realidade virtual como ferramenta de simulação aplicada no ...jlcurzel/projeto integrador/artigos...
TRANSCRIPT
Realidade Vir tual como Ferramenta de Simulação Aplicada no Ensino de Automação da Manufatura
Jeferson L. CURZEL
Centro Federal de Educação Tecnológica de Santa Catar ina, Unidade Joinville Joinville, SC 89220-200, Brasil
André B. LEAL
Tutor do Programa de Educação Tutor ial no Grupo PET Engenhar ia Elétr ica da UDESC Depar tamento de Engenhar ia Elétr ica, Universidade do Estado de Santa Catar ina
Joinville, SC 89223-100, Brasil
Marcelo S. HOUNSELL Depar tamento de Ciência da Computação, Universidade do Estado de Santa Catar ina
Joinville, SC 89223-100, Brasil
RESUMO
Neste artigo é abordado o desenvolvimento de um ambiente virtual para visualização do funcionamento de uma célula de manufatura. Apresenta-se a célula de manufatura real e a sua seqüência de funcionamento, bem como os elementos necessários para o desenvolvimento do ambiente virtual em VRML. Esta célula é utilizada no laboratório de robótica da Universidade do Estado de Santa Catarina – UDESC, e através dela pode-se realizar experimentos práticos que, em escala reduzida, reproduzem células de manufatura existentes nas indústrias. Entretanto, os equipamentos, utilizados no laboratório são caros, sendo usada uma única célula de manufatura para desenvolver as atividades, o que pode comprometer o aprendizado dos alunos. Com a utilização da Realidade Virtual cada aluno pode realizar o experimento no ambiente virtual e após ter solucionado o problema, fazer a implementação na célula real. Assim, mesmo sem ter um conhecimento prévio da programação ou do funcionamento dos dispositivos da célula de manufatura, o aluno pode visualizar e interagir com os equipamentos virtuais de forma a verificar o que é possível ser feito em termos de sincronização de movimentos, determinação de trajetórias e solução de problemas de colisão ou bloqueio.
Palavras-chaves: Célula Flexível de Manufatura, Controle Supervisório, Sistemas a Eventos Discretos, Realidade Virtual.
1. INTRODUÇÃO
A utilização da Realidade Virtual (RV) nas diversas áreas do conhecimento está em crescente expansão. Esse crescimento é devido a vários fatores, como por exemplo, os estudos envolvendo RV nas universidades e a sua respectiva divulgação nas indústrias, o barateamento das interfaces e o acesso cada vez maior das pessoas à informática [1].
Na educação e treinamento, a RV tem grande potencial, pois propicia o processo de exploração, descoberta, observação e construção de uma nova visão do conhecimento, oferecendo ao aprendiz a oportunidade de melhor compreensão do objeto de estudo, proporcionando não apenas a teoria, mas também a experimentação prática, com o uso de laboratórios didáticos [1]. No ensino da automação da manufatura, por exemplo, é possível com a RV adquirir conhecimentos e realizar treinamento em equipamentos sem, necessariamente, estar fisicamente presente ou com o dispositivo real para utilização. Isso permite que uma tarefa possa ser realizada diversas vezes, sem comprometer a segurança dos alunos nem provocar danos materiais. Neste artigo será abordado o desenvolvimento de um ambiente virtual em VRML para visualização do funcionamento de uma célula de manufatura didática, para facilitar o ensino de disciplinas que abordem temas como programação de CLPs, modelagem e controle de sistemas a eventos discretos, automação da manufatura e robótica, entre outros. Na Seção 2 é mostrada a célula de manufatura didática real e é feita uma breve descrição do seu funcionamento. Na Seção 3 é apresentada a Teoria de Controle Supervisório e a modelagem da célula. Na Seção 4 é discutida a relação existente entre a RV e os Eventos Discretos. Na Seção 5 é apresentada a célula de manufatura virtual desenvolvida e na Seção 6 têm-se as conclusões.
