tese jr 21 11 2007 pos def - fenix.tecnico.ulisboa.pt · este relatório apresenta o trabalho...
TRANSCRIPT
i
Resumo
Este relatório apresenta o trabalho desenvolvido no projecto de uma plataforma elevatória e
basculante de Veículos em Fim de Vida (VFV) com o objectivo de torná-la uma alternativa económica
e simples. Estão incluídos no âmbito deste trabalho, a pesquisa de regulamentação aplicável, do
registo de patentes e de mercado, geração e selecção de conceitos de plataformas alternativas e
dimensionamento estrutural.
As pesquisas de mercado e de registo de patentes não devolveram resultados que permitissem
influenciar o projecto da plataforma, algo que talvez se possa justificar com a juventude do mercado
em causa.
Dos nove conceitos para plataformas alternativas geradas foi escolhida uma com o auxílio de
ferramentas de selecção e com base em critérios que são importantes para a empresa que propôs
este projecto. Para o dimensionamento estrutural aplica-se a norma EN 1493:1998 [1] juntamente
com o Regulamento de Estruturas de Aço (REA) [2]. Também foram utilizados dados recolhidos pela
instituição NHTSA [3].
Os objectivos de simplicidade e economia foram atingidos com a plataforma alternativa adoptada de
entre os conceitos propostos uma vez que daí resultou uma alternativa que se considerou ser mais
simples e eficiente do que a plataforma da empresa concorrente.
Palavras-chave: Veículos em Fim de Vida, VFV, Plataforma, Basculante, Elevatória, Projecto

ii
Abstract
This report presents the work developed in a project of a lifting and tilting End of Life Vehicle (ELV)
platform with the objective of making it an economic and simple alternative to the concurrent one.
The scope of this project was market, patents registry and legislation research, generation and
selection of concepts of alternative platforms and structural dimensioning.
Market and patens registry research have not produced results that would influence the platform
design, something that could be justified by the youth of the market in question.
Of all the nine alternative concepts of platforms generated, one was selected with the help of selection
tools (lectured in the Product Development discipline) based on criteria that is important to the
company that proposed this project. For the structural dimensioning it was applied the norm EN
1493:1998 [1] along with “Regulamento de Estruturas de Aço” (REA) [2]. It was also used gathered
information by the institution NHTSA [3].
The objectives of simplicity and economy were reached with the adopted alternative platform, chosen
among the proposed concepts, because the result was considered to be a simpler and more efficient
platform then the one of the competing company.
Keywords: End of Life Vehicles, ELV, Platform, Tilting, Elevating, Project

iii
Agradecimentos
Gostaria de expressar os meus agradecimentos aos meus Professores Miguel Matos Neves e Luís
Reis pela orientação e disponibilidade demonstradas ao longo deste trabalho.
À minha colega Maria Costa e Sousa pelo apoio incansável nos momentos mais difíceis e ao Eng.
Carlos Costa e Sousa pela ajuda preciosa em momentos chave.
Ao Eng. Pedro Nazareth pela disponibilidade demonstrada e pela oportunidade apresentada de
trabalhar em projecto. À Eng. Ana Matos pela atenção e colaboração.
Aos meus pais pela interminável compreensão e ajuda ao longo de todos estes anos.

iv
Índice
RESUMO .................................................................................................................................................. i
ABSTRACT ............................................................................................................................................. ii
AGRADECIMENTOS ............................................................................................................................. iii
ÍNDICE .................................................................................................................................................... iv
LISTA DE TABELAS ............................................................................................................................. vi
LISTA DE FIGURAS .............................................................................................................................. vi
LISTA DE ABREVIATURAS................................................................................................................ viii
1. INTRODUÇÃO ................................................................................................................................. 1
1.1. MOTIVAÇÃO ............................................................................................................................................. 1
1.2. CARACTERIZAÇÃO DA PLATAFORMA DA EMPRESA LSD ......................................................................... 2
1.3. OBJECTIVOS ............................................................................................................................................ 4
1.4. ESPECIFICAÇÕES DO PROJECTO ............................................................................................................ 5
1.4.1. Requisitos do projecto ...................................................................................................................... 5
1.4.2. Constrangimentos do projecto ........................................................................................................ 8
1.5. DESCRIÇÃO DO CONTEÚDO DESTE PROJECTO ....................................................................................... 8
2. REGULAMENTAÇÃO, MERCADO E PATENTES ......................................................................... 9
2.1. DIRECTIVA MÁQUINAS............................................................................................................................. 9
2.1.1. Norma EN 1493:1998 ..................................................................................................................... 10
2.2. REGULAMENTO DE ESTRUTURAS DE AÇO (REA) ................................................................................ 13
2.3. DIRECTIVA VEÍCULOS EM FIM DE VIDA ................................................................................................. 13
2.4. PESQUISA DE MERCADO ....................................................................................................................... 15
2.4.1. Elevador de veículos de dois postes ............................................................................................ 15
2.4.2. Elevador de veículos de quatro postes ........................................................................................ 15
2.4.3. Elevador de veículos em tesoura .................................................................................................. 16
2.4.4. Elevador de veículos inserido no solo .......................................................................................... 16
2.5. PESQUISA DE REGISTOS DE PATENTES ................................................................................................ 17
2.5.1. Elevadores de veículos de dois postes ........................................................................................ 17
2.5.2. Elevador de veículos de quatro postes ........................................................................................ 18
2.5.3. Elevador de veículos em tesoura .................................................................................................. 19
2.5.4. Elevador de veículos inserido no solo .......................................................................................... 19
2.5.5. Elevador de veículos móvel ........................................................................................................... 20

v
2.5.6. Plataformas de inclinação de veículos ......................................................................................... 21
3. GERAÇÃO E SELECÇÃO DE CONCEITOS ................................................................................ 23
3.1. DECOMPOSIÇÃO DE PROBLEMAS ......................................................................................................... 23
3.2. GERAÇÃO DE CONCEITOS ..................................................................................................................... 23
3.2.1. Conceito 0 ........................................................................................................................................ 24
3.2.2. Conceito 1 ........................................................................................................................................ 26
3.2.3. Conceito 2 ........................................................................................................................................ 28
3.2.4. Conceito 3 ........................................................................................................................................ 30
3.2.5. Conceito 4 ........................................................................................................................................ 32
3.2.6. Conceito 5 ........................................................................................................................................ 34
3.2.7. Conceito 6 ........................................................................................................................................ 36
3.2.8. Conceito 7 ........................................................................................................................................ 38
3.2.9. Conceito 8 ........................................................................................................................................ 40
3.3. SELECÇÃO DE CONCEITOS ................................................................................................................... 42
3.3.1. Critérios de selecção ...................................................................................................................... 42
3.3.2. Processos de selecção ................................................................................................................... 44
4. DIMENSIONAMENTO ESTRUTURAL .......................................................................................... 50
4.1. NOTAS DE CÁLCULO ............................................................................................................................. 50
4.1.1. Modos de carregamento, combinação de cargas B1v .............................................................. 52
4.1.2. Elementos normalizados ................................................................................................................ 55
4.1.3. Tranca ............................................................................................................................................... 56
4.1.4. Suporte, lado direito ........................................................................................................................ 58
4.1.5. Suporte, lado esquerdo .................................................................................................................. 60
4.1.6. Coluna ............................................................................................................................................... 61
4.1.7. Base .................................................................................................................................................. 63
4.1.8. Estabilidade, combinação de cargas B2 ...................................................................................... 66
5. CONCLUSÕES E DESENVOLVIMENTOS FUTUROS ................................................................ 68
5.1. CONCLUSÕES ........................................................................................................................................ 68
5.2. DESENVOLVIMENTOS FUTUROS ........................................................................................................... 70
6. REFERÊNCIAS .............................................................................................................................. 71
ANEXO A - Cálculos Auxiliares .......................................................................................................... 73
ANEXO B - Desenhos Técnicos ......................................................................................................... 78

vi
Lista de Tabelas Tabela 1: Pesos atribuídos pela empresa Ambop a cada critério de selecção. .............................................................................44 Tabela 2: Quantificação de cada critério para todos os conceitos. ................................................................................................44 Tabela 3: Primeira fase do processo selecção qualitativo. ............................................................................................................45 Tabela 4: Resultados da segunda fase do processo selecção qualitativo. ....................................................................................46 Tabela 5: Resultados do segundo processo de selecção. .............................................................................................................47 Tabela 6: Resultados modificados do primeiro processo de selecção. .........................................................................................48 Tabela 7: Características do aço estrutural FeE355 para espessuras inferiores a 40 mm, fonte: [1]............................................50 Tabela 8: Tabela das características dos perfis normalizados utilizados. .....................................................................................55
Lista de Figuras Figura 1.1: Plataforma da empresa LSD inclinada a 90º em relação à vertical. ..............................................................................2 Figura 1.2: Remoção de um catalisador ao alto com recurso a uma tesoura de corte. ...................................................................2 Figura 1.3: Plataforma fabricada pela empresa LSD. ......................................................................................................................2 Figura 1.4: Vista frontal da plataforma. ............................................................................................................................................3 Figura 1.5: Pormenor das cavilhas da plataforma. ...........................................................................................................................3 Figura 1.6: Pormenor dos cilindros hidráulicos de inclinação da plataforma. ..................................................................................4 Figura 1.7: Plataforma da empresa LSD inclinada próxima dos 90º, fonte: [6]. ...............................................................................6 Figura 1.8: Distância mínima entre braços de suporte do veículo da plataforma da empresa LSD. ...............................................7 Figura 1.9: Distância máxima entre garfos de uma empilhadora, fonte: [7]. ....................................................................................7 Figura 1.10: Distância mínima entre os braços de suporte de uma plataforma de despoluição de VFV.........................................7 Figura 2.1: Distribuição da carga do veículo no dispositivo de suporte do veículo. .......................................................................12 Figura 2.2: Elevador de veículos de dois postes da empresa Rotary Lifts, fonte: [11]. .................................................................15 Figura 2.3: Elevador de veículos de quatro postes da empresa Maha, fonte: [12]. .......................................................................16 Figura 2.4: Elevador de veículos em tesoura da empresa Rotary Lifts, fonte: [11]. .......................................................................16 Figura 2.5: Elevador de veículos inserido no solo da empresa Rotary Lifts, fonte: [11]. ...............................................................17 Figura 2.6: Esquema de um elevador de veículos de dois postes patenteado, fonte: [13]. ...........................................................17 Figura 2.7: Patente de um elevador de veículos de quatro postes, fonte: [14]. .............................................................................18 Figura 2.8: Sistema de roldanas e cabos actuados por um cilindro hidráulico de uma patente de um elevador de veículos de
quatro postes, fonte: [14]. ......................................................................................................................................................18 Figura 2.9: Patente de um elevador de veículos em tesoura, fonte: [15]. ......................................................................................19 Figura 2.10: Elevador de veículos inserido no solo com sistema hidráulico inicial de baixa pressão, fonte: [16]..........................20 Figura 2.11: Patente de um elevador de veículos inserido no solo com sistema hidráulico adaptado de alta pressão, fonte: [16].
...............................................................................................................................................................................................20 Figura 2.12: Patente de um elevador de veículos móvel, fonte: [17]. ............................................................................................20 Figura 2.13: Patente de uma plataforma de inclinação parcial de veículos, fonte: [18]. ................................................................21 Figura 2.14: Patente de uma plataforma de inclinação de veículos a 90º, fonte: [19]. ..................................................................22 Figura 2.15: Sistema de inclinação da patente de uma plataforma de inclinação de veículos a 90º, fonte: [19]. ..........................22 Figura 3.1: Diagrama de decomposição de problemas. .................................................................................................................23 Figura 3.2: Conceito 0. ...................................................................................................................................................................24 Figura 3.3: Conceito 0 com o veículo em posição elevada. ...........................................................................................................24 Figura 3.4: Vista lateral do conceito 0 com o veículo inclinado a 90º. ...........................................................................................25

vii
Figura 3.5: Conceito 1. ...................................................................................................................................................................26 Figura 3.6: Conceito 1 com veículo elevado. .................................................................................................................................26 Figura 3.7: Conceito 1 com o veículo inclinado a 90º. ...................................................................................................................27 Figura 3.8: Conceito 2. ...................................................................................................................................................................28 Figura 3.9: Conceito 2 com o veículo elevado. ..............................................................................................................................28 Figura 3.10: Conceito 2 com o veículo inclinado a 90º. .................................................................................................................29 Figura 3.11: Conceito 3. .................................................................................................................................................................30 Figura 3.12: Conceito 3 com o veículo elevado. ............................................................................................................................30 Figura 3.13: Vista frontal do conceito 3 com o veículo a 90º. ........................................................................................................31 Figura 3.14: Conceito 4. .................................................................................................................................................................32 Figura 3.15: Conceito 4 com o veículo elevado. ............................................................................................................................32 Figura 3.16: Conceito 4 com o veículo inclinado de 90º. ...............................................................................................................33 Figura 3.17: Conceito 5. .................................................................................................................................................................34 Figura 3.18: Conceito 5 com o veículo elevado. ............................................................................................................................34 Figura 3.19: Conceito 5 com o veículo inclinado de 90º. ...............................................................................................................35 Figura 3.20: Conceito 6. .................................................................................................................................................................36 Figura 3.21: Conceito 6 com o veículo elevado. ............................................................................................................................36 Figura 3.22: Explicação do movimento de inclinação do veículo do conceito 6. ...........................................................................37 Figura 3.23: Conceito 6 com veículo inclinado de 90º. ..................................................................................................................37 Figura 3.24: Conceito 7. .................................................................................................................................................................38 Figura 3.25: Conceito 7 com veículo elevado. ...............................................................................................................................38 Figura 3.26: Explicação do movimento de inclinação do veículo do conceito 7. ...........................................................................39 Figura 3.27: Conceito 7 com veículo inclinado de 90º. ..................................................................................................................39 Figura 3.28: Conceito 8. .................................................................................................................................................................40 Figura 3.29: Conceito 8 com veículo elevado. ...............................................................................................................................40 Figura 3.30: Conceito 8 com veículo inclinado de 90º. ..................................................................................................................41 Figura 3.31: Conceito 1, conceito a desenvolver. ..........................................................................................................................49 Figura 3.32: Plataforma da empresa LSD. .....................................................................................................................................49 Figura 4.1: Peças a analisar do conceito escolhido (conceito 1). ..................................................................................................51 Figura 4.2: Distribuição da carga do veículo no suporte de acordo com a norma EN 1493:1998 [1]. ...........................................52 Figura 4.3: Decomposição das forças gravíticas. ..........................................................................................................................53 Figura 4.4: Perfil tubular quadrangular. ..........................................................................................................................................55 Figura 4.5: Perfil tubular rectangular. .............................................................................................................................................55 Figura 4.6: Viga em H.....................................................................................................................................................................55 Figura 4.7: Elementos normalizados utilizados na construção das várias peças da .....................................................................55 Figura 4.8: Determinação da força da tranca FT. ............................................................................................................................56 Figura 4.9: Condições de fronteira na tranca. ................................................................................................................................57 Figura 4.10: Tensão de Von Mises na tranca. ...............................................................................................................................58 Figura 4.11: Deformada da tranca. ................................................................................................................................................58 Figura 4.12: Condições de fronteira do suporte do lado direito (dimensões em mm). ...................................................................58 Figura 4.13: Tensão de Von Mises com o carregamento para verificação da EN 1493:1998 [1] para o suporte do lado direito. .59 Figura 4.14: Deformação com o carregamento para verificação da EN 1493:1998 [1] para o suporte do lado direito. ................59 Figura 4.15: Tensão de Von Mises com o carregamento para verificação do REA [2] para o suporte do lado direito. .................59 Figura 4.16: Deformação com o carregamento para verificação do REA [2] para o suporte do lado direito. ................................59 Figura 4.17: Tensão de Von Mises com o carregamento para verificação da EN 1493:1998 [1] para o suporte do lado esquerdo.
...............................................................................................................................................................................................60 Figura 4.18: Deformação com o carregamento para verificação da EN 1493:1998 [1] para o suporte do lado esquerdo. ...........60 Figura 4.19: Tensão de Von Mises com o carregamento para verificação do REA [2] para o suporte do lado esquerdo. ...........61 Figura 4.20: Deformação com o carregamento para verificação do REA [2] para o suporte do lado esquerdo. ...........................61

viii
Figura 4.21:Condições de fronteira da coluna. ..............................................................................................................................62 Figura 4.22: Tensão de Von Mises com o carregamento para verificação da EN 1493:1998 [1] para a coluna. ..........................62 Figura 4.23: Deformação com o carregamento para verificação da EN 1493:1998 [1] para a coluna. .........................................62 Figura 4.24: Tensão de Von Mises com o carregamento para verificação do REA [2] para a coluna. ..........................................63 Figura 4.25: Deformação com o carregamento para verificação do REA [2] para a coluna. .........................................................63 Figura 4.26: Condições de fronteira da base. ................................................................................................................................64 Figura 4.27: Tensão de Von Mises com o carregamento para verificação da EN 1493:1998 [1] para a base. .............................64 Figura 4.28: Deformação com o carregamento para verificação da EN 1493:1998 [1] para a base. ............................................64 Figura 4.29: Tensão de Von Mises com o carregamento para verificação do REA [2] para a base. .............................................65 Figura 4.30: Deformação com o carregamento para verificação do REA [2] para a base. ............................................................65 Figura 4.31: Esquema para a verificação de estabilidade longitudinal. .........................................................................................66 Figura 4.32: Esquema para a verificação de estabilidade lateral. ..................................................................................................66 Figura 7.1: Definição das dimensões ltx e lty. ..................................................................................................................................73 Figura 7.2: Condições de fronteira do suporte do lado direito (dimensões em mm). .....................................................................73 Figura 7.3: Dimensões importantes, L2 e ls/2. ................................................................................................................................74 Figura 7.4: Dimensões e ângulos importantes, lcil, lSTv, lSTh, lg, L, LN, hc, lrot e θ. .............................................................................74 Figura 7.5:Condições de fronteira da coluna. ................................................................................................................................75 Figura 7.6: Determinação do carregamento na base. ....................................................................................................................76 Figura 7.7: Condições de fronteira da base. ..................................................................................................................................77
Lista de Abreviaturas
VFV - Veículo em Fim de Vida
ELV - “End of Life Vehicle”
REA - Regulamento de Estruturas de Aço
EN – “European Norm”
EU - União Europeia
JO - Jornal Oficial das Comunidades Europeias
SUV - “Sports Utility Vehicle”
SSF - “Static Stability Factor”
NHTSA – “National Highway Traffic Safety Administration”

1
Capítulo 1
1. Introdução
Neste capítulo descreve-se o âmbito do problema a resolver, indicam-se os objectivos, as
especificações do projecto e o conteúdo deste documento.
1.1. Motivação
A evolução da legislação ambiental Europeia na área da gestão de resíduos tem colocado aos
operadores dos diversos sistemas de reciclagem alguns desafios que têm predominantemente uma
componente tecnológica. Assim, estes operadores têm vindo a ser confrontados com a
obrigatoriedade de separarem e encaminharem para reciclagem novas fileiras de produtos e de
materiais. Estas operações, que em muitos casos têm sido realizadas com recurso a mão-de-obra
intensiva, têm aberto o campo e suscitado o desenvolvimento de soluções tecnológicas inovadoras.
A Directiva 2000/53/CE [4], publicada a 18 de Setembro de 2000, obriga à despoluição de veículos
em fim de vida (VFV) nos países da Comunidade Europeia. Com o objectivo de aproveitar o
surgimento deste novo mercado, foi criada a Ambop - Soluções Ambientais, uma empresa jovem que
opera apenas em Portugal mas tem planos de expansão a curto prazo.
A Ambop fabrica e comercializa apenas uma Plataforma de Despoluição de VFV, com os
equipamentos e acessórios necessários a esta. Um dos equipamentos da concorrência é uma
Plataforma Elevatória e Basculante de Veículos Ligeiros, da empresa LSD (ver Fig. 1.1). Esta
plataforma permite inclinar o veículo a 90º e dessa forma uma mais fácil remoção do catalisador do
veículo por recurso a uma tesoura de corte, uma vez que o peso desta ferramenta torna a remoção
do catalisador ao alto uma tarefa com alguma dificuldade (ver Fig. 1.2). Com o veículo inclinado a 90º
a remoção de peças para reutilização também é mais fácil. Com o veículo elevado também se podem
remover peças ou efectuar operações de despoluição indicadas pela Directiva 2000/53/CE [4] com o
auxílio de ferramentas para o efeito.
É neste contexto que a empresa Ambop propôs estudar o desenvolvimento de uma plataforma
semelhante, de capacidades melhoradas e com a implementação de algumas ideias da própria
Ambop, como por exemplo, a eliminação da necessidade da instalação da plataforma por ligação
aparafusada ao solo e movimento da tranca independente do movimento de elevação do veículo.

2
Figura 1.2: Remoção de um catalisador ao
alto com recurso a uma tesoura de corte.
Figura 1.3: Plataforma fabricada pela empresa LSD.
1.2. Caracterização da plataforma da empresa LSD
A plataforma da empresa LSD, com a qual a Ambop originou este projecto é a que se apresenta na
Figura 1.3.
As principais características da Plataforma fabricada pela empresa LSD são as seguintes:
• Capacidade máxima de carga: 2000 kg,
• Peso da plataforma: 800 kg,
• Altura de elevação máxima do veículo: 2000 mm,
• Ângulo de inclinação máximo do veículo: 90º,
• Altura da plataforma: 2995 mm,
• Profundidade da plataforma (inclusive estado basculado): 4235 mm,
• Largura da plataforma: 1200 mm.
Figura 1.1: Plataforma da empresa LSD
inclinada a 90º em relação à vertical.

3
Figura 1.4: Vista frontal da plataforma. Figura 1.5: Pormenor das cavilhas da
plataforma.
A plataforma permite movimentar de duas formas um veículo nela colocado. Permite elevar o veículo
com o fundo do veículo paralelo ao chão e permite incliná-lo até que o fundo do veículo se encontre
na perpendicular ao chão. Neste segundo movimento é preciso actuar uma tranca (ver nº 5 na
Fig. 1.5) que actua sobre o tecto do veículo e tem por função bloquear o veículo que está a ser
inclinado.
Quando se pretende elevar o veículo, fazem-se actuar os cilindros hidráulicos indicados na pelo nº1
na Figura 1.4. Importa referir, que para efectuar este movimento as cavilhas indicadas pelos nos 6 e 7
na Figura 1.5 têm que estar colocadas nas respectivas posições.
Legenda das Figuras 1.4 e 1.5:
1 – Cilindros hidráulicos de elevação.
2 – Braço de suporte do veículo.
3 – Dispositivo de encaixe da tranca.
4 – Ligação aparafusada da base ao solo.
5 – Tranca.
6 e 7 – Cavilhas.
Quando se pretende inclinar o veículo, a tranca tem que ser actuada de modo a fixar o veículo. Para
que tal possa acontecer, as cavilhas indicadas pelos nos 6 e 7 na Figura 1.5 têm que ser removidas
das suas posições para que os cilindros hidráulicos (ver nº 1 na Fig. 1.4) deixem de estar ligados aos
braços de suporte do veículo (ver nº 2 na Fig. 1.4) e portanto deixem de actuar o movimento de
elevação, para actuarem o movimento da tranca (ver nº 5 na Fig. 1.5).

