sistema de aquisicÃo de dados baseado em … · aos funcionários do laboratório de ... quando a...
TRANSCRIPT

SISTEMA DE AQUISICÃO DE DADOS BASEADO EM
T~CNICAS DE INTELIGENCIA ARTIFICIAL
FREDERICO NOVAES
TESE SUBMETIDA AO CORPO DOCENTE DA COORDENAÇÃO DOS
PROGRAMAS DE PÓS-GRADUAÇÃO DE ENGENHARIA DA
UNIVERSIDADE FEDERAL DO RIO D E JANEIRO COMO PARTE DOS
REQUISITOS NECESSARIOS PARA A OBTENÇÃO DO GRAU D E MESTRE
EM CIÊNCIAS E M ENGENHARIA OCEÂNICA.
Aprovada por: I
/ Prof. Tiago Alberto Piedras Lopes, M.Sc.
(Presidente)
Prof. Antonio Almeida Pinho, D.Sc.
py: +7. V r
Arthur Palmeira Ripper Neto, Ph.D,
Rio de Janeiro, R J - BRASIL
AGOSTO D E 1990
NOVAES, FREDERICO
SISTEMA DE AQUISICÃO DE DADOS BASEADO EM
TÉCNICAS DE INTELIGENCIA ARTIFICIAL. [Rio de
Janeiro] 1990
XI, 86 p. 29,7 cm (COPPE/UFRJ, M.Sc., Engenharia
Oceânica, 1990).
Tese - Universidade Federal do Rio de Janeiro, COPPE,
1. Aquisição de dados I. COPPE/UFRJ 11. Título (série).

A Minha esposa Silene;
minha mãe, Wanda;
à memória de meu pai, Walt er;
e à meus filhos Priscilla, Rodrigo
e ao que está por vir.
Agradecimentos
A minha mãe pela educação e incentivo em todos os momentos de
minha vida,
A minha esposa Silene, pelo amor, compreensão e o apoio nos
momentos difíceis deste trabalho, e também por ter me da.do dois filhos lindos.
Aos meus filhos Priscilla e Rodrigo por terem vindo ao mundo como
meus filhos,
Ao meu próximo filho que da segurança do útero d a mãe me deu
forças para finalizar esta tese.
Ao meu orientador, Professor Tiago, por sua orientação e exemplo de
trabalho e dedicação.
Ao professor Pinho pela co-orientação no desenvolvimento d a parte
de Inteligência Artificial deste trabalho e pelas brilhantes aulas de I.A. por ele
ministradas.
Ao professor Severino pelo exemplo de dedicação, vontade,
competência, amizade e caráter, e também pelo incentivo irrestrito ao
desenvolvimento desta tese,
Ao engenheiro Troyrnan pela criteriosa revisão do texto dessa tese,
Aos engenheiros eletrônicos Evaldo e Alexandre pela @ande ajuda no
desenvolvimento do so.ftzuare e pelo desenvolvimento do hardwere na. parte

experimental desta tese, sem os quais seria extremamente difícil a conclusão desta.
Aos funcionários do Laboratório de Estrutura3 Kavais pelo apoio no
desenvolvimento desta tese.
A FINEP pelo financiamento dos equipamentos necessários ao
desenvolvimento deste trabalho e ao CNPq pela concessão da bolsa de mestrado.
A COPPE, pelo excelente nivel dos cursos e professores nos programas
de Engenharia Oceânica, Engenharia de Sistemas e Engenharia Civil, propiciando
àqueles que querem se a.primorar o contato com profissionais competentes e
atenciosos.

RESUMO DA TESE APRESENTADA A COPPE /UFRJ COMO PARTE DOS
REQUISITOS NECESSARIOS PARA OBTENÇAO DO GRAU DE MESTRE
EM CIÊNCIAS (M. SC.).
SISTEMA DE AQUISLC~O DE DADOS BASEADO EM
TÉCNICAS DE INTELIGÊNCIA ARTIFICIAL
FREDERICO NOVAES
Agosto de 1990
Orientadores: Prof.: Tiago Alberto Piedras Lopes
Prof,: Antonio de Almeida Pinho
Neste trabaIho é apresentado o desenvolvimento de um sistema de
aquisição de dados baseado em técnicas de Inteligência Artificial. O objetivo
deste sistema é permitir a obtenção de informações sobre o comportamento
dinâmico de estruturas offshore, pois, devido à característica aleatória das forças
de excitação, torna-e necessário o registro de dados por longos períodos de
tempo.
ABSTRACT O F THESIS PRESENTED T O COPPEfUFRJ AS PARTIAL
FULFILLMENT O F REQUIREMENTS FOR THE DEGREE O F MASTER O F
SCIENCE (M. Sc,).
A DATA ACQUISITION SYSTEM BASED ON AN ARTIFITIAL
INTELIGENCE APROACH
FREDERICO NOVAES
August of 1990
Thesis Supervisors: Prof.: Tiago Alberto Piedras Lopes
Prof.: Antonio de Almeida Pinho
Department: Ocean Engineering
In this report are presented the steps for developing a data acquisition
system based on an Artificial Intelligence aproach. The aim is to get access to
data. from the dynamic behavior of offshore structures, since due to the random
charact erist ics of the excitation forces, it is necessary to record t ransducer signals
for long periods of time.
C APÍTULO I - Introdução:
1.1 - Histórico
1.2 - A Concepção do SIAD
CAPÍTULO I1 - Carz t erísticas da Aquisição de Dados Experimentais
2.1 - Pré-processamento de Dados
2.1.1 - Aquisição de Dados
2.1.2 - Conversão Analógico-Digital
2.1.2.1 - Quantizqão
2.1.2.2 - Amostragem no Domínio do Tempo
2.1.3 - Conversão para Unidades de Engenharia
2.1.4 - Correção de Pontos EspUrios
2.1.5 - Remoção de Tendências
CAPITULO I11 - Aplicação de Inteligência Artificiai: Sistemas Especialistas
3.1 - Inteligência Artificial - Uma Perspectiva Histórica
3.1.1 - O Computador como Extensão do Cérebro
3.1.2 - Primeiros Trabalhos em I.A.
3.1.3 - Pressupostos das Pesquisas em IA.
3.1.4 - Atitudes Humanas que Resistem à Formalização
3.1.5 - Alternativas aos Pressupostos

3.1.6 - Classificação das Atividades Inteligentes
3.1.7 - Fatores que Propiciaram o finascimento da I.A.
3.1.8 - areas de Desenvolvimento da. IA.
3.2 - Sistemas Especialistas - Conceito
3.2.1 - Base de Conhecimento
3.2.2 - Motor de Inferência
3.2.2.1 - Encadeamento Progressivo
3.2.2.2 - Encadeamento Regressivo
3.2.3 - Int erface com o Usuhio
3.3 - Uma Classificação dos Sistemas Especialistas
3.3.1 - Controle (Automação Inteligente)
3.3.1.1 - Laço Aberto
3.3.1.2 - Laço Fechado
3.3.2 - Desenvolvimentos de Produtos
3.3.3 - Diagnóstico
3.3.4 - Planejamento
3.3.5 - Predição
3.4 - Ferramentas para a Construção de S.E.
3.4.1 - Consistência e Completude destas Bases
3.4.2 - Adequqão do SfaelZ
3.4.3 - Minimizaçk das Interfaces
3.4.4 - Estabelecimento de Heurísticas
3.4.5 - Confiabilidade dos Resultados
3.5 - O SIAD como Sistema Especialista
3.5.1 - Motor de Inferência do SIAD

3.5.2 - A Base de Conhecimento do SIAD
3.5.2.1 - Base de Fatos
3.5.2.2 - Base de Regras
CAPITULO 4 - Aquisição de Dados Utilizando-se Técnicas de I.A.
4.1 - Conversores Analógico-Digit ais
4.2 - Componentes do SIAD
4.2.1 - Trarisdutores
4.2.2 - Condicionadores de Sinais
4.2.3 - Filtros
4.2.4 - Placa de Conversão Analógico-Digital
4.2.5 - Microcomputador
4.2.6 - Armazenamento dos Dados
4.2.7 - Transferência dos Dados Gravados
4.2.8 - Ut ilizaçk do Modem
4.3 - Descrição do SIAD
4.3.1 - Aquisição Propriamente Dita
4.3.2 - Entre Duas Aquisições
4.4 - Comunicação de Dados
4.4.1 - Histórico
4.4.2 - Funcionamento
4.4.3 - Operações
4.4.3.1 - Operação Não Assistida
4.4.3.2 - Proteção Para o Ambiente Remoto
4.4.3.3 - Comandos Utili%ários de Acesso Remoto
CAPITULO 5 - Processamento de Sinais
5.1 - Coleta das Informações
5.2 - Processamento no Domínio da Frequência
5.3 - Processamento no Domínio do Tempo
CAPÍTULO 6 - Coment kios e Conclusões
6.1 - Comentários
6.2 - Conclusões
Referências Bibliograbficas

1.1 - Histórico
Os trabalhos experimentais requerem uma demanda de
equipamentos e de mão de obra muito grande. O Laboratório de Estruturas
Navais d a COPPE/UFRJ realiza diversos trabalhos nesta área,
Um dos trabalhos realizados por este laboratório foi uma
medição de altura e direção de ondas, que permitiu a caracterização das condições
do mar na bacia de Campos, que durou aproximadamente 12 meses. Um outro
trabalho realizado, na mesma época, foi a monitoração de vibração da estrutura de
uma plataforma de petróleo, que durou perto de dois anos, porém com frequência
de medições menor do que a medição de mar.
A finalidade destas medições na estrutura da plataforma é
avaliar o seu comportamento dinâmico, Isto é conseguido com as medições de
deslocamento e tensões em pontos escolhidos da estrutura. Com estes parârnet ros
e com a ajuda de cálculos estruturais que especificam o quanto um determinado
deslocamento influenciou em um outro local, é possível avaliar o dano de fadiga
que é, em última instância, a vida útil de um determinado componente da
estrutura estudada,
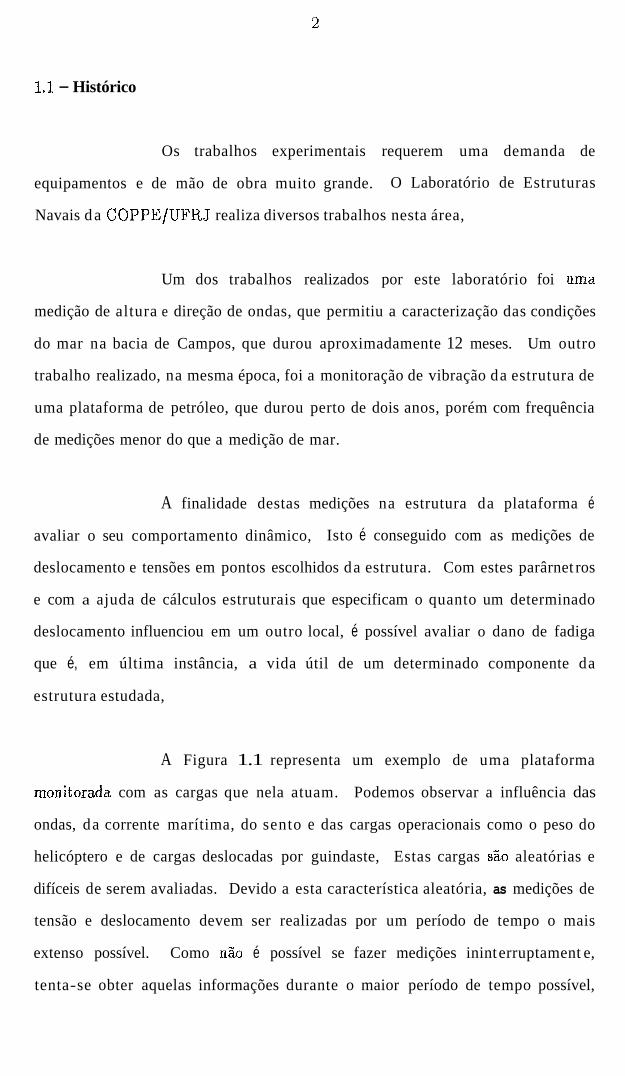
A Figura 1.1 representa um exemplo de uma plataforma
monitorada com as cargas que nela atuam. Podemos observar a influência das
ondas, da corrente marítima, do sento e das cargas operacionais como o peso do
helicóptero e de cargas deslocadas por guindaste, Estas cargas sã.0 aleatórias e
difíceis de serem avaliadas. Devido a esta característica aleatória, as medições de
tensão e deslocamento devem ser realizadas por um período de tempo o mais
extenso possível. Como nã,o é possível se fazer medições inint erruptament e,
tenta-se obter aquelas informações durante o maior período de tempo possível,
para que as conclusões tenham confiabilidade estatística.
Devido à quantidade muito grande de informações armazenadas
desta maneira, são necessários equipamentos especiais, resistentes às condições
adversas da plataforma e técnicos qualificados e disponíveis para permanecerem
trabalhando por um período de tempo grande em sistema de rodízio enquanto
durar a medição.
Quando a PETROBR~S resolveu realizar a medição de
vibração estrutural de maneira contínua, resolvemos elaborar um sistema que
pudesse substituir os operadores dos equipamentos de maneira a não perder
eficiência nem dados.
FIGURA 1.1 - Exemplo de Plataforma Monitorada
1.2 - Concepção do SIAD
Para minimizar os problemas apresentados anteriormente,
houve a necessidade de se criar um sistema para aperfeiçoar a técnica de aquisição
tornando-a automática e minimizando a presença de um técnico especializado no
local d a aquisição. Para se substituir este técnico, é necessário elaborar um
sistema que: ligue todos os equipamentos; verifique os sinais a procura de algum
problema; faça a aquisição em intervalos de tempo definidos e armazene os sinais
adquiridos, sendo que a capacidade de armazenamento deve ser suficiente para que
o sistema permaneça operando durante o maior período de tempo possível.
Pensamos, então, em criar o SIAD (Sistema Inteligente de
Aquisição d e Dados). O termo inteligente foi empregado devido ao fato de
utilizarmos técnicas de Inteligência Artificial e Sistemas Especialistas, que
veremos adiante; para que o sistema opere sozinho, realizando o trabalho do
especialista.
Os diversos módulos que compõem o SIAD foram sendo criados
com o passar do tempo, enquanto pensávamos em como seria a parte inteligente,
O módulo que realiza a aquisição propriamente dita foi
implementado utilizando-se as técnicas e limitações que compõem o
pré-processamento e a aquisição de sinais no domínio do tempo, como mostra o
Capítulo 2,
Utilizando+e as técnicas de Inteligência Artificial e Sistemas
Especialistas, cujos conceitos serão mostrados no Capítulo 3, conseguimos
construir a Base de Fatos e de Regras do SIAD e o testamos, preliminarmente, em
um gerenciador de Base de Conhecimento.

