s é m ª ns - upm
TRANSCRIPT

ANÁLISIS DEL PUNTO DE BLOQUEO
SÓNICO EN TURBOMÁQUINAS
AXIALES MEDIANTE MODELOS DE
ORDEN REDUCIDO
FEBRERO 2020
Ignacio Gutiérrez Martínez
DIRECTOR DEL TRABAJO FIN DE GRADO:
José Mª Chaquet Ulldemolins
Ign
ac
io G
uti
érr
ez M
art
íne
z
TRABAJO FIN DE GRADO PARA
LA OBTENCIÓN DEL TÍTULO DE
GRADUADO EN INGENIERÍA EN
TECNOLOGÍAS INDUSTRIALES



Análisis del punto de bloqueo en turbomáquinas axiales mediante modelos de orden reducido
AGRADECIMIENTOS
Quiero agradecer en primer lugar, al tutor del trabajo, José María, el haberme permitidohacer este trabajo. Durante el desarrollo del TFG he aprendido mucho acerca del mundode las turbomáquinas, además de conceptos de mecánica de fluidos, de matemáticas, deprogramación... No tengo más que buenas palabras hacia él, ha sido atento y paciente,ayudándome en lo necesario para que pudiese avanzar por mí mismo.
A mi familia, por su constante apoyo y cariño.
También quiero agradecer el apoyo que he recibido por parte de mis amigos y compañerosdel GITI.
A mi amigo Carlos, que además de ser un amigo de 10, me ha ayudado a iniciarme conlos documentos LATEX. Su ayuda ha servido de mucho.
Ignacio Gutiérrez Martínez III

RESUMEN
RESUMEN
La industria aeroespacial está en continuo movimiento para poder proporcionar motorescada vez mejores. La tendencia que están siguiendo los nuevos diseños resulta en motoresmás eficientes, que emiten menos contaminantes y producen un menor ruido acústico.Todo esto, intentando mantener el resto de las características de los motores ya existentesy que los costes sean mínimos.
El proceso de diseño de nuevas turbinas aeronáuticas precisa de diversos métodos desimulación para poder detectar los problemas de diseño de forma temprana. En función dela fase de diseño (estudio de la viabilidad, concepto, detalle. . . ), el grado de aproximación osimplificación de los modelos utilizados varía. Uno de los modelos más simples utilizadosactualmente en la industria para simular la eficiencia termodinámica, es el modelo delínea media. Esta formulación permite evaluar la eficiencia de una turbomáquina de unamanera simplificada.
El objetivo de este trabajo es estudiar el comportamiento de la formulación de línea mediaaplicada a una turbomáquina en las proximidades del punto de bloqueo sónico. Este tipode estudios permiten entender y prever algunos problemas que pueden aparecer en unsoftware de simulación. Entender lo que sucede en las cercanías del punto de bloqueosónico posibilita el desarrollo de códigos numéricos más robustos.
Uno de los principales problemas que existen cuando se modeliza un problema físico através de ecuaciones matemáticas es que pueden aparecer resultados que matemáticamentetienen sentido pero que no lo tengan desde un punto de vista físico. Así mismo, tambiénes posible que aparezcan ecuaciones incompatibles (sin solución matemática). En lascercanías del punto de bloqueo sónico, el sistema de ecuaciones matemáticas pasa detener soluciones múltiples a no tener solución, siendo esto un potencial problema paraque el modelo falle.
En este trabajo se ha desarrollado un modelo matemático utilizando la formulación delínea media (Meanline). El sistema de ecuaciones se ha reducido a una única expresióncon una sola incógnita. Al tratarse de una ecuación trascendente, se ha implementadouna serie de rutinas en MATLAB para encontrar las soluciones de forma numérica. Sehan considerado diferentes posibilidades de suministrar las pérdidas aerodinámicas y seha estudiado el efecto de dichas pérdidas en el punto de bloqueo sónico.
Si bien el modelo desarrollado cuenta con diversas simplificaciones, ha permitido analizarvarias características útiles a la hora de implementar un código numérico real dentro deun sistema de diseño de turbomaquinaria. De esta manera, se ha demostrado que en laformulación de línea media existen tres posibles situaciones dependiendo del punto deoperación analizado: pueden existir dos, una o ninguna solución. El punto de bloqueosónico se corresponde con la situación en la que las dos soluciones colapsan en una única.
IV Escuela Técnica Superior de Ingenieros Industriales (UPM)

Análisis del punto de bloqueo en turbomáquinas axiales mediante modelos de orden reducido
El modelo desarrollado también ha permitido demostrar que el punto de bloqueo sónicono siempre se alcanza en el punto crítico (definido como aquel en el que el flujo pasa desubsónico a supersónico, es decir, número de Mach igual a uno). En particular, se haobservado que, dependiendo de la forma de suministrar las pérdidas aerodinámicas almodelo, las dos soluciones pueden ser subsónicas antes de alcanzar el punto de bloqueosónico. Por último, también se ha comprobado que, aunque el punto crítico no siemprese corresponde con el punto de bloqueo sónico, sí que coincide siempre con el punto deoperación de máxima entropía generada.
Ignacio Gutiérrez Martínez V

RESUMEN
Palabras claveTurbomáquina, punto de bloqueo sónico, punto crítico, gasto másico, entropía.
Códigos de la UNESCONomenclatura Internacional de la UNESCO para los campos de Ciencia y Tecnología.
120210 Funciones de Variables Reales120326 Simulación120601 Construcción de Algoritmos120611 Diferenciación numérica220403 Flujo de Fluidos
220404 Mecánica de Fluidos220405 Gases221310 Relaciones Termodinámicas330109 Compresores y Turbinas
VI Escuela Técnica Superior de Ingenieros Industriales (UPM)

Análisis del punto de bloqueo en turbomáquinas axiales mediante modelos de orden reducido
ÍNDICE
AGRADECIMIENTOS III
RESUMEN IVPalabras clave . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . VICódigos de la UNESCO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . VI
1 INTRODUCCIÓN 11.1 Turbomáquinas axiales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.2 Filas y Conductos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.2.1 Filas: estátor y rotor . . . . . . . . . . . . . . . . . . . . . . . . . . 41.2.2 Triángulo de velocidades . . . . . . . . . . . . . . . . . . . . . . . . 71.2.3 Conductos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.3 Modelos de orden reducido . . . . . . . . . . . . . . . . . . . . . . . . . . . 91.3.1 Formulación de línea media (Meanline) . . . . . . . . . . . . . . . . 12
1.4 Flujo Compresible . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131.4.1 Velocidad del sonido . . . . . . . . . . . . . . . . . . . . . . . . . . 131.4.2 Número de Mach . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131.4.3 Punto crítico y de bloqueo sónico . . . . . . . . . . . . . . . . . . . 14
2 OBJETIVOS 152.1 Motivación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152.2 Alcance del trabajo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3 METODOLOGÍA 163.1 Hipótesis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.1.1 Modelo de gas ideal . . . . . . . . . . . . . . . . . . . . . . . . . . . 173.2 Ecuaciones Generales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
3.2.1 Magnitudes totales o de remanso . . . . . . . . . . . . . . . . . . . 183.2.2 Termodinámica y Entropía . . . . . . . . . . . . . . . . . . . . . . 193.2.3 Gasto másico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 213.2.4 Densidad en un gas ideal . . . . . . . . . . . . . . . . . . . . . . . . 223.2.5 Velocidad meridional . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.3 Análisis de los estados termodinámicos del fluido . . . . . . . . . . . . . . . 243.4 Planteamiento del problema . . . . . . . . . . . . . . . . . . . . . . . . . . 263.5 Formulación de línea media para un estátor . . . . . . . . . . . . . . . . . 28
3.5.1 Modelo sin pérdidas aerodinámicas . . . . . . . . . . . . . . . . . . 283.5.2 Modelo con pérdidas aerodinámicas . . . . . . . . . . . . . . . . . . 33
3.5.2.1 Coeficiente DP/P0 . . . . . . . . . . . . . . . . . . . . . . 343.5.2.2 Coeficiente KSI . . . . . . . . . . . . . . . . . . . . . . . . 383.5.2.3 Coeficiente Y . . . . . . . . . . . . . . . . . . . . . . . . . 453.5.2.4 Coeficiente Y ∗ . . . . . . . . . . . . . . . . . . . . . . . . 493.5.2.5 Coeficiente ω . . . . . . . . . . . . . . . . . . . . . . . . . 54
Ignacio Gutiérrez Martínez VII

ÍNDICE
4 RESULTADOS Y DISCUSIÓN 584.1 Entropía . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
4.1.1 Cálculo de las funciones de entropía . . . . . . . . . . . . . . . . . . 584.1.1.1 Coeficiente KSI . . . . . . . . . . . . . . . . . . . . . . . . 594.1.1.2 Coeficiente DP/P0 . . . . . . . . . . . . . . . . . . . . . . 594.1.1.3 Coeficiente Y . . . . . . . . . . . . . . . . . . . . . . . . . 594.1.1.4 Coeficiente Y ∗ . . . . . . . . . . . . . . . . . . . . . . . . 604.1.1.5 Coeficiente ω . . . . . . . . . . . . . . . . . . . . . . . . . 60
4.1.2 Resultados para un gasto másico fijo . . . . . . . . . . . . . . . . . 624.2 Número de Mach . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
4.2.1 Comparación entre coeficientes . . . . . . . . . . . . . . . . . . . . 73
5 CONCLUSIONES 79
6 LÍNEAS FUTURAS 80
7 RESPONSABILIDAD SOCIAL 81
8 BIBLIOGRAFÍA 82
9 PLANIFICACIÓN TEMPORAL Y PRESUPUESTO 839.1 Planificación temporal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 839.2 Presupuesto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
10 ABREVIATURAS, UNIDADES Y ACRÓNIMOS 8610.1 Abreviaturas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
11 ANEXO I - Funciones en MATLAB 8811.1 Método de la bisección - bisection.m . . . . . . . . . . . . . . . . . . . . 8811.2 Cálculo de la entropía - entropia6.m . . . . . . . . . . . . . . . . . . . . . 9111.3 Cálculo del número de Mach - Mach6.m . . . . . . . . . . . . . . . . . . . . 94
VIII Escuela Técnica Superior de Ingenieros Industriales (UPM)

Análisis del punto de bloqueo en turbomáquinas axiales mediante modelos de orden reducido
1 INTRODUCCIÓNEl diseño de nuevas turbinas de aviación es cada vez más complejo puesto que cada vezse tienen en cuenta un mayor número de efectos físicos que anteriormente no se conside-raban. Para ello se utilizan diversos modelos matemáticos que permiten una tempranaestimación de las características del motor (principalmente eficiencia, peso y coste) con elfin de resolver los eventuales problemas de diseño [4]. Esto permite ahorrar a las empre-sas grandes cantidades de tiempo y dinero, ya que permiten realizar un primer prototipo‘virtual’ en lugar de construir un prototipo físico para realizar los ensayos.
Los motores de aviación son sistemas complejos que integran multitud de componentes ysubsistemas que deben funcionar en conjunto. El diseño de nuevos motores busca mejo-rar ciertos aspectos de los motores actuales siguiendo diversos criterios como pueden ser:reducción del coste, reducción del ruido, aumento del rendimiento, reducción del peso, re-ducción de las emisiones, etc. La optimización de todos los criterios implica modificacionescontradictorias, como pueden ser, por ejemplo, la reducción del coste de los materialesy el aumento del rendimiento del motor. Además, generalmente los motores deben es-tar enmarcados en una normativa y cumplir unos requisitos mínimos, como pueden ser elruido o la contaminación que producen. De modo que, un modelo matemático que busqueoptimizar estas variables debe tener en cuenta restricciones y optimización de variablesque muchas veces son contradictorias entre sí [3].
Este trabajo se desarrolla en el marco de los modelos matemáticos utilizados para pre-decir el rendimiento general del motor en el proceso de diseño. Más concretamente en elmodelado del rendimiento termodinámico de las etapas de una turbina aeronáutica.
Con el fin de familiarizar al lector con la terminología y facilitar la comprensión del tra-bajo, se comienza por hacer una breve exposición de conceptos que serán necesarios paraponer en contexto este trabajo, como: turbomáquina axial, filas y conductos o modelosde orden reducido.
Ignacio Gutiérrez Martínez 1

1 INTRODUCCIÓN
1.1 Turbomáquinas axialesUna turbina∗ es una máquina cuyo propósito es obtener un trabajo mecánico haciendopasar un fluido por su sección. Este fluido transfiere su energía cinética a un eje a travésde álabes o palas que rotan en torno a ese eje.
Normalmente, cuando se habla de una turbina aeronáutica se hace referencia a un motorcompleto. Estos motores, además de tener turbinas, están compuestos por multitud decomponentes. En síntesis, un motor aeronáutico, para generar una fuerza de empuje,toma aire de la atmósfera y lo comprime a través de uno o varios compresores hasta lacámara de combustión. Una vez allí, se consume la mezcla de combustible y aire a altapresión. La mezcla de gases calientes a alta presión sigue avanzando hasta la turbina enla que se extrae trabajo mecánico. Parte de este trabajo se transmite a lo largo de un ejey se utiliza para accionar los compresores.
Figura 1: Turbofan Trent 1000 de Rolls Royce, motor utilizado en los Boeing 787 [10].
Los compresores son máquinas que al contrario que las turbinas, no extraen trabajo delfluido, sino que consiguen un aumento de la presión del fluido a partir de un trabajomecánico.Los motores aeronáuticos suelen estar separados en diferentes módulos dependiendo dela presión a la que está el gas. Para el motor Trent 1000 (figura 1), las zonas en las quese divide son alta, intermedia y baja presión, en inglés high, intermediate y low pressure(HP, IT, LP). Estas tres zonas se señalan en la figura 2.
∗Según el diccionario de la Real Academia Española[8], el prefijo turbo-: Del lat. turbo ‘remolino’significa ‘movido por una turbina’.
2 Escuela Técnica Superior de Ingenieros Industriales (UPM)

Análisis del punto de bloqueo en turbomáquinas axiales mediante modelos de orden reducido
Este motor cuenta con un compresor de baja presión, LP Compressor, o ventilador (eninglés: Fan) debido a que se trata de un turbofan. Los turbofan son motores principalmenteutilizados en la aviación civil que separan dos flujos de aire, uno que recorrerá la parteinterior de la turbina y otro que lo hará por la parte exterior. El flujo exterior se conocecomo corriente de bypass y cuanto mayor es esta corriente, mayor es la proporción delempuje procedente de los LP Compressor. Para la aviación civil, un aumento del ratio debypass se suele traducir en una reducción de las emisiones y del combustible consumido.Uno de los mayores desafíos actuales en el diseño de nuevas turbinas es la búsqueda demétodos que permitan aumentar este ratio de bypass [4].
Figura 2: Diferentes turbinas y compresores del motor Trent 1000.
Como se ve en la figura 2, el flujo de aire iría de izquierda a derecha, pasando en primerlugar por los tres compresores (LPC, IPC, HPC ) hasta la cámara de combustión, dondese produce la mezcla del aire a presión con el combustible y la ignición. Tras esto, lamezcla de gases calientes atraviesan las tres turbinas (HPT, IPT, LPT ).El funcionamiento habitual, tanto en turbinas aeronáuticas como en turbinas industriales,es que gran parte de la energía producida en las turbinas se utiliza para accionar loscompresores que se encuentran antes de la cámara de combustión [6].Por último, la energía cinética remanente en el fluido a la salida de la turbina de bajapresión se convierte en empuje en la tobera del motor.
Ignacio Gutiérrez Martínez 3

1 INTRODUCCIÓN
1.2 Filas y ConductosEn una turbomáquina se pueden diferenciar dos zonas por las que puede circular el fluidode trabajo. Las zonas móviles que aportan o extraen trabajo del fluido, así como las queacondicionan el flujo cambiando el ángulo de giro se denominan filas.Las filas están separadas entre sí por conductos.
1.2.1 Filas: estátor y rotor
Las filas se clasifican en estátor y rotor dependiendo de si se trata de una sección fija(estátor) o giratoria (rotor).El estátor es una estructura que se encuentra fija a la carcasa de la máquina. Cuentacon álabes que, como su propio nombre indica, permanecen estáticos y cuya función esacondicionar o redirigir el flujo hacia la siguiente fila. En un estátor hay pérdidas deenergía aprovechable, debido a diversos factores, como pueden ser el rozamiento viscoso,la transferencia de calor entre superficies o procesos como las ondas de choque [5]. Estaspérdidas de energía se cuantifican como generación de entropía†, una magnitud termo-dinámica que no es medible directamente y que representa cómo de bueno o ideal es unproceso, es decir, cuanto menos entropía se genera en un proceso, mayor es la eficienciade dicho proceso. Como se verá mas adelante, la entropía generada podrá ser calculadaa partir de la temperatura de salida del gas, comparándola con la temperatura de salidaque se obtendría en una hipotética máquina perfecta que no genera entropía (isentrópica).En las filas de rotor, los álabes giran solidarios a un eje. Es en esta fila donde se puedeaportar o extraer energía del gas. Dependiendo de si se aporta o extrae energía, el rotorestará trabajando como un un compresor o una turbina.Las filas se agrupan en etapas o escalones. Una etapa de turbina consta de una fila deestátor seguida de una de rotor. Por el contrario, un escalón de compresor consta de unrotor seguido de un estátor.
estátor
rotor
estátor
estátor
rotor
rotor
eje
discodiscodisco
carcasa
etapa
Vm
Figura 3: Plano meridional de una turbina de baja presión (LPT ) [3].
†Según el Diccionario de la RAE: Magnitud termodinámica que mide la parte de la energía no utilizablepara realizar trabajo.
4 Escuela Técnica Superior de Ingenieros Industriales (UPM)

Análisis del punto de bloqueo en turbomáquinas axiales mediante modelos de orden reducido
En la figura 3 se muestra un esquema de una turbina de baja presión, lo que en lafigura 2 sería el final del motor. La representación de este esquema está hecha sobre elplano meridional. Este plano es el formado por el eje axial (x) y el eje radial (r). Esla vista que se obtendría al realizar una sección a la turbomáquina por un plano quecontuviese al eje de giro.
La velocidad del fluido en una turbomáquina es un vector 3D, que en coordenadas cilín-dricas tiene unas componentes radial, tangencial y axial (r, θ, x).Como se puede ver en la figura 4, si se descompone la velocidad total del fluido V , elplano meridional es el formado por las componentes axial Vx y radial Vr. Se muestra elplano meridional marcado de color azul. Así como la velocidad meridional Vm (de colorgranate), que es la proyección de la velocidad total V sobre este plano.
Vx
Vθ
Vr
V
V m
Figura 4: Representación del del vector velocidad y sus tres componentes en coordenadascilíndricas, así como su proyección en el plano meridional.
Ignacio Gutiérrez Martínez 5

