padrão de formatação -...
TRANSCRIPT
Faculdade de Engenharia da Universidade do Porto
Desenvolvimento de um controlador de carga/descarga para bateria de ácido de chumbo
André Filipe Ferreira Matos
VERSÃO PROVISÓRIA
Relatório de Preparação da Dissertação realizado no âmbito do Mestrado Integrado em Engenharia Eletrotécnica e de Computadores
Major Automação
Orientador: Prof. Dr. Adriano da Silva Carvalho
Porto, 30 de Janeiro de 2012


i
"Oh Lua que estás tão alta, Redonda como um tamanco. Oh Maria, trás cá a escada, Pois eu não chego lá com o banco!"
© André Filipe Ferreira Matos, 2012

iii
Resumo
Considerando a panorama atual do consumo de combustíveis fósseis nos veículos e do
constante aumento dos preços, surge a necessidade de promover soluções que visem a
redução destes mesmos consumos. Nessa perspetiva é necessário promover o desenvolvimento
de tecnologia que permita suprimir esse consumo excessivo dos combustíveis fósseis. Assim
sendo, esta dissertação surge com o objetivo de final de projetar um conversor eletrónico de
potência CC/CC que garanta a carga e descarga das baterias para um veículo elétrico hibrido.
Para desenvolver o EPC CC/CC que irá permitir carga e descarga das baterias foi
necessário proceder à análise da arquitetura de um veículo elétrico híbrido de série. A partir
da retrospetiva dessa mesma arquitetura procedeu-se à modelização das baterias de ácido de
chumbo. Posteriormente, foi analisado o desempenho do VEH a um perfil de operação
especifico.
Após ter sido realizada a análise anterior procedeu-se à simulação do EPC CC/CC, este foi
projetado por forma a responder às necessidades do VEH série. Dessa forma o EPC CC/CC
permite que se proceda ao trânsito de potências no barramento CC.
Com o objetivo de aumentar a eficiência energética por parte das baterias de ácido de
chumbo foi simulado um sistema que permite o balanceamento das mesmas.
Por fim, para o desenvolvimento do EPC CC/CC, utilizou-se uma DSP F2803x para efetuar
o controlo sobre o conversor desenvolvido, sendo a DSP capaz de fazer a aquisição,
processamento e atuação sobre o conversor.
Para a realização desta dissertação foram utilizadas as ferramentas de simulação MATLAB
e PSIM.

v
Abstract
Considering the current situation as far as fossil fuels in vehicles are concerned,
particularly the rise of its prices, it is urgent to promote solutions that might reduce those
consumptions. In that perspective it is necessary the development of technology that reduces
the excessive consumption of those fossil fuels. This thesis wants to project an electric power
converter DC/ DC to guarantee loading and unloading of batteries for a hybrid electric
vehicle.
To develop the EPC DC/ DC that will allow loading and unloading batteries it was
necessary to analyze the architecture of a hybrid electric vehicle. From the retrospective of
that architecture it was possible to model the lead acid batteries. Further, it was analyzed
the performance of the HEV in a specific operating pattern.
After the previous analysis we simulated the EPC DC/ DC. This was projected to answer all
the necessities of the HEV. In that way the EPC DC/ DC allows to proceed to the power flow
on the DC bus.
With the aim of improving the lead acid batteries energetic efficiency it was simulated a
system that allows their balancing.
Finally, to the development of the EPC DC/ DC it was used a DSP F2803x to control the
developed converter, bearing in mind that this DSP was able to acquire, process and act on
the converter.
In this thesis it was used the simulating tools MATLAB and PSIM.

vii
Agradecimentos
Gostaria de agradecer ao Professor Doutor Adriano Carvalho pela ajuda no
desenvolvimento desta dissertação, não só ao nível da partilha de conhecimento, mas
também pelo incentivo que demonstrou na forma de eu encarar este projeto.
Queria aproveitar também a oportunidade de agradecer ao meu colega Abel Ferreira pela
partilha de conhecimento no desenrolar desta tese.
Gostaria de aproveitar a ocasião para agradecer aos meus pais por me terem
proporcionado a possibilidade de tirar este curso. Também queria agradecer aos meus avós a
forma como me ajudaram nesta caminhada.
Queria agradecer aos meus familiares, em particular ao Pedro.
Pretendia também agadecer aos meus dois grandes irmãos Vitor e Ângela.
Queria agradecer aos meus companheiros que me ajudaram nesta vida académica visto
que o meu sucesso académico é fruto da convivência com eles, Guru, Oui Oui, Lolj, PAC,
Picos, Ganzas, Alheira, Grey, Pensador, Ramiro, Carlos, Volume, Presa Fácil, Cacete, Carris,
Salzedas, Pizarro e Urgências.
Queria também agradecer aos meus companheiros do hóquei, em especial Vidal, Mata,
Peralta, Girão, Brandão e Zé Luís.
Queria aqui também agradecer aos meus amigos Pardal, Berna, Moura, Zé, Florindo,
Quintino, Raquel e Diana.
Queria mencionar aqui a instituição CHC, como forma de agradecimento pelo tudo aquilo
que me acrescentou na minha vida.

ix
Índice
Resumo ........................................................................................ iii
Abstract ........................................................................................ v
Agradecimentos .............................................................................. vii
Lista de figuras ............................................................................... xi
Lista de tabelas .............................................................................. xv
Abreviaturas e Símbolos .................................................................. xvii
Capítulo 1 ...................................................................................... 1
Introdução ......................................................................................................... 1 1.1 - Enquadramento ........................................................................................ 1 1.2 - Os objetivos ............................................................................................. 1 1.3 – Estrutura da dissertação .............................................................................. 2
Capítulo 2 ...................................................................................... 3
Estado da Arte .................................................................................................... 3 2.1 - Veículos elétricos híbridos ........................................................................... 3
2.1.1 - Veiculo Hibrido série ........................................................................... 5 2.1.2 - Veículo Hibrido paralelo ....................................................................... 6
2.2 - Máquina Elétrica ....................................................................................... 7 2.3 - Conversores de Potência ............................................................................. 8 2.4 - Armazenamento de energia .......................................................................... 9
2.4.1 - Baterias ........................................................................................... 9 Baterias de ácido de chumbo ................................................................... 11 Baterias de níquel ................................................................................ 11 Baterias de iões de lítio ......................................................................... 13 Modelização das baterias ....................................................................... 13 Extração de parâmetros ......................................................................... 14
2.4.2 - Topologias de balanceamento de baterias ............................................... 15 Balanceamento Passivo .......................................................................... 15 Balanceamento Ativo ............................................................................ 16
Capítulo 3 ..................................................................................... 21
Arquitetura Funcional do Sistema .......................................................................... 21 3.1 - Unidade de controlo ................................................................................. 22
x
3.2 - Barramento CC ....................................................................................... 23 3.2.1 - Configuração do Barramento CC ........................................................... 23 3.2.2 - Baterias ......................................................................................... 25 3.2.3 - Conversor de eletrónica de potência CC/CC ............................................. 25 3.2.4 - Sistema de gestão de baterias .............................................................. 25
3.3 - Sistema ICE ........................................................................................... 26 3.3.1 - Máquina elétrica para o sistema ICE ...................................................... 27
3.4 - Sistema Tração ....................................................................................... 27 3.4.1 - Máquina elétrica para o sistema de tração .............................................. 28
3.5 - Especificação do perfil de operação ............................................................. 28 3.6 - Algoritmo de gestão de energia ................................................................... 29
Capítulo 4 ..................................................................................... 31
Modelação do Sistema de Armazenamento de energia ................................................. 31 4.1 - Parametrização da bateria ......................................................................... 33 4.2 - Modelo de simulação adotado para a bateria .................................................. 36 4.3 - Resultados da simulação ........................................................................... 37 4.4 - Modelação da dinâmica do perfil de operação ................................................. 39
4.4.1 - Atrito de rolamento .......................................................................... 40 4.4.2 - Resistência do ar .............................................................................. 40 4.4.3 - Força de resistência .......................................................................... 41 4.4.4 - Força da aceleração .......................................................................... 41 4.4.5 - Força de tração ............................................................................... 41 4.4.6 - Binário .......................................................................................... 41 4.4.7 - Potência do motor de tração ............................................................... 42
4.5 - Resultados do perfil de serviço ................................................................... 42 4.6 - Capacidade energética da fonte de armazenamento de energia ........................... 43
Capítulo 5 ..................................................................................... 45
Modelação do Barramento CC ............................................................................... 45 5.1 - Conversores CC/CC .................................................................................. 45 5.2 - Controlo do conversor CC/CC ..................................................................... 46
5.2.1 - Modelização da malha de controlo de tensão ........................................... 47 5.2.2 - Modelização da malha de controlo de corrente ......................................... 48 5.2.3 - Determinar o SOC da bateria ............................................................... 50 5.2.4 - Dimensionamento do filtro do barramento das baterias ............................... 50
5.3 - Algoritmo de gestão ................................................................................. 52 5.4 - Simulação do conversor eletrónico de potência CC/CC ...................................... 57
5.4.1- Resultados da Simulação ..................................................................... 57 5.5 - Simulação do balanceamento ativo das baterias .............................................. 61
5.5.1 - Resultados da Simulação .................................................................... 63
Capítulo 6 ..................................................................................... 65
Resultados experimentais .................................................................................... 65 6.1 - Plataforma de controlo ............................................................................. 65
6.1.1 - Arquitetura da DSP ........................................................................... 65 6.2 - Circuito de aquisição de corrente ................................................................ 67 6.3 - Circuito de aquisição da tensão do barramento CC ........................................... 67 6.4 - Circuito de drive dos IGBT’s ....................................................................... 68 6.5 - Programa de controlo da DSP ...................................................................... 69 6.6 - Resultados obtidos ................................................................................... 70
Capítulo 7 ..................................................................................... 73
Conclusões ...................................................................................................... 73 7.1 - Projetos futuros ...................................................................................... 74
xi
Lista de figuras
Figura 2.1 – Classificação dos VEH: a) Série (acoplamento elétrico), b) Paralelo (acoplamento mecânico), c) Série-Paralelo (acoplamento mecânico e elétrico) e d) Complexo (acoplamento mecânico e elétrico). [1, 3] ............................................ 4
Figura 2.2 – Arquitetura do VEH série [3] .................................................................. 5
Figura 2.3 – Arquitetura do VEH paralelo [3] ............................................................. 6
Figura 2.4 - Distribuição da utilização das baterias químicas em 2009[5] ......................... 11
Figura 2.5 - Modelo básico de um circuito de uma bateria [8] ...................................... 14
Figura 2.6 – Topologias ativas e passivas de balanceamento de baterias [9] ..................... 15
Figura 2.7 - Topologia shuttling resistor: a) fixed resistor e b) controling shunting resistor [9] ........................................................................................................ 16
Figura 2.8 – Topologia Switched Capacitor[9, 10] ..................................................... 17
Figura 2.9 - Topologia Single Switched Capacitor[9, 10] ............................................. 17
Figura 2.10 – Topologia Double-Tiered Capacitor [9] ................................................. 18
Figura 2.11 - Topologia Multi-Inductor [9, 11] ........................................................ 19
Figura 2.12 - Topologia Single-Windings Transformer[9] ............................................. 19
Figura 3.1 – Arquitetura Funcional do VEH série ....................................................... 21
Figura 3.2 – Arquitetura Funcional detalhada do sistema a desenvolver .......................... 21
Figura 3.3 - Configuração do barramento CC a) sem conversor CC/CC b) com conversor CC/CC na unidade de armazenamento de energia c) com conversor CC/CC no sistema ICE ............................................................................................. 23
Figura 3.4- Ciclo de operação a adotar para a análise do sistema[13] ............................. 29
Figura 4.1 – Modelo de modelização da bateria[14] ................................................... 32
Figura 4.2 – Modelo de teste para a descarga da bateria ............................................. 33
Figura 4.3 – Modelo de teste para carga da bateria ................................................... 34
xii
Figura 4.4 – Curvas de carga e descarga da bateria de ácido de chumbo. ........................ 34
Figura 4.5 – Teste de carga da bateria ................................................................... 35
Figura 4.6 – Teste de descarga da bateria .............................................................. 36
Figura 4.7 – Modelo de simulação utilizado para determinar a curva de carga/descarga da bateria de ácido de chumbo. ....................................................................... 37
Figura 4.8 – Curvas de simulação do modelo da bateria de ácido de chumbo, curva de descarga(azul) e carga (vermelho). ................................................................ 38
Figura 4.9- Representação das forças presentes no movimento do veículo ....................... 40
Figura 4.10 – Perfil de operação adotado com análise das curvas de velocidade (vermelho), potência (azul), binário (laranja) e energia (verde). ........................... 44
Figura 5.1 – Topologias possíveis para o EPC CC/CC: a) cascata Buck-Boost , b) Half-bridge, c) Cúk e d) SEPIC/Luo.[17] ................................................................ 46
Figura 5.2 – Diagrama do fluxo de corrente entre (Sistema ICE mais Sistema de Tração) e o EPC CC/CC. ............................................................................................. 47
Figura 5.3 – Malha de tensão implementa ............................................................... 48
Figura 5.4 – Diagrama que ilustra o fluxo de corrente entre o EPC CC/CC e as baterias. ...... 49
Figura 5.5 – Malha de corrente para controlo do EPC CC/CC. ....................................... 49
Figura 5.6 – Filtro LCL ....................................................................................... 50
Figura 5.7 - Algoritmo de gestão do EPC CC/CC ....................................................... 54
Figura 5.8 – Controlo do EPC CC/CC em simulink que interage com o software PSIM. .......... 55
5.9 - Circuito de potência desenvolvido no software de simulação PSIM. ......................... 56
Figura 5.10- Validação do algoritmo de gestão de energia........................................... 58
5.11 - Resultado da simulação do EPC CC mediante um perfil de corrente no barramento CC ........................................................................................................ 59
Figura 5.12 - Resultado da simulação do efeito do filtro LCL para a corrente da bateria ...... 60
Figura 5.13 - Modelo de balaceamento para o modo de (a) descarga e (b) carga para a topologia de balanceamento ativo Multi-Indutor[11] ........................................... 61
Figura 5.14 - Processo de balaceamento de duas baterias [11] ..................................... 61
Figura 5.15 - Circuito de simulação de balanceamento das baterias aplicado no PSIM e respetivas malhas de controlo. ..................................................................... 62
Figura 5.16 - Resultado da simulação do sistema de balanceamento de baterias. .............. 63
Figura 6.1 – Arquitetura Funcional da DSP utilizada.[20] ............................................. 66
Figura 6.2 – Circuito de aquisição do sinal de corrente para entrada na DSP ..................... 67
Figura 6.3 – Transdutor de tensão que permitiu obter o valor de tensão do barramento CC .. 68
xiii
Figura 6.4 – Circuito de aquisição do sinal de tensão do barramento CC para entrar na DSP .. 68
Figura 6.5 - Circuito de controlo das entradas do drive do lado esquerdo e tabela de verdade associada ao circuito de controlo do lado direito .................................... 69
Figura 6.6 – Drive para as gates dos IGBT’s ............................................................. 69
Figura 6.7 – Controlo implementado pelo processador da DSP ...................................... 70
Figura 6.8 – Efeito pelo díodo do IGBT em antiparalelo na aquisição do sinal de corrente .... 71
Figura 6.9 – PWM e sinal de tensão adquirido no barramento CC ................................... 71
Figura 6.10 – PWM e sinal de corrente adquirido na entrada do lado do conversor do filtro LCL. ...................................................................................................... 72
xv
Lista de tabelas
Tabela 3.1 – Parâmetros do gerador do sistema ICE ................................................... 27
Tabela 3.2 – Parâmetros do motor de tração ........................................................... 28
Tabela 4.1- Resultados obtidos a partir dos resultados experimentais ............................ 36
Tabela 4.2 - Potências a ter em jogo para o perfil de operação escolhido ....................... 43

xvii
Abreviaturas e Símbolos
BMS Sistema de gestão de baterias
CC Corrente Continua
DEEC Departamento de Engenharia Eletrotécnica e de Computadores
DSP Processador de sinal digital
ECE Comissão económica para a Europa
EPC Conversor eletrónico de potência
EUA Estados Unidos da América
FEUP Faculdade de Engenharia da Universidade do Porto
ICE Internal Combustion Engine
PPS Fonte de potência de pico
PWM Pulse-Width Modulation
RUL Restante tempo de vida útil
SOA Área segura de operação
SOC State of Charge
SOH Estado de saúde
VE Veículos Elétricos
VEH Veículo Elétrico Híbrido
CR Circuito Ressonante

1
Capítulo 1
Introdução
Neste capítulo apresentam-se os aspetos iniciais a ter em consideração ao longo da
dissertação, tal como o enquadramento do projeto e a delineação dos objetivos para a
presente dissertação.
1.1 - Enquadramento
Tendo em conta as circunstâncias actuais do cenário energético existente no mundo é
importante conseguir reduzir a dependência energética relativamente ao uso de combustíveis
fósseis. Tal facto não se deve apenas ao aumento do seu custo, mas também pela sua escas-
sez. Esta situação leva a que as construtoras automóveis estejam a fazer um forte investi-
mento na modelização dos veículos para que estes não apresentarem dependência de
combustíveis fósseis.
O projeto enquadra-se numa visão ambientalista, pois é pretendido dar um contributo no
desenvolvimento sustentado das tecnologias inerentes aos veículos eléctricos hibridos como
forma de garantir a diminuição dos gases.
1.2 - Os objetivos
Com esta dissertação pretende-se desenvolver um conversor de eletrónica de potência
que permitar a carga e a descarga de baterias de àcido de chumbo para aplicação num VEH
série. Dessa forma os principais objetivos a desenvolver são:
Modelização das baterias de ácido de chumbo;
2 Introdução
Modelar um perfil de carga/descarga para validar o funcionamento do
conversor, definindo os regimes de funcionamento para os motores
elétricos(gerador e motor de tração);
Simular o funcionamento do conversor para validar a estratégia de controlo
adotada para o algoritmo de gestão de energia;
Simular uma topologia de balanceamento para posterior aplicação ao sistema
de gestão de energia;
Desenvolver um prótótipo do conversor para ser implementado num VEH
série.
1.3 – Estrutura da dissertação
A dissertação encontra-se dividida em 7 capitulos. No primeiro capitulo são referidos os
principais objetivos, sendo também feito um enquadramento do projeto a ser desenvolvido.
No segundo capitulo é analisado o estado da arte do VEH permitindo fazer o
enquadramento do problema ao nível do que é feito atualmente para desenvolver projetos
relacionados com os VEH, e dessa forma utilizar o conhecimento aí referido para analisar os
procedimentos a adotar nos restantes capitulos.
No terceiro capitulo é analisada a arquitetura funcional do sistema.
No quarto capitulo é alcançado a modelização da bateria utilizada no projeto e analisado
um perfil de carga/descarga que possa ser implementado para validar o funcionamento do
conversor num nível prático.
No quinto capitulo é simulado o funcionamento do conversor para um perfil de
carga/descarga. Neste capitulo também se simulou uma topologia de balanceamento de
baterias.
No sexto capitulo é descrito o trabalho prático desenvolvido no sentido de alcançar o
prótótipo para o conversor.
No sétimo capitulo são tecidas conclusões acerca do trabalho desenvolvido e é feita uma
análise sobre possiveis trabalhos futuros a desenvolver para que se possa otimizar o
funcionamento do sistema desenvolvido.
3
Capítulo 2
Estado da Arte
2.1 - Veículos elétricos híbridos
Um VEH surge do conceito de criar duas formas de propulsão para um veículo. Sendo que
tipicamente uma fonte de energia se restringe ao armazenamento de energia e outra fonte à
conversão de um combustível em energia. Este conceito de VEH tem mais de um século,
sendo que a origem deste conceito surge em 1898. O primeiro VEH foi construído pelo alemão
Dr. Ferdinand Porche, ficando conhecido para a história por Lohner Electric Chaise. Já o
segundo modelo da porsche a ser criado era um modelo que continha um motor de combustão
interna (ICE) para girar um gerador que fornecia energia para os motores elétricos que
estavam instalados nas rodas do veículo. Este modelo do veículo permitiu que a bateria
ficasse a funcionar de forma autónoma e pudesse circular 40km. [1, 2]
Em 1900 as empresas americanas tinham produzido cerca de 1681 carros a vapor, 1575
carros elétricos e 936 carros a gasolina. Numa pesquisa realizada no primeiro Salão
Automóvel em Nova York, permitiu chegar à conclusão que a primeira escolha dos clientes
intervenientes desse salão era os veículos elétricos, sendo que a segunda opção recaía sobre
os carros a vapor.
Nos primeiros anos do século XX, milhares de veículos elétricos e híbridos foram
produzidos. A companhia Krieger foi a criador destes veículos em 1903, tendo usado um
motor de gasolina para auxiliar o pack de baterias. Também em 1900 uma construtora belga,
introduziu um motor de gasolina acoplado ao motor elétrico.
Os primeiros VEH comercias a serem produzidos foram produzidos pela empresa Belga,
Auto-Mixte, no período de 1906 até 1912, tendo utilizando a patente Pierer para efetuar a
produção dos VEH.
No entanto, a produção dos VEH teve uma grande diminuição devido ao facto da criação
de um modelo de veículo movido a gás por parte de Henry Ford, sendo que este apresentava
4 Estado da Arte
inúmeras vantagens face ao VEH da altura. Mais tarde em 1970, muito por culpa do aumento
do preço da gasolina causado pelo embargo do mercado de petróleo Árabe, originou um novo
interesse na produção de VEH.
Mas o mercado dos VEH teve o seu grande impacto em 1997, quando a construtora Toyota
disponibilizou na sua gama comercial de veículos, no Japão, o modelo Toyota Prius. Esse
facto originou que passado dois anos surgisse nos EUA a primeira venda de um VEH, o modelo
Honda Civic Hybrid. A presença deste tipo de veículos no mercado americano marcou uma
mudança radical na gama de veículos que estão à disposição no mercado de veículos
automóveis, pois a introdução deste tipo de veículos no mercado permitiu transpor para os
veículos convencionais utilizados nos últimos 100 anos os benefícios das baterias utilizadas
nos veículos elétricos. Tendo já se verificado um crescente número de modelos de VEH de
passageiros devido ao sucesso alcançado pela venda deste tipo de veículos automóveis, sendo
já superior a 20 modelos o número de modelos existentes.[1]
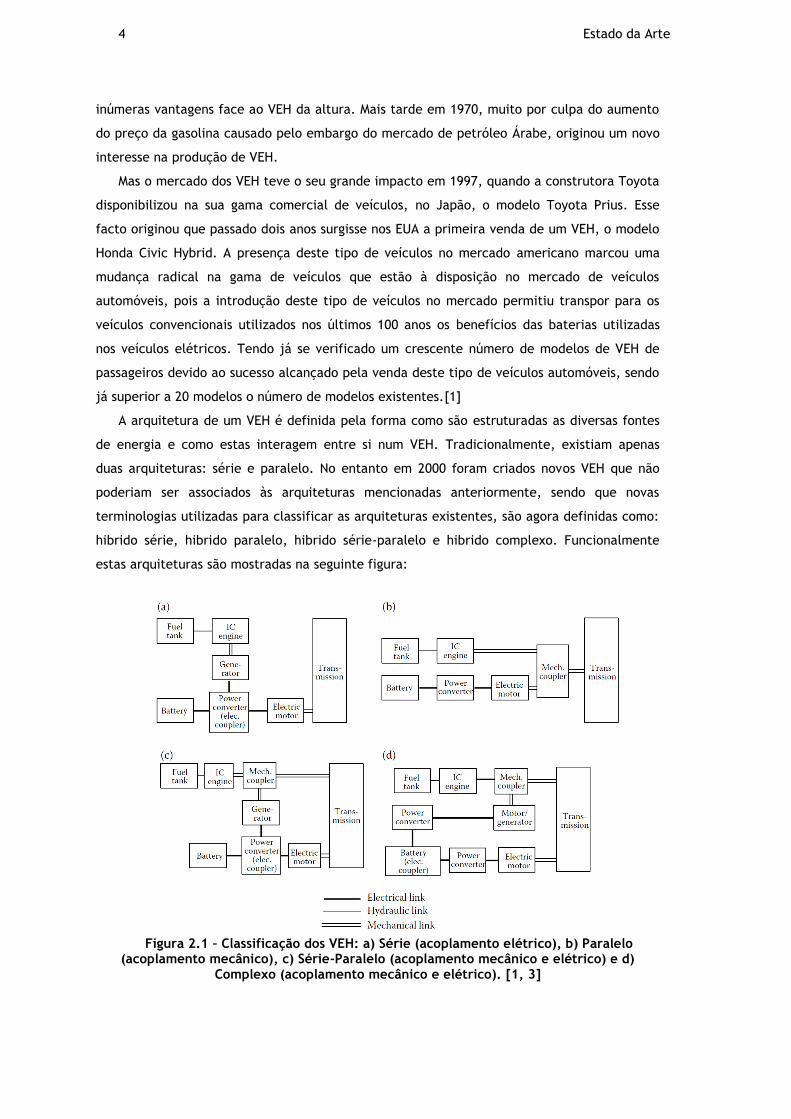
A arquitetura de um VEH é definida pela forma como são estruturadas as diversas fontes
de energia e como estas interagem entre si num VEH. Tradicionalmente, existiam apenas
duas arquiteturas: série e paralelo. No entanto em 2000 foram criados novos VEH que não
poderiam ser associados às arquiteturas mencionadas anteriormente, sendo que novas
terminologias utilizadas para classificar as arquiteturas existentes, são agora definidas como:
hibrido série, hibrido paralelo, hibrido série-paralelo e hibrido complexo. Funcionalmente
estas arquiteturas são mostradas na seguinte figura:
Figura 2.1 – Classificação dos VEH: a) Série (acoplamento elétrico), b) Paralelo
(acoplamento mecânico), c) Série-Paralelo (acoplamento mecânico e elétrico) e d) Complexo (acoplamento mecânico e elétrico). [1, 3]
5
No entanto, as principais abordagens a abordar para o design de um VEH continuam a ser
arquiteturas híbrido série e híbrido paralelo.[1, 3, 4]
2.1.1 - Veiculo Hibrido série
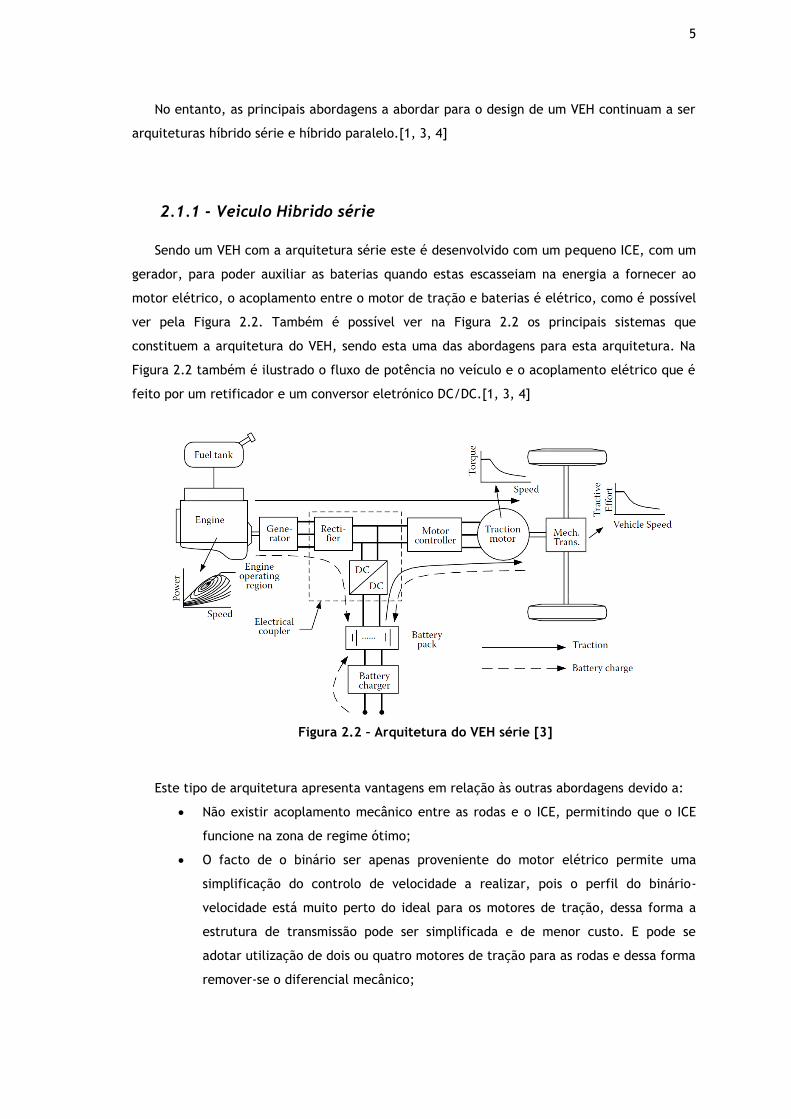
Sendo um VEH com a arquitetura série este é desenvolvido com um pequeno ICE, com um
gerador, para poder auxiliar as baterias quando estas escasseiam na energia a fornecer ao
motor elétrico, o acoplamento entre o motor de tração e baterias é elétrico, como é possível
ver pela Figura 2.2. Também é possível ver na Figura 2.2 os principais sistemas que
constituem a arquitetura do VEH, sendo esta uma das abordagens para esta arquitetura. Na
Figura 2.2 também é ilustrado o fluxo de potência no veículo e o acoplamento elétrico que é
feito por um retificador e um conversor eletrónico DC/DC.[1, 3, 4]
Figura 2.2 – Arquitetura do VEH série [3]
Este tipo de arquitetura apresenta vantagens em relação às outras abordagens devido a:
Não existir acoplamento mecânico entre as rodas e o ICE, permitindo que o ICE
funcione na zona de regime ótimo;
O facto de o binário ser apenas proveniente do motor elétrico permite uma
simplificação do controlo de velocidade a realizar, pois o perfil do binário-
velocidade está muito perto do ideal para os motores de tração, dessa forma a
estrutura de transmissão pode ser simplificada e de menor custo. E pode se
adotar utilização de dois ou quatro motores de tração para as rodas e dessa forma
remover-se o diferencial mecânico;
6 Estado da Arte
Apresentar uma estrutura simples devido ao facto de a conexão entre o
motor/gerador, as baterias e o motor de tração ser apenas feita por cabos
elétricos.[1, 3, 4]
No entanto, esta configuração também apresenta desvantagens, que são:
O facto de existir várias conversões de energia, isto é, de mecânica para elétrica
e novamente de elétrica para mecânica no motor de tração provocam mais perdas
de energia;
O facto de ser necessário um maior número de máquinas elétricas (gerador
elétrico e motor de tração);
E a necessidade de ter um grande motor de tração, uma vez que é a única fonte
de produzir binário para as rodas.[1, 3, 4]
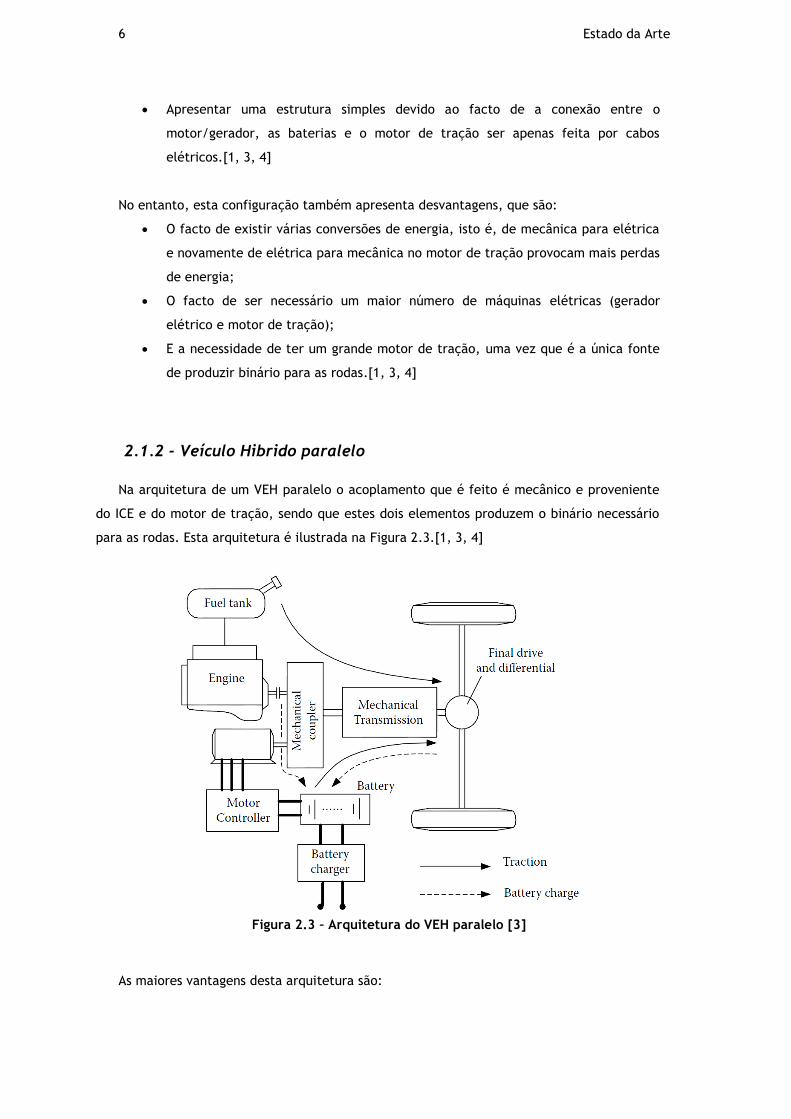
2.1.2 - Veículo Hibrido paralelo
Na arquitetura de um VEH paralelo o acoplamento que é feito é mecânico e proveniente
do ICE e do motor de tração, sendo que estes dois elementos produzem o binário necessário
para as rodas. Esta arquitetura é ilustrada na Figura 2.3.[1, 3, 4]
Figura 2.3 – Arquitetura do VEH paralelo [3]
As maiores vantagens desta arquitetura são:
7
Não ocorre mais de que uma conversão de energia, isto é, ambos os motores
produzem o binário necessário para as rodas, sendo que o motor de tração apenas
converte energia elétrica em energia mecânica e o ICE energia química em
energia mecânica, diminuindo as perdas do veículo;
Mais compacto sendo que o motor de tração é de menor tamanho.[1, 3, 4]
Quanto às desvantagens apresentadas pelo VEH paralelo são:
O facto de o acoplamento mecânico entre as rodas e o ICE, pois o ICE não
trabalha numa região de velocidade estreita, sendo que trabalha em zonas
diferentes das regiões de funcionamento ótimo;
A complexidade da estrutura e do controlo a ser realizado.[1, 3, 4]
2.2 - Máquina Elétrica
A Máquina Elétrica desempenha um papel importante no sucesso dos VEH. Os três
principais tipos de máquinas elétrica utilizadas para o desenvolvimento dos VEH são:
Máquina síncrona de ímanes permanentes (PMSM);
Máquina de indução;
Máquina de relutância variável.
