montagem e manutenção de redes - centro de referência virtual do professor (184 )
TRANSCRIPT

http://crv.educacao.mg.gov.br/sistema_crv/index.asp?id_projeto=27&ID_OBJETO=37439&tipo=ob&cp=003366&cb=&n1=&n2=Biblioteca%20Virtual&n3=Cadernos%20de%20Informática&n4=&b=s
CURSO DE MONTAGEM E MANUTENÇÃO DE COMPUTADORES
PREFÁCIO
Esta apostila foi elaborada pelos autores (Sandro Renato Dias, Sandro Roberto Lopes) com a intenção de dar ao aluno a noção necessária para o bom entendimento sobre o funcionamento, montagem e a manutenção de Microcomputadores (PCs). Para elaboração deste manual, foi preciso ter em mente uma plataforma basilar. Foi escolhido o IBM-PC, ou compatível, equipado com processador Intel com sistema operacional MSDOS. Grande parte do conteúdo desta apostila aplica-se a esse tipo de computador, bem como aos seus componentes.
De forma mais genérica, as explicações poderão aplicar-se a computadores Macintosh, às estações Unix e até minicomputadores e mainframes. É necessário deixar claro que não se pretende abordar o funcionamento dos computadores de uma forma universal. Para que o assunto fosse tratado nesta profundidade seria preciso pesquisar e inspecionar componentes muito específicos. Ousa-se dizer que se tornaria uma tarefa ingrata e humanamente impossível se forem levadas em consideração as variantes intrínsecas ao meio da informática.
Ainda assim, devido a imensa variedade de PCs IBM/Intel/AMD/MS-DOS, foi preciso limitar as explicações a configurações específicas, de maneira a torná-las o mais genéricas possível.
Um capítulo sobre a história dos computadores introduz o aluno no mundo da informática, para que o mesmo possa, assim, entender e conhecer como tudo começou. A Internet também faz parte deste trabalho, pois, nos dias de hoje, ela é uma ferramenta de grande utilidade em qualquer área. Drivers, software, informações diversas podem ser encontradas na Internet para auxiliar, principalmente informações quanto a novos modelos de componentes e dispositivos ou até mesmo drivers e atualizações dos mais antigos. Vários capítulos sobre os componentes dos computadores informam e esclarecem sobre os diversos elementos da máquina.
A montagem é explicada, passo-a-passo, num capítulo, onde estão contidas dicas de manutenção preventiva e corretiva.
Em um outro capítulo pode-se observar os passos de preparação da máquina para a instalação do Windows 98/XP, alguns comandos do MS-DOS e teclas de atalho que possibilitam trabalhar sem o mouse.
Autores:
Sandro Renato Dias
Sandro Roberto Lopes
2 - HISTÓRIA DOS COMPUTADORES
Vamos começar pela origem das palavras:
História = conjunto de conhecimentos relativos ao passado da humanidade, segundo o lugar, a época, o ponto de vista escolhido. Isto segundo o Dicionário Eletrônico Houaiss.
Computador = o que computa; calculador, calculista.
Rubrica: informática = Máquina destinada ao processamento de dados; dispositivo capaz de obedecer a instruções que visam produzir certas transformações nos dados, com o objetivo de alcançar um fim determinado. Isto segundo o Dicionário Eletrônico Houaiss.
O ser humano, à medida que passou a viver em grupos sociais maiores e mais complexos, teve a necessidade de armazenar e processar uma quantidade crescente de informações. Essa necessidade levou o engenho dos homens a criar meios cada vez mais rápidos e eficientes para trabalhar com esses dados.
Com a evolução da sociedade humana e as conquistas tecnológicas, as formas encontradas para o armazenamento de dados foram ficando cada vez mais complexas e capazes de processar uma quantidade maior de informação. Foi assim que a humanidade partiu de engenhos simples, como o ábaco, até chegar aos complexos computadores atuais, capazes de efetuar as mais variadas tarefas em velocidades infinitamente superiores a capacidade humana.
- O Ábaco

Ao contrário do que muitos imaginam, a origem do computador veio da necessidade de se efetuar cálculos que se tornaram impossíveis sem a utilização de um meio mais sofisticado, superando o uso apenas das mãos, pedras e gravetos.
O ábaco, palavra de origem fenícia, surgiu entre os povos do Mediterrâneo em 3.500 a.C. e é utilizado até hoje, por algumas culturas. É um instrumento composto de varetas e bolinhas, utilizado pelos comerciantes para efetuar operações aritméticas.
As varetas representam as casas decimais. Uma bolinha da vareta das unidades vale um, as bolinhas da vareta das dezenas valem dez, e assim por diante. Durante séculos, o ábaco foi o instrumento que permitia efetuar as operações aritméticas de maneira mais rápida. Muitos de nós no nosso dia a dia já vimos ábacos até mesmo sendo utilizados como brinquedo para crianças.
Até o século XVII não haviam inventado nada tão eficiente e simples quando o Ábaco. Existiram vários modelos, o russo e o japonês, mas nenhum se tornou tão conhecido mundialmente como o chinês, que ainda é utilizado atualmente.
- Ossos de Napier
Em 1614, Napier, um matemático escocês, inventou um método diferente de efetuar multiplicações. Criou um dispositivo conhecido como “Ossos de Napier”, formado por um conjunto de barras segmentadas, dispostas de tal maneira que os resultados de uma multiplicação eram obtidos somando-se os números de seções horizontais adjacentes.
Antes desse invento, ele introduziu à comunidade científica o cálculo logarítmico. A própria palavra logaritmo foi escrita pela primeira vez por Napier a partir do grego “logos” (que significa razão) e “aritmos” (que quer dizer números). Suas tabelas de logaritmos de funções trigonométricas foram usadas por quase um século, principalmente no auxílio ao estudo da Astronomia.
As tabelas de logaritmos de Napier foram convertidas em um instrumento mais prático: a régua de cálculo, inventada por Willian Oughtred por volta de 1620.
- Blaise Pascal - A primeira calculadora
Em 1642, o filósofo, teólogo, escritor, físico e matemático francês Blaise Pascal, com apenas 18 anos, construiu uma calculadora com rodas e engrenagens. Os números a serem somados eram introduzidos discando-se numa série de rodas dentadas, nas quais haviam algarismos de 1 a 9 impressos.
As rodas representavam unidades, dezenas e centenas. Os números introduzidos apareciam em um mostrador. Cada roda, ao completar um giro, fazia a roda à sua esquerda avançar um dígito.
A máquina de Pascal, chamada de pascaline pascaline, era capaz de efetuar outras operações por meio de um sistema de adições repetidas. Pascal construiu mais de 50 versões de sua máquina de calcular durante sua curta vida (morreu aos 39 anos).
O matemático alemão Gottlieb Leibnitz, durante seus estudos com o astrônomo holandês Christian Huygens em 1672, construiu uma calculadora mecânica, com o objetivo de simplificar os complexos cálculos dos astrônomos.
A máquina de Leibnitz era muito parecida com a de Pascal, porém, possuía componentes extras que agilizavam as quatro operações básicas, aceleravam as adições repetidas criando, dessa forma vários processos para a multiplicação, cálculos repetitivos e também o cálculo da raiz quadrada.
- A tecelagem

Em 1804, Joseph Marie Jacquard construiu um tear inteiramente automatizado que podia fazer desenhos muito complicados. Esse tear era programado por uma série de cartões perfurados, cada um deles controlando um único movimento da lançadeira. Curiosamente, ele era de um ramo que não tinha nada a ver com números e calculadoras: a tecelagem. Desde os 10 anos trabalhava como aprendiz de tecelão, herança de seus pais que também trabalhavam como tecelões Jacquard sentiu-se incomodado com a monótona tarefa que lhe fora confiada na adolescência: alimentar os teares com novelos de linhas coloridas para formar os desenhos no pano que estava sendo fiado.
Como toda a operação era manual, a tarefa de Jacquard era interminável: a cada segundo, ele tinha que mudar o novelo, seguindo as instruções necessárias para o desenho de uma determinada estampa. Com o tempo, Jacquard foi percebendo que as mudanças eram sempre seqüenciais. E inventou um processo simples: cartões perfurados, onde o “estampador” poderia registrar, ponto a ponto, a receita para a confecção de um tecido.
O tear inventado por Jacquard no século XVIII, utilizado por vários tecelões franceses nessa época, é utilizado até hoje pela indústria de tecidos. Os cartões perfurados utilizados para controlá-lo teriam novas aplicações alguns anos mais tarde.
- Babbage - uma figura estranha
Charles Babbage, filho de uma família abastada, cujo pai era banqueiro em Londres, nasceu em 26 de dezembro 1791, em Teignmouth, Inglaterra. Ocupou a cadeira de Matemática na Universidade de Cambridge, mas não comparecia à universidade e nunca proferiu uma conferência. Foi sócio fundador da Royal Astronomic Society (Sociedade Astronômica Real). Dedicou-se a corrigir erros nas tábuas de logaritmos que prejudicavam o trabalho dos astrônomos.
Em 1822, Babbage construiu o primeiro protótipo da sua Máquina de Diferenças. Essa máquina, segundo suas palavras, seria capaz de efetuar o “trabalho enfadonho e monótono das operações de cálculo repetidas”. Babbage pediu ao governo britânico uma subvenção para construir uma máquina maior e mais aperfeiçoada e obteve 1.500 libras para desenvolver seu projeto.
Em 1833, Babbage projetou a Máquina Analítica, que seria capaz de efetuar uma grande variedade de cálculos. A Máquina Analítica era constituída por um “moinho” e um “depósito”, ambos formados por rodas dentadas.
O depósito era capaz de armazenar até 100 números de 40 dígitos. Esses números ficariam armazenados até que o moinho precisasse utilizá-los. Os dados eram introduzidos na Máquina Analítica por meio de cartões perfurados.
A tia de Babbage, Augusta Ada Byron (filha ilegítima do poeta Lord Byron), interessouse pelo projeto do sobrinho e o estimulou a desenvolvê-lo.
A Máquina Analítica nunca foi construída, pois seria tão grande quanto uma locomotiva e em seu interior haveria uma intrincada mistura de mecanismos e engrenagens movidos a vapor. Restam apenas alguns desenhos e o “moinho”, construído pelo filho de Babbage.
Apesar de nenhum de seus projetos importantes terem sido finalizados, foi o primeiro a perceber que uma máquina de processamento deveria consistir em um dispositivo de entrada, uma memória, uma unidade central de processamento e um dispositivo de saída. Ele utilizava uma “impressora” como dispositivo de saída e como dispositivo de entrada, usava um leitor de cartões, inspirado nos cartões perfurados de Jacquard.
Babbage passou o resto de sua vida trabalhando em sua Máquina Analítica, sem nunca conseguir terminá-la. Em seus últimos anos de vida tentou criar em parceria com sua tia um método infalível para acertar resultados de corridas de cavalos. Também não teve sucesso nesse projeto. Mas sua Máquina Analítica é considerada o primeiro computador programável e Babbage entrou para a história como o “avô” da informática.
- Hollerith - As Estatísticas
Em 1890, o matemático americano Herman Hollerith utilizou cartões perfurados para tornar mais rápida a tabulação das estatísticas do censo dos Estados Unidos.
Os cartões utilizados por Hollerith tinham 12 fileiras de 20 orifícios, que eram perfurados para registrar dados como idade, país natal, profissão, estado civil e número de filhos.
Os funcionários encarregados do recenseamento preenchiam um formulário com essas informações, que, em seguida, eram transpostas para os cartões perfurados. Os cartões eram então inseridos em uma máquina tabuladora, na qual pequenos pinos atravessavam os orifícios dos cartões. Isso fechava um circuito elétrico, fazendo com que os indicadores no banco de mostradores avançassem.
O censo de 1890 levou um terço do tempo do censo anterior para ser tabulado, comprovando a eficiência do método de Hollerith, que ganhou prêmios e título de doutor na Universidade de Columbia pela sua invenção.
Hollerith fundou a Companhia de Máquinas Tabuladoras e vendeu sua invenção às companhias de estrada de ferro, órgãos do governo e até mesmo para a Rússia.
A companhia criada por Hollerith passou a se chamar International Business Machines Corporation (IBM) em 1924. A IBM iria se

transformar em uma das maiores empresas de Informática do mundo.
Os Computadores eletrônicos
- A era da Válvula
A Segunda Guerra Mundial provocou um rápido avanço da ciência da Informática, pois era necessário descobrir maneiras mais rápidas e eficientes de combater o inimigo.
A companhia IBM, em parceria com a marinha americana, passou a desenvolver um projeto de uma máquina capaz de efetuar todos os tipos de operações.
O desenvolvimento do projeto ficou a cargo de um jovem matemático da Universidade de Harvard, Howard Aiken.
O resultado foi o Mark I, concluído em 1943. Baseado no sistema de numeração decimal, essa máquina recebia dados por meio de cartões perfurados e era capaz de trabalhar com números de 23 dígitos. Efetuava operações de soma e subtração em 0,3 segundo e de multiplicação e divisão em três segundos.
Em 1941, o matemático alemão Konrad Zuze construiu um computador baseado no sistema binário, menor e mais eficiente do que o Mark I.
Em 1942, Zuze e seu colega Helmut Schreyer desejavam construir um computador com válvulas eletrônicas que controlaria a passagem dos circuitos elétricos por meio de tensões elétricas, sem utilizar peças móveis.
Hitler, no entanto, vetou a pesquisa, direcionando todo o potencial da Alemanha para a guerra, que ele acreditava que seria vencida rapidamente. Estava, portanto, duplamente errado.
O matemático inglês Alan Turing desenvolveu uma máquina com duas mil válvulas eletrônicas, com a qual conseguiu interceptar e quebrar os códigos secretos utilizados pelos alemães durante a guerra, com os métodos que Zuze havia planejado.
Em agosto de 1942, John Mauchly e Presper Eckert, pesquisadores da Escola Moore de engenharia, propuseram a construção

de um computador de alta velocidade que utilizava válvulas eletrônicas. Em 9 de abril de 1943 o exército americano assinou um contrato de 400 mil dólares com a Escola Moore para a construção do ENIAC.
O ENIAC possuía 17.468 válvulas e operava com sistema numérico decimal. Tinha 5,5 metros de altura por 25 de comprimento. Ficou pronto no final de 1945, quando a Segunda Guerra Mundial já havia terminado. O ENIAC (Figura 8), apesar de suas dimensões, só possuía memória suficiente para trabalhar com números da operação que estivesse executando.
Enquanto o ENIAC estava sendo construído, Mauchly e Eckert já trabalhavam no seu sucessor, o EDVAC, que era capaz de operar com instruções armazenadas eletronicamente.
O EDVAC trabalhava com números binários, o que permitia que o número de válvulas fosse consideravelmente diminuído.
John von Neuman, que havia trabalhado no projeto Manhattan, que resultou nas bombas atômicas lançadas sobre o Japão durante a Segunda Guerra, juntou-se à equipe de pesquisadores da Escola Moore em 1944.
Em junho de 1945, von Neuman escreveu o primeiro esboço de um relatório sobre o EDVAC, no qual descreve as funções da nova máquina e defende a tese de que o computador é muito mais que uma máquina de calcular, podendo ser utilizado para inúmeras atividades.
Em 1949, baseado nas propostas de Von Neuman, o cientista inglês Maurice Wilkes, da Universidade de Cambridge, construiu o primeiro computador operacional que utilizava programas de memória.
Mauchly e Eckert fundaram uma companhia para produzir um computador de uso comercial: o UNIVAC. Em 1950, a companhia foi vendida para a Remington Rand.
Em maio de 1950, Alan Turing foi um dos responsáveis pelo desenvolvimento de uma máquina que trabalhava com um programa armazenado, o ACE ( Automatic Computing Engine - Máquina de Computação Automática).
- O transistor
Em 1947, na Universidade de Stanford, foi inventado o primeiro dispositivo eletrônico de estado sólido, o transistor.
O substituto da válvula é a base de construção de todos os Microchips. Eles geram informações binárias: 1, se a corrente elétrica estiver passando, e 0 se não estiver. Todo o funcionamento lógico dos computadores é baseado nisso. Alguns chips têm milhões de transistores. Seguramente é a maior invenção da eletrônica até hoje. É praticamente impossível encontrarmos circuitos integrados que não possuam internamente, centenas, milhares e até milhões de transistores, juntamente com outros componentes. Como exemplo, podemos citar o atual processador Pentium 4, da Intel, que possui nada menos que 42 milhões de transistores.
Os transistores, devido ao seu baixo custo, vêm substituindo quase todos os dispositivos eletromecânicos, bem como a maioria dos dispositivos de controle, e aparecem em grande quantidade em qualquer dispositivo eletrônico, desde os computadores aos carros.
Desde a sua criação eram utilizados para sua produção o Silício e o Germânio. No momento do seu lançamento, esses materiais eram caríssimos, pois sua extração da natureza era mais difícil. Todavia, com as técnicas modernas esse custo se tornou irrisório.
- O Circuito Integrado

O circuito integrado nasceu de uma sugestão do inglês G.W. Dummer ao reunir todos os componentes de um circuito em um único condutor.
O primeiro protótipo de circuito integrado apareceu em 1958, projetado por Jack Kilby.
Em 1959, Robert Noyce desenvolveu um circuito integrado mais eficiente do que o de Kilby, no qual a ligação dos diversos componentes era gravada no próprio material semicondutor, dispensando a manipulação de pequenos fios feita com microscópio.
A invenção dos circuitos integrados permitiu que os computadores se tornassem cada vez menores e mais baratos, acessíveis a um número cada vez maior de pessoas. A partir de 1970, o silício começou a ser utilizado para produção dos circuitos integrados, mais fácil de ser manipulado e com uma resistência melhor ao efeito de avalanche térmica, causada pelo aumento da temperatura, devido a uma maior velocidade de processamento.
Mas a era da Informática estava apenas em seu início. Nos anos 80, surgiram os microprocessadores, e nos anos 90, os microprocessadores de alta velocidade, com a tecnologia MOS, que nada mais são que muitos circuitos integrados numa só mesa epitaxial (pastilha de silício). Atualmente, estamos caminhando para a nanotecnologia.
- A Evolução dos Computadores
A evolução dos computadores é dividida em 5 gerações que se definem desta maneira:
- 1ª Geração
Os computadores foram desenvolvidos nas universidades dos EUA e Inglaterra.
Preparados para aplicações científico-militares, esses equipamentos são baseados em tecnologias de válvulas eletrônicas, não tendo, portanto, confiabilidade.
O tempo de operação interna era milésimo de segundos (milisegundos). Entendese por tempo de operação interna o tempo gasto em operações aritméticas e lógicas.
- 2ª Geração
Nos equipamentos de segunda geração, a válvula foi substituída pelo transistor, dispositivo eletrônico desenvolvido em 1947 na BELL LABORATORIES por BARDEEN, BRETTAIN e SHOCKLE. Seu tamanho era 100 vezes menor que o da válvula, não precisava de tempo para aquecimento, consumia menos energia, era mais rápido e mais confiável. Os computadores desta época calculavam em microssegundos.
Transistor – Dispositivo eletrônico que serve para retificar e ampliar os impulsoselétricos.
- 3ª Geração
A terceira geração começa em 1965 com a substituição dos transistores pela tecnologia dos circuitos integrados. Os transistores e outros componentes eletrônicos são miniaturizados e montados em um único chip. A finalização desta geração é datada no início dos anos 70 a qual foi considerada a importância de uma maior escala de integração para o início da 4ª geração.
- 4ª Geração
A quarta geração de computadores caracteriza-se pelo uso do microprocessador. O microprocessador é a CPU ( Central Processing Unit) dos computadores, ou seja, Unidade Central de Processamento. No início da década de 70, os CPUs possuíam a capacidade de processar por volta de 100.000 informações por segundo e foram utilizados nos primeiros micros de 8 bits.
CPU – Processador central de informações. É nesta pastilha de silício que são processadas todas as informações computacionais.
INTEL – Um dos maiores fabricantes de processadores do mundo.
- 5ª Geração
Desde o início da era dos computadores, os especialistas em informática trataram de desenvolver técnicas que permitem aos computadores atuar, como faz o ser humano. Uma das bases de apoio desta nova forma de desenhar um programa é a inteligência artificial. Tradicionalmente, a inteligência artificial é dividida em 3 grandes aplicações: os processos de linguagem natural, que facilitam a comunicação do computador com o usuário; a robótica e tudo associado à visão e manipulação de objetos; e os sistemas especialistas, baseados no armazenamento do conhecimento adquirido. A fim de visualizar a evolução dos microprocessadores, apresentaremos, como exemplo, o quadro de processadores da INTEL e a utilização de cada um deles.
- Progresso da Performance

- Quadro de processadores Intel
Ao analisar os quadros acima, podemos observar que houve uma redução gradativa em valores gastos para a produção de um computador e, inversamente, ocorreu um grande aumento da sua capacidade de processamento.
A redução dos custos de produção dos computadores tornou essas ferramentas acessíveis as nossas casas e empresas. Quando surgiram, estes eram utilizados apenas pelo governo e pelos militares, e também nas grandes faculdades, onde existia alto investimento do governo em pesquisa.
Com essa breve história espero que vocês possam obter uma visão da evolução dessas incríveis máquinas até os dias atuais e da imensa utilidade na capacidade de aproveitamento do seu poder de processamento.

3 - LÓGICA BINÁRIA
- Código binário
O código binário é um sistema de numeração que possui apenas dois algarismos: 0 e 1. O nome binário se refere ao número de algarismos usados, ou seja, apenas dois algarismos. Ele também se refere à base do sistema: a base 2.
Um sistema de numeração nada mais é do que um sistema de regras que nos diz quais algarismos devem ser usados (neste caso, apenas 0 e 1) e como eles devem ser dispostos para que juntos possam representar qualquer valor, como os números 9, 13, 18, etc.
Cada algarismo 0 ou 1 é chamado de bit (sigla em inglês para unidade binária: BIT = BInary uniT). Um conjunto de 8 bits forma o que se chama de byte (sigla em inglês para termo binário: BYTE = BinarY TErm). O byte e seus derivados, como o megabyte e o gigabyte, são valores muito empregados entre usuários de computadores (exemplos: 256 Mbytes de memória, 40 Gbytes de espaço em disco, etc).
O sistema binário é diferente do sistema decimal, ou base 10, em que são utilizados os algarismos 0, 1, 2, 3, 4, 5, 6, 7, 8 e 9. Desde pequenos estamos acostumados a usar no nosso dia-a-dia o sistema decimal. Porém, o sistema binário é ainda mais simples do que o decimal, como será visto adiante, pois utiliza apenas dois algarismos diferentes. Os algarismos 2 a 9 não são utilizados no sistema binário. Existem vários outros sistemas de numeração, como o hexadecimal que usa os algarismos 0, 1, 2, 3, 4, 5, 6, 7, 8, 9, A, B, C, D, E e F para representar os diversos números.
No código binário, qualquer número deve ser representado apenas com os algarismos 0 e 1. Como isso pode ser possível? Através das posiçõesque os algarismos ocupam nos números binários. Cada posição representa uma potência diferente em relação à base do sistema de numeração. O sistema binário possui base 2 e o decimal, base 10.
Por exemplo, o número “nove” no sistema decimal se escreve 09, o número “treze” se escreve 13 e o número “dezoito” se escreve 18.
Expandindo os números, usando a base 10, temos:
• 09: 0 x 101 + 9 x 100 = 9• 13: 1 x 101 + 3 x 100 = 13• 18: 1 x 101 + 8 x 100 = 18
Estes mesmos números, nove, treze e dezoito, são escritos no sistema binário como: 01001, 01101 e 10010. Outros exemplos se encontram na Figura 13.
Expandindo os números, usando a base 2, temos:
• 01001: 0 x 24 + 1 x 23 + 0 x 22 + 0 x 21 + 1 x 20 = 9• 01101: 0 x 24 + 1 x 23 + 1 x 22 + 0 x 21 + 1 x 20 = 13• 10010: 1 x 24 + 0 x 23 + 0 x 22 + 1 x 21 + 0 x 20 = 18
- Lógica binária

O matemático inglês George Boole (1815-1864) publicou em 1854 “As leis do pensamento”, obra em que criou uma forma de armazenar e processar informações utilizando o código binário. Desta maneira, os bits não serviriam apenas para representar números, mas para qualquer coisa que precise ser informada a um computador.
Uma letra, uma vírgula, informações sobre datas, horários, programas de computador, tudo pode ser representado por seqüências de algarismos 0 e 1. Isto quer dizer que o código binário pode ser utilizado para representar qualquer tipo de informação. Cada informação pode ser transformada em um código binário e interpretada pelo computador.
A lógica binária (ou lógica booleana, em homenagem a George Boole) faz o uso dos algarismos 0 e 1, associados aos conceitos de falso e verdadeiro, para desenvolver um conjunto de operações lógicas, como “e”, “ou”, “negação”, dentre outras.
As operações lógicas são importantes para que os computadores tomem decisões, como: “Se o usuário clicar um botão, mostre o resultado da operação de soma no monitor, se não apertar mostre uma mensagem de ajuda”,
“Se o resultado da operação realizada for maior que 50, retorne o resultado, senão espere o próximo valor”,
“Se o usuário digitar uma tecla, mostre a letra correspondente a ela no monitor, se não digitar não faça nada”.
Algumas dessas operações lógicas podem ser observadas na Figura 15, onde A e B podem representar os algarismos 0 ou 1. O bit 0 equivale à idéia de falso e o bit 1 à idéia de verdadeiro. Nas tabelas da Figura 15 a coluna X representa o resultado da operação entre o bit A e o bit B. Algumas vezes é desta forma que o computador interpreta os bits, já em outras eles representam números, letras, ou quaisquer outras informações.
- Por que os computadores usam o código binário?
Outro matemático inglês, Charles Babbage (1792-1871), projetou o “Calculador Analítico”, aparelho muito próximo de um computador atual, porém era uma máquina totalmente mecânica. Ela era composta de uma memória, um engenho central, engrenagens, alavancas e dispositivos para entrada e saída de dados, que nada mais são do que informação.
A partir da década de 30, foram feitas várias tentativas de substituir as partes mecânicas dos equipamentos por partes elétricas, com o uso dos relés, equipamentos elétricos que funcionam como chaves, com posições “aberta” (sem corrente, ou seja, bit 0) ou “fechada” (com corrente, ou seja, bit 1). A vantagem de um computador elétrico é a sua velocidade, muito superior à do computador mecânico. Isto ocorre porque a corrente elétrica é muito mais rápida do que qualquer engrenagem mecânica.
Quando os computadores passaram a funcionar através da energia elétrica, o código binário foi a melhor forma encontrada para representar os sinais elétricos através de algarismos. Isto porque há dois estados possíveis para os componentes elétricos: com corrente elétrica ou sem corrente. Desta forma, o bit 0 é representado pela falta da corrente elétrica, e o bit 1 pela presença da corrente.
Pode-se entender o código binário comparando os bits a interruptores elétricos, em que 0 indica “desligado” e 1 “ligado”, como representado na Figura 17. Um byte (seqüência de oito bits) pode então ser imaginado como uma seqüência de oito interruptores, sendo que as posições em que se encontram os interruptores ligados e desligados indica qual número ou letra está sendo representado, como visto anteriormente.

Como o código binário é a representação utilizada pelos computadores, toda informação, seja um número ou uma letra, precisa ser representada através de um código composto de uma seqüência de 0 e 1. São as diferentes combinações entre os bits que são usadas para criar uma mensagem que a máquina (o computador, a calculadora, o relógio, etc) possa entender.
Como já foi visto, o número nove é representado pelo sistema binário por 00001001. Observe que, para qualquer sistema de numeração zeros à esquerda não possuem valor algum. A representação 00001001 é vista pelo computadorcomo uma lâmpada acesa, seguida de duas apagadas, depois outra acesa e por fim quatro apagadas.
Os computadores modernos (digitais) efetuam cálculos (operações aritméticas e lógicas) com precisão e rapidez, através do uso da lógica binária, desenvolvida por Boole no século XIX. Estas operações são realizadas pelos circuitos integrados, ou chips, existentes nos computadores. Eles nada mais são que componentes eletrônicos que realizam operações lógicas (como as mostradas pela Figura 15).
Além dos computadores, existe uma série de aparelhos e equipamentos digitais: relógios, termômetros, voltímetros, amperímetros, calculadoras, dentre outros. A Figura 18 e a Figura 19 mostram uma calculadora de engenharia, e também a placa com o circuito digital da mesma. Pode-se observar por onde passam os sinais elétricos na placa: nas finíssimas linhas metálicas que interligam os diversos componentes eletrônicos. Cada linha da placa, por onde passará a corrente elétrica, pode representar apenas dois valores: 0 (sem corrente elétrica) ou 1 (com corrente elétrica).
4 - FUNCIONAMENTO DO COMPUTADOR
4.1 - O que é Hardware?
A palavra “hard” em inglês significa “duro, rígido”. Porém, na informática, ela tem o significado de palpável, algo que possamos sentir, ou seja, a parte física do computador. Hardware é o conjunto de partes mecânicas, elétricas, eletrônicas, magnéticas e eletromagnéticas do computador.
É no hardware que os dados (neste contexto o mesmo que informação) entram, são processados e saem. Portanto, hardware é a máquina propriamente dita: teclado, monitor, mouse, impressora ou qualquer outro equipamento (Figura 20).
Fazendo-se uma comparação com o ser humano, o hardware é o nosso corpo, e também todos os órgãos internos, responsáveis por processar a comida que ingerimos, as informações que vemos e ouvimos, dentre outras coisas.
4.2 - O que é software?
A palavra “soft” em inglês significa “macio, mole”. Na informática, esta palavra corresponde à parte lógica do computador, ou

seja, aos programas. Software é o conjunto de programas e procedimentos relacionados ao computador.
Um programa nada mais é do que um conjunto de instruções que possibilita ao computador a execução de uma determinada tarefa. Ele é a parte lógica que dota o equipamento físico (hardware) de capacidade para realizar todo tipo de trabalho. O hardware executa os programas de software, que possuem as instruções que são enviadas para o computador em uma linguagem que este possa entender. A Figura 21 mostra um exemplo de software.
Comparando mais uma vez com o ser humano, o software corresponde ao nosso pensamento, ao nosso conhecimento, que indicam como o nosso corpo (o hardware) deve realizar diversas tarefas.
4.3 - Elementos básicos de um computador:
Processar dados consiste basicamente em tomar decisões lógicas do tipo “faça isso em função daquilo”. Por exemplo: “compare dois valores e realize uma ação se o primeiro for maior, outra ação se ambos forem iguais ou ainda uma terceira ação se o primeiro for menor”.
Todo e qualquer processamento de dados, por mais complexo que seja, nada mais é que uma combinação de ações elementares baseadas neste tipo de tomada de decisões simples. O circuito eletrônico elementar capaz de tomar decisões é chamado “porta lógica”.
Armazenar dados consiste em manter um dado em um certo local enquanto ele for necessário, de tal forma que ele possa ser recuperado quando se precisar dele de novo. O circuito eletrônico elementar capaz de armazenar um dado é denominado “célula de memória”.
Portanto, todo computador, por mais complexo que seja, pode ser entendido como uma combinação de apenas dois elementos básicos: portas lógicas e células de memória, interligados por condutores elétricos. A cada momento, estes condutores podem estar conduzindo corrente elétrica ou não, dependendo da situação de qual bit eles estejam representando:
Sem corrente elétrica: representação do bit 0
Com corrente elétrica: representação do bit 1
4.4 - Componentes de um computador:
O projeto lógico de um computador foi desenvolvido pelo matemático húngaro John von Neumann (1903-1957). Em sua proposta, von Neumann sugeriu que as instruções fossem armazenadas na memória do computador. Até então elas eram lidas de cartões perfurados e executadas, uma a uma.

Armazenar as instruções na memória, para então executá-las, tornou o computador mais rápido, já que no momento da execução, as instruções são obtidas mais rapidamente. A maioria dos computadores de hoje em dia segue ainda o modelo proposto por von Neumann, pois apresenta um funcionamento adequado, representado na Figura 23.
Baseados no projeto realizado por von Neumann, também chamada arquitetura de von Neumann, podemos dividir o hardware dos computadores nos seguintes blocos: CPU, memória, dispositivos de entrada e dispositivos de saída.
CPU (Unidade Central de Processamento): A CPU (do inglês Central Processing Unit) é responsável pelo controle central do computador, desde a busca dos dados até os cálculos matemáticos necessários para as operações.
A CPU coleta os dados recebidos pelos dispositivos de entrada, envia-os ao local correto de processamento, calcula o resultado e o armazena na memória, para depois enviar este resultado para os dispositivos de saída adequados. Ela pode ser comparada com o cérebro humano, pois é a CPU que governa todo o funcionamento do corpo (hardware).
A CPU é formada pelos seguintes elementos:
• Unidade de controle, aquela que é responsável pela busca de instruções na memória principal e pelos sinais de controle que determinam que tipo de operação será realizada com os dados.
• Unidade lógica aritmética (ULA), ela é capaz de realizar operações, ou seja, realizar os cálculos matemáticos necessários para as tarefas.
• Registradores (memória pequena de alta velocidade), eles são capazes de armazenar resultados temporários.
Memória (unidade de armazenamento): Sem memória, o computador não poderia saber como agir com as informações que ele recebe ou estar pronto para lembrar qual o resultado de uma tarefa que acabou de realizar. A memória do computador possui duas formas:
• Memória interna: aquela que contém dados e instruções que o computador precisa utilizar imediatamente e que estão sempre à disposição dele. Pode-se comparar com as informações (nomes de pessoas conhecidas, datas importantes, dentre outras) que possuímos guardadas no nosso cérebro, que estão lá assim que precisamos.
• Memória externa (principal): aquela que atua como um local de armazenamento permanente de informações que o computador precisa usar de vez em quando. Podese comparar com os livros que temos que usamos algumas vezes para obter alguma informação que desejamos e que não lembramos imediatamente. Todavia, não podemos acessá-las tão rapidamente quanto as informações que temos armazenadas em nosso cérebro.
Dispositivos de entrada de dados: Antes de poder processar algo, o computador necessita receber uma ordem para funcionar, além de qual informação usar neste funcionamento. Isto é realizado por meio de um dispositivo de entrada, através do qual o dado é introduzido no computador. Os dispositivos de entrada mais comuns são o teclado, o mouse, o scanner e a webcam.
Comparando com o nosso corpo, os dispositivos de entrada são nossos olhos, boca e nariz. Eles fazem com que possamos obter os dados de entrada: comida, bebida, ar para respirarmos, imagens de objetos, sons de animais, etc
Dispositivos de saída de dados: Uma vez que o computador aceitou as instruções e processou a informação, ele utiliza o dispositivo de saída como meio de comunicar o resultado ao usuário, como mostra a Figura 24. Os dispositivos de saída mais comuns são a tela do monitor, a impressora e as caixas de som.
Se compararmos com o nosso corpo, os dispositivos de saída são nossa boca, nossas mãos, etc. Eles fazem com que

possamos falar e escrever, ou seja, processar os dados ou informações de entrada e enviá-los para o mundo externo.
Dispositivos de entrada e saída de dados: Alguns dispositivos podem servir tanto para a entrada de dados como para a saída deles. São exemplos destes dispositivos as impressoras que também funcionam como scanners, os modems e os monitores sensíveis a toque (como os usados em terminais eletrônicos de bancos).
Comparando mais uma vez com o nosso corpo, a boca pode ser considerada um dispositivo de entrada e saída. Quando nos alimentamos, ela funciona como entrada e quando falamos, como saída.
4.5 - Sistema operacional
O sistema operacional (como Windows 98, NT, 2000, XP ou Linux) é o principal programa do computador, que controla todos os recursos existentes nele (dispositivos físicos e funções de outros programas).
O sistema operacional (SO) toma conta do computador e facilita a vida dos usuários, deixando que eles se preocupem com coisas mais úteis e produtivas. O SO é responsável pela interface (ligação) entre o hardware e o software ao usuário do computador, como indica a Figura 25.
O SO gerencia como cada programa irá utilizar os recursos existentes em cada computador, da melhor forma possível. Ele pode ser comparado a um tradutor, responsável por interpretar as nossas ações com as da máquina, facilitando desta forma a integração que se dá de ambos os lados.
4.5.1 - Execução de um programa no computador
O fluxo dos dados em um computador pode ser comparado com um conjunto de ruas, em que os dados são os automóveis que circulam por elas. Os guardas de trânsito são os sinais de controle, responsáveis por sinalizar para onde os carros devem seguir, no caso de vários caminhos.
Este fluxo de dados, em um computador, obedece ao esquema da Figura 26. As ações realizadas pelo computador são realizadas na seguinte ordem:

O programa (conjunto de instruções que devem ser seguidas pelo computador) é obtido através dos dispositivos de entrada. São as regras de trânsito.
O programa é armazenado na memória principal. As regras de trânsito são armazenadas nos manuais de trânsito, para que sejam consultados sempre que necessário.
A unidade de controle busca a instrução a ser executada na memória. A central de trânsito pesquisa nos manuais o que deve ser feito para organizar o trânsito.
As instruções são executadas em uma seqüência determinada por suas posições de memória,também chamadas de endereço.
A unidade de controle realiza a decodificação da instrução. A central de trânsito lê e interpreta as regras de trânsito do manual, fornecendo aos guardas de trânsito.
Sinais de controle são enviados da unidade de controle para a ULA para a execução das instruções. Os guardas de trânsito se dirigem às áreas determinadas pela central.
Dados são transferidos entre diversos elementos por um caminho, chamado de barramento (o barramento é usado tanto para as instruções quanto para os sinais de controle). Os carros e os guardas de trânsito se dirigem através de avenidas (barramentos).
Os sinais de controle selecionam a operação que a ULA vai realizar. Os guardas determinam se os carros devem seguir ou parar, e em que sentido devem trafegar.
A ULA realiza as ações indicadas nas instruções, executando operações numéricas (aritméticas)e não numéricas (lógicas).
O resultado deste processamento é mostrado para o usuário através dos dispositivos de saída.
O contador de instrução contém o endereço de memória da próxima instrução a ser executada. O ciclo continua na etapa 3, de forma que novas instruções possam ser executadas pelo computador.
5 - PLACA-MÃE (MOTHERBOARD/MAINBOARD/MOBO)
5.1 - Introdução
Uma das grandes estratégias da plataforma PC, que levou a seu enorme sucesso no mercado, é a modularidade. Os PCs são construídos com diferentes componentes individuais, que podem ser misturados e combinados em milhares de configurações diferentes. Isto permite ao usuário customizar seu PC de acordo com a utilização que o micro terá.

Os fundamentos da arquitetura modular do PC estão na placa-mãe, peça chave do hardware, à qual são conectados todos os demais componentes e os periféricos do computador. A placa-mãe também pode ser referenciada como motherboard, mainboard, system board (placa do sistema), maincard (placa principal), mothercard ou ainda como simplesmente mobo. Sua importância explica-se pelo fato de que ela constitui o elemento determinante da arquitetura interna do computador, ou seja, da forma pela qual se comunicam todos os componentes da máquina.
A placa-mãe é uma placa de circuito impresso, formada por um conglomerado de camadas de baquelita ou resina, entre as quais se intercalam os diversos circuitos elétricos que compõem as linhas de conexão que intercomunicam todos os seus lementos. Em geral, todas essas linhas de comunicação integram fisicamente os barramentos de dados.
No entanto, a placa-mãe não é unicamente uma placa de circuito impresso. Em sua superfície se encontram os vários elementos que gerenciam e determinam seu funcionamento, como o soquete no qual é encaixado o processador, os slots para os módulos de memória, o chipset e, entre outros componentes, os conectores dos barramentos (bus) de expansão e seus circuitos de apoio.
Assim, todos os circuitos e componentes necessários para o funcionamento do PC estão contidos ou são conectados a placa-mãe.
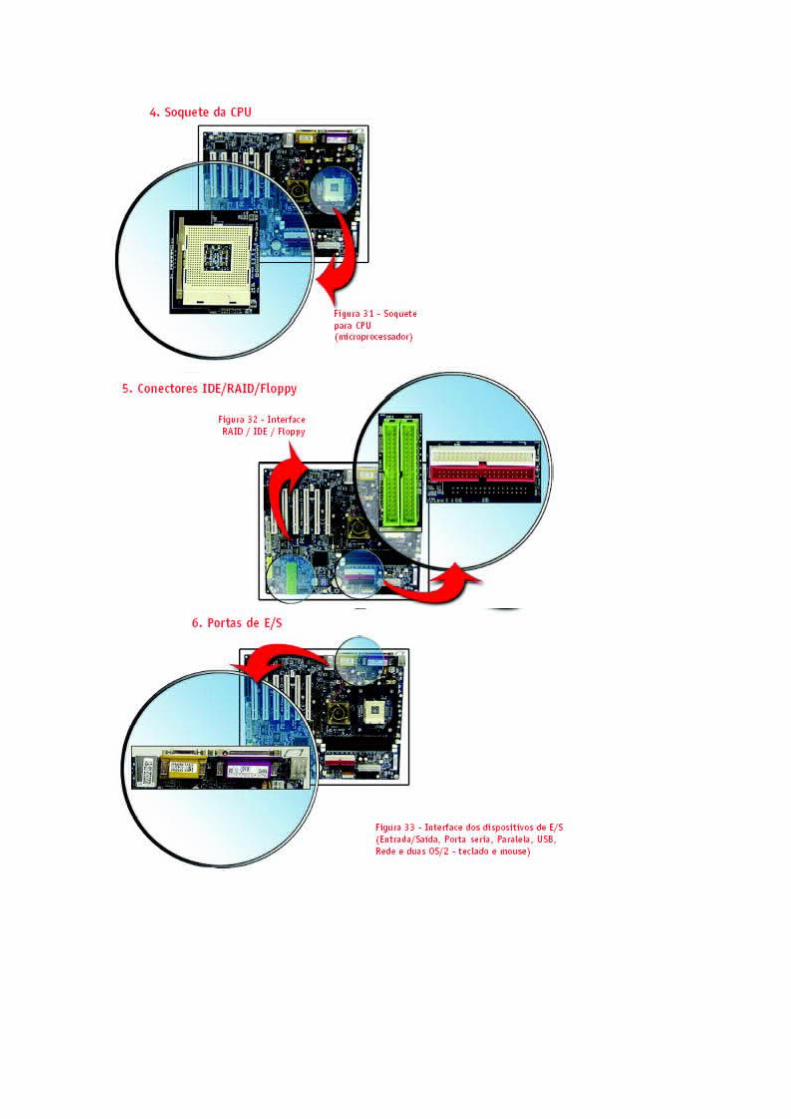
Principais componentes da placa-mãe
1. Slot AGP2. Bateria3. BIOS4. Soquete da CPU5. Conectores IDE/RAID/Floppy6. Portas de E/S7. Soquetes para Memória8. Ponte Norte (NorthBridge)9. Slots PCI10. Conector da Fonte de Força11. Ponte Sul (SouthBridge)



5.2 - A placa-mãe
A placa-mãe é, de várias formas, o componente mais importante do computador (não é o processador, contudo ele recebe mais atenção). Se o processador é o cérebro do computador, então a placa-mãe e seus principais componentes (como mostrados nas figuras anteriores) formam o principal sistema utilizado pelo processador para controlar o resto do computador. Ter um bom entendimento de como a placa-mãe e seus subsistemas funcionam é, provavelmente, a parte mais crítica para se ter um bom entendimento de como os PCs funcionam.
A placa-mãe tem um papel importante nos seguintes aspectos do computador, repare a quantidade:
Organização: de uma maneira ou de outra, tudo é eventualmente conectado à placamãe. A forma como a placa-mãe é desenhada e construída dita, com isso, como o computador será organizado.
Controle: A placa-mãe contém o chipset e o programa BIOS, que entre eles controlam os principais fluxos de dados no computador.
Comunicação: Quase toda a comunicação entre o PC com os periféricos, outros computadores e até com o usuário, passa pela placa-mãe.
Suporte ao Processador: A placa-mãe dita quais os processadores o usuário pode escolher para colocar no PC.
Suporte a Periféricos: A placa-mãe determina, em grande parte, quais tipos de periféricos o usuário pode utilizar no seu PC. Por exemplo, que tipo de placa de vídeo podese utilizar (ISA, PCI, AGP) depende de quais barramentos a placa-mãe utilizada tem.
Performance: A placa-mãe é o principal fator que determina a performance do sistema, por duas razões, principalmente. Primeiramente, a placa-mãe determina que tipo de processador, memória, barramentos do sistema, a velocidade que a interface de disco rígido pode ter e estes componentes ditam diretamente a performance do sistema. Segundo, a qualidade dos circuitos da placa-mãe e dos chipsets também tem um impacto na performance.
Cap Capacidade acidade de Upgrade: A capacidade da placa-mãe dita até que ponto o usuário é capaz de atualizar sua máquina. Por exemplo, existem muitas placas-mãe que aceitam somente Pentiums com velocidade de até 133 MHz, enquanto outras até 200 MHz. Obviamente, a segunda permite uma quantidade maior de upgrades, pois aceita processadores maiores que Pentium 133 MHz.
A forma física da placa-mãe descreve, geralmente, a forma de uma série de coisas, como o tipo de conexão de energia que pode ser utilizada. Uma companhia pode fabricar duas placas-mãe que têm basicamente as mesmas funcionalidades, mas com forma física diferentes, ou seja, a real diferença será o layout físico da placa-mãe, na posição dos componentes. Na realidade, muitas companhias fazem isto.
5.2.1 - Padrão AT e baby AT
Até recentemente, o padrão AT ou baby AT era a forma mais comum de placa-mãe no mundo. Estas duas variantes diferem primeiramente no tamanho; as antigas AT tinham 12" (± 30 cm) de largura. Isto significa que elas não podem ser utilizadas nos gabinetes mini-torre. Atualmente, não existem placas-mãe AT novas no mercado. Elas eram comuns nos computadores mais antigos, como o 386.
A placa-mãe baby AT foi, por volta de 1997, a forma mais comum encontrada no mercado. Depois de três anos de marketing e um empurrão da Intel, o ATX substitui o AT, sendo o tipo mais comum atualmente.
A placa-mãe baby AT tem 8.5" (± 20 cm) de largura e, normalmente, 13" (± 30 cm) de comprimento. Um problema com a baby

AT é que alguns fabricantes, para diminuir o custo, diminuíram o tamanho da placa. Assim, pose-se encontrar placas baby AT com 10" (± 25 cm) ou 11" (± 27 cm).
As placas-mãe baby AT são distinguidas pela sua forma e usualmente pela presença de um único conector para teclado DIN (5 pinos) soldado na placa-mãe. Os conectores das portas serial e paralela são, quase sempre, ligados através de cabos, que conectam a placa-mãe aos conectores físicos que são presos ao gabinete.
Os fabricantes colocam o soquete/slot do processador e da memória na parte da frente da placa-mãe. Na época em que esta forma de placa-mãe (design) foi criada, ela funcionava muito bem; o processador e memória eram pequenos e colocados diretamente na placa-mãe. Contudo, atualmente nós temos memórias que utilizam soquetes DIMM/ SIMM e grandes processadores que necessitam de grandes dissipadores com ventoinhas. Isto obrigou os fabricantes a redesenharem o layout da placa-mãe.
5.2.2 - Padrão ATX e Mini ATX
O desenho do ATX tem uma série de vantagens significativas sobre os modelos anteriores. As especificações do ATX não mudaram somente a placa-mãe, mas também o gabinete e as fontes de força. Algumas das principais mudanças estão listada abaixo.
• Integração dos conectores das portas de E/S: as placas-mãe baby AT utilizavam cabos para ligar os conectores físicos das portas paralela e serial à placa-mãe. Já nas placas ATX estes conectores vêm soldados diretamente na placa-mãe, ficando, assim, integrados na placa-mãe. Este aperfeiçoamento reduziu os custos, poupou tempo na instalação, aumentou a confiabilidade (visto que as portas podem ser testadas antes de se comprar a placa-mãe) e tornou as placas-mãe mais padronizadas.
• Integração de conectores PS/2 para mouse/teclado
• Redução da sobreposição de espaços utilizados pela placa-mãe e pelos drives (HD, CDROM, Floppy, etc.), ou seja, muitas vezes estes drives disputavam espaço físico com a placa-mãe. Às vezes, não tinham como ser colocados corretamente, pois esbarravam na placa-mãe ou em algum componente dela.
• Redução da sobreposição de espaços utilizados pelas placas de expansão e pelos drives (HD, CD-ROM, Floppy, etc.), a mesma coisa do item anterior.

• Conector de eletricidade melhorado: a placa-mãe ATX usa um único conector de 20 pinos, no lugar do confuso par de conectores em linha utilizado pelos padrões anteriores. O técnico não corre o risco de danificar a placa-mãe ao conectar os cabos de força de forma errada.
• Suporte a desligar/ligar: a fonte de força ATX é ligada e desligada através de um sinal da placa-mãe, dispensando o toque físico ao botão de liga e desliga. Isto permite que o PC seja ligado e desligado através de software, permitindo aumentar o gerenciamento da eletricidade.
• Suporte ao fornecimento de eletricidade a 3.3 volts: as placas-mãe estilo ATX possuem conectores elétricos de 3.3 volts diretamente da fonte. Esta tensão é usada em quase todos os processadores atuais, e reduz custo, pois o sistema de redução da tensão de 5 volts para 3.3 volts foi removido.
• Melhor controle do fluxo de ar: a fonte de força ATX sopra o ar para dentro do gabinete, em lugar de puxá-lo para fora. Isto significa que o ar do interior do gabinete é empurrado para fora através das frestas, em lugar de ser aspirado por elas. Facilitando, pois, o soquete ou slot do processador na placa-mãe localiza-se próximo à fonte de força, o ventilador da fonte de força auxilia no resfriamento da fonte de força. Em muitos casos isto elimina a necessidade de uso do ventilador do gabinete.
• Facilitou a atualização (upgrade): em parte devido ao novo design. Este novo design torna a atualização (upgrade) mais fácil, porque permite um acesso mais eficiente aos componentes da placa-mãe.
5.2.3 - Sistema de Barramentos
A placa-mãe também segue o princípio da modularidade, ou seja, a placa-mãe é composta por vários componentes independentes que se comunicam. Por exemplo, o processador e as memórias RAM são dois componentes independentes, que têm uma comunicação muito intensa entre si.

Os componentes dentro do computador conversam um com outro de várias formas diferentes. A maioria dos componentes dentro do computador, entre eles processador, cache, memória, placas de expansão e dispositivos de armazenamentos, utilizam o barramento (bus) para se comunicar.
Um barramento, em termos computacionais, consiste num canal no qual a informação flui entre dois ou mais dispositivos (tecnicamente, um barramento com dois dispositivos é considerado por muitos um porto e não um barramento). Um barramento, normalmente, tem vários pontos de acesso, ou melhor, lugares onde um dispositivo pode se conectar tornado-se, assim, parte do barramento. Dispositivos conectados no barramento podem enviar informações para outros dispositivos, que também estejam conectados através do bus (barramento), bem como receber. O conceito de barramento é relativamente simples, de forma que os barramentos internos e externos ao PC, na verdade, trabalham de maneira semelhante. Na realidade, um telefone tocando numa casa é um barramento; as informações fluem através da rede indo até o lugar onde ele está, e outra pessoa pode se conectar ao barramento fazendo uma extensão. Assim, todos os telefones da extensão compartilharão a mesma informação (voz) através da fiação (barramento, bus).
Imagine uma escola com cinco salas e um banheiro colocados lado a lado, formando uma fila, as portas das salas e do banheiro dão acesso a um corredor, que interliga todas elas. Nessa escola ninguém pode andar no corredor, exceto quem tiver um passe. Mas só existe um passe na escola e ele é controlado pelo inspetor. Assim, qualquer aluno, de qualquer sala, pode ir ao banheiro ou a outra sala, desde que tenha o passe. Suponha que um aluno queira ir ao banheiro, ele pede o passe ao inspetor, vai ao banheiro e na volta entrega o passe ao inspetor. Caso dois alunos queiram ir ao banheiro ao mesmo tempo, aquele que pedir o passe primeiro vai, o outro fica esperando pela devolução do passe. Todos os dispositivos do computador são as salas. Quando as memórias vão transferir dados para o processador elas pedem o passe e mandam as informações através do barramento (corredor) para o processador (outra sala).
5.2.3.1 - Hierarquia dos Barramentos
Os barramentos do PC, de certa forma, têm uma hierarquia. A maioria dos computadores atuais tem ao menos quatro barramentos. Esta hierarquia considera a distância destes barramentos em relação ao processador (CPU). Assim cada um tem um nível, que integra partes diferentes do PC. Cada nível é geralmente mais lento que o nível acima. O processador ocupa o nível mais alto, pois ele é o dispositivo mais rápido do computador (PC).
• Barramento do processador: este é o barramento de nível mais alto, ele é utilizado pelo chipset para enviar informações do e para o processador.
• Barramento da cache: eles eram utilizados pelo Pentium Pro e Pentium II exclusivamente para acessar o sistema de cache. Ele é algumas vezes chamado de backside bus (barramento oculto). Porém, os processadores e chipsets atuais têm a cache conectada diretamente ao barramento da memória.
• Barramento da memória: este é o segundo nível, ele conecta o sistema de memórias ao chipset e ao processador. Em muitos sistemas atuais o barramento do processador e da memória são a mesma coisa.
• Barramento local de E/S (Entrada e Saída): este é o barramento de Entrada/Saída utilizado para conectar periféricos de performance crítica para a memória, chipset e processador. Por exemplo, placa de vídeo, placas de rede e dispositivos de armazenamento (HDs, CD-ROM, etc). O mais comum é o PCI (Peripheral Component Interconnect, componente de interconexão de periféricos).
• Barramento de E/S padrão: é o mais lento de todos, era utilizado para conectar periféricos mais lentos (modem, mouse, etc) e para manter a compatibilidade com os anteriores. Este barramento é conhecido como ISA (Industry Standard Architecture, arquitetura padrão da industria). Ele não é mais utilizado, sendo encontrado somente nas placas-mãe mais antigas.
O chipset é o maestro que controla a orquestra da comunicação e garante que todos os dispositivos do sistema estão se comunicando corretamente.
Os computadores atuais utilizam um “barramento” especial e exclusivamente desenhado para a comunicação gráfica, o AGP (Accelerated Graphics Port, porto para aceleração gráfica). A palavra “barramento” está entre aspas porque, tecnicamente, é um porto e não um barramento. A distinção entre porto e barramento é que o barramento é geralmente desenhado para que vários dispositivos compartilhem a mesma mídia (meio utilizado fisicamente por todos), ou seja, segundo a analogia da escola o barramento é o corredor que é utilizado por todas as salas para que os alunos possam se locomover entre elas. O porto é a comunicação entre dois dispositivos, somente.
Em alguns PCs mais novos, pode-se encontrar o barramento PCI Express, que é o candidato a sucessor do PCI comum. Enquanto a velocidade do PCI comum é 132 MB/s para todos os periféricos, a do PCI Express chega a 8 GB/s para cada periférico.
5.2.3.2 - Largura do Barramento
O barramento é o canal sobre o qual a informação flui. Quanto mais largo for o barramento maior será a quantidade de informação que ele transportará. Suponha uma rua com uma única faixa, onde somente um carro poderá passar nela de cada vez. Imagine que ela seja duplicada, ou seja, que ela tenha duas faixas. Nesta nova configuração, dois carros poderão passar simultaneamente. Suponha agora que a pista tenha 64 faixas de largura, isto possibilita que 64 carros passem nela ao mesmo tempo. O barramento é semelhante ao exemplo, ele pode ser constituído de mais de uma linha, de forma que cada linha transporta um bit. Segundo a analogia feita, o barramento é a estrada e as linhas são as pistas da estrada.
O barramento (bus) ISA original tinha 8 bits de largura, porém, o barramento (bus) universal tem 16 bits. O PCI, outro barramento de E/S (Entrada/Saída), e o porto AGP têm 32 bits de largura. Já o barramento processador-memória possui 64 linhas.
5.2.3.3 - Velocidade do Barramento

A velocidade do barramento reflete quantos bits de informação podem ser enviados através de cada linha do barramento por segundo. Utilizando a analogia estrada, seria a velocidade máxima dos carros na estrada. Muitos barramentos transmitem um bit por linha, por pulso de clock, contudo, novos barramentos de alta performance, como o AGP, podem enviar mais de um bit por pulso de clock, aumentando a performance. Isto é o contrário de barramentos antigos como ISA, que precisam de dois pulsos de clock para envia um bit.
5.2.3.4 - Largura de banda do barramento (Bandwidth, throughput)
Largura de banda se refere à quantidade total de dados (bits) que podem, teoricamente, ser transferidos pelo barramento por unidade de tempo. Utilizando a analogia da estrada, seria a quantidade total de carros que trafegam pela estrada por unidade tempo.
A tabela abaixo mostra a largura de banda teórica dos barramentos/portos de E/S (Entrada/ Saída) mais comuns. Muitos destes barramentos podem trabalhar em diferentes velocidades, a velocidade mostrada é a mais comumente encontrada.
OBS.: A largura de banda citada na tabela acima talvez tenha causado alguma confusão. Por exemplo, a largura de banda para o PCI padrão é calculada pelos fabricantes da seguinte forma 32 / 8 x 33.3 = 133.3 MB/seg. Contudo, esta conta está tecnicamente errada. O problema consiste na diferença dos Ms (MHz e MB). Um MHz equivale a 1.000.000 (106), mas um MB equivale a 1.048.576 (220). Assim a largura de banda do PCI ficaria da seguinte forma: 32 / 8 x 33.3 x 1.000.000 / 1.048.576 = 127 MB/seg.
Teoricamente o barramento PCI pode ser estendido para 64 bits de largura e 66 MHz de velocidade. Todavia, por razões de compatibilidade, a esmagadora maioria dos barramentos PCI e seus dispositivos são mantidos a 33 MHz com 32 bits de largura. O AGP é baseado neste padrão, rodando, então, a 66 MHz, mas permanecendo com 32 bits de largura. Ele tem alguns modos adicionais 2x, 4x e 8x, que o permitem enviar respectivamente 2, 4 ou 8 bits por pulso de clock, produzindo velocidades de 133, 266 ou 533 MHz.
5.2.4 - Slots de expansão
Todas as placas-mãe têm um ou mais sistemas de barramentos de E/S (Entrada/Saída). Eles são utilizados para expandir a capacidade do computador. Os slots na parte traseira do PC são onde as placas de expansão devem ser colocadas (como placas de vídeo, placa de som, placa de rede, etc). Estes slots permitem as placas de expansão fazerem parte do barramento ao qual o slot está ligado e, assim, se comunicarem com o chipset ou, sob o controle deste, se comunicar com qualquer outro componente do microcomputador. Desta forma, os slots permitem ao usuário expandir a capacidade do computador de diferentes formas, permite ainda, o crescimento de placas de propósito geral ou específico. Isto é uma característica que permitiu a história de sucesso da plataforma PC.
Cada slot dá acesso a um determinado barramento, ou seja, conecta a placa fisicamente ao barramento por onde trafegam os dados e sinais. Portanto, as placas de expansão se comunicam utilizando as características do barramento ao qual ela está ligada.
5.2.4.1 - Slot AGP

5.2.4.2 - Slots ISA 8 bits, ISA 16 bits e VLB (Vesa Local Bus)
5.2.4.3 - Slot PCI (Peripheral Component Interconnect, Componente de Interconexão de Periféricos)
5.2.4.4 - Slots AMR
Audio Modem Riser é uma especificação desenvolvida pela Intel para o agrupamento das funções de áudio analógico de entrada e saída (Analog I/O Audio) do circuito do modem com um chip codec (coder/decoder - codificador/decodificador, que converte de um lado para outro de analógico para digital) numa pequena placa que pluga diretamente na placa-mãe. A placa é chamada de riser e por ter o circuito embutido significa que ele não precisa fazer parte da placa-mãe, sendo assim, capta menos ruídos e tem um desempenho melhor do que o mesmo dispositivo onboard. O funcionamento é o mesmo do dispositivo onboard, ou seja, o processador é que executa o processamento dos sinais.

5.2.4.5 - PCI Express (O futuro)
A especificação PCI-X (PCI Express) estava tentando substituir o PCI de maneira gradual. Esta especificação, na realidade, não corrigia nenhum dos problemas anteriores, mas sim agravava os problemas existentes.
A especificação PCI-X, em sua essência, dobra a largura do barramento de 32 bits para 64 bits, conseguindo, através disso, o aumento da transmissão paralela de dados e o aumento do espaço de endereçamento do PCI. A especificação também aumenta o clock básico do PCI para 66MHz ou 133 MHz, provendo um aumento da largura de banda do PCI para mais de um GB/s (133 MHz).
O PCI-X aumenta significantemente a largura de banda e a utilidade do PCI, mas, também, eleva muito o custo de sua implementação. O aumento do clock não é a única coisa que agrava o problema do ruído por crosstalk (interferência que uma linha do barramento causa na outra, ao serem colocadas muito próximas uma da outra, por exemplo, 64 bits implicariam 64 linhas) e eleva os custos de produção. Um outro fator é o aumento da largura do barramento, pois um barramento mais largo significa mais linhas e mais interferência por crosstalk. Além disso, todas as novas linhas são conectadas aos slots e, conseqüentemente, às placas de expansão dos dispositivos conectados. Isto implica que os dispositivos PCI necessitarão de 32 pinos extras, aumentando, também, o custo de produção dos dispositivos.
Todos estes fatores, quando colocados juntos, impedem que esta especificação faça parte dos PCs de médio e baixo custo, que representam a esmagadora maioria do mercado consumidor.
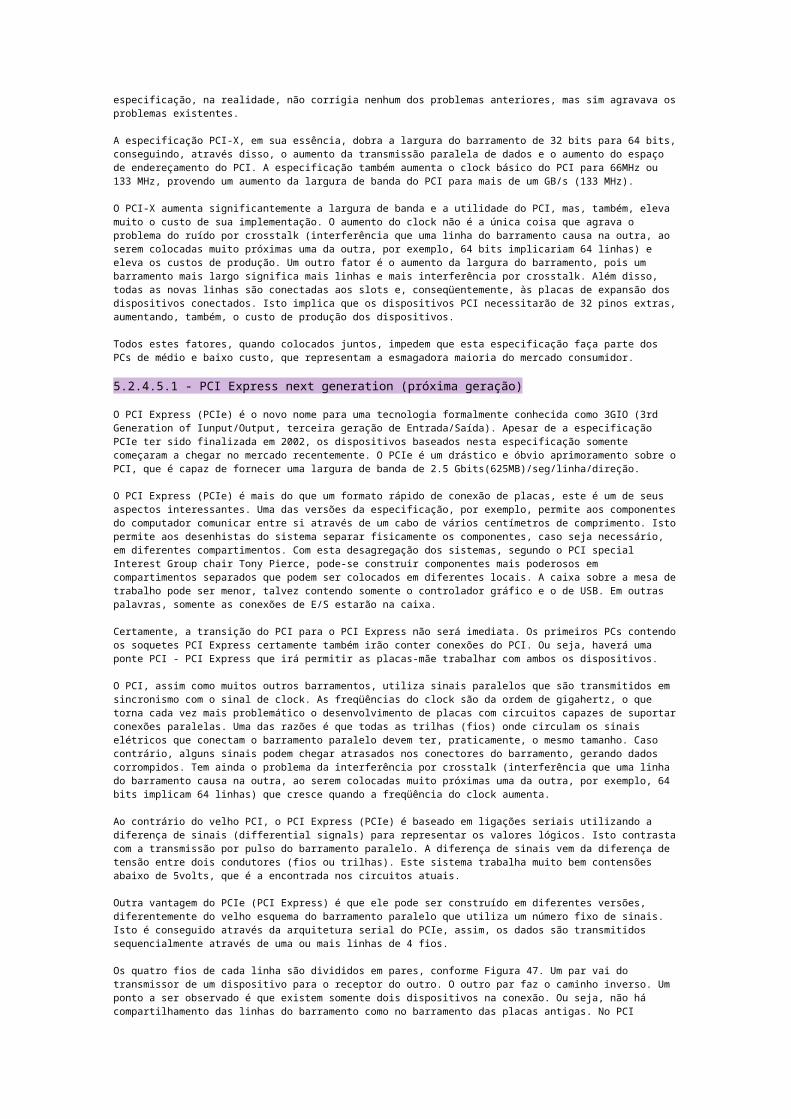
5.2.4.5.1 - PCI Express next generation (próxima geração)
O PCI Express (PCIe) é o novo nome para uma tecnologia formalmente conhecida como 3GIO (3rd Generation of Iunput/Output, terceira geração de Entrada/Saída). Apesar de a especificação PCIe ter sido finalizada em 2002, os dispositivos baseados nesta especificação somente começaram a chegar no mercado recentemente. O PCIe é um drástico e óbvio aprimoramento sobre o PCI, que é capaz de fornecer uma largura de banda de 2.5 Gbits(625MB)/seg/linha/direção.
O PCI Express (PCIe) é mais do que um formato rápido de conexão de placas, este é um de seus aspectos interessantes. Uma das versões da especificação, por exemplo, permite aos componentes do computador comunicar entre si através de um cabo de vários centímetros de comprimento. Isto permite aos desenhistas do sistema separar fisicamente os componentes, caso seja necessário, em diferentes compartimentos. Com esta desagregação dos sistemas, segundo o PCI special Interest Group chair Tony Pierce, pode-se construir componentes mais poderosos em compartimentos separados que podem ser colocados em diferentes locais. A caixa sobre a mesa de trabalho pode ser menor, talvez contendo somente o controlador gráfico e o de USB. Em outras palavras, somente as conexões de E/S estarão na caixa.
Certamente, a transição do PCI para o PCI Express não será imediata. Os primeiros PCs contendo os soquetes PCI Express certamente também irão conter conexões do PCI. Ou seja, haverá uma ponte PCI - PCI Express que irá permitir as placas-mãe trabalhar com ambos os dispositivos.
O PCI, assim como muitos outros barramentos, utiliza sinais paralelos que são transmitidos em sincronismo com o sinal de clock. As freqüências do clock são da ordem de gigahertz, o que torna cada vez mais problemático o desenvolvimento de placas com circuitos capazes de suportar conexões paralelas. Uma das razões é que todas as trilhas (fios) onde circulam os sinais elétricos que conectam o barramento paralelo devem ter, praticamente, o mesmo tamanho. Caso contrário, alguns sinais podem chegar atrasados nos conectores do barramento, gerando dados corrompidos. Tem ainda o problema da interferência por crosstalk (interferência que uma linha do barramento causa na outra, ao serem colocadas muito próximas uma da outra, por exemplo, 64 bits implicam 64 linhas) que cresce quando a freqüência do clock aumenta.
Ao contrário do velho PCI, o PCI Express (PCIe) é baseado em ligações seriais utilizando a diferença de sinais (differential signals) para representar os valores lógicos. Isto contrasta com a transmissão por pulso do barramento paralelo. A diferença de

sinais vem da diferença de tensão entre dois condutores (fios ou trilhas). Este sistema trabalha muito bem contensões abaixo de 5volts, que é a encontrada nos circuitos atuais.
Outra vantagem do PCIe (PCI Express) é que ele pode ser construído em diferentes versões, diferentemente do velho esquema do barramento paralelo que utiliza um número fixo de sinais. Isto é conseguido através da arquitetura serial do PCIe, assim, os dados são transmitidos sequencialmente através de uma ou mais linhas de 4 fios.
Os quatro fios de cada linha são divididos em pares, conforme Figura 47. Um par vai do transmissor de um dispositivo para o receptor do outro. O outro par faz o caminho inverso. Um ponto a ser observado é que existem somente dois dispositivos na conexão. Ou seja, não há compartilhamento das linhas do barramento como no barramento das placas antigas. No PCI Express (PCIe), um circuito integrado de comutação (switching IC) substitui o barramento compartilhado. Este switch (circuito integrado de comutação) é que coordena os sinais do barramento de E/S (Entrada/Saída) do PCI Express. Ele pode ser um circuito lógico separado ou integrado em outro CI (circuito integrado).
O uso desta arquitetura serial simplifica a tarefa de aumento da velocidade de transferência de dados. Uma razão é que cada linha tem seu próprio sinal de clock coordenando a sinalização de seus fios. Isto elimina a necessidade de sincronizar numerosas conexões com um único sinal de clock, como é necessário no barramento paralelo.
A freqüência do clock permite que a primeira geração do PCI Express (PCIe) produza uma taxa de transferência de 2.5 Gbits/seg/direção. Os desenvolvedores esperam avançar na tecnologia de CI até conseguirem uma largura de banda de 10 Gbits/seg/direção, considerado o máximo prático para sinais em placas com trilhas de circuitos de cobre. Imagina-se que o PCIe (PCI Express) ainda continuará sendo utilizado mesmo quando inventarem algo mais rápido que as placas de circuitos impressos.
5.2.4.5.2 - Sistema Operacional e o PCI Express (PCIe)
A Intel afirma que os sistemas operacionais serão capazes de inicializar, na plataforma PCIe, sem nenhuma modificação. Pois, a nova especificação utiliza o mesmo esquema de configuração que o antigo PCI. Contudo, segundo Tony Pierce (membro do PCI SIG), algumas características avançadas como erros de roteamento ou ativar o sistema de gerenciamento de energia não funcionarão corretamente até que o sistema operacional ofereça suporte nativo ao PCI Express.
O uso de camadas nos protocolos facilita a transição do velho PCI para a nova especificação. A idéia é manter um trecho de código de uma camada separado dos outros códigos das outras camadas do protocolo de comunicação do PCIe. Isto permite a atualização de uma das três camadas do PCIe (transação, enlace de dados e física) sem forçar uma mudança nas outras.
5.2.4.5.3 - Mudando do PCI para o PCIe
Os conectores PCI Express das placas terão os tamanhos de x1, x4, x8 e x16. Os slots PCI irão provavelmente localizar-se próximos os slots PCI Express nativos nas placas-mãe, inicialmente. A natureza serial do PCI Express torna possível colocar placas PCI Express com conectores menores em slots maiores. Os circuitos PCI Express serão inteligentes o bastante para enxergar que somente poucas linhas estão conectadas, e configurar-se automaticamente para manusear somente elas.