1 INTRODUCCIÓN
En la figura 5 se muestra el esquema de una etapa de turbina. Esta vista del detallede los álabes se conoce como vista blade-to-blade. Esta figura representa los álabes de unaetapa de turbina (estátor y rotor). El estátor se encuentra entre las estaciones marcadascomo 1 y 2, el rotor entre 2 y 3. La etapa de turbina estaría entre las estaciones 1 y 3.
Las estaciones en una etapa de turbina son:
• 1: Entrada del estátor
• 2: Salida del estátor y entrada del rotor
• 3: Salida del rotor
También se pueden ver las velocidades incidentes en los álabes descomponiéndose la ve-locidad total V en velocidad relativa W y la velocidad de giro del rotor U . Los subíndicesde las velocidades indican la estación a la que se refieren.
1 2 3
V2
W2
U
W3
V3
U
V1
Estátor Rotor
U
U
Figura 5: Esquema blade-to-blade que muestra una etapa formada por estátor y rotor.Se etiquetan las estaciones 1, 2 y 3 y las velocidades absolutas V y relativas W . U es lavelocidad de giro del rotor y se cumple: V = W + U .
En este trabajo se hace el análisis de una fila de estátor, quedando la parte del rotor fueradel alcance del proyecto.Los rotores son más complicados de analizar que los estátores debido a que los primeros,al girar, la velocidad se descompone en velocidades absoluta (V ) y relativa (W ). Para suestudio se utilizan los triángulos de velocidades, que representan las relaciones geométricasentre las componentes de la velocidad.
6 Escuela Técnica Superior de Ingenieros Industriales (UPM)
Análisis del punto de bloqueo en turbomáquinas axiales mediante modelos de orden reducido
1.2.2 Triángulo de velocidades
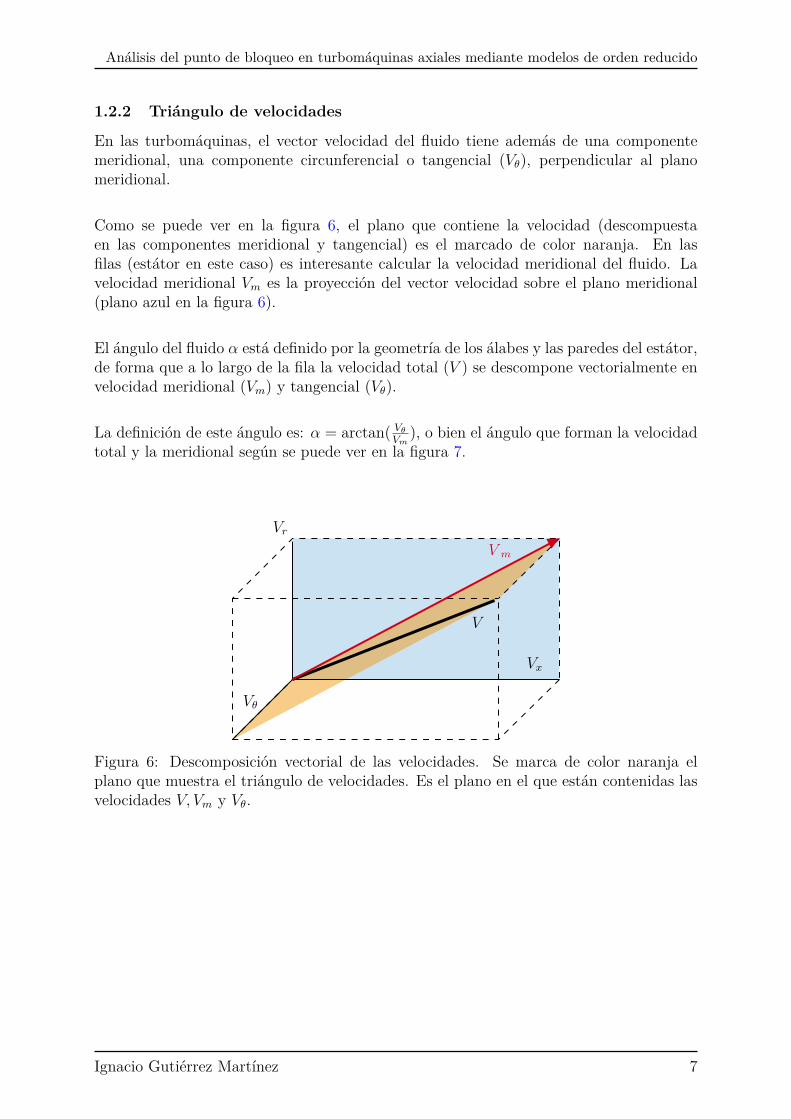
En las turbomáquinas, el vector velocidad del fluido tiene además de una componentemeridional, una componente circunferencial o tangencial (Vθ), perpendicular al planomeridional.
Como se puede ver en la figura 6, el plano que contiene la velocidad (descompuestaen las componentes meridional y tangencial) es el marcado de color naranja. En lasfilas (estátor en este caso) es interesante calcular la velocidad meridional del fluido. Lavelocidad meridional Vm es la proyección del vector velocidad sobre el plano meridional(plano azul en la figura 6).
El ángulo del fluido α está definido por la geometría de los álabes y las paredes del estátor,de forma que a lo largo de la fila la velocidad total (V ) se descompone vectorialmente envelocidad meridional (Vm) y tangencial (Vθ).
La definición de este ángulo es: α = arctan( VθVm
), o bien el ángulo que forman la velocidadtotal y la meridional según se puede ver en la figura 7.
Vx
Vθ
Vr
V
V m
Figura 6: Descomposición vectorial de las velocidades. Se marca de color naranja elplano que muestra el triángulo de velocidades. Es el plano en el que están contenidas lasvelocidades V, Vm y Vθ.
Ignacio Gutiérrez Martínez 7

1 INTRODUCCIÓN
α
βVm
W
VU
Wθ
Vθ
Figura 7: Triángulo de velocidades. La velocidad meridional es Vm = V cos(α).
1.2.3 Conductos
Se trata de las zonas de la turbomáquina en la que el fluido discurre sin atravesar álabes opalas. No obstante, en los conductos también hay generación de entropía, producida porfenómenos como: el rozamiento con las paredes o el propio rozamiento viscoso del fluido.No son el objeto de estudio de este trabajo.
8 Escuela Técnica Superior de Ingenieros Industriales (UPM)

Análisis del punto de bloqueo en turbomáquinas axiales mediante modelos de orden reducido
1.3 Modelos de orden reducidoEn el proceso de diseño de turbomáquinas se utilizan múltiples herramientas de diferentecomplejidad dependiendo de la aproximación elegida para resolver las ecuaciones físicas.En el ámbito de la mecánica de fluidos, las ecuaciones que explican el movimiento de laspartículas fluidas son las ecuaciones de la conservación de la masa y la conservación de lacantidad de movimiento. Estas ecuaciones se conocen como ecuaciones de Navier-Stokesy provienen de las ecuaciones universales de la mecánica clásica (2ª ley de Newton), portanto, se cumplen para la mayoría de los fluidos. Son ecuaciones diferenciales no linealesen derivadas parciales, en otras palabras, ecuaciones difíciles de resolver tanto analítica-mente como por métodos numéricos.‡
Las propiedades del fluido varían de forma continua en las 3 dimensiones del espacio y enel tiempo. Los software que resuelven estas ecuaciones diferenciales se conocen como CFD(Computational Fluid Dynamics). Debido a la dificultad para integrar estas ecuacionesdiferenciales, en la industria se utilizan formulaciones alternativas que no pretendan cono-cer el estado de cada partícula fluida en cada punto del espacio en cada instante, sinoque simplificando esta complejidad, permita trabajar con ecuaciones no diferenciales yconocer el valor de las variaciones de las propiedades del fluido entre dos puntos.Dependiendo de la fase de diseño que se quiera llevar a cabo (viabilidad, conceptual, de-talle...) se utiliza el código más apropiado según la precisión que requiera dicha tarea dediseño.
‡Las ecuaciones de Navier-Stokes son actualmente tema de estudio, hasta el punto que el Clay Math-ematics Institute considera el problema de la resolución de las ecuaciones de Navier-Stokes para 3 di-mensiones como uno de los Problemas del Milenio y se premia su resolución con 1.000.000 de dólares.https://www.claymath.org/millennium-problems/navier-stokes-equation.
Ignacio Gutiérrez Martínez 9

1 INTRODUCCIÓN
En la figura 8 se ilustran tres diferentes reducciones de dimensionalidad que se puedenutilizar para estudiar una turbomáquina.
En un modelo 2D, cada partícula fluida está definida por su posición en dos dimensiones.Las ecuaciones a resolver son en derivadas parciales según dos direcciones. Estos códigosse denominan throughflows en la literatura. El modelo debe predecir para cada partículasus propiedades (velocidad, temperatura, presión...) en función de su posición en el planomeridional. En comparación con un modelo tridimensional, las ecuaciones pierden unavariable, pero se obvian efectos físicos y aerodinámicos que solamente aparecen en 3dimensiones.
En un modelo 1D, las partículas fluidas que se encuentran en la misma sección de laturbomáquina se reducen a un punto. Por tanto, sólo aparecen derivadas según una únicavariable que se mide en la dirección de avance del fluido. El cálculo se reduce a consideraruna única línea de corriente.
Un modelo 0D es un modelo basado en el modelo 1D en el que la línea media se hacediscreta en tantos puntos como se desee, siendo lo más habitual situar un punto en laentrada y salida de las filas. Por lo cual, en este modelo no se determinan las propiedadesdel fluido en función de su posición, sino que únicamente pretende conocer la variación delas propiedades entre dos puntos sin tener en consideración lo que ocurre en los infinitospuntos intermedios. En consecuencia, las ecuaciones a resolver dejan de ser diferenciales.Este tipo de formulación se conoce como formulación de línea media y se explica en lossiguientes apartados.
10 Escuela Técnica Superior de Ingenieros Industriales (UPM)

Análisis del punto de bloqueo en turbomáquinas axiales mediante modelos de orden reducido
2D
1D
(línea media)
(throughflow)
0D
Figura 8: Representación de modelos de orden reducido 2D, 1D y 0D.
Ignacio Gutiérrez Martínez 11

1 INTRODUCCIÓN
1.3.1 Formulación de línea media (Meanline)
Como ya se ha comentado, el proceso de diseño de motores aeronáuticos utiliza diversasherramientas para generar modelos y predecir las características antes de su construcción.El código más sencillo que se utiliza es el de línea media y es en el que está basado estetrabajo.La formulación de línea media es un método mucho más simple que las ecuaciones deNavier-Stokes. Consiste principalmente en reducir toda la sección de entrada de una filaa un punto, el punto medio. De esta forma, el esquema de una turbomáquina en tresdimensiones se reduce a un problema 0-dimensional en el que las propiedades del fluidose aproximan al valor medio. Este tipo de formulación se utiliza en la actualidad parahacer modelos y simulaciones de turbomáquinas de una forma simplificada.Este modelo cuenta con varias ventajas y desventajas, entre las que destacan:
Ventajas
• Fácil de formular y modelar.
• Rápido en dar los resultados en comparación con otros métodos, ya que las ecua-ciones que debe resolver son sencillas.
• Se resuelven ecuaciones no diferenciales, a contrario que en los códigos CFD.
Desventajas
• Los resultados son aproximados, ya que el nivel de simplificación es elevado.
• El código no es capaz de estimar las pérdidas aerodinámicas por lo que es necesarioestimar coeficientes de pérdidas mediante correlaciones y suministrarlos al modelocomo dato.
• El caudal de fluido que atraviesa la máquina debe ser un dato conocido introducidoal modelo. En un CFD el gasto másico suele ser un resultado.
• Las ecuaciones tienen soluciones múltiples, por lo que éstas deben elegirse con ex-periencia previa.
• En la cercanía del punto de bloqueo sónico, el sistema pasa a ser incompatible, laresolución del sistema de ecuaciones puede fallar si no se prevé este comportamientoen el software.
En el modelo utilizado en este trabajo, al ser un modelo 0-dimensional, no aparecen lasvariables espaciales del problema en las ecuaciones físicas del modelo. Además como elestudio está centrado en las filas de estátor, únicamente se van a considerar dos puntosen el modelo, la entrada al estátor y su salida, tal y como se ha visto en la figura 5.
12 Escuela Técnica Superior de Ingenieros Industriales (UPM)

Análisis del punto de bloqueo en turbomáquinas axiales mediante modelos de orden reducido
1.4 Flujo CompresibleUn fluido (gas o líquido) se considera compresible cuando no se pueden despreciar susvariaciones de densidad. A continuación se describen varios conceptos acerca de los fluidoscompresibles.
1.4.1 Velocidad del sonido
La velocidad del sonido define la velocidad con la que se propagan las ondas de presión alo largo de un medio. La velocidad del sonido es un valor interesante con el que compararla velocidad de un fluido, o de un sólido que atraviesa un fluido, ya que cuando se alcanzaesta velocidad pueden aparecer ondas de choque en el fluido. Una onda de choque es unadiscontinuidad del campo de presiones de un fluido, es decir, una región del espacio dondeel valor de la presión varía bruscamente. Se producen debido a que el medio físico viajamás rápido que la velocidad de propagación de las ondas de presión.Cuando se habla de velocidad del sonido, lo correcto es hablar de velocidad local delsonido, ya que no se trata de una constante universal.
La definición de velocidad local del sonido es:
a =
√√√√(∂P∂ρ
)s=cte
Que para un gas ideal§ es:a =
√γRgT
En un gas, la velocidad local del sonido depende de la naturaleza del gas (valor de γ yconstante del gas Rg) y de la temperatura T . El valor de la velocidad local del sonido delaire en la superficie terrestre (γ = 1, 4 y T = 300K) es de a = 347m/s.Como se puede deducir, a menor valor de la temperatura, menor es la velocidad local delsonido. En la atmósfera terrestre cuanto mayor es la altura, menor es la temperatura ypor esto la velocidad local del sonido disminuye.
1.4.2 Número de Mach
El número de Mach está definido como el cociente entre la velocidad local del fluido y lavelocidad local del sonido.
M = V
a
En función del valor que toma este número adimensional se definen los conceptos de flujosubsónico (M < 1) y supersónico (M > 1).Los flujos en los que M ∼ 1 se denominan transónicos.
§El modelo de gas ideal se presenta en: Modelo de gas ideal.
Ignacio Gutiérrez Martínez 13

1 INTRODUCCIÓN
1.4.3 Punto crítico y de bloqueo sónico
Tanto en las máquinas que operan con fluidos como en las toberas, el punto crítico esel estado en el que el número de Mach es igual a la unidad (M = 1).
El punto de bloqueo sónico se define como el estado de una máquina o tobera en elcual el caudal o gasto másico del fluido es máximo para unas condiciones de entrada yvueltas del eje dadas, independientemente de las condiciones de salida.Los fluidos discurren a lo largo de las máquinas y los conductos debido a una diferencia depresiones. La presión a la entrada del conducto debe ser superior a la presión a la salidapara que haya un flujo. Si se aumenta la presión a la entrada o se reduce la presión a lasalida se incrementa esta diferencia, por tanto, se hará pasar más fluido por el conductoaumentando el caudal.Cuando se alcanza el punto de bloqueo sónico no es posible aumentar el caudal de fluidoque discurre por el conducto por más que disminuya la presión a la salida, manteniendoconstante la presión a la entrada.
14 Escuela Técnica Superior de Ingenieros Industriales (UPM)

Análisis del punto de bloqueo en turbomáquinas axiales mediante modelos de orden reducido
2 OBJETIVOS
2.1 MotivaciónEntre las desventajas de los códigos de línea media están la aparición de soluciones múlti-ples y la incompatibilidad del sistema de ecuaciones en las cercanías del punto de bloqueosónico. De forma que, un código numérico que pretenda resolver un modelo de línea mediatiene que ser capaz de elegir una de las soluciones (a partir de conocimiento previo, comocorrelaciones) y evitar situaciones que produzcan incompatibilidades.
Entender el comportamiento de las ecuaciones en la formulación de línea media en todoslos regímenes (flujos subsónicos y supersónicos) permite desarrollar códigos más robus-tos¶. Esta robustez es indispensable cuando se utilizan esas herramientas de simulacióndentro de procesos más complejos, como por ejemplo durante estudios de optimización.Con ese fin, en este trabajo se analizan los puntos de operación en los que las múltiplessoluciones del sistema colapsan en una única solución.
2.2 Alcance del trabajoEste trabajo de fin de grado (TFG) toma como punto de partida el artículo [2], dondese analizan las ecuaciones de línea media en las cercanías del punto de bloqueo sónicopara los casos ideales sin pérdidas aerodinámicas (isentrópicos), así como para casos conpérdidas dados por dos tipos de coeficientes llamados η y DP/P0. En el presente trabajose repite ese análisis, detallando todas las hipótesis y pasos intermedios. Además, se haampliado el estudio para otros tipos de coeficientes de pérdidas (KSI , Y , Y ∗ y ω). Conello se pretende extraer conocimiento particular para cada coeficiente de pérdidas, asícomo características comunes a todos ellos.Es importante resaltar que a pesar de partir de un trabajo previo, en este TFG se han rea-lizado labores de investigación novedosas, no publicadas previamente (al menos teniendoen cuenta la mejor información manejada por el autor).
Para que un código de línea media sea útil, debe contar con un sistema de correlacionesque permitan estimar las pérdidas reales, así como las desviaciones de los ángulos fluidos.También debe ser capaz de elegir en cada punto de operación y en cada fila el régimen enel que se encuentra el fluido. Estas dificultades quedan fuera del alcance de este trabajo.Así mismo, con el objeto de hacer el estudio asequible, se han asumido ciertas hipótesissimplificadoras dentro de la formulación de línea media, tales como uso de un modelo degas ideal de calor específico independiente de la temperatura, flujos de sellado y refrige-ración despreciables, velocidades meridionales normales a los bordes de ataque y salida,etc. No obstante, como se podrá observar al final del trabajo, dichas simplificaciones noinvalidan las conclusiones obtenidas. El conocimiento adquirido es aplicable a códigosnuméricos reales que no utilizan esas hipótesis simplificadoras.
¶En el Anexo I se puede ver un ejemplo del aumento de la robustez del código. Se descartan lassoluciones cuando el método de la bisección devuelve un valor negativo (if c1>0.0001 && c3>0.0001).El hecho de no haber considerado que la solución puede no existir, puede inducir a un error del código.
Ignacio Gutiérrez Martínez 15

3 METODOLOGÍA
3 METODOLOGÍAEl desarrollo del trabajo comienza por plantear un sistema de ecuaciones para una filade estátor que satisfaga las hipótesis propuestas. Una vez hecho esto, se opera con lasecuaciones con el fin de reducirlas a una sola ecuación con una incógnita. En un primerlugar, se considerará una turbomáquina perfecta, sin generación de entropía. Más ade-lante se presentan los diferentes coeficientes de pérdidas que se utilizan en la literaturaespecializada en turbo-maquinaria para explicar la causa de las pérdidas de trabajo útil.A partir de estos coeficientes se obtienen las ecuaciones de las que se extraen los resultados.
3.1 HipótesisPara analizar las condiciones del flujo a la salida de una fila se toman como conocidas yconstantes todas las propiedades del fluido a la entrada de ésta.Se asumen las siguientes condiciones para declarar las ecuaciones que gobiernan el com-portamiento del fluido. El hecho de considerar estas hipótesis, permite ignorar ciertosefectos físicos con el fin de facilitar la formulación.
– Modelo de gas ideal
– Calores específicos constantes (γ y cp no varían con la temperatura)
– Conocidas las magnitudes de remanso y estáticas a la entrada
– El fluido de trabajo no varía su composición (Rg = cte)
A continuación se explican con detalle las hipótesis, los conceptos previos necesarios y lasdeducciones que conducen al planteamiento de las ecuaciones del modelo para un estátor.
16 Escuela Técnica Superior de Ingenieros Industriales (UPM)

