projektovanje tehnologije za numa i...
TRANSCRIPT
1
21.12.2009 1
Univerzitet u Beogradu, Mašinski fakultet, Katedra za proizvodno mašinstvo – Tehnologija mašinske obrade
PROJEKTOVANJE TEHNOLOGIJE ZA NUMA I PRIMENA INDUSTRIJSKIH
ROBOTA U PROIZVODNJI
4. LABORATORIJSKA VEŽBA (PL-4)
21.12.2009 2
Univerzitet u Beogradu, Mašinski fakultet, Katedra za proizvodno mašinstvo – Tehnologija mašinske obrade
PRIMENA INDUSTRIJSKIH ROBOTA U
PROIZVODNJI

2
IndustrijskiIndustrijski ROBOTROBOT
Def. (ISO 8373)
je višenamenska, reprogramabilna,
manipulativna i automatski upravljana
mašina sa više stepeni slobode, koja
može biti u fiksiranom položaju ili
mobilna, a koristi se za automatizovane
industrijske aplikacije.
OsnovneOsnovne tipsketipske kkonfiguracijeonfiguracije
• Dekartova
• Polarno cilindrična
• Sferna
• Horizontalna zglobna-laktastaSCARA
• Vertikalna zglobna-laktasta, antropomorfna (čovekolika)

3

4
Industrijski roboti u Laboratoriji
• Dvoruki LOLA robot
• Goško
• Movemaster EX
• LOLA 50
DvorukiDvoruki LOLA robot RPD 1.25 LOLA robot RPD 1.25

5
DvorukiDvoruki
LOLA robot LOLA robot
RPD 1.25 RPD 1.25
Robotizacija opsluživanja presa je
povoljna i poželjna iz više razloga:
• ciklusno vreme je vrlo kratko,
