notas ciencias socialesonline.radioecca.org/banco/material/613/notas.pdf · 2017-08-10 · cálculo...
TRANSCRIPT

Matemáticas II
2º
BA
CH
ILLE
RA
TO
Álgebra lineal

Álgebra lineal 3
IntroducciónEl Cuaderno de Notas amplía y/o complementa los contenidos de algunos esquemas.
Por ello, debe considerarlo como una parte importante de la acción formativa.
ÍNDICEÍNDICEÍNDICEÍNDICEÍNDICE
Bloque I: Matrices...................................................................................................... 5
1. Tablas numéricas .................................................................................................5
2. Nomenclatura. Definiciones ...............................................................................6
3. Algunos tipos de matrices ...................................................................................7
4. Suma de matrices .................................................................................................9
5. Producto de un número por una matriz ............................................................9
6. Producto de matrices .........................................................................................10
7. Matriz inversa a partir de la definición .............................................................13
8. Dependencia lineal de filas o columnas ...........................................................13
9. Cálculo del rango por el método de Gauss ......................................................14
10. Matriz inversa por el método de Gauss ..........................................................16
11. Ecuaciones matriciales .....................................................................................17
Bloque II: Determinantes ........................................................................................ 18
1. Método del pivote para el cálculo de determinantes .......................................18
2. Cálculo del rango de una matriz por determinantes ......................................18
3. Cálculo de la inversa de una matriz por determinantes..................................19
Bloque III: Sistemas de ecuaciones .......................................................................... 20
1. Ecuación lineal ...................................................................................................20
2. Sistemas de ecuaciones lineales ........................................................................21
3. Transformaciones válidas en un sistema de ecuaciones .................................22
4. Resolución de sistemas de dos ecuaciones con dos incógnitas ......................23
5. Tipos de sistemas según sus soluciones ............................................................25
6. Interpretación geométrica de un sistema de ecuaciones con dos incógnitas 26
7. Sistemas de tres ecuaciones con dos incógnitas ..............................................27
8. Sistemas lineales de tres ecuaciones con tres incógnitas .................................29
9. Sistemas escalonados .........................................................................................30

4 Álgebra lineal
10. Sistemas lineales en general ............................................................................33
11. Sistemas homogéneos .....................................................................................35
12. Discusión de un sistema ..................................................................................36
13. Criterios de compatibilidad .............................................................................37
Bloque IV: Inecuaciones .......................................................................................... 39
1. Intervalos. Anotación ......................................................................................39
2. Inecuaciones. Definición .................................................................................41
3. Resolución de inecuaciones de primer grado con una incógnita .................41

Álgebra lineal 5
En esta tabla, cada fila corresponde a un alumno y en ella se registran las notas de sus
siete asignaturas, mientras que cada columna determina una asignatura y, por tanto, las
notas de los 40 alumnos en esta.
La posición de cada casilla de la tabla queda determinada por un par de números, uno
que indica la fila y otro la columna.
El conjunto de las casillas o posiciones de esta tabla se designa por A (I, J), donde I y J
son dos índices: I recorre los números correspondientes a las filas, es decir, desde 1 hasta 40,
y J recorre los correspondientes a las columnas, es decir, desde 1 hasta 7.
La tabla numérica A (I, J) suele indicarse también con el símbolo (aij), donde a
ij repre-
senta un elemento genérico: i es el subíndice fila que recorre los números naturales del 1 al
40, y j el subíndice columna que hace lo propio con los números del 1 al 7.
El número de elementos de la tabla numérica A(I, J) o (aij) es, en este caso, 280.
1. Tablas numéricas1. Tablas numéricas1. Tablas numéricas1. Tablas numéricas1. Tablas numéricas
Bloque IBloque IBloque IBloque IBloque IMatrices
Esquemas 1 al 8Esquemas 1 al 8Esquemas 1 al 8Esquemas 1 al 8Esquemas 1 al 8
1 2 3 4 5 6 7
9
1
2
3
40
Tabla A (I, J)
Asignaturas
Alumnos
Este es un ejemplo de tabla numérica que nos ayuda a entender esta herramienta mate-
mática:

6 Álgebra lineal
Las siguientes tablas numéricas son matrices:
5
1 7 –2 4 3 3 –1 4
3 0,5 0 1 –4 5 10 6
–1 2 4 –5 0 4 –1 5
Son cajas rectangulares formadas por filas y columnas.
La primera es una matriz de 3 filas y 4 columnas. Su dimensión es 3 x 4.
La segunda es una matriz de dimensión 1 x 5 (1 fila, 5 columnas).
La tercera es de dimensión 4 (matriz 4 x 1).
La cuarta es una matriz 3 x 3. Se llama matriz cuadrada de orden 3.
Las matrices son tablas numéricas rectangulares:
a11
a12
a13
... a1n
Esta es una matriz de m filas y n columnas.
a21
a22
a23
... a2n
Es de dimensión m x n.
A = a31
a32
a33
... a3n
Los elementos, aij, son números reales
... ... ... ... ... (aij RRRRR).
am1
am2
am3
... amn
Al designar una matriz genérica, como la anterior, cada término tiene dos subíndices
que indican la fila y la columna a las que pertenece. El término a23
es el que está en la
segunda fila y tercera columna. Para simplificar, la matriz anterior se puede designar
así:
aij
o bien A = (aij)
m,n o, simplemente, (a
ij)
Dos matrices son iguales cuando son de la misma dimensión y, además, coinciden
término a término:
A = (aij)
m, n
A = B aij = b
ij
B = (bij)
m,n
Se llama traspuesta de una matriz A = (aij)
m, n a otra matriz At = (a
ji)
n, m que se obtiene
al cambiar en A las filas por las columnas y las columnas por las filas.
2. Nomenclatura. Definiciones2. Nomenclatura. Definiciones2. Nomenclatura. Definiciones2. Nomenclatura. Definiciones2. Nomenclatura. Definiciones
1 4 0 32
7( )
( )i = 1, ... , m
j = 1 , ... , n
( (

Álgebra lineal 7
3. Algunos tipos de matrices3. Algunos tipos de matrices3. Algunos tipos de matrices3. Algunos tipos de matrices3. Algunos tipos de matrices
Ejemplo de matriz rectangular: A =( )
13
22
31
i + j = n + 1Diagonalsecundaria
( ) ( (
( (
Atendiendo a la forma
Matriz fila es aquella que tiene solo una fila.
Ejemplo de matriz fila: A = (1 3 5 7 9).
Las matrices fila se escriben, en la práctica, de la misma forma que los pares, ternas,
cuaternas, etc. Es decir, (2, 3), (2, 4, 6), (1, 2, 3, 4), (1, 3, 5, 7, 9, ..., 2n + 1, ...) son matrices
fila, aunque al mismo tiempo representan también vectores.
Matriz columna es aquella que solo tiene una columna.
2
A = 4
6
Matriz cuadrada es aquella que tiene igual número de filas que de columnas; en caso
contrario se llama rectangular.
1 3 5
Ejemplo de matriz cuadrada: A = 2 4 6
1 1 1
1 5 7 9
2 4 6 8
El conjunto formado por todos los elementos de la forma aij de una matriz cuadrada se
llama diagonal principal.
El conjunto formado por todos los elementos aij con i + j = n + 1 de una matriz cuadrada
de orden n recibe el nombre de diagonal secundaria.
Matriz simétrica. Se llama así a toda matriz cuadrada tal que aij = a
ji.
1 –1 3
Ejemplo de matrices simétricas: A = 2 1 , B = –1 2 4
1 5 3 4 7
11
22
33
i = jDiagonalprincipal

8 Álgebra lineal
Atendiendo a los elementos
Matriz nula es aquella que todos sus elementos son 0. La matriz nula se representa por
0 y se llama también matriz cero.
0 0 0
La matriz 0 = 0 0 0 es la matriz nula de orden 3.
0 0 0
0 0 0 0
La matriz 0 = es la matriz nula de dimensión 2 x 4.
0 0 0 0
Matriz diagonal es una matriz cuadrada, en la que todos los elementos no pertenecien-
tes a la diagonal principal son nulos.
2 0 0
Las matrices A = y B = 0 –3 0 son matrices diagonales.
0 0 9
Matriz escalar es una matriz diagonal con todos los elementos de la diagonal principal
iguales.
2 0 0
Las matrices A = y B = 0 2 0 son matrices escalares.
0 0 2
Matriz unidad, o identidad, es una matriz escalar con los elementos de la diagonal prin-
cipal iguales a 1.
1 0 0
Las matrices A = y B = 0 1 0 son matrices unidad, y se
0 0 1 designan por I2 e I
3.
Matriz triangular es una matriz cuadrada en la que todos los términos por encima (o por
debajo) de la diagonal principal son nulos.
1 2 3 4 1 0 0 0
0 1 2 3 1 2 0 0
0 0 1 2 1 2 3 0
0 0 0 1 1 2 3 4
triangular superior triangular inferior
Nota: los términos matriz diagonal, escalar, unidad, triangular y simétrica se refieren
únicamente a matrices cuadradas.
7 0
0 7( )
1 0
0 1( )
( (( (
( (7 0
0 7( )
( (
( (