5 - PLACA-MÃE (MOTHERBOARD/MAINBOARD/MOBO)
5.3 - ChipSet e Sistema de Controle
O sistema de chipset e controle são circuitos lógicos, e são a inteligência da placa-mãe. Eles controlam a transferência de dados entre o processador, cache, sistema de barramentos, periféricos, basicamente tudo dentro do computador. O fluxo de dados tem um papel crucial na operação e performance de muitas partes do computador. O chipset é um dos poucos componentes que tem um grande impacto na qualidade, nas características e velocidade do PC.
“Chipset” soa como algo extremamente complicado, mas na realidade não é, apesar de muitas de suas funções o serem. Um chipset é simplesmente um conjunto de chips. Às vezes, muitas das funções do chipset são executadas por alguns pequenos chips de controle. Existem chips separados (geralmente mais de um) para cada função: controlando a cache, executando acesso direto a memória (DMA), manuseando interrupções, transferindo dados sobre o barramento de E/S, etc. Geralmente estes chips são integrados formando um conjunto de chips, ou chipset. Eles implementam o controle das várias características da placa-mãe.
A integração traz várias vantagens, mas as duas principais são: a redução de custos e uma melhor compatibilidade (quanto mais coisas são feitas por um único chip ou conjunto de chips feitos por um único fabricante, mais simples é o design e menos chances de problemas). Algumas vezes os chipset são referenciados como “ASICs” (applicationspecific integration circuits, circuitos integrados de aplicação específica). A Intel também chama os chipsets dela de “PCIsets” e “AGPsets”, fazendo referência as tecnologias de barramento que os chipsets implementam.
O sistema de chipset, em muitos casos, não integra todos os circuitos necessários à placa-mãe. Muitas placas-mãe têm os seguintes controladores:
• O próprio sistema de chipset;
• Controlador de teclados, que gerencia não somente o teclado, mas também o mouse OS/2 integrado;
• O chip de E/S (Entrada e Saída), que lida com a entrada/saída das portas seriais, da porta paralela, do floppy e, em alguns casos, da IDE dos discos rígidos;
• Controladores adicionais são normalmente encontrados nas placas de expansão como vídeo, som, rede e, os mais comuns, controladores SCSI.
Contudo, nos computadores atuais as funções de controle das diversas características das placas-mãe são divididas baseadas na velocidade dos barramentos. Um chipset chamado northbridge (ponte norte) é responsável pela comunicação da CPU (processador) com as memórias, através do FSB (Front Side Bus), e atua como um controlador das memórias e do AGP. O tipo de FSB, de memória e de AGP varia de acordo com a placa-mãe. Alguns northbridges (ponte norte) também integram o vídeo. Um outro chipset, o southbridge (ponte sul), cuida das comunicações mais lentas como E/S (Entrada/Saída), barramento PCI, USB (Universal Serial Bus, barramento serial universal), portas seriais, porta paralela, áudio, controla os discos rígidos, dentre outras funções. O tipo de E/S depende da southbridge (ponte sul). No início a comunicação entre os dois chipsets era realizada através do barramento PCI, porém, com o aumento do fluxo de informação criou-se um barramento específico para a troca de informaçõesentre eles, o que pode ser observado na Figura 51.

A Intel substituiu a arquitetura northbridge/southbridge pela IHA (Intel HUB Architecture, arquitetura de HUB da Intel). Esta nova arquitetura também tem duas partes, o GMCH (Graphics and AGP Memory Controller, Controlador de Memória Gráfica e AGP) e o ICH (Input/OutPut Controller HUB, HUB de controle de Entrada/Saída). A arquitetura é utilizada pela Intel nos chipsets da série 800, que foram os primeiros a saírem do desenho Northbridge/Southbridge (Ponte Norte/Ponte Sul). O GMCH é similar à ponte norte (Northbrige) e auxilia no controle do AGP e memória. Já o ICH é parecido com a ponte sul (Southbridge), sendo responsável pelas mesmas funções que ela.
5.3.1 - Nível de Integração
Algumas placas-mãe são referenciadas como integradas (on board). Isto significa que um ou mais periféricos adicionais (como placas de som, de modem, de vídeo e de rede) são construídos na placa-mãe. A grande vantagem desta configuração é o baixo custo. Contudo, existem várias desvantagens, dentre elas destaca-se: os dispositivos on board não podem ser atualizados (upgrade). Muitos dos dispositivos on board (como placa de som) podem ser desabilitados no BIOS para que possam ser colocadas placas nos slots de expansão (como placas de som). Porém estas placas, geralmente, possuem poucos slots.
Outro problema, mais grave ainda, é a utilização do processador pelos dispositivos integrados (on board). A maioria dos dispositivos on board utiliza o processador para executar suas atividades, o que consome processamento. Desta forma, a CPU (processador) deixa de executar outras atividades para auxiliá-los no processamento de suas atividades. Esta utilização da CPU pode, em alguns casos, atingir 25% da velocidade do processador. É como se o usuário baixasse a velocidade do processador em um quarto. Por exemplo, um processador de 1 GHz funcionaria com se fosse um de 750 MHz.
5.3.2 - Chipsets Intel
Bem antes do lançamento do Pentium encontrávamos chipsets de diversos fabricantes: OPTi, SiS, Via, PC Chips, UMC e ALI. A Intel também fabricava chipsets, mas com o lançamento do Pentium passou à frente de todos esses fabricantes. Todos eles estavam acostumados a produzir chipsets que operavam com clocks externos de 25, 33 ou 40 MHz, usados nas placas de CPU 386 e 486. Já as primeiras placas de CPU Pentium operavam com clocks externos de 60 e 66 MHz. A Intel usou o seu know how para produzir chipsets para o Pentium e os demais fabricantes ficaram para trás.
Apenas por volta de 1997 tornaram-se comuns placas de CPU Pentium equipadas com chipsets de outros fabricantes, apesar da Intel ainda predominar. Em 1998, alguns desses fabricantes, já acostumados com a faixa de 66 MHz, e migrando para os 100 MHz, passaram a oferecer boas opções de chipsets. Façamos uma análise dos chipsets usados nas placas de CPU Pentium e Pentium II e vejamos suas características principais.
5.3.2.1 - I430FX
No final de 1995, a Intel já era a maior produtora de chipsets para Pentium, quando lançou o i430FX, conhecido informalmente como Triton. Este chipset introduziu recursos avançados, comuns até os dias atuais:
• Duas Interfaces IDE, com PIO Mode 4O PIO Mode 4 é um modo de transferência usado pelas interfaces IDE modernas que transfere dados na velocidade de 16,6 MB/s. Antes do i430FX, existiam chipsets que podiam operar em PIO Mode 4, mas eram mais raros. Os próprios chipsets produzidos pela Intel antes do i430FX não possuíam interfaces IDE. Era preciso usar chips VLSI de outros fabricantes. Algumas placas eram equipadas com uma interface IDE veloz, capaz de chegar ao PIO Mode 4, e outra interface IDE comum, operando apenas em PIO Mode 0.
• Suporte a memórias EDO DRAMNa época de lançamento do Triton, as memórias EDO DRAM eram a sensação do momento. Esse novo tipo de memória, apesar de custar praticamente o mesmo que as memórias usadas até então (FPM DRAM), permitiam transferir os dados mais rapidamente, como se o seu tempo de acesso fosse menor. Na verdade esta memória não trabalha mais rápido, mas
pode começar um novo ciclo de leitura antes do término do ciclo atual. Em outras palavras, enquanto o EDO DRAM está fornecendo os dados lidos, já deu início ao acesso do próximo grupo de dados.
• Pipelined Burst CacheAntes deste chipset, todas as placas de CPU utilizavam memórias SRAM assíncronas para formar a cache externa. Visando aumentar o desempenho dos microprocessadores, a indústria desenvolveu um novo tipo de memória chamado Pipelined Burst SRAM. Sua principal característica é um tempo de acesso bem rápido quando são acessados dados consecutivos. Por exemplo, digamos que uma SRAM assíncrona demore sempre 2 ciclos para acessar seus dados. Como as transferências de cache para o processador são feitas em seqüências de 4 leituras, teríamos a temporização 2-2-2-2 para transferir os 4 grupos de dados consecutivos. Usando SRAM do tipo Pipelined Burst, o primeiro acesso também demora 2 ciclos, mas cada um dos acessos seguintes demora apenas 1 ciclo, ficando então com a temporização 2-1-1-1. Isto representa um aumento bastante significativo no desempenho, quando este tipo de memória é usado para formar a cache externa. O chipset i430FX foi o primeiro a dar suporte a cache formado por este tipo de memória.
Com esses avanços introduzidos pelo chipset i430FX (conhecido como Triton), placas de CPU Pentium passaram a experimentar um desempenho bem melhor.
5.3.2.2 - I430HX
Ainda em 1996, a Intel lançou um outro chipset, o i430HX, conhecido informalmente como Triton II. Além de manter os recursos do i430FX, o Triton II incorporou vários avanços:
• Acesso à memóriaO Triton II é mais rápido nos acesso a memória DRAM e à memória cache, tornando o Pentium II um pouco mais veloz.
• Maior quantidade de DRAMO Triton II permite controlar uma quantidade maior de memória DRAM, o que é muito interessante para as placas de CPU usadas em servidores, que tipicamente possuem grandes quantidades de memória. Enquanto o i430FX permite a instalação de até 128 MB de DRAM, o i430HX possui circuitos que permitem controlar até 512 MB de memória DRAM. Observe que o microprocessador Pentium pode endereçar até 4 GB de memória, mas é preciso que junto com esta memória existam circuitos de acesso apropriados. Os circuitos de acesso estão localizados nos chipsets e esses circuitos no i430HX podem controlar mais memória que o i430FX.
• Maior cacheabilidadeO i430HX tem uma característica bastante interessante, que nem mesmo outros chipsets da sua série (i430VX e i430TX) possuem. Nos demais chipsets apenas 64 MB de RAM podem ser acelerados pela cache (ou seja, “cacheáveis”). No Triton II, esta área cacheável pode ser de 64 MB ou então de 512 MB, bastando acrescentar uma TAG RAM adicional na placa de CPU. Isto é muito importante para os PCs que exigem muita memória, como os servidores. Com uma área cacheável de 64 MB, se instalarmos, por exemplo, 128 MB de memória em um PC, apenas os primeiros 64 MB serão acelerados pela cache e os 64 MB restantes terão o acesso feito à velocidade típica de DRAM. O resultado é uma considerável queda de desempenho, o que torna desaconselhável instalar mais de 64 MB de memória em placas de CPU equipadas com outros chipsets da série Triton que não sejam o i430HX.
• Independência entre Master e SlaveNas placas de CPU equipadas com o i430FX, se instalássemos na mesma interface IDE um rápido disco rígido capaz de operar em PIO Mode 4 e um lento drive de CD-ROM capaz de operar apenas no PIO Mode 0, esta interface irá operar em PIO Mode 0, pois a temporização do Master e do Slave não são independentes. Seria necessário instalar o disco rígido em uma interface e o drive de CD-ROM na outra, evitando assim a queda de desempenho. Com o Triton II existe esta independência. Ao instalarmos um dispositivo IDE rápido e outro lento na mesma interface, cada um irá operar independentemente do outro, com a sua própria taxa de transferência.
5.3.2.3 - I430VX
O i430HX era bastante avançado e passou a ser usado em placas de CPU de alto desempenho, como as destinadas a servidores. No final de 1997, a Intel lançou um modelo mais simples para ser usado em computadores mais modestos. Não era na verdade um sucessor do i430HX, mas sim, do i430FX, que foi descontinuado. O VX é, portanto, inferior ao HX em quase todos os aspectos. Seu único melhoramento é o suporte à memória SDRAM, que não estava disponível no i430HX. Mesmo assim, um PC equipado com EDO RAM em uma placa que usa o i430HX pode ser mais rápido que outro equipado com SDRAM em outra placa equipada com o i430VX. Sua quantidade máxima de memória é a mesma do i430FX, ou seja, 128 MB, com apenas 64 MB cacheados.
5.3.2.4 - I925X
O chipset 925X permite a otimização do sistema através de interfaces com grande largura de banda, como FSB para DDR2 de 800MHz, adaptador gráfico PCI Express de x16, quatro slots PCI Express de x1 e permite, ainda, a conectividade através do USB 2.0. A arquitetura PCI Express, com mais de 500 MB/s de taxa de transferência nas duas direções, permite mais que dobrar a largura de banda dos tradicionais PCIs. Com uma taxa de transferência de 4 GB/s em cada direção o slot gráfico PCI Express supera muito as soluções gráficas anteriores.
5.4 - BIOS, BOOT, CMOS e SETUP
5.4.1 - Programa BIOS
BIOS significa Basic Input/Output system (sistema básico de Entrada/Saída), embora o nome completo seja raramente utilizado. O sistema da BIOS é o nível mais baixo de software no computador. Ele age como uma interface (intermediário) entre o hardware (principalmente processador e chipset) e o sistema operacional (Windows, Linux, OS/2, etc). O BIOS provê uma

maneira de acessar o hardware e permitir a criação de um nível superior de sistemas operacionais que o usuário final pode utilizar para rodar suas aplicações. Com a BIOS o sistema operacional e seus aplicativos ficam livres de ter que entender os detalhes exatos (como endereçamento de hardware) sobre os dispositivos de E/S conectados na placa-mãe. Quando alguma característica de um dispositivo muda, somente o programa da BIOS precisa ser modificado. Algumas vezes esta modificação é feita durante a configuração do sistema. De qualquer forma, nem o sistema operacional ou qualquer outro aplicativo que seja utilizado precisa ser modificado por isso.
Embora a BIOS seja sempre o intermediário entre o microprocessador e as informações de controle e fluxo de dados dos dispositivos de I/O, em alguns casos, a BIOS pode organizar o fluxo de dados diretamente da memória para os dispositivos (como placas de vídeo) que requerem fluxo de dados mais rápido e efetivo.
Algumas funções da BIOS são: Controle de hardware, post, dar início ao processo de BOOT, segurança contra vírus, proteção através de senha e gerenciamento do uso de energia.
Como regra, para que qualquer computador funcione é necessário um software que o comande. Tudo que o processador ou qualquer outro dispositivo do computador sabe fazer é seguir instruções. Um software é uma coleção de instruções. Todos os programas que são executados no PC ficam armazenados permanentemente no disco rígido e são carregados para a memória RAM quando o usuário solicita sua utilização. A partir da memória o processador pode acessar a lista de instruções do programa e executá-las.
Quando o computador é ligado, o processador precisa de instruções para executar. Contudo, como o computador acaba de ser ligado, a memória RAM está vazia, ou seja, não contém nenhuma instrução para que o processador possa executá-la. Assim, é necessário criar alguma forma de fazer com que quando o micro seja ligado exista alguma instrução para o processador.
Para isso utiliza-se um tipo de memória especial chamada ROM (Read Only Memory, memória somente para leitura) para armazenar (gravar) um programa chamado BIOS. Esta memória não perde seu conteúdo quando o micro é desligado. Com isso, quando o PC é ligado, o processador lê as instruções da BIOS, ou seja, lê o programa BIOS. Este chip de memória é colocado na placa-mãe pelo próprio fabricante da motherboard. Assim que o programa BIOS começa a ser carregado ele começa a executar a seqüência de BOOT.
5.4.2 - Sistema de BOOT da BIOS
Uma das mais importantes funções executadas pela BIOS é o BOOT (carregamento do sistema operacional na memória principal - RAM). Outro procedimento importante é o POST (power-on self test, auto-teste), que, como o próprio nome diz, executa alguns testes básicos durante o processo de BOOT.
5.4.2.1 - Seqüência de BOOT
A BIOS é o que coloca o micro em funcionamento quando ele é ligado. Os procedimentos listados abaixo constituem uma seqüência de BOOT típica. Obviamente, ela pode variar dependendo do fabricante do hardware, BIOS, etc e, especialmente, pelos periféricos que estão conectados ao PC.
1. A fonte de força interna é ligada e inicia. A fonte de força leva algum tempo até ser capaz de gerar energia estável para o resto do computador. Então o chipset gera um sinal de reset para o processador (como se o botão de reset tivesse sido pressionado) até que ele receba um sinal de energia estável da fonte de força.
2. Quando o sinal de reset cessa, o processador está pronto para executar. Quando o processador inicia não existe nada na memória para ele executar. Mas, ele é préprogramado para acessar primeiramente a ROM da BIOS para que o sistema seja inicializado.
3. A BIOS executa o POST (power-on self test, auto-teste). Caso ocorra algum erro fatal (grave) em algum teste do POST, o processo de BOOT pára. O POST emite códigos sonoros para identificar qual foi o problema.
4. A BIOS procura a placa de vídeo. A BIOS executa o programa BIOS da placa de vídeo, que a inicializa. A maioria das placas de vídeo exibe informações a respeito de sua configuração no monitor antes de permitir que a BIOS da placa-mãe possa enviar suas informações.
5. A BIOS procura por outras ROMs nos dispositivos para verificar se elas têm o programaBIOS. Caso outra BIOS seja encontrada em algum dispositivo, ela também éexecutada. Normalmente, a BIOS do disco rígido SCSI também exibe informaçõesna tela.
6. A BIOS mostra a tela de inicialização.
7. A BIOS executa mais testes no PC, incluído a contagem e teste na memória, que podem ser acompanhadas no monitor. Ela geralmente exibirá uma mensagem de erro na tela do monitor caso encontre algum erro neste ponto.
8. A BIOS apresenta uma tela mostrando os dispositivos presentes no PC, executando, em seguida, mais testes para verificar o tipo de dispositivo. As BIOSes atuais possuem configurações automáticas, por exemplo, determinam o time da memória RAM baseado no tipo de memória que elas encontram.
9. Caso a BIOS suporte o padrão Plug and Play, ela irá detectar e configurar todos os dispositivos Plug and Play mostrando no monitor cada um encontrado.
10. A BIOS exibirá uma tela de sumário mostrando a configuração do sistema. Ela é difícil de ser lida porque muitas vezes é mostrada no monitor muito rapidamente.
11. A BIOS começa a procurar o dispositivo de BOOT, de acordo com a seqüência de BOOT (BOOT sequence). A maioria da BIOSes atuais podem ser configuradas para executar o BOOT pelo floppy, HD, CD-ROM, placa de rede ou por alguns outros dispositivos.

12. Tendo identificado o dispositivo de BOOT (dispositivo que, geralmente, contém o sistema operacional), a BIOS procura pelas informações de BOOT, para que o carregamento do sistema operacional possa começar. Ela procura pelo MBR (Master Boot Record, registro de BOOT principal) no cilindro zero, cabeça zero e setor um (o primeiro setor do disco). Caso o BOOT seja pelo disquete, ela também procura pelo volume BOOT (similar ao MBR do HD) no disco.
13. Encontrando o que ela procurava, a BIOS inicia o processo de BOOT do sistema operacional (carregamento do SO para a memória RAM) utilizando as informações contidas no setor de BOOT. A partir deste ponto as instruções contidas no setor de BOOT passam a comandar o PC. Caso nenhuma informação seja encontrada no setor do primeiro dispositivo da seqüência de BOOT, tenta-se o segundo dispositivos e assim consecutivamente até que as intruções para o carregamento do sistema operacional sejam encontradas.
14. Caso nenhum dispositivo de boot seja encontrado, a BIOS mostrará uma mensagem de erro e o processo de BOOT será interrompido. A mensagem de erro depende da BIOS.
Este processo é chamado de BOOT frio, uma vez que o PC estava desligado (frio) e é ligado (aquecido). O BOOT quente ocorre quanto o PC está em funcionamento e é reiniciado, (rebboted) utilizando as teclas Ctrl, Alt e Delete pressionadas simultaneamente. Neste caso, o processo de BOOT inicia no número 8, saltando o processo de POST.
5.4.2.2 - POST (Poer-On Self Test, auto-teste na inicialização)
A primeira coisa que o BIOS faz, quando o computador é iniciado, é executar o que é chamado POST (Power-On Self-Test, auto-teste na inicialização). O POST é um programa de diagnostico embutido que checa o hardware, assegurando que tudo está presente e funcionando perfeitamente. Antes da BIOS iniciar o BOOT, e, posteriormente, continua com teste adicionais (como o teste de memória, que é mostrado no monitor) no processo de BOOT.
O POST é executado muito rapidamente, e normalmente não é notado quando está sendo executado, exceto quando um problema é encontrado. Muitas vezes, pode-se encontrar um computador que, quando ligado, emite alguns beeps e pára o processo de BOOT. Isto é o POST dizendo que algo está errado na máquina. O speaker (alto-falante) é utilizado porque quando os testes ocorrem o vídeo ainda não foi iniciado. Os padrões dos beeps podem ser utilizados para diagnosticar muitos problemas de hardware do computador. Os padrões exatos dependem do fabricante da BIOS, os mais comuns são Award e AMI.
Alguns erros do POST são considerados fatais enquanto outros não. Um erro fatal significa que o processo de BOOT será interrompido imediatamente (um exemplo, seria a falta das memórias RAM). Na prática, a maioria dos erros do POST é fatal, uma vez que o POST testa os sistemas (componentes) vitais para o PC.
Contudo, o POST também executa alguns testes extras, além do básico. Os códigos provenientes destes testes extras podem ser para diagnosticar os problemas que o PC tem. Uma placa especial pode ser comprada para mostrar estes códigos, pois eles não são mostrados através de beeps ou do monitor. Esta placa encaixa-se, geralmente, num slot e exibe através de um display, os códigos dos testes realizados.
5.4.3 - Memória CMOS
O programa BIOS pode ser configurado pelo técnico. Estas configurações permitem que ele ajuste a BIOS para o melhor funcionamento, pois diversos tipos de dispositivos podem ser colocados na placa-mãe (por exemplo, existem diferentes HDs, memórias RAM, etc).
O programa BIOS é gravado numa memória que só permite leitura (ROM read only access memory).
Essas configurações do programa BIOS deveriam ser salvas numa memória não-volátil, ou seja, que não perde seu conteúdo quando o micro é desligado. Desta maneira as configurações não seriam perdidas quando o PC fosse desligado. Isto é o oposto das memórias normais que perdem seu conteúdo quando o computador é desligado. Contudo, as ROMs só podem ser gravadas, geralmente, mediante um equipamento especial para elas. Assim sendo, todas as vezes que uma configuração da BIOS for alterada será necessário retirar a ROM do micro colocá-la neste equipamento especial para que as alterações possam ser gravadas.
Devido a estes problemas, criou-se um aparato especialmente para manter estas configuraçõesdo programa BIOS. O mesmo é composto por um tipo especial de memória, chamada CMOS, e uma pequena bateria que é responsável por alimentar eletricamente a memória CMOS quando o PC é desligado, preservando, com isso, os dados nela contidos. Este tipo de memória não-volátil é muitas vezes referenciado como NVRAM (nonvolatile RAM, memória RAM não-volátil).

CMOS significa Complementary Metal Oxide Semiconductor. Trata-se de uma tecnologiade circuitos integrados de baixíssimo consumo de energia, onde ficam armazenadas asinformações do sistema que são acessadas pelo programa BIOS no momento do BOOT. Estes dados refletem a configuração do icrocomputador (tipo de disco rígido, números e tipo de drives, data e hora, configurações gerais, velocidade de memória, etc.) permanecendo armazenados na CMOS e mantidos através da bateria interna.
Muitos desses itens estão diretamente relacionados com o processador e seu chipset e, portanto, é recomendável usar o default sugerido pelo fabricante da BIOS. Mudanças nesses parâmetros podem ocasionar o travamento da máquina, intermitência na operação, mau funcionamento dos drives e até perda de dados do HD.
Qualquer modificação deve ser feita somente se o usuário conhece realmente o significado dos termos ou por técnico especializado. Quando a placa começa a perder a configuração freqüentemente, devemos trocar a bateria interna que se encontra na placa-mãe.
5.4.4 - SETUP
Programa que grava os dados que serão utilizados pela BIOS e que são armazenados num tipo de chip chamado CMOS. O Setup define as configurações do hardware e depende de diversos fatores, a saber: Fabricante da BIOS: AMI (American Megatrends, Inc.), Award, Phoenix, Quadtel, Mr BIOS, entre outros; tipo do Chipset e do processador; versão da BIOS e Fabricante da placa-mãe. Portanto, existem diversos tipos de setup. Porém, todos eles guardam certa semelhança quanto às funções e configurações que executam. Adiante veremos algumas telas do setup de máquinas diferentes.

Quando da inicialização de um microcomputador, podemos acessar o programa setup através do pressionamento da tecla Delete durante o teste de memória ou F2 em alguns equipamentos. Neste momento a ROM carrega a BIOS que pega os dados do hardware que, por sua vez, estão armazenados na CMOS e os mostra na tela através do programa setup.
O setup armazena informações sobre o computador, como data e hora, o tipo de hardware instalado, dentre outras. O computador usa esta informação para inicializar todos os componentes no momento do boot e ter certeza que eles estão funcionando perfeitamente.
Se a configuração do setup for feita de modo errôneo, pode levar o sistema a funcionar de forma incorreta. Podendo, inclusive, afetar a inicialização da máquina. Se isso acontecer, pode-se usar o jumper de limpeza da CMOS para limpar as informações de configuração armazenadas na memória CMOS. Enquanto o computador é inicializado, manter a tecla Page Up pressionada (ou End em algumas placas) gera o mesmo efeito que o jumper da CMOS (pelo menos para os utilitários da AMIBIOS).
5.4.5 - Dentro do utilitário Setup
As informações contidas nesta seção referem-se ao setup da AMI (AMIBIOS - American Megatrends, Inc.), versão 1.21.13 de 2000.
Cada vez que o computador inicia, antes do sistema operacional ser carregado, surge a mensagem: “Hit if you want to run SETUP”.
Basta pressionar a tecla Delete e a tela do Menu Principal do setup aparecerá no monitor.

Usando as teclas de direção (teclas com as setas) podemos destacar qualquer das opções da tela do Menu Principal. Pressionando Enter selecionamos a opção destacada. Para sair do utilitário pressionamos a tecla Esc (Escape). Mantenha pressionada a tecla Shift e pressione F2 para alternar entre as cores opcionais para as telas do setup. Alguns itens já possuem um valor definido e para alterá-lo basta utilizar as teclas PageUp e PageDown. Em caixas de diálogo que exigem a resposta Sim e Não, utilize as teclas Y (Yes) e N (No).Após as alterações no setup, pressionamos F10 para salvá-las e sair do programa. Pressionamos F5 para cancelar as alterações e restaurar os valores anteriores. Pressionando F6, configura-se o setup com valores padronizados de fábrica (default) e F7 com valores para melhor performance. A diferença entre F6 e F7 será abordada a seguir.
5.4.5.1 - Standard CMOS Setup
Nesta tela configuramos as informações básicas quanto a data e hora, os dispositivos IDE e os drives de disquete. Pressionando a tecla F3, o sistema automaticamente detectará e configurará os discos rígidos nos canais IDE.
Date e Time: Nestes itens são acertados a data e hora corretos.
Pri MasterPri SlaveSec MasterSec Slave
Nestes itens configuramos os dispositivos nos canais IDE primário e secundário. Utilizando a opção Auto, no tipo do dispositivo, ele será configurado automaticamente no momento da inicialização. Pode ser usada a opção User, preenchendo-se os campos com as características do disco rígido manualmente (tamanho, cilindros, setores, etc). Selecione CD-ROM para um drive de CD-ROM. Selecione ARMD ou Floptical para um dispositivo ATAPI de mídia removível (por exemplo, ZIP drive ou LS-120).
Floppy Drive AFloppy Drive B
Os drives de disquete são configurados quanto ao tamanho e capacidade nestes itens.

Para configuração de dispositivos no modo User é preciso definir as seguintes características:
• Size = Capacidade de armazenamento em Megabytes.
• Cyln = Número de cilindros.
• Head = Número de cabeças.
• WPcom = Precompensação de escrita (informando 65535 o disco ignorará este parâmetro, pois não é usado atualmente).
• Sec = Número de setores.
• Lzone = Cilindro de estacionamento das cabeças (Valor do último cilindro + 1). Este item não faz parte da versão do setup abordada aqui, mas pode fazer parte de outras versões.
• LBA Mode = Os HD’s maiores do que 540 Mb também costumam adotar os modos LBA. O LBA é um modo de mapeamento dos setores dos discos rígidos criado para suplantar as limitações dos métodos anteriores que não são mais convenientes às tecnologias atuais. Por exemplo, a capacidade dos setores que era fixa em 512 bytes, é variável nos HD’s modernos. Se bem que para o sistema operacional isto permanece inalterado graças ao LBA. Tanto o HD quanto a BIOS da placa-mãe aceitam o modo necessário para aproveitamento máximo do espaço do dispositivo. Mesmo os HD’s mais modernos continuam aceitando a notação CHS (cilindros, cabeças e setores por trilha), mas neste caso sua total capacidade poderá não ser utilizada por causa de uma limitação natural do padrão. Em caso de adoção inadequada, nada de errado ocorrerá com os dados do HD. Estes só não ficarão acessíveis ou então o HD ficará transparente ao sistema operacional. Neste caso tente alterar de LBA para Normal ou vice-versa. Praticamente nenhum sistema adota o modo Large.
• Block Mode = Os HD’s possuem um buffer interno que atualmente varia entre 512 KB e 2 MB. Neste buffer, utilizado tanto para escrita como leitura, ficam os dados de setores temporariamente armazenados no HD e também de requisições de acesso recentes. Com isso os dados dos setores podem percorrer o cabo da controladora em seqüência e de forma mais eficiente, otimizando o fluxo de dados. O block mode define quantos setores serão transportados por operação. Nos Bios AMI a detecção é automática, eqüivalendo ao HDD MAX dos Award. Os HD’s mais novos, começando pelos de 1 GB, são capazes de transferir blocos. Já os antigos transferem apenas 1 setor por vez, equivalente à opção disabled. Os modos automáticos são transferíveis para evitar corrupção de dados. Pode ser arriscado modificar este parâmetro em HD’s com dados preciosos.
• PIO Mode = Caso o Ultra DMA não possa ser empregado, então um dos modos PIO ou DMA o serão. Configurar o modo PIO para AUTO é a melhor opção. Qualquer dispositivo IDE suporta os modos PIO e a maioria suporta os DMA.
• 32 Bit mode = É um parâmetro comum nos BIOS AMI. Nos AWARD a seleção é realizada automaticamente, tendendo sempre que possível para transferências de 32 bits, mais eficiente do que em 16 bits. Este modo será adotado no caso em que o de 32 não seja possível. Nas máquinas antigas, nas quais o barramento ISA ainda dominava, transferências de dados de 16 bits de largura eram bem comuns, por isso alguns HD’s da época limitavam o acesso a este modo. Os HD’s superiores a 540 MB geralmente aceitam transferir dados em 32 bits. Os de 1 GB e superiores certamente o fazem. Leitores de CD, ZIP IDE, gravadores de CD-R/RW, DVDs e outros dispositivos ATAPI mais recentes também aceitam o modo.
5.4.5.2 - Advanced Setup
Nesta tela configuramos informações mais avançadas com relação ao sistema. É preciso tomar bastante cuidado neste momento, pois alterações incorretas podem afetar drasticamente o funcionamento da máquina.

• Quick BOOT – Habilitando este item, o sistema inicializará mais rapidamente pela eliminação de algumas rotinas de teste de Power On.
• 1st BOOT Device / 2nd BOOT Device / 3rd BOOT Device – Determina a ordem que a máquina seguirá para carregar o sistema operacional na inicialização.
• Try Other BOOT Devices – Se habilitado, (Yes) indica que o sistema operacional deverá ser procurado em outros dispositivos que não os três definidos anteriormente, caso o carregamento a partir deles falhe. Isto inclui dispositivos USB, rede, drives ópticos ou qualquer dispositivo passível de BOOT que não tenha sido definido no item anterior.
• S.M.A.R.T. for Hard Disks – Se o disco rígido suportar SMART (Self-Monitoring, Analysis and Reporting Technology), este item pode ser habilitado.
• BOOTUp Num-Lock – Determina se a tecla Num Lock estará ativa ou inativa quando da inicialização.
• Floppy Drive Swap – Se existirem dois drives de disquete instalados na máquina, o drive A se torna drive B e o drive B se torna drive A. Simplesmente troca os nomes.
• Floppy Drive Seek – Se habilitado (Enabled), o sistema irá checar o drive de disquete na inicialização. Este item deve ficar desabilitado a menos que esteja sendo usado um drive de disquete antigo de 360 KB.
• Password Check – Define se a senha cadastrada no menu Change Password será solicitada somente para entrar no programa setup (opção Setup) ou no momento da inicialização (opção Always).
• BOOT to OS/2 > 64 MB – Deve ser habilitado (Enabled) se tiver mais de 64 MB de memória instalada e o sistema operacional for OS/2.
• L2 Cache – Deve ser mantido habilitado uma vez que todos os processadores que podem ser instalados na placa-mãe possuem cache interna. É recomendado que este item seja deixado no valor default (padrão), ou seja, Enabled.
• System BIOS Cacheable – Se habilitado, um segmento da BIOS será copiado temporariamente para a memória para execução rápida.
• Graphic Win Size – Determina o funcionamento do adaptador gráfico onboard. É recomendado que este item seja deixado no valor default.
• SDRAM Timing by SPD – Este item habilita ou desabilita a temporização da memória SDRAM definida pelo Detector de Presença Serial elétrico. Por ser uma característica particular da memória, não deve ser alterado.
• SDRAM CAS# Latency – Determina o funcionamento da configuração CAS (Column Address Strobe) da memória principal. É recomendado que este item seja deixado no valor default. A configuração 2T requer memória mais rápida do que a suportada por este modo.
• SDRAM Bank Interleave – Habilite este item para aumentar a velocidade da memória SDRAM. Quando habilitado, bancos de memória são separados para trabalhar com endereços pares e ímpares distintamente.
• Auto Detect DIMM/PCI Clk – Quando este item é habilitado, a Bios irá desabilitar o sinal de clock dos slots livres tanto DIMM quanto PCI.

• Spread Spectrum – Habilitar o spread spectrum pode reduzir significantemente a Interferência Eletro-Magnética (EMI - Electro-Magnetic Interference) gerada pelo sistema.
5.4.5.3 - Power Management Setup
Configuramos, nesta tela, alguns parâmetros do sistema de gerenciamento de energia que somente funcionará se a placa estiver ligada a uma fonte ATX.
• ACPI Aware O/S – Habilita ou desabilita a função ACPI, Interface de Gerenciamento de Energia e Configuração Avançada (Advanced Configuration and Power Management Interface).
• Power Management – Habilita ou desabilita as rotinas de gerenciamento de energia. Se habilitado, os itens abaixo estarão liberados para alteração. Suporta ACPI e APM (Advanced Power Management).
• Suspend Time Out – Configura o tempo para entrar no modo suspenso (suspend) em minutos. Se o tempo definido passa sem alguma atividade na máquina, o computador entrará no modo suspenso com economia de energia.
• Resume on RTC Alarm / Date / Hour / Minute / Second – O sistema pode ser desligado por comando de software. Se este item for habilitado, o sistema poderá ser automaticamente ligado num momento específico (Dia, Hora, Minuto e Segundo), baseado no relógio de tempo real da máquina, RTC (Real Time Clock).
• Lan/Ring Power On – Se este item for habilitado, o sistema poderá iniciar automaticamente se houver alguma chamada sendo recebida no modem, ou algum pacote proveniente da rede para esta máquina.
• Keyboard Power On / Wake Up Key / Wake Up Password – Se este item for habilitado, a máquina poderá ser ligada pressionando-se qualquer tecla do teclado ou a tecla específica de ligação do sistema (Power Key) ou pela digitação de uma senha específica.
5.4.5.4 - PCI / Plug and Play Setup
Esta tela possui parâmetros para dispositivos instalados no barramento PCI e dispositivos que usam o sistema Plug and Play.

• Share Memory Size – Este item permite alocar uma parte da memória principal para o adaptador de vídeo onboard, possibilitando 8, 16 ou 32 MB de memória para ser definida para o adaptador.
• Primary Graphics Adapter – Define se o adaptador gráfico primário está instalado num slot PCI ou no barramento AGP. A configuração PCI default permite que o adaptador de vídeo onboard seja utilizado em conjunto com um segundo adaptador de vídeo instalado em um slot PCI.
• Allocate IRQ to PCI VGA – Se este item for habilitado, um IRQ será designado para o sistema gráfico PCI VGA. Este item deve ser desabilitado (No) para liberar um IRQ.
• PCI IDE BusMaster – Este item habilita ou desabilita o DMA sob o modo DOS. É recomendável deixar este item em seu valor default (Disabled).
5.4.5.5 - Load Optimal Settings
Se selecionado este menu e pressionada a tecla Enter, uma caixa de diálogo aparecerá.Pressionando-se Y e então Enter, o programa de setup é carregado com um conjunto de valores padrão otimizado. Estes valores não são muito exigentes e permitirão que o seu sistema funcione com a maioria dos dispositivos de hardware e chips de memória.
5.4.5.6 - Load Best Performance Settings
Se selecionado este menu e pressionada a tecla Enter , uma caixa de diálogo aparecerá. Pressionando-se Y e então Enter , o programa de setup é carregado com um conjunto de valores de melhor performance. Estes valores padrão otimizados podem levar o seu sistema a não funcionar corretamente se a máquina estiver utilizando chips de memória lentos ou outros tipos de componentes de baixa performance ou antigos.
5.4.5.7 - Features Setup
Parâmetros para dispositivos periféricos instalados no sistema.

• Onboard FDC – Habilita ou desabilita a interface onboard do drive de disquete.
• Onboard Serial Porta – Habilita ou desabilita a porta serial COM1 onboard e determina um endereço para a porta.
• Onboard IR Port – Habilita ou desabilita a porta de infravermelho onboard e determina um endereço para a porta.
• Onboard Parallel Port – Habilita ou desabilita a porta paralela LPT1 onboard, e determina um endereço para a porta. A configuração Auto irá detectar um endereço disponível para a porta.
• Parallel Port Mode – Determina o modo de funcionamento da porta paralela. Pode ser selecionado SPP (Standard Parallel Port) que é o modo normal de funcionamento com dispositivos antigos; EPP (Enhanced Parallel Port) modo de funcionamento bidirecional; ECP (Extended Capabilities Port) modo de funcionamento bidirecional com utilização de DMA para transferência de dados; ou ECP + EPP, permitindo ser utilizada como uma ou outra (ECP ou EPP), dependendo do dispositivo conectado à porta.
• Parallel Port IRQ – Define um IRQ para a porta paralela, entre 5 ou 7.
• Parallel Port DMA – Define um canal DMA para a porta paralela, variando entre 0, 1 e 3.
• Onboard PCI IDE – Habilita ou desabilita os canais IDE onboard, Primário e Secundário, podendo ser definido um dos dois canais ou ambos.
• Audio Device – Habilita ou desabilita o chip de áudio onboard AC’97.
• Modem Device – Habilita ou desabilita o chip de modem onboard AC’97.
• Ethernet Device – Habilita ou desabilita o conector de rede local LAN Ethernet onboard.
• Onboard USB Function – Habilita ou desabilita as portas USB onboard.
• USB Function for DOS – Se a opção Onboard USB Function estiver habilitada, este item deve ser usado para habilitar ou desabilitar o USB quando a máquina estiver trabalhando em ambiente DOS.
• ThumbDrive for OS – Habilite este item para fazer com que uma pequena parte da memória seja utilizada como dispositivo de armazenamento para as portas USB.
5.4.5.8 - CPU PnP Setup
Configura o tipo de CPU que está instalado na máquina. A Bios irá detectar automaticamenteo tipo de CPU instalada na máquina e fará os ajustes necessários para este tipo detectado.
• CPU Over-clocking Func. – Este item habilita ou desabilita o overclock da CPU instalada na placa-mãe.
• CPU Frequency – Este item ajusta a freqüência da CPU instalada na placa-mãe. Este item só pode ser modificado se o item anterior (CPU Over-clocking Func.) estiver habilitado.
• CPU Over-clocking Frequency – Este item configura a freqüência instalada no sistema ao se fazer o overclock. Se o overclock falhar, reinicie o sistema mantendo pressionada a tecla Page Up (similar ao jumper da função Clear CMOS).

Dessa forma, a Bios irá apagar as configurações do setup necessitando de reconfiguração. Este item só pode ser modificado se o item CPU Over-clocking Func. estiver habilitado.
• DRAM Frequency – Este item ajusta a freqüência da memória DRAM instalada na placamãe. Este item só pode ser modificado se o item CPU Over-clocking Func. estiver habilitado.
5.4.5.9 - Hardware Monitor
Tela com parâmetros para as funções de monitoramento de hardware da placa-mãe.
• Vcore – Voltagem do núcleo do processador.
• Vdimm – Voltagem fornecida aos bancos de memória.
• Vivdd / Vcc5V / SB3V – Voltagem em diversos pontos da placa.
• SYSTEM Fan Speed – Velocidade do cooler do sitema, geralmente instalado numa dasfaces do gabinete, quando este tem o conector de energia plugado na placa-mãe.
• CPU Fan Speed – Velocidade do cooler do processador quando este tem o conector deenergia plugado na placa-mãe, no conector CPUFAN1.
• SYSTEM Temperature – Temperatura da placa-mãe em graus Celsius e Fahrenheit.
• CPU Temperature – Temperatura do processador em graus Celsius e Fahrenheit.
5.4.5.10 - Change Password
Se selecionado este menu e pressionada a tecla Enter uma caixa de diálogo aparecerá solicitando que seja digitada uma senha. A senha deve ter até 6 letras e/ou números. A tecla Enter deve ser pressionada após a digitação da senha confirmando a sua inclusão. Uma segunda caixa de diálogo aparecerá solicitando novamente a digitação da senha para confirmação. Mais uma vez a tecla Enter deve ser pressionada após a digitação. Esta senha será solicitada no momento da inicialização ou para entrar no programa Setup, dependendo da configuração no item Password Check no menu Advanced Setup.
5.4.5.10.1 - Mudar ou remover a senha
Uma vez incluída uma senha, a caixa de diálogo ao se acessar este menu solicitará inicialmentea senha corrente, ou seja, a senha que foi cadastrada anteriormente. Após isso a segunda caixa de diálogo solicitará a nova senha. Para desabilitar a proteção por senha basta pressionar Enter neste momento.
5.4.5.11 - Exit
Para sair do programa Setup salvando as alterações feitas, responda Y (Yes) na caixa de diálogo que aparecer ou N (No) para ignorar as alterações.
5.4.6 - Upgrade de BIOS
Como é uma operação de risco, não deve ser feita por principiantes. Os fabricantes sugerem que seja feita somente no caso de problemas com a BIOS. Esta atualização é feita através de programa para BIOS Flash ROM, programa este que apaga a BIOS antiga e grava uma nova por cima.
Como a BIOS será necessária para ser usada no próximo boot, se tiver sido gravada de forma incorreta o boot não

funcionará, isto significa que:
==> Não será possível executar novamente o programa de gravação, pois sem a BIOS não será possível acessar os dados gravados na CMOS para carregamento das informações dos dispositivos conectados ao sistema, ou seja, não será possível inicializar a máquina.
==> O chip da BIOS deverá ser trocado, não há outra forma de se recuperar uma gravação incorreta feita no chip.
5.4.6.1 - Upgrade, por quê?
Um avanço nas tecnologias de hardware de periféricos pode nos obrigar a fazer uma upgrade da BIOS capacitando-a a reconhecer novos dispositivos. A necessidade de atualização pode ser proveniente de problemas com a BIOS atual.
Por exemplo: Discos IDE maiores que 500 MB não eram reconhecidos pelas BIOS antigas, que não suportavam a função LBA. Solução: Usar apenas 500 MB de um disco de 1000 MB . Ou então fazer a upgrade da BIOS.
5.4.6.2 - Upgrade, como?
Antes de tudo é necessário ter à mão um programa gravador de Flash ROM e a última versão da BIOS da placa-mãe. Ambos podem ser obtidos na Internet, em www.ping.be/bios.
Existem alguns programas conhecidos como:
• AMIFLASH: para gravar BIOS AMI.
• AWDFLASH: para gravar BIOS Award.
• Uniflash: programa genérico para gravação de BIOS.
• CTFlash: outro programa genérico para gravação de BIOS.
É preciso identificar exatamente os seguintes dados antes de se procurar pela BIOS da placa-mãe:
• Modelo
• Fabricante
• Chipset
Basta observar os números de identificação que aparecem no BOOT ou utilizar um programa como o CTBIOS ou o CTPCI330. Abaixo podemos identificar, através do programa CTBIOS os dados da BIOS de uma placa-mãe a fim de procurar pela sua atualização na Internet.
Pelo programa podemos verificar que a BIOS é fabricada pela Award, o modelo da placamãe é ATC-5000, fabricada pela A-Trend e o chipset utilizado é o Intel i430TX. De posse destas informações podemos procurar pela versão mais nova desta BIOS a fim de atualizála. Como a URL do fabricante está contida nas informações retornadas pelo programa, ela é um bom local para se começar a procurar.
5.5 - Interfaces para disco rígido e outros dispositivos
Toda interface de disco rígido faz sua comunicação com o resto do PC através do sistema de barramentos de E/S (Entrada/Saída). Na maioria dos comutadores atuais o principal barramento ainda é o PCI. Sistemas mais antigos utilizavam o VLB (VESA Local Bus) e o ISA. Logicamente, o disco rígido é um dispositivo do sistema de barramentos, que é conectado a memória, ao processador e a outras partes do PC.
A interface que o disco rígido utiliza para se conectar ao resto do PC é, de alguma forma, tão importante quanto às características do próprio disco rígido. A interface é o canal de comunicação pelo qual todos os dados são enviados ou recebidos do HD (Hard Disk, disco rígido). A interface pode ser o principal fator de limitação da performance do sistema.
O IDE (Integrated Drive Eletronics) é um padrão de interface eletrônica usado para ligar o barramento da placa-mãe do

computador e o dos dispositivos de armazenamento. A interface IDE é baseada no padrão de barramento IBM PC ISA de 16 bits, mas também é usada em computadores que utilizam outros tipos de barramentos. O IDE possui este nome porque o controlador do drive de disco é construído na placa lógica do drive. O padrão IDE foi adotado pela ANSI (American National Standards Institute), em novembro de 1990. O nome ANSI para IDE é Advanced Tecnology Attachment (ATA). Isto gerou certa confusão, pois dava outro nome ao mesmo padrão. Por isso este padrão será referenciado como IDE/ATA.
As máquinas antigas utilizavam uma placa com interfaces para disco rígido e cabos para ligar os dispositivos às placas. Esta placa era dedicada única e exclusivamente a controlar os dispositivos nela conectados, e era colocada num dos slots que dão acesso ao sistema de barramento do PC. Estas placas eram comumente conhecidas como controladoras. Já os micros atuais possuem dois canais IDE/ATA construídos diretamente na placa-mãe e as funções da placa controladora foram transferidas para o chipset da placa-mãe. Cada canal IDE/ATA conecta dois dispositivos com um único cabo. Uma sinalização especial é utilizada para assegurar que os comandos enviados para um drive (dispositivo) não interfira no outro.
Normalmente, este canal de comunicação do HD e de outros periféricos é referenciado barramento IDE (IDE bus), contudo o mais correto seria especificação ATA (Advanced Technology Attachment) ou barramento ATA. O barramento IDE é usado nos PCs (Personal Computer, computador pessoal) como forma de interconectar o disco rígido ou outro periférico a mobo (motherboard, placa-mãe). O barramento IDE é paralelo, com a introdução do Serial ATA (SATA), o ATA paralelo (IDE) passou a ser chamado de PATA (Parallel ATA, ATA paralelo).
A especificação já foi atualizada inúmeras vezes. ATA-1 e ATA-2 foram feitas num único documento, mas após o ATA-2 a especificação foi dividida em diversos documentos diferentes. Muitos deles mantendo a compatibilidade. Cada nova versão do padrão aumentou a velocidade do barramento. A velocidade máxima do barramento IDE é, atualmente, 133MBytes/seg (133MBps).
ATA-1 (IDE, obsoleto):
– Velocidade - 8.3 MBytes/seg– Largura da conexão - 8bits ou 16bits– Cabo/Conector - 40 vias– Máximo de 2 dispositivos por barramento– Utiliza PIO Mode 0,1 e 2– Lançada em 1994
ATA-2 (EIDE ou fast ATA, obsoleto):
– Velocidade - 16.6 MBytes/seg– Largura da conexão - 8bits ou 16bits– Cabo/Conector - 40 vias– Máximo de 4 dispositivos por barramento– Utiliza PIO Mode 0, 1, 2, 3 e 4– Lançada em 1995
ATA-3:– Velocidade - 16.6 MBytes/seg– Largura da conexão - 16bits– Cabo - 40 vias– Máximo de 4 dispositivos por barramento– Utiliza PIO Mode 0, 1, 2, 3 e 4– DMA Modo 1 e 2– Inclusão do ATAPI (ATA Packet Interface, interface por pacotes ATA) - provê os comandos necessários para o controle do CD-ROM ou para o dispositivo de fita de tal forma que o computador possa usar a interface/conector ATA e controladores IDE para controlar estes dispositivos e outros tipos mais novos.
ATA - 4 (Ultra-ATA/33):– Velocidade - 33 MBytes/seg– Largura da conexão - 16bits – Cabo - 40 vias– Máximo de 4 dispositivos por barramento

– Utiliza PIO Mode 0, 1, 2, 3 e 4– DMA Modo 1 e 2 e Ultra DMA modo 0,1 e 2
ATA - 5 (Ultra-ATA/66):– Velocidade - 66 MBytes/seg– Largura da conexão - 16bits– Cabo - 40 vias ou 80 vias, o cabo de 40 vias é utilizado para permitir a compatibilidade com o ATA-4– Máximo de 4 dispositivos por barramento– Utiliza PIO Mode 0, 1, 2, 3 e 4– DMA Modo 1 e 2 e Ultra DMA modo 0, 1, 2, 3 e 4
ATA - 6 (Ultra-ATA/100):– Velocidade - 100 MBytes/seg– Largura da conexão - 16bits– Cabo - 40 vias ou 80 vias, o cabo de 40 vias é utilizado para permitir a compatibilidade com o ATA-4– Máximo de 4 dispositivos por barramento– Utiliza PIO Mode 0, 1, 2, 3 e 4– DMA Modo 1 e 2 e Ultra DMA modo 0, 1, 2, 3, 4 e 5
ATA - 7 (Ultra-ATA/133):– Velocidade - 133 MBytes/seg– Largura da conexão - 16bits– Cabo - 40 vias ou 80 vias, o cabo de 40 vias é utilizado para permitir a compatibilidade com o ATA-4– Máximo de 4 dispositivos por barramento– Utiliza PIO Mode 0, 1, 2, 3 e 4– DMA Modo 1 e 2 e Ultra DMA modo 0, 1, 2, 3, 4, 5 e 6
5.5.1 - SATA (Serial ATA)
A tradicional especificação paralela do ATA foi definida como padrão para os dispositivos de armazenamento do PC. A velocidade original dela era somente 3 MBytes/segundo, pois este protocolo foi introduzido em 1980. As últimas gerações da interface Ultra DMA -133 são capazes de transferir dados a 133 MBytes/segundo. A especificação ATA está mostrando sua idade e impondo sérias limitações aos desenvolvedores.
A especificação Serial ATA é desenhada para superar estas limitações, permitindo a interface de armazenamento aumentar sua largura de banda de acordo com a demanda da plataforma PC. O SATA (Serial ATA) veio para substituir o PATA mantendo a compatibilidade com os sistemas operacionais e dispositivos existentes e adicionando performance para os anos que virão. Ela reduziu a tensão e a quantidade de pinos necessários e utiliza cabos finos e maleáveis. Desta forma, ela provê uma taxa de transferência maior começando com 150 MB/seg na primeira versão.
5.5.1.1 - Serial versus Paralelo
A diferença fundamental entre os dois formatos está em como os dados são transferidos entre o dispositivo e os outros sistemas. Os dispositivos e controladores ATA tradicionais utilizam o mecanismo de transferência de dados em paralelo. Este processo paralelo é uma técnica, muito comum, onde múltiplos canais (fios) de dados são utilizados simultaneamente para enviar dados na tentativa de aumentar a quantidade de dados transmitidos por pulso de clock. No caso do ATA/100, utilizado nos dispositivos e controladores atuais, os dados são enviados através de um canal de 16 bits. O problema com este tipo de mecanismo é a quantidade de fios necessários para transferir os dados, isto explica porque os cabos ATA são tão largos, são necessários 40 ou 80 fios para transferir os 16 bits paralelamente. O problema com isso é que um fio causa interferência no outro. Como para aumentar a velocidade também é necessário aumentar o clock, a interferência entre os fios também aumenta muito, a ponto de comprometer a transmissão.
Nos últimos anos muitos avanços foram feitos na técnica de transmissão serial, que consiste no envio de dados serialmente. É como se os bits fossem enfileirados e fossem transmitidos um a um. Muitas evoluções foram conseguidas especialmente através do desenvolvimento do USB (universal Serial Bus, barramento serial universal). A transmissão serial é executada sobre um único canal de controle, que contrasta com os muitos canais da interface paralela. Isto significa que em algumas velocidades do clock a linha serial irá transmitir menos dados, mas como o método serial requer menos fios, a interferência é muito menor, permitindo maior integridade dos dados. Isto permite que o método de transmissão serial execute velocidades muito mais altas que o método paralelo. No caso do primeiro padrão Serial ATA, o clock roda a 1500 MHz, contrastando com

os 50 MHz do padrão ATA/100.
5.5.1.2 - Cabos e Conectores do SATA
Uma vantagem do SATA vem dos cabos utilizados, se comparados aos do velho padrão ATA. A redução da quantidade de fios necessários para a transmissão de dados permitiu uma enorme redução da largura do cabo. A Figura 67 compara um cabo 80 vias Ata/100 ao cabo SATA.
Para utilizar as novas características dos cabos do padrão SATA, um novo método de conectores também precisou ser desenvolvido.
Isto inclui conexão de dados e de energia elétrica, porém, para facilitar a transição, muitos discos rígidos oferecem os dois conectores de força. A Figura 68 mostra os conectores do PATA e os do SATA num disco rígido.
Para suportar o novo design que utiliza uma tensão menor e dispositivos com consumo menor de energia, foi necessária uma linha de 3.3 volts. Atualmente poucas as fontes de alimentação oferecem conectores de energia SATA, isto significa que os usuários necessitam de um cabo adaptador para conectar dispositivos SATA nas fontes de alimentação dos computadores atuais. Alguns fabricantes também incluem um conector de força comum, além do conector de força do SATA (isto pode ser observado na Figura 68).
5.5.1.3 - Outras vantagens do SATA sobre o ATA
Os dispositivos ATA/IDE foram desenvolvidos segundo o conceito de master/slave (controlador/escravo). Este relacionamento permite dois dispositivos conectados na mesma controladora. Para fazer isto um dos dispositivos deve ser configurado como master (controlador) e o outro como slave (escravo). Os dois dispositivos, quando estão sendo executados simultaneamente, dividem o mesmo cabo, dividindo, com isso, a taxa de transmissão de cada um dos dispositivos pela metade (por esta razão HDs e CD-ROMs devem ficar em cabos e controladoras separados). O padrão SATA removeu este

problema dando controle total da conexão com 150 MB/s (primeira versão) de largura de banda não compartilhada.
Outra excelente característica é a implementação do hot swap, que permite desconectar o dispositivo sem a necessidade de desligar o PC. Esta característica os fabricantes devem implementar em ambos, nos controladores e nos dispositivos, para que ela funcione.
5.5.2 - PIO (Programed I/O, E/S programada)
O PIO (Programed I/O, E/S programada) é um antigo método de transferência de dados, que era utilizado pela interface IDE/ATA. Nesta técnica a CPU e o hardware de controle comandavam a transferência de dados entre o disco rígido e os outros dispositivos do PC. O PIO pode operar em diferentes velocidades, que são chamadas de modos (PIO mode).
Até a metade da década de 90, o PIO era a única forma de acessar os discos rígidos IDE/ ATA.
5.5.3 - DMA (Direct Memory Access, acesso direto a memória e Bus Mastering)
O PIO, método de transferência de dados entre o disco rígido e o resto do PC, tem falhas sérias. Ele provoca muito overhead e consome muito processamento da CPU. Naturalmente, a melhor solução seria permitir a transferência de dados entre a memória e o disco rígido sem interferir no processamento da CPU (processador). DMA (Direct Memory Access, acesso direto a memória) é o termo geralmente utilizado para se referir ao protocolo de transferência onde o periférico pode enviar/receber dados diretamente para/da memória, sem que o processador seja utilizado para executar a transferência.
Muitos modos diferentes de DMA foram definidos para a interface IDE/ATA. Eles podem ser agrupados em duas categorias: Single Word (Palavra única) e Multiword (Multi palavra). O primeiro conjunto de modos são de uma única palavra (single word). Quando este modo é utilizado cada transferência move uma palavra de dados, onde uma palavra é formada por 16 bits.
Executar transferências de uma palavra de cada vez é terrivelmente ineficiente, pois para uma palavra (16bits) ser transferida é necessário o envio de dados de controle antes e depois da transferência. Ou seja, além dos 16 bits de dados outros bits também são transmitidos antes e depois, porém fazendo parte da transmissão da palavra. Por essa razão criou-se outros modos para o DMA onde muitas palavras podiam ser transferidas sem a necessidade do envio dos dados de controle. É como se a palavra que é transmitida pudesse ter qualquer tamanho. Este novo modo de DMA foi chamado demultiword (multi-palavras).
Os discos rígidos modernos utilizam a transferência de DMA first-part (primeira-parte). O termo first-part (primeira-parte) significa que os periféricos executam o trabalho de transferir dados da memória ou para ela sem a necessidade de interferência de um controlador de DMA externo, ao contrário do que era executado anteriormente. Esse tipo de transferência é chamado de bus mastering (controle de barramento), porque quando a transferência está ocorrendo o dispositivo controla o barramento. O bus mastering permite que o disco rígido e a memória trabalhem sem necessitar que o velho controlador DMA, esteja construído no sistema, ou do suporte da CPU. Porém, ele funciona somente no barramento PCI, todavia alguns barramentos antigos, como o MCA, também suportam o bus mastering, mas eles não são muito utilizados. No DMA existe um controlador do barramento (bus master) que controla todos os dispositivos escravos do barramento. Já no bus mastering DMA, cada dispositivo fica responsável pelo controle do barramento.
5.5.3.1 - Bus Master (Controlador do Barramento)
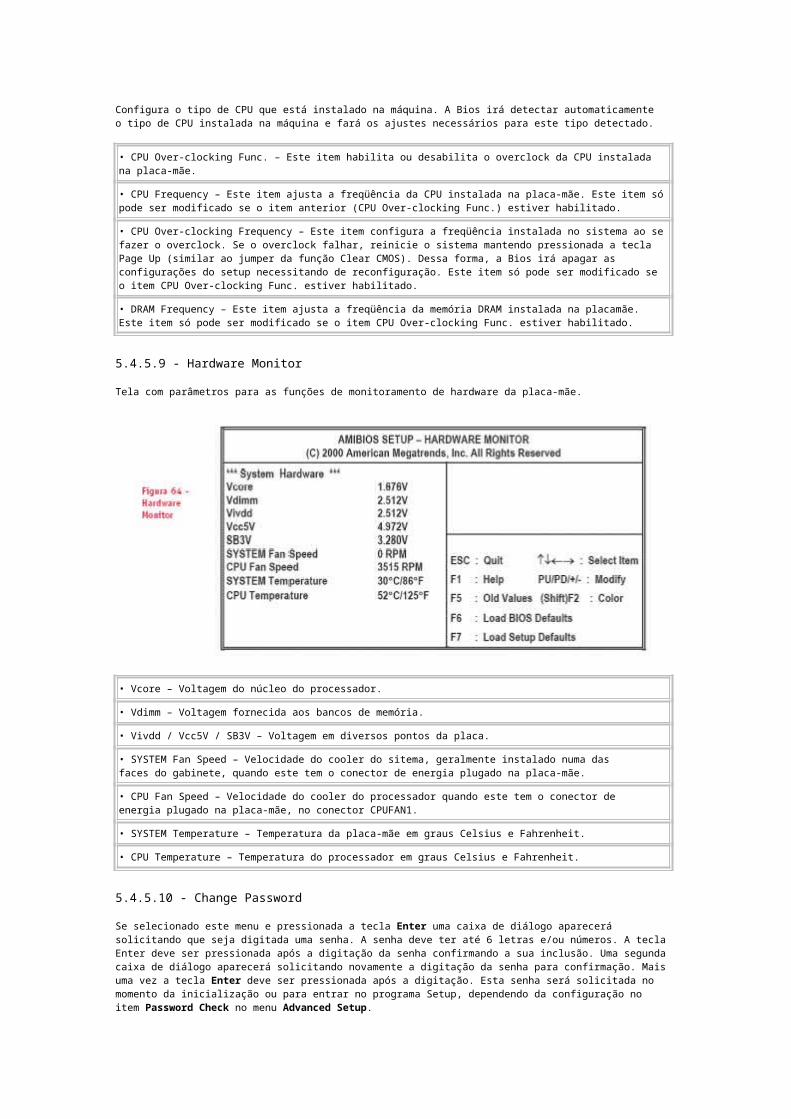
Nos barramentos com grande largura de banda, muita informação flui pelo canal a cada segundo. Normalmente, o processador é solicitado para controlar esta transferência de informação. O processador age, vulgarmente, como um intermediário, parecido com os casos do mundo real. Seria mais eficiente cortar o intermediário e executar a transferência diretamente. Isto é feito permitindo que os dispositivos assumam o controle do barramento e trabalhem sozinhos. Estes dispositivos podem ser chamados de bus masters (controladores de barramento). Teoricamente, o processador ficaria livre para executar outras tarefas simultaneamente. Na prática existem vários fatores que complicam muito este processo. Para fazer o bus master é necessário um árbitro para o barramento, esta tarefa é executada pelo chipset.
5.5.3.2 - Ultra DMA
Com o aumento da performance dos discos rígidos ao longo dos anos, o uso do PIO tornou-se um obstáculo. Como resultado, o DMA (Direct Memory Access, acesso direto a memória) entrou em cena, em particular o bus mastering (controle do barramento), e tornou-se a peça principal. Certamente, os discos rígidos tornaram-se cada vez mais rápidos, o que fez com que a máxima velocidade do multiword DMA (DMA multi-palavra) modo 2 (16.7 MB/s) ficasse insuficiente para eles. Esta necessidade produziu como resultado novos modos de transferência DMA, que são chamados modos Ultra DMA.
O Ultra DMA introduziu a transferência dupla por pulso de clock. Antes do Ultra DMA, uma única transferência era realizada a cada pulso do clock. Com o Ultra DMA ocorrem duas transferências a cada pulso de clock, dobrando a quantidade de transferências.
Para garantir a integridade dos dados nesta nova interface, o Ultra DMA também introduziu o CRC (Cyclical Redundancy Checking). Esta técnica verifica se os dados foram transferidos corretamente e, caso não sejam, solicita que sejam retransmitidos.
A primeira implementação do Ultra DMA foi no padrão ATA/ATAPI - 4, que contemplava três modos. Novos modos foram adicionados posteriormente.
Para os modos do Ultra DMA acima do 2 é necessário utilizar o cabo de 80 vias. Caso este cabo não seja detectado pelo sistema, a operação a 66/100/133 MByte/seg será desativada.
5.5.4 - Endereçamento de 16 bits e 32 bits
Uma das opções em alguns chipsets e BIOSes é conhecida como acesso/transferência de 32 bits (32 bit access ou 32 bit transfers). Na realidade, a interface IDE/ATA sempre realiza a transferência de 16 bits de cada vez, refletindo em seu nome AT Attachment (ATA). O computador AT original utilizava um barramento de 16 bits. Devido a isto o nome acesso/transferência de 32 bits é inapropriado.
Como os PCs modernos utilizam um barramento de E/S de 32 bits, como o PCI, executar transferências de 16 bits desperdiça metade da largura de banda do barramento. Habilitar o acesso a 32 bits na BIOS (se disponível) do PC, permite ao controlador da interface PCI do disco rígido mandar duas palavras de 16 bits juntas pelo barramento de 32 bits, o que permite um pequeno aumento de performance.
5.5.5 - LBA (Logical Block Addressing, endereçamento lógico por blocos)

O endereçamento dos dados que estão dentro do HD (disco rígido), é, normalmente, feito especificando-se o cilindro, a cabeça e o setor onde estão os dados que se quer ler ou gravar. Este método é conhecido como CHS. Já no sistema de endereçamento LBA (Logical Block Addressing, endereçamento lógico por blocos) cada setor recebe um número único que é utilizado para identificá-lo. Essencialmente, os setores são numerados 0, 1, 2, ... , (N-1), onde N é o número total de setores no disco. Uma analogia pode ser feita com o sistema de endereçamento postal. Normalmente, o endereço de cada casa é composto pelo número, nome da rua, nome da cidade e o nome do estado. Este é o método de endereçamento convencional (HCS). Em lugar disso, numerasse todas as casas do país, assim, cada casa teria um único número. Deste modo para enviar uma carta bastaria colocar o número da casa, diferentemente do modo convencional. Este novo método seria o LBA.
Para que o LBA possa ser utilizado é necessário que a BIOS e o sistema operacional tenham suporte a esse recurso. Entretanto, como este é um novo modo de comunicação com o disco rígido, ele também deve oferecer suporte ao LBA. Praticamente todos os novos HDs (disco rígido) suportam o LBA, que é, na maioria das vezes, detectado automaticamente pela BIOS com suporte a LBA.
5.6 - Interrupções
Uma interrupção é um sinal proveniente de um dispositivo atachado (conectado num slot) ao computador ou de um programa. Este sinal faz com que o programa principal que opera o computador, o Sistema Operacional, pare e verifique o que deve ser feito em seguida. Quase todos os computadores pessoais (ou a maioria) são orientados por interrupção, ou seja, eles iniciam a lista de instruções de máquina de um programa (por exemplo, uma aplicação como um processador de texto) e continuam executando estas instruções até que não possam continuar a execução ou um sinal de interrupção seja sentido. Após o sinal de interrupção ser sentido, o computador pode continuar executando o programa que estava executando antes ou iniciar a execução de outro programa.
Basicamente, um computador executa somente uma instrução por vez. Quando ocorre alguma interrupção ele pode retornar ao processamento anterior, ou seja voltar a executar as instruções que estava executando quando parou. Isto é conhecido como multitarefa, que permite que o usuário execute diferentes tarefas ao mesmo tempo. O computador simplesmente toma o gerenciamento dos programas que o usuário inicializa, executando numa velocidade tal que parece que as tarefas do usuário estão sendo executadas ao mesmo tempo.
Um sistema operacional, geralmente, tem um código que é chamado de tratador de interrupção, que prioriza as interrupções e salva-as em uma pilha se mais de uma está esperando para ser tratada. O sistema operacional tem outro pequeno programa, chamado escalonador, que faz o gerenciamento de qual processo está ou passará a ser executado.
5.6.1 - IRQ (Interrupt Request - Requisição de Interrupção)
IRQ é um local de acesso onde o computador pode esperar um dispositivo interromper quando este envia um sinal a respeito de sua operação. Por exemplo, quando a impressora acabou de imprimir, ela envia um sinal de interrupção para o computador. O sinal momentaneamente interrompe o computador e ele decide o que fazer em seguida. Múltiplos sinais sendo enviados ao computador pela mesma linha de interrupção podem não ser entendidos pelo computador, portanto, é preciso ter um valor único de interrupção para cada dispositivo. Excetuando-se os dispositivos Plug-and-Play (PnP), os usuários geralmente têm que configurar manualmente os valores de IRQ quando instalam um novo dispositivo no computador.
Se você precisa adicionar um dispositivo que não suporta PnP, o fabricante, espera-se, fornecerá as instruções de como acessar e configurar valores de IRQ. É preciso saber qual valor de IRQ o dispositivo utiliza para não se perder tempo procurando o valor exato ou o valor em que ele trabalha melhor.
Abaixo segue uma pequena tabela de interrupções:
Os micros padrão PC AT têm disponíveis 16 (numeradas de 0 a 15) interrupções de hardware para utilização de outras placas de expansão. Na tabela acima temos as mais comuns. As IRQs 5 e 9 são utilizadas por portas adicionais.
5.7 - Plug and play (Conectar e usar)

