processamento de dados coletados por um sistema de ... · desenvolvimento de uma metodologia de...
TRANSCRIPT

UNIVERSIDADE FEDERAL DE UBERLÂNDIA
GUILHERME HENRIQUE FRANCISCHINI
PROCESSAMENTO DE DADOS COLETADOS POR UM SISTEMA DE
MAPEAMENTO MÓVEL TERRESTRE
MONTE CARMELO
2015

GUILHERME HENRIQUE FRANCISCHINI
PROCESSAMENTO DE DADOS COLETADOS POR UM SISTEMA DE
MAPEAMENTO MÓVEL TERRESTRE
Monografia apresentada à banca avaliadora como
exigência para obtenção do título de Bacharel em
Engenharia de Agrimensura e Cartográfica pela
Universidade Federal de Uberlândia.
Orientador: Prof. Dr. Rodrigo B. A. Gallis
Coorientador: Prof. Dr. Ricardo Luís Barbosa
MONTE CARMELO
2015

PROCESSAMENTO DE DADOS COLETADOS POR UM SISTEMA DE MAPEAMENTO
MÓVEL TERRESTRE
Monografia aprovada para a obtenção do título de Bacharel
em Engenharia de Agrimensura e Cartográfica pela
Universidade Federal de Uberlândia pela banca examinadora
por:
Monte Carmelo, 04 de Dezembro de 2015
__________________________________________________
Prof. Dr. Rodrigo Bezerra de Araujo Gallis
__________________________________________________
Prof. Dr. Ricardo Luís Barbosa
__________________________________________________
Profa. Dra. Luziane Santos Ribeiro

Dedico este trabalho, bem como todas as
minhas demais conquistas, aos amados
pais, Adilson Francischini e Odila
Baraviera.

AGRADECIMENTOS
Agradeço primeiramente a Deus, por ter me dados forças para cumprir todos os meus
objetivos.
Ao meu professor Rodrigo Bezerra de Araujo Gallis, por me auxiliar na realização
deste trabalho sem medir esforços.
A instituição que propiciaram meios e recursos para a realização do presente trabalho,
especialmente ao CNPq, pelo recurso disponibilizado ao projeto, através do Processo
483413/2012-7. A Universidade Federal de Uberlândia, ao Instituto de Geografia e ao
professor Dr. Ricardo Luís Barbosa da Universidade Federal de Uberlândia e ao Pesquisador
Alan Kazuo Hiraga, da Empresa Integral Soluções Analíticas.
Aos colegas Iago Carvalho, Lorena Nogueira, Rafael Augusto (Iraí) e Vitor Godoy por
colaborarem com a realização desta monografia.
Aos meus amigos que fiz ao longo desta vida me incentivar a sempre dar o meu
melhor.
À minha família pela compreensão e incentivo em todos os momentos.

RESUMO
O mapeamento móvel vem incorporando avançadas tecnologias, como os sensores de
varredura a laser terrestre e câmaras integradas de forma a gerar imagens tridimensionais para
coletar dados de forma rápida e acuradamente. As aplicações gerais para este tipo de
levantamento são: inventario de obras de arte, projetos de corredores de trafego, transportes,
projetos de rodovias, mapeamento de túneis, aplicações ambientais e modelagem de projetos
de ruas. Por se tratar de uma tecnologia recente, há uma gama de aplicações e possibilidades a
serem descobertas. Um Sistema de Mapeamento Móvel está sendo desenvolvido na UFU para
levantamento de imagens terrestres de alta resolução com imagens georreferenciadas 360
graus de rodovias e áreas urbanas coletadas com um veículo automotor e uma câmara
Ladybug 5 com o objetivo de produzir soluções integradas e confiáveis, permitindo o
desenvolvimento de uma metodologia de coleta de dados rápida e precisa cujos dados podem
ser integrados a softwares de processamento em conjunto com imagens aéreas de alta
resolução para atender a demanda de levantamentos para diversas finalidades. Em suma, de
um ponto de vista técnico, um acervo de imagens e mapas digitais ajudará os administradores
e engenheiros a melhorar os padrões de qualidade e segurança nas rodovias e corredores de
trafego urbano.
Palavras-Chaves: Mapeamento Móvel. Fotogrametria Terrestre. Sistema de Posicionamento
Global. Sistema de Navegação Inercial.

ABSTRACT
The mobile mapping, as that state of the art has been incorporating advanced technologies,
such as scanning sensors terrestrial laser and integrated cameras to generate three-
dimensional images to collect data quickly and accurately form. The general applications for
this type of survey are: inventory of art works, traffic corridors projects, transport, road
projects, tunnel mapping, environmental applications and modeling streets projects. It is a
recent technology, there are a range of applications and possibilities to be discovered. A
Mobile Mapping System is being developed for the UFU survey of high resolution ground
images with geo-referenced images 360 degrees of highways and urban areas collected with
a motor vehicle and a Ladybug 5 camera in order to produce integrated, robust and reliable,
allowing the development of a methodology for collecting data quickly and accurately which
data can be integrated into processing software in conjunction with high-resolution images
aeras to meet demand surveys for various purposes. In short, from a technical point of view, a
collection of digital images and maps will help administrators and engineers to improve the
quality and safety standards on roads and corridors of urban traffic.
Keywords: Mobile Mapping. Terrestrial Photogrammetry. Global Positioning Systems.
Inertial Navigation System.