Uma máquina elétrica e o drive devem incluir os seguintes requisitos genéricos:
Elevada densidade de binário e de potência;
Ampla gama de velocidade com funcionamento a binário e potência constante;
Elevada eficiência energética para uma ampla gama de velocidades;
Elevada robustez e fiabilidade.
A máquina de indução é utilizada para o desenvolvimento do VEH devido a sua
simplicidade, robustez e pela ampla gama de velocidade. No entanto estas máquinas para
elevadas velocidades não têm força contra eletromotriz. Quando aplicado o controlo
orientação do campo a uma máquina de indução faz com que esta apresente um
comportamento parecido com o comportamento de uma máquina CC. No entanto, esta
máquina elétrica apresenta uma eficiência energética geralmente mais baixa que a máquina
de ímanes permanentes devidos as perdas inerentes do rotor, pela mesma razão geralmente o
seu atravancamento é superior em relação as maquinas de imanes permanentes.
As máquinas síncronas de ímanes permanentes apresentam características únicas, tais
como elevada eficiência energética, binário e densidade de potência. No entanto, as
máquinas de imanes permanentes tem uma gama pequena de potência constante devido á
8 Estado da Arte
sua capacidade bastante limitada de enfraquecimento de campo, resultantes da presença do
campo de imanes permanentes, que só pode ser enfraquecido pró meio da produção de
campo no estator, que se opõe ao campo magnético do rotor. Além disso, a força contra
eletromotriz pode ser um problema a velocidades elevadas.
As máquinas de relutância variável estão a ganhar interesse no âmbito da propulsão
elétrica para VEH, devido á sua construção simples e robusta, de controlo simples, à
capacidade de funcionamento a velocidades elevadas. No entanto, este tipo de máquinas
ainda não está a ser produzido como máquina standard devido ao seu custo ser maior do que
a máquina de indução.[1]
2.3 - Conversores de Potência
A seleção dos semicondutores de potência para conversores/inversores e circuitos de
controlo são bastante importantes para o aumento da eficiência e alta performance dos VEH.
Como tal existem certos requisitos que estes semicondutores devem seguir, nomeadamente,
tensão nominal, corrente nominal, requisitos da frequência de comutação, requisitos das
perdas de potência, características dinâmicas, requisitos de proteção, requisitos do invólucro
e requisitos de segurança perante uso constante.[4]
De seguida é possível ver as principais preocupações neste tipo de requisitos:
Tensão nominal: Baseada na tensão de fim de carregamento da bateria e na
máxima tensão permitida durante a fase de regeneração da bateria.
Corrente nominal: Determinada pela potência de saída desejada e no número de
dispositivos em paralelo. Em aplicações elétricas de propulsão a potência é o
dobro/quadruplo da componente contínua de potência e como tal os
semicondutores atingem temperaturas não desejadas. Neste caso é necessário ter
em atenção a potência de pico nominal do motor de propulsão.
Requisitos da frequência de comutação: Depende maioritariamente da potência
do motor alimentado pelo inversor. Em caso de utilização de controlo PWM, uma
frequência mínima de 20kHz deverá ser usada. Por vezes 10kHz também podem
ser usados contudo é sabido que frequências mais altas ajudam a diminuir o
tamanho dos filtros usados e até mesmo a atingir os limites EMI estabelecidos
Requisitos de Perdas de Potencia: Dependem essencialmente dos tempos turn-on
e turn-off, que devem ser o mais baixo possível.
Características Dinâmicas: Devem ser munidos de pouca energia para ativar e
descativar, pelo que a entrada do drive deverá ser baixa e a resistência deverá
ser alta. O dispositivo deverá ter também um alto dv/dt assim como di/dt. O
9
díodo antiparalelo deverá ter um tempo de recuperação reverso baixo e uma
grandeza de potência da mesma ordem que o sistema de potência principal.
Requisitos de Proteção: Deverá ter uma boa capacidade I2t e estar protegido
contra rápidas fusões de semicondutores, assim como deverá cumprir com o uso
de snubbers para as áreas de operação seguras (SOA)
Requisitos do involucro: Deverão ser isolados e deverão ter uma indutância menor
que 10nH.
Requisitos de segurança perante uso constante: Os semicondutores deverão estar
aptos para trabalhar em condições de stress pelo que o uso de elementos
capacitivos deverá ser mínimo
2.4 - Armazenamento de energia
Armazenar energia consiste em disponibilizar energia para o sistema (descarga) e adquirir
energia externa ao sistema (carga). Existem diversas formas de armazenar a energia num
veículo elétrico, pois existem diversos tipos de baterias, e essas formas podem utilizar
diversos recursos para sustentar o armazenamento da energia de um veículo elétrico ou
veículo elétrico híbrido como ultra-condensadores ou volantes de inércia.
Há uma série de requisitos que se tem que verificar para um correto armazenamento de
energia, sendo que estes requisitos variam em função do tipo de veículo que pretendemos
projetar. Pois para o VEH a primeira consideração a tomar prende-se com a potência
específica do sistema de armazenamento, pois esta vai assegurar o correto funcionamento do
veículo para o processo de aceleração do veículo, para a situação em que o veículo se
encontra em subidas e no processo em que o sistema se encontra em travagem regenerativa.
Outros requisitos também devem ser levados em consideração por forma a garantir o bom
funcionamento do VEH.[3]
Dessa forma é importante fazer referência aos vários tipos de baterias existentes, e dar
natural ênfase às suas principais características.
2.4.1 - Baterias
A bateria no sistema de armazenamento de energia dá origem a um processo
eletroquímico que transforma energia química em energia elétrica durante o processo de
descarga. A bateria é composta essencialmente por três elementos principais: dois elétrodos
(positivo e negativo) imersos num eletrolítico.
Os fabricantes das baterias especificam a capacidade da bateria em Ampere-hora (Ah).
10 Estado da Arte
Os principais fatores que influência a escolha de um tipo de bateria para além do seu
princípio de funcionamento são a densidade de energia, o ciclo de vida de cada bateria e a
sua densidade de potência. Torna-se então importante perceber o significado destes
conceitos que permitirão fazer a escolha sobre um tipo de bateria:
Energia específica - é definida como a capacidade de energia por unidade de peso
da bateria (Wh/kg). Teoricamente a energia específica é a energia máxima que
pode ser gerada por unidade de massa total do reagente celular da bateria.
Potência específica ou densidade de potência – é definida como a potência
máxima de uma bateria por unidade de peso que a bateria pode produzir num
curto espaço de tempo. A potência específica é importante na redução do peso da
bateria, especialmente em aplicações em que é exigida alta potência. A potência
específica depende essencialmente da resistência interna da bateria.
Eficiência energética – As perdas de energia, ou a descarga da bateria ou o
carregamento da bateria aparecem relacionadas com as perdas de tensão. Assim,
a eficiência da bateria durante a descarga e durante o período de carregamento
pode ser definido em qualquer ponto como a relação entre a tensão de operação
da célula com a tensão termodinâmica.
Densidade de Energia – refere-se à quantidade de energia que uma bateria tem
em relação ao seu tamanho, isto é, a quantidade total de energia que uma
bateria pode armazenar por litro do seu volume para uma determinada taxa de
descarga.
Ciclo de vida – consiste no número total de vezes em que uma bateria pode ser
descarregada e carregada durante a sua vida, é importante ter em consideração
que quando a bateria não consegue atingir mais de oitenta por cento (80%) da sua
carga o ciclo de vida da bateria é considerado acabado.
Outros aspetos a ter em consideração na escolha das baterias e que influencia o seu ciclo
de vida é a forma como estabelecemos o estado de carga e o estado de descarga da
bateria.[3]
11
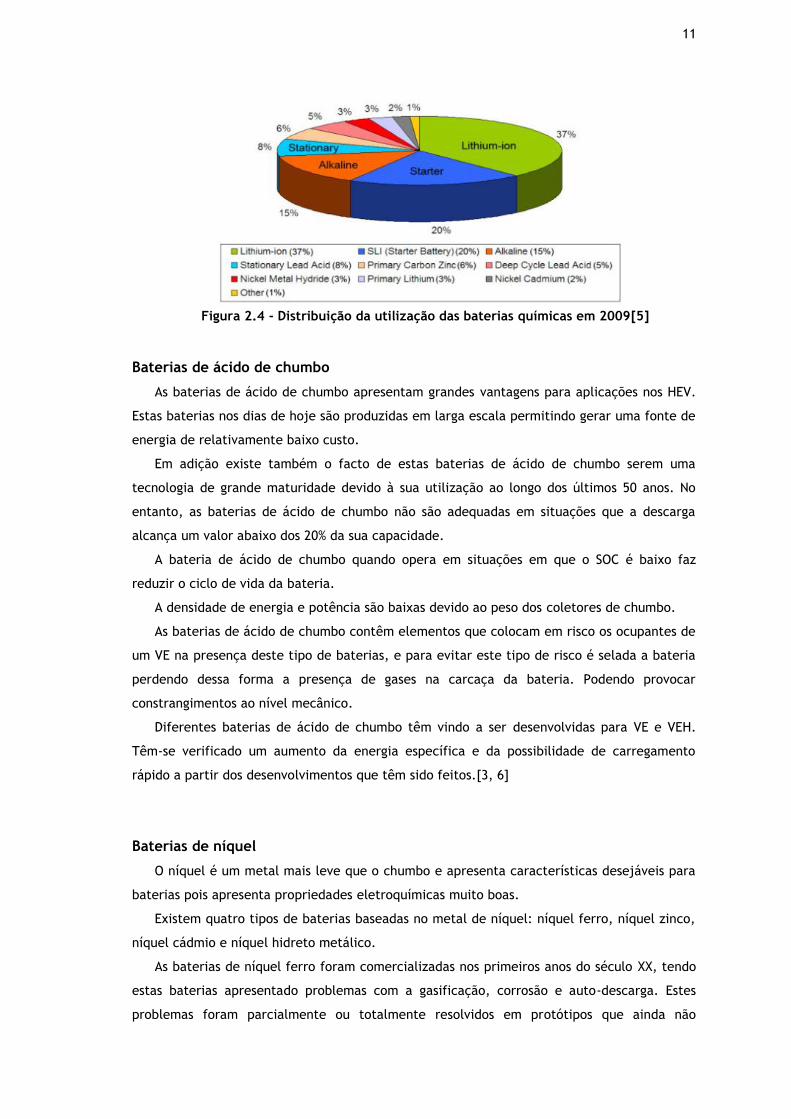
Figura 2.4 - Distribuição da utilização das baterias químicas em 2009[5]
Baterias de ácido de chumbo
As baterias de ácido de chumbo apresentam grandes vantagens para aplicações nos HEV.
Estas baterias nos dias de hoje são produzidas em larga escala permitindo gerar uma fonte de
energia de relativamente baixo custo.
Em adição existe também o facto de estas baterias de ácido de chumbo serem uma
tecnologia de grande maturidade devido à sua utilização ao longo dos últimos 50 anos. No
entanto, as baterias de ácido de chumbo não são adequadas em situações que a descarga
alcança um valor abaixo dos 20% da sua capacidade.
A bateria de ácido de chumbo quando opera em situações em que o SOC é baixo faz
reduzir o ciclo de vida da bateria.
A densidade de energia e potência são baixas devido ao peso dos coletores de chumbo.
As baterias de ácido de chumbo contêm elementos que colocam em risco os ocupantes de
um VE na presença deste tipo de baterias, e para evitar este tipo de risco é selada a bateria
perdendo dessa forma a presença de gases na carcaça da bateria. Podendo provocar
constrangimentos ao nível mecânico.
Diferentes baterias de ácido de chumbo têm vindo a ser desenvolvidas para VE e VEH.
Têm-se verificado um aumento da energia específica e da possibilidade de carregamento
rápido a partir dos desenvolvimentos que têm sido feitos.[3, 6]
Baterias de níquel
O níquel é um metal mais leve que o chumbo e apresenta características desejáveis para
baterias pois apresenta propriedades eletroquímicas muito boas.
Existem quatro tipos de baterias baseadas no metal de níquel: níquel ferro, níquel zinco,
níquel cádmio e níquel hidreto metálico.
As baterias de níquel ferro foram comercializadas nos primeiros anos do século XX, tendo
estas baterias apresentado problemas com a gasificação, corrosão e auto-descarga. Estes
problemas foram parcialmente ou totalmente resolvidos em protótipos que ainda não
12 Estado da Arte
chegaram ao mercado. Estas baterias apresentam uma grande complexidade devido à
necessidade de manter o nível de água e fazer uma eliminação segura do hidrogénio e
oxigénio libertado durante o processo de descarga. As baterias de níquel ferro apresentam
problemas com as baixas temperaturas, embora as baterias de ácido de chumbo apresentem
mais problemas a esse respeito. Estas baterias têm a capacidade de suportar 2000 descargas
profundas e o níquel é mais barato que o ácido de chumbo.
As baterias de níquel cádmio sofreram o seu desenvolvimento na mesma altura que as
baterias de níquel ferro e dessa forma apresentem um desempenho similar. A tensão nominal
de circuito aberto de uma célula de níquel cádmio é 1,3V. Esta tecnologia de bateria de
níquel têm vindo a sofrer um aperfeiçoamento técnico enorme devido às suas vantagens de
potência específica elevada, tempo de ciclos de vida, uma alta tolerância ao nível elétrico e
mecânico, uma queda de tensão numa ampla faixa de correntes de descarga, larga faixa de
temperaturas de funcionamento, taxa de descarga baixa, excelente a longo prazo em
situações de armazenamento devido à corrosão desprezável e pelo facto da disponibilidade
na variedade de tamanho das baterias. No entanto, a bateria de níquel cádmio tem algumas
desvantagens incluindo um custo inicial alto, a tensão da bateria relativamente baixa e o
perigo ambiental de cádmio. A bateria de níquel cádmio pode ser geralmente dividida em
duas categorias principais, ou seja, as que são do tipo ventilado ou as seladas. O tipo de
ventilação é composto de muitas alternativas. A placa sintetizada ventilada é o
desenvolvimento mais recente e apresenta uma alta energia específica mas é mais caro.
Caracteriza-se por uma superfície plana de perfil de descarga de tensão e baixa temperatura
de desempenho. A bateria de níquel cádmio selada incorpora uma célula específica que
contém umas características específicas de projeção de células para evitar uma acumulação
de pressão causadas pelo gás durante a sobrecarga. Como resultado a bateria não necessita
de manutenção.
A bateria de níquel de zinco tem um curto ciclo de vida e dessa forma não é uma
alternativa válida para os VEH, A tensão nominal de uma célula deste tipo de tecnologia é de
1,65V.
A bateria de níquel hidreto metálico está no mercado desde 1992. As características deste
tipo de bateria são semelhantes às da bateria de níquel cádmio, a principal diferença entre
elas é o uso do hidrogénio. A bateria de níquel hidreto metálico apresenta uma energia
específica superior à bateria de níquel cádmio e por não apresentar cádmio não apresenta o
risco ambiental introduzido pelo cádmio. A bateria de níquel hidreto metálico atualmente
apresenta uma tensão nominal de 1,2 V, atinge uma energia especifica de 65Wh/kg e uma
potência especifica de 200W/kg. A bateria de níquel hidreto metálico ainda está em
desenvolvimento, as suas vantagens baseadas na tecnologia atual são: ter maior energia
especifica, maior potência especifica do que os outros tipos de baterias níquel, respeitando o
ambiente, com um perfil de descarga plano (menor queda de tensão), e capacidade de
13
recarga rápida. No entanto, esta bateria ainda apresenta um custo inicial elevado. Além disso
ainda pode apresentar um efeito de memória. A bateria de níquel hidreto metálico tem sido
considerada como uma opção a curto prazo importante para aplicações nos VE e VEH[1, 3, 4,
6]
Baterias de iões de lítio
O lítio é o metal mais leve de todos os metais e apresenta características muito
interessantes de ponto de vista eletroquímico. Este metal permite um elevado nível muito
elevado de tensão termodinâmica, o que resulta em uma energia específica muito alta e
potencia especifica muito elevada. Existem duas tecnologias principais de baterias com metal
de lítio e são elas baterias de polímero de lítio metálico e baterias de iões de lítio.
A bateria de polímero de lítio metálico permite oferecer uma grande flexibilidade e
segurança de design deste tipo de baterias. Esta tecnologia de baterias opera com uma
tensão nominal de 3 V e uma energia específica de 155 W/kg e uma potência especifica de
315 W/kg. As vantagens correspondentes são muito baixa taxa de auto-descarga, a
capacidade de fabricação em uma variedade de formas e tamanhos e permitir segurança de
projeção das baterias. No entanto, tem a desvantagem de um desempenho relativamente
fraco a baixas temperaturas devido à dependência da temperatura da condutividade iónica.
A bateria de iões de lítio teve a sua origem no ano de 1991, tendo esta tecnologia tido um
desenvolvimento sem precedentes até aos dias de hoje, este tipo de bateria é considerada
como a mais promissora para o futuro. Embora ainda em fase de desenvolvimento, a bateria
de iões de lítio já ganhou aceitação para os VE e aplicações VEH. A bateria de iões de lítio
apresenta uma tensão nominal de 4 V, uma energia específica de 120 Wh/kg, uma densidade
de energia de 200 Wh/l e uma potência específica de 260 W/kg. O facto de ter uma energia
específica e a densidade de energia superior faz aumentar o custo deste tipo de tecnologia
tal como tem um aumento significativo da taxa de auto-descarga.[3, 4, 6]
Modelização das baterias
Um dos aspetos importantes num veículo elétrico consiste em modelizar a bateria
utilizada no sistema VE, sendo um dos principais temas de estudo de forma a poder tornar
viável o VE. Tendo em conta este aspeto de modelização da bateria utilizada no VE é
necessário ter presente que os estudos que têm sido feitos para perceber o comportamento
das baterias a diversas condições.
Os modelos das baterias são essencialmente quatro tipos diferentes: modelo
experimental, modelo eletroquímico, modelo matemático e modelo baseado no circuito
elétrico. O modelo experimental e o modelo eletroquímico não são adequados para modelar
células dinâmicas. Assim, estes modelos não podem ser utilizados para estimar o estado de
14 Estado da Arte
carga da bateria. Além disso, o modelo eletroquímico é computacionalmente caro e requer
uma extensa experimentação para determinar os parâmetros do modelo.
Os modelos matemáticos das baterias são baseados em abordagens estocásticas ou
equações empíricas para prever o tempo de execução, a eficiência e a capacidade das
baterias. No entanto, os modelos matemáticos não têm relação direta entre os parâmetros do
modelo e a característica corrente - tensão (IV) das baterias. Assim, estes modelos têm um
uso limitado em simuladores de circuitos.
O modelo baseado no circuito elétrico ou no circuito equivalente é o modelo mais
intuitivo para o uso em simuladores de circuitos. Estes modelos são baseados em circuitos
equivalentes de Thévenin e impedâncias. Estes modelos são mais simples e, portanto,
computacionalmente mais baratos. Uma das desvantagens deste tipo de modelos é a sua
incapacidade de prever a vida útil da bateria. No entanto, a sua simplicidade e a capacidade
de prever a característica corrente – tensão (IV), torna este mais adequado para a dinâmica
dos veículos elétricos. [7]
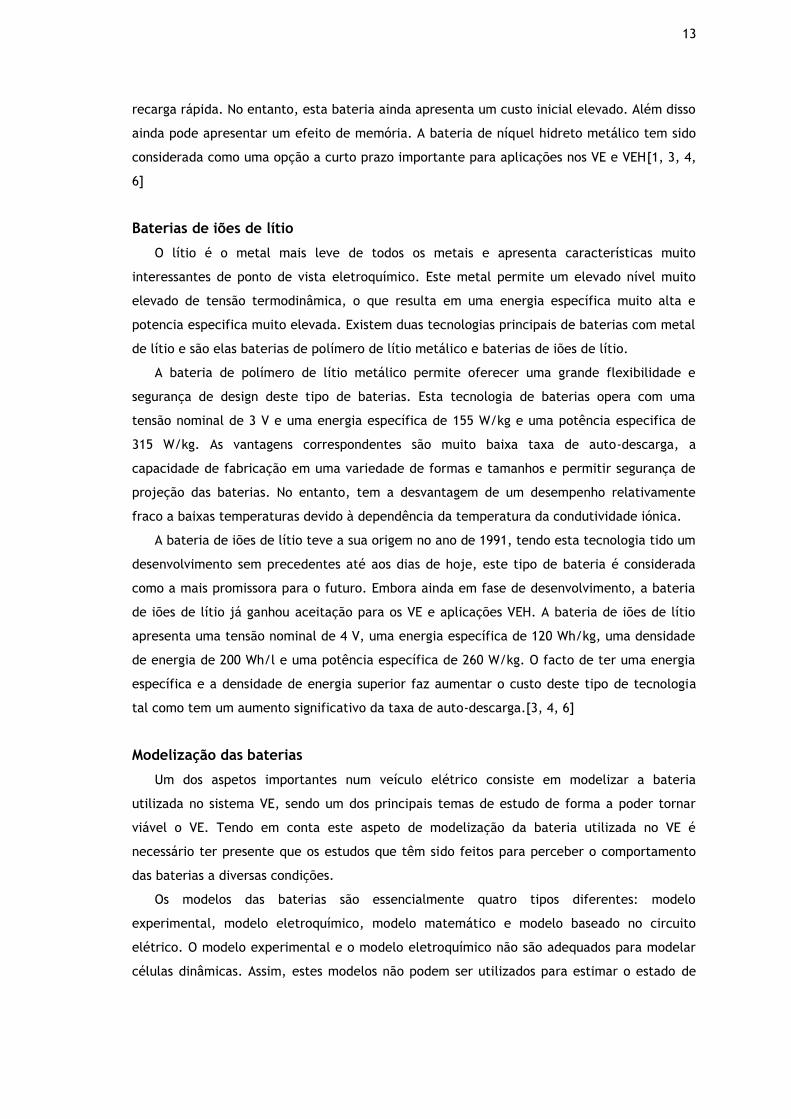
Extração de parâmetros
Existem diversificados modelos de baterias para diversas aplicações, é no entanto
importante saber quais os parâmetros que modelização a bateria. Estes parâmetros são
variáveis em relação ao SOC, corrente, temperatura, número de ciclos de vida de uma
bateria. Geralmente os parâmetros são extraídos após um número elevado de experiências,
sendo estas experiências demoradas e necessitarem de bastante perícia.[7]
Figura 2.5 - Modelo básico de um circuito de uma bateria [8]
15
2.4.2 - Topologias de balanceamento de baterias
O BMS executa várias tarefas, como medir a tensão, corrente e temperatura, o estado de
carga das células (SOC), estado de saúde (SOH), determina a restante vida útil da bateria
(RUL), controla o procedimento da carga / descarga, aquisição de dados de comunicação,
monitorização e armazenamento de dados históricos e equilíbrio celular.
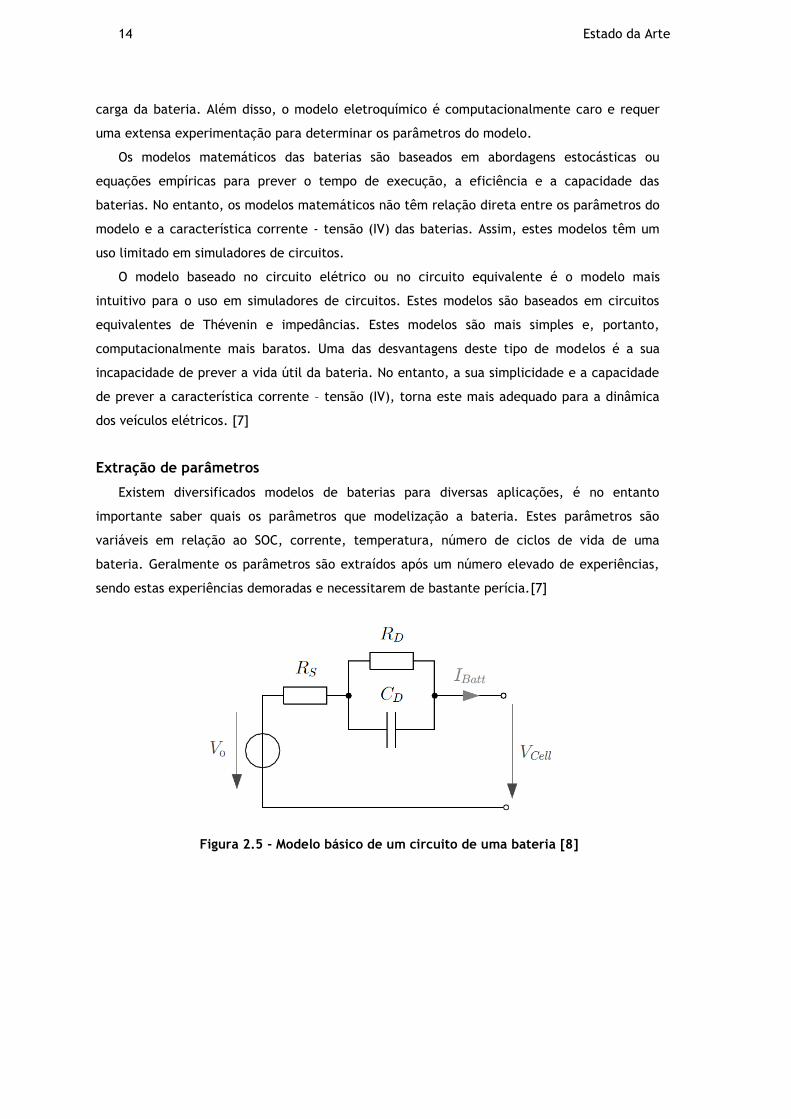
As topologias de balanceamento podem ser caracterizadas em duas categorias:
Balanceamentos ativos e passivos conforme mostrado na Figura 2.6. O método de
balanceamento passivo remove a carga em excesso a partir da célula totalmente carregada
através de um elemento passivo, resistência, este elemento pode estar no modo fixo ou no
modo comutado de acordo com o sistema da Figura 2.7. Os métodos de balanceamento ativo
caracterizam-se por remover a carga da célula com energia mais elevada e entregar a célula
com energia mais baixa. Existem diferentes topologias de acordo com o elemento ativo usado
para armazenar energia, como condensadores e/ou componentes indutivos, bem como
controlar interruptores ou conversores.[9]
Figura 2.6 – Topologias ativas e passivas de balanceamento de baterias [9]
Balanceamento Passivo
Shunting resistor balancing
Este método de balanceamento de células caracteriza-se por remover o excesso de
energia da célula de alta tensão, evitando a corrente da célula maior tensão e espera até que
a célula de baixa tensão fique ao mesmo nível.
Os métodos do shunt resistivo podem ser classificados em duas subcategorias como
mostrado na Figura 2.7. O primeiro método o shunt resistivo é fixo, este método usa a
corrente contínua sem passar para as células e a resistência é ajustada para limitar a tensão.
