proposta de sistema simulador da dinÂmica de … · trabalhar na região de torque constante,...
TRANSCRIPT
40. SBAI- Simpósio Brasileiro de Automação Inteligente, São Paulo, SP, 08-10 de Setembro de 1999
PROPOSTA DE SISTEMA SIMULADOR DA DINÂMICA DE VEíCULOELÉTRICO BASEADO EM PROCESSADOR DIGITAL DE SINAIS
Silvio [email protected]
Marcelo Godoy Simõ[email protected] .
Escola Politécnica da Universidade de São PauloDepartamento de Engenharia Mecânica
Av. Prof. Mello Moraes, 2231CEP 05508-900 - São Paulo, SP
Brasil
Abstract - Nowadays one is showing a rapid growth of DigitalSignal Processors applications in many areas. In this article it ispresented DSP system designed to control a brushless DC in-wheel motor connected with a DC motor which is used tosimulate the dynamics of a electric vehicle. To reach thenecessary strategies of control and to do the interface with lheusers, a Real Time Operational System is implemented and ahost computer is used for. Some special features, included tooptimize the performance of the system is showed.
Keyword - Electrical Vehicles, Wheel-in Motor, DC Motor,Brushless DCMotor, Digital Signal Processors, Real TimeOperational Systems
Resumo - Há, nos dias atuais, um contínuo e crescenteinteresse pelo uso de processadores digitais de sinais. Opresente texto aborda o desenvolvimento de um sistema comprocessador DSP para fins de controle de motor CC semescovas embutido numa roda e de um simulador de veículoelétrico baseado em motor Cc. Visando facilitar a estratégia dedesenvolvimento e a interface com o usuário, são adotados umsistema operacional em tempo real e a utilização decomputador hospedeiro do sistema. É apresentado odesempenho deste sistema e a escolha de recursos específicosque buscam otimizar o U!\O do DSP no desenvolvimento deestratégias de controle de motores elétricos.
Palavras Chave - Veículos Elétricos, Motor na Roda, MotorCC, Motor Brushless CC, Processadores Digitais de Sinais,Sistemas Operacionais em Tempo Real
I. INTRODUÇÃO
Com o barateamento dos circuitos ·· integrados . paraprocessamento digital de sinais (OSP), a popularização edisseminação da informática de modo geral e a disponibilidadede Sistemas Operacionais em Tempo Real (RTOS) prontospara serem aplicados em sistemas embarcados, há um nichocrescente de utilização de dispositivos de acionamento demotores elétricos.
597