Uma grande variedade de placas pode ser adicionada ao PC para expandir suas capacidades. Configurar o sistema e lidar com os conflitos de recursos é parte do problema de se ter vários dispositivos não-padronizados no mercado. Lidar com as características de cada produto pode ser tremendamente confuso, difícil e uma tarefa que consome muito tempo.
Na tentativa de resolver isto, a Microsoft, com cooperação da Intel e muitos outros fabricantes de hardware, desenvolveu a especificação Plug and Play (conectar e usar), também referenciada como PnP. O objetivo do PnP é criar um computador onde o hardware e o software trabalhem juntos para configurar e atribuir recursos aos dispositivos. Com isso facilitando as mudanças de hardware, como a adição/retirada de uma nova placa, pois não é necessário perder muito tempo na atribuição de recursos. Como o próprio nome sugere, o objetivo é ser capaz de conectar um novo dispositivo e ele imediatamente estar pronto para o uso, sem a necessidade de complicadas configurações.
5.7.1 - Requisitos para o Plug and Play
Detectar e configurar hardware e software automaticamente não é uma tarefa simples. Para executar esta tarefa é necessária a cooperação de muitas áreas do hardware e do software.
Sistema de Hardware Hardware: O sistema de hardware através do chipset e controladores de barramento deve ser capaz de lidar com dispositivos PnP. O barramento PCI atual foi construído com o PnP em mente. Muitos barramentos PCI atuais também suportam PnP em seus barramentos ISA por meio de um circuito especial que conecta os dois e permite a troca de informações.
Hardware dos Periféricos: Os dispositivos que são adicionados ao PC devem ser compatíveis com o PnP. A maioria dos dispositivos atuais suporta o PnP, de modem e placa de rede a monitores. Estes dispositivos são capazes de se identificar quando solicitado, e também são capacitados para se configurar com as informações fornecidas pelo sistema.
A BIOS : A BIOS tem um papel chave no funcionamento do PnP. Rotinas colocadas dentro da BIOS executam o trabalho de coletar informações sobre os diferentes dispositivos e de determinar quais os recursos cada dispositivo deve utilizar. A BIOS também se comunica com o sistema operacional, enviando as informações coletadas dos dispositivos e os recursos atribuídos a cada um deles. O sistema operacional utiliza estas informações para configurar os drivers e outros softwares necessários ao correto funcionamento de cada dispositivo.
O sistema operacional operacional: Finalmente, o sistema operacional deve ser desenhado paratrabalhar em conjunto com a BIOS e indiretamente com o hardware. O sistema operacional configura todo o software de baixo nível (drivers principalmente) que são necessários para que o dispositivo seja utilizado pelas aplicações instaladas no PC. Ele também se comunica com o usuário notificando as mudanças de configuração e permitindo mudanças na configuração dos recursos, se necessário. O PnP faz parte dos sistemas operacionais da Microsoft desde o Windows 95 e o Linux oferece este suporte incluído no Kernel a partir da versão 6.
5.7.2 - Funcionamento do PnP 4
A maioria das funções envolvendo o Plug and Play é executada pela BIOS durante o processo de BOOT. A BIOS segue um procedimento especial para determinar e configurar os dispositivos Plug and Play do sistema. A lista abaixo mostra de forma bastante simplificada os passos que a BIOS segue, durante o BOOT, para gerenciar o sistema Plug and Play do barramento PCI.
1. Criação de uma tabela de recursos disponíveis (IRQs, canais DMA, endereços de E/S, etc.), excluindo aqueles que são reservados.
2. Procura e identifica os dispositivos PnP e não-PnP nos barramentos PCI e ISA.
3. Carrega a configuração do sistema armazenada na área ESCD (Extended System Configuration Data, sistema estendido de dados para configuração) da CMOS.
4. Compara a configuração atual com a última configuração gravada. O processo de boot prossegue normalmente, caso a configuração não tenha sido alterada, o processo de configuração PnP termina e o BOOT prossegue normalmente.
5. Caso a configuração atual do PC seja diferente da configuração armazenada, o sistema inicia um processo de reconfiguração. Ela começa com a eliminação dos recursos utilizados pelos dispositivos não PnP da tabela de recursos.
6. Checa a configuração da BIOS para verificar se algum recurso adicional foi reservado para os dispositivos não-PnP. Caso exista, estes recursos reservados são eliminados da tabela.
7. Neste ponto, a tabela contém somente os recursos que não estão sendo utilizados no PC. Os dispositivos PnP são configurados utilizando os recursos que estão na tabela.
8. Os dados da configuração realizada são gravados na área ESCD. Algumas BIOSes exibem uma mensagem na tela indicando esta atualização.
9. O processo de BOOT continua normalmente.
5.7.3 - Extended System Configuration Data (ESCD, sistema estendidode dados para configuração)
Se a BIOS tivesse que atribuir recursos para cada dispositivo PnP em todo o BOOT, geraria dois problemas como resultado. Primeiro este processo de configuração iria tomar muito tempo para executar algo já foi feito antes (a cada BOOT). As mudanças de hardware ocorrem com pouca freqüência, isso faz com que a execução do processo de configuração a cada boot seja um tempo desperdiçado na maioria das vezes. Segundo e mais importante, é possível que a BIOS não tome sempre a mesma decisão na atribuição de recursos aos dispositivos PnP, assim mudando a configuração sem que haja

mudança de hardware.
O ESCD foi criado para resolver estes problemas. A área ESCD é uma parte especial da memória CMOS da BIOS. Esta área é utilizada para armazenar as configurações do hardware do PC. Durante o BOOT, a BIOS checa esta área da memória e, caso não existam mudanças desde o último boot, a BIOS sabe que não existe a necessidade de executar uma nova configuração.
O ESCD também é utilizado como link de comunicação entre a BIOS e o sistema operacional. Ambos utilizam esta área para verificar a configuração atual do hardware e as mudanças ocorridas.
5.8 - PC Perfeito
O melhor computador não é aquele que possui os últimos lançamentos dos fabricantes de hardware (melhor aceleradora gráfica, processador mais potente, etc.) e sim aquele que consegue executar as tarefas para as quais foi destinado. Desta forma, se o usuário deseja um computador para simplesmente fazer cartas num processador de textos (Microsoft Word/Excel 97, Open Office, etc.), pode utilizar perfeitamente um AMD K6-II (64 MB RAM; 10 GB de HD) com Windows 98. Contudo, se dinheiro não for problema, deve comprar o melhor computador possível.
Na aquisição de um computador alguns fatores devem ser levados em consideração, dentre eles destacam-se:A escolha da placa-mãe pode ser traiçoeira. Uma placa-mãe mais barata, com todos os dispositivos desejáveis integrados, pode ser o bastante. Por exemplo, para uma rede doméstica uma placa de rede on board é suficiente. Similarmente, para uma conexão discada dial-up um modem on board de 56 K é tão bom quando qualquer placa comprada separadamente.
O chipset é um fator muito importante que se deve levar em consideração, caso se deseje obter a melhor performance do sistema. Isso porque governa a interação entre todos os componentes do sistema, como um centro de controle. Para se obter o desempenho máximo do sistema deve-se ter um bom chipset. Por exemplo, alguns chipsets auxiliam quem quer realizar um overclock, rodando o sistema numa velocidade superior a recomendada pelo fabricante. Assim, se o desempenho é o principal fator deve-se pesquisar os chipsets das placas-mãe antes de comprá-las.
6 - cPu (microprocessador)
O processador pode ser comparado a um cozinheiro de um restaurante, preparando uma sobremesa. O cozinheiro segue os passos da receita para combinar os ingredientes da sobremesa (leite, ovos, açúcar, farinha de trigo...). Se o cozinheiro deixar de executar um passo, a sobremesa ficará com um gosto ruim e os clientes do restaurante vão reclamar. O programa é a receita do processador. O programa é constituído de instruções (passos) que são executadas pelo processador. As instruções dizem ao processador como processar os dados de entrada (ingredientes) que estão na memória principal. Os dados de entrada provêm de diversas fontes, como teclado, mouse, disco rígido, leitor de CD, até de outros computadores através de uma rede. Os dados precisam estar na memória principal para poderem ser processados. O resultado da execução do programa são os dados de saída (sobremesa), que podem ser armazenados de volta na memória principal ou enviados para o monitor de vídeo para que possamos vê-los. O computador é um restaurante onde os clientes (memória principal, disco rígido, monitor) são alimentados com os dados de saída do processador.
O processador ou microprocessador é responsável por executar instruções de máquina. Cada instrução é formada por uma seqüência de bits , como esta: 0000 0001 0000 0001 0001, que é uma instrução de soma do processador Intel 80386, Figura 71. Um processador é capaz de executar bilhões de instruções de soma ou subtração por segundo, envolvendo números arbitrários que variam desde 0 a 4.294.967.295 se os registradores forem de 32 bits, ou 0 a 18.446.744.073.709.551.615 para registradores de 64 bits.
Num computador é possível encontrar vários processadores, dentre os mais importantes estão a CPU e a GPU.
A CPU ( Central Processing Unit ou Unidade Central de Processamento) é o processador principal de um computador, responsável por executar diversos tipos de programas, como leitor de e-mail, navegador de Internet, jogos, editor de texto ou imagens, inclusive o sistema operacional (Linux ou Windows), que também é um programa. A CPU é um processador de uso geral porque consegue executar diversos tipos de programas.
A GPU ( Graphics Processing Unit ou Unidade Gráfica de Processamento) é o processador gráfico encontrado nas placas de vídeo aceleradoras 3D. A GPU ajuda a CPU a processar programas que desenham modelos 3D no monitor do computador. Com a GPU, os programas gráficos (jogos 3D, modeladores 3D, reprodutores de vídeo) ficam mais rápidos.
A CPU é um processador de uso geral, que serve para executar vários tipos de programas. A GPU é um processador dedicado, especializado em executar programas gráficos. A CPU também consegue executar programas gráficos, sem a ajuda da GPU, mas os programas ficam mais lentos.
Os maiores fabricantes de CPUs para PC são a Intel e a AMD. Os maiores fabricantes de GPUs para placas gráficas são NVIDIA e ATI.
6.1 - ESTRUTURA INTERNA DO PROCESSADOR
Olhando a Figura 71 vemos que a estrutura interna do processador é formada por vários componentes; dentre eles estão registradores, memória cache, ULA e UC.
6.1.1 - Registrador
O registrador é um dispositivo de armazenamento de dados existente dentro do processador. O tamanho do registrador é medido em bits, variando de 32 a 256 bits nos processadores atuais. O conjunto de todos os registradores forma uma memória interna do processador, de alta velocidade, mas de baixa capacidade se comparada com outras memórias (cache, principal, disco rígido, CD). O registrador é a memória mais rápida da hierarquia de memória do computador; é possível ler e escrever rapidamente nele.
Todo dado a ser processado precisa estar armazenado no registrador. Antes de executar uma instrução, todos os dados que a instrução precisa são lidos da memória cache e armazenados nos registradores. A instrução indica quais registradores devem ser usados e qual operação (soma, subtração, multiplicação...) deve ser executada sobre eles. Os valor dos registradores é processado pelos circuitos internos do processador para gerar como resultado um novo valor, o qual é armazenado num registrador. Como exemplo, temos a instrução add al,cl do processador 80386, Figura 71, em linguagem assembly ( linguagem de programação). O processador não executa código assembly diretamente. É necessário converter um programa escrito em assembly para linguagem de máquina, a qual pode ser executada pelo processador.Por exemplo, 0000 0000 1100 1000 (código binário de máquina). A instrução add soma os registradores al e cl e coloca o resultado em al, portanto, add al,cl corresponde a al=al+cl cl.
Quando se diz que um processador é de 32 bits ou 32-bit, significa que ele possui registradores de 32 bits. Os processadores Intel 80386, Intel Pentium 4 e AMD Athlon XP são de 32 bits. Os processadores Intel Itanium e AMD Athlon 64 são de 64 bits. A tendência no mercado de PCs desktop (computador de mesa de menor custo e poder computacional que uma workstation) é a substituição gradativa de processadores de 32 bits pelos de 64 bits.
6.1.2 - Memória Cache
A memória cache é uma memória intermediária entre a memória principal e os registradores do processador. Ela é dividida em níveis LX ( level X), onde X é um número natural. É bastante comum haver CPUs com 2 níveis de cache: cache L1 e cache L2, mas há CPUs com 3 níveis: L1, L2 e L3. Geralmente as caches L1 e L2 estão embutidas ( on-chip ou on-die) no chip do processador. Nos computadores antigos, era possível encontrar a cache L2 fora do chip da CPU, pois isso reduzia o custo de fabricação do processador.
A cache L2 estava em um chip da placa-mãe e existia um barramento conectando esse chip à CPU. Atualmente, a cache L2 é incorporada ao chip da CPU, dessa forma, a transferência de dados é mais rápida entre a cache L2 e a L1, fazendo com que a CPU fique mais rápida.
6.1.3 - ULA
A Unidade Lógica e Aritmética (ULA) é um dos núcleos de processamento do processador. A ULA processa os dados dos registradores para gerar outros dados que são resultados de uma operação. A ULA realiza operações aritméticas (soma, subtração, multiplicação, divisão) e operações lógicas (AND, OR, XOR, NOT, SHIFTS, ROTATES).
6.1.4 - UC
A Unidade de Controle (UC) é um componente do processador responsável por gerar sinais elétricos que controlam outros componentes, como a ULA e os registradores. Os sinais são gerados com base na instrução que está sendo processada. A ULA recebe esses sinais para saber qual operação executar (soma, divisão, AND, OR...), quais registradores fornecerão dados de entrada para ULA e qual será o registrador que armazenará o resultado da operação. Seja a instrução de soma add al, cl de um processador hipotético; para executar esta instrução, a UC envia um sinal para a ULA indicando que ela deve realizar uma operação de soma. A UC também envia um sinal para os registradores al e cl, indicando que eles devem fornecer seus dados para a ULA somá-los. A UC gera outro sinal para indicar que o registrador al deve armazenar o resultado da soma gerado pela ULA.

6.2 - CONJUNTO DE INSTRUÇÕES
Para cada processador existe um conjunto de instruções que ele pode executar. Além das instruções aritméticas (soma, subtração, divisão, multiplicação), uma CPU pode executar instruções de transferência de controle, manipulação de bit, suporte ao sistema operacional e de controle do processador.
Um programa de computador é uma seqüência de instruções que pertencem ao conjunto de instruções de um processador. Para criar o programa, o programador escolhe algumas instruções do conjunto de instruções e coloca-as em seqüência, repetindo algumas instruções se necessário. Em linguagem assembly, um trecho de programa ficaria assim:
jg file:00000047
dec esp
inc esi
add [ecx],eax
add [eax],eax
add [eax],al
As instruções jg, dec, inc, add pertencem ao conjunto de instruções do processador Intel 80386, também chamado de i386; estas são apenas algumas instruções do conjunto. Apesar do processador i386 ter aparecido em 1985, o conjunto de instruções do 80386 ainda é executado por processadores mais recentes, como o Pentium 4 da Intel e Athlon 64 da AMD. Isso significa que os programas que rodavam no 80386 também rodam no Pentium e no Athlon, 20 anos após o lançamento do 80386.
A arquitetura de conjunto de instruções 80x86 (ou apenas x86 ou arquitetura do processador ou simplesmente arquitetura, engloba detalhes do processador como registradores, instruções e organização da memória) domina o mercado de PCs atualmente. Os processadores Intel 8086, 80286, 80386, 80486 foram os primeiros da arquitetura 80x86. Depois seguiram os processadores Pentium até o Pentium 4. Atualmente, vários processadores de diferentes fabricantes seguem a arquitetura 80x86, por isso que um mesmo programa pode rodar em processadores diferentes, contanto que o sistema operacional (programa especial que controla o hardware do computador. Linux e Windows são sistemas operacionais) seja o mesmo.
É comum um fabricante estender a arquitetura 80x86 com novas instruções. Por exemplo, o Pentium 4 é da arquitetura x86, mas executa instruções MMX, SSE e SSE2. O Athlon XP também é da arquitetura x86, mas executa instruções MMX, 3dNOW! e SSE. O conjunto de instruções principal é o x86, mas esses processadores também possuem os conjuntos MMX, SSE e 3dNOW!, que têm instruções que tornam mais veloz o processamento de imagens e áudio. Os programas que rodam nesses processadores obrigatoriamente devem ter instruções x86, mas não precisam ter outros tipos de instruções.
Antes de baixar um programa da Internet, é necessário verificar se ele foi feito para rodar no processador da máquina. Os pacotes Debian de software para Linux podem ser encontrados para diversas arquiteturas. Cada pacote possui um programa ou conjunto de programas, e o nome do pacote indica o processador para o qual os programas foram feitos para serem executados. Exemplos:
1. mplayer-k6_i386.deb deb: o símbolo k6 indica que este pacote deve executar em processadores K6, Duron ou Athlon.
2. mplayer-586_i386.deb deb: o símbolo 586 indica que este pacote deve executar em processadores Pentium.
3. mplayer-386_i386.deb deb: o símbolo 386 indica que este pacote deve executar em processadores 80386; mas tudo que executa no 80386 também executa num Pentium ou Athlon, por isso este é um pacote geral, que roda em vários modelos de Pentium e Athlon.
Os pacotes debian terminam com a extensão .deb. Os três pacotes acima contêm o MPlayer, que é um programa que reproduz vídeo. O símbolo i386 indica que os três pacotes possuem instruções do 80386. Entretanto, apenas o pacote 3 rodaria num 80386, porque ele só possui instruções do 80386. Os pacotes 1 e 2 possuem instruções específicas para Athlon ou Pentium, por isso eles não executariam no 80386.
6.3 - BARRAMENTO CPU-RAM
A comunicação entre CPU e memória principal (ou memória RAM) é feita através do barramento CPU-RAM, também chamado de barramento de dados ou FSB ( Front Side Bus, barramento frontal). O FSB também é chamado de barramento do sistema porque ele liga a CPU ao restante dos componentes da placa-mãe. É comum encontrar o FSB ligando a CPU diretamente ao northbridge do chipset da placa-mãe. O northbridge, então, gerencia a comunicação da CPU com o restante do sistema.
A largura do barramento de dados determina quantos bits são transmitidos simultaneamente entre CPU e memória RAM.
O barramento opera numa determinada freqüência de clock. Se a largura do barramento é 64 bits (barramento 64-bit), então são transmitidos 64 bits a cada ciclo do clock. Se o barramento opera em 100MHz, então ele pode transportar 64bits x 100MHz=6400 megabits por segundo, ou 6400Mbps, ou ainda 6,4Gbps (6,4 gigabits por segundo). Diz-se que 6,4 Gbps é a largura de banda (bandwidth) do barramento. Nos barramentos DDR (Double Data Rate, dupla taxa de dados), são transmitidos 64 bits a cada meio ciclo, totalizando 64x2=128 bits a cada ciclo do clock. Se o barramento DDR funciona em 100MHz, ele poderá transportar 12,8Gbps, o dobro do barramento SDR ( Single Data Rate, “taxa de dados única”) anterior.

Já foram inventadas várias tecnologias de barramento CPU-RAM, com diferentes larguras e freqüências de operação.
6.3.1 - Pipeline e Pipelining
Pipelining é uma técnica usada na construção dos processadores que permite que várias instruções sejam executadas simultaneamente. A execução de uma instrução pode ser dividida em vários estágios:
1. A instrução é lida da memória.
2. A instrução é decodificada. Decodificar significa interpretar os zeros e uns de uma instrução para saber se ela é uma instrução de soma, subtração, ou outra que pertença ao conjunto de instruções do processador. Exemplo: os bits 0000 0000 1100 1000 são decodificados pelo processador 80386 na instrução de soma add al, cl.
3. Os dados de entrada da instrução são lidos dos registradores. Dependendo do processador, algumas instruções não precisam ler registradores.
4. A instrução é executada. Se for uma instrução de soma, os dados lidos no estágio 3 são somados.
5. O resultado da instrução é escrito num registrador.
O conjunto de todos esses estágios é chamado de pipeline. A vantagem do pipeline é que uma instrução diferente pode ser processada em cada estágio. No pipeline da Figura 73 há 5 instruções aritméticas sendo executadas simultaneamente. No ciclo 1 do processador há instruções de soma no estágio 1 e 5 do pipeline; no estágio 2 há uma multiplicação, no 3 uma divisão e no estágio 4 uma subtração. A instrução anda no pipeline da esquerda para a direita, permanecendo no mesmo estágio por um ciclo do clock. No próximo ciclo ela avança para o estágio seguinte. A instrução soma que estava no estágio 1 durante o ciclo 1 passou para o estágio 2 no ciclo 2, deixando o estágio 1 vazio. A instrução X foi lida da cache para ocupar o estágio 1. A cada ciclo uma instrução nova é lida da cache para ser inserida no estágio 1, enquanto que a instrução do estágio 5 é retirada do pipeline. As instruções X e Y podem ser quaisquer instruções do processador.
Cada instrução deve passar por todos os estágios do pipeline para ser executada. Um processador sem pipeline é mais lento porque ele só pode executar uma instrução de cada vez.
As CPUs modernas usam pipeline para executar os programas mais rapidamente. Um processador Athlon XP modelo 6 tem 10 estágios no pipeline.
O número de estágios do pipeline NÃO DEVE SER USADO COMO ÚNICO CRITÉRIO para comparação de processadores, pois um processador com mais estágios pode não ser mais rápido que um processador com menos estágios.
6.4 - SLOT E SOCKET
Há dois tipos de encaixe da CPU na placa-mãe: slot e socket.
6.4.1 - Slot
Os encaixes tipo Slot (fenda em português, geralmente há uma fenda no meio do encaixe tipo slot, na qual são inseridos os terminais elétricos do dispositivo) são estreitos e alongados, como mostra a Figura 74, na qual as setas indicam a posição do slot.

Os processadores compatíveis com slot eram distribuídos num cartucho. A Figura 75 mostra o cartucho de um Intel Pentium II. A Figura 76 mostra o cartucho aberto do Pentium II, detalhando a placa de circuitos integrados que carregava o chip do processador. O processador Pentium III da Intel também foi distribuído em cartucho para slot. Alguns modelos do Pentium III eram compatíveis com socket. O slot do Pentium II e III era chamado de Slot 1.
A Figura 77 mostra o cartucho do Athlon para slot, concorrente do Pentium III. O Athlon era fabricado pela AMD e seu slot chamava-se Slot A.
O encaixe tipo slot é pouco usado hoje em dia pelos fabricantes de CPU, que preferem usar o socket. O slot é mais usado para conectar placas de expansão ao barramento PCI ou AGP da placa-mãe.
6.4.2 - Socket
O encaixe tipo socket é bastante usado pelos fabricantes de CPU. O socket pode ser descrito como uma matriz retangular de orifícios. A Figura 78 mostra o socket usado por processadores Athlon XP ou Duron da AMD. Ele é chamado de Socket A ou Socket 462 porque tem 462 orifícios.
O Socket 939 da Figura 79 é usado pelos processadores Athlon 64 da AMD.
A Figura 79a mostra o Athlon 64 FX53 de frente; a Figura 79b mostra os pinos da parte de trás do processador. Esses pinos encaixam-se nos orifícios do Socket 939 no total são 939 pinos. Através dos pinos é feito o contato elétrico do processador com os circuitos da placa-mãe.
O número de pinos varia para cada modelo de processador e cada fabricante possui seu padrão de socket. Foram lançados processadores AMD Athlon 64 para Socket 754, Socket 940 e Socket 939. A Intel lançou processadores Pentium 4 para Socket 478, Socket 775 e Socket 423.
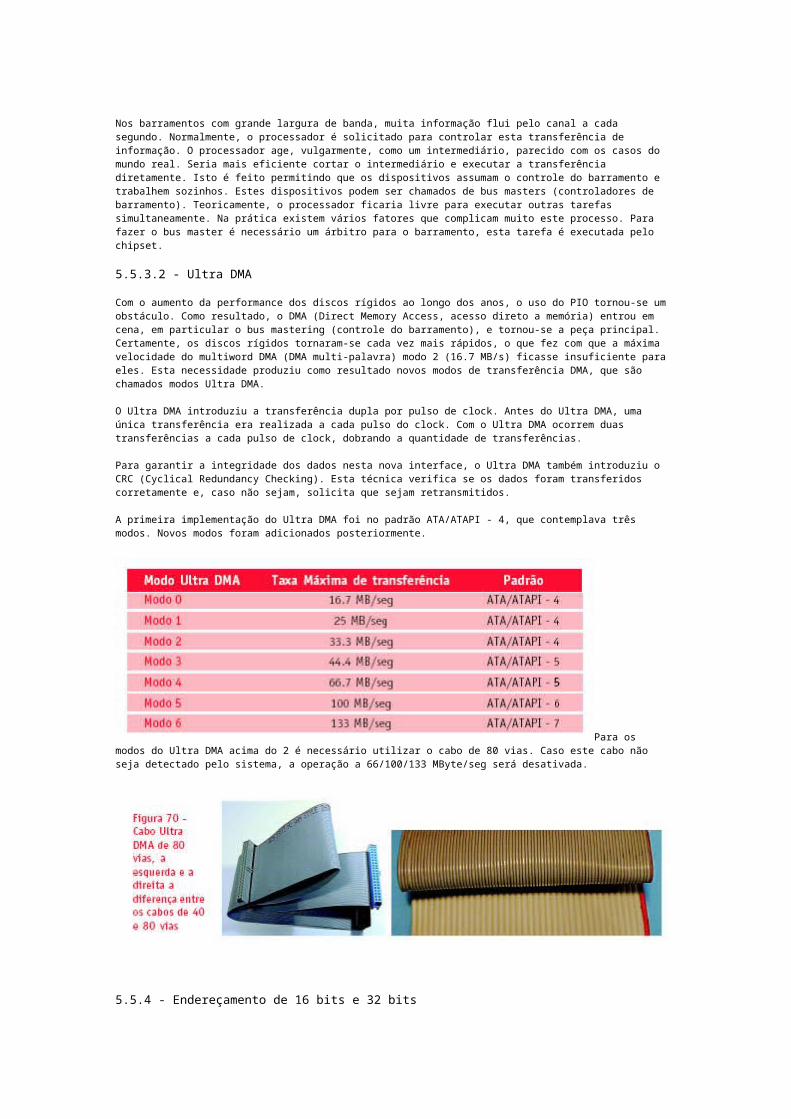
6.5 - CLOCK E MULTIPLICADORES DE CLOCK
O clock é um sinal elétrico que controla a freqüência de operação dos chips da placamãe, incluindo memória e CPU.
A freqüência do clock pode ser usada para comparar processadores do mesmo modelo. Certamente, um Pentium 4 operando em 3800MHz é mais rápido que um Pentium 4 operando em 2800MHz, desde que os dois sejam do mesmo modelo. Por outro lado, A FREQÜÊNCIA DO CLOCK NÃO DEVE SER USADA COMO ÚNICO CRITÉRIO NA COMPARAÇÃO DE PROCESSADORES DE MODELOS DIFERENTES. Isso porque um processador modelo A, operando em freqüência menor, pode executar programas mais rapidamente que um modelo B que opere numa freqüência maior. Foi por causa desse fato que a AMD mudou a especificação da freqüência de seus processadores, de forma que ficasse mais fácil compará-los com os processadores da Intel. Por exemplo, um Athlon 64 3400+ da AMD teria performance equivalente a de um Pentium 4 3400MHz da Intel. O símbolo ‘+’ em 3400+ indica que 3400MHz não é a freqüência real do Athlon; na verdade o Athlon 64 3400+ opera em 2400MHz.
A partir dos processadores Intel 80486, surgiu o conceito de multiplicador de clock. As CPUs multiplicam uma freqüência base por um fator para encontrarem a freqüência de operação de seus núcleos internos. Comumente, a freqüência de operação do FSB (Front Side Bus é o barramento que liga a CPU ao restante do sistema. Através do FSB, a CPU se comunica com outros dispositivos da placa-mãe) é usada como freqüência base. Por exemplo, um processador Athlon XP 1800+ opera na freqüência nominal de 1533MHzou 1,533GHz. Se o FSB estiver em 133MHz, então o Athlon estará usando um multiplicador de 1533/133 ou 11,5, aproximadamente. Para obter sua freqüência de operação o Athlon multiplica a freqüência do FSB por 11,5.
Alguns Setup de BIOS permitem a manipulação dos multiplicadores e, conseqüentemente, da freqüência dos processadores. Pode-se aumentar a freqüência (overclock, seção 6.5.1 - ) para fazer o processador ficar mais rápido. Pode-se também diminuir a freqüência para que o processador consuma menos energia e dissipe menos calor.
6.5.1 - Overclock
O overclock consiste em fazer um dispositivo eletrônico funcionar numa freqüência de clock maior do que a normal. Disso vem o nome overclock em inglês, que significa “acima do clock”.
O overclock é usado para fazer o dispositivo funcionar mais rápido. Um processador em overclock executa instruções mais rapidamente. Um chip de memória em overclock lê e escreve dados mais rapidamente. Os programas executam mais rápido quando a CPU funciona em overclock.
Há três tipos de overclock para CPUs: interno, externo e misto.
6.5.1.1 - Overclock Interno
O overclock interno consiste em aumentar a freqüência do sinal de clock que alimenta os núcleos internos da CPU. Conseqüentemente, a CPU fica mais rápida, enquanto os demais dispositivos da placa-mãe ficam inalterados. Essa é a forma mais segura de overclock, pois só afeta a CPU.
O overclock interno é feito alterando-se os multiplicadores da CPU através do Setup da BIOS. Por exemplo, um Athlon XP 1800+ possui freqüência nominal de 1533MHz, que equivale a um multiplicador de 11,5 quando o FSB está operando em 133MHz. Se o multiplicador for aumentado para 12, o Athlon funcionará em 1596MHz, acima da freqüência nominal e portanto em overclock.
Nem toda BIOS permite a manipulação dos multiplicadores. Também não é possível fazer overclock num processador travado, pois ele não permite a manipulação do multiplicador. Dicas de como destravar um Athlon podem ser encontradas na Internet ou em revistas especializadas. Sabe-se que certos modelos do Athlon podem ser destravados.
6.5.1.2 - Overclock Externo
O overclock externo consiste em aumentar a freqüência do sinal de clock que controla o FSB. O multiplicador da CPU continua o mesmo, mas a sua freqüência de operação aumenta, pois o multiplicador está multiplicando uma freqüência base maior. O ajuste da freqüência do FSB pode ser feito pelo Setup da BIOS, mas nem toda BIOS permite esse ajuste.
O overclock externo é mais perigoso que o overclock interno, pois pode afetar outros dispositivos da placa-mãe além da CPU.

O overclock externo é útil quando o multiplicador da CPU está travado e não pode ser mudado. Se o multiplicador de um Athlon XP 1800+ estiver travado em 11,5, pode-se aumentar a freqüência do FSB de 133MHz para 135MHz para fazer o Athlon funcionar em 135MHz x 11,5 = 1552,5MHz.
6.5.1.3 - Overclock Misto
O overclock misto é uma combinação dos overclocks externo e interno, realizados simultaneamente. É a forma mais perigosa de overclock, pois força a CPU a funcionar em freqüências maiores, além de poder afetar todos os dispositivos da placa-mãe. Para colocar o Athlon XP 1800+ em overclock misto, aumenta-se a freqüência do FSB de 133MHz para 135MHz eajusta-se o multiplicador em 12. Em vez de trabalhar na freqüência interna nominal de 1533MHz, agora o Athlon está em overclock misto, operando em 135MHz x 12=1620MHz.
6.5.1.4 - Vantagens e Desvantagens do Overclock
A vantagem do overclock é o aumento da velocidade de execução dos programas. O computador fica mais rápido. A desvantagem é que o sistema pode ficar instável. Isso significa que o computador pode travar e dados importantes podem ser perdidos. Às vezes, os danos são imperceptíveis e vão se acumulando com o tempo, resultando na corrupção de alguns arquivos do HD ( Hard Disk é o disco rígido que armazena programas e os dados do usuário). Num caso mais grave, o sistema de arquivos pode ficar corrompido, ocasionando a perda de todos os arquivos da partição do HD. O overclock não deveria ser feito se o computador é usado para o trabalho, armazena dados importantes, ou funciona como servidor de uma rede. Quanto maior for a importância ou custo do computador, maiores podem ser os prejuízos do overclock. É recomendável fazer um backup do sistema antes de se realizar o overclock.
6.5.1.5 - A CPU pode Queimar
Quanto maior for a freqüência do clock interno, maior será a temperatura da CPU. Se a CPU não estiver bem refrigerada, ela pode queimar. Além disso, o overclock pode diminuir a vida útil da CPU.
Para diminuir os riscos de perder a CPU, é recomendável aumentar a freqüência aos poucos. A cada acréscimo na freqüência, verifica-se a temperatura da CPU para ver se ela não está muito alta. Carrega-se o sistema operacional e testa-se alguns programas para verificar se o sistema permanece estável no overclock.
Para manter baixa a temperatura da CPU durante o overclock, pode-se melhorar a refrigeração da CPU com um modelo de cooler mais eficiente (e possivelmente mais caro também). Fazer overclock em dias frios também ajuda.
6.6 - HYPER-THREADING
Hyper-Threading (HT) é uma tecnologia que a Intel emprega na produção de seus processadores. A tecnologia HT permite que o processador funcione como se fosse dois processadores virtuais. Assim, dois programas podem executar simultaneamente, um em cada processador virtual. Mas na verdade, os programas estão sendo executados no mesmo processador.
Os processadores da Intel que suportam HT são:
• Pentium 4 . Nem todos os modelos de Pentium 4 suportam HT. É preciso verificar se o processador suporta HT.
• Pentium 4 Extreme Edition (P4EE). Este é um modelo melhorado do Pentium 4.
• Mobile Pentium 4. Este modelo é para notebooks.
• Xeon. Este é um processador 64-bit de alto desempenho usado em servidores e estações de trabalho (workstations).
Alguns modelos dos processadores listados acima podem não suportar HT.
Não basta que o processador suporte HT para que a tecnologia seja utilizada. É necessário que o chipset da placa-mãe, a BIOS do sistema e o sistema operacional suportem HT também. Se um deles não suportar, o processador funcionará com HT desligada e só poderá executar um programa de cada vez. A Intel fabrica chipsets com HT.
Sistemas operacionais que suportam HT:
• Microsoft Windows XP Professional Edition• Microsoft Windows XP Home Editon• Linux Red Hat 9• Linux SuSE 8.2• Linux Red Flag 4.0 Desktop• Linux COSIX 4.0
A tecnologia HT deve ser desabilitada no Setup da BIOS caso o sistema operacional Microsoft usado esteja listado abaixo:
• Windows 2000 (todas as versões)• Windows NT 4.0• Windows Me• Windows 98• Windows 98 SE
O site da Intel contém a lista atualizada de processadores, chipsets e sistemas operacionais compatíveis com HT.

6.7 - MODELOS DE MICROPROCESSADORES
Serão apresentados os modelos de CPU para PC que foram lançados ao longo do tempo. Destaque será dado para processadores compatíveis com a arquitetura x86, que é uma das arquiteturas de maior influência no mercado de processadores para PC. Processadores compatíveis com x86:
• Intel: 8086, 8088, 80286, 80386, 80486, Celeron, Pentium, Xeon.
• AMD: Am386, Am486, K5, K6, Duron, Sempron, Athlon, Opteron.
Intel e AMD são os maiores fabricantes de CPUs x86. A Intel sempre definiu os padrões da arquitetura x86, enquanto que outros fabricantes, como AMD, seguiam esses padrões e lançavam no mercado processadores compatíveis com x86.
6.7.1 - Microprocessadores Intel
A tabela da Figura 74 lista os microprocessadores produzidos pela Intel. A tabela indica o tamanho do registrador do conjunto de instruções principal e o ano de lançamento do processador. Embora os modelos de CPU mais antigos não sejam mais fabricados, eles ainda influenciam o projeto das CPUs modernas. O Pentium 4 ainda consegue executar instruções do 80386.
4004
O 4004 foi o primeiro microprocessador fabricado pela Intel. Era usado em calculadorasBusicom.
8008
O 8008 era duas vezes mais poderoso que o4004 e foi usado no Mark-8, um dos primeiros computadores domésticos.
8080
O 8080 equipou o primeiro PC da história, o Altair, que vendeu dezenas de milhares de unidades em questão de meses.
8086
O 8086 foi o primeiro processador da arquitetura 80x86 ou x86. Ele tinha 135 instruções, oito registradores 8-bit e oito registradores 16-bit. Tinha desempenho dez vezes maior que o 8080. O 8086 não podia executar código binário do 8080, mas
o código assembly originalmente escrito para o 8080 podia ser transcrito facilmente para assembly do 8086 devido às semelhanças entre os dois processadores.
O código assembly era então traduzido para código binário que podia ser executado pelo 8086. O barramento CPU-RAM do 8086 tinha largura de 16 bits. O 8086 funcionava nas freqüências 5, 8 e 10 MHz. Ele podia controlar até 1MB de memória física. Figura 82.
8088
O 8088 é uma versão do 8086 com largura do barramento CPU-RAM de 8 bits apenas, que é metade da largura do barramento do 8086. A IBM usou o 8088 no IBM PC para reduzir os custos de produção deste computador pessoal. O IBM PC foi sucesso de vendas na época, contribuindo para a disseminação da arquitetura x86 nos computadores pessoais e para o sucesso comercial da Intel. Se a IBM tivesse escolhido um processador da AMD para o IBM PC, a AMD poderia ser hoje o maior fabricante de processadores. Mas isso não ocorreu, e o maior fabricante da atualidade é a Intel. O 8088 funcionava nas freqüências 5 e 8 Mhz.
80286
O 80286 i286 ou 286, foi usado nos computadores pessoais da IBM. Depois de 6 anos do seu lançamento, estima-se que 15 milhões de PCs 286 foram vendidos no mundo.
Freqüências internas de funcionamento: 6, 10 e 12 MHz.
O 80286 tinha barramento de dados de 16 bits, a mesma largura dos registradores.
O 80286 usava memória virtual, o que permitia controlar até 1GB (1024MB) de memória total, 16MB de memória física e 1008MB de memória virtual (1024MB=1GB). Todos os dados que não cabiam nos chips da memória principal podiam ser armazenados no disco rígido. A memória virtual é a memória que está além da memória principal.
O 80286 podia operar no Modo Real para executar programas do 8086, neste modo a memória era limitada em 1MB. A memória virtual só era acessível quando o 80286 operava no Modo Protegido, neste modo a memória de um programa era protegida contra acesso por outros programas.
80386
A Figura 83 mostra uma CPU i386 ou 386. Foi o primeiro processador 32-bit da arquitetura x86. Ele podia controlar até 4GB de memória física e 64TB (terabytes) de memória virtual. O 80386 era compatível com 80286 e 8086.
Freqüências internas de funcionamento: 16, 20, 25 e 33 MHz.
Até hoje processadores como Intel Pentium 4 e o AMD Athlon 64 conseguem executar programas do 80386. Há muitos programas naInternet que possuem apenas instruções do 80386, justamente para garantir que eles possam ser executados na maioria dos processadores, principalmente Pentium e Athlon.
O modo protegido do 80386 tinha as seguintes características:
Memória Virtual: o programa consegue acessar 64TB de memória virtual, dos quais 4GB podem ser memória física. Sem memória virtual, o programa poderia acessar no máximo 4GB.
Proteção de Memória: a memória de um programa está protegida contra acesso por outros programas. A proteção de memória aumenta a estabilidade e a segurança de um sistema multitarefa.

Multitarefa: vários programas podem estar na memória principal simultaneamente. Cada programa é executado em seqüência pelo processador. Enquanto o usuário utiliza um programa, o processador executa outros programas sem que o usuário perceba.
Modo Virtual 8086: serve para rodar programas do 8086 em modo real dentro do modo protegido do 80286.
80486
O 80486 i486 ou 486 era rápido o suficiente para permitir a execução de interfaces gráficas coloridas. O 486 era mais rápido porque tinha coprocessador matemático e cache L1 interna de 8KB integrados dentro dele. O coprocessador implementava funções matemáticas complexas.
O 486 tinha 6 instruções a mais que o 386 e operava nas freqüências 50, 33 e 25 MHz. O 80486DX4-100 operava com clock externo de 33MHz e usava multiplicador 3 para ter clock interno de 99MHz. O barramento de dados tinha largura de 32 bits.
A partir do 80486, os processadores passaram a possuir memória cache L1 interna, que ficava dentro do processador. As placas-mãe podiam ter cache L2, que estava num chip que ficava fora do processador.
O Pentium ou Pentium Classic (clássico) foi o primeiro microprocessador de 5ª geração, por isso era chamado também de 80586, 586 ou i586. Entretanto, Pentium era o nome oficial dado pela Intel.
Freqüências internas: 60 a 233 MHz.
O Pentium possuia memória cache L1 interna de 16KB e coprocessador matemático. A cache L1 era dividida em 8KB para armazenar dados e 8KB para instruções. Seu barramento de dados tinha largura de 64 bits, o dobro dos registradores internos.
O Pentium tinha um bug (defeito no software ou hardware. Um programa ou dispositivo eletrônico com bug não funciona corretamente) no coprocessador matemático que fazia arredondamentos incorretos numa divisão.
Bug do Pentium Pentium: Todos os processadores possuem bugs que são corrigidos em ovasversões. O bug mais famoso do pentium refere-se a uma falha do seu coprocessador matemático que executava arredondamentos de forma incorreta numa divisão. Com os programas PC-Config ou CPUID é possível identificar se o processador tem ou não este bug.
PC-Config: http://www.holin.com/indexe.html
CPUID: http://support.intel.com/support/processors/procid/cpuid/cpuiddos.htm
Identificação de um processador Pentium
Para identificar a freqüência e o modelo do processador pode-se utilizar o software CPUID da Intel, que retorna a descrição do processador, a família, o modelo e o stepping (número da revisão). Além disso, podemos fazer uma identificação visual, observando o que vem escrito na área interna do processador, entre os seus terminais. Existem 4 linhas:
• 1ª Linha: Uma série alfanumérica que identifica data e local de fabricação, da seguinteforma:
• O 1º caracter indica o código da fábrica que produziu o processador.• O 2º indica o último algarismo do ano de fabricação.•O 3º e 4º números indicam a semana de fabricação.Os demais números indicam o número de lote / código interno de fabricação.
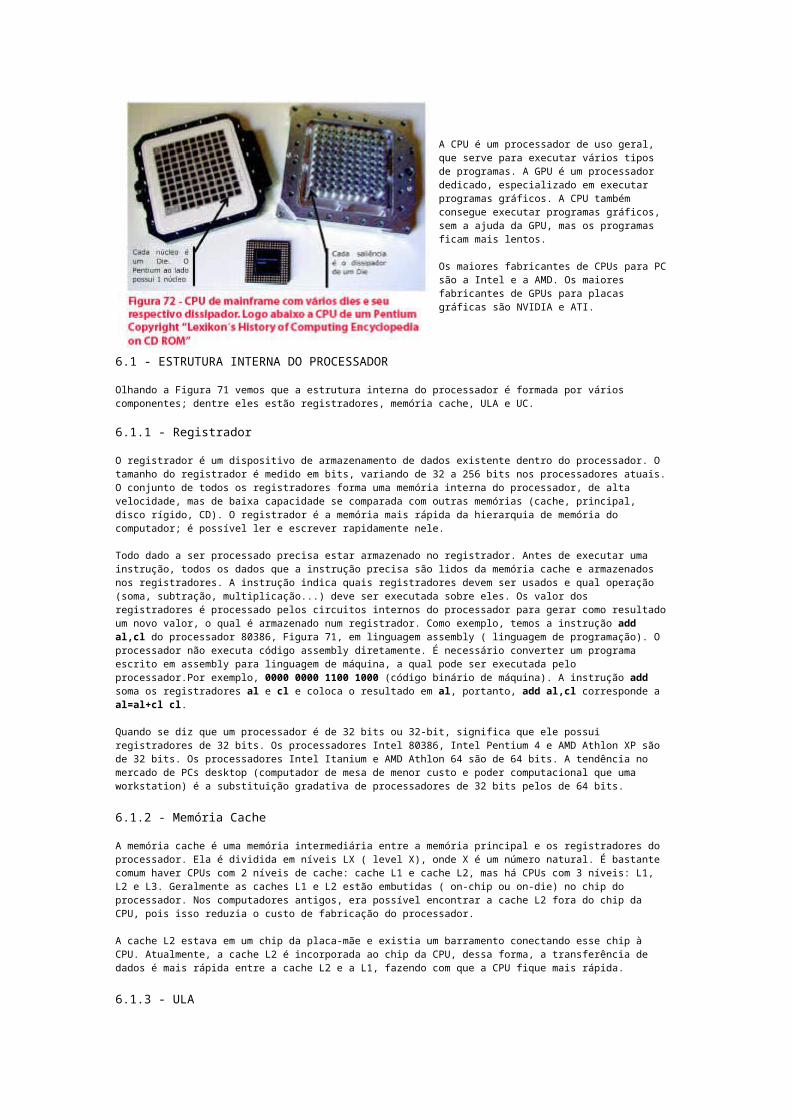
• 2ª Linha: País de fabricação (Ex.: MALAY, para a Malásia)
• 3ª Linha: Código oficial do processador e sua freqüência de operação.
Todo Pentium possui código BP80502, seguido de sua freqüência de operação. Já o Pentium Pro possui código BP80521, seguido de sua freqüência de operação.
Ex.: BP80502100 para um Pentium - 100
• 4ª Linha: SPEC, tensão de alimentação do processador, tipo de chipset e se o processador pode trabalhar com mais de um processador na mesma placa-mãe, no formato “xxxxx/abc”, onde:
Tensão de alimentação (a):S = tensão padrão, entre 3,135V e 3,6V
V = tensão “VRE”, ou seja, entre 3,4 e 3,6V
Tipo de sincronização que o chipset deverá utilizar (b):
Valores possíveis: “M” e “S”. Atualmente todos os chipsets aceitam qualquer uma das duas sincronizações.
Modo de operação (c): S = permite a utilização de mais de um processador por placa-mãe
U = não permite
Há ainda a marcação em baixo relevo, “i133” para Pentium-133 e “ipp” para os demais processadores.
Pentium Pro
O Peintum Pro foi um processador de 6ª geração, era chamado não oficialmente de 80686, 686 ou i686. Era destinado a servidores e workstations.
Freqüência interna: 150 a 233 MHz.
Barramento de dados com largura de 64 bits. Possuia cache L2 dentro do processador.
Pentium MMX
O Pentium MMX possuia 57 instruções a mais que o Pentium, formando o conjunto de instruções MMX (Multimedia Extensions). Portanto, o Pentium MMX tinha dois conjuntos de instruções: MMX e x86. As instruções MMX aumentam o desempenho de programas que

processam imagem ou áudio, mas apenas programas que foram feitos para usar instruções MMX.
Freqüência interna: 166 a 233 MHz.
A cache L1 do Pentium MMX era de 32KB.
Pentium II
O Pentium II era compatível com Slot 1, diferentemente dos processadores anteriores, compatíveis com socket. O Pentium II era colocado dentro de um cartucho, junto com a cache externa L2 de 512KB. A cache L2 estava fora do processador, mas dentro do cartucho, o qual era encaixado no Slot 1.
Freqüência interna: 233 a 450 MHz.
Freqüência externa: 100MHz.
Celeron
O Celeron é uma linha de processadores da Intel com menor desempenho e menor custo. O Celeron é baseado numa versão do processador Pentium (II, III ou 4). A Intel reduz a memória cache do Pentium e vende-o por um preço menor, com nome Celeron, possivelmente com menor freqüência de operação.
Por exemplo, em abril de 1998, foi lançado um Celeron baseado no Pentium II, que tinha freqüência externa menor (66MHz) e não possuia cache L2. Versões posteriores do Celeron tinham cache L2 de 128KB.
Pentium II e III Xeon
Pentium II eIII Xeon as versões de alta performance do Pentium II e Pentium III recebiam a extensão “Xeon” no nome. A versão Xeon podia ter cache L2 de até 2MB e era empregada em servidores e workstations.
Pentium III
Pentium III possuia 70 instruções a mais que o Pentium II. Elas fazem parte do conjunto de instruções SSE (Streaming SIMD Extensions), usadas para aumentar o desempenho de programas gráficos 2D ou 3D e programas que processam áudio.
Freqüência interna: 450 MHz a 1 Ghz.
Freqüência externa: 100 MHz.

A cache L2 tinha 512KB.
Pentium 4
Pentium 4 introduz 144 novas instruções, pertencentes ao conjunto de instruções SSE2,que é uma expansão do conjunto SSE já existente. O conjunto MMX também está presente.
Pentium 4 EE
Pentium 4 EE é uma versão de alta performance do Pentium 4. Há versões do Pentium 4 EE que possuem 512KB de cache L2 e 2MB de cache L3.
Freqüência interna: 3,20 a 3,73GHz.
Freqüência externa: 800 e 1066MHz.
Itanium 2
Itanium 2 é um processador de alta performance destinado a servidores e workstations. Sua arquitetura é de 64-bit. O Itanium 2 pode ter 32KB de cache L1, 256KB de cache L2 e 9MB de cache L3, com todos os caches integrados no processador.
Freqüência interna: 1,00 a 1,60GHz.
Freqüência externa: 400 ou 533MHz .
O barramento de dados é 128-bit.
XEON
Xeon sucessor do Pentium III Xeon, o Xeon é um processador de alta performance destinado a servidores e workstations. Sua arquitetura é 64-bit. O Xeon pode ter cache L2 de 512KB e cache L3 de 4MB.Freqüência interna: 1,00 a 3,20GHz.
Freqüência externa: 400 ou 533MHz.
6.7.2 - Microprocessadores AMD
Desde o 8080, a AMD tem lançado clones dos microprocessadores da Intel. A AMD foi autorizada pela Intel a produzir clones do 8080. O 8080A, fabricado pela AMD, era um deles.
Por mais de uma década, a AMD produziu processadores 32-bit compatíveis com a arquitetura x86, definida pela Intel. Recentemente, a AMD está tentando introduzir a arquitetura AMD64 no mercado de PCs Desktop. AMD64 é uma arquitetura 64-bit. O processador Athlon 64 da AMD marca essa transição da arquitetura x86 para AMD64. O Athlon 64 é um processador híbrido, compatível com x86 e AMD64 é um processador 32-bit e 64-bit ao mesmo tempo. Ele possui dois núcleos de processamento, um para
executar instruções x86 e outro para executar instruções AMD64. A Figura 88 mostra uma tabela que apresenta os microprocessadores produzidos pela AMD. A tabela indica o ano de lançamento do processador e o tamanho do registrador do conjunto de instruções principal (x86 ou AMD64).

8080A
O 8080A foi um dos clones do Intel 8080, entre muitos que a AMD produziu.
Am386
O AM386 clone do Intel 80386. Foram fabricadas 1 milhão de unidades até 1991. Ele foi o clone do Intel 80486.
Am5x86
Am5x86 Antes do K5, a AMD lançou um outro chip, chamado inicialmente de AMD X5, que teve seu nome mudado para AMD 5x86. Inicialmente foi projetado para competir com o Pentium de 60 e 66 MHz (o AMD 5x86-133 possui desempenho similar ao de um Pentium 75). A Cyrix também lançou o Cx5x86, em versões com desempenho similar ao Pentium-75 e ao Pentium-90. A demora da chegada desses chips ao mercado tornou inviável a sua competição com o Pentium, pois a Intel já estava produzindo modelos mais velozes. Os chips 5x86 da AMD e Cyrix possuíam pinagens compatíveis com as do 486 e tornaram-se seus concorrentes.
Nesta época, a Intel já não fabricava chips 486 e os modelos equivalentes da Cyrix e AMD dominaram o mercado de chips compatíveis com o 486 neste final de era. Em 1996 e até mesmo em 1997, apesar do Pentium já estar dominando o mercado, era possível encontrar à venda muitas placas de CPU equipadas com o AMD 5x86-133 e Cx5x86-133. Note, entretanto, que apesar do nome sugestivo “586”, não é um chip compatível com o Pentium, e sim com o 486, porém mais veloz.

K5
O K5 foi o primeiro processador da AMD compatível com o Pentium. O K5 demorou a ser lançado e por isso não ficou muito tempo no mercado, pois não conseguia concorrer com o Pentium MMX da Intel.
K6 / k6-II / k6-III
K6 K6-2 K6-III são compatíveis com Pentium MMX, portanto possuiam instruções MMX. O K6 consegue ser mais barato e mais veloz que um Pentium MMX de mesmo clock. O K6 tinha performance semelhante ao Pentium II, mas era mais barato. Em função da concorrência do K6, a Intel resolveu baixar o preço do Pentium II.
O K6-II e o K6-III suportavam o conjunto de instruções 3dNOW!, além do MMX. As instruções 3dNOW! aumentam a velocidade de programas gráficos (jogos 3D, editores de imagem, reprodutores de vídeo, navegador de Internet) e programas que processam áudio.
A cache L1 do K6-III era de 64KB e a cache L2 de 256KB.
Freqüência interna: 166 a 550MHz.
Freqüência externa: 66,95 ou 100MHz.
Athlon ou K7
O Athlon ou K7, é um processador de 7ª geração que competia com o Pentium III. O Athlon suporta os conjuntos de instruções MMX e 3dNOW! e implementa apenas uma parte do conjunto SSE.
As primeiras versões do Athlon eram distribuídas em cartucho e usavam o Slot A para se conectarem na placa-mãe. A partir do Athlon Thunderbird, a AMD abandona o slot e passa a usar o socket.
Freqüência interna: 650 a 1400MHz.
Freqüência externa: 100 ou 133MHz.
O Athlon tem 128KB de cache L1 e 512KB de cache L2.

Duron
O Duron é um processador de baixo custo e baixo desempenho que compete diretamente com o Celeron. O primeiro Duron (núcleo Spitfire) era baseado no Athlon Thunderbird, porém possuia apenas 64KB de cache L2, mantendo 128KB de cache L1. Por possuir menos cache, o custo da produção do Duron era menor. O tamanho do processador também era menor e ele funcionava em 1,5V (Volt), por isso o Duron gerava menos calor, apenas 22.9W (Watt) de potência térmica.
O Duron conseguia ser mais rápido que o Celeron.
Freqüência interna: 600 a 1300MHz.
Freqüência externa: 100MHz.
Athlon XP
Athlon XP é uma versão melhorada do Athlon, com suporte a instruções MMX, 3dNOW! e suporte completo ao conjunto de instruções SSE.
Freqüência interna: 1500+ a 3200+MHz.
Freqüência externa: 133, 166 e 200MHz.
Cache L1: 128KB; cache L2: 512KB.
A partir do XP, a AMD tem especificado a freqüência do processador de forma diferente, conforme explicado na seção 6.8 - .
Athlon MP
Athlon MP é um processador habilitado a operar num sistema dual. O Athlon MP é baseado no Athlon XP, mas diferentemente deste, o MP é destinado a servidores ou workstations. O Athlon MP baseado no núcleo Barton do XP chega a ter 54,3 milhões de transistores, assim como o próprio Athlon XP de mesmo núcleo.
Freqüência interna: 1000 a 1200MHz e 1333 a 2083MHz.
Freqüência externa: 133MHz.
Cache L1: 128KB; cache L2: 512KB.
Opteron
Opteron é um processador de alto desempenho, destinado a servidores e workstations, concorrendo com o Xeon da Intel. O Opteron é baseado no núcleo K8 de microprocessadores de 8ª geração da AMD. Processadores K8 são compatíveis com a arquitetura x86 32-bit, porém possuem extensões 64-bit introduzidas pela arquitetura AMD64. O núcleo K8 é baseado em duas arquiteturas: x86 e AMD64. Isso significa que o Opteron é capaz de executar programas 32-bit existentes que contêm apenas instruções x86, mas poderá executar novos programas 64-bit que tenham instruções AMD64. Uma arquitetura 64-bit, como AMD64, oferece muitas vantagens, dentre elas está a capacidade de endereçar 256TB (terabytes) de memória.
Processadores K8 implementam os conjuntos de instruções MMX, SSE, SSE2 e 3dNOW!.
A comunicação entre a memória principal e processadores anteriores ao K8 (K7, K6, K5...) era feita através do northbridge do chipset da placa-mãe. O K8 possui controlador de memória integrado, que melhora a comunicação do processador com a memória principal, pois o K8 comunica-se diretamente com a memória sem depender do chipset da placa-mãe. Além disso, o barramento de dados (CPU-RAM) é de 128 bits de largura. O Opteron pode ser usado em sistemas multiprocessados, em configurações de 2 (sistema dual) a 8 processadores.
Freqüência interna: 1,4 a 2,6GHz.
Freqüência externa: 200MHz.
Cache L1: 128KB; cache L2: 1024KB=1MB.
O pipeline do Opteron possui 12 estágios para processamento de inteiros e 17 estágios para processar números de ponto flutuante.
Athlon 64
Athlon 64 é baseado no núcleo K8 e por isso possui os recursos do Opteron, mas é destinado a computadores Desktop.
Freqüência interna: 2800+ a 3800+MHz.

Freqüência externa: 200MHz.
Cache L1: 128KB; cache L2: 512KB.
Athlon 64 FX
Athlon 64 FX é a versão de alta performance do Athlon 64. O FX é adequado ao processamento intensivo de áudio, vídeo e de gráficos 3D, tornando-se adequado a aplicações cinematográficas e jogos 3D.
Freqüência interna: 2,4 e 2,6GHz.
Freqüência externa: 200MHz.
Cache L1: 128KB; cache L2: 1024KB=1MB.
Sempron
Sempron é o sucessor do Duron e como este, o Sempron possui baixa performance e baixo custo. O Sempron tem núcleo K8, mas diferentemente do Athlon 64 e do Opteron, não possui extensões 64-bit. Portanto, o Sempron é um processador 32-bit que executa instruções x86, mas não executa instruções AMD64.
Freqüência interna: 1500 a 2000MHz.
Freqüência externa: 166MHz.
Cache L1: 128KB; cache L2: 512KB.
6.7.3 - CYRIX 6x86
A primeira versão de processadores da Cyrix foi o Cx 5x86, concorrente do 486, que possuía desempenho equivalente ao de um Pentium 90 MHz. Com a chegada do 6x86-P200+, a Cyrix começou a competir com o Pentium. Como exemplo, na época em que o Pentium mais veloz era o 166 MHz, a Cyrix já produzia o seu 6x86- P200+, com desempenho superior ao de um Pentium 200 MHz.
O próximo processador da Cyrix foi o 6x86 MX-P200+ que se comporta de forma idêntica a um Pentium, possui compatibilidade total, pino a pino, o que significa que podemos instalá-lo em placas de CPU Pentium. Portanto, possui características semelhantes em relação ao barramento de dados e de endereços, além da memória cache interna e do coprocessador matemático.
6.8 - ATHLON VERSUS PENTIUM
AMD e Intel são os dois maiores fabricantes de processadores. O processador Athlon da AMD concorre com o Pentium da Intel. Ambos processadores são compatíveis com a arquitetura x86 e, por isso, um mesmo programa pode ser executado nos dois. Entretanto, eles possuem estrutura interna diferente e, por essa razão, NÃO É CONFIÁVEL COMPARÁ-LOS APENAS PELA FREQÜÊNCIA INTERNA. O Athlon geralmente opera em freqüências menores e mesmo assim consegue ter performance semelhante a de um Pentium que opera em freqüências maiores.
A partir do XP, a AMD tem especificado a freqüência dos seus processadores de forma diferente para facilitar a comparação com o Pentium. Tomemos como exemplo o Athlon XP 1800+. O sinal “+” em 1800+ indica que 1800MHz não é a verdadeira freqüência interna do Athlon. Na realidade, 1800MHz é a freqüência do Pentium que tem performance equivalente. Portanto, o Athlon XP 1800+ teria performance equivalente a de um Pentium 4 1800MHz. A freqüência real do Athlon é indicada pela Figura 95, que mostra que o modelo 1800+ do Athlon XP pode operar em 1533MHz.

Cada modelo do Athlon tem uma tabela diferente para conversão do número do modelo na freqüência real. A tabela abaixo fornece a conversão para o Athlon 64. Como pode ser visto, um Athlon 64 3000+ não opera na mesma freqüência real que um Athlon XP 3000+.
6.9 - SISTEMA DUAL
O sistema dual é um sistema biprocessado no qual há dois processadores trabalhando em paralelo. O paralelismo ocorre quando duas ou mais tarefas são executadas ao mesmo tempo. Hyper-Threading da Intel é um exemplo de paralelismo que ocorre dentro de um único processador, que executa dois programas ao mesmo tempo. O sistema dual também emprega paralelismo, pois permite executar dois programas simultaneamente. Mas diferentemente de Hyper-Threading, os programas são executados em processadores separados no sistema dual. Nos dois casos, dizemos que os programas são executados em paralelo.
O sistema dual é muito usado em servidores e workstations para rodar programas que fazem muitos cálculos ou para rodar vários programas ao mesmo tempo. Entre os programas que fazem muitos cálculos estão Jogos 3D, programas de modelagem e animação 3D, editores de imagem e vídeo, programas de simulação e científicos. É comum que esses programas estejam adaptados para executar mais rapidamente em sistemas duais.
6.9.1 - Vantagens do Sistema Dual
O sistema dual permite que mais programas sejam executados simultaneamente, sem que o computador fique lento. Por exemplo, seria possível assistir a um vídeo usando o primeiro processador e, simultaneamente, usar o segundo processador para codificar um arquivo de áudio para mp3, sem prejudicar a reprodução do vídeo.
Mesmo que os programas tenham sido feitos para rodar em um processador apenas, o sistema dual ainda é vantajoso quando há vários desses programas sendo executados ao mesmo tempo no computador.
Certos programas são escritos para rodar em dois processadores ao mesmo tempo. Programasbem escritos podem ser executados duas vezes mais rápido num sistema dual porque conseguem dividir melhor a carga entre os dois processadores. Cada processador fica com 50% da carga, aproximadamente. Há programas que não conseguem distribuir bem a carga. Nesse caso, o primeiro processador poderia ficar com 80% do trabalho, enquanto o segundo ficaria com 20%.
É possível montar um sistema dual com dois processadores de baixo custo e mesmo assim ter um computador rápido. Dois processadores de 1GHz poderiam ser tão rápidos quanto um processador de 2GHz. Além disso, é possível que um sistema dual seja mais barato e rápido que um sistema monoprocessado (um processador apenas).
Há placas-mãe dual que aceitam trabalhar com um processador apenas, não sendo necessário comprar dois processadores de uma vez. O segundo processador pode ser adicionado posteriormente.
6.9.2 - Desvantagens do Sistema Dual
Uma das principais desvantagens é o maior consumo de energia do sistema dual. É preciso verificar se a fonte do computador consegue fornecer energia suficiente para manter dois processadores e duas ventoinhas funcionando.
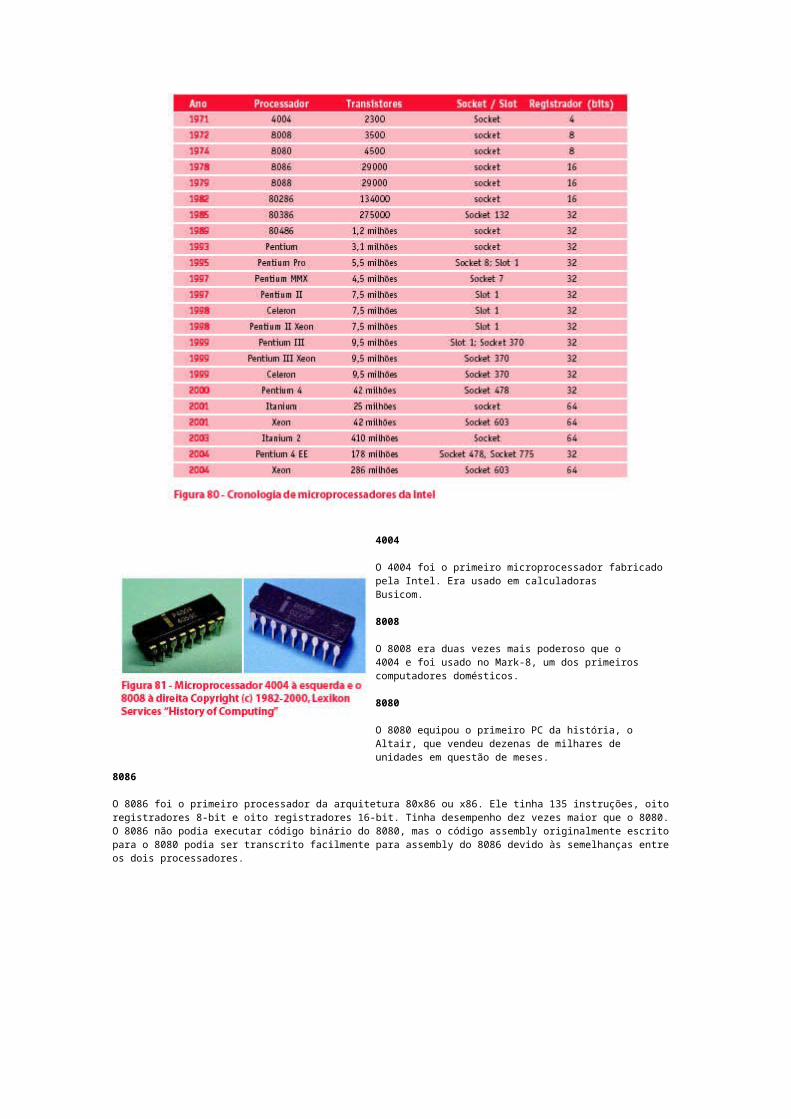
6.9.3 - Requisitos de Hardware do Sistema Dual
A placa-mãe de um sistema dual deve possuir dois encaixes de processador, como mostra a Figura 97. O chipset da placa-mãe deve suportar dois processadores operando em paralelo.
Os processadores também devem suportar operação em paralelo. Nem todos os processadores aceitam operar com outro processador na mesma placa-mãe.
• Processadores que suportam operação dual:
1. Intel : 80486, Celeron, Pentium II e Pentium III, Xeon, Itanium.2. AMD: Athlon MP, Opteron.
• Processadores que NÃO suportam operação dual:
1. AMD: Athlon Thunderbird, Duron (núcleos Spitfire ou Morgan).
Requisitos de Software do Sistema Dual:
O sistema operacional deve oferecer suporte a multiprocessamento (processamento dual neste caso). Sem suporte do sistema operacional, apenas um processador será reconhecido, enquanto o outro processador não será utilizado. Um sistema operacional sem suporte pode não executar num sistema dual.
• Sistemas operacionais que oferecem suporte a multiprocessamento:
1. Microsoft: Windows NT, Windows 2000, Windows XP Professional.2. Outros: Be OS, OS X, Linux, FreeBSD.3. O kernel do linux pode ser compilado com suporte a multiprocessamento. Durante a configuração do kernel, ativa-se o suporte pela opção Symmetric multi-processing support (suporte a multiprocessamento simétrico). Pode-se também especificar o número máximo de CPUs, variando de 2 a 32; para um sistema dual, especifica-se 2 como valor máximo.
• Sistemas operacionais que NÃO oferecem suporte a multiprocessamento:
1. Microsoft: Windows 95, Windows 98, Windows ME.
Para que um programa utilize os dois processadores ao mesmo tempo, é necessário que ele tenha sido programado para isso. Há programas que foram feitos para rodar apenas em um processador.
6.10 - REFRIGERAÇÃO DO PROCESSADOR
Os processadores atuais trabalham em altas freqüências de clock. Quanto maior a freqüência, maior é o calor gerado pelo processador. SEM REFRIGERAÇÃO CONSTANTE, O PROCESSADOR PODE QUEIMAR EM QUESTÃO DE SEGUNDOS!
Se o Setup da BIOS permitir a manipulação do multiplicador de clock, pode-se baixar a freqüência interna do processador baixando-se o multiplicador. O processador esquentará menos se a freqüência diminuir. A diminuição do multiplicador pode ser feita quando o processador não estiver suficientemente refrigerado, o que pode acontecer em dias muito quentes.
A refrigeração do processador é feita pelo cooler (significa “refrigerador” em português; pronuncia-se “culer”), que usa uma substância refrigerante, como ar ou água, para fazer a refrigeração. Há dois tipos de cooler: ativo e passivo.
O cooler passivo não gasta energia para manter a substância refrigerante em baixa temperatura. A substância permanece na temperatura ambiente. Enquanto a temperatura ambiente for menor que a temperatura do processador, haverá transferência de calor do processador para a substância. A menor temperatura do processador que o cooler passivo consegue manter é a temperatura ambiente. Na prática, a temperatura do processador estabiliza num valor acima da temperatura ambiente.
O cooler passivo é o mais usado, pois tende a ser mais barato que um cooler ativo. O cooler passivo mais comum é uma combinação de dissipador de calor (ou heatsink) e ventoinha ( fan em inglês).

