modelagem, análise dinâmica e controle em um veículo ...€¦ · abordados outros tópicos de...
TRANSCRIPT

1 Introdução
Um tema de grande relevância quando se trata de veículos articulados é o efeito canivete (jackknifedo inglês). Este tema já é assunto de diversos estudos, artigos e dissertações que tratam de temas dadinâmica desses veículos. Esse evento/fenômeno se caracteriza por um efeito de "acotovelamento"naconfiguração do cavalo-carreta, com consequente possível choque entre ambas as estruturas, podendogerar assim consequências bastante graves para os veículos que estejam em volta do equipamento. Talefeito pode ter origem em comportamentos anômalos na direção do caminhão, como freadas bruscas,perdas de tração, curvas fechadas, entre outros. Estudos estatísticos de acidentes em carretas são feitospor diferentes organizações. Um desses estudos, feito por (STARNES, 2006), aponta que entre abrilde 2001 e dezembro de 2003, 9% dos acidentes envolvendo mais de um veículo nos Estados Unidosforam causados por consequência do efeito canivete. Outro estudo feito por (MARTINEZ, 2005),mostra que 3,1% de todos acidentes envolvendo carretas em 2003 e 7,1% dos acidentes com vítimasfatais também nos Estados Unidos foram causados pelo efeito canivete.
Os objetivos desse trabalho são:
• Desenvolver modelo matemático não linear para a simulação dinâmica de um caminhão do tiposemirreboque.
• Desenvolver a linearização do modelo para auxiliar no desenvolvimento de um sistema decontrole.
• Desenvolver um sistema de controle que visa reduzir o risco do efeito canivete.
• Desenvolver critério analítico para ativação do sistema de controle.
• Fazer análises comparativas dos sistemas desenvolvidos em situações críticas.
2 Modelagem não linear
A modelagem é uma parte relevante deste trabalho, uma vez que são formuladas as equações e modelosmatemáticos a serem analisados. Esta seção contém a modelagem não linear e mais completa doconjunto cavalo-mecânico e semirreboque que será utilizada para as simulações numéricas. A seçãoseguinte se refere ao desenvolvimento de um sistema de controle e que inclui, dentre outras partes,a modelagem linear mais simples e que permitirá a aplicação de técnicas de controle. Serão ainda
1

abordados outros tópicos de importante definição ao modelo, como por exemplo o interação entre opneu e o solo.
2.1 Modelo não linear dos pneus
A interação entre os pneus e o solo são extremamente importantes na dinâmica veicular, uma vezque as forças de contato, determinadas nesses modelos em função da cinemática e geometria doconjunto, representam a maior parte da força resultante sobre os corpos e consequentemente dominama dinâmica dos veículos. A modelagem dessa interação pode ser simples, com funções linearizadas,como também pode ser complexa adotando-se modelos não lineares e até modelos dinâmicos. Extensapesquisa é feita nessa área e alguns autores merecem destaque como referência ao tema: (PACEJKA,2006), (WINKLER; ERVIN, 1976), (BOGARD; WINKLER, 1991), (DUGOFF; FANCHER; SEGEL,1970), (GUNTUR; SANKAR, 1980), (BIAN et al., 2014) e (SALVAGNI; ALVES; BARBOSA, 2013)são exemplos de pesquisas na área de modelagem da interação pneu-solo.
No presente trabalho optou-se pelo desenvolvimento de um modelo próprio, uma vez que simu-lações do efeito canivete não apresentavam resultados que convergiam satisfatóriamente com osequacionamentos desenvolvidos em (DUGOFF; FANCHER; SEGEL, 1970) e (BIAN et al., 2014).O desenvolvimento desse novo modelo de pneu foi proposto pelo professor orientador Dr. RobertoSpinola Barbosa e é descrito na monografia. No presente trabalho serão considerados apenas as forçasde contato, e não os momentos.
