projeto baseado em emula o de modelos cont nuos e ...alimped/ia361_slides_9_2014.pdf · sistemas...
TRANSCRIPT

Projeto baseado em emulação de modelos contínuos
e protocolos de acesso à rede
A. P. C. Gonçalves
Universidade Estadual de Campinas - UNICAMP
1o Semestre de 2014

Sistemas com transmissão pela rede Projeto de controle Tipos de protocolo
Este material foi inteiramente baseado em
M. Tabbara, D. Nešic e A. R. Teel, “Networked ControlSystems: Emulation-based Design”, Capítulo 3 do livroNetworked Control Systems: theory and applications,Springer-Verlag, 2010.
e suas referências.
Gonçalves, A. P. C. IA361–Tópicos em Controle II UNICAMP 2 / 18

Sistemas com transmissão pela rede Projeto de controle Tipos de protocolo
Descrição do problema
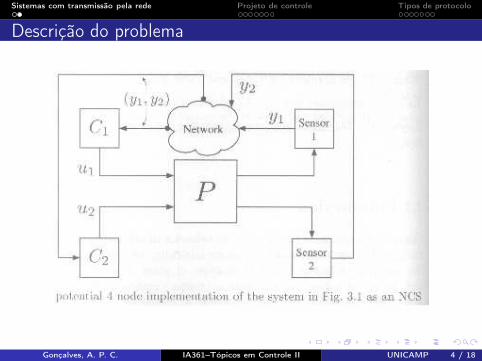
Vamos considerar que o sistema a ser controlado é compostopor nós por um único canal de comunicação ou barramento.
O sistema é composto por planta, lei de controle, nós,barramento e o protocolo que descreve como e quando ainformação vai ser transferida entre os nós.
Uma questão fundamental é a análise e o projeto do protocolode agendamento (scheduling), isto é, em que sequência osdiversos nós que compartilham a rede vão transmitir e receberdados.
Gonçalves, A. P. C. IA361–Tópicos em Controle II UNICAMP 3 / 18
Sistemas com transmissão pela rede Projeto de controle Tipos de protocolo
Descrição do problema
Gonçalves, A. P. C. IA361–Tópicos em Controle II UNICAMP 4 / 18
Sistemas com transmissão pela rede Projeto de controle Tipos de protocolo
Projeto de NCS por emulação
1 Projete um controle estabilizante desconsiderando a rede;2 escolha um protocolo de sequenciamento apropriado;3 analise se a estabilidade é robusta com relação aos efeitos que
o agendamento na rede introduz.
Pode-se mostrar que, se o sistema sem rede é estável, a escolha deuma classe adequada de protocolos de agendamento garante aestabilidade do sistema com a rede, desde que a taxa detransmissão seja suficientemente alta.
3 escolha uma taxa de transmissão (acima de um requisitomínimo) para chegar ao grau desejado de estabilidade robusta.
Gonçalves, A. P. C. IA361–Tópicos em Controle II UNICAMP 5 / 18
Sistemas com transmissão pela rede Projeto de controle Tipos de protocolo
Projeto de NCS por emulação
Vamos considerar a planta e o controlador dados por
G :
{
x = Ax + Bu
y = CxC :
{
xc = Acxc + Bcy
u = Ccxc
e vamos supor que (Ac ,Bc ,Cc) foram projetados sem levar emconta os efeitos da rede, que introduz as seguintes limitações:
1 as transmissões só ocorrem em instantes específicos {ti}∞i=0; e2 Só um componente do NCS pode transmitir dados em um
instante ti .
Gonçalves, A. P. C. IA361–Tópicos em Controle II UNICAMP 6 / 18

Sistemas com transmissão pela rede Projeto de controle Tipos de protocolo
Projeto de NCS por emulação
Vamos chamar de y e u as versões de y e u disponíveis para oscontroladores e atuadores através da rede.
G :
{
x = Ax + Bu
y = CxC :
{
xc = Acxc + Bc y
u = Ccxc
De forma análoga ao segurador de ordem zero, podemos considerarque y e u ficam constantes entre dois instantes de transmissão esão atualizados (reset) com componentes de u ou y à medida queesses ficam disponíveis e são transmitidos pela rede.
Gonçalves, A. P. C. IA361–Tópicos em Controle II UNICAMP 7 / 18

