seguimentoprecisodecaminhos3dcomaplicaçãoa ... · a dinâmica do espaço de erro é linearizada...
TRANSCRIPT
UNIVERSIDADE TÉCNICA DE LISBOA
INSTITUTO SUPERIOR TÉCNICO
Seguimento Preciso de Caminhos 3D com Aplicação aHelicópteros Autónomos
Duarte Antunes, n 49328, AE de Sistemas, Decisão e ControloPedro Gomes, n 49468, AE de Sistemas, Decisão e Controlo
LICENCIATURA EM ENGENHARIA ELECTROTÉCNICA ECOMPUTADORES
Relatório de Trabalho Final de Curso28/2004/L
Orientador: Doutor Carlos Jorge Ferreira SilvestreSetembro de 2005

Agradecimentos
Em primeiro lugar, gostávamos de agradecer ao Professor Carlos Silvestre por todo oseu apoio ao longo da realização deste trabalho final de curso. Foi graças ao Professor queaprofundámos os nossos conhecimentos em controlo e tivemos a oportunidade de conhecera área dos veículos autónomos, logo a partir do nosso terceiro ano da licenciatura. Contá-mos com a sua ajuda e compreensão nos momentos de menor disponibilidade, conselhose experiência em todas as decisões que tomámos.
Este trabalho não seria possível sem a contribuição do Nuno Paulino e da RitaCunha. O trabalho por eles desenvolvido foi fundamental na realização do trabalho finalde curso. Estamos também muito gratos por toda a ajuda e disponibilidade por elesdemonstrada.
Na elaboração do relatório contámos com a preciosa ajuda de Sajjad Fekri, RezaGhabcheloo, José Vasconcelos e Bruno Guerreiro. A eles, e aos restantes elementos dasala de bolseiros 8.11 e do laboratório de Sistemas Dinâmicos e Robótica Oceanográfica,o nosso obrigado pelo excelente ambiente de trabalho proporcionado.
A todos os amigos que tivemos a oportunidade de conhecer no IST, em especialaqueles com quem convivemos de forma mais próxima neste último ano: Gareth, Mário,Manuel, Alexandre, Pedro Agostinho, Pedro Cruz, Mário Florêncio, Ricardo, Benjamim,Francisco Melo, Júlio, Cláudia, Pedro Batista, Marco e João Simões.
Finalmente, e de um modo muito especial, agradecemos às nossas famílias.
i
ii
Resumo
Este trabalho final de curso aborda o problema de seguimento de caminhos paraveículos autónomos com aplicação a helicópteros.
A estratégia utilizada passa pela definição de um vector de erro adequado, depen-dente das variáveis do veículo e do caminho, que permite transformar o problema deseguimento num problema de controlo equivalente. Os caminhos considerados resultamda concatenação de hélices e rectas.
É definido um conjunto de regiões de funcionamento para o espaço de erro, sendoque numa dada região a linearização da dinâmica do espaço de erro é aproximada por umsistema que depende de forma afim de um conjunto de parâmetros. Para cada região é sin-tetizado um controlador utilizando a teoria das Desigualdades Matriciais Lineares. Estatécnica é adequada para sistemas que variam de forma afim num conjunto de parâmetros.Estes sistemas são um caso particular de LPVs (Linear Parametrically Varying Systems).
O controlador resultante é implementado através da teoria de ganhos comutados eutilizando a metodologia D.
Os caminhos são conhecidos à priori. Este facto permite utilizar informação futurapara melhorar o desempenho do sistema de seguimento. É realizado um estudo de como ainformação futura influência o sistema e é utilizada uma técnica de feedforward designadade preview.
O sistema resultante é testado em simulação com um modelo não-linear do he-licóptero.
Palavras-Chave: Helicóptero Autónomo, Sistemas de Controlo H2 em TempoDiscreto, Ganhos Comutados, Desigualdades Matriciais Lineares, Preview, Sistemas quevariam de forma afim nos parâmetros.
iii

iv

Abstract
This report addresses the path-following problem of steering a helicopter along adesired path. The path is defined as a concatenation of straight lines and helices.
In order to solve the problem at hand an error space is defined that allows forconverting the original steering problem into a well defined control problem.
Several working regions of the error space are defined and for each one the errordynamics is linearized. The resulting system, for each region, is then described by an affineparameter-depend model and a controller is synthesized using Linear Matrix Inequalities(LMIs). These systems are a specific case of Linear Parametrically Varying Systems(LPVs).
The controller is implemented under the scope of the gain-scheduled control theoryusing the D-methodology. The desired paths which are known in advance allow for theuse of future information to enhance the performance of the integrated guidance andcontrol system. The present work studies how to design a control system that can takeadvantage of the future information, using a well known feedforward technique namedpreview.
The overall performance of the closed loop system is accessed in simulation withthe full non-linear dynamic model of a model-scale helicopter.
Keywords: Autonomous Helicopter, Discrete Time H2 Control, Gain-scheduling,Linear Matrix Inequalities, Preview, Linear Parametrically Varying Systems.
v

vi
Conteúdo
Agradecimentos i
Resumo iii
Abstract v
Conteúdo vii
Lista de figuras xi
Lista de tabelas xiii
1 Introdução 11.1 Objectivo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2 Trabalho anterior . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.3 Descrição da técnica adoptada . . . . . . . . . . . . . . . . . . . . . . . . 21.4 Organização do relatório . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2 Modelo do Helicóptero 42.1 Notação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42.2 Modelo de um veículo autónomo . . . . . . . . . . . . . . . . . . . . . . . 52.3 Forças e momentos gerados por um helicóptero . . . . . . . . . . . . . . . 6
2.3.1 Rotor principal . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72.3.2 Rotor de cauda . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112.3.3 Modelo para controlo . . . . . . . . . . . . . . . . . . . . . . . . . 12
3 Espaço de Erro 133.1 Referenciais de trabalho . . . . . . . . . . . . . . . . . . . . . . . . . . . 133.2 Descrição do espaço de erro . . . . . . . . . . . . . . . . . . . . . . . . . 153.3 Aspectos relevantes sobre o espaço de erro . . . . . . . . . . . . . . . . . 163.4 Dinâmica e linearização do vector de erro . . . . . . . . . . . . . . . . . . 173.5 Discretização . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183.6 Parametrização do espaço de erro . . . . . . . . . . . . . . . . . . . . . . 193.7 Validade da aproximação φc = 0, θc = 0 . . . . . . . . . . . . . . . . . . . 21
vii

viii CONTEÚDO
4 Metodologia de controlo utilizando LPVs 224.1 Descrição da metodologia de controlo . . . . . . . . . . . . . . . . . . . . 224.2 Aproximação do espaço de erro . . . . . . . . . . . . . . . . . . . . . . . 244.3 Desigualdades lineares matriciais . . . . . . . . . . . . . . . . . . . . . . 264.4 LPVs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 294.5 Metodologia de ganhos comutados . . . . . . . . . . . . . . . . . . . . . . 31
5 Preview 325.1 Fundamentação da técnica de preview . . . . . . . . . . . . . . . . . . . . 325.2 Aplicação da técnica a veículos autónomos . . . . . . . . . . . . . . . . . 345.3 Introdução de preview na dinâmica do espaço de erro . . . . . . . . . . . 39
6 Implementação 426.1 Síntese do controlador de cada zona . . . . . . . . . . . . . . . . . . . . . 426.2 Implementação da técnica de preview . . . . . . . . . . . . . . . . . . . . 436.3 Algoritmo de controlo . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
7 Resultados Obtidos 457.1 Resultados do algoritmo de controlo . . . . . . . . . . . . . . . . . . . . . 457.2 Resultados de aplicação da teoria de preview . . . . . . . . . . . . . . . . 47
7.2.1 Preview sem comutação de ganhos . . . . . . . . . . . . . . . . . 477.2.2 Preview com comutação de ganhos . . . . . . . . . . . . . . . . . 48
8 Conclusões e trabalho futuro 50
A Algumas relações matemáticas 51A.1 Velocidades angulares . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51A.2 Ângulos de Euler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51A.3 Derivada de matrizes de rotação . . . . . . . . . . . . . . . . . . . . . . . 52A.4 Definição da função sign . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
B Propriedades do referencial T 53B.1 Curvas em R3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53B.2 Definição e propriedades do referencial T . . . . . . . . . . . . . . . . . 55B.3 Referencial T para caminhos de interesse . . . . . . . . . . . . . . . . . 56B.4 Vantagens do referencial T face ao Serret-Frenet . . . . . . . . . . . . 61
C Linearização e dinâmica do espaço de erro 63C.1 Dinâmica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63C.2 Linearização . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
D Validade da aproximação do espaço de erro 73
E Síntese de controladores utilizando LMIs 79E.1 Definição e propriedades . . . . . . . . . . . . . . . . . . . . . . . . . . . 79E.2 Síntese de controladores contínuos utilizando LMI’s . . . . . . . . . . . . 80
E.2.1 Estabilidade em tempo contínuo . . . . . . . . . . . . . . . . . . . 82E.2.2 Norma H2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
CONTEÚDO ix
E.2.3 Norma H∞ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84E.2.4 Colocação de pólos . . . . . . . . . . . . . . . . . . . . . . . . . . 84
E.3 Síntese em tempo contínuo . . . . . . . . . . . . . . . . . . . . . . . . . . 85E.3.1 Norma H2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86E.3.2 Norma H∞ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86E.3.3 Controlo multi-objectivo . . . . . . . . . . . . . . . . . . . . . . . 87E.3.4 Realimentação da saída . . . . . . . . . . . . . . . . . . . . . . . . 87
E.4 Síntese de controladores discretos utilizando LMI’s . . . . . . . . . . . . . 87E.4.1 Análise em tempo discreto . . . . . . . . . . . . . . . . . . . . . . 87E.4.2 Estabilidade em tempo discreto . . . . . . . . . . . . . . . . . . . 88E.4.3 Norma H2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88E.4.4 Norma H∞ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90E.4.5 Colocação de pólos . . . . . . . . . . . . . . . . . . . . . . . . . . 90
E.5 Síntese em tempo discreto . . . . . . . . . . . . . . . . . . . . . . . . . . 91E.5.1 Estabilidade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91E.5.2 Norma H2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91E.5.3 Norma H∞ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
E.6 Sistemas com incertezas poliedrais . . . . . . . . . . . . . . . . . . . . . . 94E.7 Exemplo de aplicação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
E.7.1 Síntese com sistemas poliedrais . . . . . . . . . . . . . . . . . . . 100

x CONTEÚDO

Lista de Figuras
2.1 Componentes do helicóptero . . . . . . . . . . . . . . . . . . . . . . . . . 62.2 Movimentos das pás: pitch e flap . . . . . . . . . . . . . . . . . . . . . . 72.3 Referenciais introduzidos (extraído de [1]) . . . . . . . . . . . . . . . . . 82.4 Diagrama de blocos da modelação do rotor principal . . . . . . . . . . . . 92.5 Referencial do rotor de cauda (retirado de [2]) . . . . . . . . . . . . . . . 11
3.1 Referenciais usados na definição de erro . . . . . . . . . . . . . . . . . . . 143.2 Possíveis trajectórias pela introdução de x2 no espaço de erro . . . . . . . 173.3 Expressão do vector velocidade em termos de dois ângulos . . . . . . . . 203.4 Histograma de valores de para várias trajectórias de equilíbrio . . . . . . 21
4.1 Exemplo ilustrativo da metodologia de controlo . . . . . . . . . . . . . . 234.2 Definição de zonas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 244.3 Realizações do sistema utilizadas . . . . . . . . . . . . . . . . . . . . . . 254.4 Aproximação por um plano à variação de A14 com (V, η) e (V, ρ) . . . . . 264.5 Matrizes S(p) como vértices de um politopo . . . . . . . . . . . . . . . . 304.6 Metodologia D . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
5.1 Caminho constituído por segmentos onde se encontra os instantes da in-formação de preview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
5.2 Impulso na derivada de variável de referência . . . . . . . . . . . . . . . . 365.3 Diagrama do carrinho . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 365.4 Resposta impulsiva de Hrve . . . . . . . . . . . . . . . . . . . . . . . . . 385.5 Vector de preview construído pelo veículo para várias posições . . . . . . 385.6 Resultados com e sem preview . . . . . . . . . . . . . . . . . . . . . . . . 395.7 Respostas impulsivas com e sem preview . . . . . . . . . . . . . . . . . . 39
6.1 Ganhos preview para a segunda e nona componentes de s . . . . . . . . . 446.2 Sistema em malha fechada . . . . . . . . . . . . . . . . . . . . . . . . . . 44
7.1 Concatenação de trajectórias de equilíbrio . . . . . . . . . . . . . . . . . 457.2 Sinal de actuação e estados do veículo . . . . . . . . . . . . . . . . . . . . 467.3 Valores das variáveis V e ρ ou u e w que o veículo toma entre os troços 2 e 3 467.4 Caminho em que não existe comutação de controlador . . . . . . . . . . . 477.5 Actuação, estados e erros com (em baixo) e sem preview (em cima) para
o troço 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 477.6 Actuação, estados e erros com (em baixo) e sem preview(em cima) para
troço 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
xi

xii LISTA DE FIGURAS
7.7 Trajectórias e erros com e sem preview . . . . . . . . . . . . . . . . . . . 497.8 Normas H2 com e sem preview . . . . . . . . . . . . . . . . . . . . . . . . 49
B.1 Definição do vector t . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54B.2 Definição de n . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55B.3 Referencial T . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56B.4 Referencial T para hélice com κ > 0 . . . . . . . . . . . . . . . . . . . 58B.5 Referencial T para hélice com κ > 0 . . . . . . . . . . . . . . . . . . . 59B.6 Definição de T para rectas . . . . . . . . . . . . . . . . . . . . . . . . . 61B.7 Caminho que evidencia a vantagem de utilizar T . . . . . . . . . . . . 62B.8 Dependência da transformação entre referenciais C e T . . . . . . . 62
D.1 Aproximação por um plano à variação de A33 . . . . . . . . . . . . . . . 75D.2 Erros absolutos ‖A33 − A33‖ . . . . . . . . . . . . . . . . . . . . . . . . . 76D.3 Valores próprios da realização e da aproximação . . . . . . . . . . . . . . 76D.4 Erros relativos médios de todas as realizações para a matriz A . . . . . . 77D.5 Erros relativos médios para todas as zonas para a matriz A . . . . . . . . 77D.6 Erros relativos médios para todas as zonas para a matriz B1 . . . . . . . 78
E.1 Sistema realimentado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81E.2 Interpretação do conjunto δ0 em termos de um politopo . . . . . . . . . . 95E.3 Interpretação como sistemas variantes no tempo . . . . . . . . . . . . . . 95E.4 Sistema de exemplo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98E.5 Configuração de valores próprios para minimização de H2 . . . . . . . . . 99E.6 Resposta impulsiva para minimização de H2 . . . . . . . . . . . . . . . . 99E.7 Configuração de pólos para síntese com norma H∞ . . . . . . . . . . . . 102
Lista de Tabelas
3.1 Condições de equilíbrio do veículo dados uns parâmetros da trajectória . 21
4.1 Definição das partições . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
D.1 Partições definidas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
xiii

xiv LISTA DE TABELAS
Capítulo 1
Introdução
Os helicópteros são veículos com grande capacidade de manobra capazes de efectuarmissões em locais pouco acessíveis. De forma a aumentar ainda mais as potencialidadesdestes veículos estão a ser desenvolvidos esforços no sentido de os tornar autónomos, istoé, com capacidade de efectuar missões sem intervenção humana. O helicóptero autónomopermitiria assim substituir a presença humana em tarefas de elevado risco como porexemplo observação vulcânica, vigilância de florestas, inspecção de pontes e inspecção delinhas de alta tensão. Com este tipo de veículos também se poderia realizar certas tarefasde forma mais eficiente como por exemplo: observação ambiental, tratamento de culturasagrícolas e mapeamento topográfico de regiões.
Tendo em vista as aplicações referidas, o problema de seguimento de um cam-inho/trajectória é um dos problemas mais críticos a resolver. É também importantereferir que do ponto de vista científico este problema levanta questões interessantes quesão motivo de investigação em universidades e institutos de todo o mundo.
1.1 Objectivo
No trabalho final de curso que aqui se apresenta pretende-se abordar o problemado seguimento de caminhos tendo como objectivo final a síntese de um controlador quepermita o seguimento preciso de caminhos 3D pré-definidos. Por caminho entenda-seuma referência espacial sem restrições temporais. Estes caminhos são constituídos pelaconcatenação de rectas arbitrárias no espaço tridimensional e hélices com eixo verticalalinhado com o vector gravidade. O helicóptero deverá seguir os caminhos mantendosempre uma posição paralela ao solo, ou seja, com a mesma atitude que tem em repousonum solo perpendicular ao vector gravidade. O facto de se restringir os caminhos deinteresse e a orientação do helicóptero está relacionado com o método de seguimento decaminhos adoptado e tornar-se-à mais claro no seguimento do relatório. Uma vez que oscaminhos são pré-definidos pretende-se também utilizar a informação da referência futurapara melhorar o desempenho do sistema no seguimento de caminhos.
1
2 CAPÍTULO 1. INTRODUÇÃO
1.2 Trabalho anteriorNa área dos helicópteros autónomos alguns dos projectos de maior destaque são por
exemplo o Autonomous Helicopter Project desenvolvido pelo Carnegie Mellon RoboticsInstitute ou o BEAR: Berkeley Aerobot Team da University of California, Berkeley.
Na área do controlo não linear para problemas de seguimento de caminhos existemtrabalhos com técnicas de feedback linearization baseadas em técnicas de Lyapunov. Ex-istem ainda outras técnicas de controlo que utilizam H∞ (ver [3]), controlo difuso (ver[4]), feedback linearizing controllers ou backstepping controllers (ver [5]).
Relativamente a trabalhos com aplicação a veículos autónomos onde se utiliza areferência futura indicam-se [6], [7], [8], onde se utiliza a teoria de preview e [9] onde seutiliza controlo preditivo.
Trabalhos nas áreas de seguimento de terreno [10], [2], de modelação de helicópteros[1],[11] de controlo de veículos autónomos [12] e de formalização de um espaço de erroaplicado a helicópteros [13] e [14], estiveram na base do método aplicado para resolver oproblema de seguimento em questão.
1.3 Descrição da técnica adoptadaA técnica adoptada passa pela definição de um vector de erro, dependente das
variáveis referentes ao veículo e do próprio caminho, que estabelece a ponte entre oproblema de seguimento de caminhos e um problema de controlo equivalente.
A dinâmica do espaço de erro é linearizada em torno de caminhos de equilíbrio.Estes caminhos correspondem a hélices e rectas. É definido um conjunto de regiões defuncionamento para o espaço de erro, sendo que numa dada região a linearização dadinâmica do espaço de erro é aproximada por um sistema que depende de forma afim deum conjunto de parâmetros.
Para cada região, é sintetizado um controlador por realimentação linear de variáveisde estado em tempo discreto, resolvendo um problema de controlo óptimo H2. O problemaé resolvido no âmbito da teoria existente para sistemas que dependem de forma afim deum conjunto de parâmetros. Estes sistemas são um caso particular de LPVs (LinearParametrically Varying Systems). Para este tipo de sistemas existem resultados combase na teoria de Desigualdades Matriciais Lineares.
O controlador resultante é implementado através da teoria de ganhos comutados eutilizando a metodologia D. As variáveis de parametrização do espaço de erro, permitemcomutar entre os vários controladores sintetizados para cada região de funcionamento.
De forma a suavizar a actuação e a melhorar o desempenho do helicóptero noseguimento do caminho de referência utiliza-se uma técnica de feedforward, conhecidacomo preview. A informação futura é obtida tendo em conta que é conhecido todo ocaminho de referência à priori. Na situação de comutação entre caminhos de referênciaas variáveis de referência são alteradas, introduzindo uma perturbação no sistema. Éefectuado um estudo de como esta comutação influencia o sistema e, utilizando a teoria depreview, é sintetizado um controlador que permite melhorar o desempenho do helicópterono seguimento.
O sistema de controlo final é testado em simulação com um modelo não-linear dohelicóptero.
1.4. ORGANIZAÇÃO DO RELATÓRIO 3
O presente trabalho pretende generalizar o trabalho efectuado em [2], onde o métododescrito é aplicado no seguimento de rectas contidas num plano vertical, para contemplaro caso de rectas no espaço tridimensional e hélices, utilizando o espaço de erro apresentadoem [14]. No âmbito desta generalização o trabalho apresenta as seguintes contribuições:
• Implementação de um controlador para o seguimento de hélices e rectas tridimen-sionais, utilizando a teoria de ganhos comutados e de LPVs.
• A análise da forma de introdução de informação futura no sistema de seguimentoà luz da teoria de preview.
• A definição de um espaço de erro ligeiramente diferente do apresentado em [14]para contemplar o caso em que o mesmo controlador permite o seguimento dehélices percorridas em ambos os sentidos.
1.4 Organização do relatórioPara realizar este trabalho procedeu-se ao estudo de tópicos de várias áreas dis-
tintas. Pretende-se introduzir os conceitos destas áreas estritamente necessários para acompreensão do relatório (remetendo-se para anexo os restantes conceitos e cálculos).
Para além deste primeiro capítulo introdutório, o relatório encontra-se dividido daseguinte forma:
• Capítulo 2: Modelação do helicóptero. Neste capítulo apresenta-se a notação,apresenta-se uma metodologia para derivar as equações da dinâmica de qualquerveículo autónomo e explicam-se superficialmente os princípios de funcionamento dohelicóptero.
• Capítulo 3: Espaço de erro. Pretende-se introduzir o espaço de erro e derivar asua dinâmica, linearização e discretização. Referem-se ainda os parâmetros de quedepende esta linearização.
• Capítulo 4: Metodologia de controlo utilizando LPVs. A estratégia de controloé apresentada. Esta utiliza a teoria de ganhos comutados e a teoria de LPVs.Abordam-se alguns conceitos necessários de Desigualdades Matriciais Lineares, quena nomenclatura anglo-saxónica são conhecidas como LMIs (Linear Matrix Inequa-lities).
• Capítulo 5: Preview. Este capítulo contém a forma como é introduzida a informaçãofutura da referência de acordo com a teoria de preview para melhorar o desempenhodo sistema de seguimento.
• Capítulo 6: Implementação. São referidos os valores utilizados para os parâme-tros necessários para síntese e implementação do sistema de controlo. É tambémapresentada a arquitectura do sistema de seguimento.
• Capítulo 7: Resultados. São apresentados os resultados da metodologia de controloe da utilização de preview para o seguimento de caminhos.
• Capítulo 8: Conclusões e trabalho futuro.
Capítulo 2
Modelo do Helicóptero
Este capítulo tem como objectivo introduzir o procedimento de modelação paraqualquer veículo autónomo, particularizando para o caso do helicóptero.
Dentro dos vários tipos de veículos, os helicópteros são um dos mais difíceis de mod-elar. Para além das questões de modelação aerodinâmicas do movimento de ar geradopelas pás, as equações que regem o seu movimento são altamente acopladas. Pretende-seneste capítulo apenas introduzir o seu princípio de funcionamento e descrever o proced-imento de derivação das suas equações. Este procedimento é realizado através de umaaproximação robótica, fazendo uso da teoria dos momentos, utilizada em [1], e cujasequações obtidas foram simplificadas em [11]. É dado particular ênfase à interpretaçãode equações simplificadas, e à forma como a actuação influencia as forças e momentosgerados pelo helicóptero para que o leitor possa interpretar os resultados relativos aoseguimento de caminhos por helicópteros.
A notação utilizada ao longo do relatório é também introduzida neste capítulo. Nofinal será descrito como é que o modelo será utilizado para efeitos de controlo.
2.1 NotaçãoApresenta-se de seguida uma descrição da notação utilizada ao longo do relatório:
• vector x (bold), matrix X (maiúscula), escalar x (minúscula).
• referencial "A": A com versores unitários ax, ay, az
• referencial universal: U. Este referencial é inercial e o versor uz tem a direcçãoe sentido do vector gravidade. Qualquer referência a um plano paralelo ao solorefere-se a um plano paralelo a uxouy.
• referencial fixo no centro de massa do veículo e alinhado com a sua orientação: B.Designado por referencial do corpo (body) ou por referencial do veículo. O tensorde inercia expresso neste referencial é diagonal.
• matriz de rotação do referencial A para o referencial B: baR. Esta matriz segue
a convenção dos ângulos de Euler Z-Y-X, tal que
baR = Rz(ψ) Ry(θ) Rx(φ)
4

2.2. MODELO DE UM VEÍCULO AUTÓNOMO 5
• velocidade linear/angular do referencial A em relação ao referencial B, expressaem B, respectivamente: bva e bwa
• velocidade linear/angular do referencial A em relação ao referencial universal Uexpressa no referencial A, respectivamente: va = a
uRuva e ωa = a
uRuωa
• S(.) é a matriz anti-simétrica que representa o produto externo
S(a)b = a× b
S(a) =
0 −az ay
az 0 −ax
−ay ax 0
• vector posição expresso no referencial universal: p =[x y z
]T
• vector posição do centro de massa do veículo expresso no referencial universal: pb
• vector posição expresso no referencial A: ap
• ângulos de Euler Z-Y-X do veículo: λb =[
φb θb ψb
]T . Estes ângulos definem aorientação do veículo em relação ao referencial universal.
• velocidade linear/angular do veículo em relação a U, expressa no referencial doveículo
vb =[
u v w]T
ωb =[
p q r]T
• forças e momentos geradas por s expressas em B
fs =[
Xs Ys Zs
]Tns =
[Ls Ms Ns
]T
• matrizes de projecção utilizadas para seleccionar elementos
Πx =[1 0 0
], Πyz =
[0 1 00 0 1
], Πxz =
[1 0 00 0 1
]
2.2 Modelo de um veículo autónomoAs equações de Newton-Euler descrevem a dinâmica de um corpo rígido e, junta-
mente com as equações da cinemática, são utilizadas para descrever o comportamentode um veículo autónomo. Para as equações da cinemática foi escolhida, entre outraspossíveis, a descrição de orientação através de ângulos de Euler ZYX. Tendo em contaa notação introduzida as equações da dinâmica e da cinemática podem-se escrever daseguinte forma
vb = −ωb × vb + 1mfext(vb,ωb,u) + fg(φb, θb) = f(vb,ωb, φb, θb,u)
ωb = −I−1(ωb × Iωb) + I−1next(vb,ωb,u) = n(vb, ωb,u)pb = u
b R(λb)vb
λb = Q(λb)ωb
(2.1)
6 CAPÍTULO 2. MODELO DO HELICÓPTERO
em que m é a massa do veículo, I o seu tensor de inércia no referencial do centro de massaB, fg a força gravítica expressa no referencial B e Q a transformação de velocidadeangulares para derivadas de ângulos de Euler
fg = g
− sin(θb)cos(θb) sin(φb)cos(θb) cos(φb)
Q(φb, θb) =
1 sin(φb) tan(θb) cos(φb) tan(θb)0 cos(φb) − sin(φb)0 sin(φb)/ cos(θb) cos(φb)/ cos(θb)
Cada veículo tem os seus sinais de actuação u gerando diferentes forças e momentosexternos. A natureza destas forças fext(vb, ωb,u) e momentos next(vb, ωb,u) gerados,assim como o sinal de actuação u, varia de acordo com o tipo de veículo (por exemplonum helicóptero tratam-se de forças aerodinâmicas enquanto que num submarino deforças hidrodinâmicas).
2.3 Forças e momentos gerados por um helicóptero
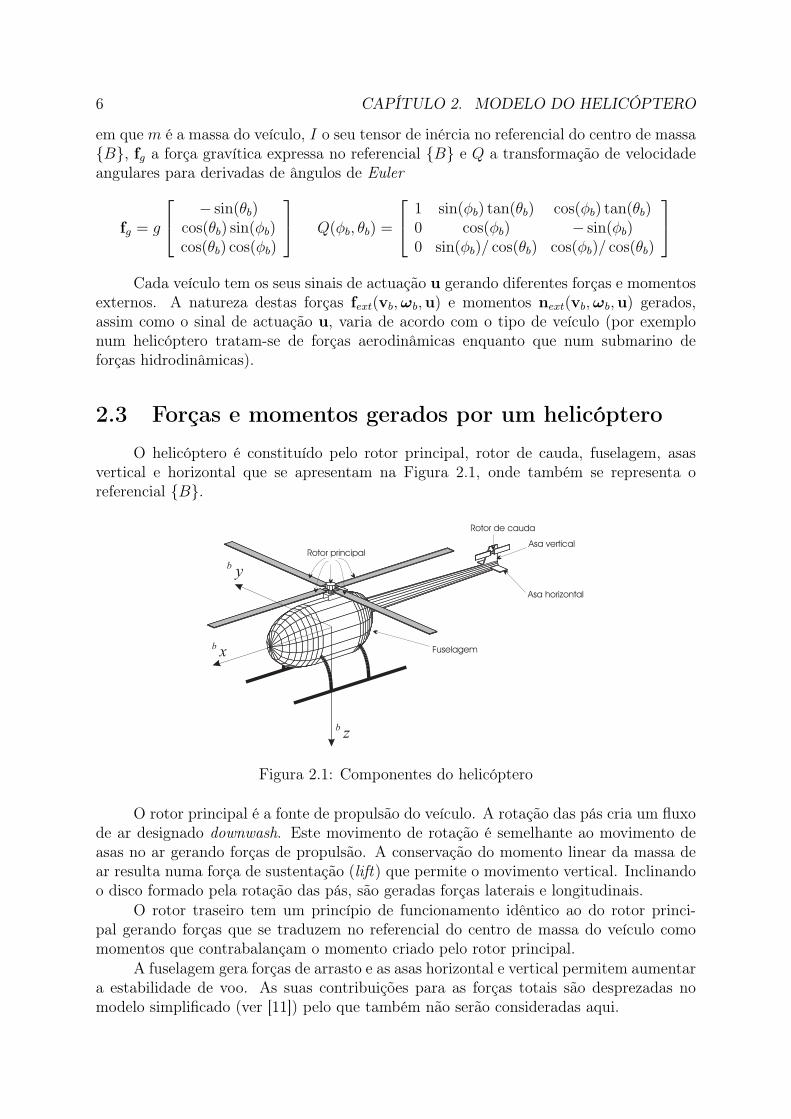
O helicóptero é constituído pelo rotor principal, rotor de cauda, fuselagem, asasvertical e horizontal que se apresentam na Figura 2.1, onde também se representa oreferencial B.
Figura 2.1: Componentes do helicóptero
O rotor principal é a fonte de propulsão do veículo. A rotação das pás cria um fluxode ar designado downwash. Este movimento de rotação é semelhante ao movimento deasas no ar gerando forças de propulsão. A conservação do momento linear da massa dear resulta numa força de sustentação (lift) que permite o movimento vertical. Inclinandoo disco formado pela rotação das pás, são geradas forças laterais e longitudinais.
O rotor traseiro tem um princípio de funcionamento idêntico ao do rotor princi-pal gerando forças que se traduzem no referencial do centro de massa do veículo comomomentos que contrabalançam o momento criado pelo rotor principal.
A fuselagem gera forças de arrasto e as asas horizontal e vertical permitem aumentara estabilidade de voo. As suas contribuições para as forças totais são desprezadas nomodelo simplificado (ver [11]) pelo que também não serão consideradas aqui.

2.3. FORÇAS E MOMENTOS GERADOS POR UM HELICÓPTERO 7
2.3.1 Rotor principal
O rotor principal é constituído por pás ligadas através de um veio (hub) que rodamcom uma frequência em regime estacionário Ω
2π. Cada pá pode exercer dois tipos de
movimento pitch e lag, representados pelos ângulos θ e β, como ilustrado na Figura 2.2,onde se representa o sentido atribuído como positivo para estes ângulos.
Figura 2.2: Movimentos das pás: pitch e flap
Estes movimentos, em regime estacionário, assumem-se periódicos em relação aoângulo de rotação ψ, que toma os valores ψ = 0, ψ = π/2, ψ = π, ψ = 3π/2 quando a páestá alinhada respectivamente com os eixos −bx, by, bx e −by (ver eixos na Figura 2.1).
O movimento de pitch é normalmente ditado pelos comandos, que estão relacionadoscom os ângulos de pitch colectivo θ0 e ângulos de pitch cíclicos θ1s e θ1c
θ(ψ) = θ0 + θ1c cos(ψ) + θ1s sin(ψ)
Existe no entanto, no helicóptero em questão, um mecanismo designado de Bell-Hiller que introduz uma dinâmica entre os comandos designados por δ1s e δ1c e os ângulosde pitch cíclicos θ1s e θ1c(o leitor interessado poderá consultar [1] para uma descrição destainteracção). Dado o carácter introdutório do capítulo esta dinâmica não será abordada,assumindo-se que δ1s = θ1s e δ1c = θ1c. Pelo seu carácter periódico em cada revolução, osângulos θ1c e θ1s criam desiquilíbrios nas forças aerodinâmicas que as pás estão sujeitasdando origem a forças e momentos que permitem manobrar o helicóptero.
O movimento de flap é ditado pelo equilíbrio de momentos dados pelas forças iner-ciais e aerodinâmicas que actuam na pá e é extremamente influenciado pelos comandos.Este movimento em regime estacionário é aproximadamente periódico sendo normalmenteaproximado pelos primeiros termos da série de Fourier β0, β1c e β1s
β(ψ) = β0 + β1c cos(ψ) + β1s sin(ψ)β2c cos(2ψ) + β2s sin(2ψ) + ...
A derivação das equações, feita em [1] é realizada colocando um conjunto de refer-enciais solidários com cada um dos movimentos do veículo e das pás, ilustrados na Figura2.3 e de acordo com as seguintes definições
cm Referencial idêntico a B introduzido anteriormente, ou seja com origem no cen-tro de massa e com a mesma orientação do veículo.
hub referencial com origem no hub e com a mesma orientação que cm à excepçãode uma rotação constante segundo cmy.
8 CAPÍTULO 2. MODELO DO HELICÓPTERO
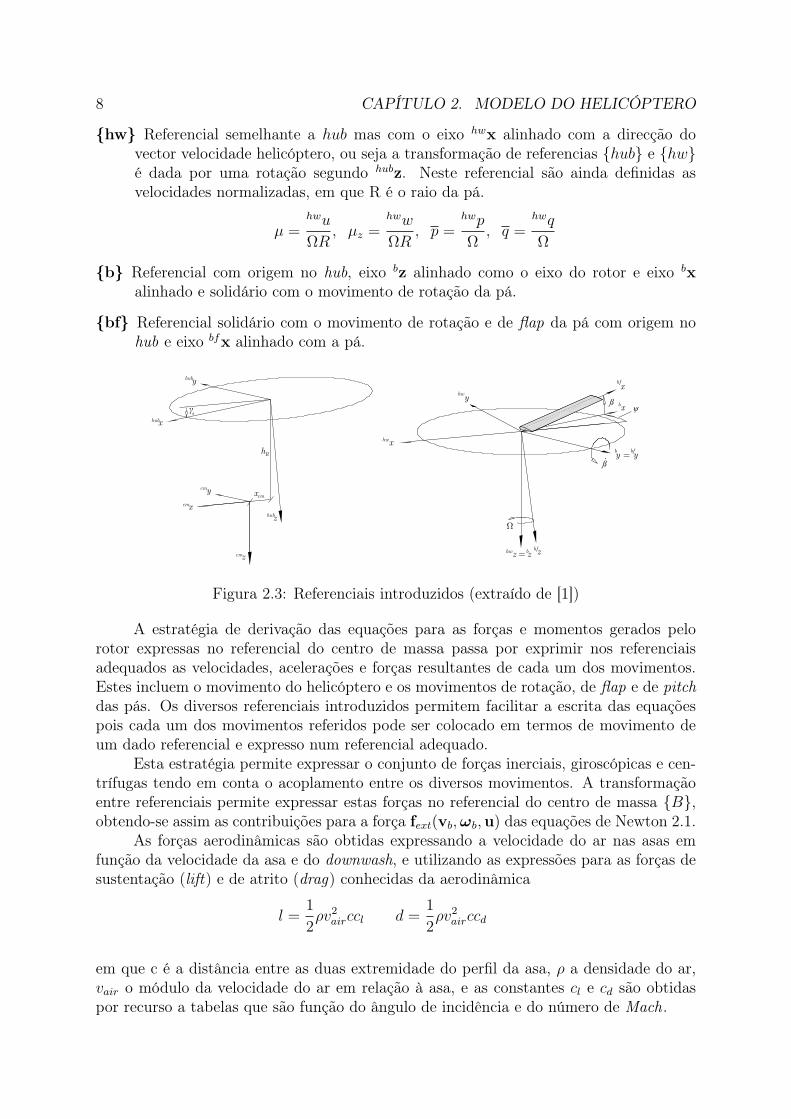
hw Referencial semelhante a hub mas com o eixo hwx alinhado com a direcção dovector velocidade helicóptero, ou seja a transformação de referencias hub e hwé dada por uma rotação segundo hubz. Neste referencial são ainda definidas asvelocidades normalizadas, em que R é o raio da pá.
µ =hwu
ΩR, µz =
hww
ΩR, p =
hwp
Ω, q =
hwq
Ω
b Referencial com origem no hub, eixo bz alinhado como o eixo do rotor e eixo bxalinhado e solidário com o movimento de rotação da pá.
bf Referencial solidário com o movimento de rotação e de flap da pá com origem nohub e eixo bfx alinhado com a pá.
Figura 2.3: Referenciais introduzidos (extraído de [1])
A estratégia de derivação das equações para as forças e momentos gerados pelorotor expressas no referencial do centro de massa passa por exprimir nos referenciaisadequados as velocidades, acelerações e forças resultantes de cada um dos movimentos.Estes incluem o movimento do helicóptero e os movimentos de rotação, de flap e de pitchdas pás. Os diversos referenciais introduzidos permitem facilitar a escrita das equaçõespois cada um dos movimentos referidos pode ser colocado em termos de movimento deum dado referencial e expresso num referencial adequado.
Esta estratégia permite expressar o conjunto de forças inerciais, giroscópicas e cen-trífugas tendo em conta o acoplamento entre os diversos movimentos. A transformaçãoentre referenciais permite expressar estas forças no referencial do centro de massa B,obtendo-se assim as contribuições para a força fext(vb,ωb,u) das equações de Newton 2.1.
As forças aerodinâmicas são obtidas expressando a velocidade do ar nas asas emfunção da velocidade da asa e do downwash, e utilizando as expressões para as forças desustentação (lift) e de atrito (drag) conhecidas da aerodinâmica
l =1
2ρv2
airccl d =1
2ρv2
airccd
em que c é a distância entre as duas extremidade do perfil da asa, ρ a densidade do ar,vair o módulo da velocidade do ar em relação à asa, e as constantes cl e cd são obtidaspor recurso a tabelas que são função do ângulo de incidência e do número de Mach.

