nuno daniel carneiro de carvalhointranet.dei.uminho.pt/gdmi/galeria/temas/pdf/42114.pdf ·...
TRANSCRIPT

Nuno Daniel Carneiro de Carvalho
WALC-AI: Laboratório para Aprendizagemdo Controlo e Automação Industrial
Nuno
Dan
iel C
arne
iro d
e Ca
rval
ho
Outubro de 2010UMin
ho |
201
0W
ALC
-AI:
Labo
rató
rio
para
Apr
endi
zage
mdo
Con
trol
o e
Auto
maç
ão In
dust
rial
Universidade do MinhoEscola de Engenharia

Outubro de 2010
Tese de MestradoCiclo de Estudos Integrados Conducentes aoGrau de Mestre em Engenharia Electrónica Industrial e Computadores
Trabalho efectuado sob a orientação daProfessora Doutora Filomena Maria Rocha MenezesOliveira Soares
Co-Orientadora:Professora Doutora Celina Maria Godinho Silva PintoLeão
Nuno Daniel Carneiro de Carvalho
WALC-AI: Laboratório para Aprendizagemdo Controlo e Automação Industrial
Universidade do MinhoEscola de Engenharia

i
"O que temos que aprender a fazer, aprendemos fazendo."
(Aristóteles)

ii

iii
Dissertação efectuada sobre a
supervisão científica da Doutora Filomena
Soares, Professora Associada do
Departamento de Electrónica Industrial da
Universidade do Minho e pela Doutora
Celina P. Leão, Professora Auxiliar do
Departamento Produção e Sistemas da
Universidade do Minho

iv

Resumo
v
Resumo
Este trabalho foi desenvolvido no âmbito de uma Bolsa da FCT, Fundação para
a Ciência e Tecnologia (UMINHO/BII/029/2009) e integra-se no projecto de
investigação financiado também pela FCT, “WALC, Web-assisted Control Studies”
(PTDC/ESC/68069/2006).
O objectivo deste trabalho consiste no projecto e implementação de uma rede de
autómatos que permite a comunicação remota e a ligação de diversos equipamentos
(maquetas de simulação, como por exemplo, parques de estacionamento, casas
“inteligentes”, estufas, entre outros). Esta rede terá a função de controlo e a agilidade
de monitorização de processos.
Para a implementação da rede de autómatos projectou-se e construiu-se um
armário (Quadro eléctrico) onde foi realizada a centralização de todo o controlo do
processo. Este armário contém um conjunto de autómatos que podem ser acedidos por
diversas ferramentas de comunicação, sendo elas, RS232, RS485, Mechatrolink,
Profibus, DeviceNet e por último e a mais importante da rede, a comunicação
Ethernet. Esta última tem uma grande importância, dado que é através desta que se
obtêm a porta de acesso para a programação e controlo remoto da rede e dos diversos
equipamentos a ela ligados.
Este projecto, para além de servir como ferramenta dedicada ao ensino, poderá
também ser utilizado para demonstrações com fins industriais. Este facultará a
acessibilidade remota entre o utilizador e a rede, com acesso local ou remoto, às várias
ferramentas de comunicação e às maquetas de demonstração de casos de estudo.
Palavra-chave: Protocolos e redes industriais.

vi

Abstract
vii
Abstract
This research was conducted under a scholarship from FCT, Foundation for Science
and Technology (UMINHO/BII/029/2009) and it is included in the research project also
funded by the FCT, "WALC, Web-assisted Control Studies" (PTDC/ESC/68069/2006).
The aim of this project is the design and implementation of a network of
programmable logic controllers (PLC), which allows remote communication and
connection of multiple devices (demonstration kits, such as car parks, „intelligent' houses,
greenhouses, among others). This network will work as a control and as a monitoring
process.
A control cabinet was projected and built in order to create a PLC network. The
centralization of all process control took place in this cabinet, which contains a set of PLC
that can be accessed by several communication tools: RS232, RS485, Mechatrolink,
Profibus, DeviceNet and finally the most important: the Ethernet communication. This
last communication is a very important one because, through it, it is possible to get the
access port to the programming and the remote control of the network and several
equipments attached to it.
This project beyond serving as a tool dedicated to teaching; it can also be used for
industrial purposes. It will provide remote accessibility between the user and the network
with local or remote access to several communication tools and models for case studies
demonstration.
Keywords: Protocols and industrial network

viii

Agradecimentos
ix
Agradecimentos
Começo por agradecer as minhas orientadoras, Prof. Dr. Filomena Soares e a
Prof. Dr. Celina P. Leão não só pela oportunidade que me deram para o
desenvolvimento do projecto, mas também pelo apoio e ajuda dada durante todo este
percurso.
Agradeço aos meus amigos e colegas que me apoiaram e ajudaram em todos os
momentos, não só no desenvolvimento desta dissertação mas também pela grande
ajuda e apoio, que me deram para eu chegar a este grau académico, não poderia aqui
deixar de agradecer ao Rodrigo Silveira pelos dias perdidos, na ajuda de solucionar
nos muitos problemas encontrados durante este percurso, ao seu contributo dado a este
projecto. Agradecer também ao Júlio Costa e ao Ricardo Freitas também eles me
ajudaram a solucionar alguns problemas. Ao Hugo Fernandes, Raul Oliveira,
Fernando Bourbón e ao Rui Peixoto pelo apoio e pela força que me deram para
conclusão desta etapa académica.
Agradeço ao engenheiro da empresa Omron, Eng. Osvaldo Azevedo, pelo apoio
e fornecimento de documentação, para a construção da rede de autómatos.
Aos funcionários das oficinas, Carlos Torres, Joel Almeida, Ângela Macedo,
Paulo Silva e ao Engenheiro Rui Gomes, agradeço-lhes toda ajuda prestada,
mostrando sempre disponibilidade na prestação dos seus devidos serviços.
Agradeço também a minha família pela força dada em todos os momentos não
só no meu percurso académico, mas em toda a minha vida. Agradeço aos meus pais
pela confiança e oportunidade dada para a conclusão desta etapa.
Gostaria de agradecer a todos aqueles que mesmo no anonimato me foram
ajudando.
A todos, os meus sinceros agradecimento e muito obrigado por tudo.

x
Índice
xi
Índice
ÍNDICE ............................................................................................................................................. XI
ÍNDICE DE FIGURAS .................................................................................................................. XV
ÍNDICE DE TABELAS ................................................................................................................ XIX
LISTA DE ACRÓNIMOS ............................................................................................................ XXI
1.INTRODUÇÃO ............................................................................................................................... 1
1.1.ENQUADRAMENTO ..................................................................................................................... 3
1.2.OBJECTIVO ................................................................................................................................. 3
1.3.ORGANIZAÇÃO DO DOCUMENTO ................................................................................................. 4
2.REDE DE AUTÓMATOS INDUSTRIAIS ................................................................................... 5
2.1. MODELO OSI ............................................................................................................................. 6
2.2.FIELDBUS ................................................................................................................................... 7
2.3.PROFIBUS ................................................................................................................................... 8
2.3.1.Arquitectura do protocolo Profibus ................................................................................... 9
2.3.2.Profibus-DP ..................................................................................................................... 10
2.3.3.Profibus-FMS .................................................................................................................. 10
2.3.4.Profibus-PA ..................................................................................................................... 11
2.3.5.O meio físico do PROFIBUS ........................................................................................... 11
2.4.PROFINET ................................................................................................................................. 12
2.4.1 Profinet IO ....................................................................................................................... 13
2.4.2 Profinet CBA .................................................................................................................... 13
2.5. AS-I ........................................................................................................................................ 14
2.6.DEVICENET ............................................................................................................................. 14
2.7.CONTROLNET ........................................................................................................................... 15
2.8.ETHERNET/IP ........................................................................................................................... 15
2.9.CIP ........................................................................................................................................... 15
2.10.MODBUS ................................................................................................................................. 16
2.10.1.Modbus RTU .................................................................................................................. 16
2.10.2.Modbus ASCII ................................................................................................................ 17
2.10.2.1.Modbus TCP .......................................................................................................................... 17
2.10.2.2.Modbus Plus .......................................................................................................................... 17
2.11. CAN ...................................................................................................................................... 17
2.12.LONWORKS ............................................................................................................................ 18
Índice
xii
3.IMPLEMENTAÇÃO DA REDE DE AUTÓMATOS ................................................................ 19
3.1. REDE ETHERNET ...................................................................................................................... 21
3.1.1. Autómato 1 ...................................................................................................................... 22
3.1.2. Autómato 2 ...................................................................................................................... 23
3.1.3. Autómato 3 ...................................................................................................................... 23
3.1.4.SmartSlice Profinet I/O Unit ............................................................................................ 24
3.2. REDE DEVICENET .................................................................................................................... 25
3.2.1. Autómato 4 ...................................................................................................................... 26
3.2.2. SmartSlice DeviceNet I/O ............................................................................................... 26
3.2.3. Controlador de rede DeviceNet de segurança ................................................................ 27
3.2.4. Terminais de entrada de temperatura ............................................................................. 28
3.3. REDE MECHATROLINK II ......................................................................................................... 29
3.3.1. Unidades de transmissão ................................................................................................ 29
3.3.2. Servomotor ...................................................................................................................... 30
3.4. REDE PROFIBUS ....................................................................................................................... 31
3.4.1. Variador de frequência ................................................................................................... 32
3.4.2. SmartSlice Profibus I/O .................................................................................................. 34
3.5. REDE RS485 ............................................................................................................................ 35
3.5.1.Autómato CP1L ................................................................................................................ 36
3.5.2.Módulo de expansão do autómato CP1L ......................................................................... 37
3.6. REDE RS232 ............................................................................................................................ 37
3.6.1. Consola táctil .................................................................................................................. 38
3.6.2. Controlador de temperatura ........................................................................................... 38
3.7. CONFIGURAÇÃO DA REDE DE AUTÓMATOS .............................................................................. 39
3.7.1.Configuração da rede Ethernet........................................................................................ 42
3.7.2.Configuração rede DeviceNet .......................................................................................... 43
3.7.3.Configuração da rede Mechatrolink ................................................................................ 44
3.7.4.Configuração da rede Profibus ........................................................................................ 47
3.7.5.Configuração da rede RS485 ........................................................................................... 52
4.APLICAÇÃO PARA CONTROLO E MONITORIZAÇÃO DOS AUTÓMATOS ................ 55
4.1.MEMÓRIA DO CPU ................................................................................................................... 55
4.2. PROTOCOLO HOST LINK .......................................................................................................... 56
4.2.1. Formato das tramas Host Link ....................................................................................... 56
4.2.2.Exemplos de tramas Host Link......................................................................................... 58
4.2.3.Software teste Host Link .................................................................................................. 61
4.3.PROTOCOLO FINS .................................................................................................................... 64
4.3.1. Tramas FINS série .......................................................................................................... 64
4.3.1.1. Exemplos de tramas FINS série .............................................................................................. 69
4.3.1.2. Software teste FINS série ....................................................................................................... 73

Índice
xiii
4.3.2. Tramas FINS Ethernet TCP ............................................................................................ 74
4.3.2.1.Exemplos de tramas FINS Ethernet TCP ................................................................................. 75
4.3.2.2. Software teste FINS Ethernet TCP ......................................................................................... 76
4.3.3. Tramas FINS Ethernet UDP ........................................................................................... 77
4.3.3.1.Exemplos de tramas FINS Ethernet UDP ................................................................................ 78
4.3.3.2. Software teste FINS Ethernet UDP ......................................................................................... 79
5.CASOS DE ESTUDO .................................................................................................................... 81
6.CONCLUSÃO E TRABALHO FUTURO .................................................................................. 89
REFERÊNCIAS BIBLIOGRÁFICAS ........................................................................................... 91

Índice
xiv

Índice de Figuras
xv
Índice de Figuras
Figura 1 - Modelo OSI [22]. ................................................................................................ 6
Figura 2 - Modelo OSI Profibus. ....................................................................................... 10
Figura 3 - Cabeamento e terminação para transmissão RS-485 no PROFIBUS [28]. ...... 12
Figura 4 - Rede de autómatos. ........................................................................................... 20
Figura 5 - Autómatos ligados por comunicação Ethernet. ................................................. 21
Figura 6 - CJ1W-PA202 [48]. ............................................................................................ 22
Figura 7 - CPU13 ETN [48]. .............................................................................................. 22
Figura 8 - CJ1W-MCH72 [48]. .......................................................................................... 22
Figura 9 - CJ1W-PRM21 [48]. .......................................................................................... 22
Figura 10 - CJ1W-CT021 [48]. .......................................................................................... 22
Figura 11 - CJ2H-CPU64-EIP [48]. ................................................................................... 23
Figura 12 - CJ1W-DRM21 [48]. ........................................................................................ 23
Figura 13 - CJ1W-ID211 [48]. ........................................................................................... 23
Figura 14 - CJ1W-OD212 [48]. ......................................................................................... 23
Figura 15 - ZFX-C15 [48]. ................................................................................................. 24
Figura 16 - ZFX-SC50 [48]. .............................................................................................. 24
Figura 17 – SmartSlice. ...................................................................................................... 25
Figura 18 - Rede DeviceNet. ............................................................................................. 25
Figura 19 - CJ1M-CPU11 [48]. ......................................................................................... 26
Figura 20 - CJ1W-SCU31-V1 [48]. ................................................................................... 26
Figura 21 - SmartSlice DeviceNet. .................................................................................... 27
Figura 22 - Controlador e equipamentos de segurança. ..................................................... 28
Figura 23 - NE1A-SCPU01-V1 [49]. ................................................................................ 28
Figura 24 - DRT2-TS04T. ................................................................................................. 28
Figura 25 - Rede Mechatrolink. ......................................................................................... 29
Figura 26 - Unidade de transmissão “Junma ML-II” [52]. ................................................ 30
Figura 27 - Servomotor “Junma” SJME-02AMB41-OY [48]. .......................................... 30
Figura 28 - Rede Profibus. ................................................................................................. 31
Figura 29 - Variador [54]. .................................................................................................. 33
Figura 30 - SI-P1 Profibus-DP. .......................................................................................... 33
Figura 31 - PG-X2 - Carta realimentação vectorial. .......................................................... 34

Índice de Figuras
xvi
Figura 32 - E6B2-CWZ1X encoder [48]. .......................................................................... 34
Figura 33 - Sistema de E/S SmartSlice. ............................................................................. 35
Figura 34 - Rede RS485. .................................................................................................... 36
Figura 35 - CP1L-M30DR-A [57]. .................................................................................... 37
Figura 36 - CP1W-MAD11 [57]. ....................................................................................... 37
Figura 37 - Rede RS232. .................................................................................................... 38
Figura 38 - NS5-SQ10B-V2 [58]. ...................................................................................... 38
Figura 39 - Controlador E5CN [59]. .................................................................................. 39
Figura 40 - Esquema de ligação da rede de autómatos. ..................................................... 40
Figura 41 - Routing Tables PLC1. ..................................................................................... 41
Figura 42 - Routing Tables PLC6. ..................................................................................... 42
Figura 43 - IO Table PLC1. ............................................................................................... 42
Figura 44 - IO Table PLC2. ............................................................................................... 42
Figura 45 - Janela de Configuração PLC1. ........................................................................ 43
Figura 46 - Janela de Configuração PLC2. ........................................................................ 43
Figura 47 - Configuração DeviceNet. ................................................................................ 44
Figura 48 - Configuração do autómato. ............................................................................. 45
Figura 49 - Configuração da carta Mechatrolink. .............................................................. 45
Figura 50 - Características do servo drive. ........................................................................ 46
Figura 51 - Teste ao servo driver. ...................................................................................... 46
Figura 52 - CX-Drive para testar o servo motor. ............................................................... 47
Figura 53 - Configuração da comunicação. ....................................................................... 48
Figura 54 - SmartSlice configuração do nó. ...................................................................... 49
Figura 55 - SmartSlice configuração das unidades. ........................................................... 49
Figura 56 - Configuração S1-P1. ....................................................................................... 50
Figura 57 - Posições de memória das entradas. ................................................................. 51
Figura 58 - Posições de memória das saídas. ..................................................................... 51
Figura 59 - CX-Programmer. ............................................................................................. 52
Figura 60 - CX-programmer IO Table. .............................................................................. 52
Figura 61 - Unidades Existentes no PLC. .......................................................................... 53
Figura 62 - Janela de configuração. ................................................................................... 53
Figura 63 - Definições do PLC6. ....................................................................................... 54
Figura 64 - Ligação RS232 do PLC a um PC. ................................................................... 56
Figura 65 - Ligação RS485 do PLC a um PC. ................................................................... 56

Índice de Figuras
xvii
Figura 66 - Trama enviado pelo PC [61]. .......................................................................... 56
Figura 67 - Trama de resposta enviado pelo PLC ao PC [61]. .......................................... 57
Figura 68 - Trama de resposta de erro [61]. ....................................................................... 57
Figura 69 - Painel frontal. .................................................................................................. 61
Figura 70 - Tipo de áreas de memória. .............................................................................. 62
Figura 71 - Janela da área de memória CIO, leitura. ......................................................... 63
Figura 72 - Janela da área de memória DM, escrita. ......................................................... 63
Figura 73 - Rede de autómatos. ......................................................................................... 65
Figura 74 - Blocos da trama de comando. ......................................................................... 66
Figura 75 - Blocos da trama de resposta. ........................................................................... 66
Figura 76 - Trama de comando FINS [62]. ........................................................................ 66
Figura 77 - Trama de resposta FINS [62]. ......................................................................... 68
Figura 78 - Exemplo sub-rede. ........................................................................................... 71
Figura 79 - Janela FINS Série. ........................................................................................... 73
Figura 80 - Janela Fins Série 2. .......................................................................................... 74
Figura 81 - Blocos da trama de comando Ethernet TCP. .................................................. 75
Figura 82 - Blocos da trama de resposta Ethernet TCP. .................................................... 75
Figura 83 - Janela FINS Ethernet. ...................................................................................... 76
Figura 84 - Janela FINS Ethernet 2. ................................................................................... 77
Figura 85 - Bloco da trama de comando. ........................................................................... 77
Figura 86 - Bloco da trama de resposta. ............................................................................ 77
Figura 87 - Janela FINS Ethernet UDP 1. .......................................................................... 80
Figura 88 - Janela FINS Ethernet UDP 2 ........................................................................... 80
Figura 89 - Protótipo do armário. ...................................................................................... 81
Figura 90 - Armário construído para a implementação da rede de autómatos. ................. 83
Figura 91 - Armário e a maqueta “Casa Inteligente”. ........................................................ 84
Figura 92 - Iluminação escadas. ......................................................................................... 85
Figura 93 - Sensor de movimento. ..................................................................................... 85
Figura 94 - Placa de comando (4 Botões de pressão e 3 leds). .......................................... 85
Figura 95 - Janela com detector de intrusão. ..................................................................... 85
Figura 96 - Controlador de temperatura. ............................................................................ 85
Figura 97 - Porta de entrada. .............................................................................................. 85
Figura 98 - Painel de monitorização remoto da “Casa Inteligente” e respectivo painel de
controlo. ............................................................................................................................. 86

Índice de Figuras
xviii
Figura 99 - Painel de monitorização remota da “Casa Inteligente” através de vídeo
câmara. ............................................................................................................................... 86
Figura 100 - Página Web com visualização do painel 1. ................................................... 87
Figura 101 - Página Web com visualização do painel 2. ................................................... 88

Índice de Tabelas
xix
Índice de Tabelas
Tabela 1 - Comprimento em função da velocidade de transmissão [26]. .......................... 12
Tabela 2 - Características do servo motor [52]. ................................................................. 31
Tabela 3 - Escrever na memória CIO, posição 1 o valor 10. ............................................. 58
Tabela 4 - Escrever na memória CIO, a partir da posição 1 o valor 10 e 3. ...................... 59
Tabela 5 - Ler da memória CIO, posição 1. ....................................................................... 59
Tabela 6 - Ler da memória CIO, a partir da posição 1 ...................................................... 59
Tabela 7 - Modo Program. ................................................................................................. 60
Tabela 8 - Modo Monitor. .................................................................................................. 60
Tabela 9 - Modo RUN. ...................................................................................................... 60
Tabela 10 - Verificar qual é o modo de operação. ............................................................. 60
Tabela 11 - Trama FINS série de escrita. .......................................................................... 70
Tabela 12 - Trama FINS série de leitura. ........................................................................... 70
Tabela 13 - Trama de escrita num PLC de uma sub-rede. ................................................. 71
Tabela 14 - Trama de leitura num PLC de uma sub-rede. ................................................. 72
Tabela 15 - Modo RUN. .................................................................................................... 72
Tabela 16 - Modo Monitor. ................................................................................................ 72
Tabela 17 - Modo Program. ............................................................................................... 72
Tabela 18 - Trama TCP que estabelece a comunicação. ................................................... 75
Tabela 19 - Trama TCP de escrita. .................................................................................... 75
Tabela 20 - Trama TCP de leitura. ..................................................................................... 76
Tabela 21 - Trama UDP de escrita. .................................................................................... 78
Tabela 22 - Trama UDP de leitura. .................................................................................... 78
Tabela 23 - Trama UDP modo PROGRAM. ..................................................................... 79
Tabela 24 - Trama UDP modo MONITOR. ...................................................................... 79
Tabela 25 - Trama UDP modo RUN. ................................................................................ 79

Índice de Tabelas
xx

Lista de Acrónimos
xxi
Lista de Acrónimos
CPU Central Processing Unit (Unidade Central de Processamento)
DEI Departamento de Electrónica Industrial
DEM Departamento de Engenharia Mecânica
DPS Departamento de Produção e Sistemas
EIA232 Electronic Industries Alliance232
EIA485 Electronic Industries Alliance485
FCT Fundação para a Ciência e a Tecnologia
FINS Factory Interface Network Service
I/O INPUT/OUTPUT
IEEE Institute of Electrical and Electronics Engineers
LabVIEW Laboratory Virtual Instrument Engineering Workbench
LAN Local Area Networks
PC Personal Computer
PLC Programmable Logic Controller
RS232 Recommended Standard 232
RS485 Recommended Standard 485

Lista de Acrónimos
xxii

Capitulo 1-Introdução
1
1.Introdução
Automação pode ser definida como o processo de seguir uma sequência predefinida
de uma operação com pouco ou nenhuma utilização de mão-de-obra humana. No seu
sentido pleno, Automação é conseguida através do uso de uma variedade de dispositivos
[1]. Também pode ser definida como um processo industrial, onde várias operações são
executadas. Os processos modernos e actualizados são principalmente controlados por
programas de computadores.
Desta forma, os sistemas de automação permitem monitorizar e controlar o
funcionamento de um processo de forma segura utilizando, para isso, vários meios de
comunicação entre os quais, controladores lógicos programáveis (PLC) e estações
remotas de entradas e saídas de sinais eléctricos (Remotas I/O).
A utilização de sistemas automatizados diminui os custos de mão-de-obra, aumenta
a qualidade dos produtos, sendo simples integrar um sistema automatizado numa rede
industrial.
O controlo e monitorização da rede permitem a eficácia de acesso e gestão dessas
redes. Estão disponíveis várias comunicações que podem ser utilizadas nas redes
industriais, tais como, Fieldbus, Profibust, Devicenet, Modbus, entre outras. Uma rede
industrial utilizando qualquer um destes tipos de protocolos dá a possibilidade ao utilizar
de aceder a diversos autómatos ligados entre si. Existem no mercado diversos dispositivos
automatizados que implementam estes protocolos, permitindo assim ao utilizador uma
fácil implementação desses dispositivos numa rede industrial. Os próprios fabricantes de
autómatos já disponibilizam autómatos com vários protocolos de comunicação
possibilitando a implementação dos seus produtos em qualquer rede industrial.
A velocidade e a localização de acesso às redes tem vindo a aumentar, bem como os
protocolos de acesso remoto nomeadamente protocolos Profinet, Ethernet/IP, entre
outros. As redes industriais têm imensas vantagens, não só pela facilidade acesso, mas
também por ser possível conectar diversos autómatos e partilhar dados entre si
aumentando assim a sua autonomia. A esses autómatos podem estar ligados diversos
sensores, actuadores e controladores [2].