Sistemas com transmissão pela rede Projeto de controle Tipos de protocolo
Projeto de NCS por emulação
Gonçalves, A. P. C. IA361–Tópicos em Controle II UNICAMP 8 / 18
Sistemas com transmissão pela rede Projeto de controle Tipos de protocolo
Projeto de NCS por emulação
Vamos definir o erro entre os valores das medidas e do sinal decontrole transmitidos pela rede e seus valores reais
e =
[
ey
eu
]
=
[
y − y
u − u
]
e entre instantes de transmissão a dinâmica do sistema fica
G :
x = Ax + Bu + Beu
y = Cx˙u = 0
C :
xc = Acxc + Bcy + Bcey
u = Ccxc
˙y = 0
Gonçalves, A. P. C. IA361–Tópicos em Controle II UNICAMP 9 / 18

Sistemas com transmissão pela rede Projeto de controle Tipos de protocolo
Projeto de NCS por emulação
Fazendo x = [x ′ x ′c ]′, chegamos a
[
˙xe
]
=
[
A11 A12
A21 A22
] [
x
e
]
onde
A11 =
[
A BCc
BcC Ac
]
A12 =
[
0 B
Bc 0
]
A21 = −
[
C 00 Cc
]
A11 A22 = −
[
C 00 Cc
]
A12
Gonçalves, A. P. C. IA361–Tópicos em Controle II UNICAMP 10 / 18
Sistemas com transmissão pela rede Projeto de controle Tipos de protocolo
Projeto de NCS por emulação
Sistema dinâmico determina o estado do sistema e o erroentre transmissões.
Os elementos de e são atualizados, ou sofrem saltos nosinstantes de transmissão.
Seja ey ,j = yj − yj . Se o j -ésimo elemento de y é transmitidono instante ti :
yj (ti)← yj(ti )⇔ ey ,j(ti ) = 0
Logo, o efeito do protocolo de agendamento na rede é o dereajustar para zero os componentes do erro nosinstantes de transmissão. Um modelo desse tipo écompletamente descrito por
1 uma dinâmica em tempo contínuo para o estado x e o erro e;2 uma sequencia de instantes de transmissão {ti}
∞
i=0;
3 um protocolo de agendamento, ou mapa de reset do erro.
Gonçalves, A. P. C. IA361–Tópicos em Controle II UNICAMP 11 / 18

Sistemas com transmissão pela rede Projeto de controle Tipos de protocolo
Características de protocolos
Uma desvantagem com a transmissão de vários dados por umúnico canal é que ele deve ser exclusivo.
Se mais de um agente tenta transmitir ao mesmo tempo,ocorre perda de dados ou colisão. A prevenção de colisões é aprincipal função do protocolo de agendamento.Os protocolos podem ter as seguintes características
1 Acesso à rede arbitrado localmente sem perdas de pacotes.2 Acesso à rede arbitrado globalmente, com ou sem perdas de
pacotes.3 Acesso à rede não é arbitrado, com ou sem perdas de pacotes.
Acessos arbitrados: Round-robin (RR) ou Maximum-error-first
try-once-discard (TOD).
Acessos não-arbitrados: Carrier-sense multiple access (CSMA):Ethernet, CSMA p-persistente: Bluetooth, 802.11 a/b/g,ALOHA.
Gonçalves, A. P. C. IA361–Tópicos em Controle II UNICAMP 12 / 18

Sistemas com transmissão pela rede Projeto de controle Tipos de protocolo
Características de protocolos
Como vimos, o sistema NCS é modelado como um sistema híbrido,composto por uma equação dinâmica contínua entre os instantes detransmissão. Mas a cada ti ,
e(t+i ) = Qi(e(ti ))e(ti ),
ou
e(t+i ) = Qi(ei (ti ))e(ti ),
e(t+i ) = Λ(i ,(I − Qi(e(ti)))e(ti ),e(ti))
Gonçalves, A. P. C. IA361–Tópicos em Controle II UNICAMP 13 / 18