Visando a melhoria da eficiência e o desempenho de sistemasutilizados em veículos elétricos, diversos projetos estão sendodesenvolvidos e motores especiais, inovadores em concepçãoelétrica ou mecânica, podem determinar novas estratégias deacionamento. Um enfoque possível é o de se projetar um motorembutido em uma roda, integrando o sistema de tração eeliminando diversos subsistemas mecânicos.
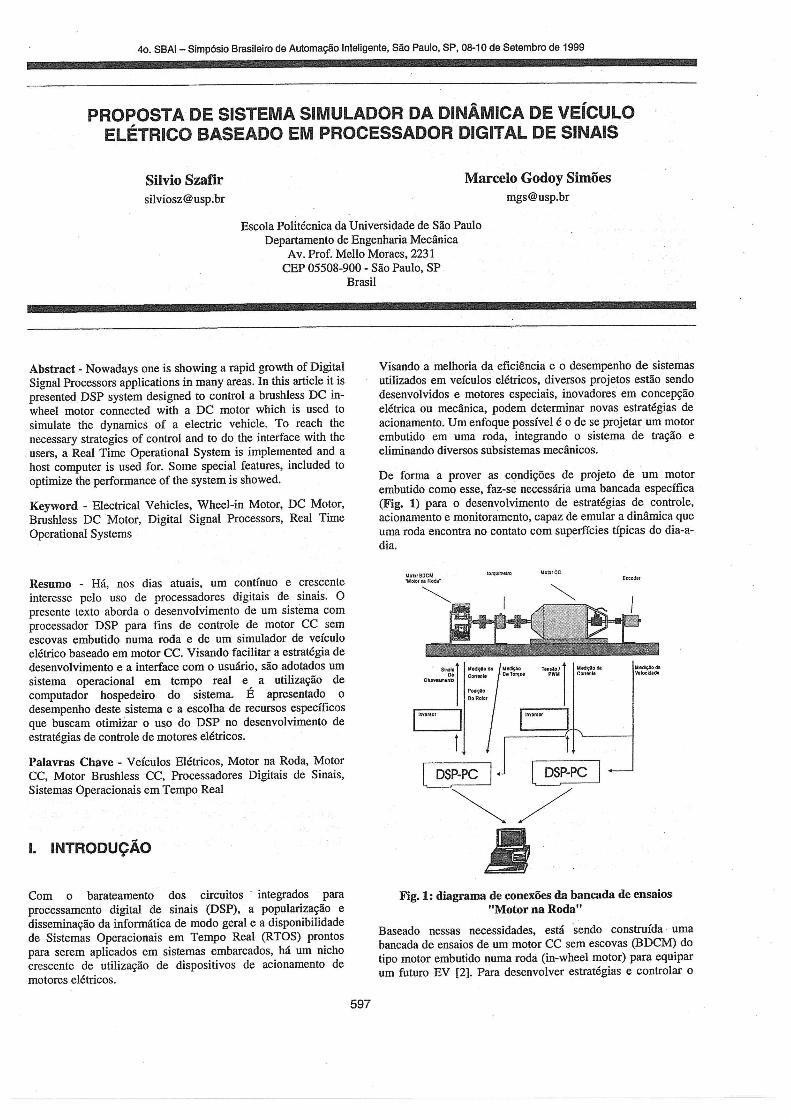
De forma a prover as condições de projeto de um motorembutido como esse, faz-se necessária uma bancada específica(Fig. 1) para o desenvolvimento de estratégias de controle,acionamento e monitoramento, capaz de emular a dinâmica queuma roda encontra no contato com superfícies típicas do dia-a-dia.
l.foXlr CC , eeeee,
Fig. 1: diagrama de conexões da bancada de ensaios"Motor na Roda"
Baseado nessas necessidades, está 'sendo construída umabancada de ensaios de um motor CC sem escovas (BDCM) dotipo motor embutido numa rodá. (in-wheel motor) para equiparum futuro EV [2]. Para desenvolver estratégias e controlar o

A bancada de ensaios que será usada para testes e escolha damelhor estratégia de controle de um BDCM de 5 fases (motorna roda) que esta sendo construído [2] é composta,basicamente, dos seguintes:
40. SBÁI- Simpósio Brasileiro de Automação Inteligente, São Paulo, SP, 08·10 de Setembro de 1999
BDCM está sendo projetada uma placa processada, com DSP, A. Bancada de Ensaiosque interfaceia com o barramento de um micro hospedeiro dotipo IBM-PC, a placa DSP-PC. [2]. É necessário estudar ocomportamento de um veículo e então simulá-lo através domodelo dinâmico que foi desenvolvido. A dinâmica do EV,como carga do BDCM, é simulada e executada com o auxíliode um motor CC, também controlado via uma segunda placaDSP-PC, independente, conforme mostra a Fig. 1.
• Motor na roda BDCM pentafásico
• MotorCC
• . Duas placas DSP-PC (uma para cada motor)
• Torquímetro
• Encoder óptico
Microcomputador PC
Equipamentos de apoio, tais como: osciloscópio, ponta decorrente, etc . ..
••
O DSP-PC alocado para o controle do BDCM será usado paratestar vários tipos de estratégias de controle, usando malhas decorrente, velocidade e torque. Nesta placa; serão tambémmonitorados sensores de temperatura colocados internamenteàs fases 'do motor. índices de desempenho e eficiência domotor poderão ser levantados a partir da análise dos dadoscoletados, para cada urna das estratégias testadas.