4
Figura 1.6: Pormenor dos cilindros hidráulicos de inclinação da plataforma.
Para que a que altura total da plataforma seja a menor possível, é necessário que a distância entre os
braços de suporte do veículo (ver nº 2 na Fig. 1.4) e a tranca (ver nº 5 na Fig. 1.5) seja a mais
pequena possível. Este facto implica que sempre que se queira elevar o veículo, se a altura deste
exceder a distância entre os braços de suporte do veículo e a tranca, esta tem de ser removida do
dispositivo de encaixe da tranca (ver nº 3 na Fig. 1.4). Para dar início ao movimento de inclinação
propriamente dito, são actuados os cilindros hidráulicos indicados pelo nº 8 na Figura 1.6.
Legenda da Figura 1.6:
8 – Cilindros hidráulicos de rotação.
A principal desvantagem do modo de funcionamento da plataforma da empresa LSD é que para
passar de um movimento de elevação para um movimento de inclinação ou vice-versa é necessário
remover o veículo da plataforma para colocar ou remover a tranca (ver nº 5 na Fig. 1.5) e para retirar
ou colocar as cavilhas (ver nos 6 e 7 na Fig. 1.5). No caso de só se pretender efectuar um dos
movimentos tem que se decidir previamente a remoção ou permanência da tranca. Só em casos em
que o veículo esteja já muito danificado e caiba entre os braços de suporte do veículo e a tranca é
que esta não precisa de ser removida para efectuar ambos os movimentos.
É também importante notar que esta plataforma necessita de ser fixada por ligação aparafusada ao
solo como se pode observar pelo nº 4 na Figura 1.4.
1.3. Objectivos
Os objectivos deste trabalho são a proposta de uma configuração alternativa e económica da
plataforma elevatória e basculante de VFV da empresa LSD e respectivo dimensionamento estrutural.
5
1.4. Especificações do projecto
1.4.1. Requisitos do projecto
De seguida apresentam-se os 14 requisitos considerados para este projecto.
1) Independência do movimento de elevação do fecho ou abertura da tranca.
Elimina a necessidade de retirar o veículo da plataforma para remoção ou colocação da tranca
(ver nº 5 na Fig. 1.5) e remoção ou colocação das cavilhas (ver nos 6 e 7 na Fig. 1.5) entre os
movimentos de elevação e inclinação do veículo, aumentando assim a eficiência das operações
com a plataforma.
2) Eliminar a necessidade de instalação da plataforma por ligação aparafusada ao solo.
Permite maior economia e flexibilidade no posicionamento da plataforma por parte do cliente
final, tendo apenas que respeitar a inclinação admissível (ver ponto 2.1.1.4, pág. 10). No entanto
há que tomar em consideração o equilíbrio da plataforma, nas diferentes situações a que estará
sujeita.
3) Fabrico em empresa metalomecânica.
A Ambop trabalha em parceria com uma empresa metalomecânica e é portanto do interesse da
Ambop que o fabrico da plataforma seja efectuado nesta empresa, com todas as limitações
inerentes a este facto. Como tal é importante que a plataforma projectada seja o mais simples
possível, evitando, por exemplo, peças fundidas.
4) Movimentos actuados por um sistema hidráulico.
Para a simplicidade desta plataforma é indicado um sistema de actuação totalmente hidráulico.
5) Capacidade para funcionamento ao ar livre.
Pretende-se que esta seja projectada de modo a que possa funcionar ao ar livre com
velocidades de vento máximas definidas pela norma EN 1493:1998 [1] (ver ponto 2.1.1.4,
pág. 11). Existem outros factores envolvidos neste requisito, como por exemplo a corrosão, mas
que não vão ser abordados por este projecto.
6) Aumento da capacidade de carga para P = 2500 kg.
Verificou-se que a grande maioria dos veículos de passageiros com oito ou menos lugares
(excluindo lugar do condutor) e de carga com peso bruto igual ou inferior a 3500 kg, têm um
peso inferior a 2500 kg (ver ponto 2.3, pág. 14). Existe no entanto um número razoável destes
veículos que pesam mais que a capacidade de carga de 2000 kg da plataforma da empresa
6 Figura 1.7: Plataforma da empresa LSD inclinada próxima dos 90º, fonte: [6].
LSD. Como tal para este projecto pretende-se um aumento da capacidade de carga para
2500 kg.
7) Aumento da altura de elevação máxima para 2,1 m.
Deste modo operadores de estatura mais elevada podem trabalhar sob o veículo de forma mais
confortável e não precisam de se baixar quando passam por baixo dos braços de suporte do
veículo (ver nº 2 na Fig. 1.4).
8) Manter a capacidade de inclinação do veículo de 90º.
9) Inclinação admissível do solo de α = 5º.
A plataforma pode ser instalada em superfícies com uma inclinação máxima de 5º.
10) Comprimento da tranca LT = 1 m.
Decidiu-se tomar como indicação o comprimento da tranca da plataforma da empresa LSD
(ver Fig. 1.3).
11) Distância mínima do veículo ao solo Hi = 300 mm
Esta distância permite uma correcta acomodação de um veículo na plataforma quando colocado
na plataforma com rodas. Decidiu-se tomar como indicação a distância usada na plataforma que
originou este projecto (ver Fig. 1.3).
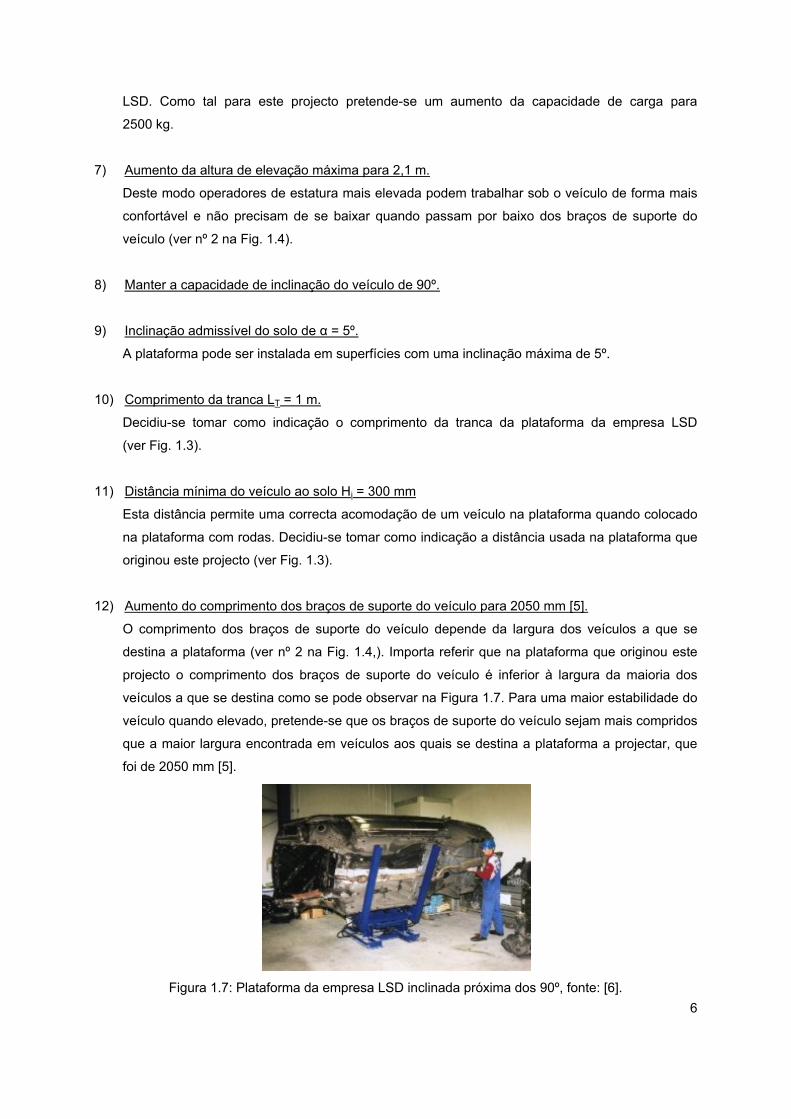
12) Aumento do comprimento dos braços de suporte do veículo para 2050 mm [5].
O comprimento dos braços de suporte do veículo depende da largura dos veículos a que se
destina a plataforma (ver nº 2 na Fig. 1.4,). Importa referir que na plataforma que originou este
projecto o comprimento dos braços de suporte do veículo é inferior à largura da maioria dos
veículos a que se destina como se pode observar na Figura 1.7. Para uma maior estabilidade do
veículo quando elevado, pretende-se que os braços de suporte do veículo sejam mais compridos
que a maior largura encontrada em veículos aos quais se destina a plataforma a projectar, que
foi de 2050 mm [5].

7
Figura 1.10: Distância mínima entre os
braços de suporte de uma plataforma
de despoluição de VFV.
13) Altura máxima do chassis do veículo de 2300 mm.
É a distância que vai desde o fundo até ao tecto do veículo. Desta medida depende a distância
máxima necessária entre a tranca e os braços de suporte do veículo (ver nos 1 e 4 na Fig. 3.2). A
maior altura encontrada em veículos aos quais se destina a plataforma a projectar foi de
aproximadamente 2300 mm.
14) Distância mínima entre os braços de suporte do veículo de 1100 mm.
Esta especificação é importante, pois condiciona a empilhadora que se pode usar para colocar
os veículos na plataforma. A distância mínima a entre os braços de suporte do veículo da
plataforma (ver Fig. 1.8) deve ser superior à distância máxima b entre os garfos de uma
empilhadora (ver Fig. 1.9), tendo em atenção que se deve dar alguma margem de manobra para
facilitar a operação de carregamento do veículo na plataforma. Decidiu-se tomar como indicação
a distância usada na plataforma que originou este projecto (ver Fig. 1.3) e na distância usada em
plataformas de despoluição de VFV, indicada pela letra c na Figura 1.10. Como tal decidiu-se
que o valor mínimo para esta distância seria de 1100 mm.
Figura 1.8: Distância mínima entre braços de
suporte do veículo da plataforma da empresa LSD.
Figura 1.9: Distância máxima entre garfos de
uma empilhadora, fonte: [7].
8
1.4.2. Constrangimentos do projecto
Os principais constrangimentos deste projecto são a norma EN 1493:1998 [1] relativa a Elevadores
de Veículos e o REA [2].
O cumprimento da norma é importante no âmbito da legislação europeia como é explicado no
capítulo seguinte.
1.5. Descrição do conteúdo deste projecto
Passa-se a apresentar uma breve descrição do conteúdo deste projecto.
Capítulo 2 contém os resultados das pesquisas de mercado e de patentes efectuadas e uma breve
descrição de toda a regulamentação considerada neste projecto.
Capítulo 3 apresenta os conceitos gerados, o método de selecção do conceito adoptado para este
projecto e os resultados da selecção de conceitos.
Capítulo 4 apresenta os cálculos efectuados para o dimensionamento da estrutura da plataforma e os
elementos escolhidos com base nesses cálculos.
Capítulo 5 apresenta as conclusões e indica direcções para futuros desenvolvimentos.

9
Capítulo 2
2. Regulamentação, Mercado e Patentes
Neste capítulo faz-se uma breve síntese da regulamentação, do resultado de pesquisa de registos de
patentes e resultado da pesquisa de produtos no mercado com função similar.
2.1. Directiva Máquinas
Uma vez que Portugal pertence à Comunidade Europeia e como tal deve cumprir as suas Directivas.
Uma das Directivas que é relevante no âmbito deste projecto é a Directiva Máquinas 2006/42/CE [8]
de 17 de Maio de 2006. Esta directiva entrou em vigor vinte dias depois de 17 de Maio de 2006 e
revoga a anterior Directiva Máquina 98/37/CE [9] sendo que os estados Membros, como Portugal,
devem legislar de acordo até 29 de Junho 2008 e aplicá-la até 29 de Dezembro de 2009. A Directiva
Máquinas regula a segurança de máquinas, estabelecendo o conjunto de regras reguladoras de
mercado que têm como destinatários os respectivos fabricantes e comerciantes, privilegiando a
prevenção na fase da concepção de tais equipamentos. Tais regras estabelecem as exigências que
devem ser respeitadas nas legislações e práticas administrativas (por exemplo, Normas Técnicas)
dos Estados membros e funcionam como garantia da liberdade de circulação de mercadorias no
mercado interno europeu.
Se a máquina pertencer a uma das categorias nomeadas no anexo IV da Directiva, um dos
procedimentos referidos nos nos 3 e 4 do artigo 12º da mesma, tem de ser cumprido. A categoria
referida no ponto 16 deste anexo é: “Plataformas Elevatórias para Veículos”, na qual se enquadra
este projecto. O nº 3 do artigo 12º diz respeito a máquinas referidas no anexo IV cujo fabrico esteja
de acordo com uma norma harmonizada pela Directiva. Um dos procedimentos indicados no nº 3 é
um procedimento de avaliação da conformidade com controlo interno do fabrico da máquina, previsto no
anexo VIII. Este é então um dos caminhos possíveis e mais simples para se obter uma declaração CE de
conformidade, que vai permitir a comercialização da máquina na Comunidade Europeia, sendo então
imperativo o cumprimento de uma norma harmonizada pela Directiva.
O Despacho nº 8633/2005 publicado em Diário da República a 20 de Abril de 2005 apresenta uma
lista de normas harmonizadas com a Directiva Máquinas 98/37/CE [9]. Relativamente à Directiva
2006/42/CE [8] não existe, à data, nenhuma lista de normas harmonizadas, pelo que se optou por
utilizar a lista referente à Directiva 98/37/CE [9]. Nesta lista a norma que se considerou como a que
melhor se adequa a este projecto é a EN 1493:1998 [1] para Elevadores de Veículos.

10
2.1.1. Norma EN 1493:1998
2.1.1.1. Domínio de aplicação Esta norma aplica-se a elevadores de veículos, fixos, móveis ou amovíveis, não destinados a elevar
pessoas, mas que são concebidos para elevar um veículo na sua totalidade com o intento de permitir
trabalhos de verificação, manutenção e reparação sob ou sobre o veículo.
2.1.1.2. Definições necessárias
• Em serviço – quando um veículo está a ser elevado, descido ou inclinado e quando se estão
a efectuar trabalhos no veículo ou no elevador de veículos (manutenção deste).
• Fora de serviço – quando o dispositivo de suporte do veículo se encontra na posição o mais
próximo do chão ou solo possível e não se encontra ninguém a efectuar trabalhos no veículo
ou no elevador de veículos.
• Carga Nominal, P – carga máxima do veículo com que a plataforma pode operar.
2.1.1.3. Dispositivos necessários Dispositivo de bloqueio, que em caso de falha do elemento de elevação, impeça a queda ou descida
do dispositivo de suporte do veículo.
Dispositivo mecânico contra o retomar da subida, que em caso de falha do elemento de elevação
impeça o retomar da subida a partir da posição inicial.
Ambos os dispositivos têm que resistir sem deformação permanente às suas actuações.
2.1.1.4. Dimensionamento estrutural A norma divide as cargas em três categorias: cargas normais, cargas ocasionais e cargas
excepcionais.
Cargas normais:
• Cargas estruturais – cargas devido à massa dos componentes do elevador de veículos.
• Cargas estruturais estáticas – cargas devido a componentes do elevador de veículos que não
estão em movimento.
• Cargas estruturais dinâmicas – cargas devido a componentes móveis do elevador de
veículos. Obtêm-se multiplicando carga estrutural estática pelo coeficiente dinâmico Ø,
indicado na norma.
• Carga nominal estática – carga devido ao veículo quando este está imobilizado.
• Carga nominal dinâmica – carga devido ao veículo proveniente da movimentação deste em
serviço. Obtêm-se multiplicando a carga do veículo estática por um coeficiente dinâmico Ø.
• Forças manuais – deverão ser no máximo de 1000 N aplicados horizontalmente no ponto de
suporte do veículo apenas quando este está elevado.
• Efeitos da inclinação admissível.

11
Coeficiente dinâmico Ø deverá ser no máximo de 1,151 (ver ponto 5.6.2.1 da norma).
Cargas ocasionais:
Carga provocada pelo vento em serviço. Esta carga deve ser considerada na direcção perpendicular
da base do veículo no cálculo das tensões. A norma prevê uma força do vento em serviço de 0,75 kN
para uma carga nominal igual ou inferior a 2500 kg com uma distribuição por eixo (do veículo) de
60/40 (ver ponto 5.6.2.2 da norma).
Cargas excepcionais:
Carga provocada pelo vento fora de serviço. Esta carga deve ser considerada na direcção
perpendicular da base do veículo no cálculo das tensões. A norma prevê uma força do vento fora de
serviço de 3 kN para uma carga nominal igual ou inferior a 2500 kg com uma distribuição por eixo (do
veículo) de 60/40 (ver ponto 5.6.2.3 da norma).
Combinações de cargas previstas pela norma (ver ponto 5.6.3 da norma):
• A1 em serviço (subida/descida/inclinação) sem vento.
• A2 em serviço (trabalhos no veículo, manutenção do elevador) sem vento.
• B1 em serviço (subida/descida/inclinação) com vento.
• B2 em serviço (trabalhos no veículo, manutenção do elevador) com vento.
• C1 fora de serviço com vento.
• C2 accionamento do dispositivo de bloqueio.
• C3 accionamento do dispositivo mecânico contra o retomar da subida.
A combinação de carga mais desfavorável é a B, uma vez que a plataforma a projectar pode ser
utilizada no exterior estando sujeita às acções do vento.
Em B1 aplicam-se cargas estruturais dinâmicas correspondentes aos componentes em movimento e
a carga nominal a usar tem de ser afectada do referido coeficiente dinâmico Ø. Não se aplicam forças
manuais pois estas não se podem sobrepor às cargas dinâmicas. Por isso em B2 só se aplicam
cargas estáticas e aplicam-se forças manuais.
Em C1 só se aplicam cargas estáticas e não forças manuais pois o elevador de veículos encontra-se
fora de serviço. Neste caso a carga a considerar devido ao vento é superior à utilizada em B, mas
como o dispositivo de elevação se encontra na posição o mais próxima do solo possível esta
combinação de cargas é mais favorável que as combinações B1 ou B2.
Importa referir que o Anexo A da norma EN 1493:1998 [1] indica a título informativo para aços
normalizados pela norma EN 10025:1990, um coeficiente de segurança à tensão de cedência de 1,33
para combinações de cargas B1 ou B2. É mencionada a garantia de segurança se o número de ciclos
for inferior a 22000. Se este número for excedido têm que ser efectuados cálculos para
dimensionamento estrutural à fadiga.
12
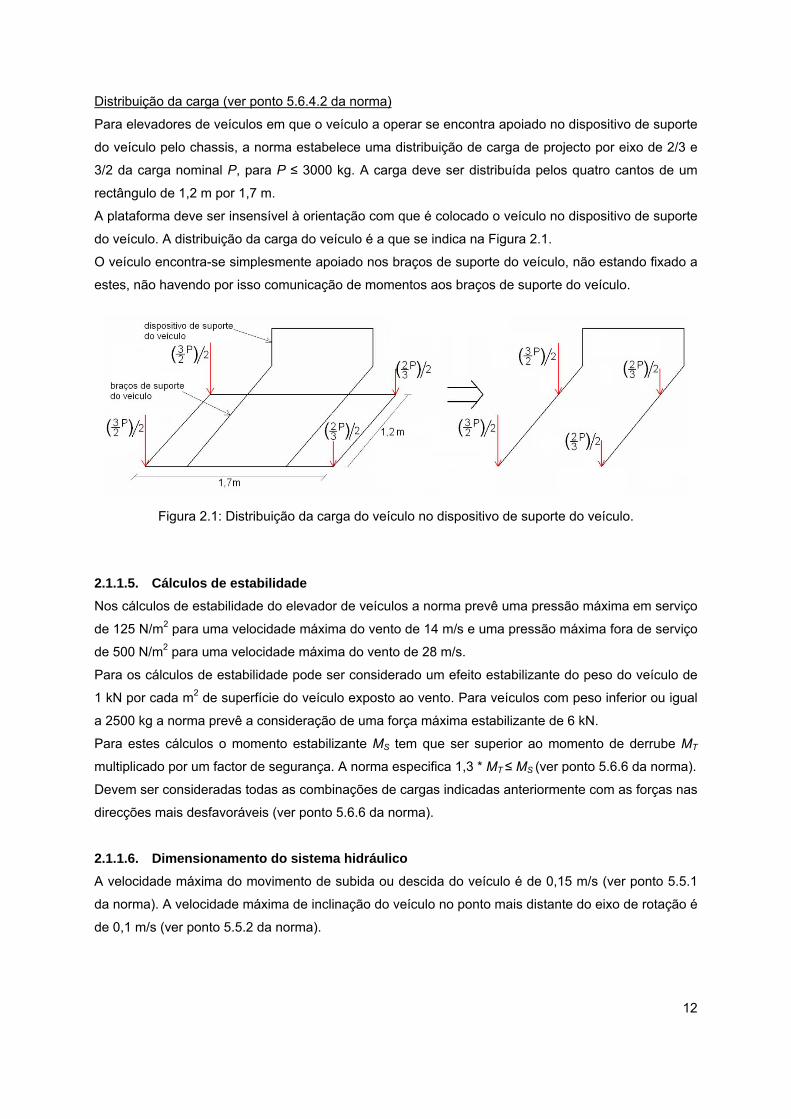
Figura 2.1: Distribuição da carga do veículo no dispositivo de suporte do veículo.
Distribuição da carga (ver ponto 5.6.4.2 da norma)
Para elevadores de veículos em que o veículo a operar se encontra apoiado no dispositivo de suporte
do veículo pelo chassis, a norma estabelece uma distribuição de carga de projecto por eixo de 2/3 e
3/2 da carga nominal P, para P ≤ 3000 kg. A carga deve ser distribuída pelos quatro cantos de um
rectângulo de 1,2 m por 1,7 m.
A plataforma deve ser insensível à orientação com que é colocado o veículo no dispositivo de suporte
do veículo. A distribuição da carga do veículo é a que se indica na Figura 2.1.
O veículo encontra-se simplesmente apoiado nos braços de suporte do veículo, não estando fixado a
estes, não havendo por isso comunicação de momentos aos braços de suporte do veículo.
2.1.1.5. Cálculos de estabilidade Nos cálculos de estabilidade do elevador de veículos a norma prevê uma pressão máxima em serviço
de 125 N/m2 para uma velocidade máxima do vento de 14 m/s e uma pressão máxima fora de serviço
de 500 N/m2 para uma velocidade máxima do vento de 28 m/s.
Para os cálculos de estabilidade pode ser considerado um efeito estabilizante do peso do veículo de
1 kN por cada m2 de superfície do veículo exposto ao vento. Para veículos com peso inferior ou igual
a 2500 kg a norma prevê a consideração de uma força máxima estabilizante de 6 kN.
Para estes cálculos o momento estabilizante MS tem que ser superior ao momento de derrube MT
multiplicado por um factor de segurança. A norma especifica 1,3 * MT ≤ MS (ver ponto 5.6.6 da norma).
Devem ser consideradas todas as combinações de cargas indicadas anteriormente com as forças nas
direcções mais desfavoráveis (ver ponto 5.6.6 da norma).
2.1.1.6. Dimensionamento do sistema hidráulico A velocidade máxima do movimento de subida ou descida do veículo é de 0,15 m/s (ver ponto 5.5.1
da norma). A velocidade máxima de inclinação do veículo no ponto mais distante do eixo de rotação é
de 0,1 m/s (ver ponto 5.5.2 da norma).

