joão oliveira - autenticação · de acordo com a teoria aerodinâmica de asas delgadas, existe um...
TRANSCRIPT

João Oliveira
Apontamentos de
Estabilidade de Voo
Versão de 31 de Dezembro de 2015

Conteúdo
1 Conceitos introdutórios e notação 11.1 Equilíbrio e estabilidade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2 Referenciais e convenções . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.3 Características geométricas das asas . . . . . . . . . . . . . . . . . . . . . . . 31.4 Resultantes das forças aerodinâmicas . . . . . . . . . . . . . . . . . . . . . . . 51.5 Coeficiente de sustentação e ângulo de ataque . . . . . . . . . . . . . . . . . 7
2 Equilíbrio, Estabilidade e Controlo Longitudinais 132.1 Voo de uma asa: equilíbrio e estabilidade . . . . . . . . . . . . . . . . . . . . 132.2 Sustentação e momento de picada de uma aeronave . . . . . . . . . . . . . . 192.3 Sustentação e momento de picada em função do ângulo de ataque . . . . 252.4 Equilíbrio, Estabilidade e Controlo Longitudinais . . . . . . . . . . . . . . . . 29
3 Estabilidade com Manche Livre e Forças de Controlo 363.1 Momento de charneira de superfície de controlo . . . . . . . . . . . . . . . . 363.2 Sustentação e momento de picada com manche livre . . . . . . . . . . . . . 383.3 Compensadores e equilíbrio com manche livre . . . . . . . . . . . . . . . . . 413.4 Equilíbrio com deflexão do compensador . . . . . . . . . . . . . . . . . . . . . 423.5 Forças de Controlo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
4 Efeitos de superfícies hiper-sustentadoras e da propulsão na estabilidadelongitudinal 474.1 Influência de superfícies hiper-sustentadoras . . . . . . . . . . . . . . . . . . 474.2 Influência da propulsão no equilíbrio e na estabilidade . . . . . . . . . . . . 49
5 Estabilidade Lateral-Direccional 525.1 Estabilidade direccional . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 525.2 Estabilidade lateral . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
6 Equações do Movimento 696.1 Referenciais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 696.2 Ângulos de Euler e matrizes de rotação . . . . . . . . . . . . . . . . . . . . . . 706.3 Equações de Euler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 756.4 Rotores em movimento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 776.5 Sistemas de eixos do corpo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
i