Análisis del punto de bloqueo en turbomáquinas axiales mediante modelos de orden reducido
3.1.1 Modelo de gas ideal
El modelo de gas ideal es el modelo más sencillo y que más simplificaciones asume paraun fluido compresible. La ecuación de estado de un gas ideal es:
Pv = RgT o bien P = ρRgT (1)
Donde P y T son la presión estática y la temperatura, respectivamente. Rg es la constantedel gas (Rg = R/N).R es la constante universal de los gases‖ y N es el peso molecular del gas.En un gas ideal, la energía interna es únicamente función de la temperatura (u = u(T )).La entalpía h también lo es [6].
h = u+ Pv = u+RgT (2)
Los calores específicos para un gas ideal a presión y temperatura constante están definidoscomo:
cp(T ) = ∂h
∂T|P=cte = ∂h
∂T⇒ dh = cp(T )dT (3)
cv(T ) = ∂u
∂T|v=cte = ∂u
∂T⇒ du = cv(T )dT (4)
Diferenciando la ecuación de la entalpía (2) y sustituyendo cp y cv
dh = du+RdT = cp(T )dT= cv(T )dT +RgdT
Por lo que resulta la relación:cp(T ) = cv(T ) +Rg (5)
La definición del coeficiente adiabático γ es el cociente entre los calores específicos
γ = cp/cv (6)
En el modelo propuesto, los calores específicos no dependerán de la temperatura y seconsideran constantes para simplificar las ecuaciones del modelo. Por tanto:
cp = cte cv = cte γ = cte
Tampoco se considera una variación en la composición del fluido de trabajo, por lo que:
Rg = cte
‖R = 8, 314J/(molK).
Ignacio Gutiérrez Martínez 17

3 METODOLOGÍA
3.2 Ecuaciones Generales3.2.1 Magnitudes totales o de remanso
Las partículas fluidas se caracterizan por tener en cada instante unas magnitudes deter-minadas que se pueden medir: una temperatura, una presión, una densidad, una veloci-dad... El conjunto de estas magnitudes determina el estado estático de la partículafluida (T, P, ρ, h, s, V ).Se define como magnitud de remanso o magnitud total al estado que tendría unapartícula fluida si se redujese su velocidad isentrópicamente hasta V = 0. Estas magni-tudes virtuales se representan con el subíndice 0 y son (T0, P0, ρ0, h0, s0, V0) siendo V0 = 0.Por definición, las magnitudes de remanso de las partículas fluidas cumplen que:s0 = s
h0 = h+ V 2
2
Es decir, el estado de remanso tiene la misma entropía que el estático y la variación deentalpía es 1/2 de la velocidad al cuadrado en el estado estático.
Figura 9: Gráfica h-s que muestra el estado de remanso (0) respecto al estático (1).Obsérvese que el punto de remanso y el estático están en la misma vertical, es decir,tienen la misma entropía, s0 = s.
18 Escuela Técnica Superior de Ingenieros Industriales (UPM)

Análisis del punto de bloqueo en turbomáquinas axiales mediante modelos de orden reducido
3.2.2 Termodinámica y Entropía
El primer principio de la termodinámica, aplicado a un sistema cerrado, enuncia que loscambios infinitesimales de trabajo w y de calor q, se traducen en la variación de la energíainterna u [6].
du = δq − δw (7)
Para una sustancia compresible, el trabajo producido se explica como una compresión oexpansión, es decir, un cambio en el volumen del gas. Si el fluido se comprime, el volumendesciende, por lo que el trabajo sería negativo.
δw = Pdv
El segundo principio de la termodinámica define la variación de calor en un procesoreversible como un cambio en la entropía (s).
δq = Tds
Sustituyendo δw y δq de un proceso reversible en la ecuación del primer principio de latermodinámica (7) se obtiene la relación:
du = Tds− Pdv
Que reescrita, despejando el término de la entropía, se conoce como primera ecuación deGibbs.
Tds = du+ Pdv (8)
Diferenciando la ecuación (2) du = dh − pdv − vdP y sustituyendo en (8) se obtiene laecuación de la entropía en derivadas parciales en función de la presión y temperatura(segunda ecuación de Gibbs):
Tds = dh− vdP (9)
Que para un gas ideal (utilizando las relaciones (1) y (3)):
ds = cpdT
T−Rg
dP
P(10)
Ignacio Gutiérrez Martínez 19

3 METODOLOGÍA
La variación de la entropía se obtiene integrando la ecuación de la entropía para ungas ideal (10) entre dos estados cualesquiera A y B, teniendo en cuenta que γ = cte ycp = cte.
∆s = sA − sB = cp ln(TATB
)−Rg ln
(PAPB
)Particularizando este resultado para los estados de remanso y estáticos:
∆s = s− s0 = cp ln(T
T0
)−Rg ln
(P
P0
)Como se ha visto, la entropía de remanso es la misma que la del estado estático s = s0por tanto, ∆s = 0 y siendo Rg = cp
(γ−1γ
)∗∗
0 = cp ln(T
T0
)− cp
(γ − 1γ
)ln(P
P0
)
0 = ln(T
T0
)−(γ − 1γ
)ln(P
P0
)Aplicando las propiedades de los logaritmos
1 =TT0
( PP0
)γ−1γ
(P
P0
) γ−1γ
= T
T0
Quedando la relación entre la presión estática y la de remanso:
P
P0=(T
T0
) γγ−1
(11)
Ecuación, que como se comprueba en la figura 9, se puede aplicar tanto para obtenerlas magnitudes de remanso, como para obtener las magnitudes de un proceso isentrópicocualquiera (en el que se cumpla que s2 − s1 = 0).
∗∗Ver ecuaciones (5) y (6) de donde se deduce que: Rg = cp
(γ−1γ
).
20 Escuela Técnica Superior de Ingenieros Industriales (UPM)

Análisis del punto de bloqueo en turbomáquinas axiales mediante modelos de orden reducido
3.2.3 Gasto másico
El gasto másico (masa/tiempo) está definido como el producto de la densidad, la velocidadmeridional†† del fluido y el área que atraviesa:
m = ρVmA
Un fluido, al atravesar una turbomáquina, no lo hace a través de una sección circular,sino a través de una sección con forma de corona circular.Para hacer un análisis en 0 dimensiones se deben definir unas magnitudes medias querepresenten el valor promedio de las dimensiones de la geometría que se va a analizar.Con ayuda de la figura 10 se calcula fácilmente el valor del área por donde circula el fluido.Por lo tanto el valor del área A por por la que circula el fluido es:
A = Ae − Ai = π(r + H
2
)2− π
(r − H
2
)2= 2πrH
z
y
rH
A
Ai
Ae
Figura 10: Corte axial de la turbomáquina. Se representa sombreada el área A por la quediscurre el fluido. El área Ae es la suma de: el área del conducto (A), y la interior (Ai).
††Como se ha visto en el triángulo de velocidades se considera una sección normal a la velocidadmeridional.
Ignacio Gutiérrez Martínez 21

3 METODOLOGÍA
Teniendo en cuenta el valor de la envergadura y el radio medios (H, r), la ecuación delgasto másico resulta:
m = 2πrHρVm (12)En la figura 11 se representa un corte por el plano meridional del conducto por el quediscurre el fluido. El eje de revolución de la corona circular sería el eje x en la parteinferior de la figura.En este trabajo se pretende analizar los cambios de las magnitudes del fluido obviandolas variaciones de las propiedades largo del eje longitudinal x, ni a lo largo de ningunadimensión espacial ni temporal. De ahí que en las ecuaciones de estado del fluido noaparezca ningún parámetro espacial ni temporal (x, y, z, t) y por tanto, tampoco aparecenderivadas (modelo 0D).
H
x
Vm
r
A
Figura 11: Representación de un corte por el plano meridional del área a estudiar.
También cabe remarcar que según el principio de conservación de la masa, el flujo másicoque atraviesa una superficie de control cerrada es nulo, por lo que el gasto másico queentra por la sección de entrada es igual al de la sección de salida.
3.2.4 Densidad en un gas ideal
De la ecuación de estado del gas ideal se despeja la densidad:P
ρ= RgT −→ ρ = P
RgT(13)
Por cuestiones de comodidad en los cálculos y utilidad a la hora de sacar conclusionesde los resultados obtenidos, se va a trabajar con la temperatura adimensional (T ) que esigual a la relación entre temperatura estática y de remanso.Como la temperatura de remanso es siempre mayor a la estática y la temperatura essiempre positiva, el valor de T va a estar siempre acotado entre 0 y 1.Para obtener la densidad en función de la temperatura adimensionalizada T = T/T0:
ρ = P
RgT T0
22 Escuela Técnica Superior de Ingenieros Industriales (UPM)

Análisis del punto de bloqueo en turbomáquinas axiales mediante modelos de orden reducido
3.2.5 Velocidad meridional
Al igual que la densidad, la velocidad en función de la temperatura adimensional será útilpara obtener la expresión del gasto másico en función de T .Partiendo de la definición de la entalpía de remanso
h0 = cpT0 = cpT + V 2
2 , (14)
se deduce que la temperatura de remanso T0 es mayor a la estática T , al tener ésta untérmino de velocidad.Utilizando la temperatura adimensional (T = T/T0) y despejando la velocidad V :
cpT + V 2
2T0= cp
V 2
2T0= cp(1− T )
V 2 = 2T0cp(1− T )
Sabiendo que la relación entre cp y Rg es cp = Rg
(γγ−1
):
V 2 = 2T0γ
γ − 1Rg(1− T ).
De las dos soluciones posibles de la ecuación cuadrática, se toma la solución positiva yaque en la figura 11 la velocidad es positiva tal y como se ha representado su sentido.
V =√
2T0γ
γ − 1Rg(1− T ) (15)
Como se ha visto en el triángulo de velocidades (figura 7), la velocidad meridional esVm = V cos(α). De forma que se puede obtener la velocidad meridional para las filascomo:
Vm = V cos(α) =√
2T0γ
γ − 1Rg(1− T )cos(α) (16)
Con esta relación y la de la densidad (13) se obtiene el gasto másico en función de latemperatura adimensionalizada.
m = ρVmA = 2πrH P
RgT T0
√2T0
γ
γ − 1Rg(1− T )cos(α) (17)
Ignacio Gutiérrez Martínez 23

3 METODOLOGÍA
3.3 Análisis de los estados termodinámicos del fluidoPara poder analizar el punto de bloqueo sónico es necesario calcular previamente laspropiedades de un gas tras una fila de turbomáquina conociendo de antemano las propiedadesaguas arriba.Para calcular las propiedades tras atravesar la fila, es de utilidad conocer los diferentesestados o puntos en los que se puede encontrar el fluido. Algunos de ellos son virtuales oteóricos, y proporcionan información para calcular los reales.Para asegurar su comprensión, se representa un diagrama de Mollier del gas. De estaforma se ve gráficamente el proceso real que se lleva a cabo en una turbomáquina.A partir de los diferentes estados, se representan en la figura 12 los distintos puntos ter-modinámicos del fluido. Se definen 3 estados y sus correspondientes estados de remanso:
∗ Entrada (1)
∗ Remanso asociado a la entrada (01)
∗ Salida (2)
∗ Remanso asociado a la salida (02)
∗ Salida isentrópica (2, is)
∗ Remanso asociado a la salida isentrópica (02, is)
Figura 12: Diagrama de Mollier (h− s) en el que se representan los estados del fluido enun proceso de compresión 1 −→ 2. El proceso 1 −→ 2, is llegaría a la misma presión P2 sinaumentar su entropía s1.
24 Escuela Técnica Superior de Ingenieros Industriales (UPM)

Análisis del punto de bloqueo en turbomáquinas axiales mediante modelos de orden reducido
Estos estados son puntos físicos en la fila. El punto 1 es la entrada, es decir, representaal fluido con las propiedades aguas arriba del rotor y el punto 2 su correspondiente salida.Al tratarse de un modelo 0-dimensional no se aprecia diferencia entre la infinidad depuntos que tiene la entrada de la turbomáquina, se simplifica colapsando todos en elpunto medio y siendo la propiedad del punto 1 la media de esa propiedad en todo el áreade entrada.A partir de aquí la notación de las magnitudes del gas se corresponde con los subíndicesdel punto en el que está medida esa propiedad.Por ejemplo: h1 es la entalpía en el punto 1, P02 la presión de remanso en el punto 2 o loque sería lo mismo, la presión estática en el punto 02, y T2,is sería la temperatura estáticaen el punto 2, is.
La ecuación que se suele utilizar normalmente para hacer un análisis a partir del principiode la conservación de energía para las filas, es la ecuación de la continuidad de la rotalpía(I), la cual se cumple tanto para un estátor como para un rotor [6]:
I = h0 − ΩrVθ = cte (18)
Esta ecuación particularizada para un estátor, donde no se genera trabajo mecánico (nohay velocidad angular Ω = 0, ya que no gira) tiene como consecuencia la continuidad dela entalpía de remanso.
h0 = cte (19)
En la figura 12 se ve gráficamente que la entalpía de los estados (01), (02, is) y (02) es lamisma (h01 = h02 = h02,is).Como consecuencia, las temperaturas totales de estos estados también es la misma, puestoque la variación de entalpía en un gas perfecto es ∆h = cp∆T al no haber variación deentalpía, tampoco la hay de temperatura, por lo que la temperatura de remanso de laentrada se mantiene:
T01 = T02 = T02,is = T0 (20)
En adelante T0.De hecho, los estados 01 y 02, is son exactamente el mismo estado. Los puntos situadosen la vertical s1 se diferencian en la entalpía que tienen (eje vertical), estos cambios deentalpía son fundamentalmente cambios de velocidad, y como ya se ha visto, el estado deremanso h0 es aquel en el que la velocidad se ha reducido isentrópicamente (recorriendola misma vertical) hasta llegar a 0. Por lo que si se reduce la velocidad de los puntos (1)y (2, is) isentrópicamente, a la máxima entalpía que podrían llegar es hasta el punto conentalpía h = h0 en el que V = 0.En el diagrama también se observa que la presión estática en la salida P2 es la mismaque la presión estática en la salida isentrópica P2,is, ya que están sobre la misma curvaisóbara.
P2 = P2,is (21)
Esto es así porque un compresor está definido como la máquina que pasa desde P1 hastaP2. Y un compresor isentrópico se define como el compresor que pasa desde P1 hasta P2sin hacer aumentar la entropía.Con las ecuaciones vistas hasta este momento se pueden definir todas las relaciones quevan a intervenir en el modelo.
Ignacio Gutiérrez Martínez 25

3 METODOLOGÍA
3.4 Planteamiento del problemaPara poder analizar el punto de bloqueo sónico en un estátor, es necesario conocer el valorde las magnitudes en la estación de salida (punto 2).El problema que se quiere abordar se resuelve particularizando las ecuaciones vistas hastael momento en cada uno de los puntos representados en la figura 12. Esto implicaríaresolver un sistema de 12 ecuaciones con 12 incógnitas para poder calcular las magnitudesen todos los puntos descritos, siendo conocidos los parámetros en la estación de entrada(punto 1). Al estar las ecuaciones para una fila isentrópica desacopladas de las ecuacionespara una fila real, este problema puede ser separado en dos partes, una parte isentrópica(sin pérdidas) y una real que tiene en cuenta pérdidas aerodinámicas o variaciones deentropía a partir de un coeficiente que modeliza esas pérdidas.
Para comenzar, se resuelve el problema isentrópico, es decir un proceso desde el punto 1hasta el punto 2, is.
m
1 2, is
T1 T01
P1 P01
ρ1
V1
T2,is T02,is
P2,is P02,is
ρ2,is
V2,is
Figura 13: Esquema de la fila en el plano meridional, en el que se representa el casoisentrópico y las variables que intervienen en el proceso.
Tal y como se han definido las hipótesis, suponiendo conocidas todas las propiedades delflujo aguas arriba (punto 1), se busca conocer el valor, o la relación que hay entre lasvariables de entrada y las de salida.En la figura 13 se representan las propiedades en la entrada de color azul (subíndice 1).A la derecha se representan las magnitudes a la salida de esta fila isentrópica (subíndices2,is). El flujo másico m va de izquierda a derecha, siendo su valor también conocido.
26 Escuela Técnica Superior de Ingenieros Industriales (UPM)

Análisis del punto de bloqueo en turbomáquinas axiales mediante modelos de orden reducido
Particularizando las ecuaciones generales de la termodinámica y de la mecánica defluidos ya presentadas para un proceso isentrópico (1 −→ 2, is), se tienen las ecuacionessiguientes.
m = 2πr2H2ρ2,isV2,iscos(α2) (S1)
ρ2,is = P2,is
RgT2,is(S2)
P2,is
P02,is=(T2,is
T02,is
) γγ−1
=(T) γγ−1 (S3)
T02,is = T2,is + V2,is2
2cp(S4)
P2,is
P1=(T2,is
T1
) γγ−1
(S5)
T02,is = T01 = T0 (S6)
Operando con estas ecuaciones, se busca reorganizarlas de modo que se obtenga una únicaecuación con una incógnita para facilitar el análisis. La única variable incógnita elegidaes T .
– La ecuación (S1) proviene de particularizar para el proceso (1 −→ 2, is) la ecuación(12).
– (S2) de la ecuación (13).
– (S3) y (S5) de la ecuación (11).
– (S4) de la ecuación (14).
– (S6) es consecuencia de la continuidad de entalpía (20).
– Se considera conocida la geometría tanto a la salida (H2, r2, α2), como a la entradade la fila (H1, r1, α1).
– Se consideran conocidas las constantes del gas (γ, cp, Rg).
– Se consideran conocidas las magnitudes del gas ‘aguas arriba’ de la fila (magnitudescon subíndice 1).
Ignacio Gutiérrez Martínez 27

3 METODOLOGÍA
3.5 Formulación de línea media para un estátor3.5.1 Modelo sin pérdidas aerodinámicas
El problema isentrópico queda desacoplado del problema real y se puede resolver porseparado. Para el caso isentrópico la temperatura adimensionalizada es T = T2,is/T02,is.Se pueden expresar las variables en salida isentrópicas (2,is) en función de las variablesen entrada (1):
T02,isEc.(S6)= T0 (22)
T2,is = T0T (23)
P2,isEc.(S5)= P1
(T0T
T1
) γγ−1
= P01(T )γγ−1 (24)
P02,isEc.(S3)= P2,is(
T2,isT0
) γγ−1
=P1(T0TT1
) γγ−1(
T0TT0
) γγ−1
= P1
(T0
T1
) γγ−1
= P01 (25)
Siendo γγ−1 − 1 = 1
γ−1 , la densidad de salida isentrópica es:
ρ2,isEc.(S2)= P2,is
RgT2,is
Ec.(24)=P01
(T) γγ−1
RgT0T=P01
(T) 1γ−1
RgT0(26)
Se ve que tanto la temperatura total T02,is como la presión total P02,is dependen única-mente de los parámetros de entrada, independientemente del valor de T . Esto quiere decirque en todo momento estas variables son conocidas y constantes. De aquí en adelante seutilizarán de la misma forma que las variables en entrada (1).
La ecuación del gasto másico (S1) para la salida isentrópica resulta:
m = 2πr2H2ρ2,isVm,2,isEcs.(26)(16)= 2πr2H2
P01(T) 1γ−1
RgT0
(√2T0
γ
γ − 1Rg(1− T ))cos(α2)
Agrupando los términos de T :
m =(T) 1γ−1
√1− T
[2πr2H2P01
√2γ
(γ − 1)RgT0cos(α2)
]
Haciendo un análisis dimensional de los términos en el corchete: ‡‡
[r ] = L, [H ] = L, [P] = MT2 L , [Rg] = L2
T2 Θ , [T ] = Θ.LL M
T 2L
√T 2
L2
=[M
T
]
El corchete tiene unidades de gasto másico (en unidades del SI de kg/s) por lo que agru-pando estos términos con el gasto másico y como se ha visto, son conocidos y constantes.
‡‡Términos: M=masa, L=longitud, T=tiempo, Θ = temperatura.
28 Escuela Técnica Superior de Ingenieros Industriales (UPM)