Capitulo 1-Introdução
2
As redes industriais permitem a transmissão de dados de uma forma rápida e fiável.
São também conhecidas como sistemas distribuídos, isto é, processos que trabalham de
forma síncrona, descentralizados, realizada por dois ou mais sistemas computacionais.
Este tipo de organização é vantajosa devido à sua distribuição e sua independência em
relação aos outros sistemas computacionais.
Este tipo de projectos tem vindo a ganhar uma certa importância no ensino, devido
a sua integração como método de aprendizagem dos alunos. Com a disponibilidade de
acesso remoto a uma rede industrial, o aluno tem oportunidade de testar, com casos de
estudo reais, o conhecimento adquirido sobre este tipo de processos. Este tipo de ensino é
particularmente importante para alunos da área de engenharia, onde esta ferramenta pode
ser utilizada como demonstração da aprendizagem dos conceitos teóricos. É a aplicação
do conceito “Aprender fazendo” [3].
Este tipo de laboratórios requer, no entanto, muito equipamento, sendo grande parte
deles dispendiosos. A construção de um laboratório depende da sua organização e de
meios de financiamento. Para além destes problemas um laboratório requer espaço físico
e pessoal especializado. Utilizando a Internet como porta de acesso a estes laboratórios
facilita a utilização destes laboratórios, diminuindo assim espaço de ocupação e
minimizando mão-de-obra especializada. Com a disponibilidade de acesso a estes
laboratórios via Internet o aluno pode testar os seus conhecimentos a partir de qualquer
lugar [4-7].
Laboratórios remotos tem um papel importante nos dias de hoje, quer a nível de
ensino, quer a nível industrial. Permitem testar, monitorizar, controlar, programar,
diferentes casos de estudo.
Actualmente, existem vários projectos relacionados com laboratórios remotos,
todos eles com o mesmo objectivo, melhorar e aumentar a qualidade de ensino e
formação [8-12]. Como exemplo de investigação neste campo, o Departamento de
Electrónica Industrial da Universidade do Minho disponibiliza vários laboratórios via
Web capazes de solucionar problemas de electrónica, de controlo de processos e de
automação. Estes laboratórios funcionam em modo virtual ou remoto [4]; o LabTEVE
(Laboratório de Tecnologias para o Ensino Virtual e Estatística) tem como principal
objectivo, o ensino a distância, sistemas de realidade virtual e computação gráfica. [13];

Capitulo 1-Introdução
3
FEUPLabs (Faculdade de Engenharia da Universidade do Porto) fornece também a
possibilidade de aceder a diversos projectos e testar remotamente experiências reais [14].
1.1.Enquadramento
Com o desenvolvimento da tecnologia e a necessidade de adaptação entre
máquinas e sistemas de controlo, as redes industriais têm assumido um papel importante.
Com a evolução dos mercados e da tecnologia e devido as exigências dos consumidores,
torna-se necessário uma maior integração entre máquinas e sistemas de controlo.
Esta dissertação foi desenvolvida com o apoio de duas bolsas de investigação, uma
bolsa BII (Bolsa de integração na investigação, UMINHO/BII/029/2009,) e uma bolsa
BIC (Bolsa de iniciação cientifica, UMINHO/BIC/015/2010) no âmbito de um projecto
de investigação, financiado pela Fundação para a Ciência e Tecnologia, em parceria com
quatro departamentos da Escola de Engenharia da Universidade do Minho (Electrónica
Industrial, Produção e Sistemas, Engenharia Mecânica e Sistemas de Informação) e com a
empresa industrial de automação Omron (WALC - Web Assisted Laboratory for Control
PTDC/ESC/68069/2006).
Neste contexto, e através da criação da plataforma WALC propõe-se disponibilizar
um espaço em ambiente Web, para uso pedagógico ao nível de graduação e também ao
nível mais avançado de estudos de pós-graduação, de um laboratório virtual e remoto
aplicado ao ensino de Automação e Controlo em Engenharia
1.2.Objectivo
O objectivo deste projecto consiste no desenho e implementação de uma rede de
autómatos, que permite a comunicação remota e a ligação de diversos equipamentos
(maquetas de simulação, como por exemplo, parques de estacionamento, casas
„domótica‟, estufas, entre outros), tendo esta rede a função de controlo e a agilidade de
monitorização de processos.

Capitulo 1-Introdução
4
Uma outra finalidade consiste em permitir ao utilizador conhecer as características
dos sistemas de comunicação industrial. Será possível ao utilizador instalar, configurar e
gerir uma rede industrial entre PLCs e dispositivos controladores I/O, além de conhecer
os procedimentos de manutenção preventiva e correctiva, permitindo o domínio sobre a
operação dos sistemas industriais.
O projecto tem ainda como objectivo dar conhecimento e formação no âmbito do
controlo e automação industrial, tendo como conceitos essenciais o domínio da
automação industrial. Estes conhecimentos possibilitam a programação de controladores
lógicos, conceitos e práticas no domínio das tecnologias envolvidas na automação e
sistemas industriais, bem como a possibilidade de ligação de dispositivos com protocolos
de comunicação diferentes.
1.3.Organização do documento
Este documento está dividido em 5 capítulos.
No primeiro capítulo é feita uma breve introdução, onde são descritos os objectivos,
o enquadramento e a motivação do projecto.
No segundo capítulo são apresentados os conceitos de automação e redes
industriais, onde também se faz uma breve descrição das redes existentes no mercado e o
seu funcionamento.
No terceiro capítulo é feito o enquadramento da rede utilizada no projecto. As redes
de comunicação utilizadas na rede de autómatos são descritas bem como a sua instalação.
O quarto capítulo aborda os protocolos a utilizar na rede de autómatos construída.
São apresentados alguns testes feitos com esses protocolos, e o software desenvolvido
para a realização dos mesmos.
No quinto capítulo é descrito o caso de estudo onde são apresentados alguns casos
práticos em que é possível inserir este projecto.
Por último apresentam-se as conclusões e as perspectivas futuras de
desenvolvimento do trabalho.

Capitulo 2- Rede de autómatos Industriais
5
2.Rede de autómatos Industriais
As redes industriais permitem a transmissão de dados de uma forma rápida e fiável,
essencial a qualquer processo produtivo.
As redes industriais são conhecidas como sistemas distribuídos, isto é, processos
que trabalham de forma síncrona, descentralizados, realizada por dois ou mais sistemas
computacionais independentes ligados por meio de comunicação com ou sem fios, a fim
de supervisionar e controlar um determinado sistema. Estes sistemas utilizam sensores,
actuadores, controladores, que necessitam de estar ligados entre si de forma a desenvolver
uma comunicação de informação de uma forma rápida e sem erro.
Este tipo de organização é vantajosa devido à sua distribuição e sua independência
em relação aos outros sistemas computacionais, que se encontram na rede, o que permite
ao utilizador alterar a rede conforme as suas necessidades sem perturbar a rede já
existente.
Existe no mercado uma variedade de empresas especializadas no desenvolvimento e
da integração dessas redes de comunicação industrial.
Nas redes industriais os sistemas de transmissão de dados começaram de uma forma
muito simples, com conexões através de RS-232 e RS-485, mas com a evolução dos
mercados, as indústrias tiveram de aumentar as velocidades e a eficácia das
comunicações; foram obrigadas a criar tecnologias próprias, protocolos, software e
hardware que se adequassem às suas necessidades [15].
Cada fabricante tem tendência a construir um sistema muito próprio, o que leva a
dificuldades de interacção entre equipamentos de diferentes fabricantes. Como
consequência, foi necessário criar protocolos abertos de modo que se possam encontrar
soluções para resolver os problemas de aquisição de equipamentos que suportem
diferentes comunicações. Permite-se, assim, a existência de uma interligação entre
dispositivos com diferentes protocolos de comunicação e diferentes marcas [16].
A maioria das redes de comunicação existentes é construída para automação
industrial. O desenvolvimento desta rede proporciona uma melhor eficácia e controlo dos
processos, diminui o número de cabos utilizados para a sua comunicação, simplificando
assim as suas ligações.
No mercado existem diversas empresas que construíram variados dispositivos com
diversos tipos de comunicações e protocolos: DeviceNet [17], ControlNet, Ethernet/IP

Capitulo 2-Rede de autómatos Industriais
6
(responsabilidade da organização ODVA (Open DeviceNet Vendors Association)) [18];
protocolos ASI, Profibus DP, PA, FMS e Profinet [19], os protocolos Modbus, Modbus
Plus, Modbus TCP. A fundação Fieldbus é a responsável pelo desenvolvimento do
protocolo Foundation Fieldbus H1, H2 e HSE [20], existindo ainda outros protocolos
desenvolvidos por outras instituições protocolos como, CAN, LonWorks, entre outros
[21].
2.1. Modelo OSI
Modelo OSI (Open Systems Interconnection) foi criado para a necessidade de
existir um modelo “standard” no desenvolvimento de redes de comunicações industriais.
Este modelo está dividido em sete camadas que definem o processo necessário para o
envio das mensagens entre redes de comunicação [22] (Figura 1). A organização
responsável pela criação e desenvolvimento deste modelo é a organização ISO
(Internacional Organization for Standardization), primeira organização responsável pelo
desenvolvimento das comunicações entre computadores [23].
Figura 1 - Modelo OSI [22].
O desenvolvimento de uma rede industrial tem de respeitar o seguimento destas
camadas; não é necessário implementar todas as camadas mas é obrigatório cumprir as
regras de seguimento das camadas do modelo OSI [24].

Capitulo 2- Rede de autómatos Industriais
7
A sétima (7º Aplicação) camada define o Software de aplicação do utilizador e as
camadas inferiores. A sexta camada (6º apresentação) trata da descodificação de dados. A
quinta camada (5º sessão) estabelece, mantém e coordena o intercâmbio de dados entre
emissor e receptor durante a comunicação. A quarta camada (4º Transporte) controlo de
fluxo de informação recebida e transmitida, verifica a correcção da entrega das
mensagens. A terceira camada (3º rede) diz respeito à ligação dos caminhos da rede ou
interligação da rede. A segunda camada (2º Ligação de dados) controla o acesso e a
transmissão aos meios físicos e a recepção de dados. E por fim a primeira camada (1º
Camada Física) define as características do meio físico da rede, conectores, interface,
codificação ou modelação de sinais [25].
O objectivo da existência deste modelo é a possibilidade da construção de um
protocolo de uma rede industrial, com facilidade de implementação num meio de
comunicação já existente. Os protocolos de comunicação existentes no mercado seguem
as normas deste modelo devido à sua facilidade de adaptação às necessidades da
indústria, a integração de redes com protocolos de diferentes fabricantes comunicar-se
entre si. Com a criação deste modelo surgiram os protocolos abertos, como por exemplo
Profibus, DeviceNet, Modbus, entre outros. São protocolos que operam sobre hardware
existente no mercado, com capacidade de implementar uma rede de comunicação de
dados entre si, com grande facilidade.
2.2.Fieldbus
A tecnologia Fieldbus começou com as primeiras tentativas de distribuir a
funcionalidade de controlo ao nível de campo. Fieldbus ou rede de comunicação de
campo como pode ser também chamada, é uma rede muito utilizada devido à sua
comunicação ser totalmente digital, em serie e bidireccional. Este protocolo apresenta
várias vantagens, sendo elas:
• Redução de número de fios;
• Comunicações de múltiplas variáveis do processo a partir de um único instrumento;
• Diagnósticos avançados;
• Interoperabilidade entre dispositivos de diferentes fabricantes;

Capitulo 2-Rede de autómatos Industriais
8
• Nível de controlo de campo melhorado;
• Integração mais simples.
Fieldbus é uma tecnologia controlada pela fundação Fieldbus Foundation, uma
fundação sem fundos lucrativos. O Foundation Fieldbus mantém muitas das
características operacionais do sistema analógico 4-20 mA, tais como uma interface física
padronizada da cablagem, os dispositivos alimentados por um único par de fios e as
opções de segurança intrínseca, mas oferece uma série de benefícios adicionais aos
utilizadores [26].
Mas foi na década de 1980 que existiu um maior desenvolvimento de dispositivos
com este padrão de comunicação. Foi devido ao esforço dos membros da comissão do
ISA SP50 que durante anos definiram os requisitos técnicos e a criar um consenso de
padronização desta rede.
Fieldbus é uma rede de transmissão de dados para comunicação entre equipamentos
de instrumentação, tais como, actuadores e controladores. Fieldbus é uma rede digital,
serial, half-duplex e multidrop. Esta rede é digital porque as instruções transmitidas na
rede é definida pelo protocolo Fieldbus série porque as mensagens transmitidas e
recebidas são feitas bit a bit, half-duplex porque a transmissão é bidireccional e multidrop
porque permite a comunicação entre diversos equipamentos ligados na rede.
Este protocolo surgiu com o intuito de padronizar as ligações entre equipamentos
construídos por diferentes fabricantes. Quase todos os fabricantes mundiais de
instrumentação constroem os seus equipamentos com base neste protocolo. O protocolo
Fieldbus é baseado no modelo OSI (OSI, Open System Interconnection) [27].
2.3.Profibus
Profibus (Process Field Bus) é uma das redes mais bem sucedidas do mundo, este
protocolo é baseado na rede de comunicação Fieldbus, visto que este também suporta
uma cablagem única (dois pares de condutores trançados), isto é podem ser ligada vários
dispositivos em barramento, reduzindo assim o número de fios utilizados para a
construção de uma linha de produção. Com uma rede Profibus para a além da vantagem
da redução de fios, também é possível obter uma maior supervisionamento da rede, isto é,

Capitulo 2- Rede de autómatos Industriais
9
é possível garantir um melhor controlo e diagnostico na linha, permitindo assim um maior
controlo não só na produção mas também dos dispositivos usados na rede [28].
O protocolo Profibus é actualmente o protocolo mais conhecido no mundo das
comunicações industriais. É um protocolo aberto, sendo que existem vários fabricantes
independentes que constroem equipamentos que utilizam este protocolo como meio de
comunicação. É um protocolo baseado no modelo OSI garantindo que os equipamentos
de diferentes fabricantes destes dispositivos podem se comunicar entre si com a maior
facilidade.
O seu desenvolvimento foi iniciado pela BMFT (German Federal Ministry of
Research and Technology) em parceria com vários fabricantes de automação em 1989.
Este protocolo foi definido entre 1991 e 1993 com a norma DIN 19245, sendo que em
1996 passou a ser chamada de EN 50170 e em 1999 foi incluída nas normas IEC
61158/IEC 61784; actualmente a sua normalização e actualizado é feita pela Profibus
International. O hardware das redes Profibus é implementado em ASIC (application
specific integrated circuit) chips produzidos por vários fabricantes, e baseia-se na
padronização RS-485.
Este tipo de rede suporta até 127 nós, com uma distância no máximo de 24 km
(com repetidores e utilizando fibra óptica para a transmissão de dados), e velocidades de
transmissão de 9600 bps até 12 Mbps. As mensagens transmitidas podem ter até 244
bytes de dados por nó.
Actualmente existe três versões diferentes de Profibus, Profibus-DP
(Decentrallised Periphery), Profibus-FMS (Fieldbus Message Specification) e Profibus-
PA (Process Automation) [26-28].
2.3.1.Arquitectura do protocolo Profibus
A arquitectura do protocolo Profibus baseias-se no modelo OSI (Open System
Interconnection), Figura 2, sendo que a primeira camada define as características físicas
de transmissão, a segunda camada define o protocolo de acesso ao barramento e a sétima
camada define a funções de aplicação, as restantes camadas como se pode ver na figura
não são utilizadas.

Capitulo 2-Rede de autómatos Industriais
10
Figura 2 - Modelo OSI Profibus.
2.3.2.Profibus-DP
O Profibus DP foi a primeira versão criado do protocolo Profibus. Este protocolo é
a solução de alta velocidade do Profibus. A sua criação foi feita especialmente para as
comunicações entre autómatos e equipamentos descentralizados. O Profibus DP foi
criado para se obter alta velocidade de transmissão de dados entre sensores e actuadores.
O módulo mestre deste protocolo lê os dados de entrada do escravo e envia os dados de
saída de volta para o escravo. Utiliza o meio físico RS-485 ou fibra óptica e pode ser
ligado à rede 126 nós [26-27].
2.3.3.Profibus-FMS
Profibus FMS é uma evolução do Profibus DP. Foi especialmente construído para a
comunicação entre mestres da comunicação Profibus (multi-master/peer-to-peer), e é
conhecido por enviar mensagens ponto a ponto fazendo com que os dispositivos mestres
possam se comunicar entre si. Tal como o Profibus DP, este também pode ligar-se na
mesma rede até 126 nós, sendo que todos os dispositivos conectados a rede podem ser
mestres [26-27].
Capitulo 2- Rede de autómatos Industriais
11
2.3.4.Profibus-PA
Profibus PA a versão mais moderna deste protocolo. Este protocolo é semelhante
ao Profibus DP V1, a diferença é que este tem os níveis de tensão e corrente mais
reduzida para se obter os requisitos de segurança intrínseca para a indústria de processo
[26-27].
2.3.5.O meio físico do PROFIBUS
O Profibus usa como meio físico a transmissão RS-485, embora para grandes
distâncias pode ser usada a fibra óptica (distancias superiores a 80Km). As principais
características desta comunicação são:
Transmissão assíncrona NRZ (non-return to zero);
Baud rate de 9.6kBit/s a 12 Mbit/s, seleccionáveis;
Par trançado com blindagem;
32 Estações por segmento, máx. 127 estações;
Distância depende da taxa de transmissão (Tabela 1);
Distância expansível até 10Km com o uso de repetidores.
A rede é construída em forma de barramento o que permite a fácil remoção ou a
ligação de um novo equipamento sem que este influencie o funcionamento dos já
existentes. Quando a rede Profibus é configurada é estabelecida uma taxa de transmissão
igual para todos os dispositivos do barramento. No barramento Profibus é necessário
indicar o fim da rede; para isso é necessário ligar o fim de cada linha de dados da rede
com umas resistências à alimentação da linha, como se pode verificar na Figura 3. Nessa
figura podem-se visualizar as resistências de terminação do barramento e o esquemático
de ligação dos dispositivos à rede.

