modelo numÉrico simplificado para anÁlise da...
TRANSCRIPT
MODELO NUMÉRICO SIMPLIFICADO PARA ANÁLISE DA VIBRAÇÃO
EXCESSIVA NO CASCO, SUPERESTRUTURA E PRAÇA DE MÁQUINAS DE
NAVIO
Osvaldo Pinheiro de Souza e Silva
Dissertação de Mestrado apresentada ao
Programa de Pós-graduação em Engenharia
Oceânica, COPPE, da Universidade Federal do
Rio de Janeiro, como parte dos requisitos
necessários à obtenção do título de Mestre em
Engenharia Oceânica.
Orientador: Severino Fonseca da Silva Neto
Rio de Janeiro
Janeiro de 2011
MODELO NUMÉRICO SIMPLIFICADO PARA ANÁLISE DA VIBRAÇÃO
EXCESSIVA NO CASCO, SUPERESTRUTURA E PRAÇA DE MÁQUINAS DE
NAVIO
Osvaldo Pinheiro de Souza e Silva
DISSERTAÇÃO SUBMETIDA AO CORPO DOCENTE DO INSTITUTO ALBERTO
LUIZ COIMBRA DE PÓS-GRADUAÇÃO E PESQUISA DE ENGENHARIA
(COPPE) DA UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COMO PARTE
DOS REQUISITOS NECESSÁRIOS PARA A OBTENÇÃO DO GRAU DE MESTRE
EM CIÊNCIAS EM ENGENHARIA OCEÂNICA.
Examinada por:
________________________________________________
Prof. Severino Fonseca da Silva Neto, D.Sc.
________________________________________________ Prof. Carlos Rodrigues Pereira Belchior, D.Sc.
________________________________________________ Prof.ª Eliane Maria Lopes Carvalho, D.Sc.
RIO DE JANEIRO, RJ - BRASIL
JANEIRO DE 2011

Souza e Silva, Osvaldo Pinheiro de
Modelo Numérico Simplificado para Análise da
Vibração Excessiva no Casco, Superestrutura e Praça de
Máquinas de Navio/ Osvaldo Pinheiro de Souza e Silva. –
Rio de Janeiro: UFRJ/COPPE, 2011.
VII, 49 p.: il.; 29,7 cm.
Orientador: Severino Fonseca da Silva Neto
Dissertação (mestrado) – UFRJ/ COPPE/ Programa de
Engenharia Oceânica, 2011.
Referências Bibliográficas: p. 48-49.
1. Modelo numérico para análise da vibração
excessiva de navio. I. Silva Neto, Severino Fonseca da. II.
Universidade Federal do Rio de Janeiro, COPPE,
Programa de Engenharia Oceânica. III. Título.
iii
AGRADECIMENTOS
A Elza, minha mãe, raiz e princípio do tudo que hoje compõe a minha vida; a Maria de
Lurdes, minha irmã, por ser o caule que permitiu e orientou meu correto
desenvolvimento; a Luiza Maria, minha esposa, a flor que desabrochou o belo e a
candura do meu sentimento, tornando-me um homem completo; a Debora Maria, minha
filha, amado fruto que me permite persistir ao desenrolar dos tempos; a Maria dos
Anjos, minha sogra, e a Paula, minha tia, verdadeiras jardineiras desse
desenvolvimento; a Vitorino, meu irmão, e a João Victor, meu sobrinho, os
“adubatores” de idéias; a Alfredo, meu pai, a Audmaro, meu sogro, e a Roberto, meu
irmão, meus apaziguadores espirituais; a Deus, que permite a existência do meu tão
querido, e importante, jardim.
Ao Professor Belchior, pelo incentivo e possibilidade de acesso a este desenvolvimento
de minha vida acadêmica, além das necessárias correções na rota do objetivo a ser
alcançado; ao Professor Severino, incansável Mestre nas orientações das dúvidas,
verdadeiro guia nos caminhos muitas vezes tortuosos e mesmo desconhecidos, Amigo,
que nunca deixou sentir-me só durante a trajetória que agora se realiza. Aos professores,
em geral, que propiciaram o engrandecimento e o apuro dos meus conhecimentos.
A toda a equipe do LEME, além de todos os alunos de graduação e pós-graduação que
compõe a equipe do laboratório, como ao pessoal da Secretaria, eficientemente
administrada pela Glace, sempre, todos, solícitos as necessidade acadêmicas, e mesmo
pessoais, de todos nós.
Ao Centro de Instrução Almirante Graça Aranha, CIAGA, da Marinha do Brasil,
através do seu Comando, da Superintendência de Ensino, do Departamento de Ensino
de Máquinas e da Divisão de Recursos Humanos, que possibilitaram o tempo de
dedicação a este estudo.
Aos amigos do CIAGA e da COPPE pelo apoio e companheirismo demonstrados nos
momentos mais difíceis do andamento dos trabalhos desta tese.
A todos meus parentes e amigos que em algum momento tenham acreditado e torcido
por mim durante a realização e concretização desta etapa profissional.
Osvaldo Pinheiro de Souza e Silva
iv

Resumo da Dissertação apresentada à COPPE/UFRJ como parte dos requisitos
necessários para a obtenção do grau de Mestre em Ciências (M.Sc.)
MODELO NUMÉRICO SIMPLIFICADO PARA ANÁLISE DA VIBRAÇÃO
EXCESSIVA NO CASCO, SUPERESTRUTURA E PRAÇA DE MÁQUINAS DE
NAVIO
Osvaldo Pinheiro de Souza e Silva
Janeiro/2011
Orientador: Severino Fonseca da Silva Neto
Programa: Engenharia Oceânica
A vibração é uma das principais causas de problemas operacionais em navios. O
estudo de vibrações é uma tarefa complexa, embora haja meios de simplificá-la. As
análises de vibrações feitas a partir de modelos tridimensionais em programas de
elementos finitos podem ser exaustivas, dando espaço ao desenvolvimento de modelos
unidimensionais, caracterizados como excelente alternativa dada à simplicidade e a
confiabilidade. Essa modelação é capaz de descrever o navio a partir das propriedades
mecânicas da sua seção mestra extrapolada ao longo do seu comprimento. Este trabalho
consiste em simplificar a análise de vibrações do casco, representando-o através de um
modelo unidimensional criado no software Nastran, com sua rigidez e massa, a fim de
analisar as freqüências naturais e respectivos modos de vibração de um navio real que
apresentou sérias conseqüências em estruturas e equipamentos de bordo, causadas por
vibração excessiva do casco. Neste trabalho, foram analisadas as freqüências extraídas
do programa, comparando-as às medições reais do navio, a fim de corroborar com a
validação da utilização de modelos unidimensionais para análises de vibração em cascos
de navios.
v

Abstract of Dissertation presented to COPPE/UFRJ as a partial fulfillment of the
requirements for the degree of Master of Science (M.Sc.)
USEFUL OF SIMPLE NUMERIC MODEL FOR EXCESSIVE VIBRATIONS
ANALYSIS FROM SHIP’S HULL, SUPERESTRUCTURE AND ENGINE ROOM
SET
Osvaldo Pinheiro de Souza e Silva
January / 2011
Advisor: Severino Fonseca da Silva Neto
Department: Ocean Engineering
The vibration is one of main causes from operational troubles on ships. The
study of vibrations is a complex job but is possible to simplify it. Vibrations analysis
made from tridimensional models in finite elements program should be tired, causing
the development of one-dimensional models regarding to do the same job, viewing its
simplicity and trustily. This model can describe the vessel through its mechanical
properties from master ship cross-section to ship all long. This job consists to simplify
the analysis of hull vibrations showed through the one-dimensional model by Nastran
software, with its rigidity and its mass, regarding to analyze its natural frequencies and
respective vibrations modes from a real ship which showed hard consequences on its
structures and equipments, caused by excessive vibrations from its hull. In this job were
analyzed the frequencies from the program versus measurements from real vibrations of
the ship, viewing to validate the useful of one-dimensional model to analyze the
vibration from ship’s hull.
vi
- SUMÁRIO – 1 - Introdução.................................................................................................................... 1
1.1 - Importância e Motivação........................................................................................ 1
1.2 - Vibrações de Navio................................................................................................ 2
1.3 – Desenvolvimentos do Estudo do Modelo Numérico............................................. 2
2 - Conceitos Básicos....................................................................................................... 5
2.1 - Vibrações de Vigas................................................................................................. 5
2.1.1 - Viga de Euler..................................................................................................... 5
2.1.2 - Viga de Timoshenko......................................................................................... 6
2.2 - Teoria do Fluxo de Tensões Cisalhantes em Seções de Paredes Finas.................. 6
2.3 - Massa Adicional..................................................................................................... 9
3 – Análise Experimental de Vibração de Navio Porta-Contentor................................. 12
3.1 – Características do Navio...................................................................................... 12
3.2 - Medição.............................................................................................................. 15
3.2.1 - Locais Medidos... ........................................................................................... 15 3.2.2 - Equipamentos Utilizados................................................................................. 16 3.2.3 - Programas Utilizados na Medição................................................................... 17
3.2.4 - Resultados da Medição.................................................................................... 19
3.2.5 - Análise da Medição......................................................................................... 27
4 – Análise Numérica da Vibração Livre pelo Método dos Elementos Finitos............. 28
4.1 – Modelação do Casco........................................................................................... 28
4.1.1 – Unidades de Medida...................................................................................... 28
4.1.2 - Características do Material Utilizado............................................................ 29
4.1.3 – Modelos......................................................................................................... 30
4.1.4 – Área de Aço e Inércia Através do PROSEC5............................................... 30
4.1.5 – Massa Virtual................................................................................................ 39
4.1.6 – Massa do Motor............................................................................................ 39
4.1.7 – Condições de Carregamento......................................................................... 40
4.2 – Resultados.......................................................................................................... 42
5 - Conclusão.................................................................................................................. 45
vii
1 – Introdução
1.1 – Importância e Motivação
A análise de vibração em sistemas oceânicos é um dos assuntos amplamente estudados
e desenvolvidos hoje na engenharia naval. Além dos problemas técnicos, estruturais e
no funcionamento de equipamentos, problemas relativos à qualidade de vida, através de
sensações fisiológicas, são, comprovadamente, oriundos dessa conseqüência, a
vibração, quando da produção, ativa ou reativa, de movimento.
Muitos problemas operacionais ocorrem devido a vibrações excessivas, e bons
exemplos de fontes de vibrações são o motor e o propulsor da embarcação.
Sempre que a freqüência natural de vibração de um equipamento ou sistema coincide
com a freqüência da força externa atuante, ocorre um fenômeno conhecido como
ressonância, capaz de ocasionar grandes deformações e falhas mecânicas. Dados os
efeitos devastadores que podem ser causados por estas vibrações excessivas, testes
vibratórios são um procedimento padrão no projeto e desenvolvimento da maioria dos
sistemas em engenharia.
Vibrações excessivas as quais podem estar submetidas às embarcações são de relevante
preocupação, uma vez que elas podem levar os sistemas a falharem causando danos em
equipamentos, em estruturas, além do desconforto a que pode estar sujeita a tripulação.
O estudo das vibrações é uma tarefa complexa, embora haja meios de simplificá-la.
As análises de vibrações feitas a partir de modelos tridimensionais em programas de
elementos finitos podem ser exaustivas, dando espaço ao desenvolvimento de modelos
unidimensionais, caracterizados como excelente alternativa dada as suas simplicidade e
confiabilidade. Esta modelação é capaz de descrever o navio a partir das propriedades
mecânicas de sua seção mestra, extrapolada ao longo do seu comprimento.
Este trabalho consiste em simplificar a análise de vibrações do casco, representando-o
através de um modelo unidimensional criado no software Nastran, com sua rigidez e
massa, a fim de analisar as freqüências naturais, e respectivos modos de vibração, de um
navio real que apresentou sérias conseqüências em suas estruturas e equipamentos de
bordo, causadas por vibração excessiva do casco.
1
Neste trabalho, foram analisadas as freqüências extraídas do programa comparando-as
às medições reais do navio, a fim de corroborar com a validação da utilização de
modelos unidimensionais para análises de vibração em cascos de navios.
1.2 – Vibrações de Navio
No contexto deste trabalho, vibrações de navio consistem exclusivamente da vibração
elástica do casco do navio e/ou de suas partes. Estas vibrações podem interferir na vida
do navio, prejudicando a eficiência e a saúde do pessoal embarcado, causar danos em
partes da embarcação ou de sua carga e, ainda, em casos mais severos, colocar em risco
a própria segurança da embarcação.
1.3 – Desenvolvimentos do Estudo do Modelo Numérico
Segundo ZANIBONI (2010), no Brasil vários trabalhos foram feitos no intuito de
investigar a vibração de navio, tanto na parte experimental quanto na parte numérica
utilizando modelos de elementos finitos.
Estes estudos se concentram na investigação de vibração causada pelo motor que está
dentro do navio.
LEGUE-LEGUE (1989), realizou um estudo de vibrações na praça de máquinas de um
navio, originadas por seu motor principal, onde foram analisadas não só as frequências
naturais de vibração do navio, bem como a resposta dinâmica aos agentes excitadores.
O navio é um graneleiro de 265 metros de comprimento, tendo um motor principal com
potência de 14100 HP a 74 RPM de 6 cilindros em linha. Neste estudo realizou-se uma
modelação da estrutura da praça de máquinas do navio, utilizando elementos de viga
para representar as longarinas e hastilhas e elementos de casca para representar o
chapeamento do costado e do fundo. O motor principal foi modelado utilizando
elementos de casca de espessura constante para representar as anteparas, paredes e os
cilindros do motor, de acordo com a sua geometria. A massa do motor foi modelada por
massa nodal, considerando a distribuição de massa existente próximo ao nó e levando
em conta o centro de gravidade do motor real. Nesta análise o motor teve sua base
engastada. A fim de obter as respostas dinâmicas, modelaram-se também as forças
excitadoras do motor obtidas de acordo com os dados fornecidos pelo fabricante. Estas
excitações foram o momento da segunda ordem horizontal, reações do par motor sobre
2
o eixo de manivela em seu sexto harmônico e momento com respeito ao centro do
motor em seu terceiro harmônico. Estas forças e momentos foram aplicados ao modelo
de elementos finitos, nos nós situados no extremo dos cilindros, de acordo com o modo
de vibração. Neste estudo foram apresentado as três primeiras freqüências e modos
naturais de vibração do motor, como também os da praça de máquinas do navio e
comparados com valores experimentais. Além disso, obteve-se a resposta dinâmica de
dois pontos representados por nós no modelo, um situado no cilindro 1 do motor
principal e outro situado no convés principal da linha de centro. Para cada nó
considerado foram obtidos o deslocamento e a velocidade para os três primeiros modos
de vibração da praça de máquinas. Estes resultados também foram comparados com os
valores experimentais.
Há também estudos sobre solução do problema de vibração de MCP, alterando as
características de rigidez com o uso de estais, como descrito por DINUCCI (1994).
Neste trabalho foi feita uma pesquisa bibliográfica sobre a necessidade do uso de estais.
Também foram comentados outros artifícios para solução da vibração em motores,
como o uso de contrapesos ajustáveis no eixo de manivela, Rodas sintonizadoras,
Compensadores eletricamente controlados e Amortecedores de Vibração Axial. Foram
também comentadas as características de vibração de motores diesel, principalmente os
problemas encontrados em alguns navios que utilizam motores com pequeno número de
cilindros.
No trabalho de TROCADO (1995), foi feito um estudo sobre estaiamento de um MCP
através de análise numérica. Foi utilizado um modelo em elementos finitos de viga
como um pórtico para representar o MCP e no topo do motor, estais com elementos de
mola. Neste modelo foi inserido uma força também no topo do MCP. A partir daí foram
feitas análises estáticas e dinâmicas variando-se a rigidez destas molas, e observados os
deslocamentos máximos e os fatores de amplificação quando em ressonância.
Observou-se comportamento distinto para cada modo de vibração, quanto ao fator de
amplificação, à medida que se aumentasse o fator de rigidez.
No trabalho de TAWECAL & MIHARJANA (2009) foi realizada a análise de vibração
da superestrutura de um semicontainer de 3500 toneladas de porte bruto em elementos
finitos. Medições experimentais foram usadas para comparar com os resultados
numéricos. Dois modelos tridimensionais foram utilizados um contemplando o modelo
da superestrutura juntamente com o casco e o outro somente a superestrutura, ambos
com boa precisão. Os resultados mostraram boa concordância entre as medições e os
3
dois modelos apresentando diferença entre o mais baixo valor obtido pelos modelos e o
resultado experimental menor que 5%.
No trabalho de GUL & KAYDIHAN (2009), um modelo tridimensional contemplando
o casco, a superestrutura e o sistema propulsivo de um navio containeiro de 1900
toneladas de porte bruto, foi elaborado para análise de frequência natural e analise de
vibração. O modelo foi construído através do software Abaqus, com elementos de placa
e de viga para modelar o casco e a superestrutura e o motor com elementos sólidos.
Neste motor foram inseridos forças e momentos, para análise dinâmica do navio. Para
efeitos hidrodinâmicos, a água do mar em torno do navio foi modelada com elementos
do tipo acústico. Elementos de massa foram usados para modelagem da massa da carga.
