lista de tabelas - feup project manager · web viewtabela 1 – energia específica de algumas...
TRANSCRIPT

Faculdade de Engenharia da Universidade do Porto
Índice
Lista de tabelas..........................................................................................................................2
Lista de figuras...........................................................................................................................2
Introdução...................................................................................................................................5
Requisitos do projeto..............................................................................................................18
Conversão de um veículo elétrico.........................................................................................20
Dimensionamentos..................................................................................................................21
Motor elétrico de tração......................................................................................................23
Discussão/Conclusão da secção do motor......................................................................23
Baterias / Ultracondensador...............................................................................................24
Discussão/Conclusão da seção das baterias / ultracondensadores............................25
Conversores.........................................................................................................................26
Simulações...............................................................................................................................29
Motor elétrico de tração......................................................................................................29
Baterias.................................................................................................................................32
Conversores.........................................................................................................................34
Referências..............................................................................................................................37
Anexos......................................................................................................................................39
Eletrónica Automóvel 2011-12 Page 1
Faculdade de Engenharia da Universidade do Porto
Lista de tabelas
Tabela 1 – energia específica de algumas baterias.............................................................9
Tabela 2 – caraterísticas técnicas de algumas baterias......................................................9
Tabela 3 - comparação entre os motores para VEH.........................................................10
Tabela 4 - tabela de requisitos para o projeto.....................................................................18
Tabela 5 – desmultiplicação da caixa de velocidades e do diferencial da moto original
...................................................................................................................................................22
Tabela 6 - caraterísticas da bateria LFPO20AH.................................................................25
Tabela 7 - caraterísticas do BCAP1500 P270.....................................................................25
Lista de figuras
Fig. 1 – peso da bateria vs distância permitida.....................................................................6
Fig. 2 – preço da bateria vs distância permitida....................................................................6
Fig. 3 – Topologia série de um veículo híbrido...................................................................13
Fig. 4 - System Breakdown Structure...................................................................................15
Fig. 5 – diagrama funcional do sistema................................................................................16
Fig. 6 – forças exercidas na moto num plano inclinado.....................................................21
Fig. 7 – efeito do atrito do ar com a velocidade..................................................................22
Fig. 8 – conversor buck-boost em meia ponte....................................................................26
Fig. 9 - inversor de tensão trifásico.......................................................................................28
Fig. 10 - diagrama de blocos geral implementado..............................................................29
Fig. 11 - diagrama de blocos do Motor Control...................................................................29
Fig. 12 - diagrama de blocos do controlador de velocidade..............................................30
Fig. 13 - diagrama de blocos do controlo vetorial...............................................................30
Fig. 14 - drivetrain simulado...................................................................................................31
Eletrónica Automóvel 2011-12 Page 2
Faculdade de Engenharia da Universidade do Porto
Fig. 15 - caixa de velocidades simulada..............................................................................31
Fig. 16 - modelo de bateria simulado...................................................................................32
Fig. 17 - simulação de carga variável...................................................................................33
Fig. 18 - correntes e tensões após 5min de descarga e 25min de descanso do modelo
da bateria pelo modelo simples.............................................................................................33
Fig. 19 - 5 min de carga e 25 min de descarga da bateria pelo modelo de carga
variável......................................................................................................................................34
Fig. 20 - conversor buck-boost em meia ponte simulado.................................................35
Fig. 21 - Tensão do Barrramento DC (96V) e corrente exigida pela carga de 7kW.......35
Fig. 22 - Tensão do Barrramento DC (96V) e corrente exigida pela carga de 7kW em
regime estacionário.................................................................................................................35
Fig. 23 - conversor buck-boost em meia ponte em malha fachada..................................36
Eletrónica Automóvel 2011-12 Page 3

Faculdade de Engenharia da Universidade do Porto
Eletrónica Automóvel 2011-12 Page 4
Faculdade de Engenharia da Universidade do Porto
Introdução
Os veículos elétricos já existiam antes dos motores a combustão interna. São altamente adaptáveis e fazem parte da sociedade quotidiana. Podem-se encontrar carros elétricos no cimo de montanhas (teleféricos), no fundo do mar (submarinos), arranha-céus (elevadores), até mesmo na Lua (Lunar Rover)!
Cerca de 15% da energia no combustível dum veículo a motor de combustão é utilizada para colocar o mesmo em movimento ou alimentar acessórios, tais como o ar condicionado. O resto da energia é perdida. Devido a este facto, os veículos elétricos são um potencial candidato para poupar combustível fóssil. Com baterias recarregáveis, a energia útil que chega às rodas poderá rondar os 75%.Um veículo elétrico é constituído por baterias/ultracondensadores que fornecem energia, um motor elétrico que traciona as rodas e ainda controladores que controlam o fluxo de energia no motor.
Segue uma breve descrição de cada um dos elementos.
Baterias e ultracondensadores
Tanto nos veículos híbridos como nos elétricos um dos componentes mais importantes são sem dúvida as baterias elétricas. E como tal são também o componente que mais influencia o projeto, conceção, fiabilidade e comercialização dos mesmos. Posto isto torna-se essencial dar especial atenção no estudo teórico das baterias.
Neste documento será explicado de uma forma sucinta o que é uma bateria, qual a sua importância na tecnologia automóvel atual, os tipos de baterias mais usadas, quais as exigências a que devem responder, como podem ser carregadas ou descarregas e os respetivos cuidados a ter, quais os modelos usados para modelar as baterias com os seus pontos fortes e fracos.
No final teremos qual o tipo de bateria que deve ser usada, qual o modelo a usar, como será o controlo de carga e descarga.
O sistema de armazenamento é uma peça fundamentar num automóvel elétrico, pois é o seu maior ponto fraco. Isto porque tipicamente um terço do peso do automóvel ou mais pertence às baterias. E um quarto ou mais do custo durante a vida útil do veículo depende igualmente das baterias [1](Bansal 2005). Para melhor se perceber a influência das baterias no projeto podemos observar as figuras 1 e 2 [3](Doctors 1995) que descrevem a relação peso das baterias vs. distância percorrida e preço da bateria vs distância.
Eletrónica Automóvel 2011-12 Page 5

Faculdade de Engenharia da Universidade do Porto
Fig. 1 – peso da bateria vs distância permitida
Fig. 2 – preço da bateria vs distância permitida
Sendo assim torna-se preponderante para o bom desenrolar do projeto obter um conhecimento alargado dos tipos de baterias existentes, qual ou quais as melhores escolhas e enumerar e explicar as caraterísticas técnicas das baterias, caraterísticas estas que influenciarão todo o projeto, e a escolha das mesmas. Explicar como é o carregamento e descarregamento das baterias e quais os sistemas usados; quais os modelos das baterias existentes e quais os mais adequados.
As baterias são compostas por células ligadas entre si em que a energia química é convertida em energia elétrica e vice-versa. Os níveis de tensão e de carga desejados numa bateria são conseguidos ligando um certo número de células em serie e em paralelo respetivamente.
Para a maioria dos tipo de baterias, a potência e a energia que estas são capazes de fornecer não são independentes uma da outra e por isso, durante o projeto das baterias, são fixados os valores que se quer atingir para estas grandezas. Como também foi visto existem outras caraterísticas que influenciam a escolha do tipo de bateria, tais como o ciclo de vida, a temperatura operacional e a profundidade de descarga.
Com o desenvolvimento máximo que tem existido nesta área, diferentes tipos de baterias têm sido desenvolvidos, apesar de ser ainda uma área da tecnologia que ainda não é bem entendida o que nos leva a acreditar que muito vai mudar nos tempos vindouros.
Os principais tipos de baterias usados em veículos elétricos/híbridos são [5](Husain 2005):
Acido-chumbo (Pb - acid); Niquel-cadmio (NiCd); Niquel hidreto metálico (NiMH); Iões de lithium (Li-ion); Llithium polímeros ( Li-poly); Sulfureto de sódio (NaS); Ar-Zinco (Zn-Air).
Dentro destas daremos mais ênfase às baterias de acido-chumbo, Niquel-cadmio, Niquel hidreto metálico e Iões de lítio, devido às suas destacadas posições em termos de utilização e perspetivas de evolução.
Eletrónica Automóvel 2011-12 Page 6
Faculdade de Engenharia da Universidade do Porto
Acido-chumbo (Pb - acid)
Baterias de descarga profunda: A maioria dos veículos elétricos ainda hoje está equipada com baterias de ciclo profundo. Este tipo de baterias são projetadas para terem uma vida útil de 400 a 800 ciclos [1].
Baterias ”horizon”: são as baterias usadas no Austin TX, um carro que a Austin está a testar e que tem a capacidade de fazer 177 Km sem carregamento.
Estas são baterias com um fabrico especial que foi patenteado pela “ELECTROSOUCE”. É uma bateria com maior capacidade, ciclos de vida mais longos de descarga profunda sem degeneração e de recarga rápida e alta energia específica [1].
Os pontos fortes gerais destas baterias são [4]: Custo relativamente baixo; Matérias-primas de fácil acesso (chumbo, enxofre); Facilidade de fabricação; Caraterísticas eletromecânicas favoráveis.
Os pontos fracos são: Baixa densidade energética; Ciclo de vida reduzido.
Níquel-cadmium (NiCd)
Este tipo de baterias já é usado por empresas da indústria automóvel da Europa e do Japão. São mais caras do que as baterias de chumbo, mas tem uma maior densidade energética e um ciclo de vida de 1000 cargas.
São um tipo de baterias que podem ser carregadas rapidamente mas que para isso é necessário ter alguns cuidados pois tem tendência a aquecer [1].
O cádmio é altamente tóxico, por isso este é um elemento que tem de ser manejado com muito cuidado. A reciclagem de cádmio é possível, mas perigosa.
Os pontos fortes desta bateria são: Maior densidade energética que a bateria de Pb-acid ; Maior número de ciclo de vida; O cádmio é passível de reciclagem.
Pontos fracos: Tendência a subaquecer quando submetida a carga rápida; Preço elevado; Cádmio é altamente tóxico.
Níquel hidreto metálico (NiMH)
Esta bateria é constituída por materiais recicláveis e não tóxicos. Tem uma vida útil esperada igual ao dobro da vida útil da bateria de chumbo-acido. É um tipo de bateria livre de manutenção, pode ser carregada rapidamente e suporta sub e sobrecarga sem perigo de subaquecimento ou explosão [1].
Os pontos fortes desta bateria são:
Eletrónica Automóvel 2011-12 Page 7