2.3. FORÇAS E MOMENTOS GERADOS POR UM HELICÓPTERO 9
O downwash, representado por λ designa o fluxo de ar perpendicular ao disco for-mado pelas pás rotor principal, e a sua expressão, obtida através da teoria dos momentos(ver [1]), tem uma componente constante e outra periódica em ψ.
λ = λ0 +rb
Rλ1ccos(ψ) (2.2)
em que rb
Ré a distância de um ponto da pá ao hub, rb, normalizada pelo raio da pá R.
O mecanismo de actuação do rotor principal consiste em alterar o ângulo θ ao longode uma rotação das pás. As actuações influenciam o downwash e o ângulo de flap β quepor sua vez influência directamente as forças. O esquema da Figura 2.4 explicita estasdependências. De seguida analisa-se como se expressa esta influência em casos muitosimples.
Figura 2.4: Diagrama de blocos da modelação do rotor principal
Influência dos comandos nos ângulos de flap
O equilíbrio de momentos resultantes de forças inerciais e aerodinâmicas para cadapá, dá origem a uma equação que permite interpretar a influência dos comandos nos ân-gulos de flap. Introduzindo a notação u′ = u
Ωe γ correspondente ao número de Lock, essa
influência pode ser colocada da seguinte forma, para µ = 0 e após algumas simplificações(ver [1])
influência dos comandos na força
β′′ +γ
8β′ + β =
︷ ︸︸ ︷γ
8(θ0 + θ1c cos(ψ) + θ1s sin(ψ)) +
2[(p +q′
2) cos(ψ)− (q − p′
2) sin(ψ)] +
γ
8[4
3(µz − λ0) + (ωy − λ1)]
︸ ︷︷ ︸forcas inerciais e devidas ao downwash
Assumindo regime estacionário e aproximando β pelos primeiros termos da série deFourier β = β0 + β1c cos(ψ) + β1s sin(ψ) a equação fica

10 CAPÍTULO 2. MODELO DO HELICÓPTERO
β0 = γ8[θ0 + 4
3(µz − λ0)]
β1c = −θ1s − p + 8γ(2q − p′) + λ1s
β1s = θ1c + 8γ(2p + q′) + q − λ1c
(2.3)
A dependência do ângulo de flap corresponde à solução de um sistema de segundaordem excitado à frequência de ressonância. Os comandos θ1c e θ1s apresentam assim umadesfasagem de 90o em relação aos ângulos de flap. O comando θ0 influência directamenteβ0.
Influência dos ângulos de flap nas forças e momentos
As forças e momentos podem ser escritas na seguinte forma onde se evidencia ainfluência das ângulos de flap nas forças
fmr =
Xmr
Ymr
Zmr
=
n
2
−Y1s
−Y 1c2Z0
+
n
2
−Z1c −Z0 0Z1s 0 Z0
0 0 0
β0
β1c
β1s
(2.4)
nmr =
Lmr
Mmr
Nmr
= n
00
N0
+
n
2
−N1c −N0 −kβ
N1s −kβ N0
0 0 0
β0
β1c
β1s
(2.5)
Os termos Y(.), Z(.) e N(.) representam as componentes de forças e momentos geradaspelas pás e são funções das variáveis de estados do rotor principal e das entradas. Onúmero de pás é expresso por n e kβ é uma constante.
De particular relevância são as componentes Z0 e N0, designadas por thrust e torquerespectivamente, como se pode verificar na expressão em cima traduzem as forças e mo-mentos segundo bz (Zmr = nZ0, Nmr = nNo). Representam assim a força de propulsãodo veículo e o momento segundo bz, ou seja, o momento que o rotor de cauda terá quecontrariar para manter o helicóptero com momento segundo z nulo. As suas expressõesalvo de simplificação em [11], apresentam-se de seguida e mostram a forte dependênciado ângulo de comando colectivo
Z0 = −s1a0[1
3θ0 +
1
2(µz − λ0)] (2.6)
N0 = −s2a0[1
3(µz − λ0)θ0 +
1
2(µz − λ0)
2] +1
4s2θ0
onde s1,s2 e a0 são constantes.A equação mais simples, para as componentes laterais e longitudinais da força, que
corresponde a considerar apenas alguns termos de 2.4, apresenta-se de seguida (ver [1])[Xmr
Ymr
]= nb
bfZ0
[β1c
−β1s
](2.7)
Pode-se agora analisar a influência das actuações no comportamento do helicóptero.O aumento do comando θ0 leva a um aumento do ângulo β0 (equação 2.3), levando
ao aumento da força vertical de propulsão (equação 2.6). O efeito do aumento de β0
2.3. FORÇAS E MOMENTOS GERADOS POR UM HELICÓPTERO 11
corresponde visualmente a estreitar o cone formado pelas pás. O efeito do aumento doângulo de pitch colectivo é idêntico ao de um avião que também aumenta o ângulo depitch dos comandos das asas para aumentar a altitude, gerando uma força vertical.
O ângulo de comando θ1c influência o ângulo β1s (equação 2.3), produzindo assimuma força lateral hwYmr segundo hwy (equação 2.7). Repare-se que visualmente o efeitode alterar o ângulo β1s corresponde a inclinar lateralmente o disco formado pelo rotor,uma vez que β1s sin(ψ) toma os valores máximos e mínimos quando a pá está alinhadacom os eixos by e −by.
Finalmente o ângulo de comando θ1s influência o ângulo β1c (equação 2.3), pro-duzindo assim uma força longitudinal hwXmr segundo hwx (equação 2.7). Visualmenteo efeito de alterar o ângulo β1c corresponde a inclinar longitudinalmente o disco for-mado pelo rotor, já que β1c cos(ψ) toma os valores máximos e mínimos quando a pá estáalinhada com os eixos −bx e bx.
2.3.2 Rotor de cauda
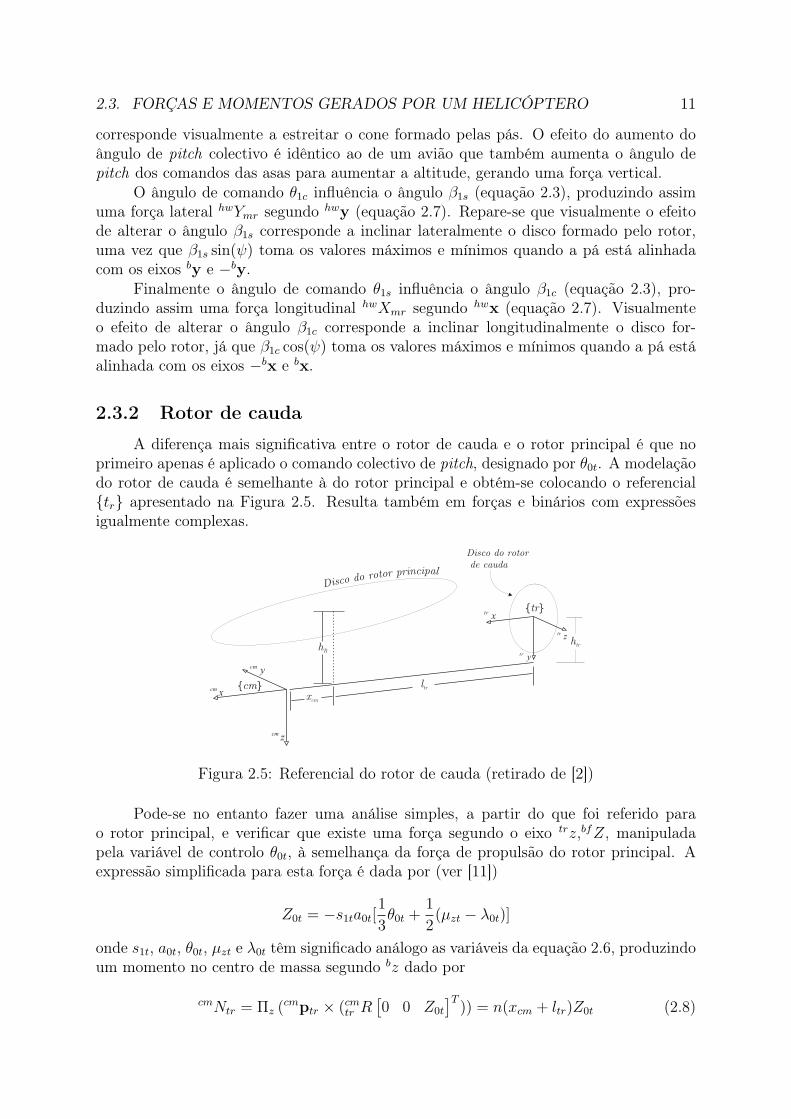
A diferença mais significativa entre o rotor de cauda e o rotor principal é que noprimeiro apenas é aplicado o comando colectivo de pitch, designado por θ0t. A modelaçãodo rotor de cauda é semelhante à do rotor principal e obtém-se colocando o referencialtr apresentado na Figura 2.5. Resulta também em forças e binários com expressõesigualmente complexas.
Figura 2.5: Referencial do rotor de cauda (retirado de [2])
Pode-se no entanto fazer uma análise simples, a partir do que foi referido parao rotor principal, e verificar que existe uma força segundo o eixo trz,bfZ, manipuladapela variável de controlo θ0t, à semelhança da força de propulsão do rotor principal. Aexpressão simplificada para esta força é dada por (ver [11])
Z0t = −s1ta0t[1
3θ0t +
1
2(µzt − λ0t)]
onde s1t, a0t, θ0t, µzt e λ0t têm significado análogo as variáveis da equação 2.6, produzindoum momento no centro de massa segundo bz dado por
cmNtr = Πz (cmptr × (cmtr R
[0 0 Z0t
]T)) = n(xcm + ltr)Z0t (2.8)

12 CAPÍTULO 2. MODELO DO HELICÓPTERO
que contraria o momento segundo bz, que corresponde a Nmr referido anteriormente(equação 2.7).
2.3.3 Modelo para controlo
Para efeitos de controlo linear o modelo apresentado é linearizado em torno depontos de equilíbrio. Impondo as condições de equilíbrio v = 0 e w = 0 para as equaçõesda dinâmica 2.1 e definindo o estado e actuações de equilíbrio xc =
[vc ωc λc
]′, uc
obtém-se
0 = −ωc × vc + 1
mfext(vc,ωc,uc) + fg(φc, θc) = f(vc,ωc, φc, θc,uc)
0 = −I−1(ωc × Iωc) + I−1next(vc,ωc,uc) = n(vc, ωc,uc)(2.9)
Como é possível constatar em [12] as trajectórias1 de equilíbrio de um veículoautónomo 2.1 são hélices ou rectas parametrizadas pelas variáveis flight path angle γc,yaw rate ψc e velocidade linear Vc =‖ vc ‖, para além das posições e orientações iniciais.O caminho pode ser assim parametrizado em função do tempo da seguinte forma
λc =
φc
θc
ψc0
+
00
ψc
,pc =
p0x
p0y
p0z
+
Vc
ψccos(γc) sin(ψct + ψ0)
− Vc
ψccos(γc) cos(ψct + ψ0)
−Vc sin(γc)t
(2.10)
Isto significa que para qualquer veículo autónomo impondo comandos constantesu = 0, bem como vb = 0, ωb = 0, ou seja, next(vb, ωb, u) = const e fext(vb, ωb,u) = constos caminhos de equilíbrio que resultam são hélices (com eixo alinhado com o vectorgravidade) ou rectas. Dado que para efeitos de controlo linear as equações da dinâmicasão linearizadas em torno de um dado caminho de equilíbrio, justifica-se assim porque éque as técnicas de seguimento apresentadas têm como principal aplicação o seguimentode caminhos que resultam da concatenação destes dois tipos de curvas.
Relativamente aos próximos capítulos, o helicóptero é considerado como um sis-tema não linear e variante no tempo que para uma dada trajectória de equilíbrio (a quecorrespondem as variáveis vc, ωc, uc de equilíbrio) tem uma linearização invariante notempo, sumarizada pelas matrizes A e B definidas em baixo. Dada a intratabilidade dasexpressões analíticas do modelo não linear, tanto as soluções de equilíbrio vc, ωc e uc de2.9 como as matrizes A e B das linearizações, que são funções de vc, ωc, uc, são obtidasnumericamente. Utiliza-se a notação ∂u
∂v
∣∣cpara designar que as derivadas parciais são
avaliadas em equilíbrio.
A =
∂f∂vb
∣∣∣c
∂f∂ωb
∣∣∣c
∂n∂vb
∣∣∣c
∂n∂ωb
∣∣∣c
B =
[∂f∂u
∣∣c
∂n∂u
∣∣c
]
[δvb
δωb
]= A
[δvb
δwb
]+ Bδu (2.11)
1Repare-se que apesar de se pretender seguimento de caminhos e não de trajectórias, quando se impõeuma velocidade constante para percorrer o caminho este pode ser parametrizado pelo tempo. Desta formaao referir caminhos de equilíbrio caracterizados por velocidade constante utilizar-se-á indiferentemente adesignação caminho ou trajectória
Capítulo 3
Espaço de Erro
O problema de seguimento pode ser formulado como um problema de controlo. Adefinição do espaço ou vector de erro, dependente tanto da dinâmica do veículo como docaminho, permite estabelecer a ponte entre estes dois problemas. Como será demonstradoo veículo segue o caminho com orientação e velocidades desejadas se e só se o vector deerro for nulo.
Aborda-se de seguida a definição e descrição do espaço de erro. São definidosos referenciais de trabalho e os vectores necessários para introduzir o vector de erro.Apresenta-se a dinâmica deste vector de erro que posteriormente é linearizada. Comoserá visto a linearização para trajectórias de equilíbrio é invariante no tempo e como tal adescrição obtida (após a linearização) é adequada à técnica de controlo linear empregue.Em particular, o controlador a sintetizar tem como objectivo levar para zero o vector deerro definido. É também abordado o problema da parametrização da dinâmica do erro eda discretização do modelo linear contínuo.
3.1 Referenciais de trabalho
Para além do referencial B mencionado nos capítulos anteriores introduz-se doisnovos referenciais (que estão representados na Figura 3.1):
• referencial tangente: T. Este referencial é tangente ao caminho de referência etem origem no ponto do caminho mais próximo do veículo.
• referencial C que tem a mesma origem que T mas tem a orientação desejadapara o veículo.
O referencial T é semelhante ao conhecido referencial de Serret-Frenet. Ambostêm o versor x tangente à trajectória de referência, mas ao contrário do referencial deSerret-Frenet o sentido do versor ty do referencial T é independente da orientação docaminho. As propriedades deste referencial bem como as suas vantagens relativamenteao referencial de Serret-Frenet são apresentadas no Anexo B.
A introdução do referencial C permite especificar qual a orientação que o veículodeve ter ao seguir a trajectória e, assim sendo, este referencial coincide com o referencialB quando o veículo segue o caminho com a orientação desejada.
13

14 CAPÍTULO 3. ESPAÇO DE ERRO
tx
tz
ty
pt
pb
U
B
C
d
1
Figura 3.1: Referenciais usados na definição de erro
De seguida apresentam-se as relações entre as velocidades linear e angular do refer-encial tangente T e as variáveis do veículo.
Seja d o vector erro de posição expresso no mundo, definido pela diferença entrea posição actual do veículo e a posição pretendida no caminho (ponto mais próximo doveículo no caminho, que é a origem do referencial T)
d = upb − upt
Este erro de posição expresso no referencial T tem componente segundo tx nula,facto também expresso na Figura 3.1
tuRd = t
uR (upb − upt) =
[0dt
]=
0dydz
(3.1)
O facto deste referencial tangente seguir o veículo leva a que este contenha infor-mação da posição e velocidade do mesmo. Tendo em conta que a velocidade do referencialT é dada por t(uvt) = vt =
[Vt 0 0
]T (a velocidade é tangente ao caminho e como taltem apenas componente segundo tx), pode-se obter, derivando a expressão 3.1, a seguinterelação 1
[0
dt
]= ˙t
uR (upb − upt) + tuR (upb − upt) = −S(ωt)
[0dt
]+ t
uRub Rvb − t
uRut Rvt
= −S(Vt
τ0k
)
[0dt
]+ t
bRvb −
Vt
00
= −Vt
−k dy−τ dzτ dy
+ t
bRvb −
Vt
00
(3.2)
onde se utilizou a relação ωt = Vt
[τ 0 κ
]T derivada no Anexo B onde também se podeencontrar as definições de curvatura κ e torção τ . A partir da primeira linha de 3.2obtém-se
Vt =1
1− k dy
[1 0 0
]tbRvb
1Para algumas das relações matemáticas utilizadas consultar o Anexo A

3.2. DESCRIÇÃO DO ESPAÇO DE ERRO 15
Podendo-se assim também expressar ωt em função de vb
ωt = Vt
τ0k
=
1
1− k dy
τ0k
[
1 0 0]
tbRvb
3.2 Descrição do espaço de erro
As trajectórias de equilíbrio são percorridas com velocidades linear e angular con-stantes, designadas respectivamente por vr(com módulo Vr) e ωr e denominadas de refer-ência. Estas velocidade definem-se no referencial T da seguinte forma
vr = Vr
100
=
Vr
Vt
vt ωr =Vr
Vt
ωt (3.3)
Para além das velocidades pretende-se também especificar a orientação que o veículodeve ter ao seguir o caminho. Isto é conseguido, como foi mencionado anteriormente,através do referencial C e da definição de λc, que especifica a orientação pretendidapara o veículo, e de tωc que especifica a velocidade angular do referencial C em relaçãoao referencial tangente.
Com as variáveis introduzidas, que permitem especificar os vários parâmetros dereferência relacionados com a forma com que se pretende que o veículo siga o caminho,e tendo em conta o trabalho apresentado em [2] (que se baseia em [13]) apresenta-se ovector de erro
xe
x1
x2
=
ve
ωe
dt
λe
x1
x2
=
vb − btRvr
ωb − btR (ωr + tωc)
ΠyztuR (upb − upc)λb − λc∫
(ve + btR [0 d′t]
′)dt∫ψe dt
(3.4)
Note-se que as velocidades de referência são rodadas para o referencial do corpo e a-ssim as componente ve e ωe, que representam os erros das velocidades, estão representadasno referencial do corpo.
O erro de orientação é representado por λe cujos ângulos de Euler respectivos estãodefinidos em relação ao referencial do mundo.
Como já foi referido dt representa o erro de posição entre o veículo e a posiçãopretendida, referenciado em T.
Os dois estados integrais, x1 e x2, permitem seguimento das referências para vb e ψb
com erro estático nulo. O utilização de integradores é um método utilizado em controlopara obter seguimento de referências com erro estático nulo (ver [15]).
O método adoptado para seguir caminhos consiste em determinar um controladorque leve o vector de erro para zero. Se tal suceder, então o veículo segue o caminho comvelocidades e orientação pretendida. Este resultado resume-se no seguinte lema, que podeser encontrado em [13].

16 CAPÍTULO 3. ESPAÇO DE ERRO
Lema 1 Considere-se um veículo com o estado dado por xb = [p′b λ′b v′b ω′b]′ ∈ R12 e
um caminho de referência. Para o vector de erro xe definido por 3.4 tem-se xe = 0 see só se o veículo seguir o caminho de referência com velocidade linear |vb| = Vt = Vr,velocidade angular relativa tωb =t ωc e orientação λb = λc.
Dem: Se dt = 0, de acordo com a sua definição, o veículo segue o caminho sem erro deposição.
Se ve = 0 tem-se
ve = 0 ⇔ vb − btRvr = 0 ⇔ t
bRvb = vr ⇔ tvb = vr (3.5)
Utilizando a equação 3.2 e 3.5 e a condição dt = 0 tem-se
Vt =1
1− k dy
[1 0 0
]tbRvb =
[1 0 0
]Vr
100
= Vr (3.6)
Dado que |vb| = |vr| = Vr pode-se então concluir que |vb| = Vr = Vt
Se ωe = 0 tem-se
ωe = 0 ⇔ ωb − btR(ωr + tωc) = 0 ⇔ ωb = b
tR(ωr + tωc) (3.7)
Utilizando as propriedades de transformações de vectores entre referenciais (relaçõesdescritas no Anexo A), a velocidade angular pode também ser expressa por
ωb = buR
uωb = buR(uωt + u
t Rtωb) = b
tRtuR
uωt + btR
tωb = btR(ωt + tωb) (3.8)
Utilizando a relação 3.3 pode-se concluir que se Vt = Vr então ωt = ωr. Logo arelação 3.7 pode ser escrita como ωb = b
tR(ωt + tωc) que comparando com 3.8 permiteconcluir
tωb =t ωc
Se λe = 0 pode-se concluirλb = λc
e o veículo segue o caminho com a orientação desejada.Mostra-se assim que se xe = 0 então o veículo segue o caminho com velocidade
e orientação pretendida. De forma análoga também se pode mostrar que se o veículosegue o caminho com velocidade |vb| = Vt = Vr, velocidade angular relativa tωb = tωc eorientação λb = λc então xe = 0. ¤
3.3 Aspectos relevantes sobre o espaço de erroO vector de erro apresentado em 3.4 contém apenas dois estados integrais x1 e x2,
nos quais existem somente quatro integrações. A estratégia de utilização de integradorespermite apenas obter seguimento da referência com erro estático nulo para um númerode variáveis inferior ou igual ao número de actuadores.
Para um helicóptero que se desloque, como pretendido, paralelamente ao solo (ouseja, com o eixo bz paralelo ao eixo uz e portanto com φb = 0 e θb = 0), a introdução

3.4. DINÂMICA E LINEARIZAÇÃO DO VECTOR DE ERRO 17
do estado integral x2 permite que o ângulo de Euler ψb seja o desejado ψc. Consegue-seassim realizar, por exemplo, um caminho que consista numa recta orientado para a frenteou uma hélice orientado para o seu interior, se assim se desejar. Esta situação encontra-seilustrada na Figura 3.2 onde se pode observar o veículo em equilíbrio e paralelo ao soloem dois dos caminhos possíveis, tendo no segundo uma dada orientação segundo z emrelação ao caminho.
c tx x
ty
tx
c ty y
cy
cx
ψc − ψt
1
Figura 3.2: Possíveis trajectórias pela introdução de x2 no espaço de erro
O estado integral x1 é introduzido para evitar que se tenha erro de velocidade nulo eerro de posição diferente de zero, ou seja, que o helicóptero siga o caminho paralelamentea este (com erro de posição diferente de zero). Este estado integral tem como ideia baseo facto de ter em conta tanto o erro de velocidade como o erro de posição. Devido àortogonalidade entre vt =
[Vr 0 0
]T e[0 dt
]T a introdução do estado x1 impõe queos erros de posição e de velocidade sejam ambos nulos.
Tal como se referiu anteriormente os caminhos a considerar são a concatenação detrajectórias de equilíbrio. Para este tipo de trajectórias tem-se tωc = 0, pois a orientaçãodo referencial B em equilíbrio em relação ao caminho tem de ser constante, e como tala relação da velocidade angular do espaço de erro pode ser simplificada para
ωe = ωb − btRωr
3.4 Dinâmica e linearização do vector de erroApresenta-se de seguida a derivada temporal do vector de erro introduzido (ex-
pressão 3.4)
ve
ωe
dt
λe
x1
x2
=
vb + S(ωb)(vb − ve)− btR
[0 Vr k Vt 0
]T
ωb + S(ωe)btR ωr
11−k dy
[τ dz 1− k dy 0τ dy 0 1− k dy
]tbRvb
λb − sign(κ)Vr
√τ 2 + κ2
ve + btR [0 d′t]
′
ψe
(3.9)
Os cálculos auxiliares que permitem chegar as expressões apresentadas fazem partedo Anexo C. Estes cálculos são adaptações das derivações realizadas pelos autores de [13]e [14], cujo resultado pode aí ser consultado.

18 CAPÍTULO 3. ESPAÇO DE ERRO
As técnicas de controlo a aplicar são técnicas de controlo linear e como tal énecessário linearizar a dinâmica do erro. Para tal utiliza-se uma aproximação de Taylorem torno do ponto de equilíbrio definido por xe = 0 e u = uc (actuação em equilíbrio).
O modelo linear em torno do ponto de equilíbrio é dado por
δxe = Fδxe + Gδu (3.10)[δx1
δx2
]= Hδxe (3.11)
F =
∂ve
∂ve|c ∂ve
∂ωe|c ∂ve
∂dt|c ∂ve
∂λe|c
∂ωe
∂ve|c ∂ωe
∂ωe|c ∂we
∂dt|c ∂ωe
∂λe|c
∂dt
∂ve|c 0 ∂dt
∂dt|c 0
∂λe
∂ve|c ∂λe
∂ωe|c ∂λe
∂dt|c ∂λe
∂λe|c
, G =
(∂f/∂u)|c(∂n/∂u)|c
00
, H =
[∂xi
∂ve|c 0 ∂xi
∂dt|c ∂xi
∂λe|c](3.12)
As expressões para as derivadas em ordem ao estado são apresentadas no Anexo C,onde se pode observar que a linearização obtida é invariante no tempo.
3.5 DiscretizaçãoDado que se pretende aplicar técnicas de controlo discreto é necessário discretizar
o modelo linear obtido. Para tal utiliza-se a discretização por escalão invariante. Adiscretização das equações correspondentes a xe, 3.10, para um período de amostragemts, pode ser expressa por
xe(k + 1) = Ae xe(k) + Be u(k) (3.13)
onde Ae = eF ts e Be = (∫ ts
0eF (ts−τ)d τ) G.
Como foi referido as variáveis x1 e x2 são introduzidas como a integração de algunsestados de xe com o objectivo de levar estes estados para zero (e consequentemente obterseguimento de referência para algumas variáveis de interesse vb e ψb). No caso discreto,o operador integração pode ser escrito na forma.
caso contínuo xi(t) = τu(t)
caso discreto xi(k + 1) = xi(k) + tsτu(k) t = kts
que corresponde à discretização por escalão invariante. Aplicando a discretização àsequações para a linearização de x1, x2, 3.10, obtém-se
[x1(k + 1)x2(k + 1)
]= Ai
xe(k)x1(k)x2(k)
(3.14)
em que Ai =
[tsH
[I 00 1
]].
Agrupando as equações, 3.14 e 3.13, obtém-sexe(k + 1)x1(k + 1)x2(k + 1)
= xe(k + 1) = A xe(k) + B u(k) (3.15)
3.6. PARAMETRIZAÇÃO DO ESPAÇO DE ERRO 19
onde A =
[Ae 0tsH I
]e B =
[Be
0
].
Refere-se ainda que seria diferente aplicar a discretização à linearização do sistemaaumentado
[xe x1 x2
]T , ao invés do que foi realizado, ou seja discretizar separadamenteas equações correspondente a xe e x1, x2.
3.6 Parametrização do espaço de erroDevido à técnica de controlo empregue, apresentada adiante, é necessário ter uma
descrição dos parâmetros de que depende a linearização do espaço de erro. Tendo emconta os cálculos para a dinâmica e linearização do espaço de erro apresentados no AnexoC, verifica-se que a linearização do espaço de erro depende dos seguintes parâmetros: k,τ , Vr, c
tR, ωr, φc, θc e da aceleração da gravidade g.A partir das relações (cuja derivação pode ser consultada no Anexo C)
ωr = Vr
[k 0 τ
]Tψr = Vr
√k2 + τ 2 θt = arctan
−τ
k(3.16)
e tendo em conta que a matriz ctR pode ser expressa através dos ângulos de Euler θt e
ψct = ψc−ψt (facto que se constatará ainda nesta secção), pode-se afirmar que o seguinteconjunto de parâmetros
ξ = Vr, θt, ψct, ψr, θc, φc (3.17)
é suficiente para parametrizar a dinâmica do erro em equilíbrio. Note-se que este vectoré constante para uma dada trajectória de equilíbrio.
Pelo facto de o helicóptero possuir quatro actuadores é possível fixar quatro destesparâmetros (graus de liberdade). Assume-se que o helicóptero se desloca nestas trajec-tórias de equilíbrio paralelamente ao solo, e que portanto os ângulos θc e ψc são aproxi-madamente zero (a validade desta aproximação será discutida na próxima secção)2. Destaforma os parâmetros que caracterizam uma trajectória de equilíbrio são
Vr, θt, ψct, ψr (3.18)
Os parâmetros Vr e θt permitem realizar trajectórias a diferentes velocidades, oparâmetro ψct permite orientar o veículo segundo z em relação à trajectória e o parâmetroψr permite realizar trajectórias em hélice.
Os parâmetros considerados podem, em equilíbrio, ser expressos por variáveis doveículo. Considere-se então que o veículo se encontra a seguir uma trajectória de equilíbriocomo apresentado na Figura 3.3. O seu vector de velocidade terá que ser tangente àtrajectória. Em equilíbrio pode-se exprimir o vector vb no referencial B, que coincidecom C, como
vb = cvt = ctR
Vt
00
= (u
c R)T ut R
Vt
00
= Rx(φc)
T Ry(θc)T Rz(ψc)
T Rz(ψt)Ry(θt)Rx(φt)
Vt
00
(3.19)2O facto de para caminhos de equilíbrio apenas se poder restringir quatro parâmetros justifica que
para o método ser aplicável se assuma que a orientação é tal que o veículo se desloca paralelamente aosolo