Para permitir que todo o conjunto opere sem falhas e dentro detempos pré-definidos, um Sistema Operacional em Tempo Real(RTOS) será implementado como o sistema monitor da placaDSP-PC. Desta maneira, pretende-se ter um sistema ondetarefas como o acesso aos periféricos, a interface com omicrocomputador hospedeiro, a intercomunicação entre placasgêmeas e rotinas do usuário sejam executadas de maneirapreemptiva. O RTOS realiza o chaveamento das tarefas queestão em execução, faz o controle da interface com ocomputador hospedeiro através de memória de acesso dual e ocontrole e decisão do atendimento às interrupções entre outrasfunções. Urna visão geral, da maneira pela qual os módulos do .Sistema Simulador da Dinâmica de Veículo Elétrico baseadoem Processador Digital de Sinais interagem pode ser observadana Fig. 2. A bancada de ensaios é a estrutura física onde estãolocalizados os motores elétricos controlados pela(s) placa(s)DSP-PC. A(s) placa(s) interfaceam com um computadorhospedeiro, IBM-PC, através do RTOS já citado e da memóriade acesso duplo , permitindo o acesso e a intervenção dousuário no sistema.
Bancada
Fig. 2: sequência do funcionamento do sistema D8p·PC nabancada de ensaios e interface com usuário
Em especial, utilizamos um processador de baixo custo econsumo de energia, o Motorola DSP56L811, um processadordigital de sinais, para obter parte destes recursos aliados a suafacilidade de programação e execução no estilo encontrado nosmicrocontroladores.
B. O Simulador da carga
Para o simulador de carga da bancada do motor na roda sãoutilizados recursos que são comuns tanto para o motor CC-como para o motor na roda; por exemplo o encoder para medira velocidade de rotação de ambos os motores, o sensor de .torque, etc ...
Este artigo apresenta uma visão geral da bancada de ensaio edesenvolvimento (Seção ll), mostrando detalhes de arquiteturada placa de controle DSP-PC (Seção III) e de seu sistemamonitor (Seção VI), fazendo uma análise de seu desempenho esua relação custo beneficio (Seção V).
O motor CC atua como carga de rolagem dinâmica emconfiguração de freio dinarnométrico. O BDCMé controladoem configuração escalar, pretendendo-se no futuroimplementar uma estratégia vetorial.
11. BANCADA DO MOTOR NA RODA
A estratégia de controle do motor CC está sendo implementadausando malhas de corrente (interna ao conversor) e develocidade, sendo a malha de velocidade realimentada peloencoder óptico, conforme pode ser vista na ·F ig. 3. .
598

40. SBAI - Simpósio Brasileiro de Automação Inteligente, São Paulo, SP, 08-10 de Setembro de 1999
É importante que o estudo da dinâmica do EV esteja baseadonum perfil torque-velocidade do sistema de propulsão elétrico,neste caso pelas características elétricas do projeto do "motorna roda" [2]. No nosso caso em particular, o motor CCescolhido possui especificações de torque e velocidadesuperiores ao BDCM, sempre operando no regime de torqueconstante. Apenas a malha de velocidade será trabalhada, paraefeitos de simulação dinâmica das características impostas pelamodelagem do EV [3] [4] [5].
Pls:e. OSP·PC
onde f é o coeficiente da resistência de rolagem do pneu. Elevaria com a velocidade do veículo e durante a manobra na .dirigibilidade do veículo. m é a massa do veículo. g a constantede aceleração da gravidade.
O arrasto aerodinâmico é a resistência da viscosidade do aratuando no veículo
OSP
S6L811
onde ç é a densidade do ar, Car o coeficiente de arrastoaerodinâmico, A é a área frontal do veículo, v a velocidade doveículo e Vo a velocidade do vento .
A resistência de oscilação fo tem sinal positivo durante aaceleração e negativo durante a desaceleração, dado por:
••
Fig. 3: circuito de controle do motor CC
Com a máxima rotação do BDCM em 750 rpm, é possívelantigir uma velocidade de aproximandamente 92 KmIh,utilizando para o cálculo uma roda de aro de 14". O torquenominal do BDCM é de 30 Nm, sendo o motor CC usado nasimulação do EV um motor com conjugado de 71,60 Nm,muito acima do valor do motor BDCM. Da mesma maneira arotação nominal do motor, que é de 1000 rpm, está acima darotação máxima que pretende-se alcançar na bancada deensaios.