SUMÁRIO
1. INTRODUÇÃO ................................................................................................................. 8
2. OBJETIVOS ....................................................................................................................... 11
2.1 OBJETIVOS GERAIS ..................................................................................................... 11
3. JUSTIFICATIVA ............................................................................................................... 11
4. FUNDAMENTAÇÃO TEÓRICA ..................................................................................... 12
4.1 SISTEMA DE MAPEMAMENTO MÓVEL ................................................................. 12
4.2 SISTEMAS COM FOCO NO IMAGEAMENTO TRIDIMENSIONAL ................... 13
4.3 SISTEMAS DE NAVEGAÇÃO INERCIAL ................................................................. 16
5. METODOLOGIA ............................................................................................................... 18
5.1 AQUISIÇÕES DE DADOS TRIDIMENSIONAIS TERRESTRES ............................ 18
5.2 PROCESSAMENTO DOS DADOS ............................................................................... 25
5.2.1 POINT GREY CAP PRO ............................................................................................. 26
5.2.2 KOLOR PANOTOUR PRO. ........................................................................................ 30
6. RESULTADOS E DISCUSSÕES ..................................................................................... 35
7. CONCLUSÃO ..................................................................................................................... 36
REFERÊNCIAS ..................................................................................................................... 37

8
1. INTRODUÇÃO
A Cartografia juntamente com a informática proporcionou o desenvolvimento dos
Sistemas de Informações Geográficas (SIG’s), que são tratados como ferramentas de extrema
importância na aplicação das mais distintas áreas, tendo a função de organizar e processar um
enorme volume de informações geográficas e prover fundamentos para atividades que exigem
tomadas de decisões (OLIVEIRA, 2003).
O Brasil hoje é um país que possui pouca dimensão territorial mapeada, podendo
constatar que há grandes porções do território sem cobertura cartográfica em determinadas
escalas. É possível observar também que nem todas as regiões que já foram mapeadas
possuem cartas topográficas atualizadas (OLIVEIRA, 2003).
Nos dias atuais os mapas são as principais fontes de dados para o SIG, sendo o
levantamento de campo o principal processo de coleta dos mesmos. Esses dados podem ser
entidades ou fenômenos geográficos distribuídos na superfície terrestre, podendo ser
pertencentes ao sistema natural ou criado pelo homem.
A integração entre os dados espaciais e temporais pode ser o princípio básico para a
solução de problemas do mapeamento, dentre as soluções disponíveis, os Sistemas Móveis de
Mapeamento (SMM), são alternativas que integram sensores e dados de posicionamento e
imageamento. Com a crescente necessidade de atualizar os dados, com o avanço da tecnologia
foi possível obter novas técnicas de coleta de informações espaciais, uma delas são os
Sistemas Móveis de Mapeamento Digital (SMMD), que tem como qualidade a sua eficiência
e economia.

9
Figura 1 - Unidade de Mapeamento Móvel
Fonte: O autor
Estes mesmos sistemas proporcionam uma sequência de pares de imagens, que
permitem a análise e medição de pontos para fins de levantamento e mapeamento
fotogramétrico, entre outros e podem ser concebidos da seguinte forma (GALLIS, 2002):
Orbital: com aplicação em áreas grandes, observadas do espaço e com grande
diversificação de dados.
Aéreo: indicado seu uso no mapeamento em escalas médias e grandes.
Terrestres: Aplicações em áreas urbanas, rodoviárias e ferroviárias.
Um SMM é uma plataforma móvel, em geral, um veículo automotor, que recebe
distintos sensores de mapeamento, navegação, de posicionamento, de mensuração e de
aquisição de imagens que são integrados em um sistema que produz imagens
georreferenciadas dos lugares por onde transita (TAO e LI, 2007). A pesquisa em
desenvolvimento de sistemas de mapeamento móvel data de meados de 1980, onde os
pioneiros foram centros de mapeamento da Ohio State University e Calgary University.
A metodologia de SMM foi desenvolvida devido à necessidade da realização de
inventários das rodovias e corredores de tráfego das cidades, assim como o de mapear estes
corredores. Câmeras e sistemas de posicionamento e navegação como Sistemas de
Posicionamento Global (GPS) e Sistemas de Navegação Inercial (INS) foram integrados e
montados em veículos com o propósito de utilizar os dados em conjunto para mapear rodovias
e seus entornos. Em geral um sistema de mapeamento móvel consiste na integração de
sensores para se fazer a navegação e a coleta de dados. Esses sensores são classificados em
duas categorias (TAO; CHAPMAN; CHAPLIN, 2001): posicionamento e mapeamento. Os

10
sensores de posicionamento podem ser externos ou internos. Exemplo de sensor de
posicionamento externo é o GPS (Global Positioning System) e de sensor interno o INS
(Inertial Navigation System). Os sensores de mapeamento são classificados em passivos ou
ativos. Os passivos são câmeras de vídeo ou fotográficas e um exemplo de sensor de
mapeamento ativo é o laser scanner.
O pioneiro na atividade de mapeamento móvel de vias de locomoção terrestre foi o
sistema GPSVan (BOSSLER et al., 1991), composto de um par de câmaras digitais, um
sistema de armazenamento de imagens e um receptor GPS.
No Brasil, Silva (1997) propôs a montagem de um sistema móvel de mapeamento
digital, denominado de Unidade Móvel de Mapeamento Digital (UMMD), com um segmento
fixo, o laboratório de Mapeamento Móvel (LMM). No laboratório são baixadas as imagens de
vídeo e os dados GPS, que são processados e editados com o uso de programas comerciais e
científicos, os resultados finais desta aplicação têm sido expressos na forma de mapas de
arruamentos urbanos e de rodovias.
Alguns dos sistemas existentes foram customizados para utilização em uma grande
variedade de aplicações.
O Street View, por exemplo, é um serviço integrado ao Google Maps que permite
visualizar mapas ao nível da rua. Cada veículo tem um equipamento que reúne nove câmeras
(oito para montar a imagem panorâmica e uma para o céu), sensores de infravermelho, GPS e
um computador para armazenar os dados.
Algumas companhias que possuem sistemas de mapeamento móvel terrestre operante
oferecem produtos que vão desde mapas e cartas topográficas de áreas urbanas, mapas
rodoviários e ferroviários, imagens georreferenciadas de placas e obras de arte em torno das
rodovias e ruas, levantamentos de perfis de rodovias, etc. São várias as aplicações de um
SMM, como por exemplo: utilização em administrações municipais para localização,
visualização e gerenciamento das informações referentes a um arruamento, a um lote ou
edificações; interesses de empresas e órgãos públicos relacionados ao planejamento,
construção, conservação e utilização de rodovias; serviços de utilidade pública, como água,
esgoto, energia elétrica, telefonia entre outros.