Álgebra lineal 9
Para que dos matrices puedan sumarse, es necesario que tengan la misma dimensión.
En tal caso, se suman término a término:
(aij)
m, n + (b
ij)
m, n = (a
ij + b
ij)
m, n
la suma de matrices A y B se designa por A + B
a11
a12
a13
b11
b12
b13
a11
+ b11
a12
+ b12
a13
+ b13
a21
a22
a23
+ b21
b22
b23
= a21
+ b21
a22
+ b22
a23
+ b23
a31
a32
a33
b31
b32
b33
a31
+ b31
a32
+ b32
a33
+ b33
La adición de matrices posee las siguientes propiedades:
1. Propiedad asociativa: A + (B + C) = (A + B) + C.
2. Propiedad conmutativa: A + B = B + A.
3. 0 es la matriz nula: A + 0 = A.
4. La matriz –A, que se obtiene cambiando de signo todos los elementos de A, recibe el
nombre de matriz opuesta, ya que A + (–A) = 0
Dos matrices son opuestas si su suma es la matriz nula o matriz cero.
La diferencia de las matrices A y B se representa por A – B, y se define así:
A – B = A + (–B)
4. Suma de matrices4. Suma de matrices4. Suma de matrices4. Suma de matrices4. Suma de matrices
Para multiplicar un número por una matriz se multiplica por el número cada término de
la matriz:
k · (aij)
m, n = (k a
ij)
m, n
El producto de la matriz A por el número k se designa por kA o k · A.
5. Producto de un número por una matriz5. Producto de un número por una matriz5. Producto de un número por una matriz5. Producto de un número por una matriz5. Producto de un número por una matriz

10 Álgebra lineal
Producto de una matriz fila F por una matriz columna C
Comencemos con un ejemplo fácil:
Si F = (6 2 4 3) indica los precios, en euros, del litro de vino en cuatro establecimien-
tos distintos y la matriz columna C = nos da los litros comprados en cada uno de ellos,
entonces, para calcular el total de lo gastado en la compra del vino, hacemos el siguiente
producto:
F · C = (6 2 4 3) · = 6 · 6 + 2 · 12 + 4 · 4 + 3 · 9 = 103 euros
Observe que el resultado es un número.
En general, el producto de una matriz fila por una matriz columna (con el mismo
número de entradas) se define como el número que se obtiene al sumar los productos de
las entradas correspondientes. Esto es,
F · C = (f1 f
2 ... f
n) · = f
1 · c
1 + f
2 · c
2 + ... + f
n · c
n = f
i · c
i
6. Producto de matrices6. Producto de matrices6. Producto de matrices6. Producto de matrices6. Producto de matrices
a11
a12
a13
ka11
ka12
ka13
k . a21
a22
a23
= ka21
ka22
ka23
a31
a32
a33
ka31
ka32
ka33
Al número real k se le llama también escalar, y a este producto, producto de escalares
por matrices.
El producto de un número por una matriz verifica las siguientes propiedades:
1. Propiedad distributiva 1ª: k (A + B) = kA + kB.
2. Propiedad distributiva 2ª: (k + h)A = kA + hA.
3. Propiedad asociativa mixta: k[h(A)] = (kh)A.
4. Elemento neutro: 1 · A = A.
El número 1 es el elemento unidad de los números reales; A y B matrices cualesquiera
del mismo orden, y h y k números reales.
6
12
4
9
6
12
4
9
c1
c2...c
n

Álgebra lineal 11
( )
Para poder multiplicar F por C, el número de columnas de F ha de ser igual al número
de filas de C.
Producto de una matriz fila F por una matriz A
Se multiplica la matriz fila F por cada una de las columnas de la matriz A.
a11
a12
Por ejemplo, para F = (f1 f
2 f
3) y A = a
21a
22 , se tiene que
a31
a32
a11
a12
F · A = (f1 f
2 f
3) · a
21a
22 =
a31
a32
Para que este producto pueda realizarse es necesario que el número de columnas de F
coincida con el número de filas de A.
Producto de dos matrices cualesquiera
La multiplicación de dos matrices cualesquiera no tiene por qué estar definida, e inclu-
so aunque lo esté, no tiene por qué ser conmutativa. Estas indicaciones revelan la necesidad
de precisar el orden de los dos factores de un producto de matrices al referirse a ellos.
Para poder multiplicar dos matrices es necesario que el número de columnas de la
primera matriz coincida con el número de filas de la segunda matriz; dicho de otro modo:
si A tiene dimensión (m x n) y B (p x q), para realizar el producto A · B es necesario que n = p.
El producto de la matriz A = (aij) de dimensión m x n por la matriz B = (b
ij) de
dimensión n x q, es otra matriz P = (pij) de dimensión m x q, tal que cada elemento
pij se obtiene multiplicando escalarmente la fila i de la primera matriz por la colum-
na j de la segunda.
El producto de las matrices A y B se designa por A · B o AB.
1 2 3 1 2 –1 5 10 6 15 29
–1 5 0 . 0 –1 2 3 = –1 –7 11 10
2 1 2 3 2 4 6 8 7 8 25
(–1) · (–1) + 5 · 2 + 0 · 4 = 11
Fila 2 Columna 3 = Elemento a23
f1 · a
11 + f
2 · a
21 + f
3 · a
31
f1 · a
12 + f
2 · a
22 + f
3 · a
32
=
( (( (
( (( (( (

12 Álgebra lineal
El producto de matrices verifica las siguientes propiedades:
1. A(BC) = (AB)C (propiedad asociativa).
2. El producto de matrices en general no es conmutativo; es decir, AB BA:
1 2 1 1 11 7
3 4 5 3 23 15
1 1 1 2 4 6
5 3 3 4 14 22
3. Si A es una matriz cuadrada de orden n, se tiene:
A · In = I
n · A = A
siendo In la matriz unidad de orden n.
4. Dada una matriz A de orden n, no siempre existe otra B tal que
AB = BA = In
Si existe la matriz B, se dice que es la matriz inversa de A, y se designa por A–1.
Dos matrices de orden n son inversas si su producto es la matriz unidad de
orden n.
Una matriz cuadrada que posee inversa se dice que es inversible o regular; en
caso contrario recibe el nombre de singular.
5. El producto de matrices es distributivo respecto de la suma de matrices, es decir:
A(B + C) = AB + AC
Para no equivocarse:
A B = 0 no implica necesariamente que A = 0 o B = 0
A B = A C no implica necesariamente que B = C
(A + B)2 no es necesariamente igual a A2 + 2AB + B2
(A – B)2 no es necesariamente igual a A2 – 2AB + B2
(A + B) (A – B) no es necesariamente igual a A2 – B2
( ) ( ) ( )( ) ( ) ( )
=
=

Álgebra lineal 13
En el epígrafe anterior hemos visto que:
Dos matrices de orden n son inversas si su producto es la matriz unidad de orden n.
Utilizando esta definición vamos a calcular la inversa de la matriz
2 –1
1 1
Debemos encontrar una matriz A–1 = , tal que
2 –1 x y 1 0
1 1 z t 0 1
Multiplicando las matrices, e igualando término a término, se obtienen los sistemas
2x – z = 1 2y – t = 0
x + z = 0 y + t = 1
cuyas soluciones son
x = , z = – , y = , t =
La matriz inversa es:
A–1 =
7. Matriz inversa a partir de la definición7. Matriz inversa a partir de la definición7. Matriz inversa a partir de la definición7. Matriz inversa a partir de la definición7. Matriz inversa a partir de la definición
( )
( )
A =
=
( )x y
z t
( ) ( )
1
3
1
3
1
3
2
3
En el estudio de una matriz A de dimensión m x n, podemos analizar la dependencia o
independencia lineal de sus m filas (o sus n columnas).
Una fila (o columna), I, depende linealmente de sus paralelas I1, I
2, I
3, ..., I
n, si
existen unos números reales, a1, a
2, a
3, ..., a
n, no todos nulos, tales que:
I = a1I
1 + a
2I
2 + a
3I
3 + ... + a
nI
n
8. Dependencia lineal de filas o columnas8. Dependencia lineal de filas o columnas8. Dependencia lineal de filas o columnas8. Dependencia lineal de filas o columnas8. Dependencia lineal de filas o columnas
1
3
1
3
1
3
2
3–