20 CAPÍTULO 3. ESPAÇO DE ERRO
Figura 3.3: Expressão do vector velocidade em termos de dois ângulos
Em equilíbrio, assumindo que φb = 0, θb = 0 e φt = 0 e tendo em conta queψct = ψc − ψt tem-se
uc
vc
wc
= Rz(ψct)
T Ry(θt)
Vt
00
=
cos(ψct) sin(ψct) 0− sin(ψct) cos(ψct) 0
0 0 1
cos(θt) 0 sin(θt)0 1 0
− sin(θt) 0 cos(θt)
Vt
00
(3.20)
e portanto a rotação do vector velocidade para o corpo depende apenas de duas rotações,assumindo que o veículo se encontra numa posição paralela ao solo, como se pode observarna Figura 3.3.
A partir de 3.20 tem-se ainda
uc
vc
wc
=
cos(ψct) cos(θt)− sin(ψct) cos(θt)
− sin(θt)
Vt (3.21)
de onde se tira que
θt = arctan
(sin θt
cos θt
)= arctan
(−wc√u2
c + v2c
)(3.22)
ψct = arctan
(−vc
uc
)(3.23)
Em equilíbrio também se verifica
Vr = Vt = ‖vb‖ =√
u2c + v2
c + w2c (3.24)
eψr = ψc =
[0 0 1
]Q(φc, θc) ωc (3.25)
onde se utilizou a expressão λ = Q(φ, θ) w. Assumindo φc = 0 e θc = 0 o que implica queQ(φc, θc) = I, obtém-se
ψr = rc (3.26)
3.7. VALIDADE DA APROXIMAÇÃO φC = 0, θC = 0 21
3.7 Validade da aproximação φc = 0, θc = 0
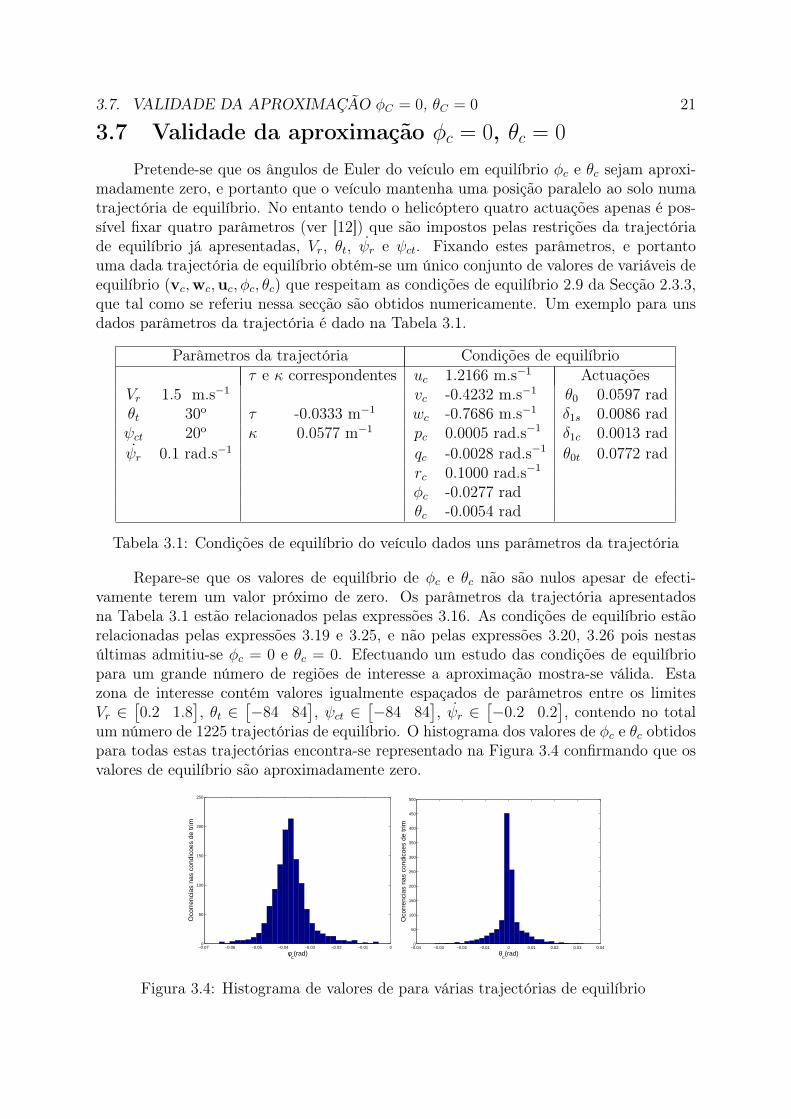
Pretende-se que os ângulos de Euler do veículo em equilíbrio φc e θc sejam aproxi-madamente zero, e portanto que o veículo mantenha uma posição paralelo ao solo numatrajectória de equilíbrio. No entanto tendo o helicóptero quatro actuações apenas é pos-sível fixar quatro parâmetros (ver [12]) que são impostos pelas restrições da trajectóriade equilíbrio já apresentadas, Vr, θt, ψr e ψct. Fixando estes parâmetros, e portantouma dada trajectória de equilíbrio obtém-se um único conjunto de valores de variáveis deequilíbrio (vc,wc,uc, φc, θc) que respeitam as condições de equilíbrio 2.9 da Secção 2.3.3,que tal como se referiu nessa secção são obtidos numericamente. Um exemplo para unsdados parâmetros da trajectória é dado na Tabela 3.1.
Parâmetros da trajectória Condições de equilíbrioτ e κ correspondentes uc 1.2166 m.s−1 Actuações
Vr 1.5 m.s−1 vc -0.4232 m.s−1 θ0 0.0597 radθt 30o τ -0.0333 m−1 wc -0.7686 m.s−1 δ1s 0.0086 radψct 20o κ 0.0577 m−1 pc 0.0005 rad.s−1 δ1c 0.0013 radψr 0.1 rad.s−1 qc -0.0028 rad.s−1 θ0t 0.0772 rad
rc 0.1000 rad.s−1
φc -0.0277 radθc -0.0054 rad
Tabela 3.1: Condições de equilíbrio do veículo dados uns parâmetros da trajectória
Repare-se que os valores de equilíbrio de φc e θc não são nulos apesar de efecti-vamente terem um valor próximo de zero. Os parâmetros da trajectória apresentadosna Tabela 3.1 estão relacionados pelas expressões 3.16. As condições de equilíbrio estãorelacionadas pelas expressões 3.19 e 3.25, e não pelas expressões 3.20, 3.26 pois nestasúltimas admitiu-se φc = 0 e θc = 0. Efectuando um estudo das condições de equilíbriopara um grande número de regiões de interesse a aproximação mostra-se válida. Estazona de interesse contém valores igualmente espaçados de parâmetros entre os limitesVr ∈
[0.2 1.8
], θt ∈
[−84 84], ψct ∈
[−84 84], ψr ∈
[−0.2 0.2], contendo no total
um número de 1225 trajectórias de equilíbrio. O histograma dos valores de φc e θc obtidospara todas estas trajectórias encontra-se representado na Figura 3.4 confirmando que osvalores de equilíbrio são aproximadamente zero.
−0.07 −0.06 −0.05 −0.04 −0.03 −0.02 −0.01 00
50
100
150
200
250
φc(rad)
Oco
rren
cias
nas
con
dico
es d
e tr
im
−0.04 −0.03 −0.02 −0.01 0 0.01 0.02 0.03 0.040
50
100
150
200
250
300
350
400
450
500
θc(rad)
Oco
rren
cias
nas
con
dico
es d
e tr
im
Figura 3.4: Histograma de valores de para várias trajectórias de equilíbrio
Capítulo 4
Metodologia de controlo utilizandoLPVs
Este capítulo tem como objectivo apresentar a metodologia de controlo utilizada.Esta faz uso da formulação de LPVs (Linear Parametrically Varying Systems), que temcomo caso particular o estudo de sistemas cujo modelo varia de forma afim com umconjunto de parâmetros. Dado que as linearizações do espaço de erro não variam deforma afim nos parâmetros de que dependem, é realizada e discutida uma aproximaçãopor mínimos quadrados a um sistema que dependa de forma afim dos mesmos. Para ossistemas do tipo LPVs existem vários resultados com base na teoria das DesigualdadesMatriciais Lineares (LMIs-Linear Matrix Inequalities). São também utilizadas técnicasde controlo de ganhos comutados. Estas técnicas são introduzidas de seguida.
4.1 Descrição da metodologia de controloComo foi mencionado na capítulo anterior, para uma dada trajectória de equilíbrio,
a linearização da dinâmica do espaço de erro é invariante no tempo o que permite autilização de técnicas de controlo linear. Cada trajectória de equilíbrio corresponde a umconjunto de variáveis do veículo em equilíbrio.
Definem-se as seguintes variáveis
V =√
u2 + v2 + w2
η = arctan(−w√
u2 + w2)
ρ = arctan(−v
u)
ψb = rb (4.1)
que de acordo com as expressões 3.24 3.22, 3.23, e 3.26 do capítulo anterior são respec-tivamente iguais às variáveis (Vr, θt, ψct, ψr) quando o veículo se encontra em equilíbrio,assumindo que φc = 0 e θc = 0.
Pretende-se desenhar um controlador para o espaço de variáveis de parametrização(V , η, ρ, ψb). Utiliza-se normalmente a nomenclatura flight envelope, para designar oconjunto do espaço das variáveis escolhido de que depende a dinâmica do veículo e emque este opera.
22
4.1. DESCRIÇÃO DA METODOLOGIA DE CONTROLO 23
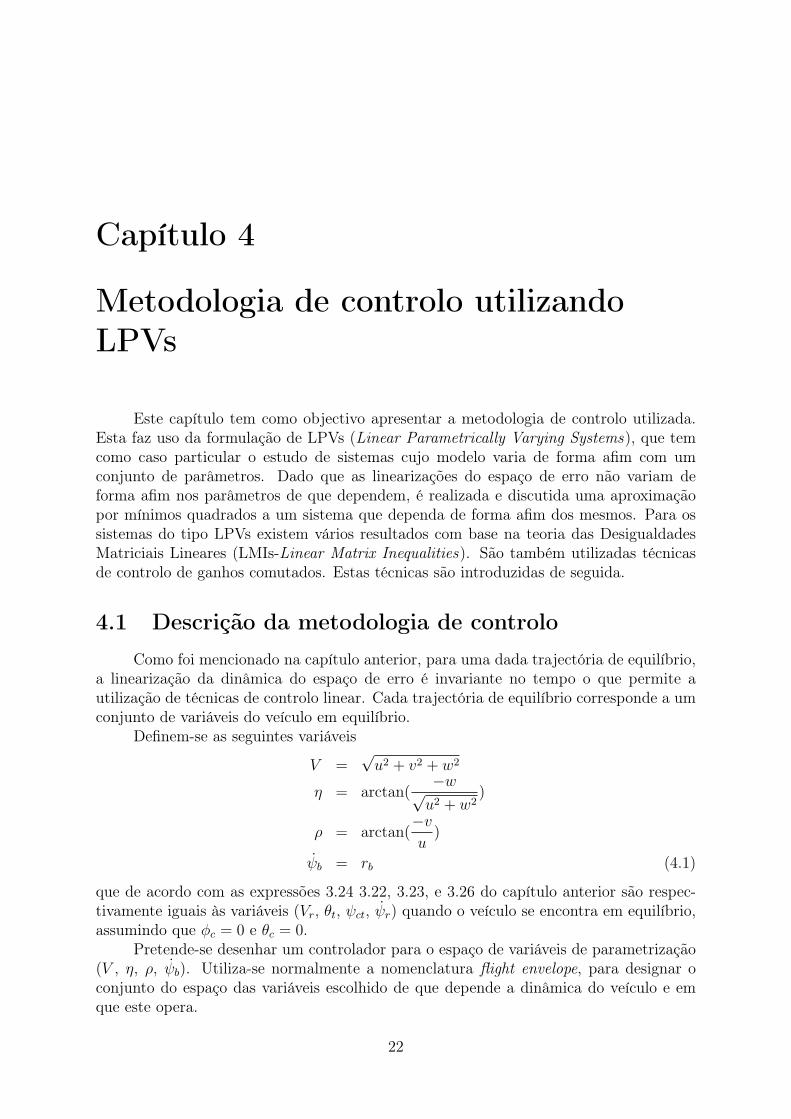
Se por um lado é impraticável desenhar um controlador para cada conjunto possívelde variáveis do veículo que correspondem a variáveis de caminhos de equilíbrio, por outronão é possível sintetizar um controlador capaz de estabilizar o veículo em todo o flightenvelope dado que a dinâmica do espaço de erro (que também depende da dinâmica doveículo) varia consideravelmente. O flight envelope é então dividido num conjunto departições em que cada uma define uma dada zona de funcionamento. Estas zonas sãocaracterizadas por um dado intervalo para cada variável de parametrização. É entãosintetizado um controlador para cada uma destas partições sendo utilizada a teoria dosganhos comutados para controlar o veículo em todo o flight envelope. Esta situação éilustrada na Figura 4.1 considerando uma possível concatenação de caminhos, L e J , eem que o espaço de parâmetros é ilustrado como sendo constituído por dois parâmetros P1
e P2. A cada uma das zonas assinaladas está associado um controlador, e a cada ponto doespaço de parâmetros (P1 , P2) está associado um conjunto de variáveis de parametrizaçãode equilíbrio do veículo. A este ponto do espaço de parâmetros está também associadaum único caminho de equilíbrio. Partindo de uma situação de equilíbrio na trajectória Las variáveis de parametrização variam continuamente até atingir uma nova situação deequilíbrio, correspondente à trajectória J
Figura 4.1: Exemplo ilustrativo da metodologia de controlo
Repare-se que o controlador utilizado depende dos parâmetros relativos às variáveisdo veículo e não dos parâmetros da trajectória. Garante-se assim suavidade na comu-tação entre trajectórias sendo que os valores das variáveis do veículo percorrem o espaçode parâmetros continuamente utilizando-se um controlador adequado para o estado doveículo. Considerar os parâmetros da trajectória para efectuar tal transição seria para oexemplo da Figura 4.1 comutar entre o controlador da partição correspondente ao cam-inho L para o controlador da partição correspondente ao caminho J , embora o controladorda partição L pudesse não estabilizar sequer o veículo para o estado correspondente aosparâmetros da partição J .
A síntese do controlador para cada uma das zonas de funcionamento faz uso dosresultados para sistemas que variam de forma afim nos parâmetros. Dado que o sistemaem causa, cujo estado é constituído pelo espaço de erro que depende dos parâmetrosjá referidos mas não de uma forma afim, é realizada uma aproximação por mínimosquadrados, que se discute de seguida.
24 CAPÍTULO 4. METODOLOGIA DE CONTROLO UTILIZANDO LPVS
4.2 Aproximação do espaço de erro
O espaço de parâmetros, constituído pelas variáveis (V, η, ρ, ψb) que em equilíbriocorrespondem às variáveis (Vr, θt, ψct, ψr), é particionado com os intervalos de valores paracada parâmetro indicados na Tabela 4.1.
Parâmetros Intervalos escolhidos NúmeroV [0 1] [0.9 1.9] 2η [-90 -60] [-65 -35] [-40 -10] [-15 15] [10 40] [35 65] [60 90] 7ρ [-90 -60] [-65 -35] [-40 -10] [-15 15] [10 40] [35 65] [60 90] 7ψb [-0.2 0.2] 1
Tabela 4.1: Definição das partições
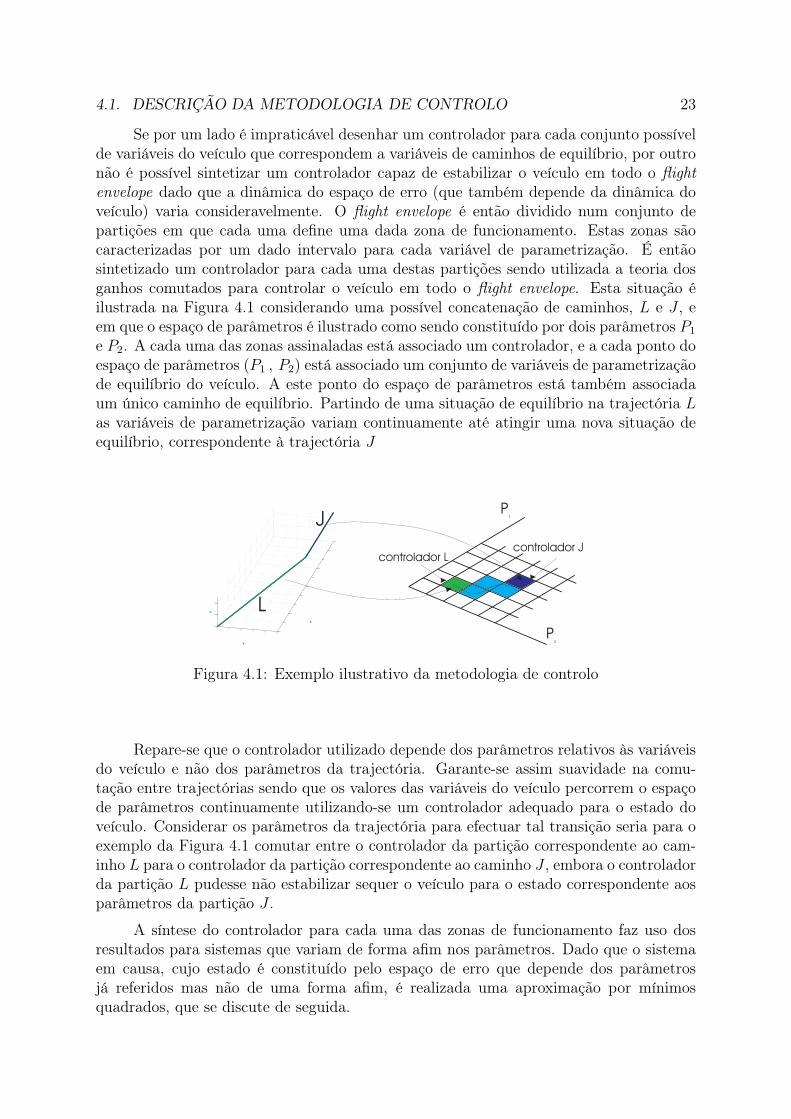
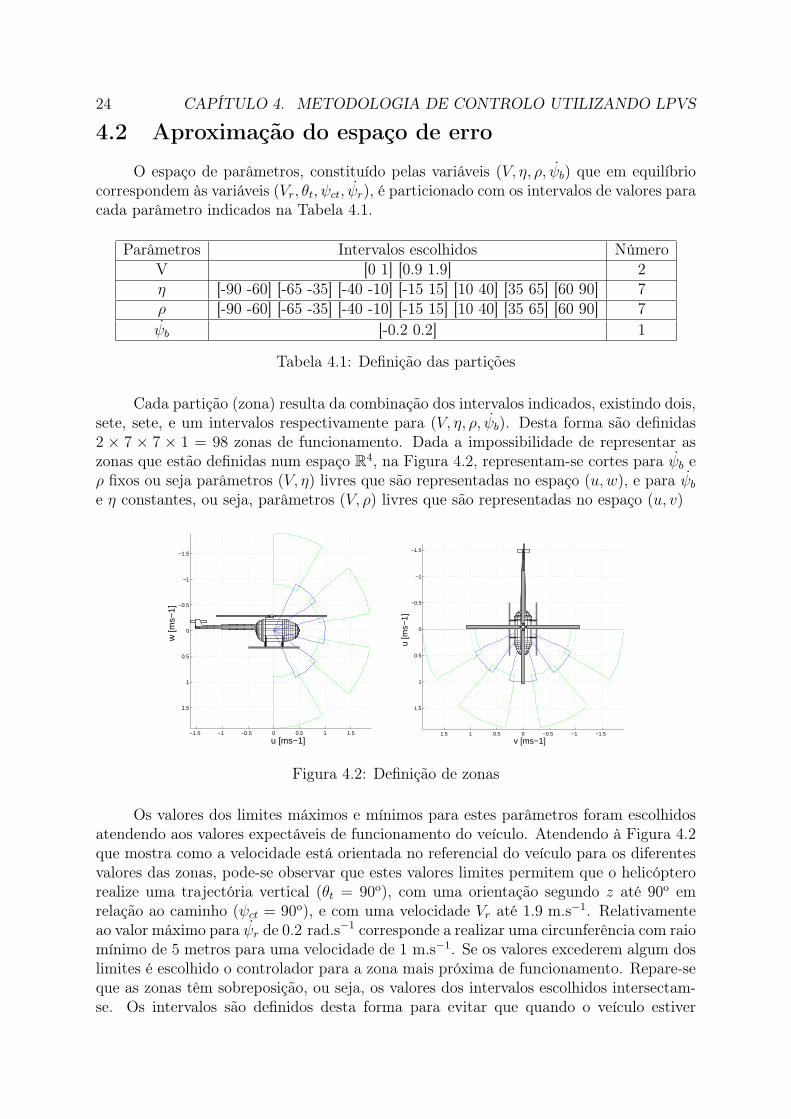
Cada partição (zona) resulta da combinação dos intervalos indicados, existindo dois,sete, sete, e um intervalos respectivamente para (V, η, ρ, ψb). Desta forma são definidas2 × 7 × 7 × 1 = 98 zonas de funcionamento. Dada a impossibilidade de representar aszonas que estão definidas num espaço R4, na Figura 4.2, representam-se cortes para ψb eρ fixos ou seja parâmetros (V, η) livres que são representadas no espaço (u,w), e para ψb
e η constantes, ou seja, parâmetros (V, ρ) livres que são representadas no espaço (u, v)
−1.5 −1 −0.5 0 0.5 1 1.5
−1.5
−1
−0.5
0
0.5
1
1.5
u [ms−1]
w [m
s−1]
−1.5
−1
−0.5
0
0.5
1
1.5
−1.5−1−0.500.511.5
v [ms−1]
u [m
s−1]
Figura 4.2: Definição de zonas
Os valores dos limites máximos e mínimos para estes parâmetros foram escolhidosatendendo aos valores expectáveis de funcionamento do veículo. Atendendo à Figura 4.2que mostra como a velocidade está orientada no referencial do veículo para os diferentesvalores das zonas, pode-se observar que estes valores limites permitem que o helicópterorealize uma trajectória vertical (θt = 90o), com uma orientação segundo z até 90o emrelação ao caminho (ψct = 90o), e com uma velocidade Vr até 1.9 m.s−1. Relativamenteao valor máximo para ψr de 0.2 rad.s−1 corresponde a realizar uma circunferência com raiomínimo de 5 metros para uma velocidade de 1 m.s−1. Se os valores excederem algum doslimites é escolhido o controlador para a zona mais próxima de funcionamento. Repare-seque as zonas têm sobreposição, ou seja, os valores dos intervalos escolhidos intersectam-se. Os intervalos são definidos desta forma para evitar que quando o veículo estiver
4.2. APROXIMAÇÃO DO ESPAÇO DE ERRO 25
com parâmetros próximos dos limites de definição das zonas, não existam comutaçõessucessivas entre as zonas (histerese na comutação).
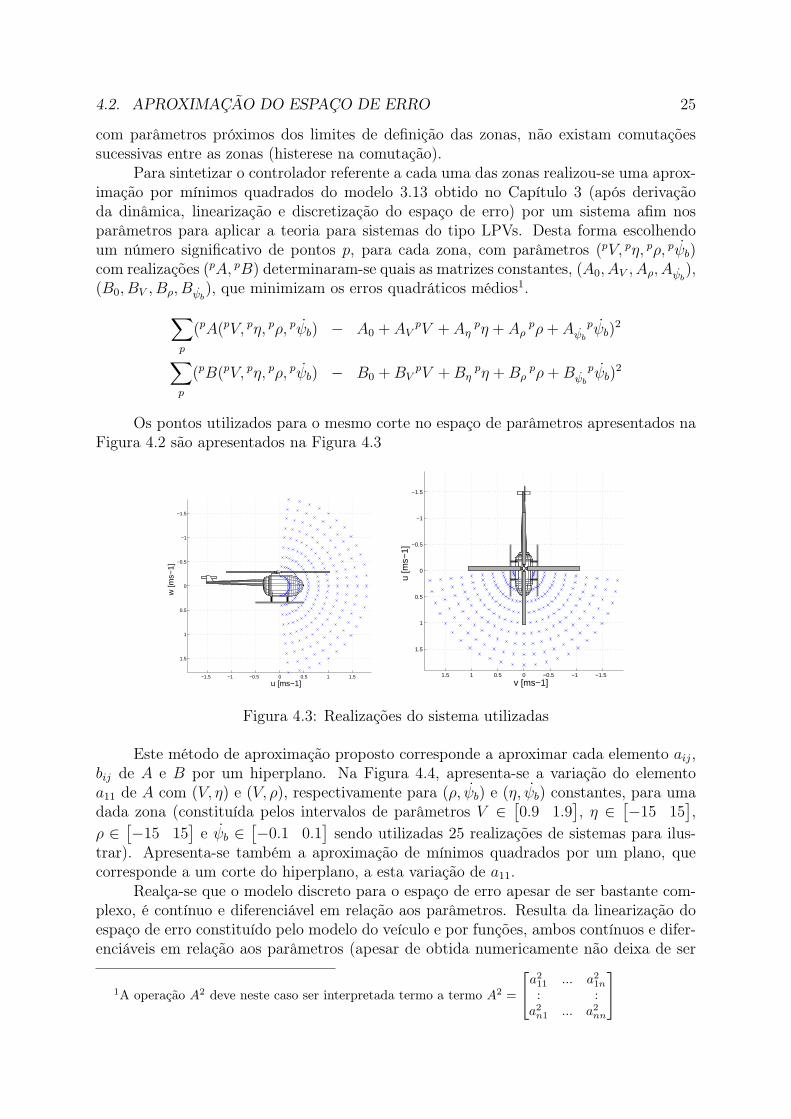
Para sintetizar o controlador referente a cada uma das zonas realizou-se uma aprox-imação por mínimos quadrados do modelo 3.13 obtido no Capítulo 3 (após derivaçãoda dinâmica, linearização e discretização do espaço de erro) por um sistema afim nosparâmetros para aplicar a teoria para sistemas do tipo LPVs. Desta forma escolhendoum número significativo de pontos p, para cada zona, com parâmetros (pV, pη, pρ, pψb)com realizações (pA, pB) determinaram-se quais as matrizes constantes, (A0, AV , Aρ, Aψb
),(B0, BV , Bρ, Bψb
), que minimizam os erros quadráticos médios1.
∑p
(pA(pV, pη, pρ, pψb) − A0 + AVpV + Aη
pη + Aρpρ + Aψb
pψb)2
∑p
(pB(pV, pη, pρ, pψb) − B0 + BVpV + Bη
pη + Bρpρ + Bψb
pψb)2
Os pontos utilizados para o mesmo corte no espaço de parâmetros apresentados naFigura 4.2 são apresentados na Figura 4.3
−1.5 −1 −0.5 0 0.5 1 1.5
−1.5
−1
−0.5
0
0.5
1
1.5
u [ms−1]
w [m
s−1]
−1.5
−1
−0.5
0
0.5
1
1.5
−1.5−1−0.500.511.5
v [ms−1]
u [m
s−1]
Figura 4.3: Realizações do sistema utilizadas
Este método de aproximação proposto corresponde a aproximar cada elemento aij,bij de A e B por um hiperplano. Na Figura 4.4, apresenta-se a variação do elementoa11 de A com (V, η) e (V, ρ), respectivamente para (ρ, ψb) e (η, ψb) constantes, para umadada zona (constituída pelos intervalos de parâmetros V ∈ [
0.9 1.9], η ∈ [−15 15
],
ρ ∈ [−15 15]e ψb ∈
[−0.1 0.1]sendo utilizadas 25 realizações de sistemas para ilus-
trar). Apresenta-se também a aproximação de mínimos quadrados por um plano, quecorresponde a um corte do hiperplano, a esta variação de a11.
Realça-se que o modelo discreto para o espaço de erro apesar de ser bastante com-plexo, é contínuo e diferenciável em relação aos parâmetros. Resulta da linearização doespaço de erro constituído pelo modelo do veículo e por funções, ambos contínuos e difer-enciáveis em relação aos parâmetros (apesar de obtida numericamente não deixa de ser
1A operação A2 deve neste caso ser interpretada termo a termo A2 =
a211 ... a2
1n
: :a2
n1 ... a2nn

26 CAPÍTULO 4. METODOLOGIA DE CONTROLO UTILIZANDO LPVS
−0.4
−0.2
0
0.2
0.4
1
1.2
1.4
1.6
1.8
−4.9
−4.8
−4.7
−4.6
−4.5
−4.4
−4.3
x 10−4
η
Realizacoes do sistema
V−0.4
−0.2
0
0.2
0.4
1
1.2
1.4
1.6
1.8
−5.1
−5
−4.9
−4.8
−4.7
−4.6
−4.5
−4.4
−4.3
x 10−4
η
Aproximacao
V
A 14
−0.4
−0.2
0
0.2
0.4
1
1.2
1.4
1.6
1.8
−4.9
−4.85
−4.8
−4.75
x 10−4
ρ
Realizacoes do sistema
V−0.4
−0.2
0
0.2
0.4
1
1.2
1.4
1.6
1.8
−5.05
−5
−4.95
−4.9
−4.85
−4.8
−4.75
−4.7
x 10−4
ρ
Aproximacao
V
Figura 4.4: Aproximação por um plano à variação de A14 com (V, η) e (V, ρ)
o cálculo de uma matriz jacobiana), seguido de uma discretização (que também preservapropriedades de continuidade e diferenciabilidade das matrizes A e B contínuas). Destaforma a aproximação linear nos parâmetros deverá ser válida pelo menos numa vizinhançaem torno de uma dada realização. Resta saber se a mesma suavidade visível na Figura4.4 é também válida para cada uma das zonas, para todos os elementos das matrizes Ae B e em relação a todos os parâmetros. Isto é o assunto de discussão do Anexo D ondepara além desta questão se aborda problema de discretizar um espaço de R4 bem comoo número de pontos de discretização utilizados para cada zona. Neste anexo conclui-seque a aproximação é de facto válida, pelo que o sistema discreto 3.13 assume-se que é daforma
x(k+1) = (A0 +AV V +Aη η+Aρ ρ+Aψbψb)x(k)+(B0 +BV V +Bη η+Bρ ρ+Bψb
ψb)u(k)(4.2)
De seguida apresenta-se um resumo dos resultados mais importantes relativos à teo-ria das LMIs que serão utilizados para a síntese de controladores no âmbito dos resultadosdos LPVs.
4.3 Desigualdades lineares matriciais
Uma LMI é uma função da forma
F (x) = F0 +n∑
i=1
xiFi < 0 (4.3)
onde F1, ..., Fn ∈ Rp×p são matrizes simétricas e o símbolo < denota que a matriz F (x) édefinida negativa, ou seja, a forma quadrática associada a F (x) é definida negativa
F (x) < 0 ⇔ uT F (x))u < 0 ,∀u ∈ Rp,u 6= 0,
e onde x ∈ Rn é o vector de variáveis de decisão.A principal motivação para utilizar LMI’s advém do facto de o conjunto P :=
x|F (x) < 0 definir uma restrição convexa em x, ou seja, se x1, x2 ∈ P e α ∈ [0, 1] então

4.3. DESIGUALDADES LINEARES MATRICIAIS 27
αx1 + (1− α)x2 ∈ P , isto é
uT F (αx1 + (1− α)x2)u = α(uT F (x1)u) + (1− α)(uT F (x2)u) < 0
Existem dois tipos de problemas que se irão considerar. O problema de factibilidadeque consiste em decidir se existe um conjunto de variáveis de decisão que verifiquem váriasrestrição do tipo 4.3, e o problema de minimização de um custo linear sujeito a restriçõesdo tipo 4.3.
As restrições do tipo LMI para problemas de controlo aparecem normalmente naforma matricial 4.4 que é equivalente a 4.3 (ver Anexo B para prova de equivalência), eem que P é uma variável de decisão matricial simétrica.
F (P ) = A +n∑i
AiP < 0 (4.4)
De seguida apresentam-se resultados de formulação de problemas clássicos de con-trolo colocados na forma de LMIs.
Considere-se o sistema 4.5 em que ω2 representa uma entrada exógena (por exemploruído ou uma referência) e z2 um vector de desempenho
x(k + 1) = Ax(k) + B u(k) + B2 ω2(k)
z2(k) = C2 x(k) + E2 u(k) (4.5)
que para uma lei de controlo por realimentação linear de variáveis de estado u(k) =K x(k), se pode escrever na forma
x(k + 1) = Ac x(k) + Bc2 ω2(k)
z2(k) = Cc2 x(k) (4.6)
em que Ac = A + B K, Cc2 = C2 + E2K e Bc2 = B2.O problema de síntese de um controlador que estabilize o sistema em malha fechada
pode ser colocado na forma de LMIs, o que se apresenta no seguinte teorema.
Teorema 1 Se existirem matrizes X = XT , e W que verifiquem a restrição[
X X AT + W T BT
AX + B W X
]> 0
o sistema 4.5 com lei de controlo u(k) = WX−1x(k) = K x(k) é assimptoticamenteestável
Dem: ver Anexo D.
Para além de estabilidade, o desempenho de um sistema pode ser avaliado atravésda sua norma H2 que para sistemas discretos é definida como
‖G(z)‖22 =
1
2π
∫ π
−π
tr(G∗(ejw)G(ejw))dw =∞∑
k=0
tr(g∗(k)g(k)) (4.7)

28 CAPÍTULO 4. METODOLOGIA DE CONTROLO UTILIZANDO LPVS
em que G(z) é a função de transferência e g(k) é a resposta ao impulso do sistema, quepor exemplo para o sistema 4.6 são dadas por
G(z) = Cc2(zI − Ac)−1Bc2 g(k) =
Cc2A
kcBc2 k > 0
0 k = 0
e a identidade 4.7 é estabelecida recorrendo ao teorema de Parseval.A norma representa assim a soma da energia das várias respostas ao impulso. Se por
exemplo o estado for o vector de erro definido para o veículo autónomo a minimização dasoma das respostas impulsivas estará relacionada pela forma como estes erros decrescempara zero e como tal com a forma como o veículo segue o caminho. O valor desta normatem assim uma interpretação de desempenho para o sistema.
A norma H2 tem ainda uma interpretação estocástica. Se w2 for ruído brancogaussiano com média nula e intensidade unitária, a saída z2 tem média nula e a normaH2 coincide com a sua variância.
O problema de síntese de um controlador que minimize a norma H2 do sistema podeser colocada em termos de LMIs, o que se apresenta no seguinte teorema
Teorema 2 Para um dado valor γ, se existirem matrizes X = XT , W e Z = ZT queverifiquem as restrições
X XAT + W T BT XCT
2 + W T ET2
AX + BW X 0C2X + E2W 0 I
> 0 (4.8)
[X B2
BT2 Z
]> 0 (4.9)
tr(Z) < γ2 (4.10)
Então a norma H2 do sistema 4.5 com lei de controlo u(k) = WX−1x(k) = K x(k)verifica ‖(C2 + E2K)(zI − A− B2K)−1B2‖2 < γ. Em particular o vector de ganhos queminimiza a norma H2 pode ser obtido resolvendo o problema
min γ
s.a (4.8), (4.9) e (4.10)
Dem: ver Anexo D.
Tendo em conta a relação entre a resposta ao impulso e a resposta livre do sistemacom umas dadas condições iniciais, pode-se estabelecer a relação entre a síntese de umcontrolador por realimentação de estado e o problema de regulação óptimo LQR (LinearQuadratic Regulator). O resultado é apresentado no seguinte teorema.
Teorema 3 O problema clássico de regulação óptimo para o sistema 4.5 com funcionalde custo
min J =+∞∑
k=0
(x(k)T Qx(k) + u(k)T Ru(k)) (4.11)
com matrizes Q = CT2 C2 e R = ET
2 E2 com CT2 E2 = 0 é equivalente ao problema de
encontrar um lei de controlo u(k) = Kx(k) que minimize a norma H2 (teorema 2).
Dem: ver Anexo D.

4.4. LPVS 29
4.4 LPVs
Os sistemas do tipo LPVs são sistemas lineares cujas matrizes de descrição dadinâmica dependem de um conjunto de parâmetros que estão contidos num conjuntoconhecido e cujo valor pode ser medido. Um caso particular são os sistemas que variamde forma afim com os parâmetros, para os quais existe um conjunto de resultados bemestabelecidos. O facto da linearização da dinâmica do espaço de erro poder ser expressaem termos dos parâmetros 4.1 (que podem ser medidos admitindo o estado acessível),leva a que a teoria existente para estes sistemas seja adequada para o problema em causa.
Considere-se o sistema dependente de um conjunto de parâmetros p =[p1 ... pv
]T
[x(k + 1)z2(k)
]=
[A(p) B(p) B2(p)C2(p) E2(p) 0
]
x(k)u(k)w2(k)
(4.12)
em que os parâmetros do sistema p = (p1, p2, ..., pv) variam num conjunto P := lp1<
p1 < lp1 , .., lpv< pv < lpv e as matrizes A, B, B2, C2 e E2 são afins no conjunto de
parâmetros, ou seja, para S = A,B, B2, C2, E2 e Si = Ai, Bi, B2i, C2i
, E2i, i = 0, .., v
S(p) = S0 + p1S1 + ... + pvSv (4.13)
Dada a dependência afim dos parâmetros, este conjunto de sistemas pode ser escritoda seguinte forma
[x(k + 1)z2(k)
]=
[A(δ) B(δ) B2(δ)C2(δ) E2(δ) 0
]
x(k)u(k)w2(k)
(4.14)
em que a matriz
S(δ) =
[A(δ) B(δ) B2(δ)C2(δ) E2(δ) 0
](4.15)
pode ser escrita como uma combinação convexa nas funções δ =[δ1 δ2 ... δv
]T , es-tando contida no seguinte conjunto de matrizes
∆ := S(δ) =v∑
i=1
Siδi,
v∑i=1
δi = 1,δi > 0
em que as matrizes Si são constantes e definem o conjunto
∆0 = Si =
[Ai Bi B2i
C2iE2i
0
], 1 < i < v (4.16)
Geometricamente estas matrizes Si constituem os vértices do politopo ∆ em quea matriz S pode estar contida, como é ilustrado na Figura 4.5. Os parâmetros p po-dem representar incertezas no modelo do sistema, sendo a realização de S(p), ou S(δ),constante mas desconhecida. Podem também ser funções do tempo, p(t), e neste caso osistema S(p(t)) ou S(δ(t)) é variante no tempo.

