mvo-30/ab-103 estabilidade e controle de aeronaves...
TRANSCRIPT

MVO-30/AB-103 Estabilidade e Controle deAeronaves 2013
(carga horaria: 64 horas)
Flavio Silvestre
Departamento de Mecanica do VooDivisao de Engenharia AeronauticaInstituto Tecnologico de Aeronautica
2013

IntroducaoDinamica do movimento
Equacoes completas do movimento
PARTE V
Dinamica Completa do Movimento da Aeronave
Flavio Silvestre MVO-30/AB-103

IntroducaoDinamica do movimento
Equacoes completas do movimento
Aplicacao da 2a. Lei: resumoSistemas de referencia
Introducao
Ja estudamos a dinamica longitudinal:
equacoes do movimento
simulacao
modos de voo
estabilidade dinamica
estabilidade estatica
A seguir estenderemos as nossas analisespara o movimento completo da aeronave.
xb
zb
CM
V
velocidade
xa
za
xi
zi
a
g
ângulo deataque
ângulo detrajetória
ângulo dearfagem θ
L
sustentação
Darrasto
Mext
W
peso
CGxb
zb
yb
p
q
r
Flavio Silvestre MVO-30/AB-103

IntroducaoDinamica do movimento
Equacoes completas do movimento
Aplicacao da 2a. Lei: resumoSistemas de referencia
IntroducaoAplicacao da 2a. Lei: resumo
Como ja foi visto:Considerando a aeronave como corpo rıgido,a Terra como referencial inercial, a diadicade inercia constante, a atmosfera parada(sem vento), e desconsiderando a variacaode massa, a aplicacao da 2a. Lei de Newtonresume-se portanto a:
δV0
δt=
Fext
m− ω ×V0
e
δω
δt= J
−1(M
extCM − ω × (Jω)
)
xI yI
zI
Terra
CM
RR0
r
xB
zB
sistema de referência
do corpo (não inercial)
sistema de referência da Terra
(considerado inercial)
elemento
de massa
Flavio Silvestre MVO-30/AB-103

IntroducaoDinamica do movimento
Equacoes completas do movimento
Aplicacao da 2a. Lei: resumoSistemas de referencia
IntroducaoSistemas de referencia
As forcas e momentos, bem como velocida-des e aceleracoes da aeronave estao escritosem diferentes sistemas de referencia, em es-pecial:
sistema de referencia terrestre(considerado inercial)
sistema de referencia do corpo
sistema de referencia aerodinamico
sistema de referencia propulsivo
Faca uma revisao das definicoes e das ma-
trizes de transformacao!
yb
xb
zazb
ya
xa
CM
b
a
plano formadopor x e ya b
plano desimetria x zb b
V
Flavio Silvestre MVO-30/AB-103

IntroducaoDinamica do movimento
Equacoes completas do movimento
Dinamica de translacaoDinamica de rotacaoSistema de equacoes diferenciaisCinematica de translacaoCinematica de rotacaoRelacao entre (u,v,w) e (V,α,β)
Dinamica do movimentoDinamica de translacao
Comecemos com a 2a. Lei aplicada a dinamica de translacao:
δV0
δt=
Fext
m− ω ×V0
soma das forcas externas, no referencial do corpo:
Fext = Lba
−D
Y
−L
+ Lbp
T
00
︸ ︷︷ ︸
Fx
Fy
Fz
+Lbt
00mg
Flavio Silvestre MVO-30/AB-103

IntroducaoDinamica do movimento
Equacoes completas do movimento
Dinamica de translacaoDinamica de rotacaoSistema de equacoes diferenciaisCinematica de translacaoCinematica de rotacaoRelacao entre (u,v,w) e (V,α,β)
Dinamica do movimentoDinamica de translacao
vetor velocidade do CG, no referencial do corpo:
V0 =
u
v
w
Nao se esqueca que:
V0 = Lba
V
00
=
u
v
w
Daı saem as relacoes entre as componentes u, v , w com V , α e β queveremos adiante.
Flavio Silvestre MVO-30/AB-103

