joão oliveira - fenix.tecnico.ulisboa.pt · 6.4 rotores em movimento ... a figura 1.6 representa...
TRANSCRIPT

João Oliveira
Estabilidade de VooConteúdo das apresentações das aulas
Versão de 24 de Novembro de 2014

Conteúdo
1 Conceitos introdutórios e notação 11.1 Equilíbrio e estabilidade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2 Referenciais e convenções . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.3 Características geométricas das asas . . . . . . . . . . . . . . . . . . . . . . . 31.4 Resultantes das forças aerodinâmicas . . . . . . . . . . . . . . . . . . . . . . . 51.5 Coeficiente de sustentação e ângulo de ataque . . . . . . . . . . . . . . . . . 6
2 Equilíbrio, Estabilidade e Controlo Longitudinais 142.1 Voo de uma asa: equilíbrio e estabilidade . . . . . . . . . . . . . . . . . . . . 142.2 Sustentação e momento de picada de uma aeronave . . . . . . . . . . . . . . 192.3 Sustentação e momento de picada em função do ângulo de ataque . . . . 262.4 Equilíbrio, Estabilidade e Controlo Longitudinais . . . . . . . . . . . . . . . . 30
3 Estabilidade com Manche Livre e Forças de Controlo 383.1 Momento de charneira de superfície de controlo . . . . . . . . . . . . . . . . 383.2 Sustentação e momento de picada com manche livre . . . . . . . . . . . . . 403.3 Compensadores e equilíbrio com manche livre . . . . . . . . . . . . . . . . . 433.4 Equilíbrio com deflexão do compensador . . . . . . . . . . . . . . . . . . . . . 443.5 Forças de Controlo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
4 Efeitos de superfícies hiper-sustentadoras e da propulsão na estabilidadelongitudinal 494.1 Influência de superfícies hiper-sustentadoras . . . . . . . . . . . . . . . . . . 494.2 Influência da propulsão no equilíbrio e na estabilidade . . . . . . . . . . . . 51
5 Estabilidade Lateral-Direccional 545.1 Estabilidade direccional . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 545.2 Estabilidade lateral . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
6 Equações do Movimento 686.1 Referenciais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 686.2 Ângulos de Euler e matrizes de rotação . . . . . . . . . . . . . . . . . . . . . . 696.3 Equações de Euler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 746.4 Rotores em movimento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 766.5 Sistemas de eixos do corpo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
i

7 Estados Estacionários e Manobras 807.1 Forças e momentos aplicados a uma aeronave . . . . . . . . . . . . . . . . . 807.2 Estados estacionários longitudinais . . . . . . . . . . . . . . . . . . . . . . . . 847.3 Estados estacionários laterais . . . . . . . . . . . . . . . . . . . . . . . . . . . . 877.4 Manobras . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 887.5 Manobra de descida-subida simétrica . . . . . . . . . . . . . . . . . . . . . . . 887.6 Manobra de Viragem Estacionária . . . . . . . . . . . . . . . . . . . . . . . . . 95
8 Teoria para Pequenas Perturbações 998.1 Definição do estado estacionário . . . . . . . . . . . . . . . . . . . . . . . . . . 998.2 Linearização das equações . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1018.3 Forma geral das equações . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
9 Derivadas de Estabilidade 1069.1 Relações entre derivadas de estabilidade dimensionais e adimensionais . 1069.2 Derivadas relativas ao movimento longitudinal . . . . . . . . . . . . . . . . . 1129.3 Derivadas relativas ao movimento lateral . . . . . . . . . . . . . . . . . . . . . 119
10 Estabilidade Dinâmica Longitudinal 12910.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12910.2 Sistemas de equações diferenciais ordinárias de 1ª ordem . . . . . . . . . . 13010.3 Modos longitudinais: características típicas . . . . . . . . . . . . . . . . . . . 13410.4 Modos longitudinais aproximados . . . . . . . . . . . . . . . . . . . . . . . . . 14410.5 Teoria Geral da Estabilidade Longitudinal Estática . . . . . . . . . . . . . . . 15010.6 Efeito da posição do centro de massa . . . . . . . . . . . . . . . . . . . . . . . 15110.7 Efeito do Vento nos Modos Longitudinais . . . . . . . . . . . . . . . . . . . . 15410.8 Modos longitudinais em atmosferas estratificadas . . . . . . . . . . . . . . . 157
11 Estabilidade Dinâmica Lateral 16011.1 Modos laterais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16011.2 Modos laterais aproximados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 168
Bibliografia 174
ii

Capítulo 1
Conceitos introdutórios enotação
1.1 Equilíbrio e estabilidade
O nosso objectivo será analisar estados de equilíbrio do voo de aeronaves e a suaestabilidade. Comecemos pois por recordar as noções de equilíbrio e estabilidade deum sistema.
Um sistema num estado de equilíbrio permanece nesse estado se não houver per-tubações pela acção de forças ou momentos. Habitualmente, a condição de equilíbriomecânico de um sistema é ∑
~F = 0∑~M = 0
A estabilidade de um estado de equilíbrio pode ser estática ou dinâmica. Relativa-mente à estabilidade estática,
• um estado de equilíbrio é estável se o sistema voltar ao estado de equilíbrio apósdele ser afastado;
• um estado de equilíbrio é instável se o sistema se continuar a afastar do estadode equilíbrio após o afastamento inicial;
• um estado de equilíbrio é neutro se após um afastamento inicial, o sistema nãotende nem a retornar ao equilíbrio nem a dele se afastar.
A Estabilidade dinâmica de um estado de equilíbrio diz respeito ao modo como osistema evolui depois de afastado do estado de equilíbrio: um sistema dinamicamenteestável tende assimpoticamente para o estado de equilíbrio, enquanto que um sistemadinamicamente instável sofre oscilações com amplitude crescente ou afasta-se cadavez mais da posição de equilíbrio.
1

Equilíbrio Estável Equilíbrio Instável Equilíbrio Neutro
Figura 1.1: Estabilidade estática do equilíbrio.
0.5 1.0 1.5 2.0 2.5 3.0
-0.5
0.5
1.0
Equilíbrio dinamicamente estável
0.5 1.0 1.5 2.0 2.5 3.0
-2
2
4
Equilíbrio dinamicamente instável
Figura 1.2: Estabilidade dinâmica do equilíbrio.
1.2 Referenciais e convenções
Para se poder analisar o movimento de uma aeronave é necessário de definir os re-ferenciais nos quais a análise será realizada. Considerar-se-á como referencial inercialum referencial ligado à Terra. Os efeitos de curvatura da Terra serão desprezados e aforça gravítica terá sempre a direcção vertical.
Na figura 1.3 representa-se o referencial ligado à aeronave. Os eixos estão definidosde forma que
• Cxz: é o plano de simetria
• Cx: ao longo da fuselagem
• Cz: «para baixo»
• Cy: perpendicular ao plano de simetria, formando triedro directo com os outrosdois eixos
As componentes segundo x,y, z da velocidade linear ~v são designadas por ~v =(u,v,w). As componentes da velocidade angular são ~ω = (p, q, r), em que:
• p: velocidade angular de rolamento (roll)
• q: velocidade angular de picada (pitch)
• r : velocidade angular de guinada (yaw)
As componentes segundo x,y, z das forças aplicadas à aeronave serão designadassimplesmente por ~F = (X, Y ,Z), enquanto que as componentes dos momentos são~M = (L,M,N), em que
2

Figura 1.3: Sistema de eixos ligado à aeronave.
• L: momento de rolamento
• M : momento de picada
• L: momento de guinada
1.3 Características geométricas das asas
1.3.1 Planta da asa
Para uma asa de planta rectangular (Figura 1.4), define-se
• c: corda (chord)
• b: envergadura (span)
• A: alongamento (aspect ratio)
• S: área da asa (em planta)
Figura 1.4: Asa de planta rectangular
3
Note-se que o alongamento é definido por:
A = bc= b
2
S. (1.1)
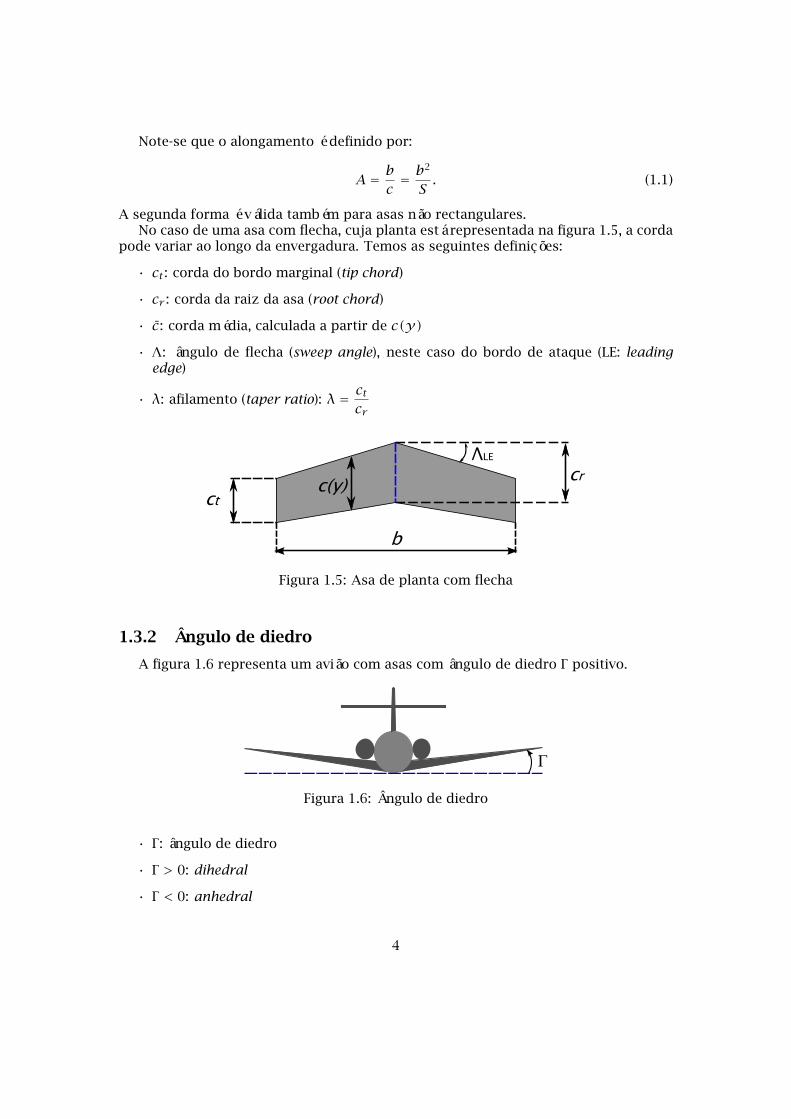
A segunda forma é válida também para asas não rectangulares.No caso de uma asa com flecha, cuja planta está representada na figura 1.5, a corda
pode variar ao longo da envergadura. Temos as seguintes definições:
• ct : corda do bordo marginal (tip chord)
• cr : corda da raiz da asa (root chord)
• c: corda média, calculada a partir de c(y)
• Λ: ângulo de flecha (sweep angle), neste caso do bordo de ataque (LE: leadingedge)
• λ: afilamento (taper ratio): λ = ctcr
Figura 1.5: Asa de planta com flecha
1.3.2 Ângulo de diedro
A figura 1.6 representa um avião com asas com ângulo de diedro Γ positivo.
Figura 1.6: Ângulo de diedro
• Γ : ângulo de diedro
• Γ > 0: dihedral
• Γ < 0: anhedral
4
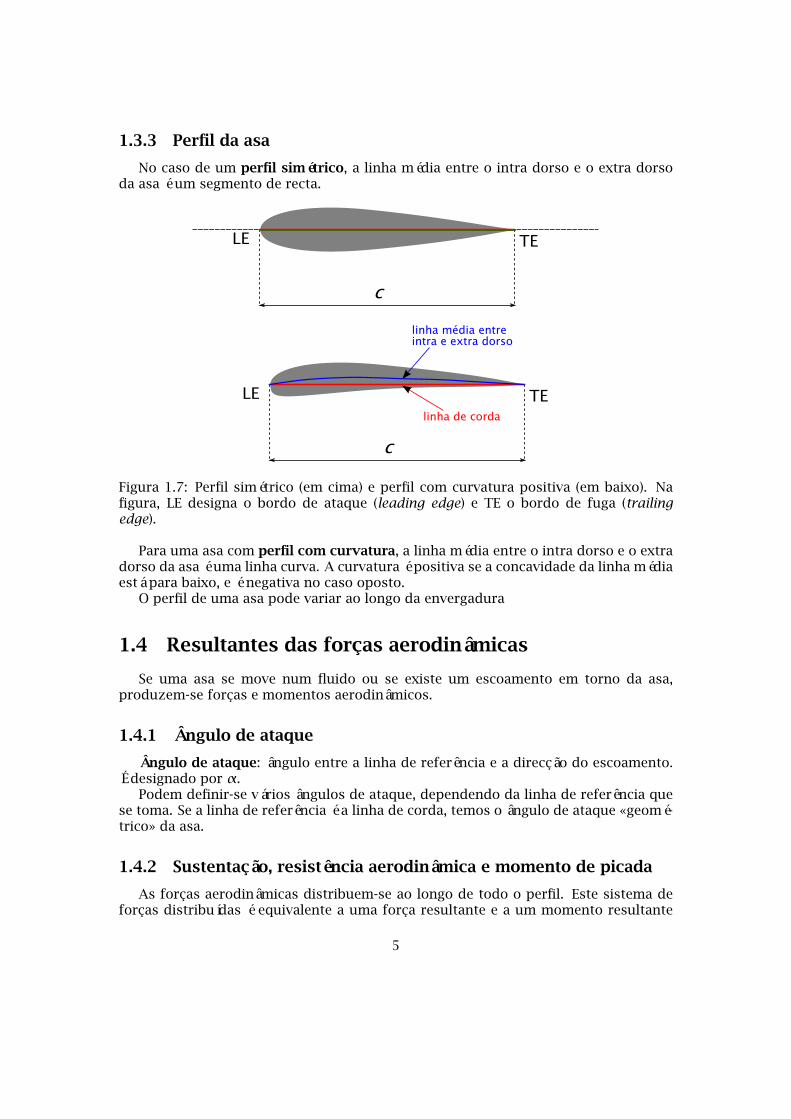
1.3.3 Perfil da asa
No caso de um perfil simétrico, a linha média entre o intra dorso e o extra dorsoda asa é um segmento de recta.
Figura 1.7: Perfil simétrico (em cima) e perfil com curvatura positiva (em baixo). Nafigura, LE designa o bordo de ataque (leading edge) e TE o bordo de fuga (trailingedge).
Para uma asa com perfil com curvatura, a linha média entre o intra dorso e o extradorso da asa é uma linha curva. A curvatura é positiva se a concavidade da linha médiaestá para baixo, e é negativa no caso oposto.
O perfil de uma asa pode variar ao longo da envergadura
1.4 Resultantes das forças aerodinâmicas
Se uma asa se move num fluido ou se existe um escoamento em torno da asa,produzem-se forças e momentos aerodinâmicos.
1.4.1 Ângulo de ataque
Ângulo de ataque: ângulo entre a linha de referência e a direcção do escoamento.É designado por α.
Podem definir-se vários ângulos de ataque, dependendo da linha de referência quese toma. Se a linha de referência é a linha de corda, temos o ângulo de ataque «geomé-trico» da asa.
1.4.2 Sustentação, resistência aerodinâmica e momento de picada
As forças aerodinâmicas distribuem-se ao longo de todo o perfil. Este sistema deforças distribuídas é equivalente a uma força resultante e a um momento resultante
5

(ver figura 1.9). Por conveniência, a força resultante é decomposta em duas direcçõesperpendiculares: a componente na direcção da velocidade do escoamento é a resistên-cia aerodinâmica (drag, D), a componente perpendicular à velocidade é a sustentação(lift, L).
O centro de pressões é o ponto relativamente ao qual o sistema de forças aerodinâ-micas é equivalente apenas a sustentação + resistência, não havendo momento resul-tante. No entanto, o centro de pressões não é um ponto fixo, depende do escoamentoem torno do perfil alar. Em particular, a posição do centro de pressões desloca-se parao bordo de ataque da asa à medida que o ângulo de ataque aumenta (ver figura 1.10).A utilização prática do centro de pressões fica deste modo comprometida porque énecessário calcular a sua posição sempre que se altera o ângulo de ataque da asa, oque é deveras inconveniente.
1.4.3 Centro aerodinâmico
De acordo com a teoria aerodinâmica de asas delgadas, existe um ponto fixo relati-vamente ao qual o momento de picada M não depende do ângulo de ataque, e que seencontra a 1/4 de corda. A esse ponto dá-se o nome de centro aerodinâmico.
Numa asa real o centro aerodinâmico não se encontra habitualmente no ponto xac =c/4. Porém, esta é uma boa aproximação em muitos casos.
O momento de picada relativamente ao centro aerodinâmico Mac é constante, ouseja, é independente do ângulo de ataque. O seu valor depende da curvatura do perfil.Para um perfil simétrico, Mac = 0, para um perfil com curvatura positiva, Mac < 0, epara um perfil com curvatura negativa, Mac > 0.
Podemos finalmente concluir que as forças aerodinâmicas aplicadas numa asa sãoequivalentes a: resultante aplicada no centro aerodinâmico, decomposta em sustenta-ção L (perpendicular à velocidade) e resistência aerodinâmica D (na direcção da velo-cidade), e momento de picada Macw relativamente ao C.A. (ver figura 1.11).
1.5 Coeficiente de sustentação e ângulo de ataque
1.5.1 Coeficiente de sustentação de perfis
Para um escoamento de um fluido com massa volúmica ρ e velocidade V , a pressãodinâmica define-se como:
pd =12ρV 2. (1.2)
Verifica-se que a sustentação e a resistência aerodinâmica de uma asa são (aproxi-madamente) proporcionais à pressão dinâmica e à área da asa. Os outros factores, tais
Figura 1.8: Ângulo de ataque
6
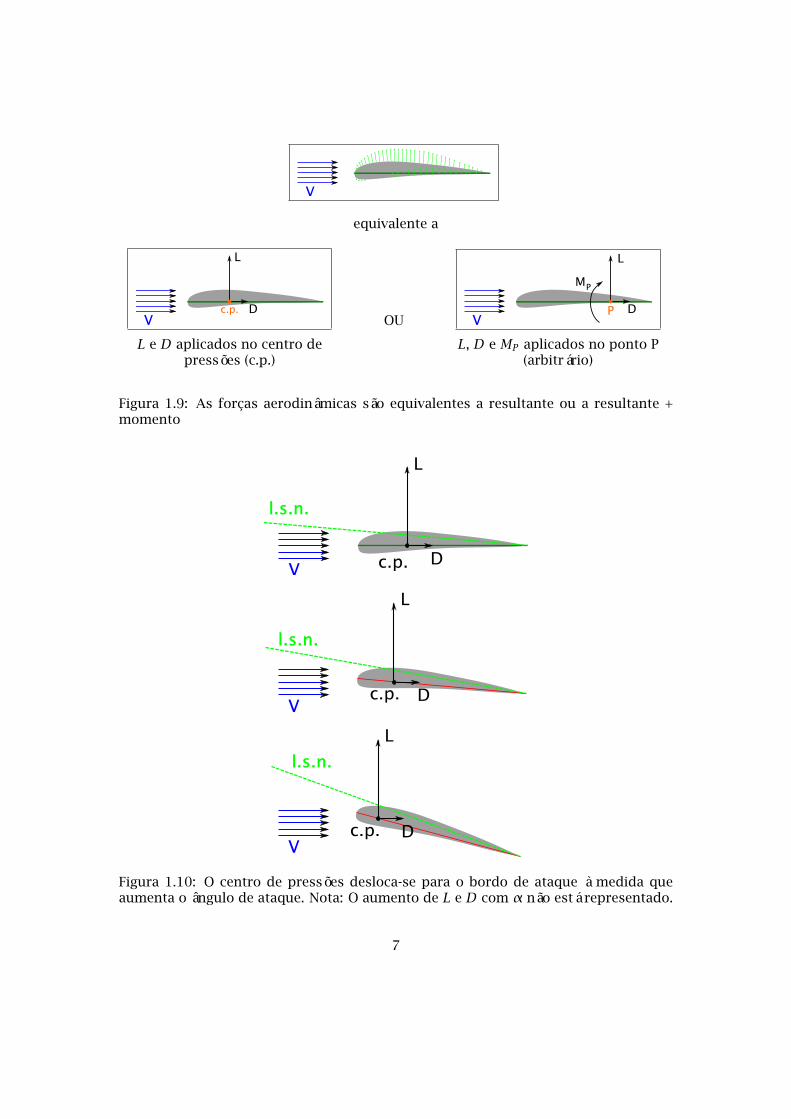
equivalente a
L e D aplicados no centro depressões (c.p.)
OU
L, D e MP aplicados no ponto P(arbitrário)
Figura 1.9: As forças aerodinâmicas são equivalentes a resultante ou a resultante +momento
Figura 1.10: O centro de pressões desloca-se para o bordo de ataque à medida queaumenta o ângulo de ataque. Nota: O aumento de L e D com α não está representado.
7

Figura 1.11: Centro aerodinâmico
como a geometria da asa (perfil e planta) e o ângulo de ataque, podem ser incluídosnum coeficiente adimensional. Definimos coeficiente de sustentação e coeficiente daresistência aerodinâmica como:
CL =LpdS
= L12ρV 2S
(1.3)
CD =DpdS
= D12ρV 2S
(1.4)
Habitualmente, convém distinguir os efeitos devidos apenas ao perfil (o que equi-vale a considerar uma asa de envergadura infinita, em que o escoamento pode serconsiderado bidimensional) dos efeitos devidos ao alongamento, forma da asa, etc.Usaremos para isso a notação L e CL para a sustentação e respectivo coeficiente adi-mensional para asas finitas e l e Cl para os casos correspondentes a perfis («asasinfinitas»). Nota importante: os símbolos l e Cl só serão usados com este significadonesta aula/capítulo.
A figura 1.12 mostra a variação do coeficiente de sustentação com o ângulo deataque, para asas com perfil simétrico e com curvatura positiva. A forma das curvas ésemelhante, mas os valores de Clmax e de Cl0 = Cl(α = 0) são diferentes.
Na figura 1.13 mostra-se o efeito da curvatura do perfil na curva Cl vs. α. A formadas curvas é semelhante, sofrendo uma translação para cima quando a curvatura au-menta. Por isso, quanto maior for a curvatura do perfil, maior é o valor de Clmax e deCl0 = Cl(α = 0). As asas com curvatura positiva permitem pois ter sustentação comângulos de ataque nulos.
Após atingir o valor Clmax , se o ângulo de ataque α continuar a aumentar, o coe-ficiente de sustentação diminui: a asa entra em perda. Habitualmente vamos estarinteressados em que o ângulo de ataque esteja dentro da zona de variação linear do Clcom α, bem longe da zona de perda.
O declive da curva do Cl em função do ângulo de ataque, constante na zona linear,é designada por Clα :
Clα =∂Cl∂α
De acordo com a teoria de perfis delgados o Clα tem um valor bem determinado:
8

Perfil simétrico Perfil com curvatura positiva
Figura 1.12: Variação do coeficiente de sustentação com o ângulo de ataque.
Figura 1.13: Efeito da curvatura do perfil na curva Cl vs. α
9

Figura 1.14: A sustentação de um perfil é causada pela vorticidade do escoamento emtorno do perfil. Fonte: Aircraft Flight, Barnard & Philpott
Clα = 2π rad−1 ≈ 0.1097/o. Esta aproximação permite ter uma ideia dos valores típicosdo Clα , mas para perfis reais é necessário usar teorias mais exactas.
Em primeira aproximação pode afirmar-se que a sustentação de um perfil é causadapela vorticidade do escoamento em torno do perfil (figura 1.14). Se uma aeronaveestá inicialmente em repouso num fluido ideal, a vorticidade total é nula. Quandoa aeronave começa a voar, forma-se um vórtice que permanece ligado à asa e queprovoca sustentação e é libertado um outro vórtice, de vorticidade oposta, de modoque a vorticidade total se mantenha nula, como representado na figura 1.15. Note-seque a jusante da asa o escoamento é deflectido verticalmente para baixo (downwash),como consequência do vortice ligado e portanto do aparecimento da sustentação. Odownwash será tanto maior quanto maior for a sustentação criada.
Figura 1.15: Vórtice ligado, vórtice libertado e downwash
10

Figura 1.16: Vórtice do bordo marginal. Fonte: Aircraft Flight, Barnard & Philpott
1.5.2 Coeficiente de sustentação de asas finitas
Numa asa infinita o escoamento pode ser considerado bidimensional e a única coisaque interessa é o perfil (ou distribuição de perfis...). Numa aeronave real a asa é finita eperto do bordo marginal da asa o escoamento torna-se tridimensional. Como a pressãoé superior na parte inferior da asa, o ar tende a deslocar-se da parte inferior para aparte superior e forma-se um vórtice do bordo marginal. Este vórtice cria na asa umcampo de velocidades verticais para baixo que tem como efeito uma diminuição doângulo de ataque efectivo na asa, levando a uma diminuição da sustentação e tambéma uma diminuição do declive da curva do coeficiente de sustentação vs. α.
A importância dos efeitos tridimensionais é tanto maior quanto menor for o alonga-mento da asa. Entre os declives das curvas do coeficiente de sustentação com o ângulode ataque para asas finitas (CLα ) e para perfis ou asas infinitas (Clα ) verifica-se que:
• CLα < Clα
• CLα decresce mais para A menores
A figura 1.17 exemplifica a variação do coeficiente de sustentação para asas com omesmo perfil mas com alongamentos diferentes. É possível estabelecer relações maisexplícitas entre CLα e Clα em muitas situações. O caso mais simples é o de uma distri-buição elíptica de sustentação, em que
CLα = ClαA
A+ 2(1.5)
Na zona de linearidade com α, o coeficiente de sustentação é dado por
CL = CL0 + CLαα (1.6)
O coeficiente de resistência aerodinâmica (drag) pode ser dado através da polar:
CD = CD0 + CDi (1.7)
CDi =1πeA
C2L (coeficiente de resistência induzida) (1.8)
11

Figura 1.17: Variação do CL com α para asas com o mesmo perfil e alongamentosdiferentes
Figura 1.18: Ângulo de ataque em relação à linha de corda
1.5.3 Ângulo de ataque absoluto
Na relação (1.6), exemplificada na figura 1.18, aparece o coeficiente de sustentaçãopara ângulo de ataque nulo, CL0 . Normalmente é conveniente medir os ângulos deataque em relação à linha de sustentação nula (l. s. n.), que é direcção do escoamentocorrespondente ao ângulo de ataque que torna a sustentação nula (CL = 0), com o se
Figura 1.19: Ângulo de ataque absoluto: medido em relação à linha de sustentaçãonula
12

exemplifica na figura 1.19. Nesse caso, temos:
CL = CL0 + CLαα (1.9)
αL=0 = −CL0
CLα(1.10)
αabs = α−αL=0 (1.11)
αabs = α+CL0
CLα(1.12)
Os ângulo de ataque medidoa relativamente à linha de sustentação nula são chama-dos ângulos de ataque absolutos, αabs, relativamente aos quais se tem simplesmente:
CL = CLααabs (1.13)
Note-se que o declive CLα não se altera, porque apenas fizemos uma mudança deorigem da curva.
13

Capítulo 2
Equilíbrio, Estabilidade eControlo Longitudinais
Neste capítulo pretende-se estabelecer condições de equilíbrio e estabilidade parauma aeronave em voo rectilíneo. Trataremos apenas do equilíbrio e da estabilidadelongitudinais, isto é, relativos aos movimentos que fazem a aeronave manter-se no seuplano de simetria. O equilíbrio e estabilidade laterais serão tratados noutro capítulo.
O equilíbrio e a sua estabilidade dizem respeito não só às forças mas também aosmomentos: para uma aeronave se manter em voo rectilíneo com velocidade constante,não deverá ter nem acelerações lineares nem acelerações angulares. Partindo da análisedo caso mais simples, o de uma asa voadora, e introduzindo pouco a pouco os outroselementos de uma aeronave com configuração convencional, verificar-se-á que paraassegurar a estabilidade do equilíbrio é necessário que a aeronave disponha de umestabilizador horizontal e que o leme de profundidade é uma superfície de controlonecessária para o piloto poder alterar a velocidade de equilíbrio a que a aeronave voa.
2.1 Voo de uma asa: equilíbrio e estabilidade
Começaremos por procurar verificar em que condições uma asa com perfil comcurvatura positiva e sem torção pode voar em equilíbrio e verificar se esse equilíbrio éestável.
2.1.1 Equilíbrio de uma asa voadora
As condições de equilíbrio a verificar são, no referencial da asa,
∑~F =m
(d~Vdt+ ~ω× ~V
)= 0 (2.1)
∑~MG =
(d ~HGdt
+ ~ω× ~HG)= 0 (2.2)
Vamos considerar o caso simples de um voo rectilíneo horizontal (p = q = r = 0),com velocidade constante (u = v = w = 0), e sem derrapagem (v = 0) de uma asa com
14

Figura 2.1: Forças e momentos aerodinâmicos aplicados numa asa em voo com veloci-dade V e ãngulo de ataque αw .
perfil com curvatura positiva e sem torção. Supomos que a asa dispõe de um sistemade propulsão que lhe permite vencer a resistência aerodinâmica. Pretendemos saberem que condições é que a asa pode voar em equilíbrio e se esse equilíbrio é estável.Começaremos por determinar que forças e momentos estão aplicados na asa.
Forças aerodinâmicas
As forças e momentos aerodinâmicos aplicados à asa voadora que se desloca comvelocidade V com um ângulo de ataque αw (medido relativamente à sua linha de sus-tentação nula) estão representados na figura 2.1, onde L designa a sustentação, D aresistência aerodinâmica e Mac o momento de picada relativo ao centro aerodinâmico.
A distância (na direcção x) entre o bordo de ataque da asa e o centro de massa érepresentada por hc. Dito doutro modo, h é a distância entre o bordo de ataque da asae o centro de massa, adimensionalizado pela corda média c. A distância (na direcção x)entre o bordo de ataque da asa e o seu centro aerodinâmico é representado por hnw c,ou seja, hnwb é a distância entre o bordo de ataque da asa e o seu centro aerodinâmico,adimensionalizado pela corda média c.
Para além das forças aerodinâmicas, estão também aplicadas à asa a força de pro-pulsão, cuja linha de acção admitimos ser Gx, e o peso, cuja linha de acção é Gz.
Para pequenos ângulos de ataque α são válidas as seguintes aproximações:
• cosα ≈ 1
• sinα ≈ α
Estas aproximações são válidas se α2 1, com α em radianos. Note-se que 0.3 rad ≈17, pelo que esta aproximação é razoável para a maioria dos casos de interesse.
15

A componente segundo x das forças aerodinâmicas é, pela figura 2.1,
(FA)x = L sinαw −D cosαw ≈ Lαw −D. (2.3)
Supomos que a força de propulsão T é a necessária para garantir o equilíbrio na direc-ção Cx:
T = D cosαw − L sinαw ≈ D − Lαw . (2.4)
Uma vez que a força de propulsão é determinada pelo piloto, esta condição pode sersempre verificada neste caso (voo rectilíneo horizontal).
A componente segundo z das forças aerodinâmicas é
(FA)z = L cosαw +D sinαw ≈ L. (2.5)
A condição de equilíbrio para as forças segundo Gz é∑Fz = 0⇒ W = L cosαw +D sinαw ≈ L. (2.6)
Concluímos que, de forma aproximada, para haver equilíbrio tem de se verificar
L = W. (2.7)
Momento de picada relativamente ao centro de massa
O momento de picada relativamente ao centro de massa é dado por
MG = Macw + (hc − hnw c) [L cosαw +D sinαw]+ zG [L sinαw −D cosαw] (2.8)
Para pequenos valores do ângulo de ataque α,
MG = Macw + (hc − hnw c) [L+Dαw]+ zG [Lαw −D] (2.9)
Usando os coeficientes de sustentação (1.3) e de resistência aerodinâmica (1.4),
CL =L
12ρV 2S
, CD =D
12ρV 2S
,
e definindo o coeficiente do momento de picada relativamente ao centro de massacomo
Cm =M
12ρV 2Sc
, (2.10)
obtemos, para pequenos ângulos αw
Cm = Cmacw + (h− hnw )CLw +zGc[CLwαw − CDw ] (2.11)
Supondo agora que o centro de massa da asa voadora se encontra aproximadamenteno eixo x, ou seja, que
zGc 1 (2.12)
e atendendo a que αw é pequeno e a que habitualmente em voo de cruzeiro CDw CLw ,o último termo pode ser desprezado face aos outros dois. Obtemos então
Cmw = Cmacw + (h− hnw )CLw (2.13)
16

Figura 2.2: Variação de Cm com CL
Sustentação e velocidade de equilíbrio
A condição (aproximada) de equilíbrio para as forças segundo z, (2.7) permite en-contrar um valor para o coeficiente de sustentação que garante o equilíbrio se a asavoar a uma velocidade V :
L = W ⇒ CLw =W
12ρV 2S
. (2.14)
No caso do momento de picada, a condição de equilíbrio é M = 0 ⇒ Cm = 0, peloque
Cmw = Cmacw + (h− hnw )CLw = 0. (2.15)
Como Cmacw < 0 e CL > 0, é sempre possível encontrar um valor de CLw que garante oequilíbrio do momento de picada:
CLeq =−Cmacw
(h− hnw ),
como se mostra na figura 2.2. A este valor CLeq corresponde uma velocidade de equilí-brio dada por
CLw =W
12ρV 2S
⇒ V 2 = W12ρCLwS
.
CLeq =−Cmacw
(h− hnw ), logo Veq =
√√√√−W(h− hnw )12CmacwρS
. (2.16)
Na equação (2.16) os parâmetros que estão fixos em cada situação de voo são W , hnw ,Cmacw , ρ e S. O único parâmetros que é fácil modificar é a posição do centro de massa,h. Logo, Veq fica determinada por h (posição do CM)!
Como se sabe, existem outras formas mais expeditas de controlar a velocidade deum avião, através do uso de lemes de profundidade (elevator) ou outras superfícies decontrolo. No entanto, de momento estamos apenas a considerar o equilíbrio uma asasem superfícies de controlo.
17

Figura 2.3: Variação de CL (esquerda) e Cm (direita) com αw
Figura 2.4: Efeito da variação de α no CL.
2.1.2 Estabilidade do ponto de equilíbrio
A variação de Cm com CL é linear, como mostra a equação (2.13). Existe um pontode equilíbrio, para o qual Cm = 0.
Dado que o coeficiente de sustentação depende do ângulo de ataque, o coeficientedo momento vai também depender de αw . Na zona de linearidade, CLw = CLαwαw ⇒Cm = Cmacw + CLαw (h − hnw )αw , como se representa na figura 2.3. O valor de αeq é oque garante Cm = 0, e este valor por sua vez, determina CLeq .
Para determinarmos se este ponto de equilíbrio é estável, vejamos o que acontecese por alguma razão o ângulo de ataque for ligeiramente aumentado relativamente aαeq. Como se pode verificar pela figura 2.4, se existir uma perturbação no voo quefizer α aumentar, o coeficiente de sustentação CL aumentará também, o que leva auma resultante não nula na vertical, conduzindo a uma aceleração vertical para cima.Esta aceleração faz aparecer uma componente vertical da velocidade da asa, para cima,que provoca uma diminuição do ângulo de ataque, o qual, por sua vez, implica uma
18

Figura 2.5: Efeito da variação de α no Cm.
diminuição do CL e um retorno à situação inicial. Uma situação em tudo semelhante,mas com os sentidos invertidos, aconteceria se a perturbação no voo fizesse diminuiro ângulo de ataque. Conclui-se que, relativamente ao movimento na direcção vertical,o voo é estável.
Na figura 2.5 representa-se o efeito sobre o momento de picada de um aumento doângulo de ataque. Verifica-se que um aumento de α leva a um aumento de Cm, o queconduz a uma aceleração angular de picada q > 0 e portanto ao aparecimento de umavelocidade angular de picada q > 0, de modo que o bordo de ataque da asa levanta;isto leva a um aumento ainda maior de α, que por sua vez faz Cm aumentar ainda maise o bordo de ataque levantar ainda mais etc. Produz-se um afastamento da situaçãoinicial, pelo que se conclui que o equilíbrio não é estável relativamente ao momento depicada. Chegar-se-ía à mesma conclusão se inicialmente se admitisse uma diminuiçãodo ângulo de ataque.
Em resumo, conclui-se que uma asa pode voar em equilíbrio, mas esse equilíbrionão é estável. Para se ter um ponto de equilíbrio estável a configuração projectadadeve conduzir a uma variação do Cm com α como mostrado na figura 2.6, cortandoo eixo dos α de modo a garantir o equilíbrio e com um declive negativo de modo agarantir estabilidade. O valor de Cm para α = 0 terá então de ser positivo. A maneiramais frequente de conseguir uma variação deste tipo é acrescentar um estabilizadorhorizontal, e é este tipo de configuração que analisaremos em seguida.
Note-se, finalmente, que é possível projectar asas voadoras, mas é necessário nessecaso usar asas com perfil, flecha e torção não habituais na maioria das aeronaves con-vencionais.
2.2 Sustentação e momento de picada de uma aeronave
Vimos que uma asa voadora pode voar em equilíbrio, mas esse equilíbrio não éestável. Uma maneira de resolver este problema é acoplar um estabilizador horizontalà asa. Nas configurações convencionais a asa e o estabilizador estão ligados a umafuselagem, e o sistema de propulsão pode estar ligado à asa ou à fuselagem.
19