Análisis del punto de bloqueo en turbomáquinas axiales mediante modelos de orden reducido
Finalmente se puede definir una función fis(T ) que permite expresar el gasto másicoen función de una sola incógnita T . Para ello se define un gasto másico de referencia mref .
mref =[2πr2H2P01
√2γ
(γ − 1)RgT01cos(α2)
](27)
De este modo, se llega a la siguiente expresión:
fis(T ) ≡(T) 1γ−1
√1− T = m
mref
(28)
El sistema de ecuaciones de la evolución 1 −→ 2, is queda sintetizado en la ecuación trascen-dente (28) de una sola variable T . La solución (o soluciones) del sistema de ecuacionesinicial se produce en el valor de Tsol tal que fis(Tsol) = m
mref.
Ignacio Gutiérrez Martínez 29

3 METODOLOGÍA
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0
0.05
0.1
0.15
0.2
0.25
0.3
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
0
0.05
0.1
0.15
0.2
0.25
0.3
Figura 14: Representación de la función fis(T ) para un valor de γ = 1, 4, valor tabuladodel aire seco a 20ºC (arriba). Función isentrópica en función del número de Mach, M(abajo). El punto de bloqueo sónico (mayor gasto másico) se obtiene para M = Mb = 1.
30 Escuela Técnica Superior de Ingenieros Industriales (UPM)

Análisis del punto de bloqueo en turbomáquinas axiales mediante modelos de orden reducido
La ecuación (28) relaciona la variable T con un gasto másico m. Como mref esconstante (todas las variables conocidas) se deduce que: a mayor valor de la funciónfis(T ) mayor es el gasto másico. El número de Mach en función de T se puede calcular apartir de la ecuación (15), en la que se tiene la velocidad V en función de T .
M(T ) = V√γRgT
=
√2T0
γγ−1Rg(1− T )√γRgT
=
√√√√ 2γ − 1
T0(1− T )T
=√
2γ − 1
( 1T− 1
)(29)
La relación (29) entre número de Mach (M) y temperatura adimensional (T ) es biyectiva,por lo que para un valor de T existe únicamente un valor de M correspondiente.Aplicando esta relación entre el número de Mach y la temperatura adimensional T , sepuede definir la función fis en función de M .Despejando T :
γ − 12 M2 = 1
T− 1
γ − 12 M2 + 1 = 1
T
T = 1γ−1
2 M2 + 1
No se detalla la función fis(M) porque no se considera de interés en este trabajo. Laformulación utilizando T es más sencilla y como se ha visto, la relación entre los doscoeficientes es biyectiva por lo que la formulación puede cambiarse en todo momento y esequivalente. Se ha representado la función fis(M) en la parte inferior de la figura 14.
El valor de T donde se alcanza el máximo gasto másico o punto de bloqueo sónico Tb∗es un punto en el que la derivada de la función fis(T ) se anula (condición necesaria deextremo local [9]).
dfis(T )dT
= 0 −→ T1
1−γ−1(γT + T − 2)
2(γ − 1)√
1− T= 0 −→ Tb = 2
γ + 1 (30)
El valor del número de Mach para el punto de gasto máximo T = Tb es:
Mb =
√√√√ 2γ − 1
(1Tb− 1
)=√
2γ − 1
(γ + 1
2 − 1)
=√
2γ − 1
(γ − 1
2
)= 1 (31)
En la figura 14 se observa que el máximo gasto se alcanza para M = 1 para un estátorisentrópico.Para una fila isentrópica el punto de bloqueo sónico coincide con el punto crítico (M = 1).Más adelante en el texto se mostrará que esta condición no se cumple para todos los mo-delos con pérdidas, es decir, por norma general el punto de bloqueo sónico y el puntocrítico no coinciden.
∗Se ha utilizado el subíndice b para designar el punto de bloqueo sónico o de gasto másico máximo.
Ignacio Gutiérrez Martínez 31

3 METODOLOGÍA
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0
0.1
0.2
0.3
0.0
1.0
2.0
3.0
4.0
Figura 15: Soluciones de la ecuación (28) y número de Mach para dichas soluciones. Lafunción fis(T ) igualada a m/mref puede tener 1, 2 o ninguna solución.
Gráficamente las soluciones son los puntos de corte de la función con las horizontalesm/mref . Haciendo variar el valor del gasto másico se tienen las distintas soluciones quepuede tener la ecuación (28).A lo largo de la curva se tienen soluciones dobles para los gastos inferiores al gasto máximo(horizontal de color verde), que corresponden a un flujo subsónico y a otro supersónicocomo se puede ver en la parte superior de la figura 15. Según va aumentando el gastomásico, las soluciones se encuentran más próximas entre sí. Cuando se alcanza el gastomáximo las dos soluciones colapsan en una, correspondiente al punto de bloqueo sónico(de color azul).Para gastos m tales que (m/mref ) > (m/mref )max (línea horizontal superior a la de(m/mref )max) no cortaría a la gráfica de fis, por lo que la ecuación no tiene soluciones.La ausencia de solución se interpreta como la imposibilidad de hacer pasar tal gasto másicopor la fila.
En la parte superior de la figura 15 se puede apreciar que la relación M − T es biyectiva,para un valor de T existe un único valor de M , por lo que hablar en términos de unavariable o de otra es equivalente. La principal ventaja que presenta utilizar T es unamayor simplicidad en las ecuaciones.
32 Escuela Técnica Superior de Ingenieros Industriales (UPM)

Análisis del punto de bloqueo en turbomáquinas axiales mediante modelos de orden reducido
3.5.2 Modelo con pérdidas aerodinámicas
En la realidad los fluidos no se comportan siguiendo flujos isentrópicos. La entropía cuan-tifica la energía destruida o no aprovechada en un proceso termodinámico. Partiendo dediferentes hipótesis se pueden definir unos coeficientes de pérdidas que tratan de modeli-zar y explicar la causa de la generación de entropía en el proceso.
m
1 2
T1 T01
P1 P01
ρ1
V1
T2 T02
P2 P02
ρ2
V2
Figura 16: Esquema de la fila en el que se representa el caso para la fila real y las variablesque intervienen en el proceso.
Particularizando las ecuaciones generales en la estación de salida (2) se tienen 6 ecua-ciones. La 6ª ecuación será diferente para cada caso, y es la que nos permite formularuna función con una sola variable, T .
m = 2πr2H2ρ2V2cos(α2) (R1)
ρ2 = P2
RgT2(R2)
P2
P02=(T2
T02
) γγ−1
(R3)
T02 = T2 + V22
2cp(R4)
T02 = T01 = T0 (R5)
Ec. coeficiente de pérdidas (R6)
Al igual que con el caso isentrópico se trata de reescribir estas ecuaciones de forma quese obtenga una ecuación con una sola incógnita (T ), que permita relacionar el estado 1con el 2.
Ignacio Gutiérrez Martínez 33

3 METODOLOGÍA
3.5.2.1 Coeficiente DP/P0
El coeficiente de pérdidas basado en la presión total se define en [2] como:
DP/P0 = P02,is − P02
P02,is(32)
El término P02,is es la presión de remanso a la salida del estátor si el proceso fueseisentrópico. Coincide con la presión de remanso en la entrada P01, (ver ecuación (25) ).
(1−DP/P0) = P02,is
P02,is− P02,is − P02
P02,is= P02
P02,is= P02
P01
Despejando P02:P02 = P01 (1−DP/P0) (33)
La presión estática en la salida P2 es:
P2Ec.(R3)= P02
(T2
T0
) γγ−1 Ec.(33)= P01 (1−DP/P0)
(T2
T0
) γγ−1
= P01 (1−DP/P0)(T) γγ−1 (34)
La densidad de salida, ρ2, es:
ρ2 = P2
RgT2
Ec.(34)=P01 (1−DP/P0)
(T) γγ−1
RgT T0=P01 (1−DP/P0)
(T) 1γ−1
RgT0(35)
Tomando las ecuaciones (12), (16) y (35), se obtiene:
m = 2πr2H2P01 (1−DP/P0)
(T) 1γ−1
RgT0
√2T0
γ
γ − 1Rg(1− T )cos(α2)
Reescribiendo y agrupando el término mref :
m =(T) 1γ−1
√1− T (1−DP/P0)
[2πr2H2P01
√2γ
(γ − 1)RgT0cos(α2)
]
Definiendo una función fDP/P0 se reduce el problema inicial a una ecuación trascendentecon una sola incógnita T .
fDP/P0(T ) ≡(T) 1γ−1
√1− T (1−DP/P0) = m
mref
(36)
34 Escuela Técnica Superior de Ingenieros Industriales (UPM)

Análisis del punto de bloqueo en turbomáquinas axiales mediante modelos de orden reducido
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0
0.05
0.1
0.15
0.2
0.25
0.3
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
0
0.05
0.1
0.15
0.2
0.25
0.3
Figura 17: Función fDP/P0 para γ = 1, 4. Función de T (arriba), función de M (abajo).
Ignacio Gutiérrez Martínez 35

3 METODOLOGÍA
Análisis de la función
La definición de la función fDP/P0 (36), coincide con función isentrópica (28) paraDP/P0 =0.
Los valores negativos de DP/P0 representan funciones con eficiencias mejores que una filaisentrópica.Esto implicaría que P02 > P02,is, lo que es imposible, ya que el estado 02 es un estadocon entropía mayor s2 > s2,is = s1. Como ambos estados tienen la misma entalpía h0, lapresión P02 es menor a la presión P02,is (ver diagrama de Mollier, figura 12).
Para DP/P0 = 1 la función se anula ∀T .Para valores DP/P0 > 1 la función fDP/P0 es negativa, careciendo de sentido físico ya querepresentaría un gasto másico negativo.
Por tanto, la función fDP/P0(T ) está definida para DP/P0 ∈ [0, 1).
El máximo de la función, Tb se obtiene de la misma forma que en (30), derivando lafunción fDP/P0(T ) e igualando a cero.
d
dT
(T) 1γ−1
√1− T (1−DP/P0) = 0
(DP/P0 − 1)(T) 1γ−1 −1
(γT + T − 2) = 0
γT + T − 2 = 0
El valor máximo de la función se alcanza en
Tb = 2γ + 1 (37)
36 Escuela Técnica Superior de Ingenieros Industriales (UPM)

Análisis del punto de bloqueo en turbomáquinas axiales mediante modelos de orden reducido
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0
0.1
0.2
0.3
0.0
1.0
2.0
3.0
4.0
M=1 M=1
Figura 18: Soluciones para DP/P0 = 0, 4. También se muestra el valor del número deMach para estas soluciones. Para facilitar la comparación se muestra el caso isentrópico(DP/P0 = 0).
El valor máximo del gasto para un valor de DP/P0 > 0 se encuentra en la mismaabscisa que para la función isentrópica es decir que Tb = 2
γ+1 y por tanto, el valor deMach en ese punto es Mb = 1.Para este coeficiente de pérdidas el punto de bloqueo sónico coincide con el punto críticoya que el valor máximo de la función se alcanza en el mismo valor de T ya que el valor deeste máximo no depende del coeficiente de pérdidas, como se puede comprobar en (37).
Ignacio Gutiérrez Martínez 37

3 METODOLOGÍA
3.5.2.2 Coeficiente KSI
Se pueden definir varios coeficientes de pérdidas energéticos que tienen en cuenta los cam-bios de entalpía. En [5] se definen los coeficientes (38) y (39). Los cambios de entalpíason la cantidad de trabajo que se puede extraer o aportar al fluido. De aquí la definiciónde rendimiento o eficiencia, el cociente entre el trabajo útil y el trabajo real.En este estudio se han analizado los coeficientes energéticos η y KSI , (40) y (41). Secumple que 1− η = KSI
ζt = h2 − h2,is
h02 − h2=V 2
2,is − V 22
V 22
(38)
ζc = h2 − h2,is
h01 − h1=V 2
2,is − V 22
V 21
(39)
η = h02 − h2
h02 − h2,is= V 2
2V 2
2,is(40)
KSI = h2 − h2,is
h02 − h2,is=V 2
2,is − V 22
V 22,is
(41)
Figura 19: Valor de la diferencia de entalpías en función de las velocidades. En esencia,una diferencia de entalpías es una diferencia de energía cinética.
38 Escuela Técnica Superior de Ingenieros Industriales (UPM)

Análisis del punto de bloqueo en turbomáquinas axiales mediante modelos de orden reducido
KSI difiere de ζc en un único término: en lugar de comparar en el denominador con lavelocidad en la entrada (V1), se compara con la velocidad de salida de una fila isentrópica(V2,is). KSI es el cociente entre la energía cinética real y la energía o trabajo en el casode ser un flujo totalmente isentrópico. De la ecuación de la energía cinética, 1
2mV2, los
únicos términos que no se cancelan son las velocidades al cuadrado.
Utilizando:– la ecuación de la velocidad en función de T (15)
– la igualdad de temperaturas totales (20)
– las relaciones: T = T2/T0 y T2 = T2,is
se obtiene KSI en función de las temperaturas:
KSI =V 2
2,is − V 22
V 22,is
Ec.(15)=2T02,is
γγ−1Rg(1− T )− 2T02
γγ−1Rg(1− T )
2T02,isγγ−1Rg(1− T )
=
= T0 − T2,is − T0 + T2
T0 − T2,is= T2 − T2,is
T0 − T2,is
(42)
Despejando T2,is en función de KSI , T0 y T2:
KSI = T2 − T2,is
T0 − T2,is
KSI (T0 − T2,is) = T2 − T2,is
KSI (T0)−KSI (T2,is) = T2 − T2,is
(1−KSI )T2,is = T2 −KSI (T0)
T2,is = T2 −KSI (T0)1−KSI = T0 −
T0 − T2
1−KSI
(43)
La presión estática del gas, P2, es igual a la presión estática del proceso isentrópico P2,is,como se puede comprobar en la ecuación (21).
P2Ec.(21)= P2,is
Ec.(S5)= P1
(T2,is
T1
) γγ−1 Ec.(43)= P1
(T0 − T0−T2
1−KSIT1
) γγ−1
(44)
Siendo P1P01
= (T1T0
)γγ−1 se tiene la presión de salida en función de la presión total de entrada:
P2 = P01
(T0 − T0−T2
1−KSIT0
) γγ−1
= P01
(1 + T − 1
1−KSI
) γγ−1
(45)
La densidad de salida queda:
ρ2 = P2
RgT2
Ec.(45)= P01
RgT0
(1 + T−1
1−KSI
) γγ−1
T(46)
Finalmente, combinando las ecuaciones de la velocidad meridional (16) y densidad (46)en la ecuación del gasto másico (12) se obtiene:
m = 2πr2H2ρ2Vm2 = 2πr2H2P01
RgT0
(1 + T−1
1−KSI
) γγ−1
T
√2T0
γ
γ − 1Rg(1− T )cos(α2)
Ignacio Gutiérrez Martínez 39

3 METODOLOGÍA
Agrupando términos de T y agrupando el término mref
m =
√1− TT
(1 + T − 1
1−KSI
) γγ−1
[2πr2H2P01
√2γ
(γ − 1)RgT0cos(α2)
](47)
A partir de este resultado se define la función fKSI que reduce el problema a una ecuacióncon la incógnita única T .
fKSI (T ) ≡
√1− TT
(1 + T − 1
1−KSI
) γγ−1
= m
mref
(48)
40 Escuela Técnica Superior de Ingenieros Industriales (UPM)

Análisis del punto de bloqueo en turbomáquinas axiales mediante modelos de orden reducido
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0
0.05
0.1
0.15
0.2
0.25
0.3
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
0
0.05
0.1
0.15
0.2
0.25
0.3
Figura 20: Función fKSI para γ = 1, 4. En función de T (arriba), en función deM (abajo).
Ignacio Gutiérrez Martínez 41

3 METODOLOGÍA
Análisis de la función
La función fKSI tiene un punto singular (denominador 0) para KSI = 1.Para KSI = 0 se obtiene la función isentrópica.Para un valor negativo (KSI < 0) se obtiene una función positiva que tiene sentidomatemático pero no físico, las funciones estarían situadas por encima de la función isen-trópica (KSI = 0) y por lo tanto se podrían obtener gastos másicos mayores que con unaturbomáquina perfecta, lo que es imposible.KSI > 1 no es posible por la propia definición del coeficiente, 1− V 2
2V 2
2,isno puede ser mayor
que 1 al restarse de 1 una cantidad forzosamente positiva.
Por tanto, la función fKSI (T ) está definida para valores del parámetro KSI ∈ [0, 1).
Cabe destacar que la función tiene su mínimo y se anula en el punto T = KSI . Es elúnico coeficiente de los estudiados con esta propiedad, el resto se anulan en T = 0.Para KSI > 0, en el punto mínimo de la función, es decir en T = KSI , se obtiene unvalor máximo de Mach. Como se verá para el resto de coeficientes, éste es el único casoen el que el Mach máximo está acotado.Para una función cuyo mínimo está en T = 0 según se reduce el gasto aumenta el númerode Mach indefinidamente.El valor de este Mach máximo es:
M(T = KSI ) =√
2γ − 1
( 1KSI − 1
)(49)
Esto se puede apreciar en la figura 20 (abajo). El punto para cada KSI en el que el gastomásico se anula, es el valor de Mach máximo que se puede obtener para ese KSI .
El punto máximo Tb se alcanza en:d
dTfKSI (T ) = 0
(KSI − TKSI − 1
) γγ−1
(KSI (γ − 1)(T − 2) + T (γT + T − 2)) = 0
Tb =(2−KSI (γ − 1))±
√KSI (γ − 1)− 1)2 + 8KSI (γ − 1)(γ + 1)
2(γ + 1)Para elegir el signo correcto de la ecuación de segundo grado, se sustituye el valor deKSI = 0 y se iguala al valor del máximo de la función isentrópica 2
γ+1 .
KSI = 0⇒ Tb = 2±√
42(γ + 1) = 2
γ + 1Por tanto, se debe tomar el signo +
Tb =(2−KSI (γ − 1)) +
√KSI (γ − 1)− 1)2 + 8KSI (γ − 1)(γ + 1)
2(γ + 1) (50)
El valor máximo depende de KSI , por lo que para diferentes valores de KSI se tendrá laabscisa Tb desplazada.
42 Escuela Técnica Superior de Ingenieros Industriales (UPM)

Análisis del punto de bloqueo en turbomáquinas axiales mediante modelos de orden reducido
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0
0.1
0.2
0.3
0.0
1.0
2.0
3.0
4.0
M<1M=1
Figura 21: Soluciones de la ecuación (48) para KSI = 0, 4 y valor del número de Mach paraestas soluciones. También se incluye el caso isentrópico, KSI = 0 para su comparación.
El valor de Tb se desplaza hacia la derecha según aumenta el valor de KSI , esto tienecomo consecuencia que el punto de mayor gasto (bloqueo sónico) no coincida con el puntocrítico (M = 1).
Además el valor del máximo (fKSI(Tb)) es también inferior al de la función isentrópica,teniendo por tanto, un gasto máximo menor según aumenta el coeficiente de pérdidas.
Se puede apreciar el punto donde la función se anula (de color rosa) en T = KSI teniendo,en consecuencia, un valor de Mach máximo para este coeficiente, como se ha calculado en(49).
Ignacio Gutiérrez Martínez 43

