simulação de robôs móveis e articulados: aplicações e...
TRANSCRIPT

Simulação de Robôs Móveis e Articulados: Aplicações e Prática
Fernando Santos Osório
Rafael Alceste Berri
34º JAI - Jornadas de Atualização em Informática

Introdução à Robótica
Fernando Santos Osório
Rafael Alceste Berri

De onde vêm os Robôs
• Robô vem de robota
(Língua tcheca), significando
“trabalhador humilde”;
• Peça teatral de ficção R.U.R.
“Rossum’s Universal Robots”
(1921);
• Executar tarefas humanas
do cotidiano.
3
Karel Čapek(09/01/1890 - 25/12/1938)

Para onde vão os Robôs
“PCs irão deixar o seu
lugar em cima das mesas
para passar a ver, ouvir,
tocar e manipular
objetos” [Gates 2007].
4
William Henry Gates III(Bill Gates)

O que é um robô?
5
• Software e hardware para executar tarefas (físicas);
Áreas Relacionadas:
Engenharia Eletrônica (hardware)
Computação (software)
Mecânica (estrutura do robô)
Outras:
P.ex. Física, Matemática

O que é um robô?
6
• 1º Percepção (Sensores): capacidade de
perceber o ambiente;

O que é um robô?
7
• 2º Planejamento, decisão e controle:
Inteligência - Sistema de processamento
de informação;

O que é um robô?
8
• 3º Atuadores: ação.
Motores

Ciclo operacional de um
robô
9
Decisão
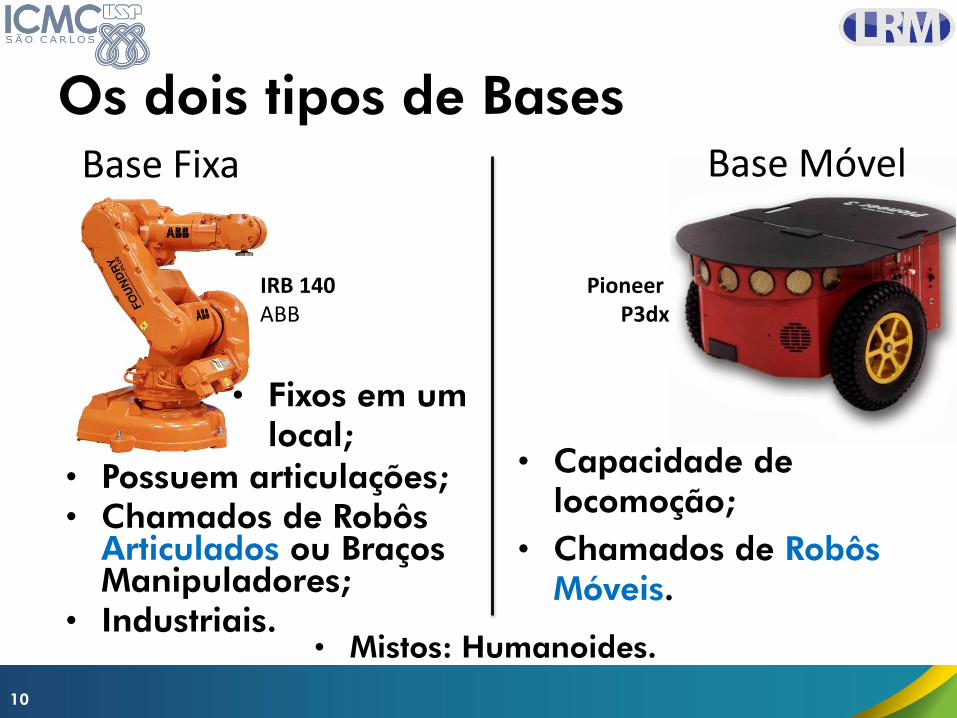
Os dois tipos de Bases
10
Base Fixa Base Móvel
IRB 140 ABB
Pioneer P3dx
• Capacidade de
locomoção;
• Chamados de Robôs
Móveis.
• Possuem articulações;
• Chamados de Robôs
Articulados ou Braços
Manipuladores;
• Industriais.
• Fixos em um
local;
• Mistos: Humanoides.

