retroacção linear de variáveis de estado · poincaré e lyapunov (que já consideravam problemas...
TRANSCRIPT
CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
1
Retroacção Linear de
Variáveis de Estado
-2.5 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 2.5-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
J. Miranda Lemos
Professor Catedrático do IST
2012
CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
2
Plano
1.Motivação para o controlo por retroacção linear de variáveis de estado
2.Controlabilidade e Observabilidade
3.Realimentação linear de variáveis de estado (regulação)
4.Observadores assimptóticos
5.Teorema de separação
6.Seguimento de referências e inclusão do efeito integral

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
3
1.Motivação para retroacção linear de
variávreis de estado
Objectivo:
Motivar o projecto de controladores com base no modelo de estado e
apresentar os principais problemas que esta abordagem coloca, relacionando-
os com os conceitos de controlabilidade e observabilidade.

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
4
Exemplo: O controlo da suspensão magnética revisitado
ku y1
s
+
-
r
2
Em cadeia fechada:
ks
ksY
2)(
O sistema em cadeia fechada com controlo proporcional fica sempre
oscilatório não amortecido.
kj
kj

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
5
Retroacção da velocidade
1s
u y+
-
r1s
K
k1
++
ku y1
s
+
-
r
2
1+k s1
)()1(
)(1
2sR
skKs
KsY
Equação característica da cadeia fechada:
01
2 KsKks
Por ajuste dos coeficientes podemos colocar os pólos arbitrariamente.
CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
6
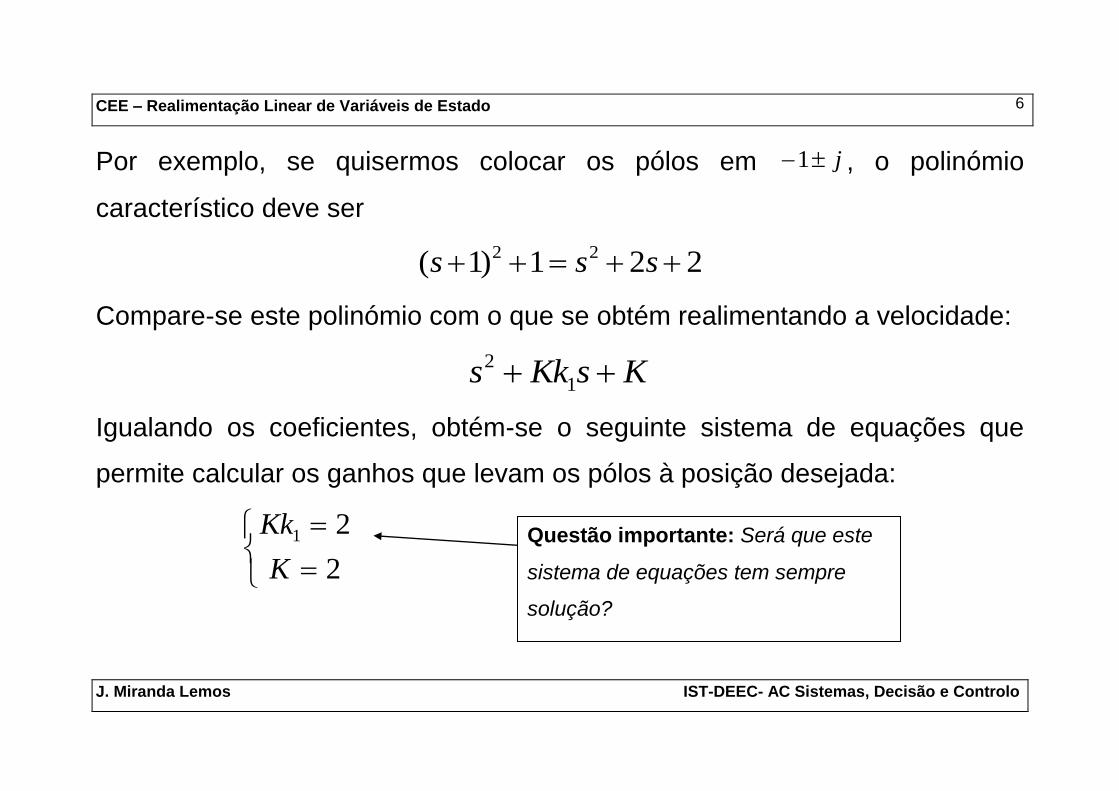
Por exemplo, se quisermos colocar os pólos em j1 , o polinómio
característico deve ser
221)1( 22 sss
Compare-se este polinómio com o que se obtém realimentando a velocidade:
KsKks 1
2
Igualando os coeficientes, obtém-se o seguinte sistema de equações que
permite calcular os ganhos que levam os pólos à posição desejada:
2
21
K
Kk
Questão importante: Será que este
sistema de equações tem sempre
solução?

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
7
Conclusão:
A retroacção linear de todas as variáveis de estado permite aumentar a
flexibilidade no projecto do controlador (pelo menos aparentemente), dado
que temos um procedimento sistemático para colocar os pólos da cadeia
fechada.
Levantam-se questões importantes:
Acessibilidade do estado. O estado nem sempre está acessível para
medida directa, por exemplo devido a limitações tecnológicas ou de custo
dos sensores;
Existência de solução das equações.
Isto levar-nos-á ao conceito de
controlabilidade

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
8
Estimação do estado
Quando o estado não está acessível uma possibilidade é substitui-lo por uma
estimativa. Estimador em cadeia aberta:
1s
u y+
-
r1s
K
1s
y1s
k1
++
v
v
Modelo
^ ^
Esta solução não é boa:
Leva-nos a um controlador
em cadeia aberta.
As perturbações e os erros
de modelação não são
atenuados.

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
9
Solução com observador assimptótico
1s
u y+
-
r1s
K
1s
y1s
k1
++
v
v̂ ^
+
-L L
2 1
Questões importantes:
Será sempre possível determinar
1L e 2L por forma a que o erro de
estimação tenda para zero?
OBSERVABILIDADE
Qual o efeito da incerteza no
modelo?
Limitações nos valores
de 1L e 2L
CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
10
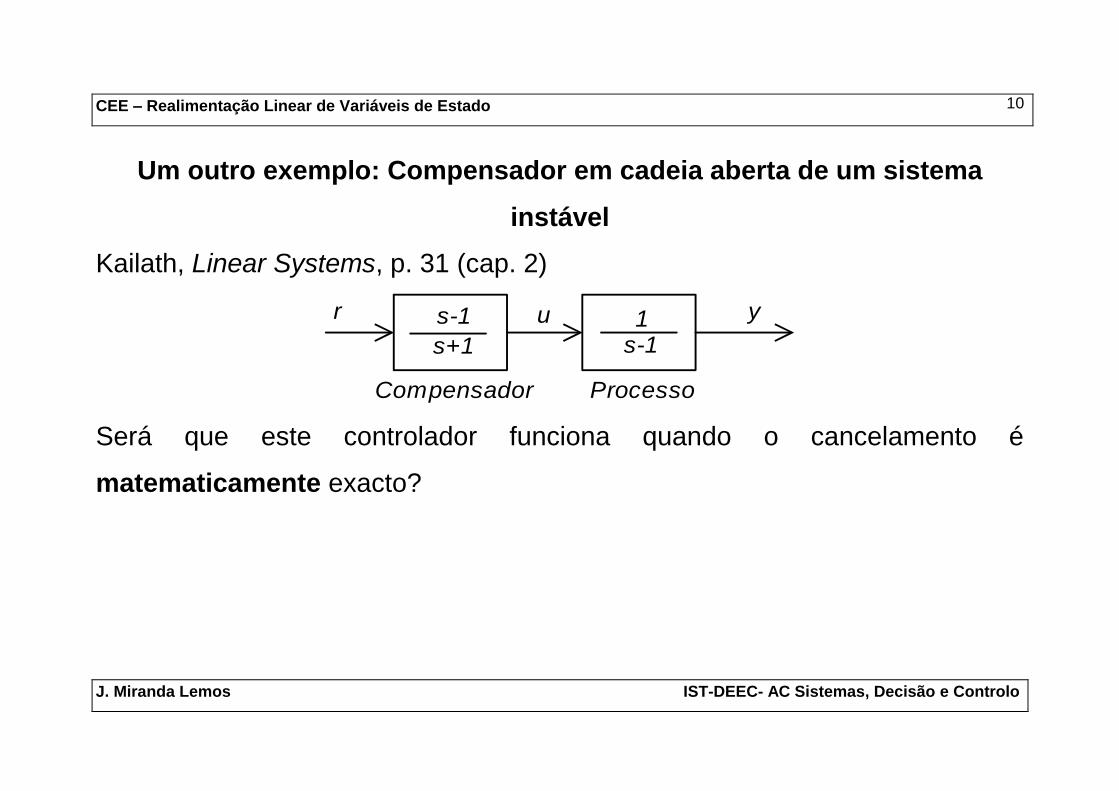
Um outro exemplo: Compensador em cadeia aberta de um sistema
instável
Kailath, Linear Systems, p. 31 (cap. 2)
u y1s-1
r s-1
s+1
Compensador Processo
Será que este controlador funciona quando o cancelamento é
matematicamente exacto?
CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
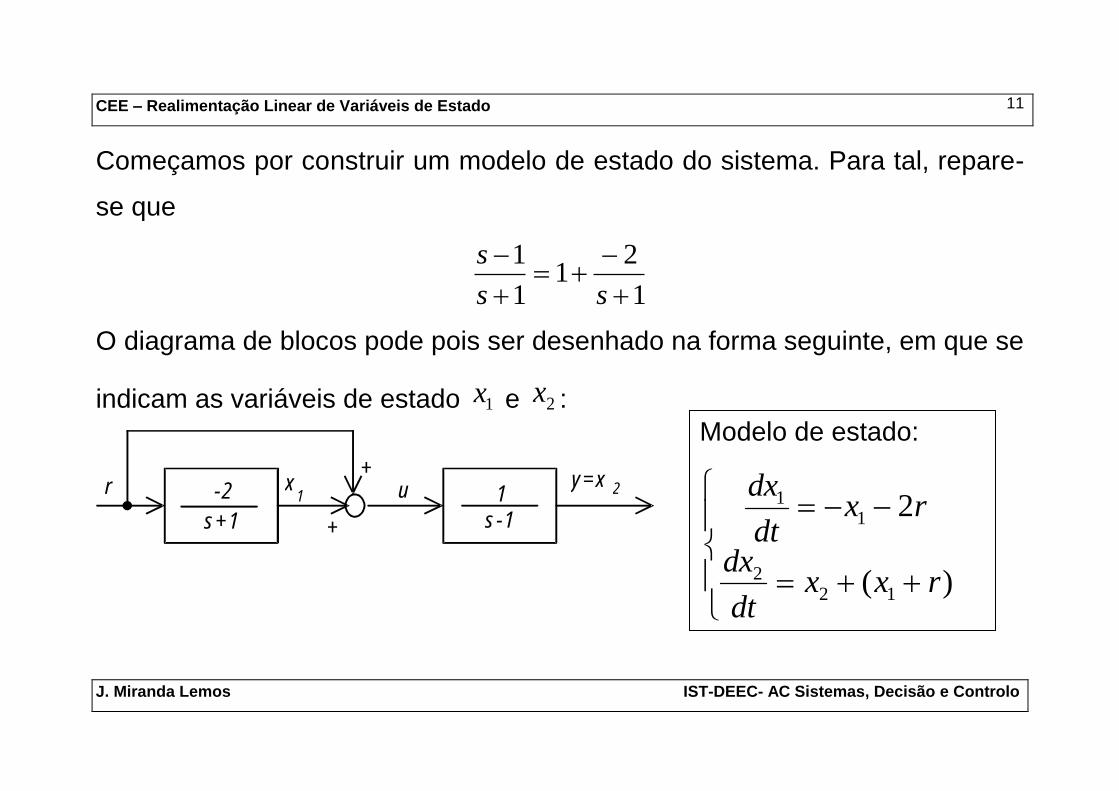
11
Começamos por construir um modelo de estado do sistema. Para tal, repare-
se que
1
21
1
1
ss
s
O diagrama de blocos pode pois ser desenhado na forma seguinte, em que se
indicam as variáveis de estado 1x e 2x :
uy=x
1s-1
r -2
s+1
x1
2+
+
Modelo de estado:
)(
2
122
11
rxxdt
dx
rxdt
dx

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
12
A resolução destas equações (faça!) conduz a ( significa “convolução”):
)(2)( 101 trexetx tt
)()(2
1)( 1020 trexeexety tttt
Conclusão:
Mesmo quando o cancelamento é exacto, o sistema só é estável quando
02010 xx .
Repare-se que é frequente afirmar que o sistema não funciona porque, na prática, o
cancelamento não é nunca matematicamente exacto. Isto é verdade, mas mais importante ainda
é que, mesmo que haja cancelamento perfeito, há modos naturais (associados às condições
iniciais) que tendem para infinito.

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
13
A necessidade de uma descrição interna dos sistemas
Este exemplo ilustra a importância de termos uma descrição interna dos
sistemas, que clarifique as questões relativas ao cancelamento de pólos e
zeros.
Isto vai conduzir-nos uma vez mais aos conceitos de Controlabilidade e
Observabilidade.

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
14
Os métodos para o projecto de sistemas de controlo baseados no modelo de estado nasceram nos anos 60
nos USA, associados aos problemas postos pela Engenharia Aeroespacial (a célebre “aposta” de Kennedy
sobre a ida à Lua data desse período). Têm no entanto raízes mais antigas (e importantes) nos trabalhos de
Poincaré e Lyapunov (que já consideravam problemas não-lineares). Uma boa parte dos fundamentos da teoria
do controlo em espaço de estado é devida a R. Kalman (que viu muitos dos seus trabalhos rejeitados em
revistas de Electricidade, o que o levou a publicar em revistas de Mecânica).
Na Europa o problema era diferente: Após a destruição causada pela II Guerra Mundial a prioridade ia para o
desenvolvimento das indústrias de bens de consumo. Aqui, ao contrário da indústria Aeroespacial, é muito
difícil construir modelos de estado a partir de princípios básicos, o que levou a um maior desenvolvimento dos
modelos entrada/saída. Nomes como V. Peterka (na Checoslováquia, onde a indústria do aço adquiriu grande
importância) ou K. Astrom (na Suécia, com trabalhos ligados à indústria do papel) ilustram esta afirmação.
A partir dos anos 80 compreendeu-se progressivamente melhor (não sem que antes tivesse havido debates
acesos) que as duas abordagens são, de facto, as duas faces da mesma moeda, dando pontos de vista
complementares sobre virtualmente todas as questões.

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
15
2.Controlabilidade e Observabilidade
Objectivo:
Introduzir os conceitos de observabilidade, controlabilidade,
reconstrutibilidade e atingibilidade. Critérios de controlabilidade e
observabilidade. Relação das propriedades de controlabilidade e
observabilidade do modelo de estado com a função de transferência.

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
16
Questão (relacionada com a Controlabilidade):
Dado o sistema descrito pelo modelo de estado contínuo
)()()( tbutAxtx
será possível, partindo da origem ( 0)0( x ) levar o estado a um valor
especificado arbitrário por escolha conveniente das entradas?
A resposta a esta questão depende do par de matrizes ),( bA
Uma questão relacionada com esta é:
Como escolher a entrada por forma a levar o estado ao ponto especificado?
Pode colocar-se uma questão análoga para sistemas discretos.