Modelos unidimensionais também foram utilizados para análise de vibração de viga
navio. No trabalho feito por TEIXEIRA (2010), foi construído um modelo
unidimensional em elementos finitos a fim de calibrar a massa adicional de uma viga
navio. O navio é um petroleiro de 186 metros de comprimento, com capacidade de
carga de 44000 ton e 18500 ton de lastro. Foram utilizados, para calibração, resultados
experimentais de vibração. Construído o modelo com a rigidez apropriada, a massa
adicional foi sendo inserida através de elementos de massa, conectados aos nós dos
elementos de viga do modelo, de maneira homogênea, até que os valores experimentais
coincidissem com os valores experimentais. O valor de rigidez da viga foi obtido
através de uma planilha, cujas propriedades foram extraídas do desenho da seção mestra
e inseridos ao modelo. O valor da área de cisalhamento foi obtido comparando-se o
resultado de frequência natural, com o modelo tridimensional utilizado neste trabalho,
ambos sem elementos de massa.
O objetivo desta dissertação é apresentar uma metodologia de determinação das
primeiras freqüências naturais do casco de uma embarcação, utilizando como
ferramenta um software de elementos finitos.
4
2 - Conceitos Básicos
Neste item será apresentada uma revisão teórica de conceitos utilizados durante a
elaboração deste trabalho.
2.1 - Vibrações de Vigas A vibração ocorre sempre na existência de forças dinâmicas, forças que variam ao longo
do tempo atuando no casco, apêndices ou em elementos estruturais, se uma estrutura
apresenta massa e elasticidade é passível a vibração. A resposta a essa, em um dado
sistema, depende da intensidade das forças de excitação e das características - inércia,
amortecimento e rigidez - do mesmo.
Existem alguns tipos diferentes de vibração, sendo elas: torcional, longitudinal, lateral e
a estudada neste trabalho, transversal, aplicada a vigas. Estas vigas podem ser
consideradas de dois tipos, vigas de Euler-Bernoulli, as quais a seção transversal pode
ser considerada pequena em relação ao seu comprimento, assim o estudo de vibração
não inclui o efeito adicional da rotação das seções, e vigas de Timoshenko, a chamada
viga curta, com isso não pode desconsiderar este efeito, além de ter que levar em conta
a deformação produzida pela força cortante.
A viga-navio é representada, portanto, por uma viga de Timoshenko, uma vez que suas
dimensões da seção mestra não podem ser consideradas pequenas em relação ao
comprimento da embarcação.
2.1.1 - Viga de Euler
A equação elástica desta viga considerada apenas o momento fletor, ou seja:
(2.1) Onde,
- Inércia da viga distribuída ao longo do comprimento;
- Carga distribuída ao longo da viga e variável com o tempo;
Esta viga além de considerar a hipótese, como dito anteriormente, de que se trata de
uma viga esbelta, ou seja, o comprimento da viga é muito maior que as dimensões da
5
sua seção transversal. Também considera que os deslocamentos verticais de todos os
pontos de uma mesma seção transversal são pequenos e iguais ao eixo da viga, o
deslocamento lateral é nulo, as seções transversais normais ao eixo da viga antes da
deformação permanecem planas e ortogonais ao eixo após a deformação, ou seja, não
existe empenamento das seções durante a flexão e por fim considera que o seu material
obedece a Lei de Hooke.
2.1.2 - Viga de Timoshenko
Para que uma viga seja considerada Viga de Timoshenko sua dimensão transversal não
pode ser inferior a 10% de seu comprimento. Esta viga, ao contrario da Viga de Euler,
considera a inércia de rotações das seções e o efeito da força.
A viga em questão considera que as seções planas se mantêm planas. Contudo, uma
seção normal ao eixo da viga não mantém necessariamente essa característica após a
deformação. Deste modo é possível considerar a deformação devida ao cisalhamento,
uma vez que na medida em que a relação do seu comprimento pela altura aumenta, as
tensões de cisalhamento na direção da altura tornam-se importantes e não podem mais
ser desprezadas.
Assim o elemento da viga que já havia sofrido uma rotação devido ao momento
fletor , sofre com a atuação das forças cortantes uma distorção β , de forma
que a rotação final da viga passe a ser:
(2.2)
Essas hipóteses fazem com que os resultados obtidos da vibração de vigas em flexão,
suas freqüências naturais, sejam mais precisos e próximos do real.
2.2 - Teoria do Fluxo de Tensões Cisalhantes em Seções de Paredes Finas Os fundamentos da Teoria do Fluxo de Tensões Cisalhantes em Seções de Paredes
Finas podem ser encontrados em MEGSON (1974). No entanto, neste relatório, a teoria
será apresentada de forma rápida e conclusiva.
6

São consideradas as seguintes hipóteses:
1. A espessura do material é considerada pequena se comparada com as demais
dimensões da seção;
2. As tensões cisalhantes distribuem-se uniformemente pela espessura da parede;
3. O material é linear e isotrópico e;
4. Considera-se o coeficiente de Poisson nulo, uma vez que, segundo CHALMERS
(1979), sua inclusão na análise não se justifica.
Figura 2.1 - Seção de Parede Fina
Para uma seção plana qualquer, como apresentada na Figura 2.1, o fluxo cisalhante em
um ponto s da seção é determinado por:
∑∫∑∫ ++−+−= 000 ))(())(( qybdsytIS
zbdsztIS
q S
zz
yS
yy
zs
(2.3)
sendo,
zzyy
yz
yy
yzzy
y
III
II
SSS 2
1
)(
−
−
=
(2.4)
7

Onde,
yS - Força cortante aplicada na direção y;
zS - Força cortante aplicada na direção y;
zy, - Coordenadas relativas ao centróide da área da seção;
zzyy II , - Momentos de Inércia de área centroidal;
yzI - Momento de Inércia de área centroidal;
t - Espessura das paredes;
b - Área de reforço que absorve tensões normais, mas não tensões cisalhantes;
oq - Fluxo de tensão cisalhante no ponto inicial 0.
Com definido, torna-se necessário escrever uma equação para a área efetiva ao
cisalhamento, , em função do fluxo cisalhante. De acordo com a teoria elementar de
flexão de vigas, assume-se que a inclinação da elástica devido a uma forca cortante V
seja dada por:
sq
ak '
aGkV
dxdw
'=
(2.5)
Onde,
G - modulo de elasticidade transversal do material
aGk ' - é o termo conhecido como “rigidez ao cisalhamento”.
A partir do Principio do Valor Estacionário da Energia Complementar Total do
Sistema Elástico, MEGSON (1972), pode-se escrever que:
∫= tdsdxdw
S λτ * (2.6)
Onde,
*τ - Tensão cisalhante por unidade de força cortante num ponto arbitrário da seção;
γ = Deformação de cisalhamento causada pela força cortante V .
Definindo tq ** τ= e )/(Gtq=λ , e se o sistema elástico é linear, , logo: *Vqq =
8
∫=s
dst
qGV
dxdw 2*
(2.7)
Por fim, igualando Equações (2.6) e (2.7):
12
))*((' −∫= dst
qak S (2.8)
A determinação de deve ser feita para a força cortante unitária na direção relevante
em questão.
*q
No método proposto as paredes da seção são compostas por elementos retilíneos, o que
segundo CHALMERS (1979) subestima a área efetiva no cisalhamento em
aproximadamente 1%. Mas, o uso destes elementos retilíneos justifica-se pela maior
facilidade na solução das integrais.
2.3 - Massa Adicional Ao considerar uma viga-navio, deve se levar em conta que esta se encontra parcialmente
submersa no fluido, dessa forma deve ser dimensionada e acrescentada à massa da
estrutura uma massa adicional. Esta consiste nas partículas líquidas próximas ao casco
que se movimentam junto com a embarcação e depende da geometria do navio – área e
esbelteza – e da profundidade do meio fluido, ou seja, o calado da embarcação.
Existem diferentes formas, apresentadas por LOPES (1980), de se calcular a massa
adicional, entre elas formulações empíricas desenvolvidas por Burril, Kumay, Todd e
também o Método da Transformação Conforme, desenvolvido por Lewis, que apresenta
os resultados mais precisos.
Lewis considerou resultados de uma seção circular e através do método citado a cima,
determinou resultados para seções típicas de navio. A partir desses resultados o
pesquisador Landweber gerou dois gráficos, apresentados abaixo, com curvas de CV e
CH – coeficiente de massa virtual vertical e coeficiente de massa virtual horizontal –
respectivamente, que serão utilizados para o cálculo da massa adicional.
9
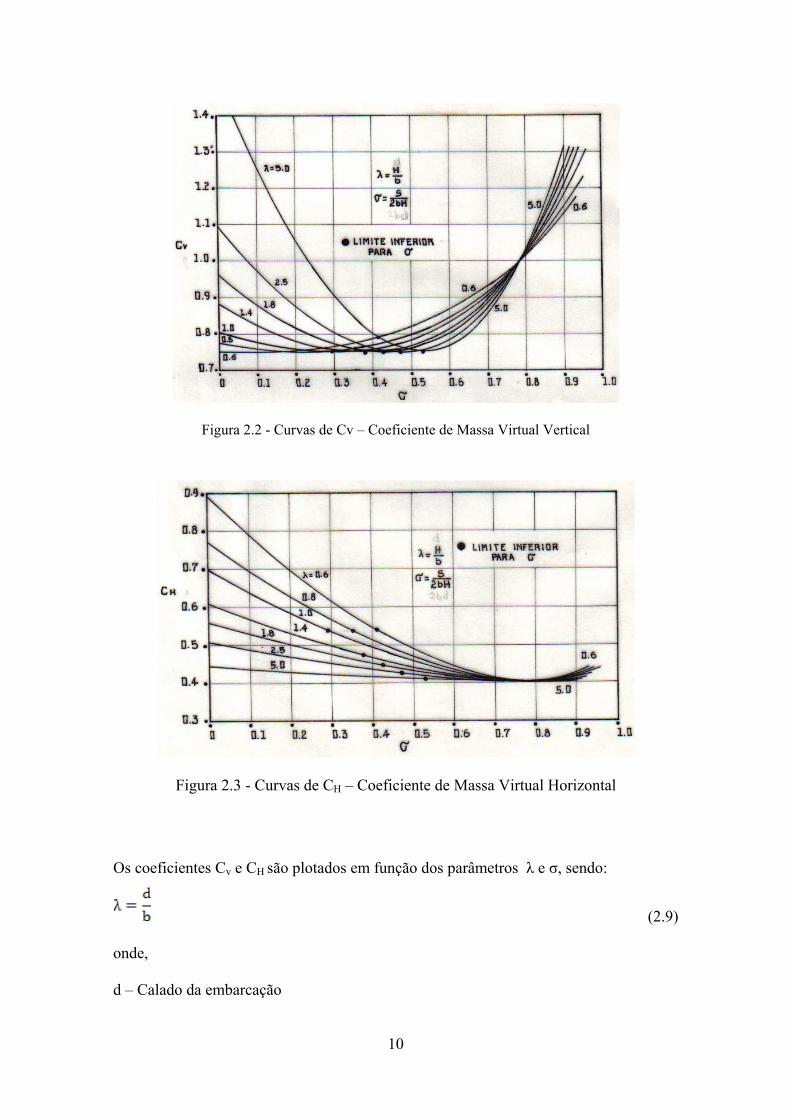
Figura 2.2 - Curvas de Cv – Coeficiente de Massa Virtual Vertical
Figura 2.3 - Curvas de CH – Coeficiente de Massa Virtual Horizontal
Os coeficientes Cv e CH são plotados em função dos parâmetros λ e σ, sendo:
(2.9) onde, d – Calado da embarcação
10

b – Meia Boca da embarcação
(2.10) onde, S – Área imersa da Seção
Estes coeficientes retirados dos gráficos são aplicados a fim de obter a massa adicional
vertical e horizontal por unidade de comprimentos respectivamente nas seguintes
formulações:
(2.11)
(2.12)
onde,
ρ – Massa Específica do fluido
b – Meia Boca da embarcação
d – Calado da embarcação
11
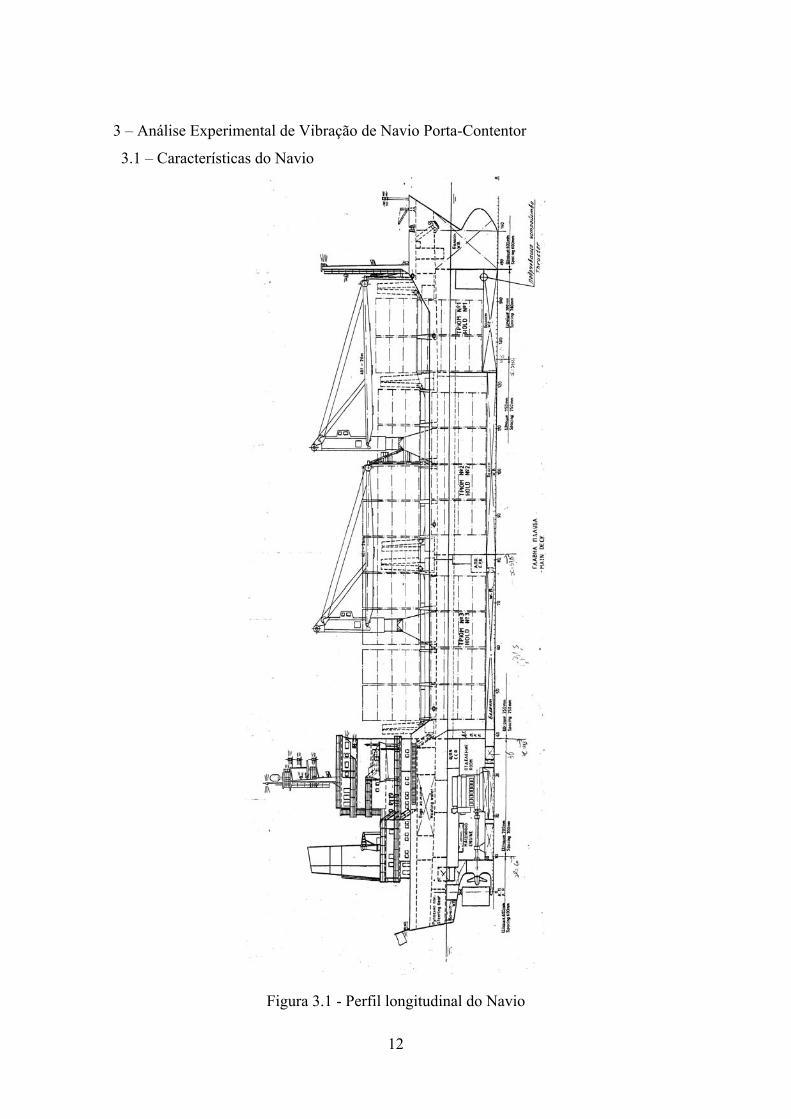
3 – Análise Experimental de Vibração de Navio Porta-Contentor
3.1 – Características do Navio
Figura 3.1 - Perfil longitudinal do Navio
12
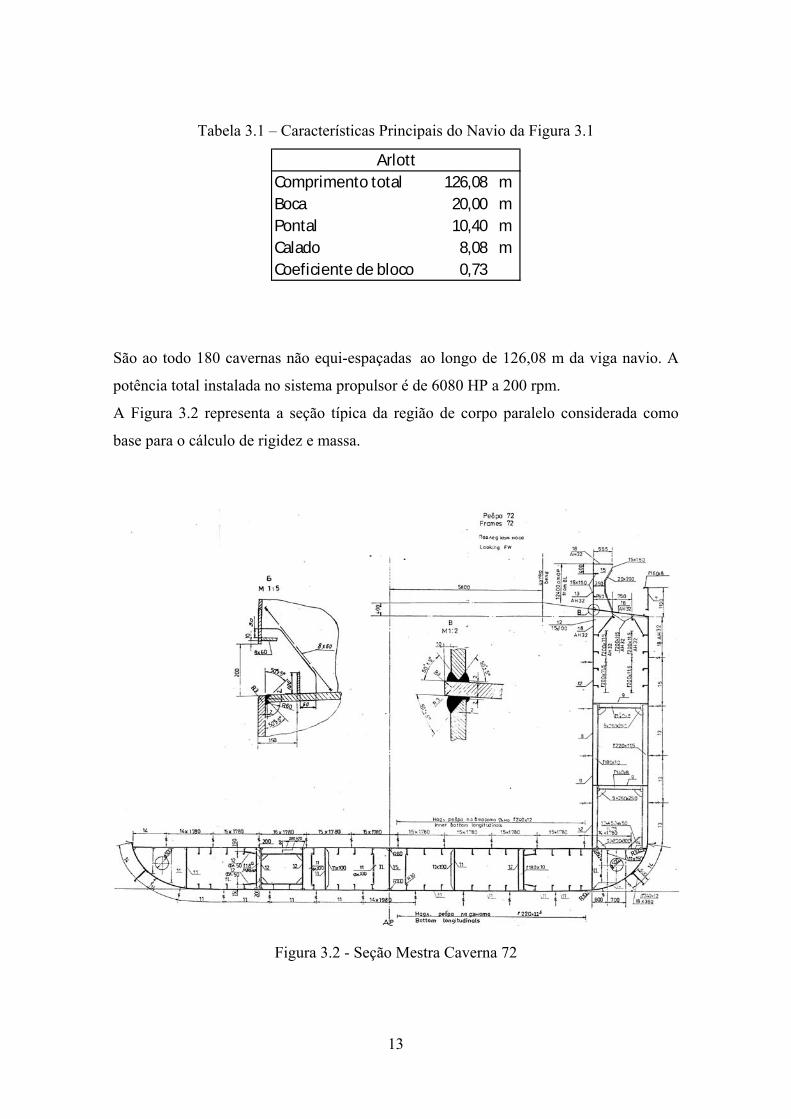
Tabela 3.1 – Características Principais do Navio da Figura 3.1
Comprimento total 126,08 mBoca 20,00 mPontal 10,40 mCalado 8,08 mCoeficiente de bloco 0,73
Arlott
São ao todo 180 cavernas não equi-espaçadas ao longo de 126,08 m da viga navio. A
potência total instalada no sistema propulsor é de 6080 HP a 200 rpm.