As características deste balanceamento são: baixo custo e simplicidade, mas tem energia
contínua dissipada como calor para todas as células. No segundo método o shunt resistivo é
controlado e caracteriza-se na remoção de energia da maior célula não continuamente, mas
controlando usando interruptores/relés. [9]

16 Estado da Arte
Figura 2.7 - Topologia shuttling resistor: a) fixed resistor e b) controling shunting resistor [9]
Balanceamento Ativo
Capacitive shuttling balancing methods
O Balanceamento de células capacitivas utilizam basicamente dispositivos de
armazenamento de energia externo, condensadores, para o transporte de energia entre
células, de modo atingir o equilíbrio. O capacitor shuttling ser caracterizado em 3 categorias:
Switched Capacitor, Single Switched Capacitor e Double tiered Capacitor.[9]
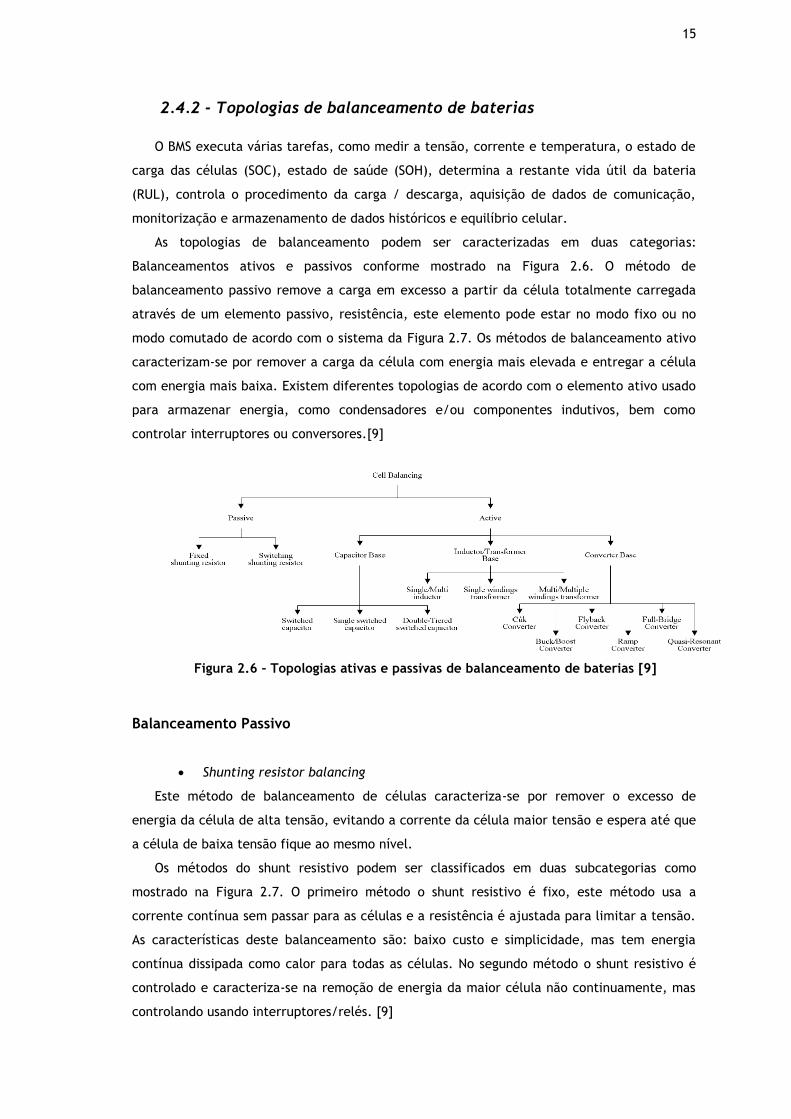
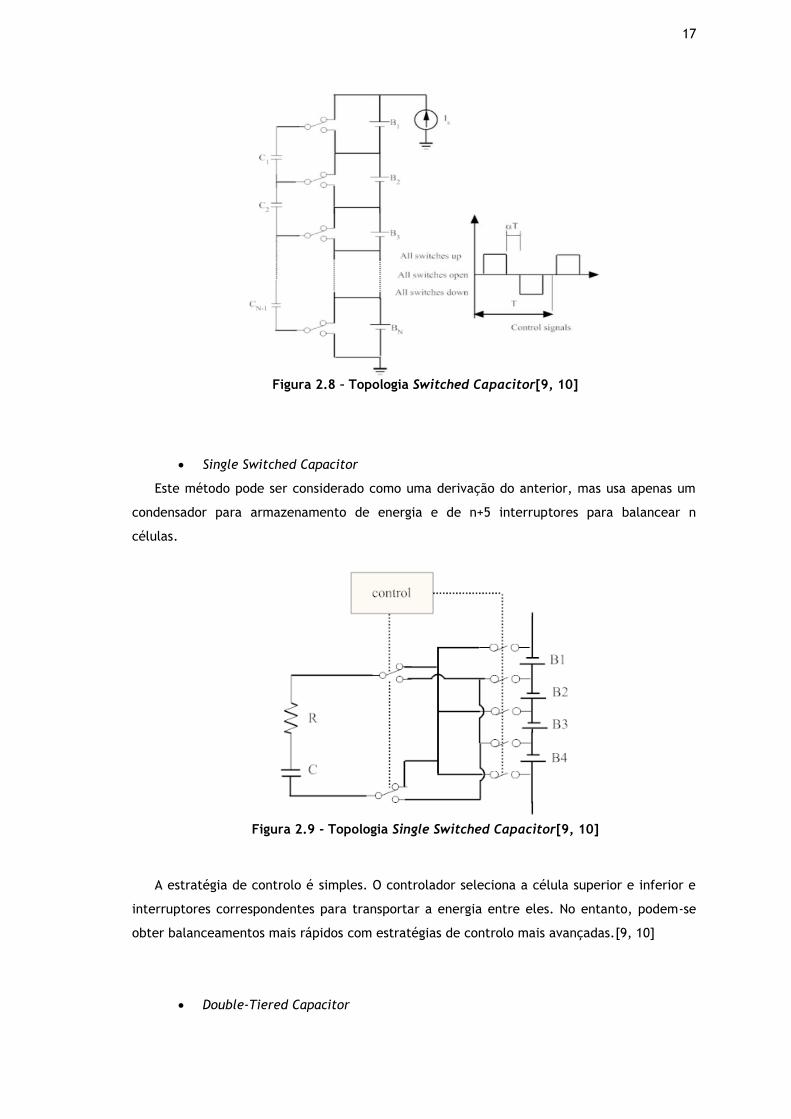
Switched Capacitor
Como ilustrado na figura abaixo, este método requer n-1 condensadores e 2n
interruptores para equilibrar as células. A estratégia de controlo é simples, pois tem apenas
dois estados. Além disso, não precisa de controlo inteligente e pode funcionar nas operações
de carga e descarga. A desvantagem desta topologia é que tem um tempo de equalização
relativamente longo. [9, 10]
17
Figura 2.8 – Topologia Switched Capacitor[9, 10]
Single Switched Capacitor
Este método pode ser considerado como uma derivação do anterior, mas usa apenas um
condensador para armazenamento de energia e de n+5 interruptores para balancear n
células.
Figura 2.9 - Topologia Single Switched Capacitor[9, 10]
A estratégia de controlo é simples. O controlador seleciona a célula superior e inferior e
interruptores correspondentes para transportar a energia entre eles. No entanto, podem-se
obter balanceamentos mais rápidos com estratégias de controlo mais avançadas.[9, 10]
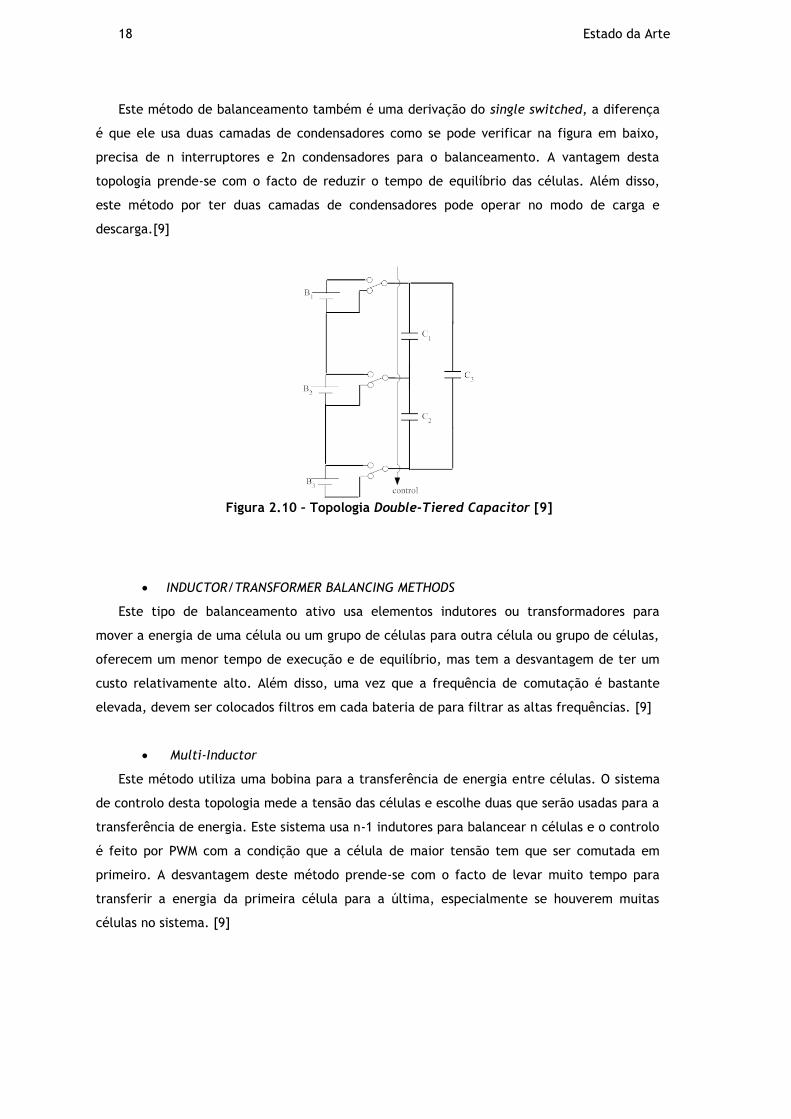
Double-Tiered Capacitor
18 Estado da Arte
Este método de balanceamento também é uma derivação do single switched, a diferença
é que ele usa duas camadas de condensadores como se pode verificar na figura em baixo,
precisa de n interruptores e 2n condensadores para o balanceamento. A vantagem desta
topologia prende-se com o facto de reduzir o tempo de equilíbrio das células. Além disso,
este método por ter duas camadas de condensadores pode operar no modo de carga e
descarga.[9]
Figura 2.10 – Topologia Double-Tiered Capacitor [9]
INDUCTOR/TRANSFORMER BALANCING METHODS
Este tipo de balanceamento ativo usa elementos indutores ou transformadores para
mover a energia de uma célula ou um grupo de células para outra célula ou grupo de células,
oferecem um menor tempo de execução e de equilíbrio, mas tem a desvantagem de ter um
custo relativamente alto. Além disso, uma vez que a frequência de comutação é bastante
elevada, devem ser colocados filtros em cada bateria de para filtrar as altas frequências. [9]
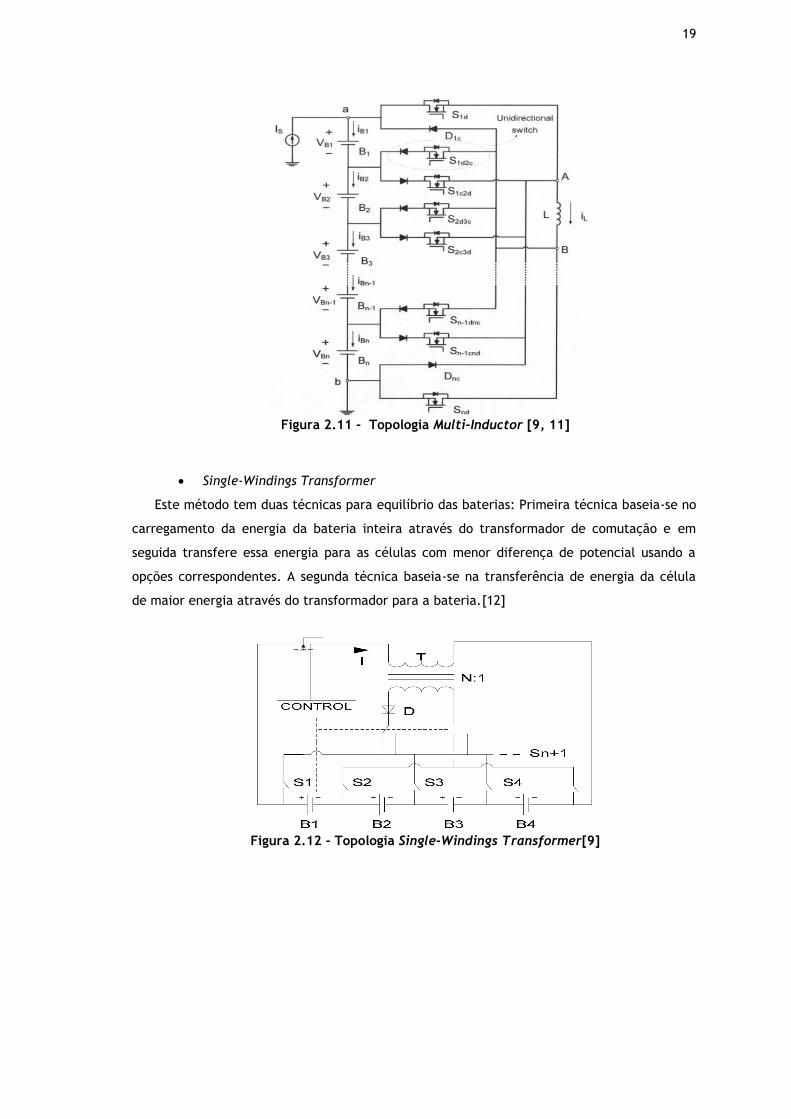
Multi-Inductor
Este método utiliza uma bobina para a transferência de energia entre células. O sistema
de controlo desta topologia mede a tensão das células e escolhe duas que serão usadas para a
transferência de energia. Este sistema usa n-1 indutores para balancear n células e o controlo
é feito por PWM com a condição que a célula de maior tensão tem que ser comutada em
primeiro. A desvantagem deste método prende-se com o facto de levar muito tempo para
transferir a energia da primeira célula para a última, especialmente se houverem muitas
células no sistema. [9]
19
Figura 2.11 - Topologia Multi-Inductor [9, 11]
Single-Windings Transformer
Este método tem duas técnicas para equilíbrio das baterias: Primeira técnica baseia-se no
carregamento da energia da bateria inteira através do transformador de comutação e em
seguida transfere essa energia para as células com menor diferença de potencial usando a
opções correspondentes. A segunda técnica baseia-se na transferência de energia da célula
de maior energia através do transformador para a bateria.[12]
Figura 2.12 - Topologia Single-Windings Transformer[9]

21
Capítulo 3
Arquitetura Funcional do Sistema
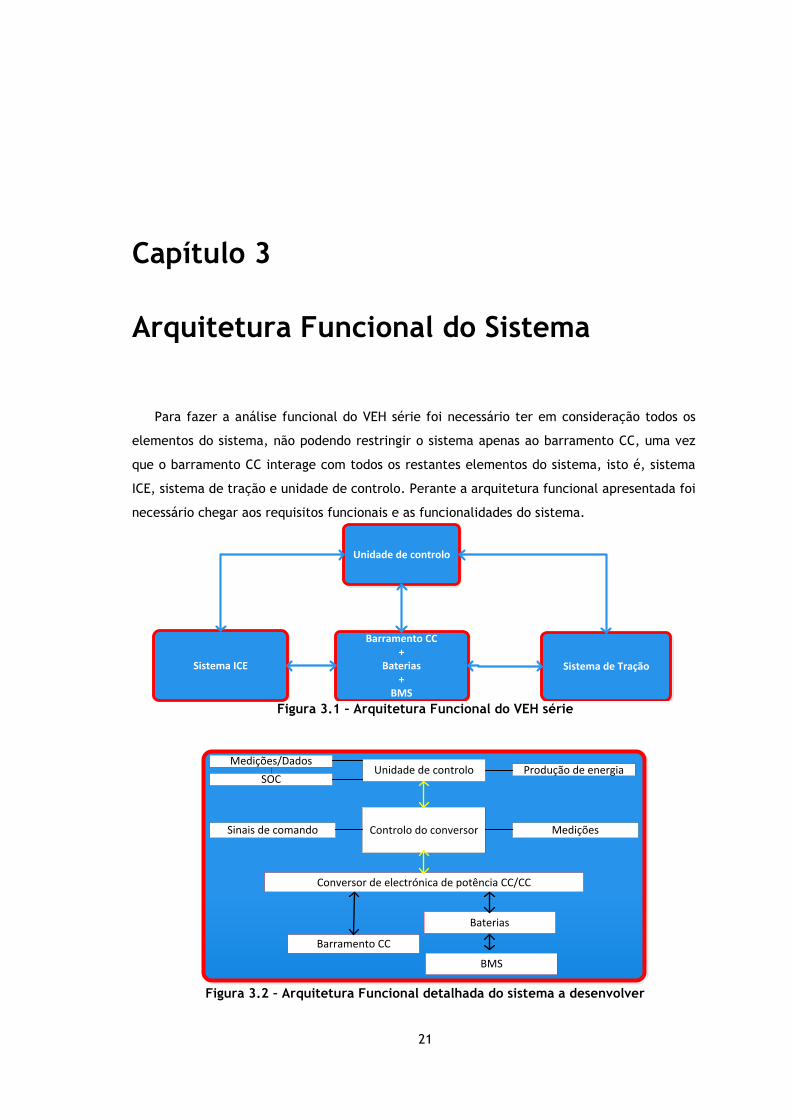
Para fazer a análise funcional do VEH série foi necessário ter em consideração todos os
elementos do sistema, não podendo restringir o sistema apenas ao barramento CC, uma vez
que o barramento CC interage com todos os restantes elementos do sistema, isto é, sistema
ICE, sistema de tração e unidade de controlo. Perante a arquitetura funcional apresentada foi
necessário chegar aos requisitos funcionais e as funcionalidades do sistema.
Unidade de controlo
Sistema ICE
Barramento CC+
Baterias+
BMS
Sistema de Tração
Figura 3.1 – Arquitetura Funcional do VEH série
Conversor de electrónica de potência CC/CC
Barramento CC
Baterias
Unidade de controloSOC
Medições/DadosProdução de energia
Controlo do conversorSinais de comando Medições
BMS
Figura 3.2 – Arquitetura Funcional detalhada do sistema a desenvolver
22 Arquitetura Funcional do Sistema
Para o sistema de armazenamento de energia, que é o principal alvo de estudo desta
dissertação, é feita uma representação da arquitetura funcional do barramento CC na Figura
3.1. Para a projeção e implementação deste sistema tive em consideração que este visa ser
implementado num VEH série.
Sendo um VEH série como visto em [1], este contempla a utilização de um sistema ICE, de
um sistema de tração e uma unidade de armazenamento de energia (baterias), a utilização
do sistema ICE visa garantir um maior intervalo de condução em comparação com os veículos
convencionais. Devido à desacoplação existente entre as rodas e o sistema ICE, é garantida
uma maior flexibilidade na localização do gerador ICE. Tendo em conta estes aspetos
analisados anteriormente, é preponderar delinear os diversos requisitos que o sistema irá
apresentar.
Tendo em conta a arquitetura funcional do sistema é então possível perceber que o
sistema de armazenamento de energia tem que ser capaz de:
Armazenar e fornecer energia;
Funcionar nos diversos modos de operação do sistema, isto é, coordenar o
fornecimento de energia por parte das diversas fontes de energia;
Disponibilizar a potência instantânea requerida pelo motor de tração;
Controlar os valores de Tensão, Corrente e Temperatura;
Permitir a bidireccionalidade de Corrente;
Disponibilizar uma medida da tensão de saída;
Disponibilizar uma medida da tensão de entrada;
Disponibilizar uma medida da corrente de entrada;
Disponibilizar uma medida da corrente de saída;
Proceder à estimação do estado de carga das baterias;
Aproveitar a energia regenerativa;
Obedecer a um perfil de utilização.
Tendo em conta os requisitos estabelecidos, é necessário fazer a devida análise da
influência destes requisitos no sistema.
3.1 - Unidade de controlo
A unidade de controlo visa garantir o bom funcionamento do sistema. As suas principais
funções são coordenar toda a informação proveniente de todos os sensores, fazer o
processamento dessa informação e atuar sobre os diversos atuadores do sistema. Esta
unidade de controlo também visa colocar em funcionamento a estratégia de gestão de
energia. Essa estratégia não só visa o fornecimento de energia por parte das Baterias, mas
também por parte do ICE. A estratégia de gestão de energia também passará por permitir o
23
aproveitamento da energia regenerativa proveniente do sistema de tração. Outra das funções
da unidade de controlo será atuar sobre o BMS. A unidade de controlo também terá que
informar sobre o estado atual do sistema e alertar para eventuais situações anómalas.
3.2 - Barramento CC
3.2.1 - Configuração do Barramento CC
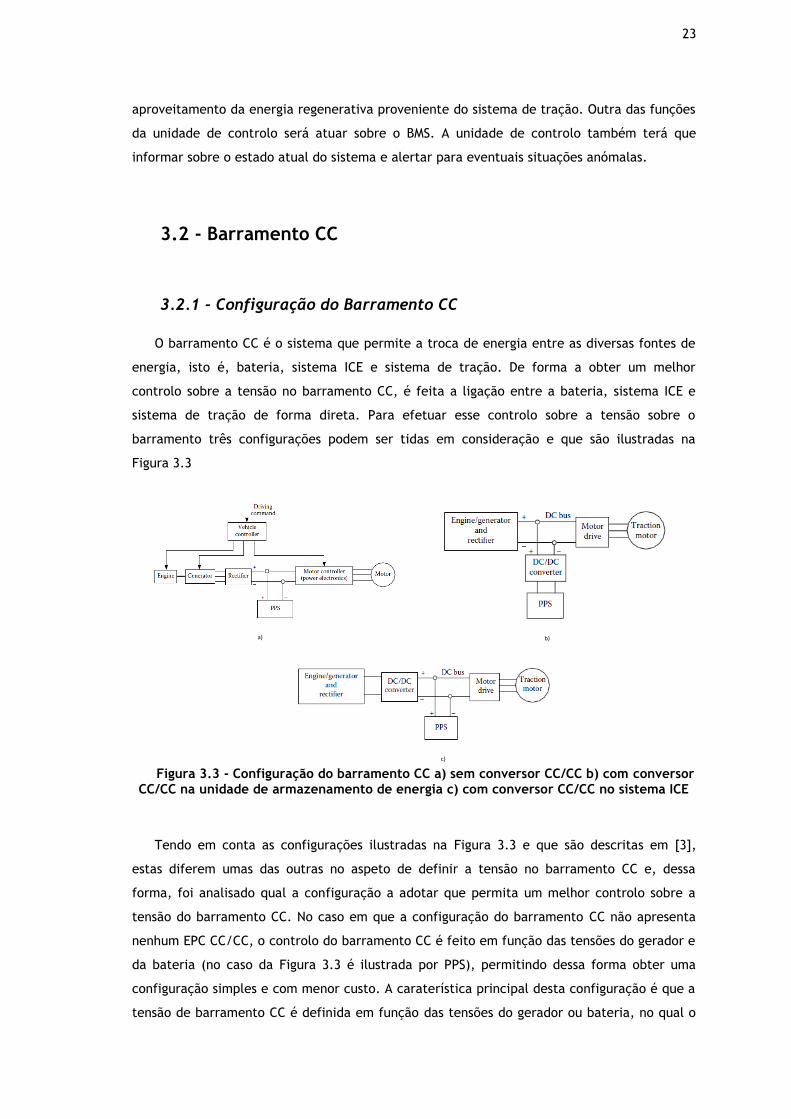
O barramento CC é o sistema que permite a troca de energia entre as diversas fontes de
energia, isto é, bateria, sistema ICE e sistema de tração. De forma a obter um melhor
controlo sobre a tensão no barramento CC, é feita a ligação entre a bateria, sistema ICE e
sistema de tração de forma direta. Para efetuar esse controlo sobre a tensão sobre o
barramento três configurações podem ser tidas em consideração e que são ilustradas na
Figura 3.3
a)
c)
b)
Figura 3.3 - Configuração do barramento CC a) sem conversor CC/CC b) com conversor
CC/CC na unidade de armazenamento de energia c) com conversor CC/CC no sistema ICE
Tendo em conta as configurações ilustradas na Figura 3.3 e que são descritas em [3],
estas diferem umas das outras no aspeto de definir a tensão no barramento CC e, dessa
forma, foi analisado qual a configuração a adotar que permita um melhor controlo sobre a
tensão do barramento CC. No caso em que a configuração do barramento CC não apresenta
nenhum EPC CC/CC, o controlo do barramento CC é feito em função das tensões do gerador e
da bateria (no caso da Figura 3.3 é ilustrada por PPS), permitindo dessa forma obter uma
configuração simples e com menor custo. A caraterística principal desta configuração é que a
tensão de barramento CC é definida em função das tensões do gerador ou bateria, no qual o
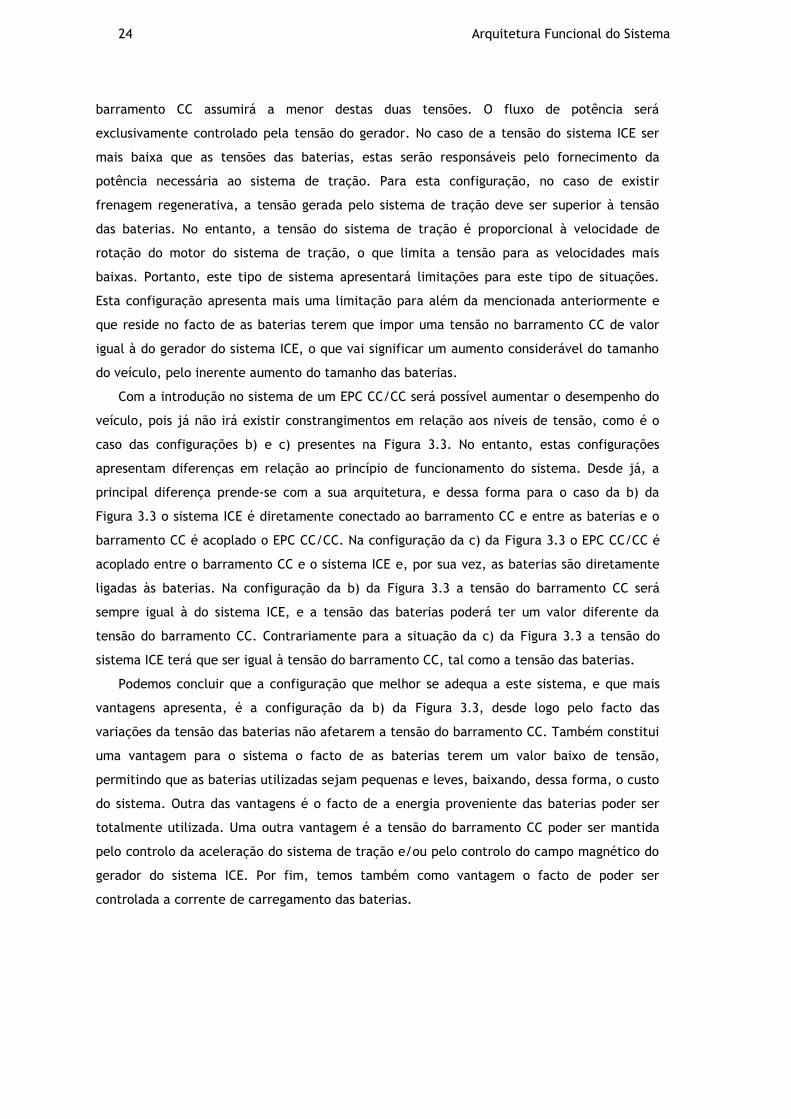
24 Arquitetura Funcional do Sistema
barramento CC assumirá a menor destas duas tensões. O fluxo de potência será
exclusivamente controlado pela tensão do gerador. No caso de a tensão do sistema ICE ser
mais baixa que as tensões das baterias, estas serão responsáveis pelo fornecimento da
potência necessária ao sistema de tração. Para esta configuração, no caso de existir
frenagem regenerativa, a tensão gerada pelo sistema de tração deve ser superior à tensão
das baterias. No entanto, a tensão do sistema de tração é proporcional à velocidade de
rotação do motor do sistema de tração, o que limita a tensão para as velocidades mais
baixas. Portanto, este tipo de sistema apresentará limitações para este tipo de situações.
Esta configuração apresenta mais uma limitação para além da mencionada anteriormente e
que reside no facto de as baterias terem que impor uma tensão no barramento CC de valor
igual à do gerador do sistema ICE, o que vai significar um aumento considerável do tamanho
do veículo, pelo inerente aumento do tamanho das baterias.
Com a introdução no sistema de um EPC CC/CC será possível aumentar o desempenho do
veículo, pois já não irá existir constrangimentos em relação aos níveis de tensão, como é o
caso das configurações b) e c) presentes na Figura 3.3. No entanto, estas configurações
apresentam diferenças em relação ao princípio de funcionamento do sistema. Desde já, a
principal diferença prende-se com a sua arquitetura, e dessa forma para o caso da b) da
Figura 3.3 o sistema ICE é diretamente conectado ao barramento CC e entre as baterias e o
barramento CC é acoplado o EPC CC/CC. Na configuração da c) da Figura 3.3 o EPC CC/CC é
acoplado entre o barramento CC e o sistema ICE e, por sua vez, as baterias são diretamente
ligadas às baterias. Na configuração da b) da Figura 3.3 a tensão do barramento CC será
sempre igual à do sistema ICE, e a tensão das baterias poderá ter um valor diferente da
tensão do barramento CC. Contrariamente para a situação da c) da Figura 3.3 a tensão do
sistema ICE terá que ser igual à tensão do barramento CC, tal como a tensão das baterias.
Podemos concluir que a configuração que melhor se adequa a este sistema, e que mais
vantagens apresenta, é a configuração da b) da Figura 3.3, desde logo pelo facto das
variações da tensão das baterias não afetarem a tensão do barramento CC. Também constitui
uma vantagem para o sistema o facto de as baterias terem um valor baixo de tensão,
permitindo que as baterias utilizadas sejam pequenas e leves, baixando, dessa forma, o custo
do sistema. Outra das vantagens é o facto de a energia proveniente das baterias poder ser
totalmente utilizada. Uma outra vantagem é a tensão do barramento CC poder ser mantida
pelo controlo da aceleração do sistema de tração e/ou pelo controlo do campo magnético do
gerador do sistema ICE. Por fim, temos também como vantagem o facto de poder ser
controlada a corrente de carregamento das baterias.
25
3.2.2 - Baterias
As baterias vão desempenhar um papel fundamental para o sistema, pois vão funcionar
como fonte principal de fornecimento de energia, tendo em conta a estratégia de controlo,
isto é, estratégia de controlo ON/OFF e que vai adotar para VEH um regime de
funcionamento em que maior parte do tempo em modo de funcionamento será puramente
elétrico. Isto vai levar a uma diminuição do consumo de combustíveis fósseis por parte do
VEH. A bateria também necessita ser projetada para corresponder à corrente de arranque
para o sistema ICE, isto é, fornecer a corrente necessária para o arranque do ICE e permita
armazenar a energia suficiente para um adequado funcionamento do sistema.
3.2.3 - Conversor de eletrónica de potência CC/CC
Tal como visto anteriormente a utilização do EPC CC/CC vai acrescentar vantagens ao
sistema, permitindo um melhor desempenho por parte do VEH. Para tal o EPC terá que
responder aos requisitos impostos pelo sistema. Sendo que se pretende que o VEH possa
aproveitar a energia regenerativa e a energia proveniente do sistema ICE, o controlador que
terá que ser projetado será um EPC CC/CC bidirecional.
O conversor vai então ter um papel fundamental sobre o processo de fornecimento de
energia e, tendo em conta a estratégia escolhida para o funcionamento do controlo do VEH
que assenta na estratégia de controlo ON/OFF e a configuração escolhida e que está presente
na b) da Figura 3.3, o EPC terá ser capaz de disponibilizar a tensão necessária para o
barramento CC. O EPC CC/CC também tem que ser responsável por responder eficazmente
aos valores de referência gerados pela unidade de controlo. Este controlo é influenciado
pelos valores de tensão do barramento CC, fluxo de potência que sofre influência direta do
fluxo de corrente, temperatura da bateria, SOC da bateria.
3.2.4 - Sistema de gestão de baterias
Um dos grandes problemas dos VEH consiste em otimizar os ciclos de vida que as baterias
apresentam, isto é, o tempo de vida que as baterias terão. Uma das formas de aumentar esse
tempo de vida consiste em introduzir no sistema de armazenamento de energia um BMS. Este
sistema tem com principal função perceber o estado de cada bateria e moldar o pack de
baterias para aumentar o rendimento do sistema. O BMS terá que aceder à unidade de
controlo por forma a estabelecer a forma de funcionamento do BMS, isto é, obter a
informação que permitirá o BMS entrar em execução. O sistema BMS permitirá retirar de
funcionamento as baterias que se encontrem degradadas. Também permitirá tirar de
26 Arquitetura Funcional do Sistema
funcionamento o pack de baterias, será capaz de proceder ao fornecimento de informação à
unidade de controlo acerca do estado das baterias, isto é, fornecer informação quanto ao
SOC das baterias, temperatura a que as baterias se encontram, tensão das baterias e o fluxo
de energia/potência que o sistema está a realizar. Este tipo de sistemas contém um circuito
de balanceamento das células que compõem o pack de baterias. Esse circuito de
balanceamento poderá apresentar as tipologias de balanceamento que foram referidas
anteriormente. No entanto a topologia que irá ser abordada é a topologia de balanceamento
ativo, isto porque ao ser uma topologia do tipo ativo irá existir menos perdas de energia e um
maior rendimento do processo de balanceamento das células, sendo que as perdas que se irão
verificar dizem respeito à comutação dos semicondutores que quando passarem para o estado
ativo, irão proceder à seleção das baterias que farão a troca de energia. Dentro das
topologias de balanceamento ativo que existem optou-se por escolher a topologia Multi-
Indutor.