IntroducaoDinamica do movimento
Equacoes completas do movimento
Dinamica de translacaoDinamica de rotacaoSistema de equacoes diferenciaisCinematica de translacaoCinematica de rotacaoRelacao entre (u,v,w) e (V,α,β)
Dinamica do movimentoDinamica de translacao
vetor velocidade de rotacao da aeronave em relacao ao referencial daTerra, escrito no referencial do corpo:
ω =
p
q
r
NOTA: o produto vetorial ω×V0 pode ser calculado pela produto matri-cial:
ω ×V0 =
0 −r q
r 0 −p
−q p 0
u
v
w
=
qw − rv
−pw + ru
pv − qu
Flavio Silvestre MVO-30/AB-103

IntroducaoDinamica do movimento
Equacoes completas do movimento
Dinamica de translacaoDinamica de rotacaoSistema de equacoes diferenciaisCinematica de translacaoCinematica de rotacaoRelacao entre (u,v,w) e (V,α,β)
Dinamica do movimentoDinamica de translacao
A aplicacao de:
δV0
δt=
Fext
m− ω ×V0
resume-se portanto a:
u
v
w
=
Fx/mFy/mFz/m
︸ ︷︷ ︸
aero + prop
+
−g sin θg cos θ sinφg cos θ cosφ
︸ ︷︷ ︸
gravidade
+
−qw + rv
pw − ru
−pv + qu
︸ ︷︷ ︸
rotacao
Flavio Silvestre MVO-30/AB-103

IntroducaoDinamica do movimento
Equacoes completas do movimento
Dinamica de translacaoDinamica de rotacaoSistema de equacoes diferenciaisCinematica de translacaoCinematica de rotacaoRelacao entre (u,v,w) e (V,α,β)
Dinamica do movimentoDinamica de rotacao
Passemos a aplicacao da 2a. Lei a dinamica de rotacao:
δω
δt= J
−1(M
extCM − ω × (Jω)
)
soma dos momentos externos, no referencial do corpo:
Mext = MA
︸︷︷︸
aero
+MF︸︷︷︸
prop
=
L
M
N
Flavio Silvestre MVO-30/AB-103
IntroducaoDinamica do movimento
Equacoes completas do movimento
Dinamica de translacaoDinamica de rotacaoSistema de equacoes diferenciaisCinematica de translacaoCinematica de rotacaoRelacao entre (u,v,w) e (V,α,β)
Dinamica do movimentoDinamica de rotacao
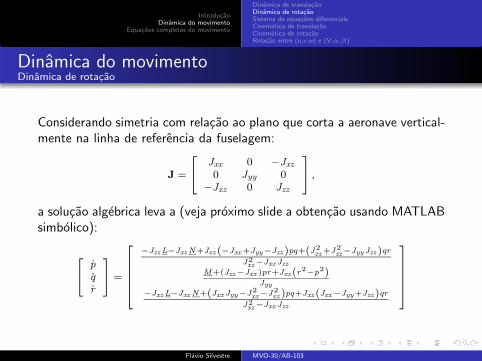
Considerando simetria com relacao ao plano que corta a aeronave vertical-mente na linha de referencia da fuselagem:
J =
Jxx 0 −Jxz0 Jyy 0
−Jxz 0 Jzz
,
a solucao algebrica leva a (veja proximo slide a obtencao usando MATLABsimbolico):
p
q
r
=
−JzzL−JxzN+Jxz (−Jxx+Jyy−Jzz )pq+(J2
xz+J2
zz−JyyJzz )qrJ2xz−JxxJzz
M+(Jzz−Jxx )pr+Jxz (r2−p2)Jyy
−JxzL−JxxN+(JxxJyy−J2
xx−J2
xz )pq+Jxz (Jxx−Jyy+Jzz )qrJ2xz−JxxJzz
Flavio Silvestre MVO-30/AB-103