O modelo utilizado nesse trabalho aproxima a curva de força (lateral ou longitudinal) por umafunção tangente hiperbólica. O objetivo de se utilizar essa função é a maior estabilidade de integraçãonumérica de um equacionamento que não usa funções com derivadas descontínuas (exemplo funçãomódulo em (BIAN et al., 2014)):
Figura 1 – Tangente hiperbólica
Fonte: (UFF, 2017)
2.2 Considerações sobre o coeficiente de rigidez lateral e a força normal
Como pode ser visto em estudos de dinâmica de arfagem as forças normais nos eixos 1, 2 e 3,respectivamente N1, N2 e N3 variam conforme a desaceleração e a distribuição das forças de frenagem.Esse fenômeno, também referenciado como transferência de carga (do inglês Load Transfer), écomentado em (M.PINXTEREN, 2010). De acordo com (M.PINXTEREN, 2010), em uma frenagemem linha reta, a carga no eixo dianteiro pode chegar a 1,698 vezes a carga estática e a carga noeixo traseiro do cavalo mecânico pode chegar a 0,893 da carga estática. Dado que o coeficientede rigidez lateral em caminhões apresenta uma relação praticamente linear com a força normal emcaminhões e carretas (LUIJTEN, 2010a), espera-se que o fenômeno de transferência de carga influencieconsideravelmente no efeito canivete. Com isso, são utilizadas relações do tipo Cα = f ·N , Onde fé o coeficiente de rigidez lateral normalizado(LUIJTEN, 2010a). (JAZAR, 2013) também mencionaa dependência das rigidez longitudinal e vertical do pneu em função da força normal. A imagem a
2
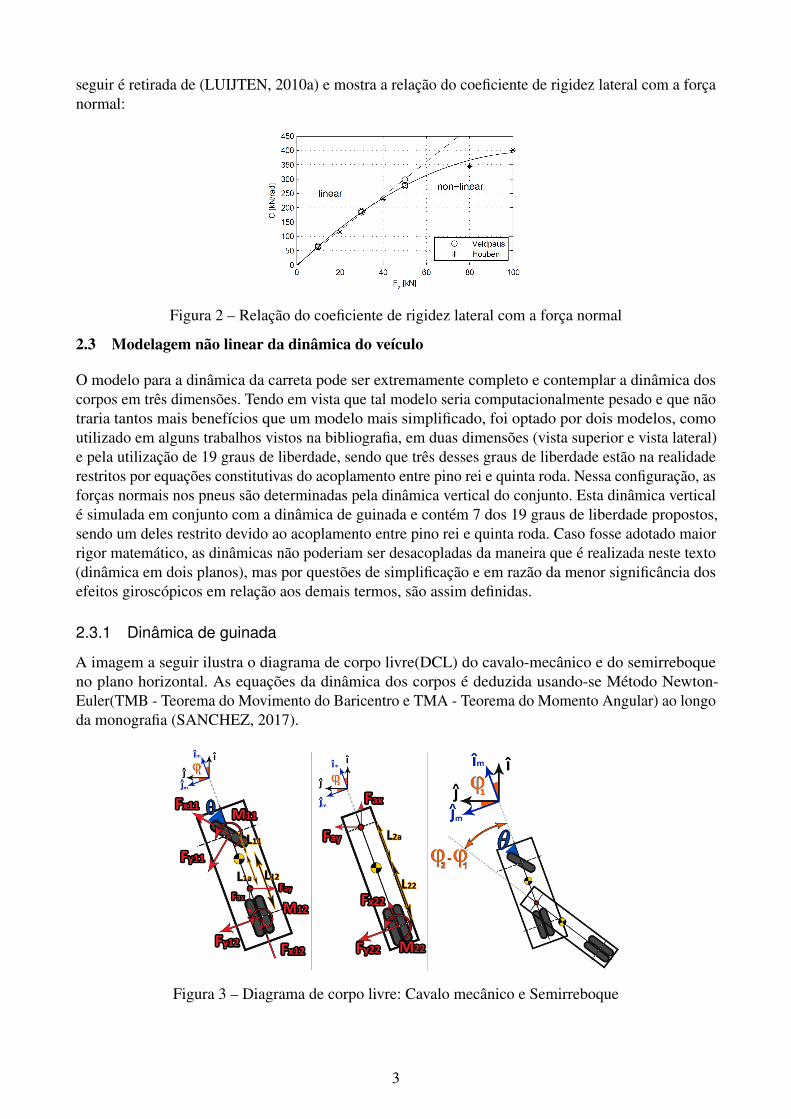
seguir é retirada de (LUIJTEN, 2010a) e mostra a relação do coeficiente de rigidez lateral com a forçanormal:
Figura 2 – Relação do coeficiente de rigidez lateral com a força normal
2.3 Modelagem não linear da dinâmica do veículo
O modelo para a dinâmica da carreta pode ser extremamente completo e contemplar a dinâmica doscorpos em três dimensões. Tendo em vista que tal modelo seria computacionalmente pesado e que nãotraria tantos mais benefícios que um modelo mais simplificado, foi optado por dois modelos, comoutilizado em alguns trabalhos vistos na bibliografia, em duas dimensões (vista superior e vista lateral)e pela utilização de 19 graus de liberdade, sendo que três desses graus de liberdade estão na realidaderestritos por equações constitutivas do acoplamento entre pino rei e quinta roda. Nessa configuração, asforças normais nos pneus são determinadas pela dinâmica vertical do conjunto. Esta dinâmica verticalé simulada em conjunto com a dinâmica de guinada e contém 7 dos 19 graus de liberdade propostos,sendo um deles restrito devido ao acoplamento entre pino rei e quinta roda. Caso fosse adotado maiorrigor matemático, as dinâmicas não poderiam ser desacopladas da maneira que é realizada neste texto(dinâmica em dois planos), mas por questões de simplificação e em razão da menor significância dosefeitos giroscópicos em relação aos demais termos, são assim definidas.
