schubert pfeil ronaldo carvalho battista rio de janeiro...
TRANSCRIPT

EDIFICAÇÕES FLEXÍVEIS SOB AÇÃO DINÂMICA DE VENTO TURBULENTO
Sander David Cardoso Júnior
Dissertação de Mestrado apresentada ao
Programa de Pós-graduação em Engenharia
Civil, COPPE, da Universidade Federal do Rio
de Janeiro, como parte dos requisitos necessários
à obtenção do título de Mestre em Engenharia
Civil.
Orientadores: Michèle Schubert Pfeil
Ronaldo Carvalho Battista
Rio de Janeiro
Junho de 2011

EDIFICAÇÕES FLEXÍVEIS SOB AÇÃO DINÂMICA DE VENTO TURBULENTO
Sander David Cardoso Júnior
DISSERTAÇÃO SUBMETIDA AO CORPO DOCENTE DO INSTITUTO ALBERTO
LUIZ COIMBRA DE PÓS-GRADUAÇÃO E PESQUISA DE ENGENHARIA
(COPPE) DA UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COMO PARTE
DOS REQUISITOS NECESSÁRIOS PARA A OBTENÇÃO DO GRAU DE MESTRE
EM CIÊNCIAS EM ENGENHARIA CIVIL.
Examinada por:
RIO DE JANEIRO, RJ - BRASIL
JUNHO DE 2011

iii
Cardoso Júnior, Sander David
Edificações flexíveis sob ação dinâmica de vento
turbulento / Sander David Cardoso Júnior. – Rio de Janeiro:
UFRJ / COPPE, 2011.
XVI, 101 p.: il.; 29,7 cm.
Orientador: Michele Schubert Pfeil
Ronaldo Carvalho Battista
Dissertação (mestrado) – UFRJ/ COPPE/ Programa de
Engenharia Civil, 2011.
Referências Bibliográficas: p. 99-101.
1. Engenharia do vento. 2. Turbulência. 3. Estruturas
flexíveis. I. Pfeil, Michèle Schubert. et al. II. Universidade
Federal do Rio de Janeiro, COPPE, Programa de
Engenharia Civil. III. Título.

iv
Ao meu filho João Pedro
v
AGRADECIMENTOS
Ao meu filho João Pedro, por existir na minha vida e a quem dedico não só este
trabalho, mas todas as conquistas de minha vida.
Aos meus pais, pelo amor incondicional, carinho, dedicação e pela formação do
meu caráter.
Aos meus irmãos Bruno, Mishely e, em especial, Alicia, e a minha afilhada
Júlia, pelo companheirismo e amizade que só existem em uma família.
À minha professora, orientadora e amiga Michèle Pfeil, pelo apoio, incentivo e
compreensão durante todo o mestrado. Sou grato por toda ajuda e ensinamentos,
fundamentais para concretização deste trabalho.
Aos professores Ronaldo Battista e Eliane Carvalho, pelo convívio e
ensinamentos passados nas disciplinas cursadas na pós-graduação.
Aos meus eternos professores Paulo Miana e Miguel Pimenta, pelos anos de
convívio, aprendizagem e verdadeira amizade durante minha graduação e trabalho na
Universidade Federal de Juiz de Fora.
Ao CNPQ pelo apoio financeiro recebido durante o período de março de 2009 a
março de 2011.
vi
Resumo da Dissertação apresentada à COPPE/UFRJ como parte dos requisitos
necessários para a obtenção do grau de Mestre em Ciências (M.Sc.)
EDIFICAÇÕES FLEXÍVEIS SOB AÇÃO DINÂMICA DE VENTO TURBULENTO
Sander David Cardoso Júnior
junho/2010
Orientadores: Michele Schubert Pfeil
Ronaldo Carvalho Battista
Programa: Engenharia Civil
Estruturas flexíveis e pouco amortecidas são, geralmente, susceptíveis aos
efeitos dinâmicos causados pela turbulência do vento originado de ciclones
extratropicais. Esses efeitos podem resultar em respostas muito maiores do que aquelas
decorrentes de uma análise estática da estrutura sob ação de forças extremas. Para
considerar a resposta dinâmica de estruturas, as normas de projetos adotam modelos
para o cálculo manual. Esses modelos são baseados no método de Davenport e
formulados a partir da solução modal no domínio da frequência. Os objetivos principais
desta dissertação são: (i) realizar um estudo comparativo entre alguns desses métodos,
além de desenvolver soluções nos domínios do tempo e da frequência; (ii) Elaborar um
programa computacional e propor sua utilização no método discreto adotado pela norma
brasileira NBR 6123/1988 (“Forças devido ao vento em edificações”). Apresentam-se
soluções, em termos de deslocamento na direção principal do vento, para três exemplos
de estruturas flexíveis considerando o modo fundamental de vibração. Em geral os
resultados obtidos pelos diversos métodos mostraram boa correlação.

vii
Abstract of Dissertation presented to COPPE/UFRJ as a partial fulfillment of the
requirements for the degree of Master of Science (M.Sc.)
ALONG-WIND RESPONSE OF FLEXIBLE TALL STRUCTURES
Sander David Cardoso Júnior
June/2010
Advisors: Michele Schubert Pfeil
Ronaldo Carvalho Battista
Department: Civil Engineering
Flexible and low-damped structures are particularly affected by the dynamic
effects originated from the wind turbulence caused by EPS storms. These effects may
result in much larger responses than those obtained from static analysis of the structure
under extreme loads. To consider the dynamic analysis of the structures, some design
codes present simple models allowing manual evaluation. These models are based on
Davenport’s method which is formulated on the basis of a frequency domain modal
solution. The main goals of this work are: (i) the comparison of some of these
procedures, as well as the development of time and frequency domain solutions; (ii) the
implementation of a computer code and its application to the discrete model adopted by
the Brazilian Code NBR6123/1988 (“Wind forces on buildings”). Three flexible
structures are discussed here and the along-wind displacement responses are presented
considering the fundamental vibration mode. The obtained results using the different
methods showed good agreement.

viii
SUMÁRIO
Capítulo 1 Introdução ................................................................................................. 1
1.1 Cenário do tema ................................................................................................. 1
1.2 Objetivos e Metodologia .................................................................................... 7
1.3 Apresentação da dissertação .............................................................................. 8
Capítulo 2 Caracterização de ventos fortes............................................................... 9
2.1 Tipos de fenômenos ........................................................................................... 9
2.1.1 Fenômenos de macroescala ........................................................................ 9
2.1.2 Fenômenos de microescala e mesoescala ................................................. 11
2.2 Descrição física e modelagem matemática de ciclones extratropicais ............ 11
2.2.1 Características gerais ................................................................................ 12
2.2.2 Descrição matemática do vento turbulento .............................................. 13
2.2.3 Perfil vertical de velocidade média U ..................................................... 14
2.2.4 Intensidade de turbulência ........................................................................ 16
2.2.5 Espectro de turbulência ............................................................................ 17
2.2.6 Espectro cruzado de turbulência ............................................................... 20
2.2.7 Geração numérica de histórias de turbulência .......................................... 23
Capítulo 3 Análise dinâmica de estruturas submetidas ao vento turbulento ...... 25
3.1 Formulação do problema dinâmico ................................................................. 25
3.2 Forças devidas à ação dinâmica do vento ........................................................ 28
3.2.1 Força resultante em estruturas de pequenas dimensões............................ 28
3.2.2 Estruturas alargadas e/ ou alteadas ........................................................... 30
3.3 Solução do sistema de equações diferenciais de equilíbrio ............................. 32
3.3.1 Solução modal no domínio do tempo ....................................................... 33
3.3.2 Modelo de Davenport – Fator de rajada ................................................... 35
3.3.3 Solução modal no domínio da frequência ................................................ 40
3.3.4 Processo: Eurocode procedimento 1 ........................................................ 43
3.3.5 Processo: Dyrbye e Hansen ...................................................................... 44
3.3.6 Modelo discreto – NBR 6123 ................................................................... 46
Capítulo 4 Exemplos numéricos ............................................................................... 52
4.1 Torre de reservatório de água .......................................................................... 52
4.1.1 Análise estática da torre de reservatório (item 4 da NBR 6123) .............. 53
4.1.2 Análise dinâmica da torre de reservatório ................................................ 54
4.1.3 Resultados da torre de reservatório .......................................................... 61
4.2 Chaminé ........................................................................................................... 62
4.2.1 Análise estática da chaminé (item 4 da NBR 6123) ................................. 64
4.2.2 Análise dinâmica da chaminé ................................................................... 66
4.2.3 Resultados da chaminé ............................................................................. 75
4.3 Edifício de concreto armado ............................................................................ 78
4.3.1 Componente média de velocidade ( )U .................................................... 81

ix
4.3.2 Componente flutuante de velocidade ( )u : Domínio da frequência ......... 82
4.3.3 Componente flutuante de velocidade ( )u : Eurocode – Procedimento 1 . 84
4.3.4 Componente flutuante de velocidade ( )u : Dyrbye e Hansen .................. 85
4.3.5 Componente flutuante de velocidade ( )u : Modelo discreto .................... 87
4.3.6 Resultados do edifício .............................................................................. 88
Capítulo 5 Programa computacional F-TURB ....................................................... 90
5.1 Apresentação e utilização do programa F-Turb ............................................... 91
5.2 Resultados numéricos obtidos com o programa F-Turb .................................. 93
5.2.1 Exemplo do reservatório de água utilizando o programa F-Turb ............. 93
5.2.2 Exemplo da chaminé utilizando o programa F-Turb ................................ 94
5.2.3 Exemplo do edifício utilizando o programa F-Turb ................................. 95
Capítulo 6 Considerações finais ............................................................................... 97
Referências bibliográficas ............................................................................................ 99
x
Lista de Figuras
Figura 1.1: (a) Força devido ao vento; Resposta típica de estruturas com altas frequências naturais no domínio do tempo (b) e no domínio da frequência (c). .............. 2
Figura 1.2: (a) Força devido ao vento; Resposta típica de estruturas com baixas frequências naturais no domínio do tempo (b) e no domínio da frequência (c). .............. 3
Figura 1.3: Ilustração do método de Davenport (adaptado de Davenport, 1967). ........... 5
Figura 1.4: Função densidade espectral de resposta e área para cálculo da variância da resposta (adaptado de Davenport, 1967). ......................................................................... 5
Figura 2.1: Registro de um anemógrafo durante a passagem de um ciclone extra-tropical (Holmes, 2007)......................................................................................... 10
Figura 2.2: Geração da turbulência. em ventos de camada limite atmosférica. ............. 12
Figura 2.3: Registros de velocidade em três alturas diferentes (Dyrbye & Hansen, 1997). ............................................................................................. 13
Figura 2.4: Perfis verticais de velocidade média para terreno com
categoria de rugosidade III. O comprimento de rugosidade 0 0,2z m=
na equação 3.3 e o expoente na equação 3.1. ............................................... 15
Figura 2.5: intensidade de turbulência para diferentes categorias de terreno. ................ 17
Figura 2.6: Espectros de Von Kármán, Kaimal, ESDU e Harris em escala semi-
logarítmica para um terreno de categoria III, 0 0,2 z m= , e ( )10 30U m s= .
........................................................................................................................................ 20
Figura 2.7: Espectros Von Karman em escala semi-logarítmica para um terreno com
categoria de rugosidade III, 0 0,2z m= , velocidade ( )10 30U m s= . ........................... 20
Figura 2.8: Co-espectro normalizado considerando 2yC π= e 240 L m= . .................. 23
Figura 3.1: Admitância aerodinâmica (Blessmann,1998). ............................................. 31
Figura 3.2: Resposta da estrutura em função do tempo. ................................................. 33
Figura 3.3: (a) estrutura discretizada em n nós; (b) forma modal j. ............................... 34
Figura 3.4: Sistema massa-mola-amortecedor. .............................................................. 35
Figura 3.5: Densidade espectral da resposta típica de uma estrutura, destacando as parcelas ressonante R e não ressonante B da variância da resposta................................ 38
Figura 3.6: Altura de referência. ..................................................................................... 44
Figura 3.7: Coeficiente de amplificação dinâmica, ξ , para terreno de categoria I (
1800 L m= ; h em metros). 49
Figura 3.8: Coeficiente de amplificação dinâmica, ξ , para terreno de categoria II (
1800 L m= ; h em metros). 49
Figura 3.9: Coeficiente de amplificação dinâmica, ξ , para terreno de categoria III (
1800 L m= ; h em metros). 50
Figura 3.10: Coeficiente de amplificação dinâmica, ξ , para terreno de categoria IV (
1800 L m= ; h em metros). 50
Figura 3.11: Coeficiente de amplificação dinâmica, ξ , para terreno de categoria V (
1800 L m= ; h em metros). 51
0,185p =
100 z m=
xi
Figura 4.1: Perspectiva e planta da torre de reservatório de água. ................................. 52
Figura 4.2: História da velocidade de turbulência ( )30,5 z m= . ................................... 55
Figura 4.3: Densidade espectral do sinal de flutuação da figura 4.2 e função densidade espectral de flutuação de Harris...................................................................................... 56
Figura 4.4: História da força dinâmica a 30,5 metros de altura (somente parcela flutuante). ........................................................................................... 56
Figura 4.5: Deslocamento na torre ( )30,5 z m= . ........................................................... 57
Figura 4.6: Densidade espectral do deslocamento na torre ( )30,5 z m= . ...................... 57
Figura 4.7: Densidade espectral da ação dinâmica em escala logarítmica. .................... 58
Figura 4.8: Função de admitância mecânica da estrutura em escala logarítmica. .......... 59
Figura 4.9: Densidade espectral da resposta em escala logarítmica. .............................. 59
Figura 4.10: Densidade espectral da resposta para solução no domínio do tempo e da frequência. ........................................................................... 60
Figura 4.11: (a) Elevação da chaminé; (b) Modelo da chaminé. .................................... 63
Figura 4.12: Espectros Harris em escala logarítmica. .................................................... 68
Figura 4.13: Função de admitância mecânica da estrutura em escala logarítmica. ........ 68
Figura 4.14: Espectro de reposta da estrutura em escala logarítmica. ............................ 68
Figura 4.15: determinação gráfica de ξ . ........................................................................ 74
Figura 4.16: Planta de forma do pavimento tipo do edifício. ......................................... 79
Figura 4.17: Perspectiva do edifício. .............................................................................. 79
Figura 4.18: Vista frontal e pórtico plano para o edifício. ............................................. 80
Figura 4.19: Densidade espectral da resposta para solução no domínio do tempo e da frequência. ........................................................................... 83
Figura 5.1: Janela principal do programa F-Turb e seu conteúdo. ................................. 91
Figura 5.2: Esquema para o modelo discreto. ................................................................ 91
xii
Lista de Tabelas
Tabela 2.1: Parâmetros de rugosidade para as categorias de I a V da NBR6123 (Blessmann, 1995). ......................................................................................................... 16
Tabela 3.1: Parâmetros G para diferentes formas modais. ........................................... 45
Tabela 4.1: Resultados do deslocamento máximo provável para a torre de reservatório. ........................................................................................................................................ 62
Tabela 4.2: Características geométricas da chaminé. ..................................................... 63
Tabela 4.3: Dados associados aos nós do modelo adotado. 1φ é o autovalor associado ao
primeiro modo de flexão; im é a massa concentrada no nó i; i
A e iCa são,
respectivamente a área exposta e o coeficiente de arrasto correspondente ao nó i. ....... 64
Tabela 4.4: forças estáticas devido ao vento. ................................................................. 65
Tabela 4.5: Resultados para a componente média de velocidade de projeto. ................ 67
Tabela 4.6: Resultados para forças equivalentes dinâmicas atuantes na chaminé. ........ 75
Tabela 4.7: Resultados da análise dinâmica da chaminé: com Categoria III ( 0,185p =
para lei potencial e 0 0,2 z m= para lei logarítmica), 0 40U m s= . ............................ 76
Tabela 4.8: Resultados para solução no domínio da frequência com espectro ESDU (com L(z) dado pela equação 2.14) e com diferentes funções para o co-espectro normalizado de velocidade de vento e para o processo de Dyrbye & Hansen. .............. 78
Tabela 4.9: Dados associados aos nós do modelo adotado. 1φ é o autovalor associado ao
primeiro modo de flexão; im é a massa concentrada no nó i; i
A e iCa são,
respectivamente a área de exposição e o coeficiente de arrasto correspondente ao nó i. 80
Tabela 4.10: Resultados para a componente média de velocidade de projeto. .............. 81
Tabela 4.11: Resultados para forças equivalentes dinâmicas atuantes no edifício. ....... 88
Tabela 4.12: Resultados da análise dinâmica do edifício: 0 0,2 z m= e 25U m s= . . 89
Tabela 5.1: Forças equivalentes dinâmicas obtidas com o programa F-Turb para o exemplo da chaminé (item 4.2). ..................................................................................... 94
Tabela 5.2: Forças equivalentes dinâmicas obtidas com o programa F-Turb para o exemplo do edifício (item 4.3). ...................................................................................... 95
xiii
Lista de Símbolos
Letras romanas maiúsculas:
eA - área frontal efetiva;
( )A t - vetor de amplitude dos autovetores;
B - fator de resposta não ressonante (background);
C - matriz de amortecimento da estrutura;
C - matriz que aplica a correlação espacial;
Ca - coeficiente de arrasto;
rC - coeficiente de decaimento das pressões;
yC e
zC - coeficientes de decaimento;
( )F t - ação devido à velocidade de vento;
( )F z - ação média ou estática devido à velocidade de vento;
( )ˆ , , ,F x y z t - ação dinâmica correspondente a velocidade de vento;
G - fator de rajada para resposta;
( )
2H f - função de admitância mecânica;
uI , vI e
wI - intensidade de turbulência respectivamente nas direções x, y, z;
K - matriz de rigidez da estrutura;
( )1L z e ( )L z - comprimento de escala de turbulência;
L - constantes do espectro de Harris;
M - matriz de massa da estrutura;
( )jN t - é um processo aleatório de média igual a zero e variância unitária;
R - fator de resposta ressonante;
hR e b
R - fatores de admitância aerodinâmica;
uS - densidade espectral das componentes flutuantes de velocidade de vento u;
FS - densidade espectral da força flutuante;
( )xS f - densidade espectral do deslocamento;
,ui ujS - densidade espectral cruzada de turbulência;
U - velocidade do vento;
U - velocidade média do vento;
xiv
( )U z - velocidade média correspondente a uma altura z sobre o terreno;
refU - velocidade média tomada em uma altura de referência, 10refz m= ;
0U - velocidade básica, que corresponde à velocidade de uma rajada 3 segundos,
excedida na média uma vez em 50 anos, a 10 metros acima do terreno, em
campo aberto e plano (categoria II) da NBR613.
( )10min, 1 3 0 1 310 0,69p IIU U S S U S S= = - velocidade de projeto, é a velocidade
média em 10 minutos, a 10 metros de altura referido à categoria II da NBR613.
( )ɺɺX t , ( )ɺX t e ( )X t , respectivamente os vetores de aceleração, velocidade e
deslocamento;
relU - velocidade do vento em relação à estrutura;
1X , 1Y - frequências admensionais.
Letras romanas minúsculas:
( )ja t - amplitude do modo j de frequência associada jω ;
b - parâmetro meteorológico para mudança de categoria de rugosidade
(NBR6123);
b - largura da edificação ou estrutura;
asc - coeficiente de arrasto superficial;
Lf - frequências admensionais;
rf - frequência natural correspondente ao modo r de vibração;
g - fator de pico;
h - altura da edificação ou estrutura;
refh - altura de referência;
g - fator de pico;
k - constante de Von Kármán;
jk - rigidez modal;
jm - massa modal;
0n - frequência representativa para a rajada em estruturas rígidas,
p - expoente da lei potencial do perfil de velocidade média do vento;
p - ordem da autoregressão;
jp - é a força modal;

xv
( )ur h t∆ - coeficiente de autocovariância;
*u - velocidade cisalhante;
, comprimento de rugosidade;
maxx e maxy , deslocamento máximo esperado;
maxx e maxy , deslocamento máximo flutuante;
x e y , deslocamento estático ou médio;
x e y , deslocamento dinâmico.
Letras romanas gregas:
α - coeficiente de proporcionalidade entre o amortecimento e a massa;
δ - altura da camada limite, denominada altura gradiente;
rδ - decremento logarítmico de amortecimento;
aerζ - razão de amortecimento aerodinâmico;
estζ - razão de amortecimento estrutural;
rζ - razão de amortecimento crítico;
kφ e Nuσ - parâmetros adotados na autoregressão;
ρ , massa específica do ar;
xσ e yσ - desvio padrão do deslocamento flutuante;
2xσ e 2
yσ - variância do deslocamento flutuante;
uσ , vσ e
wσ - desvio padrão das flutuações de velocidade de vento
respectivamente nas direções x, y, z;
2,uj ui
σ - variância da densidade espectral cruzada de turbulência;
deslocamento nodais;
ΦΦΦΦ , matriz dos autovetores;
jφ - autovetor do modo de vibração j ;
v - frequência efetiva da resposta;
0τ - tensão cisalhante;
uψ - função de co-espectro normalizado;
pψ - co-espectro normalizado das pressões;
0z

1
Capítulo 1
Introdução
1.1 Cenário do tema
Uma das causas da resposta dinâmica de estruturas à ação do vento é a natureza
flutuante da velocidade do vento originado de diferentes tipos de tormentas. Nos
ciclones extratropicais os ventos (também chamados de ventos de camada limite
atmosférica) são “bem comportados”, mantendo sua direção e propriedades estatísticas
relativamente constantes por até várias horas. Estes são os ventos tradicionalmente
considerados nas normas de projetos de estruturas.
As estruturas podem, ainda, apresentar resposta dinâmica devido à ressonância
com o desprendimento cadenciado de vórtices e devido à instabilidade aerodinâmica.
Ambos os fenômenos ocorrendo principalmente sob a ação de vento suave i.e., com
baixa turbulência (Blessmann, 1998).
O presente trabalho focaliza a resposta dinâmica de estruturas originada da
turbulência dos ventos em ciclones extratropicais.
Podem-se distinguir dois tipos de respostas estruturais decorrentes da ação do
vento e sua natureza flutuante caracterizada por maiores amplitudes em baixas
frequências:
a) As estruturas caracterizadas por altas frequências naturais, associadas aos modos
fundamentais de vibração e por altas taxas de amortecimento apresentam
comportamento quase-estático diante da ação de vento, i.e., as respostas apenas
dependem dos valores instantâneos da ação. Este tipo de resposta está ilustrado
nos domínios do tempo e da frequência na Figura 1.1;
b) Nas estruturas com frequência fundamental baixa e cujas correspondentes taxas
de amortecimento são também baixas a resposta é dinâmica já que há
ressonância entre as frequências da excitação e da estrutura, conforme ilustrado
na Figura 1.2.