30 CAPÍTULO 4. METODOLOGIA DE CONTROLO UTILIZANDO LPVS
Figura 4.5: Matrizes S(p) como vértices de um politopo
O interesse desta classe de sistemas decorre da convexidade do conjunto de pos-síveis sistemas. Assim sendo, propriedades do sistema em todo o conjunto ∆ podem sergarantidas através da verificação das mesmas num conjunto finito de pontos ∆0.
O seguinte resultado permite sintetizar um controlador que garante estabilidadepara um sistema deste tipo (4.14) se forem verificadas as restrições de estabilidade paratodos os pontos do conjunto ∆0.
Teorema 4 Se existirem matrizes X = XT , e W que verifiquem as restrições[
X X ATi + W T BT
i
Ai X + Bi W X
]> 0 (4.17)
em que Ai, Bi fazem parte das realizações de Si no conjunto de vértices do politopo ∆0, en-tão o sistema 4.14 com lei de controlo u(k) = WX−1x(k) = K x(k) é assimptoticamenteestável.
Dem: ver Anexo D.
O resultado que de seguida se apresenta foi o utilizado para sintetizar o controlador,para cada uma das partições. Este é um controlador por realimentação linear de variáveisde estado para o espaço de erro considerando que este se pode escrever na forma 4.2. Asíntese através deste resultado garante desempenho (em termos de norma H2) para osistema para qualquer valor dos parâmetros dentro da partição, e portanto para qualquercorrespondente trajectória de equilíbrio.
Teorema 5 Se existirem matrizes X = XT , e W e Q = QT que tornem factível oproblema de optimização
min γ
s.a.
X XATi + W T BT
i XCT2i
+ W T DT2i
AiX + BiW X 0C2i
X + D2iW 0 I
< 0 (4.18)
[Q B2i
B2iX
]> 0 (4.19)
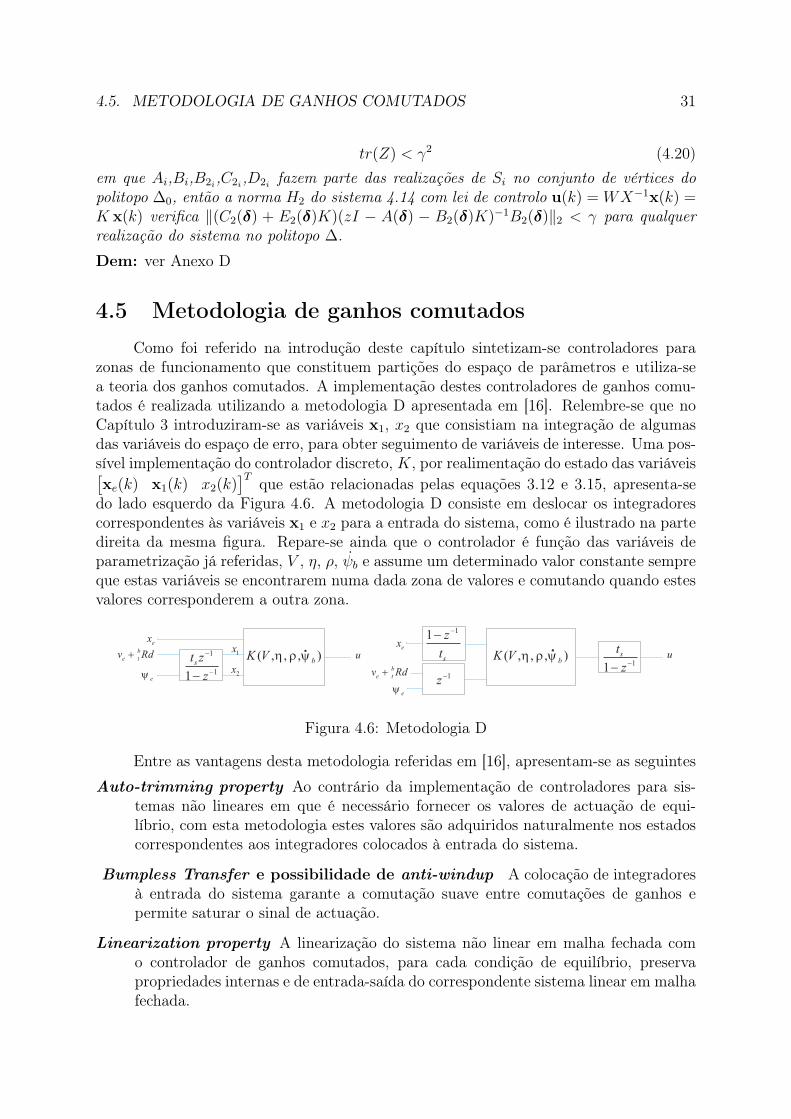
4.5. METODOLOGIA DE GANHOS COMUTADOS 31
tr(Z) < γ2 (4.20)em que Ai,Bi,B2i
,C2i,D2i
fazem parte das realizações de Si no conjunto de vértices dopolitopo ∆0, então a norma H2 do sistema 4.14 com lei de controlo u(k) = WX−1x(k) =K x(k) verifica ‖(C2(δ) + E2(δ)K)(zI − A(δ) − B2(δ)K)−1B2(δ)‖2 < γ para qualquerrealização do sistema no politopo ∆.
Dem: ver Anexo D
4.5 Metodologia de ganhos comutadosComo foi referido na introdução deste capítulo sintetizam-se controladores para
zonas de funcionamento que constituem partições do espaço de parâmetros e utiliza-sea teoria dos ganhos comutados. A implementação destes controladores de ganhos comu-tados é realizada utilizando a metodologia D apresentada em [16]. Relembre-se que noCapítulo 3 introduziram-se as variáveis x1, x2 que consistiam na integração de algumasdas variáveis do espaço de erro, para obter seguimento de variáveis de interesse. Uma pos-sível implementação do controlador discreto, K, por realimentação do estado das variáveis[xe(k) x1(k) x2(k)
]T que estão relacionadas pelas equações 3.12 e 3.15, apresenta-sedo lado esquerdo da Figura 4.6. A metodologia D consiste em deslocar os integradorescorrespondentes às variáveis x1 e x2 para a entrada do sistema, como é ilustrado na partedireita da mesma figura. Repare-se ainda que o controlador é função das variáveis deparametrização já referidas, V , η, ρ, ψb e assume um determinado valor constante sempreque estas variáveis se encontrarem numa dada zona de valores e comutando quando estesvalores corresponderem a outra zona.
Figura 4.6: Metodologia D
Entre as vantagens desta metodologia referidas em [16], apresentam-se as seguintes
Auto-trimming property Ao contrário da implementação de controladores para sis-temas não lineares em que é necessário fornecer os valores de actuação de equi-líbrio, com esta metodologia estes valores são adquiridos naturalmente nos estadoscorrespondentes aos integradores colocados à entrada do sistema.
Bumpless Transfer e possibilidade de anti-windup A colocação de integradoresà entrada do sistema garante a comutação suave entre comutações de ganhos epermite saturar o sinal de actuação.
Linearization property A linearização do sistema não linear em malha fechada como controlador de ganhos comutados, para cada condição de equilíbrio, preservapropriedades internas e de entrada-saída do correspondente sistema linear em malhafechada.
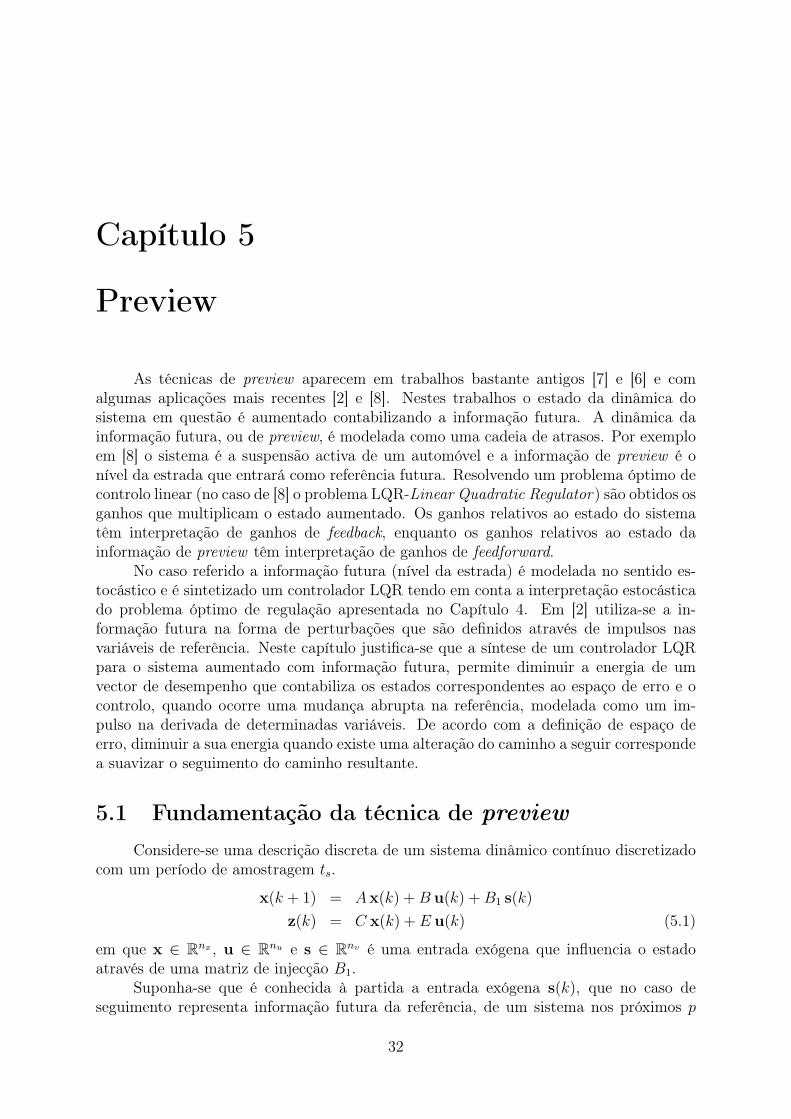
Capítulo 5
Preview
As técnicas de preview aparecem em trabalhos bastante antigos [7] e [6] e comalgumas aplicações mais recentes [2] e [8]. Nestes trabalhos o estado da dinâmica dosistema em questão é aumentado contabilizando a informação futura. A dinâmica dainformação futura, ou de preview, é modelada como uma cadeia de atrasos. Por exemploem [8] o sistema é a suspensão activa de um automóvel e a informação de preview é onível da estrada que entrará como referência futura. Resolvendo um problema óptimo decontrolo linear (no caso de [8] o problema LQR-Linear Quadratic Regulator) são obtidos osganhos que multiplicam o estado aumentado. Os ganhos relativos ao estado do sistematêm interpretação de ganhos de feedback, enquanto os ganhos relativos ao estado dainformação de preview têm interpretação de ganhos de feedforward.
No caso referido a informação futura (nível da estrada) é modelada no sentido es-tocástico e é sintetizado um controlador LQR tendo em conta a interpretação estocásticado problema óptimo de regulação apresentada no Capítulo 4. Em [2] utiliza-se a in-formação futura na forma de perturbações que são definidos através de impulsos nasvariáveis de referência. Neste capítulo justifica-se que a síntese de um controlador LQRpara o sistema aumentado com informação futura, permite diminuir a energia de umvector de desempenho que contabiliza os estados correspondentes ao espaço de erro e ocontrolo, quando ocorre uma mudança abrupta na referência, modelada como um im-pulso na derivada de determinadas variáveis. De acordo com a definição de espaço deerro, diminuir a sua energia quando existe uma alteração do caminho a seguir correspondea suavizar o seguimento do caminho resultante.
5.1 Fundamentação da técnica de previewConsidere-se uma descrição discreta de um sistema dinâmico contínuo discretizado
com um período de amostragem ts.
x(k + 1) = Ax(k) + B u(k) + B1 s(k)
z(k) = C x(k) + E u(k) (5.1)
em que x ∈ Rnx , u ∈ Rnu e s ∈ Rnv é uma entrada exógena que influencia o estadoatravés de uma matriz de injecção B1.
Suponha-se que é conhecida à partida a entrada exógena s(k), que no caso deseguimento representa informação futura da referência, de um sistema nos próximos p
32

5.1. FUNDAMENTAÇÃO DA TÉCNICA DE PREVIEW 33
instantes de amostragem, e introduz-se a seguinte notação para esse vector, designado depreview
xs(k) =[
s(k)T s(k + 1)T ... s(k + p)T]T
Esta informação está acessível numa janela entre o instante actual de amostragemk e p instantes à frente, e assim sendo pode ser modelada na forma de uma FIFO, cujasequações de estado para o vector xs são
xs(k + 1) = M xs(k) + N s(k + p + 1)
B1 s(k) = H xs(k)
M =
0 I 0 ... 00 0 I ... 00 0 0 ... 0
N =
0:I
H =
[B1 0 0 0 ... 0
]
que juntamente com as equações da dinâmica do sistema formam o sistema aumentadoxt(k) =
[x(k) xs(k)
]T cuja dinâmica é dada por
xt(k + 1) =
[A H0 D
]xt(k) +
[0E
]s(k + p + 1) +
[B0
]u(k)
z(t) =[C Cs
]xt(k) + Eu(k)
Esta equação contabiliza exactamente o atraso entre o instante em que informaçãoé recolhida s(k+p) e quando entra no sistema. Desta forma a aplicação da teoria do LQRpara a síntese de um controlador para o sistema aumentado deverá reflectir a correlaçãoentre a informação futura e os estados do sistema.
Dada a estrutura das matrizes envolvidas no sistema aumentado, a solução do prob-lema de regulação óptimo LQR para o sistema 5.2, designada por P e K, pode ser obtidaa partir da solução óptima para o mesmo problema relativo ao sistema 5.1, designada porKx e Px, que se resume no seguinte lema
Lema 2 Seja Px a solução da equação algébrica de Riccati do problema de regulaçãoóptimo LQR, para o sistema 5.1 com funcional de custo
∞∑
k=0
x(k)T Qx x(k) + u(k) Rx u(k) Qx = CT C Rx = ET E
dada porPx − AT PxA + AT PxB(BT PxB + Rx)
−1BT PxA− CT C = 0
e o ganho óptimo Kx = −(BT PxB + Rx)−1BT PxA. Então para o sistema aumentado 5.2
a solução óptima do mesmo problema K, com matrizes
P =
[Px Pxs
Pxs Ps
]Q =
[Qx Qxs
Qxs Qs
]=
[C Cs
]T [C Cs
]R = Rx
pode ser obtida através de Px e Kx.
K = [Kx Ks]

34 CAPÍTULO 5. PREVIEW
comKs = −(BT PxB + R)−1BT (PxH + PxsM)
onde Pxs é dada por
Pxs = [ATc PxB1, (A
2c)
T PxB1, ..., (Ansc )T PxB1] + [Q1, A
Tc Q1 + Q2, ....,
ns∑j=1
(Ans−jc )T Qj]
onde Ac = [A + BKx] e Qj denota a j-ésima coluna de Qxs
Dem: ver [8]
A utilização de preview permite reduzir a norma H2 do sistema em malha fechada(utilizando o controlador de acordo com o Lema 2) resultado que se encontra resumidono seguinte lema
Lema 3 A norma H2 do sistema 5.1, ‖Gsz2(s)‖2, é inferior à norma H2 do sistema 5.2,‖Gsz2(s)‖2, para uma lei de controlo respectivamente da forma u(k) = Kx x(k) e u(k) =[Kx Ks
]xs(k) sintetizada de acordo com o Lema 2 e em que z2 = C2 x(k) + E2 u(k) e
z2 =[C2 0
]xs(k) + E2 u(k) são os respectivos vectores de desempenho.
Dem: ver [8]
5.2 Aplicação da técnica a veículos autónomosPara o caso de seguimento de caminhos, admite-se que o caminho é constituído pela
concatenação de segmentos. Tendo em conta as variáveis de parametrização definidas noCapítulo 3, Vr, ψct, ψr , θt, que definem variáveis de equilíbrio com que se pretende que oveículo siga o caminho, é definido um novo segmento sempre que pelo menos uma destasvariáveis é alterada. Para além da definição de um novo troço quando estas variáveis sãoalteradas, é definindo um novo troço se existir uma variação brusca do caminho mesmoque estas variáveis de equilíbrio não mudem de valor. Por variação brusca entenda-se quese g(ξ) = (x(ξ), y(ξ), z(ξ)) for uma parametrização do caminho, um ponto de variaçãobrusca corresponde aos pontos em que a parametrização não é C1 (g(ξ) não é contínua).Esta última situação acontece entre as trajectórias A e B da Figura 5.1. Para além dosparâmetros Vr = 2 m.s−1, ψr = 0 rad.s−1 se assumirmos que se pretende as duas rectascom os mesmos ψct e θt, estas têm os mesmos parâmetros mas correspondem a umamudança brusca do caminho. Do troço B para C existe uma mudança de Vr e do troçoC para D de ψr.
A informação de preview, correspondente ao vector s, depende da forma como areferência entra no sistema e será discutida mais à frente. Como será justificado, estainformação corresponde a mudanças das variáveis de referência. Por agora basta consid-erar que este vector s é constituído por variáveis relacionadas com a referência e que sãodeterminadas em cada instante de amostragem para os p instantes seguintes, formandoo vector xs.
Relativamente ao instante em que esta informação entra no sistema, este só podeser conhecido assumindo que o veículo percorre o caminho com velocidade constante, Vr,
5.2. APLICAÇÃO DA TÉCNICA A VEÍCULOS AUTÓNOMOS 35
Figura 5.1: Caminho constituído por segmentos onde se encontra os instantes da infor-mação de preview
e erro de posição nulo, ou seja se assumir que o veículo se encontra em equilíbrio. Assimpode-se prever em que instante a informação da referência futura entrará na dinâmica dosistema. Trivialmente no instante l a partir do instante de amostragem actual k a infor-mação da referência encontrar-se-á na posição ltsVr a partir da posição actual do veículo.Esta situação encontra-se também ilustrada na Figura 5.1 em que as várias posições assi-naladas correspondem aos instantes em que o veículo se encontrará se percorrer o caminhocom a velocidade desejada, a partir da posição inicial, e portanto são os instantes em quese prevê que a informação de preview entrará no sistema. Repare-se o efeito interessantede incluir a velocidade neste cálculo da distância de preview, que é dada por pVrts (poisas amostras de preview são calculadas em p instantes de amostragem): quanto maiora velocidade a que o veículo se desloca ao longo do caminho maior será a distância devisibilidade, que é, por exemplo, o que um condutor faz quando conduz um automóvel.
Outro facto extremamente importante diz respeito ao que acontece se o veículo nãose encontrar sobre o caminho, ou não se encontrar com velocidade constante (repare-seque esta situação é frequente veja-se, por exemplo, a situação de transição entre segmentoscom velocidades ou direcções diferentes). Desta forma a informação não entra no sistemada forma como se modelou dado que a informação de referência que se encontra a umadistância ktsVr, não entrará no sistema no instante de amostragem k. Por esta razão ainformação de preview não é guardada de um instante de amostragem para o outro massim recalculada em cada instante de amostragem. A forma como é recalculada passa porprojectar a velocidade do veículo nesse instante de amostragem no caminho e, designandopor V o módulo dessa projecção, retirar a informação sobre o caminho a distâncias ktsVa partir da posição actual. Assim a informação de preview não entra no sistema da formaque se modelou, mas de uma forma semelhante, resultando os ganhos de preview emganhos que multiplicam esta informação futura que é actualizada em cada instante deamostragem.
Relativamente à notação, se u(t) for uma variável contínua em cada um dos seg-mentos de referência, mas descontínua no instante de comutação t0, introduz-se a notaçãos(t) = u(t) = s(t0)δ(t−t0) para o impulso que decorre da derivação desta variável descon-tínua no instante t0 e s(t0) = u(t+0 ) − u(t−0 ) para a amplitude desse impulso. Para sim-plificar, nas derivações que se seguem, considera-se apenas uma comutação entre troçossendo s(t) apenas constituído por um impulso, sendo fácil a generalização para várias
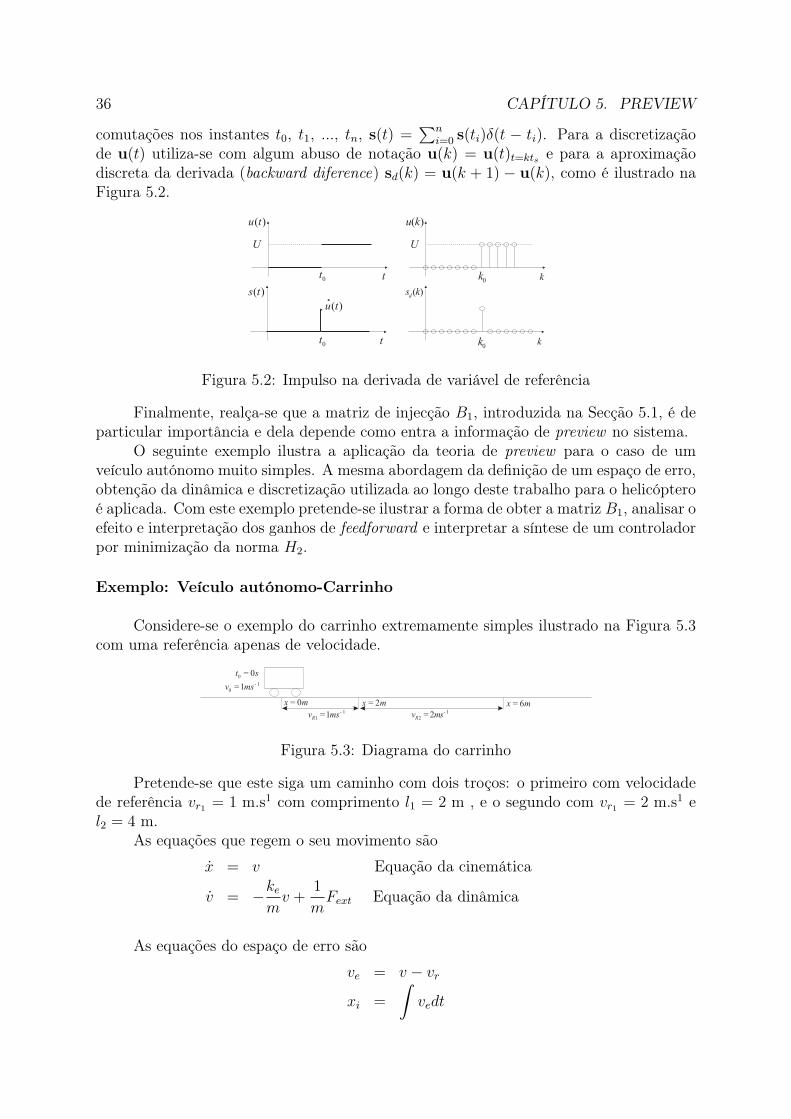
36 CAPÍTULO 5. PREVIEW
comutações nos instantes t0, t1, ..., tn, s(t) =∑n
i=0 s(ti)δ(t − ti). Para a discretizaçãode u(t) utiliza-se com algum abuso de notação u(k) = u(t)t=kts e para a aproximaçãodiscreta da derivada (backward diference) sd(k) = u(k + 1) − u(k), como é ilustrado naFigura 5.2.
Figura 5.2: Impulso na derivada de variável de referência
Finalmente, realça-se que a matriz de injecção B1, introduzida na Secção 5.1, é departicular importância e dela depende como entra a informação de preview no sistema.
O seguinte exemplo ilustra a aplicação da teoria de preview para o caso de umveículo autónomo muito simples. A mesma abordagem da definição de um espaço de erro,obtenção da dinâmica e discretização utilizada ao longo deste trabalho para o helicópteroé aplicada. Com este exemplo pretende-se ilustrar a forma de obter a matriz B1, analisar oefeito e interpretação dos ganhos de feedforward e interpretar a síntese de um controladorpor minimização da norma H2.
Exemplo: Veículo autónomo-Carrinho
Considere-se o exemplo do carrinho extremamente simples ilustrado na Figura 5.3com uma referência apenas de velocidade.
Figura 5.3: Diagrama do carrinho
Pretende-se que este siga um caminho com dois troços: o primeiro com velocidadede referência vr1 = 1 m.s1 com comprimento l1 = 2 m , e o segundo com vr1 = 2 m.s1 el2 = 4 m.
As equações que regem o seu movimento são
x = v Equação da cinemática
v = −ke
mv +
1
mFext Equação da dinâmica
As equações do espaço de erro são
ve = v − vr
xi =
∫vedt

5.2. APLICAÇÃO DA TÉCNICA A VEÍCULOS AUTÓNOMOS 37
e a sua dinâmica é dada por
ve = v − vr
xi = ve⇔
ve = −ke
mv + 1
mF − vr
xi = ve⇔
ve = −ke
mve + 1
mu− vr
xi = ve
[ve
xi
]=
[ −ke
m0
1 0
] [ve
xi
]+
[1m
0
]u +
[−10
]r = Ac
[ve
xi
]+ Bcu + B1cr
em que u = F − Feq, Feq = ke vr e r = vr = s(t0)δ(t − t0) representa o impulso queé zero para um dado troço com vr constante e infinito quando a referência é alteradanum instante t0. Neste caso é extremamente simples de perceber como a referência entrana dinâmica do espaço de erro, através da matriz de injecção B1c =
[−1 0]T . Assim,
uma mudança abrupta na referência de velocidade entra sob a forma de um impulso nadinâmica do espaço de erro. Discretizando o sistema e utilizando η(k) para representara variável discreta amostrada da variável η(t), η(kts) (com óbvio abuso de notação), vem
[ve(k + 1)xi(k + 1)
]= A
[ve(k)xi(k)
]+ Bu(k) + B1r(k)
em que o termo B1cr(t) é discretizado através da técnica de impulso invariante, resultandoassim B1 = eActsB1c e r(k) = r(kts) = vr(kts + ts)− vr(kts)
∫ kts+ts
kts
eAc(kts+ts−τ)B1cr(τ)dτ =
∫ kts+ts
kts
eAc(kts+ts−τ)B1cvr(τ)dτ
=
∫ kts+ts
kts
eAc(kts+ts−τ)B1cs(kts)δ(kts − τ)dτ = eActsB1c(vr(kts + ts)− vr(kts))
e em que A, B são as discretizações das matrizes da dinâmica do espaço de erro, obtidascom período de amostragem ts = 0.01 s e de acordo com a secção 3.5.
Sintetizando um controlador LQR por realimentação linear de variáveis de estadou(k) = K x(k) e utilizando o vector de desempenho
z(k) =
1 00 50 0
[ve(k)xi(k)
]+
00
0.2
u(k) (5.2)
o sistema em malha fechada fica[ve(k + 1)xi(k + 1)
]= [A + BK]
[ve(k)xi(k)
]+ B1r(k)
Na Figura 5.2 ilustra-se a resposta a um impulso da função de transferência Hrve
em malha fechada, que representa a perturbação no sistema que ocorre quando existeuma variação brusca em vr (recorde-se que r(k) = vr(k + 1)− vr(k)).
Sintetiza-se um controlador para o sistema aumentado com vector de preview xs
com p = 40 amostras. O vector de desempenho é o mesmo que 5.2, não pesando o estadoxs. Como visto no teorema 2 se Kx for a solução do problema sem preview, o vectorK =
[Kx Ks
]é solução do problema com preview em que Ks ∈ Rp.
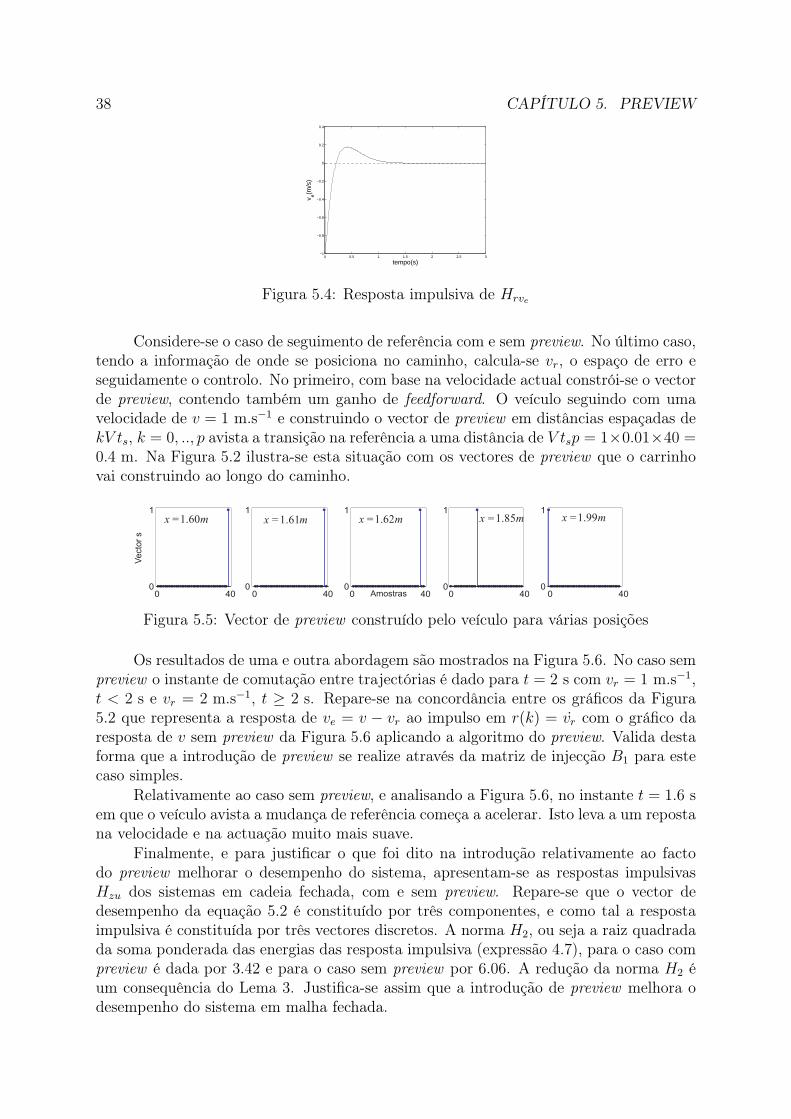
38 CAPÍTULO 5. PREVIEW
0 0.5 1 1.5 2 2.5 3−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
tempo(s)
v e(m/s
)
Figura 5.4: Resposta impulsiva de Hrve
Considere-se o caso de seguimento de referência com e sem preview. No último caso,tendo a informação de onde se posiciona no caminho, calcula-se vr, o espaço de erro eseguidamente o controlo. No primeiro, com base na velocidade actual constrói-se o vectorde preview, contendo também um ganho de feedforward. O veículo seguindo com umavelocidade de v = 1 m.s−1 e construindo o vector de preview em distâncias espaçadas dekV ts, k = 0, .., p avista a transição na referência a uma distância de V tsp = 1×0.01×40 =0.4 m. Na Figura 5.2 ilustra-se esta situação com os vectores de preview que o carrinhovai construindo ao longo do caminho.
Figura 5.5: Vector de preview construído pelo veículo para várias posições
Os resultados de uma e outra abordagem são mostrados na Figura 5.6. No caso sempreview o instante de comutação entre trajectórias é dado para t = 2 s com vr = 1 m.s−1,t < 2 s e vr = 2 m.s−1, t ≥ 2 s. Repare-se na concordância entre os gráficos da Figura5.2 que representa a resposta de ve = v − vr ao impulso em r(k) = vr com o gráfico daresposta de v sem preview da Figura 5.6 aplicando a algoritmo do preview. Valida destaforma que a introdução de preview se realize através da matriz de injecção B1 para estecaso simples.
Relativamente ao caso sem preview, e analisando a Figura 5.6, no instante t = 1.6 sem que o veículo avista a mudança de referência começa a acelerar. Isto leva a um repostana velocidade e na actuação muito mais suave.
Finalmente, e para justificar o que foi dito na introdução relativamente ao factodo preview melhorar o desempenho do sistema, apresentam-se as respostas impulsivasHzu dos sistemas em cadeia fechada, com e sem preview. Repare-se que o vector dedesempenho da equação 5.2 é constituído por três componentes, e como tal a respostaimpulsiva é constituída por três vectores discretos. A norma H2, ou seja a raiz quadradada soma ponderada das energias das resposta impulsiva (expressão 4.7), para o caso compreview é dada por 3.42 e para o caso sem preview por 6.06. A redução da norma H2 éum consequência do Lema 3. Justifica-se assim que a introdução de preview melhora odesempenho do sistema em malha fechada.
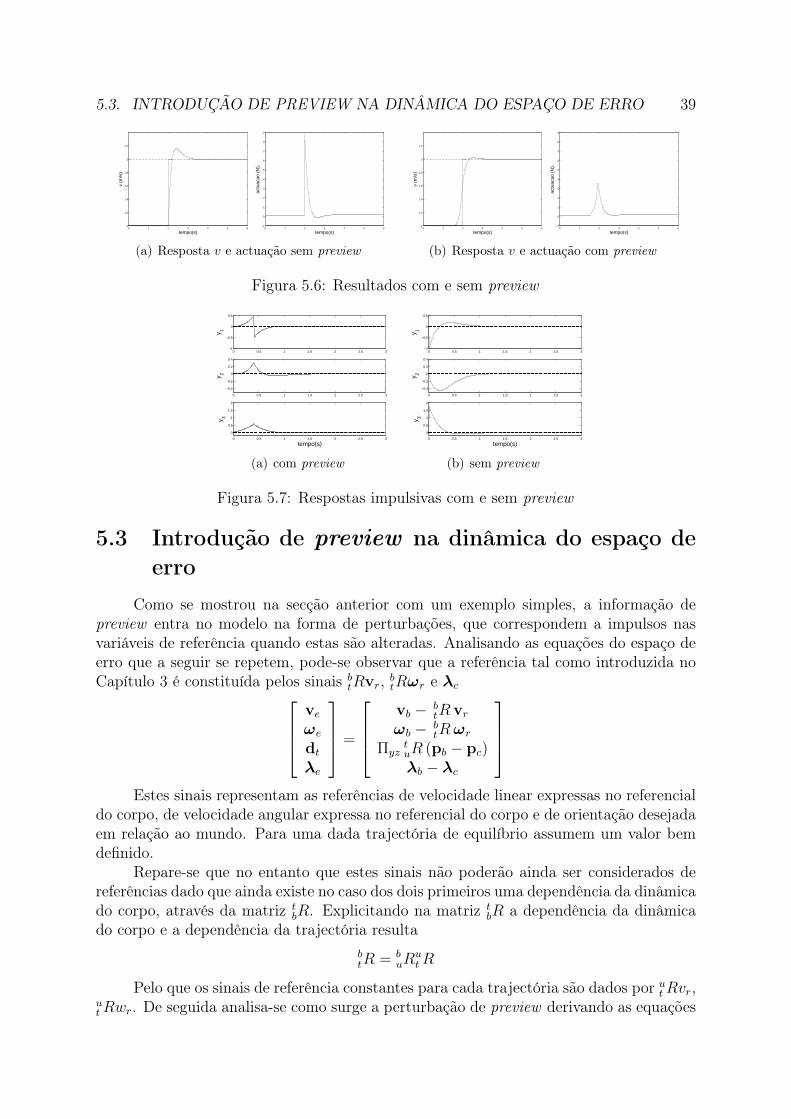
5.3. INTRODUÇÃO DE PREVIEW NA DINÂMICA DO ESPAÇO DE ERRO 39
0 1 2 3 4 5 61
1.2
1.4
1.6
1.8
2
2.2
tempo(s)
v (m
/s)
0 1 2 3 4 5 6−1
0
1
2
3
4
5
6
7
8
9
tempo(s)
actu
acao
(N
),(a) Resposta v e actuação sem preview
0 1 2 3 4 5 61
1.2
1.4
1.6
1.8
2
2.2
tempo(s)
v (m
/s)
0 1 2 3 4 5 6−1
0
1
2
3
4
5
6
7
8
9
tempo(s)
actu
acao
(N
),
(b) Resposta v e actuação com preview
Figura 5.6: Resultados com e sem preview
0 0.5 1 1.5 2 2.5 3−1
−0.5
0
0.5
y 1
0 0.5 1 1.5 2 2.5 3
−0.4
−0.2
0
0.2
0.4
y 2
0 0.5 1 1.5 2 2.5 3
0
0.5
1
1.5
2
y 3
tempo(s)
(a) com preview
0 0.5 1 1.5 2 2.5 3−1
−0.5
0
0.5
y 1
0 0.5 1 1.5 2 2.5 3
−0.4
−0.2
0
0.2
0.4
y 2
0 0.5 1 1.5 2 2.5 3
0
0.5
1
1.5
2
y 3
tempo(s)
(b) sem preview
Figura 5.7: Respostas impulsivas com e sem preview
5.3 Introdução de preview na dinâmica do espaço deerro
Como se mostrou na secção anterior com um exemplo simples, a informação depreview entra no modelo na forma de perturbações, que correspondem a impulsos nasvariáveis de referência quando estas são alteradas. Analisando as equações do espaço deerro que a seguir se repetem, pode-se observar que a referência tal como introduzida noCapítulo 3 é constituída pelos sinais b
tRvr, btRωr e λc
ve
ωe
dt
λe
=
vb − btRvr
ωb − btR ωr
ΠyztuR (pb − pc)λb − λc
Estes sinais representam as referências de velocidade linear expressas no referencialdo corpo, de velocidade angular expressa no referencial do corpo e de orientação desejadaem relação ao mundo. Para uma dada trajectória de equilíbrio assumem um valor bemdefinido.
Repare-se que no entanto que estes sinais não poderão ainda ser considerados dereferências dado que ainda existe no caso dos dois primeiros uma dependência da dinâmicado corpo, através da matriz t
bR. Explicitando na matriz tbR a dependência da dinâmica
do corpo e a dependência da trajectória resultabtR = b
uRut R
Pelo que os sinais de referência constantes para cada trajectória são dados por ut Rvr,
ut Rwr. De seguida analisa-se como surge a perturbação de preview derivando as equações

40 CAPÍTULO 5. PREVIEW
do espaço de erro. Repare-se que estas equações já foram apresentadas na Secção 3.4mas assumindo que o veículo se encontra em equilíbrio, a seguir uma dada trajectória,e portanto neste caso os sinais t
uRvr, tuRωr são constantes. Assume-se agora que estes
sinais podem variar bruscamente quando se dá a passagem de uma trajectória de equi-líbrio para outra. As derivações que se apresentam de seguida são bastantes semelhantesàs apresentadas no Anexo C, pelo que são omitidos alguns passos. Analise-se separada-mente para ve, ωe e λc como se pode introduzir a informação de preview.
Introdução de informação de preview para ve
Derivando a equação ve = vb − btRvt obtém-se
ve = vb − d
dt(buR
ut Rvr) = vb + S(ωb)
buR
ut Rvr − b
uRd
dt(ut Rvr)
e dado que
buR
d
dt(ut Rvr) = b
uRS(uωt) + buR
d
dt(ut Rvr) = b
tR
0−Vr k Vt
0
+ b
uR(uvr)
vem finalmente
ve = vb + S(ωb)(vb − ve)− btR
0Vr k Vt
0
− b
uR(uvr)
Repare-se que a dinâmica de erro de ve é dada pelas equações respectivas da Secção3.4, acrescentadas do sinal de preview que é dado por −b
uRddt
(ut Rvr) = −b
uR(uvr) e quecontabiliza o facto do caminho seja ser a concatenação de troços a que correspondemdescontinuidades na referência, resultando assim o impulso.
Introdução de informação de preview para ωe
Derivando a equação ωe = ωb − btRωt obtém-se
ωe = ωb − d
dt(buR
ut Rvr)ωe = ωb + S(ωb)
buR
ut Rωr − b
uRd
dt(ut Rωr)
e dado que
buR
d
dt(ut Rωr) = b
uRS(uωt)ωr + buR
d
dt(ut Rωr) = u
t RS(ωt)ωr + buR(uωr) = 0 + b
uR(uωr)
onde se utilizou S(ωt)ωr = 0 por os vectores serem colineares.Vem finalmente
ωe = ωb + S(ωb)(vb − ve)− buR(uωr)
De igual forma ao que foi referido no parágrafo anterior a dinâmica de ωe é dadapelas equações respectivas da Secção 3.4, acrescentadas do sinal de preview que é dado