O dissipador é a parte do cooler que fica em contato direto com o processador. A função do dissipador é absorver o calor do processador o mais rápido possível. Ele é feito de metal, comumente aço, cobre, alumínio, ou liga de metais, como cobre e alumínio ou cobre e ouro. Há também dissipadores constituídos de diversas partes, cada parte feita de um metal diferente. A Figura 98 mostra um dissipador feito de cobre. A Figura 99 mostra um dissipador feito de cobre puro banhado em ouro; a camada de ouro de 0.3 milímetros envolve o núcleo de cobre.
A ventoinha é responsável por soprar ar frio sobre o dissipador de forma a resfriá-lo. A Figura 100 mostra uma ventoinha instalada sobre um dissipador de cobre.
As hélices da ventoinha giram a alguns milhares de rpm (rotações por minuto. RPM é uma unidade usada para medir freqüência de rotação) para gerar o fluxo de ar que refrigera o dissipador. É possível encontrar ventoinhas que funcionam entre 2000 a 7000rpm. Geralmente, quanto maior a velocidade de rotação, maior será o ruído gerado pela ventoinha, mas em compensação a temperatura do processador será menor.
Para cada tipo de processador existe um cooler específico. Às vezes um cooler é compatível com vários tipos de processadores. A especificação do cooler geralmente informa a máxima freqüência de clock na qual o processador pode operar e mesmo assim ser eficientemente refrigerado. SE O PROCESSADOR FOR USADO NUMA FREQÜÊNCIA MAIOR, O COOLER NÃO VAI CONSEGUIR REFRIGERÁ-LO ADEQUADAMENTE E O PROCESSADOR PODE QUEIMAR. A Figura 101 mostra um cooler com duas ventoinhas para processador de slot. A Figura 100 apresenta um cooler para processadores de socket.
Quando o processador não gera muito calor, apenas o dissipador é suficiente para refrigerá-lo. Algumas GPUs e chipsets usam apenas o dissipador. GPUs mais potentes e boa parte das CPUs modernas utilizam ventoinha, além do dissipador (sem ventoinha elas queimariam).
6.10.2 - Cooler Ativo
O cooler ativo gasta energia para manter a substância refrigerante em baixa temperatura, possivelmente abaixo da temperatura ambiente. Um cooler ativo tende a ser mais caro que um cooler passivo e por isso não é muito comum em computadores de médio e baixo custo.
A vantagem do cooler ativo é que ele consegue manter a temperatura da CPU mais próxima da temperatura ambiente ou mesmo abaixo dela, enquanto que um cooler passivo não conseguiria fazê-la ficar menor que a temperatura ambiente. O cooler ativo consegue refrigerar melhor processadores em overclock.
A desvantagem do cooler ativo é o maior gasto de energia. Além disso, pode haver condensação de vapor d’água ao redor do processador. A água liquida que se forma pode danificar o processador e outros componentes da placa-mãe. A condensação ocorre quando o processador está numa temperatura abaixo da temperatura ambiente.
6.10.3 - Pasta Térmica
A pasta térmica aumenta a transferência de calor através da superfície de contato entre processador e dissipador, podendo reduzir a temperatura do processador em até 4°C (4 graus Célsius).
Se o contato entre processador e dissipador fosse perfeito, a pasta térmica não seria necessária, pois o metal do dissipador absorveria o calor do processador com muito mais eficiência que a pasta, entretanto, a superfície de contato apresenta irregularidades que são preenchidas por ar. Isso quer dizer que em alguns pontos da superfície existe apenas ar para transferir o calor. Sabe-se que o ar possui condutividade térmica de 0.035W/mK (A condutividade térmica é uma propriedade dos materiais descrita nos livros de Física. A condutividade é medida em Watts/(metro x Kelvin)), que é um valor muito baixo. O cobre dos dissipadores possui condutividade de 401W/mK (em 1 atm, 300K). Por isso usa-se a pasta térmica, pois ela apresenta condutividade variando de 2W/mK a 9W/mK. Quanto maior a condutividade, melhor será a pasta. A pasta é aplicada na superfície de contato entre dissipador e processador, substituindo o ar nas irregularidades da superfície. Embora as melhores pastas térmicas possam ter uma condutividade (401/9) 44 vezes menor que a do cobre do dissipador, as piores pastas ainda são (2/0.035) 57 vezes melhores que o ar.
A pasta térmica é um composto baseado geralmente em silicone. Em alguns compostos pode haver partículas de prata ou cobre, que estão entre os metais de maior coeficiente de condutividade térmica: 429W/mK (prata) e 401W/mK (cobre).

6.11 - TERMOS TÉCNICOS
• arquitetura de conjunto de instruções ou arquitetura do processador ou, simplesmente arquitetura, é uma camada de abstração entre o hardware do processador e o código binário de máquina, que é o software de mais baixo nível do computador. Essa camada descreve detalhes do processador como registradores, instruções e organização da memória. A arquitetura fornece informações que o programador precisa para poder escrever um programa em código de máquina que possa ser executado por esse processador. O Pentium e o Athlon seguem a arquitetura 80x86.
• bit é a menor quantidade de informação que um processador pode reconhecer. Nos processadores atuais, um bit pode assumir dois valores apenas: 0 ou 1. No processador, um transistor pode assumir 2 estados (0 ou 1) e, portanto, representa um bit. Um bit possibilita 21=2 combinações: 0 ou 1. Dois bits possibilitam 22=4 combinações: 00 01 10 11. Três bits possibilitam 23=8 combinações: 000 001 010 011 100 101 110 111. N bits possibilitam 2n combinações. Oito bits permitem representar caracteres de texto no sistema ASCII 24 bits podem representar um pixel numa imagem truecolor 128 bits é o tamanho de uma chave de encriptação.
• chip lasca ou fatia em inglês. Chip é um pedaço pequeno e fino (que lembra um lasca) de material semicondutor (geralmente silício) no qual há um circuito integrado embutido. Apesar de ser pequeno (1 a 3 cm² de área), um chip pode conter milhões de componentes eletrônicos (transistores). Os chips podem ser processadores, como os chips de CPU, cuja principal função é processar dados. Os chips de memória servem para armazenar dados.
• chipset conjunto de chips em inglês. É usado para referenciar um conjunto de chips que trabalham juntos para realizar uma tarefa. Termo comumente usado para indicar o conjunto de chips principais de uma placa-mãe. No chipset de uma placa-mãe pode haver dois chips denominados northbridge e southbridge. Certos chips northbridge comunicam-se diretamente com a CPU e a memória principal. Todos os dados que trafegam entre CPU e memória passam antes pelo northbridge, pois não há ligação direta entre CPU e memória. As CPUs que possuem controlador de memória embutido, comunicam-se diretamente com a memória principal do sistema, sem antes passar pelo northbridge.
• desktop é um computador PC de mesa de menor custo e poder computacional que uma workstation. O desktop é comumente encontrado em residências e escritórios, sendo usado para tarefas de baixo custo computacional, como edição de textos, leitura de email e navegação na Internet.
• microprocessador é o nome dado a um chip processador. O nome enfatiza o caráter miniaturizado do chip, que pode conter milhões de componentes eletrônicos num espaço reduzido.
• palavra ( word em inglês) indica uma quantidade de bits relacionada com o tamanho dos registradores do processador. Cada fabricante de processador define o tamanho da palavra de forma diferente. No caso do processador 80286 da fabricante Intel, a palavra tem 16 bits, o mesmo tamanho dos registradores do 80286. Já a palavra do processador Intel 80386 tem 16 bits, embora os seus registradores sejam de 32 bits. O 80386 é sucessor do 80286, por isso a palavra continuou do mesmo tamanho. Para o 80386, define-se a dupla-palavra ( double-word ou dword) como tendo 32 bits. Fabricantes de processadores 64-bit podem definir a palavra como tendo 64 bits.
• PC é sigla para Personal Computer, ou computador pessoal. O PC é um computador de propósito geral, baixo custo relativo e que pode ser usado por uma pessoa apenas.
• transistor é um dispositivo eletrônico capaz de assumir dois estados: 0 ou 1. O transistor é feito de um material semicondutor, que permite controlar o fluxo de corrente elétrica. No estado 0, não há corrente passando pelo transistor; no estado 1, a corrente passa por ele. Um material condutor sempre deixa a corrente passar; um material não condutor não deixa a corrente passar; já um semicondutor ora conduz, ora não conduz a corrente. O transistor encontrado nos microprocessadores é feito de silício, o elemento de número atômico 14 da tabela periódica, que possuiu propriedades semicondutoras quando combinado com outros elementos (fósforo ou boro). O silício funciona em baixas tensões elétricas. No setup de algumas BIOS é possível especificar o nível da tensão que alimenta o processador, variando entre 1,5 e 2 volts nos processadores modernos.
• workstation ou estação de trabalho é um computador mais caro e de maior poder computacional que um desktop. A workstation geralmente está conectada a uma rede como cliente ou servidor de baixo porte e pode ser usada também em aplicações científicas. A workstation pode ter um monitor de vídeo de alta resolução e uma GPU de alta performance para auxiliar aplicações gráficas.
7 - unidades de armazenamento

Como podemos perceber pela Figura 102 e Figura 103, a capacidade de armazenamento não está ligada à velocidade de acesso. Em fitas magnéticas, por exemplo, temos uma enorme capacidade de armazenamento (uma fita DAT DDS2 tem capacidade de 4GB) porém uma velocidade de acesso muito baixa uma vez que o drive da fita precisa rebobinála ou mesmo rodá-la para posicionar a cabeça de leitura no ponto onde queremos ler/escrever. Os registradores são as unidades de armazenamento mais velozes que temos pois estão dentro do processador, como podemos observar na Figura 103.
Pela Figura 103, podemos observar a dimensão de capacidade das diversas formas de armazenamento. A primeira linha (Speed) refere-se à velocidade de acesso medida em nano segundos (1 nano segundo = 10-9 segundo), onde temos que os registradores possuem uma velocidade de acesso de unidades de nano segundos, enquanto a cache possui uma velocidade de acesso de dezenas de nano segundos. Vale ressaltar que, nos micros atuais, o segundo nível da cache geralmente está localizado dentro do processador, diferente do que é mostrado na Figura 103. O mesmo ocorre com a segunda linha (Size), ou seja, o tamanho, a capacidade de cada dispositivo. Enquanto as memórias cache possuem uma capacidade de centenas de bytes, um dispositivo de armazenamento secundário, por exemplo uma unidade de fita, pode armazenar gigabytes de dados (1.000.000.000 bytes).
Podemos dividir os meios de armazenamento em memória volátil e não-volátil. O termo “memória” geralmente é utilizado como sinônimo de “memória RAM”, em que este é um dispositivo eletrônico de armazenamento de instruções e dados que o microprocessador acessa rapidamente. Quando o computador está em operação normal, sua memória geralmente contém as principais partes do sistema operacional, alguns aplicativos e os dados que estão sendo utilizados. Esses dispositivos são voláteis, ou seja, perdem seu contudo quando a eletricidade é cortada. Contudo, quando se fala em memória, também se pode referir as outras formas de armazenamento como os dispositivos de armazenamento secundário (discos rígidos, fitas, discos flexíveis, CD-ROM), normalmente chamados de memória secundária, que são não-voláteis, isto é, não perdem os dados armazenados quando a eletricidade é cortada.
7.1 - REGISTRADORES
Os registradores são pequenos dispositivos de armazenamento de dados, fazem parte do microprocessador e provêem um local temporário para os dados enquanto estes estão executando as instruções. Um registrador pode ser grande o suficiente para armazenar uma instrução - num computador de 32 bits um registrador deve ter 32 bits de tamanho. Em outros tipos de máquina podem existir registradores menores para outros tipos de instrução. Dependendo do processador e das regras de linguagem adotadas por ele, os registradores podem ser numerados ou ter nomes arbitrários. Um registrador é a menor unidade de armazenamento e a mais veloz, pois é construído dentro do processador, não tendo, portanto, que se comunicar com ele através de um barramento externo (mais demorado), como é o caso da memória RAM. O registrador é um meio de armazenamento caro devido ao alto custo da tecnologia empregada na sua construção e também é volátil, ou seja, o que foi armazenado neles é perdido quando ocorre uma queda de energia ou quando o sistema é desligado.
7.2 - MEMÓRIA CACHE
Enquanto os processadores tornaram-se extremamente rápidos em relação aos antigos XT, a memória RAM (memória principal) pouco evoluiu em performance. Com isso as memórias RAM (memória principal) não eram mais capazes de acompanhar o processador em velocidade. Isto faz com que muitas vezes processador fique “esperando” os dados serem liberados pela RAM e chegarem ao processador para que este possa concluir suas tarefas, perdendo muito em capacidade de processamento. Para solucionar este problema, começou a ser usada a memória cache, um tipo ultra-rápido de memória, que serve para armazenar os dados mais frequentemente usados pelo processador, evitando, na maioria das vezes, que ele tenha que recorrer memória RAM, relativamente lenta. Sem ela o desempenho do sistema ficará limitado à velocidade da memória RAM, podendo cair em até 90%. Usamos dois tipos de cache, chamados de cache primária, ou cache L1 (level 1) e cache secundária, ou cache L2 (level 2).

A cache primária é embutida no próprio processador, e é rápida o bastante para acompanhá-lo em velocidade. Como este tipo de memória é extremamente cara, usamos apenas uma pequena quantidade dela. Por exemplo, o Pentium II traz 32 KB enquanto o K6- 2 traz 64 KB.
Para complementar, usamos também um tipo um pouco mais lento de memória cache na forma de cache secundária. Por ser um pouco mais barata, podemos usar uma quantidade maior. Nos micros mais modernos o mais comum é o uso de 512 KB, porém em alguns processadores ela pode chagar a 1MB. Dependendo do processador usado, o cache L2 pode vir dentro do processador (como o cache L1) ou fazer parte da placa-mãe. Todavia, a L2 interna é mais comum.
Sempre que o processador precisar ler dados, ele irá procurá-los primeiramente na L1. Caso o dado seja encontrado, o processador não perderá tempo, já que o cache primário funciona na mesma freqüência que ele. Caso o dado não esteja na L1, ele irá procurá-los na L2. Encontrando o dado na cache secundária, o processador já perderá algum tempo, mas não tanto quanto perderia caso precisasse acessar a memória RAM. Finalmente, caso os dados não estejam na L2, não há outra saída senão aguardar que os dados sejam fornecidos pela lenta memória RAM.
Para entender melhor como funciona a Cache vamos fazer uma analogia com um escritório, Figura 104. Num escritório temos um arquivo de gavetas, geralmente um armário de aço, uma mesa de trabalho e um quadro de avisos. O trabalho que está sendo feito fica na mesa de trabalho e os documentos ali preparados estão na memória principal do computador. Caso seja necessária uma informação rápida ela pode estar no quadro de avisos (cache), cujo acesso é muito mais rápido que na mesa, pois basta olhá-lo obtendo- se assim a informação. Caso contrário deve-se procurar pelos documentos em cima da mesa (memória principal) e se não estiver ali, devemos procurar pelos arquivos no armário de aço (disco rígido).
7.3 - MEMÓRIA PRINCIPAL
Esse tipo de memória geralmente é referenciada como memória RAM.
7.3.1 - Tipos de Memória7.3.1.1 - Memória RAM
RAM é a abreviação de Random Access Memory, ou seja, Memória de Acesso Aleatório. Este tipo de memória está fisicamente localizada próxima do microprocessador e é passível de expansão com a adição ou substituição dos módulos. Quanto mais RAM a máquina tem, menos freqüentemente ela terá que acessar um disco rígido ou outro dispositivo de armazenamento de baixa velocidade de acesso em busca de dados e instruções. A memória RAM tem uma velocidade de acesso (leitura/escrita) muito mais rápida que as outras formas de armazenamento do computador, tais como CD-ROM, disco rígido, discos flexíveis e fitas.
Acesso aleatório significa que o acesso é direto. Por exemplo, para trazer informação da posição de memória número 7.934.233 não é necessário primeiro ler tudo que tem nas primeiras 7 milhões de posições anteriores. A memória retorna instantaneamente o valor como se este estivesse na primeira posição. Nas operações de leitura e escrita, cada posição de memória é endereçável, isto é, cada vez que uma posição de memória precisa ser preenchida, apagada ou lida, o respectivo endereço deve ser fornecido na entrada de endereços da memória. Eletricamente as memórias RAM são memórias voláteis (quando se desliga, perde-se toda a informação).
Fisicamente a memória RAM se apresenta em forma de módulos de memória que possuem diversas características muito utilizadas para sua identificação, tais como:
Número de vias – está relacionado aos contatos localizados na base do módulo e se encaixam no slot de memória. Por exemplo: 30 vias, 72 vias, 168 vias, 184 vias...
Quantidade de memória armazenável – é a quantidade de memória que pode ser armazenada nos chips que fazem parte do módulo de memória. Cada chip possui a sua capacidade e a soma delas nos dá a quantidade total de informação que pode

ser armazenada. Por exemplo: 16 MB, 32 MB, 64 MB, 128 MB, 256MB, 512MB, 1GB...
Número de bits do barramento. Refere-se à quantidade de linhas de comunicação existentes entre o slot de memória e a placa-mãe. Por exemplo: 8 bits, 16 bits, 32 bits...
7.3.1.1.1 - Tipos de Tecnologias de RAM
A RAM pode ser dividida em RAM principal, que armazena todo o tipo de dado e o torna rapidamente acessível em relação as memórias secundárias e ao microprocessador, e RAM de vídeo, que armazena os dados que serão enviados para a tela do monitor, tornando o carregamento das imagens mais rápido. Como não entraremos nos detalhes da construção de adaptadores de vídeo, não abordaremos aqui as vídeo RAM. A RAM principal pode ser dividida em RAM Estática (SRAM) e RAM Dinâmica (DRAM).
Static RAM (SRAM)
A RAM Estática é mais cara, requer o equivalente a quatro vezes o espaço necessário para a mesma quantidade de dados de uma RAM Dinâmica. Mas, diferentemente de uma RAM Dinâmica, ela não precisa ser refrescada e é de acesso mais rápido. Tem um tempo de acesso médio de 25 nano segundos em contraste com o acesso de 60 nano segundos de uma RAM Dinâmica. A RAM Estática é usada principalmente em memórias cache de nível 1 e 2, memória esta que o microprocessador consulta antes de ir à RAM Dinâmica.
Dynamic RAM (DRAM)
A RAM Dinâmica usa um tipo de capacitor que precisa ser freqüentemente refrescado (recarregado) para reter sua carga. Como a leitura de uma DRAM apaga o seu conteúdo, o refrescamento da energia é necessário após cada leitura. Além da leitura, somente para manter a carga que mantém o conteúdo nas posições da memória, a DRAM precisa ser refrescada a cada 15 micro segundos. A RAM Dinâmica é o tipo mais barato de RAM.
Enhaced DRAM
Enhanced DRAM (EDRAM) é a combinação de SRAM e DRAM em um único pacote que é normalmente usado para cache de nível 2. Tipicamente, 256 bytes de RAM Estática são incluídos junto com a RAM Dinâmica. O dado é lido da SRAM, mais rapidamente (tipicamente 15 nanosegundos) e, se não for encontrado lá, é lido da DRAM à tipicamente 35 nanosegundos.
Extended Data Output RAM ou DRAM (EDO RAM ou EDO DRAM)
Extended Data Output RAM (EDO RAM) ou Extended Data Output Dynamic RAM (EDO DRAM) é mais de 25% mais rápido que uma DRAM padrão e reduz a necessidade de memória cache de segundo nível (nível 2).
Synchronous DRAM (SDRAM)
Synchronous DRAM (SDRAM) é um nome genérico para vários tipos de DRAM que são sincronizados com a freqüência do clock, otimizando o microprocessador. Isto tende a aumentar o número de instruções que o processador pode executar num dado tempo. A velocidade de SDRAM é melhor avaliada em MHz do que em nano segundos (ns), o que torna mais fácil a comparação da velocidade do barramento e a velocidade do chip de RAM. Você pode converter a velocidade do clock da RAM para nano segundos pela divisão da velocidade do chip por 1 bilhão de nano segundos (que é um segundo). Por exemplo, uma RAM de 83 MHz seria equivalente a 12 ns.
PC100 SDRAM - esta é uma especificação criada pela Intel para habilitar os fabricantes RAM a produzir chips que trabalhassem com o chipset Intel i440BX, projetado para chegar a 100 MHz. Este tipo de RAM aumenta a performance de um sistema com socket 7 de 10 a 15% (mas não num Pentium II porque a velocidade de sua cache L2 é somente metade da velocidade do processador).
PC133 SDRAM - esta memória é uma evolução a partir da PC100, que é capaz de trabalhar a 133 MHz.
7.3.1.1.2 - DDR - Double Data Rate X SDR - Single Data Rate
O barramento AGP foi o primeiro a utilizar uma tecínica conhecida como DDR (Double Data Rate) ou ‘taxa de dados dupla’.

Esta implantação foi bem sucedida, e fez com que esta técnica fosse utilizada em outros componentes do computador. Esta técnica permite utilizar baixas freqüências nas trilhas da placa-mãe. Freqüências elevadas necessitam de elevados cuidados quanto a quantidade de componentes e design das placas. Além disso, a emissão de ruído eletromagnético pode aumentar exponencialmente a ponto de interferir em outros equipamentos. A constatação deste fato veio com a utilização do Rambus em algumas placas-mãe. Assim, o aumento da freqüência do barramento da memória (FSB - Front Side bus) enfrenta sérios problemas técnicos que e torna muito dispendioso.
O clock é o sinal elétrico que varia entre duas voltagens, por exemplo entre 1 e 3 volts (caso fictício). Ele coordena todos os componentes do microcomputador. O clock pode ser visto como um cabo elétrico que circula uma corrente elétrica durante certo tempo. Assim essa tensão, segundo o exemplo, ficaria em 1 volt durante um período. Após este período ela avançaria para 3 volts, permanecendo nesta tensão durante o tempo ajustado. Ao término deste tempo, a tensão volta para o valor inicial, formando, assim, um ciclo continuo e ininterrupto, no qual o sinal elétrico fica oscilando de 1volt para 3 volts e de 3 volts para 1 volt. Cada ciclo é chamado de pulso.
A freqüência do clock é a quantidade de variações desse sinal elétrico num tempo prédeterminado, tipicamente 1 segundo. Contudo, vale ressaltar que são contadas as variações do sinal elétrico de 1 para 3 volts. Em resumo, a freqüência é a quantidade de oscilações de 1 para 3 volts por segundo. A unidade que normalmente é utilizada para medir a quantidade de oscilações é Hertz. Nesta medida 1 oscilação por segundo = 1 Hz (abreviatura de Hertz). Desta forma, se o sinal elétrico varia de 1 para 3 volts 100 vezes num único segundo, dizemos que sua freqüência é de 100Hz. Atualmente as freqüências do FSB são da ordem de 200 MHz, ou seja, aproximadamente 200.000.000 (duzentos milhões) oscilações por segundo.
As memórias SDRAM transmitem/recebem dados somente quando o clock varia de 1 para 3 volts e por isso são chamadas de SDR (Single Data Rate), em português taxa de dados simples. Já as DDR (Double Data Rate), em português taxa de dados dupla, conseguem transmitir/receber dados quando o clock varia de 1 para 3 volts e também quando ele varia de 3 para 1 volt. Desta forma elas conseguem transmitir/receber duas vezes em cada pulso (ciclo) do clock. As memórias funcionam como se a freqüência do barramento fosse dobrada.
7 - unidades de armazenamento
Como podemos perceber pela Figura 102 e Figura 103, a capacidade de armazenamento não está ligada à velocidade de acesso. Em fitas magnéticas, por exemplo, temos uma enorme capacidade de armazenamento (uma fita DAT DDS2 tem capacidade de 4GB) porém uma velocidade de acesso muito baixa uma vez que o drive da fita precisa rebobinála ou mesmo rodá-la para posicionar a cabeça de leitura no ponto onde queremos ler/escrever. Os registradores são as unidades de armazenamento mais velozes que temos pois estão dentro do processador, como podemos observar na Figura 103.
Pela Figura 103, podemos observar a dimensão de capacidade das diversas formas de armazenamento. A primeira linha (Speed) refere-se à velocidade de acesso medida em nano segundos (1 nano segundo = 10-9 segundo), onde temos que os registradores possuem uma velocidade de acesso de unidades de nano segundos, enquanto a cache possui uma velocidade de acesso de dezenas de nano segundos. Vale ressaltar que, nos micros atuais, o segundo nível da cache geralmente está localizado dentro do processador, diferente do que é mostrado na Figura 103. O mesmo ocorre com a segunda linha (Size),

ou seja, o tamanho, a capacidade de cada dispositivo. Enquanto as memórias cache possuem uma capacidade de centenas de bytes, um dispositivo de armazenamento secundário, por exemplo uma unidade de fita, pode armazenar gigabytes de dados (1.000.000.000 bytes).
Podemos dividir os meios de armazenamento em memória volátil e não-volátil. O termo “memória” geralmente é utilizado como sinônimo de “memória RAM”, em que este é um dispositivo eletrônico de armazenamento de instruções e dados que o microprocessador acessa rapidamente. Quando o computador está em operação normal, sua memória geralmente contém as principais partes do sistema operacional, alguns aplicativos e os dados que estão sendo utilizados. Esses dispositivos são voláteis, ou seja, perdem seu contudo quando a eletricidade é cortada. Contudo, quando se fala em memória, também se pode referir as outras formas de armazenamento como os dispositivos de armazenamento secundário (discos rígidos, fitas, discos flexíveis, CD-ROM), normalmente chamados de memória secundária, que são não-voláteis, isto é, não perdem os dados armazenados quando a eletricidade é cortada.
7.1 - REGISTRADORES
Os registradores são pequenos dispositivos de armazenamento de dados, fazem parte do microprocessador e provêem um local temporário para os dados enquanto estes estão executando as instruções. Um registrador pode ser grande o suficiente para armazenar uma instrução - num computador de 32 bits um registrador deve ter 32 bits de tamanho. Em outros tipos de máquina podem existir registradores menores para outros tipos de instrução. Dependendo do processador e das regras de linguagem adotadas por ele, os registradores podem ser numerados ou ter nomes arbitrários. Um registrador é a menor unidade de armazenamento e a mais veloz, pois é construído dentro do processador, não tendo, portanto, que se comunicar com ele através de um barramento externo (mais demorado), como é o caso da memória RAM. O registrador é um meio de armazenamento caro devido ao alto custo da tecnologia empregada na sua construção e também é volátil, ou seja, o que foi armazenado neles é perdido quando ocorre uma queda de energia ou quando o sistema é desligado.
7.2 - MEMÓRIA CACHE
Enquanto os processadores tornaram-se extremamente rápidos em relação aos antigos XT, a memória RAM (memória principal) pouco evoluiu em performance. Com isso as memórias RAM (memória principal) não eram mais capazes de acompanhar o processador em velocidade. Isto faz com que muitas vezes processador fique “esperando” os dados serem liberados pela RAM e chegarem ao processador para que este possa concluir suas tarefas, perdendo muito em capacidade de processamento. Para solucionar este problema, começou a ser usada a memória cache, um tipo ultra-rápido de memória, que serve para armazenar os dados mais frequentemente usados pelo processador, evitando, na maioria das vezes, que ele tenha que recorrer memória RAM, relativamente lenta. Sem ela o desempenho do sistema ficará limitado à velocidade da memória RAM, podendo cair em até 90%. Usamos dois tipos de cache, chamados de cache primária, ou cache L1 (level 1) e cache secundária, ou cache L2 (level 2).
A cache primária é embutida no próprio processador, e é rápida o bastante para acompanhá-lo em velocidade. Como este tipo de memória é extremamente cara, usamos apenas uma pequena quantidade dela. Por exemplo, o Pentium II traz 32 KB enquanto o K6- 2 traz 64 KB.
Para complementar, usamos também um tipo um pouco mais lento de memória cache na forma de cache secundária. Por ser um pouco mais barata, podemos usar uma quantidade maior. Nos micros mais modernos o mais comum é o uso de 512 KB, porém em alguns processadores ela pode chagar a 1MB. Dependendo do processador usado, o cache L2 pode vir dentro do processador (como o cache L1) ou fazer parte da placa-mãe. Todavia, a L2 interna é mais comum.
Sempre que o processador precisar ler dados, ele irá procurá-los primeiramente na L1. Caso o dado seja encontrado, o processador não perderá tempo, já que o cache primário funciona na mesma freqüência que ele. Caso o dado não esteja na L1, ele irá procurá-los na L2. Encontrando o dado na cache secundária, o processador já perderá algum tempo, mas não tanto quanto perderia caso precisasse acessar a memória RAM. Finalmente, caso os dados não estejam na L2, não há outra saída senão aguardar que os dados sejam fornecidos pela lenta memória RAM.
Para entender melhor como funciona a Cache vamos fazer uma analogia com um escritório, Figura 104. Num escritório temos um arquivo de gavetas, geralmente um armário de aço, uma mesa de trabalho e um quadro de avisos. O trabalho que está sendo feito fica na mesa de trabalho e os documentos ali preparados estão na memória principal do computador. Caso seja necessária uma informação rápida ela pode estar no quadro de avisos (cache), cujo acesso é muito mais rápido que na mesa, pois basta olhá-lo obtendo- se assim a informação. Caso contrário deve-se procurar pelos documentos em cima da mesa (memória principal) e se não estiver ali, devemos procurar pelos arquivos no armário de aço (disco rígido).
7.3 - MEMÓRIA PRINCIPAL
Esse tipo de memória geralmente é referenciada como memória RAM.

7.3.1 - Tipos de Memória7.3.1.1 - Memória RAM
RAM é a abreviação de Random Access Memory, ou seja, Memória de Acesso Aleatório. Este tipo de memória está fisicamente localizada próxima do microprocessador e é passível de expansão com a adição ou substituição dos módulos. Quanto mais RAM a máquina tem, menos freqüentemente ela terá que acessar um disco rígido ou outro dispositivo de armazenamento de baixa velocidade de acesso em busca de dados e instruções. A memória RAM tem uma velocidade de acesso (leitura/escrita) muito mais rápida que as outras formas de armazenamento do computador, tais como CD-ROM, disco rígido, discos flexíveis e fitas.
Acesso aleatório significa que o acesso é direto. Por exemplo, para trazer informação da posição de memória número 7.934.233 não é necessário primeiro ler tudo que tem nas primeiras 7 milhões de posições anteriores. A memória retorna instantaneamente o valor como se este estivesse na primeira posição. Nas operações de leitura e escrita, cada posição de memória é endereçável, isto é, cada vez que uma posição de memória precisa ser preenchida, apagada ou lida, o respectivo endereço deve ser fornecido na entrada de endereços da memória. Eletricamente as memórias RAM são memórias voláteis (quando se desliga, perde-se toda a informação).
Fisicamente a memória RAM se apresenta em forma de módulos de memória que possuem diversas características muito utilizadas para sua identificação, tais como:
Número de vias – está relacionado aos contatos localizados na base do módulo e se encaixam no slot de memória. Por exemplo: 30 vias, 72 vias, 168 vias, 184 vias...
Quantidade de memória armazenável – é a quantidade de memória que pode ser armazenada nos chips que fazem parte do módulo de memória. Cada chip possui a sua capacidade e a soma delas nos dá a quantidade total de informação que pode ser armazenada. Por exemplo: 16 MB, 32 MB, 64 MB, 128 MB, 256MB, 512MB, 1GB...
Número de bits do barramento. Refere-se à quantidade de linhas de comunicação existentes entre o slot de memória e a placa-mãe. Por exemplo: 8 bits, 16 bits, 32 bits...
7.3.1.1.1 - Tipos de Tecnologias de RAM
A RAM pode ser dividida em RAM principal, que armazena todo o tipo de dado e o torna rapidamente acessível em relação as memórias secundárias e ao microprocessador, e RAM de vídeo, que armazena os dados que serão enviados para a tela do monitor, tornando o carregamento das imagens mais rápido. Como não entraremos nos detalhes da construção de adaptadores de vídeo, não abordaremos aqui as vídeo RAM. A RAM principal pode ser dividida em RAM Estática (SRAM) e RAM Dinâmica (DRAM).
Static RAM (SRAM)
A RAM Estática é mais cara, requer o equivalente a quatro vezes o espaço necessário para a mesma quantidade de dados de uma RAM Dinâmica. Mas, diferentemente de uma RAM Dinâmica, ela não precisa ser refrescada e é de acesso mais rápido. Tem um tempo de acesso médio de 25 nano segundos em contraste com o acesso de 60 nano segundos de uma RAM Dinâmica. A RAM Estática é usada principalmente em memórias cache de nível 1 e 2, memória esta que o microprocessador consulta antes de ir à RAM Dinâmica.

Dynamic RAM (DRAM)
A RAM Dinâmica usa um tipo de capacitor que precisa ser freqüentemente refrescado (recarregado) para reter sua carga. Como a leitura de uma DRAM apaga o seu conteúdo, o refrescamento da energia é necessário após cada leitura. Além da leitura, somente para manter a carga que mantém o conteúdo nas posições da memória, a DRAM precisa ser refrescada a cada 15 micro segundos. A RAM Dinâmica é o tipo mais barato de RAM.
Enhaced DRAM
Enhanced DRAM (EDRAM) é a combinação de SRAM e DRAM em um único pacote que é normalmente usado para cache de nível 2. Tipicamente, 256 bytes de RAM Estática são incluídos junto com a RAM Dinâmica. O dado é lido da SRAM, mais rapidamente (tipicamente 15 nanosegundos) e, se não for encontrado lá, é lido da DRAM à tipicamente 35 nanosegundos.
Extended Data Output RAM ou DRAM (EDO RAM ou EDO DRAM)
Extended Data Output RAM (EDO RAM) ou Extended Data Output Dynamic RAM (EDO DRAM) é mais de 25% mais rápido que uma DRAM padrão e reduz a necessidade de memória cache de segundo nível (nível 2).
Synchronous DRAM (SDRAM)
Synchronous DRAM (SDRAM) é um nome genérico para vários tipos de DRAM que são sincronizados com a freqüência do clock, otimizando o microprocessador. Isto tende a aumentar o número de instruções que o processador pode executar num dado tempo. A velocidade de SDRAM é melhor avaliada em MHz do que em nano segundos (ns), o que torna mais fácil a comparação da velocidade do barramento e a velocidade do chip de RAM. Você pode converter a velocidade do clock da RAM para nano segundos pela divisão da velocidade do chip por 1 bilhão de nano segundos (que é um segundo). Por exemplo, uma RAM de 83 MHz seria equivalente a 12 ns.
PC100 SDRAM - esta é uma especificação criada pela Intel para habilitar os fabricantes RAM a produzir chips que trabalhassem com o chipset Intel i440BX, projetado para chegar a 100 MHz. Este tipo de RAM aumenta a performance de um sistema com socket 7 de 10 a 15% (mas não num Pentium II porque a velocidade de sua cache L2 é somente metade da velocidade do processador).
PC133 SDRAM - esta memória é uma evolução a partir da PC100, que é capaz de trabalhar a 133 MHz.
7.3.1.1.2 - DDR - Double Data Rate X SDR - Single Data Rate
O barramento AGP foi o primeiro a utilizar uma tecínica conhecida como DDR (Double Data Rate) ou ‘taxa de dados dupla’. Esta implantação foi bem sucedida, e fez com que esta técnica fosse utilizada em outros componentes do computador. Esta técnica permite utilizar baixas freqüências nas trilhas da placa-mãe. Freqüências elevadas necessitam de elevados cuidados quanto a quantidade de componentes e design das placas. Além disso, a emissão de ruído eletromagnético pode aumentar exponencialmente a ponto de interferir em outros equipamentos. A constatação deste fato veio com a utilização do Rambus em algumas placas-mãe. Assim, o aumento da freqüência do barramento da memória (FSB - Front Side bus) enfrenta sérios problemas técnicos que e torna muito dispendioso.
O clock é o sinal elétrico que varia entre duas voltagens, por exemplo entre 1 e 3 volts (caso fictício). Ele coordena todos os componentes do microcomputador. O clock pode ser visto como um cabo elétrico que circula uma corrente elétrica durante certo tempo. Assim essa tensão, segundo o exemplo, ficaria em 1 volt durante um período. Após este período ela avançaria para 3 volts, permanecendo nesta tensão durante o tempo ajustado. Ao término deste tempo, a tensão volta para o valor inicial, formando, assim, um ciclo continuo e ininterrupto, no qual o sinal elétrico fica oscilando de 1volt para 3 volts e de 3 volts para 1 volt. Cada ciclo é chamado de pulso.
A freqüência do clock é a quantidade de variações desse sinal elétrico num tempo prédeterminado, tipicamente 1 segundo. Contudo, vale ressaltar que são contadas as variações do sinal elétrico de 1 para 3 volts. Em resumo, a freqüência é a quantidade de oscilações de 1 para 3 volts por segundo. A unidade que normalmente é utilizada para medir a quantidade de oscilações é Hertz. Nesta medida 1 oscilação por segundo = 1 Hz (abreviatura de Hertz). Desta forma, se o sinal elétrico varia de 1 para 3 volts 100 vezes num único segundo, dizemos que sua freqüência é de 100Hz. Atualmente as freqüências do FSB são da ordem de 200 MHz, ou seja, aproximadamente 200.000.000 (duzentos milhões) oscilações por segundo.
As memórias SDRAM transmitem/recebem dados somente quando o clock varia de 1 para 3 volts e por isso são chamadas de SDR (Single Data Rate), em português taxa de dados simples. Já as DDR (Double Data Rate), em português taxa de dados dupla, conseguem transmitir/receber dados quando o clock varia de 1 para 3 volts e também quando ele varia de 3 para 1 volt. Desta forma elas conseguem transmitir/receber duas vezes em cada pulso (ciclo) do clock. As memórias funcionam como se a freqüência do barramento fosse dobrada.
7.3.1.2 - Memória ROM (Read Only Memory)
As memórias do tipo ROM são usadas em situações em que os dados devem ser mantidos permanentemente e não podem ser corrompidos. A memória ROM (Read Only Memory), a rigor, deveria ser chamada Read Only RAM, por ser uma memória de acesso aleatório, não volátil. As informações nela contidas são gravadas pelo fabricante por meio de uma máscara, de acordo com o pedido do cliente. Se por um lado uma ROM não perde os seus registros quando ocorre a falta de energia, por outro lado não é alterável. Trata-se de uma memória permanente, pois é alimentada pela bateria do micro. Nestas memórias são colocados, por exemplo, os programas básicos do hardware (BIOS), pois no momento em que a maquina é ligada, estes programas são executados.
7.3.1.2.1 - Tipos de ROM

PROM (Programmable Read-Only Memory)
PROM (Memória de somente leitura programável) é uma ROM que pode ser modificada uma vez pelo usuário. PROM é uma forma de permitir a criação de um programa de microcódigo usando uma máquina especial chamada programador de PROM. Esta máquina fornece uma corrente elétrica a células específicas na ROM que efetivamente as funde. O processo é conhecido como queima de PROM. Como o processo não deixa margem de erro, muitos chips de ROM projetados para serem modificados por usuários usam PROMs apagáveis (EPROM) ou apagáveis eletricamente programáveis (EEPROM).
EPROM (Erasable Programmable Read-Only Memory)
Memória de Somente Leitura Programável Apagável é uma PROM que pode ser apagada e reutilizada. Uma intensa luz ultravioleta é usada para apagá-la através de uma abertura projetada no chip. Embora a luz de uma sala não contenha luz ultravioleta suficiente para apagá-la, a luz solar pode causar isto. Por esta razão, a abertura é coberta com uma etiqueta quando não estiver instalada no computador.
EEPROM (Electrically Erasable Programmable Read-Only Memory)
Memória de Somente Leitura Apagável Eletricamente Programável é uma ROM modificável pelo usuário que pode apagá-la e reprogramá-la (gravar novamente) repetidamente através de aplicação de corrente elétrica acima do normal. Diferentemente das EPROMs, as EEPROMs não precisam ser removidas do computador para serem modificadas. De qualquer forma, uma EEPROM tem que ser apagada e reprogramada completamente, nãosendo possível modificar apenas parte dela. Ela também tem uma vida limitada, ou seja, o número de vezes que pode ser reprogramada é limitado a dezenas ou centenas de milhares de vezes.
Flash BIOS
Memória Flash é um tipo de memória não volátil constantemente energizada que pode ser apagada e reprogramada em unidades de memória chamadas blocos. É uma variação da EEPROM que, diferentemente da Memória Flash, é apagada e rescrita a nível de byte, sendo, portanto, mais lenta. A Memória Flash é freqüentemente usada para manter código de controle; como o Sistema Básico de Entrada e Saída (Basic Input/Output System - BIOS) em computadores pessoais. Quando a BIOS precisa ser modificada (rescrita), aFlash pode ser escrita em blocos (ao invés de bytes), facilitando a atualização. De outra forma, a Memória Flash não é útil como uma memória de acesso aleatório (RAM), pois a RAM precisa ser endereçada a nível de byte e não de bloco.
A Memória Flash tem este nome porque o microchip é organizado de tal forma que uma seção de células de memória é apagada em uma ação simples ou instantânea (flash). Ela também é usada em celulares, câmeras digitais, switches de rede, e outros.
7.3.2 - Tipos de Slots de Memória
Os slots de memória são os componentes inseridos na placa-mãe que permitem a conexão dos pentes de memória.
7.3.2.1 - SIMM - Single In Line Memory Module
Os módulos SIMM se apresentam de duas formas, contendo 30 ou 72 pinos. Os módulos de 30 pinos ou SIMM-30 são módulos de 8 bits encontrados nas versões de 256 KB, 1 MB e 4 MB. Os módulos de 72 pinos ou SIMM-72 são módulos de 32 bits encontrados nas versões mais comuns de 4 MB, 8MB, 16 MB e 32 MB.
7.3.2.2 - DIMM - Double In Line Memory Module
Os módulos DIMM se apresentam com 168 pinos (SDR), 184 pinos (DDR I) ou 240 pinos (DDR II) e são de 64 bits, ou seja, utilizam um barramento de 64 bits. Os módulos DIMM são encontrados com e sem paridade. Para identificar se o módulo possui ou não paridade basta contar o número de circuitos integrados existentesem uma das faces. Se for um número ímpar, ele tem paridade, caso contrário, não.
7.3.2.3 - RIMM - Rambus In Line Memory Module
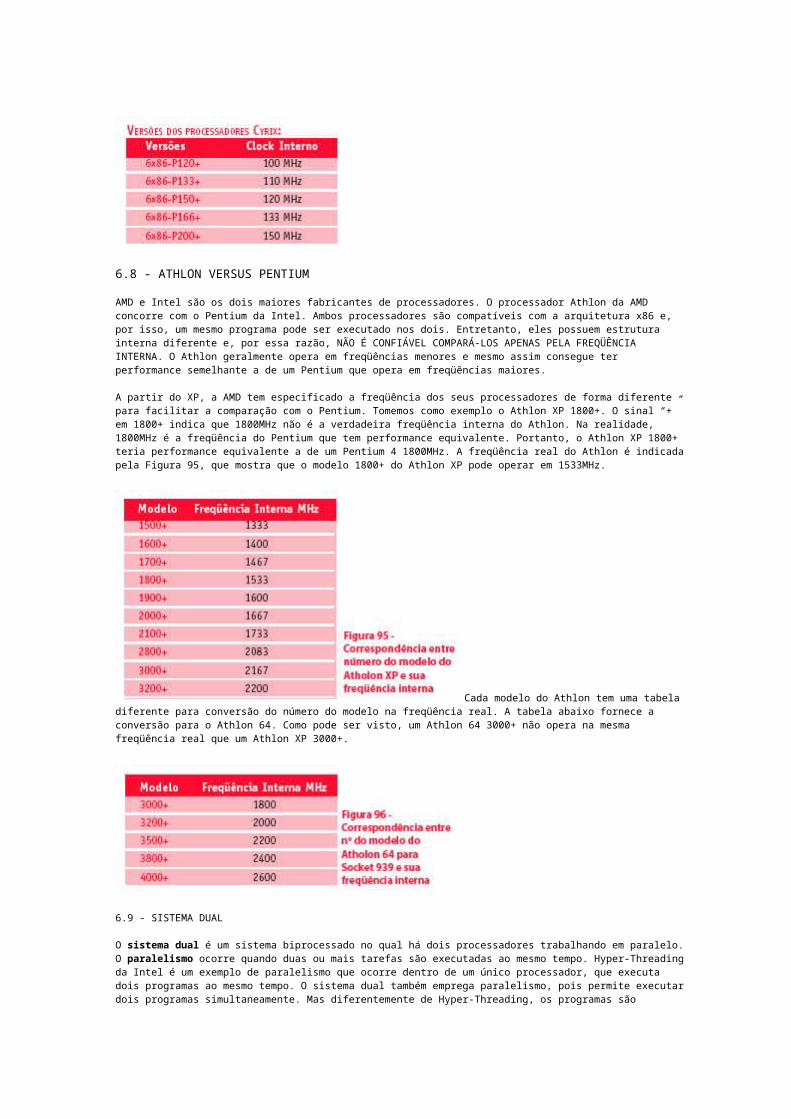
RIMM é um tipo de módulo padronizado pela Rambus Inc. para utilização de memórias DRDRAM, ou seja, os módulos RIMM utilizam DRDRAM. Os módulos possuem algumas semelhanças com o DIMM. Porém, não são compatíveis com o mesmo slot. O número de pinos do RIMM determina o número de canais suportado pelo módulo. Os módulos com um único canal vem com 168 ou 184 pinos e ambos os tipos podem ser trocados. Já os com 2 canais (capacidade de acessar dois pentes de memória simultaneamente) utilizam 242 pinos, proporcionado dois canais independentes por módulo: RIMM 4200 (1066MHz operação), RIMM 4800 (1200MHz operação) ou RIMM 6400 (1600MHz operação).
Normalmente, a configuração usada é de dois canais, fazendo com que a taxa de transferência seja o dobro da nominal, caso sejam usados dois módulos. Por exemplo, em uma placa-mãe com dois módulos PC800 instalados, a taxa de transferência da memória será de 3.200 MB/s (1.600 MB/s x 2), supondo que ela utilize a configuração de dois canais.
7.3.2.4 - C-RIMM - Continuity Rambus In Line Memory Module
Este é um módulo de memória “sem memória” e deve ser instalado nos soquetes de memória RIMM que ficariam vazios em placas-mãe que usam este tipo de memória. A tecnologia Rambus necessita de terminação resistiva. Por este motivo, todos os soquetes RIMM da placa-mãe devem, obrigatoriamente, estar preenchidos. No caso de não haver módulos de memória suficientes para preencher todos os soquetes, deve-se instalar ummódulo chamado C-RIMM (Continuity RIMM) que é um módulo “sem memória” responsável por fechar o circuito resistivo (Figura 115).
7.3.3 - Conceito de Paridade
Para mantermos a integridade dos dados na memória, evitando que defeitos nesta prejudiquem o funcionamento do sistema, o chipset gera um bit de paridade para cada byte de dado escrito na memória (baseado no número de bits de valor 1). A lógica de teste da paridade gera o bit de paridade conforme o byte armazenado no chip de memória, fazendo a comparação deste bit posteriormente quando for lido qualquer byte da memória. Caso seja detectado um erro, o sistema travará gerando uma NMI (interrupção sem possibilidade de uso do equipamento). Como exemplo, se temos o byte 00001111, teremos como bit de paridade 0; se 00101010, teremos 1, e assim pordiante. Na maioria das BIOS temos uma opção que habilita/desabilita esse teste de paridade. Sempre devemos deixá-lo habilitado.
7.3.3.1 - Identificação de módulos de memória com paridade

Quase sempre é possível reconhecer visualmente módulos de memória com paridade. Nos módulos de 72 pinos, os pinos responsáveis pela paridade são os pinos de número 35, 36, 37 e 38, aqueles situados perto da ranhura central do módulo. Ao se inspecionar estes pinos, pode-se constatar se existe conexão entre eles e o resto do módulo, se houver, será um módulo com paridade. É necessário que se verifique conexões aos pinos em ambos os lados dos módulos.
7.3.4 - Identificação de módulos de memória SIMM e DIMM
Parece óbvia a identificação dos tipos de módulos SIMM e DIMM, mas é importante atentar aos detalhes que os diferenciam. Os módulos SIMM são posicionados nos slots na diagonal e depois pressionados nos encaixes para prendê-los através dos furos, conforme mostrado na Figura 117.
Os módulos SIMM-30 têm 30 pinos, são menores, possuem um único chanfro na lateral próximo dos contatos e dois furos na parte superior do módulo. Estes furos são usados no momento do encaixe do módulo no slot de memória para prendê-lo e o chanfro define a posição correta de encaixe.
Os módulos SIMM-72 têm 72 pinos, são maiores que os de 30, possuem um chanfro na lateral próximo dos contatos e outro aproximadamente no centro do módulo, no meio dos contatos. Possui também dois furos na parte superior do módulo para prendê-lo no slot.
Os módulos DIMM têm 168 pinos, maiores que os SIMM-72, não possuem o chanfro lateral, mas possuem dois chanfros nos contatos, onde o mais central define a voltagem do módulo de memória (3,3 V ou 5,0 V). Os furos são inferiores e possuem ainda dois chanfros laterais que servem para prender o módulo no slot. Diferentemente do SIMM, o DIMM é encaixado na vertical, de cima para baixo, conforme mostrado na Figura 118. Para se descobrir qual a voltagem de um módulo DIMM, observamos o chanfro mais central: se a distância entre o chanfro e os contatos for igual dos dois lados, o módulo é de 3,3 volts; se a distância for diferente, ou seja, um lado mais próximo dos contatos, o módulo é de 5,0 volts.
Os pentes de 168, 184 e 240 pinos têm as mesmas dimensões: 13,34 centímetros de comprimento e 3,00 centímetros de altura. Porém, os pentes de 184 e 240 pinos possuem somente um chanfro na parte inferior. O número de componentes de um DIMM 240 pinos pode variar, mas sempre possui 120 pinos de cada lado do chanfro localizado na parte inferior do módulo, o que não acontece com o DIMM 184 pinos.

7.3.5 - Freqüência do FSB (Front Side Bus) X freqüência da CPU
O FSB é o barramento entre o microprocessador e os módulos de memória. Podemos dizer que é a principal estrada de dados do PC. Quanto mais rápido for este barramento, mais rápida será a transferência de informação entre o processador e a memória. A velocidade do FSB não é a mesma do processador (pelo menos ainda), mas a tecnologia está mudando rapidamente. Acredita-se que num curto espaço de tempo já existirão processadores e FSB rodando a uma mesma velocidade. Se você tem um processador Pentium de 600MHz com FSB de 100MHz, a informação trafega dentro do processador com a velocidade de 600MHz, contudo, a transferência de dados para fora do processador irá ocorrer a 100MHz. Um dos principais fatores que limitam a velocidade dos PC’s atualmente é a velocidade dos barramentos. Enquanto você pode ter um processador rodando a 3 GHz, a velocidadedo FSB está em aproximadamente 1GHz.
7.3.6 - Definições e termos importantes
7.3.6.1 - MegaByte X Megabit
Suponha que alguém tenha comprado um módulo de 128 MegaBytes e decide saber o que são todas aquelas letras e números estampados nos chips de memória. Neste caso você nota que o seu módulo é da Mícron/Crucial com número MT48LC8M8A2. Você acessa o web-site da Mícron e encontra um texto dizendo que o seu módulo é um par de 64 megabits, mas você comprou um módulo de 128 MegaBytes.
7.3.6.2 - Bits e Bytes
Um bit é um único caractere de dados (0 zero ou 1 um). Um byte são oito caracteres de dados, ou seja, oito bits formam um byte. O computador processa informação em conjuntos de oito bits ou um byte. Neste ponto é que surge a confusão. Para fazer um módulo de 128 MB (MegaBytes), precisa-se de oito chips com 128 Mb (Megabits) em cada. Lembre-se que um byte é formado por oito bits. Então multiplicando-se 128 Mb (Megabits) por oito obtemos como resultado 128 MB (MegaBytes). A tabela abaixo ilustra algumas medidas dos bits.
7.3.6.3 - Lendo os dados da memória
Quando o computador lê os dados da memória, ele lê um bit de cada um dos oito chips de memória formando, assim, um byte. Isso significa que todos os chips do módulo de memória sempre trabalham em conjunto, ao invés de um chip de cada vez. Caso o módulo de memória possua ECC (Error Correcting Code - Código para Correção de Erros) ele terá nove chips ao invés de oito.
7.3.6.4 - Grande “B” versus pequeno “b”
As siglas e a nomenclatura também causam confusão. Megabit possui a sigla com o b minúsculo Mb, já megabyte possui a sigla com o B maiúsculo MB. Os módulos de memória são referenciados como megabytes (MB), e megabits (Mb) é geralmente utilizado para dimensionar a quantidade de dados transferidos (tráfego) entre computadores de uma rede.
7.3.6.5 - Densidades Diferentes
Outra coisa que deve ser levada em consideração é que a quantidade de megabits em cada componente do módulo não é a mesma da quantidade total de megabytes, como no exemplo anterior (1 módulo de 128 MegaBytes é construído com 8 chips de 128 megabits). Existem diversas formas de construir um módulo de 128 MB. Pode-se, por exemplo, utilizar dezesseis chips de 64 megabit ou quatro de 256 megabit, em ambos os casos o total seria 128 MB (16 x 64 Mb = 128 MB ou 4 x 256 Mb = 128 MB). Isto dá flexibilidade aos fabricantes de memórias para utilizar diferentes chips de memória podendo tirar vantagens do custo dos diversos tipos de chips.
7.3.7 - Quantidade de Memória Ideal

Para determinar a quantidade de memória que se deve colocar num computador é necessário responder a algumas perguntas.
Qual computador você tem e qual a idade dele?
O tipo e a idade do computador são muito importantes, mas por razões não tão obvias. Não faz sentido sugerir uma grande quantidade de memória para o usuário que ainda está utilizando um 486 DX66 ou 100, ou Pentium 66. Obviamente os computadores devem estar rodando perfeitamente, mas sugerir que eles deverão ter 128 MB de memórianão faz muito sentido dado o preço dos computadores atualmente. Existe a possibilidade do computador não suportar essa quantidade de memória. Apesar de as memórias estarem extremamente baratas, o valor delas ainda deve ser levado em consideração. Esta é uma questão importante, mas não tão importante quanto as próximas.
Qual o sistema operacional que você vai utilizar no seu computador?
Existem MD-DOS, Windows 3.1 (ainda estão em uso), Windows 95, Windows 98, Windows ME, Windows XP (Professional, Home), Windows NT (Workstation e Server), Windows 2000 (Professional, Server e Advanced Server), Windows 2003 Server e Linux (destacase entre as distribuições brasileiras a Conectiva e Kurumim), e diversos outros sistemas operacionais. Certamente cada sistema operacional tem seu próprio requisito de hardware, dependendo da utilização que ele vai ter. Se será utilizado o Windows 95 ou 98 simplesmente para enviar/receber e-mails, executar algum processador de texto (Word, StarOfficeou OpenOffice) e para navegar na Internet, a quantidade de memória necessária será menor do que se o SO (Sistema Operacional) for utilizado para programas gráficos (Corel, 3D Max, PhotoShop). Isto nos leva a outra questão.
Para que o computador será utilizado?
Destas três questões esta é a mais importante. Qual a utilização do computador determina a quantidade de memória necessária. Os vendedores adoram dizer a quantidade de memória que será necessária ou quanto você deve pagar. Os casos que serão citados servem simplesmente como referência, pois, cada caso deve ser estudado individualmente.
Considere um computador K6-2 450 MHz ou Pentium III 450 MHz com o Windows 98 que será utilizado para enviar/receber e-mail, processador de textos (Office 97) e navegar na Internet (FireFox 1.0 ou Internet Explorer 6.0), a quantidade mínima de memóriadeve ser 64 MB.
7.3.8 - Testando a Memória
Como determinar se um módulo de memória está com problemas? Os fabricantes possuem equipamentos dedicados para testar as memórias fabricadas por eles. Mas da fábrica até as mãos do técnico ou do usuário há um longo caminho a ser percorrido, com uma diversidade de obstáculos, especialmente manipulação inadequada e remarcação (colaretiqueta de PC133 em memórias PC100).
Existem vários utilitários de teste na Internet, por exemplo: www.memtest86.com ou www.aceshardware.com. Mesmo utilizando estes utilitários não existe garantia de que o módulo esteja totalmente livre de falhas. Pois, pode haver problemas com os módulos de memória, com chipset da placa-mãe e até com o processador. Para se ter certeza absoluta, que um módulo com suspeita de defeito não contém problemas, somente substituindo-o por outro (que se tenha certeza sobre seu funcionamento correto) e executar os testes novamente. Vale ressaltar que o controlador da memória, localizado no northbridge, pode aquecer muito. Pode-se conectar uma ventoinha a ele e executar o teste novamente. Quando o PC está operando normalmente, esta controladora não é tão exigida, dissipando menos energia.
7.3.9 - Número de Pentes de Memória X Largura do Barramento FSB
A quantidade de pentes de memória que deve ser colocada depende da largura do barramento da memória (32bits, 64bits) e dos módulos de memória. A Figura 120 e a Figura 121 ilustram este fato. Mas, também é necessário observar as configurações daplaca-mãe, por exemplo, as placas mãe que utilizavam o chipset da Intel i850 (±final de 2000) operavam com dois pentes de memória Rambus. Outras placas mãe trabalham com o sistema dual channel (conseguem acessar dois módulos de memória simultaneamente). Para estas placas atingirem a sua melhor performance seria necessário utilizara memória sempre aos pares, contudo, isto não é obrigatório.

7.4 - MEMÓRIA SECUNDÁRIA (NÃO VOLÁTIL)
A memória secundária é formada por equipamentos que são capazes de armazenar dados (bits) e mantê-los mesmo quando o computador é desligado.
7.4.1 - Disco Rígido, Hard Disk (HD) ou Winchester
Desde a chegada ao mercado, o disco rígido constitui o mais difundido sistema de armazenamento de grandes volumes de dados. Os primeiros computadores pessoais não o possuíam porque os pequenos volumes de dados com que trabalhavam podiam perfeitamente ser arquivados nos disquetes de poucos KB de capacidade.
A incorporação do disco rígido é um dos fatores que explicam o extraordinário desenvolvimento dos computadores pessoais. A partir do lançamento comercial do IBM PC/ XT, essa unidade de armazenamento transformou-se em componente padrão de qualquer PC.
A importância do disco rígido não está apenas no desempenho dentro do sistema. Trata-se de um dispositivo de armazenamento permanente e, portanto, capaz de conservar a informação nele arquivada mesmo quando o sistema é desligado. Ele abriga em seu interior os dados necessários para o funcionamento do PC (o sistema operacional e os programas), bem como os arquivos e informações que o usuário vai gerando.
Tudo isso dá uma idéia da importância do disco rígido e da gravidade implicada em qualquer defeito nele verificado.
7.4.1.1 - História dos Discos Rígidos (HDs)
O disco rígido tem uma história curta e fascinante. Em 24 anos ele saiu de uma monstruosidade com 50 discos de 24 polegadas, armazenando 5 MB (± 5.000 Bytes) de dados para os HDs atuais medindo 31/2" de comprimento por 1" (ou menos) de altura, armazenando mais de 160 GB (± 170.000.000.000 Bytes).
Em 1950, Engineering Research Associates of Minneapolis construiu o primeiro cilindro de armazenamento magnético para a U.S. Navy (marinha americana), o ERA 110. Ele podia armazenar um milhão de bits e recuperar uma palavra em 5 milésimos de segundo (1 milésimo de segundo = 1 segundo dividido por 1000).
Em 1956 a IBM inventou o primeiro sistema de armazenamento em discos para computador, o RAMAC 305 (Random Access Method of Accounting and Control). Este sistema armazenava 5 MB e tinha 50 discos de 24 polegadas (60,96 centímetros) de diâmetro.
Em 1961 a IBM inventou o primeiro drive de discos (disk drive) com envolta das cabeças de leitura e escrita. Em 1963, ela introduziu o drive de discos removíveis.
Em 1970 a IBM introduziu o floppy disk de 8 polegadas (20,32 centímetros).
Em 1973 a IBM lançou o Winchester 3340, chamado hard disk drive (HD ou disco rígido), este é o antecessor de todos os discos rígidos (HD) atuais. O 3340 tinha 2 eixos, cada um com a capacidade de 30 MB.
Em 1980, a Seagate TEchnology introduziu o primeiro disco regido para microcomputadores, o

ST506. Ele contava com um motor de passo e armazenava 5 MB. Ainda em 1980 foi introduzido o primeiro drive ótico a laser. No inicio dos anos 80, o primeiro disco rígido de 51/4" começou a ser vendido em massa. Em 1981, a Sony lançao primeiro floppy drive de 31/2".
Em 1983 foi feito o primeiro disco rígido de 3.5". O primeiro drive de CD-ROM foi construído em 1984. O drive IDE de 31/2" iniciou sua existência como um drive de expansão da placamãe, ou “hard card” (cartão rígido). O cartão rígido incluía o drive e a controladora que era integrada na IDE (Integrated Device Electronics) do disco rígido. A Quantum foi a primeira a fabricar os cartões rígido em 1985.
Em 1997, a Seagate o primeiro disco rígido Ultra ATA de 7.200 RPM Rotações Por Minuto) para computadores Desktop (computadores de mesa).
Em 2000, a IBM triplicou a capacidade dos pequenos discos rígidos. Este drive armazenava um gigabyte, confira o tamanho na Figura 124. Uma pequena evolução para o primeiro disco rígido de um gigabyte do mundo, o IBM 3380, lançado em 1980, tinha o tamanho de uma geladeira, pesava 250 Kg e custava US $ 40.000 (quarenta mil dólares).
7.4.1.2 - Armazenamento Magnético
No interior do disco rígido existem vários pratos (discos) rígidos recobertos por uma camada de material magnético. O número de pratos é variável e limitado apenas pela altura da unidade armazenamento. Geralmente, os pratos do disco rígido são feitos de alumínio ou de compostos vitrocerâmicos de grande rigidez. A superfície de cada prato é revestida por uma camada muito fina de um material com a densidade aumentada por partículas metálicas. Por essa razão, o aumento de densidade nos compostos metálicos da superfície dos pratos é um dos fatores que permitem que a capacidade de armazenamento dos discos rígidos venha aumentando cada vez mais sem a necessidade do aumento das dimensões da unidade.
Podemos imaginar a superfície de cada prato dividida em bilhões de minúsculos quadradinhos, onde em cada quadradinho pode ser colocado e retirado um pequenino imã do tamanho do quadradinho. O HD armazena bits, e cada bit pode assumir o valor 0 ou 1. Assim, se o HD for armazenar um 0 ele não coloca o imã no quadradinho, se ele for armazenar um (1), ele coloca o imã no quadradinho. Desta forma, é fácil visualizar que quanto maior a quantidade de quadradinhos, mais bits consegue-se colocar e, conseqüentemente, maior a capacidade de armazenamento.
Suponha que se tenha um quadrado onde cada lado mede 1 metro perfazendo um total de 1 m2. Se dividirmos este quadrado em 25 quadrados menores, tem-se como resultado 25 quadrados de 0,04 m2 . Suponha, agora, o quadrado dividido em 100 quadradinhos, tem-se como resultado 100 quadrados de 0,01 m2. Pede-se observar pela Figura 125 que a quantidade de quadrados dentro do quadrado maior aumentou, ou seja, a densidade de quadradinhos aumentou dentro do quadrado maior.
7.4.1.3 - Funcionamento
O disco rígido compõe-se de duas seções, a mecânica e a eletrônica (ou lógica). A primeira recupera a informação

armazenada magneticamente e a envia à eletrônica, que a interpreta e, por sua vez, a envia ao barramento do sistema. A cabeça são os elementos responsáveis pela leitura dos dados armazenados e escrita dos dados que serão gravados. Por meio de braços metálicos, elas se deslocam acima da superfície dos pratos, sem chegar a tocá-los, deixando entre ambos um espaço de menos de décimo de milímetro. Esse afastamento entre as cabeças e a superfície dos pratos é produto da pressão do ar que eles deslocam ao girar a velocidades acima 3600 rpm (rotações por minuto).
Como norma, os discos rígidos dispõem de uma cabeça de leitura e de escrita para cada uma das faces de um prato, ou seja, uma cabeça para a face superior e outra para a face inferior. Todos os braços das cabeças do disco rígido ficam agrupados e trabalham com base num sistema único de movimento que faz com que as cabeças de todos os pratos se desloquem simultaneamente.
Um sistema eletromagnético incumbe-se de mover sobre um eixo o conjunto formado pelos braços e as cabeças do disco rígido, podendo situar estas últimas em qualquer ponto do raio de ação dos braços. Esse movimento, combinado com a rotação dos pratos, permite que as cabeças possam percorrer a totalidade da superfície útil dos respectivos pratos.
Depois que a seção mecânica do disco obteve os dados, na forma de impulsos elétricos, entra em ação a parte eletrônica, que se encarrega de preparar esses dados para enviálos através do barramento (bus) de dados incorporado no disco rígido.
Segue-se um pequeno exemplo mostrando uma breve explicação do que acontece com o HD cada vez que lhe é solicitado a leitura de uma pequena porção de informação do disco. Este é um exemplo muito simplificado que não leva em consideração fatores como o cache do disco, correção de erros e outras técnicas especiais que os sistemas utilizam hoje para aumentar a performance e a confiança. Os setores não são lidos individualmente na maioria dos PCs, eles são agrupados em blocos contínuos chamados clusters. Um trabalho comum, a leitura de um arquivo através de um programa como o Microsoft Word, pode envolver milhares ou talvez milhões de acessos individuais ao disco.
O primeiro passo no acesso ao disco é calcular onde no disco devemos procurar pela informação desejada, ou seja, determinar qual parte do disco deve ser lida.
A localização exata no disco passa por uma ou duas traduções até que a requisição possa finalmente ser processada pelo drive com o endereço da informação expressado em termos da geometria do disco. A geometria do HD é normalmente expressada em termos de cilindro, cabeça e setor nos qual o sistema quer que o HD leia (Um cilindro é equivalente a uma trilha

para a finalidade de endereçamento). A requisição é enviadapara o HD através de sua interface, fornecendo o endereço do setor que deve ser lido.
Primeiramente o programa interno de controle do disco rígido checa se a informação solicitada está no cache (buffer) interno do próprio HD. Caso esteja, a controladora lê a informação a partir do cache (buffer) e a envia, sem a necessidade de ler a superfície do disco.
Na maioria dos casos, o disco já está girando. Se não estiver, provavelmente o motor deve ter sido desligado pelo sistema de gerenciamento de energia para economizála. Neste a controladora do HD irá ativá-lo, colocando os discos para girar na velocidade padrão do modelo do disco rígido (HD).
A controladora recebe e interpreta o endereço dos dados que devem ser lidos e executa as translações adicionais, caso sejam necessárias, dependendo de cada modelo e fabricante. Com isso, finalmente, o programa que controla o HD tem o número do cilindro que contém a informação requisitada. O número do cilindro diz ao HD qual trilha e qual superfície de disco deve ser acessada. O programa controlador instrui o atuador a mover a cabeça de leitura/escrita para a trilha apropriada.
Quando as cabeças estão na posição correta, o programa controlador ativa especificamente a cabeça que está sobre a região exata que precisa ser lida. A cabeça começa a ler a trilha procurando pelo setor que foi solicitado. Somente então, após o disco ter rodado até o inicio do setor solicitado é que os dados procurados começam a serem lidos. A controladora coordena o fluxo das informações do HD para uma área de armazenamento temporário (buffer). Somente então os dados começam a sair pela interface do HD, geralmente para a memória do PC, satisfazendo, assim, a solicitação do sistema operacional.
7.4.1.4 - Performance
Um HD (disco rígido) rápido ou lento afeta toda a performance do sistema num ambiente comum. Caso o sistema operacional utilizado não faça swap constantemente (ocorre quando há pouca memória RAM), a velocidade do disco rígido é a pequena parte que faz o balanceamento do sistema. Caso seja trocado um HD antigo do sistema por outro 30% mais rápido, os benefícios para as aplicações padrões estarão entre 2% e 18%. Muitas vezes é necessário outros componentes mais rápidos. Em outros casos ainda é preciso uma maior capacidade e segurança.
Existem muitos programas que executam testes de performance no HD (disco rígido), alguns bons outros ruins. Em qualquer dos dois casos é necessário um ponto de comparação. Diferentes benchmarks (programas capazes de medir a performance) significam diferentes números. Benchmarks modernos funcionam independentemente de existir ou não dados no HD (disco rígido). Neste caso, somente teste de leitura são realizados. Contudo, o banchmark pode ser afetado por alguns fatores, principalmente:
1. Em qual canal o HD está conectado;
2. Se o HD está sozinho ou existe outro dispositivo conectado junto com ele na controladora;
3. Em qual sistema operacional o HD foi testado e usado;
4. Quais drivers foram, ou não, carregados.
Os principais fatores que influenciam a performance do HD (disco rígido) são:
• Velocidade de Rotação• Número de setores por trilha• Tempo de seek / tempo de escolha da cabeça / tempo de escolha do cilindro• Latência da rotação• Tempo de acesso aos dados• Tamanho da cache do HD• Como os dados são organizados no disco
7.4.1.4.1 - Velocidade de Rotação (Rotation Speed)
Um disco rígido típico tem a velocidade de rotação da ordem de 4.500, 5.200, 7.200, 10.000 e 15.000 rpm. A velocidade de rotação aumenta muito a taxa de transferência, mas também aumenta o ruído e o calor dissipado (o HD aquece mais). Os HDs modernos conseguem ler todos os setores de uma trilha em uma única volta do disco (Interleave 1:1). Outro fato que deve ser destacado é o de que a velocidade de rotação é constante.
7.4.1.4.2 - Número de setores por trilha
Os HDs modernos utilizam diferentes tamanhos de trilhas. As partes mais externas dos discos têm mais espaço para setores (mais setores) que as partes internas. Geralmente, os discos rígidos começam lendo das trilhas mais externas para as internas. Conseqüentemente, os dados são lidos e escritos mais rapidamente no início da transferência.

