sistema global de posicionamento (gps)€¦ · 000km acima do satelites gps) em três planos...
TRANSCRIPT

Sistema Global de Posicionamento (GPS)
João Matos, Ana Paula FalcãoDepartamento de Engenharia Civil e Arquitectura
(Versão 1.1) – 26 Março 2007

Motivação
A utilização de referências exteriores à Terra sempre se prefiguroucomo uma abordagem natural ao problema da determinação de posição. A utilização de satélites artificiais, do qual o GPS é o de utilização mais alargada, situa-se nessa linha de evolução e veiotrazer a possibilidade de determinação de coordenadas de ummodo simples e com equipamento de baixo custo.
A utilização para fins topográficos ou geodésicos é distinta da utilização para navegação, requerendo diferente metodologia e diferente equipamento.

Posicionamento Espacial (síntese histórica)
Observatório de Uraniborg
Observatório McDonald – Universidade do Texas

Posicionamento Astronómico
Radar e Distanciómetro – II Guerra Mundial
TRANSIT
Sistema para navegação (baixa precisão)Processamento Doppler permite precisão submétrica
1970
VLBI Very Long Baseline Interferometry
SLR Sattelite Laser Ranging


Goddard Geophysical and Astronomical Observatory. LAGEOS
Satellite Laser Ranging
Lunar Laser Ranging
Laser Ranging Station at McDonald Observatory
1978 – 1º satélite bloco I
1989 – 1º satélite bloco II
1985 – 10 satélite bloco I
1994 – Operacionalidade
2000 – Desactivado S/A
1973 Navigation System with Timing and RangingGlobal Positioning System(Directiva do DoD para a sua criação)
1981 – 1º Receptor Código/Fase

Sistema Global de Posicionamento
Satélite GPS do bloco II

OBJECTIVO DO GPSDeterminação de posiçãoDeterminação deVelocidadeDeterminação de tempo
OPERAÇÃO FUNDAMENTALMedição de distâncias para satélites
APLICAÇÕES DO GPSNavegação (mar, terra, ar)Geodesia e geodinâmicaTopografia e CartografiaSistemas de Informação Geográfica

SEGMENTO ESPACIAL
SEGMENTO DE CONTROLO
SEGMENTO DO UTILIZADOR
COMPONENTES DO SISTEMA

24 Satélites
Altitude: 22200 km
Período: 11h58m
Repetição da constelação: 23h56m
Inclinação: 50o
Separação no equador: 60o (3 pl.)
SEGMENTO ESPACIAL

SEGMENTO DE CONTROLO
1 Estação de Controlo(Schriever Air Force Base - Colorado Springs) para cálculo de correcções às Efemérides e aos Parâmetros de Relógio
4 Estações de Monitorização(Hawaii e Kwajalein, no Oceano Pacifico; Diego Garcia, no Oceano Índico e Ascension Island, no Oceano Atlântico) para obtenção de informações acerca do comportamento de cada satélite e envio das correcções calculadas em Colorado Springs

SEGMENTO DO UTILIZADOR
“CIVIL” : SPS (10m)
“MILITAR – EUA”: PPS (1m)
SA - SELECTIVE AVAILABILITY(Actualmente Desactivado)
AS – “Anti Spoofing”(Impede acesso ao código P)

Novos satélites (Bloco IIR-M, IIF)Mudança do sinal L1 e L2 (mais potentes)Adição de um novo sinal (L5)Criação de novos códigos
- L2C- M
Modernização do Segmento de ControloA próxima geração - GPS III
Evolução do Sistema

Sistemas complementares e outros
Satélite do Sistema Galileo (ESA)

GLONASS – Global OrbitingNavigation Satellite System
Funcionamento:Segmento espacial
21 satélites em 3 planos orbitaisorbita 19,100 km e passo 8 dias
SINAL: derivado da banda-L (L1=1602 MHz + n*0.5025)n é o número de frequência do canal
Segmento de controlo
Segmento do utilizador
Desenvolvido por:
Ministério de defesa da Federação Russa

EGNOS- European Geostationary Navigation OverlayService( perspectivas: melhorar a precisão posicional de 20m para 2m)
•Segmento espacial
•Três satélites geostacionários
•Inmarsat III Atlantic Ocean region –East ( 15.5ºW)
•ESA ARTEMIS (21.5ºE)
•Inmarsat III F5 (25ºE)
Ainda:
Informação precisa da posição de cada satélite GPS;
Informação sobre os relógios a bordo;
Parâmetros ionosféricos

Segmento de controlo
34 estações terrestresEstações de controlo principais
Segmento do utilizador