O SIAD se caracteriza por ser um programa controlador de
diversos módulos e de direcionar a execução para o módulo específico que a
situação exige, além de não ser necessária a presença do usuário como na maioria
dos programas. Uma explicação detalhada do funcionamento do SIAD e de seus
componentes será apresentada no Capítulo 4.
Os módulos que formam o SIAD, foram elaborados nas
linguagens mais adequadas para cada caso. Os módulos que fazem a aquisição
foram escritos em PASCAL. Os módulos gráficos e o módulo que realiza a análise
no domínio do tempo foram escritos em BASIC. O módulo que realiza a análise
no domínio da frequência foi escrito em FORTRAN,
CAPÍTULO 2
CARACTER~STICAS DA AQUISICÃO DE DADOS EXPERIMENTAIS
2.1 - Pré-processamento de Dados
A finalidade desse capítulo é sumarizar as condições básicas que
têm lugar entre a aquisição e a análise de sinais. O processamento dos sinais é
muito dependente do fenômeno físico representado pelos dados e dos objetivos do
processamento, em termos de engenharia.
Em geral, os passos intermediários podem ser divididos em [I]:
1. aquisição de dados;
2. conversão analógico-digit al;
3. conversão para unidades de engenharia;
4. correção de dados espúrios;
5. remoção de tendências.
2.1.1 - Aquisição de Dados
A partir da captação da ocorrência física com um transdutor, a
aquisição de sinais pode incluir a transmissão e o armazenamento dos sinais.
O sistema de armazenamento mais conveniente é a gravação em fita
magnética, pois pode guardar e reproduzir de forma analógica uma grande
quantidade de dados. Outra alternativa muito ut iliaada atualmente, é a
gravação digital através de microprocessadores.
2.1.2 - Conversão Analógicc+Digital
Digitalizar um sinal analógico significa representá-lo por um
conjunto de palavras em código binário equivalentes à média do sinal
amostrado em intervalos regulares de t ernpo, Dois processos estão
envolvidos: a quant ização e a amost ragem.
Enquanto a amplitude de um nível analógico passa por todos os
níveis possíveis, com resolução infinita, o número de níveis por que
passa o sinal digitalizado depende de quantos bits possui a placa de
conversão A/D.
A distribuição das amplitudes de um sinal digitalizado não é
mais contínua, porém discreta, Na maioria dos casos práticos, o erro é
completamente aleatório com distribuição de probabilidades definida
por:
Assim a média ? é zero, pois P(E) é simétrica em relação a
E = O, e a variância é dada por:

Isto significa, por exemplo, que, se as amplitudes forem
quantizadas numa faixa com 256 pontos, o valor da relação
ruído/sinal é 0,29/256 0,001, Verifica4e que, para a maioria das
aplicações, o erro de quantização é negligenciável.
2.1.2.2 - Amostragem no Domínio do Tempo
A Figura 2.1 demonstra como uma função é amostrada no
tempo por uma função pulso com frequência de amostragem f, = '/Ta.
A cada período Ta é tomada uma amostra que corresponde à média
das amplitudes no intervalo At, Cada amostra será dada por uma
palavra em código binário,
INTERVALO
s (tl af (tl 9
FIGURA 2.1 - Exemplo de Amostragem
Um erro de importância extremamente relevante em
processamento e análise de sinais é o erro de identificação (abiastng
~ T T Q T ) .

A Figura 2.2 ilustra o fato de que várias funções senoidais
podem ser interpretadas pelo sistema de digit alização de maneira
equivalente.
Para se resolver este problema, a frequência de amostragem f,
deverá, ser fixada de tal maneira que f, ) 2f,, onde f, é a frequência de
interesse mais alta no sinal, a denominada frequência de Nyquist ,
SINAL DE AMOSTRAGEM FREQUÊNCIA fn
X
SINAL INFERIDO ERRONEAMENTE
TEMPO
AMOSTRAGEM
FIGURA 2.2 - Sistema de Digitalização em diversas ondas senoidais
Para se assegurar que o sinal não contém frequências acima da
frequência de Nyquist, o mesmo deve passar por um filtro passa-baixa
com frequência de corte igual a frequência de Nyquist, antes de ser
amostrado.
Como um filtro ideal não existe, a sua faixa de operação deve
ser levada em consideração. Na prática usa+e:
Se um s ina contém frequências de O a fU Hz, para que ele possa
ser recuperado após a digitalização, é necessário que o período de
amostragem At seja tal que:
2.1.3 - Conversão para Unidades de Engenharia
Os dados processados só poderão ser usados convenientemente
se for estabelecida uma relação entre suas amplitudes e as grandezas físicas a
que se referem. Para isto, é comum usar-se um dos procedimentos a seguir:
- cdibração por níveis;
- calibração senoidal.
Em ambos os casos, o transdutor é ligado a um calibrador e é
registrado o sinal de saída do sistema de medição,
- Calibrqão por Níveis
Uma série de níveis de voltagem, dos quais se conhece a relação
com as grandezas físicas, é introduzida no processador e digitalizada.
- Calibrqão Senoidal
A calibração senoidal é feita pela injeção de uma onda senoidal
de amplitude conhecida no sistema, registrando-se e digitalizando-se
vários períodos,
2.1.4 - Correção dos Pontos Espúrios
Pontos espúrios podem ser introduzidos nos dados pelo sistema
de aquisição, tanto devido a uma falha na digitalização ou falha no
equipamento ou captação de sinais estranhos do meio ambiente, ou mesmo
perda do sinal na transmissão. Se estes pontos não forem identificados e
substituídos, podem trazer consequências sérias, como uma estimativa errada
de Densidade Espectral de Potência.
A maneira mais simples de se eliminar estes pontos é
substituí-10s manualmente. Entretanto pode-se implementar um sistema
automático através de um programa elaborado para este fim. Um destes
procedimentos consiste no seguinte:
a) guarda-e o sinal original;

b) obtém-se uma sequência digital xn;
c) obtém-se o quadrado de < formando-se a sequência
que chamaremos (FJ2;
d) obtêm-e uma outra sequência, que chamaremos xi;
e) checa-se cada ponto x,,, da sequência original,
considerando-se bom todo o ponto que tornar verdadeira
a expressão:
(S. 4)
onde F: = xi /N - (FJ2 é um valor atualizado da variância e k deve ser
escolhido entre 3 e 9, sendo 6 um valor inicial para a maioria dos casos. Se o
ponto xntl não for aceito ele poderá ser substituído por ext rapolação.
6 necessário que se determine antes o número de extrapolações
máximas sucessivas, para que, após uma sequência de pontos ilegítimos, não
se venha a eliminar um ponto realmente bom. O procedimento acima é
usado quando se acredita que os dados não devam conter muitos pontos
dispersos.
2.1.5 - Remoção de Tendências
De maneira geral, dois tipos de tendências podem estar
presentes nos dados. No primeiro caso, dados que deveriam ter média zero
apresentam um valor diferente, Quando isto acontece a média deve ser
subtraida dos dados. O segundo caso é uma oscilação de baixa frequência
int roduzida por ruído dos equipament os. Este problema, quando verificado,
pode ser resolvido usando-se um filtro passa+lta adequado,

APLICACAO DE INTELIGENCIA ARTIFICIAL:
SISTEMAS ESPECIALISTAS

3.1 - Inteligihcia Artificial - Uma Perspectiva Histórica [2]
3.1.1 - O Computador como ExtensZo do Cérebro
Fazer o computador realizar tarefas simples e repetitivas como
por exemplo, computar uma grande quantidade de operações aritméticas, é
uma tarefa relativamente simples e naturalmente a máquina as executa mais
rápida e precisamente do que um ser humano.
Entretanto, tentar elaborar um programa para simular o
pensamento e a inteligência do homem é tarefa ainda impossível. O próprio
conceito de inteligência, por ser relativo, contribui para esta impossibilidade.
Em 1959 Turing [3] definiu um teste, que levou o seu nome,
para determinar se uma máquina possui inteligência ao nível humano. Neste
teste, dois humanos, A e B, e um computador, C, são colocados em um
ambiente de forma que não haja comunicação entre eles, a não ser através de
um dispositivo do tipo terminal de computador. O humano A representa o
papel de interrogador e seu objetivo é descobrir, analisando as respostas de B
e C, qual deles é o computador, Caso A não consiga determinar, com uma
margem mínima de certeza de 50 %, qual dos dois (B ou C) é o outro
humano, e este resultado for confirmado por outras pessoas representando os
papéis de A e B, diz-se que o computador C passou pelo teste de Turing, e
que simula a inteligência humana,
Obviamente este experimento nunca foi tentado na prática,
pois nenhuma máquina passaria por este tipo de teste, devido à sua pouca
capacidade de memória e à arquitetura das atuais máquinas.

3.1.2 - Primeiros Trabalhos em Inteligência Artificial
a) Tradutor Automático Inglês-Russo - Oct tinger (1956)
b) Logic Theorist - Newell, Shaw e Simon (1957)
c) GPS - General Problem Solver - Newell, Shaw e Simon (1959 a 1967)
d) St udent - Bobrow - resolvia problemas de álgebra elementar
Todos os trabalhos tinham em comum um início auspicioso e
bastante ambicioso para, durante a elaboração, esbarrar em obst áiculos
intransponíveis, Não era difícil construir um programa que executasse uma
tarefa, mas parecia impossível fazer com que a máquina a executasse bem,
isto é, torná-la competitiva, em termos qualitativos, com o ser humano,
3.1.3 - Pressupostos das Pesquisas em I.A.
As pesquisas em Inteligência Artificial se baseavam
implicitamente em alguns pressupostos:
a) Biológko - acreditava-se que se poderia modelar o cérebro humano
em um computador digital; algumas dificuldades derrubaram este
pressuposto, tais como por exemplo, a diversidade, a simultaneidade,
a interatividade e a complexidade do cérebro humano que é, no
mínimo, dez vezes superior a qualquer computador,
b) Psicológico - acreditava-se que a mente humana poderia ser simulada
por um programa; Simon em 1959 afirmou "Em dez anos, as teorias
psicológicas assumirão a forma de um programa de computador";
Neisse, por sua vez, afirmou o seguinte: "A tarefa de
um psicólogo que tenta compreender a cognição humana é análoga à
de alguém que tenta descobrir como um computador foi programado"
Epistemológico - acreditava-se também que todo o conhecimento do
homem podia ser formalizado; tomando-se como contra exemplo a
linguagem, sabe-se que ao ser humano é possível compreender uma
frase na qual uma regra gramatical foi infringida; porém, para que um
computador possa compreender uma infração de regras, é necessibio
uma formalização da linguagem para a qual são necessárias regras
gramaticais, meta-regras que regulem a sua aplicação,
meta-meta-regras que regulem a aplicação destas e assim
sucessivamente; isso parece impossível para um computador, mas é
simples para o ser humano.
3.1.4 - Comportamentos Humanos que h s i s t em a Formalização
a) Consciência Marginal - um programa de computador bem elaborado
considera vinte e seis mil alternativas em um jogo de xadrez, enquanto
um mestre considera duzentas e realiza um lance melhor; o
tique-taque de um relógio, que só é percebido quando cessa, também é
um exemplo de consciência marginal; um outro exemplo é uma pessoa
perceber o rosto de uma outra conhecida no meio da multidão, mesmo
sem a estar procurando.
b) Tolerância a Ambiguidades - para reduzir a ambiguidade, o ser
humano considera o contexto, sem que para isto necessite de uma
formalização; por exemplo, no reconhecimento de escrita cursiva ou na
compreensão de frases como "ele segue Freud" ou "fique perto de
mim",
c) Discriminação entre o Essencial e o não Essencial - na resolução de
problemas o homem separa o essencial do conjunto de dados que
acompanha o problema em questão, o que é extremamente difícil de se
implementar em um programa, e relativamente simples para o
homem.
d) Reconhecimento de Similaridades - é possível ao ser humano
reconhecer uma pessoa mesmo que não a veja há muito tempo,
3.1.5 - Alternativas aos Pressupostos
Existe no ser humano um horizonte interior, uma antecipação
pré-delineada, parcialmente indeterminada, de dados parcialmente
indeterminados, Por exemplo, para o homem o significado do todo precede o
dos elementos; os traços individuais adquirem significado em função de uma
antecipação determinada do conjunto. O sentido de uma frase é
compreendida sem que sejam examinados os significados de cada palavra que
a compõe. O comportamento humano pode ser regular sem ser normativo,
além de ser função das necessidades do ser humano.
3.1.6 - Classificação das Atividades Inteligentes
Area I - Comportamento associat ivo elementar, onde o significado e o
contexto são irrelevantes.
Exemplos:

- jogos de memória associativa;
- jogos solucionados por tentativa e erro;
- dicionário mecânico,
Solução:
- árvores de busca;
- busca em tabelas.
Area I1 - Comportamentos formais simples, onde os significados são
complet m e n t e explícitos e independentes do contexto.
Exemplos:
- jogos computáveis ou quase computáveis (velha);
- problemas combinat órios simples (labirinto);
- prova de teoremas utilizando-se procedimentos mecânicos
(lógica);
- reconhecimento de configurações rígidas simples (leitura de
página impressa).
Solução:
- procedimentos exaustivos de busca.
Area 111 - Comportamentos formais complexos, onde os significados
não são totalmente explícitos nem totalmente independentes do
contexto.