3 METODOLOGÍA
El coeficiente de pérdidas KSI está íntimamente relacionado con la eficiencia η.La eficiencia se define como:
η = h02 − h2
h02 − h2,is= V 2
2V 2
2,is= 1−KSI (51)
Tiene el comportamiento inverso a KSI , es decir, a mayor valor de η, mayor es elrendimiento de la turbina. Por tanto, las conclusiones que se obtienen para el parámetroKSI se pueden aplicar también al coeficiente η.La función de η se obtiene directamente sustituyendo en la ecuación (48) η = 1−KSI :
fη(T ) ≡
√1− TT
(1 + T − 1
η
) γγ−1
= m
mref
(52)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0
0.05
0.1
0.15
0.2
0.25
0.3
Figura 22: Función fη para distintos valores de η (γ = 1, 4).
44 Escuela Técnica Superior de Ingenieros Industriales (UPM)

Análisis del punto de bloqueo en turbomáquinas axiales mediante modelos de orden reducido
3.5.2.3 Coeficiente YEl coeficiente basado en la presión dinámica Y se define en [7] como:
Y = P02,is − P02
P02,is − P2(53)
Relaciona la diferencia entre las presiones totales o de remanso entre el estado isen-trópico y el real, con la presión dinámica† isentrópica a la salida.El punto 02, is es el mismo que el 01, ecuación (25), por lo tanto P02,is = P01:
Y = P02,is − P02
P02,is − P2= P01 − P02
P01 − P2(54)
P01 − P2 = P01 − P02
Y
Aplicando la relación P2 = P02(T )γγ−1 (R3):
P2 = P01 −P01 − P02
Y
Ec.(R3)= P01 −P01 − P2
(T )γγ−1
Y=
(Y − 1)P01 + P2
(T )γγ−1
Y
P2Y = (Y − 1)P01 + P2
(T )γγ−1
P2Y −P2
(T )γγ−1
= (Y − 1)P01
Sacando factor común P2 y escribiendo 1(T )
γγ−1
= (T )−γγ−1 :
P2
(Y − (T )
−γγ−1
)= (Y − 1)P01
P2 = Y − 1Y − (T )
−γγ−1
P01 (55)
La densidad ρ2 es:
ρ2 = P2
RgT2
Ec.(55)= Y − 1Y − (T )
−γγ−1
P01
RgT0T(56)
El gasto másico es:m = 2πr2H2ρ2V2cos(α2)
m = 2πr2H2
Y − 1Y − (T )
−γγ−1
P01
RgT0T
√2T0
γ
γ − 1Rg(1− T )cos(α2)
Reescribiendo:
m = Y − 1Y − (T )
−γγ−1
√
1− TT
[2πr2H2P01
√2γ
(γ − 1)RgT0cos(α2)
]
Definiendo una nueva función fY , la solución se puede expresar mediante una sola ecuación:
fY (T ) ≡ Y − 1Y − (T )
−γγ−1
√
1− TT
= m
mref
(57)
†Presión dinámica: diferencia entre la presión total o de remanso y presión estática (P0 − P ).
Ignacio Gutiérrez Martínez 45

3 METODOLOGÍA
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0
0.05
0.1
0.15
0.2
0.25
0.3
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
0
0.05
0.1
0.15
0.2
0.25
0.3
Figura 23: Función fY (T ) y fY (M) para γ = 1, 4.
46 Escuela Técnica Superior de Ingenieros Industriales (UPM)

Análisis del punto de bloqueo en turbomáquinas axiales mediante modelos de orden reducido
Análisis de la función
Como se aprecia en la ecuación (57), la función fY se anula para Y = 1.Para Y = 0 se obtiene la función isentrópica.Para Y < 0 se obtienen, para un mismo T , valores de m/mref positivos y superiores a losde la función isentrópica, estos valores de Y carecen de sentido físico ya que esto implicaría:
Y = P01 − P02
P01 − P2< 0
P02 > P01
P2 > P01
Lo cual es imposible, ya que tanto para una turbina como para un compresor se cumpleque:
• P02 < P01: Ambos puntos tienen la misma entalpía h0 pero como el proceso 1-2no es isentrópico, la entropía del segundo estado es mayor que la del primero, porlo que el punto 02 se encontrará más a la derecha en el diagrama de Mollier, estoimplica que la isóbara P02 estará por debajo de la isóbara P01.
• P2 < P01: La presión P02 es siempre mayor o igual a la presión P2 y el punto 02 estáen la misma horizontal h0 que el punto 01. Como el punto 01 tiene menor entropíaque el 02, la presión P01 es mayor que P02 y por tanto, también mayor que P2. Esdecir P01 > P02 > P2.
Esto se puede ver gráficamente en la Figura 24.
(a) Compresor (b) Turbina
Figura 24: Diagramas de Mollier (h-s) de un compresor y una turbina.
Para Y > 1 se tendría que P01 − P02 > P01 − P2 ⇒ P2 > P02, lo que es imposible.Por tanto, la función fY (T ) está definida para Y ∈ [0, 1).
Al igual que los otros coeficientes, la abscisa máxima (Tb) se calcula derivando e igualandoa cero:
d
dTfY (T ) = 0 ⇒ Y (γ − 1)(T − 2)T
γγ−1 + (γ − 1)T − 2 = 0 (58)
La ecuación (58) es una ecuación trascendente, por lo que el valor de Tb no puede despe-jarse.
Ignacio Gutiérrez Martínez 47

3 METODOLOGÍA
Como se aprecia en la figura 23, el punto máximo de la función(Tb, fY (Tb)
)varía
para diferente valor de Y . Cuanto mayor es Y , más desplazado hacia la derecha está elmáximo y su valor es menor.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0
0.1
0.2
0.3
0.0
1.0
2.0
3.0
4.0
M<1
M=1
Figura 25: Soluciones de la ecuación (57) para Y = 0, 4 y el caso isentrópico para sucomparación. También se representa el valor del número de Mach para estas soluciones.Se observa que Tb está desplazado del punto crítico.
Para el coeficiente Y , las conclusiones son similares a las obtenidas para KSI , salvo quepara este coeficiente no hay un valor de Mach máximo.
48 Escuela Técnica Superior de Ingenieros Industriales (UPM)

Análisis del punto de bloqueo en turbomáquinas axiales mediante modelos de orden reducido
3.5.2.4 Coeficiente Y ∗
El coeficiente basado en la presión total, Y ∗ se define en [5] para una turbina como:
Y ∗ = P02,is − P02
P02 − P2(59)
P02,is = P01, ecuación (25) :
Y ∗ = P02,is − P02
P02 − P2= P01 − P02
P02 − P2(60)
Y ∗ es un coeficiente similar a Y . Relaciona las presiones totales o de remanso entre elestado isentrópico y el real con la presión dinámica real a la salida.En ciertas publicaciones como [6] o [5] este coeficiente se define como stagnation pressureloss coefficient o coeficiente de pérdidas basado en la presión de remanso, y se usa YPpara simbolizarlo.Se busca despejar P2 función de P01:
(P02 − P2)Y ∗ = P01 − P02
(P02 − P2)Y ∗ = P01 − P02
(Y ∗ + 1)P02 − P01 = P2Y∗
Aplicando la relación P2 = P02(T )γγ−1 (R3):
(Y ∗ + 1) P2
(T )γγ−1− P01 = P2Y
∗
P2((Y ∗ + 1)(T )
−γγ−1 − Y ∗
)= P01
P2 = P01((Y ∗ + 1)(T )
−γγ−1 − Y ∗
) = P01(T )γγ−1(
Y ∗ + 1− Y ∗(T )γγ−1) (61)
La densidad ρ2 es:
ρ2 = P2
RgT2
Ec.(61)= P01(T )γγ−1(
Y ∗ + 1− Y ∗(T )γγ−1)RgT T0
= P01(T )1
γ−1(Y ∗ + 1− Y ∗(T )
γγ−1)RgT0
(62)
El gasto másico es:m = 2πr2H2ρ2V2cos(α2)
m = 2πr2H2P01(T )
1γ−1(
Y ∗ + 1− Y ∗(T )γγ−1)RgT0
√2T0
γ
γ − 1Rg(1− T )cos(α2)
Reescribiendo:
m = (T )1
γ−1
√1− T
Y ∗ + 1− Y ∗(T )γγ−1
[2πr2H2P01
√2γ
(γ − 1)RgT0cos(α2)
]
Finalmente, se define la función fY ∗ que permite reducir el sistema a una única ecuacióny una sola incógnita T :
fY ∗(T ) ≡ (T )1
γ−1
√1− T
Y ∗ + 1− Y ∗(T )γγ−1
= m
mref
(63)
Ignacio Gutiérrez Martínez 49

3 METODOLOGÍA
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0
0.05
0.1
0.15
0.2
0.25
0.3
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
0
0.05
0.1
0.15
0.2
0.25
0.3
Figura 26: Función fY ∗(T ) para γ = 1, 4. Función de T (arriba) y función del número deMach (abajo).
50 Escuela Técnica Superior de Ingenieros Industriales (UPM)

Análisis del punto de bloqueo en turbomáquinas axiales mediante modelos de orden reducido
Análisis de la función
Para Y ∗ = 0 se obtiene la función isentrópica. La función fY ∗ toma valores reales paravalores de Y ∗ negativos, no obstante, su interpretación física (mayor eficiencia que el casoisentrópico) hace descartar estos casos.
Figura 27: Diagrama h-s que representa el proceso de expansión 1-2 en una turbina.
Como se ve en la figura 27, la presión P02 es siempre inferior a P01 al haber un ∆s > 0.La presión estática en la salida siempre es menor que su magnitud de remanso (P2 < P02).Como se ha asumido que la velocidad siempre es positiva, el estado de remanso asociadosiempre tiene una entalpía superior al estado estático y por consiguiente una mayor presiónal estar ambos estados sobre la misma vertical isentrópica.
Y ∗ = P01 − P02
P02 − P2< 0
P02 > P01
P2 > P02
Haciendo un análisis análogo al mostrado para el parámetro Y se ve que ninguna de lasdos condiciones es posible y se concluye que Y ∗ no tomará valores negativos.
Ignacio Gutiérrez Martínez 51

3 METODOLOGÍA
Los valores de Y ∗ > 1 son posibles, esto implica que P01 − P02 > P02 − P2, lo cualse cumple cuando aumenta lo suficiente la entropía. Además el coeficiente Y ∗ no parecetener cota superior, pues cuanto mayor es el aumento de entropía, mayor es la relaciónentre las diferencias de presiones. Esto se debe a que las presiones divergen según aumentala entropía en el diagrama de Mollier (Figura 27). Para el caso extremo de P2 = P02, estecoeficiente tiende a +∞.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0
0.05
0.1
0.15
0.2
0.25
0.3
Figura 28: Las funciones fY ∗ están cada vez más juntas entre ellas según aumenta Y ∗.En la figura se muestran las funciones cuando Y ∗ toma el valor de las potencias de 2. Seobserva que no hay un valor de Y ∗ finito para que ∀T , fY ∗(T ) = 0.
Como conclusión, la función fY ∗(T ) está definida para Y ∗ ∈ [0,+∞).
La abscisa máxima (Tb) se calcula derivando la función e igualando a cero. La ecuaciónresultante no se puede resolver, por tratarse de una ecuación trascendente. No obstante,se sabe que Tb depende de Y ∗, como se puede apreciar en la figura 28, donde se ve que elmáximo se va desplazando a la derecha a medida que Y ∗ aumenta.
52 Escuela Técnica Superior de Ingenieros Industriales (UPM)
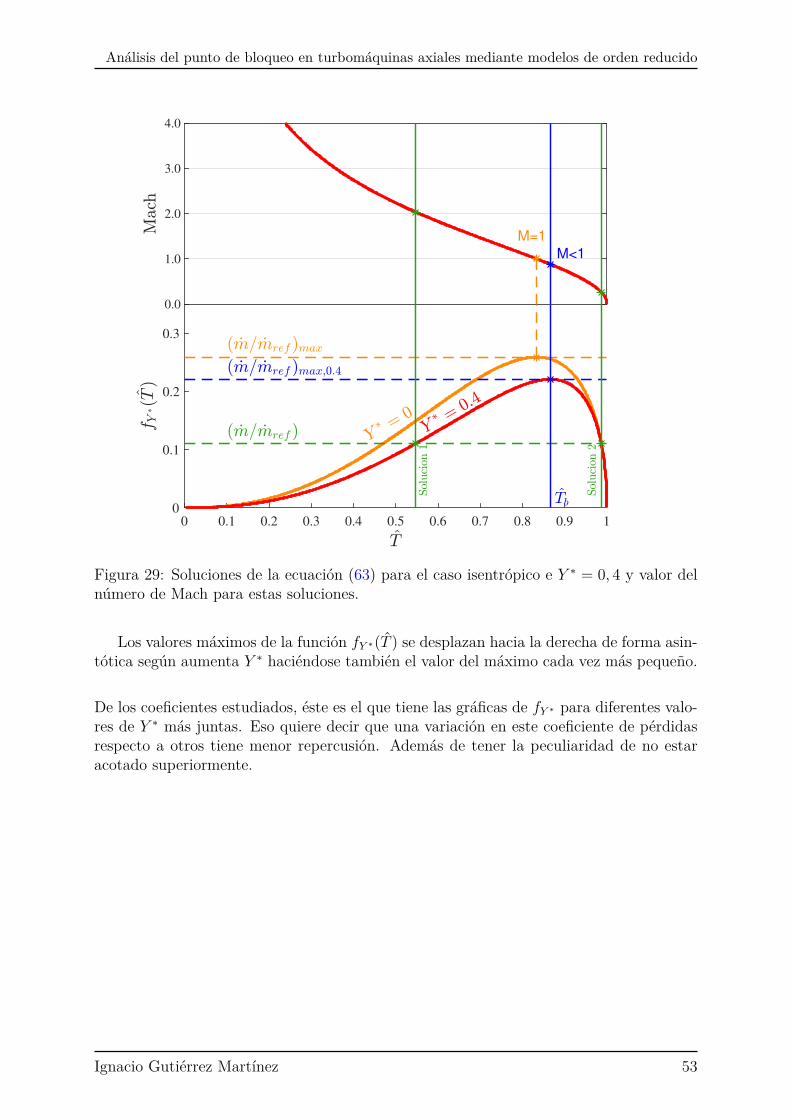
Análisis del punto de bloqueo en turbomáquinas axiales mediante modelos de orden reducido
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0
0.1
0.2
0.3
0.0
1.0
2.0
3.0
4.0
M<1
M=1
Figura 29: Soluciones de la ecuación (63) para el caso isentrópico e Y ∗ = 0, 4 y valor delnúmero de Mach para estas soluciones.
Los valores máximos de la función fY ∗(T ) se desplazan hacia la derecha de forma asin-tótica según aumenta Y ∗ haciéndose también el valor del máximo cada vez más pequeño.
De los coeficientes estudiados, éste es el que tiene las gráficas de fY ∗ para diferentes valo-res de Y ∗ más juntas. Eso quiere decir que una variación en este coeficiente de pérdidasrespecto a otros tiene menor repercusión. Además de tener la peculiaridad de no estaracotado superiormente.
Ignacio Gutiérrez Martínez 53

3 METODOLOGÍA
3.5.2.5 Coeficiente ωEl coeficiente de pérdidas basado en la presión dinámica está definido en [2] como larelación:
ω = P02,is − P02
P01 − P1(64)
El punto (02, is) es el mismo que el (01) (Figura 12), por tanto, P02,is = P01
ω = P02,is − P02
P01 − P1= P01 − P02
P01 − P1(65)
Despejando P2, sabiendo que P2 = P02(T )γγ−1 (R3):
P02 = P01 − ω(P01 − P1)
P2 = (T )γγ−1(P01 − ω(P01 − P1)
)Sacando factor común P01 del paréntesis :
P2 = (T )γγ−1
(1− ω
(1−
(P1
P01
)))P01 (66)
La densidad de salida es:
ρ2 = P2
RgT2
Ec.(66)=(T )
γγ−1
(1− ω
(1−
(P1P01
)))P01
RgT T0(67)
El gasto másico es:m = 2πr2H2ρ2V2cos(α2)
m = 2πr2H2(T )
γγ−1
(1− ω
(1−
(P1P01
)))P01
RgT T0
√2T0
γ
γ − 1Rg(1− T )cos(α2)
Simplificando (T )γγ−1
T= (T )
γγ−1 −1 = (T )
1γ−1 y reescribiendo:
m = (T )1
γ−1
√1− T
(1− ω
(1−
(P1
P01
))) [2πr2H2P01
√2γ
(γ − 1)RgT0cos(α2)
]
Definiendo la función fω, la ecuación resulta:
fω(T ) ≡ (T )1
γ−1
√1− T
(1− ω
(1− P1
P01
))= m
mref
(68)
54 Escuela Técnica Superior de Ingenieros Industriales (UPM)

Análisis del punto de bloqueo en turbomáquinas axiales mediante modelos de orden reducido
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0
0.05
0.1
0.15
0.2
0.25
0.3
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
0
0.05
0.1
0.15
0.2
0.25
0.3
Figura 30: Representación de la función fω para γ = 1, 4 y para un valor(P1P01
)= 0, 4.
Ignacio Gutiérrez Martínez 55

3 METODOLOGÍA
Análisis de la función
Particularizando (68) para ω = 0 se obtiene la función isentrópica.Es el único coeficiente de pérdidas que hace que su función fω(T ) dependa de parámetrosen la entrada. Por supuesto el cociente P1/P01 es siempre < 1 o = 1 en el caso extremo.El caso ω < 0 es posible matemáticamente, pero como con el resto de coeficientes, carecede sentido físico, ya que supondría un comportamiento mejor que el isentrópico.Los casos de ω ≥ 1 son posibles físicamente, ya que debido a que el cociente de presionesa la entrada aparece en la ecuación y multiplican al coeficiente ω compensándolo, hastael punto que ω(1 − P1/P01) = 1, o lo que es lo mismo, para unos valores dados de P1 yP01 el valor máximo de ω admisible es ω = P01
P01−P1> 1. Para el caso de la figura 30, en el
que P1/P01 = 0, 4 = 25 el valor máximo de ω sería 5
5−2 = 1, 6.Que ω sea > 1 implica que P02 < P1. Esto solamente puede ser cierto para turbinas comola de la figura 31. Esto es posible cuando la expansión aumenta tanto la entropía y lavelocidad de salida que la isóbara P02 queda por debajo de P1. El aumento de entropíadebe ser alto, lo que concuerda con el significado del coeficiente de pérdidas ω, a mayorvalor de ω, mayores son las pérdidas respecto al sistema isentrópico.
Figura 31: Diagrama de Mollier de una turbina en la que la presión P02 < P1.
Por lo tanto la función fω(T ) está definida para ω ∈ [0, P01P01−P1
).
56 Escuela Técnica Superior de Ingenieros Industriales (UPM)

Análisis del punto de bloqueo en turbomáquinas axiales mediante modelos de orden reducido
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0
0.1
0.2
0.3
0.0
1.0
2.0
3.0
4.0
M=1M=1
Figura 32: Soluciones de la ecuación (68) para ω = 0, 4 y(P1P01
)= 0, 4 y valor del número
de Mach para estas soluciones. También se representa el caso isentrópico (ω = 0).
El valor máximo del gasto para un valor de ω > 0 se encuentra en la misma abscisaque para la función isentrópica es decir que Tb = 2
γ+1 y por tanto, el valor de Mach en esepunto es Mb = 1.No obstante, el valor del máximo es menor que el valor del máximo de la función isen-trópica ya que cuanto mayor es ω, menor es el término 1 − ω
(1− P1
P01
). Este término
multiplica a la función isentrópica en fω y está acotado entre 0 y 1.
Ignacio Gutiérrez Martínez 57