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
17
Controlabilidade (definição – sistemas contínuos)
A realização de estado contínua
)()()( tbutAxtx
diz-se completamente controlável se, dado um estado inicial na origem
0)0( x , e qualquer fx , existir um instante finito ft e uma função de entrada
)(tu , ftt 0 tal que ff xtx )( .
x(0)=0
xf

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
18
Nota sobre o conceito de controlabilidade
Para sistemas contínuos a definição de controlabilidade é equivalente a
impôr que de qualquer estado se atinja a origem num intervalo de tempo finito
por escolha conveniente da entrada. É esta a definição dada em [Rugh]. A
definição dada no acetato anterior é normalmente referida como
atingibilidade. Para sistemas contínuos as duas definições são equivalentes
mas para sistemas discretos não.
Referências:
Rugh (1996). Linear System Theory.
Kailath (1980). Linear Systems.
CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
19
Critério de controlabilidade (sistemas contínuos)
O sistema contínuo
)()()( tbutAxtx
é completamente controlável sse a matriz
bAbAAbbBAC n 12 ||||,
dita matriz de controlabilidade, tiver característica xn dim .
Este facto, que necessita demonstração, proporciona-nos um critério de
controlabilidade.

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
20
Exemplo de um sistema não completamente controlável
1/s 1/sx (t)x (t)
-1 -2
u(t)
2 1
Trajectórias
possíveis
x
x2
1
A partir do diagrama de blocos conclui-se, dado que a entrada não afecta a
variável 2x que não podem ser atingidos pontos do espaço fora do eixo 1x .
22
211 2
xdt
dx
uxxdt
dx
u
x
x
x
x
0
1
10
12
2
1
2
1

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
21
ux
x
x
x
0
1
10
12
2
1
2
1
00
21|),( AbbbAC
21),( nbACcar
Logo a realização de estado considerada não é controlável. Apenas podem
ser atingidos pontos num subespaço de dimensão 1),( bACcar do espaço de
estados (que tem dimensão 2).

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
22
Outro exemplo de um sistema não completamente controlável
1/s
x (t)
-1u(t)
21/s
x (t)
-1
1
Trajectórias
possíveis
x
x1
2
x1
x2=
Repare-se que os valores próprios são iguais.
uxdt
dx
uxdt
dx
22
11
Com condições iniciais nulas é
t
t duetxtx0
)(
21 )()()(
Apenas podem ser atingidos pontos sobre a recta 21 xx

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
23
Vejamos o que diz o critério de controlabilidade:
1
1
10
01bA
11
11),( bAC
Como 21),( nbACcar o critério permite pois concluir que o sistema é não
controlável e que apenas se podem atingir a partir da origem pontos do
espaço de estados que estão num subespaço de dimensão 1.

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
24
Interpretação em termos de sistemas diagonais (contínuo)
)()()( tbutztz ),,,( 21 ndiag
n
n
nnnnnn
n
n
bbbb
bbbb
bbbb
bC
12
2
1
22
2
2222
1
1
11
2
1111
),(
Para que esta realização de estado seja controlável, tem de ser iib 0
para que nenhuma linha se anule e ainda jiji para que não haja
linhas proporcionais.
CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
25
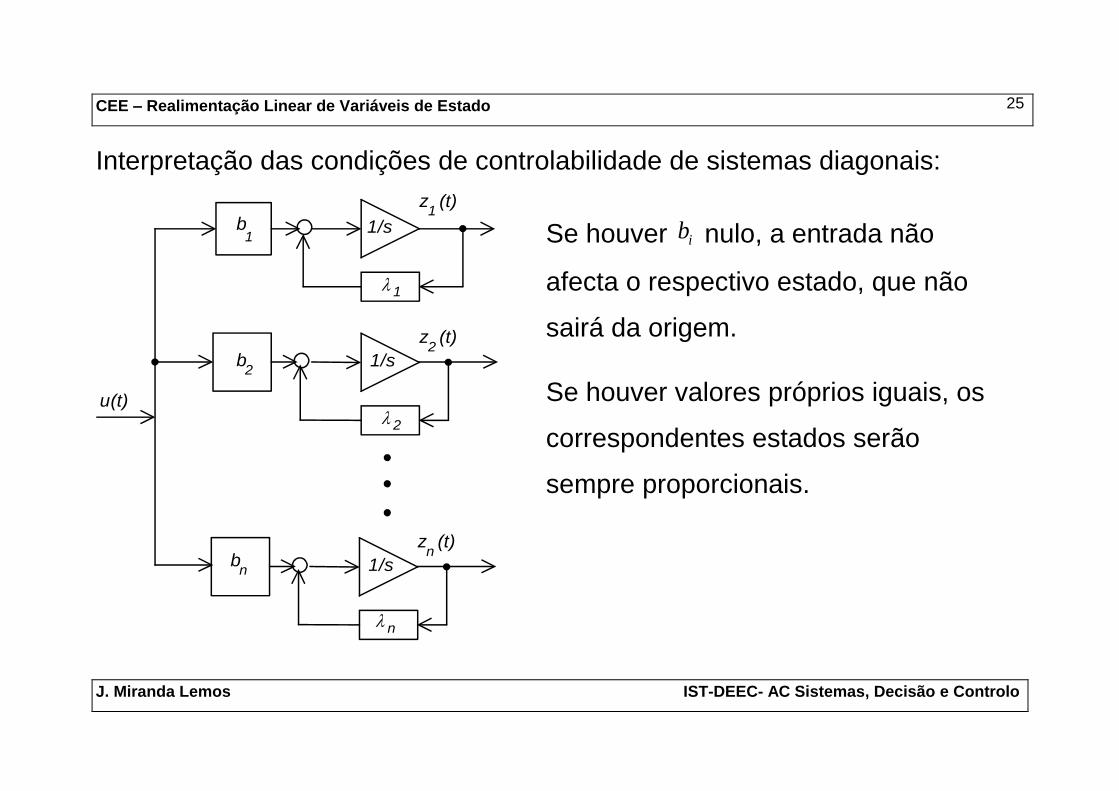
Interpretação das condições de controlabilidade de sistemas diagonais:
1/s
z (t)
u(t)
21/s
z (t)1
z (t)n
1/s
b
b
b
1
1
2
2
n
n
Se houver ib nulo, a entrada não
afecta o respectivo estado, que não
sairá da origem.
Se houver valores próprios iguais, os
correspondentes estados serão
sempre proporcionais.

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
26
Definição de Controlabilidade (Sistemas discretos)
A realização de estado de ordem n :
)()()1( kbukAxkx
diz-se completamente controlável sse para para uma condição inicial 0)0( x
e fx qualquer, existe N finito e uma sequência de entradas
)1(,),1(),0( Nuuu
tal que
fxNx )(

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
27
Critério de controlabilidade (sistemas discretos)
O sistema contínuo
)()()1( kbukAxkx
é completamente controlável sse a matriz
bAbAAbbbAC n 12 ||||),(
dita matriz de controlabilidade, tiver característica xn dim .
CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
28
Para demonstrar o critério de controlabilidade para realizações de estado de
sistemas discretos, precisamos do seguinte lema:
Lema
nN tem-se:
bAAbbcarbAbAAbbcar nNn 111 ||||||||
A demonstração é uma consequência do Teorema de Cailey-Hamilton.
(Tente fazê-la).

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
29
Demonstração do Lema
Seja n
nn asasAsIsa 1
1)det()( o polinómio característico da matriz A . Pelo
teorema de Cailey-Hamilton a matriz verifica a condição
01
1 IaAaA n
nn
Multiplicando à direita por b :
01
1 babAabA n
nn
ou seja, bAn é uma combinação linear de bbAn ,,1 . A demonstração de que
nibA in também é uma combinação linear dos mesmos vectores é feita por
indução.

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
30
Ajuda na demonstração do lema: O teorema de Cailey-Hamilton
Dada uma matriz quadrada A com polinómio característico
)det()( 2
2
1
1 AsIasasassa n
nnn
a matriz verifica a equação:
02
2
1
1 IaAaAaA n
nnn
Com abuso de linguagem diz-se que a matriz verifica a sua equação
característica.
Referência: Strang (1980). Linear Algebra and its Applications. Academic Press.

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
31
Demonstração do critério de controlabilidade (discreto)
Pela fórmula de variação das constantes e tendo em conta que a condição
inicial é nula, o estado ao fim de nN passos vem dado por
)1()1()0()( 21 NbubuAbuANx NN
Os pontos do espaço de estados que podem ser atingidos a partir da origem
são pois os que se podem obter como combinação linear de
bAbAAbb NN 12 ,,,,
Pelo lema, o subespaço gerado por estes vectores é igual ao gerado pelos
vectores
bAbAAbb nn 12 ,,,,

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
32
Problema
Considere o sistema discreto
)(0
1
)(
)(
00
11
)1(
)1(
2
1
2
1ku
kx
kx
kx
kx
a) Mostre que o sistema não é controlável, i.e. que nem sempre é possível
transferir a origem para um estado arbitrário;
b) Mostre que partindo de um estado genérico
)0(x , , dados, existe
uma lei de controlo que leva o estado à origem em 1 passo (i.e., existe
)0(u função de , tal que
0
0)1(x .

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
33
a) O sistema não é controlável. Com efeito:
00
11),( AbbbAC
2dim1),( xbACcar
De acordo com o critério de controlabilidade, há estados que não podem ser
atingidos partindo da origem.

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
34
b) Como:
)0(x
0
0)1(x
)0(u deve verificar o sistema de equações
)0(0
1
00
11
0
0u
Este sistema tem por solução
)0(u

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
35
Controlabilidade para a origem e Controlabilidade
Tal como o problema anterior mostra, nos sistemas discretos os conceitos de
controlabilidade para a origem (ser capaz de atingir a origem a partir de
qualquer estado) e controlabilidade (ser capaz de atingir a origem a partir de
qualquer estado) não são equivalentes. Isto leva a que a controlabilidade
como a definimos seja também designada por atingibilidade.
Nos sistemas contínuos os dois conceitos são equivalentes.
Repare-se que o critério relativo à característica da matriz de controlabilidade
se refere à atingibilidade (=controlabilidade) e não à controlabilidade para a
origem.
CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
36
Influência de uma transformação linear do estado na Controlabilidade
Dado o modelo de estado
buAxx
Considere o modelo de estado nas coordenadas transformadas Tzx .
a) Sendo a matriz T invertível, mostre que se o par ),( bA é controlável, a
realização de estado nas novas coordenadas também é controlável.
Escreva a matriz de controlabilidade nas novas coordenadas, zC .
b) Relacione zC e ),( bAC .
c) Exprima T em zC e ),( bAC
CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
37
Sugestão:
Obtenha o modelo de estado para z ;
Calcule a matriz de controlabilidade nas novas coordenadas
Relacione-a com a matriz de controlabilidade original.
CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
38
Tzx zTx buTATzTbuAxTz 111 )(
buTATzTz 11
bTATTATTbTATTbTCz
111111 ))(()(
bAbAAbbTC n
z
121
),(1 bACTCz
1),( zCbACT
CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
39
Provou-se o seguinte facto:
Dadas duas realizações de estado controláveis e com a mesma dimensão,
ubxAx xx e ubzAz zz
elas são semelhantes, sendo a transformação de semelhança T que leva de
uma para outra
Tzx
dada por
),(),( 1
zzxx bACbACT