Faculdade de Engenharia da Universidade do Porto
Maior densidade energética Pb-acid; Maior numero de ciclo de vida quando comparada com Pb-acid; Reciclável; Materiais não tóxicos; Uso mais seguro; Rápida recarga.
Pontos fracos: Ciclos de vida de menor número quando comparada com a bateria NiCd ; Preço elevado em relação à Pb-acid.
Iões de Lítio (Li-ion)
Estas baterias são as baterias usadas nos aparelhos portáteis usados hoje em dia, como os computadores portáteis e os telemóveis Estão a ser agora usadas por alguns construtores de automóveis, como a Nissan e a Tesla.
São baterias com efeito de memória baixo, alta energia específica (100Wh/Kg) e alta densidade de potência (300W/Kg).
A vida útil espera-se que seja superior a 1000 ciclos.Cada célula desta bateria tem uma tensão nominal de 2,5 a 4,5V durante o
carregamento e descarregamento, respetivamente.Estas baterias necessitam de um controlo complexo de operação de cada célula
e de um sistema eficaz de arrefecimento, com o perigo de explosão na falha destes, sendo que são baterias que custo muito elevado.
Os pontos fortes desta bateria são: Maior densidade energética; Maior numero de ciclo de vida quando comparada com Pb-acid; Maior densidade de potência; Maior energia específica;
Pontos fracos: Preço elevado; Altamente instáveis; Sistema de controlo complexo; Necessidade de sistema auxiliar de refrigeração;
Para se perceber um pouco melhor a comparação entre os diversos tipos de baterias vamos apresentar algumas tabelas bastante elucidativas.
Na tabela 1 podemos comparar a energia específica entre a bateria de chumbo, NiCd e NiHm [4];
Eletrónica Automóvel 2011-12 Page 8

Faculdade de Engenharia da Universidade do Porto
Tabela 1 – energia específica de algumas baterias
Na tabela 2 [6](Lee), podemos comparar as diferenças técnicas entre as baterias de chumbo e as Li-ion.
Tabela 2 – caraterísticas técnicas de algumas baterias
Eletrónica Automóvel 2011-12 Page 9

Faculdade de Engenharia da Universidade do Porto
Motor elétrico
O motor elétrico é um componente fundamental no sistema de tração. Este é responsável por fazer a conversão da energia elétrica em mecânica, que através da ligação a um eixo, movimenta o veículo.
À partida, qualquer motor elétrico pode ser utilizado para esta conversão, desde que se faça um controlo de binário e velocidade do eixo.
Os requisitos que um motor deve cumprir para ser possível instalar num veículo elétrico são: Alta densidade de binário e de potência; Elevado binário de arranque, em baixas velocidades e em subidas, com
elevadas potências nas altas velocidades do veículo; Faixa de aceleração, operando com potência constante, até 3 a 4 vezes a
velocidade nominal; Maior eficiência ao longo do movimento do binário e da velocidade,
incluindo operação com binário baixo; Capacidade de sobrecarga intermitente, tipicamente o dobro do binário
nominal, com curta duração; Alta robustez e fiabilidade, apropriadas ao ambiente do veículo; Custo aceitável.
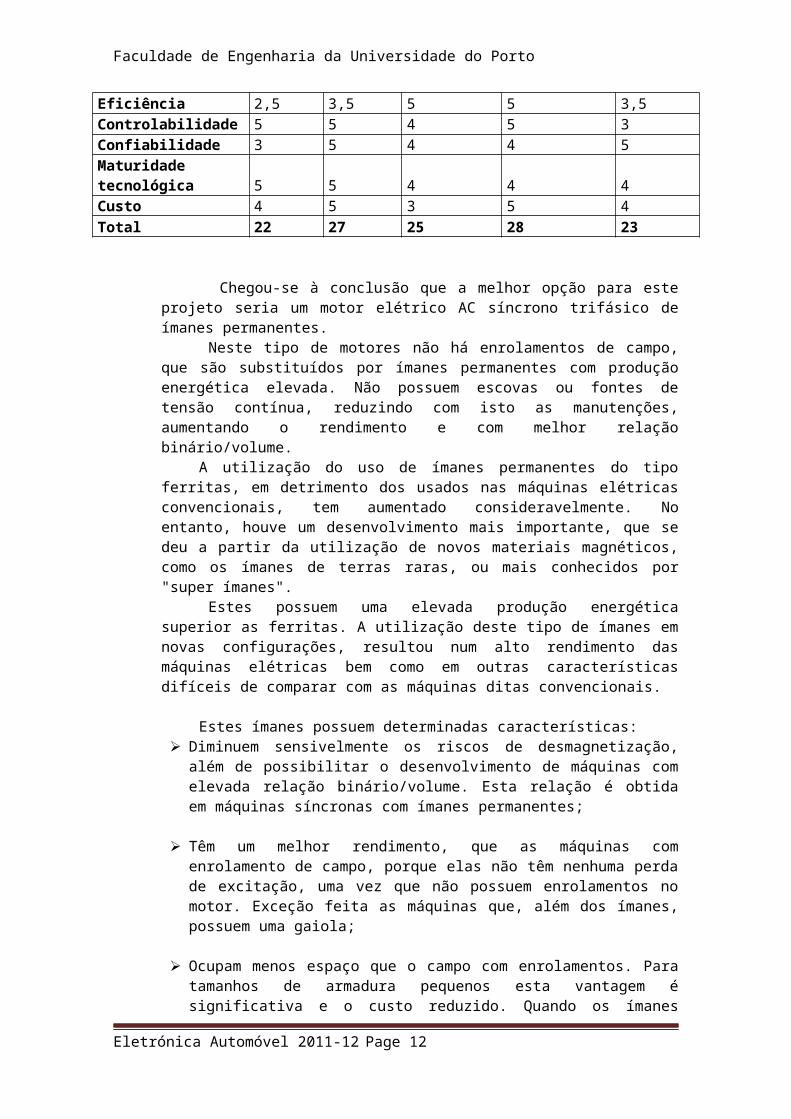
Após feita uma pesquisa relativa aos motores existentes no mercado, elaborou-se uma tabela com as caraterísticas mais importantes de cada um deles, avaliadas de uma escala de 0 a 5, de modo a poder compara-los e selecionar a melhor opção para este projeto:
Tabela 3 - comparação entre os motores para VEHMotor
Característica
Motor CC
Motor deIndução
Motor CC comíman permanente
Motor síncrono trifásico comíman permanente
Motor de RelutânciaVariável
Densidade de Potência 2,5 3,5 5 5 3,5Eficiência 2,5 3,5 5 5 3,5Controlabilidade 5 5 4 5 3Confiabilidade 3 5 4 4 5Maturidade tecnológica 5 5 4 4 4Custo 4 5 3 5 4Total 22 27 25 28 23
Chegou-se à conclusão que a melhor opção para este projeto seria um motor elétrico AC síncrono trifásico de ímanes permanentes.
Neste tipo de motores não há enrolamentos de campo, que são substituídos por ímanes permanentes com produção energética elevada. Não possuem escovas ou fontes de tensão contínua, reduzindo com isto as manutenções, aumentando o rendimento e com melhor relação binário/volume.
Eletrónica Automóvel 2011-12 Page 10