Capitulo 2-Rede de autómatos Industriais
12
Figura 3 - Cabeamento e terminação para transmissão RS-485 no PROFIBUS [28].
Caso o barramento seja muito extenso ou tenha mais de 32 dispositivos deve-se usar
repetidores. A velocidade de transmissão depende da distância. A Tabela 1 apresenta a
relação do comprimento do barramento com a velocidade de transmissão.
Tabela 1 - Comprimento em função da velocidade de transmissão [26].
Baud rate (kbit/s) 9.6 19.2 93.75 187.5 500 1500 12000
Comprimento (m) 1200 1200 1200 1000 400 200 100
2.4.Profinet
Profinet (Process Field Net) é uma rede de padrão Ethernet industrial criada para a
automação industrial, é uma rede semelhante ao Profibu. Esta comunicação tira o proveito
da Ethernet e do TCP/IP para a comunicação em tempo real.
O Profinet tem um alcance mais amplo que o Profibus; permitem a integração com
as infra-estruturas de TI (Tecnologia da Informação) e com a Internet [29].
Este protocolo é um modelo que engloba todas as exigências para o uso de Ethernet
na automação industrial, abrange a comunicação no nível de controlo, programação das
entradas/saídas e controlo avançado de movimento, é portanto um protocolo que se
adequa para todos as aplicações de automação industrial.
Profinet apresenta duas possibilidades, sendo um o Profinet IO (Input/Output) para
a adaptação de entradas/saídas distribuídas e o Profinet CBA (Component Based
Automation) para a criação de redes modulares em automação distribuída [30].

Capitulo 2- Rede de autómatos Industriais
13
2.4.1 Profinet IO
Este protocolo é idêntico ao Profibus DP só que em Ethernet. Profinet IO permite
interface directa de dispositivos de campo descentralizada na Ethernet. Todos os
dispositivos são conectados em uma estrutura de rede compatível, o que proporciona uma
comunicação aberta ao longo de todo sistema produtivo [30].
Profinet IO usa três canais distintos de comunicação para a troca de dados entre os
autómatos programáveis e os outros dispositivos. Usa TCP/IP para a parametrização,
configuração e ciclos de leitura/gravação de operações. Em tempo real (RT), é usado para
a transferência de dados padrão cíclicos e alarmes de comunicação RT ignorando o
padrão TCP/IP (interface para agilizar a troca de dados com os autómatos programáveis)
[30].
2.4.2 Profinet CBA
Profinet CBA (Component Based Automation) é uma rede de alto nível para
aplicações de automação industrial. Profinet CBA usa como meio físico o tradicional
hardware Ethernet e software para definir a estrutura da rede, desde a sua configuração,
gestão de acessos e controlo de dispositivos de automação industrial.
A Profinet CBA foi criada com base na estrutura de interface de objecto definido
pelo Distributed Component Object Model (DCOM). DCOM é uma tecnologia da
Microsoft para a criação de componentes de softwares distribuídos em computadores
ligados em rede. O DCOM é uma extensão do COM (também da Microsoft COM-
Component Object Model) para a comunicação entre objectos em sistemas distribuídos.
DCOM é uma boa tecnologia escolhida para este sistema, pois é um mecanismo orientado
ao objecto, podendo assim com facilidade localizar, transferir e fazer pedidos de
transferência entre cliente e servidor [30-31].

Capitulo 2-Rede de autómatos Industriais
14
2.5. AS-I
AS-I (Actuator Sensor Interface), ASI é uma rede que foi desenvolvida por vários
fabricantes, sendo alguns deles, Siemens, Allen Bradley, Banner Engineering,
Telemecanique, Festo, Omron, entre outros [26].
Este protocolo é muito utilizado em redes industriais de automação, em sistemas de
automação baseados em PC. Este protocolo é utilizado para ligações de dispositivos de
entrada/saída, como por exemplo, dispositivos de entradas e saídas digitais (ON/OFF)
como actuadores, sensores, encoderes rotativos, entrada e saídas analógicas, botões,
sensores de posição de válvulas, entre outros. Dispositivos estes que só comunicam
através de um par de condutores. Assim com este protocolo reduz-se o número de fios e
aumenta-se a facilidade de adicionar novos equipamentos [26], [32].
AS-I é um protocolo aberto baseado na IEC62026 e EN 50295, esta tecnologia pode
ser conectada em anel, árvore ou estrela, até 100 metros, a energia fornecida pela fonte à
rede é de 24V, que pode necessitar até 8A na rede [33].
2.6.DeviceNET
O protocolo de comunicação DeviceNet é um protocolo muito utilizado em
sistemas para redes industriais para a troca de dados entre equipamentos de controlo. Este
protocolo de comunicação é baseado no protocolo CAN (Controller Area Network,
tecnologia desenvolvida pela Bosch), o protocolo DeviceNet foi desenvolvido pela
companhia Allen-Bradley que actualmente pertence a empresa Rockwell Automation
[17].
A rede DeviceNet possui um protocolo aberto. A Rockwell Automation decidiu
partilhar a sua tecnologia com outros fabricantes. Após esta partilha este protocolo passou
a ser gerido pela Open DeviceNet Vendors Association (ODVA). A ODVA é uma
organização independente que apoia alguns protocolos abertos existentes no mercado.
Esta organização é a responsável pela especificação das normas e supervisiona os avanços
deste protocolo [18], [34].

Capitulo 2- Rede de autómatos Industriais
15
2.7.ControlNet
ControlNet é um protocolo aberto para aplicações de redes industriais. A gestão
deste protocolo é feita também pela organização ODVA. A rede ControlNet utiliza e
baseia-se no protocolo Common Industrial Protocol (CIP, protocolo gerido também pela
organização ODVA) para combinar a funcionalidade de um I/O e uma rede ponto a
ponto, proporcionando um desempenho de alta velocidade para ambas as funções [18],
[35-36].
2.8.EtherNet/IP
EtherNet/IP é um dos protocolos mais desenvolvidos e completos, existentes
actualmente no mercado. Este protocolo foi introduzido no mercado por volta de 2001.
EtherNet/IP é mais um protocolo que utiliza o protocolo CIP.
EtherNet/IP fornece ao utilizador ferramentas para implantar a tecnologia de rede
Ethernet para aplicações industriais, possibilitando assim um controlo remoto dos
equipamentos, sendo possível obter dados a qualquer hora e em qualquer lugar [37].
EtherNet/IP permite gerir eficazmente o controlo em tempo real e fluxo de
informação em toda a indústria.
Este protocolo pode levar a confusão da conhecida rede Ethernet ou a internet mas é
só um protocolo de comunicação, que pode ser utilizado para o controlo e programação
de autómatos. EtherNet/IP é um protocolo de camadas de aplicação industrial, em que o
IP de vem em EtherNet/IP, não é uma abreviatura de “Internet Protocol”, mas sim o
significado de “Industrial Protocol”.
A Ethernet/IP é construída sobre os protocolos TCP/IP, esta interface utiliza
hardware e software já estabelecidos para definir um protocolo de camada de aplicação
para a configuração, acesso e controlo de dispositivos de automação industrial [18].
2.9.CIP
Rede Common Industrial Protocol (CIP), é um protocolo aberto. Este protocolo
pode utilizar diferentes camadas de protocolos de comunicação, tais como DeviceNet,
ControlNet e Ethernet/IP. Uma das vantagens de utilizar redes CIP é a capacidade de

Capitulo 2-Rede de autómatos Industriais
16
alterar uma mensagem proveniente desta rede, como por exemplo DeviceNet, e passar
essa mensagem para outra rede CIP, como a EtherNet/IP. Assim os utilizadores destes
tipos de redes podem adicionar equipamentos novos aos já existentes.
O protocolo CIP foi desenvolvido de maneira que fosse expansível, permitindo a
existência de novos serviços como CIP Motion, CIP Sync ou CIP Safety, sejam
adicionados, sem a necessidade de reconstruir a rede básica.
O protocolo CIP é também gerido pela organização ODVA [38].
2.10.Modbus
Modbus é um protocolo de comunicação criado pela empresa Modicon (Modicom
empresa que foi adquirida pelo grupo Schneider Electric), e é utilizado em sistemas de
automação industrial. Actualmente este protocolo é gerido pela organização Modbus
Organization, que fornece a infra-estrutura e partilha a informação sobre o protocolo para
a sua utilização na construção de equipamentos, fazendo com que várias empresas
construam diversos dispositivos com este protocolo. Assim ligação entre dispositivos de
diferentes marcas vem facilitada, o que o torna num protocolo muito utilizado devido a
sua fácil aplicação.
O protocolo Modbus é protocolo que utiliza diferentes meios físicos para a sua
comunicação, entre eles, RS-232, RS-485 e Ethernet, sendo que o seu funcionamento de
comunicação, é sempre de mestre/escravo ou servidor/cliente. Este protocolo está
dividido em duas variações, Modbus RTU e Modbus ASCII [26-27], [39-40].
2.10.1.Modbus RTU
No Modbus RTU (Remote Terminal Unit) o envio de dados é feito em tramas de
oito bits. Modbus RTU utiliza o formato de codificação binário o que torna as mensagens
ilegíveis, mas deste modo reduz o tamanho de cada mensagem o que permite uma maior
troca de dados no mesmo intervalo de tempo. Um dispositivo configurado com o modo
Modbus ASCII não é capaz de descodificar uma mensagem em Modbus RTU e vice-
versa [27], [39-41].

Capitulo 2- Rede de autómatos Industriais
17
2.10.2.Modbus ASCII
No protocolo Modbus ASCII (American Standard Code for Information
Interchange) em cada mensagem é enviado dois caracteres sem geração de erros. Deste
modo todas as mensagens são codificadas em valores hexadecimais, representadas com
caracteres legíveis ASCII, sendo utilizados somente os caracteres de 0 a 9 e A a F para a
codificação das mensagens. O modo Modbus ASCII está dividido em duas partes,
Modbus TCP e Modbus Plus [27], [39-40].
2.10.2.1.Modbus TCP
Modbus TCP/IP (Transmission Control Protocol, Internet Protocol), é usado para
comunicações entre sistemas de supervisão e controladores lógicos programáveis. O
protocolo Modbus é encapsulado no protocolo TCP/IP e transmitido de redes padrão
Ethernet com controlo de acesso ao meio por CSMA/CD [42].
2.10.2.2.Modbus Plus
Modbus Plus é um mestre/escravo Fieldbus baseada na comunicação RS-485,
tecnologia de transmissão e um protocolo de passagem de testemunho (token) para
aplicações de controlo industrial. Dispositivos de rede podem trocar mensagens de
controlo e acompanhamento dos processos em locais remotos na planta industrial [43].
2.11. CAN
A rede CAN (Controller-area network) foi criada por uma empresa alemã para
aplicações de automação industrial; e baseia-se no mecanismo de comunicação
“broadcast”, ou seja, baseia-se num protocolo de transporte orientado a mensagem. Este
protocolo define o conteúdo da mensagem. Cada mensagem tem um identificador de
mensagem, que é único na rede que define o conteúdo e também a prioridade da
mensagem. Isso é importante quando várias estações competem pelo acesso ao
barramento [44-45].

Capitulo 2-Rede de autómatos Industriais
18
2.12.LonWorks
LonWorks é um protocolo aberto muito conhecido no meio da indústria de
automação.
LonWorks é um protocolo criado para a necessidade de redução de custos e do
aumento da qualidade das redes industriais. Este protocolo é baseado na tecnologia de
barramento com o padrão analógico de 4-20mA. A tecnologia LonWorks é baseado num
outro protocolo chamado LonTalk, sendo que este cumpre as regras definidas nas
camadas do modelo OSI. LonWorks foi criado pela Echelon, sendo conhecido como
ISSO / IEC 14908-1 [46-47].
Este protocolo pode ser aplicado em equipamentos utilizados em:
Linhas de montagem;
Fabricação de semicondutores;
Controlo de iluminação;
Controlo e gestão de Energia;
Sistemas de aquecimento, ventilação e ar condicionado;
Sistemas da segurança;
Automação residencial;
Controlos de dispositivos genéricos;
Iluminação de rua e controlos públicos;
Controlo da estação de Petróleo;
Controlo de freios em trens de carga.

Capitulo 3- Implementação da rede de autómatos
19
3.Implementação da rede de autómatos
A rede de autómatos implementada é constituída por vários autómatos com
diferentes funcionalidades e diferentes ferramentas de comunicação. Sendo assim, dá a
possibilidade ao utilizador de trabalhar com a rede através de ferramentas de
comunicação com Ethernet, DeviceNet, Mechatrolink, Profibus, RS485 e RS232. Estas
ferramentas de comunicação são utilizadas para a programação e monitorização dos
controladores lógicos e sistemas industriais.
Na Figura 4 é apresentada a rede construída para a concretização do projecto.
Através das diferentes cores representadas na figura são apresentados os vários tipos de
comunicação a utilizar. Sendo assim a linha verde representa a comunicação DeviceNet,
tendo esta como função a troca de dados entre dispositivos de controlo (autómatos),
dispositivos de segurança e dispositivos de controlo de entradas/saídas.
A linha roxa representa a comunicação RS485; esta vai conter dois PLCs
(Controlador Lógico Programável) contendo diversos sensores. A cor de laranja está
representada a comunicação Mechatrolink, que é utilizada neste caso para o controlo do
servomotor. Usa-se este tipo de comunicação devido ao seu alto desempenho em termos
de velocidade e alta precisão de controlo de movimento. A comunicação Profibus, que
ligará um variador e um dispositivo de controlo de entradas/saídas. E por último a rede
Ethernet, como apresentada na Figura 4, ligada a dois autómatos, um dispositivo de
controlo de entradas/saídas e um sistema de visão.
A rede Ethernet assume o papel principal da rede, devido a permitir a acessibilidade
remota entre o utilizador e a rede. Com este meio de comunicação criam-se as condições
para a programação, controlo e monitorização a partir de qualquer ponto remoto.

Capitulo 3-Implementação da rede de autómatos
20
Figura 4 - Rede de autómatos.

Capitulo 3- Implementação da rede de autómatos
21
Antes da possibilidade de controlar e programar os autómatos desta rede, é
necessário definir a rede, isto é, dar um endereço a cada ponto de comunicação entre
PLCs. Para a realização deste processo é necessária a ajuda de um software apropriado
para cada tipo de comunicação.
Assim, com estes processos realizados, a rede está preparada para ser utilizada tanto
local como remotamente, e preparada para receber e enviar informação de diferentes
autómatos desta rede.
Na implementação da rede foi utilizada uma série de equipamentos diferentes,
usados em aplicações industriais. Dividindo o equipamento por tipos diferentes de
comunicação utilizados na rede (Figura 4), esta vai ser composta por seis partes:
Ethernet;
DeviceNet;
Mechatrolink;
Profibus;
RS485;
RS232.
3.1. Rede Ethernet
Ethernet é uma tecnologia de interconexão para redes locais (Local Area
Networks - LAN) que se baseia no envio de pacotes. A Ethernet foi criada pelo IEEE,
sendo esta tecnologia de LAN mais utilizada, tendo tomado grande parte do espaço de
outros padrões de rede [26].
Na Comunicação Ethernet estão ligados três dos quatro principais autómatos
(Figura 5).
Figura 5 - Autómatos ligados por comunicação Ethernet.

Capitulo 3-Implementação da rede de autómatos
22
3.1.1. Autómato 1
Autómato com conexão Ethernet, contendo uma porta RS232 que possibilita o
controlo e a programação do autómato directamente. Tem ainda mais três módulos: um de
ligação para a rede de comunicação Mechatrolink, outro para a comunicação Profibus e
um módulo contador de alta precisão.
O primeiro autómato é um modelo da família CJ1, gama intermédia da Omron, que
oferece unidades de controlo. Esta é compatível com a família CS1 (Gama de autómatos
mais elevada da Omron). A diferença é que a gama modelar CJ1 dá uma inclusão e
ampliação mais elevada, sendo que os PLCs CS1 fornecem uma gama de controlo
avançado e ainda com opção de redundância dupla, sendo que as duas gamas podem
trabalhar em conjunto.
Este autómato está equipado com os seguintes módulos de expansão:
CJ1W-PA202, fonte de alimentação 230VAC, Figura 6;
CPU13-ETN, unidade de Ethernet, Figura 7;
CJ1M-MCH72, unidade comunicação Mechatrolink, Figura 8;
CJ1W-PRM21, módulo Mestre Profibus DP-V1, Figura 9;
CJ1W-CT021, módulo contador de velocidade alta precisão (500KHz), Figura 10.
Figura 6 - CJ1W-PA202 [48].
Figura 7 - CPU13 ETN [48].
Figura 8 - CJ1W-MCH72 [48].
Figura 9 - CJ1W-PRM21 [48].
Figura 10 - CJ1W-CT021 [48].

Capitulo 3- Implementação da rede de autómatos
23
3.1.2. Autómato 2
O segundo autómato (Figura 5) é do modelo CJ2H, estando equipado com:
CJ1W-PA202, fonte de alimentação 230VAC, Figura 6;
CJ2H-CPU64-EIP, conexão à rede Ethernet, Figura 11;
CJ1W-DRM21, modelo Mestre/Escravo DeviceNet, Figura 12;
CJ1W-ID211, módulo de 16 entradas 24 VDC, Figura 13;
CJ1W-OD212, módulo de 16 Saídas PNP, Figura 14.
Figura 11 - CJ2H-CPU64-EIP [48].
Figura 12 - CJ1W-DRM21 [48].
Figura 13 - CJ1W-ID211 [48].
Figura 14 - CJ1W-OD212 [48].
3.1.3. Autómato 3
O terceiro autómato da Figura 5, é um módulo de visão composto por um
controlador PNP (ZFX-C15, Figura 15) e um sensor ajustável de Cores (50x46) e luz
branca (ZFX-SC50, Figura 16).

Capitulo 3-Implementação da rede de autómatos
24
Figura 15 - ZFX-C15 [48].
Figura 16 - ZFX-SC50 [48].
Este módulo é composto por um ecrã táctil que permite o acesso fácil ao ZFX-C15.
Contém ainda funcionalidades avançadas e um interface intuitivo. As funções de ajuste
automático guiam o utilizador ao longo do desenvolvimento das aplicações de visão,
sendo o ZFX-C15 responsável pela iluminação, filtragem, como contador, entre outras
funcionalidades [48].
3.1.4.SmartSlice Profinet I/O Unit
Tendo em consideração a larga experiência da Omron com a comunicação Profibus,
esta sentiu a necessidade de desenvolver a comunicação Profinet-IO, uma solução aberta
às redes Ethernet. Assim, pode-se ligar equipamentos com a ligação Profinet à rede
Ethernet. Além de cumprir todos os requisitos necessários para actuar numa rede de
automação, esta tem a vantagem de fornecer velocidades mais altas, à medida que os
equipamentos se tornam mais complexos. Neste caso, o meio de comunicação a utilizar é
o Profinet [48].
O dispositivo utilizado é o GRT1-PNT Profinet I/O Unit SmartSlice, que contém
acoplado dois módulos, um de entrada e outro de saída (Figura 17).
Este dispositivo está equipado com os seguintes módulos:
GRT1-PNT, SmartSlice para Comunicações ProfiNet I/O;
GRT1-ID8-1, unidade SmartSlice de 8 Entradas PNP;
GRT1-OD8-1, unidade SmartSlice de 8 Saídas PNP;
GRT1-END-M, unidade SmartSlice de fim de Bus para ProfiNet.

Capitulo 3- Implementação da rede de autómatos
25
Figura 17 – SmartSlice.
3.2. Rede DeviceNet
Na Figura 18 está representada a rede DeviceNet, onde está integrado o quarto
autómato (considerado nesta rede como um dos principais autómatos). Este encontra-se
ligado ao segundo autómato descrito na rede. Como já referido anteriormente, esta
comunicação é composta por equipamentos utilizados para controlar dispositivos de
segurança.
Figura 18 - Rede DeviceNet.