A Figura 3.2 representa a seção típica da região de corpo paralelo considerada como
base para o cálculo de rigidez e massa.
Figura 3.2 - Seção Mestra Caverna 72
13
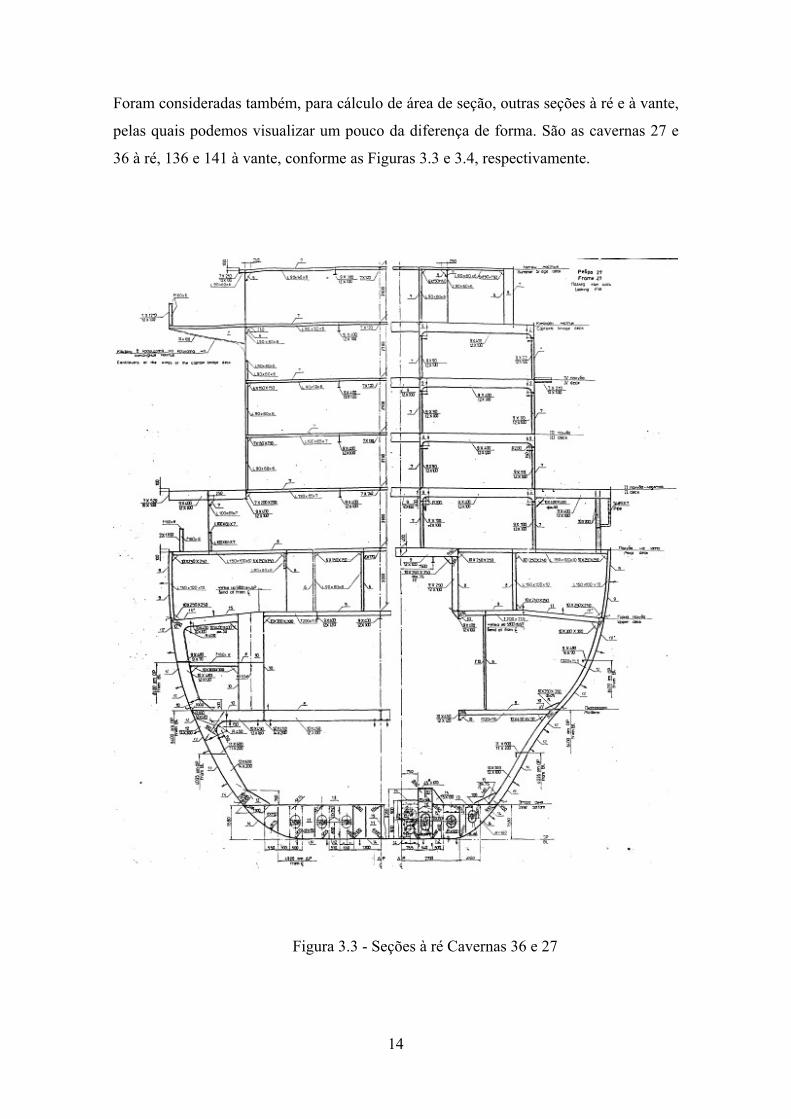
Foram consideradas também, para cálculo de área de seção, outras seções à ré e à vante,
pelas quais podemos visualizar um pouco da diferença de forma. São as cavernas 27 e
36 à ré, 136 e 141 à vante, conforme as Figuras 3.3 e 3.4, respectivamente.
Figura 3.3 - Seções à ré Cavernas 36 e 27
14
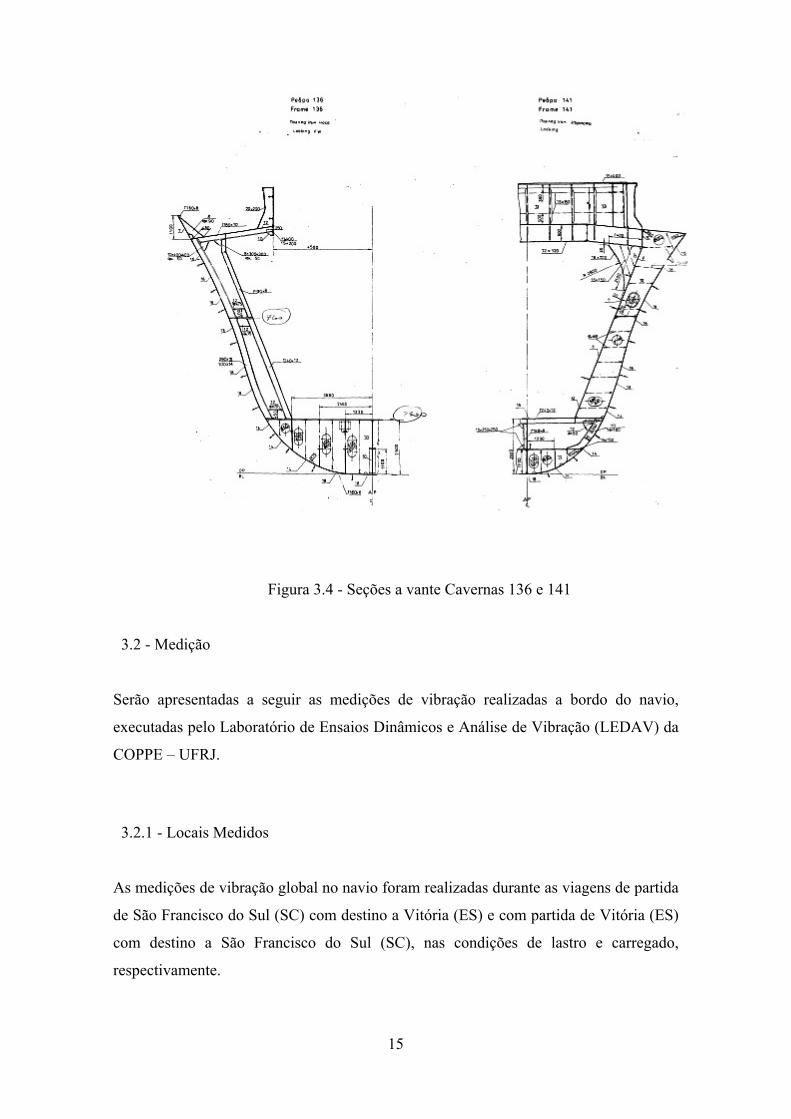
Figura 3.4 - Seções a vante Cavernas 136 e 141
3.2 - Medição
Serão apresentadas a seguir as medições de vibração realizadas a bordo do navio,
executadas pelo Laboratório de Ensaios Dinâmicos e Análise de Vibração (LEDAV) da
COPPE – UFRJ.
3.2.1 - Locais Medidos
As medições de vibração global no navio foram realizadas durante as viagens de partida
de São Francisco do Sul (SC) com destino a Vitória (ES) e com partida de Vitória (ES)
com destino a São Francisco do Sul (SC), nas condições de lastro e carregado,
respectivamente.
15
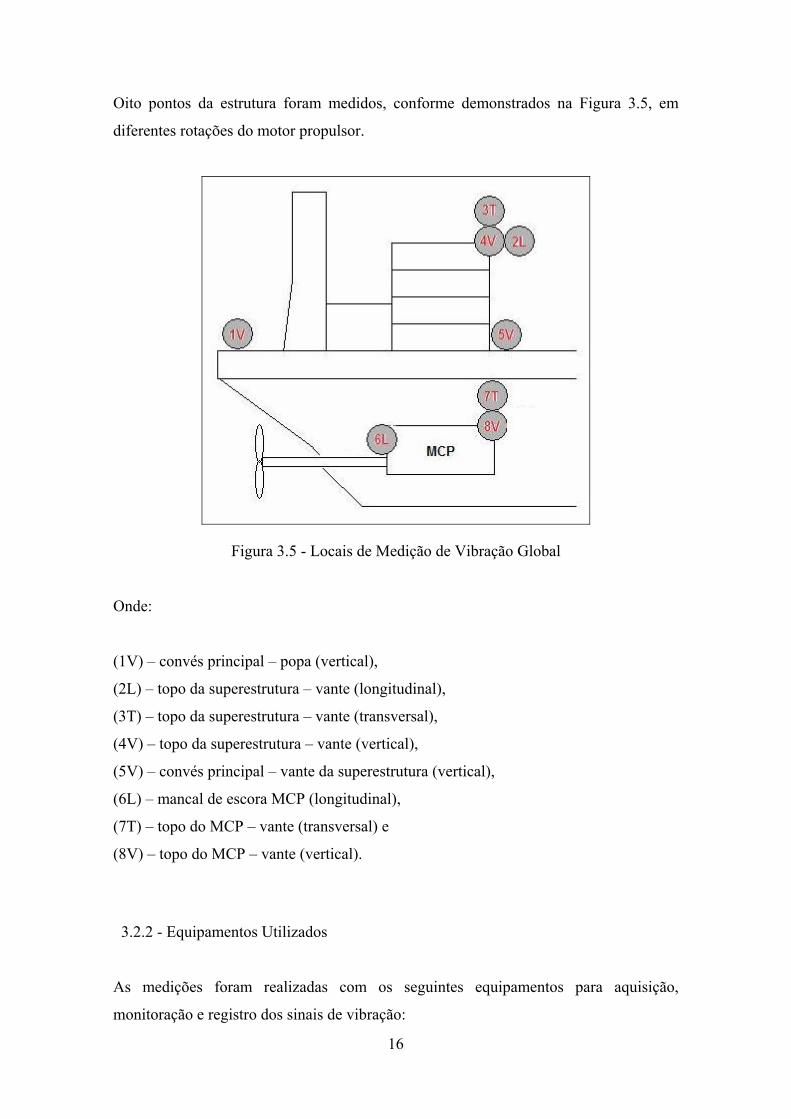
Oito pontos da estrutura foram medidos, conforme demonstrados na Figura 3.5, em
diferentes rotações do motor propulsor.
Figura 3.5 - Locais de Medição de Vibração Global
Onde:
(1V) – convés principal – popa (vertical),
(2L) – topo da superestrutura – vante (longitudinal),
(3T) – topo da superestrutura – vante (transversal),
(4V) – topo da superestrutura – vante (vertical),
(5V) – convés principal – vante da superestrutura (vertical),
(6L) – mancal de escora MCP (longitudinal),
(7T) – topo do MCP – vante (transversal) e
(8V) – topo do MCP – vante (vertical).
3.2.2 - Equipamentos Utilizados
As medições foram realizadas com os seguintes equipamentos para aquisição,
monitoração e registro dos sinais de vibração:
16
- 8 acelerômetros resistivos KYOWA de 2g;
- 1 controladora COMPACTDAQ com 2 módulos NI-9237 (4 canais cada módulo) da
NATIONAL INSTRUMENTS;
- 1 notebook TOSHIBA SATELLITE U305 equipado com software especialmente
desenvolvido em LABVIEW para a aquisição dos sinais.
A Figura 3.6 mostra o sistema de aquisição em funcionamento.
Figura 3.6 - Sistema de Aquisição dos Dados
3.2.3 - Programas Utilizados na Medição
Os sinais de vibração foram adquiridos durante dois minutos, em cada rotação do motor,
e armazenadas as leituras de todos os pontos, simultaneamente, por um sistema de
aquisição Analógica/Digital no domínio do tempo, como mostrado na Figura 3.7. Esses
sinais foram processados em laboratório, com a utilização da técnica de Transformada
Rápida de Fourier (FFT) realizada através do programa “Global Vibration
Measurements”, desenvolvido pelo Eng. Frederico Novaes, do LEDAV, no ambiente
LabView da National Instruments, quando foi possível realizar a análise espectral de
todos os sinais, no domínio da frequência.
17
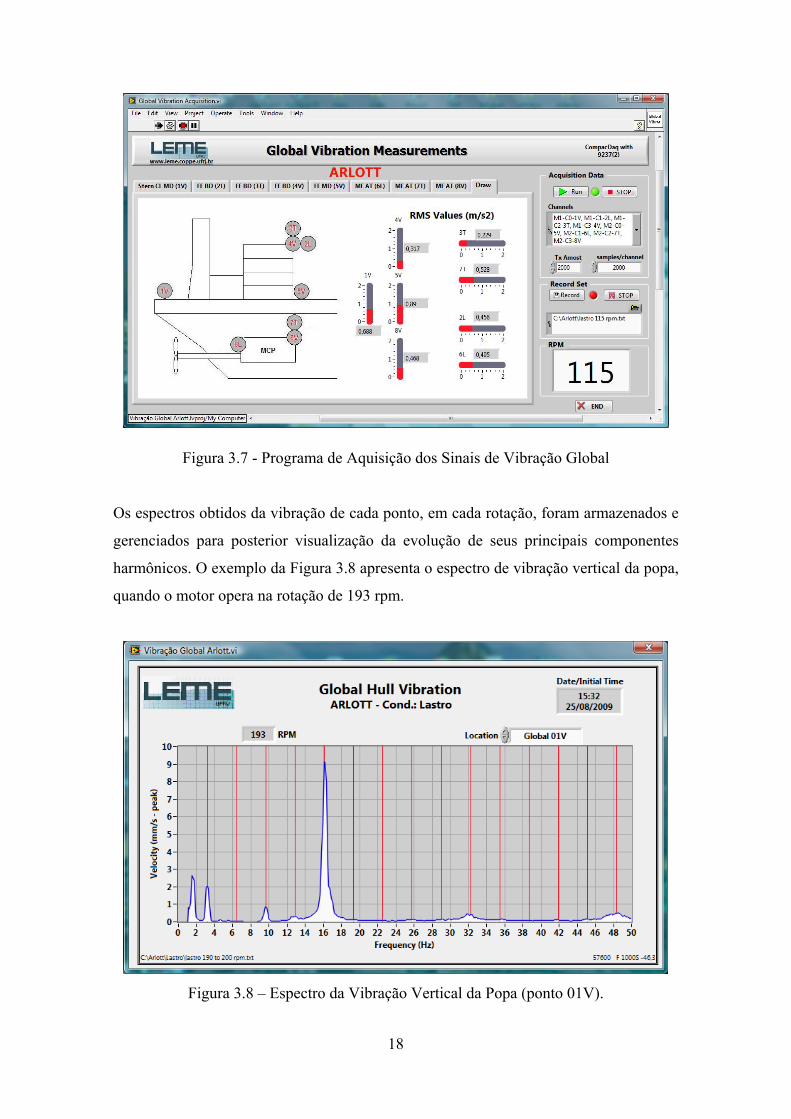
Figura 3.7 - Programa de Aquisição dos Sinais de Vibração Global
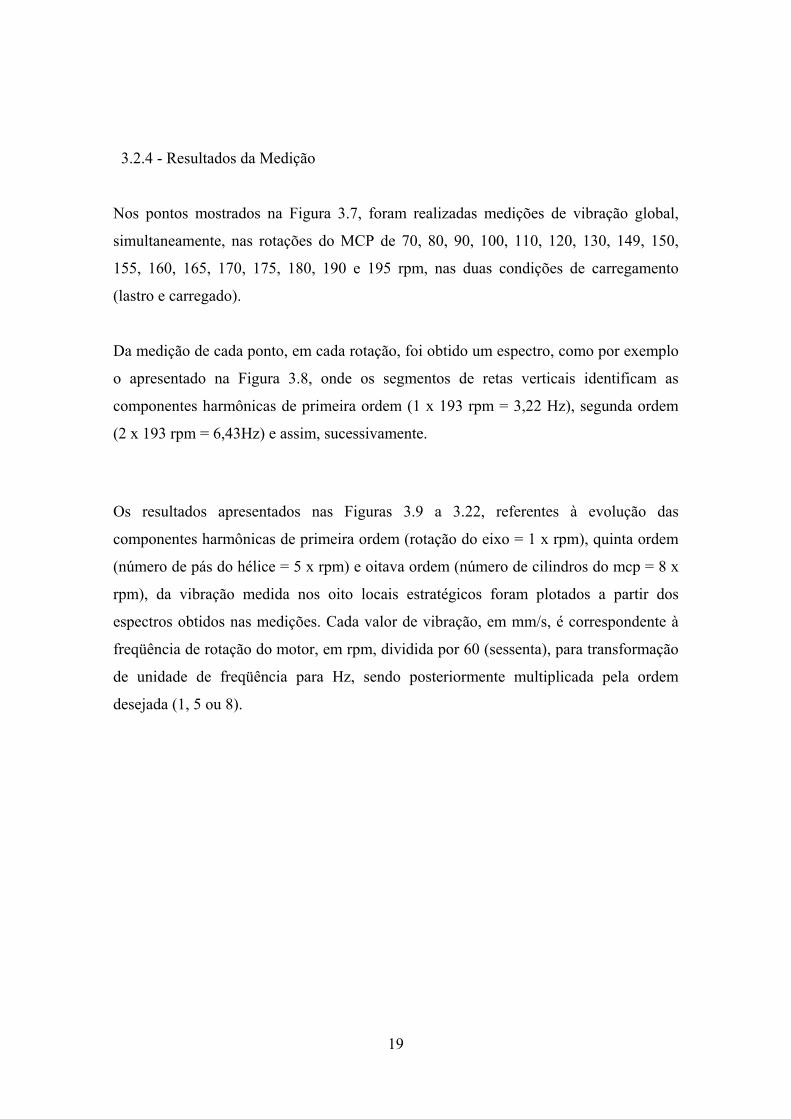
Os espectros obtidos da vibração de cada ponto, em cada rotação, foram armazenados e
gerenciados para posterior visualização da evolução de seus principais componentes
harmônicos. O exemplo da Figura 3.8 apresenta o espectro de vibração vertical da popa,
quando o motor opera na rotação de 193 rpm.