7 Estados Estacionários e Manobras 817.1 Forças e momentos aplicados a uma aeronave . . . . . . . . . . . . . . . . . 817.2 Estados estacionários longitudinais . . . . . . . . . . . . . . . . . . . . . . . . 857.3 Estados estacionários laterais . . . . . . . . . . . . . . . . . . . . . . . . . . . . 887.4 Manobras . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 897.5 Manobra de descida-subida simétrica . . . . . . . . . . . . . . . . . . . . . . . 897.6 Manobra de Viragem Estacionária . . . . . . . . . . . . . . . . . . . . . . . . . 95
8 Teoria para Pequenas Perturbações 1008.1 Definição do estado estacionário . . . . . . . . . . . . . . . . . . . . . . . . . . 1008.2 Linearização das equações . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1028.3 Forma geral das equações . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
9 Derivadas de Estabilidade 1089.1 Relações entre derivadas de estabilidade dimensionais e adimensionais . 1089.2 Derivadas adimensionais relativas a movimento longitudinal . . . . . . . . 1149.3 Derivadas relativas ao movimento lateral . . . . . . . . . . . . . . . . . . . . . 122
10 Estabilidade Dinâmica Longitudinal 13110.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13110.2 Sistemas de equações diferenciais ordinárias de 1ª ordem . . . . . . . . . . 13110.3 Modos longitudinais: características típicas . . . . . . . . . . . . . . . . . . . 13510.4 Modos longitudinais aproximados . . . . . . . . . . . . . . . . . . . . . . . . . 14410.5 Teoria Geral da Estabilidade Longitudinal Estática . . . . . . . . . . . . . . . 15010.6 Efeito da posição do centro de massa . . . . . . . . . . . . . . . . . . . . . . . 15110.7 Efeito do Vento nos Modos Longitudinais . . . . . . . . . . . . . . . . . . . . 15410.8 Modos longitudinais em atmosferas estratificadas . . . . . . . . . . . . . . . 157
11 Estabilidade Dinâmica Lateral 16011.1 Modos laterais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16011.2 Modos laterais aproximados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 168
12 Resposta à Actuação de Controlo 17412.1 Matrizes e vectores de controlo . . . . . . . . . . . . . . . . . . . . . . . . . . . 17412.2 Método das transformadas de Laplace . . . . . . . . . . . . . . . . . . . . . . 17612.3 Resposta longitudinal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18212.4 Resposta lateral . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19412.5 Resposta transiente a ailerons e rudder . . . . . . . . . . . . . . . . . . . . . . 200
13 Qualidades de Voo 20513.1 Classificação de aeronaves e fases de voo . . . . . . . . . . . . . . . . . . . . 20513.2 Níveis de qualidades de voo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20513.3 Aplicação dos critérios a um Cessna 182 . . . . . . . . . . . . . . . . . . . . . 208
A Equilíbrio e estabilidade para configurações canard 211A.1 Características das configurações canard . . . . . . . . . . . . . . . . . . . . 211A.2 Equilíbrio e estabilidade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 212A.3 Condições de equilíbrio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 215
Bibliografia 217
ii

Capítulo 1
Conceitos introdutórios enotação
1.1 Equilíbrio e estabilidade
O nosso objectivo será analisar estados de equilíbrio do voo de aeronaves e a suaestabilidade. Comecemos pois por recordar as noções de equilíbrio e estabilidade deum sistema.
Um sistema num estado de equilíbrio permanece nesse estado se não houver per-tubações pela acção de forças ou momentos. Habitualmente, a condição de equilíbriomecânico de um sistema é ∑
~F = 0∑~M = 0
A estabilidade de um estado de equilíbrio pode ser estática ou dinâmica. Relati-vamente à estabilidade estática, um estado de equilíbrio é estável se o sistema voltarao estado de equilíbrio após dele ser afastado; é instável se o sistema se continuara afastar do estado de equilíbrio após o afastamento inicial; e é neutro se após umafastamento inicial, o sistema não tende nem a retornar ao equilíbrio nem a dele seafastar.
A estabilidade dinâmica diz respeito ao modo como o sistema evolui depois de afas-tado do estado de equilíbrio: um sistema dinamicamente estável tende assimpotica-mente para o estado de equilíbrio, enquanto que um sistema dinamicamente instável
Equilíbrio Estável Equilíbrio Instável Equilíbrio Neutro
Figura 1.1: Estabilidade estática do equilíbrio.
1

0.5 1.0 1.5 2.0 2.5 3.0
-0.5
0.5
1.0
Equilíbrio dinamicamente estável
0.5 1.0 1.5 2.0 2.5 3.0
-2
2
4
Equilíbrio dinamicamente instável
Figura 1.2: Estabilidade dinâmica do equilíbrio.
sofre oscilações com amplitude crescente ou afasta-se cada vez mais da posição deequilíbrio.
1.2 Referenciais e convenções
Para se poder analisar o movimento de uma aeronave é necessário definir os refe-renciais nos quais a análise será realizada. Considerar-se-á como referencial inercialum referencial ligado à Terra. Os efeitos de curvatura da Terra serão desprezados e aforça gravítica terá sempre a direcção vertical.
Na figura 1.3 representa-se o referencial ligado à aeronave. Os eixos estão definidosde forma que Cxz é o plano de simetria. O eixo Cx, ao longo da fuselagem, apontapara o nariz da aeronave e Cz está dirigido «para baixo». Finalmente, o eixo Cyé perpendicular ao plano de simetria, formando triedro directo com os outros doiseixos.
Figura 1.3: Sistema de eixos ligado à aeronave.
As componentes segundo x,y, z da velocidade linear ~v são designadas por ~v =
2