Como é característico nos -motores CC (como o motor na roda),a curva de torque inicia uma diminuição do torque máximo emrelação a velocidade de rotação do motor. Como nos interessa .trabalhar na região de torque constante, qualquer referência aotorque do motor será feita para essa região.
Para a modelagem dinâmica que será empregada no motor CC,deve ser formulada uma carga de rolagem do veículo, vistopela roda. As características da carga, através do simulador.podem ser modeladas de maneira simplificada como a força derolagem (FJJ que consiste da resistência de rolagem (iro), doarrasto aerodinâmico do veículo (iar) e ' 'da resistência deoscilação do veículo durante sua aceleração e desaceleração(io)
A resistência de rolagem (ira) é causada pela deformação dopneu na pista .
fm=fem «s
599
f o= me g e sen a
onde a é o grau de inclinação.
A força motr iz (F) disponível no veículo - resultado do sistemade propulsão que é obtido pela força de cada motor na rodamultiplicado pela quantidade de propulsores no veículo - ésubtraída da força de rolagem (FJJ.
O resultado F- FR acelera o veículo. A aceleração do veículo édada por
F-Fa= Rm
O modelo baseado nestas equações [3] possui os seguintesítens principais, para uma análise de perfil de força constante:
Aceleração inicial
Dirigindo o veículo na velocidade nominal
• Dirigindo o veículo na velocidade máxima
Para estes ítens, temos as seguintes variáveis:
• Taxa de potência do motor na roda (elétrico)
• Velocidade nominal do motor

40. SBAI- Simpósio Brasileiro de Automação Inteligente. São Paulo, SP, 08-10 de Setembro de 1999
• Velocidade máxima do motor • conversorND, serial;
• conversor D/A, serial ;
Não é considerada a taxa de redução, ou redutor, entre o eixodo motor e a roda, uma vez que não há acoplamentos, além dosrolamentos necessários para conectar o eixo de tração doveículo ao motor na roda.
No caso do motor CC, a simulação da carga, suportada pelomotor na roda , poderá ser executada baseada em dadosoriundos de uma modelagem de um carro "fictício ", ou baseadaem dados reais retirados de um carro real em movimento, querepresentam o que o motor na roda enxerga como sua cargareal quando colocado num veículo de tração elétricaimplementado com este motor.
• EPROM com programa monitor
Fig. 4: diagrama de blocos dos módulos da placa DSP·PC
o ensaio poderá ser multiplicado/dividido para diferentescapacidades de tração, como a tração em apenas duas rodas(dianteiras e/ou traseiras) e a tração integral nas quatro rodas . A. Processador DSP56l811
11I. DSP COM MEMÓRIA DE ACESSO DUPLOEM PC
Uma grande vantagem presente nos DSPs atuais é que taisprocessadores incorporam recursos de hardware onde aexecução de várias instruções simultâneas, utilização dearquiteturas do tipo Harvard, existência de mais de um pipelinee otimização do código processado estejam presentes em parteou na sua totalidade.
Combinando recursos típicos de microcontroladores, a famíliaDSP56800 da Motorola permite uma flexibilidade maior noprojeto . Sua arquitetura, mostrada na Fig. 5, contendo multi-barramento de acesso à memória interna e externa, aumenta odesempenho deste processador frente ao processadores DSPtradicionais , tais como os modelos mais simples da TexasInstruments.
Por este motivo foi escolhido o processador DSP da Motorola,o DSP56L811, que possui funções do tipo microcontroladorassociado ao alto desempenho na relação custo/desempenhosem a necessidade de dois process adores como encontrados nomercado [6] [7].
• E/S
• ND
Normalmente, as placas de controle habituais utilizam umprocessador DSP 'e um microcontrolador ou processador deapoio, para realizar tarefa'> rotineiras como:
Fig. 5: arquitetura interna do processador MotorolaDSP56L811
D/A
intercomunicação entre processadores
comunicação serial
•••Para permitir que custo e recursos de hardware , bem comofacilidade de programação, sejam otimizados, optou-se porapenas um processador DSP de baixo custo e baixo consumo[2].