3.3 - Sistema ICE
Para caraterizar esta parte do sistema é necessário ter em consideração que este sistema
vai ser composto por um ICE, por um gerador e por um EPC. Este sistema será uma fonte de
energia para o sistema, no qual teremos um processo de transformação de energia mecânica
em energia elétrica. O motor de combustão interna permitirá obter a energia mecânica a
partir da queima de um combustível fóssil. A energia mecânica produzida pelo ICE será
entregue ao gerador que permitirá obter a energia elétrica. Posteriormente, esta energia, irá
ser entregue ao barramento CC através do EPC.
Para controlo desta parte do sistema existem duas principais estratégias de controlo e
ambas tem em conta a finalidade que se pretende dar ao sistema global, dependendo do tipo
de condução que se pretende para o veículo. No caso do VEH ter como finalidade circular
frequentemente no pára-arranca, a estratégia de controlo que melhor se adequa a este
sistema é a estratégia de controlo de manter o SOC num nível alto e constante. Neste caso,
teremos o sistema ICE como fonte primária de energia e a fonte secundária de energia serão
as baterias. No caso, em que se pretende que o VEH circule por longos períodos de tempo
com pouca variação de velocidade e em que a maior parte da circulação do VEH seja feita a
uma velocidade constante, a estratégia de controlo que melhor se adequa a este tipo de
circulação é a estratégia do termóstato, que também é conhecida por estratégia de controlo
ON/OFF do ICE. Esta estratégia permitirá o ICE funcionar no regime de rendimento ótimo,
fazendo com que as baterias trabalhem entre dois valores do SOC, sendo que o ICE ficará no
estado ativo (ON), no caso em que as baterias atingem o nível minino pré-estabelecido do
27
SOC e no estado desativo (OFF) no caso do SOC atingir o nível máximo inicialmente
estabelecido.
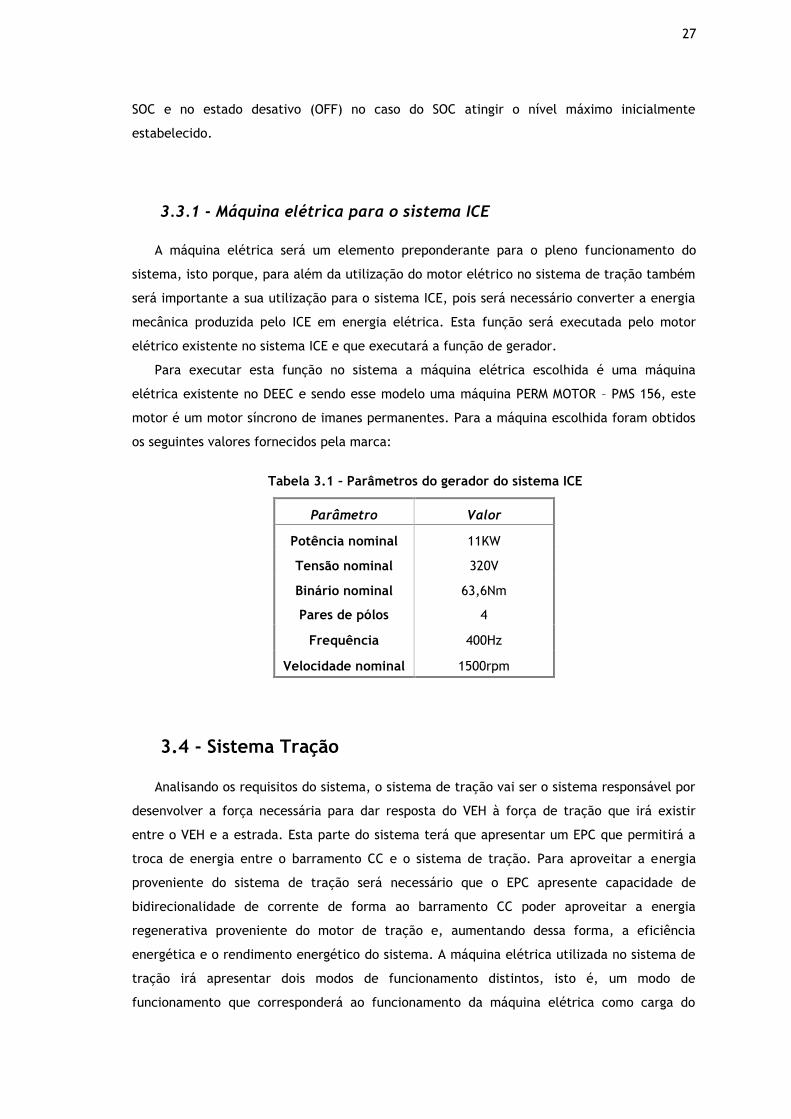
3.3.1 - Máquina elétrica para o sistema ICE
A máquina elétrica será um elemento preponderante para o pleno funcionamento do
sistema, isto porque, para além da utilização do motor elétrico no sistema de tração também
será importante a sua utilização para o sistema ICE, pois será necessário converter a energia
mecânica produzida pelo ICE em energia elétrica. Esta função será executada pelo motor
elétrico existente no sistema ICE e que executará a função de gerador.
Para executar esta função no sistema a máquina elétrica escolhida é uma máquina
elétrica existente no DEEC e sendo esse modelo uma máquina PERM MOTOR – PMS 156, este
motor é um motor síncrono de imanes permanentes. Para a máquina escolhida foram obtidos
os seguintes valores fornecidos pela marca:
Tabela 3.1 – Parâmetros do gerador do sistema ICE
Parâmetro Valor
Potência nominal 11KW
Tensão nominal 320V
Binário nominal 63,6Nm
Pares de pólos 4
Frequência 400Hz
Velocidade nominal 1500rpm
3.4 - Sistema Tração
Analisando os requisitos do sistema, o sistema de tração vai ser o sistema responsável por
desenvolver a força necessária para dar resposta do VEH à força de tração que irá existir
entre o VEH e a estrada. Esta parte do sistema terá que apresentar um EPC que permitirá a
troca de energia entre o barramento CC e o sistema de tração. Para aproveitar a energia
proveniente do sistema de tração será necessário que o EPC apresente capacidade de
bidirecionalidade de corrente de forma ao barramento CC poder aproveitar a energia
regenerativa proveniente do motor de tração e, aumentando dessa forma, a eficiência
energética e o rendimento energético do sistema. A máquina elétrica utilizada no sistema de
tração irá apresentar dois modos de funcionamento distintos, isto é, um modo de
funcionamento que corresponderá ao funcionamento da máquina elétrica como carga do
28 Arquitetura Funcional do Sistema
sistema, sendo que a energia fornecida para a máquina elétrica será proveniente do
barramento CC e o outro modo corresponderá ao funcionamento por parte da máquina
elétrica em regime de gerador, e que corresponderá ao fornecimento de energia para o
barramento CC a partir do aproveitamento da energia regenerativa.
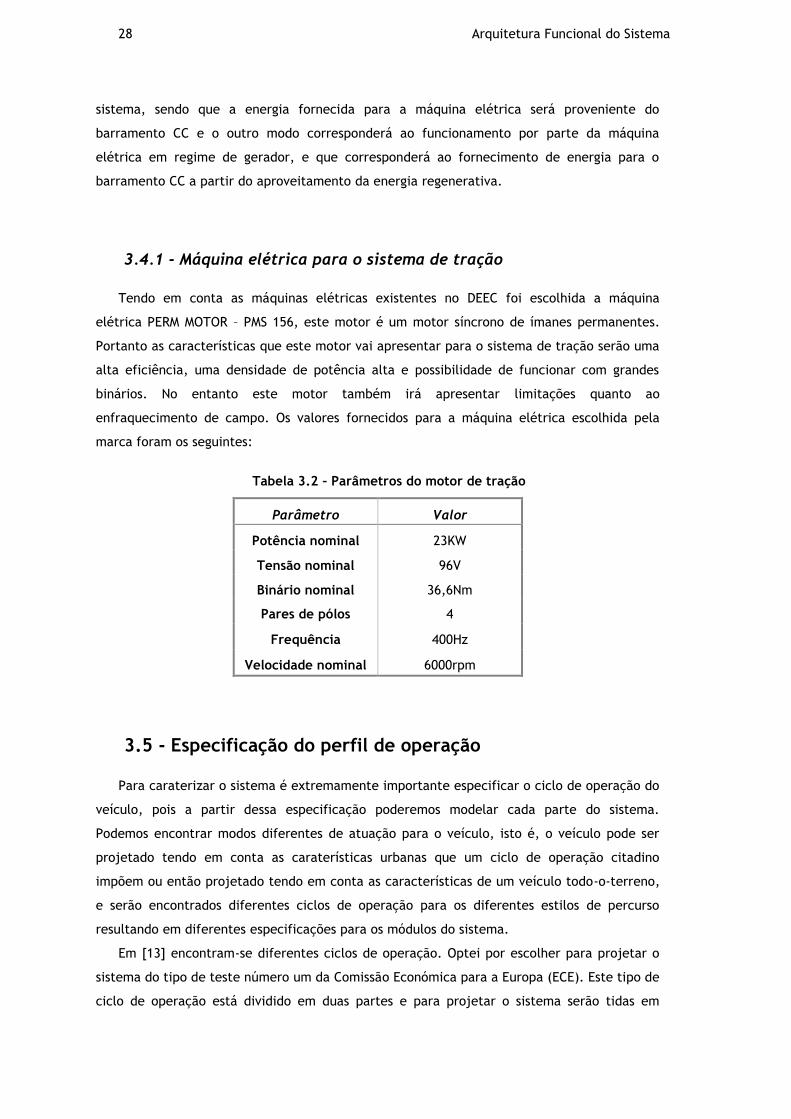
3.4.1 - Máquina elétrica para o sistema de tração
Tendo em conta as máquinas elétricas existentes no DEEC foi escolhida a máquina
elétrica PERM MOTOR – PMS 156, este motor é um motor síncrono de ímanes permanentes.
Portanto as características que este motor vai apresentar para o sistema de tração serão uma
alta eficiência, uma densidade de potência alta e possibilidade de funcionar com grandes
binários. No entanto este motor também irá apresentar limitações quanto ao
enfraquecimento de campo. Os valores fornecidos para a máquina elétrica escolhida pela
marca foram os seguintes:
Tabela 3.2 – Parâmetros do motor de tração
Parâmetro Valor
Potência nominal 23KW
Tensão nominal 96V
Binário nominal 36,6Nm
Pares de pólos 4
Frequência 400Hz
Velocidade nominal 6000rpm
3.5 - Especificação do perfil de operação
Para caraterizar o sistema é extremamente importante especificar o ciclo de operação do
veículo, pois a partir dessa especificação poderemos modelar cada parte do sistema.
Podemos encontrar modos diferentes de atuação para o veículo, isto é, o veículo pode ser
projetado tendo em conta as caraterísticas urbanas que um ciclo de operação citadino
impõem ou então projetado tendo em conta as características de um veículo todo-o-terreno,
e serão encontrados diferentes ciclos de operação para os diferentes estilos de percurso
resultando em diferentes especificações para os módulos do sistema.
Em [13] encontram-se diferentes ciclos de operação. Optei por escolher para projetar o
sistema do tipo de teste número um da Comissão Económica para a Europa (ECE). Este tipo de
ciclo de operação está dividido em duas partes e para projetar o sistema serão tidas em
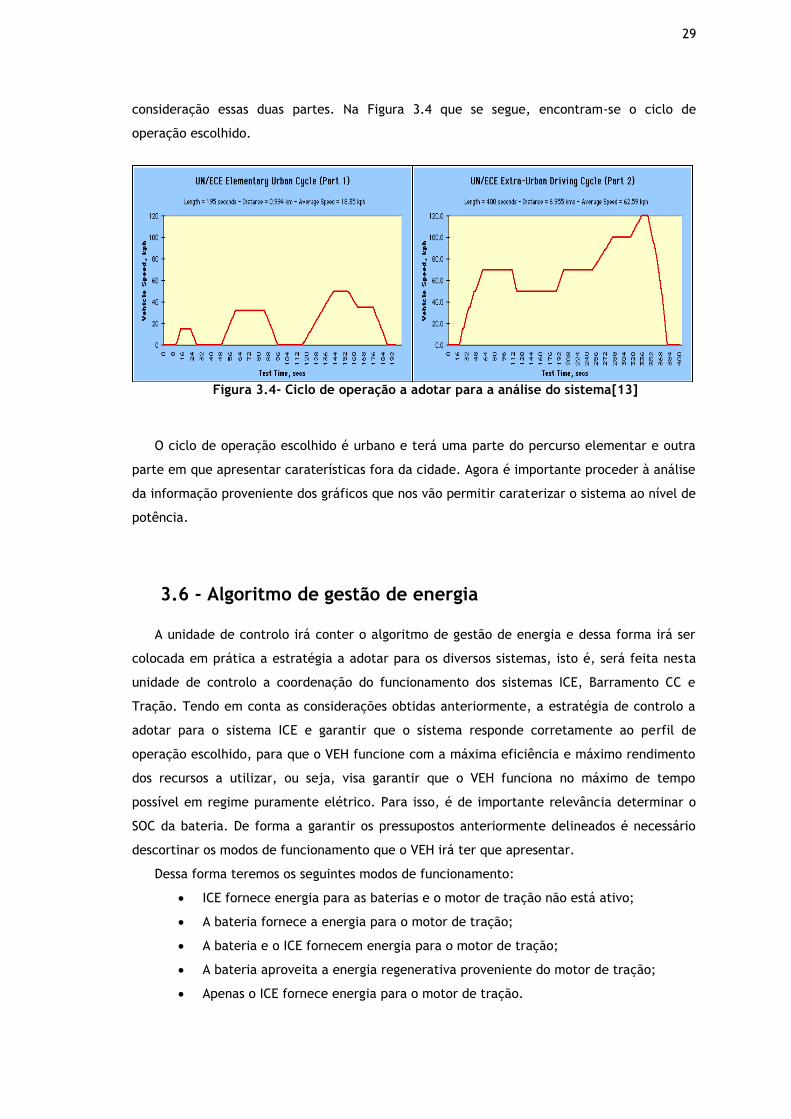
29
consideração essas duas partes. Na Figura 3.4 que se segue, encontram-se o ciclo de
operação escolhido.
Figura 3.4- Ciclo de operação a adotar para a análise do sistema[13]
O ciclo de operação escolhido é urbano e terá uma parte do percurso elementar e outra
parte em que apresentar caraterísticas fora da cidade. Agora é importante proceder à análise
da informação proveniente dos gráficos que nos vão permitir caraterizar o sistema ao nível de
potência.
3.6 - Algoritmo de gestão de energia
A unidade de controlo irá conter o algoritmo de gestão de energia e dessa forma irá ser
colocada em prática a estratégia a adotar para os diversos sistemas, isto é, será feita nesta
unidade de controlo a coordenação do funcionamento dos sistemas ICE, Barramento CC e
Tração. Tendo em conta as considerações obtidas anteriormente, a estratégia de controlo a
adotar para o sistema ICE e garantir que o sistema responde corretamente ao perfil de
operação escolhido, para que o VEH funcione com a máxima eficiência e máximo rendimento
dos recursos a utilizar, ou seja, visa garantir que o VEH funciona no máximo de tempo
possível em regime puramente elétrico. Para isso, é de importante relevância determinar o
SOC da bateria. De forma a garantir os pressupostos anteriormente delineados é necessário
descortinar os modos de funcionamento que o VEH irá ter que apresentar.
Dessa forma teremos os seguintes modos de funcionamento:
ICE fornece energia para as baterias e o motor de tração não está ativo;
A bateria fornece a energia para o motor de tração;
A bateria e o ICE fornecem energia para o motor de tração;
A bateria aproveita a energia regenerativa proveniente do motor de tração;
Apenas o ICE fornece energia para o motor de tração.

31
Capítulo 4
Modelação do Sistema de Armazenamento de energia
Esta parte do sistema irá consistir na modelação do sistema de armazenamento de
energia. Esta unidade de armazenamento consiste num conjunto de baterias de ácido de
chumbo, em que cada bateria apresenta as seguintes características: 12AH de capacidade
nominal e 12 volts de tensão nominal.
Tendo em conta a preponderância que a bateria apresenta para o VEH, foi necessário
chegar a um modelo para a bateria. Dessa forma será mais precisa a simulação do sistema e
possibilitará tornar o sistema de controlo eficiente, visto este necessitar da informação sobre
a bateria, sendo que o SOC da bateria é um dos parâmetros essenciais para realizar o controlo
sobre o VEH.
Como foi visto anteriormente existem várias formas de se modelar as baterias. No
entanto, optou-se pelo modelo presente em [14]. O modelo escolhido para a modelação da
bateria vai então consistir em ter uma fonte de tensão controlada em série com uma
resistência que representa a resistência interna da bateria. Como é possível observar pela
Figura 4.1, a fonte de tensão permitirá caraterizar o funcionamento da bateria, pois o seu
valor sofre influência dos vários parâmetros, sendo que a única variável de estado é o SOC.
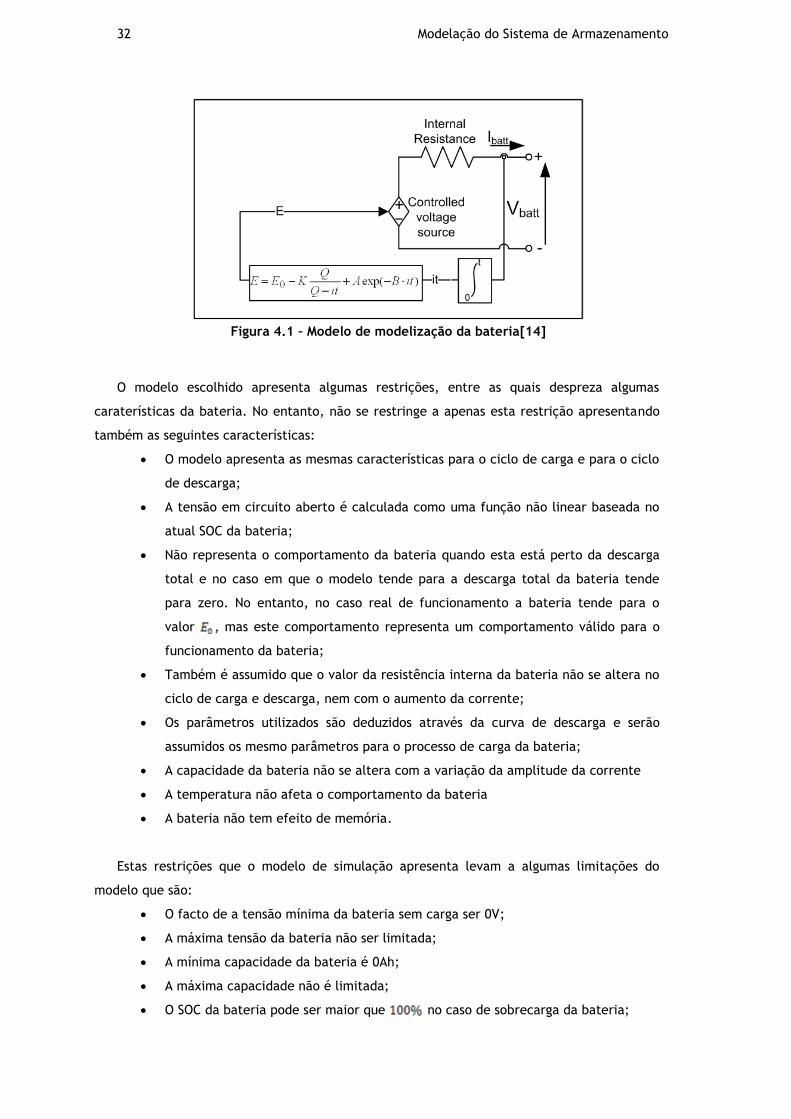
32 Modelação do Sistema de Armazenamento
Figura 4.1 – Modelo de modelização da bateria[14]
O modelo escolhido apresenta algumas restrições, entre as quais despreza algumas
caraterísticas da bateria. No entanto, não se restringe a apenas esta restrição apresentando
também as seguintes características:
O modelo apresenta as mesmas características para o ciclo de carga e para o ciclo
de descarga;
A tensão em circuito aberto é calculada como uma função não linear baseada no
atual SOC da bateria;
Não representa o comportamento da bateria quando esta está perto da descarga
total e no caso em que o modelo tende para a descarga total da bateria tende
para zero. No entanto, no caso real de funcionamento a bateria tende para o
valor , mas este comportamento representa um comportamento válido para o
funcionamento da bateria;
Também é assumido que o valor da resistência interna da bateria não se altera no
ciclo de carga e descarga, nem com o aumento da corrente;
Os parâmetros utilizados são deduzidos através da curva de descarga e serão
assumidos os mesmo parâmetros para o processo de carga da bateria;
A capacidade da bateria não se altera com a variação da amplitude da corrente
A temperatura não afeta o comportamento da bateria
A bateria não tem efeito de memória.
Estas restrições que o modelo de simulação apresenta levam a algumas limitações do
modelo que são:
O facto de a tensão mínima da bateria sem carga ser 0V;
A máxima tensão da bateria não ser limitada;
A mínima capacidade da bateria é 0Ah;
A máxima capacidade não é limitada;
O SOC da bateria pode ser maior que no caso de sobrecarga da bateria;
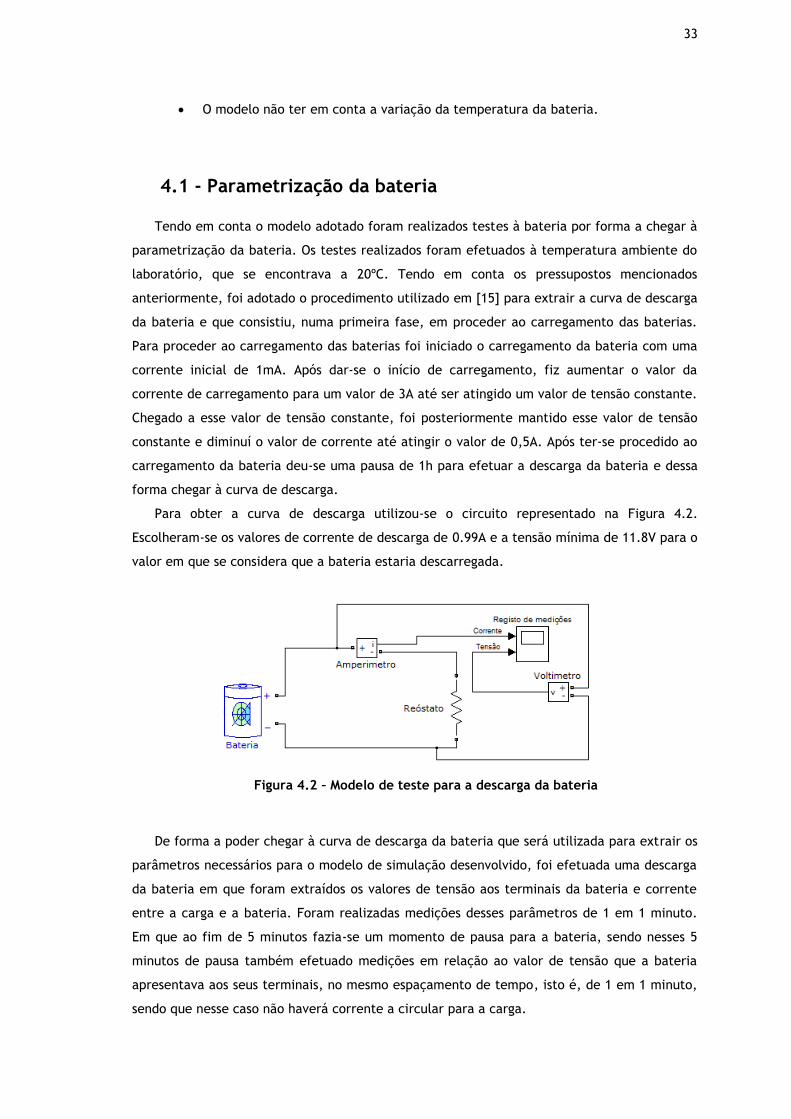
33
O modelo não ter em conta a variação da temperatura da bateria.
4.1 - Parametrização da bateria
Tendo em conta o modelo adotado foram realizados testes à bateria por forma a chegar à
parametrização da bateria. Os testes realizados foram efetuados à temperatura ambiente do
laboratório, que se encontrava a 20ºC. Tendo em conta os pressupostos mencionados
anteriormente, foi adotado o procedimento utilizado em [15] para extrair a curva de descarga
da bateria e que consistiu, numa primeira fase, em proceder ao carregamento das baterias.
Para proceder ao carregamento das baterias foi iniciado o carregamento da bateria com uma
corrente inicial de 1mA. Após dar-se o início de carregamento, fiz aumentar o valor da
corrente de carregamento para um valor de 3A até ser atingido um valor de tensão constante.
Chegado a esse valor de tensão constante, foi posteriormente mantido esse valor de tensão
constante e diminuí o valor de corrente até atingir o valor de 0,5A. Após ter-se procedido ao
carregamento da bateria deu-se uma pausa de 1h para efetuar a descarga da bateria e dessa
forma chegar à curva de descarga.
Para obter a curva de descarga utilizou-se o circuito representado na Figura 4.2.
Escolheram-se os valores de corrente de descarga de 0.99A e a tensão mínima de 11.8V para o
valor em que se considera que a bateria estaria descarregada.
Figura 4.2 – Modelo de teste para a descarga da bateria
De forma a poder chegar à curva de descarga da bateria que será utilizada para extrair os
parâmetros necessários para o modelo de simulação desenvolvido, foi efetuada uma descarga
da bateria em que foram extraídos os valores de tensão aos terminais da bateria e corrente
entre a carga e a bateria. Foram realizadas medições desses parâmetros de 1 em 1 minuto.
Em que ao fim de 5 minutos fazia-se um momento de pausa para a bateria, sendo nesses 5
minutos de pausa também efetuado medições em relação ao valor de tensão que a bateria
apresentava aos seus terminais, no mesmo espaçamento de tempo, isto é, de 1 em 1 minuto,
sendo que nesse caso não haverá corrente a circular para a carga.
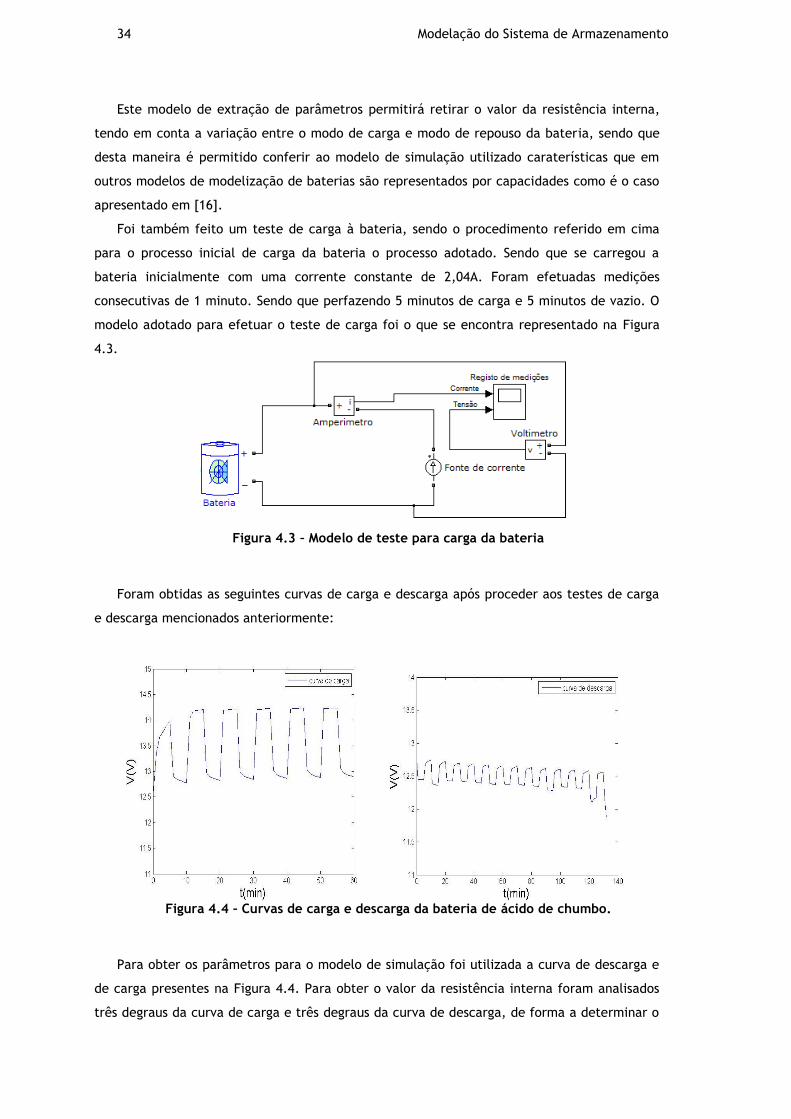
34 Modelação do Sistema de Armazenamento
Este modelo de extração de parâmetros permitirá retirar o valor da resistência interna,
tendo em conta a variação entre o modo de carga e modo de repouso da bateria, sendo que
desta maneira é permitido conferir ao modelo de simulação utilizado caraterísticas que em
outros modelos de modelização de baterias são representados por capacidades como é o caso
apresentado em [16].
Foi também feito um teste de carga à bateria, sendo o procedimento referido em cima
para o processo inicial de carga da bateria o processo adotado. Sendo que se carregou a
bateria inicialmente com uma corrente constante de 2,04A. Foram efetuadas medições
consecutivas de 1 minuto. Sendo que perfazendo 5 minutos de carga e 5 minutos de vazio. O
modelo adotado para efetuar o teste de carga foi o que se encontra representado na Figura
4.3.
Figura 4.3 – Modelo de teste para carga da bateria
Foram obtidas as seguintes curvas de carga e descarga após proceder aos testes de carga
e descarga mencionados anteriormente:
Figura 4.4 – Curvas de carga e descarga da bateria de ácido de chumbo.
Para obter os parâmetros para o modelo de simulação foi utilizada a curva de descarga e
de carga presentes na Figura 4.4. Para obter o valor da resistência interna foram analisados
três degraus da curva de carga e três degraus da curva de descarga, de forma a determinar o
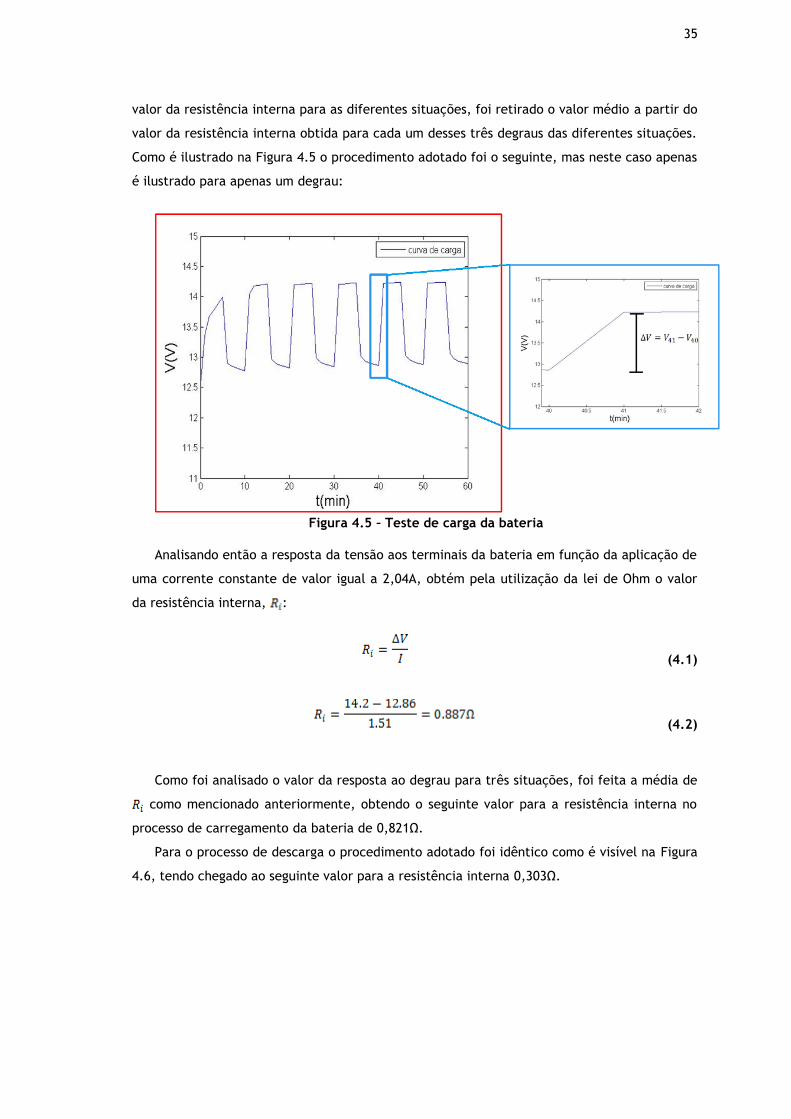
35
valor da resistência interna para as diferentes situações, foi retirado o valor médio a partir do
valor da resistência interna obtida para cada um desses três degraus das diferentes situações.