IntroducaoDinamica do movimento
Equacoes completas do movimento
Dinamica de translacaoDinamica de rotacaoSistema de equacoes diferenciaisCinematica de translacaoCinematica de rotacaoRelacao entre (u,v,w) e (V,α,β)
Dinamica do movimentoDinamica de rotacao
Usando MATLAB simbolico para calcular J−1 (MextCM − ω × (Jω)):
syms p q r Jxx Jyy Jzz Jxz L M N
% angular velocity
om=[p;q;r];
% inertia diadic
J=[Jxx,0,-Jxz;0,Jyy,0;-Jxz,0,Jzz];
% total external moment
Mext=[L;M;N];
simplify((J^(-1))*(Mext-cross(om,J*om)))
Obtem-se como resposta:ans =
- (Jxz*(N + q*(Jxx*p - Jxz*r) - Jyy*p*q))/(Jxz^2 - Jxx*Jzz) - (Jzz*(L + q*(Jxz*p - Jzz*r) + Jyy*q*r))/(Jxz^2 -
Jxx*Jzz)
-(p*(Jxz*p - Jzz*r) - M + r*(Jxx*p - Jxz*r))/Jyy
- (Jxx*(N + q*(Jxx*p - Jxz*r) - Jyy*p*q))/(Jxz^2 - Jxx*Jzz) - (Jxz*(L + q*(Jxz*p - Jzz*r) + Jyy*q*r))/(Jxz^2 -
Jxx*Jzz)
Flavio Silvestre MVO-30/AB-103

IntroducaoDinamica do movimento
Equacoes completas do movimento
Dinamica de translacaoDinamica de rotacaoSistema de equacoes diferenciaisCinematica de translacaoCinematica de rotacaoRelacao entre (u,v,w) e (V,α,β)
Dinamica do movimentoSistema de equacoes diferenciais
Chegamos ao seguinte sistema de equacoes diferenciais:
u = Fx/m − g sin θ − qw + rv
v = Fy/m + g cos θ sinφ+ pw − ru
w = Fz/m + g cos θ cosφ− pv + qu
p =−JzzL− JxzN + Jxz (−Jxx + Jyy − Jzz ) pq +
(J 2
xz + J 2
zz − JyyJzz)qr
J 2xz − JxxJzz
q =M + (Jzz − Jxx ) pr + Jxz
(r2 − p2
)
Jyy
r =−JxzL− JxxN +
(JxxJyy − J 2
xx − J 2
xz
)pq + Jxz (Jxx − Jyy + Jzz ) qr
J 2xz − JxxJzz
Flavio Silvestre MVO-30/AB-103

IntroducaoDinamica do movimento
Equacoes completas do movimento
Dinamica de translacaoDinamica de rotacaoSistema de equacoes diferenciaisCinematica de translacaoCinematica de rotacaoRelacao entre (u,v,w) e (V,α,β)
Dinamica do movimentoSistema de equacoes diferenciais
Para resolver esse sistema de equacoes diferencias e necessario conhecerainda:
α, β e V : modelo aerodinamico / modelo propulsivo
altitude H : modelo aerodinamico / modelo propulsivo
θ e φ: entram diretamente nas equacoes
Flavio Silvestre MVO-30/AB-103

IntroducaoDinamica do movimento
Equacoes completas do movimento
Dinamica de translacaoDinamica de rotacaoSistema de equacoes diferenciaisCinematica de translacaoCinematica de rotacaoRelacao entre (u,v,w) e (V,α,β)
Dinamica do movimentoCinematica de translacao
Da cinematica de translacao temos que:
dR0
d t= V0
Escrevendo-se os vetores no sistema terres-tre:
x
y
−H
= LTbt
u
v
w
onde, lembrando:
Lbt e a matriz de transformacao
u, v e w sao as componentes de V0
no sistema do corpo
xI yI
zI
Terra
CM
RR0
r
xB
zB
sistema de referência
do corpo (não inercial)
sistema de referência da Terra
(considerado inercial)
elemento
de massa
Flavio Silvestre MVO-30/AB-103