Figura 2.6: Forma da variação de Cm com α desejável para se conseguir um voo emequilíbrio estável.
Note-se que, por enquanto, não nos vamos preocupar com o controlo da velocidadede equilíbrio, que se consegue com um leme de profundidade (elevator).
O equilíbrio do voo e a sua estabilidade dependem da sustentação e do momento depicada da aeronave. Por isso, começaremos por determinar as contribuições devidas àasa+fuselagem, ao sistema de propulsão e ao estabilizador horizontal separadamentee usaremos os índices wb (de wing-body), P (de propulsão) e t (de tail) para indicar asrespectivas contribuições.
2.2.1 Contribuição da asa + fuselagem
Os escoamentos em torno da asa e da fuselagem interferem mutuamente. No en-tanto, a asa é a superfície sustentadora mais importante e a sua contribuição par L eMé a mais importante. Por isso podemos admitir que a contribuição da asa+fuselagempara a sustentação e o momento de picada é semelhante à da asa, variando apenas aposição do centro aerodinâmico, o momento de picada relativamente ao CA e o decliveda curva CL vs. α:
• hnwb < hnw ≈ 0.25
• CLαwb < CLαw• Cmacwb < Cmacw < 0
Para simplificar a escrita vamos usar a seguinte notação simplificada para o decliveda curva CL vs. α:
a ≡ CLα =∂CL∂α. (2.17)
Por exemplo, aw = CLαw e awb = CLαwb .Como referido acima, admite-se que o coeficiente do momento de picada relativa-
mente ao centro de massa da aeronave tem a mesma forma da contribuição da asa:
Cmwb = Cmacwb + (h− hnwb)CLwb . (2.18)
20
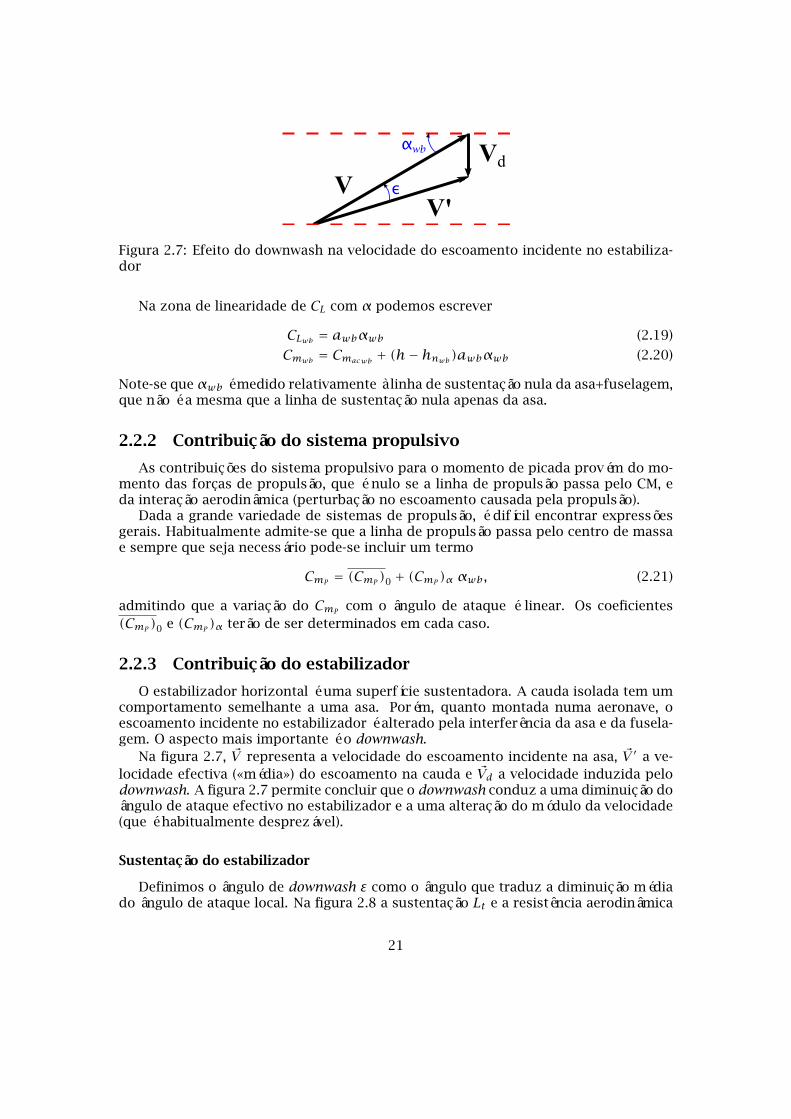
Figura 2.7: Efeito do downwash na velocidade do escoamento incidente no estabiliza-dor
Na zona de linearidade de CL com α podemos escrever
CLwb = awbαwb (2.19)
Cmwb = Cmacwb + (h− hnwb)awbαwb (2.20)
Note-se que αwb é medido relativamente à linha de sustentação nula da asa+fuselagem,que não é a mesma que a linha de sustentação nula apenas da asa.
2.2.2 Contribuição do sistema propulsivo
As contribuições do sistema propulsivo para o momento de picada provém do mo-mento das forças de propulsão, que é nulo se a linha de propulsão passa pelo CM, eda interação aerodinâmica (perturbação no escoamento causada pela propulsão).
Dada a grande variedade de sistemas de propulsão, é difícil encontrar expressõesgerais. Habitualmente admite-se que a linha de propulsão passa pelo centro de massae sempre que seja necessário pode-se incluir um termo
CmP = (CmP )0 + (CmP )α αwb, (2.21)
admitindo que a variação do CmP com o ângulo de ataque é linear. Os coeficientes(CmP )0 e (CmP )α terão de ser determinados em cada caso.
2.2.3 Contribuição do estabilizador
O estabilizador horizontal é uma superfície sustentadora. A cauda isolada tem umcomportamento semelhante a uma asa. Porém, quanto montada numa aeronave, oescoamento incidente no estabilizador é alterado pela interferência da asa e da fusela-gem. O aspecto mais importante é o downwash.
Na figura 2.7, ~V representa a velocidade do escoamento incidente na asa, ~V ′ a ve-locidade efectiva («média») do escoamento na cauda e ~Vd a velocidade induzida pelodownwash. A figura 2.7 permite concluir que o downwash conduz a uma diminuição doângulo de ataque efectivo no estabilizador e a uma alteração do módulo da velocidade(que é habitualmente desprezável).
Sustentação do estabilizador
Definimos o ângulo de downwash ε como o ângulo que traduz a diminuição médiado ângulo de ataque local. Na figura 2.8 a sustentação Lt e a resistência aerodinâmica
21

Figura 2.8: Sustentação e resistência aerodinâmica na cauda e ângulos de ataque e dedownwash
Dt do estabilizador são definidos relativamente à direcção de ~V ′, que é a velocidadeefectiva («média») do escoamento na cauda.
A sustentação total é a componente ⊥ ~V (velocidade incidente na asa) da força ae-rodinâmica resultante. A contribuição do estabilizador horizontal para a sustentaçãototal é:
Lt cos ε −Dt sin ε ≈ Lt (2.22)
Para a adimensionalização da sustentação da cauda usa-se a pressão dinâmica nacauda (1
2ρV′2) e a área do estabilizador (St). Logo
CLt =Lt
12ρV ′
2St(2.23)
No regime linear,CLt = atαt (2.24)
Note-se que at e αt devem ser medidos in situ, não com a cauda isolada. Deste modoat inclui já os efeitos da interferência da asa e da fuselagem no escoamento incidenteno estabilizador.
A sustentação total da aeronave (L) é a soma da contribuição da asa+fuselagem, Lwbe da contribuição da cauda, Lt :
L = Lwb + Lt (2.25)
Para a adimensionalização da sustentação total convém ter em conta que a asaconstitui a contribuição mais importante (de longe!) para a sustentação. Por isso (eporque as contas ficam facilitadas) adimensionaliz-se a sustentação total pela área daasa S ≡ Sw .
CL =L
12ρV 2S
= Lwb12ρV 2S
+ Lt12ρV 2S
= CLwb +Lt
12ρV 2S
(2.26)
Lt =12ρV ′2StCLt =
12ρV 2S
(V ′
V
)2 StSCLt =
12ρV 2S ηt
StSCLt (2.27)
em que
ηt ≡(V ′
V
)2
≈ 1 (2.28)
admitindo que o módulo da velocidade é pouco afectado pelo downwash.
22

Figura 2.9: Distâncias entre o centro aerodinâmica da cauda e o centro de massa daaeronave.
CL = CLwb + ηtStSCLt ≈ CLwb +
StSCLt (2.29)
Momento de picada relativo ao CM
A contribuição da cauda para o momento de picada relativamente ao centro demassa da aeronave é (ver figura 2.9):
Mt = Mact + lt [−Lt cos(αwb − ε)−Dt sin(αwb − ε)]+zt [−Dt cos(αwb − ε)+ Lt sin(αwb − ε)]
Faremos as seguintes aproximações:
• (αwb − ε) pequeno, logo
– cos(αwb − ε) ≈ 1,
– sin(αwb − ε) ≈ αwb − ε.• Dt Lt .
• zt lt .
Além disso, Mact = 0 se o perfil for, como é habitual, simétrico.Das aproximações anteriores conclui-se que na segunda parcela Lt cos(αwb − ε)
Dt sin(αwb − ε). Além disso, a última parcela é desprezável face à segunda. Com estasaproximações,
Mt = −ltLt +Mact . (2.30)
Mas, como
Lt =(
12ρV 2
)S ηt
StSCLt , (2.31)
o coeficiente adimensional da contribuição do estabilizador horizontal para o mo-mento de picada total é
Cmt =Mt
12ρV 2Sc
= −ηtltcStSCLt + ηt
StSCmact
. (2.32)
23

Figura 2.10: Distância entre o centro aerodinâmica do estabilizador e o centro de massalt ou o centro aerodinâmica lt da aeronave.
Define-se razão de volume do estabilizador horizontal como
VH =lt Stc S
. (2.33)
Assim, podemos concluir finalmente que
Cmt = −ηtVHCLt + ηtStSCmact
. (2.34)
O centro de massa (CM) de uma aeronave não é fixo, pelo que VH depende da po-sição deste. Convém-nos explicitar a posição do CM nas nossas equações e para issointroduzimos a distância entre os centros aerodinâmicos da asa+fuselagem e do esta-bilizador horizontal, lt . Pela figura 2.10 vemos que
lt = lt + (h− hnwb)c. (2.35)
Definindo
VH =lt Stc S
, (2.36)
podemos escrever
VH = VH +StS(h− hnwb). (2.37)
A equação (2.34) pode então escrever-se numa forma que explicita a dependência daposição do centro de massa:
Cmt = −ηtVHCLt + CLtηtStS(h− hnwb)+ ηt
StSCmact
. (2.38)
O momento de picada total é dado pela soma das várias contribuições, Cm = Cmwb+Cmt + CmP . Substituindo as expressões de cada uma das contribuições, obtém-se
Cm = Cmacwb +CLwb(h−hnwb)+CLtηtStS(h−hnwb)−ηtVHCLt +CmP +ηt
StSCmact
. (2.39)
Dado que CL = CLwb + ηt StS CLt , temos
Cm = Cmacwb + CL(h− hnwb)− ηtVHCLt + CmP + ηtStSCmact
. (2.40)
24

Habitualmente podemos admitir que ηt ≈ 1. Por outro lado, frequentemente operfil dos estabilizadores é simétrico, pelo que Cmact
= 0. Logo:
Cm = Cmacwb + CL(h− hnwb)− VHCLt + CmP . (2.41)
Cmα e Ponto neutro
O coeficiente Cmα (pitch stiffness) é de grande importância para a estabilidade deuma aeronave. Para o calcular derivamos (2.41)
Cmα ≡∂Cm∂α
= ∂Cmacwb
∂α+ CLα(h− hnwb)− VH
∂CLt∂α
+ ∂CmP
∂α. (2.42)
Por definição de centro aerodinâmico,
∂Cmacwb
∂α= 0. (2.43)
Logo
Cmα = CLα(h− hnwb)− VH∂CLt∂α
+ ∂CmP
∂α. (2.44)
A condição de estabilidade é Cmα < 0. Ora, o valor de Cmα depende da posição doCM. Logo, variando h podemos fazer Cmα positivo ou negativo. A posição do CM quetorna Cmα = 0 separa regiões de estabilidade e instabilidade.
O ponto neutro hn pode definir-se como posição que o CM do avião teria de terpara que Cmα = 0. O ponto neutro é então o centro aerodinâmico do avião: o momentode picada calculado relativamente a ele não depende do ângulo de ataque.
Para a determinação do ponto neutro:
0 = Cmα =∂Cmacwb
∂α+ CLα(hn − hnwb)− VH
∂CLt∂α
+ ∂CmP
∂α. (2.45)
Logo:
hn = hnwb −1CLα
(∂Cmacwb
∂α− VH
∂CLt∂α
+ ∂CmP
∂α.)
(2.46)
Substituindo na expressão de Cmα , obtém-se
Cmα = CLα(h− hn). (2.47)
A margem estática Kn define-se como a distância (adimensional) entre o centro demassa e o ponto neutro:
Kn = hn − h.Logo, podemos escrever
Cmα = −CLαKn. (2.48)
Daqui podemos concluir que
• Kn < 0⇒ Cmα > 0: a aeronave é instável.
• Kn > 0⇒ Cmα < 0: a aeronave é estável.
• Kn > 0⇒ h < hn: CM à frente do PN é estável.
Quando mais à frente do PN estiver o CM, maior será a margem estática e maior aestabilidade estática do avião, mas uma estabilidade estática exagerada diminui mano-brabilidade do avião.
25

Definição alternativa de ponto neutro
Por vezes define-se ponto neutro como a localização do CM para o qual
dCmdCL
= 0. (2.49)
Ora, esta definição só coincide com a anterior em algumas condições de voo bemdefinidas (ex: voo de planeio de uma aeronave rígida a baixo número de Mach), pois sónesse caso Cm e CL dependem apenas de α. Nesse caso,
dCmdCL
=
(∂Cm∂α
)(∂CL∂α
)e portanto
dCmdCL
= 0⇒ ∂Cm∂α
= 0.
Mas tanto CL como Cm dependem não apenas de α mas também do número deMach (efeitos de compressibilidade) e da pressão dinâmica (efeitos aeroelásticos). Adefinição da equação (2.49) é por isso, quando muito, uma aproximação (apesar demuito usada e frequentemente útil).
2.3 Sustentação e momento de picada em função do ân-gulo de ataque
Como habitualmente, vamos admitir que a aeronave está a voar com um ângulode ataque dentro da zona de linearidade. Deste modo, as forças de sustentação, eportanto com momento de picada total variam linearmente com o ângulo de ataque.Iremos determinar as expressões para CL e Cm em função do(s) ângulo(s) de ataque,bem como expressões para a posição do ponto neutro hn.
2.3.1 Coeficiente de sustentação total
Vamos analizar uma aeronave numa configuração convencional: asa + fuselagem +estabilizador horizontal.
Na figura 2.11 estão representados os ângulos de ataque na asa e no estabilizador(tendo em conta os ângulos de incidência do estabilizador e o ângulo de downwash) eas respectivas forças de sustentação. Como admitimos estar na zona de linearidade,os coeficientes de sustentação na asa e na cauda são dados por
CLwb = awbαwb, (2.50)
CLt = atαt. (2.51)
Tendo em conta a figura 2.12, a relação entre os ângulos de ataque absolutos naasa+fuselagem αwb e no estabilizador αt é
αt = αwb − it − ε. (2.52)
26

Figura 2.11: Ângulos de ataque e sustentação na asa e no estabilizador.
Figura 2.12: Relação entre ângulos de ataque na asa e no estabilizador, e sustentaçãono estabilizador.
27

Podemos agora determinar o coeficiente de sustentação da cauda em função de αwb:
CLt = atαt = at(αwb − it − ε). (2.53)
O ângulo de downwash é proporcional à sustentação criada pela asa. Por isso po-demos admitir que varia linearmente com αwb:
ε = ε0 +∂ε∂ααwb = ε0 + εααwb. (2.54)
Nesta equação ε0 é a contribuição do campo de velocidades induzido pela fuselagem etorção da asa, não variando com o ângulo de ataque, e εα é contribuição da esteira devórtices do bordo de fuga, cuja intensidade é proporcional a CL, e portanto a αwb.
Escrevendo agora a equação (2.53) numa forma que explicita os termos constantese os que dependem de αwb, obtém-se
CLt = at [αwb(1− εα)− (it + ε0)] . (2.55)
Usando (2.50) e (2.55) na equação para o coeficiente de sustentação total (2.29) obtém-se uma expressão em função de αwb
CL = awbαwb + atαwb(1− εα)StSη− at(it + ε0)
StSη
= awb[
1+ atStawbS
η(1− εα)]αwb − at
StSη(it + ε0).
(2.56)
Podemos escrever a expressão anterior na forma
CL = CL0 + a αwb, (2.57)
com
a = awb[
1+ atStawbS
(1− εα)η], (2.58)
CL0 = −atStS(it + ε0)η. (2.59)
Note-se que CL0 < 0 e que habitualmente podemos usar a aproximação η ≈ 1.O ângulo de ataque absoluto da aeronave total, representado simplesmente por
α, é o ângulo de ataque do escoamento incidente medido relativamente à linha desustentação nula da aeronave. Assim,
CL = CL0 + aαwb = aα. (2.60)
Daqui podemos deduzir α = αwb +CL0
a , ou seja,
α−αwb = −ataStSη(it + ε0). (2.61)
28

Figura 2.13: Curvas CL vs. αwb e vs. α absoluto da aeronave.
2.3.2 Momento de picada total
O momento de picada total é dado pela equação (2.41):
Cm = Cmacwb + CL(h− hnwb)− VHCLt + CmP . (2.62)
Podemos escrever CL e CLt em função tanto de αwb como de α, obtendo expressõespara Cm em função de cada um destes ângulos.
Podemos separar o momento de picada devido ao sistema de propulsão num termoconstante e num termo que depende de αwb. Admitimos que a variação com αwb élinear:
CmP = (CmP )0)+∂CmP
∂ααwb. (2.63)
Habitualmente podemos desprezar esta contribuição. Quando for necessário incluí-la,
teremos de determinar (CmP )0) e∂CmP∂α .
Substituindo em (2.62) as expressões de CL, dadas por (2.57), (2.58) e (2.59), de CLt ,dada por (2.55), e de CmP , dada por (2.63), obtemos
Cm = Cm0 + Cmααwb, (2.64)
em que o termo constante Cm0 é dado por
Cm0 = Cmacwb + at(it + ε0)VH + (CmP )0,
e o declive Cmα (pitch stiffness) se pode escrever de duas formas equivalentes,
Cmα = a(h− hnwb)− atVH(1− εα)+∂CmP
∂α(2.65)
= awb(h− hnwb)− atVH(1− εα)+∂CmP
∂α. (2.66)
Muitas vezes é mais útil escrever Cm em função do ângulo de ataque absoluto α.A relação do momento de picada devido ao sistema de propulsão continua a ser
linear com α, mas agora o termo constante é diferente. Podemos supor uma relaçãoda forma
CmP = (CmP )0 +∂CmP
∂ααwb, (2.67)
29

em que (CmP )0 será determinado em cada caso.Agora podemos substituir em (2.62) as expressões de CL, dada por (2.60), de CLt ,
dada por (2.55) juntamente com a relação ente ângulos de ataque (2.61), e de CmP , dadapor (2.67), obtendo
Cm = Cm0 + Cmαα, (2.68)
sendo o coeficiente Cm0 dado por
Cm0 = Cmacwb + at(it + ε0)VH[
1− ataStS(1− εα)
]+ (CmP )0. (2.69)
Note-se que Cmα é, tal como no caso anterior, dado por (2.65) ou (2.66). (Porquê?)
Ponto neutro
Por definição de ponto neutro, Cmα = 0. Ora
Cmα = 0⇒ a(hn − hnwb)− atVH(1− εα)+∂CmP
∂α= 0.
Resolvendo em ordem a hn obtemos
hn = hnwb +ataVH(1− εα)+
1a∂CmP
∂α. (2.70)
Com frequência a contribuição da propulsão pode ser desprezada.Como vimos, o coeficiente de sustentação é dado em função do ângulo de ataque
absoluto por CL = CLαα, enquanto que o momento de picada, dado por (2.68), podetomar uma forma muito útil se usarmos a expressão para o ponto neutro (2.70):
Cm = Cm0 + Cmαα = Cm0 + CLα(h− hn)α. (2.71)
As forças (de sustentação) e momentos aplicados numa aeronave podem portanto serdescritas através da força de sustentação aplicada no ponto neutro e do momento depicada Cm0 relativamente ao ponto neutro, como representado na figura 2.14. Note-seque a configuração analizada não inclui leme de profundidade (elevator) pelo que asua contribuição não foi incluída em (2.71).
2.4 Equilíbrio, Estabilidade e Controlo Longitudinais
2.4.1 Equilíbrio sem leme de profundidade
Para a configuração asa+fuselagem+estabilizador horizontal (sem leme de profun-didade), as condições de equilíbrio são L = W e M = 0.
L = W ⇒ CLeq =W
12ρV 2S
. (2.72)
Como CL = aα, temos:
CLeq = aαeq e Veq =√√√√ W
12ρSCLeq
. (2.73)
30
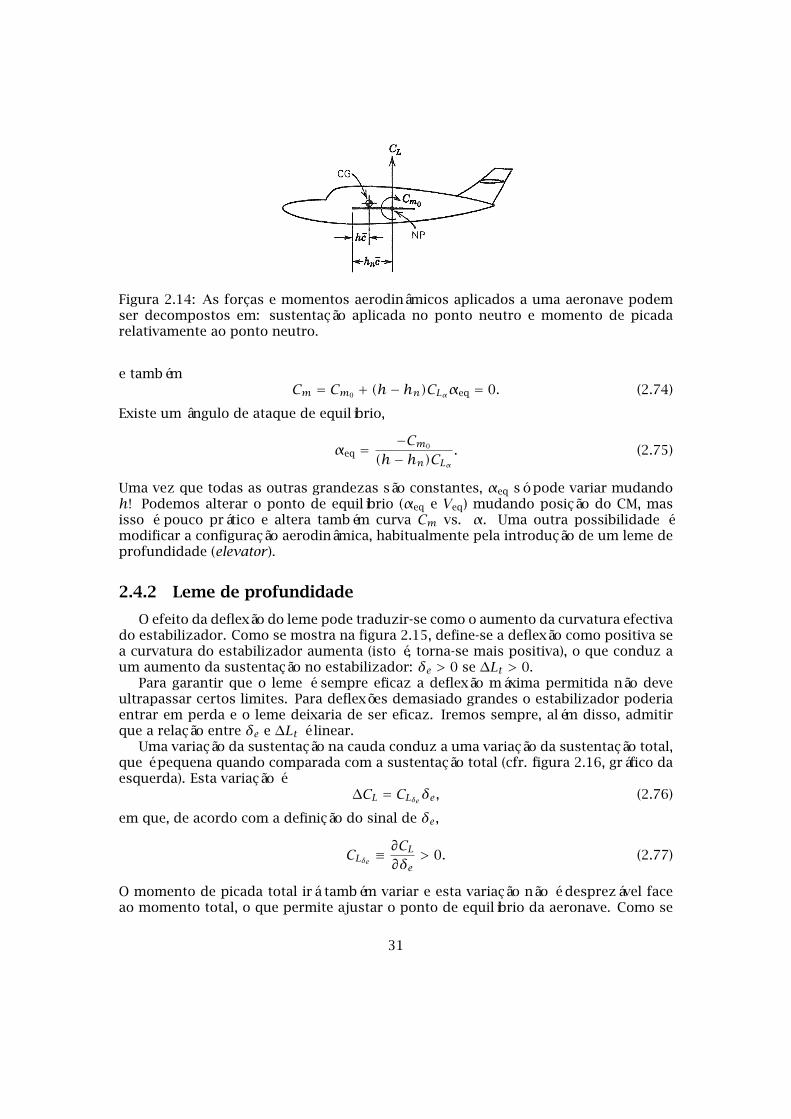
Figura 2.14: As forças e momentos aerodinâmicos aplicados a uma aeronave podemser decompostos em: sustentação aplicada no ponto neutro e momento de picadarelativamente ao ponto neutro.
e tambémCm = Cm0 + (h− hn)CLααeq = 0. (2.74)
Existe um ângulo de ataque de equilíbrio,
αeq =−Cm0
(h− hn)CLα. (2.75)
Uma vez que todas as outras grandezas são constantes, αeq só pode variar mudandoh! Podemos alterar o ponto de equilíbrio (αeq e Veq) mudando posição do CM, masisso é pouco prático e altera também curva Cm vs. α. Uma outra possibilidade émodificar a configuração aerodinâmica, habitualmente pela introdução de um leme deprofundidade (elevator).
2.4.2 Leme de profundidade
O efeito da deflexão do leme pode traduzir-se como o aumento da curvatura efectivado estabilizador. Como se mostra na figura 2.15, define-se a deflexão como positiva sea curvatura do estabilizador aumenta (isto é, torna-se mais positiva), o que conduz aum aumento da sustentação no estabilizador: δe > 0 se ∆Lt > 0.
Para garantir que o leme é sempre eficaz a deflexão máxima permitida não deveultrapassar certos limites. Para deflexões demasiado grandes o estabilizador poderiaentrar em perda e o leme deixaria de ser eficaz. Iremos sempre, além disso, admitirque a relação entre δe e ∆Lt é linear.
Uma variação da sustentação na cauda conduz a uma variação da sustentação total,que é pequena quando comparada com a sustentação total (cfr. figura 2.16, gráfico daesquerda). Esta variação é
∆CL = CLδeδe, (2.76)
em que, de acordo com a definição do sinal de δe,
CLδe ≡∂CL∂δe
> 0. (2.77)
O momento de picada total irá também variar e esta variação não é desprezável faceao momento total, o que permite ajustar o ponto de equilíbrio da aeronave. Como se
31

Figura 2.15: A deflexão do leme de profundidade, δe, é positiva quando aumenta acurvatura efectiva da cauda, aumentando a sustentação no estabilizador horizontal
Figura 2.16: Variação com α de CL (esquerda) e Cm (direita), para os casos sem e comdeflexão do leme de profundidade (respectivamente, δe = 0 e δe > 0).
32

CLt = atαt CLt = atαt + aeδe
Figura 2.17: Sustentação na cauda sem (esquerda) e com (direita) deflexão δe do lemede profundidade.
pode ver no gráfico da direita da figura 2.16, a variação do momento de picada devidoa uma deflexão δe do leme de profundidade pode ser dada por
∆Cm = Cmδeδe, (2.78)
em que o coeficiente de proporcionalidade entre Cm e δe é negativo:
Cmδe ≡∂Cm∂δe
< 0. (2.79)
A sustentação e o momento de picada totais de uma aeronave dependem do ângulode ataque absoluto e de δe, e temos:
CL = CL(α)+ CLδeδeCm = Cm(α)+ Cmδeδe
(2.80)
Na gama de valores de α em que a variação é linear, podemos escreverCL = CLαα+ CLδeδeCm = Cm0 + Cmαα+ Cmδeδe
(2.81)
Estas expressões são válidas quer para o caso de asas voadoras ou asas em delta,em que o leme está montado na própria asa, quer quando a aeronave tem o leme deprofundidade montado num estabilizador horizontal. Neste último caso é necessáriodeterminar expressões para CLδe e Cmδe em função das características do leme, o quefaremos em seguida.
Eficácia de sustentação do leme de profundidade
A eficácia de sustentação do leme de profundidade, ae, mede a capacidade que oleme tem para criar sustentação no estabilizador para uma dada deflexão δe:
ae =∂CLt∂δe
(2.82)
Uma vez que CL = CLwb +StSCLt , a derivada CLδe é dada por
CLδe =∂CLwb∂δe
+ StSae, (2.83)
33

e, como para aeronaves com estabilizador horizontal∂CLwb∂δe ≈ 0,
CLδe =StSae. (2.84)
Para determinar a derivada Cmδe para aeronaves com estabilizador partimos de
Cm = Cmacwb + CL(h− hnwb)− VHCLt + CmP ,
de onde se deduz
Cmδe =∂Cmacwb
∂δe+ CLδe (h− hnwb)− VH
∂CLt∂δe︸ ︷︷ ︸ae
+ ∂CmP
∂δe︸ ︷︷ ︸≈0
(2.85)
Para aeronaves com estabilizador horizontal,∂Cmacwb∂δe ≈ 0 e CLδe = ae
StS . Logo,
Cmδe = −ae[VH −
StS(h− hnwb)
]. (2.86)
2.4.3 Deflexão do leme de profundidade para equilíbrio
Tendo determinado a dependência das derivadas CLδe e Cmδe em função das caracte-rísticas da aeronave, estamos em condições de, a partir do sistema de equações (2.81),determinar as condições de equilíbrio da aeronave.
Em voo horizontal com velocidade V , as condições de equilíbrio de uma aeronavesão
Leq = W,Meq = 0.
(2.87)
O índice eq designa a situação de equilíbrio. Para designar o valor da deflexão do lemede profundidade e ângulo de ataque e correspondente coeficiente de sustentação (ede momento de picada) que permitem à aeronave voar em equilíbrio com uma certavelocidade, usaremos o índice trim. (O índice trim refere-se ao equilíbrio numa certasituação de voo.)
É conveniente usar as equações de equilíbrio (2.87) na forma adimensionalCLtrim =
Leq12ρV
2trimS
= W12ρV
2trimS
,
Cmtrim = 0,(2.88)
que nos permitem escrever, tendo em conta (2.81),CLtrim = CLααtrim + CLδeδetrim ,
0 = Cm0 + Cmααtrim + Cmδeδetrim .(2.89)
Estas são as equações de equilíbrio para αtrim e δetrim . Para as resolver podemos escrevê-las na forma matricial Na forma matricial:[
CLα CLδeCmα Cmδe
][αtrim
δetrim
]=[CLtrim
−Cm0
](2.90)
34

A solução de (2.90) permite obter os valores do ângulo de ataque e da deflexão do lemede profundidade que garantem o voo em equilíbrio à velocidade Vtrim:
αtrim =CLtrimCmδe + Cm0CLδe
det
δetrim = −CLαCm0 + CLtrimCmα
det
(2.91)
em que det é o determinante da matriz do sistema:
det = CLαCmδe − CmαCLδe (2.92)
Embora o valor do determinante possa ser facilmente calculado conhecidas as de-rivadas CLα , Cmα , CLδe e Cmδe , é muitas vezes útil usar expressões explícitas em funçãodas características da aeronave. Para aeronaves com cauda,
Cmα = CLα(h− hn)Cmδe = CLδe (h− hnwb)− aeVH
CLδe = aeStS
Logo,
det = CLα[CLδe (hn − hnwb)− aeVH
](2.93)
= a ae[StS(hn − hnwb)− VH
](2.94)
Variação da deflexão do leme com a velocidade
Como vimos,
δetrim = −CLαCm0 + CLtrimCmα
det.
Mantendo constante a posição do centro de massa, h, a deflexão do leme de profun-didade necessária para equilíbrio, δetrim , é uma função exclusiva de CLtrim (supondo quenão há efeitos aeroelásticos, de compressibilidade, etc.). Na figura 2.18 representa-sea variação de δetrim com CLtrim para vários valores de h. Quando h = hn, verifica-se queδetrim não depende de CLtrim e toma um valor constante. Para h = hn a variação é linear,com declive negativo: δetrim diminui quando CLtrim aumenta, e é negativo para valoreselevados de CLtrim .
Interessa também estudar como varia a velocidade de equilíbrio com δetrim . Paramais facilmente compararmos diferentes situações de voo, é conveniente usarmos avelocidade equivalente (EAS), VE , definida por
VE =√ρρ0V, (2.95)
em que ρ é a massa volúmica à altitude de voo e ρ0 é massa volúmica ao nível do mar(SSL).
35
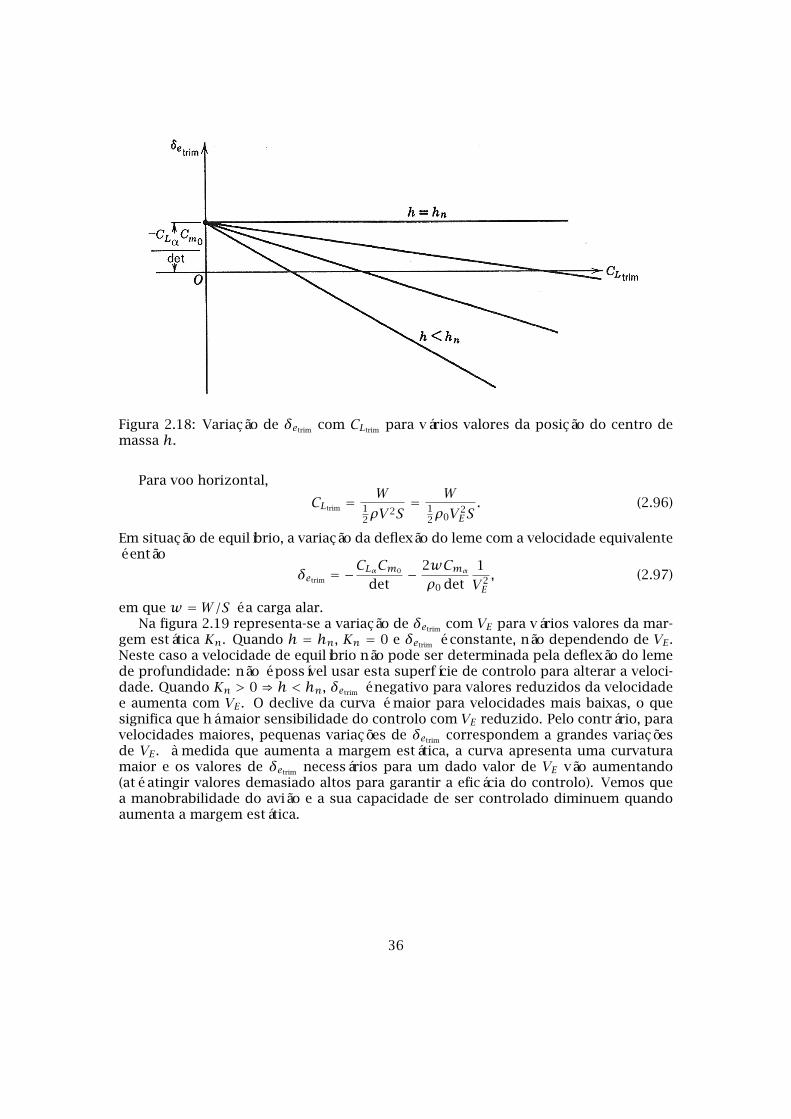
Figura 2.18: Variação de δetrim com CLtrim para vários valores da posição do centro demassa h.
Para voo horizontal,
CLtrim =W
12ρV 2S
= W12ρ0V 2
ES. (2.96)
Em situação de equilíbrio, a variação da deflexão do leme com a velocidade equivalenteé então
δetrim = −CLαCm0
det− 2wCmα
ρ0 det1V 2E, (2.97)
em que w = W/S é a carga alar.Na figura 2.19 representa-se a variação de δetrim com VE para vários valores da mar-
gem estática Kn. Quando h = hn, Kn = 0 e δetrim é constante, não dependendo de VE .Neste caso a velocidade de equilíbrio não pode ser determinada pela deflexão do lemede profundidade: não é possível usar esta superfície de controlo para alterar a veloci-dade. Quando Kn > 0 ⇒ h < hn, δetrim é negativo para valores reduzidos da velocidadee aumenta com VE . O declive da curva é maior para velocidades mais baixas, o quesignifica que há maior sensibilidade do controlo com VE reduzido. Pelo contrário, paravelocidades maiores, pequenas variações de δetrim correspondem a grandes variaçõesde VE . à medida que aumenta a margem estática, a curva apresenta uma curvaturamaior e os valores de δetrim necessários para um dado valor de VE vão aumentando(até atingir valores demasiado altos para garantir a eficácia do controlo). Vemos quea manobrabilidade do avião e a sua capacidade de ser controlado diminuem quandoaumenta a margem estática.
36

Kn = 0.0
Kn = 0.1
Kn = 0.2
40 60 80 100VE
-30
-25
-20
-15
-10
-5
5
∆e trim
Figura 2.19: Variação de δetrim com VE para margem estática Kn = 0, 0.1 e 0.2, para umaaeronave com características baseadas num Cessna 310.
37
Capítulo 3
Estabilidade com Manche Livre eForças de Controlo
3.1 Momento de charneira de superfície de controlo
O controlo longitudinal de uma aeronave faz-se habitualmente por meio do leme deprofundidade (elevator). O compensador (trim tab) usa-se para facilitar a deflexão doleme ou para manter o avião em equilíbrio (trim) sem necessidade de actuação do leme.Nesta última função o compensador permite voar em equilíbrio mantendo o manchelivre.
Neste capítulo iremos determinar condições de equilíbrio e de estabilidade no casode voo com manche livre. Note-se que se o manche está livre, o leme também o es-tará. Iremos também procurar determinar qual a força de controlo necessária paraestabelecer certa deflexão no leme ou certa velocidade de equilíbrio.
3.1.1 Momento de charneira
Para manter ou alterar a deflexão de uma superfície de controlo é necessário aplicarum momento na charneira (dobradiça) que permita contrariar os momentos devidosàs forças aerodinâmicas.
A figura 3.1 representa uma parte de um estabilizador horizontal com um lemede profundidade e um compensador (tab). Definimos Se como a área da parte doleme a jusante da linha de charneira e ce como a corda média da parte do leme ajusante da linha de charneira. O momento de charneira, isto é, o momento das forçasaerodinâmicas exercidas no leme calculado em relação à linha de charneira do lemede profundidade, é designado por He. Supondo η ≈ 1, o coeficiente do momento decharneira é
Che =He
12ρV 2Sece
(3.1)
O sentido positivo de deflexão de δt > 0 é definido da mesma forma que para δe.Assim, na figura 3.2, δe < 0 e δt > 0. Admitimos uma relação linear entre Che e αt , δee δt , pelo que
Che = b0 + b1αt + b2δe + b3δt. (3.2)
38

Figura 3.1: Geometria do leme. (Fonte: Etkin)
Por definição,
b1 =∂Che∂αt
, b2 =∂Che∂δe
, b3 =∂Che∂δt
.
Se o perfil do estabilizador for simétrico não há forças ou momentos aerodinâmicosquando αt = 0 = δe = δt , pelo que nesse caso b0 = 0.
Na equação (3.2) e na definição de b1 o ângulo de ataque considerado é αt . Dadoque αt = αwb(1 − εα) − (it + ε0) e que o ângulo de ataque absoluto da aeronave éα = αwb − at
aStS (it + ε0), podemos escrever
b1αt = b1
[α+ at
aStS(it + ε0)
](1− εα)− (it + ε0)
= b1(1− εα)α− b1(it + ε0)
[1− at
aStS(1− εα)
]Substituindo em (3.2) obtemos uma expressão para o coeficiente do momento de char-neira em função do ângulo de ataque absoluto:
Che = Che0 + Cheαα+ b2δe + b3δt (3.3)
39

Figura 3.2: Deflexões do leme de profundidade e do compensador. (Fonte: Etkin)
com
Che0 = b0 − b1(it + ε0)[
1− ataStS(1− εα)
](3.4)
Cheα = b1(1− εα) (3.5)
3.2 Sustentação e momento de picada com manche livre
Na situação tratada no capítulo 2.4 supôs-se sempre que o leme de profundidadeestava fixo, isto é, que a deflexão do leme permanecia constante, δe = constante. Acondição que vai ser considerada agora é a de leme completamente livre. Neste caso adeflexão do leme é aquela que anula o momento de charneira: He = 0 (Che = 0).
Ambos os casos são ideais. O leme não está nunca completamente fixo tanto por-que em muitas aeronaves é difícil manter o manche completamente fixo como porquea estrutura das aeronaves não é totalmente rígida e existem sempre deformações quealteram ligeiramente a posição do leme. Por outro lado o leme nunca está comple-tamente livre porque existe sempre algum atrito, o que leva ao aparecimento de ummomento de charneira He de atrito. No entanto estes casos ideais estão suficiente-mente perto da realidade para podermos tirar conclusões pertinentes.
3.2.1 Deflexão do leme com manche livre
Como vimos, a condição de manche livre é He = 0 a Che = 0. Vamos supor que δtestá fixo, mas que o leme está livre, pelo que usamos a notação δe = δefree . Da equação(3.3) obtemos, para manche livre,
Che = Che0 + Cheαα+ b2δefree + b3δt = 0. (3.6)
O leme de profundidade deflecte até He se anular e o valor de δefree é
δefree = −1b2
(Che0 + Cheαα+ b3δt
). (3.7)
40

3.2.2 Sustentação e momento de picada em função do ângulo de ata-que
Tendo em conta a contribuição do compensador, a sustentação total é
CL = CLαα+ CLδeδe + CLδtδt. (3.8)
No entanto a contribuição do compensador para a sustentação total é pequena, peloque CLδt é pequeno quando comparado com as outras derivadas e a última parcela éhabitualmente desprezada. Com manche livre a deflexão do leme verifica (3.7), dondese conclui que o coeficiente de sustentação total no caso de voo com manche livre, quevamos designar por C′L, é dado por
C′L = CLαα− CLδe1b2
(Che0 + Cheαα+ b3δt
), (3.9)
que se pode escrever na formaC′L = C′L0
+ C′Lαα (3.10)
com
C′L0= −
CLδeb2
(Che0 + b3δt
), (3.11)
a′ = C′Lα = CLα −CLδeb2Cheα . (3.12)
Num voo com manche livre a relação entre CL e α continua a ser linear, mas a linha desustentação nula altera-se e o declive da recta diminui.
Analogamente, para o momento de picada total relativo ao centro de massa temos
Cm = Cm0 + Cmαα+ Cmδeδe + Cmδtδt. (3.13)
Dado que o compensador é normalmente pequeno, tanto a sustentação como o mo-mento de picada adicionais criados pela deflexão δt são pequenos e, em primeiraaproximação, podemos fazer Cmδt
≈ 0 e desprezar o último termo. Usando a expressãopara δefree , (3.7), obtemos
C′m = Cm0 + Cmαα− Cmδe
1b2
(Che0 + Cheαα+ b3δt
), (3.14)
em que C′m designa o momento de picada total relativamente ao centro de massa paravoo com manche livre. A equação anterior tem a forma
C′m = C′m0+ C′mα
α, (3.15)
com
C′m0= Cm0 −
Cmδe
b2
(Che0 + b3δt
), (3.16)
C′mα= Cmα −
Cmδe
b2Cheα . (3.17)
Tendo em conta que Cmδe , b2 e Cheα são negativos, |C′mα| < |Cmα|. O declive da curva de
Cm com α é menos negativo e isto significa que, com manche livre, há uma diminuiçãoda estabilidade estática com manche livre.
41