WAAS – Wide Area Augmention SystemDesenvolvido por: Federal Aviation Administration (FAA) e Department oftransportation (DOT)
FUNCIONAMENTO:25 estações terrestres localizadas nos EUA; 2 estações de controlo
Recebem a informação GPS, determinam e enviam as correcções a aplicar aos dados GPS ( derivas orbitais, erros do relógio, atrasos ionosféricos e troposféricos)
VALIDADE: América do Norte
Operacional desde Setembro de 2002 : precisão posicional horizontal 1-2 mprecisão posicional vertical 2-3 m

Áreas geográficas com cobertura WAAS, EGNOS e MSAS


Segmento espacial
30 satélites (orbita 24 000 km, cerca de 4 000km acima do satelites GPS) em três planos orbitais com inclinação de 56º. Cada plano terá 9+1 satélites
Segmento de controlo
2 centros principais na Europa central
Segmento do utilizador
GALILEU – European Satellite Navigation SystemProjecto da Comissão europeia em conjunto com a ESA
Previsão da data de entrada em funcionamento :2009

Princípios de Funcionamento

Fo=10,23 MHz
L1= 154xFo = 1575.42 MHz (19,0cm)L2= 120xFo = 1227.60 MHz (24,4cm)
C/A (Coarse/Acquisition) 1.023 MHzP (Precise) 10.23 MHz Y (Y emitido + W = P)
SINAL GPS
(oscilação de referência)
Onda Portadora (Carrier Phase)
Código
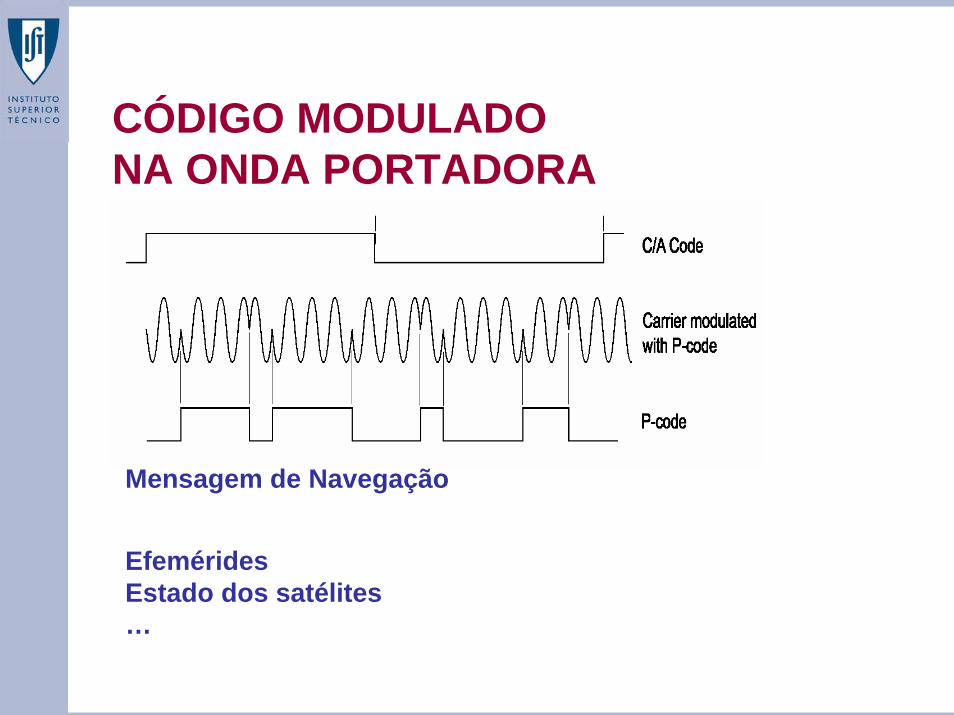
CÓDIGO MODULADONA ONDA PORTADORA
Mensagem de Navegação
EfeméridesEstado dos satélites…
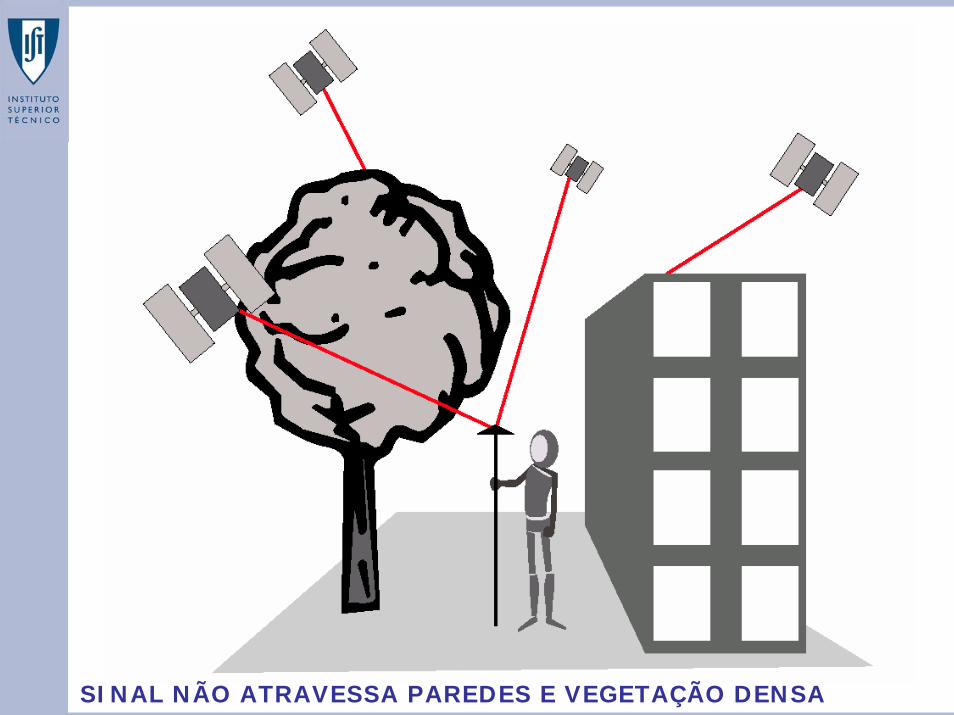
SINAL NÃO ATRAVESSA PAREDES E VEGETAÇÃO DENSA