IntroducaoDinamica do movimento
Equacoes completas do movimento
Dinamica de translacaoDinamica de rotacaoSistema de equacoes diferenciaisCinematica de translacaoCinematica de rotacaoRelacao entre (u,v,w) e (V,α,β)
Dinamica do movimentoCinematica de translacao
No MATLAB simbolico:syms psi theta phi u v w real
% IRF to BRF
Lpsi=[cos(psi) sin(psi) 0;-sin(psi) cos(psi) 0;0 0 1];
Ltheta=[cos(theta) 0 -sin(theta);0 1 0;sin(theta) 0 cos(theta)];
Lphi=[1 0 0;0 cos(phi) sin(phi);0 -sin(phi) cos(phi)];
% transformation matrix
Lbt=Lphi*Ltheta*Lpsi;
% vector velocity, written on IRF
simplify(Lbt’*[u;v;w])
Em regime sem a presenca de vento, x e y
sao ignoraveis. A equacao de H e:
H = u sin θ − v cos θ sinφ− w cosφ cos θ
xI yI
zI
Terra
CM
RR0
r
xB
zB
sistema de referência
do corpo (não inercial)
sistema de referência da Terra
(considerado inercial)
elemento
de massa
Flavio Silvestre MVO-30/AB-103

IntroducaoDinamica do movimento
Equacoes completas do movimento
Dinamica de translacaoDinamica de rotacaoSistema de equacoes diferenciaisCinematica de translacaoCinematica de rotacaoRelacao entre (u,v,w) e (V,α,β)
Dinamica do movimentoCinematica de rotacao
Da cinematica de rotacao, temos no sistemado corpo (lembre-se que os angulos de Eulernao estao definidos no sistema do corpo!):
φ00
+Lφ
0
θ0
+LφLθ
00
ψ
= ω =
p
q
r
Logo (use o MATLAB simbolico por exem-plo):
φ = p + tan θ(q sinφ+ r cosφ)
θ = q cosφ− r sinφ
ψ =q sinφ+ r cosφ
cos θ
CGxb
zb
yb
p
q
r
Flavio Silvestre MVO-30/AB-103

IntroducaoDinamica do movimento
Equacoes completas do movimento
Dinamica de translacaoDinamica de rotacaoSistema de equacoes diferenciaisCinematica de translacaoCinematica de rotacaoRelacao entre (u,v,w) e (V,α,β)
Dinamica do movimentoRelacao entre (u,v,w) e (V,α,β)
Da relacao geometrica entre os sistemas ae-rodinamico e do corpo:
V =√
u2 + v2 + w2
α = arctanw
u
β = arcsinv
V
Porem, por vezes e conveniente usar as equa-coes com as variaveis do segundo conjunto.Logo:
V = (uu + v v + ww) /V
α = (uw − wu) /(u2 + w2
)
β =(V v − vV
)/(
V√
u2 + w2
)
yb
xb
zazb
ya
xa
CM
b
a
plano formadopor x e ya b
plano desimetria x zb b
V
u = V cosβ cosα
v = V sinβ
w = V cosβ sinα
Flavio Silvestre MVO-30/AB-103