3.2.3 Sustentação na cauda e factor de manche livre
Pretende-se agora determinar a variação da sustentação na cauda com αt para umaaeronave com um estabilizador horizontal com perfil simétrico (donde b0 = 0) e mu-nido de um leme de profundidade. Supomos que existe um compensador, mas que asua contribuição para a sustentação é desprezável. Com manche livre
Che = Che0 + b2αt + b2δefree + b3δt = 0,
pelo que
δefree = −1b2(b1αt + b3δt) .
Então o coeficiente de sustentação na cauda é
C′Lt = atαt + aeδefree +∂CLt∂δt
δt
= atαt − ae1b2(b1αt + b3δt)+
∂CLt∂δt︸ ︷︷ ︸≈0
δt
Logo,
C′Lt =(at −
aeb1
b2
)αt −
aeb3
b2δt.
A variação com αt é linear e o declive da recta é dado por
∂C′Lt∂αt
= at −aeb1
b2= at
(1− aeb1
atb2
)= atF, (3.18)
em que F é designado por factor de manche livre,
F = 1− aeb1
atb2. (3.19)
3.2.4 Ponto neutro de manche livre
O momento de picada total relativo ao centro de massa depende das contribuiçõesda asa e do estabilizador (ver equação (2.41)),
C′m = Cmacwb + CLwb(h− hnwb)−StSltcC′Lt
= Cmacwb + CLwb(h− hnwb)−StS(h− hnwb)C′Lt − VHC
′Lt .
Tendo em conta que (ver equação (2.29))
C′L = CLwb + ηtStSC′Lt ,
obtemos finalmente
C′m = Cmacwb + C′L(h− hnwb)− VHC′Lt . (3.20)
42
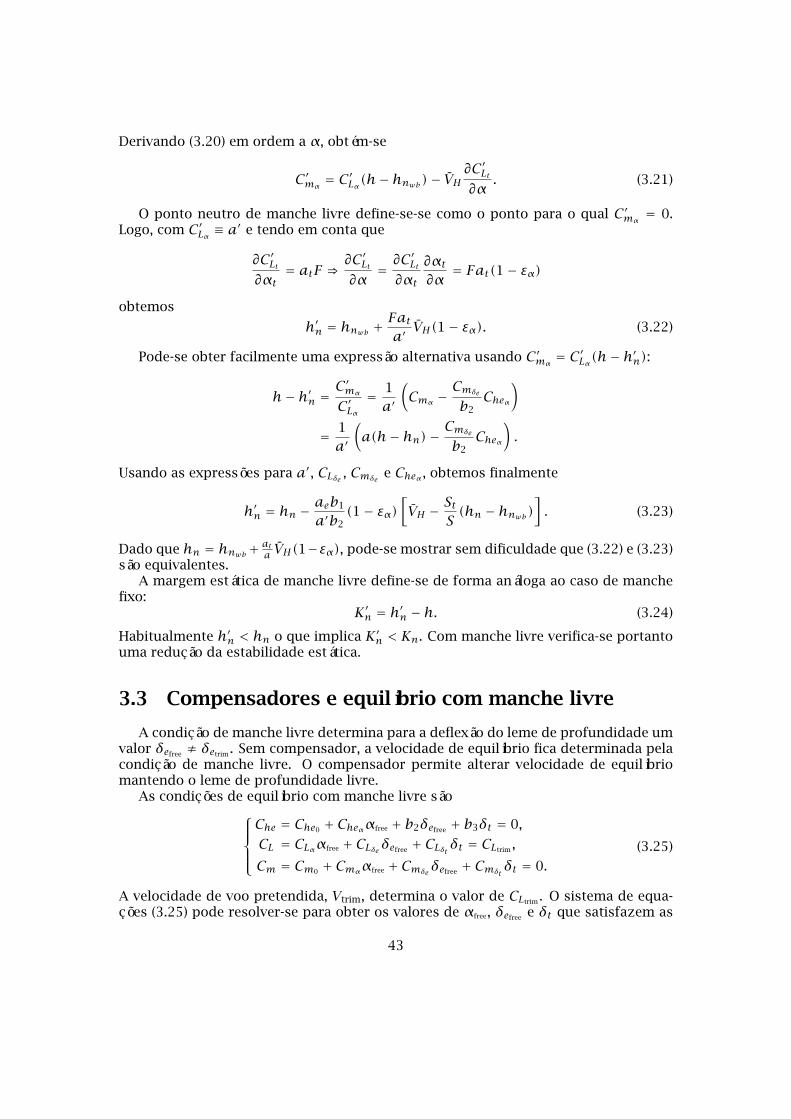
Derivando (3.20) em ordem a α, obtém-se
C′mα= C′Lα(h− hnwb)− VH
∂C′Lt∂α
. (3.21)
O ponto neutro de manche livre define-se-se como o ponto para o qual C′mα= 0.
Logo, com C′Lα ≡ a′ e tendo em conta que
∂C′Lt∂αt
= atF ⇒∂C′Lt∂α
=∂C′Lt∂αt
∂αt∂α
= Fat(1− εα)
obtemos
h′n = hnwb +Fata′VH(1− εα). (3.22)
Pode-se obter facilmente uma expressão alternativa usando C′mα= C′Lα(h− h′n):
h− h′n =C′mα
C′Lα= 1a′
(Cmα −
Cmδe
b2Cheα
)= 1a′
(a(h− hn)−
Cmδe
b2Cheα
).
Usando as expressões para a′, CLδe , Cmδe e Cheα , obtemos finalmente
h′n = hn −aeb1
a′b2(1− εα)
[VH −
StS(hn − hnwb)
]. (3.23)
Dado que hn = hnwb+ ata VH(1−εα), pode-se mostrar sem dificuldade que (3.22) e (3.23)são equivalentes.
A margem estática de manche livre define-se de forma análoga ao caso de manchefixo:
K′n = h′n − h. (3.24)
Habitualmente h′n < hn o que implica K′n < Kn. Com manche livre verifica-se portantouma redução da estabilidade estática.
3.3 Compensadores e equilíbrio com manche livre
A condição de manche livre determina para a deflexão do leme de profundidade umvalor δefree ≠ δetrim . Sem compensador, a velocidade de equilíbrio fica determinada pelacondição de manche livre. O compensador permite alterar velocidade de equilíbriomantendo o leme de profundidade livre.
As condições de equilíbrio com manche livre sãoChe = Che0 + Cheααfree + b2δefree + b3δt = 0,CL = CLααfree + CLδeδefree + CLδtδt = CLtrim ,Cm = Cm0 + Cmααfree + Cmδeδefree + Cmδt
δt = 0.(3.25)
A velocidade de voo pretendida, Vtrim, determina o valor de CLtrim . O sistema de equa-ções (3.25) pode resolver-se para obter os valores de αfree, δefree e δt que satisfazem as
43

condições de equilíbrio para uma velocidade Vtrim. No entanto, CLδt ≈ 0 e Cmδt≈ 0 e
podemos resolver o sistema de equações aproximado que se obtém desprezando ostermos referidos. Nessa aproximação as duas últimas equações conduzem a
CLααfree + CLδeδefree = CLtrim
Cm0 + Cmααfree + Cmδeδefree = 0
O sistema (3.3) é idêntico a (2.89), pelo que as soluções serão também idênticas ao casode manche fixo. Logo, nesta aproximação,
δefree = δetrim
αfree = αtrim
(3.26)
A condição de manche livre é (3.6):
Che0 + Cheααfree + b2δefree + b3δttrim = 0,
e permite obter
δttrim = −1b3
(Che0 + Cheααtrim + b2δetrim
). (3.27)
Em conclusão, nesta aproximação (3.27) permite obter o valor de δttrim que faz δefree =δetrim e αfree = αtrim. Substituindo as expressões para δetrim e αtrim, obtém-se
δttrim = −1b3
[Che0 +
Cm0
det
(CheαCLδe − b2CLα
)− a
′b2
det(h− h′n)CLtrim
]. (3.28)
Conclui-se que δttrim varia linearmente com CLtrim (se h cte), e varia linearmente com h.
3.4 Equilíbrio com deflexão do compensador
Note-se que o compensador pode ter uma deflexão não nula δt e a aeronave estar avoar com manche fixo. Nesse caso as equações de equilíbrio são apenas
CL = CLααtrim + CLδeδetrim + CLδtδt = CLtrim ,Cm = Cm0 + Cmααtrim + Cmδeδetrim + Cmδt
δt = 0,(3.29)
e a condição de manche livre, Che = 0, não se verifica. A solução do sistema éαtrim =
CLtrimCmδe + Cm0CLδe +(CLδeCmδt
− CLδtCmδe
)δt
det,
δetrim = −CLαCm0 + CLtrimCmα +
(CLαCmδt
− CLδtCmα
)δt
det.
(3.30)
Os valores de equilíbrio αtrim e δetrim dependem da deflexão do compensador, δt . Noentanto, se pudermos admitir que o compensador tem uma contribuição desprezá-vel para a sustentação total (CLδt ≈ 0) e para o momento de picada total (Cmδt
≈ 0),
44

Figura 3.3: Ligações entre manche e leme de profundidade. (Fonte: Etkin)
obtemos a seguinte solução aproximada:αtrim ≈
CLtrimCmδe + Cm0CLδedet
δetrim ≈CLαCm0 + CLtrimCmα
det
(3.31)
Nesta aproximação os valores de equilíbrio αtrim e δetrim não dependem da deflexão docompensador, δt . Esta influi apenas no coeficiente do momento de charneira e, comoveremos, na força de controlo.
3.5 Forças de Controlo
Nesta secção pretende-se determinar a força necessária para deflectir o leme deprofundidade em função de CLtrim ou Vtrim.
3.5.1 Forças de controlo e momento de charneira
Vamos considerar uma aeronave com um estabilizador horizontal com leme deprofundidade e compensador. Admitimos que todos os elementos são rígidos e que oatrito é desprezável.
A figura 3.3 representa esquematicamente as ligações entre manche e leme de pro-fundidade. Estas ligações podem ser, como nas aeronaves mais antigas, puramentemecânicas ou podem incluir sistemas hidráulicos, pneumáticos ou electrónicos. Emqualquer dos casos podemos supor que a força que é necessário exercer no manche,P , é proporcional ao momento de charneira He, isto é,
P = GHe. (3.32)
O coeficiente de proporcionalidade G é chamado factor de engrenagem (gear factor,em m-1). O sentido da força P é definido como positivo se está dirigida para a caudado avião. Tendo em conta a definição (3.1) do coeficiente do momento de charneira,
P = G 12ρV 2 Sece Che (3.33)
45

Para prosseguir, é necessário encontrar uma expressão para Che em função de CLtrim
ou Vtrim. O coeficiente do momento de charneira pode ser dado pela equação (3.2):
Che = Che0 + Cheαα+ b2δe + b3δt
Como vimos anteriormente (equações (3.6) e (3.27)), quando δt = δttrim , o equilíbrioatinge-se com manche livre, e nesse caso a força é nula:
P = 0⇒ Che = 0⇒ δttrim = −1b3
(Che0 + Cheααtrim + b2δetrim
). (3.34)
Consideremos agora o caso em que, mantendo a mesma velocidade de equilíbrio, δt ≠δttrim . Como referido na secção 3.4, o equilíbrio neste caso é ainda definido, pelo menosde forma aproximada, por α = αtrim e δe = δetrim , mas agora o momento de charneiranão se anula e a força não é nula. O coeficiente do momento de charneira pode entãoescrever-se
Che = Che0 + Cheααtrim + b2δetrim + beδt ≠ 0, (3.35)
ou, usando (3.34),Che = b3(δt − δttrim). (3.36)
Usando a expressão (3.28) para δttrim , obtém-se
Che = b3δt + Che0 +Cm0
det
(CheαCLδe − b2CLα
)− a
′b2
det(h− h′n)CLtrim . (3.37)
Num voo horizontal o coeficiente de sustentação é dado por
CLtrim =W
12ρV 2 S
= w12ρV 2
, (3.38)
em que w = W/S é a carga alar. Substituindo (3.38) e (3.37) em (3.33) e ordenando ostermos de modo a pôr em evidência a dependência de V , obtém-se a expressão para aforça de controlo:
P = A+ B12ρV 2 (3.39)
com
A = −GSe cewa′b2
det(h− h′n) (3.40)
B = GSe ce[b3δt + Che0 +
Cm0
det
(CheαCLδe − b2CLα
)](3.41)
A é um termo independente da velocidade (depende de w e K′n), enquanto que B entrano termo relativo à dependência com a pressão dinâmica (com V 2).
Na figura 3.4 representa-se a variação da força de controlo com a velocidade. Daanálise da figura e das equações (3.39), (3.40) e (3.41) podemos concluir que a força decontrolo P é proporcional a Sece (isto é, ao cubo da dimensão linear do avião), ao factorde engrenagem G e à pressão dinâmica (P aumenta com ρ, diminuindo com altitude, eé proporcional a V 2). A posição do centro de massa afecta apenas o termo constante (seh diminui, P aumenta). A carga alar também afecta apenas termo constante (se cargaalar w aumenta, P aumenta). Finalmente, a variação da deflexão do compensador, δt ,altera o valor de B. Deste modo altera a curvatura da parábola, controla intersecçãocom eixo V e portanto determina Vtrim, isto é, o valor de V para o qual P = 0.
46

Figura 3.4: Variação da força de controlo com a velocidade. (Fonte: Etkin)
3.5.2 Gradiente da força de controlo
O gradiente da força de controlo traduz a variação de P necessária para alterar avelocidade V . Se o gradiente é grande, o controlo é pesado, ou seja, é preciso variarmuito a força para mudar a velocidade; se é pequeno, o controlo é leve e uma pequenavariação da força altera muito a velocidade.
O termo A depende da margem estática de manche livre, enquanto que B não de-pende da posição do centro de massa mas depende da deflexão do compensador. As-sim, se alteramos a posição do centro de massa de h = h1 para h = h1 + ∆h (se oCM se deslocar para a cauda do avião) e ao mesmo tempo alteramos δttrim para manterVtrim constante, verifica-se que o gradiente diminui com K′n, como ilustra a figura 3.5.Quando K′n = 0, A anula-se e o declive também se anula mantivermos a condição deVtrim permanecer constante.
Para determinar o gradiente da força de controlo, deriva-se P em (3.39) em ordema V obtendo-se
P = A+ B12ρV 2 ⇒ dP
dV= BρV.
Para valores típicos das derivadas de estabilidade o gradiente da força de controlo énegativo e varia linearmente com V .
Considere-se agora o caso de manche livre, em que P = 0. A deflexão do compen-sador é δt = δttrim e determina a velocidade de equilíbrio Vtrim. Da equação (3.39) comP = 0 segue-se que
B = − A12ρV
2trim
. (3.42)
Logo, obtemos (dPdV
)trim= −2
AVtrim
. (3.43)
47

Figura 3.5: Variação da força de controlo com a velocidade V da aeronave para dife-rentes valores de h, mantendo fixo o valor de Vtrim.
Usando expressão para A, obtém-se finalmente(dPdV
)trim= 2GSecew
a′b2
det(h− h′n)
1Vtrim
. (3.44)
Conclui-se que quando o avião voa em equilíbrio com manche livre (sendo a forçade controlo nula por definição e a velocidade Vtrim determinada por δt = δttrim ), ogradiente da força de controlo é proporcional ao cubo da dimensão linear do avião(porque proporcional a Sece), à carga alar e à margem estática de manche livre K′n,e é inversamente proporcional a Vtrim. Logo, o controlo do leme de profundidade é«mais pesado» a baixa velocidade, quando centro de massa está mais à frente (margemestática maior) e com maior peso.
48

Capítulo 4
Efeitos de superfícieshiper-sustentadoras e dapropulsão na estabilidadelongitudinal
4.1 Influência de superfícies hiper-sustentadoras
As superfícies hiper-sustentadoras são elementos que provocam alteração da con-figuração das asas. Os seus efeitos na estabilidade de uma aeronave decorrem princi-palmente da modificação dos valores de hnwb , Cmacwb
e CLwb .
4.1.1 Influência dos flaps
Vamos considerar apenas o caso de flaps que cobrem parte da envergadura, nobordo de fuga.
Os efeitos aerodinâmicos dos flaps estão esquematizados na figura 4.1. A distri-buição de sustentação na asa é alterada e o ângulo de downwash aumenta (porque asustentação aumenta). Localmente o efeito deflexão dos flaps é equivalente a aumentara curvatura da asa. Como se mostra nas figuras 4.2 e 4.3, isto conduz a variações nasustentação da asa, no coeficiente do momento relativamente ao centro aerodinâmico
Figura 4.1: Efeitos aerodinâmicos. (Fonte: Etkin & Reid, Dynamics of Flight)
49

Figura 4.2: Efeitos da deflexão dos flaps. (Fonte: Etkin & Reid, Dynamics of Flight)
Figura 4.3: Efeito da deflexão dos flaps no coeficiente de sustentação (esquerda), ân-gulo de downwash (centro) e coeficiente do momento de picada (direita). (Fonte: Etkin& Reid, Dynamics of Flight)
da asa e no ângulo de downwash, resultando em
∆Cmwb = ∆Cmacwb+∆CLwb(h− hnwb), (4.1)
∆CL = ∆CLwb − atStS∆ε, (4.2)
∆Cmt = atVH∆ε. (4.3)
Dado que, como se referiu acima, o efeito da deflexão dos flaps é equivalente aaumentar a curvatura do perfil, as variações ∆Cmacwb
e ∆CLwb não dependem de α masapenas do ângulo de deflexão dos flaps. Admitiremos ainda que ∆hnwb é desprezável.Neste caso, o único efeito que a deflexão dos flaps tem em CLα e em Cmα é devido àvariação do ângulo de downwash ε.
Recordando que
a ≡ CLα = awb[
1+ atawb
StS(1− εα)
],
Cmα = a(h− hnwb)− atVH(1− εα),
conclui-se que
∆a ≡ ∆CLα = awbatawb
StS(−∆εα) = −at
StS∆εα (4.4)
∆Cmα = (h− hnwb)∆a+ atVH∆εα (4.5)
=[−(h− hnwb)
StS+ VH
]at∆εα (4.6)
Como ∆a < 0 e ∆Cmα > 0, a deflexão dos flaps diminui a estabilidade.
50

Figura 4.4: Geometria
4.2 Influência da propulsão no equilíbrio e na estabili-dade
Há tipos de propulsão muito diversos (hélice, turboprops, jacto, etc.), pelo que édifícil fazer tratamento exaustivo. Faremos uma referência apenas aos tipos de pro-pulsão mais usados e mais estudados: hélice e jacto.
Formalmente, para descrever a influência da propulsão no equilíbrio e na estabi-lidade de uma aeronave basta introduzir nas equações os termos Cm0P
e ∂CmP /∂αe incluir os efeitos indirectos da propulsão nos coeficientes da asa+fuselagem e dacauda.
4.2.1 Propulsão a hélice
A força resultante da propulsão tem duas componentes: a força de propulsão T , aolongo do eixo (não afecta Cmα ), e uma força NP , no plano do hélice.
A contribuição devido à força NP no plano do hélice é
∆Cm = CNPxPcSPS, (4.7)
em que SP é a área varrida pelo hélice e
CNP =NP
12ρV 2SP
. (4.8)
Para pequenos ângulos de ataque podemos admitir que CNP é proporcional αP .Logo, NP contribui para Cm0P
e para ∂CmP /∂α. Esta última contribuição pode ser esti-mada a partir de (4.7):
∆Cm = CNPxPcSPS
⇒ ∂CmP
∂α= SPSxPc∂CNP∂αP
∂αP∂α
(4.9)
Se o hélice se encontra longe da asa, ∂αP∂α = 1. A colocação mais comum do hélice éperto da asa, o que induz upwash no hélice, caracterizado pelo ângulo de upwash εP .Deste modo,
αP = α+ εP + cte ⇒ ∂αP∂α
= 1+ ∂εP∂α
(4.10)
51

Figura 4.5: A direcção do escoamento incidente o do jacto não são iguais, o que provocauma força normal à linha de propulsão.
Conclui-se portanto que a contribuição da propulsão para Cmα é
∂CmP
∂α= SPSxPc∂CNP∂αP
(1+ ∂εP
∂α
)(4.11)
Outros efeitos que a propulsão pode produzir são:
• Aumento da sustentação na asa (se escoamento a jusante do hélice incide sobrea asa)
• Aumento do valor efectivo de at e ae (depende de quão afectada é a cauda peloescoamento induzido pelo hélice)
• Aumento do ângulo de downwash (difícil de estimar)
4.2.2 Propulsão a jacto
A influência da propulsão a jacto na derivada cmα decorre de vários efeitos. Doisdeles estão representados nas figuras 4.5 e 4.6.
Na figura 4.5 mostra-se que num motor a jacto a direcção do escoamento incidentee a direcção do jacto podem não ser exactamente iguais, havendo uma variação domomento linear do fluido na direcção normal ao escoamento. Como consequência,existe uma força normal, representada na figura por Nj , a qual provoca um momentode picada relativamente ao centro de massa do avião.
Outro efeito está representado na figura 4.6. O jacto, saindo do motor, vai-se pro-gressivamente misturando com o ar circundante, criando uma zona de mistura que vaiaumentando de dimensões à medida que a distância à sa´da do motor aumenta. Paraesta zona de mistura contribuem tanto o jacto como o ar circundante. Neste, à medidaque parte do ar vai sendo integrado na zona de mistura, gera-se um escoamento nadirecção do jacto (designado por jet induced inflow) o qual altera o escoamento emtorno da cauda e deste modo o ângulo de ataque efectivo na cauda.
52

Figura 4.6: Jet induced flow: o diâmetro do jacto vai crescendo à custa de um fluxo dear do meio circundante, o que pode provoca uma alteração do escoamento incidentena cauda.
53

Capítulo 5
Estabilidade Lateral-Direccional
Os aviões têm habitualmente um plano de simetria. Um movimento diz-se longitu-dinal se não altera a posição do plano de simetria. Movimento lateral é todo aquele emque o plano de simetria se altera. Portanto, há movimento lateral se existir derrapa-gem (sideslip), isto é, velocidade com componente segundo y , ou velocidade angularde rolamento p (roll) ou velocidade angular de guinada r (yaw). Habitualmente háacoplamento entre movimentos (e controlo) laterais.
Em voo rectilíneo estacionário simétrico as forças e momentos laterais são nulos.Portanto, há equilíbrio para deflexão nula dos ailerons e do rudder, o que significa quenum voo rectilíneo simétrico o trim lateral está garantido. Por esta razão a posição docentro de massa não é importante na estabilidade lateral-direccional.
A estabilidade estática lateral-direccional permite estabelecer condições para que,após uma pequena perturbação que induza uma velocidade de derrapagem ou um ân-gulo de pranchamento, o avião retorne à posição de voo simétrico com asas niveladas.
5.1 Estabilidade direccional
5.1.1 Condições de estabilidade
O ângulo de derrapagem β é o ângulo entre a velocidade da aeronave (airspeed) e oplano de simetria. Como se pode constatar da figura 5.1,
β = arcsinvV
(5.1)
Num voo simétrico v = 0 e não existe derrapagem nem momento aerodinâmico deguinada. Pelo contrário, num voo com derrapagem existe um momento aerodinâmicode guinada N (ver figura 5.1). Para que um voo simétrico seja estável face a pequenasperturbações da velocidade lateral, é necessário que N > 0 para β > 0. A condição deestabilidade pode escrever-se como
∂N∂β> 0 (5.2)
O coeficiente do momento de guinada define-se como
Cn =N
12ρV 2Sb
, (5.3)
54
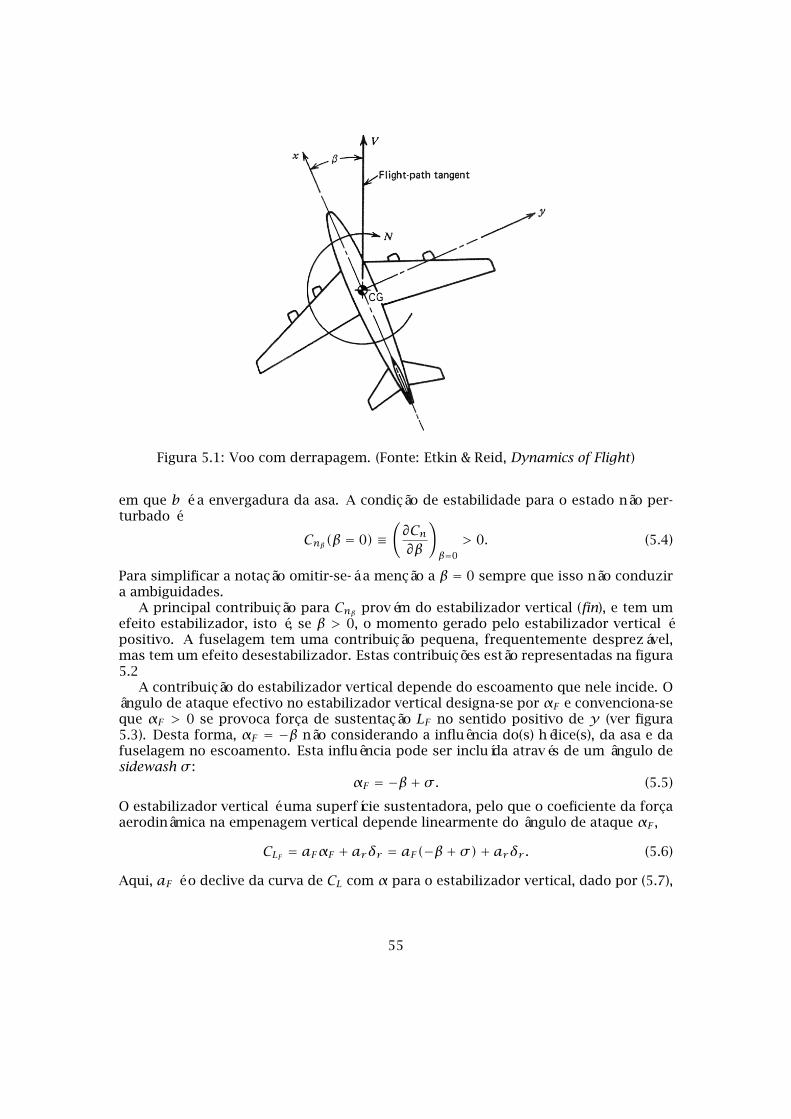
Figura 5.1: Voo com derrapagem. (Fonte: Etkin & Reid, Dynamics of Flight)
em que b é a envergadura da asa. A condição de estabilidade para o estado não per-turbado é
Cnβ(β = 0) ≡(∂Cn∂β
)β=0
> 0. (5.4)
Para simplificar a notação omitir-se-á a menção a β = 0 sempre que isso não conduzira ambiguidades.
A principal contribuição para Cnβ provém do estabilizador vertical (fin), e tem umefeito estabilizador, isto é, se β > 0, o momento gerado pelo estabilizador vertical épositivo. A fuselagem tem uma contribuição pequena, frequentemente desprezável,mas tem um efeito desestabilizador. Estas contribuições estão representadas na figura5.2
A contribuição do estabilizador vertical depende do escoamento que nele incide. Oângulo de ataque efectivo no estabilizador vertical designa-se por αF e convenciona-seque αF > 0 se provoca força de sustentação LF no sentido positivo de y (ver figura5.3). Desta forma, αF = −β não considerando a influência do(s) hélice(s), da asa e dafuselagem no escoamento. Esta influência pode ser incluída através de um ângulo desidewash σ :
αF = −β+ σ. (5.5)
O estabilizador vertical é uma superfície sustentadora, pelo que o coeficiente da forçaaerodinâmica na empenagem vertical depende linearmente do ângulo de ataque αF ,
CLF = aFαF + arδr = aF(−β+ σ)+ arδr . (5.6)
Aqui, aF é o declive da curva de CL com α para o estabilizador vertical, dado por (5.7),
55
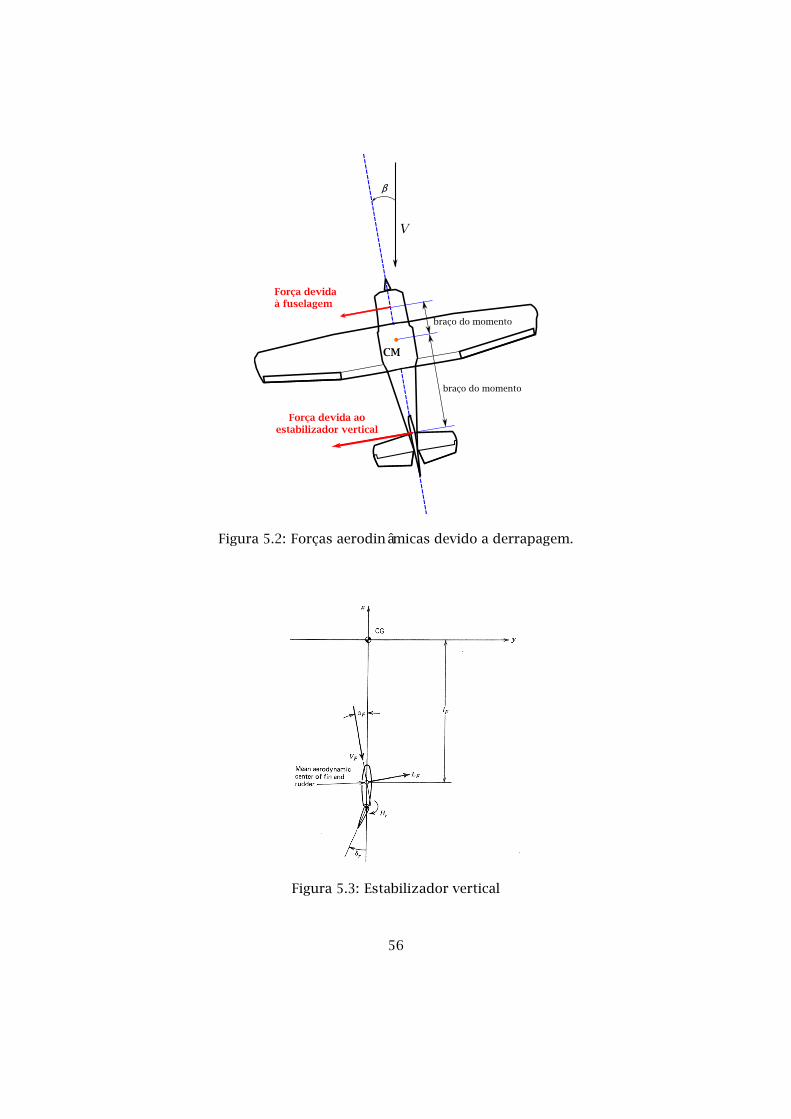
Figura 5.2: Forças aerodinâmicas devido a derrapagem.
Figura 5.3: Estabilizador vertical
56

e ar é eficiência do leme de direcção (rudder), dado por (5.8):
aF ≡∂CLF∂αF
, (5.7)
ar ≡∂CLF∂δr
. (5.8)
O momento de guinada devido à força aerodinâmica aplicada no estabilizador verticalé (ver figura 5.3)
NF = −LF · lF = −CLF12ρV 2
F SF lF , (5.9)
em que VF é a velocidade do escoamento incidente no estabilizador vertical, SF é aárea do estabilizador vertical e lF é distância (em x) entre o centro aerodinâmico doestabilizador e o centro de massa (ou seja, é o módulo da coordenada x do centroaerodinâmico do estabilizador vertical). O coeficiente do momento de guinada é
CnF =NF
12ρV 2Sb
= −CLF
12ρV
2F SF lF
12ρV 2Sb
= −CLFVV(VFV
)2
. (5.10)
A razão de volume do estabilizador vertical, VV , é definida por
VV =SF lFSb
. (5.11)
Recordando que CLF = aF(−β+ σ)+ arδr , obtém-se
CnF = − [aF(−β+ σ)+ arδr ]VV(VFV
)2
. (5.12)
Derivando em ordem ao ângulo de derrapagem β, obtemos finalmente
∂CnF∂β
= aFVV(VFV
)2(
1− ∂σ∂β
). (5.13)
O factor de sidewash ∂σ∂β é difícil de estimar pois depende da alteração do escoa-
mento devido à fuselagem e aos hélices. A asa têm também uma contribuição devidaao escoamento assimétrico (importante para asas com alongamento pequeno e comflecha). Com frequência desprezaremos este termo.
A razão de velocidades do escoamento incidente na asa e no estabilizador verticalé(VFV
)= 1, excepto se o estabilizador vertical estiver na esteira do hélice. Nesse caso
VF > V .Em conclusão, a contribuição do estabilizador vertical para a derivada Cnβ é posi-
tiva, pelo que tem um efeito estabilizador, e é proporcional a aF e VV .
5.1.2 Controlo de guinada
O controlo de guinada é feito através do leme de direcção (rudder), como se mostrana figura 5.4. Num voo simétrico com trajectória rectilínea a deflexão do rudder (δr ) énula. O rudder é importante quando se quer manter β ≠ 0, como nas situações de voo
57

Figura 5.4: A deflexão do leme de direcção rudder leva ao aparecimento de uma forçaaerodinâmica no estabilizador vertical que provoca um momento de guinada.
com derrapagem (ex: aproximação à pista), quando um motor deixa de funcionar (OEI:One Engine Inoperative) ou em manobras.
Atendendo a que CLF = aF(−β+ σ)+ arδr
CnF = −CLFVV(VFV
)2
conclui-se que
Cnδr = −arVV(VFV
)2
(5.14)
Num voo com ângulo de derrapagem estacionário, β ≠ 0. Se apenas houver deflexãodo rudder e não existir deflexão dos ailerons,
Cn = Cnββ+ Cnδr δr .
Para que o movimento seja estacionário Cn = 0. Logo, obtemos
βδr= −
CnδrCnβ
. (5.15)
Esta relação entre o ângulo de derrapagem e o ângulo de deflexão do rudder é apenasaproximada porque a deflexão do rudder provoca também um momento de rolamento.Este é necessário compensar com os ailerons, o que provoca um momento adicionaldo guinada e logo uma alteração de δr .
A deflexão do leme de direcção implica um momento de charneira e a correspon-dente força de controlo do rudder. Analogamente ao que acontece com o elevator, omomento de charneira é
Chr = b1αF + b2δr , (5.16)
58

enquanto que a força de controlo é dada por
P = G12ρV 2
F Sr cr (b1αF + b2δr ) (5.17)
= G12ρV 2
F Sr cr [b1(−β+ σ)+ b2δr ]. (5.18)
No caso de leme de direcção livre, Chr = 0⇒ δrfree = −b1
b2αF .
C′LF = aFαF + ar(−b1
b2αF)= aF
(1− arb1
aFb2
)︸ ︷︷ ︸
factor de rudder livre
αF (5.19)
5.2 Estabilidade lateral
Os movimentos de rolamento e guinada estão acoplados e a análise da estabili-dade deve ser feita considerando os dois movimentos em conjunto. No entanto, podeconseguir-se uma ideia aproximada acerca dos parâmetros de que depende a estabi-lidade lateral considerando apenas o grau de liberdade de rolamento, como se fosseindependente da guinada.
Supomos um voo estacionário rectilíneo, horizontal e de asas niveladas. Existeestabilidade de rolamento se, quando uma pequena perturbação conduzir a um ângulode pranchamento φ, o momento criado fizer a aeronave voltar a voo nivelado, ou seja,Clφ < 0.
5.2.1 Efeitos devidos a pranchamento
Consideraremos de seguida dois dos efeitos devidos a voo com ângulo de pran-chamento φ. Em primeiro lugar o peso não se encontra no plano de simetria e temcomponente segundo y (ver figura 5.5). Esta força lateral leva ao aparecimento deuma componente da velocidade segundo y , ou seja ao aparecimento de derrapagem.Para haver estabilidade, a derrapagem deve induzir um momento de rolamento quevolta a nivelar a aeronave.
Por outro lado, se devido a uma pequena perturbação as asas de um avião que voacom um certo ângulo de ataque deixarem de estar niveladas, a sua velocidade deixade estar no plano de simetria e passa a existir uma componente v segundo y , isto é,passa a haver derrapagem (ver figuras 5.6 e 5.7).
Num voo nivelado com ângulo de ataque αx a velocidade do avião tem componentes
~V =V cosαx
0V sinαx
, (5.20)
enquanto que num voo não nivelado, com ângulo de pranchamento φ, tem componen-tes
~V = V cosαxV sinαx sinφV sinαx cosφ
. (5.21)
59

Figura 5.5: Voo com pranchamento: o peso tem componente lateral não compensadapela sustentação, o que induz derrapagem.
Figura 5.6: Voo nivelado: vista de perfil (esquerda) e a partir da cauda (direita). Avelocidade do avião encontra-se no plano de simetria.
Figura 5.7: Voo com asas não niveladas, com ângulo de pranchamento φ. Agora avelocidade não se encontra no plano de simetria e tem componente v segundo y .
60

Nos novos eixos há componente de ~V segundo y , pelo que
sinβ = vV= V sinαx sinφ
V= sinαx sinφ, (5.22)
isto é, existe um ângulo de derrapagem que depende de φ. Mas, se há derrapagemé induzido um momento de rolamento devido à contribuição das asas, da fuselageme do estabilizador vertical. Estas contribuições serão discutidas mais à frente, maspor enquanto interessa apenas que o momento de rolamento gerado é proporcional aoângulo de derrapagem β, isto é,
∆Cl = Clββ, (5.23)
ou, usando (5.22),∆Cl = Clββ = Clβ arcsin(sinαx sinφ). (5.24)
Logo, quando as asas deixam de estar niveladas e existe um ângulo de pranchamentoφ é induzido momento de rolamento que é proporcional a
∂Cl∂φ
= ∂Cl∂β
∂β∂φ= Clβ
sinαx cosφ(1− sin2αx sin2φ)1/2
.
Se αx for pequeno, sinβ = sinαx sinφ⇒ β ≈ αx sinφ. Conclui-se que
∂Cl∂φ
= Clβsinαx cosφ
(1− sin2αx sin2φ)1/2≈ Clβαx cosφ
e, supondo αx > 0, o momento de rolamento induzido tem sinal de Clβ . Mas para haverestabilidade lateral o momento de rolamento induzido deve contrariar o rolamento,isto é, ∂Cl∂φ deve ser negativo. Conclui-se então que, para haver estabilidade lateral, énecessário que
Clβ < 0. (5.25)
5.2.2 «Efeito diedro»
A asa, a fuselagem e o estabilizador vertical contribuem para a derivada Clβ . Acontribuição mais importante é devida ao ângulo de diedro (é tão importante que Clβé por vezes chamada efeito diedro). O alongamento e afilamento da asa, bem como aflecha também são importantes para Clβ . Um outro factor importante é a posição daasa relativamente à fuselagem (asa alta ou asa baixa).
Contribuição do diedro das asas
Quando as asas têm um ângulo de diedro, a existência de velocidade de derrapagemleva a uma diferença na sustentação nas asas que provoca um momento de rolamento.Este contraria o pranchamento inicial (ver figura 5.8) e tem por isso um efeito estabili-zador.
O ângulo de ataque numa asa depende da razão entre a componente da velocidadeperpendicular à linha de corda do perfil, Vn, e a componente segundo a linha de cordado perfil, ou, de forma aproximada,
α∝ Vn/V. (5.26)
61

Figura 5.8: Efeito de diedro.
Figura 5.9: Diferença de ângulo de ataque devido ao diedro.
62