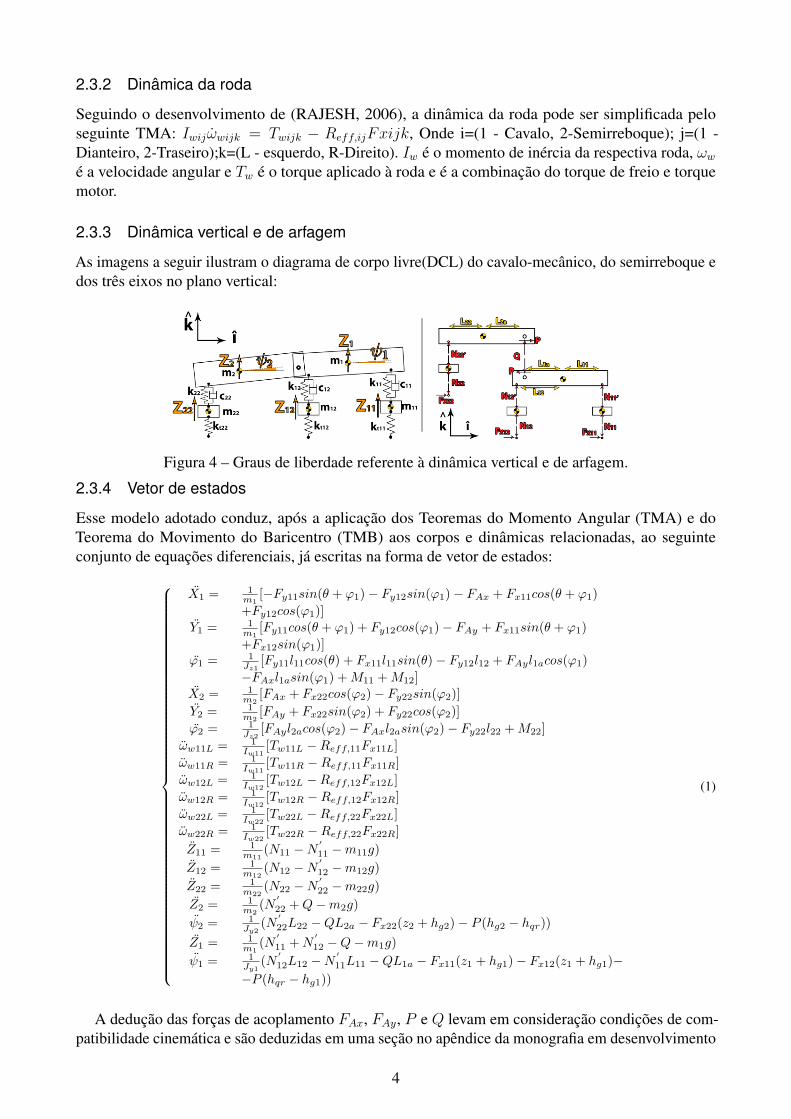
2.3.1 Dinâmica de guinada
A imagem a seguir ilustra o diagrama de corpo livre(DCL) do cavalo-mecânico e do semirreboqueno plano horizontal. As equações da dinâmica dos corpos é deduzida usando-se Método Newton-Euler(TMB - Teorema do Movimento do Baricentro e TMA - Teorema do Momento Angular) ao longoda monografia (SANCHEZ, 2017).
Figura 3 – Diagrama de corpo livre: Cavalo mecânico e Semirreboque
3
2.3.2 Dinâmica da roda
Seguindo o desenvolvimento de (RAJESH, 2006), a dinâmica da roda pode ser simplificada peloseguinte TMA: Iwijωwijk = Twijk − Reff,ijFxijk, Onde i=(1 - Cavalo, 2-Semirreboque); j=(1 -Dianteiro, 2-Traseiro);k=(L - esquerdo, R-Direito). Iw é o momento de inércia da respectiva roda, ωwé a velocidade angular e Tw é o torque aplicado à roda e é a combinação do torque de freio e torquemotor.