Tipos de Robôs
11

Tipos de Robôs: Robótica Móvel
12

Arquiteturas Robóticas
• Maneira pela qual se constrói um software que
controla de maneira inteligente um robô [Grassi
Jr. and Okamoto Jr. 2014].
• Arquitetura = módulos + interação entre eles.
13
Percepção
Planejamento/Decisão
Atuação

Classificação das Arquiteturas
• Deliberativa, reativa e híbrida
(reativa + deliberativa).
14
- Fortemente reativo- Heurística de movimentação pelo ambiente- Basicamente reage ao ambiente/obstáculos
Roomba - iRobot
HauzenSamsung
- Fortemente deliberativo- Cria mapa detalhado do ambiente- Planeja antecipadamente aonde aspirar!

Classificação das
Arquiteturas
15

Grau de autonomia
16

Comportamentos
Robóticos
• Robô autônomo (reativo) + alguma
preparação do ambiente = realização de
tarefas importantes.
17

Comportamento
Seguidor de Linhas
• Robôs da Kiva System/Amazon, buscando as
mercadorias no estoque da Amazon.
18

Comportamento de
Vaguear (wander behavior)
• Roomba da iRobot, aspira o pó usando rotas
quase que aleatórias.
• Sem conhecer
o local!
19

Comportamento de
Seguir Paredes
• Percorrer todo um ambiente (geração de mapas).
20

Comportamento de
Acompanhar (Follow-me)
• Seguir pessoas, automóveis, outros robôs...
21
[Correa 2013]

Comportamentos Robóticos
22
• O ambiente pode ser aproveitado de diversas
formas;
• Combinar comportamentos reativos;
• Navegação c/Mapas e Plano/Rota (deliberativo) +
Desvio de obstáculos (reativo)
CaRINA 2

Autonomia
23
• Executar tarefas sem
a intervenção humana
Projeto CaRINA 2 - LRMProjeto LRM / CRob USP-Scania
Projeto LRM USP-Jacto

Componentes dos
Robôs Autônomos
• Mobilidade e Articulações
Motores e Atuadores
• Percepção
Sensores
• Decisão/Inteligência
Computadores Embarcados
24

Atuadores
• Dotam os robôs da capacidade de produzir
ações;
• Deslocar, manipular, etc;
• Basicamente, motores;
• Operam em partes móveis (ex: juntas, pistões).
• Controlam deslocamento (robôs móveis).
25

Atuadores
26
Rodas, Patas, Pernas, Esteiras, Propulsores VREP

Sensores
• Transformam a energia medida em outro
formato de apresentação, mais simples para a
utilização [Murphy 2000];
• Som, luz, convertido em sinal analógico ou
digital e para um formato mais amigável;
• Tipos:
– Ativos – emitem e mensuram retorno;
– Passivos – captam energia já disponível.
27

Sensores
28
Velodyne HDL-32E
LadyBug2PointGrey
Stereo CameraPointGrey

Sonar
• Detectam distâncias usando um sensor
ultrassônico (tempo de retorno);
• Sensores ativos.
29
HC-SR04 da Cytron

Laser
• LIDAR (Light Detection and Ranging);
• Tempo de retorno da Luz (Laser InfraRed);
• Sensor ativo.
30
Sick LMS 200Hokuyo URG-04

Câmeras de Vídeo
• Ativas e passivas;
• Rica quantidade de informações sobre uma
área;
• Aplicações: obter distâncias, presença, postura,
gestos, etc.
• Tipos: Monocular, Near InfraRed (visão noturna),
Far InfraRed – FIR (Termal), Multi-Espectral,
Câmera Estéreo, Trinocular, Esférica, RGB-Depth
31

Sensor de
posicionamento e orientação
• Global Positioning System (GPS);
– Calcula distância que a mensagem percorreu para
chegar do satélite;
– Pelo menos mensagem 2 a 3 satélites;
– Precisão sistema comercial: Erro de ~5 a 10 metros
– Sistema de Alta Precisão: DGPS / RTK – Erro ~10cm
• Compass (Bússola)
– Orientação em relação ao campo magnético
32

