jos´e lima luz netto - unicamp
TRANSCRIPT
UNIVERSIDADE ESTADUAL DE CAMPINAS
Faculdade de Engenharia Mecanica
Jose Lima Luz Netto
Controle Cooperativo H2 e H∞ Via Rede de Comunicacao:
Teoria e Implementacao Pratica em Pendulos Invertidos
CAMPINAS2018

Jose Lima Luz Netto
Engenheiro Mecanico - FEM/UNICAMP (2017)
Controle Cooperativo H2 e H∞ Via Rede de Comunicacao:
Teoria e Implementacao Pratica em Pendulos Invertidos
Dissertacao de Mestrado apresentada a Facul-dade de Engenharia Mecanica da UniversidadeEstadual de Campinas como parte dos requisi-tos exigidos para a obtencao do tıtulo de Mestreem Engenharia Mecanica, na Area de Mecanicados Solidos e Projeto Mecanico.
Orientadora: Profa. Dra. Grace Silva Deaecto
ESTE EXEMPLAR CORRESPONDE A VERSAOFINAL DA DISSERTACAO DEFENDIDA PELOALUNO JOSE LIMA LUZ NETTO, E ORIENTADAPELA PROFA. DRA. GRACE SILVA DEAECTO.
CAMPINAS2018

Agência(s) de fomento e nº(s) de processo(s): Não se aplica.
Ficha catalográficaUniversidade Estadual de Campinas
Biblioteca da Área de Engenharia e ArquiteturaLuciana Pietrosanto Milla - CRB 8/8129
Luz Netto, José Lima, 1992-L979c LuzControle cooperativo H2 e Hinf via rede de comunicação : teoria e
implementação prática em pêndulos invertidos / José Lima Luz Netto. –Campinas, SP : [s.n.], 2018.
LuzOrientador: Grace Silva Deaecto.LuzDissertação (mestrado) – Universidade Estadual de Campinas, Faculdadede Engenharia Mecânica.
Luz1. Sistemas com comutação. 2. Sistemas de controle por realimentação. 3.Desigualdades matriciais lineares. I. Deaecto, Grace Silva, 1983-. II.Universidade Estadual de Campinas. Faculdade de Engenharia Mecânica. III.Título.
Informações para Biblioteca Digital
Título em outro idioma: H2 and Hinf cooperative switched control through communicationnetwork : theory and practical implementation in inverted pendulumsPalavras-chave em inglês:Switched systemsFeedback control systemsLinear matrix inequalitiesÁrea de concentração: Mecânica dos Sólidos e Projeto MecânicoTitulação: Mestre em Engenharia MecânicaBanca examinadora:Grace Silva Deaecto [Orientador]Ricardo Coração de Leão Fontoura de OliveiraJean Marcos de Souza RibeiroData de defesa: 23-04-2018Programa de Pós-Graduação: Engenharia Mecânica

UNIVERSIDADE ESTADUAL DE CAMPINAS
FACULDADE DE ENGENHARIA MECANICA
COMISSAO DE POS-GRADUACAO EM ENGENHARIA
MECANICA
DEPARTAMENTO DE MECANICA COMPUTACIONAL
DISSERTACAO DE MESTRADO ACADEMICO
Controle Cooperativo H2 e H∞ Via Rede de Comunicacao:
Teoria e Implementacao Pratica em Pendulos Invertidos
Autor: Jose Lima Luz NettoOrientadora: Grace Silva Deaecto
A Banca Examinadora composta pelos membros abaixo aprovou esta Dissertacao:
Profa. Dra. Grace Silva Deaecto, PresidenteFaculdade de Engenharia Mecanica - UNICAMP
Prof. Dr. Ricardo Coracao de Leao Fontoura de OliveiraFaculdade de Engenharia Eletrica e de Computacao - UNICAMP
Prof. Dr. Jean Marcos de Souza RibeiroFaculdade de Engenharia - UNESP - Campus de Ilha Solteira
A Ata da defesa com as respectivas assinaturas dos membros encontra-se no processo de vidaacademica do aluno.
Campinas, 23 de Abril de 2018.

Aos meus pais, Joao e Lourdes

Agradecimentos
Antes de mais nada, e com muita alegria que gostaria de agradecer aos meus pais, JoaoLima e Maria de Lourdes. O imenso amor, apoio e dedicacao na educacao de seus filhostornou-me a pessoa que sou e, sem duvida, foi o fator mais relevante para o desenvolvimentodeste trabalho. A minha irma, Gabriela, pelo companheirismo e amizade em todas as etapasda minha caminhada.
Agradeco minhas avos Maria e Santinha pela ternura e carinho. Tambem ao meu padri-nho, Samuel, pelos conselhos e constante presenca no meu crescimento e amadurecimento. Asminhas tias Cristina e Dolores, pelos ensinamentos e aos meus primos Murilo, Junior, Thiagoe Bruna pela convivencia e momentos de descontracao. Assim como meus demais familiares,todos foram essenciais no meu aprendizado.
Meu amoroso obrigado a Bianca, pela paciencia, carinho e apoio na totalidade deste tra-balho, cujos conselhos me deram forcas para superar as duvidas e momentos difıceis.
A minha orientadora, professora Grace S. Deaecto, pelos ensinamentos e companheirismo.Sua imensuravel contribuicao tornou viavel a finalizacao deste projeto e ensinou-me, peloexemplo, que a dedicacao e amor pela profissao sao fatores fundamentais para a realizacaoprofissional e pessoal. Agradeco ao privilegio da oportunidade, por sempre acreditar no meupotencial e pelos ensinamentos que levarei para a vida.
Sou grato a todos os meus colegas de graduacao e pos-graduacao, por compartilhar osdesafios e recompensas desta caminhada. Em especial, gostaria de deixar meu muito obrigadoa todos os irmaos que fiz na Republica TicoTuco. Foram sete anos de convivencia que, semduvida, contribuıram para a conclusao desta dissertacao e para momentos inesquecıveis emminha vida. Tambem, aos meus amigos de laboratorio, Lucas e Helder, pelas discussoes, con-versas, paciencia e companhia.

Resumo
LUZ NETTO, Jose Lima. Controle Cooperativo H2 e H∞ Via Rede de Comunicacao: Teoria
e Implementacao Pratica em Pendulos Invertidos, Campinas: Faculdade de Engenharia Me-
canica, Universidade Estadual de Campinas, 2018. Dissertacao (Mestrado).
Esta dissertacao trata da sıntese e implementacao pratica do controle cooperativo, via rede
de comunicacao, de um conjunto de sistemas lineares e invariantes no tempo. Cada um deles
representa a dinamica de um pendulo invertido, acoplado a um carro, atuado por um motor
de corrente contınua, que se move sobre um trilho. A ideia e sintetizar o esforco de controle
a ser enviado atraves da rede para o carro, de forma a manter o pendulo na posicao vertical
para cima. O projeto de controle leva em conta que o canal de comunicacao apresenta largura
de faixa limitada e que, a cada intervalo de tempo, apenas um dos sistemas recebe o sinal de
controle atualizado, enquanto os demais mantem a informacao previamente recebida. Um dos
benefıcios desta polıtica de controle e evitar o congestionamento da rede dificultando, por-
tanto, a perda de pacotes no canal de comunicacao. Assim, um dos nossos principais objetivos
e determinar uma estrategia dinamica de distribuicao dos recursos da rede que permite asse-
gurar estabilidade, bem como otimizar ındices de desempenho H2 e H∞. Esta estrategia atua
como um coordenador, gerenciando o envio dos sinais de controle entre os sistemas e, mate-
maticamente, e representada por uma regra de comutacao. Inicialmente, o sistema mecanico
e analisado, modelado e identificado atraves de tecnicas simples de identificacao de sistemas.
Com um modelo adequado, o projeto da estrategia de controle com comutacao, baseado em
desigualdades de Lyapunov-Metzler generalizadas, e realizado. Por fim, a tecnica de controle
proposta e implementada. Os resultados experimentais obtidos mostram a eficiencia da meto-
dologia de controle desenvolvida.
Palavras-chave: sistemas com comutacao, sistemas de controle por realimentacao, desi-
gualdades matriciais lineares

Abstract
LUZ NETTO, Jose Lima. H2 and H∞ Cooperative Switched Control Through Communication
Network: Theory and Practical Implementation in Inverted Pendulums, Campinas: School of
Mechanical Engineering, University of Campinas, 2018. Master’s Thesis.
This master thesis treats the control design and practical implementation of switched
cooperative networked control of a set of linear time invariant systems. Each of them represents
the dynamics of a pendulum mounted on a motor-driven car that moves on a trail. The idea
is to synthesize the control effort to be transmitted through the network to act in car in
order to maintain the pendulum in the inverted vertical position. The control design takes
into account that the communication network presents limited bandwidth and that, at each
instant of time, only one of the systems is allowed to receive the updated control signal, while
the others must remain with the previously received information. Hence, our main goal is to
design a cooperative resource sharing dynamic strategy assuring stability as well as H2 and
H∞ performance indexes. This strategy acts as a coordinator managing the sending of control
signals among the systems and is mathematically represented by a switching rule. Initially, the
mechanical system is analyzed, modeled and identified in a simple and precise manner. With
a suitable model, the switching control conception and the technique, which is based on the
solution of generalized Lyapunov-Metzler inequalities, are presented. Finally, experimental
results and simulations show the efficiency of the adopted control methodology.
Keywords: switched systems, feedback control systems, linear matrix inequalities.

Lista de Figuras
1.1 Arquitetura de controle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3.1 Sistema IP02, retirado de Quanser R©, User Manual 2012 . . . . . . . . . . . . 33
3.2 Diagrama do conjunto carro-pendulo . . . . . . . . . . . . . . . . . . . . . . . 34
3.3 Resposta do sistema para entrada de onda quadrada - E.IP02 No1 . . . . . . . 40
3.4 Resposta do sistema para entrada de onda quadrada - E.IP02 No2 . . . . . . . 40
3.5 Resposta do conjunto carro-motor . . . . . . . . . . . . . . . . . . . . . . . . . 43
3.6 Deslocamento angular do pendulo . . . . . . . . . . . . . . . . . . . . . . . . . 46
3.7 Comparacao do sistema para onda quadrada - E.IP02 No 1 . . . . . . . . . . . 47
3.8 Comparacao do sistema para onda quadrada - E.IP02 No 2 . . . . . . . . . . . 48
4.1 Resposta do conjunto carro-motor para controle H2 . . . . . . . . . . . . . . . 64
4.2 Diagrama do conjunto carro-pendulo com influencia do vento . . . . . . . . . . 65
4.3 Montagem do experimento de perturbacao por rajada de vento . . . . . . . . . 66
4.4 Resposta do conjunto carro-motor para controle H∞ . . . . . . . . . . . . . . . 68

Lista de Sımbolos
I - Matriz identidade.N - Conjunto dos numeros naturais.Z - Conjunto dos numeros inteiros.R - Conjunto dos numeros reais.R
m×n - Conjunto das matrizes reais de dimensao m× n.K - Conjunto dos N numeros naturais positivos 1, · · · , N.F (s) - Transformada de Laplace da funcao f(t).F (z) - Transformada Z da funcao f [k].L· - Operador transformada de Laplace aplicado a funcao f(t).Z· - Operador transformada Z aplicado a funcao f [k].‖ξ‖22 - Norma ao quadrado de uma trajetoria ‖ξ‖22 =
∫∞
0ξ(t)′ξ(t)dt para o caso
contınuo ou ‖ξ‖22 =∑∞
0 ξ[k]′ξ[k] para o caso discreto.L2 - Conjunto de todas as trajetorias ξ(t) no caso contınuo ou ξ[k] no caso
discreto tais que ‖ξ‖2 < ∞.U ′ - Transposto da matriz real U .U(jω)∗ - Conjugada da matriz complexa U(jω).P > (≥)0 - Matriz P simetrica e (semi-)definida positiva.P < (≤)0 - Matriz P simetrica e (semi-)definida negativa.diagU, V - Matriz bloco diagonal formada pelas matrizes U e V .tr(U) - Traco da matriz quadrada U .• - Bloco simetrico de uma matriz simetrica.

Indice
1 Introducao 13
1.1 Descricao sumaria dos capıtulos . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2 Conceitos Fundamentais 17
2.1 Sistemas dinamicos lineares e invariantes no tempo . . . . . . . . . . . . . . . 17
2.2 Estabilidade de sistemas dinamicos . . . . . . . . . . . . . . . . . . . . . . . . 18
2.3 Norma H2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.3.1 Sistemas a tempo contınuo . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.3.2 Sistemas a tempo discreto . . . . . . . . . . . . . . . . . . . . . . . . . 22
2.4 Norma H∞ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
2.4.1 Sistemas a tempo contınuo . . . . . . . . . . . . . . . . . . . . . . . . . 24
2.4.2 Sistemas a tempo discreto . . . . . . . . . . . . . . . . . . . . . . . . . 25
2.5 Sistema discreto equivalente . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
2.6 Sistemas com comutacao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
2.7 Consideracoes finais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
3 Modelagem e Identificacao 32
3.1 Descricao do sistema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
3.2 Equacionamento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
3.3 Linearizacao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
3.4 Representacao de estado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
3.5 Validacao do modelo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
3.6 Consideracoes finais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
4 Controle Cooperativo H2 e H∞ 50
4.1 Formulacao do problema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
4.2 Controle H2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
4.2.1 Criterio de desempenho . . . . . . . . . . . . . . . . . . . . . . . . . . 54
4.2.2 Controle via realimentacao de estado . . . . . . . . . . . . . . . . . . . 56
4.3 Controle H∞ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57

4.3.1 Criterio de desempenho . . . . . . . . . . . . . . . . . . . . . . . . . . 58
4.3.2 Controle via realimentacao de estado . . . . . . . . . . . . . . . . . . . 60
4.4 Resultados experimentais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
4.4.1 Controle H2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
4.4.2 Controle H∞ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
4.5 Consideracoes finais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
5 Conclusoes e Perspectivas 70

13
CAPITULO 1
Introducao
A demanda por um mundo cada vez mais integrado e conectado produz a urgencia no
desenvolvimento de ferramentas mais eficientes na transmissao e no tratamento de dados. O
conceito de “Internet das Coisas” e bastante atual e compreende a comunicacao e controle
de diferentes dispositivos que visam proporcionar um melhor desempenho ao usuario. Neste
contexto, o controle via rede de comunicacao ganha destaque, pois permite a interacao simul-
tanea de um numero finito de sistemas, em que sinais de sensores, controladores e atuadores
sao transmitidos via canais de rede compartilhados dispondo da flexibilidade do trafico de
informacoes entre seus componentes.
Desta forma, durante o projeto de controle e importante levar em conta fenomenos que
podem ocorrer durante a transmissao e que sao intrınsecos da rede de comunicacao, tais
como: limitacao da largura de faixa, perda de pacotes de dados, atraso e erros de quantiza-
cao. Estes aspectos, que sao tradicionalmente estudados em teoria de comunicacao, se nao
forem considerados na malha de controle, podem piorar o desempenho do sistema contro-
lado, levando-o inclusive a instabilidade. As referencias (HESPANHA; NAGHSHTABRIZI;
XU, 2007) e (WANG; LIU, 2008) fornecem embasamento teorico e apontam os principais de-
safios cientıficos a serem superados sobre controle via rede de comunicacao. Neste contexto,
o estudo de sistemas com dados amostrados ganhou importancia especial, pois eles permitem
modelar a limitacao da largura de faixa no canal de comunicacao, veja (SOUZA et al., 2014).
As referencias (MAZO; TABUADA, 2008) e (MENG; CHEN, 2014) tambem sao importantes
pois apresentam estrategias de auto acionamento1 e acionamento por eventos2, normalmente
utilizadas para reduzir o consumo de recursos de transmissao do sinal de controle pela rede.
Outro tema de grande interesse atual e o estudo sobre sistemas com comutacao. Estes sao
definidos por um numero finito de subsistemas e uma regra de comutacao, que seleciona a
cada instante de tempo um deles. Esta regra pode ser arbitraria, exercendo o papel de uma
perturbacao externa, ou uma variavel de controle que, quando adequadamente projetada, pode
1do ingles self-triggering2do ingles event-triggering

14
assegurar estabilidade e melhorar o desempenho do sistema global. Nosso interesse e estudar
o segundo caso, no qual a regra e uma variavel de controle a ser determinada. As referencias
(DECARLO et al., 2000), (HESPANHA; MORSE, 2002), (SHORTEN et al., 2007) e os livros
(LIBERZON, 2012) e (SUN, 2006) sao importantes para iniciar o estudo do tema. No contexto
de controle em rede, as estrategias baseadas em comutacao ja foram utilizadas em (DAI; LIN;
GEE, 2009) e (DONKERS et al., 2009) para alocar o acesso a rede de forma a prevenir colisao
de informacoes no meio compartilhado.
Nesta dissertacao, nosso objetivo e tratar o controle cooperativo de varios sistemas lineares
e invariantes no tempo (LIT) controlados atraves de uma rede de comunicacao com largura de
faixa limitada. A Figura 1.1 apresenta o esquema da arquitetura de controle a ser adotada.
Nesta estrutura, as plantas recebem o sinal de controle que e transmitido pela rede. De
Planta 1
· · ·
· · ·
Planta N
x1 xNu1
G1
z1 zN
GN
C1 CN
uN
σ
x1, · · · , xN
uσ
Rede de Comunicacao
Coordenador
Controle 1 Controle N
Computador Central
sensorsensor atuadoratuador
Figura 1.1: Arquitetura de controle
forma a evitar perda de pacote de dados, bastante comum quando ha congestionamento de
informacao, supomos que a cada intervalo de tempo apenas o sinal de controle enviado a uma
das plantas ocupa o canal de comunicacao. Assim, apenas esta planta recebe o sinal de controle
atualizado, enquanto que as outras mantem a informacao previamente recebida. Alem disso,
o sinal atualizado se mantem constante durante um certo intervalo de tempo, escolhido de
tal forma a respeitar a largura de faixa do canal de comunicacao. A escolha de qual planta
recebe a informacao atualizada e feita por um coordenador, representado matematicamente
pela regra de comutacao. O controle global e responsavel por assegurar estabilidade e um
custo garantido de desempenho.