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
40
Exemplo – Forma canónica do controlador
1s
1s
1s
u yxc2xc1 xc3
b2
b1
b3
-a2
-a1
-a3
321
3
32
2
1)(asasas
bsbsbsG
CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
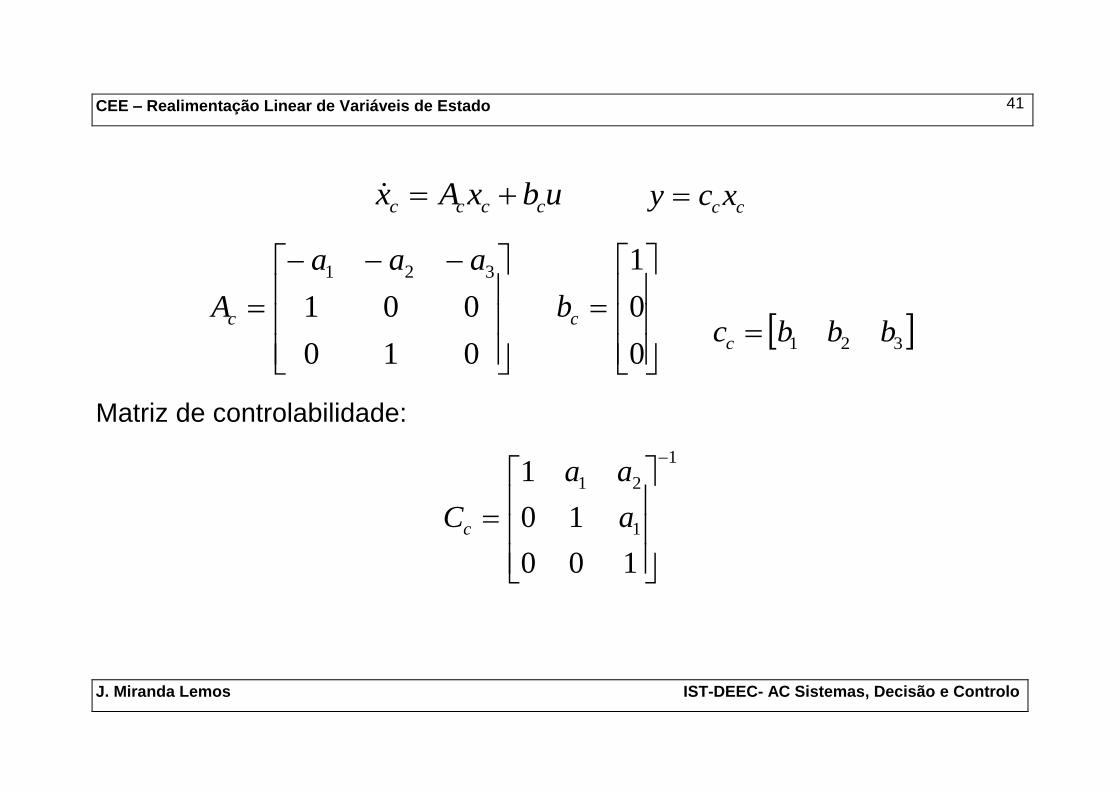
41
ubxAx cccc ccxcy
010
001
321 aaa
Ac
0
0
1
cb 321 bbbcc
Matriz de controlabilidade:
1
1
21
100
10
1
a
aa
Cc
CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
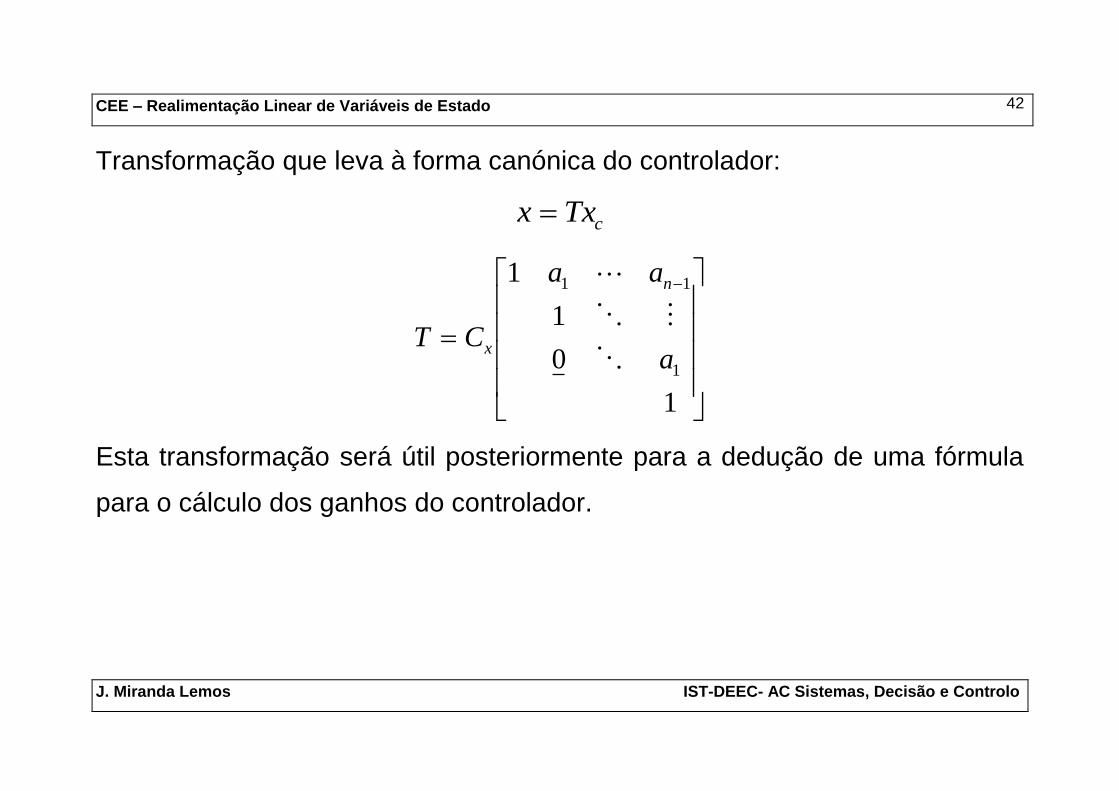
42
Transformação que leva à forma canónica do controlador:
cTxx
1
0
1
1
1
11
a
aa
CT
n
x
Esta transformação será útil posteriormente para a dedução de uma fórmula
para o cálculo dos ganhos do controlador.
CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
43
Questão (relacionada com a observabilidade)
Dado a realização de estado
)()( tAxtx )()( tCxty
00)( xtx condição inicial desconhecida
Será possível determinar a condição inicial 0x (e portanto ttx )( ) por
observação da saída?
A resposta depende de ),( CA
Uma questão relacionada é:
Como estimar o estado a partir das observações da saída?
CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
44
Definição de observabilidade (sistemas contínuos)
O sistema contínuo
)()( tAxtx )()( tCxty
diz-se completamente observável se existir 10 t tal que o conhecimento
da saída )(ty para 10 tt é suficiente para determinar a condição inicial
do estado, )0(x .
CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
45
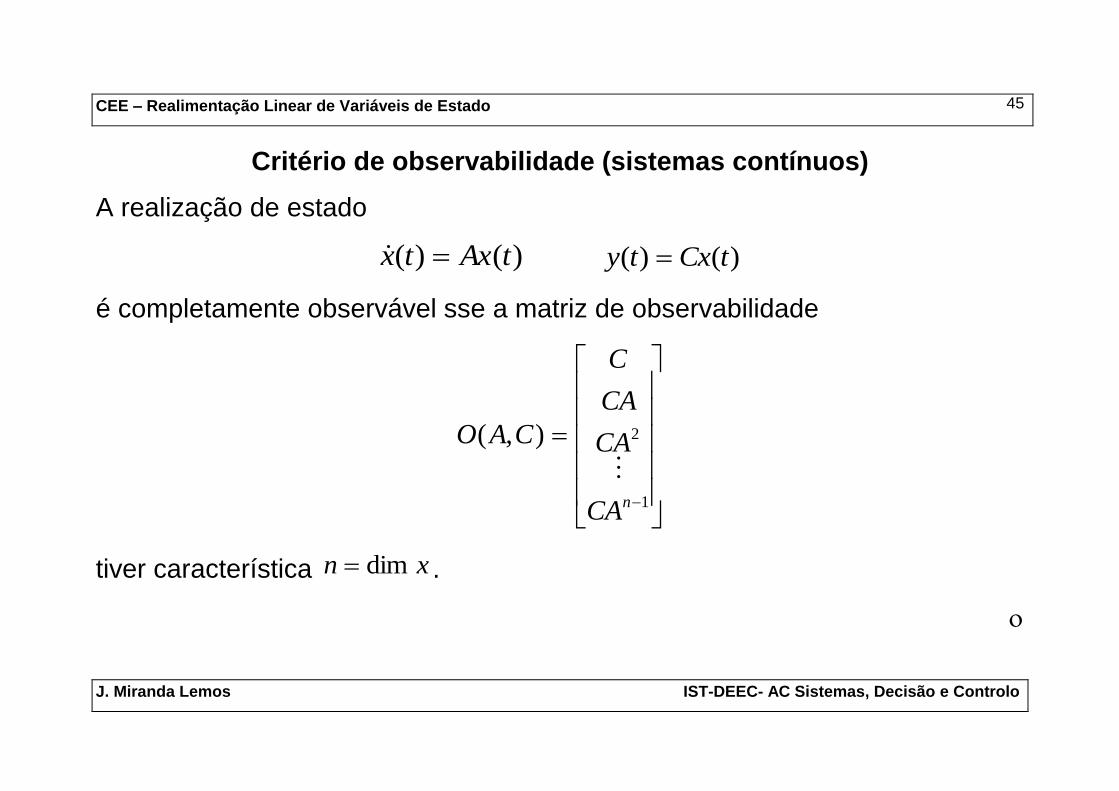
Critério de observabilidade (sistemas contínuos)
A realização de estado
)()( tAxtx )()( tCxty
é completamente observável sse a matriz de observabilidade
1
2),(
nCA
CA
CA
C
CAO
tiver característica xn dim .
CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
46
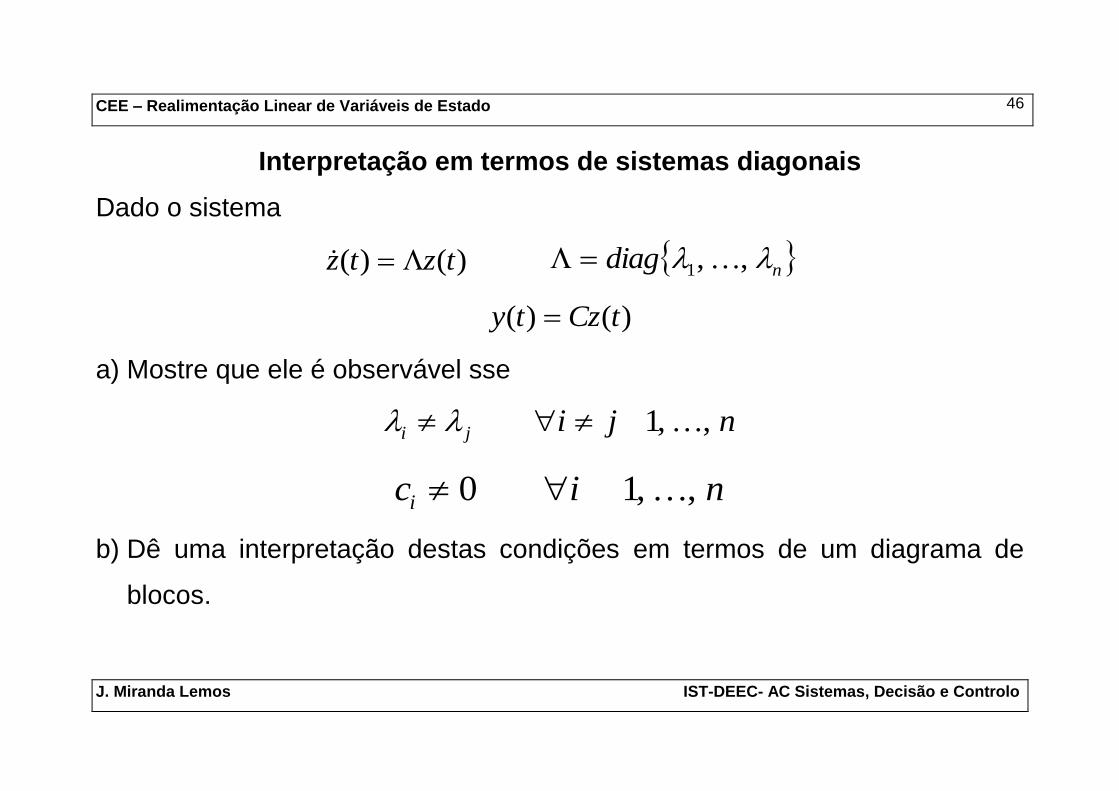
Interpretação em termos de sistemas diagonais
Dado o sistema
)()( tztz ndiag ,,1
)()( tCzty
a) Mostre que ele é observável sse
njiji ,,1
nici ,,10
b) Dê uma interpretação destas condições em termos de um diagrama de
blocos.
CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
47
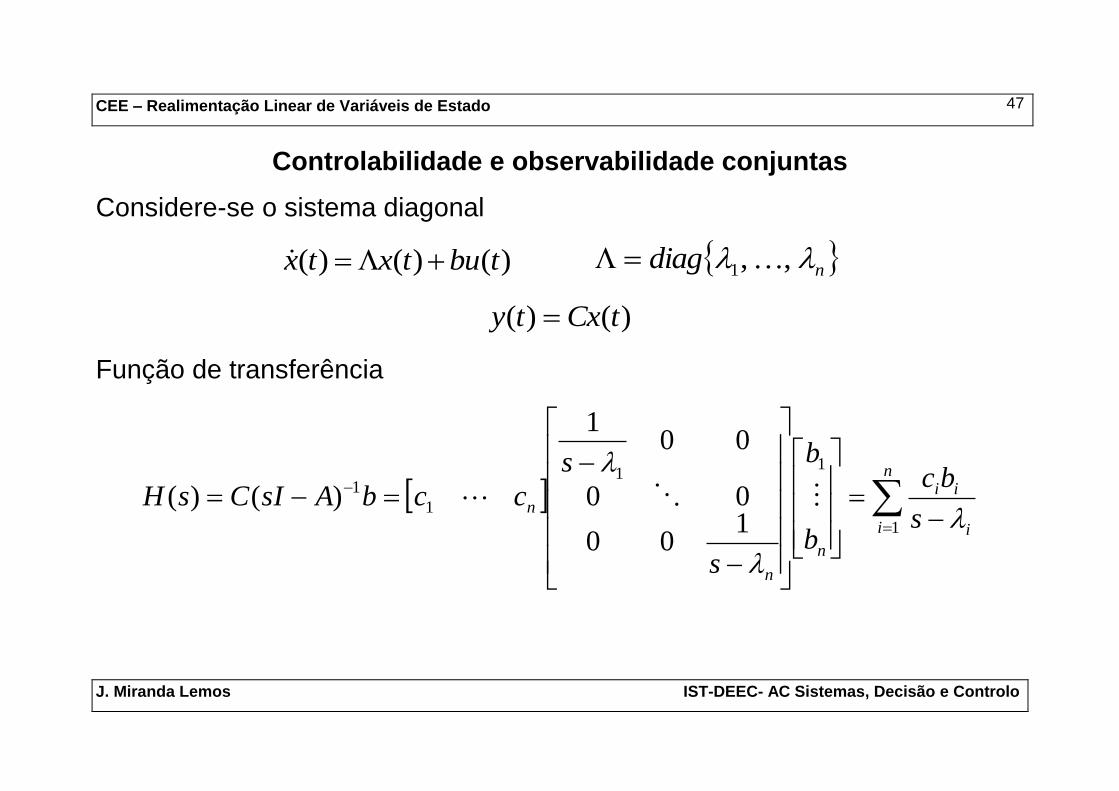
Controlabilidade e observabilidade conjuntas
Considere-se o sistema diagonal
)()()( tbutxtx ndiag ,,1
)()( tCxty
Função de transferência
n
i i
ii
n
n
ns
bc
b
b
s
s
ccbAsICsH1
11
1
1
100
00
001
)()(
CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
48
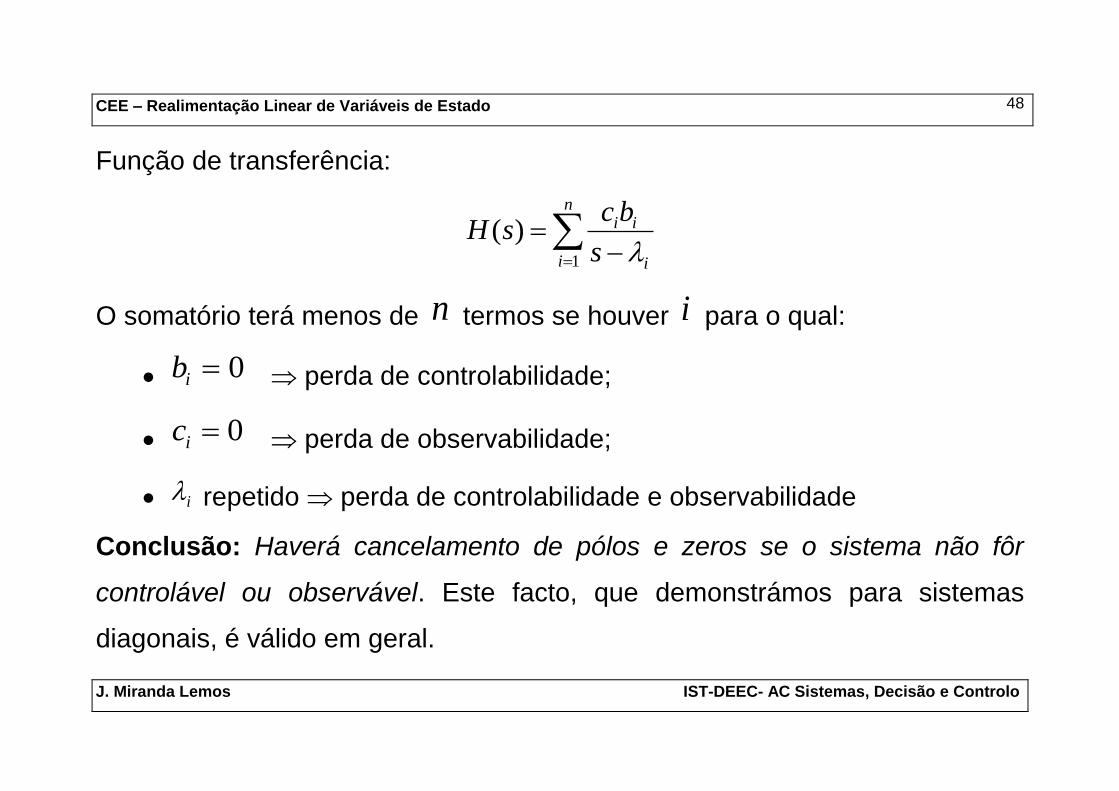
Função de transferência:
n
i i
ii
s
bcsH
1
)(
O somatório terá menos de n termos se houver i para o qual:
0ib perda de controlabilidade;
0ic perda de observabilidade;
i repetido perda de controlabilidade e observabilidade
Conclusão: Haverá cancelamento de pólos e zeros se o sistema não fôr
controlável ou observável. Este facto, que demonstrámos para sistemas
diagonais, é válido em geral.