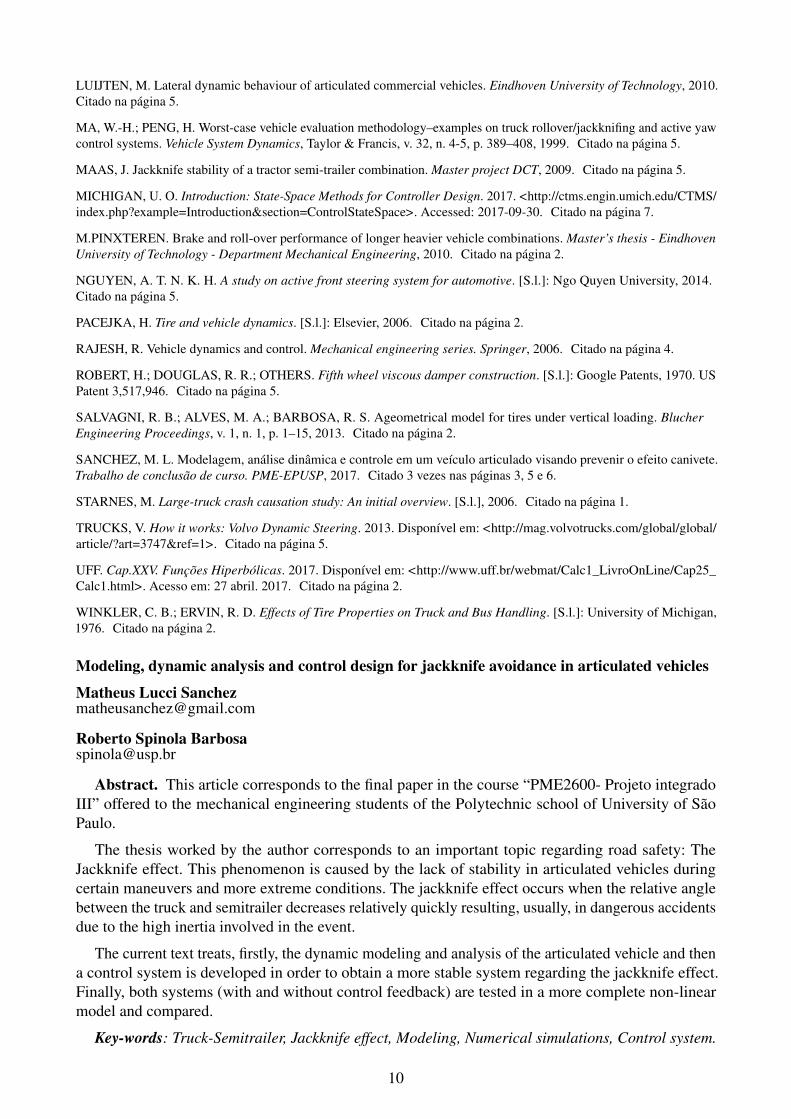
2.3.3 Dinâmica vertical e de arfagem
As imagens a seguir ilustram o diagrama de corpo livre(DCL) do cavalo-mecânico, do semirreboque edos três eixos no plano vertical:
Figura 4 – Graus de liberdade referente à dinâmica vertical e de arfagem.
2.3.4 Vetor de estados
Esse modelo adotado conduz, após a aplicação dos Teoremas do Momento Angular (TMA) e doTeorema do Movimento do Baricentro (TMB) aos corpos e dinâmicas relacionadas, ao seguinteconjunto de equações diferenciais, já escritas na forma de vetor de estados:
X1 = 1m1
[−Fy11sin(θ + ϕ1) − Fy12sin(ϕ1) − FAx + Fx11cos(θ + ϕ1)+Fy12cos(ϕ1)]
Y1 = 1m1
[Fy11cos(θ + ϕ1) + Fy12cos(ϕ1) − FAy + Fx11sin(θ + ϕ1)+Fx12sin(ϕ1)]
ϕ1 = 1Jz1
[Fy11l11cos(θ) + Fx11l11sin(θ) − Fy12l12 + FAyl1acos(ϕ1)−FAxl1asin(ϕ1) +M11 +M12]
X2 = 1m2
[FAx + Fx22cos(ϕ2) − Fy22sin(ϕ2)]Y2 = 1
m2[FAy + Fx22sin(ϕ2) + Fy22cos(ϕ2)]
ϕ2 = 1Jz2
[FAyl2acos(ϕ2) − FAxl2asin(ϕ2) − Fy22l22 +M22]ωw11L = 1
Iw11[Tw11L −Reff,11Fx11L]
ωw11R = 1Iw11
[Tw11R −Reff,11Fx11R]ωw12L = 1
Iw12[Tw12L −Reff,12Fx12L]
ωw12R = 1Iw12
[Tw12R −Reff,12Fx12R]ωw22L = 1
Iw22[Tw22L −Reff,22Fx22L]
ωw22R = 1Iw22
[Tw22R −Reff,22Fx22R]Z11 = 1
m11(N11 −N
′
11 −m11g)Z12 = 1
m12(N12 −N
′
12 −m12g)Z22 = 1
m22(N22 −N
′
22 −m22g)Z2 = 1
m2(N ′
22 +Q−m2g)ψ2 = 1
Jy2(N ′
22L22 −QL2a − Fx22(z2 + hg2) − P (hg2 − hqr))Z1 = 1
m1(N ′
11 +N′
12 −Q−m1g)ψ1 = 1
Jy1(N ′
12L12 −N′
11L11 −QL1a − Fx11(z1 + hg1) − Fx12(z1 + hg1)−−P (hqr − hg1))
(1)
A dedução das forças de acoplamento FAx, FAy, P e Q levam em consideração condições de com-patibilidade cinemática e são deduzidas em uma seção no apêndice da monografia em desenvolvimento
4

(SANCHEZ, 2017). Os parâmetros geométricos para as simulações deste trabalho de conclusão decurso foram retirados em sua maioria de (LUIJTEN, 2010b).