Figura 3.8 – Espectro da Vibração Vertical da Popa (ponto 01V).
18
3.2.4 - Resultados da Medição
Nos pontos mostrados na Figura 3.7, foram realizadas medições de vibração global,
simultaneamente, nas rotações do MCP de 70, 80, 90, 100, 110, 120, 130, 149, 150,
155, 160, 165, 170, 175, 180, 190 e 195 rpm, nas duas condições de carregamento
(lastro e carregado).
Da medição de cada ponto, em cada rotação, foi obtido um espectro, como por exemplo
o apresentado na Figura 3.8, onde os segmentos de retas verticais identificam as
componentes harmônicas de primeira ordem (1 x 193 rpm = 3,22 Hz), segunda ordem
(2 x 193 rpm = 6,43Hz) e assim, sucessivamente.
Os resultados apresentados nas Figuras 3.9 a 3.22, referentes à evolução das
componentes harmônicas de primeira ordem (rotação do eixo = 1 x rpm), quinta ordem
(número de pás do hélice = 5 x rpm) e oitava ordem (número de cilindros do mcp = 8 x
rpm), da vibração medida nos oito locais estratégicos foram plotados a partir dos
espectros obtidos nas medições. Cada valor de vibração, em mm/s, é correspondente à
freqüência de rotação do motor, em rpm, dividida por 60 (sessenta), para transformação
de unidade de freqüência para Hz, sendo posteriormente multiplicada pela ordem
desejada (1, 5 ou 8).
19
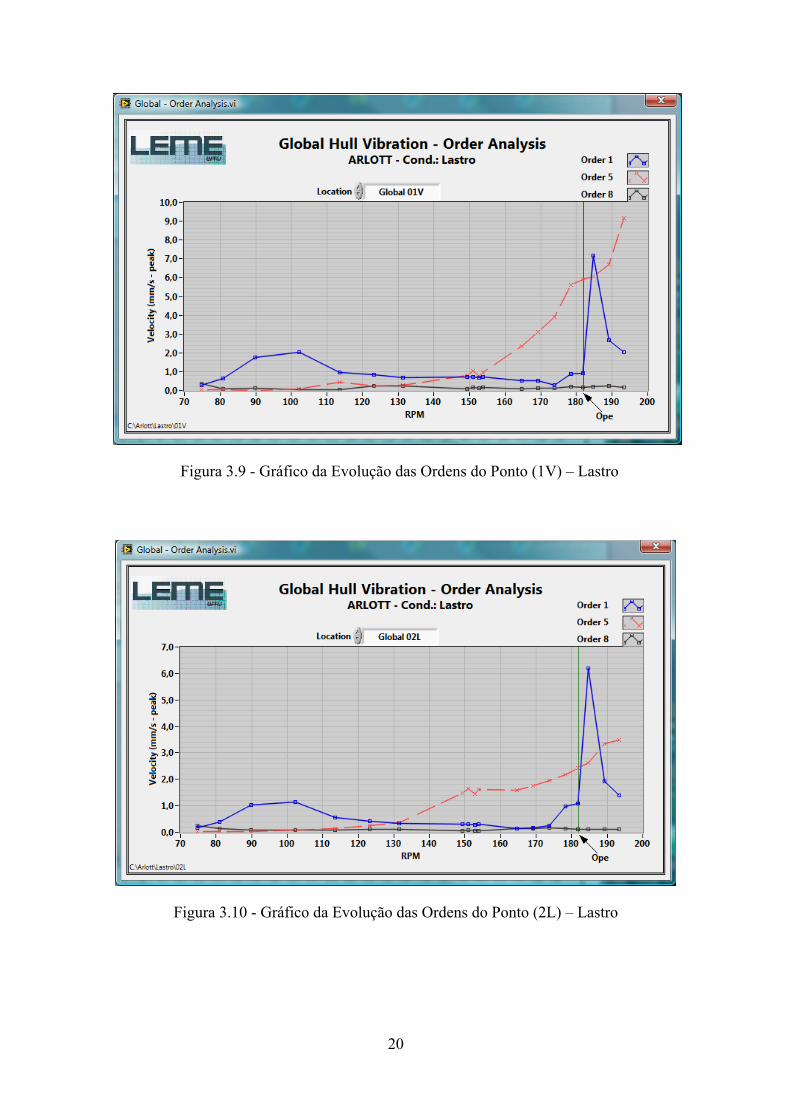
Figura 3.9 - Gráfico da Evolução das Ordens do Ponto (1V) – Lastro
Figura 3.10 - Gráfico da Evolução das Ordens do Ponto (2L) – Lastro
20
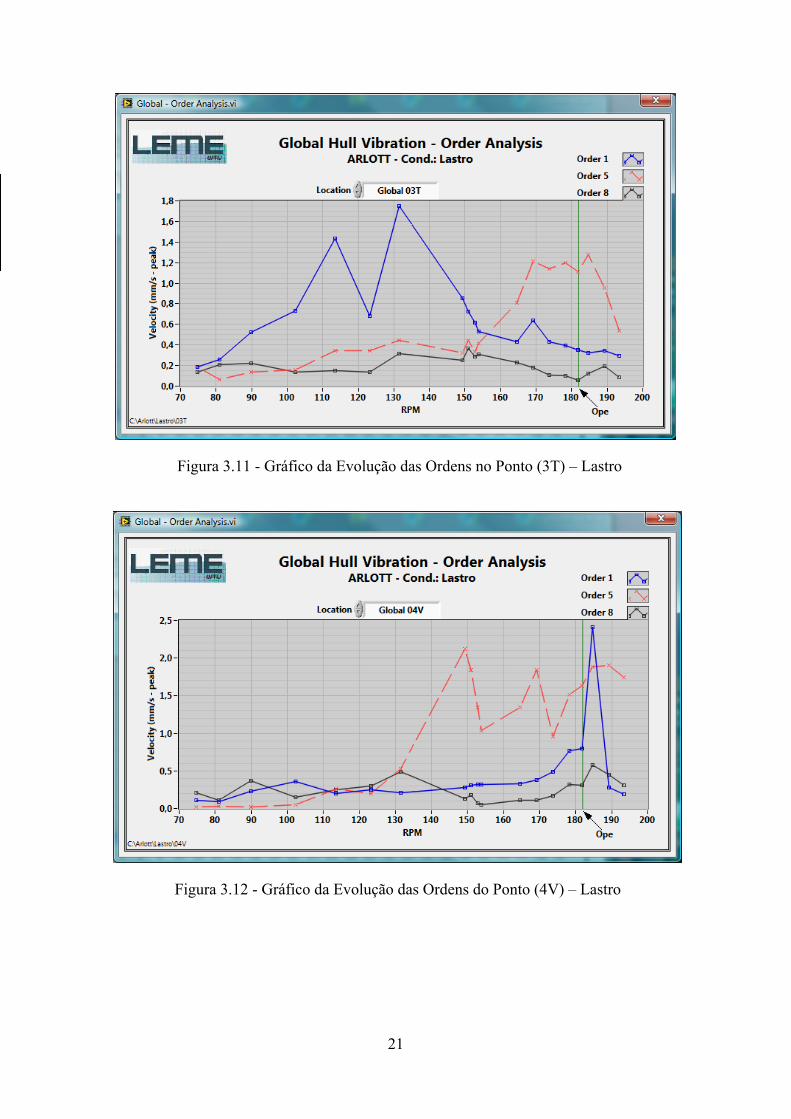
Figura 3.11 - Gráfico da Evolução das Ordens no Ponto (3T) – Lastro
Figura 3.12 - Gráfico da Evolução das Ordens do Ponto (4V) – Lastro
21
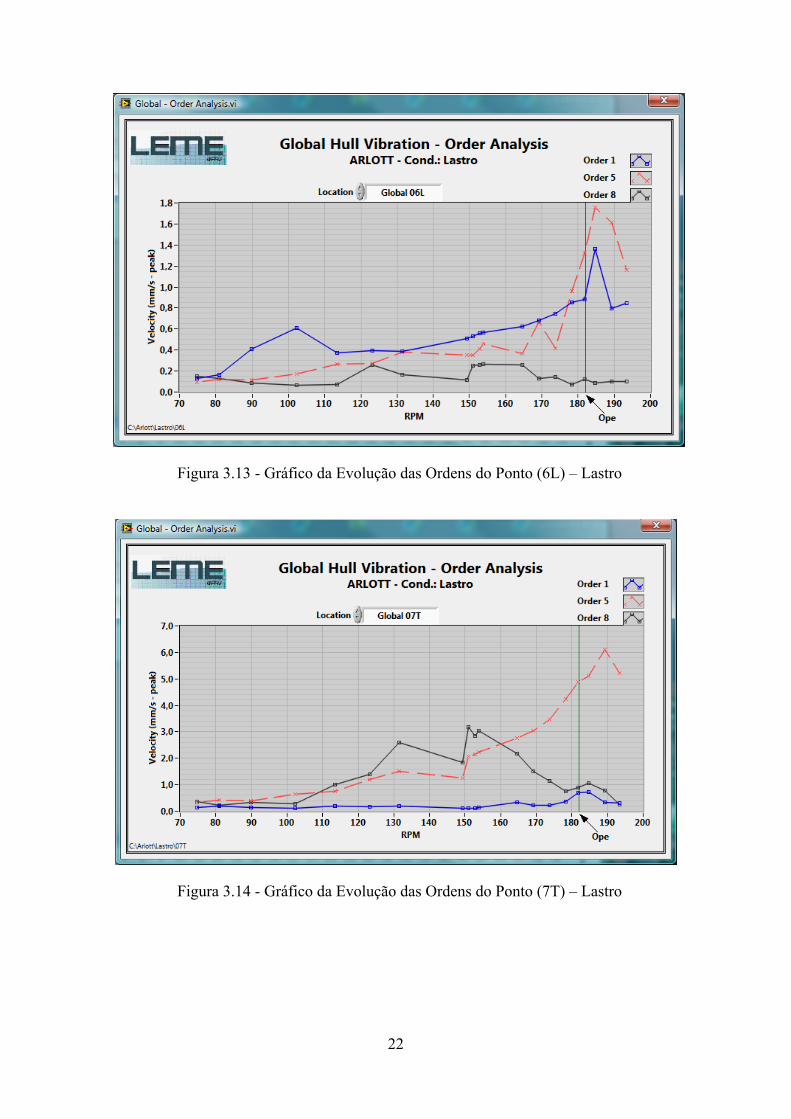
Figura 3.13 - Gráfico da Evolução das Ordens do Ponto (6L) – Lastro
Figura 3.14 - Gráfico da Evolução das Ordens do Ponto (7T) – Lastro
22
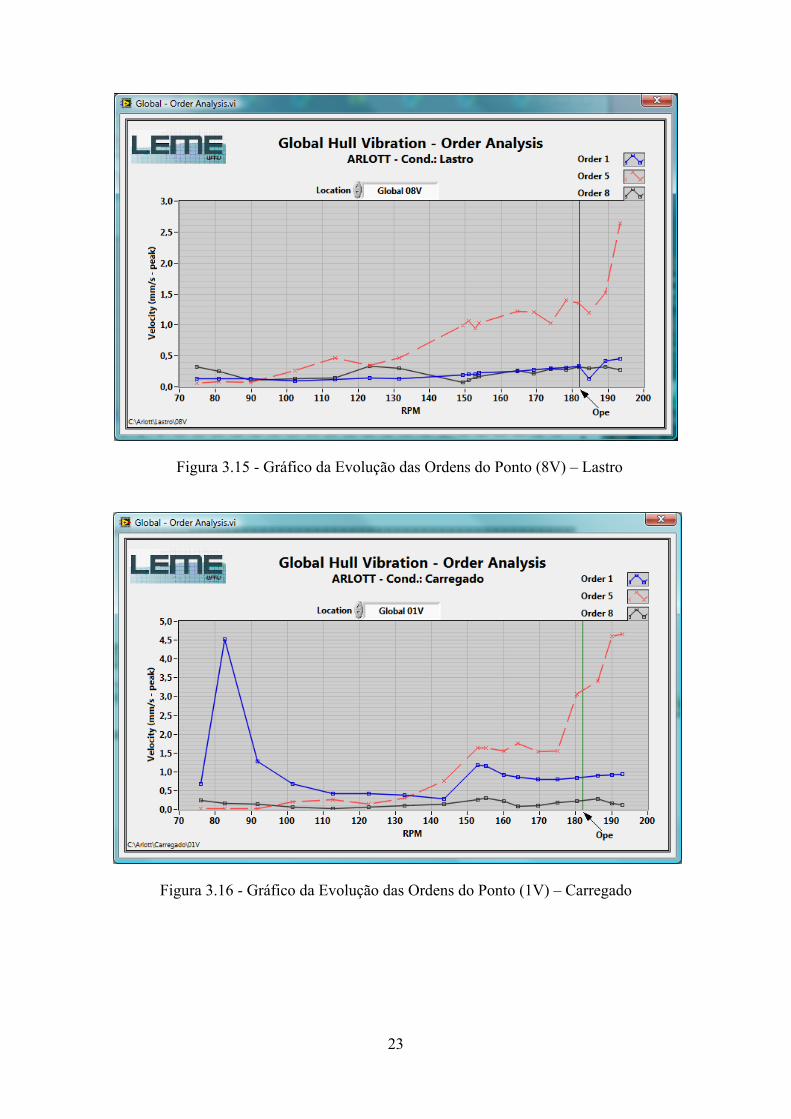
Figura 3.15 - Gráfico da Evolução das Ordens do Ponto (8V) – Lastro
Figura 3.16 - Gráfico da Evolução das Ordens do Ponto (1V) – Carregado
23
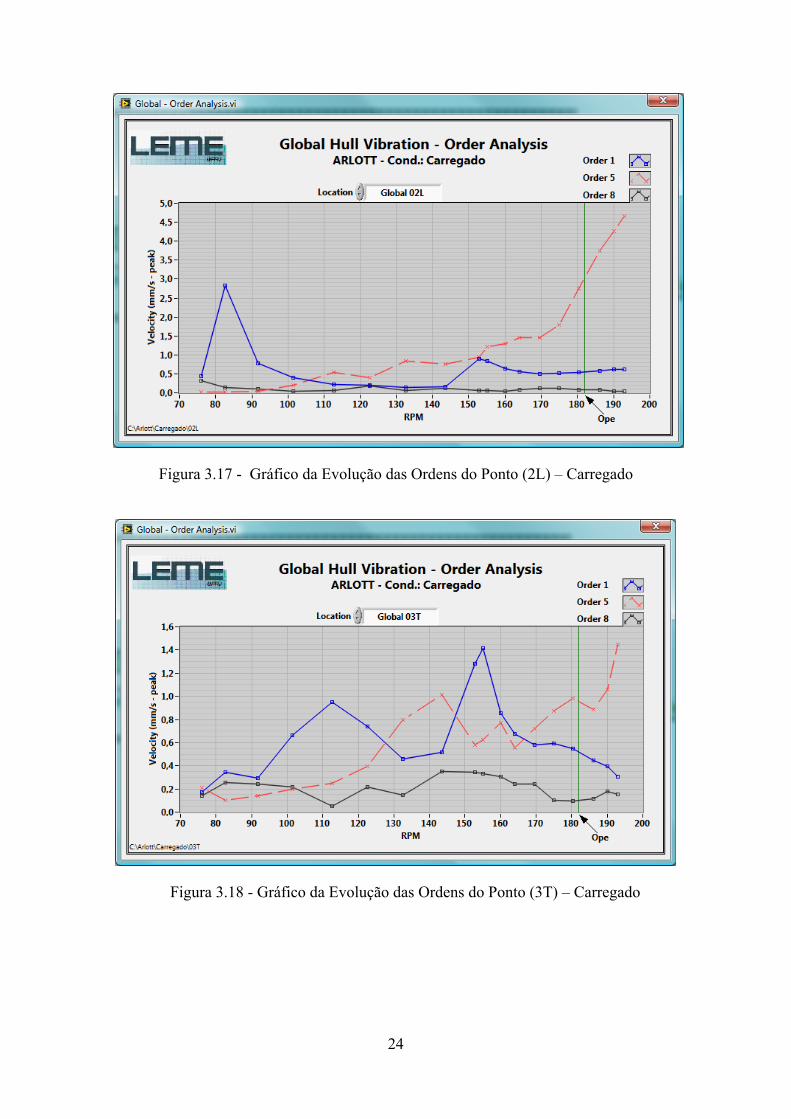
Figura 3.17 - Gráfico da Evolução das Ordens do Ponto (2L) – Carregado
Figura 3.18 - Gráfico da Evolução das Ordens do Ponto (3T) – Carregado
24
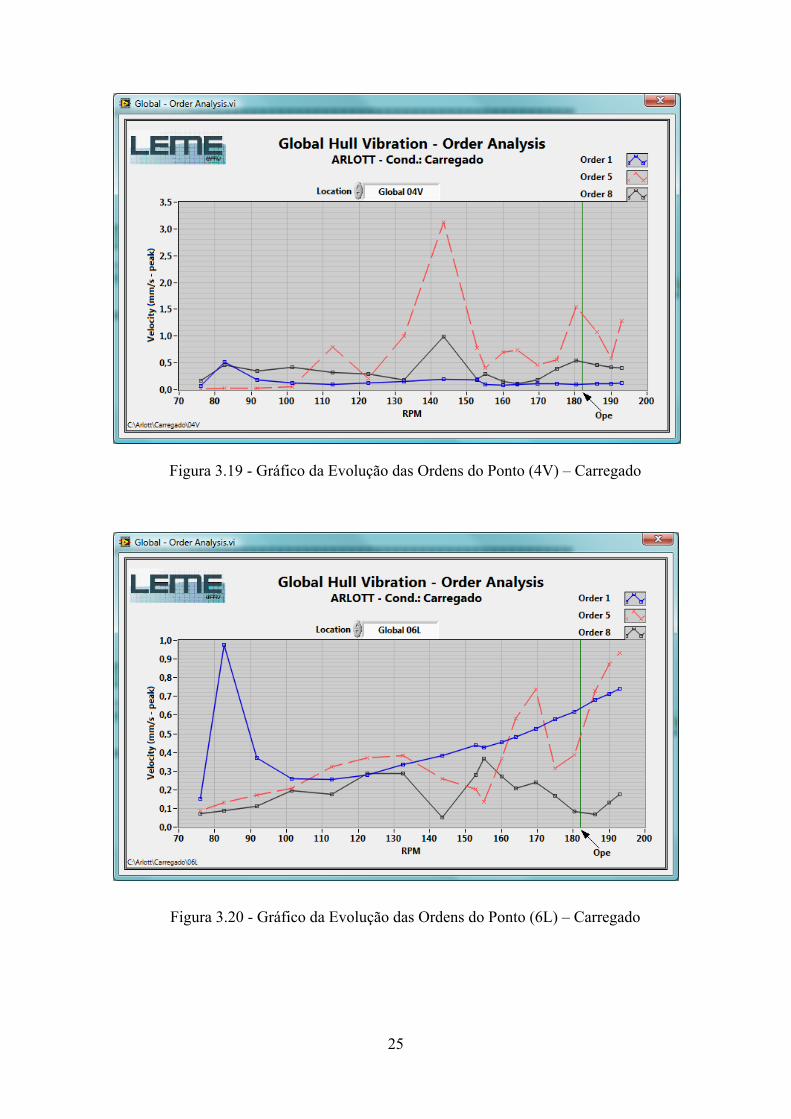
Figura 3.19 - Gráfico da Evolução das Ordens do Ponto (4V) – Carregado
Figura 3.20 - Gráfico da Evolução das Ordens do Ponto (6L) – Carregado
25
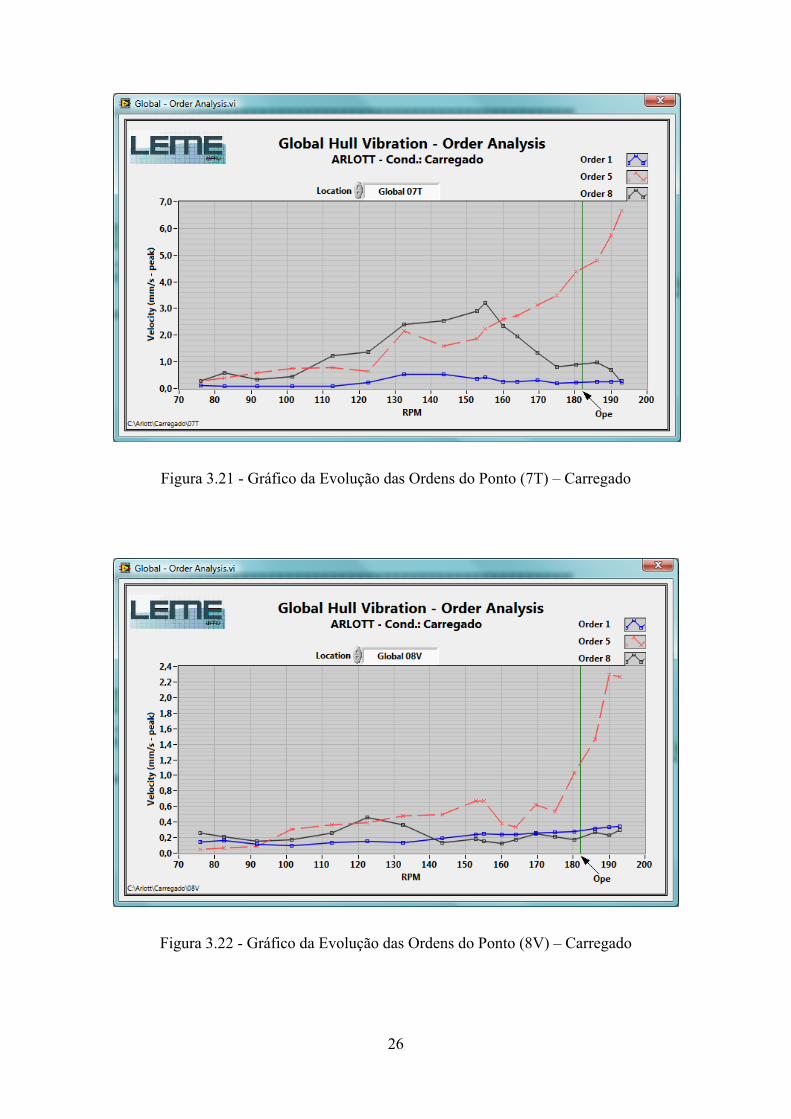
Figura 3.21 - Gráfico da Evolução das Ordens do Ponto (7T) – Carregado
Figura 3.22 - Gráfico da Evolução das Ordens do Ponto (8V) – Carregado
26
3.2.5 - Análise da Medição
O navio na condição de lastro apresenta uma freqüência natural de vibração livre de
flexão no plano vertical de 3,07 Hz, observada nos gráficos da vibração de primeira
ordem (1 x 184 rpm) das Figuras 3.9 (popa) e 3.10 (topo da superestrutura), excitada
por forças e momentos de desbalanceamento de primeira ordem da linha do eixo
propulsor, quando o motor encontra-se em rotação próxima a 184 rpm, alcançando
amplitudes de vibração vertical de 7 mm/s na popa e de vibração longitudinal de 6,2
mm/s no convés do tijupá.
O navio na condição carregado apresenta duas freqüências naturais de vibração livre
de flexão no plano vertical de 1,37 Hz e 2,55 Hz, observada nos gráficos da vibração
de primeira ordem (1 x 82 rpm e 1 x 153 rpm) das Figuras 3.16 (popa) e 3.17 (topo
da superestrutura), excitadas por forças e momentos de desbalanceamento de
primeira ordem da linha do eixo propulsor, quando o motor encontra-se em rotações
próximas a 82 rpm e 153 rpm, respectivamente, alcançando amplitudes de vibração
vertical de 4,5 mm/s na popa e de vibração longitudinal de 2,9 mm/s no convés do
tijupá.
O navio nas condições medidas em lastro (Figura 3.14) e carregado (Figura 3.21)
apresenta uma freqüência natural de vibração livre da praça de máquinas de 20,7 Hz,
excitada por forças dos gases no interior dos cilindros de oitava ordem da linha do
eixo propulsor, quando o motor encontra-se em rotação próxima a 155 rpm,
alcançando amplitudes de vibração transversal de 3,0 mm/s no topo do motor.
As amplitudes de vibração da quinta ordem da linha de eixo, excitadas pelo hélice de
5 pás, nas condições medidas, atingiram valores crescentes de vibração vertical de