2. A CÉLULA DE MANUFATURA DIDÁTICA
A Célula de Manufatura Didática (CMD) considerada (Figura 1) é composta por dois robôs, uma mesa giratória, uma estação de teste, uma esteira transportadora e uma mesa para peças rejeitadas. O funcionamento da célula prevê que as peças que estão na esteira são transportadas pelo robô 1 até a mesa giratória, são manufaturadas e testadas e, se estiverem com problema, são transportadas para a mesa de rejeito
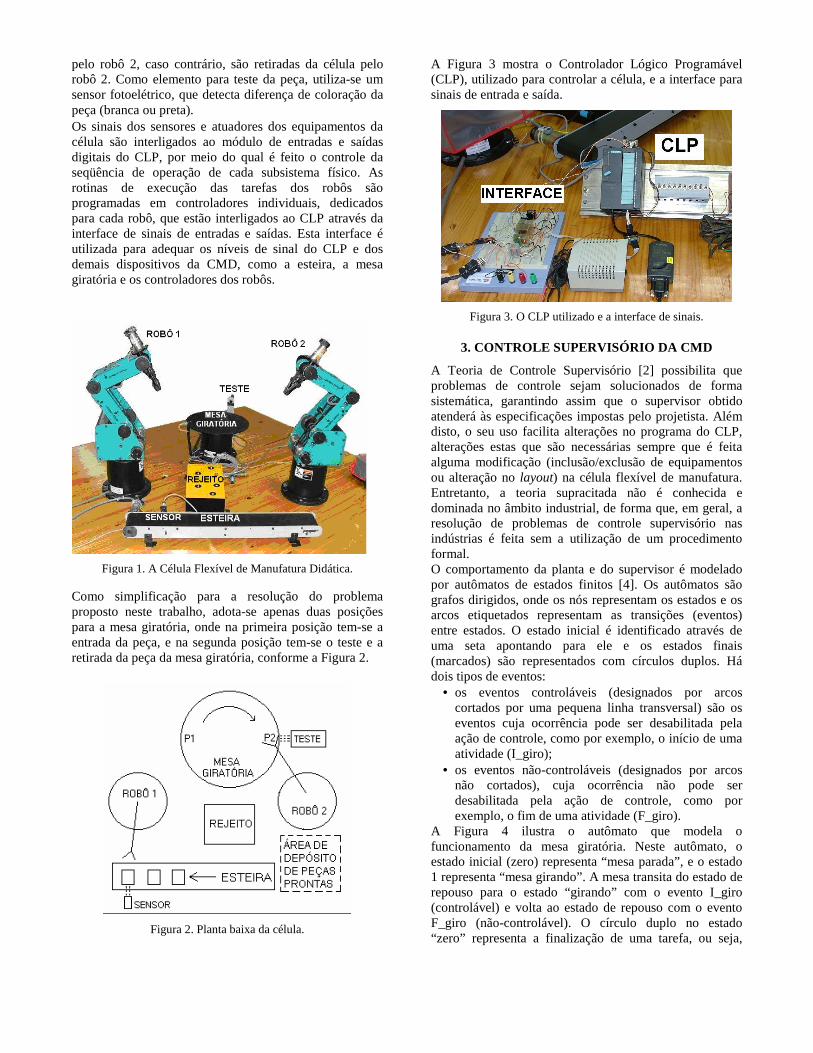
pelo robô 2, caso contrário, são retiradas da célula pelo robô 2. Como elemento para teste da peça, utiliza-se um sensor fotoelétrico, que detecta diferença de coloração da peça (branca ou preta). Os sinais dos sensores e atuadores dos equipamentos da célula são interligados ao módulo de entradas e saídas digitais do CLP, por meio do qual é feito o controle da seqüência de operação de cada subsistema físico. As rotinas de execução das tarefas dos robôs são programadas em controladores individuais, dedicados para cada robô, que estão interligados ao CLP através da interface de sinais de entradas e saídas. Esta interface é utilizada para adequar os níveis de sinal do CLP e dos demais dispositivos da CMD, como a esteira, a mesa giratória e os controladores dos robôs.