3 Controle
O sistema de controle que visa a melhora do desempenho do veículo quanto à dinâmica lateral éextensivamente trabalhado em diversas fontes. Merecem destaques trabalhos como:(MAAS, 2009) e(CHEN; SHIEH, 2011). Outros trabalhos que também podem ser usados como fontes para trabalhos dedinâmica e controle lateral de veículos articulados são: (LIEBERT, 2009),(GUTIÉRREZ; CANALE,1999). Percebe-se uma tendencia no desenvolvimento de alguns tipos de sistemas de controle paramelhora do desempenho da dinâmica lateral e de guinada de veículos articulados: Controle poresterçamento ativo, Controle ativo ou passivo no sistema pino rei e quinta roda e Controle por torqueativo ou Programa eletrônico de estabilidade.
Para o controle por esterçamento ativo (em inglês Active steering system), a estabilização provemda correção ativa do esterçamento sob o movimento imposto pelo motorista. Atuadores adicionados àbarra de direção mudam o esterçamento das rodas a fim de se otimizar a dinâmica do sistema (KUMAR,2012), (NGUYEN, 2014) e (TRUCKS, 2013).
Para controle ativo ou passivo no sistema pino rei e quinta roda (em inglês articulation anglecontrol), são instalados atuadores (ativos e/ou passivos) no acoplamento entre o cavalo mecânico eo semirreboque. Diversas patentes podem ser encontradas relacionadas a esse sistema: (ROBERT;DOUGLAS et al., 1970), (E, 1970) e (HUNGERINK; HEEB; INGRAHAM, 1999).
Para controle por torque ativo ou Programa eletrônico de estabilidade (em inglês active yawtorque ou Electronic Stability Program), o torque transmitido às rodas é controlado para que adinâmica de guinada seja mais estável. Podem ser utilizados sistemas de freio diferenciais, diferenciaiscontrolados, ou outras técnicas de controle. Sistemas eletrônicos de estabilidade (em ingles: ESC -Electronic Stability Control) apresentam funcionamento semelhante e já são embarcados em diversosveículos comerciais. Alguns trabalhos que abordam esse sistema de controle são (ESMAILZADEH;GOODARZI; VOSSOUGHI, 2003),(CHEN; TOMIZUKA, 1995),(ELHEMLY; FAYED; ELMAIHY,2013) e (MA; PENG, 1999).
Figura 5 – Exemplo de sistemas de controle para veículos.
Fonte: BMW, MERCEDES e FORD
Pelo fato do sistema de controle de torque ativo ser mais facilmente implementado em um sistemacavalo-semirreboque, pois exigiria menos mudanças mecânicas em sistemas já existentes, é o sistemade controle a ser trabalhado nas próximas seções. Em termos de atuador, seria aproveitado o própriosistema de freio do veículo, só que a dosagem seria distribuida nas rodas do veículos de formacontrolada.
5

3.1 Linearização do modelo
Nesta seção é exposto o modelo linear utilizado para o desenvolvimento das técnicas de controle. Adedução do modelo linear encontra-se no apêndice da monografia (SANCHEZ, 2017) e foi baseado notrabalho desenvolvido por (LUIJTEN, 2010a). Os seguintes graus de liberdade são considerados nessemodelo: Velocidades lateral e de guinada do cavalo mecânico e ângulo relativo e velocidade angularrelativa entre cavalo-mecânico e semirreboque.
Como entrada e saída temos respectivamente: Ângulo de esterçamento dos pneus "θ"e Torquereferente ao freio diferencial "Mz".