11
2. OBJETIVOS
2.1 OBJETIVOS GERAIS
O objetivo deste trabalho é, de posse dos dados coletados com o Sistema de
Mapeamento Móvel, realizar o pós processamento das imagens para que as mesmos sejam
utilizados posteriormente nos processos de visualização 360º e posteriormente, extração de
informação para fins de mapeamento de feições em áreas urbanas e rodoviárias.
2.2 OBJETIVOS ESPECIFICOS
Com esse projeto de pesquisa mantém-se, o interesse científico e tecnológico na
integração de imagens tomadas perspectivas terrestre, com o objetivo de produzir soluções de
integração confiáveis. Os principais objetivos da pesquisa a ser desenvolvida são:
Acompanhar o desenvolvimento de um sistema de coleta dotado de um sistema
de imageamento que permita coleta de vídeos e imagens panorâmicas esféricas
integradas a um receptor GPS;
Avaliar potencialidades do sistema e participando de situações para teste da
metodologia;
Processar as imagens coletadas pelo Sistema de Mapeamento Móvel.
Utilizar as imagens coletadas para integra-las a uma cena orbital de alta
resolução para analisar espacialmente o entorno de arruamentos e rodovias.
3. JUSTIFICATIVA
Na Cartografia, a integração de tecnologias digitais vem criando novas opções de
abordagem de problemas recentes ou já conhecidos, propiciando o surgimento de outros
produtos ou serviços distintos dos que já existem e exigindo recursos humanos qualificados.
O mapeamento móvel, que como estado da arte, vem incorporando avançadas tecnologias
recentes, como os sensores de varredura a laser terrestre, câmaras integradas de forma a gerar
imagens tridimensionais para coletar dados de forma rápida e acuradamente. As aplicações
gerais para este tipo de levantamento são: inventario de obras de arte, projetos de corredores

12
de trafego, transportes, projetos de rodovias, mapeamento de túneis e modelagem de projetos
de ruas. Por se tratar de uma tecnologia inovativa, há uma gama de aplicações e possibilidades
a serem descobertas.
4. FUNDAMENTAÇÃO TEÓRICA
4.1 SISTEMA DE MAPEMAMENTO MÓVEL
Os sistemas Terrestres de Mapeamento Móvel (STMM), têm como características
básicas sensores acoplados em um veículo automotor percorrendo vias de transportes
existentes (GALLIS, 2002).
Embarcadas nestes, as câmaras obtêm imagens constantemente, os receptores GPS dão
o posicionamento global, a IMU (Inertial Measurementunit) determina a orientação angular
do sensor de imagem e também junta as posições quando os dados GPS estão prejudicados
por causa das interferências das estruturas ao longo das ruas e rodovias (SILVA et al, 2001).
Ainda de acordo com o mesmo autor o sistema de mapeamento móvel (SMM), podem
ser definidos como plataformas com alguns sensores de imageamento e posicionamento que
servem na coleta de dados (coordenadas, imagens e altitude), o mesmo dispõe um
posicionamento tridimensional (3D), sendo composto de dois segmentos, móvel e fixo. O
segmento móvel é uma combinação de diferentes tipos de sensores que são integrados em um
sistema com interesse de se obter dados espaciais, exemplo disso é um veículo que traz a
bordo vídeo câmaras, receptores GPS, tecnologia INS e outros sensores conectados todos
juntos, tendo como auxilio um microcomputador.
Um dos primeiros sistemas móveis de mapeamento foi o GPSVan, da Universidade
Estadual de Ohio, em Columbus-OH, nos Estados Unidos. O mesmo possui a configuração
básica de um sistema, ou seja, um par de câmaras digitais, um receptor GPS, um sistema de
armazenamento de imagens, um mecanismo que executava o controle do sistema e softwares
que gerenciavam as operações de campo e escritório. Nesta configuração, as posições
espaciais e os atributos eram extraídos automaticamente no momento da coleta ou durante o
pós-processamento e eram imediatamente transferidos para um SIG (Sistemas de informação
Geográfica) (NOVAK et al BOSLLER, 1995).
Segundo El-Sheimy (1996) surgiu no Canadá um sistema com o mesmo princípio do
GPSVAn. Trata-se do VISAT (Video-Inercial_Satellite) da SeniorEngineer, GEOFIT Inc.
Inicialmente o sistema foi desenvolvido pela Universidade de Calgary e pela empresa

