oficina de robóticaoficina.labdegaragem.com/robótica_oficina.pdf · o robô seguidor de linha já...
TRANSCRIPT

Oficina de Robótica
Oficina de Robótica Página 2
O Laboratório de Garagem
O Laboratório de Garagem foi fundado em 2010 e tem como proposta ser uma iniciativa voltada para a
integração, colaboração e apoio aos desenvolvedores independentes de ciência e tecnologia.
O Lab começou com uma rede social, destinada a inventores que gostavam de trocar ideias e opiniões
sobre seus projetos, logo surgiu um laboratório compartilhado onde, os inventores se reuniam para dar
"vida" as suas ideias. Conforme essas ideias foram surgindo veio a iniciativa Incubadora, onde elas
poderiam se tornar um produto. Com tudo isso acontecendo surgiu a loja do Lab criada para sustentar e
expandir o Laboratório de Garagem.
Hoje esta iniciativa conta com uma rede social, uma loja, uma incubadora e um grupo de pessoas que
acredita que a revolução pode sair de qualquer ideia, de uma simples discussão em um grupo de amigos,
ou de uma garagem qualquer.
Rede Social
Nossa rede social, oferece diversas ferramentas para interação e colaboração entre seus membros. Esta
rede conta com mais de 27 mil usuários cadastrados, que apresentam e solucionam diversas duvidas,
tanto na área de eletrônica quanto em outras. Além disso nós também postamos tutoriais no site,
mostrando como usar e os tipos de aplicações de alguns produtos.
Loja Virtual
A nossa loja oferece peças, componentes, acessórios e um suporte para que garagistas de todo o Brasil
possam dar vida ás suas ideias.
Incubadora
A Incubadora do Lab tem como objetivo, colocar no mercado produtos desenvolvidos pelos Garagistas.
Oficina de Robótica Página 3
Índice
1. Apresentação ........................................................................................................................................... 4
2. Funcionamento ......................................................................................................................................... 5
3. Montagem ................................................................................................................................................ 6
3.1. Faça as conexões dos motores e da alimentação no Dual Motor Garagino ....................................... 7
3.2. Encaixe o Garagino no Dual Motor Garagino ..................................................................................... 7
3.3. Faça as ligações dos sensores e fixe-os na plataforma zumo ............................................................ 8
4. Programação ............................................................................................................................................ 9
4.1. Leitura do Sensor ............................................................................................................................... 9
4.2. Controle dos motores ......................................................................................................................... 9
4.3. Sketch ................................................................................................................................................ 9
4.4. Gravando o programa no Garagino ............................................................................................... ...11
5. Executando ............................................................................................................................................ 11
5.1. Insira as pilhas no suporte da plataforma zumo ............................................................................... 11
5.2. Ajuste os sensores ........................................................................................................................... 12
6. Referências ............................................................................................................................................ 13
7. Links e Contatos ..................................................................................................................................... 13

Oficina de Robótica Página 4
1. Apresentação
Nesta oficina você será introduzido ao mundo da robótica, onde você pode criar robôs autônomos utilizando sensores e lógica de programação, e nessa oficina montaremos um seguidor de linha. O robô seguidor de linha já se tornou um clássico na aprendizagem de robótica, sendo até um tipo de categoria em qualquer competição de robótica hoje em dia. Ele junta a interface de controles entre um robô e seus sensores e também o divertido desafio de montar e ajustar um robô que nunca saia da linha e complete todo o percurso.

Oficina de Robótica Página 5
2. Funcionamento
Figura 1- Emissor e receptor Infravermelho
Com um emissor e um receptor infravermelho é simples detectar a linha preta. O emissor emite a luz infravermelha e quando essa luz for refletida, o receptor irá receber a luz. Em nossa demonstração utilizamos uma cartolina branca e fita isolante, quando for refletida e recebida pelo receptor, nos indica que abaixo do nosso receptor tem uma superfície que reflete a luz, no nosso caso essa superfície será a cartolina branca. Quando o sensor estiver acima da fita isolante, por ela ser preta, não refletirá luz, então com isso podemos afirmar que está sendo detectada a linha preta. Ao detectar que o carrinho esta saindo da linha, acionamos os motores para que ele permaneça acima da linha. Com essa montagem de emissor + receptor, estamos trabalhando com uma lógica binária, ou reflete luz, ou não reflete, ou seja, ou o sensor está acima da cartolina branca, ou o sensor está acima da linha preta. Na figura abaixo você pode ver o resumo da lógica utilizada para controlar o Zumo:
Figura 2 - Lógica utilizada para controlar o Zumo
Os micromotores são controlados pelo Dual Motor Garagino e ele permite que controlemos cada um dos motores individualmente.