até 9,2 mm/s na popa (Figuras 3.9 e 3.16), de vibração longitudinal de até 4,7 mm/s
no convés do tijupá (Figuras 3.10 e 3.17) e de vibração transversal de até 6,7 mm/s
no topo do motor (Figuras 3.14 e 3.21), à medida que a rotação do motor
ultrapassava 175 rpm.
27
Como a rotação máxima do motor durante a medição atingiu 193 rpm,
correspondente à freqüência próxima de 16,0 Hz (5 x 3,2 Hz), excitada pela quinta
ordem da linha de eixo, verifica-se que o aumento de vibração global no navio, em
ambas as condições medidas, é justificado por uma grande intensidade de pressões
provocadas pelo hélice, em freqüências que tendem à ressonância da praça de
máquinas em 20,7 Hz.
4 – Análise Numérica da Vibração Livre pelo Método dos Elementos Finitos
4.1 – Modelação do Casco
O casco do navio foi modelado no software Nastran, de onde obtivemos os
resultados utilizados na comparação da medição real.
Para tal análise, foi necessário modelar o casco a partir das propriedades das suas
seções. O modelo unidimensional tem seus nós representados pelos espaçamentos de
cavernas, neste caso, diferentes ao longo do comprimento do navio. Seus elementos
de viga carregam as propriedades de rigidez e massa retiradas da seção mestra,
extrapolada para cada seção dentro do comprimento total, pela relação com boca e
pontal. A condição de carregamento, mais o peso do motor e massa adicional são
acrescentados ao modelo como elementos de massa.
4.1.1 – Unidades de Medida
As unidades utilizadas no modelo são as do Si (Sistema Internacional). Seguem
abaixo com suas respectivas grandezas:
28

Tabela 4.1
Grandeza Unidade Comprimento metro (m) Freqüência Hertz (Hz) Tensão Pa (N/m²) Massa kg Massa específica kg/m³ Inércia m4
Área m²
4.1.2 - Características do Material Utilizado
Aço Naval.
Densidade = 7860 kg/m³
Módulo de Elasticidade = 2,1 E + 11 N/m²
Tensão de Escoamento = 235 E + 6 N/m²
Coeficiente de Poisson = 0,3
Figura 4.1 - Características do Material
29
4.1.3 – Modelos Foram utilizados dois modelos para a análise das características do navio.
Primeiramente foi utilizado o programa PROSEC5, criado pelo engenheiro Antonio
Carlos Ramos Troyman, D.Sc. e do Professor Carlos Antonio Levi da Conceição, Ph.D.,
visando encontrar os valores de área de aço total, inércia e área efetiva ao cisalhamento.
Para encontrar as freqüências foi utilizado o programa NASTRAN, tendo como entrada
os dados encontrados no PROSEC5.
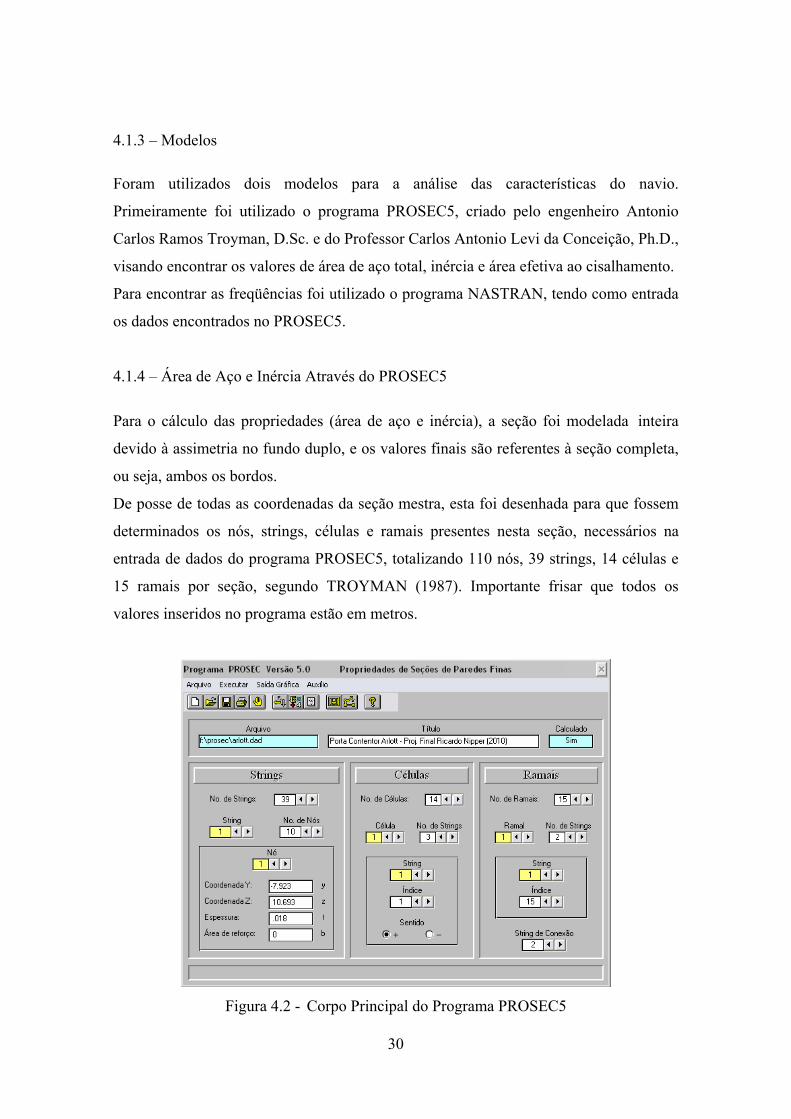
4.1.4 – Área de Aço e Inércia Através do PROSEC5
Para o cálculo das propriedades (área de aço e inércia), a seção foi modelada inteira
devido à assimetria no fundo duplo, e os valores finais são referentes à seção completa,
ou seja, ambos os bordos. De posse de todas as coordenadas da seção mestra, esta foi desenhada para que fossem
determinados os nós, strings, células e ramais presentes nesta seção, necessários na
entrada de dados do programa PROSEC5, totalizando 110 nós, 39 strings, 14 células e
15 ramais por seção, segundo TROYMAN (1987). Importante frisar que todos os
valores inseridos no programa estão em metros.
Figura 4.2 - Corpo Principal do Programa PROSEC5
30
Na Figura 4.2 do programa PROSEC5, nota-se como foram utilizados os valores
obtidos da seção mestra, inclusive valores das coordenadas Y e Z, e espessura, e nos
casos onde os nós representavam reforços foi dado também a área do reforço, sendo a
espessura relacionada à espessura da chapa, e não do reforço.
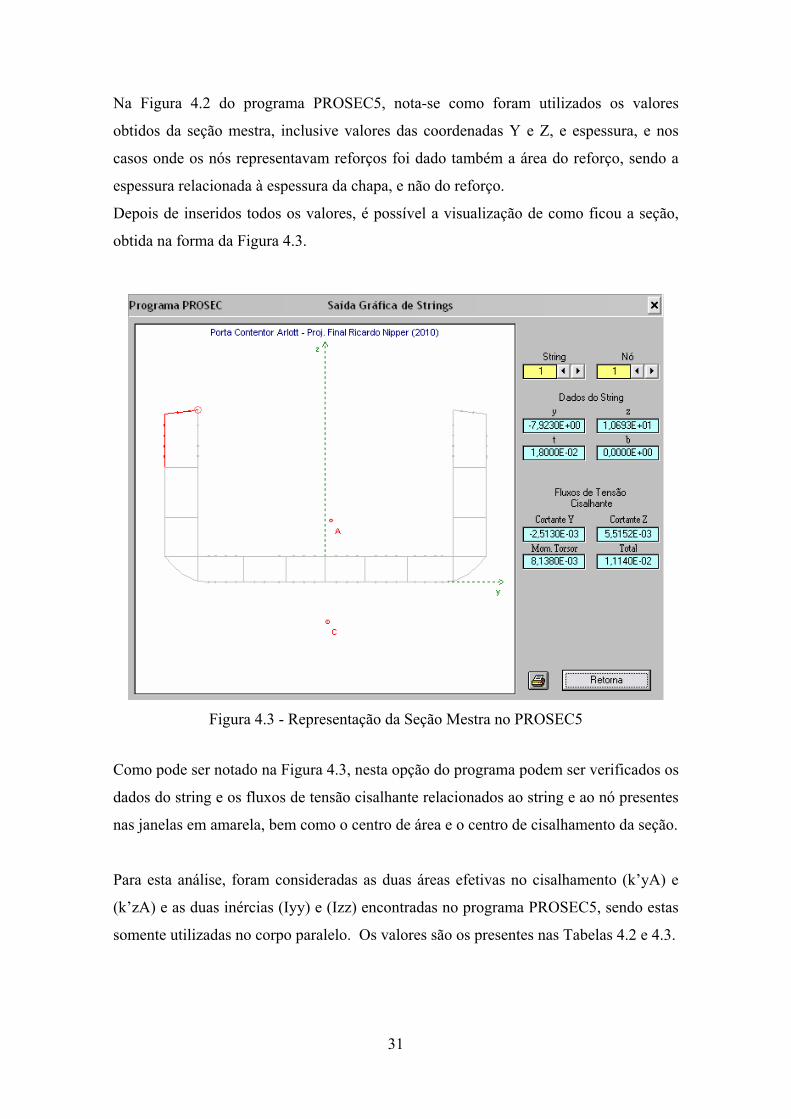
Depois de inseridos todos os valores, é possível a visualização de como ficou a seção,
obtida na forma da Figura 4.3.
Figura 4.3 - Representação da Seção Mestra no PROSEC5
Como pode ser notado na Figura 4.3, nesta opção do programa podem ser verificados os
dados do string e os fluxos de tensão cisalhante relacionados ao string e ao nó presentes
nas janelas em amarela, bem como o centro de área e o centro de cisalhamento da seção.
Para esta análise, foram consideradas as duas áreas efetivas no cisalhamento (k’yA) e
(k’zA) e as duas inércias (Iyy) e (Izz) encontradas no programa PROSEC5, sendo estas
somente utilizadas no corpo paralelo. Os valores são os presentes nas Tabelas 4.2 e 4.3.