13
GEOFIT Inc., tendo como principal objetivo o mapeamento móvel de rodovias, tendo como
principal diferença entre o sistema um conjunto de oito câmaras digitais, que captam imagens
de áreas ao redor da rodovia e não só a visão frontal.
No Brasil, cita-se como experiências bem sucedidas na área de Mapeamento Móvel - o
protótipo denominado Unidade Móvel de Mapeamento Digital (UMMD) que foi
desenvolvido em 1999. Este sistema é composto por duas câmaras de vídeo digitais (Sony
DSR2001), receptores GPS e um sistema de edição e processamento dos dados coletados.
Outra experiência, é o protótipo SIMMOV – Sistema de Mapeamento Móvel, da Empresa
Cartovias Engenharia Cartográfica, que em 2009, através da Fundação de Amparo à Pesquisa
do Estado de São Paulo – FAPESP, aprovou a Fase II do Programa PIPE com recursos
financeiros em quantidade suficiente para implementar uma Unidade Móvel de Mapeamento
equipada com câmeras de média resolução (vídeo e fotográficas), um receptor GPS e uma
unidade inercial, que possibilita o georreferenciamento direto das feições terrestres.
Já existem várias empresas no mundo, recentemente constituídas, que utilizam este
método para levantar dados espaciais, especificamente relacionados a rodovias e arruamentos.
Os sistemas na maioria das vezes são compostos por câmaras digitais, receptores GNSS, IMU
e sistema de armazenamento de imagens. A nova geração de sistemas de mapeamento são
compostos de laser scanners terrestres e sistemas de imageamento esférico fornecendo
imagens panorâmicas em 360 graus.
4.2 SISTEMAS COM FOCO NO IMAGEAMENTO TRIDIMENSIONAL
O sistema de coleta Earthmine, disponível apenas no Brasil através da CIVIS e sua
parceira Aeroimagem, captura imagens ao nível da rua por meio de uma tecnologia única e
proprietária de câmera panorâmica. A taxa padrão de captura do sistema são intervalos de 10
metros, ajustáveis para outras distâncias. O fluxo de trabalho automatizado usa imagens
estéreo para criar tanto imagens ao nível da rua de alta resolução em mosaico, em um
panorama de 360 graus, como um mapa de profundidade em 3D contendo a localização de
cada pixel (exceto o céu) na cena.
Cada imagem do nível da rua possui cerca de 32 mega pixels com resolução espacial
variando em função da distância. Por exemplo, a 15 metros do veículo, a resolução da
imagem é de 1,27 cm por pixel. Esta alta resolução permite a identificação confiável das
diversas feições nas imagens.

14
Figura 2 - Unidade de Mapeamento Móvel
Fonte: GALLIS, R. B. A , 2015.
O sistema de mapeamento móvel dos Laboratórios Iwane no Japão é um dos sistemas
baseados em imageamento tridimensional. Além de proporcionar alta precisão em
medições em 3D, a composição e configuração de Dual Cam é simples e estável em termos
de mecânica e estabilidade elétrica.
A velocidade de condução no momento da aquisição de dados pode chegar a até 80
km/h. Além do sistema de coleta, o Laboratório Iwane investe fortemente em soluções de
visão computacional e computação gráfica, para gerar produtos baseados nas imagens
tridimensionais coletados pelo sistema de mapeamento móvel.
Figura 3- Sistema de Mapeamento Iwane.
Fonte: GALLIS, R. B. A , 2000.
Abaixo alguns produtos gerados pelas imagens coletadas através das soluções
computacionais desenvolvidas pela empresa.