Faculdade de Engenharia da Universidade do Porto
A utilização do uso de ímanes permanentes do tipo ferritas, em detrimento dos usados nas máquinas elétricas convencionais, tem aumentado consideravelmente. No entanto, houve um desenvolvimento mais importante, que se deu a partir da utilização de novos materiais magnéticos, como os ímanes de terras raras, ou mais conhecidos por "super ímanes".
Estes possuem uma elevada produção energética superior as ferritas. A utilização deste tipo de ímanes em novas configurações, resultou num alto rendimento das máquinas elétricas bem como em outras características difíceis de comparar com as máquinas ditas convencionais.
Estes ímanes possuem determinadas características: Diminuem sensivelmente os riscos de desmagnetização, além de
possibilitar o desenvolvimento de máquinas com elevada relação binário/volume. Esta relação é obtida em máquinas síncronas com ímanes permanentes;
Têm um melhor rendimento, que as máquinas com enrolamento de campo, porque elas não têm nenhuma perda de excitação, uma vez que não possuem enrolamentos no motor. Exceção feita as máquinas que, além dos ímanes, possuem uma gaiola;
Ocupam menos espaço que o campo com enrolamentos. Para tamanhos de armadura pequenos esta vantagem é significativa e o custo reduzido. Quando os ímanes cerâmicos (ferritas) são usados, o custo destes motores tende a ser bastante competitivo.
Controlador
O controlador de motor é um dispositivo que tem como finalidade controlar, de uma maneira pré-definida, o desempenho de um motor elétrico. Este tipo de dispositivo pode incluir um modo manual ou automático com as seguintes funcionalidades: colocar o motor em funcionamento ou faze-lo parar; aceleração ou desaceleração de rotação; selecionar e regular a velocidade; regular ou limitar o binário; proteção contra sobrecargas e falhas.O caso mais simples é um interruptor que interliga o motor a uma fonte. O
interruptor pode ser acionado manualmente ou por um relé ou contactor ligado a algum tipo de sensor que automaticamente aciona ou para o motor. O interruptor poderá ter várias posições para selecionar diferentes ligações ao motor. Isto permite um arranque mais suave e controlo ou seleção de variadas velocidades.
Controladores mais sofisticados podem ser usados para controlar a velocidade e binário do motor ao qual se liga e poderão até pertencer a um controlo em malha fechada dos mesmos.
Conversores
Os conversores são elementos essenciais em qualquer projeto de eletrónica em que seja necessário alterar o valor da tensão, corrente ou frequência. Atualmente os conversores são classificados em quatro tipos: AC/DC, DC/DC, DC/AC e AC/AC.
Eletrónica Automóvel 2011-12 Page 11
Faculdade de Engenharia da Universidade do Porto
Na escolha dos conversores uma elevada eficiência é um requerimento obrigatório, visto que a refrigeração destes conversores é muito complicada e acarreta elevados custos económicos.
Dados os requisitos do projeto vão ser necessários apenas três tipos de conversores: AC/DC, DC/DC e DC/AC. Os 3 tipos de conversores irão ser descritos em seguida e serão analisadas as vantagens e desvantagens das diversas topologias.
Conversores AC/DC
Estes conversores, também designados de retificadores, são dos mais utilizados na indústria. Sempre que um dispositivo precisa de ser ligado à rede elétrica geralmente implica que internamente haverá uma conversão de AC para DC.
No âmbito do projeto, este tipo de conversores irá ser utilizado para converter os valores de tensão e corrente alternada, vindos do grupo gerador, para valores contínuos. Desta forma será possível utilizar a energia elétrica gerada para alimentar os motores elétricos e carregar as baterias do veículo.
Existem duas topologias básicas de retificadores: half wave e full wave.Apesar de o retificador half wave ser muito simples de implementar, não
é muito eficiente. Apenas utiliza metade do ciclo da onda de entrada e desperdiça toda a energia disponível na outra metade do ciclo.
Em contrapartida, o retificador full wave deixa passar as duas metades do ciclo da onda. Desta forma existe mais energia disponível na saída, sem que hajam grandes intervalos de tempo onde não é fornecia energia nenhuma (como é o caso do retificador half wave). Assim sendo, apesar de a montagem ser ligeiramente mais complexa, este é o tipo de retificador mais eficiente.
Conversores DC/DC
Os conversores DC/DC têm uma ampla gama de utilização. Estão presentes nas fontes de alimentação de diversos dispositivos e também são utilizados no controlo de motores elétricos.
Nestes conversores, a tensão de entrada é regulada para obter o valor de tensão pretendido. A tensão de saída terá uma magnitude (e possivelmente polaridade) diferente da tensão de entrada.
Nos veículos híbridos o conversor DC/DC tem como objetivo converter tensões elevadas provenientes da fonte de energia principal (200-300V) para tensões mais baixas (14-42 V) para alimentar circuitos eletrónicos, ou para tensões ainda mais altas (400-600V) para alimentar circuitos elétricos.
Existem diferentes tipos de conversores DC/DC, com diversos tipos de aplicações. A distinção mais importante encontra-se no tipo de isolamento. Os conversores não isolados são utilizados quando se pretende elevar ou baixar o valor da tensão. As principais topologias que constituem este grupo são: buck, buck-boost, cúk, SEPIC e charge pump. São amplamente utilizados para elevar, baixar e/ou inverter o valor de tensão de entrada e são normalmente utilizados em circuitos de baixa potência.
Quando é necessário isolar a entrada da saída, mas os circuitos continuam a ser de baixa potência, as topologias utilizadas são as seguintes: flyback e fly forward.
Para circuitos de elevada potência (com isolamento) são utilizados os conversores half bridge ou full bridge. Tipicamente, os conversores isolados
Eletrónica Automóvel 2011-12 Page 12
Faculdade de Engenharia da Universidade do Porto
são maiores e mais caros que as soluções sem isolamento. No entanto, dada a origem das aplicações, são mais seguros.
Conversores DC/AC
Estes conversores são também designados de inversores. São usualmente utilizados para obter energia AC proveniente de fontes DC, como é o caso dos painéis solares ou baterias.
Atualmente os inversores são muito utilizados para alimentar os motores de tração presentes nos veículos elétricos e híbridos. Em veículos com travagem regenerativa, o inversor transmite a energia do motor (que nestas alturas atua como um gerador) para as baterias.
O inversor mais utilizado para alimentar motores de indução trifásicos consiste numa configuração de seis interruptores, que através do controlo apropriado moldam a tensão DC de entrada numa onda com a magnitude e frequência desejada. O inversor de seis interruptores pode operar no six-step mode ou no pulse with modulation (PWM) mode.
Topologia
Existem essencialmente três tipos de Veículos Elétricos Híbridos:Série: o motor a combustão aciona o gerador para gerar energia elétrica,
e o gerador pode tanto carregar as baterias ou alimentar um motor elétrico que aciona as rodas.
Paralelo: a unidade de conversão e o motor elétrico estão ligados diretamente às rodas do veículo. Normalmente, o motor primário é usado e o elétrico fornece o extra em subidas, acelerações e outros períodos de maior necessidade.
Split: Existem também veículos que usam as duas configurações, sendo a primeira para condução na autoestrada (dado o baixo consumo e a maior eficiência do motor de combustão) e a segunda configuração para condução a baixas velocidades.
O modelo a utilizado no projeto é o Série:
Eletrónica Automóvel 2011-12 Page 13

Faculdade de Engenharia da Universidade do Porto
Fig. 3 – Topologia série de um veículo híbrido
O esquema de híbrido série pode ser interpretado de duas maneiras, consoante o seu dimensionamento e utilização:
Como um veículo elétrico puro ao qual é acrescentado um grupo gerador para carregar a bateria – então o motor elétrico é principalmente alimentado pela bateria, podendo ser assistido pela corrente do gerador em caso de picos de potência;
Como uma transmissão elétrica para um motor de combustão – se a potência da bateria não for significativa e o gerador alimentar maioritariamente o motor elétrico; os picos de potência provêm da bateria.
A primeira opção confere a maior poupança de energia, pois o MCI necessário é de menores dimensões e potência. A segunda opção aproxima-se perigosamente do comportamento do Paralelo, podendo incorrer nos mesmos desperdícios.
Quais são as vantagens que tornam este sistema assim tão eficiente? As técnicas de poupança energética 1 e 2 acima descritas (Assistência
Elétrica e Ralenti Eliminado) são elevadas ao seu máximo expoente, pois o MCI funciona única e exclusivamente dentro do seu regime de máxima eficiência, ou então está desligado;
O MCI é dimensionado exatamente segundo as necessidades mais prováveis do veículo, ou seja, é subdimensionado face àquilo que é normal num veículo comum, permitindo logo à partida um consumo inferior.Infelizmente, este esquema também tem os seus inconvenientes face aos
Paralelos, e são de natureza económica. As desvantagens são: Logo à partida nota-se que tem forçosamente de incluir um gerador elétrico
com a mesma potência do MCI, separadamente do motor elétrico; Como o MCI não colabora na tração, isto significa que o sistema elétrico
(gerador, baterias, motores, e controladores eletrónicos) tem de suportar a totalidade da potência de tração do veículo (para o pior caso), e isto é o mais caro de implementar.
Pode-se “fugir” ao custo das baterias necessárias, utilizando uma tecnologia de bateria mais barata; no entanto, não é possível levar este raciocínio muito longe, pois quanto mais baratas são as baterias, menor é a sua densidade energética (Wh/L) e energia específica (Wh/kg), o que pode comprometer os
Eletrónica Automóvel 2011-12 Page 14
Faculdade de Engenharia da Universidade do Porto
ganhos do sistema por excesso de peso ou falta de capacidade. Por esta razão, a tecnologia de bateria para um híbrido Série, mais ainda do que num híbrido Paralelo, tende a ser cara.
As razões económicas decidem o rumo dos desenvolvimentos, sendo esta a principal razão para os fabricantes preferirem o Paralelo.
O projeto….
Inicialmente, o projeto tratava-se da conversão de uma moto 4 convencional, numa moto 4 híbrida. Foi encontrada alguma dificuldade significativa ao longo do projeto que impediu que a conversão fosse possível em tempo útil. Devido a isto, optou-se por assentar apenas na simulação de uma moto 4 elétrica.
O Sistema será dividido em 4 partes: Armazenamento de Energia: o sistema tem como função armazenar a
Energia proveniente por aproveitamento da energia cinética. Este produto divide-se em Baterias e Ultra Condensadores.
Controlo: tem como objetivo realizar uma monitorização do sistema de forma a transmitir ao utilizador informações essenciais.
Conversores: são responsáveis por alterar a energia elétrica com certas características, em energia elétrica com outras características.
Tração: tem a finalidade de transformar a energia elétrica em energia cinética que faz deslocar o sistema. Para cumprir este objetivo precisamos de um motor elétrico e a respetiva unidade de controlo.
Fig. 4 - System Breakdown Structure
Apresenta-se de seguida o diagrama funcional do sistema a implementar:
Eletrónica Automóvel 2011-12 Page 15