Figura 1. A Célula Flexível de Manufatura Didática.
Como simplificação para a resolução do problema proposto neste trabalho, adota-se apenas duas posições para a mesa giratória, onde na primeira posição tem-se a entrada da peça, e na segunda posição tem-se o teste e a retirada da peça da mesa giratória, conforme a Figura 2.
Figura 2. Planta baixa da célula.
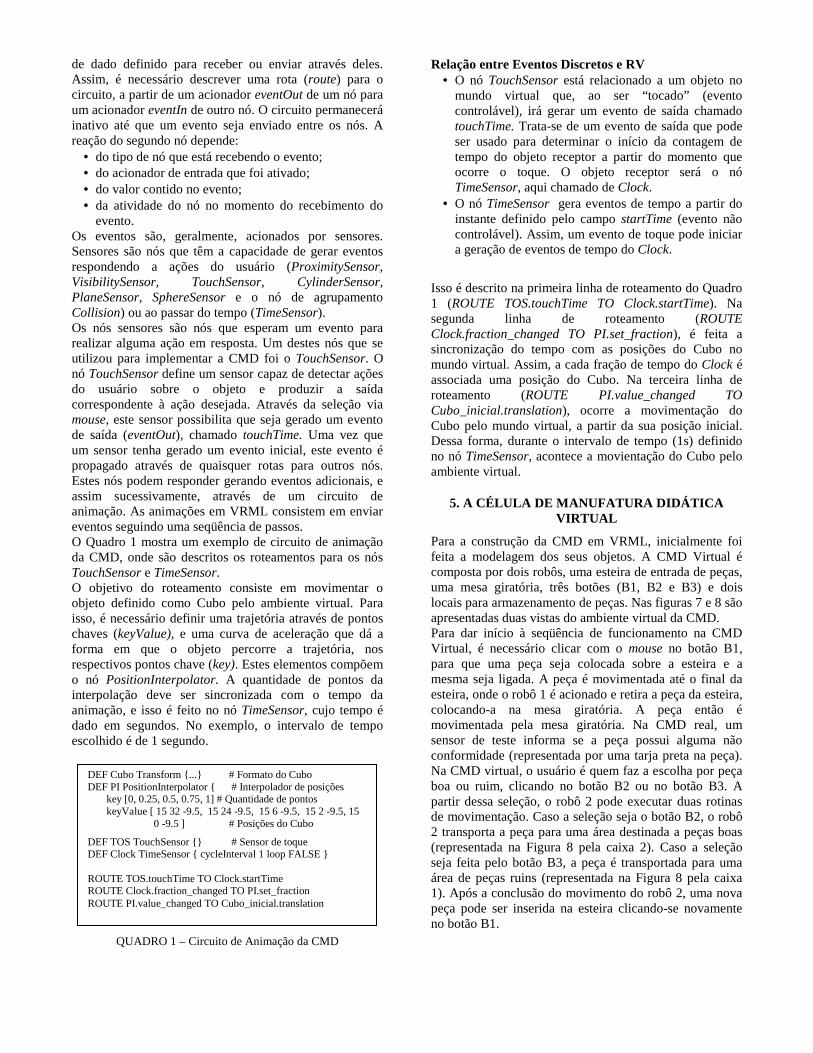
A Figura 3 mostra o Controlador Lógico Programável (CLP), utilizado para controlar a célula, e a interface para sinais de entrada e saída.
Figura 3. O CLP utilizado e a interface de sinais.