Figura 5.10: Contribuição devida ao ângulo de flecha.
No caso de asas com diedro, a figura 5.9 permite constatar que a componente normalda velocidade é, para a asa direita,
Vn = w cos Γ + v sin Γ ≈ w + vΓ , (5.27)
e para a asa esquerda,Vn = w cos Γ − v sin Γ ≈ w − vΓ . (5.28)
Para pequenos ângulos de derrapagem, β = vV ⇒ v = βV . Tendo em conta (5.26), a
variação de ângulo de ataque devido ao ângulo de diedro é, na asa direita ∆α ∝ +βΓ ,enquanto que na asa esquerda é ∆α ∝ −βΓ . Para β > 0, na asa direita ∆α > 0, o quefaz aumentar CL, enquanto que na asa esquerda ∆α < 0 o que faz diminuir CL. Emconsequência, é gerado um momento de rolamento Cl ∝ −βΓ ⇒ Clβ ∝ −Γ . Se Γ > 0, osinal é negativo, como pretendido para garantir a estabilidade.
Contribuição da flecha da asa
A força de sustentação numa asa é dada por L = 12ρV
2nSCL, em que Vn representa
aqui a componente da velocidade perpendicular à linha de referência da asa (1/4 cordapara voo subsónico). Para o mesmo ângulo de ataque, L é tanto maior quanto maiora velocidade Vn. Mas, se β > 0, então L é maior na asa direita, pelo que existe ummomento de rolamento negativo. Uma estimativa desse momento é
Cl ∝ −CL[(V 2n)asa dir. − (V 2
n)asa esq.]
= −CLV 2[cos2(Λ− β)− cos2(Λ+ β)]= −CLV 2 sin 2Λ sin 2β
≈ −2βCLV 2 sin 2Λ
Logo, a contribuição da flecha para Clβ ∝ −2CLV 2 sin 2Λ < 0. Esta estimativa não émuito exacta, mas permite concluir que a contribuição da flecha para Clβ é estabiliza-dora.
63
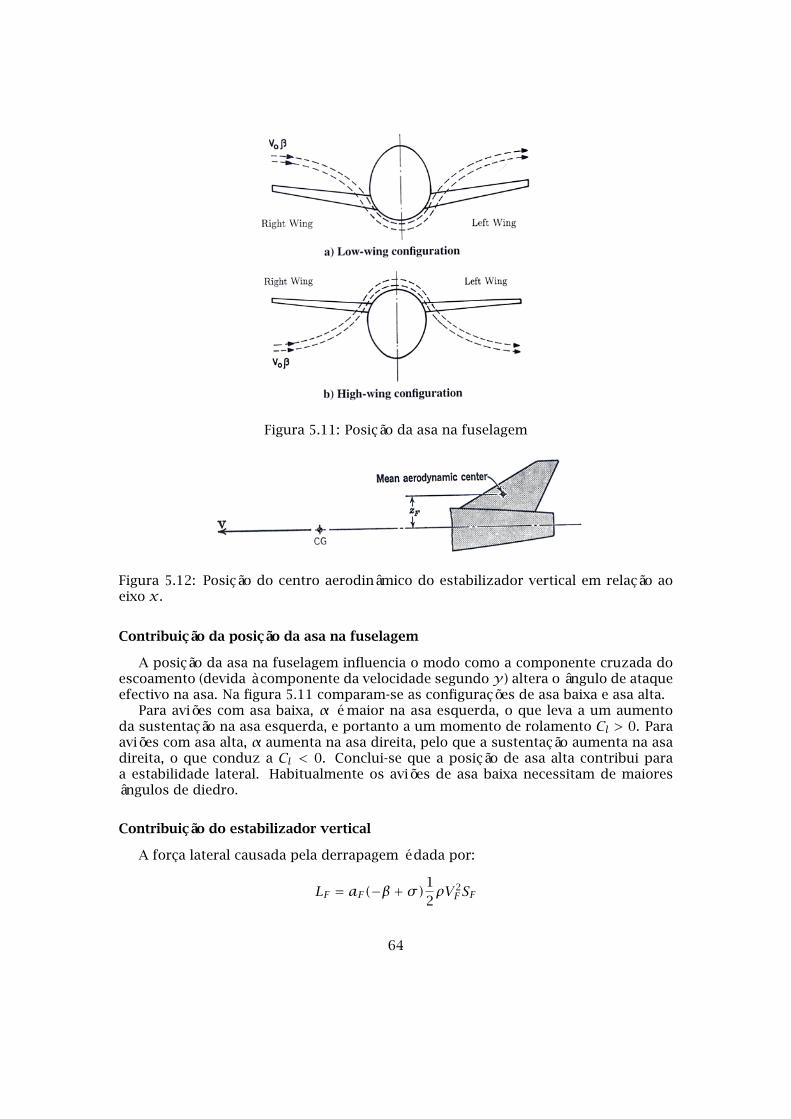
Figura 5.11: Posição da asa na fuselagem
Figura 5.12: Posição do centro aerodinâmico do estabilizador vertical em relação aoeixo x.
Contribuição da posição da asa na fuselagem
A posição da asa na fuselagem influencia o modo como a componente cruzada doescoamento (devida à componente da velocidade segundo y) altera o ângulo de ataqueefectivo na asa. Na figura 5.11 comparam-se as configurações de asa baixa e asa alta.
Para aviões com asa baixa, α é maior na asa esquerda, o que leva a um aumentoda sustentação na asa esquerda, e portanto a um momento de rolamento Cl > 0. Paraaviões com asa alta, α aumenta na asa direita, pelo que a sustentação aumenta na asadireita, o que conduz a Cl < 0. Conclui-se que a posição de asa alta contribui paraa estabilidade lateral. Habitualmente os aviões de asa baixa necessitam de maioresângulos de diedro.
Contribuição do estabilizador vertical
A força lateral causada pela derrapagem é dada por:
LF = aF(−β+ σ)12ρV 2
F SF
64

Figura 5.13: O controlo de rolamento é feito por intermédio de ailerons.
O coeficiente do momento de rolamento respectivo é:
∆Cl =LFzF
12ρV 2Sb
= aF(−β+ σ)SFzFSb
(VFV
)2
.
Derivando em ordem a β obtemos a expressão da contribuição do estabilizador verticalpara a derivada Clβ :
∆Clβ = −aF(
1− ∂σ∂β
)SFzFSb
(VFV
)2
Esta contribuição é negativa, e portanto é estabilizadora, mas normalmente é muitomenor que as tratadas anteriormente, uma vez que tanto SF/S como zF/b são peque-nos.
5.2.3 Controlo de rolamento
O controlo da velocidade angular de rolamento é feito pelos ailerons.Por definição, a deflexão total dos ailerons é a média da deflexão de cada um (ver
figura 5.14):
δa =12(δ1 + δ2). (5.29)
A deflexão dos ailerons é considerada positiva se o aileron da asa direita é deflectidopara baixo e o da asa esquerda deflectido para cima. (Esta é a convenção usada no livro
65

Figura 5.14: Deflexão dos ailerons.
de Etkin; muitos autores usam a convenção oposta.) Com esta convenção,
δa > 0 ⇒ Cl < 0 ⇒ Clδa < 0 (5.30)
Note-se que a deflexão dos ailerons produz também momento de guinada. Por isso aderivada Cnδa não é nula.
Guinada adversa
No caso de ailerons simples (tipo flap), a sua deflexão para baixo leva a um aumentode sustentação e de resistência induzida. Assim, δa > 0 leva a um aumento de resistên-cia aerodinâmica na asa direita e a uma diminuição na asa esquerda. O diferencial deresistência aerodinâmica provoca um momento de guinada positivo (nose-right). Ora,normalmente δa > 0 usa-se para iniciar viragem à esquerda e o momento de guinadaprovocado tem o efeito inverso, chamando-se por isso guinada adversa (aileron ad-verse yaw). O efeito da guinada adversa é mais importante em aeronaves com grandealongamento.
O efeito da guinada adversa é normalmente corrigido usando o rudder. Para mini-mizar a necessidade de correcção é possível usar-se frise ailerons, spoilers ou aileronsdiferenciais. Também se pode recorrer ao acoplamento de ailerons e rudder.
Reversão dos ailerons (aileron reversal)
A deflexão de uma superfície de controlo (tipo flap) faz variar a carga aerodinâ-mica aplicada. O seu centróide está localizado perto de c/2 para velocidades baixase desloca-se para trás quando velocidade aumenta (especialmente para velocidadessupersónicas). Quando centróide está atrás do eixo de torsão da asa, a deflexão doaileron implica uma torsão da asa, o que leva a uma diminuição do ângulo de ataque,o que conduz a uma diminuição da eficácia do controlo.
Para a velocidade de reversão, uma deflexão positiva dos ailerons conduz a uma di-minuição de sustentação na asa direita, a um aumento de sustentação na asa esquerda,
66
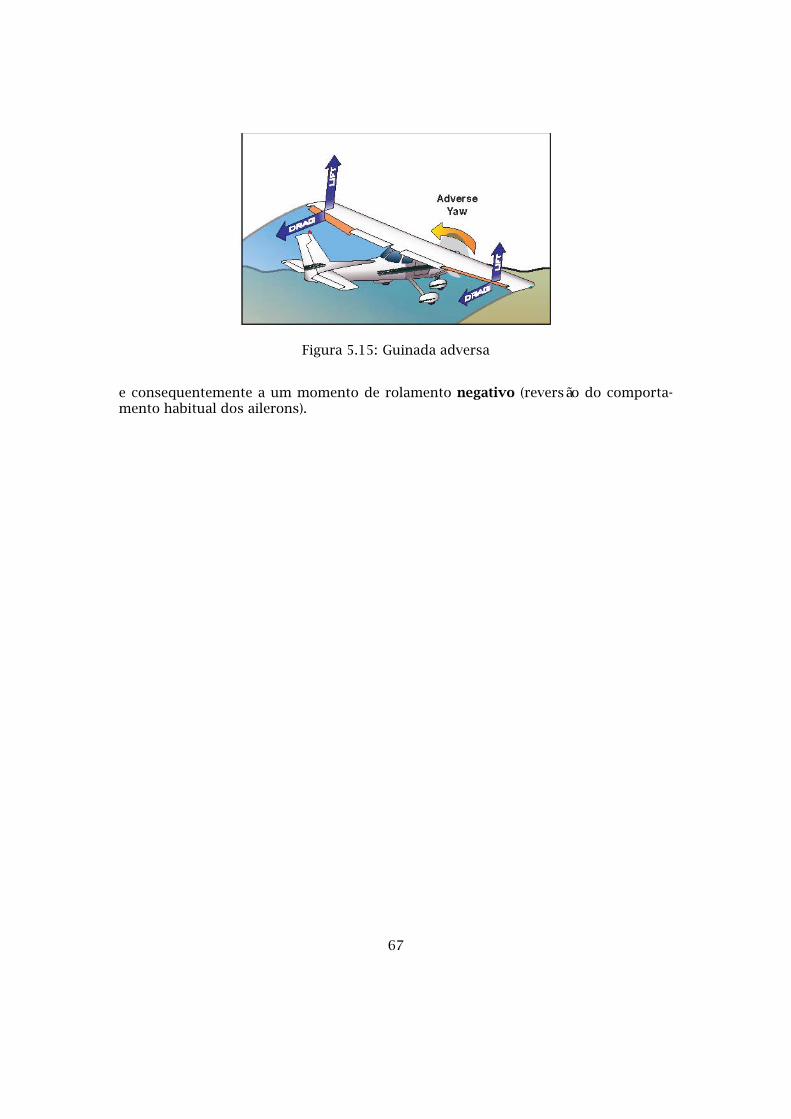
Figura 5.15: Guinada adversa
e consequentemente a um momento de rolamento negativo (reversão do comporta-mento habitual dos ailerons).
67

Capítulo 6
Equações do Movimento
Neste capítulo estabelecer-se-ão as equações que regem a dinâmica de um avião,considerado como um corpo rígido. Na realidade um avião é um corpo deformável,mas na maior parte das situações dinâmicas os efeitos da elasticidade não são muitoimportantes e é possível, quando necessário, tratá-los como pequenas modificaçõesrelativamente ao caso rígido.
6.1 Referenciais
Para os nossos propósitos podemos considerar como referencial inercial um refe-rencial fixo na Terra, designado por FE, (OxEyEzE). Uma vez que pretendemos anali-sar apenas o voo durante intervalos de tempo relativamente curtos (da ordem de minu-tos), podemos desprezar a curvatura da Terra e considerar a aceleração da gravidade~g como vertical. O eixo OzE é escolhido segundo a direcção e sentido da gravidade (évertical e aponta para baixo). O referencial fixo no avião é designado por FB, (Cxyz).Tem origem no centro de massa da aeronave e move-se solidário com ela. A figura 6.1representa os dois referenciais.
Qualquer dos referenciais pode ser usado para medir grandezas físicas. Assim,podemos medir a velocidade do ar relativamente ao avião ou relativamente à Terra.Por outro lado, os eixos e os vectores de base de qualquer dos referenciais pode serusado para escrever qualquer vector. Podemos, por exemplo, escrever a velocidade doar relativamente ao avião tanto no referencial do avião como no referencial da Terra.Sempre que possa haver ambiguidades usaremos a notação
~Vabem que o expoente a identifica o referencial relativamente ao qual medimos o vector eo índice b identifica o referencial no qual escrevemos as componentes do vector.
Exemplificando o uso da notação, a velocidade relativamente à Terra é ~VE , e tantopode ser escrita no referencial da Terra, ~VEE = (xE, yE, zE), como no referencial doavião, ~VEB = (uE, vE,wE). A velocidade do avião relativamente ao ar (airspeed), podeser designada simplesmente por ~VB = (u,v,w), escrita no referencial do avião. Note-se que, se o vento tiver velocidade ~W relativamente à Terra,
~VE = ~V + ~W.
68

Figura 6.1: Referencial inercial ligado à Terra, FE , de eixos (OxEyEzE) e referencialligado ao avião, FB , de eixos (Cxyz).
6.2 Ângulos de Euler e matrizes de rotação
6.2.1 Definição dos Ângulos de Euler
Os ângulos de Euler permitem descrever a orientação relativa dos dois referenciais(FE fixo na Terra e FB solidário com o avião). Existem muitas definições possíveis paraos ângulos de Euler, mas em aeronáutica são usados os ângulos de guinada (yaw),picada/cabragem (pitch) e pranchamento ou rolamento (bank, roll) que definem trêsrotações sucessivas.
A primeira rotação, em torno do eixo vertical fixo CzE , define o ângulo de guinadaψ, como se mostra na figura 6.2. A segunda rotação, representada na figura 6.3, éfeita em torno do eixo Cy1 obtido após a rotação anterior, e define o ângulo de picada(usa-se também cabragem quando o ângulo é negativo), θ. A terceira rotação faz-se emtorno do eixo Cx2, como se mostra na figura 6.4 e define o ângulo de pranchamento(ou rolamento) φ.
6.2.2 Matrizes de rotação
Para relacionar as componentes de um vector no sistema de eixos da Terra e nosistema de eixos do avião temos de introduzir a matriz de rotação entre os dois sis-temas de eixos. Uma matriz de rotação relaciona as componentes de um vector nossistemas de eixos antes e depois da rotação. Como os ângulos de Euler são definidoscomo rotações em torno de sucessivos eixos coordenados, definiremos em primeirolugar as matrizes para rotações em torno de cada um dos eixos coordenados para os
69

Figura 6.2: Rotação que define o ângulo de guinada, em torno do eixo fixo vertical CzE .
Figura 6.3: Rotação que define o ângulo de picada, em torno do eixo Cy1.
70

Figura 6.4: Rotação que define o ângulo de rolamento, em torno do eixo Cx2 ≡ Cx.
x
y
z
α
α
β
βx
y
z
x
y
z
γ
γ
Figura 6.5: Rotações em torno de cada um dos eixos coordenados
71

ângulos mostrados na figura 6.5. Para uma rotação de um ângulo α em torno do eixoOx, a matriz de rotação é
Lx(α) =1 0 0
0 cosα sinα0 − sinα cosα
; (6.1)
para uma rotação de um ângulo β em torno do eixo Oy a matriz de rotação é
Ly(β) =cosβ 0 − sinβ
0 1 0sinβ 0 cosβ
; (6.2)
finalmente, para uma rotação de um ângulo γ em torno do eixo Oz a matriz de rotaçãoé dada por
Lz(γ) = cosγ sinγ 0− sinγ cosγ 0
0 0 1
. (6.3)
Para obtermos a matriz de rotação do referencial fixo na Terra FE para o referen-cial fixo na aeronave FB basta-nos aplicar multiplicar (da direita para a esquerda) asmatrizes correspondentes às rotações de guinada, picada e pranchamento:
LBE = Lx(φ) · Ly(θ) · Lz(ψ). (6.4)
Para transformar as componentes de um vector escritas no referencial da Terra para ascomponentes do mesmo vector escritas no referencial do avião basta-nos multiplicarpela matriz de rotaçao:
~VB = LBE ~VE. (6.5)
A matriz LBE de rotação do referencial fixo na Terra FE para o referencial fixo naaeronave FB que se obtém a partir de (6.4) e das matrizes (6.1), (6.2) e (6.3) é
LBE = Lx(φ) · Ly(θ) · Lz(ψ) =1 0 00 cosφ sinφ0 − sinφ cosφ
·cosθ 0 − sinθ
0 1 0sinθ 0 cosθ
· cosψ sinψ 0− sinψ cosψ 0
0 0 1
= cosθ cosψ cosθ sinψ − sinθ
sinφ sinθ cosψ− cosφ sinψ sinφ sinθ sinψ+ cosφ cosψ sinφ cosθcosφ sinθ cosψ+ sinφ sinψ cosφ sinθ sinψ− sinφ cosψ cosφ cosθ
. (6.6)
Como exemplo, vamos determinar as componentes do peso no referencial do avião.No referencial da Terra o peso é (m~g)E = (0,0,mg). Para obtermos as suas compo-nentes no referencial do avião usamos (6.5):
(m~g)B =
cosθ cosψ cosθ sinψ − sinθsinφ sinθ cosψ− cosφ sinψ sinφ sinθ sinψ+ cosφ cosψ sinφ cosθcosφ sinθ cosψ+ sinφ sinψ cosφ sinθ sinψ− sinφ cosψ cosφ cosθ
0
0mg
=
−mg sinθmg cosθ sinφmg cosθ cosφ
.72

Também é possível definir a matriz de rotação inversa, do referencial fixo na aero-nave FB para o referencial fixo na Terra FE :
LEB = L−1BE = Lz(−ψ) · Ly(−θ) · Lx(−φ).
Agora as rotações devem ser feitas pela ordem inversa e os ângulos são simétricosdos ângulos da rotação inicial. A relação entre as componentes dos vectores nos doisreferenciais é
~VE = LEB ~VB, (6.7)
sendo a matriz LEB de rotação do referencial fixo na aeronave FB para o referencialfixo na Terra FE dada por
LEB = L−1BE = Lz(−ψ) · Ly(−θ) · Lx(−φ) =
=cosθ cosψ sinφ sinθ cosψ− cosφ sinψ cosφ sinθ cosψ+ sinφ sinψ
cosθ sinψ sinφ sinθ sinψ+ cosφ cosψ cosφ sinθ sinψ− sinφ cosψ− sinθ sinφ cosθ cosφ cosθ
.(6.8)
6.2.3 Velocidade e frequências angulares
A velocidade angular de um avião é habitualmente referida a partir das componen-tes ao longo dos eixos coordenados do avião:
~ω = p~iB + q~jB + r ~kB. (6.9)
Por outro lado, da definição dos ângulos de Euler deduz-se que a velocidade angularse pode escrever em função das frequências angulares ψ, θ e φ. Para relacionar p, q er com as frequências angulares comecemos por notar que
~ω = ψ~k1B + θ ~j2B + φ~i3B . (6.10)
Mas, pela definição dos ângulos de Euler:~i3B = ~iB,~j2B = cosφ~jB − sinφ~kB,~k1B = cosθ(sinφ~jB + cosφ~kB)− sinθ~iB.
(6.11)
Substituindo (6.11) em (6.10), obtém-se
~ω = ψ~k1B + θ ~j2B + φ~i3B= ψ[cosθ(sinφ~jB + cosφ~kB)− sinθ~iB]+ θ[cosφ~jB − sinφ~kB]+ φ~iB= (φ− ψ sinθ)~iB + (ψ cosθ sinφ+ θ cosφ)~jB + (ψ cosθ cosφ− θ sinφ)~kB.
Por comparação com (6.9), constata-se facilmente quep = φ− ψ sinθ,
q = ψ cosθ sinφ+ θ cosφ,
r = ψ cosθ cosφ− θ sinφ.
(6.12)
73

Destas equações se vê que as velocidades angulares não se identificam com as corres-pondentes taxas de variação dos ângulos de Euler: a velocidade angular de rolamentonão é igual à taxa de variação do ângulo de rolamento/pranchamento, e o mesmo sepode dizer relativamento à picada e à guinada.
6.3 Equações de Euler
6.3.1 Equações do movimento
Considerando o avião como um corpo rígido e sendo ~F a resultante das forçasexteriores aplicadas ao avião, ~MC o momento resultante relativo ao centro de massa Cdo avião e ~HC o momento angular total relativamente a C , as equações do movimentono referencial inercial FE são
~F =m[
ddt(~VE)
]FE
(6.13)
para a dinâmica de translação e
~MC =[
ddt( ~HC)
]FE
(6.14)
para a dinâmica de rotação.O referencial do avião é um referencial em rotação com velocidade angular ~ω. Por
isso, se os vectores ~VE e ~HC estiverem escritos no referencial do avião, a equação dadinâmica de translação pode escrever-se
(~F)B =m[
ddt(~VE)
]FE=m
[(~VE)B + ( ~ω)B × (~VE)B
], (6.15)
enquanto que para a equação da dinâmica de rotação temos
( ~MC)B =[
ddt( ~HC)
]FE=[( ~HC)B + ( ~ω)B × ( ~HC)B
]. (6.16)
São estas equações, em que as grandezas vectoriais estão expressas no referencial doavião, que vamos procurar desenvolver e resolver.
6.3.2 Equações do movimento no referencial do avião
As forças externas aplicadas a uma aeronave incluem a força gravítica m(~g)B , asforças aerodinâmicas, aqui designadas genericamente por ~A, e a força de propulsão ~T .
Como vimos, no referencial do avião a força gravítica pode escrever-se
m(~g)B =mg(− sinθ~iB + cosθ sinφ~jB + cosθ cosφ~kB
)(6.17)
Por outro lado, podemos por enquanto agrupar as forças aerodinâmicas e de propulsãosob uma designação genérica,
( ~A)B + (~T)B = X~iB + Y ~jB + Z~kB. (6.18)
74

Note-se que, uma vez que as forças aerodinâmicas dependem tanto da velocidade comoda velocidade angular do avião, as forças X, Y e Z dependem das variáveis dinâmicas(~V e ~ω). Teremos também de incluir em X, Y e Z as forças de controlo.
Tendo em conta que no referencial do avião ( ~ω)B = p ~iB + q ~jB + r ~kB(~VE)B = uE~iB + vE ~jB +wE~kB
as componentes segundo x, y e z da equação da dinâmica de translação (6.15) sãoX −mg sinθ =m(uE + qwE − rvE),
Y +mg cosθ sinφ =m(vE + ruE − pwE),Z +mg cosθ cosφ =m(wE + pvE − quE).
(6.19)
O momento resultante das forças externas relativamente ao centro de massa C daaeronave é
( ~MC)B = L~iB +M ~jB +N ~kB, (6.20)
em que L, M , e N são chamados respectivamente momentos de rolamento, picada eguinada. O momento angular relativamente a C é dado por
[( ~HC)B] = [IB][( ~ω)B]. (6.21)
A matriz de inércia é
[IB] = Ixx −Ixy −Ixz−Ixy Iyy −Iyz−Ixz −Iyz Izz
, (6.22)
sendo os momentos de inércia definidos por Ixx =∫(y2 + z2)dm, etc., e os produtos
de inércia definidos como Ixy =∫xy dm, etc.
Substituindo todas estas expressões na equação da dinâmica de rotação (6.16) ascomponentes segundo x, y e z são
L = Ixxp − Iyz(q2 − r 2)− Izx(r + pq)− Ixy(q − rp)− (Iyy − Izz)qr ,M = Iyy q − Izx(r 2 − p2)− Ixy(p + qr)− Iyz(r − pq)− (Izz − Ixx)rp,N = Izzr − Ixy(p2 − q2)− Iyz(q + rp)− Izx(p − qr)− (Ixx − Iyy)pq.
(6.23)
6.3.3 Resumo das equações do movimento
Em resumo, temos nove equações diferenciais não lineares acopladas: três equações(6.19) para a dinâmica de translação, três equações (6.23) para a dinâmica de rotaçãoe três equações (6.19) que relacionam as velocidades angulares com as frequências deEuler.
As incógnitas são também nove: as três componentes da velocidade linear, as trêscomponentes da velocidade angular e os três ângulos de Euler: (u,v,w,p, q, r ,ψ, θ,φ).A resolução das equações permite obter cada uma destas incógnitas em função dotempo, dadas as necessárias condições iniciais.
Para a resolução das equações, uma simplificação que é válida na maior parte doscasos é a de considerar que a aeronave é simétrica, o que implica Ixy = 0 = Iyz.
75

Note-se que só é possível separar completamento o movimento longitudinal do mo-vimento lateral se p = 0 = r , e isto exige φ = 0 (pois caso contrário a existência deq ≠ 0 implica r ≠ 0). Portanto, se as asas não estiverem niveladas não é possível umvoo com movimento apenas longitudinal.
6.3.4 Equações da trajectória
A trajectória (flight path) é definida no referencial solidário com a Terra Terra, FE .Neste referencial ~VEE = (xE, yE, zE) e ~VEB = (uE, vE,wE). As velocidades uE , vE e wEsão obtidas pelas equações do movimento, e os vectores velocidade estão relacionadospor [~VEE ] = [LEB][~VEB ]. Daqui obtém-se o sistema de equações diferenciais para ascoordenadas da trajectória.
xE = uE cosθ cosψ+ vE(sinφ sinθ cosψ− cosφ sinψ)+wE(cosφ sinθ cosψ+ sinφ sinψ)
yE = uE cosθ sinψ+ vE(sinφ sinθ sinψ+ cosφ cosψ)+wE(cosφ sinθ sinψ− sinφ cosψ)
zE = −uE sinθ + vE sinφ cosθ +wE cosφ cosθ
Conhecidas as velocidades e os ângulos de Euler em função do tempo, estas equaçõespodem facilmente ser integradas para se obterem as coordenadas da trajectória emfunção do tempo.
6.4 Rotores em movimento
Mesmo desprezando os efeitos de elasticidade, um avião não é um corpo rígido. Nocaso de propulsão a hélice, os hélices dos motores são partes em movimento rotativo,como o são as turbinas e compressores no caso de propulsão a jacto. Quando esta-belecemos as equações de Euler, admitimos que o avião era um corpo rígido, mas nãoé difícil introduzir o efeito dos rotores nas equações, bastando somar ao momentoangular do avião o termo correspondente o momento angular dos rotores:
[( ~HC)B] = [IB][( ~ω)B]+ [~hrotB ], (6.24)
em que ~hrotB é momento angular dos rotores (devido ao seu movimento de rotação
relativo ao avião) e [IB][( ~ω)B] é momento angular do avião, já anteriormente conside-rado. É este momento angular total que deve ser usado na equação para a dinâmica derotação (6.16)
( ~MC)B =[
ddt( ~HC)
]FE=[( ~HC)B + ( ~ω)B × ( ~HC)B
]Quando a velocidade dos rotores é constante, é necessário apenas acrescentar os se-guintes termos adicionais na equação dos momentos:
na equação segundo x, qhrotz − rhrot
y ;
na equação segundo y , rhrotx − phrot
z ;
na equação segundo z, phroty − qhrot
x .
76
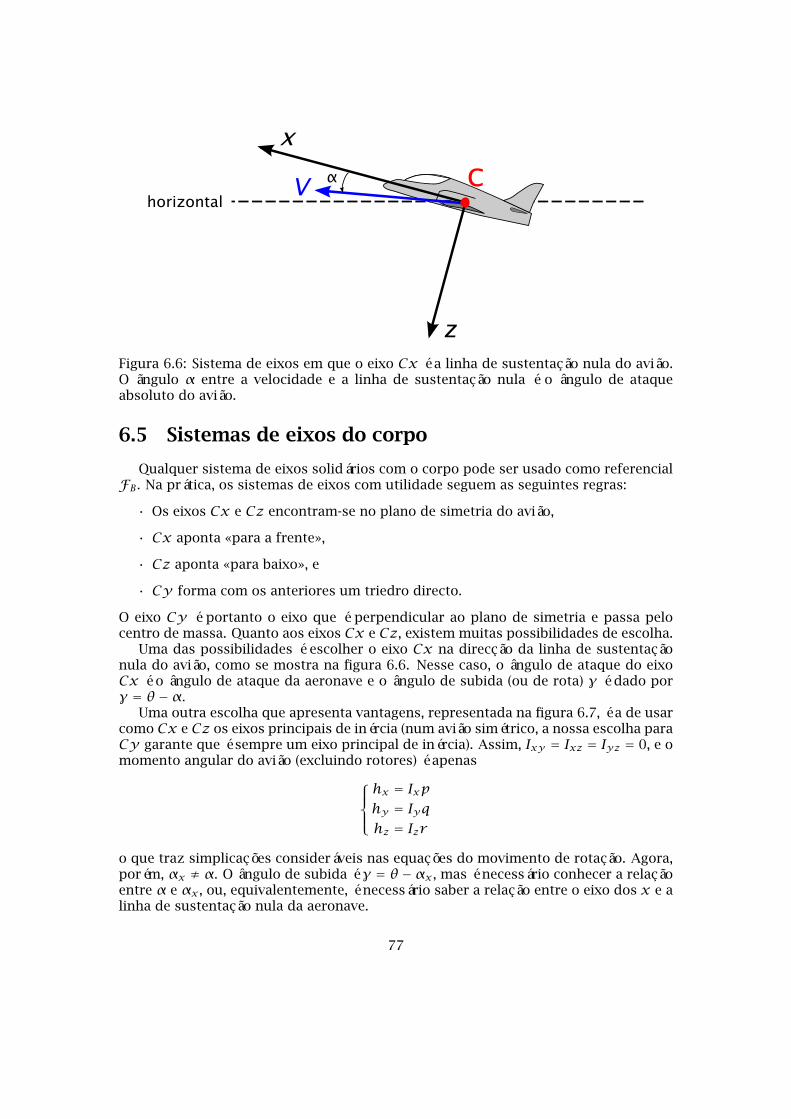
Figura 6.6: Sistema de eixos em que o eixo Cx é a linha de sustentação nula do avião.O ãngulo α entre a velocidade e a linha de sustentação nula é o ângulo de ataqueabsoluto do avião.
6.5 Sistemas de eixos do corpo
Qualquer sistema de eixos solidários com o corpo pode ser usado como referencialFB . Na prática, os sistemas de eixos com utilidade seguem as seguintes regras:
• Os eixos Cx e Cz encontram-se no plano de simetria do avião,
• Cx aponta «para a frente»,
• Cz aponta «para baixo», e
• Cy forma com os anteriores um triedro directo.
O eixo Cy é portanto o eixo que é perpendicular ao plano de simetria e passa pelocentro de massa. Quanto aos eixos Cx e Cz, existem muitas possibilidades de escolha.
Uma das possibilidades é escolher o eixo Cx na direcção da linha de sustentaçãonula do avião, como se mostra na figura 6.6. Nesse caso, o ângulo de ataque do eixoCx é o ângulo de ataque da aeronave e o ângulo de subida (ou de rota) γ é dado porγ = θ −α.
Uma outra escolha que apresenta vantagens, representada na figura 6.7, é a de usarcomo Cx e Cz os eixos principais de inércia (num avião simétrico, a nossa escolha paraCy garante que é sempre um eixo principal de inércia). Assim, Ixy = Ixz = Iyz = 0, e omomento angular do avião (excluindo rotores) é apenas
hx = Ixphy = Iyqhz = Izr
o que traz simplicações consideráveis nas equações do movimento de rotação. Agora,porém, αx ≠ α. O ângulo de subida é γ = θ −αx , mas é necessário conhecer a relaçãoentre α e αx , ou, equivalentemente, é necessário saber a relação entre o eixo dos x e alinha de sustentação nula da aeronave.
77

Figura 6.7: Sistema de eixos em que os eixos Cx e Cz são eixos principais de inérciado avião. O ângulo γ entre a velocidade e a horizontal é o ângulo de subida do avião.
Figura 6.8: Sistema de eixos de estabilidade: o eixo Cx coincide com a direcção davelocidade do avião. Por definição αx = 0. O ângulo ξ é o ângulo enter o sistema deeixos principal de inércia e o sistema de eixos de estabilidade.
78

Em estudos de estabilidade é frequente usar um outro sistema de eixos, conhecidoprecisamente como sistema de eixos de estabilidade (xS , yS , zS) e que se apresenta nafigura 6.8. O eixo Cx é aqui escolhido segundo a direcção do vector velocidade. Agrande vantagem é que por definição, w = 0, e portanto αx = 0. Este é o sistemas deeixos que iremos usar mais frequentemente no estudo da estabilidade dinâmica.
Designando por ξ o ângulo entre os eixos de estabilidade e os eixos principais deinércia, os novos momentos e produtos de inércia são
IxS = IxP cos2 ξ + IzP sin2 ξ,
IzS = IxP sin2 ξ + IzP cos2 ξ,
IxSzS =12(IzP − IxP ) sin 2ξ.
79

Capítulo 7
Estados Estacionários eManobras
Num voo típico, um avião encontra-se habitualmente num estado estacionário:subida ou descida com ângulo constante, voo de cruzeiro, volta coordenada, etc.Interessa-nos caracterizar estes estados estacionários, que serão a base para o estudoda estabilidade dinâmica para pequenas perturbações.
Alguns estados estacionários podem caracterizar-se por ser apenas longitudinais,enquanto noutros entram também em jogo variáveis laterais. Vamos procurar carac-terizar estes tipos de movimentos. Além disso trataremos de manobras estacionárias:volta coordenada e manobra de descida-subida simétrica (pull-up).
Começaremos por caracterizar um pouco melhor as forças e momentos aplicados auma aeronave.
7.1 Forças e momentos aplicados a uma aeronave
Para além do peso, as forças e momentos aplicados a uma aeronave podem terorigem aerodinâmica (sustentação, resistência aerodinâmica) ou ser forças e momen-tos de controlo. Estes podem ser devidos à propulsão ou a modificação das forças emomentos aerodinâmicos pela deflexão de superfícies de controlo, como o leme deprofundidade (elevator, ou alternativamente, stabilator), o leme de direcção (rudder)ou os ailerons.
Para as forças e momentos usamos a seguinte notação: XA, ZA, ZA designam ascomponentes aerodinâmicas das forças e LA, MA, NA designam as componentes aero-dinâmicas dos momentos. As componentes devidas ao controlo são designadas porum índice C : ∆XC , ∆YC , ∆ZC para as forças e ∆LC , ∆MC , ∆NC para os momentos. Asforças totais são então
X = XA +∆XC ,Y = YA +∆YC ,Z = ZA +∆ZC ,
(7.1)
80

e os momentos totais L = LA +∆LC ,M = MA +∆MC ,N = NA +∆NC .
(7.2)
7.1.1 Variáveis dinâmicas e sua adimensionalização
Os momentos e forças aerodinâmicos dependem das variáveis dinâmicas: as velo-cidades lineares u, v e w, e as velocidades angulares p, q e r .
Iremos muitas vezes utilizar a versão adimensional das variáveis dinâmicas. Asvelocidades lineares adimensionalizam-se dividindo pelo módulo da velocidade, isto é,
u = uV, (7.3)
v = vV, (7.4)
w = wV. (7.5)
As velocidades angulares adimensionalizam-se de modo diferente consoante são va-riáveis laterais (p e r ) ou longitudinal (q):
p = p b2V, (7.6)
q = q c2V, (7.7)
r = r b2V. (7.8)
Note-se que se os ângulos de derrapagem e de ataque são pequenos, então sãoválidas as aproximações
β = arcsinvV≈ vV= v, (7.9)
α = arctanwV≈ wV= w. (7.10)
As forças e momentos aerodinâmicos não dependem das derivadas das variáveisdinâmicas, com uma excepção: podem depender de w, ou seja, de α. A adimensiona-lização da derivada temporal é feita dividindo pelo factor 2V/c, isto é,
ˆα = α c2V. (7.11)
7.1.2 Forças e momentos aerodinâmicos para o movimento longitu-dinal
Relativamente ao movimento longitudinal, isto é, o que não altera a posição doplano de simetria do avião, as forças e momentos aerodinâmicos relevantes são XA, ZA
81

e MA e, para o movimento ser verdadeiramente longitudinal, devem depender apenasdas variáveis dinâmicas longitudinais, isto é, de u, w, q e w:
XA = Xuu+Xww +Xq q +Xw w,ZA = Zuu+ Zww + Zq q + Zw w,MA = Muu+Mww +Mq q +Mw w,
(7.12)
Por definição, as derivadas (dimensionais) são
Xu ≡∂X∂u
Zu ≡∂Z∂u
Mu ≡∂M∂u
Xw ≡∂X∂w
Zw ≡∂Z∂w
Mw ≡∂M∂w
Xq ≡∂X∂q
Zq ≡∂Z∂q
Mq ≡∂M∂q
Xw ≡∂X∂w
Zw ≡∂Z∂w
Mw ≡∂M∂w
Com frequência é preferível usar coeficientes adimensionais em vez de forças e mo-mentos dimensionais. Para o movimento longitudinal, os coeficientes adimensionaisdas forças e momentos aerodinâmicos são
XA =12ρV 2S CxA , (7.13)
ZA =12ρV 2S CzA , (7.14)
MA =12ρV 2Sc CmA . (7.15)
A versão adimensionalizada de (7.12) éCxA = Cxuu+ Cxαα+ Cxq q + Cx ˆα
ˆα,
CzA = Czuu+ Czαα+ Czq q + Cz ˆαˆα
CmA = Cmuu+ Cmαα+ Cmq q + Cm ˆαˆα.
(7.16)
Note-se que as derivadas são obtidas derivando os coeficientes adimensionais em or-dem às variáveis adimensionais, isto é,
Cxu ≡∂Cx∂u, Cxα ≡
∂Cx∂α, Cxq ≡
∂Cx∂q, Cx ˆα
≡ ∂Cx∂ ˆα, etc.
Forças e momentos de controlo longitudinal
Para controlo longitudinal dispomos habitualmente de uma superfície de controlo(leme de profundidade ou equivalente, cuja deflexão é δe) e podemos também controlar
82

a potência desenvolvida pelo motor, sendo a posição relativa da manete de potênciadada por δT . Assim, temos
∆XC = Xδeδe +XδTδT ,∆ZC = Zδeδe + ZδTδT ,∆MC = Mδeδe +MδTδT .
(7.17)
Os coeficientes das forças e momentos de controlo longitudinal obtém-se por adimen-sionalização das equações acima:
∆Cx = Cxδeδe + CxδT δT ,∆Cz = Czδeδe + CzδT δT ,∆Cm = Cmδeδe + CmδT
δT .(7.18)
Tendo em conta (7.1) e (7.2), os coeficientes das forças e momento longitudinaistotais, incluindo controlo, são
Cx = Cxuu+ Cxαα+ Cxq q + Cx ˆαˆα+ Cxδeδe + CxδT δT ,
Cz = Czuu+ Czαα+ Czq q + Cz ˆαˆα+ Czδeδe + CzδT δT ,
Cm = Cmuu+ Cmαα+ Cmq q + Cm ˆαˆα+ Cmδeδe + CmδT
δT .
(7.19)
7.1.3 Forças e momentos aerodinâmicos para o movimento lateral
Para o movimento lateral, em que a posição do plano de simetria do avião é alterada,as forças e momentos aerodinâmicos relevantes são YA, LA e NA, que devem dependerapenas das variáveis dinâmicas longitudinais, isto é, de v , p e r :
YA = Yvv + Ypp + Yrr ,LA = Lvv + Lpp + Lrr ,NA = Nvv +Npp +Nrr .
(7.20)
As derivadas (dimensionais) são
Yv ≡∂Y∂v, Lv ≡
∂L∂v, Nv ≡
∂N∂v,
Yp ≡∂Y∂p, Lp ≡
∂L∂p, Np ≡
∂N∂p,
Yr ≡∂Y∂r, Lr ≡
∂L∂r, Nr ≡
∂N∂r.
Para o movimento lateral, os coeficientes adimensionais das forças e momentosaerodinâmicos são
YA =12ρV 2S CyA , (7.21)
LA =12ρV 2Sb ClA , (7.22)
NA =12ρV 2Sb CnA . (7.23)
83