Capitulo 3-Implementação da rede de autómatos
26
3.2.1. Autómato 4
O é composto por um modelo da gama CJ1, com as seguintes características
(PLC4):
CJ1W-PA202, fonte de alimentação 230VAC, Figura 6;
CJ1M-CPU11, Figura 19;
CJ1W-DRM21, módulo Mestre/Escravo DeviceNet, Figura 12
CJ1W-SCU31-V1, módulo constituído por duas saídas RS422/485, Figura
20.
Figura 19 - CJ1M-CPU11 [48].
Figura 20 - CJ1W-SCU31-V1 [48].
3.2.2. SmartSlice DeviceNet I/O
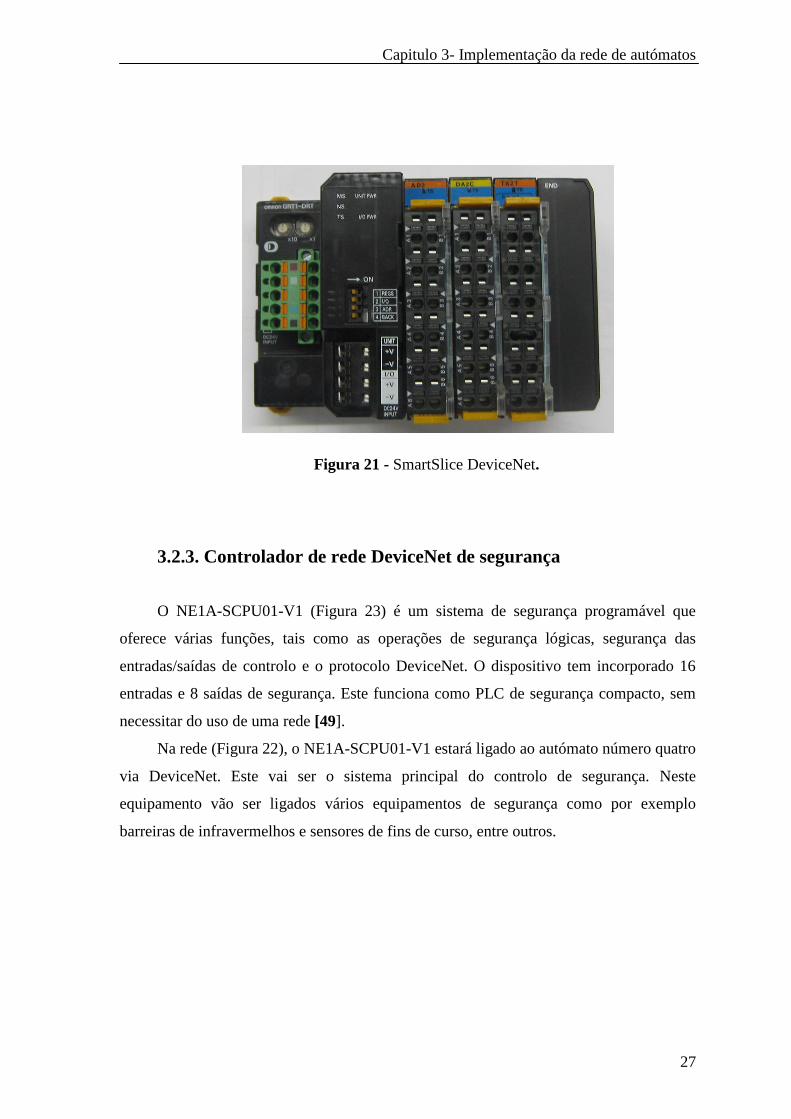
O sistema de entradas/saídas SmartSlice DeviceNet da Omron é um equipamento
inteligente, compacto e simples (Figura 21). É um dispositivo de fácil configuração e
contém funções de restauro e segurança, dando a opção ao programador de dispor de
dados de manutenção preventiva e diagnóstico ao nível de entradas/saídas. Ou seja, por
exemplo, se for ligado um relé a uma das entradas, e tendo este como duração de “vida” o
número de comutações feitas ao longo do tempo da sua utilização, então sabendo esse
número, o programador configura o dispositivo (SmartSlice) com o número de
comutações que o relé é capaz de fazer, atingindo esse valor o SmartSlice envia uma
mensagem ao “Mestre” dizendo que o relé atingiu o limite de duração.
O SmartSlice neste projecto contém os seguintes módulos:
GRT1-DRT, SmartSlice para comunicações DeviceNet;
GRT1-AD2, unidade SmartSlice de 2 Entradas Analógicas;
GRT1-DA2C, unidade SmartSlice de 2 Saídas Analógicas de Corrente;
GRT1-TS2T, unidade SmartSlice de 2 Entradas Termopar;
GRT1-END, unidade SmartSlice de fim de Bus.
Capitulo 3- Implementação da rede de autómatos
27
Figura 21 - SmartSlice DeviceNet.
3.2.3. Controlador de rede DeviceNet de segurança
O NE1A-SCPU01-V1 (Figura 23) é um sistema de segurança programável que
oferece várias funções, tais como as operações de segurança lógicas, segurança das
entradas/saídas de controlo e o protocolo DeviceNet. O dispositivo tem incorporado 16
entradas e 8 saídas de segurança. Este funciona como PLC de segurança compacto, sem
necessitar do uso de uma rede [49].
Na rede (Figura 22), o NE1A-SCPU01-V1 estará ligado ao autómato número quatro
via DeviceNet. Este vai ser o sistema principal do controlo de segurança. Neste
equipamento vão ser ligados vários equipamentos de segurança como por exemplo
barreiras de infravermelhos e sensores de fins de curso, entre outros.

Capitulo 3-Implementação da rede de autómatos
28
Figura 22 - Controlador e equipamentos de
segurança.
Figura 23 - NE1A-SCPU01-V1 [49].
3.2.4. Terminais de entrada de temperatura
A Omron desenvolveu um equipamento de leitura de temperatura com vários canais
de entrada, que fornece funções que estão disponíveis apenas nos terminais de entrada de
temperatura, tais como: tempo de operação em faixa de temperatura e detecção da
diferença de temperatura entre os canais de entrada [50].
O DRT2-TS04T (Figura 24) é um equipamento concebido pela Omron com um
módulo de 4 entradas de termopares.
Figura 24 - DRT2-TS04T.

Capitulo 3- Implementação da rede de autómatos
29
3.3. Rede Mechatrolink II
Mechatrolink é um sistema de rede de comunicação industrial para controlo de
movimento que foi desenvolvido pela Yaskawa Electric Corporation. A velocidade inicial
de transmissão era de 4 Mbps (Mega bits por segundo), chamando-se por Mechatrolink-I.
Com os pedidos do mercado e a necessidade do aumento da competitividade foi criada a
Mechatrolink-II, com velocidade de transmissão de 10 Mbps e com mais comandos de
movimento [51].
Esta rede será utilizada para o controlo de servomotores, sendo o controlo desta
comunicação feita no primeiro autómato referido na Figura 25, utilizando o módulo
CJ1M-MCH72 que vai comunicar como servomotor.
Figura 25 - Rede Mechatrolink.
3.3.1. Unidades de transmissão
A unidade de transmissão equipada com a comunicação Mechatrolink-II, é de
simples de conexão, apenas necessitando de um único cabo para a comunicação entre
vários servos.
Os Junma ML-II (Figura 26) com a comunicação Mechatrolink-II adicionada,
diminuem substancialmente o número de ligações e o tempo da montagem da instalação,
evitando assim erros nas conexões.

Capitulo 3-Implementação da rede de autómatos
30
Este produto possui tempo de resposta rápido, velocidade e torque elevado, alta
precisão e fiabilidade comprovada [52].
Figura 26 - Unidade de transmissão “Junma ML-II” [52].
3.3.2. Servomotor
Os motores Junma, Figura 27, são unidades de servomotores desenhados para
oferecer simplicidade e desempenho num formato compacto. Estes servomotores são
ideais para muitas aplicações onde substituem as unidades de passo.
Figura 27 - Servomotor “Junma” SJME-02AMB41-OY [48].
Os servomotores Junma estão disponíveis em 4 modelos, sendo eles, o de 100,
200, 400 e 750W (Watts). Esta série é ideal para o uso com a maioria dos controladores
com saídas de impulsos, por exemplo a série CJ1 PLCs.
O servomotor utilizado no projecto encontra-se representado na Figura 27, e as
características deste servomotor estão na Tabela 2.

Capitulo 3- Implementação da rede de autómatos
31
Tabela 2 - Características do servo motor [52].
Velocidade 3000 min-1
Velocidade máxima de rotação 4500 min-1
Resolução do encoder 8192 ppr
Saída (Output) 200 W
Binário 0.64 Nm
Inércia do rotor 0.33 10-4
kgm²
Avaliação Protecção IP 55
Classe de isolamento B (130°C)
Temperatura de funcionamento 0…40 °C
Dimensões L x W x H 125.5 x 60 x 60 mm
3.4. Rede Profibus
Profibus é dos protocolos de comunicação mais usado no mercado da indústria de
automação. Este é um padrão de rede de campo aberto e independente de fornecedores,
onde o interface entre eles permite uma ampla aplicação em processos. Esse padrão é
garantido segundo as normas EN 50170 e EN 50254. Desde o inicio do ano 2000, o
Profibus foi incluído nas normas IEC 61158/IEC 61784. A IEC 61158 estando separada
em sete partes distintas, entre 61158-1 e 61158-6, onde estão especificações segundo o
modelo OSI. Os construtores de
equipamentos que utilizam este protocolo
podem agora se referenciar a um padrão
internacional de protocolo, cujo
desenvolvimento procura a redução de custos,
flexibilidade, atendimento às mais diversas
aplicações e a vários fornecedores [26].
A Omron desenvolveu vários
equipamentos que possuem este protocolo de
comunicação. O autómato 1, possui um
módulo mestre (Figura 9, CJ1W-PRM21), ao
qual estão ligados um dispositivo de controlo
de entradas/saídas e um variador [53].
Figura 28 - Rede Profibus.

Capitulo 3-Implementação da rede de autómatos
32
3.4.1. Variador de frequência
O variador instalado na rede, F7, é um inversor de frequência variável. Este
equipamento é ideal para aplicações industriais, visto que com eles é possível controlar
motores de indução.
Os motores de corrente contínua (CC) eram os motores mais usados, visto que estes
possuíam uma maior gama de controlo de velocidade, torque e posição. A tecnologia
utilizada no controlo destes motores é ou era mais económica que a tecnologia de
controlo dos motores de corrente alternada (CA). No entanto, motores CA possuem
algumas vantagens sobre os motores CC, como por exemplo, são mais leves, são mais
económicos, necessitam de uma menor manutenção, são mais fáceis de construir e mais
robustos. Com o desenvolvimento da electrónica de potência, permitiu a redução dos
custos do accionamento destes motores, possibilitando o aparecimento dos variadores de
frequência (Figura 29) capazes de controlar com mais eficácia a velocidade e o
posicionamento dos motores AC. Com este desenvolvimento os motores de corrente
alternada passaram a ser mais utilizados em aplicações industriais. Estes variadores
permitem obter melhore controlo sobre a velocidade, possibilitando arranques mais
suaves dos motores, fazendo também com que estes não consumam tanta energia.
O variador da Figura 29 tem capacidade para controlar a variação de um motor
trifásico até a uma potência máxima de 0,4KW, bom desempenho em circuito aberto com
150% de binário a 0,5Hz, é silencioso, com capacidade de aplicar cartas opcionais como
por exemplo unidade PLC, Mechatrolink, E/S analógicas ou digitais, entre outros. Este
variador pode ser configurado no próprio painel ou através do software da Omron, CX-
Drive. A este variador são acrescentadas duas placas de aquisição de dados sendo uma de
comunicação e outra de controlo [54].

Capitulo 3- Implementação da rede de autómatos
33
Figura 29 - Variador [54].
A placa de comunicação Figura 30, é uma placa que está equipada com a
comunicação Profibus, e através dela é possível receber e enviar informação do variador
para o autómato que está equipado com a carta mestre desta comunicação, sendo possível
controlar o variador através do autómato, desde fazer RUN, Stop, ajustar a frequência,
entre outras [54].
Figura 30 - SI-P1 Profibus-DP.
A outra placa adicionada ao variador é uma placa de controlo (Figura 31); esta
placa é montada no variador para fornecer informação sobre direcção e velocidade através
de encoder (Figura 32) que se pode aplicar a esta placa; é possível aumentar o controlo do
variador, dando informação ao variador para fins de correcção de velocidade de flutuação
causada pelo deslizamento do motor e manter a velocidade [54].

Capitulo 3-Implementação da rede de autómatos
34
Figura 31 - PG-X2 - Carta realimentação vectorial.
Figura 32 - E6B2-CWZ1X encoder [48].
3.4.2. SmartSlice Profibus I/O
Nas unidades de entrada/saída da comunicação Profibus, os dados são
compartilhados com o módulo Mestre. Após ser configurada a rede, o Mestre tem um
espaço de memória alocado para cada equipamento a ele ligado. Assim, os dados do
SmartSlice vão ser recolhidos, enviados e armazenados no módulo Mestre (CJ1W-
PRM21). SmartSlice Profibus tem capacidade de ligação até 64 módulos de entrada/saída,
ocupa pouco espaço e dispõe ao utilizador dados de manutenção preventiva e diagnóstico
ao nível de entradas/saídas [55].
O SmartSlice Profibus utilizado (Figura 33) é composto pelos seguintes módulos:
GRT1-PRT, unidade SmartSlice para Comunicações Profibus;
GRT1-ID4-1, unidade SmartSlice de 4 Entradas PNP;
GRT1-OD4-1, unidade SmartSlice de 4 Saídas PNP;
GRT1-END, unidade SmartSlice de Fim de Bus.

Capitulo 3- Implementação da rede de autómatos
35
Figura 33 - Sistema de E/S SmartSlice.
3.5. Rede RS485
A rede RS485 ou também conhecida por EIA485 é um protocolo de comunicação
muito usado em dispositivos electrónicos da Omron. O envio de dados na rede RS485, a
solução lógica da Omron é baseado no envio de pacotes que permutam entre o “Mestre” e
os “Escravos”. Uma rede RS485 pode ter no máximo 32 nós, a 12 metros suporta uma
comunicação no máximo de 10M bps e no limite da distância suporta uma comunicação
de 100Kbps (100 x 1000 bits por segundo), a uma distância não superior a 1333 metros.
Esta rede é muito semelhante à comunicação Profibus, na forma como são ligados
os dispositivos. No protocolo Profibus existem normas, para haver uma sincronização
entre fabricantes, sendo possível comunicar com dispositivos de diferentes fabricantes.
Por outro lado, na comunicação RS485 existem dificuldades na ligação de dispositivos de
diferentes fabricantes, devido na comunicação RS485 não existir ou recomendar qualquer
protocolo [56].
A rede RS485 vai ser ligada ao autómato 4 (Figura 34), composta por um PLC de
30 pontos com display e módulo de entradas/saídas analógicas e vários sensores, sendo
eles de fibra óptica, fotoeléctricos, entre outros.

Capitulo 3-Implementação da rede de autómatos
36
Figura 34 - Rede RS485.
3.5.1.Autómato CP1L
Os autómatos da série CP1L (Figura 35) são controladores para máquinas
compactas. Estes controladores oferecem a capacidade de um micro-PLC. Esta gama de
autómatos oferece todas as funcionalidades necessárias para controlo de máquina
compactas. Este PLC pode conter várias entradas e saídas digitais ou analógicas. Apesar
estes autómatos serem mais compactos que a série CJ1, o CP1L pode ser expandido com
módulos CP1W (Figura 36).
Existem duas placas de para comunicação RS232 ou RS422/485 para facilitar a
ligação simultânea de equipamentos, tais como por exemplo, variadores, controladores de
temperatura sensores inteligentes ou ligações a PLCs. A porta USB (Universal Serial
Bus) é utilizada para a programação deste equipamento. O CP1L usa a mesma
arquitectura que o CJ1 e a série CS1; os programas são compatíveis com as alocações de
memória e instrução [57].
O modelo utilizado na rede é o CP1L-M30DR-A (Figura 35). Este PLC contém as
seguintes características:
18 Entradas digitais;
12 Saídas digitais;
Entrada de comunicação ao PC através de uma porta USB;

Capitulo 3- Implementação da rede de autómatos
37
Módulo com entrada RS232 - CP1W-CIF01;
Módulo com entrada RS485 – CP1W-CIF11.
Figura 35 - CP1L-M30DR-A [57].
3.5.2.Módulo de expansão do autómato CP1L
Existe uma grande variedade de unidades de expansão, entre elas, unidades de
entrada/saída digitais, analógicas e remotas, sendo possível ligar unidades de expansão
entre si. O número de unidade a ser ligadas vai depender do tipo de unidade de expansão
a serem usadas.
A unidade de expansão utilizada na rede é a CP1W-MAD11 com duas entradas
analógicas e uma saída analógica (Figura 36) [57].
3.6. Rede RS232
No protocolo RS232 os caracteres são enviados do modo assíncrono, bit a bit, sendo
necessário o envio de 10 bits para enviar um carácter.
Quase todos os autómatos existentes na rede possuem entrada RS232, sendo esta a
entrada principal para a comunicação entre o autómato e o PC. Este protocolo tem a
Figura 36 - CP1W-MAD11 [57].
Capitulo 3-Implementação da rede de autómatos
38
desvantagem, comparativamente com os apresentados anteriormente, de só poder ser
conectado um dispositivo a cada porta.
A rede de comunicação RS232, contém uma consola táctil e um controlador de
temperatura ligado ao autómato 2 (Figura 37).
Figura 37 - Rede RS232.
3.6.1. Consola táctil
A consola NS5 comunica directamente com sistemas de controlo, como por
exemplo, PLCs, variadores, controladores de temperatura ou controladores de
movimento, entre outros. Esta comunicação pode ser directa ou indirecta (Figura 39). É
um produto de fácil programação, utilizando um software específico para a sua
programação (CX-Designer) [58].
Figura 38 - NS5-SQ10B-V2 [58].
3.6.2. Controlador de temperatura
O E5CN é um controlador de temperatura de alto desempenho, com capacidade de
alta precisão e de manutenção preventiva de funções (Figura 39). O modo de controlo

Capitulo 3- Implementação da rede de autómatos
39
feito pelo E5CN pode ser ON/OFF ou PID, as saídas de controlo podem ser por relé, relé
híbrido, tensão ou de corrente linear; pode ser ligado directamente a um PC para
eventuais configurações de parâmetros e os sensores a utilizar neste tipo de controlador
são termoresistência de platina (Pt100 e JPt100) e termopares [59].
Figura 39 - Controlador E5CN [59].
3.7. Configuração da rede de autómatos
Após a identificação e ligação de todo material, é necessário configurar os
caminhos de acesso entre os diversos dispositivos, definir os caminhos de comunicação
entre autómatos, identificar os autómatos mestres e os escravos. Para a configuração da
rede é utilizado o software da Omron, CX-One, que contém as ferramentas necessárias
para a configuração da rede e programação. Este software contém os vários programas,
tais como o CX-Integrator, CX-Drive, CX-Profibus, CX-Programmer, CX-Thermo, CX-
Motion Pro, CX-Designer. Como na rede existe diferentes tipos de comunicação, é
necessário utilizar os diferentes softwares integrados no CX-One.
A Figura 40 apresenta o esquema de ligação das diferentes redes de comunicação
entre autómatos.

Capitulo 3-Implementação da rede de autómatos
40
Figura 40 - Esquema de ligação da rede de autómatos.
Para a configuração da rede de autómatos é necessário definir a rede a que cada
autómato vai estar ligado. Como se pode ver na Figura 40 os autómatos, PLC1 e PLC2
estão ligados a rede 1 (Network 1), rede 2 (Network 2) liga o PLC2 ao PLC4 e por fim a
rede 3 (Network 3) que liga os autómatos PLC5 e PLC6 ao autómato PLC4.
Para configurar o autómato na rede, é utilizado o programa “Routing Table”, onde
se definem as redes de destino e os endereços para os nós FINS de comunicação. Este
tipo de configuração é necessário para a transferência de dados entre autómatos. Esta
configuração é feita, como se pode ver na Figura 41, através da rede local e remota do
PLC1.

Capitulo 3- Implementação da rede de autómatos
41
Figura 41 - Routing Tables PLC1.
A configuração da rede local é usada quando duas ou mais unidades de
comunicações são utilizadas no mesmo PLC; a unidade de CPU do autómato usa a tabela
de rede local para identificar as unidades de comunicação e redes associadas. Esta
configuração é necessária quando há necessidade de troca de dados entre diferentes níveis
de rede. No caso da Figura 41 o ponto (a) mostra as redes locais configuradas no
autómato PLC1, a rede 1 (Network 1 Figura 40) que utiliza a comunicação Ethernet e a
rede 4 (Network4 Figura 40) que utiliza a comunicação Profibus. No ponto (b) da Figura
41 são identificadas as redes remotas, ou seja, por onde se pode aceder ao autómato
através de outros autómatos. No caso do autómato PLC1é necessário identificar as redes,
as portas de acesso e o nó de entrada do autómato.
A rede remota é utilizada para o envio de dados ou programação de autómatos
através de diferentes níveis de autómatos. No caso da configuração apresentada na Figura
40, é possível programar, receber e enviar informação para todos os autómatos, a partir de
qualquer um dos autómatos. Na Figura 41 é apresentada a configuração de acesso ao
PLC1. Para os restantes autómatos o procedimento é semelhante. Na Figura 42 é
apresentado o “Routing Tables” do PLC6.
(a) (b)

Capitulo 3-Implementação da rede de autómatos
42
Figura 42 - Routing Tables PLC6.
3.7.1.Configuração da rede Ethernet
Existem na rede três autómatos com comunicação Ethernet: os autómatos PLC1,
PLC2 e o PLC3. O PLC3 é configurado manualmente no próprio autómato, os outros dois
tem que ser configurados através do item do “IO Table and Unit Setup” existente no CX-
Programmer (Figura 59). Para isso, devem ser efectuados os mesmos passos como já foi
referido atrás, ou seja, fazer o pedido upload das unidades existentes no autómato
(Figuras 43 e 44).
Figura 43 - IO Table PLC1.
Figura 44 - IO Table PLC2.