Oficina de Robótica Página 6
3. Montagem
Imagem 1 - Robô Seguidor de Linha
Itens necessários: - Computador - Garagino + Conversor USB/Serial - Dual Motor Garagino - Plataforma robótica Zumo com Motores - Sensores de Linha (Montagem Emissor + Receptor infravermelho) - 4 Pilhas AA - Jumpers/Fios para conexões
Oficina de Robótica Página 7
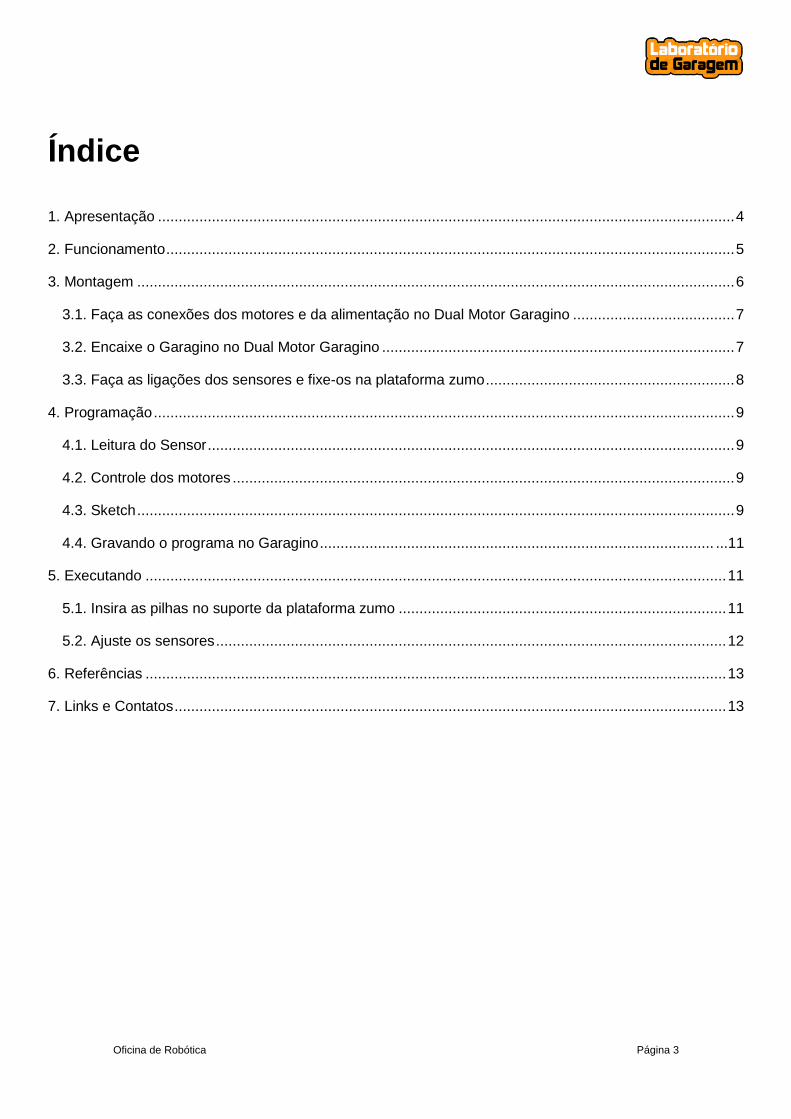
3.1. Faça as conexões dos motores e da alimentação no Dual Motor Garagino:
Imagem 2 - Conexão dos motores e alimentação
> Motor da Esquerda – M1 (Vermelho M1+ / Azul M1-) > Motor da Direita – M2 (Vermelho M2+ / Azul M2-) > Alimentação – (Vermelho + / Azul -)
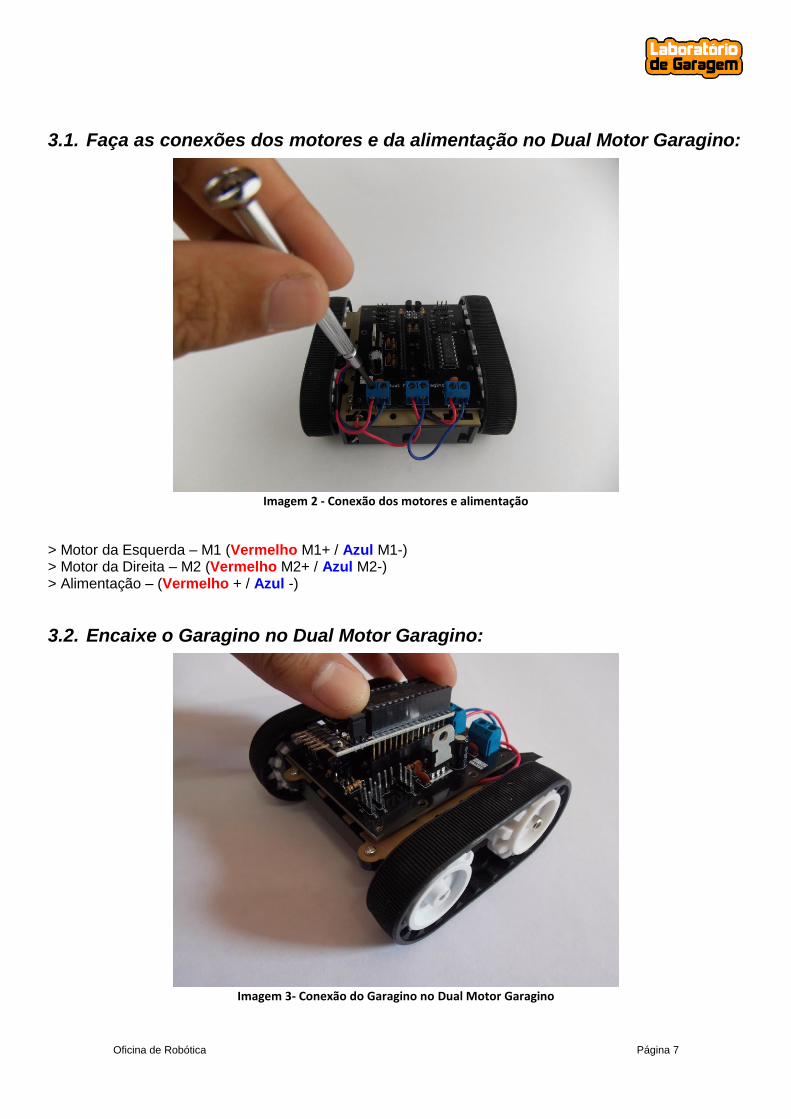
3.2. Encaixe o Garagino no Dual Motor Garagino:
Imagem 3- Conexão do Garagino no Dual Motor Garagino
Oficina de Robótica Página 8
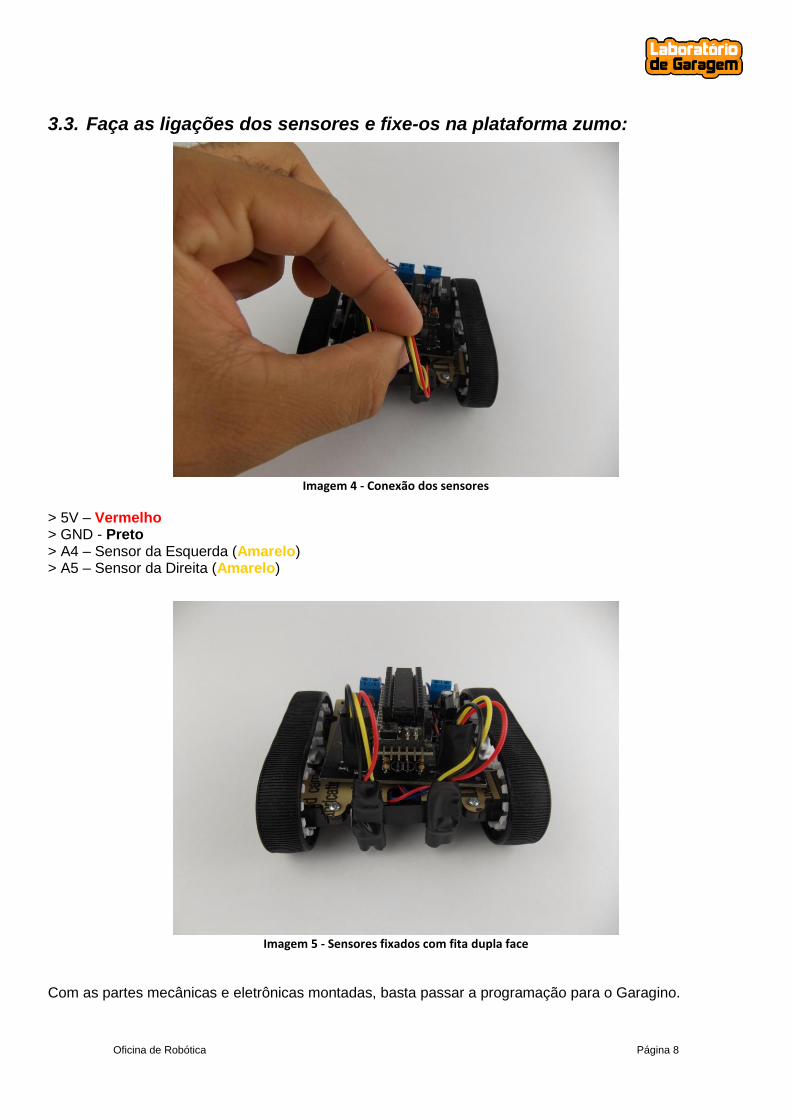
3.3. Faça as ligações dos sensores e fixe-os na plataforma zumo:
Imagem 4 - Conexão dos sensores
> 5V – Vermelho > GND - Preto > A4 – Sensor da Esquerda (Amarelo) > A5 – Sensor da Direita (Amarelo)
Imagem 5 - Sensores fixados com fita dupla face