A versão adimensionalizada de (7.20) éCyA = Cyββ+ Cyp p + Cyr r ,ClA = Clββ+ Clp p + Clr r ,CnA = Cnββ+ Cnp p + Cnr r .
(7.24)
Note-se que, tal como anteriormente, as derivadas são obtidas derivando os coeficien-tes adimensionais em ordem às variáveis adimensionais, isto é,
Cyβ ≡∂Cy∂β, Cyp ≡
∂Cy∂p, Cyr ≡
∂Cx∂r, etc.
Forças e momentos de controlo lateral
Para controlo lateral as superfícies de controlo habitualmente disponíveis são oleme de direcção (rudder, cuja deflexão é δr ) e os ailerons, cuja deflexão é dada por δa.Assim, temos
∆YC = Yδaδa + Yδrδr ,∆LC = Lδaδa + Lδrδr ,∆NC = Nδaδa +Nδrδr .
(7.25)
Estas equações podem facilmente adaptar-se a outras configurações (como, por exem-plo, um par adicional de ailerons). Note-se também que frequentemente se faz a apro-ximação Yδa = 0, pois a força lateral devido à deflexão dos ailerons é praticamentenula.
Os coeficientes das forças e momentos de controlo lateral obtêm-se facilmente pelaadimensionalização das equações acima:
∆Cy = Cyδaδa + Cyδr δr ,∆Cl = Clδaδa + Clδr δr ,∆Cn = Cnδaδa + Cnδr δr .
(7.26)
Tendo em conta (7.1) e (7.2), os coeficientes das forças e momento laterais totais,incluindo controlo, são
Cy = Cxββ+ Cyp p + Cyr r + Cyδaδa + Cyδr δr ,Cl = Clββ+ Clp p + Clr r + Clδaδa + Clδr δr ,Cy = Cnββ+ Cnp p + Cnr r + Cnδaδa + Cnδr δr .
(7.27)
7.2 Estados estacionários longitudinais
Estamos agora em condições de abordar alguns estados estacionários. Começare-mos por verificar em que condições é que podem existir estados estacionários longitu-dinais «puros».
Por definição, num estado estacionário as derivadas temporais são nulas, isto é,u = 0 = v = w, p = 0 = q = r e ψ = 0 = θ = φ. Se o estado estacionárioé longitudinal, são nulas as velocidades angulares laterais p = r = 0, bem como avelocidade lateral (de derrapagem) v = 0, donde β = 0. Adicionalmente, se o estado
84

estacionário corresponder a um voo rectilíneo, não existe velocidade angular de picada,q = 0. As equações do movimento de translação (6.19) reduzem-se então a
X −mg sinθ = 0,Y +mg cosθ sinφ = 0,Z +mg cosθ cosφ = 0,
(7.28)
e as equações do movimento de rotação (6.23) aL = 0,M = 0,N = 0.
(7.29)
Dado que L = Lvv + Lpp + Lrr + Lδaδa + Lδrδr ,N = Nvv +Npp +Nrr +Nδaδa +Nδrδr ,
e que v = p = r = 0, conclui-se que δa = 0 = δr . Logo Y = Yvv + Ypp + Yrr + Yδaδa +Yδrδr = 0. Da segunda equação de (7.28) segue-se finalmente que sinφ = 0.
Em conclusão, só pode haver estados (estacionários) longitudinais para voo comasas niveladas, i.e., com ângulo de pranchamento nulo. Se φ ≠ 0, passa a existiracoplamento entre movimento longitudinal e lateral. Os estados estacionários longitu-dinais possíveis são voos simultaneamente rectilíneos e com asas niveladas e podemser horizontais ou com ângulo de subida.
7.2.1 Voo com ângulo de subida constante
O estado estacionário longitudinal mais simples é o voo horizontal rectilíneo comasas niveladas. No entanto, este já foi tratado anteriormente com pormenor. O estadoestacionário longitudinal que iremos tratar agora é o de um voo rectilíneo com ângulode subida constante. Como se afirmou acima, para ser estado estacionário longitudi-nal, este voo terá de ser nivelado, ou seja, é necessário que φ = 0.
O eixo Cx é escolhido segundo a direcção da linha de sustentação nula do avião.Suporemos que a linha de propulsão coincide com o eixo Cx (no caso mais geral existeum ângulo constante entre a linha de propulsão e o eixo Cx, que aqui supomos nulo).
As forças aplicadas no avião estão representadas na figura 7.1. As componentesdas segundo x e z das forças aerodinâmicas e de propulsão são dadas por
X = T + L sinα−D cosα,Z = −L cosα−D sinα.
(7.30)
De (7.28) com φ = 0 e de (7.29), as equações do movimento neste caso sãoT + L sinα−D cosα−mg sinθ = 0,− L cosα−D sinα+mg cosθ = 0,M = 0
(7.31)
Se α for suficientemente pequeno para podermos desprezar os termos em sinα, aprimeira equação é
T = D +mg sinθ (7.32)
85

Figura 7.1: Voo rectilíneo com ângulo de subida constante.
e a intensidade da força de propulsão determina θ e deste modo o ângulo de subidaγ = θ − α. Esta é uma aproximação um pouco grosseira, mas permite perceber que oângulo de subida é determinado principalmente pela força de propulsão.
Numa aproximação menos grosseira, em que sinα ≈ α e cosα ≈ 1, teríamosT + Lα−D −mg sinθ = 0,− L+mg cosθ = 0,M = 0.
(7.33)
Na segunda equação o termo D sinα foi desprezado face aos outros dois. Adimensio-nalizando (7.33), obtém-se
CT + CLα− CD − CW sinθ = 0,CL = CW cosθ,Cm = 0.
(7.34)
As duas últimas equações são idênticas às equações de equilíbrio habituais para voorectilíneo horizontal, mas com CLtrim = CW cosθ. Os valores de α e de δe resultam dasolução de
CW cosθ = CLααtrim + CLδeδetrim ,0 = Cm0 + Cmααtrim + Cmδeδetrim .
(7.35)
Como CLtrim = CW cosθ < CW (que é o valor de CLtrim para voo horizontal), o valor deαtrim será menor e o de δetrim será maior (isto é, mais positivo ou menos negativo) quepara voo horizontal para a mesma velocidade. Isto deve-se a que agora a sustentaçãotem de equilibrar apenas uma parte do peso, sendo a outra parte equilibrada por umacréscimo da força de propulsão. A primeira equação de (7.34) é agora
CT = CD + CW sinθ − CLα = CD + CW (sinθ −α cosθ). (7.36)
86

Em conclusão, a velocidade e o ângulo de subida são determinados pelo sistema(7.34) e controlados por δe e pela força de propulsão.
7.3 Estados estacionários laterais
O único estado estacionário lateral que vamos tratar é a derrapagem estacionária.A volta coordenada é também um estado estacionário lateral, mas iremos descrevê-lacomo manobra estacionária.
7.3.1 Derrapagem estacionária
Tal como anteriormente, «estacionária» implica que as derivadas temporais sãonulas (excepto, evidentemente, xE). Num voo apenas de derrapagem, as velocidadesangulares devem também ser nulas:
p = 0 = q = r . (7.37)
As equações do movimento lateral são (para aeronaves simétricas):Y +mg cosθ sinφ =m(v + ru− pw) = 0,L = Ixxp − Izx(r + pq)− (Iyy − Izz)qr = 0,N = Izzr − Izx(p − qr)− (Ixx − Iyy)pq = 0.
Tendo em conta (7.37) e o anulamento das derivadas temporais, obtemosY +mg sinφ cosθ = 0,L = 0,N = 0.
Recordando (7.20) e (7.25), as forças e momentos aerodinâmicos são dados porY = Yvv + Ypp + Yrr + Yδrδr = Yvv + Yδrδr ,L = Lvv + Lpp + Lrr + Lδrδr + Lδaδa = Lvv + Lδrδr + Lδaδa,N = Nvv +Npp +Nrr +Nδrδr +Nδaδa = Nvv +Nδrδr +Nδaδa.
Obtem-se então o sistema de equações para a derrapagem estacionária:Yvv + Yδrδr +mg cosθ sinφ = 0
Lvv + Lδrδr + Lδaδa = 0
Nvv +Nδrδr +Nδaδa = 0
Este sistema pode escrever-se na forma matricial. Dada a velocidade de derrapagem,obtemos os valores das deflexões dos ailerons e do leme de direcção, bem como doângulo de pranchamento necessários para a manobra.Yδr 0 mg cosθ
Lδr Lδa 0Nδr Nδa 0
δrδa
sinφ
= −YvLvNv
v. (7.38)
87

Note-se que as equações (7.38) podem também ser escritas na forma adimensional:Cyδr 0 CW cosθClδr Clδa 0Cnδr Cnδa 0
δrδa
sinφ
= −CyβClβCnβ
β. (7.39)
A relação entre as derivadas dimensionais e as derivadas dos coeficientes adimensio-nais será tratada mais à frente.
Alguns casos particulares de especial interesse são os de voo com vento lateral ede voo na situação de One engine inoperative (OEI). No caso de One engine inoperative(OEI) a propulsão não é simétrica e há forças adicionais de resistência do(s) motor(es)parado(s). Por este motivo gera-se um momento de guinada devido à propulsão, NT ,que é necessário adicionar às equações acima. O momento total de guinada passa aser não nulo: N = NT .
7.4 Manobras
As manobras efectuadas pelos aviões são em geral não estacionárias. Com frequên-cia nas manobras os efeitos aerodinâmicos transientes são importantes e os ângulosde guinada e rolamento (e até de picada) podem ser elevados. Como não são estadosde equilíbrio, também não faz sentido falar de estabilidade das manobras, embora aestabilidade da aeronave seja relevante para a capacidade de efectuar manobras facil-mente e com segurança.
Existem, porém, algumas manobras que podem ser consideradas estacionárias eque iremos considerar em seguida: a manobra de descida-subida simétrica, ou pull-upsimétrico, que é uma manobra longitudinal, e a viragem estacionária, ou volta coorde-nada, que é uma manobra lateral.
7.5 Manobra de descida-subida simétrica
A manobra longitudinal que vamos considerar é a manobra de descida-subida (pull-up) simétrica. A figura 7.2 representa esta manobra na situação em que o avião seencontra no ponto mais baixo da trajectória. A trajectória de voo é circular num planovertical, pelo que existe uma aceleração normal. Além disso, existe uma velocidadeangular de picada q. Em rigor esta manobra não é estacionária porque a direcção dasforças aplicadas ao avião não é constante. No entanto, considerando uma vizinhançapróxima do ponto mais baixo da trajectória podemos desprezar essa variação da di-recção das forças e considerar a manobra como simétrica.
Define-se factor de carga n como a razão entre a sustentação e o peso da aeronave:
n = LWa L = nW. (7.40)
Logo, na direcção vertical L−W = (n− 1)W = (n− 1)mg, e a aceleração normal é
an =L−Wm
= (n− 1)g. (7.41)
Seja δe a deflexão do leme necessária para um voo rectilíneo estacionário com velo-cidade V . Na manobra de pull-up a deflexão deverá ser diferente: δe + ∆δe. Por outro
88

Figura 7.2: Manobra de pull-up simétrico.
lado, se a força de controlo que é necessário exercer para equilíbrar o avião é P numvoo rectilíneo estacionário, numa manobra de pull-up deverá ser P + ∆P . Pretende-mos determinar os valores dos acréscimos ∆δe e ∆P . Normalmente estes acréscimosexpressão-se em função da aceleração normal, medida em g. Define-se assim deflexãodo leme de profundidade por g como
∆δen− 1
, (7.42)
e força de controlo por g como∆Pn− 1
. (7.43)
A aceleração numa manobra de pull-up é a aceleração centrípeta do movimentocircular com velocidade V e raio R (ver figura 7.3):
an =V 2
R= q2R ⇒ q = V
R⇒ an = qV (7.44)
Logo, a velocidade angular de picada é dada por
q = anV= (n− 1)g
V. (7.45)
7.5.1 Equações de equilíbrio dinâmico
Devido à existência da velocidade angular de picada q, o escoamento visto pelaaeronave é curvo. Logo, há alteração no campo de pressões e nas forças e momentosaerodinâmicos relativamente à situação em que q = 0. Representando por ∆CL e ∆Cma variação dos respectivos coeficiente quando q ≠ 0, podemos escrever
CLtotal = CLvoo horizontal +∆CL,Cmtotal = Cmvoo horizontal +∆Cm.
(7.46)
Se q, ∆α e ∆δe forem «pequenos», os coeficientes CL e Cm dependem linearmentedas variáveis, isto é,
CLtotal = CLα(α+∆α)+ CLq q + CLδe (δe +∆δe),Cmtotal = Cm0 + Cmα(α+∆α)+ Cmq q + Cmδe (δe +∆δe).
89

Figura 7.3: Manobra de pull-up simétrico: aceleração normal e factor de carga n.
90

e, tendo em conta que num voo horizontal CLvoo horizontal e Cmvoo horizontal devem verificar(2.81), obtemos
∆CL = CLα∆α+ CLq q + CLδe∆δe,∆Cm = Cmα∆α+ Cmq q + Cmδe∆δe.
(7.47)
No sistema introduziu-se a velocidade angular de picada adimensional q, definida em(7.7) e as respectivas derivadas de estabilidade:
CLq =∂CL∂q, (7.48)
Cmq =∂Cm∂q
. (7.49)
A equação (7.45) permite escrever a velocidade angular de picada q como
q = qc2V= (n− 1)gc
2V 2= (n− 1)
mg12ρSV 2
12ρSc2m
= (n− 1)CW2µ
(7.50)
em que se introduziram o coeficiente adimensional do peso,
CW =mg
12ρV 2S
, (7.51)
e a razão de massaµ = m
12ρSc
. (7.52)
Na descida-subida estacionária não há aceleração angular. Por isso, Cmtotal = 0 im-plica ∆Cm = 0. Por outro lado, os coeficientes de sustentação verificam
CLtotal =L
12ρV 2S
, (7.53)
CLvoo horizontal =W
12ρV 2S
= CW , (7.54)
∆CL =L−W12ρV 2S
= (n− 1)W12ρV 2S
= (n− 1)CW . (7.55)
Das equações de equilíbrio dinâmico deduz-se portanto que∆CL = (n− 1)CW = CLα∆α+ CLq(n− 1)
CW2µ+ CLδe∆δe
∆Cm = 0 = Cmα∆α+ Cmq(n− 1)CW2µ+ Cmδe∆δe
(7.56)
Na forma matricial: [CLα CLδeCmα Cmδe
]· ∆αn−1
∆δen−1
=CW
(1− CLq
2µ
)−CW
Cmq2µ
. (7.57)
91

A deflexão adicional do elevator necessária para que se dê a manobra de pull-up:
∆δen− 1
= −CWdet
[Cmα −
12µ
(CLqCmα − CLαCmq
)]. (7.58)
O acréscimo no ângulo de ataque pode ser dado por
∆αn− 1
= − 1CLα
[CW − CLq
CW2µ− CLδe
∆δen− 1
],
ou ainda por∆αn− 1
= CWdet
[Cmδe −
12µ
(CLqCmδe − CLδeCmq
)].
7.5.2 Ponto e margem de manobra
A variação de ∆δe com a posição do centro de massa decorre da derivada Cmα , umavez que pela equação (2.93) sabemos que det não depende de h. Fazendo uso de (2.47),
∆δen− 1
= −CWdet
[CLα(h− hn)
(1− 1
2µCLq
)+CLαCmq
2µ
]
= −CWCLα(2µ − CLq)
2µ det
(h− hn +
Cmq
2µ − CLq
). (7.59)
Note-se que as derivadas CLq e Cmq dependem de também de h.Define-se ponto de manobra (hm) como a posição do centro de massa para a qual
∆δen−1 = 0. Assim,
∆δen− 1
= −CWCLα(2µ − CLq)
2µ det
(h− hn +
Cmq
2µ − CLq
)= 0,
e conclui-se que o ponto de manobra é dado por
hm = hn −Cmq(hm)
2µ − CLq(hm). (7.60)
Na equação (7.60) explicitou-se a dependência de CLq e Cmq relativamente à posiçãodo centro de massa. Na maioria dos casos pode-se simplicar a equação (7.60) poisCLq 2µ. Além disso, em aeronaves com cauda a variação de Cmq com h é pequena.A variação de ∆δe com h é aproximadamente linear e a posição do ponto de manobrapode ser aproximada por
hm = hn −Cmq
2µ. (7.61)
Em função do ponto de manobra, a deflexão (adicional) do leme por g vem dadapor
∆δen− 1
= −CWCLα(2µ − CLq)
2µ det(h− hm) . (7.62)
Define-se margem de manobra com controlo fixo como (hm − h). Na hipótese de quea variação de CLq e Cmq com h pode ser desprezada, a deflexão do leme por g varialinearmente com a margem de manobra. O declive da recta é proporcional a CW .
92

Figura 7.4: (Fonte: Etkin & Reid, Dynamics of Flight)
7.5.3 Força de controlo por g e ponto de manobra de manche livre
Para realizar a manobra de pull-up é necessária uma deflexão adicional de leme deprofundidade. A esta deflexão adicional corresponderá uma força de controlo adicio-nal, que vamos determinar de seguida.
A força de controlo depende do momento de charneira, pelo que
P = GSece12ρV 2Che ⇒ ∆P = GSece
12ρV 2∆Che (7.63)
Mas, em voo rectilíneo e estacionário,
Chevoo rectilíneo = Che0 + Cheαα+ b2δe + b3δt.
na manobra de pull-up teremos
Chetotal = Chevoo rectilíneo +∆Che, (7.64)
em que ∆Che depende não apenas de α e δe, mas também da velocidade angular depicada q, dado que esta modifica o escoamento em torno do avião:
∆Che = Cheα∆α+ Cheq q + b2∆δe. (7.65)
Substituindo ∆α e q:
∆Chen− 1
= −CheαCLα
[CW − CLq
Cw2µ− CLδe
∆δen− 1
]+ Cheq
CW2µ+ b2
∆δen− 1
= − CW2µCLα
[(2µ − CLq)Cheα + CheqCLα
]+ ∆δen− 1
(b2 −
CheαCLδeCLα
)
93

Figura 7.5: Força de controlo por g: dependência da posição do centro de massa.(Fonte: Etkin & Reid, Dynamics of Flight)
Mas: a′ = CLα −CheαCLδeb2
⇒ a′b2
CLα= b2 −
CheαCLδeCLα
, pelo que
∆Chen− 1
= −CW2µa′b2
det(2µ − CLq)(h− h′m). (7.66)
Na equação (7.66) introduziu-se o ponto de manobra com manche livre, h′m, definidopor
h′m = hm +deta′b2
(CheαCLα
+Cheq
2µ − CLq
)(7.67)
A equação (7.63) permite determinar a força de controlo por g, representada porQ:
Q = ∆Pn− 1
= GSece12ρV 2 ∆Che
n− 1
= −GSece12ρV 2CW
12µa′b2
det(2µ − CLq)(h− h′m)
= −GSeceWSa′b2
2µ det(2µ − CLq)(h− h′m)
Em função da carga alar (wing loading) w = W/S, a força de controlo por g vemdada por
Q = −GSecewa′b2
2µ det(2µ − CLq)(h− h′m). (7.68)
Podemos concluir que Q aumenta linearmente com h à medida que o CG se deslocapara a frente, é proporcional à carga alar w, é proporcional a (Sece), i.e., ao cubo dasdimensões lineares da aeronave, e é independente da velocidade do avião, V .
Na figura 7.5 mostra-sea dependência da força de controlo por g com a posição docentro de massa da aeronave.
94
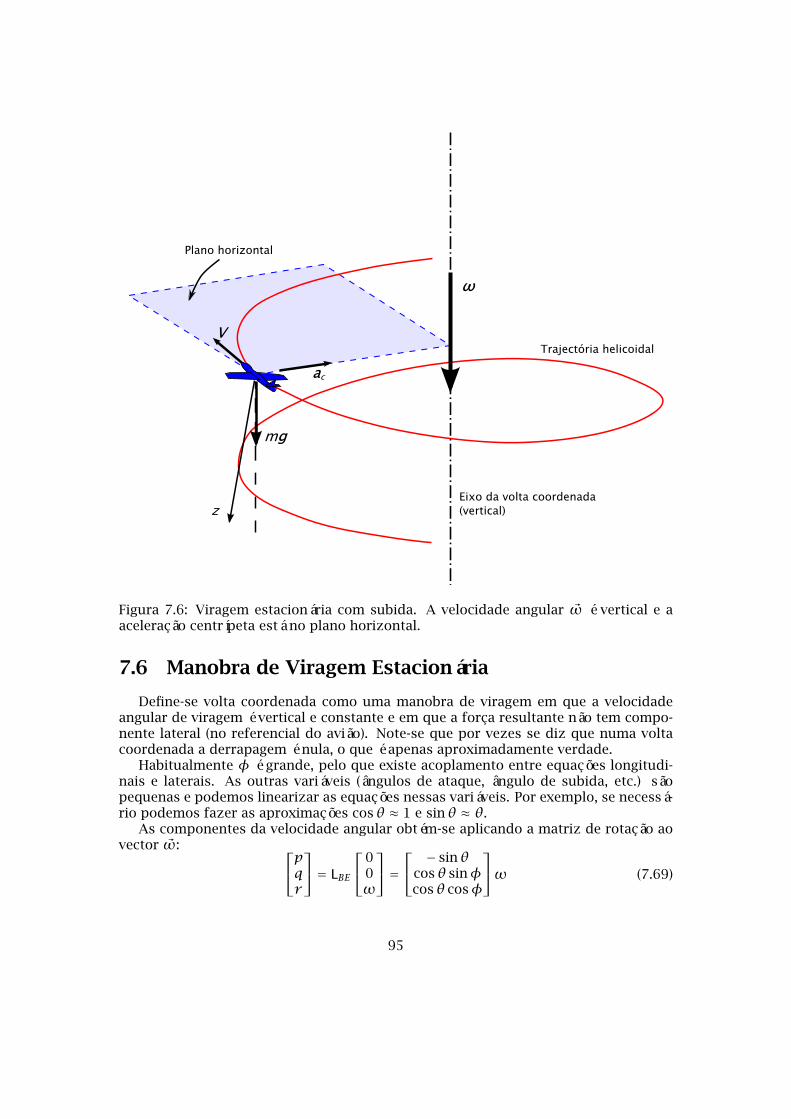
Figura 7.6: Viragem estacionária com subida. A velocidade angular ~ω é vertical e aaceleração centrípeta está no plano horizontal.
7.6 Manobra de Viragem Estacionária
Define-se volta coordenada como uma manobra de viragem em que a velocidadeangular de viragem é vertical e constante e em que a força resultante não tem compo-nente lateral (no referencial do avião). Note-se que por vezes se diz que numa voltacoordenada a derrapagem é nula, o que é apenas aproximadamente verdade.
Habitualmente φ é grande, pelo que existe acoplamento entre equações longitudi-nais e laterais. As outras variáveis (ângulos de ataque, ângulo de subida, etc.) sãopequenas e podemos linearizar as equações nessas variáveis. Por exemplo, se necessá-rio podemos fazer as aproximações cosθ ≈ 1 e sinθ ≈ θ.
As componentes da velocidade angular obtém-se aplicando a matriz de rotação aovector ~ω: pq
r
= LBE
00ω
= − sinθ
cosθ sinφcosθ cosφ
ω (7.69)
95

Figura 7.7: Forças numa manobra de viragem estacionária. No plano yz a resultanteda sustentação e do peso é a aceleração centrípeta.
ou seja, p = −ω sinθq =ω sinφ cosθr =ω cosφ cosθ
(7.70)
Comecemos por determinar as equações do movimento de translação segundo ye z, que dependem das forças aerodinâmicas aplicadas. O sistema de eixos de esta-bilidade é o mais adequado neste problema. O eixo Gx é definido como estando nadirecção da projecção da velocidade no plano de simetria e portanto αx = 0 = w.Admitiremos também que não há vento. As equações do movimento de translaçãosegundo y e z são então
Y +mg cosθ sinφ =m(v +ur − pw) =murZ +mg cosθ cosφ =m(w + vp − qu) =m(vp − qu)
Numa volta coordenada o ângulo de derrapagem é quase nulo, pelo que podemossupor v pequeno, e portanto u ≈ V . Além disso, se v e p são pequenos, podemosdesprezar o produto vp. Logo, o sistema pode aproximar-se por
Y ≈ −mg sinφ cosθ +mrV = 0
Z ≈ −mg cosφ cosθ −mqV (7.71)
Note-se que Y = 0 pela definição de volta coordenada, e que Y = 0⇒ Cy = 0.
96

0 = −mg sinφ cosθ +mrV ⇒ sinφ = rVg cosθ
r =ω cosφ cosθ ⇒ cosφ = rω cosθ
⇒ tanφ = ωVg
O factor de carga (vertical) nz é a razão entre a força vertical e o peso, donde
nz = −Zmg
= cosφ cosθ + qVg= cosφ cosθ + (ω sinφ cosθ)V
g=
= cosφ cosθ + sinφ tanφ cosθ = cosθcosφ
= cosθ secφ
Para eixos de estabilidade Z = −L, pelo que
n = LW= nz = cosθ secφ (7.72)
O incremento do coeficiente de sustentação relativamente ao valor necessário para umvoo estacionário rectilíneo é
∆CL =L−mg12ρV 2S
= (n− 1)CW . (7.73)
Este incremento é conseguido à custa da contribuição da velocidade angular de picadae dos incrementos ∆α e ∆δe relativamente aos valores de equilíbrio para voo rectilíneohorizontal.
Consideremos agora as equações para o movimento de rotação. Para uma aeronavesimétrica as equações dos momentos são
L = Ixp − Izx r + qr(Iz − Iy)− Izxpq + qh′z − rh′yM = Iy q + rp(Ix − Iz)+ Izx(p2 − r 2)+ rh′x − ph′zN = Izr − Izxp + pq(Iy − Ix)− Izxqr + ph′y − qh′x
Num estado estacionário as derivadas temporais são nulas. Por outro lado as veloci-dades angulares sopõem-se pequenas e pode-se desprezar os termos quadráticos (qr ,pq, rp, p2 e r 2). Finalmente, desprezam-se as contribuições dos rotores. Conclui-seportanto que L = M = N = 0 ⇒ Cl = Cm = Cn = 0.
Tendo em conta (7.27), as equações para o movimento lateral direccional são então0 = Cl = Clββ+ Clp p + Clr r + Clδr δr + Clδaδa0 = Cn = Cnββ+ Cnp p + Cnr r + Cnδr δr + Cnδaδa0 = Cy = Cyββ+ Cyp p + Cyr r + Cyδr δr
Para o movimento longitudinal as equações são∆CL = CLα∆α+ CLq q + CLδe∆δe = (n− 1)CWCm = Cmα∆α+ Cmq q + Cmδe∆δe = 0
em que, tal como no caso da manobra de pull-up, ∆α e ∆δe são os incrementos doângulo de ataque e da deflexão do elevator relativamente ao caso de voo rectilíneoestacionário (em equilíbrio).
97

Usando (7.70) para escrever todas as velocidades angulares em função de ω, asequações na forma matricial para as variáveis laterais sãoCyβ Cyδr 0
Clβ Clδr ClδaCnβ Cnδr Cnδa
· βδrδa
=Cyp CyrClp ClrCnp Cnr
· [ sinθ− cosφ cosθ
]× ωb
2V, (7.74)
e para as variáveis longitudinais são[CLα CLδeCmα Cmδe
]·[∆α∆δe
]= −
[CLqCmq
]× ωc
2Vsinφ cosθ +
[0
(n− 1)CW
]. (7.75)
O incremento da deflexão do leme de profundidade pode obter-se resolvendo a equa-ção (7.75), obtendo-se
∆δe =1
det
Cmα
[−CLq
ωc2V
sinφ cosθ + (n− 1)CW]+ CLα
(Cmq
ωc2V
sinφ cosθ)
= 1det
ωc2V
sinφ cosθ(CmqCLα − CmαCLq
)+ (n− 1)CWCmα
= 1det
n2 − 1n
CW2µ
cosθ(CmqCLα − CmαCLq
)+ (n− 1)CWCmα
.
Nas equações acima usou-se
ωc2V
sinφ = (g tanφ/V)c2V
sinφ = mg12ρV 2S
ρSc2× 2m
sin2φcosφ
=
= CW2µ(1− 1
n2)n = CW
2µn2 − 1n
.
A expressão para ∆δe pode também escrever-se como
∆δe = −(n− 1)CWCmα + n+1
2µn cosθ(CmqCLα − CmαCLq
)CLαCmδe − CLδeCmα
. (7.76)
Esta expressão apresenta semelhanças com a obtida para o caso da manobra de pull-up.Resolvendo o sistema (7.74) podem-se encontrar os valores da deflexão dos ailerons
e do rudder necessários para que se realize a volta coordenada, bem como o valor doângulo de derrapagem (que é habitualmente quase nulo).
98
Capítulo 8
Teoria para PequenasPerturbações
No capítulo 6 deduziram-se as equações gerais do movimento de uma aeronave.Estas equações são não lineares, mas é possível encontrar soluções particulares paraalguns estados estacionários, como foi feito no capítulo 7. Interessa saber se esses es-tados estacionários são estáveis para pequenas perturbações das variáveis dinâmicas.Para isso é necessário estabelecer as equações que regem a evolução temporal des-sas pequenas perturbações. Começaremos por linearizar as equações do movimentoe em seguida usaremos as equações do movimento do estado estacionário para obterequações diferenciais lineares para as pequenas perturbações.
8.1 Definição do estado estacionário
As variáveis dinâmicas vão ser decompostas na soma do valor que assumem noestado estacionário com o valor da pequena perturbação. Usaremos o índice 0 paraidentificar as variáveis do estado estacionário.
O estado estacionário relativamente ao qual vamos procurar estabelecer as equa-ções de evolução das pequenas perturbações é o correspondente a um movimentorectilíneo uniforme sem derrapagem e com asas niveladas. Logo, são nulas a acelera-ção linear (u0 = v0 = w0 = 0), a velocidade angular p0 = q0 = r0 = 0, a velocidadelateral (v0 = 0) e o ângulo de pranchamento (φ0 = 0). Vamos além disso usar ângulode rumo nulo: ψ = 0 (é sempre possível sem perda de generalidade).
Usaremos um sistema de eixos de estabilidade, pelo que o eixo Cx tem a direcçãode ~V (o que é sempre possível porque v0 = 0). Logo, w0 = 0, o que implica que αx = 0,pelo que θ0 coincide com o ângulo de subida.
Admitiremos que o efeito dos rotores é desprezável. Esta hipótese é válida se oavião está em voo planado ou se o momento angular de cada rotor é pequeno ou aindase os rotores são simétricos e rodam em sentidos opostos.
Se existir vento com velocidade constante, a velocidade do avião relativamente àTerra é ~VE = ~V + ~W e, dado que v0 = 0 = w0, conclui-se que vE0 = Wy e wE0 = Wz. Ainfluência do vento na dinâmica será tratada mais à frente. Por enquanto admitir-se-áque não existe vento e que ~VE = ~V , donde uE = u, vE = v e wE = w.
99

Finalmente, no estado estacionário temos δa = 0 e δr = 0 (mas não, evidentemente,δe = 0).
8.1.1 Notação para estado estacionário e perturbação
As variáveis dinâmicas vão ser decompostas na soma do valor que assumem no es-tado estacionário com o valor da pequena perturbação. Por exemplo, para uma variávelx, temos:
• Variável total: x.
• Valor da variável no estado estacionário: x0.
• Valor da perturbação: ∆x.
• Logo: x = x0 +∆x.
No caso em que x0 = 0, a variável total é x = ∆x. Neste caso usaremos apenas x paraa perturbação.
Tendo em conta o estado estacionário definido acima, a velocidade linear éuE = u0 +∆u,vE ≡ ∆v,wE ≡ ∆w.
(8.1)
Note-se que v0 = 0 = w0, o que nos levará daqui para a frente a omitir o símbolo ∆nos casos respectivos. A velocidade angular é
p ≡ ∆p (p0 = 0),q ≡ ∆q (q0 = 0),r ≡ ∆r (r0 = 0),
(8.2)
e os ângulos de Euler são ψ ≡ ∆ψ (ψ0 = 0),θ = θ0 +∆θ,φ ≡ ∆φ (φ0 = 0).
(8.3)
Dado que, por hipótese, ∆θ é pequeno, podemos usar as aproximações habituais:cos∆θ ≈ 1 e sin∆θ ≈ ∆θ. Logo,
sin(θ0 +∆θ) = sinθ0 cos∆θ + cosθ0 sin∆θ ≈ sinθ0 +∆θ cosθ0
cos(θ0 +∆θ) = cosθ0 cos∆θ − sinθ0 sin∆θ ≈ cosθ0 −∆θ sinθ0
8.1.2 Equações para o estado estacionário
Substituindo as definições do estado estacionário nas equações gerais do movi-mento (6.19), (6.23) e (6.12), obtemos
X0 −mg sinθ0 = 0,Y0 = 0,Z0 +mg cosθ0 = 0,
100

para as equações da dinâmica de translação, e para as equações da dinâmica de rotaçãotemos
L0 = 0,M0 = 0,N0 = 0.
Por sua vez, as equações da trajectória do estado estacionário são simplesmentexE0 = u0 cosθ0,yE0 = 0,zE0 = −u0 sinθ0.
8.2 Linearização das equações
Como foi visto acima, supomos que as perturbações são pequenas e por isso pode-mos desprezar os termos quadráticos face aos termos lineares. São termos quadráticostodos aqueles em que aparecem produtos das variáveis da perturbação.
Para linearizar as equações do movimento para pequenas perturbações é necessáriosubstituir todas as variáveis de estado pela soma da contribuição do estado estacio-nário com a da perturbação. Em seguinda usamos as equações do estado estacionáriopara eliminar os termos que contenham apenas contribuições do estado estacionário.Finalmente, desprezamos os termos quadráticos nas pequenas perturbações.
8.2.1 Forças e momentos aerodinâmicos
As forças e os momentos aerodinâmicos são funcionais das variáveis de estado.Para pequenas perturbações, as variáveis de estado longitudinais são ∆u, w, q e aderivada temporal w (∆u e q não são relevantes). As variáveis de estado laterais sãov , p e r .
Supomos que as perturbações nas forças e momentos dependem linearmente dasvariáveis de estado. Admitimos ainda que em configurações simétricas as forças e mo-mentos laterais só dependem das variáveis laterais e desprezamos a contribuição dasvariáveis laterais (assimétricas) para as forças e momentos longitudinais (simétricas).Assim, admitimos que as forças e momentos longitudinais dependem linearmente de∆u,w,q, w e que as forças ou momentos laterais dependem linearmente de v,p, r .
∆X = Xu∆u+Xww +Xww +Xqq +∆Xc (8.4)
∆Y = Yvv + Ypp + Yrr +∆Yc (8.5)
∆Z = Zu∆u+ Zww + Zww + Zqq +∆Zc (8.6)
∆L = Lvv + Lpp + Lrr +∆Lc (8.7)
∆M = Mu∆u+Mww +Mww +Mqq +∆Zc (8.8)
∆N = Nvv +Npp +Nrr +∆Nc (8.9)
Habitualmente a dependência da força segundo x em q e w pode ser desprezada. Issosignifica que Xw ≈ 0 e Xq ≈ 0. Também não vamos considerar a variação da densidadeρ com a altitude.
101

8.2.2 Linearização das equações longitudinais
O movimento longitudinal é aquele em que o plano de simetria do avião não sealtera. O estado estacionário consiste num voo simétrico (e não existem efeitos giros-cópicos dos rotores em movimento) e por isso é possível deduzir equações para aspequenas perturbações que incluem apenas as variáveis longitudinais. As equaçõeslongitudinais a linearizar são as equações de translação segundo x e z e a equação domovimento de rotação segundo y .
Equação do movimento de translação segundo x
Comecemos pela linearização da equação do movimento de translação segundo x,
X −mg sinθ =m(uE + qwE − rvE).
Substituindo todas as variáveis como a soma da contribuição do estado estacionáriocom a da perturbação, obtém-se
(X0 +∆X)−mg sin(θ0 +∆θ) =m(u0 +∆u+ qw − rv) (8.10)
Usamos sin(θ0+∆θ) ≈ sinθ0+∆θ cosθ0 e as equações do estado estacionário, tem-se
(X0 −mg sinθ0)︸ ︷︷ ︸=0 (Est. estacionário)
+∆X −mg cosθ0∆θ =m(u0︸︷︷︸=0
+∆u+ qw − rv). (8.11)
A linearização implica que qw ≈ 0 e que rv ≈ 0, pelo que
∆X −mg cosθ0∆θ =m∆u. (8.12)
Por outro lado, de (8.4) e desprezando Xq e Xw ,
∆X = Xu∆u+Xww +∆Xc , (8.13)
donde:Xu∆u+Xww +∆Xc −mg cosθ0∆θ =m∆u
ou, resolvendo para a aceleração ∆u,
∆u = Xum∆u+ Xw
mw +−g cosθ0∆θ +
∆Xcm
(8.14)
Equação do movimento de translação segundo z
De forma análoga (usando as equações do estado estacionário e linearizando), de
Z +mg cosθ cosφ =m(wE + pvE − quE)
chega-se a:
w = ∆Zm− g sinθ0∆θ +u0q. (8.15)
Usando (8.6) obtém-se
w = Zum∆u+ Zw
mw + Zw
mw + Zq
mq − g sinθ0∆θ +u0q +
∆Zcm, (8.16)
102

e resolvendo em ordem a w, obtém-se finalmente:
w = Zum− Zw
∆u+ Zwm− Zw
w +
(mu0 + Zq
)m− Zw
q − mg sinθ0
m− Zw∆θ + ∆Zc
m− Zw. (8.17)
Equação do movimento de rotação segundo y
A linearização da equação do movimento de rotação em torno de y ,
M = Iyy q − Izx(r 2 − p2)− Ixy(p + qr)− Iyz(r − pq)− (Izz − Ixx)rp
conduz a
q = ∆MIy. (8.18)
Usando (8.8) e (8.17), obtém-se finalmente
q = 1Iy
[(Mu +
MwZum− Zw
)∆u+
(Mw +
MwZwm− Zw
)w+
(Mq +
Mw(mu0 + Zq)m− Zw
)q − Mwmg sinθ0
m− Zw∆θ +∆Mc +
Mw∆Zcm− Zw
](8.19)
Fecho do sistema de equações
Obtivemos até ao momento três equações, mas temos como variáveis ∆u, w, q e∆θ. A quarta equação pode obter-se da linearização de
q = ψ cosθ sinφ+ θ cosφ,
sendo simplesmente∆θ = q. (8.20)
Resumo das equações longitudinais para pequenas perturbações
Escrevendo o sistema de equações (8.14), (8.19), (8.17) e (8.20) na forma matricial,
∆u
w
q
∆θ
=
Xum
Xwm 0 −g cosθ0
Zum−Zw
Zwm−Zw
(mu0+Zq)m−Zw
mg sinθ0m−Zw
1Iy
(Mu + MwZu
m−Zw
)1Iy
(Mw + MwZw
m−Zw
)1Iy
(Mq + Mw (mu0+Zq)
m−Zw
)−Mwmg sinθ0Iy (m−Zw )
0 0 1 0
∆u
w
q
∆θ
.
(8.21)Nas equações acima omitiu-se o vector das variáveis de controlo, dado por[
∆Xcm,∆Zc
m− Zw,∆McIy
+ Mw∆Zcm− Zw
,0]T
(8.22)
103

As equações linearizadas para o «flight path» são
∆xE = ∆u cosθ0 +w sinθ0 −u0∆θ sinθ0 (8.23)
∆zE = −∆u sinθ0 +w cosθ0 −u0∆θ cosθ0 (8.24)
8.2.3 Linearização das equações laterais
O processo de linearização das equações laterais é idêntico ao das equações longi-tudinais. Da equação para o movimento de translação segundo y obtemos a aceleraçãov , enquanto que p e r se obtêm das equações para o movimento de rotação segundo xe z, respectivamente. A quarta equação, necessária para fechar o sistema de equações,pode obter-se da linearização da primeira e terceira equações de (6.12), que conduz aφ = p + r tanθ0.
Na forma matricial, o sistema de equações diferenciais de primeira ordem para aevolução das pequenas perturbações laterais é
v
p
r
φ
=
Yvm
Ypm
(Yrm −u0
)g cosθ0
(LvI′x + I
′zxNv
) (LpI′x + I
′zxNp
) (LrI′x + I
′zxNr
)0
(I′zxLv + Nv
I′z
) (I′zxLp +
NpI′z
) (I′zxLr + Nr
I′z
)0
0 1 tanθ0 0
v
p
r
φ
. (8.25)
O vector das variáveis de controlo[∆Ycm,∆LcI′x+ I′zx∆Nc , I′zx∆Lc +
∆NcI′z, 0]T
(8.26)
foi omitido também aqui.Para simplificar a escrita, nas equações (8.25) usou-se a notação
I′x = (IxIz − I2zx)/Iz, (8.27)
I′z = (IxIz − I2zx)/Ix, (8.28)
I′zx = Izx/(IxIz − I2zx). (8.29)
Note-se que, se usarmos um sistema de eixos principal de inércia, Izx = 0, e entãoI′x = Ixx , I′z = Izz e I′zx = 0.
Para completar as equações para o «flight path», a equação linearizada para ∆yE é
∆yE = u0ψ cosθ0 + v. (8.30)
Esta equação só é necessária para perturbações laterais e para perturbações longitudi-nais reduz-se a ∆yE = 0.
Finalmente, a linearização da equação de (6.12) que se refere à velocidade angularde guinada, r = ψ cosθ cosφ− θ sinφ, leva a
ψ = r secθ0. (8.31)
104

8.3 Forma geral das equações
Como vimos, podem existir perturbações puramente longitudinais se o avião tiverum plano de simetria, se não houver efeitos giroscópicos do rotor. As condições para aexistência de perturbações puramente laterais são as referidas, mas é necessário aindaque não existam acoplamentos aerodinâmicos cruzados, isto é, se as forças e momen-tos longitudinais não dependerem das variáveis laterais e se as forças e momentoslaterais não dependerem das variáveis longitudinais.
As equações para as pequenas perturbações têm, em ambos os casos, a mesmaforma matricial
x = Ax+ Bc.
Esta equação matricial representa um sistema de equações diferenciais lineares de 1ªordem, em que a matriz do sistema A é determinada a partir de (8.21) para perturaçõeslongitudinais,
A =
Xum
Xwm 0 −g cosθ0
Zum−Zw
Zwm−Zw
(mu0+Zq)m−Zw
mg sinθ0
m−Zw
1Iy
(Mu + MwZu
m−Zw
)1Iy
(Mw + MwZw
m−Zw
)1Iy
(Mq + Mw(mu0+Zq)
m−Zw
)−Mwmg sinθ0
Iy(m−Zw)
0 0 1 0
,
e a partir de (8.25) para perturbações laterais,
A =
Yvm
Ypm
(Ypm −u0
)g cosθ0
(LvI′x + I
′zxNv
) (LpI′x + I
′zxNp
) (LrI′x + I
′zxNr
)0
(I′zxLv + Nv
I′z
) (I′zxLp +
NpI′z
) (I′zxLr + Nr
I′z
)0
0 1 tanθ0 0
.
A matriz B e o vector c são a matriz e o vector de controlo, a determinar a partirdas mesmas equações. O vector de estado x é, para perturbações longitudinais, x =[∆u w q ∆θ]T , a para parturbações laterais, x = [v p r φ]T .
O nosso objectivo é resolver o sistema x = Ax + Bc em ambos os casos, mas paraisso temos de saber determinar todos os termos das matrizes A e B e do vector c.
105