2
Observa-se nas Figuras. 1.1 e 1.2 que a resposta da estrutura tipo (a) é quase-
estática enquanto que a resposta da estrutura tipo (b) apresenta as parcelas ressonante e
sub- ressonante. Em geral, considera-se que as estruturas que apresentem frequências
fundamentais acima de 1 Hz não ficam sujeitas à ação dinâmica do vento, contudo isto
também depende das taxas de amortecimento estrutural (originadas dos materiais
constituintes da estrutura e do atrito nas ligações) e aerodinâmico (ver item 3.3.1).
Tradicionalmente, as normas de projeto de estruturas consideram a ação
dinâmica do vento turbulento através do método de fator de rajada proposto por
Davenport (1961). De acordo com este método, a resposta estática da estrutura à ação
do vento com velocidade constante é multiplicada pelo fator de rajada para considerar
as flutuações devidas à turbulência. Davenport aplicou conceitos estatísticos de um
processo aleatório estacionário à velocidade de vento para determinar seu valor de pico,
admitindo distribuição de probabilidades de Gauss. As flutuações da velocidade de
vento, em torno do valor médio, são descritas pela função de densidade espectral ou
simplesmente espectro de velocidade. A partir dessa descrição chega-se às forças
atuantes na estrutura e finalmente à resposta em termos de deslocamento.
(a)
(c)
(b)
Figura 1.1: (a) Força devido ao vento; Resposta típica de estruturas com altas
frequências naturais no domínio do tempo (b) e no domínio da frequência (c).
forç
a de
ven
to
tempo
dens
idad
e es
pectra
l da
resp
osta
frequência
resp
osta
tempo

3
(a)
(c)
(b)
Figura 1.2: (a) Força devido ao vento; Resposta típica de estruturas com baixas
frequências naturais no domínio do tempo (b) e no domínio da frequência (c).
A Figura 1.3 (Davenport, 1967) resume os principais conceitos do método. Na
primeira linha da figura, os principais elementos do método (velocidade de vento, forças
de vento e resposta da estrutura) são mostrados no domínio do tempo. Na segunda linha,
estes elementos estão descritos no domínio da frequência, e, na terceira linha têm-se as
respectivas distribuições de probabilidade. No domínio da frequência a determinação
do espectro da força, a partir do espectro de velocidade de vento, envolve a chamada
função de admitância aerodinâmica, que considera as características espaciais da
turbulência e sua organização em torno da estrutura (correlação espacial). Esta função
foi determinada por ajuste a resultados experimentais (Vickery, 1965). O espectro da
resposta em deslocamento é obtido por meio da função de admitância mecânica ou
função de resposta em frequência. O desvio padrão do deslocamento flutuante yσ é
obtido a partir do espectro de deslocamentos e multiplicado pelo fator de pico g. Assim,
chega-se à estimativa do valor máximo de deslocamento flutuante que somado ao
estático y fornece o máximo deslocamento total.
ygyy σ+=max (1.1)
forç
a de
ven
to
tempo
dens
idad
e es
pectra
l da
resp
osta
frequência resp
osta
tempo

4
O fator de rajada para resposta G é definido como a razão entre a resposta
máxima esperada (em termos de deslocamentos ou esforços) em certo intervalo de
tempo (em geral igual a 10 minutos) e a resposta média neste mesmo intervalo.
yg
y
yG
yσ+== 1max (1.2)
O desvio padrão da resposta flutuante yσ é a raiz quadrada da variância 2yσ , que
é igual à área sob o gráfico da função de densidade espectral de resposta (último gráfico
da segunda linha da Figura 1.3). Esta área é convenientemente calculada em duas
parcelas conforme ilustra a Figura 1.4: parcelas sub-ressonante e ressonante
correspondentes às áreas A2 e A1, respectivamente. Como a resposta na região sub-
ressonante é quase-estática, a área A2 é calculada a partir da integral do espectro da
própria força de vento. Enquanto que a área A1 é calculada a partir da magnitude do
espectro de resposta na frequência fr de ressonância. Dessa forma, o fator de rajada para
resposta pode ser escrito na forma:
RBU
gG u ++=σ
21 (1.3)
onde uσ é o desvio padrão das flutuações de velocidade de vento, U é a velocidade
média e B e R correspondem, respectivamente, às parcelas sub-ressonante (background)
e ressonante da resposta.
O método foi inicialmente formulado (Davenport, 1961) para uma estrutura
representada por um modelo discreto de um grau de liberdade (sistema massa – mola –
amortecedor). Por exemplo, uma estrutura formada por uma massa concentrada no topo
de uma coluna ou torre leve, tal como uma torre para reservatório de água.
Posteriormente, o método foi estendido para incluir a influência da forma modal
associada ao modo fundamental de vibração da estrutura (Davenport, 1967).

5
Figura 1.3: Ilustração do método de Davenport (adaptado de Davenport, 1967).
Figura 1.4: Função densidade espectral de resposta e área para cálculo da variância da
resposta (adaptado de Davenport, 1967).
velocidade força resposta
espectro de flutuações de velocidade
admitância aerodinâmica
espectro da força de vento
admitância mecânica
espectro de resposta
tempo
frequência (escala log.)
densidade de probabilidade
espectro de resposta
espectro da força
área = A1
frequência (escala log)
área = A2
densidade espectral
fr

6
A equação de G apresentada na forma da equação 1.3, ou em outros formatos
alternativos, é adotada nas normas de projeto para estimativas através de cálculos
manuais da resposta de estruturas flexíveis devida ao vento turbulento. O procedimento
usual é calcular G com base nas características do modo fundamental de vibração,
admitindo-se a forma modal aproximada por funções das coordenadas z vertical e y
lateral. Para se obter todos os tipos de respostas (diagramas de momentos fletores,
deslocamento, etc), aplica-se G à distribuição de forças de vento calculada para o valor
médio U da velocidade.
Apesar de o fator G ter sido definido como a razão entre uma resposta extrema
esperada e a correspondente resposta média, ele foi de fato formulado e calculado com
base na amplitude do modo fundamental de vibração. A sua utilização para
determinação de outros tipos de respostas é, portanto, um procedimento aproximado.
Diversos autores (Holmes, 1994; Vickery, 1995 apud Holmes, 2007; Zhou et al., 1999
apud Kareem & Zhou, 2003) observaram que, apesar de fornecer resultados com boa
aproximação para algumas estruturas e respostas como, por exemplo, o momento fletor
na base de edifícios altos, este procedimento fornece resultados menos aproximados
para outras respostas ou tipos estruturais.
Para superar esta limitação, o método foi revisado por diversos autores (Loredo-
Souza, 1996 apud Loredo-Souza et al., 2005; Dyrbye & Hansen, 1997; Holmes, 2007)
utilizando o conceito de linhas de influência, usualmente adotado em projetos de
estruturas sujeitas a cargas móveis, como por exemplo em pontes. A resposta total deve
ser calculada adicionando a contribuição dos modos de vibração em que há resposta
ressonante.
A norma brasileira, NBR 6123 (1988), apresenta em seu item 9 dois
procedimentos para determinação dos efeitos dinâmicos devidos à turbulência
atmosférica, denominados modelo contínuo simplificado e modelo discreto. O primeiro
aplica-se a edificações de seção constante e distribuição de massa aproximadamente
constante, nos quais podem ser atribuídas funções para definir a forma modal do
primeiro modo de vibração. No modelo discreto, a edificação é representada por um
modelo numérico para o qual se obtém as formas modais discretizadas e as
correspondentes frequências naturais de vibração. O método basicamente consiste em
determinar um vetor de forças a ser aplicado estaticamente à estrutura, de modo que
7
resulte nas solicitações e deslocamentos máximos esperados. Este vetor tem duas
parcelas, sendo a primeira resultante da ação do vento com velocidade média e a outra
correspondente às ações dinâmicas. O valor de pico do deslocamento é obtido com o
fator g como na equação 1.1.
Diferentemente do método de Davenport, o cálculo da área sob o espectro de
resposta modal não é obtido conforme ilustra a Figura 1.4 e sim por integração
numérica admitindo uma forma modal linear ao longo da altura (Galindez, 1979). O
método é aplicado com auxílio de gráficos para diferentes categorias de rugosidade de
terreno.
1.2 Objetivos e Metodologia
Os objetivos deste trabalho são os seguintes:
• Realizar um estudo comparativo entre diferentes métodos para determinação da
resposta máxima em termos de deslocamentos de estruturas alteadas sob ação de
vento originado de ciclones extra-tropicais;
• Propor a utilização do modelo discreto da NBR 6123 (1988) através de um
programa computacional, baseado na solução modal exata no domínio da
frequência, que forneça diretamente o vetor de forças a ser aplicado
estaticamente na estrutura, de modo a reproduzir o máximo deslocamento
esperado; elaborar o programa.
Para alcançar estes objetivos, três exemplos de estruturas foram analisados sob
ação de vento nos domínios do tempo e da frequência, através de rotinas
computacionais desenvolvidos especialmente para estas análises. Estes mesmos
exemplos foram também resolvidos por métodos apresentados na literatura e
desenvolvidos para cálculos manuais. Todas as soluções são elaboradas em termos de
deslocamento, considerando-se apenas o modo fundamental de vibração.
O programa citado no segundo objetivo desta dissertação foi desenvolvido e,
para sua ampla utilização, poderia ficar disponível na internet depois de ser
suficientemente testado, fazendo parte do procedimento da NBR 6123.

8
1.3 Apresentação da dissertação
Procura-se nesta dissertação descrever as características dos ventos fortes
originados de ciclones extratropicais e apresentar os principais métodos de análise
dinâmica de estruturas submetidas a estes ventos. Assim, os próximos capítulos são
apresentados na seguinte sequência.
O capítulo 2 faz uma breve abordagem sobre os diferentes tipos de ventos fortes,
com foco nos ventos originados por ciclones extratropicais, apresentando sua descrição
física e modelagem matemática.
O capítulo 3 apresenta conceitos fundamentais de análise dinâmica em estruturas
e uma abordagem da consideração da ação atuante na estrutura devida ao vento. Na
sequência é apresentada a solução do problema dinâmico nos domínios do tempo e da
frequência. Apresentam-se ainda, quatro métodos baseados na solução no domínio da
frequência: método fator rajada proposto por Davenport (1961); processo adotado no
Eurocode 1 - Wind action (2005); processo de Dyrbye e Hansen (1997); e modelo
discreto proposto na NBR 6123 (1988).
No capítulo 4 são resolvidas diferentes estruturas através dos métodos descritos
no capítulo 3. Primeiro é resolvida uma torre de reservatório de água, estrutura que pode
ser representada por um sistema discreto de um grau de liberdade. O segundo problema
exemplo trata-se de uma chaminé de 180 metros de altura retirada do anexo I da NBR
6123 (1988). Por último, é resolvido um edifício de concreto armado que,
diferentemente dos dois primeiros exemplos (estruturas alteadas), tem uma maior
influência da sua dimensão horizontal na ação do vento.
No capítulo 5 apresenta-se um programa computacional cujo intuito é auxiliar a
aplicação do modelo discreto da NBR 6123 (1988). Este programa baseia-se na
formulação no domínio da frequência e fornece como resultado um vetor de forças que,
ao ser aplicado estaticamente na estrutura, reproduz os resultados extremos de uma
análise dinâmica.
Finalmente, as conclusões e sugestões para trabalhos futuros são apresentadas no
capítulo 6.
9
Capítulo 2
Caracterização de ventos fortes
A principal causa dos ventos naturais é a diferença na pressão atmosférica
decorrente das variações de temperatura do ar aquecido pela energia solar. Os sistemas
meteorológicos que dão origem a ventos de alta velocidade, são tratados como
tormentas independentemente de seu mecanismo de formação. Os tipos mais comuns de
ventos de alta velocidade são ciclones e anticiclones, tormentas elétricas e tornados.
2.1 Tipos de fenômenos
Os ventos de alta velocidade podem ser classificados, segundo suas dimensões,
em fenômenos de macroescala, mesoescala e microescala.
2.1.1 Fenômenos de macroescala
Fenômenos de macroescala ou escala sinóptica, possuem dimensões espaciais
superiores a 500 km e dimensões temporais maiores ou iguais a dois dias. São
constituídos basicamente por ciclones e anticiclones.
Os diâmetros dos ciclones são da ordem de 1000 km e os dos anticiclones
podem ser ainda maiores. Ao contrário dos anticiclones, os ciclones podem gerar ventos
de alta velocidade e podem ser classificados em tropicais e extratropicais, dependendo
de sua origem.
- Ciclones extratropicais (EPS)
Os ciclones extratropicais são os fenômenos mais freqüentes que ocasionam
ventos fortes em latitudes temperadas, ao se formarem ao longo de frentes frias polares
(Blessmann, 1995). Em seu estágio “maduro” são denominados de sistemas de pressão
plenamente desenvolvidos ou tormentas EPS (“Extratropical Pressure Systems”).
Os ciclones extratropicais geram os ventos em equilíbrio dinâmico com a
rugosidade da superfície da Terra. Sendo estes ventos os mais bem estudados, e aos
quais se aplicam os modelos de campo de velocidades para o cálculo de forças em
estruturas, adotados pelas normas de projeto. Estes ventos podem manter velocidade e

direção relativamente constantes por até algumas dezenas de horas como mostra, na
Figura 2.1, o registro de um anemógrafo.
Figura 2.1: Registro de um anemógrafo durante a passagem de um ciclone
- Ciclones tropicais
A formação dos ciclones tropicais o
onde temperatura da água é superior a 27,2
liberação do calor latente com a condensação do
úmido.
Quando a velocidade do vento próximo à superfície atinge cerca de 7
ciclone é chamado de tormenta tropical; para velocidades superiores a 120km/h, o
ciclone é chamado furacão ou tufão.
Os ciclones tropicais aparecem, em geral, entre as latitudes de 5° e 30°. Nos
oceanos Índico e Pacífico, onde recebem o nome de t
ambos os hemisférios. No oceano Atlântico, onde são denominados de furacão,
formam-se apenas no hemisfério Norte, já que no sul a temperatura da água é inferior a
26°C, pelo menos por enquanto. Em função do aquecimento globa
estufa, já é prevista a formação destes fenômenos no Atlântico Sul
10
direção relativamente constantes por até algumas dezenas de horas como mostra, na
, o registro de um anemógrafo.
Registro de um anemógrafo durante a passagem de um ciclone
extra-tropical (Holmes, 2007).
A formação dos ciclones tropicais ocorre sobre os oceanos em regiões t
peratura da água é superior a 27,2°C. A energia dos ciclones tropicais surge da
liberação do calor latente com a condensação do vapor d’água contido no ar quente e
Quando a velocidade do vento próximo à superfície atinge cerca de 7
ciclone é chamado de tormenta tropical; para velocidades superiores a 120km/h, o
ciclone é chamado furacão ou tufão.
Os ciclones tropicais aparecem, em geral, entre as latitudes de 5° e 30°. Nos
oceanos Índico e Pacífico, onde recebem o nome de tufão ou “typhoon”, formam
ambos os hemisférios. No oceano Atlântico, onde são denominados de furacão,
se apenas no hemisfério Norte, já que no sul a temperatura da água é inferior a
26°C, pelo menos por enquanto. Em função do aquecimento global, decorrente do efeito
estufa, já é prevista a formação destes fenômenos no Atlântico Sul (Blessmann, 1995
direção relativamente constantes por até algumas dezenas de horas como mostra, na
Registro de um anemógrafo durante a passagem de um ciclone
corre sobre os oceanos em regiões tropicais
°C. A energia dos ciclones tropicais surge da
contido no ar quente e
Quando a velocidade do vento próximo à superfície atinge cerca de 70 km/h o
ciclone é chamado de tormenta tropical; para velocidades superiores a 120km/h, o
Os ciclones tropicais aparecem, em geral, entre as latitudes de 5° e 30°. Nos
ufão ou “typhoon”, formam-se em
ambos os hemisférios. No oceano Atlântico, onde são denominados de furacão,
se apenas no hemisfério Norte, já que no sul a temperatura da água é inferior a
l, decorrente do efeito
(Blessmann, 1995).

11
2.1.2 Fenômenos de microescala e mesoescala
Os fenômenos de microescala possuem dimensões espaciais na ordem de 20 km
e dimensões temporais menores do que uma hora. Os fenômenos de mesoescala
possuem dimensões intermediárias entre os de micro e macroescala. Eles são
constituídos basicamente por tormentas elétricas e tornados.
- Tormentas elétricas (TS)
As tormentas elétricas ou TS (“Thunder Storms”) podem ocorrer de forma
isolada ou associada ao avanço de uma frente fria. A condição necessária para esta
ocorrência é a formação de nuvens de grande altura, às vezes acima de 22km,
produzidas pela ascensão de ar quente e úmido. Estas tormentas geram os ventos
violentos como os tornados e aqueles conhecidos por “downburst” (Blessmann, 1995).
No estágio maduro, as tormentas elétricas se caracterizam por correntes descendentes
que atingem o solo bruscamente, provocando rajadas violentas e chuvas intensas. Ao
tocarem a superfície da Terra, as correntes descendentes geram um escoamento
horizontal com velocidades de vento que podem atingir 67m/s (Holmes, 2007).
- Tornados
Os tornados são movimentos ciclônicos em forma de funil vertical gerados em
grandes nuvens convectivas de tormentas elétricas. Ele é o vento com maior poder de
destruição. Seu núcleo, com pressões extremamente baixas, pode fazer explodir (por
diferença de pressão) uma edificação que esteja com suas aberturas fechadas. Além
disso, seu núcleo funciona como uma chaminé, sugando do solo restos das edificações
por ele destruídas, objetos grandes e pequenos, pedaços de árvores etc.
Os tornados têm diâmetro médio de 300m e transladam-se a uma velocidade que
pode chegar a 100km/h e por extensões de até 30 km. A velocidade tangencial do vento
pode chegar a 350km/h.
2.2 Descrição física e modelagem matemática de ciclones extratropicais
Os ventos de camada limite atmosférica, originados pelos ciclones extratropicais
(tormenta EPS), são os mais bem estudados. Suas características serão descritas nos
próximos subitens em termos dos seguintes aspectos:
• Descrição matemática da velocidade de vento;
• Perfil da velocidade média ao longo da altura;
• Intensidade de turbulência;
• Espectros de turbulência;
• Correlação espacial de turbulência.
Ao final deste subitem encontra
trabalho, para a geração numérica de histórias de velocidade flutuante de vento com
correlação espacial.
2.2.1 Características gerais
A velocidade do vento apres
denominada de turbulência, sendo esta produzida por turbilhões e vórtices no
escoamento. A origem da turbulência pode estar associada
causada pela rugosidade da superfície
por gradientes térmicos.
Nos casos dos ciclones extratropicais e em certa medida dos ciclones tropicais, a
turbulência é gerada principalmente pela interação (atrito) do vento com a superfície
rugosa da Terra (ver a Figura
denominada camada limite atmosférica. A contribuição de origem térmica para a
turbulência, nos casos de ciclones extratropicais, pode ser desprezada já que a
estabilidade da atmosfera pode ser considerada neutra.
Figura 2.2: Geração da turbulência. em ventos de camada limite atmosférica
A Figura 2.3 (Dyrbye & Hansen, 1997), mostra os
vento em três alturas acima do terreno
extratropical. Este tipo de tormenta apresenta
do vento, exibindo um valor médio constante por um longo período
algumas horas. Em torno deste valor médio ocorrem as flutuações de velocidade, que
12
Perfil da velocidade média ao longo da altura;
Intensidade de turbulência;
Espectros de turbulência;
cial de turbulência.
item encontra-se uma descrição do método utilizado neste
para a geração numérica de histórias de velocidade flutuante de vento com
Características gerais
A velocidade do vento apresenta flutuações ao longo do tempo, característica
turbulência, sendo esta produzida por turbilhões e vórtices no
escoamento. A origem da turbulência pode estar associada a agitação do escoamento
causada pela rugosidade da superfície da Terra ou a processos de convecção causados
Nos casos dos ciclones extratropicais e em certa medida dos ciclones tropicais, a
turbulência é gerada principalmente pela interação (atrito) do vento com a superfície
Figura 2.2), em uma camada de altura entre 500 e 1000m,
denominada camada limite atmosférica. A contribuição de origem térmica para a
turbulência, nos casos de ciclones extratropicais, pode ser desprezada já que a
mosfera pode ser considerada neutra.
Geração da turbulência. em ventos de camada limite atmosférica
(Dyrbye & Hansen, 1997), mostra os registros de velocidade do
vento em três alturas acima do terreno (14,7 25,5 e 43,1m) durante um ciclone
Este tipo de tormenta apresenta características de “bom comportamento”
exibindo um valor médio constante por um longo período de tempo, por vezes
algumas horas. Em torno deste valor médio ocorrem as flutuações de velocidade, que
se uma descrição do método utilizado neste
para a geração numérica de histórias de velocidade flutuante de vento com
flutuações ao longo do tempo, característica
turbulência, sendo esta produzida por turbilhões e vórtices no
gitação do escoamento
rocessos de convecção causados
Nos casos dos ciclones extratropicais e em certa medida dos ciclones tropicais, a
turbulência é gerada principalmente pela interação (atrito) do vento com a superfície
), em uma camada de altura entre 500 e 1000m,
denominada camada limite atmosférica. A contribuição de origem térmica para a
turbulência, nos casos de ciclones extratropicais, pode ser desprezada já que a
Geração da turbulência. em ventos de camada limite atmosférica.
registros de velocidade do
durante um ciclone
características de “bom comportamento”
de tempo, por vezes
algumas horas. Em torno deste valor médio ocorrem as flutuações de velocidade, que

13
caracterizam a turbulência. Nota-se também o aumento da velocidade média com a
altura acima do terreno.
Figura 2.3: Registros de velocidade em três alturas diferentes
(Dyrbye & Hansen, 1997).
As seguintes hipóteses são aplicáveis ao vento turbulento, que se desenvolve na
camada limite atmosférica em um terreno de rugosidade uniforme, durante um ciclone
extratropical (tormenta EPS):
• A altura da camada limite, denominada altura gradiente , é constante;
• O vento é horizontal e sua variação de direção é desprezível ao longo da altura
(despreza-se a influência da rotação da Terra - força de Coriolis – no movimento
do ar);
• A velocidade de vento é um processo aleatório estacionário e, de acordo com a
prática meteorológica internacional, o intervalo de tempo de 10 minutos é
tomado para determinação da velocidade média.
2.2.2 Descrição matemática do vento turbulento
Os registros de velocidade de vento indicam as variações na magnitude da
velocidade na direção do vento. O campo de velocidade de vento é descrito com base
em um sistema cartesiano: à direção predominante do vento, atribui-se a coordenada x;
a direção horizontal ortogonal a esta é a direção y e a direção z é vertical, positiva para
cima.
O vetor velocidade em certo instante de tempo pode ser escrito em termos de
três componentes:
δ

14
na direção longitudinal x:
na direção lateral y:
na direção vertical z:
onde é a velocidade média que depende somente da altura z acima do terreno, e u,
v e w são as componentes flutuantes, ou componentes de turbulência, que são tratadas
como processo aleatório estacionário de média nula.
2.2.3 Perfil vertical de velocidade média U
Historicamente, a variação da velocidade média com a altura z foi descrita por
uma expressão empírica, denominada lei potencial proposta em 1916:
(2.1)
A equação 2.1 relaciona as velocidades médias em duas alturas diferentes, e
, sendo p o expoente que depende da rugosidade do terreno e é tomado constante em
toda a altura. Muitas normas de projeto utilizam a lei potencial para determinar a
velocidade em função da velocidade , conhecida à de altura
( ).
A lei logarítmica é outra expressão usada para descrever a variação de ao
longo de . Esta lei foi deduzida matematicamente para uma camada limite turbulenta
do escoamento sobre uma superfície plana. Considera-se que o gradiente de velocidade
é função da altura z, da tensão cisalhante entre a superfície da placa e o
escoamento e a massa específica do ar ρ. Formando um único número adimensional
envolvido no problema, tem-se na equação 2.2:
(2.2)
sendo uma constante, denominada constante de Von Kármán, obtida
experimentalmente, igual a . Integrando-se a equação 2.2 chega-se à lei logarítmica:
( ) ( )tzyxuzU ,,,+
( )tzyxv ,,,
( )tzyxw ,,,
( )zU
U
( )p
ref
ref
zU z U
z
=
z
refz
( )zU refU 10 m
10 refz m=
U
z
dzUd 0τ
kz
dz
Ud 1
0
=τρ
k
0, 4
15
(2.3)
onde é a constante de integração com dimensões de comprimento e conhecida como
comprimento de rugosidade, e é igual a com valores típicos entre e .
Este último parâmetro é conhecido por velocidade cisalhante e pode ser obtido
substituindo-se na equação 2.3 o valor conhecido de .
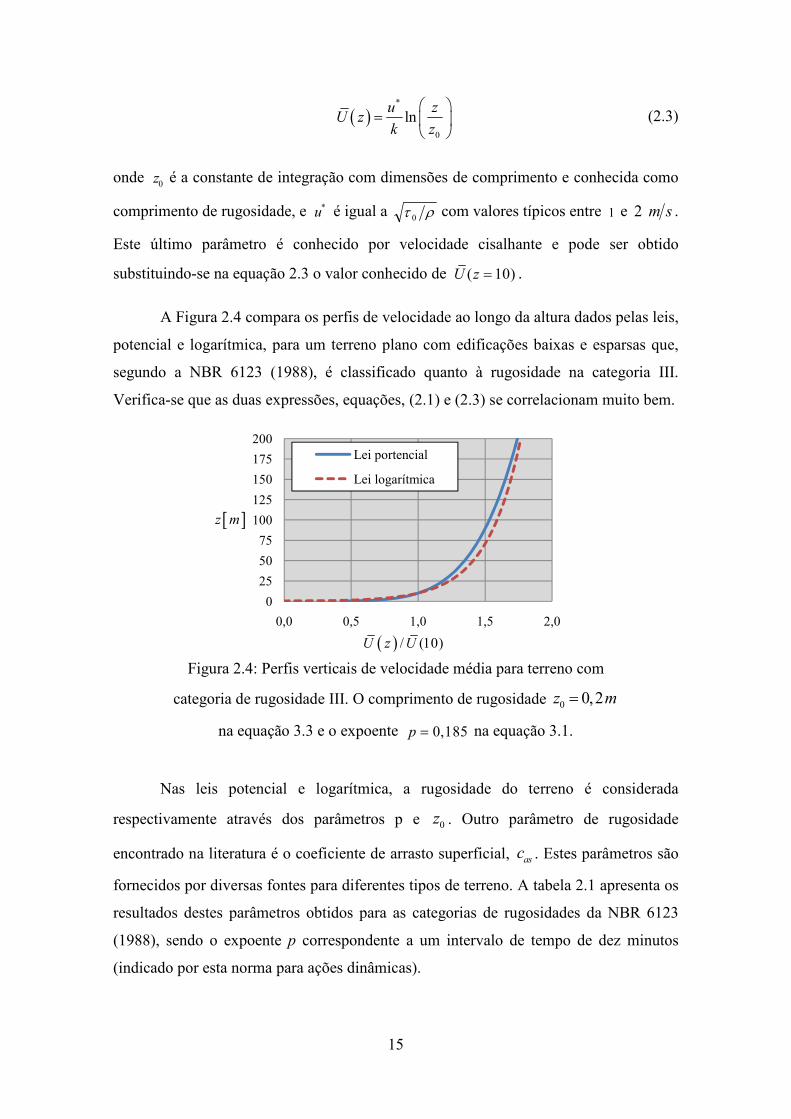
A Figura 2.4 compara os perfis de velocidade ao longo da altura dados pelas leis,
potencial e logarítmica, para um terreno plano com edificações baixas e esparsas que,
segundo a NBR 6123 (1988), é classificado quanto à rugosidade na categoria III.
Verifica-se que as duas expressões, equações, (2.1) e (2.3) se correlacionam muito bem.
Figura 2.4: Perfis verticais de velocidade média para terreno com
categoria de rugosidade III. O comprimento de rugosidade 0 0,2z m=
na equação 3.3 e o expoente na equação 3.1.
Nas leis potencial e logarítmica, a rugosidade do terreno é considerada
respectivamente através dos parâmetros p e 0z . Outro parâmetro de rugosidade
encontrado na literatura é o coeficiente de arrasto superficial, asc . Estes parâmetros são
fornecidos por diversas fontes para diferentes tipos de terreno. A tabela 2.1 apresenta os
resultados destes parâmetros obtidos para as categorias de rugosidades da NBR 6123
(1988), sendo o expoente p correspondente a um intervalo de tempo de dez minutos
(indicado por esta norma para ações dinâmicas).
( )*
0
lnu z
U zk z
=
0z
*u ρτ 0 1 2 m s
( 10)U z =
0
25
50
75
100
125
150
175
200
0,0 0,5 1,0 1,5 2,0
Lei portencial
Lei logarítmica
0,185p =
( ) / (10)U z U
[ ]z m