4 RESULTADOS Y DISCUSIÓN
4 RESULTADOS Y DISCUSIÓN
4.1 Entropía4.1.1 Cálculo de las funciones de entropía
El incremento de entropía entre las estaciones 1 y 2, como ya se ha visto, se calculaintegrando la ecuación (10) entre 1 y 2:
∆s = s2 − s1 = cp ln(T2
T1
)−Rg ln
(P2
P1
)Se adimensionaliza la variación de entropía con la constante del gas Rg, ya que tienen lasmismas unidades (Jkg−1K−1).
∆sRg
= ln(T2T1
)γγ−1
P2P1
= ln[(T2
T1
) γγ−1 P1
P2
]
La presión de salida isentrópica es igual a la presión de salida real:
P2 = P2,is = P1
(T2,is
T1
) γγ−1
Sustituyendo y operando se concluye que la variación en la entropía se debe a la diferenciaentre la temperatura de salida real T2 y la temperatura de salida isentrópica T2,is:
∆sRg
= ln
(T2
T1
) γγ−1 P1
P1(T2,isT1
) γγ−1
= ln[T2
T2,is
] γγ−1
= γ
γ − 1 ln[T2
T2,is
](69)
Para conocer los cambios de entropía se debe calcular el cociente T2/T2,is en función deT y cada coeficiente de pérdidas.Para el coeficiente KSI se puede aplicar directamente la definición para calcular estecociente.Para el resto de coeficientes basados en las presiones se obtiene la relación entre T2,is y T2a partir de la relación de presiones P2 y P01 ya calculada.
P2Ec.(21)= P2,is
Ec.(S5)= P1
(T2,is
T1
) γγ−1
= P01
(T2,is
T0
) γγ−1
P2
P01=(T2,is
T0
) γγ−1
(70)
Éstas relaciones entre P2 y P01 se obtienen en las ecuaciones (34), (55), (61) y (66).
58 Escuela Técnica Superior de Ingenieros Industriales (UPM)

Análisis del punto de bloqueo en turbomáquinas axiales mediante modelos de orden reducido
4.1.1.1 Coeficiente KSIPara el coeficiente KSI la relación entre T2,is y T2 se obtiene directamente dividiendo laecuación (43) entre T2 :
T2,is
T2=
1− KSIT
1−KSI = T −KSIT (1−KSI )
T2
T2,is= T (1−KSI )
T −KSI
(71)
Sustituyendo en la ecuación de la entropía:
∆sRg
= γ
γ − 1 ln[T (1−KSI )T −KSI
](72)
4.1.1.2 Coeficiente DP/P0
(T2,is
T0
) γγ−1
= P2
P01
Ec(34)= (1−DP/P0)(T) γγ−1
(T2,is
T2
) γγ−1
= (1−DP/P0)
T2
T2,is=(
11−DP/P0
) γ−1γ
Sustituyendo en la ecuación de la entropía:
∆sRg
= γ
γ − 1 ln[
11−DP/P0
] γ−1γ
=(
γ
γ − 1
)(γ − 1γ
)ln[
11−DP/P0
]=
= ln[
11−DP/P0
] (73)
4.1.1.3 Coeficiente Y
(T2,is
T0
) γγ−1
= P2
P01
Ec(55)= Y − 1Y − (T )
−γγ−1
=(
Y − 1Y (T )
γγ−1 − 1
)(T )
γγ−1
(T2,is
T2
) γγ−1
=(
Y − 1Y (T )
γγ−1 − 1
)
T2
T2,is=Y (T )
γγ−1 − 1
Y − 1
γ−1γ
Sustituyendo en la ecuación de la entropía:
∆sRg
= γ
γ − 1 lnY (T )
γγ−1 − 1
Y − 1
γ−1γ
=(
γ
γ − 1
)(γ − 1γ
)lnY (T )
γγ−1 − 1
Y − 1
=
= lnY (T )
γγ−1 − 1
Y − 1
(74)
Ignacio Gutiérrez Martínez 59

4 RESULTADOS Y DISCUSIÓN
4.1.1.4 Coeficiente Y ∗
(T2,is
T0
) γγ−1
= P2
P01
Ec(61)= (T )γγ−1(
Y ∗ + 1− Y ∗(T )γγ−1)
(T2,is
T2
) γγ−1
= 1(Y ∗ + 1− Y ∗(T )
γγ−1)
T2
T2,is=(Y ∗ + 1− Y ∗(T )
γγ−1) γ−1
γ
Sustituyendo en la ecuación de la entropía:
∆sRg
= γ
γ − 1 ln[Y ∗ + 1− Y ∗(T )
γγ−1] γ−1
γ =(
γ
γ − 1
)(γ − 1γ
)ln[Y ∗ + 1− Y ∗(T )
γγ−1]
=
= ln[Y ∗ + 1− Y ∗(T )
γγ−1]
(75)
4.1.1.5 Coeficiente ω
(T2,is
T0
) γγ−1
= P2
P01
Ec(66)= (T )γγ−1
(1− ω
(1− P1
P01
))(T2,is
T2
) γγ−1
= 1− ω(
1− P1
P01
)T2
T2,is= 1
1− ω(1− P1
P01
)
γ−1γ
Sustituyendo en la ecuación de la entropía:
∆sRg
= γ
γ − 1 ln 1
1− ω(1− P1
P01
)γ−1γ
=(
γ
γ − 1
)(γ − 1γ
)ln 1
1− ω(1− P1
P01
) =
= ln 1
1− ω(1− P1
P01
)
(76)
60 Escuela Técnica Superior de Ingenieros Industriales (UPM)

Análisis del punto de bloqueo en turbomáquinas axiales mediante modelos de orden reducido
Coeficiente Definición Función f(T ) ∆s/Rg
Isentrópico -(T) 1γ−1
√1− T 0
KSI V 22,is−V
22
V 22,is
√1−TT
(1 + T−1
1−KSI
) γγ−1 γ
γ−1 ln[T (1−KSI )T−KSI
]
DP/P0P02,is−P02P02,is
(T) 1γ−1
√1− T (1−DP/P0) ln
[1
1−DP/P0
]
Y P02,is−P02P02,is−P2
(Y−1
Y−(T )−γγ−1
) √1−TT
ln[Y (T )
γγ−1 −1
Y−1
]
Y ∗ P02,is−P02P02−P2
(T )1
γ−1√
1−T(Y ∗+1−Y ∗(T )
γγ−1) ln
[Y ∗ + 1− Y ∗(T )
γγ−1]
ω P02,is−P02P01−P1
(T )1
γ−1
√1− T
(1− ω
(1−
(P1P01
)))ln 1
1−ω(
1− P1P01
)Tabla 1: Funciones f(T ) y su variación de entropía para los diferentes coeficientes depérdidas.
Ignacio Gutiérrez Martínez 61

4 RESULTADOS Y DISCUSIÓN
4.1.2 Resultados para un gasto másico fijo
Para analizar el punto de bloqueo sónico y su relación con la entropía, se elige un valorpara el gasto másico adimensional m/mref = 0, 185, que será el mismo para todos loscoeficientes. De esta forma se pueden comparar los comportamientos de la función deentropía calculada para cada coeficiente.Se hacen variar las pérdidas aumentándolas desde el caso isentrópico hasta el punto debloqueo sónico, a partir del cual el sistema se hace incompatible y no hay solución quesatisface la ecuación fY (T ) = m/mref .
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.05
0.1
0.15
0.2
0.25
0.3
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.40
0.1
0.2
0.3
0.4
0.5
0.6
Figura 33: Resultados de la entropía para el coeficiente Y . El gasto másico está fijado enm/mref = 0, 185.
Como se puede ver en la figura 33 (izquierda) el algoritmo para representar los cambios deentropía comienza con fijar un valor para el gasto másico, en este caso m/mref = 0, 185,que es una horizontal en el gráfico. Después se calculan las soluciones de fY (T ) =m/mref = 0, 185 para cada valor del coeficiente de pérdidas Y . Después se va incre-mentando el coeficiente hasta que no existe solución. Esta ecuación puede tener dos, unao ninguna solución, dependiendo del valor máximo de la función fY :
• 2 soluciones: para los valores de Y que tienen max(fY ) > m/mref . (Desde Y = 0hasta Y = 0, 504)
• 1 solución: para el valor de Y que cumple max(fY ) = m/mref . En este caso esY = 0, 504.
• Ninguna solución: para los valores de Y en los que max(fY ) < m/mref ∀T , es decir,cuyas gráficas se encuentran por debajo de 0, 185.
62 Escuela Técnica Superior de Ingenieros Industriales (UPM)

Análisis del punto de bloqueo en turbomáquinas axiales mediante modelos de orden reducido
0.6 0.65 0.7 0.75 0.8 0.85 0.9 0.95
0.16
0.18
0.2
0.22
0.24
0.26
Figura 34: Detalle de la figura 33. En verde, • el punto de bloqueo sónico para el que lasolución es única.
En la figura 34 se aprecian con mayor claridad las dobles soluciones para los valoresde Y entre 0 y 0,5. Se representa de color rojo la primera solución y en azul la segunda.Un problema que puede aparecer a la hora de resolver ecuaciones con soluciones múltiplesmediante un método iterativo, como es el de la bisección, es que se explore un dominioen el que no hay soluciones. Por tanto, para asegurar la obtención de dos soluciones,el método que se ha seguido es el siguiente: en primer lugar se calcula el máximo de lafunción y se busca la primera solución entre T = 0 y el máximo. Si se ha encontradola primera solución x1 se suma una pequeña cantidad a x1 (por ejemplo δ = 0, 0001) yse busca la segunda solución, x2 entre T = x1 + δ y T = 1. Si no se encuentra unasegunda solución hay dos posibilidades, o bien se ha encontrado el punto de bloqueosónico, o bien el valor de δ ha sido demasiado alto. Es importante que la variación δsea lo suficientemente pequeña como para no sobrepasar el dominio de exploración de lasolución x2. Esto dependerá del paso de barrido del coeficiente de pérdidas que se utilice.En el caso del ejemplo el paso del barrido es de 0,1 (los coeficientes Y toman los valoresde 0,1 en 0,1).
Una vez obtenidas todas las soluciones posibles desde Y = 0 hasta el punto de bloqueo(Y que hace fY = m/mref ), se aplica la relación de la entropía calculada en el apartadoanterior, sustituyendo los valores de T e Y de las soluciones. Se representa en un gráfico∆s/Rg respecto a Y , figura 33 (derecha).Esta gráfica con forma de pétalo desdobla las soluciones en dos ramas. Para cada valor delcoeficiente de pérdidas hay dos posibles valores de T que satisfacen la ecuación (puntosrojos y azules en la figura 33). Para Y = 0 también se tienen dos soluciones, no obstante,al tratarse de la función isentrópica, T2 = T2,is por lo que ∆s = 0 para las dos soluciones.Según va creciendo el coeficiente de pérdidas Y , la entropía de las dos soluciones va siendocada vez mayor, creciendo más rápidamente la rama inferior del pétalo. Esto quiere decirque de las dos soluciones posibles para cada valor del coeficiente de pérdidas, la solucióncon mayor entropía es la que se alcanza para menor valor de T (puntos rojos •).
Ignacio Gutiérrez Martínez 63

4 RESULTADOS Y DISCUSIÓN
0 0.05 0.1 0.15 0.2 0.25 0.3 0.350
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0 0.05 0.1 0.15 0.2 0.25 0.3 0.350
0.05
0.1
0.15
0.2
0.25
0.3
0 0.05 0.1 0.15 0.2 0.25 0.3 0.350
0.1
0.2
0.3
0.4
0.5
0.6
0 0.05 0.1 0.15 0.2 0.25 0.3 0.350
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
0 0.05 0.1 0.15 0.2 0.25 0.3 0.350
0.2
0.4
0.6
0.8
1
1.2
Figura 35: Resultados de los posibles valores de ∆s/Rg para los diferentes coeficientes depérdidas. El gasto másico está fijado en m/mref = 0, 185.
64 Escuela Técnica Superior de Ingenieros Industriales (UPM)

Análisis del punto de bloqueo en turbomáquinas axiales mediante modelos de orden reducido
Siguiendo el mismo algoritmo para todos los coeficientes de pérdidas, se obtiene lafigura 35 en la que se representa la variación de la entropía para un gasto másico fijo.
Se tienen dos tipos de gráfica en la figura 35. Por un lado las gráficas de Y , Y ∗ y KSIque tienen un aspecto y propiedades similares (forma de pétalo) y se analizan con másdetalle en los siguientes apartados.
Por otra parte se tienen las gráficas de DP/P0 y ω. Como se comprueba en las ecua-ciones (73) y (76) el valor de ∆s/Rg para estos coeficientes de pérdidas no varía con T ,únicamente lo hace con el propio coeficiente. Esto provoca que las dos soluciones de lasecuaciones para un cierto ω o DP/P0 tengan la misma variación de entropía independi-entemente de T . Por tanto, cada punto de la gráfica representa las dos soluciones de laformulación de línea media. Como consecuencia, el punto de mayor entropía es el corre-spondiente al valor máximo del coeficiente de pérdidas y también coincide con el puntode bloqueo sónico.
Ignacio Gutiérrez Martínez 65

4 RESULTADOS Y DISCUSIÓN
Para los coeficientes Y , Y ∗ y KSI se obtiene un resultado curioso acerca de la entropíamáxima. Se utiliza la gráfica del coeficiente Y como ejemplo para ilustrar el resultado.
La solución de máxima entropía es el punto más a la derecha en la gráfica de ∆s/Rg y sealcanza en Y = 0, 458 (asterisco azul ∗ en la figura 36). Para Y = 0, 458 hay 2 soluciones.Este punto de máxima entropía corresponde a la solución a la izquierda del máximo, esdecir, la primera solución de la ecuación fY (T ) = 0, 185 para Y = 0, 458.
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.05
0.1
0.15
0.2
0.25
0.3
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.40
0.1
0.2
0.3
0.4
0.5
0.6
Figura 36: Soluciones que tienen mayor entropía que el valor de Y máximo para el gastom/mref = 0, 185.
Como se puede observar, se obtienen soluciones que tienen un mayor incremento de en-tropía que el incremento de entropía del punto de bloqueo sónico (Y = 0, 504). La partedel pétalo marcada de color amarillo en la figura 36 (derecha) son soluciones de la ecuación(57) que tienen mayor entropía que el punto Y = 0, 504, pese a corresponderse con va-lores del coeficiente de pérdidas mas bajos. Estas soluciones con mayor entropía son lasprimeras soluciones, x1 (se encuentran a la izquierda del punto de bloqueo) y son los va-lores de Y comprendidos entre 0, 338 < Y < 0, 504, como se ve en la figura 36 (izquierda)marcados también de color amarillo.
Se tiene, por tanto, que para un gasto másico y un coeficiente de pérdidas fijos, de lasdos soluciones posibles, la solución que se encuentra a la izquierda del coeficiente máximo(punto de bloqueo) es de mayor entropía, es decir, la solución con menor valor de T generamás entropía. Esto es debido a que la función de la entropía ∆s/Rg es decreciente con Tcomo se verá a continuación.
66 Escuela Técnica Superior de Ingenieros Industriales (UPM)

Análisis del punto de bloqueo en turbomáquinas axiales mediante modelos de orden reducido
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0
0.05
0.1
0.15
0.2
0.25
0.3
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
0
0.1
0.2
0.3
0.4
0.5
0.6
Figura 37: Ejemplo para Y = 0, 4 y m/mref = 0, 185. La solución de menor T , a laizquierda del máximo (rojo) tiene mayor entropía que la solución que se encuentra a laderecha del máximo (azul).
Ignacio Gutiérrez Martínez 67

4 RESULTADOS Y DISCUSIÓN
Para Y ∗ y KSI también se tienen puntos con entropía mayor al punto de soluciónúnica (máximo coeficiente de pérdidas), por el mismo motivo. Además, para un Y, Y ∗ oKSI fijo, la entropía es decreciente según aumenta T .‡ Por tanto, se debe cumplir que lasderivadas parciales de las funciones de entropía (∆s/Rg) respecto a T sean negativas.§
∂
∂T
(ln[Y ∗ + 1− Y ∗(T )
γγ−1])
= −γY ∗Tγγ−1 −1
(γ − 1)(−Y ∗Tγγ−1 + Y ∗ + 1)
≤ 0 (77)
∂
∂T
lnY (T )
γγ−1 − 1
Y − 1
= γY Tγγ−1 −1
(γ − 1)(Y Tγγ−1 − 1)
≤ 0 (78)
∂
∂T
(γ
γ − 1 ln[T (1−KSI )T −KSI
])= KSIT (KSI − T )
≤ 0 (79)
Estas derivadas parciales no son difíciles de calcular y efectivamente se confirma que sonnegativas. Para una comprensión más visual de este resultado, se han representado enunos gráficos 3D las funciones de entropía como superficies que dependen de las variablesT y el correspondiente coeficiente de pérdidas. Según se recorren las curvas de color rojoen sentido T ascendente, el valor de la entropía (altura de la superficie) desciende.
Figura 38: Superficie que representa ∆s/Rg función de Y ∗ y T . Las curvas rojas repre-sentan valores de Y ∗ = cte. Se observa que a lo largo de estas curvas según aumenta T ,el valor de la entropía disminuye. ∂
∂T(∆sRg
)Y ∗=cte < 0.
‡Dominio de los coeficientes de pérdidas: Y ∗ ∈ [0, +∞), Y ∈ [0, 1), KSI ∈ [0, 1).§Recuérdese que la función fKSI (T ) está definida para T ≥ KSI (49).
68 Escuela Técnica Superior de Ingenieros Industriales (UPM)

Análisis del punto de bloqueo en turbomáquinas axiales mediante modelos de orden reducido
Figura 39: Superficie que representa ∆s/Rg función de Y y T . Las curvas rojas repre-sentan valores de Y = cte. Se observa que a lo largo de estas curvas según aumenta T , elvalor de la entropía disminuye. ∂
∂T(∆sRg
)Y=cte < 0.
Figura 40: Superficie que representa ∆s/Rg función de KSI y T . Las curvas rojas rep-resentan valores de KSI = cte. Se observa que a lo largo de estas curvas según aumentaT , el valor de la entropía disminuye. ∂
∂T(∆sRg
)KSI=cte < 0. Además nótese que la funciónentropía solamente es válida para T > KSI , al igual que la función fKSI .
Ignacio Gutiérrez Martínez 69