Exemplos:
- jogos incomput áveis (xadrez);
- problemas combinatórios complexos (planejamento);
- demonstração de teoremas que exijam procedimentos não
mecânicos, como intuição;
- reconhecimento de configurações complexas (fotografias de
satélites);
Solução:
- busca heurística,
Area IV - Comportamentos não formais onde os significados
dependem completamente do contexto.
Exemplos:
- problemas mal definidos (charadas);
- problemas de estrutura aberta, nas quais não são dadas as
condições relevantes (diagnóstico médico);
- tradução de linguagem natural;
- reconhecimento de configurqões variadas e alternadas (fala,
paisagem natural, escrita cursiva),
Solução:
- Não há um procedimento para solucionax completamente tais
problemas. A solução atual é restringir o problema, para uma
porção pelo menos parcialmente formalizável e então
enquadrá-lo na Area III.
3.1.7 - Fatores que Propiciaram o Renasciment o da I. A.
a) A orientação das pesquisas no sentido de auxiliar, e não
substituir, a inteligência humana - Sistemas Especialistas,
mat emát ica semi-aut omatizada;
b) Novas arquiteturas das máquinas (processamento paralelo,
quinta geração, diálogo homem-máquina);
c) Novos ambientes de programação específicas para esta área
(linguagens Lisp, Prolog, etc.);
d) Nova metodologia de programação que separa conhecimento de
procedimento.
3.1.8 - Areas de Desenvolvimento da Inteligência Artificial
a) demonstração automática de teoremas;
b) organização do conhecimento;
c) raciocínio aproximado;
d) sistemas especialistas;
e) compreensão de linguagem natural;
f) programação automática;
g) reconhecimento de padrões;
h) jogos de estratégia;
i) otimização de sistemas de recuperação;
j) sistemas de consulta especializados;
1) robótica;
in) aprendizado.
3.2 - Sistemas EspeciaIistíbs - C~ncei to [4]
Um Sistema Especialista (S.E.) é um programa que tem por
objetivo simular a atuação de um especialista na área de sua especialidade.
Um S.E. é composto basicamente de três partes, a saber:
- uma base de conhecimento;
- um motor de inferência;
- uma interface com o usuário.
3.2.1 - Base de Conhecimento
Em um S.E. baseado em regras, a base de conhecimento é
formada normalmente de uma base de fatos e uma base de regras
propriamente dita. Na base de fatos estão os conhecimentos que o sistema
possui sobre o problema que se está tentando resolver, enquanto que na base
de regras está o conhecimento do especialista sobre a interligação dos
diversos fatos e a influência sobre o resultado do problema em questão, Na
base de fatos, normalmente, ut ilizam+e frames, redes semânticas, triplas
O-A-V (Objeto, Atributo e Valor), enquanto que na base de regras
utilizam-se normalmente regras de produção,
3.2.2 - Motor de Inferência [2]
O motor de inferência é um procedimento que faz com que a
base de regras atue sobre a base de fatos modificando-a, inferindo novos
fatos, até que se infira um fato novo que se revela a resposta ao problema
que se deseja resolver,
Existem baqicamente duas direções pelas quais o encadeamento
de inferências pode ser realizado, dando origem a duas formas de atuação do
motor de inferência:
3.2.2.1 - Encadeamento Progressivo
As inferências são realizadas a partir dos fatos (dados) em
direção aos objetivos. Essa forma de atuação é vantajosa quando:
- os dados são menos numerosos do que os
objetivos;
- os dados são obtidos de maneira automiitica
através de alguma interface com outro sistema,
por exemplo um banco de dados.
3.2.2.2 - Encadeamento Regressivo
As inferências são realizadas a partir dos objetivos em direção
aos fatos (dados), A utilização dessa forma de atuação, que é a mais
utilizada, é vantajosa quando:
- os objetivos são menos numerosos que os dados;
- deseja-se minimizar as solicitações ao usuário;
- é possível estabelecer-se alguma forma de prioridade
entre os objetivos,
O encadeamento regressivo funciona, em linha gerais, da
seguinte maneira:
Considere as regras:
R1: Se a então b
R2: Se b então c dado : a
R3: Se c então d objetivo: d
A primeira regra a ser acionada é RS; como não é possível dispará-la,
pois ' 'cii não é conhecido, procura-se uma regra com "então c" (82); como também não é possível dispará-la, procura-se uma regra com
I I então b" (R1); como "a" é um dado, solicita-se ao usuário; se "a" é
verdadeiro então são disparadas R1, 82 e R3 encontrando4e "d".
O motor de inferência deve também possuir um terceiro tipo de
conhecimento, uma heuríst ica ou meta conhecimento, que permita ao sistema
decidir qual regra deve ser disparada, quando existem mais de uma nestas
condições.

3.2.3 - Int erface com o Usuário
O contato do Sistema Especialista com o mundo exterior se faz
através da interface com o usuário, Esta interface deve possuir
procedimentos que permitam que este contato seja o mais próximo possível
da linguagem humana. A interface com o usuário deve permitir recursos
para:
- solicitar ao usuário os conhecimentos sobre o problema
em questão;
- fornecer ao usuário o encadeamento das inferências que
foram realizadas durante o processament o (rast reament o
do raciocínio);
- apresentar ao usuário os motivos pelos quais um certo
dado foi solicit d o , ou realizada uma certa inferência;
- fornecer ao usuário os resultados obtidos.
3.3 - Uma Classificação dos Sistemas Especialistas [2]
Os Sistemas Especialistas podem ser utilizados em uma ampla
variedade de aplicações. 1st o torna difícil uma classificação, porém tentaremos
apresent 5,-la baseada na resposta do sistema.
3.3.1 - Controle (Automação Inteligente)
O Sistema Especialista gerencia a operação de um sistema
físico, que tanto pode ser um motor como uma fábrica; existem dois tipos de
controle a saber: r
3.3.1.1 - Laço Aberto
O computador segue uma fórmula matemática ou um
procedimento passo a passo para provocar um comportamento
específico no sistema físico.
3.3.1.2 - Laço Fechado
O computador possui sensores que detect arn características
específicas do meio e estas informações são utilizadas pelo Sistema
Especialista para calibrar o processo de controle.
3.3.2 - Desenvolvimento de Produtos
Dado o conjunto de especificações de um produto, o Sistema
Especialista procura uma configuração que satisfaça as especificações.

3.3.3 - Diagnóstico
O Sistema Especialista estabelece um relacionamento entre um
conjunto de evidências (dados) e um conjunto de hipóteses (diagnósticos) em
uma árvore de hierarquia, indicando as hipóteses que mais provavelmente
decorrem das evidências.
3.3.4 - Planejamento
Tendo um ponto de partida, um objetivo, uma fonte de
recursos, passos intermediários possíveis e restrições, o Sistema Especialista
tenta estabelecer um caminho dentro das restrições impostas, minimizando a
utilização de recursos.
3.3.5 - Predição
Dadas as informações sobre uma situação o Sistema
Especialista tenta estabelecer uma ou mais situações que seriam
consequências da primeira.
3.4 - Ferramentas para a Construção de Sistemas Especialistas [2]
Durante a construção de um Sistema Especialista é necessário
se prever a possibilidade de alterações na base de conhecimento, como a inclusão e
a retirada de fatos e regras, principalmente, na fase de testes, Sendo assim, em
príncipio, é possível retirar todas as regras e fatos relativos a um ramo de
conhecimento e incluir novos fatos e regras relativos a outro ramo de
conhecimento. Um Sistema Especialista que possua estas condições, isto é, vazio
de fatos e regras, é o que chamamos de um shell ou gerenciador de bases de
conhecimento; um conjunto definido pelo motor de inferência, pelos arquivos
destinados a receber a base de fatos e de regras, e da interface com o usuário.
Pa.ra efeitos computacionais é suficiente, pelo menos em príncipio, construir ou
adquirir um shd , e com ele desenvolver um Sistema Especialista somente
preenchendo-o com os fatos e as regras. Esta idéia se baseia em algumas
suposições:
que qualquer base de fatos pode ser descrita segundo o
formalismo de qualquer shedt
que qualquer base de regras pode ser submetida a qualquer
motor de inferência;
que é possível a um usuário leigo em inteligência artificial
construir a base de conhecimento.
Estas suposições são, entretanto, discutíveis, principalmente a
última. A construção de bases de conhecimento segundo uma formalização
computacional, está gerando um ramo da inteligência artificial chamado de
Engenharia do Conhecimento. No caso de Sistemas Especialistas, a Engenharia
do Conhecimento tem por finalidade a construção de bases de conhecimento,
levando em conta:

3.4.1 - A Consistência e Completude destas Bases
A presença de fatores de inconsistência e incompletude na base
de conhecimento pode comprometer seriamente o desempenho de um Sistema
Especialista. Abaixo, alguns exemplos de inconsistência e incomplet ude:
a) encadeamento circular
exemplo: Se a Se b
Então b Então c
b) regras conflit ant es
exemplo: Se a Se b
Então b Então c
c) regras implícitas
exemplo: Se a Se b
Então b Então c
d) condições inacessíveis
Se c
Então a
Se a
Então não c
Se a
Então c
exemplo: S e a e b Se a
Então c Então não b
3.4.2 - A Adequação do shell
Se for escolhido um shebl para o desenvolvimento de um Sistema
Especialista, o engenheiro do conhecimento deve esta.r certo de que os
procedimentos do motor de inferência e o modelo de raciocínio aproximado
que este shekl utiliza são adequados à aplicação.
3.4.3 - A Mininiizaçk das Interfaces
O número de solicitações que o Sistema Especialista faz ao
usuário, é um dos incovenientes d a sua utilização. O engenheiro do
conhecimento deve cuidar para que o encadeamento de inferências não leve o
sistema a perguntar ao usuário fatos irrelevantes ou que poderiam ser
inferidos.
3.4.4 - O Estabelecimento de Heuristicas
No caso dos gerenciadores de bases de conhecimento de
propósito geral, é difícil a utilização de heurísticas, pois estes sistemas podem
ser utilizados para várias finalidades. No caso de gerenciadores dedicados, é
possível o estabelecimento de heurísticas que visem a redução do consumo de
recursos comput acionais.
3.4.5 - A Confiabilidade dos Resultados
A qualidade dos resultados fornecidos por um Sistema
Especialista depende fortemente dos conhecimentos do especialista e também
da construção da base de conhecimentos. Embora um Sistema Especialista

não se preocupe em fornecer resultados ótimos, o engenheiro do
conhecimento deve estabelecer condições para que a resposta do sistema
possua algum nível de confiança, principalmente, se o sistema utilizar
alguma forma de raciocínio aproximado,
3.5 - O SIAD como Sistema Especialista
O SIAD utiliza a base de fatos sob a forma de triplas O-A-V e
a base de regras sob a forma de regras de produção. No SIAD não existe o usuário
na maneira usual. As perguntas que seriam feitas ao usuário, são feitas a outras
partes do sistema que têm condições de respondê-las.
3.5.1 - Motor de Inferência do SIAD
A partir da base de fatos e da base de regras, o objetivo do
SIAD é conhecer a condição dos sinais. Na base de fatos, no objeto "Sinais"
e no atributo "Condição", temos uma série de valores que aquele objeto com
esse atributo podem assumir. O motor de inferência que está acoplado ao
SIAD, procura na base de regras uma regra com "então a condição dos sinais
é ..,". O SIAD então verifica se a primeira parte da regra é um fato, isto é,
se não existe outra regra com a parte do Então sendo a primeira parte da
regra anterior. O SIAD prosegue assim até que ele encontra um fato. Como
não há usuário, o SIAD pergunta a outras partes do sistema se aquele fato é
verdadeiro ou falso. Dependendo da resposta, o SIAD prosegue a busca ou
imediatamente informa o resultado, Se o resultado indicar que a condiçk
dos sinais não é ótima, o SIAD, sabendo qual é a condição dos sinais, desvia
a execução do programa a fim de corrigir a falha apontada pela resposta.
Após a correção do problema o comando retorna ao SIAD e o ciclo recomeça.
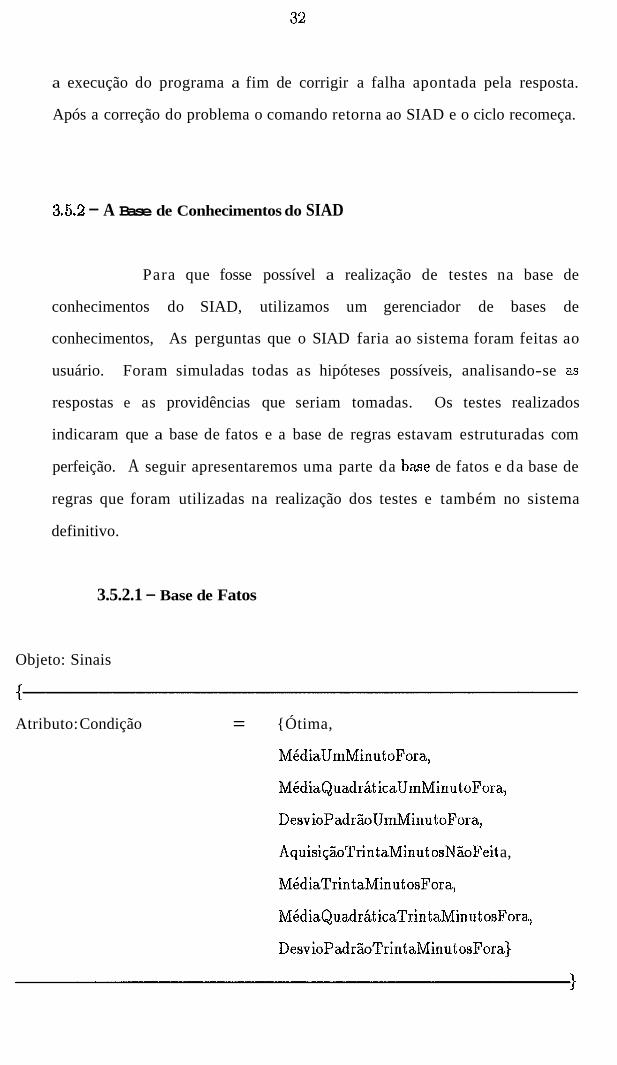
3.5.2 - A Base de Conhecimentos do SIAD
Para que fosse possível a realização de testes na base de
conhecimentos do SIAD, utilizamos um gerenciador de bases de
conhecimentos, As perguntas que o SIAD faria ao sistema foram feitas ao
usuário. Foram simuladas todas as hipóteses possíveis, analisando-se as
respostas e as providências que seriam tomadas. Os testes realizados
indicaram que a base de fatos e a base de regras estavam estruturadas com
perfeição. A seguir apresentaremos uma parte da baçe de fatos e da base de
regras que foram utilizadas na realização dos testes e também no sistema
definitivo.
3.5.2.1 - Base de Fatos
Objeto: Sinais
I
Atributo: Condição = {Ótima,
MédiaUmMinut oFora,
MédiaQuadrát icaUmMinut oFora,
DesvioPadrãoUmMinutoFora,
AquisiçãoTrintaMinut osNãoFeit a,
MédiaTrintaMinut osFora,
MédiaQuadrát icaTrint aMinut osFora,
DesvioPadrãoTrintaMinutosFora}
L
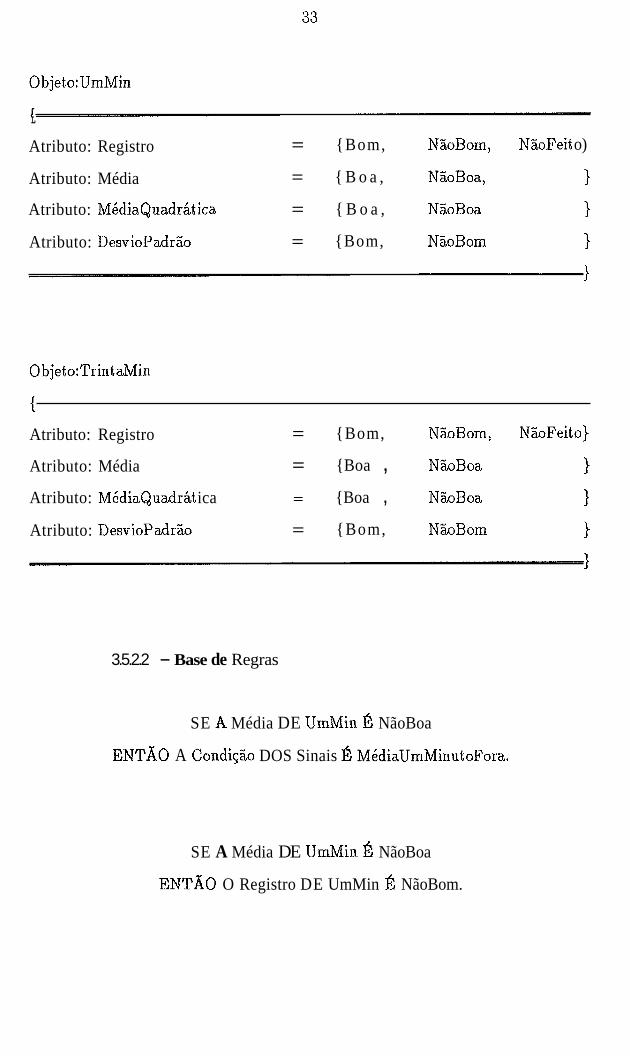
Atributo: Registro = {Bom, NãoBom, NãoFeit o)
Atributo: Média = { B o a , NãoBoa, 1 Atributo: MédiaQuadrática = { B o a , NãoBoa 1 Atributo: DesvioPadrão = {Bom, NãoBom }
0bjeto:TrintaMin
{
Atributo: Registro = {Bom, NãoBom, NãoFeito)
Atributo: Média = {Boa , NãoBoa 1 Atributo: MédiaQuadrát ica = {Boa , NãoBoa 1 Atributo: DesvioPadrão = {Bom, NZoBom }
3.5.2.2 - Base de Regras
SE A Média DE UrnMin É: NãoBoa
ENTAO A Condisão DOS Sinais h MédiaUmMinut oFora.
SE A Média DE UmMin É NãoBoa
ENTAO O Registro DE UmMin É NãoBom.
SE A MédiaQuadrática DE UmMin É NãoBoa
ENTAO A Condição DOS Sinais ~ MédiaQuadráticaUmMinutoFora.
SE A MédiaQuadrática DE UmMin É NãoBoa
ENTAO O Registro DE UmMin É NãoBom.
SE O DesvioPadrão DE UmMin É NãoBom
ENTAO A Condição DOS Sinais É DesrioPadrãoUmMinutoFora.
SE O DesvioPadrão DE UmMin É NãoBom
ENTAO O Registro DE UmMin É NãoBom.
SE A Aquisi~ão DE TrintaMin É NãoFeita
ENTAO O Registro DE TrintaMin É NãoFeito.
SE A Média DE TrintaMin É NãoBoa
ENTAO A Condi~ão DOS Sinais É MédiaTrintaMinutosFora.
SE A Média DE TrintaMin É NãoBoa
ENTAO O Registro DE TrintaMin É NãoBom.
SE A MédiaQuadrática DE TrintaMin É NãoBoa
ENTAO O Registro DE TrintaMin É NãoBom.
SE O DesvioPadrão DE TrintaMin fi NãoBom
ENTAO A Condigão DOS Sinais E DesvioPadrãoTrintaMinut osFora.
SE O DesvioPadrão DE TrintaMin E NãoBom
ENTAO O Registro DE TrintaMin fi NãoBom.
SE O Registro DE TrintaMin fi Bom
ENTAO A Condi@ DOS Sinais fi Ótima.
SE A Média DE UmMin É3 Boa
E A MédiaQuadrática DE UrnMin 6 Boa
E O DesvioPadrão DE UmMin fi Bom
ENTAO O Registro DE UmMin h Bom.
SE O Registro DE UmMin É Bom
E A Média DE TrintaMin fi Boa
E A MédiaQuadrática DE TrintaMin fi Boa
E O DesvioPadrão DE TrintaMin ~ Bom
ENTÁO O Registro DE Trint aMin É Bom.