16
Tabela 2.1: Parâmetros de rugosidade para as categorias de I a V da NBR6123
(Blessmann, 1995).
Altura (m) Parâmetros
p (10min) 0z (mm) as
c
I
II
III
IV
V
0,095
0,15
0,185
0,23
0,31
5
70
200
700
1750
0,0028
0,0065
0,0105
0,0226
0,0527
2.2.4 Intensidade de turbulência
Uma medida do grau de turbulência é o desvio padrão, neste caso igual ao valor
da média quadrática, uσ , v
σ , wσ , das componentes flutuantes u, v e w. As relações
entre o desvio padrão de cada componente flutuante e a velocidade média, definem as
intensidades de turbulência,
na direção longitudinal x: (2.4a)
na direção lateral y: (2.4b)
na direção vertical z: (2.4c)
De acordo com medições experimentais, o desvio padrão pode ser suposto
como aproximadamente . Sendo assim, pode-se escrever a intensidade de
turbulência em função da altura substituindo-se , na equação 2.4a, pela equação
2.3. Chega-se a:
(2.5)
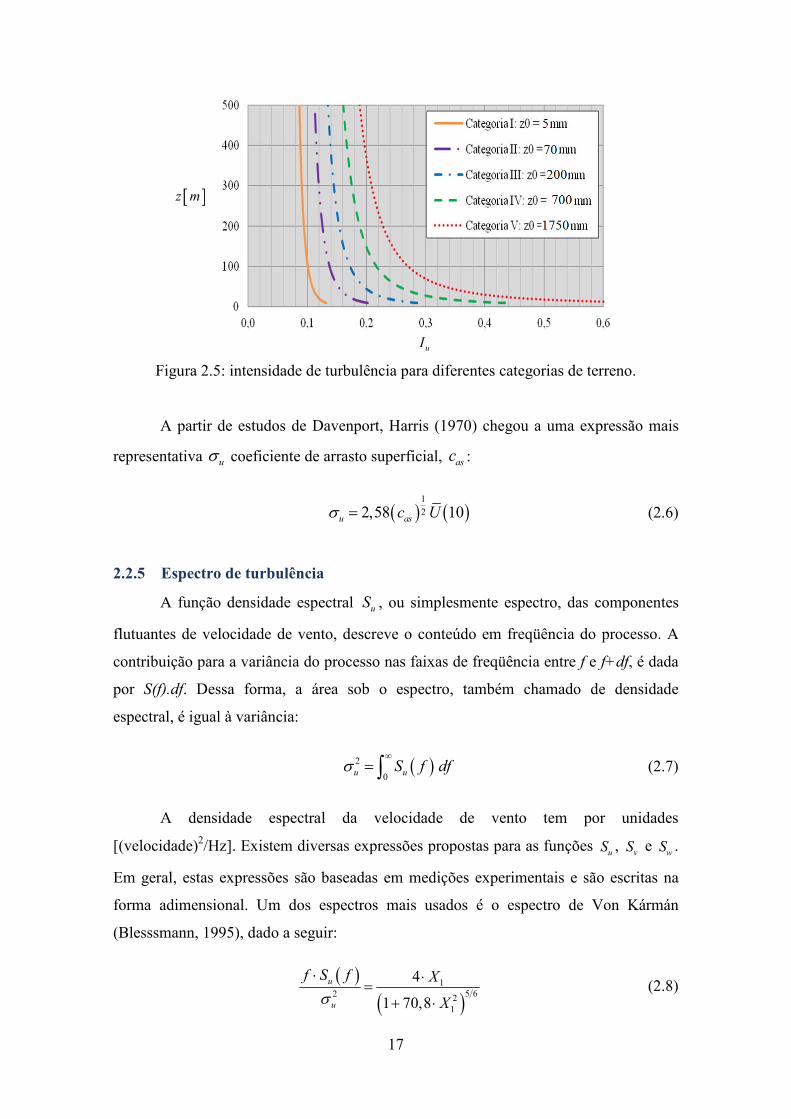
nota-se na equação acima que uI diminui ao longo da altura z. A Figura 2.5 mostra a
variação da intensidade de turbulência com a altura para as cinco categorias de
rugosidade de terreno da NBR 6123 (1988).
/u uI Uσ=
/v vI Uσ=
/w wI Uσ=
uσ
*2,5.u
z U
0
1
lnuI
z
z
=
17
Figura 2.5: intensidade de turbulência para diferentes categorias de terreno.
A partir de estudos de Davenport, Harris (1970) chegou a uma expressão mais
representativa uσ coeficiente de arrasto superficial, as
c :
( ) ( )1
22,58 10u asc Uσ = (2.6)
2.2.5 Espectro de turbulência
A função densidade espectral uS , ou simplesmente espectro, das componentes
flutuantes de velocidade de vento, descreve o conteúdo em freqüência do processo. A
contribuição para a variância do processo nas faixas de freqüência entre f e f+df, é dada
por S(f).df. Dessa forma, a área sob o espectro, também chamado de densidade
espectral, é igual à variância:
( )2
0 u uS f dfσ
∞= ∫ (2.7)
A densidade espectral da velocidade de vento tem por unidades
[(velocidade)2/Hz]. Existem diversas expressões propostas para as funções , e .
Em geral, estas expressões são baseadas em medições experimentais e são escritas na
forma adimensional. Um dos espectros mais usados é o espectro de Von Kármán
(Blesssmann, 1995), dado a seguir:
(2.8)
uS vS wS
( )( )
15 62 2
1
4
1 70,8
u
u
f S f X
Xσ
⋅ ⋅=
+ ⋅
[ ]z m
uI

18
onde da equação 2.8 é a freqüência adimensional:
(2.9)
sendo ( )1L z o comprimento da escala de turbulência, que varia com a altura z e a
rugosidade do terreno. Expressões como a da equação 2.10 descrevem esta
dependência:
(2.10)
Outra função para a densidade espectral da componente flutuante u, é o espectro
de Kaimal (Blesssmann, 1995), dado a seguir:
(2.11)
onde da equação 2.11 é a freqüência adimensional:
(2.12)
A Engineering Sciences Data Unit, (ESDU, 1974) propõe uma adaptação do
espectro de Kaimal, por considerar que, para alturas superiores a 50m, 1Y não varia
linearmente com z. Este espectro é adotado pelo Eurocode (2005) e dado por:
( )
( )52
3
6,8
1 10,2
u L
uL
f S f f
fσ
=+
(2.13)
onde ( )( )L
f L z
U zf = é a frequência adimensional e ( )L z é o comprimento da escala de
turbulência, também dado pelo Eurocode (2005):
( )( )00,67 0,05ln
300200
zz
L z
+ =
(2.14)
1X
( )1
( )f L zX
U z
⋅=
0,35 0,0631 0( ) 25L z z z
−= ⋅ ⋅
( )( )
15 32
1
(100 / 3)
1 50
u
u
f S f Y
Yσ
⋅ ⋅=
+ ⋅
1Y
( )1
f zY
U z
⋅=

19
Já Dyrbye e Hansen (1997) adotam a equação 2.14a para o comprimento de
escala de turbulência, ( )L z .
( )0,3
10010
zL z
=
; para 10 200 m z m≤ ≤ (2.14a)
A NBR 6123 (1988) adota o espectro de Harris. Este, ao contrário dos espectros
de Von Kármán e Kaimal, não considera a variação da turbulência com a altura. Na
equação abaixo é dada a expressão para o espectro de Harris.
(2.15)
onde da equação 2.15 é a freqüência adimensional
(2.16)
sendo L , da equação 2.16, independe da altura e é tomado igual a 1800m em função de
ajustes a dados experimentais.
A Figura 2.6 apresenta os espectros de Von Kármán, Kaimal e Harris para um
terreno de categoria de rugosidade III, altura e velocidade ( )10 30,0U m s= .
A comparação entre os diferentes espectros é feita por meio de um gráfico semi-
logarítmico, onde a ordenada é o espectro adimensionalizado e a abscissa igual a
. Observa-se uma boa correlação entre os espectros de Von Karman e Harris.
Como dito anteriormente, os espectros de Kaimal e Von Karman apresentam
variação com a altura. Na Figura 2.7 estão representados espectros de Von Kárman para
as alturas de 10, 50 e 150 metros, juntamente com o espectro de Harris. Estes espectros
são apresentados a partir da freqüência igual a 0,01Hz, região de interesse na engenharia
estrutural.
( )( )
15 62 2
1
0,6
2
u
u
f S f X
Xσ
⋅ ⋅=
+
1X
( )1 10
f LX
U
⋅=
100 z m=
( )log f

20
Figura 2.6: Espectros de Von Kármán, Kaimal, ESDU e Harris em escala semi-
logarítmica para um terreno de categoria III, 0 0,2 z m= , e ( )10 30U m s= .
Figura 2.7: Espectros Von Karman em escala semi-logarítmica para um terreno com
categoria de rugosidade III, 0 0,2z m= , velocidade ( )10 30U m s= .
2.2.6 Espectro cruzado de turbulência
Em um determinado instante de tempo, a flutuação da velocidade do vento não
apresenta uma correlação perfeita para diferentes pontos no espaço. Esta variação da
0
0,05
0,1
0,15
0,2
0,25
0,3
1,E-02 1,E-01 1,E+00 1,E+01
Kárman: L=139m; z=100m; Categ.III; z0=0,2m
Kaimal: L=z=100m
Eurocode 1: L=199m; z=100m; Categ.III; z0=0,2m
Harris: L=1800m (independente de z)
100 z m=
0
0,05
0,1
0,15
0,2
0,25
0,3
1,E-02 1,E-01 1,E+00 1,E+01
Kárman: z=10m
Kárman: z=50m
Kárman: z=150m
Harris
( ) [ ]log f Hz
2u
u
f S
σ⋅
( ) [ ]log f Hz
2u
u
f S
σ⋅

21
flutuação entre os pontos i e j, pode ser considerada por meio da função densidade
espectral cruzada de turbulência, cuja parte real é denominada co-espectro e é dada por:
( ) ( ) ( ), , , ,ui uj u i u j uS S f S f r fψ= ∆ (2.17)
sendo ( ),u
r fψ ∆ a função de co-espectro normalizado:
( )( ) ( )2 22 2
, expy j i z j i
u
m
f C y y C z zr f
Uψ
− + − ∆ = −
(2.18)
onde,
( ),i iy z e ( ),j jy z , são respectivamente as coordenadas dos pontos i e j ;
e coeficientes de decaimento, obtidos experimentalmente. Na falta de
ensaios experimentais, são adotados valores conservadores para e
respectivamente iguais a 16 e 10 (Simiu e Scanlan, 1996);
( ) ( )( )12m i jU U z U z= + , é a velocidade média do vento entre os pontos i e j .
Na verdade, os coeficientes de decaimento não são constantes, variando em
função do tipo de tormenta, categoria de rugosidade da superfície e altura sobre o
terreno. Para tormentas extratropicais, Sfintesko e Wyatt (1977) sugerem a seguinte
expressão para incluir a influência da altura sobre o terreno:
0,09
* my y
ref
zC C
z
−
=
e
0,09
* mz z
ref
zC C
z
−
=
(2.19)
Sendo mz a altura média entre os pontos i e j . Considerando os coeficientes yC e z
C
corrigidos e a média das velocidades, mU , utilizando a lei potencial, equação 2.1, pode-
se reescrever a função co-espectro normalizado, equação 2.18, da seguinte forma:
( )( ) ( )2 2 0,092 2
, exp
p
y j i z j im
u
ref ref
f C y y C z z zr f
U zψ
− − − + − ∆ = −
(2.20)
yC zC
yC zC
22
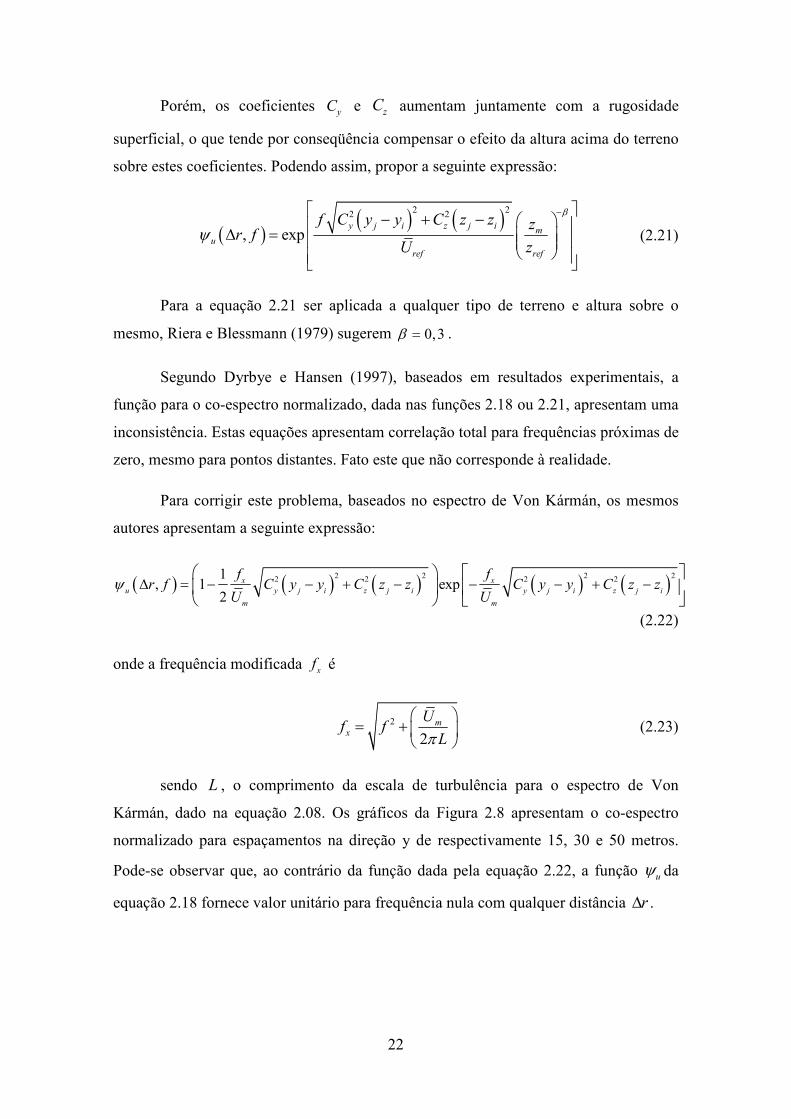
Porém, os coeficientes yC e zC aumentam juntamente com a rugosidade
superficial, o que tende por conseqüência compensar o efeito da altura acima do terreno
sobre estes coeficientes. Podendo assim, propor a seguinte expressão:
( )( ) ( )2 22 2
, expy j i z j i
mu
ref ref
f C y y C z z zr f
U z
β
ψ− − + − ∆ =
(2.21)
Para a equação 2.21 ser aplicada a qualquer tipo de terreno e altura sobre o
mesmo, Riera e Blessmann (1979) sugerem 0,3β = .
Segundo Dyrbye e Hansen (1997), baseados em resultados experimentais, a
função para o co-espectro normalizado, dada nas funções 2.18 ou 2.21, apresentam uma
inconsistência. Estas equações apresentam correlação total para frequências próximas de
zero, mesmo para pontos distantes. Fato este que não corresponde à realidade.
Para corrigir este problema, baseados no espectro de Von Kármán, os mesmos
autores apresentam a seguinte expressão:
( ) ( ) ( ) ( ) ( )2 2 2 22 2 2 21, 1 exp
2x x
u y j i z j i y j i z j i
m m
f fr f C y y C z z C y y C z z
U Uψ ∆ = − − + − − − + −
(2.22)
onde a frequência modificada xf é
2
2m
x
Uf f
Lπ
= +
(2.23)
sendo L , o comprimento da escala de turbulência para o espectro de Von
Kármán, dado na equação 2.08. Os gráficos da Figura 2.8 apresentam o co-espectro
normalizado para espaçamentos na direção y de respectivamente 15, 30 e 50 metros.
Pode-se observar que, ao contrário da função dada pela equação 2.22, a função uψ da
equação 2.18 fornece valor unitário para frequência nula com qualquer distância r∆ .

23
Figura 2.8: Co-espectro normalizado considerando 2yC π= e 240 L m= .
2.2.7 Geração numérica de histórias de turbulência
Existem vários métodos para simulação de um sinal aleatório, estacionário e
com média nula, gerado a partir de um espectro de turbulência. O método da
autoregressão, apresentado por Buchholdt em (1985), faz a simulação de um sinal
genérico, ( )w t , como uma combinação linear de p valores prévios, somados a um
impulso aleatório de média igual a zero e variância igual a 2Nuσ . Assim, ( )w t pode ser
dado por:
( ) ( ) ( )1
p
k j Nu
k
w t u t k t N tφ σ=
= − ∆ +∑ (2.24)
onde kφ e Nu
σ são parâmetros adotados na autoregressão, ( )jN t , é um processo
aleatório de média igual a zero e variância unitária, geralmente adotada como uma
distribuição Gaussiana, e p é a ordem da autoregressão.
O parâmetro 2Nuσ é dado pela seguinte equação:
( )2 2
1
1p
Nu u k u
k
r k tσ σ φ=
= − ∆
∑ (2.25)
Os parâmetros kφ podem ser obtidos resolvendo o seguinte sistema linear:
( ) ( )( )1
1,...,p
u k u
k
r h t r h k t h pφ=
∆ = − ∆ =∑ (2.26)

24
O coeficiente de autocovariância ( )ur h t∆ para um intervalo de tempo h tτ = ∆ é
obtido a partir do espectro ( )uS f através das integrais de Wiener-Khinchin
( ) ( ) ( ) ( ) ( )sup
inf2 2
1cos 2
fu
u u uf
u u
R h tr h t r h t S f f h t dfπ
σ σ
∆∆ = − ∆ = − = − ∆∫ (2.27)
O método acima gera um único sinal de velocidade flutuante ( )w t . Encontram-
se na literatura muitos métodos para a geração de um conjunto de histórias de
turbulência correlacionadas. Solari e Spinelli (1984) sugerem o seguinte procedimento
para gerar um campo de velocidade flutuante do vento:
( ) ( ), , y z t t=Cu w (2.28)
onde: ( )u t é um vetor em que para cada instante de tempo t seus componentes de
velocidade flutuante apresentam uma correlação espacial; ( )w t é um vetor com valores
de flutuação de velocidade aleatórios e independentes; e C é uma matriz que aplica a
correlação espacial, dada na equação 2.29.
11
21 22
1 2
1 2
0 0
0 0
0 0j j jj
n n nn
c
c c
Cc c c
c c c
=
⋯ ⋯ ⋯
⋯ ⋯
⋮ ⋮
⋯
⋮ ⋮
⋯ ⋯ ⋯
(2.29)
Com os elementos da diagonal:
12
1
1j
jj jk
k
c c−
=
= −∑ (2.30)
Para os elementos fora da diagonal, com i j< :
1
2, 12
i
jk ikuj ui k
ji
w ii
c c
Cc
σ
σ
−
== −∑
(2.31)
onde 2,uj ui
σ é a variância da densidade espectral cruzada de turbulência dada por:
( ) ( ) ( )sup
inf
2, , , ,
f
uj ui u j u i uf
S f S f r f dfσ ψ= ∆∫ (2.32)
25
Capítulo 3
Análise dinâmica de estruturas
submetidas ao vento turbulento
O objetivo de uma análise estrutural dinâmica é estudar o comportamento de
uma estrutura submetida a ações, ou excitações, dinâmicas externas. Este estudo é
baseado, por exemplo, na resposta da estrutura em termos de deslocamentos,
velocidades, acelerações e esforços internos.
As ações dinâmicas costumam ser idealizadas como determinísticas (definidas
em função do tempo) ou aleatórias (variam arbitrariamente no tempo). O vento é um
exemplo de ação aleatória, já que não é possível prever um valor de velocidade exato
em certo instante de tempo. Dessa forma, este fenômeno deve ser tratado através de
médias estatísticas para descrever tanto as ações como os efeitos nas estruturas.
Neste capítulo apresentam-se, sucintamente, a formulação das equações
diferenciais de movimento e alguns métodos para sua solução. Encontra-se em Clough
& Penzien (1995), uma abordagem mais detalhada sobre dinâmica estrutural.
Foram adotadas as seguintes hipóteses para formulação das equações deste
capítulo:
i. a estrutura tem comportamento linear elástico;
ii. o amortecimento estrutural é viscoso;
iii. as forças devidas ao vento são calculadas com base no campo de velocidades
de vento, não sendo perturbadas pelo movimento da estrutura. Está hipótese
será justificada mais adiante.
3.1 Formulação do problema dinâmico
O comportamento dinâmico de uma estrutura, discretizada em N graus de
liberdade, obedece ao sistema de equações de movimento. Este sistema é formado por

26
equações diferenciais de segunda ordem na variável tempo e pode ser escrito na forma
matricial como:
( ) ( ) ( ) ( ) + + =M C Kɺɺ ɺX t X t X t F t (3.1)
onde: M, C e K representam respectivamente matrizes de massa, amortecimento e
rigidez da estrutura; ( )ɺɺX t , ( )ɺX t e ( )X t são respectivamente os vetores de aceleração,
velocidade e deslocamento nodais; ( )F t é o vetor das ações nodais externas.
Dada a dificuldade de determinar a matriz de amortecimento da estrutura,
arbitra-se esta de maneira a simplificar a solução das equações de equilíbrio. Assim,
costuma-se adotar C como sendo uma matriz proporcional a matriz de massa, ou seja,
α= ⋅C M . Substituindo esta simplificação da matriz de amortecimento na equação 3.1,
tem-se,
( ) ( ) ( ) ( ) t t t tα+ + =MX M X K X Fɺɺ ɺ (3.2)
sendo α o coeficiente de proporcionalidade entre o amortecimento e a massa.
Existem vários métodos para solução do sistema de equações 3.2, sendo que o
método de superposição modal é um dos mais utilizados, por conduzir a um sistema de
equações desacopladas (no caso de amortecimento proporcional). Nele as equações
mais relevantes são, em geral, as associadas aos primeiros modos de vibração.
O método da superposição modal consiste em fazer uma transformação de
coordenadas físicas, escrevendo os deslocamentos na base formada pelos modos
naturais de vibração. Ou seja,
( ) ( )t t= ⋅X AΦΦΦΦ (3.3)
onde ΦΦΦΦ e ( )tA , são respectivamente a matriz dos autovetores e o vetor de amplitude
das coordenadas modais, correspondentes aos modos naturais de vibração da estrutura.
Assim, com a substituição dessa transformação no sistema de equações de
movimento e multiplicando o resultado por TΦΦΦΦ , obtém-se:
( ) ( ) ( ) ( ) T T T Tt t t tα+ + =M A M A K A Fɺɺ ɺΦ Φ Φ Φ Φ Φ ΦΦ Φ Φ Φ Φ Φ ΦΦ Φ Φ Φ Φ Φ ΦΦ Φ Φ Φ Φ Φ Φ (3.4)

27
Em função das propriedades de ortogonalidade dos autovetores em relação à
matriz de massa, chega-se a um sistema de equações, com a equação correspondente ao
modo j de vibração dada por:
( ) ( ) ( ) ( ) j j j j j j
m a t m a t k a t p tα+ + =ɺɺ ɺ (3.5)
onde:
( )ja t , é a amplitude do modo j de frequência associada jω ;
T
j j jm = Mφ φφ φφ φφ φ , denominada massa modal;
T
j j jk = Kφ φφ φφ φφ φ , denominada rigidez modal;
T
j jp = Fφφφφ , é a força modal.
Do problema de auto valor, têm-se:
2 j j j
ω=K Mφ φφ φφ φφ φ (3.6)
pré-multiplicando-se ambos os lados da equação 3.6 por T
jφφφφ
chega-se à relação entre
rigidez modal e massa modal, 2
j j jk mω= .
O sistema 3.4 fica desacoplado de tal maneira que, cada equação corresponde a
um modo de vibração e a resposta dinâmica da estrutura é a superposição das respostas
modais, em termos de deslocamentos.
As equações mais relevantes são as associadas aos primeiros modos de vibração.
Isso porque as frequências naturais destes modos se aproximam das frequências das
ações que comumente atuam nas estruturas.
Portanto, para encontrar a resposta dinâmica da estrutura, basta resolver as
equações diferenciais correspondentes aos modos de vibração mais relevantes. Estas
equações podem ser resolvidas no domínio do tempo, por meio de uma integração
numérica ou no domínio da frequência, representando as excitações através de integral
de Fourier.
Os itens 3.2 e 3.3 tratam respectivamente da determinação da ação do vento e de
métodos para solução do sistema de equações diferenciais.