7.4.1.4.1 - Velocidade de Rotação (Rotation Speed)
Um disco rígido típico tem a velocidade de rotação da ordem de 4.500, 5.200, 7.200, 10.000 e 15.000 rpm. A velocidade de rotação aumenta muito a taxa de transferência, mas também aumenta o ruído e o calor dissipado (o HD aquece mais). Os HDs modernos conseguem ler todos os setores de uma trilha em uma única volta do disco (Interleave 1:1). Outro fato que deve ser destacado é o de que a velocidade de rotação é constante.
7.4.1.4.2 - Número de setores por trilha
Os HDs modernos utilizam diferentes tamanhos de trilhas. As partes mais externas dos discos têm mais espaço para setores (mais setores) que as partes internas. Geralmente, os discos rígidos começam lendo das trilhas mais externas para as internas. Conseqüentemente, os dados são lidos e escritos mais rapidamente no início da transferência.
7.4.1.4.4 - Latência da rotação
Quando a cabeça está sobre a trilha desejada após um salto, ela precisa esperar que a rotação do disco chegue até o setor correto. Este tempo é chamado latência rotacional, que é medido em milésimos de segundo (ms) (1 ms = 1 segundo dividido por 1000). O aumento da velocidade de rotação dos discos diminui esse tempo. A média deste tempo está em torno de 4 ms (7200 rpm) à 6 ms (5400 rpm)
7.4.1.4.5 - Tempo de acesso aos dados
O tempo de acesso aos dados é uma combinação do tempo de seek, tempo de escolha da cabeça e da latência rotacional e também é medido em milésimos de segundo (ms). Como já foi citado anteriormente, o tempo de seek diz somente a velocidade com que a cabeça é posicionada sobre o cilindro desejado. Até o dado ser lido ou escrito deve-se adicionar o tempo de comutação da cabeça para a escolha da trilha e também o tempoda latência rotacional para encontrar o setor desejado.
7.4.1.4.6 - Cache do HD
A cache é o armazenamento temporário dos dados a serem escritos ou que já foram lidos do HD, conforme escrito no item funcionamento. Todos os discos rígidos modernos têm seu próprio cache, contudo, eles variam em tamanho e na organização dos dados que estão armazenados nela. Pode-se checar o conteúdo do cache com alguns programas específicos, como o ASPIID da Seagate.
Normalmente, o tamanho da cache não é tão importante quanto a organização dos dados na cache (write/read cache ou look ahead cache). Na maior parte dos drives EIDE a cache do HD também é utilizada para armazenar seu firmware. Quando o drive é ligado, ele lê o firmware a partir de um setor especial. Fazendo isso, os fabricantes poupam dinheiro eliminando a necessidade de uma ROM e ganham a flexibilidade de realizar um update da “BIOS” do drive facilmente, caso seja necessário. (Como para os drives da Western Digital que têm problemas com algumas “BIOS” de algumas placas mãe resultando no funcionamento inadequado do sistema).
7.4.1.4.7 - Organização dos Dados no Disco
Através de uma rápida observação da BIOS pode-se encontrar três valores: total de cilindros, cabeças e setores, assuntos já abortados anteriormente.
Atualmente, estes valores são utilizados simplesmente para compatibilidade com o antigo DOS, não refletindo a real geometria do disco rígido. O HD calcula estes valores baseado no endereço lógico dos blocos (LBA - Logical Block Address). E estes valores LBA são convertidos nos valores reais de cilindros, cabeças e setores. As BIOS atuais são capazes de trabalhar com o LBA, superando a antiga limitação de 504 MB. Contudo, Cilindros, cabeças e setores ainda são utilizados pelo ambiente DOS. Os drives SCSI sempre utilizaram o LBA para acessar os dados no HD. Os sistemas operacionais atuais acessam os dados via LBA, sem utilizarem a BIOS.
7.4.1.5 - Sistema de Arquivos - Organização Lógica dos Dados no HD
O Disco Rígido divide-se primeiramente em cilindros. Cada cilindro é dividido em trilhas e estas, em setores. Geralmente cada setor possui o tamanho de 512 Bytes. Os setores são agrupados em conjuntos maiores chamados clusters ou unidade alocável. Desta forma um cluster é um grupo de setores. O cluster é a menor parte endereçável nos discos rígidos, ou seja, é a menor unidade de espaço em disco que pode ser atribuída a um arquivo.
Em uma partição de 1024 MB ou mais, cada cluster tem 64 setores (32 KB), enquanto discos de 512 MB até 1024 MB adotam clusters de 32 setores. Isto significa que, se for gravado um arquivo de 1 KB em uma partição com mais de 1024 MB serão desperdiçados 31 KB, já que nenhum outro arquivo poderá ocupar aquele cluster. Um cluster pode ter o tamanho máximo de 64 setores (32 KB), o que obriga que uma partição, em FAT16 (explicada abaixo), tenha no máximo 2 GB. Se você dividir o espaço ocupado no seu disco (em bytes) pelo tamanho do cluster correspondente, a capacidade do disco rígido terá como resultado um número inteiro.
7.4.1.5.1 - FAT (File Allocation Table) - Sistema de Alocação de Arquivos
O DOS, incluído o DOS 7.0 e o Windows 95, utilizam a FAT como sistema de arquivos para armazenar dados no disco rígido e nos flexíveis (floppy disk). A FAT agrupa os setores em clusters utilizando 16 bits para endereçar todos os clusters. Estes

16 bits de endereçamento da FAT16 permitem a ela endereçar somente 65526 clusters, nos quais alguns são utilizados com um propósito especial. Um cluster não pode ser maior que 32 KB (64 setores de 512 bytes). Portanto, o tamanho máximo de uma partição FAT16 é 2 GB = 65526 x 32 KB(32768 Bytes).
Este fato afeta drasticamente os arquivos que têm menos de 32 KB. Pois os mesmos ocupariam os 32 KB do cluster, porque num cluster só pode haver um arquivo. É por este fato que muitas pessoas dividem o disco rígido em partições menores que 512 MB, para aproveitarem melhor seu espaço, utilizando clusters com somente 8KB. Pode-se checar a partição com o chkdsk do DOS-prompt e utilizar um software como o Partition Magic para reparticionar o HD sem perder os dados nele contidos.
Com o lançamento do Windows 95 OEM Service Realease 2 (Windows 95 OSR2), a Microsoft introduziu a FAT com endereçamento de 32 bits. Como quatro bits são reservados, conseqüentemente, 228 (268.435.456) clusters podem ser endereçados através desta FAT ou FAT32, como é normalmente referenciada. Isto permite que partições maiores que 8 GB utilizem clusters com apenas 4 KB de tamanho. O tamanho máximo da partição é 2 TB (2048 GB). Comparado com a FAT16, a FAT32 não tem um tamanho fixo para a partição da raiz. Assim, pode-se armazenar muitos diretórios com uma grande quantidade de arquivos diretamente no diretório raiz do HD. A tabela abaixo ilustra a nova divisão dos clusters.
O sistema de arquivos FAT32 tem as seguintes vantagens sobre o FAT16:
• Permite que os programas sejam abertos mais rapidamente até 50%, na média 36% mais rápido.• Utiliza um tamanho de cluster menor, resultando em uma utilização mais eficiente do espaço em disco até 15% mais eficiente, na média 28% a mais de espaço em disco.• Permite que um disco rígido de até 2 TB seja formatado como uma unidade única, eliminando a necessidade de partição do disco rígido.• Pode realocar a pasta raiz e usar cópias de backup do FAT, tornando seu computador menos vulnerável a falhas.
7.4.1.5.2 - NTFS (NT File System)
No início dos anos 90 a Microsoft começou a criar um sistema operacional e um sistema de arquivos com qualidade, performance e segurança. O objetivo deste sistema era permitir a Microsoft entrar no lucrativo sistema corporativo. Os sistema operacionais da Microsoft, até então, eram o MS-DOS e o Windows 3.x. Nenhum deles tinha o poder ou características comparáveis ao UNIX ou a qualquer outro sistema operacional sério. Uma das maiores fraquezas do MS-DOS e do Windows 3.x era o sistema de arquivos no qual eram baseados (FAT). Este sistema de arquivos oferecia poucos dos recursos necessários ao armazenamento e gerenciamento de dados em sistemas high-end, de rede ou para o ambiente corporativo. Para atingir estes objetivos a Microsoft criou um novo sistema de arquivos, o NTFS, que não era baseado na FAT.
O NTFS foi designado para atender a objetivos específicos, entre eles os mais importantes são:
Confiança: Segurança e Controle de acesso: uma característica dos sistemas de arquivos sérios é a capacidade de se

recuperar de problemas sem a perda de dados. NTFS implementa algumas características importantes permitindo que as transações sejam totalmente concluídas, sem perda de dados, aumentando a tolerância à falhas do sistema.
Segurança e Controle de Acesso: A principal fraqueza do sistema de arquivos FAT é que não inclui nenhuma facilidade para controlar o acesso a diretórios e arquivos armazenados no disco rígido (HD). Sem este controle é quase impossível a implementação de aplicações e redes que necessitam de segurança e também da capacidade de gerenciar quem pode ler ou gravar dados.
Quebra a barreira do Tamanho: No início dos anos 90, a FAT estava limitada a FAT16, que somente permitia partições de no máximo 2 GB. O NTFS foi desenhado para permitir grandes partições, antecipando o crescimento da capacidade de armazenamento dos HDs, e também pode utilizar RAID arrays.
Armazenamento Eficiente: Novamente, no momento em que o NTFS estava sendo desenvolvido,a maioria dos PCs utilizavam FAT16, cujos resultados no armazenamento de arquivos em disco deixavam a desejar. O NTFS evitou este problema utilizando um método diferente da FAT na alocação de espaço para os arquivos.
Nomes de Arquivos Longos: NTFS permite que os nomes dos arquivos possuam até 255 caracteres.
Este sistema de arquivos não ficou estagnado, a Microsoft sempre tem feito aperfeiçoamentos e lançado novas versões. Recentemente, a Microsoft introduziu o NTFS 5.0 como parte do sistema operacional Windows 2000. Em alguns aspectos, é muito semelhante ao utilizando pelo Windows NT, porém com várias características e funcionalidades novas.
NTFS 5.0
Quando a Microsoft lançou a nova versão do sistema operacional Windows NT, ela surpreendeu todas as pessoas nomeando o novo sistema operacional como Windows 2000 e não como Windows NT 5.0, como era esperado. Contudo, a nova versão do NTFS, utilizada pelo Windows 2000, recebeu o nome de NTFS 5.0. Muitas das novas funcionalidades do Windows 2000 atualmente dependem do sistema de arquivos NTFS, por exemplo, o Serviço de Diretório (Active Directory service).
Dentre as novas funcionalidades que foram adicionadas ao NTFS com a versão 5.0 destacam-se, principalmente:
Pontos de Redirecionamento (Reparse Points): Arquivos e diretórios do sistema operacional podem ter ações associadas a ele. Assim, quando este objeto do sistema de arquivos é acessado de uma determinada forma, a ação associada é carregada. Isso permite implementar algo parecido com o “symbolic file link” do UNIX/LINUX.
Aumento das Permissões e da Segurança: Uma das mais importantes vantagens conseguidas com a escolha do NTFS como sistema de arquivos em relação aos anteriores (FAT, FAT32) é o maior controle sobre quem pode executar determinadas operações em determinados arquivos do sistema de arquivos. A FAT foi construída para trabalhar com PCs que são utilizados por uma única pessoa (sigle-user PC), não priorizando critérios como segurança e controle de acesso. Isto torna este sistema de arquivos muito pobre para o ambiente multi-usuário. Em contraste com a FAT, o NTFS oferece um ambiente flexível de controle de quem pode acessar o que, isto permite a vários usuários e grupos de usuários diferentes acessarem dados no servidor simultaneamente, porém, cada um pode acessar somente os dados que lhe são permitidos.
Variações dos arquivos (Change Journals) Journals): o NTFS pode registrar todas as operações executadas sobre os arquivos e diretórios, ou seja, registra quem executou determinada tarefa. Por exemplo, o usuário Bartolomeu apagou o arquivo X e alterou o arquivo Y. Quando este serviço está ativo o sistema grava todas as mudanças feitas no Change Journal, cujo nome também é utilizado para descrever esta característica.
Um jornal (neste caso um arquivo) é mantido para cada partição (volume) NTFS, ele começa como um arquivo vazio. A qualquer momento que uma mudança é realizada no volume, um registro é adicionado ao arquivo. Cada registro inclui uma identificação de 64 bit chamada Update Sequence Number - USN (Número Seqüencial de Atualização). Change Journals algumas vezes são chamados USN Journals. Cada registro no Change Journal contém o USN associado, o nome do arquivo e as informações de como as mudanças foram feitas.
Um ponto importante do Change Journal é que ele descreve as mudanças realizadas, mas não inclui os dados ou detalhes associados com a mudança. Se um dado é gravado num arquivo particular, o Change Journal irá conter uma entrada (registro) indicando que um dado foi gravado, mas não contém os dados que foram gravados no arquivo. Por esta razão o Chage Journal não pode ser usado como “undo” das operações realizadas nos objetos do sistema de arquivos.
Criptografia: O NTFS 5.0 permite que os arquivos sejam criptografados e automaticamente descriptografados quando eles são lidos.
Cotas de Disco: o administrador pode rastrear o quanto de espaço está sendo utilizado pelos usuários ou grupos de usuários. Com isso é possível colocar um limite no espaço que pode ser utilizado por eles, caso seja necessário.
Suporte a Arquivos Esparsos: Arquivos esparsos são arquivos que alocam grandes áreas do HD, mas que os dados são colocados aos poucos até preencher todo o espaço. Estes arquivos funcionam como se fosse um arquivo de aço para pastas com documentos. Quando o arquivo de aço é comprado existem poucas pastas para serem colocadas nele, porém, com o passar do tempo, novas pastas são colocadas no arquivo de aço, até que ele esteja totalmente cheio. Um arquivo esparso é um arquivo com uma grande quantidade de espaço vazio, que é preenchido com o decorrer do tempo ou pode não ser preenchido.
7.4.1.5.3 - WinFS (Windows Future Storage) - sistema de arquivos do Longhorn
Os desenvolvedores atuais não querem lidar com restrições que tenham relação a capacidade dos discos rígidos, pelo contrário, eles têm nas mãos o gerenciamento de gigantescas quantidades de dados armazenado numa mídia virtual ilimitada. O sistema de arquivos FAT não foi desenhado para lidar várias centenas de MB de um disco rígido de 200 GB.

Este problema impulsionou a Microsoft a tomar uma ação para a próxima geração do Windows. O sistema de arquivos Windows Future Storage (Win FS) vai substituir os atuais sistemas de arquivos no Longhorn, o sucessor do Windows XP. Pela primeira vez uma tecnologia utilizada por servidores vai gerenciar os PCs domésticos através de um banco de dados relacionais.
WinFS é o codenome da próxima plataforma de armazenamento no Windows Longhorn. Ela utilizará todas as vantagens da tecnologia de banco de dados. A Microsoft está avançando no sistema de arquivos, integrando armazenamento de dados, dados relacionais e dados XML. Os usuários do Windows irão ter disponíveis novas maneiras intuitivas de procurar, relacionar e lidar com suas informações. Terão ainda, suporte a sincronização de dados entre máquinas diferentes que utilizem o Longhorn. Esta nova plataforma rica em APIs para gerenciamento também será compatível com as APIs Win32.
7.4.1.6 - Setores Defetuosos (bad sectors ou bad blocks)
Setores ruins (sinal de que você já deveria ter trocado seu HD) podem ser detectados por ruídos de cabeça batendo, os chamados cliques. Este sintoma pode ocorrer quando um setor não é encontrado, uma vez que sempre que isto ocorre o HD reinicializa. Uma rotina de reinicialização leva as cabeças para uma área de referência e novamente para a região onde se espera encontrar o setor, esta operação é chamada de calibração.
Os setores ruins são, geralmente, causados por danos na mídia, mas também por desligamentoinadequado, por vibrações e choques acima dos limites máximos. A formatação completa (não rápida) feita pelos sistemas operacionais pode acabar com alguns setores ruins não oriundos de defeitos na mídia. De fábrica, praticamente todo HD sai com alguns deles (mídia com imperfeições). Quando vai chegando o fim de vida, começam a surgir novos setores ruins que podem ser detectados e isolados por programas como o Norton Disk Doctor (NDD) em análise de superfície, formatadores de baixo nível oferecidos pelos fabricantes e programas como Disk Manager da Ontrack
7.4.1.7 - Detecção do tamanho do HD pela BIOS
Uma questão que não deve ser esquecida é a detecção do tamanho correto do HD. Não é preciso saber que cada GB equivale a 1024 MB para descobrir que o tamanho do HD não foi detectado corretamente. Há alguns limites de reconhecimento por parte da BIOS da placas mãe. Os limites geralmente ficam em 527 MB (até os 486), 2GB à 8 GB (muitas placas de Pentium II/III). Felizmente, há uma solução relativamente fácil de empregar chamada de dynamic drive overlay (DDO). Os fabricantes de HDs costumam oferecer um software para que um programa especial seja instalado nos setores de BOOT ou então carregado pelo config.sys permitindo acesso transparente e legítimo a toda extensão do HD.
7.4.1.8 - DMA (Direct Memory Access) - Acesso Direto à Memória
O Direct Memory Acces (DMA - Acesso Direto à Memória) é uma forma de controlar a memória do sistema sem controlar a CPU (Processador). Este módulo pode mover dados de um local ou região da memória para outro local ou região.
Nos primeiros computadores o processador (CPU) praticamente fazia quase tudo dentro do PC. Ele tinha que executar os programas, mas também era responsável por transferir dados de/para os periféricos. Infelizmente, quando a CPU executa estas transferências ele não pode fazer mais nada, ou seja, não pode executar nenhuma outra operação.
A invenção do DMA permite aos periféricos transferir os dados diretamente para a memória, sem a necessidade de utilizar o processador. Isto permite um ganho na performance. Canais especiais foram criados ao longo de cada circuito para permitir o controle dos mesmos. Este circuito é geralmente parte do sistema de chipset da placa-mãe.
Na maioria das situações o acesso direto à memória é mais rápido se comparado ao que utiliza a CPU. O DMA pode ser configurado para lidar com todos os dados oriundos dos periféricos. Porém, somente a memória pode ser acessada desta maneira, mesmo assim muitos sistemas de periféricos, registradores de dados e registradores de controle podem ser acessados como se fossem uma memória comum. O DMA é utilizado, geralmente, somente para alguns dispositivos específicos, pois ele usa o mesmo barramento que o processador (CPU) usa para acessar a memória e apenas um dos dois pode utilizá-lo de cada vez. Ou seja, a CPU e o DMA não podem acessar a memória simultaneamente.
7.4.2 - Floppy drive ou disco flexível
Os disquetes, assim como os discos rígidos, são periféricos de acesso aos dados aleatórios. A fita magnética é um meio de armazenamento seqüencial, ou seja, temos que passar por todos os dados gravados para acessarmos um byte no final da fita.
Os floppy drives utilizam discos magnéticos para a gravação e leitura de dados. Seu acesso é lento (0.06 Mbps em discos de 1.44 MB) e têm capacidade limitada até 2.88 MB por disquete. São conectados ao conector de unidades de disco flexível. Cada interface de conexão, localizada na placa-mãe, pode ter até duas unidades de disco.
As chamadas mídias de armazenamento removíveis vêm tendo grande aceitação no mercado com o Zip Drive da Iomega. É um drive externo ligado a porta paralela (ou interno, conectado a uma placa SCSI ou mesmo utilizando os canais EIDE) que aceita pequenos discos com capacidade para armazenar até 100 MB de informação, tendo-se hoje discos Zip de até 250 MB.

Em agosto de 1997, foi lançado o SuperDisk LS-120 da O. R. Technology, que lê os disquetes tradicionais de 31/2" e discos de 120 MB. Existem outros modelos desta linha como o Jazz Drive, também da Iomega, com capacidade de armazenamento de 800 MB.
As informações nos disquetes dividem-se basicamente em trilhas que são compostas de setores. Os setores formam o cluster, conforme explicado anteriormente.
7.4.3 - Armazenamento Ótico
O compact disk (CD) foi lançado em outubro de 1982 e provou ser um grande sucesso como um formato de distribuição confiável não somente para a música, mas também para todas as outras aplicações.
Os CDs de áudio podem armazenar até 80 minutos de música no formato digital, segundo a especificação do Livro Vermelho (Red Book). Em 1984, o Livro Amarelo (Yellow Book) publicou a especificação para o CD-ROM que podia ser utilizado para armazenar dados de aplicações.
A introdução das versões dos CDs graváveis e a redução do preço para o hardware e a mídia gravável encorajou os consumidores a fazerem cópias de CDs e CD-ROMs, não somente para seu próprio uso. Isto fez com que as companhias utilizassem várias tecnologias de proteção contra cópias, na tentativa de diminuir o nível de cópias domésticas e combater a pirataria. Contudo o futuro do CD está ameaçado pela Internet e pelo DVD.
7.4.3.1 - Formatos do CD
Os CDs contêm milhões de marcas que correspondem aos valores 0 e 1, a única informação que o computador é capaz de compreender. Sem uma organização lógica, o leitor de CD seria incapaz de acessá-la para interpretá-la corretamente. Por essa razão, os dados são organizados segundo diferentes padrões, que fizeram com que o tipo de informação que deveriam armazenar evoluísse paralelamente. A maioria das unidades leitoras de CD é compatível com os formatos mais difundidos. O principal formato utilizado hoje aproveita o sistema utilizado nos disquetes magnéticos convencionais e o aplica aos discos óticos.
O compact disk (CD) suporta vários formatos prégravados para música, dados de computadores, vídeo, jogos e outras aplicações. Isto pode ser visto na Figura 129.
CD de Áudio: é o formato original do CD, a base para todos os outros formatos, ou seja, todos os outros formatos sairam deste formato. Os discos feitos no padrão do CD de áudio também podem ser utilizados para CD-Gráficos (CD-Graphics) ou CD-Textos (CDText), já o CD-Extra adiciona dados de computador ao CD de Áudio.
CD-ROM: é derivado do CD de Áudio e armazena dados de computador para jogos de PC e outras aplicações.
CD-ROM XA: é a versão multimídia do CD-ROM, utilizado como base para o CD-I, CDVídeo e CD-Foto. O CD-I Bridge (CD-I Ponte) permite que os dois últimos formatos sejam executados em aparelhos que executam CD-I.
7.4.3.1.1 - CD de Áudio (Audio-CD)
Os CDs de Áudio foram desenhados para armazenar mais de uma hora de áudio estéreo em alta qualidade. Armazenado no formato digital o barulho praticamente não existe.
O CD é superior aos discos de vinil e aos cassetes de muitas maneiras:
• Qualidade superior do som sem clicks, hiss ( som de “sss”, barulho parecido com som do ar escapando) ou outros defeitos.• Facilidade de executar acesso randômico (aleatório) para qualquer faixa.• Longa vida, os CDs teoricamente não estragam.• Tamanho compacto, 12 cm de diâmetro.
Áudio digital
A qualidade superior dos CDs aliada a seu tamanho compacto torna possível a utilização da tecnologia digital. O CD de áudio provê a qualidade necessária para todas as aplicações de áudio, mas para os puristas ela ainda não é suficiente. Por este motivo várias características novas foram introduzidas no formato HDCD e o novo formato DVD-Audio incorporou estas novas características incluindo o aumento do número de amostras vocais por segundo, mais bits por amostra e multi-canais com som surround.

No vinil e nas fitas cassetes de áudio, a onda sonora é gravada como sinal analógico. Conseqüentemente, qualquer imperfeição irá ser ouvida como um barulho (hiss) ou como qualquer outro defeito. Para reduzir estes defeitos, os CDs utilizam o PCM (Pulse Code Modulation - Código de Modulação por Pulso), a mais simples tecnologia de codificação digital.
Utilizando a tecnologia PCM, amostras da onda analógica são tomadas em intervalos e armazenadas como números. O exemplo acima mostra a conversão de uma onda analógica (que poderia ser parte de um sinal de áudio) para o digital através da representação de cada amostra como um número (de 0 a 100 neste exemplo).
Na prática, a faixa de valores e a quantidade (taxa) de amostragem devem ser grandes o suficiente para assegurar a exata reprodução da onda analógica original. O limite superior para a audição humana é da ordem de 20 KHz. Conseqüentemente, o áudiodeve ser amostrado 40.000 vezes por segundo ou mais.
Para reduzir a distorção cada amostra deve ser representada por um número de, no mínimo, 16 bits produzindo 65536 valores possíveis ou níveis (0 a 65535) por amostra.
HDCD High Definition Compatible Digital - Compatibilidade Digital de Alta Definição
HDCD é um processo de gravação que aumenta a qualidade do áudio em relação aos CDs, produzindo um resultado final mais aceitável para os puristas. Ele foi desenvolvido pela Pacific Microsonics.
Os discos HDCD utilizam os bits menos significantes dos 16 bits por canal para codificar informações adicionais de forma a aumentar a qualidade do sinal de áudio e de maneira a não afetar os players de CD (“tocadores” de CD) comum. Isto permite que CD players (“tocadores” de CD) executem o HDCD normalmente, como se fossem CDs comuns. O resultado destas informações adicionais é um sistema de codificação de 20 bits por canal, ele é utilizado para produzir maior fidelidade a enorme variedade de sons naturais.
Muitos títulos HDCD podem ser encontrados no mercado mundial hoje, especialmente nos USA (Estado Unidos). Os discos podem ser reconhecidos pela presença da logomarca HDCD. Para maiores informações acesse o site www.hdcd.com.
Players (“tocadores”) especiais para HDCD são necessários para executar discos HDCD, pois eles utilizam ferramentas adicionais como a interpolação adicionada e códigos para corrigir erros da interpolação. Estes players (“tocadores”) também produzem melhores resultados tocando CDs comuns, isso se comparado aos players (“tocadores”) de CDs comuns. Alguns players de DVD também irão tocar discos HDCD.
7.4.3.1.2 - CD-ROM
Visto que os CDs armazenam áudio no formato digital, eles também são apropriados para armazenar outras informações que podem ser representadas de forma digital. Em 1984, a Philips e a Sony liberaram a especificação do CD-ROM (Compact Disc Read Only Memory). Quaisquer dados de computador poderiam ser gravados num CD-ROM.Os discos CD-ROM se diferenciam dos CDs de áudio principalmente de duas formas:
• Os dados no CD-ROM são divididos em setores, que armazenam os dados do usuário e códigos adicionais para a correção de erros.• Os dados do CD-ROM são separados em arquivos, então um sistema de arquivos é necessário para que os arquivos sejam acessados de maneira fácil é rápida.

CD-ROM Drives (players, tocadores de CD-ROM)
Os discos CD-ROM são lidos pelos drives de CD-ROMs, que hoje é um componente padrão dos PCs e de alguns consoles de jogos. Estão começando a ser substituídos pelos drives de DVD-ROM. Um CD-ROM tem muitas vantagens sobre outros formatos de armazenamento de dados e poucas desvantagens:
A capacidade de um CD-ROM é, na média, 700 MB de dados, isto equivale a aproximadamente 500 disquetes de alta densidade.
Os dados de um CD-ROM podem ser acessados mais rapidamente que uma fita, mas CDROMs são mais lentos que os discos rígidos (HD).
Como nos CDs de áudio, somente pode-se regravar dados nos discos regraváveis.
Especificação
A especificação do CD-ROM, segundo o Livro Amarelo, define o uso de dois tipos de setores, Mode 1 e Mode 2 (utilizado pelo CD-ROM XA). O principal parâmetro do CD-ROM e conseqüentemente do CD-ROM XA estão descritos na tabela abaixo.
Setores do CD-ROM
Os dados armazenados num disco CD-ROM são divididos em setores equivalentes aos blocos de áudio no CD de Áudio. Vale ressaltar que os primeiros players (“tocadores”) liam 75 setores por segundo, que é chamada de velocidade básica (1x) do player. Deste modo, se um player possui uma velocidade de leitura dupla (2x), significa que o drives de CD-ROM consegue ler 150 setores por segundo. A velocidade básica tornou-se a unidade de medida dos player (drive de CD ou “tocador”), por exemplo, um drive de CD de 52x é 52 vezes mais rápido que o primeiro player, ou seja, esse é capaz de ler 3900 (52 x 75) setores por segundo.
Contudo, como os CDs foram desenhados primeiramente para áudio, eles necessitam de algumas alterações para que possam ser utilizados no armazenamento de dados decomputadores. Entre as mudanças destacam-se, principalmente, a adição de dados no cabeçalho e de códigos para correção de erros.
Existem dois tipos diferentes de setores definidos na especificação do CD-ROM, Mode 1 e Mode 2 (este último é utilizado para os discos CD-ROM XA).
Setores Mode 1 são destinados a armazenar dados de computador e contém os campos abaixo:
• Sync (12 bytes): utilizado para sincronização. Com ele o player identifica o início de cada setor;• Header (cabeçalho 4 bytes): cabeçalho;• Dados (2.048 bytes): dados armazenados no setor;• ECC (Error Correction Code - 276 bytes): códigos para a correção de erros;
• EDC (Error Detection Code - 4 bytes): códigos para detecção de erros e conseqüente correção.

O Mode 1 é o tipo mais simples formato, ele era utilizado como formato básico para os CD-ROMs que seguem o Livro Amarelo. Setores mode 2 são utilizados como formato básico para o CD_ROM XA e pode ter dois formatos: o Form 1 e o Form 2.
• Mode 2 no formato Form 1: os setores contêm 2048 bytes com o mesmo ECC utilizado nos setores mode 1.• Mode 2 no formato Form 2: os setores contêm 2324 bytes por setor para os dados do usuário.
Mas sem o ECC, que é adequado somente para dados onde os erros podem ser ocultados.
Setores Mode 2 compreendem os seguintes campos:
• Sync (12 bytes) que é usado para permitir ao player identificar o início de cada setor;
• Header (4 bytes);
• SubHeader (sub-cabeçalho - 8 bytes) contém parâmetros relacionados com o tipo dos dados contidos no setor;
• ECC Eror Correction Code (Código para Correção de Erros - 276 bytes) que compreende um nível adicional do CIRC (Cross Interleaved Read - Solomon Code) proteção de erro somente para o Form 1;
• EDC Error Detection Code (Código pra Detecção de Erros) para o Form 1 e 2.
Note que o Mode 1 e o Mode no formato Form1 utilizam o mesmo sistema de correção de erros, isto permite que o uso deles seja alternado, mas não na mesma trilha e preferencialmente não no mesmo disco. O software utilizado para gravar CDs pode ser configurado como Mode 1 ou Mode 2 no formato Form1. Quase todos os computadores PCs e MACs lêem CD-ROMs Mode 2 no formato Form1 como se fosse Mode 1. Os discos Video-CD usam Mode 2 no formato Form 2 para vídeos MPEG, o que permite rápidas taxas de transferências.
Capacidade do CD-ROM
A capacidade do CD-ROM depende do formato utilizado, CD-ROM Mode 1 ou Mode 2 CDROM XA. Existem 336.300 setores num CD-ROM, assumindo que o tamanho máximo é 76 minutos e 30 segundos (conforme recomenda o padrão). Destes devem ser subtraídos 166 setores do início da trilha 1, mais alguns setores para o sistema de arquivos, perfazendo um total de, aproximadamente, 200. Isto deixa 336.100 setores disponíveis para os dados dos usuários.
Setores Mode 1 contêm 2048 bytes por setor, que produz uma capacidade total de 688.332.800 bytes ou 656 MB
Setores Mode 2 também contêm 2048 ou 2324 bytes por setor, o que permite, de certa forma, uma capacidade mais alta, dependendo da mistura destes dois tipos de setores.
Um player (“tocador”, leitor de CD) compatível com o formato CD-ROM XA é capaz de encotrar no disco diferentes tabelas de conteúdos para acessar os dados guardados em diferentes sessões. O método utilizado pelos leitores compatíveis com multissessão é chamado de interleaving e consiste, basicamente, na capacidade de distribuir os arquivos em diferentes segmentos não contíguos, acrescentando, a cada um, uma referência sobre o tipo de dados que contém (gráficos, som ou texto) e intercalando, por exemplo, blocos de som entre duas seqüências de mesmo vídeo, para reproduzi-los de forma sincronizada. Os CDs gravados com multissessão têm um espaço menor reservado para dados do usuário menor.
Sistema de Arquivos
O Livro Amarelo não especifica como os arquivos de dados devem ser armazenados e recuperados (lidos). Para acessar qualquer arquivo no computador o sistema operacional precisa saber onde estes arquivos estão. Por conveniência, todos os arquivos recebem um único nome e são colocados num diretório da hierarquia organizada de diretórios.
Um sistema de arquivos facilita o armazenamento e a recuperação de talvez centenas, milhares ou ainda milhões de arquivos. Cada sistema operacional usa um sistema de arquivos diferentes e, conseqüentemente, existem vários sistemas de arquivos para CD-ROM que são utilizados por estas plataformas, incluindo o windows, Macintoch Unix, Linux, etc.
O sistema de arquivos para CD-ROM mais comum é o ISSO 9660, que é uma versão internacional do sistema de arquivos do High Sierra Group. Foi desenhado para os PCs e para o MD-DOS. Sua extensão, o JOLIET, provê nomes de arquivos longos.
Com o advento do DVD, o sistema de arquivos UDF (Universal Disk Format, formato dedisco universal) foi adicionado a lista. Ele é adequado para discos de somente leitura e regraváveis e permite nome de arquivos longos.
ISO 9660
No ISO 9660, os dados começam no setor 166 (setor lógico 16) e são definidos dois níveis:

Nível 1: Compatível com o sistema de arquivos MS-DOS. Nomes de arquivos em caixa alto, nome de arquivos no formato 8+3 e subdiretórios com 8 níveis de profundidade são as principais características.
Nível 2: Nomes de arquivos com até 32 caracteres. Não pode ser utilizado para o sistema MS-DOS. As outras restrições do nível 1 continuam.
JOLIET Extensão do ISO 9660
A especificação do Joliet foi desenvolvida para resolver as deficiências do sistema de arquivos ISO 9660 original (Nível 1), particularmente quando é utilizado o Windows 95 ou superior, dentre elas destacam-se:
• Conjunto de caracteres limitados para os caracteres em caixa alto, números e underscore;• Nomes de arquivos limitados a 8 caracteres, mais 3 da extensão;• Limitações do nível de profundidade dos subdiretórios;• Limitação com relação ao formato do nome do diretório.
O Joliet utiliza o SVD (Suplementary Volume Descriptor, descritor adicional de volume) para resolver os problemas citados acima. Para manter a compatibilidade com o MS-DOS o descritor SVP primário utiliza uma tabela de caminhos (path) que se encontra no formato ISO 9660 Nível 1. Ele utiliza ainda uma segunda tabela com nomes de arquivos longos para manter a compatibilidade com o Windows 9x/2000/XP. O Joliet aceita que se utilizem nomes de arquivos longos, com no máximo 64 caracteres, contudo os nomes devem seguir um padrão internacional denominado Unicode. O Unicode é um padrão internacional que tem por objetivo definir a codificação interna do computador para um texto. A grosso modo, ele permite que um disquete com um texto feito no Brasil seja transportado para a China e visualizado lá da mesma forma que ele se encontrava no seu país de origem.
UDF (Universal Disk Format, formato de disco universal)
Hoje, cada sistema operacional usa um formato de sistema de arquivos proprietário, impedindo, com isso, que as mídias removíveis sejam portáveis entre diferentes sistemas operacionais. Por exemplo, uma mídia criada utilizando o sistema de arquivos HPFS do OS/2 não pode ser lida ou modificada com o sistema de arquivos do Windows NT. Para resolver este problema outro sistema de arquivos foi criado e definido.
O UDF (Univesal Dsik Format, formato de disco universal) é um sistema de arquivos universal, ou seja, independente de fabricante, desenvolvido permitir para permitir a troca de informações e ser portável, permitindo aos diferentes sistemas operacionais acessar os dados (ler/gravar/modificar) que foram criados por outro sistema operacional. O UDF é um subconjunto (totalmente compatível) do padrão de troca de dados através de gravação não seqüencial (NSR Non-Sequential Recording, gravação não seqüencial) criado pela ISO (International Standards Organization, organização internacional de padrões) conhecido como ISO 13346. O UDF é um subconjunto do ISO 13346 e foi definido como OSTA (Optical Storage Technology Association, associação tecnológica de armazenamento ótico), uma associação comercial sem fins lucrativos que promove, ativamente, o uso de tecnologias de gravação ótica e produtos para armazenamento de dados e imagens de computadores.
O UDF pode ser imaginado como a próxima geração do ISO 9660, o padrão de sistema de arquivos de somente leitura que permitia a mídia do CD-ROM ser lida em todos os sistemas operacionais. O ISO 9660 foi o principal responsável pelo sucesso do CD-ROM em ambientes domésticos, comerciais e em organizações governamentais do mundo inteiro.
O objetivo primário do UDF era maximizar a troca de dados de forma segura, resguardando a uniformidade dos dados, permitindo uma única plataforma de informações dos arquivos armazenados e diminuindo o custo e a complexidade da implementação do ISO 13346. Ele é ideal para qualquer aplicação ou uso quando a toca de arquivos entre diferentes sistemas operacionais é necessária.
Até hoje, o padrão de sistema de arquivos UDF foi especificado para DOS/Windows 3.xx, OS/2, Macintosh, Unix (todas as versões), Windows 9x, Linux e sistemas operacionais baseados na tecnologia do Windows NT.
A partir da perspectiva do sistema de arquivos podemos dividir as mídias em dois tipos:
Mídias de somente leitura (Read-only): como principais exemplos têm-se o CDROM ou DVD-ROM, que são de somente leitura para o usuário final. Desta forma, o sistema de arquivos funciona como somente leitura, impedindo que arquivos sejam apagados, renomeados, modificados, que o espaço seja alocado, que diretórios sejam criados, renomeados, removidos, e assim por diante.
Mídias graváveis (Writable): estas mídias são aquelas que podem ser gravadas pelo usuário final. Elas podem ser subdivididas em: escrita seqüencial e não seqüencial.
As mídias de gravação seqüencial incluem o CD-R e o DVD-R, que são semelhantes em todos os níveis, exceto na capacidade. Gravação seqüencial, geralmente, referese a gravação de um disco (disk-at-once) ou de uma trilha (track-at-once).
Quando alguma informação é gravada, é alocado um espaço maior que o necessário para os dados que serão gravados. Este excesso será ajustado pela gravação subseqüente, uma vez que o sistema de arquivos precisa saber a localização exata dos dados gravados. Nesta gravação subseqüente, outra estrutura UDF é criada. Esta nova VAT (Virtual Allocation Table, tabela de alocação virtual) aceita que os blocos seja remapeados, permitindo ao sistema de arquivos regravar somente as informações novas ou modificadas. A VAT mantém a imagem anterior do sistema de arquivos UDF que foi devidamente fechada, isto permite que o estado da última gravação bem sucedida seja retomado, eliminando a necessidade de um utilitário extra para checar e reparar.
As principais mídias de gravação não seqüenciais são: WORM (Write-Once Read- Many, mídia que pode ser gravada somente uma vez e lida inúmeras vezes), CD-RW, DVD+RW, DVD-RAM e discos magnéticos não seqüenciais. Mídias gravadas utilizando esta tecnologia necessitam de um alto nível de complexidade porque o sistema operacional precisa gerenciar o espaço livre. Primeiramente, o sistema de arquivos UDF precisa manter uma trilha de espaço não alocado (espaço que está
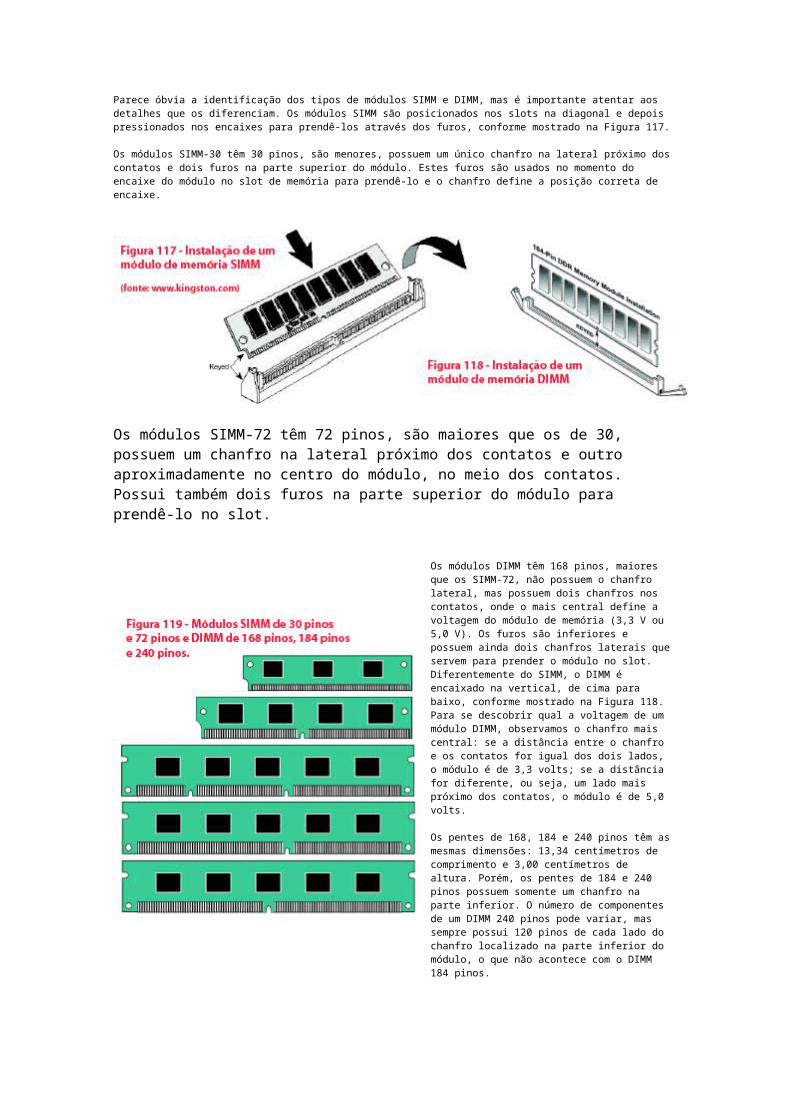
pronto para ser alocado) e espaço liberado (espaço que será necessário para a preparação da operação antes da alocação). Segundo, o sistema de arquivos UDF deve otimizar a mudança dos dados, por exemplo, quando um novo diretório é criado, ao invés de simplesmente adicionar um registro no final do arquivo de diretórios (parecido como o que é feito na gravação seqüencial), o UDF deve procurar e reutilizar o registro do diretório gravado e corrigir o tamanho verificando se ele não é maior ou mais longo que o permitido pela mídia ou pelo padrão.
A gravação não seqüencial precisa de um utilitário para checar e reparar, garantindo o correto funcionamento do sistema de arquivos no caso de um evento como a falta de energia ou o travamento do sistema operacional enquanto os dados estão sendo grav ados e das informações ainda estarem armazenadas na RAM.
As mídias gravadas não seqüencialmente podem ser divididas em WORM e Regraváveis (Rewritable).
As mídias WORM permitem gravações nos setores de todo o disco em qualquer ordem, mas cada setor pode ser gravado somente uma vez. As regraváveis também permitem gravações em qualquer setor em qualquer ordem, porém, a gravação num determinado setor pode ocorrer inúmeras vezes, parecido com os discos magnéticos (HDs).
7.4.3.1.3 - CD-I
Diferentemente do CD-ROM, que foi concebido como uma mídia de uso geral, os discos CD-I foram desenvolvidos para serem discos multimídia, ou seja, para áudio, vídeo, gráficos e texto juntos.
CD-I de dados pode conter uma ou mais “streams” de áudio, cada uma numa língua diferente, por exemplo, todas juntas com um vídeo e ainda imagens e/ou gráfico de dados. O sub-cabeçalho de cada setor pode também conter um gatilho de bits, que inicia eventos que podem ser detectados pelos softwares.
7.4.3.1.4 - CD-Vídeo (Vídeo-CD VCD)
Os VCDs foram definidos pelo livro branco. Eles contêm áudio e vídeo no formato MPEG-1. A especificação do VCD foi criada pela Philips, Sony, Matsushita e JVC. Ele é um formato genérico que é independente do hardware. A versão original foi para o karaokê CD.
A despeito da introdução do DVD-Video, Video-CD ganhou um novo fôlego (particularmente na China) com a introdução de uma nova versão.
7.4.3.1.5 - CD-Foto (Photo-CD)
A Kodak anunciou o Photo Cd em 1990 e o lançou no verão de 1992. Discos no formato Photo CD contêm imagens fotográficas numa faixa de resolução que pode ser processada por várias aplicações.
7.4.3.2 - Tecnologias empregadas no armazenamento ótico
7.4.3.2.1 - Tecnologia do Laser
O compact disk (CD) baseou-se na tecnologia do laser para ler e escrever os dados no disco. A palavra laser significa Light Amplification by Stimulated Emission of Radiation (Emissão de luz através da estimulação da emissão de radiação). O laser gera uma luz coerente, que permite a um feixe de luz ser focalizado num ponto muito pequeno, cujo menor diâmetro equivale ao comprimento de onda dividido pela abertura numérica (NA - numerical aperture), que pode ser vista na Figura 133.
A aparição do laser, mais especificamente, do diodo emissor de laser a custo baixo permitiu que a tecnologia do compact disk (CD) se tornasse uma das tecnologias eletrônicas mais consumidas de todos os tempos.
7.4.3.2.2 - Disco Laser (Laser Disc)
A Philips desenvolveu o disco de vídeo a laser. O disco de 30 cm era capaz de armazenar 60 minutos de vídeo analógico de cada lado. Um laser de baixo poder foi utilizado para ler as informações do vídeo armazenado em sulcos (buracos) na superfície do disco. Os sinais de vídeo e áudio eram representados de forma analógica por estes sulcos, que eram armazenados na forma de uma espiral, como era feito nos discos de vinil.

7.4.3.2.3 - Compact Disk (CD)
Os CD players (aparelhos que tocam o CD, aparelhos de som, computadores, etc.) utilizam a luz emitida pelos diodos lasers, que são compactos e têm baixo custo, para ler os dados contidos nos sulcos (buracos) da superfície do disco.
O diodo laser é montado num pivô móvel que pode se mover na direção radial através da superfície do disco enquanto o disco é girado. Isto permite que o raio laser acompanhe os sulcos com precisão.
Um material parcialmente reflexivo, que se encontra na parte de cima de todos os CDs, permite que o raio laser seja refletido. O laser refletido é capturado pela célula fotoelétrica (material capaz de transformar luz em sinal elétrico). Quando o raio laser incide sobre um sulco muito pequeno, o raio refletido tem uma intensidade menor em relação ao que é refletido por uma superfície normal. Esta mudança na intensidade da luz é
detectada pela célula fotoelétrica gerando uma série de pulsos, que são interpretados por um conversor analógico- digital, como informação binária. Eles são então analisados por um microprocessador, que os corrigem e convertem para uma seqüência de zeros, para, posteriormente, serem decodificadas no sinal de áudio original ou num sinal de dados para o computador.
7.4.3.2.4 - Apagar e Regravar
Os discos CD-ROM e CD-R colocaram ao alcance dos usuários de PC a capacidade de armazenar e recuperar grandes volumes de informação. Na tentativa de satisfazer as necessidades de um número cada vez maior de usuários, foram desenvolvidos compact discs regraváveis ou CD-RW que permitem apagar e regravar a informação que armazenam.
Os discos CD-RW são uma evolução dos CD-R. A principal diferença entre ambos consiste na mudança da camada de material fotossensível por outra, realizada a partir de um composto químico de características muito especiais. Quando o referido composto esfria, depois de ter esquentado até alcançar uma determinada temperatura, cristaliza-se rapidamente. Ao

contrário, quando aquecido a uma temperatura superior à estabelecida, ao voltar a esfriar ele recupera sua estrutura original sem chegar a se cristalizar. O grau de reflexão do referido composto é muito maior em estado cristalino. Por essa razão, os discos CD-RW empregam um laser com uma freqüência diferente da utilizada nos discos CDROM e CD-R, para poderem, assim, alterar com facilidade o estado do composto sensível à temperatura e, desse modo, criar as marcas necessárias para a leitura e escrita da informação.
Essas mesmas características ópticas do composto empregado nos discos CD-RW fazem com que seja também necessário empregar um laser com freqüência específica para poder ler a informação armazenada. Por isso os discos CD-RW são incompatíveis com muitos dos leitores de CD existentes. No entanto, alguns leitores (players) de CD-ROM podem ler dados de discos CD-RW, já que incorporam uma cabeça que opera com o feixe de laser em duas freqüências distintas. Essa característica é conhecida como multi-leitura (multiread).
7.4.3.2.5 - Discos e Gravadores
O surgimento dos discos CD-RW fez com que quase todos os gravadores de CD-ROM fossem capazes de operar indistintamente com discos CD-R ou CD-RW.
As diferenças mais notáveis entre gravadores de distintos modelos e fabricantes são determinadas pelo barramento (bus) de conexão com o sistema e pela velocidade gravação e leitura dos variados tipos de discos. A velocidade de trabalho de um gravador de CDs costuma ser expressa por meio de três cifras que indicam, respectivamente, a velocidade de leitura para CD-R ou CD-ROM, a velocidade de gravação para CD-R e a velocidade de apagamento e regravação (CD-RW). Por exemplo, um gravador de CDs com velocidade de 32x10x40x poderá ler discos CD-ROM e CD0-R com 32 vezes a velocidade base de um leitor (32 x 150KB/s = 4.800 KB/s), poderá gravar em discos CD-R a 1.500 KB/s e, ao operar com discos CD-RW, sua velocidade se limitará a 6.000 KB/s.
7.4.3.2.6 - Cor do CD
Basicamente, um CD-R é constituído por quatro camadas. A primeira é de acrílico transparente (será atravessada pelo laser), servindo de base para o CD. A segunda é a do material sensibilizável (dye) que armazenará os dados, atribuindo a tão badalada cor. A terceira é metálica (alumínio, prata ou ouro), ideal para refletir o feixe, mas como é uma camada nuito fina, chega a ser transparente . Finalmente, diretamente sobre a metálica é aplicado um fino verniz acrílico que pode receber uma etiqueta ou pintura. Deve-se tomar cuidado para não danificar esse verniz e muito menos a camada metálica.
Quando se observa a parte inferior do CD-R é possível verificar diferentes cores entre CDs de fabricantes diferentes, ou ainda, do mesmo fabricante. Ela é a combinação da camada de reflexão com a cor do die. Por exemplo, um die azul com uma superfície refletora em ouro produz uma cor esverdeada na parte inferior do CD.
A cor do disco CD-R esta relacionada com a cor específica do die utilizado na camada de sensibilizável. Nesta camada, cada fabricante tem a sua receita que envolve meteriais orgânicos (compostos que possuem carbono). A cor básica do die é modificada quando a camada reflexiva (Ouro, prata ou alumínio) é adicionada. Algumas combinações die/ camada reflexiva parecem verdes, outras azuis ou ouro. As diferentes cores entre os vários tipos de mídia são irrelevantes do ponto de vista da padronização.
Os CD-Rs de cor ouro utilizam PhthaloCyanine como pigmento do die e uma camada refletora em ouro. Como o pigmento é transparente, a camada refletora brilha através da parte inferior do CD parecendo ouro. Comparada com as outra mídias coloridas, a reflexão média do ouro é maior e com relação à durabilidade, a literatura especializada diz que dura mais de 100 anos.
O CD-R verde, geralmente o mais barato dos três, utiliza o Cyanine como pigmento. Este pigmento tem cor azul, mas junto como a superfície refletora gera uma cor verde na parte inferior. Contudo, a habilidade do cyanine em manter suas propriedades refletoras é menor, com isso estima-se que sua vida fique em torno de 10 anos.
CDs com baixa capacidade reflexiva podem gerar erros na leitura quando são executados em leitores antigos.
Recentemente a formula da cyanine foi alterada, produzindo como resultado um aumento da sua vida útil para 20 a 50 anos. A camada reflexiva foi substituída pela prata, produzindo uma cor azulada na parte inferior do CD.
A mídia azul é feita de pigmentos Azo. Utilizando-se uma superfície reflexiva verde, produz-se uma cor azul na parte inferior. Os fabricantes garantem que os CD-Rs azuis têm a mesma duração dos CD-Rs ouro.
7.4.4 - Discos Virtuais - RAMDRIVES
São discos lógicos configurados na memória do computador. Estes discos são criados através de um programa que passa a utilizar a memória como uma área de armazenamento momentâneo. A capacidade depende da memória livre disponível e seu

acesso é o mesmo do acesso de leitura ou gravação em memória, ou seja, bem mais rápido que qualquer HD. São utilizados para testes, softwares com muitos acessos a discos e como área de armazenamento de arquivos temporários por alguns programas. Toda informação neste tipo de disco é perdida quando o microcomputador é desligado. São designados por letras como os drives D:, E:, etc. A instalação do Windows 98 utiliza um disco virtual para colocação de arquivos temporários, de forma a agilizar o processo da instalação e configuração da máquina.
7.5 - SCSI (SMALL COMPUTER SYSTEM INTERFACE)
Howard Shugart (inventor do floppy disk) lança o SASI disk (Shugart Associates System Interface) em 1979 e, em 1986, a ANSI aprova o padrão e nomeia-o SCSI.
A interface SCSI (pronuncia-se “scuzzy”) permite que você conecte uma larga gama de periféricos, tais como discos rígidos, CD-ROMs, impressoras e scanners. O SCSI é uma maneira pela qual os periféricos se comunicam com o processador do computador. Três das maiores vantagens do SCSI são velocidade, compatibilidade e expansibilidade.
A parte mais rápida de um computador é o processador e desde o início da história do computador são feitos esforços para transferir informações de/para o processador o mais rápido possível. O SCSI transfere informações de/para o processador
rapidamente.
Maiores utilizações do SCSI:
• file server - servidor de arquivos (redes);• media management - gerenciador de mídia (sons, imagens, vídeos, etc.);• audio/video workstation - estação de trabalho para processamento de audio e vídeo;• web server - servidor de páginas na Internet;• graphics workstation - estação de trabalho para processamento gráfico;• multi-threaded OS machines (NT, UNIX, MacOS X, OS/2, BeOS, etc) - servidor de sistemasoperacionais multitarefa;• Servidores de bancos de dados que processam um grande número de transações onlinecomo comércio eletrônico e transações bancárias.
O SCSI é altamente compatível. Todos os computadores Macintosh vêm com uma porta SCSI e você pode comprar muitos PCs com porta SCSI. Se o seu computador tem uma porta SCSI, você pode adquirir outro dispositivo SCSI do mesmo tipo, conectá-lo e o novo dispositivo deverá funcionar.
O SCSI também facilita a expansão. Se você quiser acrescentar um disco rígido adicional ao seu computador é só conectá-lo via porta SCSI. Se você quiser acrescentar a seu computador outro CD-ROM ou uma impressora, é só encadear dispositivos adicionais até sete ou mais. Vale lembrar que o EIDE suporta somente quatro dispositivos.
Se a história dos computadores foi baseada na transferência de informações de/para o processador, a história do SCSI foi baseada na tentativa de se abrir um caminho mais largo de/para o processador. O caminho de entrada e saída, ou interface, pode se transformar em um gargalo que torna lento o tráfego de dados. À medida que os microprocessadores vão ficando mais rápidos, tornam-se necessários discos rígidos maiores e com alta velocidade para garantir que o processador trabalhe na sua velocidade máxima. A figura abaixo faz uma comparação entre o SCSI, IDE, SATA e SAS

7.5.1 - SCSI Desbalanceado e Diferencial
O SCSI desbalanceado, a forma mais comum do SCSI, conduz suas transmissões em único fio. A maior desvantagem do SCSI desbalanceado é o ruído, sinais elétricos aleatórios gerados por componentes do circuito ou por distúrbios naturais que causam corrupção e erro nos dados.
O SCSI diferencial conduz sinais em dois fios. Detecta sinais medindo a diferença de tensão entre dois fios. A grande vantagem do SCSI diferencial sobre o SCSI desbalanceado é a distância e a alta imunidade ao ruído. O comprimento de um barramento diferencial é de 25 metros, comparado com os 6 metros do SCSI desbalanceado.

7.5.2 - Características das Gerações SCSI
7.5.2.1 - Serial Attached SCSI (SAS) e Serial ATA (SATA)
Atualmente, o padrão das interfaces nos servidores das empresas é o SCSI e dos desktops o ATA. Ambos dependem da transmissão paralela dos dados. A evolução dessa tecnologia de transmissão esbarra numa série de problemas que se devem justamente ao fato de os sinais elétricos serem transmitidos em cabos paralelos. Dentre os principais problemas destacam-se, principalmente, o crosstalk (interferência gerada num fio devido à passagem de corrente elétrica num fio próximo), as restrições nos terminadores de sinal, areflexão de sinal no cabo e nos conectores e o endereçamentos dos dados no dispositivo. Esses problemas são tão graves que podem comprometer a escalabilidade dessa tecnologia de transmissão.
A tecnologia serial (SAS - Serial Attached SCSI; SATA - Serial ATA) foi introduzida para superar essas barreiras, gerando mais velocidade, confiança e escalabilidade. O SATA foi desenhado para os desktops, sendo uma boa escolha entre os dispositivos de armazenamento que oferecem simplicidade na configuração e ótima relação custo/capacidade de armazenamento. Por outro lado, o SAS oferece alta performance, escalabilidade e segurança para servidores famintos por largura de banda, como servidores de comércio eletrônico e servidores de transações bancárias. O SAS combina a segurança e a funcionalidade do SCSI com o poder da tecnologia serial. A primeira geração vai permitir uma taxa de transferência de informação da ordem de 3Gb/s (±300MB/Segundo) e as próximas gerações permitirão taxas acima de 12Gb/s (±1,5 GB/Segundo). Aliado a tudo isso o SAS admite múltiplas conexões ponto a ponto permitindo a tolerância a falhas. A conexão ponto a ponto que liga os dispositivos SAS’s são full-duplex, ou seja, eles podem receber dados e enviar dados ao mesmo tempo, permitindo um considerável aumento de performance, podendo permitir, sob certas condições, transmissões da ordem de 24Gb/s (3GB/Segundo).
7.5.2.2 - Cabos utilizados
A foto abaixo mostra o cabo utilizado para conectar dispositivos internos dos padrões Ultra2/Ultra160/Ultra320 LVD. Este cabo possui quatro conectores fêmeas de 68 pinos (HD68). Um para a controladora, dois para os dispositivos e um para o terminador.
A foto abaixo mostra o cabo utilizado para conectar dispositivos internos dos padrões SCSI-1 e SCSI-2 juntamente com seu conector. Este cabo é apropriado para os conectores de 50 pinos (IDC50).
8 - INTERFACES PARA DISPOSITIVOS DE E/S (EXTERNOS AO GABINETE)

8.1 - USB
Qualquer computador comprado hoje em dia vem com, no mínimo, uma conexão USB (Universal Serial Bus, barramento serial universal). Estas conexões permitem ao usuário conectar qualquer coisa, desde um simples mouse a uma impressora, ao computador de forma rápida e simples. Os sistemas operacionais suportam o USB muito bem. Então a instalação dos dispositivos também é rápida e simples. Comparado com outras formas de conectar dispositivos ao computador (incluindo portas paralela e serial ou placas especiais que devem ser instaladas dentro do computador) os dispositivos USB são incrivelmente simples.
Qualquer um que está envolvido com computadores nestes dois ou três últimos anos sabe qual o problema que o USB está tentando resolver. No passado, conectar dispositivos ao computador era realmente uma dor de cabeça.
Impressoras eram conectadas às portas paralelas e a esmagadora maioria dos computadores vinham com somente uma porta. Algumas coisas como o “Zip drive”, que necessitava de uma conexão rápida com o computador, utilizavam a porta paralela, mas sempre com pouca velocidade, sem falar na complexidade da conexão (conectar o zip a porta paralela e conectar a impressora ao Zip drive).
Modems utilizam a porta serial, mas algumas impressoras também, isso sem falar na variedade de outros dispositivos como mouse, Palm Tops e câmeras. A maioria dos computadores vem com somente duas, sem contar que para muitos esta conexão é muito lenta.
Dispositivos que necessitavam de conexões mais rápidas vinham com suas próprias placas, que tinham que ser colocadas no slot apropriado dentro do computador. Infelizmente, o número de slots é limitado e a instalação do software destas placas era, geralmente, muito difícil.
O objetivo do USB é acabar com toda esta dor de cabeça. O USB (Universal Serial Bus, barramento serial universal) fornece uma conexão simples, padronizada, fácil de utilizar e que pode conectar até 127 dispositivos ao computador.
8.1.1 - Principais Benefícios
8.1.1.1 - Periféricos Plug and Play
USB permite virtualmente um número ilimitado de expansões externas ao PC. Com o USB, os usuários do PC não precisam se preocupar em selecionar a porta serial correta, instalar placas de expansão ou problemas técnicos com dip switches, jampers, drivers de softwares, IRQ (Interrupt ReQuest), canais de DMA e endereços de I/O.
As características dos conectores USB permitem conectar e desconectar periféricos com muita facilidade, sem a necessidade de abrir o PC. No USB os periféricos são conectados e desconectados a quente. Esta característica faz com que a expansão seja muito simples porque os usuários podem adicionar novos dispositivos sem a necessidade de desligar o PC.
8.1.1.2 - Compatibilidade Universal
A especificação do USB é seguida amplamente pelas industrias fabricantes de dispositivos de expansão do PC plug and play. Mais de 400 companhias, líderes de mercado, incluindo os fabricantes de PCs e fornecedores de produtos de telecomunicação, periféricos e software para PC, suportam o USB. A NEC Technologies junto com quatro outras companhias, que incluem a Intel e a Microsoft, são co-desenvolvedores da especificação USB.
8.1.1.3 - Desenho simplificado do Periférico
Eliminando a necessidade de se adicionar placas de expansão, o USB fez com que os periféricos ficassem mais simples e fáceis de serem produzidos. O USB distribui energia. Assim, muitos dispositivos não necessitam de uma conexão de energia adicional. O USB facilitou a conexão para o usuário final de monitores, impressoras, caixas de som digitais, modems, entrada para dispositivos gráficos como mesas digitalizadoras, scanners, câmeras digitais, joysticks, etc.
8.1.1.4 - Duas Velocidades
O USB permite duas velocidades: 12 Mbps (±12.000.000 milhões de bits por segundo) para dispositivos que necessitam de muita largura de banda (velocidade); e 1.5 Mbps para dispositivos de baixa velocidade, como joysticks, teclados e mouses, cuja velocidade é estimada na ordem de 0.5 Mbps.
8.1.1.5 - Diferentes modos para transferência de dados
O USB suporta quatro modos para transferência de dados, o que permite aos dispositivos utilizar o modo de comunicação mais adequado ao seu funcionamento.
Isochronous: Modo de transmissão utilizado pelos dispositivos de telefonia e de áudio como as caixas de som digital.
Asynchronous: Modo de transmissão mais popular. Utilizado pelos dispositivos com grande volume de dados para transferir, como impressora, scanners e HD externos.
Comunicação controlada e por Interrupção: Estes últimos são utilizados por dispositivos de baixa velocidade como mouse, teclado e joysticks.
8.1.1.6 - Topologia em estrela

O USB utiliza a topologia em estrela, o que significa que alguns dispositivos USB, chamados HUB, podem servir como conexões para outros dispositivos de expansão. Somente um dispositivo precisa estar conectado ao computador. Os outros dispositivos podem ser conectados ao HUB, criando infinitas conexões.
8.1.1.7 - HUBs USB (Monitores)
HUBs USB podem ser embutidos nos periféricos como monitores. Alguns HUBs padrões estão disponíveis, provendo as várias portas USB que são adequadas para cada computador. Os HUBs são caracterizados como upstream (em relação ao PC) e também como múltiplas portas downstream, permitindo a conexão de periféricos adicionais. Até 127 dispositivos podem ser conectados simultaneamente.
A Figura 142 mostra os conectores das extremidades de um cabo USB. O conector da esquerda é dito tipo A ou upstream, utilizado, normalmente, conectado ao PC. Mostra, também, uma conexão tipo B ou downstream, geralmente utilizada na conexão dos periféricos.
Os computadores atuais vêm, geralmente, com duas conexões USB. Com a grande diversidade de dispositivos USB encontrados no mercado hoje, um usuário pode facilmente necessitar conectar mais de dois dispositivos simultaneamente ao PC. São nestes casos que o HUB é utilizado.
Um HUB tem quatro portas, tipicamente, mas pode ter mais. O HUB deve ser conectado ao computador e os dispositivos (ou outro HUB) no HUB. Através do cascateamento de HUBs (ato de conectar um HUB no outro), pode-se disponibilizar dezenas de portas USB para um único computador.
Os HUBs podem ter ou não alimentação externa. O padrão USB também permite aos dispositivos receberem energia através da conexão. Obviamente, dispositivos que necessitam de grande quantidade de energia, como uma impressora ou um scanner, terão suas próprias conexões elétricas. Contudo, dispositivos que necessitam de pouca eletricidade, como mouses e câmeras digitais, podem utilizar a eletricidade fornecida através da conexão USB. A eletricidade (até 500 miliampers e 5 volts) vem do PC ou do HUB (caso ele tenha alimentação externa). O HUB sem conexão elétrica é utilizado quando se têm muitos dispositivos com alimentação externa, como, impressoras e scanners. Já o HUB com conexão elétrica externa quanto se têm muitos periféricos que não possuem conexão de força, como mouses e câmeras fotográficas. A Figura 143 mostra um HUB com alimentação externa.
8.1.1.8 - Configuração automática
O host controller (dispositivo que controla o barramento, geralmente o PC) gerencia e controla o software (driver) e a lagura de banda (quantidade de dados transmitida) que cada periférico conectado ao barramento necessita. Os usuários não precisam fazer nada porque todos os passos da configuração são executados automaticamente. O controlador do

barramento USB também controla a energia que cada periférico necessita. Assim como os controladores, os HUBs USB também são capazes de detectar quando os periféricos são conectados ou desconectados deles.
8.1.1.9 - Alimentação elétrica
O barramento USB também provê eletricidade, comprimento máximo do cabo de 5 metros, para os periféricos conectados nele. Para maiores detalhes ver o item HUBs USB (monitores). Isto permite conectar dispositivos sem a necessidade de conexõeselétricas externas, desde que os dispositivos necessitem de pouca eletricidade.
A Figura 144 mostra um cabo USB, existem dois fios para conexão elétrica +5 volts (vermelho) e o terra (marrom) e também um par de fios trançados (amarelo e azul) para transportar os dados. O cabo USB também é blindado.
8.1.1.10 - Software
O software, para muitos dispositivos USB, já vem com o Windows 98 ou superior na forma de drivers. O mesmo ocorre com o Linux. Isto simplifica a instalação e operação dos periféricos mais comuns, apesar de alguns periféricos necessitarem de drivers adicionais do próprio fabricante.
8.1.2 - Padrão USB 2.0
USB 1.0/1.1 suportam a transferência de dados até 1.5 Mbps para dispositivos de baixa velocidade e 12 Mbps para periféricos que necessitam de uma velocidade maior.Microsoft, HP, Compaq, Intel, Agere, NEC and Philips são os 7 principais membros do USB-IF (USB-Implementers Forum, USB Fórum de Implementação) que trabalharam na especificação do USB 2.0. Este suportará uma taxa de transferência de dados (largura de banda) de até 480 Mbps. USB2.0 é apropriado para dispositivos de alta performance como câmeras para vídeo-conferência de alta definição, scanner de alta resolução e dispositivos de armazenamento de alta desidade. A versão 2.0 também suportará os padrões antigos USB 1.0/1.1 juntamente com seus softwares e periféricos.
8.2 - SERIAL
A porta serial envia, através da interface, um bit por vez. Assim, para enviar dados, a porta serial deve decompor em bits a informação que recebe através do barramento do computador e enviá-los seqüencialmente. Para que o dispositivo receptor possa determinar onde começa e onde termina cada dado, a porta serial acrescenta bits de sincronização ao preparar o dado que será enviado. Esse tipo de controle do fluxo de informação é conhecido como comunicação assíncrona.
A porta serial precisa realizar o processo inverso quando recebe informações, convertendo os impulsos elétricos que chegam

a ela em séries de 1 e 0 e processando-os por meio de bits de sincronização para obter os dados corretos que vai colocando no barramento do sistema.
O coração da porta serial, geralmente, é o UART (Universal asynchronous receiver/ transmiter, emissor/receptor assíncrono universal), um chip especializado dotado de circuitos que lhe permitem funcionar como ponte entre uma linha de comunicação serial e o barramento do sistema. As características da porta serial do sistema são determinadas pelo modelo do UART que a gerencia.
Elas são usualmente referenciadas como conexões DB9 ou DB25, que foram anexadas a interface RS232, definida pela ISO 2110 e ISO 4902. Desta forma, podemos ter uma conexão serial (RS232) com 9 pinos (DB9), a mais comum ou com 25 pinos (DB25), conforme Figura 146.
8.3 - PARALELA
Os PCs possuem normalmente uma porta paralela de comunicações constituída por um conector fêmea de 25 pinos (DB25), também referenciada como LPT, situado na parte traseira do gabinete. Esse tipo de porta é empregado principalmente para a conexão de impressoras que dispõem de um conector diferente daquele da porta do computador destinada a isso. Enquanto o conector da porta paralela conta com 25 pinos que, teoricamente, poderiam transmitir 25 diferentes sinais simultâneos, o conector Centronics existente na maioria das impressoras paralelas possui 36 pinos de conexão, que não são empregados em sua totalidade. Ocorre o mesmo com a porta paralela do computador, que não utiliza todas as linhas ou pinos de que dispõe.
Cada pino pode transmitir 1 bit de informação por meio de variações de tensão do sinal que conduz. Os sinais elétricos transmitidos por uma porta paralela têm níveis de tensão de padrão TTL (transistor to transistor logic, lógica de transistor a transistor). Quando a tensão em um pino alcança +5volts, o valor lógico do dado por ele representado é 1, enquanto a tensão de 0 volt equivale a um 0 (zero) lógico.
Nos setups atuais temos algumas configurações para as portas paralelas, a saber:
Normal ou SPP (Standard Parallel Port): Unidirecional com taxa de transferência de 150 KB/s, usada desde os antigos XT.
EPP (Enhanced Parallel Port): Bidirecional com taxa de transferência de até 2MB/s usando cabo bidirecional. Muito utilizado por impressoras e periféricos de armazenamento como Zip Drive.
ECP (Enhanced Capabilities Port): Além das características da EPP, utiliza DMA não necessitando da interferência do processador na transferência de dados, usa um buffer FIFO de 16 bytes. Elas podem, com isso, tratar a informação de modo prévio em relação a comunicação, o que lhes permite aplicar algoritmos de compressão para reduzir o volume de dados que precisam transmitir.
8.4 - DIN - INTERFACE PARA TECLADO
DIN é a conexão utilizada para conectar o teclado. O conector DIN (5 pinos) é uma conexão utilizada pelos PCs mais antigos (PCs AT). Nos PCs atuais o conector utilizado é o MiniDin (6 pinos).