Capitulo 3- Implementação da rede de autómatos
43
Nas janelas, já com os pedidos feitos a cada um dos autómatos, aparecem as
unidades que cada um contém. No item que corresponde a unidade de comunicação de
Ethernet ao ser clicado nesse item aparece uma nova janela com o local para configurar
os autómatos com para serem possíveis serem acedidos via Web.
As Figuras 45 e 46 mostram as janelas onde são feitas as configurações de cada
um dos autómatos, desde o endereço IP, a máscara de sub-rede e a Gateway.
Figura 45 - Janela de Configuração PLC1.
Figura 46 - Janela de Configuração PLC2.
3.7.2.Configuração rede DeviceNet
Na rede DeviceNet existem dois autómatos com unidades mestre em cada um deles,
e a comunicação entre os autómatos PLC2 e o PLC4 é feita através da comunicação
DeviceNet. Trata-se da comunicação entre mestres e escravos que utilizam esta
comunicação. Como referido na Figura 18, esta rede é composta por dois mestres e por 4
escravos. Para a configuração desta rede é utilizado o software CX-Integrator.
A Figura 47 apresenta a ligação dos escravos aos seus respectivos mestres. Como é
possível ver na figura, os mestres estão alocados com o nó de acesso sendo um com o nó
63 e o outro com o nó 62. A primeira unidade mestre de DeviceNet, a unidade CJ1W-
DRM21 com o nó 63 (PLC2), tem alocado como escravo a unidade de controlo de
segurança, NE1A-SCPU01-V1 com o nó 61; a segunda unidade mestre desta rede, CJ1W-
DRM21 com o nó 62 (PLC4), tem alocado os outros três escravos sendo eles, a unidade

Capitulo 3-Implementação da rede de autómatos
44
SmartSlice GRT1-DRT com o nó 1, composto por mais três unidades acopladas a esta,
sendo elas uma com duas entradas analógicas GRT1-AD2, outra com duas entradas de
sensores de temperatura (termopares) GRT1-TS2T e a última duas saídas analógicas de
corrente GRT1-DA2C, DRT2-TS04T com o nó 2 e o ultimo escravo é o EJ1N-HFUB-
DRT com o nó 3, é composto por uma unidade de aquisição de temperatura EJ1N-TC2A-
QNHB.
Figura 47 - Configuração DeviceNet.
3.7.3.Configuração da rede Mechatrolink
A rede Mechatrolink está ligada ao autómato PLC1; o módulo de controlo desta
rede, CJ1W-MCH72 está na unidade 1 deste autómato. Para a configuração, teste e
programação desta rede é utilizado o software CX-Motion Pro (Figuras 48, 49 e 50) e o
software CX-Drive, utilizado como teste do servo-drive (as Figuras 51 e 52 mostram
passos necessários para a sua utilização).

Capitulo 3- Implementação da rede de autómatos
45
Figura 48 - Configuração do autómato.
Figura 49 - Configuração da carta Mechatrolink.

Capitulo 3-Implementação da rede de autómatos
46
Figura 50 - Características do servo drive.
Figura 51 - Teste ao servo driver.

Capitulo 3- Implementação da rede de autómatos
47
Figura 52 - CX-Drive para testar o servo motor.
3.7.4.Configuração da rede Profibus
Na configuração da rede Profibus é utilizado o software CX-Profibus. As Figura 53,
a 48, apresentam os passos necessários para a configuração do equipamento utilizado na
rede que usa como comunicação o protocolo Profibus.
Na Figura 53 é configurado a unidade mestre da comunicação Profibus (Figura 9),
sendo que nesta janela é configurado o autómato onde a unidade está acoplada, bem como
onde ela se encontra no autómato. Neste caso, esta unidade encontra-se no PLC1, no
endereço 1 e é a unidade 2 deste autómato.

Capitulo 3-Implementação da rede de autómatos
48
Figura 53 - Configuração da comunicação.
Os escravos existentes são um módulo SmartSlice GRT1-PRT (Figura 33), com
uma unidade de quatro entradas digitais e uma unidade de saídas digitais e o outro
escravo é uma placa que é aplicada num variador de velocidade (Figura 29) com o nome
de SI-P1 (Profibus-DP COMMUNICATION INTERFACE CARD Figura 30). No
software estes módulos vão ser configurados como escravos. Após serem identificados os
escravos da rede é necessário configurar cada um deles. Como se pode ver na Figura 54, o
módulo SmartSlice é configurado como escravo e encontra-se no endereço 2. Neste tipo
de escravo, em que contém duas unidades acopladas a ele, é necessário indicar no
software as unidades existentes. A Figura 55 mostra onde essas unidades são
configuradas, sendo uma de entrada e outra de saída digitais (Figura 33). O último
escravo nesta rede é a placa do variador F7. A Figura 56 mostra a janela de configuração
da placa adicional, onde é definido o número ou o tipo de informação adquirida e enviada
da placa para o PLC1.

Capitulo 3- Implementação da rede de autómatos
49
Figura 54 - SmartSlice configuração do nó.
Figura 55 - SmartSlice configuração das unidades.

Capitulo 3-Implementação da rede de autómatos
50
Figura 56 - Configuração S1-P1.
No fim da identificação dos escravos e da respectiva configuração é possível ver na
janela da carta mestre, na área dos escravos (Slave Area), a alocação da memória das
entradas e saídas que cada escravo vai ocupar na memória do autómato. A Figura 57
apresenta as posições ocupadas pelas entradas dos escravos, e a Figura 58 lista as
posições de memória ocupadas pelas saídas dos escravos. Estas posições de memória,
tanto as de entrada como as de saída, podem ser alteradas pelo utilizador.

Capitulo 3- Implementação da rede de autómatos
51
Figura 57 - Posições de memória das entradas.
Figura 58 - Posições de memória das saídas.

Capitulo 3-Implementação da rede de autómatos
52
3.7.5.Configuração da rede RS485
A rede RS485 é composta por um mestre, sendo ele o autómato PLC4 e por dois
escravos, os autómatos PLC5 e PLC6. Para configurar esta rede a Omron não tem
nenhum software específico. Assim, para configurar esta rede, foi utilizado o software de
programação dos autómatos da Omron, o programa CX-Programmer. O PLC4 contém
uma unidade com uma porta com a comunicação RS485, porta de saída e entrada de
dados do módulo mestre desta rede. Através do CX-Programmer alteram-se as
configurações desta porta, que por defeito vem como entrada ou saída Host Link. Com
este modo só é possível comunicar com o autómato utilizando um PC ou outro
equipamento equiparado. Desta forma, para usar esta porta (RS485 do PLC4, unidade 3
deste autómato) como mestre e para comunicar com os outros autómatos é necessário
mudar de Host Link para o modo Serial Gateway. Para se efectuar essa mudança pode-se
recorrer ao CX-Programmer, Figura 59. No lado esquerdo da figura, clicando sobre esse
item que está a sublinhado com uma linha vermelha (IO Table and Unit Setup), aparece
outra janela onde é possível ver as unidades existentes do autómato. Na Figura 60
apresenta a listagem das unidades acopladas ao autómato.
Figura 59 - CX-Programmer.
Figura 60 - CX-programmer IO Table.
Com as unidades do autómato já visíveis, clicando sobre a unidade com a porta
RS485 (CJ1W-SCU31 Figura 20 e 61), Figura 62, aparece outra janela com as
configurações desta unidade. Por exemplo, se pretender alterar o modo de comunicação

Capitulo 3- Implementação da rede de autómatos
53
da porta RS485, sendo esta a porta 1 da unidade, então nos parâmetros da unidade
escolhe-se a porta 1 e no item do modo de comunicação série (Serial communications
mode) altera-se do modo Host Link (default) para Gateway.
O modo Serial Gateway é uma função dos autómatos Omron para converter
automaticamente mensagens FINS, que recebe na porta série na Unidade de CPU, Serial
Communications Board ou Serial Communications Unit e é muito usado para troca de
dados entre autómatos. E tem a particularidade de converter os comandos FINS para
CompoWay/F, FINS Host Link ou Modbus [60].
Figura 61 - Unidades Existentes no PLC. Figura 62 - Janela de configuração.
Nos autómatos escravos da rede (PLC5 e PLC6) é só necessário mudar o nó Host
Link, e pode-se também utilizar o CX-Programmer para se fazer essa configuração. No
software (Figura 59), existe um item com o nome “Settings”; se clicar nesse item
aparecem as definições do autómato que se pretendem alterar. Como nesta rede só
existem dois escravos ligados, só é necessário alterar o nó de um dos autómatos; o
autómato em que foi feita a alteração foi o PLC6 (Figura 35) que ficou com o nó 1 (Unit
Number, Figura 63).

Capitulo 3-Implementação da rede de autómatos
54
Figura 63 - Definições do PLC6.
No PLC5 foi mantido o nó que tem por defeito, no caso nó 0. Este autómato tem
uma unidade acoplada com duas portas de comunicação, uma RS232 e outra RS485. A
porta RS485 é a porta 1 da unidade, caso fosse necessário alterar o nó neste autómato, não
era possível usar o mesmo caminho usado no PLC6. Neste caso deve ser escolhido ir pelo
IO Table and Unit Setup (como foi feito no PLC4, Figura 59, fazer o pedido ao autómato
das unidades a ele acopladas) e na unidade de comunicação série, ao ser seleccionada, vai
aparecem as definições da unidade (uma janela idêntica a da Figura 62); no item Port1:
Host Link Unit Number, que por defeito está a 0, caso se pretenda alterar introduz-se o
valor correcto do nó.

Capitulo 4- Aplicação para Controlo e Monitorização dos Autómatos
55
4.Aplicação para Controlo e Monitorização dos
Autómatos
O controlo e a monitorização de redes de autómatos têm vindo a crescer devido à
sua importância no mundo industrial. A gestão da monitorização e controlo de uma rede
possibilita a aquisição de dados em tempo real, das características do tráfego, do
diagnóstico de falhas e da configuração da rede. A monitorização disponibiliza esta
informação, desempenhando assim um papel importante na gestão da rede.
Para a monitorização e controlo desta rede recorreu-se aos protocolos proprietários
da empresa Omron (parceira do projecto), sendo eles, o protocolo Host Link e o protocolo
FINS (Factory Interface Network Service). Estes protocolos possibilitam a monitorização
e controlo eficaz da rede.
4.1.Memória do CPU
Antes de utilizar dos protocolos, acima identificados (Host Link e FINS), para a
monitorização e controlo da rede é necessário conhecer as diferentes alocações de
memória existentes no CPU (Central Process Unit) de cada dispositivo (PLC).
A memória do CPU dos dispositivos da Omron está separada em vários tipos, sendo
eles:
CIO (Core Input Output) ou IR (depende do modelo do PLC), área de memória
utilizada para o interface externo de entradas/saídas;
W (Work Area), área de trabalho;
A (Auxiliary Area);
T (Timer Area);
C (Counter Area);
DR (Data Register);
TK (Task Flag Area);
D (Data Memory);
H (Holding Area);
IR (Index Register);
EM (Expanded Memory).

Capitulo 4- Aplicação para Controlo e Monitorização dos Autómatos
56
4.2. Protocolo Host Link
Host Link é um protocolo da Omron para a comunicação realizada via série. Este
protocolo permite a comunicação série através das entradas/saídas da memória alocada no
CPU de cada unidade de controlo. Com o Host Link é possível ler, escrever e alterar o
modo de operação do CPU de cada unidade, a partir de um computador pessoal. A
capacidade máxima de dispositivos a ser ligada a partir deste protocolo é de 32 unidades e
o número máximo de Words é de 30 por mensagem [60].
4.2.1. Formato das tramas Host Link
O envio de tramas do protocolo Host Link pode ser feito via porta RS232, Figura 64
ou via RS485, Figura 65.
Figura 64 - Ligação RS232 do PLC a um PC.
Figura 65 - Ligação RS485 do PLC a um PC.
Na comunicação Host Link, sempre que se envia um comando é retornada uma
resposta. A transmissão da trama a partir de um PC, é representada no formato
apresentado na Figura 66.
Figura 66 - Trama enviado pelo PC [61].
A trama Host Link de envio para os PLCs é constituída da seguinte forma:
@, o símbolo @ deve ser sempre colocado no inicio da trama;
Node No, identifica o PLC a utilizar para o envio da trama;

Capitulo 4- Aplicação para Controlo e Monitorização dos Autómatos
57
Header Code, local onde é definido o código de comando (ler, escrever e o
tipo de memória);
Text, local onde é definido os parâmetros de comando (exemplo a posição e
o valor a enviar para a memória);
FCS, código da paridade da trama a enviar;
Terminator, é representado pelo símbolo “*”, e indica o fim da trama [61].
A trama de resposta enviada pelo PLC ao PC, está representada na Figura 67.
Figura 67 - Trama de resposta enviado pelo PLC ao PC [61].
Trama Host Link de resposta dos PLC ao computador pessoal, é constituída por:
@, o símbolo @ deve ser sempre colocado no inicio da trama;
Node No, identifica o PLC que envia a resposta para o PC;
Header Code, local onde é definido o código de comando (ler, escrever e o
tipo de memória);
End Code, o estado de execução do comando é retornado (código final
normal);
Text, local onde é definido os parâmetros de comando (exemplo a posição e
o valor a enviar para a memória);
FCS, código da paridade da trama a enviar;
Terminator, é representado pelo símbolo “*”, e indica o fim da trama [61].
A trama de resposta enviada pelo PLC ao PC em caso de erro, está representada na
Figura 68.
Figura 68 - Trama de resposta de erro [61].
Capitulo 4- Aplicação para Controlo e Monitorização dos Autómatos
58
A trama Host Link de resposta de erro, é constituída da seguinte forma:
@, o símbolo @ deve ser sempre colocado no inicio da trama;
Node No, identifica o PLC que envia a resposta para o PC;
Header Code, local onde é definido o código de comando (ler, escrever e o
tipo de memória);
End Code, o estado de execução do comando é retornado (código de erro).
FCS, código da paridade da trama a enviar;
Terminator, é representado pelo símbolo “*”, e indica o fim da trama [61].
4.2.2.Exemplos de tramas Host Link
Após compreender o envio das tramas de comando e as tramas das respostas, é
necessário saber o código de acesso à memória e identificar se é do tipo de leitura ou de
escrita.
A seguir são apresentados alguns exemplos de envio de comandos ao PLC e a
respectiva resposta enviada do autómato ao computador pessoal. O autómato utilizado
para a realização destes testes é um autómato da gama CJ1.
No primeiro teste realizado, Tabela 3, é enviado um comando de escrita na memória
CIO, em que o @ indica o início da trama, os dois zeros representam o nó (PLC) para
onde vai ser enviada a trama, os dois caracteres seguintes indicam a memória a ser
utilizada e se é de escrita ou de leitura. Neste caso, WR significa que a trama enviada para
a memória CIO é de escrita, os quatro caracteres seguintes (0001) indicam a posição de
memória (CIO) onde vai ser escrito, os quatro caracteres seguintes (0010) representam o
valor a ser escrito na memória escolhida, e por fim os últimos dois caracteres são o FCS
paridade da trama que termina com o “*” (Terminator). Sempre que é enviada uma
determinada trama, o PLC retorna uma trama de resposta, sendo através desta, possível
saber se a trama foi aceite, isto é, indica que a trama enviada está correcta. Neste primeiro
teste, apresentado abaixo, pode verificar-se que não houve erro: os dois caracteres
seguintes ao comando WR da trama de resposta representam o código de erro retornado
pelo PLC. São retornado dois zeros, o que permite concluir que o envio do comando foi
enviado com sucesso para o PLC.
Tabela 3 - Escrever na memória CIO, posição 1 o valor 10.
Comando:
@00WR0001001045* (trama enviada ao PLC)
Resposta:
@00WR0045* (trama recebida pelo PC)

Capitulo 4- Aplicação para Controlo e Monitorização dos Autómatos
59
O segundo teste (Tabela 4) é idêntico ao primeiro, com a diferença em que neste
são enviados dois valores. Neste teste vai ser escrito na memória CIO a partir da posição
1 o valor 10 e o valor 3 na posição seguinte.
Tabela 4 - Escrever na memória CIO, a partir da posição 1 o valor 10 e 3.
Comando:
@00WR00010010000346*
Resposta:
@00WR0045*
No terceiro teste (Tabela 5) é enviado um comando com o pedido de leitura
(comando “RR”) a partir da posição 1 da memória CIO e o número de posições. Ao ser
efectuado o pedido, o autómato retorna como resposta o valor colocado em cada posição
a partir do ponto especificado na trama de comando. No comando, o primeiro R
representa que o comando é de leitura e o segundo R representa o tipo de memória a ser
utilizada para esse pedido, os quatro caracteres seguintes indicam a posição de onde se
quer retirar esta informação (0001 a posição de onde vai ser feito o pedido de leitura); de
seguida é colocado o número de posições que se quer ler; neste teste vai ser lida só uma
posição memória (0001). Como no teste de escrita (Tabela 4), foi escrito na posição 1
(0001) da memória CIO o valor 10 (0010) neste teste ao ser enviado o pedido de leitura a
esta posição, a resposta enviada pelo PLC ao PC vai conter o valor 10.
Tabela 5 - Ler da memória CIO, posição 1.
Comando:
@00RR0001000140*
Resposta:
@00RR00001041*
O quarto teste (Tabela 6) mostra que se pode também fazer vários pedidos de
leitura. Neste pedido em vez de uma leitura como no terceiro teste, é feito o pedido de
leitura de duas posições de memória, sendo que é obtido como resposta enviada ao PC os
valores escritos no teste feito na Tabela 4, que são o valor 10 (0010) e o valor 3 (0003).
Tabela 6 - Ler da memória CIO, a partir da posição 1
Comando:
@00RR0001000243*
Resposta:
@00RR000010000342*

Capitulo 4- Aplicação para Controlo e Monitorização dos Autómatos
60
Com este protocolo é possível ler/escrever de/em várias posições de memória. Os
testes anteriores mostram o pedido de leitura e de escrita de uma e duas posições da
memória CIO. Mas é possível também fazer o pedido com mais posições em simultâneo e
noutros tipos de memória do CPU dos autómatos. Como por exemplo, para aceder à
memória de dados do autómato, referenciada pelo nome DM ou D (data memory) o
código para ler desta memoria é RD e para escrever WD. Além de possibilitar a escrita e
a leitura nas memórias dos PLC, este protocolo permite ao utilizador alterar e verificar o
modo de operação em que se encontra o PLC. Os autómatos da Omron têm três modos de
operação: modo de Programação, modo RUN e o modo Monitor. Através dos testes
seguintes (Tabelas 7, 8 e 9) são apresentadas as tramas que alteram os modos de operação
e a Tabela 10 contém a trama que verifica o modo operação em que se encontra o PLC.
Tabela 7 - Modo Program.
Comando:
@00SC0050*
Resposta:
@00SC0050*
Tabela 8 - Modo Monitor.
Comando:
@00SC0252*
Resposta:
@00SC0050*
Tabela 9 - Modo RUN.
Comando:
@00SC0353*
Resposta:
@00SC0050*
Tabela 10 - Verificar qual é o modo de operação.
Comando:
@00MS5E*
Resposta:
@00MS00002854* - (caso seja modo Program)
@00MS00032857* - (caso seja modo Monitor)
@00MS00022856* - (caso seja modo RUN)

Capitulo 4- Aplicação para Controlo e Monitorização dos Autómatos
61
4.2.3.Software teste Host Link
Desenvolveu-se um programa de monitorização e controlo dos PLCs em LabView,
linguagem de programação gráfica da National Instruments, com a capacidade de
monitorizar um ou mais autómatos (exemplo da ligação dos autómatos apresentado nas
Figuras 64 e 65).
A Figura 69 apresenta o painel frontal do programa de monitorização e gestão da
rede. É dado ao utilizador a possibilidade de escolher um dos tipos de protocolos da
Omron, Host Link ou FINS (este último é apresentado na secção 4.3).
Figura 69 - Painel frontal.
Ao ser escolhido o protocolo Host Link no painel frontal aparece outra janela,
Figura 70 Esta janela contém botões com os tipos de modo de operação do autómato
(Program, Monitor e RUN) a ser escolhido pelo utilizador; tem outro botão que envia um
comando com o pedido de verificação do tipo de modo de operação em que se encontra o
autómato (Tipo de Modo?) e contém os botões com algumas áreas de memória que
podem ser acedidas com este protocolo (CIO, DM, LR, HR, AR e PV). Estas só podem
ser acedidas se o autómato se encontrar no modo de operação “Monitor”; caso contrario
estes botões estão bloqueados.

Capitulo 4- Aplicação para Controlo e Monitorização dos Autómatos
62
Figura 70 - Tipo de áreas de memória.
Após colocar o autómato em modo monitor, é possível escolher o tipo de área de
memória a utilizar. As áreas de memória só são acedidas em modo “Monitor” devido a
que, com este protocolo, só se consegue retirar ou enviar informação se o PLC operar
neste modo. Escolhida a área de memória a utilizar, aparece outra janela. Através da
Figura 70, foi escolhida a memória CIO (ao ser pressionado o botão com esse nome) e
aparece uma nova janela. Nesta nova janela (Figura 71), aparecem os locais necessários a
preencher para enviar a trama Host Link: nó (escolher o PLC para o qual se quer enviar a
trama) e Header Code (escolher se a trama a enviar é de leitura ou escrita). Por exemplo,
no caso da Figura 71, como foi escolhido um comando de leitura, aparece então ao lado a
posição e o número de posições que se deseja ler.