Com as partes mecânicas e eletrônicas montadas, basta passar a programação para o Garagino.
Oficina de Robótica Página 9
4. Programação
4.1. Leitura do Sensor
Para efetuar a leitura dos sensores de linha, basta utilizar o seguinte comando: analogRead(Ax); - Sendo x um número de 0 a 5, que será determinado pelo o pino de leitura. Quanto maior for o valor aferido pelo sensor, menor será a refletância, ou seja, quanto mais próximo de 1023, menos a luz está sendo refletida.
4.2. Controle dos motores
Para controlar os motores, primeiramente você deve incluir a biblioteca e criar uma instância da mesma como podemos ver no exemplo abaixo: #include <DualMotor.h> //Inclui a biblioteca DualMotor.h DualMotor dualmotor; //Instância a DualMotor As funções de controle dos motores são bem simples, veja a descrição de cada uma das funções abaixo: dualmotor.M1move(velocidade, sentido); //Aciona o motor 1, velocidade (0 a 255) e sentido (0 - Trás ou 1 - Frente) dualmotor.M2move(velocidade, sentido); //Aciona o motor 2, velocidade (0 a 255) e sentido (0 - Trás ou 1 - Frente) dualmotor.M1parar(); //Para o motor 1 dualmotor.M2parar(); //Para o motor 2
4.3. Sketch