CAPÍTULO 4
AQUISIGAO DE DADOS UTILIZANDO-SE TÉCNICAS DE I. A.
Neste capítulo trataremos em primeiro lugar dos equipamentos
e periféricos necessários para tornar possível ao SIAD (Sistema Inteligente de
Aquisição de Dados) realizar as tarefas necessárias com bom desempenho.
Trataremos em seguida do funcionamento detalhado do SIAD, com fluxogramas e
explicações para cada módulo que o compõe.
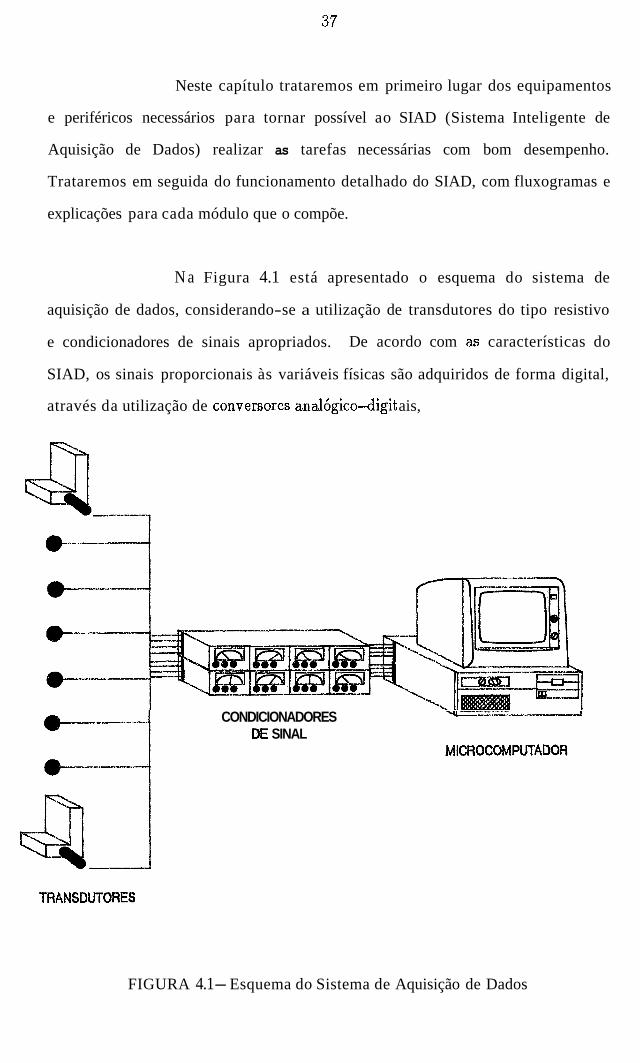
N a Figura 4.1 está apresentado o esquema do sistema de
aquisição de dados, considerando-se a utilização de transdutores do tipo resistivo
e condicionadores de sinais apropriados. De acordo com a características do
SIAD, os sinais proporcionais às variáveis físicas são adquiridos de forma digital,
através da utilização de conversores analógico-digit ais,
TRANSDUTORES
CONDICIONADORES DE SINAL
FIGURA 4.1- Esquema do Sistema de Aquisição de Dados
Quando é necessáxia a comunicação entre sistemas analógicos e
digitais, são requeridos conversores analógico-digitais e/ou digit al-analógicos.
Estes conversores realizam a união entre o mundo do fenômeno real onde as
variáveis são geralmente quantidades analógicas contínuas, e o mundo do
engenheiro projetista de processamento de informações digitais, onde as vaziáveis
são quantidades discretas.
O número de aplicações e tipos de conversores disponíveis
aumentou muito nos últimos anos, Em parte isto foi resultado do reconhecimento
das possibilidades dos sinais digitalisados tais como processament o e transmissão
em oposição aos sinais analógicos.
Em geral as vantagens do processamento e da transmissão de
sinais digitais repousa no aumento da precisão, imunidade a ruídos, flexibilidade
de processamento e facilidades de armazenamento.
O incremento do uso de processamento digital de sinais
analógicos está ligado ao rápido desenvolvimento de sofisticados, já não tão caros,
mini e micro=-computadores. Ao mesmo tempo, o declínio constante do preço e o
aumento progressivo do desempenho dos conversores AfD efou DfA, facilitou
àqueles computadores serem efetivamente acoplados ao ambiente analógico.
A informação digital é geralmente representada pela presença
ou ausência de uma voltagem ou nível de corrente fixas, Então, cada unidade de
informação ou bit tem dois estados, sendo eles os estados "um" e "zero".
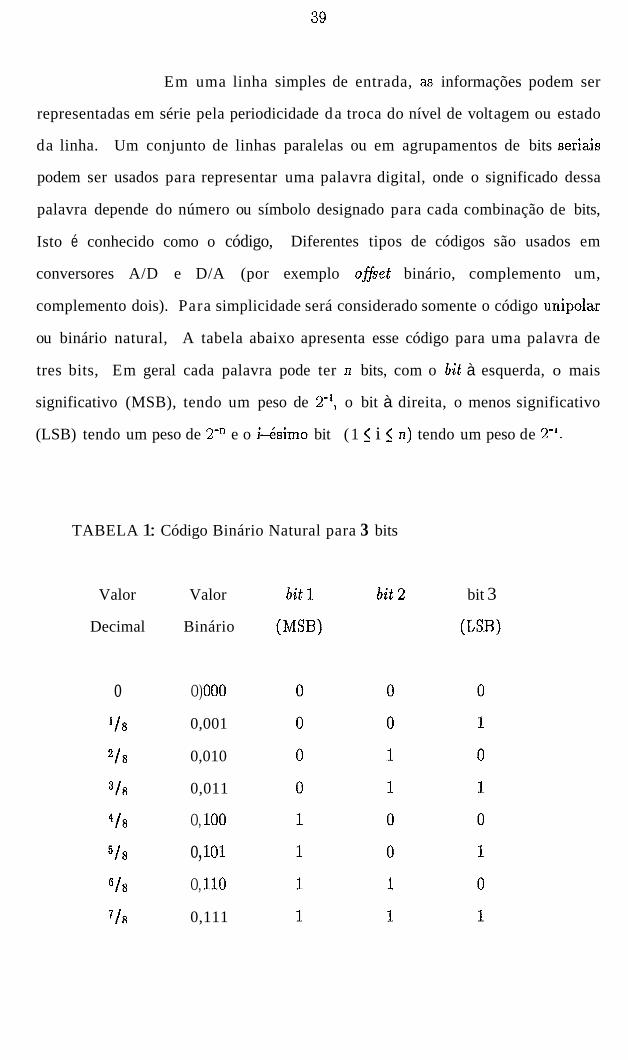
Em uma linha simples de entrada, as informações podem ser
representadas em série pela periodicidade da troca do nível de volt agem ou estado
da linha. Um conjunto de linhas paralelas ou em agrupamentos de bits seriais
podem ser usados para representar uma palavra digital, onde o significado dessa
palavra depende do número ou símbolo designado para cada combinação de bits,
Isto é conhecido como o código, Diferentes tipos de códigos são usados em
conversores A/D e D/A (por exemplo offset binário, complemento um,
complemento dois). Para simplicidade será considerado somente o código unipolar
ou binário natural, A tabela abaixo apresenta esse código para uma palavra de
tres bits, Em geral cada palavra pode ter n bits, com o bit à esquerda, o mais
significativo (MSB), tendo um peso de 2-', o bit à direita, o menos significativo
(LSB) tendo um peso de 2-" e o i-ésimo bit (1 5 i 5 R ) tendo um peso de 2-I.
TABELA 1: Código Binário Natural para 3 bits
Valor
Decimal
o '/8
2 /8
3/8
4/8
V 8
V 8
7/8
Valor
Binário
O) O00
0,001
0,010
0,011
O, 100
o, 101
O, 110
0,111
bit 3
(LSB)
4.2 - Componentes do SIAD
4.2.1 - Transdiat ores
Como já foi explanado, os dados adquiridos são produtos de
medições de deformação e/ou aceleração obtidos através de sensores
resistivos instalados em pontos escolhidos da plataforma, Através destes
dados, depois de feita a análise, pode-se determinar a resposta dinâmica da
estrutura.
4.2.2 - Condicionadores de Sinais
Os condicionadores de sinais são equipamentos que geralmente
amplificam o sinal dos transdutores a fim de que a voltagem de saída destes
sensores tenham uma faixa de operação condizente com o resto do sistema
(filtros, conversor A/D, etc). Os condicionadores de sinais utilizados pelo
SIAD foram especialmente desenvolvidos levando em conta, as
peculiariedades do sistema.
4.2.3 - Filtros
Também foram construidos filtros passa-baixa para eliminar o
erro de aliasing para atuar especificament e na faixa de frequência desejada.
4.2.4 - Placa de Conversão Analógico-Digital
Para se viabilizar a construção do SIAD, vários obstátulos
foram superados. O primeiro foi a escolha de um conversor analógico-digital
que se enquadrasse perfeitamente nos parâmetros necessários para uma
perfeita resposta do sistema e que tivesse no mínimo 8 canais de aquisição.
Foi conseguido no mercado, depois de estudar-ise vários tipos e modelos de
conversores A/D, o modelo de placa que atualmente é utilizado que é o
fabricado pela Taurus que comporta 8 canais com sample hold e
multiplexagem e possui as seguintes características técnicas [ 5 1:
- entradas andógicas do tipo diferencial
- tempo de conversão mínimo = 6 p
- numero de canais = 8
- taxa máxima de amostragem (interrupção) = 4 KHz/canal
- taxa máxima de amostragem ( ~ o o l i n ~ ) = 3 KHz /canal
- resolução relativa = 0,5 %
- tempo mínimo de sample = 4 p
- entradas selecionáveis corrente/tensão