13
Os cilindros hidráulicos, suas canalizações rígidas e as suas ligações que estão submetidas à
pressão máxima fornecida pela válvula limitadora de pressão, devem ser concebidos para resistirem
sem deformação permanente, pelo menos a duas vezes essa pressão.
Os tubos flexíveis devem ser dimensionados para resistirem, sem rebentamento, a uma pressão igual
a pelo menos três vezes a pressão máxima admitida pela válvula limitadora de pressão.
2.2. Regulamento de Estruturas de Aço (REA)
A norma EN 1493:1998 [1] não indica valores para a deformada máxima permitida e por isso tomou-
se em consideração o código REA [2].
Admitiu-se que a deformada máxima que a estrutura pode apresentar é de L/200 sendo que L é o vão
da estrutura. Esta é a deformada máxima que o REA prevê para coberturas.
2.3. Directiva Veículos em Fim de Vida
Outra directiva relevante para este projecto, é a Directiva 2000/53/CE [4] publicada a 18 de Setembro
de 2000, relativa a veículos em fim de vida. Esta directiva obriga à despoluição de VFV e como tal
permitiu a criação de mercado e levou ao desenvolvimento deste projecto.
Esta directiva obriga os Estados Membros, como Portugal, a possibilitarem aos proprietários de um
VFV a entrega gratuita do mesmo a uma instituição que garanta que este será despoluído de forma
ambientalmente correcta, e que os respectivos registo e matrícula serão cancelados. È referido que a
reutilização e valorização dos resíduos provenientes do VFV constituem um princípio fundamental.
Quanto ao tratamento dos VFV, a Directiva estabelece requisitos técnicos mínimos no que respeita às
instalações de tratamento, às operações de despoluição e às operações de tratamento com vista à
reciclagem. Do Anexo I do documento têm-se os seguintes requisitos, para:
Instalações de tratamento:
• Superfícies impermeáveis equipadas com sistemas de recolha de derramamentos,
decantadores e purificantes.
• Armazéns adequados para os componentes desmontados e impermeáveis para os
contaminados com óleo.
• Recipientes adequados para o armazenamento de baterias, filtros e condensadores.
• Reservatórios separados para armazenamento dos fluidos a extrair do VFV.
• Locais adequados para o armazenamento de pneus usados com prevenção de incêndios e
contra o empilhamento excessivo.

14
Operações de tratamento para despoluição dos VFV:
• Remoção de baterias e depósitos de gás liquefeito.
• Remoção ou neutralização de componentes potencialmente explosivos.
• Remoção, recolha e armazenagem separadas de:
-Combustível
-Óleo de motor
-Óleo de transmissão
-Óleo de caixa de velocidades
-Óleo dos sistemas hidráulicos
-Líquidos de arrefecimento
-Anticongelante
-Fluido de travões
-Fluido de ar condicionado
-Qualquer outro fluido contido no VFV a menos que necessário para a reutilização
de componentes
-Remoção, tanto quanto possível, de componentes identificados como contendo
mercúrio
Operações de tratamento a fim de promover a reciclagem:
• Remoção de catalisadores.
• Remoção de componentes metálicos que contenham cobre, alumínio e magnésio se não
forem separados no retalhamento.
• Remoção de pneus e grandes componentes de plástico se não forem separados no
retalhamento.
• Remoção dos vidros.
A Directiva abrange as categorias M1 (veículos a motor de passageiros até nove lugares) ou N1
(veículos a motor de mercadorias com peso máximo em carga de 3500 kg) e veículos a motor de três
rodas. Estas categorias são definidas pela Directiva 2001/116/CE [10] sendo a estes veículos que se
destina a plataforma a projectar. Na prática verificou-se que a grande maioria dos veículos de
passageiros com oito ou menos lugares e de carga com peso bruto inferior ou igual a 3500 kg têm um
peso inferior ou igual a 2500 kg.

15
Figura 2.2: Elevador de veículos de dois postes da empresa Rotary Lifts, fonte: [11].
2.4. Pesquisa de mercado
Na pesquisa realizada não se encontraram elevadores de veículos que possibilitassem a sua
inclinação, pois os elevadores de veículos no mercado são destinados a oficinas de reparação
automóvel. A única plataforma que se tem para comparação é a fabricada pela empresa LSD e que
inspirou este projecto.
É apresentado de seguida um breve resumo da pesquisa de mercado efectuada. Nesta mostra-se
pelo menos um exemplo de cada tipo de elevador de veículos considerado relevante.
2.4.1. Elevador de veículos de dois postes
Na Figura 2.2 é apresentado um elevador de veículos de dois postes da empresa Rotary Lifts, modelo
SPOA40M. Este elevador tem uma capacidade de carga de 4000 kg e uma capacidade de elevação
de 2005 mm.
2.4.2. Elevador de veículos de quatro postes
Na Figura 2.3 é apresentado um elevador de veículos de quatro postes da empresa MAHA
Maschinenbau, modelo Carlift 4.1. Este elevador tem uma capacidade de carga de 4000 kg e uma
capacidade de elevação de 1900 mm.

16
Figura 2.3: Elevador de veículos de quatro postes da empresa Maha, fonte: [12].
Figura 2.4: Elevador de veículos em tesoura da empresa Rotary Lifts, fonte: [11].
2.4.3. Elevador de veículos em tesoura
Na Figura 2.4 é apresentado um elevador de veículos em tesoura da empresa Rotary Lifts, modelo
GLP35. Este elevador tem uma capacidade de carga de 3500 kg e uma capacidade de elevação de
1920 mm.
2.4.4. Elevador de veículos inserido no solo
Na Figura 2.5 é apresentado um elevador de veículos cujos cilindros hidráulicos de elevação estão
inseridos no solo. Este elevador é fabricado pela empresa Rotary Lifts, modelo SL235. Este elevador
tem uma capacidade de carga de 3500 kg e uma capacidade de elevação de 1920 mm.

17
Figura 2.5: Elevador de veículos inserido no solo da empresa Rotary Lifts, fonte: [11].
Figura 2.6: Esquema de um elevador de veículos de dois postes patenteado, fonte: [13].
2.5. Pesquisa de registos de patentes
Nas bases de dados consultadas não se encontraram registos de patentes de elevadores de veículos
que também permitissem a sua inclinação. As patentes encontradas dizem respeito, na sua maioria, a
elevadores de veículos para oficinas que só possuem movimento de elevação.
2.5.1. Elevadores de veículos de dois postes
Na Figura 2.6 é apresentado o esquema de um elevador de dois postes. Neste elevador existe
apenas um cilindro hidráulico (ver nº 12 na Fig. 2.6) que através de um cabo comunica o movimento a
ambos os lados do elevador. É de notar que o cabo ao passar por cima do cilindro hidráulico, duplica
o curso deste actuador. Neste caso o cabo passa por baixo do veículo a elevar.
Número da patente: JP2002226187 [13]
Data de publicação: 21/08/2002
Inventor: Isogai Shunji
Requerente: Sugiyasu Kogyo KK

18
Figura 2.7: Patente de um elevador de veículos de quatro postes, fonte: [14].
Figura 2.8: Sistema de roldanas e cabos actuados por um cilindro hidráulico de uma patente de
um elevador de veículos de quatro postes, fonte: [14].
2.5.2. Elevador de veículos de quatro postes
Na Figura 2.7 é apresentado o esquema de um elevador de quatro postes. Este elevador possui
quatro postes que suportam as placas (ver nº 22 na Fig. 2.7) onde é colocado o veículo a elevar.
Debaixo de uma das placas encontra-se um cilindro hidráulico (ver nº 68 na Fig. 2.8) que através de
um sistema de cabos e roldanas é responsável pelo movimento de elevação.
Número da patente: US7143869 [14]
Data de publicação: 05/12/2006
Inventor: Chance Mitch (US)
Requerente: Igs, Inc. (US)

19
Figura 2.9: Patente de um elevador de veículos em tesoura, fonte: [15].
2.5.3. Elevador de veículos em tesoura
Na Figura 2.7 é apresentado o esquema de um elevador em tesoura. Este elevador funciona através
de braços (ver nos 11a e 11b na Fig. 2.9) ligados entre si por pontos de rotação (ver nº 12 na Fig. 2.9),
à semelhança de uma tesoura. Dois destes braços estão ligados a um cilindro hidráulico (ver nº 3 na
Fig. 2.9) que é responsável pelo movimento de elevação do veículo. Estes elevadores funcionam aos
pares e portanto são necessárias duas máquinas como a apresentada na Figura 2.9 para elevar um
veículo. Cada máquina é colocada entre cada par de rodas dianteira e traseira à semelhança do que
se pode observar na Figura 2.4.
Número da patente: US5636711 [15]
Data de publicação: 10/06/1997
Inventor: Hans Nussbaum
Requerente: Otto Nussbaum GmbH & Co. KG
2.5.4. Elevador de veículos inserido no solo
Na Figura 2.10 é apresentado o esquema de um elevador cujo mecanismo de accionamento se
encontra inserido no solo. Este elevador funciona através de um cilindro hidráulico inserido no solo.
Esta patente diz respeito ao método de adaptação de um elevador de veículos inserido no solo com
sistema hidráulico de baixa pressão a um sistema hidráulico de alta pressão. O objectivo é diminuir o
volume de fluido hidráulico necessário de modo a minimizar possíveis problemas ambientais, uma
vez que um sistema hidráulico está sempre sujeito a fugas.
Número da patente: US5860491 [16]
Data de publicação: 19/01/1999
Inventor: Robert H. Fletcher
Requerente: Advantage Lift Systems, Inc.

20
Figura 2.10: Elevador de veículos inserido no
solo com sistema hidráulico inicial de baixa
pressão, fonte: [16].
Figura 2.11: Patente de um elevador de veículos
inserido no solo com sistema hidráulico adaptado
de alta pressão, fonte: [16].
2.5.5. Elevador de veículos móvel
Na Figura 2.12 é apresentado o esquema de um elevador móvel. Este elevador é um dos que mais
se aproxima do pretendido neste projecto, pois não está fixo ao solo, o movimento de elevação é
efectuado através de um mecanismo inserido numa única coluna de suporte e o veículo é suportado
pelo chassis.
Número da patente: US5236065 [17]
Data de publicação: 17/08/1993
Inventor: Shunji Isogai, Hekinan, Japan
Requerente: Sugiyasu Industries Co., Ltd, Takahama, Japan
Figura 2.12: Patente de um elevador de veículos móvel, fonte: [17].

21
Figura 2.13: Patente de uma plataforma de inclinação parcial de veículos, fonte: [18].
2.5.6. Plataformas de inclinação de veículos
Na Figura 2.13 é apresentado o esquema de uma plataforma que permite elevar a dianteira ou a
traseira de um veículo que nela é colocado, através da insuflação dos sacos de ar indicados pelo
nº 30 na Figura 2.13.
Número da patente: US6918575 [18]
Data de publicação: 19/07/2005
Inventores: Tony P. Cadrain, Donald Sands
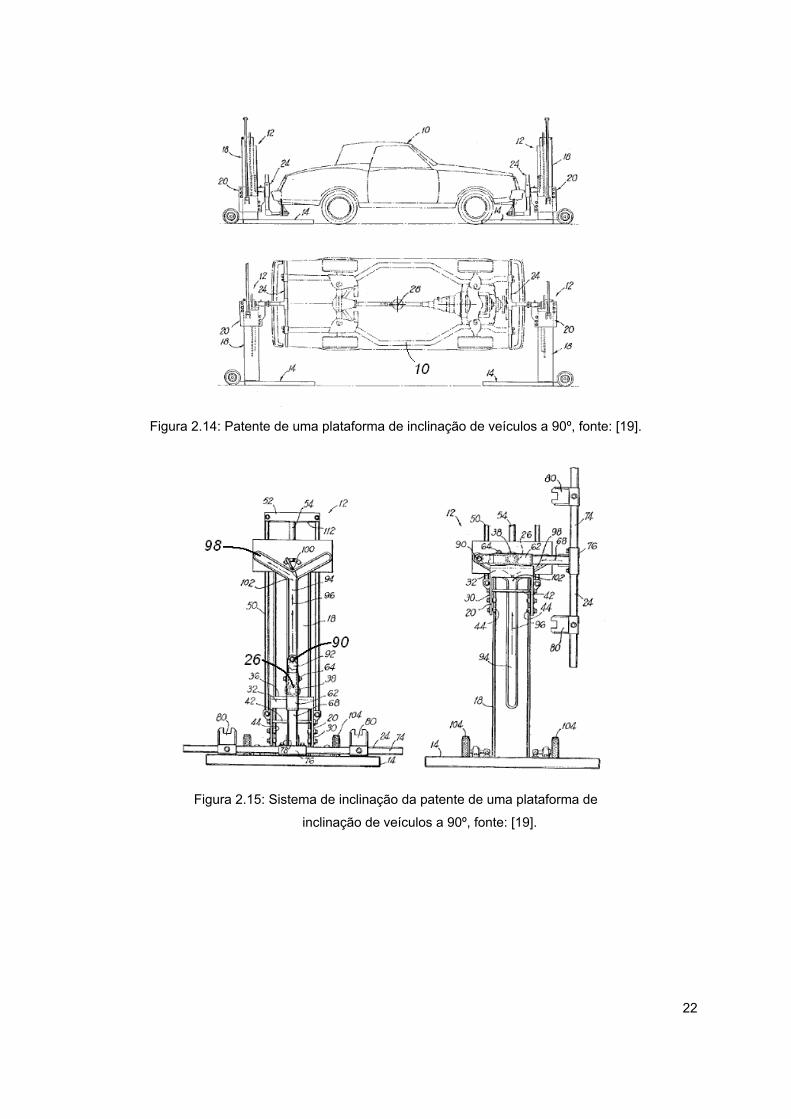
Na Figura 2.14 é apresentado o esquema de uma plataforma que permite inclinar um veículo a 90º
em torno do seu eixo longitudinal. Esta plataforma permite inclinar totalmente o veículo que nela é
colocado através da rotação de 90º dos suportes do veículo (ver nº 24 na Fig. 2.14). Esta plataforma
não permite a elevação do veículo de modo a que um operador possa trabalhar por baixo deste em
pé, mas poderia ser modificada para que o pudesse fazer e deste modo é a patente mais interessante
de todas as encontradas no âmbito deste projecto.
O veículo é elevado ligeiramente através de cilindros hidráulicos (ver nº 54 na Fig. 2.15) até que a
peça identificada pelo nº 90 na Figura 2.14, que está ligada aos suportes do veículo, atinja a calha
identificada pelo nº 98 na Figura 2.15, que através da continuação do movimento de elevação vai
provocar a rotação dos suportes do veículo em torno do eixo identificado pelo nº 26 na Figura 2.15. O
veículo é fixado aos suportes (ver nº 24 na Fig. 2.14) pelo chassis (ver nº 10 na Fig. 2.14) através de
correntes.
Número da patente: US4599034 [19]
Data de publicação: 08/07/1986
Inventores: Donald L. Kennedy, John P. Kennedy, Peggy Kennedy
22
Figura 2.14: Patente de uma plataforma de inclinação de veículos a 90º, fonte: [19].
Figura 2.15: Sistema de inclinação da patente de uma plataforma de
inclinação de veículos a 90º, fonte: [19].

23
Figura 3.1: Diagrama de decomposição de problemas.
Capítulo 3
3. Geração e selecção de conceitos
Identificados o problema e as especificações bem como o enquadramento normativo e no mercado
actual, passa-se à fase de apresentação dos conceitos gerados para este projecto.
Entende-se como conceito uma ideia concreta das linhas ou formas gerais de um equipamento,
destinado a efectuar tarefas bem identificadas que neste caso em particular não podem ser
efectuados pelo homem.
De seguida apresentam-se os nove conceitos gerados e a selecção do que melhor satisfaz as
especificações.
3.1. Decomposição de Problemas
No diagrama da Figura 3.1 podemos observar uma esquematização dos principais problemas que
terão que ser abordados pelos novos conceitos.
3.2. Geração de conceitos
Nos conceitos gerados têm-se três movimentos: o de elevação, o de rotação e o da tranca que deve
ser actuada antes do movimento de rotação de modo a bloquear o veículo. Note-se que não há
necessidade de actuar a tranca para o movimento de elevação.
Todos os conceitos foram concebidos para que os três movimentos sejam independentes.

24
Figura 3.3: Conceito 0 com o veículo em posição elevada.
O veículo que se observa nas figuras tem as dimensões aproximadas de um veículo familiar de três
portas e quatro lugares com um comprimento de 4200 mm, largura de 1765 mm e altura de 1420 mm.
As bases (ver nº 6 na Fig. 3.2) de todos os conceitos gerados com excepção do conceito 8, que se
apresentará mais à frente, estão com a mesma configuração da plataforma da empresa LSD
(apresentada no ponto 1.2), mas a intenção é que venham a ser de maiores dimensões para eliminar
a necessidade de ligação aparafusada ao solo.
3.2.1. Conceito 0
O primeiro conceito apresentado, que se designou de conceito 0, é uma modificação da plataforma
que inspirou este projecto e que se distingue por ter o movimento da tranca independente do
movimento de elevação do veículo.
Podemos observar na Figura 3.2, os braços de suporte do veículo a cinzento (ver nº 1 na Fig. 3.2), o
dispositivo de suporte do veículo a vermelho (ver nº 2 na Fig. 3.2), o dispositivo de encaixe da tranca
a cor-de-rosa (ver nº 3 na Fig. 3.2), a tranca a cor-de-laranja (ver nº 4 na Fig. 3.2), as vigas de
suporte a amarelo (ver nº 5 na Fig. 3.2) e a base a azul-escuro (ver nº 6 na Fig. 3.2).
Legenda das Figuras 3.2 e 3.3:
1 – Braço de suporte do veículo. 6 – Base.
2 – Dispositivo de suporte do veículo. 7 – Cilindro hidráulico de accionamento da tranca.
3 – Dispositivo de encaixe da tranca. 8 – Cilindros hidráulicos de rotação.
4 – Tranca. 9 – Cilindros hidráulicos de elevação.
5 – Vigas de suporte.
Figura 3.2: Conceito 0.

25
Figura 3.4: Vista lateral do conceito 0 com o veículo inclinado a 90º.
O movimento de elevação do veículo é efectuado por um ou mais cilindros hidráulicos (ver nº 9 na
Fig. 3.3) ligados entre o dispositivo de suporte do veículo e as vigas de suporte. O dispositivo de
suporte do veículo é guiado pelas vigas de suporte através de rolamentos montados no dispositivo de
suporte do veículo.
Antes de iniciar o movimento de inclinação do veículo (ver Fig. 3.4) é necessário impedir qualquer
movimento deste através do fecho da tranca. Este movimento é actuado por um cilindro hidráulico
(ver nº 7 na Fig. 3.2) que está ligado entre o dispositivo de suporte do veículo e o dispositivo de
encaixe da tranca. O dispositivo de encaixe da tranca é guiado pelo dispositivo de suporte do veículo
através de rolamentos montados no dispositivo de encaixe da tranca.
O movimento de inclinação do veículo (ver Fig. 3.4) é provocado pela rotação das vigas de suporte e
é actuado por dois ou quatro cilindros hidráulicos (ver nº 8 na Fig. 3.4) ligados entre a base e as vigas
de suporte.
Legenda da Figura 3.4:
8 – Cilindros hidráulicos de rotação.

26
Figura 3.6: Conceito 1 com veículo elevado.
3.2.2. Conceito 1
Este conceito difere do anterior essencialmente por ter apenas uma viga de suporte.
Podemos observar na Figura 3.5, o dispositivo de suporte do veículo a vermelho (ver nº 1 na Fig. 3.5),
a tranca a cor-de-laranja (ver nº 2 na Fig. 3.5), a viga de suporte a amarelo (ver nº 3 na Fig. 3.5) e a
base a azul-escuro (ver nº 4 na Fig. 3.5).
Legenda das Figuras 3.5 e 3.6:
1 – Dispositivo de suporte do veículo.
2 – Tranca.
3 – Viga de suporte.
4 – Base.
5 – Cilindro hidráulico de elevação.
6 – Cilindro hidráulico de accionamento da tranca.
7 – Cilindros hidráulicos de rotação.
O movimento de elevação é actuado por um cilindro hidráulico (ver nº 5 na Fig. 3.6) ligado entre o
dispositivo de suporte do veículo e a viga de suporte. O dispositivo de suporte do veículo é guiado
pela viga de suporte através de rolamentos montados no dispositivo de suporte do veículo.
Antes do movimento de inclinação do veículo (ver Fig. 3.7) é necessário impedir qualquer movimento
deste através do fecho da tranca. Este movimento é actuado por um cilindro hidráulico (ver nº 6 na
Fig. 3.6) que está ligado entre a tranca e o dispositivo de suporte do veículo. A tranca é guiada pelo
dispositivo de suporte do veículo através de rolamentos montados na tranca.
Também neste conceito, o movimento de inclinação do veículo é provocado pela rotação da viga de
suporte e é actuado por dois ou quatro cilindros hidráulicos (ver nº 7 na Fig. 3.6) ligados entre a base
e a viga de suporte.
Figura 3.5: Conceito 1.

27
Figura 3.7: Conceito 1 com o veículo inclinado a 90º.
28
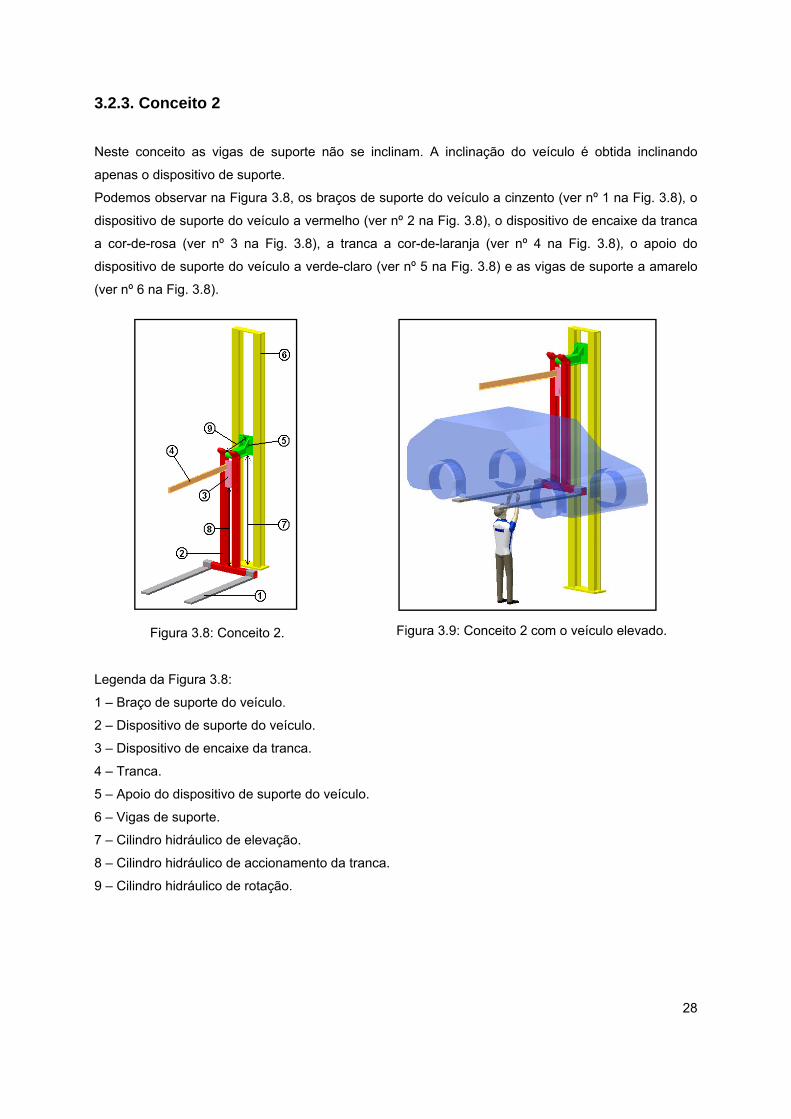
Figura 3.8: Conceito 2. Figura 3.9: Conceito 2 com o veículo elevado.
3.2.3. Conceito 2
Neste conceito as vigas de suporte não se inclinam. A inclinação do veículo é obtida inclinando
apenas o dispositivo de suporte.
Podemos observar na Figura 3.8, os braços de suporte do veículo a cinzento (ver nº 1 na Fig. 3.8), o
dispositivo de suporte do veículo a vermelho (ver nº 2 na Fig. 3.8), o dispositivo de encaixe da tranca
a cor-de-rosa (ver nº 3 na Fig. 3.8), a tranca a cor-de-laranja (ver nº 4 na Fig. 3.8), o apoio do
dispositivo de suporte do veículo a verde-claro (ver nº 5 na Fig. 3.8) e as vigas de suporte a amarelo
(ver nº 6 na Fig. 3.8).
Legenda da Figura 3.8:
1 – Braço de suporte do veículo.
2 – Dispositivo de suporte do veículo.
3 – Dispositivo de encaixe da tranca.
4 – Tranca.
5 – Apoio do dispositivo de suporte do veículo.
6 – Vigas de suporte.
7 – Cilindro hidráulico de elevação.
8 – Cilindro hidráulico de accionamento da tranca.
9 – Cilindro hidráulico de rotação.