Sistemas com transmissão pela rede Projeto de controle Tipos de protocolo
Protocolos arbitrados
Round-robin
Empregado nos protocolos tipo token ring e token bus
Tipo mais simples de protocolo de agendamento para sistemasmultiplexados no tempo.
Cada link de rede tem um índice único e o acesso à rede éfornecido conforme uma ordem pré-estabelecida. Em termosdo modelo para a atualização do erro, fica
e+ = (I −∆(i))e,
onde ∆(i) = diag{δ1(i)Is1 , . . . , δN(i)Isℓ} e
δk(i) =
{
1, se k − 1 = i mod ℓ0, caso contrário
Gonçalves, A. P. C. IA361–Tópicos em Controle II UNICAMP 14 / 18

Sistemas com transmissão pela rede Projeto de controle Tipos de protocolo
Protocolos arbitrados
Maximum-error-first try-once-discard
O esquema TOD pode ser descrito por
Qi (e) = (I −Ψ(e))
onde Ψ(e) = diag{ψ1(e)Il1 , . . . ,ψℓ(e)Ilℓ} e
ψj(e) =
{
1, se j = min(arg maxj |ej |)0, caso contrário
Ou seja, o nó escolhido para ocupar o canal é sempre aquele commaior magnitude de erro para transmissão.
Gonçalves, A. P. C. IA361–Tópicos em Controle II UNICAMP 15 / 18

Sistemas com transmissão pela rede Projeto de controle Tipos de protocolo
Protocolos randômicos
Sequência de tempos de transmissão aleatória e mapas de erroQi i.i.d, independentes de e.
Qi são matrizes que assumem valores em {M0,M1, . . . ,Mℓ}onde M0 = I e Mj é tal que
Mje = Mj(e1 . . . ,ej , . . . ,eℓ)
= (e1, . . . ,ej−1,0,ej+1, . . . ,eℓ)
Ou seja, no instante de tempo ti algum nó j vai assumir ocontrole da rede e transmitir seus valores, levando o vetor deerro para zero
ej(t+
i ) = 0,ek(t+
i ) = ek(ti ), k 6= j
Ou ainda, Qi = M0, o que significa que houve uma colisão e ovetor e segue sem mudanças.
Gonçalves, A. P. C. IA361–Tópicos em Controle II UNICAMP 16 / 18
Sistemas com transmissão pela rede Projeto de controle Tipos de protocolo
Protocolos randômicos
Para um NCS com ℓ links, um protocolo randômico é definidocomo uma cadeia de Markov discreta Qi subordinada a umprocesso de renovação N(t) tal que
1 Qi são matrizes i.i.d. associadas com probabilidades de links ecolisões dadas por
Prob{Qi = Mk} = pk , k = 1,2, . . . , ℓ
2 A sequência de tempos de transmissão {ti}i∈N é definida por
t0 = τ0,
onde τ0 ∼ exp(λ) e para cada i > 0, i ∈ N,
ti = ti−1 + τi ,
onde τi ∼ exp(λ). Definimos
N(t) =
{
0, t ∈ [0,t0),k , t ∈ [tk−1,tk)
Gonçalves, A. P. C. IA361–Tópicos em Controle II UNICAMP 17 / 18
Sistemas com transmissão pela rede Projeto de controle Tipos de protocolo
Protocolos randômicos
Tempo de cobertura é definido como
T0 = min{j ≥ 1 : {M1, . . . ,Mℓ} ⊂ {Q0, . . . ,Qj−1}}
e para i > 0:
Ti = min{j ≥ 0 : {M1, . . . ,Mℓ} ⊂ {QTi−1, . . . ,Qj−1}}
É possível mostrar que, se a probabilidade de colisão for p0 eProb{Qi = Mk} = Prob{Qi = Mj} = (1− p0)/ℓ, para k ,j 6= 0,então
E [T ] =ℓHℓ
1− p0
,
onde Hℓ é o ℓ-ésimo número harmônico.
Gonçalves, A. P. C. IA361–Tópicos em Controle II UNICAMP 18 / 18