Como é ilustrado na Figura 4.5 o procedimento adotado foi o seguinte, mas neste caso apenas
é ilustrado para apenas um degrau:
Figura 4.5 – Teste de carga da bateria
Analisando então a resposta da tensão aos terminais da bateria em função da aplicação de
uma corrente constante de valor igual a 2,04A, obtém pela utilização da lei de Ohm o valor
da resistência interna, :
(4.1)
(4.2)
Como foi analisado o valor da resposta ao degrau para três situações, foi feita a média de
como mencionado anteriormente, obtendo o seguinte valor para a resistência interna no
processo de carregamento da bateria de 0,821Ω.
Para o processo de descarga o procedimento adotado foi idêntico como é visível na Figura
4.6, tendo chegado ao seguinte valor para a resistência interna 0,303Ω.
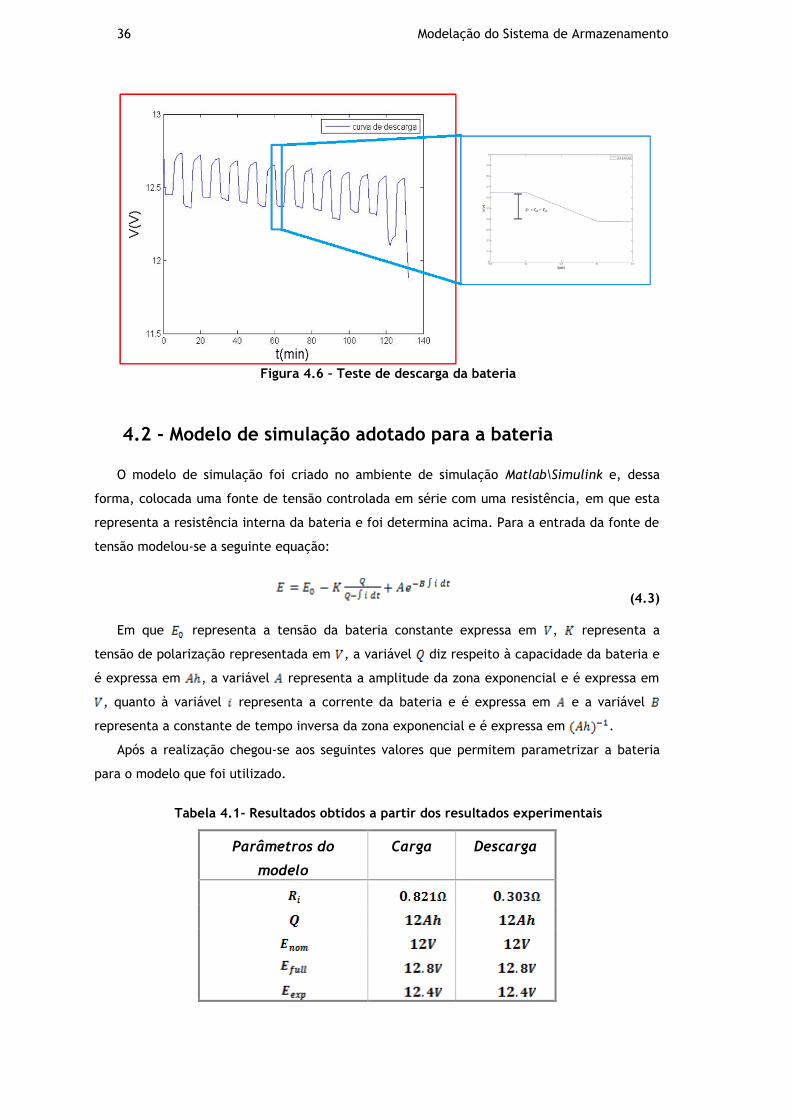
36 Modelação do Sistema de Armazenamento
Figura 4.6 – Teste de descarga da bateria
4.2 - Modelo de simulação adotado para a bateria
O modelo de simulação foi criado no ambiente de simulação Matlab\Simulink e, dessa
forma, colocada uma fonte de tensão controlada em série com uma resistência, em que esta
representa a resistência interna da bateria e foi determina acima. Para a entrada da fonte de
tensão modelou-se a seguinte equação:
(4.3)
Em que representa a tensão da bateria constante expressa em , representa a
tensão de polarização representada em , a variável diz respeito à capacidade da bateria e
é expressa em , a variável representa a amplitude da zona exponencial e é expressa em
, quanto à variável representa a corrente da bateria e é expressa em e a variável
representa a constante de tempo inversa da zona exponencial e é expressa em .
Após a realização chegou-se aos seguintes valores que permitem parametrizar a bateria
para o modelo que foi utilizado.
Tabela 4.1- Resultados obtidos a partir dos resultados experimentais
Parâmetros do
modelo
Carga Descarga
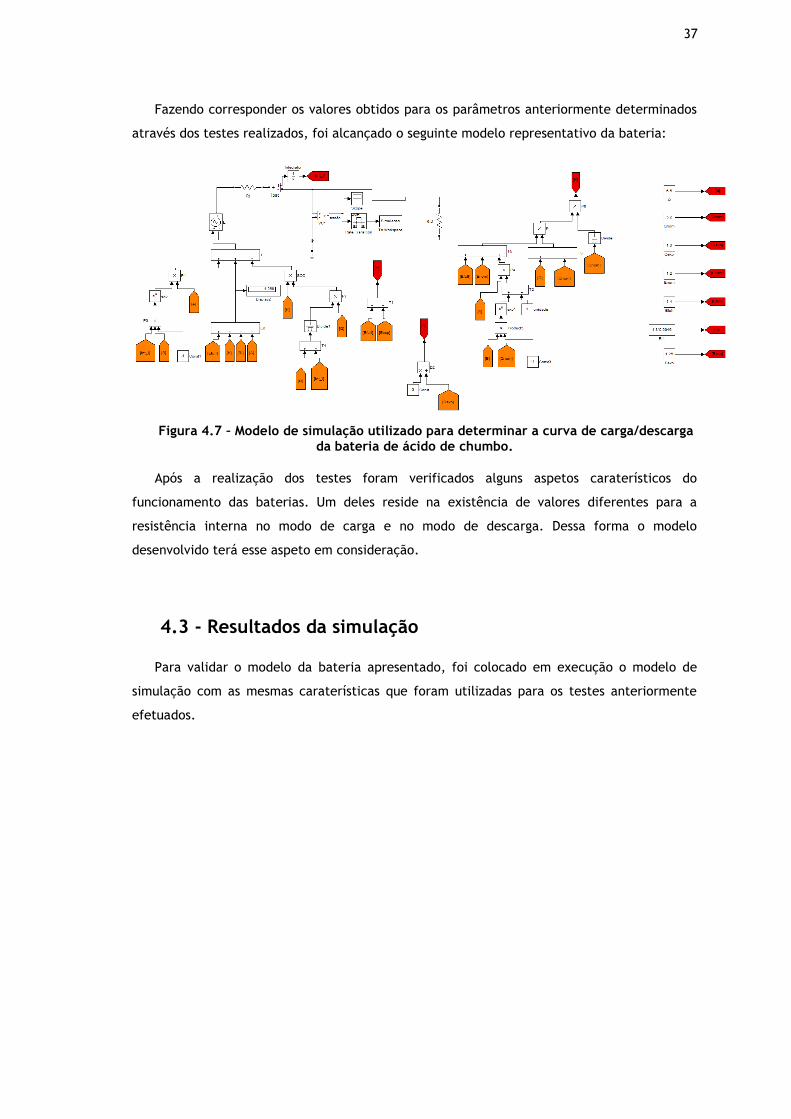
37
Fazendo corresponder os valores obtidos para os parâmetros anteriormente determinados
através dos testes realizados, foi alcançado o seguinte modelo representativo da bateria:
Figura 4.7 – Modelo de simulação utilizado para determinar a curva de carga/descarga
da bateria de ácido de chumbo.
Após a realização dos testes foram verificados alguns aspetos caraterísticos do
funcionamento das baterias. Um deles reside na existência de valores diferentes para a
resistência interna no modo de carga e no modo de descarga. Dessa forma o modelo
desenvolvido terá esse aspeto em consideração.
4.3 - Resultados da simulação
Para validar o modelo da bateria apresentado, foi colocado em execução o modelo de
simulação com as mesmas caraterísticas que foram utilizadas para os testes anteriormente
efetuados.
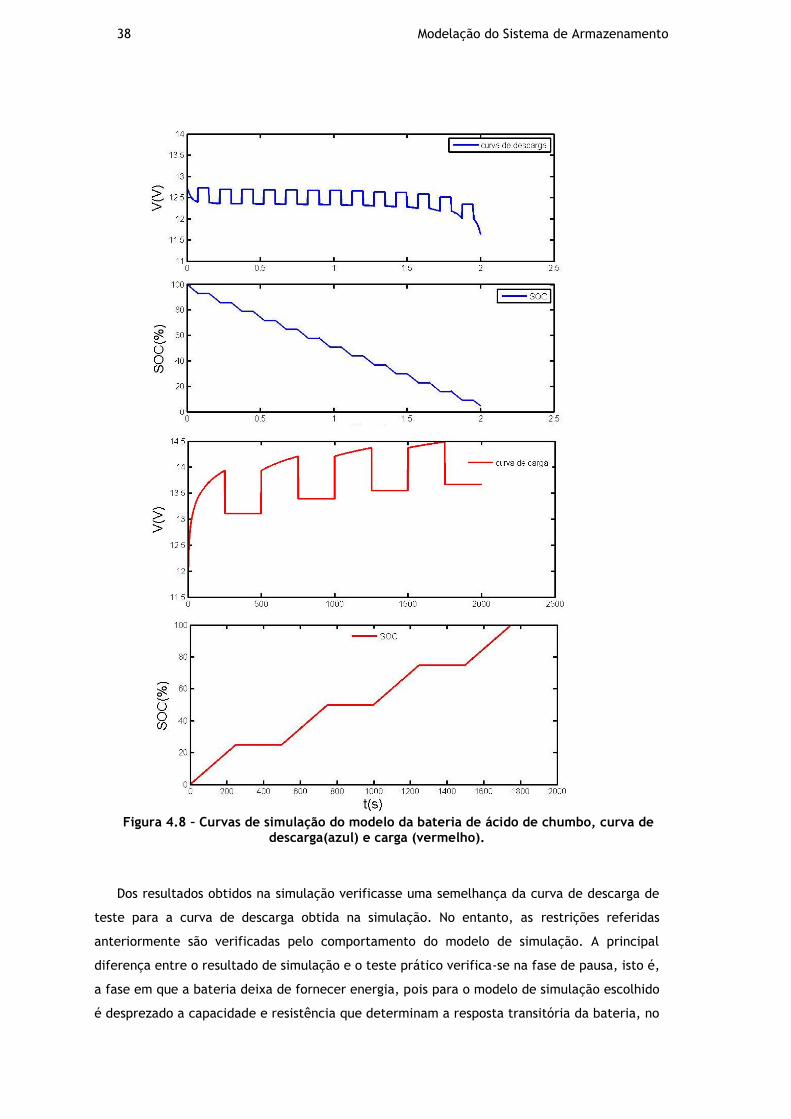
38 Modelação do Sistema de Armazenamento
Figura 4.8 – Curvas de simulação do modelo da bateria de ácido de chumbo, curva de
descarga(azul) e carga (vermelho).
Dos resultados obtidos na simulação verificasse uma semelhança da curva de descarga de
teste para a curva de descarga obtida na simulação. No entanto, as restrições referidas
anteriormente são verificadas pelo comportamento do modelo de simulação. A principal
diferença entre o resultado de simulação e o teste prático verifica-se na fase de pausa, isto é,
a fase em que a bateria deixa de fornecer energia, pois para o modelo de simulação escolhido
é desprezado a capacidade e resistência que determinam a resposta transitória da bateria, no
39
entanto há outros modelos de simulação que modelizam esta resposta transitória como é o
caso referenciado em [16]. Este facto não é de grande relevância para o sistema que foi
projetado, já que esta característica das baterias que não é reportada neste modelo de
simulação não afeta a eficiência da estratégia de controlo a adotar.
Para cada modelo também é feita a caraterização do estado atual de carga da bateria de
forma a demonstrar a dinâmica da bateria. Tal como foi referido acima, no processo de carga
da bateria, esta excederá o SOC de 100%. No entanto, visto que a estratégia de controlo a
utilizar vai colocar a bateria a funcionar entre dois valores de SOC, sendo que o máximo valor
que delimita o fornecimento por parte da bateria de energia é inferior ao máximo valor do
SOC da bateria, este não causará nenhum entrave para o eficaz funcionamento da estratégia
de controlo adotada.
4.4 - Modelação da dinâmica do perfil de operação
É necessário perceber a dinâmica de funcionamento do veículo quando este se encontra
em circulação, para que se possa fazer um conveniente dimensionamento das fontes de
potência do sistema. No entanto, o principal enfâse a dar nesta modelação da dinâmica do
perfil de operação prende-se com o facto de o VEH responder eficazmente a um perfil de
operação tipo. Para tal, é necessário analisar quais as forças que interagem no funcionamento
regular do VEH. Isto porque é a interação entre todas as forças inerentes ao veículo que
permitem o movimento do veículo, sendo que estas forças estão referenciadas em [3]. Pela
segunda lei de Newton temos que a aceleração do veículo é:
(4.4)
Onde é a velocidade, em que é o somatório das forças causadas pelos esforços de
tração no veículo, é o somatório das forças resistivas causadas no movimento do veículo,
é o total da massa do veículo e é um fator de massa que converte as componentes inércias
de rotação em componentes translacional.
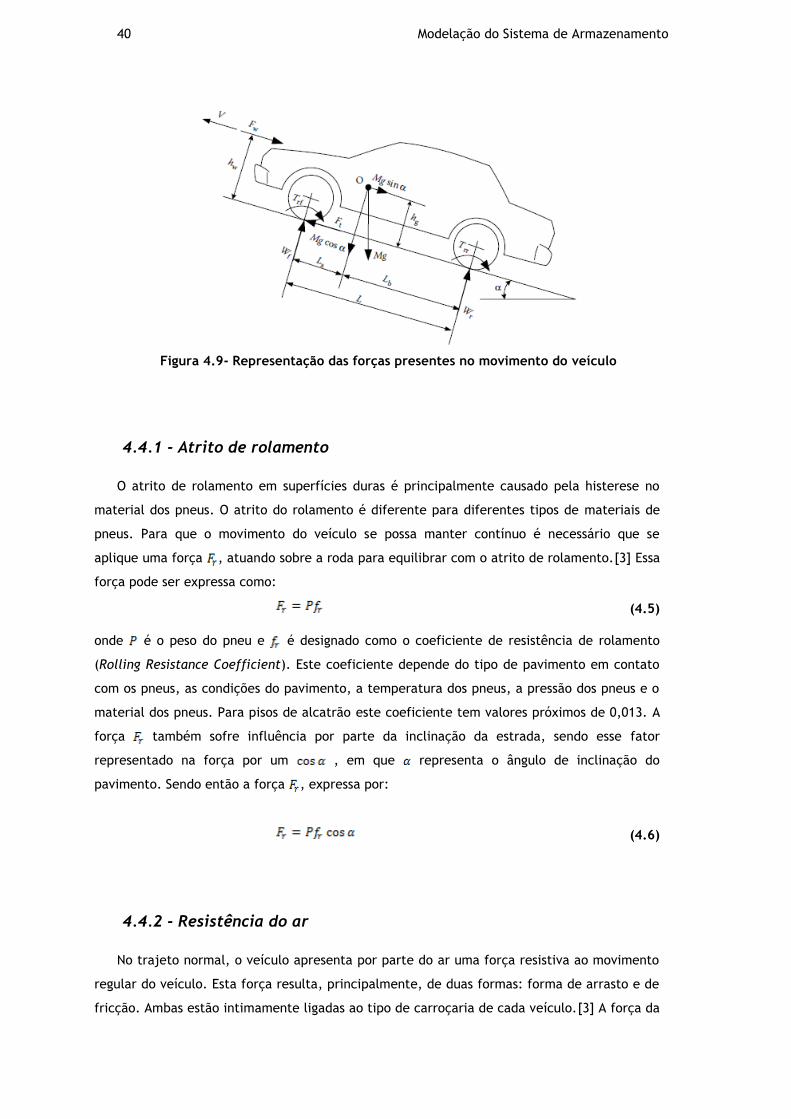
40 Modelação do Sistema de Armazenamento
Figura 4.9- Representação das forças presentes no movimento do veículo
4.4.1 - Atrito de rolamento
O atrito de rolamento em superfícies duras é principalmente causado pela histerese no
material dos pneus. O atrito do rolamento é diferente para diferentes tipos de materiais de
pneus. Para que o movimento do veículo se possa manter contínuo é necessário que se
aplique uma força , atuando sobre a roda para equilibrar com o atrito de rolamento.[3] Essa
força pode ser expressa como:
(4.5)
onde é o peso do pneu e é designado como o coeficiente de resistência de rolamento
(Rolling Resistance Coefficient). Este coeficiente depende do tipo de pavimento em contato
com os pneus, as condições do pavimento, a temperatura dos pneus, a pressão dos pneus e o
material dos pneus. Para pisos de alcatrão este coeficiente tem valores próximos de 0,013. A
força também sofre influência por parte da inclinação da estrada, sendo esse fator
representado na força por um , em que representa o ângulo de inclinação do
pavimento. Sendo então a força , expressa por:
(4.6)
4.4.2 - Resistência do ar
No trajeto normal, o veículo apresenta por parte do ar uma força resistiva ao movimento
regular do veículo. Esta força resulta, principalmente, de duas formas: forma de arrasto e de
fricção. Ambas estão intimamente ligadas ao tipo de carroçaria de cada veículo.[3] A força da
41
resistência do ar , é função da velocidade do veículo , da área frontal do veículo, , e a
densidade do ar :
(4.7)
onde é coeficiente de fricção do ar (aerodynamic drag coefficient) em função do tipo de
carcaça apresentado por cada veículo e é a componente da velocidade do vento que se
move na mesma direção do veículo.
4.4.3 - Força de resistência
Esta força consiste na força associada às subidas e descidas do veículo. Esta força permite
ajudar o movimento do veículo ou opor-se ao seu movimento. [3] No caso de o veículo estar
no sentido ascendente, esta força pode ser expressa da seguinte forma:
(4.8)
onde representa a massa do veículo, a aceleração da gravidade e é o grau de inclinação
do veículo face ao nível médio da superfície do mar.
4.4.4 - Força da aceleração
Força aplicada ao veículo para que este se mova no sentido pretendido e intimamente
ligada ao movimento do veículo.[3] É expressa por:
(4.9)
onde é a massa do veículo e é a aceleração do veículo.
4.4.5 - Força de tração
A Força de tração corresponde ao somatório de todas as forças inerentes ao movimento
do veículo e descritas anteriormente e é expressa por:
(4.10)
4.4.6 - Binário
O binário representa a força rotacional aplicada aos pneus do veículo. É expressa por:
(4.11)
onde representa a força de tração e o raio do pneu do veículo. É necessário analisar o
binário necessário a desenvolver pelo motor de tração. Este surge associado aos rácios
42 Modelação do Sistema de Armazenamento
existentes na transmissão e na caixa de velocidades e também é necessário relacionar o
binário com a eficiência da transmissão , sendo expresso o binário do motor por:
(4.12)
4.4.7 - Potência do motor de tração
A potência do motor de tração surge associada então ao binário desenvolvido pelo motor,
tal como a velocidade a que este está a circular, sendo expressa por:
(4.13)
onde refere-se à velocidade angular do motor de tração e é expresso em rotações por
minuto. Ou também podendo ser expressa por:
(4.14)
onde representa a força total instantânea e a velocidade instantânea do veículo.
4.5 - Resultados do perfil de serviço
Tendo por base as forças descritas anteriormente foram determinadas as potências que o
sistema irá ter de ser capaz de fornecer, sendo mencionado na Tabela 4.2 as potências mais
importantes para o sistema, pois estas serão fundamentais para a projetar os vários módulos
do sistema. Foram tomadas considerações de forma a proceder ao cálculo das potências a ter
em conta para o perfil de operação utilizado. Portanto, foi considerado o valor máximo para a
força de resistência. Para isso foi considerado que a inclinação corresponderia ao valor nulo.
Foi também considerado para a velocidade do vento seria a 17km/h pois é o valor médio
anual da velocidade do vento em Portugal. O valor da massa do veículo considerado é de
520kg. Os valores de referência obtidos estão presentes na Tabela 4.2.
Portanto tendo em conta os valores obtidos para a potência correspondente ao perfil de
operação permite nos concluir que a potência que o ICE terá que apresentar será de 172W o
motor de tração terá que ser capaz de produzir a potência de 2520W e gerar a potência de
1163W. De forma a respeitar as potências anteriormente dimensionadas e validar o
funcionamento do sistema foi estipulado para o barramento das baterias uma tensão 48V e no
barramento do acoplamento elétrico, isto é, o barramento CC uma tensão de 100V.
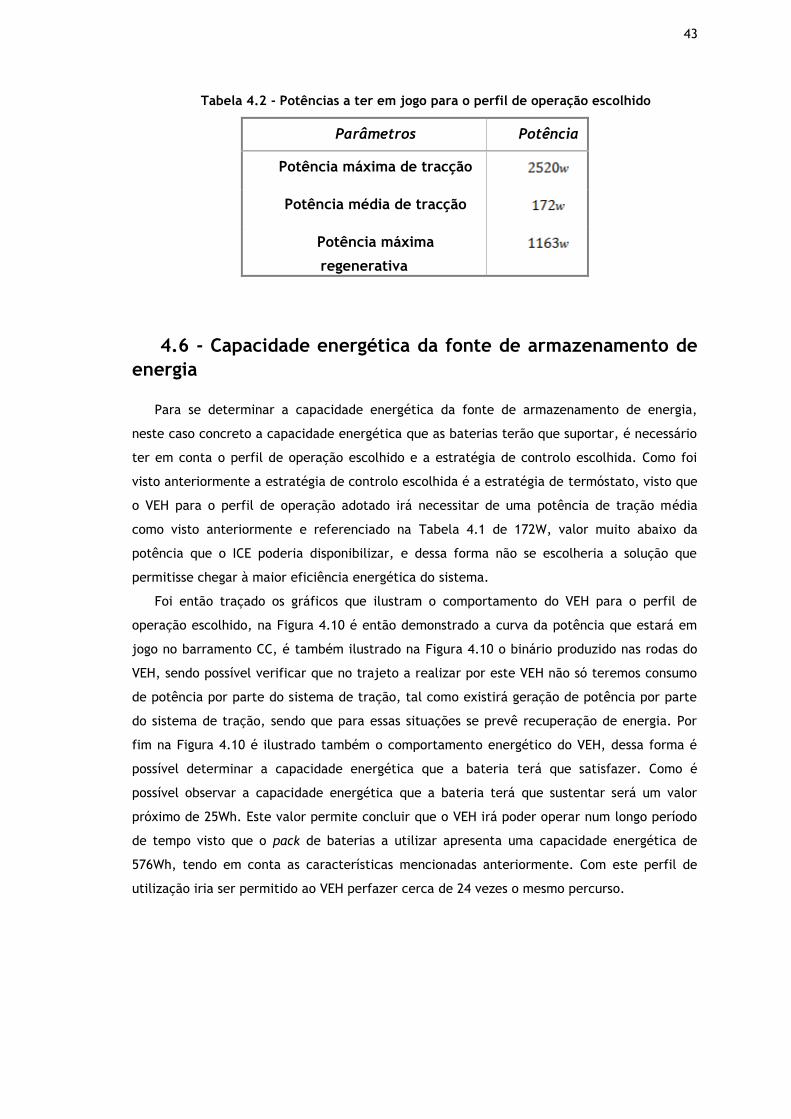
43
Tabela 4.2 - Potências a ter em jogo para o perfil de operação escolhido
Parâmetros Potência
Potência máxima de tracção
Potência média de tracção
Potência máxima
regenerativa
4.6 - Capacidade energética da fonte de armazenamento de
energia
Para se determinar a capacidade energética da fonte de armazenamento de energia,
neste caso concreto a capacidade energética que as baterias terão que suportar, é necessário
ter em conta o perfil de operação escolhido e a estratégia de controlo escolhida. Como foi
visto anteriormente a estratégia de controlo escolhida é a estratégia de termóstato, visto que
o VEH para o perfil de operação adotado irá necessitar de uma potência de tração média
como visto anteriormente e referenciado na Tabela 4.1 de 172W, valor muito abaixo da
potência que o ICE poderia disponibilizar, e dessa forma não se escolheria a solução que
permitisse chegar à maior eficiência energética do sistema.
Foi então traçado os gráficos que ilustram o comportamento do VEH para o perfil de
operação escolhido, na Figura 4.10 é então demonstrado a curva da potência que estará em
jogo no barramento CC, é também ilustrado na Figura 4.10 o binário produzido nas rodas do
VEH, sendo possível verificar que no trajeto a realizar por este VEH não só teremos consumo
de potência por parte do sistema de tração, tal como existirá geração de potência por parte
do sistema de tração, sendo que para essas situações se prevê recuperação de energia. Por
fim na Figura 4.10 é ilustrado também o comportamento energético do VEH, dessa forma é
possível determinar a capacidade energética que a bateria terá que satisfazer. Como é
possível observar a capacidade energética que a bateria terá que sustentar será um valor
próximo de 25Wh. Este valor permite concluir que o VEH irá poder operar num longo período
de tempo visto que o pack de baterias a utilizar apresenta uma capacidade energética de
576Wh, tendo em conta as características mencionadas anteriormente. Com este perfil de
utilização iria ser permitido ao VEH perfazer cerca de 24 vezes o mesmo percurso.
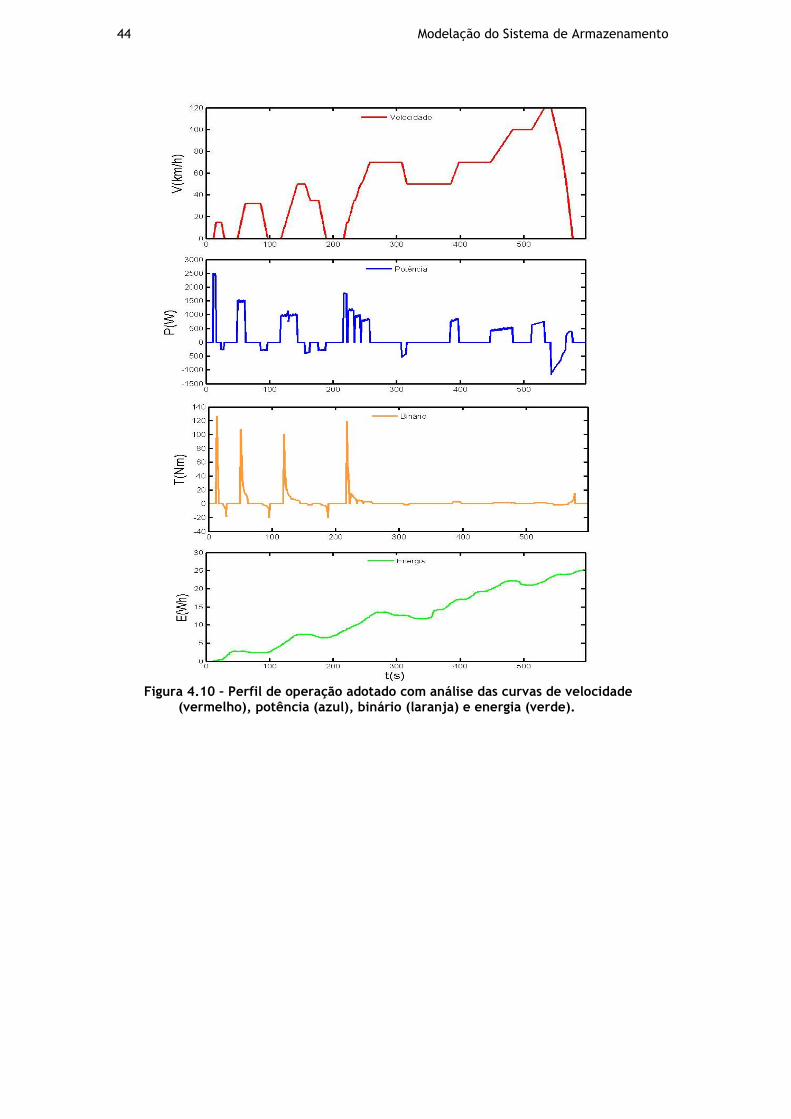
44 Modelação do Sistema de Armazenamento
Figura 4.10 – Perfil de operação adotado com análise das curvas de velocidade
(vermelho), potência (azul), binário (laranja) e energia (verde).
45
Capítulo 5
Modelação do Barramento CC
Para a modelação deste sistema terá que ser então desenvolvido um EPC CC/CC que
permita a troca de energia entre o barramento CC e as baterias. Este EPC terá em conta os
requisitos anteriormente mencionados. Foram utilizados os softwares PSIM e Matlab de forma
a permitir simular o funcionamento do conversor CC/CC. Para desenvolver o sistema de
balanceamento das baterias também foram utilizados os softwares acima mencionados. Para
implementar a simulação deste sistema foi utlizada uma sinergia entre os softwares
mencionados anteriormente. Sendo que a ferramenta de simulação Matlab possui um bloco
de conexão destas duas ferramentas de simulação, o bloco é denominado por SimCoupler,
sendo que este bloco permitiu transpor a parte de controlo a efetuar sobre os elementos de
potência para o Matlab e apenas utilizar elementos de potência no software PSIM. Esta opção
de ter dois softwares a interagirem permite desenvolver um modelo de controlo que poderá
facilitar a integração da parte de controlo ao nível prático, pois existem processadores que
reconhecem os blocos de simulação utilizados no software Matlab.
5.1 - Conversores CC/CC
Existem diversos conversores que podem satisfazer os requisitos do sistema, esses são
mencionados em [17], estes conversores vão apresentam diferentes topologias o que vai levar
a características de funcionamento diferentes, pois diferem um dos outros em relação aos
elementos passivos e ativos que apresentam. Como essas topologias diferem umas das outras
em termos de elementos passivos e ativos, como é possível observar pela Figura 5.1, temos
níveis de rendimento da transferência de energia diferentes, pois nas topologias que
apresentam mais elementos passivos irá apresentar mais perdas, tal como o tamanho e peso
dos EPC irão sofrer um aumento.