Faculdade de Engenharia da Universidade do Porto
Fig. 5 – diagrama funcional do sistema
Normas
Após uma pesquisa sobre o que influencia direta e indiretamente o nosso projeto, descobrimos que para este tipo de veículos é necessário haver uma estação de recarregamento dos diversos módulos de armazenagem de energia. Como ainda é um tema em estudo, nada está definido quanto a essas estações. No entanto, e para que os fabricantes tenham noção do modo como os seus veículos tem que ser desenvolvidos e preparados, foram criadas normas que estabelecem certos requisitos para o desenvolvimento das estações e que influenciam o desenvolvimento dos veículos.
Uma das normas em questão é a IEC 62196, que é uma norma internacional para o conjunto de conectores elétricos e modos de carregamento para veículos elétricos e é mantida pela International Electrotechnical Commission (IEC).
A outra norma em questão é a ISO 6469. Trata-se também de uma norma internacional que visa definir as especificações de segurança necessárias para veículos elétricos rodoviários e é mantida pela International Organization for Standartization (ISO).
Eletrónica Automóvel 2011-12 Page 16

Faculdade de Engenharia da Universidade do Porto
Para este projeto, precisa apenas de saber-se quais as especificações usadas ao nível europeu, já que é para este tipo de mercado que irá direcionar-se, inicialmente.
Para não entrar em muito detalhe acerca das normas, segue-se um quadro resumo das normas necessárias ao projeto:
Obs.
Classe de tensão B
As pessoas devem estar protegidas contra contatos indiretos das partes condutoras que pertençam à classe B de tensões. Para tal é necessário garantir o isolamento das partes condutoras ou colocar uma barreira/encapsulamento nos aparelhos ou uma combinação das duas.
Tensão no barramento (V) 96
Modo de carregamento 2
250Vac – 32A
Valores máximos das tomadas domésticas. Neste modo, o nível de segurança é independente da
instalação. É assegurada pelo veículo.
Nível de carregamento 3
A energia DC é fornecida a partir de um carregador externo; não há um exigido de energia, mas a corrente máxima especificada é de 400 amperes e 240 kW de potência continua fornecido.
Eletrónica Automóvel 2011-12 Page 17

Faculdade de Engenharia da Universidade do Porto
Requisitos do projetoPara este projeto, foram definidos os seguintes requisitos:
Tabela 4 - tabela de requisitos para o projeto
ID Requisitos e subrequisitos Descrição Prioridade(1-5)
BF1 Deverá ser dotado de travagem regenerativa.
A energia é armazenada nos ultracondensadores se a bateria estiver cheia. Caso contrário é
armazenada nas baterias.
3
BF2Possuir baterias de
hidretos de níquel ou lítio.
São baterias utilizadas para veículos elétricos híbridos (HEV´s) pela sua autonomia relativamente às outras.
5
BF2.1Autonomia mínima de
quinze minutos a velocidade constante de
70km/h.
As baterias devem conseguir suportar o funcionamento contínuo, a
velocidade constante de 70km/h durante quinze minutos em terreno com inclinação máxima de cinco
graus.
4
BF2.2Autonomia de uma hora
e meia a velocidade constante de 70km/h.
As baterias devem conseguir suportar o funcionamento contínuo, a
velocidade constante de 70km/h durante uma hora e meia em terreno
plano.
4
BF2.3 Deverão carregar no máximo em três horas.
O carregamento de baterias deverá ser feito num tempo máximo de três
horas.4
BF2.4 Deverá ser de células acessíveis.
O sistema deverá ser capaz de detetar o estado funcional de cada célula de modo a pôr a célula fora de serviço
caso esta se encontre danificada pois como as células se encontram em
série caso uma delas avarie irá condicionar o funcionamento normal
de fornecimento de energia ao sistema global
5
BF2.5 Minimizar o tamanho.Devido às limitações de espaço, o tamanho das baterias deverá ser o
mínimo possível.5
PNF1 Ter um nível de conforto elevado.
A moto deverá possuir um sistema capaz de garantir a comodidade do
condutor.2
PNF1.1
O arranque deverá ser controlado.
Ao iniciar o movimento, o arranque deverá ser o mais suave possível. 3
PNF2 Ser uma moto todo terreno.
Mota deve ser construída de modo a poder andar nas serras e montes. 4
PNF2.1
Deverá ter tração apropriada para
diferentes tipos de
A mota deve aguentar terrenos do tipo serras e montes, sendo estes os que
mais forçam a tração.
4
Eletrónica Automóvel 2011-12 Page 18

Faculdade de Engenharia da Universidade do Porto
terreno.
TF1Possuir motor elétrico de tração – Motor síncrono de ímanes permanentes.
Este motor apresenta a melhor curva de características a nível de controlo da razão Nm/rpm relativamente aos
outros motores.
5
PNF3 Não ser uma moto de utilização diária.
Espera-se que esta moto seja uma moto de lazer. 3
PNF4 Ser uma moto económica.
Esta moto será dimensionada de forma a que a sua autonomia seja
maximizada por forma a permitir uma utilização de 17,5 Km num plano com
cinco graus de inclinação, para competir com as soluções que já
existem no mercado.
4
PNF5 Ser uma moto estável.
O dimensionamento desta moto terá como um dos principais objetivos
oferecer um bom nível de estabilidade, de modo a poder ser todo o terreno.
4
PNF5.1
O peso deve ser distribuído
uniformemente.
Os componentes a ser incluídos na moto4 elétrica devem ser distribuídos por toda a mota, de forma a garantir a
sua estabilidade.
4
PNF6 Ser uma moto com potência razoável.
A potência desta moto deverá ser dimensionada para obter um
desempenho razoável em termos de força pois será uma moto todo terreno.
3
PNF6.1
O motor deverá ter a potência de 7kW.
A potência do motor foi dimensionada de modo a garantir um desempenho
razoável da mota, tendo sido escolhido 7kW
3
PNF6.2
O peso do motor não deverá exceder 20 kg.
Um motor de 7kW não deverá exceder 20 kg, garantindo que a mota não é
demasiado pesada.3
PNF6.3 Minimizar o tamanho.
Devido a limitações de espaço, o motor deverá ter o menor tamanho
possível.4
PNF6.4
O motor a implementar deve ser de potência
sobrelevada.
A potência exigida neste caso é sobre elevada, pois não será necessária
tanta potencia se reduzirmos a velocidade máxima permitida.
3
PNF7 Ser uma moto puramente elétrica.
O facto de ser uma moto puramente elétrica, implica que o motor elétrico é
o único responsável pela tração.5
PNF8 Minimizar o peso da moto.
Tem-se como outro objetivo minimizar o peso da moto de forma a maximizar
o seu rendimento tanto a nível de consumos de potência.
4
PNF8.1
A massa total da moto4 com o condutor deverá ser, no máximo, 350kg.
Dado a potência da moto4 e o peso da moto4 e passageiro, conclui-se que
este não deverá ser superior a 350kg, pois não é garantido o seu
funcionamento com carga superior a esta.
3
Eletrónica Automóvel 2011-12 Page 19

Faculdade de Engenharia da Universidade do Porto
Conversão de um veículo elétrico
O primeiro passo será conhecer as opções disponíveis. O veículo deverá ficar o mais leve possível, caso se esteja a construir de raiz, ou então, caso se adquira um para conversão, retirar todo o peso desnecessário do mesmo. O peso é um fator muito importante na conversão de um veículo elétrico. Influencia bastante, tanto o dimensionamento do motor como do sistema de armazenamento de energia. Toda a força necessária para pôr o veículo em andamento é aplicada nas rodas. Quanto mais peso nas rodas, maior terá que ser a força a aplicar. Será necessário também ter cuidado com a distribuição do peso pelo veículo após as remoções de excesso de peso, mantendo assim o equilíbrio.
Mais um aspeto a ter em conta é uma boa aerodinâmica, de modo a reduzir o atrito do ar, que é significativo para velocidades mais altas.
Deverá ser também otimizado para um atrito de rolamento mínimo nas rodas, travões, direção e ainda o mínimo de perdas no sistema de transmissão. A combinação de motor, sistema de transmissão e bateria deverá ser capaz de cumprir os requisitos impostos pelo utilizador. Por exemplo, velocidade máxima alta ou elevada autonomia ou a combinação dos dois.
O próximo passo a seguir será projetar o sistema de modo a conseguir satisfazer os requisitos impostos, ou seja, dimensionar o motor e sistema de armazenamento de energia para o veiculo, tendo em conta a aerodinâmica e atritos de rolamento.
Para este projeto, foi-nos fornecida uma moto 4 da Honda para fazer a sua conversão.
Eletrónica Automóvel 2011-12 Page 20