14 Álgebra lineal
Si una fila (o columna) depende linealmente de otra fila (o columna), se dice que am-
bas filas (o columnas) son proporcionales, por serlo entonces sus elementos.
Un conjunto de filas (o columnas) de una matriz es linealmente dependiente si al me-
nos una de ellas depende linealmente de las restantes. En caso contrario se dice que son
independientes.
Se demuestra que en una matriz el número de filas linealmente independientes es igual
al número de columnas linealmente independientes. A este número, común a filas y colum-
nas, se le llama rango de la matriz.
Por ejemplo, en la matriz,
1 3 4 2
A = 2 6 8 4
5 1 6 0
el número de filas linealmente independientes es 2, ya que la segunda fila depende de la
primera (es proporcional a ella), mientras que la primera y la tercera son independientes,
al no ser proporcionales. El rango es 2.
El rango o característica de una matriz es el número de filas, o columnas,
linealmente independientes:
rango (A) = rango (F1, F
2, F
3, ...) = rango (C
1, C
2, C
3, ...)
En el cálculo del rango de una matriz:
a) Se pueden suprimir sin que varíe el rango:
– Las filas o columnas nulas.
– Las filas o columnas proporcionales a otras.
– Las filas o columnas dependientes de otras.
9. Cálculo del rango por el método de Gauss9. Cálculo del rango por el método de Gauss9. Cálculo del rango por el método de Gauss9. Cálculo del rango por el método de Gauss9. Cálculo del rango por el método de Gauss
( (

Álgebra lineal 15
b) Se pueden realizar las siguientes operaciones sin que varíe el rango:
Regla 1: Multiplicar una fila o columna por un número distinto de cero.
Regla 2: Sumar o restar una fila o columna a otra.
Aplicando estos procesos se puede llegar a una matriz escalonada que indica el número
de filas o columnas independientes.
El siguiente esquema (los asteriscos son números cualesquiera) muestra cómo se puede
pasar de una matriz a otra escalonada donde el número de filas indica el rango de la matriz.
Un esquema semejante puede hacerse para columnas.
* * * * *
* * * * *
* * * * *
* * * * *
* * * * *
0 * * * * * * * * *
0 0 * * * 0 * * * * * * * * *
0 0 0 * * 0 0 * * * 0 * * * * (* * * * *) Rango 4 Rango 3 Rango 2 Rango 1
Veamos cómo se calcula el rango de una matriz.
Ejemplo 1:
1 2 3 F2 – F
11 2 3 1 2 3
4 5 6 3 3 3 F3 – F
23 3 3
7 8 9 F3 – F
23 3 3 Rango 2
Las dos filas no son proporcionales, son linealmente independientes.
Ejemplo 2:
1 1 2 F2 – 2F
11 1 2 1 1 2
2 1 1 0 –1 –3 F3 + 3 F
20 –1 –3
–1 2 0 F3 + F
10 3 2 0 0 –7
Rango 3
Las tres filas son linealmente independientes.
( )
( ( ( (( (
( ( ( (
( (( (

16 Álgebra lineal
Hemos visto que una matriz A se dirá invertible, o que tiene matriz inversa, si existe una
matriz, que se denota por A–1 y se llama inversa de A, que verifica:
A · A–1 = A–1 · A = I
Para que pueda cumplirse la igualdad señalada, se comprueba que A y A–1 deben ser
matrices cuadradas y del mismo orden. Sin embargo, no toda matriz cuadrada posee inver-
sa.
Puede demostrarse que la condición necesaria y suficiente para que una matriz A sea
invertible es que su rango coincida con su orden, es decir, que todas sus filas (y columnas)
han de ser linealmente independientes. Se dice, entonces, que la matriz es regular.
Evidentemente, esta condición caracteriza a las matrices que tienen inversa, pero no da
un método para su cálculo.
En este apartado se estudia un segundo método para calcular la matriz inversa.
El método de Gauss-Jordan consiste en añadir a la derecha de la matriz regular, A, la
matriz unidad I, del mismo orden, formando así la matriz (A I). Operando en (A I),
mediante transformaciones elementales por filas, se llegará a la matriz (I A–1).
En esquema:
Transformaciones de Gauss
(A I) (I A–1)
Para ello se utilizan las siguientes reglas:
Regla 1: Multiplicar una fila por un número distinto de cero.
Regla 2: Sumar o restar a una fila otra multiplicada por un número.
Estas reglas se deben aplicar a la vez, tanto a la fila de la matriz A como a la fila corres-
pondiente de la matriz I.
Si en el proceso aparece en el lugar de la matriz A alguna fila nula, la matriz no tiene
inversa.
Una matriz cuadrada es inversible o regular cuando su rango coincide con su orden, es
decir, cuando las filas son linealmente independientes.
Para comprobar que este proceso es cierto, basta multiplicar la matriz A por A–1 y ver
que el resultado es la matriz unidad.
10. Matriz inversa por el método de Gauss10. Matriz inversa por el método de Gauss10. Matriz inversa por el método de Gauss10. Matriz inversa por el método de Gauss10. Matriz inversa por el método de Gauss

Álgebra lineal 17
Una ecuación en la que las incógnitas que aparecen son matrices se llama ecuación
matricial.
Distinguiremos dos tipos de ecuaciones:
Ecuaciones lineales
Son de la forma a · X + b · B = C
donde a, b son números y X, B, C matrices de igual dimensión.
Para resolverlas, se despeja la incógnita:
a · X + b · B = C a · X = C – b · B X = (C – b · B)
Ecuaciones no lineales
Estudiaremos las de la forma
(1) A · X + B = C
(2) X · A + B = C
donde A, B C son matrices conocidas y X la matriz incógnita.
En ambos casos, para despejar X hemos de operar con la inversa de A como sigue:
(1) A · X + B = C A · X = C – B A–1 · A · X = A–1 (C – B) X = A–1 (C – B)
(2) X · A + B = C X · A = C – B X · A · A–1 = (C – B)A–1 X = (C – B)A–1
Observe que si A no tiene matriz inversa, el proceso indicado no puede hacerse. En tal
caso, la ecuación propuesta puede no tener solución, o, por el contrario, tener múltiples
soluciones.
11. Ecuaciones matriciales11. Ecuaciones matriciales11. Ecuaciones matriciales11. Ecuaciones matriciales11. Ecuaciones matriciales
1
a

18 Álgebra lineal
Anteriormente definimos el rango de una matriz A como el número de líneas de la
misma (filas o columnas) linealmente independientes.
Sabemos que un determinante solo es distinto de cero si sus líneas son independientes,
luego podemos utilizarlos para hallar los rangos de las matrices.
El proceso sería el siguiente:
2. Cálculo del rango de una matriz por determinantes2. Cálculo del rango de una matriz por determinantes2. Cálculo del rango de una matriz por determinantes2. Cálculo del rango de una matriz por determinantes2. Cálculo del rango de una matriz por determinantes
Este método consiste en generar el máximo número de ceros en toda una línea, toman-
do como base un término elegido previamente, al que llamamos pivote. Al desarrollar el
determinante por los adjuntos de esa línea, los cálculos se reducen al producto del pivote
por su adjunto, que es un determinante de orden una unidad inferior al primitivo. En el
adjunto resultante podemos reiterar el proceso eligiendo un nuevo pivote o calculándolo
directamente si la dimensión es reducida.
Ejemplo.
7 4 1 9
2 0 6 3 Tomamos el 1 de la segunda columna como pivote
5 1 6 11 porque ya hay un cero.
–1 7 2 8
7 4 1 9 F1 – 4F3 –13 0 –23 –35
2 0 6 3 2 0 6 3
5 1 6 11 5 1 6 11
–1 7 2 9 F4 – 7F3 –36 0 –40 –69
–13 –23 –35
= (–1) · 2 6 3 = 1628
–36 –40 –69
La elección del pivote viene sugerida por la línea (fila o columna) que más ceros tenga
en el determinante original y porque el elemento tome el valor 1 o –1, lo que simplifica las
operaciones a realizar.
1. Método del pivote para el cálculo de determinantes1. Método del pivote para el cálculo de determinantes1. Método del pivote para el cálculo de determinantes1. Método del pivote para el cálculo de determinantes1. Método del pivote para el cálculo de determinantes
Bloque IIBloque IIBloque IIBloque IIBloque IIDeterminantes
Esquemas 9 al 12Esquemas 9 al 12Esquemas 9 al 12Esquemas 9 al 12Esquemas 9 al 12
=

Álgebra lineal 19
a11
a12
a13
A11
A21
A31
A = a21
a22
a23
A–1 = · A21
A22
A23
a31
a32
a33
A31
A32
A33
Regla práctica para calcular la inversa de una matriz
Para hallar la inversa de una matriz sugerimos que se realicen los siguientes pasos:
(aij) (M
ij) (A
ij) (A
ji) A–1 = (A
ji)
(0) Hallamos A y solo si es nulo seguimos adelante.
(1) Formamos una nueva matriz con los menores complementarios de cada elemento.
(2) Cambiamos el signo alternativamente para obtener los adjuntos.
(3) Trasponemos la matriz: (Aji) = (A
ij)t.
(4) Didimos cada elemento por A . Si no son divisibles, es más cómodo sacar factor
común
1
A
1
A
(1) (2) (3) (4)
1
A
( ( ( (
Para que una matriz cuadrada, A, tenga inversa, A–1, es necesario y suficiente que su
determinante sea no nulo.
En tal caso A–1 adopta la siguiente expresión:
3. Cálculo de la inversa de una matriz por determinantes3. Cálculo de la inversa de una matriz por determinantes3. Cálculo de la inversa de una matriz por determinantes3. Cálculo de la inversa de una matriz por determinantes3. Cálculo de la inversa de una matriz por determinantes
(1) Se busca en A una submatriz cuadrada de orden 2 (A2), cuyo determinante no sea
nulo (si no existiese ninguna, el rango es 1 o 0 si la matriz es nula) y el rango es,
como mínimo, 2.
(2) Añadimos a A2 una fila y sucesivas columnas. Si todas las matrices obtenidas son
singulares, la fila añadida es combinación lineal de las dos que forman A2 y pode-
mos prescindir de ella.
(3) Repetimos el paso (2) con el resto de filas.
(4) Si encontramos alguna submatriz regular de orden 3 (A3), entonces el rango, por
lo menos, es 3. En el caso de que todas las submatrices formadas fueran singulares,
se concluye que el rango es 2.
(5) Se repite el proceso indicado para submatrices de orden 4 y sucesivos.
El rango de la matriz A será, entonces, el orden de la mayor submatriz regular que
hallamos encontrado.