As variáveis foram escolhidas convenientemente para facilitar o processo de sensoriamento e parase adequarem a proposta de estudo e controle determinados. O sistema foi descrito na forma de espaçode estados, pois essa notação é comumente usada para a aplicação das técnicas de controle. Tem-seentão:
m1 +m2 −m2(L1a + L2a) −m2L2a 0−m2L1a I1 +m2L22(L1a + L2a) m2L22L2a 0−m2L2a I2 +m2L2a(L1a + L2a) I2 +m2L
22a 0
0 0 0 1
v1ϕ1φ
φ
= − 1u
(2)
C + C3 Cs1 − C3(L1a + l2) + (m1 +m2)u2 −C3l2 −C3u
Cs1 − C3L1a Cq21 + C3L1a(L1a + l2) −m2L1al2 C3L1al2 C3L1au
−C3l2 C3l2(L1a + l2) −m2L2au2 C3l
22 C3l2u
0 0 −u 0
v1ϕ1φφ
+
C1
L11C100
δ1+
0010
Mz
A única variável a ser sensoriada é o ângulo entre o cavalo e o semirreboque. Essa escolha foifeita após alguns testes preliminares acerca da observabilidade do sistema. Percebeu-se que a partirda medida dessa única variável de estado o sistema era completamente observável. Isso se mostroubastante positivo do ponto de vista do sensoriamento do sistema, já que apenas um sensor é necessário,e sensores de coordenada angular são extremamente numerosos, encontrados para as mais diversasaplicações, tamanhos, geometrias e precisões. Além disso o posicionamento do sensor não é de grandedificuldade, bastando instalá-lo no conjunto pino-rei quinta roda.
3.2 Verificação da estabilidade
A análise de estabilidade pode ser feita por algumas metodologias para o modelo descrito na sessãoanterior. Para os parâmetros descritos estabelecidos na monografia (SANCHEZ, 2017) e para veloci-dade constante de u = 70km/h, temos um sistema estável, ao passo que para velocidade constrante deu = 90km/h, temos um sistema instável. Tal constatação pode ser observada pela existencia de raízescom partes reais positivas na função de transferência que define o sistema linear e pela existenciadesses polos positivos no diagrama de zeros e polos plotados a seguir. Para efeito comparativo, foramplotados o diagrama de polos para diferentes velocidades:
Figura 6 – Diagrama de zeros e polos do sistema, variando a velocidade longitudinal de 40 a 100 km/h
6

3.3 Metodologias de controle
Nesta seção serão desenvolvidos diferentes tipos de controladores para que depois possam ser com-parados. Serão desenvolvidas algumas técnicas disponíveis para a sintonia de controladores do tipoProporcional-Integrativo-Derivativo (PID), como alocação de polos (Pole placement), lugar das raí-zes(Root Locus) e também os resultados provenientes de uma ferramenta de sintonia automática dePID (MatLab ®"PID Tuner") inclusa no software utilizado.
Uma metodologia para a sintonia dos ganhos PID se dá pela utilização do diagrama do lugardas raízes. Utiliza-se nesse caso o recurso "Control System Designer"do MatLab ®, ferramenta queautomatiza o processo de tunagem e facilita a vizualização dos resultados simultaneamente ao processode sintonia. Matematicamente o programa plota as respostas dinâmicas e os polos do sistema para ospossíveis ganhos proposcionais e pode-se, então, a partir das respostas escolher o ganho que melhor seadequou aos critérios de projeto (minimização do tempo de assentamento e do overshoot).
Para o método de alocação de polos a determinação dos ganhos do controlador é realizada utilizado-se o comando "place"do Matlab. Nessa metodologia, estipula-se os polos objetivos para a planta, ematematicamente o software usa o método da "Alocaçao dos polos"para retornar um controlador emque a planta com malha fechada apresenta os ganhos especificados. Como o sistema é controlavel,teoricamente qualquer polo pode ser estipulado(MICHIGAN, 2017), no entanto a grande limitação é abanda do atuador (neste caso é a força de frenagem). Como a planta real apresenta uma limitação naforça de frenagem que o pneu consegue desenvolver - saturação do contato - o a alocação de polosmuito negativos acaba sendo inviabilizada.
O método "PID Tuner"de sintonia é uma ferramenta automática do software MatLab ®. Nessesoftware, a sintonia é feita graficamente alterando-se duas barras de ajuste de "tempo de resposta"e"comportamento transiente".
3.4 Respostas dinâmicas
Nesta seção são expostos as respostas dinâmicas ao degrau e ao impulso do sistema linear em análisealém dos diagrama de polos e zeros e do diagrama de bode.
Figura 7 – Resposta ao impulso e ao degrau do sistema original vs controlado (Alocação de polos,lugar das raizes e PID Tuner)
Pode-se observar pelos gráficos acima, que a metodologia que obteve melhor desempenho foi aalocação dos polos, mas as demais técnicas (root locus e PID Tuner) também apresentaram resultadossatisfatórios, uma vez que conseguiram estabilizar um sistema que originalmente era instável.
4 Sistema não linear com controle e resultados
A seção anterior mostrou que as três metodologias de sintonização dos ganhos de controle foramsatisfatórias e conseguiram estabilizar o sistema (inicialmente instável para a velocidade de cruzeiroselecionada). Nesta seção aplica-se o sistema de controle para o modelo não linear e busca-se comparara resposta dinâmica do sistema com e sem controle. Por simplicidade da aplicação, optou-se pelo
7

método de sintonia de Lugar das raízes (root locus), uma vez que é utilizado apenas um ganhoproporcional.