3. CONTROLE SUPERVISÓRIO DA CMD
A Teoria de Controle Supervisório [2] possibilita que problemas de controle sejam solucionados de forma sistemática, garantindo assim que o supervisor obtido atenderá às especificações impostas pelo projetista. Além disto, o seu uso facilita alterações no programa do CLP, alterações estas que são necessárias sempre que é feita alguma modificação (inclusão/exclusão de equipamentos ou alteração no layout) na célula flexível de manufatura. Entretanto, a teoria supracitada não é conhecida e dominada no âmbito industrial, de forma que, em geral, a resolução de problemas de controle supervisório nas indústrias é feita sem a utilização de um procedimento formal. O comportamento da planta e do supervisor é modelado por autômatos de estados finitos [4]. Os autômatos são grafos dirigidos, onde os nós representam os estados e os arcos etiquetados representam as transições (eventos) entre estados. O estado inicial é identificado através de uma seta apontando para ele e os estados finais (marcados) são representados com círculos duplos. Há dois tipos de eventos:
• os eventos controláveis (designados por arcos cortados por uma pequena linha transversal) são os eventos cuja ocorrência pode ser desabilitada pela ação de controle, como por exemplo, o início de uma atividade (I_giro);
• os eventos não-controláveis (designados por arcos não cortados), cuja ocorrência não pode ser desabilitada pela ação de controle, como por exemplo, o fim de uma atividade (F_giro).
A Figura 4 ilustra o autômato que modela o funcionamento da mesa giratória. Neste autômato, o estado inicial (zero) representa “mesa parada” , e o estado 1 representa “mesa girando” . A mesa transita do estado de repouso para o estado “girando” com o evento I_giro (controlável) e volta ao estado de repouso com o evento F_giro (não-controlável). O círculo duplo no estado “zero” representa a finalização de uma tarefa, ou seja,

considera-se que a mesa completou sua tarefa quando ela concluiu o giro.
Figura 4. Autômato para a mesa giratória.
Os seguintes passos devem ser realizados para a resolução de um problema de controle supervisório [2]:
• Modelar o comportamento da planta sem coordenação (planta livre);
• Modelar as especificações de controle; • Utilizando os modelos obtidos nos passos anteriores,
sintetizar o supervisor. Na modelagem da célula, cada elemento é modelado por um autômato e o comportamento global (comportamento livre) da planta pode ser obtido fazendo-se a composição síncrona [5] destes modelos individuais. Conforme proposto por [6], podem ser modeladas ainda algumas restrições físicas, devido aos modelos individuais não possuírem informações importantes do sistema global. Por exemplo, se a esteira não estiver acionada, não ocorrerá o acionamento do sensor posicionado ao final desta, não havendo dessa forma a geração do evento correspondente. Assim, pode-se modelar uma restrição física para indicar que o sensor da esteira só pode ser ativado quando a esteira está ligada. Os autômatos que modelam estas restrições físicas devem ser sincronizados com o autômato que modela a planta, obtendo-se um modelo que descreva o seu comportamento de forma mais exata. Analogamente, cada especificação de controle é modelada por um autômato e a composição síncrona de todas as especificações gera o autômato que modela a especificação global para o sistema. O produto síncrono do autômato da planta com o autômato da especificação global gera o autômato que representa a linguagem alvo, ou seja, a linguagem desejável para o sistema sob supervisão. Tendo em vista que a linguagem alvo pode não ser controlável, é necessário encontrar a máxima linguagem controlável [2] que está contida na linguagem alvo. O autômato que reconhece esta linguagem consiste no supervisor não bloqueante e minimamente restritivo que deverá será implementado de forma a garantir o cumprimento das especificações de controle. Todos os passos descritos acima podem ser realizados com auxílio de ferramentas computacionais. Em especial, sugere-se a utilização da ferramenta TCT [7], disponível em http://www.control.utoronto.ca/DES/ e da ferramenta GRAIL [8], disponível em http://www.das.ufsc.br/~cury/ensino-5202.html, ambas distribuídas gratuitamente para fins educacionais.
Modelagem da CMD A modelagem da célula e a resolução de problemas de controle são feitos seguindo a Teoria de Controle
Supervisório de Sistemas a Eventos Discretos [2]. Nesta abordagem o controle é feito por um supervisor, o qual restringe o comportamento do sistema físico de forma a satisfazer um conjunto de especificações. O alfabeto de eventos que compõe os modelos individuais de cada subsistema físico é dividido em eventos controláveis e eventos não-controláveis. A tabela 1 indica o evento associado a cada subsistema físico da célula e a descrição do evento.