A placa projetada DSP-PC, conforme mostrada na Fig. 4, écomposta dos seguintes recursos:
No nosso projeto, por usarmos apenas o DSP56L811 como oprocessador .da placa , demos preferência por colocá-lo comouma placa interna (s/ot) de microcomputador PC-Compátivel,seu hospedeiro. Pretende-se dessa maneira, realizar duastarefas de auxílio ao desenvolvimento/operação, a saber:
• processador DSP;
• memória acesso duplo;
1. Servir como base da placa no que se refere a alimentaçãodo sistema e poder observar e manusear variáveis
600

40 . SBAI- Simpósio Brasileiro de Automação Inteligente, São Paulo. SP, 08-10 de Setembro de 1999
numéricas utilizadas no processo como p.ex. os ganhos do • Integração com uma segunda placa DSP (inter-controlador PID do motor Cc. comunicação)
... -. • Processamento em Tempo-Real
IV. SISTEMA MONITORO Sistema Monitor compreende de um chaveador de tarefas,que as executa de modo preemptivo [12].
2. Permitir que o programa (algoritmo) que está sendoexecutado no processador DSP possa ser alterado e/oudescarregado com a placa em funcionamento on-lineatravés do barramento do PC; sendo o próprio PC aferramenta de desenvolvimento deste sistema, utilizandolinguagem Assembly, C e ferramentas como programa dedepuração (debug) e simulação do processador, entreoutras.
• Conversão Analógico-Digital (ND)
Conversão Digital-Analógico (D/A)
B. Memória Acesso Duplo
Para permitir que os programas e as variáveis sejam alteradasdurante o tempo de execução do programa, foi preferidoutilizar neste projeto uma interface entre o barramento do DSPe do PC utilizando memória de acesso duplo (dual-port) [8].
Com a crescente proliferação do uso deste tipo de memória,nos últimos anos, espera-se que seu preço continue baixandorapidamente, permitindo que tal configuração escolhidacorresponda a uma placa potente de baixo custo e altamenteflexível ao usuário.
Os processos são armazenados na memória dual-port, sendoambos memória do programa e de dados configuráveis atravésdo sistema hospedeiro.
O tempo crítico é definido pelo usuário no momento de gerar ocódigo a ser executado pela placa DSP-PC [12] . Para que osistema possa receber novos dados e até pequenas rotinas, oDSP - através do sistema monitor - pode ler áreas da memórialDual Port da placa DSP-PC. Da mesma maneira, pode o DSPescrever resultados numéricos de operações realizadas, apedido do usuário, para que sejam capturadas pelo PChospedeiro e visualizadas na tela ou simplesmentearmazenadas no disco do hospedeiro para futura análise, p.ex.gráfica, da operação da bancada sob determinada estratégiabem como as características de torque-velocidade.
A maneira pela qual o recurso de upload e dnload on-line(carregamento e descarregamento durante a execução) sejarealizado com êxito, depende de rotinas do sistema monitor ede áreas previamente alocadas na memória Dual Port. O acessoà memória é feito, simultaneamente, tanto pelo PC hospedeirocomo pelo DSP, conforme visto na Fig. 6.
O sistema monitor também se encarrega de gerenciar e operarpara o usuário o acesso aos conversores ND e D/A, amboscom acesso via modo serial síncrono, suportado peloprocessador DSP56L811.
Fig. 6: diagrama de blocos do acesso via memória dualentre DSP e PC hospedeiro
Recurso como o acesso via DMA (Acesso Direto à Memória) ememória mapeada, são utilizados no projeto da placa DSP-PÇ.
PS ro ram selflclos data select
Leitura DadoEscrita Programa
AO ..A15
DO ..D15
Leitura
Escrita
• Integração com o computador hospedeiro (host)
A memória dual-port escolhida [9] possui mais de 32 bit nobarramento de dados, permitindo que este possa ser dividido demaneira que 16 bit sejam alocados para a área de programa doDSP e outros 16 bit sejam alocados como área de dados doDSP, dessa maneira garantindo a integridade do conteúdo dosdados.
O uso de rotinas de serviço de interrupção (ISR) no sistemamonitor, permite utilizar de maneira adequada todos osrecursos existentes na placa DSP-PC, entre estes recursospodemos citar os ND e D/A com interface serial síncrono(SSI) entre o processador DSP, ou seja:
Para garantir que os processos ocorram no tempo adequado,um sistema em Tempo Real (RTOS) esta sendo implementado,com recursos de escolha da hierarquia de tarefas e o intervalode tempo de execução da tarefa, num processo preemptivo [10][11]. A escolha destas prioridades é definida no momento dacompilação do programa do usuário.