1.1. Descricao sumaria dos capıtulos 15
Mais especificamente, nesta dissertacao, desejamos realizar o projeto conjunto de ganhos
de realimentacao de estado, importantes para sintetizar a lei de controle u(·), e da logica do
coordenador σ(·) de forma a garantir estabilidade do sistema global. Dois criterios de desem-
penho sao adotados. O primeiro e inspirado na norma H2 de sistemas dinamicos, enquanto
que o segundo e inspirado na norma H∞. Como ficara claro em seguida, a teoria desenvolvida
considera resultados importantes sobre controle com dados amostrados, usado para modelar
a limitacao da largura de faixa do canal de comunicacao, e controle com comutacao, usado
para projetar a logica do coordenador. Alem disso, conta com uma funcao de Lyapunov do
tipo mınimo especial que permite concatenar o comportamento de todos os sistemas LIT ao
mesmo tempo viabilizando, assim, a estabilidade global do conjunto.
A teoria e validada experimentalmente atraves do controle cooperativo de duas estacoes
de trabalho IP02 do fabricante Quanser, que consiste em um pendulo invertido acoplado a um
carro que se move sobre um trilho, (QUANSER, 2012). Este sistema apresenta caracterısticas
interessantes que podem ser claramente observadas, por exemplo, no diciclo segway, que e um
sistema de transporte muito utilizado atualmente para turismo e para esquemas de seguranca
no mundo todo. O seu modelo matematico e nao-linear e muito utilizado em livros didaticos
de graduacao e pos-graduacao para ilustrar aspectos importantes sobre teoria de controle
de sistemas dinamicos. Esta dissertacao apresenta a modelagem matematica de ambas as
estacoes, a identificacao de seus parametros e o controle cooperativo considerando as tecnicas
de projeto aqui desenvolvidas. Os resultados relacionados ao controle cooperativo H2 estao
disponıveis em (LUZ NETTO et al., 2017). Enquanto que as referencias (EGIDIO; LUZ
NETTO; DEAECTO, 2018b) e (EGIDIO; LUZ NETTO; DEAECTO, 2018a) apresentam
resultados sobre o controle cooperativo H∞.
1.1 Descricao sumaria dos capıtulos
Esta dissertacao esta dividida em cinco capıtulos, que sao sumariamente descritos a seguir:
• Capıtulo 1: Neste capıtulo, introduzimos o problema que sera tratado nesta disserta-
cao, enfatizando a sua importancia, principalmente, no contexto de controle via rede de
comunicacao que, junto com a “Internet das Coisas”, compoem um dos assuntos mais
estudados atualmente pela comunidade cientıfica de controle e computacao.
• Capıtulo 2: Este capıtulo apresenta uma revisao sobre conceitos fundamentais relacio-
nados a sistemas dinamicos. Inicialmente, sao apresentados o criterio de estabilidade de
Lyapunov e o calculo de normas H2 e H∞ de sistemas lineares e invariantes no tempo.
Posteriormente, alguns topicos relacionados a sistemas com dados amostrados e sistemas
com comutacao sao discutidos, pois serao muito utilizados para a obtencao dos nossos
resultados principais.

1.1. Descricao sumaria dos capıtulos 16
• Capıtulo 3: Neste capıtulo, realizamos a modelagem fısica do sistema mecanico IP02
da Quanser bem como a identificacao de seus parametros, principalmente daqueles que
sofrem variacao devido a fatores externos, como por exemplo, desgaste dos equipamen-
tos e alteracao do coeficiente de atrito viscoso devido ao ambiente onde e realizado o
experimento. Discutimos e validamos o modelo que sera utilizado no capıtulo seguinte
para o projeto de controle.
• Capıtulo 4: Neste capıtulo, obtemos as condicoes para o projeto de controle cooperativo
H2 e H∞ de varios sistemas LIT atraves de rede de comunicacao. Aplicamos o resultado
no controle das duas estacoes de trabalho IP02 da empresa Quanser, modeladas e iden-
tificadas no capıtulo anterior. Como ficara claro, os resultados experimentais mostram
a eficiencia e a validade da teoria desenvolvida nesta dissertacao.

17
CAPITULO 2
Conceitos Fundamentais
Neste capıtulo, sao apresentados alguns conceitos basicos sobre analise de sistemas dina-
micos. Inicialmente, e realizada uma breve discussao sobre sistemas lineares e invariantes no
tempo, caracterizando-os em termos da sua representacao em espaco de estado e sua funcao
de transferencia, para os domınios de tempo contınuo e discreto. O estudo de estabilidade
em termos do criterio de Lyapunov e o calculo de normas H2 e H∞ sao tambem abordados.
Por fim, sao fornecidos alguns resultados recentes sobre sistemas com dados amostrados e
sistemas com comutacao, que sao essenciais para o desenvolvimento do tema principal desta
dissertacao.
2.1 Sistemas dinamicos lineares e invariantes no tempo
Um sistema linear e invariante no tempo (LIT) pode ser representado em espaco de estado
na formax(t) = Ax(t) +H w(t), x(0) = 0
z(t) = C x(t) +Gw(t)(2.1)
no domınio de tempo contınuo, 0 ≤ t ∈ R, ou na forma
x[k + 1] = Ah x[k] +Hhw[k], x[0] = 0
z[k] = Ch x[k] +Ghw[k](2.2)
no domınio de tempo discreto, 0 ≤ k ∈ Z, em que x ∈ Rnx e o vetor de estado, w ∈
Rnw a entrada exogena e z ∈ R
nz o vetor de saıda controlada. As matrizes (A,H,C,G)
ou (Ah, Hh, Ch, Gh) possuem dimensoes compatıveis e determinam a realizacao em espaco de
estado do sistema. Este e dito estritamente proprio se G = 0 ou Gh = 0, e proprio caso
contrario.
A funcao de transferencia do sistema (2.1), obtida atraves da transformada de Laplace, e

2.2. Estabilidade de sistemas dinamicos 18
dada por
Hwz(s) = C(sI −A)−1H + G (2.3)
e, utilizando a transformada Z, obtemos
Hwz(z) = Ch(zI − Ah)−1Hh +Gh (2.4)
que representa a funcao de transferencia do sistema a tempo discreto (2.2).
2.2 Estabilidade de sistemas dinamicos
O estudo de estabilidade e de fundamental importancia para a analise e o projeto de
controle de sistemas dinamicos. De fato, estabilidade e o atributo mais basico, sendo o primeiro
requisito de projeto em qualquer sistema de controle, (GEROMEL; KOROGUI, 2001). O
objetivo desta secao e introduzir o criterio de estabilidade de Lyapunov para sistemas LIT em
ambos os domınios de tempo. Por ser uma caracterıstica intrınseca, independente da entrada
exogena, vamos considerar o sistema (2.1) com w(t) ≡ 0, ∀t ≥ 0, e o sistema (2.2) com
w[k] ≡ 0, ∀k ∈ N. Alem disso, a definicao de ponto de equilıbrio e um conceito importante e
esta apresentada a seguir.
Definicao 2.2.1 (Ponto de Equilıbrio) O vetor de estado xe ∈ Rnx e ponto de equilıbrio
de um sistema dinamico a tempo contınuo (tempo discreto), se a condicao inicial x(0) = xe
implicar que x(t) = xe para todo t ≥ 0 (x[k] = xe para todo k ∈ N).
Note que se a matriz A do sistema a tempo contınuo, ou I−Ah do sistema a tempo discreto,
for nao singular o unico ponto de equilıbrio do sistema LIT e a origem xe = 0. A definicao de
estabilidade a seguir foi retirada de (KHALIL, 2002).
Definicao 2.2.2 (Estabilidade) O ponto de equilıbrio xe = 0 e dito estavel se, para cada
ǫ ≥ 0, existe δ(ǫ) tal que
1. ‖x(0)‖2 < δ(ǫ) ⇒ ‖x(t)‖2 < ǫ, ∀t ≥ 0, no caso do sistema a tempo contınuo;
2. ‖x(0)‖2 < δ(ǫ) ⇒ ‖x[k]‖2 < ǫ, ∀k ∈ N, no caso do sistema a tempo discreto;
Caso contrario, o sistema e dito instavel. Alem disso, a origem e dita assintoticamente estavel
se for estavel e se, para qualquer condicao inicial,
1. limt→∞
x(t) = 0, no caso do sistema a tempo contınuo.
2. limk→∞
x[k] = 0, no caso do sistema a tempo discreto.

2.2. Estabilidade de sistemas dinamicos 19
Como demonstrado em (KHALIL, 2002), o sistema LIT a tempo contınuo e globalmente
assintoticamente estavel se, e somente se, a matriz A for Hurwitz estavel, ou seja, se possuir
todos os seus autovalores com parte real negativa. Analogamente, para o caso discreto (2.2),
a matriz Ah deve ser Schur estavel, ou seja, apresentar todos os seus autovalores dentro do
cırculo unitario.
Outra maneira de estudar estabilidade de sistemas lineares e atraves da aplicacao do criterio
de Lyapunov. Este criterio define uma funcao v(x(t)) que pode ser interpretada como a
distancia ao quadrado entre um ponto generico da trajetoria x(t) e o ponto de equilıbrio xe = 0.
Se para toda condicao inicial x(0) = x0, a funcao v(x(t)) diminuir e, consequentemente, tender
para zero no decorrer do tempo, entao o ponto de equilıbrio xe e globalmente assintoticamente
estavel. A mesma interpretacao da funcao v(x[k]) pode ser utilizada no caso discreto. Define-se
v(x) como funcao de Lyapunov, aquela que possui as seguintes propriedades, (KHALIL, 2002):
1. v(x) = 0 para x = xe e v(x) > 0 para x 6= xe;
2. v(x) e contınua e diferenciavel em relacao a todas as componentes de x ∈ Rnx (ou apenas
contınua no caso discreto);
3. v(x) e decrescente para todo x 6= xe, ou seja, v(x(t)) ≤ 0, no caso contınuo e v(x[k +
1])− v(x[k]) ≤ 0 no caso discreto para todo x 6= xe.
Embora a definicao apresentada seja a mais geral, estamos interessados em funcoes de
Lyapunov que permitam assegurar estabilidade assintotica global. Neste caso, para assegurar
estabilidade assintotica, a terceira propriedade da definicao deve ficar restrita a funcoes v(x)
estritamente decrescentes, ou seja, v(x(t)) < 0 no caso contınuo, e v(x[k+1])− v(x[k]) < 0 no
caso discreto, para todo x 6= xe. Para levar em conta estabilidade global devemos acrescentar
a exigencia de que v(x) seja ilimitada para todo ‖x‖ ilimitado. O teorema a seguir apresenta o
criterio de Lyapunov para o estudo de estabilidade assintotica global de um sistema dinamico,
veja (KHALIL, 2002) e (SLOTINE; LI, 1991).
Teorema 2.2.1 (Teorema de Lyapunov) Considere um sistema dinamico a tempo contı-
nuo (tempo discreto) autonomo, ou seja, com entrada nula. O ponto de equilıbrio x = xe
e globalmente assintoticamente estavel, se existir uma funcao de Lyapunov v(x) : Rn → R,
ilimitada para ‖x‖ ilimitado, satisfazendo v(x) < 0, ∀x 6= xe (∆v(x) = v(x[k+1])− v(x[k]) <
0, ∀x 6= xe).
Para sistemas LIT uma escolha natural e a funcao de Lyapunov quadratica
v(x) = x′Px (2.5)

2.3. Norma H2 20
com P > 0. Note que ela atende as duas primeiras propriedades de uma funcao de Lyapunov,
alem de ser ilimitada para ‖x‖ ilimitado. Ademais, temos
v(x) = x′Px+ x′P x = x′(A′P + PA)x (2.6)
no caso do sistema (2.1) com w(t) ≡ 0 e
v(x[k + 1])− v(x[k]) = x′[k](A′hPAh − P )x[k] (2.7)
no caso do sistema (2.2) com w[k] ≡ 0. Fazendo A′P +PA < 0 no caso contınuo ou A′hPAh−
P < 0 no caso discreto, temos que as condicoes do Teorema 2.2.1 sao atendidas e, portanto, a
origem xe = 0 e globalmente assintoticamente estavel. Estas desigualdades matriciais lineares1
sao restricoes convexas na variavel P > 0 e, quando factıveis, possuem infinitas solucoes. Para
obtencao de uma unica solucao pode-se resolver a equacao matricial linear, tambem chamada,
equacao de Lyapunov A′P + PA = −Q ou A′hPAh − P = −Q, sendo Q uma matriz simetrica
definida positiva dada. O resultado seguinte expressa o criterio de Lyapunov para sistemas
LIT, veja (GEROMEL; KOROGUI, 2001).
Lema 2.2.1 (Criterio de Lyapunov - Sistemas LIT) O sistema x = Ax (x[k + 1] =
Ahx[k])e globalmente assintoticamente estavel se, e somente se, para uma matriz simetrica
Q > 0 dada, existir uma unica matriz simetrica P > 0 solucao de A′P + PA = −Q
(A′hPAh − P = −Q).
A seguir apresentamos a definicao e o calculo das normasH2 eH∞ para sistemas dinamicos.
2.3 Norma H2
A normaH2 e um importante criterio para analise do desempenho de um sistema dinamico.
A seguir apresentamos a sua definicao e o seu calculo atraves de gramianos e por meio de
desigualdades matriciais lineares, considerando sistemas definidos em ambos os domınios de
tempo, veja (COLANERI; GEROMEL; LOCATELLI, 1997).
2.3.1 Sistemas a tempo contınuo
Considere o sistema (2.1) com funcao de transferencia (2.3). A norma H2 e definida para
todas as funcoes de transferencia racionais, estritamente proprias, analıticas no semi-plano
1do ingles Linear Matrix Inequalities

2.3. Norma H2 21
complexo direito, incluindo o eixo imaginario e e dada por
‖Hwz(s)‖22 =1
2π
∫ ∞
−∞
tr(
Hwz(−jω)′
Hwz(jω))
dω =
∫ ∞
0
tr (hwz(t)′hwz(t)) dt (2.8)
em que a segunda igualdade foi obtida utilizando o Teorema de Parseval, sendo hwz(t) a
resposta ao impulso do sistema, ou seja, hwz(t) = L−1Hwz(s).A integral definida por (2.8) converge se, e somente se, A for Hurwitz estavel e a matriz
G = 0. De fato, para o caso geral, a resposta ao impulso do sistema e dada por
hwz(t) = L−1Hwz(s) = CeAtH +Gδ(t) , ∀t ≥ 0 (2.9)
portanto, de acordo com (2.8) e utilizando (2.9), temos
∫ ∞
0
tr(hwz(t)′hwz(t)) dt = tr
(
H ′
∫ ∞
0
eA′tC ′CeAtdtH
)
+ tr (H ′C ′G) +
+tr(G′CH) +∫∞
0tr(G′G)δ2(t) dt
(2.10)
Uma vez que∫∞
0δ2(t)dt → ∞, para que a norma seja finita, ambos os requisitos mencionados
devem ser atendidos. Logo, utilizando a equacao (2.10), com o auxılio da propriedade de
circularidade do operador traco em que tr(hwz(t)′hwz(t)) = tr(hwz(t)hwz(t)
′), podemos calcular
a norma H2 do sistema de duas maneiras distintas
‖Hwz(s)‖22 = tr(H ′PoH) = tr(CPcC′) (2.11)
na qual Po e Pc sao os gramianos de observabilidade e de controlabilidade, respectivamente,
dados por
Po =
∫ ∞
0
eA′tC ′CeAt dt, Pc =
∫ ∞
0
eAtHH ′eA′t dt (2.12)
E digno de nota que ambos os gramianos podem ser obtidos atraves da resolucao das seguintes
equacoes de Lyapunov, veja (GEROMEL; KOROGUI, 2001)
A′Po + PoA+ C ′C = 0
APc + PcA′ +HH ′ = 0
(2.13)
A observabilidade do par (A,C) e a controlabilidade do par (A,H) sao condicoes necessarias
e suficientes para que os gramianos Po e Pc sejam matrizes simetricas e definidas positivas,
respectivamente.
Para finalizar esta sessao, focaremos no calculo da norma H2 atraves da resolucao de
problemas de otimizacao convexa. O proximo lema, disponıvel em (OLIVEIRA, 1999), e
essencial para atingir este objetivo

2.3. Norma H2 22
Lema 2.3.1 Seja A uma matriz Hurwitz. Se os pares (P1, Q1) e (P2, Q2) satisfazem a equacao
de Lyapunov A′P + PA+Q = 0, entao Q1 > Q2 implica em P1 > P2.
Uma vez que toda solucao definida positiva de A′P + PA + C ′C < 0 satisfaz a equacao
de Lyapunov A′P + PA + C ′C = −V para alguma matriz V > 0, utilizando do Lema 2.3.1,
pode-se concluir que C ′C + V > C ′C e, portanto, P > Po. Assim sendo,
‖Hwz(s)‖22 = tr(H ′PoH) < tr(H ′PH) (2.14)
Entao, a norma H2 do sistema (2.1) pode ser calculada a partir da solucao do problema de
otimizacao convexa
‖Hwz(s)‖22 = infP>0
tr(H ′PH) : A′P + PA+ C ′C < 0 (2.15)
Analogamente, para o gramiano de controlabilidade, e possıvel obter a normaH2 resolvendo-se
‖Hwz(s)‖22 = infP>0
tr(CPC ′) : AP + PA′ +HH ′ < 0 (2.16)
As LMIs (2.15) e (2.16) apresentam duas formulacoes para o calculo da normaH2 via LMIs.
Esta abordagem considera a solucao de problemas de otimizacao convexa, que ja contam na
literatura com diversos algoritmos especializados em resolve-los. A sua grande vantagem,
quando comparada a solucao via gramianos e a possibilidade de generalizar as LMIs para
tratar problemas mais gerais, como por exemplo, projeto de controle via realimentacao de
estado e realimentacao dinamica de saıda, com ou sem restricoes nas matrizes de ganho.
2.3.2 Sistemas a tempo discreto
Considere o sistema (2.2), cuja funcao de transferencia e dada por (2.4). A norma H2
e definida para funcoes de transferencia racionais, analıticas no semi-plano complexo direito
fechado, e e dada por
‖Hwz(z)‖22 =1
2π
∫ 2π
0
tr(Hwz(e−jω)
′
Hwz(ejω)) dω =
∑
k∈N
tr(hwz[k]′hwz[k]) (2.17)
em que a segunda igualdade foi obtida utilizando o teorema de Parseval, sendo hwz[k] a resposta
ao impulso do sistema, ou seja, hwz[k] = Z−1Hwz(z). A relacao definida por (2.17) converge
se, e somente se, Ah for Schur estavel. De fato, considerando que a resposta ao impulso do