IntroducaoDinamica do movimento
Equacoes completas do movimento
Diagrama de blocosDiagrama de blocosModelo aerodinamicoModelo propulsivoDeterminacao do equilıbrio
Equacoes completas do movimento
V = (uu + vv + ww) /V
θ = q cosφ− r sinφ
q =M + (Jzz − Jxx ) pr + Jxz
(
r2 − p2)
Jyy
α = (uw − wu) /(
u2 + w2)
H = u sin θ − v cos θ sinφ− w cosφ cos θ
β =(
V v − vV)
/(
V√
u2 + w2)
r =−JxzL− JxxN +
(
JxxJyy − J2xx − J2
xz
)
pq + Jxz (Jxx − Jyy + Jzz ) qr
J2xz − JxxJzz
φ = p + tan θ(q sinφ+ r cosφ)
p =−JzzL− JxzN + Jxz (−Jxx + Jyy − Jzz ) pq +
(
J2xz + J2
zz − JyyJzz)
qr
J2xz − JxxJzz
Flavio Silvestre MVO-30/AB-103

IntroducaoDinamica do movimento
Equacoes completas do movimento
Diagrama de blocosDiagrama de blocosModelo aerodinamicoModelo propulsivoDeterminacao do equilıbrio
Equacoes completas do movimento
O sistema de equacoes diferenciais assim obtido pode ser integrado nume-ricamente, dados:
condicao inicial
comandos
Vetor de estado, no sistema completo:
X = [ V θ q α H β r φ p ]T
5 variaveis longitudinais 4 variaveis latero-direcionais
Flavio Silvestre MVO-30/AB-103

IntroducaoDinamica do movimento
Equacoes completas do movimento
Diagrama de blocosDiagrama de blocosModelo aerodinamicoModelo propulsivoDeterminacao do equilıbrio
Equacoes completas do movimentoDiagrama de blocos
coluna do manche
pedais
manete
u
(controles)
X
(estados)
primários
manete
aileron
profundor
leme de direção
Flavio Silvestre MVO-30/AB-103

IntroducaoDinamica do movimento
Equacoes completas do movimento
Diagrama de blocosDiagrama de blocosModelo aerodinamicoModelo propulsivoDeterminacao do equilıbrio
Equacoes completas do movimentoDiagrama de blocos
modelo aerodinâmico
modelo propulsivo
EoM's
dX
dt
Xu
(controles)
modelo atmosférico
estados
densidade
Mach
forças e momentos
aerodinâmicos
forças e momentos
propulsivos integrador
(estados)
atuadores
Flavio Silvestre MVO-30/AB-103

IntroducaoDinamica do movimento
Equacoes completas do movimento
Diagrama de blocosDiagrama de blocosModelo aerodinamicoModelo propulsivoDeterminacao do equilıbrio
Equacoes completas do movimentoModelo aerodinamico
forcas e momentos atraves de coeficientes adimensionais
L =1
2ρV 2SCL (forca de sustentacao)
Y =1
2ρV 2SCY (forca lateral)
D =1
2ρV 2SCD (forca de arrasto)
L =1
2ρV 2SκCL (momento de rolamento)
M =1
2ρV 2ScCM (momento de arfagem)
N =1
2ρV 2SκCN (momento de guinada)
onde κ = b/2 (nem sempre, portanto atente para a definicao dos coefici-entes!).
Flavio Silvestre MVO-30/AB-103