r r
rr
1
2 3
4 to
t1 r4 = t1 tov ( - )
PSEUDO-DISTÂNCIA(Pseudo-Range)

.)()()(
,)()()(
,)()()(
,)()()(
2424244
2323233
2222222
2121211
kkkkk
kkkkk
kkkkk
kkkkk
cdtZZYYXX
cdtZZYYXX
cdtZZYYXX
cdtZZYYXX
+−+−+−=
+−+−+−=
+−+−+−=
+−+−+−=
ρ
ρ
ρ
ρ
(Xi,Yi,Zi) – Posição do satélite i(Xk,Yk,Zk) – Posição do receptordtk – Estado do relógio do receptor
Determinação de coordenadasem função da Pseudo-distância
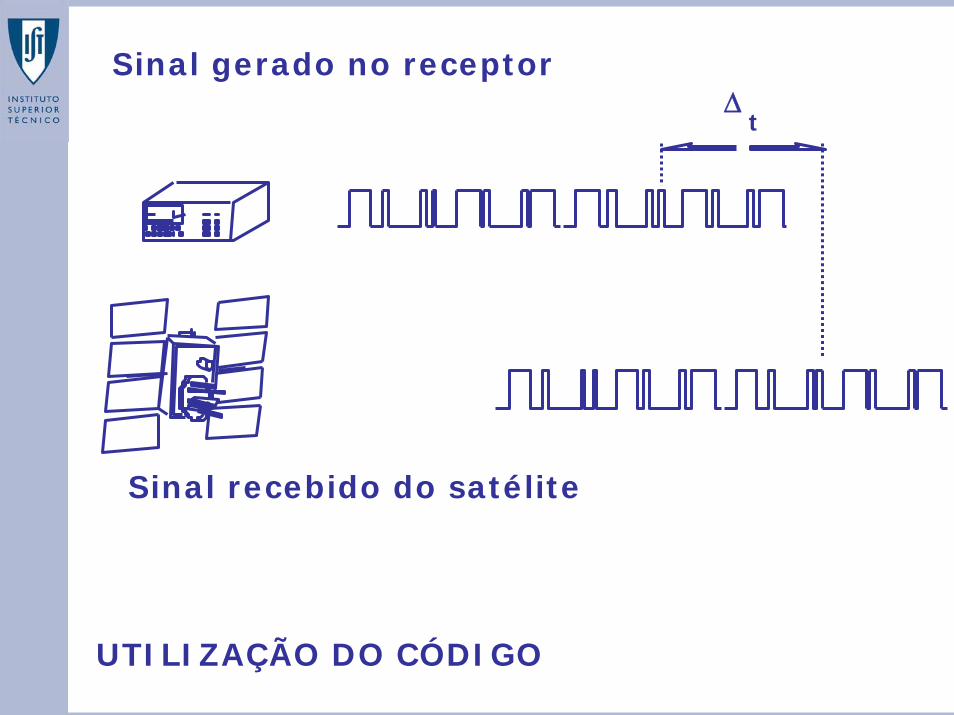
Δt
UTILIZAÇÃO DO CÓDIGO
Sinal gerado no receptor
Sinal recebido do satélite