20 Álgebra lineal
Bloque IIIBloque IIIBloque IIIBloque IIIBloque IIISistemas de ecuaciones
Esquemas 13 al 19Esquemas 13 al 19Esquemas 13 al 19Esquemas 13 al 19Esquemas 13 al 19
Las ecuaciones siguientes son lineales:
2x – 3 = 0 , 5x + 4y = 20 , 3x + 2y + 6z = 6 , 5x – 3y + z – 5t = 0
pues tienen la peculiaridad de que son polinómicas de grado 1. Es decir, las incógnitas no
están elevadas a ninguna potencia, ni multiplicadas entre sí, ni bajo radicales, ni en el deno-
minador.
Estas otras no son lineales: 2x – 3y + z = 5 , 3xy – 2z = 0 , ...
Ecuación lineal es una ecuación polinómica de grado uno con una
o varias incógnitas.
Una ecuación lineal tiene la forma
ax + by + cz + ... = m, con a, b, c, m RRRRRLas letras a,b,c..., representan números llamados coeficientes; siendo m el término independiente.
Se dice que el conjunto de valores S = (x0, y
0, z
0...) es solución de la ecuación
ax + by + cz + ... = m, si se verifica que
a · x0 + b · y
0 + c · z
0 + ... = m
La solución de una ecuación lineal puede ser única, múltiple o no existir.
La ecuación lineal de una incógnita ax = m tiene:
– Una solución, si a 0, es x =
– Infinitas soluciones si a = m = 0, pues cualquier valor de x la satisfaría. La eucación
sería 0 · x = 0, que es cierta para cualquier valor de x.
– Solución imposible si a = 0 y m 0; ya que no hay valor de x que la cumpla. La
ecuación sería 0 · x = m, que es una igualdad absurda.
La ecuación lineal de dos incógnitas ax + by = m, con a y b 0, posee múltiples
soluciones. Para hallarlas basta con despejar una de las incógnitas:
1. Ecuación lineal1. Ecuación lineal1. Ecuación lineal1. Ecuación lineal1. Ecuación lineal
m
a

Álgebra lineal 21
Cuando se consideran simultáneamente varias ecuaciones lineales, se tiene un sistema.
El caso más sencillo es el de sistema lineal con dos incógnitas, cuya forma más simple
sería:
ax + by = c
a1x + b
1y = c
1
Las incógnitas son x e y; a, b, a1 y b
1 son los coeficientes; c y c
1, son los términos indepen-
dientes. Las incógnitas también se llaman variables o indeterminadas.
Una solución del sistema es toda pareja de valores de las variables que satisfacen sus
ecuaciones al mismo tiempo.
2. Sistemas de ecuaciones lineales2. Sistemas de ecuaciones lineales2. Sistemas de ecuaciones lineales2. Sistemas de ecuaciones lineales2. Sistemas de ecuaciones lineales
y =
Asignando valores arbitrarios a x, por ejemplo x = x0, se obtienen los correspondien-
tes valores y0; cada par (x
0, y
0) constituye una solución.
Como sabe, esos pares de soluciones, representados en el plano cartesiano, están
alineados según una recta.
Así, las soluciones de la ecuación 2x – 3y = –2 se obtienen despejando y:
y =
Dando valores a x se obtienen algunos pares de soluciones:
(–1, 0), (0, 2/3), (2, 2)...
Todas esas soluciones son puntos de la recta re-
presentada en la figura, y cada punto de la recta
es una solución de la ecuación 2x – 3y = – 2.
Una ecuación lineal con tres incógnitas, ax + by + cz = m, también posee infinitas
soluciones. En efecto, si despejamos y, resulta:
y =
m – ax
b
2x + 2
3
m – ax – cz
b

22 Álgebra lineal
Dos sistemas son equivalentes cuando tienen la misma solución.
Resolver un sistema es encontrar todas sus soluciones. Para resolver un sistema de
dos ecuaciones hay tres métodos básicos, que recordará de cursos anteriores.
Para resolver un sistema, normalmente hay que transformarlo en otro equivalente a él
y que sea más sencillo. Esta es la finalidad de cualquier método de resolución.
Para cada par de valores asignados a x y z, se calcula el correspondiente de y obteniéndose
las ternas de soluciones (x0, y
0, z
0), (x
1, y
1, z
1)...
Estas ternas de valores pueden entenderse como coordenadas de puntos en el espacio
tridimensional, que constituyen un plano de extensión infinita.
En el caso de la ecuación x + y – z = 2, como y = 2 + z – x, pueden obtenerse las solucio-
nes
(0, 2, 0), (2, 0, 0), (4, 0, 2), (0, 3, 1) ...
Todos los puntos del plano dibujado en la figura son solución de la ecuación planteada.
Para el estudio y resolución de un sistema de ecuaciones, hay que realizar transforma-
ciones que simplifiquen las ecuaciones, pero que mantengan la solución del sistema.
Condieraremos válida toda transformación que pase de un sistema a otro equivalente.
Son transformaciones válidas, por ejemplo, las siguientes:
Multiplicar o dividir los dos miembros de una de las ecuaciones por un número
distinto de cero.
3x + 5y – z = 3 3x + 5y – z = 3
x – 2y + z = 5 3x – 6y + 3z = 15
3. Transformaciones válidas en un sistema de ecuaciones3. Transformaciones válidas en un sistema de ecuaciones3. Transformaciones válidas en un sistema de ecuaciones3. Transformaciones válidas en un sistema de ecuaciones3. Transformaciones válidas en un sistema de ecuaciones
(2ª) · 3

Álgebra lineal 23
Añadir una ecuación que sea combinación lineal(1) de las que había.
Suprimir una ecuación que sea combinación lineal de las restantes.
3x + 5y – z = 3
3x + 5y – z = 3 x – 2y + z = 5
x – 2y + z = 5 11y – 4z = –12
Sustituir una ecuación por el resultado de sumarle otra multiplicada por un núme-
ro.
3x + 5y – z = 3 11y – 4z = –12
x – 2y + z = 5 x – 2y + z = 5
Se llaman transformaciones válidas a las que mantienen las soluciones del sistema.
En la resolución de sistemas de ecuaciones, debemos realizar transformaciones que,
además de válidas, sean convenientes, es decir, que nos aproximen a la solución. Para ello
utilizaremos, fundamentalmente, las transformaciones y descritas arriba.
(1) Combinación lineal de varias ecuaciones: si cada una de las ecuaciones se multiplica por un número y los
resultados se suman miembro a miembro, se obtiene una nueva ecuación que es combinación lineal de
las ecuaciones de partida.
(1ª) – 3 · (2ª)
(1ª) – 3 · (2ª)
Método de sustitución
Se sustituye, en una de las ecuaciones, una incógnita que ha sido previamente despeja-
da en la otra.
4. Resolución de sistemas de dos ecuaciones con dos incógnitas4. Resolución de sistemas de dos ecuaciones con dos incógnitas4. Resolución de sistemas de dos ecuaciones con dos incógnitas4. Resolución de sistemas de dos ecuaciones con dos incógnitas4. Resolución de sistemas de dos ecuaciones con dos incógnitas
Para resolver el sistema x – 2y = –12x + 3y = 2
(1) Despejamos x en la primera ecuación: x = 2y – 1.
(2) Sustituimos este valor de x en la segunda ecuación, y resolvemos la que obtengamos.
x – 2y = –1 x = 2y – 1 x = 2y – 1
2x + 3y = 2 2 (2y – 1) + 3y = 2 7y = 4
EJEMPLO

24 Álgebra lineal
x = 2y – 1 x = 2 . – 1 x =
y = y = y =
La solución del sistema esx = y =
Evidentemente, puede despejarse cualquiera de las incógnitas, pero la eficacia del métodose basa en obtener más fácilmente una de ellas.
47
17
47
47
47
47
17
Método de igualación
Se despeja una misma incógnita en cada ecuación y se igualan ambos resultados. A
continuación, se resuelve la ecuación obtenida.
Para resolver el sistema x – 2y = –12x + 3y = 2
(1) Despejamos x en la 1ª y 2ª ecuación:
x = 2y – 1
x = y + 1
(2) Sustituimos este valor de y en cualquiera de las dos ecuaciones y hallamos el valor dex:
x =
EJEMPLO
–32
2y – 1 = y + 1 = 2 y =–32
7y2 4
7
17
Método de reducción
Este método consiste en reducir (eliminar) una de las incógnitas presentes en el siste-
ma, sumando a una ecuación la otra, multiplicada por un número convenientemente elegi-
do.
Se dice que la nueva ecuación que se forma es combinación lineal de las otras.