5.3. INTRODUÇÃO DE PREVIEW NA DINÂMICA DO ESPAÇO DE ERRO 41
por −buR
ddt
(ut Rωr) = −b
uR(uωr)
Introdução de informação de preview para λe
Derivando a equação λe = λb − λc obtém-se
λe = Q(φb, θb)ωb − sign(κ)Vr
√κ2 + τ 2 − λc
A inclusão de preview para este caso é a mais simples. Novamente os termos dadinâmica são a soma dos termos já derivados na Secção 3.4, acrescentadas do sinal depreview que é dado por λc. Ao contrário dos casos anteriores o correspondente sinal λc
para uma dada trajectória de equilíbrio não é nulo mas é dado por sign(κ)Vr
√κ2 + τ 2,
pelo que se utiliza com algum abuso de notação λc = (λc(t+0 ) − λc(t
−0 ))δ(t − t0) para
designar apenas o impulso quando existe uma mudança de trajectória de equilíbrio noinstante t0, que corresponde a uma mudança de referência dos parâmetros Vr, τ ou κ.
Introdução da informação de preview no espaço de erro
Reunindo o que foi derivado nos parágrafos anteriores, a introdução da informaçãode preview no espaço de erro resulta em
ve
ωe
dt
λe
=
vb + S(ωb)(vb − ve)− btR
[0 Vr k Vt 0
]T
ωb + S(ωe)btR ωr
11−k dy
[τ dz 1− k dy 0τ dy 0 1− k dy
]tbRvb
λb − sign(κ)Vr
√κ2 + τ 2
+
−buR(uvr)
−buR(uωr)
0
−λc
Linearizando, atendendo que buR
∣∣trim
= cuR e utilizando a mesma notação da Secção
3.4, vemδxe = Fδxe + Gδu + W r
em que
W =
−uc R 0 00 −u
c R 00 0 00 0 −I
r(t) =
[(uvr(t))
T (uωr)T λ
T
c
]T
Discretizando vem
xe(k + 1) = Axe(k) + B u(k) + B1 s(k)
onde B1, a matriz de injecção, é assim dada por
B1 = eFts
−uc R 0 00 −u
c R 00 0 00 0 −I
e a informação de preview ou seja o vector s(k) tem dimensão ns = 9 e é dado por
s(k) =
uvr(k + 1)− uvr(k)uωr(k + 1)− uωr(k)λc(k + 1)− λc(k)
(5.3)
Capítulo 6
Implementação
Os temas da síntese do controlador e da sua implementação são abordados deseguida. A elevada complexidade computacional da síntese do controlador leva a queseja utilizado um método expedito com sugerido em [2]. Pretende-se também apresen-tar os parâmetros escolhidos tais como amostras de preview e matrizes de desempenhodo controlador. Relativamente à implementação do controlador, pretende-se resumir oalgoritmo de controlo e a forma como se implementou a técnica de preview.
6.1 Síntese do controlador de cada zonaO controlador sintetizado garante desempenho em termos da norma H2 para toda a
zona de funcionamento do sistema afim obtido por aproximação por mínimos quadrados.O problema de optimização que permite sintetizar este controlador foi apresentado noteorema 5 do capítulo 4.
O problema de síntese do controlador para cada zona tem elevada complexidadecomputacional. Atendendo ao teorema 5, pode-se verificar que o número de variáveisde decisão é de ordem de n2 em que n é a dimensão do estado (a variável de decisãomatricial X tem dimensão n × n apesar de ser simétrica). Relativamente ao númerode restrições, cada vértice impõe uma restrição do tipo LMI, existindo ainda as duasrestrições do problema H2 para o ponto central. Neste caso temos 2 × 2 × 2 × 2 = 16vértices correspondentes às combinações de valores máximos e mínimos de cada um dosparâmetros da partição.
Para sintetizar um controlador, apenas para o sistema sem preview, ou seja com15 estados correspondentes ao espaço de erro, para uma dada região demorou cercade 100 segundos num computador com bom desempenho (Pentium Centrino 1,5Mhz512 RAM ). Os controladores para as 98 zonas demoraram assim a sintetizar mais de 3horas. Um controlador com o estado aumentado de 15+nsp estados em que p ' 60 é onúmero de amostras de preview e ns = 9 a dimensão da informação de preview de cadaamostra não foi possível sintetizar por falta de recursos computacionais. Para resolvereste problema utilizou-se um método expedito tal como apresentado em [2]. Este métodoconsiste em utilizar as soluções P = X−1 e K obtidas resolvendo o problema relativoao teorema 5 para construir o vector de preview como se estas soluções se tratassem doproblema LQR no ponto central da região de parâmetros. O ponto central da região deparâmetros pi ∈
[li li
]é definido como a realização das matrizes da dinâmica para os
42

6.2. IMPLEMENTAÇÃO DA TÉCNICA DE PREVIEW 43
parâmetros pM = lp1+lp1
2, ..,
lpv+lpv2
. Repare-se que a solução do problema óptimo H2
para a realização do sistema correspondente ao ponto central, é idêntica à solução doproblema problema LQR para o ponto central, Px e Kx, nas condições do teorema 3 doCapítulo 3. Portanto poder-se-ia utilizar o Lema 2 do Capítulo 5, para encontrar a soluçãoóptima para o sistema aumentado a partir de Px e Kx. No entanto o problema é diferentedado que se impõe desempenho para a aproximação linear no espaço de parâmetrospara toda a região e portanto as condições do Lema 2 do Capítulo 5 não são satisfeitas.Resumindo, o que se propõe com o método expedito é utilizar a solução P e K, obtidascom o problema impondo desempenho para toda a região, para construir os ganhos dovector de preview da mesma forma como se tratasse da solução LQR, para o ponto central.A obtenção do vector de ganhos de Ks de preview é realizada de acordo com o Lema 2do Capítulo 5. Este método encontra uma solução sub-óptima tal como referido em [2].Como provado em [10] a norma H2 do sistema em malha fechada desta forma sintetizadocom preview é menor que a norma do sistema sintetizado sem preview, resultado que ésemelhante ao Lema 3 do Capítulo 5.
As matrizes C2 e D2 do teorema 5 foram escolhidas de acordo com o seguinte vectorde desempenho.
z =
[0.5v′e 0.1ω′
e d′t 0.01φ′e 0.01θ′e 0.1ψ′e 0.1x′i 00 5.0u′
]′(6.1)
A matriz B2, de acordo como o referido na Secção 5.1 do Capítulo 5, é escolhidacomo sendo a matriz de injecção B2=B1. O período de amostragem escolhido para adiscretização do sistema foi de ts = 0.02 s.
Os ganhos de preview, Ks, têm dimensão nu × (ns p), em que nu = 4 é a dimensãoda actuação, ns = 9 é a dimensão do vector s e p o número de amostras de preview. Nafigura 6.1 apresenta-se os ganhos correspondentes à segunda e nona componentes de s daprimeira linha do vector de preview, para uma dada zona1 e para p = 100. De acordo coma definição do vector s (expressão 5.3), representam a influência na primeira componenteda actuação de uma variação das referências uvr (componente segundo y de uvr) e deuψr. Note-se o rápido decrescimento destes ganhos com o número de amostras.
6.2 Implementação da técnica de previewRelativamente à implementação da técnica de preview, o vector introduzido é cal-
culado projectando a velocidade do corpo no caminho e cada vez que o ciclo de controlose repete são recalculadas as amostras de preview de acordo com o que foi referido naSecção 5.2. Quanto à escolha do número de amostras de preview que são calculadasestabeleceu-se o valor de ns = 60 amostras. O estudo da influência dos ganhos de previewpode ser visto em [2], onde se conclui que um valor de amostras superior não influenciasignificativamente o sinal de controlo. Uma conclusão semelhante pode-se tirar da Figura6.1.
Para uma velocidade razoável de por exemplo V = 1.0 m/s este número de amostrascorresponde a uma distância de visibilidade de ts × V × ns = 0.02,×1 × 60 = 1.2 m. A
1A zona referida é constituída pelos intervalos de parâmetros V ∈ [0.9 1.9
], η ∈ [−15 15
], ρ ∈[−15 15
]e ψb ∈
[−0.1 0.1]
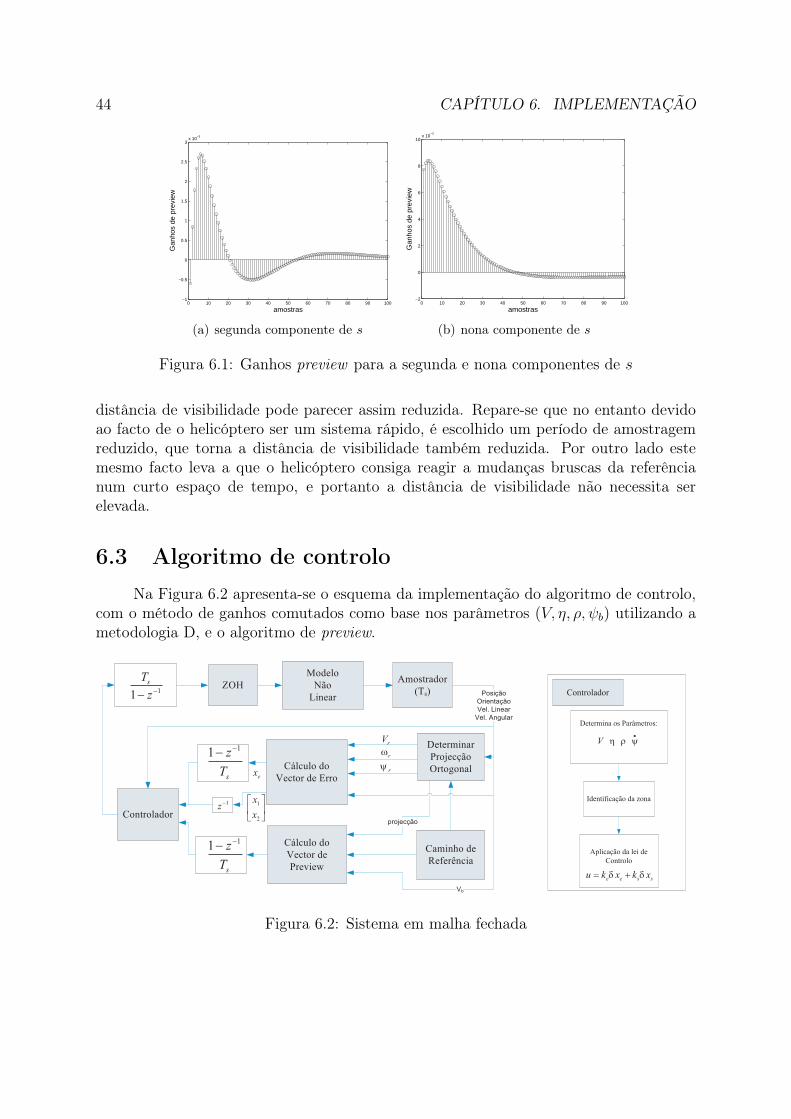
44 CAPÍTULO 6. IMPLEMENTAÇÃO
0 10 20 30 40 50 60 70 80 90 100−1
−0.5
0
0.5
1
1.5
2
2.5
3x 10
−3
Gan
hos
de p
revi
ew
amostras
(a) segunda componente de s
0 10 20 30 40 50 60 70 80 90 100−2
0
2
4
6
8
10x 10
−3
Gan
hos
de p
revi
ew
amostras
(b) nona componente de s
Figura 6.1: Ganhos preview para a segunda e nona componentes de s
distância de visibilidade pode parecer assim reduzida. Repare-se que no entanto devidoao facto de o helicóptero ser um sistema rápido, é escolhido um período de amostragemreduzido, que torna a distância de visibilidade também reduzida. Por outro lado estemesmo facto leva a que o helicóptero consiga reagir a mudanças bruscas da referêncianum curto espaço de tempo, e portanto a distância de visibilidade não necessita serelevada.
6.3 Algoritmo de controloNa Figura 6.2 apresenta-se o esquema da implementação do algoritmo de controlo,
com o método de ganhos comutados como base nos parâmetros (V, η, ρ, ψb) utilizando ametodologia D, e o algoritmo de preview.
Figura 6.2: Sistema em malha fechada
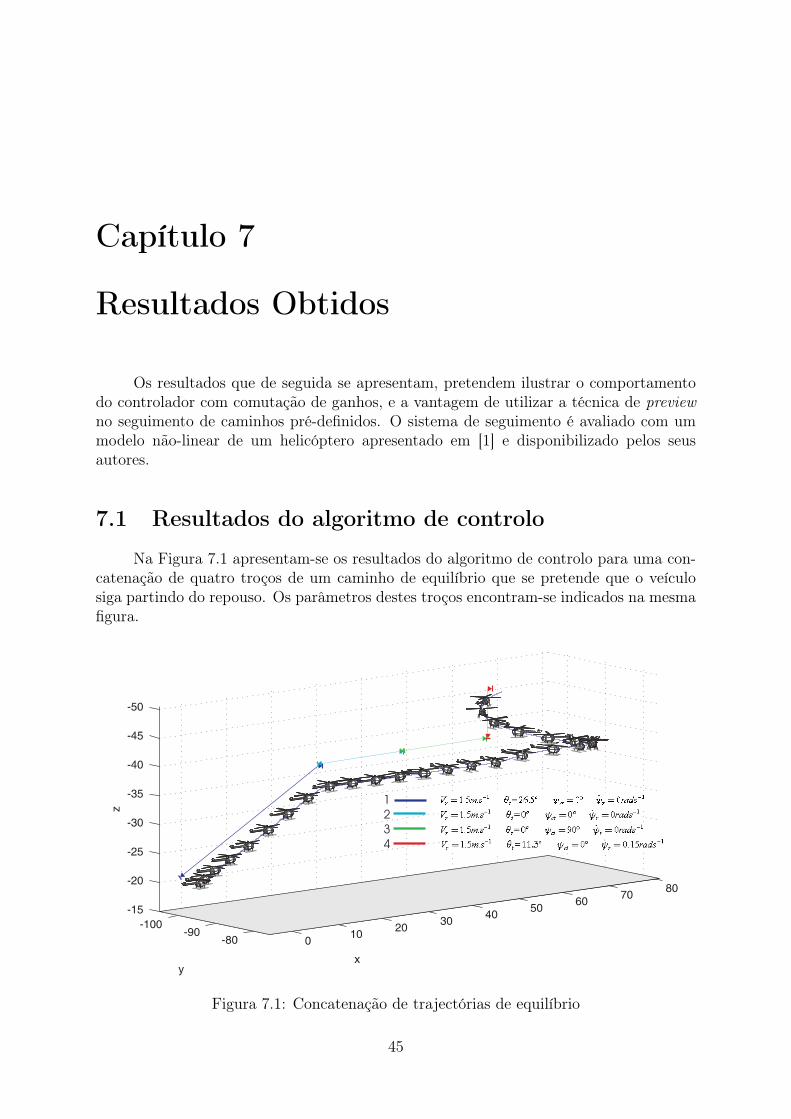
Capítulo 7
Resultados Obtidos
Os resultados que de seguida se apresentam, pretendem ilustrar o comportamentodo controlador com comutação de ganhos, e a vantagem de utilizar a técnica de previewno seguimento de caminhos pré-definidos. O sistema de seguimento é avaliado com ummodelo não-linear de um helicóptero apresentado em [1] e disponibilizado pelos seusautores.
7.1 Resultados do algoritmo de controlo
Na Figura 7.1 apresentam-se os resultados do algoritmo de controlo para uma con-catenação de quatro troços de um caminho de equilíbrio que se pretende que o veículosiga partindo do repouso. Os parâmetros destes troços encontram-se indicados na mesmafigura.
Figura 7.1: Concatenação de trajectórias de equilíbrio
45
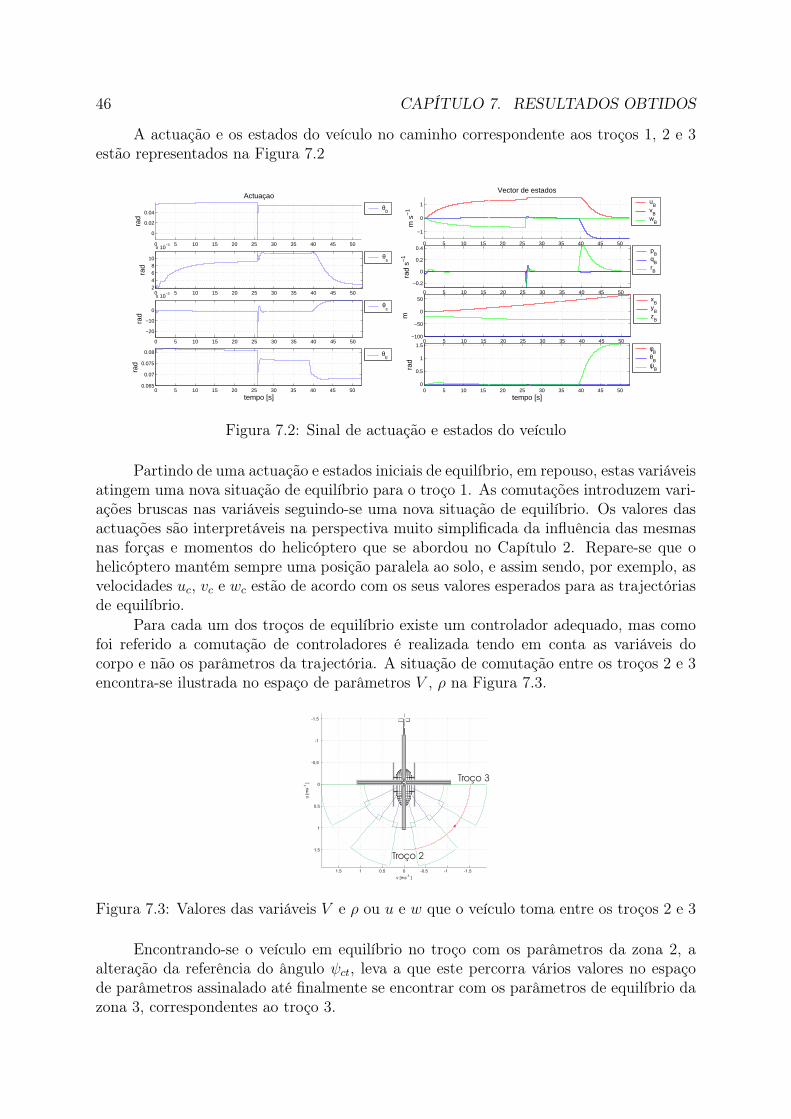
46 CAPÍTULO 7. RESULTADOS OBTIDOS
A actuação e os estados do veículo no caminho correspondente aos troços 1, 2 e 3estão representados na Figura 7.2
0 5 10 15 20 25 30 35 40 45 50
0
0.02
0.04
Actuaçao
rad
θ0
0 5 10 15 20 25 30 35 40 45 502468
10
x 10−3
rad
θs
0 5 10 15 20 25 30 35 40 45 50
−20
−10
0
x 10−3
rad
θc
0 5 10 15 20 25 30 35 40 45 500.065
0.07
0.075
0.08
rad
tempo [s]
θtr
0 5 10 15 20 25 30 35 40 45 50
−1
0
1
Vector de estados
m s
−1
uB
vB
wB
0 5 10 15 20 25 30 35 40 45 50
−0.2
0
0.2
0.4
rad
s−1
pB
qB
rB
0 5 10 15 20 25 30 35 40 45 50−100
−50
0
50
m
xB
yB
zB
0 5 10 15 20 25 30 35 40 45 500
0.5
1
1.5
rad
tempo [s]
φB
θB
ψB
Figura 7.2: Sinal de actuação e estados do veículo
Partindo de uma actuação e estados iniciais de equilíbrio, em repouso, estas variáveisatingem uma nova situação de equilíbrio para o troço 1. As comutações introduzem vari-ações bruscas nas variáveis seguindo-se uma nova situação de equilíbrio. Os valores dasactuações são interpretáveis na perspectiva muito simplificada da influência das mesmasnas forças e momentos do helicóptero que se abordou no Capítulo 2. Repare-se que ohelicóptero mantém sempre uma posição paralela ao solo, e assim sendo, por exemplo, asvelocidades uc, vc e wc estão de acordo com os seus valores esperados para as trajectóriasde equilíbrio.
Para cada um dos troços de equilíbrio existe um controlador adequado, mas comofoi referido a comutação de controladores é realizada tendo em conta as variáveis docorpo e não os parâmetros da trajectória. A situação de comutação entre os troços 2 e 3encontra-se ilustrada no espaço de parâmetros V , ρ na Figura 7.3.
Figura 7.3: Valores das variáveis V e ρ ou u e w que o veículo toma entre os troços 2 e 3
Encontrando-se o veículo em equilíbrio no troço com os parâmetros da zona 2, aalteração da referência do ângulo ψct, leva a que este percorra vários valores no espaçode parâmetros assinalado até finalmente se encontrar com os parâmetros de equilíbrio dazona 3, correspondentes ao troço 3.
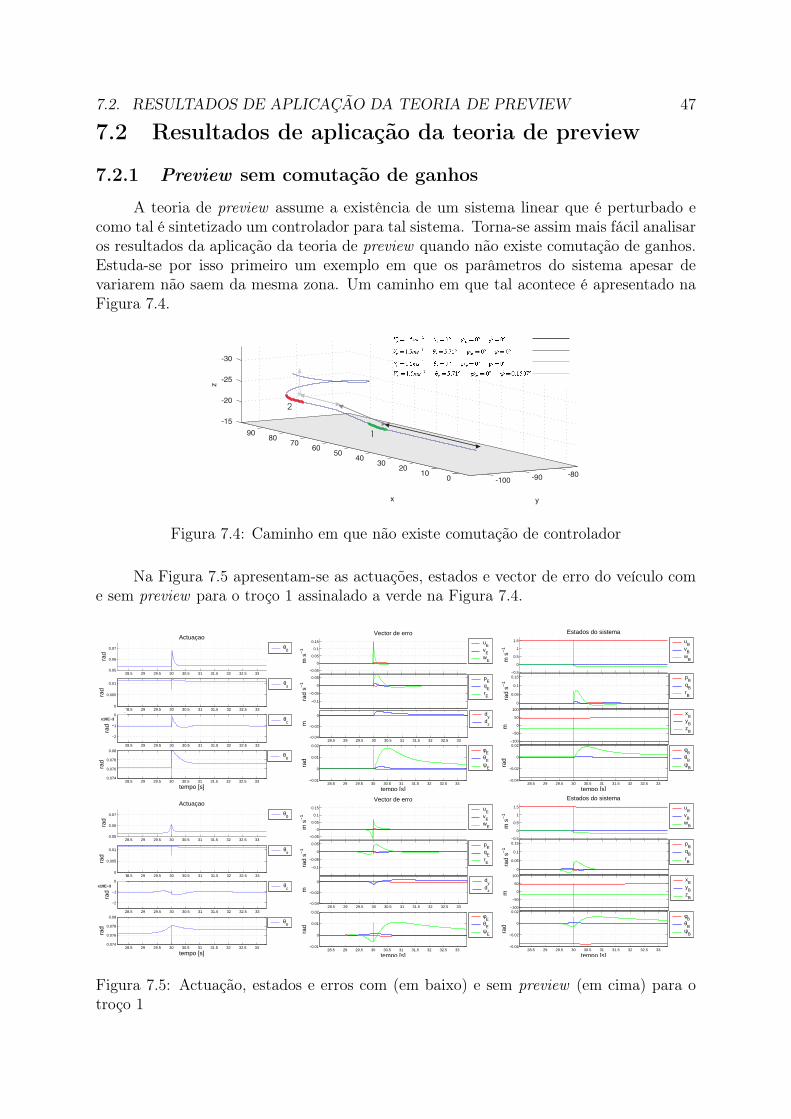
7.2. RESULTADOS DE APLICAÇÃO DA TEORIA DE PREVIEW 47
7.2 Resultados de aplicação da teoria de preview
7.2.1 Preview sem comutação de ganhos
A teoria de preview assume a existência de um sistema linear que é perturbado ecomo tal é sintetizado um controlador para tal sistema. Torna-se assim mais fácil analisaros resultados da aplicação da teoria de preview quando não existe comutação de ganhos.Estuda-se por isso primeiro um exemplo em que os parâmetros do sistema apesar devariarem não saem da mesma zona. Um caminho em que tal acontece é apresentado naFigura 7.4.
Figura 7.4: Caminho em que não existe comutação de controlador
Na Figura 7.5 apresentam-se as actuações, estados e vector de erro do veículo come sem preview para o troço 1 assinalado a verde na Figura 7.4.
28.5 29 29.5 30 30.5 31 31.5 32 32.5 330.05
0.06
0.07
Actuaçao
rad
θ0
28.5 29 29.5 30 30.5 31 31.5 32 32.5 330
0.005
0.01
rad
θs
28.5 29 29.5 30 30.5 31 31.5 32 32.5 33
−2
−1
0x 10
−3
rad
θc
28.5 29 29.5 30 30.5 31 31.5 32 32.5 330.074
0.076
0.078
0.08
rad
tempo [s]
θtr
x10E−3
.
28.5 29 29.5 30 30.5 31 31.5 32 32.5 33
−0.05
0
0.05
0.1
0.15
Vector de erro
m s
−1
uE
vE
wE
28.5 29 29.5 30 30.5 31 31.5 32 32.5 33
−0.1
−0.05
0
0.05
rad
s−1
pE
qE
rE
28.5 29 29.5 30 30.5 31 31.5 32 32.5 33−0.04
−0.02
0
m
dy
dz
28.5 29 29.5 30 30.5 31 31.5 32 32.5 33−0.01
0
0.01
0.02
rad
tempo [s]
φE
θE
ψE
28.5 29 29.5 30 30.5 31 31.5 32 32.5 33−0.5
0
0.5
1
1.5
Estados do sistema
m s
−1
uB
vB
wB
28.5 29 29.5 30 30.5 31 31.5 32 32.5 33
0
0.05
0.1
0.15
rad
s−1
pB
qB
rB
28.5 29 29.5 30 30.5 31 31.5 32 32.5 33
−100
−50
0
50
100
m
xB
yB
zB
28.5 29 29.5 30 30.5 31 31.5 32 32.5 33−0.04
−0.02
0
0.02
rad
tempo [s]
φB
θB
ψB
28.5 29 29.5 30 30.5 31 31.5 32 32.5 330.05
0.06
0.07
Actuaçao
rad
θ0
28.5 29 29.5 30 30.5 31 31.5 32 32.5 330
0.005
0.01
rad
θs
28.5 29 29.5 30 30.5 31 31.5 32 32.5 33
−2
−1
0x 10
−3
rad
θc
28.5 29 29.5 30 30.5 31 31.5 32 32.5 330.074
0.076
0.078
0.08
rad
tempo [s]
θtr
x10E−3
.
28.5 29 29.5 30 30.5 31 31.5 32 32.5 33
−0.05
0
0.05
0.1
0.15
Vector de erro
m s
−1
uE
vE
wE
28.5 29 29.5 30 30.5 31 31.5 32 32.5 33
−0.1
−0.05
0
0.05
rad
s−1
pE
qE
rE
28.5 29 29.5 30 30.5 31 31.5 32 32.5 33−0.04
−0.02
0
m
dy
dz
28.5 29 29.5 30 30.5 31 31.5 32 32.5 33−0.01
0
0.01
0.02
rad
tempo [s]
φE
θE
ψE
28.5 29 29.5 30 30.5 31 31.5 32 32.5 33−0.5
0
0.5
1
1.5
Estados do sistema
m s
−1
uB
vB
wB
28.5 29 29.5 30 30.5 31 31.5 32 32.5 33
0
0.05
0.1
0.15
rad
s−1
pB
qB
rB
28.5 29 29.5 30 30.5 31 31.5 32 32.5 33
−100
−50
0
50
100
m
xB
yB
zB
28.5 29 29.5 30 30.5 31 31.5 32 32.5 33−0.04
−0.02
0
0.02
rad
tempo [s]
φB
θB
ψB
Figura 7.5: Actuação, estados e erros com (em baixo) e sem preview (em cima) para otroço 1

48 CAPÍTULO 7. RESULTADOS OBTIDOS
Repare-se que os resultados com preview apresentam actuações mais suaves e menorenergia dos erros. Estes sinais são alterados antes de existir a comutação de caminho.Repare-se também na semelhança entre o que acontece neste caso e o exemplo abordadona Secção 5.2, tanto para a actuação como por exemplo para o erro em we que é distribuídoantes e depois da comutação.
Apresenta-se ainda na Figura 7.6 os mesmos resultados para o troço 2 assinaladona Figura 7.4 a vermelho, interpretáveis da mesma forma.
54 55 56 57 58 590.05
0.06
0.07
Actuaçao
rad
θ0
54 55 56 57 58 590
0.005
0.01
rad
θs
54 55 56 57 58 59
−2
−1
0x 10
−3
rad
θc
54 55 56 57 58 590.074
0.076
0.078
0.08
rad
tempo [s]
θtr
x10E−3
.
54 55 56 57 58 59
−0.05
0
0.05
0.1
0.15
Vector de erro
m s
−1
uE
vE
wE
54 55 56 57 58 59
−0.1
−0.05
0
0.05
rad
s−1
pE
qE
rE
54 55 56 57 58 59−0.04
−0.02
0
m
dy
dz
54 55 56 57 58 59−0.02
0
0.02
0.04
rad
tempo [s]
φE
θE
ψE
54 55 56 57 58 59−0.5
0
0.5
1
1.5
Estados do sistema
m s
−1
uB
vB
wB
54 55 56 57 58 59
0
0.05
0.1
0.15
rad
s−1
pB
qB
rB
54 55 56 57 58 59
−100
−50
0
50
100
m
xB
yB
zB
54 55 56 57 58 59
0
0.2
0.4
rad
tempo [s]
φB
θB
ψB
54 55 56 57 58 590.05
0.06
0.07
Actuaçao
rad
θ0
54 55 56 57 58 590
0.005
0.01
rad
θs
54 55 56 57 58 59
−2
−1
0x 10
−3
rad
θc
54 55 56 57 58 590.074
0.076
0.078
0.08
rad
tempo [s]
θtr
x10E−3
.
54 55 56 57 58 59
−0.05
0
0.05
0.1
0.15
Vector de erro
m s
−1
uE
vE
wE
54 55 56 57 58 59
−0.1
−0.05
0
0.05
rad
s−1
pE
qE
rE
54 55 56 57 58 59−0.04
−0.02
0
m
dy
dz
54 55 56 57 58 59−0.02
0
0.02
0.04
rad
tempo [s]
φE
θE
ψE
54 55 56 57 58 59−0.5
0
0.5
1
1.5
Estados do sistema
m s
−1
uB
vB
wB
54 55 56 57 58 59
0
0.05
0.1
0.15
rad
s−1
pB
qB
rB
54 55 56 57 58 59
−100
−50
0
50
100
m
xB
yB
zB
54 55 56 57 58 59
0
0.2
0.4
rad
tempo [s]
φB
θB
ψB
Figura 7.6: Actuação, estados e erros com (em baixo) e sem preview(em cima) para troço2
7.2.2 Preview com comutação de ganhos
Apesar de a teoria de preview apenas se referir a situações em que um único contro-lador é utilizado, é expectável que os ganhos de preview também melhorem o desempenhodo seguimento quando existem comutações de ganhos. Tal situação é ilustrada na Figura7.7 onde claramente a utilização de preview melhora o desempenho.
Nesta Figura 7.7 apresentam-se também os erros. Repare-se como estes são dis-tribuídos pelas duas trajectórias de equilíbrio, o que corresponde às variáveis do veículoanteciparem a mudança. Realça-se os erros em ψe e nas componentes da velocidade, queilustram o facto ao veículo começar a virar com antecedência.
Finalmente apresenta-se a norma com e sem preview para o ponto central de to-das as zonas. Tal como referido anteriormente a norma H2 com preview para o sis-tema aproximado por um sistema afim é inferior do que sem preview. Com este gráficoconfirma-se, como seria expectável dado que as aproximações por funções afim dos sis-temas mostraram-se válidas, também para as realizações do sistema.
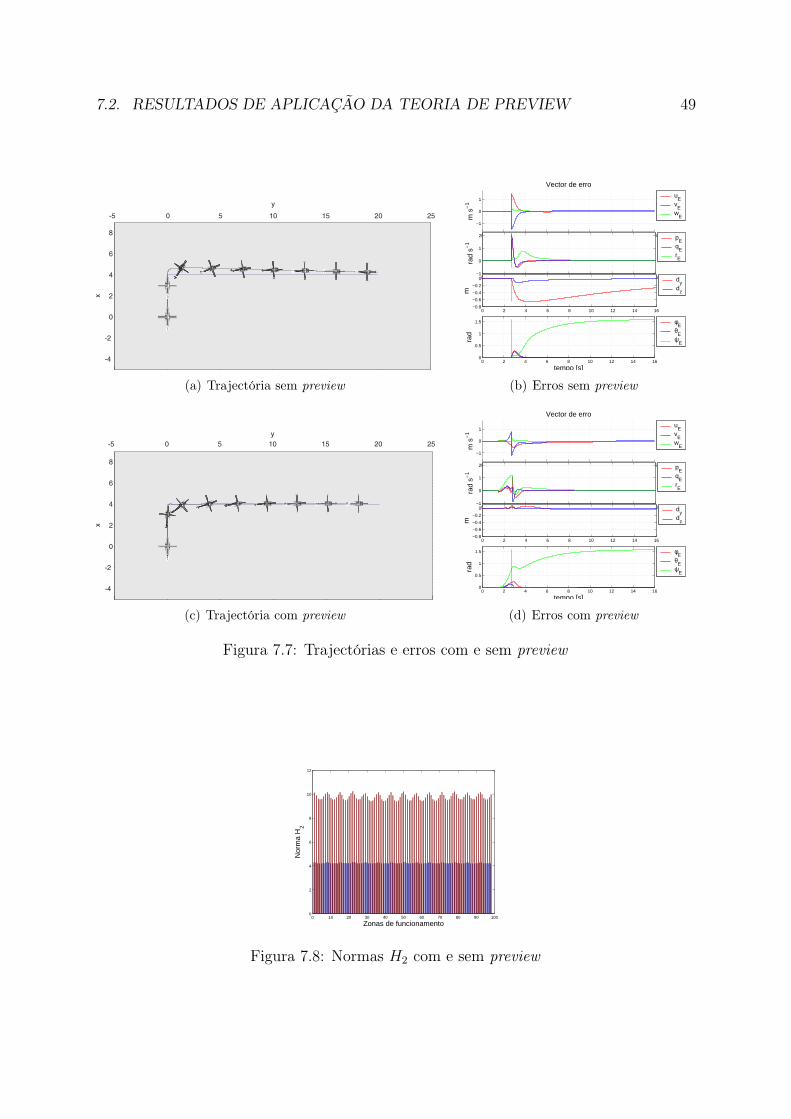
7.2. RESULTADOS DE APLICAÇÃO DA TEORIA DE PREVIEW 49
(a) Trajectória sem preview
0 2 4 6 8 10 12 14 16
−1
0
1
Vector de erro
m s
−1
uE
vE
wE
0 2 4 6 8 10 12 14 16−1
0
1
2
rad
s−1
pE
qE
rE
0 2 4 6 8 10 12 14 16−0.8
−0.6
−0.4
−0.2
0
m
dy
dz
0 2 4 6 8 10 12 14 160
0.5
1
1.5
rad
tempo [s]
φE
θE
ψE
(b) Erros sem preview
(c) Trajectória com preview
0 2 4 6 8 10 12 14 16
−1
0
1
Vector de erro
m s
−1
uE
vE
wE
0 2 4 6 8 10 12 14 16−1
0
1
2ra
d s−
1p
Eq
ErE
0 2 4 6 8 10 12 14 16−0.8
−0.6
−0.4
−0.2
0
m
dy
dz
0 2 4 6 8 10 12 14 160
0.5
1
1.5
rad
tempo [s]
φE
θE
ψE
(d) Erros com preview
Figura 7.7: Trajectórias e erros com e sem preview
0 10 20 30 40 50 60 70 80 90 1000
2
4
6
8
10
12
Zonas de funcionamento
Nor
ma
H2
Figura 7.8: Normas H2 com e sem preview

Capítulo 8
Conclusões e trabalho futuro
Neste trabalho abordou-se o problema de seguimento de caminhos com aplicaçãoa helicópteros autónomos. O problema foi formulado como um problema de controloatravés da definição de um espaço de erro adequado. Foi sintetizado um controladoratravés da teoria existente para LPVs e aplicada a teoria de preview tendo em conta oconhecimento de informação da referência futura. O sistema de controlo foi testado emsimulação utilizando um modelo não linear do helicóptero.
Os pressupostos utilizados ao longo do trabalho revelaram-se válidos e a imple-mentação do sistema de controlo em simulação revelou que o método é uma abordagemeficiente para resolver o problema de seguimento. O estudo da forma de introduzir infor-mação futura à luz da teoria de preview permitiu melhorar o desempenho do sistema deseguimento com bons resultados.
Relativamente a trabalho futuro, referem-se os seguintes aspectos que podem serexplorados através do trabalho realizado:
• O elevado número de parâmetros (quatro) da dependência das linearizações dadinâmica do espaço de erro, levou a dificuldades na aplicação do método de síntesedo controlador com a discretização de um espaço de R4. Em [17] é proposta umaalternativa designada de Blending Approach, que pode ser explorada futuramente.
• O pressuposto de que o estado é acessível pode não ser válida para alguns veículosautónomos (falta de sensores). Poder-se-á assim analisar resultados relativos àsíntese de controlador por realimentação das saídas (abordados no Anexo E) emvez dos utilizados para realimentação do estado.
• Como tópico mais avançado, refere-se a redução do conservadorismo inerente aométodo de síntese do controlador (teorema 5 do Capítulo 4), problema para o qualexiste algum trabalho relativamente a problemas semelhantes para estabilidade enorma H∞ (ver [18])
• A eficiência e facilidade de implementação do método de controlo levam a que ospróximos passos possam ser o teste num aparato Hardware in the loop e implemen-tação e teste numa plataforma real.
50