Tabela 1. Eventos dos subsistemas físicos da célula. SUBSISTEMA EVENTO DESCRIÇÃO
E_liga Liga a esteira. Esteira E_desl Desliga a esteira. S_liga Chegada de peça na esteira. Sensor da
esteira S_desl Saída de peça da esteira. I_giro Liga a mesa giratória. Mesa giratória F_giro Fim de giro da mesa. T_M Inicia a operação do robô 1. Robô 1 F_rb1 Fim de operação do robô 1. I_teste Início do teste de peça. T_OK Resultado do teste => peça boa.
Estação de teste
T_NOK Resultado do teste => peça ruim. T_R Inicio de operação do robô 2 para
retirada de peça ruim. T_S Início de operação do robô 2 para
retirada de peça boa.
Robô 2
F_rb2 Fim de operação do robô 2. O funcionamento dos subsistemas físicos pode ser modelado pelos autômatos G1 a G6, mostrados na Figura 5. Para o autômato G1, que modela o funcionamento da esteira, o estado inicial “0” representa a esteira desligada e o estado “1” representa a esteira ligada. O autômato G2 representa o comportamento do sensor da esteira.
Especificações de Controle A Teoria proposta por [2] prevê que a partir de um conjunto de especificações de controle possamos obter um supervisor que garanta que o sistema se comporte conforme desejado. A seguir são apresentadas as especificações de controle.
Figura 5. Autômatos G1 a G6.

Na Figura 6 são mostradas as especificações de controle E1 a E9. A especificação E1 indica que a esteira pode ser ligada somente quando o sensor está desativado e deve ser desligada apenas quando o sensor está ativado. A especificação E3 indica que a mesa giratória só poderá iniciar o giro após o fim de operação do robô 1.
Figura 6. Especificações E1 a E9.
Síntese e Implementação do Supervisor Neste trabalho utiliza-se um único supervisor para controlar a célula de manufatura. Assim, no processo de síntese do supervisor deve-se obter um modelo para a planta (sistema a ser controlado) e um modelo global que reúna todas as especificações de controle. O autômato que consiste no supervisor não bloqueante e minimamente restritivo, que será implementado no CLP de forma a garantir o cumprimento das especificações de controle possui 73 estados e 158 transições. Todo o processo de síntese do supervisor foi realizado com o auxílio da ferramenta GRAIL [8]. Para auxiliar na implementação do supervisor no CLP, foi desenvolvido um programa no Laboratório de Pesquisa em Automação de Sistemas – LAPAS, da UDESC, que faz a geração automática de código. Este programa utiliza-se da listagem gerada pelo GRAIL, e a partir daí gera as linhas do programa que será implementado no CLP. A concepção e a modelagem da CMD apresentada neste trabalho são descritas com maiores detalhes em trabalhos anteriores [9] e [10].
4. RV E OS EVENTOS DISCRETOS
A implementação de eventos em RV é discutida em alguns trabalhos que tratam de simulação de eventos [11], simuladores de robôs [12], validação de modelos [13] e sincronização de eventos [14]. Conforme visto em [15], onde é tratado o uso de eventos discretos, a implementação em RV é feita tomando por base o
resultado obtido a partir da teoria de controle supervisório, mas não há uma interface que permita a migração de SEDs para RV diretamente. Será mostrado como são mapeados os eventos discretos (controláveis ou não) a eventos de entrada e saída usando VRML.
Tratamento de Eventos no VRML O VRML (Virtual Reality Modeling Language) é uma linguagem independente de plataforma que permite a criação de cenários 3D, por onde se pode passear, visualizar objetos sob diversos ângulos e ainda interagir com eles [16]. A linguagem foi concebida para descrever simulações interativas de múltiplos participantes, em mundos virtuais disponibilizados na Internet e ligados com a World Wide Web. O VRML é um padrão (ISO 14772-1:1997) no qual os objetos podem ser representados através de geometrias primitivas, transformações hierárquicas, fontes de luz, pontos de visão, animações, mapeamentos de texturas, entre outros. O VRML permite a criação de mundos virtuais a partir de arquivos “ .wrl” escritos em código ASCII. A fim de visualizar e interagir com ambientes e objetos virtuais, um plugin precisa ser instalado. O plugin, como extensão ao navegador WWW, será ativado toda vez que arquivos com a extensão wrl forem acessados [15].