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
49
Decomposição de Kalman
Em geral, é possível levar um sistema à representação de estado:
)(
0
0)(
00
000
00
)(3
1
4442
34333231
22
1211
tub
b
tx
AA
AAAA
A
AA
tx
)(00)( 21 txccty
''''' cococooc xxxxx
A função de transferência depende apenas da parte controlável e observável:
1
1
111 )()( bAsIcsG
Soc
u y
Soc
Soc
Soc

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
50
Reconstructibilidade e Detectabilidade
Dois conceitos importantes relacionados com a observabilidade são:
Se a partir das observações da saída fôr possível obter o “último” valor do
estado (mas não necessariamente a condição inicial), a realização diz-se
reconstruível.
Se a parte não observável do estado fôr assimptoticamente estável, a
realização diz-se detectável.

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
51
Problema (Interpretação da controlabilidade e da observabilidade)
Considere o sistema definido pelo seguinte diagrama de blocos:
s+1
1s
-1x =y
u x +
+
12
Construa um modelo de estado, utilizando as variáveis indicadas.
Diga para que valores do parâmetro é que a realização de estado que
obteve é:
a) Controlável.
b) Observável
Dê uma interpretação em termos da função de transferência.
CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
52
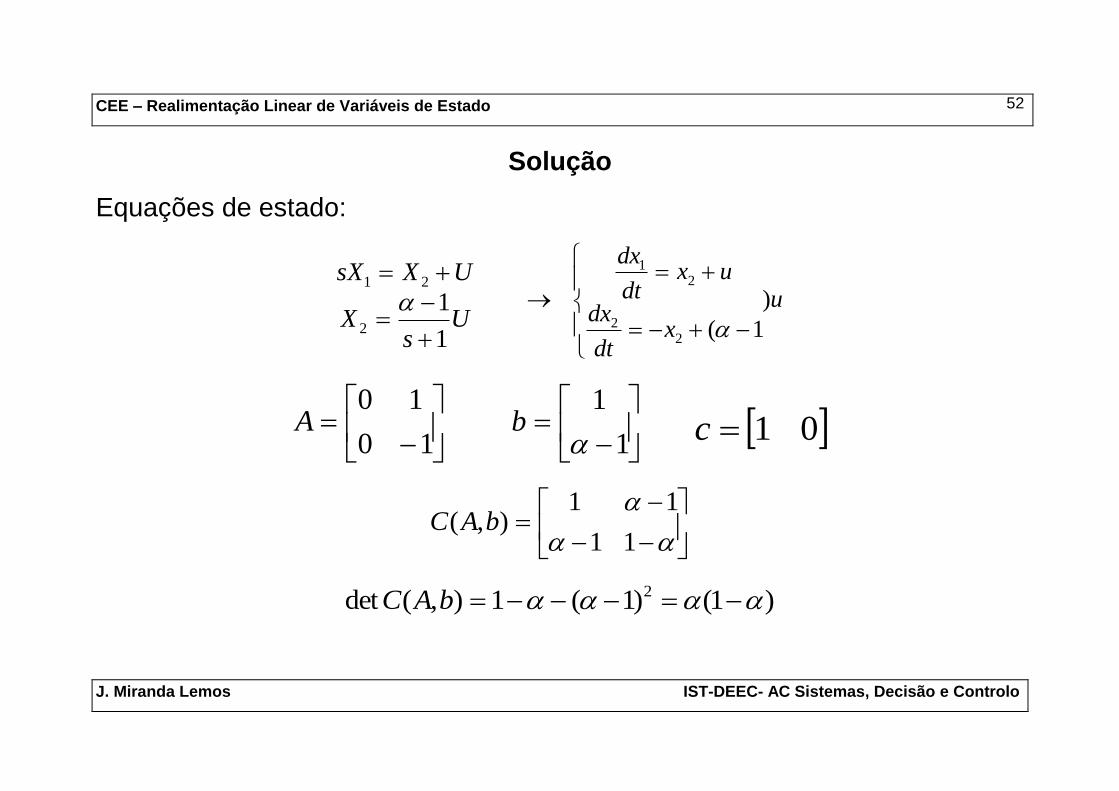
Solução
Equações de estado:
Us
X
UXsX
1
12
21
u
xdt
dx
uxdt
dx
)
1(22
21
10
10A
1
1
b
01c
11
11),( bAC
)1()1(1),(det 2 bAC
CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
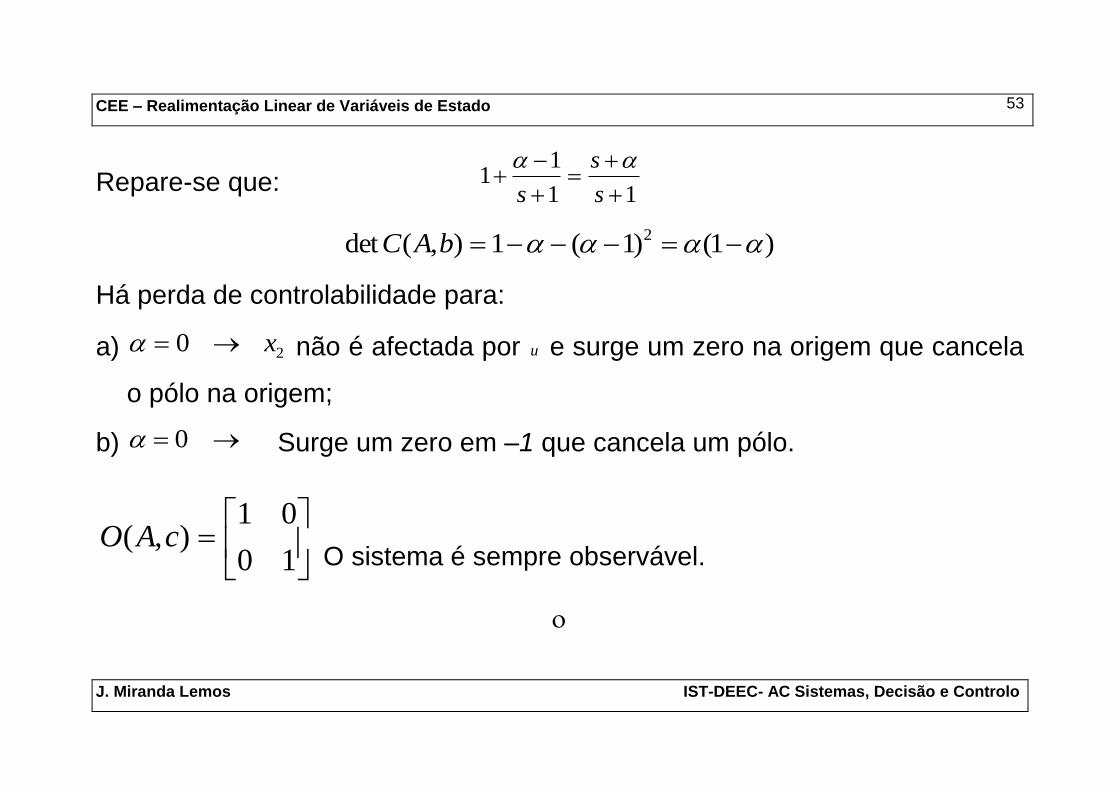
53
Repare-se que: 11
11
s
s
s
)1()1(1),(det 2 bAC
Há perda de controlabilidade para:
a) 20 x não é afectada por u e surge um zero na origem que cancela
o pólo na origem;
b) 0 Surge um zero em –1 que cancela um pólo.
10
01),( cAO
O sistema é sempre observável.

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
54
Problema (Interpretação da controlabilidade e da observabilidade)
Considere o sistema descrito pelo modelo de estado
)(0
)(
)(
1
10
)(
)(
2
1
2
1tu
tx
tx
tx
tx
)(
)(1)(
2
1
tx
txty
Para que valores de , e é que o sistema é:
a) Controlável;
b) Observável.
Dê uma interpretação em termos da função de transferência.

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
55
0),( bAC pelo que a realização é controlável sempre que 0 .
Este facto interpreta-se facilmente em termos da função de transferência:
bAsICsH 1)()(
s
s
sss
s
As
sAsI
T
11
)1(
1
1
1
)det(
1
1
1)(
1
1
ss
ssH
2
1)( Logo, para 0 o ganho da FT anula-se.
1
1O Como a matriz é quadrada, podemos testar a
observabilidade a partir do determinante. Quando 0)),(det( cAO a
realização deixa de ser competamente observável.

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
56
21)),(det( cAO Há perda de observabilidade se 01 2 ou seja se
2
1
. Nestas condições (i. e. quando há perda de observabilidade), os
pólos sáo as raízes de 01
2
2
ss . Esta equação é satisfeita por
1s
pelo que quando há perda de observabilidade há um pólo que cancela o zero.

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
57
3.Realimentação linear de variáveis de estado
Objectivos:
Projectar um regulador de colocação de pólos por realimentação linear de
todas as variáveis de estado. Demonstração da fórmula dxe Bass-Gura.

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
58
Problema (Projecto de um regulador por RLVE)
Dada uma realização de estado controlável e observável
)()()()( tCxytbutAxtx
com polinómio característico
n
nn asasAsIsa 1
1)det()(
Lei de controlo admissível:
)()( tKxrtu
Começaremos por considerar 0r (problema de regulação).
Determinar o vector de ganhos K de modo a que o polinómio característico
da cadeia fechada seja n
nn sss 1
1)(

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
59
b+
+
r +
-
K
C
A
yx(t)x.
)()()()()( tKxrtutbutAxtx
Sistema em cadeia fechada:
)()()()( tbrtxbKAtx

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
60
Polinómio característico do sistema em cadeia fechada:
)det()( bKAsIsak
Objectivo:
Determinar K por forma a que
)()( ssaK
Polinómio característico do
sistema realimentado.
Depende do ganho K
Polinómio característico
especificado
Podemos ajustá-lo
por escolha do
ganho K

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
61
Método dos coeficientes indeterminados
A equação a resolver é
)()det( sbKAsI
n
nnn
K
n
K
n ssasas 1
1
11
)(saK
Polinómio característico
que se obtém para um
dado K
Polinómio característico
especificado. Traduz a
dinâmica pretendida
para a cadeia fechada

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
62
n
nnn
K
n
K
n ssasas 1
1
11
Igualando os coeficientes dos monómios do mesmo grau em ambos os
polinómios obtém-se o sistema de equações lineares verificado pelo ganho
K :
n
n
K
K
a
a
1
1
Quando é que este sistema tem solução n ,,1 ?
Veremos que existe sempre solução se o par ),( bA fôr controlável.

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
63
Fórmula de Bass-Gura
Posicionamento arbitrário dos pólos da cadeia fechada sse ),( bA é
controlável. Nestas condições, o vector de ganhos é calculado por
1)( CMaK T
em que bAbAAbbbACC n 12 ||||),( é a matriz de controlabilidade associadsa
ao par ),( bA e
n 21
naaaa 21
1
0
1
001
11
1
aa
aM
n

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
64
Exercício (fórmula de Bass-Gura)
Considere o sistema definido pelo diagrama de blocos:
u2
1s
1s
xx 12
a) Obtenha uma realização de estado com variáveis de estado 1x e 1x .
b) Através da fórmula de Bass-Gura determine os ganhos de um controlador
de realimentação de variáveis de estado que coloque os pólos em j1 .
c) Resolva o mesmo problema pelo método dos coeficientes indeterminados.

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
65
ux
xx
22
21
u
x
x
x
x
2
0
00
10
2
1
2
1
02
20),( AbbbAC
02/1
2/10),(1 bAC
Polinómio característicop associado à matriz A :
2
0
1)det()( s
s
sAsIsa
(como era de esperar!)
Recorde-se a nomenclatura:
21
2)( asassa donde 0000 21 aaa
CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
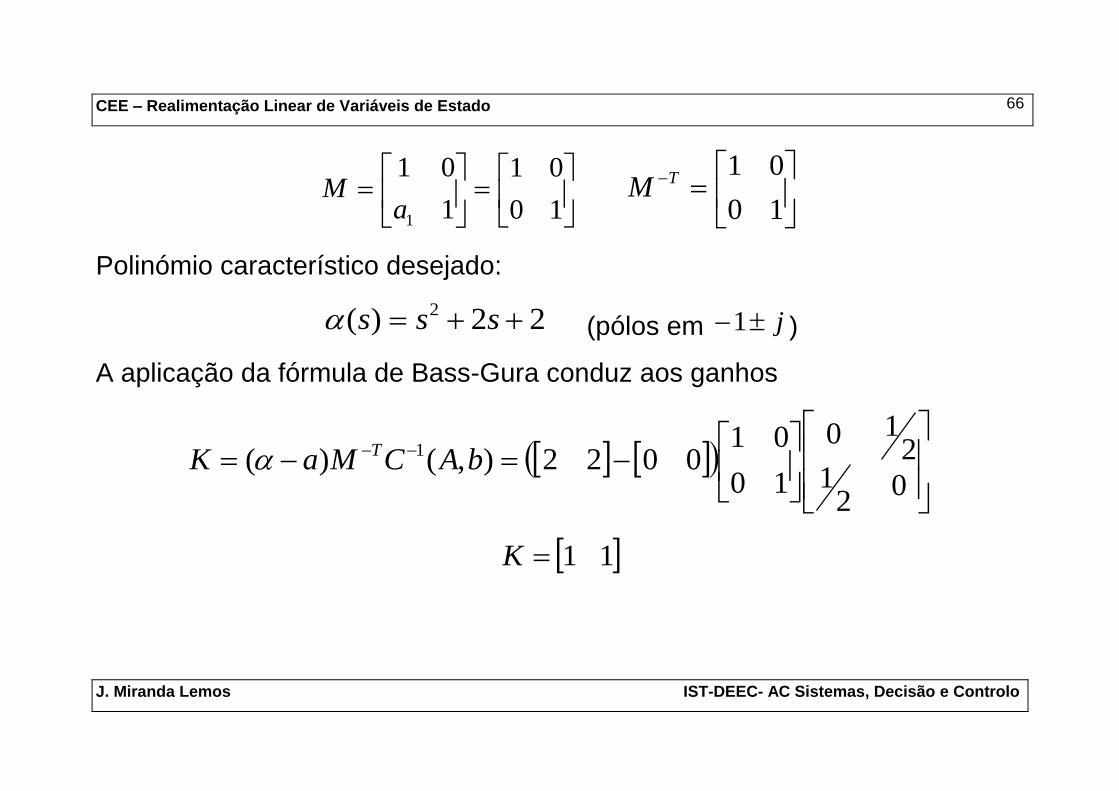
66
10
01
1
01
1aM
10
01TM
Polinómio característico desejado:
22)( 2 sss (pólos em j1 )
A aplicação da fórmula de Bass-Gura conduz aos ganhos
02
12
10
10
010022),()( 1 bACMaK T
11K
CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
67
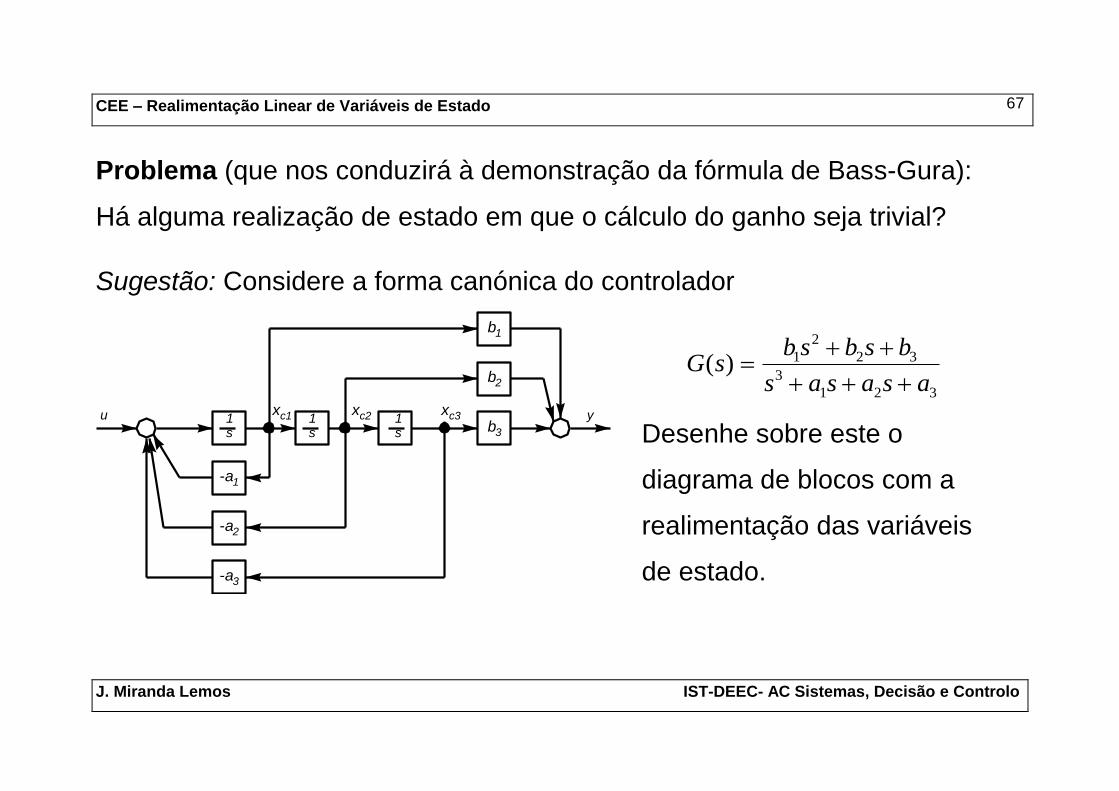
Problema (que nos conduzirá à demonstração da fórmula de Bass-Gura):
Há alguma realização de estado em que o cálculo do ganho seja trivial?
Sugestão: Considere a forma canónica do controlador
1s
1s
1s
u yxc2xc1 xc3
b2
b1
b3
-a2
-a1
-a3
321
3
32
2
1)(asasas
bsbsbsG
Desenhe sobre este o
diagrama de blocos com a
realimentação das variáveis
de estado.