2.3. Norma H2 23
sistema e dada por
hwz[k] = Z−1Hwz(z) =
Gh, se k = 0
ChAk−1h Hh, se k ≥ 0
(2.18)
de acordo com (2.17) e utilizando (2.18), temos
∑
k∈R
tr(hwz[k]′hwz[k]) = tr
(
H ′h
∑
k∈N
(A′h)
kC ′hChA
khHh
)
+ tr(G′hGh) (2.19)
que e convergente se, e somente se, Ah for Schur estavel como mencionado anteriormente.
Note que diferente do caso contınuo, o sistema nao precisa ser estritamente proprio para o
calculo da norma. Alem disso, devido a propriedade de circularidade do operador traco, em
que tr(hwz[k]′hwz[k]) = tr(hwz[k]hwz[k]
′), a norma H2 tambem pode ser calculada atraves do
gramiano de controlabilidade, da seguinte forma
‖Hwz(z)‖22 = tr(H ′hPoHh +G′
hGh) = tr(ChPcC′h +GhG
′h) (2.20)
com os gramianos dados por
Po =∑
k∈N
(A′h)
kC ′hChA
kh, Pc =
∑
k∈N
AkhHhH
′h(A
′h)
k (2.21)
que podem ser obtidos atraves da resolucao das seguintes equacoes de Lyapunov (GEROMEL;
KOROGUI, 2001)
A′hPoAh − Po + C ′
hCh = 0
AhPcA′h − Pc +HhH
′h = 0
(2.22)
Podemos notar que toda solucao definida positiva de A′hPAh − P + C ′
hCh < 0 satisfaz
a equacao de Lyapunov A′hPAh − P + C ′
hCh = −V para alguma matriz V > 0. Como
C ′hCh + V > C ′
hCh temos que P > Po e, portanto
‖Hwz(z)‖22 = tr(H ′hPoHh +G′
hGh) < tr(H ′hPHh +G′
hGh) (2.23)
Assim, a normaH2 do sistema (2.2) pode ser calculada a partir da solucao do seguinte problema
de otimizacao convexa
‖Hwz(z)‖22 = infP>0
tr(H ′hPHh +G′
hGh) : A′hPAh − P + C ′
hCh < 0 (2.24)

2.4. Norma H∞ 24
ou, alternativamente, podemos resolver
‖Hwz(z)‖22 = infP>0
tr(ChPC ′h +GhG
′h) : AhPA′
h − P +HhH′h < 0 (2.25)
se desejarmos determina-la em termos do gramiano de controlabilidade. O operador ınfimo e
importante para deixar os lados direito e esquerdo de (2.23) arbitrariamente proximos.
2.4 Norma H∞
A normaH∞ e outro criterio importante para analisar o desempenho de sistemas dinamicos
e esta intimamente ligada a analise de robustez do sistema, veja (COLANERI; GEROMEL;
LOCATELLI, 1997).
2.4.1 Sistemas a tempo contınuo
Seja o sistema (2.1) com funcao de transferencia (2.3). A sua norma H∞ e definida como
‖Hwz(s)‖2∞ = supω∈R
σmaxHwz(jω) (2.26)
em que σmaxHwz(·) e o valor singular maximo da funcao Hwz(·). Esta norma e finita para
funcoes de transferencia Hwz(s) analıticas no semiplano complexo direito, incluindo o eixo
imaginario, e diferente do caso H2 contınuo, nao exige que Hwz(s) seja estritamente propria.
Considerando w(t) pertencente ao conjunto L2, ou seja
∫ ∞
0
w(t)′w(t)dt < ∞ (2.27)
utilizando o Teorema de Parseval, e o fato de que z(s) = Hwz(s)w(s), temos
∫ ∞
0
z(t)′z(t)dt =1
π
∫ ∞
0
z(−jω)′
z(jω)dω
=1
π
∫ ∞
0
w(−jω)′
Hwz(−jω)′
Hwz(jω)w(jω)dω
≤ ‖Hwz(s)‖2∞∫ ∞
0
w(t)′w(t)dt (2.28)
e, portanto, podemos fazer ‖Hwz(s)‖2∞ < ρ se, e somente se ‖z(t)‖22 < ρ‖w(t)‖22. Note que
embora a norma H∞ seja definida no domınio da frequencia, este resultado e importante pois
nos permite calcula-la atraves de funcoes descritas no domınio do tempo.

2.4. Norma H∞ 25
Utilizando a funcao de Lyapunov v(x) = x′Px, P > 0, e impondo
v(x(t)) < −z(t)′z(t) + ρw(t)′w(t), ∀t ≥ 0 (2.29)
para algum ρ > 0, apos a integracao de ambos os lados, de t = 0 a t → ∞ obtemos
v(x(∞))− v(x(0)) < −‖z‖22 + ρ‖w‖22 (2.30)
Note que v(x(∞)) = 0, pois o sistema e assintoticamente estavel, e v(x(0)) = 0, pois x(0) = 0.
Portanto, o lado esquerdo desta desigualdade e nulo e, consequentemente, ‖Hwz(s)‖2∞ < ρ.
Assim, podemos obter a norma H∞, sempre que a desigualdade (2.29) for verificada.
Para o sistema (2.1) temos
v(x(t)) = (x(t)′Px(t) + x(t)′P x(t) + z(t)′z(t)− ρw(t)′w(t))− z(t)′z(t) + ρw(t)′w(t)
=
[
x(t)
w(t)
]′ [
A′P + PA+ C ′C •H ′P +G′C G′G− ρI
][
x(t)
w(t)
]
− z(t)′z(t) + ρw(t)′w(t)
< −z(t)′z(t) + ρw(t)′w(t) (2.31)
em que a desigualdade e obtida sempre que
[
A′P + PA+ C ′C •H ′P +G′C G′G− ρI
]
< 0 (2.32)
Entao, podemos determinar a norma H∞ do sistema (2.1) atraves da solucao do seguinte
problema de otimizacao convexa
‖Hwz(s)‖2∞ = infρ>0,P>0
ρ :
[
A′P + PA+ C ′C •H ′P +G′C G′G− ρI
]
< 0
(2.33)
2.4.2 Sistemas a tempo discreto
Considere o sistema a tempo discreto (2.2) com funcao de transferencia (2.4). A sua norma
H∞ e definida como
‖Hwz(z)‖2∞ = supω∈[0,2π]
σmaxHwz(ejω) (2.34)
Ela e finita para funcoes de transferencia Hwz(z) assintoticamente estaveis. De forma similar
ao caso contınuo, utilizando o Teorema de Parseval, e o fato de que z(z) = Hwz(z)w(z),
podemos calcular a norma H∞ atraves de funcoes descritas no domınio do tempo da seguinte

2.5. Sistema discreto equivalente 26
forma∑
k∈N
(z[k]′z[k] − ρw[k]′w[k]) < 0 (2.35)
em que ‖Hwz(z)‖2∞ < ρ e w[k] ∈ L2. Esta desigualdade pode ser assegurada impondo
∆v(x[k]) = v(x[k + 1])− v(x[k]) < −z[k]′z[k] + ρw[k]′w[k] (2.36)
De fato, note que somando ambos os lados desta desigualdade de k = 0 ate k → ∞ obtemos
v(x[∞])− v(x[0]) < −‖z‖22 + ρ‖w‖22 (2.37)
O lado esquerdo desta desigualdade e nulo, uma vez que v(x[0]) = 0 pois x[0] = 0 e v(x[∞]) = 0
pois o sistema e assintoticamente estavel. Logo impondo (2.36) temos
∆v(x[k])=
[
x[k]
w[k]
]′[
A′hPAh − P + C ′
hCh •H ′
hPAh +G′hCh H ′
hPHh +G′hGh − ρI
][
x[k]
w[k]
]
− z[k]′z[k] + ρw[k]′w[k]
<−z[k]′z[k] + ρw[k]′w[k] (2.38)
que e valida sempre que a seguinte desigualdade
[
A′hPAh − P + C ′
hCh •H ′
hPAh +G′hCh H ′
hPHh +G′hGh − ρI
]
< 0 (2.39)
e verificada. Logo a norma H∞ do sistema (2.2) pode ser calculada atraves do seguinte
problema de otimizacao convexa.
‖Hwz(z)‖2∞ = infρ>0,P>0
ρ :
[
A′hPAh − P + C ′
hCh •H ′
hPAh +G′hCh H ′
hPHh +G′hGh − ρI
]
< 0
(2.40)
2.5 Sistema discreto equivalente
Nesta secao, vamos apresentar um resultado importante no contexto de controle via rede de
comunicacao, principalmente para levar em conta o fato de que, a largura de faixa de um canal
de comunicacao e, geralmente, limitada, veja (SOUZA et al., 2014). Considerando um sistema
a tempo contınuo, amostrado com perıodo de amostragem h > 0, a ideia e obter um modelo
a tempo discreto cuja norma L2 da sua saıda seja identica aquela determinada para a saıda
do sistema amostrado a tempo contınuo. Como a obtencao desta norma nao envolve qualquer
aproximacao, dizemos que o modelo obtido e um sistema discreto equivalente. Utilizando
este modelo, o projeto de controle de um sistema amostrado pode ser realizado totalmente no

2.5. Sistema discreto equivalente 27
domınio do tempo discreto e o controlador obtido aplicado diretamente no sistema a tempo
contınuo original.
Como motivacao, vamos apresentar um problema tıpico de controle via rede de comunica-
cao. Considere o sistema a tempo contınuo
x(t) = Ax(t) +B u(t), x(0) = x0
z(t) = C x(t) +Du(t)(2.41)
em que u(t) ∈ Rnu e a entrada de controle transmitida ao sistema atraves de um canal de
comunicacao. Devido ao limite da largura de faixa do canal, u(t) deve respeitar um perıodo
h > 0 mınimo exigido na transmissao, dentro do qual nao pode haver atualizacao. Desta
forma, a entrada u(t) e modelada como um sinal constante por partes dado por
u(t) = u(tk) = u[k], t ∈ [tk, tk+1) (2.42)
para todo k ∈ N. O tempo entre dois instantes de amostragem sucessivos deve entao respeitar
tk+1 − tk = h > 0. Definindo as matrizes
F =
[
A B
0 0
]
, E =[
C D]
(2.43)
em que F ∈ R(nx+nu)×(nx+nu) e E ∈ R
nz×(nx+nu), o proximo teorema, disponıvel em (SOUZA
et al., 2014) e (CHEN; FRANCIS, 2012), fornece o sistema discreto equivalente a (2.41) no
que diz respeito ao calculo da norma L2 da saıda.
Teorema 2.5.1 Considere o sistema dinamico (2.41), e defina as matrizes (Ah, Bh, Ch, Dh)
de dimensoes compatıveis tais que
eFh =
[
Ah Bh
0 I
]
(2.44)
Q(h) =
∫ h
0
eF′tE ′EeFtdt =
[
C ′h
D′h
][
C ′h
D′h
]′
(2.45)
e o sistema linear a tempo discreto
x[k + 1] = Ah x[k] +Bh u[k], x(0) = x0
z[k] = Ch x[k] +Dh u[k](2.46)

2.5. Sistema discreto equivalente 28
Entao, igualdade a seguir e satisfeita
∫ ∞
0
z(t)′z(t)dt =∑
k∈N
z′[k]z[k] (2.47)
Prova: Disponıvel em (SOUZA, 2012) e (CHEN; FRANCIS, 2012).
Podemos observar que, geralmente, as dimensoes de z(t) e de z[k] nao sao as mesmas. Por
exemplo, pode ocorrer que o lado esquerdo de (2.45) seja uma matriz definida positiva, o que
impoe z[k] ∈ Rnx×nu embora a dimensao da saıda do sistema amostrado seja z(t) ∈ R
nz com
nz ≤ nx < nx + nu.
Neste ponto e importante fazer algumas consideracoes no que se refere ao calculo das
matrizes do sistema a tempo discreto. Note que a dinamica de (2.46) pode ser facilmente
obtida a partir do sistema original atraves do calculo da exponencial de matriz eFh, que por
sua vez e avaliado a partir de tecnicas eficientes e ja disponıveis na literatura, veja (GOLUB;
LOAN, 2012). As matrizes da saıda do sistema a tempo discreto requerem um cuidado maior
pois dependem do calculo da integral
Q(h) =
∫ h
0
eF′tE ′EeFtdt (2.48)
que pode ser obtida a partir de rotinas de integracao numerica, veja (BURDEN; FAIRES, 2001).
Em seguida, utilizando Q(h) podemos calcular Ch e Dh atraves da sua decomposicao em va-
lores singulares. De fato, como Q(h) e simetrica e semidefinida positiva, existem matrizes
U ∈ R(nx+nu)×(nx+nu) unitaria e S ≥ 0 ∈ R
(nx+nu)×(nx+nu) diagonal, tais que
Q(h) = USU ′ = V V ′ (2.49)
em que V = US1/2. Note que a matriz V esta bem definida, uma vez que S ≥ 0. Assim, de
(2.45) e (2.49), temos que[
Ch Dh
]
= V ′ = S1/2U ′ (2.50)
Logo, Ch e Dh sao particoes de V ′, a primeira contendo as primeiras nx colunas e a segunda
as nu restantes. Observe que, como mencionado, as matrizes Ch e Dh possuem nx+nu linhas,
podendo algumas ser nulas. Como ficara claro nos proximos capıtulos, a obtencao do sistema
discreto equivalente sera fundamental para levar em conta o modelo da rede no projeto do
controle cooperativo de varios sistemas a partir do compartilhamento de um unico canal de
transmissao, que e o tema principal desta dissertacao.

2.6. Sistemas com comutacao 29
2.6 Sistemas com comutacao
Sistemas dinamicos com comutacao sao aqueles definidos por um numero finito de sub-
sistemas e uma regra de comutacao que seleciona a cada instante de tempo um deles. Esta
regra pode ser arbitraria, exercendo o papel de uma perturbacao externa, ou uma variavel
de controle que, quando adequadamente projetada, pode assegurar estabilidade e melhorar o
desempenho do sistema global, veja (GEROMEL; DEAECTO; DAAFOUZ, 2013). As refe-
rencias (DECARLO et al., 2000), (HESPANHA; MORSE, 2002), (SHORTEN et al., 2007) e
os livros (LIBERZON, 2012) e (SUN, 2006) sao importantes para iniciar o estudo do tema.
No contexto desta dissertacao, a regra de comutacao assume um papel importante na
alocacao dos recursos da rede de comunicacao para cada um dos sistemas conectados a ela.
Por esta razao, uma revisao sobre resultados recentes envolvendo o seu projeto possui particular
importancia. Considere entao um sistema com comutacao a tempo discreto dado por
x[k + 1] = Ahσ x[k], x(0) = x0
z[k] = Chσ x[k](2.51)
definido para todo k ∈ N, no qual σ e a regra de comutacao que seleciona a cada instante de
tempo um subsistema dentre os N disponıveis. No nosso contexto esta regra σ[·] : N → K e
uma variavel de controle a ser projetada para assegurar estabilidade e desempenho garantido
ao sistema global. Dentre os trabalhos existentes na literatura, veja por exemplo (GERO-
MEL; COLANERI, 2006), (FIACCHINI; JUNGERS, 2014), (FIACCHINI; GIRARD; JUN-
GERS, 2016) e (ZHANG; HU; ABATE, 2012), o primeiro e o mais adequado para os nossos
objetivos e e baseado na seguinte funcao de Lyapunov quadratica por partes do tipo mınimo
v(x) = mini∈K
x′Pix (2.52)
a qual esta associada a regra de comutacao
σ(x) = argmini∈K
x′Pix (2.53)
em que Pi > 0 ∈ Rnx×nx e uma matriz simetrica, definida positiva que deve satisfazer algumas
condicoes a serem apresentadas a seguir. Estas condicoes dependem de uma importante classe
de matrizes de Metzler denotada por M, que consiste de todas as matrizes Π ∈ RN×N , tais
que
πji ≥ 0,
N∑
j=1
πji = 1, ∀i, j ∈ K×K (2.54)
O teorema a seguir, disponıvel em (GEROMEL; COLANERI, 2006), apresenta estas condicoes.
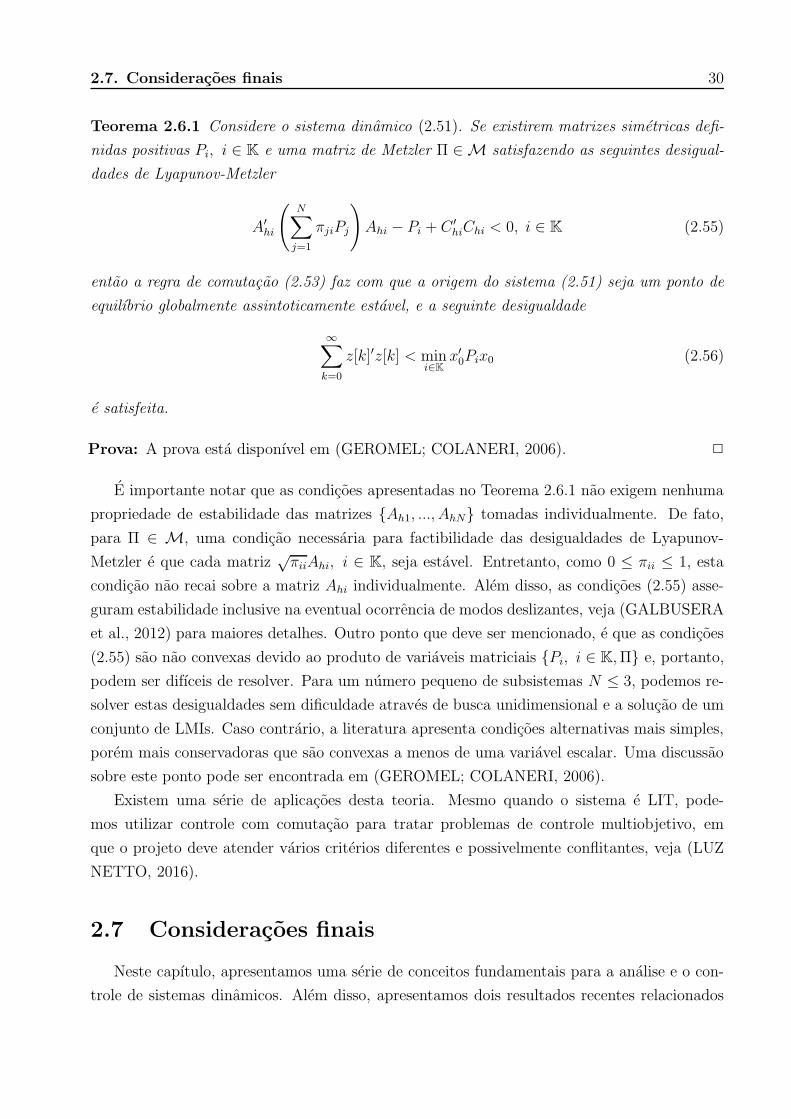
2.7. Consideracoes finais 30
Teorema 2.6.1 Considere o sistema dinamico (2.51). Se existirem matrizes simetricas defi-
nidas positivas Pi, i ∈ K e uma matriz de Metzler Π ∈ M satisfazendo as seguintes desigual-
dades de Lyapunov-Metzler
A′hi
(
N∑
j=1
πjiPj
)
Ahi − Pi + C ′hiChi < 0, i ∈ K (2.55)
entao a regra de comutacao (2.53) faz com que a origem do sistema (2.51) seja um ponto de
equilıbrio globalmente assintoticamente estavel, e a seguinte desigualdade
∞∑
k=0
z[k]′z[k] < mini∈K
x′0Pix0 (2.56)
e satisfeita.
Prova: A prova esta disponıvel em (GEROMEL; COLANERI, 2006).
E importante notar que as condicoes apresentadas no Teorema 2.6.1 nao exigem nenhuma
propriedade de estabilidade das matrizes Ah1, ..., AhN tomadas individualmente. De fato,
para Π ∈ M, uma condicao necessaria para factibilidade das desigualdades de Lyapunov-
Metzler e que cada matriz√πiiAhi, i ∈ K, seja estavel. Entretanto, como 0 ≤ πii ≤ 1, esta
condicao nao recai sobre a matriz Ahi individualmente. Alem disso, as condicoes (2.55) asse-
guram estabilidade inclusive na eventual ocorrencia de modos deslizantes, veja (GALBUSERA
et al., 2012) para maiores detalhes. Outro ponto que deve ser mencionado, e que as condicoes
(2.55) sao nao convexas devido ao produto de variaveis matriciais Pi, i ∈ K,Π e, portanto,
podem ser difıceis de resolver. Para um numero pequeno de subsistemas N ≤ 3, podemos re-
solver estas desigualdades sem dificuldade atraves de busca unidimensional e a solucao de um
conjunto de LMIs. Caso contrario, a literatura apresenta condicoes alternativas mais simples,
porem mais conservadoras que sao convexas a menos de uma variavel escalar. Uma discussao
sobre este ponto pode ser encontrada em (GEROMEL; COLANERI, 2006).
Existem uma serie de aplicacoes desta teoria. Mesmo quando o sistema e LIT, pode-
mos utilizar controle com comutacao para tratar problemas de controle multiobjetivo, em
que o projeto deve atender varios criterios diferentes e possivelmente conflitantes, veja (LUZ
NETTO, 2016).
2.7 Consideracoes finais
Neste capıtulo, apresentamos uma serie de conceitos fundamentais para a analise e o con-
trole de sistemas dinamicos. Alem disso, apresentamos dois resultados recentes relacionados