8.5 - PS/2 - INTERFACE PARA TECLADO/MOUSE
Interface utilizada para conectar o teclado ou o mouse ao computador. Alguns PCs diferenciam a interface do teclado da destinada ao mouse pela cor. Roxo para o teclado e verde para o mouse. A conexão PS/2 destinada ao mouse é comumente referenciada por MiniDin, fazendo uma alusão a conexão anterior do teclado a DIN. Existem daptadores que possibilitam a conexão de um teclado DIN num conector de teclado PS/2 (MiniDin) da placa-mãe, ou vice-versa.
8.6 - FIREWIRE
O padrão IEEE 1394 é uma interface digital rápida, escalável e de baixo custo. Foi concebido pela Apple Computer e desenvolvido dentro do Grupo de Trabalho IEEE 1394. É normalmente conhecido como FireWire - marca registrada da Apple - apesar de outras empresas usarem outros nomes, tais como I-link e Lynx. FireWire promete integrar computadores pessoais com o mundo dos eletroeletrônicos.
Como FireWire é uma interface totalmente digital, não há necessidade de converter dados digitais em analógicos para transmissão. Isto leva a um dos usos mais importantes do FireWire: como interface digital para eletroeletrônicos e periféricos audiovisuais. Como a interface FireWire é ponto a ponto, ela possibilita conectar um equipamento (uma filmadora digital, por exemplo) no outro sem necessidade de computador. Ele também permite que vários computadores compartilhem um dado periférico sem suporte especial no periférico ou nos computadores.
FireWire suporta taxas de dados de 100, 200 e 400 Mbps. Ele suporta até 63 dispositivos, com distância máxima de 4,5 m entre os dispositivos. O número máximo de lances na cadeia é 16, totalizando 72 metros no máximo. O padrão IEEE 1394 suporta conexões em cascata e implementações ponto-a-ponto. É possível conectar conexões em cascata e ponto-a-ponto numa mesma instalação.
Além de sua alta velocidade, FireWire suporta transmissão de dados isócrona e assíncrona, proporcionando taxas de dados garantidas sem nenhum atraso ou lapso. Como o padrão suporta transmissão garantida de dados sensíveis ao sincronismo, ele permite que as aplicações usem buffers menores, baixando os custos.
Isso o torna ideal para aplicações tais como áudio e vídeo digitais, os quais demandam transferências de dados em tempo real. A interface FireWire combinada com as novas filmadora digitais de alta qualidade e baixo custo permitem que usuários de Macintosh capturem vídeo de alta qualidade.
O cabo FireWire é leve, flexível e barato - um grande avanço sobre os cabos SCSI volumosos e caros. E, diferente de muitas interfaces mais antigas, não é preciso de identificação de dispositivos, jumpers, chaves DIP, parafusos, travas ou terminadores.
Há dois tipos de conectores FireWire: de 6 e 4 pinos.
O conector de 6 pinos, normalmente encontrado em computadores, tem dois pares de fios para os sinais e um par de fios para fornecer alimentação para equipamentos externos. Os periféricos de computador que usam conectores FireWire de 6 pinos geralmente apresentam no mínimo dois e, freqüentemente três conectores FireWire para conexão em cascata.
O conector FireWire de 4 fios é normalmente encontrado em eletroeletrônicos tais como filmadoras, videocassetes e vídeo

games. Ele apresenta quatro fios para sinal e nenhum para alimentação. Dispositivos usando FireWire de 4 fios não são conectados em cascata. Ao usar uma filmadora no PC, por exemplo, será preciso um cabo conversor de 6 para 4 fios.
8.7 - REDE (PLACA DE REDE)
A placa de rede, geralmente abreviada como NIC (Network Interface Card, placa de rede), é uma expansão da placa-mãe que pode ser offBoard (placa separada da placamãe) ou onBoard (placa integrada na placa-mãe). Ela permite conectar o computador a uma rede. Cada placa de rede é construída pra um tipo rede, de protocolo e mídia, apesar de algumas servirem para várias redes.
Uma rede é um conjunto de dois ou mais computadores conectados que permite, por exemplo, que um computador consiga imprimir numa impressora que está fisicamente conectada a outro computador. Esta rede é construída, na maioria das vezes, conectandose um cabo da placa de rede de cada computador a um dispositivo central (HUB ou Switch). Este dispositivo é que realiza a comunicação entre os computadores.
8.8 - BLUETOOTH
Existem diferentes formas que os dispositivos eletrônicos podem utilizar para se conectarem. Por exemplo:
• Um PC é conectado com o mouse, o teclado, uma impressora, etc.• Um Palm Top é conectado, normalmente, ao computador com um cabo.• Uma televisão pode ser conectada ao videocassete com um controle remoto para estes componentes.• Um telefone sem fio se conecta com a base através de ondas de rádio.
Quando se utiliza o computador, sistemas entretenimento ou telefones, as várias peças e partes do sistema formam uma comunidade de dispositivos eletrônicos. Estes dispositivos comunicam-se um com o outro utilizando uma variedade de fios, cabos, sinais de rádio, luz infravermelha e imensa variedade de conectores, plugs e protocolos.
A arte de conectar coisas torna-se mais complexa a cada dia. Os usuários sentem como se precisassem de um Ph.D. em engenharia elétrica para conectar e configurar os eletrônicos de suas casas. Bluetooth é uma comunicação sem fios e automática que possui uma série de características interessantes para facilitar o dia a dia.
8.8.1 - Os Problemas
Quando dois dispositivos precisam se comunicar um com o outro, eles devem concordar com uma série de pontos antes que a conversação possa começar. O primeiro ponto de concordância deve ser o meio físico: Eles irão conversar utilizando cabos ou através do mesmo sinal de rádio? Se utilizarem cabos, quantos são necessários - um, dois, três, 25? Quando o atributo físico já está resolvido, várias outras questões aparecem:
A informação será enviada utilizando-se o esquema serial de comunicação, onde 1 bit é enviado de cada vez, ou em grupo de bits (usualmente 8 ou 16 de cada vez) utilizando a comunicação paralela. O PC utiliza ambas para comunicar com diferentes dispositivos.
Todas as partes da discussão eletrônica precisão ser conhecidas, o que cada bit significa e se a mensagem recebida pelo dispositivo é a mesma que o outro dispositivo enviou. Em alguns casos, isto significa desenvolver uma linguagem de comandos

e respostas conhecida como protocolo. Alguns tipos de produtos têm um protocolo padrão utilizado por todas as companhias na fabricação de seus produtos. Assim, um determinado comando tem o mesmo efeito sobre o mesmo produto fabricado por diferentes empresas, o modem é um bom exemplo.
As companhias que constroem computadores, sistemas de entretenimento e outros dispositivos eletrônicos fizeram uma incrível quantidade de cabos e conectores para seus produtos, tornando difícil, até para um técnico, conectar corretamente todos os dispositivos numa primeira tentativa. Para tornar os dispositivos eletrônicos mais amigáveis, necessita-se de uma forma melhor para que todos os dispositivos eletrônicos da vida moderna se comuniquem entre si. É para isso que o Bluetooth veio.
8.8.2 - Solução Bleutooth
O Bluetooth é um padrão desenvolvido por um grupo de fabricantes de dispositivos eletrônicos que permite a qualquer tipo de equipamento eletrônico, de computadores e telefones celulares a teclados e fones de ouvido, fazerem suas próprias conexões, sem fios, cabos ou qualquer interferência do usuário. O bluetooth é um padrão que se destina a atuar em dois níveis:
• Provendo à concordância sobre o meio físico, o bluetooth é um padrão baseado nas freqüências de rádio.• Ele, também, promove uma concordância no nível acima, onde os produtos têm que concordar em quando enviar os bits, quantos bits serão enviados por vez e como as partes da conversação podem assegurar que a mensagem recebida é a mesma que foi enviada.
O bluetooth foi criado para superar os problemas que vêm com o infravermelho e a sincronização dos sistemas cabeados. Os fabricantes de hardware, incluindo Siemens, Intel, Toshiba, Motorola e Ericsson (existem mais de 1.000 empresas) desenvolveram uma especificação para um rádio muito pequeno que pode ser construído junto com o computador, telefone e equipamentos de entretenimento. Do ponto de vista dos usuários, o bluetooth tem três características importantes:
Ele é wireless (não utiliza fios ou cabos). Pode-se projetar uma sala sem se preocupar com o lugar onde os fios irão passar.
Ele é barato.
O usuário não tem que se preocupar com nada. O bluetooth não necessita que o usuário faça nenhuma tarefa especial para que ele funcione. Os próprios dispositivos se encontram e iniciam a conversação sem que o usuário forneça nenhuma informação.
8.8.3 - Curiosidade (Interferência)
É improvável que muitos dispositivos estejam numa mesma freqüência ao mesmo tempo porque o bluetooth utiliza uma técnica conhecida como spread-spectrum frequency hopping (salto entre faixas de freqüências). Nesta técnica, o dispositivo utiliza 79 freqüências individuais randomicamente escolhidas dentro de uma faixa designada e mudará de uma para outra de tempo em tempo. No caso do bluetooth, os transmissores mudam de freqüência 1.600 vezes por segundo. Isto significa que outros dispositivos podem utilizar o mesmo espectro de freqüência. Esta técnica minimiza o risco de que telefones móveis ou babás eletrônicas interfiram no sinal dos equipamentos bluetooth, pois, qualquer interferência numa freqüência particular irá durar somente uma fração de segundo.
Quando um dispositivo bluetooth entra no raio de ação de outro, uma conversação eletrônica acontece para determinar se ele tem dados para compartilhar ou se necessita do controle de outro. O usuário não tem que pressionar nenhum botão ou dar nenhum comando, a conversação se inicia automaticamente. Uma vez ocorrida à conversação, os dispositivos formam uma rede. O sistema bluetooth cria uma PAN (personal-area-network, rede pessoal) ou piconet que talvez preencha uma sala ou abranga uma área maior, como a de um telefone sem fio. Uma vez estabelecida uma piconet, os seus membros saltam entre as freqüências randomicamente em harmonia. Desta forma, mantendo o contato entre si, para evitar que outra piconet se forme na mesma sala.
8.9 - IrDA
A conectividade entre computadores e periféricos ou entre vários PCs tem sido um dos maiores inconvenientes a serem superados pelos técnicos e implantadores de sistemas. A necessidade de dispor de um meio físico, o cabo, que transmita os sinais para realizar o transporte de dados pode, em muitos casos, revelar-se bastante incômoda. Em 1993, a Infrared Data Association, associação de dados por infravermelho, trouxe a solução sob a forma de um canal de comunicação de alta velocidade que opera por meio de radiação infravermelha. Esse canal utiliza uma porta serial UART comum. Seu funcionamento é muito similar ao de uma porta serial convencional. A distância para a transmissão entre o transmissor e o receptor é de 1 a 3 metros. Além disso, eles estão limitados a um ângulo de emissão e recepção máximo de 30º e não pode haver nenhum obstáculo entre eles.
9.1 - TECLADO (KEYBOARD)
Todos os computadores, assim como os aplicativos neles instalados, precisam de um dispositivo por maio do qual o usuário possa introduzir as instruções necessárias para o seu funcionamento. Por exemplo, para a edição de textos, o teclado (keyboard) é o dispositivo de entrada de dados (E/S) utilizado, na maioria das vezes, para colocar (inserir) os caracteres

(letras) dentro do computador. Embora com o aparecimento de sistemas operacionais gráficos o mouse tenha ganhado maior destaque e os sistemas de reconhecimento de voz (a pessoa fala o computador capta o som, interpreta e “escreve” aquilo que aquilo que foi dito) continuem evoluindo, o uso do teclado continua sendo imprescindível. Um teclado, em linhas gerais, é uma carcaça que contém um circuito em seu interior, sobre o qual está disposto um conjunto de molas mecânicas, correspondentes às teclas. Cada uma dessas teclas, ao ser pressionada, fecha um contato sobre o circuito, que é detectado e identificado imediatamente, transmitindo o valor que o identifica. Dessa maneira, o computador pode interpretar que tecla ou combinação delas foi utilizada. Nesse sentido uma das características mais importantes de um teclado é o ponto de pressão.
A partir desse parâmetro é possível determinar quando foi acionada ou não uma tecla, para se poder então gerar o caractere correspondente. Se o ponto de pressão é excessivamente suave ou se os caracteres são emitidos antes de se alcançar esse ponto, é provável que ocorram erros de digitação, bem mais habituais nos teclados de baixa qualidade. Só quando se alcança o ponto de pressão adequado é que se pode gerar o caractere de forma correta. A principal diferença entre os diversos modelos de teclados existentes está na tecnologia empregada para acionar o contato, classificada em dois grandes grupos: de contato capacitivo e de mola mecânica. Também existem outras classificações, de acordo com o mecanismo utilizado para devolver a tecla à sua posição original.
Os teclados de contato capacitivo possuem uma mola em cada uma das teclas, que se encarrega de retorná-las à posição original depois que são acionadas. No final da mola existe uma peça uma forma de disco, geralmente de plástico e com a face inferior de metal, situada perto das lâminas do circuito impresso. Essas lâminas têm formato circular, o que assegura um contato adequando. Quando o usuário pressiona a tecla, o disco se aproxima dos contatos do circuito, o que origina uma ligeira variação na capacitância, reduzindo-a de um valor normal, compreendido entre 20 a 24 picofarads, para um valor compreendido entre 2 e 6 picofarads. Essa variação origina um corrente elétrica entre os dois contatos, fechando o circuito sem que haja contato físico entre o disco e as lâminas. Existem outros modelos de teclado que empregam um mecanismo similar (uma resistência capacitiva), embora se baseiem no incremento da capacitância (afastando o disco das lâminas) e produzam o efeito contrário na corrente. Esse tipo de teclado é usado principalmente nos equipamentos portáteis, embora também existam modelos desse tipo destinados a computadores de mesa.
Os teclados com molas mecânicas operam como interruptores convencionais. Uma membrana de material plástico ou borracha elástica, situada debaixo de cada tecla, faz com que ela volte, depois de ser acionada, à sua posição original. Enquanto a tecla permanece apertada, exerce-se uma pressão sobre dois contatos metálicos, situados embaixo dessa membrana e separados por uma distância muito pequena, de maneira a fechar o circuito. Esse sistema é mais simples e barato que o anterior (por isso é utilizado pela imensa maioria dos fabricantes), mas apresenta um grave inconveniente: o uso continuado produz um desgaste na membrana, obrigando o usuário a fazer uma pressão maior ou então impedindo a tecla de recuperar sua posição original, deixando- a permanentemente pressionada.
9.1.1 - Acionamento do Teclado
Um teclado é um dispositivo dotado de um chipmicrocontrolador em seu interior, encarregado de examinar constantemente os circuitos para detectar os eventuais mudanças de estado das teclas. Esse precesso é realizado paralelamente às demais atividades desempenhadas pelo PC, de modo que é impossível o acionamento de uma tecla passar despercebido mesmo quando o computador está ocupado em realizar outra tarefa.
O processo seguido para tectar um acionamento de tecla é muito simples. Em primeiro lugar, o usuário aciona o mecanismo correspondente a uma tecla, de maneira a fechar um interruptor de contato elétrico existente embaixo dela. Isso permite que o microcontrolador reconheça esse acionamento, embora, às vezes, possam ocorrer erros nesse procedimento, seja porque o interruptor não fechou corretamente, seja porque o contato não foi suficientemente claro. Conseqüentemente, pode-se produzir uma série de repiques antes de se estabelecer um contato limpo. O microcontrolador, que faz verificações constantes do estado das teclas (operação que poderia ser realizada milhões de vezes por segundo se fosse necessário), às vezes interpreta os contatos produzidos pelo repique como uma rápida repetição de acionamentos na tecla correspondente.
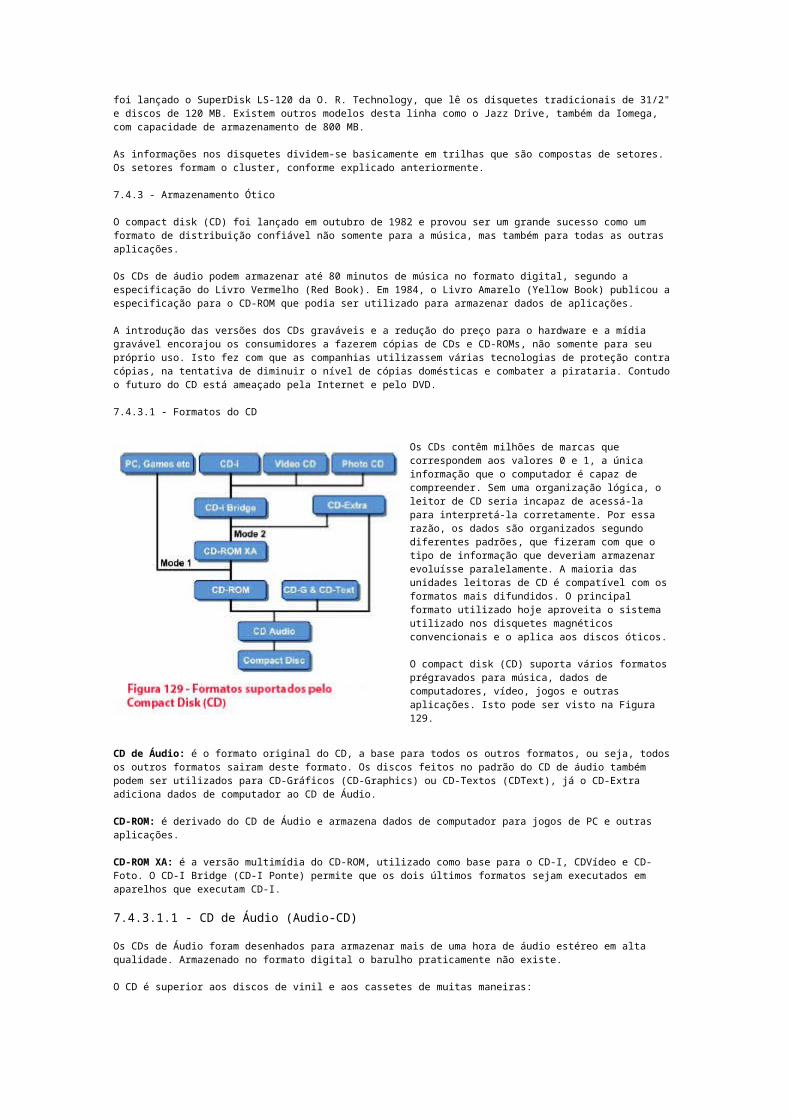
Esse fenômeno, conhecido como eco de teclado (keybounce), costuma ocorrer com maior freqüência em teclados modernos de desempenho mais elevado. Por esse motivo, implementa-se no chip controlador um algoritmo que determina a freqüência com que se deve examinar o teclado e é complementado pelo software de verificação do teclado (o controlador empregado pelo sistema operacional), para eliminar as repetições produzidas pelo eco ou repique. Por exemplo, se o algoritmo indica que sejam discriminados os acionamentos situados abaixo dos 5 milissegundos de duração e o software solicita os acionamentos a cada dez milissegundos, não será detectada a maioria das repetições desse tipo.
O simples acionamento de uma tecla não é suficiente para gerar todo o código que o PC necessita. Mesmo mantendo-se a tecla acionada por um determinado período de tempo, só depois de soltá-la novamente é que o chip controlador irá gerar uma nova seqüência que a identifique cada vez que se examinar o teclado (e que, portanto, detecte a tecla acionada enquanto esta mantiver o contato fechado). Em vez disso, gera-se um valor simples para indicar quando foi acionada a tecla (down code) e, posteriormente, outro valor (up code), quando se solta a tecla e ela volta à sua posição de repouso.
Os valores geraos não têm correspondência com os códigos ASCII; eles foram selecionados de forma arbitrária pela IBM quando a empresa desenvolveu o primeiro teclado para PC.
O chip controlador do teclado envia ao computador esses dois valores (chamados de códigos de exploração) para cada tecla pressionada, quando são processados pela rotina do serviço de interrupções do teclado ou ISR (Iterrupt Service Routine). É importante utilizar dosi valores independentes, pois algumas teclas, como a que permite alternar entre maiúsculas e minúsculas (shift) ou as teclas Ctrl e Alt, denominadas modificadores, são funcionais durante todo o tempo em que permanecem acinadas. Gerar o valor upcode paa todas as teclas possibilita, além disso, que a ISR reconheça que teclas estão sendo acinadas enquanto o usuário mantém quanlquer desses modificadores apertado. Para algumas teclas são transmitidos mais de dois códigos de exploração; é o caso das teclas que foram acrescentadas aos teclados mais recentes, que não estavam presentes nos desenhos originais da IBM.
Quando o código de exploração chega ao computador, é recebido por um segundo controlador, que faz uma conversão para que o sistema operacional possa interpretá-lo, coloca-o à disposição da porta de Entrada/Saída (E/S) e solicita uma interrupção ao processador para avisar que foi recebido um código de exploração do teclado. Finalmente, o valor convertido é enviado. Esse código é um valor único, embora muitas teclas sejam utilizadas para representar vários caracteres (por exemplo, a partir da tecla A podem-se obter os caracteres â, Ã e Ctrl-A etc.). Seu valor convertido, ou seja, o que será utilizado pelo PC, depende do estado dos modificadores no momento em que são enviados os códigos de exploração da tecla.
Existem dois chips encarregados de controlar o teclado, com os quais se comunica o sistema: um montado sobre a placa-mãe do computador (controlador on board) e outro instalado no próprio dispositivo. A comunicação com o controlador da placa-mãe permite, ao ler um byte de estado, conhecer a informação no controlador do teclado e mandar informação para o dispositivo, por exemplo, para ligar ou desligar os LEDs, escrevendo nesse byte. O protocolo de transmissão do teclado é um processo bidirecional.
Esses modificadores podem ser divididos em dois grupos: os ativos e os de transição. Os modificadores ativos correspondem às teclas Alt, Ctrl e Shift, nas quais se leva em consideração a modificação nas teclas restantes, enquanto elas permanecem acionadas, por meio de um bit associando que muda seu valor quando se detecta o down code de um desses modificadores e recupera seu estado inicial ao detectar o up code. Já para as teclas correspondentes ao grupo de transição (caps Lock, Num Lock ou Scroll Lock), o bit se modifica depois de uma seqüência down code e up code consecutiva.
9.1.2 - Layout de teclado
A disposição das teclas é similar em todos os teclados para computadores compatíveis, embora existam diferenças na atribuição de cada tecla, dependendo do idioma de cada país. Isso significa que o código de exportação enviado depois de acinar uma das tecls pode ser diferente para alguns caracteres especiais. Mesmo assim, e contrariamente ao que acontecia com sistemas operacionais anteriores, foi possível mudar a configuração do teclado para utilizar mais de um layout de teclado.
Quando o sistema recebe um código de exportação do teclado, converte-o num código de tecla virtual, associando ao sistema operacional. Enquanto os códigos de exportação dependem do teclado ou de seu fabricante, os códigos virtuais são independentes do dispositivo, o que permite reconhecer, sem dificuldade, diversos modelos de teclados diferentes. Assim, quando o controlador recebe um código, transmite-o ao sistema operacional para que possa ser gerada a mensagem correspondente. Dessa maneira, é possível, por exemplo, utilizar um teclado com uma disposição de teclas correspondente a um idioma específico, para escrever empregando, caracteres de outro idioma.
A disposição padrão das teclas, letras, números e pontuação (vírgula, ponto final, etc.) é conhecida como QWERTY. Ela recebe este nome devido às seis primeiras letras da linha superior de teclas de letras serem justamente qwerty. Este teclado foi desenhado nos anos 80 para as máquinas de escrever mecânicas e foi na verdade desenhado para diminuir a velocidade do datilografo evitando, assim, a interferência de uma tecla sobre a outra. O teclado Dvorak é outro tipo de teclado cuja disposição das teclas foi construída para aumentar a velocidade de digitação.

9.2 - MOUSE
O mouse é usado basicamente para deslocar o cursor (ponteiro) pela tela e selecionar operações e menus, permitindo agilizar o trabalho de forma surpreendente. Atualmente o mouse tornou-se um dispositivo de entrada de dados tão útil como o teclado. De fato, hoje a maioria dos aplicativos e sistemas operacionais baseia sua interface na utilização específica do mouse, a fim de aproveitar ao máximo suas possibilidades e conseguir maior eficácia. Por suas características, o mouse agiliza e simplifica a entrada de informações no computador, embora para isso seja necessário trabalhar com uma interface gráfica que admita essa possibilidade. Basicamente o mouse registra e transfere para a tela do computador um movimento físico.
Ele foi chamado mouse primeiramente porque os primeiros modelos construídos, juntamente com o fio de conexão, lembravam um roedor, e também pelo movimento do cursor (ponteiro) na tela se parecer com o movimento de um rato. Na prática todos os aplicativos indicam a posição relativa do mouse por meio de uma pequena seta na tela, conhecida como ponteiro do mouse.
O mouse foi inventado em 1963 no Instituto de Pesquisa de Stanford (Stanford Research Institute) por Douglas Engelbart. Ele foi um dos muitos dispotivos “apontadores” desenvolvidos que eram compostos por duas partes: o hardware e o software. O primeiro mouse era grande, e utilizava duas rodas grandes perpendiculares. A rotação de cada roda era traduzida em movimento ao longo dos eixos X e Y no plano.
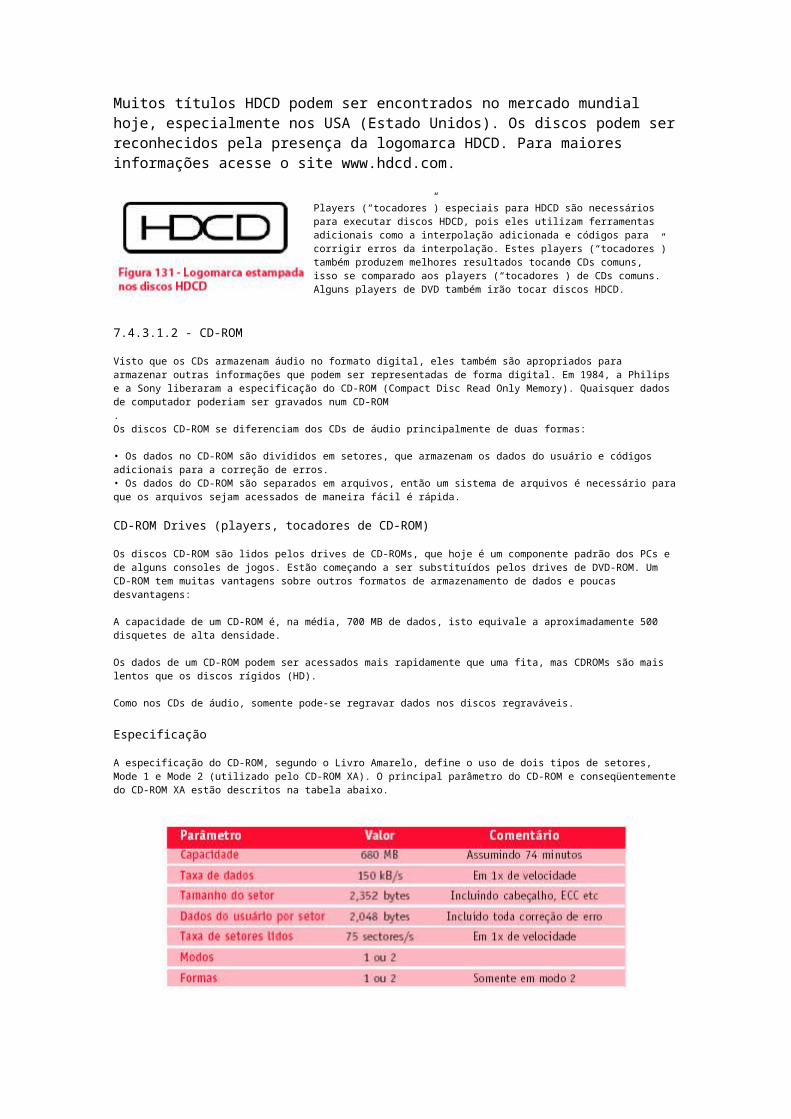
Dentro da carcaça de plástico de um mouse encontram-se seus componentes básicos, uma pequena placa de circuito impresso, sensores e outros componentes. O centro do mecanismo de um mouse é uma grande bola de aço, recoberta de material plástico ou de borracha, presa à base do mouse por dois eixos que ficam em contato com a superfície da bola para transmitir qualquer movimento que esta realize. Para o movimento, o mouse incorpora roletes, que ficam unidos a duas pequenas rodas radiais (uma na horizontal e outra na vertical). A rotação destas rodas é registrada eletronicamente e se transforma em impulsos elétricos, transmitidos ao computador para que este possa interpretá-los. Para captar o movimento das rodas utiliza-se principalmente o método opto mecânico, que não envolve contato físico. Este método se baseia numa pequena célula fotoelétrica que registra de forma precisa o movimento da pequena roda perfurada. A presença ou ausência de luz se transforma numa série de impulsos (nos eixos X e Y) que são codificados e mandados ao computador para que este os interprete.
9.3 - MONITOR
O monitor do computador (display) é um periférico capaz de mostrar imagens estáticas ou em movimento gerada pelo computador e processada pelo adaptador gráfico (placa de vídeo ou aceleradora gráfica). As duas principais tecnologias utilizadas na fabricação são a CRT (Cathode Ray Tube - Tubo de Raios Catódicos) e o LCD (Liquid Crystal Display - Monitor de Cristal Liquido).
Alguns fatores podem influenciam a compra de um monitor, estes fatores têm influencia direta sobre a performance e o preço:
• Tecnologia de fabricação (LCD ou CRT)• Área visível, geralmente medida na diagonal• Resolução máxima• Dot pitch• Taxa de atualização (Refresh rate)• Consumo de energia
Os primeiros monitores eram baseados em texto não eram capazes de operar em modo gráfico. Em 1981 a IBM introduziu o CGA - (Color Graphics Adapter - Adaptadores Gráficos Coloridos), que trabalhava com 4 cores e tinha uma resolução máxima de 320 pixels horizontais por 200 pixels verticais. Já em 1984 ela lançou o EGA (Enhaced Graphics Adapter - Adaptador Gráfico Extendido). Ele permitia mais de 16 cores diferentes e aumentou a resolução para 640x480 pixels, melhorando muito a aparência da imagem e tornado o texto mais fácil de ser lido. Em 1987 a IBM mostrou o sistema VGA (Vídeo Graphics Array), muitos monitores VGA ainda estão em uso atualmente. Em 1990 a IBM introduziu o XGA (Extended Graphics Array), que oferecia uma resolução de 800x600 pixel em modo true color (cor real - 16.8 milhões de cores) e uma resolução de 1024x768 pixel com 65535 cores.
Mais tarde um consórcio de empresas conhecido como VESA (Video Electronics Standards Association) desenvolveu um outro padrão conhecido com Super VGA ou simplesmente SVGA. O Super XGA foi criado para substituir o SVGA original, mas na prática a industria abandonou esta idéia e passou a chamar todos os monitores de alta qualidade de SVGA, assim quase todos os monitores feitos a partir de 1980 são chamados de SVGA.
9.3.1 - Tecnologia de Fabricação
9.3.1.1 - CRT (Cathode Ray Tube - Tubo de Raios Catódicos)
Raios catódicos são elétrons em alta velocidade, que são emitidos por um catodo aquecido num tubo a vácuo. Num tudo de raios catódicos, os elétrons são cuidadosamente direcionados formando um feixe, que é direcionado (defletidos) por um campo magnético para que ele incida sobre um ponto exato em uma superfície (anodo), que possui um material fosforescente arranjado em linhas. Uma luz é emitida como resultado do choque dos elétrons neste material. Os monitores coloridos utilizam três materiais diferentes para produzir três cores diferentes (Vermelho, Verde e Azul) e um feixe diferente para uma das cores.

Para montar uma imagem na tela (parte frontal do tubo de imagem) o feixe de elétrons é redirecionado de modo que ele percorra toda a tela segundo um padrão chamado raster, conforme mostrado na Figura ao lado, varrendo a tela da esquerda para a direita e de cima para baixo. O sinal de vídeo é quem controla este feixe de elétrons.
O fósforo brilha quando o feixe incide sobre ele, mas ele não consegue manter este brilho por muito tempo, assim, para manter o brilho da tela é necessário que o feixe de elétrons, de tempo em tempo, incida sobre o mesmo ponto novamente, antes que o brilho acabe. Ou seja, todos os pontos da tela devem ser atualizados de tempo em tempo, para manter a imagem ou porque a imagem da tela mudou.
A freqüência de um monitor ou taxa de atualização é justamente a quantidade de vezes que a tela foi atualizada por segundo. Na maioria dos monitores modernos, o feixe eletrônico descreve mais de 50.000 linhas por segundo.
A freqüência vertical ou taxa de atualização é a quantidade de vezes que a tela é atualizada, uma freqüência de 72 Hz significa que a tela é atualizada 72 vezes por segundo. Quando esta freqüência é muito baixa pode-se perceber que a imagem pisca rapidamente (efeito flicker). Então esta freqüência determina a estabilidade da imagem (quanto maior a freqüência vertical, melhor). Já freqüência horizontal é a velocidade com que uma linha é atualizada.
A freqüência dos monitores é o que limita a resolução que este pode apresentar ao usuário, ou seja, o sinal de maior freqüência que pode ser processado pelos circuitos do monitor. Quanto maior a resolução necessária maior resposta em freqüência o monitor deve ter. Alguns monitores têm uma freqüência fixa, o que significa que só aceitam a entrada de dados a uma determinada freqüência. Outros tipos de monitores (multiscanning monitor) se ajustam automaticamente à freqüência de sinal enviada a ele, o que permite maior compatibilidade com diferentes tipos de placas de vídeo.
Os CRT’s trabalham com tensões muito altas, na ordem dos 10.000 a 25.000 Volts dependendo do seu tamanho. Estas tensões podem continuar acumuladas durante vários dias mesmo após o aparelho ter sido desligado da corrente elétrica. Por isso, nunca tente mexer neles, a menos que tenha conhecimentos técnicos para tal.
9.3.1.2 - LCD (Liquid Crystal Display - Monitor de Cristal Líquido)
Os monitores CRT utilizam um raio catódico para bombardear a tela gerando assim a imagens, já os LCD utilizam os cristais líquidos para formarem a imagem. A tecnologia LCD está presente em diversos equipamentos como laptops, relógios digitais, televisores, microondas, CD players e muitos outros equipamentos. LCDs são comuns porque oferecem várias vantagens sobre o CRT. Eles são finos, leves e consomem muito menos energia que o CRT.
9.3.1.2.1 - Liquid Crystal - Cristal Líquido
Geralmente aprende-se que a matéria possui três estados: sólido, líquido e gasoso. Nos sólidos suas moléculas sempre mantêm sua orientação e permanecem na mesma posição uma em relação à outra. Nos líquidos ocorre justamente o oposto; elas mudam sua orientação e podem mover-se para qualquer lugar no líquido. Mas, existem algumas substâncias que podem existir num estado estranho, que se parecem com líquido e também com o sólido. Quando elas estão neste estado, suas moléculas tendem a manter sua orientação, como nos sólidos, no entanto, elas também podem mover-se por diferentes posições, como nos líquidos. Isto significa que os cristais líquidos não são nem sólidos nem líquidos. Isso explica o nome contraditório deste material (Cristal Líquido), que é duro como o quartzo, mas é chamado de líquido.

Fase Nematic do crital Líquido
Há diversas substâncias que podem assumir o estado de cristal líquido e elas são classificadas por seu tipo. Mas, destacam-se, principalmente, aquelas usadas para fabricar telas de LCD. Nestas, durante sua mudança de estado, são capazes de assumir a “fase nemática” ( “nematic phase”), especialmente os do tipo “nemático retorcido” ( “twisted nematics”). Essas substâncias apresentam estruturas moleculares paralelas, como todos os cristais. Mas apresentam também uma propriedade curiosa, da qual se aproveitam os fabricantes de telas de cristal líquido: se a elas for aplicada uma tensão elétrica, as estruturas se “retorcem”, formando uma espécie de estrutura curva. E o grau de torção é tão maior quanto mais intensa for à corrente aplicada. Os LCDs utilizam este cristal líquido porque eles reagem muito bem a corrente elétrica e através disto pose-se controlar a passagem da luz através dele.
9.3.1.2.2 - Luz Polarizada
Luz é uma forma de energia. Há duas teorias sobre sua natureza. Uma, afirma que ela é formada por partículas de energia pura, os fótons. Outra, a teoria da natureza ondulatória, afirma que ela é formada por ondas. E a luz é uma coisa tão estranha que há fenômenos que só podem ser explicados por uma teoria e há fenômenos que só podem ser explicados pela outra. Neste caso trataremos a luz segundo à teoria da natureza ondulatória.
Esta teoria afirma que a luz é uma forma de energia radiante (que se irradia através de ondas), um caso particular das ondas eletromagnéticas que transmitem os programas de rádio, por exemplo. A diferença está no “espectro”, ou seja, na faixa de comprimentos de onda de uma e de outra. O espectro da luz visível abarca comprimentos de onda que vão de 380 nm (nanômetros, ou milionésimos de milímetro), que corresponde à cor violeta, até 780 nm, comprimento de onda da luz vermelha. Abaixo deste espectro estão as radiações conhecidas por ultravioleta, raios X e raios Gama. Acima, todas as demais, do infravermelho, microondas até as ondas de rádio, TV e radar.
A onda luminosa, ao se propagar, “vibra” em planos que têm em comum a linha por onde passa o raio luminoso. Por exemplo, duas crianças, cada uma segurando uma extremidade de uma corda, destas de “pular”, uma das crianças começa a mover sua mão para cima e para baixo em movimentos regulares. Imediatamente se formará uma onda que se propagará pela corda. Como a criança balança a mão para cima e para baixo, essa onda se propagará no plano vertical, como a onda mostrada pela linha azul da Figura 160. Se ela movesse a mão de um lado para outro, na horizontal, a onda se propagaria no plano horizontal, como a onda mostrada pela linha vermelha da Figura 160.
A luz natural se propaga em ondas que vibram em planos de todas as inclinações possíveis. A Figura 160 mostra apenas os planos horizontal e vertical, mas entre eles há uma infinidade de outros planos, todos passando pela linha preta que corresponde à direção da propagação do raio luminoso.
Agora imagine que fosse colocada uma grade, ou fenda vertical, no caminho das ondas de luz (que, no caso da Figura 160, caminham da direita para a esquerda). A única onda que seria capaz de se propagar além da fenda seria aquela cujo plano de oscilação atravessa a fenda, no caso o plano vertical. Todas as outras seriam retidas por não conseguirem atravessar a fenda. Assim se consegue fazer com que um raio luminoso se propague em um único plano. Este tipo de luz denomina-se “luz polarizada”. A luz polarizada pode ser obtida fazendo a luz comum atravessar um filtro polarizador, um meio transparente dotado de uma estrutura que funciona como um conjunto de fendas paralelas. A luz que atravessa o filtro (luz polarizada) é composta de ondas que vibram apenas em planos paralelos.
9.3.1.2.3 - Montando o LCD
O LCD é o fruto de uma combinação de diversos fatores, dentre eles destaca-se:
• A possibilidade de polarização da luz• Os cristais líquidos permitem a passagem da luz e podem rotacionar a luz polarizada

• A estrutura dos cristais líquidos pode ser mudada através de uma corrente elétrica• Existem substâncias transparentes que podem conduzir a eletricidade
Na montagem de um LCD utiliza-se duas peças de vidros com um filme polarizador somente numa das faces, um que polariza a lua na horizontal e outro na vertical. Faz-se minúsculos buracos na face sem filme de um dos vidros e coloca-se o cristal liquido nessas orifícios. Pequenos eletrodos são colocados em cada um destes furos. Quando a luz atravessa o primeiro filtro, ela é polarizada, chegando então ao cristal líquido, que através da corrente fornecida pelos eletrodos gira o raio polarizado da luz de forma que ele seja capaz de atravessar o último filtro, chegando finalmente aos olhas de quem na frente da tela. Se o cristal líquido não rotacionar a luz, ela não consegue atravessar o segundo filtro, sendo, assim, bloqueada. Isto acontece porque um filtro permite que a luz passe somente se ela estiver na horizontal, no entanto, o segundo filtro só permite a passagem da luz na vertical. Para que a luz atravesse os dois filtros faz-se necessário que a luz polarizanda horizontalmente seja girada para a vertical, podendo com isso atravessar o segundo filtro de polarização vertical.
9.3.2 - Área Visível
Os monitores possuem uma tela onde são projetadas (1 polegada = 2,54 cm) as imagens que são visualizadas. O tamanho da tela é normalmente medido em polegadas 1" e em diagonal, ou seja, de um canto ao canto oposto outro. Os primeiros fabricantes de televisão para tornar seus televisores mais atraentes mostravam o tamanho das TVs medindo a diagonal, o que proporcionava uma medida maior, já que a medida da diagonal é maior que a dos lados. Isto gerava mais destaque para a TV.
Os tamanhos mais populares de telas de monitores são 15", 17", 19" e 21". Obviamente o tamanho da tela está diretamente ligado à resolução. Pois, a mesma quantidade de pixel que gera uma bom definição num monitor pequeno gerará uma baixa definição num monitor grande. Uma vez que num monitor pequeno haverá um espaço menor entre os pixel, o que não acontece no monitor grande. A curvatura também é outra característica importante do monitor. Alguns monitores apresentam uma curva na tela, semelhante àquela apresentada pelas TVs. Os monitores mais recentes apresentam em sua maioria tela plana permitindo um maior conforto para o usuário, mas os monitores não são totalmente planos, na verdade eles são quase planos.
9.3.3 - Resolução, Dot Pitch e geração da imagem
A imagem que aparece na tela consiste em linhas horizontais de pontos brilhantes. Em um monitor colorido esses pontos podem assumir um determinado número de cores de um conjunto maior, denominado “palheta”. Em um monitor monocromático as cores são representadas por tons de cinza, verde ou âmbar, dependendo do tipo de monitor. Esses pontos chamam-se pixels, abreviação de “picture cells”, ou células de imagem. A imagem é gerada pelos circuitos internos da máquina. Em princípio, quem o faz é a própria CPU. Mas nada impede que essa tarefa seja feita por um microprocessador auxiliar.
O resultado é uma longa lista de códigos, cada um representando um pixel. O primeiro corresponde ao ponto situado no canto superior esquerdo da tela e contém seus “atributos”, ou seja, sua cor (o preto corresponde, evidentemente, a um pixel “apagado”). O segundo representa o pixel situado imediatamente à direita, e assim sucessivamente, até a extremidade direita da linha do topo da tela. Depois vem o código que representa o pixel da extremidade esquerda da segunda linha e assim por diante, até o último pixel da última linha, aquele situado no canto inferior direito da tela. Esses códigos são gravados, exatamente nesta ordem, pela CPU ou pelo microprocessador auxiliar em um trecho de memória RAM, a memória de vídeo. Quando um programa deseja modificar a tela, basta alterar o conteúdo dessa área de memória.
Com a geração da imagem se encerra a tarefa do microprocessador. Exibi-la é função da placa controladora de vídeo e do monitor. Na placa, há um circuito que fica permanentemente “varrendo” a memória de vídeo e lendo o que está gravado lá. Essas informações são convertidas em sinais eletrônicos e enviadas ao monitor, que as processa e encaminha para o tubo de imagem, que bombardeia a tela “acendendo” cada pixel e ajustando sua cor (ou tom de cinza) conforme as informações lidas na memória de vídeo. O feixe começa disparando no primeiro pixel da primeira linha, passa para seu vizinho da direita, prossegue até o último, desloca-se bruscamente para a esquerda e desce para o começo da segunda linha, continuando nesse vai-vem até a base da tela. Depois, salta bruscamente até o alto, volta ao início da primeira linha e começa tudo de novo. O número de vezes em cada segundo que o feixe de elétrons se desloca da esquerda para a direita e varre uma linha chama-se freqüência (ou “varredura”) horizontal e o número de vezes que ele percorre a tela verticalmente (varrendo todas as linhas) chama-se freqüência (ou “varredura”) vertical.

A definição da imagem depende do número de pixels da tela. Um número pequeno resulta em uma imagem pouco nítida, com curvas e linhas inclinadas que parecem “quebradas” e onde não se pode representar detalhes. Esse número varia com o chamado “padrão de vídeo” (CGA, EGA, VGA e SVGA). Um pixel é formado por três pontos de fósforo na tela, um com um filme vermelho (Red), outro com o verde (Green) e um terceiro com o filme azul (Blue). Já dot pitch é distância medida diagonalmente entre dois pontos de fósforo da mesma cor, conforme Figura 162, pode-se dizer que dot pitch mede a quantidade de espaço que existe entre os pixels. Assim, quanto menor o dot pitch melhor a qualidade do monitor.
Resolução se refere ao número de pixels (pontos coloridos) contidos na tela. A resolução é expressada indicando-se o número de pixels na horizontal e na vertical, como 640x480.
As resoluções que um monitor normalmente pode suportar depende da quantidade física de pixels (pontos) da tela, por exemplo, um monitor com uma grade física de 1280 linhas por 1024 colunas pode obviamente suportar a resolução máxima de 1280x1024 pixels, ou menores como: 1024x768, 800x600, and 640x480.
9.3.4 - Taxa de Atualização
A taxa de atualização, conforme citado anteriormente, é o numero de vezes o feixe de elétrons atualizada a tela por segundo. Se o monitor tem uma taza de 85 Hz (Hertz), então todos os pixels do canto superior esquerdo ao canto inferior direito são atualizados 85 vezes por segundo. A taxa de atualização é muito importante porque controle o flicker, ocorre quando a imagem pisca rapidamente, assim é desejável a melhor taxa de atualização possível. Quando a taxa de atualização é baixa pode-se notar a tela piscando (flickering), isto pode causar dores de cabeça eirritação nos olhos.
Os televisores possuem uma taxa de atualização inferior a dos monitores. Para tentar resolver isto, eles fazem uso de um método chamado entrelaçamento. Isto significa que o canhão de elétrons atualizará primeiro todas as linhas impares, de cima para baixo, para então começar a atualizar as linhas pares. Assim, para nossos olhos todas as linhas foram montadas de uma única vez.
A taxa de atualização depende da quantidade linhas que o canhão tem que atualizar, isto limita a máxima resolução possível. Muitos monitores suportam várias taxas de atualização, que geralmente depende da resolução utilizada.

9.3.5 - Consumo de energia
O consumo de energia varia muito com a tecnologia de fabricação empregada, os CRTs são geralmente famintos, geralmente um monitor comum consome 110 watts. Já os LCDs geralmente consomem entre 30 e 40 watts.
Num computador doméstico típico que utilize um CRT, o monitor geralmente é responsável por 80% da energia consumida pelo computador. Como a maioria dos usuários não interage com o computador o tempo todo, o governo dos Estados Unidos (USA) iniciou o programa “Energy Star” em 1992. Os monitores dos fabricantes que fazem parte deste programa são capazes de desligar parte de seus componentes, quando os usuários não estão utilizando o micro, isto permite economizar uma boa quantidade de energia.
10 - MONTAGEM
10.1 - ELETRICIDADE ESTÁTICA
Este tipo de eletricidade não é o mesmo de uma bateria ou do suprimento de energia de uma residência. Ela é como um raio, ou seja, uma descarga rápida mas substancial que pode causar um estrago razoável. É adquirida naturalmente, como por exemplo, ao caminhar sobre carpete, principalmente em climas frios e secos. Ela é capaz de danificar componentes elétricos, discos, disquetes, fitas e outras formas de armazenamento em mídia magnética. Isto ocorre pela desmagnetização dos dados e formatação de marcadores na mídia, além da sobrecarga da capacidade dos componentes elétricos.
A eletricidade estática é perigosa principalmente para módulos de memória RAM. Para evitar uma descarga do seu corpo para os componentes internos do computador, ao abrir o gabinete, tenha já todas as ferramentas necessárias à instalação ao alcance da mão, e encoste as duas mãos na fonte do gabinete. Isso garantirá a segurança da operação. Algumas precauções para evitar a eletricidade estática:
• Mantenha a placa-mãe e outros componentes em seu saco anti-estático original até que seja o momento de manuseá-los.• Durante a montagem, use uma pulseira anti-estática ou, se não a tiver, freqüentemente descarregue a eletricidade estática tocando a parte metálica do gabinete.• Manipule a placa-mãe, as placas de expansão e os pentes de memória pelas bordas evitando o toque direto nos componentes e circuitos integrados (chips). No caso das placas de expansão, elas podem ser manuseadas tocando-se apenas na extremidade metálica que será parafusada no gabinete (bracket).

Quanto aos cabos, cuidado para não tirar algum do lugar ou deixá-lo mal encaixado. Se isso acontecer, o sistema irá no mínimo ignorar o drive (de disquete, CD-Rom ou HD). No caso do HD, se o cabo de dados for deixado mal encaixado, pode não ser enviado sinal de vídeo ao monitor. Neste caso, desligue o computador e reveja todos os cabos, fazendo pressão para garantir que não haverá mais mal contato.
Também é importante, nunca mexer no interior do computador com ele ligado à tomada, ou no estabilizador, mesmo desligado. Sempre tire o cabo de força da fonte do gabinete antes de qualquer instalação de hardware. Depois de instalar o hardware fisicamente, recoloque o cabo de força e tudo estará como antes. Assim, você vai evitar choques e descargas elétricas, tornando a operação segura para você e para o micro.
Dica: Para evitar ter que largar tudo para procurar alguma coisa no meio da instalação, tenha sempre tudo que você precisará para instalar o hardware ao alcance da mão. Exemplos: chave de fenda, jumpers, parafusos, placas, manuais, diskettes ou CDs de instalação dos dispositivos, CD de instalação do Windows, etc.
10.2 - ETAPAS DA MONTAGEM
Sugere-se seguir os seguintes passos para a montagem:
• Abertura do gabinete.• Colocação das memórias na motherboard.• Instalação do processador na motherboard.• Configuração da motherboard através dos jumpers.• Colocação da motherboard no gabinete.• Ligação da alimentação da motherboard pelo cabo de força.• Fixação dos drives e disco rígido.• Colocação das placas nos slots (vídeo, som, modem, rede).• Ligação da alimentação dos drives e disco rígido.• Ligação dos cabos de IDE.• Ligação dos fios do gabinete e Motherboard.• Preparação do display.• Setup e teste da máquina.
10.2.1 - Abertura do Gabinete
1. Desparafusar a tampa do gabinete.
2. Liberar os fios do painel frontal e prepará-lo para receber a Motherboard.
3. Identificar cada fio que parte do painel frontal do gabinete, que são:
• Chave liga/desliga teclado (KeyLock).• Turbo Switch (botão liga/desliga Turbo).• Turbo Led (indicador de turbo acionado).• Reset (botão de reinicialização da máquina).• Power Led (indicador de máquina ligada/desligada).• Alto-falante (speaker).
Os três primeiros itens do número 3 podem ser ignorados quando se tratar de gabinetes mais novos, que não possuem estas características.
10.2.2 - Colocação das Memórias na Motherboard
Os pentes de memória se diferenciam pela capacidade de armazenamento (1MB, 2MB, 4MB, 8MB, 16MB, 32MB, 64MB, 128MB, 256MB), tipo de tecnologia (EDO, FPM, etc. - ver

Memória RAM), velocidade de acesso (70, 60 ou 50ns) e formato (SIMM, DIMM, ...).
Nas motherboards tipo Pentium, são utilizados 2 bancos de memória SIMM (denominados 0 e 1), cada banco com 2 slots. Não devemos misturar pentes com capacidades diferentes no mesmo banco de memória. Por ser um processador de 64 bits, o Pentium não permite que um banco de memória esteja parcialmente preenchido, ou seja, um slot ocupado e outro livre (isto no caso de slots SIMM por armazenar dados a 32 bits).
Algumas placas-mãe possuem um slot DIMM (de 64 bits) além dos 4 slots SIMM. Neste caso, esse slot pertence ao banco 0 de memória, já que a memória DIMM utiliza o mesmo caminho de acesso da memória SIMM. Com isso, se o slot DIMM for utilizado, o banco 0 da memória SIMM deverá estar vazio.
Como regra geral, não deve-se usar módulos de memória com diferentes velocidades (tempo de acesso). Pode-se conferir o tempo de acesso do módulo de memória através das inscrições nos chips (algo como -60 e -70, -06 e -07 ou -6 e -7 para os módulos SIMM). Sobre o tipo de tecnologia (ver Memória RAM), consulte o manual da placa-mãe. Normalmente, pode-se utilizar diferentes tipos de memória em bancos diferentes, mas não no mesmo banco.
As placas (ou módulos) de memórias são colocadas nos slots apropriados. Veja a tabela de exemplos abaixo para uma placa de um pentium contendo um slot DIMM e dois slots SIMM (os números se referem à capacidade dos módulos de memória em megabytes vezes o número de módulos em cada banco):

Com as máquinas antigas haviam vários tipos de encapsulamento (formato do módulo) para as memórias (DIP, SIPP, SIMM e DIMM).
Hoje em dia os dois primeiros estão em desuso nos microcomputadores destacando-se somente o tipo SIMM (32 bits - 72 vias) que se encaixam diretamente à placa-mãe. O modelo DIMM (64 bits - 168 vias) está sendo usado em PCs agora mas já é comum em Mac’s.
O lado chanfrado indica o número 1 do pente. Ele dever ser colocado cuidadosamente no banco de memórias. O pente só encaixa de uma maneira. Tome cuidado para não forçá-los, pois se pode quebrar os suportes laterais de encaixe. Lembre-se também da eletricidade estática mantendo-as em invólucros anti-estáticos até o momento da instalação e tocando numa parte de metal sem pintura e que esteja aterrada. A eletricidadeestática é o maior inimigo das memórias!
10.2.3 - Instalação do processador na motherboard
A instalação do processador deve ser feita sempre com muito cuidado pois é uma peça sensível e que pode facilmente ser danificada pela eletricidade estática ou pelo encaixe incorreto. Para processadores que se encaixam em soquetes, é preciso ficar atento ao pino 1, ou seja à posição em que ele será conectado ao soquete, e à alavanca que trava o processador, abri-la antes de encaixá-lo e fechar para prendê-lo totalmente. O processador deve ser encaixado por igual, sem que um lado fique mais inclinado do que o outro para não amassar os pinos de comunicação. Após o encaixe do processador não se esqueça de encaixar sobre ele o dissipador, já com a pasta térmica, e o cooler para uma melhor irradiação do calor.

A Pasta Térmica permite um perfeito acoplamento entre o dissipador e o semicondutor, eliminando o ar entre os elementos montados e transmitindo o calor da CPU para dissipador.
Para processadores de slot, deve-se observar a ordem de encaixe do dissipador ou do cartucho de dissipação e do cooler. Siga as instruções do manual da placa e/ou do processador para proceder da forma correta.
10.2.4 - Configuração da placa-mãe através dos jumpers
A configuração da placa-mãe visa uma melhor identificação dos componentes que estão sendo utilizados, podendo se dar através de jumpers ou através do programa setup (para algumas placas). Esta configuração pode referir-se a, por exemplo: freqüência do processador, tipo do processador, voltagem do núcleo do processador, voltagem das memórias, habilitação de componentes onboard (som, vídeo, rede, fax), limpeza da CMOS, keyboard power on, entre outras funções e configurações. É interessante que esta configuração através de jumpers seja feita enquanto a placa-mãe se encontrar fora do gabinete, pois assim fica mais fácil realizar a tarefa do que fazê-la com a placa encaixada e com todos os cabos ligados a ela.
10.2.5 - Alimentação da Motherboard (placa-mãe)
Os conectores dos fios de alimentação da motherboard AT são diferentes dos demais. São dois conectores que unidos tem 9 pinos. Os fios pretos (terra ou GND) devem estar sempre juntos e no meio do conector, já os fios vermelho e azul nos extremos. Para a motherboard ATX o conector é único e se encaixa somente de uma forma, pois possui um lado chanfrado nas extremidades.As tensões nestes fios são as seguintes:
Fio Vermelho: ........................................................................ 5VDCFio Branco: ........................................................................... -5VDCFio Amarelo: ........................................................................ 12VDCFio Azul: ............................................................................. -12VDCFio Preto: ................................................................... Terra OU GND
10.2.6 - Fixação dos Drives e Disco Rígido
Os drives e o disco rígido são fixados por parafusos nas suas laterais. Cada um tem seu lugar definido no gabinete e devemos ter muito cuidado para não fixar o disco rígido com parafusos, que por serem muito compridos, possam atingir sua placa. O comprimento destes deve ser menor que a espessura de um lápis. Parafusos muito compridos podem encostar na placa do disco rígido ocasionando um curto circuito e também a perda da garantia do HD.
Evite choques no HD. Este componente tem uma mecânica de precisão que mesmo desligada pode sofrer danos facilmente.

A ordem de ligação (alimentação e dados) e fixação dos drives e do(s) hd(s) depende da habilidade do montador e do equipamento que está sendo montado. Dependendo do gabinete pode ser melhor fixá-los primeiro para depois fazer as ligações. Neste caso deve-se tomar o cuidado de verificar, antes de fixar, qual é o lado do pino 1 do flat cable.
10.2.7 - Colocação das placas
As placas são colocadas nos slots vagos da motherboard podendo colocar qualquer placa em qualquer slot, não existe uma ordem a se seguir.
Devemos tomar cuidado para que uma placa não trabalhe encostada à outra, já que podemos ter componentes que encostem no lado da solda da outra placa bem como um aquecimento excessivo por falta de ventilação.
Devemos utilizar o bom senso para otimizar as colocações das placas, principalmente a multi-IDE ou controladora de drives e discos rígidos, já que esta terá cabos ligados aos drives e discos rígidos. Normalmente esta placa fica nos primeiros slots, próximos ao conector de força da placa-mãe.
Observe também as placas de 8 bits e 16 bits para não colocar uma placa de 16 bits num slot de 8 bits, ou uma placa PCI num slot ISA. Enquanto os slots ISA são compridos e pretos, os slots PCI são brancos e curtos.
Cada placa trabalha num determinado endereço lógico e utilizando uma determinada interrupção. As exceções são as placas configuradas por software (jumperless). Mas mesmo assim não podemos colocar via software uma interrupção e endereço igual a de outra placa do sistema.
Quando ocorrer algum problema, deve-se sempre verificar se não está havendo conflito entre interrupção e endereço. Caso tenha muitas placas conectadas no equipamento, ao adicionar uma nova e esta não funcionar, retire todas as placas mantendo somente a de vídeo, multi-IDE e a placa nova. Assim tentamos isolar o conflito de interrupção e

endereçamento.
Na instalação de novas placas escolhemos uma interrupção diferente das usadas no sistema.
As placas multi-IDE têm a possibilidade de configurar as saídas seriais e paralelas e suas interrupções (ver manual das placas), habilitar ou não a saída de jogo, etc.
Devemos também ter este mesmo cuidado na instalação de placas tipo: FAX-Modem, controladora SCSI, placas de som e vídeo, placas de rede local, entre outras. A princípio, qualquer placa para micros PC tem que ter uma interrupção e endereçamento diferente das demais placas! O barramento ISA não permite ocompartilhamento de interrupções, ou seja, duas ou mais placas utilizando a mesma IRQ, como o padrão MCA e EISA.
10.2.8 - Alimentação dos Drives e Disco rígido
Os soquetes de alimentação dos drives e disco rígido só se encaixam de uma única maneira. Pode ser utilizado qualquer soquete, desde que o conector seja compatível. Apenas os Drives de 1.44MB (31/2") utilizam um soquete menor para a alimentação da tensão. Todos os conectores da fonte são chanfrados, tendo-se apenas uma possibilidade de encaixá-los nos periféricos.
10.2.9 - Ligação dos Cabos do HD IDE
Os cabos de dados e sinais de controle dos drives têm uma tarja vermelha em um dos lados. Esta tarja vermelha deve ser ligada sempre onde estiver indicado o número “1” nas placas ou uma outra marcação nos drives. Os cabos dos discos rígidos tipo IDE são mais largos (40 pinos) que os dos floppy drives e o SCSI tem 50 pinos. Na placa da controladora está indicado o soquete do disco rígido e do drive, na placa-mãe eles são identificados pelos nomes IDE1 e IDE2 (discos) e FDC (floppy disk connector).
Quando utilizarmos dois discos rígidos devemos configurar um como “MASTER” (principal) e o outro como “SLAVE”. Isso é feito através do jumper, com o auxílio do manual dos HDs ou uma etiqueta explicativa no próprio chassi do disco. Nos discos rígidos tipo IDE o lado vermelho do cabo geralmente fica do mesmo lado do soquete de alimentação do HD.
10.2.10 - Preparação dos HDs
Depois do disco (ou discos) estar fisicamente instalado, entre no Setup do micro. Acione a opção “IDE HDD Auto Detection” ou similar como, em alguns setups, “Detect IDE” ou “Detect Hard Disks”.

O Setup reconhecerá o tipo de seu disco, que ocupará a posição de Primary Master (ou Slave caso seja o 2º disco). Salve a configuração.
Agora, no prompt do DOS (se você estiver instalando o primeiro HD, deverá ter uma cópia dos arquivos de sistema, do Format e do FDisk em disquete), rode o programa FDisk para criar as partições do disco.
Ao entrar no programa:
Alterar a Unidade de Disco Fixo Atual. A numeração depende da unidade física a ser particionada. Caso seja o primeiro disco, use 1. Se for o segundo, use 2 (Figura 177, opção 5).
• Criar Partição do DOS, mesmo se você utiliza o Windows 95 (Figura 177, opção 1).
• Criar Partição Primária. Item obrigatório já que o disco ainda não tem partições (Figura 178 , opção 1).