Álgebra lineal 25
En el sistema 2x + 3y = 2 x – 2y = 15
podemos eliminar la incógnita x en la primera ecuación; para ello hay que restar a laprimera ecuación el doble de la segunda (E1 – 2E2). El proceso sería el siguiente:
2x + 3y = 2 2x + 3y = 2 E1 – E2 7y = –28
x – 2y = 15 2E2 2x – 4y = 30 2x – 4y = 30
Eliminada x de la primera ecuación se obtiene que y = –4. Sustituyendo y = –4 en la otraecuación se tiene que x = 7.
Este método permite variaciones. Así, podríamos haber optado por eliminar y en la segun-da ecuación. El proceso sería:
2x + 3y = 2 2E1 4x + 6y = 4 4x + 6y = 4
x – 2y = 15 3E2 3x – 6y = 45 E2 + E1 7x = 49
De E2 se deduce que x = 7; de E1, y = –4.La solución, obviamente, es la misma.
EJEMPLO
Al igual que en una ecuación lineal con una incógnita, un sistema puede poseer una o
múltiples soluciones o, por el contrario, no tener solución.
Si solo tiene una solución, el sistema es compatible determinado.
Si posee múlti-
ples soluciones, es com-
patible indeterminado.
Si no tiene solu-
ción, lo calificamos
como incompatible.
Podemos esquema-
tizar lo dicho en la si-
guiente tabla:
5. Tipos de sistemas según sus soluciones5. Tipos de sistemas según sus soluciones5. Tipos de sistemas según sus soluciones5. Tipos de sistemas según sus soluciones5. Tipos de sistemas según sus soluciones
Única:
x = 1, y = 2
Múltiples:
x = 0, y = -2; x = –1, y = 2
...
No hay
–2x + y = 0
x + 2y = 5
4x + y = –2
2x + y = –1
–x + 5y = 1
2x – 10y = 2
1
2
Compatible
determinado
Compatible
indeterminado
Incompatible
Sistema Ejemplo Soluciones

26 Álgebra lineal
La representación gráfica de los distintos tipos de sistemas señalados en la tabla dela página anterior es:
(a) Compatible determinado. b) Compatible indeterminado. (c) Incompatible.
EJEMPLO
Las soluciones de la ecuación lineal con dos incógnitas, están localizadas sobre una
recta, siendo aquélla la expresión analítica de la misma. Un sistema de dos ecuaciones con
dos incógnitas es, desde ese punto de vista geométrico, un par de rectas, cuya posición en el
plano ha de corresponderse con el tipo de sistema que se trate.
Así, en un sistema determinado, con solución x = x0 e y = y
0, se ha de verificar que:
ax0 + by
0 = c
a1x
0 + b
1y
0 = c
1
por lo que el punto de coordenadas P = (x0, y
0) pertenece a las dos rectas representadas por
las ecuaciones del sistema, siendo éstas, entonces, concurrentes en P.
Si el sistema no tiene solución, no existe ningún par de valores de x e y que verifiquen
las ecuaciones, por lo que las rectas que representan no tienen ningún punto en común: se
trata de dos rectas paralelas.
Por último, si el sistema posee múltiples pares de valores solución, los puntos corres-
pondientes serán comunes a las rectas que, en consecuencia, serían coincidentes.
6. Interpretación geométrica de un sistema de ecuaciones con dos6. Interpretación geométrica de un sistema de ecuaciones con dos6. Interpretación geométrica de un sistema de ecuaciones con dos6. Interpretación geométrica de un sistema de ecuaciones con dos6. Interpretación geométrica de un sistema de ecuaciones con dosincógnitasincógnitasincógnitasincógnitasincógnitas

Álgebra lineal 27
RECUERDE:
Las rectas r : ax + by = c
r1: a
1x + b
1y = c
1
son paralelas si tienen la misma pendiente. En este caso:
– = – =
Por tanto, los coeficientes de ambas ecuaciones deben ser proporcionales.
Si, además, se mantuviese la proporcionalidad para los términos independientes:
= =
las rectas coincidirían.
Cuando , las rectas se cortan.
a
b
a1
b1
a
a1
b
b1
a
a1
b
b1
c
c1
a
a1
b
b1
Estos sistemas son de la forma: ax + by = c
a1x + b
1y = c
1
a2x + b
2y = c
2
Son compatibles cuando la solución del sistema, formado por dos cualesquiera de sus
ecuaciones, satisface la otra ecuación. Así, si x0 e y
0 son la solución de las dos primeras
ecuaciones, en la tercera debe cumplirse que a2x
0 + b
2y
0 = c
2; si esta igualdad no se cumple,
el sistema es incompatible.
Cuando uno de estos sistemas es compatible, será:
Determinado (una solución), si al menos dos de sus ecuaciones no son equivalentes.
Indeterminado (múltiples soluciones), si las tres ecuaciones son equivalentes.
Geométricamente:
En un sistema compatible, las tres rectas asociadas a las ecuaciones tendrán algún
punto en común.
El sistema será incompatible si las tres rectas no se cortan a la vez en un mismo
punto.
7. Sistemas de tres ecuaciones con dos incógnitas7. Sistemas de tres ecuaciones con dos incógnitas7. Sistemas de tres ecuaciones con dos incógnitas7. Sistemas de tres ecuaciones con dos incógnitas7. Sistemas de tres ecuaciones con dos incógnitas
28 Álgebra lineal
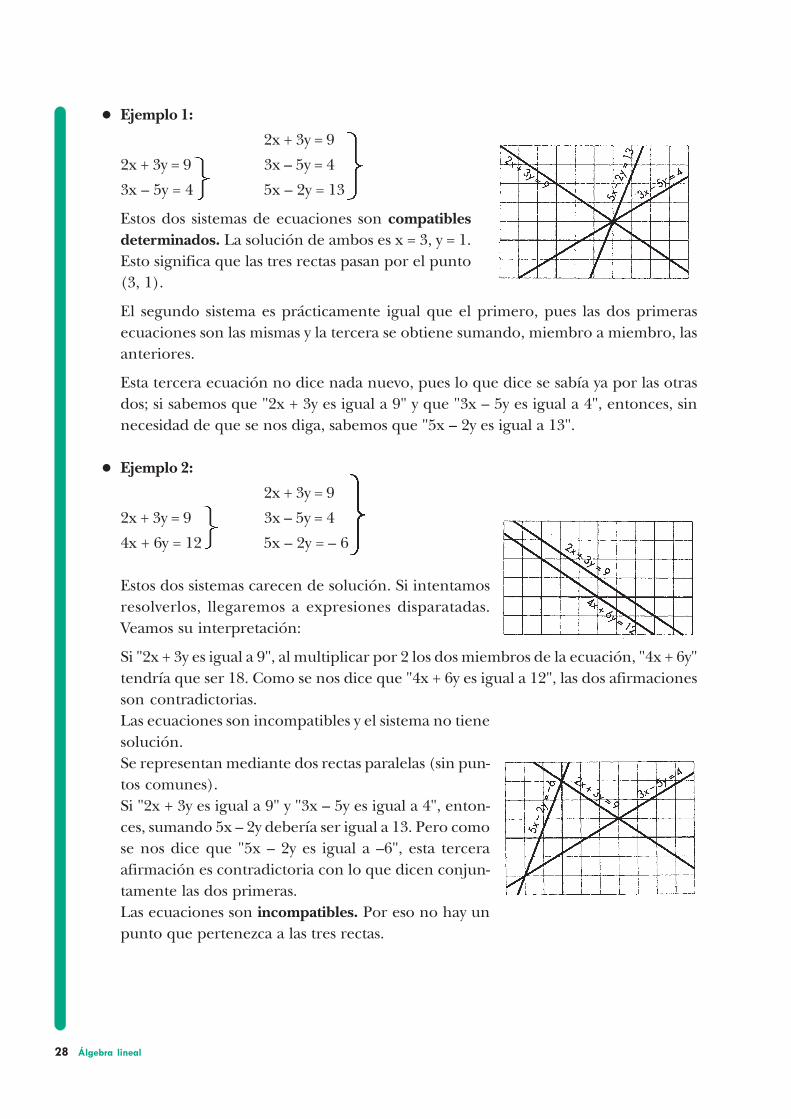
Ejemplo 1:
2x + 3y = 9
2x + 3y = 9 3x – 5y = 4
3x – 5y = 4 5x – 2y = 13
Estos dos sistemas de ecuaciones son compatibles
determinados. La solución de ambos es x = 3, y = 1.
Esto significa que las tres rectas pasan por el punto
(3, 1).
El segundo sistema es prácticamente igual que el primero, pues las dos primeras
ecuaciones son las mismas y la tercera se obtiene sumando, miembro a miembro, las
anteriores.
Esta tercera ecuación no dice nada nuevo, pues lo que dice se sabía ya por las otras
dos; si sabemos que "2x + 3y es igual a 9" y que "3x – 5y es igual a 4", entonces, sin
necesidad de que se nos diga, sabemos que "5x – 2y es igual a 13".
Ejemplo 2:
2x + 3y = 9
2x + 3y = 9 3x – 5y = 4
4x + 6y = 12 5x – 2y = – 6
Estos dos sistemas carecen de solución. Si intentamos
resolverlos, llegaremos a expresiones disparatadas.
Veamos su interpretación:
Si "2x + 3y es igual a 9", al multiplicar por 2 los dos miembros de la ecuación, "4x + 6y"
tendría que ser 18. Como se nos dice que "4x + 6y es igual a 12", las dos afirmaciones
son contradictorias.
Las ecuaciones son incompatibles y el sistema no tiene
solución.
Se representan mediante dos rectas paralelas (sin pun-
tos comunes).
Si "2x + 3y es igual a 9" y "3x – 5y es igual a 4", enton-
ces, sumando 5x – 2y debería ser igual a 13. Pero como
se nos dice que "5x – 2y es igual a –6", esta tercera
afirmación es contradictoria con lo que dicen conjun-
tamente las dos primeras.
Las ecuaciones son incompatibles. Por eso no hay un
punto que pertenezca a las tres rectas.