(u,v,w). As componentes da velocidade angular são ~ω = (p, q, r). Assim, p é avelocidade angular de rolamento (roll), q é a velocidade angular de picada (pitch) e r éa velocidade angular de guinada (yaw).
As componentes segundo x,y, z das forças aplicadas à aeronave serão designa-das simplesmente por ~F = (X, Y ,Z), enquanto que as componentes dos momentossão ~M = (L,M,N), sendo L o momento de rolamento, M : momento de picada e L omomento de guinada.
1.3 Características geométricas das asas
1.3.1 Perfil da asa
Uma das principais características de uma asa é o seu perfil, que pode ser simétricoou ter curvatura.
No caso de um perfil simétrico, a linha média entre o intra dorso e o extra dorsoda asa é um segmento de recta.
Figura 1.4: Perfil simétrico (em cima) e perfil com curvatura positiva (em baixo). Nafigura, LE designa o bordo de ataque (leading edge) e TE o bordo de fuga (trailingedge).
Para uma asa com perfil com curvatura, a linha média entre o intra dorso e o extradorso da asa é uma linha curva. A curvatura é positiva se a concavidade da linha médiaestá para baixo, e é negativa no caso oposto.
1.3.2 Planta da asa
A envergadura b e a corda c definem-se para uma asa de planta rectangular comomostra a figura 1.5.
• c: corda (chord)
3

• b: envergadura (span)
• A: alongamento (aspect ratio)
• S: área da asa (em planta)
Figura 1.5: Envergadura b e corda c de uma asa de planta rectangular
O alongamento A pode ser definido por A = b/c, mas é preferível reescrever aexpressão fazendo uso da área da asa S:
A = b2
S. (1.1)
Esta definição é válida também para asas não rectangulares.No caso de uma asa com flecha, como aquela cuja planta está representada na
figura 1.6, a corda pode variar ao longo da envergadura. A corda do bordo marginal(tip chord) é designada por ct e a corda da raiz da asa (root chord) por cr . A cordamédia c é calculada a partir da variação c(y) da corda ao longo da envergadura.
O ângulo de flecha (sweep angle) é designado por Λ e pode determinar-se para obordo de ataque, o bordo de fuga, a meia corda ou a qualquer outra fracção da corda.
O afilamento λ (taper ratio) é definido por
λ = ctcr. (1.2)
Figura 1.6: Asa de planta trapezoidal. ΛLE é o ângulo de flecha do bordo de ataque (LE:leading edge), cr é a corda da raiz da asa e ct é a corda do bordo marginal da asa.
1.3.3 Ângulo de diedro
A figura 1.7 representa um avião com asas com ângulo de diedro Γ positivo.Note-se que em inglês se usa dihedral para um ângulo de diedro positivo Γ > 0 e
anhedral para um ângulo de diedro negativo Γ < 0.
4