• Utilizar tamanho máximo disponível? Responda sim à pergunta. Entre com o tamanho em MB ou percentual do espaço em disco para criar a partição. Em caso de dúvida, utilize 100%. Leve em conta que em FAT16, uma partição não pode ser maior que 2 GB.
Após completado o processo, reinicie o computador.
Volte ao FDisk e selecione a opção Exibir Informações de Partição para conferir se obte-ve sucesso.Para instalar outra partição de outro disco, escolha a opção “Alterar a unidade de disco fixo atual” e preencha com a numeração apropriada. Se a partição a ser criada for do mesmo disco (da mesma unidade física), não execute esse passo.
Volte a tela principal e selecione a opção Criar Partição de DOS.
Caso queira criar a partição primária de outro disco, use a opção Criar Partição Primária. Se for criar outra partição para uma mesma unidade física, ative a opção Criar Partição Estendida. Siga os passos anteriores.
Para terminar, formate cada partição usando o comando Format. Seus discos estarão prontos para receber dados. (Para dúvidas quanto ao uso do Fdisk e do comando Format veja capítulo 12 – MS-DOS)
10.2.11 - Interface dos Discos Rígidos (HD)
Os tipos de HD mais comuns são: EIDE e SCSI. Os tipos de EIDE são os mais simples (mais limitados) e mais utilizados (mais baratos). O padrão SCSI é o mais utilizado em servidores de rede e sistemas com grande acesso a disco rígido necessitando porém de uma placa específica e podendo controlar até 7 periféricos diferentes (scanners, CD-ROMs, Hard-disk).
Podemos utilizar esta placa em conjunto com a IDE e no Setup da máquina não indicamos a existência do HD SCSI pois a placa tem BIOS própria. Cada periférico SCSI tem um identificador que vai de 1 até 7 configurado por jumpers no dispositivo e não podemos ter dois dispositivos com o mesmo identificador.
A interface EIDE tem um canal primário e um secundário. Cada canal pode conectar até 2 acessórios. Em um canal EIDE, os 2 acessórios revezam no controle do barramento. Se existir um HD e um CD-ROM no mesmo canal, o HD terá de esperar enquanto a requisição do CD-ROM não tiver terminado. Como o CD-ROM é relativamente lento em relação ao HD, há uma redução na performance. Deve-se portanto conectar o CD-ROM no canal secundário e o HD no canal primário. Os novos drives CD-R (gravadores de CD-ROM) já estão adotando a interface EIDE para sua ligação com o sistema. Os CD-R mais antigos utilizam interface SCSI.
Alguns tipos de discos rígidos ainda utilizados e com interfaces mais antigas, ST-506 e ESDI estão fora de uso devido a algumas limitações técnicas impedindo o seu desenvolvimento. O padrão ST 506 só permite hard-disk com no máximo 140MB e a ESDI também não tornou-se um padrão de mercado.
10.2.12 - Ligação dos fios do gabinete à placa-mãe
Identificados os fios do gabinete, devemos ligá-los:
• (+) indica existência de polaridade!• Turbo Led (dois pinos, fio vermelho ou amarelo +).• Turbo Switch (dois pinos sem polaridade).• Reset (idem).• Keylock e Power Led Conector (5 pinos) • pino 1 - Led Power (+) (ligar fio Power Led no 1 e 3).• pino 2 - Não usado.• pino 3 - Terra.• pino 4 - Inibe teclado (ligar fio da chave do teclado no 4 e 5).• pino 5 - Terra.• Speaker Conector (4 pinos)• pino 1 - Terra (ligar fio do falante no 1 e 4)

• pino 2 - Não usado• pino 3 - Não usado• pino 4 - 5VDC
10.2.13 - Preparação do Display
A indicação do número do display deve ser programada de acordo com o manual do gabinete para velocidades em modo turbo e normal. O chaveamento dos números nos displays é fornecido pelo sinal Turbo Led da motherboard. Ao contrário do que se pode pensar, o display do gabinete apenas é um indicativo do clock do microcomputador e não exerce controle sobre a motherboard (nos computadores atuais, geralmente o display está ausente).
10.2.14 - Ligando o Equipamento e Verificando o Funcionamento
Os seguintes passos devem ser tomados antes de se ligar o equipamento:
1. Muito cuidado com o gabinete, pois mesmo se ele não contiver um HD deve-se ao máximo evitar choques e outros danos. O HD é um mecanismo de precisão e muito sensível.
2. No painel traseiro do gabinete temos as seguintes saídas (mais comuns):
• Saídas paralelas (LPT1 e LPT2) em micros com monitores CGA.• Saídas seriais (COM1 e COM2). Podemos ter com os conectores DB9 (9 pinos) ou DB25 (25 pinos).• Saída de game para joystick.• Saída de vídeo (CGA / VGA / SVGA).• Plug fêmea para conexão do teclado.• Tomada de força (fêmea) para ligação do monitor (junto com a fonte).• Tomada de força (macho) para cabo de força tripolar.• Saídas diversas se houverem placas opcionais (USB, PS2, SCSI, RJ11, RJ45 entre outros).
3. Conectar o teclado ao plug atrás do gabinete. Em alguns gabinetes este plug poderá estar na parte frontal.
4. Conecte o cabo lógico (cabo de sinal do monitor) à saída de vídeo do computador.
Estes conectores têm uma forma trapezoidal que só encaixa de uma única maneira.
5. Ligar o monitor (cabo de força) na tomada junto a fonte do gabinete. Caso as tomadas sejam diferentes o monitor poderá ser conectado diretamente a outra fonte que alimenta o microcomputador (muito aconselhável ter um estabilizador de voltagem).
6. Verificar se a tensão da rede é a mesma do microcomputador. É muito importante a utilização de um estabilizador ou uma proteção para o equipamento. Evite ligá-lo diretamente a rede elétrica e certifique-se que esta rede elétrica esteja devidamente alterada.
7. Conectar o cabo de força do gabinete a energia elétrica. Os dois terminais deste cabo também só se encaixam de uma única maneira.
10.2.14.1 - Teste Inicial ao Ligar
Quando o computador é ligado, a CPU passa a realizar vários testes para verificar se tudo está OK. Estas rotinas de verificação (programas) estão armazenadas na BIOS. Se algo estiver errado a CPU nos informará com diferentes tipos de beeps. O tipo do beep dependerá da BIOS que estiver na motherboard. Este procedimento é chamado de POST (Power On Self Test). Descrição passo a passo deste teste:
a) Quando o computador é ligado a CPU passa a rodar um programa armazenado permanentemente num determinado endereço o qual aponta para a BIOS (Basic Input/ Output System) em ROM.b) A CPU envia um sinal ao BUS de dados para certificar se tudo está funcionando.c) É o teste das memórias e aparece um contador no monitor.d) A CPU checa se o teclado está conectado e verifica se nenhuma tecla foi pressionada.e) É enviado um sinal através do BUS de dados para verificar quais os tipos de drives estão disponíveis.f) Logo após o micro está pronto para iniciar o BOOT.
No caso da BIOS ser AMI, teremos sinais sonoros caso ocorra algum problema descrito na tabela abaixo:

Para 1, 2 ou 3 beeps verifique se os pentes de memória estão bem encaixados ou remova-os e encaixe-os novamente. Se o erro persistir, troque os pentes por pentes que tenha certeza que não possuem defeito.
4, 5, 7 ou 10 beeps, verifique o processador ou a placa-mãe.
6 beeps, verifique o teclado ou troque-o, para placas mais velhas, pode ser a bios controladora do teclado.
8 beeps, troque a placa de vídeo ou os pentes/chips de memória da placa de vídeo.
9 beeps, pode ser um erro que não pode ser corrigido, devendo-se trocar a placa-mãe ou tentar um upgrade de bios, a fim de corrigir o problema.
Se nenhum beep for ouvido e ainda assim não houver sinal na tela do monitor, verifique a alimentação de energia elétrica ou se os leds do gabinete estão acendendo, se sim, há passagem de corrente.
Inspecione a placa-mãe por componentes esquecidos, como CPU, chip da BIOS, Oscilador de cristal, ou algum outro chip, que farão com que a placa não funcione.
Elimine todas as possibilidades de interferência por uma placa com problema, removendo todas exceto a de vídeo. Insira-as de volta uma a uma verificando a inicialização até que o problema retorne e, quando acontecer, a última placa que foi posta é a geradora do problema.
Se nada disso funcionar, o problema pode estar na placa-mãe, que deve pode estar queimada ou com algum componente danificado.
Os erros reportados pela BIOS na tabela são FATAIS, ou seja, o sistema não pode ser utilizado. Os dois erros abaixo independem do funcionamento do micro:
• 1 longo, 3 curtos - Falha no teste de memória estendida• 1 longo, 8 curtos - Falha no teste do monitor
10.2.14.2 - Mensagens de erro mais freqüentes
Mismatch CMOS e Checksum failure Configuration - neste caso, algum parâmetro descrito na CMOS não é condizente com o sistema. Acesse a CMOS e verifique os dados nela contidos.
HDD ou FDD Failure - quando esta mensagem ocorre, os motivos que levam o drive a não funcionar podem ser três: o cabo de ligação do drive está mal conectado ou partido; o cabo de alimentação do drive, que sai da fonte, também possui defeito ou está mal conectado e, por último, seu drive não foi citado ou citado incorretamente na CMOS.
Parity error - quando ocorre tal descrição, mais de uma memória apresenta defeito. E outro caso, a placa-mãe poderá estar defeituosa.
Non-system disk or disc error - pode ser que você esteja com um disco sem sistema no drive

A:/ ou ocorreu algum problema de forma que seu disco rígido tenha perdido o S.O. verifique esta possibilidade, e tome as medidas necessárias.
Bad address 1005B-B00CFH - mais uma vez o problema se refere à memória. A má conexão pode ser resolvida com um aperto no soquete/slot, caso não resolva, ou mesmo estando as memórias bem conectadas, experimente uma limpeza antes de tomar uma atitude mais drástica.
No Rom Basic - este tipo de erro requer a utilização de um programa específico para instalação de drive. Neste caso, é comum o utilitário tentar resolver. Este tipo de programa pode ser indicado pelo fabricante do disco rígido, ou pode ser encontrado no site do fabricante.
Sector not found / Unrecoverable error - o disco em uso apresenta problemas que podem se tornar irreversíveis. Para evitar maiores danos, lance mão de aplicativos de recuperação, um dos mais conhecidos e eficazes é o Norton Utilities.
Quando ligamos o computador devemos ter primeiramente a mensagem do chipset da placa de vídeo e o teste da memória DRAM pela BIOS, onde aparecerá um contador no canto superior esquerdo da tela. Passado este teste devemos configurar a máquina pelo setup, isto é, dizer se na máquina temos drives, HDs e muitos outros parâmetros (vermanual da motherboard).
É muito importante a configuração correta do disco rígido em termos de número de cilindros, cabeças e setores. Se isto for feito incorretamente, o HD não será acessado ou trará problemas futuros.
É sempre recomendável colocar a configuração indicada no manual do HD. Isto porque os harddisks padrão IDE permitem várias configurações diferentes, desde que não ultrapassem o número máximo de setores permitido pelo HD. Muitas BIOS hoje em dia têm uma opção de auto-detecção dos valores do HD, cilindro, cabeças e setores. Use-a caso tenha alguma dúvida.
Normalmente as BIOS têm opções para coleção de senhas de proteção contra acessos não permitidos. O bom senso indica que se o usuário não utiliza o equipamento em locais com grande acesso de pessoas a colocação de uma senha apenas é um dado a mais que o usuário terá de lembrar. Além disso, caso esqueça a senha, terá que retirar a bateria interna para apagar os dados de configuração, usar o jumper para a limpeza da CMOS, tentar uma senha mestra (senha definida pelo fabricante da BIOS e que burla a senha definida pelo usuário) ou utilizar os comandos abaixo usando o programa DEBUG do DOS, basta digitá-los como se apresentam e depois reconfigurar o setup:
o 70 2e
o 71 ff
q
Coloque sempre um disquete nos drives A e B para verificar seu funcionamento. Um teste rápido e confiável é formatálos gravando o sistema operacional em questão com o comando: format a: (ou b:) /u/s.

10.2.14.4 - BOOT
Após o teste inicial do microcomputador (POST), entra o processo de BOOT do micro. Mas o que é o BOOT?
Para executar qualquer programa, antes de qualquer coisa precisamos carregar o sistema operacional desejado via disquetes ou pelo HD. O famoso BOOT nada mais é que uma verificação da BIOS do equipamento em busca de um programa que inicialize um sistema operacional. Este processo inicial está gravado na BIOS da motherboard onde existem as instruções básicas para ele começar a operar este programa que é lido pela CPU onde existe a instrução para leitura dos arquivos do sistema operacional (no MS DOS 6.2 são IO.SYS e o MSDOS.SYS) que estão gravados no primeiro setor do hard-disk ou do disquete colocado no drive A. Se um HD ou disquete estiverem com os primeiros setores danificados eles tornam-se inutilizáveis para carregar o sistema operacional.
No caso do MS DOS podemos dizer que um disquete ou hard-disk é bootável quando ele contém os dois arquivos do sistema operacional já mencionados e mais um arquivo chamado COMMAND.COM. Este arquivo é lido e carregado na memória.
O arquivo COMMAND.COM está divido em 3 partes. A primeira parte contém instruções de entrada e saída. A segunda parte comandos internos dos sistema operacional, como por exemplo, DIR, COPY, etc... A terceira parte contém instruções para leitura de arquivos batch como o arquivo AUTOEXEC.BAT.
Outro arquivo chamado CONFIG.SYS irá configurar a maneira como o computador irá trabalhar com alguns parâmetros (FILES BUFFERS, drives virtuais, CD-ROM, gerenciadores de memória, etc).
Podemos dizer que o BOOT nada mais é que um processo básico que o microcomputador realiza para carregar qualquer tipo de sistema operacional.
Quando carregamos um S.O. o kernel deste fica normalmente residente em memória. Kernel é o núcleo do S.O. O que nos apresenta no monitor é o SHELL, que no caso do MS DOS nos é dado pelo já mencionado arquivo COMMAND.COM.
Alguns sistemas operacionais fornecem vários tipos de shell, como as versões do UNIX, cada uma prestando-se melhor a uma determinada função.
11 - MANUTENÇÃO
Entendemos como manutenção todo procedimento feito em um micro como forma de mantê-lo em perfeito funcionamento. Podemos definir, a princípio, dois tipos de manutenção: a Manutenção Preventiva e a Manutenção Corretiva.
Neste momento, por ser um dos mais difundidos sistemas operacionais dentro do mercado de softwares, tomaremos o Windows 98 como nosso parceiro neste trabalho e mostraremos aqui alguns recursos deste sistema para manutenção e alguns aplicativos que usaremos nesta tarefa.
11.1 - MANUTENÇÃO PREVENTIVA
Dentro de manutenção preventiva podemos citar alguns procedimentos necessários no dia-a-dia de qualquer usuário. Em primeiro lugar, os cuidados com as memórias de massa (HD’s, fitas, discos flexíveis, zip’s e outros), devemos mantê-los sempre bem acondicionados. Estando em bom estado, ficará sempre mais fácil detectar se há problemas físicos e lógicos, como por exemplo, setores defeituosos nos discos, e/ou danos nas fitas, sabendo que estes estão bem cuidados, ficará fácil definir onde está o problema. É bom se ter o cuidado de guardar todos os manuais dos equipamentos pois sempre podemos

e devemos, por uma questão de bom senso, lançar mão deles em situações difíceis. Citaremos alguns programas usados para este tipo de manutenção e que podem inclusive, em alguns casos, corrigir pequenos problemas (manutenção corretiva).
11.1.1 - Manutenção Física
Não se sinta excessivamente cauteloso ao tomar determinados cuidados ao lidar com o micro, realmente todo componente da placa-mãe e das placas de expansão, são extremamente frágeis, e necessitam de cuidados, nunca se esqueça dos cuidados com a eletricidade estática, além de não instalar ou retirar periféricos com o micro ligado, caso isso não seja observado o toque em placas ou outros componentes poderá danificá-los, inutilizando-os definitivamente.
Muitos problemas podem ter sua origem no hardware, por mau contato das placas ou cabos ou mesmo por defeitos físicos nos componentes. Portanto, é uma boa prática verificar as conexões dos cabos externos antes de se abrir ou mesmo tentar solucionar o problema por software, pois por mau contato os dados podem não estar sendo transmitidos e/ou o dispositivo pode não estar sendo reconhecido pelo sistema operacional. É preciso observar se a chave 110/220 V está na posição correta e se a conexão com o estabilizador está de acordo.
O outro passo é testar as conexões dos cabos internos, retirando-os e conectando-os novamente (não se esqueça de confirmar a posição correta de encaixe). Com isso eliminamos os problemas de cabos encaixados incorretamente, lado incorreto não casando pino 1 com pino 1, e maus contatos. Um exemplo, se o flat cable do disco rígido estiver invertido, o micro não liga; outro exemplo, com o botão de reset travado o micro não liga, verifique também, portanto, os fios do gabinete. Caso encontre algum problema de mau contato, limpe os contatos das placas e dos módulos de memória, além dos slots, soquetes e conectores. Você poderá proceder da seguinte forma para limpá-los:
• Placas e módulos de memória - utilize uma borracha branca macia para limpar os contatos das placas. Tome o cuidado de não fazer isto próximo do micro.• Slots, soquetes e conectores - utilize uma escova de dentes (velha) embebida em álcool isopropílico.
Se estes testes não resolverem o problema, é preciso atacá-lo de outra forma: é preciso testar peça a peça num outro equipamento que saiba-se que esteja funcionando perfeitamente. Este procedimento agiliza a manutenção porque você não precisará colocar uma máquina com defeito para funcionar, apenas testará os seus componentes em outra que funciona, além de poder isolar as peças testando uma a uma. Caso coloque uma placa na outra máquina e ela não funcionar, esta placa está com problema. O mesmo pode ser feito com o disco rígido, memória, drives (CD, disquete, ZIP) e fonte de alimentação.
Se não houver um outro micro funcionando para fazer os testes, retire todos os periféricos do micro, deixando-o somente com a fonte de alimentação, placa-mãe, processador com ventoinha, memória e placa de vídeo. Se assim não funcionar, substitua um a um estes componentes para verificar qual deles está com defeito.
11.1.2 - Manutenção Lógica
A Manutenção Lógica visa detectar problemas de hardware e de software. Isto se dá através de programas do sistema operacional (Ferramentas de Sistema) ou mesmo outros programas de diagnóstico como Norton Utilities, PC Check, entre outros.
Na pasta Ferramentas de Sistema do Windows 98 temos 5 programas que são úteis numa manutenção lógica: Assistente para Manutenção, Backup, Desfragmentador de disco, Limpeza de disco e Scandisk. Um outro programa essencial que deve estar instalado em toda máquina é o antivírus.
11.1.2.1 - Backup
O Backup (cópia de segurança) visa restaurar o sistema depois de algum “desastre”. Caso você tenha perdido algum arquivo que foi feito Backup ou tenha apagado algum arquivo de sistema e não os recuperou a tempo da lixeira, você pode recuperá-lo do Backup. É preciso lembrar que o Backup recupera o arquivo que foi feito Backup, caso tenha sido feita alguma alteração no arquivo após o Backup, esta alteração não estará presente na recuperação.
Quando trabalha-se com dados muito importantes ou arquivos muito grandes devese ter o costume de se fazer Backup com freqüência, principalmente quando existem problemas de energia elétrica em seu bairro (quedas freqüentes de energia, picos). Este Backup pode ser feito apenas copiando-se este arquivo para um zipdrive, um cd-rw ouum outro micro da sua rede, pois assim evita-se ter que refazer todo o trabalho da geração do arquivo.

11.1.2.2 - Limpeza de disco
Você pode executar a Limpeza de disco para liberar espaço na unidade de disco rígido. É feita uma pesquisa na unidade escolhida (Figura 180) e, em seguida, é exibida uma relação dos arquivos temporários, dos arquivos de cache da Internet e dos arquivos de programas desnecessários que podem ser excluídos com segurança (Figura 182). O espaço disponível após a limpeza é calculado.
O utilitário Limpeza de disco ainda possibilita a remoção de componentes opcionais do Windows (como por exemplo Suporte Multilíngue, Ferramentas e Opções de Acessibilidade, Acessórios), programas que não estejam sendo utilizados e possibilita, também, a conversão da unidade para FAT 32, gerando mais espaço em disco (Figura 183).
É possível fazer com que a Limpeza de disco seja feita automaticamente quando o disco rígido apresentar pouco espaço disponível (Figura 181). Basta clicar no item (único) contido na pasta Configurações. Isso fará com que o usuário seja informado de que o disco contém pouco espaço e poderá, naquele momento, executar a limpeza.
11.1.2.3 - Scandisk
Este aplicativo tem a característica de verificar se há qualquer tipo de erro em seu disco, ou se há arquivos corrompidos, isto pode acontecer em qualquer queda de energia, ou se desligarmos de forma indevida nosso micro, tudo isso pode causar perda e danos na estrutura do Windows, ou no disco rígido. Como nem sempre lembramo-nos de executálo para fazermos as verificações que deveriam ser rotina. Você pode tomar como medida ativá-lo pelo seu autoexec.bat, com as seguintes características:
scandisk /all /nosummary /autofix /surface
Desta forma ele verificará todos os discos rígidos existentes, não lhe dará as mensagens de erros possíveis, corrigirá todos os erros automaticamente e fará uma varredura no disco para verificar possíveis blocos danificados e os marcará para não serem usados no futuro. Quando o sistema Windows cai por problemas de queda de energia ou mesmo quando você desliga seu micro de forma incorreta, o win98 executa uma varredura nos discos usando o Scandisk. Mas este procedimento deve ser feito pelo menos uma vez por semana.
Quando iniciamos o Scandisk sua configuração inicial é padrão, ou seja, ele fará as verificações de rotina no disco. Podemos mudar para um verificação mais completa simplesmente mudando o tipo de teste de padrão para completo (Figura 184),

depois podemos mudar as alternativas na caixa Opções (Figura 185), onde temos o seguinte:
• Áreas de sistema e de dados: Será feito testes em todos os arquivos do disco, sem distinção de tipo de arquivo, aplicativos, arquivos de dados, e ou de sistemas.
• Área de sistema: Os testes somente serão feitos em arquivos de sistema, não sendo desta forma verificados outros arquivos.
• Área de dados: Somente os arquivos de dados serão verificados.
Clicando no botão Avançado (Figura 184), podemos modificar algumas funções importantes como, por exemplo:
• Fragmentos de arquivo perdido. Fragmentos de arquivos danificados podem ser recuperados. Se liberar, perderemos estes arquivos ou fragmentos de arquivos, que na maioria das vezes estão corrompidos ou inutilizáveis.• Arquivos com referência cruzada, melhor excluir.• Verificação de nomes e datas inválidas bem como nomes duplicados.
As demais opções são somente informações de retorno de problemas; acabam por tomar muito tempo e tornar a verificação mais lenta.
11.1.2.4 - Defrag
Este aplicativo tem como principal característica o rearranjo dos arquivos no disco. Quando se grava algum arquivo no disco, o sistema vai gravando os dados nos primeiros locais disponíveis que encontrar mesmo que não sejam contínuos, uma parte em um bloco outra em outro bloco, usando as vezes apenas partes de um bloco, com isto nosso disco fica completamente fragmentado, com partes de um arquivo no início outras no meio e outras no fim. A grosso modo, o que o defrag faz é juntar todas as partes do arquivo em blocos seqüenciais, desfragmentando o disco dessa forma, que passa a ficar mais rápido e melhor utilizado.

Assim que é ativado o defrag pergunta qual unidade deverá desfragmentar, o ideal seria desfragmentar todas as unidades, mas caso não seja possível, deve-se pelo menos desfragmentar a unidade onde está o sistema operacional e seus aplicativos.
A Figura 187 nos mostra o aplicativo desfragmentando o disco rígido C:/, temos as opções Pausa que pára a desfragmentação por instantes, podemos usá-la para fechar algum aplicativo que esteja ativo. A opção MostrarDetalhes nos mostra um gráfico (Figura 189) da desfragmentação que está sendo feita no disco, mostrando a reorganização dos blocos/agrupamentos.
Conforme podemos analisar pela caixa de legenda, a medida que o disco vai se desfragmentado os cluster vão assumindo novas cores, sempre de acordo com sua categoria atual, a medida que os dados vão mudando de lugar no disco, os espaços livres, os blocos danificados vão assumindo nova posição à medida que o disco vai sendo desfragmentado.

11.1.2.5 - Sfc - System File Checker (Verificador de arquivos do sistema)
Você pode utilizar o ‘Verificador de arquivos do sistema’ para verificar a integridade dos arquivos do sistema operacional, para restaurá-los se estiverem corrompidos e para extrair arquivos compactados (como drivers) dos discos de instalação.
O ‘Verificador de arquivos do sistema’ pode fazer um backup dos arquivos existentes antes da restauração dos arquivos originais. Você pode também personalizar os critérios de pesquisa com base na extensão do arquivo e da pasta.
Para abrir o aplicativo siga os seguintes passos:
01 - Clique no botão Iniciar.02 - Escolha a opção executar.03 - Digite “sfc” e clique em ok.
A opção “Procurar arquivos alterados”, executa uma leitura de todos os arquivos que pertencem ao sistema operacional e verifica se existe algum arquivo corrompido. Caso seja encontrado algum arquivo com problema ele será recuperado a partir dos discos de instalação do Windows.
Também temos a opção de recuperar um arquivo específico, sem a necessidade de utilizar a busca automática. A opção “Extrair um arquivo do disco de instalação” permite que especifiquemos apenas um arquivo pelo nome, e esse arquivo

será pesquisado nas bibliotecas de arquivos de instalação do Windows, no caso os arquivos com a extensão “cab”.
Para extrair arquivos do sistema de seus discos de instalação:
01 - Abra o Verificador de arquivos do sistema.02 - Clique em Extrair um arquivo do disco de instalação.03 - Digite o nome do arquivo em Arquivos a serem extraídos ou clique em Procurar.04 - Clique em Iniciar.05 - Em Restaurar de, digite o nome da pasta na qual os arquivos cab estão localizados. Se necessário, altere o caminho em Salvar o arquivo em.06 - Clique em OK.07 - Após o arquivo estar restaurado aparecerá a seguinte tela.
11.1.2.6 - Assistente para manutenção
Este assistente é útil quando pretende-se otimizar o desempenho da máquina através da execução do defrag e do scandisk regularmente. O Assistente para manutenção funciona como um agendador de tarefas para os aplicativos citados além do aplicativo limpeza de disco, que elimina arquivos duplicados ou inúteis. O aplicativo inicia (Figura 193) com duas opções: Executar a manutenção agora, neste caso ele usará as opções padrão do Windows 98, ou Alterar minhas configurações de manutenção ou agenda, que nos permite configurar o assistente para uma manutenção aprimorada.

Deve ser selecionada a opção que mais convier em termos de horário, é necessário ter bom senso, pois não adianta configurar o micro para fazer este trabalho em um horário em que ele estará desligado.
Com o Assistente para manutenção podemos evitar a inicialização de alguns programas além de podermos agendar e configurar a desfragmentação do disco (defrag), a verificação por erros no disco (scandisk) e ainda a exclusão de arquivos desnecessários, duplicados, temporários, arquivos antigos do scandisk entre outros que apenas ocupam espaço no disco.

Finalmente, após todas as configurações é iniciada a manutenção efetivamente, será feita uma varredura no disco em busca de arquivos perdidos, duplicados, temporários, entre outros desnecessários. Logo em seguida, é dado início à desfragmentação do disco para após ser feita a verificação em busca de erros utilizando-se o scandisk.
11.1.2.7 - Limpeza manual
Depois de ter seguido os passos descritos acima, o micro estará praticamente otimizado, porém no dia-a-dia, o disco rígido fica cheio de lixo, o que acontece sempre que usamos programas como o Word, que geram arquivos temporários, ou quando instalamos algum programa, que por ventura tenha como procedimento normal fazer modificações nos arquivos de configuração do sistema operacional. Encontramos muitos programas no mercado que se apresentam como um excelente auxiliar para essas horas.
Faz-se necessário destacar aqui alguns dos inconvenientes que eles apresentam. É comum a esses programas apagar os arquivos tidos como duplicados ou sem vínculos, e ainda não usados. Isso pode ser uma verdadeira armadilha para usuários pouco experientes, pois estes programas costumam entender que um arquivo que não foi aberto à algum tempo seja um arquivo sem utilidade. Ou então, arquivos gravados no diretório do programa que você instalou, caso ele ache dois arquivos, um no diretório system do Windows e outro no diretório do seu programa, ele sugerirá que você apague um deles, isto pode fazer com que seu programa não funcione mais. Portanto para não correr riscos o melhor mesmo é fazer este serviço no velho sistema, ou seja manualmente. Podemos agir de duas formas, uma delas seria localizar todos os arquivos que podemos apagar sem medo, um exemplo destes arquivos são os temporários.
Como o nome diz, arquivos temporários são criados por programas para uso temporário e normalmente são apagados após o uso. Mas, infelizmente nem sempre isso ocorre. Por algum motivo - como, por exemplo, “congelamentos”, programas mal escritos, micro desligado incorretamente ou o usuário ter abortado alguma operação - os arquivos temporários continuam existindo, ocupando inutilmente espaço no disco rígido do micro. Os arquivos temporários começam com o símbolo “~”. Para localizá-los no Windows, faça o seguinte, no menu Iniciar, ative o item Localizar - Arquivos ou Pastas.
Na janela “Localizar: Todos os arquivos”, digite, no campo Nome, ~*.* Selecione os drives onde serão procurados os arquivos temporários. Pressione o botão localizar agora.
Após terem sidos localizados, observe que o Windows localizará todos os arquivos temporários do seus discos rígidos já que pedimos para fazer uma procura em todos os nossos discos rígidos. Agora que já temos um lista como todos os nossos arquivos temporários, podemos selecioná-los e apagá-los de uma só vez. Você seleciona da seguinte forma, clique no primeiro arquivo da lista, mantenha pressionada a tecla Shift, use então as teclas Page Down para selecionar página por página, ou a tecla End para selecionar até o fim.
Depois de selecionados, podemos apagar todos os arquivos. O inconveniente deste processo é o de haver algum aplicativo aberto e que esteja usando um dos arquivos temporários que estamos tentando apagar. Neste caso evitamos tentar apagar estes arquivos até que tenhamos fechado o aplicativo em questão.
Outro procedimento que podemos tomar é o de usar o autoexec.bat para fazer todo este trabalho, já que sabemos que a maioria dos arquivos temporários se armazenam no diretório temp do Windows, podemos simplesmente editar o arquivo Autoexec.bat e acrescentar as seguintes linhas:
SET TEMP=C:/WINDOWS/TEMP
IF EXIST C:/WINDOWS/TEMP/~*.*

DEL C:/WINDOWS/TEMP/~*.*
Observe que nossa sugestão não é a de você estar sempre fazendo as coisas no modo mais difícil, mas sim no modo mais seguro. Você pode e deve usar aplicativos para fazer determinados serviços, mas tenha sempre em mente todo o cuidado na hora de efetuar este tipo de limpeza. Você deve ser sempre seguro nas suas ações, para evitar aborrecimentos mais tarde.
11.1.2.8 - Winzip
Para se evitar problemas devido à falta de espaço em disco, utiliza-se um programa de compactação de arquivos.
O Winzip é um dos diversos programas de compactação de arquivos existentes no mercado, explicaremos aqui, um pouco do seu funcionamento.
O termo em inglês utilizado para designar arquivos que contêm outros é Archive. Na maioria das vezes os arquivos contidos em um Archive. estão na forma comprimida. Os arquivos com extensão .zip são o tipo Archive mais comum utilizado para comprimir e agrupar arquivos em microcomputadores.
11.1.2.8.1 - Porque são utilizados?
Os Archive oferecem dois grandes benefícios para transferência de arquivos:

—> Apenas uma única operação de transferência, “download”, é necessário para se obter todos os arquivos necessários, como por exemplo, para instalação de um aplicativo;
—> Os arquivos estão na forma comprimida, o que torna a transferência mais rápida, já que não precisamos, transferir arquivo por arquivo, selecionamos o arquivo que queremos transferir e fazemos download.
11.1.2.8.2 - Elementos da janela do WinZip
A janela do Winzip é composta por 5 elementos principais:
—> Barra de Título, que fornece o nome do Archive que esta sendo manipulado;—> Barra Menus, na qual oferece todas as opções disponíveis para se trabalhar com osarquivos;—> Barra de Tarefas, composta por ícones que possibilitam ao usuário efetuar a maior parte das operações sem utilizar os menus;—> Área principal da Janela, exibe informações sobre todos os arquivos que estão contidos no archive;—> Barra de Status, exibe o número e tamanho dos arquivos que estão selecionados,
11.1.2.8.3 - Compactando arquivos
Clique no ícone “New” da Barra de Tarefas. Navegue até o diretório em que se deseja criar o arquivo .zip. Digite o nome do arquivo .zip que se deseja criar (Ex.: doc.zip) e clique no botão “OK”.
Marque os arquivos que serão inseridos e clique em add, a compactação dos arquivos termina quando o ícone vermelho da Barra de Status se apaga e o ícone verde se acende.
Uma outra forma de se compactar arquivos é selecioná-los no Windows Explorer e clicar sobre eles com o botão direito do mouse, escolhendo a opção “Add do zip”, que abrirá uma tela do winzip, onde daremos um nome para o arquivo zipado, além de escolher o seu diretório.
11.1.2.8.4 - Visualizando arquivos
É possível visualizar arquivos dentro do arquivo .zip. Basta selecionar o arquivo e clicar no ícone “View”. Aparecerá uma janela para escolha do visualizador.
11.1.2.8.5 - Decodificando arquivos UUencoded
A Internet não foi projetada para transportar arquivos binários (programas e outros arquivos não-texto). Para resolver essa limitação, UUencoding e outros métodos de codificação foram criados.
O UUencoding converte arquivos binários em caracteres texto que o sistema de e-mail é capaz de transportar. A pessoa que recebe a mensagem deve então decodificá-la para recriar o arquivo original.
Abaixo podemos ver um exemplo de um arquivo Uuencoded:
begin 666 encoded.txt

M5&5S=”$-”@T*1V5N=&QE(%)E861E<CH-”@
T*5&AI<R!I<R!N;W1H:6YG(&UO
M<W0@9FEL92!C
5R
M(&9O<B!T:&4@=F%R:6]U<R!E;F-O9&
EN9R!S8VAE;65S+B!)9B!Y;W4@87)E
M(‘5S:6YG(&ET(‘1O(‘1E<W0L(&-O;F=R871U;&%T:6]N<R!O;B!Y;W5R(&%G
M:6QI=’D@:6X@8W5T=&EN9RP@<&%S=&EN9RP@<V%V:6YG+”!A;F0@9
&5C;V1I
:;F<@=7-I;F<@5VEN6FEP+@T*#0I%;FIO>2$‘
end
Para decodificar o arquivo:
Salve o conteúdo da mensagem em um arquivo texto com extensão .uue. Abra o arquivo que acabou de ser criado pelo Winzip como se fosse abrir um arquivo .zip. Na área de trabalho principal aparecerá o nome do arquivo codificado. Extraia este arquivo para o diretório de sua preferência. Feche o Winzip
11.1.2.8.6 - Compactação de Folders
Na compactação de folders no WinZip todos os arquivos do diretório corrente bem como toda árvore de subdirectórios é compactada.
11.1.2.8.7 - Compactando diretórios
Clique na ícone “New” da Barra de Tarefas. Navegue até o diretório em que se deseja criar o arquivo .zip. Digite o nome do arquivo .zip que se deseja criar (Ex.: doc.zip) e clique no botão “OK”.
Na janela “Add” certique-se que a opção “Recurse Folders” esteja selecionada. Clique no botão “Add With Wildcards”.
A compactação dos arquivos termina quando o ícone vermelho da Barra de Status se apaga e a ícone verde se acende.
11.1.2.8.8 - Descompactando diretórios
Siga o mesmo procedimento descrito no item “Extraindo Arquivos”, certificando-se que o item “Folder Names” da janela “Extract” esteja selecionado.
</V%V:6YG+”!A;F0@9</W0L(&-O;F=R871U;&%T:6]N<R!O;B!Y;W5R(&%G</B!T:&4@=F%R:6]U<R!E;F-O9&</R!I<R!N;W1H:6YG(&UO
11.1.3 - Cuidados com vírus
11.1.3.1 - O que são vírus de computador?
São programas desenvolvidos para alterar nociva e clandestinamente softwares instalados em um computador. Eles têm comportamento semelhante ao do vírus biológico: multiplicam-se, precisam de um hospedeiro, esperam o momento certo para o ataque e tentam se esconder para não serem exterminados. Estão agrupados em famílias (BOOT, arquivo e programa), com milhares de variantes.
11.1.3.2 - Como os vírus de computador se propagam?
Os vírus de propagam por meio de disquetes e de arquivos compartilhados, pelas redes corporativas, por arquivos anexados em mensagens de correio eletrônico e pela Internet. A rede mundial é hoje a principal via de propagação dos vírus - principalmente os de macro e os chamados “cavalos de Tróia” -, pois ela permite que os usuários de computador façam download de vários programas e arquivos de fontes nem sempre confiáveis.
11.1.3.3 - Como os vírus são ativados?
Para ativar um vírus, é preciso rodar (executar) o programa infectado.
Quando você executa o código do programa infectado, o código do vírus também é executado e tentará infectar outros programas no mesmo computador e em outros computadores conectados a ele por rede.
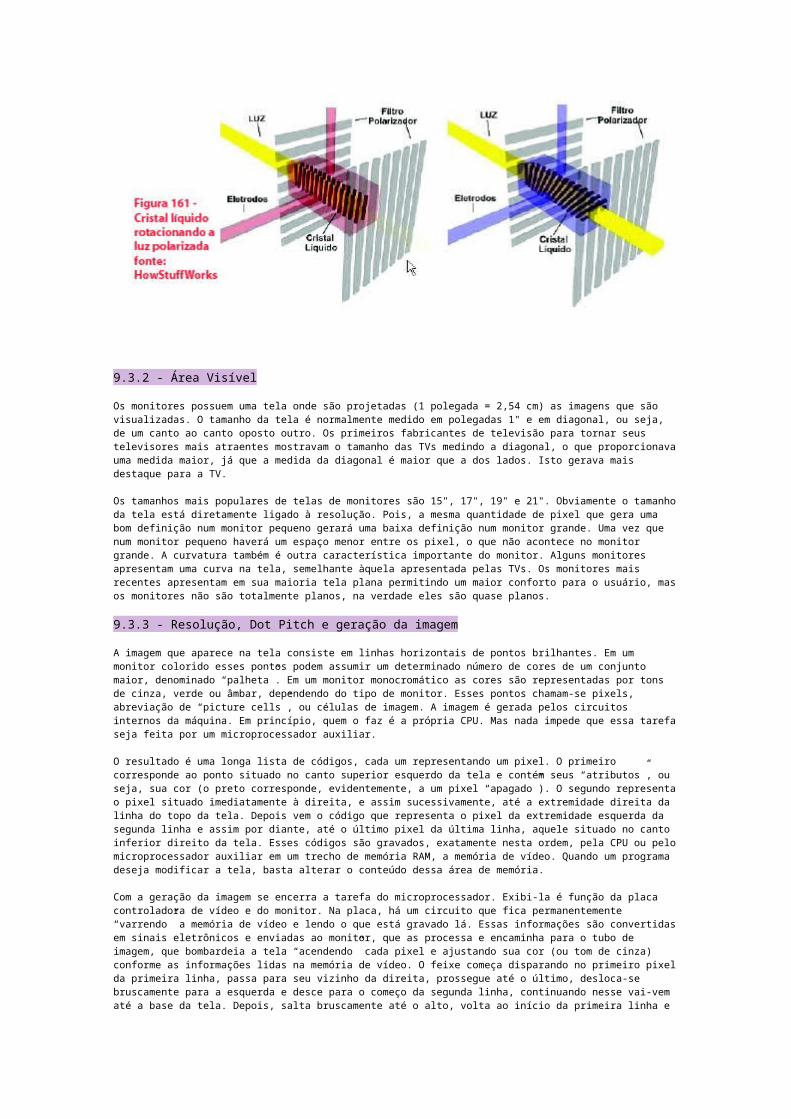
11.1.3.4 - Que tipos de arquivo podem espalhar vírus?
Todo o arquivo que contém códigos executáveis podem espalhar vírus (.exe, .sys, .dat, .doc, .xls etc.). Os vírus podem infectar qualquer tipo de código executável. Por exemplo: alguns vírus infectam códigos executáveis no setor de boot de disquetes ou na área de sistema dos discos rígidos.
Outros tipos de vírus, conhecidos como “vírus de macro”, podem infectar documentos que usam macros, como o processador de textos Word e a planilha de cálculos Excel. Macros são códigos utilizados para automatizar tarefas repetitivas dentro de um programa.
Arquivos de dados puros estão seguros. Isso inclui arquivos gráficos, como .bmp, .gif e .jpg, bem como textos em formato .txt. Portanto, apenas olhar arquivos de imagens não provocará a infecção do computador com um vírus.
11.1.3.5 - O que são hoaxes?
São boatos espalhados por mensagens de correio eletrônico, que servem para assustar o usuário de computador. Uma mensagem no e-mail alerta para um novo vírus totalmente destrutivo que está circulando na rede e que infectará o micro do destinatário enquanto a mensagem estiver sendo lida ou quando o usuário clicar em determinada tecla ou link. Quem cria a mensagem hoax normalmente costuma dizer que a informação partiu de uma empresa confiável, como IBM e Microsoft, e que tal vírus poderá danificar a máquina do usuário. Desconsidere este tipo de mensagem.
11.1.3.6 - O que são cavalos de Tróia?
São programas aparentemente saudáveis que carregam escondido o código de um vírus. Por exemplo: você faz um download do que pensa ser um joguinho legal, mas quando executa o programa, ele apaga arquivos de seus disco rígido ou captura a sua senha da Internet e a envia por e-mail para outra pessoa.
11.1.3.7 - O que são vírus de e-mail?
Não existem vírus de e-mail. O que existem são vírus escondidos em programas anexados às mensagens enviadas por e-mail. Você não infecta seu computador só de ler uma mensagem de correio eletrônico escrita em formato texto (.txt). Mas evite ler o conteúdo de arquivos anexados sem antes certificar-se de que eles estão livres de vírus. Salveos em um diretório e passe um programa antivírus atualizado. Só depois abra o arquivo.
11.1.3.8 - O que fazer para evitar os vírus?
Existem vacinas para os vírus de computador. São os softwares antivírus, que podem ser usados também como um antídoto em máquinas já infectadas. Existem vários programas no mercado, que são atualizados constantemente. Antes de comprar um ou baixar uma versão da Internet, verifique se o software é certificado pelo ICSA (International Computer Security Association), uma entidade mundial que testa e aprova a qualidade dos softwares antivírus e de outros programas de segurança.
11.1.3.9 - Onde obter mais informações sobre vírus?
A Internet também oferece sites recheados de informações sobre vírus e com dicas de prevenção e proteção. É possível encontrar softwares antivírus gratuitos, suporte on line 24 horas e até diagnóstico à distância. Mas, infelizmente, a maioria das informações está em inglês. Aqui vão alguns endereços:
http://www.icsa.net/html/communities/antivirus/certifiedproducts.shtml
International Computer Security Association Virus Lab: traz a lista de programas antivírus certificados pela entidade, a lista de vírus existentes e a descrição de como atuam, alertas sobre novos vírus, informações sobre hoaxes e links para sites sobre vírus. É o mais completo site sobre vírus de computador.
http://www.metro.ch/avpe
AVP Virus Encyclopedia: glossário, classificações de vírus de computador, métodos para detecção e remoção de vírus e lista de vírus.
http://www.symantec.com/avcenter/index.html
Antivirus Research Center: centro de pesquisa sobre vírus da Symantec, fabricante do Norton Antivírus. Traz informações sobre como agem os vírus, quais são os mais nocivos e glossário de termos técnicos.
http://www.icsalabs.com/html/communities/antivirus/macintosh/archives/macvirus/index.html
Mac Virus: novidades, ajuda, informações sobre antivírus e referência para usuários de Macintosh.
http://br.mcafee.com/virusInfo/default.asp?id=glossary
Virus Info Library: biblioteca de vírus da Network Associates, fabricante do VirusScan. Traz informações sobre vírus (alertas,

nomes, tipos), hoaxes e documentação técnica.
http://www.antivirus.com
Trend Micro: a fabricante do antivírus PC-cillin é a única a disponibilizar um serviço on line gratuito para detecção de vírus, batizado de Housecall. O internauta clica no símbolo da ambulância, espera alguns segundos, indica que disco (HD, CD ou disquete) ou arquivo deve ser verificado e espera pelo check-up. Se for encontrado algum vírus, o Housecall faz a limpeza do arquivo. Traz também enciclopédia, calendário e um guia sobre vírus para iniciantes.
http://ca.com/
Virus Information Center: site da Computer Associates, fabricante do antivírus Innoculan. Traz informações sobre vírus, hoaxers e uma seção que ensina como agir quando o micro é infectado por um vírus.
http://www.vmyths.com/
Computer Virus Mythus: este site mantido pelo analista de segurança de rede Rob Rosenberger trata das verdades e das mentiras a cerca dos vírus de computador. traz uma lista completa com os vírus-boatos (hoaxes), traz alertas de vírus, dá dicas para reconhecer e-mails que circulam falando de vírus descobertos ou enviados por “autoridades” no assunto e opinião de experts no assunto.
11.2 - MANUTENÇÃO CORRETIVA
A manutenção corretiva acontecerá quando o micro apresentar problemas, por causas inicialmente desconhecidas, nestes casos agiremos de forma a tentar identificar e corrigir o problema. Os passos e alguns programas utilizados na manutenção preventiva podem ser úteis quando da correção e também podem evitar danos maiores.
A maior parte dos problemas está relacionada com a interface hardware/software, ou seja os drivers. Drivers são pequenos programas carregados em memória que “ensinam” ao sistema como trabalhar com um determinado periférico. Todo dispositivo gerenciado pelo Sistema Operacional precisa de um driver e se ele não é fornecido no momento da instalação é porque o Sistema Operacional já possui o driver daquele dispositivo. Quando o driver é incorreto ou é muito antigo para o dispositivo, acontecem os problemas. A solução neste caso seria reinstalar o driver do dispositivo, ou o software que faz acesso a ele (pois esses geralmente possuem os drivers). Uma gama de drivers podem ser encontrados em sites como Winfiles (www.winfiles.com), DriverZone (www.driverzone.com), Drivers HQ (www.drivershq.com), ou mesmo no site do dispositivo, como para impressoras e scanners na página da Hewllet Packard (www.hp.com), Lexmark (www.lexmark.com), fax-modem na USRobotics (www.usr.com) entre outros.
Outro gerador de problemas são as bibliotecas de vínculo dinâmico, os arquivos com a extensão DLL. Estes arquivos possuem rotinas executáveis para serem carregadas somente quando necessárias ao programa que as chama. Um exemplo de DLL seria a janela executada em qualquer programa quando se clica no botão Abrir Arquivo. Estas bibliotecas podem ser do Windows e utilizadas por programas instalados ou podem ser dos próprios programas. Quando um desses arquivos está corrompido ou funcionando incorretamente, encontramos diversos problemas na execução dos programas resultando em travamentos no Windows. Uma forma de corrigir isto seria a reinstalação do programa que está gerando os travamentos, caso a DLL problemática seja dele. Se não resolver, outro passo seria a reinstalação do próprio Windows, a fim de se recuperar o arquivo danificado.
Desinstalações incorretas também podem resultar em problemas. Quando um programa é instalado no computador, ele copia para o disco rígido diversas DLL e drivers que ele precisará para funcionar. Para desinstalar este programa é preciso apagar todos os arquivos que ele copiou para o disco além de limpar as entradas no Registro do Windows (Registry), é o que fazem os programas desinstaladores ou o próprio Windows quando utilizado para a desinstalação. Se o usuário simplesmente apagar o diretório onde o programa foi instalado isso poderá resultar em erros de execução pois alguma rotina do Windows pode ter sido associada àquele programa e assim a execução incorrerá em erro pois o arquivo necessário não foi encontrado.
A forma correta de se desinstalar um programa é utilizando o próprio desinstalador do programa, geralmente são arquivos chamados Uninstal.exe, Desinstalar.exe, ou outros quando existir. Para desinstalar a partir do Windows, basta usar a opção Adicionar ou Remover Programas do Painel de Controle, escolher o programa em questão e clicar no botão Adicionar/Remover. Nestes dois casos a desinstalação remove o que for necessário para que o sistema volte a funcionar como antes, evitando dores de cabeça com os travamentos.
11.2.1 - Resolução de problemas no Windows
O que você faz quando o Windows começa a comportar-se estranhamente? (Exatamente no momento após você golpear a mesa e gritar na frente do micro?) Existem diversas coisas que podem acontecer como travamentos, congelamentos, mensagens de erro, interrupção na execução de programas e a temida Tela Azul da Morte.
Geralmente, diante de um problema do Windows, as pessoas passam por diversas caixas de diálogo na esperança de tropeçar com a solução. Ao invés disso, o interessante é usar uma estratégia para a resolução dos problemas que aparecerem. A lista seguinte pode ser um bom referencial na solução deste tipo de problemas:
11.2.1.1 - Verifique os cabos e conectores
Um bom mecânico, enquanto conversa com o cliente para saber qual o problema, vai verificando uma a uma as conexões dos cabos do motor, verifica o cabo da bateria, vai apertando um a um os cabos do distribuidor. Nestes “apertos” o

problema que levava o carro a não ligar já pode ter sido resolvido. E isto é o que acontece na maioria das vezes. Com os computadores, não muda. Antes de perder muito tempo tentando detectar o problema, verifique todas as conexões do hardware, todos os cabos, inclusive as conexões óbvias. Veja se cada cabo está conectado com certeza. Pois algum cabo mal encaixado ou com mal contato pode passar despercebido. O mesmo acontece com os conectores, principalmente no caso de placas com componentes onboard, pois um par de pinos pode ter ficado de fora do conector e não são percebidos numa olhada rápida. Interessante utilizar uma pequena lanterna para iluminar conector a conector para verificar sua ligação.
11.2.1.2 - Isole o problema, se possível
Se o sistema trabalhou bem na última semana mas apresentou problemas nesta semana, tente identificar tudo o que foi mudado recentemente. Foi instalado algum hardware ou software novo? Algum driver de dispositivo foi atualizado? Tente desinstalar o software, remover o dispositivo de hardware, ou restaurar o driver antigo temporariamente, para ver se o problema persiste. Se conseguir reproduzir a geração do problema, você estará mais próximo da solução.
11.2.1.3 - Use a Solução de Problemas do Windows
Se você estiver usando o Windows 98, Windows Millennium Edition ou o Windows 2000, o sistema de Ajuda inclui diversos assistentes que podem guiá-lo no processo passo a passo para a detecção do problema. Para isso clique no menu Iniciar e escolha Ajuda. Ao fim da pasta Conteúdo, clique em Solução de Problemas e escolha a situação que estiver vivendo ou descreva-a na pasta Índice, para uma busca mais direta (ver figura seguinte).
11.2.1.4 - Verifique o(s) disco(s) rígido(s)
É importante que o disco tenha sempre uma boa área de espaço livre. Muitos programas geram arquivos temporários enquanto estão executando, o próprio Windows faz isso. Além de programas de navegação que precisam de uma área para colocar os arquivos que estão sendo visualizados, entre outros casos. Caso o disco tenha um espaço livre muito pequeno ou nenhum:
a)Desinstale os programas que não têm utilidade ou que não estejam sendo utilizados.b)Faça a compactação dos arquivos que não estão sendo utilizados para liberar maisespaço.

c)Faça uma limpeza dos arquivos temporários e desnecessários (ver 11.1.2.7 - Limpeza Manual), logo após, limpe a lixeira.
Para verificar a quantidade de espaço livre em disco, pode ser utilizado o Windows Explorer ou o Meu Computador, clicando-se no ícone do drive de disco (C:, D:, ...) escolhendo Propriedades. É interessande também, executar os utilitários de disco como o Scandisk (em busca de erros) e o Defrag (para desfragmentação). Esses dois utilitários foram abordados na seção 11.1 - Manutenção Preventiva.
11.2.1.5 - Procure por vírus
Os vírus podem causar os mais terríveis e inesperados problemas na máquina. Tenha sempre à mão um bom programa antivírus e um disco de inicialização contendo o antivírus para ser rodado quando houver alguma suspeita de infecção por vírus. Existem, na Internet, diversos pogramas antivírus para compra ou uso gratuito, e também, vacinas específicas, para apenas um vírus ou um conjunto de vírus.
11.2.1.6 - Inicialize no Modo de Segurança do Windows
Reinicialize o computador e quando surgir a mensagem Iniciando o Windows, pressione a tecla F8. No menu, selecione Modo de Segurança. Isto inicializará o Windows em um modo especial de diagnóstico que carrega somente os drivers e componentes do Windows que são absolutamente necessários. Neste modo, é possível que alguns dispositivos não estejam disponíveis. Se o sistema funcionar bem no Modo de Segurança, o problema estará então num driver ou num programa instalado. Verifique as configurações de rede, os drivers dos dispositivos ou os softwares instalados. Se o sistema apresentar problemas no Modo de Segurança, então existe um problema de hardware, ou seja, um problema físico, ou será necessário reinstalar o Windows.
11.2.1.7 - Mude o driver de vídeo para um driver padrão
Acredite ou não, uma das causas mais comuns de travamentos é um driver de vídeo incorreto ou com problemas na sua construção, falhas no código do programa. Neste caso, basta substituir o driver de vídeo em uso por um dos drivers genéricos do Windows, assim pode-se descobrir se este é o problema. Abra a opção Vídeo no Painel de Controle e escolha a pasta Configurações. Clique no botão Avançadas e escolha a pasta Adaptador, onde estará o nome do driver de vídeo corrente. Clicando no botão Alterar será executado o Assistente de Atualização de Driver de Dispositivo. Escolha uma das opções de Adaptador de Vídeo Padrão (VGA) ou Super VGA e reinicialize o sistema. Se isto resolver o problema dos travamentos, será necessário atualizar o driver que está sendo utilizado ou substituí-lo, removendo e instalando novamente. O driver mais atualizado poderá ser encontrado na Internet, no site do fabricante da placa de vídeo, ou junto ao vendedor da placa ou do microcomputador.
11.2.1.8 - 8) Remova os itens da inicialização (startup)
Alguns programas executam automaticamente na inicialização, sem aparecer na barra de

tarefas (barra no canto inferior direito da tela). Para detectar problemas deste tipo, use o Utilitário de Configuração do Sistema do Windows 98 para bloquear a inicialização de todos os programas que carregam automaticamente. Se encontrar a solução para os problemas, adicione novamenteum a um até que encontre o que está gerando os problemas.
Ao longo de algum tempo venho colecionando dicas quentes de manipulação do Registro do Windows 98 e também do Windows 95, válidas para aqueles usuário que gostam de ir além de simples cliques em menus idiotas de configuração e para aqueles que não agüentam mais aqueles programas intrusos que aparecem na inicialização do Sistema. E mais, alguém que tenha a necessidade de alterar nomes de usuários ou registros de softwares, excluir ou alterar nomes de ícones que aparecem na seu desktop, eliminar menus inconvenientes no botão iniciar, dar uma boa alterada na inicialização do sistema alterando ou excluindo programas idiotas que só atrapalham, detonar todos os programas estúpidos que o Cds dos provedores insistem em instalar na sua máquina . Resumindo, deixar o seu sistema como o diabo gosta. Veja abaixo algumas informações adicionais sobre o registro e como ele funciona.
O que é o registro do Sistema ?
É um lugar oculto onde são armazenadas todas e qualquer tipo de informação a respeito da configuração de seu sistema(Win98/95/NT), ou seja tudo o que é feito é também registrado no Regedit, tudo mesmo.
O que acontece ?
Toda vez que você inicializa o sistema o windows verifica todas as configurações possíveis do Registro, como tipo de hardware utilizado, software, configurações adicionais(papel de parede, caminhos de arquivos, registros de softwares, configurações de Internet, arquivos essenciais para inicialização do sistema.
11.3 - REGISTER (REGISTRO DO WINDOWS)
O Windows registry (registro do windows) é um banco de dados usado para armazenar configurações e opções para a versão 32 bits do Microsoft Windows (Windows 95, 98, ME, NT, 2000, XP e 2003). Ele contém informações e configurações sobre todo o hardware, todos os softwares, usuários e preferências do PC. Desta forma, qualquer mudança feita no PC é gravada no registro. Estas atualizações do registro podem ocorrer quando um usuário altera as configurações do “painel de controle”, ou faz uma associação de arquivo (liga a extensão do arquivo a um programa), ou ainda, quando ele instala um programa, dentre outros.
Os arquivos físicos utilizados para armazenar o registro dependem da versão do Windows. O Windows 95 e 98 utilizam o “USER.DAT” e o “SYSTEM.DAT”, que são arquivos ocultos localizados dentro do diretório “C:/Windows”. No Windows ME existe um arquivo adicional chamado “CLASSES.DAT”. Já no NT/2000 e XP esses arquivos estão contidos no diretório “%SystemRoot%/System/Config”. Não se deve editar esses arquivos diretamente, é necessário utilizar um aplicativo comumente conhecido como “regedit.exe” (registry editor – editor do registro) para fazer qualquer mudança.
O registro do Win95/98/NT/ME/2000/XP é muito fácil de ser explorado e modificado. Primeiro deve-se ir em INICIAR/EXECUTAR. Execute o arquivo regedit.exe (digite regedit e Enter). Abrirá uma janela, depois é só editar o registro do Win95/98/NT/ME/2000/ XP. Umas das ferramentas mais utilizadas é a LOCALIZAR que fica no menu EDITAR. Com ela pode-se localizar o que quiser.

11.3.1 - Algumas pastas do editor de registro
O registro tem uma estrutura hierárquica aparentemente complicada. Contudo ela é parecida com com a estrutura de diretórios do disco rígido, assim, o regedit é parecido com o “Windows Explorer”.
O registro tem uma estrutura hierárquica aparentemente complicada. Contudo ela é parecida com com a estrutura de diretórios do disco rígido, assim, o regedit é parecido com o “Windows Explorer”.
No regedit cada um dos itens, denotados pelos ícones de pasta (conforme Figura 205) é chamado de chave (Key). Uma chave pode conter outras chaves ou valores (Values), fazendo uma associação com o “Windows Explorer”, as chaves seriam os diretórios e os valores os arquivos.
No registro existem seis chaves principais, que contêm parte das informações armazenadasno registro.
• HKEY_CLASSES_ROOT: Este item todas as informações relacionadas as associações de arquivos (liga a extensão do arquivo a um programa), que permite que o sistema operacional abra o Microsoft Word quando o usuário dá um clicque duplo sobre um documento do Word. Contém, ainda, informações sobre o OLE (Object Linking and Embedding), atalhos e configurações essenciais do Windows à interface do usuário
• HKEY_CURRENT_USER: Este item está conectado ao item HKEY_USERS, mas ele armazena somente as informações do usuário que está “logado” no PC. Dentre as informações destacam-se principalmente: o nome do usuário, configurações do desktop e do menu iniciar específicas do usuário “logado”.
• HKEY_LOCAL_MACHINE: Neste item estão as infromações sobre todo o hardware e programas instalados no PC, bem como, suas configurações. Estas informações são utilizadas por todos os usuários que utilizam o computador.
• HKEY_USERS: Contêm as preferências, devidamente separadas, de cada usuário queutiliza o microcomputador. Cada usuário é representado por uma sub-chave cujo nome é um SID (security id identifier – nome único atribuído a um objeto)
• HKEY_CURRENT_CONFIG: Este item está ligado ao item HKEY_LOCAL_MACHINE, mas contém informações das configurações do hardware que são específicas do usuários conectado (“logado”) atualmente no PC. Por exemplo, se o diretório atual é o mesmo que o diretório de trabalho (diretório default).
• HKEY_DYN_DATA: Esta seção está conectada à chave HKEY_LOCAL_MACHINE, mas ela é utilizada para armazenar somente as informações relacionadas aos dispositivos Pug & Play do Windows. Isto faz com que seu conteúdo seja dinâmico, pois seu teor deverá ser alterado sempre que se adicionar ou remover um dispositivo do sistema para que a chave sempre reflita o estado do hardware.
ATENÇÃO !
Antes de começar a edição de novas configurações no registro é vital para todos os usuários, principalmente aqueles novatos em computação, realizar um BACKUP completo de todo o REGISTRO DO SEU SISTEMA, Nunca deixe de fazer isto.
11.3.2 - Como fazer o BACKUP DO REGISTRO ?
Método 1:
1. Clique em Iniciar/Executar e digite: “regedit” e Enter.2. Na janela do Editor de Registro clique no menu Registro/”Exportar Arquivo de Registro”.3. Agora dê um nome para o arquivo que irá armazenar toda o cópia do seu registro. (Sugestão: Registro).

4. Marque a opção “Todos” na caixa intervalo de exportação.5. Indique o caminho onde esse arquivo será armazenado(pode ser qualquer lugar, de preferência um que você não esqueça).6. Clique em OK e pronto, seu Registro está todo seguro. Todas as suas configurações estão a salvo.
Método 2:
Uma outra forma é copiar da pasta System do Windows os arquivos System.dat e User.dat, para um disquete ou outro lugar qualquer. (Prefiro o 1º método).
11.3.3 - Como recuperar o seu REGISTRO caso seja danificado ?
Bom, há várias maneiras de realizar a devida restauração do registro de seu sistema caso tenha ocorrido algum desastre como instalação de programas inconvenientes, exclusão de chaves ou itens do registro, alteração indevida por parte de usuários não autorizados, problemas na inicialização do seu sistema e formatação do disco rígido.
Método 1:
Computadores com o Win95/98/NT que inicializão mais acusam falta ou modificação de determinados arquivos ou uma ocorrência de configuração desastrosa por parte do próprio usuário(o que mais acontece) :
1. Clique em Iniciar/Executar e digite: Regedit e Enter.2. Na janela do “Editor de Registro” clique no menu Registro/”Importar Arquivo de Registro”.3. Busque o arquivo de backup que foi criado(caso tenha sido criado) e clique em abrir. O conteúdo desse arquivo será adicionado ao conteúdo do registro danificado.4. Reinicie seu computador.
Método 2 :
1. Localize o arquivo de Backup e de um clique duplo em cima dele. O seu conteúdo será adicionado ao Registro. (Um dos métodos mais fáceis).2. Reiniciar o seu micro.
Método 3:
Substituição do System.dat e User.dat :
1. Em posse dos devidos arquivos, você deve copiá-los para dentro da pastam System do Windows.2. Reiniciar o seu micro.
Método 4 - com Windows 95
Computadores com o Windows 95 instalado e que não possuem backup do registro(eu não disse) :
1. Dê um BOOT na máquina e entre no prompt do MS-DOS.2. Quando aparecer a mensagem iniciando o Windows 95, tecle F8.3. Entre no prompt do DOS
DIGITE:
CD C:/WINDOWS
Depois digite os seguintes comandos, pressionando Enter depois de cada um. (Observe que System.dao e User.dao contém o número zero.)
attrib -h -r -s system.datattrib -h -r -s system.da0attrib -h -r -s user.datattrib -h -r -s user.da0
4. Reinicie a máquina.
Método 4 - com Windows 98
Computadores com o Windows 98 instalado e que não possuem Backup do Registro:
1. De um BOOT na máquina.2. Tecle CTRL até que apareça o menu de inicializações do Windows 98.3. Escolha somente prompt de comando.4. Digite :
• Scanreg/fix : se quiser restaurar a cópia da ultima inicialização do sistema.• Scanreg/Restore : se optar por datas de inicializações sem problemas. Ele oferece 4 opções de datas .(Para mim essa é a melhor maneira).

Obs : Sempre que for preciso realizar a restauração dos Arquivos do seu Registro você deverá Reinicializar o sistema para que todas as alterações sejam reconhecidas.
Método 5 :
1. Format c:/s2. Instale tudo de novo.
11.3.4 - Dicas
Mudando o nome da Lixeira
a) Abra o RegEdit (regedit.exe)b) Localize por: {645FF040-5081-101B-9F08-00AA002F954E};c) Dê dois cliques em padrão e ALTERE O NOME...
Tirando itens padrão da Área de Trabalho
Quando o Win95 é instalado, ele cria icones que você não onsegue remover da área de trabalho. É o caso da lixeira, meu computador, caixa de entrada. Se quizer removê-los siga os passos:
a) Abra o regedit.exeb) Vá para seguinte chave:c) key_Local_Machine/Software/Microsoft/Windows/CurrentVersion/explorer/Desktop/NameSpaceNela encontrarão os items de sua área de trabalho.d) Remova os itens que desejar.LEMBREM-SE: se você remover algum ítem, não será mais possível recuperá-lo.
Adicionando novas dicas do dia para a entrada do Win95/98/NT.
a) Abra o regedit.exeb) Abra a seguinte chave:H_KEY_LOCAL_MACHINE/Software/Microsoft/Windows/CurrentVersion/explorer/TipsAgora é só adicionar um valor da seguinte forma:c) Clique no lado direito, com o botão direito do mouse e selecione: novo e depois valor de sequência;d) Numere-o (como 51, se adicionar outro, 52 e assim por diante.);e) Dê um click duplo em DADOS e escreva a dica que desejar.
Alterando o sistema de 16-bits para 32-bits nomes longos em qualquer arquivo de qualquer software sendo 16 bits ou 32 bits). Aqueles nomes do tipoMeusdo~1.
a) Abra no regedit: HKEY_LOCAL_MACHINE/System/CurrentControlSet/Control/FileSystemb) Dê um duplo clique no lado direito da tela, com o botão direito do mouse;c) Escolha novo, valor binário;d) Nomeie-o de: NameNumericTail e dê enter;e) Dê um clique duplo no valor que você criou e coloque 0 (zero) como valor binário completo/f) Clique em Ok e reinicie o Windows.
Aumente a velocidade do menu INICIAR.
a) Abra o regedit.exe;b) Vá para seguinte pasta: HKEY_CURRENT_USER/Control Panel/desktopc) No lado direito da tela, clique com o botão direito do mouse. Escolha NOVO, depois “Valor DE Sequência”;d) Nomeie esse valor de MenuShowDelay e mude seu valor para um número de1 à 10 (1 é o mais rápido).
Mudando nomes default de usuários e
a) Abra o regedit.exeb) Abra HKEY_CURRENT_USER/Software/Microsoft/MS SETUP (ACME);c) No lado direito da tela aparecerão os seguintes valores de sequência:DefCompany (empresa de ou de companhia), DefName (Nome de registro);

empresas. d) Para alterá-los basta dar um clique duplo em cada.
Mude os dados do windows (Versão, NOME, etc):
a) Abra o regedit.exe;b) Vá em: HKEY_LOCAL_MACHINE/SOFTWARE/MICROSOFT/Windows/Current versionc) Você notará que do lado direito da tela, existem vários valores. Mude os que achar conveniente.d) Para modificar os ítens, basta dar um clique duplo sobre eles.
Mudando o ícone do “Meu Computador”:
a) Abra o regedit.exe;b) Mande localizar pelo nome: “Meu Computador”;c) Aperte o TAB para ir para a chave binária e dê um clique duplo na mesma;d) Vá para “Default Icon” e do lado direito da tela aparecerá o local do ícone.É só trocar o endereço para o que tem o ícone desejado.
Se desejar que programas sejam executados ao iniciar o Windows sem que apareça nomenu INICIAR:
a) Abra o regedit.exeb) Vá para a seguinte pasta:HKEY_CURRENT_USER/Software/Microsoft/Windows/CurrentVersion/Runc) Adicione um novo valor de sequência do lado direito da tela, dando umclique com o botão direito do mouse e escolhendo NOVO. Digite algum nomeparecido com o programa;d) Depois de ter nomeado, dê um duplo clique em DADOS e coloque o endereçocompleto do arquivo.
Se desejar fixar um diretório para salvar seus documentos e quer que todos os editores de texto andem salvar diretamente nele. Faça o seguinte:
a) Abra o regedit.exeb) Abra a seguinte pasta:HKEY_CURRNT_USER/Software/Microsoft/Current_Version/Explorer/UserShell Foldersc) Crie um novo valor de sequência, como explicado anteriormente.d) Nomeie-o de: Personal e edite seus dados colocando o endereço da pasta desejada para torná-la default.
Desligando a animação das janelas Você pode desligar a animação mostrada quando você minimiza ou maximiza janelas.
a) Abra RegEdit e selecione.b) HKEY_CURRENT_USER/Control panel/Desktop/WindowMetrics;c) Crie um novo valor de sequência, como explicado anteriormente.d) Nomeie o novo valor para MinAnimate;e) Dê duplo clique em MinAnimate e digite 0 (desliga animação) ou 1 (liga);f) Feche Regedit e todos os programas e reinicialize o PC.
Você já deve ter percebido, que quando você deixa o mouse sobre algum ícone na desktop aparece quase que uma janela de help amarela dizendo o que aquele ícone faz. Se você deseja modificar o help desses ícones, faça o seguinte:
a) Entre no regedit.exeb) Mande, por exemplo, localizar a chave da lixeira: {645FF040-5081-101B-9F08-00AA002F954E};c) Após isso, você verá que do lado direiro da tela existem dois valores, um é o Padrão e o outro é o InfoTip, dê um duplo clique no InfoTip e modifique-o; Para conferir é so ir ao desktop, selecionar a lixeira e deixar o mouse sobre ela; Pode-se fazer isso com todos os ícones que tem esse InFoTip, e os que não tiver é só criar, mandando colocar um novo valor de sequência e nomeando o de InfoTip.
Acabe com o Prompt de Logoff. Aquele do menu iniciar Efetuar Logoff
a) Execute o registro;b) Abra as pastas na sequência:Meucomputador/HKEY_CURRENT_USER/Sotware/Microsoft/Windows/CurrentVersion/Polices/Explorer.c) Crie um valor do tipo “Valor Binário”. Nomeie a nova entrada como: NoLogoff;d) Pressione enter e defina o seguinte valor : 01 00 00 00.

de <Nome-do-usuário>:
e) Reinicie o computador.
Acabe com o menu favoritos no Menu Iniciar:
a) Abra o editor de Registro;b) Abra as pastas na sequência:Meu Computador/HKEY_CURRENT_USER/Sotware/Microsoft/Windows/Current Version/Polices/Explorer.c) Crie um valor do tipo “Valor DWORD”;d) Nomeie a nova entrada como: NoFavoritesMenu;e) Pressione enter e defina o seguinte valor: 01 00 00 00f) Reinicie o computador.
Eliminar programas que insistem em aparecer na inicialização do Windows:
a) Abra o editor de Registro.b) Abra as pastas na seqüência HKEY_CURRENT_MACHINE/Software/Microsoft/Windows/CurrentVersion/Runc) Verifique se existem nomes suspeitos de programas nessa chave. Você pode até mesmo deletar todos esses arquivos, o windows terá uma inicialização mais rápida;d) Veja também: RunOnce, RunOnceEx, RunServices e subkeys de RunServiceOnce. Dê um clique duplo em cima deles e verá a sua localização e para quais programas eles apontam.
O CD dos provedores de acesso a Internet. Estes CDs colocam muitas chaves no resgistro do windows com programas quase sempre indesejáveis, vejamos como eliminá-los manualmente:
a) Abra o editor de Registrob) Apague as seguintes chaves :
HKEY_LOCAL_MACHINE/Software/Microsoft/IE4/SETUP/ActiveXFiles.HKEY_LOCAL_MACHINE/Software/Microsoft/ActiveSetup/Chanels.HKEY_LOCAL_MACHINE/Software/Microsoft/ActiveSetup/ComponentProgress/IE4.HKEY_LOCAL_MACHINE/Software/Microsoft/IE4/OptionsHKEY_LOCAL_MACHINE/Software/Microsoft/ActiveSetup/InstallInfo.HKEY_LOCAL_MACHINE/Software/Microsoft/ActiveSetup/Jobs/Job.IE4.HKEY_LOCAL_MACHINE/Software/Microsoft/ActiveSetup/Installed/Componentes/>{60B49E34C7CC-11D0-8953-00A0C90347FF}UOL3456UOL
Página Inicial. Você poderá alterar a página inicial do seu navegador.
a) HKEY_LOCAL_MACHINE/Software/Microsoft/Internet Explorer/Main.
Arquivos intrusos que são instalados no seu computador por estes CDs de provedores de acesso, sem a sua permissão:
a) C:/Windows/System/Homepage.infb) C:/Windows/System/Iedkcs32.dllc) C:/Windows/System/User.datd) C:/Windows/System/Wavemix.inie) Faça um backup desses arquivos antes de instalar esses Cds de provedores. Depois é só restaurar a configuração original com essas cópias.
Modificar a origen dos arquvos de configuração. Alguma vez já tentou instalar um componente do Windows ou algúm hardware e ele te perguntou o caminho dos arquivos de instalação do Windows? Veja como mudar.
a) HKEY_LOCAL_MACHINE/Software/Microsoft/Windows/CurrentVersion/Setupb) Mude o endereço dos arquivos de instalação, alterando dando um clique duplo sobre o valor SourcePath
Você rola a tela a) HKEY_LOCAL_USER/Software/Microsoft/Office/8.0/Word/Options

do Word e não sabe onde ela vai parar ?
b) Crie um valor do tipo “Valor da Sequência”;c) Nomeie a nova entrada como: LiveScroolingd) Clique com o botão direito do mouse sobre a nova entrada e escolha “modificar o valor” e digite 1.Da próxima vez que tentar rolar a barra num arquivo grande o deslize será mais suave e gradativo.
Adicionar um atalho para o “Painel de Controle” ao seu menu iniciar:
a) Dê um clique com o botão direito do mouse sob o botão iniciar e escolha EXPLORAR;b) O explorer abrirá visualizando a pasta do menu iniciar;c) Dê um clique com o botão direito do mouse em qualquer parte branca do lado direito da tela;d) Escolha “NOVO” e depois “PASTA”;e) Com isso você criou uma pasta chamada: “NOVA PASTA”;f) Troque o nome “NOVA PASTA” para o seguinte código :Painel de Controle.{21EC2020-3AEA-1069-A2DD-08002B30309D}g) Quando acabar aperte enter;h) Feche o explorer e abra o menu iniciar clicando no botão iniciar.
12 - MS-DOS, TECLAS DE ATALHO E INSTALAÇÃO DO WINDOWS 98/XP
12.1 - CARACTERÍSTICAS DE ALGUNS COMANDOS DO MS-DOS
Eis alguns comandos úteis do MS-DOS, a ajuda sobre estes comandos pode ser obtida digitando-se “comando /?” no prompt, onde “comando” é o nome do comando que se quer saber maiores informações e prompt é a indicação que aparece na tela antes de se digitar qualquer coisa. Um exemplo comum de prompt é o seguinte, que refere-se à unidade C, que pode ser uma unidade de disco rígido, um CD, um RAMDRIVE entre outros:
C:/>_
Comandos do MS-DOS:
Exibe uma lista de arquivos e subpastas em uma pasta.
Sintaxe:DIR [unidade:][caminho][arquivo] [/P] [/W] [/[[:]atributos]][/O[[:]ordem]] [/S] [/B] [/L] [/V] [/4]
Exemplo: C:/>DIR C:/WIN98 /W /O:E /P
[unidade:][caminho][arquivo]Especifica a unidade, pasta e/ou arquivos a serem exibidos. (Pode ser especificação de arquivo aperfeiçoada ou de vários arquivos).
/P Efetua uma pausa depois de cada tela completa.
/W Exibe a lista em várias colunas.
/A Exibe arquivos com os atributos especificados.
Atributos:
D Pastas R Somente leitura
H Ocultos A Para arquivamento
S Sistema - Prefixo significando ‘não’
/O Exibe os arquivos em uma determinada ordem.
Ordem
N Por nome (alfabética) S Por tamanho (crescente)
E Por extensão (alfabética) D Por data e hora (cronológica)
G Pastas primeiro - Prefixo para inverter a ordem
A Pela data do último acesso (cronológica)
/S Exibe arquivos na pasta especificada e em todas as subpastas.
/B Exibe a lista em um formato simples (sem o cabeçalho e o resumo).
/L Usa letras minúsculas.
/V Modo detalhado.
/4 Exibe o ano com 4 dígitos (é ignorado se /V for passado).
As opções podem ser predefinidas na variável de ambiente DIRCMD. Desative as opções predefinidas precedendo-as com um hífen. Por exemplo, /-W.
12.1.2 - CLS
Limpa a tela.