• velika buka i monotonost posle, štopovećava opasnost povređivanja,
• povečanje produktivnosti,
• ostvarivanje ujednačenog kvalitetagotovih delova.
DvorukiDvoruki
LOLA robot LOLA robot
RPD 1.25 RPD 1.25
Metodeprogramiranja:
ON - LINE
Režimi rada LOLA robota RPD1.25
• Ručni režim rada
• Automatski režim rada– taktni
– ciklusni
– automatski
6
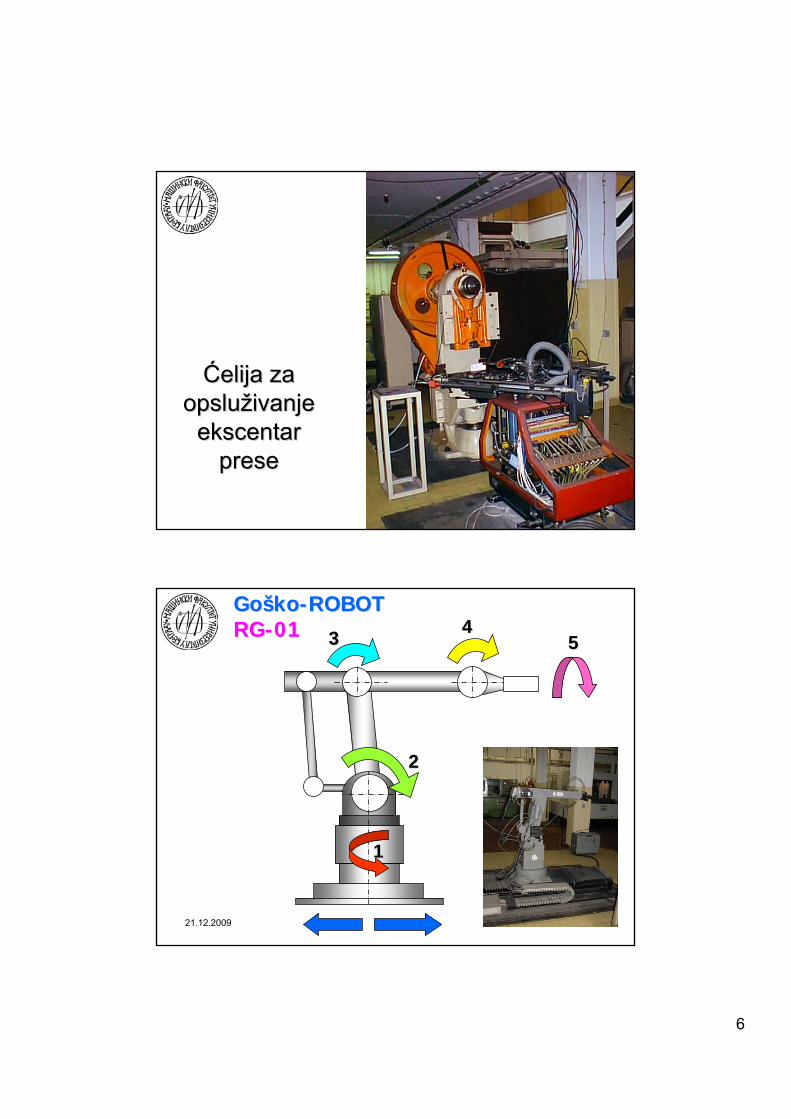
ĆĆelija za elija za opsluopslužživanje ivanje