31
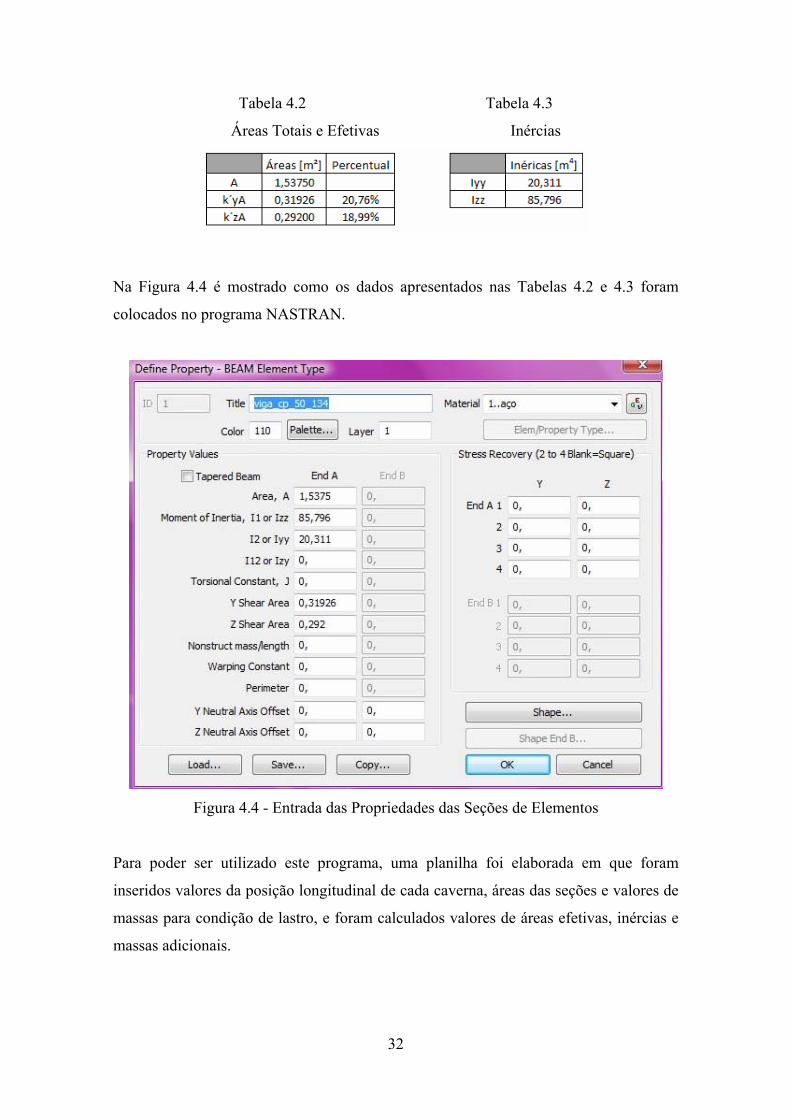
Tabela 4.2 Tabela 4.3
Áreas Totais e Efetivas Inércias
Na Figura 4.4 é mostrado como os dados apresentados nas Tabelas 4.2 e 4.3 foram
colocados no programa NASTRAN.
Figura 4.4 - Entrada das Propriedades das Seções de Elementos
Para poder ser utilizado este programa, uma planilha foi elaborada em que foram
inseridos valores da posição longitudinal de cada caverna, áreas das seções e valores de
massas para condição de lastro, e foram calculados valores de áreas efetivas, inércias e
massas adicionais.
32
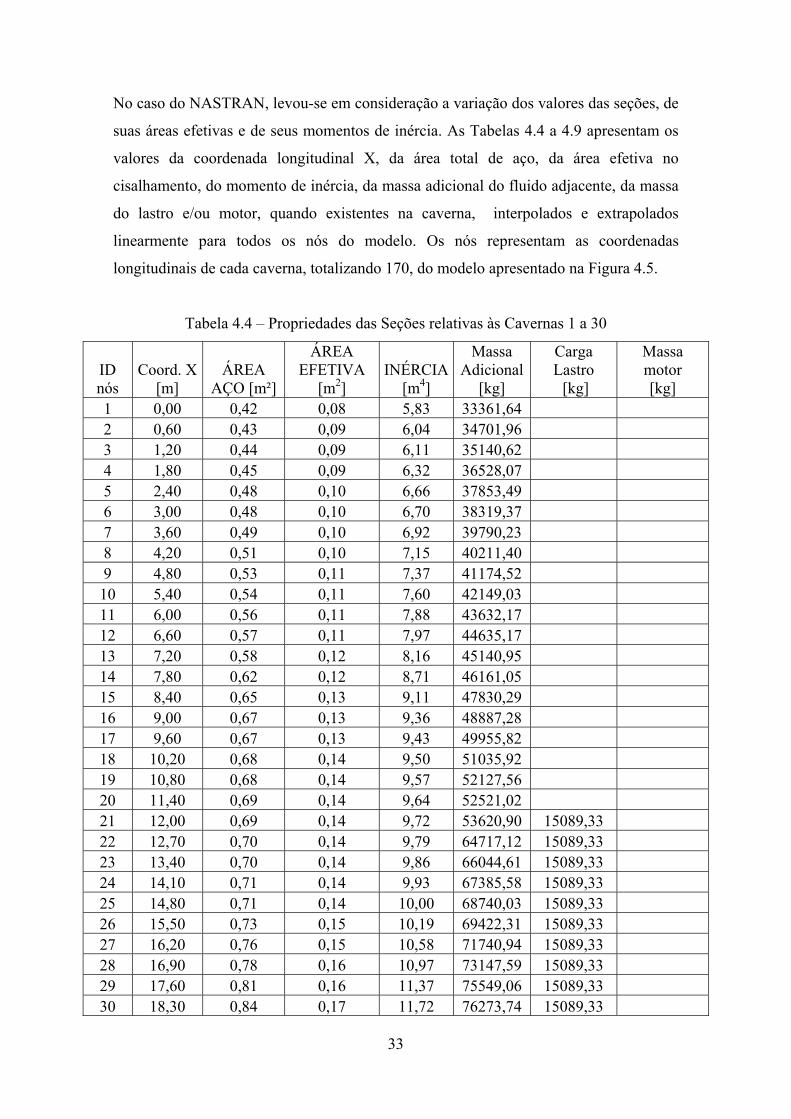
No caso do NASTRAN, levou-se em consideração a variação dos valores das seções, de
suas áreas efetivas e de seus momentos de inércia. As Tabelas 4.4 a 4.9 apresentam os
valores da coordenada longitudinal X, da área total de aço, da área efetiva no
cisalhamento, do momento de inércia, da massa adicional do fluido adjacente, da massa
do lastro e/ou motor, quando existentes na caverna, interpolados e extrapolados
linearmente para todos os nós do modelo. Os nós representam as coordenadas
longitudinais de cada caverna, totalizando 170, do modelo apresentado na Figura 4.5.
Tabela 4.4 – Propriedades das Seções relativas às Cavernas 1 a 30
ID nós
Coord. X [m]
ÁREA AÇO [m²]
ÁREA EFETIVA
[m2] INÉRCIA
[m4]
Massa Adicional
[kg]
Carga Lastro [kg]
Massa motor [kg]
1 0,00 0,42 0,08 5,83 33361,64 2 0,60 0,43 0,09 6,04 34701,96 3 1,20 0,44 0,09 6,11 35140,62 4 1,80 0,45 0,09 6,32 36528,07 5 2,40 0,48 0,10 6,66 37853,49 6 3,00 0,48 0,10 6,70 38319,37 7 3,60 0,49 0,10 6,92 39790,23 8 4,20 0,51 0,10 7,15 40211,40 9 4,80 0,53 0,11 7,37 41174,52 10 5,40 0,54 0,11 7,60 42149,03 11 6,00 0,56 0,11 7,88 43632,17 12 6,60 0,57 0,11 7,97 44635,17 13 7,20 0,58 0,12 8,16 45140,95 14 7,80 0,62 0,12 8,71 46161,05 15 8,40 0,65 0,13 9,11 47830,29 16 9,00 0,67 0,13 9,36 48887,28 17 9,60 0,67 0,13 9,43 49955,82 18 10,20 0,68 0,14 9,50 51035,92 19 10,80 0,68 0,14 9,57 52127,56 20 11,40 0,69 0,14 9,64 52521,02 21 12,00 0,69 0,14 9,72 53620,90 15089,33 22 12,70 0,70 0,14 9,79 64717,12 15089,33 23 13,40 0,70 0,14 9,86 66044,61 15089,33 24 14,10 0,71 0,14 9,93 67385,58 15089,33 25 14,80 0,71 0,14 10,00 68740,03 15089,33 26 15,50 0,73 0,15 10,19 69422,31 15089,33 27 16,20 0,76 0,15 10,58 71740,94 15089,33 28 16,90 0,78 0,16 10,97 73147,59 15089,33 29 17,60 0,81 0,16 11,37 75549,06 15089,33 30 18,30 0,84 0,17 11,72 76273,74 15089,33
33
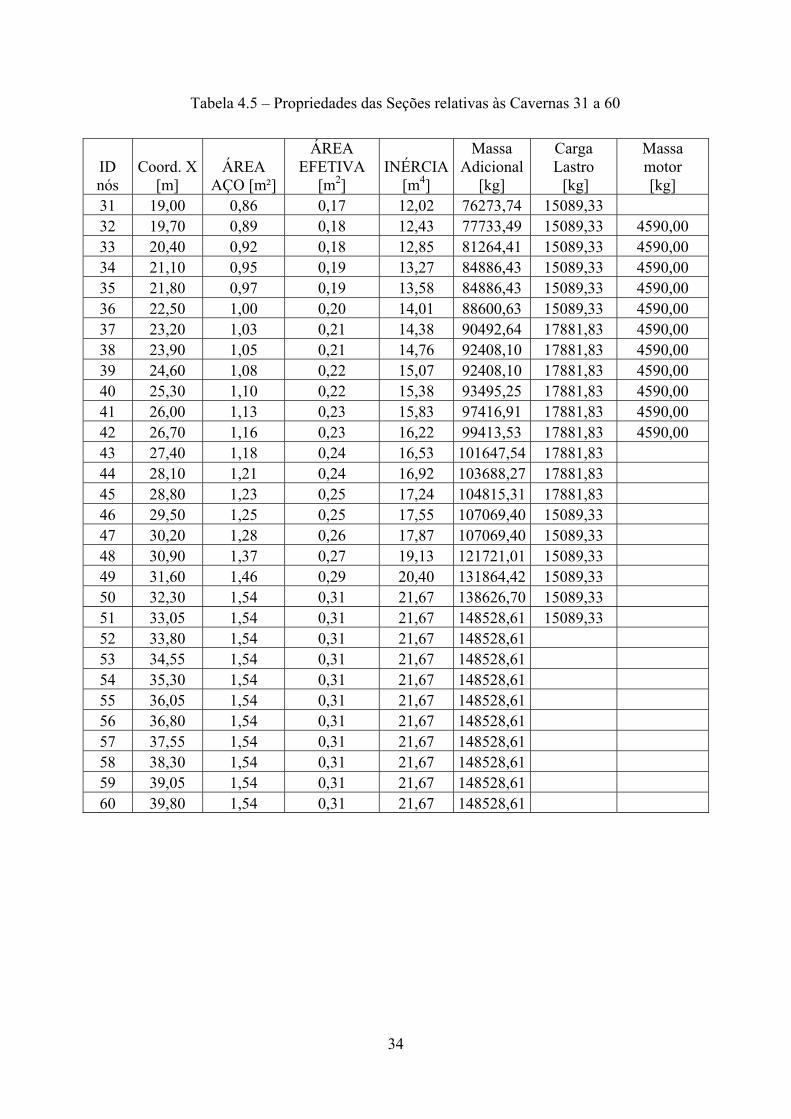
Tabela 4.5 – Propriedades das Seções relativas às Cavernas 31 a 60
ID nós
Coord. X [m]
ÁREA AÇO [m²]
ÁREA EFETIVA
[m2] INÉRCIA
[m4]
Massa Adicional
[kg]
Carga Lastro [kg]
Massa motor [kg]
31 19,00 0,86 0,17 12,02 76273,74 15089,33 32 19,70 0,89 0,18 12,43 77733,49 15089,33 4590,00 33 20,40 0,92 0,18 12,85 81264,41 15089,33 4590,00 34 21,10 0,95 0,19 13,27 84886,43 15089,33 4590,00 35 21,80 0,97 0,19 13,58 84886,43 15089,33 4590,00 36 22,50 1,00 0,20 14,01 88600,63 15089,33 4590,00 37 23,20 1,03 0,21 14,38 90492,64 17881,83 4590,00 38 23,90 1,05 0,21 14,76 92408,10 17881,83 4590,00 39 24,60 1,08 0,22 15,07 92408,10 17881,83 4590,00 40 25,30 1,10 0,22 15,38 93495,25 17881,83 4590,00 41 26,00 1,13 0,23 15,83 97416,91 17881,83 4590,00 42 26,70 1,16 0,23 16,22 99413,53 17881,83 4590,00 43 27,40 1,18 0,24 16,53 101647,54 17881,83 44 28,10 1,21 0,24 16,92 103688,27 17881,83 45 28,80 1,23 0,25 17,24 104815,31 17881,83 46 29,50 1,25 0,25 17,55 107069,40 15089,33 47 30,20 1,28 0,26 17,87 107069,40 15089,33 48 30,90 1,37 0,27 19,13 121721,01 15089,33 49 31,60 1,46 0,29 20,40 131864,42 15089,33 50 32,30 1,54 0,31 21,67 138626,70 15089,33 51 33,05 1,54 0,31 21,67 148528,61 15089,33 52 33,80 1,54 0,31 21,67 148528,61 53 34,55 1,54 0,31 21,67 148528,61 54 35,30 1,54 0,31 21,67 148528,61 55 36,05 1,54 0,31 21,67 148528,61 56 36,80 1,54 0,31 21,67 148528,61 57 37,55 1,54 0,31 21,67 148528,61 58 38,30 1,54 0,31 21,67 148528,61 59 39,05 1,54 0,31 21,67 148528,61 60 39,80 1,54 0,31 21,67 148528,61
34

Tabela 4.6 – Propriedades das Seções relativas às Cavernas 61 a 90
ID nós
Coord. X [m]
ÁREA AÇO [m²]
ÁREA EFETIVA
[m2] INÉRCIA
[m4]
Massa Adicional
[kg]
Carga Lastro [kg]
Massa motor [kg]
61 40,55 1,54 0,31 21,67 148528,61 62 41,30 1,54 0,31 21,67 148528,61 63 42,05 1,54 0,31 21,67 148528,61 64 42,80 1,54 0,31 21,67 148528,61 65 43,55 1,54 0,31 21,67 148528,61 66 44,30 1,54 0,31 21,67 148528,61 67 45,05 1,54 0,31 21,67 148528,61 68 45,80 1,54 0,31 21,67 148528,61 69 46,55 1,54 0,31 21,67 148528,61 7018,26 70 47,30 1,54 0,31 21,67 148528,61 7018,26 71 48,05 1,54 0,31 21,67 148528,61 7018,26 72 48,80 1,54 0,31 21,67 148528,61 7018,26 73 49,55 1,54 0,31 21,67 148528,61 7018,26 74 50,30 1,54 0,31 21,67 148528,61 7018,26 75 51,05 1,54 0,31 21,67 148528,61 7018,26 76 51,80 1,54 0,31 21,67 148528,61 7018,26 77 52,55 1,54 0,31 21,67 148528,61 7018,26 78 53,30 1,54 0,31 21,67 148528,61 7018,26 79 54,05 1,54 0,31 21,67 148528,61 38716,72 80 54,80 1,54 0,31 21,67 148528,61 38716,72 81 55,55 1,54 0,31 21,67 148528,61 38716,72 82 56,30 1,54 0,31 21,67 148528,61 38716,72 83 57,05 1,54 0,31 21,67 148528,61 38716,72 84 57,80 1,54 0,31 21,67 148528,61 38716,72 85 58,55 1,54 0,31 21,67 148528,61 38716,72 86 59,30 1,54 0,31 21,67 148528,61 38716,72 87 60,05 1,54 0,31 21,67 148528,61 38716,72 88 60,80 1,54 0,31 21,67 148528,61 38716,72 89 61,55 1,54 0,31 21,67 148528,61 38716,72 90 62,30 1,54 0,31 21,67 148528,61 38716,72