Faculdade de Engenharia da Universidade do Porto
Dimensionamentos
Para então partir para os dimensionamentos dos vários elementos do veículo, foi imprescindível calcular os atritos a que o veículo é sujeito.
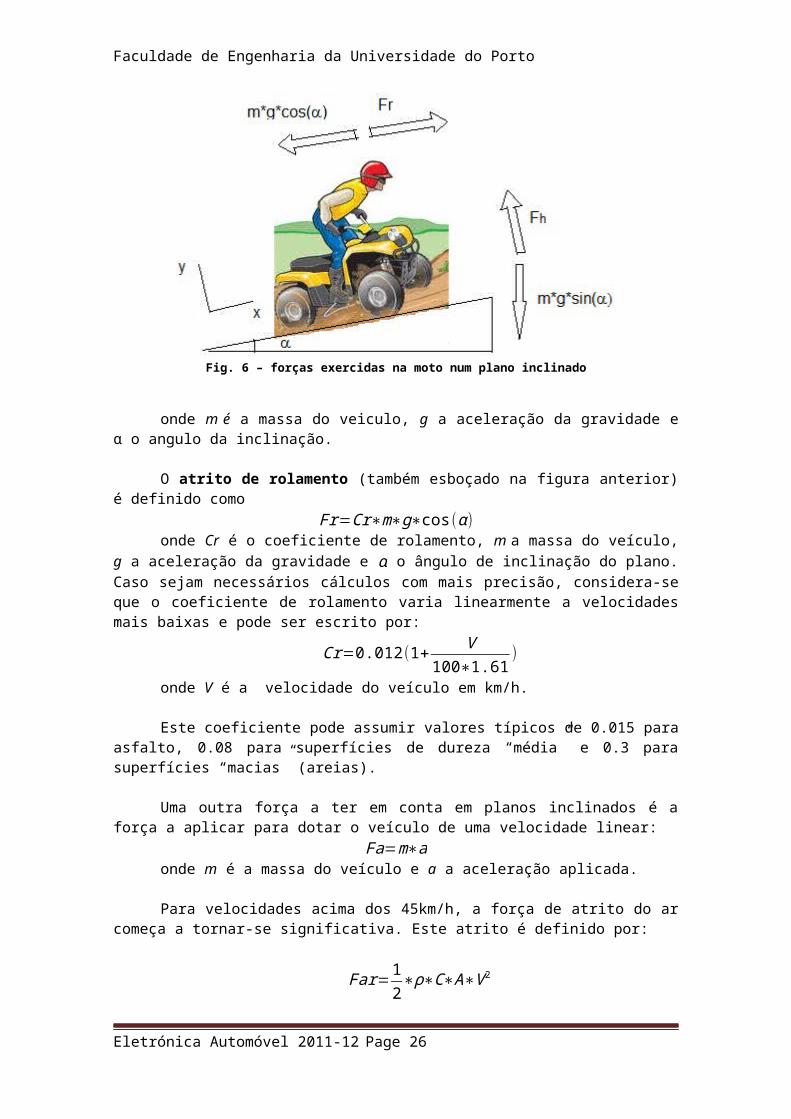
Em planos inclinados, o veículo será sujeito a uma força vertical diretamente proporcional a sin(α), Fh, tal como mostra a figura seguinte:
Fig. 6 – forças exercidas na moto num plano inclinado
onde m é a massa do veiculo, g a aceleração da gravidade e α o angulo da inclinação.
O atrito de rolamento (também esboçado na figura anterior) é definido comoFr=Cr∗m∗g∗cos (α )
onde Cr é o coeficiente de rolamento, m a massa do veículo, g a aceleração da gravidade e α o ângulo de inclinação do plano. Caso sejam necessários cálculos com mais precisão, considera-se que o coeficiente de rolamento varia linearmente a velocidades mais baixas e pode ser escrito por:
Cr=0.012(1+ V100∗1.61
)
onde V é a velocidade do veículo em km/h.
Este coeficiente pode assumir valores típicos de 0.015 para asfalto, 0.08 para superfícies de dureza “média” e 0.3 para superfícies “macias” (areias).
Uma outra força a ter em conta em planos inclinados é a força a aplicar para dotar o veículo de uma velocidade linear:
Fa=m∗aonde m é a massa do veículo e a a aceleração aplicada.
Eletrónica Automóvel 2011-12 Page 21

Faculdade de Engenharia da Universidade do Porto
Para velocidades acima dos 45km/h, a força de atrito do ar começa a tornar-se significativa. Este atrito é definido por:
Far=12∗ρ∗C∗A∗V 2
sendo ρ a densidade do ar, C o coeficiente de atrito aerodinâmico, A a área frontal do veículo e V a velocidade, em km/h, a que o veículo de desloca. Na figura seguinte é mostrado a comparação entre o atrito de rolamento e do ar para diferentes velocidades:
Fig. 7 – efeito do atrito do ar com a velocidade
Resumindo então estes cálculos, a força total que o veículo terá que receber é:Ftotal=Far+Fr+Fa+Fh
¿>Ftotal=12. p .C . A .V 2+Cr .m. g .cos (α )+m.a+m .g . sin (α )
Para todos os cálculos efetuados, considerou-se uma moto 4 de 350kgs (moto + condutor).
A velocidade máxima da moto 4 ficou definida em 70km/h.Quanto ao diâmetro da roda para os cálculos de binário, consultou-se o Service
Manual da moto 4 e constatou-se que é de 0.55m.Para melhor aproveitar a potência do motor, decidiu-se integrar uma caixa de
velocidades. A desmultiplicação no diferencial e na caixa de velocidades da moto original encontra-se na figura a seguir:
Tabela 5 – desmultiplicação da caixa de velocidades e do diferencial da moto original
Eletrónica Automóvel 2011-12 Page 22

Faculdade de Engenharia da Universidade do Porto
Tendo em conta estes fatores, seguiu-se então para o dimensionamento de cada elemento da moto…
Motor elétrico de tração
Para dimensionar este elemento do veículo, estabeleceu-se uma determinada aceleração da moto 4 com 350kgs de massa, para um plano inclinado de 5º (8.75%):0 a 50km/h em 60 segundos. Para determinar então a potência do motor para esta situação, recorreu-se à fórmula anteriormente mencionada:
Ftotal=12. p .C . A .V 2+Cr .m .g .cos (α )+m .a+m. g . sin (α )
Devido à falta de informação de coeficiente de atrito do ar numa moto 4, considerou-se um coeficiente de atrito do ar igual a 1, já que a mesma não é dotada de boa aerodinâmica. Assim sendo, os valores a substituir na formula são p=1.2401 kg /m3 (20ºC), A=1m2, m=350kgs, cos(5)=0.996, sin(5)=0.0871, C=1, Cr=0.015, V=13.9m/s, g=9.8m/s2, a=0.23m/s2:
F total=¿551 N
Calculou-se de seguida o binário a aplicar nas rodas: T=551*0.55/2=151.5 N.m
Para de seguida calcular o binário do motor, considerou-se a desmultiplicação do diferencial e ainda a desmultiplicação da 1ª velocidade. Obteve-se então:
Tmotor=151.5∗13.7
∗13
42=¿12.7 N.m
Consideraram-se 6000 RPM de máximo. Posto isto:
Pmotor =T∗RPM9549
=12.7∗60009549
=7.9Kw
Eletrónica Automóvel 2011-12 Page 23