29
Figura 3.10: Conceito 2 com o veículo inclinado a 90º.
O movimento de elevação (ver Fig. 3.9) é actuado por um cilindro hidráulico (ver nº 7 na Fig. 3.8)
ligado entre o apoio do dispositivo de suporte do veículo e as vigas de suporte. O apoio do dispositivo
de suporte do veículo é guiado pelas vigas de suporte através de rolamentos montados no guia do
dispositivo de suporte do veículo.
Antes do movimento de inclinação do veículo (ver Fig. 3.10) é necessário impedir qualquer
movimento deste através do fecho da tranca. Este movimento é actuado por um cilindro hidráulico
(ver nº 8 na Fig. 3.8) que está ligado entre o dispositivo de suporte do veículo e o dispositivo de
encaixe da tranca. O dispositivo de encaixe da tranca é guiado pelo dispositivo de suporte do veículo
através de rolamentos montados no dispositivo de encaixe da tranca.
O movimento de rotação do veículo é provocado pela actuação do cilindro hidráulico (ver nº 9 na
Fig. 3.8) que se encontra ligado entre o topo do dispositivo de suporte do veículo e o apoio do
dispositivo de suporte do veículo.

30
Figura 3.12: Conceito 3 com o veículo elevado.
3.2.4. Conceito 3
Este conceito é praticamente idêntico ao anterior, mudando apenas a localização do eixo de rotação
do movimento de inclinação, que passou do topo do dispositivo de suporte do veículo para o meio
deste de modo a reduzir a sua altura.
Neste conceito podemos observar na Figura 3.11, os braços de suporte do veículo a cinzento (ver
nº 1 na Fig. 3.11), o dispositivo de suporte do veículo a vermelho (ver nº 2 na Fig. 3.11), o dispositivo
de encaixe da tranca a cor-de-rosa (ver nº 3 na Fig. 3.14), a tranca a cor-de-laranja (ver nº 4 na
Fig. 3.11), o apoio do dispositivo de suporte do veículo a verde-claro (ver nº 5 na Fig. 3.11) e as vigas
de suporte a amarelo (ver nº 6 na Fig. 3.11).
Legenda da Figura 3.11:
1 – Braço de suporte do veículo.
2 – Dispositivo de suporte do veículo.
3 – Dispositivo de encaixe da tranca.
4 – Tranca.
5 – Apoio do dispositivo de suporte do veículo.
6 – Vigas de suporte.
7 – Cilindro hidráulico de elevação.
8 – Cilindro hidráulico de accionamento da tranca.
9 – Cilindro hidráulico de rotação.
O movimento de elevação (ver Fig. 3.12) é actuado por um cilindro hidráulico (ver nº 7 na Fig. 3.11)
ligado entre o apoio do dispositivo de suporte do veículo e as vigas de suporte. O apoio do dispositivo
de suporte do veículo é guiado pelas vigas de suporte através de rolamentos montados no apoio do
dispositivo de suporte do veículo.
Figura 3.11: Conceito 3.

31
Figura 3.13: Vista frontal do conceito 3 com o veículo a 90º.
Antes do movimento de inclinação do veículo é necessário impedir qualquer movimento deste através
do fecho da tranca. Este movimento é actuado por um cilindro hidráulico (ver nº 8 na Fig. 3.11) que
está ligado entre o dispositivo de suporte do veículo e o dispositivo de encaixe da tranca. O
dispositivo de encaixe da tranca é guiado pelo dispositivo de suporte do veículo através de
rolamentos montados no dispositivo de encaixe da tranca.
O movimento de rotação do veículo (ver Fig. 3.13) é provocado pela actuação de um cilindro
hidráulico (ver nº 9 na Fig. 3.11) que se encontra ligado entre o topo do dispositivo de suporte do
veículo e o apoio do dispositivo de suporte do veículo.
32
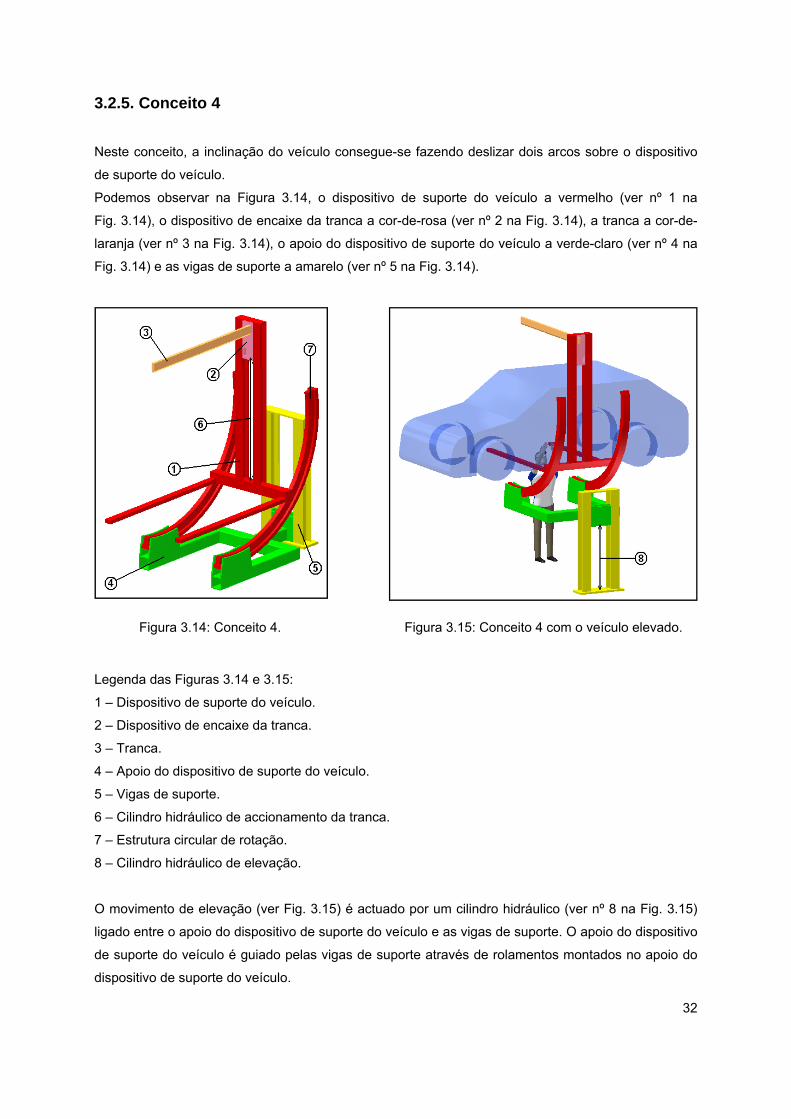
Figura 3.15: Conceito 4 com o veículo elevado.
3.2.5. Conceito 4
Neste conceito, a inclinação do veículo consegue-se fazendo deslizar dois arcos sobre o dispositivo
de suporte do veículo.
Podemos observar na Figura 3.14, o dispositivo de suporte do veículo a vermelho (ver nº 1 na
Fig. 3.14), o dispositivo de encaixe da tranca a cor-de-rosa (ver nº 2 na Fig. 3.14), a tranca a cor-de-
laranja (ver nº 3 na Fig. 3.14), o apoio do dispositivo de suporte do veículo a verde-claro (ver nº 4 na
Fig. 3.14) e as vigas de suporte a amarelo (ver nº 5 na Fig. 3.14).
Legenda das Figuras 3.14 e 3.15:
1 – Dispositivo de suporte do veículo.
2 – Dispositivo de encaixe da tranca.
3 – Tranca.
4 – Apoio do dispositivo de suporte do veículo.
5 – Vigas de suporte.
6 – Cilindro hidráulico de accionamento da tranca.
7 – Estrutura circular de rotação.
8 – Cilindro hidráulico de elevação.
O movimento de elevação (ver Fig. 3.15) é actuado por um cilindro hidráulico (ver nº 8 na Fig. 3.15)
ligado entre o apoio do dispositivo de suporte do veículo e as vigas de suporte. O apoio do dispositivo
de suporte do veículo é guiado pelas vigas de suporte através de rolamentos montados no apoio do
dispositivo de suporte do veículo.
Figura 3.14: Conceito 4.

33
Antes do movimento de inclinação do veículo é necessário impedir qualquer movimento deste através
do fecho da tranca. Este movimento é actuado por um cilindro hidráulico (ver nº 6 na Fig. 3.14) que
está ligado entre o dispositivo de suporte do veículo e o dispositivo de encaixe da tranca. O
dispositivo de encaixe da tranca é guiado pelo dispositivo de suporte do veículo através de
rolamentos montados no dispositivo de encaixe da tranca.
É no movimento de inclinação (ver Fig. 3.16) que este conceito difere dos anteriores pois é efectuado
por uma estrutura circular que se pode observar a vermelho com o nº 7 na Figura 3.14 como parte
integrante do dispositivo de suporte do veículo. Esta estrutura roda guiada e apoiada pelo apoio do
dispositivo de suporte do veículo. Este movimento seria actuado por engrenagens ligadas a um motor
eléctrico, que comunicariam o seu movimento a uma superfície dentada na estrutura circular.
Figura 3.16: Conceito 4 com o veículo inclinado de 90º.
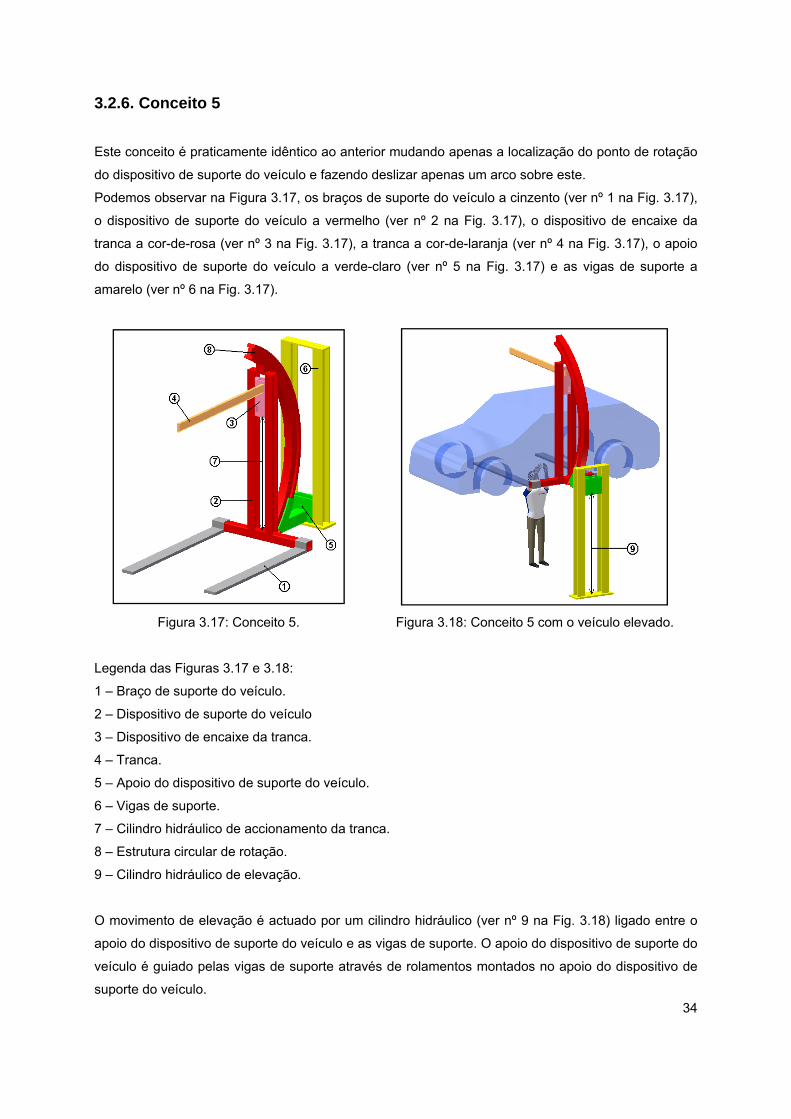
34
3.2.6. Conceito 5
Este conceito é praticamente idêntico ao anterior mudando apenas a localização do ponto de rotação
do dispositivo de suporte do veículo e fazendo deslizar apenas um arco sobre este.
Podemos observar na Figura 3.17, os braços de suporte do veículo a cinzento (ver nº 1 na Fig. 3.17),
o dispositivo de suporte do veículo a vermelho (ver nº 2 na Fig. 3.17), o dispositivo de encaixe da
tranca a cor-de-rosa (ver nº 3 na Fig. 3.17), a tranca a cor-de-laranja (ver nº 4 na Fig. 3.17), o apoio
do dispositivo de suporte do veículo a verde-claro (ver nº 5 na Fig. 3.17) e as vigas de suporte a
amarelo (ver nº 6 na Fig. 3.17).
Figura 3.17: Conceito 5. Figura 3.18: Conceito 5 com o veículo elevado.
Legenda das Figuras 3.17 e 3.18:
1 – Braço de suporte do veículo.
2 – Dispositivo de suporte do veículo
3 – Dispositivo de encaixe da tranca.
4 – Tranca.
5 – Apoio do dispositivo de suporte do veículo.
6 – Vigas de suporte.
7 – Cilindro hidráulico de accionamento da tranca.
8 – Estrutura circular de rotação.
9 – Cilindro hidráulico de elevação.
O movimento de elevação é actuado por um cilindro hidráulico (ver nº 9 na Fig. 3.18) ligado entre o
apoio do dispositivo de suporte do veículo e as vigas de suporte. O apoio do dispositivo de suporte do
veículo é guiado pelas vigas de suporte através de rolamentos montados no apoio do dispositivo de
suporte do veículo.

35
Figura 3.19: Conceito 5 com o veículo inclinado de 90º.
Antes do movimento de inclinação do veículo é necessário impedir qualquer movimento deste através
do fecho da tranca. Este movimento é actuado por um cilindro hidráulico (ver nº 7 na Fig. 3.17) que
está ligado entre o dispositivo de suporte do veículo e o dispositivo de encaixe da tranca.
O dispositivo de encaixe da tranca é guiado pelo dispositivo de suporte do veículo através de
rolamentos montados no dispositivo de encaixe da tranca.
O movimento de inclinação (ver Fig. 3.19) é efectuado por uma estrutura circular que se pode
observar a vermelho com o nº 8 na Figura 3.17, como parte integrante do dispositivo de suporte do
veículo. Esta estrutura roda guiada e apoiada pelo apoio do dispositivo de suporte do veículo. Este
movimento seria actuado por engrenagens ligadas a um motor eléctrico, que comunicariam o seu
movimento a uma superfície dentada na estrutura circular.

36
3.2.7. Conceito 6
Este conceito mantém as vigas de suporte fixas, à semelhança do conceito anterior, mas propõe um
sistema de inclinação do veículo diferente.
Podemos observar na Figura 3.20, o dispositivo de suporte do veículo a vermelho (ver nº 1 na
Fig. 3.20), o dispositivo de encaixe da tranca a cor-de-rosa (ver nº 2 na Fig. 3.20), a tranca a cor-de-
laranja (ver nº 3 na Fig. 3.20), o apoio do dispositivo de suporte do veículo a verde-claro (ver nº 4 na
Fig. 3.20) e as vigas de suporte a amarelo (ver nº 5 na Fig. 3.20).
Figura 3.20: Conceito 6. Figura 3.21: Conceito 6 com o veículo elevado.
Legenda das Figuras 3.20 e 3.21:
1 – Dispositivo de suporte do veículo
2 – Dispositivo de encaixe da tranca.
3 – Tranca.
4 – Apoio do dispositivo de suporte do veículo.
5 – Vigas de suporte.
6 – Cilindro hidráulico de accionamento da tranca.
7 – Cilindro hidráulico de elevação.
O movimento de elevação é actuado por um cilindro hidráulico (ver nº 7 na Fig. 3.21) ligado entre o
apoio do dispositivo de suporte do veículo e as vigas de suporte. O apoio do dispositivo de suporte do
veículo é guiado pelas vigas de suporte através de rolamentos montados no apoio do dispositivo de
suporte do veículo.
Antes do movimento de inclinação do veículo é necessário impedir qualquer movimento deste através
do fecho da tranca. Este movimento é actuado por um cilindro hidráulico (ver nº 6 na Fig. 3.20) que
está ligado entre o dispositivo de suporte do veículo e o dispositivo de encaixe da tranca. O

37
dispositivo de encaixe da tranca é guiado pelo dispositivo de suporte do veículo através de
rolamentos montados no dispositivo de encaixe da tranca.
Dentro da estrutura tubular do apoio do dispositivo de suporte do veículo, vai-se ter uma corrente em
L onde o dispositivo de suporte do veículo vai estar fixado por dois pontos como se pode observar
nos pormenores da Figura 3.22. A corrente quando animada de movimento vai provocar a inclinação
do dispositivo de suporte do veículo (ver Fig. 3.23).
Figura 3.22: Explicação do movimento de inclinação do veículo
do conceito 6.
Figura 3.23: Conceito 6 com
veículo inclinado de 90º.

38
Figura 3.25: Conceito 7 com veículo elevado.
3.2.8. Conceito 7
Este conceito é muito semelhante ao anterior diferindo na forma como actua o movimento de
inclinação do veículo.
Podemos observar na Figura 3.24, o dispositivo de suporte do veículo a vermelho (ver nº 1 na
Fig. 3.24), o dispositivo de encaixe da tranca a cor-de-rosa (ver nº 2 na Fig. 3.24), a tranca a cor-de-
laranja (ver Fig. 3.24, nº 3), o apoio do dispositivo de suporte do veículo a verde-claro (ver nº 4 na
Fig. 3.24) e as vigas de suporte a amarelo (ver nº 5 na Fig. 3.24).
Legenda das Figuras 3.24 e 3.25:
1 – Dispositivo de suporte do veículo
2 – Dispositivo de encaixe da tranca.
3 – Tranca.
4 – Apoio do dispositivo de suporte do veículo.
5 – Vigas de suporte.
6 – Cilindro hidráulico de accionamento da tranca.
7 – Cilindro hidráulico de elevação.
O movimento de elevação é actuado por um cilindro hidráulico (ver nº 7 na Fig. 3.25) ligado entre o
apoio do dispositivo de suporte do veículo e as vigas de suporte. O apoio do dispositivo de suporte do
veículo é guiado pelas vigas de suporte através de rolamentos montados no apoio do dispositivo de
suporte do veículo.
Figura 3.24: Conceito 7.

39
Antes do movimento de inclinação do veículo é necessário impedir qualquer movimento deste através
do fecho da tranca. Este movimento é actuado por um cilindro hidráulico (ver nº 6 na Fig. 3.24) que
está ligado entre o dispositivo de suporte do veículo e o dispositivo de encaixe da tranca. O
dispositivo de encaixe da tranca é guiado pelo dispositivo de suporte do veículo através de
rolamentos montados no dispositivo de encaixe da tranca.
Neste conceito o dispositivo de suporte do veículo é empurrado no topo para baixo por uma força F
gerada por um motor eléctrico acoplado ao dispositivo de suporte do veículo (ver Fig. 3.26) e que
comunica a força através de engrenagens a uma superfície dentada no guia do dispositivo de suporte
do veículo, gerando-se assim o movimento de inclinação (ver Fig. 3.27).
Figura 3.26: Explicação do movimento de inclinação do veículo
do conceito 7.
Figura 3.27: Conceito 7 com
veículo inclinado de 90º.

40
3.2.9. Conceito 8
Neste conceito a abordagem é um pouco diferente já que o veículo é suportado pelos dispositivos de
suporte do veículo pela parte de trás e da frente permitindo um melhor acesso à parte inferior do
veículo. No entanto, como se pode observar (ver Fig. 3.28 e 3.29), há uma duplicação dos sistemas
de suporte, de elevação e de inclinação do veículo.
Podemos observar na Figura 3.28, os braços de suporte do veículo a cinzento (ver nº 1 na Fig. 3.28),
os dispositivos de suporte do veículo a vermelho (ver nº 2 na Fig. 3.28), os dispositivos de encaixe
das trancas a cor-de-rosa (ver nº 3 na Fig. 3.28), as trancas a cor-de-laranja (ver nº 4 na Fig. 3.28), os
apoios dos dispositivos de suporte do veículo a verde-claro (ver nº 5 na Fig. 3.28), as vigas de
suporte a amarelo (ver nº 6 na Fig. 3.28) e a base a azul-escuro (ver nº 7 na Fig. 3.28).
Figura 3.28: Conceito 8. Figura 3.29: Conceito 8 com veículo elevado.
Legenda das Figuras 3.20 e 3.21:
1 – Braço de suporte do veículo.
2 – Dispositivo de suporte do veículo
3 – Dispositivo de encaixe da tranca.
4 – Tranca.
5 – Apoio do dispositivo de suporte do veículo.
6 – Vigas de suporte.
7 – Base.
8 – Cilindro hidráulico de elevação.
O movimento de elevação do veículo é efectuado por dois ou mais cilindros hidráulicos (ver nº 8 na
Fig. 3.29) ligados entre os apoios dos dispositivos de suporte do veículo e as vigas de suporte. Os
apoios dos dispositivos de suporte do veículo são guiados pelas vigas de suporte através de
rolamentos montados nos apoios dos dispositivos de suporte do veículo.

41
Figura 3.30: Conceito 8 com veículo inclinado de 90º.
Antes do movimento de inclinação do veículo é necessário impedir qualquer movimento deste através
do fecho das trancas. Estes movimentos são actuados por dois cilindros hidráulicos (um por cada
dispositivo de suporte do veículo) que estão ligados entre os dispositivos de suporte do veículo e os
dispositivos de encaixe das trancas, do mesmo modo que o conceito anterior. O dispositivo de
encaixe da tranca é guiado pelo dispositivo de suporte do veículo através de rolamentos montados no
dispositivo de encaixe da tranca.
O movimento de inclinação do veículo em torno do eixo longitudinal (ver Fig. 3.30) é provocado pela
rotação simultânea dos dois dispositivos de suporte do veículo através da actuação de dois cilindros
hidráulicos (um por cada dispositivo de suporte do veículo) ligados entre os dispositivos de suporte do
veículo e os apoios dos dispositivos de suporte do veículo de modo a provocar a rotação dos
dispositivos de suporte do veículos em relação aos apoios destes que servem de pivot de rotação.