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
68
1s
1s
1s
u yxc2xc1 xc3
b2
b1
b3
-a2
-a1
-a3
-k1
-k2
-k3
-1
-2
-3
Conclusão:
Na forma canónica do controlador
o cálculo dos ganhos é feito
simplesmente por
aKc

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
69
Realização
de estado
),,( cbA
Forma canónica
do controlador
),,( ccc cbA
Transformação de coordenadas
T
c MbACTTxx ),(
Ganhos na forma canónica
do controlador
Ganhos na
realização original
Como inverter a transformação para os ganhos?
Difícil (Objectivo) Fácil
CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
70
Sugestão para relacionar os ganhos nas coordenadas originais x e da forma
canónica do controlador, cx :
Exprimir o controlo u como retroacção de x e exprimir x em cx para obter
uma relação entre K e cK .
cKTxKxu
cK
CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
71
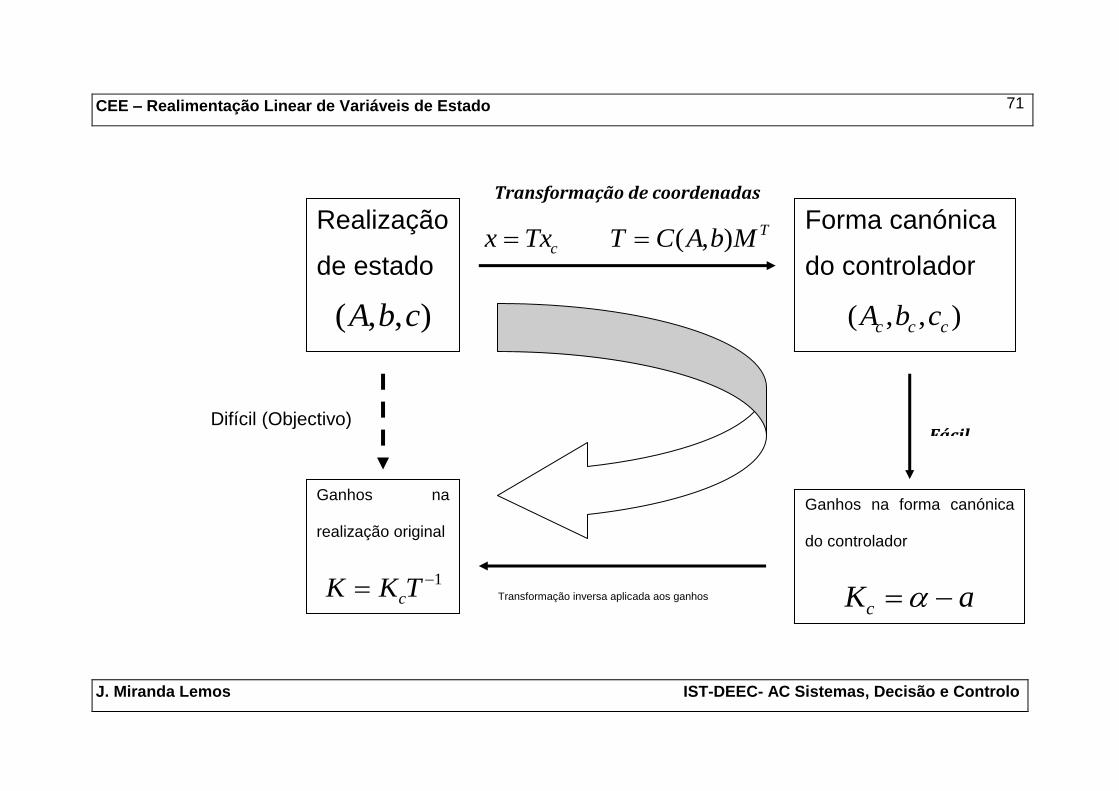
Realização
de estado
),,( cbA
Forma canónica
do controlador
),,( ccc cbA
Transformação de coordenadas
T
c MbACTTxx ),(
Ganhos na forma canónica
do controlador
aKc
Ganhos na
realização original
1 TKK c Transformação inversa aplicada aos ganhos
Difícil (Objectivo) Fácil

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
72
Fórmula de Ackerman
Alternativamente, o vector de ganhos do controlador pode ser cálculado pela
fórmula de Ackerman, que não necessita do conhecimento explícito do
polinómio característico do sistema em cadeia aberta:
)(),(100 1 AbACK
Última linha da inversa da
matriz de controlabilidade
Polinómio característico
desejado calculado para
As
CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
73
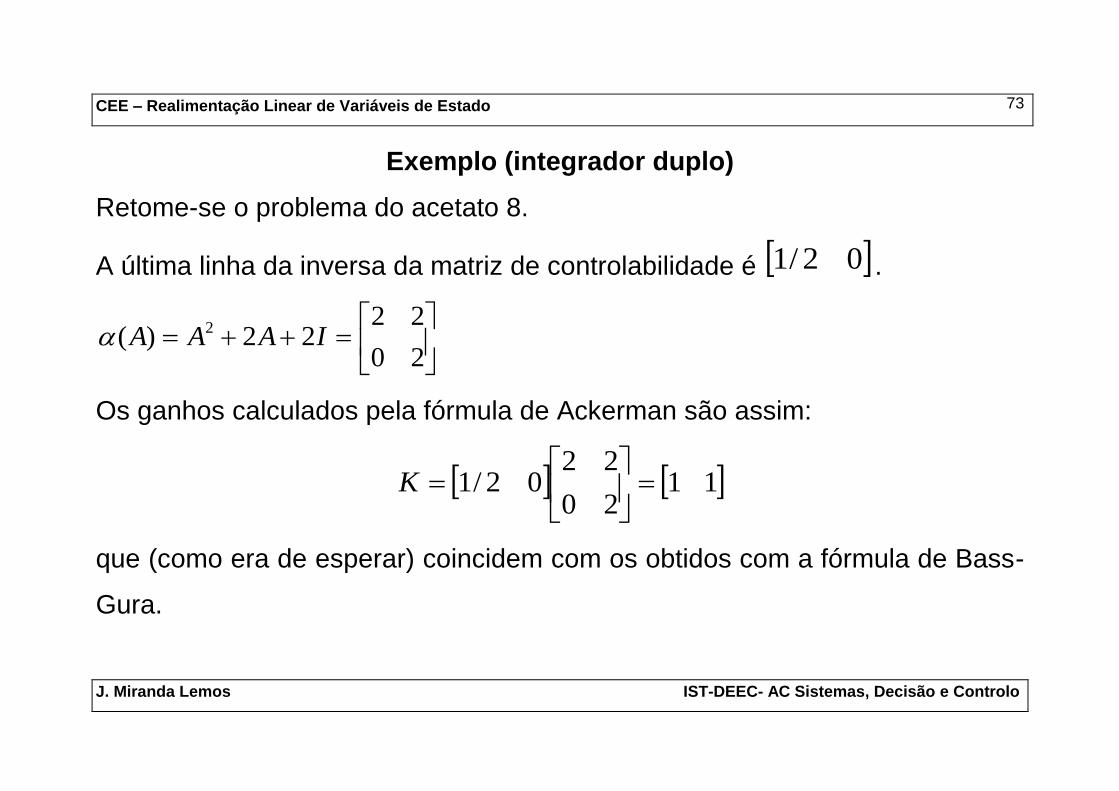
Exemplo (integrador duplo)
Retome-se o problema do acetato 8.
A última linha da inversa da matriz de controlabilidade é 02/1 .
20
2222)( 2 IAAA
Os ganhos calculados pela fórmula de Ackerman são assim:
1120
2202/1
K
que (como era de esperar) coincidem com os obtidos com a fórmula de Bass-
Gura.