28
3.2 Forças devidas à ação dinâmica do vento
3.2.1 Força resultante em estruturas de pequenas dimensões
Admitindo a estrutura em repouso, com pequenas dimensões em relação aos
turbilhões incidentes, a força resultante devida ao vento na direção da velocidade média
(direção longitudinal) pode ser escrita pela seguinte expressão:
( )2 , , ,
2 a e
U x y z tF C A
ρ= (3.7)
sendo:
ρ , é a massa especifica do ar;
( ), , ,U x y z t , é a velocidade do vento;
aC , é o coeficiente de arrasto;
eA , é área frontal efetiva.
Na equação 3.7, admite-se que Ca foi obtido para ação de vento turbulento. No
caso de Ca referir-se à condição de vento suave pode-se utilizar um coeficiente χ
proposto por Davenport (1961) para levar em conta a variação do coeficiente de arrasto
com a turbulência.
Como visto no capítulo 2, a velocidade ( ), , ,U x y z t pode ser representada como
a soma de duas parcelas: uma velocidade média, ( )U z , e uma velocidade flutuante,
( ), , ,u x y z t . Ou seja,
( ) ( ) ( ), , , , , ,U x y z t U z u x y z t= + (3.8)
Substituindo a equação 3.8 na 3.7, tem-se:
( ) ( ) ( ) ( )2 , , , 2 , , ,
2F x y z t U z U z u x y z t Ca A
ρ = + (3.9)
onde foi desprezado o termo ( )2 , , ,u x y z t , pois em geral para ventos fortes tem-se
( ) ( ), , ,u x y z t U z≪ .
29
Pode-se, então, escrever a ação ( ), , ,F x y z t como a soma de duas parcelas: uma
ação média ou estática, ( )F z , e uma dinâmica, ( )ˆ , , ,F x y z t .
( ) ( ) ( )ˆ, , , , , ,F x y z t F z F x y z t= + (3.10)
com,
( ) ( )2
2
U zF z Ca A
ρ= (3.11)
( ) ( ) ( ) ˆ , , , 2 , , , 2
F x y z t U z u x y z t Ca Aρ
= (3.12)
A ação estática do vento, ( )F z , é função da velocidade média, U , que é
correspondente a uma média tomada sobre um tempo geralmente igual a dez minutos.
Esta velocidade varia com a altura e pode ser representada pela lei potencial, equação
2.1. Assim, a equação 3.11 pode ser reescrita da seguinte maneira:
( )22
2
p
ref
ref
U zF z Ca A
z
ρ =
(3.13)
Como ( )F z não varia em relação ao tempo, pode-se tratar o problema de
maneira estática, ficando o sistema de equações 3.1 reduzido a ( ) z=K X F .
A ação dinâmica do vento, ( )ˆ , , ,F x y z t , é função da flutuação da velocidade do
vento, ( ), , ,u x y z t . Para tratar o problema no domínio do tempo, utilizam-se histórias
de velocidades de vento. E, no domínio da frequência utiliza-se diretamente um
espectro de turbulência.
Para a estrutura em movimento, a força devido ao vento é função da
velocidade do vento em relação à estrutura ( relU ), que substitui U na equação 3.7.
Sendo xɺ a velocidade da estrutura na direção do vento e desprezando-se as outras
componentes de velocidade ( yɺ e zɺ ) tem-se:
( ) ( ) ( )relU t U t x t= − ɺ (3.14)

30
Neste caso a equação 3.9 é reescrita como
( ) ( ) ( ) ( ) ( ) ( )2 2 2 2
F t U z U z u t U z x t Ca Aρ
= + − ɺ (3.15)
onde foram desprezados os termos em u xɺ e 2xɺ . As grandezas F , u , xɺ , Ca e A têm
valores associados a cada ponto nodal ( , ,x y z ) da estrutura. O termo em xɺ na equação
de F dará origem ao termo denominado de amortecimento aerodinâmico já que pode
ser combinado ao amortecimento estrutural somando-o aos dois lados da equação de
movimento, ver equação 3.23.
3.2.2 Estruturas alargadas e/ ou alteadas
Para estruturas cuja dimensão característica não é pequena em relação às
dimensões dos turbilhões, deve-se levar em conta a correlação espacial das pressões
devidas ao vento no cálculo da força resultante. A dimensão característica l de uma
estrutura pode ser expressa, por exemplo, pela raiz quadrada da sua área exposta ou pela
dimensão da diagonal desta área. Já a dimensão característica dos turbilhões é dada por
U f , sendo f a frequência. A razão entre as dimensões características da estrutura e
dos turbilhões é expressa por f l U .
Vickery (1965) e Davenport (1963) introduziram a função de admitância
aerodinâmica ( )2 a
f l Uχ para relacionar as funções densidades espectrais da força
flutuante resultante, F
S , e da flutuação da velocidade do vento, uS , levando em conta a
correlação espacial das pressões devidas ao vento. Trata-se de um ajuste do espectro da
força de arrasto em relação ao caso ideal de uma estrutura envolvida pela turbulência
com correlação perfeita. A relação entre F
S e uS é dada por:
22
ˆ 24 a uF
FS S
Uχ= (3.16)
Os autores acima citados, baseados em estudos experimentais em placas e
prismas, e em estudos teóricos, sugerem uma fórmula empírica para 2aχ ,

31
24
3
1
2 1
a
f l
U
χ = +
(3.17)
A fórmula acima possui suas limitações, pois é baseada em ensaios
experimentais em tuneis de vento feitos em discos e placas planas. Porém, Vickery
(1966) informa que em ensaios realizados em protótipos com relação de dimensões
altura/largura menor que 4, aχ , é praticamente independente da forma da superfície
frontal da placa.
Para certa estrutura de dimensão característica l sob ação de vento de velocidade
média U , verifica-se a redução da admitância aerodinâmica com o aumento da
frequência associada aos turbilhões. Isto porque os turbilhões de menores dimensões
(que não envolvem a estrutura como um todo, causando perda de correlação de
pressões) têm menores comprimentos de onda e, portanto, maiores frequências. A
Figura 3.1 apresenta a admitância aerodinâmica em função da frequência.
Figura 3.1: Admitância aerodinâmica (Blessmann,1998).
Ainda, Dyrbye e Hansen (1997) propõem uma formulação teórica para o cálculo
de 2aχ para estruturas alteadas (como torres e chaminés), a partir do co-espectro
normalizado das pressões, pψ . Sendo 2aχ definido por:
2
0
12 1
l
a p
rdr
l lχ ψ = −
∫ (3.18)
onde pψ é, da mesma forma que o co-espectro das flutuações de velocidade uψ (equação
2.18), dado por uma função exponencial:

32
( ) , , expp r
f rr f U C
Uψ
∆ ∆ = − (3.19)
onde r∆ é a distância entre os dois pontos considerados e rC é o coeficiente de
decaimento das pressões obtido experimentalmente.
Dyrbye e Hansen (1997) relatam medições de pressões em estruturas cujos
resultados indicam que as pressões na face de barlavento são melhores correlacionadas
espacialmente que as flutuações de velocidade do vento não perturbado pela presença da
estrutura. Também Simiu e Scanlan (1996) relatam estudos teóricos sobre a distorção do
escoamento incidente devido à presença de um corpo, sugerindo que a coerência entre
as flutuações de pressões em altas frequências é maior do que entre as flutuações de
velocidade do vento.
Por outro lado, as flutuações das pressões a sotavento são menos intensas do que
na face de barlavento (Simiu e Scanlan, 1996). Além disso, resultados de ensaios em
túnel de vento relatados em Dyrbye e Hansen (1997) demonstram que as flutuações das
pressões na face de sotavento são praticamente não correlacionadas com as flutuações
de pressões a barlavento, o que conduz a uma redução das forças dinâmicas.
Os dois fatores mencionados anteriormente - o da maior correlação espacial das
flutuações das pressões a barlavento em relação à das flutuações de velocidade do vento
incidente e a falta de correlação entre as flutuações da pressão a barlavento e a
sotavento- tem efeitos contrários sobre as forças dinâmicas de vento. O cálculo destas
forças de acordo com a hipótese (iii), apresentada no início do capítulo, i.e., com base
nas propriedades do escoamento não perturbado, não levará em conta aqueles dois
fatores opostos. Assim, na determinação das forças devidas ao vento com correlação
espacial será utilizada a função do co-espectro normalizado das flutuações de
velocidade de vento, equação 2.18.
3.3 Solução do sistema de equações diferenciais de equilíbrio
Este item apresenta métodos para solução do sistema de equações diferenciais de
equilíbrio. Neste trabalho optou-se por resolver estas equações considerando somente a
componente de força dinâmica, ( )F t . Portanto, estes métodos estão desenvolvidos para
esta componente de força.

33
Os resultados podem ser expressos em termos de deslocamentos máximos
prováveis, por se tratar de uma solicitação aleatória. A Figura 3.2 ilustra o aspecto de
uma resposta aleatória em função do tempo, destacando-se os valores médio x ,
flutuante máximo maxx e o máximo total maxx .
Figura 3.2: Resposta da estrutura em função do tempo.
O subitem 3.3.1 mostra a solução no domínio do tempo e os subitens 3.3.2 ao
3.3.6 tratam alguns métodos para solução no domínio da frequência.
3.3.1 Solução modal no domínio do tempo
A solução do sistema de equações pode ser feita no domínio do tempo
integrando-se as equações com métodos de integração numérica. Neste trabalho foi
utilizado o método Runge-Kutta de quarta ordem para integrar o sistema de equações.
Considerando a equação 3.6, pode-se reescrever a equação de movimento
independente para cada modo j (equação 3.5) da seguinte forma:
( ) ( ) ( )( )2
,j
j est j j j j
j
p ta t a t a t
mα ω+ + =ɺɺ ɺ (3.20)
onde ,est jα , é o coeficiente de proporcionalidade entre o amortecimento estrutural e a
massa, dado por ,2 estj est j jα ζ ω= , sendo ,est jζ o amortecimento estrutural referente ao
modo j.
Considera-se uma estrutura discretizada em n nós, como ilustra a figura 3.3. Em
cada nó k atua uma força kF devido ao vento, calculada como indica a equação 3.15,
sendo kF a parcela flutuante composta dos termos funções de u e xɺ . Neste caso A é a

34
área de exposição no trecho de influência do nó k, kU e ku correspondem à velocidade
média e à flutuação de velocidade do vento na cota z do nó k. Para calcular a força
modal pré-multiplica-se o vetor F de forças nodais pelo vetor j
ΤΤΤΤφφφφ e chega-se a:
( ) ( ) ( ),1
2 2 2
n
j k k j k k k k k
k
p t Ca A U u t U x tρ
φ=
= − ∑ ɺ (3.21)
onde ,j kφ expressa a componente x do autovetor j no nó k.
Figura 3.3: (a) estrutura discretizada em n nós; (b) forma modal j.
Com a expressão 3.21 da força modal e lembrando que ( ) ( ), k j k jx t a tφ=ɺ ɺ , pode-
se reescrever a equação 3.20 da seguinte maneira:
( ) ( ) ( ) ( )21
,
2
,
,1
n
k k k
k
j est j j j j
j j
j k n
k k j k k k
k
Ca A U
a t a t a tm m
Ca A U u t
ρ φρ
α ω φ=
=
+ + + =
∑∑ɺɺ ɺ (3.22)
ou,
( ) ( ) ( )( )2 j
j j j j j
j
p ta t a t a t
mα ω+ + =ɺɺ ɺ (3.23)
sendo jα um coeficiente de proporcionalidade entre o amortecimento e a massa,
composto pela soma de um coeficiente de amortecimento estrutural, ,est jα , com um
coeficiente de amortecimento aerodinâmico, ,aer jα . Ou seja,

35
( ), , j , ,2 j est j aer j est j aer jα α α ω ζ ζ= + = + (3.24)
com,
2,
1,
2
n
j k k k k
kaer j
j j
Ca A U
m
ρ φζ
ω==∑
.
Com a solução da equação correspondente ao modo de vibração j tem-se a
amplitude deste modo de vibração, ( )ja t . A partir da equação 3.3, o deslocamento
( )kx t do nó genérico k é calculado com
( ) ,k j k j
j
x t aφ=∑ (3.25)
sendo ,j kφ o componente do autovetor j na direção do deslocamento x no nó k.
3.3.2 Modelo de Davenport – Fator de rajada
O método de fator de rajada foi proposto por Davenport (1961), adaptando à
engenharia estrutural conceitos em uso na engenharia mecânica e na de comunicações.
Sendo este método conseqüência do processo estatístico para definir a turbulência, e do
desenvolvimento de processos similares na resposta de filtros eletrônicos a ruído
aleatório no campo de comunicações. Um resumo esquemático do método é apresentado
pela figura 1.1 do capítulo1.
Para uma estrutura representada por um sistema de um grau de liberdade
composto por massa, mola, amortecedor (Figura 3.4), a equação de movimento é dada
por:
( ) ( ) ( ) ( ) m x t c x t k x t F t+ + =ɺɺ ɺ (3.26)
Figura 3.4: Sistema massa-mola-amortecedor.
2 r r
kf
mω π= =

36
Aplicando a transformada de Fourier a ambos os membros do sistema de
equações 3.26:
( ) ( ) ( ) ( ) m x t c x t k x t F t + + = ɺɺ ɺF F (3.27)
obtém-se:
( ) ( ) ( ) ( )2 m x i c x k x Fω ω ω ω ω ω− + + = (3.28)
A equação 3.28 é uma função complexa, definida no domínio da frequência, cuja
solução pode ser escrita a seguir, em termos de funções de densidade espectral.
( ) ( ) ( )2
2
1 x FS f H f S f
k= ou ( )
( )( ) ( )
2
42
1
2 x F
r
S f H f S fm fπ
= (3.29)
onde, ( )xS f é a função da densidade espectral de ( )x t , sendo esta calculada a partir da
função de admitância mecânica, ( )2
H f , dada por:
2
22 2
2
1( )
1 4 r
r r
H f
f f
f fζ
=
− +
(3.30)
em que r est aerζ ζ ζ= + , é a razão de amortecimento crítico, dada no item anterior.
A força devido à pressão dinâmica causada pelo vento é dada pela equação 3.10.
Para estruturas do tipo pontual, em relação às dimensões dos turbilhões, esta equação
pode ser escrita da seguinte forma:
( ) ( )2
2
UF t Ca A Ca A U u t
ρρ= + (3.31)
Fazendo 212 F U Ca Aρ= , pode-se reescrever a equação acima da seguinte
maneira:
( ) ( )2 F u tF t F
U= + (3.32)
Designando a componente de força devida à flutuação por F , ou seja,

37
( ) ( )2 ˆ F u tF t
U= (3.33)
pode-se escrever a densidade espectral da força atuante, ( )F
S f , como:
( ) ( )2
ˆ 4 uF
FS f S f
U
=
(3.34)
A equação acima é válida para estruturas pequenas em relação às dimensões dos
turbilhões incidentes, nas quais incide o vento com velocidade igual a ( )U u t+ em toda
superfície frontal da estrutura. A correlação espacial de pressões de vento incidindo em
estruturas de grandes dimensões é considerada por meio da função de admitância
aerodinâmica, equação 3.17. Tem-se, então:
( ) ( )2
2ˆ 4 a uF
FS f S f
Uχ
=
(3.35)
sendo U é a velocidade em um ponto de referência da estrutura.
Definida a densidade espectral da força atuante, ( )F
S f , pode-se reescrever a
equação 3.29 obtendo a seguinte expressão:
( ) ( ) ( )2
2 22
4 x a u
FS f H f S f
k Uχ
=
(3.36)
A variância da resposta é obtida integrando na frequência a densidade espectral
da resposta, ou seja:
( ) ( ) ( )2
22 220 0
1 4 x x a u
FS f df H f S f df
U kσ χ
∞ ∞ = =
∫ ∫ (3.37)
Fazendo x F k= e ( ) ( )2 'u u uS f S fσ= na equação 3.37, Davenport subdivide a
variância em duas parcelas, as respostas ressonante e não ressonante (“background”):
( )22
24x u B R
x U
σ σ = +
(3.38)

38
com,
( )
( ) ( ) ( )
( ) ( )
2
0
22
0
22
'
R '
R
4
a u
a r u r
u r rra r
r u
B S f df
f S f H f df
S f ff
χ
χ
πχ
ζ σ
∞
∞
≈
≈
≈
∫
∫
onde B é o fator de resposta não ressonante e R é o fator de resposta ressonante.
A resposta não ressonante, B , é calculada admitindo uma ação quase-estática do
vento flutuante, ( )2
0 1H f = = . Já para calcular a resposta ressonante, R , assume-se
que na largura do pico ressonante ( )2a
fχ e ( )'uS f têm valores constantes iguais a
( )2a r
fχ e ( )'u rS f respectivamente.
Uma forma típica da resposta de uma estrutura submetida à ação do vento é
ilustrada na Figura 3.5, onde a soma das áreas hachuradas corresponde à variância 2xσ .
Figura 3.5: Densidade espectral da resposta típica de uma estrutura, destacando as
parcelas ressonante R e não ressonante B da variância da resposta.
Por se tratar de um problema probabilístico, deve ser calculada a resposta
dinâmica de pico, obtida com estimativa de máximos do processo aleatório a partir do
valor RMS, dada por:
maxˆ x
x g σ= (3.39)
( )log f
( )xS f

39
onde g é o fator de pico que depende do intervalo de tempo para o qual se calcula a
resposta máxima e a faixa de freqüências. Davenport (1961) deduziu a seguinte
expressão para o fator de pico, aplicável a respostas com distribuição de probabilidade
gaussiana. Este é o caso para estruturas submetidas à ação de vento turbulento:
( )( )
0,5772ln
2lng T
Tν
ν= + (3.40)
onde ν é frequência efetiva de resposta e T é o intervalo de tempo da estimativa, assim,
o produto Tν é o número de ciclos da resposta. Para uma análise no domínio da
frequência, geralmente ν é tomada igual a frequência do modo de vibração
considerado.
Substituindo a equação 3.38 na 3.39, resulta:
maxˆ 2 ux g I B R x = + (3.41)
onde u uI Uσ= , é a intensidade de turbulência, equação 2.4.
Definindo G como a razão entre o deslocamento máximo maxx e o
deslocamento médio x , denominada “fator de rajada para deslocamento” tem-se:
maxˆ 1+2 u
x xG g I B R
x
+= = + (3.42)
Alternativamente a equação 3.42 pode ser escrita em termos de fatores de pico
associados separadamente às respostas ressonantes e não ressonantes:
2 2 1+2 u u RG I g B g R= + (3.43)
onde ug e R
g são fatores de pico da velocidade de vento calculados com a equação
3.40.
O método de Davenport, originalmente desenvolvido para um sistema de um
grau de liberdade discreto, foi posteriormente revisado para incluir a forma modal da
estrutura (Davenport, 1967).

40
3.3.3 Solução modal no domínio da frequência
O sistema de equações 3.23 é formado por equações de movimento
desacopladas, em que cada equação corresponde a um modo de vibração. Assim, a
equação de movimento correspondente ao modo de vibração j:
( ) ( ) ( ) ( )2 j j j j j
j
p ta t a t a t
mα ω+ + =ɺɺ ɺ (3.44)
Da mesma maneira que no item anterior, aplicando a transformada de Fourier a
ambos os membros da equação acima, chega-se a equação no domínio da frequência,
cuja solução pode ser escrita em termos de funções de densidade espectral.
( )( )
( ) ( )2
, ,42
1
2 a j p j
j r
S f H f S fm fπ
= (3.45)
onde,
( ),a jS f
, é a função da densidade espectral da amplitude do ja do modo j ;
( )2
H f , é a função de admitância mecânica definida na equação 3.30;
( ),p jS f , é a densidade espectral da força modal.
Para a estrutura discretizada em n nós, ilustrada na figura 3.3, admite-se
inicialmente a atuação de apenas uma força kF aplicada no nó k, cuja função densidade
espectral é dada por ( )ˆ ,F kS f . Sendo assim, ( ),p j
S f pode ser escrita como:
( ) ( )2ˆ, , ,
p j j k F kS f S fφ= (3.46)
onde ,j kφ , é o componente do autovetor do modo j na direção da força de vento do nó
k .
Sendo kF a força flutuante de vento descrita pela equação 3.12, pode-se escrever
a densidade espectral da força, ( )ˆ ,F kS f , como:
( ) ( ) ( )2
ˆ , k uF k
S f U Ca A S fρ= (3.47)

41
Admite-se agora a atuação de forças aplicadas em vários nós, da estrutura
discretizada em n nós, tem-se
( ) ( ), , , ,1 1
n n
p j j k j l Fk Fl
k l
S f S fφ φ= =
=∑∑ (3.48)
onde ( ),k lF FS f é o espectro cruzado das forças aplicadas nos nós k e l, dado por:
( ) ( )( ) ( )2
, , 2 2 4Fk Fl k l k l k l uk ulS f U U Ca Ca A A S fρ
= (3.49)
O co-espectro de velocidade flutuante ( ),uk ulS f considera a correlação espacial
da velocidade u entre dois pontos k e l , conforme exposto no item 2.2.6:
( ) ( ) ( ) ( ), ,uk ul uk ul uS f S f S f r fψ= ∆ (3.50)
onde:
e , são respectivamente os espectros de turbulência dos nós k e l;
( ),u
r fψ ∆ é o co-espectro normalizado, dado na equação 2.15.
Substituindo as expressões 3.49 e 3.50 na equação 3.48 chega-se ao espectro da
força modal:
( ) ( )( ) ( ) ( ) ( )2
, , ,1 1
2 2 ,4
n n
p j k l k l k l j k j l uk ul u
k l
S f U U Ca Ca A A S f S f r fρ
φ φ ψ= =
= ∆∑∑ (3.51)
Escrevendo ( ),p jS f em termos dos parâmetros associados a uma altura de
referência, refh , e aplicando-se a equação 3.45 chega-se a uma expressão com o mesmo
aspecto da equação 3.36:
( ) ( ) ( ) ( )2
n n2 2
, , ,2k=1 l=1
4 ,
ref
ref
a j j z k l u u ref
j ref
FS f H f g g r f S f
k Uφ ψ
= ∆
∑∑ (3.52)
( )ukS f ( )ulS f

42
Sendo,
21
2ref ref ref refF U Ca Aρ= ;
,
,
u kk k kk
ref ref ref u ref
SU Ag
U A S
φφ
= .
Se as formas modais forem descritas por funções contínuas ao longo da altura z
o somatório duplo será substituído por uma integral dupla na equação 3.52. Diversos
processos de cálculo manual encontrados na literatura utilizam funções de diversos tipos
para a função kg , assumindo formas modais dos seguintes tipos:
z
h;
2z
h
; 3
z
h
; 4
z
h
; z
senh
π
.
Definida a densidade espectral da amplitude ja do modo j , sua variância 2,a j
σ ,
como no item anterior, é obtida pela integração de ( ),a jS f , equação 3.45, em relação à
frequência:
( )2, ,0a j a jS f dfσ
∞= ∫ (3.53)
e a variância de um deslocamento x qualquer considerando um único modo é obtida
com:
2 2 2, ,x j j a j
σ φ σ= (3.54)
Para m modos têm-se:
2, ,
1 1
m m
x i j a i a j
i j
σ φ φ σ σ= =
=∑∑ (3.55)
Segundo Clough & Penzien (1995), os termos cruzados na equação 3.55 podem
ser desprezados nos casos de estruturas de baixo amortecimento e com modos de
vibração com frequências afastadas, resultando em:
(3.56) 2 2 2
jx j a
j
σ φ σ= ∑

43
Os processos simplificados desenvolvidos a partir da solução modal no domínio
da frequência admitem funções contínuas para as formas modais e separam a variância
da resposta nas parcelas ressonante e não ressonante, como proposto por Davenport.
Apresenta-se a seguir, nos itens 3.3.4 e 3.3.5, dois destes métodos.
3.3.4 Processo: Eurocode procedimento 1
O Eurocode, Part 1.4 – Wind action (2005), traz dois procedimentos para
considerar os efeitos dinâmicos devido à turbulência do vento. Estes procedimentos,
assim como o processo de Davenport, consideram os efeitos dinâmicos através do fator
de rajada, equação 3.43.
O procedimento 1, fornecido pelo anexo B desta norma, propõe a seguinte
expressão para representar o fator de resposta não ressonante desta equação:
( )
0,63
1
1 0,9
B
b h
L z
= +
+
(3.57)
onde, b e h são a largura e a altura da estrutura e ( )L z é o comprimento de escala de
turbulência, dado na equação 2.14.
E o fator de resposta ressonante é representado por:
( )2
* , 2 u ref r h b
r
R S h f R Rπδ
= (3.58)
onde:
( ) ( )* 2, u ref r u u
S h f f S σ= , o valor da densidade espectral de turbulência na
forma adimensional (equação 2.13), na frequência fundamental da estrutura rf
e em uma altura de referência refh dada na Figura 3.6;
hR e b
R são fatores de admitância aerodinâmica, equação 3.59, associados às
dimensões vertical e lateral da estrutura;
rδ é o decremento logarítmico de amortecimento, dado por 2
r rδ π ζ= .