2.7. Consideracoes finais 31
a sistemas com dados amostrados e com comutacao que serao utilizados conjuntamente nos
proximos capıtulos, para tratar o controle cooperativo de varios sistemas que compartilham o
mesmo canal de comunicacao, tema principal desta dissertacao.
Primeiramente, os conceitos de estabilidade e ponto de equilıbrio foram introduzidos, segui-
dos pela analise de estabilidade via criterio de Lyapunov. Em seguida, definimos os conceitos
de norma H2 e H∞, tanto para sistemas contınuos quanto para discretos no tempo, e apresen-
tamos como podemos calcular estas normas a partir da solucao de um problema de otimizacao
convexa descrito em termos de LMIs. O capıtulo tambem exibiu resultados relacionados a dis-
cretizacao exata de sistemas contınuos com dados amostrados e, por fim, foram apresentados
conceitos basicos importantes de sistemas com comutacao a tempo discreto.

32
CAPITULO 3
Modelagem e Identificacao
Neste capıtulo, nosso objetivo principal e a modelagem e a identificacao dos parametros
de um sistema mecanico, que consiste em um pendulo invertido acoplado a um carro que se
move sobre um trilho. Duas estacoes de trabalho IP02 do fabricante Quanser R©, denotados
por E.IP02 No1 e E.IP02 No2 sao utilizadas. Apos uma descricao detalhada da estacao IP02,
obtemos um conjunto de equacoes diferenciais, tendo como meta a simplicidade das relacoes
matematicas e, ao mesmo tempo, maxima precisao, de forma que as equacoes obtidas descre-
vam de maneira adequada o comportamento dinamico do sistema real. Realizamos entao a
validacao do modelo matematico a partir da comparacao entre as medidas obtidas do sistema
real e as respostas fornecidas pelo modelo com os parametros fısicos fornecidos pelo fabricante.
Sendo observada pequenas discrepancias e, tendo em vista que alguns destes parametros levam
em conta fatores externos como desgaste dos trilhos e o ambiente experimental, utilizamos tec-
nicas simples de identificacao de sistemas para uma melhor estimativa dos parametros fısicos,
obtendo sinais mais satisfatorios e proximos dos valores medidos. Os resultados deste capıtulo
tambem estao disponıveis em (LUZ NETTO et al., 2017) e em (LUZ NETTO, 2016).
3.1 Descricao do sistema
O modelo IP02 do fabricante Quanser R© , mostrado na Figura 3.1, consiste em um solido
carro de alumınio atuado por um motor de corrente contınua de baixa indutancia onde e
acoplado um pendulo com eixo de rotacao perpendicular ao movimento do carro. A montagem
do carro permite apenas a sua translacao sobre um trilho horizontal. A transmissao de potencia
entre o motor e o carro ocorre atraves de uma caixa de transmissao, composta por um conjunto
de engrenagens em montagem planetaria e pinhao-cremalheira, veja a parte direita da Figura
3.1. Este mecanismo permite a transformacao de um movimento rotativo para linear nos
trilhos.
Com a energia recebida do conjunto motor/caixa de transmissao, o carro movimenta o

3.2. Equacionamento 33
Conjunto planetario
Pinhao
Cremalheira
Motor CC
Pivo
Figura 3.1: Sistema IP02, retirado de Quanser R©, User Manual 2012
pendulo de haste cilındrica atraves do ponto de pivotamento proporcionando, assim, um mo-
vimento livre de ate 360o. A seguir, apresentamos a modelagem matematica do sistema.
3.2 Equacionamento
A metodologia utilizada para obtencao das equacoes de movimento tem como base as leis
que regem a dinamica de corpos solidos, para o caso do carro, e as leis de Kirchhoff, para o
motor. A Figura 3.2 mostra as variaveis de interesse e as constantes do sistema carro/pendulo,
com suas respectivas referencias adotadas no modelo.
Motor/caixa de transmissao
Do lado esquerdo da Figura 3.2, apresentamos o diagrama do motor com momento de
inercia Jm, em que Vm e a tensao de entrada, Im e a corrente, Rm a resistencia de armadura,
Lm a indutancia do motor e km a constante de forca contra-eletromotriz. Aplicando a Lei de
Kirchhoff no circuito da Figura 3.2, obtemos
Vm − Rm Im(t)− Lm Im(t)− km θm = 0 (3.1)
em que θm e o angulo de rotacao do motor e kmθm e a forca contra-eletromotriz. Considerando
que a indutancia do motor e desprezıvel, ou seja Lm ≈ 0, tem-se que a corrente eletrica e dada
por:
Im =Vm − kmθm
Rm(3.2)

3.2. Equacionamento 34
Vm
Rm
Im
θm
Lm
Fc
kg
x
y
FcMc
lp
Mp, Jp
θ
xc
Figura 3.2: Diagrama do conjunto carro-pendulo
Por outro lado, temos que o torque gerado pelo motor, que sera transferido a carga, e propor-
cional a corrente Im da seguinte forma:
τm = ηmktIm (3.3)
em que ηm e a eficiencia do motor e kt e a constante de proporcionalidade corrente-torque.
Apos alterado pela caixa de transmissao, com constante de reducao kg e eficiencia ηg, o torque
e responsavel por aplicar a forca
Fc =ηgkgτmrpm
(3.4)
no carro de massa Mc, em que rpm e o raio do pinhao, como pode ser visto no lado di-
reito da figura. As equacoes (3.1)-(3.4) descrevem a dinamica do sistema motor/caixa de
transmissao. Estas equacoes, em conjunto com a transformacao de movimento no mecanismo
pinhao-cremalheira, dado por
θm =kgxc
rpm(3.5)
permitem a obtencao da forca aplicada no carro em funcao da entrada de tensao Vm e da
velocidade xc, do tipo:
Fc =ηg ηm kg ktrpmRm
(
Vm(t)−km kgrpm
xc(t)
)
(3.6)

3.2. Equacionamento 35
E digno de nota que Fc e um parametro importante no estudo do sistema da Figura 3.1, pois
e o elemento que relaciona a dinamica do conjunto carro/pendulo com o movimento do motor.
Carro
Como pode ser observado no lado direito da Figura 3.2, o carro movimenta um pendulo
de massa Mp e esta imerso em um meio responsavel por um atrito viscoso de constantes Bc
e Bp no carro e no pendulo, respectivamente. Os referenciais adotados estao apresentados na
figura. Aplicando o princıpio de D’Alembert, a equacao dinamica do carro na horizontal e
dada por:
Mc xc + Fa + Tx +Bc xc = Fc (3.7)
na qual Tx e a forca causada pela haste do pendulo. A forca inercial da armadura Fa ocorre
devido a acao de rotacao do motor com torque de inercia τm = Jmθm = Jm(kgxc/rpm), sendo
expressa na forma:
Fa =ηg kg τm
rpm=
ηg k2g Jmxc
r2pm(3.8)
Utilizando (3.6) e (3.8), obtemos que a equacao do carro (3.7) torna-se
Meqxc + Beqxc + Tx = AeqVm (3.9)
em que a massa equivalente assume a forma:
Meq = Mc +ηgk
2gJm
r2pm(3.10)
o coeficiente de atrito viscoso equivalente:
Beq = Bc +ηgηmk
2gktkm
r2pmRm(3.11)
e, finalmente, o ganho de atuacao:
Aeq =ηgηmkgktrpmRm
(3.12)
Pendulo
O pendulo possui momento de inercia Jp em relacao ao seu centro de gravidade, que esta
localizado a uma distancia lp do ponto de pivoteamento. O movimento de translacao e da
forma
Mpd2
dt2(xc − lp sen(θ))− Tx = 0 (3.13)

3.3. Linearizacao 36
Adicionalmente, o movimento de rotacao e descrito por:
(Jp +Mp l2p) θ −Mp lp cos(θ) xc −Mp g lp sen(θ) +Bp θ = 0 (3.14)
A seguir, vamos acoplar as equacoes obtidas ate entao para encontrar aquelas que descrevem
o conjunto carro/pendulo.
Equacoes nao-lineares do sistema
Eliminando-se a forca Tx a partir das equacoes (3.9) e (3.13), verificamos que as equacoes
diferenciais nao-lineares, que descrevem o comportamento do carro xc(t) e o deslocamento
angular do pendulo θ(t) para todo t ≥ 0, podem ser resumidas a:
(Mp +Meq) xc + Beq xc −Mp lp cos(θ) θ +Mp lp sen(θ) θ2 = Aeq Vm (3.15)
(Mp l2p + Jp) θ +Bp θ −Mp lp cos(θ) xc −Mp lp g sen(θ) = 0 (3.16)
Desse modo, as equacoes (3.15)-(3.16) representam completamente o sistema dinamico de
interesse, o pendulo IP02 Quanser R©.
As proximas etapas tratam da manipulacao e analise de suas caracterısticas.
3.3 Linearizacao
A linearizacao e topico importante para o projeto do controlador, tanto no calculo propri-
amente dito, quanto na analise da abrangencia de um equacionamento mais simplista. Alem
disso, como ficara claro em seguida, o modelo linear e utilizado para identificacao dos parame-
tros fısicos, visto que estes valores podem diferir daqueles fornecidos pelo fabricante devido ao
desgaste dos trilhos, perdas de eficiencia, entre outros. Desenvolvendo as equacoes (3.15)-(3.16)
em serie de Taylor ate a primeira ordem e considerando a origem (x0, θ0, x0, θ0) = (0, 0, 0, 0)
como ponto de operacao, tem-se:
(Mp +Meq) xc + Beq xc −Mp lp θ = Aeq Vm (3.17)
(Mp l2p + Jp) θ +Bp θ −Mp g lp θ −Mp lp xc = 0 (3.18)
As Equacoes (3.17)-(3.18) representam a dinamica do sistema pendulo invertido linearizado
em relacao a origem.

3.4. Representacao de estado 37
3.4 Representacao de estado
A partir das Equacoes (3.15)-(3.16) e (3.17)-(3.18), que descrevem a dinamica do sistema
oriundas das subsecoes anteriores, e possıvel encontrar a equacao dinamica em espaco de estado
do conjunto definida como
x(t) = Ax(t) +B u(t), x(0) = x0 (3.19)
em que u(t) e a entrada de controle do sistema. Adote o seguinte vetor de estados x =
[xc θ xc θ]′ ∈ R
4 em que xi representa a i-esima componente do vetor x e a entrada de controle
u = Vm.
Caso linear
Feitas as consideracoes iniciais, basta substituir as variaveis de estado nas equacoes dina-
micas (3.17)-(3.18) e obter as matrizes A e B. Apos certo algebrismo, tem-se:
A =1
JT
0 0 JT 0
0 0 0 JT
0 M2p l
2p g −Beq (Mp l
2p + Jp) −BpMp lp
0 Mp lp g (Meq +Mp) −Beq Mp lp −Bp (Meq +Mp)
(3.20)
B =Aeq
JT
0
0
Mp l2p + Jp
Mp lp
(3.21)
com JT = Meq (Mp l2p + Jp) + JpMp.
Caso nao-linear
Em contrapartida, no caso nao-linear, as matrizes A e B sao dependentes das variaveis
de estado xi, i = 1, · · · , 4. Desse modo, para encontra-las, podemos reescrever as equacoes
(3.15)-(3.16) na forma matricial, obtendo:
Φ(x) x+ Γ(x) x+ Ω(x) = Ψ u (3.22)

3.5. Validacao do modelo 38
Sendo
Φ(x) =
1 0 0 0
0 1 0 0
0 0 Mp +Meq −Mp lp cos(x2)
0 0 −Mp lp cos(x2) Jp +Mp l2p
,Γ(x) =
0 0 −1 0
0 0 0 −1
0 0 Beq Mp lp sen(x2) x4
0 0 0 Bp
(3.23)
Ω(x) =
0
0
0
−Mp lp g sen(x2)
, Ψ =
0
0
Aeq
0
(3.24)
Isolando a variavel x, obtem-se:
x = −Φ(x)−1 Γ(x) x+ Φ(x)−1 Ψ u− Φ(x)−1 Ω(x) (3.25)
que explicita A(x) = −Φ(x)−1 Γ(x), B = Φ(x)−1 Ψ e E(x) = −Φ(x)−1 Ω(x). Portanto, os
resultados sao mostrados abaixo:
A(x) =1
JTn(x)
0 0 JTn(x) 0
0 0 0 JTn(x)
0 0 −Beq (Mp l2p + Jp) −BpMplp cos(x2)−Mplp x4 sen (x2) (Mpl
2p + Jp)
0 0 −BeqMplp cos(x2) −Bp(Meq +Mp)−M2p l
2p cos(x2) sen(x2)x4
(3.26)
e
B(x) =Aeq
JTn(x)
0
0
Mpl2p + Jp
Mplp cos(x2)
, E(x) =1
JTn(x)
0
0
M2p l
2p g sen(x2) cos(x2)
Mp lp g sen(x2)(Mp +Meq)
(3.27)
onde JTn(x) = −M2p l
2p (cos (x2))
2 + (Mp +Meq)(Mp l2p + Jp). As matrizes A(x) e B(x), junta-
mente com E(x), concluem a modelagem do sistema geral carro/pendulo invertido nao-linear
em representacao em espaco de estado.
3.5 Validacao do modelo
A validacao pode ser realizada atraves da comparacao entre a resposta medida do sistema
fısico e a simulada utilizando o modelo matematico obtido. As duas estacoes de trabalho dis-
ponıveis, denotadas por E.IP02 No1 e E.IP02 No2, sao consideradas para validacao. A Tabela
3.1 mostra os parametros fornecidos pelo fabricante Quanser R©, bem como suas respectivas

3.5. Validacao do modelo 39
unidades.
E. IP02 Mp [kg] lp [m] Bp
[
N.m.s
rad
]
Jp [kg.m2] Aeq
[
N
V
]
Meq [kg] Beq
[
N.s
m2
]
No 1 0.230 0.3302 0.0024 0.00788 1.0717 1.2863 5.4No 2 0.127 0.1778 0.0024 0.00120 1.0717 1.1598 5.4
Tabela 3.1: Parametros do fabricante Quanser R©
Para viabilizar esta etapa, deslocamos o conjunto carro/pendulo para um novo ponto de
operacao (xc, α) = (0, θ + π) que, diferente do anterior, representa um ponto de equilıbrio
estavel. Nesta situacao, o pendulo esta localizado na posicao de equilıbrio vertical para baixo.
Note que, naturalmente, as equacoes nao-lineares
(Mp +Meq) xc + Beq xc +Mp lp cos(α) α−Mp lp sen(α) α2 = Aeq Vm (3.28)
(Mp l2p + Jp) α +Bp α +Mp lp cos(α) xc +Mp lp g sen(α) = 0 (3.29)
e sua versao linearizada em torno do novo ponto de equilıbrio (x0, α0) = (0, 0)
(Mp +Meq) xc + Beq xc +Mp lp α = Aeq Vm (3.30)
(Mp l2p + Jp) α +Bp α +Mp lp g α +Mp lp xc = 0 (3.31)
sao identicas as anteriores, a menos de algumas trocas de sinal.
Logo, para ambas estacoes de trabalho, submetemos o sistema fısico e o seu modelo a uma
tensao Vm(t) quadrada. Para a E.IP02 No1, Vm = 5 [V] com frequencia de 2 [Hz] e, para
E.IP02 No2, Vm = 2 [V] com frequencia de 1.5 [Hz]. Realizamos a validacao para ambos
os modelos (linear e nao-linear), entretanto, para estas entradas em particular, nao houve
diferencas significativas entre as respostas de ambos. A Figura 3.3 mostra, para a estacao
de trabalho E.IP02 No 1, os sinais encontrados utilizando o modelo linear, em linha preta
tracejada, e os sinais adquiridos experimentalmente, em linha azul tracejada. Paralelamente,
a Figura 3.4 faz a mesma comparacao, porem utilizando linha vermelha tracejada para os
sinais adquiridos na estacao de trabalho E.IP02 No 2.
Podemos notar que o modelo capturou adequadamente as caracterısticas do sistema fısico.
Entretanto, apresentou pequenas diferencas de amplitude que podem ser explicadas pela utili-
zacao de parametros, tais como, coeficientes de atrito viscoso Bp e Bc e eficiencia do motor ηm,
que podem variar com o ambiente experimental, com as condicoes de realizacao do ensaio e
com o desgaste dos equipamentos e que, portanto, podem ser diferentes dos valores fornecidos
pelo fabricante. Alem dos parametros mencionados, nota-se que o efeito do cabo de transmis-
sao do sinal dos encoders e a nao-planicidade do eixo de corrida do carro contribuıram para

3.5. Validacao do modelo 40
0 1 2 3 4 5 6 7 8 9 10
-0.15
-0.1
-0.05
0
ExperimentalModelo c/ dados do fabricante
0 1 2 3 4 5 6 7 8 9 10
-0.2
-0.1
0
0.1
0.2
xc[m
]α[rad
]
tempo [s]
Figura 3.3: Resposta do sistema para entrada de onda quadrada - E.IP02 No1
0 5 10 15-0.1
-0.08
-0.06
-0.04
-0.02
0
ExperimentalModelo c/ dados do fabricante
0 5 10 15-0.4
-0.2
0
0.2
0.4
xc[m
]α[rad
]
tempo [s]
Figura 3.4: Resposta do sistema para entrada de onda quadrada - E.IP02 No2
as diferencas mencionadas. Assim, para obter um modelo mais preciso, realizamos a identifi-
cacao dos parametros do sistema, principalmente, daqueles que podem variar com o ambiente
e/ou com as condicoes do ensaio. A proxima etapa compreende a metodologia adotada para
identificacao, sua aplicacao e uma discussao sobre a abrangencia dos resultados obtidos.