4.2.5 - Microcomputador
O microcomputador a ser utilizado também foi cuidadosamente
escolhido, pois ele deveria ser resistente às condições adversas da plataforma,
além de poder funcionar sem problemas durante 24 horas por dia, por um
periodo de tempo muito grande. Deveria ter condições para a instalação dos
periféricos previstos. Depois de se estudar várias propostas, foi escolhido um
microcomputador industrial que se enquadrou perfeitamente às exigências.
Foram então instalados nele todos os periféricos e se iniciou a fase de testes.
4.2.6 - Armazenamento dos Dados
Ainda na fase de testes surgiu o problema de como armazenar
os dados obtidos. O armazenamento dos sinais no disco rígido foi a primeira
solução encontrada. Porém, prevendo-se o problema da transmissão dos
dados adquiridos, pensou-se em uma unidade de fita que receberia os dados
transferidos do disco rígido após um número de registros definido, Após um
número determinado de registros gravados na unidade de fita seria mais
rápida a transferência dos registros nela gravados.
4.2.7 - Trms£erência dos Dados Gravados
Para a transferência dos dados gravados havia duas
possibilidades a serem analisadas. A transferência por homem e via modem.
A incoveniência de se usar o modem para a transferência é que o tempo para
tal transferência seria muito grande, além dos ruídos que certamente
prejudicaria a pureza dos sinais gravados. Assim sendo, resolveu-se utilizar
uma pessoa para ir a plataforma quando a fita estivesse completa e trocar a
fita por uma nova,
4.2.8 - Utilização do Modem
O uso do modem ficou restrito à inspeção do sistema, A
qualquer momento pode-se entrar em contato com a plataforma e
transferir-se alguns registros para verificar se o sistema está funcionando a
contento.
4.3 - Descrição do SIAD
O SIAD é um conjunto de programas que tem por finalidade
tornar automática a aquisição de dados, minimizando a necessidade da presença
de um técnico no local da aquisição. Para que a substituição do técnico fosse feita
com sucesso, foi necessário que o programa realizasse todas as tarefas que aquele
técnico realizaria,
No momento em que o programa principal é chamado, o SIAD
verifica a hora do sistema operacional e através de um algorítmo calcula a hora da
próxima aquisição. As aquisições são periódicas e o intervalo entre uma aquisição
e outra é uma variável do programa.
4.3.1 - Aquisição Propriamente Dita
O SIAD fica em estado de espera até que faltem dez minutos
para a aquisição. Neste momento o programa através da saída digital liga

todos os equipamentos acoplados ao sistema. Durante estes dez minutos os
equipamentos se aquecem para que no momento da aquisição eles estejam na
temperatura de operação. A figura 4.2 mostra a tela do microcomputador
nesta condição, Passados os dez minutos de aquecimento dos periféricos, é
FIGURA 4.2 - SIAD Aguardando
realizada a aquisição de controle de um minuto. A figura 4.3 mostra a tela
do microcomputador nesta condição. Um arquivo binário com estes dados é
gravado no disco rígido com um nome que depende da hora, dia, mês e ano
d a aquisição mais a terminação ".CHKH, O módulo de avaliação é ativado
para escolher, entre os oito canais adquiridos, os quatro melhores; a figura
4.4 mostra a tela deste módulo. Essa. escolha é decorrente de comparações
entre os resultados dos cálculos estatísticos realizados com os sinais.
Escolhidos os quatro canais, o SIAD cria um arquivo de texto, com o mesmo
nome do arquivo binário anterior, que contém os dados estatísticos dos oito
canais usados na escolha e os canais que foram escolhidos. O controle, então,
retoma. ao módulo principal e, através dos dados gravados no arquivo de
- -
FIGURA 4.3 - Aquisição de um minuto do SIAD
FIGURA 4.4 - Tela do Módulo de Avaliação
texto descrito acima, realiza a aquisição de trinta minutos somente dos
canais escolhidos pelo módulo de avaliação, A tela da aquisição de trinta
minutos é mostrada na figura 4.5. Durante a aquisição os dados são
gravados no disco rígido com o mesmo nome com a terminação ".ADC" e, só
depois de terminada a aquisição padrão, é que o arquivo é copiado para a
unidade de fita magnética e removido do disco rígido. Toda a operação
FIGURA 4.5 - Tela da Aquisição de Trinta Minutos
descrita acima demora aproximadamente quarenta minutos. No fluxograma
da figura 4.6 podemos acompanhar o encadeamento dos procedimentos
descritos. Este fluxograma mostra o que ocorre durante a aquisição
propriamente dita. O que ocorre entre uma aquisição e outra é o que
veremos a seguir.
4.3.2 - Entre Duas Aquisições
Depois de terminada a transferência do arquivo com os dados
da aquisição padrão, o sistema passa o controle para o módulo de

comunicação de dados. Durante todo o intervalo entre duas aquisições, o
microcomputador que fez a aquisição fica à disposição para ser operado
Aquisição de um minuto . Verificação Estatística
J. Sim
Seleção dos melhores canais
I v Aquisição de trinta minutos
I Gravacão dos Dados Adquiridos I
Espera próxima aquisição I
FIGURA 4.6 - Fluxograma do SIAD
remotamente por outro. A descrição do funcionamento deste módulo e os
motivos pelos quais ele foi implementado será descrito no próximo item.
Quando a hora da nova aquisição se aproximar, o módulo
aborta o que o programa estiver executando e retorna o comando para o
módulo principal. ,
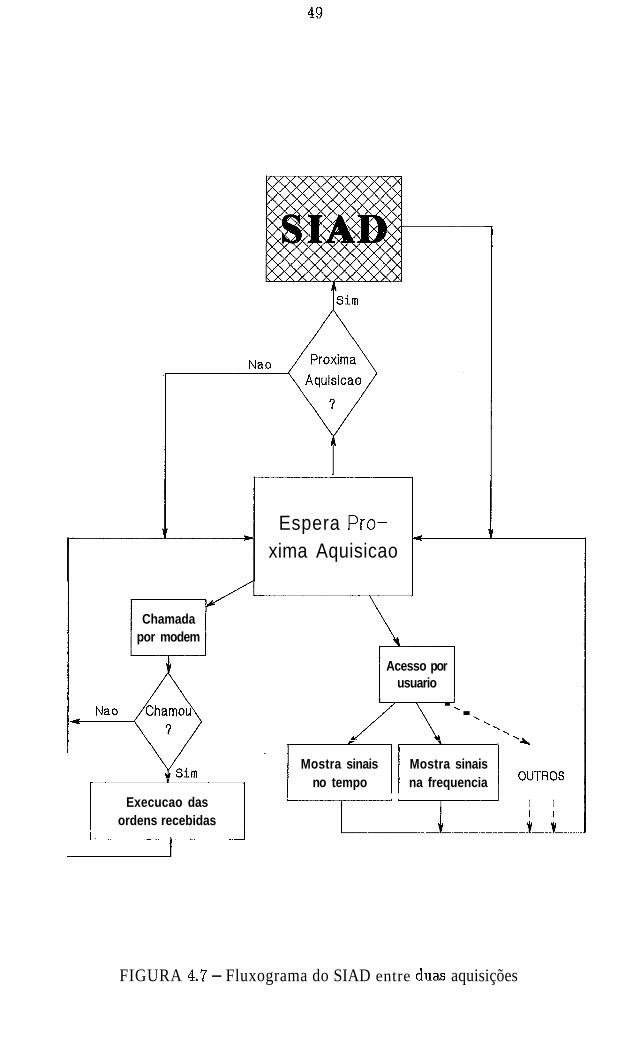
Enquanto o programa estiver esperando a hora de uma nova
aquisição, um usuário autorizado pode interromper a execução do programa
de comunicação e operar o microcomputador como lhe convier, inclusive
utilizando programas que permitem a visualiaação dos sinais. O fluxograma
do SIAD nesta fase está apresentado na figura 4.7.
4.4 - Comunicação de Dados
4.4.1 - Hist Ór ico
O SIAD, como já foi explanado, é um conjunto de programas
que tem por finalidade tornar automática a aquisição de dados, minimizando
a necessidade de um técnico no local da aquisição. Porém, o SIAD muito
provavelmente apresentará problemas de mau funcionamento. Pensando em
detectar tais problemas a distância, já que enviar um técnico para fazer esta
verificação tornaria o SIAD menos automático, introduzimos no SIAD um
módulo de comunicação de dados. Este módulo consiste em um software
comercial chamado ZAPT [6] que é instalado em dois microcomputadores: o
microcomputador remoto, onde está instalado o SIAD, e o microcomputador
mestre que, através de modems, comanda o microcomputador remoto à
distancia.
Chamada por modem
Execucao das ordens recebidas
Espera Pro- xima Aquisicao
Acesso por usuario
I I . \ .
\ -. -. \
. 'A.
Mostra sinais Mostra sinais OUTROS no tempo na frequencia
I I I I
FIGURA 4.7 - Fluxograma do SIAD entre diias aquisições
4.4.2 - Funcionamento
O ambiente onde o ZAPT é utilizado é constituído por dois
microcomputadores tipo PC interligados por um meio de comunicação
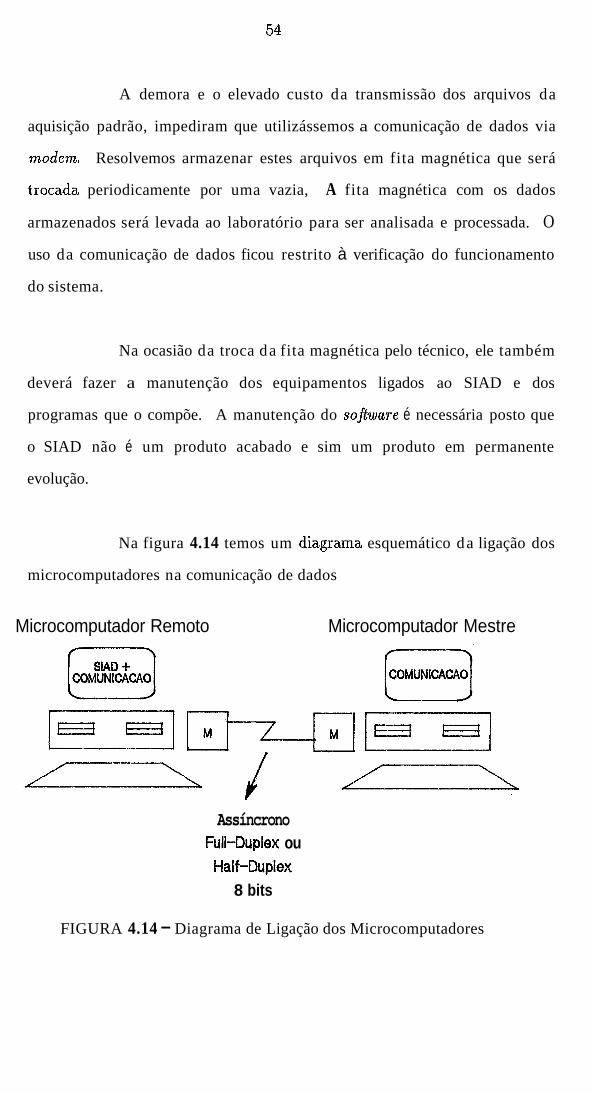
asíncrona fulkdupiex ou hakf-duplex, que permite a transmissão de oito bits
de dados por byte. Qualquer meio de comunicação com estas características
pode ser utilizado.
O meio de comunicação é constituído de uma linha telefônica
ligada nas interfaces seriais (RS-2324) dos microcomputadores através de
modems. Os modems utilizados têm a característica de permitir a discagem
pelo programa e de responder automaticamente,
O SIAD, depois de terminada a aquisição padrão, envia o
comando para o ZAPT, O microcomputador então, permanece no estado
remoto conforme mostra a figura 4.8, esperando que a comunicação seja
efetivada. e d
Comunicacao Zapt com f i l t r o ZZ, versao 2.01 A (C)1988, Humana Inforrnatica Ltda.
[ 12: 371 Aguardando conexao [ 12: 371 Conexao estabelecida [12:371 Aguardando i n i c i a l izacao
FIGURA 4.8 - Tela de Espera do Módulo de Comunicação
Quando o microcomputador mestre é conectado ao remoto a
tela do microcomputador remoto se apresenta como mostra. a figura 4.9
enquanto o outro apresenta a tela como mostra a figura 4.10.
Comunicacao Zapt com f i l t r o ZZ, versao 2.01 A (C11988, Humana In fo rmat i ca Ltda.
C 12: 501 Aguardando conexao [12: 501 Conexao estabelecida [12:501 Aguardando i n i c i a l i z a c a o [12:501 I n i c i a l i z a c a o completa - Operacao l iberada
FIGURA 4.9 - Tela do Remoto na Comunicação
Comunicacao a t i v a 12:53 RECEBE TRANSMIT DIR-REM IDENT RET-RX RET-TX SUPR-REM RENOMEIA - i
F1: Recebe arquivo do serv idor remoto. (C)1988, Humana In fo rmat i ca Ltda.
[12: 521 Aguardando conexao [12: 521 Conexao estabelecida [12:52] Aguardando i n i c i a l i z a c a o [12:521 I n i c i a l i z a c a o completa - Operacao l i be rada
FIGURA 4.10 - Tela do Mestre na Comunicação
A primeira providência é a identificação do usuário, conforme
pode ser visto na figura 4.11. Ele deve estar cadastrado e possuir senha
própria que lhe dará acesso aos arquivos e & transferências de arquivos entre
os microcomputadores,
--> Forneca a sua I d e n t i f l c a c a o de Usuario ou CR para cancelar a i d e n t i f i c a c a o a tua l : COPPE
Forneca a sua Senha: **** [13:031 Uso 1 iberado. D i r e t o r i o remoto a tua l : A:\ (STRD)
--> A l t e r a r unidade e d i r e t o r i o remoto a tua l para C:\CHK
[ l 3 : 041 Novo d i r e t o r i o remoto: C:\CHK\ (STRD)
FIGURA 4.11 - Tela da Senha do Microcomputador Mestre
As operações que o microcomputador mestre pode realizar são
várias, mas no caso do SIAD, a principal atividade é a transferência dos
arquivos de controle, pois através deles é possível determinar se existem
problemas na aquisição. A transferência destes arquivos de controle é
relativamente rápida devido à pouca quantidade de informações que eles
contém.
A figura 4.12 mostra a tela do microcomputador mestre. O
usuário modificou o diretório remoto de A:\ para C:\CHK. A seguir pediu o
conteúdo deste diretório.