44
( )
( )
22
22
1 11 ; 1 para 0
2
1 11 ; 1 para 0
2
h
b
h h h
h h
b b b
b b
R e R
R e R
η
η
ηη η
ηη η
−
−
= − − = =
= − − = =
(3.59)
com, ( ) ( )4,6
,h L ref r
hf h f
L zη = e
( ) ( )4,6 ,h L ref r
bf h f
L zη = , lembrando que L
f é a
frequência adimensional dada na equação 2.13.
Figura 3.6: Altura de referência.
Observa-se que a expressão utilizada pelo Eurocode (2005) para o fator de
resposta ressonante é a expressão desenvolvida por Davenport, na equação 3.38, com a
admitância aerodinâmica, ( )2a r
fχ , dividida em dois coeficientes, hR e b
R .
Uma descrição mais completa do processo de cálculo usado no Eurocode pode
ser encontrada em duas publicações de Solari (1993).
3.3.5 Processo: Dyrbye e Hansen
Segundo Dyrbye e Hansen (1997) o procedimento 1, descrito no Eurocode
(2005), subestima o fator de resposta não ressonante para estruturas com dimensões
abaixo de 50 m e superestima para estruturas grandes. Ainda, consideram que este
procedimento também subestima o fator de resposta não ressonante.
O processo proposto por eles e indicado como procedimento 2 do Eurocode
(2005) adota o espectro ESDU (equação 2.13), a lei logarítmica para o perfil vertical de
velocidades (equação 2.3), a intensidade de turbulência dada pela equação 2.5 e a
função do co-espectro normalizado descrito na equação 2.18. A função do comprimento
de escala de turbulência utilizada é a equação 2.14.

45
Assim, Dyrbye e Hansen (1997) propõem a seguinte expressão para o fator de
resposta não ressonante B:
( ) ( ) ( ) ( )
2 2 2
1
3 31
2
B
b h b h
L z L z L z L zπ
=
+ + +
(3.60)
E o fator de resposta ressonante, R, é representado por:
( )2
* , 2 u ref r sR S h f Rπδ
= (3.61)
onde, s aδ δ δ= + , sendo s
δ referente o amortecimento estrutural e aδ ao
amortecimento aerodinâmico; sR é um parâmetro de redução da função em função da
admitância aerodinâmica, aproximado pela seguinte expressão:
( ) ( )2
2 2
1
21
s
y y z z y y z z
R
G G G Gφ φ φ φπ
= + + +
(3.62)
Com:
( ) y r
y
ref
C b f
U hφ = e
( )
z rz
ref
C h f
U hφ = ;
yG e zG são parâmetros que dependem da forma modal da estrutura. A Tabela
3.1 apresenta estes parâmetros para algumas formas modais definidas (Dyrbye e
Hansen, 1997).
Tabela 3.1: Parâmetros G para diferentes formas modais.
Forma modal G (eq. 3.62)
1
z/h
(z/h)²
(z/h)³
(z/h)4
sin(πz/h)
1/2
3/8
5/18
7/32
9/50
4/π²

46
Estas expressões foram incorporadas no Eurocode (2005) em sua ultima revisão,
fazendo parte do procedimento 2, referente ao anexo C desta norma.
Neste método o fator de pico g também é calculado por meio da equação 3.40.
Porém, a frequência efetiva da resposta é tomada pela seguinte expressão:
2 20 en B n R
vB R
+=
+ (3.63)
sendo, en tomado com a frequência do modo de vibração considerado e 0n é uma
frequência representativa para a rajada em estruturas rígidas, aproximadamente igual a:
( )( )0
0,3
refU z h bn
L zh b=
(3.64)
3.3.6 Modelo discreto – NBR 6123
Adotado pela norma brasileira NBR 6123 (1988), o processo do modelo discreto
apresenta uma formulação modal no domínio da frequência para determinar uma ação
estática equivalente do vento, que represente os efeitos dinâmicos em termos de
deslocamentos máximos da estrutura.
Para descrever matematicamente o campo de velocidade de vento, o método
utiliza a lei potencial (equação 2.1) para representar o perfil de velocidade média ao
longo da altura, o espectro de Harris dado pela equação 2.15, e o espectro cruzado é
representado pelo co-espectro normalizado dado pela equação 2.21. Conforme
Blessman (1998), os fundamentos deste método são apresentados a seguir.
A variância da amplitude do primeiro modo de vibração, em função da
admitância mecânica e da densidade espectral de força, pode ser obtida substituindo a
equação 3.45 na 3.53, resultando:
( )( ) ( )
22, ,40 2
1
2 a j p j
j j
H f S f dfm f
σπ
∞= ∫ (3.65)
Como visto anteriormente, item 3.3.2, o valor máximo provável de ja é dado
multiplicando o desvio padrão, ,a jσ , por um fator de pico, ou seja,
, j a ja g σ= (3.66)

47
A relação acima está escrita no referencial modal. Por meio da equação 3.3,
pode-se escrever a resposta de pico em coordenadas nodais referente ao modo j de
vibração, como,
, a j jg σ=X φφφφ (3.67)
Com o vetor de deslocamentos definido, a partir do método da rigidez, pode-se
escrever o seguinte sistema de equações:
, a j jg σ=F K φφφφ (3.68)
onde F é um vetor de forças nodais, que ao ser aplicado estaticamente na estrutura
resulta deslocamentos extremos devido à ação dinâmica do vento considerando apenas o
modo j de vibração.
Do problema de autovalor tem-se 2 j jω=K Mφ φφ φφ φφ φ , pode-se reescrever a equação
acima como:
2,
j a j j jg σ ω=F M φφφφ (3.69)
Cada componente do vetor F representa a força equivalente dinâmica em cada
nó k da estrutura. Sendo M uma matriz de massa diagonal, para cada nó k , pode se
escrever:
2, , , j k a j j k j k
F g mσ ω φ= (3.70)
A partir da equação 3.65 pode-se escrever:
( )
( ) ( )
1
222
, , ,40 2
1
2 j k j k j k p j
j j
F g m H f S f dfm f
ω φπ
∞ = ∫
(3.71)
Substituindo a densidade espectral da força dinâmica modal, pS , equação 3.51,
na equação acima, tem-se:
, , j k H k j kF F m φ= (3.72)
Com:
( )( ) ( )( ) ( ) ( )
1
2 2
22
, ,40 21 14
1= 2 2
2
n n
H j k l k l k l j k j l uk ul u
k ljj
F g H f U U Ca Ca A A S f S f dfm f
ρω φ φ ψ
π
∞
= =
∑∑∫
(3.73)

48
Utilizando o espectro de Harris, equação 2.15, e lembrando que este não varia
com a altura, ou seja, ( ) ( )uk ulS f S f= . Ainda, retirando os termos que são constantes
em relação à frequência, tem-se:
( ) ( ) ( )
1
2,22 1
0médio
4 ,
2
n
k k k j k
kH j u u
j
Ca U A
F g H f S f r f dfm
φρ
ω ψ∞
=
= ∆
∑∫ �����������
(3.74)
Substituindo kU da equação anterior pela lei potencial, equação 2.1, e fazendo
2,
1
n
j k j k
k
m m φ=
=∑ , tem-se:
( ) ( ) ( )
1, 2
21
02
médio,1
4 , 2
pn
kk k j k
k refref
H j uk un
k j k
k
zCa A
zUF g H f S f r f df
m
φρ
ω ψφ
∞=
=
= ∆
∑∫
∑�����������
(3.75)
A integral na equação 3.75 tem dimensão ( )2m s , dividindo-se por 2ref
U , para
admensionalizá-la, resulta:
( ) ( ) ( )
1médio 2
2,12
202,
1
,
4 2
pn
kk k j k
k ref uk u
H j ref n
refk j k
k
zCa A
z H f S f r fF g U df
Um
φψρ
ωφ
∞=
=
∆ =
∑∫
∑
���������
(3.76)
Ou, reescrevendo da seguinte forma:
,21
2,
1
2
pn
kk k j k
k refref
H n
k j k
k
zCa A
zUF
m
φρ
ξφ
=
=
=
∑
∑ (3.77)
Com:
jgξ ω γ= (3.78)
( ) ( ) ( )médio
2
220
, 4
uk u
ref
H f S f r fdf
U
ψγ
∞ ∆= ∫
���������
(3.79)

O parâmetro ξ é denominado fator de amplificação dinâmica
Galindez (1979), admitindo um fator de pico
NBR 6123 (1988) apresenta gráficos para obtenção de
rugosidade desta norma. Estes gráficos são reproduzidos nas f
Figura 3.7: Coeficiente de amplificação dinâmica,
Figura 3.8: Coeficiente de amplificação dinâmica,
49
é denominado fator de amplificação dinâmica e foi calculado por
, admitindo um fator de pico 4g = e uma forma modal
apresenta gráficos para obtenção de ξ para a cinco categorias de
rugosidade desta norma. Estes gráficos são reproduzidos nas figuras 3.7 a 3.11
eficiente de amplificação dinâmica, ξ , para terreno de categoria I
( 1800 L m= ; h em metros).
Coeficiente de amplificação dinâmica, ξ , para terreno de categoria II
( 1800 L m= ; h em metros).
e foi calculado por
e uma forma modal ( )z z hφ = . A
para a cinco categorias de
iguras 3.7 a 3.11.
, para terreno de categoria I
, para terreno de categoria II
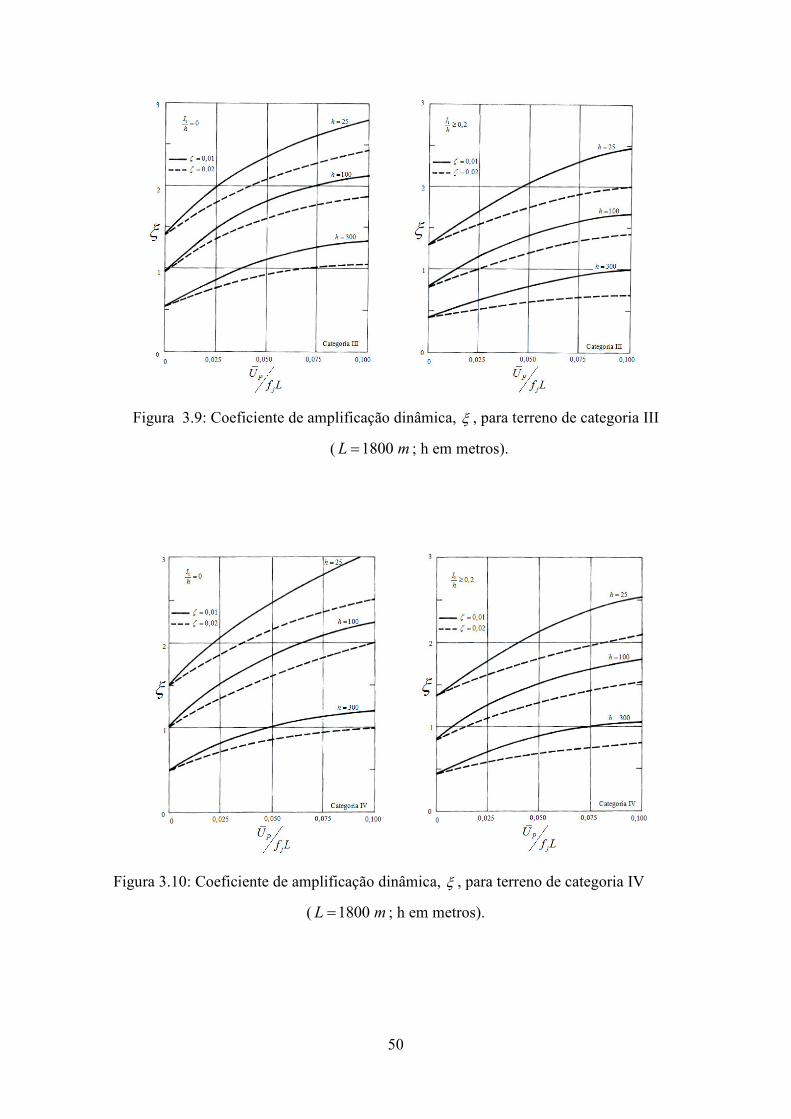
Figura 3.9: Coeficiente de amplificação dinâmica,
Figura 3.10: Coeficiente de amplificação dinâmica,
50
Coeficiente de amplificação dinâmica, ξ , para terreno de categoria III
( 1800 L m= ; h em metros).
Coeficiente de amplificação dinâmica, ξ , para terreno de categoria IV
( 1800 L m= ; h em metros).
, para terreno de categoria III
, para terreno de categoria IV

Figura 3.11: Coeficiente de amplificação dinâmica,
51
Coeficiente de amplificação dinâmica, ξ , para terreno de categoria V
( 1800 L m= ; h em metros).
, para terreno de categoria V

52
Capítulo 4
Exemplos numéricos
São dados três exemplos numéricos: uma torre de reservatório de água, uma
chaminé e um edifício. Esses exemplos são dados respectivamente nos itens 4.1 ao 4.3.
4.1 Torre de reservatório de água
Será determinado o comportamento de uma torre com 30,5 metros de altura
submetida ao efeito do vento na direção de sua velocidade média. Um esquema desta
torre é apresentado na Figura 4.1. Admite-se a ação do vento atuando somente sobre as
faces do reservatório.
Figura 4.1: Perspectiva e planta da torre de reservatório de água.
A estrutura do reservatório possui as seguintes características: massa do
reservatório cheio de água é igual a 325 toneladas; frequência fundamental de vibração
0,8rf Hz= ; rigidez da estrutura para o deslocamento horizontal a uma altura de 30,50
metros igual a 8212 kN m ; coeficiente de arrasto 1Ca = ; e foi adotada uma razão de
amortecimento estrutural 1,0%est
ζ = .
A velocidade básica do vento, 0 45,0 U m s= ; o fator topográfico, 1 1S = ; o
fator probabilístico, 3 1S = ; Terreno com categoria de rugosidade IV.
Nos próximos itens, 4.1.1 e 4.1.2, são feitas respectivamente uma análise
puramente estática, respeitando as prescrições da NBR 6123 (1988) quanto à
53
determinação das forças estáticas devidas ao vento, e uma análise dinâmica, resolvendo
a torre de reservatório por diferentes métodos, descritos no capítulo 3.
4.1.1 Análise estática da torre de reservatório (item 4 da NBR 6123)
Admitindo que a estrutura terá uma resposta quase-estática à ação do vento, é
feita uma análise estática considerando que a estrutura está submetida a uma velocidade
média de vento calculada em um certo intervalo de tempo, que depende das dimensões
da estrutura.
A norma brasileira NBR6123 (1988) fornece a velocidade básica do vento, 0U ,
que corresponde à velocidade de uma rajada 3 segundos, excedida na média uma vez
em 50 anos, a 10 metros acima do terreno, em campo aberto e plano (categoria II). Esta
velocidade é informada por regiões territoriais, através de gráficos de isopletas.
A velocidade é corrigida de acordo com a rugosidade do terreno, dimensões da
estrutura, condições topográficas e grau de segurança requerido. Assim, utiliza-se a
velocidade característica, kU , que é a velocidade básica corrigida quanto a estes fatores.
Dada através da equação 4.1.
( ) 0 1 2 3 kU z U S S S= v (4.1)
com:
0 45,0 U m s= , velocidade básica do vento;
1 3 1S S= = , fatores de correção da velocidade;
( )2 10 p
S b z= ⋅ , onde, para uma análise estática, os parâmetros 0,86b = e
0,12p = , são fornecidos pela tabela 1 da NBR 6123 (1988), para a estrutura
pertencente à classe A desta norma (edificação com maior dimensão igual a 6
metros).
Resultando uma velocidade característica, a uma altura de 30,50 m, igual a
44,3kU m s= . A partir desta velocidade determina-se a força estática atuante na
estrutura por meio da equação 3.11:
( ) ( ) ( )2
2 3 0,613 44,3 1,0 36 43, 2 10
2
U zF z Ca A N
ρ= = × × × = × (3.11a)
54
Aplicando esta força estática na estrutura resulta um deslocamento
-35,26 10 x m= × .
4.1.2 Análise dinâmica da torre de reservatório
A análise dinâmica foi separada em duas partes, escrevendo a velocidade do
vento na direção principal, U , como a soma de uma componente média, U , com uma
componente flutuante, u . Fica-se então, o problema dividido em uma análise estática e
outra dinâmica. A análise dinâmica será efetuada no domínio do tempo, da frequência e
pelo método de fator de rajada.
4.1.2.1 Componente média de velocidade ( )U
Em uma análise dinâmica, a velocidade média, U , corresponde a uma
velocidade média tomada em 10 minutos. A norma brasileira corrige a velocidade
característica, multiplicando esta, por um fator de redução. Obtém-se assim, o perfil de
velocidade média para uma análise dinâmica, dado por:
( ) 0 1 2 30,69 U z U S S S= (4.2)
com,
0 45,0 U m s= , velocidade básica do vento;
1 3 1S S= = , fatores de correção da velocidade;
2 10
pz
S b = ⋅
, onde, para uma análise dinâmica, os parâmetros 0,71b = e
0, 23p = , são fornecidos pela tabela 20 da NBR 6123 (1988).
Resultando uma velocidade de projeto, a uma altura de 30,50 m, igual a
28,5U m s= . Novamente, a partir da equação 3.11 determina-se a força
correspondente a esta velocidade.
( ) ( ) ( )2
2 3 0,613 28,5 1,0 36 17,9 10
2
U zF z Ca A N
ρ= = × × × = × (3.11b)
Aplicando esta força na estrutura resulta um deslocamento -32,18 10 x m= × .

55
4.1.2.2 Componente flutuante de velocidade ( )u : Domínio do tempo
A razão de amortecimento crítico é igual a est aerζ ζ ζ= + , com parcela de
amortecimento estrutural 1,0%est
ζ = e a parcela referente ao aerodinâmico é dada pela
equação 3.24 e calculada a seguir:
( ) 1 36 28,5
0,613 0,00038 0,038%2 2 0,80 325000aer
Ca A U
m
ρζ
ω π× ×
= = = =× ×
(3.24a)
Resultando uma razão de amortecimento 1,038%est aer
ζ ζ ζ= + = .
Como visto no capítulo 2, uma amostra da componente flutuante de velocidade
pode ser obtida a partir de um espectro de turbulência. Através do algoritmo TURB
(Pfeil, 1993) foi gerada uma história a partir dos seguintes dados:
• Espectro de Harris (equação 2.15);
• Intervalo de tempo da análise: 10 min;
• Categoria de rugosidade IV (NBR 6123, 1988);
• Velocidade de referência: ( ) 0 1 310 0,69 b 22,0 ref
U U S S m s= = ;
• Intervalo de tempo da geração: 0,1t s∆ = ;
• Coeficiente de arrasto superficial: 0,0226asc = (Tabela 2.1).
As figuras Figura 4.2 e Figura 4.3 mostram respectivamente a história da
flutuação da velocidade do vento gerada e sua correspondente densidade espectral,
comparada ao espectro teórico de Harris. Verifica-se uma boa correlação entre os dois
espectros mencionados.
Figura 4.2: História da velocidade de turbulência ( )30,5 z m= .
-30
-20
-10
0
10
20
30
0 100 200 300 400 500 600
mus
[ ]t s

56
Figura 4.3: Densidade espectral do sinal de flutuação da figura 4.2 e função densidade
espectral de flutuação de Harris.
A densidade espectral do sinal gerado u, assim como as outras densidades
espectrais obtidas numericamente neste trabalho, foi obtida através da rotina pburg do
programa comercial MatLab.
Definida a flutuação u , calcula-se a ação dinâmica por meio da equação 3.12. A
Figura 4.4 mostra a variação desta ação em função do tempo.
Figura 4.4: História da força dinâmica a 30,5 metros de altura
(somente parcela flutuante).
Com ação dinâmica definida no tempo, para resolver o problema, basta integrar
o sistema de equações diferenciais de equilíbrio dinâmico, sistema 3.23. Neste caso,
trata-se de uma equação dada por:
( )325 33,9 8212x x x F t+ + =ɺɺ ɺ (3.23a)
0
50
100
150
200
250
0,00 0,25 0,50 0,75 1,00
Espectro de Su
Espectro de Harris
-40
-30
-20
-10
0
10
20
30
40
0 100 200 300 400 500 600
( )2m s
u HzS
[ ] f Hz
[ ]F kN
[ ] t s

57
A solução da equação diferencial pode ser feita através de uma integração
numérica utilizando o método Runge-Kutta de quarta ordem. Para esta integração foi
utilizada a rotina ode43 do software MATLAB, usando suas configurações padrões.
O resultado obtido para o deslocamento, na direção da velocidade média do
vento, é apresentado no domínio do tempo no gráfico da Figura 4.5 e sua densidade
espectral no gráfico da Figura 4.6.
Figura 4.5: Deslocamento na torre ( )30,5 z m= .
Figura 4.6: Densidade espectral do deslocamento na torre ( )30,5 z m= .
A variância da resposta é obtida pela integral da sua densidade espectral,
equação 3.37. Esta integral, assim como as outras contidas nesta dissertação, foram
resolvidas numericamente através da regra dos trapézios com um intervalo de
integração de 0,001 Hz. Resultando uma variância da resposta do deslocamento na
torre:
( )2 6 2
0 5,64 10 x xS f df mσ
∞ −= = ×∫ (3.37a)
-0,015
-0,010
-0,005
0,000
0,005
0,010
0,015
0 100 200 300 400 500 600
0,00
0,05
0,10
0,15
0,20
0,25
0,0 0,5 1,0 1,5 2,0
[ ]t s
[ ]x m
[ ]f Hz
[ ]xS m
310−×