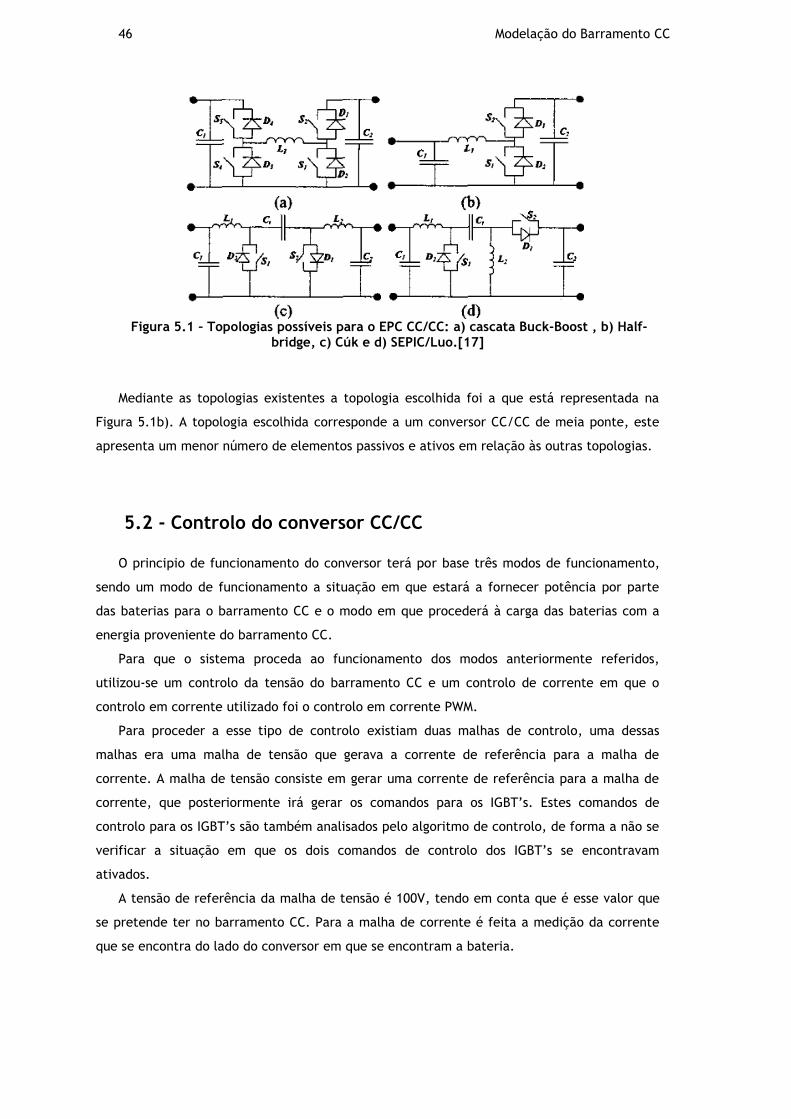
46 Modelação do Barramento CC
Figura 5.1 – Topologias possíveis para o EPC CC/CC: a) cascata Buck-Boost , b) Half-
bridge, c) Cúk e d) SEPIC/Luo.[17]
Mediante as topologias existentes a topologia escolhida foi a que está representada na
Figura 5.1b). A topologia escolhida corresponde a um conversor CC/CC de meia ponte, este
apresenta um menor número de elementos passivos e ativos em relação às outras topologias.
5.2 - Controlo do conversor CC/CC
O principio de funcionamento do conversor terá por base três modos de funcionamento,
sendo um modo de funcionamento a situação em que estará a fornecer potência por parte
das baterias para o barramento CC e o modo em que procederá à carga das baterias com a
energia proveniente do barramento CC.
Para que o sistema proceda ao funcionamento dos modos anteriormente referidos,
utilizou-se um controlo da tensão do barramento CC e um controlo de corrente em que o
controlo em corrente utilizado foi o controlo em corrente PWM.
Para proceder a esse tipo de controlo existiam duas malhas de controlo, uma dessas
malhas era uma malha de tensão que gerava a corrente de referência para a malha de
corrente. A malha de tensão consiste em gerar uma corrente de referência para a malha de
corrente, que posteriormente irá gerar os comandos para os IGBT’s. Estes comandos de
controlo para os IGBT’s são também analisados pelo algoritmo de controlo, de forma a não se
verificar a situação em que os dois comandos de controlo dos IGBT’s se encontravam
ativados.
A tensão de referência da malha de tensão é 100V, tendo em conta que é esse valor que
se pretende ter no barramento CC. Para a malha de corrente é feita a medição da corrente
que se encontra do lado do conversor em que se encontram a bateria.
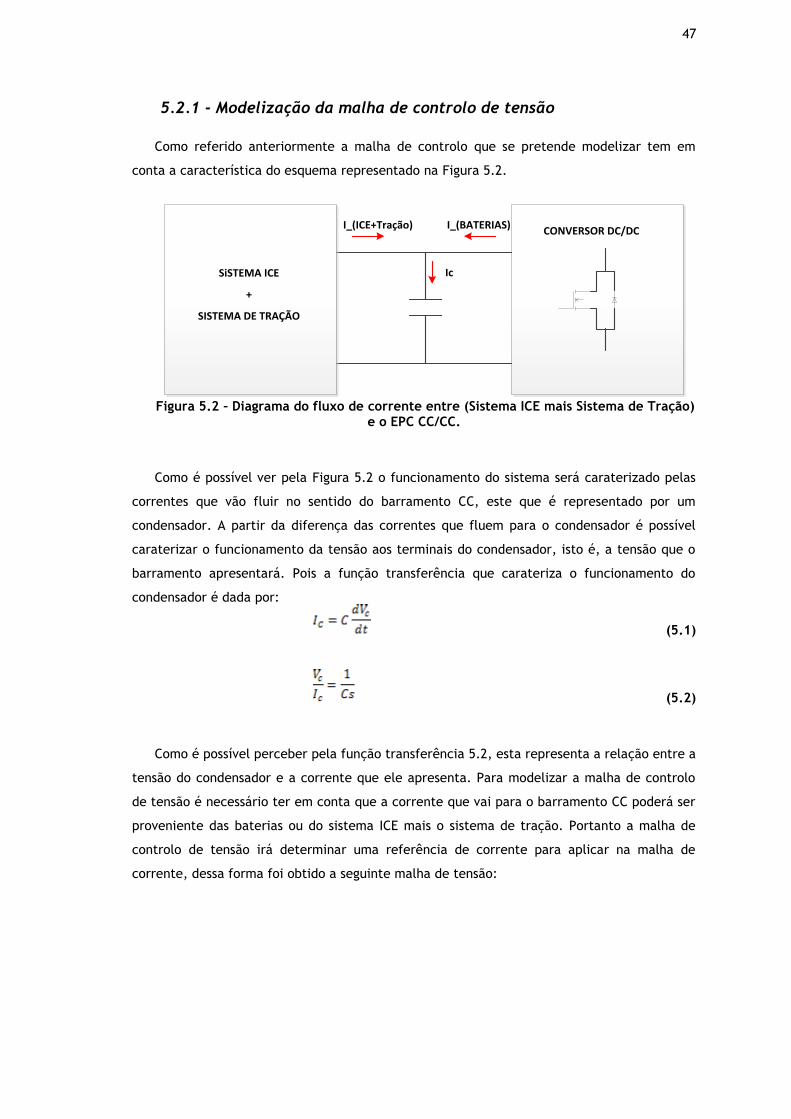
47
5.2.1 - Modelização da malha de controlo de tensão
Como referido anteriormente a malha de controlo que se pretende modelizar tem em
conta a característica do esquema representado na Figura 5.2.
CONVERSOR DC/DC
SiSTEMA ICE
+
SISTEMA DE TRAÇÃO
I_(ICE+Tração)
Ic
I_(BATERIAS)
Figura 5.2 – Diagrama do fluxo de corrente entre (Sistema ICE mais Sistema de Tração)
e o EPC CC/CC.
Como é possível ver pela Figura 5.2 o funcionamento do sistema será caraterizado pelas
correntes que vão fluir no sentido do barramento CC, este que é representado por um
condensador. A partir da diferença das correntes que fluem para o condensador é possível
caraterizar o funcionamento da tensão aos terminais do condensador, isto é, a tensão que o
barramento apresentará. Pois a função transferência que carateriza o funcionamento do
condensador é dada por:
(5.1)
(5.2)
Como é possível perceber pela função transferência 5.2, esta representa a relação entre a
tensão do condensador e a corrente que ele apresenta. Para modelizar a malha de controlo
de tensão é necessário ter em conta que a corrente que vai para o barramento CC poderá ser
proveniente das baterias ou do sistema ICE mais o sistema de tração. Portanto a malha de
controlo de tensão irá determinar uma referência de corrente para aplicar na malha de
corrente, dessa forma foi obtido a seguinte malha de tensão:

48 Modelação do Barramento CC
V_cc(Tensão do
barramento CC)
V_cc_ref*(Tensão do
barramento CC de referência)
PI I_ref
Figura 5.3 – Malha de tensão implementa
Na Figura 5.3 é ilustrada a malha de tensão utilizada, é de referir que o principal bloco
desta malha de controlo é o bloco referenciado por PI. O bloco PI apresenta uma função
transferência que tem por base modelizar o comportamento do erro da tensão e gerar uma
referência de corrente. A função transferência que modeliza o comportamento do bloco é
dada por:
(5.3)
(5.4)
Analisando a função transferência 5.4 , foi necessário analisar os valores das constantes
e a aplicar para obter o controlo desejado sobre o valor do erro de tensão obtido no
barramento CC e gerar uma corrente de referência para a malha de corrente.
5.2.2 - Modelização da malha de controlo de corrente
A malha de corrente terá como objetivo gerar os sinais de comando para o EPC CC/CC,
como o EPC CC/CC terá bidireccionalidade de corrente este terá que ter duas malhas de
controlo, permitindo que a corrente circule em ambos os sentidos.
49
I_(BATERIAS) I_(BATERIAS) BateriasCONVERSOR DC/DC
Figura 5.4 – Diagrama que ilustra o fluxo de corrente entre o EPC CC/CC e as baterias.
Para se desenvolver a malha de controlo da corrente é utilizada a corrente de referência
gerada no barramento CC, pois esta corrente ilustra o sentido da corrente no barramento e
dessa forma é procedida a análise sobre o modo como o conversor terá que aplicar o seu
controlo. A malha de corrente visa gerar o PWM, que irá permitir estabelecer o controlo
sobre os IGBT’s.
I_ref
I_BateriasCorrente das
bateriasPI
PWM_1
I_ref
I_BateriasCorrente das
bateriasPI
PWM_2
Processamento Lógico
g1
g2
Figura 5.5 – Malha de corrente para controlo do EPC CC/CC.
Mais uma vez teremos um PI que estabelecerá o controlo sobre o valor do erro de
corrente, após o PI irá ser estabelecido um valor de erro que irá ser comparado com uma
função que no caso em concreto é um dente de serra, após comparação destas duas entradas
será gerado o duty-cycle de cada um dos IGBT’s. Mais uma vez será necessário determinar as
constantes e que permitam um controlo eficaz sobre o processo. Após gerar o duty-
cycle de cada IGBT, este irá ser processado e posteriormente enviado para as gates dos
IGBT’s, como é ilustrado na Figura 5.5.
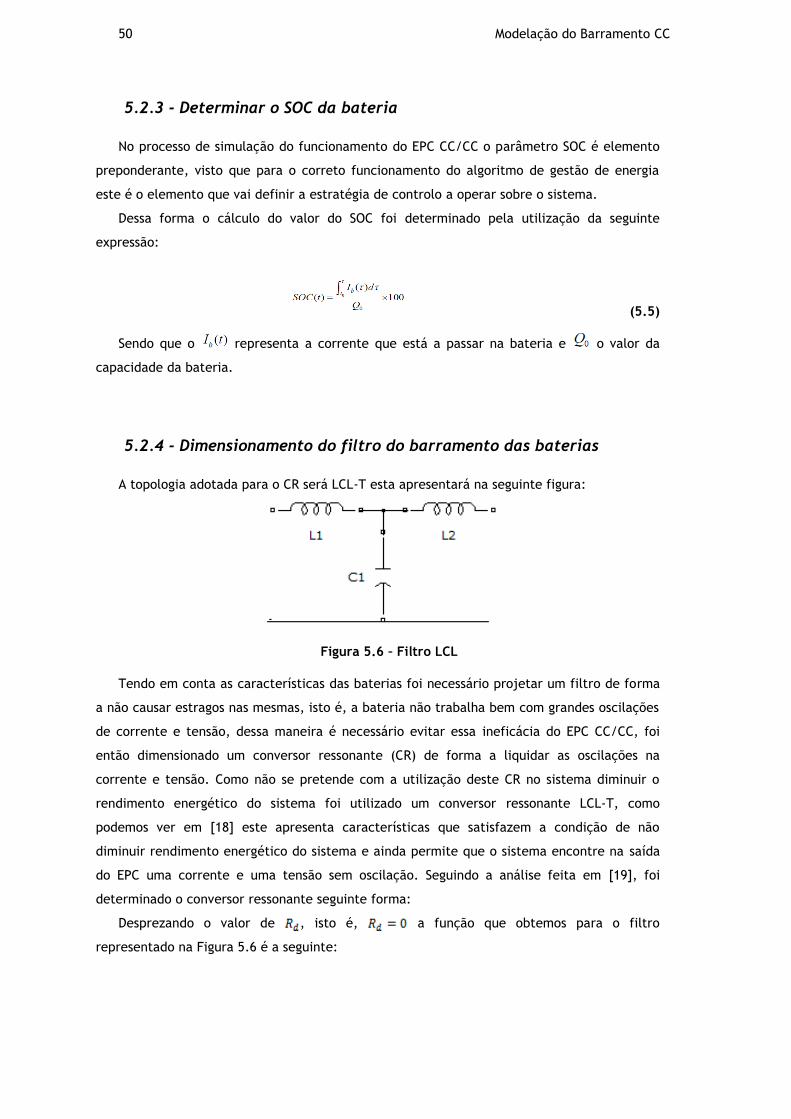
50 Modelação do Barramento CC
5.2.3 - Determinar o SOC da bateria
No processo de simulação do funcionamento do EPC CC/CC o parâmetro SOC é elemento
preponderante, visto que para o correto funcionamento do algoritmo de gestão de energia
este é o elemento que vai definir a estratégia de controlo a operar sobre o sistema.
Dessa forma o cálculo do valor do SOC foi determinado pela utilização da seguinte
expressão:
(5.5)
Sendo que o representa a corrente que está a passar na bateria e o valor da
capacidade da bateria.
5.2.4 - Dimensionamento do filtro do barramento das baterias
A topologia adotada para o CR será LCL-T esta apresentará na seguinte figura:
Figura 5.6 – Filtro LCL
Tendo em conta as características das baterias foi necessário projetar um filtro de forma
a não causar estragos nas mesmas, isto é, a bateria não trabalha bem com grandes oscilações
de corrente e tensão, dessa maneira é necessário evitar essa ineficácia do EPC CC/CC, foi
então dimensionado um conversor ressonante (CR) de forma a liquidar as oscilações na
corrente e tensão. Como não se pretende com a utilização deste CR no sistema diminuir o
rendimento energético do sistema foi utilizado um conversor ressonante LCL-T, como
podemos ver em [18] este apresenta características que satisfazem a condição de não
diminuir rendimento energético do sistema e ainda permite que o sistema encontre na saída
do EPC uma corrente e uma tensão sem oscilação. Seguindo a análise feita em [19], foi
determinado o conversor ressonante seguinte forma:
Desprezando o valor de , isto é, a função que obtemos para o filtro
representado na Figura 5.6 é a seguinte:
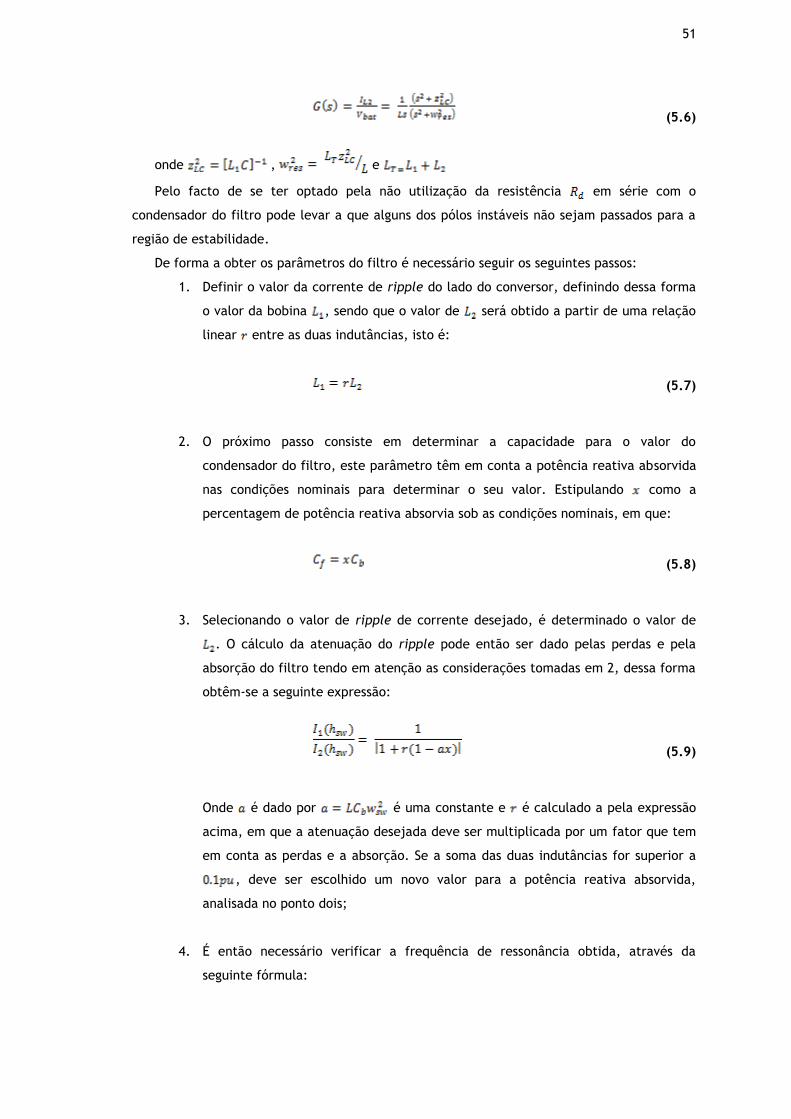
51
(5.6)
onde , e
Pelo facto de se ter optado pela não utilização da resistência em série com o
condensador do filtro pode levar a que alguns dos pólos instáveis não sejam passados para a
região de estabilidade.
De forma a obter os parâmetros do filtro é necessário seguir os seguintes passos:
1. Definir o valor da corrente de ripple do lado do conversor, definindo dessa forma
o valor da bobina , sendo que o valor de será obtido a partir de uma relação
linear entre as duas indutâncias, isto é:
(5.7)
2. O próximo passo consiste em determinar a capacidade para o valor do
condensador do filtro, este parâmetro têm em conta a potência reativa absorvida
nas condições nominais para determinar o seu valor. Estipulando como a
percentagem de potência reativa absorvia sob as condições nominais, em que:
(5.8)
3. Selecionando o valor de ripple de corrente desejado, é determinado o valor de
. O cálculo da atenuação do ripple pode então ser dado pelas perdas e pela
absorção do filtro tendo em atenção as considerações tomadas em 2, dessa forma
obtêm-se a seguinte expressão:
(5.9)
Onde é dado por é uma constante e é calculado a pela expressão
acima, em que a atenuação desejada deve ser multiplicada por um fator que tem
em conta as perdas e a absorção. Se a soma das duas indutâncias for superior a
, deve ser escolhido um novo valor para a potência reativa absorvida,
analisada no ponto dois;
4. É então necessário verificar a frequência de ressonância obtida, através da
seguinte fórmula:
52 Modelação do Barramento CC
(5.10)
5. Se o valor da atenuação não for o indicado é necessário proceder a um reajuste
da condição 3), aumentando o valor do coeficiente de multiplicação. Se não for
suficiente é necessário regressar à condição 2) selecionando um valor mais alto
para a potência reativa.
Procedendo da forma descrita acima foram determinados os seguintes valores para o
filtro LCL a utilizar , e .
5.3 - Algoritmo de gestão
O algoritmo de gestão utilizado para o conversor têm em conta o funcionamento dos
elementos que interagem diretamente com o barramento CC e intrinsecamente ligado a esses
sistemas está o fluxo de potência. Portanto foi necessário ter em consideração a
bidirecionalidade da corrente no EPC CC/CC e esse facto resultou em definir distintos modos
de funcionamento. Portanto foram definidos os seguintes modos de funcionamento para o
conversor:
Quando não existe fluxo de corrente (fluxo de potência) no barramento CC e não
existindo fluxo de corrente nem para o motor de tração, nem para as baterias e o sistema ICE
estará no regime OFF.
Quando existe fluxo de potência no sentido do motor de tração, neste caso será feita uma
analise de previsão pela unidade de controlo por forma a precaver o valor de potência que
será necessário para o motor de tração e analisar a necessidade de utilização do sistema ICE,
no entanto, para o modo de funcionamento que está a ser descrito o EPC CC/CC funcionará
no regime elevador (termo inglês boost). E a estratégia passará por permitir desenvolver a
potência necessária no barramento das baterias para sustentar o funcionamento correto do
motor de tração. No caso, em que as baterias atinjam um valor abaixo dos 20% de SOC, a
unidade de controlo terá que garantir a correta utilização do sistema ICE, nessa situação a
potência do sistema de tração será imposta pelo sistema ICE. O valor de 20% tem que ser
respeitado, pois como visto anteriormente quando as baterias de ácido de chumbo operam
num valor abaixo dos 20% do SOC perdem ciclos de vida.
O outro modo de funcionamento que o sistema pode apresentar é a situação em que há
possibilidade de carregar as baterias nessa situação o EPC CC/CC funcionará no regime
abaixador (termo inglês buck). Este controlo do algoritmo de gestão sobre o EPC CC/CC terá
em conta mais uma vez o SOC da bateria já que no caso da bateria se encontrar com um SOC
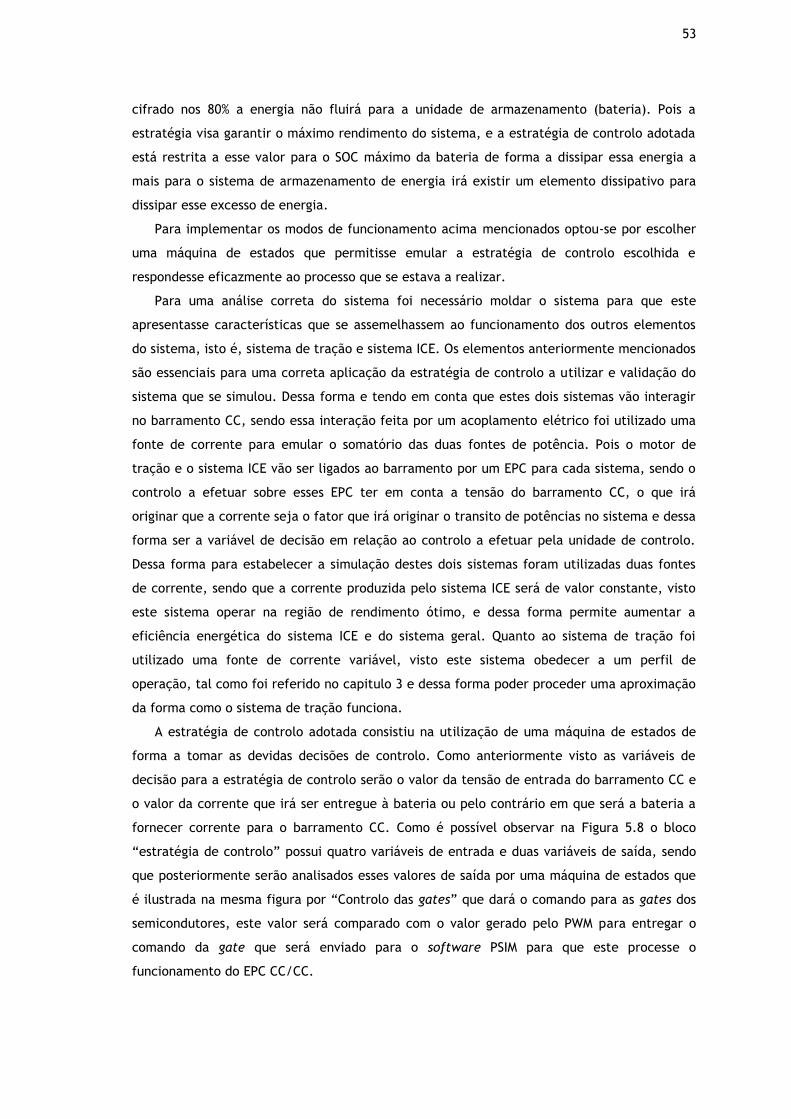
53
cifrado nos 80% a energia não fluirá para a unidade de armazenamento (bateria). Pois a
estratégia visa garantir o máximo rendimento do sistema, e a estratégia de controlo adotada
está restrita a esse valor para o SOC máximo da bateria de forma a dissipar essa energia a
mais para o sistema de armazenamento de energia irá existir um elemento dissipativo para
dissipar esse excesso de energia.
Para implementar os modos de funcionamento acima mencionados optou-se por escolher
uma máquina de estados que permitisse emular a estratégia de controlo escolhida e
respondesse eficazmente ao processo que se estava a realizar.
Para uma análise correta do sistema foi necessário moldar o sistema para que este
apresentasse características que se assemelhassem ao funcionamento dos outros elementos
do sistema, isto é, sistema de tração e sistema ICE. Os elementos anteriormente mencionados
são essenciais para uma correta aplicação da estratégia de controlo a utilizar e validação do
sistema que se simulou. Dessa forma e tendo em conta que estes dois sistemas vão interagir
no barramento CC, sendo essa interação feita por um acoplamento elétrico foi utilizado uma
fonte de corrente para emular o somatório das duas fontes de potência. Pois o motor de
tração e o sistema ICE vão ser ligados ao barramento por um EPC para cada sistema, sendo o
controlo a efetuar sobre esses EPC ter em conta a tensão do barramento CC, o que irá
originar que a corrente seja o fator que irá originar o transito de potências no sistema e dessa
forma ser a variável de decisão em relação ao controlo a efetuar pela unidade de controlo.
Dessa forma para estabelecer a simulação destes dois sistemas foram utilizadas duas fontes
de corrente, sendo que a corrente produzida pelo sistema ICE será de valor constante, visto
este sistema operar na região de rendimento ótimo, e dessa forma permite aumentar a
eficiência energética do sistema ICE e do sistema geral. Quanto ao sistema de tração foi
utilizado uma fonte de corrente variável, visto este sistema obedecer a um perfil de
operação, tal como foi referido no capitulo 3 e dessa forma poder proceder uma aproximação
da forma como o sistema de tração funciona.
A estratégia de controlo adotada consistiu na utilização de uma máquina de estados de
forma a tomar as devidas decisões de controlo. Como anteriormente visto as variáveis de
decisão para a estratégia de controlo serão o valor da tensão de entrada do barramento CC e
o valor da corrente que irá ser entregue à bateria ou pelo contrário em que será a bateria a
fornecer corrente para o barramento CC. Como é possível observar na Figura 5.8 o bloco
“estratégia de controlo” possui quatro variáveis de entrada e duas variáveis de saída, sendo
que posteriormente serão analisados esses valores de saída por uma máquina de estados que
é ilustrada na mesma figura por “Controlo das gates” que dará o comando para as gates dos
semicondutores, este valor será comparado com o valor gerado pelo PWM para entregar o
comando da gate que será enviado para o software PSIM para que este processe o
funcionamento do EPC CC/CC.
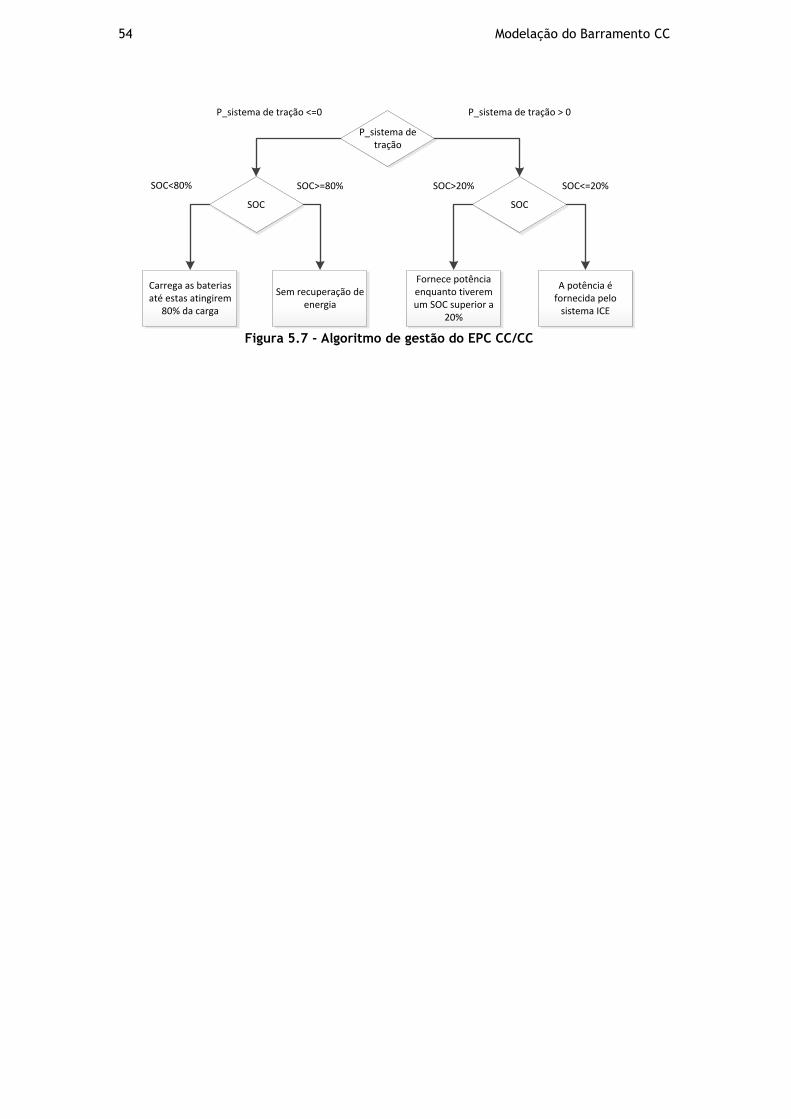
54 Modelação do Barramento CC
P_sistema de tração
P_sistema de tração <=0 P_sistema de tração > 0
SOCSOC
Carrega as baterias até estas atingirem
80% da carga
Sem recuperação de energia
Fornece potência enquanto tiverem um SOC superior a
20%
A potência é fornecida pelo
sistema ICE
SOC<80% SOC>=80% SOC>20% SOC<=20%
Figura 5.7 - Algoritmo de gestão do EPC CC/CC
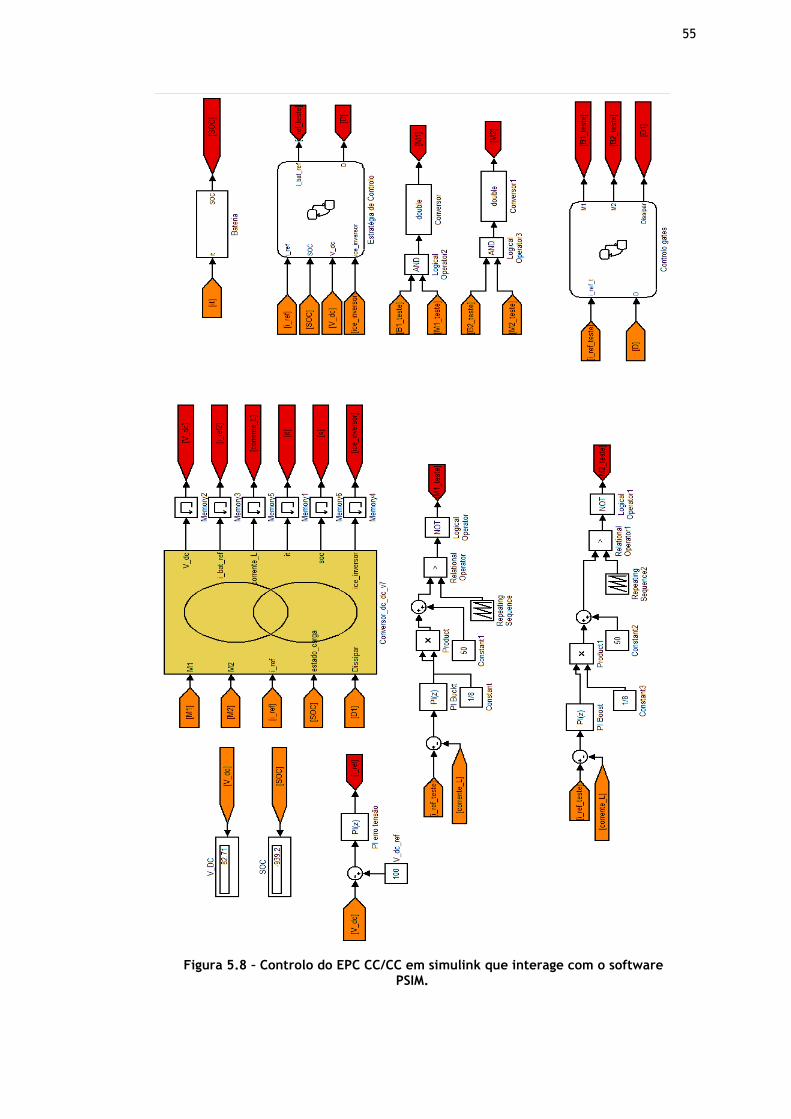
55
Figura 5.8 – Controlo do EPC CC/CC em simulink que interage com o software PSIM.