ekscentar ekscentar preseprese
21.12.2009
GoGošškoko--ROBOTROBOTRGRG--0101
22
4433 55
11
7
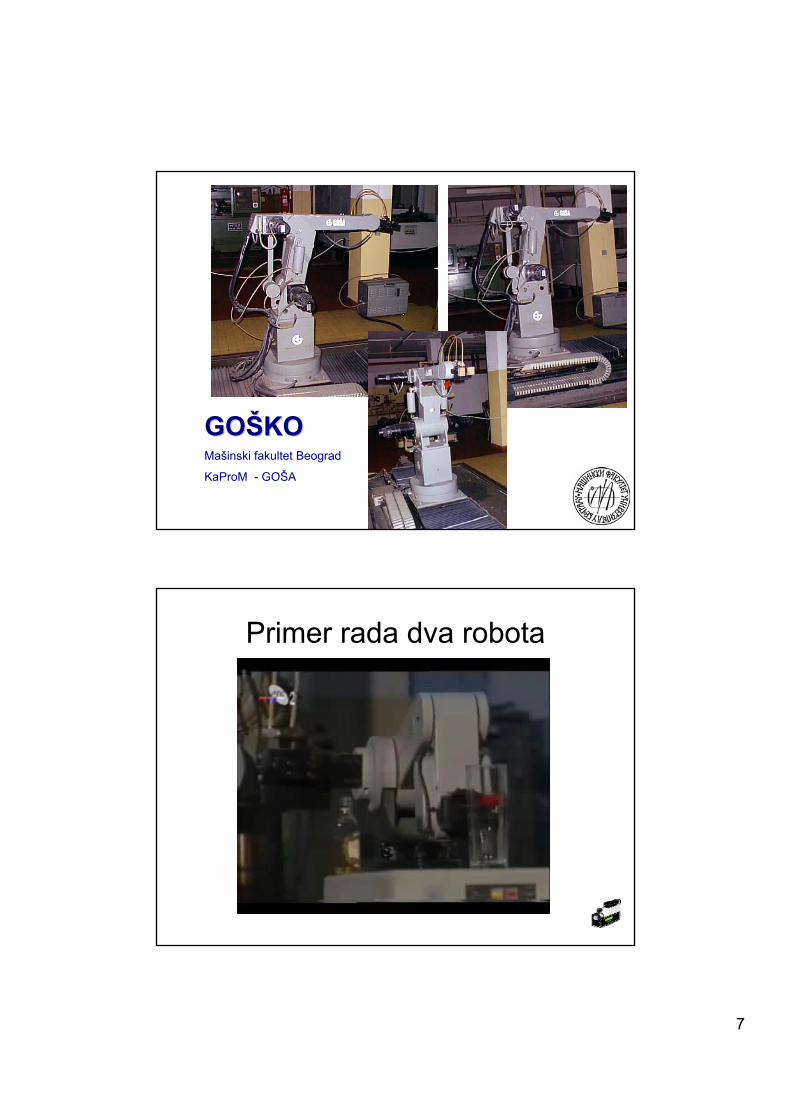
GOGOŠŠKOKOMašinski fakultet Beograd
KaProM - GOŠA
Primer rada dva robota

8
LOLA ROBOTLOLA ROBOT
IVO LOLA RIBARIVO LOLA RIBAR
LOLA ROBOT IVO LOLA RIBARLOLA ROBOT IVO LOLA RIBAR
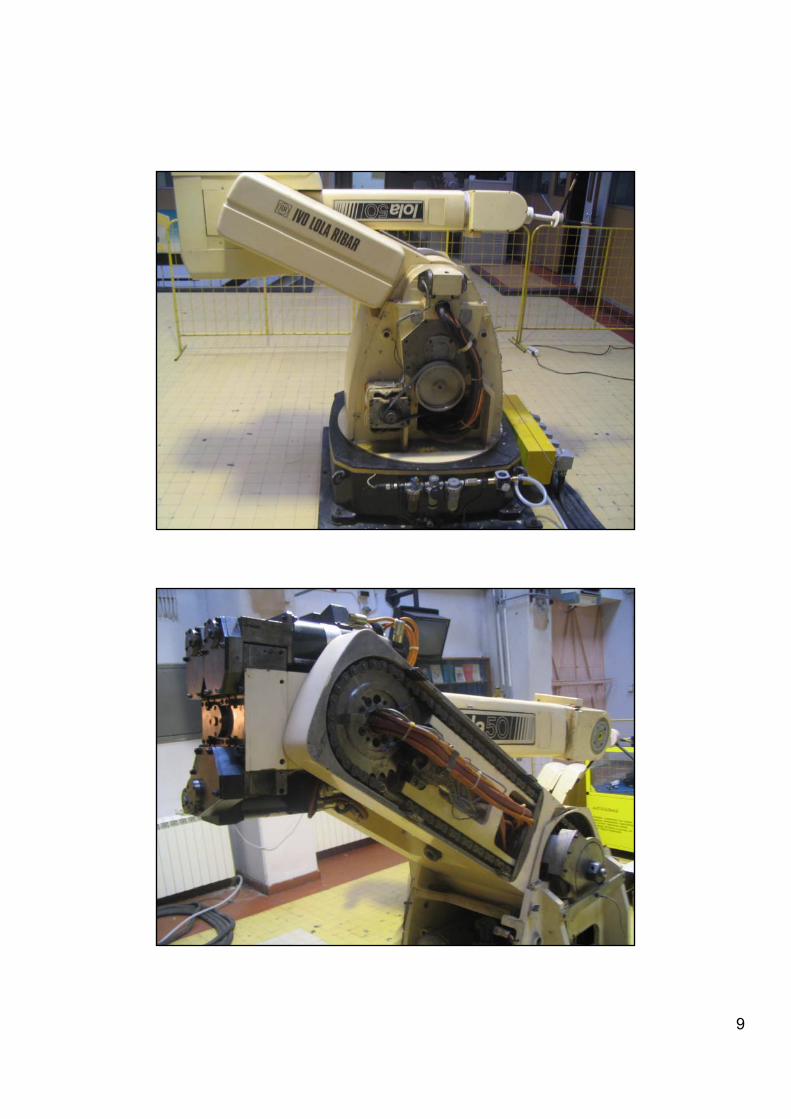
9

10
Obrada robotom LOLA50