4 RESULTADOS Y DISCUSIÓN
4.2 Número de Mach
Como se ha visto en la ecuación (29), el valor del número de Mach en función de T esúnico y vale: M =
√2
γ−1
(1T− 1
).
A continuación se pretende analizar como varía el número de Mach para los diferentescoeficientes de pérdidas. El algoritmo a seguir para obtener las soluciones y representar elvalor del número de Mach para los posibles puntos de funcionamiento es similar al procesoseguido para la entropía.Se debe recordar que el sistema tiene una única incógnita o variable, T o el número deMach.Al fijar el gasto másico y el coeficiente de pérdidas, las soluciones del problema (T o M)quedan determinadas en caso de ser compatible, obteniéndose los puntos de operación.
Se fija un valor para m/mref = 0, 185 y se hace un barrido de cada coeficiente de pérdidasdesde 0 hasta el punto de bloqueo sónico (a partir de donde el sistema se hace incompa-tible) obteniéndose dos soluciones de T . Se sustituye T por M utilizando la relación (29)y se representan los puntos en una gráfica.
Salvo para el valor del coeficiente de pérdidas que justamente tiene su punto máximo enla horizontal m/mref = 0, 185 (punto de bloqueo sónico), los coeficientes menores queéste tienen dos soluciones.
Las gráficas obtenidas (Figura 41) se deben interpretar como los posibles valores quepuede tomar el número de Mach para un cierto gasto másico. Todas las gráficas parael valor 0 del coeficiente de pérdidas tienen el mismo Mach, debido a que se trata de lafunción isentrópica en todos los casos. Según va aumentando el coeficiente de pérdidas,la velocidad cambia de forma diferente debido a la naturaleza de cada coeficiente.Los coeficientes Y, Y ∗ y KSI no tienen su máximo en M = 1, sino que lo tienen en valoresM < 1. El máximo representa en este gráfico el valor del coeficiente que únicamente tocaen un punto (punto de BS) la horizontal m/mref .
70 Escuela Técnica Superior de Ingenieros Industriales (UPM)

Análisis del punto de bloqueo en turbomáquinas axiales mediante modelos de orden reducido
0.6 0.8 1 1.2 1.4 1.6 1.80
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.6 0.8 1 1.2 1.4 1.6 1.80
0.05
0.1
0.15
0.2
0.25
0.3
0.6 0.8 1 1.2 1.4 1.6 1.80
0.1
0.2
0.3
0.4
0.5
0.6
0.6 0.8 1 1.2 1.4 1.6 1.80
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
0.6 0.8 1 1.2 1.4 1.6 1.80
0.2
0.4
0.6
0.8
1
1.2
Figura 41: Resultados de los posibles valores del número de Mach para los diferentescoeficientes de pérdidas. El gasto másico está fijado en m/mref = 0, 185.
Ignacio Gutiérrez Martínez 71

4 RESULTADOS Y DISCUSIÓN
En la figura 41 se representan los posibles valores del número de Mach para los coe-ficientes de pérdidas estudiados. Se ha utilizado el método de la bisección para obtenerlas soluciones para un gasto adimensional de m/mref = 0, 185.
Para todos los coeficientes la gráfica del número de Mach tiene forma de campana. Laparte derecha de la campana que queda a la derecha de la vertical de color azul (querepresenta el punto crítico) serían los puntos de funcionamiento para los que se tendríaun flujo supersónico. Con estos resultados, para los únicos coeficientes que consideran unpunto de bloqueo sónico a una velocidad subsónica son Y , Y ∗ y KSI . Para ω y DP/P0solamente se podría alcanzar el bloqueo sónico para un número de Mach igual a la unidad.
Como ya se venía explicando a lo largo del trabajo, éste es uno de los resultados que sepretendía observar. Para los coeficientes de pérdidas ω y DP/P0 sí se cumple que el puntode bloqueo sónico se alcanza en M = 1. Por otra parte, para los otros tres coeficientes, elbloqueo sónico se alcanza para valores de M < 1. Además, el valor del número de Machpara el que se alcanza el bloqueo es diferente para cada uno de los tres casos.
72 Escuela Técnica Superior de Ingenieros Industriales (UPM)

Análisis del punto de bloqueo en turbomáquinas axiales mediante modelos de orden reducido
4.2.1 Comparación entre coeficientes
En un código real que resuelva las ecuaciones que se han presentado en el trabajo, lológico es que sea posible visualizar la solución obtenida (el punto de funcionamiento) enfunción del resto de coeficientes de pérdidas. Esto quiere decir que para cada soluciónexpresada en función de un coeficiente de pérdidas debe existir una y solo una soluciónequivalente expresada con otro coeficiente de pérdidas.
Para un punto de trabajo dado, es decir, una vez resuelto el sistema, se puede calcularel resto de coeficientes de pérdidas equivalentes. Para hacer esta conversión entre coefi-cientes no se puede utilizar la expresión de la entropía, ya que para un valor de ∆s/Rg haydos soluciones (dos posibles valores del coeficiente), incluyendo los coeficientes DP/P0 yω en los que las dos soluciones colapsan en el mismo punto. En consecuencia, se debeutilizar la expresión del número de Mach para hacer este tipo de conversión entre coe-ficientes. Esto se puede ver en la figura 41, para cada valor del número de Mach existesolamente un valor posible del coeficiente de pérdidas. Por tanto, para obtener el restode coeficientes equivalentes de forma gráfica simplemente habría que consultar para quevalor del coeficiente de pérdidas se tiene el mismo valor del número de Mach. Por ejem-plo, para el punto crítico (azul) se tendrían los coeficientes equivalentes: DP/P0 = 0, 284,KSI = 0, 314, Y = 0, 458, Y ∗ = 0, 845 y ω = 0, 474.
Una forma de obtener la relación que existe entre dos coeficientes de pérdidas consis-tiría en despejar los coeficientes a partir de las funciones f(T ). Como este trabajo estáprincipalmente orientado hacia un software, se puede calcular el coeficiente equivalentesimplemente mediante un método iterativo de cálculo de raíces. Para ello se debe saberel punto de operación, siempre definido por el coeficiente de pérdidas y las variables, my, o bien T , o bien M , ya que para un valor del coeficiente de pérdidas las curvas f(T ) yf(M) pueden cortar hasta en dos puntos a la horizontal m/mref .
Por este motivo, en las gráficas del coeficiente de pérdidas en función del número de Mach(figura 41), para un único valor del número de Mach existe un único valor del coeficientede pérdidas. No obstante, al revés no es así, para un valor del coeficiente de pérdidas,pueden existir dos valores del número de Mach. Al fijarse un valor de T , el valor deM queda también fijado (debido a que la relación entre T y M es biyectiva). Se deberecordar que el modelo utilizado tiene un único grado de libertad y es, o T , o bien M .
Ignacio Gutiérrez Martínez 73

4 RESULTADOS Y DISCUSIÓN
0 0.05 0.1 0.15 0.2 0.25 0.3
0
0.1
0.2
0.30.6 0.8 1 1.2 1.4 1.6 1.8
0
0.1
0.2
0.3
0
0.1
0.2
0.3
0.4
0
0.1
0.2
0.3
0.4
0
0.1
0.2
0.3
0.4
0.5
0
0.1
0.2
0.3
0.4
0.5
0
0.2
0.4
0.6
0.8
1
0
0.2
0.4
0.6
0.8
1
0 0.05 0.1 0.15 0.2 0.25 0.30
0.1
0.2
0.3
0.4
0.5
0.6 0.8 1 1.2 1.4 1.6 1.80
0.1
0.2
0.3
0.4
0.5
Figura 42: Comparación de los resultados obtenidos para la variación de la entropía y elnúmero de Mach (m/mref = 0, 185).
74 Escuela Técnica Superior de Ingenieros Industriales (UPM)

Análisis del punto de bloqueo en turbomáquinas axiales mediante modelos de orden reducido
En la figura 42 se recopilan los resultados de este trabajo. Esta gráfica permite com-parar los diferentes coeficientes de pérdidas y observar los comportamientos diferentes quetiene cada uno. Como ya se ha visto a lo largo del trabajo, los coeficientes que se hanestudiado se pueden clasificar en dos grupos. Por un lado estarían DP/P0 y ω, coeficientescuyo punto de bloqueo sónico coincide con el punto crítico y las soluciones subsónica ysupersónica tienen la misma variación de entropía.Por otra parte, se encuentran KSI , Y e Y ∗. Para estos coeficientes de pérdidas el puntode bloqueo sónico no coincide con el punto crítico, sino que se alcanza el bloqueo paravalores de M < 1. Además, las soluciones múltiples de la ecuación f(T ) = m/mref tienenvariaciones de entropía distintas, de ahí la forma de pétalo de la gráfica.También es importante destacar el fenómeno poco intuitivo que se produce cerca delpunto de bloqueo sónico. Para un gasto másico dado, hay infinitos puntos de operaciónque tienen mayor generación de entropía que el punto de bloqueo sónico. Estos puntos deoperación, son los que se encuentran entre los dos puntos de color rojo •. El punto de blo-queo sónico es el punto rojo superior, es decir el valor máximo del coeficiente de pérdidaspara el que existe solución única y a partir del cual el sistema se hace incompatible. Todala región comprendida entre los dos puntos rojos son puntos de funcionamiento ‘peores’al punto de bloqueo sónico, pese a ser soluciones con un coeficiente de pérdidas menor.Para todos los coeficientes de pérdidas coincide que el punto de mayor generación de en-tropía es el punto crítico. Este punto es el que más a la derecha se encuentra en el gráficode la entropía (punto azul •) y se corresponde con el valor de M = 1.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.350
0.1
0.2
0.3
0.4
0.5
0.6 0.8 1 1.2 1.4 1.6 1.80
0.1
0.2
0.3
0.4
0.5
Figura 43: Resultados de la entropía y número de Mach para distintos valores del gastomásico. En todos los casos el punto de máxima entropía se alcanza en el punto crítico(azul).
Este fenómeno no es casualidad por el valor de m/mref elegido. Como se ve en la figura 43,sin importar el valor del gasto másico, el punto de máxima entropía siempre se encuentraen el punto crítico.
Ignacio Gutiérrez Martínez 75

4 RESULTADOS Y DISCUSIÓN
El motivo por el que la entropía máxima se obtiene en el punto crítico no es intuitivoa simple vista. Representando la curva de soluciones de la entropía en 3 dimensiones seaprecia claramente que el valor de la entropía depende tanto de T como del coeficiente depérdidas (Para Y, Y ∗ y KSI ).
0
0.6
0.7 0.4
0.2
0.30.8
0.2
0.4
0.90.1
1
0.6
0
0.6 0.65 0.7 0.75 0.8 0.85 0.9 0.95 1
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35
0
0.1
0.2
0.3
0.4
0.5
0.6
Figura 44: Representación en 3D de la curva de soluciones de la ecuación fY (T ) = 0, 185y su entropía (arriba). El punto crítico es el punto con entropía máxima.Proyección sobre el plano (T ,∆s/Rg) (abajo izquierda) y sobre el plano (∆s/Rg, Y ) (abajoderecha).
76 Escuela Técnica Superior de Ingenieros Industriales (UPM)

Análisis del punto de bloqueo en turbomáquinas axiales mediante modelos de orden reducido
En la proyección de la curva sobre el plano (T ,∆s/Rg) se puede ver que el máximovalor de la entropía se obtiene siempre para el mismo T , independientemente del valor dem para el que se resuelve el problema. Este valor de T es 2
γ+1 que se corresponde con elvalor de M = 1 aplicando la relación (29).
0.6 0.65 0.7 0.75 0.8 0.85 0.9 0.95 1
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
Figura 45: Proyección de la figura 44 sobre el plano (T , ∆s/Rg) para diferentes valoresde m/mref .
Como se vio en la definición de las ecuaciones de la entropía, para los coeficientes KSI , Y e Y ∗,la variación de entropía depende del valor del coeficiente y de T . Lo que invita a repre-sentar los posibles puntos de trabajo en un gráfico en 3D.
Ignacio Gutiérrez Martínez 77

4 RESULTADOS Y DISCUSIÓN
Figura 46: Curvas de la figura 45 representadas sobre la superficie de la entropía funciónde Y y T . El punto crítico es el punto de la curva de soluciones que más valor de entropíatiene (más alto en la superficie).
78 Escuela Técnica Superior de Ingenieros Industriales (UPM)

Análisis del punto de bloqueo en turbomáquinas axiales mediante modelos de orden reducido
5 CONCLUSIONESAl modelizar un sistema físico mediante un software, debido tanto a la formulación es-cogida, como a las simplificaciones realizadas, las ecuaciones pueden tomar valores sinsentido físico o ser incluso incompatibles (sin solución matemática posible). Las conclu-siones que se obtienen de este estudio permiten desarrollar códigos numéricos más robustos(se pueden ver ejemplos prácticos en el Anexo I). A continuación, se enumeran de formamuy resumida las principales conclusiones obtenidas en este trabajo.
El punto de bloqueo sónico no se alcanza necesariamente en el punto crítico (número deMach igual a uno). Esto es cierto únicamente para el modelo isentrópico y para ciertoscoeficientes de pérdidas. Para otros coeficientes, el sistema puede volverse incompatiblepara valores del número de Mach inferiores a la unidad.
Para un gasto másico constante, el valor del coeficiente de pérdidas más alto se obtieneen el punto de bloqueo sónico. No obstante, este punto puede no ser el punto con lasmayores pérdidas aerodinámicas (mayor incremento de entropía). Esto quiere decir queun valor del coeficiente de pérdidas mayor no implica forzosamente que las pérdidas sonmayores.
El punto de máxima entropía se alcanza siempre en el punto crítico (M = 1). Esto suponeque para un gasto másico fijado, se consigue mayor eficiencia cuanto más alejado está elpunto de trabajo del punto crítico. Por tanto, si se quiere que la salida sea supersónica,para minimizar la entropía generada, se busca maximizar la velocidad de salida y al con-trario para una salida subsónica.
Las pérdidas aerodinámicas (o la generación de entropía) en el modelo utilizado, se de-terminan a partir de dos valores, el coeficiente de pérdidas y, o bien la temperaturaadimensionalizada T , o el número de Mach. El coeficiente de pérdidas no es suficientepara definir el punto de trabajo y las pérdidas aerodinámicas.
Cuando se especifican las pérdidas con el coeficiente KSI , no se puede alcanzar cualquiervalor del número de Mach, existiendo una cota superior dada por la expresión:
M(T = KSI ) =√
2γ − 1
( 1KSI − 1
),
valor obtenido en el punto en el que la temperatura adimensionalizada con la tempera-tura total a la entrada (T ) se hace igual precisamente al coeficiente de pérdidas KSI . Noobstante, esta limitación teórica en el el número de Mach no se suele apreciar en códigosreales, pues es un valor muy alto para los regímenes usuales en turbinas de gas conven-cionales. Así, para una eficiencia típica de 0,9 (KSI = 0, 1), el valor máximo teórico delnúmero de Mach es 6,71.
Todos los coeficientes de pérdidas estudiados están acotados entre 0 y 1 para obtenersoluciones físicas, exceptuando el coeficiente Y ∗, que no tiene cota superior.
Ignacio Gutiérrez Martínez 79

6 LÍNEAS FUTURAS
6 LÍNEAS FUTURASAl inicio de este proyecto se ha definido el alcance del trabajo que, en síntesis, consisteen realizar el análisis del punto de bloqueo sónico en una fila de estátor con unas hipóte-sis muy concretas que permiten simplificar el problema. Por este motivo, hay multitudde conceptos y temas no tratados en este trabajo que podrían ser objeto de un estudiosimilar.
Lo más sencillo de proponer es un estudio similar en el que se incluyan otros coeficientesde pérdidas. Por ejemplo, los coeficientes de pérdidas energéticos ζ definidos en [5] ycomparación con coeficientes los ya estudiados en este trabajo.Una ampliación que seguiría la misma línea que este trabajo sería el análisis completo deuna etapa (rotor y estátor) y que considere un modelo con las estaciones 1, 2 y 3. Estopermitiría realizar un análisis mucho más completo ya que aparecerían coeficientes depérdidas compuestos, definiciones de eficiencias de la etapa completa, cálculo del trabajogenerado/aportado por una etapa, etc. A partir de este modelado, no sería demasiadocomplicado iniciar el modelo matemático de una turbomáquina completa encadenando nfilas 0-dimensionales.
Sin olvidar que estos modelos matemáticos son una de las muchas herramientas utilizadasen la actualidad para el diseño de turbomáquinas, se podría proponer un modelo de gasmás realista, que por ejemplo considere que cp y γ varían con la temperatura. Un pasohacia un modelo más realista también sería considerar una mezcla de gases ideales, yaque en las etapas posteriores a la cámara de combustión de un motor, el fluido de trabajoes la mezcla de aire con los productos de la combustión. Así mismo, en los compresoresse podría tener en cuenta la humedad en el flujo de aire de entrada.
80 Escuela Técnica Superior de Ingenieros Industriales (UPM)

Análisis del punto de bloqueo en turbomáquinas axiales mediante modelos de orden reducido
7 RESPONSABILIDAD SOCIALEstá previsto que, al ritmo de crecimiento actual, la población mundial llegue a cifras de8500 millones de personas en el año 2030. La International Air Transport Association(IATA) predice que, en el año 2030, habrá seis mil millones de usuarios anuales de trans-porte aéreo.Además, esta asociación ha publicado un artículo [1] en el que se analizan los factoresque pueden influir en el futuro de la aviación con el fin de que las empresas comiencen atomar acciones para aprovechar las oportunidades y afrontar los retos que aparecerán enlos próximos años. Se clasifican estos factores en:
• Sociedad
• Tecnología
• Economía
• Política
• Medio ambiente
La ingeniería del presente tiene la responsabilidad de proveer las soluciones y las técnicaspara que la tecnología pueda avanzar al mismo ritmo que lo hace la sociedad.La industria aeronáutica está desarrollando nuevos motores más eficientes, que emitenmenos contaminantes y más silenciosos. Por tanto, los esfuerzos en el diseño de nuevatecnología están centrados en reducir el impacto que tiene el transporte aéreo en el medioambiente. Los avances de nuevas tecnologías y métodos, así como la optimización delas tecnologías existentes, contribuyen al alcance de objetivos del desarrollo sostenible:reducción de las emisiones, el consumo de combustibles fósiles y la contaminación acústicaproducidas por el transporte aéreo.
Ignacio Gutiérrez Martínez 81

8 BIBLIOGRAFÍA
[1] I. A. T. Association et al. Future of the airline industry 2035. URL: https://www.iata. org/policy/Documents/iata-future-airline-industry. pdf, 2018.
[2] D. Cadrecha, J. M. Chaquet, R. Corral, and V. P. Timon. Robust method to solvemeanline equations for choked flows. In ASME Turbo Expo 2018: TurbomachineryTechnical Conference and Exposition, pages V02CT42A005–V02CT42A005. Ameri-can Society of Mechanical Engineers, 2018.
[3] J. M. Chaquet. Optimización de la eficiencia termodinámica de turbinas aeronáuticasmediante algoritmos genéticos. In Trabajo final del Máster oficial en InteligenciaArtificial. Universidad Nacional de Educación a Distancia, 2010.
[4] P. De la Calzada. Aerothermodynamic design of low pressure turbines. Aero-EngineDesign: From State of the Art Turbofans Towards Innovative Architectures, 2008.
[5] J. D. Denton. The 1993 igti scholar lecture: Loss mechanisms in turbomachines.Journal of turbomachinery, 115(4):621–656, 1993.
[6] S. A. Korpela. Principles of turbomachinery. Wiley Online Library, 2011.
[7] P. Ligrani, G. Potts, and A. Fatemi. Endwall aerodynamic losses from turbine com-ponents within gas turbine engines. Propulsion and Power Research, 6(1):1–14, 2017.
[8] Diccionario de la lengua española. https://dle.rae.es/. Acceso: 2019-12-06.
[9] R. Riaza and M. Alvarez. Cálculo infinitesimal: volumen I. Sociedad de Amigos dela ETS de Ingenieros Industriales, 1996.
[10] Rolls-Royce. Trent 1000 cutaway poster 2019. https://www.rolls-royce.com/products-and-services/civil-aerospace/airlines/trent-1000. Acceso: 2020-01-04.
82 Escuela Técnica Superior de Ingenieros Industriales (UPM)