Faculdade de Engenharia da Universidade do Porto
Discussão/Conclusão da secção do motor
Após os cálculos feitos, e uma pesquisa online, o motor encontrado mais adequado ao dimensionamento foi o PMS120, refrigerado a ar, da Perm Motors. Este motor tem 20N.m de binário nominal e 7Kw de potência nominal (mais características no fim em anexo). Este motor revela-se suficiente para o projeto, embora a potência exigida para a aceleração seja superior à potência nominal do motor. Com este motor, será possível obter uma aceleração de 0 a 50km/h em pouco menos de 15 segundos num plano não inclinado.
Estes valores obtidos são todos valores aproximados e tanto poderão estar sobredimensionados, como subdimensionados, pois o valor de coeficiente de atrito do ar numa moto 4 não está tabelado, dificultando a sua pesquisa, e a área frontal da moto também foi aproximada. No Service Manual, a largura frontal da moto é definida com 1035mm e altura 1065mm. O valor de área frontal utilizado (1m2) é uma aproximação da área frontal da moto + condutor.
Outro elemento que influenciou bastante o dimensionamento do motor foi o peso da moto + condutor. No fim, a moto poderá pesar menos que 350kgs, o que fará com que a aceleração máxima do motor seja maior, como também poderá pesar mais.
Baterias / Ultracondensador
Para dimensionar esta secção, definiu-se uma autonomia de 15 minutos, num plano inclinado de 5º, a uma velocidade constante de 70km/h (19.4m/s). Mais uma vez, recorrendo à soma dos atritos do sistema, calculou-se a energia necessária por parte das baterias:
Ftotal=12. p .C . A .V 2+Cr .m .g .cos (α )+m .a+m. g . sin (α )
¿584N
P = δWδt
=F∗δxδt
=F .v=584∗19.4=11.4 Kw=2.8Kwh=10.08∗10 6J
I=280096
=29.2 Ah
A tensão nominal das baterias ficou definida em 36V.
Para o ultracondensador, decidiu-se que terá que absorver energia equivalente a uma travagem de 6 segundos, partindo dos 70km/h, até parar.
Valores a ter em conta:- Tempo travagem: 6 segundos- Velocidade inicial:19.44 m/s- Distância percorrida: 40m- Desaceleração: 4.25m/s2
- Tensão: 36V
Eletrónica Automóvel 2011-12 Page 24

Faculdade de Engenharia da Universidade do Porto
P=350∗4.25∗406
=9.9kW=16.56W h=59616 J
E=12∗C∗V 2≤¿C=2∗E
V 2 =2∗59616362
=92F=0.46 Ah
Como não é aconselhável a descarga completa do ultracondensador, definiu-se o limite mínimo de descarga em 50%. Daí, a capacidade do ultracondensador deverá ser no mínimo 184F.
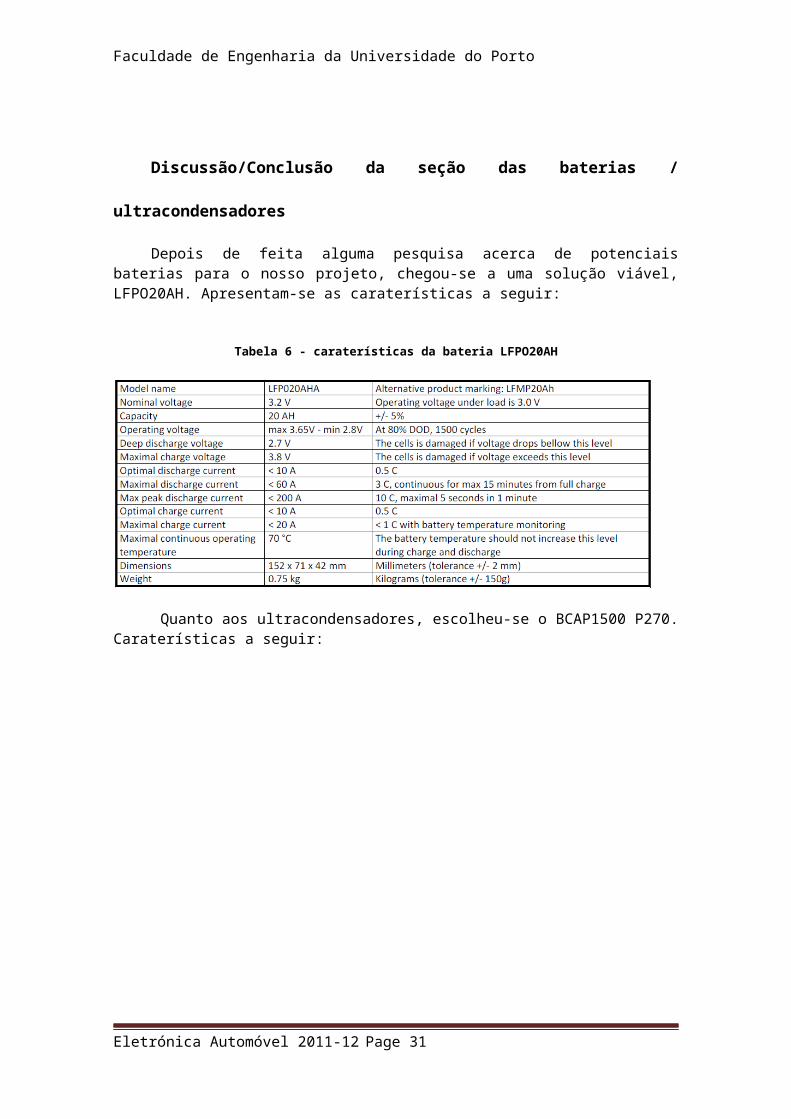
Discussão/Conclusão da seção das baterias / ultracondensadores
Depois de feita alguma pesquisa acerca de potenciais baterias para o nosso projeto, chegou-se a uma solução viável, LFPO20AH. Apresentam-se as caraterísticas a seguir:
Tabela 6 - caraterísticas da bateria LFPO20AH
Quanto aos ultracondensadores, escolheu-se o BCAP1500 P270. Caraterísticas a seguir:
Eletrónica Automóvel 2011-12 Page 25
Faculdade de Engenharia da Universidade do Porto
Tabela 7 - caraterísticas do BCAP1500 P270
Conversores
Foi necessário dimensionar dois conversores DC/DC para a ligação entre as baterias e os ultracondensadores com o barramento DC (96V). Ambos os conversores são bidirecionais, mais propriamente buck-boost em meia ponte. Abaixo encontra-se a topologia do conversor:
Fig. 8 – conversor buck-boost em meia ponte
Para as baterias, foi utilizado um conversor igual ao da figura acima de modo a poder controlar a carga e descarga da bateria. Para tal, o dimensionamento do mesmo foi feito tendo em conta a potência máxima admitida pelo conversor. Para este caso, considerou-se um pico de potência de 9kW tendo em conta a potência nominal do motor. Sendo assim abaixo serão mostrados os cálculos relativos aos elementos do conversor:
Valores a ter em conta:- Frequência de comutação – fs = 10kHz
Eletrónica Automóvel 2011-12 Page 26

Faculdade de Engenharia da Universidade do Porto
- Tensão da bateria - Vin = 3,2Vpor célula x 12 = 38.4V- Corrente da bateria – 10A (0.5C para carga e descarga) em série * 4=40A- Corrente na carga – Icc=8.5kW/38.4V=221.4A- Tensão do barramento DC – Vout = 96V- Ripple das correntes– 1%- Ripple de tensão – 1%
Para os valores dados, em modo buck, temos um Duty-cycle D = Vess/Vcc= 38,4 / 96 = 0.4. Já em modo boost, D=1-Vess/Vcc=0.6.
Conversor no modo Buck:
A indutância L=Vcc∗D (1−D)Fs∗ΔI
=5.8mH
Condensador do sistema de armazenamento de energia
Cess= ΔI8∗ΔVess∗Fs
=13 .02uF
Conversor no modo boost:
A indutância L=Vcc∗D (1−D)Fs∗ΔI
=1.05mH
Condensador do barramento Ccc= Iccmax∗DΔVcc∗Fs
=13.8mF
O valor de indutância a usar é a maior das duas calculadas anteriormente, L=5.8mH
Depois de dimensionado o conversor para as baterias, seguiu o conversor para os ultracondensadores:
Valores a ter em conta:- frequência de comutação – fs = 10kHz - Tensão do ultracondensador - Vin = 2.7V x 13 = 35V- Corrente do ultracondensador – 97A- Corrente na carga – Icc=8.5kW/38.4V=221.4A- Tensão do barramento DC – Vout = 96V- Ripple das correntes– 1%- Ripple de tensão – 1%Para os valores dados, em modo buck, temos um Duty-cycle D = Vess/Vcc= 35 / 96 = 0.36. Já em modo boost, D=1-Vess/Vcc=0.64.
Conversor no modo Buck:
A indutância L=Vcc∗D (1−D)Fs∗ΔI
=2.28mH
Condensador do sistema de armazenamento de energia
Cess= ΔI8∗ΔVess∗Fs
=34 .6uF
Conversor no modo boost:
Eletrónica Automóvel 2011-12 Page 27

Faculdade de Engenharia da Universidade do Porto
A indutância L=Vcc∗D (1−D)Fs∗ΔI
=1mH
Condensador do barramento Ccc= Iccmax∗DΔVcc∗Fs
=8 .28mF
O valor de indutância a usar é a maior das duas calculadas anteriormente, L=2.28mH
O controlo destes conversores será explicado com maior detalhe à frente no capítulo das simulações. No entanto, poderá dizer-se que haverá um controlo de corrente de carga e descarga tanto das baterias como dos condensadores. Haverá ainda também um controlo relativo à tensão do barramento DC. Tudo isto será controlado de maneira tendo em conta o regime de funcionamento do motor (aceleração ou travagem), ou seja, se estamos a carregar (travagem) ou descarregar (aceleração) as baterias e/ou os condensadores. Para tal haverá um controlo para cada conversor que posteriormente será controlado por um controlo mestre, ou seja um BMS.
A topologia do conversor escolhida para a alimentação do motor foi um conversor DC/AC (inversor trifásico). O conversor em questão não foi dimensionado, pois foi escolhido conjuntamente com o motor PMSM tendo em conta as caraterísticas do mesmo. No conversor em questão escolheu-se a tensão de entrada de 96V tendo em conta as normas de segurança e daí ter-se escolhido uma tensão de 96V para o barramento de tensão DC. De seguida, é apresentado a topologia de um inversor de tensão trifásico:
Fig. 9 - inversor de tensão trifásico
O controlo deste inversor será feito tendo em conta o regime de funcionamento que é pretendido o qual estará explicado de forma mais completa no capítulo da simulação. De uma forma simples o controlo adotado será um controlo vetorial pois é o que permite dar um melhor rendimento ao motor.
Os conversores AC/DC são os conversores responsáveis para carregar as baterias e os ultracondensadores através do plugin. São conversores relativamente simples, constituídos por uma ponte de díodos retificadora.
Eletrónica Automóvel 2011-12 Page 28