Capítulo 9
Derivadas de Estabilidade
O tema deste capítulo é cálculo das derivadas de estabilidade que figuram nas equa-ções para pequenas perturbações. Em primeiro lugar estabelecer-se-á a relação entreas derivadas dimensionais e as adimensionais. Em seguida procurar-se-á encontrarexpressões que permitam calcular ou, pelo menos, obter uma estimativa, para as deri-vadas de estabilidade adimensionais.
9.1 Relações entre derivadas de estabilidade dimensio-nais e adimensionais
As equações do movimento (para pequenas perturbações) foram escritas na formadimensional, usado as derivadas de estabilidade na forma dimensional. Porém, asderivadas são normalmente obtidas na forma adimensional, por exemplo, por meio detestes de modelos em túnel aerodinâmico. Torna-se por isso necessário relacionar asderivadas de estabilidade dimensionais e adimensionais.
9.1.1 Derivadas de estabilidade dimensionais e adimensionais
As forças e momentos longitudinais correspondentes a pequenas perturbações sãodados por (8.4), (8.6) e (8.8), sendo as derivadas calculadas no estado estacionário.Exemplificando com a equação (8.6),
∆Z = Zu∆u+ Zww + Zww + Zqq +∆Zc ,
se usarmos o índice 0 para identificar o estado estacionário, as derivadas de estabili-dade são
Zu =(∂Z∂u
)0, Zw =
(∂Z∂w
)0, Zq =
(∂Z∂q
)0
, Zw =(∂Z∂w
)0.
As forças e momentos laterais correspondente à pequena perturbação são dados por(8.5), (8.7) e (8.9), sendo também aqui as derivadas calculadas no estado estacionário.
106

As variáveis dinâmicas são adimensionalizadas, no caso de pequenas perturbações,usando a velocidade do estado estacionário, isto é, V = u0. Logo, temos
u = uu0, v = v
u0, w = w
u0, ˆα = α
2u0
c
,
p = p2u0
b
, q = q2u0
c
, r = r2u0
b
.
Os coeficientes adimensionais longitudinais são definidos por (7.13), (7.14) e (7.15).Em termos das variáveis dinâmicas, os coeficientes Cx , Cz e Cm são dados por (7.16),sendo as derivadas calculadas no estado estacionário. Assim, por exemplo,
Cz = Czuu+ Czαα+ Czq q + Czα ˆα,
em que
Czu =(∂Cz∂u
)0, Czα =
(∂Cz∂α
)0, Czq =
(∂Cx∂q
)0
, Czα =(∂Cz∂ ˆα
)0.
Os coeficientes adimensionais laterais são definidos, por sua vez, por (7.21), (7.22)e (7.23) e são dados, em termos das variáveis dinâmicas adimensionais laterias, por(7.24). De novo, as derivadas são calculadas no estado estacionário.
De seguida vamos estabelecer a relação entre as derivadas dimensionais e adimen-sionais.
9.1.2 Derivadas longitudinais
Derivadas da força segundo z
A relação entre a força segundo Z e o respectivo coeficiente é Z = 12ρV
2SCz. Avelocidade da aeronave é
V 2 = u2 + v2 +w2.
No estado estacionário, u = u0, v0 = 0, e w0 = 0. Logo, temos(∂V 2
∂u
)0
= 2u0,(∂V 2
∂v
)0
= 0,(∂V 2
∂w
)0
= 0.
A derivada relativamente a u é
Zu ≡(∂Z∂u
)0= ∂∂u
[12ρV 2SCz
]0=[∂∂u
(12ρV 2S
)]0(Cz)0 +
(12ρV 2S
)0
(∂Cz∂u
)0
= 12ρ(2u0)S (Cz)0 +
12ρu2
0S(∂Cz∂u
)0= ρu0S (Cz)0 +
12ρu2
0S(∂Cz∂u
)0. (9.1)
No estado estacionário: Z0 = −mg cosθ0. Logo:
(Cz)0 =Z0
12ρSu
20
= −mg cosθ012ρSu
20
= −CW0 cosθ0. (9.2)
107

Por outro lado,
Czu =(∂Cz∂u
)0=(∂u∂u
)0
(∂Cz∂u
)0=(∂ uu0
∂u
)0
(∂Cz∂u
)0= 1u0Czu . (9.3)
Finalmente, substituímos (9.2) e (9.3) em (9.1), obtendo
Zu = −ρu0S cosθ0CW0 +12ρSu0Czu . (9.4)
A derivada relativamente a w calcula-se de forma semelhante:
Zw ≡(∂Z∂w
)0= ∂∂w
[12ρV 2SCz
]0=[∂∂w
(12ρV 2S
)]0(Cz)0 +
(12ρV 2S
)0
(∂Cz∂w
)0
= 12ρ(2w0︸︷︷︸
0
)S (Cz)0 +12ρu2
0S(∂Cz∂w
)0= 1
2ρu2
0S(∂Cz∂w
)0. (9.5)
Note-se que (∂Cz∂w
)0=(∂w∂w
)0
(∂Cz∂w
)0=(∂ wu0
∂w
)0
(∂Cz∂w
)0= 1u0
(∂Cz∂w
)0.
Por outro lado, para pequenas perturbações w = α, pelo que(∂Cz∂w
)0≡ Czα . Por substi-
tuição em (9.5) conclui-se de que
Zw =12ρSu0Czα . (9.6)
O cálculo da derivada relativamente a w faz-se da mesma forma.
Zw ≡(∂Z∂w
)0= ∂∂w
[12ρV 2SCz
]0
=[∂∂w
(12ρV 2S
)]0(Cz)0 +
(12ρV 2S
)0
(∂Cz∂w
)0= 0+ 1
2ρu2
0S(∂Cz∂w
)0
(9.7)
Para pequenas perturbações: w = wu0= αx ⇒ w = u0αx . Por outro lado: ˆαx = αx c
2u0.
Logo, (∂Cz∂w
)0= 1u0
(∂Cz∂α
)0= 1u0
c2u0
(∂Cz∂ ˆα
)0= c
2u20Czα ,
obtendo-se finalmente
Zw =14ρScCzα . (9.8)
Por fim, calcula-se a derivada relativamente a q:
Zq ≡(∂Z∂q
)0
= ∂∂q
[12ρV 2SCz
]0=[
∂∂q
(12ρV 2S
)]0
(Cz)0 +(
12ρV 2S
)0
(∂Cz∂q
)0
= 0+ 12ρu2
0S(∂Cz∂q
)0
. (9.9)
108

Tendo em conta que q = q c2u0
, tem-se(∂Cz∂q
)0
= c2u0
(∂Cz∂q
)0
= c2u2
0Czq , (9.10)
pelo que facilmente se obtém
Zq =14ρu0ScCzq . (9.11)
Derivadas da força segundo x
Para o cálculo das derivadas da força segundo x procede-se de forma idêntica aocaso anterior, mas agora X = 1
2ρV2SCx.
A derivada relativamente a u é:
Xu ≡(∂X∂u
)0= ∂∂u
[12ρV 2S Cx
]0
=[∂∂u
(12ρV 2S
)]0(Cx)0 +
(12ρV 2S
)0
(∂Cx∂u
)0= ρu0S (Cx)0 +
12ρu2
0S(∂Cx∂u
)0.
Note-se que agora X0 =mg sinθ0, o que implica Cx0 = CW0 sinθ0, e por outro lado,
(∂Cx∂u
)0=(∂u∂u
)0
(∂Cx∂u
)0=(∂ uu0
∂u
)0
(∂Cx∂u
)0= 1u0Cxu .
O resultado final é
Xu = ρu0S sinθ0 CW0 +12ρSu0 Cxu . (9.12)
Para as outras derivadas procede-se exactamente como para o caso das derivadasda força segundo z, obtendo-se:
Xw =12ρSu0Cxα , (9.13)
Xw =14ρScCxα , (9.14)
Xq =14ρu0ScCxq . (9.15)
Derivadas do momento de picada
Para o cálculo das derivadas do momento de picada, partimos de M = 12ρV
2ScCm.A única diferença face aos cálculos anteriores é que o momento de picada no estado
109

estacionário M0 = 0, donde (Cm)estado estacionário = 0, obtendo-se agora
Mu =12ρSu0cCmu , (9.16)
Mw =12ρSu0cCmα , (9.17)
Mq =14ρSu0c2Cmq , (9.18)
Mw =14ρSc2Cmα . (9.19)
9.1.3 Derivadas laterais
Derivadas do momento de rolamento
O coeficiente do momento de rolamento é dado por L = 12ρV
2Sb Cl. No estadoestacionário, as variáveis dinâmicas são nulas: v0 = 0 e p0 = r0 = 0. Além disso, omomento de rolamento no estado estacionário é nulo, L0 = 0, e portanto Cl0 = 0.
Começamos por calcular a derivada em ordem a v .
Lv ≡(∂L∂v
)0= ∂∂v
[12ρV 2SbCl
]0
=[∂∂v
(12ρV 2Sb
)]0Cl0 +
(12ρV 2Sb
)0
(∂Cl∂v
)0= 0+ 1
2ρu2
0Sb(∂Cl∂v
)0. (9.20)
Recorde-se que, para pequenas perturbações
β = arcsinvV≈ vu0= v,
pelo que (∂Cl∂v
)0=(∂v∂v
)0
(∂Cl∂v
)0= 1u0Clβ .
Por substituição em (9.20), deduz-se facilmente que
Lv =12ρu0Sb Clβ . (9.21)
O cálculo da derivada em ordem a p é semelhante:
Lp ≡(∂L∂p
)0
=[∂∂p
(12ρV 2Sb
)]0
Cl0 +(
12ρV 2Sb
)0
(∂Cl∂p
)0
= 0+ 12ρu2
0Sb(∂Cl∂p
)0
,
mas agora p = p(2u0/b)
, pelo que
(∂Cl∂p
)0
=(∂p∂p
)0
(∂Cl∂p
)0
= b2u0
Clp .
110

O resultado final é então
Lp =14ρu0Sb2 Clp . (9.22)
Finalmente, para a derivada em ordem a r temos
Lr ≡(∂L∂r
)0=[∂∂r
(12ρV 2Sb
)]0Cl0 +
(12ρV 2Sb
)0
(∂Cl∂r
)0
= 0+ 12ρu2
0Sb(∂Cl∂r
)0,
e, como r = r(2u0/b)
,
(∂Cl∂r
)0=(∂r∂r
)0
(∂Cl∂r
)0= b
2u0Clr ,
obtendo-se por fim
Lr =14ρu0Sb2 Clr . (9.23)
Derivadas do momento de guinada
Para as derivadas do momento de guinada partimos de N = 12ρV
2Sb Cn. No estadoestacionário N0 = 0⇒ Cn0 = 0.
De forma análoga ao caso do momento de rolamento, obtém-se
Nv =12ρu0Sb Cnβ , (9.24)
Np =14ρu0Sb2 Cnp , (9.25)
Nr =14ρu0Sb2 Cnr . (9.26)
Derivadas da força lateral
Finalmente, para as derivadas da força lateral usamos Y = 12ρV
2S Cy . No estadoestacionário Y0 = 0⇒ Cy0 = 0. De forma análoga aos casos anteriores obtemos
Yv =12ρu0S Cyβ , (9.27)
Yp =14ρu0Sb Cyp , (9.28)
Yr =14ρu0Sb Cyr . (9.29)
111

Figura 9.1: Voo rectilíneo com ângulo de subida constante.
9.2 Derivadas relativas ao movimento longitudinal
Na fase de projecto é importante dispor de expressões aproximadas para as de-rivadas de estabilidade adimensionais em função das características das aeronaves.Procuraremos encontrar estas expressões tratando separadamente, como é habitual,os casos de movimento longitudinal e movimento lateral.
Recorde-se que as derivadas são calculadas no estado estacionário e que este édefinido aqui como um voo rectilíneo uniforme, donde p0 = 0 = q0 = r0, e semderrapagem, isto é, com v0 = 0. Usamos eixos de estabilidade, pelo que w0 = 0, ouseja, (αx)0 = 0.
Num movimento puramente longitudinal, interessam-nos apenas as forças segundox e z e o momento de picada. As forças e momentos longitudinais dependem dasustentação L, da resistência aerodinâmica D e da força de propulsão T .
Admitimos que a linha de propulsão coincide com o eixo x. Por outro lado, comousamos eixos de estabilidade, (αx)0 = 0. As perturbações ao estado estacionário são,por hipótese, pequenas, pelo que a velocidade segundo w será pequena ou seja αx 1. Logo, cosαx ≈ 1 e sinαx ≈ αx . As equações para as forças segundo x e z no casode um voo rectilíneo, nivelado e com ângulo de subida são dadas por (7.30). Usandoas aproximações acima e adimensionalizando as equações, obtemos
Cx = CT + CLαx − CD,Cz = −(CL + CDαx).
(9.30)
9.2.1 Derivadas em ordem ao ângulo de ataque
Pretendemos encontrar expressões para as derivadas Cxα , Czα e Cmα .
112
Por definição, a derivada Cxα , calculada no estado estacionário, é
Cxα ≡(∂Cx∂α
)0.
Mas, da primeira equação de (9.30),(∂Cx∂α
)0=(∂∂α(CT + CLαx − CD)
)0
(∂CT∂α
)0︸ ︷︷ ︸
=0
+(CL)0 +(∂CL∂α(αx)0
)0︸ ︷︷ ︸
=0⇐(αx)0=0
−(∂CD∂α
)0.
Logo,
Cxα = CL1 −(∂CD∂α
)0≡ CL1 − CDα . (9.31)
Note-se que, para evitar ambiguidades, usamos a notação CL1 ≡ (CL)0 para o coefi-ciente de sustentação no estado estacionário. De igual forma, designaremos por CD1 ocoeficiente da resistência aerodinâmica no estado estacionário.
Se o coeficiente de resistência estiver relacionado com o coeficiente de sustentaçãoatravés da polar CD = CD0 + C2
L/(πAe), então
CDα ≡(∂CD∂α
)0= 2CL0
πAeCLα ,
e este valor de CDα pode ser usado em (9.31).Para calcular a derivada Czα no estado estacionário partimos da definição
Czα =(∂Cz∂α
)0
e da segunda equação de (9.30), o que leva a(∂Cz∂α
)0= −
(∂∂α(CL + CDαx)
)0= −
(CLα + CDααx + CD
)0 = −(CLα + CD1).
Em conclusão, pode-se escrever
Czα = −(CLα + CD1). (9.32)
Resta-nos determinar a derivada Cmα . Mas o seu valor é dado, como se sabe, por
Cmα = a(h− hn).
9.2.2 Derivadas em ordem à velocidade longitudinal
As derivadas em ordem a u traduzem as alterações de forças e momentos quandovaria a velocidade horizontal, supondo α, T , etc. constantes.
Os coeficientes CL e CD dependem de u devido a efeitos de compressibilidade (istoé, dependem do número de Mach Ma), a efeitos aeroelásticos (isto é, dependem dapressão dinâmica pd = 1/2ρV 2) e à interacção da propulsão com a airframe (asa efuselagem), especialmente no caso de propulsão a hélice.
113

Se CLu e CDu forem conhecidos, as derivadas calculam-se facilmente a partir de(9.30):
Cxu = CTu − CDu (9.33)
Czu = −CLu (9.34)
Caso contrário, é necessário determinar todas as contribuições separadamente. Porexemplo, para a derivada Cxu teríamos
Cxu ≡(∂Cx∂u
)0=(∂Cx∂Ma
)0
(∂Ma∂u
)0+(∂Cx∂pd
)0
(∂pd∂u
)0+(∂Cx∂CT
)0
(∂CT∂u
)0︸ ︷︷ ︸
CTu
.
As derivadas(∂Ma∂u
)0
e(∂pd∂u
)0
podem calcular-se facilmente, mas as derivadas de Cxem ordem a Ma, pd e CT são difíceis de estimar.
Derivada CTu
A derivada CTu é necessária para calcular Cxu a partir de (9.33). De acordo com adefinição, CT = T
1/2ρV2S , donde
∂CT∂u
=∂T∂u
1/2ρV 2S− 2T
1/2ρV 3S∂V∂u.
Ora, tendo em conta que V =√u2 + v2 +w2 e que no estado estacionário V = u0,
CTu =(∂CT∂u
)0= u0
(∂CT∂u
)0=
(∂T∂u
)0
1/2ρu0S− 2T
1/2ρu20S,
e chegamos finalmente a
CTu =
(∂T∂u
)0
1/2ρu0S− 2CT0
O cálculo da derivada ∂T∂u depende do tipo de voo. Para voo planado, T = 0 pelo que
CTu = 0. (9.35)
Para voo com propulsão constante (boa aproximação para aviões a jacto em voo decruzeiro),
∂T∂u= 0,
e conclui-se imediatamente queCTu = −2CT0 . (9.36)
Para voo com potência constante (boa aproximação para aviões com propulsão a hélicecom velocidade constante, em voo de cruzeiro),
TV = cte = T0V0 ⇒ T =T0V0
V.
114

Logo (∂T∂u
)0= −
(T0V0
V 2
)0= −T0
V0⇒ CTu =
−T0
1/2ρu20S− 2CT0 .
Conclui-se portanto queCTu = −3CT0 . (9.37)
Resta-nos calcular CT0 . Se admitirmos que no estado estacionário a força de propul-são e a velocidade são aproximadamente colineares, e usando eixos de estabilidade, oequilíbrio na direcção x exige
CT0 = CD0 + CW0 sinθ0.
Para voo horizontal, em que θ0 = 0, obtemos simplesmente CT0 = CD0 .
9.2.3 Derivadas em ordem à velocidade angular de picada
As derivadas em ordem a q são calculadas mantendo constantes α e as outrasvariáveis.
A contribuição mais importantes é a da cauda; a contribuição da asa é menos impor-tante e mais difícil de estimar. É prática corrente estimar a contribuição da asa como10% da contribuição da cauda (i.e., a derivada total ≈ 1.1× contribuição da cauda).
Recorde-se que, de acordo com (9.10),
Czq =2u0
c
(∂Cz∂q
)0
.
Por outro lado, (9.30) permite relacionar Czq com CLq :
Cz = −(CL + CDαx) ⇒(∂Cz∂q
)0
= −(∂CL∂q
)0
, (9.38)
e portanto Czq = −CLq .
Contribuição da cauda
O efeito mais importante na cauda é a variação do ângulo de ataque efectivo devidoà velocidade angular de picada q.
Admitimos que a sustentação na cauda Lt se altera instantaneamente quando αtvaria. A figura 9.2 permite concluir que ∆αt = qlt/u0. A variação do coeficiente desustentação da cauda devida à velocidade angular de picada é
∆CLt = at∆αt = atqltu0⇒ ∆CL =
StS∆CLt =
StSatqltu0.
A contribuição da cauda para a derivada de CL em ordem a q é então(∂CL∂q
)tail
= StSatltu0.
115

Figura 9.2: Variação do ângulo de ataque na cauda devido à velocidade angular depicada. (Fonte: [1])
Usando (9.38) conclui-se que
(CLq
)tail= 2u0
c
(∂CL∂q
)tail
= 2u0
cStSatltu0,
que se pode escrever na forma mais compacta(CLq
)tail= 2VHat. A contribuição da
cauda para a derivada Czq é portanto(Czq
)tail= −2VHat. (9.39)
Para determinar a contribuição da cauda para Cmq , partimos de
∆Cm = −VH∆CLt = −atVHqltu0⇒ ∂Cm∂q
= −atVHltu0.
Tendo em conta a adimensionalização da velocidade angular de picada,(Cmq
)tail= 2u0
c∂Cm∂q
= −2u0
catVH
ltu0.
Conclui-se finalmente que (Cmq
)tail= −2VHat
ltc. (9.40)
116

Figura 9.3: A velocidade angular produz uma distribuição de velocidades normais àasa que é equivalente a ter uma curvatura adicional na asa. (Fonte: [1])
Figura 9.4: Dependência do centro de massa. (Fonte: [1])
Contribuição da asa
Como se afirmou acima, é frequente estimar a contribuição da asa como 10% dacontribuição da cauda. No entanto, especialmente para asas com flecha elevada oualongamento pequeno esta contribuição pode ser mais importante e nesse caso é ne-cessário uma estimativa mais exacta.
Como se ilustra na figura 9.3, a velocidade angular é equivalente a uma curvaturaadicional da asa. Para determinarmos essa curvatura, impomos a condição de quea componente normal à asa da velocidade do escoamento deve igualar a velocidadeadicional induzida por q na asa real:
u0∂z∂x= qx ⇒ ∂z
∂x= qxu0⇒ z = q
2u0x2.
Asa equivalente, que produz uma distribuição de velocidades normais equivalente, tempois um arco parabólico.
A velocidade angular q é definida relativamente ao centro de massa do avião. Porisso, como se ilustra na figura 9.4, a contribuição da asa para CLq e Cmq depende daposição do centro de massa. Se o centro de massa se desloca de A para B, o ângulo deataque efectivo na asa induzido pela velocidade angular de picada varia:
∆α = −qcu0∆h.
A esta variação corresponde uma variação do coeficiente de sustentação:
∆CL = CLα∆α = −CLαqcu0∆h = −2CLα q∆h.
117

Figura 9.5: Variação de Cmq com h. (Fonte: [1])
Derivando em ordem a h obtemos
∂CL∂h
= ∆CL∆h
= −2CLα q ⇒∂2CL∂h∂q
= −2CLα ⇒∂∂hCLq = −2CLα ⇒ CLq = −2CLα(h−h0).
A contribuição da asa para o coeficiente do momento de picada é
Cm = Cmac + CL(h− hnw ).
Derivando em ordem a h obtém-se
Cmq =∂Cmac
∂q+ CLq(h− hnw ) ⇒ Cmq =
∂Cmac
∂q− 2CLα(h− h0)(h− hnw )
A variação de Cmq com h é quadrática e está representada na figura 9.5. Pode-seescrever na forma
Cmq = Cmq − 2CLα(h− h)2.Na aproximação da teoria linear bi-dimensional de asas finas, para voo supersónico,h0 = h = 1/2, e Cmq = 2/(3
√Ma2 − 1), enquanto que para voo subsónico: h0 = 3/4,
h = 1/2 e Cmq = 0.
9.2.4 Derivadas em ordem a αOs coeficientes de sustentação e do momento de picada dependem de α porque
quando o ângulo de ataque varia a distribuição de pressões na asa e na cauda não seajusta instantaneamente ao valor de equilíbrio (enquanto α varia o escoamento deixade ser estacionário).
A contribuição da asa para as derivadas pode ser calculada a partir da respostaem frequência de uma asa com movimento oscilatório harmónico. No entanto, podetambém estimar-se como sendo 10% da contribuição da cauda. Para esta última, oefeito mais importante é o de lag-of-downwash.
Contribuição da cauda (atraso no downwash)
Quando o ângulo de ataque α se modifica, o escoamento em torno de todas assuperfícies do avião altera-se. Esta alteração não é instantânea e só se faz sentir nacauda passados algum tempo porque a vorticidade do bordo de fuga é convectada pelo
118

escoamento. O atraso é da ordem de ∆t ≈ lt/u0. O ângulo de downwash na cauda noinstante t, ε(t), é devido ao ângulo de ataque que existia na asa no instante (t −∆t).
ε = ε0 + εααwb ⇒ ∆ε = (ε0 + εααwb(t−∆t))− (ε0 + εααwb(t)) = −εαα∆t = −εααltu0
Devido ao atraso no downwash o ângulo de ataque na cauda, αt = αwb − ε − it , temuma variação
∆αt = −∆ε = εααltu0,
do qual resulta uma variação no coeficiente de sustentação da cauda
∆CLt = atαt = atεααltu0
e a correspondente variação no coeficiente de sustentação total,
∆CL =StS∆CLt = atεαα
ltu0
StS.
Tendo em conta a adimensionalização de α,
ˆα = αc2u0
⇒ Czα =∂Cz∂ ˆα
= 2u0
c∂Cz∂α
= 2u0
c∂(−CL)∂α
.
A contribuição da cauda para a derivada em ordem a ˆα é então(Czα
)tail = −2atεαVH . (9.41)
Contribuição da cauda para Cmα
Contribuição da cauda para Cmα deduz-se facilmente da variação do coeficiente desustentação da cauda devido ao atraso no downwash,
∆Cm = −VH∆CLt = −VHatεααltu0
Devido à adimensionalização,
ˆα = αc2u0
⇒ Cmα =∂Cm∂ ˆα
= 2u0
c∂Cm∂α
,
de que resulta (Cmα
)tail = −2atεαVH
ltc. (9.42)
9.3 Derivadas relativas ao movimento lateral
9.3.1 Derivadas em ordem ao ângulo de derrapagem
Pretende-se determinar as derivadas Cyβ , Clβ e Cnβ . Só é possível derivar expressõesanalíticas com estimativas para as contribuições da cauda. As contribuições da asae fuselagem são obtidas em ensaios em túnel aerodinâmico ou usando expressõesempíricas.
119
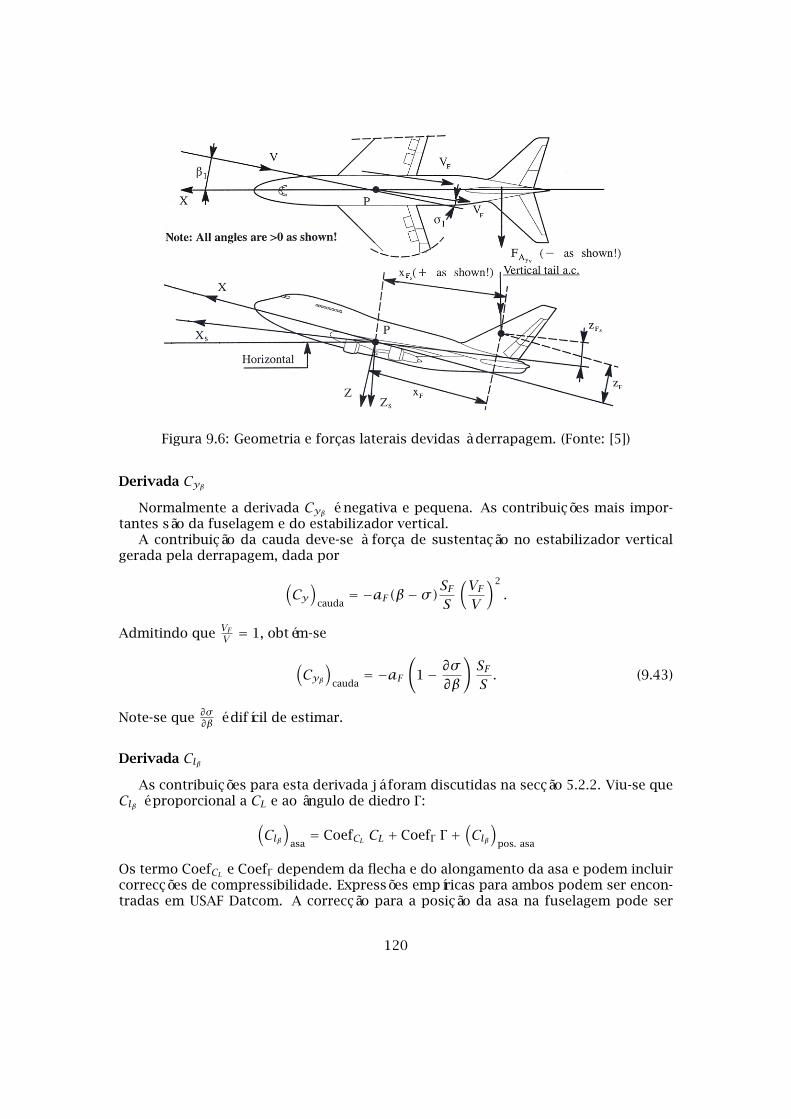
Figura 9.6: Geometria e forças laterais devidas à derrapagem. (Fonte: [5])
Derivada Cyβ
Normalmente a derivada Cyβ é negativa e pequena. As contribuições mais impor-tantes são da fuselagem e do estabilizador vertical.
A contribuição da cauda deve-se à força de sustentação no estabilizador verticalgerada pela derrapagem, dada por
(Cy)
cauda= −aF(β− σ)
SFS
(VFV
)2
.
Admitindo que VFV = 1, obtém-se
(Cyβ
)cauda
= −aF(
1− ∂σ∂β
)SFS. (9.43)
Note-se que ∂σ∂β é difícil de estimar.
Derivada Clβ
As contribuições para esta derivada já foram discutidas na secção 5.2.2. Viu-se queClβ é proporcional a CL e ao ângulo de diedro Γ :(
Clβ)
asa= CoefCL CL + CoefΓ Γ +
(Clβ)
pos. asa
Os termo CoefCL e CoefΓ dependem da flecha e do alongamento da asa e podem incluircorrecções de compressibilidade. Expressões empíricas para ambos podem ser encon-tradas em USAF Datcom. A correcção para a posição da asa na fuselagem pode ser
120

estimada a partir de:
(Clβ)
pos. asa=
Asa alta : − 0.00016/
Asa média : 0
Asa baixa : + 0.00016/
A contribuição da cauda é (∆Cl)cauda = CyzF/b, pelo que
(∆Clβ
)cauda
= −aFzFbSFS
(1− ∂σ
∂β
)(VFV
)2
.
Derivada Cnβ
Tal como já discutido na secção 5.1.1, esta derivada depende principalmente doestabilizador vertical. Tendo em conta a figura 9.6, a contribuição da cauda para omomento de guinada é (Cn)cauda = −(Cy)cauda lF/b, e usando a expressão para (Cy)cauda
obtém-se
(Cn)cauda = aFVV(
1− ∂σ∂β
)(VFV
)2
, (9.44)
em que VV = (lFSF)/(bS) é a razão de volume do estabilizador vertical.
9.3.2 Derivadas em ordem a pDevido ao rolamento, o escoamento em torno de todas as superfícies aerodinâmicas
é afectado. Dá-se uma alteração do ângulo de ataque local, que conduz a uma alteraçãona distribuição de pressões, e uma modificação da esteira de vórtices atrás da asa. Adistribuição de vorticidade passa a ser assimétrica relativamente a x, o que provoca oaparecimento de sidewash no estabilizador vertical.
A figura 9.7 mostra a variação do ângulo de ataque local devido à velocidade angularde rolamento. Na cauda essa variação é
∆αF = −pzu0+ p∂σ
∂p.
Na asa, a variação é nula na raiz, toma o valor
∆α = pyu0
(9.45)
ao longo da asa, na coordenada y , e atinge o valor máximo
∆α = pb2u0
(9.46)
na ponta da asa.
121

Figura 9.7: Variação do ângulo de ataque local devido à velocidade angular de rola-mento. (Fonte: [1])
122

Figura 9.8: Distribuição de sustentação devido à velocidade angular de rolamento.(Fonte: [1])
Derivada Cyp
Usando a altura «média» do estabilizador zF , e p = 2u0
b p,
∆αF = −2u0
bpzFu0+ p ∂σ
∂p=(−2zFb+ ∂σ∂p
)p
∆CyF = aF∆αF = aF(−2zFb+ ∂σ∂p
)p (9.47)
Para a aeronave completa:
∆Cy =SFS∆CyF = aF
SFS
(−2zFb+ ∂σ∂p
)p
(Cyp
)tail= −aF
SFS
(2zFb− ∂σ∂p
)(9.48)
Derivada Clp (damping in roll)
Para a derivada Clp a contribuição mais significativa é a da asa.Devido ao rolamento a distribuição de sustentação na asa é assimétrica, como se
mostra na figura 9.8. Consequentemente, é criado um momento de rolamento L que éproporcional a p e tem o sinal negativo (faz subir a asa direita): Clp < 0.
Pode obter-se uma estimativa da derivada Clp a partir da distribuição de sustentaçãoao longo da envergadura. Considere-se uma aeronave a voar com velocidade longitudi-nal u0 e velocidade angular de rolamento p. Desprezando os efeitos tridimensionais,a variação devida a p da sustentação numa secção arbitrária da asa a uma distância ydo centro de massa e de largura dy é
d(Sustentação) = Clα ∆α(
12ρu2
0
)c(y)dy.
123

A variação do ângulo de ataque ∆α é dada por (9.45), a derivada Clα é a correspondenteao perfil da secção da asa em consideração e c(y) é a respectiva corda. A contribuiçãodesta secção para o momento de rolamento é
dL = −y d(Sustentação) = −y Clα(pyu0
)(12ρu2
0
)c(y)dy.
O momento total obtém-se por integração ao longo de toda a envergadura da asa:
L =∫
dL = 2∫ b/2
0−y d(Sustentação) = −
∫ b/20Clαpy
2u0c(y)dy.
O coeficiente do momento de rolamento é dado por
Cl = −2pu0Sb
∫ b/20Clαy
2u0c(y)dy.
Segue-se que a derivada Clp é dada por
Clp =∂Cl∂p= 2u0
b∂Cl∂p= − 4
Sb2
∫ b/20Clαy
2c(y)dy.
Se aproximarmos Clα de cada perfil pelo valor da derivada para a asa inteira, isto é,admitindo que Clα ≈
(CLα
)w = aw , obtém-se
Clp = −4awSb2
∫ b/20y2c(y)dy. (9.49)
Para asas com afilamento linear o integral pode exprimir-se facilmente em termos doafilamento λ, obtendo-se
Clp = −aw12
1+ 3λ1+ λ . (9.50)
Para asas rectangulares a expressão anterior reduz-se a clp = −aw/6. Se necessário,podem obter-se melhores aproximações usando os métodos recomendados em [2].
Considere-se agora o caso de elevadas velocidades angulares de rolamento. Paravalores suficientemente elevados de p a parte da asa mais perto da ponta entra emperda (ver figura 9.9), a assimetria na distribuição de sustentação diminui, o momentode rolamento L diminui e |Clp | diminui. Se uma parte importante da asa está em perda,Clp pode até mudar de sinal, situação que leva à autorotação da asa (cfr. spin).
Derivada Cnp
A derivada Cnp é uma derivada cruzada e conduz a acoplamento entre rolamento eguinada. As principais contribuições são da asa e da empenagem vertical. Esta últimacontribuição estima-se a partir da força lateral.
A contribuição da asa deve-se a dois factores. O primeiro é a variação do perfil deresistência com o ângulo de ataque local da asa (se p > 0, na asa direita α aumenta, oque implica um aumento da resistência aerodinâmica induzida, enquanto que na asaesquerda α diminui e em consequência a resistência aerodinâmica diminui também,o que em conjunto leva a um momento de guinada N > 0 (nose-right) e portanto a
124

Figura 9.9: Distribuição do coeficiente de sustentação quando parte da asa entrou emperda. (Fonte: [1])
∆Cnp > 0). O outro factor é a variação da inclinação da sustentação nas asas, que seilustra na figura 9.10. Se p > 0, devido à variação do ângulo de ataque local, na asadireita a força de sustentação inclina para a frente, enquanto que na asa esquerda ainclinação da força de sustentação é para trás. Logo existe um momento de guinadaN < 0 e esta contribuição para Cnp é proporcional ao coeficiente de sustentação daasa. Em [4] sugere-se a seguinte aproximação: (Cnp)asa ≈ −CL/8. Evidentemente quemelhores aproximações se conseguem usando os métodos sugeridos em [2].
A contribuição da cauda depende da força lateral que o rolamento provoca no esta-bilizador vertical,
(∆Cn)tail = −∆CyFSFSlFb
e ∆CyF pode obter-se de (9.47), pelo que
(∆Cn)tail = +aF(
2zFb− ∂σ∂p
)pVV .
A contribuição da cauda para a derivada Cnp é então
(Cnp
)tail= aF
(2zFb− ∂σ∂p
)VV . (9.51)
9.3.3 Derivadas em ordem a rA velocidade angular de guinada provoca alterações no escoamento que são gran-
des se a asa tem ângulo de flecha elevado. A componente normal a 1/4 de corda davelocidade varia da raiz para a ponta da asa e aumenta na asa esquerda enquanto que
125
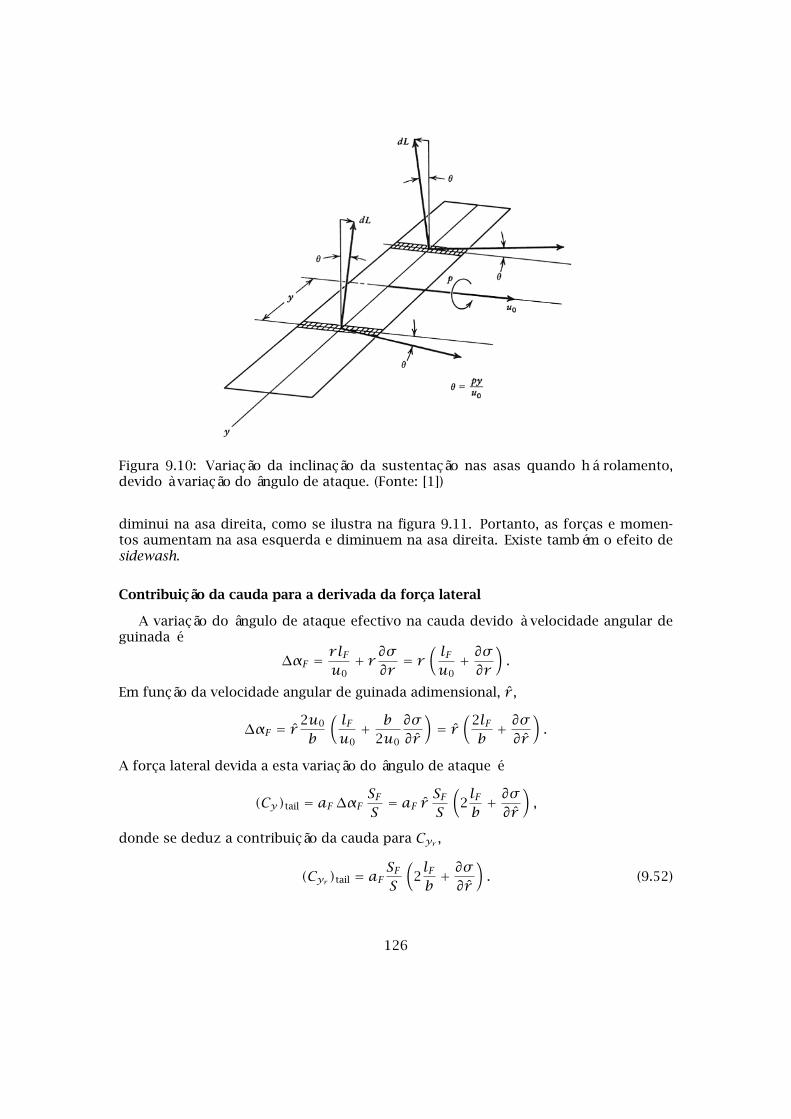
Figura 9.10: Variação da inclinação da sustentação nas asas quando há rolamento,devido à variação do ângulo de ataque. (Fonte: [1])
diminui na asa direita, como se ilustra na figura 9.11. Portanto, as forças e momen-tos aumentam na asa esquerda e diminuem na asa direita. Existe também o efeito desidewash.
Contribuição da cauda para a derivada da força lateral
A variação do ângulo de ataque efectivo na cauda devido à velocidade angular deguinada é
∆αF =rlFu0+ r ∂σ
∂r= r
(lFu0+ ∂σ∂r
).
Em função da velocidade angular de guinada adimensional, r ,
∆αF = r2u0
b
(lFu0+ b
2u0
∂σ∂r
)= r
(2lFb+ ∂σ∂r
).
A força lateral devida a esta variação do ângulo de ataque é
(Cy)tail = aF ∆αFSFS= aF r
SFS
(2lFb+ ∂σ∂r
),
donde se deduz a contribuição da cauda para Cyr ,
(Cyr )tail = aFSFS
(2lFb+ ∂σ∂r
). (9.52)
126

Figura 9.11: Variação da componente da velocidade perpendicular a uma asa comflecha. (Fonte: [1])
127