Vale destacar que na implementação do sistema de controle buscou-se um sistema robusto e confiá-vel. Percebeu-se, entretanto, que a aplicação do controle em manobras simples e pouco exigentes naverdade atrapalhava a controlabilidade do veículo, deixando-o mais lento para atingir a estabilização.A fim de se evitar a interferência do sistema de controle em manobras menos agressívas, e consequen-temente menos sujeitas ao efeito canivete, implementou-se um sistema de "liga e desliga"do controlebaseado no trabalho de (BOUTELDJA; CEREZO, 2011). Na fonte pesquisada, o autor desenvolve umestimador da suscetibilidade do sistema ao efeito canivete com base no ângulo entre o cavalo-mecânicoe sua derivada. A "suscetibilidade"do sistema ao efeito canivete é estimada pelo TLBA ("Time leftbefore accident"), onde por uma extrapolação linear verifica-se o tempo que o sistema levaria a umângulo crítico. A extrapolação é calculada a partir do ângulo de acoplamento e sua derivada. Adota-secomo TLBA crítico um tempo de 8 segundos para um ângulo de 85o.
Figura 8 – Risk criterion prediction (TLBA) (BOUTELDJA; CEREZO, 2011)
O modelo não linear foi submetido a testes em diferentes manobras. A imagem a seguir ilustrapor exemplo a eficiencia do sistema de controle em evitar o efeito canivete em uma manobra demudança de faixa brusca (esterçamento senoidal) com frenagem próxima de 5 m/s2. Essa manobraseria equivalente a tentativa de desvio de um obstáculo na pista.
Figura 9 – Esterçamento senoidal com frenagem. Sist. sem controle (esq.) e com controle (dir.)
A imagem a seguir ilustra a simulação de um caso com esterçamento brusco e com uma frenagematrasada do motorista. A situação ilustra o caso do motorista entrar com o caminhão em uma curvaem alta velociade, aplicar uma angulo de esterçamento fechado e realizar a frenagem durante a curva.Pode-se perceber que o caminhão sem o sistema de controle apresenta o efeito canivete, enquanto queo sistema controlado consegue se manter relativamente estável (mesmo com o ângulo entre os corposchegando a cerca de 40o)
8

Figura 10 – Esterçamento degrau com frenagem. Sist. sem controle (esq.) e com controle (dir.)
Referências
BIAN, M. et al. A dynamic model for tire/road friction estimation under combined longitudinal/lateral slip situation. [S.l.],2014. Citado na página 2.
BOGARD, S.; WINKLER, C. B. Lateral Performance Measurements of Wide-Base Truck Tires. [S.l.]: University ofMichigan, 1991. Citado na página 2.
BOUTELDJA, M.; CEREZO, V. Jackknifing warning for articulated vehicles based on a detection and prediction system.In: 3rd international conference on road safety and simulation. [S.l.: s.n.], 2011. p. 14–16. Citado na página 8.
CHEN, C.; TOMIZUKA, M. Dynamic modeling of articulated vehicles for automated highway systems. In: IEEE.American Control Conference, Proceedings of the 1995. [S.l.], 1995. v. 1, p. 653–657. Citado na página 5.
CHEN, L.; SHIEH, Y. Jackknife prevention for articulated vehicles using model reference adaptive control. Proceedings ofthe Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, Sage Publications, v. 225, n. 1, p.28–42, 2011. Citado na página 5.
DUGOFF, H.; FANCHER, P.; SEGEL, L. An analysis of tire traction properties and their influence on vehicle dynamicperformance. [S.l.], 1970. Citado na página 2.
E, K. G. W. G. P. Fifth wheel coupler with rotary damping. [S.l.]: Google Patents, 1970. US Patent 3,520,557. Citado napágina 5.
ELHEMLY, M. A. E.; FAYED, M. A. E.; ELMAIHY, A. A. E. Tractor–semitrailer jackknifing elimination using semitrailerdifferential braking technique. International Journal of Heavy Vehicle Systems, Inderscience Publishers Ltd, v. 20, n. 1, p.19–34, 2013. Citado na página 5.
ESMAILZADEH, E.; GOODARZI, A.; VOSSOUGHI, G. Optimal yaw moment control law for improved vehiclehandling. Mechatronics, Elsevier, v. 13, n. 7, p. 659–675, 2003. Citado na página 5.
GUNTUR, R.; SANKAR, S. A friction circle concept for dugoff’s tyre friction model. International Journal of VehicleDesign, Inderscience Publishers, v. 1, n. 4, p. 373–377, 1980. Citado na página 2.
GUTIÉRREZ, J. C. H.; CANALE, A. C. Estudo Comparativo da Estabilidade Direcional de Duas Combinações VeicularesTipo Cavalo Semi-Reboque. [S.l.]: Congresso Nacional de Engenharia Mecânica - CONEM, 1999. Citado na página 5.