Capitulo 4- Aplicação para Controlo e Monitorização dos Autómatos
63
Figura 71 - Janela da área de memória CIO, leitura.
Na Figura 72 é apresentado um comando de escrita. Ao se efectuar o pedido de
escrita, aparece uma pequena janela onde o utilizador insere o valor da memória de onde
quer iniciar a escrita dos valores e por último o local onde o utilizador insere os dados dos
valores a serem escritos na memória. Neste caso, é efectuado um comando de escrita na
memória DM (memória de dados do PLC); a trama de resposta do PLC enviada ao PC
mostra só o “End Code”, que neste caso é zero como se pode ver na Figura 72. Significa
que o pedido feito ao PLC foi realizado com sucesso.
Figura 72 - Janela da área de memória DM, escrita.

Capitulo 4- Aplicação para Controlo e Monitorização dos Autómatos
64
As outras opções de memória encontradas na janela da Figura 70 funcionam de
modo semelhante, só são diferenciadas através do “Header Code” que identifica o tipo
de área de memória a utilizar e se o comando é de leitura ou de escrita.
4.3.Protocolo FINS
A maioria dos novos autómatos da Omron vem com o novo protocolo designado
por “FINS”. Este protocolo dá a possibilidade de encapsular comandos FINS via Host
Link, dando a entender ao utilizador que o protocolo FINS é igual ao Host Link ou um
dos protocolos é um subconjunto do outro. No entanto, o protocolo FINS contém um
novo conjunto de comandos capaz de comunicar com diferentes autómatos da mesma
rede ou de sub-redes de uma rede de autómatos, através do mesmo ponto de entrada.
Este protocolo apresenta mais vantagens que o Host Link não só por poder
comunicar com autómatos de uma sub-rede, pois o Host Link só funciona com uma
ligação directa entre PC e o PLC ou vários PLC ligados em barramento a um PC, mas
também por poder ser acedido a um maior número de posições de memória (Host Link
limitado ao número máximo de 30 Words e o FINS tem uma capacidade máxima de
receber até 538bytes, 269 Words e de enviar 540 bytes, 270 Words), e ainda pode ser
usado em comunicações Ethernet. O protocolo FINS apresenta diferentes tramas para
diferentes modos de comunicação.
O protocolo FINS da Omron pode ser usado através de um programa para a
transferência de dados e realizar outros serviços com o PLC remoto conectado numa rede
Ethernet ou através da comunicação série. FINS é um protocolo de rede utilizado pela
Omron para o envio de comandos via RS232, Ethernet entre outras comunicações usadas
pelos equipamentos da Omron.
4.3.1. Tramas FINS série
As tramas FINS série são muito idênticas as tramas Host Link. No modo série, as
tramas FINS usam o cabeçalho e a terminação Host Link. O que diferencia os dois
protocolos é o cabeçalho do FINS (“Header Code”), este contém o comando “FA”. No
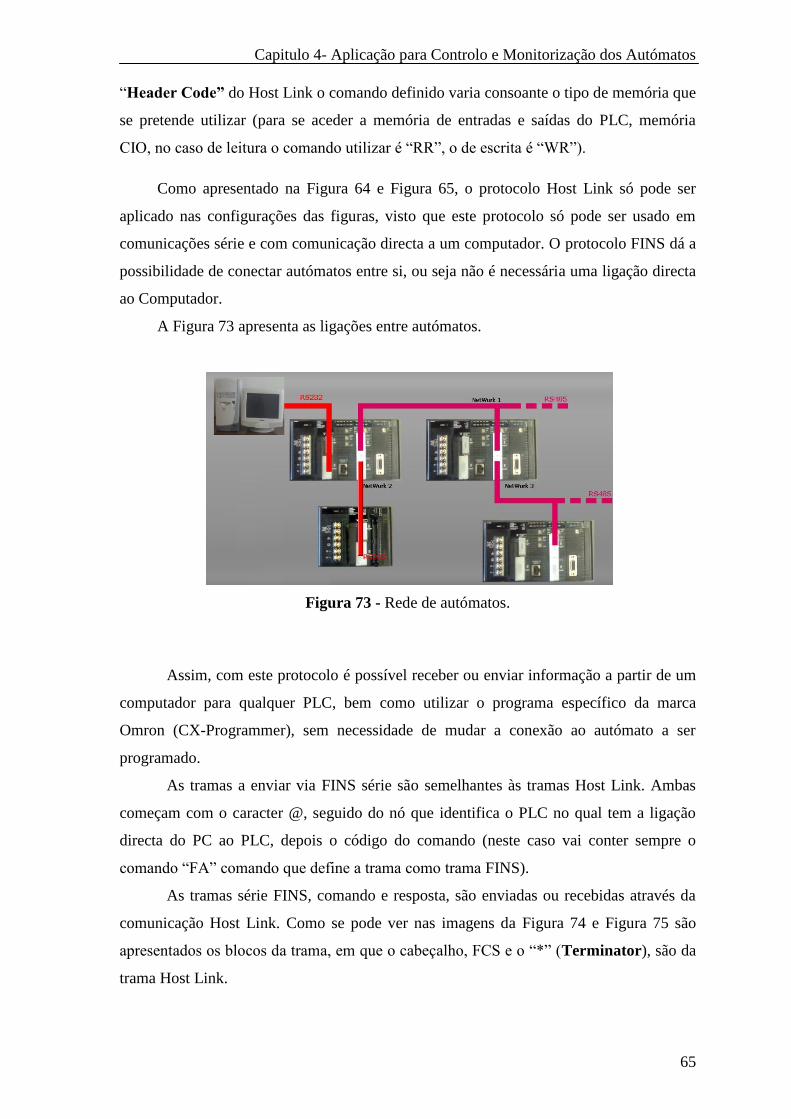
Capitulo 4- Aplicação para Controlo e Monitorização dos Autómatos
65
“Header Code” do Host Link o comando definido varia consoante o tipo de memória que
se pretende utilizar (para se aceder a memória de entradas e saídas do PLC, memória
CIO, no caso de leitura o comando utilizar é “RR”, o de escrita é “WR”).
Como apresentado na Figura 64 e Figura 65, o protocolo Host Link só pode ser
aplicado nas configurações das figuras, visto que este protocolo só pode ser usado em
comunicações série e com comunicação directa a um computador. O protocolo FINS dá a
possibilidade de conectar autómatos entre si, ou seja não é necessária uma ligação directa
ao Computador.
A Figura 73 apresenta as ligações entre autómatos.
Figura 73 - Rede de autómatos.
Assim, com este protocolo é possível receber ou enviar informação a partir de um
computador para qualquer PLC, bem como utilizar o programa específico da marca
Omron (CX-Programmer), sem necessidade de mudar a conexão ao autómato a ser
programado.
As tramas a enviar via FINS série são semelhantes às tramas Host Link. Ambas
começam com o caracter @, seguido do nó que identifica o PLC no qual tem a ligação
directa do PC ao PLC, depois o código do comando (neste caso vai conter sempre o
comando “FA” comando que define a trama como trama FINS).
As tramas série FINS, comando e resposta, são enviadas ou recebidas através da
comunicação Host Link. Como se pode ver nas imagens da Figura 74 e Figura 75 são
apresentados os blocos da trama, em que o cabeçalho, FCS e o “*” (Terminator), são da
trama Host Link.

Capitulo 4- Aplicação para Controlo e Monitorização dos Autómatos
66
Figura 74 - Blocos da trama de comando.
Figura 75 - Blocos da trama de resposta.
O formato da trama usada para o envio de comandos FINS a partir de um
computador pessoal para a unidade de CPU (autómato) está apresentado na Figura 76.
Figura 76 - Trama de comando FINS [62].
A trama é constituída por:
@, o símbolo @ deve ser sempre colocado no inicio da trama;
Unit Number, identifica o PLC que envia a resposta para o PC;
Header Code, o código do cabeçalho que distingue entre diferentes tipos de
comandos."FA" (ASCII: 46, 41) quando se utiliza comandos FINS
comandos;
Response Wait Time, O tempo de espera de resposta define o tempo de
quando a unidade de CPU recebe um bloco de comando até que ele começa

Capitulo 4- Aplicação para Controlo e Monitorização dos Autómatos
67
a retornar uma resposta. Ela pode ser definida de 0 a F em hexadecimal, em
unidades de 10 ms. Exemplo: Se F (15) é definido, a resposta começará a ser
devolvido 150 ms (15 × 10 ms) após o bloco de comando foi recebido;
ICF (Information Control Field), Especifica se existe ou não são centros
de rede. 80" (ASCII: 38,30), quando do envio de um comando FINS a uma
unidade de CPU em uma rede. "00" (ASCII: 30,30) o envio de uma unidade
de CPU ligado directamente ao computador;
RSV (Reserved),"00" (ASCII: 30,30). Definir RSV é exigida apenas
quando o envio de uma unidade de CPU na rede;
GCT (Gateway Count), Este é o número de redes através do qual a
transmissão pode ser retransmitida. "07" (ASCII: 30, 37). Definir GCT é
exigida apenas quando o envio de uma unidade de CPU em sub-rede;
DNA, DA1, DA2, endereços que indica a rede de destino, o nó, e a
unidade;
DNA (Destination Network Address), indicação do número CPU da rede
de destino, sendo este de 00 a 7FHex (0 a 127);
DA1 (Destination Node Address), indicar o nó do CPU da rede de destino,
Unidades Ethernet com os números de outro modelo: 01 a hex 7E (1-126)
Link Controller Unit: 01-20 hex (1-32 decimal)
SYSMAC NET: 01 a hex 7E (1-126 decimal)
SYSMAC LINK: 01 a 3E hex (1-62 decimal);
DA2 (Destination Unit Address), indica a unidade de destino,
00 – CPU Unit
FE – Unidade de ligação à rede
10 a 1F– BUS da unidade do CPU;
SNA (Source Network Address), SA1 (Source Node Address), Definir a
rede de endereços de origem e nó. Definir tanto a "00" (ASCII: 30, 30),
independentemente da existência ou não de um relé de rede.
Configuração SNA e SN1 é exigida apenas quando o envio de uma unidade
de CPU em uma rede;
SA2 (Source Unit Address), Definir o endereço da unidade fisicamente
ligado ao computador host.
A configuração muda de acordo com o aparelho que está ligado.

Capitulo 4- Aplicação para Controlo e Monitorização dos Autómatos
68
Quando conectado à Unidade CPU, Serial Communications Board, ou um
Serial Communications Unit, "00" para indicar a unidade de CPU (ASCII:
30, 30);
SID (Source ID), o SID é usado como um contador quando reenviar. Ele
deve ser normalmente configurado inicialmente para "00" (ASCII: 30, 30);
Command Code, Text, Defina o código de comando e texto de acordo com
o comando FINS e formatos de resposta;
FCS (Frame Check Sequence), código da paridade da trama a enviar;
Terminator é representado pelo símbolo “*”, e indica o fim da trama [62].
A trama de resposta enviado pelo autómato ao PC tem o formato apresentado na
Figura 77.
Figura 77 - Trama de resposta FINS [62].
Na trama de resposta são devolvidos todos os parâmetros configurados na trama de
comando, a baixo é detalhado todos os parâmetros que contem a trama de resposta.
@, o símbolo @ deve ser sempre colocado no inicio da trama;
Unit Number é o número do dispositivo na de rede e o Header Code define a
trama como comando FINS;
ICF (Information Control Field), para uma unidade de CPU em rede, C0
"(ASCII: 43, 30) será devolvido. Para uma Unidade de CPU ligado directamente
ao computador host, será devolvido "40" (ASCII: 34,30);

Capitulo 4- Aplicação para Controlo e Monitorização dos Autómatos
69
RSV (Reserved), esta secção é reservada ao sistema. Não aceder ao RSV;
GCT (Gateway Count) Esta secção é reservada para o sistema. Não aceder ao
GCT. O GCT mesmo que foi especificado no comando que foi recebido será
devolvido. Definir GCT é necessário no formato de resposta apenas a partir de
uma unidade de CPU em rede;
DNA (Destination Network Address), DA1 (Destination Node Address), DA2
(Destination Unit Address), o mesmo conteúdo especificado para SNA, SA1,
SA2 e no comando que foi recebido será devolvido. Definir DNA e DA1 é
necessária para os formatos de resposta apenas a partir de uma unidade de CPU
em rede;
SNA (Source Network Address), SA1 (Source Node Address), SA2 (Source
Unit Address) O mesmo conteúdo especificado para o DNA, DA1, DA2 e no
comando que foi recebido será devolvido. Configuração SNA e SN1 são
necessárias para os formatos de resposta apenas a partir de uma unidade de CPU
em rede;
SID (Source ID), o SID que foi especificado no comando que foi recebido será
devolvido;
Command Code, Response Code, Text, o código de comando, código de
resposta, e texto correspondente ao comando FINS e formatos de resposta será
retornado;
FCS (Frame Check Sequence), código da paridade da trama a enviar;
Terminator é representado pelo símbolo “*”, e indica o fim da trama [62].
4.3.1.1. Exemplos de tramas FINS série
Tal como nas tramas Host Link, em que é necessário saber como é feito o envio das
tramas de comando e as tramas das respostas, o código de acesso à memória e se é do tipo
de leitura ou escrita, nas tramas FINS também é necessário saber os comandos de acesso
à memória. A Tabela 11 apresenta um teste realizado com um PLC. Neste teste é enviado
uma trama de comando no formato FINS, onde é possível verificar que tem características
idênticas às tramas de formato Host Link.
Na trama apresentada na Tabela 11, o teste é iniciado com o caracter @ seguido do
nó que identifica o PLC na rede, depois o comando que identifica a trama do protocolo
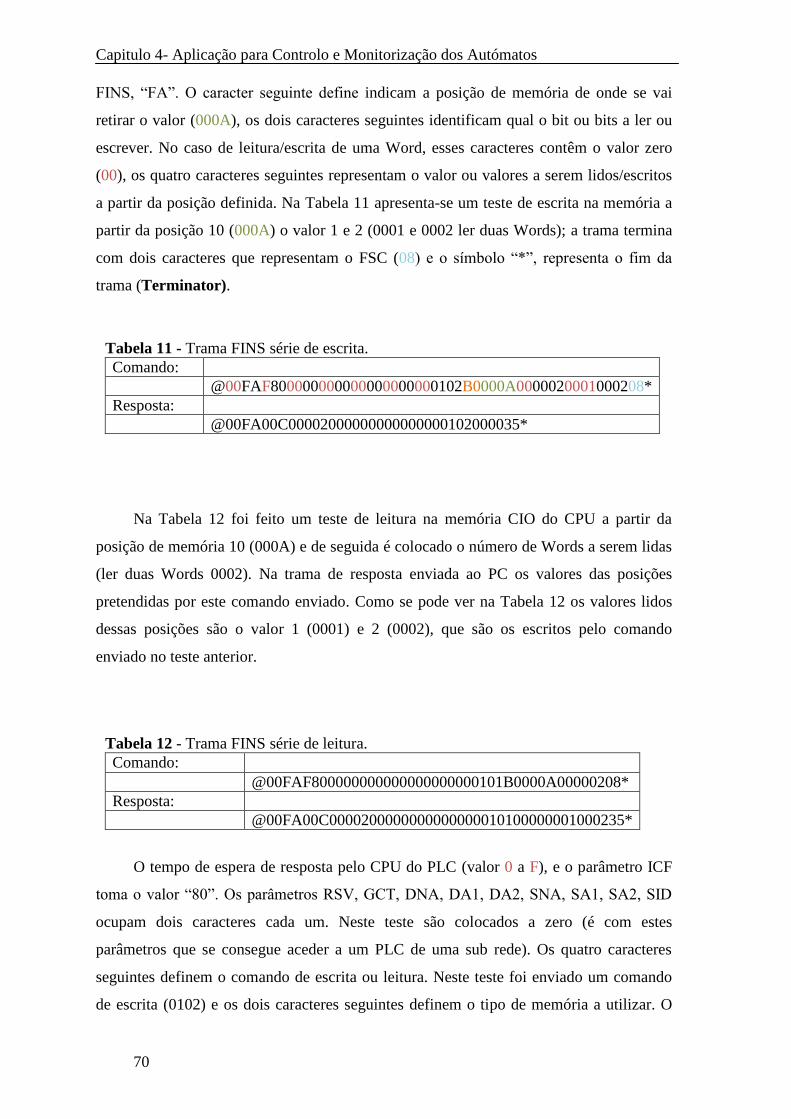
Capitulo 4- Aplicação para Controlo e Monitorização dos Autómatos
70
FINS, “FA”. O caracter seguinte define indicam a posição de memória de onde se vai
retirar o valor (000A), os dois caracteres seguintes identificam qual o bit ou bits a ler ou
escrever. No caso de leitura/escrita de uma Word, esses caracteres contêm o valor zero
(00), os quatro caracteres seguintes representam o valor ou valores a serem lidos/escritos
a partir da posição definida. Na Tabela 11 apresenta-se um teste de escrita na memória a
partir da posição 10 (000A) o valor 1 e 2 (0001 e 0002 ler duas Words); a trama termina
com dois caracteres que representam o FSC (08) e o símbolo “*”, representa o fim da
trama (Terminator).
Tabela 11 - Trama FINS série de escrita.
Comando:
@00FAF800000000000000000000102B0000A0000020001000208*
Resposta:
@00FA00C00002000000000000000102000035*
Na Tabela 12 foi feito um teste de leitura na memória CIO do CPU a partir da
posição de memória 10 (000A) e de seguida é colocado o número de Words a serem lidas
(ler duas Words 0002). Na trama de resposta enviada ao PC os valores das posições
pretendidas por este comando enviado. Como se pode ver na Tabela 12 os valores lidos
dessas posições são o valor 1 (0001) e 2 (0002), que são os escritos pelo comando
enviado no teste anterior.
Tabela 12 - Trama FINS série de leitura.
Comando:
@00FAF800000000000000000000101B0000A00000208*
Resposta:
@00FA00C0000200000000000000010100000001000235*
O tempo de espera de resposta pelo CPU do PLC (valor 0 a F), e o parâmetro ICF
toma o valor “80”. Os parâmetros RSV, GCT, DNA, DA1, DA2, SNA, SA1, SA2, SID
ocupam dois caracteres cada um. Neste teste são colocados a zero (é com estes
parâmetros que se consegue aceder a um PLC de uma sub rede). Os quatro caracteres
seguintes definem o comando de escrita ou leitura. Neste teste foi enviado um comando
de escrita (0102) e os dois caracteres seguintes definem o tipo de memória a utilizar. O
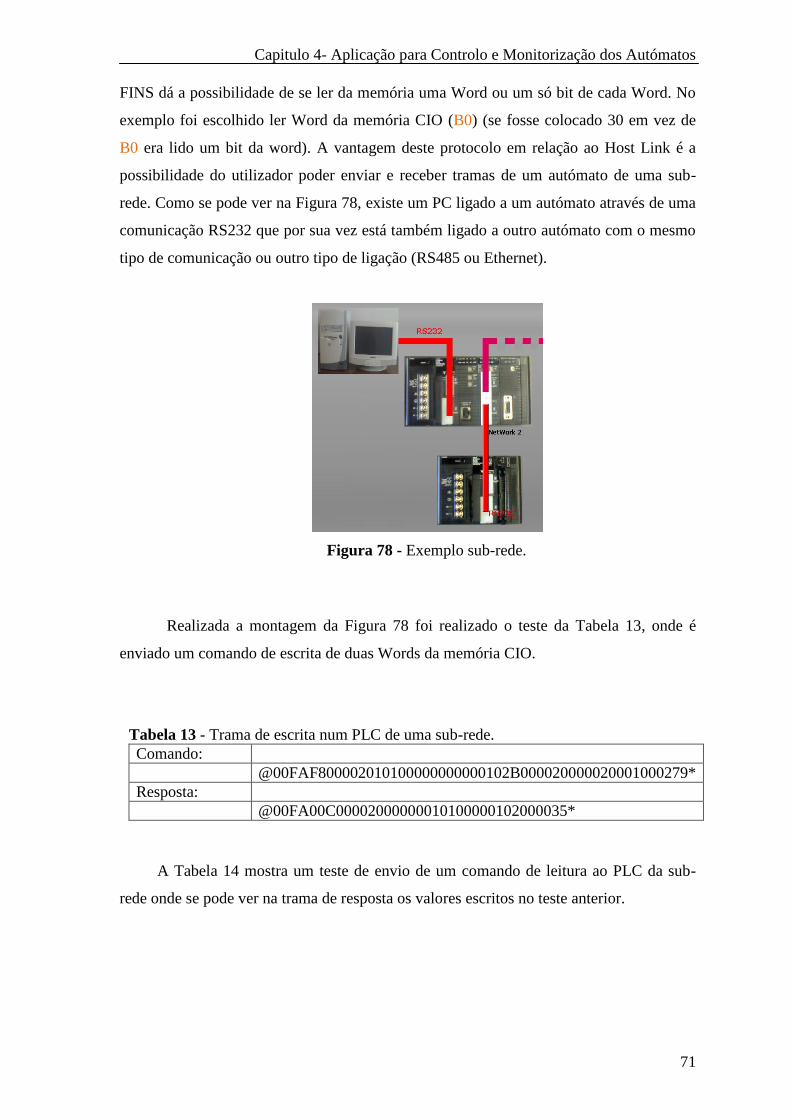
Capitulo 4- Aplicação para Controlo e Monitorização dos Autómatos
71
FINS dá a possibilidade de se ler da memória uma Word ou um só bit de cada Word. No
exemplo foi escolhido ler Word da memória CIO (B0) (se fosse colocado 30 em vez de
B0 era lido um bit da word). A vantagem deste protocolo em relação ao Host Link é a
possibilidade do utilizador poder enviar e receber tramas de um autómato de uma sub-
rede. Como se pode ver na Figura 78, existe um PC ligado a um autómato através de uma
comunicação RS232 que por sua vez está também ligado a outro autómato com o mesmo
tipo de comunicação ou outro tipo de ligação (RS485 ou Ethernet).
Figura 78 - Exemplo sub-rede.
Realizada a montagem da Figura 78 foi realizado o teste da Tabela 13, onde é
enviado um comando de escrita de duas Words da memória CIO.
Tabela 13 - Trama de escrita num PLC de uma sub-rede.
Comando:
@00FAF800002010100000000000102B000020000020001000279*
Resposta:
@00FA00C00002000000010100000102000035*
A Tabela 14 mostra um teste de envio de um comando de leitura ao PLC da sub-
rede onde se pode ver na trama de resposta os valores escritos no teste anterior.