Apêndice A
Algumas relações matemáticas
Neste anexo constam algumas relações matemáticas utilizadas na derivação dosresultados apresentados.
A.1 Velocidades angulares
A velocidade angular de um corpo rígido verifica as seguintes relações
aωc = aωb + abR
bωc
cωb = −cbR
bωc
A.2 Ângulos de Euler
Ângulos de Euler λb =
φb
θb
ψb
Matriz de rotação do referencial B para o referencial U ub R, segundo os ângulos
de Euler Z-Y-X
ub R = Rz(ψb) Ry(θb) Rx(φb)
=
cos ψb − sin ψb 0sin ψb cos ψb 0
0 0 1
cos θb 0 sin θb
0 1 0− sin θb 0 cos θb
1 0 00 cos φb − sin φb
0 sin φb cos φb
Determinação dos ângulos
• φb = arctan 2(r32, r33)
• θb = arctan 2(−r31,√
r211 + r2
21)
• ψb = arctan 2(r21, r11)
51
52 APÊNDICE A. ALGUMAS RELAÇÕES MATEMÁTICAS
Relação entre os ângulos de Euler λb e a velocidade angular ωb
ωb =
φb
00
+ Rx(φb)
0
θb
0
+ Rx(φb) Ry(θb)
00
ψb
Relação que invertida resulta em
λb = Q ωb =
1 sin φb tan θb cos φb tan θb
0 cos φb − sin φb
0 sin φb/ cos θb cos φb/ cos θb
ωb
A.3 Derivada de matrizes de rotaçãoExpressões para a derivada em ordem ao tempo
baR = S( bωa)
baR = b
aR S(a(bωa))
Expressões para a derivada em ordem a λ
d
d λ(Ru) = −R S(u) Q−1
d
d λ(R−1 u) = S(R−1 u) Q−1
A.4 Definição da função sign
sign(x) =
1 se x >= 0−1 se x < 0

Apêndice B
Propriedades do referencial T
De seguida apresentam-se algumas propriedades do referencial T, introduzido nocapitulo 3. Este referencial é muito semelhante ao referencial Serret-Frenet cujas pro-priedades podem ser consultadas em [12] e em [14]. São apresentadas primeiro algumasdefinições para curvas em R3, necessárias para definir o referencial T concluindo-secom os exemplos de interesse para o trabalho, rectas e hélices com eixo vertical no es-paço tridimensional, assim como a vantagem de utilizar este referencial relativamente aoreferencial de Serret-Frenet.
B.1 Curvas em R3
Seja Γ um curva C2 parametrizada por ξ ∈ [ξ0 , ξ1]
Γ(ξ) = (x, y, z) = ( x(ξ) , y(ξ) , z(ξ) )
O seu comprimentos s entre ξ0 e ξ é por definição dado por
s(ξ) =
∫ ξ
ξ0
[(d
dτx(τ))2 + (
d
dτy(τ))2 + (
d
dτz(τ))2]
12 dτ (B.1)
A curva pode também ser parametrizada por s, sendo que a transformação entreparâmetros s = g(ξ) é dada por B.1.
Vector tangente O vector tangente t a um curva Γ é por definição dado por
t(ξ) =dx
dsx +
dy
dsy +
dz
dsz = (
ds
dξ)−1(
dx
dξx +
dy
dξy +
dz
dξz)
Repare-se que a partir de B.1 obtém-se dsdξ
= (( ddξ
x)2 + ( ddξ
y)2 + ( ddξ
z)2)12 e portanto
t é um vector com norma unitária.
‖t(ξ)‖ =(( d
dξx)2 + ( d
dξy)2 + ( d
dξz)2)
12
dsdξ
= 1
A interpretação geométrica de t(ξ) encontra-se ilustrada na Figura B.1
53

54 APÊNDICE B. PROPRIEDADES DO REFERENCIAL Tt( )x
G(x)
Figura B.1: Definição do vector t
Vector normal principal Considere-se o vector obtido derivando t(ξ) em ordem a s
dt(ξ)
ds=
d 2x
ds2x +
d 2y
ds2y +
d 2z
ds2z
Dado que t(ξ) tem norma unitária
t(ξ).t(ξ) = 1
derivando em ambos os membros, obtém-se
2dt(ξ)
ds.t(ξ) = 0
ou seja o vector dt(ξ)ds
, se for diferente do vector nulo, é ortogonal a t.Introduz-se o vector n(ξ), normal a t(ξ), da seguinte forma
κ(ξ)n(ξ) =dt(ξ)
ds(B.2)
com
κ(ξ) = σ(ξ)(d 2x
ds2+
d 2y
ds2+
d 2z
ds2)
12 , σ(ξ) ∈ −1, 1
e portanto n(ξ) é um vector com norma unitária.O valor σ(ξ) ∈ −1, 1 é definido da seguinte forma
σ(ξ) =(t× dt
ds).z
‖(t× dtds
).z‖permitindo assim que o referencial formado pelos vectores ton tenha a mesma orientaçãoque xoy (ver [19] para definição de orientação), tal como ilustrado na Figura B.2.
A diferença entre o referencial T e o referencial de Serret-Frenet estabelece-sepela introdução de σ. Neste último referencial n(ξ) tem sempre o mesmo sentido quedt(ξ)ds
. A utilidade da definição de n(ξ) desta forma, tendo em conta o sinal de σ, serádiscutida mais à frente.
O valor absoluto de κ é normalmente designado por curvatura
|κ| = (d 2x
ds2+
d 2y
ds2+
d 2z
ds2)
12
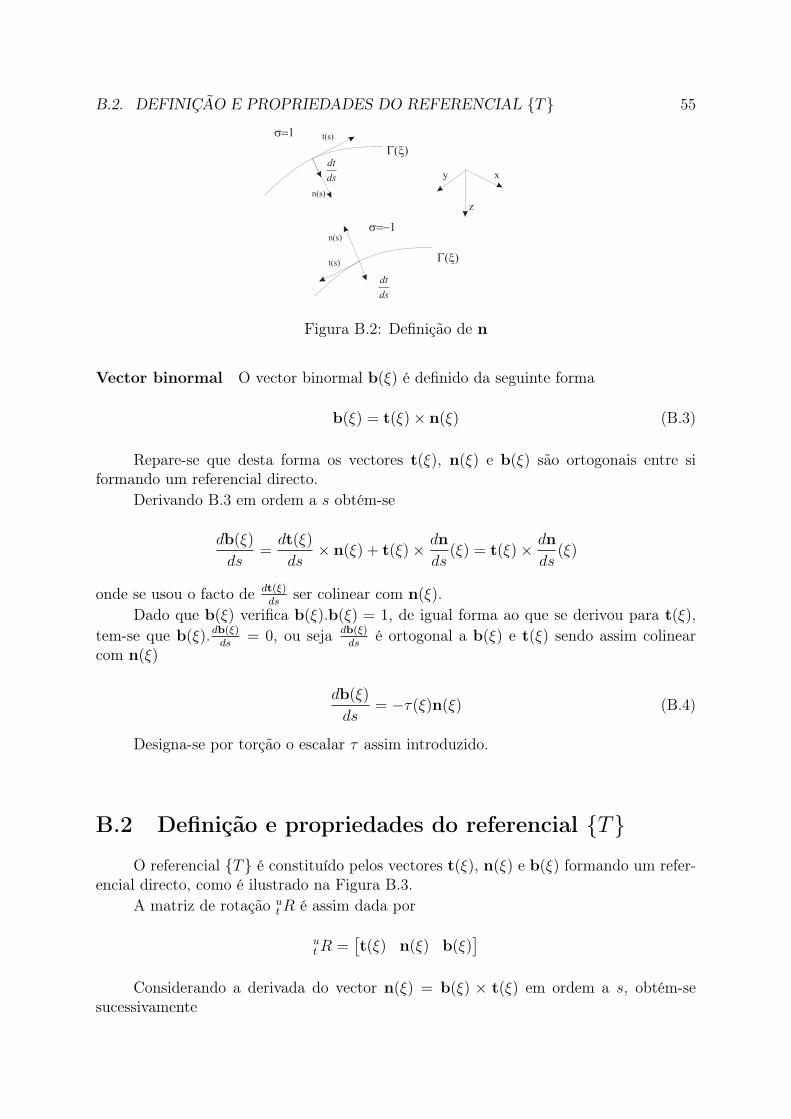
B.2. DEFINIÇÃO E PROPRIEDADES DO REFERENCIAL T 55
Figura B.2: Definição de n
Vector binormal O vector binormal b(ξ) é definido da seguinte forma
b(ξ) = t(ξ)× n(ξ) (B.3)
Repare-se que desta forma os vectores t(ξ), n(ξ) e b(ξ) são ortogonais entre siformando um referencial directo.
Derivando B.3 em ordem a s obtém-se
db(ξ)
ds=
dt(ξ)
ds× n(ξ) + t(ξ)× dn
ds(ξ) = t(ξ)× dn
ds(ξ)
onde se usou o facto de dt(ξ)ds
ser colinear com n(ξ).Dado que b(ξ) verifica b(ξ).b(ξ) = 1, de igual forma ao que se derivou para t(ξ),
tem-se que b(ξ).db(ξ)ds
= 0, ou seja db(ξ)ds
é ortogonal a b(ξ) e t(ξ) sendo assim colinearcom n(ξ)
db(ξ)
ds= −τ(ξ)n(ξ) (B.4)
Designa-se por torção o escalar τ assim introduzido.
B.2 Definição e propriedades do referencial TO referencial T é constituído pelos vectores t(ξ), n(ξ) e b(ξ) formando um refer-
encial directo, como é ilustrado na Figura B.3.A matriz de rotação u
t R é assim dada por
ut R =
[t(ξ) n(ξ) b(ξ)
]
Considerando a derivada do vector n(ξ) = b(ξ) × t(ξ) em ordem a s, obtém-sesucessivamente

56 APÊNDICE B. PROPRIEDADES DO REFERENCIAL T
n
t
b
T
Figura B.3: Referencial T
dn(ξ)
ds=
db(ξ)
ds× t(ξ) + b(ξ)× dt(ξ)
dsdn(ξ)
ds= (−τ(ξ)n(ξ))× t(ξ) + b(ξ)× (κ(ξ)n(ξ))
dn(ξ)
ds= τ(ξ)b(ξ)− κ(ξ)t(ξ) (B.5)
A partir das equações B.2, B.4 e B.5, pode-se obter a derivada da matriz ut R em
ordem a ξ
d
dξut R =
[dds
t(ξ) dds
n(ξ) dds
b(ξ)] ds
dξ=
[t(ξ) n(ξ) b(ξ)
]
0 −κ(ξ) 0κ(ξ) 0 −τ(ξ)
0 τ(ξ) 0
ds
dξ
Se o parâmetro ξ for o tempo ξ = t e tendo em conta a relação
d
dtut R = u
t R ωt × . = ut RS(ωt)
vem que
ωt =[τ(ξ) 0 κ(ξ)
]T ds
dt=
[τ(ξ) 0 κ(ξ)
]TVt
onde se utilizou a definição de velocidade escalar, neste caso da velocidade Vt da origemdo referencial T
Vt =ds
dtRepare-se que o referencial T foi definido no Capítulo 3 como tendo origem no
ponto do caminho mais próximo da posição do veículo. Desta forma se se utilizar umaparametrização para o caminho dependendo do tempo,
Γ(t) = (x(t) , y(t) , z(t))
as funções (x(t) , y(t) , z(t)) são tais que o ponto (x, y, z) indica para cada instante detempo o ponto do caminho mais próximo do veículo.
B.3 Referencial T para caminhos de interesseOs caminhos de interesse são hélices com eixo vertical e rectas no espaço tridimen-
sional. As hélices podem ser percorridas no sentido directo (k > 0) ou no sentido oposto(k < 0), pelo que estes casos são tratados de forma separada.

B.3. REFERENCIAL T PARA CAMINHOS DE INTERESSE 57
Hélice com κ > 0 Uma hélice pode ser parametrizada por ξ ∈ (ξ0 ξ1), ξ1 > ξ0 na forma
Γ(ξ) =a
b
cos(γ) sin(bξ)− cos(γ) cos(bξ)−bξ sin(γ)
+
x0
y0
z0
(B.6)
com a > 0, b > 0 e γ ∈]− π2
π2[.
O vector tangente obtém-se derivando B.6 em ordem a s
ds
dξt(ξ) = a
cos(γ) cos(bξ)cos(γ) sin(bξ)− sin(γ)
De onde vem que dsdξ
= a e t(ξ) é tal que ‖t(ξ)‖ = 1
t(ξ) =
cos(γ) cos(bξ)cos(γ) sin(bξ)− sin(γ)
O vector n(ξ) obtém-se a partir de dtds
dt
ds=
dt
dξ
dξ
ds=
1
a
dt
dξ=
b
a
− cos(γ) sin(bξ)cos(γ) cos(bξ)
0
Neste caso σ = 1, dado que
(t× dt
ds). z
(
0 sin(γ) cos(γ) sin(bξ)− sin(γ) 0 − cos(γ) cos(bξ)
− cos(γ) sin(bξ) cos(γ) cos(bξ) 0
b
a
− cos(γ) sin(bξ)cos(γ) cos(bξ)
0
)T
001
=b
acos2(γ)
obtém-se σ =(t× dt
ds). z
‖(t× dtds
). z‖ =ba
cos2(γ)ba
cos2(γ)= 1.
Desta forma κ > 0 e tendo em conta que ‖n‖ = 1, vem
κ(ξ) =b
acos(γ) n =
− sin(bξ)cos(bξ)
0
(B.7)
Finalmente o vector b(ξ) pode ser obtido através da relação b(ξ) = t(ξ)× n(ξ)
b(ξ) =
0 sin(γ) cos(γ) sin(bξ)− sin(γ) 0 − cos(γ) cos(bξ)
− cos(γ) sin(bξ) cos(γ) cos(bξ) 0
− sin(bξ)cos(bξ)
0

58 APÊNDICE B. PROPRIEDADES DO REFERENCIAL T
ux
uy
uz
n
b
t
Figura B.4: Referencial T para hélice com κ > 0
b(ξ) =
sin(γ) cos(bξ)sin(γ) sin(bξ)
cos(γ)
A torção τ(ξ) pode-se determinar a partir de db(ξ)ds
db(ξ)
ds=
db(ξ)
dξ
1
a=
b
asin(γ)
− sin(bξ)cos(bξ)
0
= −τ(ξ)n(ξ)
em que
τ = − b
asin(γ) (B.8)
O referencial T constituído pelos vectores t(ξ), n(ξ) e b(ξ) encontra-se ilustradona Figura B.4
Hélice com κ < 0 Uma hélice percorrida no sentido oposto ao sentido directo pode serparametrizada de forma semelhante a B.6, fazendo no entanto b < 0
Γ(ξ) =a
−b
cos(γ) sin(bξ)− cos(γ) cos(bξ)
bξ sin(γ)
+
x0
y0
z0
(B.9)
com a > 0 e γ ∈]− π2
π2[.
Os vectores t(ξ),n(ξ) e b(ξ) podem ser obtidos de forma análoga. Para os vectorest(ξ) e dt(ξ)
dstem-se
t =
− cos(γ) cos(bξ)− cos(γ) sin(bξ)
− sin(γ)
dt
ds=
b
a
cos(γ) sin(bξ)− cos(γ) cos(bξ)
0
Neste caso σ = −1, resultando assim κ < 0 dado que

B.3. REFERENCIAL T PARA CAMINHOS DE INTERESSE 59
uy
ux
uz
b
t
n
Figura B.5: Referencial T para hélice com κ > 0
(t× dt
ds). z
(
0 sin(γ) − cos(γ) sin(bξ)− sin(γ) 0 cos(γ) cos(bξ)
cos(γ) sin(bξ) − cos(γ) cos(bξ) 0
b
a
cos(γ) sin(bξ)− cos(γ) cos(bξ)
0
)T
001
=b
acos2(γ)
obtém-se σ =(t× dt
ds). z
‖(t× dtds
). z‖ =ba
cos2(γ)
| ba
cos2(γ)| = b|b| = −1.
k(ξ)n =b
a
cos(γ) sin(bξ)− cos(γ) cos(bξ)
0
de onde
κ(ξ) =b
acos(γ) < 0 n =
sin(bξ)− cos(bξ)
0
(B.10)
O vector b(ξ) = t(ξ)× n(ξ) é dado por
b(ξ) =
− sin(γ) cos(bξ)− sin(γ) sin(bξ)
cos(γ)
e o valor da torção por
τ = − b
asin(γ) (B.11)
O referencial T constituído pelos vectores t(ξ), n(ξ) e b(ξ) encontra-se ilustradona Figura B.5.

60 APÊNDICE B. PROPRIEDADES DO REFERENCIAL TDe referir ainda que se o veículo estiver em equilíbrio ao longo da trajectória e a
curva for parametrizada pelo tempo, ξ = t, a hélice pode ser escrita da seguinte forma
Γ(t) =Vc
ψc
cos(γ) sin(ψc t + ψc0)
− cos(γ) cos(ψc t + ψc0)
−ψc t sin(γ)
+
x0
y0
z0
com Vc = Vt > 0, γ ∈] − π2
π2[ e onde ψc = ψc é a derivada do ângulo de Euler ψt
do referencial T em relação ao universal U e determina o sentido em que a hélice épercorrida (sentido directo ψc > 0). Identificando a = Vc e b = ψc, rescrevendo asequações B.8 ou B.11 e B.7 ou B.10, vem
τ = − ψc
Vc
sin(γ) (B.12)
κ =ψc
Vc
cos(γ) (B.13)
e considerando a função sign(x)
sign(x) =
1 se x >= 0−1 se x < 0
pode-se escrever
sign(ψc) = sign(κ)
e
|ψc| = Vc
√τ 2 + κ2
resultando finalmente
ψc = sign(κ)Vc
√τ 2 + κ2
Das expressões B.12 e B.13 pode ainda estabelecer-se a relação
γ = arctan(−τ
κ)
É fácil de constatar, tendo em conta a definição do referencial T que γ = θt
(ângulo de euler) e portanto
θt = arctan(−τ
κ)
Rectas 3D Um recta Γ no espaço tridimensional pode ser parametrizada da seguinteforma
Γ(ξ) = a
cos(γ) sin(ψ0)ξ− cos(γ) cos(ψ0)ξ
ξ sin(γ)
+
x0
y0
z0
(B.14)

B.4. VANTAGENS DO REFERENCIAL T FACE AO SERRET-FRENET 61
com a > 0, ψ0 ∈]− π , π[ γ ∈]− π2, π
2].
O vector tangente t é dado por
t =
cos(γ) sin(ψ0)− cos(γ) cos(ψ0)
sin(γ)
e tem-se ainda que dsdt
= a.Dado que neste caso dt
ds= 0 o vector n(ξ) fica indefinido. Define-se este vector n(ξ)
para rectas como sendo
n(ξ) =
t(ξ)× z(ξ) se t(ξ)× z(ξ) 6= 0
y se t(ξ)× z(ξ) = 0
esta definição torna o vector n(ξ) paralelo ao plano xoy. O caso em que t(ξ)× z(ξ) = 0corresponde a rectas verticais.
Para o caso da parametrização B.14, tem-se
n(ξ) =
t(ξ)× z(ξ) =
[cos(γ) cos(ψ0) cos(γ) sin(ψ0) 0
]T se γ 6= π2
y se γ = π2
Esta situação é ilustrada na Figura B.6
Figura B.6: Definição de T para rectas
B.4 Vantagens do referencial T face ao Serret-FrenetA vantagem do referencial T em relação ao referencial de Serret-Frenet está rela-
cionada principalmente com a dependência directa da variável dt = ΠyztuR(pb − pt) do
espaço de erro deste referencial (ver definição do espaço de erro no Capítulo 3). Daforma como se definiu este referencial o valor algébrico do erro dt permanece no mesmoquadrante conforme se percorre uma hélice no sentido directo ou no sentido oposto, aocontrário do referencial de Serret− Frenet, tal como é ilustrado na Figura B.7.
Neste Figura B.7 pode-se ver que o referencial T varia continuamente enquantoo versor dos y do referencial de Serret-Frenet aponta segundo a direcção dt
dslevando a
uma variação brusca do referencial e a uma mudança de sinal do erro de posição dt. Este
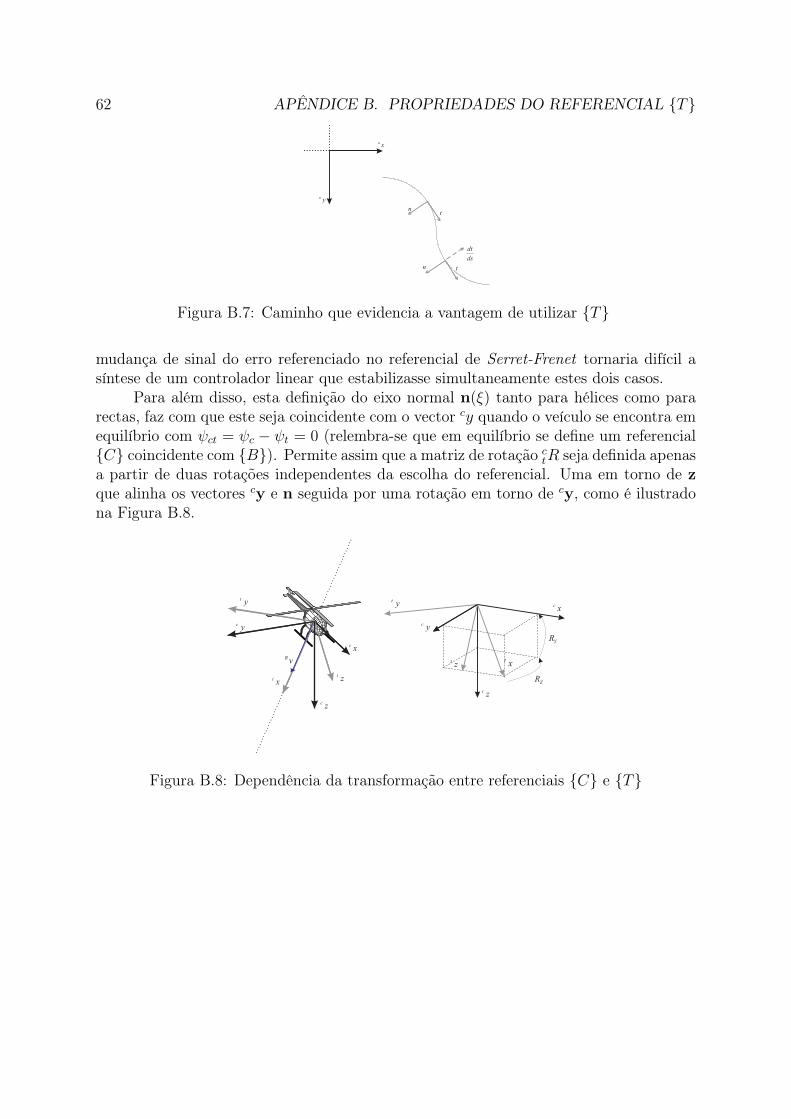
62 APÊNDICE B. PROPRIEDADES DO REFERENCIAL T
ux
uy
nt
tn
dt
ds
Figura B.7: Caminho que evidencia a vantagem de utilizar T
mudança de sinal do erro referenciado no referencial de Serret-Frenet tornaria difícil asíntese de um controlador linear que estabilizasse simultaneamente estes dois casos.
Para além disso, esta definição do eixo normal n(ξ) tanto para hélices como pararectas, faz com que este seja coincidente com o vector cy quando o veículo se encontra emequilíbrio com ψct = ψc − ψt = 0 (relembra-se que em equilíbrio se define um referencialC coincidente com B). Permite assim que a matriz de rotação c
tR seja definida apenasa partir de duas rotações independentes da escolha do referencial. Uma em torno de zque alinha os vectores cy e n seguida por uma rotação em torno de cy, como é ilustradona Figura B.8.
Figura B.8: Dependência da transformação entre referenciais C e T

Apêndice C
Linearização e dinâmica do espaço deerro
As derivações da dinâmica e linearizações do espaço de erro que se introduzem nesteanexo são adaptações das derivações realizadas pelos autores de [13] e [14], cujo resultadopode aí ser consultado.
As equações do espaço de erro apresentadas no Capítulo 3 repetem-se de seguida
ve
ωe
dt
λe
x1
x2
=
vb − btRvr
ωb − btR (ωr + tωc)
ΠyztuR (upb − upc)λb − λc∫
(ve + btR [0 d′t]
′)dt∫ψe dt
C.1 Dinâmica
Dinâmica de ve
ve = vb − btRvr
= vb − buR
ut Rvr
Derivando
ve = vb − S( bωu)btRvr − b
uRd
dt( u
t Rvr)
= vb − S( bωu)(vb − ve)− buR S( uωt)
ut Rvr − b
tR vr
= vb + S(ωb)(vb − ve)− btR S(ωt)vr
= vb + S(ωb)(vb − ve)− btR S(ωt)
Vr
00
63

64 APÊNDICE C. LINEARIZAÇÃO E DINÂMICA DO ESPAÇO DE ERRO
= vb + S(ωb)(vb − ve)− btR Vt
0 −k 0k 0 −τ0 τ 0
Vr
00
= vb + S(ωb)(vb − ve)− btR
0Vr k Vt
0
Dinâmica de ωe
ωe = ωb − btR(ωr + tωc)
= ωb − btR ωr
= ωb − buR
ut R ωr
Derivando
ωe = ωb − S( bωu)btR ωr − b
uRd
dt( u
t R ωr)
= ωb − S( bωu)(ωb − ωe)− buR S( uωt)
ut R ωr − b
tR ωr
= ωb + S(ωb)(ωb − ωe)− btR S(ωt) ωr
= ωb + S(ωb)(ωb − ωe)− btR S(ωt) Vr
τ0k
= ωb + S(ωb)(ωb − ωe)− btR Vt
0 −k 0k 0 −τ0 τ 0
Vr
τ0k
= ωb + S(ωb)(ωb − ωe)
= ωb + S(ωb)btR ωr
= ωb + S(ωe + btR ωr)
btR ωr
= ωb + S(ωe)btR ωr + b
tR (S(ωr) ωr)
= ωb + S(ωe)btR ωr
Dinâmica de dt
O erro de posição d pode ser expresso no referencial tangente através de
tuRd = t
uR (upb − upt) =
[0dt
]=
0dydz
em que dt é dado por
dt = ΠyztuR (upb − upt)

C.1. DINÂMICA 65
Derivando[
0
dt
]= ˙t
uR (upb − upt) + tuR (upb − upt)
= −S(ωt)
[0dt
]+ t
uRub Rvb − t
uRut Rvt
= −S(Vt
τ0k
)
[0dt
]+ t
bRvb −
Vt
00
⇔[Vt
dt
]= −Vt
−k dy−τ dzτ dy
+ t
bRvb
⇒ dt = Vt τ
[−dz
dy
]+ t
bRvb
Tendo em conta os referenciais e as variáveis definidas pode-se escrever para omódulo da velocidade do referencial T
Vt =1
1− k dy
[1 0 0
]tbRvb
=1
1− k dy
[1 0 0
]tbR (ve + b
tRvr)
=1
1− k dy
[1 0 0
](tbRve + vr)
(C.1)
Utilizando C.1 a derivada do erro em posição pode ser expressa como
dt =1
1− k dy
[τ dz 1− k dy 0τ dy 0 1− k dy
]tbRvb
=
(Vt τ
[0 1−1 0
])dt +
[0 1 00 0 1
]tbRve
Dinâmica de λe
Para os ângulos de Euler
λe = λb − λc
Derivando
λe = λb − λc = Q(φb, θb) ωb − sign(k) Vt
√k2 + τ 2
001
Dinâmica de x1 e x2

66 APÊNDICE C. LINEARIZAÇÃO E DINÂMICA DO ESPAÇO DE ERRO
Para os estados integrais
x1 =
∫(ve + b
tR [0 d′t]′)dt
Derivando
x1 = ve + btR [0 d′t]
′
x2 =
∫ψe dt
Derivando
x2 = ψe
Resumo da dinâmica de xe
ve
ωe
dt
λe
x1
x2
=
vb + S(ωb)(vb − ve)− btR
[0 Vr k Vt 0
]T
ωb + S(ωe)btR ωr
11−k dy
[τ dz 1− k dy 0τ dy 0 1− k dy
]tbRvb
λb − λc
ve + btR [0 d′t]
′
ψe
C.2 LinearizaçãoLinearizações de ve
Utilizando C.1 a derivada da velocidade de erro pode ser escrito como
ve = vb + S(ωb)(vb − ve)− btR
0Vr k Vt
0
ve = vb + S(ωb)(vb − ve)− btR
0Vr k0
1
1− k dy
[1 0 0
]( t
bRve + vr)
Derivadas em ordem ao estado
∂ve
∂ve
=∂vb
∂vb
∂vb
∂ve
+ S(ωb)
(∂vb
∂ve
− ∂ve
∂ve
)− b
tR
0Vr k0
1
1− k dy
[1 0 0
]tbR
=∂vb
∂vb
− btR
0Vr k0
1
1− k dy
[1 0 0
]tbR

C.2. LINEARIZAÇÃO 67
∂ve
∂ve
∣∣∣∣c
=∂vb
∂vb
∣∣∣∣c
− btR
∣∣c
0Vr k0
1
1− k dy
∣∣∣∣c
[1 0 0
]tbR
∣∣c
=∂vb
∂vb
∣∣∣∣c
− ctR
0Vr k0
[
1 0 0]
ctR
∂ve
∂ωe
=∂vb
∂ωb
∂ωb
∂ωe
+∂
∂ωe
(S(ωb)(vb − ve))
=∂vb
∂ωb
∂ωb
∂ωe
+∂
∂ωe
(S(ωb)btRvr))
=∂vb
∂ωb
∂ωb
∂ωe
− ∂
∂ωe
(S(btRvr) ωb))
=∂vb
∂ωb
∂ωb
∂ωe
− S(btRvr)
∂ve
∂ωe
∣∣∣∣c
=∂vb
∂ωb
∣∣∣∣c
− S(ctRvr)
∂ve
∂dt
=∂vb
∂vb
∂vb
∂dt
+ btR
0−k Vr
0
∂Vt
∂dt
∂ve
∂dt
∣∣∣∣c
=∂vb
∂vb
∂vb
∂dt
∣∣∣∣c
+ btR
0−k Vr
0
∂Vt
∂dt
∣∣∣∣c
= −∂vb
∂vb
crR
0 01 00 1
− c
tR
0k Vr
0
[
k 0]
Vr
∂ve
∂λe
∣∣∣∣c
=∂vb
∂vb
∣∣∣∣c
S( tcRvr) Q−1(φc, θc) +
+∂f
∂ωb
∣∣∣∣c
S( tcR ωr) Q−1(φc, θc) + Rx(φc)
T S(Ry(θc)T
00g
)
1 0 00 1 00 0 0
Linearizações de ωe

68 APÊNDICE C. LINEARIZAÇÃO E DINÂMICA DO ESPAÇO DE ERRO
A velocidade angular pode ser expressa como
ωe = ωb + S(ωe)btR ωr
Derivadas em ordem ao estado
∂ωe
∂ve
=∂ωb
∂vb
∂vb
∂ve
∂ωe
∂ve
∣∣∣∣c
=∂ωb
∂vb
∣∣∣∣c
∂ωe
∂ωe
=∂ωb
∂ωb
∂ωb
∂ωe
− S(btR ωr)
∂ωe
∂ωe
∣∣∣∣c
=∂ωb
∂ωb
∣∣∣∣c
− S(ctR ωr)
∂ωe
∂dt
=∂ωb
∂vb
∂vb
∂dt
∂ωe
∂dt
∣∣∣∣c
= − ∂ωb
∂vb
∣∣∣∣c
ctR
0 01 00 1
∂ωe
∂λe
=∂ωb
∂vb
∂vb
∂λe
+∂ωb
∂ωb
∂ωb
∂λe
∂ωe
∂λe
∣∣∣∣c
=∂ωb
∂vb
∣∣∣∣c
S(ctRvr) Q−1(φc, θc) +
∂ωb
∂vb
∣∣∣∣c
S(ctR ωr) Q−1(φc, θc)
Linearizações de dt
As derivadas em ordem ao estado para o erro em posição (as únicas que são diferentesde zero neste caso)
∂dt
∂ve
∣∣∣∣∣c
=
[0 1 00 0 1
]tcR
∂dt
∂dt
∣∣∣∣∣c
= Vr τ
[0 1−1 0
]− I

C.2. LINEARIZAÇÃO 69
Linearizações de λe
A derivada do erro em orientação pode ser expressa como
λe = Q(φb, θb) ωb − sign(k) Vt
√k2 + τ 2
001
= Q(φe + φc, θe + θc) ωe + Q(φe + φc, θe + θc)btR ωr − sign(k) Vt
√k2 + τ 2
001
Derivadas em ordem ao estado
∂λe
∂ve
= −sign(k)√
k2 + τ 2
001
∂Vt
∂ve
∂λe
∂ve
∣∣∣∣∣c
= −sign(k)√
k2 + τ 2
001
[
1 0 0]
tcR
∂λe
∂ωe
∣∣∣∣∣c
= Q(φc, θc)
∂λe
∂dt
= −sign(k)√
k2 + τ 2
001
∂Vt
∂dt
∂λe
∂dt
∣∣∣∣∣c
= −sign(k)√
k2 + τ 2
001
[
k Vr 0]
∂λe
∂λe
=∂Q(φe + φc, θe + θc)
btR ωe
∂λe
∂λe
∂λe
∣∣∣∣∣c
=∂Q c
tR ωr
∂λb
∣∣∣∣c
∂λb
∂λe
∣∣∣∣c
+ Q(φc, θc)∂b
tR ωr
∂λe
∣∣∣∣c
=
0 1cos2 θc
0
0 0 00 sin θc
cos2 θc0
Q(φc, θc) S(c
tR ωr)
0 1 00 0 00 0 0
+
+Q(φc, θc) S(ctR ωr) Q−1(φc, θc)
0 0 01 1 00 0 1

70 APÊNDICE C. LINEARIZAÇÃO E DINÂMICA DO ESPAÇO DE ERRO
Resumo da linearizações de xe
δxe = Fδxe + Gδu (C.2)[δx1
δx2
]= Hδxe (C.3)
F =
∂ve
∂ve|c ∂ve
∂ωe|c ∂ve
∂dt|c ∂ve
∂λe|c
∂ωe
∂ve|c ∂ωe
∂ωe|c ∂ωe
∂dt|c ∂ωe
∂λe|c
∂dt
∂ve|c 0 ∂dt
∂dt|c 0
∂λe
∂ve|c ∂λe
∂ωe|c ∂λe
∂dt|c ∂λe
∂λe|c
, G =
(∂f/∂u)|c(∂n/∂u)|c
00
, H =
[∂xi
∂ve|c 0 ∂xi
∂dt|c ∂xi
∂λe|c](C.4)
∂ve
∂ve
∣∣∣c= ∂vb
∂vb
∣∣∣c− c
tR
0Vr k0
[
1 0 0]
ctR
∂ve
∂ωe
∣∣∣c= ∂vb
∂ωb
∣∣∣c− S(c
tRvr)
∂ve
∂dt
∣∣∣c= −∂vb
∂vb
crR
0 01 00 1
− c
tR
0k Vr
0
[
k 0]
Vr
∂ve
∂λe
∣∣∣c= ∂vb
∂vb
∣∣∣c
S( tcRvr) Q−1(φc, θc)+
+ ∂f∂ωb
∣∣∣c
S( tcR ωr) Q−1(φc, θc) + Rx(φc)
T S(Ry(θc)T
00g
)
1 0 00 1 00 0 0
∂ωe
∂ve
∣∣∣c= ∂ωb
∂vb
∣∣∣c
∂ωe
∂ωe
∣∣∣c= ∂ωb
∂ωb
∣∣∣c− S(c
tR ωr)
∂ωe
∂dt
∣∣∣c= − ∂ωb
∂vb
∣∣∣c
ctR
0 01 00 1
∂ωe
∂λe
∣∣∣c= ∂ωb
∂vb
∣∣∣c
S(ctRvr) Q−1(φc, θc) + ∂ωb
∂vb
∣∣∣c
S(ctR ωr) Q−1(φc, θc)
∂dt
∂ve
∣∣∣c=
[0 1 00 0 1
]tcR

C.2. LINEARIZAÇÃO 71
∂dt
∂dt
∣∣∣c= Vr τ
[0 1−1 0
]− I
∂λe
∂ve
∣∣∣c= −sign(k)
√k2 + τ 2
001
[
1 0 0]
tcR
∂λe
∂ωe
∣∣∣c= Q(φc, θc)
∂λe
∂dt
∣∣∣c= −sign(k)
√k2 + τ 2
001
[
k Vr 0]
∂λe
∂λe
∣∣∣c=
0 1cos2 θc
0
0 0 00 sin θc
cos2 θc0
Q(φc, θc) S(c
tR ωr)
0 1 00 0 00 0 0
+
+Q(φc, θc) S(ctR ωr) Q−1(φc, θc)
0 0 01 1 00 0 1
Invariância temporal da linearização
Tendo em conta os cálculos para a dinâmica e linearização do espaço de erro apresen-tados, verifica-se que a linearização do espaço de erro depende dos seguintes parâmetros:k, τ , Vr, c
tR, ωr, φc, θc e da aceleração da gravidade g. Estes parâmetros para umadada trajectória de equilíbrio são constantes. Como tal a linearização para uma dadatrajectória de equilíbrio é invariante no tempo.