Eventos e Rotas A linguagem VRML permite a criação de mundos dinâmicos onde eventos acontecem e são gerenciados. Para fazer isto, a linguagem VRML dispõe de instruções que descrevem como conectar nós para atuação conjunta ou condicionada. Os nós contêm a descrição das figuras contidas no arquivo e suas propriedades no mundo virtual. Por exemplo, abrir uma porta quando o usuário seleciona (clica) em um determinado objeto ou acender uma lâmpada nas mesmas condições. Os eventos são mecanismos de troca de mensagens entre os objetos e envolvem:
• um par de nós para atuar conjuntamente; • uma rota de comunicação entre os dois nós
envolvidos; Uma vez a rota tendo sido definida entre os dois nós, o primeiro deles pode enviar mensagens ao segundo. Esta mensagem, chamada de event (evento), contém valores que poderão ser usados ou tratados pelo nó receptor. Existe inclusive a possibilidade de encadear vários nós criando um circuito de comunicação. Cada tipo de nó apresenta acionadores de entrada e saída com os quais os eventos atuam. Por exemplo, o nó que cria uma luz (lâmpada) tem um acionador de entrada que pode ligá-la ou desligá-la (on/off). Acionando-o, através do envio de um evento, é possível ligar e desligar esta luz remotamente. Cabe salientar que um nó pode ter vários acionadores para interação entre outros nós do circuito. Estes acionadores podem ser de entrada (input) e saída (output). Os acionadores de entrada são chamados de eventIn e os acionadores de saída são chamados de eventOut. É importante notar ainda que estes acionadores têm um tipo
de dado definido para receber ou enviar através deles. Assim, é necessário descrever uma rota (route) para o circuito, a partir de um acionador eventOut de um nó para um acionador eventIn de outro nó. O circuito permanecerá inativo até que um evento seja enviado entre os nós. A reação do segundo nó depende:
• do tipo de nó que está recebendo o evento; • do acionador de entrada que foi ativado; • do valor contido no evento; • da atividade do nó no momento do recebimento do
evento. Os eventos são, geralmente, acionados por sensores. Sensores são nós que têm a capacidade de gerar eventos respondendo a ações do usuário (ProximitySensor, VisibilitySensor, TouchSensor, CylinderSensor, PlaneSensor, SphereSensor e o nó de agrupamento Collision) ou ao passar do tempo (TimeSensor). Os nós sensores são nós que esperam um evento para realizar alguma ação em resposta. Um destes nós que se utilizou para implementar a CMD foi o TouchSensor. O nó TouchSensor define um sensor capaz de detectar ações do usuário sobre o objeto e produzir a saída correspondente à ação desejada. Através da seleção via mouse, este sensor possibilita que seja gerado um evento de saída (eventOut), chamado touchTime. Uma vez que um sensor tenha gerado um evento inicial, este evento é propagado através de quaisquer rotas para outros nós. Estes nós podem responder gerando eventos adicionais, e assim sucessivamente, através de um circuito de animação. As animações em VRML consistem em enviar eventos seguindo uma seqüência de passos. O Quadro 1 mostra um exemplo de circuito de animação da CMD, onde são descritos os roteamentos para os nós TouchSensor e TimeSensor. O objetivo do roteamento consiste em movimentar o objeto definido como Cubo pelo ambiente virtual. Para isso, é necessário definir uma trajetória através de pontos chaves (keyValue), e uma curva de aceleração que dá a forma em que o objeto percorre a trajetória, nos respectivos pontos chave (key). Estes elementos compõem o nó PositionInterpolator. A quantidade de pontos da interpolação deve ser sincronizada com o tempo da animação, e isso é feito no nó TimeSensor, cujo tempo é dado em segundos. No exemplo, o intervalo de tempo escolhido é de 1 segundo.