42
3.3. Selecção de Conceitos
Neste ponto, importa seleccionar o conceito que melhor se adapta às condições da empresa Ambop.
Para tal utilizaram-se ferramentas de selecção (utilizadas no âmbito da disciplina de Desenvolvimento
do Produto [20]). É preciso notar que estas ferramentas dão um auxílio importante na sistematização
e fundamentação da selecção de conceitos mas não substituem a experiência dos projectistas
envolvidos, requerendo por isso uma interpretação crítica e experiente dos resultados produzidos.
3.3.1. Critérios de selecção
Para seleccionar um conceito de entre os vários gerados, definiram-se os vários critérios que
possibilitassem uma diferenciação entre as várias alternativas geradas e que foram apresentadas no
ponto 3.2. Estes critérios são aqueles que se consideraram mais pertinentes para a empresa que
encomendou o projecto e que fossem possíveis de quantificar nesta fase do projecto, em que ainda
não se passou ao dimensionamento estrutural. Os critérios considerados são:
Volume necessário
Com este critério quantifica-se o espaço que a plataforma precisa para elevar e inclinar um veículo.
Para avaliar este critério foi considerado um veículo com um comprimento de 6400 mm, uma vez que
este foi o maior comprimento encontrado em veículos aos quais se destina a plataforma a projectar.
Volume de transporte
Volume mínimo que uma plataforma vai ocupar em transporte.
Complexidade dos sistemas de actuação
Com este critério pretende-se avaliar qualitativamente o nível crescente de complexidade dos
sistemas de actuação dos movimentos de cada conceito. Assim de um modo crescente de
complexidade tem-se:
1 - Utilização de apenas cilindros hidráulicos.
2 - Utilização de cilindros hidráulicos e engrenagens.
3 - Utilização de cilindros hidráulicos, engrenagens e correntes de transmissão.
Número de peças
Pretende-se quantificar o número de peças que têm de ser fabricadas em cada conceito. Por exemplo
na Figura 3.5 podemos observar 4 peças numeradas com os nos 1,2,3 e 4.
Importa referir que a tranca (ver nº 3 na Fig. 3.24) e o dispositivo de encaixe da tranca (ver nº 2 na
Fig. 3.24) são contabilizadas como uma só peça porque em qualquer conceito estas duas peças
podem ser fabricadas como sendo só uma ou então manterem-se como duas peças por uma questão
de operacionalidade. O mesmo acontece com os braços de suporte do veículo (ver nº 1 na Fig. 3.17)

43
e o dispositivo de suporte do veículo (ver nº 2 na Fig. 3.17). São contabilizados como uma só peça
porque por uma questão de economia serão fabricados como uma só peça, mas se assim se desejar,
poderão ser fabricados como duas ou três peças distintas de modo a se poder regular a distância
entre os braços de suporte do veículo.
Processo fabrico
Com este critério pretende-se avaliar qualitativamente o nível crescente de complexidade dos
processos usados para o fabrico de cada conceito. Assim de um modo crescente de complexidade
tem-se:
1 - Utilização de soldadura e/ou aparafusamento de componentes normalizados.
2 - Utilização de soldadura e/ou aparafusamento de componentes normalizados e fundição de
determinados componentes.
Necessidade de vala
Podemos observar na Figura 3.16 que o operador não chega à parte superior do veículo com este
inclinado a 90º. Neste caso para este conceito ser viável, o comprador da plataforma teria que instalar
a plataforma a um nível inferior ao do solo, de modo a afundá-la, para que o operador pudesse
alcançar o topo do veículo quando este estivesse inclinado de 90º. Para este projecto considerou-se
que uma vala seria necessária se a distância entre o veículo e o solo, indicada pela letra d na
Figura 3.16, fosse superior a 400 mm. Assim de uma forma quantitativa crescente tem-se:
1 - Não necessita de vala para instalar plataforma.
2 - Necessita de vala para instalar plataforma.
Facilidade de operação
Com este critério pretende-se avaliar qualitativamente o nível crescente da acessibilidade do
operador ao fundo do veículo. Assim de um modo crescente de complexidade tem-se:
1 - Acessibilidade quase total ao fundo do veículo, como se pode observar na Figura 3.29.
2 - Acessibilidade limitada ao fundo do veículo e equivalente à plataforma original como se pode
observar nas Figuras. 3.3 e 3.6.
3 - Acessibilidade igual à anterior, mas com dificuldades na deslocação do operador ao longo do
veículo como se pode observar nas Figuras 3.15 e 3.16.
Altura necessária
Com este critério pretende-se estimar a altura que cada conceito necessitaria para elevar um veículo
a 2,10 m do solo.
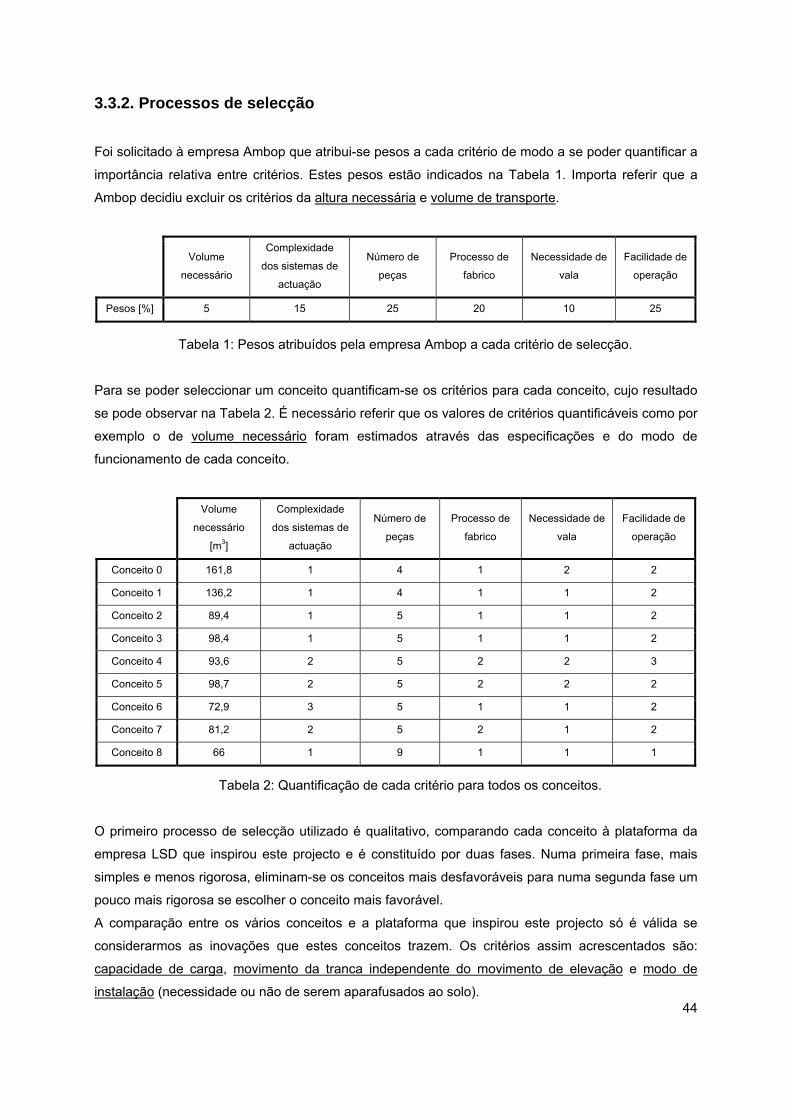
44
3.3.2. Processos de selecção
Foi solicitado à empresa Ambop que atribui-se pesos a cada critério de modo a se poder quantificar a
importância relativa entre critérios. Estes pesos estão indicados na Tabela 1. Importa referir que a
Ambop decidiu excluir os critérios da altura necessária e volume de transporte.
Volume
necessário
Complexidade
dos sistemas de
actuação
Número de
peças
Processo de
fabrico
Necessidade de
vala
Facilidade de
operação
Pesos [%] 5 15 25 20 10 25
Para se poder seleccionar um conceito quantificam-se os critérios para cada conceito, cujo resultado
se pode observar na Tabela 2. É necessário referir que os valores de critérios quantificáveis como por
exemplo o de volume necessário foram estimados através das especificações e do modo de
funcionamento de cada conceito.
Volume
necessário
[m3]
Complexidade
dos sistemas de
actuação
Número de
peças
Processo de
fabrico
Necessidade de
vala
Facilidade de
operação
Conceito 0 161,8 1 4 1 2 2
Conceito 1 136,2 1 4 1 1 2
Conceito 2 89,4 1 5 1 1 2
Conceito 3 98,4 1 5 1 1 2
Conceito 4 93,6 2 5 2 2 3
Conceito 5 98,7 2 5 2 2 2
Conceito 6 72,9 3 5 1 1 2
Conceito 7 81,2 2 5 2 1 2
Conceito 8 66 1 9 1 1 1
O primeiro processo de selecção utilizado é qualitativo, comparando cada conceito à plataforma da
empresa LSD que inspirou este projecto e é constituído por duas fases. Numa primeira fase, mais
simples e menos rigorosa, eliminam-se os conceitos mais desfavoráveis para numa segunda fase um
pouco mais rigorosa se escolher o conceito mais favorável.
A comparação entre os vários conceitos e a plataforma que inspirou este projecto só é válida se
considerarmos as inovações que estes conceitos trazem. Os critérios assim acrescentados são:
capacidade de carga, movimento da tranca independente do movimento de elevação e modo de
instalação (necessidade ou não de serem aparafusados ao solo).
Tabela 1: Pesos atribuídos pela empresa Ambop a cada critério de selecção.
Tabela 2: Quantificação de cada critério para todos os conceitos.
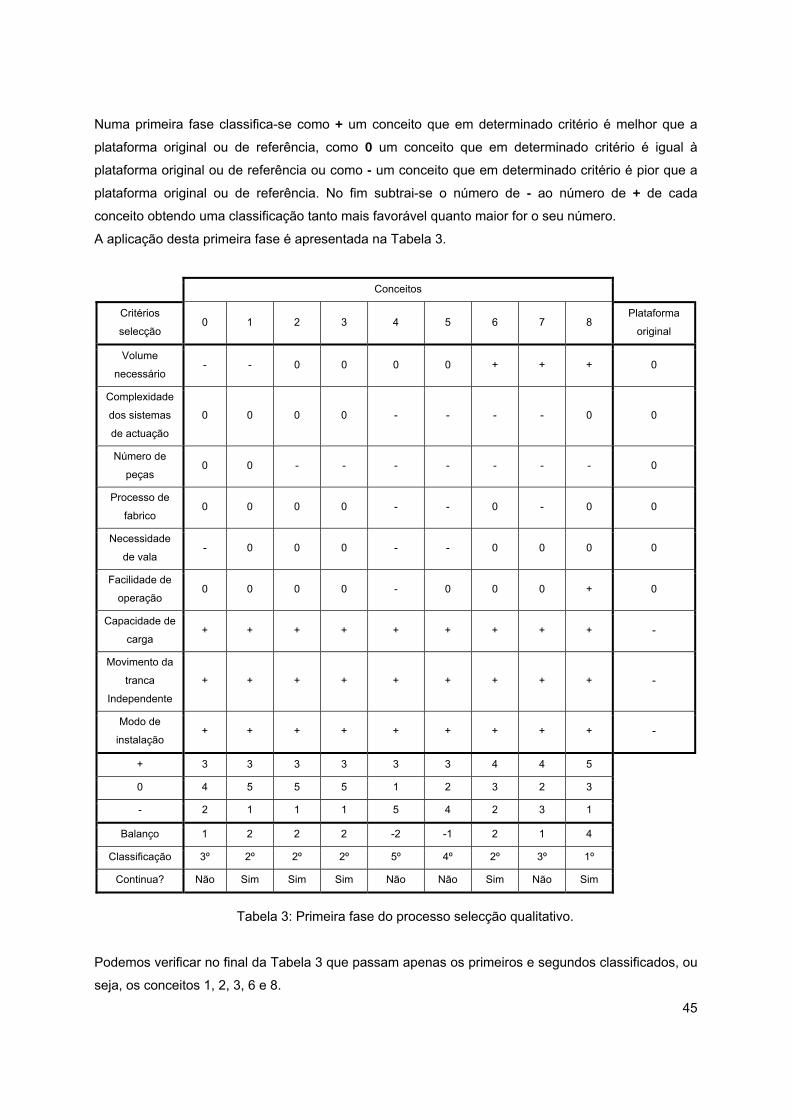
45
Numa primeira fase classifica-se como + um conceito que em determinado critério é melhor que a
plataforma original ou de referência, como 0 um conceito que em determinado critério é igual à
plataforma original ou de referência ou como - um conceito que em determinado critério é pior que a
plataforma original ou de referência. No fim subtrai-se o número de - ao número de + de cada
conceito obtendo uma classificação tanto mais favorável quanto maior for o seu número.
A aplicação desta primeira fase é apresentada na Tabela 3.
Conceitos
Critérios
selecção 0 1 2 3 4 5 6 7 8
Plataforma
original
Volume
necessário - - 0 0 0 0 + + + 0
Complexidade
dos sistemas
de actuação
0 0 0 0 - - - - 0 0
Número de
peças 0 0 - - - - - - - 0
Processo de
fabrico 0 0 0 0 - - 0 - 0 0
Necessidade
de vala - 0 0 0 - - 0 0 0 0
Facilidade de
operação 0 0 0 0 - 0 0 0 + 0
Capacidade de
carga + + + + + + + + + -
Movimento da
tranca
Independente
+ + + + + + + + + -
Modo de
instalação + + + + + + + + + -
+ 3 3 3 3 3 3 4 4 5
0 4 5 5 5 1 2 3 2 3
- 2 1 1 1 5 4 2 3 1
Balanço 1 2 2 2 -2 -1 2 1 4
Classificação 3º 2º 2º 2º 5º 4º 2º 3º 1º
Continua? Não Sim Sim Sim Não Não Sim Não Sim
Podemos verificar no final da Tabela 3 que passam apenas os primeiros e segundos classificados, ou
seja, os conceitos 1, 2, 3, 6 e 8.
Tabela 3: Primeira fase do processo selecção qualitativo.

46
Na segunda fase classifica-se cada conceito de 1 a 5 sendo que 3 é igual à plataforma original ou de
referência e afecta-se cada classificação do peso atribuído a cada critério, como indicado na
Tabela 1. Os pesos atribuídos na Tabela 1 têm que ser adaptados à inserção de mais três critérios,
de modo a se obter um total de 100%. É preciso notar que se atribuiu o mesmo peso aos critérios
facilidade de operação e movimento da tranca independente uma vez que esta inovação vai melhorar
bastante a operacionalidade da plataforma a projectar. Dada a importância dos outros dois critérios
inseridos, uma vez que representam inovações, foi-lhes atribuído um peso igual ao critério processo
de fabrico que é o segundo mais alto. De modo a cumprir-se o referido anteriormente e a manter a
proporcionalidade entre os critérios indicados na Tabela 1, estes foram divididos pelo valor de 1,65.
A aplicação desta segunda fase pode ser observada na Tabela 4.
Conceito 1 Conceito 2 Conceito 3 Conceito 6 Conceito 8
Critérios
selecção Pesos Aval.
Aval. c/
peso Aval.
Aval.
c/
peso
Aval.
Aval.
c/
peso
Aval.
Aval.
c/
peso
Aval.
Aval.
c/
peso
Volume
necessário 3,030 1 0,030 3 0,091 3 0,091 4 0,121 3 0,091
Complexidade
dos sistemas
de actuação
9,091 3 0,273 3 0,273 3 0,273 2 0,182 3 0,273
Número de
peças 15,152 3 0,455 3 0,455 3 0,455 3 0,455 1 0,152
Processo de
fabrico 12,121 3 0,364 3 0,364 3 0,364 3 0,364 3 0,364
Necessidade
de vala 6,061 3 0,182 3 0,182 3 0,182 3 0,182 3 0,182
Facilidade de
operação 15,152 3 0,455 3 0,455 3 0,455 3 0,455 4 0,606
Capacidade
de carga 12,121 4 0,485 4 0,485 4 0,485 4 0,485 4 0,485
Movimento da
tranca
Independente
15,152 4 0,606 4 0,606 4 0,606 4 0,606 4 0,606
Modo de
instalação 12,121 4 0,485 4 0,485 4 0,485 4 0,485 4 0,485
Balanço 3,333 3,394 3,394 3,333 3,242
Classificação 2º 1º 1º 2º 3º
Como se pode observar na Tabela 4 ainda não é possível escolher um conceito, pois dois dos
conceitos estão em primeiro lugar.
Tabela 4: Resultados da segunda fase do processo selecção qualitativo.

47
Recorreu-se então a um processo de selecção com uma maior capacidade de discretização em cada
critério comparando os vários conceitos entre si.
Com este objectivo utilizou-se uma adimensionalização dos valores apresentados na Tabela 2
recorrendo à Equação 1.
mínimomáximo
mínimoconceito
vvvv
v−−
= . (1)
onde v é o valor adimensionalizado, mínimov é o valor mais pequeno de todos os conceitos para um
determinado critério, máximov é o maior valor de todos os conceitos para um determinado critério e
conceitov é o valor de um conceito em determinado critério.
O resultado da aplicação do processo de adimensionalização à Tabela 2, página 44, é o apresentado
na Tabela 5.
Pesos
[%]
Conceitos
0 1 2 3 4 5 6 7 8
Volume
necessário [m3] 5 1 0,73 0,24 0,34 0,29 0,34 0,07 0,16 0
Complexidade
dos sistemas de
actuação
15 0 0 0 0 0,5 0,5 1 0,5 0
Número de peças 25 0 0 0,2 0,2 0,2 0,2 0,2 0,2 1
Processo de
fabrico 20 0 0 0 0 1 1 0 1 0
Necessidade de
vala 10 1 0 0 0 1 1 0 0 0
Facilidade de
operação 25 0,5 0,5 0,5 0,5 1 0,5 0,5 0,5 0
Resultados 0,275 0,162 0,187 0,192 0,689 0,567 0,329 0,458 0,25
Classificação 5º 1º 2º 3º 9º 8º 6º 7º 4º
Comparando os resultados da Tabela 5 com os da Tabela 4 verificou-se que são contraditórios, pois
há uma inversão de posições, não permitindo a escolha definitiva de um conceito.
Verificou-se que no primeiro processo de selecção o conceito 8, apesar de se encontrar em 3º lugar,
estava a condicionar os resultados através do critério número de peças. Os outros conceitos
avaliados, apesar de terem números de peças diferentes, eram classificados como iguais pois a
diferença no número de peças para o conceito 8 era muito elevada.
Tabela 5: Resultados do segundo processo de selecção.

48
Removendo o conceito 8 da segunda fase do primeiro processo de selecção, verifica-se que os
resultados se modificam como se pode observar na Tabela 6.
Conceito 1 Conceito 2 Conceito 3
Critérios
selecção Pesos Avaliação
Avaliação
com peso Avaliação
Avaliação
com peso Avaliação
Avaliação
com peso
Volume
necessário 3,030 1 0,030 3 0,091 3 0,091
Complexidade
dos sistemas
de actuação
9,091 3 0,273 3 0,273 3 0,273
Número de
peças 15,152 3 0,455 2 0,303 2 0,303
Processo de
fabrico 12,121 3 0,364 3 0,364 3 0,364
Necessidade
de vala 6,061 3 0,182 3 0,182 3 0,182
Facilidade de
operação 15,152 3 0,455 3 0,455 3 0,455
Capacidade
de carga 12,121 4 0,485 4 0,485 4 0,485
Movimento da
tranca
Independente
15,152 4 0,606 4 0,606 4 0,606
Modo de
instalação 12,121 4 0,485 4 0,485 4 0,485
Balanço 3,333 3,242 3,242
Classificação 1º 2º 2º
Comparando os resultados da Tabela 6 com os resultados do segundo processo de selecção
apresentados na Tabela 5, verificou-se que o conceito 1 (ver Fig.3.31) é o escolhido e portanto é o
que se propõe como alternativa à plataforma da empresa LSD (ver Fig.3.32).
Tabela 6: Resultados modificados do primeiro processo de selecção.

49
Figura 3.31: Conceito 1, conceito a desenvolver.
Figura 3.32: Plataforma da empresa LSD.
Importa referir que a base da plataforma escolhida para dimensionamento, apresentada na
Figura 3.31, será desenvolvida de modo a suprimir a necessidade da instalação por ligação
aparafusada ao solo da plataforma da empresa LSD, de acordo com o que se pode observar na
Fig. 4.1.