15
Figura 4 - Virtual Tour.
Fonte: GALLIS, R. B. A , 2000.
Figura 5 - Ortoimagens dos corredores de tráfego obtidas a partir dos levantamentos realizados com
sistema de coleta.
Fonte: GALLIS, R. B. A , 2000.
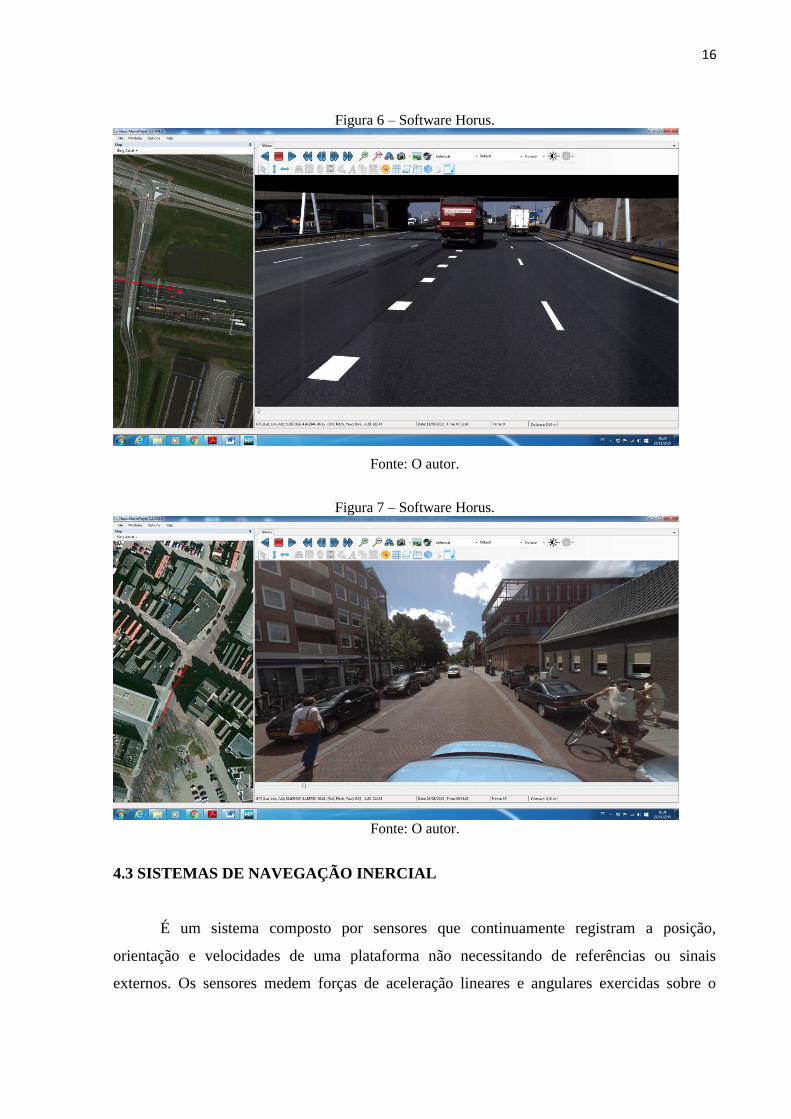
O Software de Inventario da Horus suite é composto por três programas: o Movie
Recorder (gravador de filme), o Movie Maker e o Movie Player . A principal função do
Movie Recorder é gravar todos os dados da câmera de e sensores adicionais. O Movie
Recorder tem uma função de reprodução simples, ele é apenas usado para verificar as imagens
que foram gravadas.
O Horus Movie Maker é usado para editar as gravações, ele é usado para selecionar
as gravações úteis e permitem que você edite seções que não são necessárias.
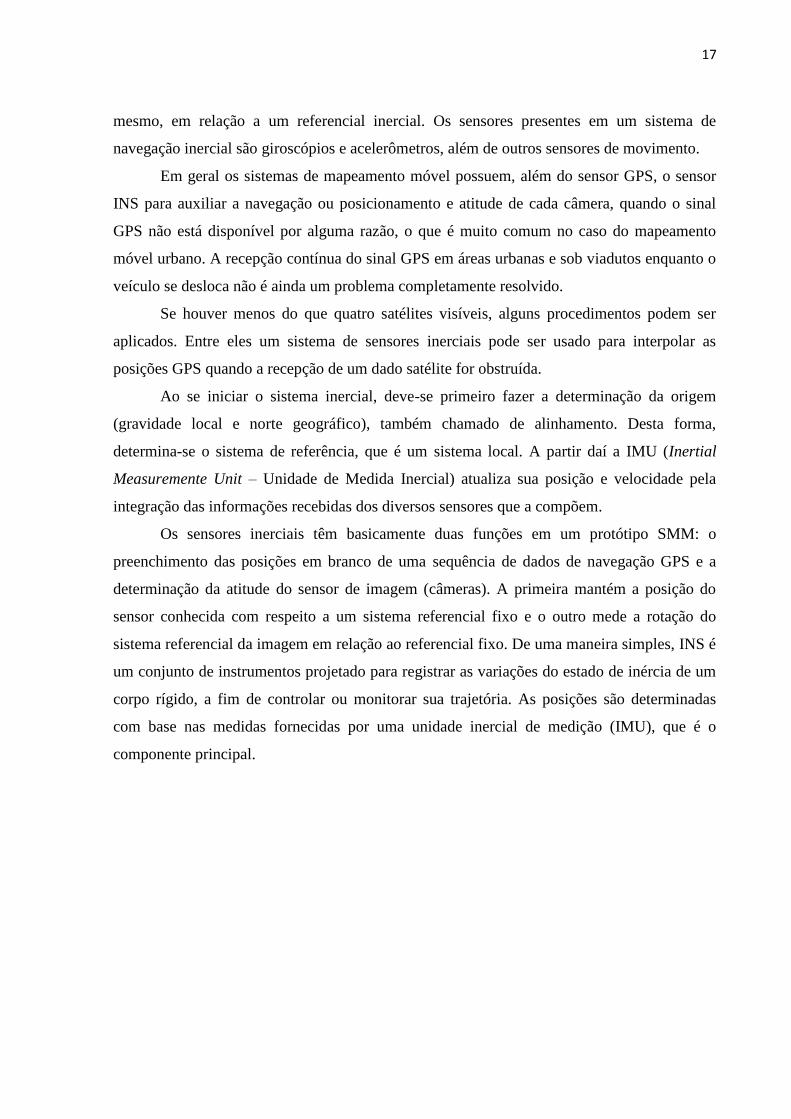
O Horus Movie Player é usado para as funções de vistoria, inspecção e medições nas
imagens panoramicas. Este programa é usado para editar grande quantidade de imagens
gravadas. Abaixo algumas imagens do software:
16
Figura 6 – Software Horus.
Fonte: O autor.
Figura 7 – Software Horus.
Fonte: O autor.
4.3 SISTEMAS DE NAVEGAÇÃO INERCIAL
É um sistema composto por sensores que continuamente registram a posição,
orientação e velocidades de uma plataforma não necessitando de referências ou sinais
externos. Os sensores medem forças de aceleração lineares e angulares exercidas sobre o
17
mesmo, em relação a um referencial inercial. Os sensores presentes em um sistema de
navegação inercial são giroscópios e acelerômetros, além de outros sensores de movimento.
Em geral os sistemas de mapeamento móvel possuem, além do sensor GPS, o sensor
INS para auxiliar a navegação ou posicionamento e atitude de cada câmera, quando o sinal
GPS não está disponível por alguma razão, o que é muito comum no caso do mapeamento
móvel urbano. A recepção contínua do sinal GPS em áreas urbanas e sob viadutos enquanto o
veículo se desloca não é ainda um problema completamente resolvido.
Se houver menos do que quatro satélites visíveis, alguns procedimentos podem ser
aplicados. Entre eles um sistema de sensores inerciais pode ser usado para interpolar as
posições GPS quando a recepção de um dado satélite for obstruída.
Ao se iniciar o sistema inercial, deve-se primeiro fazer a determinação da origem
(gravidade local e norte geográfico), também chamado de alinhamento. Desta forma,
determina-se o sistema de referência, que é um sistema local. A partir daí a IMU (Inertial
Measuremente Unit – Unidade de Medida Inercial) atualiza sua posição e velocidade pela
integração das informações recebidas dos diversos sensores que a compõem.
Os sensores inerciais têm basicamente duas funções em um protótipo SMM: o
preenchimento das posições em branco de uma sequência de dados de navegação GPS e a
determinação da atitude do sensor de imagem (câmeras). A primeira mantém a posição do
sensor conhecida com respeito a um sistema referencial fixo e o outro mede a rotação do
sistema referencial da imagem em relação ao referencial fixo. De uma maneira simples, INS é
um conjunto de instrumentos projetado para registrar as variações do estado de inércia de um
corpo rígido, a fim de controlar ou monitorar sua trajetória. As posições são determinadas
com base nas medidas fornecidas por uma unidade inercial de medição (IMU), que é o
componente principal.