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
74
Questão (prática e da maior importância!)
Porque não podemos transformar um FIAT PUNTO num Ferrari por
retroacção da velocidade com um ganho muito elevado?
Infelizmente (!…) a fórmula de Bass-Gura mostra que os ganhos são tanto
maiores quanto o deslocamento dos pólos, o que para ganhos muito elevados
leva a uma saturação da entrada manipulada.
C V
CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
75
4.Observadores assimptóticos
Objectivo:
Projecto de observadores assimptóticos de ordem completa.
CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
76
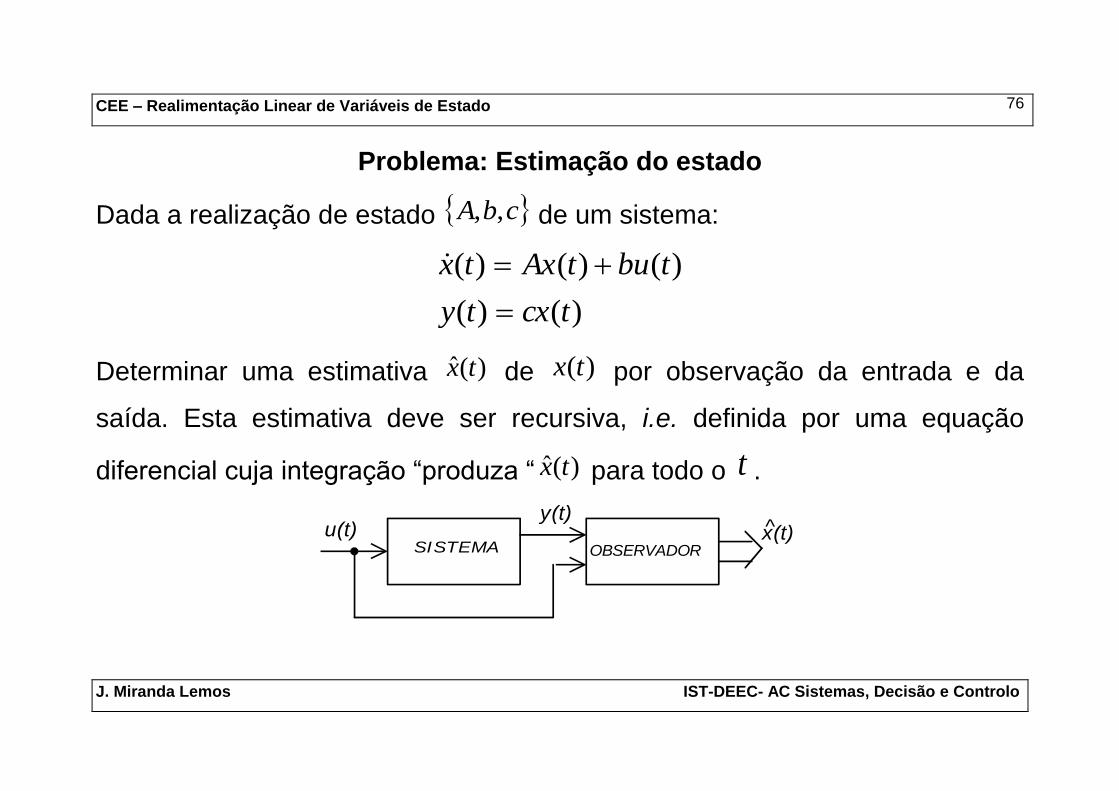
Problema: Estimação do estado
Dada a realização de estado cbA ,, de um sistema:
)()(
)()()(
tcxty
tbutAxtx
Determinar uma estimativa )(ˆ tx de )(tx por observação da entrada e da
saída. Esta estimativa deve ser recursiva, i.e. definida por uma equação
diferencial cuja integração “produza “ )(ˆ tx para todo o t .
u(t)y(t)
x(t)OBSERVADORSISTEMA
^
CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
77
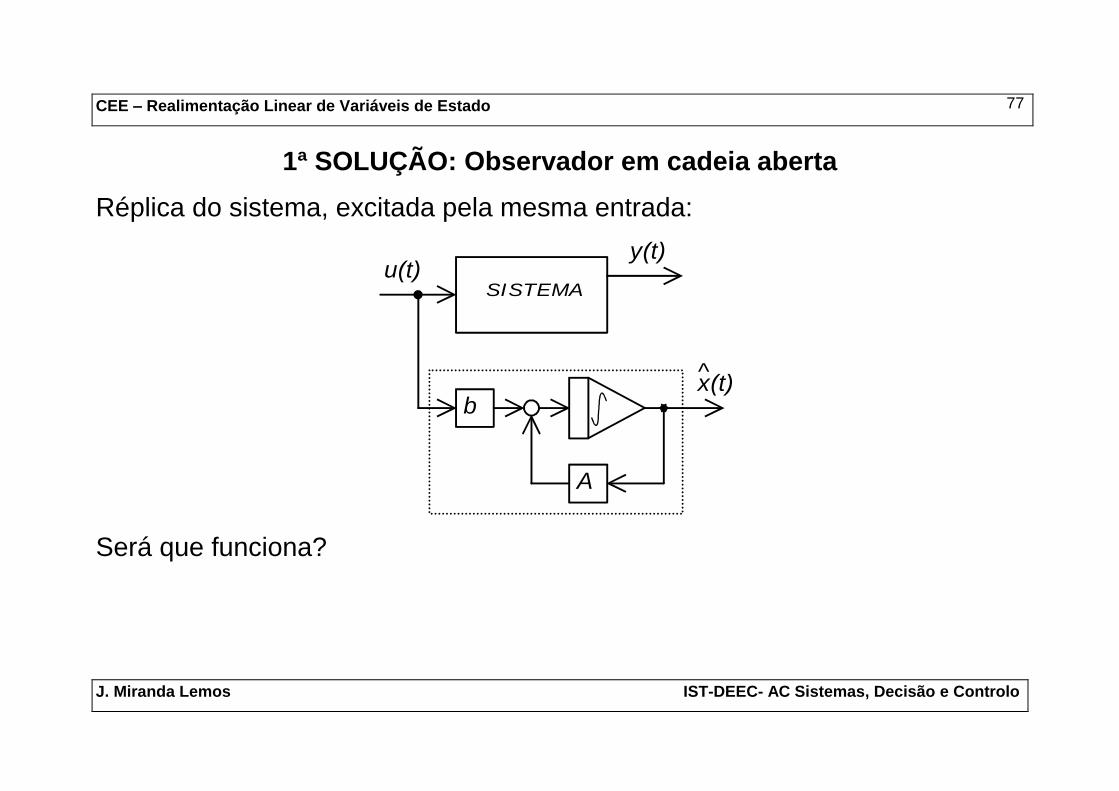
1ª SOLUÇÃO: Observador em cadeia aberta
Réplica do sistema, excitada pela mesma entrada:
u(t)y(t)
SISTEMA
x(t)b
A
^
Será que funciona?
CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
78
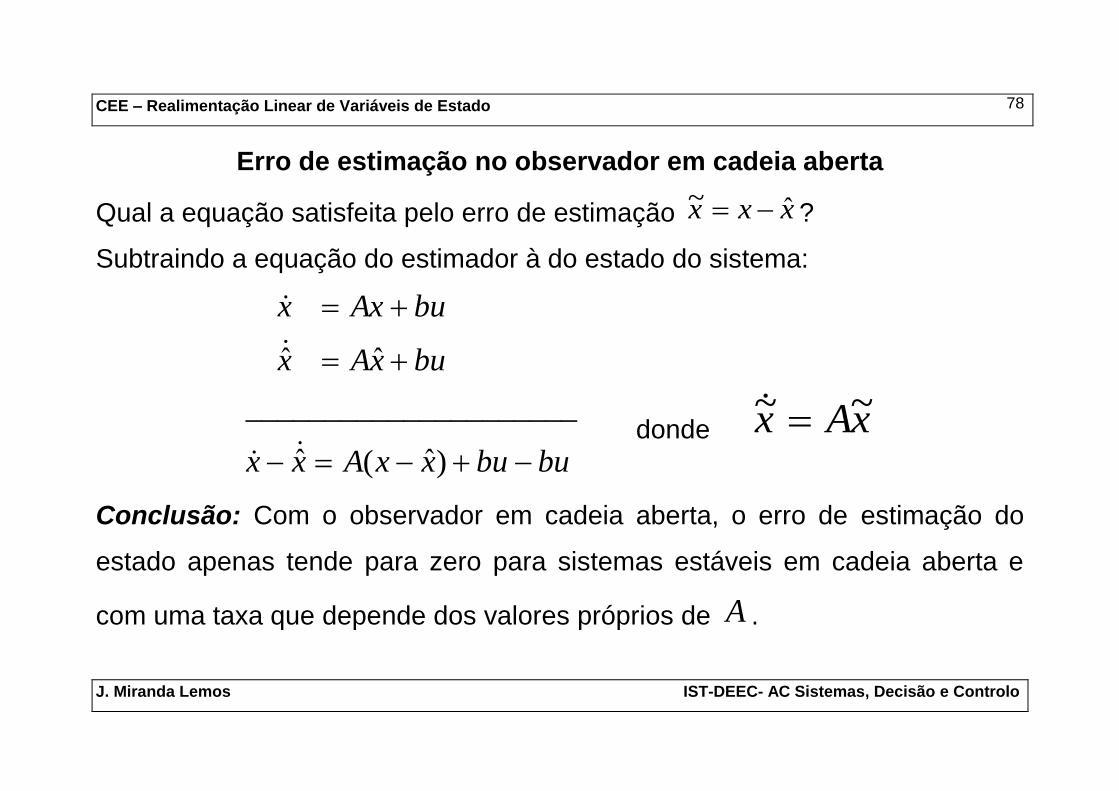
Erro de estimação no observador em cadeia aberta
Qual a equação satisfeita pelo erro de estimação xxx ˆ~ ?
Subtraindo a equação do estimador à do estado do sistema:
bubuxxAxx
buxAx
buAxx
)ˆ(ˆ
_____________________
ˆˆ
donde xAx ~~
Conclusão: Com o observador em cadeia aberta, o erro de estimação do
estado apenas tende para zero para sistemas estáveis em cadeia aberta e
com uma taxa que depende dos valores próprios de A .

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
79
2ª SOLUÇÃO: Observador em cadeia fechada (assimptótico)
u(t) y(t)SISTEMA
x(t)b
A
^
L
Cy(t)^
y(t)-y(t)^
+
-
++
+
Qual a nova equação satisfeita pelo erro?
Sugestão: Escreva as equações do sistema e do observador e subtrai-as usando a equação para y(t).
)(ˆ)()()(ˆ)(ˆ txCtyLtbutxAtx
Vector coluna com
dim L= dim x
Quando a estimativa é a correcta, o termo de
correcção xcy ˆ anula-se e a estimativa
segue a dinâmica do sistema verdadeiro.
CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
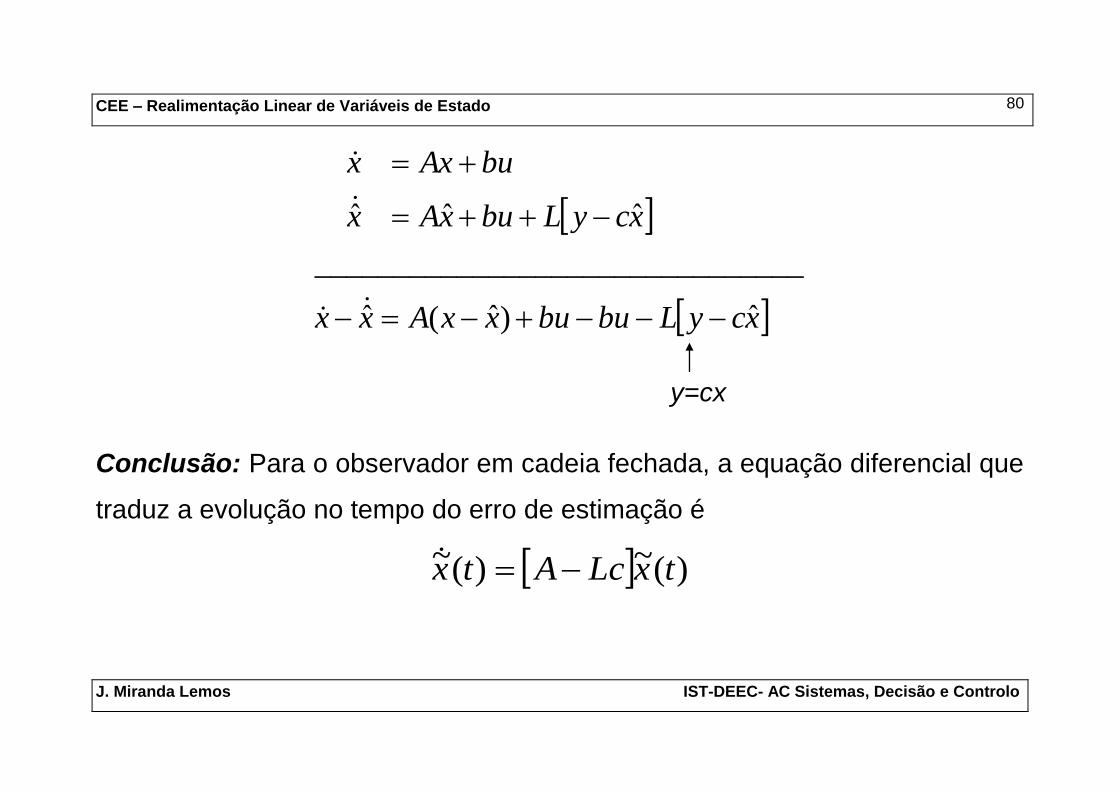
80
xcyLbubuxxAxx
xcyLbuxAx
buAxx
ˆ)ˆ(ˆ
_______________________________
ˆˆˆ
Conclusão: Para o observador em cadeia fechada, a equação diferencial que
traduz a evolução no tempo do erro de estimação é
)(~)(~ txLcAtx
y=cx
CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
81
Dinâmica do erro do observador assimptótico
)(~)(~ txLcAtx
Se o par ),( cA fôr observável, podemos posicionar arbitrariamente os valores
próprios da matriz LcA .
Pelo facto de (para realizações observáveis) o ganho L poder ser
dimensionado por forma a que o erro tenda assimptotiocamente para zero,
este tipo de observadores diz-se “assimptótico”.
CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
82
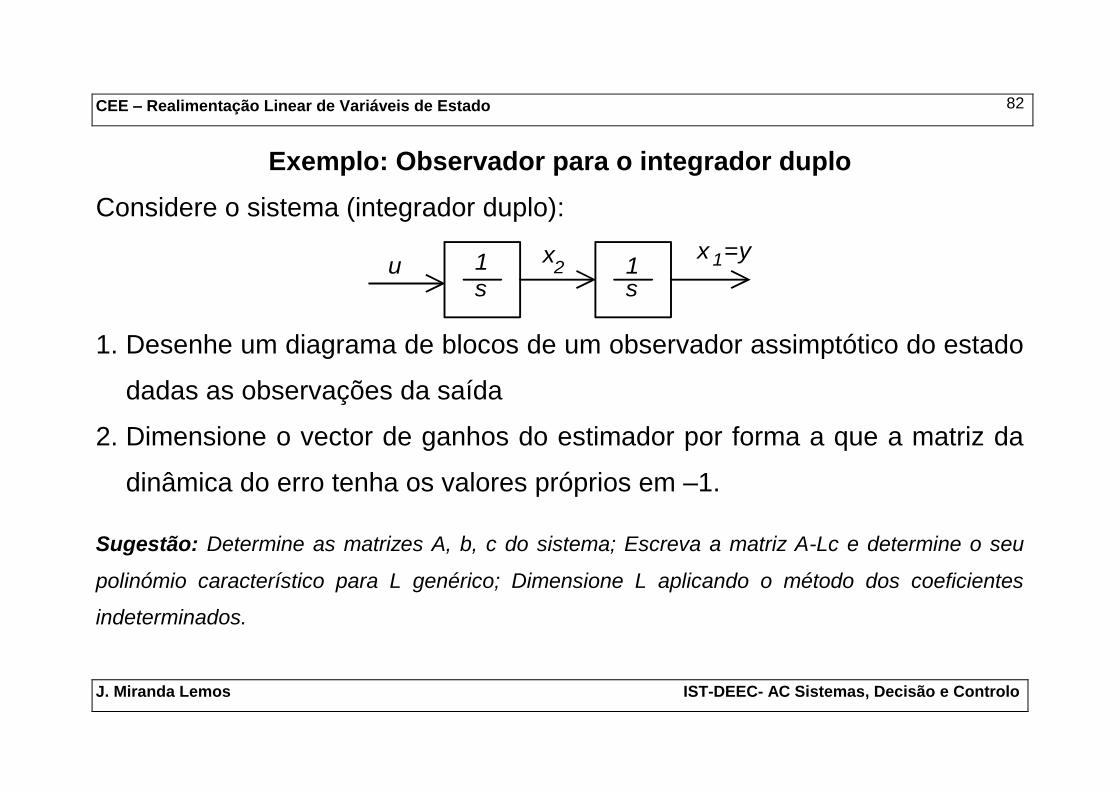
Exemplo: Observador para o integrador duplo
Considere o sistema (integrador duplo):
u 1s
1s
x =yx 12
1. Desenhe um diagrama de blocos de um observador assimptótico do estado
dadas as observações da saída
2. Dimensione o vector de ganhos do estimador por forma a que a matriz da
dinâmica do erro tenha os valores próprios em –1.
Sugestão: Determine as matrizes A, b, c do sistema; Escreva a matriz A-Lc e determine o seu
polinómio característico para L genérico; Dimensione L aplicando o método dos coeficientes
indeterminados.

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
83
u 1s
1s
x =yx 12
1
2
21
xy
ux
xx
xy
ux
x
x
x
01
1
0
00
10
2
1
2
1
0
101
00
10
2
1
2
1
L
L
L
LLCA 21
2
2
1 1)det( LsLs
sL
LsLcAsI
Pretendemos os valores próprios da dinâmica do erro do observador nas
raízes do polinómio
22)1( 22 sss
Pelo método dos coeficientes indeterminados:
22 21 LL

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
84
Escolha dos valores próprios da dinâmica do erro
A escolha dos valores próprios de LcA resulta do seguinte compromisso:
Não podem ser muito pequenos, para que o erro não tenda lentamente para
zero;
Não podem ser muito grandes pois, se o estimador fôr muito rápido, pode
ser “enganado” pelos erros de modelação. Em particular, o ganho de malha
resultante quando se fecha a cadeia realimentando as estimativas do
estado deve respeitar a condição de estabilidade robusta.

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
85
Fórmula de Bass- Gura para o cálculo dos ganhos do Observador
Demonstre o correspondente à fórmula de Bass-Gura para o
dimensionamento dos ganhos do observador.
Sugestão: Escreva uma equação verificada pelo erro na estimativa do estado
com um observador assimptótico e faça a transformação de coordenadas que
a leve à forma canónica do observador:
xTxo ),( CAMOT
1
0
1
001
11
1
aa
aM
n

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
86
Os ai são os coeficientes do polinómio característico do sistema em cadeia
aberta. A forma canónica do observador é tal como se mostra na figura
seguinte:
b3 b2 b1
x1=yx2x31/s 1/s 1/s
-a3 -a2 -a1
u

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
87
5.Teorema de Separação
Objectivo:
Mostrar que o observador e o controlador por realimentação da estimativa do
estado podem ser projectados independentemente.

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
88
Quando o estado não está acessível para medida directa, uma ideia natural
consiste em realimentar a estimativa produzida por um observador
assimptótico. Tem-se a estrutura do compensador (a maneira correcta de
introduzir a referência será discutida posteriormente):
Sistema
Compensador
r +
-
Kx(t)
u(t)b
A
c
L
b
A
c
+
-
+
+
+
++
y(t)x(t)
^
Sistema:
)()()()()( tcxtytbutAxtx
Observador:
)()()(ˆ)()(ˆ tbutLcytxLcAtx
Lei de controlo:
)(ˆ)( txKtu
O sistema compensado é de ordem 2n.