- -- --
Forneca a sua Senha: **** [13:031 Uso l iberado. D i r e t o r i o remoto atual : A:\ (STRD)
--> A l t e r a r unidade e d i r e t o r i o remoto atual para C:\CHK
[13:041 Novo d i r e t o r i o remoto: C:\CHK\ (STRD)
--> D i r e t o r i o remoto de *.CHK
D i r e t o r i o de C:\CHK\*.CHK Criacao Tamanho Duracao 1200
Arquivo Data Hora (bytes) (min aprox)
00120490.CHK I l/abr/90 0:02:08 517 O. 1 04120490.CHK 12/abr/90 4:02:08 517 O. 1 16110490.CHK l l /abr /90 16:02:08 517 0.1 20110490.CHK l l /abr /90 20:02:06 517 O. 1 ------------ ------- ------
4 a r q u i v o ( ~ ) To ta l : 2068 0.4 Disponivel: 24576
FIGURA 4.12 - Tela do Microcomputador Mestre
Na figura 4.13 vemos a tela do microcomputador mestre depois
de transmitidos os a,rquivos de controle do rnicrocomputador remoto.
--> Recebe arquivo(s) remoto(s) *.CHK em arquivo(s) l o c a l ( i s ) *.CHK
[13:071 S o l i c i t a d a a recepcao de arquivo [13:071 Recebendo 16110490.CHK (517 bytes)
N. Pacote Retransmissoes N. Erros To ta is 2 o o
[13:071 Fim da recepcao [13:07] Recebendo 20110490.CHK (517 bytes)
N. Pacote Retransmissoes N. Erros To ta is 4 o o
[13:071 Fim da recepcao [13:071 Recebendo 00120490.CHK (517 bytes)
N. Pacote Ret ransmi ssoes N. Erros Tota is 6 O O
[13:071 Fim da recepcao [13:071 Recebendo 04120490.CHK (517 bytes)
N. Pacote Ret ransmi ssoes N. Erros To ta is 8 O O
[13:081 Fim da recepcao [13:081 Fim de operacao
4 Arquivo(s) recebidocs)
% Arquivo 1 O0
% Arquivo 1 O0
% Arquivo 100
% Arquivo 1 O0
FIGURA 4.13 - Tela de Transmissão de Dados
A demora e o elevado custo da transmissão dos arquivos da
aquisição padrão, impediram que utilizássemos a comunicação de dados via
modem, Resolvemos armazenar estes arquivos em fita magnética que será
trocada periodicamente por uma vazia, A fita magnética com os dados
armazenados será levada ao laboratório para ser analisada e processada. O
uso da comunicação de dados ficou restrito à verificação do funcionamento
do sistema.
Na ocasião da troca da fita magnética pelo técnico, ele também
deverá fazer a manutenção dos equipamentos ligados ao SIAD e dos
programas que o compõe. A manutenção do sojware é necessária posto que
o SIAD não é um produto acabado e sim um produto em permanente
evolução.
Na figura 4.14 temos um diagama esquemático da ligação dos
microcomputadores na comunicação de dados
Microcomputador Remoto Microcomputador Mestre
Assíncrono Full-Duplex ou Half-Duplex
8 bits
FIGURA 4.14 - Diagrama de Ligação dos Microcomputadores
4.4.3 - Operações
Apesar de no caso do SIAD o uso da comunicação de dados
ficar restrita i transferência dos arquivos de controle, o softzuare que realiza
esta comunicação está preparado para executar as seguintes operações:
4.4.3.1 - Operação Não Assistida
O programa permite a um usuário executar comandos
(transferir arquivos, consultar diretórios, suprimir arquivos,
renomeá-10s) etc.) sobre os discos do microcomputador remoto, sem
que haja um operador presente, como no caso do SIAD.
4.4.3.2 - Proteção Para o Ambiente Remoto
O programa trabalha com o conceito de usuários
cadastrados e identificados através de senha, com direitos de acesso
definidos no ambiente remoto.
No microcomputador onde os dados estão presentes são
definidos a sua senha, o diretório e a família de arquivos que podem
ser usados, bem como quais operações podem ser realizadas
(transmitir, receber, suprimir, et c).
Ao iniciar a comunicação com o microcomputador
remoto, o usuário se identifica fornecendo seu nome e senha. Antes de
executar cada comando, o microcomputador remoto verifica se o
acesso pode ser realizado pelo usuário, rejeitando-o caso ele não tenha
permissão para fazê-lo.
4.4.3.3 - Comandos Utilitários de Acesso Remoto
Os comandos atendidos pelo microcomput ador remoto
não se limitam à transferência de arquivos. O programa possui um
conjunto de comandos que permitem ao usuário realizar sobre o
ambiente remoto as seguintes operações:
- transmitir arquivos para o disco remoto;
- receber arquivos remotos;
- ret omar uma transmissão de arquivo interrompida;
- retomar uma recepção de arquivo interrompida;
- obter lista dos arquivos remotos (diretório);
- suprimir arquivos remotos;
- renomear arquivos remotos;
- alterar a unidade e o diretório remoto correntes.
No procedimento de transmissão de dados, este módulo
inclui também um conjunto de características adicionais:
- transferência de dados segura.
A transferência de dados entre os microcomputadores é
realizada com protocolo de comunicação, que detecta e recupera
erros na transmissão.
- transferência de qualquer tipo de compactação.
Os dados transferidos entre os microcomputadores são
compactados de forma a obter uma melhor utilização d a linha
de comunicação, reduzindo o tempo de transmissão e,
consequentemente, o tempo de realização das operações
remotas, Essa compactação é realizada tanto na transmissão de
arquivos de texto como na transmissão de arquivos binários.
- recuperação de transmissões interrompidas,
O programa possui comandos que permitem a retomada
de um procedimento de transferência interrompido por queda
na ligação, ou por decisão de um dos operadores.

CAP~TULO 5
PROCESSAMENTO DE SINAIS
5.1 - Coleta das Informações
A coleta das informações eminentemente dinâmicas associadas
ao presente trabalho se faz através dos componentes do sistema de aquisição de
dados apresentados na Figura 5.1, Conforme foi exposto, a cada período de tempo
determinado, é feita a aquisição obtendo-se uma série temporal de
aproximadamente trinta minutos a cada horário de medição.
Os primeiros elementos do sistema de aquisição de dados siio os
sensores de aceleração colocados na estrutura. Cada um desses sensores gera um
sinal de voltagem em corrente contínua ou alternada que, multiplicado por um
fator de conversão, indica o valor da variável medida,
O sinal obtido é amplificado para aumento da resolução final.
Em seguida percorre um filtro passa-baixa que atenua as oscilações existentes
acima de uma certa frequência, para eliminar ruídos e evitar uma fonte de erro no
processo de digitalização, conforme foi visto no Capítulo 2.
Uma vez filtrado, o sinal está pronto para o processamento que
consiste no seguinte: passa-se o sinal analógico de voltagem por um conversor
analógicdigital, com o que as informações são processadas por microcomputador
e armazenadas em uma unidade de £ita magnética, ainda sob a forma de uma série
temporal. O tratamento rigoroso da teoria de análise de dados aleatórios é
apresentado por Bendat e Piersol [ I .
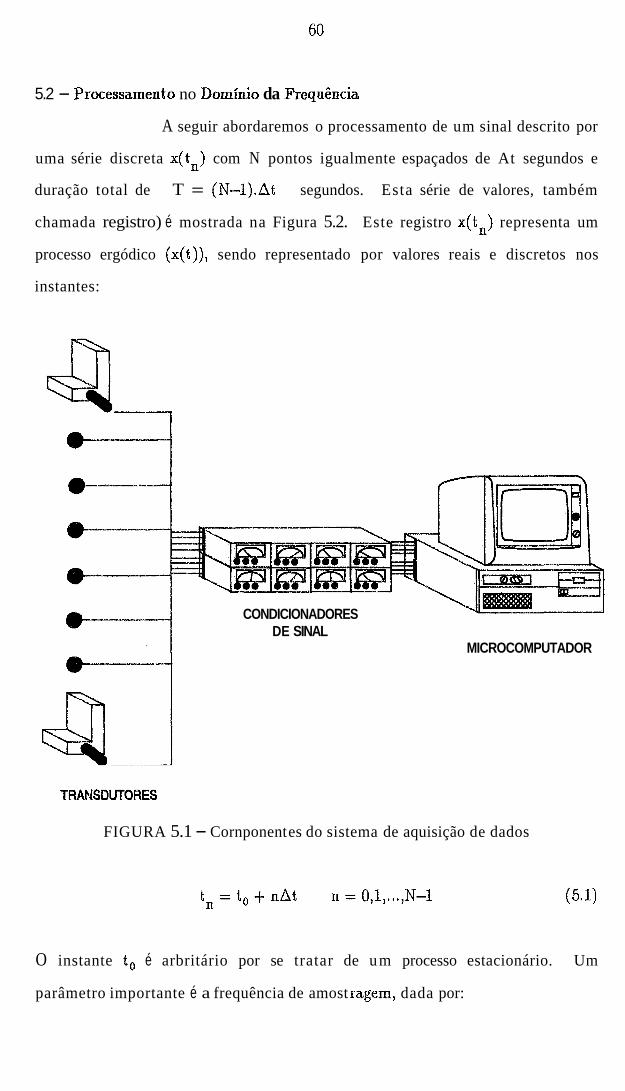
5.2 - Prmessamento no Dominio da Frequência
A seguir abordaremos o processamento de um sinal descrito por
uma série discreta x(tn) com N pontos igualmente espaçados de At segundos e
duração total de T = (N-l).At segundos. Esta série de valores, também
chamada registro) é mostrada na Figura 5.2. Este registro x(tn) representa um
processo ergódico (x(t)), sendo representado por valores reais e discretos nos
instantes:
CONDICIONADORES DE SINAL
-----i MICROCOMPUTADOR
TRANSRUTORES
FIGURA 5.1 - Cornponent es do sistema de aquisição de dados
O instante t o é arbritário por se tratar de um processo estacionário. Um
parâmetro importante é a frequência de amost ragem, dada por:
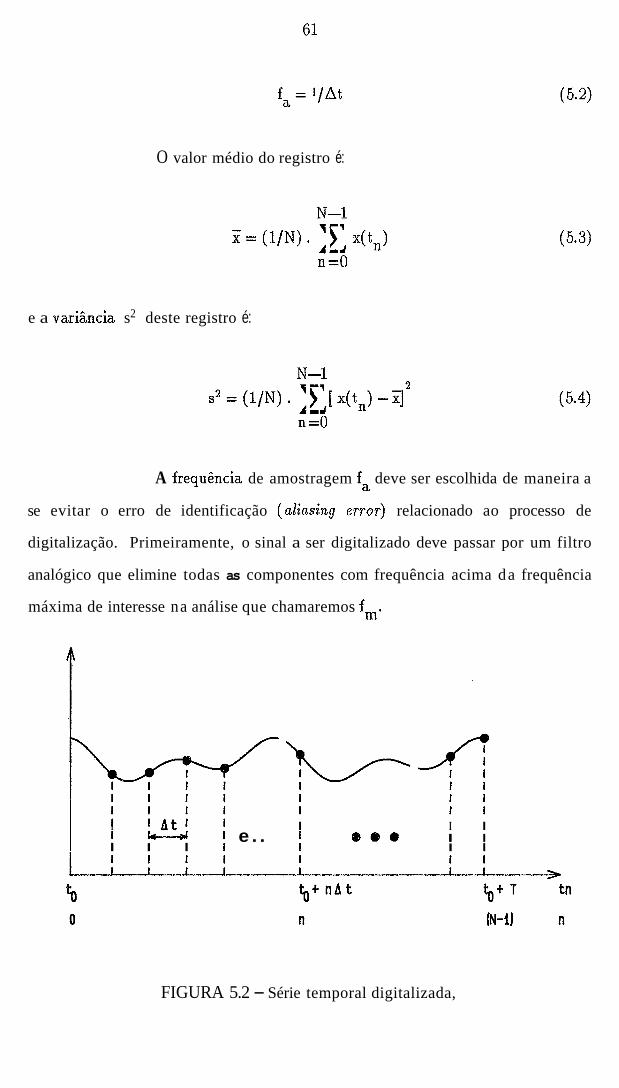
O valor médio do registro é:
e a variância s2 deste registro é:
A frequ6ncia de amostragem fa deve ser escolhida de maneira a
se evitar o erro de identificação (abiasing error) relacionado ao processo de
digitalização. Primeiramente, o sinal a ser digitalizado deve passar por um filtro
analógico que elimine todas as componentes com frequência acima da frequência
máxima de interesse na análise que chamaremos fm.
" I I I I I e . . e @ . I I
I I I I I
FIGURA 5.2 - Série temporal digitalizada,

Como um filtro que atenue uma oscilação a zero exatamente a
partir da frequência desejada não é fisicamente realizável, a frequência de corte,
na verdade, deve ser um pouco mais baixa que f numa proporção que depende m )
das características do equipamento.
Numa série discreta amostrada a cada At segundos, define-se
também a frequência de Ny quist , fn, dada por:
donde
Dada uma certa frequência de amost ragem fa, a frequência de Nyquist fn é aquela
da onda de maior frequência que se pode definir na série digitalizada. No capitulo
2 pode-se observar com maiores detalhes este assunto.
Gerges [8], no entanto, sugere uma frequência de amostragem
relacionada à frequência máxima de interesse na análise, sendo fa de 4 a 10 vezes o
valor de fm, para caracterizar o sinal sem ainda onerar muito o armazenamento
dos dados pela retenção de informações desnecessárias.
Sejam dois registros estacionários e ergódicos x(t) e y(t) de
duração Tt, divididos em M segmentos ou sub-registros xi(t) e yi(t)
(i = 1,2, ..., M) contíguos e de duração T segundos cada um, conforme mostra a
Figura 5.3.