IntroducaoDinamica do movimento
Equacoes completas do movimento
Diagrama de blocosDiagrama de blocosModelo aerodinamicoModelo propulsivoDeterminacao do equilıbrio
Equacoes completas do movimentoModelo aerodinamico
modelo linearizado
coeficientes adimensionais: funcao dos estados e controles(derivadas de estabilidade e de controle)
CL = CL0 + CLαα+ CLδeδe + CLα
αc
Vref+ CLq
qc
Vref
CY = CY 0 + CY ββ + CY δaδa + CY δr
δr + CY p
pκ
Vref+ CY r
rκ
Vref
CD = CD0 + CDαα+ CDeδe
CL = CL0+ CLβ
β + CLδaδa + CLδr
δr + CLp
pκ
Vref+ CLr
rκ
Vref
CM = CM 0+ CMα
α+ CM δeδe + CM α
αc
Vref+ CMq
qc
Vref
CN = CN 0+ CN β
β + CN δaδa + CN δr
δr + CN p
pκ
Vref+ CN r
rκ
Vref
Flavio Silvestre MVO-30/AB-103
IntroducaoDinamica do movimento
Equacoes completas do movimento
Diagrama de blocosDiagrama de blocosModelo aerodinamicoModelo propulsivoDeterminacao do equilıbrio
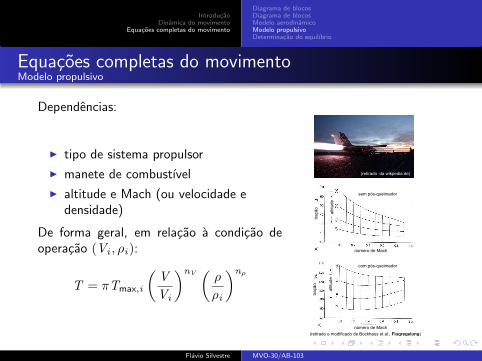
Equacoes completas do movimentoModelo propulsivo
Dependencias:
tipo de sistema propulsor
manete de combustıvel
altitude e Mach (ou velocidade edensidade)
De forma geral, em relacao a condicao deoperacao (Vi , ρi):
T = πTmax,i
(V
Vi
)nV(ρ
ρi
)nρ
(retirado da wikpedia.de)
(retirado e modificado de Bockhaus et al., Flugregelung)altitu
de
número de Mach
tra
ção
sem pós-queimador
número de Mach
tra
ção
altitu
de
com pós-queimador
Flavio Silvestre MVO-30/AB-103

IntroducaoDinamica do movimento
Equacoes completas do movimento
Diagrama de blocosDiagrama de blocosModelo aerodinamicoModelo propulsivoDeterminacao do equilıbrio
Equacoes completas do movimentoDeterminacao do equilıbrio
Considerando-se apenas os controles primarios: 9 estados 4 controles
No equilıbrio: taxas de variacao nulas: p = q = r = 0 equacoes de θ e φ anulam-se identicamente, veja:
θ = q cosφ− r sinφ
φ = p + tan θ(q sinφ+ r cosφ)
Logo:
restam 7 equacoes 6 estados + 4 controles a serem determinados
Portanto, 3 grandezas precisam ser estipuladas a priori:
velocidade de voo (V ), altitude de voo (H ),angulo de derrapagem (β,normalmente nulo)
Flavio Silvestre MVO-30/AB-103
IntroducaoDinamica do movimento
Equacoes completas do movimento
Diagrama de blocosDiagrama de blocosModelo aerodinamicoModelo propulsivoDeterminacao do equilıbrio
Equacoes completas do movimentoDeterminacao do equilıbrio
Casos de excecao: voo de subida permanente
neste caso, H /V e igual aogradiente de subida
como a densidade varia, evalido somente nas redondezasda condicao de operacaoinformada
retirado de news.delta.com
Flavio Silvestre MVO-30/AB-103

IntroducaoDinamica do movimento
Equacoes completas do movimento
Diagrama de blocosDiagrama de blocosModelo aerodinamicoModelo propulsivoDeterminacao do equilıbrio
Equacoes completas do movimentoDeterminacao do equilıbrio
Casos de excecao: curva permanente
neste caso, ψ = Ω e o gradiente de curva, e φ = θ = 0
da relacao entre as componentes da velocidade angular, 3 estadosficam estipulados:
pE = −Ωsin θE
qE = ΩsinφE cos θE
rE = ΩcosφE cos θE
7 equacoes: 4 controles + 3 estados podem ser determinados
3 estados estipulados (V, H, e β = 0 para curva coordenada)
NOTE: os comandos obtidos sao para manter a condicao de voo, enao para se chegar a ela!
Flavio Silvestre MVO-30/AB-103