QUADRO 1 – Circuito de Animação da CMD
Relação entre Eventos Discretos e RV • O nó TouchSensor está relacionado a um objeto no
mundo virtual que, ao ser “ tocado” (evento controlável), irá gerar um evento de saída chamado touchTime. Trata-se de um evento de saída que pode ser usado para determinar o início da contagem de tempo do objeto receptor a partir do momento que ocorre o toque. O objeto receptor será o nó TimeSensor, aqui chamado de Clock.
• O nó TimeSensor gera eventos de tempo a partir do instante definido pelo campo startTime (evento não controlável). Assim, um evento de toque pode iniciar a geração de eventos de tempo do Clock.
Isso é descrito na primeira linha de roteamento do Quadro 1 (ROUTE TOS.touchTime TO Clock.startTime). Na segunda linha de roteamento (ROUTE Clock.fraction_changed TO PI.set_fraction), é feita a sincronização do tempo com as posições do Cubo no mundo virtual. Assim, a cada fração de tempo do Clock é associada uma posição do Cubo. Na terceira linha de roteamento (ROUTE PI.value_changed TO Cubo_inicial.translation), ocorre a movimentação do Cubo pelo mundo virtual, a partir da sua posição inicial. Dessa forma, durante o intervalo de tempo (1s) definido no nó TimeSensor, acontece a movientação do Cubo pelo ambiente virtual.
5. A CÉLULA DE MANUFATURA DIDÁTICA VIRTUAL
Para a construção da CMD em VRML, inicialmente foi feita a modelagem dos seus objetos. A CMD Virtual é composta por dois robôs, uma esteira de entrada de peças, uma mesa giratória, três botões (B1, B2 e B3) e dois locais para armazenamento de peças. Nas figuras 7 e 8 são apresentadas duas vistas do ambiente virtual da CMD. Para dar início à seqüência de funcionamento na CMD Virtual, é necessário clicar com o mouse no botão B1, para que uma peça seja colocada sobre a esteira e a mesma seja ligada. A peça é movimentada até o final da esteira, onde o robô 1 é acionado e retira a peça da esteira, colocando-a na mesa giratória. A peça então é movimentada pela mesa giratória. Na CMD real, um sensor de teste informa se a peça possui alguma não conformidade (representada por uma tarja preta na peça). Na CMD virtual, o usuário é quem faz a escolha por peça boa ou ruim, clicando no botão B2 ou no botão B3. A partir dessa seleção, o robô 2 pode executar duas rotinas de movimentação. Caso a seleção seja o botão B2, o robô 2 transporta a peça para uma área destinada a peças boas (representada na Figura 8 pela caixa 2). Caso a seleção seja feita pelo botão B3, a peça é transportada para uma área de peças ruins (representada na Figura 8 pela caixa 1). Após a conclusão do movimento do robô 2, uma nova peça pode ser inserida na esteira clicando-se novamente no botão B1.
DEF Cubo Transform { ...} # Formato do Cubo DEF PI PositionInterpolator { # Interpolador de posições
key [0, 0.25, 0.5, 0.75, 1] # Quantidade de pontos keyValue [ 15 32 -9.5, 15 24 -9.5, 15 6 -9.5, 15 2 -9.5, 15
0 -9.5 ] # Posições do Cubo DEF TOS TouchSensor { } # Sensor de toque DEF Clock TimeSensor { cycleInterval 1 loop FALSE } ROUTE TOS.touchTime TO Clock.startTime ROUTE Clock.fraction_changed TO PI.set_fraction ROUTE PI.value_changed TO Cubo_inicial.translation

Figura 7. A CMD Virtual – Vista 1
Figura 8. A CMD Virtual – Vista 2
6. CONCLUSÕES
Foram vistos neste trabalho conceitos sobre Sistemas a Eventos Discretos e Realidade Virtual, a forma como são relacionados os eventos no mundo real (controláveis e não controláveis) e no mundo virtual (eventos de saída e eventos de entrada) e como estes eventos são implementados na prática. Foi detalhada a seqüência para a criação em VRML de uma Célula de Manufatura Didática, tomando-se por base uma célula de manufatura real existente no laboratório de robótica da UDESC. Limitou-se o uso da RV à visualização e simulação de eventos através da interação do usuário utilizando o mouse. Na continuidade desta pesquisa pretende-se desenvolver uma interface que permita a comunicação da célula virtual com a célula real, viabilizando a monitoração e interação com a célula de manufatura didática via internet.