FIGURA 5.3 - Subdivisão de um registro
Define-se a função densidade espectral cruzada unilateral
estimada como:
onde
representam as transformadas finitas de Fourier das funções xi(t) e yi(t) no
domínio [to,t o+T]. O asterisco em Xi(f,T) representa o conjugado complexo. O

termo "estimada" se prende ao fato de que um parâmetro avaliado em uma
amostra finita constitui uma estimativa do valor real associado a um processo
aleatório teoricamente infinito.
Em termos digitais, cada sub-registro xi(t) e yi(t) é
representado por séries xi(tn) e yi(tn) de N valores discretos amostrados a cada
At segundos, com valores médios Fi e i nulos.
e as trandormadas finitas de Fourier vão gerar valores complexos e discretos nas
frequências:
fk = k/T 2 k/(NAt) k = O,1, ..., N-1
sendo reescritas como:
a função densidade espectral cruzada unilateral estimada se torna:

Note-se que o dominio de definição de G é [ O, fi 1, embora XY
somente nos interesse o intervalo [ O, fm 1. Observaise também que a resolução
em frequência de G é igual ao inverso do período de duração de cada XY
sub-registro, T 2 NAt.
A função densidade espectral cruzada bilateral estimada é dada
por:
Ela é dita bilateral porque é matematicamente definida para
frequências negativas, o que não tem significado físico; daí termos optado pela
unilateral, cujo domínio é real e positivo.
Como foi dito anteriormente, a função é dita "estimada" por
causa da duração temporal finita do registro a que ela se refere. Para facilidade de
notação, passaremos a nos referir a G como densidade espectral cruzada XY
retirando o chapéu (^) que significa valor estimado sobre o símbolo.
A função G calculada a partir de N valores discretos no v' domínio do tempo, é definida para N/2 frequências o que aparentemente
representa uma perda de informações. Ocorre que G é uma função complexa, x Y
sendo escrita como:
onde o termo real C é chamado x Y
quad-espectro, Para cada frequência
co-espectro e o termo imaginário Q XY
fk são gerados dois valores, não havendo
perda de informação e sim mudança de contra-domínio,
Um caso particular importante de G ocorre quando os XY
sub-regist ros xi(tn) e yi(t n) coincidem. Assim a função densidade espect ral
cruzada é chamada densidade espectral de potgncia, densidade espectral ou
simplesmente espectro, dada por:
Note-se que Gxx é sempre real e positiva. Ela é dita "de
potência" porque a potência (ou energia) de um dado processo está normalmente
relacionada ao quadrado da grandeza que o descreve.
O cálculo das transformadas discretas de Fourier como

indicadas em (5.11) implica na realização de 2N2 multiplicações reais, o que pode
inviabilizar a análise à medida que o número de pontos N em cada sub-registro
cresça, Em 1965, Cooley e Tukey [9 e 101 introduziram um algorítmo para o
cálculo das expressões (5.11) que envolve 4N (log2N) muitiplicações reais,
O algorítmo utilizado neste trabalho chamado Transformada
Rápida de Fourier (TRF), é apresentado por Paz [ll]. Ele exige que o número de
pontos N seja uma potência de dois resultando numa redução no tempo de
processamento de:
Se, por exemplo, tomarmos cada sub-registro com 512 (29)
pontos, o uso do algorítmo TRF reduz o tempo de processamento a 3,5% do tempo
original.
A definição do número de sub-registros M e de pontos em cada
sub-registro N é feita a partir da análise dos erros estatísticos inerentes ao
processo de amostragem, Tais erros são mostrados na figura 5.4 através de uma
analogia ao tiro-ac-alvo e se classificam em erro sistemático (ou desvio do valor
correto) e erro aleatório (ou dispersão dos resultados).
FIGURA 5.4 - Erros aleatório e sistemático
O erro quadrático médio em uma amostra resulta d a soma do
erro aleatório com o quadrado do erro sistemático:
Bendat E Piersol [9] desenvolverain expressões para cálculo desses erros quando da
determinação da função densidade espectral Gxx:
A última fórmula é válida para sistemas com um p a u de liberdade sendo B a
largura de meia potência e Af a resolução em frequência de Gxx.
Se os modos fundamentais da estrutura têm frequências
suficientemente distintas para que não haja interação entre eles, a função
densidade eçpectral de deslocamentos terá picos separados e bem definidos em
cada frequência natural, validando o uso da fórmula (5.19) para uma estimativa
do erro sistemático.
A Figura 5.5 mostra a curva de densidade espectral de
deslocamento de um sistema com um grau de liberdade. A curva tem um pico na
frequência de ressonância fr do sistema, de ordenada Gmax A largura do pico na
ordenada Gmax/2 é a largura de meia potência B, como indicado.

Gmax ~~~~~~~~
I I I I
Gmax/2 I B I I I i I
3
F I G U M 5.5 - Densidade Espectral de Deslocamento
Em sistemas com um grau de liberdade com razão de
amortecimento abaixo de 10 % é válida a seguinte relação aproximada:
e o erro quadrático médio se torna, através de (5.2) e (5.12), considerando-se
T N.At:
expressão que depende apenas do número de pontos em cada sub-registro N, uma
vez que todos os outros parâmetros são conhecidos.
A divisão de um registro em sub-registros para cálculo da
densidade espectral é chamada de alisamento porque o valor obtido por (5.15)
representa o comportamento médio dos sub-registros, menos variável que o de um
sub-registro individual. Este conceito está embutido na própria definição do erro
aleatório, J,, que diminui com o aumento do número de sub-registros,

Como mostra Mitchell 1121, a Transformada Rápida de Fourier
assume que o sub-intervalo seja periódico de período igual a seu intervalo de
duração T. Como isto normalmente não ocorre, o truncamento do sinal acarreta o
aparecimento de componentes da função densidade espect ral em frequências que
não existem no sinal original, à semelhança de um espectro de choque.
As Figuras 5.6a e 5.6b ilustram este fenômeno para um sinal
senoidal, cuja densidade espectral seria teoricamente a função delta de Dirac.
Este efeito é chamado vazamento porque ocasiona um espalhamento da energia do
sinal pelas frequências, embora as ordenadas diminuam de maneira a conservar a
energia total. O vazamento é atenuado pelo uso das funções janela que,
multiplicadas pelo sinal no domínio do tempo, garantem sua continuidade nos
extremos pela redução a zero, como mostra a Figura 5,6c,
A função janela altera a largura e a amplitude dos picos
espectrais, uma vez que altera o sinal temporal. Funções janela existem em
profusão, cada uma com características especiais para uma dada aplicação. De
acordo com Gade e Erlufsen [13], para a análise de sinais contínuos as funções
janela mais indicadas seriam:
- Janela Retangular (ou ausência de janela)

A) Sinal Periódico no Intervalo T
B) Sinal Não Periódico em T
C) Sinal N ~ Q Periódico Afetado por Função Janela
FIGURA 5.6 - Vazamento e função janela

para o caso particular de se ter certeza da periodicidade do sinal no intervalo de
tempo considerado caso inexista o problema do vazamento. A definição como
função nula fora do domínio do sub-registro é comum a todas as janelas.
- Janela Hanning
W(t) = 1 - cos 2~(t-to)/?'
to 5 t < to+T
de uso geral, com características medianas para resolução em frequência e
determinação de amplitudes.
- Janela I<aiser-Bessei
de grande seletividade em frequência, devendo ser usada quando se deseja separar
picos em frequências muito próximas no espectro.
- Janela Flat Top

usada para a correta medição das amplitudes dos sinais a partir da £unção
densidade espectral. A Figura 5.7 plota as funções janelas mencionadas.
- m -0,53 - o . t
-i
FIGURA 5.7 - Funções janelas no domínio do tempo
Na figura 5.8 apresentamos um exemplo de saída gráfica de
uma análise no domínio da frequência. Todos os espectros são de densidade
espectral e se referem a medição de vibração realizada com acelerômetros
localizados em pontos diametralmente opostos na mesa da Plataforma de Garoupa
na Bacia de Campos (PGP-I), nas direções transversal e longitudinal a menos do
primeiro que se refere à altura de mar.
Na figura 5.9 apresentamos um outro exemplo que se refere a
medições realizadas com extensômetros elétricos colocados em uma seção de um
contraventamento da Plataforma de Garoupa na Bacia de Campos, Foram
instalados quatro extensômetros diametralmente opostos, No gráfico A podemos
observar a densidade espectral de tensão referente a flexão em um plano (através
da semi-diferença entre os sinais no mesmo plano). A flexão no outro plano
calculada da mesma maneira, está representada pelo espectro B. No Gráfico C
encontra-se a densidade espectral referente à tração~compressão naquela seção.
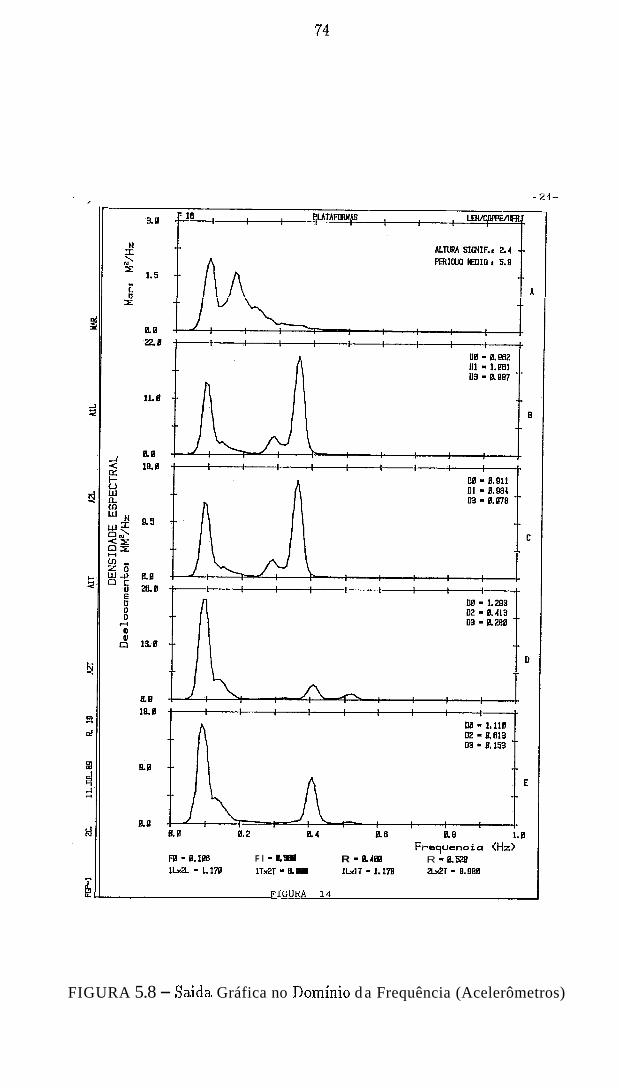
F~equenoia (Hz> FB - 8 . I I F l = R W R -u4m R =a528 Llxã - LlW 1TxZT - R. @2E 1lxlT 1.17ü 2WT - 8.988
FIGURA 5.8 - Saida Gráfica no Dominio d a Frequência (Acelerômetros)
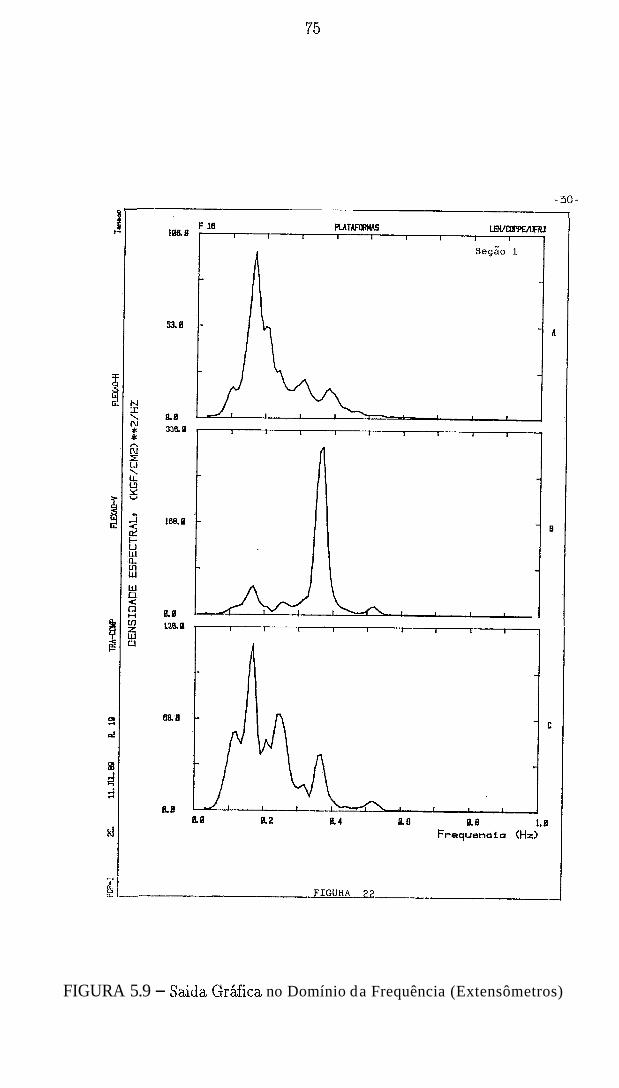
FIGURA 5.9 - Saida Gráfica no Domínio da Frequência (Extensômetros)
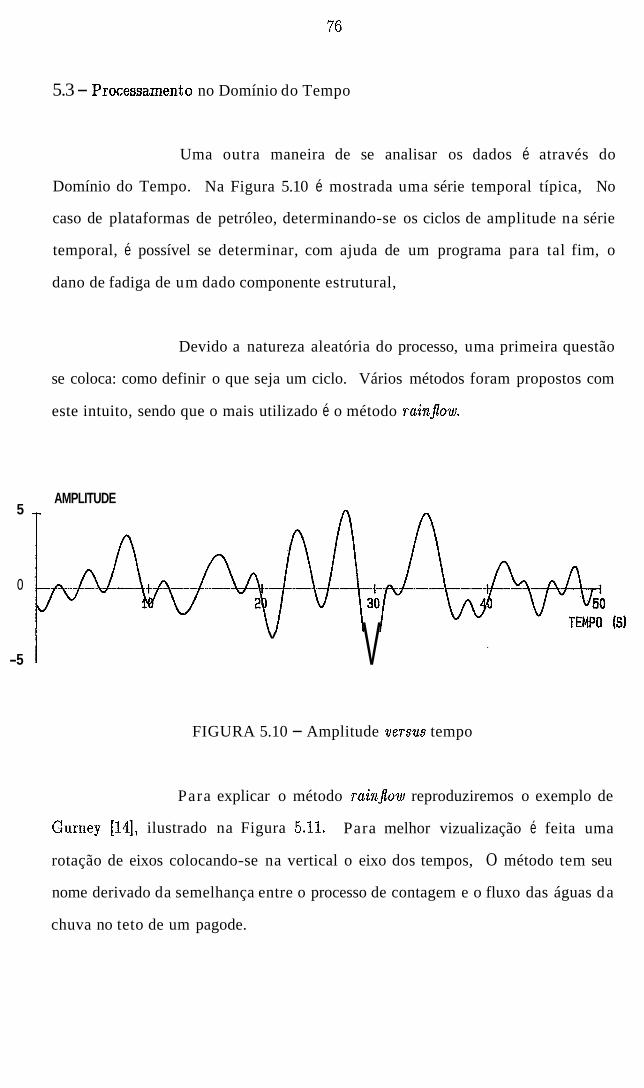
5.3 - Processamento no Domínio do Tempo
Uma outra maneira de se analisar os dados é através do
Domínio do Tempo. Na Figura 5.10 é mostrada uma série temporal típica, No
caso de plataformas de petróleo, determinando-se os ciclos de amplitude na série
temporal, é possível se determinar, com ajuda de um programa para tal fim, o
dano de fadiga de um dado componente estrutural,
Devido a natureza aleatória do processo, uma primeira questão
se coloca: como definir o que seja um ciclo. Vários métodos foram propostos com
este intuito, sendo que o mais utilizado é o método rainjow,
AMPLITUDE 5
o
v
-5 V FIGURA 5.10 - Amplitude versas tempo
Para explicar o método rainflour reproduziremos o exemplo de
Gurney [14], ilustrado na Figura 5.11, Para melhor vizualização é feita uma
rotação de eixos colocando-se na vertical o eixo dos tempos, O método tem seu
nome derivado da semelhança entre o processo de contagem e o fluxo das águas da
chuva no teto de um pagode.
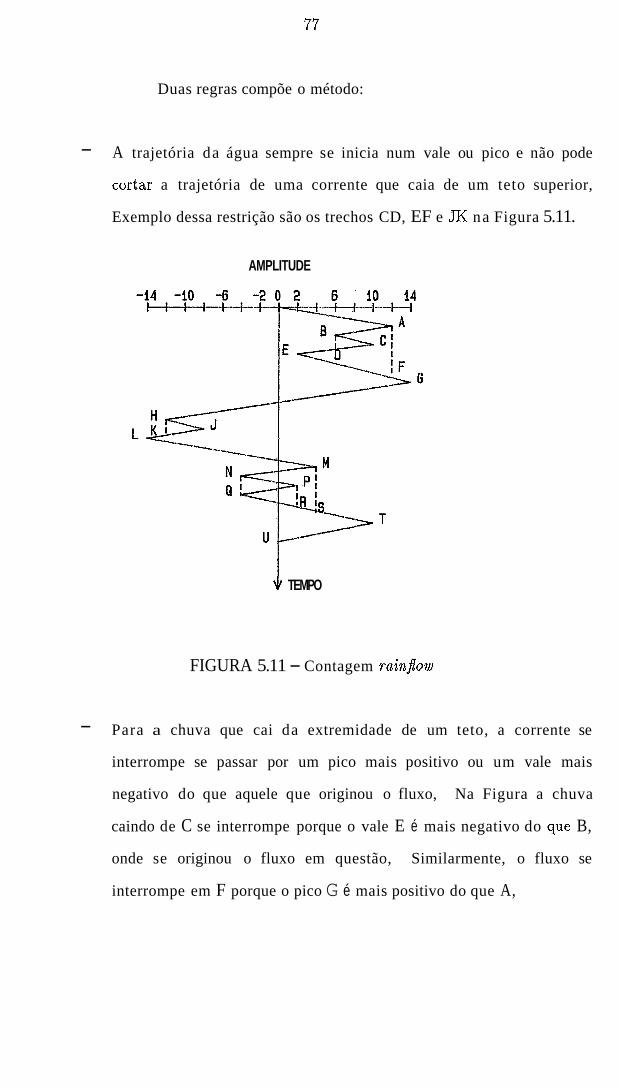
Duas regras compõe o método:
- A trajetória da água sempre se inicia num vale ou pico e não pode
cortar a trajetória de uma corrente que caia de um teto superior,
Exemplo dessa restrição são os trechos CD, EF e JK na Figura 5.11.
AMPLITUDE
$ TEMPO
FIGURA 5.11 - Contagem rna'n~ow
- Para a chuva que cai da extremidade de um teto, a corrente se
interrompe se passar por um pico mais positivo ou um vale mais
negativo do que aquele que originou o fluxo, Na Figura a chuva
caindo de C se interrompe porque o vale E é mais negativo do que B,
onde se originou o fluxo em questão, Similarmente, o fluxo se
interrompe em F porque o pico G é mais positivo do que A,
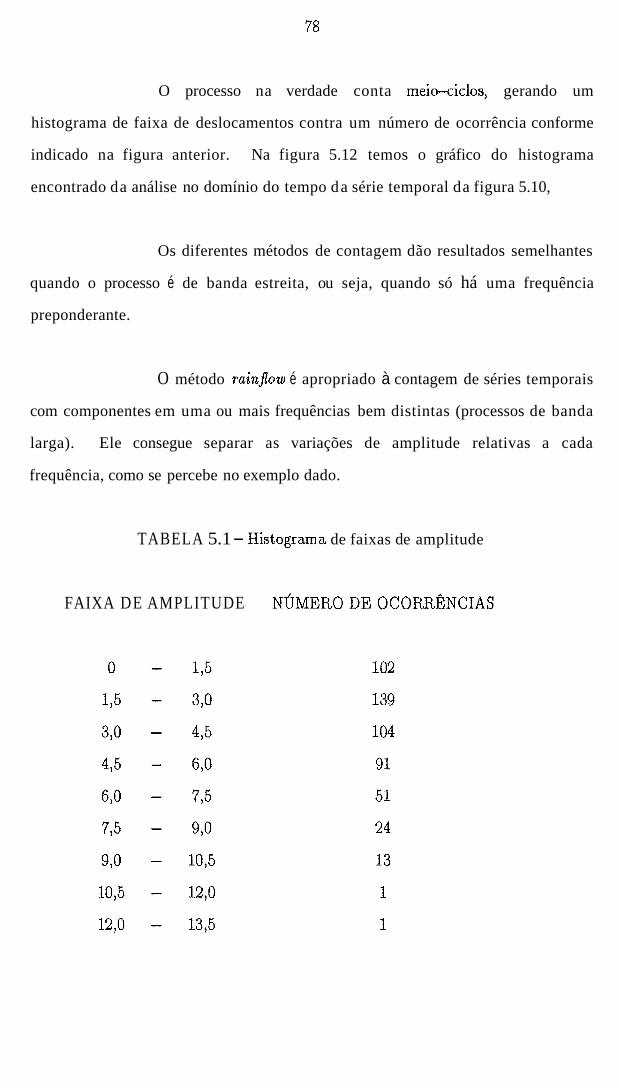
O processo na verdade conta meio-ciclos, gerando um
histograma de faixa de deslocamentos contra um número de ocorrência conforme
indicado na figura anterior. Na figura 5.12 temos o gráfico do histograma
encontrado da análise no domínio do tempo da série temporal da figura 5.10,
Os diferentes métodos de contagem dão resultados semelhantes
quando o processo é de banda estreita, ou seja, quando só há uma frequência
preponderante.
O método rainJow é apropriado à contagem de séries temporais
com componentes em uma ou mais frequências bem distintas (processos de banda
larga). Ele consegue separar as variações de amplitude relativas a cada
frequência, como se percebe no exemplo dado.
TABELA 5.1 - Histograma de faixas de amplitude
FAIXA DE AMPLITUDE
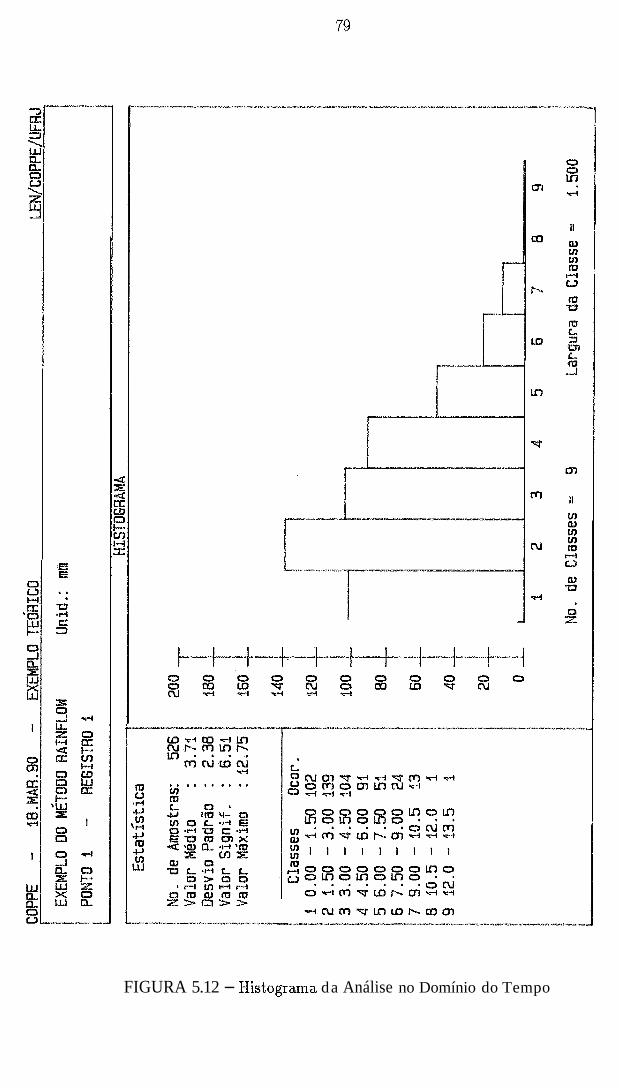
FIGURA 5.12 - Histogama da Análise no Domínio do Tempo
Existe uma inlinidade de algorítmos computacionais para a
realização da contagem rainfioui de séries temporais, dentre os quais o de
Downing e Socie [151. A Tabela 5.1 apresenta o histograma de faixa de amplitude
versus o número de ocorrências que resulta da aplicação daquele algorítrno à série
temporal da Figura 5.10.