50
Capítulo 4
4. Dimensionamento estrutural
Neste capítulo apresentam-se as notas de cálculo correspondentes ao dimensionamento do conceito
escolhido (conceito 1) e respectivas verificações.
4.1. Notas de Cálculo
Um dos requisitos deste projecto é o fabrico em metalomecânica e um dos objectivos é a proposta de
uma alternativa económica à plataforma da empresa LSD. Com vista ao cumprimento destas
especificações de projecto serão utilizados elementos normalizados. Com o objectivo de cumprir as
especificações mencionadas anteriormente e de manter o peso da estrutura o mais reduzido possível
foi escolhido como material de construção da plataforma um aço, neste caso um aço estrutural
FeE355 definido pela norma EN 10025:1990 que possui as características indicadas na Tabela 7 para
espessuras inferiores a 40 mm. No caso de não ser possível utilizar elementos normalizados
constituídos por este material, deve-se utilizar um aço de características idênticas ou superiores às
indicadas na Tabela 7 para o aço estrutural FeE355.
Tensão de
cedência σced [N/mm2]
Tensão de rotura
σu [N/mm2]
Módulo de elasticidade E
[N/mm2]
Módulo de corte
G [N/mm2]
Coeficiente de Poisson
v
FeE355 355 510 210000 80769 0,3
Para seleccionar os elementos normalizados mais adequados, optou-se por analisar cada estrutura
através do método dos Elementos Finitos. Utilizou-se para o efeito um programa comercial de
simulação numérica com base na Teoria dos Elementos Finitos, designado por Ansys®, realizando as
análises estruturais no domínio das pequenas deformações.
A análise estática aplica-se a uma estrutura constituída por vigas em aço, um material dúctil, que
impõe a utilização de um elemento finito estrutural, elástico e do tipo viga. Atendendo às diversas
solicitações verifica-se que o elemento escolhido deve ser tridimensional.
Para análise estrutural optou-se pelo elemento finito Beam4 do Ansys®, um elemento da Teoria de
vigas de Euler-Bernoulli do tipo viga tridimensional, linear e elástico. Com dois nós por elemento e
seis graus de liberdade por nó: translação (ux, uy, uz) e rotação (rotx, roty, rotz) em três eixos
(x, y e z). Tem assim capacidade de tracção, compressão, torção e flexão.
Importa referir que para calcular os centros de gravidade das estruturas foi utilizado um programa de
modelação CAD tridimensional, o Autodesk Inventor®.
Tabela 7: Características do aço estrutural FeE355 para espessuras inferiores a 40 mm, fonte: [1].
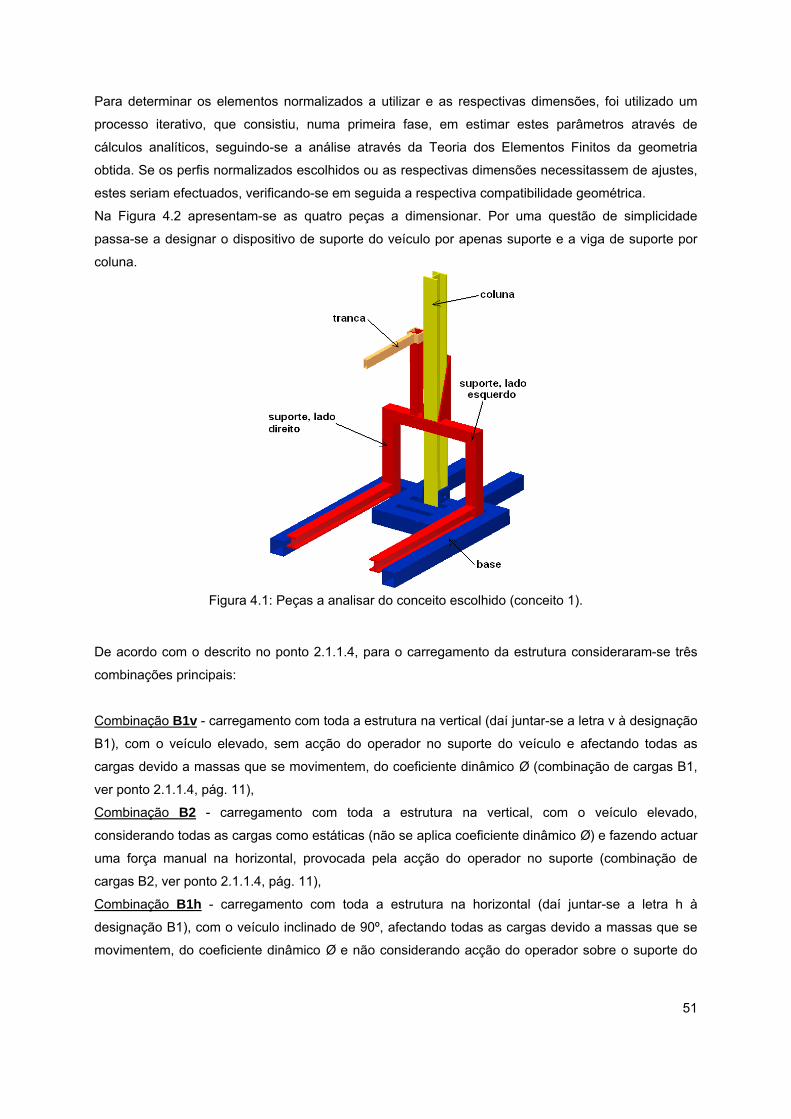
51
Figura 4.1: Peças a analisar do conceito escolhido (conceito 1).
Para determinar os elementos normalizados a utilizar e as respectivas dimensões, foi utilizado um
processo iterativo, que consistiu, numa primeira fase, em estimar estes parâmetros através de
cálculos analíticos, seguindo-se a análise através da Teoria dos Elementos Finitos da geometria
obtida. Se os perfis normalizados escolhidos ou as respectivas dimensões necessitassem de ajustes,
estes seriam efectuados, verificando-se em seguida a respectiva compatibilidade geométrica.
Na Figura 4.2 apresentam-se as quatro peças a dimensionar. Por uma questão de simplicidade
passa-se a designar o dispositivo de suporte do veículo por apenas suporte e a viga de suporte por
coluna.
De acordo com o descrito no ponto 2.1.1.4, para o carregamento da estrutura consideraram-se três
combinações principais:
Combinação B1v - carregamento com toda a estrutura na vertical (daí juntar-se a letra v à designação
B1), com o veículo elevado, sem acção do operador no suporte do veículo e afectando todas as
cargas devido a massas que se movimentem, do coeficiente dinâmico Ø (combinação de cargas B1,
ver ponto 2.1.1.4, pág. 11),
Combinação B2 - carregamento com toda a estrutura na vertical, com o veículo elevado,
considerando todas as cargas como estáticas (não se aplica coeficiente dinâmico Ø) e fazendo actuar
uma força manual na horizontal, provocada pela acção do operador no suporte (combinação de
cargas B2, ver ponto 2.1.1.4, pág. 11),
Combinação B1h - carregamento com toda a estrutura na horizontal (daí juntar-se a letra h à
designação B1), com o veículo inclinado de 90º, afectando todas as cargas devido a massas que se
movimentem, do coeficiente dinâmico Ø e não considerando acção do operador sobre o suporte do

52
veículo uma vez que a norma EN 1493:1998 [1] só prevê a aplicação da força manual quando o
veículo está em posição elevada (combinação de cargas B1, ver ponto 2.1.1.4, pág. 11).
Das combinações de carregamento referidas a mais desfavorável em termos de dimensionamento
estrutural à resistência é a B1v, sendo desta forma a que vai ser apresentada e utilizada para os
dimensionamentos.
Das combinações de carregamento referidas a mais desfavorável em termos de estabilidade da
estrutura é a B2, sendo desta forma a que vai ser utilizada para os cálculos de estabilidade da
estrutura.
4.1.1. Modos de carregamento, combinação de cargas B1v
Para o dimensionamento estrutural foram utilizados dois critérios, o da tensão de cedência e o da
deformada. A norma EN 1493:1998 [1] indica um coeficiente de segurança à tensão de cedência de
n = 1,33 (ver ponto 2.1.1.4, pág. 11) mas determina um carregamento devido ao veículo de
aproximadamente duas vezes da capacidade de carga pretendida (ver ponto 1.4.1, pág. 5).
O REA [2] indica uma deformada máxima de L/200 (ver ponto 2.2, pág. 13) mas não especifica como
deve ser efectuado o carregamento da estrutura.
Para verificar o REA [2], carregou-se a estrutura apenas com a capacidade de carga pretendida, em
vez do carregamento indicado pela norma EN 1493:1998 [1] de aproximadamente duas vezes da
capacidade de carga pretendida. Obtêm-se assim um coeficiente de segurança à tensão de cedência
mais próximo da realidade ajudando a prevenir o sobredimensionamento da estrutura.
Passa-se à apresentação dos modos de carregamento supra referidos.
4.1.1.1. Carregamento segundo a norma EN 1493:1998
Com a distribuição da carga indicada pela norma EN 1493:1998 [1] (ver Fig. 4.3) pretende-se verificar
um coeficiente de segurança à tensão de cedência de n = 1,33 (ver ponto 2.1.1.4, pág. 11) utilizando
o critério de Von Mises.
Figura 4.2: Distribuição da carga do veículo no suporte de acordo com a norma EN 1493:1998 [1].

53
De acordo com a norma EN 1493:1998 [1] (ver Fig. 4.3), FW = 750 N (ver ponto 2.1.1.4, pág. 11),
Ø = 1,151 (ver ponto 2.1.1.4, pág. 11) e com o requisito de projecto P = 2500 kg (ver ponto 1.4.1,
pág. 5) tem-se que arredondado ao Newton:
N9409151,181,93
2500Øg3PØgPF PEPE =⋅⋅=⋅⋅=⋅⋅= , (1)
N21171151,181,94
25003Øg4P3ØgPF GDGD =⋅⋅
⋅=⋅⋅
⋅=⋅⋅= , (2)
N22527506,0
2F6,0F W
WGD=
⋅=
⋅= , (3)
N15027504,0
2F4,0F W
WPE=
⋅=
⋅= . (4)
Introduzindo agora o requisito de projecto de inclinação admissível de α = 5º (ver ponto 1.4.1, pág. 5),
as forças gravíticas FGD e FPE decompõem-se em três componentes (ver Fig. 4.4) relativamente ao
referencial alinhado com a plataforma.
N1838)(sen1
)(sen)cos(FFF4
GDyGDxGD =
α−
α⋅α⋅== , (5)
N817)(sen1
)(sen)cos(FFF4
PEyPExPE =
α−
α⋅α⋅== , (6)
N21011)(sen1
)(cosFF4
2GD
zGD =α−
α⋅= (7)
N9338)(sen1
)(cosFF4
2PE
zPE =α−
α⋅= . (8)
Figura 4.3: Decomposição das forças gravíticas.

54
Importa referir que FGDx ,FGDy ,FPEx e FPEy (ver Fig. 4.4) podem tomar os dois sentidos possíveis e que
a força do vento (ver ponto 2.1.1.4, pág. 11) e da acção da tranca (ver Fig. 4.2) (ver ponto 4.1.3,
pág. 52) acumulam-se apenas à componente da força gravítica segundo o eixo dos zz (ver Fig. 4.4).
4.1.1.2. Carregamento segundo o REA
A norma EN 1493:1998 [1] implica uma distribuição de carga por eixo de 69,23/30,77. Para a
verificação do critério da deformada indicado pelo REA [2] (ver ponto 2.2, pág. 13) de L/200 utiliza-se
a distribuição da carga indicada pela norma EN 1493:1998 [1] mas aplicando apenas a capacidade de
carga pretendida (ver ponto 1.4.1, pág. 5). Tem-se então que
N848981,92
6923,02500g26923,0PgPF GDGD =⋅
⋅=⋅
⋅=⋅= , (9)
N377381,92
3077,02500g23077,0PgPF PEPE =⋅
⋅=⋅
⋅=⋅= , (10)
Note-se que para verificar o REA [2] não se utiliza nem o coeficiente dinâmico Ø nem a força do vento
FW.
Introduzindo agora o requisito de projecto de inclinação admissível de α = 5º (ver ponto 1.4.1, pág. 5),
as forças gravíticas FGD e FPE decompõem-se em três componentes (ver Fig. 4.4) relativamente ao
referencial alinhado com a plataforma.
De acordo com as Equações 5, 6, 7 e 8 tem-se que FGDx = FGDy = 737 N, FPEx = FPEy = 328 N,
FGDz = 8425 N e FPEz = 3744 N.
As Equações 5, 6, 7 e 8 aplicam-se da mesma forma a FST (força resultante da massa da tranca e do
suporte), a FC (força resultante da massa da coluna) e a FPL (força resultante da massa de toda a
plataforma).

55
4.1.2. Elementos normalizados
Todas as peças da plataforma (ver Fig. 4.8) serão compostas por vigas ou tubos normalizados. As
vigas em H (ver Fig. 4.7) respeitam norma dimensional DIN 1025-2 e os perfis tubulares (ver Fig. 4.5
e 4.6) respeitam a norma dimensional EN 10210-1. Na Tabela 8 apresentam-se as características de
cada tipo de perfil utilizado.
Figura 4.4: Perfil tubular
quadrangular.
Figura 4.5: Perfil tubular
rectangular.
Figura 4.6: Viga em H.
Figura 4.7: Elementos normalizados utilizados na construção das várias peças da
plataforma, cuja numeração atribui o respectivo perfil recorrendo à Tabela 8.
Nº perfil Perfil Área [cm2] Ixx [cm4] Izz [cm4] h [mm] b [mm] #1 120×60×12 35,89 536,6 162,6 120 60 #2 HEB 120 34 864 318 120 120 #3 160×14 79,66 2783 2783 - 160 #4 HEM 140 80,56 3291 1144 160 146 #5 HEM 200 131,3 10640 3651 220 205 #6 200×14 102,1 5811 5811 - 200
Tabela 8: Tabela das características dos perfis normalizados utilizados.
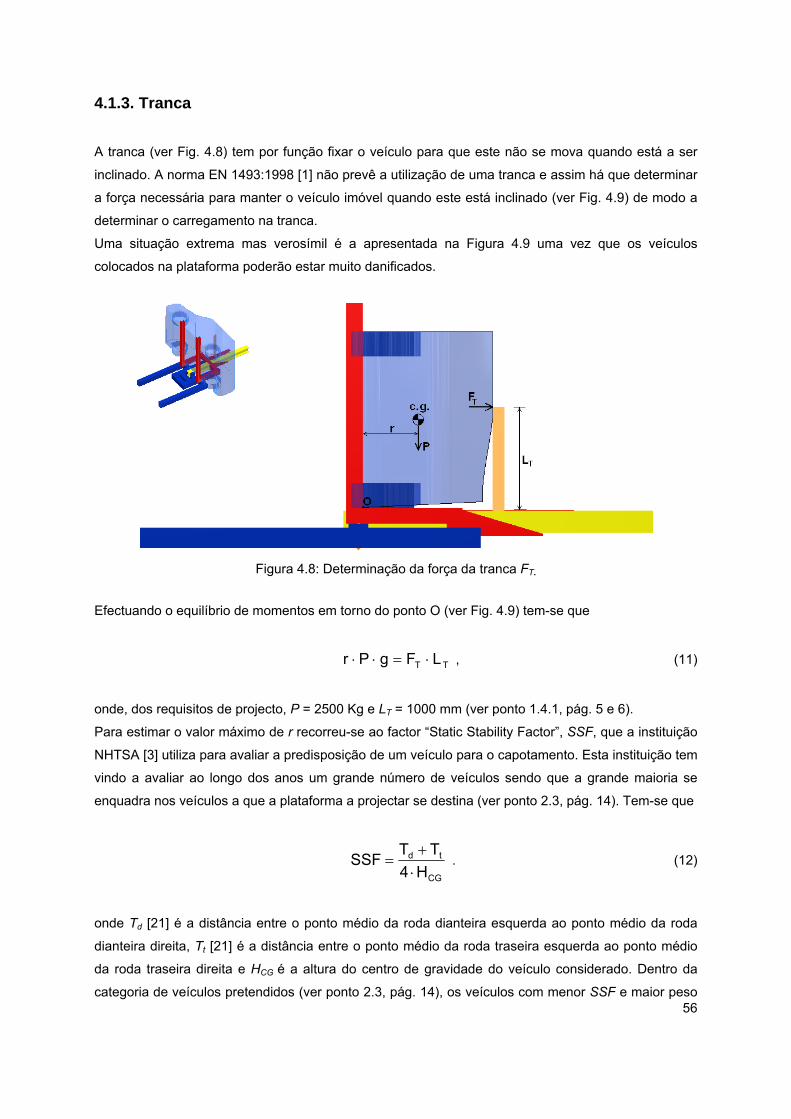
56
Figura 4.8: Determinação da força da tranca FT.
4.1.3. Tranca
A tranca (ver Fig. 4.8) tem por função fixar o veículo para que este não se mova quando está a ser
inclinado. A norma EN 1493:1998 [1] não prevê a utilização de uma tranca e assim há que determinar
a força necessária para manter o veículo imóvel quando este está inclinado (ver Fig. 4.9) de modo a
determinar o carregamento na tranca.
Uma situação extrema mas verosímil é a apresentada na Figura 4.9 uma vez que os veículos
colocados na plataforma poderão estar muito danificados.
Efectuando o equilíbrio de momentos em torno do ponto O (ver Fig. 4.9) tem-se que
TT LFgPr ⋅=⋅⋅ , (11)
onde, dos requisitos de projecto, P = 2500 Kg e LT = 1000 mm (ver ponto 1.4.1, pág. 5 e 6).
Para estimar o valor máximo de r recorreu-se ao factor “Static Stability Factor”, SSF, que a instituição
NHTSA [3] utiliza para avaliar a predisposição de um veículo para o capotamento. Esta instituição tem
vindo a avaliar ao longo dos anos um grande número de veículos sendo que a grande maioria se
enquadra nos veículos a que a plataforma a projectar se destina (ver ponto 2.3, pág. 14). Tem-se que
CG
td
H4TTSSF
⋅+
= . (12)
onde Td [21] é a distância entre o ponto médio da roda dianteira esquerda ao ponto médio da roda
dianteira direita, Tt [21] é a distância entre o ponto médio da roda traseira esquerda ao ponto médio
da roda traseira direita e HCG é a altura do centro de gravidade do veículo considerado. Dentro da
categoria de veículos pretendidos (ver ponto 2.3, pág. 14), os veículos com menor SSF e maior peso

57
Figura 4.9: Condições de fronteira na tranca.
são os SUV’s e os veículos de todo o terreno. Um dos veículos encontrados com menor SSF e maior
peso foram os Mitsubishi Pajero fabricados entre 1992 e 2000 com um SSF = 0,95.
Pesquisando pelos valores de Td e Tt [21] e introduzindo-os na Equação 12, obtém-se um valor de
HCG = 775,5 mm. Retirando a este valor a distância do fundo do chassis ao chão [22], ficou-se com
r = 600 mm. Utilizando a Equação 11 obtém-se FT = 14715 N.
A norma EN 1493:1998 [1] obriga a considerar o efeito do vento na direcção do fundo do veículo
(ver ponto 2.1.1.4, pág. 11) mas não indica o sentido. Assim a situação mais desfavorável será a
aplicação da força resultante do vento FW na mesma direcção e sentido da força da tranca FT.
Para analisar esta peça no Ansys® as condições de fronteira e dimensões utilizadas são as
apresentadas na Figura 4.10. A peça encontra-se em consola, fixa na origem do referencial,
indicando-se as reacções vertical FRz e de momento em torno de y, MRy.
Importa referir que todas as forças e momentos representados na Figura 4.10, identificados com o
índice R, são forças e momentos de reacção que correspondem a constrangimentos introduzidos no
Ansys® para analisar a peça.
As características do perfil utilizado na tranca, #1, (ver Fig. 4.10) são as indicadas na Tabela 8,
anteriormente apresentada.
Para verificar a flecha máxima pelo REA [2], considerou-se LT = 1000 mm, com FW = 750 N (ver
ponto 2.1.1.4, pág. 11), tem-se que
mm5200/L T = . (13)
Como podemos observar pela Figura 4.12 a deformada máxima obtida pela análise estrutural na
tranca é de 4,6 mm, respeitando assim o critério do REA [2] (ver Equação 13).
Para a tensão de Von Mises observa-se um valor máximo de 173 MPa (ver Fig. 4.11), a que
corresponde a um coeficiente de segurança à tensão de cedência de n = 2,05. Desta forma, a tranca
irá ter um peso de aproximadamente 40 kg.

58
Figura 4.12: Condições de fronteira do suporte do lado direito (dimensões em mm).
Figura 4.10: Tensão de Von Mises na tranca. Figura 4.11: Deformada da tranca.
4.1.4. Suporte, lado direito
As dimensões (em mm) e condições de fronteira mais desfavoráveis utilizadas para analisar a peça
no Ansys® estão apresentadas na Figura 4.13. Importa referir que todas as forças e momentos
identificados com o índice R, são forças e momentos de reacção que correspondem a
constrangimentos introduzidos no Ansys® para analisar a peça.

59
As características dos perfis utilizados no suporte do lado direito, #2, #3 e #4, (ver Fig. 4.13) podem
ser observadas na Tabela 8, anteriormente apresentada. Considerou-se LN = 1200 mm e
L1 = 2150 mm. Dos cálculos resulta que MTx = 2943 N.m e MTy = 19144 N.m (ver Anexo A).
Nas Figuras 4.14 e 4.15 observa-se a tensão de Von Mises e a deformação resultantes da aplicação
do carregamento para verificar a norma EN 1493:1998 [1] (ver ponto 4.1.1.1, pág. 47 e 48).
Figura 4.13: Tensão de Von Mises com o
carregamento para verificação da EN 1493:1998
[1] para o suporte do lado direito.
Figura 4.14: Deformação com o carregamento
para verificação da EN 1493:1998 [1] para o
suporte do lado direito.
Para a tensão de Von Mises (ver Fig. 4.14) observa-se um valor máximo de 249 MPa, que
corresponde a um coeficiente de segurança à tensão de cedência (ver Tabela 7) de n = 1,43.
Nas Figuras 4.16 e 4.17 observa-se a tensão de Von Mises e a deformação resultantes da aplicação
do carregamento para verificar REA [2] (ver ponto 4.1.1.2, pág. 48 e 49) de acordo com a
Equação 14, com L1 = 2150 mm (ver Fig. 4.13).
mm75,10200/L1 = . (14)
Figura 4.15: Tensão de Von Mises com o
carregamento para verificação do REA [2] para o
suporte do lado direito.
Figura 4.16: Deformação com o carregamento
para verificação do REA [2] para o suporte do
lado direito.
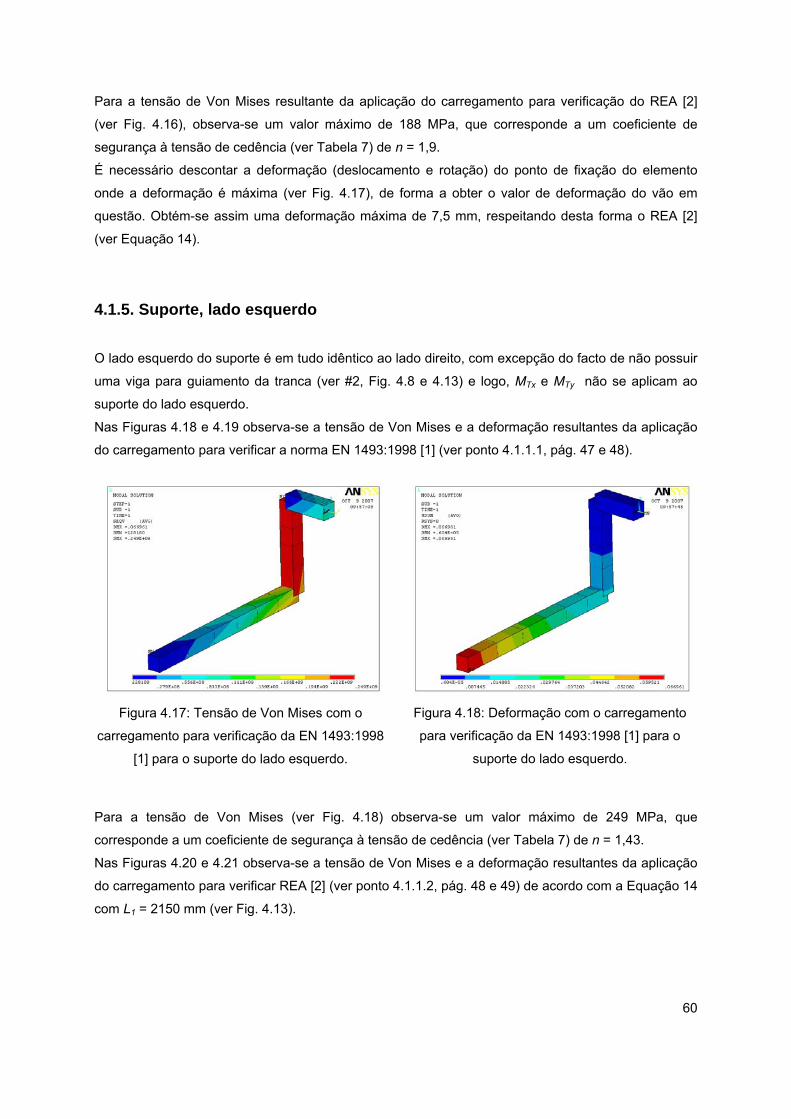
60
Para a tensão de Von Mises resultante da aplicação do carregamento para verificação do REA [2]
(ver Fig. 4.16), observa-se um valor máximo de 188 MPa, que corresponde a um coeficiente de
segurança à tensão de cedência (ver Tabela 7) de n = 1,9.
É necessário descontar a deformação (deslocamento e rotação) do ponto de fixação do elemento
onde a deformação é máxima (ver Fig. 4.17), de forma a obter o valor de deformação do vão em
questão. Obtém-se assim uma deformação máxima de 7,5 mm, respeitando desta forma o REA [2]
(ver Equação 14).
4.1.5. Suporte, lado esquerdo
O lado esquerdo do suporte é em tudo idêntico ao lado direito, com excepção do facto de não possuir
uma viga para guiamento da tranca (ver #2, Fig. 4.8 e 4.13) e logo, MTx e MTy não se aplicam ao
suporte do lado esquerdo.
Nas Figuras 4.18 e 4.19 observa-se a tensão de Von Mises e a deformação resultantes da aplicação
do carregamento para verificar a norma EN 1493:1998 [1] (ver ponto 4.1.1.1, pág. 47 e 48).
Para a tensão de Von Mises (ver Fig. 4.18) observa-se um valor máximo de 249 MPa, que
corresponde a um coeficiente de segurança à tensão de cedência (ver Tabela 7) de n = 1,43.
Nas Figuras 4.20 e 4.21 observa-se a tensão de Von Mises e a deformação resultantes da aplicação
do carregamento para verificar REA [2] (ver ponto 4.1.1.2, pág. 48 e 49) de acordo com a Equação 14
com L1 = 2150 mm (ver Fig. 4.13).
Figura 4.18: Deformação com o carregamento
para verificação da EN 1493:1998 [1] para o
suporte do lado esquerdo.
Figura 4.17: Tensão de Von Mises com o
carregamento para verificação da EN 1493:1998
[1] para o suporte do lado esquerdo.