3.5. Validacao do modelo 41
Identificacao dos parametros fısicos
Na secao anterior, realizamos a modelagem do sistema mecanico, pendulo invertido aco-
plado a um carro. As disparidades encontradas na comparacao entre a simulacao com os
parametros fornecidos pelo fabricante e o sistema fısico da Quanser R© indicam a necessidade
de se aperfeicoar o modelo. Logo, o estudo e a aplicacao de tecnicas de identificacao e de
suma relevancia para a determinacao de um modelo matematico adequado que descreve com
precisao a dinamica do sistema.
Neste momento, nosso objetivo e identificar os parametros relacionados aos coeficientes de
atrito viscoso Bp, Bc e as eficiencias ηm e ηg do motor e da caixa de transmissao, respecti-
vamente. O foco nestes parametros vem da sua forte dependencia a fatores externos, como
desgaste do trilho e o ambiente experimental, enquanto que as demais grandezas Mc, Mp, e lp
podem ser facilmente medidas. Os ensaios realizados durante a identificacao nos permitirao,
tambem, identificar nao linearidades que nao foram levadas em conta durante a modelagem.
Identificacao do conjunto carro/motor
Nota-se das equacoes (3.30)-(3.31) que e possıvel fazer a analise do conjunto carro/motor
e do pendulo separadamente. Podemos, neste caso, desacoplar o pendulo do carro, eliminando
os parametros α(t) e Mp em (3.30), obtendo apenas o movimento de translacao do carro, que
assumira o formato
Meq xc + Beq xc = Aeq Vm (3.32)
No sistema fısico da Quanser R© esta adaptacao pode ser feita simplesmente atraves da remocao
do pendulo da haste de apoio.
Definindo xc = vc, a velocidade linear do carro, obtemos uma equacao diferencial linear de
primeira ordem, que pode ser escrita na forma padrao:
τ vc + vc = κ0 Vm (3.33)
com:
κ0 =Aeq
Beq
, τ =Meq
Beq
(3.34)
A resposta deste sistema a uma entrada degrau com ν0 de amplitude Vm(t) = ν0, ∀t ≥ 0, e
dada por:
vc(t) = κ0ν0 (1− e−tτ ) (3.35)
o que permite a facil identificacao dos parametros de constante de tempo τ e do ganho κ0. De
fato, o procedimento para identificar os parametros passa por duas etapas bastante simples:
• Fazendo t → ∞ e facil verificar que κ0ν0 e o valor em regime permanente de vc(t);

3.5. Validacao do modelo 42
• Para t = τ temos que vc(τ) = κ0(1− e−1) e, portanto, τ e o instante em que a resposta
vc(t) atinge 63% do seu valor de regime.
Note, entretanto, que realizando apenas este ensaio para a determinacao de κ0 e τ nao
e possıvel encontrar separadamente os tres parametros de interesse Aeq, Meq e Beq. Esta
dificuldade pode ser contornada com o auxılio de um ensaio extra, de mesmo formato. A ideia
e acoplar uma massa conhecida ao carro Mk, de forma que a equacao dinamica resultante seja
identica a (3.33), mas com a nova constante de tempo
τ ′ =Meq +Mk
Beq
(3.36)
que, juntamente com (3.34), nos permite determinar
Beq =Mk
τ ′ − τ, Meq = Beqτ, Aeq = Beqκ0 (3.37)
E interessante o fato de que esta simples repeticao da metodologia, porem agora com uma
alteracao no sistema fısico, permita que encontremos as tres grandezas de interesse. Alem
disso, podemos notar que o ganho estacionario no segundo ensaio deve ser identico ao do
primeiro κ′0 = κ0, o que representa um ponto de conferencia para a validacao do metodo.
Ambas estacoes de trabalho foram submetidas a estes ensaios utilizando uma massa Mk =
0.25 [kg]. A identificacao foi realizada para uma faixa de tensao de entrada de 2.5 [V] a 4 [V],
com incremento de 0.5 [V] entre ensaios. A Tabela 3.2 mostra a media dos valores identificados
para cada estacao de trabalho IP02. Os ensaios mostram, como esperado, que κ0 ≈ κ′0 com
Parametros identificados - Carro/Motor
E. IP02 Aeq
[
N
V
]
Meq [kg] Beq
[
N.s
m2
]
No 1 1.3051 1.6895 7.3235No 2 1.1241 1.5653 6.6048
Tabela 3.2: Parametros identificados do carro
uma discrepancia pequena pouco maior que 2%.
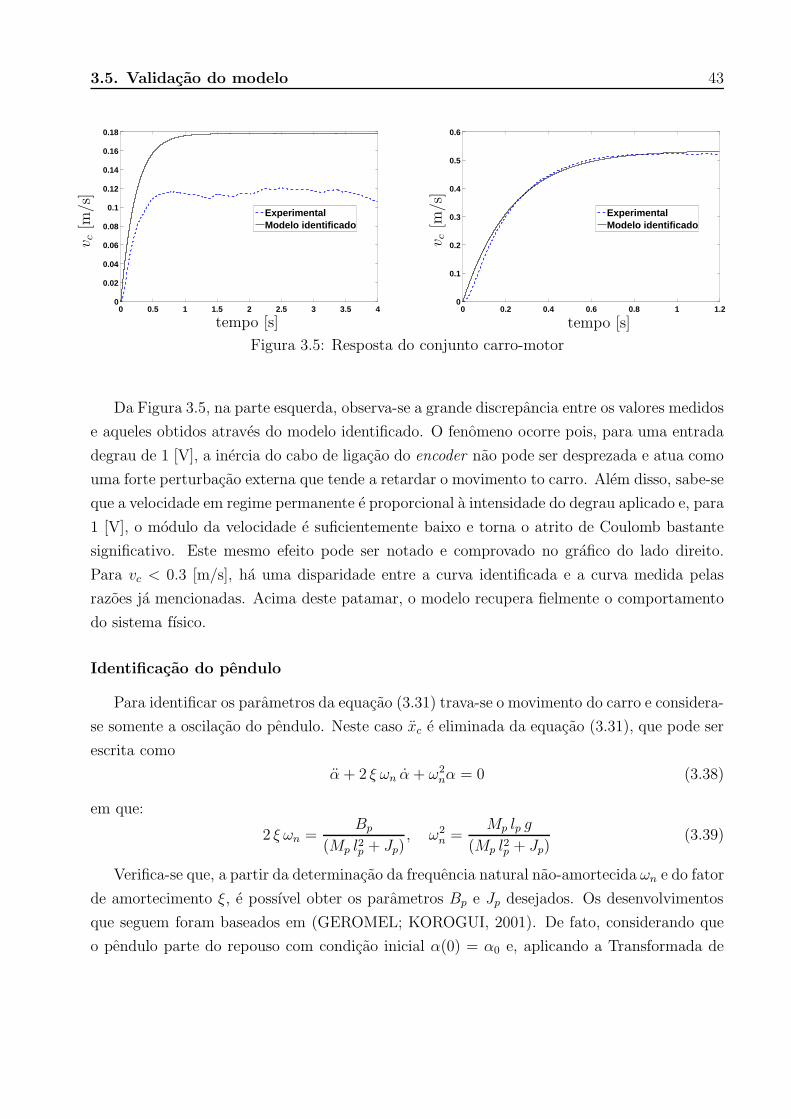
Para fins de validar o modelo identificado, quatro entradas do tipo degrau foram aplicadas
na estacao de trabalho E.IP02 No1. A Figura 3.5 apresenta, no lado esquerdo, a velocidade
para a entrada degrau unitario e, no lado direito, a velocidade para um degrau de 3 [V]. O
comportamento para as entradas de 2 [V] e 4 [V] foram omitidos, pois sao similares a resposta
para a entrada de 3 [V]. Por simplicidade e semelhanca, nao serao exibidos as figuras referentes
a E.IP02 No2.
3.5. Validacao do modelo 43
0 0.5 1 1.5 2 2.5 3 3.5 40
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
0.18
ExperimentalModelo identificado
v c[m
/s]
tempo [s]0 0.2 0.4 0.6 0.8 1 1.2
0
0.1
0.2
0.3
0.4
0.5
0.6
ExperimentalModelo identificado
v c[m
/s]
tempo [s]
Figura 3.5: Resposta do conjunto carro-motor
Da Figura 3.5, na parte esquerda, observa-se a grande discrepancia entre os valores medidos
e aqueles obtidos atraves do modelo identificado. O fenomeno ocorre pois, para uma entrada
degrau de 1 [V], a inercia do cabo de ligacao do encoder nao pode ser desprezada e atua como
uma forte perturbacao externa que tende a retardar o movimento to carro. Alem disso, sabe-se
que a velocidade em regime permanente e proporcional a intensidade do degrau aplicado e, para
1 [V], o modulo da velocidade e suficientemente baixo e torna o atrito de Coulomb bastante
significativo. Este mesmo efeito pode ser notado e comprovado no grafico do lado direito.
Para vc < 0.3 [m/s], ha uma disparidade entre a curva identificada e a curva medida pelas
razoes ja mencionadas. Acima deste patamar, o modelo recupera fielmente o comportamento
do sistema fısico.
Identificacao do pendulo
Para identificar os parametros da equacao (3.31) trava-se o movimento do carro e considera-
se somente a oscilacao do pendulo. Neste caso xc e eliminada da equacao (3.31), que pode ser
escrita como
α + 2 ξ ωn α + ω2nα = 0 (3.38)
em que:
2 ξ ωn =Bp
(Mp l2p + Jp), ω2
n =Mp lp g
(Mp l2p + Jp)(3.39)
Verifica-se que, a partir da determinacao da frequencia natural nao-amortecida ωn e do fator
de amortecimento ξ, e possıvel obter os parametros Bp e Jp desejados. Os desenvolvimentos
que seguem foram baseados em (GEROMEL; KOROGUI, 2001). De fato, considerando que
o pendulo parte do repouso com condicao inicial α(0) = α0 e, aplicando a Transformada de

3.5. Validacao do modelo 44
Laplace em (3.38) obtemos
α(s) =α0 (s+ 2 ξ ωn)
s2 + 2 ξ ωn s+ ω2n
= α0
(
s+ ξωn
(s+ ξωn)2 + ω2d
+
(
ξωn
ωd
)
ωd
(s+ ξωn)2 + ω2d
)
em que ωd = ωn
√
1− ξ2 e a frequencia natural amortecida. A transformada inversa de Laplace,
por sua vez, nos permite encontrar a resposta no tempo do sistema da seguinte forma:
α(t) =α0e
−ξωnt
ωd(ωd cos(ωdt) + ξωnsen(ωdt))
=α0e
−ξωnt
sen(φ)sen(ωdt+ φ) (3.40)
em que:
tg(φ) =ωd
ξωn
=√
ξ−2 − 1 (3.41)
para 0 < ξ < 1. E importante notar que, a partir da equacao (3.40), a derivada de α(t) no
tempo nos permite observar que os pontos de maximo e mınimo da funcao satisfazem a regra
tg(ωd t+ φ) = tg(φ), ou seja:
ωd ti = i π , i = 0, 1, 2, ... (3.42)
Logo, como ωd(ti+1 − ti) = π, temos que o valor medio relacionado aos m pontos de maximo
e mınimo obtidos da medida do deslocamento, fornece a relacao:
ωd =(m− 1) π
m−1∑
i=1
(ti+1 − ti)
(3.43)
Com a aplicacao dos mesmos instantes de tempo na equacao (3.40), obtemos:
α(ti) = α0 e−ξ ωn ti (−1)i , i = 0, 1, 2, ... (3.44)
que faz com que os pontos de maximo e mınimo satisfacam a relacao:
|α(ti+1)||α(ti)|
= e−ξ ωn (ti+1−ti) = e−π/tg(φ) (3.45)

3.5. Validacao do modelo 45
Por fim, de maneira equivalente, apos algumas manipulacoes algebricas, chegamos a igualdade
tg(φ) =(m− 1) π
m−1∑
i=1
(ln(|α(ti)|)− ln(|α(ti+1)|))(3.46)
Observe que, apos determinar ωd a partir de (3.43), a utilizacao da equacao (3.46), junta-
mente com (3.41) nos permite obter o valor do fator de amortecimento ξ e, consequentemente,
da frequencia natural nao-amortecida ωn, concluindo o procedimento adotado.
No sistema fısico, fixou-se o carro de maneira que este nao influenciasse nas leituras de α(t)
e deslocou-se pendulo ate a condicao inicial α0 = 0.3129 [rad], para E.IP02 No 1, e α0 = 0.3988
[rad], para E.IP02 No 2. Utilizando os valores de maximo e mınimo de α(t), determinamos ξ,
ωn e, consequentemente, os parametros Bp e Jp desejados. A Tabela 3.3 apresenta os resultados
obtidos.
Parametros identificados - Pendulo
E. IP02 ξ ωn [rad/s] Bp [N.m.s/rad] Jp [kg.m2]No 1 0.0029 4.7847 0.00088 0.00747No 2 0.0110 6.6568 0.00073 0.00098
Tabela 3.3: Parametros identificados do pendulo
A Figura 3.6 compara a posicao angular medida com a obtida a partir do modelo identifi-
cado para a estacao E.IP02 No1. De maneira similar a identificacao do sistema carro/motor,
omitiremos aqui os resultados para a E.IP02 No2. Para E.IP02 No1, foram utilizados m = 46
pontos para o procedimento. Apresentamos a resposta apenas a partir dos 20 [s] iniciais, haja
vista que o ajuste para t ≤ 20 [s] e fiel as medidas do sistema.
Nota-se que a condicao de sistema subamortecido e encontrada na resposta α(t). Observe
que, a partir dos 100 [s], as duas curvas comecam a se diferenciar e os pontos coletados
no ensaio tendem mais rapidamente a origem do que o sistema identificado. Este fato esta
relacionado a omissao da forca de atrito de Coulomb no modelo, que atua no pendulo sempre
que a velocidade muda de sentido e sua influencia cresce quanto menor e a velocidade angular
do pendulo.
Comparacao dos resultados
Os resultados obtidos nas sessoes anteriores sao resumidos na Tabela 3.4. E notavel uma
diferenca significativa entre os valores obtidos na identificacao do sistema em relacao aqueles
fornecidos pelo fabricante Quanser R© . Esta disparidade torna-se importante na variavel Bp,
que e 69% menor do que o valor fornecido pelo fabricante, para o sistema E.IP02 No2.