Faculdade de Engenharia da Universidade do Porto
Simulações
Nesta fase inicial, simularam-se todos os elementos em separado, com o objetivo de numa fase posterior, simular tudo em conjunto.
Motor elétrico de tração
Apresenta-se na imagem a seguir, o diagrama de blocos utilizado para a simulação do motor elétrico e seu controlo:
Fig. 10 - diagrama de blocos geral implementado
Eletrónica Automóvel 2011-12 Page 29

Faculdade de Engenharia da Universidade do Porto
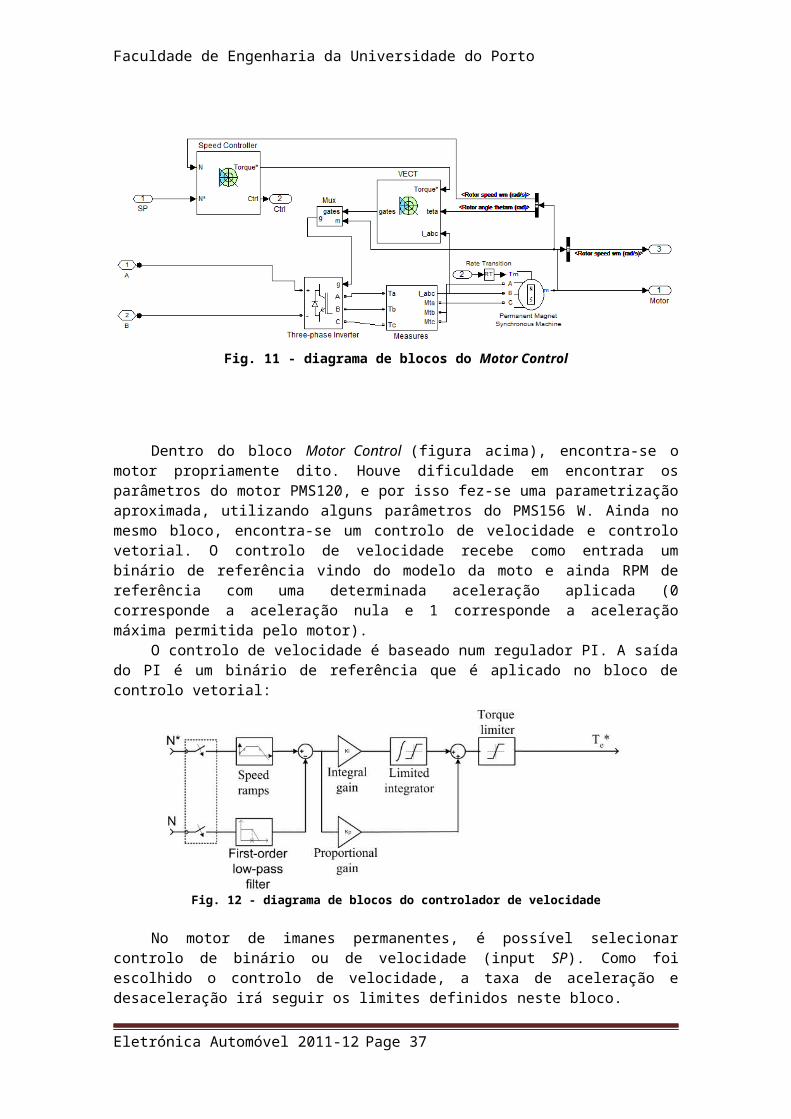
Fig. 11 - diagrama de blocos do Motor Control
Dentro do bloco Motor Control (figura acima), encontra-se o motor propriamente dito. Houve dificuldade em encontrar os parâmetros do motor PMS120, e por isso fez-se uma parametrização aproximada, utilizando alguns parâmetros do PMS156 W. Ainda no mesmo bloco, encontra-se um controlo de velocidade e controlo vetorial. O controlo de velocidade recebe como entrada um binário de referência vindo do modelo da moto e ainda RPM de referência com uma determinada aceleração aplicada (0 corresponde a aceleração nula e 1 corresponde a aceleração máxima permitida pelo motor).
O controlo de velocidade é baseado num regulador PI. A saída do PI é um binário de referência que é aplicado no bloco de controlo vetorial:
Fig. 12 - diagrama de blocos do controlador de velocidade
No motor de imanes permanentes, é possível selecionar controlo de binário ou de velocidade (input SP). Como foi escolhido o controlo de velocidade, a taxa de aceleração e desaceleração irá seguir os limites definidos neste bloco.
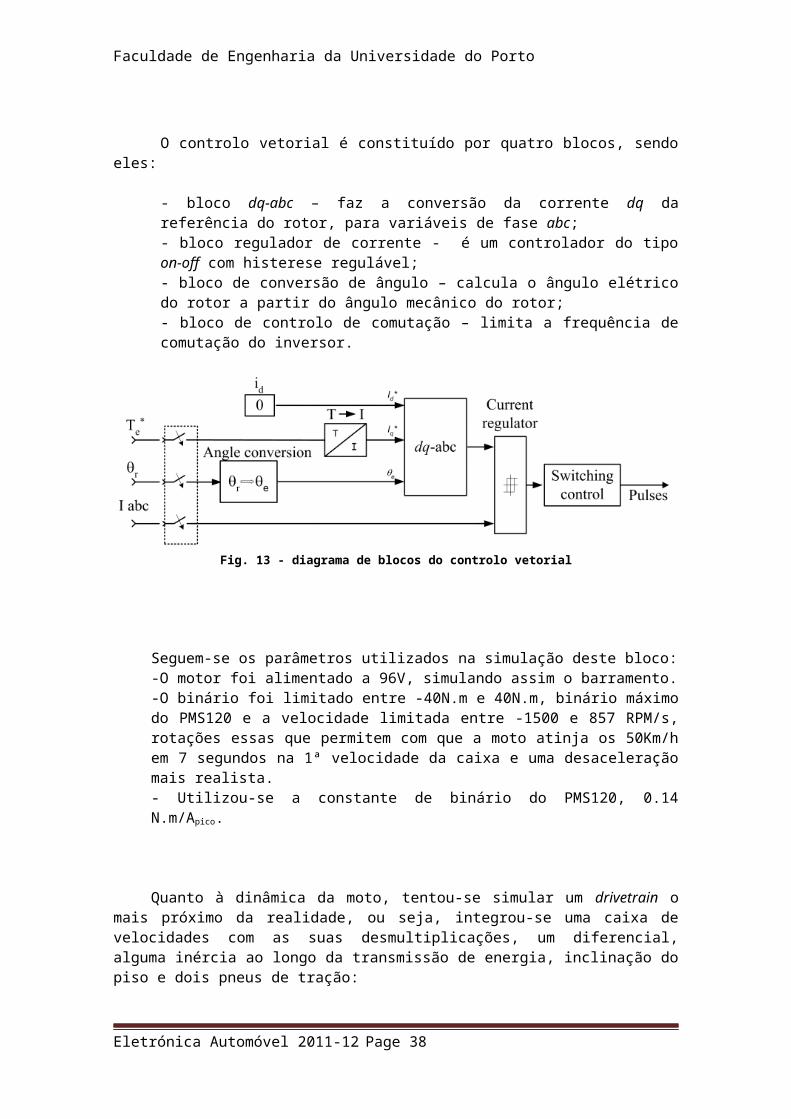
O controlo vetorial é constituído por quatro blocos, sendo eles:
- bloco dq-abc – faz a conversão da corrente dq da referência do rotor, para variáveis de fase abc;- bloco regulador de corrente - é um controlador do tipo on-off com histerese regulável;
Eletrónica Automóvel 2011-12 Page 30
Faculdade de Engenharia da Universidade do Porto
- bloco de conversão de ângulo – calcula o ângulo elétrico do rotor a partir do ângulo mecânico do rotor;- bloco de controlo de comutação – limita a frequência de comutação do inversor.
Fig. 13 - diagrama de blocos do controlo vetorial
Seguem-se os parâmetros utilizados na simulação deste bloco:-O motor foi alimentado a 96V, simulando assim o barramento.-O binário foi limitado entre -40N.m e 40N.m, binário máximo do PMS120 e a velocidade limitada entre -1500 e 857 RPM/s, rotações essas que permitem com que a moto atinja os 50Km/h em 7 segundos na 1ª velocidade da caixa e uma desaceleração mais realista.- Utilizou-se a constante de binário do PMS120, 0.14 N.m/Apico.
Quanto à dinâmica da moto, tentou-se simular um drivetrain o mais próximo da realidade, ou seja, integrou-se uma caixa de velocidades com as suas desmultiplicações, um diferencial, alguma inércia ao longo da transmissão de energia, inclinação do piso e dois pneus de tração:
Fig. 14 - drivetrain simulado
Eletrónica Automóvel 2011-12 Page 31