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
89
Teorema de Separação
O polinómio característico do sistema global (sistema em cadeia aberta e
observador, com realimentação da estimativa do estado) é o produto dos
polinómios característicos de bKA e de LcA .
Este teorema diz-nos que podemos projectar o vector de ganhos K como se
realimentássemos o estado e não a sua estimativa, e o vector de ganhos do
observador L como se estimássemos o estado em cadeia aberta. O
observador e o controlador podem pois ser projectados separadamente.

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
90
Nota sobre o Teorema de Separação: Em geral, para sistemas não lineares,
o controlador e o observador não podem ser projectados separadamente. Isto
axcontece porque a variável de controlo tem um efeito chamado dual: Por um
lado, permite efectuar a acção de regulação da saída; por outro lado
proporciona a excitação suficiente para se estimar o estado. Estes dois efeitos
conflituam e a escolha do controlo deve ser feito como um compromisso entre
ambos. O efeito de dualidade é conhecido (no âmbito do Controlo Adaptativo)
desde os anos 50, pelos trabalhos de Feld’baum. No caso linear, o conflito
não existe, tendo lugar o teorema de separação. Há classes de sistemas não
lineares para os quais é possível demonstrar “teoremas de separação”. Isto
constitui um tema de investigação actual.
CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
91
Lema
Sejam CA, matrizes quadradas. Então:
CAC
BA
0
Demonstração:
Tem-se: C
C
I
0
0
e ainda A
I
BA
0
Como
I
BA
C
I
C
BA
00
0
0 o resultado conclui-se por o determinante de um
produto de matrizes ser o produtos dos determinantes dos factores.

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
92
Demonstração do teorema de separação
Equações do sistema e do controlador/observador:
)()()()()( tcxtytbutAxtx
)()()(ˆ)()(ˆ tbutLcytxLcAtx
)(ˆ)( txKtu
Em termos do estado x do sistema a controlar e do estado x̂ do observador,
estas equações escrevem-se
)(ˆ)()( txbKtAxtx
)(ˆ)()()(ˆ txbKLcAtLcxtx

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
93
)(ˆ)()( txbKtAxtx
)(ˆ)()()(ˆ txbKLcAtLcxtx
Convém trabalhar com o erro de estimação )(ˆ)()(~ txtxtx e não com a
estimativa do estado. Isto corresponde a fazer uma transformação invertível
de coordenadas no estado, pelo que os valores próprios do sistema global
não são alterados. Subtraindo as duas equações anteriores, obtém-se
)(~)()(~ txLcAtx
O sistema global é pois descrito pelas equações
)(~)()(~
)(~)()()(
txLcAtx
txbKtxbKAtx

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
94
Equações do estado do sistema global:
)(~)()(~
)(~)()()(
txLcAtx
txbKtxbKAtx
Na forma matricial:
x
x
LcA
bKbKA
x
x~0~
Pelo lema anterior, o polinómio característico desta matriz (dinâmica do
sistema global) é:
observadorrcontrolado
LcAsIbKAsILcAsI
bKbKAsI)det(.)det(
0

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
95
Conclusão: As frequências naturais agrupam-se em dois tipos de termos:
Uma parte dependem apenas do ganho K do controlador, como se fosse
feita uma retroacção do estado e não da sua estimativa.
A outra parte pedende apenas do ganho L do observador, como se o
controlador estivesse ausente.

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
96
Exemplo: Pêndulo invertido
mLsin f
f
zx
)()()( tLttg fxf
)(sin)()(
)(sin)(
tLttz
tmgtzm
fx
f
Modelo linear válido para ângulos pequenos:
ff sin
)()()(
)()(
tLttz
tgtz
fx
f
CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
97
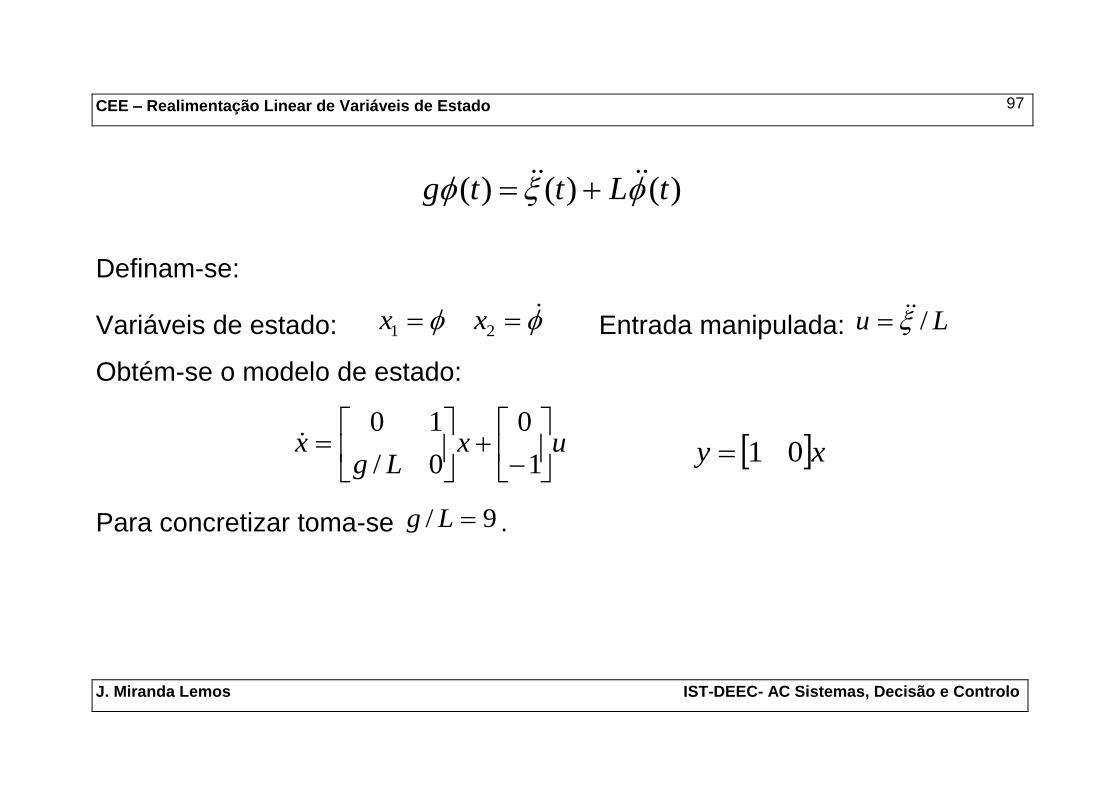
)()()( tLttg fxf
Definam-se:
Variáveis de estado: ff 21 xx Entrada manipulada: Lu /x
Obtém-se o modelo de estado:
uxLg
x
1
0
0/
10
xy 01
Para concretizar toma-se 9/ Lg .
CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
98
uxx
1
0
09
10
xy 01
Projecto do controlador supondo acesso ao estado:
21
219
10
1
0
09
10
kkkkbKA
)9(9
1)det( 12
2
21
ksksksk
sbKAsI
Polinómio característico especificado: 22)( 2 sss
Comparando os coeficientes dos dois polinómios, obtém-se
211 21 kk
CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
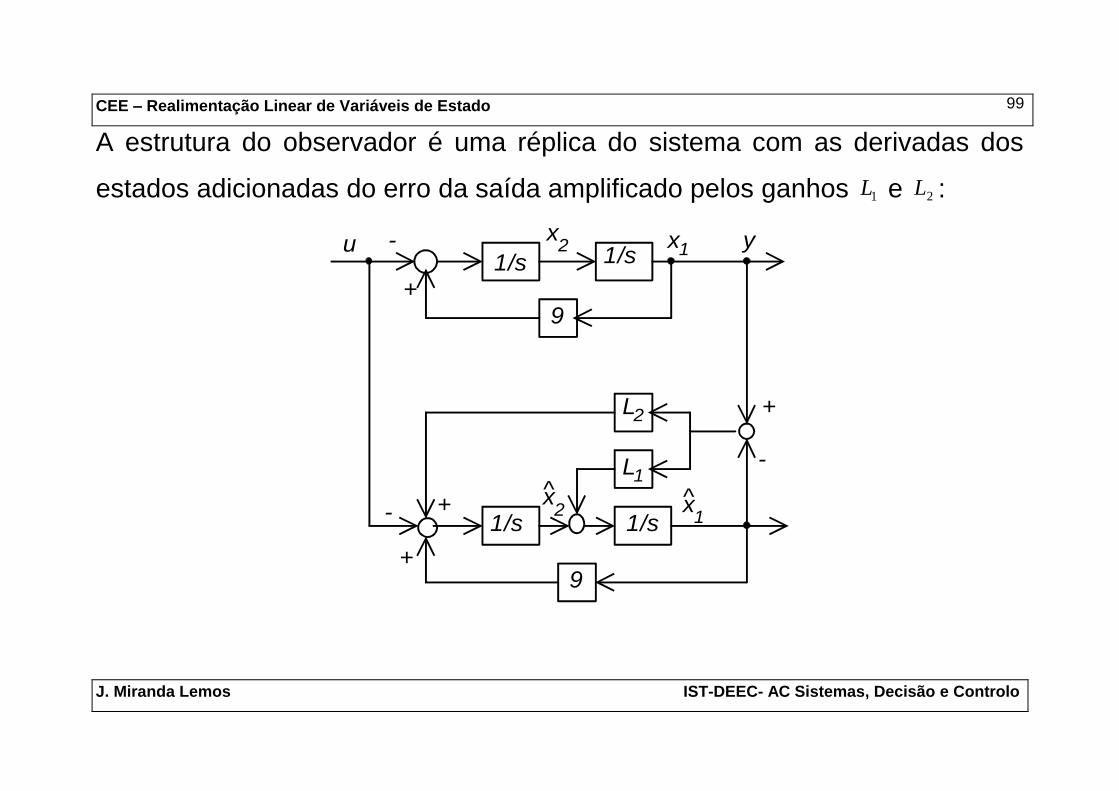
99
A estrutura do observador é uma réplica do sistema com as derivadas dos
estados adicionadas do erro da saída amplificado pelos ganhos 1L e 2L :
9
1/s 1/s
9
+
-
xx
-
+
- +
+
1/s 1/s
L
L
xx yu
^^
1
1
2
2
1
2
CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
100
Para o dimensionamento dos ganhos do observador, temos de posicionar os
valores próprios da matriz LcA .
09
101
09
10
2
1
2
1
L
L
L
LLcA
99
1)det( 21
2
2
1
LsLs
sL
LsLcAsI
Se desejarmos os valores próprios nas raízes de
3284)4()( 222 sssso
Os ganhos do observador devem ser
418 21 LL

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
101
O controlador é obtido realimentando as estimativas dos estados:
9
1/s 1/s
9
+
-
xx
-
+
- +
+
1/s 1/s
L
L
xx yu
^^
1
1
2
2
1
2
-
k k12
CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
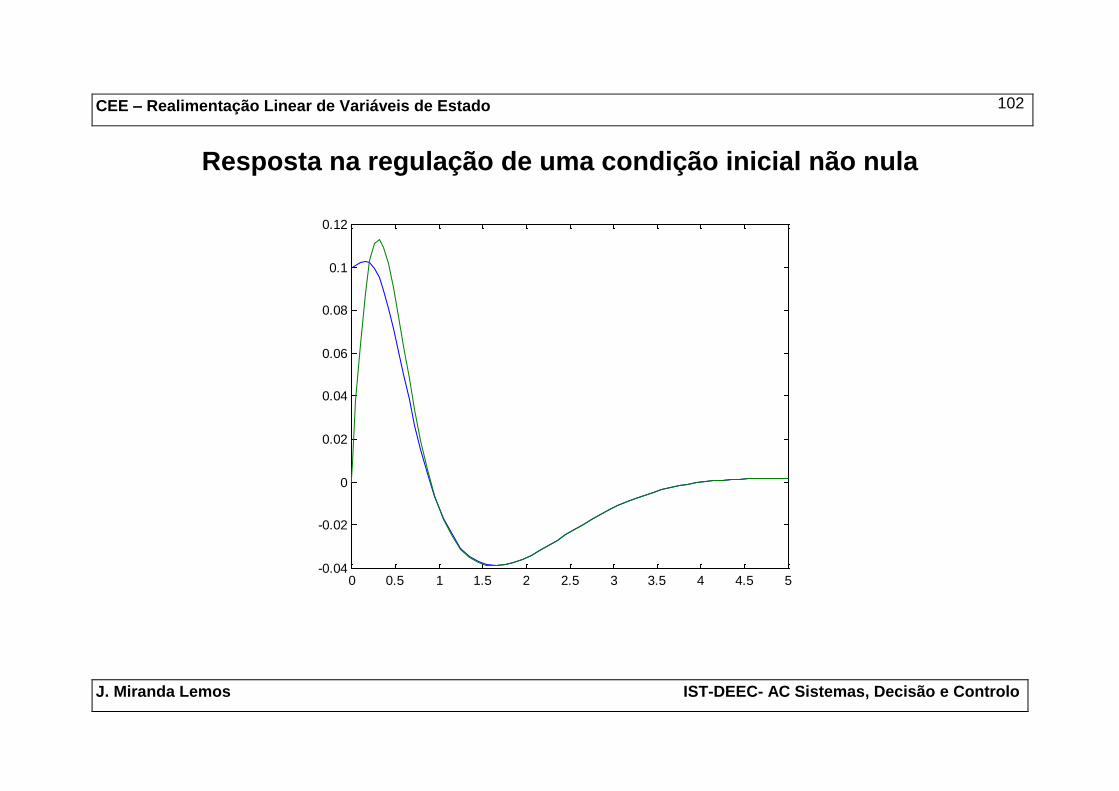
102
Resposta na regulação de uma condição inicial não nula
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-0.04
-0.02
0
0.02
0.04
0.06
0.08
0.1
0.12

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
103
Função de transferência do compensador
Modelo do processo em cadeia aberta:
cxy
buAxx
bAsIcsGp
1)()(
Modelo de estado do observador:
LybuxLcAx ˆ)(̂
LyxbKLcAx ˆ)(̂
xKu ˆ
xKu ˆ