3.5. Validacao do modelo 46
20 40 60 80 100 120 140-15
-10
-5
0
5
10
15ExperimentalModelo identificado
α(t)[rad]
tempo [s]
Figura 3.6: Deslocamento angular do pendulo
As Figuras 3.7 e 3.8 fazem a comparacao entre a resposta do sistema real, o modelo com
parametros identificados e o modelo com parametros Quanser R©. Aplicou-se uma forma de
onda quadrada com frequencia de 2.5 [Hz] e amplitude de 5 [V] na entrada Vm(t), para ambas
as estacoes de trabalho. Para E.IP02 No1, a curva em linha tracejada azul representa a resposta
experimental do conjunto. Ja para E.IP02 No2, este mesmo parametro e representado pela
linha tracejada vermelha. A linha preta contınua simula o modelo do pendulo com parametros
identificados e, finalmente, a linha preta tracejada simula o modelo com parametro fornecidos
pelo fabricante.
E notavel que a identificacao do sistema utilizando a metodologia apresentada permitiu a
obtencao de um modelo mais preciso do que aquele fornecido pelo fabricante. Isto ocorre devido
a maior proximidade das variaveis identificadas para o sistema real, uma vez que o desgaste de
uso e condicoes de laboratorio influenciam nestes fatores. Porem, tambem e importante discutir
alguns fenomenos que nao foram levados em conta no modelo e que explicam as pequenas
diferencas observadas. A resposta da simulacao com parametros identificados define bem a
dinamica do sistema, embora nota-se uma pequena defasagem, principalmente na variavel
α. A explicacao para este fenomeno deve-se a nao-linearidades, como o atrito de Coulomb,
que nao foi considerado no modelo. Para a variavel xc, nota-se uma pequena diferenca na
amplitude do deslocamento. Neste caso, fatores externos, tambem nao levados em conta no

3.5. Validacao do modelo 47
Variaveis identificadas versus fornecidas
E. IP02 no 1 Fornecido Identificado Unidade VariacaoAeq 1.0717 1.3051 [N/V] 22%Beq 5.4 7.3235 [N.s/m2] 36%Meq 1.2863 1.6895 [kg] 31%Bp 0.00240 0.00088 [N.m.s/rad] −63%Jp 0.00788 0.00746 [kg.m2] −5%
E. IP02 no 2 Fornecido Identificado Unidade VariacaoAeq 1.0717 1.1241 [N/V] 5%Beq 5.4 6.6048 [N.s/m2] 22%Meq 1.1598 1.5653 [kg] 35%Bp 0.0024 0.00073 [N.m.s/rad] −69%Jp 0.0012 0.00098 [kg.m2] −18%
Tabela 3.4: Comparacao entre os resultados
0 1 2 3 4 5 6 7 8 9 10
-0.15
-0.1
-0.05
0
ExperimentalModelo c/ dados identificadosModelo c/ dados Quanser
0 1 2 3 4 5 6 7 8 9 10
-0.2
-0.1
0
0.1
0.2
xc[m
]α[rad]
tempo [s]
Figura 3.7: Comparacao do sistema para onda quadrada - E.IP02 No 1
modelo, tais como a influencia do cabo do encoder e a nao planicidade do trilho de corrida,
sao responsaveis por este efeito. Apesar disso, e fato que o modelo engloba com bastante
eficiencia o movimento do conjunto como um todo, e segue corretamente os dados coletados
do ensaio. Verificamos, entao, de maneira clara, que o modelo e suficientemente adequado
para ser utilizado para fins de projeto de controle.
Os valores da Tabela 3.4, aplicados a dinamica linear do pendulo invertido modelada pelas

3.6. Consideracoes finais 48
0 5 10 15-0.1
-0.08
-0.06
-0.04
-0.02
0ExperimentalModelo c/ dados identificadosModelo c/ dados Quanser
0 5 10 15-0.4
-0.2
0
0.2
0.4
xc[m
]α[rad]
tempo [s]
Figura 3.8: Comparacao do sistema para onda quadrada - E.IP02 No 2
matrizes (3.20)-(3.21), nos proporcionam
A1 =
0 0 1 0
0 0 0 1
0 0.9979 −4.2034 −0.0012
0 25.2223 −9.8095 −0.0299
, B1 =
0
0
0.7491
1.7481
(3.47)
para o sistema E.IP02 No1, acrescentadas do ındice 1 e
A2 =
0 0 1 0
0 0 0 1
0 0.6293 −4.1532 −0.0021
0 47.1557 −18.7606 −0.1565
, B2 =
0
0
0.7068
3.1930
(3.48)
para o sistema E.IP02 No2, acrescentadas do ındice 2, que representam as bancadas do fabri-
cante Quanser R© e completam este capıtulo.
3.6 Consideracoes finais
Apresentamos a estacao de trabalho IP02 da empresa Quanser R©. Duas destas estacoes
serao utilizadas no proximo capıtulo para controle cooperativo, via rede de comunicacao. Desta

3.6. Consideracoes finais 49
forma, o presente capıtulo foi dedicado a descricao do sistema mecanico, a obtencao de seu
modelo matematico e a identificacao dos seus parametros. Mais especificamente, obtivemos
seu modelo matematico nao-linear e sua versao linearizada em torno do ponto de interesse.
Apresentamos tecnicas simples de identificacao de sistemas, para a obtencao, de forma precisa,
dos parametros dos modelos de ambas as estacoes de trabalho, identificadas como E.IP02 No1 e
E.IP02 No2, principalmente daqueles que sofrem variacao com as condicoes do ambiente e com
o desgaste dos equipamentos e que, portanto, diferem dos valores fornecidos pelo fabricante.
Os modelos de ambas foram validados e se mostraram bastante adequados para reproduzir a
dinamica real de ambas as estacoes de trabalho em consideracao.

50
CAPITULO 4
Controle Cooperativo H2 e H∞
Apos a modelagem e identificacao de ambas as estacoes de trabalho, estamos em condicoes
de realizar o controle cooperativo de ambos os sistemas atraves de uma rede de comunicacao.
O controle deve ser realizado a partir de uma estrategia dinamica de compartilhamento de
recursos a ser determinada. Esta estrategia e representada por uma regra de comutacao que
seleciona, a cada intervalo de tempo, qual sistema deve receber o sinal de controle atualizado,
enquanto o outro mantem o sinal previamente recebido. Consideramos que a rede apresenta
largura de faixa limitada e, portanto, o sinal de controle deve permanecer constante durante
um intervalo de tempo suficiente para respeitar a largura de faixa do canal de comunicacao.
Alem disso, o controle via realimentacao de estado deve ser realizado de forma a assegurar cri-
terios de desempenho H2 e H∞ a serem definidos posteriormente. Neste capıtulo, que contem
os principais resultados desta dissertacao, o projeto de controle H2 foi baseado na referen-
cia recente (SOUSA; GEROMEL; DEAECTO, 2015). Nossa contribuicao foi implementar e
validar experimentalmente as tecnicas de (SOUSA; GEROMEL; DEAECTO, 2015) para o
controle de ambas as estacoes de trabalho identificadas no capıtulo anterior. Os resultados
obtidos foram publicados em (LUZ NETTO et al., 2017). Outra contribuicao deste trabalho
foi obter as condicoes para o projeto de controle cooperativo H∞ via rede de comunicacao,
ate entao nao disponıveis na literatura, validando experimentalmente a tecnica de controle
obtida. Estes resultados foram submetidos a (EGIDIO; LUZ NETTO; DEAECTO, 2018b) e
(EGIDIO; LUZ NETTO; DEAECTO, 2018a) e estao em fase de revisao.
4.1 Formulacao do problema
A seguir formulamos o problema de controle para o caso generico de N sistemas lineares e
invariantes no tempo (LIT) de ordem nxique compartilham o mesmo canal de comunicacao.
Posteriormente, eles serao particularizados para o caso em estudo. Considere que a i-esima

4.1. Formulacao do problema 51
planta LIT possui a realizacao em espaco de estado
xi(t) = Aixi(t)+Biui(t)+Hiwi(t), xi(0)=0 (4.1)
zi(t) = Cixi(t)+Diui(t)+Giwi(t) (4.2)
para todo i ∈ K, com xi ∈ Rnxi , ui ∈ R
nui , wi ∈ Rnwi e zi ∈ R
nzi sendo o estado, o esforco de
controle, a entrada exogena e a saıda controlada, respectivamente. Note que as plantas podem
ter ordens distintas e numeros diferentes de entradas e de saıdas. Consideramos que os sinais
de controle devem satisfazer as seguintes caracterısticas:
• Largura de faixa limitada e aplicada levando em conta um esforco de controle do tipo
ui(t) = ui(tk) = ui[k], t ∈ [tk, tk+1), ∀i ∈ K (4.3)
no qual tkk∈N sao instantes de amostragem sucessivos tais que t0 = 0 e tk+1− tk = h ≥T > 0. A frequencia de amostragem 1/T deve respeitar a largura de faixa do canal de
transmissao, veja (HESPANHA; NAGHSHTABRIZI; XU, 2007) para maiores detalhes.
• Compartilhamento cooperativo e incluıdo de maneira que a cada instante tk ≥ 0
somente o sistema definido por σ[k] ∈ K deve receber o sinal de controle atualizado, ou
seja
ui[k] =
Kiui[k − 1] + Lixi[k] , i = σ[k]
ui[k − 1] , i 6= σ[k](4.4)
em que as matrizes (Ki, Li) para todo i ∈ K devem ser determinadas.
Considerando o exposto, podemos observar que uma regra de comutacao pode ser utilizada
como um coordenador para decidir a cada instante de amostragem tk ≥ 0 qual planta LIT deve
ser controlada enquanto as demais mantem o ultimo sinal de controle recebido. O controle
deve ser realizado de forma a levar em conta os seguintes ındices de desempenho:
• Indice de desempenho H2: Considerando Gi = 0, ∀i ∈ K, podemos definir o seguinte
ındice
J2(σ) = infKi,Li,σ∈Ω
N∑
i=1
nwi∑
q=1
∫ ∞
0
zqi (t)′zqi (t)dt (4.5)
em que zqi e a resposta da i-esima planta a entrada impulsiva wi(t) = eqδ(t), i ∈ K, em
que eq e a q-esima coluna da matriz identidade de ordem nwi.
• Indice de desempenho H∞: Para entradas wi(t) ∈ L2, i ∈ K, com wi(t) = wi(tk) =

4.2. Controle H2 52
wik(t) = wi[k], ∀t ∈ [tk, tk+1), podemos definir o seguinte ındice
J∞(σ) = infKi,Li,σ∈Ω
supwik(t)∈Ld2
∑Ni=1
∫∞
0zi(t)
′zi(t)dt∑N
i=1
∫∞
0wik(t)′wik(t)dt
(4.6)
Nestas definicoes Ω e o conjunto de todas as regras de comutacao estabilizantes.
Alternativamente, podemos reescrever o esforco de controle como
ui[k]=(1 − δiσ)ui[k − 1] + δiσ(Kiui[k − 1] + Lixi[k]) (4.7)
em que δij = 1 se i = j e δij = 0 se i 6= j para (i, j) ∈ K × K o que facilitara a modelagem
matematica nos desenvolvimentos que seguem.
4.2 Controle H2
Considerando que as entradas wi(t) = eqδ(t) sao do tipo impulsivas, podemos verificar que
o sistema (4.1)-(4.2) pode ser alternativamente reescrito como
xi(t) = Aixi(t)+Biui(t), xi(0+)= Hieq (4.8)
zi(t) = Cixi(t)+Diui(t) (4.9)
Esta equivalencia entre ambos os sistemas pode ser facilmente observada integrando ambos os
lados de (4.1) de forma a obter
∫ t
0
xi(τ) =
∫ t
0
(Aixi(τ)+Biui(τ) +Hieqδ(τ)) dτ (4.10)
=
∫ t
0
(Aixi(τ)+Biui(τ)) dτ +Hieq (4.11)
Considerando que a condicao inicial antes da aplicacao do impulso e x(0) e que x(0+) representa
a condicao inicial imediatamente apos a sua aplicacao, temos
xi(t)− xi(0)−Hieq =
∫ t
0
(Aixi(τ)+Biui(τ)) dτ (4.12)
Como x(0) = 0, obtemos exatamente o sistema alternativo (4.8)-(4.9), veja (GEROMEL;
DEAECTO; COLANERI, 2007). Alem disso, levando em conta que o sinal de controle (4.7)
se mantem constante dentro do intervalo de tempo definido por dois instantes de amostragens

4.2. Controle H2 53
sucessivos t ∈ [tk, tk+1) podemos obter o sistema discreto equivalente
xi[k + 1] = Aihxi[k]+Bihui[k], xi[0]=Hieq (4.13)
zi[k] = Cihxi[k]+Dihui[k] (4.14)
em que as matrizes (Aih, Bih, Cih, Dih) sao calculadas a partir das seguintes identidades
eFih =
[
Aih Bih
0 I
]
,
∫ h
0
eF′
itE ′iEieFitdt =
[
C ′ih
D′ih
] [
C ′ih
D′ih
]′
(4.15)
com as matrizes
Fi =
[
Ai Bi
0 0
]
, Ei =[
Ci Di
]
(4.16)
Esta descricao permite assegurar que o desempenho do sistema a tempo discreto (4.13)-(4.14)
seja identico aquele do sistema a tempo contınuo (4.8)-(4.9) sempre que a entrada de controle
for do tipo (4.3). Neste caso, a igualdade
∫ ∞
0
zi(t)′zi(t)dt =
∑
k∈N
zi(tk)′zi(tk) (4.17)
e preservada. Para maiores detalhes veja a Secao 2.5 desta dissertacao.
Definindo o vetor de estado aumentado ηi[k] = [xi[k]′ ui[k − 1]′]′ e utilizando o esforco de
controle ui[k] apresentado em (4.7), a dinamica do sistema em malha fechada torna-se
ηi[k + 1] = (Aiσ + BiσKi)ηi[k], ηi0 = Hieq (4.18)
zi[k] = (Ciσ +DiσKi)ηi[k] (4.19)
com Hi = [H ′i 0′]′ para todo i ∈ K. As matrizes indicadas sao
Aiσ =
[
Aih (1− δiσ)Bih
0 (1− δiσ)I
]
, Biσ =
[
δiσBih
δiσI
]
, Ciσ =
[
C ′ih
(1− δiσ)D′ih
]′
, Diσ =[
δiσDih
]
(4.20)
e as matrizes de ganho sao Ki = [Li Ki]. Note que o sistema em malha fechada e dado por
ηi[k + 1] =
[
Aih +BihLi BihKi
Li Ki
]
ηi[k] (4.21)
zi[k] =[
Cih +DihLi DihKi
]
ηi[k] (4.22)

4.2. Controle H2 54
quando o i-esimo sistema e escolhido pelo coordenador, ou seja, i = σ[k] e
ηi[k + 1] =
[
Aih Bih
0 I
]
ηi[k] (4.23)
zi[k] =[
Cih Dih
]
ηi[k] (4.24)
caso i 6= σ[k], o que deixa claro a importancia do coordenador. De fato para i = σ[k] sempre
e possıvel estabilizar o i-esimo sistema desde que o par (Aih, Bih) seja controlavel. Por outro
lado, os demais sistemas (4.23) sao instaveis pois nada e imposto sobre a Schur estabilidade de
Aih, ∀i ∈ K, e alem disso, ele possui varios autovalores unitarios. Logo, a regra de comutacao
e essencial para controlar esta classe de sistemas principalmente porque a funcao objetivo (4.5)
depende da saıda de todas as plantas LIT.
4.2.1 Criterio de desempenho
Considere o caso mais simples (4.18)-(4.19) com Ki dado para todo i ∈ K e a seguinte
realizacao em espaco de estado
ηi[k + 1] = Aiσηi[k], ηi[0] = ηi0 (4.25)
zi[k] = Ciσηi[k] (4.26)
em que Aij = Aij +BijKi, Cij = Cij +DijKi e o coordenador σ(·) e a unica variavel de projeto.
Adote a funcao de Lyapunov do tipo mınimo
V (ηi[k]) = minj∈K
∑
i∈K
ηi[k]′Pijηi[k] (4.27)
com Pij > 0 para todo (i, j) ∈ K×K a qual esta associada a regra de comutacao
σ(ηi[k]) = argminj∈K
∑
i∈K
ηi[k]′Pijηi[k] (4.28)
O Teorema 4.2.1, disponıvel em (SOUSA; GEROMEL; DEAECTO, 2015), apresenta as con-
dicoes de estabilidade e um custo garantido para este sistema.
Teorema 4.2.1 Considere que a matriz de Metzler Π ∈ M seja dada. Se existirem matrizes
Pij > 0 satisfazendo as desigualdades de Lyapunov-Metzler generalizadas
A′ij
(
∑
ℓ∈K
πℓjPiℓ
)
Aij − Pij < −C′ij Cij (4.29)

4.2. Controle H2 55
para todo (i, j) ∈ K×K, entao a regra de comutacao (4.28) assegura que o sistema em malha
fechada e globalmente assintoticamente estavel e satisfaz
∑
i∈K
∫ ∞
0
zi(t)′zi(t)dt < min
j∈K
∑
i∈K
η′i0Pijηi0 (4.30)
Prova: A prova esta disponıvel em (SOUSA; GEROMEL; DEAECTO, 2015).
Embora a prova esteja disponıvel em (SOUSA; GEROMEL; DEAECTO, 2015), devido a sua
importancia, ela sera repetida aqui em linhas gerais. De fato, considerando que para um
instante arbitrario t = tk temos σ[k] = j ∈ K e utilizando a funcao de Lyapunov (4.27) temos
V (ηi[k + 1]) = minℓ∈K
∑
i∈K
ηi[k]′A′
ijPiℓAijηi[k]
≤∑
i∈K
ηi[k]′A′
ij
(
∑
ℓ∈K
πℓjPiℓ
)
Aijηi[k]
< V (ηi[k])−∑
i∈K
zi[k]′zi[k] (4.31)
a primeira desigualdade decorre do fato de que cada coluna de Π e um vetor λ ∈ Λ, em que Λ
e o simplex unitario definido como
Λ =
λ ∈ RN : λi ≥ 0,
∑
i∈K
λi = 1
(4.32)
A segunda desigualdade vem de (4.29). Alem disso, levando em conta (4.17) e somando ambos
os lados de (4.31) para todo k ∈ N, obtemos
∑
i∈K
∫ ∞
0zi(t)
′zi(t)dt =∑
i∈K
∑
k∈N
zi[k]′zi[k]
<∑
k∈N
(V (ηi[k])− V (ηi[k + 1]))
< V (ηi0)
< minj∈K
∑
i∈K
η′i0Pijηi0 (4.33)
o que mostra a validade do custo garantido (4.30). Para Π dado, as condicoes sao LMIs e
podem ser resolvidas sem grandes dificuldades. Alem disso, para o caso de interesse, temos
N = 2 e, portanto, a matriz Π pode ser obtida atraves de busca unidimensional de apenas
dois parametros.
O proximo corolario apresenta um custo garantido H2 para o sistema (4.1)-(4.2). Este
custo decorre de (4.30) se lembrarmos que (4.1)-(4.2) com ui(tk) = ui[k], dado por (4.7), e