HUNGERINK, G. W.; HEEB, J. P.; INGRAHAM, R. D. Fifth wheel hitch coupling control system. [S.l.]: Google Patents,1999. US Patent 5,861,802. Citado na página 5.
JAZAR, R. N. Vehicle dynamics: theory and application. [S.l.]: Springer Science & Business Media, 2013. Citado napágina 2.
KUMAR, D. N. K. A. An Overview of Active Front Steering System. [S.l.]: International Journal of Scientific andEngineering Research, 2012. Citado na página 5.
LIEBERT, D. Modelagem Dinâmica Longitudinal de Veículos Articulados. [S.l.]: Escola Politécnica da Universidade deSão Paulo - EPUSP, 2009. Citado na página 5.
LUIJTEN, M. Lateral dynamic behaviour of articulated commercial vehicles. Master’s thesis - Eindhoven University ofTechnology - Department Mechanical Engineering, 2010. Citado 3 vezes nas páginas 2, 3 e 6.
9
LUIJTEN, M. Lateral dynamic behaviour of articulated commercial vehicles. Eindhoven University of Technology, 2010.Citado na página 5.
MA, W.-H.; PENG, H. Worst-case vehicle evaluation methodology–examples on truck rollover/jackknifing and active yawcontrol systems. Vehicle System Dynamics, Taylor & Francis, v. 32, n. 4-5, p. 389–408, 1999. Citado na página 5.
MAAS, J. Jackknife stability of a tractor semi-trailer combination. Master project DCT, 2009. Citado na página 5.
MICHIGAN, U. O. Introduction: State-Space Methods for Controller Design. 2017. <http://ctms.engin.umich.edu/CTMS/index.php?example=Introduction§ion=ControlStateSpace>. Accessed: 2017-09-30. Citado na página 7.
M.PINXTEREN. Brake and roll-over performance of longer heavier vehicle combinations. Master’s thesis - EindhovenUniversity of Technology - Department Mechanical Engineering, 2010. Citado na página 2.
NGUYEN, A. T. N. K. H. A study on active front steering system for automotive. [S.l.]: Ngo Quyen University, 2014.Citado na página 5.
PACEJKA, H. Tire and vehicle dynamics. [S.l.]: Elsevier, 2006. Citado na página 2.
RAJESH, R. Vehicle dynamics and control. Mechanical engineering series. Springer, 2006. Citado na página 4.
ROBERT, H.; DOUGLAS, R. R.; OTHERS. Fifth wheel viscous damper construction. [S.l.]: Google Patents, 1970. USPatent 3,517,946. Citado na página 5.
SALVAGNI, R. B.; ALVES, M. A.; BARBOSA, R. S. Ageometrical model for tires under vertical loading. BlucherEngineering Proceedings, v. 1, n. 1, p. 1–15, 2013. Citado na página 2.
SANCHEZ, M. L. Modelagem, análise dinâmica e controle em um veículo articulado visando prevenir o efeito canivete.Trabalho de conclusão de curso. PME-EPUSP, 2017. Citado 3 vezes nas páginas 3, 5 e 6.
STARNES, M. Large-truck crash causation study: An initial overview. [S.l.], 2006. Citado na página 1.
TRUCKS, V. How it works: Volvo Dynamic Steering. 2013. Disponível em: <http://mag.volvotrucks.com/global/global/article/?art=3747&ref=1>. Citado na página 5.
UFF. Cap.XXV. Funções Hiperbólicas. 2017. Disponível em: <http://www.uff.br/webmat/Calc1_LivroOnLine/Cap25_Calc1.html>. Acesso em: 27 abril. 2017. Citado na página 2.
WINKLER, C. B.; ERVIN, R. D. Effects of Tire Properties on Truck and Bus Handling. [S.l.]: University of Michigan,1976. Citado na página 2.
Modeling, dynamic analysis and control design for jackknife avoidance in articulated vehicles
Matheus Lucci [email protected]
Roberto Spinola [email protected]
Abstract. This article corresponds to the final paper in the course “PME2600- Projeto integradoIII” offered to the mechanical engineering students of the Polytechnic school of University of SãoPaulo.
The thesis worked by the author corresponds to an important topic regarding road safety: TheJackknife effect. This phenomenon is caused by the lack of stability in articulated vehicles duringcertain maneuvers and more extreme conditions. The jackknife effect occurs when the relative anglebetween the truck and semitrailer decreases relatively quickly resulting, usually, in dangerous accidentsdue to the high inertia involved in the event.
The current text treats, firstly, the dynamic modeling and analysis of the articulated vehicle and thena control system is developed in order to obtain a more stable system regarding the jackknife effect.Finally, both systems (with and without control feedback) are tested in a more complete non-linearmodel and compared.
Key-words: Truck-Semitrailer, Jackknife effect, Modeling, Numerical simulations, Control system.
10