56 Modelação do Barramento CC
5.9 - Circuito de potência desenvolvido no software de simulação PSIM.
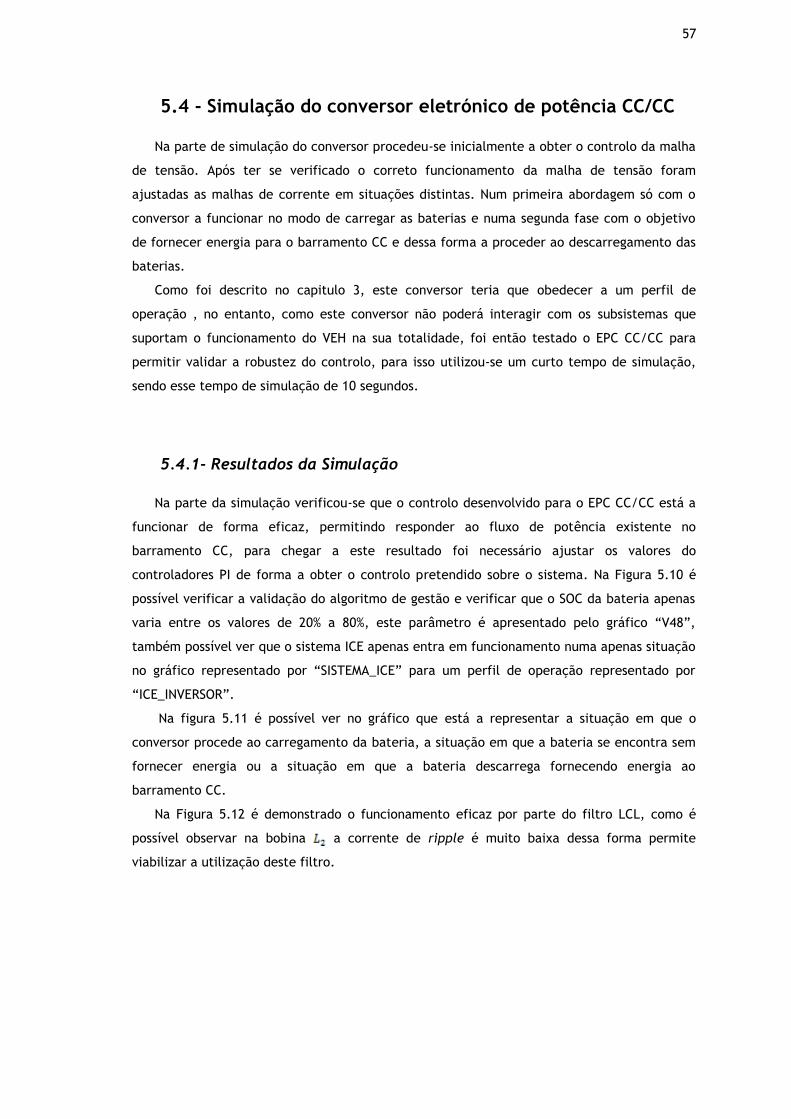
57
5.4 - Simulação do conversor eletrónico de potência CC/CC
Na parte de simulação do conversor procedeu-se inicialmente a obter o controlo da malha
de tensão. Após ter se verificado o correto funcionamento da malha de tensão foram
ajustadas as malhas de corrente em situações distintas. Num primeira abordagem só com o
conversor a funcionar no modo de carregar as baterias e numa segunda fase com o objetivo
de fornecer energia para o barramento CC e dessa forma a proceder ao descarregamento das
baterias.
Como foi descrito no capitulo 3, este conversor teria que obedecer a um perfil de
operação , no entanto, como este conversor não poderá interagir com os subsistemas que
suportam o funcionamento do VEH na sua totalidade, foi então testado o EPC CC/CC para
permitir validar a robustez do controlo, para isso utilizou-se um curto tempo de simulação,
sendo esse tempo de simulação de 10 segundos.
5.4.1- Resultados da Simulação
Na parte da simulação verificou-se que o controlo desenvolvido para o EPC CC/CC está a
funcionar de forma eficaz, permitindo responder ao fluxo de potência existente no
barramento CC, para chegar a este resultado foi necessário ajustar os valores do
controladores PI de forma a obter o controlo pretendido sobre o sistema. Na Figura 5.10 é
possível verificar a validação do algoritmo de gestão e verificar que o SOC da bateria apenas
varia entre os valores de 20% a 80%, este parâmetro é apresentado pelo gráfico “V48”,
também possível ver que o sistema ICE apenas entra em funcionamento numa apenas situação
no gráfico representado por “SISTEMA_ICE” para um perfil de operação representado por
“ICE_INVERSOR”.
Na figura 5.11 é possível ver no gráfico que está a representar a situação em que o
conversor procede ao carregamento da bateria, a situação em que a bateria se encontra sem
fornecer energia ou a situação em que a bateria descarrega fornecendo energia ao
barramento CC.
Na Figura 5.12 é demonstrado o funcionamento eficaz por parte do filtro LCL, como é
possível observar na bobina a corrente de ripple é muito baixa dessa forma permite
viabilizar a utilização deste filtro.
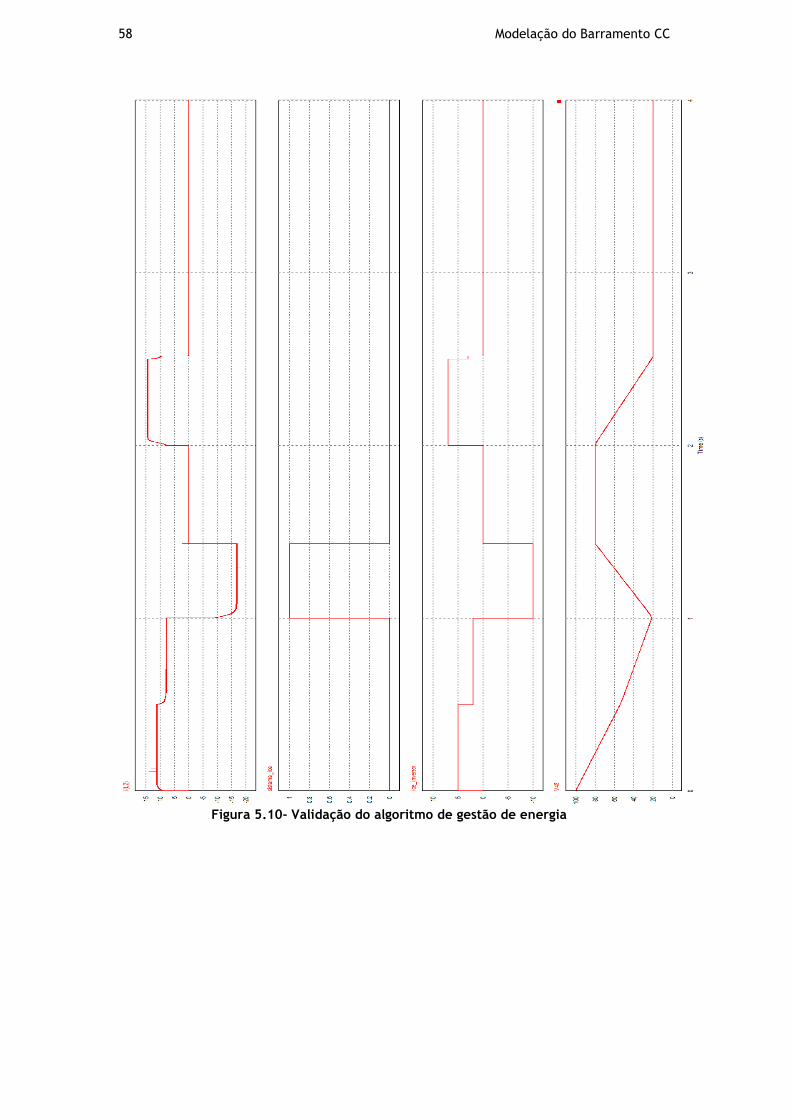
58 Modelação do Barramento CC
Figura 5.10- Validação do algoritmo de gestão de energia
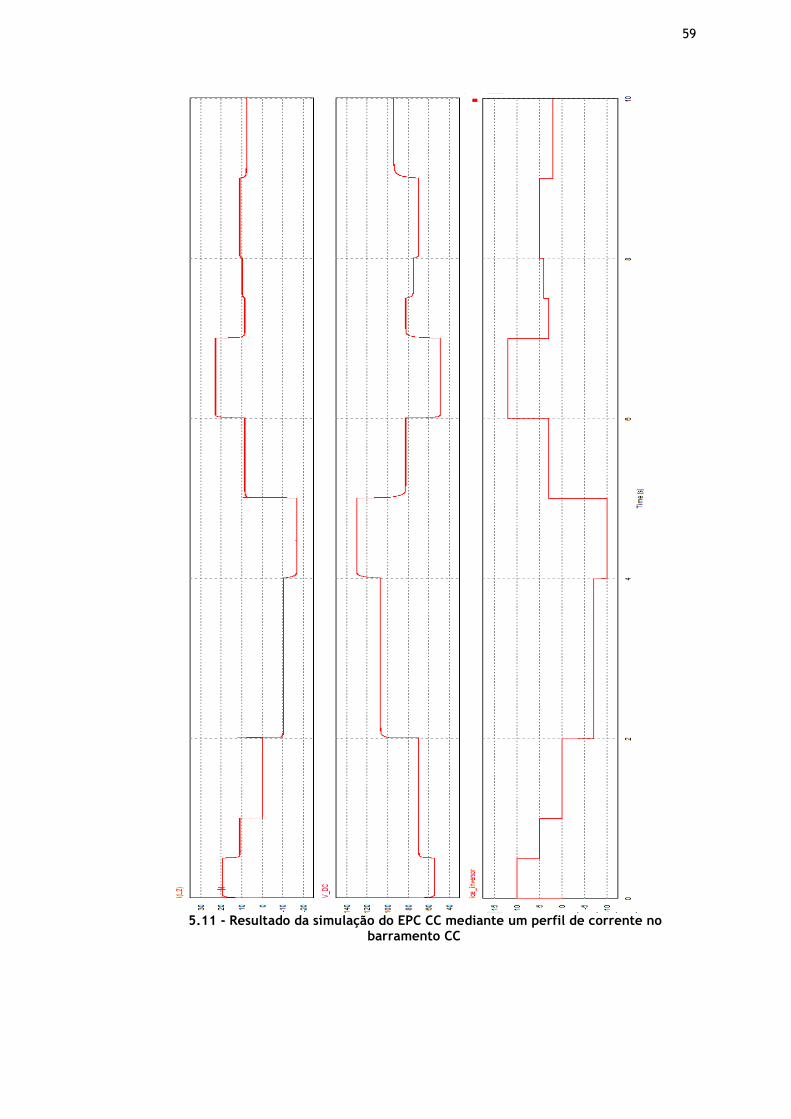
59
5.11 - Resultado da simulação do EPC CC mediante um perfil de corrente no
barramento CC
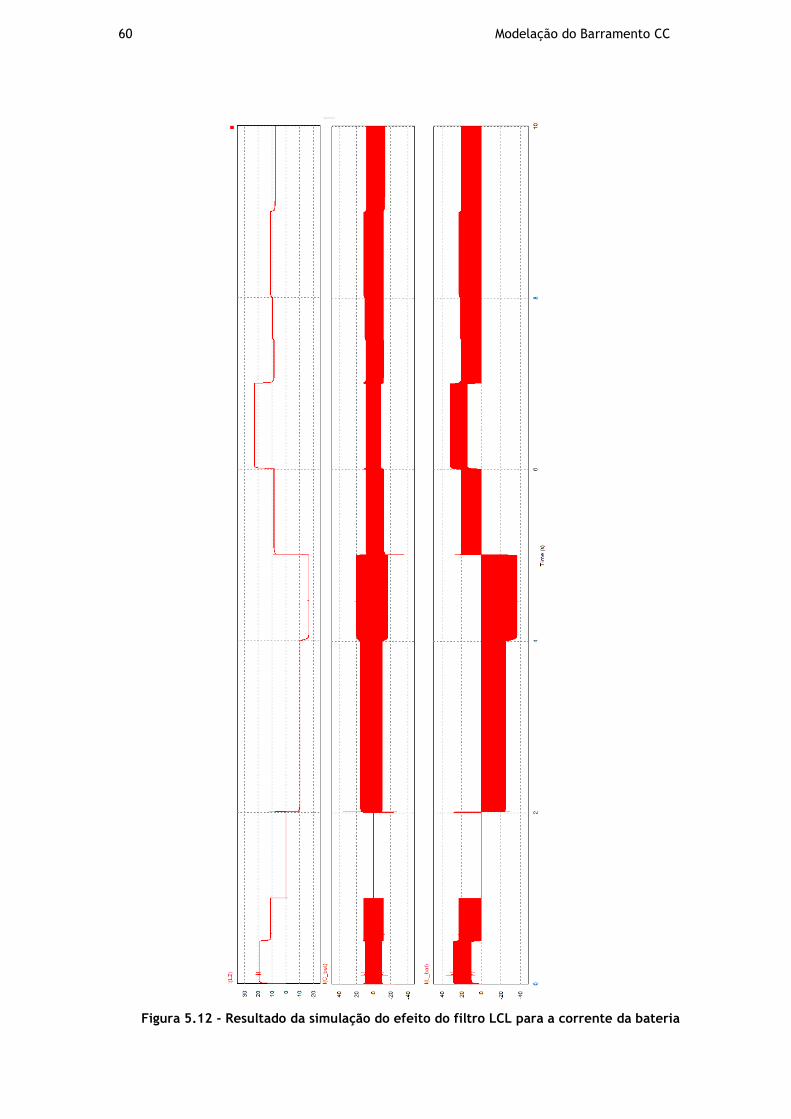
60 Modelação do Barramento CC
Figura 5.12 - Resultado da simulação do efeito do filtro LCL para a corrente da bateria
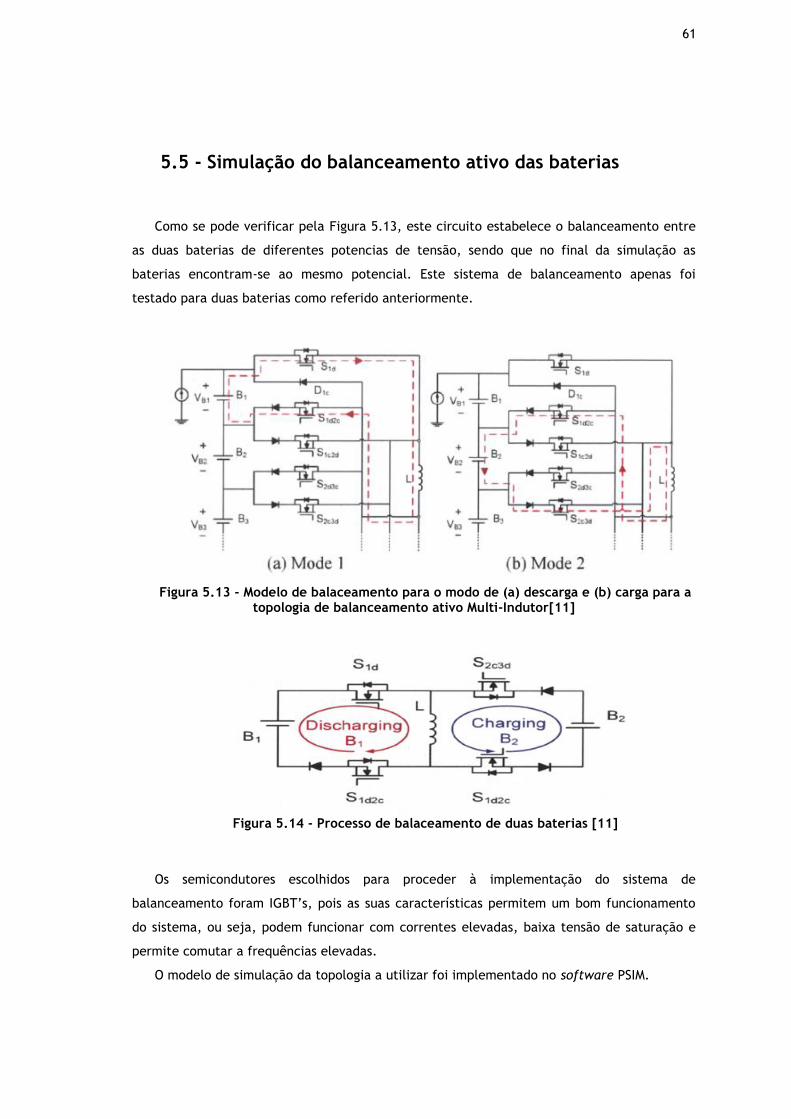
61
5.5 - Simulação do balanceamento ativo das baterias
Como se pode verificar pela Figura 5.13, este circuito estabelece o balanceamento entre
as duas baterias de diferentes potencias de tensão, sendo que no final da simulação as
baterias encontram-se ao mesmo potencial. Este sistema de balanceamento apenas foi
testado para duas baterias como referido anteriormente.
Figura 5.13 - Modelo de balaceamento para o modo de (a) descarga e (b) carga para a
topologia de balanceamento ativo Multi-Indutor[11]
Figura 5.14 - Processo de balaceamento de duas baterias [11]
Os semicondutores escolhidos para proceder à implementação do sistema de
balanceamento foram IGBT’s, pois as suas características permitem um bom funcionamento
do sistema, ou seja, podem funcionar com correntes elevadas, baixa tensão de saturação e
permite comutar a frequências elevadas.
O modelo de simulação da topologia a utilizar foi implementado no software PSIM.
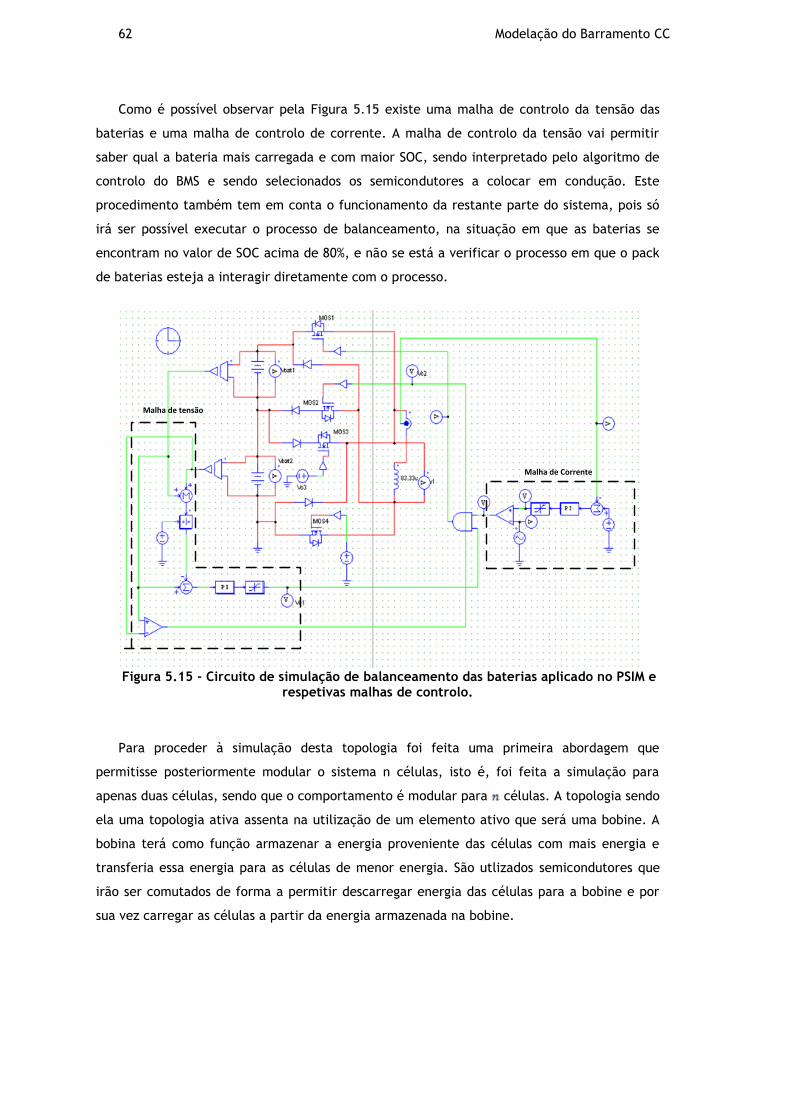
62 Modelação do Barramento CC
Como é possível observar pela Figura 5.15 existe uma malha de controlo da tensão das
baterias e uma malha de controlo de corrente. A malha de controlo da tensão vai permitir
saber qual a bateria mais carregada e com maior SOC, sendo interpretado pelo algoritmo de
controlo do BMS e sendo selecionados os semicondutores a colocar em condução. Este
procedimento também tem em conta o funcionamento da restante parte do sistema, pois só
irá ser possível executar o processo de balanceamento, na situação em que as baterias se
encontram no valor de SOC acima de 80%, e não se está a verificar o processo em que o pack
de baterias esteja a interagir diretamente com o processo.
Malha de Corrente
Malha de tensão
Figura 5.15 - Circuito de simulação de balanceamento das baterias aplicado no PSIM e
respetivas malhas de controlo.
Para proceder à simulação desta topologia foi feita uma primeira abordagem que
permitisse posteriormente modular o sistema n células, isto é, foi feita a simulação para
apenas duas células, sendo que o comportamento é modular para células. A topologia sendo
ela uma topologia ativa assenta na utilização de um elemento ativo que será uma bobine. A
bobina terá como função armazenar a energia proveniente das células com mais energia e
transferia essa energia para as células de menor energia. São utlizados semicondutores que
irão ser comutados de forma a permitir descarregar energia das células para a bobine e por
sua vez carregar as células a partir da energia armazenada na bobine.
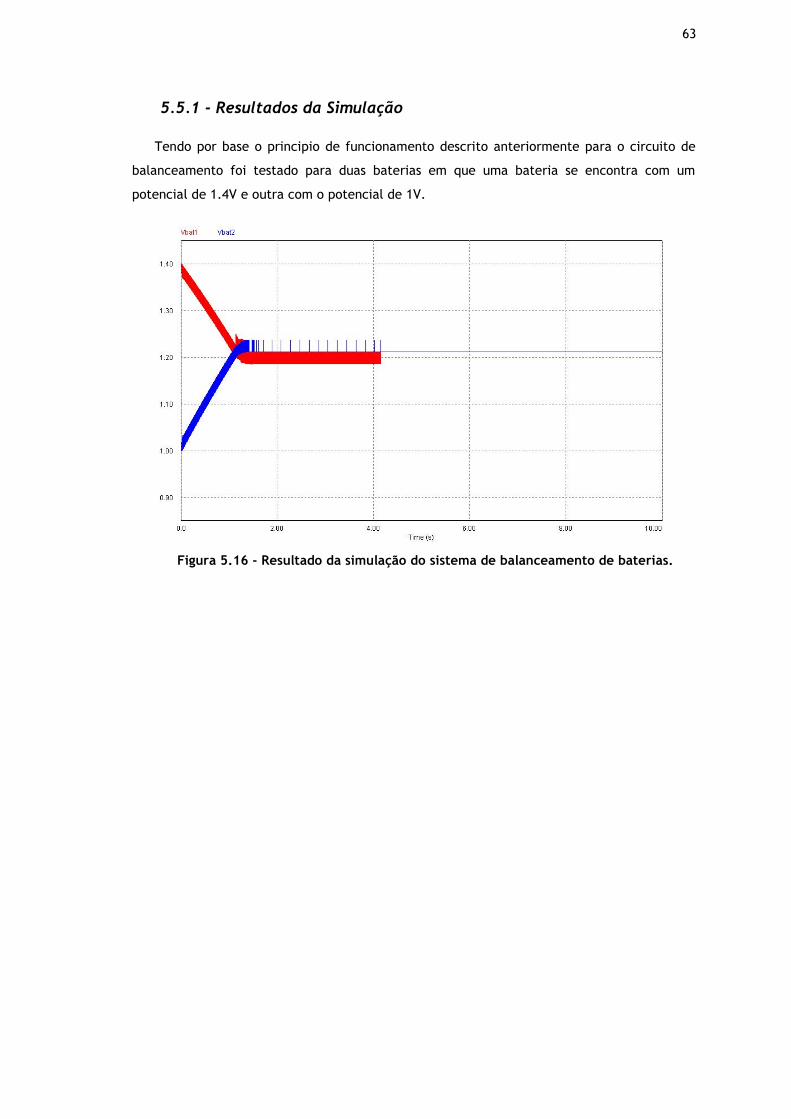
63
5.5.1 - Resultados da Simulação
Tendo por base o principio de funcionamento descrito anteriormente para o circuito de
balanceamento foi testado para duas baterias em que uma bateria se encontra com um
potencial de 1.4V e outra com o potencial de 1V.
Figura 5.16 - Resultado da simulação do sistema de balanceamento de baterias.
65
Capítulo 6
Resultados experimentais
Neste capitulo vão ser expostos os resultados experimentais obtidos, são também
analisados os circuitos de aquisição utlizados, e a plataforma escolhida para o tratamento
desses sinais. Também é abordado a forma como são gerados os comandos dos
semicondutores e a forma como é feito o controlo sobre esses comandos.
6.1 - Plataforma de controlo
A plataforma de controlo utilizada foi a DSP Piccolo F2803x, esta plataforma de controlo
possui ADC’s, entradas e saídas digitais, permitindo que sejam utilizadas estas entradas e
saídas para fazer um controlo eficaz sofre o processo que se pretende controlar. Esta
tecnologia permite um interface com o simulink ferramenta de simulação e modelação do
software Matlab, sendo utilizada a biblioteca “C2000lib” presente no simulink, para
modelizar o controlo a efetuar pela DSP.
Outro software que foi necessário para auxiliar a programação da DSP, foi o software
“Code Composer Studio” a interação entre o simulink, “Code Composer Studio” e processador
da DSP permite configurar o processador da DSP de forma a permite obter aquilo que
pretendemos para a unidade de controlo.
6.1.1 - Arquitetura da DSP
Arquitetura funcional da DSP utilizada é demonstrada na Figura 6.1. Pela observação
dessa figura é possível verificar a existência de vários periféricos, é possível observar as
unidades de processamento e armazenamento de informação, que permitem fazer a aquisição
e o controlo eficaz sobre o sistema que se pretende controlar.
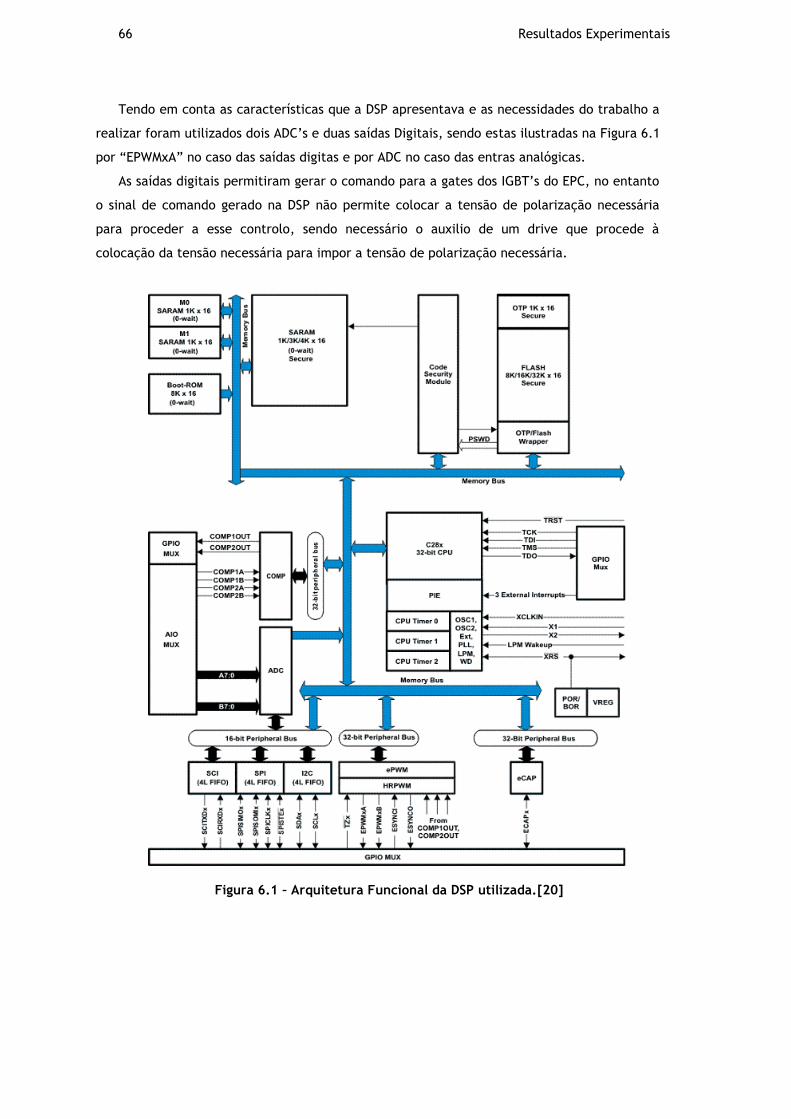
66 Resultados Experimentais
Tendo em conta as características que a DSP apresentava e as necessidades do trabalho a
realizar foram utilizados dois ADC’s e duas saídas Digitais, sendo estas ilustradas na Figura 6.1
por “EPWMxA” no caso das saídas digitas e por ADC no caso das entras analógicas.
As saídas digitais permitiram gerar o comando para a gates dos IGBT’s do EPC, no entanto
o sinal de comando gerado na DSP não permite colocar a tensão de polarização necessária
para proceder a esse controlo, sendo necessário o auxilio de um drive que procede à
colocação da tensão necessária para impor a tensão de polarização necessária.