35
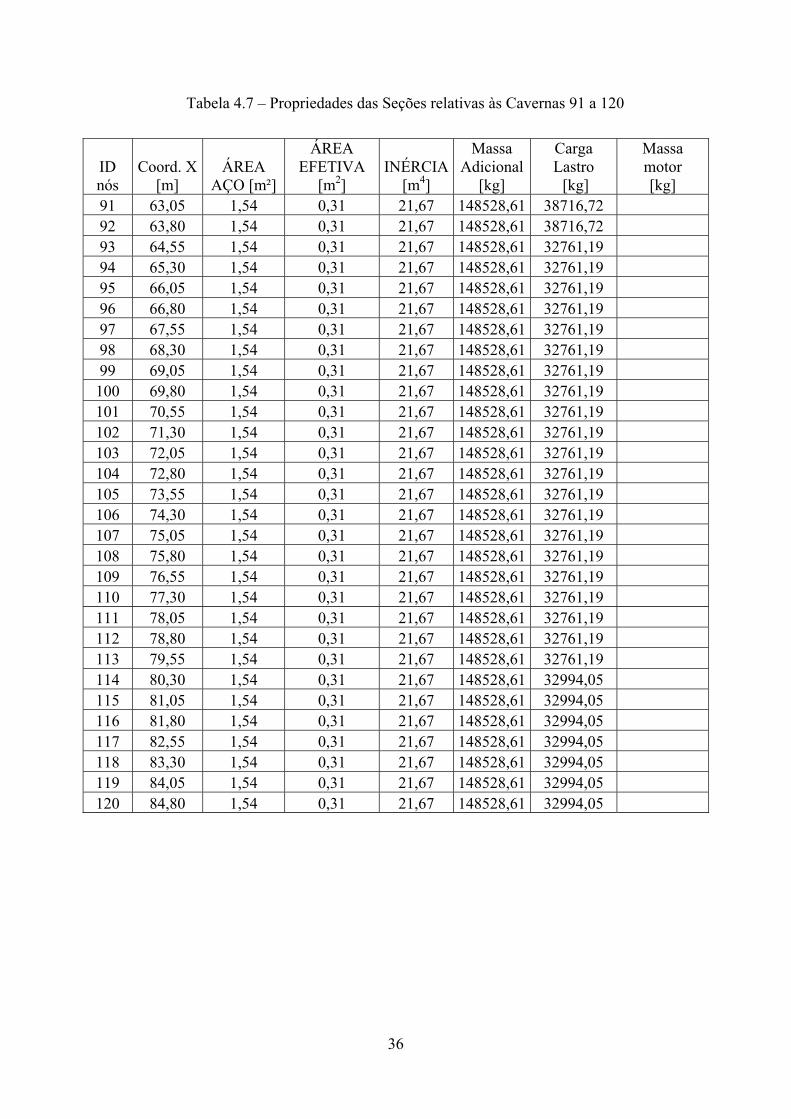
Tabela 4.7 – Propriedades das Seções relativas às Cavernas 91 a 120
ID nós
Coord. X [m]
ÁREA AÇO [m²]
ÁREA EFETIVA
[m2] INÉRCIA
[m4]
Massa Adicional
[kg]
Carga Lastro [kg]
Massa motor [kg]
91 63,05 1,54 0,31 21,67 148528,61 38716,72 92 63,80 1,54 0,31 21,67 148528,61 38716,72 93 64,55 1,54 0,31 21,67 148528,61 32761,19 94 65,30 1,54 0,31 21,67 148528,61 32761,19 95 66,05 1,54 0,31 21,67 148528,61 32761,19 96 66,80 1,54 0,31 21,67 148528,61 32761,19 97 67,55 1,54 0,31 21,67 148528,61 32761,19 98 68,30 1,54 0,31 21,67 148528,61 32761,19 99 69,05 1,54 0,31 21,67 148528,61 32761,19 100 69,80 1,54 0,31 21,67 148528,61 32761,19 101 70,55 1,54 0,31 21,67 148528,61 32761,19 102 71,30 1,54 0,31 21,67 148528,61 32761,19 103 72,05 1,54 0,31 21,67 148528,61 32761,19 104 72,80 1,54 0,31 21,67 148528,61 32761,19 105 73,55 1,54 0,31 21,67 148528,61 32761,19 106 74,30 1,54 0,31 21,67 148528,61 32761,19 107 75,05 1,54 0,31 21,67 148528,61 32761,19 108 75,80 1,54 0,31 21,67 148528,61 32761,19 109 76,55 1,54 0,31 21,67 148528,61 32761,19 110 77,30 1,54 0,31 21,67 148528,61 32761,19 111 78,05 1,54 0,31 21,67 148528,61 32761,19 112 78,80 1,54 0,31 21,67 148528,61 32761,19 113 79,55 1,54 0,31 21,67 148528,61 32761,19 114 80,30 1,54 0,31 21,67 148528,61 32994,05 115 81,05 1,54 0,31 21,67 148528,61 32994,05 116 81,80 1,54 0,31 21,67 148528,61 32994,05 117 82,55 1,54 0,31 21,67 148528,61 32994,05 118 83,30 1,54 0,31 21,67 148528,61 32994,05 119 84,05 1,54 0,31 21,67 148528,61 32994,05 120 84,80 1,54 0,31 21,67 148528,61 32994,05
36
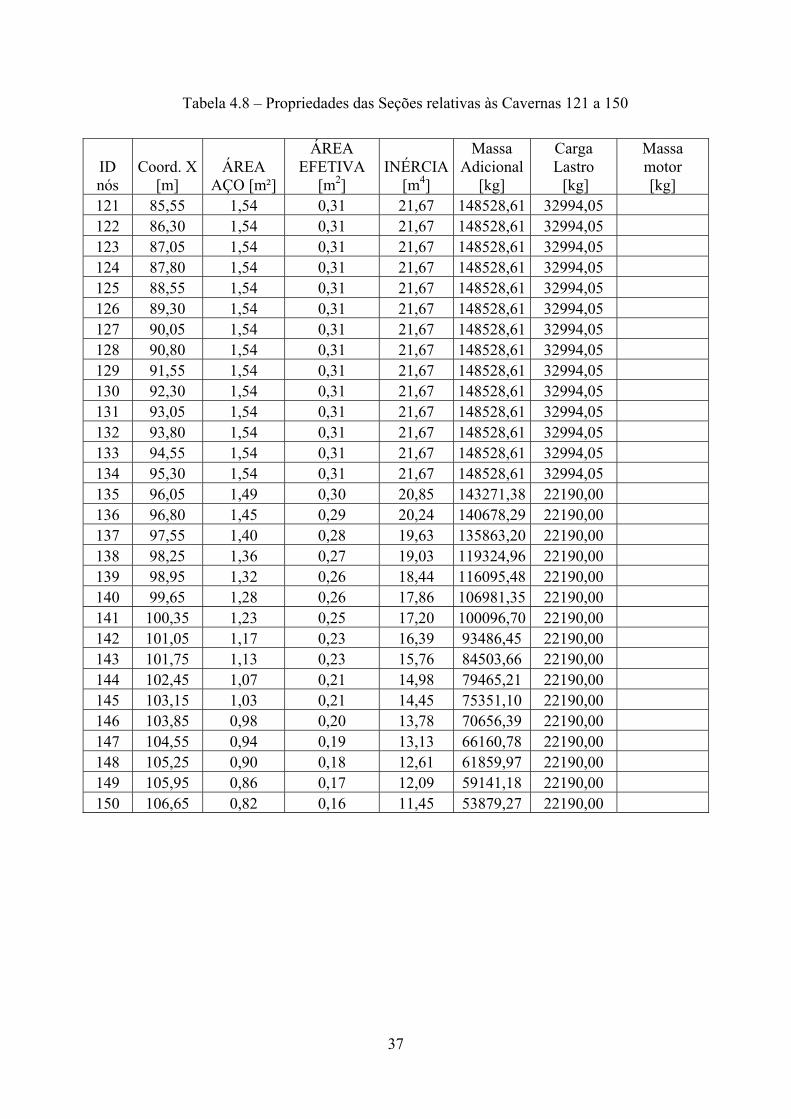
Tabela 4.8 – Propriedades das Seções relativas às Cavernas 121 a 150
ID nós
Coord. X [m]
ÁREA AÇO [m²]
ÁREA EFETIVA
[m2] INÉRCIA
[m4]
Massa Adicional
[kg]
Carga Lastro [kg]
Massa motor [kg]
121 85,55 1,54 0,31 21,67 148528,61 32994,05 122 86,30 1,54 0,31 21,67 148528,61 32994,05 123 87,05 1,54 0,31 21,67 148528,61 32994,05 124 87,80 1,54 0,31 21,67 148528,61 32994,05 125 88,55 1,54 0,31 21,67 148528,61 32994,05 126 89,30 1,54 0,31 21,67 148528,61 32994,05 127 90,05 1,54 0,31 21,67 148528,61 32994,05 128 90,80 1,54 0,31 21,67 148528,61 32994,05 129 91,55 1,54 0,31 21,67 148528,61 32994,05 130 92,30 1,54 0,31 21,67 148528,61 32994,05 131 93,05 1,54 0,31 21,67 148528,61 32994,05 132 93,80 1,54 0,31 21,67 148528,61 32994,05 133 94,55 1,54 0,31 21,67 148528,61 32994,05 134 95,30 1,54 0,31 21,67 148528,61 32994,05 135 96,05 1,49 0,30 20,85 143271,38 22190,00 136 96,80 1,45 0,29 20,24 140678,29 22190,00 137 97,55 1,40 0,28 19,63 135863,20 22190,00 138 98,25 1,36 0,27 19,03 119324,96 22190,00 139 98,95 1,32 0,26 18,44 116095,48 22190,00 140 99,65 1,28 0,26 17,86 106981,35 22190,00 141 100,35 1,23 0,25 17,20 100096,70 22190,00 142 101,05 1,17 0,23 16,39 93486,45 22190,00 143 101,75 1,13 0,23 15,76 84503,66 22190,00 144 102,45 1,07 0,21 14,98 79465,21 22190,00 145 103,15 1,03 0,21 14,45 75351,10 22190,00 146 103,85 0,98 0,20 13,78 70656,39 22190,00 147 104,55 0,94 0,19 13,13 66160,78 22190,00 148 105,25 0,90 0,18 12,61 61859,97 22190,00 149 105,95 0,86 0,17 12,09 59141,18 22190,00 150 106,65 0,82 0,16 11,45 53879,27 22190,00
37
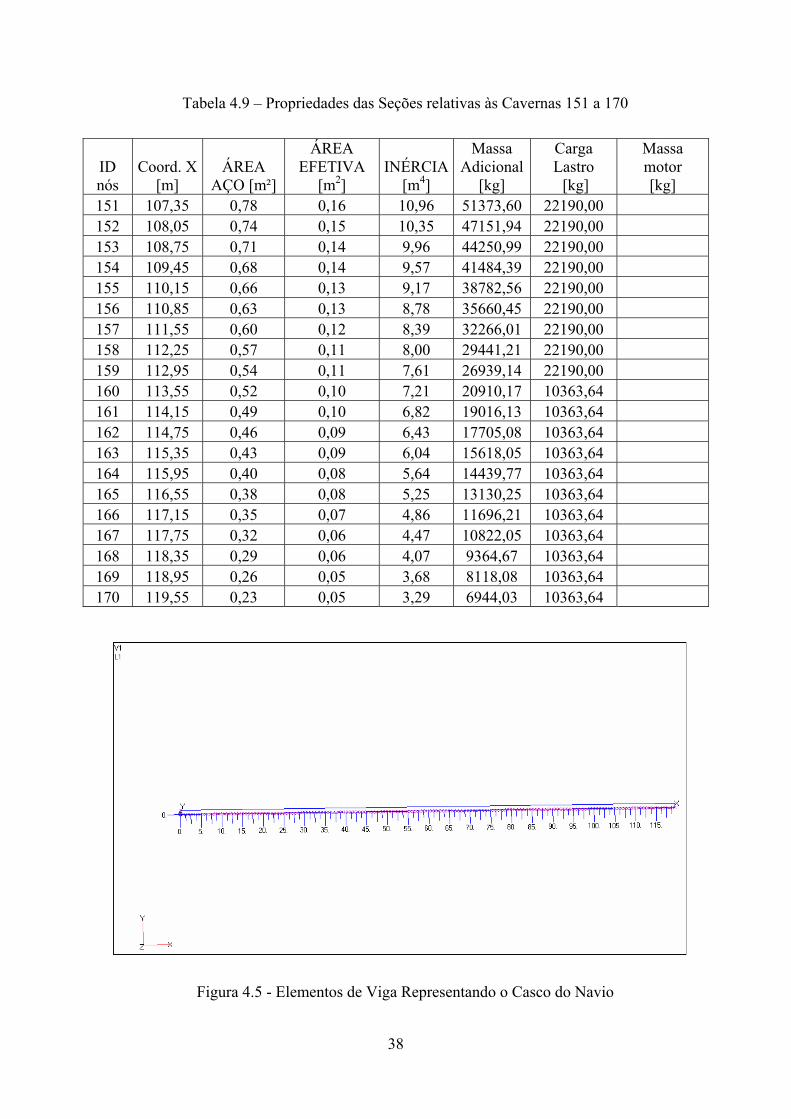
Tabela 4.9 – Propriedades das Seções relativas às Cavernas 151 a 170
ID nós
Coord. X [m]
ÁREA AÇO [m²]
ÁREA EFETIVA
[m2] INÉRCIA
[m4]
Massa Adicional
[kg]
Carga Lastro [kg]
Massa motor [kg]
151 107,35 0,78 0,16 10,96 51373,60 22190,00 152 108,05 0,74 0,15 10,35 47151,94 22190,00 153 108,75 0,71 0,14 9,96 44250,99 22190,00 154 109,45 0,68 0,14 9,57 41484,39 22190,00 155 110,15 0,66 0,13 9,17 38782,56 22190,00 156 110,85 0,63 0,13 8,78 35660,45 22190,00 157 111,55 0,60 0,12 8,39 32266,01 22190,00 158 112,25 0,57 0,11 8,00 29441,21 22190,00 159 112,95 0,54 0,11 7,61 26939,14 22190,00 160 113,55 0,52 0,10 7,21 20910,17 10363,64 161 114,15 0,49 0,10 6,82 19016,13 10363,64 162 114,75 0,46 0,09 6,43 17705,08 10363,64 163 115,35 0,43 0,09 6,04 15618,05 10363,64 164 115,95 0,40 0,08 5,64 14439,77 10363,64 165 116,55 0,38 0,08 5,25 13130,25 10363,64 166 117,15 0,35 0,07 4,86 11696,21 10363,64 167 117,75 0,32 0,06 4,47 10822,05 10363,64 168 118,35 0,29 0,06 4,07 9364,67 10363,64 169 118,95 0,26 0,05 3,68 8118,08 10363,64 170 119,55 0,23 0,05 3,29 6944,03 10363,64
Figura 4.5 - Elementos de Viga Representando o Casco do Navio
38
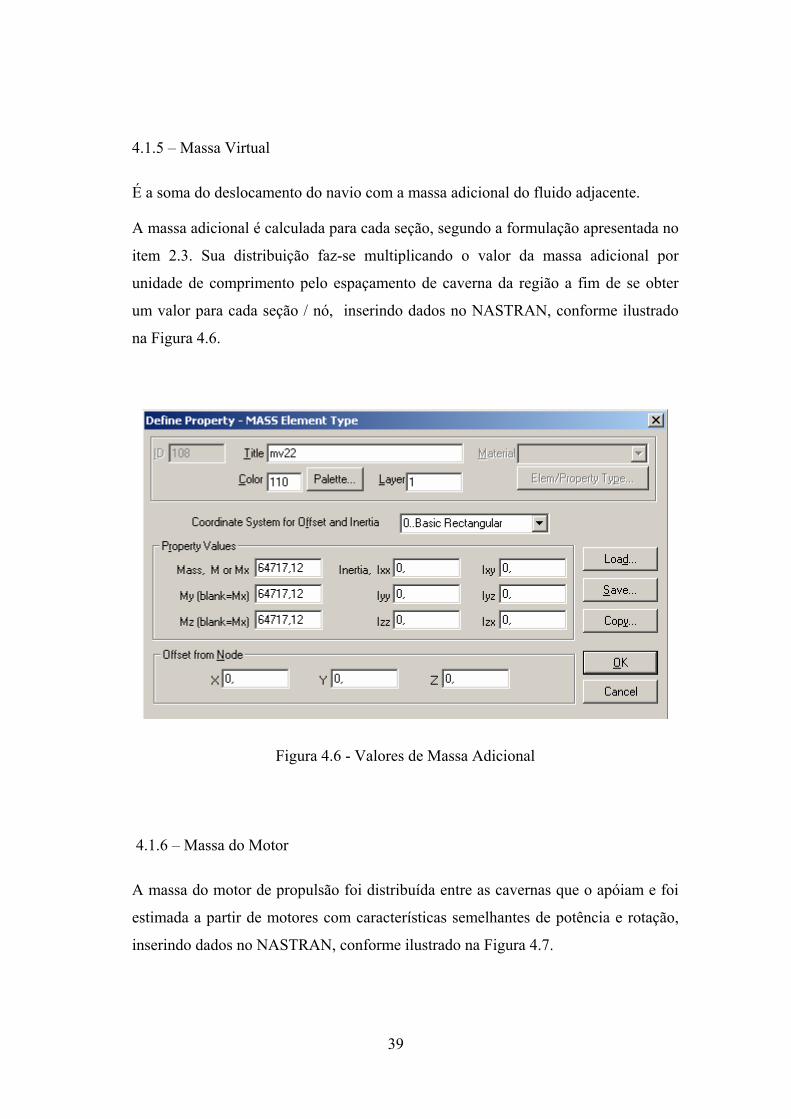
4.1.5 – Massa Virtual
É a soma do deslocamento do navio com a massa adicional do fluido adjacente.
A massa adicional é calculada para cada seção, segundo a formulação apresentada no
item 2.3. Sua distribuição faz-se multiplicando o valor da massa adicional por
unidade de comprimento pelo espaçamento de caverna da região a fim de se obter
um valor para cada seção / nó, inserindo dados no NASTRAN, conforme ilustrado
na Figura 4.6.
Figura 4.6 - Valores de Massa Adicional
4.1.6 – Massa do Motor
A massa do motor de propulsão foi distribuída entre as cavernas que o apóiam e foi
estimada a partir de motores com características semelhantes de potência e rotação,
inserindo dados no NASTRAN, conforme ilustrado na Figura 4.7.