Sensores Inerciais
• Giroscópio: dispositivo capaz de informar a direção
para onde está se movendo (orientação);
– Mecânicos ou por luz/laser.
• Acelerômetro: mede a ação de forças (inclusive a
gravidade);
– Pequena coluna (massa) balançante.
• IMUs (Inertial Measurement Units): agregam um
giroscópio e um acelerômetro, e outros, como um
magnetômetro;
• Problema do erro cumulativo nos sensores inerciais.
33
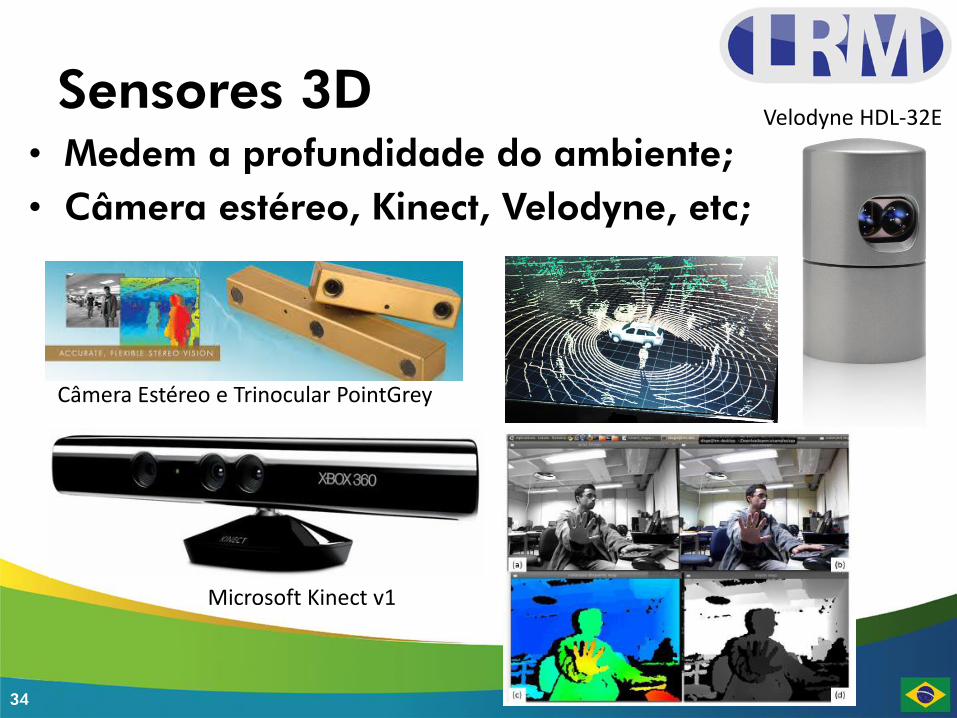
Sensores 3D
• Medem a profundidade do ambiente;
• Câmera estéreo, Kinect, Velodyne, etc;
34
Velodyne HDL-32E
Microsoft Kinect v1
Câmera Estéreo e Trinocular PointGrey

Fusão de Sensores
• Redundante ou competitiva: sensores medem o
ambiente para posterior confronto (tratamento
de imprecisão);
• Complementar: informações distintas (eliminar
falsas detecções);
• Coordenada: sensores em uma ordem específica.
35

Referências
36
• [Gates 2007] Gates, B. (2007). A robot in every home. Scientific American,
296(1):58–65.
• [Grassi Jr. and Okamoto Jr. 2014] Grassi Jr., V. and Okamoto Jr., J. (2014).
Arquiteturas de controle: tipos e conceitos. In Romero, R. A. F., Prestes, E., Osório, F.,
and Wolf, D., editors, Robótica Móvel, chapter 4, pages 47–60. Editora LTC, Rio de
Janeiro.
• [Correa 2013] Correa, D. S. O. (2013). Navegação autônoma de robôs móveis e
detecção de intrusos em ambientes internos utilizando sensores 2D e 3D. USP ICMC -
Dissertação de Mestrado, Sao Carlos, SP, Brasil.
• [Murphy 2000] Murphy, R. R. (2000). Introduction to AI Robotics. MIT Press,
Cambridge, MA, USA, 1st edition.
• [Wolf 2009] Wolf, D.; Osório, F.; Simões, E.; Trindade, O. “Robótica Móvel Inteligente:
Da Simulação às Aplicações no Mundo Real”. JAI – SBC, 2009
Web: http://osorio.wait4.org/palestras/jai2009.html
• [Romero 2014] Romero, R.; Osório, F.; Prestes, E.; Wolf, D. Robótica Móvel. Editora
LTC. 2014. 316p. Web: http://www.grupogen.com.br/robotica-movel.html

A SEGUIR:
APLICAÇÕES DA
ROBÓTICA MÓVEL
37

38
Site: http://www.lrm.icmc.usp.br/
Vídeos: http://youtube.com/lrmicmc
https://www.youtube.com/user/lrmicmc/videos
Laboratório de Robótica Móvel – ICMC/USP
Contato:Prof. Fernando OsórioProf. Denis Wolf http://www.icmc.usp.br/~fosorioE-mail: { fosorio, denis } @icmc.usp.br