Figura 6.1 – Arquitetura Funcional da DSP utilizada.[20]
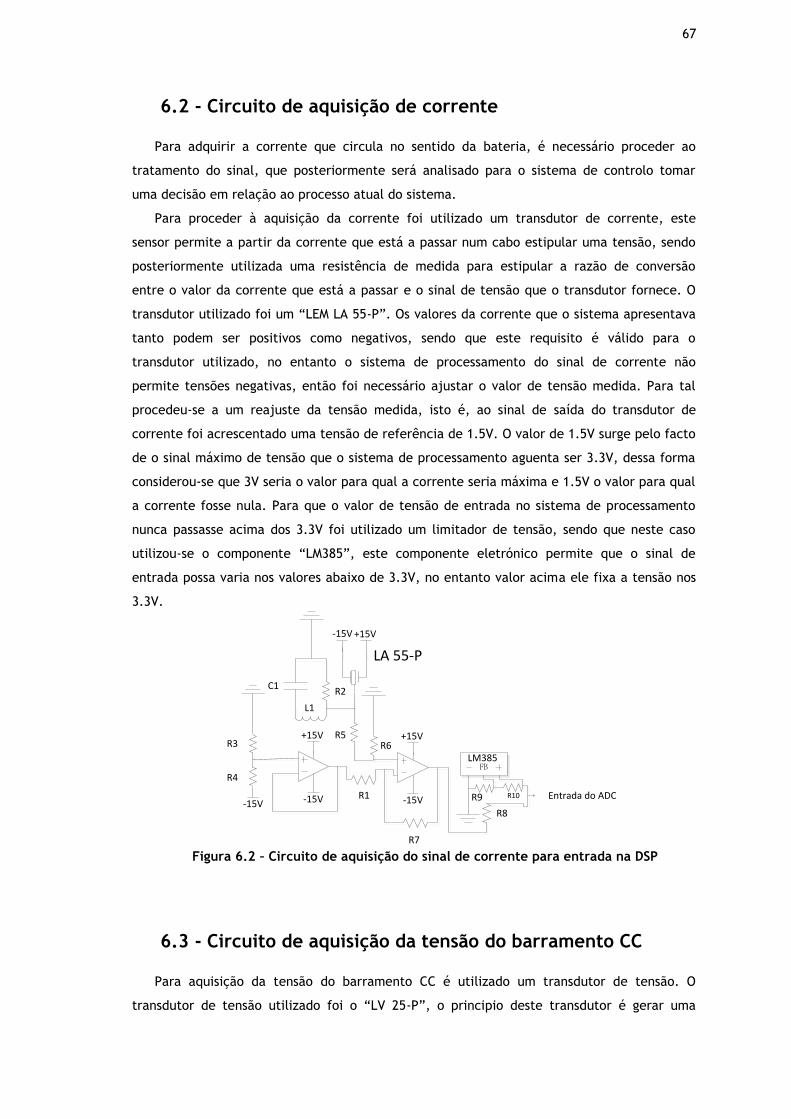
67
6.2 - Circuito de aquisição de corrente
Para adquirir a corrente que circula no sentido da bateria, é necessário proceder ao
tratamento do sinal, que posteriormente será analisado para o sistema de controlo tomar
uma decisão em relação ao processo atual do sistema.
Para proceder à aquisição da corrente foi utilizado um transdutor de corrente, este
sensor permite a partir da corrente que está a passar num cabo estipular uma tensão, sendo
posteriormente utilizada uma resistência de medida para estipular a razão de conversão
entre o valor da corrente que está a passar e o sinal de tensão que o transdutor fornece. O
transdutor utilizado foi um “LEM LA 55-P”. Os valores da corrente que o sistema apresentava
tanto podem ser positivos como negativos, sendo que este requisito é válido para o
transdutor utilizado, no entanto o sistema de processamento do sinal de corrente não
permite tensões negativas, então foi necessário ajustar o valor de tensão medida. Para tal
procedeu-se a um reajuste da tensão medida, isto é, ao sinal de saída do transdutor de
corrente foi acrescentado uma tensão de referência de 1.5V. O valor de 1.5V surge pelo facto
de o sinal máximo de tensão que o sistema de processamento aguenta ser 3.3V, dessa forma
considerou-se que 3V seria o valor para qual a corrente seria máxima e 1.5V o valor para qual
a corrente fosse nula. Para que o valor de tensão de entrada no sistema de processamento
nunca passasse acima dos 3.3V foi utilizado um limitador de tensão, sendo que neste caso
utilizou-se o componente “LM385”, este componente eletrónico permite que o sinal de
entrada possa varia nos valores abaixo de 3.3V, no entanto valor acima ele fixa a tensão nos
3.3V.
+15V
-15V
+15V
-15VR1-15V
R3
R4
-15V +15V
C1R2
R5R6
R7
FBLM385
R8
R9 R10 Entrada do ADC
L1
LA 55-P
Figura 6.2 – Circuito de aquisição do sinal de corrente para entrada na DSP
6.3 - Circuito de aquisição da tensão do barramento CC
Para aquisição da tensão do barramento CC é utilizado um transdutor de tensão. O
transdutor de tensão utilizado foi o “LV 25-P”, o principio deste transdutor é gerar uma
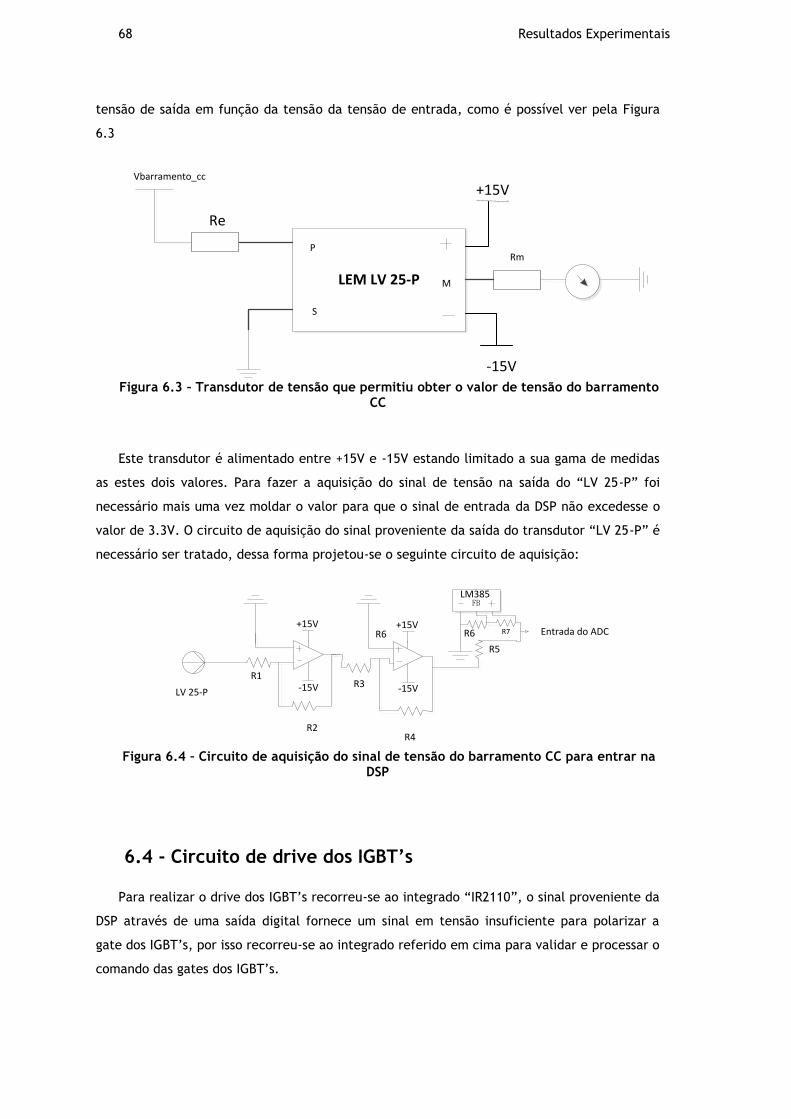
68 Resultados Experimentais
tensão de saída em função da tensão da tensão de entrada, como é possível ver pela Figura
6.3
LEM LV 25-P M
Vbarramento_cc
RmP
S
-15V
+15V
Re
Figura 6.3 – Transdutor de tensão que permitiu obter o valor de tensão do barramento
CC
Este transdutor é alimentado entre +15V e -15V estando limitado a sua gama de medidas
as estes dois valores. Para fazer a aquisição do sinal de tensão na saída do “LV 25-P” foi
necessário mais uma vez moldar o valor para que o sinal de entrada da DSP não excedesse o
valor de 3.3V. O circuito de aquisição do sinal proveniente da saída do transdutor “LV 25-P” é
necessário ser tratado, dessa forma projetou-se o seguinte circuito de aquisição:
FBLM385
R5
R6 R7 Entrada do ADC
LV 25-P
+15V
-15V
+15V
-15VR3
R6
R1
R2R4
Figura 6.4 – Circuito de aquisição do sinal de tensão do barramento CC para entrar na
DSP
6.4 - Circuito de drive dos IGBT’s
Para realizar o drive dos IGBT’s recorreu-se ao integrado “IR2110”, o sinal proveniente da
DSP através de uma saída digital fornece um sinal em tensão insuficiente para polarizar a
gate dos IGBT’s, por isso recorreu-se ao integrado referido em cima para validar e processar o
comando das gates dos IGBT’s.
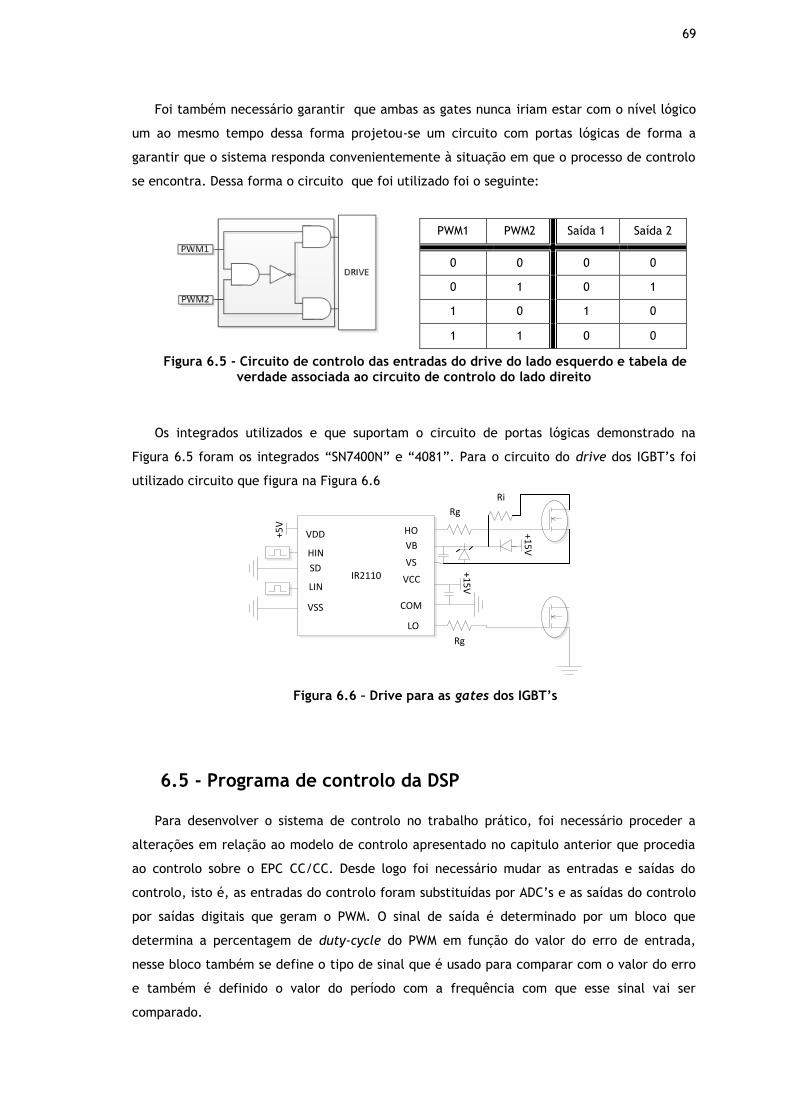
69
Foi também necessário garantir que ambas as gates nunca iriam estar com o nível lógico
um ao mesmo tempo dessa forma projetou-se um circuito com portas lógicas de forma a
garantir que o sistema responda convenientemente à situação em que o processo de controlo
se encontra. Dessa forma o circuito que foi utilizado foi o seguinte:
PWM1 PWM2 Saída 1 Saída 2
0 0 0 0
0 1 0 1
1 0 1 0
1 1 0 0
Figura 6.5 - Circuito de controlo das entradas do drive do lado esquerdo e tabela de verdade associada ao circuito de controlo do lado direito
Os integrados utilizados e que suportam o circuito de portas lógicas demonstrado na
Figura 6.5 foram os integrados “SN7400N” e “4081”. Para o circuito do drive dos IGBT’s foi
utilizado circuito que figura na Figura 6.6
IR2110
VDD
HIN
SD
LIN
VSS
HO
VB
VS
VCC
COM
LO
+15
V
+15
V
+5V
Rg
Rg
Ri
Figura 6.6 – Drive para as gates dos IGBT’s
6.5 - Programa de controlo da DSP
Para desenvolver o sistema de controlo no trabalho prático, foi necessário proceder a
alterações em relação ao modelo de controlo apresentado no capitulo anterior que procedia
ao controlo sobre o EPC CC/CC. Desde logo foi necessário mudar as entradas e saídas do
controlo, isto é, as entradas do controlo foram substituídas por ADC’s e as saídas do controlo
por saídas digitais que geram o PWM. O sinal de saída é determinado por um bloco que
determina a percentagem de duty-cycle do PWM em função do valor do erro de entrada,
nesse bloco também se define o tipo de sinal que é usado para comparar com o valor do erro
e também é definido o valor do período com a frequência com que esse sinal vai ser
comparado.
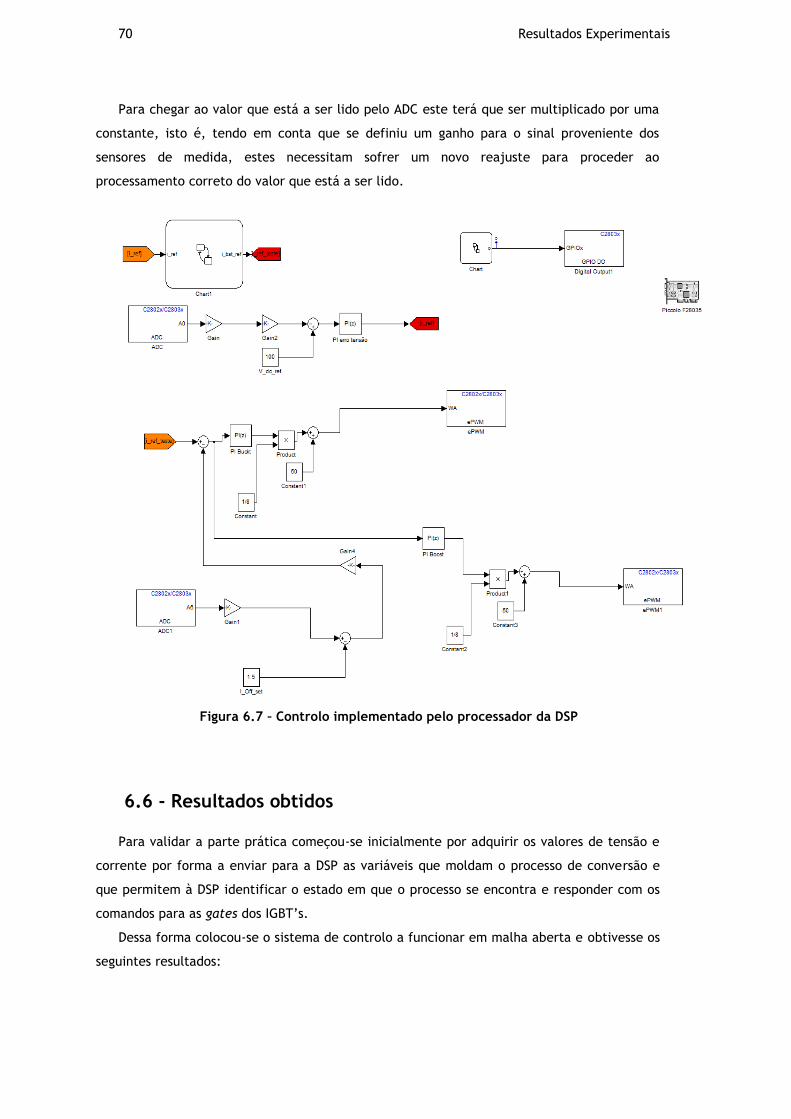
70 Resultados Experimentais
Para chegar ao valor que está a ser lido pelo ADC este terá que ser multiplicado por uma
constante, isto é, tendo em conta que se definiu um ganho para o sinal proveniente dos
sensores de medida, estes necessitam sofrer um novo reajuste para proceder ao
processamento correto do valor que está a ser lido.
Figura 6.7 – Controlo implementado pelo processador da DSP
6.6 - Resultados obtidos
Para validar a parte prática começou-se inicialmente por adquirir os valores de tensão e
corrente por forma a enviar para a DSP as variáveis que moldam o processo de conversão e
que permitem à DSP identificar o estado em que o processo se encontra e responder com os
comandos para as gates dos IGBT’s.
Dessa forma colocou-se o sistema de controlo a funcionar em malha aberta e obtivesse os
seguintes resultados:
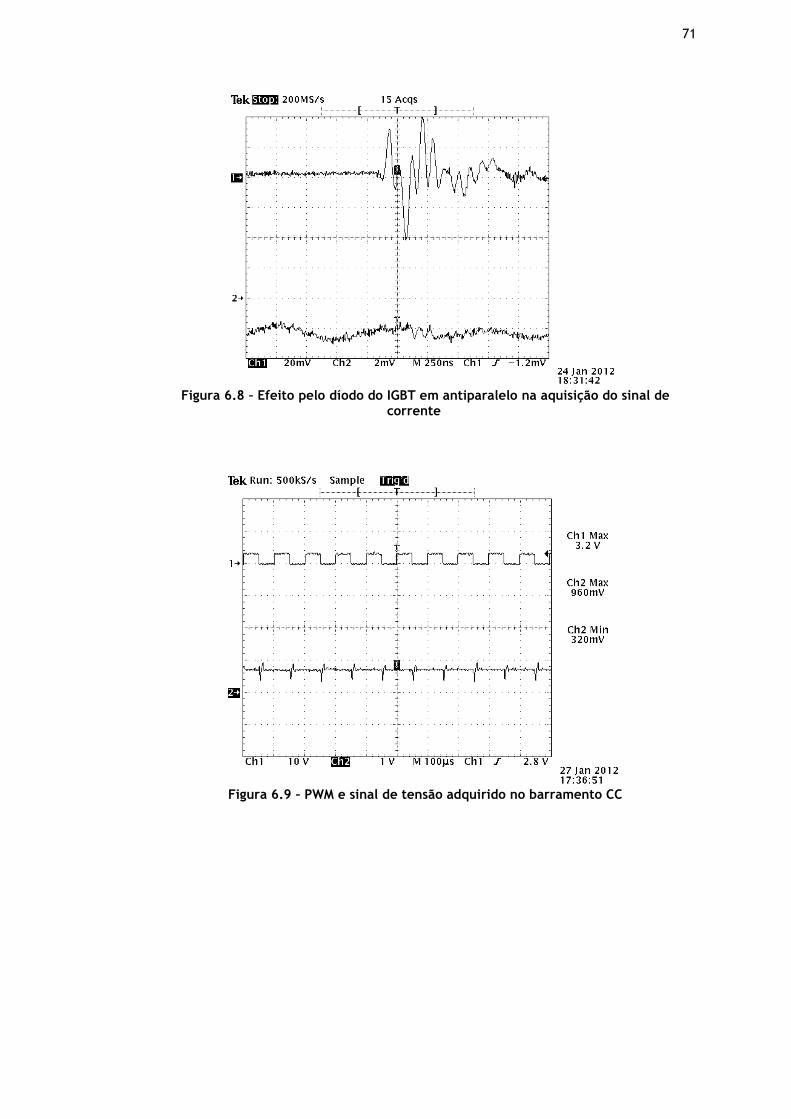
71
Figura 6.8 – Efeito pelo díodo do IGBT em antiparalelo na aquisição do sinal de
corrente
Figura 6.9 – PWM e sinal de tensão adquirido no barramento CC
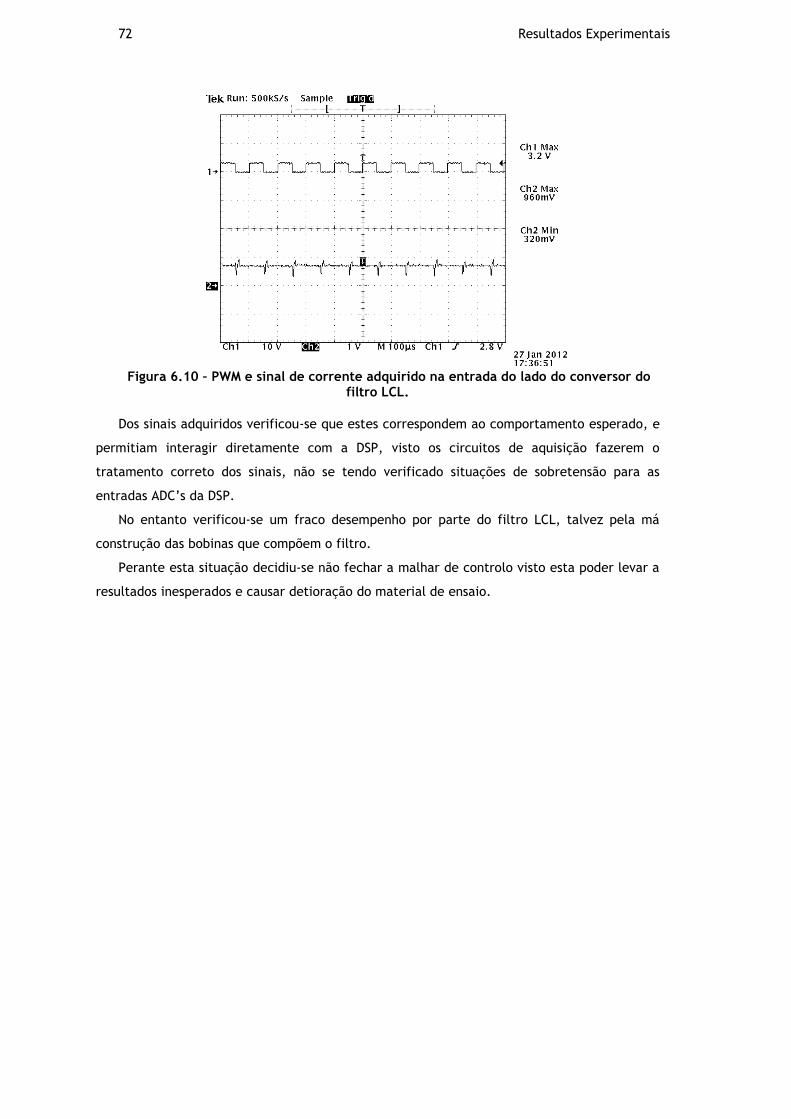
72 Resultados Experimentais
Figura 6.10 – PWM e sinal de corrente adquirido na entrada do lado do conversor do
filtro LCL.
Dos sinais adquiridos verificou-se que estes correspondem ao comportamento esperado, e
permitiam interagir diretamente com a DSP, visto os circuitos de aquisição fazerem o
tratamento correto dos sinais, não se tendo verificado situações de sobretensão para as
entradas ADC’s da DSP.
No entanto verificou-se um fraco desempenho por parte do filtro LCL, talvez pela má
construção das bobinas que compõem o filtro.
Perante esta situação decidiu-se não fechar a malhar de controlo visto esta poder levar a
resultados inesperados e causar detioração do material de ensaio.
73
Capítulo 7
Conclusões
Nesta tese o trabalho realizado foi no sentido de desenvolver um EPC CC/CC, este que
teria que respeitar a bidirecionalidade da corrente. O EPC a ser desenvolvido estava ligado a
uma unidade de armazenamento de energia, sendo essa unidade de armazenamento no caso
do estudo desenvolvido uma bateria, foi então necessário proceder a uma análise no capitulo
4 sobre o modelo da bateria e a capacidade energética que a bateria teria que ter para o
perfil de operação adotado, este perfil que foi desenvolvido pela entidade ECE, sendo esta
entidade responsável pela regulação da construção dos veículos na União Europeia.
Por isso no capitulo 4 procedeu-se ao cálculo da capacidade energética que as baterias
teriam que apresentar, tendo por base as forças que interagem no veículo quando estes se
movimenta, utilizando esse principio foi possível chegar à capacidade energética que a
bateria teria que apresentar. Quanto ao modelo de simulação desenvolvido para as baterias
foi necessário submeter a bateria a uns testes de carga e descarga, sendo possível a partir
desses testes chegar a um modelo da bateria que pudesse validar o comportamento da
bateria ao nível da simulação.
No capitulo 5 foi realizado o dimensionamento e simulação do EPC CC/CC, foram
analisados os modelos de EPC existentes e que pudessem responder convenientemente aos
requisitos do sistema. Chegou-se à conclusão que o EPC que melhores características oferecia
para o desenvolvimento do sistema de carga e descarga de baterias seria o conversor de
eletrónica de potência CC/CC de meia ponte. Neste capitulo também se deu grande
importância ao desenvolvimento de um filtro que permitisse responder eficazmente às
características do sistema, isto é, garantir que não existiria degradação das baterias pelo
facto de existir muito ripple da corrente de saída do conversor.
Neste mesmo capitulo é simulado um modelo de balanceamento de baterias, sendo que
este modelo apenas é simulado para duas baterias. Da análise realizada sobre as topologias
de balanceamento, foi escolhido o balanceamento ativo por ser um balanceamento em que a
74 Conclusões
eficiência energética é maior que no caso de um balanceamento passivo, sendo que a
topologia escolhida foi a topologia de balanceamento Multi-Indutor.
No capitulo 6 é analisado o comportamento prático do sistema. Numa primeira análise
verificou-se o funcionamento do sistema em malha aberta, sendo feita a validação dos
circuitos de aquisição e o funcionamento da unidade de processamento e atuação sobre as
gates do EPC CC/CC, situação em que se verificou uma fraca eficiência do filtro, pois
verificou-se muitas interferências eletromagnéticas. Por falta de tempo não foi conseguido
melhor este fraco desempenho e fechar a malha de controlo para validar o EPC CC/CC
desenvolvido.
7.1 - Projetos futuros
Numa perspectiva de futuro o trabalho a desenvolver passa por melhorar os sistemas de
aquisição, desenvolvendo para isso uma PCB para os circuitos de aquisição melhorando o
desempenho do sistema.
Alocar o EPC CC/CC desenvolvido no sistema VEH, e proceder ao reajuste do algoritmo de
gestão a colocar em prática.
Outros dos trabalhos futuros poderá passar por melhorar a modelação do funcionamento
da bateria, melhorando o modelo de simulação da bateria principalmente no aspeto em que a
bateria não se encontra modo de funcionamento de fornecimento de energia ou no modo
armazenamento de energia.
Outro dos trabalhos futuros que poderá ser desenvolvido passa por validar o
funcionamento do EPC CC/CC com outro tipo de baterias, tendo em conta que a utilização de
outro tipo de baterias poderá aumentar o rendimento energético do VEH, nessa vertente era
importante fazer esta comparação.
Outros dos aspetos que seria interessante analisar seria a integração no sistema de
armazenamento de energia, outra fonte de armazenamento de energia sendo que esta
pudesse apresentar características para complementares às das baterias, possibilitando o
aumento energético do sistema de armazenamento de energia.
Na perspectiva de acoplar este EPC CC/CC no VEH seria necessário conceber os sistemas
que iam proceder ao fornecimento das tensões necessárias para o funcionamento do EPC
CC/CC, alimentação dos circuitos de aquisição, processamento e atuação.
Outro dos trabalhos interessantes a desenvolver no futuro é implementar o modelo
simulado para o balanceamento de bateiras, sendo que a utilização deste sistema irá
contribuir para o aumento substancial do número de ciclos de vida de uma bateria, algo que
nos dias de hoje é de especial importância, na perspectiva em que quanto maior for o número
75
de ciclos de uso da bateria maior rendimento o sistema apresentará e dessa forma será
potencializado o aumento dos VEH no mercado automóvel.

77
Referências
[1] C. C. Chan, "The State of the Art of Electric, Hybrid, and Fuel Cell Vehicles,"
Proceedings of the IEEE, vol. 95, pp. 704-718, 2007.
[2] A. E. Fuhs, Hybrid vehicles and the future of personal transportation: CRC, 2009.
[3] M. Ehsani, Y. Gao, and A. Emadi, Modern electric, hybrid electric, and fuel cell
vehicles: fundamentals, theory, and design: CRC, 2009.
[4] A. Emadi, Handbook of automotive power electronics and motor drives vol. 125: CRC,
2005.
[5] I. Buchmann. Battery University. Available: http://batteryuniversity.com/
[6] D. Linden, "Handbook of Batteries, 1995," McGraw-Hill, Inc., vol. 36, p. 36.65.
[7] M. Einhorn, V. F. Conte, C. Kral, J. Fleig, and R. Permann, "Parameterization of an
electrical battery model for dynamic system simulation in electric vehicles," 2010,
pp. 1-7.
[8] P. Kumar and P. Bauer, "Parameter extraction of battery models using multiobjective
optimization genetic algorithms," in Power Electronics and Motion Control
Conference (EPE/PEMC), 2010 14th International, 2010, pp. T9-106-T9-110.
[9] M. Daowd, N. Omar, P. Van Den Bossche, and J. Van Mierlo, "Passive and active
battery balancing comparison based on MATLAB simulation," 2011, pp. 1-7.
[10] J. Cao, N. Schofield, and A. Emadi, "Battery balancing methods: A comprehensive
review," 2008, pp. 1-6.
[11] P. Sang-Hyun, K. Tae-Sung, P. Jin-Sik, M. Gun-Woo, and Y. Myung-Joong, "A new
battery equalizer based on buck-boost topology," in Power Electronics, 2007. ICPE
'07. 7th Internatonal Conference on, 2007, pp. 962-965.
[12] M. Daowd, N. Omar, P. Van Den Bossche, and J. Van Mierlo, "Passive and active
battery balancing comparison based on MATLAB simulation," in Vehicle Power and
Propulsion Conference (VPPC), 2011 IEEE, 2011, pp. 1-7.
78 Referências
[13] O. o. T. a. A. Q. (OTAQ). Testing and Measuring Emissions [Online]. Available:
http://www.epa.gov/nvfel/testing/dynamometer.htm
[14] O. Tremblay, L. A. Dessaint, and A. I. Dekkiche, "A Generic Battery Model for the
Dynamic Simulation of Hybrid Electric Vehicles," in Vehicle Power and Propulsion
Conference, 2007. VPPC 2007. IEEE, 2007, pp. 284-289.
[15] S. Abu-Sharkh and D. Doerffel, "Rapid test and non-linear model characterisation of
solid-state lithium-ion batteries," Journal of Power Sources, vol. 130, pp. 266-274,
2004.
[16] T. Kim and W. Qiao, "A Hybrid Battery Model Capable of Capturing Dynamic Circuit
Characteristics and Nonlinear Capacity Effects," Energy Conversion, IEEE Transactions
on, pp. 1-9.
[17] R. M. Schupbach and J. C. Balda, "Comparing DC-DC converters for power
management in hybrid electric vehicles," in Electric Machines and Drives Conference,
2003. IEMDC'03. IEEE International, 2003, pp. 1369-1374 vol.3.
[18] M. Borage, S. Tiwari, and S. Kotaiah, "Analysis and design of an LCL-T resonant
converter as a constant-current power supply," Industrial Electronics, IEEE
Transactions on, vol. 52, pp. 1547-1554, 2005.
[19] M. Liserre, F. Blaabjerg, and S. Hansen, "Design and control of an LCL-filter-based
three-phase active rectifier," Industry Applications, IEEE Transactions on, vol. 41, pp.
1281-1291, 2005.
[20] Piccolo Microcontroller TMS320F28027 [Online]. Available:
http://www.ti.com/general/docs/datasheetdiagram.tsp?diagramId=SPRS523G&generi
cPartNumber=TMS320F28027&isFunctional=Y&isFunctional=Y