Primer paletizacije crepova (Sa sajma tehnike)

11
MovemasterEXMovemasterEX
MovemasterEXMovemasterEX

12
MovemasterEXMovemasterEX
Primer rada robota Primer rada robota MovemasterEXMovemasterEX
13
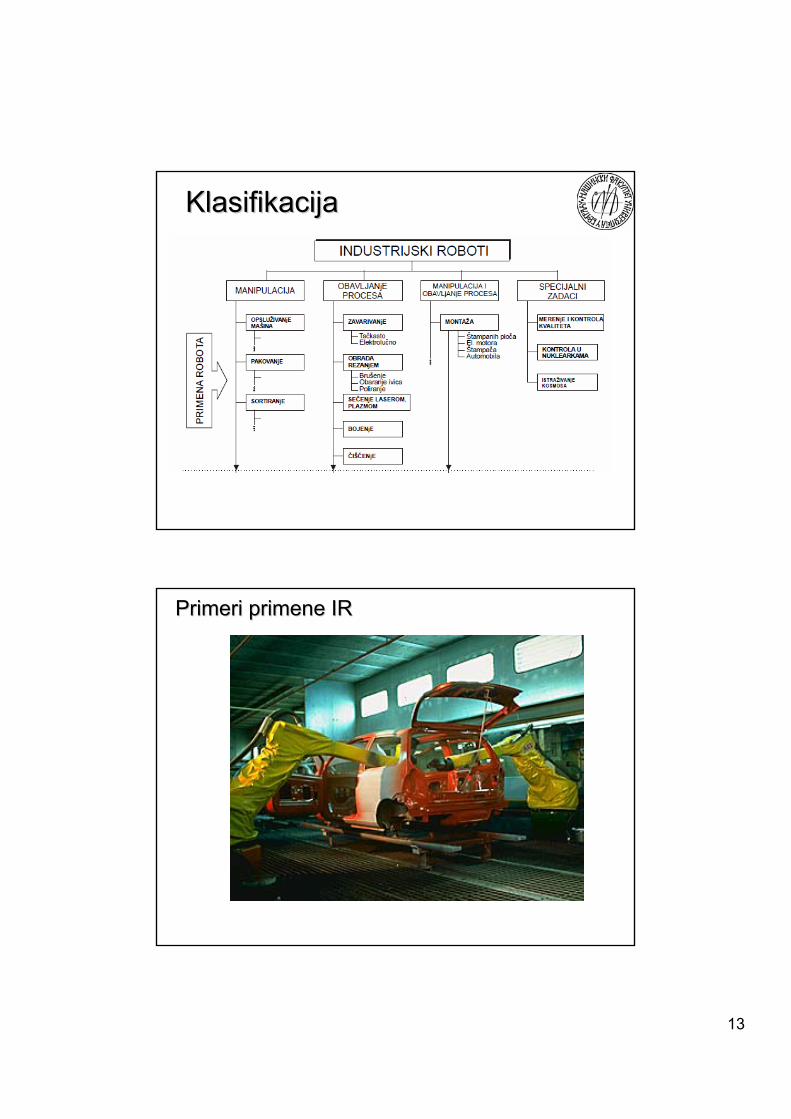
KlasifikacijaKlasifikacija
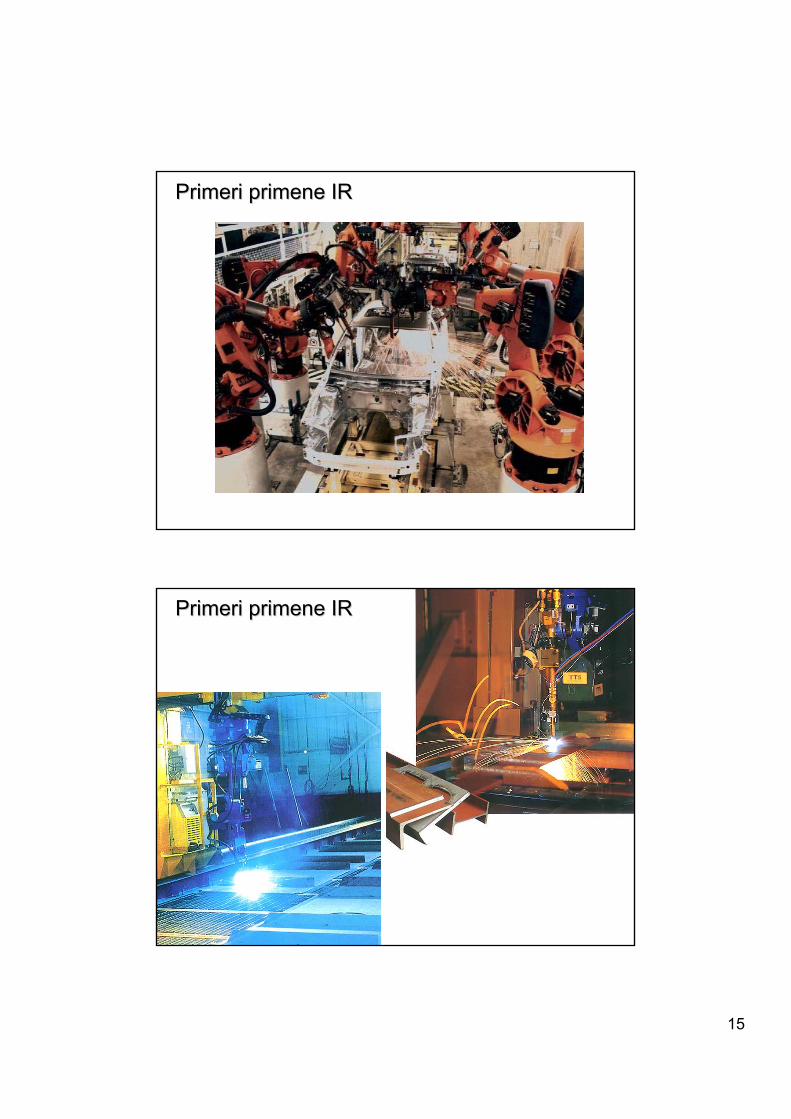
PrimeriPrimeri primeneprimene IRIR

14
PrimeriPrimeri primeneprimene IRIR
PrimeriPrimeri primeneprimene IRIR
15