18
Figura 8 - INS (Unidade de medida Inercial).
Fonte: O autor.
5. METODOLOGIA
Nos últimos anos foram realizados diversos trabalhos de pesquisa utilizando o Sistema
de Mapeamento Móvel (SMM). Estes trabalhos comprovam a viabilidade de utilização deste
tipo de tecnologia em mapeamento. Um projeto de mapeamento utilizando tal sistema móvel
gera um grande número de imagens que permitem a análise e medição de pontos para fins de
levantamento e mapeamento fotogramétrico ou simples observação para avaliação das
condições das vias de transporte e de seu entorno. Este projeto conta com uma câmera digital
esférica Ladybug 5® que possui seis câmeras de 5 MP e permite que sistema de vídeo tenha
uma cobertura 360º esférica.
Conta ainda com uma interface IEEE-1394b (FireWire) que permite que imagens
JPEG com resolução de 12MP seja transmitido para um sistema de armazenamento a 15fps.
5.1 AQUISIÇÕES DE DADOS TRIDIMENSIONAIS TERRESTRES
O autor, acompanhado do orientador e do Sr. Alan, da Empresa Integral, participou de
uma coleta utilizando o Sistema de Mapeamento Móvel que está sendo desenvolvido na UFU.
A metodologia de coleta baseou-se no recobrimento terrestre da área percorrendo as vias com

19
um veículo automotor dotado do sistema de coleta Ladybug5 e um receptor GNSS integrado a
uma IMU.
O levantamento com o sistema foi realizado entre as cidades de Uberaba – MG com
coordenadas (latitude 19º44’54” S, de longitude 47º55’55” O e uma altitude aproximada de
800 m), e Campo Florido – MG com coordenadas (latitude 19º45’58” S, de longitude
48º34’18” O e uma altitude aproximada de 626 m), tendo como distância entre as duas
cidades 72.900 m, e duração de aproximadamente 1 hora no trajeto que está representado na
figura abaixo.
Figura 9 - (Trecho entre Uberaba e Campo Florido).
Fonte: Google Earth.
No levantamento realizado, embarcou-se a câmara esférica Ladybug 5 num suporte
especialmente concebido para recebe-la, ligou-se a mesma em um receptor gps e o sistema de
navegação inercial. Tanto o sistema de imageamento (câmara), quanto o sistema de
posicionamento (GPS e Inercial) foram ligados num computador embarcado que serviu como
armazenamento das imagens e sincronização dos dados de navegação com a câmara.
Abaixo imagem da montagem da câmara Ladybug no veículo utilizado:

20
Figura 10 - Sistema de coleta de Imagens LadyBug5®.
Fonte: O autor.
Figura 11 - LadyBug 5®.
Fonte: O autor.

21
Figura 12 - LadyBug 5®.
Fonte: O autor.
A seguir, algumas imagens coletadas durante o levantamento realizado.
Figura 13 – Exemplo de imagem obtida com a câmera em movimento
Fonte: (Laboratório de Fotogrametria e Sensoriamento Remoto) – UFU.

22
Figura 14 – Exemplo de imagem obtida com a câmera em movimento.
Fonte: (Laboratório de Fotogrametria e Sensoriamento Remoto) – UFU.
Outros dois levantamentos foram realizados para prover dados para outros dois TCC’s.
O primeiro trecho, ilustrado na figura abaixo está situada entre as cidades de Monte
Carmelo – MG com coordenadas (latitude 18° 44′ 5″S, de longitude 47° 29′ 47″ O e uma
altitude aproximada de 890 m), e Abadia dos Dourados – MG com coordenadas (latitude
18°29'10''S, de longitude 47° 23' 4'' O e uma altitude aproximada de 785 m), tendo como
distância entre as duas cidades 32000 m, como está representado na figura abaixo.

23
Figura 15 – Representação do percurso de estudo.
Fonte: O autor.
A segunda área de estudo ilustrada na figura abaixo está situada na cidade de Monte
Carmelo – MG, no bairro Nossa Senhora de Fátima com coordenadas (latitude 18° 44′ 5″S, de
longitude 47° 29′ 47″ O e uma altitude aproximada de 890 m).

24
Figura 16 – Percurso de área de estudo.
Fonte: O autor.
Avaliando a potencialidade do método, dois outros levantamentos foram realizados. A
seguir algumas imagens coleadas.
Figura 17 – Imagem obtida com a câmera em movimento.
Fonte: O autor.