72 APÊNDICE C. LINEARIZAÇÃO E DINÂMICA DO ESPAÇO DE ERRO
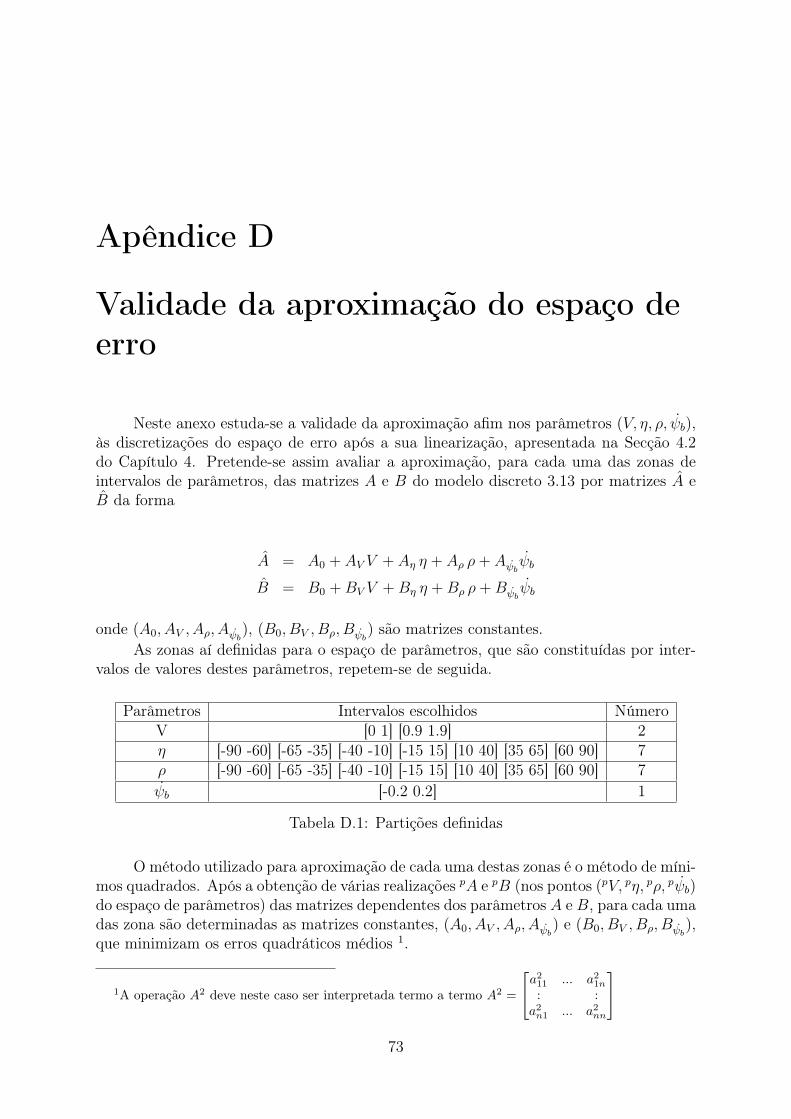
Apêndice D
Validade da aproximação do espaço deerro
Neste anexo estuda-se a validade da aproximação afim nos parâmetros (V, η, ρ, ψb),às discretizações do espaço de erro após a sua linearização, apresentada na Secção 4.2do Capítulo 4. Pretende-se assim avaliar a aproximação, para cada uma das zonas deintervalos de parâmetros, das matrizes A e B do modelo discreto 3.13 por matrizes A eB da forma
A = A0 + AV V + Aη η + Aρ ρ + Aψbψb
B = B0 + BV V + Bη η + Bρ ρ + Bψbψb
onde (A0, AV , Aρ, Aψb), (B0, BV , Bρ, Bψb
) são matrizes constantes.As zonas aí definidas para o espaço de parâmetros, que são constituídas por inter-
valos de valores destes parâmetros, repetem-se de seguida.
Parâmetros Intervalos escolhidos NúmeroV [0 1] [0.9 1.9] 2η [-90 -60] [-65 -35] [-40 -10] [-15 15] [10 40] [35 65] [60 90] 7ρ [-90 -60] [-65 -35] [-40 -10] [-15 15] [10 40] [35 65] [60 90] 7ψb [-0.2 0.2] 1
Tabela D.1: Partições definidas
O método utilizado para aproximação de cada uma destas zonas é o método de míni-mos quadrados. Após a obtenção de várias realizações pA e pB (nos pontos (pV, pη, pρ, pψb)do espaço de parâmetros) das matrizes dependentes dos parâmetros A e B, para cada umadas zona são determinadas as matrizes constantes, (A0, AV , Aρ, Aψb
) e (B0, BV , Bρ, Bψb),
que minimizam os erros quadráticos médios 1.
1A operação A2 deve neste caso ser interpretada termo a termo A2 =
a211 ... a2
1n
: :a2
n1 ... a2nn
73

74 APÊNDICE D. VALIDADE DA APROXIMAÇÃO DO ESPAÇO DE ERRO
∑p
(pA(pV, pη, pρ, pψb) − A(pV, pη, pρ, pψb))2
∑p
(pB(pV, pη, pρ, pψb) − B(pV, pη, pρ, pψb))2
Quantos mais pontos se utilizarem mais exacta deverá ser a aproximação por míni-mos quadrados. Repare-se no entanto que estes pontos correspondem a tomar realizaçõesou a discretizar uma zona do espaço de parâmetros que está contido em R4 e como talnão é possível utilizar muitos pontos por limitações de memória. Utilizaram-se cerca de5 valores para cada um dos parâmetros em cada zona e tomaram-se os pontos resultantesdestas combinações. Considerando a zona, que também será utilizada mais à frente comoexemplo, constituída pelos intervalos de parâmetros
V ∈ [0.9 1.9
], η ∈ [−15 15
], ρ ∈ [−15 15
]e ψb ∈
[−0.1 0.1]
(D.1)
foram utilizadas pontos para as combinações V[1 1.2 1.4 1.6 1.8
],
η[−14 −7 0 7 14
], ρ
[−14 −7 0 7 14]e ψb
[−0.16 −0.08 0 0.08 0.16]
resultando num total de 5 × 5 × 5 × 5 = 625 pontos para esta zona. Dado que são 98zonas resulta cerca de 61250 pontos, que representa um número extremamente elevado.Daí que não é possível obter muitos pontos para cada zona (o número obtido permiteainda assim ter uma boa aproximação).
Relativamente à definição de zonas refira-se que quanto menores forem estas zonas(ou seja quando menores forem os intervalos de variação dos parâmetros que as definem)mais válida é esta aproximação. No entanto utilizando zonas pequenas, leva a um aumentodo número de zonas e consequentemente do número de controladores que se terá desintetizar, para além de aumentar o número de comutações do controlador de ganhoscomutados. Existe assim um compromisso para o número de intervalos a escolher para osparâmetros. Estes intervalos foram escolhidos tendo em conta, para além destes factores,a sua influência para as linearizações. Através de uma análise experimental verificou-seque os pequenas variações nos parâmetros (η, ρ) influenciam mais as componentes dasmatrizes de linearização do que pequenas variações nos restantes (V, ψb). Desta forma sejustifica a escolha de um número de intervalos superior para estes dois parâmetros (η, ρ),respectivamente sete e sete, do que (V, ψb), respectivamente dois e um.
De seguida faz-se primeiro um estudo da aproximação considerando apenas umazona, e só depois a validade da aproximação é avaliada para todas as zonas
Estudo da aproximação para uma zona
Considere-se a zona definida pelos intervalos de parâmetros D.1. Na Figura D.1ilustra-se a variação do elemento a33 com as várias combinações de dois parâmetros, e aaproximação por um plano nestes dois parâmetros (que representa um corte no hiperplanoque depende dos quatro parâmetros) .
A mesma suavidade foi possível constatar para os outros elementos da matriz A eB.
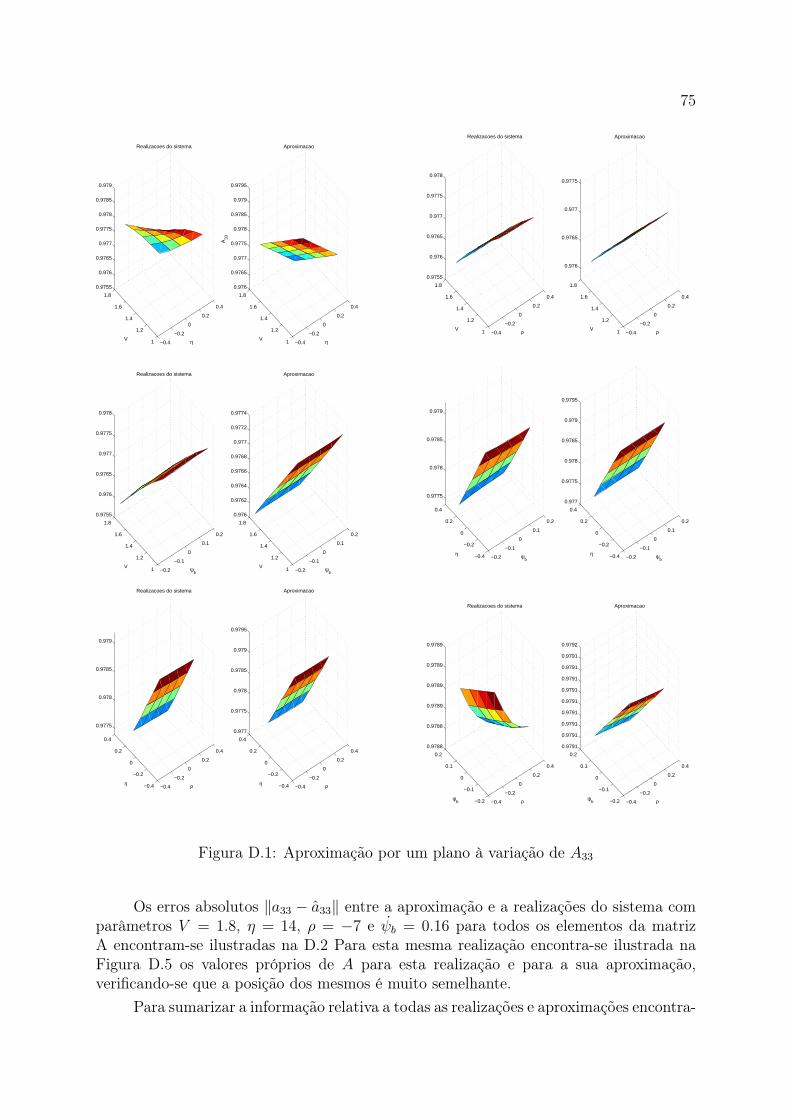
75
−0.4
−0.2
0
0.2
0.4
1
1.2
1.4
1.6
1.8
0.9755
0.976
0.9765
0.977
0.9775
0.978
0.9785
0.979
η
Realizacoes do sistema
V−0.4
−0.2
0
0.2
0.4
1
1.2
1.4
1.6
1.8
0.976
0.9765
0.977
0.9775
0.978
0.9785
0.979
0.9795
η
Aproximacao
V
A33
−0.4
−0.2
0
0.2
0.4
1
1.2
1.4
1.6
1.8
0.9755
0.976
0.9765
0.977
0.9775
0.978
ρ
Realizacoes do sistema
V−0.4
−0.2
0
0.2
0.4
1
1.2
1.4
1.6
1.8
0.976
0.9765
0.977
0.9775
ρ
Aproximacao
V
−0.2
−0.1
0
0.1
0.2
1
1.2
1.4
1.6
1.8
0.9755
0.976
0.9765
0.977
0.9775
0.978
ψb
Realizacoes do sistema
V−0.2
−0.1
0
0.1
0.2
1
1.2
1.4
1.6
1.8
0.976
0.9762
0.9764
0.9766
0.9768
0.977
0.9772
0.9774
ψb
Aproximacao
V
−0.2
−0.1
0
0.1
0.2
−0.4
−0.2
0
0.2
0.4
0.9775
0.978
0.9785
0.979
ψb
η−0.2
−0.1
0
0.1
0.2
−0.4
−0.2
0
0.2
0.4
0.977
0.9775
0.978
0.9785
0.979
0.9795
ψb
η
−0.4
−0.2
0
0.2
0.4
−0.4
−0.2
0
0.2
0.4
0.9775
0.978
0.9785
0.979
ρ
Realizacoes do sistema
η−0.4
−0.2
0
0.2
0.4
−0.4
−0.2
0
0.2
0.4
0.977
0.9775
0.978
0.9785
0.979
0.9795
ρ
Aproximacao
η
−0.4
−0.2
0
0.2
0.4
−0.2
−0.1
0
0.1
0.2
0.9788
0.9788
0.9789
0.9789
0.9789
0.9789
ρ
Realizacoes do sistema
ψb −0.4
−0.2
0
0.2
0.4
−0.2
−0.1
0
0.1
0.2
0.9791
0.9791
0.9791
0.9791
0.9791
0.9791
0.9791
0.9791
0.9791
0.9792
ρ
Aproximacao
ψb
Figura D.1: Aproximação por um plano à variação de A33
Os erros absolutos ‖a33 − a33‖ entre a aproximação e a realizações do sistema comparâmetros V = 1.8, η = 14, ρ = −7 e ψb = 0.16 para todos os elementos da matrizA encontram-se ilustradas na D.2 Para esta mesma realização encontra-se ilustrada naFigura D.5 os valores próprios de A para esta realização e para a sua aproximação,verificando-se que a posição dos mesmos é muito semelhante.
Para sumarizar a informação relativa a todas as realizações e aproximações encontra-
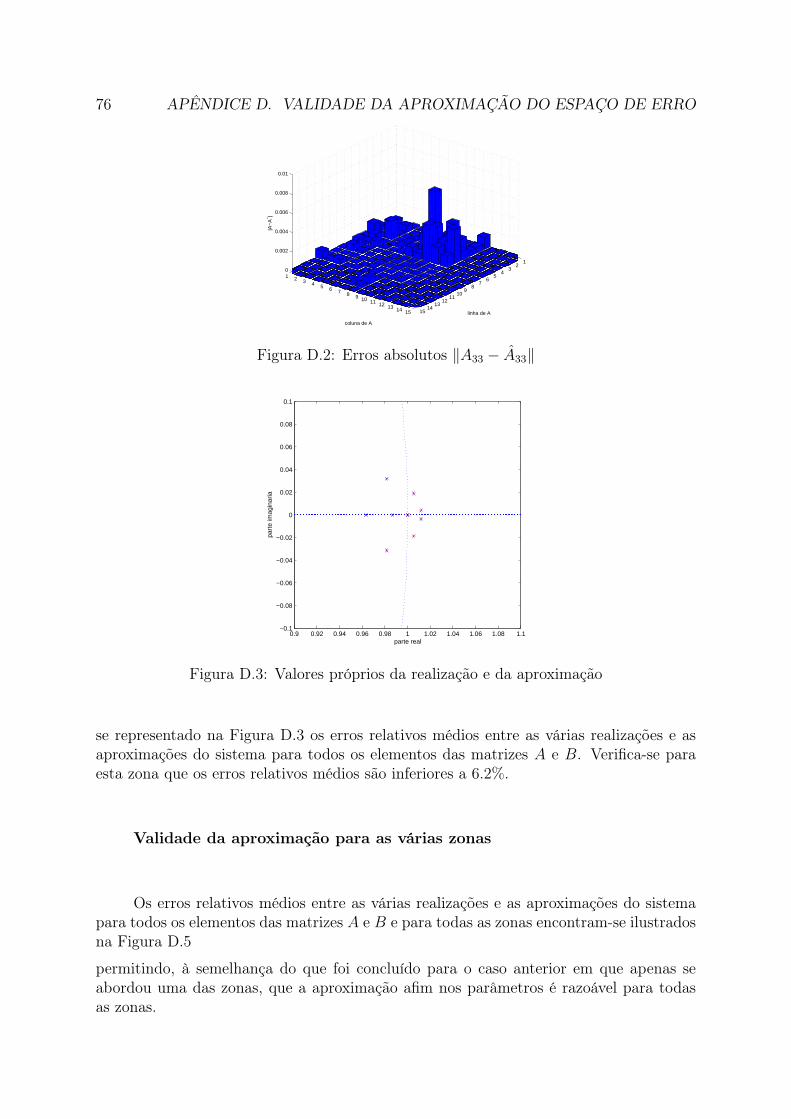
76 APÊNDICE D. VALIDADE DA APROXIMAÇÃO DO ESPAÇO DE ERRO
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
12
34
56
78
910
1112
1314
15
0
0.002
0.004
0.006
0.008
0.01
linha de A
coluna de A
|A−
A−|
Figura D.2: Erros absolutos ‖A33 − A33‖
0.9 0.92 0.94 0.96 0.98 1 1.02 1.04 1.06 1.08 1.1−0.1
−0.08
−0.06
−0.04
−0.02
0
0.02
0.04
0.06
0.08
0.1
parte real
part
e im
agin
aria
Figura D.3: Valores próprios da realização e da aproximação
se representado na Figura D.3 os erros relativos médios entre as várias realizações e asaproximações do sistema para todos os elementos das matrizes A e B. Verifica-se paraesta zona que os erros relativos médios são inferiores a 6.2%.
Validade da aproximação para as várias zonas
Os erros relativos médios entre as várias realizações e as aproximações do sistemapara todos os elementos das matrizes A e B e para todas as zonas encontram-se ilustradosna Figura D.5
permitindo, à semelhança do que foi concluído para o caso anterior em que apenas seabordou uma das zonas, que a aproximação afim nos parâmetros é razoável para todasas zonas.
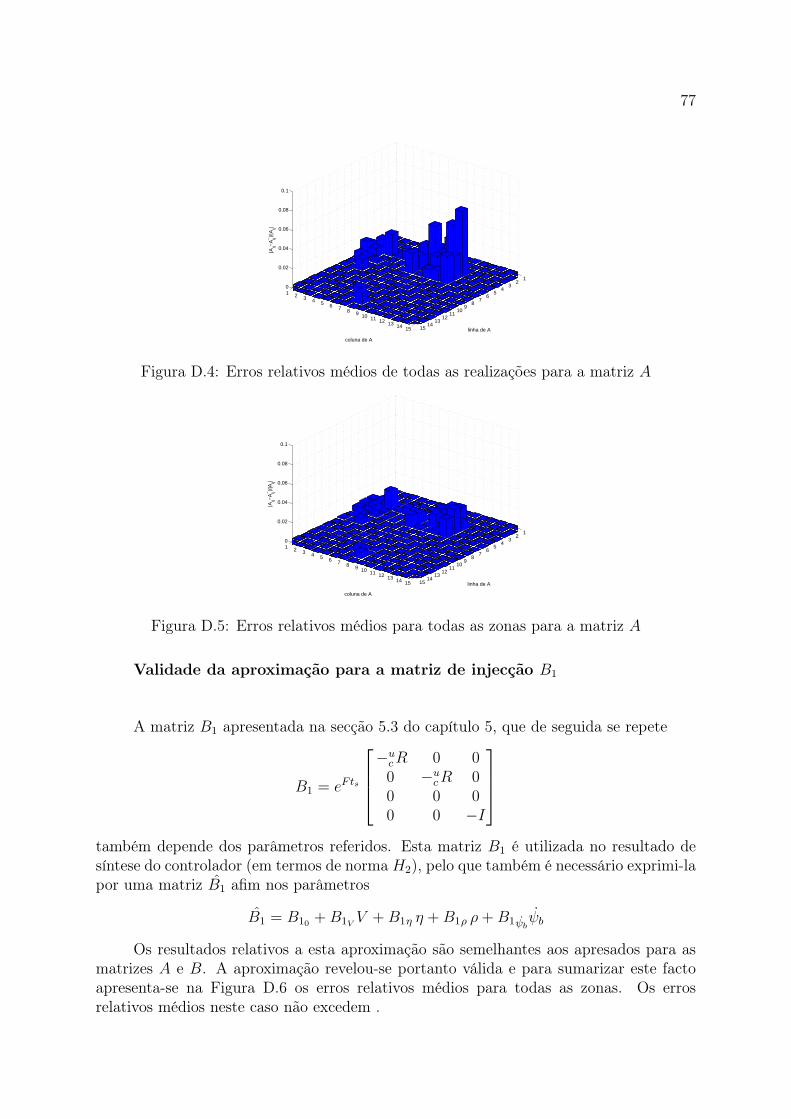
77
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
12
34
56
78
910
1112
1314
15
0
0.02
0.04
0.06
0.08
0.1
linha de A
coluna de A
|Aij−
Aij−|/|
Aij|
Figura D.4: Erros relativos médios de todas as realizações para a matriz A
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
12
34
56
78
910
1112
1314
15
0
0.02
0.04
0.06
0.08
0.1
linha de A
coluna de A
|Aij−
Aij−|/|
Aij|
Figura D.5: Erros relativos médios para todas as zonas para a matriz A
Validade da aproximação para a matriz de injecção B1
A matriz B1 apresentada na secção 5.3 do capítulo 5, que de seguida se repete
B1 = eFts
−uc R 0 00 −u
c R 00 0 00 0 −I
também depende dos parâmetros referidos. Esta matriz B1 é utilizada no resultado desíntese do controlador (em termos de norma H2), pelo que também é necessário exprimi-lapor uma matriz B1 afim nos parâmetros
B1 = B10 + B1VV + B1η η + B1ρ ρ + B1ψb
ψb
Os resultados relativos a esta aproximação são semelhantes aos apresados para asmatrizes A e B. A aproximação revelou-se portanto válida e para sumarizar este factoapresenta-se na Figura D.6 os erros relativos médios para todas as zonas. Os errosrelativos médios neste caso não excedem .
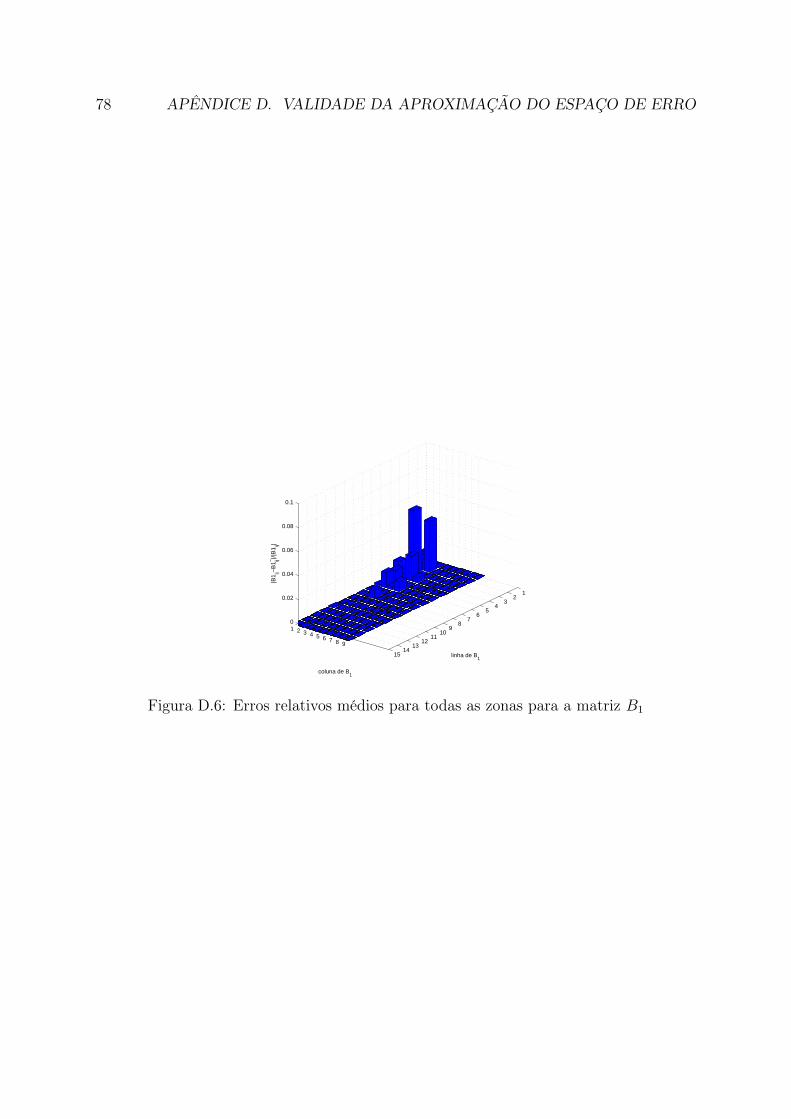
78 APÊNDICE D. VALIDADE DA APROXIMAÇÃO DO ESPAÇO DE ERRO
1 2 3 4 5 6 7 8 9
12
34
56
78
910
1112
1314
15
0
0.02
0.04
0.06
0.08
0.1
linha de B1
coluna de B1
|B1 ij−
B1 ij−
|/|B
1 ij|
Figura D.6: Erros relativos médios para todas as zonas para a matriz B1
Apêndice E
Síntese de controladores utilizandoLMIs
E.1 Definição e propriedades
Uma LMI (Linear Matrix Inequality) ou desigualdade matricial linear é uma funçãoda forma
F (x) = F0 +n∑
i=1
xiFi < 0 (E.1)
Onde F1, ..., Fn ∈ Rp×p são matrizes simétricas e o símbolo < denota que a matrizF (x) é definida negativa, ou seja, a forma quadrática associada a F (x) é definida negativa
F (x) < 0 ⇔ uT F (x))u < 0 ,∀u ∈ Rp, u 6= 0, e onde x ∈ Rn é o vector de variáveisde decisão.
Uma das principais motivações para utilizar LMI’s advém do facto de o conjuntoP := x|F (x) < 0 definir uma restrição convexa em x, ou seja, se x1, x2 ∈ P e α ∈ [0, 1]então αx1 + (1− α)x2 ∈ P , isto é
uT F (αx1 + (1− α)x2)u = α(uT F (x1)u) + (1− α)(uT F (x2)u) < 0
Devido a esta propriedade existem algoritmos extremamente eficientes para resolverproblemas de optimização sujeitos a restrições do tipo LMI. Para além disso, váriosproblemas de controlo podem ser formulados nesta forma.
Algumas das propriedades relacionadas com a formulação de problemas sob a formade LMI’s resumem-se de seguida
• O conjunto de LMI’s F1(x) < 0, ...Fp(x) < 0, com F1(x) ∈ Rp1×p1 , ...Fp(x) ∈ Rpp×pp
é equivalente à seguinte LMI
F1(x) 0 . . . 00 F2(x) . . . 0...
... . . . ...0 0 . . . Fp(x)
< 0
79

80 APÊNDICE E. SÍNTESE DE CONTROLADORES UTILIZANDO LMIS
• Uma LMI expressa com variável matricial P pode ser expressa na forma (E.1). Paratal, basta considerar uma base das matrizes simétricas P1, ....., Pm com m = n(n+1)
2
e
Ao +n∑
i=1
AiP ≡ F0+m∑
j=1
xjFj,
onde F0 = A0, Fi =n∑
j=1
AiPj.
• Uma transformação congruente da forma A = P T FP não altera a região de factibil-idade de uma LMI, pois se P for uma transformação congruente verifica-se
F (x) < 0 ⇔ P T F (x)P < 0
O seguinte resultado (Lema de Schur) permite formular restrições convexas nãolineares de determinado tipo em restrições do tipo LMI’s.
Lema de Schur : as seguintes afirmações são equivalentes:
i)[
Q(x) S(x)S(x)T R(x)
]< 0
ii) R(x) < 0, e Q(x)− S(x)R(x)−1S(x)T < 0iii) Q(x) < 0, e R(x)− S(x)T Q(x)−1S(x) < 0
onde a matriz[
Q(x) S(x)S(x)T R(x)
]é uma função afim de x, e Q(x) = QT (x), R(x) = RT (x)
Lema da projecção: para matrizes constantes arbitrárias A, B e M = MT a LMI
AT XB + BT XT A + M < 0
de variável matricial X, tem solução se e só se, qualquer que seja x ∈ Rn verificar-se
Ax = 0 ou Bx = 0 implica xT Mx < 0 ou x = 0 (E.2)
o que corresponde a afirmar se WA e WB forem matrizes tais que o espaço gerado pelassuas colunas (imagem) Im(WA) e Im(WB) coincida com o espaço nulo de A e B re-spectivamente: Im(WA) = ker(A) e Im(WB) = ker(WB), então E.2 é equivalente aW T
A MWA < 0 e W TB MWB < 0.
E.2 Síntese de controladores contínuos utilizando LMI’sConsidere-se o esquema da Figura E.1 para o sistema realimentado. A nomen-
clatura apresentada nesta figura será utilizada ao longo deste anexo. Os vectores w∞ ew2 representam sinais de entrada exógenos (perturbações, comandos e ruído de estado ede sensores), z∞ e z2 são as saídas para medição de desempenho, y é a saída disponívelpara controlo e u é o sinal de controlo. Os canais w∞ → z∞, w2 → z2 especificamdesempenho nos problemas H∞ e H2 respectivamente.

E.2. SÍNTESE DE CONTROLADORES CONTÍNUOS UTILIZANDO LMI’S 81
Figura E.1: Sistema realimentado
Considera-se que o sistema G pode ser escrito na seguinte forma
G =
.x = Ax + B∞w∞ + B2w2 + Buz∞ = C∞x + D∞w∞ + E∞uz2 = C2x + D2w2 + E2uy = Cx + F∞w∞ + F2w2
(E.3)
Assim sendo o sistema realimentado tem a seguinte realização
C =
.xc = Acxc + Bcwz = Ccxc + Dcw
z =
[z∞z2
], w =
[w∞w2
]
onde as matrizes Ac, Bc, Cc e Dc são para o caso da realimentação linear de variáveis deestado (conhecido na literatura anglo-saxónica por State Feedback) dadas por
Ac = [A + BK], Bc = [ Bc∞ Bc2 ] = [ B∞ B2 ]
Cc =
[Cc∞Cc2
]=
[C∞ + E∞KC2 + E2K
], Dc =
[Dc∞ 00 Dc2
]=
[D∞ 00 D2
](E.4)
(obtidas com a lei de controlo correspondente u = Kx)
e para o caso de realimentação da saída (Output Feedback)
Ac =
[A + BDKC BCK
BKC AK
]
Bc = [ Bc∞ Bc2 ] =
[B∞ + BDKF∞ B2 + BDKF2
BKF∞ BKF2
](E.5)
Cc =
[Cc∞Cc2
]=
[C∞ + E∞DKC E∞CK
C2 + E2DKC E2CK
],

82 APÊNDICE E. SÍNTESE DE CONTROLADORES UTILIZANDO LMIS
Dc =
[Dc∞ 00 Dc2
]=
[D∞ + E∞DKF∞ 00 D2 + E2DKF2
]
com um controlador com a realização em espaço de estados
K =
.
ξ = AKξ + BKyu = CKξ + DKy
Será ainda útil considerar as seguintes funções de transferência do sistema
Hw∞z∞(s) = Cc∞(sI − Ac)−1Bc∞ + Dc∞
Hw2z2(s) = Cc2(sI − Ac)−1Bc2 + Dc2
E.2.1 Estabilidade em tempo contínuo
Considere-se o sistema autónomo
.x(t) = Acx(t), x(t) ∈ Rn
O sistema é estável se e só se admite uma função quadrática de Lyapunov da forma
V (x(t)) = x(t)T Px(t), P > 0, P = P T
que verifique V (x(t)) > 0 e.
V (x(t)) < 0 ao longo das trajectórias do sistema. Estasegunda condição pode-se também escrever como
.
V (x(t)) = x(t)T (ATc P + PAc)x(t) < 0
que é equivalente à seguinte LMI
ATc P + PAc < 0 (E.6)
que é uma função linear nas n(n+1)2
variáveis de decisão correspondentes à matriz P .
E.2.2 Norma H2
A norma H2 de um sistema assimptoticamente estável e estritamente próprio (umsistema definido por (E.3) diz-se estritamente próprio se DC = 0 e simplesmente própriocaso contrário) é definida por
‖ Hw2z2(jw) ‖22=
1
2π
∞∫
0
tr(H∗w2z2
(jw)Hw2z2(jw))dw
que é equivalente a (utilizando o teorema de Parseval)
‖ Hw2z2(jw) ‖22=
∞∫
0
tr(h(t)T h(t))dt

E.2. SÍNTESE DE CONTROLADORES CONTÍNUOS UTILIZANDO LMI’S 83
em que h(t) = Cc2eActBc2 é a resposta impulsiva do sistema.
Considerando a matriz gramiano de controlabilidade (controllability gramian) definidapor
Wcontr∆=
∞∫
0
eActBc2BTc2
eATc tdt
a norma H2 pode ser escrita como
‖ Hw2z2(jw) ‖22= tr(Cc2WcontrC
Tc2
)
Pode-se mostrar que a matriz Wcontr é solução da seguinte equação de Lyapunov
AcWcontr + WcontrATc + Bc2B
Tc2
= 0
e que se uma matriz X verificar 0 < Wcontr < X então
AcX + XATc + Bc2B
Tc2
< 0
e a norma tem um limite superior α se
tr(Cc2WcontrCTc2
) < α
Estas condições podem ser colocadas em termos de LMI’s (ver [20]) e este resultadoé resumido pelo seguinte teorema
Teorema 6 Em relação ao sistema definido por (E.3) as seguintes afirmações são equiv-alentes
i) ‖ Hw2z2(jw) ‖22< γ
ii) Existem matrizes P = P T ∈ Rn×n e W = W T ∈ Rr×r de tal forma que[
ATc P + PAc BT
c2
Bc2 −I
]< 0 (E.7)
[W Cc2PPCT
c2P
]> 0 (E.8)
tr(W ) < γ (E.9)
O valor da norma H2 de Hw2z2(jw) pode ser calculada resolvendo o problema
‖ Hw2z2(jw) ‖22= min γ s.a. E.7− E.9
De forma equivalente poder-se-ia chegar a uma LMI definindo um gramiano deobservabilidade.