O programa para o seguidor de linha pode ser encontrado abaixo, basta digitá-lo na interface da Arduino IDE: #include <DualMotor.h> //Inclui a biblioteca #define SENSOR_ESQ A4 //Define SENSOR_ESQ como A2
#define SENSOR_DIR A5 //Define SENSOR_DIR como A3 DualMotor.h
DualMotor dualmotor; //Instancia a DualMotor
void setup()
{
delay(5000); //Aguarda 5 segundos para iniciar o programa
Serial.begin(9600);

Oficina de Robótica Página 10
}
void loop()
{
if(analogRead(SENSOR_ESQ) < 700 && analogRead(SENSOR_DIR) < 700) //Senão se nenhuma luz for
refletida para os sensores
{
//Move para Frente
dualmotor.M1move(255,1); //Motor 1 (Esquerda), gira para frente com velocidade total (255)
dualmotor.M2move(255,1); //Motor 2 (Direita), gira para frente com velocidade total (255)
Serial.println("Frente");
}
else if(analogRead(SENSOR_ESQ) < 700) //Senão se o sensor da Esquerda detectar a linha preta
{
//Move para Esquerda
dualmotor.M1move(255,1); //Motor 1 (Esquerda), gira para trás com velocidade total (255)
dualmotor.M2move(255,0); //Motor 2 (Direita), gira para frente com velocidade total (255)
Serial.println("Direita");
}