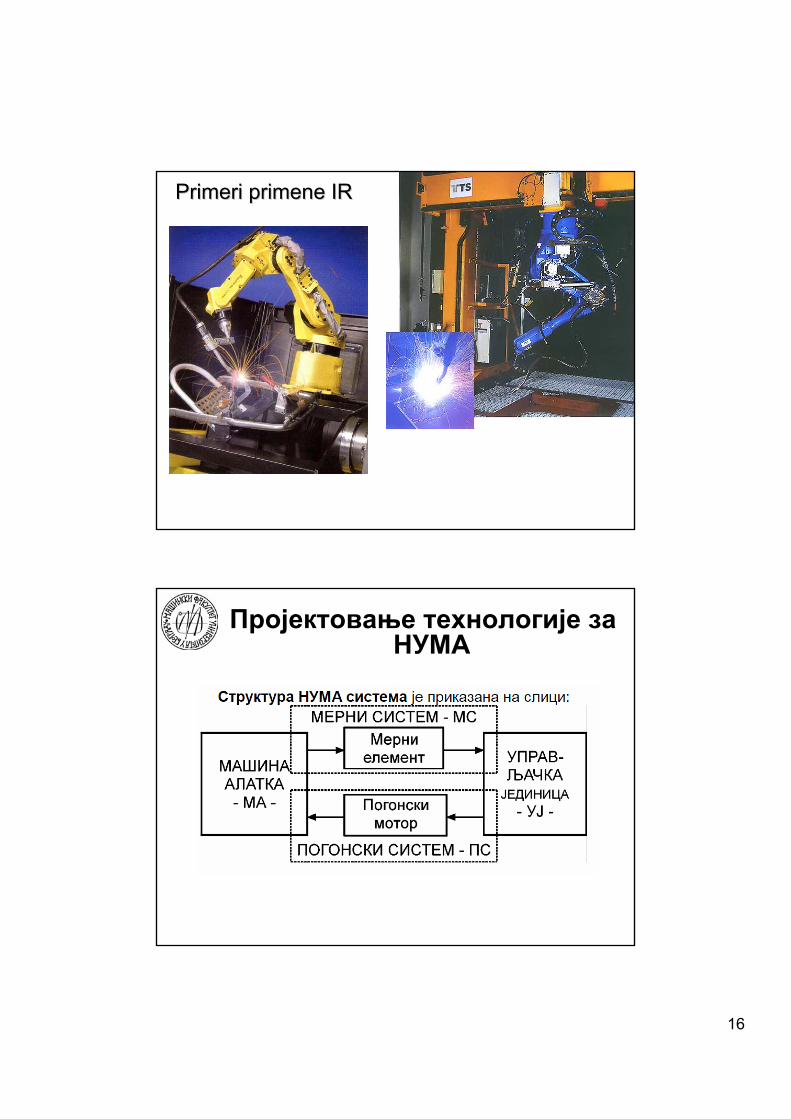
PrimeriPrimeri primeneprimene IRIR
PrimeriPrimeri primeneprimene IRIR
16
PrimeriPrimeri primeneprimene IRIR
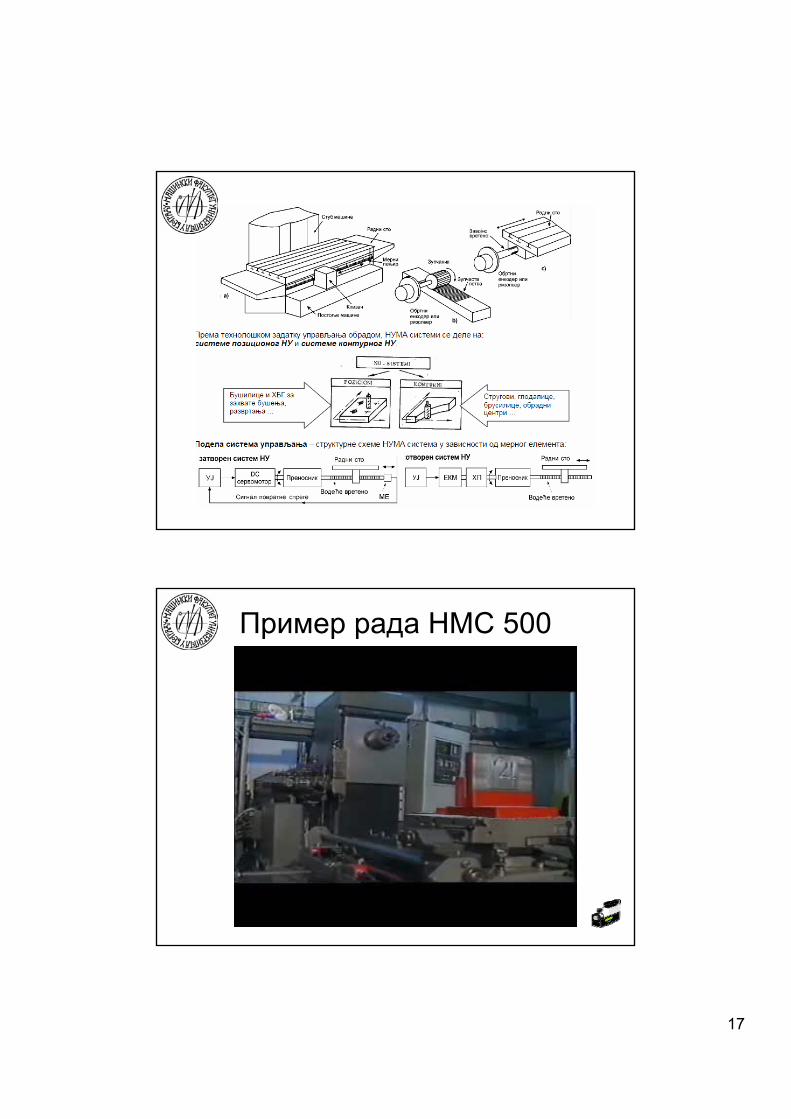
Пројектовање технологије заНУМА
17
Пример рада HMC 500
18
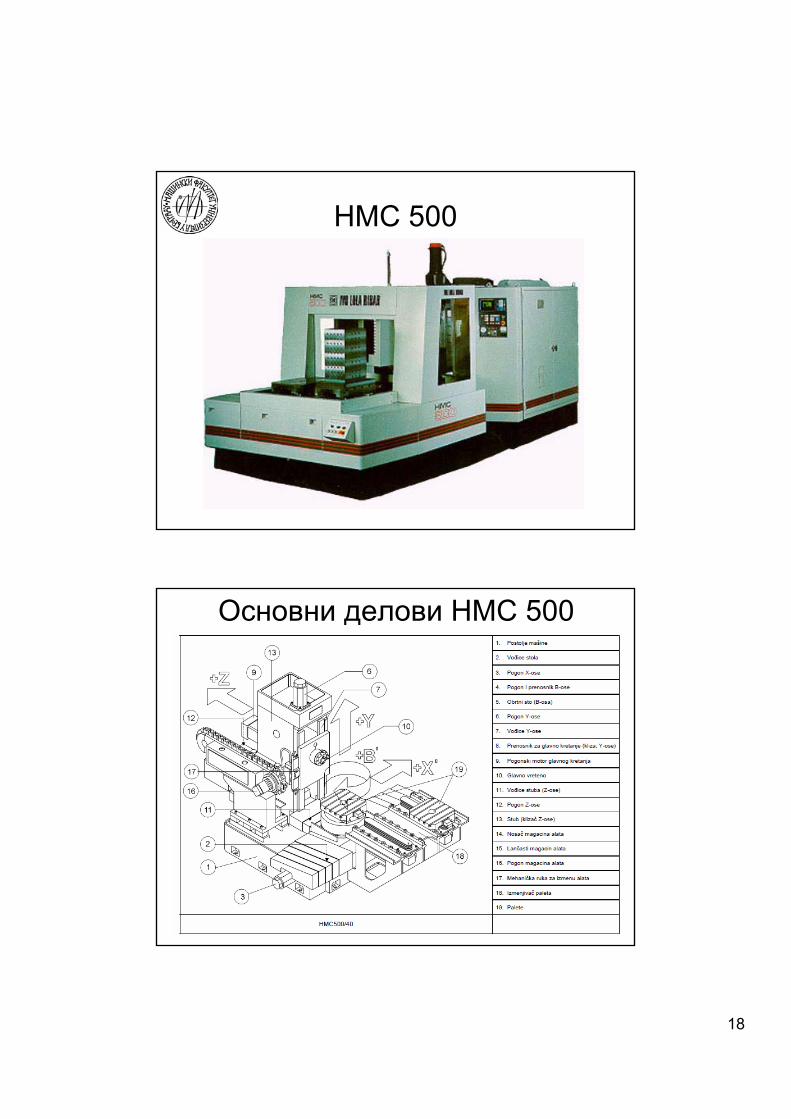
HMC 500
Основни делови HMC 500

19
Пример рада HMC 500
Пример рада ph42-CNC

20
Основни делови ph42-CNC
Пример рада ph42-CNC