Álgebra lineal 29
Son sistemas de la forma a11
x + a12
y + a13
z = b1
a21
x + a22
y + a23
z = b2
a31
x + a32
y + a33
z = b3
Las incógnitas son x, y y z; los coeficientes aij y los términos independientes b
i son núme-
ros reales. Conocidos aij y b
i, un sistema queda totalmente determinado.
Si un sistema se da en la forma anterior (con las incógnitas en el mismo orden en todas
las ecuaciones, y los términos independientes en el lado derecho de las igualdades), tal
sistema puede representarse de un modo simplificado, pues se omiten las incógnitas y los
signos mediante el rectángulo de números:
C1
C2
C3
C4
F1 a11
a12
a13
b1
F2 a21
a22
a23
b2
F3 a31
a32
a33
b3
que recibe el nombre de matriz (ampliada) del sistema, representando cada una de sus filas
(Fi) a cada ecuación y las columnas (Ci) a los coeficientes de las incógnitas y términos
independientes.
Una solución del sistema es una terna de valores S = (x0, y
0, z
0) que verifican todas las
ecuaciones del mismo.
Si esta terna es única, decimos que el sistema es determinado; indeterminado si pueden
encontrarse infinitas de esas ternas; e incompatible, si no existiera ninguna.
8. Sistemas lineales de tres ecuaciones con tres incógnitas8. Sistemas lineales de tres ecuaciones con tres incógnitas8. Sistemas lineales de tres ecuaciones con tres incógnitas8. Sistemas lineales de tres ecuaciones con tres incógnitas8. Sistemas lineales de tres ecuaciones con tres incógnitas
El sistema x + y – 2z = –52x – y + z = 23x + 2y + z = 5
queda representado por la matriz: 1 1 –2 –52 –1 1 23 2 1 5
La solución del sistema es: x0 = 0 , y0 = 1 , z0 = 3
EJEMPLO
( (
( (

30 Álgebra lineal
Los sistemas que tienen un aspecto de la forma a11
x + a12
y + a13
z = b1
a22
y + a23
z = b2
a33
z = b3
son fáciles de resolver. En ellos vamos obteniendo de abajo a arriba el valor de cada incóg-
nita que, sustituida en las anteriores ecuaciones, permite seguir el proceso.
Estos sistemas se llaman escalonados.
El método de Gauss es lo que nos permitirá pasar de un sistema a su escalonado equiva-
lente.
Transformaciones elementales en un sistema
Son las que justifican la aplicación de dicho método. Se conocen como transformacio-
nes elementales de Gauss, básicamente, consisten en tres sencillas manipulaciones de las
ecuaciones del sistema. Son las siguientes:
Reordenar las ecuaciones y/o las incógnitas del sistema.
Multiplicar (o dividir) los dos miembros de una ecuación por un número distinto de
cero.
Sumar a una ecuación otra (u otras) multiplicada previamente por un número. En
este caso, la ecuación resultante se dice que es combinación lineal de las anteriores.
Método de Gauss
El método de Gauss consiste en transformar un sistema de ecuaciones lineales en otro
escalonado.
El proceso se realiza muy ventajosamente si, en lugar de las ecuaciones, utilizamos ex-
clusivamente los números –coeficientes y términos independientes– estructurados en ma-
trices.
9. Sistemas escalonados9. Sistemas escalonados9. Sistemas escalonados9. Sistemas escalonados9. Sistemas escalonados
El sistema:
2x – y + z = 3 E2 –x + 2z = 1 –x + 2z = 1
–x + 2z = 1 E1 2x – y + z = 3 2x – y + z = 3
2y + 6z = –4 (–1/2 E3) y – 3z = 2 E3 + 2E1 –2x + y + z = 4
EJEMPLO

Álgebra lineal 31
El método, pues, consiste en transformar el sistema a11
x + a12
y + a13
z = b1
a21
x + a22
y + a23
z = b2
a31
x + a32
y + a33
z = b3
en otro equivalente y triangular (tiene tantas ecuaciones como incógnitas):
a11
x + a12
y + a13
z = b1
a'22
y + a'23
z = b'2
[1]
a"33
z = b"3
Para ello procedemos del siguiente modo:
(1) Debe procurarse que el coeficiente a11
= ± 1, que puede conseguirse alterando la
colocación de incógnitas o ecuaciones o bien dividiendo la ecuación por ese a11
.
(2) Se elimina la incógnita x en las ecuaciones E2 y E3, realizando las transformaciones:
E2 – E1 E3 – E1
Con esto, el sistema [1] es equivalente al sistema a11
x + a12
y + a13
z = b1
a'22
y + a'23
z = b'2 [2]
a'32
y + a'33
z = b'3
El sistema [2] puede representarse por la matriz a11
a12
a13
b1
0 a'22
a'23
b'2
0 a'32
a'33
b'3
(3) Suprimimos ahora la incógnita y de la ecuación E3, mediante la transformación
E3 – E2
obteniéndose el sistema escalonado: a11
x + a12
y + a13
z = b1
a'22
y + a'23
z = b'2
[3]
a"33
z = b"3
El sistema [3] tiene asociada la matriz a11
a12
a13
b1
0 a'22
a'23
b'2
0 0 a"33
b"3
La práctica del método se hace muy ágil si se maneja la matriz ampliada del sistema,
en la que un cero indica ausencia de la incógnita correspondiente.
a21
a11
a31
a11
a'32
a'22
( (
( (

32 Álgebra lineal
2x – y + z = 3 E2 –x + 2z = 1 –x + 2z = 1
–x + 2z = 1 E1 2x – y + z = 3 E2 + 2E1 –y + 5z = 5
–2y + 6z = –4 –E3/2 y – 3z = 2 y – 3z = 2
–x + 2z = 1 –y + 5z = 5
E3 + E2 2z = 7
Las transformaciones anteriores pueden agilizarse utilizando las siguientes matrices:
2 –1 1 3 F2 –1 0 2 1
–1 0 2 1 F 2 –1 1 3
0 –2 6 –4 –F3/2 0 1 –3 2
–1 0 2 1 –1 0 2 1
F2 – 2F1 0 –1 5 5 0 –1 5 5
0 1 –3 2 F3 + F2 0 0 2 7
Si volvemos al último sistema la solución se obtiene fácilmente resolviendo de abajo arriba:
x = 2z – 1 x = 2 – 1 = 6
– x + 2z = 1 – y + 5z = 5 y = 5z – 5 y = 5 – 5 = 2z = 7
z =
EJEMPLO
72
72
252
72
El sistema escalonado final: a11
x + a12
y + a13
z = b1
a'22
y + a'23
z = b'2
a"33
z = b"3
proporciona los datos necesarios para determinar de qué tipo es el sistema [1] de
partida:
Si a"33
0, el sistema es compatible determinado, pues siempre se puede encon-
trar una solución única empezando a resolver el sistema por la tercera ecuación.
Si a"33
= b"3 = 0, el sistema es compatible indeterminado: tendrá infinitas solucio-
nes.
Observe que la ecuación E3 desaparece (queda 0z = 0, que se cumple para cual-
( (( ( ( (
( (