Faculdade de Engenharia da Universidade do Porto
No bloco tire, os parâmetros de entrada são o peso exercido na roda e a velocidade linear no veículo, obtida pelos RPM do motor. Os parâmetros de saída são a velocidade angular do pneu e a força exercida no piso.
Para confirmar que o binário aplicado na moto segue o binário do motor, utilizou-se a força exercida nos pneus (Fx) e multiplicou-se pelo raio da roda e pelas razões da velocidade da caixa no momento e do diferencial. De modo semelhante, utilizou-se a velocidade angular dos pneus para comparar os RPM. Com essa velocidade angular, também foi possível calcular a velocidade linear da moto.
Fig. 15 - caixa de velocidades simulada
Na figura acima está representada a desmultiplicação da caixa de velocidades dentro do bloco caixa. As velocidades são selecionadas manualmente no bloco vel caixa (de 1 a 5).
Parâmetros utilizados na simulação deste bloco:- raio da roda – 0.275m- peso em cada roda – 350/4 kgs*9.8m/s2
Baterias
Neste ponto são mostradas várias simulações das baterias tendo em conta alguns modelos já conhecidos.
Começando pelas baterias temos um modelo mais simples, ou seja, não tão realista como outros que está representado na seguinte figura:
Eletrónica Automóvel 2011-12 Page 32

Faculdade de Engenharia da Universidade do Porto
Fig. 16 - modelo de bateria simulado
Como se pode observar na figura acima representada, existe uma resistência Rserie, a qual é responsável por modelar as resistências internas presentes na bateria tais como a dos conetores, elétrodos e eletrólito. Podemos ainda ver duas malhas RC. A primeira modeliza uma resposta transitória mais rápida, na ordem das décimas de segundo, que a segunda malha modeliza uma resposta transitória mais lenta da bateria, ou seja, na ordem de poder chegar a várias horas.
Os parâmetros deste modelo variam com o estado de carga da bateria, mas neste modelo são considerados fixos pelo qual ser um modelo mais simplificado.
Para testar este modelo simulou-se este modelo ligado a uma carga que simula o funcionamento do motor, ou seja, uma carga que consome corrente em aceleração e gera corrente para as baterias em travagem que é mostrado na seguinte figura.
Fig. 17 - simulação de carga variável
Na imagem seguinte temos a simulação de cinco minutos de descarga da bateria seguido de vinte e cinco minutos de descanso. Como se pode observar a tensão da bateria diminui durante a descarga e durante o descanso tende para o valor nominal dela.
Eletrónica Automóvel 2011-12 Page 33

Faculdade de Engenharia da Universidade do Porto
Na figura abaixo é simulado a carga de uma bateria durente cinco minutos seguida de vinte e cinco minutos de descanso. Pode observar-se que durante a carga a tensão da bateria sobe um pouco acima do nominal e no descanso tende a tomar o valor nominal.
Fig. 19 - 5 min de carga e 25 min de descarga da bateria pelo modelo de carga variável
Neste momento tanto as simulações de outros modelos de baterias como de condensadores estão em desenvolvimento, pelo que não constam neste relatório.
Conversores
A simulação seguinte diz respeito a um conversor bidirecional buck boost de meia ponte o qual é responsável pela transição de energia das baterias e
Eletrónica Automóvel 2011-12 Page 34
Fig. 18 - correntes e tensões após 5min de descarga e 25min de descanso do modelo da bateria pelo modelo simples

Faculdade de Engenharia da Universidade do Porto
ultracondensadores da para o barramento DC apartir do qual será alimentado o motor PMSM, mas também será responsável pela transição de energia do motor para as baterias e ultracondensadores quando este está em regime de funcionamento de travagem e assim encontrar-se em regeneração de energia.
A figura seguinte mostra a simulação do conversor buck-boost em meia ponte em malha aberta utilizando uma carga resistiva de modo a simular uma transiçao de potência de 7kW no conversor tendo em conta a potência do motor para uma tensão do barramento DC de 96V.
Fig. 20 - conversor buck-boost em meia ponte simulado
Fig. 21 - Tensão do Barrramento DC (96V) e corrente exigida pela carga de 7kW
Eletrónica Automóvel 2011-12 Page 35
Fig. 22 - Tensão do Barrramento DC (96V) e corrente exigida pela carga de 7kW em regime estacionário

Faculdade de Engenharia da Universidade do Porto
Como se pode observar nas duas figuras acima, este conversor está devidamente dimensionado de modo a funcionar para uma potência de 7kW tendo em conta uma tensão de barramento de 96V. O riple de tensão e correntes considerados foi de ±1% .
De seguida está representada uma simulação, que ainda não está terminada, do conversor acima referido mas agora em malha fechada.
Fig. 23 - conversor buck-boost em meia ponte em malha fachada
Esta simulação representa o controlo em malha fechada do conversor em questão de modo a controlar a limitar a corrente de entrada tanto nas baterias como nos ultracondensadores quando estão em carga (controlador buck) bem como limitar a corrente quando estão em descarga (controlador boost), pois dependo das suas caraterísticas físicas tanto uns como ou outros têm os seus próprios limites como se sabe. Tem ainda um controlo de tensão do barramento DC de modo a garantir que o barramento esteja sempre a 96V. Tudo isto será controlado por um controlo superior, representado por uma caixa na figura, o qual é um algoritmo de gestão de energia e terá como parâmetros de entrada a saída dos três controlos já mencionados de modo a saber qual o regime de funcionamento em que se encontra e assim determinar o comando dos semicondutores do Conversor que na figura estão representados por T1 e T2.
Neste momento a parte do bloco de gestão de energia não está feita pelo que não serão mostrados os resultados da simulação em regime dinâmico.
Eletrónica Automóvel 2011-12 Page 36
Faculdade de Engenharia da Universidade do Porto
Referências
[1] Bansal, R. C. (2005). Electric Vehicles. Handbook of Automotive Power Electronics
and Motor Drives, B. I. o. T. a. Science. Pilani, Taylor & Francis Group, LLC: 10,11,12,13,14.
[2] Chow, H. Z. a. M.-Y. (2010) Comprehensive Dynamic Battery Modeling PHEV
Applications.
[3] Doctors, R. (1995) A SYSTEMS APPROACH TO BAmERY POWERED VEHICLES.
117 - 123
[4] H.L. Chan, D. S. (2000) A New Battery Model for use with Battery Energy Storage
Systems and Electric Vehicles Power Systems. 470 - 475
[5] Husain, I. (2005). Electric and Hybrid Vehicles. Design Fundamentals. C. PRESS.
New York Washington, D.C., Taylor & Francis e-Library.
[6] Lee, I. S. a. S.-H. Battery Energy Storage. Large Energy Storage Systems
Handbook.
[7] Lorenzo Serrao, Z. C., Yann Guezennec,Giorgio Rizzoni (2005) An Aging Model of
Ni-MH Batteries for Hybrid Electric Vehicles. 78 - 85
[8] Martin Coleman, C. K. L., Chunbo Zhu, and William Gerard Hurley (2007). "State-of-
Charge Determination From EMF Voltage Estimation: Using Impedance, Terminal
Voltage, and Current for Lead-Acid and Lithium-Ion Batteries." IEEE TRANSACTIONS
ON INDUSTRIAL ELECTRONICS VOL. 54: 2550-2557.
[9] Ryan C. Kroeze, P. T. K. (2008) Electrical Battery Model for Use in Dynamic Electric
Vehicle Simulations. 1336-1343
[10] - S. L. a. B. Brant, Build your own ELECTRIC VEHICLE, Second ed.
[11] - Power electronics. http://en.wikipedia.org/wiki/Power_electronics.
[12] - Robert W. Erickson. DC-DC Power Converters. Article in Wiley Encyclopedia of
Electrical and Electronics Engineering.
[13] - Electric Vehicle. http://en.wikipedia.org/wiki/Electric_vehicle
[14] - Sonya Gargies, Isolated Bidirectional DC-DC Converter for Hybrid Electric:
Vehicle Applications
[15] - Iqbal Husain. Electric and Hybrid Vehicles. Design Fundamentals. CRC press.
[16] - http://www.apve.pt/content01.asp?treeID=07&categoriaID=6&newsID=94
Eletrónica Automóvel 2011-12 Page 37
Faculdade de Engenharia da Universidade do Porto
[17]-http://cripplerooster.blogspot.com/2011/08/uma-reflexao-sobre-os-sistemas-
de.html
[18]-http://br.librosintinta.in/biblioteca/ver-pdf/www.ufrgs.br/ldtm/publicacoes/
05%252004.pdf.htx
[19] - http://fe.up.pt/tre
Eletrónica Automóvel 2011-12 Page 38

Faculdade de Engenharia da Universidade do Porto
AnexosMotor elétrico
Eletrónica Automóvel 2011-12 Page 39