61
Para a tensão de Von Mises resultante da aplicação do carregamento para verificação do REA [2]
(ver Fig. 4.20), observa-se um valor máximo de 119 MPa, com o carregamento para verificação do
REA [2], que corresponde a um coeficiente de segurança à tensão de cedência (ver Tabela 7) de
n = 2,98.
É necessário descontar a deformação (deslocamento e rotação) do ponto de fixação do elemento,
onde a deformação é máxima (ver Fig. 4.21), de forma a obter o valor de deformação do vão em
questão. Obtém-se assim uma deformação máxima de 7,44 mm, respeitando desta forma o REA [2]
(ver Equação 14).
O suporte no seu todo, lado direito e lado esquerdo, terá um peso total de 580 kg.
4.1.6. Coluna
As dimensões e condições de fronteira mais desfavoráveis utilizadas para analisar a peça no Ansys®
estão apresentadas na Figura 4.22. Importa referir que todas as forças e momentos na Figura 4.22
identificados com o índice R são forças e momentos de reacção que correspondem a
constrangimentos introduzidos no Ansys® para analisar a peça.
Figura 4.19: Tensão de Von Mises com o
carregamento para verificação do REA [2] para
o suporte do lado esquerdo.
Figura 4.20: Deformação com o carregamento
para verificação do REA [2] para o suporte do
lado esquerdo.
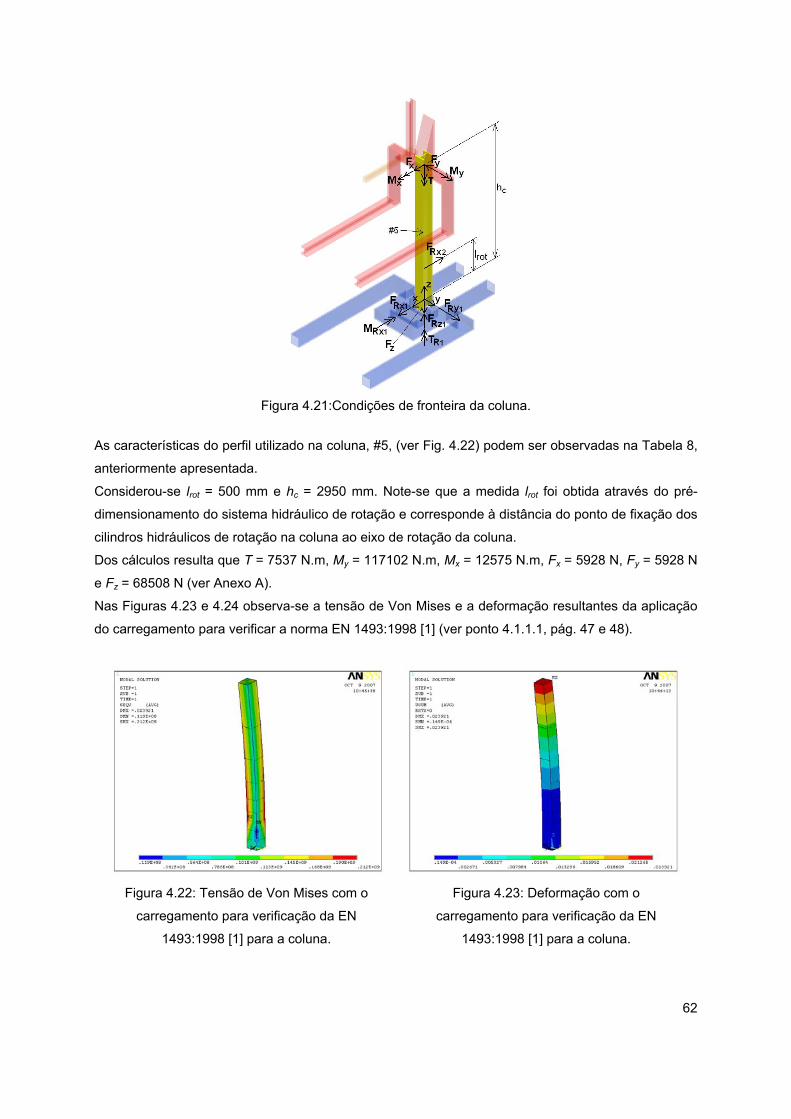
62
Figura 4.21:Condições de fronteira da coluna.
Figura 4.23: Deformação com o
carregamento para verificação da EN
1493:1998 [1] para a coluna.
As características do perfil utilizado na coluna, #5, (ver Fig. 4.22) podem ser observadas na Tabela 8,
anteriormente apresentada.
Considerou-se lrot = 500 mm e hc = 2950 mm. Note-se que a medida lrot foi obtida através do pré-
dimensionamento do sistema hidráulico de rotação e corresponde à distância do ponto de fixação dos
cilindros hidráulicos de rotação na coluna ao eixo de rotação da coluna.
Dos cálculos resulta que T = 7537 N.m, My = 117102 N.m, Mx = 12575 N.m, Fx = 5928 N, Fy = 5928 N
e Fz = 68508 N (ver Anexo A).
Nas Figuras 4.23 e 4.24 observa-se a tensão de Von Mises e a deformação resultantes da aplicação
do carregamento para verificar a norma EN 1493:1998 [1] (ver ponto 4.1.1.1, pág. 47 e 48).
Figura 4.22: Tensão de Von Mises com o
carregamento para verificação da EN
1493:1998 [1] para a coluna.
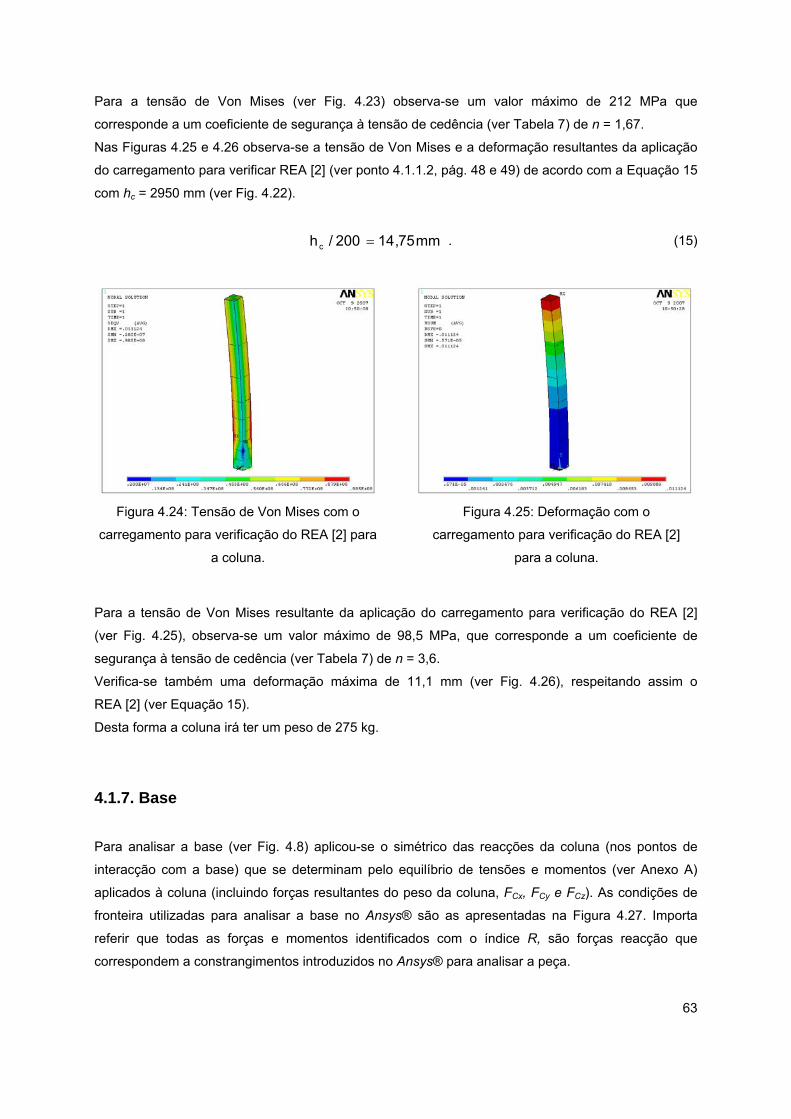
63
Figura 4.25: Deformação com o
carregamento para verificação do REA [2]
para a coluna.
Para a tensão de Von Mises (ver Fig. 4.23) observa-se um valor máximo de 212 MPa que
corresponde a um coeficiente de segurança à tensão de cedência (ver Tabela 7) de n = 1,67.
Nas Figuras 4.25 e 4.26 observa-se a tensão de Von Mises e a deformação resultantes da aplicação
do carregamento para verificar REA [2] (ver ponto 4.1.1.2, pág. 48 e 49) de acordo com a Equação 15
com hc = 2950 mm (ver Fig. 4.22).
mm75,14200/hc = . (15)
Para a tensão de Von Mises resultante da aplicação do carregamento para verificação do REA [2]
(ver Fig. 4.25), observa-se um valor máximo de 98,5 MPa, que corresponde a um coeficiente de
segurança à tensão de cedência (ver Tabela 7) de n = 3,6.
Verifica-se também uma deformação máxima de 11,1 mm (ver Fig. 4.26), respeitando assim o
REA [2] (ver Equação 15).
Desta forma a coluna irá ter um peso de 275 kg.
4.1.7. Base
Para analisar a base (ver Fig. 4.8) aplicou-se o simétrico das reacções da coluna (nos pontos de
interacção com a base) que se determinam pelo equilíbrio de tensões e momentos (ver Anexo A)
aplicados à coluna (incluindo forças resultantes do peso da coluna, FCx, FCy e FCz). As condições de
fronteira utilizadas para analisar a base no Ansys® são as apresentadas na Figura 4.27. Importa
referir que todas as forças e momentos identificados com o índice R, são forças reacção que
correspondem a constrangimentos introduzidos no Ansys® para analisar a peça.
Figura 4.24: Tensão de Von Mises com o
carregamento para verificação do REA [2] para
a coluna.

64
Figura 4.26: Condições de fronteira da base.
Figura 4.28: Deformação com o
carregamento para verificação da EN
1493:1998 [1] para a base.
As características do perfil utilizado na base, #6, (ver Fig. 4.27) podem ser observadas na Tabela 8,
anteriormente apresentadas.
Considerou-se m = 285 mm e L3 = 1830 mm. Dos cálculos resulta que Fx2 = 134967 N, Fz2 = 77923 N,
Fx3 = 105422 N, Fz3 = 71014 N, Fx4 = 158315 N, Fy4 = 6198 N e Fz4 = 142603 N (ver Anexo A).
Nas Figuras 4.28 e 4.29 observa-se a tensão de Von Mises e a deformação resultantes da aplicação
do carregamento para verificar a norma EN 1493:1998 [1] (ver ponto 4.1.1.1, pág. 47 e 48).
Para a tensão de Von Mises (ver Fig. 4.28) observa-se-se um valor máximo de 247 MPa, que
corresponde a um coeficiente de segurança à tensão de cedência (ver Tabela 7) de n = 1,44.
Figura 4.27: Tensão de Von Mises com o
carregamento para verificação da EN
1493:1998 [1] para a base.
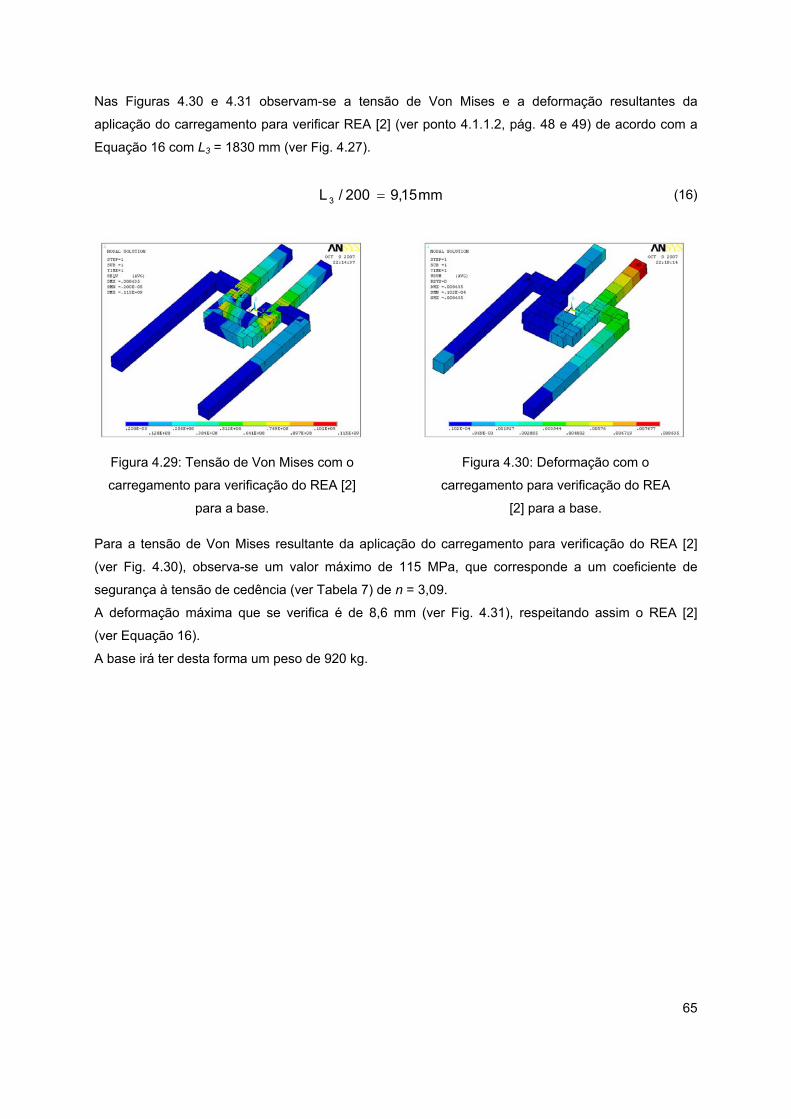
65
Figura 4.30: Deformação com o
carregamento para verificação do REA
[2] para a base.
Nas Figuras 4.30 e 4.31 observam-se a tensão de Von Mises e a deformação resultantes da
aplicação do carregamento para verificar REA [2] (ver ponto 4.1.1.2, pág. 48 e 49) de acordo com a
Equação 16 com L3 = 1830 mm (ver Fig. 4.27).
mm15,9200/L 3 = (16)
Para a tensão de Von Mises resultante da aplicação do carregamento para verificação do REA [2]
(ver Fig. 4.30), observa-se um valor máximo de 115 MPa, que corresponde a um coeficiente de
segurança à tensão de cedência (ver Tabela 7) de n = 3,09.
A deformação máxima que se verifica é de 8,6 mm (ver Fig. 4.31), respeitando assim o REA [2]
(ver Equação 16).
A base irá ter desta forma um peso de 920 kg.
Figura 4.29: Tensão de Von Mises com o
carregamento para verificação do REA [2]
para a base.

66
4.1.8. Estabilidade, combinação de cargas B2
De acordo com a norma EN 1493:1998 [1] a estabilidade da estrutura deve ser considerada
(ver ponto 2.1.1.5, pág. 12). Vai-se então avaliar a estabilidade da plataforma utilizando a
configuração mais desfavorável, combinação de cargas B2 (ver ponto 4.1, pág. 46), e segundo duas
direcções, que estão apresentadas nas Figuras 4.32 e 4.33.
Considerou-se helev = 2100 mm, hcgv = 1182 mm, hcgh = 1824 mm, hcgl = 936 mm, lGD = 1575 mm e
lPE = 315 mm. Fe = 6000 N e corresponde à força máxima estabilizante, devido ao veículo, que a
norma EN 1493:1998 [1] permite considerar (ver ponto 2.1.1.5, pág. 12). FH = 1000 N (ver ponto
2.1.1.4, pág. 10) corresponde à força exercida horizontalmente pelo operador no suporte (ver
Fig. 4.8). Para a distribuição da carga Fe pelos dois braços de suporte do veículo (ver Fig. 4.33)
utiliza-se a mesma distribuição de carga de verificação do REA [2] (ver ponto 4.1.1.2, pág. 48).
É necessário referir que a força correspondente ao peso total da plataforma, FPL = 17854 N, quando
sujeita ao requisito de inclinação admissível (ver pontos 4.1.1.1 e 4.1.1.2, pág. 47, 48 e 49), dá
origem às componentes FPLx, FPLy e FPz, segundo o referencial alinhado com a plataforma. Desta
forma, utilizando as Equações 5 e 7 tem-se que FPLx = FPLy = 1550 N e FPLz = 17719 N.
Figura 4.32: Esquema para a verificação
de estabilidade lateral.
Figura 4.31: Esquema para a verificação de
estabilidade longitudinal.

67
Para a combinação de cargas B2 (ver ponto 4.1, pág. 46) tem-se que
N817581,93
2500g3PgPF PEPE =⋅=⋅=⋅= , (17)
N1839381,94
25003g4P3gFF GDGD =⋅
⋅=⋅
⋅=⋅= , (18)
De acordo com as Equações 5 e 6 temos que FGDx = FGDy = 1597 N e FPEx = FPEy = 710 N.
N3307FFFF HPEGDxdf x=++= , (19)
N2307FFFxPEGDxda =+= , (20)
Fazendo o equilíbrio de momentos em torno do ponto O da Figura 4.32 tem-se que
m.N359202LFhFM Ne
cghplzS =⋅
+⋅= , (21)
m.N13621hFh)FF(M cgvplxelevdadfT =⋅+⋅+= , (22)
Fazendo o equilíbrio de momentos em torno do ponto O da Figura 4.33 tem-se que
m.N20801hFlF6923,0lF3077,0M cglplzPEeGDeS =⋅+⋅⋅+⋅⋅= , (23)
m.N11521hFh)F2F2(M cgvplyelevPEGDT yy=⋅+⋅⋅+⋅= , (24)
Tem-se que n ≥ 1,3 (ver ponto 2.1.1.5, pág. 12)
TS MnM ⋅= . (25)
De acordo com a Equação 25 tem-se que n = 2,64 para a estabilidade longitudinal (ver Fig. 4.32) e
n = 1,8 para a estabilidade lateral (ver Fig. 4.33).

68
Capítulo 6
5. Conclusões e Desenvolvimentos Futuros
5.1. Conclusões
O objectivo deste projecto foi o de conceber e realizar os primeiros dimensionamentos de uma
alternativa económica à plataforma elevatória e basculante de VFV da empresa LSD (ver Fig. 1.3). A
empresa que propôs este projecto, Ambop – Soluções Ambientais, atribui a este equipamento
algumas limitações (ver ponto 1.2, pág. 2) que gostava de ver ultrapassadas num modelo próprio.
Entre estas limitações estão a necessidade de instalação por ligação aparafusada ao solo, a
interdependência de dois dos três movimentos necessários, que tornavam a operação pouco prática,
e a capacidade de carga reduzida que deixava de fora uma fatia razoável de VFV.
Esta nova plataforma, seria fabricada pela Ambop em parceria com uma empresa metalomecânica,
com todas limitações daí inerentes.
O primeiro passo consistiu na pesquisa de legislação pertinente, que se revelou ser a Directiva
Máquinas 2006/42/CE [8], Directiva 98/37/CE [9] e a norma EN 1493:1998 [1]. Esta norma para além
de garantir a segurança no projecto, indica as cargas a serem aplicadas e a sua distribuição
(ver Fig. 2.1) mas não especifica limites para a deformada. Para verificação das deformadas adoptou-
se um critério do REA [2].
As pesquisas de mercado e de patentes não produziram resultados que permitissem influenciar o
projecto. Este facto justifica-se pelo estado actual do mercado em causa, que só surge após o
aparecimento de legislação que obriga à despoluição de VFV.
A geração de novos conceitos (ver ponto 3, pág. 23) é um processo qualitativo e que requer algum
cuidado, uma vez que não é prático fazer cálculos estruturais para todos os conceitos gerados.
Depende assim do projectista apresentar conceitos que possam estar perto da realidade para que
possam ser comparáveis e o facto de se ter um equipamento como ponto de partida ajuda criando um
ponto de referência. A selecção entre os vários conceitos gerados é complicada dado o número de
variáveis existentes para avaliar cada conceito, mas ferramentas de selecção de conceitos, como o
“Concept Scoring” [20], prestam um auxílio importante na selecção de um conceito que esteja mais
de acordo com o pretendido pela empresa. Importa referir que estas ferramentas dispensam uma
interpretação crítica dos resultados.
Como já foi mencionado, para o dimensionamento estrutural foram utilizados dois critérios, o da
tensão de cedência e o da deformada. A norma EN 1493:1998 [1] indica um coeficiente de segurança
à tensão de cedência de n = 1,33 mas obriga a um carregamento devido ao veículo de
aproximadamente duas vezes da capacidade de carga pretendida (ver ponto 1.4.1, pág. 5). O REA [2]
indica uma deformada máxima de L/200 mas não especifica como deve ser efectuado o
carregamento da estrutura.