else if(analogRead(SENSOR_DIR) < 700) //Senão se o sensor da Direita detectar a linha preta
{
//Move para a Direita
dualmotor.M1move(255,0); //Motor 1 (Esquerda), gira para frente com velocidade total (255)
dualmotor.M2move(255,1); //Motor 2 (Direita), gira para trás com velocidade total (255)
Serial.println("Esquerda");
}
else
{
//Move para Trás com velocidade reduzida e aguarda 100 milissegundos
dualmotor.M1move(100,0); //Motor 1 (Esquerda), gira para trás com potência reduzida (100 ~ 39%)
dualmotor.M2move(100,0); //Motor 2 (Direita), gira para trás com potência reduzida (100 ~ 39%)
delay(100); //Aguarda 100 milissegundos
Serial.println("Tras");
}
}
Oficina de Robótica Página 11
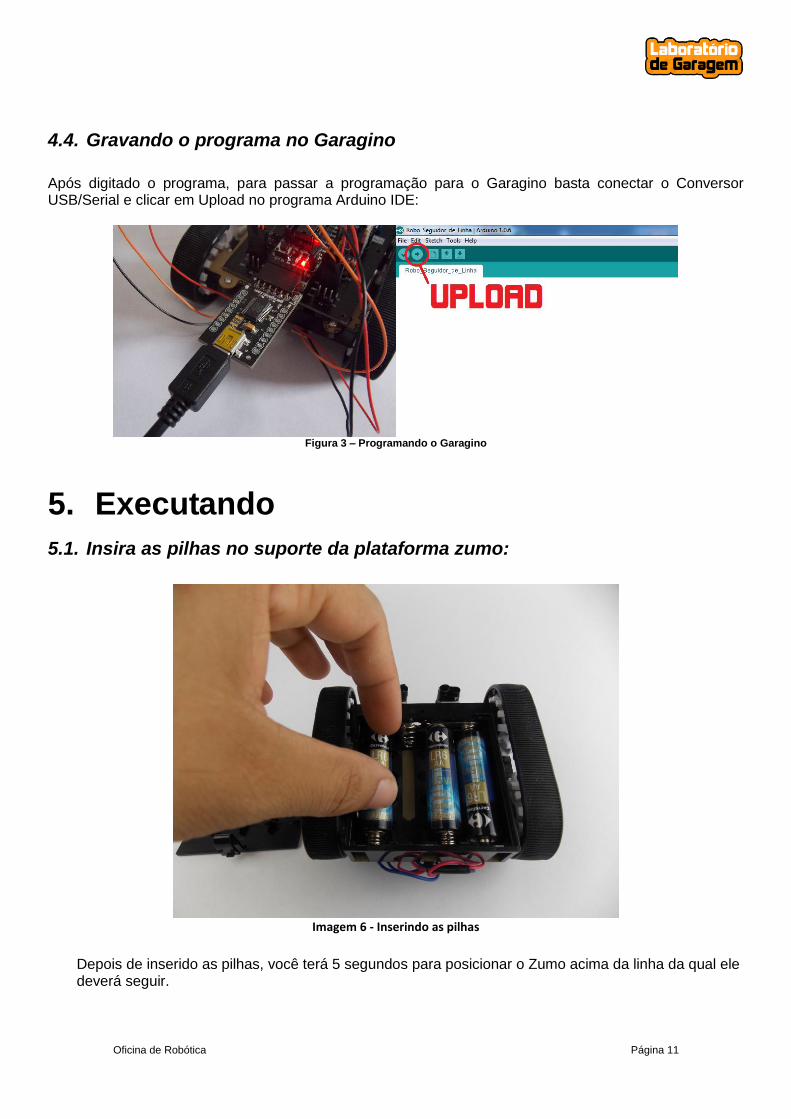
4.4. Gravando o programa no Garagino
Após digitado o programa, para passar a programação para o Garagino basta conectar o Conversor USB/Serial e clicar em Upload no programa Arduino IDE:
Figura 3 – Programando o Garagino
5. Executando
5.1. Insira as pilhas no suporte da plataforma zumo:
Imagem 6 - Inserindo as pilhas
Depois de inserido as pilhas, você terá 5 segundos para posicionar o Zumo acima da linha da qual ele deverá seguir.