Álgebra lineal 33
quier valor de z).
Resulta así, un sistema con dos ecuaciones y tres incógnitas, pues el sistema [3] es
equivalente al sistema.
a11
x + a12
y + a13
z = b1
a'22
y + a'23
z = b'2
equivalente, a su vez, a
a11
x + a12
y = b'1 – a
13z
a'22
y = b'2 – a'
23z
Para resolver este sistema hemos de suponer la incógnita z conocida y hacer de-
pender las otras dos de ella.
Si a"33
= 0 y b"3 0, el sistema es incompatible: no tiene solución.
Observe que la ecuación E3 queda 0z 0, que evidentemente es absurdo, pues
cualquier valor de z multiplicado por cero debe dar cero.
10. Sistemas lineales en general10. Sistemas lineales en general10. Sistemas lineales en general10. Sistemas lineales en general10. Sistemas lineales en general
Representamos un sistema lineal de m ecuaciones y n incógnitas como:
a11
x1 + a
12x
2 + ... + a
1nx
n = b
1
a21
x1 + a
22x
2 + ... + a
2nx
n = b
2
. . . . .
. . . . .
. . . . .
am1
x1 + a
m2x
2 + ... + a
mnx
n = b
m
cuya matriz asociada será:
a11
a12
... a1n
b1
a21
a22
... a2n
b2
. . . . .
. . . . .
. . . . .
am1
am2
... amn
bm

34 Álgebra lineal
Para resolver un sistema como el expuesto aplicaremos el método de Gauss.
Al finalizar el proceso, o en algún paso intermedio, podemos encontrarnos con uno de
los siguientes casos:
a) Una fila de ceros. Corresponde a una ecuación trivial y podemos prescindir de ella:
(0 0 .... 0 0) 0x + 0y + ... + 0t = 0, que no afirma nada útil.
b) Dos filas iguales o proporcionales. Corresponden a ecuaciones equivalentes y pode-
mos prescindir inmediatamente de una de ellas, sin esperar a que se transforme en
ceros. Por ejemplo:
... ... ... ... ...
0 1 5 –2 6
0 –3 –15 6 –18
c) Una fila de ceros, salvo el último número –correspondiente al término indepen-
diente– que es distinto de cero.
(0 0 0 ... 0 ) 0x + 0y + ... + 0t = ( es un número distinto de cero)
Evidentemente corresponde a una ecuación imposible. En tal caso, reconocemos de
inmediato el sistema como incompatible.
Al finalizar el proceso se llegará a uno de los siguientes casos:
I. 0 número distinto de cero
0 0 un número cualquiera
0 0 0
Hay tantas ecuaciones válidas como incógnitas. Paso a paso, vamos obteniendo
un valor numérico para cada incógnita.
Es, por tanto, un sistema compatible, determinado.
II. 0 0 0
Hay menos ecuaciones válidas que incógnitas.
Las incógnitas que están de más, se pasan al segundo miembro, con lo que el
valor de las demás se dará en función de ellas.
El sistema es compatible indeterminado. Su solución general vendrá dada con
tantos parámetros como incógnitas hayamos pasado al segundo miembro.
III. ... ... ... ... ... ...
... ... ... ... ... ...
0 0 0 ... 0
La ecuación señalada no se puede cumplir nunca. El sistema es incompatible.
... ... ... ... ...
0 1 5 –2 6
( (
( (
( (
( ( ( (

Álgebra lineal 35
Resolvamos el siguiente sistema de 3 ecuaciones con 2 incógnitas:
x – y = 22x + y = –14x – y = 0
Construyamos su matriz ampliada y apliquemos Gauss:
1 –1 2 1 –1 2 1 –1 22 1 –1 F2 – 2F1 0 3 –5 0 3 –54 –1 0 F3 – 4F1 0 3 –8 F3 – F2 0 0 –3
que por contener la ecuación absurda 0 = –3 hace el sistema incompatible.
Si ahora estudiamos el sistema:
x + y – 4z = 22x – y – z = 1 x – 2y + 3z = –14x + y – 9z = 5
cuya matriz es:
1 1 –4 2 1 1 –4 2 1 1 –4 22 –1 –1 1 F2 – 2F1 0 –3 7 –3 0 –3 7 –31 –2 3 –1 F3 – F1 0 –3 7 –3 F3 – F2 0 0 0 04 1 –9 5 F4 – 4F1 0 –3 7 –3 F4 – F2 0 0 0 0
En la penúltima matriz podríamos haber suprimido directamente las filas 3 y 4. De cual-quier manera, el sistema inicial se transforma en su equivalente.
x + y – 4z = 2 –3y + 7z = –3
el cual es indeterminado.
EJEMPLO
Un sistema lineal con todos sus términos independientes nulos se dice que es homogéneo.
Su forma es, entonces,
11. Sistemas homogéneos11. Sistemas homogéneos11. Sistemas homogéneos11. Sistemas homogéneos11. Sistemas homogéneos
( ( ( ( ( (
( ( ( ( ( (

36 Álgebra lineal
Discutir un sistema es determinar su compatibilidad o incompatibilidad y número de
soluciones, en su caso, sin llegar a su cálculo concreto.
Una circunstancia que propicia la necesidad de discutir el sistema se produce cuando
este contiene algún coeficiente no determinado (parámetro). Entonces, antes de resolver
el sistema hemos de especificar su compatibilidad en función de los diferentes valores del
parámetro.
12. Discusión de un sistema12. Discusión de un sistema12. Discusión de un sistema12. Discusión de un sistema12. Discusión de un sistema
a11
x1 + a
12x
2 + ... + a
1nx
n = 0
a21
x1 + a
22x
2 + ... + a
2nx
n = 0
. . . . .
. . . . .
. . . . .
am1
x1 + a
m2x
2 + ... + a
mnx
n = 0
Estos sistemas tienen la característica de ser siempre compatibles, pues seguro que ad-
miten la solución x1 = 0, x
2 = 0 ... x
n = 0, que, por ser obvia, se califica de solución trivial.
El interés de estos sistemas es que nos proporcionan otras soluciones distintas de la
trivial, para lo cual han de ser indeterminados.
x + y + kz = 1kx + (k – 1) y + z = kx + y + z = k + 1
Esto, más que un sistema de ecuaciones, es un conjunto de ellos, pues para cada valor delparámetro k hay un sistema de ecuaciones distinto.De estos infinitos sistemas, es posible que los haya compatibles e incompatibles. Discu-tir "el sistema dependiendo del parámetro" es reconocer los valores de k para los que elsistema es de un tipo u otro.
Discutir un sistema de ecuaciones dependiente de uno o más parámetros es identificarpara qué valores de los parámetros el sistema es compatible, distinguiendo los casos en quees determinado o indeterminado.Utilizaremos el método de Gauss:
EJEMPLO

Álgebra lineal 37
1 1 k 1 (1º) 1 1 k 1k k – 1 1 k (2º) – k · (1º) 0 –1 1 – k2 01 1 1 k + 1 (3º) – (1º) 0 0 1 – k k
Si k = 1, la última fila es (0 0 0 1). El sistema es incompatible.
Si k 1 , z = , y = k2 + k , x =
Es decir, para cualquier k 1, el sistema es compatible, determinado. Su solución es:
, k2 + k ,
Atención: No hay infinitas soluciones, sino infinitos sistemas, uno para cada valor de k. Ycada uno de ellos tiene solución única, salvo el correspondiente a k = 1, que no tiene solu-ción. Por ejemplo, para k = 2 el sistema es:
x + y + 2z = 12x + y + z = 2 Su solución es: x = –1 , y = 6 , z = –2 x + y + z = 3
k1 – k
k3 – k2 – 2k + 11 – k
k3 – k2 – 2k + 11 – k
k1 – k( (
( ( ( (
Dos teoremas (Rouché y Cramer) dan respuesta a las dos cuestiones que plantea la
resolución de un sistema:
– ¿Es compatible el sistema? Es decir, ¿tiene soluciones?
– En caso afirmativo, ¿cuántas y cuáles son las soluciones del mismo?
Teorema de Rouché
En este apartado se estudia la compatibilidad de un sistema expresada por el teorema de
Rouché.
Un sistema es compatible si el rango de la matriz de los coeficientes es igual al
rango de la matriz ampliada con la columna de los términos independientes, y recí-
procamente.
Sistema compatible rango A = rango A*
13. Criterios de compatibilidad13. Criterios de compatibilidad13. Criterios de compatibilidad13. Criterios de compatibilidad13. Criterios de compatibilidad