Capitulo 4- Aplicação para Controlo e Monitorização dos Autómatos
72
Tabela 14 - Trama de leitura num PLC de uma sub-rede.
Comando:
@00FAF800002010100000000000101B0000200000279*
Resposta:
@00FA00C0000200000001010000010100000001000235*
As Tabelas 15 a 17 apresentam mais alguns testes feitos ao autómato, mostrando a
capacidade de mudar o modo de operação do PLC; o primeiro teste (Tabela 15) mostra a
trama que coloca o PLC em modo RUN, o segundo teste (Tabela 16) coloca o PLC em
modo Monitor e o da Tabela 17 coloca o PLC em modo Program.
Tabela 15 - Modo RUN.
Comando:
@00FAF800000000000000000090401FFFF05*
Resposta:
@00FA00C0000200000000000009040100003A*
Tabela 16 - Modo Monitor.
Comando:
@00FAF80000000000000000008040104*
Resposta:
@00FA00C0000200000000000008040100003B*
Tabela 17 - Modo Program.
Comando:
@00FAF80000000000000000007040208*
Resposta:
@00FA00C00002000000000000070402000037*
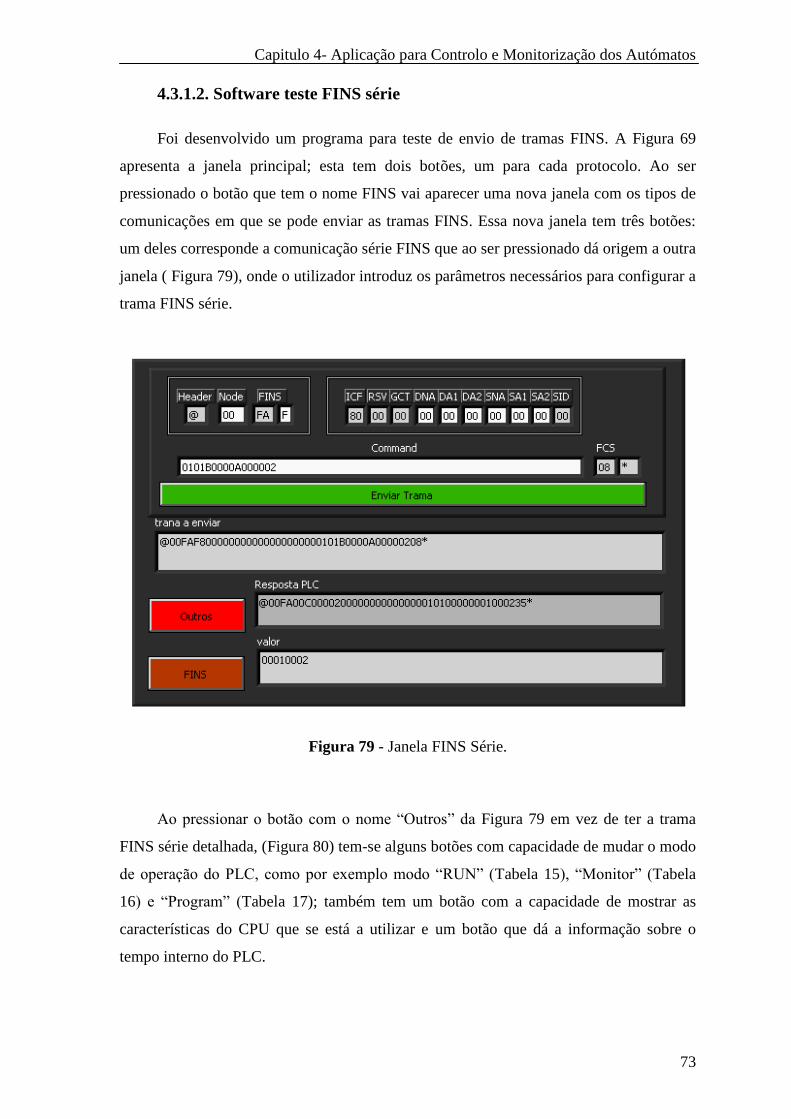
Capitulo 4- Aplicação para Controlo e Monitorização dos Autómatos
73
4.3.1.2. Software teste FINS série
Foi desenvolvido um programa para teste de envio de tramas FINS. A Figura 69
apresenta a janela principal; esta tem dois botões, um para cada protocolo. Ao ser
pressionado o botão que tem o nome FINS vai aparecer uma nova janela com os tipos de
comunicações em que se pode enviar as tramas FINS. Essa nova janela tem três botões:
um deles corresponde a comunicação série FINS que ao ser pressionado dá origem a outra
janela ( Figura 79), onde o utilizador introduz os parâmetros necessários para configurar a
trama FINS série.
Figura 79 - Janela FINS Série.
Ao pressionar o botão com o nome “Outros” da Figura 79 em vez de ter a trama
FINS série detalhada, (Figura 80) tem-se alguns botões com capacidade de mudar o modo
de operação do PLC, como por exemplo modo “RUN” (Tabela 15), “Monitor” (Tabela
16) e “Program” (Tabela 17); também tem um botão com a capacidade de mostrar as
características do CPU que se está a utilizar e um botão que dá a informação sobre o
tempo interno do PLC.

Capitulo 4- Aplicação para Controlo e Monitorização dos Autómatos
74
Figura 80 - Janela Fins Série 2.
4.3.2. Tramas FINS Ethernet TCP
A utilização da comunicação Ethernet, permite ao utilizador uma maior facilidade
de controlo e monitorização. Os novos PLC da Omron com entrada Ethernet estão
preparados para serem acedidos por um sistema de comunicação de dados TCP/IP com o
protocolo FINS Ethernet. Comparando com a comunicação série convencional, o
interface Ethernet aumenta a velocidade de comunicação quer para a programação quer
para a monitorização e controlo com o PLC.
No protocolo FINS Ethernet, as tramas não têm o mesmo formato que as do
protocolo FINS série, sendo possível a comunicação directa remota com os dispositivos.
Nas tramas FINS Ethernet não é necessário recorrer ao protocolo Host Link para o envio
de comandos. Este protocolo depende do tipo de comunicação Ethernet a utilizar: se o
envio é feito através da comunicação de dados Ethernet TCP/IP ou por Ethernet UDP/IP.
Na comunicação Ethernet TCP/IP as tramas são constituídas por um cabeçalho TCP e por
cabeçalho FINS como mostra as Figuras 81 e a 82.

Capitulo 4- Aplicação para Controlo e Monitorização dos Autómatos
75
Figura 81 - Blocos da trama de comando Ethernet TCP.
Figura 82 - Blocos da trama de resposta Ethernet TCP.
4.3.2.1.Exemplos de tramas FINS Ethernet TCP
Para o envio de tramas FINS Ethernet TCP, e sempre que se estabelece a ligação
por este meio de comunicação é necessário enviar um comando FINS para estabelecer
remotamente uma ligação entre o PLC e um PC. A Tabela 18 apresenta a trama de
activação da comunicação via Ethernet. Após efectuada esta conexão é possível ler,
escrever, mudar o modo de operação do PLC remotamente.
Tabela 18 - Trama TCP que estabelece a comunicação.
Comando:
46494E530000000C000000000000000000000000
Resposta:
46494E53000000100000000100000000000000F000000065
No teste da Tabela 19 é enviado um comando de escrita de Words à área de
memória DM a partir da posição 68, onde vão ser escritos dois valores a partir da posição
dimensionada, sendo esses valores, o 3 e 4.
Tabela 19 - Trama TCP de escrita.
Comando:
46494E530000001E000000020000000080000300650000F00004010282006800000200030004
Resposta:
46494E53000000160000000200000000C0000200F0000065000401020000

Capitulo 4- Aplicação para Controlo e Monitorização dos Autómatos
76
Na Tabela 20 é efectuado um pedido de leitura de Words da memória DM a partir
da posição 64 e são lidas duas posições a partir da posição escolhida.
Tabela 20 - Trama TCP de leitura.
Comando:
46494E530000001A000000020000000080000300650000F000010101820064000002
Resposta:
46494E530000001A0000000200000000C0000200F000006500010101000002220022
4.3.2.2. Software teste FINS Ethernet TCP
Na Figura 83 é apresentada a interface desenvolvida para testes de envio de
comandos deste protocolo. No caso da Figura 83 é enviado um comando de escrita na
memória CIO do autómato, onde vão ser escritos quatro valores a partir da posição de
memória um. Como se pode ver na figura 83 vão ser escritos os valores de um a quatro
(0001 0002 0003 0004). Neste caso só é retirado da trama de resposta o “End Code” que é
o que permite ao utilizador saber se o comando enviado foi bem sucedido.
Figura 83 - Janela FINS Ethernet.
Como no protocolo FINS série existe também uma janela com alguns botões que
contém já as tramas de comandos específicos dos autómatos utilizados para estes testes.

Capitulo 4- Aplicação para Controlo e Monitorização dos Autómatos
77
Na Figura 84, a janela representada contém três botões com funções de mudar o
modo de operação do PLC.
Figura 84 - Janela FINS Ethernet 2.
4.3.3. Tramas FINS Ethernet UDP
Como referido anteriormente as tramas FINS Ethernet podem ser enviadas por
Ethernet TCP/IP ou por Ethernet UDP/IP. A comunicação Ethernet UDP/IP é mais
simples que a TCP/IP visto que não necessita de código de activação da comunicação
entre utilizador e o PLC, e após a conexão estabelecida entre PLC e o PC só é necessário
enviar o cabeçalho FINS com os devidos comandos. O formato do cabeçalho FINS destas
tramas é igual ao cabeçalho FINS das tramas Ethernet TCP/IP. A Figura 85 e a Figura 86
mostram o único bloco necessário com o formato da trama a enviar e a respectiva
resposta.
Figura 85 - Bloco da trama de comando.
Figura 86 - Bloco da trama de resposta.

Capitulo 4- Aplicação para Controlo e Monitorização dos Autómatos
78
4.3.3.1.Exemplos de tramas FINS Ethernet UDP
Na Tabela 21 é apresentado um teste realizado com esta comunicação, em que é
feito um pedido de escrita no PLC. É enviado um comando de escrita (0101) na memória
D ou DM (82), onde é feita a escrita a partir da posição 1 (000100), e de seguida é
colocado o número de posições a serem escritas (no teste 0002) e por fim os valores a
serem escritos, o valor 1 e o valor 2 (00010002). Neste teste, a segunda trama retornada
pelo PLC, indica que o pedido foi realizado com sucesso (o código que indica o estado da
trama enviada são os números que estão a azul C0000200B2000000000101020000).
Tabela 21 - Trama UDP de escrita.
Comando:
80000300000000B20001010282000100000200010002
Resposta:
C0000200B2000000000101020000
No teste da Tabela 22 é apresentado o comando de pedido de leitura ao PLC. Como
no teste anterior é feito um pedido de escrita; neste teste vai ser verificado se foram
escritos ou não os valores indicados no teste anterior. O código que define se o comando
é de leitura é o “0101”; depois é colocado o código que define o tipo de memória, de
seguida a partir de que posição de memória vai ser feita a leitura e por fim o número de
posições a ler. Na trama de resposta pode verificar-se os valores que foram escritos no
teste anterior (como se pode ver na trama seguinte, são os números que estão a azul
C0000200B200000000020101000000010002).
Tabela 22 - Trama UDP de leitura.
Comando:
80000300000000B200020101820001000002
Resposta:
C0000200B200000000020101000000010002
As Tabelas 23 a 25 apresentam as tramas de comando que fazem alterar o modo de
operação do PLC sendo que a primeira tabela apresenta o comando que altera o PLC para
o modo de programação, seguida da trama que altera para o modo monitor e por fim a que
coloca o PLC em mudo “RUN”.

Capitulo 4- Aplicação para Controlo e Monitorização dos Autómatos
79
Tabela 23 - Trama UDP modo PROGRAM.
Comando:
80000300000000B200030402
Resposta:
C0000200B2000000000304020000
Tabela 24 - Trama UDP modo MONITOR.
Comando:
80000300000000B200040401
Resposta:
C0000200B200000000020101000000010002
Tabela 25 - Trama UDP modo RUN.
Comando:
80000300000000B200050401FFFF
Resposta:
C0000200B2000000000504010000
4.3.3.2. Software teste FINS Ethernet UDP
Como na comunicação Ethernet TCP, nesta comunicação também foi desenvolvido
no programa uma janela com a comunicação Ethernet UDP, para facilitar a compreensão
deste tipo de tramas. Neste caso é feito um pedido de leitura, ou seja, é feito o teste
apresentado na Tabela 22. A Figura 87 apresenta os locais de configuração feitas pelo
utilizador, contém a parte de configuração do cabeçalho FINS onde são colocadas as
especificações do autómato a utilizar e o comando pretendido para enviar ao autómato.
Esta figura mostra que foi colocado um comando de leitura da memória D ou DM, onde
vão ser lidas, a partir da posição 1, duas posições de memória. Nesta janela é possível
visualizar a trama de resposta completa, de onde é retirado o “end code” (código que
indica se a trama foi bem sucedida ou não) e o “valor” (local, no caso de leitura, se pode
ver os valores escritos na ou nas posições indicadas na trama de comando).

Capitulo 4- Aplicação para Controlo e Monitorização dos Autómatos
80
Figura 87 - Janela FINS Ethernet UDP 1.
Como no programa de teste Ethernet TCP, esta também possui três botões já com o
comando pré definido, sendo que basta ser pressionado qualquer um dos botões
apresentados na Figura 88 para alterar o modo de operação do PLC.
Figura 88 - Janela FINS Ethernet UDP 2

Capitulo 5- Casos de estudo
81
5.Casos de estudo
Foi projectado e construído um armário para armazenar todo o equipamento de
controlo. O projecto e consequente construção, do armário de controlo, foram feitos de
forma a permitir a portabilidade dos vários sistemas de controlo implementados neste
trabalho bem como a facilidade de, no futuro, acrescentar novos equipamento à rede já
desenvolvida.
Para a construção do armário foi desenvolvido um protótipo, com a ajuda de um
software apropriado para esses fins (o software utilizado para o desenvolvimento deste
protótipo foi o Google sketchup). A Figura 89 apresenta o protótipo desenvolvido para o
armazenamento de todo o equipamento de controlo da rede.
Figura 89 - Protótipo do armário.
Capitulo 5- Casos de estudo
82
Esta configuração permite utilizar este sistema como uma ferramenta de ensino e
teste com acesso local ou remoto, promovendo-se não só a compreensão de redes
industriais e dos diversos tipos de ferramentas de comunicação (RS232, RS485, Profibus,
Mechatrolink, DeviceNet e Ethernet), como também a possibilidade de utilização quer
local quer remota para o ensino de programação de PLC (LADDER) e a facilidade de
ligação a este armário de maquetas ou simuladores de controlo de processos para fins de
demonstrações quer a nível do ensino quer a nível industrial. A monitorização e controlo
da rede poderão ser realizada via Web.
A Figura 90 apresenta o armário com o equipamento aplicado na rede.
A Figura 91 mostra uma das maquetas possíveis que foi controlada e monitorizada
pela rede a “Casa Inteligente”.
As funcionalidades disponíveis da “Casa Inteligente”, são:
- Controlo da activação geral da casa;
- Controlo do alarme;
- Ligação do controlo de temperatura;
- Controlo da porta de entrada;
- Controlo da iluminação das escadas;
- Controlo da iluminação interna;
- Controlo de temperatura.
O controlo da iluminação das escadas é feito através de três botões de pressão
(Figura 92), colocados em lugares distintos das escadas e a iluminação interna é
controlada por um sensor de movimento (Figura 93).
Para as restantes funcionalidades foi construído um painel de controlo que contém
quatro botões de pressão e três leds (Figura 94). O primeiro botão é utilizado para a
activação do circuito geral, o segundo é utilizado para activação do alarme (Figura 95), o
terceiro liga o controlador de temperatura (Figura 96). Para cada uma destas
funcionalidades são utilizados leds de sinalização onde o verde significa que o circuito
está activo e o vermelho que o circuito está desactivado, por último, o quarto botão do
painel de controlo, controla a abertura e fecho da porta de entrada (Figura 97) [63].
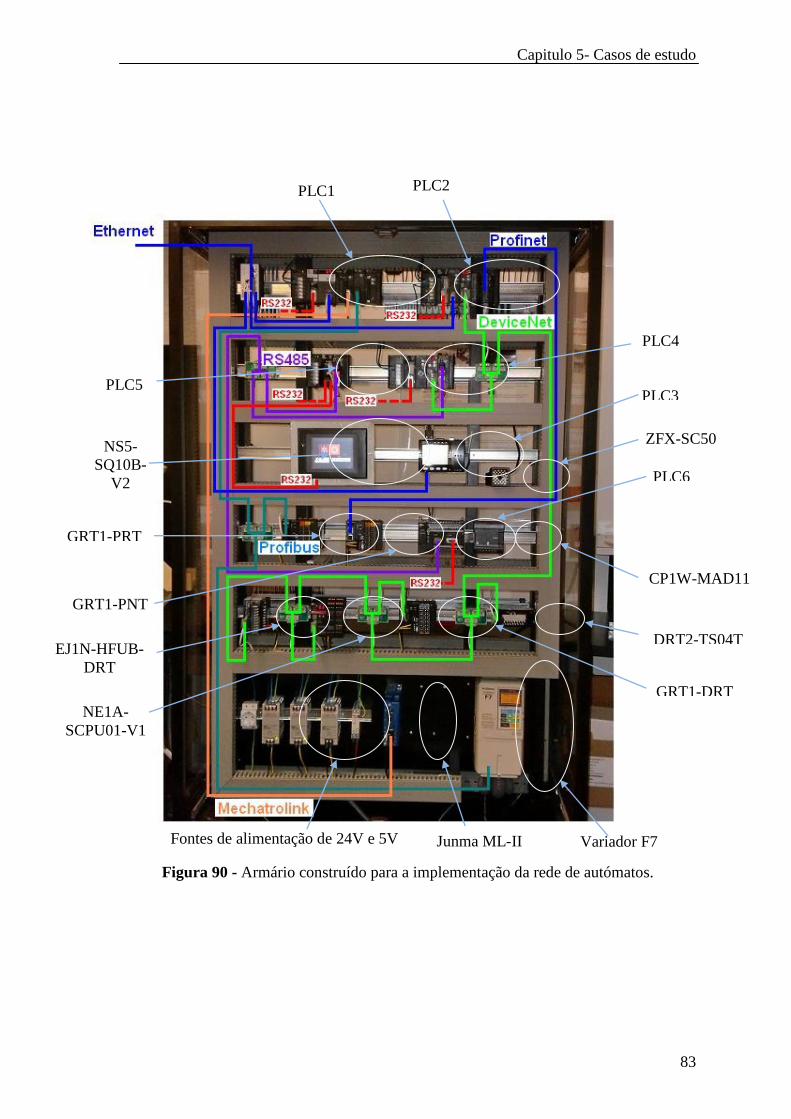
Capitulo 5- Casos de estudo
83
Figura 90 - Armário construído para a implementação da rede de autómatos.
Fontes de alimentação de 24V e 5V
DRT2-TS04T
CP1W-MAD11
PLC1
NS5-
SQ10B-
V2
GRT1-PRT
Variador F7
GRT1-PNT
EJ1N-HFUB-
DRT
Junma ML-II
NE1A-
SCPU01-V1
GRT1-DRT
ZFX-SC50
PLC6
PLC4
PLC3 PLC5
PLC2

Capitulo 5- Casos de estudo
84
Figura 91 - Armário e a maqueta “Casa Inteligente”.

Capitulo 5- Casos de estudo
85
Figura 92 - Iluminação
escadas.
Figura 93 - Sensor de
movimento.
Figura 94 - Placa de comando
(4 Botões de pressão e 3 leds).
Figura 95 - Janela com
detector de intrusão.
Figura 96 - Controlador de
temperatura.
Figura 97 - Porta de entrada.
Numa primeira fase deste projecto programou-se um dos autómatos existentes na
rede para controlar as diversas funcionalidades. Na segunda fase desenvolveu-se um
sistema remoto de monitorização e controlo da casa. Foi utilizado o software da “National
Instruments” LABVIEW (LABVIEW 8.2). Assim, através deste software foi possível
estabelecer uma comunicação entre o computador (PC) e o autómato.
A janela apresentada na Figura 98 apresenta o interface de controlo e monitorização
da “Casa Inteligente”. Na monitorização da casa são utilizados diversos sinalizadores que
indicam os sensores que estão a ser actuados e as lâmpadas que estão a ser controladas.
Ao lado da foto da casa está colocado um painel virtual com um conjunto de botões e os
respectivos sinalizadores que tem como função simular os botões e leds existentes na
parte de baixo casa.
Neste projecto também foi utilizado uma câmara com endereço IP, que para além
de disponibilizar a imagem real da casa, também substitui a fotografia utilizada na janela
do teste anterior. A Figura 99 apresenta a janela com a imagem da casa obtida através da
câmara e o painel lateral com os botões e sinalizadores responsáveis pela monitorização e
controlo da casa.