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
104
LyxbKLcAx ˆ)(̂
xKu ˆ
O compensador (conjunto observador+retroacção da estimativa do estado) é
descrito, por estas equações, como tendo dinâmica bKLcA , entrada y e
saída u . A função de transferência do compensador é pois
LbKLcAsIKsGc
1)()(
G (s)
G (s)
u y
Processo
Compensadorc
p
CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
105
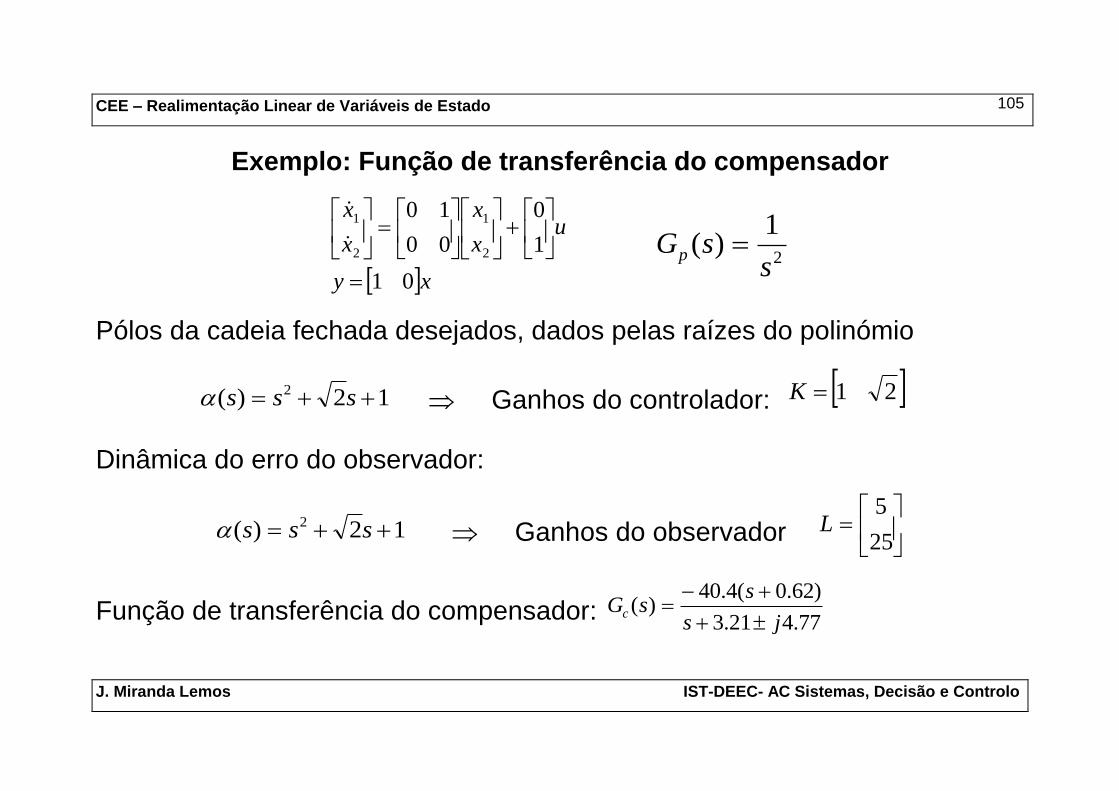
Exemplo: Função de transferência do compensador
xy
ux
x
x
x
01
1
0
00
10
2
1
2
1
2
1)(
ssGp
Pólos da cadeia fechada desejados, dados pelas raízes do polinómio
12)( 2 sss Ganhos do controlador: 21K
Dinâmica do erro do observador:
12)( 2 sss Ganhos do observador
25
5L
Função de transferência do compensador: 77.421.3
)62.0(4.40)(
js
ssGc
CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
106
Como se vê, a função de transferência do compensador e, por conseguinte o
ganho de malha, dependem dos ganhos K e L . Estes ganhos podem pois
ser encarados como “botões de ajuste” que permitem moldar o ganho de
malha por forma a satisfazer especificações.

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
107
6.Seguimento de referências e efeito integral
Objectivo:
Mostrar como é possível modificar o regulador de retroacção de variáveis de
estado por forma a seguir referências não nulas, incluindo ou não efeito
integral.

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
108
Seguimento de referências não nulas
Temos considerado até agora o problema de projectar controladores que
levem o estado do processo para zero, rejeitando assim perturbações que
tenham causado condições iniciais não nulas. Este problema é conhecido
como problema de regulação.
Em geral, no entanto, pretendem seguir-se referências não nulas,
eventualmente variáveis. Neste último caso o problema diz-se problema do
servomecanismo (isto é uma “herança dos tempos em que os controladores
visavam movimentar sistemas mecânicos, por exemplo lemes de navios –
anos 20 – ou canhões – anos 40).
CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
109
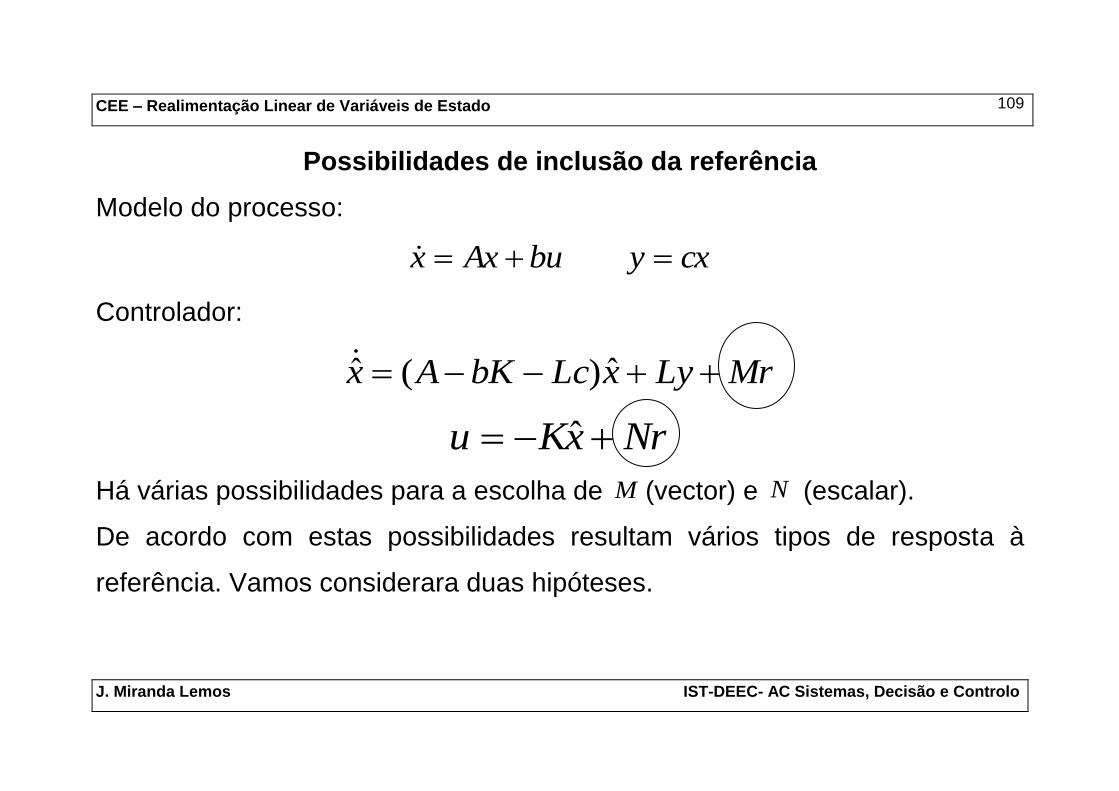
Possibilidades de inclusão da referência
Modelo do processo:
cxybuAxx
Controlador:
MrLyxLcbKAx ˆ)(̂
NrxKu ˆ
Há várias possibilidades para a escolha de M (vector) e N (escalar).
De acordo com estas possibilidades resultam vários tipos de resposta à
referência. Vamos considerara duas hipóteses.

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
110
a) Escolher M e N por forma a que
a equação de erro não dependa da referência r
Com a lei de controlo incorporando a referência, o erro satisfaz
MrLyxLcbKA
NrxKBAxxx
ˆ)(
)ˆ(̂
ou seja
rMbNxLcAx
0
)(~)(~
Para que este termo se anule, deve escolher-se
bNM
CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
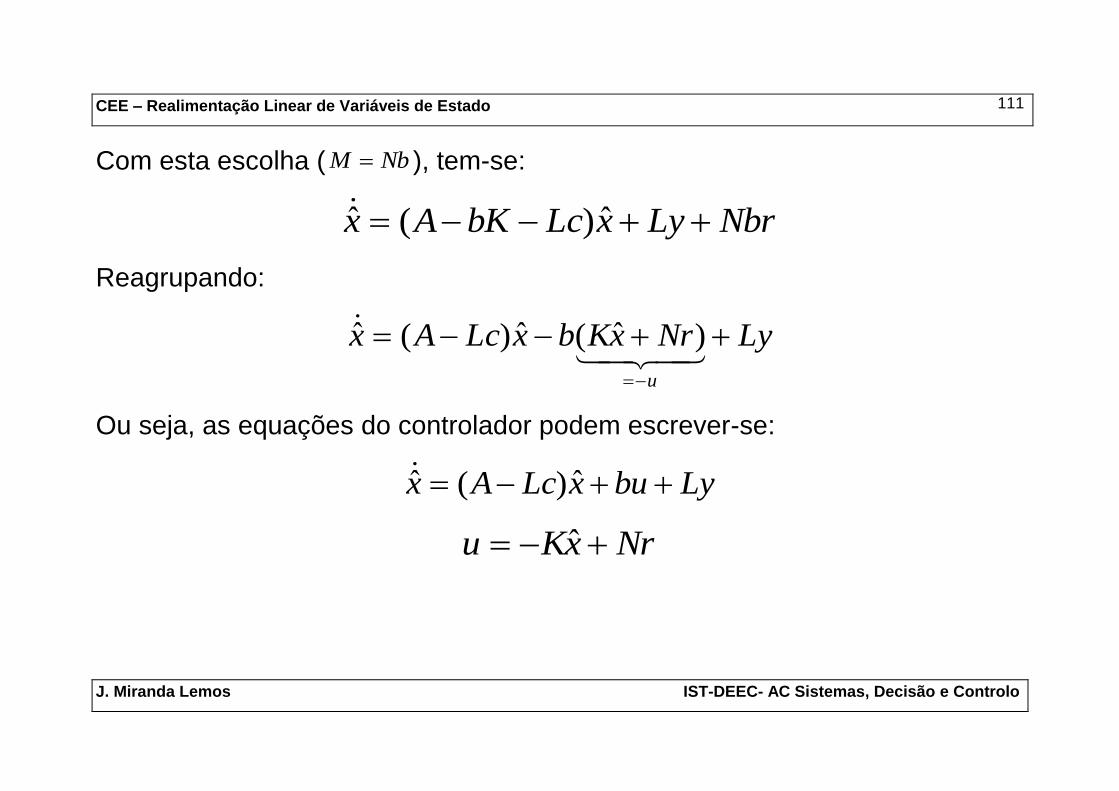
111
Com esta escolha ( NbM ), tem-se:
NbrLyxLcbKAx ˆ)(̂
Reagrupando:
LyNrxKbxLcAx
u
)ˆ(ˆ)(ˆ
Ou seja, as equações do controlador podem escrever-se:
LybuxLcAx ˆ)(̂
NrxKu ˆ

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
112
Estrutura do controlador por forma a que o erro de estimação
do estado não dependa da referência
LybuxLcAx ˆ)(̂
NrxKu ˆ
rN
K
+
-
u y
x
Processo
Observador^

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
113
b) Escolher M e N por forma a que
o erro de seguimento yre seja usado no controlador
MrLyxLcbKAx ˆ)(̂
NrxKu ˆ
Escolhendo
LMN 0
O controlador fica definido pelas equações
LexLcbKAx ˆ)(̂
xKu ˆ

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
114
Estrutura do compensador por forma a usar o erro de seguimento
LexLcbKAx ˆ)(̂
xKu ˆ
Observador ProcessoKuxer +
-
y^

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
115
Inclusão de efeito integral
Uma maneira de introduzir o efeito integral é aumentar o estado x do
processo com o estado Ix do integrador do erro. Repare-se que derivando
t
I drytx0
))(()( para .constr , obtém-se )()( tCxtxI
O conjunto sistema+integrador é pois descrito pelo modelo de estado
aumentado:
rub
x
x
c
A
x
x
II
1
0
00
0

CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
116
rub
x
x
c
A
x
x
II
1
0
00
0
A este modelo podem ser aplicadas as técnicas estudadas antes. Em
particular, se o estado fôr acessível e com 0r
I
Ix
xkKu 0
e tem-se a estrutura seguinte para o controlador
r -
+
1
s-k
-k
Processo
x
yxI
o
I
+
+
CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
117
O modelo de estado aumentado
ub
x
x
c
A
x
x
II
00
0
é controlável mas não é observável (demonstre!).
Podemos no enatnto estimar apenas o estado x com um observador, e usar a
medida directa do estado do integrador Ix (dado que é gerado pelo
computador de controlo).
Nestas condições continua a ser válido o teorema de separação (demonstre!).
CEE – Realimentação Linear de Variáveis de Estado
J. Miranda Lemos IST-DEEC- AC Sistemas, Decisão e Controlo
118
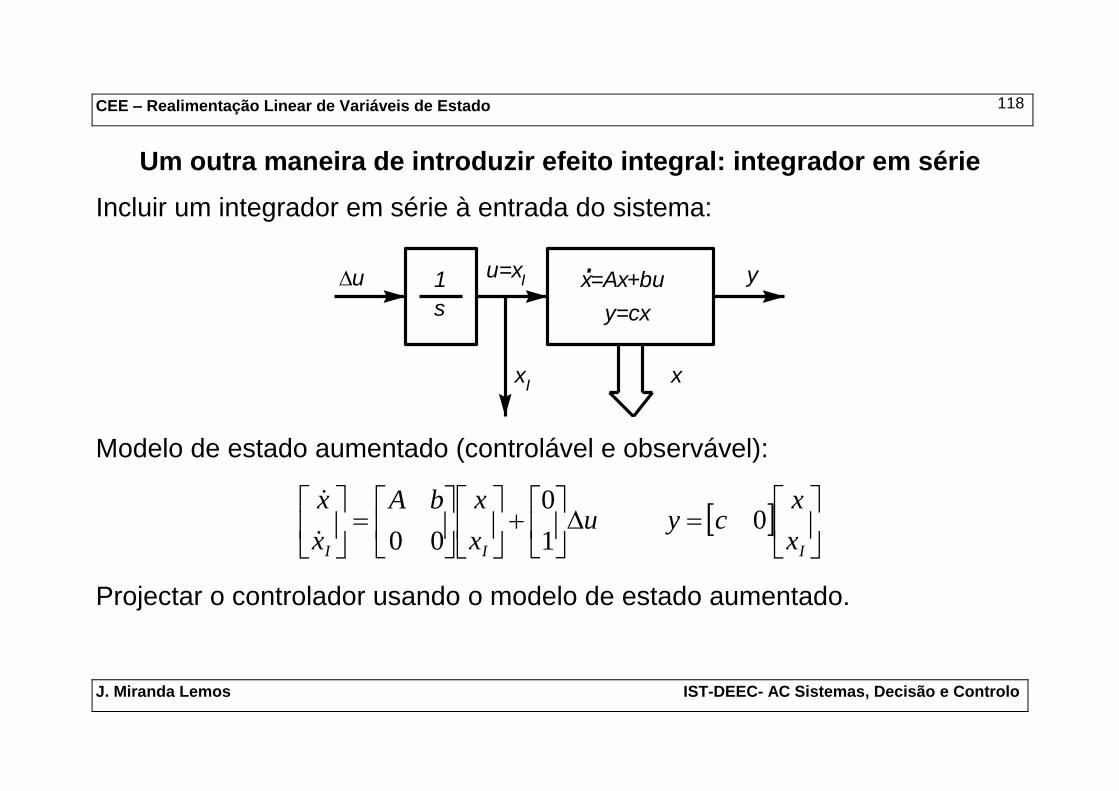
Um outra maneira de introduzir efeito integral: integrador em série
Incluir um integrador em série à entrada do sistema:
1
s
u=xIu yx=Ax+bu
y=cx
.
xxI
Modelo de estado aumentado (controlável e observável):
ux
xbA
x
x
II
1
0
00
Ix
xcy 0
Projectar o controlador usando o modelo de estado aumentado.