58
com um desvio padrão 32,375 10x mσ −= × .
Conforme descrito no item 3.3.2, o deslocamento dinâmico máximo provável,
maxx , é obtido multiplicando seu desvio padrão, xσ , por um fator de pico, g . O fator de
pico é dado pela equação 3.40.
( )( )
( )( )
0,577 0,5772ln 2ln 419
2ln 2ln 419
3,64
g TT
g
νν
= + = +
=
(3.40a)
sendo Tν , para uma análise no domínio do tempo, tomado como o número de
cruzamentos de zeros ascendentes da resposta.
Assim, tem-se um deslocamento máximo provável igual a:
3max
3max
ˆ 3,64 2,375 10
ˆ 8,64 10
xx g
x m
σ −
−
= = × ×
= ×
4.1.2.3 Componente flutuante de velocidade ( )u : Domínio da frequência
Este método, descrito no item 3.3.3 envolve a densidade espectral de potência da
excitação, que é função do espectro das componentes flutuantes de velocidade do vento.
Para este exemplo foi utilizado o espectro de Harris, mantendo os mesmos dados
referente ao item 4.1.2.2.
Nas figuras 4.7 a 4.9 encontram-se respectivamente: a densidade espectral da
ação dinâmica, equação 3.51; a função de admitância mecânica, equação 3.30; e o
espectro de reposta da estrutura, equação 3.52.
Figura 4.7: Densidade espectral da ação dinâmica em escala logarítmica.
0,0
1,0
2,0
3,0
4,0
1,00E-03 1,00E-02 1,00E-01 1,00E+00
910×
( )2
p Hz
NS
( ) [ ]log f Hz

59
Figura 4.8: Função de admitância mecânica da estrutura em escala logarítmica.
Figura 4.9: Densidade espectral da resposta em escala logarítmica.
Resultando uma variância da resposta, equação 3.37:
( )2 6 2
0 6,60 10x xS f df mσ
∞ −= = ×∫ (3.37b)
com um desvio padrão 32,569 10x mσ −= × .
Para uma análise no domínio da frequência, o fator de pico também é dado pela
equação 3.40. Porém, o termo ν e T desta equação são respectivamente a frequência
do modo vibração da estrutura e o intervalo de tempo da análise. Resultando um fator de
pico:
( )( )
( )( )
0,577 0,5772ln 2ln 0,8 600
2ln 2ln 0,8 600
3,68
g TT
g
νν
= + = × +×
=
(3.40b)
0,0
1,0
2,0
3,0
1,00E-03 1,00E-02 1,00E-01 1,00E+00
0,00
0,05
0,10
0,15
0,20
0,25
1,E-03 1,E-02 1,E-01 1,E+00
( ) [ ]log f Hz
( ) [ ]log f Hz
2
xmS
Hz
310×
310−×
( )2
H f

60
Como no subitem anterior, o deslocamento máximo provável, maxx , é obtido
multiplicando seu desvio padrão, xσ , pelo fator de pico, g :
3max
3max
ˆ 3,68 2,569 10
ˆ 9,45 10
xx g
x m
σ −
−
= = × ×
= ×
Ainda, o gráfico da Figura 4.10 apresenta um gráfico com as densidades
espectrais da resposta para solução no domínio do tempo e da frequência.
Figura 4.10: Densidade espectral da resposta para solução
no domínio do tempo e da frequência.
4.1.2.4 Componente flutuante de velocidade ( )u : Fator de rajada
Como visto no item 3.3.2, o método de Davenport determina um deslocamento
máximo provável devido à flutuação, maxx , em função do deslocamento máximo devido
à componente média de velocidade do vento, x . Esta relação é dada na equação 3.41 e
reproduzida a seguir:
maxˆ 2 ux g I B R x = + (3.41a)
O fator de resposta não ressonante, B , é dada pela integral da expressão 3.38 e
reescrita a seguir:
( )2
0 ' =0,959a uB S f dfχ
∞≈ ∫ (3.38a)
0,00
0,05
0,10
0,15
0,20
0,25
0,0 0,5 1,0 1,5 2,0
Domínio do tempo
Domínio da frequência
310−×
2
xmS
Hz
[ ] f Hz

61
2aχ é a função de admitância aerodinâmica (equação 3.17) e ( ) ( ) 2' .
u u uS f S f σ=
Sendo que, para efeito de comparação com os itens anteriores o espectro utilizado foi o
espectro de Harris.
O fator de resposta ressonante, R , é dado pela expressão 3.38 e reescrita a
seguir:
( ) ( )2 R ' 2,351
4 r
a r u r
ff S f
πχ
ζ≈ =
(3.38a)
com,
frequência fundamental de vibração da estrutura: 0,80 rf Hz= ;
admitância mecânica para frequência rf : ( )2 0,810
a rfχ = ;
espectro 'uS para frequência r
f : ( )' 0,0462u rS f = ;
razão de amortecimento crítico da estrutura: 0, 01ζ = .
Com os fatores de resposta de resposta B e R definidos, tem-se para o
deslocamento dinâmico máximo provável:
max
3max
ˆ 2
ˆ 7,74 10
ux g I B R x
x −
= +
= ×
Com,
- fator de pico: 3, 68g = (idem ao item anterior);
- A intensidade de turbulência 0,265u uI Uσ= = (equação 2.5);
- Deslocamento devido à velocidade média do vento: 32,18 10 x m−= × (item
4.1.2.1).
4.1.3 Resultados da torre de reservatório
A Tabela 4.1 apresenta uma síntese dos resultados para a torre de reservatório,
em termos de deslocamento máximo provável, encontrados nos itens 4.1. Verifica-se
que os resultados encontrados na solução através dos domínios do tempo e da
frequência se aproximaram, como pode ser observado no gráfico das densidades
espectrais para ambas as soluções (Figura 4.10).

62
Ainda, a solução pelo processo proposto por Davenport apresentou um bom
resultado, quando comparado as soluções anteriores. Em seu formato original o método
é aplicável a um modelo de um sistema de um grau de liberdade discreto.
Também é importante ressaltar, para esta estrutura, a significativa diferença
entre as análises estática e dinâmica, resultando um deslocamento máximo na análise
dinâmica da ordem de duas vezes o da análise estática.
Tabela 4.1: Resultados do deslocamento máximo provável para a torre de reservatório.
Modelo 3 10x m− 3
maxˆ 10x m− 3
max 10x m−
Análise estática - - 5,26
Análise dinâmica: Domínio do tempo
2,18
8,64 10,82
Análise dinâmica: Domínio da frequência
9,45 11,63
Análise dinâmica: Processo de Davenport
7,74 9,92
4.2 Chaminé
Como segundo exemplo, tem-se a chaminé de concreto armado, ilustrada na
Figura 4.11 (a), de 180 metros de altura e cujo modelo com elementos de pórtico plano
está mostrado na Figura 4.11 (b). As características geométricas dos elementos estão
indicadas na Tabela 4.2, enquanto que os dados associados aos nós do modelo adotado
na análise dinâmica estão apresentados na Tabela 4.3. Este exemplo foi retirado do
anexo I da NBR 6123 (1988), sendo parte dos dados da Tabela 4.2 obtidos por
interpolação linear dos valores fornecidos no referido anexo. O módulo de elasticidade
do material foi adotado a 628,5 10 ²E kN m= × .
Foi calculada a frequência fundamental de vibração da chaminé, obtendo-se
1 0,26 f Hz= . A forma do modo fundamental de vibração está dada também na tabela
4.3, adotando-se uma razão de amortecimento estrutural 0,01est
ζ = . O coeficiente de

63
arrasto é 0, 6Ca = , tendo em vista o número de Reynolds e a rugosidade da superfície
da chaminé.
Para os cálculos de velocidade de vento foram utilizados os seguintes dados:
velocidade básica do vento, 0 40,0 U m s= , fator topográfico 1 1S = e o fator
probabilístico, 3 1S = ; Terreno com categoria de rugosidade III da NBR6123 (1988).
(a) (b)
Figura 4.11: (a) Elevação da chaminé; (b) Modelo da chaminé.
Tabela 4.2: Características geométricas da chaminé.
Elemento z
( )m
Diâmetro externo
( )m
Espessura da parede
( )m
Momento de inércia
( )4m
11
10
9
8
7
6
5
4
3
2
1
165 - 180
150 - 165
135 - 150
120 - 135
105 - 120
90 - 105
75 - 90
60 - 75
40 - 60
20 - 40
0 - 20
4,92
5,27
5,61
5,98
6,43
6,89
7,34
7,81
8,35
8,97
9,56
0,17
0,17
0,17
0,17
0,20
0,22
0,25
0,35
0,48
0,60
0,60
7,18
8,85
10,77
13,36
18,86
25,85
34,59
56,77
92,87
138,80
170,41

64
Tabela 4.3: Dados associados aos nós do modelo adotado. 1φ é o autovalor associado ao
primeiro modo de flexão; im é a massa concentrada no nó i; i
A e iCa são,
respectivamente a área exposta e o coeficiente de arrasto correspondente ao nó i.
nó iz
( )m
1φ i
m
( )kg
iA
( )2m iCa
11
10
9
8
7
6
5
4
3
2
1
180
165
150
135
120
105
90
75
60
40
20
1,00
0,84
0,69
0,54
0,41
0,30
0,21
0,14
0,08
0,04
0,01
70900
146200
153700
163100
174400
195000
232500
292500
463800
750000
1254000
36,3
76,4
81,6
86,9
93,0
99,9
107,2
114,0
141,4
173,2
282,5
0,6
0,6
0,6
0,6
0,6
0,6
0,6
0,6
0,6
0,6
0,6
Assim como no exemplo da torre de reservatório, item 4.1, a chaminé é
resolvida nos próximos subitens de maneira estática e dinâmica. Para o cálculo estático
dos deslocamentos provocados por forças devidas à velocidade do vento foi utilizado o
software SAP2000.
4.2.1 Análise estática da chaminé (item 4 da NBR 6123)
Como no exemplo anterior, a análise estática é feita considerando uma
velocidade de vento característica, kU , dada através da equação 4.1 e reescrita a seguir:
( ) 0 1 2 3 kU z U S S S= (4.1)
com:
0 40,0 U m s= , velocidade básica do vento;
1 3 1S S= = , fatores de correção da velocidade;
210
pz
S b = ⋅
, sendo os parâmetros b e p, fornecido pela tabela 1 da NBR6123

65
(1988). Porém, para estruturas cuja maior dimensão excede 80 m, este parâmetro
pode ser calculado para um intervalo de tempo, t, de acordo com o anexo A
desta norma:
( )17,5
t
Lt
U h= (4.3)
onde: 1L , é o maior valor entre a largura e a altura da superfície frontal da edificação;
( ) ( )1 2 0 t
U h S S h U= , é a velocidade média sobre t segundos, no topo da edificação.
O cálculo do intervalo de tempo t é feito de forma iterativa, por aproximações
sucessivas de t e tU . Resultando um intervalo de tempo de aproximadamente 25
segundos para a dimensão de 180 metros. Por interpolação linear da tabela 21 da NBR
6123 (1988) têm-se 0,915b = e 0,135p = .
A Tabela 4.4 apresenta o perfil de velocidade característica do vento e as forças
estáticas referentes a esta velocidade (equação 3.11).
Tabela 4.4: forças estáticas devido ao vento.
nó z
( )m
kU ( )m
q ( )2kN m
a
C e
A ( )2m
aF
( )kN
11
10
9
8
7
6
5
4
3
2
1
180
165
150
135
120
105
90
75
60
40
20
54,07
53,44
52,75
52,01
51,19
50,27
49,24
48,04
46,62
44,13
40,19
1,79
1,75
1,71
1,66
1,61
1,55
1,49
1,41
1,33
1,19
0,99
0,6
0,6
0,6
0,6
0,6
0,6
0,6
0,6
0,6
0,6
0,6
36,3
76,4
81,6
86,9
93
99,9
107,2
114
141,4
173,2
282,5
39,03
80,24
83,52
86,45
89,63
92,87
95,59
96,77
113,01
124,07
167,83
Aplicando a força de arrasto, aF , na estrutura, resulta em um deslocamento
máximo no topo da chaminé, 0,325 x m= .

66
4.2.2 Análise dinâmica da chaminé
Novamente, como no exemplo anterior, a análise dinâmica foi separada em duas
partes, escrevendo a velocidade do vento na direção principal, U , como a soma de uma
componente média, U , com uma componente flutuante, u . A análise dinâmica é
resolvida por quatro métodos diferentes: resolução no domínio da frequência; processo
Dyrbye e Hansen, processo adotado pelo Eurocode e modelo discreto da NBR 6123
(1988).
Estes métodos estão descritos no capítulo 3 e podem ser resolvidos utilizando o
método da superposição modal. Assim, para efeito de comparação entre os métodos, a
chaminé foi resolvida utilizando somente o primeiro modo natural de vibração da
estrutura.
4.2.2.1 Componente média de velocidade ( )U
A velocidade média, U , corresponde a uma velocidade média tomada em 10
minutos, o perfil de velocidade média para uma análise dinâmica é dada, pela
NBR6123, através da equação 4.2 e reescrita a seguir:
( ) 0 1 2 30,69 U z U S S S= (4.2a)
com,
0 40,0 U m s= , velocidade básica do vento;
1 3 1S S= = , fatores de correção da velocidade;
2 10
pz
S b = ⋅
, onde, para uma análise dinâmica, os parâmetros 0,86b = e
0,185p = , são fornecidos pela tabela 20 da NBR6123 (1988).
A Tabela 4.5 apresenta o perfil de velocidade do vento de projeto e as forças
estáticas referentes a esta velocidade (equação 3.11).

67
Tabela 4.5: Resultados para a componente média de velocidade de projeto.
nó z
( )m
pU
( )m s
q ( )2kN m
Ca
eA
( )2m
aF ( )kN
11
10
9
8
7
6
5
4
3
2
1
180
165
150
135
120
105
90
75
60
40
20
40,52
39,87
39,17
38,42
37,59
36,67
35,64
34,46
33,06
30,68
26,98
1,01
0,97
0,94
0,90
0,87
0,82
0,78
0,73
0,67
0,58
0,45
0,6
0,6
0,6
0,6
0,6
0,6
0,6
0,6
0,6
0,6
0,6
36,3
76,4
81,6
86,9
93
99,9
107,2
114
141,4
173,2
282,5
21,92
44,67
46,05
47,17
48,33
49,41
50,08
49,79
56,86
59,94
75,65
Aplicando a força de arrasto, aF , na estrutura, resulta em um deslocamento
máximo no topo da chaminé, 177 x 0, m= .
4.2.2.2 Componente flutuante de velocidade ( )u : Domínio da frequência
A razão de amortecimento crítico é igual a est aerζ ζ ζ= + , com parcela de
amortecimento estrutural 1,0%est
ζ = e a parcela referente ao aerodinâmico é dada pela
equação 3.24 e calculada a seguir:
2,
1,
0,0046 0,46%
2
n
j k k k k
kaer j
j j
Ca A U
m
ρ φζ
ω== = =∑
(3.24b)
Resultando uma razão de amortecimento 1,46%est aer
ζ ζ ζ= + = .
Este método, descrito no item 3.3.3 envolve a densidade espectral de potência da
excitação, que é função do espectro das componentes flutuantes de velocidade de vento.
Para este exemplo foi utilizado o espectro de Harris, mantendo os mesmos dados
referente ao item 4.1.2.2.

68
Nas figuras 4.15 a 4.17 encontram-se respectivamente: o espectro de Harris; a
função de admitância mecânica, equação 3.30; o espectro de resposta da estrutura,
equação 3.52.
Figura 4.12: Espectros Harris em escala logarítmica.
Figura 4.13: Função de admitância mecânica da estrutura em escala logarítmica.
Figura 4.14: Espectro de reposta da estrutura em escala logarítmica.
Resultando uma variância da resposta, equação 3.37:
( )2 2
0 0,00765x xS f df mσ
∞= =∫ (3.37d)
com um desvio padrão 0,0875 x
mσ = .
0
250
500
750
1000
0,01 0,10 1,00
0
250
500
750
1000
1250
1500
0,01 0,10 1,00
0
0,1
0,2
0,3
0,4
0,5
0,01 0,10 1,00( ) [ ]log f Hz
( ) [ ]log f Hz
( ) [ ]log f Hz
( )2m s
u HzS
2
,1amS
Hz
( )2
H f

69
Para uma análise no domínio da frequência, o fator de pico também é dado pela
equação 3.40. Porém, o termo ν e T desta equação são respectivamente a frequência
do modo vibração da estrutura e o intervalo de tempo da análise. Resultando um fator de
pico:
( )( )
( )( )
0,577 0,5772ln 2ln 0,26 600
2ln 2ln 0,26 600
3,36
g TT
g
νν
= + = × +×
=
(3.40d)
Como no subitem anterior, o deslocamento máximo provável, maxx , é obtido
multiplicando seu desvio padrão, xσ , pelo fator de pico, g :
max
max
ˆ 3,36 0,0875
ˆ 0,294 xx g
x m
σ= = ×
=
Este método foi também utilizado, para determinação de ˆmáxx , em mais duas
análises: para uma razão de amortecimento crítico 1%est
ζ ζ= = ; e para a ação do vento
considerando-se a turbulência dada pelo espectro ESDU (equação 2.13) e perfil de
velocidade dado pela lei logarítmica. Para categoria III da NBR 6123 (1988) o
comprimento de rugosidade é 0z igual a 0,2 metros (Tabela 2.1); ver a figura 2.11. O
resumo dos resultados encontra-se mais adiante na tabela 4.7
4.2.2.3 Componente flutuante de velocidade ( )u : Eurocode – Procedimento 1
A resposta flutuante pelo procedimento 1 do processo descrito pelo Eurocode é
dada por uma expressão da forma da equação 3.41 e reescrita a seguir:
maxˆ 2 ux g I B R x = + (3.41)
com,
- 0,177 x m= , item 4.2.2.1;
- 3,36g = , fator de pico (idem ao item anterior);

70
- A intensidade de turbulência é calculada por meio da equação 2.5 para a uma
altura de referencia, 0,6refz h= , conforme figura 3.6:
( ) ( )0
1 10,159
ln ln 108 0,2uIz z
= = = ;
Os fatores de resposta não ressonante, B , e ressonante, R , são dados
respectivamente pelas equações 3.57 e 3.58. Sendo estes, calculados a seguir.
- Fator de resposta não ressonante:
( )
0,63
1
1 0,9
0,544b h
L z
B+
+
= =
(3.57a)
com,
7,17b m= , largura média da estrutura;
180 h m= , altura da estrutura;
( )( )00,67 0,05ln
300200
209 ref
z
ref
zL z m
+ = =
, comprimento de escala de turbulência,
equação 2.14, para 108 refz m= e 0 0,2 z m= .
- Fator de resposta ressonante:
(3.58a)
com,
1 12 2 (0,01 0,0046) 0,092δ π ζ π= = × × + = , decremento logarítmico de
amortecimento;
( ) ( )108 38,17 refU z U m s= = , lei logarítmica (equação 2.3);
( )( )
*1 5
3
6,8, 0,100
1 10, 2
Lu ref
L
fS h f
f
= =+
, para ( )
( )1 0, 26 209
38,171,424
L
ref
ref
f L z
U zf
×= = = ,
valor da densidade espectral de turbulência na forma adimensional, equação
2.13;
( )2
*1
1
, 0,7522 u ref h bR S h f R Rπδ
= =

71
( )22
1 11 0,162
2 h
h
h h
R eη
η η−= − − = , para
( ) ( )4,6 , 5,641h L ref r
hf z f
L zη = = , fator de
admitância aerodinâmica associado à dimensão vertical, equação 3.59;
( )22
1 11 0,865
2 b
b
b b
R eη
η η−= − − = , para
( ) ( )4,6 b, 0,225b L ref rf z f
L zη = = , fator de
admitância aerodinâmica associado à dimensão horizontal, equação 3.59;
Definidos todos os parâmetros da equação 3.41, resulta um deslocamento
flutuante máximo de:
max
max
max
ˆ 2
ˆ 2 3,36 0,159 0,544 0,752 0,177
ˆ 0, 215 ; 0,064
u
x
x g I B R x
x
x m mσ
= +
= × × + = =
(3.41b)
4.2.2.4 Componente flutuante de velocidade ( )u : Dyrbye e Hansen
Assim, como o processo do Eurocode, a resposta flutuante pelo processo do
Dyrbye e Hansen também é dada por uma expressão da forma da equação 3.41, porém
os fatores de respostas não ressonante, B , e ressonante, R , são dados respectivamente
pelas equações 3.60 e 3.61. Sendo estes, calculados a seguir:
- Fator de resposta não ressonante:
( ) ( ) ( ) ( )
2 2 2
10, 432
3 31
2
B
b h b h
L z L z L z L zπ
= =
+ + +
(3.60a)
para 7,17b m= , 180 h m= e ( ) 209 refL z m= (idem ao item anterior).
- Fator de resposta ressonante:
( )2
* , 1, 2022 u ref r sR S h f Rπδ
= = (3.61a)
para 1 0,092δ = e ( )*1, 0,100u refS h f = (idem ao item anterior), e s
R dado na equação
3.62 e reescrita a seguir:

72
( ) ( )2
2 2
1 0,224
21
s
y y z z y y z z
R
G G G Gφ φ φ φπ
= = + + +
(3.62a)
Com:
( ) 10 7,17 0,26
0,48838,17
y r
y
ref
C b f
U hφ
× ×= = = ;
( ) 10 180 0,26
12,2638,17
z rz
ref
C h f
U hφ
× ×= = = ;
1 2yG = e 5/18
zG = (Tabela 3.1).
O fator de pico é definido, como nos itens anteriores (4.2.2.3 e 4.2.2.4), é
definido através da equação 3.40. Porém, a frequência efetiva da resposta é dada pela
equação 3.63 e calculada a seguir:
2 2 2 20 0,132 0, 432 0, 26 1,169
0, 2330, 432 1,169
en B n Rv Hz
B R
+ × + ×= = =
+ + (3.63a)
com 0,26 en Hz= e
( )( )0
38,17 180 7,170,3 0,3 0,132
209 180 7,17
refU z h bn
L zh b
×= = =
×
Resultando um fator de pico igual a:
( )( )
( )( )
0,577 0,5772ln 2ln 0,233 600
2ln 2ln 0,233 600
3,33
g TT
g
νν
= + = × +×
=
(3.40e)
Definidos todos os parâmetros da equação 3.41, resulta um deslocamento
flutuante máximo de:
max
max
max
ˆ 2
ˆ 2 3,33 0,159 0, 432 1, 202 0,177
ˆ 0, 240 ; 0,0721
u
x
x g I B R x
x
x m mσ
= +
= × × + = =
(3.41c)

73
4.2.2.5 Componente flutuante de velocidade ( )u : Modelo discreto
Como visto no capítulo 3, item 3.3.6, o modelo discreto determina uma força
estática equivalente para estimar o deslocamento máximo dinâmico da estrutura. Esta
força em cada nó k é dada pela equação 3.72, repetida abaixo:
, ,ˆ j k H k j kF F m φ= (3.72a)
km é a massa referente ao nó k e ,j kφ é o autovalor correspondente ao nó k referente ao
modo de vibração j. HF é dado pela equação 3.48 e repetida abaixo:
2 ,1
2,
1
10
2
pnk
k k j kref k
H n
k j k
k
zCa A
UF
m
φρξ
φ
=
=
=
∑
∑ (3.48a)
com,
31, 226 kg mρ = , massa específica do ar;
( )10min
10 23,74 ref
U U m s= = , velocidade de referência;
kCa , k
z , kA , ,j kφ e k
m , são respectivamente o coeficiente de arrasto, a altura, a
área efetiva, o auto valor do modo de vibração j e a massa correspondente ao
elemento k, todos estes valores se encontram na tabela 4.3;
ξ , é o coeficiente de amplificação dinâmica.
O coeficiente de amplificação dinâmica é obtido através do gráfico da figura 3.9,
retirado da NBR6123, a figura 4.18 mostra a determinação gráfica de ξ . Este gráfico é
definido dos seguintes parâmetros:
Taxa de amortecimento, 0, 01ζ = ;
Velocidade de projeto, ( )110min, 0 310 0,69 27,6 P IIU U U S S m s= = = ;
Frequência natural do modo de vibração j; 0, 26 jf Hz= ;
Parâmetro de ajuste experimental; 1800L = .
A Figura 3.9 apresenta dois gráficos, um para estruturas alteadas, com relação
largura/altura igual a 0, e outro para estrutura com relação largura/altura maior ou igual

74
a 2. Para casos intermediários, pode-se efetuar uma interpolação entre os gráficos.
Porém, por a chaminé se tratar de uma estrutura alteada e por ter sido discretizada
linearmente, foi adotado o gráfico para relação largura/altura igual a 0, com a
interpolação efetuada apresentada no gráfico da figura Figura 4.15.
Figura 4.15: determinação gráfica de ξ .
No gráfico com 1 0I h = , obteve-se para 100 h m= , 1,91ξ = , e para
300 h m= , 1,15ξ = . Com uma interpolação linear para estes dois valores, chega-se a
1, 61ξ = .
A tabela 4.6 mostra os resultados obtidos para as forças equivalentes dinâmicas,
,ˆj kF , atuantes na chaminé. Com os seguintes resultados parciais:
2,
1
2 5,
1
318,12 10
3,62 10
0,462
pnk
k k j k
k
n
k j k
k
H
zCa A m
m kg
NFkg
φ
φ
=
=
=
= ×
=
∑
∑