Capitulo 5- Casos de estudo
86
Figura 98 - Painel de monitorização remoto da “Casa Inteligente” e respectivo painel de
controlo.
Figura 99 - Painel de monitorização remota da “Casa Inteligente” através de vídeo
câmara.
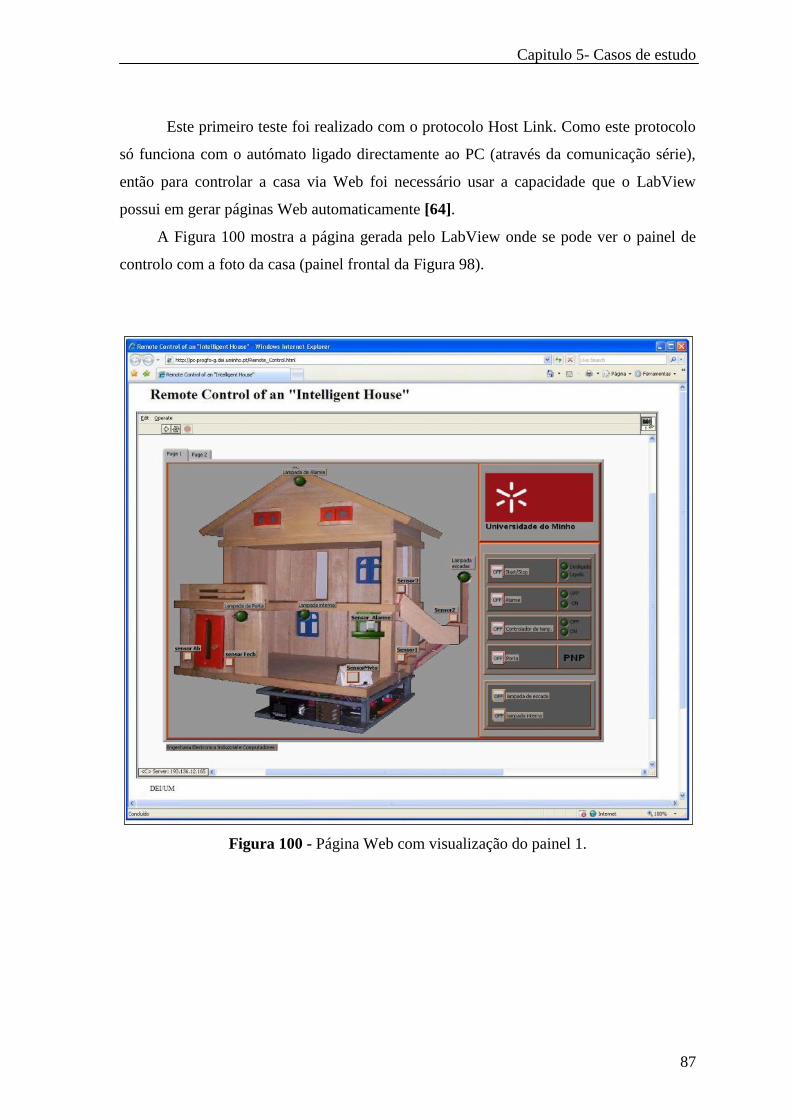
Capitulo 5- Casos de estudo
87
Este primeiro teste foi realizado com o protocolo Host Link. Como este protocolo
só funciona com o autómato ligado directamente ao PC (através da comunicação série),
então para controlar a casa via Web foi necessário usar a capacidade que o LabView
possui em gerar páginas Web automaticamente [64].
A Figura 100 mostra a página gerada pelo LabView onde se pode ver o painel de
controlo com a foto da casa (painel frontal da Figura 98).
Figura 100 - Página Web com visualização do painel 1.

Capitulo 5- Casos de estudo
88
Na Figura 101 mostra a janela com a imagem da casa dada através da câmara na
página gerada pelo LabView.
Figura 101 - Página Web com visualização do painel 2.
Com o protocolo FINS é possível obter outra alternativa para a realização deste
último teste. Com um autómato com entrada de Ethernet é possível comunicar
remotamente sem que seja necessária uma ligação directa ao PLC. Assim, não é
necessário recorrer a ajuda do software para gerar a página Web para o controlo remoto,
nem é necessário construir dois programas TCP/IP (um com o servidor outro como
cliente). Com este protocolo e com o PLC com entrada Ethernet basta construir um
programa de controlo. Essa interface vai funcionar como cliente na comunicação
Ethernet, sendo que o servidor é o próprio PLC.

Capitulo 6- Conclusão e Trabalho Futuro
89
6.Conclusão e Trabalho Futuro
O tema desta dissertação, “WALC-AI: Laboratório para a aprendizagem do Controlo
e Automação Industrial” surge no âmbito do projecto de investigação e desenvolvimento
financiado pela Fundação para a Ciência e a Tecnologia, WALC, Web Assisted
Laboratory for Control Engineering on-line Education, PTDC/ESC/68069/2006.
Esta dissertação teve como objectivo o desenvolvimento e a implementação de uma
rede de autómatos para fins de demonstrações quer educacionais quer industriais. Com
esta rede é possível implementar várias aplicações de automação bem como
demonstrações e comunicações entre redes industriais existentes no mercado.
De forma a permitir quer a portabilidade dos vários sistemas de controlo
implementados quer a facilidade de acrescentar novos equipamentos projectou-se e
construí-se um armário de controlo onde se implementou a rede industrial de automação.
O armário foi projectado, utilizando o software Google sketchup.
Através deste projecto é possível fazer as demonstrações, programar, controlar e
monitorizar via Web, fazendo assim com que seja possível, a partir de qualquer ponto
com internet, aprender a programar autómatos bem como fazer demonstrações de
problemas de automação.
O trabalho desenvolvido foi alvo de várias publicações em conferências
internacionais com arbitragem científica. Assim, o estudo e a implementação dos
protocolos internos da Omron (Host Link e FINS) foram apresentados numa conferência
internacional, Icinco Itália Milão, Julho 2009 “The FINS Protocol for Complex Industrial
Applications: A Case Study”[65].
O desenvolvimento do quadro de armazenamento da rede de autómatos e o software
de teste das comunicações (desenvolvido em LabView) do protocolo Host Link e FINS,
foram apresentados na conferência internacional VU09, Eslováquia Bratislava, Dezembro
2009 “Platform WALC: design and development of a PLC network”[66].
Foi também apresentado na conferência internacional Icinco, e foram feitas duas
apresentações na conferência internacional IFAC2010 Workshop on Intelligent
Manufacturing Systems (IMS‟10), sendo a primeira apresentação intitulada
Capitulo 6- Conclusão e Trabalho Futuro
90
por,”Industrial Network Platform for Monitoring and Control of Automated
Manufacturing Systems”. Nesta apresentação são detalhados os protocolos utilizados na
rede desenvolvida e a ideia da sua utilização no projecto [67], e a segunda apresentação
intitula-se “An Interface for industrial network monitoring and control”, detalhando os
protocolos internos da Omron (Host Link e FINS) e as suas funcionalidades no projecto
[68].
Outra conferência onde foi demonstrado a utilização de continuidade do
desenvolvimento deste projecto foi na conferência Controlo‟2010, conferencia realizada
em Coimbra, onde o artigo apresentado tinha como titulo “REMOTE ACCESS TO e-
LABS”. Neste artigo é apresentado um modo como aceder a rede de autómatos
remotamente, nomeadamente, o primeiro estudo de gestão de acessos, controlo e
monitorização [69].
Por fim a última conferência onde foi a apresentado o estado em que se encontra o
projecto WALC, foi na conferência MECAHITECH‟10, realizada na Roménia Bucareste,
entre 23 e 24 de Setembro [70].
Assim, com a disponibilização remota e local deste projecto podem ser adquiridos
mais conhecimentos sobre a programação de autómatos, bem como a sua configuração,
controlo e monitorização.
Como actividades de trabalho futuro destacam-se:
- Construir novos Kits didácticos para conectar a rede, ou desenvolver um Kit ou
maqueta, onde seja possível adicionar todo equipamento apresentado no esquema
proposto (figura 4).
- Desenvolver uma plataforma de ensino via Web, onde seja possível testar os
diversos equipamentos ou Kits remotamente, facilitando assim o ensino via Web.
- Envio, via Web, do programa para controlar o autómato pretendido, sendo que
este só é possível com o programa da Omron (CX-Programmer) o que causa alguns
problemas a nível de gestão de acessos.
- Testar dispositivos de controlo de outros fabricantes.
Referências Bibliográficas
91
Referências Bibliográficas
[1] A. K. Gupta, S.K. Arora, Industrial Automation and Robotics, Laxmi Publications
LTP, 2007.
[2] Leonardo Tavares do Nascimento, Avaliação da utilização de tecnologia de
comunicação sem fio em redes PROFIBUS e FOUNDATION Fieldbus™, Monografia
para obtenção do Certificado de Especialista em Engenharia de Instrumentação, 61 pp.,
Universidade Federal de Pernambuco, Recife, Brasil, 2008.
[3] E. Hansen, "The role of interactive video technology in higher education: Case study
and proposed framework," Education Technology, September 1990, pp. 13-21.
[4] Departamento de Electrónica Industrial, Automação, http://dei-
s1.dei.uminho.pt/lic/AUT/ (acedido em 08/10/2010).
[5] National Library, The Visible Human Project
http://www.nlm.nih.gov/research/visible/visible_human.html (acedido em 08/10/2010).
[6] MIT Microelectronics, Tutorials
http://weblab2.mit.edu/docs/weblab/v6.1/manual/tutorial.htm (acedido em
08/10/2010).
[7] APEL, Remote Monitored & Controlled Laboratory
http://www.apel.ee.upatras.gr/rmclab/en/index.htm (acedido em 08/10/2010). [8] M. A. González, J. Adiego, L.F. Sanz, N.Bouab, W. Bouab, J. Mass, Laboratorios
Remotos en la WEB, una Herramienta para la Cooperación al Desarrollo en el Campo
de la Educación, I Encuentro de Cooperación para el Desarrollo 2.0, Gijón, Spain.
January 2008.
[9] Marco Túlio Chella, Elnatan Chagas Ferreira, Arquitectura para laboratórios de acesso
remoto com aplicação no ensino de engenharia electrônica, Revista de Ensino de
Engenharia, Vol. 24, No 1 (2005).
[10] Alberto José Álvares, João Carlos Espíndola Ferreira, metodologia para implantação
de laboratórios remotos via intenet na área de automação da manufatura, Congresso
Brasileiro de Engenharia de Fabricação (COBEF), Uberlândia, MG, 18 a 21 de Maio,
2003.
Referências Bibliográficas
92
[11] Sandra Costa, Celina P. Leão, Filomena Soares, Helena Rodrigues, José Machado,
WALC - Web Assisted Laboratory for Control engineering on-line education,
CONTROLO‟2010 9TH PORTUGUESE CONFERENCE ON AUTOMATIC
CONTROL, Controlo‟ 2010 Coimbra, Portugal, 10-11 September 2010.
[12] Nedic, Z., Machotka, J. and Nafalski, A., Remote Laboratories versus Virtual and
Real Laboratories, 33rd ASEE/IEEE Frontiers in Education Conference, Boulder, CO,
November 5-8, 2003.
[13] LabTeve – Laboratório de Tecnologias para o Ensino Virtual e Estatística
http://www.de.ufpb.br/~labteve/index.html (acedido 27/10/2010).
[14] FEUP Labs access to remote experiments http://remotelab.fe.up.pt/ (acedido
27/10/2010).
[15] Laboratório de Controlo e Automação II
http://www.cpdee.ufmg.br/~dora/Lab_C&AII/controle_distribuido.pdf
(acedido em 19/05/2010).
[16] Chatha, Andrew. (1994). Fieldbus: The Foundation for Field Control Systems
Control Engineering, May, 47–50.
[17] Rockwell Automation http://www.rockwellautomation.com/ (acedido em
05/03/2010).
[18] Open DeviceNet Vendors Association (ODVA) http://www.odva.org/ (acedido em
05/03/2010).
[19] Profibus http://www.profibus.com/ (acedido em 05/03/2010).
[20] Fieldbus
http://www.fieldbus.org/index.php?option=com_content&task=view&id=136&Itemid
=307(acedido em 23/03/2010).
[21] Logan T. White, Hazardous gas monitoring: a guide for semiconductor and other
hazardous, Fifth Edition, May 2000.
[22] Bill Fenner, W. Richard Stevens, Andrew Rudoff, Programação de REDE Unix, V.1:
API Para Soquetes de Rede, Bookman 2004.
[23] Behrouz A. Forouzan, Comunicação de Dados e redes de Computadores, 2004
Bookman.

Referências Bibliográficas
93
[24] Guido Lemos De Souza Filho, Sergio Colcher, Antonio Tadeu Azevedo Gomes,
Anderson Oliveira Da Silva, VOIP – VOZ SOBRE IP, 2005, Elsevier Editora Ltda..
[25] Henrique Cesar Ulbrich, Universidade Hacker, 2005 Digerati Books.
[26] Deon Reynders, Steve Mackay and Edwin Wright, Practical Industrial Data
Communications, Newnes 2005.
[27] N. Mathivanan, PC-based instrumentation: concepts and practice, Prentice-Hall of
India Pvt.Ltd, August 2007, 2007.
[28] Profibus http://www.profibus.com/technology/profibus/(acedido em 23/03/2010).
[29] Profinet http://www.profibus.com/technology/profinet/(acedido em 23/03/2010).
[30] Raimond Pigan,Mark Metter, Automating with PROFINET: Industrial
Communication Based on Industrial Ethernet, SIEMENS, 2008.
[31] DCOM-Distributed Component Object Model
http://msdn.microsoft.com/library/cc201989.aspx (acedido em 11/05/2010).
[32] Actuator-sensors interface AS-i-bus http://www.download.schneider-
electric.com/85256E540060851A/all/852566B70073220C85256E13004F1E53/$File/
xdoc5011en.pdf (acedido em10/05/2010).
[33] Francesco Carlo Morabito, Advances in intelligent systems, F.C.Morabito, 1997.
[34] DeviceNet http://www.odva.org/default.aspx?tabid=66 (acedido em 05/03/2010).
[35] ControlNet http://www.odva.org/default.aspx?tabid=244 (acedido em 05/03/2010).
[36] ControlNet http://www.ab.com/networks/controlnet/(acedido em 05/03/2010).
[37] Ethernet/IP http://www.odva.org/default.aspx?tabid=67 (acedido em 05/03/2010).
[38] CIP http://www.odva.org/default.aspx?tabid=65(acedido em 05/03/2010).
[39] Modbus http://www.modbus.org/(acedido em 12/05/2010).
[40] Modbus http://www.modbus.org/docs/Modbus_Application_Protocol_V1_1b.pdf
(12/10/2010).
[41] Lawrence M. Thompson, Industrial Data Communications, 4th Edition, ISA 2008.
[42] Larry Chaffin, Craig Schiller, Anton Chuvakin, Infosecurity 2008 Threat Analysis,
SYNGRESS, 2008.

Referências Bibliográficas
94
[43] Cobus Strauss, Practical electrical network automation and communication systems,
ELSEVIER, 2003.
[44] Robert Meersman, Zahir Tari, On the move to meaningful internet systems 2004:
CooplS, DOA, and ODBASE, Springer 2004.
[45] Dietmar Loy, Dietmar Dietrich, Hans-Joerg Schweinzer, Open control networks:
LonWorks/EIA 709 technology, 4th Edition, ISA 2008.
[46] Thomas Böhme, Herwig Unger, Innovative Internet computing systems:
International Workshop IICS 2001, Springer 2001.
[47] Echelon http://www.echelon.com (acedido em 20/05/2010).
[48] Industrial Automation OMRON http://industrial.omron.eu/ (acedido em 20/05/2010).
[49] NE1A-SCPU01- controlador de segurança,
http://industrial.omron.eu/en/misc/search/default.html?q=NE1A-SCPU01-V1
(acedido em 20/05/2010).
[50] DRT2-TS04T, http://industrial.omron.eu/en/misc/search/default.html?q=DRT2-
TS04T+&rt=w (acedido em 20/05/2010).
[51] Mechatrolink Omron,
http://industrial.omron.pt/pt/misc/search/default.html?q=Mechatrolink (acedido em
20/05/2010).
[52] Unidade de transmissão servo,
http://industrial.omron.pt/pt/products/catalogue/motion_and_drives/servo_systems/se
rvo_drives/junma_ml_ii/default.html (acedido em 20/05/2010).
[53] Profibus Omron, http://industrial.omron.pt/pt/misc/search/default.html?q=profibus
(acedido em 20/05/2010).
[54] Variador F7,
http://industrial.omron.pt/pt/products/catalogue/motion_and_drives/frequency_invert
ers/general_purpose/f7/default.html (acedido em 20/05/2010).
[55] SmartSlice Profibus I/O,
http://industrial.omron.pt/pt/products/catalogue/automation_systems/remote_i_o/mod
ular_i_o/smartslice/default.html (acedido em 20/05/2010).

Referências Bibliográficas
95
[56] RS485 Omron,
http://industrial.omron.eu/en/misc/search/default.html?q=rs485&rt=w (acedido em
20/05/2010).
[57] Autómato CP1L Omron,
http://industrial.omron.pt/pt/products/catalogue/automation_systems/programmable_l
ogic_controllers/compact_plc_series/cp1l/default.html (acedido em 20/05/2010)
[58] Consola táctil,
http://industrial.omron.pt/pt/products/catalogue/automation_systems/hmi/scalable_h
mi/ns5/default.html (acedido em 20/05/2010).
[59] Controlador temperatura,
http://industrial.omron.pt/pt/products/catalogue/control_components/temperature_co
ntrollers/digital_process_controllers/e5_n/default.html (acedido em 20/05/2010).
[60] Serial Communications Unit,
http://industrial.omron.eu/en/misc/search/default.html?q=W336+E1+08&rt=w
(acedido em 20/05/2010).
[61] Serial Communications Unit 1,
http://www.cms.dicotec.ch/media/Datenblaetter/Omron/01%20Automation%20Syste
ms/Programmable%20Logic%20Controllers/Englisch/W365-E1-02.pdf (acedido em
20/05/2010).
[62] Serial Communications FINS,
http://www.usedplcs.co.uk/usedplcs/manuals/Omron/M11W227E11299.pdf (acedido
em 11/11/2010).
[63] Celina P. Leão, Pedro M. Silva, Paulo C. Oliveira, Nuno C. Carvalho, Filomena O.
Soares (2007), Learning automation by doing it – a case-study, ICEE 2007,
Conference, Coimbra, Portuga, September 3-7.
[64] Silva, P.M., Oliveira, P.O., Carvalho, N., Leão, C.P., and Soares, F.O. (2007),
Virtual and Remote Control: an experience by students for students, in REV07
Conference, Porto, Portugal, June 25-27.

Referências Bibliográficas
96
[65] Júlio Costa, Nuno Carvalho, Filomena Soares, José Machado, The FINS protocol
for complex industrial applications: a case study, International Conference on
Informatics in Control – Icinco 2009, Milan, Italy, July, 2009.
[66] Nuno Carvalho, Rodrigo Silveira, Celina P. Leão, José M. Machado, Filomena O.
Soares, Platform WALC: design and development of a PLC network, International
Scientific Conference VIRTUAL UNIVERSITY - VU‟2009, Bratislava, Slovak
Republic, December, 2009.
[67] Nuno Carvalho, Celina P. Leão, Filomena O. Soares, José M. Machado, An
Interface for industrial network monitoring and control, IFAC Workshop on
Intelligent Manufacturing Systems, IFAC 2010 Lisboa, Portugal, July, 2010.
[68] Júlio Costa, Nuno Carvalho, Celina P. Leão, Filomena O. Soares, José M. Machado,
Industrial Network Platform for Monitoring and Control of Automated
Manufacturing Systems, IFAC Workshop on Intelligent Manufacturing Systems,
IFAC 2010 Lisboa, Portugal, July, 2010.
[69] Júlio Costa, Nuno Carvalho, Filomena O. Soares, Celina P. Leão, José M. Machado,
REMOTE ACCESS TO e-LABS, CONTROLO‟2010 9TH PORTUGUESE
CONFERENCE ON AUTOMATIC CONTROL, Controlo‟ 2010 Coimbra, Portugal,
10-11 September 2010.
[70] Nuno Carvalho, Sandra Costa, Celina Leão, Filomena Soares, José Machado, A
Network Configuration for Industrial Systems Control, MECAHITECH‟10, 2nd
International Conference on Innovations, Recent Trends and Challenges in
Mechatronics, Mechanical Engineering and New High-Tech Products Development,
Bucharest, Romania, 23-24September 2010.