84 APÊNDICE E. SÍNTESE DE CONTROLADORES UTILIZANDO LMIS
E.2.3 Norma H∞A norma H∞de um sistema é definida, no domínio espectral, por
‖ Hwz(jw) ‖∞:= supw∈R
σ(Hwz(jw))
em que sup σ representa o maior valor singular de Hwz(jw). No caso unidimensionalrepresenta o maior ganho do diagrama de Bode (maior valor que ocorre no diagrama) dosistema.
O seguinte resultado permite expressar a restrição ‖ Hwz(jw) ‖∞< γ, na normainfinito de um sistema, sob a forma de uma LMI (ver [20]).
Teorema 7 Em relação ao sistema (E.3) as seguintes afirmações são equivalentesi) ‖ Hwz(jw) ‖∞< γii) Existe uma matriz P = P T > 0 ∈ Rn×nde tal forma que
AcP + PATc PBc∞ CT
c∞BT
c∞P −γI DTc∞
Cc∞ Dc∞ −γI
< 0 (E.10)
O resultado pode ser obtido tendo em conta a teoria de sistemas dissipativos. Estateoria permite fazer a ponte entre resultados no domínio do tempo e da frequência,podendo ser utilizada para provar resultados com o teorema do ganho pequeno (ver [18]).
E.2.4 Colocação de pólos
Vários tipos de restrições para a colocação de pólos, no plano complexo, podem serescritos na forma de LMI’s na variável complexa s. Considere-se por exemplo
Re(s) < −α ⇔ s +_s + 2α < 0
|s| < r ⇔[ −r s
_s −r
]< 0
Re(s) tan(θ) < −|Im(s)| ⇔[
(s +_s) sin(θ) (s− _
s) cos(θ)(s− _
s) cos(θ) (s +_s) sin(θ)
]< 0
(E.11)
Estes resultados são facilmente verificados tendo em conta que uma matriz é definidanegativa se todos os seus valores próprios são negativos.
O seguinte resultado (ver [21]) permite expressar estas restrições na forma de LMI’sna variável matricial P .
Teorema 8 (M.Chilali e P.Gahinet) Seja P = P T , Q e Ac matrizes reais. A matriz Ac
tem todos os seus valores próprios na região
Υ :=
s ∈ C|P + Qs + QT_s < 0
(E.12)

E.3. SÍNTESE EM TEMPO CONTÍNUO 85
sse existir uma matriz X = XT > 0 tal que
p11X + q11AcX + q11XATc . . . p1kX + q1kAcX + qk1XAT
c... . . . ...pk1X + qk1AcX + q1kXAT
c . . . pkkX + qkkAcX + qkkXATc
< 0 (E.13)
Note-se que a substituição (1, s,_s) → (X,AcX, XAT
c ) transforma (E.12) em (E.13).A título de exemplo veja-se como se transforma uma restrição na forma (E.11) numa LMIda forma (E.13)[(s + s) sin θ (s− s) cos θ(s− s) cos θ (s + s) sin θ
]< 0 ⇔ ∃X=XT >0 :
[(AX + AXT ) sin(θ) (AX − AXT ) cos(θ)(AX − AXT ) cos(θ) (AX + AXT ) sin(θ)
]
E.3 Síntese em tempo contínuoO problema de análise permite apenas verificar propriedades, por exemplo esta-
bilidade ou desempenho (valor das normas H2 ou H∞), ou seja, dado um controlador,e consequentemente as matrizes Ac, Bc, Cc e Dc, os resultados indicados anteriormentepermitem concluir acerca de propriedades como a estabilidade e a desempenho do sistemarealimentado. No entanto um problema mais interessante seria projectar um controladorque verifique determinadas propriedades. Substituindo nas equações das LMI’s apre-sentadas as expressões para Ac, Bc, Cc e Dc (realimentação do estado) definidas por(E.4), estas tornam-se funções não afins das variáveis K e P . Por exemplo, fazendo asubstituição na LMI E.6 correspondente à condição de estabilidade obtém-se
ATc P + PAc < 0 ⇔ AT P + KT BT P + PA + PBK < 0 (E.14)
No entanto é possível aplicar transformações congruentes às LMI’s apresentadas(E.6,E.7-E.8,E.10 e E.13), expressas em função da variável matricial K do controlador,que reduzam a parte não afim a um de dois produtos (para X = P−1)
AcX = AX + BKX
Cc∞X = C∞X + E∞KX
aplicando a transformação
X = P−1,W = KX (E.15)
os produtos podem ser expressos de forma afim nas novas variáveis matriciais W e X
Cc∞X = C∞X + E∞KX = C∞X + E∞W
AcX = AX + BKX = AX + BW
Considerando novamente a expressão (E.14), multiplicando ambos ao membros porX = P−1(transformação congruente) obtém-se

86 APÊNDICE E. SÍNTESE DE CONTROLADORES UTILIZANDO LMIS
XAT + XKT BT + AX + BKX < 0
⇔ XAT + XKT BT + AX + BW < 0
que é afim nas variáveis matriciais W e X.
E.3.1 Norma H2
Aplicando a transformação congruente definida por[
X 00 I
]
ao sistema de LMI’s (E.7)-(E.8), seguindo da transformação (E.15), obtém-se[
AX + BW + XAT + W T BT B2
BT2 −I
]< 0
[Y C2X + E2WXCT
2 + W T E2 X
]< 0
A solução para este problema de realimentação do estado minimizando a normaH2 tem uma estreita relação com o problema de controlo óptimo de regulaçãoLQR, cujaequação algébrica de Riccati se apresenta de seguida
AT P + PA− PBR−1BT P + Q = 0
Pode-se mostrar (ver [22] e [23]) que dadas as seguintes condições os problemas sãoequivalentes
R = ET2 E2 = I, CT
2 E2 = 0, D2 = 0, Q = CT2 C2 (E.16)
Em que R e Q são as matrizes do funcional de custo do problema LQR
J =
+∞∫
0
xT Qx + uT Ru
E.3.2 Norma H∞Aplicando a transformação congruente
X 0 00 I 00 0 I
à LMI (E.10), seguido da transformação (E.15), obtém-se
AX + BW + XAT + W T BT B∞ XCT∞ + W T ET
∞BT∞ −γI DT
∞C∞X + E∞W D∞ −γI
< 0

E.4. SÍNTESE DE CONTROLADORES DISCRETOS UTILIZANDO LMI’S 87
E.3.3 Controlo multi-objectivo
No projecto do controlador poderá ser interessante incluir conjuntamente especifi-cações, por exemplo, em termos de limites superiores nas normas H2, H∞. Neste casoencontrar directamente matrizes X1 e X2 que verifiquem respectivamente as LMI’s (E.7)-(E.9) e (E.10) não permite sintetizar o controlador pois em geral X1 6= X2 e o vector deganhos K do controlador depende da matriz X.
Uma solução para este problema (conhecido na literatura anglo-saxónica por mixedcontrol problem) passa por impor X1 = X2 = X nas várias LMI’s (ver [20]), resultandono entanto num resultado conservador pois a solução assim obtida é em geral diferentedas soluções óptimas de cada um dos problemas.
E.3.4 Realimentação da saída
Tal como no caso de realimentação do estado, existe uma transformação de co-ordenadas que transforma as equações (E.3) da malha fechada em equações afins dosparâmetros do controlador, neste caso AK , BK , CK e DK(ver [20]). No entanto estatransformação é algebricamente mais complexa que a anterior pelo que não será apresen-tada aqui. No exemplo de aplicação serão apresentados resultados com a realimentaçãoda saída para o caso da minimização da norma H∞ com restrições na colocação de pólos.
E.4 Síntese de controladores discretos utilizando LMI’s
E.4.1 Análise em tempo discreto
A notação utilizada para o caso discreto é idêntica à utilizada para o caso contínuoapresenta na Figura E.1.
O sistema G pode ser escrito da seguinte forma
G =
x(k + 1) = Ax(k) + B∞w∞(k) + B2w2(k) + Bu(k)z∞(k) = C∞x(k) + D∞w∞(k) + E∞u(k)z2(k) = C2x(k) + D2w2(k) + E2u(k)y(k) = Cx(k) + F∞w∞(k) + F2w2(k)
(E.17)
e o sistema realimentado
C =
xc(k + 1) = Acxc(k) + Bcw(k)z(k) = Ccxc(k) + Dcw(k)
(E.18)
As funções de transferência apresentam-se de seguida
Hw∞z∞(z) = Cc∞(zI − Ac)−1Bc∞ + Dc∞
Hw2z2(z) = Cc2(zI − Ac)−1Bc2 + Dc2

88 APÊNDICE E. SÍNTESE DE CONTROLADORES UTILIZANDO LMIS
E.4.2 Estabilidade em tempo discreto
Considere-se o sistema linear em tempo discreto
x(k + 1) = Ax(k) (E.19)
O sistema é estável se e só se admite uma função quadrática de Lyapunov da forma
V (x(k)) = x(k)T Px(k), P > 0, P = P T
que verifique V (x(k)) > 0 e V (x(k + 1)) < V (x(k)). Esta condição pode-se escrever naforma
x(k + 1)T Px(k + 1) < x(k)T Px(k)
⇔ x(k)T AT PAx(k) < x(k)T Px(k)
⇔ x(k)T (AT PA− P )x(k) < 0
que é equivalente à seguinte LMI, que é uma função linear nas n(n+1)2
variáveis de decisãocorrespondentes à matriz P
AT PA− P < 0 (E.20)
E.4.3 Norma H2
Para sistemas discretos, a norma H2 é definida da seguinte forma
‖ Hw2z2(z) ‖22=
1
2π
π∫
−π
tr(H∗w2z2
(ejw)Hw2z2(ejw)) =
∞∑
k=0
tr(h∗(k)h(k)) (E.21)
em que h(k) é a resposta impulsiva do sistema dada por
h(k) =
Cc2A
kcBc2
, k ≥ 00, k < 0
(E.22)
Analogamente ao caso contínuo podem-se definir os gramianos de controlabilidadee observabilidade
M =∞∑
k=0
(ATc )kCT
c2Cc2
Akc
N =∞∑
k=0
AkcBc2B
Tc2
(ATc )k
que se podem obter através das equações de Lyapunov

E.4. SÍNTESE DE CONTROLADORES DISCRETOS UTILIZANDO LMI’S 89
AT MA−M + CT2 C2 = 0 (E.23)
AT NA−N + BT2 B2 = 0
e a norma H2 pode ser escrita como
‖Hw2z2(z)‖22 = tr(Cc2NCT
c2)
‖Hw2z2(z)‖22 = tr(Bc2MBT
c2)
O problema pode ser colocado na forma LMIs, que se apresenta de seguida
Teorema 9 Em relação ao sistema (E.17) as seguintes afirmações são equivalentesi) ‖ Hw2z2(z) ‖2
2< γii) Existe P = P T > 0 tal que
ATc PAc − P + Cc2C
Tc2
< 0 (E.24)
tr(BTc2
PBc2) < γ2 (E.25)
iii) Existem matrizes P = P T ∈ Rn×n e Z = ZT ∈ Rr×r de tal forma que−P AT
c CTc2
Ac −P−1 0Cc2 0 −I
< 0 (E.26)
[P−1 Bc2
BTc2
Z
]> 0 (E.27)
tr(Z) < γ2 (E.28)
Em particular o problema de encontrar a norma H2 do sistema pode ser resolvidoatravés do problema
minγ
s.a. E.26, E.27, E.28
Dem:Se 0 < P < M então a partir de E.23 obtém-se
ATc PAc − P + CT
c2Cc2 < 0
que é equivalente à LMI E.26 como se pode verificar aplicando o lema de Shur sucessiva-mente

90 APÊNDICE E. SÍNTESE DE CONTROLADORES UTILIZANDO LMIS
−P Ac CT
c2
ATc −P−1 0
Cc2 0 −I
< 0 ⇐⇒
[−P Ac
ATc −P−1
]−
[CT
c2
0
](−I)−1
[Cc2 0
]< 0 ⇐⇒
[−P + CTc2
Cc2 Ac
ATc −P−1
]< 0 ⇐⇒ AT
c PAc − P + CTc2
Cc2 < 0
A partir da LMI E.27 obtém-se aplicando o lema de Shur que
Z < BTc2
PBc2
Através das propriedades do traço vem sucessivamente
tr(Z) < tr(BTc2
PBc2) < tr(BTc2
MBc2) = γ
ou seja a solução do problema fornece um limite superior para a norma H2. Minimizandoo valor de obtém-se o valor da norma H2 do sistema. ¤
E.4.4 Norma H∞
A norma H∞ para sistemas discretos é definida da seguinte forma
‖ Hw2z2(z) ‖∞:= maxθ∈[0,2π]
σ(Hwz(ejθ))
O cálculo da norma H∞pode ser expresso na forma de LMI’s como é apresentadopelo seguinte resultado (ver [22] para demonstração)
Teorema 10 Em relação ao sistema (E.17) as seguintes afirmações são equivalentesi) ‖ Hw∞z∞(z) ‖2
∞< γ
ii) Existe uma matriz P = P T ∈ Rn×n de tal forma que
P ATc P 0 CT
c∞PAc P PBc∞ 00 BT
c∞P γI DTc∞
Cc∞ 0 Dc∞ I
(E.29)
E.4.5 Colocação de pólos
Embora seja evidente que a colocação de pólos no caso discreto tenha zonas objectivodiferentes de no caso contínuo (por exemplo estabilidade na caso contínuo correspondea Re(s) < 0 e no caso discreto a |z| < 1), as mesmas restrições LMI podem ser uti-lizadas. Assim as equações (E.12) e (E.13) podem ser aplicadas ao caso discreto fazendoa substituição s → z.

E.5. SÍNTESE EM TEMPO DISCRETO 91
E.5 Síntese em tempo discreto
E.5.1 Estabilidade
O seguinte teorema permite sintetizar um controlador por realimentação linear devariáveis de estado u(k) = Kx(k) que estabilize o sistema
Teorema 11 Se existirem matrizes X = XT , e W que verifiquem a restrição[
X X AT + W T BT
AX + B W X
]> 0 (E.30)
o sistema E.17 com lei de controlo u(k) = WX−1x(k) = Kx(k) é assimptoticamenteestável
Dem:A partir da LMI E.20 particularizada para o sistema realimentado
ATc PAc − P < 0
(A + BK)T P (A + BK)− P < 0
Tem-se por aplicação do lema de Shur que esta LMI se pode exprimir da seguinteforma
[P (A + BK)T
(A + BK) P−1
]> 0
Aplicando a transformação congruente[X 00 I
]
e a mudança de variáveis E.15 obtêm-se a LMI E.30[X 00 I
] [P (A + BK)T
(A + BK) P−1
] [X 00 I
]> 0 =
[X X AT + (KX)T BT
AX + B KX X
]> 0
E.5.2 Norma H2
Aplicando a transformação congruente
X 0 00 I 00 0 I
(E.31)
à LMI E.26, seguido transformação E.15 é possível expressar o problema de síntese naforma de LMI’s o que se resume no seguinte teorema

92 APÊNDICE E. SÍNTESE DE CONTROLADORES UTILIZANDO LMIS
Teorema 12 Para um dado valor γ, se existirem matrizes X = XT , W e Z = ZT queverifiquem as restrições
X XAT + W T BT XCT2 + W T ET
2
AX + BW X 0C2X + E2W 0 I
> 0 (E.32)
[X B2
BT2 Z
]> 0 (E.33)
tr(Z) < γ2 (E.34)
Então a norma H2 do sistema E.17 com lei de controlo u(k) = WX−1x(k) = Kx(k)verifica ‖(C2 + E2K)(zI − A− B2K)−1B2‖2 < γ. Em particular o vector de ganhos queminimiza a norma H2 pode ser obtido resolvendo o problema
min γ (E.35)s.a (E.32), (E.33) e (E.34) (E.36)
Dem: Aplicando a transformação congruente E.31 à LMI E.26 vem que
X 0 00 I 00 0 I
−P AT
c CTc2
Ac −P−1 0Cc2 0 −I
X 0 00 I 00 0 I
< 0 ⇐⇒ (E.37)
−X X(A + BK)T X(C2 + E2K)T
(A + B2K)X −X 0(C2 + E2K)X 0 −I
< 0 (E.38)
Utilizando a mudança de variáveis E.15 obtém-se
−X XAT + W T BT XCT2 + W T ET
2
AX + BW −X 0C2X + E2W 0 −I
< 0 (E.39)
Aplicando sucessivamente o lema de Shur (nos dois sentidos) obtém-se a LMI E.32
−X − [XAT + W T BT XCT
2 + W T ET2
] [−X 00 −I
]−1 [AX + BW
C2X + E2W
]< 0 ⇐⇒
X − [XAT + W T BT XCT
2 + W T ET2
] [X 00 I
]−1 [AX + BW
C2X + E2W
]> 0 ⇐⇒
X XAT + W T BT XCT2 + W T ET
2
AX + BW X 0C2X + E2W 0 I
> 0
¤De forma semelhante ao caso contínuo o problema de minimização da norma H2
tem uma estreita relação como o problema LQR o que é resumido no seguinte teorema

E.5. SÍNTESE EM TEMPO DISCRETO 93
Teorema 13 O problema clássico de regulação óptimo para o sistema E.17 com funcionalde custo
min J =+∞∑
k=0
(x(k)T Qx(k) + u(k)T Ru(u)) (E.40)
com matrizes Q = CT2 C2 e R = ET
2 E2 com CT2 E2 = 0 é equivalente ao problema de
encontrar um lei de controlo u(k) = Kx(k) que minimize a norma H2 (teorema 12).
Dem:A solução do problema de regulação óptimo é dada por K = −(BT
2 PB2+R)−1BT2 PA =
−LBT2 PA, L = (BT
2 PB2 + R)−1 e onde P é solução da desigualdade de Ricatti
AT PA− P + Q− AT PB2(BT2 PB2 + R)−1BT
2 PA < 0
Dadas as condições do teorema chega-se a esta desigualdade a partir da LMI E.26Aplicando o lema de Shur vem
(A + B2K)T P (A + B2K)− P + (C2 + E2K)T (C2 + E2K) < 0 ⇐⇒AT PA− P + CT
2 C2 + KT B2PA + A′PB2K + KT BT2 PB2K + KT ET
2 E2K < 0 ⇐⇒AT PA− P + Q− AT PB2LBT
2 PA− AT PB2LBT2 PA + KT (BT
2 PB2 + R)K < 0 ⇐⇒AT PA− P + Q− AT PB2(B
′2PB2 + R)−1BT
2 PA < 0
Que não é mais do que a desigualdade de Ricatti ¤
Esta relação de equivalência entre os problemas pode também ser estabelecida tendoem conta a relação entre a resposta ao impulso e a resposta livre do sistema com umasdadas condições iniciais. Para tal atenda-se a que o problema LQR para o sistema discretopode ser colocado na forma de minimizar o funcional de custo,
min+∞∑
k=0
(x(k)T Qx(k) + u(k)T Ru(u)) (E.41)
que usando o facto de Q = CT2 C2 e R = ET
2 E2 se pode exprimir por
min+∞∑
k=0
(x(k)T CT2 C2x(k) + u(k)T ET
2 E2u(k)) (E.42)
e dado que
z2(k)T z2(k) = (x(k)T CT2 +u(k)T ET
2 )(C2x(k)+E2u(k)) = (x(k)T CT2 C2x(k)+u(k)T ET
2 E2u(k))
onde se usou o facto de CT2 E2 = 0, o funcional fica da forma
min+∞∑
k=0
z2(k)T z2(k) (E.43)
Sabendo também que a solução óptima para a lei de controlo é dada por u(k) = Kx(k)o sistema em malha fechada é dado por

94 APÊNDICE E. SÍNTESE DE CONTROLADORES UTILIZANDO LMIS
x(k + 1) = (A + BK)x(k)
z2(k) = (C2 + E2K)x(k)
E para um dada condição inicial x(0) = x0, z2(k) é dado pela expressão
z2(k) =
(C2 + E2K)(A + BK)kx0 k ≥ 0
0 k < 0(E.44)
Como a minimização é válida para qualquer condição inicial, basta fazer x0 = B2
para verificar que os dois problemas LQR, com funcional de custo E.41, e minimizaçãoda norma H2 com funcional de custo E.21 onde z2 é dado por E.44 e onde h(k) é dadopor E.22, são equivalentes.
E.5.3 Norma H∞Aplicando a transformação congruente
X 0 0 00 X 0 00 0 I 00 0 0 I
à LMI (E.29), seguido da transformação (E.15), obtém-se
X XAT + W T BT 0 XCT∞ + W T ET
∞AX + BW X B∞ 00 BT
∞ γI DT∞
C∞X + E∞W 0 D∞ I
< 0
E.6 Sistemas com incertezas poliedraisConsidere-se a seguinte classe de sistemas
[˙x(t)
z(t)
]=
[A(δ) B(δ)C(δ) D(δ)
] [x(t)u(t)
](E.45)
em que a matriz
S(δ) =
[A(δ) B(δ)C(δ) D(δ)
](E.46)
pode ser escrita como uma combinação convexa das funções δ, estando contida no seguinteconjunto de matrizes
∆ := S(δ) =V∑
i=1
Siδi,
V∑i=1
δi = 1,δi > 0
em que as matrizes Si são constantes e definem o conjunto

E.6. SISTEMAS COM INCERTEZAS POLIEDRAIS 95
∆0 = Si, 1 < i < V (E.47)
Geometricamente estas matrizes constituem os vértices do politopo ∆ em que amatriz S pode estar contida.
Esta classe de sistemas permite modelar:
• Sistemas invariantes no tempo, em que existem incertezas sobre parâmetros do sis-tema p = (p1, p2, ..., pV ) que variam num conjunto P := lp1
< p1 < lp1 , .., lpV<
pV < lpV e S(p) é uma função afim dos parâmetros. Neste caso, o sistema admite
uma realização fixa mas desconhecida, dependente dos valores dos parâmetros. Ex-iste sempre uma transformação linear que permite passar da representação afimde S(p) para a representação convexa introduzida atrás S(δ) como é ilustrado naFigura E.2
Figura E.2: Interpretação do conjunto δ0 em termos de um politopo
• Sistemas variantes no tempo em que a matriz S pode ser escrita na forma
S(t) =
[A(t) B(t)C(t) D(t)
],
ou seja as funções δi da expressão, são dependentes do tempo. Neste caso o sistemaé não linear e variante no tempo mas a sua realização para qualquer instante detempo está contida no politopo ∆ como é ilustrado na Figura E.6.
Figura E.3: Interpretação como sistemas variantes no tempo
O interesse desta classe de sistemas decorre da convexidade do conjunto de possíveissistemas, como é apresentado pelo seguinte teorema

96 APÊNDICE E. SÍNTESE DE CONTROLADORES UTILIZANDO LMIS
Teorema 14 Seja f : ∆ → R uma função convexa sobre o conjunto ∆ = co∆0. Entãof(ξ) < γ, ∀ξ ∈ ∆, sse f(ξ) < γ, ∀ξ ∈ ∆0
O conjunto definido por co∆0(caso convexo) é a intersecção de todos os conjuntosconvexos que contêm ∆0. No caso particular em que ∆0 é constituído por um conjuntofinito de pontos (sem reentrâncias) o conjunto ∆ = co∆0 é precisamente o politopodelimitado pelos vértices de ∆0.
A aplicação deste resultado a sistemas com incertezas poliedrais é imediata. Nestecaso ∆0 = S1, S2, .., SV , ξ = S1δ1 + S2δ2 + ... + SV δV e f(ξ) < 0 é uma funçãoconvexa do tipo LMI que pode ser qualquer uma das apresentadas anteriormente para aanálise ou síntese de sistemas. Assim sendo, para um sistema com incertezas poliedrais,a verificação das propriedades colocadas na forma de LMI’s para todas as possíveis einfinitas realizações no politopo, pode ser garantida se a restrição f(ξ) < 0 for verificadaapenas no número finito dos seus vértices.
A título de exemplo, considere-se a análise de estabilidade de um sistema. O seguinteteorema resume a aplicação deste resultado para sistemas com incertezas poliedrais paraa propriedade de estabilidade.
Teorema 15 : O sistema (E.45) é estável para S(δ) ∈ ∆ se existir uma matriz P ∈Rn×nsimétrica e definida positiva tal que
ATi P + PAi < 0 (E.48)
em que Ai ∈ ∆0são os vértices do politopo.
Repare-se que, apesar de poderoso, este resultado para sistemas com incertezaspoliedrais é conservador. Se tomarmos por exemplo o caso de estabilidade apresentadoem cima pode não existir uma única função de Lyapunov xT Px cuja matrizP verifique aLMI AT
i P + PAi < 0 e no entanto o sistema ser estável para todas as realizações dentrodo politopo (que pode ser garantido tomando uma matriz função de Lyapunov diferentepara cada ponto do politopo).
Assim sendo pode-se reduzir o conservadorismo fazendo com que a função de Lya-punov dependa dos parâmetros
P = P0 + δ1P1 + ... + δV PV (E.49)
Nesse caso pode-se mostrar (ver [18]) o seguinte resultado, considerando que astaxas de variação dos parâmetros são limitadas, pertencendo ao conjunto Λ = coΛ0onde
Λ0 :=
(λ1, ..., λV ), λj ∈ λj, λj,.
δj(t) = λj
(E.50)
Teorema 16 O sistema com incertezas poliedrais (E.45) com taxas de variação de parâmet-ros definidas no conjunto Λ é assimptoticamente estável se existirem matrizes simétricasK0, ...., KV tal que:
A(δ)T K(δ) + K(δ)A(δ) + K(λ) < K0 para δ ∈ ∆0 e λ ∈ Λ0
K(δ) > I para δ ∈ ∆0
ATi Ki + KiAi ≥ 0 para i = 1, ..., V

E.7. EXEMPLO DE APLICAÇÃO 97
onde A(δ) = A0 +V∑
j=1
δjAj e K(δ) = K0 +V∑
j=1
δjKj.
O resultado que é apresentado de seguida permite garantir desempenho em termosda norma H2 para todas as realizações do sistema no conjunto δ utilizando um númerofinito de testes no conjunto de vértices δ0
Teorema 17 Se existirem matrizes X = XT , e W e Q = QT que tornem factível oproblema de optimização
min γ
s.a.
X XATi + W T BT
i XCT2i
+ W T DT2i
AiX + BiW X 0C2i
X + D2iW 0 I
< 0 (E.51)
[Q B2i
B2iX
]> 0 (E.52)
tr(Z) < γ2 (E.53)
em que Ai,Bi,B2i,C2i
,D2ifazem parte das realizações de Si no conjunto de vértices do
politopo ∆0, então a norma H2 do sistema 4.14 com lei de controlo u(k) = WX−1x(k) =K x(k) verifica ‖(C2(δ) + E2(δ)K)(zI − A(δ) − B2(δ)K)−1B2(δ)‖2 < γ para qualquerrealização do sistema no politopo ∆.
Dem: Considerando os mapeamentos, para x fixo e ξ ∈ ∆ = co(∆0)
f1(ξ) = xT
X XA(ξ)T + W T B(ξ)T XC2(ξ)T + W T D2(ξ)
T
A(ξ)X + B(ξ)W X 0C2(ξ)X + D2(ξ)W 0 I
x
f2(ξ) = xT
[Q B2(ξ)
B2(ξ) X
]x
O resultado é uma aplicação directo do teorema 14. ¤
E.7 Exemplo de aplicaçãoConsidere-se o sistema contínuo representado na Figura E.4, cuja realização em
espaço de estados é a seguinte
.x = Ax + Bu + B∞w∞ + B2w2
y = Cxz2 = C2x + D2w2 + E2uz∞ = C∞x + D∞w∞ + E∞u
(E.54)

98 APÊNDICE E. SÍNTESE DE CONTROLADORES UTILIZANDO LMIS
Figura E.4: Sistema de exemplo
Em que
A =
0 0 1 00 0 0 1−k k 0 0k −k 0 0
,B =
0010
,C =
[0 1 0 0
](E.55)
x =[
x1 x2.x1
.x2
]T
As matrizes C2, D2, E2 e C∞, D∞, E∞ que apenas influenciam os vectores de desem-penho z2 e z∞ serão definidas consoante o problema a tratar de seguida, bem como asmatrizes B∞ e B2. A constante de elasticidade da mola k é desconhecida.
O Matlab possui um conjunto de funções fáceis de utilizar e bastante eficientes paraa resolução dos problemas de factibilidade e de minimização de um funcional de custolinear sujeito a um sistema de restrições do tipo LMI’s. Relativamente à síntese e análisede sistemas utilizando o conjunto de LMI’s apresentadas, o Matlab possui apenas parao caso contínuo e síntese por realimentação de variáveis de estado. Possui ainda rotinaspara sistemas com incertezas poliedrais.
Síntese de controlador por realimentação de variáveis de estado por minimiza-ção da norma H2 com colocação de pólos numa dada região
Admite-se inicialmente que a constante desconhecida assume o valor k = 1.Definindo as matrizes
B2 =
0001
C2 =
1 0 0 00 0 0 00 0 0.001 00 0 0 0.001
(E.56)
D2 =
0000

E.7. EXEMPLO DE APLICAÇÃO 99
E2 =[
0 1 0 0]T
E a região para a colocação de pólos da forma −π4
< θ < π4e Re(s) < −0.5, onde
θé definido em relação ao eixo −Re(s)O problema de minimização da norma H2 sujeito à colocação dos pólos na região
pretendida resulta na configuração de valores próprios indicada na Figura E.5
Figura E.5: Configuração de valores próprios para minimização de H2
A resposta impulsiva da entrada para a saída é apresentada de seguida na figuraE.6
O valor da norma H2 e o vector de ganhos obtidos foram
K =[ −10.61 7.38 −6.38 −3.43
]
‖ Hw2z2(s) ‖22= 7.87
Repare-se que as matrizes de desempenho E.56 verificam as condições E.16, e assimo problema H2 sem restrições de colocação de pólos pode ser confirmado com o problemado regulador óptimo, levando a uma norma H2 de
‖ Hw2z2(s) ‖22= 1.20
Que é naturalmente menor (dado que não tem a restrição de colocação de pólos)que a norma H2 do problema anterior.
Figura E.6: Resposta impulsiva para minimização de H2

100 APÊNDICE E. SÍNTESE DE CONTROLADORES UTILIZANDO LMIS
A função implementada foi confirmada com a seguinte rotina do Matlab em quePsystem é uma representação interna do sistema criada com a função LTISYS e region aregião pretendida criada com a função LMIREG.
[gopt,h2opt,K,Pcl] = msfsyn(Psystem,r,[0 0 0 1],region);
E.7.1 Síntese com sistemas poliedrais
No problema anterior foi atribuído o valor de k = 1 para o parâmetro desconhecidoe foi projectado um controlador para esse valor. No entanto este valor não é conhecido.Se o valor real for de 0.8 a matriz A será diferente da matriz para o qual se projectouo controlador. Para este valor de ganhos de realimentação das variáveis de estado asespecificações não são cumpridas como é possível verificar analisando o diagrama depólos zeros para o sistema realimentado nesta situação, apresentado na Figura E.7.1
No sentido de resolver este problema, poder-se-á utilizar oresultado para sistemas com incertezas poliedrais. Admita-se que k varia no con-
junto convexo k ∈ [0.5 1.5
]ou seja o conjunto ∆0 (E.47) é da forma
∆0 =
0 0 1 00 0 0 1−0.5 0.5 0 00.5 −0.5 0 0
B
C D
,
0 0 1 00 0 0 1−1.5 1.5 0 01.5 −1.5 0 0
B
C D
Impondo as restrições nos vértices do politopo para a colocação de pólos e cor-respondes à norma H2, chega-se a resultados para a norma H2 mais conservativo de‖ Hw2z2(s) ‖2
2= 159.04 no entanto este valor de ganhos do controlador
K =[
188.04 −39.52 30.56 320.12]
garante que para qualquer valor de k ∈ [0.5 1.5
]o sistema em malha fechada cumpre
as especificações pretendidas. Em particular para um valor de k = 0.8 os valores própriosdo sistema em malha fechada são
p1 = −22.77, p2 = −5.89, p3 = −1.08, p4 = −0.81
que estão claramente dentro da região pretendida.

E.7. EXEMPLO DE APLICAÇÃO 101
Síntese de controlador com realimentação da saída por minimização da normaH∞ com colocação de pólos numa dada região
Apresenta-se brevemente outro exemplo de utilização das restrições do tipo LMI’spara o caso de minimização da norma H∞com colocação de pólos na mesma regiãodo problema anterior, para o caso de realimentação da saída. Enquanto as matrizesB2, C2, D2, E2 do problema H2 têm uma interpretação semelhante ao problema LQR depesos no funcional de custo e de botões de ajuste para o controlador, no problema H∞ asmatrizes B∞, C∞, D∞, E∞ podem ser interpretadas como a forma como uma perturbaçãow∞ influencia um vector de desempenho z∞, sendo que se pretende que esta influên-cia seja mínima. Se
[w1 w2
]T (ilustrado na Figura E.4) representar a perturbação e[z1 z2
]T=
[x1 x2
]T , as matrizes que determinam esta influência são
B∞ =
[0 0 1 00 0 0 1
]T
C∞ =
[1 0 0 00 1 0 0
]
D∞ =
[0 00 0
]
E∞ =
[11
]
F∞ = [ 0 0 ]
Resolvendo o problema de minimização chega-se ao seguinte controlador
AK =
−0.0513 −2.2643 −0.5102 −0.842810.0540 −6.8247 −1.7499 −2.1132−2.3649 1.5199 −3.1124 −1.61920.0626 0.0346 −1.7502 −5.5877
BK =[ −0.7849 −17.8322 4.2901 −0.0238
]
CK =[ −1.6777 2.7459 0.9609 1.1001
]
DK = 3.3622
A colocação dos pólos do sistema em malha fechada, está ilustrada na Figura E.7 eo valor da norma H∞ apresenta-se de seguida
‖ Hwz(s) ‖∞= 55.32

102 APÊNDICE E. SÍNTESE DE CONTROLADORES UTILIZANDO LMIS
Figura E.7: Configuração de pólos para síntese com norma H∞
Discretização do sistema
Discretizando o sistema contínuo, pelo método invariante ao escalão, chega-se aoseguinte sistema discreto, para um tempo de amostragem de Ta = 0.2s
x(k + 1) = ADx(k) + BDu(k)y(k) = CDx(k) + DDu(k)
Em que
AD = eATa =
0.9801 0.0199 0.1987 0.00130.0199 0.9801 0.0013 0.1987−0.1973 0.1973 0.9801 0.01990.1973 −0.1973 0.0199 0.9801
BD =
Ta∫
0
eAξBdξ =
0.01990.00010.19870.0013
CD =[
1 0 0 0]
DD = 0
Síntese de controlador por realimentação de variáveis de estado por minimiza-ção da norma H2-caso discreto
Definindo as matrizes de acordo com a notação utilizada
B2 =
0001

E.7. EXEMPLO DE APLICAÇÃO 103
C2 =
1 0 0 00 0 0 00 0 0.001 00 0 0 0.001
D2 =
0000
E2 =[
0 1 0 0]T
A resolução do problema de minimização da norma H2 resulta no seguinte vectorde ganhos e norma H2
K =[
0.6212 0.2625 1.1619 0.5906]
‖ Gz2w2(z) ‖2= 2.68
O diagrama de pólos do sistema em malha fechada apresenta-se de seguida na figuraE.7.1
Repare-se que as matrizes B2, C2, D2, F2 foram definidas de forma verificar as condições(E.16), o que permite obter o mesmo resultado para o problema LQR, para as matrizesQ e R do funcional de custo
Q = CT2 C2
R = 1
A seguinte instrução do Matlab permite obter o mesmo valor para o vector deganhos: [K,S, E] = DLQR(A, B, Q,R)

104 APÊNDICE E. SÍNTESE DE CONTROLADORES UTILIZANDO LMIS
Bibliografia
[1] Rita Cunha. Modeling and control of an autonomous robotic helicopter. Master’sthesis, Instituto Superior Técnico, Julho 2002.
[2] Nuno Paulino. Sistema de controlo para seguimento de terreno com aplicação ahelicópteros autónomos. Master’s thesis, Instituto Superior Técnico, Setembro 2004.
[3] E. Prempain and I. Postlethwaite. Static h∞ loop shaping control of a fly-by-wirehelicopter. In IEEE Conference on Decision and Control, 2004.
[4] James F. Montgomery and George A. Bekey. Learning helicopter control throughteaching by showing. In IEEE Conference on Decision and Control, 1998.
[5] E. Altung, James P. Ostrowski, and Robert Mahony. Control of a quadrotor he-licopter using visual feedback. In IEEE International Conference on Robotics andAutomation, May 2002.
[6] M. Tomizuka and D.E.Whitney. Optimal discrete finite preview problems (why andhow is future information important?). Journal of Dynamic Systems, Meausurement,and Control, 1975.
[7] M. Tomizuka. Optimal discrete preview problems with application to vehiclesuspension-revisited. Journal of Dynamic Systems, Meausurement, and Control,1976.
[8] G. Prokop and R. S. Sharp. Performance enhancement os limited bandwidth activeautomotive suspensions by road preview. CONTROL 94, 1994.
[9] T.Keviczky and G. Balas. Receding horizon control of an f-16 aircraft: a comparativestudy. American Control Conference, 2003.
[10] Nuno Paulino, Carlos Silvestre, and Rita Cunha. Terrain following controller foraffine parameter dependent systems: An aplication to model-scale helicopters. InAIAA Conference Navigation, Guidance and Control, 2005.
[11] Bruno Guerreiro. Simplification of an helicopter’s nonlinear model. Technical report,Institute for Systems and Robotics, Dezembro 2004.
[12] Carlos Silvestre. Multi-Objective Optimization Theory with Aplication to the Inte-grated Design of Controllers / Plants for Autonomous Vehicles. PhD thesis, InstitutoSuperior Técnico, Junho 2000.
105
106 BIBLIOGRAFIA
[13] Rita Cunha and Carlos Silvestre. A 3d path-following, velocity-tracking controller forautonomous vehicles. Technical report, Institute for Systems and Robotics, Fevereiro2005.
[14] Rita Cunha and Carlos Silvestre. A 3d path-following, velocity-tracking controllerfor autonomous vehicles. IFAC, 2005.
[15] B. Franklin. Feedback Control of Dynamic Systems. 2000.
[16] Isaav Kaminer, A. Pascoal, P. Khargonekar, and E.Coleman. A velocity algorithmfor the implementation of gain-sheduled controllers. Automatica, 1995.
[17] G. Balas and J. Shin. Optimal blending functions in linear parameter varying control,synthesis for f16 aircraft. American Control Conference, 2002.
[18] Carsten Scherer and Siep Weiland. Linear matrix inequalities in control. DutchInstitute of Systems and Control, DISC, Outubro 2000.
[19] W. Fleming. Functions of Several Variables. 1976.
[20] Carlos Silvestre. Introduction to the synthesis of feedback control systems usinglinear matrix inequalities. Technical report, Institute for Systems and Robotics,2002.
[21] M. Chilali and P. Gahinet. h∞ design with pole placement constraints an lmi ap-proach. IEEE Transactions on Automatic Control, 1996.
[22] Maurício Carvalho de Oliveira. Controle de sistemas lineares baseado nas desigual-dades matriciais lineares. PhD thesis, Universidade Estadual de Campinas, Maio1999.
[23] J. Li, H. Wang, and L. Bushnell. On the relantionship between lmis and ares appli-cations to absolute stability criteria, robustness analysis and optimal control. Notes.