75
Tabela 4.6: Resultados para forças equivalentes dinâmicas atuantes na chaminé.
z
( )m
,ˆj kF
( )kN
180
165
150
135
120
105
90
75
60
40
20
34,66
60,04
51,85
43,06
34,95
28,60
23,87
20,02
18,14
14,67
6,13
Aplicando a forças equivalentes dinâmicas, ,ˆj kF , na estrutura, resulta em um
deslocamento máximo no topo da chaminé, ˆ 184 x 0, m= , que corresponde a um desvio
padrão xσ de 0,046 metros já que g é tomado igual a 4.
4.2.3 Resultados da chaminé
Os resultados são apresentados em termos do deslocamento máximo da chaminé
( 180z m= ). A Tabela 4.7 apresenta os resultados da análise dinâmica para os
diferentes métodos usados no item 4.2.2. Nas análises alguns parâmetros foram variados
para permitir comparações com os processos normativos. Por exemplo, para efeito de
comparação com o método da NBR6123, a solução da frequência foi efetuada
admitindo-se o espectro de Harris e desprezando-se o amortecimento aerodinâmico.
Para comparação com o processo do Eurocode e de Dyrbye & Hansen, considerou-se o
espectro do ESDU e a existência do amortecimento aerodinâmico. As soluções
numéricas com o espectro de Harris (equação 2.15) utilizam a lei potencial (equação
2.1) para o perfil vertical de velocidades e a equação 2.21 para o co-espectro
normalizado uψ , conforme adotado pela NBR 6123. Já as soluções com o espectro

76
ESDU (equação 2.13) utilizam a lei logarítmica (equação 2.3) e a função uψ dada pela
equação 2.18, além de ( )L z descrito pela equação 2.14.
As comparações entre as soluções numéricas no domínio da frequência e os
métodos de cálculo manuais são feitas separadamente em termos do desvio padrão das
respostas e do fator de pico (g).
Tabela 4.7: Resultados da análise dinâmica da chaminé: com Categoria III ( 0,185p =
para lei potencial e 0 0,2 z m= para lei logarítmica), 0 40U m s= .
Método de análise
dinâmica
Espectro
uS
x
[ ]m
xσ
[ ]m
ζ
[ ]%
g x
x gσ+
[ ]m
Análise Estática - 0,325 - - - 0,325
Domínio da frequência Harris
0,177
0,088 1,46 3,36 0,471
Domínio da frequência Harris 0,100 1,00 3,36 0,513
Modelo discreto
NBR6123
Harris 0,046 1,00 4,00 0,361
Domínio da frequência ESDU 0,083 1,46 3,36 0,456
Eurocode
procedimento 1 ESDU 0,064 1,46 3,36 0,392
Dyrbye e Hansen
(processo 2- Eurocode) ESDU 0,072 1,46 3,33 0,419
Como primeira análise pode-se notar a influência da consideração da razão de
amortecimento aerodinâmico. Para a solução no domínio da frequência, sua
consideração apresentou uma redução 8 % na resposta.
A resposta obtida pelo modelo discreto da NBR 6123 apresentou um resultado
abaixo dos obtidos por outros métodos. Porém, este método inclui algumas
simplificações para utilização de gráficos na determinação do coeficiente de
amplificação dinâmica, ficando difícil uma comparação direta dos resultados. Em

77
termos de desvio padrão da resposta, observa-se que a solução numérica no domínio da
frequência com espectro de Harris e 1%ζ = forneceu um valor maior que o dobro
daquele obtido pelo modelo discreto. Esta diferença é, em parte, compensada no
resultado final em termos de deslocamento máximo pelo maior valor de g (igual a 4,0)
adotado no modelo discreto.
Agora, comparando os resultados para solução no domínio da frequência,
processo adotado pelo Eurocode e o de Dyrbye e Hansen, que consideram a lei
logarítmica e o espectro ESDU, observa-se, em geral, uma melhor correlação dos
resultados.
A tabela 4.8 apresenta os resultados destes processos separados em termos da
variância das respostas não ressonante e ressonante. A solução numérica no domínio da
frequência foi aplicada com espectro ESDU e três expressões diferentes para a função
do co-espectro uψ . Esta função dada pela equação 2.18 é também adotada pelo processo
de Dyrbye e Hansen. Apesar de utilizar os mesmos parâmetros para descrever a
turbulência para fins de resposta ressonante, verifica-se que a solução numérica (com a
equação 2.18) e o processo de Dyrbye e Hansen apresentam significativa diferença na
variância desta parcela (0,00475 m² para o primeiro e 0,00381 m² para o segundo
método). A representação da força modal no método de Dyrbye e Hansen é feita através
da função de distribuição de carga kg (ver equação 3.52) com (z/h)², que neste caso
representa bem os dados do exemplo. Resta ainda esclarecer a origem da diferença
encontrada. Em termos da resposta não ressonante a diferença é ainda maior, mas neste
caso a abordagem do método de Dyrbye e Hansen é distinta da solução numérica deste
trabalho. Ainda, na Tabela 4.8 pode-se apreciar a influência do formato da função uψ .
Verifica-se que o formato exponencial modificado da equação 2.22 realmente reduz a
correlação em baixas frequências (ver figura 2.8).

78
Tabela 4.8: Resultados para solução no domínio da frequência com espectro ESDU
(com L(z) dado pela equação 2.14) e com diferentes funções para o co-espectro
normalizado de velocidade de vento e para o processo de Dyrbye & Hansen.
Método de análise
dinâmica
Função co-espectro
normalizado
2xσ não-ressonante
2m
2xσ ressonante
2m x
σ [ ]m
Domínio da frequência
Eq. 2.18 0,00220 0,00475 0,0834
Eq. 2.21 0,00231 0,00571 0,0896
Eq. 2.22 0,000685 0,00285 0,0595
Dyrbye e Hansen
Eq. 2.18 para parcela
ressonante 0,00137 0,00383 0,0721
Por fim, observa-se novamente a importância da análise dinâmica em estrutura
de baixa frequência fundamental de vibração. Sendo que uma análise puramente estática
segundo os critérios da NBR6123 apresentou uma resposta máxima de 0,325 x m= ,
enquanto a análise dinâmica no domínio da frequência da ordem de 0,5 x m= .
Os resultados mostrados na Tabela 4.7 referem-se à análise de um mesmo
modelo estrutural sob ação de vento turbulento caracterizado por uma mesma
velocidade média V0 = 40m/s. As diversas análises são originadas de dois modelos para
a caracterização da turbulência, dois valores de taxa de amortecimento e também de
procedimentos diferentes para a estimativa da resposta máxima. Estudos comparativos
desta natureza são importantes para avaliar a incerteza de modelagem (Kaminski et al.,
2008). No presente caso, mesmo sem realizar uma avaliação quantitativa da incerteza de
modelagem pode-se observar pequenos desvios nos resultados obtidos.
4.3 Edifício de concreto armado
Como terceiro exemplo, é dado um edifício de concreto armado com 50 metros
de altura, 50 metros de largura e 10 metros profundidade. A planta de forma do
pavimento tipo e uma perspectiva do edifício são apresentadas respectivamente nas
Figura 4.16.

Figura 4.16:
Figura
A frequência fundamental de vibração do edifício é
modo fundamental de vibração está dada também na tabela 5.2, adotando
de amortecimento estrutural
vista o número de Reynolds e a rugosidade da superfície
A velocidade média do vento a dez metros de altura é
correspondente a uma velocidade média
média para este exemplo é dado pela lei logarítmica, equação 2.3, com comprimento de
rugosidade 0 0,2z m= .
Como simplificação,
diafragma rígido. Assim, pode
estrutura do edifício divi
discretização adotada para a estrutura
79
Planta de forma do pavimento tipo do edifício
Figura 4.17: Perspectiva do edifício.
A frequência fundamental de vibração do edifício é 1 0,28 f Hz=
modo fundamental de vibração está dada também na tabela 5.2, adotando
de amortecimento estrutural 0,01est
ξ = . O coeficiente de arrasto é aC
vista o número de Reynolds e a rugosidade da superfície do edifício.
A velocidade média do vento a dez metros de altura é refU U m s= =
a uma velocidade média tomada em 10 minutos, e o perfil de velocidade
média para este exemplo é dado pela lei logarítmica, equação 2.3, com comprimento de
Como simplificação, assume-se que as lajes do edifício funcionam como um
ígido. Assim, pode-se adotar um modelo plano para sua análise, ficando a
estrutura do edifício dividida em seis pórticos planos. A Figura
discretização adotada para a estrutura e a Tabela 4.9 as correspondentes propriedades
Planta de forma do pavimento tipo do edifício.
0,28 f Hz . A forma do
modo fundamental de vibração está dada também na tabela 5.2, adotando-se uma razão
1,4aC = , tendo em
( )10 25 U U m s= = ,
tomada em 10 minutos, e o perfil de velocidade
média para este exemplo é dado pela lei logarítmica, equação 2.3, com comprimento de
que as lajes do edifício funcionam como um
se adotar um modelo plano para sua análise, ficando a
Figura 4.18 mostra a
as correspondentes propriedades.

Figura 4.18
Tabela 4.9: Dados associados
primeiro modo de flexão;
respectivamente a área de expo
nó iz
( )m
1 e 41
2 e 42
3 e 43
4 e 44
5 e 45
6 e 46
7 e 47
8 e 48
9, 17, 25 e 33
10, 18, 26 e 34
11, 19, 27 e 35
12, 20, 28 e 36
13, 21, 29 e 37
14, 22, 30 e 38
15, 23, 31 e 39
16, 24, 32 e 40
6,25
12,50
18,75
25,00
31,25
37,50
43,75
50,00
6,25
12,50
18,75
25,00
31,25
37,50
43,75
50,00
A razão de amortecimento crítico é igual a
amortecimento estrutural ζ
equação 3.24 e calculada a seguir:
80
18: Vista frontal e pórtico plano para o edifício
Dados associados aos nós do modelo adotado. 1φ é o autovalor associado
primeiro modo de flexão; im é a massa concentrada no nó i; i
A e
a de exposição e o coeficiente de arrasto correspondente ao nó
iz
m
1φ i
m
( )kg
iA
( )2m
6,25
12,50
18,75
25,00
31,25
37,50
43,75
50,00
6,25
12,50
18,75
25,00
31,25
37,50
43,75
50,00
0,13
0,30
0,47
0,63
0,77
0,88
0,95
1,00
0,13
0,30
0,47
0,63
0,77
0,88
0,95
1,00
100000
100000
100000
100000
100000
100000
100000
59000
100000
100000
100000
100000
100000
100000
100000
59000
46,875
31,25
31,25
31,25
31,25
31,25
31,25
15,625
93,75
62,50
62,50
62,50
62,50
62,50
62,50
31,25
A razão de amortecimento crítico é igual a est aerζ ζ ζ= + , com parcela de
1,0%est
ζ = e a parcela referente ao aerodinâmico é dada pela
equação 3.24 e calculada a seguir:
Vista frontal e pórtico plano para o edifício.
é o autovalor associado ao
e iCa são,
correspondente ao nó i.
iCa
1,4
1,4
1,4
1,4
1,4
1,4
1,4
1,4
1,4
1,4
1,4
1,4
1,4
1,4
1,4
1,4
, com parcela de
e a parcela referente ao aerodinâmico é dada pela
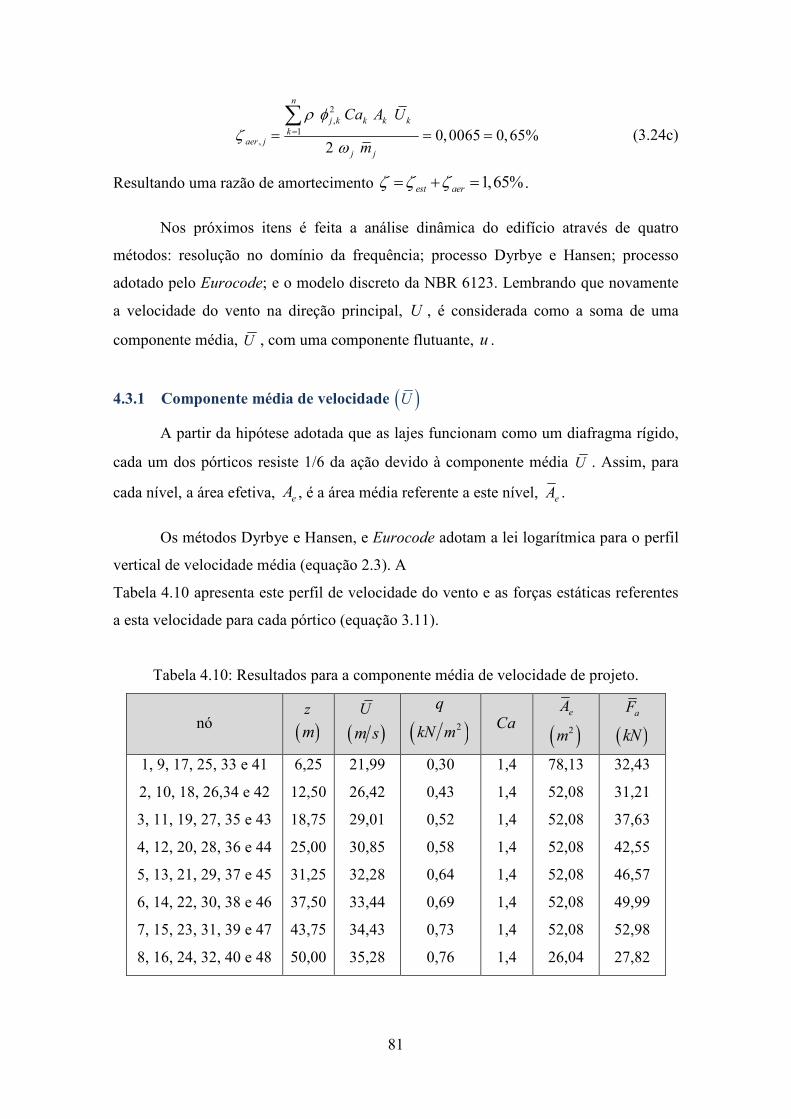
81
2,
1,
0,0065 0,65%
2
n
j k k k k
kaer j
j j
Ca A U
m
ρ φζ
ω== = =∑
(3.24c)
Resultando uma razão de amortecimento 1,65%est aer
ζ ζ ζ= + = .
Nos próximos itens é feita a análise dinâmica do edifício através de quatro
métodos: resolução no domínio da frequência; processo Dyrbye e Hansen; processo
adotado pelo Eurocode; e o modelo discreto da NBR 6123. Lembrando que novamente
a velocidade do vento na direção principal, U , é considerada como a soma de uma
componente média, U , com uma componente flutuante, u .
4.3.1 Componente média de velocidade ( )U
A partir da hipótese adotada que as lajes funcionam como um diafragma rígido,
cada um dos pórticos resiste 1/6 da ação devido à componente média U . Assim, para
cada nível, a área efetiva, eA , é a área média referente a este nível, eA .
Os métodos Dyrbye e Hansen, e Eurocode adotam a lei logarítmica para o perfil
vertical de velocidade média (equação 2.3). A
Tabela 4.10 apresenta este perfil de velocidade do vento e as forças estáticas referentes
a esta velocidade para cada pórtico (equação 3.11).
Tabela 4.10: Resultados para a componente média de velocidade de projeto.
nó z
( )m
U ( )m s
q
( )2kN m
Ca eA
( )2m
aF
( )kN
1, 9, 17, 25, 33 e 41
2, 10, 18, 26,34 e 42
3, 11, 19, 27, 35 e 43
4, 12, 20, 28, 36 e 44
5, 13, 21, 29, 37 e 45
6, 14, 22, 30, 38 e 46
7, 15, 23, 31, 39 e 47
8, 16, 24, 32, 40 e 48
6,25
12,50
18,75
25,00
31,25
37,50
43,75
50,00
21,99
26,42
29,01
30,85
32,28
33,44
34,43
35,28
0,30
0,43
0,52
0,58
0,64
0,69
0,73
0,76
1,4
1,4
1,4
1,4
1,4
1,4
1,4
1,4
78,13
52,08
52,08
52,08
52,08
52,08
52,08
26,04
32,43
31,21
37,63
42,55
46,57
49,99
52,98
27,82
82
Aplicando a força de arrasto, aF , na estrutura, resulta em um deslocamento
máximo no topo do edifício, 188 x 0, m= .
4.3.2 Componente flutuante de velocidade ( )u : Domínio da frequência
Para solução no domínio da frequência foi utilizado o espectro ESDU, dado na
equação 2.13:
( )
( )523
6,8
1 10,2
u L
uL
f S f f
fσ
=+
(2.13a)
onde,
( )( )L
f L z
U zf = , é a frequência adimensionalizada;
( )( )00,67 0,05ln
300200
zz
L z
+ =
, é a escala longitudinal de turbulência.
U , velocidade média dada na tabela 4.10;
0 0,2z m= , comprimento de rugosidade;
2uσ , variância da flutuação.
Nos exemplos anteriores 2uσ
estava sendo calculada por meio da expressão
desenvolvida por Harris (equação 2.6). Porém, os próximos métodos são desenvolvidos
em função da intensidade de turbulência em uma altura de referência, dado na equação
2.5. Assim, para efeito de comparação entre os três métodos utilizados neste exemplo, a
variância da flutuação será determinada através da equação 2.4, desenvolvida a seguir:
( ) ( )u uI z U zσ = (2.4a)
O mesmo procedimento descrito acima foi utilizado para determinar a variância
da flutuação na solução da chaminé (item 4.2), quando empregado o espectro ESDU.
O espectro de resposta da estrutura é dado pela equação 3.52. Seguindo os
mesmos passos do item 4.2.2.3, este espectro é apresentado diretamente no gráfico da
figura 4.24.

83
Figura 4.19: Densidade espectral da resposta para solução
no domínio do tempo e da frequência.
Resultando uma variância da resposta, equação 3.37:
( )2 2
0 0,0109x xS f df mσ
∞= =∫ (3.37e)
com um desvio padrão 0,104 x
mσ = .
Para uma análise no domínio da frequência, o fator de pico também é dado pela
equação 3.40. Porém, o termo ν e T desta equação são respectivamente a frequência
do modo vibração da estrutura e o intervalo de tempo da análise. Resultando um fator de
pico:
( )( )
( )( )
0,577 0,5772 ln 2 ln 0, 28 600 3,38
2 ln 2 ln 0, 28 600g T
Tν
ν= + = × + =
× (3.40f)
Como nos subitens anteriores, o deslocamento máximo provável, maxx , é obtido
multiplicando seu desvio padrão, xσ , pelo fator de pico, g :
max
max
ˆ 3,38 0,104
ˆ 0,351 xx g
x m
σ= = ×
=
Ainda, para efeito de comparação com a solução do modelo discreto da
NBR6123, a estrutura foi resolvida no domínio da frequência considerando o espectro
de Harris para categoria de rugosidade de terreno III (correspondente a 0 0,2z m= ),
perfil vertical de velocidade do vento obedecendo à lei potencial e razão de
amortecimento crítico igual a 1,0%ζ = . Resultando uma variância de 2 20,0298 .x mσ =
0
0,2
0,4
0,6
0,00 0,25 0,50 0,75 1,00
2
xmS
Hz
[ ] f Hz

84
4.3.3 Componente flutuante de velocidade ( )u : Eurocode – Procedimento 1
A resposta flutuante pelo processo do Eurocode é dada por uma expressão da
forma da equação 3.41 e reescrita a seguir:
maxˆ 2 ux g I B R x = + (3.41)
com,
- 0,188 x m= , item 4.3.1;
- 3,38g = , fator de pico (idem ao item anterior);
- ( ) 0,200u refI z = (idem ao item anterior);
Os fatores de resposta não ressonante, B , e ressonante, R , são dados
respectivamente pelas equações 3.57 e 3.58. Sendo estes, calculados a seguir.
- Fator de resposta não ressonante:
( )
0,63
1
1 0,9
0,523b h
L z
B+
+
= =
(3.57b)
com,
50, 0b m= , largura média da estrutura;
50,0 h m= , altura da estrutura;
( )( )00,67 0,05ln
300200
98 ref
z
ref
zL z m
+ = =
, comprimento de escala de turbulência,
equação 2.14, para 30 refz m= e 0 0,2 z m= .
- Fator de resposta ressonante:
( )2
*1
1
, 0,8792 u ref h bR S h f R Rπδ
= = (3.58b)
com,
1 12 2 (0,01 0,0065) 0,104δ π ζ π= = × × + = , decremento logarítmico de
amortecimento;

85
( ) ( )30 32,02 refU z U m s= = , lei logarítmica (equação 2.3);
( )( )
*1 5
3
6,8, 0,131
1 10, 2
Lu ref
L
fS h f
f
= =+
, para ( )
( )1 0, 28 98
32, 020,857
L
ref
ref
f L z
U zf
×= = = ,
valor da densidade espectral de turbulência na forma adimensional, equação
2.13;
( )22
1 11 0,376
2 h
h
h h
R eη
η η−= − − = , para
( ) ( )4,6 , 2,011h L ref r
ref
hf z f
L zη = =
, fator de admitância aerodinâmica associado à dimensão vertical, equação 3.59;
( )22
1 11 0,376
2 b
b
b b
R eη
η η−= − − = , para
( ) ( )4,6 b, 2,011b L ref r
ref
f z fL z
η = = , fator
de admitância aerodinâmica associado à dimensão horizontal, equação 3.59;
Definidos todos os parâmetros da equação 3.41, resulta um deslocamento
flutuante máximo de:
max
max
max
ˆ 2
ˆ 2 3,38 0,200 0,523 0,879 0,188
ˆ 0,301 ; 0,0890
u
x
x g I B R x
x
x m mσ
= +
= × × + = =
(3,41d)
4.3.4 Componente flutuante de velocidade ( )u : Dyrbye e Hansen
Assim, como o processo do Eurocode, a resposta flutuante pelo processo do
Dyrbye e Hansen também é dada por uma expressão da forma da equação 3.41. Porém,
os fatores de respostas não ressonante, B , e ressonante, R , são dados respectivamente
pelas equações 3.60 e 3.61. Sendo estes, calculados a seguir:
- Fator de resposta não ressonante:
( ) ( ) ( ) ( )
2 2 2
10, 466
3 31
2
B
b h b h
L z L z L z L zπ
= =
+ + +
(3.60b)
para 50, 0b m= , 50,0 h m= e ( ) 98 refL z m= (idem ao item anterior).