4.2. Controle H2 56
equivalente ao sistema (4.18)-(4.19).
Corolario 4.2.1 Considere que as condicoes do Teorema 4.2.1 sejam satisfeitas, a desigual-
dade
J2(σ) < minj∈K
N∑
i=1
tr(H′iPijHi) (4.34)
representa um custo garantido para o sistema (4.1)-(4.2).
Prova: A prova e simples e baseada no custo garantido (4.30). De fato, note que
N∑
i=1
nwi∑
q=1
∫ ∞
0
zqi (t)′zqi (t)dt =
N∑
i=1
nwi∑
q=1
∑
k∈N
zqi [k]′zqi [k]
<
nwi∑
q=1
(
minj∈K
N∑
i=1
η′i0Pijηi0
)
< minj∈K
N∑
i=1
nwi∑
q=1
(
e′qH′iPijHieq
)
< minj∈K
N∑
i=1
tr (H′iPijHi)
em que a primeira desigualdade e obtida de (4.30), a segunda decorre da propriedade de
operador mınimo, em que o mınimo da soma e menor ou igual a soma dos mınimos, provando,
assim o corolario proposto.
Neste ponto e importante observar que as matrizes Aij nao precisam ser Schur estaveis como
uma condicao necessaria para a factibilidade de (4.29). De fato, uma condicao necessaria e que
as matrizes√πjjAij sejam Schur estaveis e, portanto, como 0 ≤ πjj ≤ 1 nenhuma propriedade
de estabilidade e exigida de cada subsistema Aij.
4.2.2 Controle via realimentacao de estado
Considere o sistema mais geral (4.1)-(4.2), com Gi = 0, realimentado pela lei de con-
trole (4.7) e reescrito alternativamente como (4.18)-(4.19). O teorema a seguir retirado de
(SOUSA; GEROMEL; DEAECTO, 2015) generaliza os resultados anteriores para tratar do
projeto conjunto dos ganhos de realimentacao Ki e das matrizes Pij > 0 importantes para a
implementacao da regra de comutacao.
Teorema 4.2.2 Considere que a matriz de Metzler Π ∈ M seja dada. Existem matrizes
simetricas Pij > 0 satisfazendo (4.29) se, e somente se, existirem matrizes Rij ,Wijℓ, matrizes

4.3. Controle H∞ 57
Yi e Jij tais que as desigualdades
Rij • •AijRij Jij + J ′
ij −∑
ℓ∈K πℓjWijℓ •CijRij 0 I
> 0, i 6= j (4.35)
Rii • •AiiRii + BiiYi Jii + J ′
ii−∑
ℓ∈K πℓiWiiℓ •CiiRii +DiiYi 0 I
> 0 (4.36)
[
Wijℓ •J ′
ij Riℓ
]
> 0 (4.37)
sejam validas para todo (i, j, ℓ) ∈ K×K×K.
Prova: A prova esta disponıvel em (SOUSA; GEROMEL; DEAECTO, 2015).
De maneira a obter o menor limitante superior para o custo H2 definido em (4.5), o projeto
deve ser realizado a partir da solucao do seguinte problema de otimizacao
infRij ,Wijℓ,Jii,Yi
minj∈K
∑
i∈K
tr(H′iR−1
ij Hi) : (4.35)− (4.37)
(4.38)
que fornece os ganhos de realimentacao de estado Ki = YiR−1ii e as matrizes Pij = R−1
ij ,
(i, j) ∈ K×K importantes para a implementacao da regra.
4.3 Controle H∞
Considere novamente o sistema (4.1)-(4.2) com entrada exogena wi ∈ L2 nao-nula e trans-
mitida atraves de um canal de comunicacao com perıodo de amostragem h ≥ 0. Isto significa
que wi(t) e modelada como
wi(t) = wi(tk) = wik(t) = wi[k], ∀t ∈ [tk, tk+1) (4.39)
No presente contexto, este modelo e de nosso interesse pois pode representar ruıdos aditivos no
sinal de controle ou perturbacoes relativamente bem comportadas, como e o caso da influencia
do vento interferindo no controle dos pendulos identificados no capıtulo anterior. Note que,
como wi[k] e constante por partes, temos que
∫ ∞
0
wik(t)′wik(t)dt = h
∑
k∈N
wi[k]′wi[k] (4.40)

4.3. Controle H∞ 58
e, portanto, o sistema discretizado
xi[k + 1] = Aihxi[k]+Bihui[k] +Hihwi[k], xi[0] = 0 (4.41)
zi[k] = Cihxi[k]+Dihui[k] +Gihwi[k] (4.42)
obtido como em (4.15)-(4.16) mas com [Bih Hih] → Bih, [Dih Gih] → Dih em (4.15) e [Bi Hi] →Bi, [Di Gi] → Di em (4.16), permite obter a relacao
supwi(t)∈Ld2
∫∞
0zi(t)
′zi(t)dt∫∞
0wi(t)′wi(t)dt
= supwi∈Ld2
∑
k∈N zi[k]′zi[k]
h∑
k∈Nwi[k]′wi[k](4.43)
em que L2 e o conjunto de todas as trajetorias ξ(t) tal que∫∞
0ξ(t)′ξ(t)dt < ∞ e, analogamente,
Ld2 e o conjunto de todas as trajetorias ξ[k] tais que∑
k∈N ξ[k]′ξ[k] < ∞. Esta relacao indica
que o ındice de desempenho J∞(σ) se diferencia daquele obtido atraves do sistema a tempo
discreto (4.41)-(4.42) por um fator de h. Um ponto importante que deve ser mencionado e
que para uma entrada arbitraria w(t) ∈ L2, sem que ela seja modelada como em (4.39), temos
que
J∞(σ) ≤ supwi(t)∈L2
∑
i∈K
∫∞
0zi(t)
′zi(t)dt∑
i∈K
∫∞
0wi(t)′wi(t)dt
(4.44)
Para maiores detalhes a respeito da discretizacao e da relacao de custos (4.43) veja (SOUZA
et al., 2014). Como as entradas de interesse apresentam a estrutura (4.39) nosso objetivo e
encontrar um limitante superior para J∞(σ).
Utilizando o estado aumentado ηi[k] = [xi[k]′ ui[k−1]′]′ e o sinal de controle (4.7) obtemos
o sistema em malha fechada
ηi[k + 1] = (Aiσ + BiσKi)ηi[k] +Hiwi[k], ηi[0] = 0 (4.45)
zi[k] = (Ciσ +DiσKi)ηi[k] + Giwi[k] (4.46)
com as matrizes Aiσ,Biσ, Ciσ,Diσ ja definidas em (4.20), Hi = [H ′i 0
′]′ e Gi = Gi.
4.3.1 Criterio de desempenho
Considere primeiramente o caso mais simples em que Ki e dado para todo i ∈ K no sistema
(4.45)-(4.46). O proximo teorema apresenta um limitante superior para o custo J∞ do sistema.
Teorema 4.3.1 Considere que a matriz de Metzler Π ∈ M seja dada. Se existir Pij > 0 e

4.3. Controle H∞ 59
um escalar ρ > 0 satisfazendo as desigualdades de Riccati-Metzler generalizadas
Pij • • •0 ρI • •
(∑
ℓ∈K πℓjPiℓ
)
Aij
(∑
ℓ∈K πℓjPiℓ
)
Hi
(∑
ℓ∈K πℓjPiℓ
)
•Cij Gi 0 I
> 0 (4.47)
para todo (i, j) ∈ K×K, entao a regra de comutacao (4.28) assegura que o sistema em malha
fechada e globalmente assintoticamente estavel e satisfaz
J∞(σ) < ρ/h (4.48)
Prova: Considere que em um instante arbitrario de tempo t = tk a regra de comutacao
(4.28) fornece σ[k] = j ∈ K e que as desigualdades (4.47) sao satisfeitas. Logo, realizando o
complemento de Schur com relacao as duas ultimas linhas e colunas de (4.47) e organizando
o termos, obtemos
[
A′ijPπijAij −Pij •H′
iPπijAij H′iPπijHi
]
+
[
C′ij Cij •G ′iCij G ′
iGi − ρI
]
< 0 (4.49)
em que Pπij =∑
ℓ∈K πℓjPij . Da definicao da funcao de Lyapunov (4.27) segue
V (ηi[k + 1]) = minℓ∈K
∑
i∈K
[
ηi[k]
wi[k]
]′ [
A′ijPiℓAij •
H′iPiℓAij H′
iPiℓHi
][
ηi[k]
wi[k]
]
≤∑
i∈K
[
ηi[k]
wi[k]
]′ [
A′ijPπijAij •
H′iPπijAij H′
iPπijHi
][
ηi[k]
wi[k]
]
< V (ηi[k])−∑
i∈K
zi[k]′zi[k] + ρ
∑
i∈K
wi[k]′wi[k] (4.50)
em que a primeira desigualdade decorre do fato de que cada coluna de Π ∈ M e um vetor
λ ∈ Λ e a segunda desigualdade e obtida de (4.49) multiplicando a esquerda por [ηi[k]′ wi[k]
′] e
a direita pelo seu transposto. Note que o sistema e assintoticamente estavel pois a factibilidade
de (4.49) assegura que a desigualdade A′ijPπijAij−Pij < 0 e satisfeita para todo (i, j) ∈ K×K.
Assim, somando ambos os lados de (4.50) para todo k ∈ N obtemos
∑
k∈N
(V (ηi[k + 1])− V (ηi[k])) < −∑
k∈N
∑
i∈K
zi[k]′zi[k] + ρ
∑
k∈N
∑
i∈K
wi[k]′wi[k] (4.51)
como∑
k∈N (V (ηi[k + 1])− V (ηi[k])) = V (ηi[∞])−V (ηi[0]) = 0, pois a estabilidade assintotica

4.3. Controle H∞ 60
do sistema implica em V (ηi[∞]) = 0 e V (ηi[0]) = 0 pois as condicoes iniciais sao nulas, temos
∑
i∈K
∑
k∈N
zi[k]′zi[k] < ρ
∑
i∈K
∑
k∈N
wi[k]′wi[k], ∀wi ∈ Ld2
< ρ supwi∈Ld2
∑
i∈K
∑
k∈N
wi[k]′wi[k]
e, portanto,
supwi∈Ld2
∑
i∈K
∑
k∈N zi[k]′zi[k]
∑
i∈K
∑
k∈N wi[k]′wi[k]< ρ (4.52)
Levando em conta a relacao apresentada em (4.43), a desigualdade (4.48) e satisfeita con-
cluindo, assim, a prova.
4.3.2 Controle via realimentacao de estado
Considere agora o sistema mais geral (4.1)-(4.2), realimentado pela lei de controle (4.7)
e reescrito alternativamente como (4.45)-(4.46). O teorema a seguir generaliza os resultados
anteriores para tratar do projeto conjunto dos ganhos de realimentacao Ki e das matrizes
Pij > 0 importantes para a implementacao da regra de comutacao.
Teorema 4.3.2 Considere que a matriz de Metzler Π ∈ M seja dada. Existem matrizes
simetricas Pij > 0 satisfazendo (4.47) se, e somente se, existirem matrizes Rij ,Wijℓ, matrizes
Yi, Jij e um escalar ρ > 0 tais que as desigualdades
Rij • • •0 ρI • •
AijRij Hi Jij + J ′ij −
∑
ℓ∈K πℓjWijℓ •CijRij Gi 0 I
> 0, i 6= j (4.53)
Rii • • •0 ρI • •
AiiRii + BiiYi Hi Jii + J ′ii −
∑
ℓ∈K πℓjWiiℓ •CiiRii +DiiYi Gi 0 I
> 0 (4.54)
[
Wijℓ •Jij Riℓ
]
> 0 (4.55)
sejam validas para todo (i, j, ℓ) ∈ K×K×K.
Prova: Para a prova, considere que as desigualdades (4.47) sejam satisfeitas para o sistema em
malha fechada. Multiplicando ambos os lados de (4.47) por diagP−1ij , I,
(∑
ℓ∈K πℓjPiℓ
)−1, I

4.3. Controle H∞ 61
e definindo Rij = P−1ij , obtemos
Rij • • •0 ρI • •
AijRij Hi
(∑
ℓ∈K πℓjR−1iℓ
)−1 •CijRij Gi 0 I
> 0 (4.56)
para (i, j) ∈ K × K. Agora, utilizando o Complemento de Schur em (4.55) obtemos Wijℓ >
J ′ijR−1
iℓ Jij o que nos permite concluir que
(
∑
ℓ∈K
πℓjR−1iℓ
)−1
≥ Jij + J ′ij −
∑
ℓ∈K
πℓjJ ′ij R−1
iℓ Jij
> Jij + J ′ij −
∑
ℓ∈K
πℓjWijℓ (4.57)
Logo a desigualdade (4.56) com Jij+J ′ij−∑
ℓ∈K πℓjWijℓ no lugar de(∑
ℓ∈K πℓjR−1iℓ
)−1assegura
a validade do Teorema 4.3.1 para o sistema em malha fechada. Note que, para i 6= j as matrizes
(Aij, Cij) nao dependem do ganho de realimentacao de estado e, portanto, a desigualdade
(4.53) pode ser utilizada diretamente. Contudo, para i = j o problema e nao-convexo devido
ao produto de variaveis matriciais, sendo necessaria a mudanca de variavel Yi = KiRii, de
forma a obter a versao linearizada (4.54).
Para a necessidade, devemos mostrar que a factibilidade das desigualdades (4.56), implica
na validade de (4.53). Desta forma, escolhendo Jij =(∑
ℓ∈K πℓjR−1iℓ
)−1e Wijℓ = J ′
ijR−1iℓ Jij +
ǫI com ǫ > 0, temos
(
∑
ℓ∈K
πℓjR−1iℓ
)−1
= Jij + J ′ij −J ′
ij
(
∑
ℓ∈K
πℓjR−1iℓ
)
Jij (4.58)
= Jij + J ′ij −
∑
ℓ∈K
πℓjWijℓ + ǫI (4.59)
o que indica que se as condicoes (4.56) sao satisfeitas, (4.53) tambem sao para um ǫ > 0
arbitrariamente pequeno. A prova do teorema e assim concluıda.
De maneira a obter o menor limitante superior para o custo H∞ definido em (4.6), o projeto
deve ser realizado a partir da solucao do seguinte problema de otimizacao convexa
infRij ,Wijℓ,Jij ,Yi
ρ : (4.53)− (4.55) (4.60)
que fornece os ganhos de realimentacao de estado Ki = YiR−1ii e as matrizes Pij = R−1
ij ,
(i, j) ∈ K×K importantes para a implementacao da regra.

4.4. Resultados experimentais 62
A secao seguinte trata da validacao experimental da teoria desenvolvida neste capıtulo.
4.4 Resultados experimentais
Nesta secao, a estrategia de controle H2 e H∞ e implementada para o controle conjunto
dos dois pendulos invertidos ja identificados no capıtulo anterior. O projeto deve ser realizado
cooperativamente compartilhando o mesmo canal de comunicacao, ou seja, enquanto uma
estacao de trabalho recebe o sinal de controle atualizado, a outra mantem o sinal previamente
recebido sem atualizacao.
O modelo e definido por (4.1)-(4.2), com vetor de estados xi = [xci θi xci θi]′, entrada
de controle ui = Vmi e matrizes dinamica fornecidas no Capıtulo 3, a saber, (3.47)-(3.48),
que representam a estacao de trabalho E.IP02 No1 e E.IP02 No2, respectivamente. Todas as
simulacoes e rotinas numericas foram realizadas em um computador com sistema operacional
Windows 10 Pro utilizando o software MATLABr R2015b 64-bits, com o auxılio do LMILab
e Simulink.
4.4.1 Controle H2
Para o controle cooperativo H2, adota-se o sistema (4.8)-(4.9) com condicao inicial definida
pelas matrizes
H1 =
0
π/18
0
0
, H2 =
0
−π/12
0
0
(4.61)
A saıda controlada e dada por
zi =[
xci γθi (γui/10)]′
(4.62)
com i = 1, 2 e γ = 0.3.
O sistema global foi discretizado utilizando as relacoes definidas por (4.15)-(4.16) para um
perıodo de amostragem h = 10 [ms]. Resolvemos o problema de otimizacao convexa descrito
pelo Teorema 4.2.2, considerando uma matriz de Metzler da forma
Π =
[
p 1− q
1− p q
]
(4.63)
com os escalares (p, q) variando na caixa [0, 1]× [0, 1] com passo de 0.1. A solucao otima, do
problema (4.38), correspondente a um custo garantido de 0.0622 obtido para (p, q) = (0, 0),

4.4. Resultados experimentais 63
forneceu os ganhos de realimentacao de estado
L1 =[
28.9812 −94.4876 27.8288 −19.3330]
L2 =[
27.9916 −71.6480 24.4713 −10.4432]
com K1 = K2 ≈ 0 e as matrizes Pij , (i, j) ∈ K × K importantes para a implementacao da
regra de comutacao. Esta estrategia de controle foi implementada nas plantas do fabricante
Quanser, E.IP02 No 1 e E.IP02 No 2, que opera integrado ao Simulink MATLABr. Os ensaios
foram repetidos 20 vezes e os resultados estao apresentados na Figura 4.1.
Nesta figura, os quatro primeiros graficos correspondem as trajetorias xci, θi, i = 1, 2.A regiao sombreada representa um desvio padrao da media das repeticoes, as linhas traceja-
das em azul e vermelho representam as respostas de um dos ensaios relacionadas ao sistema
E.IP02 No 1 e E.IP02 No 2, respectivamente. A linha contınua em preto representa a resposta
obtida via simulacao numerica. A Figura 4.1 tambem exibe o esforco de controle ui[k] e a
regra de comutacao (coordenador σ[k]) relacionado ao mesmo ensaio escolhido anteriormente,
para i = 1, 2. Podemos observar pelo destaque apresentado no grafico de u[k] a natureza
cooperativa do controlador, uma vez que u1[k] e u2[k] nao sofrem alteracoes simultaneas, ou
seja, quando u1[k] e atualizado u2[k] permanece constante e vice-versa. A implementacao
capturou corretamente a dinamica do sistema com comutacao. A resposta e satisfatoria com-
parada a simulacao computacional. A pequena diferenca observada na variavel xc2 deve-se a
baixa inercia do sistema E.IP02 No 2 comparado ao sistema E.IP02 No 1, o que o deixa mais
suscetıvel as nao-linearidades que nao foram levadas em conta durante a modelagem como, por
exemplo, o atrito de Coulomb, a folga no conjunto pinhao-cremalheira e a influencia dos cabos
do encoder e da alimentacao. Mesmo assim, este fator causa uma oscilacao muito baixa, com
amplitude aproximada de 3 [cm]. E importante ressaltar a robustez da estrategia de controle
face a diversos fenomenos e incertezas que foram ignoradas durante a modelagem do sistema.