25
Figura 18 – Imagem obtida com a câmera em movimento.
T Fonte: (Laboratório de Fotogrametria e Sensoriamento Remoto) – UFU.
.
Figura 19 – Imagem obtida com a Câmera em movimento.
Fonte: O autor.
5.2 PROCESSAMENTO DOS DADOS
Softwares de edição e de processamento das imagens foram utilizados para deixá-las
aptas se serem utilizadas no sistema de visualização que foi gerado para visualização dos
dados coletados (vetor dado pelo GPS e imagens pela câmara) dos levantamentos realizados.
Dentre os softwares utilizados destacam-se:
26
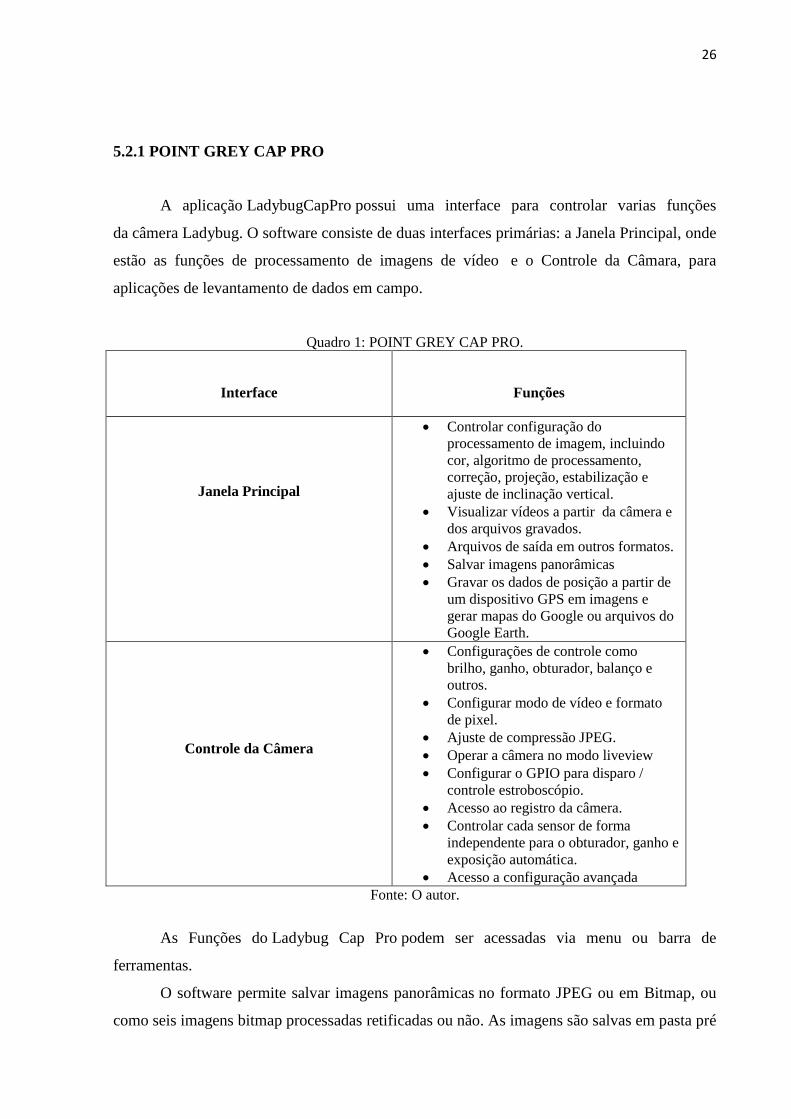
5.2.1 POINT GREY CAP PRO
A aplicação LadybugCapPro possui uma interface para controlar varias funções
da câmera Ladybug. O software consiste de duas interfaces primárias: a Janela Principal, onde
estão as funções de processamento de imagens de vídeo e o Controle da Câmara, para
aplicações de levantamento de dados em campo.
Quadro 1: POINT GREY CAP PRO.
Interface
Funções
Janela Principal
Controlar configuração do
processamento de imagem, incluindo
cor, algoritmo de processamento,
correção, projeção, estabilização e
ajuste de inclinação vertical.
Visualizar vídeos a partir da câmera e
dos arquivos gravados.
Arquivos de saída em outros formatos.
Salvar imagens panorâmicas
Gravar os dados de posição a partir de
um dispositivo GPS em imagens e
gerar mapas do Google ou arquivos do
Google Earth.
Controle da Câmera
Configurações de controle como
brilho, ganho, obturador, balanço e
outros.
Configurar modo de vídeo e formato
de pixel.
Ajuste de compressão JPEG.
Operar a câmera no modo liveview
Configurar o GPIO para disparo /
controle estroboscópio.
Acesso ao registro da câmera.
Controlar cada sensor de forma
independente para o obturador, ganho e
exposição automática.
Acesso a configuração avançada
Fonte: O autor.
As Funções do Ladybug Cap Pro podem ser acessadas via menu ou barra de
ferramentas.
O software permite salvar imagens panorâmicas no formato JPEG ou em Bitmap, ou
como seis imagens bitmap processadas retificadas ou não. As imagens são salvas em pasta pré

27
configurada. As imagens contem em seu cabeçalho as coordenadas georreferenciadas do local
em que foi gerada (Latitude, Longitude, Altitude Elipsoidal), permitindo a realização de uma
série aplicações com as mesmas, dando como exemplo:
Pericias ambientais;
Visualização de passivos;
Feições urbanas, etc.
Abaixo, algumas imagens panorâmicas visualizadas no ambiente do Software Point
Grey Cap Pro
Figura 20 - Imagem extraída do software Point Grey Cap Pro.
Fonte: O autor.

28
Figura 21 - Imagem extraída do software Point Grey Cap Pro.
Fonte: O autor.
Figura 22 - Imagem extraída do software Point Grey Cap Pro.
Fonte: O autor.

29
Figura 23 - Imagem extraída do software Point Grey Cap Pro.
Fonte: O autor.
Figura 24 - Imagem extraída do software Point Grey Cap Pro.
Fonte: O autor.

30
Figura 25 - Imagem extraída do software Point Grey Cap Pro.
Fonte: O autor.
5.2.2 KOLOR PANOTOUR PRO.
O software Kolor Panotour foi de suma importância para a criação de um mosaico de
imagens que tem como resultado final a geração de um arquivo Html. O mesmo possui
ferramentas que possam ser inseridas de maneira a auxiliar o seu projeto, ou acrescentar de tal
maneira a valorizar o resultado final em si.
Primeiramente foi carregada uma pasta de imagens georreferenciadas, onde foi
possível ter uma pré-visualização das mesmas, como ilustrado na imagem abaixo.

31
Figura 26 - Software Panotour.
Fonte: O autor.
Em seguida foram inseridos alguns plug-ins, entre eles:
PanotourMaps.
Radar.
Pilhas de Miniatura.
Figura 27 - Plug-in PanotourMaps .
Fonte: O autor.
Figura 28 - Plug-in Radar. 1
Fonte: O autor.

32
Figura 29 - Plug-in Pilha de Miniaturas 1
Fonte: O autor.
Figura 30 - Software Kolor Panotour.
Fonte: O autor.
Com a definição de todos os plug-ins e configurações, é possível inserir a base do
Google Maps e do Bing Maps para geoespacializar as imagens coletadas nos
levantamento, em seguida foi executada a construção do mosaico.

33
Figura 31 - Software Kolor Panotour.
Fonte: O autor.
Nas figuras a seguir, as visualizações em html geradas para os levantamentos
realizados.
Figura 32- Trecho entre Monte Carmelo e Abadia dos Dourados.
Fonte: O autor.