86
- Fator de resposta ressonante:
( )2
* , 1,5102 u ref r sR S h f Rπδ
= = (3.61b)
para 1 0,104δ = e ( )*1, 0,131u refS h f = (idem ao item anterior), e s
R dado na equação
3.62 e reescrita a seguir:
( ) ( )2
2 2
1 0,243
21
s
y y z z y y z z
R
G G G Gφ φ φ φπ
= = + + +
(3.62b)
com,
( ) 10 50 0,28
4,3732,02
y r
y
ref
C b f
U hφ
× ×= = = e
( ) 10 50 0,28
4,3732,02
z rz
ref
C h f
U hφ
× ×= = = ;
1 2yG = e 3/8
zG = (Tabela 3.1).
O fator de pico é definido, como nos itens anteriores (4.3.2 e 4.3.3), é definido
através da equação 3.40. Porém, a frequência efetiva da resposta é dada pela equação
3.63 e calculada a seguir:
2 2 2 20 0, 098 0, 466 0, 26 1,510
0, 2320, 466 1,510
en B n Rv Hz
B R
+ × + ×= = =
+ + (3.63b)
com 0,28 en Hz= e
( )( )0
32,02 50 500,3 0,3 0,098
98 50 50
refU z h bn
L zh b
×= = =
×
Resultando um fator de pico igual a:
( )( )
( )( )
0,577 0,5772ln 2ln 0,232 600
2ln 2ln 0,233 600
3,33
g TT
g
νν
= + = × +×
=
(3.41e)
Definidos todos os parâmetros da equação 3.41, resulta um deslocamento
flutuante máximo de:
max
max
max
ˆ 2
ˆ 2 3,33 0,200 0,466 1,510 0,188
ˆ 0,352 ; 0,106
u
x
x g I B R x
x
x m mσ
= +
= × × + = =
(3.41e)

87
4.3.5 Componente flutuante de velocidade ( )u : Modelo discreto
O problema do edifício foi resolvido através do modelo discreto da NBR 6123
seguindo os mesmos passos do item 4.2.2.5 para os seguintes dados:
31, 226 kg mρ = , massa específica do ar;
( )10min
10 25,0 ref
U U m s= = , velocidade de referência;
kCa , k
z , kA , ,j kφ e k
m , são os mesmos valores encontrados na tabela 4.9;
O coeficiente de amplificação dinâmica é igual a 1,89ξ = . Sendo este, obtido
através de uma interpolação linear do gráfico da figura 3.9, considerando os seguintes
parâmetros:
Taxa de amortecimento, 0, 01ζ = ;
A velocidade de projeto corresponde a uma velocidade média em 10 minutos, a
10 metros de altura referido à categoria II da NBR613. Assim, a velocidade de
projeto pode ser obtida dividindo a velocidade de referência por b para passar
esta da categoria III para II. Resultando, 29,07 p refU U b m s= = (com b=0,86
correspondente a categoria III);
Frequência natural do modo de vibração j; 0, 28 jf Hz= ;
Parâmetro de ajuste experimental; 1800L = .
A tabela 4.11 mostra os resultados obtidos para as forças equivalentes
dinâmicas, ,ˆj kF , atuantes na chaminé. Com os seguintes resultados parciais:
2,
1
2 6,
1
2521 10
2,15 10
0,849
pnk
k k j k
k
n
k j k
k
H
zCa A m
m kg
NFkg
φ
φ
=
=
=
= ×
=
∑
∑
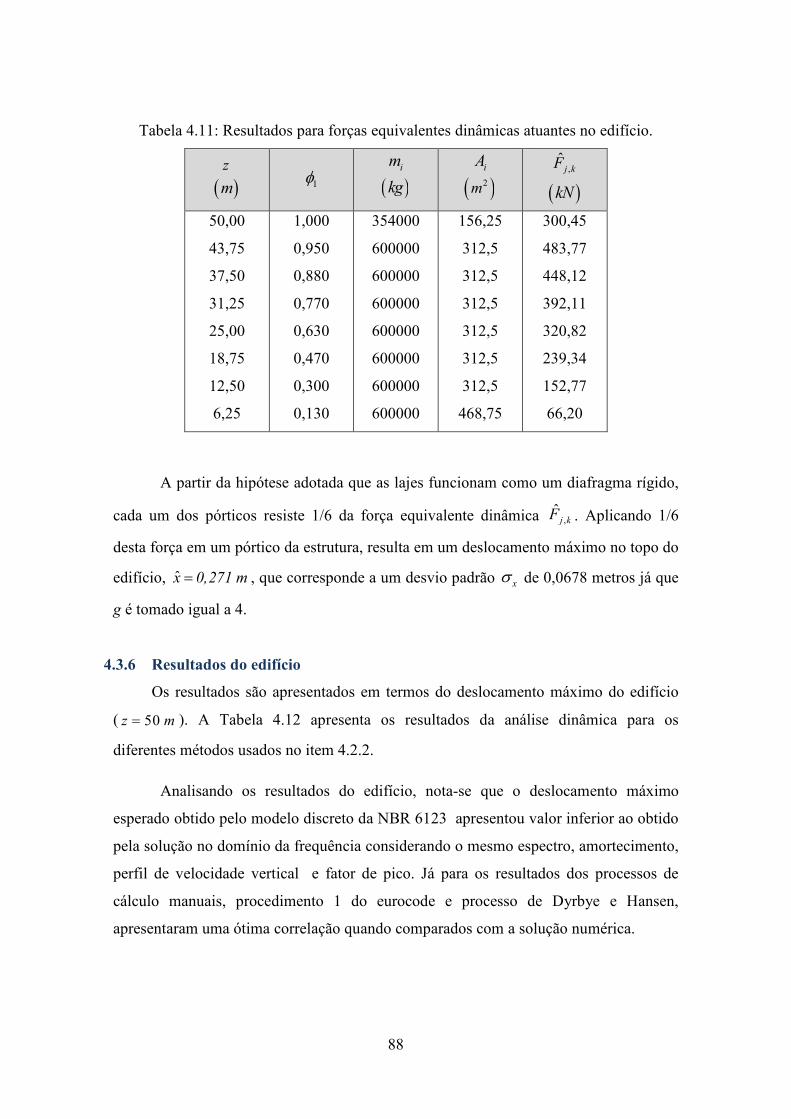
88
Tabela 4.11: Resultados para forças equivalentes dinâmicas atuantes no edifício.
z
( )m
1φ i
m
( )kg
iA
( )2m
,ˆj kF
( )kN
50,00
43,75
37,50
31,25
25,00
18,75
12,50
6,25
1,000
0,950
0,880
0,770
0,630
0,470
0,300
0,130
354000
600000
600000
600000
600000
600000
600000
600000
156,25
312,5
312,5
312,5
312,5
312,5
312,5
468,75
300,45
483,77
448,12
392,11
320,82
239,34
152,77
66,20
A partir da hipótese adotada que as lajes funcionam como um diafragma rígido,
cada um dos pórticos resiste 1/6 da força equivalente dinâmica ,ˆj kF . Aplicando 1/6
desta força em um pórtico da estrutura, resulta em um deslocamento máximo no topo do
edifício, ˆ x 0,271 m= , que corresponde a um desvio padrão xσ de 0,0678 metros já que
g é tomado igual a 4.
4.3.6 Resultados do edifício
Os resultados são apresentados em termos do deslocamento máximo do edifício
( 50z m= ). A Tabela 4.12 apresenta os resultados da análise dinâmica para os
diferentes métodos usados no item 4.2.2.
Analisando os resultados do edifício, nota-se que o deslocamento máximo
esperado obtido pelo modelo discreto da NBR 6123 apresentou valor inferior ao obtido
pela solução no domínio da frequência considerando o mesmo espectro, amortecimento,
perfil de velocidade vertical e fator de pico. Já para os resultados dos processos de
cálculo manuais, procedimento 1 do eurocode e processo de Dyrbye e Hansen,
apresentaram uma ótima correlação quando comparados com a solução numérica.

89
Tabela 4.12: Resultados da análise dinâmica do edifício: 0 0,2 z m= e 25ref
U m s= .
Método de
análise dinâmica
Perfil de
velocidade
Espectro
uS
x
[ ]m
xσ
[ ]m
ζ
[ ]%
g x
x gσ+
[ ]m
Modelo discreto
NBR6123
Lei
potencial Harris
0,173
0,068 1,0 4,0 0,445
Domínio da
frequência
Lei
potencial Harris 0,173 1,0 4,0 0,865
Domínio da
frequência
Lei
logarítmica ESDU
0,188
0,104 1,65 3,38 0,540
Eurocode
Procedimento 1
Lei
logarítmica ESDU 0,089 1,65 3,38 0,489
Dyrbye e Hansen Lei
logarítmica ESDU 0,106 1,65 3,33 0,541
90
Capítulo 5
Programa computacional F-TURB O modelo discreto proposto pela NBR3123 (1988), descrito no capítulo 3,
determina um vetor de forças que, ao ser aplicado estaticamente na estrutura reproduz
os efeitos extremos correspondente a uma análise dinâmica. Este vetor de forças é
composto por uma parcela correspondente à ação do vento com velocidade média em 10
minutos e outra correspondente à ação da turbulência do vento. A parcela da ação
dinâmica associada ao modo j de vibração é dada na equação 3.72 e reescrita a seguir
para o nó k do modelo discreto:
, , j k H k j kF F m φ=
com
,21
2,
1
2
pn
kk k j k
k refref
H n
k j k
k
zCa A
zUF
m
φρ
ξφ
=
=
=
∑
∑ (equação 3.77).
HF é função de um coeficiente de amplificação dinâmica, ξ , sendo este obtido
através de interpolação em curvas apresentadas em função da categoria de rugosidade
do terreno, dimensões e razão de amortecimento (Figuras 3.7 a 3.11). Tendo em vista as
simplificações adotadas na confecção destas curvas e dos limites de sua aplicação,
propõe-se a determinação do vetor de forças dinâmicas (equação 3.69) através de um
programa computacional denominado F-Turb. Sendo os cálculos efetuados por este,
diretamente por integração da equação 3.71 ao invés da equação 3.72 e interpolação de
gráficos.
O programa F-Turb foi implementado em Java, que é uma linguagem de
programação orientada objeto desenvolvida na década de 90 pela empresa Sun
Microsystems. Tem como vantagem o fato do programa ser utilizado em qualquer
sistema operacional e possuir recursos de fácil implementação de interface gráfica para
entrada e saída de dados.

91
5.1 Apresentação e utilização do programa F-Turb
O programa possui uma janela principal para entrada de todas as variáveis do
problema e apresentação dos resultados. Esta janela é apresentada na Figura 5.1
juntamente com seu conteúdo.
Figura 5.1: Janela principal do programa F-Turb e seu conteúdo.
A entrada de dados é basicamente dividida em três grupos: dados gerais da
estrutura; dados referentes aos nós do modelo discreto; e dados referentes ao vento.
Estas entradas correspondem a um modelo discreto da estrutura, cujo esquema é
apresentado na Figura 5.2, e suas respectivas variáveis são dadas a seguir.
Figura 5.2: Esquema para o modelo discreto.

92
• Dados gerais da estrutura:
- número de nós em que a estrutura foi discretizada (exceto nós fixos);
- número de modos de vibração considerados na análise, com a opção de 1,2 e
3 modos;
- Frequência natural de vibração e razão de amortecimento crítico
referentes aos modos selecionados na análise.
• Dados referentes aos nós do modelo discreto:
- y e z são as coordenadas em metros referentes a cada nó i no plano
perpendicular à orientação do vetor velocidade média;
- Ae é a área de influência em metros quadrados correspondente a cada nó i;
- M é a massa discreta em quilogramas correspondente a cada nó i;
φφφφ1, φφφφ2 e φφφφ3 são respectivamente as amplitudes das formas modais 1, 2 e 3.
• Dados referentes ao vento:
- Velocidade básica é a velocidade do vento em metros por segundo
corresponde à velocidade de uma rajada 3 segundos, excedida na média uma vez
em 50 anos, a 10 metros acima do terreno, em campo aberto e plano (categoria
II);
- Categoria de rugosidade indica a categoria de terreno, com a opção das cinco
categorias definidas pela NBR 6123 (1988);
- S1 e S3 são respectivamente os fatores topográfico e probabilístico da
NBR6123 (1988);
- Perfil de velocidade é a lei que define a variação da velocidade média do
vento com a altura, com a opção entre a lei potencial e logarítmica;
- Espectro de turbulência indica a função densidade espectral da componente
flutuante da velocidade, com a opção do espectro de Harris, Von Kármán e
ESDU (utilizado pelo Eurocode, 2005).
Os resultados obtidos são apresentados na tabela “resultados” e possuem as
seguintes variáveis:
- z é a altura em metros da coordenada i sobre o nível do terreno;
- V é a velocidade média do vento (tomada em 10 minutos) correspondente

93
categoria de rugosidade do terreno e altura i;
- F é o vetor de forças em kN referente a velocidade média de vento
correspondente;
-f1, f2 e f3 são os vetores de forças estáticas equivalentes em kN referentes a
componente de velocidade flutuante u para os modos de vibração 1, 2 e 3,
respectivamente.
Para a utilização do programa deve-se seguir os seguintes passos:
1º Passo – a entrada de dados começa pelo preenchimento dos dados gerais da
estrutura. Definida estas variáveis pressiona-se o botão “criar tabela” que gera
uma tabela para uma segunda fase de entrada de dados;
2º Passo – com a tabela criada, preenche-se esta com as propriedades do
elemento correspondente a cada nó i.
3º Passo - com todas as propriedades referente à estrutura informadas, deve-se
definir as variáveis referente ao vento.
4º Passo – depois de todos os dados preenchidos, aperta-se o botão “calcular”
para calcular os vetores de ações devido à velocidade média, F, e equivalentes à
velocidade flutuante f1, f2 e f3.
Estes vetores devem, então, ser somados e aplicados estaticamente ao modelo
numérico da estrutura para a obtenção das respostas máximas estimadas.
5.2 Resultados numéricos obtidos com o programa F-Turb
Os exemplos numéricos resolvidos no domínio da frequência no capítulo 4 são
recalculados utilizando o programa F-Turb, com o intuito de validar inicialmente o
programa. Os resultados encontrados são apresentados nos próximos subitens.
5.2.1 Exemplo do reservatório de água utilizando o programa F-Turb
O exemplo do reservatório de água foi resolvido no item 4.1. Para os mesmos
dados referente a este item o programa resultou uma força correspondente a componente
média de velocidade idêntica, F 17,91 kN= . Já para ação equivalente correspondente a
componente flutuante foi f1 76, 68 kN= , que quando aplicada na estrutura resulta um

94
deslocamento de 3max,ˆ 9,34 10
F Turbx m−
− = × . Deslocamento este, muito próximo do
obtido anteriormente, 3max,ˆ 9,45 10
freqx m−= × .
5.2.2 Exemplo da chaminé utilizando o programa F-Turb
O exemplo da chaminé foi resolvido no item 4.2 variando para a solução no
domínio da frequência o perfil de velocidade, o espectro de turbulência e a taxa de
amortecimento. Utilizando o programa F-Turb foram encontradas as forças equivalentes
dinâmicas. Essas forças, juntamente com o deslocamento maxx produzido por elas, são
apresentados na tabela 5.1.
Tabela 5.1: Forças equivalentes dinâmicas obtidas com o programa F-Turb para o
exemplo da chaminé (item 4.2).
Perfil de velocidade
Lei potencial Lei potencial Lei logarítmica
Espectro Harris Harris ESDU
ζ 1% 1,46% 1,46%
Nó f1 (kN) f1 (kN) f1 (kN)
11 10 9 8 7 6 5 4 3 2 1
63,37 109,77 94,79 78,72 64,07 52,29 43,85 36,60 36,48 26,81 11,21
55,56 96,24 83,11 69,02 56,17 45,85 38,45 32,09 31,99 23,51 9,83
53,48 92,64 80,00 66,44 54,07 44,13 37,01 30,89 30,79 22,63 9,46
F-Turb
maxˆ (m)x 0,337 0,295 0,284
Dom. frequência
maxˆ (m)x (item 4.2)
0,336 0,296 0,280

95
Como pode ser visto na tabela 5.1, os deslocamentos obtidos através da solução
no domínio da frequência e pelo programa ficaram muito próximos.
5.2.3 Exemplo do edifício utilizando o programa F-Turb
No item 4.3 foi resolvido um edifício utilizando um perfil de velocidade de
vento respeitando a lei logarítmica e o espectro ESDU. Para os mesmos dados
fornecidos neste item, o programa resultou forças estáticas e equivalentes dinâmicas
apresentadas na tabela 5.2.
Tabela 5.2: Forças equivalentes dinâmicas obtidas com o programa F-Turb para o
exemplo do edifício (item 4.3).
Nó F (kN) f1 (kN)
1 e 41
2 e 42
3 e 43
4 e 44
5 e 45
6 e 46
7 e 47
8 e 48
9, 17, 25 e 33
10, 18, 26 e 34
11, 19, 27 e 35
12, 20, 28 e 36
13, 21, 29 e 37
14, 22, 30 e 38
15, 23, 31 e 39
16, 24, 32 e 40
19,46
18,73
22,58
25,53
27,95
30,00
31,79
16,70
38,93
37,46
45,16
51,07
55,90
60,00
63,59
33,39
14,27
32,94
51,61
69,18
84,55
96,63
104,32
64,79
14,27
32,94
51,61
69,18
84,55
96,63
104,32
64,79
Aplicando a componente de força equivalente dinâmica f1 na estrutura, resulta
um deslocamento igual à max,ˆ 0,350 F Turbx m− = sendo que o deslocamento obtido pela
solução no domínio da frequência foi max,ˆ 0,351 freqx m= .

96
Como esperado, para os três exemplos, os resultados obtidos pela solução modal
no domínio da frequência se igualam aos resultados obtidos através do programa
desenvolvido. Apesar dos primeiros resultados serem satisfatórios, a validação do
programa desenvolvido só se dará com mais testes, pois neste trabalho foram
considerados somente três exemplos numéricos.

97
Capítulo 6
Considerações finais
Como primeiro objetivo, este trabalho se propôs a fazer uma análise comparativa
entre alguns métodos de solução de equações de movimento em termos de coordenadas
generalizadas de edificações sob ação de vento turbulento. Foram desenvolvidas
soluções numéricas nos domínios do tempo e da frequência e aplicados métodos para o
cálculo manual apresentados pelas normas Eurocode (2005) e NBR6123 (1988). De
uma forma geral, os resultados obtidos por estes métodos apresentam uma boa
correlação para os três exemplos testados: uma torre de reservatório de água; uma
chaminé de 180 metros de altura; e um edifício de 50 metros de altura.
A comparação entre as soluções nos domínios do tempo e da frequência para o
exemplo da torre do reservatório foi muito boa. A solução numérica no domínio da
frequência apresentou boa correlação com os resultados dos processos 1 e 2 indicados
no eurocode (2005), o segundo sendo o processo proposto por Dyrbye e Hansen. Já o
deslocamento máximo obtido através do modelo discreto da NBR6123 foi inferior ao
dos outros dois processos de cálculo manual e também ao da solução numérica aplicada
com as mesmas hipóteses adotadas pelo modelo discreto.
Depois desta análise comparativa, foi desenvolvido como proposto, um
programa denominado F-Turb que auxilia a aplicação do modelo discreto da NBR 6123.
Os resultados obtidos através deste programa, para os três exemplos propostos nesta
dissertação, se igualam ao obtido pela solução modal no domínio da frequência.
Apesar de inicialmente o programa apresentar bons resultados, este deve ser
demasiadamente testado para só assim, ser considerado como válido. Posteriormente,
ele poderá ser disponibilizado pela internet para aplicação do modelo discreto descrito
pela NBR 6123 em alternativa à utilização de gráficos impressos. Ainda, fica em aberto
o desenvolvimento de novas versões do programa, com sugestão dos seguintes itens:
melhorias na apresentação de resultados, mostrando os gráficos dos espectros
envolvidos no processo (semelhante à figura clássica do método de Davenport, Figura
1.3); consideração automática da parcela de amortecimento aerodinâmico (equação

98
3.24); mudanças na entrada de dados do programa para não ser preciso discretizar as
estruturas horizontalmente; etc.
Vale lembrar que todas as análises foram feitas em termos de deslocamento
máximo provável, considerando apenas o primeiro modo de vibração. Não foram
abordados resultados em termos de esforços e acelerações, sendo estes fundamentais
para uma análise em estado limite último e de serviço, respectivamente.
Com relação aos esforços, os métodos envolvendo o fator rajada (Eurocode e
Dyrbye e Hansen) tem por base a razão entre uma resposta extrema esperada e a
correspondente resposta média. Diversos autores, como mencionado no capítulo de
introdução, observaram que este procedimento fornece resultados menos aproximados
para alguns casos. Assim, outros trabalhos poderão ser desenvolvidos em cima de uma
análise comparativa de esforços em estruturas submetidas à ação do vento turbulento.
Ainda, para o caso de edificações, as oscilações decorrentes da ação dinâmica do vento
podem provocar desconforto aos seus usuários. Tradicionalmente, níveis aceitáveis de
conforto são classificados em termos de acelerações. Ficando também, esta abordagem
em relação ao estado limite de serviço, como sugestão para trabalhos futuros. Vale
salientar que esta análise envolve velocidades de vento com maior probabilidade de
ocorrência do que os ventos tratados em projeto estrutural, diferentes dos ventos
tratados neste trabalho.

99
Referências bibliográficas
ASSOCIAÇÃO BRASILEIRA DE NORMAS TÉCNICAS, 1988. NBR-6123 – Forças
devidas ao vento em edificações. Rio de Janeiro.
BLESSMANN, J., 1995. O vento na engenharia estrutural. 2.ed. Porto Alegre, UFRGS.
BLESSMANN, J., 1998. Introdução ao estudo das ações dinâmicas do vento. 2.ed.
Porto Alegre, UFRGS.
BUCHHOLDT, H.A.; IANNUZZI, A.; SPINELLI, P, 1985. Time Domain Dynamic
Response of Slender Structures to Wind Loading. Asia Pacific Symposium on
Wind Engineering, University of Roorkee, Roorkee, India.
CLOUGH, R.W.; PENZIEN, J., 1995. Dynamics of Structures. 3.ed. New York:
McGrawHill.
DAVENPORT, A.G., 1961. The application of statistical concepts to the Wind loading
of structures, Proceedings Institution of Civil Engineers, vol. 19, p. 449-472,
London.
DAVENPORT, A.G., 1963. The buffeting of structures by gust. Symposium nº 16,
Wind Effects on Buildings as and Structures, v.1, Paper 9, p. 357-391,
Teddington, England.
DAVENPORT, A.G., 1967. Gust Loading Factors, Journal of the Structural Division
ASCE- American Society of Civil Engineers, Vol. 93, No. ST3, pp.11-34.
DYRBYE, C., HANSEN, S.O., 1997. Wind Loads on Structures, John Wiley & Sons,
England.
EUROCODE 1, 2005. Actions on structures – Part 1-4: General actions – Wind
actions. The European Standard EN 1991-1-4.
ESDU 7401, 1974. Characteristics of atmospheric turbulence near the groud. Part II,
single point data for strong winds (neutral atmosphere). Engineering Sciences
Data Unit, London.

100
GALINDEZ, ENRIQUE E., 1979. Resposta dinâmica de estruturas na direção da
velocidade média do vento. Dissertação M.Sc., UFRGS, Rio Grande do Sul, RS,
Brasil.
HARRIS, R.I., 1970. The nature of the Wind. The modern Design of wind Sensitive
Structures. London, Construction Industry Research and Information
Association. Paper 3, p. 29-55.
HOLMES, J.D., 2007. Wind Loading of Structures, Taylor & Francis Ed., USA.
KAMINSKI JR, J.; RIERA, J.D.; DE MENEZES R.C.R.; MIGUEL, L.F.F., 2008.
Model uncertainty in the assessment of transmission line towers subjected to
cable rupture, Engineering Structures, Elsevier.
KAREEM, A., ZHOU, Y., 2003. Gust Loading fator – past, present and future. Journal
of Wind Engineering and Industrial Aerodynamics Vol. 91, pp.1301- 1328,
Elsevier Ltd.
LOREDO-SOUZA, A.M., 1996. The behavior of transmission lines under high winds,
Ph.D. Thesis, University of Western Ontario, London, Canada.
LOREDO-SOUZA, A.M.; DAVENPORT, A.G.; PALLUCH, M.J., 2005,
Determinação da resposta de torres de transmissão treliçadas à ação de vento,
Construção metálica: estudos e pesquisas recente, Editora UPF. Passo Fundo,
RS, Brasil.
PFEIL, M. S., 1993. Comportamento Aeroelástico de Pontes Estaiadas, Tese de
Doutorado,COPPE/UFRJ, Rio de Janeiro, Brasil.
RIERA, J.; BLESSMANN, J., 1979. Respuesta dinâmica de estructuras em dirección
del viento. XX jornadas Sulamericanas de Engenharia Estrutural, 20, Cordoba,
Argentina.
SFINTESCO, D.; WYATT, T.A., 1977. A proposed european code of practice: Current
work of the eccs towards specification of the effect of wind on structures.
INTERNATIONAL CONFERENCE ON WIND EFFECTS ON BUILDINGS
ANS STRUCTURES, 4., Heathrow, 1975. Proceedings. Cambridge University
Press, p.643-54.
101
SIMIU, E. ; SCALAN, R., 1996. Wind Effects on Structures. , 3rd Ed. John Wiley
& Sons.
SOLARI, G., SPINELLY, P. (1984). Time-domain analysis of tall buildings response to
wind action, Proceedings, 3rd International Conference on Tall Buildings,
Hong Kong & Guangzhou.
SOLARI, G. 1993a. Gust buffeting. I: Peak Wind velocity and equivalent pressure,
Journal of Structural Engineering, Vol. 119, No. 2, pp.365-382.
SOLARI, G. 1993b. Gust buffeting. II: Dynamic along wind response, Vol. 119, No. 2,
pp.383-398.
VICKERY, B.J., 1965. On the flow behind a coarse grid and its use as a model of
atmospheric turbulence in studies related to wind loads on buildings.
Teddington – England, National Physical Laboratory, NPL Aero Report 1143.
VICKERY, B.J., 1966 On the assessment of wind effects on elastic structures. Civil
Engineering Transactions of the Institution of Engineers, Australia, p.183-192.
VICKERY, B.J., 1995. The response of chimneys and tower-like structures to Wind
loading, A state of art in Wind Engineering, ed. P. Krishna, Wiley Eastern, New
Delhi.
ZHOU, Y., KAREEM, A., Gu, M., 1999. Gust loading factors for design applications.
Proceedings of the 10th ICWE, pp. 169-176, Copenhagen, Denmark.