7. REFERÊNCIAS
[1] C. Kirner, e R. Tori, Editores, Realidade Virtual: Conceitos e Tendências. São Paulo, Livro do Pré Simpósio SVR. pp 3-8, ISBN 85-904873-1-8, 2004. [2] P. J. Ramadge, and W. M. Wonhan, The Control of Discrete Event Systems, Proceedings of IEEE, 77(1), pp. 81-98, 1989.
[3] J. E. R. Cury, Teria de Controle Supervisório de Sistemas a Eventos Discretos. V Simpósio Brasileiro de Automação Inteligente (Minicurso). Canela, RS, 2001. [4] J.E. Hopcroft, R. Motwani, and J.D. Ullmann, Introduction to Automata Theory, Languages and Computation, 2nd ed., Addison Wesley Publishing Company, 2001. [5] C.G. Cassandras, and S. Lafortune, Introduction to Discrete Event Systems, 2nd Ed., Kluwer Academic Publishers, Massachusetts, 1999. [6] W.R. Moraes, e A.B. Leal, Controle Supervisório do Transportador de Entrada de um Sistema Flexível de Manufatura. Proceedings of the VII International Conference on Industrial Applications-Induscon, Recife, Brasil, 2006. [7] W. M. Wonham, Supervisory Control of Discrete Event Systems, Notas de aula, Systems Control Group, University of Toronto, 2005. [8] D. Raymond, and D. Wood, Grail: A C++ library for automata and expressions, in Journal of Symbolic Computation, 11, pp. 341-350, 1995. [9] J. L. Curzel, e A. B. Leal, Implementação de Controle Supervisório em Linguagem Ladder para uma Célula Flexível de Manufatura Didática. XVI Congresso Brasileiro de Automática. pp 2700-2705. Salvador, BA, 2006. [10] J. L. Curzel,, F. T. da Silva,, A. B. Leal, e S. do Amaral, Concepção de uma Célula de Manufatura Didática para o Ensino de Engenharia. XXXIV Congresso Brasileiro de Ensino de Engenharia. pp 1916-1926. Passo Fundo, RS. ISBN 85-7515-371-4, 2006. [11] L. Gabcan, C. L. N. dos Santos, M. J. F. de Oliveira, G. G. Cunha, e L. Landau, Utilização de Técnicas de Realidade Virtual na Visualização de Simulação de Atendimento em Hospital. I Workshop de Realidade Virtual e Visualização Científica do Laboratório de Métodos Computacionais em Engenharia. Rio de Janeiro, 2002. [12] M. S. Hounsell, e R. Redel, Implementação de Simuladores de Robôs com o Uso da Tecnologia de Realidade Virtual. IV Congresso Brasileiro de Computação – CBComp, 2004. [13] A. Perkusich, e L. D. Silva, Uso de Realidade Virtual para Validação de Modelos de Sistemas Flexívels de Manufatura. VI Simpósio Brasileiro de Automação Inteligente. Bauru, SP, 2003. [14] J. L. R. Souza, e J. Kniess, Apresentação e Implementação de um modelo para especificar Sincronização em Realidade Virtual. IV Congresso Brasileiro de Computação – CBComp, 2004. [15] J. L. Curzel, M. S. Hounsell, e A. B. Leal, Uso da Realidade Virtual para Ensino de Automação da Manufatura. International Conference on Engineering and Computer Education. Santos, Brasil, 2007. [16] R. Carrey, and G. Bell, The annotated VRML 2.0 reference manual. Mass.: Addison-Wesley Developers Press, ISBN 0-201-41974-2, 1999.