38 Álgebra lineal
Regla de Cramer
La regla de Cramer es un teorema con una inmediata utilidad práctica. Sirve para obte-
ner la solución de un sistema de n ecuaciones con n incógnitas.
Sistemas de Cramer
Un sistema de ecuaciones lineales es un sistema de Cramer si cumple las siguientes con-
diciones:
a) Tiene n ecuaciones y n incógnitas.
b) El determinante de la matriz de los coeficientes del sistema es distinto de cero.
Un sistema de Cramer es por definición compatible, ya que:
Rango A = Rango A*
Vamos a enunciar esta regla para un sistema de 3 ecuaciones con 3 incógnitas:
Tenemos un sistema de 3 ecuaciones con 3 incógnitas.
a11
x1 + a
12x
2 + a
13x
3 = b
1
a21
x1 + a
22x
2 + a
23x
3 = b
2y tal
a31
x1 + a
32x
2 + a
33x
3 = b
3
a11
a12
a13
que A = a21
a22
a23
0
a31
a32
a33
Su solución es:
b1
a12
a13
a11
b1
a13
a11
a12
b1
b2
a22
a23
a21
b2
a23
a21
a22
b2
b3
a32
a33
a31
b3
a33
a31
a32
b3
A A A
Las siguientes observaciones son de gran utilidad para la resolución práctica de un siste-
ma compatible.
Si el sistema es compatible, el rango de la matriz del sistema indica el número de ecuaciones
independientes.
Si el número de incógnitas es igual al rango, el sistema es compatible determinado.
Si el número de incógnitas es mayor que el rango, el sistema es compatible indeterminado.
x1 = , x
2 = , x
3 =

Álgebra lineal 39
Bloque IVBloque IVBloque IVBloque IVBloque IVInecuaciones
Esquema 20Esquema 20Esquema 20Esquema 20Esquema 20
a) Intervalo cerrado
Si a y b son dos números reales (a < b) llamaremos intervalo cerrado de extremos a y b
al conjunto de los números reales comprendidos entre a y b (ambos inclusive). Se denota:
[a, b]
[a, b] = { x RRRRR / a x b }
Se lee "conjunto de números reales tales que, están comprendidos entre a y b (ambos
inclusive)".
Gráficamente:
Ejemplo: intervalo cerrado: [–3, 2], los extremos –3 y 2 están incluidos:
b) Intervalo abierto
Si a y b son dos números reales (a < b) llamaremos intervalo abierto de extremos a y b al
conjunto de los números reales comprendidos entre a y b (excluidos a y b). Se denota:
(a, b)
(a, b) = { x RRRRR / a < x < b }
Se lee "conjunto de números reales tales que, están comprendidos entre a y b (ambos
excluidos)".
Gráficamente:
Ejemplo: intervalo abierto: (–3, 2), los extremos –3 y 2 están excluidos:
1. Intervalos. Anotación1. Intervalos. Anotación1. Intervalos. Anotación1. Intervalos. Anotación1. Intervalos. Anotación
a b
a b
–3 0 2
–3 0 2
40 Álgebra lineal
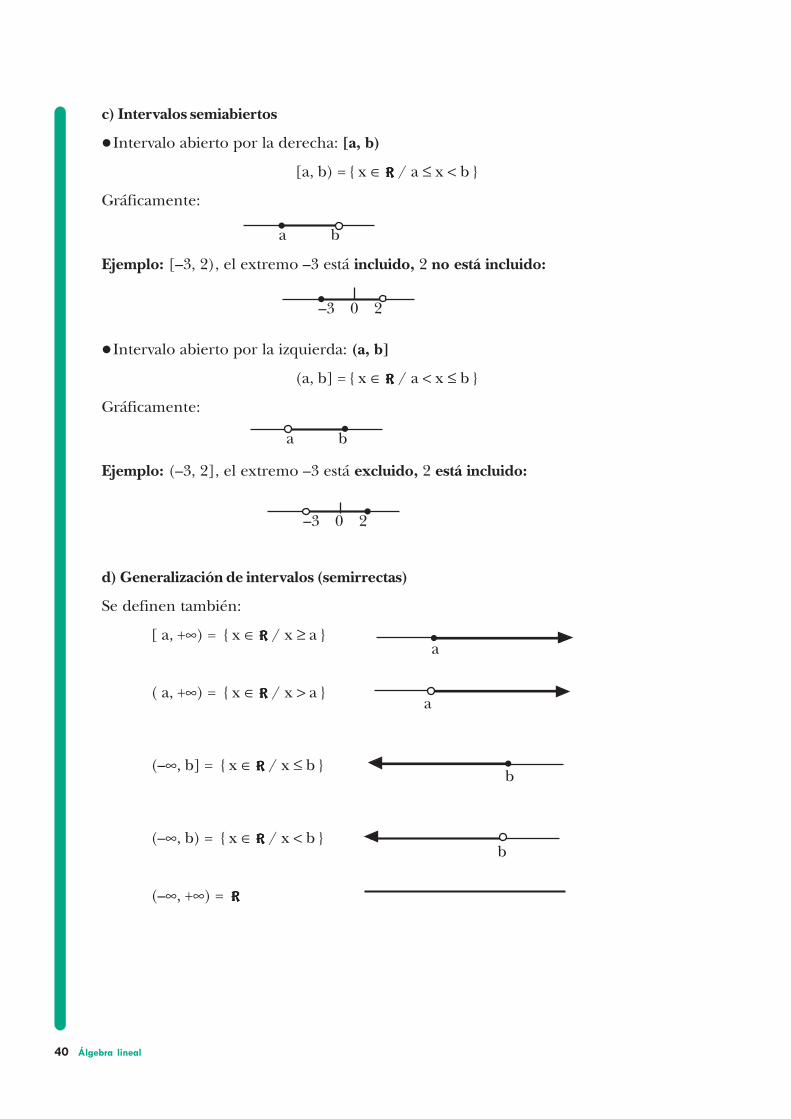
c) Intervalos semiabiertos
Intervalo abierto por la derecha: [a, b)
[a, b) = { x RRRRR / a x b }
Gráficamente:
Ejemplo: [–3, 2), el extremo –3 está incluido, 2 no está incluido:
Intervalo abierto por la izquierda: (a, b]
(a, b] = { x RRRRR / a x b }
Gráficamente:
Ejemplo: (–3, 2], el extremo –3 está excluido, 2 está incluido:
d) Generalización de intervalos (semirrectas)
Se definen también:
[ a, +) = { x RRRRR / x a }
( a, +) = { x RRRRR / x a }
(–, b] = { x RRRRR / x b }
(–, b) = { x RRRRR / x b }
(–, +) = RRRRR
a b
–3 0 2
a b
–3 0 2
a
a
b
b

Álgebra lineal 41
Se llama inecuación a toda desigualdad algebraica en la que intervienen números cono-
cidos y números desconocidos (llamados incógnitas) representados por letras.
Cada valor de la incógnita (o pares de valores si hay dos incógnitas) que satisfacen la
inecuación se le llama solución de la inecuación.
Al conjunto de todas las soluciones se le llama conjunto solución.
Ejemplo:
2x + 3 < x + 5 es una inecuación con una incógnita.
x + y > 2 es una inecuación con dos incógnitas.
x = 3 es una solución de 2x + 3 < x + 2:
2 . 3 + 3 < 3 + 2
{ x RRRRR / x < 2 } es el conjunto solución de la inecuación 2x – x < 5 – 3.
También puede expresarse el conjunto solución mediante intervalos: (–, 2)
Se realiza aplicando las mismas propiedades de las desigualdades:
a) Si se suma un número cualquiera a los dos miembros de una desigualdad, ésta no
varía.
De esta propiedad se deduce que los términos que están sumando en un miem-
bro se pueden pasar al otro miembro con signo contrario, y viceversa (transposi-
ción de términos).
b) Si se multiplican o dividen los dos miembros de la desigualdad por un número posi-
tivo, ésta no varía.
c) Si se multiplican o dividen los dos miembros de la desigualdad por un número nega-
tivo, se obtiene una desigualdad de signo contrario a la primera.
Ejemplos:
1) 2x + 4 < x 2x – x < – 4 x < –4
x < 4
El conjunto solución se expresa: (–, –4);
todos los números reales menores a –4.
2. Inecuaciones. Definición2. Inecuaciones. Definición2. Inecuaciones. Definición2. Inecuaciones. Definición2. Inecuaciones. Definición
–5 –4 –3 –2 –1 0
3. Resolución de inecuaciones de primer grado con una incógnita3. Resolución de inecuaciones de primer grado con una incógnita3. Resolución de inecuaciones de primer grado con una incógnita3. Resolución de inecuaciones de primer grado con una incógnita3. Resolución de inecuaciones de primer grado con una incógnita

42 Álgebra lineal
2) 3x 6 x x 2
x 2
El conjunto solución se expresa: [2, +);
todos los números reales mayores o iguales a 2
3) –3x < 6 x > x > –2
x > –2
El conjunto solución se expresa: (–2, +);
todos los números reales mayores a –2
6
3
0 1 2 3 4 5
–6
3
–3 –2 1 0 1 2