Análisis del punto de bloqueo en turbomáquinas axiales mediante modelos de orden reducido
9 PLANIFICACIÓN TEMPORAL Y PRESUPUESTO
9.1 Planificación temporalEl trabajo ha tenido principalmente dos etapas. La primera etapa concierne todo aquelloque tiene que ver con la contextualización, la comprensión y el estudio de cuales eran losobjetivos a alcanzar en el trabajo. Esta etapa termina con el cálculo de las expresionesde los coeficientes de pérdidas a finales del mes de octubre (desarrollo teórico). Unavez obtenidas las expresiones, comienza la programación, el análisis, las simulaciones, lascomparaciones...El trabajo concluye con la redacción de la memoria en los meses de diciembre y enero.
Aproximadamente el número de horas de trabajo invertidas en el proyecto es de 345h.Desde el día 26 de agosto de 2019, día en el que empezó el proyecto con su propuesta,hasta el día de la entrega, 3 de febrero de 2020, se obtiene un total de 161 días. Lo queresulta en un promedio de trabajo de 2 horas y 10 minutos al día.
Las tareas en las que se ha dividido el trabajo se representan en el siguiente diagramaEDT (Estructura de Descomposición del Trabajo):
Aprendizaje Desarrollo teórico Programación Reuniones Redacción
Trabajo deFin de Grado
EstudioFunciónIsentrópica
EstudioFuncionesReales
Estudiode losartículos
Reunionescon eltutor
Código yfiguras enMATLAB
Consulta debibliografía
Redacciónde lamemoria
Cálculocoeficientesde pérdidas
Cálculosf. Entropíay Mach
Además de las representadas en el diagrama EDT, se podrían incluir varias tareas adi-cionales, sobre todo en la parte de aprendizaje, por ejemplo: Búsqueda de documentaciónde LATEX, de MATLAB, depuración de código, redacción de mails, revisión del documento,etc. Estas tareas transversales no están programadas y se engloban en las tareas princi-pales.
En la figura 47 se representa la planificación temporal que ha seguido cada una de lastareas en un diagrama de Gantt.
Ignacio Gutiérrez Martínez 83

9 PLANIFICACIÓN TEMPORAL Y PRESUPUESTO
26
/08/2
01
906
/09/2
01
917
/09/2
01
928
/09/2
01
909
/10/2
01
920
/10/2
01
931
/10/2
01
911
/11/2
01
922
/11/2
01
903
/12/2
01
914
/12/2
01
925
/12/2
01
905
/01/2
02
016
/01/2
02
0
Est
udio
de
los
artí
culo
s
Est
udio
Funci
ón I
sentr
ópic
a
Est
udio
Funci
ones
Rea
les
Reu
nio
nes
con e
l tu
tor
Códig
o y
fig
ura
s en
Mat
lab
Cál
culo
coef
icie
nte
s de
pér
did
as
Cál
culo
s fu
nci
ones
Entr
opía
/Mac
h
Consu
lta
de
bib
liogra
fía
Red
acci
ón d
e la
mem
ori
a
Figu
ra47:Diagram
ade
Gan
tt.
84 Escuela Técnica Superior de Ingenieros Industriales (UPM)

Análisis del punto de bloqueo en turbomáquinas axiales mediante modelos de orden reducido
9.2 PresupuestoLa hora de trabajo del alumno se tasa a 10€/hora. La hora de trabajo del tutor se tasa a40€/hora. Las horas del tutor se desglosan en: 15 horas de reuniones, 10 horas de trabajoprevio al TFG y 20 en otros conceptos (responder correos, lectura del trabajo, búsquedade normativa, envío de documentación, etc.).
El ordenador que se ha utilizado costó 700€ hace 5 años, se considera su valor residualnulo y que se ha utilizado durante 6 meses en estos 5 años para la realización del proyecto.Para el consumo eléctrico se considera el consumo de un ordenador portátil con una fuentede alimentación de 65W y el precio del KWh de 0,19€ (incluyendo impuestos). Lo queresulta en un precio/hora del consumo del ordenador de 0,01235€/h.Aunque con la nueva normativa de 2019 no es necesario imprimir el trabajo, se prevén 2copias del TFG en papel para que el tribunal pueda consultarlo en el acto de defensa.
Al presupuesto habría que añadirle el coste de las licencias del software utilizado. Eneste trabajo se ha utilizado principalmente MATLAB para los cálculos y la generación defiguras. Ya que la UPM proporciona estas licencias a los alumnos de forma gratuita, seasume que el coste de esta licencia está incluida en las tasas de la matrícula.
Precio unitario Cantidad TotalHoras alumno 10,00 345,00 3450,00Horas tutor 40,00 45,00 1800,00Matrícula TFG 24,55 12,00 294,60Consumo eléctrico 0,01235 345,00 4,26Amortización equipo 700,00 0,10 70,00Impresión 60,00 2,00 120,00TOTAL 5738,86
Ignacio Gutiérrez Martínez 85

NOMENCLATURA
10 ABREVIATURAS, UNIDADES Y ACRÓNIMOS
Nomenclatura
A Área [m2]
a Velocidad local del sonido a =√γRgT [m/s]
cp Capacidad calorífica a presión constante [J/(kgK)]
cv Capacidad calorífica a volumen constante [J/(kgK)]
DP/P0 Coeficiente de pérdidas basado en la presión total
H Envergadura de las filas o conductos [m]
h Entalpía específica [J/kg]
KSI Coeficiente de pérdidas basado en la energía = 1− η
m Gasto másico [kg/s]
M Número de Mach = V/√γRgT
N Peso molecular [kg/mol]
P Presión estática [Pa]
r Radio medio [m]
R Constante universal de los gases 8, 314J/(kgK)
Rg Constante del gas [J/(kgK)]
s Entropía [J/(kgK)]
T Temperatura adimensionalizada = T/T0
T Temperatura estática del fluido [K]
u Energía interna [J/Kg]
V Velocidad del fluido [m/s]
v Volumen [m3]
Vm, Vθ Velocidades meridional y tangencial [m/s]
w, q Trabajo y calor específicos [J/kg]
Y Coeficiente de pérdidas basado en la presión dinámica isentrópica en la salida
Y ∗ Coeficiente de pérdidas basado en la presión dinámica real en la salida
86 Escuela Técnica Superior de Ingenieros Industriales (UPM)

Análisis del punto de bloqueo en turbomáquinas axiales mediante modelos de orden reducido
Símbolos griegos
α Ángulo de giro o Slope whirl angle = arctg(Vθ/Vm) [rad]
η Eficiencia basada en la energía
γ Coeficiente de dilatación adiabática = cp/cv
ω Coeficiente de pérdidas basado en la presión presión dinámica en la entrada
ρ Densidad del fluido [kg/m3]
ζ Eficiencia basada en la entalpía [5]
10.1 Abreviaturas• 0D: Cero-dimensional
• 1D: Unidimensional
• 2D: Bidimensional
• 3D: Tridimensional
• BS: Bloqueo sónico
• CFD: Computational Fluid Dynamics
• IATA: International Air Transport Association
• IS: Isentrópico
• SI: Sistema Internacional
Ignacio Gutiérrez Martínez 87

11 ANEXO I - FUNCIONES EN MATLAB
11 ANEXO I - Funciones en MATLABEn esta sección se incluyen algunas funciones de MATLAB utilizadas para resolver lasecuaciones y representar las gráficas de este documento. Se describe el funcionamientodel código, los problemas que se han encontrado y las soluciones que se han considerado.
11.1 Método de la bisección - bisection.m
Función de MATLAB implementada para la búsqueda de ceros de una función medianteel método de la bisección. Los parámetros de entrada son:
• f: función de la que se quieren calcular la solución x tal que f(x) = 0.
• a y b: intervalo entre el que se debe buscar la solución.
Salida:
• p: punto en el que la función f se anula.
Según el teorema de Bolzano: si una función f es continua en [a, b] y cumple que f(a) ∗f(b) < 0, entonces existe c en (a, b) tal que f(c) = 0.Si la función bisection.m devuelve el valor p=-1 significa que no existe ningún valorintermedio entre a y b que anule la función f. Se asume, por tanto, que 0 ≤ a < b.Existe un parámetro interno configurable en función de la precisión con la que se quieraobtener la solución (err).
function p = bisection(f,a,b)if f(a)*f(b)>0
p=−1;else
p = (a + b)/2;err = abs(f(p));while (err > 0.000001)
if f(a)*f(p)<0 %solucion entre a y pb = p;
elsea = p; %solucion entre p y b
endp = (a + b)/2;err = abs(f(p));
endend
88 Escuela Técnica Superior de Ingenieros Industriales (UPM)

Análisis del punto de bloqueo en turbomáquinas axiales mediante modelos de orden reducido
Un error que se ha encontrado utilizando este código es en el momento de buscar lasegunda solución. Como ya se ha comentado en Resultados para un gasto másico fijo,para utilizar el método de la bisección de forma robusta se utiliza la función max() deMATLAB que devuelve el máximo de un vector y su posición. Sabiendo que para el gastomásico dado existen dos soluciones, la primera solución estará a la izquierda del máximoy la segunda a la derecha. Por tanto, el método para buscar las dos soluciones, consisteen buscar la primera solución (c1) entre 0 y la coordenada x(idx), donde se produceel máximo de la función y la segunda entre c1+0.001 y 1. Si se añade un incrementodemasiado grande a la primera solución para buscar la segunda se corre el riesgo, para uncoeficiente cercano al bloqueo sónico, de no encontrar la segunda solución c3.
y=real(f(x));%m es el valor maximo del vector ’y’%idx es el numero del elemento de ’y’ maximo[m,idx] = max(y);%funcion f(T) igualada al gasto para buscar sus ceros por la biseccion%c2 es el nuevo punto de inicio para la exploracion de la 2a soluciong =@(x) f(x) − gasto;c1=bisection(g,0,x(idx));c2=c1+0.001;c3=bisection(g,c2,1);
Este código también es susceptible de tener un bucle infinito. Si el error mínimo no sealcanza nunca dividiendo entre 2 el intervalo de exploración de la solución, nunca se saledel bucle while.Esto se puede producir si la solución resulta estar exactamente en a o b. Como el primerif solo comprueba si es mayor estricto entraría en el bucle. Por ejemplo, si la soluciónestá en a:function p = bisection(f,a,b)if f(a)*f(b)>0 %f(a)=0
p=−1;else %entra por el else
p = (a + b)/2; %calcula p>aerr = abs(f(p));while (err > 0.000001) %err>0.000001
if f(a)*f(p)<0 % %f(a)=0b = p;
else %entra por elsea = p; %pone el nuevo a en p
endp = (a + b)/2;err = abs(f(p));
endend
Al poner el nuevo a en p nunca se va a salir del bucle porque se va a buscar la soluciónentre (a+b)/2 y b, estando la solución en a.La solución no puede ser cambiar el mayor estricto por un mayor o igual, porque si lasolución está en a, se rechazaría esta solución.
Ignacio Gutiérrez Martínez 89

11 ANEXO I - FUNCIONES EN MATLAB
La solución sería considerar un if anidado con el primero preguntando si f(a)*f(b)=0.function p = bisection(f,a,b)if f(a)*f(b)>0
p=−1;else
if f(a)*f(b)=0if f(a) = 0
p=a;else
p=b;end
elsep = (a + b)/2;err = abs(f(p));while (err > 0.000001)
if f(a)*f(p)<0b = p;
elsea = p;
endp = (a + b)/2;err = abs(f(p));
endend
end
90 Escuela Técnica Superior de Ingenieros Industriales (UPM)

Análisis del punto de bloqueo en turbomáquinas axiales mediante modelos de orden reducido
11.2 Cálculo de la entropía - entropia6.m
Este código hace un barrido para un coeficiente de pérdidas que viene como parámetrode entrada (coef) entre 0 y 0,6. Este valor arbitrario de 0,6 ha sido obtenido medianteprueba y error. Es lo suficientemente alto como para sobrepasar al punto de bloqueosónico con el gasto másico adimensional utilizado de 0,185.Dependiendo del coeficiente que se introduzca, se definen las funciones f(T ) y se alma-cenan en el vector ‘y’. Luego, a través del método de la bisección, se obtienen las dossoluciones para el valor de ‘gasto’, que es un parámetro de entrada de la función. Unavez se ha comprobado que las dos soluciones c1 y c3 son válidas (positivas), se calculael valor de la entropía para cada solución. Todas estas operaciones se repiten en buclehasta el punto indicado (coef=0,6). Cuando se sobrepasa el punto de bloqueo sónico yno existen soluciones, la función bisection devuelve el valor -1 en c1 y c3, por lo que nose crean más elementos de los vectores de salida e1, e3 y vc.
Entradas:
• coef: nombre del coeficiente a utilizar
• gasto: gasto másico fijo para el que se soluciona el sistema
Salidas:
• e1: vector de i elementos que contiene el valor de la entropía de la primera solución
• e3: vector de i elementos que contiene el valor de la entropía de la segunda solución
• vc: vector de i elementos que contiene el valor del coeficiente de pérdidas de cadapar de soluciones
Representando los vectores vc, e1 y e3 en una gráfica bidimensional, se obtienen figurascomo la 35.
Ignacio Gutiérrez Martínez 91

11 ANEXO I - FUNCIONES EN MATLAB
function[e1,e3,vc]=entropia6(coef,gasto)
%coef = [’DP/P_0’];%coef = [’KSI’];%coef = [’Y’];%coef = [’Y^*’];%coef = [’\omega’];
%el vector x es la temperatura adimensional Tx=[0:0.001:1];i=1;
for c=0 : 0.001 : 0,6%definicion funciones para el coeficiente ’c’%Yif strcmp (coef, ’Y’)
f =@(x) ((c−1)./(c − x.^(−1.4/0.4))) .* (sqrt(1 − x) ./ x);entropia = @(x)(( c .* (x .^ (1.4/0.4)) −1) ./ (c−1));
end%Y^*if strcmp (coef, ’Y^*’)
f =@(x) (x.^(1/0.4) .* sqrt (1−x)) ./ (c+1−c.*x.^(1.4/0.4));entropia = @(x) c + 1 − c .* (x .^(1.4/0.4));
end%KSIif strcmp (coef, ’KSI’)
f =@(x) (1 + (x − 1)./(1−c)).^(1.4/0.4) .* (sqrt(1−x) ./x);entropia = @(x) (x.*(1−c) / (x − c)).^(1.4/0.4);
end%DPP0if strcmp (coef, ’DP/P_0’)
f =@(x) x.^(1/0.4) .* sqrt(1−x) .* (1−c);entropia = @(x) 1/(1−c);
end%omegaif strcmp (coef, ’\omega’)
f =@(x) x.^(1/0.4) .* sqrt(1−x) .* (1−c*(1−0.4));entropia = @(x) 1/(1−c*(1−0.4));
end%se genera la funcion f(T) y se guarda en yy=real(f(x));%se suprimen los elementos negativos (dandoles valor = −1)y(y <= 0.000000001)=[−1];%m es el valor maximo del vector y%idx es el numero del elemento de y para el que%se corresponde el valor maximo[m,idx] = max(y);
92 Escuela Técnica Superior de Ingenieros Industriales (UPM)

Análisis del punto de bloqueo en turbomáquinas axiales mediante modelos de orden reducido
%funcion f(T) igualada al gasto para buscar sus ceros por la biseccion%las 2 soluciones son c1 y c3%c2 es el nuevo punto de inicio para la exploracion de la 2a soluciong =@(x) f(x) − gasto;c1=bisection(g,0,x(idx));c2=c1+0.001;c3=bisection(g,c2,1);%si las soluciones son validas se calcula el valor de la entropia%una vez sobrepasado el valor del bloqueo sonico c1 y c3 valdran −1if c1>0.0001 && c3>0.0001
e1(i)= real(log(entropia (c1)));e3(i)= real(log(entropia (c3)));vc(i)=c;i=i+1;
%se crean 3 vectores de longitud ’i’%e1 y e3 son los valores de la entropia de las soluciones c1 y c3%el vector vc es el valor del coeficiente%de perdidas para el par de soluciones
endend
La condición ‘if’ que evalúa las soluciones obtenidas de la bisección, para después calcularlos valores de la entropía, es una de las condiciones más importantes en lo que conciernea la robustez del código. En el código real la condición utilizada ha sido:
if c1 − c3 < 0.0001 && c1>0.0001 && c3>0.0001 && c1<1 && c3<1
Es decir, se descartan las soluciones en las que la segunda solución es menor que la primeray para los valores que quedan fuera del intervalo (0,1).Aunque parecen condiciones lógicas que siempre se van a cumplir, no es así. En lascercanías del punto de bloqueo sónico, las soluciones dejan de tener sentido físico.Otra medida que se ha tomado para aumentar la robustez ya que inducía a errores deejecución es la línea
y(y <= 0.000000001)=[−1];
que elimina los valores negativos de f(T ). Estas funciones realmente tienen un dominiosuperior al (0,1). Sin embargo, no tienen sentido y por eso no se han estudiado.Otro ejemplo para robustecer el código es la utilización de la función real() ya que ellogaritmo neperiano puede no existir y dar una solución imaginaria.
Ignacio Gutiérrez Martínez 93

11 ANEXO I - FUNCIONES EN MATLAB
11.3 Cálculo del número de Mach - Mach6.m
Función muy similar a entropia6.m. Se hace un barrido del coeficiente de pérdidas y secalcula dentro del bucle la función f(T ) y el valor del número de Mach para ese valor delcoeficiente de pérdidas si tiene solución para el gasto. Se devuelven 3 vectores, dos parael valor del número de Mach de cada solución ‘s1’, ‘coef’ y el coeficiente de pérdidas ‘yc’.
Utilizando en conjunto las funciones ‘entropia6.m’ y ‘Mach6.m’ se pueden generar fácil-mente figuras como la 42 en las que se compara el valor de la entropía y el número deMach para el mismo barrido del coeficiente de pérdidas.
94 Escuela Técnica Superior de Ingenieros Industriales (UPM)

Análisis del punto de bloqueo en turbomáquinas axiales mediante modelos de orden reducido
function[s1,s3,yc]=Mach6(coef,gasto)%x: vector T%y: f(T)x=[0:0.001:1];mach =@(x) sqrt((2/0.4).*((1./x) − 1));i=1;for c=0 : 0.001 : 0.6
if strcmp (coef, ’Y’)%Y
f =@(x) ((c−1)./(c − x.^(−1.4/0.4))) .* (sqrt(1 − x) ./ x);endif strcmp (coef, ’Y^*’)%Y^*
f =@(x) (x.^(1/0.4) .* sqrt (1−x)) ./ (c + 1 − c .* x .^(1.4/0.4));endif strcmp (coef, ’\omega’)%omega
f =@(x) x.^(1/0.4) .* sqrt(1−x) .* (1−c*(1−0.4));endif strcmp (coef, ’KSI’)%KSI
f =@(x) (1 + (x − 1)./(1−c)).^(1.4/0.4) .* (sqrt(1−x) ./x);endif strcmp (coef, ’DP/P_0’)%DPP0
f =@(x) x.^(1/0.4) .* sqrt(1−x) .* (1−c);endy=real(f(x));[m,idx] = max(y);Tb=x(idx);g =@(x) f(x) − gasto;c1=bisection(g,0,Tb);c2=c1+0.00001;c3=bisection(g,c2,0.9999);if c1 − c3 < 0.0001 && c1>0.0001
m1=real(mach(c1));m3=real(mach(c3));s1(i)=m1;s3(i)=m3;yc(i)=c;i=i+1;
endend
Ignacio Gutiérrez Martínez 95