Sintaxe: CLS
Exemplo: C:/>CLS
12.1.3 - DEL, ERASE
Exclui um ou mais arquivos.
Sintaxe: DEL [unidade:][caminho]arquivo [/P]ERASE [unidade:][caminho]arquivo [/P]
Exemplo: C:/>DEL C:/WIN98/LIXO.TXT
[unidade:][caminho] arquivo Indica os arquivos a serem excluídos. Especifique múltiplosarquivos usando caracteres curingas.
/P Pede uma confirmação antes de excluir cada arquivo.
12.1.4 - DELTREE
Exclui uma pasta e todas as subpastas e arquivos dentro dela.
Sintaxe: DELTREE [/Y] [unidade:]caminho [[unidade:]caminho[...]]
Exemplo: C:/>DELTREE /Y C:/TEMP
/Y Não pede confirmação para a exclusão da pasta.
[unidade:] caminho Especifica o nome da pasta que você deseja excluir.
Observação: use DELTREE com cuidado. Todos os arquivos e pastas dentro da pasta especificada serão excluídos.
12.1.5 - RMDIR, RD
Remove (exclui) uma pasta.
Sintaxe: RMDIR [unidade:]caminhoRD [unidade:]caminho
12.1.6 - MKDIR, MD
Cria uma pasta.
Sintaxe: MKDIR [unidade:]caminhoMD [unidade:]caminho
Exemplo: MKDIR C:/WIN98
12.1.7 - CHDIR, CD
Exibe o nome ou altera a pasta atual.
Sintaxe:
CHDIR [unidade:][caminho]CHDIR[..]CD [unidade:][caminho]CD[..]
E xemplo: C:/>CD WIN98
.. Especifica que se quer mudar para a pasta superior.
Digite CD unidade: para exibir a pasta atual na unidade especificada.
Digite CD sem parâmetros para exibir a unidade e a pasta atuais.
12.1.8 - DISKCOPY
Copia o conteúdo de um disquete para outro.
Sintaxe: DISKCOPY [unidade1: [unidade2:]] [/1] [/V] [/M]

Exemplo: C:/>DISKCOPY A: A: /V
/1 Copia somente o primeiro lado do disco.
/V Verifica se as informações estão sendo copiadas corretamente.
/MForça Força a cópia em vários passos usando somente a memória.
Os dois disquetes devem ser do mesmo tipo. Você pode especificar a mesma unidade para unidade1 e unidade2.
12.1.9 - XCOPY
Copia arquivos e pastas.
Sintaxe:XCOPY origem [destino] [/A | /M] [/D[:data]] [/P] [/S [/E]] [/W] [/C] [/I] [/Q] [/F] [/L] [/H] [/R] [/T][/U] [/K] [/N]
Exemplo: C:/>XCOPY I:/WIN98 C:/WIN98 /E /W /F
Origem Especifica os arquivos a serem copiados.
Destino Especifica o local e/ou o nome dos novos arquivos;
/A Copia arquivos com o atributo de arquivamento e não muda o atributo.
/M Copia arquivos com o atributo de arquivamento e desativa o atributo.
/D:data Copia arquivos alterados em ou depois da data especificada.Se a data não for fornecida, copia apenas os arquivos que sejam mais recentes na origem do que no destino.
/P Pede confirmação antes de criar cada arquivo de destino.
/S Copia pastas e subpastas, exceto as vazias.
/E Copia pastas e subpastas, inclusive as vazias. Igual a /S /E. Pode ser usado para modificar /T.
/W Pede que você pressione uma tecla antes de começar a copiar.
/C Continua copiando mesmo que haja erros.
/I Se o destino não existir e mais de um arquivo estiver sendo copiado, assume que o destino seja uma pasta.
/Q Não exibe os nomes dos arquivos enquanto os copia.
/F Exibe os nomes completos dos arquivos de origem e de destino enquanto os copia.
/L Exibe os arquivos que seriam copiados.
/H Copia também arquivos ocultos e de sistema.
/R Substitui os arquivos somente leitura.
/T Cria a estrutura de pastas, mas não copia os arquivos. Não incluipastas ou subpastas vazias. /T /E Inclui pastas e subpastas vazias.
/U Atualiza os arquivos que já existem no destino.
/K Copia atributos. O Xcopy normal redefine os atributos somente leitura.
/Y Sobrescreve os arquivos existentes sem pedir Confirmação.
/-Y Pede confirmação antes de sobrescrever os arquivos existentes.
/N Copia usando os nomes abreviados gerados.
12.1.10 - COPY
Copia um ou mais arquivos para outro local.
Sintaxe: COPY [/A | /B] origem [/A | /B] [+ origem [/A | /B] [+ ...]][destino [/A | /B]] [/V] [/Y | /-Y]
Exemplo: C:/>COPY I:/WIN98/*.* C:/WIN98
Origem Define o arquivo ou arquivos a serem copiados.
/A Indica um arquivo texto ASCII.
/B Indica um arquivo binário.
Destino Define a pasta e/ou o(s) nome(s) do(s) novo(s) arquivo(s).
/V Verifica se os novos arquivos foram gravados corretamente.
/Y Não pede que o usuário confirme a substituição de um arquivo de

destino existente.
/-Y Pede que o usuário confirme a substituição de um arquivo de destino existente.
A opção /Y pode ser predefinida na variável de ambiente COPYCMD. Uma vez definida,ela pode ser anulada usando-se /-Y na linha de comando. Para anexar arquivos, especifiqueapenas um arquivo como destino e múltiplos arquivos como origem (usando curingasou o formato arquivo1+arquivo2+arquivo3).
12.1.11 - FORMAT
Formata um disco para ser usado com o MS-DOS.
Sintaxe:
FORMAT unidade: [/V[:nome]] [/Q] [/F:tamanho] [/B | /S] [/C]
FORMAT unidade: [/V[:nome]] [/Q] [/T:trilhas /N:setores] [/B | / S] [/C]
FORMAT unidade: [/V[:nome]] [/Q] [/1] [/4] [/B | /S] [/C]
FORMAT unidade: [/Q] [/1] [/4] [/8] [/B | / S] [/C]
Exemplo: C:/>FORMAT D: /S
/V[:nome] Especifica o nome do volume.
/Q Faz uma formatação rápida.
/F:tamanho Especifica o tamanho do disquete a ser formatado (como 160, 180, 320, 360, 720, 1.2, 1.44, 2.88).
/B Aloca espaço no disco formatado para os arquivos de sistema.
/S Copia arquivos de sistema para o disco formatado.
/T: trilhas Especifica o número de trilhas em cada lado do disco.
/N: setores Especifica o número de setores por trilha.
/1 Formata um único lado de um disquete.
/4 Formata um disquete de 5,25 polegadas com 360KB em uma unida de de alta densidade.
/8 Formata oito setores por trilha.
/C Testa os clusters que estão atualmente marcados como defeituosos.
12.1.12 - FDISK
Configura o disco rígido para utilizar o MS-DOS.
Sintaxe: FDISK [/STATUS] /X
/STATUS Exibe as informações sobre as partições.
/X Ignora o suporte estendido de acesso a disco. Use esta opção se você receber mensagens de estouro de pilhas ou de acesso ao disco.
Este comando tem por finalidade executar um particionamento físico do disco rígido de forma que se possa usar um sistema operacional, no nosso caso o DOS ou Windows.
Vale lembrar que caso você esteja usando o Fdisk do Windows 98, você tem a opção de usar a FAT32, neste caso você não precisará dividir o disco, usando todo ele como partição primária.
Na figura anterior, usando um disco gerado no sistema Windows 98, o usuário é advertido sobre os problemas que ele poderá ter usando FAT32, e o porquê. Isso se deve ao fato de que o Windows 95, o DOS e mesmo o NT, não suportam este padrão, com isto corre-se o risco de se ter arquivos que não serão executados na FAT32, ou vice versa.
Nesta segunda tela, Figura 207, (lembre-se que estamos usando um disco do Windows 98 para fazer o particionamento) temos quatro opções básicas.
Criar as partições... (Create DOS partition or Logical DOS Drive)
Esta opção abre uma janela onde teremos outras três opções. Conforme Figura 202
Definir a partição ativa (Set active partition)
Abre uma janela onde devemos definir qual partição será a primária.
Apagar partições primárias estendidas ou lógicas do DOS.
Abre uma janela onde podemos excluir algumas partições ou todas, sempre começando pelas partições lógicas, ou seja só poderemos apagar a partição primária após apagar as partições lógicas e estendidas, obviamente elas precisam existir. :)
Exibir informações sobres as partições (Display partition information)
Exibe informações sobre as partições existentes.
Entre com a opção [ ] (Enter choice [])
Escolha um número de 1 à 4
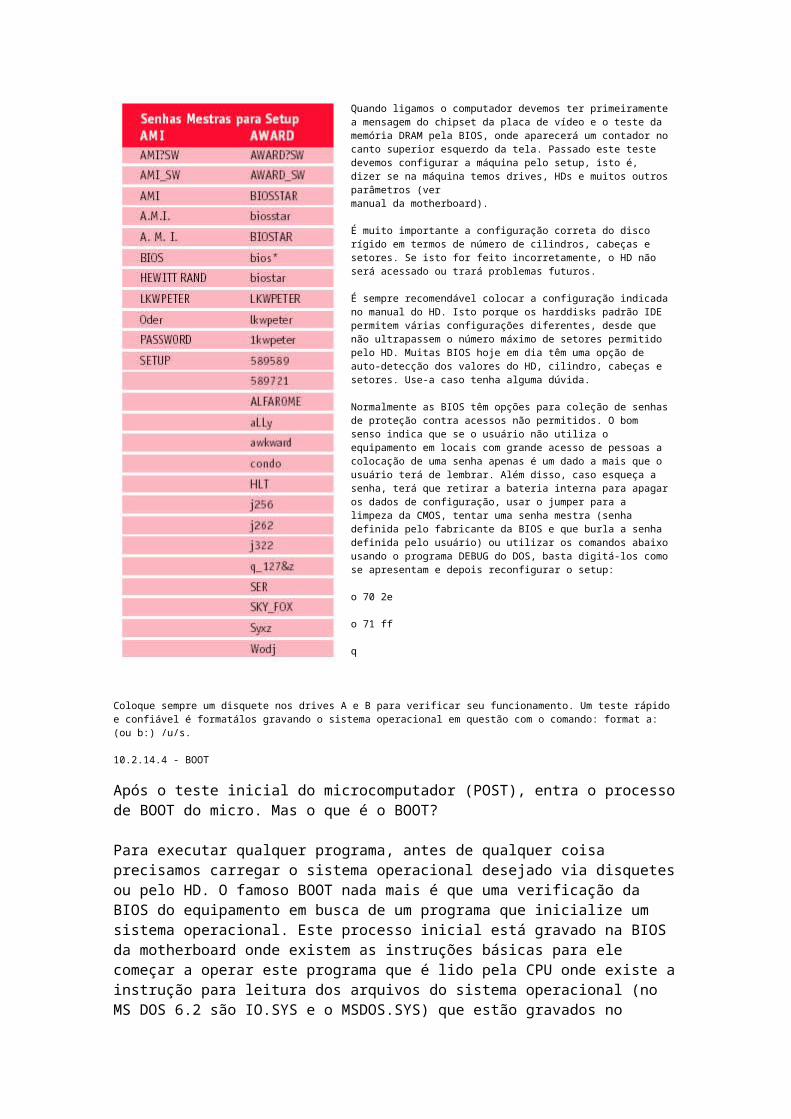
Se você tiver mais de um HD você terá a opção 5 que serve para mudar de disco rígido corrente. Veja Figura 209.
Criar as partições.
Opção 1 cria a partição primária onde instalaremos nosso sistema operacional.Opção 2 cria a partição estendida do DOS.Opção 3 cria unidades lógicas caso nosso disco tenha mais DE 4 GB. Este procedimento deverá ser feito se for nossa intenção usar todo o disco para o WINDOWS.
Normalmente assim que se cria a partição primária ela é definida como a partição ativa. Caso isso não ocorra defina manualmente usando a opção 2 da primeira tela de opções.
Obs.: Caso você vá instalar outro sistema você deverá, no particionamento, reservar um espaço para este sistema como partição não DOS.
IMPORTANTE
Outro detalhe que deve se levar em consideração é que após fazer o fdisk você deve reiniciar a máquina e formatar todas as partições criadas indistintamente.
12.1.13 - HIMEM.SYS
Himem.sys é um gerenciador de memória estendida incluído no MS-DOS. Este gerenciador propicia um acesso à memória estendida e evita que dois programas utilizem a mesma parte da memória estendida ao mesmo tempo.
Se quiser utilizar a memória estendida de seu sistema, você deverá instal ar o HIMEM.SYS.

12.1.13.1 - Vantagens:
A seguinte lista relaciona as vantagens de se utilizar o HIMEM:
Torna a memória disponível a programas que utilizam a memória estendida de acordo com as especificações de memória estendia (XMS - Extended Memory Especification).
Evita erros do sistema que podem ocorrer quando os programas efetuam requisições de memória conflitantes.
Em conjunto com O EMM386.EXE, possibilita executar o MS_DOS na memória estendida de modo a conservar memória convencional.
12.1.13.2 - Desvantagens
Utiliza uma pequena parte da memória convencional. Pode não ser compatível com os programas mais antigos que alocam memória estendida diretamente, ao invés de utilizar um gerenciador de memória estendida. Por exemplo, a versão 2X do Microsoft Windows/386 não pode ser executada com a versão do Himem que está incluída com o MS-DOS versão 5.0.
12.1.13.3 - Recomendações
Himem deve ser instalado se você possui um sistema acima do 286 com memóriaestendida.
Certifique-se de que o comando device para o HIMEM foi incluído no arquivo CONFIG.SYS antes de quaisquer comandos que iniciam controladores de dispositivos ou programas que utilizam memória estendida. Por exemplo, o EMM386 utiliza memória estendida, o comando device para o emm386 deve aparecer após o comando himem.sys.
12.1.13.4 - Para instalar o HIMEM
Utilize um editor texto, como por exemplo, o Editor do MS-DOS, para abrir o config.sys normalmente localizado no diretório principal do disco de inicialização.
Adicione um comando device para Himem.sys no início do arquivo config.sys. Este comando DEVICE deve ser introduzido antes de quaisquer comando DEVICE para controladores de dispositivos que utilizam a memória estendida.
A linha de comando para o HIMEM.SYS especifica o local do arquivo de programa do Himem, como o Himem deve gerenciar a memória e o tipo de seu sistema. O seguinte comando executará o Himem utilizando valores padrões:
device=c:/dos/himem.sys
Obs.: Toda e qualquer alteração feita no config só entrará em vigor após reiniciar o computador.
12.2 - TECLAS DE ATALHO
12.2.1 - Utilizando a tecla WINDOWS
Você pode usar os seguintes atalhos do teclado com um teclado Microsoft Natural Keyboard ou com qualquer teclado
compatível que tenha a tecla com o logotipo do Windows.

12.2.2 - Utilizando teclas de atalho para o Windows Explorer
12.2.3 - Utilizando teclas de atalho em caixas de diálogo
12.2.4 - Utilizando teclas de atalho para a Área de Trabalho, Meu Computador e Windows Explorer
Quando um item é selecionado, você pode utilizar as seguintes teclas de atalho.

Você pode utilizar a tecla APPLICATION com um teclado Microsoft Natural Keyboard ou com qualquer teclado
compatível que inclua a tecla APPLICATION . Caso não possua, ela pode ser simulada utilizando-se SHIFT+F10.
12.2.5 - Utilizando teclas de atalho no Windows

12.3 - INSTALAÇÃO DO WINDOWS 98
12.3.1 - Passos para a instalação do Windows 98
Segue abaixo uma descrição dos passos a serem executados no momento de se instalar o Windows 98 em uma máquina com um HD novo.
1. Ligar o computador, após a contagem da memória pressionar a tecla DELETE para entrar no setup da máquina (ou outra tecla conforme o caso). Configurar no setup a seqüência de BOOT com o FLOPPY DRIVE como primeiro dispositivo de BOOT (1st BOOT device) e o HD (IDE0) como segundo dispositivo de BOOT (2nd BOOT device). Reiniciar o computador com o disquete do Windows 98 ou MS-DOS.
2. Após o carregamento do boot do disquete, aparecerão três opções:
1- Iniciar o computador com suporte a CD-ROM.2- Iniciar o computador sem suporte a CD-ROM.3- Exibir o arquivo da Ajuda.
Você deve escolher a primeira opção (Inicia o computador com suporte a CD-ROM). Caso não seja feita uma escolha dentro de 30 segundos, o sistema inicializa a partir da primeira opção. Após a inicialização observamos o prompt do MS-DOS na unidade A:, ou seja, a unidade de disquete. Aparecerá o seguinte:
A:/>_
Execute o FDISK para efetuar o particionamento do disco.
O que é particionar?
Particionar é criar uma partição no disco rígido, este pode conter uma só Partição (sem divisão do Disco), ou mais de uma Partição (divisão do Disco).
Como particionar o disco rígido.
Para particionar você cria primeiramente a partição Primária, com o valor total do Disco (sem divisão do Disco), ou um determinado valor (divisão do Disco). Note que se você usar o tamanho total de seu Disco, não haverá outra Partição, logo as outras Partições só existirão se houver divisão do Disco. Logo após você criar a Partição Primária, e a intenção for de dividir o Disco, você cria a Partição Estendida que aparecerá com o restante do valor total do HD. É a Partição Estendida que será dividida em Unidades Lógicas. E se por acaso você quiser apagar as partições deverá fazer o inverso, excluir primeiro as Unidades Lógicas, depois a Partição Estendida e por último a Partição Primária.
3. A primeira tela do FDISK nos informa quanto à utilização de suporte a discos de grande capacidade, ou seja a utilização ou não da FAT32. No fim do texto você deverá optar pela FAT que irá trabalhar:
Deseja ativar o suporte a unid. de grande capacidade? (S/N) [S]
Se você optar por S estará fazendo opção pela FAT32 , caso opte por N estará fazendo opção pela FAT16.
4. Independente da resposta à pergunta anterior, aparecerá o menu principal do FDISK:
1. Criar uma partição ou uma unidade lógica do DOS2. Definir uma partição ativa3. Excluir uma partição ou uma unidade lógica do DOS4. Exibir as informações sobre as partições
É preciso criar inicialmente a partição primária. Para tanto, escolha a opção 1 e no menu seguinte novamente a primeira opção:
1. Criar uma partição primária do DOS2. Criar uma partição estendida do DOS3. Criar unidades lógicas na partição estendida do DOS
Após a escolha o FDISK irá perguntar-lhe quanto ao tamanho do disco:
Deseja usar o tamanho máximo... (S/N)? [S]
Caso tenha escolhido trabalhar com FAT32, você poderá definir a sua partição primária com todo o tamanho do disco gerando assim um disco com uma única partição, ou então criar diversas partições definindo assim um tamanho menor que o tamanho total do disco na partição primária para poder utilizá-lo na partição estendida. Caso contrário, FAT16, o tamanho máximo estará limitado a 2047MB e se o seu disco tiver mais do que isso será necessário criar uma partição estendida para utilizar o restante do espaço do disco.
Não se pode esquecer de que ao final da criação das partições e unidades lógicas no FDISK é preciso reiniciar o computador, o que deve ser feito somente no prompt, ou seja, deve-se sair do FDISK com a tecla ESC antes da

reinicialização. Esta reinicialização é necessária para que se possa gravar a alteração dos dados da FAT.
5. Após a criação das partições e reinicialização da máquina é preciso formatar cada uma das partições criadas usando-se o comando FORMAT:
A:/>FORMAT C:A:/>FORMAT D:
E assim por diante até que todas as partições estejam formatadas.
6. Para agilizar o processo de instalação, e facilitar a busca de arquivos do Windows durante a instalação de alguns drivers, vamos copiar os arquivos do CD do Windows 98 para o disco rígido. Para isso é preciso mudar de unidade de disco:
A:/>C:
Agora que estamos no disco rígido, é preciso criar o diretório onde colocaremos os arquivos:
C:/>MD WIN98
E realizamos a cópia dos arquivos usando o comando COPY:
C:/>COPY :/WIN98/*.* C:/WIN98
Onde é a letra da unidade de CD-ROM. É importante observar que a unidade de CD-ROM está sempre após o seu RAMDRIVE e que o RAMDRIVE ocupa a primeira letra após a última letra das partições. Exemplo: para um HD com 5 partições (C,D,E,F,G) o RAMDRIVE é a letra H e o CD é a letra I. O RAMDRIVE é um espaço em memória criado pelo sistema de BOOT do Windows 98 para trabalhar como um disco rígido (disco virtual). Nele são colocados os arquivos necessários durante o processo de preparação da máquina e instalação do sistema operacional Windows 98.
7. Para instalar o Windows é preciso executar o programa de instalação:
C:/>INSTALAR
Para Windows em português ou, se for em inglês:
C:/>INSTALL
Se estiver instalando um software e não souber qual o seu programa de instalação execute o comando de listagem de arquivos para descobrir o seu nome:
C:/>DIR /O/W/P
Este comando listará todos os arquivos em ordem alfabética, em linha e página a página. Procure por arquivos executáveis como instalar.exe, install.exe, setup.exe, config.exe (último caso) entre outros.
Daqui em diante é só seguir o programa de instalação do Windows.
8. RESUMO DA SEQÜÊNCIA DE INSTALAÇÃO
Iniciar com o disco de Boot.
A:/>_A:/>FDISK A:/>_A:/>FORMAT C:A:/>_A:/>C:C:/>MD WIN98C:/>COPY :/WIN98/*.* C:/>WIN98C:/>CD WIN98C:/>WIN98>DIR /W/O/PC:/>WIN98>INSTALAR
12.4 - INSTALAÇÃO DO WINDOWS XP
12.4.1 - Passos para instalação do Windows XP
Segue abaixo uma descrição dos passos a serem executados no momento de se instalar o Windows XP em um computador com o HD novo.
1. Ligar o computador, após a contagem de memória pressionar a tecla DELETE para entrar no setup da máquina (ou outra tecla conforme o caso). Configurar no setup a sequencia de BOOT com o CDROM como primeiro dispositivo de BOOT (1st BOOT device) e o HD (IDE0) como segundo dispositivo de BOOT(2nd BOOT device). Reiniciar o computador e inserir o CD-

ROM de BOOT do Windows XP.
2. Após o carregamento do BOOT pelo CD-ROM aparecerá a seguinte mensagem:
Pressione uma tecla para inicializar do cdrom...
3. Depois de pressionar qualquer tecla a instalação do Windows XP irá identificar alguns dispositivos do seu computador e irá parar na seguinte tela:
[ENTER] = essa opção é utilizada para iniciar a instalação.
[R] = essa opção é utilizada para se reparar (consertar) uma instalação feita anteriormente.
[F3] = sai do programa de instalação sem instalar o Windows XP.
4. Para se continuar a instalação pressione e tecla [ENTER].
5. Após pressionar a tecla [ENTER] surgirá na tela o contrato de licença para o usuário final como apresentado na seguinte tela:
[F8] = escolhendo essa opção você irá concordar com o contrato e a instalação continuará.
[ESC] = escolhendo essa opção você não irá concordar com o contrato e a instalação não continuará.
[PAGE DOWN] = pressionando esta tecla é possível ter acesso a todas as páginas do contrato de licença.
6. Para se continuar com a instalação é necessário concordar com o contrato, pressione a tecla [F8].
7. O processo de instalação agora mostra como se encontra particionado o disco rígido do seu computador, em nosso

exemplo estamos instalando o Windows XP em um disco com capacidade de 4 GB, como podemos ver na seguinte tela:
[ENTER] = pressionando-se essa tecla todo o espaço disponível no disco será utilizado na instalação do Windows XP.
[C] = para se criar partições, ou seja, dividir o disco rígido em diferentes unidades, você deverá pressionar essa tecla.
[F3] = para sair da instalação nesse instante.
Em nosso exemplo iremos utilizar todo o espaço disponível no disco para a instalação.
8. Agora a instalação pergunta por qual sistema de arquivo deverá ser utilizado no disco, como podemos ver na tela a seguir:
Em nosso exemplo iremos utilizar o sistema de arquivos NTFS, como selecionado na Figura 213.
9. Após escolhermos essa opção a partição será formatada.

10. Após a formatação, o programa de instalação iniciará a cópia dos arquivos necessários para a instalação.
11. Ao termino da cópia dos arquivos será informado que o sistema será reinicializado.
12. Durante a reinicialização nenhuma tecla deverá ser pressionada, é necessário guardar a inicialização a partir do disco rígido para que a instalação continue. O programa de instalação irá identificar todos os dispositivos do seu computador e depois disso será solicitado algumas informações para que a instalação continue.
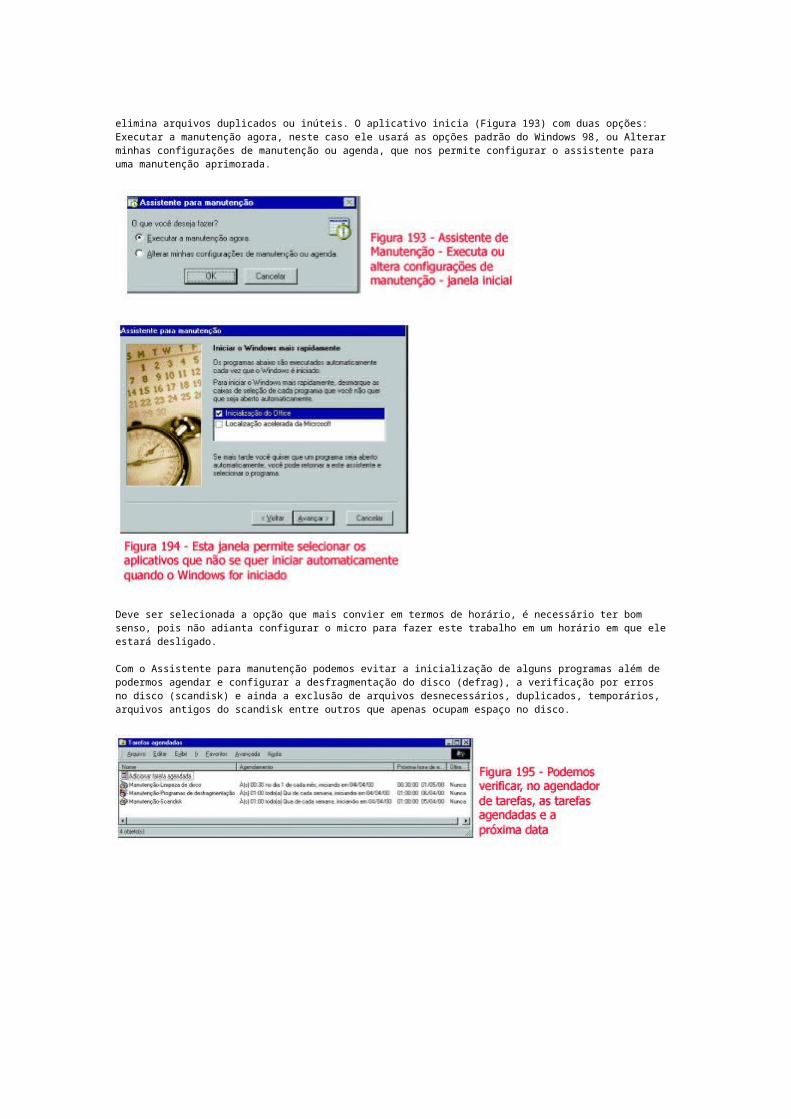
12.4 - INSTALAÇÃO DO WINDOWS XP - CONTINUAÇÃO
13. Será solicitado durante a instalação que se indiquem as configurações regionais, ou seja, o país onde o Windows XP será utilizado para que se configurem os símbolos de moeda, data e também do layout do teclado utilizado.
14. Agora o programa de instalação solicita que se digite o nome e organização, e depois clique no botão avançar para que a instalação prossiga.
15. Depois será solicitado o número de série do produto que normalmente se encontra na caixa do Windows ou em uma etiqueta fixada ao computador. Clique em Avançar.

16. Depois da chave do produto digitada é necessário que você indique um nome para o computador e clique no botão Avançar. Nesse instante é possível definir uma senha que será utilizada para alterar as configurações do sistema, ou seja, administrá-lo, pode ser deixada em branco.
17. O próximo passo será acertar data e hora e definir qual o fuso horário.

18. Agora será executada a instalação da rede e dos programas básico necessários ao seu funcionamento. Deixe a opção padrão “configurações típicas” selecionada e clique em Avançar.
19. Será necessário fornecer também o nome do grupo de trabalho ao qual o computador pertencerá na rede. Caso o computador não for ser conectado a uma rede basta clicar sobre o botão Avançar.
12.4 - INSTALAÇÃO DO WINDOWS XP - CONTINUAÇÃO
20. O programa de instalação agora irá copiar os arquivos do Windows XP e as configurações selecionadas durante o processo de instalação para o disco rígido.
21. Depois de copiar os itens do menu iniciar vão ser instalados.

22. Após os itens do menu iniciar serem instalados, os componentes serão registrados.
23. As configurações serão salvas, nesse instante a instalação já está sendo finalizada.
24. Após o termino da etapa anterior o computador será reinicializado e aparecerá a seguinte tela:
25. O Windows XP precisa de uma resolução mínima de 800x600 pixels para funcionar com todos os seus recursos visuais, por isso o motivo do ajuste da resolução e do pedido de confirmação.

26. Agora o assistente de configuração do sistema irá solicitar algumas informações para finalizar a configuração do Windows XP. Clique no botão Avançar.
27. Na tela a seguir marque a opção “Ajudar a proteger meu PC ativando as Atualizações Automáticas agora”. Com essa opção habilitada e o computador conectado a internet o Windows XP se manterá atualizado buscando manter o sistema o mais seguro possível. Clique no botão Avançar após escolher a opção desejada.

28. O assistente irá verificar se o computador já possui acesso a Internet para se registrar no site da Microsoft.
29 No caso de não encontrar uma conexão ativa com a internet aparecerá a seguinte tela:

Agora temos a opção de deixar para se registrar depois na Microsoft caso não tenhamos acesso a internet no momento. Basta marcar a opção “Não, deixar para depois”, e clicar sobre o botão Avançar.
30. O Windows XP permite que mais de um usuário utilze o mesmo sistema sem que um possa altera as opções do outro, na tela a seguir podemos definir esses usuários. Sendo necessário apenas clicar nas caixas de texto e digitar um nome diferente para cada um e depois clicar no botão Avançar.
31. Agora o Windows XP já está instalado e pronto para o uso. Apenas clique no botão Concluir.


13- ASSOCIAÇÃO PLACAS X PALAVRAS-CHAVE
Devido à dificuldade de alguns alunos em identificar, em manuais ou mesmo em placas, as configurações e as informações quanto às placas de expansão ou aos componentes onboard, resolvemos colocar esta pequena tabela de associação entre os diversos sinônimos e/ou palavras-chave encontrados para as seguintes placas, de forma a ajudar na sua identificação:
14 - internet
A Internet é um grande conjunto de redes de computadores interligadas pelo mundo inteiro. Não importa a marca ou modelo do computador a ser utilizado, para que seja possível tal conectividade, basta observar uma regra básica: todos os integrantes devem “falar” a mesma língua. Ou seja, utiliza-se um conjunto de protocolos e serviços em comum para usufruir de serviços de informação de alcance mundial.
A comunicação pode ocorrer sob diversas formas, dados puros, voz, vídeo, e a união de todos os componentes, ou seja, multimídia. Porém a multimídia requer cada vez mais velocidade nas transmissões.
O “caminho” percorrido por um pacote de dados, a título de exemplo, nem sempre segue diretamente da fonte para o destino, pelo contrário. Mais comum, no entanto, é os dados percorrerem caminhos diversos, passando por ‘N’ computadores até o destino, visando sempre o menor trajeto.
Com a aparição e uso mais difundido das Intranet’s, integrando redes internas de grandes empresas com a Internet, a utilização da mesma vem sendo cada vez mais diversificada.
14.1 - HISTÓRIA DA INTERNET
A Internet surgiu a partir da Advanced Research and Projects Agency (ARPA), uma agência norte-americana que objetivava conectar os computadores dos seus departamentos de pesquisa. A Internet nasceu a partir da ARPANET, que interligava quatro instituições: Universidade da Califórnia, Los Angeles e Santa Bárbara; Instituto de Pesquisa de Stanford e Universidade de Utah, tendo início em 1969.
Os pesquisadores e estudiosos do assunto receberam o projeto à disposição para trabalhar. A ARPA requisitou um sistema de rede que fosse descentralizado. De forma que em caso de guerra, por mais que uma base de dados fosse atingida, a comunicação não fosse interrompida. Deste estudo que perdurou na década de 70, nasceu o TCP/IP (Transmission Control Protocol / Internet Protocol - 1974), grupo de protocolos que é a base da Internet desde aqueles tempos até hoje.
A Universidade da Califórnia de Berkeley implantou os protocolos TCP/IP ao Sistema Operacional UNIX, um sistema aberto típico do meio universitário, possibilitando a integração de várias universidades à ARPANET. Nesta época, início da década de 80, redes de computadores de outros centros de pesquisa foram integradas à rede da ARPA. Em 1985, a entidade americana National Science Foundation (NSF) interligou os supercomputadores do seu centro de pesquisa, a NSFNET, que

no ano seguinte entrou para a ARPANET. A ARPANET e a NSFNET passaram a ser as duas espinhas dorsais (backbone) de uma nova rede que junto com os demais computadores ligados a elas, era a INTERNET.
Dois anos depois, em 1988, a NSFNET passou a ser mantida com apoio das organizações IBM, MCI (empresa de telecomunicações) e MERIT (instituição responsável pela rede de computadores de instituições educacionais de Michigan), que formaram uma associação conhecida como Advanced Network and Services (ANS).
Em 1990 o backbone ARPANET foi desativado, criando-se em seu lugar o backbone Defense Research Internet (DRI); em 1991/1992 a ANSNET passou a ser o backbone principal da Internet; nessa mesma época iniciou-se o desenvolvimento de um backbone europeu (EBONE), interligando alguns países da Europa à Internet.
A partir de 1993 a Internet deixou de ser uma instituição de natureza apenas acadêmica e passou a ser explorada comercialmente, tanto para a construção de novos backbones por empresas privadas (PSI, UUnet, Sprint,...) como para fornecimento de serviços diversos, abertura essa a nível mundial.
14.2 - LINHA DO TEMPO DA INTERNET
14.3 - A INTERNET NO BRASIL
Em 1988 a Internet chegou no Brasil, por iniciativa das comunidades acadêmicas de São Paulo (FAPESP - Fundação de Amparo à Pesquisa do Estado de São Paulo) e do Rio de Janeiro (UFRJ - Universidade Federal do Rio de Janeiro e LNCC - Laboratório Nacional de Computação Científica).
O Ministério de Ciência e Tecnologia criou em 1989 a Rede Nacional de Pesquisas (RNP), no intuito de iniciar e coordenar a isponibilização de serviços de acesso à Internet no Brasil. À partir da criação da RNP foi também criado um backbone conhecido como o backbone RNP, interligando instituições educacionais à Internet.
Tal backbone inicialmente interligava 11 estados a partir de Pontos de Presença (POP - Point of Presence) em suas capitais; ligados a esses pontos foram criados alguns backbones regionais, a fim de integrar instituições de outras cidades à Internet.

Em dezembro/1994 foi iniciada a exploração comercial da Internet num projeto piloto da Embratel, onde foram permitidos acesso à Internet inicialmente através de linhas discadas, e posteriormente (abril/1995) através de acessos dedicados.
A partir de abril/1995 foi iniciada pela RNP um processo para implantação comercial da Internet no Brasil. Bem como a ampliação do backbone RNP no que se refere a velocidade e número de POP’s, a fim de suportar o tráfego comercial de futuras redes conectadas a esses POP’s. Tal backbone veio a se chamar Internet/BR.
Uma primeira etapa da expansão desse backbone foi concluída em dezembro/1995, restando ainda a criação de POP’s em mais estados; além disso, algumas empresas (IBM, UNISYS, Banco Rural) anunciam em 1996 a inauguração de backbones próprios.
14.4 - A ADMINISTRAÇÃO DA INTERNET NO BRASIL
No Brasil, a instância máxima consultiva é o Comitê Gestor Internet; criado em junho/ 1995 por iniciativa dos ministérios das Comunicações e da Ciência e Tecnologia, é composto por membros desses ministérios e representantes de instituições comerciais e acadêmicas, e tem como objetivo a coordenação da implantação do acesso à Internet no Brasil.
A nível de redes, a RNP administra o backbone Internet/BR, através do Centro de Operações da Internet/BR; as redes ligadas a esse backbone são administradas por instituições locais, por exemplo a FAPESP, em São Paulo.

Ligado à RNP existe ainda o Centro de Informações da Internet/BR cujo objetivo principal é o de coletar e disponibilizar informações e produtos de domínio público, a fim de auxiliar a implantação e conexão à Internet de redes locais.
14.5 - WWW (WORLD WIDE WEB)
A World Wide Web (www) é um serviço disponível na Internet. Caracteriza-se como um conjunto de documentos espalhados por toda rede disponível a qualquer um. Estes são escritos em hipertexto, utilizando de uma linguagem especial, chamada HTML. Podem ser visualizados através de um tipo de programa chamado Browser.
Hipertexto é uma forma especial de navegação dentro de um documento. Um documento normal (não hipertexto) somente permite que seu leitor navegue seqüencialmente, percorrendo seu conteúdo para a frente e para trás. Em um documento hipertexto o leitor pode, através de um clique do mouse em cima de elementos especiais (links) “saltar” para outra parte do texto. Um exemplo bastante difundido de hipertexto é o sistema de HELP (AJUDA) do Windows.
Browsers são programas especiais para visualizar páginas WWW. Os browsers lêem e interpretam os documentos escritos em HTML, apresentando as páginas formatadas para os usuários.
Hoje, os Browsers muitas vezes realizam tarefas relacionadas com à Internet, como a leitura de correio eletrônico e de grupos Usenet News. No entanto, estas atividades extras NÃO são relacionadas diretamente com a WWW.
O Browser da Netscape dominou o mercado por grande período, porém teve uma queda, com relação ao Internet Explorer da Microsoft que por ser grátis e de fácil acesso vem crescendo em larga escala. Existem também uma série de navegadores, como também são chamados, de pequenas empresas alternativas.
Os Browsers mais comuns, reúnem características como suporte a vários recursos tais como programação em JavaScript, ActiveX, Java,
Perl, e ainda opção de instalação de Plugins. Suportam ainda tecnologias Push, Style Sheet, DHTML e HTML4, além de opções de correio eletrônico e leitor Usenet News, BookMarks e editores HTML, etc.
14.6 - HTTP (HYPER TEXT TRANSFER PROTOCOL)
Quando seres humanos se comunicam, utilizam um idioma. O mesmo, para que haja entendimento. Tal acontece na Internet. A “língua” em que os computadores conversam é o TCP/IP, este é um conjunto de regras ou se preferir, uma biblioteca de protocolos.
Para que dois computadores se comuniquem, é necessário que “falem” e “entendam” um mesmo protocolo. O protocolo mais comum utilizado pela WWW é o Hyper Text Transfer Protocol ou Protocolo de Transferência em Hipertexto, que na forma reduzida diz-se HTTP. O HTTP faz parte do conjunto TCP/IP.

14.7 - HTML (HYPERTEXT MARKUP LANGUAGE)
É a linguagem utilizada para a criação de páginas para a WWW. Não é, no entanto, uma linguagem de programação. Suas principais características são:
Portabilidade - Os documentos escritos em HTML devem ter aparência semelhante nas diversas plataformas de trabalho.
Flexibilidade - O usuário deve ter a liberdade de “customizar” diversos elementos dodocumento, como o tamanho padrão da letra, as cores, etc.
Tamanho Reduzido - Os documentos devem ter um tamanho reduzido, a fim de economizar tempo na transmissão através da Internet, evitando longos períodos de espera e congestionamento na rede.
14.8 - HISTÓRIA DA WWW
A WWW nasceu no CERN (Centre European Research Nucleare), Suíça. No intuito de padronizar, facilitar e unificar o método de acesso à todas as informações disponíveis. O que outrora era realizado com uma série de programas.
O objetivo inicial era, portanto, centralizar, em uma única ferramenta, as várias tarefas necessárias para se obter as informações disponíveis na Internet. O projeto, iniciado em 1989, originou a WWW em 1991. No entanto, apenas em fins de 1993 a World Wide Web iniciou sua fase de crescimento explosivo, com a versão final do software Mosaic, um Browser, para a comunidade Internet. Usuários de todo o mundo foram atraídos pela forma simples e divertida que a WWW disponibilizava o conteúdo da Internet. Principalmente após a entrada de duas gigantes da informática como a Microsoft e a Netscape, cada uma com seu Browser, que evoluíram as tecnologias de apresentação de imagens, dados, sons e multimídia.
14.9 - FTP (FILE TRANSFER PROTOCOL)
File Transfer Protocol. É o protocolo utilizado para a transferência de arquivos entre duas máquinas ligadas à Internet. Faz parte da biblioteca TCP/IP. O nome FTP também é dado aos programas, chamados clientes, que realizam a transferência do arquivo propriamente dita. O FTP é utilizado, entre outras coisas, para atualizar os sites hospedados em máquinas remotas.
A maioria dos Browsers vem com um Cliente FTP. Alguns Clientes FTP possuem um sistema para recuperar a transmissão de onde parou, em caso de falha.
14.10 - TELNET - EXECUÇÃO REMOTA DE APLICAÇÕES
Protocolo da biblioteca TCP/IP, que lida com acesso remoto. Normalmente executado à partir de um programa de emulação de terminal. O equipamento remoto deve ter um sistema operacional que possua mecanismos de acesso via um sistema de contas - login; daí a classificação do serviço telnet como um serviço de ‘remote login’ da Internet. O usuário interage com o serviço telnet através de um programa cliente telnet, selecionando o equipamento onde deseja executar uma dada aplicação; nesse equipamento é acionado um servidor telnet, que envia um prompt para o estabelecimento de sessão, normalmente solicitado ao usuário um nome de login e uma senha de acesso; uma vez estabelecida a sessão, o usuário pode executar qualquer aplicação desse equipamento autorizada para essa sessão.
Serviço de uso muito difundido na Internet, como por exemplo, BBS, configuração de equipamentos de rede, trabalho remoto, etc.

14.11 - EMAIL - SERVIÇO DE CORREIO ELETRÔNICO
São serviços que permitem a troca de mensagens entre usuários através da Internet. São os serviços de maior alcance da Internet, pois permitem a troca de mensagens tanto com usuários de outras redes de serviços (CompuServe, América Online, BITNET, FidoNet) como com usuários de redes corporativas não totalmente interligados à Internet.
O funcionamento desses serviços tem como base um endereço conhecido como endereço de correio eletrônico ou “e-mail address”, cujo formato é:
user@host,
onde user representa o identificador de uma caixa postal (um espaço em disco) para recebimento de mensagens, e host representa o nome do domínio do equipamento que pode localizar essa caixa postal; esse endereço pode estar associado a um usuário, a um grupo de usuários ou mesmo a um serviço a ser prestado usando o correio eletrônico como meio de transporte.
O funcionamento do correio eletrônico é baseado no paradigma “store-and-forward’, onde os usuários envolvidos na transferência de uma mensagem não interagem diretamente entre si, e sim com programas servidores encarregados de executar e gerenciar essa transferência.
Além da simples troca de correspondência entre dois usuários, existem outros serviços na Internet baseados nesse sistema, tais como Listas de Discussão (“Mailing Lists”). Este serviço é baseado na associação de um endereço de correio eletrônico a várias caixas postais (ou seja, uma lista de usuários), de forma que uma correspondência enviada a esse endereço é recebida em todas essas caixas postais; essa lista de discussão pode ser uma lista simples (sem controle sobre a correspondência e o cadastramento do usuários), moderada (com controle sobre a correspondência por um moderador), ou fechada (com controle sobre o cadastramento de usuários).
Existem também os Serviços de Informação via Correio Eletrônico (“Mailing Information Services”) fornecidos por programas que interagem com os usuários através de correspondência direcionada a um dado endereço de correio eletrônico, correspondência normalmente constituída por comandos e palavras chaves que orientam tais programas a transferir as informações solicitadas.
Obs.: O símbolo de @ (arroba) é de procedência incerta, porém seu uso na Internet foi fundamentado da seguinte forma: @ traduziu-se at em inglês, que em português significa “em”.
Então: joã[email protected] significaria joão “em” ibase.br.
14.12 - INTERNET E MANUTENÇÃO DE MICROCOMPUTADORES
Atualmente a Internet desempenha um papel fundamental para o profissional de manutenção e montagem de microcomputadores. A importância dela já começa na montagem do micro, pois para montá-lo é desejável que se tenha o manual das placas a serem colocadas no computador, principalmente da placa-mãe. Contudo, muitos revendedores as entregam sem eles, se for este o caso, a Internet é a ferramenta que deve utilizada para consegui-los, na qual, é possível obtê-los a partir do site do fabricante da placa. Outro caso, no qual o manual é importante, é quando o micro é usado, nestas circunstâncias a forma mais prática de se conseguir estes manuais é através da página do fabricante na Internet.
Outro ponto onde a Internet desempenha papel fundamental é na manutenção, principalmente na obtenção e atualização de drivers, na atualização do sistema operacional e do anti-vírus, entre outros.
15 - Sites Úteis

16 - LISTA DE EXERCÍCIOS
EXERCÍCIOS
1. O que é sala limpa e para que serve?
2. Qual a diferença entre driver e drive?
3. Defina hardware e software.
4. O que é x86 e qual a sua importância para um sistema ser compatível com x86?
5. O que é linguagem Assembly e qual a sua relação direta com a arquitetura do processador?
6. Defina e dê 3 exemplos para:
. Dispositivos de entrada
. Dispositivos de saída
. Dispositivos de entrada/saída
7. Defina as memórias RAM e ROM. Dê exemplos.
8. Explique a diferença entre CPU e gabinete.
9. Para que serve a memória cache?
10. Quais são os componentes da CPU?
11. Complete as igualdades
. 1,44 MB = ...................... KByte
. 64 KB = ......................... Byte
. 512 MB = ....................... GByte
. 40 GB = ......................... MByte
. 131.072 KB = ................. MByte
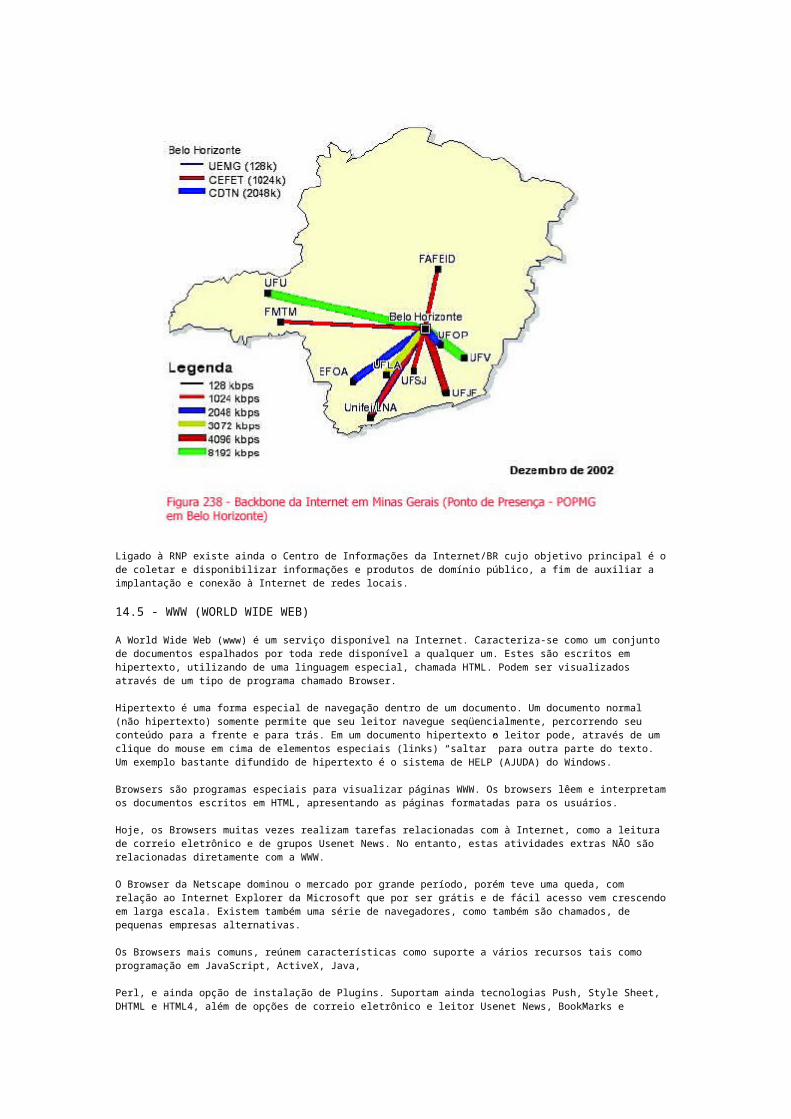
12. O que é um processador? Descreva sua função.
13. O que é um bit? E um Byte?
14. Qual o sistema numérico com o qual os computadores digitais trabalham?
15. Para que serve a BIOS?
16. O que é um barramento?
17. Exponha os principais acontecimentos de cada geração de computadores.
18. Quais os tipos de memória RAM e suas características.
19. O que é um transistor?
20. O que é um circuito integrado?
21. Como um programa é executado no computador?
22. Qual modelo de máquina para processamento criado na década de 40 é utilizado pelos processadores atuais? Explique esse modelo.
23. Defina e determine os tipos de Ram´s e Rom´s e suas características. Dê um exemplo de aplicação para cada.
24. O que é FSB? Explique seu relacionamento com a CPU. Determine como as freqüências da CPU e do FSB trabalham.
25. Qual a relação entre o barramento da memória e o FSB?
26. Determine o que é a memória principal do computador e a memória cache e como elas interagem.
27. O que são os registradores que se encontram dentro processador e para que são utilizados?
28. Considerando uma máquina que possui 12 bits para a representação de dados numéricos, informe qual o maior valor inteiro positivo que esta máquina pode representar.Coloque a resposta em decimal e demonstre.
29. Se cada um dos números que um registrador pode armazenar estiver associado a uma única instrução da linguagem de máquina, responda:
. Quantas instruções podemos ter se o tamanho do registrador for de 4 bits?
. Quantas instruções podemos ter se o tamanho do registrador for de 8 bits?
. Quantas instruções podemos ter se o tamanho do registrador for de 16 bits?
30. Com uma linha de endereço de memória de 20 bits, qual a capacidade máxima de armazenamento desse sistema de memória?
31. Complete o quadro abaixo:
32. Cite alguns dispositivos de armazenamento.
33. O que é um disco rígido e como ele funciona?
34. Quais são os padrões de CD-ROM e como os dados são armazenados?
35. Cite alguns padrões de barramento usados em dispositivos de armazenagem
36. Cite alguns dispositivos de armazenagem portáteis.

37. Explique os termos: setor, trilha, cluster.
38. Qual a relação entre os termos da questão anterior?
39. Como funciona a memória cache do HD?
40. Qual a função das cabeças de leitura e gravação?
41. Pesquise o que são discos SCSI e IDE.
42. Para que serve o DMA e onde se encontra essa tecnologia na Motherboard?
43. Quais são os tipos de interface para HD. Destaque os pontos principais de cada uma.
44. Quantos dispositivos podem ser conectados por IDE?
45. Explique os seguintes termos: partição, unidade lógica, sistemas de arquivo.
46. O que acontecerá se a trilha 0 (zero) do disco estiver danificada por bad sectors?
47. Cite alguns sistemas de arquivos e suas características.
48. Quais são os passos que devem ser executados para preparar o HD para receber um sistema operacional?
49. Pesquise como funciona um sistema de RAID.
50. Quais as diferenças de leitura/gravação entre o disquete, CDR-W e o CD-R?
51. Tenho um livro de 500 páginas com 3.000 caracteres por página, qual mídia poderia ser usada para se gravar esses dados? Demonstre seu raciocínio.
52. Liste pelo menos 5 mídias diferentes de armazenamento portáteis, mostre suas capacidades.
53. O que é uma mídia READ-ONLY?
54. O que é uma mídia REWRITABLE?
55. O que é um disco virtual (ex. RAMDRIVE)? Como ele é usado na instalação do Windows 98?
56. Quando é necessário o uso de uma tecnologia SCSI?
57. Quais as velocidades de rotação dos discos rígidos atuais e como isso influencia sua performance?
58. O que é uma IDE?
59. Para que serve o chipset e quais as funções do norte e sul?
60. O que são slots de expansão e como eles funcionam?
61. Dê exemplos de utilização dos slots PCI, ISA, AGP. Indique a largura do barramento, velocidade e a taxa de transferência.
62. Qual a função da bateria existente na placa-mãe?
63. Explique como funciona o processo de BOOT do computador.
64. Um determinado computador vem equipado com 268.435.456 bytes de memória. Porque o fabricante escolheu um número tão difícil de guardar na cabeça em vez de um mais fácil como 250.000.000.
65. A velocidade de transferência de dados entre o processador e a memória é mais rápida do que entre o processador e os dispositivos de E/S. Explique como essa diferença pode causa ineficiência.
66. Cite e explique os diferentes tipos de memória que temos em nosso computador no laboratório.
67. O que é um protocolo?
68. O que é um U.L.A e onde ela se encontra? Um processador pode ter mais de um dispositivo desse?
69. Explique o funcionamento em conjunto BIOS/CMOS.
70. Quais as funções da BIOS?
71. O que é POST e qual a sua função?
72. Para que serve o gerenciamento de energia existente na BIOS?
73. Descreva a seqüência de BOOT em detalhes.

74. O que acontece quando nenhum dispositivo de BOOT é encontrado?
75. O que é um sistema operacional?
76. Para que serve um sistema operacional?
77. Cite algumas tarefas do sistema operacional. (5 no mínimo)
78. Dê alguns exemplos de sistemas operacionais. (5 no mínimo)
79. Explique a diferença entre uma interface gráfica e uma textual.
80. Determine quais as características da fonte.
81. Liste os dispositivos e portas on-board que uma placa-mãe pode possuir.
82. Cite 5 tipos de memória RAM juntamente com suas características.
83. Pode-se instalar um drive de CD-ROM num computador equipado com processador 386? Caso seja possível, o que é necessário ?
84. Quias os tipos de conectores podem ser utilizados para o teclado?
85. Quais os padrões de porta podem ser utilizados para o mouse?
86. Pode-se fazer um upgrade de um pentium 166MHz para um processador Pentium 4 utilizando o mesmo gabinete?
87. Qual o modelo da BIOS? Que tipo de memória é utilizado?
88. Liste os chipsets e seus respectivos modelos, se possível liste suas funções.
89. O que ocorreria com um computador equipado com um processador Sempron 2200 caso o cooler viesse a falhar?
90. Como a fonte de alimentação trabalha? O que aconteceria se a tensão de entrada fosse maior que o suportado?
91. Caso o disco rígido (HD) fosse afetado por um campo magnético, o que poderia ocorrer com os dados gravados nesse disco?
92. Quais fatores podem afetar a performance de um HD?
93. O sistema de arquivos influenciaria a velocidade de acesso ao HD?
94. Um determinado computador sempre que é ligado pede para se acertar data e hora. O que poderia causar esse problema?
95. Qual a diferença entre megabyte (MB) e megabit (Mb)?
96. Em um determinado gravador de CD vem estampado as seguintes informações: CDRW 52x24x52x, o que significa isso?
97. Qual o número de KBytes que podem ser gravados em um disco CD-R com capacidade para 700 MB?
98. Como um FSB, com freqüência mais próxima da do processador, poderia melhorar o desempenho do computador?
99. Qual a capacidade em GBytes que se pode armazenar num disco de ZIP DRIVE de 100 MBytes?
100. Caso o pente de memória estivesse com problema num endereço, o que poderia ocorrer durante o funcionamento do SO?
101. O que é overclock?
102. Quais são as conseqüências de um overclock mal sucedido?
103. O que é um upgrade de BIOS?
104. Como pode ser feito?
105. Quais são as situações onde deve ser feito?
106. Quais itens devem ser observados ao se encaixar os cabos flat, no HD e no Floppy?
107. Quais itens devem ser obsevados ao se encaixar os cabos de alimentação no HD ou no CD-ROM?
108. Como se configura um dispositivo que utilize a interface IDE para trabalhar como MASTER OU SLAVE? Quais itens devem ser observados e configurados?
109. O que deve ser obsevado ao se conectar o cabo de alimentação à placa-mãe?

110. O que poderia ocorrer se o computador fosse ligado com o pente de memória mal encaixado?
111. O que são cilindros e setores?
112. Quantos dispositivos, que utilizam a interface IDE, podem ser conectados no computador? Dê exemplo.
113. Quantos floppys pode-se utilizar num PC atual?
114. Quais características preciso avaliar para comprar uma fonte?
115. Cite 3 tipos de cabo flat, suas características e quando utiliza-los.
116. Para que serve o Scandisk e qual a operação ele realiza?
117. Para que serve o Desfragmentador de discos, qual a operação que ele realiza?
118. O que o comando CHKDSK faz?
119. Descreva passo a passo como fazer a instalação física de um HD.
120. Descreva passo a passo como fazer a instalação lógica de um HD.
121. Mostre o caminho para alterar as configurações de hardware do Windows.
122. O que aconteceria caso um arquivo do SO Windows fosse corrompido e esse arquivo fosse essencial para o seu funcionamento?
123. O que acontece quando um driver é instalado incorretamente?
124. O que é um BAD BLOCK?
125. Quando um endereçamento de memória está com problema e não pode ser lido?
126. Qual a diferença entre memória SDR e DDR?
127. O que é POST?
128. Qual o possível problema da máquina quando não há sinal no monitor, a máquina liga, porém emite alguns beeps?
129. Um computador possui 4 dispositivos IDE passíveis de BOOT. O SETUP possui somente 3 itens para configurar a seqüência de boot. Como fazer para que o boot ocorra no 4º dispositivo após a falha dos anteriores?
130. Qual a configuração para os 4 itens dos canais IDE, no STANDARD CMOS SETUP, para que os dispositivos sejam reconhecidos na inicialização?
131. Quais as formas de se acessar o SETUP de uma máquina que possui senha no mesmo (pelo menos 3 formas)?
132. Um computador possui dois drives floppy, o floppy (A:) está danificado. O que é preciso configurar no setup para que se utilze o floppy B como A,e além disso, de BOOT nele?
133. Para que se utilize dois adaptadores de vídeo, qual a configuração deverá ser feita no SETUP?
134. O Windows é um software proprietário e o Linux é um software livre. O que significa isso?
135. Quanto custa uma licença do Windows XP e quanto custa uma distribuição Linux como a Conectiva, por exemplo?
136. Pode-se adquirir um (01) CD do Windows XP com uma (01) licença de uso e instalálo nos 150 micros de uma empresa?
137. Posso fazer isso com o Linux?
138. O que é Openoffice? E Staroffice?
139. Posso fazer o mesmo do item 3 com o Microsoft Office? Por que?
140. Posso fazer o mesmo do item 3 com o Openoffice? E com o Staroffice? Por que?
141. Para que servem os softwares abaixo e quais os nomes dos seus fabricantes?
a) Winzipb) Coreldrawc) Pagemakerd) Brazipe) Paint shop prof) Norton Anti-virusg) Firefoxh) Norton System Works

i) AVGj) Avastk) Download Accelerator
142. O que são softwares classificados como Freeware? E Shareware? E Adware?
143. Classifique os softwares do item 8 como Freeware, Shareware e Proprietário.
144. Quais são os itens que podem ser configurados em uma plca de vídeo? Explique cada uma delas.
145. O que é o LBA MODE adotado por alguns discos rígidos e placas-mãe?
146. O que a opção floppy drive seek faz?
147. O que se configura na opção SHARE MEMORY SIZE?
148. Para que serve a opção HARDWARE MONITOR existente no setup?
149. Por que devemos configurar como master e/ou slave os dispositivos ligados ao barramento do canal IDE?
150. Não há sinal de vídeo no monitor. Quais as possíveis causas disso? Descreva cada uma das categorias abaixo:
a) Fora do gabineteb) Dentro do gabinetec) Na placa-mãed) Em placas de expansãoe) Outros dispositivos
151. Cite pelo menos 5 formas de se conseguir acessar um micro com senha do SETUP na inicialização.
152. Durante o BOOT o computador apresenta diversas mensagens de erro impedindo o carregamento do Windows. Acusa a falta de um arquivo do sistema. Como recuperar esse arquivo a partir do prompt de comando?
153. Uma vez que o Windows foi carregado é possível recuperar arquivos de sistema utilizando aplicativos do próprio Windows.
154. Qual é este aplicativo?
155. Como ele é executado?
156. Como faço para recuperar um arquivo do sistema que foi perdido?
157. O que são arquivos com as extensões:
158. O que é o registro do Windows? Para que ele serve?
159. Qual a seqüência para geração de um disco de BOOT do Windows?
160. Qual aplicativo devo utilizar para resolver problemas na inicialização do Windows? Como ele funciona?
161. Se o arquivo MV154.DLL não deve ser carregado na inicialização, cite duas formas de se remover sua referência na inicialização do sistema. Inclua na resposta os passos para se fazer isso.
162. Qual a chave de registro do Windows onde está o número de série do Windows?

163. Descreva cada um dos seguintes arquivos:
a) Autoexec.batb) Config.sysc) System.inid) Win.ini
164. O que é manutenção preventiva?
165. O que é manutenção corretiva?
166. Quais ferramentas são usadas na manutenção preventiva? (ferramentas podem ser de hardware ou software).
167. Quais ferramentas são usadas na manutenção corretiva? (ferramentas podem ser de hardware ou software).
168. Pessionando-se ctrl+alt+del durante o funcionamento do Windows abre a janela de fechar programas. Para que ela serve? O que são os nomes contidos nessa janela?
169. O que é um anti-vírus e para que ele serve?
170. O que é a atualização do engine do anti-vírus e para que serve?
171. O que é a atualização de definições de vírus e para que serve?
172. Quais as conseqüências de se apagar uma chave do registro do Windows incorretamente?
173. Quais os passos para se desinstalar software corretamente?
174. Quais os passos para se instalar o aplicativo Hyper Terminal do Windows, que não é instalado na instalação típica?
175. Quais as chaves do registro que apontam para o diretório onde estão os arquivos de instalação do Windows?
176. Como está dividido o HD do seu computador? Faça um esboço.
177. Como o Linux trabalha com memória virtual?
178. Como o Windows trabalha com memória virtual?
179. Quais os tipos de sistema de arquivo que o Linux consegue ler?
180. Quais os tipos de sistema de arquivo que o Windows XP consegue ler? E o Windows 98?
181. O Linux pode ser instalado utilizando quais sistemas de arquivo?
182. O que é um gerenciador de BOOT?
183. Quais os passos para se instalar o Windows XP e depois uma versão Linux? Considere que ele acabou de ser instalar um HD novo.
184. Explique o que é:
a) Bus masteringb) ATAc) IDEd) Chipsete) DMAf) IRQ
185. Quais os problemas que podem impedir que o computador dê sinal de vídeo?
186. Como a memória DDR consegue ser mais “rápida” que a SDR?
187. Defina:
a) Estação de trabalhob) Servidorc) Switchd) HUBe) Roteador
188. O que é a Internet?
189. O que é um browser?
190. Quais os passos para se compartilhar uma impressora na rede?
191. O desempenho do Hardware(computador) afeta o desempenho da rede? Responda levando em consideração uma estação de trabalho e um servidor de rede.
192. Pesquise as marcas disponíveis no mercado e os valores.

a) Placa de vídeob) HDc) CD/CDR-W/DVD/DVD-RW/FLOPPYd) Placa-mãee) CPU/ COOLERf) Monitor CRT/LCDg) Memória DDR/DIMMh) Fonte at/atx, gabinete, torre, mini-torre, full tower slim, desktopi) Teclado normal, ergonômico, sem fio.j) Placa de rede, faz e som.k) Impressora jato de tinta, laser (pb e color), matricial, jato de cera, multifuncional, térmica, fiscal.
193. O que são memórias voláteis e não voláteis? Dê 3 exemplos.
194. Qual é o tipo de memória ROM utilizados nas BIOS das placas mães atuais?
195. Uma maior quantidade de memória cachê pode atrapalhar o funcionamento do computador? Por que?
196. Qual protocolo é utilizado na Internet? O que é um protocolo?
197. Quais as diferenças entre fontes AT/ATX?