Número completo e inteiro de ciclos desde o momento da emissão até à recepção da fase da onda portadora
Ambiguidade
Fase medida
UTILIZAÇÃO DA ONDA PORTADORA

Época (0)
Ambiguidade
Época (i)
Ambiguidade
Nº de ciclos já contadosFase medida
Fase medida
É necessário determinar a ambiguidade da fase da onda portadora para que se possa usar a sua informação como medição de distâncias ao longo do tempo

TÉCNICAS PARA FIXAÇÃODE AMBIGUIDADES
Modos de Operação

0,50 m3-5 min1 seg.
< 40 Km
DGPS2,00 m3-5 min1 seg.
< 300 Km
WADGPS 4 m
SPS 5 a 15 m
Posicionamento Absoluto

Mono Frequência Dupla FrequênciaC/A + L1 C/A+L1,L2
Estático(Convencional)
Estático(Rápido)
Cinemático
0,02 m30 min até 10 Km
+ 3 min/Km5 a 10 s< 20 Km
0,01 m20 min até 10 Km
+ 2 min/Km5 a 15 s< 20 Km
0,005 m20 min até 10 Km
+ 2 min/Km5 a 30 s< 20 Km
0,01 m10 min até 10 Km
+ 1 min/Km5 a 10 s< 20 Km
0,01 m(RTK) < 20 Km-
Posicionamento Relativo

Em modo de navegaçãoSPS (C/A) : 10mPPS (P) : 1m
Pós-processadaTempo real
POSICIONAMENTO ABSOLUTO
WADGPS: correcção diferencial regional4m
DGPS: correcção diferencial local 0,5m-2m

Estação de referência no Instituto Superior Técnico(http://websig.civil.ist.utl.pt/gps)
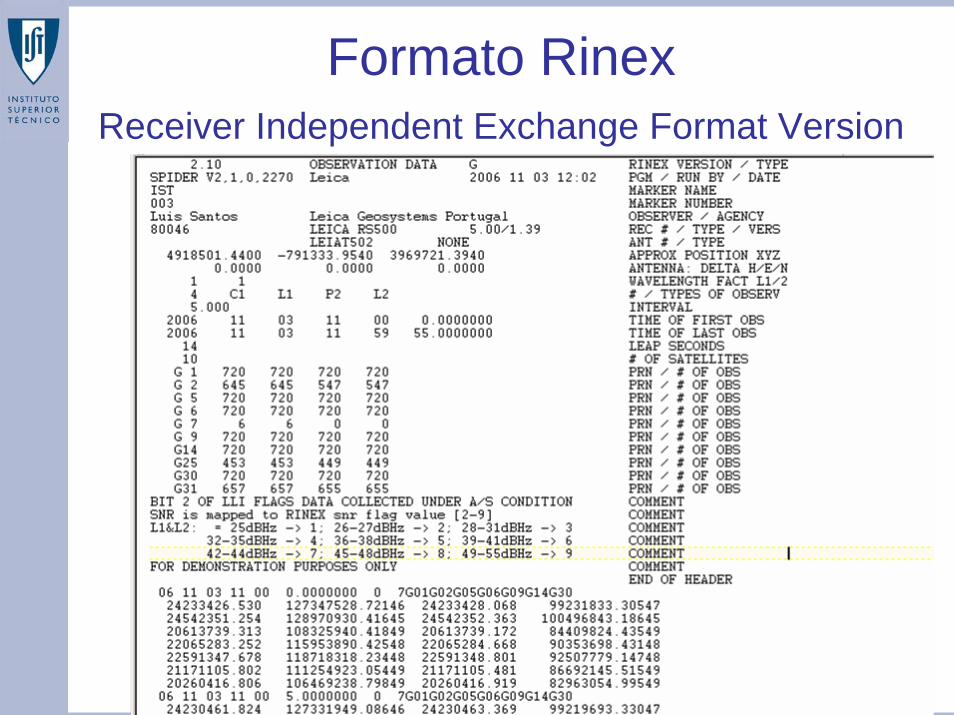
Formato RinexReceiver Independent Exchange Format Version

Estação de referência no edifício ACAIT – Dili

Tempo-real (<40km)
Pós-processado
Correcção diferencial por transmissão de:- correcções às coordenadas- correcções às pseudo-distâncias

Emissão daCorrecção Diferencial
Estações Costeiras (Beacon Stations)Satélites Geoestacionários (Racal/OmniStar)Antenas Retransmissoras de Telemóvel (GSM)Outro Receptor (Via Rádio)
RTCM – Radio Technical Commission for Maritime Services(Standard para transmissão de correcções diferenciais)