Oficina de Robótica Página 12
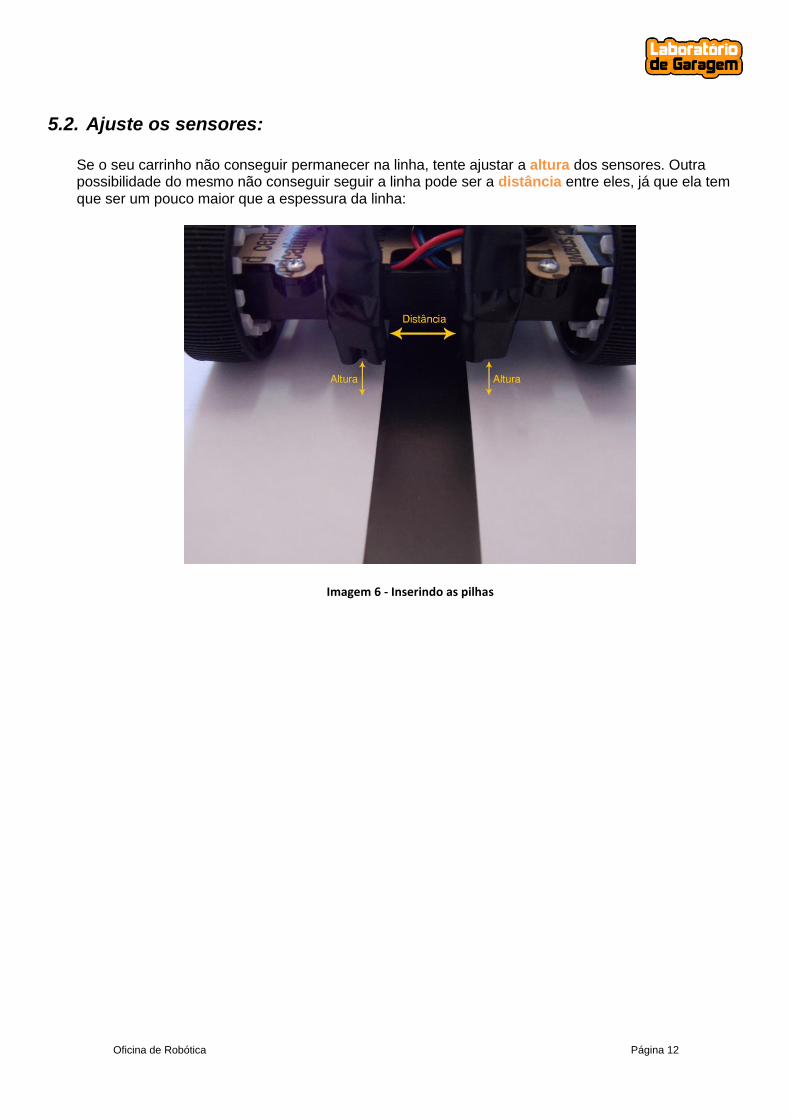
5.2. Ajuste os sensores:
Se o seu carrinho não conseguir permanecer na linha, tente ajustar a altura dos sensores. Outra possibilidade do mesmo não conseguir seguir a linha pode ser a distância entre eles, já que ela tem que ser um pouco maior que a espessura da linha:
Imagem 6 - Inserindo as pilhas

Oficina de Robótica Página 13
6. Referências
http://labdegaragem.com/profiles/blogs/tutorial-seguidor-de-linha-com-plataforma-zumo http://labdegaragem.com/profiles/blogs/tutorial-carrinho-seguidor-de-linha-que-desvia-de-obstaculos-com- http://labdegaragem.com/profiles/blogs/tutorial-seguidor-de-linha-com-dual-motor-garagino-que-remove-obs
7. Links e Contatos
- Para fazer parte de nossa Rede Social, acesse: http://labdegaragem.com/
- Para adquirir os produtos utilizados neste material ou outros, acesse nossa Loja Virtual: http://www.labdegaragem.org/loja/
- Não deixe de assistir aos vídeos tutoriais de nosso canal do Youtube: https://www.youtube.com/user/LabdeGaragem
- Contatos: Loja – [email protected] Incubadora – [email protected]
Informações – [email protected]