4.4. Resultados experimentais 64
0 1 2 3 4-0.2
-0.15
-0.1
-0.05
0
0.05
Região de variânciaEnsaio específicoSimulação
xc1[m
]
0 1 2 3 4-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
Região de variânciaEnsaio específicoSimulação
θ1[rad]
0 1 2 3 4-0.05
0
0.05
0.1
0.15
0.2
Região de variânciaEnsaio específicoSimulação
xc2[m
]
tempo [s]0 1 2 3 4
-0.3
-0.2
-0.1
0
0.1
0.2
Região de variânciaEnsaio específicoSimulação
θ2[rad]
tempo [s]
0 0.5 1 1.5 2 2.5 3 3.5 4-20
-10
0
10
20
30
Ensaio específico E. IP02 Nº 1Ensaio específico E. IP02 Nº 2
0.35 0.45-2
2
0 0.5 1 1.5 2 2.5 3 3.5 4
1
2 Regra de comutação
u[V
]σ
tempo [s]
Figura 4.1: Resposta do conjunto carro-motor para controle H2

4.4. Resultados experimentais 65
x
y
Fc
Fv
Mc
lp
Mp, Jp
θ
xc
Figura 4.2: Diagrama do conjunto carro-pendulo com influencia do vento
4.4.2 Controle H∞
Para o controle cooperativo H∞, adota-se o sistema (4.1)-(4.2). Neste caso, leva-se em
consideracao uma entrada exogena wi ∈ L2 constante por partes, com perıodo de amostragem
h > 0. Para os sistemas em estudo, a forca de arrasto produzida por uma rajada de vento de
intensidade constante e fluxo laminar pode ser aproximada como uma entrada exogena deste
tipo, pois e representada por um sinal de onda quadrada.
Para validar o controle H∞ consideramos que um dos pendulos das estacoes de trabalho
E.IP02 e submetido a uma rajada de vento concentrada na ponta da sua haste, como indicado
no diagrama de forcas da Figura 4.2, em que Fv representa a forca de arrasto causada pelo
movimento do ar. O modelo em espaco de estado desprezando, por conveniencia, o ındice i e
dado por
(Mp +Meq) xc + Beq xc −Mp lp cos(θ) θ +Mp lp sen(θ) θ2 + Fv = Aeq Vm (4.64)
(Mp l2p + Jp) θ +Bp θ −Mp lp cos(θ) xc −Mp lp g sen(θ)− 2 lp Fv cos(θ) = 0 (4.65)
Considerando a mesma escolha de vetor de estados x = [xc θ xc θ]′, apos linearizar o sistema
(4.64)-(4.65), obtemos a representacao em espaco de estado
xi(t) = Aixi(t) +Biui(t) +Hiwi(t), xi(0) = 0 (4.66)

4.4. Resultados experimentais 66
em que as matrizes Ai e Bi sao as mesmas dadas em (3.20)-(3.21), com valores numericos em
(3.47) e (3.48), e as matrizes Hi sao dadas por
H1 =1
JT
0
0
Mp l2p − Jp
Mp lp + 2Meq lp
=
0
0
0.3106
21.0178
(4.67)
H2 =1
JT
0
0
Mp l2p − Jp
Mp lp + 2Meq lp
=
0
0
0.3813
72.8588
(4.68)
Definindo a saıda controlada como zi = [xci γθi (5γui/30)]′, i = 1, 2 com γ = 0.3 e discre-
tizando o sistema com h = 50 [ms], resolvemos o problema de otimizacao convexa (4.60) rela-
cionado as condicoes do Teorema 4.3.2 para a matriz de Metzler (4.63) com (p, q) = (0, 0.6354)
determinado por busca unidimensional e obtivemos os seguintes ganhos de realimentacao de
estado
L1 =[
31.8872 −104.9489 30.5089 −21.5664]
L2 =[
175.4744 −321.8152 120.4072 −47.5117]
com K1 = K2 ≈ 0 e as matrizes Pij , (i, j) ∈ K × K importantes para a implementacao da
regra de comutacao, junto ao custo garantido ρ = 8.8731.
Compressor de Ar
E.IP02 no1 E.IP02 n
o2
Figura 4.3: Montagem do experimento de perturbacao por rajada de vento

4.4. Resultados experimentais 67
Implementamos esta estrategica de controle cooperativo no sistema cuja foto da montagem
no laboratorio esta apresentada na Figura 4.3. O compressor de ar, indicado na figura, e o
responsavel pela rajada de vento que perturba somente a estacao E.IP02 No 1. Como com-
pressor, utilizamos um aspirador de po na funcao reversa com 1400 [W] de potencia. A sua
saıda de ar foi posicionada na posicao horizontal e a aproximadamente 13 [cm] da ponta do
pendulo. Alem disso, de forma a ter precisao no momento de aplicacao da perturbacao, im-
plementamos um circuito temporizador simples utilizando um rele eletromagnetico de contato
reversıvel CP1CR-DC05V comandado por um microcontrolador FRDM-KL25Z para ligar e
desligar o aspirador. Foram realizados 20 repeticoes de um ensaio de 30 [s] de duracao, em
que o compressor foi programado para ligar apenas durante o intervalo t ∈ [5, 15] [s].
Para saber a intensidade da forca Fv calculamos o valor medio da inclinacao θ1 = −2.7617
do pendulo da E.IP02 No 1 durante os ultimos 5 segundos em que a perturbacao atuava no
sistema em todos os ensaios. Resolvendo entao a equacao (4.65) para Fv e considerando os
termos derivativos nulos, obtivemos o valor de Fv = 54.4 [mN]. Esta estrategia de controle foi
implementada nas plantas do fabricante Quanser, E.IP02 No 1 e E.IP02 No 2. Os resultados
estao apresentados na Figura 4.4.
Nesta figura, os dois primeiros graficos correspondem as trajetorias xc1(t) e θ1(t) enquanto
os dois abaixo correspondem as de xc2(t) e θ2(t). A regiao sombreada representa um desvio
padrao em relacao a media, considerando as 20 repeticoes realizadas, e as linhas em azul e
vermelho correspondem as medidas de um ensaio especıfico. A Figura 4.4 tambem exibe a regra
de comutacao (coordenador σ[k]) e o esforco de controle u[k] referente ao ensaio escolhido para
cada um dos pendulos. Nota-se que, para a E.IP02 No1, a influencia da perturbacao alterou
a posicao de equilıbrio, tanto para a variavel xc1(t) quanto para θ1(t) enquanto a E.IP02
No2 mantem-se suficientemente proxima a posicao vertical desejada. Apos o efeito cessar,
ambas tendem a voltar para a origem como esperado. As oscilacoes observadas durante o
regime permanente nas figuras sao consideradas aceitaveis tendo em vista a intensidade da
perturbacao envolvida. Note que, o coordenador σ[k] mostra em qual sistema a estrutura de
controle esta atualizando o sinal, enquanto mantem o outro constante respeitando o intervalo
de h = 50 [ms]. E importante ressaltar a robustez da estrategia de controle face a diversos
fenomenos e incertezas e, ademais, e valido notar que o intervalo de amostragem foi cinco vezes
maior que o utilizado para a implementacao pratica do caso H2, reforcando assim o sucesso
da tecnica de controle proposta.

4.4. Resultados experimentais 68
0 5 10 15 20 25 30
-0.3
-0.2
-0.1
0
0.1
0.2Região de variância do ensaioAmostra do ensaio
xc1[m
]
0 5 10 15 20 25 30
-0.1
-0.05
0
0.05
0.1Região de variância do ensaioAmostra do ensaio
θ1[rad]
0 5 10 15 20 25 30
-0.3
-0.2
-0.1
0
0.1
0.2
Região de variância do ensaioAmostra do ensaio
xc2[m
]
tempo [s]0 5 10 15 20 25 30
-0.1
-0.05
0
0.05
0.1Região de variância do ensaioAmostra do ensaio
θ2[rad]
tempo [s]
0 5 10 15 20 25 30-5
0
5
10 Ensaio específico E. IP02 Nº1Ensaio específico E. IP02 Nº 2
4.8 5 5.2 5.4 5.6-4
-2
0
2
4
0 5 10 15 20 25 30
1
2 Regra de comutação
u[V
]σ
tempo [s]
Figura 4.4: Resposta do conjunto carro-motor para controle H∞

4.5. Consideracoes finais 69
4.5 Consideracoes finais
Neste capıtulo, apresentamos os principais resultados desta dissertacao. Primeiramente,
obtivemos as condicoes H2 e H∞ relacionadas ao projeto de controle cooperativo de diversos
sistemas LIT. Estes resultados foram experimentalmente validados ao realizar o controle si-
multaneo de duas estacoes de trabalho, cada uma delas correspondentes ao sistema que foi
modelado e identificado no capıtulo anterior. Foram realizados dois experimentos, um relaci-
onado ao controle H2 e o outro ao controle H∞. Neste ultimo, a perturbacao foi representada
por uma rajada de vento de intensidade constante e fluxo laminar produzida por um compres-
sor de ar. As medidas obtidas deixaram claro a validade da teoria e a eficiencia do metodo de
controle proposto.

70
CAPITULO 5
Conclusoes e Perspectivas
Neste trabalho, tratamos de um tema bastante atual, relacionado ao controle atraves da
rede de comunicacao, levando em conta limitacao da largura de faixa do canal de comunica-
cao. Mais especificamente, propusemos uma estrategia dinamica de distribuicao dos recursos
da rede, representada matematicamente por uma regra de comutacao, responsavel por esco-
lher a cada intervalo de tempo, qual sistema LIT deve receber o sinal de controle atualizado,
enquanto que os demais guardam a informacao previamente recebida. O modelo geral e des-
crito por sistemas a tempo contınuo com dados amostrados, cada um deles representado por
um sistema discreto equivalente, cuja saıda contem a mesma norma L2 da saıda do sistema
a tempo contınuo correspondente. Utilizando os modelos discretos, obtivemos condicoes H2 e
H∞ descritas em termos de desigualdades de Lyapunov ou Riccati-Metzler generalizadas para
o controle cooperativo de varios sistemas LIT, obtendo como resultado um conjunto de ganhos
de realimentacao de estado e uma regra de comutacao que asseguram estabilidade e um de-
sempenho garantido H2 ou H∞ para o conjunto. Aplicamos a tecnica de controle desenvolvida
em um sistema real composto de duas estacoes de trabalho IP02 da empresa Quanser que
consistem de um pendulo invertido, acoplado a um carro que se move sobre um trilho apos ser
atuado pela aplicacao de uma tensao no seu motor de corrente contınua. A ideia e obter um
sinal de controle adequado para manter ambos os pendulos na posicao vertical para cima e os
carros na origem. O sistema foi modelado e seus parametros foram devidamente identificados
atraves de tecnicas simples de identificacao de sistemas. Os resultados experimentais obtidos
mostram a validade da teoria e ilustram a eficiencia da tecnica de controle obtida.
Os estudos realizados durante este perıodo resultaram nos seguintes artigos cientıficos:
• J. L. Luz Netto, L. N. Egidio, J. V. Ferreira, G. S. Deaecto, “Controle cooperativo com
comutacao H2: Implementacao em pendulos invertidos via rede de comunicacao”, Anais
do Simposio Brasileiro de Automacao Inteligente, pp. 171–176, Porto Alegre - RS, 2017.
• L. N. Egidio, J. L. Luz Netto, G. S. Deaecto, “Controle cooperativo H∞ via rede de
comunicacao’, Anais do Congresso Brasileiro de Automatica, submetido, Joao Pessoa -

71
PB, 2018.
• L. N. Egidio, J. L. Luz Netto, G. S. Deaecto, “H∞ cooperative switching control in
networked control systems”, Proc. of the IEEE Conference on Decision and Control,
submitted, 2018.
Como perspectivas para trabalhos futuros podemos enfatizar a generalizacao do controle
cooperativo aqui desenvolvido para o caso de realimentacao de saıda, incluindo no modelo da
rede outras restricoes tıpicas, como por exemplo, a robustez com relacao a perda de pacotes e a
possibilidade de ocorrencia de atrasos na transmissao, deixando o sistema ainda mais proximo
de um modelo real.

72
Bibliografia
BURDEN, R. L.; FAIRES, J. D. Numerical analysis. Brooks/Cole, USA, 2001.
CHEN, T.; FRANCIS, B. A. Optimal sampled-data control systems. [S.l.]: Springer Science& Business Media, 2012.
COLANERI, P.; GEROMEL, J. C.; LOCATELLI, A. Control Theory and Design: AnRH2 and RH∞ Viewpoint. [S.l.]: Academic press, 1997.
DAI, S.; LIN, H.; GEE, S. S. A switched system approach to scheduling of networkedcontrol systems with communication constraints. Proc. of the IEEE Conference on Decisionand Control, p. 4991–4996, 2009.
DECARLO, R. A.; BRANICKY, M. S.; PETTERSSON, S.; LENNARTSON, B.Perspectives and results on the stability and stabilizability of hybrid systems. Proc. of theIEEE, v. 88, p. 1069–1082, 2000.
DONKERS, M. C. F.; HETEL, L.; HEEMELS, W. P. M. H.; WOUW, N. van de;STEINBUCH, M. Stability analysis of networked control systems using a switched linearsystems approach. Hybrid Systems: Computation and Control–Lecture Notes in ComputerScience, v. 5459, p. 150–164, 2009.
EGIDIO, L. N.; LUZ NETTO, J. L.; DEAECTO, G. S. Controle cooperativo H∞ via redede comunicacao. Anais do Congresso Brasileiro de Automatica, Joao Pessoa - PB, 2018.Submetido.
EGIDIO, L. N.; LUZ NETTO, J. L.; DEAECTO, G. S. H∞ cooperative switching controlin networked systems. Proc. of the IEEE Conference on Decision and Control, 2018.Submitted.
FIACCHINI, M.; GIRARD, A.; JUNGERS, M. On the stabilizability of discrete-timeswitched linear systems: Novel conditions and comparisons. IEEE Transactions onAutomatic Control, v. 61, p. 1181–1193, 2016.
FIACCHINI, M.; JUNGERS, M. Necessary and sufficient condition for stabilizability ofdiscrete-time linear switched systems: A set-theory approach. Automatica, v. 50, p. 75–83,2014.
GALBUSERA, L.; BOLZERN, P.; DEAECTO, G. S.; GEROMEL, J. C. State and outputfeedback H∞ control of time-delay switched linear systems. International Journal of Robustand Nonlinear Control, v. 22, p. 1674–1690, 2012.

BIBLIOGRAFIA 73
GEROMEL, J. C.; COLANERI, P. Stability and stabilization of discrete time switchedsystems. International Journal of Control, v. 79, p. 719–728, 2006.
GEROMEL, J. C.; DEAECTO, G. S.; COLANERI, P. Multi-objective H2 control viaswitched linear systems. IFAC Proceedings Volumes, v. 40, p. 238–243, 2007.
GEROMEL, J. C.; DEAECTO, G. S.; DAAFOUZ, J. Suboptimal switching controlconsistency analysis for switched linear systems. IEEE Transactions on Automatic Control,v. 58, p. 1857–1861, 2013.
GEROMEL, J. C.; KOROGUI, R. H. Controle linear de sistemas dinamicos: Teoria,ensaios praticos e exercıcios. [S.l.]: Editora Edgard Blucher, 2001.
GOLUB, G. H.; LOAN, C. F. V. Matrix computations. [S.l.]: JHU Press, 2012. v. 3.
HESPANHA, J. P.; MORSE, A. S. Switching between stabilizing controllers. Automatica,v. 38, p. 1905–1917, 2002.
HESPANHA, J. P.; NAGHSHTABRIZI, P.; XU, Y. A survey of recent results in networkedcontrol systems. Proc. of the IEEE, v. 95, p. 138–162, 2007.
KHALIL, H. K. Nonlinear systems, 3rd. New Jewsey, Prentice Hall, 2002.
LIBERZON, D. Switching in Systems and Control. [S.l.]: Springer Science & BusinessMedia, 2012.
LUZ NETTO, J. L. Implementacao pratica do controle multiobjetivo H2 em um penduloinvertido atraves de rede de comunicacao. Trabalho de Graduacao, FEM - UNICAMP,2016.
LUZ NETTO, J. L.; EGIDIO, L. N.; FERREIRA, J. V.; DEAECTO, G. S. Controlecooperativo com comutacao H2: Implementacao em pendulos invertidos via rede decomunicacao. Anais do XIII Simposio Brasileiro de Automacao Inteligente, Porto Alegre -RS, p. 171–176, 2017.
MAZO, M.; TABUADA, P. On event-triggered and self-triggered control oversensor/actuator networks. Proc. of the IEEE Conference on Decision and Control, p.435–440, 2008.
MENG, X.; CHEN, T. Event triggered robust filter design for discrete-time systems. IETControl Theory & Applications, v. 8, p. 104–113, 2014.
OLIVEIRA, M. C. Controle de sistemas lineares baseado nas desigualdades matriciaislineares. Tese de Doutorado, FEEC - UNICAMP, 1999.
QUANSER. User manual, IP02 Linear Inverted Pendulum and IP02 Linear PendulumGantry Experiments. 2012.
SHORTEN, R.; WIRTH, F.; MASON, O.; WULFF, K.; KING, C. Stability criteria forswitched and hybrid systems. SIAM review, v. 49, p. 545–592, 2007.

BIBLIOGRAFIA 74
SLOTINE, J.-J. E.; LI, W. Applied nonlinear control. [S.l.]: Prentice hall Englewood Cliffs,NJ, 1991. v. 199.
SOUSA, T. T. de; GEROMEL, J. C.; DEAECTO, G. S. Switching control resourceallocation in networked control systems. Proc. of the IEEE Conference on Decision andControl, p. 6862–6867, 2015.
SOUZA, M. Controle de sistemas dinamicos atraves de redes de comunicacao. Dissertacaode Mestrado, FEEC - UNICAMP, 2012.
SOUZA, M.; DEAECTO, G. S.; GEROMEL, J. C.; DAAFOUZ, J. Self-triggered linearquadratic networked control. Optimal Control Applications and Methods, v. 35, p. 524–538,2014.
SUN, Z. Switched linear systems: control and design. [S.l.]: Springer Science & BusinessMedia, 2006.
WANG, F.; LIU, D. Networked Control Systems: Theory and Applications. London,England: Springer-Verlag, 2008.
ZHANG, W.; HU, J.; ABATE, A. Infinite-horizon switched LQR problems in discrete time:A suboptimal algorithm with performance analysis. IEEE Transactions on AutomaticControl, v. 57, p. 1815–1821, 2012.