39
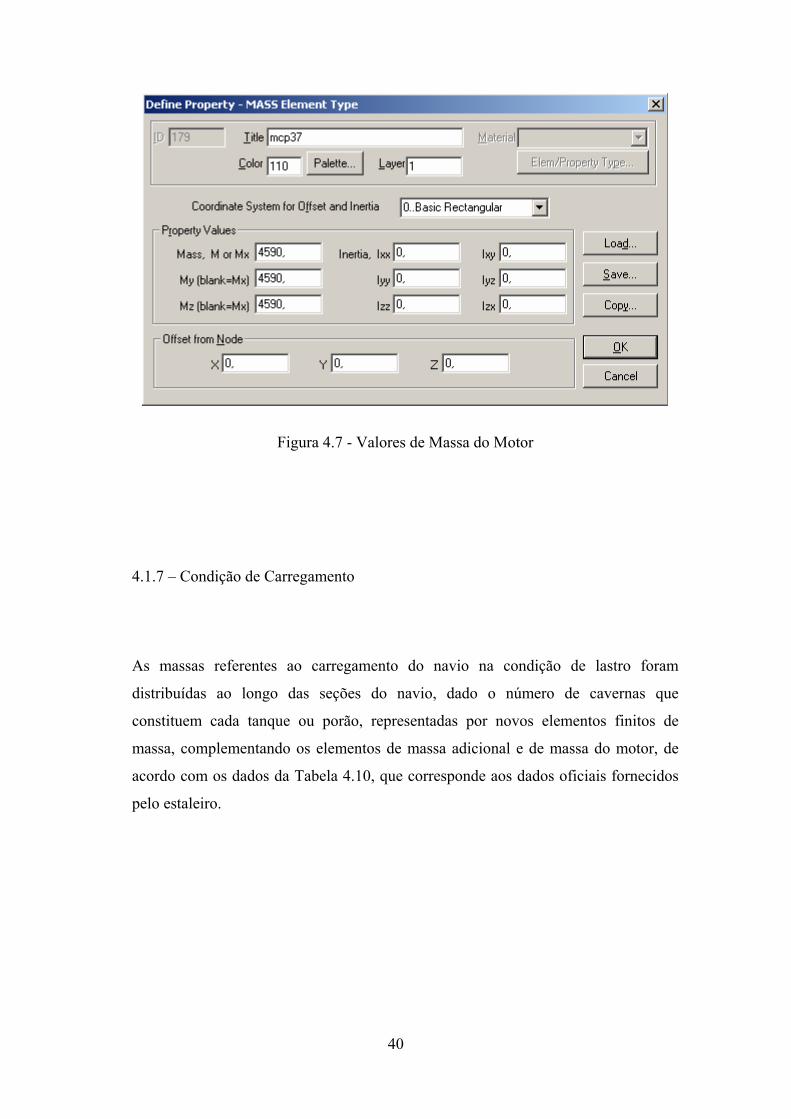
Figura 4.7 - Valores de Massa do Motor
4.1.7 – Condição de Carregamento
As massas referentes ao carregamento do navio na condição de lastro foram
distribuídas ao longo das seções do navio, dado o número de cavernas que
constituem cada tanque ou porão, representadas por novos elementos finitos de
massa, complementando os elementos de massa adicional e de massa do motor, de
acordo com os dados da Tabela 4.10, que corresponde aos dados oficiais fornecidos
pelo estaleiro.
40
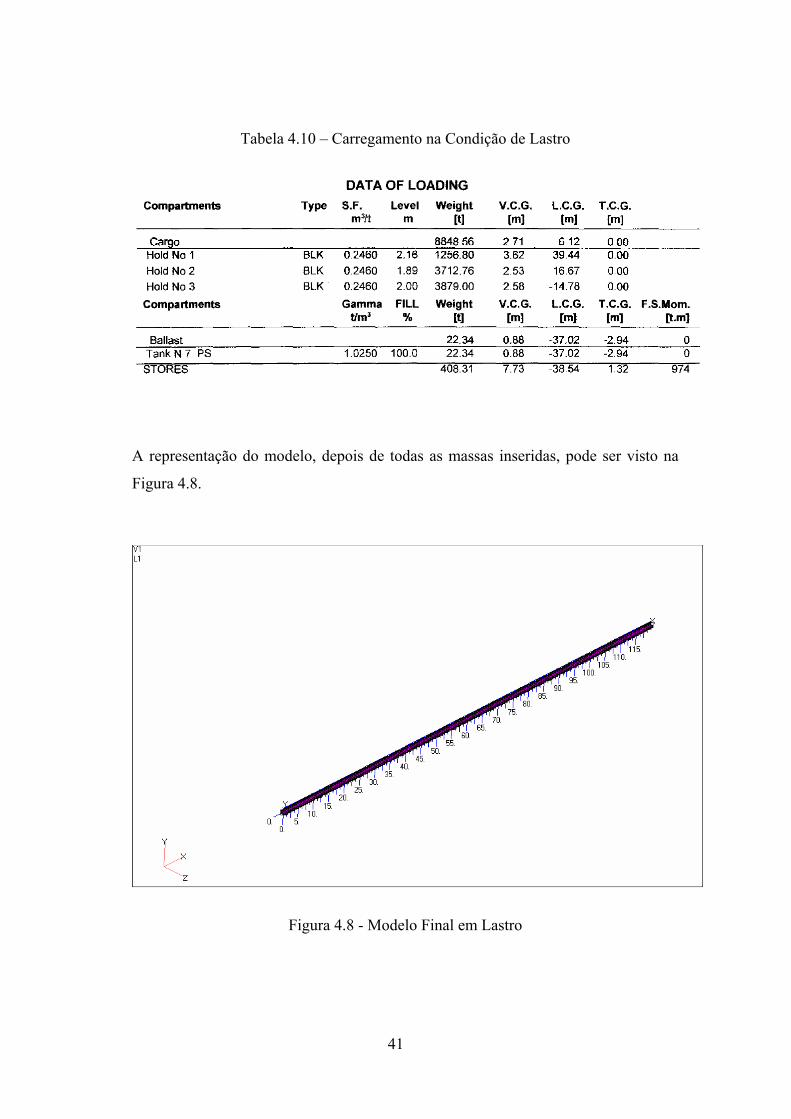
Tabela 4.10 – Carregamento na Condição de Lastro
A representação do modelo, depois de todas as massas inseridas, pode ser visto na
Figura 4.8.
Figura 4.8 - Modelo Final em Lastro
41
4.2 – Resultados
Os resultados experimentais e numéricos obtidos são apresentados na Tabela 4.11.
Tabela 4.11 – Resultados Numéricos e Experimentais
Freqüências (Hz) Experimental Numérico
Modo de Flexão 2 3,07 3,08
Modo de Flexão 13 20,7 20,5
Modelo numérico:
A condição em lastro apresentou freqüência natural de vibração livre de flexão no
plano vertical de 3,08 Hz (Figura 4.9), e freqüência natural de vibração livre na praça
de máquinas no valor de 20,5 Hz (Figura 4.10).
Medição experimental:
A condição em lastro apresentou freqüência natural de vibração livre de flexão no
plano vertical de 3,07 Hz (Figuras 3.9 e 3.10), e freqüência natural de vibração livre
na praça de máquinas no valor de 20,7 Hz (Figuras 3.14 e 3.21), como apresentadas
na análise realizada no Capítulo 3.
42
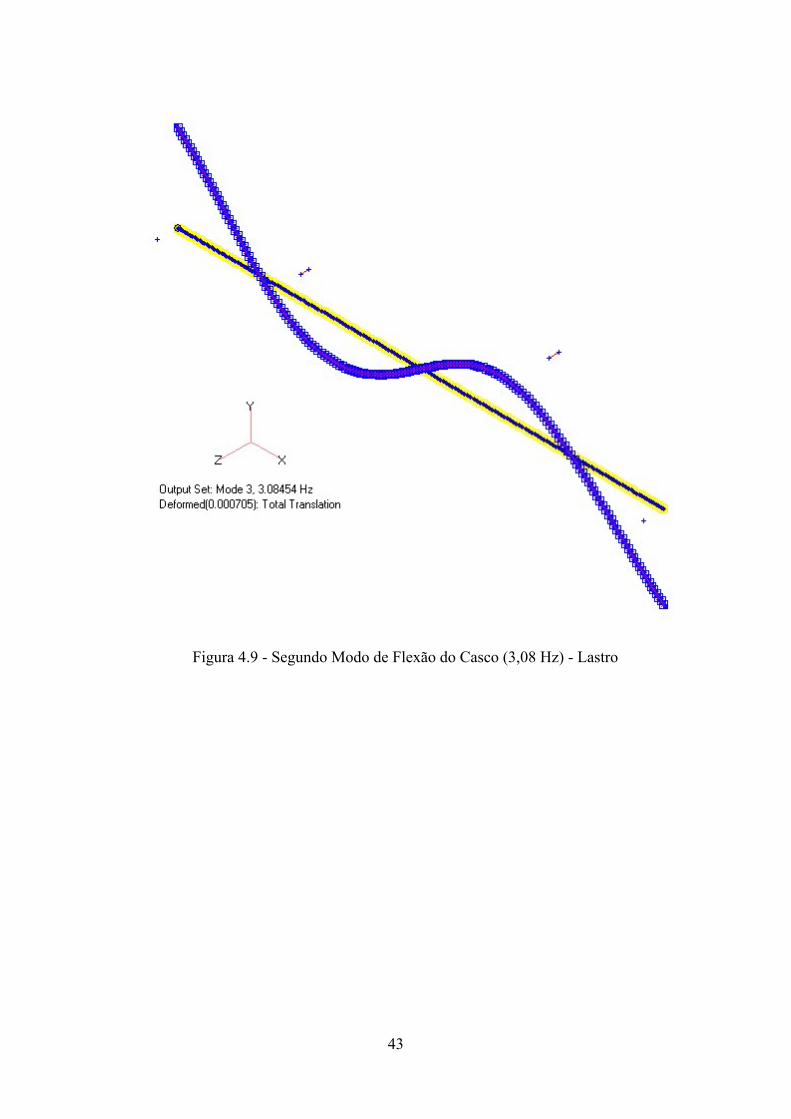
Figura 4.9 - Segundo Modo de Flexão do Casco (3,08 Hz) - Lastro
43

Figura 4.10 – Décimo Terceiro Modo de Flexão do Casco (20,5 Hz) - Lastro
Os resultados numéricos, além de apresentarem erro insignificante em relação aos
experimentais, conforme Tabela 4.11, qualificam os tipos de vibrações acopladas
presentes a bordo na condição de operação em lastro e justificam a preocupação original
apresentada pelo operador do navio na solicitação das medições de vibração. As Figuras
3.13 e 3.20, correspondentes às evoluções dos componentes harmônicos de oitava
ordem (8 cilindros) da vibração transversal medida no topo do motor (local 7T da
Figura 3.5), mostram que, mesmo em condição de ressonância predominante do motor
(20,5Hz), os níveis são baixos, não justificando a vibração excessiva da superestrutura.
No entanto, os resultados numéricos dessa dissertação (Figura 4.10) apontam para uma
vibração natural de flexão no casco acoplada com a do motor na mesma freqüência
(20,5Hz) à medida que a rotação do motor ultrapassa 170rpm indicada nas Figuras 3.8 e
3.15 (vibração vertical da popa) e nas Figuras 3.14 e 3.21 (vibração vertical do topo do
motor a vante), todas de quinta ordem excitadas pelo propulsor de 5 pás, impedindo que
seu gerador de eixo seja colocado em operação pela vibração excessiva.
44
5 – Conclusão
A dissertação apresenta uma aplicação de modelos numéricos calibrados por
medições em escala real para a análise de vibrações excessivas do casco, superestrutura
e praça de máquinas de navio. Estruturas de grandes navios mercantes vêm
apresentando alta vibração global excitadas pelo propulsor e pelo motor principal desde
as últimas décadas do século passado até os dias de hoje. O projetista estrutural pode ter
dificuldade em evitar uma condição de ressonância global casco, propulsor e motor, por
este último possuir na fábrica comportamento dinâmico muito diferente do apresentado
no navio, quando está fixado a um fundo muito flexível. Para simular corretamente
rigidez e massa da estrutura do casco, o desenvolvimento dessa dissertação contou com
resultados reais de vibrações medidas nas condições lastro e carregado do navio em
viagem, que permitiram verificar a correta simulação deste casco, ao mesmo tempo
bastante complexa e extremamente útil para evitar que as principais forças no navio
ocorram em rotações do motor com freqüência próxima às de vibração livre do sistema,
causando ressonância.
Os conceitos teóricos revistos dizem respeito à vibração de sistemas mecânicos (vigas),
a métodos matemáticos responsáveis pela discretização da rigidez e massa do sistema
(Método dos Elementos Finitos), pela determinação dos valores de área efetiva ao
cisalhamento e da massa do fluido adjacente ao casco, modelado como uma viga
equivalente.
A maior sensibilidade do cálculo das freqüências naturais e modos do casco é devida ao
efeito da massa fluida adjacente ao casco, que se comporta de forma distinta para cada
modo de vibração. Por contar com resultados experimentais, o procedimento adotado
foi verificado no caso de um problema real ocorrido em um navio cuja estrutura vibrava
intensamente.
A simulação consistiu inicialmente em um modelo unidimensional do casco, cuja
rigidez, sensível à área efetiva ao cisalhamento da viga que o representa, pode ser
calculada através da teoria de fluxo de tensões cisalhantes em seções de parede fina. De
posse desse modelo e de resultados experimentais do navio real, foi possível confirmar
45
os valores calculados de massa adicional de fluido ao casco, que foi então inserida no
modelo, assim como a massa do casco e do carregamento.
O modelo final pode ser utilizado para simular níveis de vibração em vários locais do
navio e também como ferramenta para solução de problemas de vibração, através da
simulação do efeito de pequenas intervenções no projeto estrutural do navio, de modo a
deslocar as freqüências naturais do casco, superestrutura e praça de máquinas para
valores fora da faixa de operação.
Um ponto importante para a continuação desta pesquisa é a busca de soluções para a
simulação também do problema de vibração do motor principal, do hélice e do eixo
propulsor na praça de máquinas acoplada ao modelo unidimensional calibrado, visando
evitar ou minimizar seus efeitos de vibração excessiva no casco.
Os resultados analisados neste trabalho nos levam a conclusão de que o Modelo
Unidimensional Simplificado indicou boa concordância com as medições realizadas, o
que possibilita, ainda na fase de projeto de navios, o emprego do procedimento adotado
nessa dissertação para a predição das freqüências naturais e modos de vibração do
casco. O procedimento consiste em construir um modelo numérico simplificado do
casco, a partir de informações sobre os planos do projeto do navio (arranjo geral, seção
mestra e curvas hidrostáticas), delineamento do motor de propulsão e do propulsor e
dados sobre condições de carregamento previstas (lastro e carga), formado a partir de
elementos finitos de viga (esbeltos reticulados). De posse das dimensões principais e
espaçamento de cavernas, identificam-se as extremidades de cada elemento, cujas
propriedades, rigidez e massa, são obtidas a partir de dados do material (módulo de
elasticidade, massa específica e coeficiente de Poisson); dados geométricos da seção
transversal (área resistente de aço, momentos de inércia, constante de torção e áreas
efetivas no cisalhamento); valores de massa e localização do motor, equipamentos e
carga e informações sobre as seções submersas, de modo a calcular a massa que
representa a energia cinética das partículas de fluido adjacente ao casco (massa
adicional). Finalmente, após calculadas as matrizes de rigidez e massa do casco através
de um programa de Elementos Finitos, no caso dessa dissertação o NASTRAN, são
obtidas as freqüências naturais e visualizados os modos de vibração, pela solução
matemática do problema de autovalor/autovetor. De posse dessas informações finais, é
46
possível evitar, ainda na fase de projeto, condições de ressonância a bordo, garantindo
segurança e qualidade de vida da tripulação, prevenindo acidentes contra o meio
ambiente e permitindo a adequação operacional e a integridade da embarcação.
47
REFERÊNCIAS BIBLIOGRÁFICAS
CHALMERS, D.W., PRICE, W.G. (1979), “On the Effective Shear Areas of Ship
Sections”, RINA, Supplementary Papers, Volume 122, pages 245-252.
DINUCCI,César L.(1994), “Pesquisa Bibliográfica, Estais para MCP’s”. Projeto Final,
UFRJ, Rio de Janeiro, Brasil.
GUL, Y, T.R, KAYDIHAN, L.(2009), “A Global vibration analysis of a 1900 TEU
capacity container ship”, Marines Structures 22, vol.1, pp 730-743.
LEGUE-LEGUE, H.(1989), “Modelação e Análise da vibração da Praça de Máquinas
do Navio.”, Tese Msc., COPPE UFRJ, Rio de Janeiro, Brasil.
LOPES, T.A.P., TROYMAN, A.C.R. (1980), “Apostila de Vibrações do Navio”,
COPPE UFRJ, Rio de Janeiro, Brasil.
MEGSON, T.H.G. (1972), “Aircraft Structures for Engineering Students”, Edward
Arnold, London.
MEGSON, T.H.G. (1974), “Linear Analysis of Thin Walled Elastic Structures”, Surrey
University Press.
TAWECAL, R.L., MIHARJANA, N.P. (2009), “A Validation of 3650 DWT semi
container ship finite element model by full scale measurements”, Marines Structures 22,
vol.1, pp 730-743.
TEIXEIRA, G.S. (2010), “Análise da Influência da Massa Adicional de Cascos de
Navios em sua Freqüência de Vibração Natural”, Projeto Final, UFRJ, Rio de Janeiro,
Brasil.
48
TROCADO, E.T. (1995), “Análise Dinâmica de um Motor de 6 Cilindros, Influência da
Rigidez do Estaiamento”, Projeto Final, UFRJ, Rio de Janeiro, Brasil.
TROYMAN, A.C.R., CONCEIÇÃO, C.A.L. (1987), “Área Efetiva no Cisalhamento e
Centro de Cisalhamento de Seções Transversais de Navios”, Revista Brasileira de
Engenharia, Vol. 4 N1.
ZANIBONI, E.X. (2010), “Aplicação de Modelos Numéricos Calibrados por Medições
em Escala Real para o Diagnóstico e Análise de Vibração de Motores em Praças de
Máquinas de Navios”, Tese Msc., COPPE UFRJ, Rio de Janeiro, Brasil.
49