Derivada Clr
A derivada Clr é uma derivada cruzada e por isso contribui para o acoplamentoentre guinada e rolamento.
A contribuição da asa deve-se ao aumento de sustentação na asa esquerda e dimi-nuição na asa direita, sendo por isso positiva e proporcional ao coeficiente de susten-tação da asa. Uma aproximação simples sugerida em [4] é (Clr )asa = CL/4.
A contribuição da cauda é devida à força lateral na cauda que o movimento deguinada provoca, e pode estimar-se de forma semelhante às outras contribuições dacauda, obtendo-se
(Clr )tail = aFSFSzFb
(2lFb+ ∂σ∂r
). (9.53)
Derivada Cnr (damping-in-yaw)
A derivada Cnr deve ser sempre negativa para existir amortecimento do movimentode guinada.
A contribuição da asa é devida ao aumento de resistência na asa esquerda e di-minuição na asa direita (resistência induzida), e provoca N < 0. A contribuição dacauda deve-se à força lateral na cauda que o movimento de guinada provoca e podedeterminar-se a partir do momento de guinada que esta força gera, obtendo-se
(Cnr )tail = −aFVV(
2lFb+ ∂σ∂r
). (9.54)
128

Capítulo 10
Estabilidade DinâmicaLongitudinal
10.1 Introdução
Neste capítulo dar-se-á início ao estudo da estabilidade dinâmica de uma aeronave.Abordar-se-ão métodos de resolução das equações para pequenas perturbações (semcontrolo). Em seguida estudar-se-ão as características habituais das soluções e, a par-tir destas, definir-se-ão os «modos» típicos para perturbações longitudinais. Por fim,pretende-se encontrar expressões aproximadas para os modos longitudinais. Os mo-dos laterais serão tratados no capítulo seguinte.
Como se referiu anteriormente, as equações do movimento para pequenas perturba-ções foram deduzidas partindo do seguinte estado estacionário: Movimento rectilíneouniforme (aceleração linear nula, isto é u0 = v0 = w0 = 0, e velocidade angular nula:p0 = q0 = r0 = 0), sem derrapagem (v0 = 0) e com asas niveladas (φ = 0). Para sim-plificar as expressões, admitimos que o estado estacionário tem ângulo de rumo nulo(ψ = 0). Finalmente, as equações forma deduzidas usando eixos de estabilidade, istoé, em que o eixo Cx é paralelo a ~V , o que implicaw0 = 0, pelo que αx = 0 e θ0 coincidecom o ângulo de subida.
A forma geral das equações do movimento para pequenas perturbações é
x = A x+∆fc, (10.1)
em que x é o vector de estado (vector das variáveis de estado), A é a matriz do sistemae ∆fc é o vector dos incrementos das forças e momentos de controlo relativamente aoestado estacionário (não vai ser usado neste capítulo).
Para o movimento longitudinal, o vector de estado é
x =
∆uwq∆θ
,
129

e a matriz do sistema é
A =
Xum
Xwm 0 −g cosθ0
Zum−Zw
Zwm−Zw
(mu0+Zq)m−Zw
mg sinθ0
m−Zw
1Iy
(Mu + MwZu
m−Zw
)1Iy
(Mw + MwZw
m−Zw
)1Iy
(Mq + Mw(mu0+Zq)
m−Zw
)−Mwmg sinθ0
Iy(m−Zw)
0 0 1 0
.
Para o movimento lateral, o vector de estado é
x =
vprφ
,e a matriz do sistema é
A =
Yvm
Ypm
(Ypm −u0
)g cosθ0
(LvI′x + I
′zxNv
) (LpI′x + I
′zxNp
) (LrI′x + I
′zxNr
)0
(I′zxLv + Nv
I′z
) (I′zxLp +
NpI′z
) (I′zxLr + Nr
I′z
)0
0 1 tanθ0 0
. (10.2)
Em seguida veremos como determinar as soluções de (10.1) no caso em que não háforças de controlo, ou seja,
x = A x, (10.3)
que é um sistema de equações diferenciais ordinárias lineares de 1ª ordem.
10.2 Sistemas de equações diferenciais ordinárias de 1ªordem
Uma equação diferencial linear de primeira ordem
x = ax adxx= adt (10.4)
tem soluções da forma:x(t) = x0eλt (10.5)
desde que λ = a. Note-se que x0 é o valor de x para t = 0. No caso de um sistemas deequações diferenciais
x = A x, (10.6)
130

as soluções são da formax(t) = x0eλt, (10.7)
sendo x0 o vector de estado inicial, isto é, para t = 0. Dado que a derivada temporaldo vector de estado se pode escrever
x = λx0eλt,
substituindo em (10.6) temos
λx0eλt = A x0eλt ⇒ λx0 = A x0.
Esta última equação pode escrever-se
(A − λI)x0 = 0 (10.8)
que é a equação aos valores próprios da matriz A. Esta equação só tem soluções nãotriviais (isto é, identicamente nulas) se
(A − λI) = 0. (10.9)
Esta é chamada a equação característica do sistema e permite determinar os valorespróprios λ da matriz A.
Uma matriz N × N tem N valores próprios λ1, . . . , λN . A cada valor próprio λkcorresponde um vector próprio x0k . Para simplificar a exposição, suporemos todosos vectores próprios diferentes. O caso em que dois ou mais valores próprios sãoiguais não nos vai interessar. A solução geral de (10.6) é sobreposição das soluçõescorrespondentes a cada valor/vector próprio:
x(t) =N∑k=1
x0keλkt. (10.10)
Uma matriz 4× 4 tem 4 valores próprios, pelo que a solução geral vai ser
x(t) = x01eλ1t + x02e
λ2t + x03eλ3t + x04e
λ4t.
Note-se que, como (10.8) é uma equação homogénea, os vectores próprios determinamapenas uma direção, isto é, estão definidos a menos de uma constante multiplicativa.Essas constantes (uma para cada vector próprio) podem ser definidas à custa das con-dições iniciais.
10.2.1 Modos do sistema
A matriz do sistema, A, é uma matriz real, isto é, todos os seus elementos sãonúmeros reais. Pode mostrar-se que os valores próprios de uma matriz real são ounúmeros reais ou pares de valores próprios complexos conjugados. Para uma matriz4×4 temos as seguintes possibilidades: 4 valores próprios reais, ou 2 valores própriosreais e um par de complexos conjugados, ou 2 pares de valores próprios complexosconjugados.
Para cada par de valores próprios complexos conjugados, quando existam, pode-mos escrever os valores próprios, representados aqui por λ1 e λ2, como:
λ1 = n+ iω ⇒ x1 = a1eλ1t (10.11)
λ2 = n− iω ⇒ x0 = a2eλ2t (10.12)
131

As constantes a1 e a2 são complexas conjugadas porque correspondem a vectorespróprios de valores próprios complexos conjugados. Podemos por isso escrevê-lascomo
a1 = aeiϕ,
a2 = ae−iϕ.
A soma dos modos correspondentes a um par de valores próprios complexos conjuga-dos é
x1 + x2 = a1eλ1t + a2eλ2t
= a eiϕe(n+iω)t + ae−iϕe(n−iω)t
= a ent(eiϕeiωt + e−iϕe−iωt
)= a ent
(ei(ωt+ϕ) + e−i(ωt+ϕ)
)= 2a ent cos(ωt +ϕ).
Conclui-se que a soma x1 + x2 é real, isto é, que a soma das duas soluções complexasconjugadas correspondentes a valores próprios complexos conjugados é afinal umúnico modo real oscilatório (e amortecido).
Em resumo, podemos afirmar que os modos possíveis no caso presente, em quea matriz do sistema é real são os seguintes: se dois valores próprios são complexosconjugados, obtemos um modo oscilatório com frequência angular ω, período T =2π/ω e amplitude variando exponencialmente (aumenta se n > 0, o que correspondea um modo instável, diminui se n < 0, o que corresponde a um modo estável); seum valor próprio é real, obtemos um modo aeλt cuja «amplitude» aumenta se λ > 0(instável) e diminui se λ < 0 (estável). A figura 10.1 ilustra os modos descritos.
Um modo é dinamicamente estável se a sua amplitude diminui ao longo do tempo,ou seja, se Re(λ) < 0. Pelo contrário, se Re(λ) > 0 a amplitude aumenta ao longo dotempo e o modo é instável.
Alguns parâmetros importantes que caracterizam os modos são o período (quandoo modo é oscilante), o tempo necessário para a amplitude passar a metade/dobro: t1/2ou t2 e o número de ciclos necessário para a amplitude passar a metade/dobro: N1/2ou N2.
ent1/2 = 12
⇒ t1/2 =log 1/2n
= log 2|n| (10.13)
ent2 = 2 ⇒ t2 =log 2n
= log 2|n| (10.14)
N1/2 =t1/2T
ou N2 =t2T
(10.15)
Outros parâmetros importantes são a frequência natural, definida por
ωn =√ω2 +n2, (10.16)
e o factor de amortecimento, dado por
ζ = − nωn. (10.17)
132

Figura 10.1: Modos com valor próprio real: instável (a) e estável (b); Modos correspon-dentes a pares de valores próprios complexos conjugados: instável (c) e estável (d).Fonte: [1].
133

No caso de modos estáveis,
t1/2 =log 2|ζ|ωn
,
N1/2 =ω2π
log 2|ζ|ωn
= log 22π
√1− ζ2
|ζ| .
10.2.2 Critério de estabilidade de Routh
Um sistema tem modos instáveis se a equação característica det(A − λI) = 0 tiverraízes com parte real positiva. Para sistemas de 4ª ordem, como no caso vertente, aequação característica é um polinómio de grau 4, que podemos escrever como
Aλ4 + Bλ3 + Cλ2 +Dλ+ E = 0. (10.18)
Existe formas de determinar se uma equação característica tem todas as raízes comparte real negativa (isto é, se o sistema é estável) sem ter de as calcular. Uma dessasformas é a utilização do critério de Routh-Hurwitz: aplicado a sistemas de 4ª ordem,afirma que uma condição necessária e suficiente para que todas as raízes tenham partereal negativa é que se verifique simultaneamente
• B > 0,
• D > 0,
• E > 0,
• R = D(BC −AD)− B2E > 0 (discriminante de Routh).
Estas condições são válidas se A > 0; das condições anteriores deduz-se que C > 0.Com frequência em aeronáutica E > 0 e R > 0 representam casos críticos signifi-
cativos. Se uma configuração de uma aeronave é estável e um parâmetro de projectoé alterado de forma que passa a haver uma instabilidade, então: se apenas E passa anegativo, uma raiz real passa de negativa a positiva; se apenas R passa a negativo: aparte real de um par de raízes complexas conjugadas passa de negativa a positiva. Assuperfícies E = 0 e R = 0 definem fronteiras entre regiões de estabilidade e instabili-dade.
10.3 Modos longitudinais: características típicas
Começaremos por determinar os modos longitudinais num caso concreto e usar aspropriedades dos modos obtidos para definir características típicas para estes modos.
10.3.1 Exemplo: Cessna 182 Skylane
Os passos a seguir na determinação dos modos de uma aeronave são:
1. Cálcular as derivadas dimensionais (conhecidas as adimensionais)
2. Cálcular os elementos da matriz A
134

Tabela 10.1: Características do Cessna 182
S = 16.17 m2 c = 1.49m W = 11787 NIx = 1285.0 kg m2 Iy = 1824.4 kg m2 Iz = 2666.2 kg m2
Ixz = 0 kg m2
Tabela 10.2: Derivadas adimensionais do Cessna 182
CD CL CT Cmu 0 0 -0.096 0α 0.121 4.41 – -0.613q 0 3.9 – -12.4ˆα 0 1.7 – -7.27
(Fonte: [5])
3. Determinar as soluções da equação característica (valores próprios de A)
4. Para cada valor próprio determinar o respectivo vector próprio (a menos de umaconstante multiplicativa)
Vamos determinar os modos longitudinais de um Cessna 182 Skylane que se en-contra em voo horizontal a 5000 ft, com velocidade u0 = 67.08m/s (Ma = 0.201). Oestado estacionário caracteriza-se por θ0 = 0, CL1 = 0.307 e CD1 = 0.032. De acordocom a atmosfera padrão, ρ = 1.055 kg/m3.
Na tabela 10.1 apresenta-se algumas características do Cessna 182 usado nesteexemplo e na tabela 10.2 apresentam-se as derivadas de estabilidade adimensionais.Com estes valores e usando as expressões deduzidas no capítulo 9, podemos determi-nar o valor das derivadas adimensionais segundo os eixos x e z:
Cxu = CTu − CDu = −0.096,Cxα = CL1 − CDα = 0.186,Cxq = 0,Cxα = 0,Czu = −CLu = 0,Czα = −(CLα + CD1) = −4.442,Czq = −CLq = −3.9,Czα = −CLα = −1.7.
135

As derivadas dimensionais podem agora ser calculadas:
Xu = ρu0SCW0 sinθ0 +12ρu0SCxu = −54.9456 Ns/m,
Zu = −ρu0SCW0 cosθ0 +12ρu0SCzu = −351.485 Ns/m,
Mu =12ρu0cSCmu = 0,
Xw =12ρu0SCxα = 106.457 Ns/m,
Zw =12ρu0SCzα = −2542.38 Ns/m,
Mw =12ρu0ScCmα = −524.002 Ns/m,
Xq =14ρu0ScCxq = 0,
Zq =14ρu0ScCzq = −1666.89 Ns,
Mq =14ρu0Sc2Cmq = −7915.44 Ns/m,
Xw =14ρScCxα = 0,
Zw =14ρScCzα = −10.8307 Ns/m,
Mw =14ρSc2Cmα = −69.1756 Ns/m.
Estamos agora em condições de calcular todos os termos da matriz do sistema, queneste caso é
A =
Xum
Xwm 0 −g cosθ0
Zum−Zw
Zwm−Zw
(mu0+Zq)m−Zw
mg sinθ0
m−Zw
1Iy
(Mu + MwZu
m−Zw
)1Iy
(Mw + MwZw
m−Zw
)1Iy
(Mq + Mw(mu0+Zq)
m−Zw
)−Mwmg sinθ0
Iy(m−Zw)
0 0 1 0
.
Nas condições de voo indicadas temos a matriz do sistema para o Cessna 182 é
A =
−0.0457289 0.0885998 0 −9.81
−0.289913 −2.09701 65.1123 0
0.0109923 −0.207702 −6.80735 0
0 0 1 0
.
estando todos os termos calculados no Sistema Internacional de unidades.
136

A equação característica, det(A− λI) = 0, é agora
λ4 + 8.95009λ3 + 28.2319λ2 + 1.4905λ+ 0.816844 = 0.
Tendo em conta que A, B e D são positivos, e que
E = 0.816844 > 0,
R = D(BC −AD)− B2E = 308.96 > 0,
os critérios de estabilidade permitem afirmar que todos os modos vão ser estáveis.As raízes da equação característica, que são os valores próprio de A, são
λ1,2 = −0.0220954± 0.169956i (modo fugóide)λ3,4 = −4.45295± 2.82492i (modo de período curto)
Obtemos dois pares de raízes complexas conjugadas, pelo que vamos ter dois modososcilatórios, normalmente conhecidos por modo fugóide e modo de período curto.
Podemos determinar a frequência, o período, t1/2 e N1/2 para ambos os modos. Parao modo fugóide temos
ωf = |Im(λ1,2)| = 0.17 rad/s, Tf =2πωf
= 37.0 s, t1/2 =log 2|n| = 31.4 s,
nf = Re(λ1,2) = −0.022 s-1, N1/2 =t1/2Tf= 0.85.
Por sua vez, para o modo de período curto obtém-se
ωpc = |Im(λ2,3)| = 2.82 rad/s, Tpc =2πωpc
= 2.22 s, t1/2 =log 2|n| = 0.156 s,
npc = Re(λ2,3) = −4.45 s-1, N1/2 =t1/2Tpc
= 0.07.
Verifica-se que o modo fugóide tem um período mais longo, da ordem das dezenasde segundos, e é fracamente amortecido. Pelo contrário, o modo de período curtotem um período de poucos segundos, fazendo jus ao nome, e é muito amortecido.Estas características são típicas destes modos e são comuns para muitas aeronaves econdições de voo.
Determinação dos vectores próprios
Como se viu anteriormente, os vectores próprios x0 são as soluções da equação(A − λI)x0 = 0 e são determinados a menos de uma constante multiplicativa. Natabela 10.3 apresentam-se os valores próprios obtidos no exemplo presente para osdois modos oscilatórios (normalizando os resultados obtidos de forma que o valorinicial do modo com maior amplitude seja 1).
137

Tabela 10.3: Vectores próprios obtidos para o Cessna 182
Fugóide Período curto
Módulo Fase Módulo Fase
∆u 1.0 0º 0.0065 -37.7ºα = w 0.045 179.1º 1.0 0ºq 0.0030 -1.8º 0.0564 129.8º∆θ 0.0175 -99.2º 0.0107 -17.8º
50 100 150 200t
-1.0
-0.5
0.5
1.0
Θ
Α
u
Figura 10.2: Oscilações do modo fugóide para um Cessna 182 nas condições de voodescritas no texto.
138

10.3.2 Modo fugóide
Os dados da tabela 10.3 permitem obter a evolução temporal de cada uma dasvariáveis dinâmicas longitudinais no modo fugóide:
∆u = (∆u)inicial e−0.022t cos(0.17t) (10.19)
α = (∆u)inicial × 0.045 e−0.022t cos(
0.17t − 179.1π
180
)(10.20)
q = (∆u)inicial × 0.0030 e−0.022t cos(
0.17t + 1.8π
180
)(10.21)
∆θ = (∆u)inicial × 0.0175 e−0.022t cos(
0.17t + 99.2π
180
)(10.22)
A figura 10.2 apresenta esta mesma evolução de forma gráfica. Pode-se constatar queo modo fugóide apresenta variações grandes da velocidade longitudinal u, e variaçõesdesprezáveis do ângulo de ataque α, da velocidade angular de picada q e do ângulo depicada θ. O ângulo de ataque oscila aproximadamente em oposição de fase com a ve-locidade longitudinal, enquanto que as oscilações do ângulo de picada estão atrasadasde aproximadamente 90.
Para se obter a trajectória do avião, parte-se das equações linearizadas para o «flightpath», que neste caso são
∆xE = ∆u (10.23)
∆zE = w −u0∆θ = u0α−u0∆θ (10.24)
Após a substituição de (10.19) em (10.23) e de (10.20) e (10.22) na equação (10.24), aintegração das equações conduz a
∆xE = (∆u)inicialent(n cos[ωt]+ω sin[ωt])
n2 +ω2(10.25)
para a perturbação na coordenada xE devida ao modo fugóide, e a
∆zE =u0
n2 +ω2ent(∆u)inicial ×
[0.045n cos(ωt +ϕα)+ 0.045ω sin(ωt +ϕα)
− 0.0175n cos(ωt +ϕθ)− 0.0175ω sin(ωt +ϕθ)]
(10.26)
para a correspondente perturbação na coordenada zE . Note-se se xE = (xE)0 + ∆xE ,sendo (xE)0 = u0t. Por outro lado, zE = (zE)0 + ∆zE , mas a cota (zE)0 é constanteno estado estacionário e podemos escolher a origem do sistema de eixos de forma atornar (zE)0 = 0.
A variação de ∆xE e ∆zE está representada na figura 10.3. Neste exemplo as vari-ações na altitude do avião estão desfazadas das variações na posição longitudinal deaproximadamente 90. O período das oscilações é o do modo fugóide e elas são poucoamortecidas. O gráfico da figura 10.4 representa a posição do centro de massa do aviãonu referencial centrado no sistema de eixos de estabilidade do estado estacionário (eque se desloca com velocidade (u0,0,0) relativamente à Terra). Pode observar-se quequando o avião desce, a sua velocidade aumenta, enquanto que quando ele sobe a suavelocidade diminui. O mesmo se pode observar na figura 10.5, em que se mostra avariação da velocidade longitudinal total uE , comparando-a com a variação na altitude
139

50 100 150 200t
-2
2
4
xE - t u0
50 100 150 200t
-10
-5
5
zE
Figura 10.3: Variações da posição em xE e zE relativamente ao estado estacionário nomodo fugóide, para o exemplo do Cessna 182.
-15 -10 -5 0 5 10 15-15
-10
-5
0
5
10
15
x - t u0
z
Figura 10.4: Modo fugóide: posição do centro de massa do avião no referencial doestado estacionário.
140

50 100 150 200t
66.5
67.0
67.5
68.0
uE
50 100 150 200t
-10
-5
5
zE
Figura 10.5: Variação da velocidade longitudinal total uE para o modo fugóide,comparando-a com a variação na altitude do avião, já mostrada na figura 10.3. Indica-se a velocidade do estado estacionário, u0 = 67.08 m/s.
141

0.5 1.0 1.5 2.0 2.5t
-0.2
0.2
0.4
0.6
0.8
1.0
Θ
q
Α
Figura 10.6: Oscilações das variáveis dinâmicas no modo de período curto.
do avião. Como o modo é pouco amortecido, esta conversão entre energia cinética epotencial e feita mantendo a energia mecânica total do avião aproximadamente cons-tante. Esta constatação está na base da aproximação mais simples ao modo fugóide, aaproximação de Lanchaster, que veremos mais à frente.
10.3.3 Modo de período curto
Com os dados da tabela 10.3 pode-se obter a evolução temporal de cada uma dasvariáveis dinâmicas longitudinais no modo de período curto:
∆u = αinicial × 0.0065 e−4.45t cos(
2.82t − 37.7π
180
)α = αinicial e−4.45t cos(2.82t)
q = αinicial × 0.0564 e−4.45t cos(
2.82t + 129.8π
180
)∆θ = αinicial × 0.0107 e−4.45t cos
(2.82t − 17.8
π180
)Na figura 10.6 esta mesma evolução é representada de forma gráfica. Pode-se constatarque o modo fugóide apresenta variações grandes do ângulo de ataque α, e variaçõesdesprezáveis da velocidade angular de picada q e do ângulo de picada θ. A variaçãoda velocidade longitudinal ∆u é também desprezável e toma valores tão pequenos quenem foi representada na figura.
142

0.5 1.0 1.5 2.0 2.5t
-0.0012
-0.0010
-0.0008
-0.0006
-0.0004
-0.0002
xE - t u0
0.5 1.0 1.5 2.0 2.5t
-2
2
4
6
8
10-zE
Figura 10.7: Variações da posição em xE e zE relativamente ao estado estacionário nomodo de período curto, para o exemplo do Cessna 182.
0.0 0.5 1.0 1.5 2.0 2.5t
67.05
67.10
67.15
67.20uE
Figura 10.8: Variações da velocidade longitudinal uE relativamente ao estado estacio-nário no modo de período curto, para o exemplo do Cessna 182.
143

As equações da trajectória podem obter-se de forma semelhante à descrita para omodo fugóide. Na figura 10.7 apresenta as variações da posição em xE e zE relativa-mente ao estado estacionário. As variações na posição longitudinal são desprezáveis,tal como as variações na velocidade longitudinal representadas na figura 10.8. As úni-cas variações importantes são da altitude do avião, mas as oscilações são fortementeamortecidas, como é próprio deste modo.
Resumo dos modos fugóide e de período curto
O modo fugóide pode ser visto como correspondendo a oscilações da velocidadelongitudinal a ângulo de ataque constante, com um longo período e pouco amortecido.Por sua vez, podemos considerar que o modo de período curto consiste em variaçõesdo ângulo de ataque a velocidade constante, com um período curto e muito amorte-cido.
10.4 Modos longitudinais aproximados
Nesta secção procuraremos deduzir expressões aproximadas para os modos longi-tudinais. Estas expressões facilitam os cálculos para a obtenção dos valores própriose permitem perceber mais facilmente quais são os factores mais importantes que de-terminam os valores do período e factor de amortecimento de cada modo. Na fase deprojecto preliminar isto é importante para saber o efeito de alterar as característicasda aeronave.
10.4.1 Modo fugóide aproximado
Como vimos, o modo fugóide caracteriza-se por oscilações de ∆u com pequenavariação de α, q e ∆θ.
Aproximação de Lanchester
A aproximação mais simples ao modo fugóide foi desenvolvida por Lanchaster logono início do séc. XX.
Nesta aproximação admite-se que as perturbações do ângulo de ataque são nulas.Usando eixos de estabilidade, admiti-se que α = 0. Além disso admite-se que a linhade acção da força de propulsão é o eixo Cx, ou seja, αT = 0; e que T = D, o que garanteo equilíbrio das forças em x.
Tendo em conta que L é perpendicular à velocidade e por isso não realiza trabalho eque, se T = D, o trabalho das forças tangenciais não conservativas se anula, conclui-seque a única força que produz trabalho (o peso) é conservativa e que nesta aproximaçãohá conservação da energia.
A origem do referencial FE é definida de forma que V = u0 quando zE = 0 (isto é, aaltitude de referência é a correspondente ao estado estacionário). Pela conservação deenergia mecânica,
E = 12mV 2 −mgzE = cte = 1
2mu2
0 ⇒ V 2 = u20 + 2gzE. (10.27)
144

Mas, como α = 0, CL = CL1 = CW0 . Note-se que no modo fugóide q é suficientementepequeno para não alterar significativamente o valor de CL. Então,
L = 12ρV 2SCW0 =
12ρu2
0SCW0 +12ρ2gzESCW0 = W + kzE, (10.28)
em que se define k = ρSgCW0 .A equação do movimento segundo z pode escrever-seW −L cosθ =mzE . Dado que
θ0 = 0 e que no modo fugóide as oscilações ∆θ são desprezáveis, θ 1, pelo que
W − L =mzE ⇒ W − (W + kzE) =mzE.
Obtém-se uma equação de movimento harmónico simples,
mzE + kzE = 0, (10.29)
para oscilações verticais de frequência
ω =√km. (10.30)
Pela conservação de energia conclui-se que há também oscilações em V = u0 +∆u.O período das oscilações é
T = 2πω= 2π
√mk= 2π
√m
ρSgCW0
. (10.31)
Usando CW0 =mg/(12ρu
20S), obtém-se finalmente
T = π√
2u0
g. (10.32)
O período depende apenas de u0! Não depende nem das características da aeronave,nem de ρ (e portanto da altitude).
Para verificarmos até que ponto a aproximação de Lanchester dá resultados fiáveis,comparemos o valor do período obtido usando esta aproximação com o valor exactoobtido anteriormente para o Cessna 182:
• Texacto = 37 s,
• Taprox = 30.3 s.
Conclui-se que a aproximação de Lanchaster permite obter valores razoávelmenteaproximados para o período (o erro é, neste caso, inferior a 20%), mas não há amor-tecimento das oscilações. Necessitamos, pois, de outra aproximação que nos permitadeterminar de forma aproximada o factor de amortecimento.
Modo fugóide: outra aproximação
Para esta aproximação vams usar uma abordagem diferente: partimos das equaçõesdo movimento para pequenas perturbações e fazemos as aproximações directamentenas equações do movimento de modo a obter sistemas de ordem inferior à inicial.
145

As aproximações que iremos fazer decorrem das características do modo fugóide:q e ∆θ são pequenos e podem ser desprezados nas equações. Além disso, como oestado estacionário é um voo horizontal, θ0 = 0. Omitindo os termos de controlo, asequações para o movimento longitudinal são:
∆u = Xum∆u+ Xw
mw +−g cosθ0︸ ︷︷ ︸
≈1
∆θ
w = Zum∆u+ Zw
mw + Zw
mw︸ ︷︷ ︸
≈0
+ Zqmq︸ ︷︷ ︸
≈0
−g sinθ0︸ ︷︷ ︸≈0
∆θ +u0q
q︸︷︷︸≈0
= ∆MIy≈ 1Iy(Mu∆u+Mww)
∆θ = qCom as aproximações indicadas anteriormente, e escrevendo as equações na formamatricial, temos
∆u
w
0
∆θ
=
Xum
Xwm 0 −g
Zum
Zwm u0 0
Mu Mw 0 0
0 0 1 0
∆u
w
q
∆θ
.
Este sistema de equações diferenciais ordinárias pode ser resolvido de forma análogaao sistema completo. Admitindo soluções na forma x = x0eλt ⇒ x = λx, obtém-se
∆u = λ∆u,w = λw,∆θ = λ∆θ,
e substituindo nas equações anteriores vem
λ∆u
λw
0
λ∆θ
=
Xum
Xwm 0 −g
Zum
Zwm u0 0
Mu Mw 0 0
0 0 1 0
∆u
w
q
∆θ
⇒
Xum − λ
Xwm 0 −g
Zum
Zwm − λ u0 0
Mu Mw 0 0
0 0 1 −λ
∆u
w
q
∆θ
= 0.
(10.33)A equação característica para o modo fugóide aproximado é∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
Xum − λ
Xwm 0 −g
Zum
Zwm − λ u0 0
Mu Mw 0 0
0 0 1 −λ
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣= 0,
146

e daqui se deduz
(−u0Mw)︸ ︷︷ ︸A
λ2 +[gMu +
u0
m(MwXu −MuXw)
]︸ ︷︷ ︸
B
λ+[gm(MwZu −MuZw)
]︸ ︷︷ ︸
C
= 0. (10.34)
Obtemos portanto uma equação característica que é de 2ª ordem, o que mostra que osistema aproximado é também de 2ª ordem. Note-se que a equação se pode escrever
Aλ2 + Bλ+ C = 0 ⇒ λ2 + BAλ+ C
A= 0.
Num sistema de 2ª ordem, a frequência natural e factor de amortecimento de ummodo oscilante podem obter-se facilmente a partir da equação característica. Se λ1 =n+ iω e λ∗1 = n− iω são soluções de
λ2 + (B/A)λ+ (C/A) = 0,
então(λ− λ1)(λ− λ∗1 ) = λ2 + (B/A)λ+ (C/A).
Mas
(λ− λ1)(λ− λ∗1 ) = 0⇒ (λ− (n+ iω)) (λ− (n− iω)) = 0
⇒ λ2 − 2nλ+ (n2 +ω2) = 0
⇒ λ2 + 2ζωnλ+ω2n = 0,
em que se usou n = −ζωn e ωn = (n2 +ω2). Conclui-se imediatamente que
ω2n =
CA, (10.35)
2ζωn =BA. (10.36)
A frequência natural e factor de amortecimento para o modo fugóide aproximadopodem determinar-se usando A, B e C definidos na equação (10.34), obtendo-se
ω2n = −
gmu0
(Zu −
ZwMw
Mu), (10.37)
ζ = −12
[gmu0
(ZwMw
Mu − Zu)]−1/2 [ gMu
u0Mw+ 1m
(Xu −
MuXuXw
)]. (10.38)
Para muitas aeronaves e situações de voo é possível fazer ainda a aproximaçãoMu = 0.Nesse caso, os valores para a frequência natural e o factor de amortecimento são dadospor
ω2n = −
gZumu0
, (10.39)
ζ = −12
[− gZumu0
]−1/2 Xum= −Xu
2
√− u0
mgZu. (10.40)
147

Note-se que, se Czu ≈ 0, e com θ0 = 0,
Zu = −ρu0SCW0 cosθ0 +12ρu0SCzu = −ρu0SCW0
A frequência natural será nesta aproximação dada por
ω2n = −
g(−ρu0SCW0)mu0
= 2g2
u20⇒ ωn =
√2gu0.
Note-se que recuperamos a aproximação de Lanchester para o período:
Tn =2πωn
=√
2πu0
g.
Para se verificar de que depende o factor de amortecimento consideremos o casode um jacto. Sendo a propulsão aproximadamente constante, tem-se CTu = −2CT0 . Poroutro lado CT0 ≈ CD1 . Desprezando as derivadas de CD, CL e Cm em ordem a u,
Cxu ≈ CTu = −2CT0 = −2CD1
Supondo θ0 = 0, de (9.12) e (9.4) obtém-se
Xu = 1/2ρu0SCxu = −ρu0SCD1 ,Zu = −ρu0SCW0 = −ρu0SCL1 .
O factor de amortecimento é então:
ζ = −Xu2
√− u0
mgZu= 1√
2CD1
CL1
,
ou seja, é proporcional ao inverso da razão L/D:
ζ ∼ 1L/D
.
Conclui-se que o amortecimento da fugóide se degrada quando melhora a eficiênciaaerodinâmica pelo aumento de L/D. Um amortecimento da fugóide demasiado baixopode dificultar a pilotagem do avião, especialmente se o piloto está a voar por instru-mentos. Os sistemas de aumento de estabilidade permitem eliminar este problema.
Na tabela 10.4 comparam-se os valores exactos obtidos para o período e o factorde amortecimento do modo fugóide com os valores obtidos para a aproximação deLanchester e a segunda aproximação feita. Neste caso Cmu = 0 (cfr. tabela 10.2), peloque se usaram as expressões (10.39) e (10.40). Em ambas as aproximações o valordo período é semelhante e apresenta um erro relativo inferior a 20% relativamente aovalor exacto. O factor de amortecimento só pode ser calculado mediante a segundaaproximação, e o valor obtido tem um erro relativo da ordem dos 14%. Isto mostra queestas aproximações são razoáveis desde que não seja necessário grande precisão, casoem que se devem usar as expressões exactas.
148

Tabela 10.4: Comparação entre as aproximações e o valor exacto para o modo fugóide
Factor dePeríodo (T ) amortecimento (ζ)
Valor exacto 37.0 s 0.129Aproximação de Lanchester 30.4 s —Aproximação «melhor» 30.6 s 0.111
10.4.2 Modo de período curto aproximado
O modo de período curto caracteriza-se por ∆u ≈ 0. Por isto para se obter o modoaproximado ignorar-se-á a equação em x, que determina a evolução de ∆u. Admitir-se-á ainda que Zw m ⇒ (m − Zw) ≈m e também que Zq mu0 ⇒ (Zq +mu0) ≈mu0. Finalmente, usar-se-á o facto de que o estado estacionário corresponde a um voohorizontal, pelo que θ0 = 0.
As equações para o movimento longitudinal (omitindo os termos de controlo) são
∆u =Xum∆u+ Xw
mw +−g cosθ0∆θ [equação ignorada]
w = Zum− Zw
∆u︸︷︷︸≈0
+ Zwm− Zw︸ ︷︷ ︸≈Zw/m
w +
(mu0 + Zq
)m− Zw︸ ︷︷ ︸≈u0
q − mg sinθ0
m− Zw︸ ︷︷ ︸≈0 (θ0≈0)
∆θ
q = 1Iy
[(Mu +
MwZum− Zw
)∆u︸︷︷︸≈0
+(Mw +
MwZwm− Zw︸ ︷︷ ︸MwZw/m
)w +
(Mq +
Mw(mu0 + Zq)m− Zw︸ ︷︷ ︸Mwu0
)q
− Mwmg sinθ0
m− Zw︸ ︷︷ ︸≈0 (θ0≈0)
∆θ]
∆θ =q
Com as aproximações indicadas a 2ª e a 3ª equações dependem apenas dew e q e suasderivadas. Desta forma, obtém-se o sistema de equações:w
q
=
Zwm u0
1Iy
[Mw + MwZw
m
]1Iy
[Mq +Mwu0
]wq
,cuja equação característica é∣∣∣∣∣∣∣
Zwm − λ u0
1Iy
[Mw + MwZw
m
]1Iy
[Mq +Mwu0
]− λ
∣∣∣∣∣∣∣ = 0.
149

Tabela 10.5: Comparação entre os valores exactos e aproximados obtidos para o modode período curto.
λ T (s) ζ t1/2 (s) N1/2
Exacto −4.45295± 2.82492i 2.2242 0.844 0.156 0.07Aproximado −4.49906± 2.8647i 2.1933 0.8435 0.154 0.07
Desenvolvendo o determinante, obtém-se:
λ2−[Zwm+ 1Iy
(Mq +Mwu0
)]︸ ︷︷ ︸
B
λ− 1Iy
[Mwu0 −
ZwmMq]
︸ ︷︷ ︸C
= 0.
De (10.35) e de (10.36) com A = 1, obtém-se
ωn =√C =
√− 1Iy
(Mwu0 −
ZwmMq), (10.41)
ζ = B2√C=
Zwm +
1Iy
(Mq +Mwu0
)2√
1Iy
(Mwu0 − Zw
mMq) . (10.42)
As expressões (10.41) e (10.42) são válidas se o período curto for um modo oscilatório.Nesse caso as soluções da equação
λ2 + Bλ+ C = 0 (10.43)
são um par de raízes complexas conjugadas, e como o modo é oscilatório existe ωne ζ. No entanto, para certos valores das derivadas (10.43) pode ter duas raízes reais.Nesse caso os modos não são oscilatórios, não háωn nem ζ e é necessário calcular asraízes da equação.
Na tabela 10.5 apresentam-se os resultados obtidos por intermédio da aproxima-ção acima e comparam-se com os valores exactos anteriormente obtidos para o modode período curto. Os resultados da aproximação são muito satisfatórios neste caso.Geralmente esta aproximação de período curto dá resultados muito aproximados dovalor exacto para uma grande gama de aeronaves e de condições de voo.
10.5 Teoria Geral da Estabilidade Longitudinal Estática
A estabilidade dinâmica pressupõe a existência de estabilidade estática. Podemosusar os critérios de estabilidade dinâmica para recuperar os critérios de estabilidadeestática.
Para existir estabilidade dinâmica é necessário que a parte real das raízes da equa-ção característica seja negativa. A equação característica é, como vimos, det(A− λI) =Aλ4 + Bλ3 + Cλ2 +Dλ+ E = 0.
Pelo critério de Routh, uma das condições de estabilidade é E > 0. Mas E obtém-sedo polinómio característico fazendo λ = 0, pelo que E = det A. Supondo que o voo é
150

horizontal, θ0 = 0. Faremos ainda a simplificação adicional de admitir que Zw e Zq sãodesprezáveis. Então,
E = det A =
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
Xum
Xwm 0 −g
Zum
Zwm u0 0
1Iy
(Mu + MwZu
m
)1Iy
(Mw + MwZw
m
)1Iy
(Mq +Mwu0
)0
0 0 1 0
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣=
= gmIy
[ZuMw − ZwMu] .
A condição de estabilidade dinâmica implica então que
E = gmIy
[ZuMw − ZwMu] > 0⇒ ZuMw − ZwMu > 0.
Mas, tendo em conta que
Zu = −ρu0SCW0 +12ρu0SCzu ,
Zw =12ρu0SCzα ,
Mu =12ρu0cSCmu ,
Mw =12ρu0cSCmα ,
a condição de estabilidade é
(Czu − 2CW0)Cmα − CmuCzα > 0.
Se Czu ≈ 0 ≈ Cmu , a condição acima é apenas
−2CW0Cmα > 0 ⇒ Cmα < 0. (10.44)
Obtemos assim uma das condições de estabilidade estática como consequência dascondições necessárias e suficientes para estabilidade dinâmica.
10.6 Efeito da posição do centro de massa
Várias derivadas longitudinais dependem da posição do centro de massa, como porexemplo, Cmα , Cmq e CLq . Consequentemente, os modos longitudinais dependem deh. Para exemplificar essa dependência calcularam-se as raízes da equação caracterís-tica completa para os modos longitudinais de um Cessna 182 nas condições de vooanteriormente descritas, para várias posições do centro de massa.
Habitualmente a variação das derivadas Cmq e CLq com h é menos importante quea variação de Cmα . Por isso neste exemplo supomos que apenas Cmα depende de h, eusamos a bem conhecida expressão Cmα = CLα(h− hn) = −CLαKn.
151

Raízes para −0.1 < Kn < 0.5
-8 -6 -4 -2n
-5
5
Ω
Comportamento perto da origem
-0.6 -0.4 -0.2 0.2n
-0.4
-0.2
0.2
0.4Ω
Figura 10.9: Localização das raízes λ = n + iω da equação característica longitudinalexacta de um Cessna 182. A vermelho: raízes para −0.1 < Kn < 0; a azul: raízes para0 < Kn < 0.5.
As raízes da equação característica longitudinal exacta de um Cessna 182 foram cal-culadas para margens estáticas no intervalo −0.1 < Kn < 0.5. Na figura 10.9 apresenta-se a localização das raízes, e o comportamento perto da origem. Verifica-se que paraKn < 0 existem raízes com parte real positiva, que correspondem a modos instáveis.
Na figura 10.10 mostra-se a localização das raízes para margem estática positivae distinguindo o modo fugóide do modo de período curto. Para 0.5 ≥ Kn ≥ 0.08 asraízes correspondem às características habituais dos modos: o modo fugóide é osci-latório (pares de raízes complexas conjugadas) e pouco amortecido (a parte real dasraízes está próximo da origem); o modo de período curto é oscilatório (pares de raízescomplexas conjugadas), é muito amortecido (parte real negativa de valor elevado) etem frequência elevada. No entanto, para o modo de período curto a sua frequênciadiminui à medida que a margem estática diminui, e anula-se para Kn = 0.08. Nessaaltura passamos a ter duas raízes reais positivas e o modo deixa de ser oscilatório.Para margem estática na gama 0.08 > Kn ≥ 0.0019 o modo fugóide continua a seroscilatório mas a frequência vai-se aproximando de zero; por sua vez, as raízes reaiscorrespondentes ao modo de período curto afastam-se, uma delas aumentando e aoutra diminuindo de valor. Finalmente, para 0.0019 > Kn ≥ 0 o modo fugóide deixade ser oscilatório e passamos a ter duas raízes reais, aproximando-se uma delas daorigem.
Finalmente, na figura 10.11 mostra-se a localização das raízes para margem estáticanegativa. Observa-se que, à medida que a margem estática se torna mais negativa, araiz real positiva, que corresponde a um modo instável, se torna mais positiva. Poroutro lado, uma das raízes reais correspondente ao modo fugóide e uma das raízesreais correspondente ao modo de período curto aproximam-se e tornam-se iguais paraKn ≈ −0.03. Para valores mais negativos de Kn estas raízes passam a ser um par deraízes complexas conjugadas, correspondendo a um modo oscilatório. A quarta raíz,não mostrada na figura, é real e toma valores crescentemente negativos à medida queKn se torna mais negativo.
152