69
Para verificar o REA [2], carregou-se a estrutura apenas com a capacidade de carga pretendida, em
vez do carregamento indicado pela norma EN 1493:1998 [1] de aproximadamente duas vezes da
capacidade de carga pretendida. Obtêm-se assim um coeficiente de segurança à tensão de cedência
mais próximo da realidade ajudando a prevenir o sobredimensionamento da estrutura.
O suporte (ver Fig. 4.8) é constituído por perfis tubulares quadrados e vigas em H. Vigas em H são
utilizadas em elementos que não estão sujeitos à torção, enquanto que os perfis tubulares são
utilizados em elementos que estão sujeitos à torção. Esta peça irá ter um peso de 580 kg, valor que
quando comparado com o peso total da plataforma da empresa LSD, 880 kg (ver ponto 1.2, pág. 2),
pode parecer exagerado. Esta diferença pode ser justificada pelo aumento da capacidade da
plataforma, pelo aumento significativo do comprimento dos braços de suporte do veículo (ver
ponto 1.4.1, pág. 6) e pela própria natureza do desenho do suporte.
Utilizando o carregamento do REA [2] obteve-se um coeficiente de segurança à tensão cedência de
n = 1,9 para o lado direito do suporte e de n = 2,98 para o lado esquerdo do suporte. No lado direito
do suporte obteve-se um coeficiente de segurança mais baixo por causa da viga de suporte da tranca
(ver #2 nas Fig. 4.8 e 4.13 e ver Fig. 4.16) onde a tensão é máxima. Utilizando o carregamento da
norma EN 1493:1998 [1], a solicitação nos elementos inferiores aumenta (ver Fig. 4.14 e 4.18),
enquanto que a solicitação na viga de suporte da tranca se mantém (o carregamento da tranca não é
definido pela norma, ver ponto 4.1.3, pág. 52). Nesta situação ambos os lados do suporte passam a
ter tensão máxima no mesmo ponto e os coeficientes de segurança à tensão passam a ser
semelhantes (ver Fig. 4.14 e 4.18).
A coluna (ver Fig. 4.8 e 4.22) é constituída por uma viga normalizada em H, apesar de estar sujeita à
torção, para poder servir de guiamento ao suporte. Esta peça irá ter um peso de 275 kg.
A base é constituída por perfis tubulares quadrados. Esta peça irá ter um peso de 920 kg. O caso
mais desfavorável de carregamento acontece quando o veículo está elevado. São os cilindros
hidráulicos de rotação (ver Anexo A, Fig. 7.3) que mantêm a coluna e o suporte na vertical, passando
os esforços para a parte de trás da base. Para conferir a rigidez necessária à base, a ligação entre o
lado esquerdo e o lado direito é reforçada de modo a resistir ao esforço de torção existente nesta
ligação (ver Fig. 4.28).
Dado o peso obtido para a base, existem dois caminhos possíveis para a redução do seu peso, ou se
reconsidera a eliminação da necessidade de instalação por ligação aparafusada ao solo (ver
ponto 1.2, pág. 3), ou se coloca um batente na zona inferior da coluna que a mantenha, juntamente
com o suporte e o veículo, na posição vertical, quando o veículo é elevado. Retira-se assim o esforço
dos cilindros hidráulicos de rotação e da parte de trás da base, permitindo assim reduzir o peso da
base. É importante referir que a manutenção da coluna, suporte e veículo na vertical através dos
cilindros hidráulicos de rotação, poderá não ser a mais correcta, pois as forças envolvidas poderão
ser superiores às que estes elementos poderão estar preparados para suportar.
Quando o carregamento utilizado é o do REA [2], todas as peças à excepção do lado direito do
suporte (devido à viga de suporte da tranca, ver #2 na Fig. 4.13 e Fig. 4.16), têm um coeficiente de
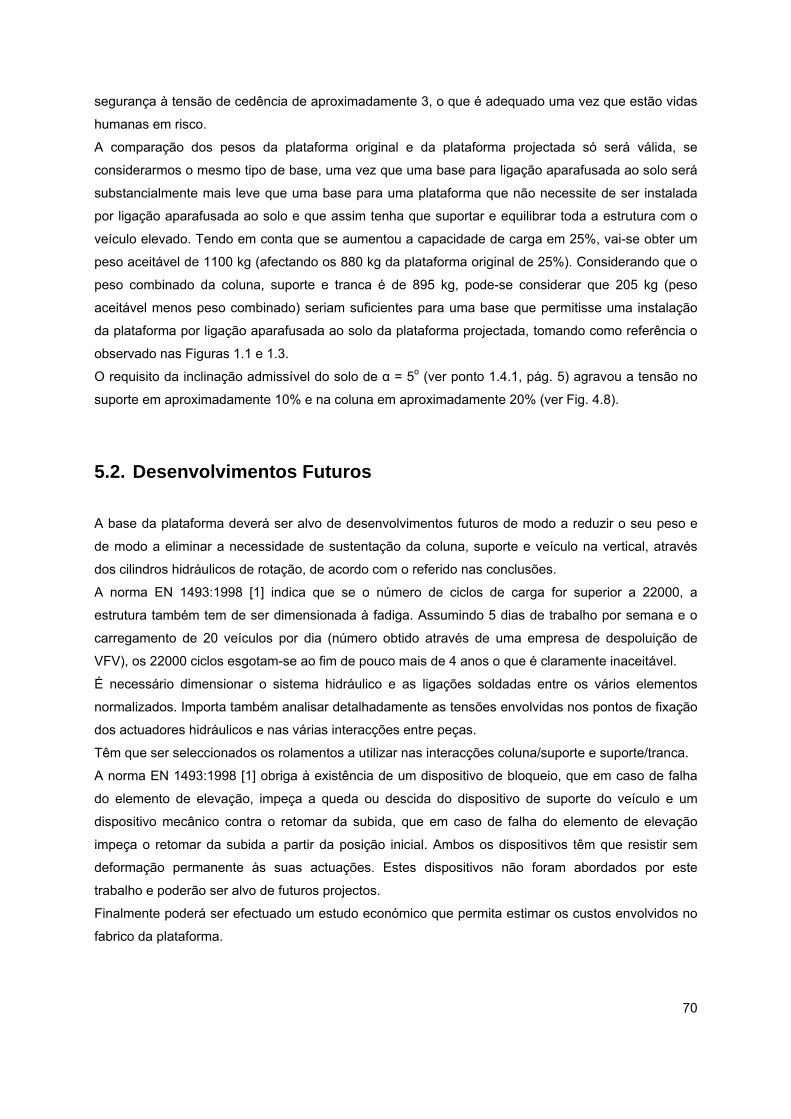
70
segurança à tensão de cedência de aproximadamente 3, o que é adequado uma vez que estão vidas
humanas em risco.
A comparação dos pesos da plataforma original e da plataforma projectada só será válida, se
considerarmos o mesmo tipo de base, uma vez que uma base para ligação aparafusada ao solo será
substancialmente mais leve que uma base para uma plataforma que não necessite de ser instalada
por ligação aparafusada ao solo e que assim tenha que suportar e equilibrar toda a estrutura com o
veículo elevado. Tendo em conta que se aumentou a capacidade de carga em 25%, vai-se obter um
peso aceitável de 1100 kg (afectando os 880 kg da plataforma original de 25%). Considerando que o
peso combinado da coluna, suporte e tranca é de 895 kg, pode-se considerar que 205 kg (peso
aceitável menos peso combinado) seriam suficientes para uma base que permitisse uma instalação
da plataforma por ligação aparafusada ao solo da plataforma projectada, tomando como referência o
observado nas Figuras 1.1 e 1.3.
O requisito da inclinação admissível do solo de α = 5o (ver ponto 1.4.1, pág. 5) agravou a tensão no
suporte em aproximadamente 10% e na coluna em aproximadamente 20% (ver Fig. 4.8).
5.2. Desenvolvimentos Futuros
A base da plataforma deverá ser alvo de desenvolvimentos futuros de modo a reduzir o seu peso e
de modo a eliminar a necessidade de sustentação da coluna, suporte e veículo na vertical, através
dos cilindros hidráulicos de rotação, de acordo com o referido nas conclusões.
A norma EN 1493:1998 [1] indica que se o número de ciclos de carga for superior a 22000, a
estrutura também tem de ser dimensionada à fadiga. Assumindo 5 dias de trabalho por semana e o
carregamento de 20 veículos por dia (número obtido através de uma empresa de despoluição de
VFV), os 22000 ciclos esgotam-se ao fim de pouco mais de 4 anos o que é claramente inaceitável.
É necessário dimensionar o sistema hidráulico e as ligações soldadas entre os vários elementos
normalizados. Importa também analisar detalhadamente as tensões envolvidas nos pontos de fixação
dos actuadores hidráulicos e nas várias interacções entre peças.
Têm que ser seleccionados os rolamentos a utilizar nas interacções coluna/suporte e suporte/tranca.
A norma EN 1493:1998 [1] obriga à existência de um dispositivo de bloqueio, que em caso de falha
do elemento de elevação, impeça a queda ou descida do dispositivo de suporte do veículo e um
dispositivo mecânico contra o retomar da subida, que em caso de falha do elemento de elevação
impeça o retomar da subida a partir da posição inicial. Ambos os dispositivos têm que resistir sem
deformação permanente às suas actuações. Estes dispositivos não foram abordados por este
trabalho e poderão ser alvo de futuros projectos.
Finalmente poderá ser efectuado um estudo económico que permita estimar os custos envolvidos no
fabrico da plataforma.
71
6. Referências
[1] EN 1493:1998. Norma Europeia referente a Elevadores de veículos. Cen Comité Europeu de
Normalização.
[2] Regulamento de Segurança e Acções para Estruturas de Edifícios e Pontes e Regulamento de
Estruturas de Aço para Edifícios (Abril 1998). 2ªEdição, Editora Rei dos Livros.
[3] NHTSA (National Highway Traffic Safety Administration), www.nhtsa.dot.gov. Acedido a 12 de
Setembro de 2007.
[4] Directiva 2000/53/CE, do Parlamento Europeu e do Conselho de 18 Setembro de 2000.
Directiva Europeia relativa aos Veículos em Fim de Vida. Jornal Oficial das Comunidades
Europeias de 21 de Outubro de 2000.
[5] Fiat Commercial Vehicles. http://www.fiatcv.com.au/cms/media/PDFs/LWB%20Van%20spec%
20sheet.pdf. Acedido a 19 de Agosto de 2007.
[6] LSD Recycling Technology. http://www.lsd-gmbh.com/lsd_gmbh/referenzen_eng.html. Acedido
a 5 de Outubro de 2007.
[7] Wuhan Haiyu Technology Development Co., Ltd. http://atvchina.en.alibaba.com. Acedido a 5
de Outubro de 2007.
[8] Directiva 2006/42/CE do Parlamento Europeu e do Conselho de 17 Maio de 2006. Directiva
europeia relativa às máquinas. Jornal Oficial da União Europeia de 9 de Junho de 2006.
[9] Directiva 98/37/CE do Parlamento Europeu e do Conselho de 22 de Junho de 1998. Directiva
Europeia relativa à aproximação das legislações dos Estados-membros respeitantes às
máquinas. Jornal Oficial da União Europeia de 23 de Agosto de 1998.
[10] Directiva Europeia 2001/116/CE, da Comissão Europeia de 20 de Dezembro de 2001.
Directiva europeia que adapta ao processo técnico a Directiva 70/156/CEE do Conselho
relativa à aproximação das legislações do Estados-membros respeitantes à homologação dos
veículos a motor e seus reboques. Jornal Oficial das Comunidades Europeias de 21 de Janeiro
de 2002.
[11] Rotary Lift. http://www.rotarylift.com/default.asp?language=English&location=Europe. Acedido
a 5 de Outubro de 2007.
[12] MAHA Maschinenbau Haldenwang GmbH & Co. KG. http://www.maha.de/en/impressum.asp.
Acedido a 5 de Outubro de 2007.
[13] European Patent Office.
http://v3.espacenet.com/textdoc?DB=EPODOC&IDX=JP2002226187&F=0. Acedido a 5 de
Outubro de 2007.
[14] Google Patent Search. http://www.google.com/patents?id=MxF9AAAAEBAJ&dq=7143869.
Acedido a 5 de Outubro de 2007.

72
[15] Google Patent Search. http://www.google.com/patents?id=q-MfAAAAEBAJ&dq=5636711.
Acedido a 5 de Outubro de 2007.
[16] Google Patent Search. http://www.google.com/patents?id=52sYAAAAEBAJ&dq=in-
ground+vehicle+lift. Acedido a 5 de Outubro de 2007.
[17] Google Patent Search. http://www.google.com/patents?id=qsoiAAAAEBAJ&dq=four+post+lift.
Acedido a 5 de Outubro de 2007.
[18] Google Patent Search. http://www.google.com/patents?id=1PsTAAAAEBAJ&dq=vehicle+tilting.
Acedido a 5 de Outubro de 2007.
[19] Google Patent Search. http://www.google.com/patents?id=vPw3AAAAEBAJ&dq=4599034.
Acedido a 5 de Outubro de 2007.
[20] Ulrich, K. T. e Eppinger, S. D. (2003). Product Design & Development. 3ª edição, McGraw-Hill.
[21] Internet Auto Guide. http://www.internetautoguide.com/car-specifications/09-int/1995/mitsubishi
/montero/index.html. Acedido a 5 de Outubro de 2007.
[22] Auto Mall USA. http://www.automallusa.net/1995/mitsubishi/montero/reviews.html. Acedido a 5
de Outubro de 2007.
[23] Shigley, J. E., Mischke, C. R. e Budynas, R.G. (2004). Mechanical Engineering Design. 7ª
edição, McGraw-Hill.
[24] Beer, F. P. e Johnston, E. R. (1992). Mechanics of Materials. 2ª edição, Mc Graw Hill.
[25] Silva, A., Dias, J. e Sousa, L. (2001). Desenho Técnico Moderno. 1ª edição, Lidel.

73
Figura 7.1: Definição das dimensões ltx e lty.
7. ANEXO A - Cálculos Auxiliares
Suporte, lado direito
Apresentam-se os cálculos relativos aos momentos aplicados ao topo da viga do suporte que guia o
movimento da tranca (ver #2 na Fig. 7.2).
Figura 7.2: Condições de fronteira do suporte do lado direito (dimensões em mm).

74
Considerou-se ltx = 250 mm e lty = 200 mm (ver Fig. 7.1). Estas dimensões correspondem ao
desalinhamento do cilindro hidráulico (que actua o movimento da tranca) do eixo de guiamento da
tranca (ver #2 nas Fig. 4.8 e 4.13).
tyTTx lFM ⋅= , (1)
txTRyTy lFMMtranca
⋅−−= . (2)
Para FT e MRytranca ver ponto 4.1.3, página 52. MRytranca foi determinado através das reacções
resultantes dos constrangimentos aplicados à tranca (constrangimentos necessários à simulação da
interacção entre a tranca e o suporte do lado direito) quando esta foi analisada no Ansys® (ver
Fig. 4.10).
Coluna
Antes de se calcularem as forças que actuam sobre a coluna é necessário definir algumas dimensões
que se podem observar nas Figuras 7.3 e 7.4.
Figura 7.3: Dimensões importantes, L2 e ls/2. Figura 7.4: Dimensões e ângulos importantes, lcil, lSTv,
lSTh, lg, L, LN, hc, lrot e θ.
Considerou-se ls = 1260 mm, L2 = 920 mm, lcil = 190 mm, lSTv = 460 mm, lSTh = 530 mm, lg = 150 mm,
L = 2050 mm, LN = 1200 mm, hC = 2950 mm, lrot = 500 mm e θ = 30º.
Os valores de lrot e θ foram obtidos através do pré-dimensionamento do sistema hidráulico de rotação.

75
PST = 630 kg corresponde ao peso do conjunto do suporte e da tranca.
ØgPF STST ⋅⋅= , (3)
)(sen1
)(sen)cos(FFF
4
STySTxST
α−
α⋅α⋅== , (4)
)(sen1
)(cosFF4
2ST
zSTα−
α⋅= , (5)
Assim para as forças e momentos apresentados na Figura 7.5, tem-se que
xxx STPEGDx FF2F2F +⋅+⋅= , (6)
yyy STPEGDy FF2F2F −⋅−⋅−= , (7)
PEGDzzz WWSTPEGDz F2F2FF2F2F ⋅−⋅−−⋅−⋅−= , (8)
)l)F(l)F(()lF
)Ll2L2()FF((T
sPEsGDSThST
Ng1PEGDC
xxy
yy
⋅−⋅+⋅−
−−⋅+⋅⋅−−= , (9)
)lFLF2LF2(
)l)FF(l)FF((MM
STvST2PE2GD
sGDWGDsPEWPETx
yyy
zzx
⋅−⋅⋅−⋅⋅−+
+⋅−−−⋅−−+= , (10)
)lFLF2LF2(
l)F()l2/LlL()F()lF
)Ll2L2()FFFF((MM
STvST2PE2GD
cilzcilNg1TSThST
Ng1PEGDWGDWTy
xxx
z
zzPEy
⋅+⋅⋅+⋅⋅−
−⋅−−+−+⋅−+⋅+
+−⋅+⋅⋅−−−−−−= , (11)
tyTTx lFM ⋅= , (1)
txTRyTy lFMMtranca
⋅−−= . (2)
Figura 7.5:Condições de fronteira da coluna.

76
Base
Para determinar as forças e momentos que actuam sobre a base (forças e momentos de reacção
indicados com o índice R na Fig. 7.6) é necessário adicionar o efeito da massa da coluna às forças
que actuam sobre esta.
Considerou-se m = 285 mm, hC = 2950 mm, lrot = 500 mm e θ = 30º. Note-se que lrot e θ foram obtidos
através do pré-dimensionamento do sistema hidráulico de rotação. A medida lrot corresponde à
distância do ponto de fixação dos cilindros hidráulicos de rotação na coluna ao eixo de rotação da
coluna e θ corresponde ao ângulo entre os cilindros hidráulicos de rotação (com a coluna na posição
vertical) e a horizontal.
PC = 275 kg corresponde ao peso da coluna.
ØgPF CC ⋅⋅= , (12)
)(sen1
)(sen)cos(FFF4
CyCxC
α−
α⋅α⋅== , (13)
)(sen1
)(cosFF4
2C
zCα−
α⋅= , (14)
Figura 7.6: Determinação do carregamento na base.

77
Fazendo o equilíbrio das forças e momentos da Figura 7.6 obtém-se
colunaR TT1= , (15)
colunayCR FFFy1y+= , (16)
2zCzR FFFFzcoluna1z++= , (17)
rot
CxyvCR l
hFMlFF colunacolunax
2x
⋅++⋅= , (18)
colunax2x1x xCRR FFFF −−= , (19)
CyvCxR hFlFMMcolunaycoluna1x
⋅+⋅+= . (20)
Por fim, para determinar as forças a aplicar sobre a base, tem-se que
2/FF2xR2x −= , (21)
)tan(FF 2x2z θ⋅= , (22)
m/)T(2/FF 1R1Rx3x −−−= , (23)
)m/M(2/FF 1Rx1Rz3z −+−= , (24)
m/)T(2/FF 1R1Rx4x −+−= , (25)
)m/M(2/FF 1Rx1Rz4z −−−= , (26)
1Ry4y FF −= . (27)
Figura 7.7: Condições de fronteira da base.

78
8. ANEXO B – Desenhos Técnicos
Desenhos Técnicos

ISTDesenho de Conjunto
Ambop
Desenhado 29-10-2007 João Read
1:25Plataforma Elevatória e
Basculante de Veículos Ligeirosem Fim de Vida
LISTA DE PEÇASNº NOME1 Base2 Coluna3 Suporte4 Tranca
1
2
3
4

A-A ( 1 : 25 )
( 1 :50 )
ISTBase
Ambop
Desenhado 29-10-2007 João Read
AA
1:25Plataforma Elevatória e
Basculante de Veículos Ligeirosem Fim de Vida
2440 970
1490
100
205
260
2190
930
1120
Lista de PeçasNº Descrição Comprimento Quant. Material Designação1 Tubo TPS Quadrangular 2440 2 S 355 J2 H EN 10210-1 200×14 2 Tubo TPS Quadrangular 480 2 S 355 J2 H EN 10210-1 200×143 Tubo TPS Quadrangular 1930 2 S 355 J2 H EN 10210-1 200×144 Tubo TPS Quadrangular 930 1 S 355 J2 H EN 10210-1 200×145 Tubo TPS Quadrangular 530 1 S 355 J2 H EN 10210-1 200×146 Tubo TPS Quadrangular 122,5 2 S 355 J2 H EN 10210-1 200×14
1
2
3
4
5 6

( 1 :50 )
ISTColuna
Ambop
Desenhado 29-10-2007 João Read
1:25Plataforma Elevatória e
Basculante de Veículos Ligeirosem Fim de Vida
2950
150
Lista de PeçasNº Descrição Comprimento Quant. Material Designação1 HEM 200 3100 1 S 355 J2G3 DIN 1025-2
1

( 1 :50 )
ISTSuporte
Ambop
Desenhado 29-10-2007 João Read
1:25Plataforma Elevatória e
Basculante de Veículos Ligeirosem Fim de Vida
1420
1114
1000
Lista de PeçasNº Descrição Comprimento Quant. Material Designação1 HEM 140 2050 2 S 355 J2G3 DIN 1025-22 Tupo TPS Quadrangular 1160 2 S 355 J2 H EN 10210-1 160×143 Tubo TPS Quadrangular 577,5 2 S 355 J2 H EN 10210-1 160×144 HEB 120 1120 1 S 355 J2G3 DIN 1025-2
1
2
4
3
577,5407,5
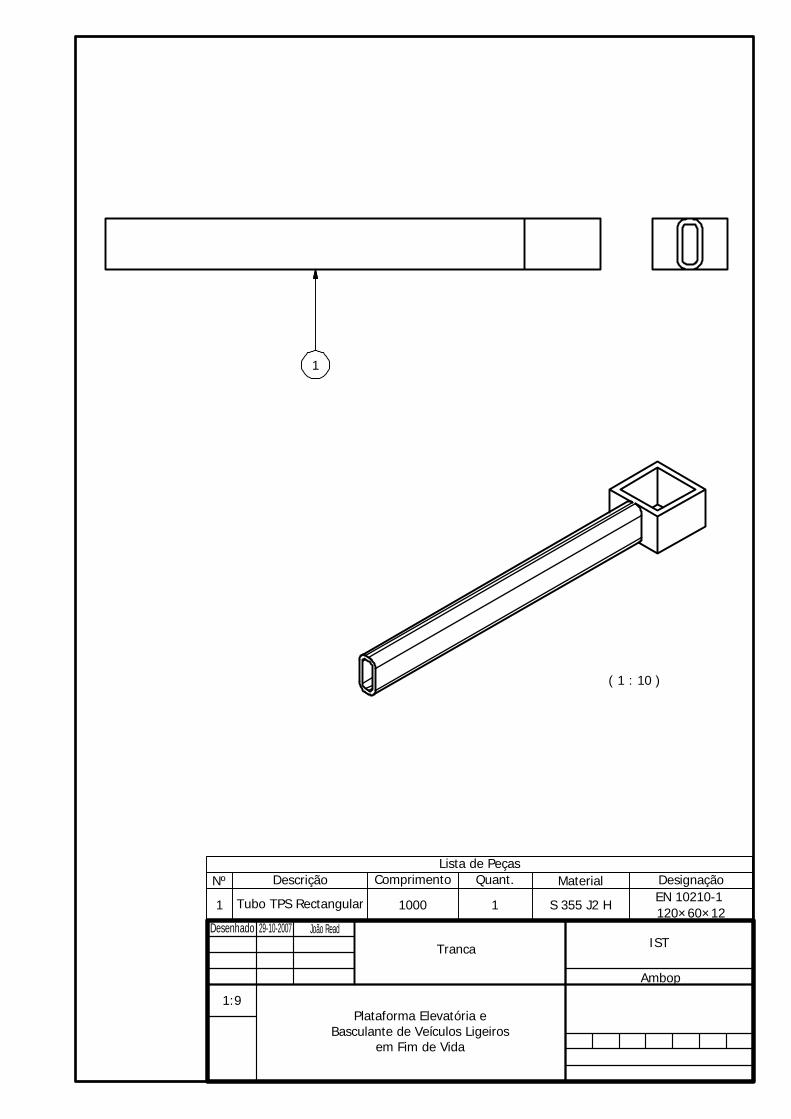
( 1 : 10 )
ISTTranca
Ambop
Desenhado 29-10-2007 João Read
1:9Plataforma Elevatória e
Basculante de Veículos Ligeirosem Fim de Vida
Lista de PeçasNº Descrição Comprimento Quant. Material Designação
1 Tubo TPS Rectangular 1000 1 S 355 J2 HEN 10210-1 120×60×12
1