601

[5] Katsuhiro Asano, Shigenobu Okada e Norio Iwana,"Vibration Supression of Induction-Motor-DrivenHybrid Vehicle Using Wheel Torque Observer", IEEEtransactions on Industry Applications, VoI. 28 No. 2March/April, 1992.
[6] M. Stern, "Universal Digital Motion Controller", EPE,Aachen, 1989.
[7] Yan Guo, Howard C. Lee, Boom-Teck Ooi, "ExtensibleDigital-Signal Processing Modules for Real-TimeControl and Simulation" , IECON, voI. III 1993.
40. SBAI- Simpósio Brasileiro de Automação Inteligente, São Paulo, SP, 08-10 de Setembro de 1999
Funções específicas, como o acesso ao torquímetro, aoencoder, de realização de PWM, rampa de tensão no DIA, entreoutras funções também estarão implementadas no sistemamonitor da placa DSP-PC
Na inicialização do sistema o DSP lê o conteúdo da EPROMda placa - através de processo conhecido como boot-ROM -contendo a rotina básica do Sistema Monitor que entãoencarrega-se de ler na área de memória de programa damemória dual-port funções extendidas e programas do usuáriolá depositados através do PC hospedeiro. Durante a execuçãodas rotinas do usuário, novos valores atribuidos às variáveispoderão serem lidos elou escritos , dependendo da necessidadedo programa em execução .
v. CONCLUSÃO[8] Jim Lewis e Lakshmi Mandyam, "Dual Por! Memory
for Multiprocessor Applications", Motorola, AN1707.
o desenvolvimento de uma placa embarcada utilizandoprocessadores de baixo custo e soluções de comunicaçãomodernas como as memórias dual-port, permitirá uma eventualmigração da tecnologia desenvolvida em laboratório para umaaplicação prática industrial, assim como o fato de duplicar obarramento do PC Compátivel, obtendo-se um segundoconectar, no padrão PC-104 de sistemas embarcados, permiteum futuro aproveitamento da placa DSP-PC migrando-a para .dentro de um EV implementado com motor na roda executandotestes reais dos algoritmos e desenvolvimentos jáimplementados anteriormente na bancada.
[9] Motorola DSP56800 Family Manual,
Motorola DSP56811 User's Manual,
Motorola MCM59C536 Data Sheet
[LO]' Jeff Michalski, "Architeture of a Timeslicing UniformSamplig MicroKernel DSPOS High PerformanceSolutions for Real-Time Signal Processing", ConcurSystem Technologies (www.concursys.com).
Referências Bibliográficas:
[1] M. Godoy Simões, N.N. Fransceschetti, J.C.Adamowsky, "Drive system control and energymanagement of a solar powered electric vehicle" IEEE-APEC Applied Power Electronics Conference , VoI. I,pp. 49-55, Anaheim CA, February 15-19, 1998. :
[ll] Richard Man e Christina Willrich , "A MinimalistMultitasking Executive",
Circuit Cellar Ink, No. 101, December, 1998.
(12) Jean J. Labrosse, MicroC/OS-l/ The Real Time Kernel,R&DBooks
[2] M. Godoy Simões , Acionamento e Controle-de motorembutido em roda "wheel-motor" para veículoselétricos. Proposta de trabalho aprovada pela FAPESP,projeto FAPESP No. 98/11351-7 . Julho, 1998
[3] MelÍrdad Ehsani , Khwaja M. Rahman e Hamid A.Toliyat, "Propulsion System Design of Electric andHybrid Vehicles", IEEE Transactions on IndustrialElectronics, voI. 44 no. I, February, 1997.
[4]Yoichi Hori, Yasushi Toyoda Yoshimasa Tsuruoka,"Traction Control of Electric Vehile: BasicExperimental Results Using lhe Test EV UOT ElectricMarch" , IEEE Transactions on IndustryApplications,VoI. 34 No. 5, September/October, 1998
602