6.1 - Comentários
Como foi explanado, o Sistema Inteligente de Aquisição de Dados
como substituição da aquisição de dados tradicional, se mostra uma ferramenta
eficaz para as situações em que uma grande quantidade de informaqão precisa ser
armazenada durante um longo período de tempo.
O SIAD tem algumas características que deverão ser melhoradas. O
armazenamento temporário das informações, que atualmente é feita em disco
rígido, é uma delas, Isso porque enquanto o microcomputador permanece ligado,
o disco rígido está em operação (girando). Como esse periférico é mecânico ele
está sujeito a falhas com o passar do tempo, A melhoria que será feita consistirá
na troca do disco rígido por um outro sistema de armazenamento baseado em
componentes eletrônicos (por exemplo uma placa de memória do tipo CMOS) que
pudesse simular o funcionamento do disco rígido.
Uma outra melhoria que será feita no SIAD, acontecerá quando a
melhoria das condições das comunicações telefônicas permitir que se faça a
transmissão dos dados de maneira segura, rápida e baraia para o laboratório,
eliminando-se a necessidade de trocar a fita magnética com os dados adquiridos
no período, como o projeto atual obriga. Essa melhoria aumentaria sobremaneira
a autonomia do SIAD, que ficaria operando sozinho por um período de tempo,
difícil de se avaliar no momento, e transmitindo todas as informações diretamente
para o interessado, em um sistema que, em última instância seria on l h e .
Este trabalho se refere basicamente i aquisição de dados de
maneira automática. Porém a enorme quantidade de dados gerados deverão ser
processados em laboratório, tanto para a análise no domínio do tempo quanto no
domínio da frequência. Este processamento atualmente é realizado de maneira
não automática, ou seja, é realizado por uma ou mais pessoas sem qualquer tipo
de automação. Uma melhoria que necessariamente será implementada será um
sistema de processamento aut omat izado, que certamente também utilizará
técnicas de Inteligência Artificial, que mesmo não substituindo o especialista,
deverá orientá-lo e corrigí-10 quando ocorrer alguma falha no processamento dos
sinais adquiridos pelo SIAD.
6.2 - Conclusões
O uso de técnicas não muito difundidas se mostra uma ferramenta
muito importante para resolver problemas diversos. A utilização de técnicas de
Inteligência Artificial neste trabalho melhorou em muito a eficiência da aquisição
de dados, economizando tempo e material humano, e com um custo não tão caro.
Outra técnica utilizada neste trabalho, foi a utilização da comunicação
de dados via modem. Como o SIAD não tem usuário no local da aquisição, foi
necessária a implementação de um módulo que permitisse a inspeção do sistema à
distância e que operasse o microcomputador remotamente. Foi necessário uma
pesquisa de mercado muito grande para se achar um software que, se não previsse
este tipo de operação, pelo menos pudesse ser manipulado para se adaptar às
características do SIAD, e um modelo de modem que também se adaptasse às
características, tanto do soft ware comercial, quanto do SIAD.
O SIAD, devido à sua característica modular e i maneira como foi
elaborado, permite ser utilizado para diversas aplicações, com pequenas alterações
em seu conteúdo. O uso inicial do SIAD, como foi visto no decorrer deste
trabalho, será a monitoração da plataforma de Garoupa na Bacia de Campos, para
calcular, em conjunto com o Centro de Pesquisa e Desenvolvimento da Petrobrás,
(CENPES), o dano de fadiga nas juntas mais críticas, permitindo assim uma
estimativa da vida út i1 destes componentes e, em consequência, a periodicidade
das inspeções nas juntas mais problemáticas daquela estrutura.
Uma aplicação, que ainda está sendo estudada para o SIAD, é a
monitoração de um riser durante e após a sua instalação, por um longo período de
tempo mas ainda não completamente definido.

LAWRENCE, P. D., MAUCH, K. - Real-Time Microcomputer
System Design. An Introduction. McGraw-Hill, Inc., 1987.
PINHO, A. A. - Notas de Aula da Disciplina Inteligência
Artificial I - COPPEJUFRJ, 1988.
TURING, A - Computing Machinery and Intelfigency - 1959.
CHARNIAK, E., Mc DERMOTT, D. - Introduction to Artificial
Intelligence - Addison-Wesley Publishing Cornpany, Inc,, 1987.
Manual da Placa ADA,da TAURUS, 1988.
Manual do ZAPT - filtro zz, Humana Informática, 1989.
BENDAT, J. S., PIERSOL, A. G. - Engineering Applications ~f
Correlation and Spectral Analysis, John Wiley and Sons, 1980.
GERGES, SAMIR N. Y., Processamento e Análise de Sinais - Notas
de Aula, São Paulo, Bruel & Kjaer do Brasil, 1985.
COOLEY, J. W, TUKEY, J. W., An Algorithm for Machine
Calculation of Complex Fourier Series, Math & Computer, 1965.
COOLEY, J. W., LEWIS, P. A. W., WELCH, P , D., The FFT and
its Applications, IEEE Transaction in Education, Vol. 12, 1969, No,l,
[111 - PAZ, M., Stmctural Dynamics Theory md Computation, New York,
Van Nostrand Reinhold Company, 1980.
[I21 - MITCHELL, L. D., Sipal Processing and the Fast Fourier Transform
(FFT) Andyser, Experiment a1 Techniques, Oct ober 1985.
1131 - GADE, S., HERLUFSEN, H., Use of Weighting Functions in
DFT/FFT Analysis (parts 1 & 111) Naerum, Denmark, Bruel & Kjaer
Techinical Review, 1987.
E141 - GURNEY, T. R., A Comparison of Three Stress Counting Methods
Using Simulated Stress Spectra, Research Report , Abingt on, GH.b.,
The Welding Institute Press, 1978.
[i51 - DOWNING, S. D., SOCIE, D. F., Simple R ~ ~ R ~ I O W Counting
Algorithms, Int ernational Journal of Fat ique, pp. 3 1 4 0 , January
1982.