34
Figura 33 - Trecho entre Monte Carmelo e Abadia dos Dourados.
Fonte: O autor.
Figura 34 – Imagem obtida com a Câmera em movimento.
Fonte: O autor.
Figura 34 – Imagem obtida com câmera em movimento.
Fonte: O autor.

35
6. RESULTADOS E DISCUSSÕES
O potencial de informações que podem ser abstraídas da análise dos dados coletados
em campo utilizando-se esta metodologia de coleta pode torna-se útil para estudos dessa
natureza, tendo em vista a necessidade de monitoramento de áreas que estão sujeitas as
constantes intervenções humanas.
Em se tratando de ruas, rodovias e estradas, a concepção de um sistema de coleta de
dados dotado de um sistema de imageamento panorâmico esférico e sistema de navegação no
intuito de coletar dados no entorno das mesmas mostra-se necessária.
O maior benefício é a possibilidade de ter imagens e dados de ruas e rodovias com
todas as feições visíveis serem referenciadas a um sistema de coordenadas e vista de
diferentes perspectivas – terrestre e aérea. Muitos tipos diferentes de dados relacionados aos
caminhos imageados podem ser derivados por meio de uma simples operação de medição nas
imagens (ainda em implementação), proporcionando aos escritórios da administração e
engenharia a informação atualizada. Apenas como exemplo, suponha que o engenheiro de
transportes queira confirmar a altura de um túnel ou viaduto, ou verificar o posicionamento
dos sinais de trânsito, ou as condições de segurança do pavimento e das faixas de
acostamentos, ou o topo das árvores e dos postes de eletrificação entre outras coisas. Para
esses exemplos, quantidades enormes de dados podem ser coletados rapidamente e durante a
realização dos levantamentos e o fluxo de tráfego numa rodovia não é afetado, assim, evita
complicações onerosas no que diz respeito à logística. Riscos potenciais de trabalho são
significativamente reduzidos porque não há a necessidade de a equipe transitar fora do veículo
e trabalhar em locais propensos a acidentes, tais como ruas movimentadas, canteiros de obras,
vias férreas, etc.
As imagens geooreferenciadas se mostraram uteis para um série de aplicações
posteriores ao levantamento. Considerando-se o apresentado entende-se que as imagens
tomadas a partir de um sistema de mapeamento móvel integradas com imagens aéreas de alta
resolução tem potencial de ser aplicado em:
Mapeamento topográfico de rodovias por meio de caminhamento
fotogramétrico (que tem como exemplo, a rede de localização de postes da
rede de distribuição elétrica).
Auxiliar serviços de utilidade pública, tendo como exemplo: esgoto, energia
elétrica, água, telecomunicações, engenharia de transporte, tráfego e
segurança, entre outros.

36
Auxiliar administrações nas tarefas de localização, visualização e
gerenciamento das informações referentes a um determinado arruamento,
lote ou construção.
7. CONCLUSÃO
Conclui-se que a metodologia é válida, estudada, utilizada e testada em algumas
situações através do projeto Universal CNPq 483413/2012-7 e dos trabalhos de conclusão que
vem sendo realizado, veem colocando a UFU num patamar de pesquisa na área de modo a ser
produtora de tecnologia e através deste projeto, todos os alunos poderão ter acesso a essa
técnica inovadora de coleta de dados espaciais.
Neste sentido, este trabalho buscou compreender o funcionamento do Sistema de
Coleta e o processamento das mesmas, para posterior utilização das mesmas em estudos de
caso como a integração de imagens aéreas e terrestres para auxiliar análises espaciais uma vez
que uma imagem aérea possibilita visualizar áreas de uma posição estratégica, permitindo ao
analista identificar e quantificar áreas atingidas e visualizar relações topológicas e de
proximidade com elementos e objetos do entorno.

37
REFERÊNCIAS
BOSSLER, J. D.; GOAD, C. C. GPS and GIS MaptheNation'sHighways. Geo Info
Systems, 3 : 26-37, 1991.
EL-SHEIMY, N. A mobile multi-sensor system for GIS applications in urban centers. In:
internationalcongressofisprs, 18, Viena. InternationalArchives..., ISPRS, v. 31, t. B2, p. 95-
100, 1996.
GALLIS, R. B. A. Integração de imagens matriciais e vetoriais para visualização dos
levantamentos realizados com a unidade móvel de mapeamento digital. 2002. 72p.
Dissertação (Mestrado em Ciências Cartográficas) – Faculdade de Ciências e Tecnologia,
Universidade Estadual Paulista, Presidente Prudente.
NOVAK, K.; BOSSLER, J. D. Developmentandapplicationofthehighwaymapping system
of Ohio StateUniversity. Photogrammetric Record, 15(85):123-34, 1995.
OLIVEIRA, E.B. Implementação do módulo de interseção fotogramétrica em um banco
de imagens georreferenciadas. 2003, 112p. Dissertação (Mestrado em Ciências
Cartográficas) – Faculdade de Ciências e Tecnologia, Universidade Estadual Paulista,
Presidente Prudente.
TAO, C.V.; LI, J. Advances in Mobile Mapping Technology. New York: Taylor &
Francis. 2007
Silva, J. F. C. Fototriangulação no caminhamento fotogramétrico. 85f. Tese (Livre
docência em fotogrametria) – Faculdade de Ciências e Tecnologia, Universidade Estadual
Paulista, Presidente Prudente, 1997.
SILVA, J. F. C.; CAMARGO, P. O.; OLIVEIRA, R. A.; REISS, M. L. L.; SILVA, R. A. C.;
GUARDIA, M. C.; GALLIS, R. B. A. Mapeamento de Ruas com um Sistema Móvel de
Mapeamento Digital. Revista Brasileira de Cartografia. , v.53, p.82 - 91, 2001.
TAO, C.; CHAPMAN, M. A.; CHAPLIN, B. A. Automated processing of mobile mapping
image sequences. Journal of Photogrammetry & Remote Sensing, v. 55, p. 330–346, 2001.