RECEPTORES PARA SPS

SPS aplicado a navegação terrestre

RECEPTORES PARA DGPS(tempo-real ou pós-processado)
Delineamento da fronteirade Timor-Leste
Trimble Geo-Explorer 2005

RECEPTORES PARA DGPS(tempo-real ou pós-processado)
Levantamento das gravuras de Foz Côa

DEPOIS DA CORRECÇÃO DIFERENCIAL
ANTES DA CORRECÇÃO DIFERENCIAL
EXEMPLO

Estático
POSICIONAMENTO RELATIVO
ConvencionalEstático rápido
Cinemático
Tempo Real (RTK)Pós-processado

BaseBaseBAA
Observaçõesprocessadasem conjunto

RENEPREDE NACIONAL DE ESTAÇÕES PERMANENTES(INSTITUTO GEOGRÁFICO PORTUGUÊS)
Cascais
Ponta Delgada

Precisão (m)
1.00
0.10
0.01
EstEstáático convencionaltico convencional 0 120
RRáápido Estpido Estááticotico 0 2 5
Tempo (mins)
Ambiguidadesnão resolvidas
Ambiguidadesresolvidas
Uma vez as ambiguidades resolvidas, a precisão não melhora significativamente com o decorrer do tempo
ESTÁTICO

Para bases longas (>20Km), onde é exigida a maior precisão possívelTécnica indicada para implementação de redes geodésicasTécnica ideal para grandes áreas
Para bases com comprimento até 20KmCurtos períodos de ocupaçãoO mais utilizado para grande produtividade de trabalho
Modo Estático
Modo Rápido-Estático
Utilizado para caracterização da trajectória de um objecto em movimento (medições contínuas)
Útil para levantamento de eixos de via e completagemcartográfica, entre outras aplicações
Cinemático

Não é necessário o Pós-Processamento
Resultados disponíveis no momento da observação
Aplicações em engenharia civil
RTK - Cinemático em Tempo Real
Receptores de Mono Frequência
Medição da base com precisão de 2 cm + 1 ppm (rms)Utilizam a onda portadora L1Utilizados essencialmente em aplicações topográficas com comprimentos de bases não superiores a 15 KmSolução menos dispendiosa mas de maior dificuldade para obter as precisões mencionadas

Medição da base com precisão de 3 mm + 0.5 ppm (rms)Utilização em Geodesia e Topografia :
Redes Geodésicas, Geodinâmica, Densificações de Rede, Controlo Fotogramétrico, Detalhe Topográfico
Receptores de Dupla Frequência

Erros de Observação
SA ligada
2001
2006
http://www.mar-it.de/NavGen/navgen_r.htm

Multi-trajecto

Retardamento ionosférico

Ru
Ru íí
do d
o do
do
Rec
ept
Rec
ept ..
Mul
titra
ject
oM
ultit
raje
cto
Rel
Rel
óó gio
s gi
os S
atSat éé
ll ..
Trop
osfe
raTr
opos
fera
Efem
Efem
éé rid
esrid
es
Iono
sfer
aIo
nosf
era00
1010
2020
3030
Met
ros
Met
ros
4040
Importância relativa dasfontes de erro

Propagação do erro
PDOP – Position Dilution of Precision
HDOP – Horizontal Dilution of Precision
VDOP – Vertical Dilution of Precision

Questões de Revisão e Consolidação
1. Defina ângulo de mascara e indique a importância da sua definição na recolha dos dados com um receptor GPS.
2. Após processamento dos dados registados em campo, selecione um elemento e identifique a qualidade posicional final do elemento.
3. Com recurso ao Sistema de Posicionamento Global (GPS), descreva, justificando, situações em que seja conveniente a utilização dos seguintes tipos de posicionamento:
i) Modo Absoluto, recolha dos dados em modo cinemático, observação de código;
ii) Modo Diferencial Pós-Processado, recolha dos dados em modo estático, observação de código e fase ;
iii) Modo Diferencial Tempo-Real, recolha dos dados em modo estático, observação de código e fase;
iv) Modo Diferencial Pós-Processado, recolha dos dados em modo cinemático, observação de código e fase.

Casos de aplicação
Levantamento da Rede de Escolas em Timor-Leste
Delineamento da Fronteira de Timor-Leste
Levantamento do Estado de Conservação da Rede Rodoviária Nacional

Levantamento da rede de escolas de Timor-Leste
João MatosDepartamento de Engenharia Civil e Arquitectura
(Versão 1.0) – 1 Março 2007