Fugóide
-0.07 -0.06 -0.05 -0.04 -0.03 -0.02 -0.01n
-0.2
-0.1
0.1
0.2Ω
Período curto
-6 -4 -2n
-5
5
Ω
Figura 10.10: Localização das raízes da equação característica longitudinal exacta deum Cessna 182 para 0 < Kn < 0.5, para o modo fugóide (esquerda) e o modo deperíodo curto (direita). A azul: raízes para 0.5 ≥ Kn ≥ 0.08; a verde: raízes para0.08 > Kn ≥ 0.0019; a vermelho: raízes para 0.0019 > Kn ≥ 0.
-1.0 -0.8 -0.6 -0.4 -0.2 0.2n
-0.3
-0.2
-0.1
0.1
0.2
0.3
Ω
Figura 10.11: Localização das raízes da equação característica longitudinal exacta deum Cessna 182 para Kn < 0. Para 0 > Kn > −0.03: a vermelho, «modo fugóide»; aazul, »modo de período curto». Para −0.03 ≥ Kn ≥ −0.1, a verde, modo oscilatório; alaranja, raiz real.
153

10.7 Efeito do Vento nos Modos Longitudinais
O vento pode influenciar a dinâmica de uma aeronave de várias formas, especial-mente se existe turbulência atmosférica ou se o vento apresenta gradientes espaciais.Entre estes incluem-se as correntes verticais ascendentes (térmicas), os downbursts eos gradientes devido à camada limite atmosférica.
No que se segue abordar-se-á apenas efeito do vento de frente ou vento de caudanum voo horizontal na camada limite atmosférica.
10.7.1 Camada limite atmosférica
Supomos que o vento é horizontal, isto é, que no referencial FE fixo na Terra ~W sótem componente horizontal. na camada limite atmosférica a variação da velocidadedo vento com a altitude tem a forma W = khn, em que W é a velocidade do vento,h é altura acima do solo e k e n são constantes que dependem das características doterreno.
10.7.2 Equações do movimento para pequenas perturbações na pre-sença de vento
O estado estacionário é o definido na secção 8.1, isto é, um voo horizontal niveladocom velocidade u0. Assim, u0 = v0 = w0 = 0, p0 = q0 = r0 = 0, v0 = 0, θ0 = 0 e φ = 0.Além disso, supomos sem perda de generalidade que ψ0 = 0. Usaremos um sistemade eixos de estabilidade, pelo que w0 = 0, ou seja, αx = 0 no estado estacionário.
A diferença relativamente ao caso tratado no capítulo 8 é que agora a velocidade dovento não é nula.
~VE = ~V + ~W ⇒
uE = u+WxvE = v +WywE = w +Wz
Assim, as equações linearizadas (8.12), (8.15), e (8.24) dependem agora da velocidaderelativa à Terra e não apenas do velocidade relativa ao ar. As equações (8.18) e (8.20)permanecem iguais. O sistema de equações no referencial do avião é agora
∆X −mg∆θ =m(∆uE + qWz − rWy
)∆Z =m(wE + pWy − quE0)∆M = Iy q∆θ = q∆zE = wE −uE0∆θ
(10.45)
A última equação é importante porque as velocidades relativas a FE dependem davelocidade do vento e este depende da altitude, e portanto da coordenada zE . Defacto, como a velocidade do vento depende da altitude, as componentes Wi = Wi(zE)dependem também da altitude.
Vamos tratar apenas o caso de vento na direcção do movimento do avião (ventode frente ou de cauda) e em que não existe vento lateral. Logo no referencial da terra
154

podemos escrever~WE = (W(zE),0,0). (10.46)
Se a posição vertical da aeronave no estado estacionário está definida por zE0 ese durante a fase de voo em consideração zE não varia muito relativamente a zE0 ,podemos desenvolver W(zE) em série de Taylor e tomar apenas o termo linear:
W(zE) = W0 +dWdze
∆zE = W0 + Γ ∆zE, (10.47)
em que W0 = W(zE0) e
Γ ≡ dWdze
. (10.48)
No referencial fixo na Terra, a velocidade do vento é então
~WE =W0
0
=W0 + Γ∆zE
00
,e no referencial do avião ~WB = [Wx,Wy ,WZ]T vem dado por
~WB = LBE ~WE =W cosθ
0W sinθ
= W0 + Γ∆zE
0(W0 + Γ∆zE)∆θ
≈W0 + Γ∆zE
0W0∆θ
. (10.49)
Usando (10.49) podemos escrever
uE = ddt[u+Wx] =
ddt[(u0 +∆u)+ (W0 + Γ∆zE)] = ∆u+ Γ∆zE (10.50)
wE = ddt[w +Wz] =
ddt[w + (W0∆θ)] = w +W0∆θ (10.51)
Substituindo (10.50) na primeira equação de (10.45) e (10.51) na segunda e na quintaequações de (10.45), obtém-se
∆X −mg∆θ =m(∆u+ Γ∆zE)∆Z =m(w +W0∆θ − quE0)∆M = Iy q∆θ = q∆zE = (w +W0∆θ)−uE0∆θ = w + (W0 −uE0)∆θ
Mas uE0 = u0 +W0 ⇒ W0 −uE0 = −u0, pelo que se pode simplificar o sistema:
∆X −mg∆θ =m(∆u+ Γ∆zE) =m[∆u+ Γ(w −u0∆θ)]
∆Z =m(w +W0∆θ − quE0) =m(w − qu0)∆M = Iy q∆θ = q∆zE = w + (W0 −uE0)∆θ = w −u0∆θ
155
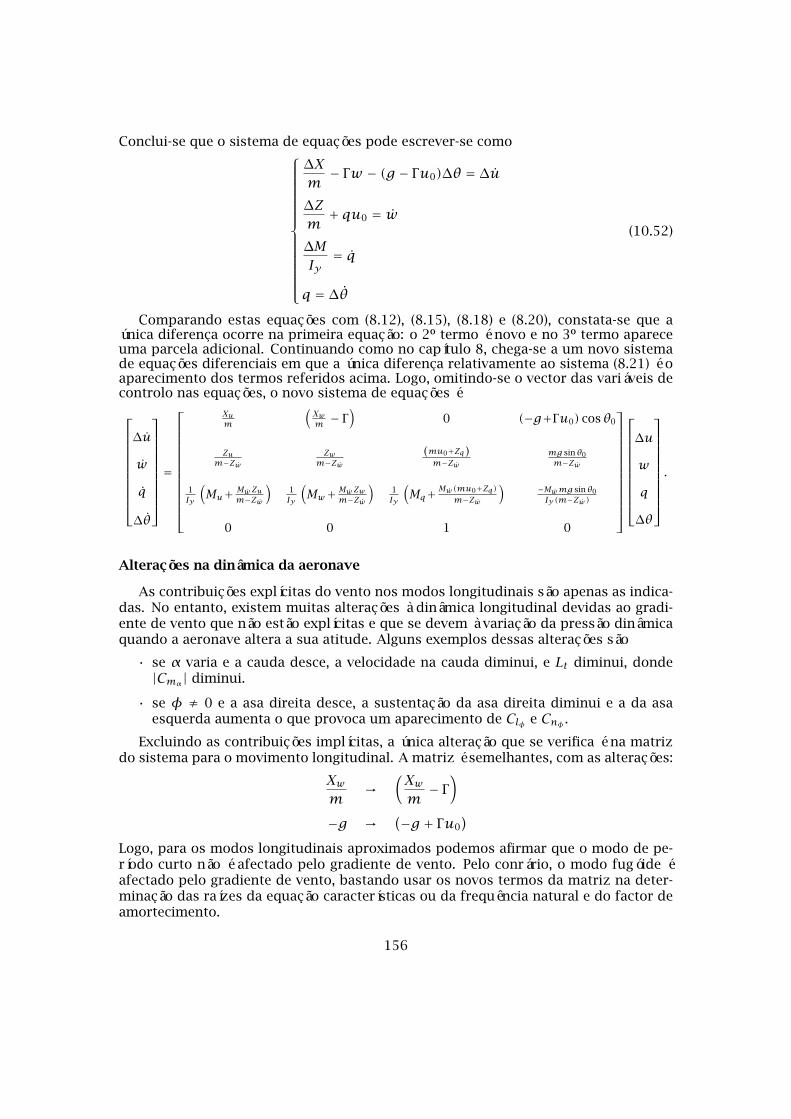
Conclui-se que o sistema de equações pode escrever-se como
∆Xm− Γw − (g − Γu0)∆θ = ∆u
∆Zm+ qu0 = w
∆MIy= q
q = ∆θ
(10.52)
Comparando estas equações com (8.12), (8.15), (8.18) e (8.20), constata-se que aúnica diferença ocorre na primeira equação: o 2º termo é novo e no 3º termo apareceuma parcela adicional. Continuando como no capítulo 8, chega-se a um novo sistemade equações diferenciais em que a única diferença relativamente ao sistema (8.21) é oaparecimento dos termos referidos acima. Logo, omitindo-se o vector das variáveis decontrolo nas equações, o novo sistema de equações é
∆u
w
q
∆θ
=
Xum
(Xwm − Γ
)0 (−g+Γu0) cosθ0
Zum−Zw
Zwm−Zw
(mu0+Zq)m−Zw
mg sinθ0m−Zw
1Iy
(Mu+ MwZu
m−Zw
)1Iy
(Mw+ MwZw
m−Zw
)1Iy
(Mq+ Mw (mu0+Zq)
m−Zw
)−Mwmg sinθ0Iy (m−Zw )
0 0 1 0
∆u
w
q
∆θ
.
Alterações na dinâmica da aeronave
As contribuições explícitas do vento nos modos longitudinais são apenas as indica-das. No entanto, existem muitas alterações à dinâmica longitudinal devidas ao gradi-ente de vento que não estão explícitas e que se devem à variação da pressão dinâmicaquando a aeronave altera a sua atitude. Alguns exemplos dessas alterações são
• se α varia e a cauda desce, a velocidade na cauda diminui, e Lt diminui, donde|Cmα| diminui.
• se φ ≠ 0 e a asa direita desce, a sustentação da asa direita diminui e a da asaesquerda aumenta o que provoca um aparecimento de Clφ e Cnφ .
Excluindo as contribuições implícitas, a única alteração que se verifica é na matrizdo sistema para o movimento longitudinal. A matriz é semelhantes, com as alterações:
Xwm
→(Xwm− Γ
)−g →
(−g + Γu0
)Logo, para os modos longitudinais aproximados podemos afirmar que o modo de pe-ríodo curto não é afectado pelo gradiente de vento. Pelo conrário, o modo fugóide éafectado pelo gradiente de vento, bastando usar os novos termos da matriz na deter-minação das raízes da equação características ou da frequência natural e do factor deamortecimento.
156

10.8 Modos longitudinais em atmosferas estratificadas
Nesta secção tratar-se-á da influência da variação de ρ com a altitude. De facto,numa atmosfera estratificada ρ = ρ(zE) e, dado que no modo fugóide há variaçõesapreciáveis de zE , os gradientes de ρ influenciam este modo. A razão é que quandoo avião desce, a densidade aumenta e há um acréscimo de sustentação, acontecendoo inverso quando o avião sobe. Esta dependência da sustentação e das outras forçasaerodinâmicas em zE influencia as características da fugóide. O modo de período curtoé menos afectado.
10.8.1 Modificação das Equações do Movimento
Numa atmosfera estratificada um estado estacionário tem de ser um voo horizontal(altitude constante). A sustentação, bem como a resistência aerodinâmica e o momentode picada, dependem de ρ e portanto da altitude. Para incluir este efeito nas equaçõespara pequenas perturbações é necessário incluir a equação para zE nas equações dadinâmica e explicitar a dependência de forças e momentos em zE .
Das equações para o flight path, a equação linearizada para zE é:
∆zE = −∆u sinθ0 +w cosθ0 −u0∆θ cosθ0.
Num voo horizontal:∆zE = w −u0∆θ.
Explicitando a dependência das forças e momentos longitudinais com zE , obtém-se
∆X = Xu∆u+Xww ++XzzE +∆Xc ,
∆Z = Zu∆u+ Zww + Zww + Zqq + ZzzE +∆Zc ,
∆M = Mu∆u+Mww +Mww +Mqq +MzzE +∆Zc ,
onde
Xz =∂X∂zE
∣∣∣∣0, Zz =
∂Z∂zE
∣∣∣∣0, Mz =
∂M∂zE
∣∣∣∣0.
Comecemos por calcular a derivada Zz. Dado que Z = 12ρV
2SCz,
∂Z∂zE
= ∂Z∂ρ
∂ρ∂zE
= 12V 2S
[Cz + ρ
∂Cz∂ρ
]∂ρ∂zE
Admitindo que a densidade varia exponencialmente com a altitude (exacto para atmos-fera isotérmica):
ρ = ρ0eκzE ⇒ ∂ρ∂zE
= κρ (10.53)
Desprezando as variações de Cz com ρ (isto é, supondo que CL não depende de ρ),
∂Z∂zE
= 12V 2SCzκρ.
A derivada é calculada no estado estacionário, donde
Zz =∂Z∂zE
∣∣∣∣0= κ 1
2ρu2
0S(Cz)0 = κZ0 = −κmg.
157

Procedendo de forma análoga, mostrar -se-ia que
Xz = κX0,Mz = κM0.
Mas, no estado estacionário, X0 −mg sinθ0 = 0, pelo que, num voo horizontal, X0 =0⇒ Xz = 0. Por outro lado, Mz = κM0 = 0.
As equações longitudinais para pequenas perturbações a um voo horizontal numaatmosfera estratificada são então
∆u
w
q
∆θ
zE
=
Xum
Xwm 0 −g 0
Zum−Zw
Zwm−Zw
(mu0+Zq)m−Zw 0 Zz
m
Qu Qw Qq 0 1Iy
(MwZzm−Zw
)0 0 1 0 0
0 1 0 −u0 0
∆u
w
q
∆θ
zE
, (10.54)
em que se omitiram os termos de controlo e se usaram as seguintes abreviaturas:Qu = 1
Iy
(Mu + MwZu
m−Zw
); Qw 1
Iy
(Mw + MwZw
m−Zw
); Qq = 1
Iy
(Mq + Mw(mu0+Zq)
m−Zw
)10.8.2 Estimativa para a variação do período do modo fugóide
Do sistema de equações (10.54) é possível calcular a frequência e factor de amor-tecimento do modo fugóide, usando os métodos habituais. Para que se possa saberem que circunstâncias é importante usar esta correcção convém começar por obteruma estimativa da variação do período. A estimativa mais simples é a baseada naaproximação de Lanchester.
Nas hipóteses da aproximação de Lanchester, há conservação de energia e verifica-se (10.27), pelo que V 2 = u2
0 + 2gzE . A equação (10.28) tem de ser modificada, porqueagora a sustentação é
L = 12ρ0
(1+ ∆ρ
ρ0
)V 2SCW . (10.55)
Mas, usando (10.53),∆ρρ0= 1ρ0
∂ρ∂zE
zE = κzE.
Logo, tendo em conta (10.27), após linearização das equações obtém-se
L = W + kzE + κWzE. (10.56)
Daqui, obtém-semzE = W − L = −(k+ k′)zE, (10.57)
158

em que k′ = κW e k = ρgSCW0 . Esta equação corresponde a um movimento harmónicosimples com período T ′ = 2π
√m/(k+ k′). O período T do modo fugóide que se obtém
na aproximação de Lanchester é dado pela equação (10.31). Assim, obtemos
T ′
T= F, com F =
√k
k+ k′ =√
11+ k′/k
Mas, usando os valores de k e k′,
k′
k= κWCW0ρ0gS
= κu20
2g⇒ F = 1√
1+ κu20
2g
O factor de correcção F depende apenas de κ e u0.
10.8.3 Exemplos de variação do modo fugóide
Exemplo 1: Cessna 182
Voo horizontal a 5000 ft, com velocidade u0 = 67m/s.Determinação de κ:h1 = 1200 m ρ1 = 1.0900 kg/m3;h = 1500 m ρ0 = 1.0900 kg/m3;h2 = 1800 m ρ2 = 1.0269 kg/m3.
Logo, obtém-se
κ = ρ2 − ρ1
−(h2 − h1)ρ0= 9.9392× 10−5 /m
F = T ′/T ζ′/ζ
Aprox. Lanchester 0.98881 —Cálculo exacto 0.99466 0.98472
Exemplo 2: Boeing 747
Voo horizontal a 40000 ft, com velocidade u0 = 265.5m/s.Determinação de κ:h1 = 12000 m ρ1 = 0.31194 kg/m3
h2 = 12300 m ρ2 = 0.29758 kg/m3;
κ = ρ2 − ρ1
−(h2 − h1)ρ1= 1.53448× 10−4 /m
Estimativa com base na aproximação de Lanchester: F = T ′/T = 0.802756.Constata-se que para voos a maior altitude e, principalmente, a maior velocidade, o
factor de correcção é maior e os efeitos da estratificação da atmosfera são importantes.
159

Capítulo 11
Estabilidade Dinâmica Lateral
11.1 Modos laterais
A determinação dos modos laterais de uma aeronave faz-se da mesma forma quepara os modos longitudinais: começa-se por calcular as derivadas dimensionais (co-nhecidas as adimensionais), em seguida calculam-se os elementos da matriz A (nestecaso, a matriz para as equações do movimento lateral) e determinam-se as soluções daequação característica, que são os valores próprios de A; finalmente, para cada valorpróprio determina-se o respectivo vector próprio (a menos de uma constante multipli-cativa).
A equação do movimento para pequenas perturbações, na ausência de controlo, éx = Ax. No caso de modos laterais, o vector de estado é x = [v p r φ]T e a matrizdo sistema é dada por (10.2). Tal como no caso de modos longitudinais, supõe-se quea solução da equação do movimento é da forma x = x0eλt e, substituindo na equação,obtém-se (A− λI)x0 = 0. Logo, x0 são os vectores próprios da matriz A do sistema e λsão os valores próprios da matriz, obtidos pela equação característica det(A−λI) = 0.Como exemplo, vamos em seguida determinar os modos laterais de um Cessna 182.
11.1.1 Exemplo: modos laterais de um Cessna 182
Os modos laterais de um Cessna 182 serão determinados para a mesma situação devoo para o qual se calcularam os modos longitudinais: voo horizontal a 5000 ft, comvelocidade u0 = 67.08m/s (Ma = 0.201).
As características geométricas do Cessna 182 estão resumidas na tabela 10.1. Natabela 11.1 apresentam-se as derivadas adimensionais da força lateral e do momentode rolamento e de guinada em ordem a β, p e r .
160

Tabela 11.1: Derivadas adimensionais laterais (por radiano)
Cy Cl Cnβ -0.393 -0.0923 0.0587p -0.075 -0.484 -0.0278r 0.214 0.0798 -0.0937
As derivadas dimensionais laterais, calculadas no Sistema Internacional, são:
Yv =12ρu0SCyβ = −224.9 kg s−1
Yp =14ρu0SbCyp = −235.5 kg m s−1
Yr =14ρu0SbCyr = 671.99 kg m s−1
Lv =12ρu0SbClβ = −579.67 kg m s−1
Lp =14ρu0Sb2Clp = −16676.8 kg m2 s
−1
Lr =14ρu0Sb2Clr = 2749.6 kg m2 s
−1
Nv =12ρu0SbCnβ = 368.6 kg m s−1
Np =14ρu0Sb2Cnp = −957.88 kg m2 s
−1
Nr =14ρu0Sb2Cnr = −3228.54 kg m2 s
−1
Usando as derivadas acima, determinam-se todos os termos da matriz do sistema,
A =
−0.1872 −0.1960 −67.27 9.81
−0.4511 −12.978 2.1398 0
0.13827 −0.3593 −1.211 0
0 1 0 0
,
calculada em SI. A equação característica det(A − λI) = 0 conduz a uma equação qua-drática:
λ4 + 14.3764λ3 + 28.3543λ2 + 139.089λ+ 2.45636 = 0.
Mais uma vez podemos recorrer aos critérios de estabilidade, e como
E = 2.45636 > 0,
R = D(BC −AD)− B2E = 36843.8 > 0,
concluimos que todos os modos vão ser estáveis.
161

Tabela 11.2: Características de cada modo
Modo Período (s) t1/2 (s) N1/2
Espiral — 39.1 —Rolamento — 0.053 —Rolamento holandês 1.967 1.03 0.525
Tabela 11.3: Vectores próprios laterais obtidos para o Cessna 182
Espiral Rolamento Rolamento holandês
Módulo Fase
β = v 1 0.22004 1 0ºp -0.0149 1 0.035 178.2ºr 0.12038 0.02785 0.046 -80.5ºφ 0.84249 -0.0768 0.0107 76.3º
ψ -83.049 -0.0262 0.849 99.5º
As raízes da equação características são os valores próprio de A:
λ1 = −0.0177239 s−1 (modo espiral)
λ2 = −13.018 s−1 (modo de rolamento)
λ3,4 = −0.670368± 3.19323 i (s−1) (rolamento holandês)
Na tabela 11.2 apresentam as características dos modos laterais correspondentes. Doisdos valores próprios são reais e negativos, pelo que os modos correspondentes sãoestáveis. O modo correspondente à raiz mais perto da origem é chamado de modoespiral e o outro modo é chamado de modo de rolamento, por razões que veremosmais à frente. Os outros dois valores próprios constituem um par de raízes complexasconjugadas, e o modo correspondente é oscilante. Como a parte real destas raízes énegativa, este modo, habitualmente chamado de rolamento holandês, é também está-vel.
Os vectores próprios x0 são as soluções da equação (A − λI)x0 = 0 e são deter-minados a menos de uma constante multiplicativa. Na tabela 11.3 apresentam-se osresultados obtidos para os vectores próprios correspondentes aos modos laterais doCessna 182, considerando que o valor mais elevado é unitário. A análise das soluçõesobtidas permite determinar as características típicas dos modos laterais.
11.1.2 Características típicas de cada modo
Modo espiral
A figura 11.1 representa a variação dos ângulos de guinada, derrapagem e prancha-mento no modo espiral do Cessna 182, obtidos a partir da tabela 11.3. Constata-sefacilmente que o ângulo de guinada tem a variação mais importante, como se podeconfirmar fazendo a razão entre os ângulos β : φ : ψ = 1 : 0.84 : −83. O modo espiral
162

0 50 100 150 200t
20
40
60
80
ÈΦÈ
ÈΒÈ
ÈΨÈ
Figura 11.1: Modo espiral: variação dos ângulos de guinda, derrapagem e prancha-mento.
50 100 150 200t
0.2
0.4
0.6
0.8
1.0
r
p
Β
Figura 11.2: Modo espiral: variáveis dinâmicas
é caracterizado por ter derrapagem «pequena» e ângulo de rolamento «pequeno», peloque é uma banked turn com raio variável.
As variáveis importantes para a determinação das forças e momentos aerodinâmi-cos são β, p e r , que estão representadas graficamente para o modo espiral na figura11.2. Da tabela 11.3 vem β : p : r = 1 : −0.0149 : 0.120. Ora, β já tinha módulo«pequeno» (comparado com ψ). Conclui-se portanto que todas as variáveis dinâmicasenvolvidas têm módulo pequeno e as forças e momentos por elas criados têm intensi-dade pequena; daí que o modo seja «fraco», com constantes de tempo grandes. Se forestável, o modo espiral converge lentamente; se for instável, o modo espiral divergelentamente.
As equações para a trajectória (flight path) relevantes para modos laterais são
∆xE = ∆u cosθ0 +w cosθ0 −uo∆θ sinθ0, (11.1)
∆yE = u0ψ cosθ0 + v. (11.2)
163

0 10 20 30 40 50y0
20
40
60
80
100
120
140
x100
Figura 11.3: Trajectória no modo espiral, no exemplo do Cessna 182 e com ângulo deguinada inicial ψinicial = 20º.
Para o modo espiral,
ψ = (ψ)inicial eλSt,
v = u0β =(βψ
)(ψ)inicial eλSt,
e supondo que ∆u = 0 = w e θ0 = 0, obtém-se ∆xE = 0, donde xE = u0t. Por outrolado,
yE =u0
(βψ
)(ψ)inicial
λSeλSt.
A trajectória no modo espiral do Cessna 182, em que o valor próprio é λS =−0.0177239 s-1 e supondo um ângulo de guinada inicial de ψinicial = 20º, está re-presentada na figura 11.3 para os primeiros 180 s. Neste exemplo este modo é estável,pelo que se observa uma lenta aproximação do avião à trajectória não perturbada, istoé, com yE = 0 (note-se a diferença de escalas nas abcissas e nas ordenadas).
Convergência de rolamento
O modo de rolamento tem um valor próprio real e habitualmente negativo e comvalor absoluto grande, sendo a constante de tempo associada, τ = −1/λ, pequena. Épor isso um modo estável, com grande atenuação, e é chamado de convergência derolamento.
A partir da tabela 11.3 determinam-se facilmente as relações entre ângulos, β : φ :ψ = 0.22 : −0.0768 : −0.026 e entre variáveis dinâmicas, β : p : r = 0.220 : 1 : 0.0278.
164

0.2 0.4 0.6 0.8 1.0t
-0.2
0.2
0.4
0.6
0.8
1.0
r
Ψ
p
Β
Φ
Figura 11.4: Modo de rolamento: representação da evolução temporal das variáveisdinâmicas e dos ângulos de pranchamento e guinada.
2 4 6 8 10t
-1.0
-0.5
0.5
1.0
Ψ
r
p
Φ
Β
Figura 11.5: Variáveis dinâmicas no modo de rolamento holandês.
Estas relações estão representadas na figura 11.4. Verifica-se que o modo de rola-mento é caracterizado aproximadamente por derrapagem «pequena» e um ângulo evelocidade angular de guinada «pequenos». A principal variável dinâmica é a veloci-dade angular de rolamento, o que justifica o nome dado ao modo.
A componente mais importante para as forças aerodinâmicas é Clp p (e é estabiliza-dora porque Clp < 0). A contribuição de Clr r é desprezável. Este modo é estável, comconstantes de tempo pequenas e muito atenuado.
Modo de rolamento holandês
O terceiro modo do exemplo do Cessna 182 é uma oscilação lateral e correspondeao modo conhecido como dutch roll.
Na figura 11.5 pode ver-se a evolução temporal das variáveis dinâmicas e dos ângu-los de pranchamento e de guinada. Embora neste exemplo β seja a variável predomi-
165

-4 -2 0 2 4y
2
4
6
8
10x100
Figura 11.6: Modo dutch roll: trajectória
nante, como se pode confirmar na tabela 11.3, habitualmente no modo de rolamentoholandês todas as variáveis dinâmicas têm ordem de grandeza semelhante e contri-buem para o movimento.
A figura 11.6 representa a trajectória seguida pelo centro de massa do avião noexemplo em estudo para o modo de rolamento holandês. Observa-se que a trajectóriaseguida é oscilatória, mas centrada em torno de yE = 0. O centro de massa do aviãosegue uma trajectória aproximadamente rectilínea.
Na figura 11.7 apresenta-se um gráfico paramétrico da variação de φ e ψ, a quecorresponde o movimento da ponta da asa do avião. Neste exemplo as oscilações emφ são muito menores que as oscilações em ψ, mas observa-se que a ponta da asavai descrevendo uma elipse cada vez mais apertada, com oscilações amortecidas deamplitude cada vez menor.
O movimento de um avião no modo de rolamento holandês está esquematizado nafigura 11.8.
166

-40 -30 -20 -10 10 20100 Φ
-30
-20
-10
10
20Ψ
Figura 11.7: Modo dutch roll: gráfico paramétrico da variação de φ e ψ (movimento daponta da asa).
Figura 11.8: Movimento esquemático de um avião no modo de rolamento holandês.(Fonte: [4])
167

11.2 Modos laterais aproximados
Como se sabe, a matriz do sistema (para modos laterais) é dada por
A =
Yvm
Ypm
(Yrm −u0
)g cosθ0(
LvI′x + I
′zxNv
) (LpI′x + I
′zxNp
) (LrI′x + I
′zxNr
)0
(I′zxLv + Nv
I′z
) (I′zxLp +
NpI′z
) (I′zxLr + Nr
I′z
)0
0 1 tanθ0 0
.
Para simplificar a escrita das expressões vamos usar a seguinte notação:
Yv =Yvm, (11.3)
Yp =Ypm, (11.4)
Yr =Yrm−u0, (11.5)
Lv =LvI′x+ I′xyNv , (11.6)
Lp =LpI′x+ I′xyNp, (11.7)
Lr =LrI′x+ I′xyNr , (11.8)
Nv = I′xyLv +NvI′z, (11.9)
Np = I′xyLp +NpI′z, (11.10)
Nr = I′xyLr +NrI′z. (11.11)
A matriz A pode então escrever-se como
A =
Yv 0 Yr g cosθLv Lp Lr 0Nv Np Nr 00 1 tanθ 0
.Tendo em conta que
A− λI =
Yv − λ 0 Yr g cosθ
Lv Lp − λ Lr 0Nv Np Nr − λ 00 1 tanθ −λ
,a equação característica do sistema completo, no caso de modos laterais, é dado por
det(A− λI) = λ4 + Bλ3 + Cλ2 +Dλ+ E = 0, (11.12)
168

em que os coeficientes do polinómio são definidos por
B = −Lp −Nr − Yv ,C = −LrNp +LpNr −NvYr +LpYv +NrYv ,D = −LvNpYr +LpNvYr +LrNpYv −LpNrYv − gLv cosθ − gNv sinθ,E = g(LvNr cosθ −LrNv cosθ −LvNp sinθ +LpNv sinθ).
Com base nestas expressões pode-se encontrar uma aproximação para o modo espiral.
11.2.1 Aproximação para o modo espiral
No modo espiral a raiz real está perto da origem (λS 1). Por isso, na equaçãocaracterística podemos desprezar os termos em λ2, λ3 e λ4, obtendo
Dλ+ E = 0 ⇒ λS = −ED.
O coeficiente D pode ser escrito como
D = (−LvNp +LpNv)Yr + (LrNp −LpNr )Yv − g(Lv cosθ +Nv sinθ).
Tendo em conta a definição (11.5) e os valores típicos para uma aeronave, Yr = Yr/m−u0 ≈ −u0. Por outro lado, comparando os valores numéricos, |Yv| = |Yv|/m |Yr | ≈u0 (usando o exemplo do Cessna 182, Yv = −0.187203/s, Yr = −67.2737 m/s ≈ −u0 =−67.05m/s). Logo, o termo (LrNp −LpNr )Yv pode ser desprezado em na expressãode D, obtendo-se
D ≈ (LvNp −LpNv)u0 − g(Lv cosθ +Nv sinθ),
e obter então a raiz aproximada do modo espiral:
λS = −(LvNp −LpNv)u0 − g(Lv cosθ0 +Nv sinθ0)
g(LvNr cosθ0 −LrNv cosθ0 −LvNp sinθ0 +LpNv sinθ0). (11.13)
Se o estado estacionário corresponde a um voo horizontal, em que θ0 = 0, e expressãoanterior simplifica-se:
λS = −(LvNp −LpNv)u0 − gLv
g(LvNr −LrNv). (11.14)
Para obter o resultado desta aproximação ao exemplo do Cessna 182, comecemos
169

por usar as definições (8.27)–(8.29) e (11.3)–(11.11), obtendo-se
I′x =IxIz − I2zx
Iz= 1284.97 kg m2,
I′z =IxIz − I2zx
Ix= 2666.18 kg m2,
I′xz =Izx
IxIz − I2zx= 0,
Yv =Yvm= −0.187203 s-1,
Yp =Ypm= −0.196006 m s-1,
Yr =Yrm−u0 = −67.2737 m s-1,
Lv =LvI′x+ I′xyNv = −0.451115 m-1s-1,
Lp =LpI′x+ I′xyNp = −12.978 s-1,
Lr =LrI′x+ I′xyNr = 2.1398 s-1,
Nv = I′xyLv +NvI′z= 0.13827 m-1s-1,
Np = I′xyLp +NpI′z= −0.359271 s-1,
Nr = I′xyLr +NrI′z= −1.21092 s-1.
A raiz aproximada do modo espiral, que se obtém de (11.14), pode comparar-secom o valor exacto obtido anteriormente:
λS(exacto) = −0.0177239 s−1,
λS(aprox) = −0.0176542 s−1,
concluindo-se que, neste caso, esta é uma boa aproximação para o modo espiral. Estaconclusão pode generalizar-se, porque esta aproximação do modo espiral conduz habi-tualmente a resultados muito próximos do valor exacto obtido por cálculo dos valorespróprios da matriz total do sistema.
O modo espiral é com frequência instável. Habitualmente isso não causa dificulda-des no voo, porque este é um modo lento e não é difícil ao piloto efectuar as correcçõesnecessárias. No entanto, interessa usar os critérios de estabilidade para determinarcondições a verificar caso se pretenda que o modo seja estável. Como se referiu atrás,uma condição necessária para a estabilidade no caso de uma equação característica de4ª ordem, como (11.12), é E > 0:
E = g[(LvNr −LrNv) cosθ + (LpNv −LvNp) sinθ)
]> 0
Substituindo na equação acima as expressões para os termos (11.3) a (11.11) e as ex-pressões para as derivadas de estabilidade obtemos a condição de estabilidade:
(ClβCnr − ClrCnβ) cosθ0 + (ClpCnβ − ClβCnp) sinθ0 > 0. (11.15)
170

No caso em que o estado estacionário é um voo horizontal, θ0 = 0 e a condiçãosimplifica-se:
ClβCnr − ClrCnβ > 0. (11.16)
11.2.2 Aproximação para o modo de rolamento
Modo de rolamento: aproximação 1
No modo de rolamento a principal variável dinâmica é p. É um movimento quaseunidimensional de rolamento em torno de x. Por isso, a aproximação mais simplesconsiste em considerar v = 0 = r . A 2ª equação do sistema é então
p = Lpp. (11.17)
Logo, o valor próprio para o modo de rolamento nesta aproximação é
λR = Lp =LpI′x+ I′xyNp. (11.18)
Comparando com o valor exacto anteriormente obtido para o exemplo do Cessna 182,esta aproximação, apesar de muito simples, dá resultados bastante aproximados:
λR(aprox) = −12.9783 s−1,
λR(exacto) = −13.018 s−1.
No entanto, noutras situações e para outras aeronaves os resultados não são tão satis-fatórios e é necessário recorrer a outras aproximações.
Aproximação para os modo de rolamento e espiral
Nesta aproximação pretende-se encontrar um sistema de 2ª ordem cujas raízessejam os valores próprios correspondentes aos modos espiral e rolamento.
As hipóteses em que esta aproximação se baseia para simplificar as equações domovimento são as seguintes:
• a força lateral é devida apenas à derrapagem (mv = Yvv). Logo, a força lateralproduzida pela taxa de guinada r anula a força lateral devida ao peso.
• Yp/m e Yr/m são desprezados
• θ0 = 0
Usando estas hipóteses, a equação
v = Yvmv + Yp
mp +
(Yrm−u0
)r + g cosθ0φ
reduz-se a−u0r + g cosθ0φ = 0. (11.19)
171

Logo, o sistema de equações é:0 = −u0r + gφp = Lvv +Lpp +Lrrr = Nvv +Npp +Nrr
φ = p
Na forma matricial, escreve-se0prφ
=
0 0 −u0 gLv Lp Lr 0Nv Np Nr 00 1 0 0
vprφ
. (11.20)
A equação característica é∣∣∣∣∣∣∣∣0 0 −u0 g
Lv (Lp − λ) Lr 0Nv Np (Nr − λ) 00 1 0 −λ
∣∣∣∣∣∣∣∣ = 0, (11.21)
que se pode escrever como uma equação de 2ª grau,
CSRλ2 +DSRλ+ ESR = 0, (11.22)
sendo os coeficientes de (11.22) dados por
CSR = u0Nv , (11.23)
DSR = u0(LvNp −LpNv)− gLv , (11.24)
ESR = g(LvNr −LrNv). (11.25)
Comparando os resultados exactos para o exemplo do Cessna 182 com os obtidoscom este modo «rolamento + espiral» e com as aproximações anteriores, temos, parao modo espiral,
λS(exacto) = −0.0177239 s−1
λS(aprox. S) = −0.0176542 s−1
λS(aprox. S+R) = −0.0181258 s−1
e para o modo de rolamento,
λR(exacto) = −13.018 s−1
λR(aprox. R) = −12.9783 s−1
λR(aprox. S+R) = −14.6094 s−1
Ambas as raízes aproximadas têm valores próximos dos exactos. Em geral esta aproxi-mação (S+R) dá resultados aceitáveis para ambos os modos e frequentemente constituiuma melhoria face à aproximação de rolamento mais simples anteriormente apresen-tada. Neste exemplo esta aproximação não melhora os resultados anteriores.
172

Tabela 11.4: Valores próprios, período e N1/2 exactos e aproximados para o modo derolamento holandês.
λDR T (s) N1/2 (ciclos)
Valor Exacto −0.670368± i3.19323 1.97 0.525Aproximação −0.699063± i3.00234 2.09 0.47
11.2.3 Modo de rolamento holandês aproximado
Este modo é difícil de aproximar porque todas as variáveis são importantes. Noentanto, tendo em conta que no exemplo do Cessna 182 as variáveis com menor am-plitude eram p e φ, podemos simplificar as equações admitindo que um movimentode guinada/derrapagem sem rolamento (movimento «plano»), com p = 0 = φ. Alémdisso, admitimos Yr desprezável. As equações do movimento são então
v = Yvmv + Yp
mp︸︷︷︸≈0
+(Yrm−u0
)︸ ︷︷ ︸
−u0
r + g cosθ0 φ︸︷︷︸≈0
,
p =(LvI′x+ I′zxNv
)v +
(LpI′x+ I′zxNp
)p +
(LrI′x+ I′zxNr
)r ,
r =(I′zxLv +
NvI′z
)v +
(I′zxLp +
NpI′z
)p︸︷︷︸≈0
+(I′zxLr +
NrI′z
)r ,
φ = p + tanθ0 r .
A segunda equação pode ser ignorada pois, com as aproximações anteriores, a primeirae a terceira equação constituem um sistema fechado:
v = Yvmv −u0r ,
r =(I′zxLv +
NvI′z
)v +
(I′zxLr +
NrI′z
)r .
Usando (11.3), (11.9) e (11.11), temosv = Yvv −u0r ,r = Nvv +Nrr .
(11.26)
A equação característica do sistema aproximado é
λ2 − (Yv +Nr )λ+ (YvNr +u0Nv) = 0. (11.27)
A comparação para o exemplo do Cessna 182 dos valores próprios exactos parao modo de rolamento holandês com as raízes de (11.27) encontra-se na tabela 11.4.Constatamos que neste caso esta aproximação é razoável tanto para o período comopara o factor de amortecimento. Note-se, no entanto, que esta aproximação nem sem-pre dá valores aceitáveis para o factor de amortecimento.
173

Bibliografia
[1] Bernard Etkin and Lloyd Duff Reid. Dynamics of Flight: Stability and Control. JohnWiley and Sons, 3rd edition, 1996.
[2] R. D. Finck. USAF Stability and Control Datcom. Technical Report AFWAL-TR-83-3048, Air Force Wright Aeronautical Laboratories, 1978.
[3] Barnes W. McCormick. Aerodynamics, Aeronautics and Flight Mechanics. John Wileyand Sons, 2nd edition, 1995.
[4] Robert C. Nelson. Flight Stability and Automatic Control. McGraw-Hill, 2nd edition,1998.
[5] Jan Roskam. Airplane Flight Dynamics and Automatic Flight Controls, Part I. DAR-corporation, 2003.
174