Figura 1.7: Ângulo de diedro.
1.4 Resultantes das forças aerodinâmicas
Se existe um escoamento em torno da asa, produzem-se forças e momentos aerodi-nâmicos, que dependem de vários parâmetros. Um dos principais é o ângulo de ataquedo escoamento.
1.4.1 Ângulo de ataque
O ângulo de ataque, representado na figura 1.8, é o ângulo entre a linha de referên-cia e a direcção do escoamento incidente. É designado por α.
Podem definir-se vários ângulos de ataque, dependendo da linha de referência quese toma. Se a linha de referência é a linha de corda, temos o ângulo de ataque «geomé-trico» da asa.
1.4.2 Sustentação, resistência aerodinâmica e momento de picada
As forças aerodinâmicas distribuem-se ao longo de todo o perfil. Este sistema deforças distribuídas é equivalente a uma força resultante e a um momento resultante(ver figura 1.9). Por conveniência, a força resultante é decomposta em duas direcçõesperpendiculares: a componente na direcção da velocidade do escoamento é a resistên-cia aerodinâmica (drag, D), a componente perpendicular à velocidade é a sustentação(lift, L).
O centro de pressões é o ponto relativamente ao qual o sistema de forças aerodinâ-micas é equivalente apenas a sustentação + resistência, não havendo momento resul-tante. No entanto, o centro de pressões não é um ponto fixo, depende do escoamentoem torno do perfil alar. Em particular, a posição do centro de pressões desloca-se parao bordo de ataque da asa à medida que o ângulo de ataque aumenta (ver figura 1.10).A utilização prática do centro de pressões fica deste modo comprometida porque énecessário calcular a sua posição sempre que se altera o ângulo de ataque da asa, oque é deveras inconveniente.
Figura 1.8: Ângulo de ataque
5

é equivalente a
L e D aplicados no centro depressões (c.p.)
OU
L, D e MP aplicados no ponto P(arbitrário)
Figura 1.9: As forças aerodinâmicas são equivalentes a resultante ou a resultante +momento
Figura 1.10: O centro de pressões desloca-se para o bordo de ataque à medida queaumenta o ângulo de ataque. Nota: O aumento de L e D com α não está representado.
6

Figura 1.11: Centro aerodinâmico
1.4.3 Centro aerodinâmico
De acordo com a teoria aerodinâmica de asas delgadas, existe um ponto fixo relati-vamente ao qual o momento de picada M não depende do ângulo de ataque, e que seencontra a 1/4 de corda. A esse ponto dá-se o nome de centro aerodinâmico. Numaasa real o centro aerodinâmico não se encontra habitualmente no ponto xac = c/4.Porém, esta é uma boa aproximação em muitos casos.
O momento de picada relativamente ao centro aerodinâmico Mac é constante, ouseja, é independente do ângulo de ataque. O seu valor depende da curvatura do perfil.Para um perfil simétrico, Mac = 0, para um perfil com curvatura positiva, Mac < 0, epara um perfil com curvatura negativa, Mac > 0.
Podemos finalmente concluir que as forças aerodinâmicas aplicadas numa asa sãoequivalentes a uma força resultante aplicada no centro aerodinâmico, decomposta emsustentação L (perpendicular à velocidade) e resistência aerodinâmica D (na direcçãoda velocidade), e um momento de picada Macw relativamente ao C.A. (ver figura 1.11).
1.5 Coeficiente de sustentação e ângulo de ataque
1.5.1 Coeficiente de sustentação de perfis
Para um escoamento de um fluido com massa volúmica ρ e velocidade V , a pressãodinâmica define-se como:
pd =12ρV 2. (1.3)
Verifica-se experimentalmente que a sustentação e a resistência aerodinâmica deuma asa são (aproximadamente) proporcionais à pressão dinâmica e à área da asa. Osoutros factores, tais como a geometria da asa (perfil e planta) e o ângulo de ataque, po-dem ser incluídos num coeficiente adimensional. Definimos coeficiente de sustentação
7

Perfil simétrico Perfil com curvatura positiva
Figura 1.12: Variação do coeficiente de sustentação com o ângulo de ataque.
e coeficiente da resistência aerodinâmica como:
CL =LpdS
= L12ρV 2S
(1.4)
CD =DpdS
= D12ρV 2S
(1.5)
Habitualmente, convém distinguir os efeitos devidos apenas ao perfil (o que equi-vale a considerar uma asa de envergadura infinita, em que o escoamento pode serconsiderado bidimensional) dos efeitos devidos ao alongamento, forma da asa, etc.Usaremos para isso a notação L e CL para a sustentação e respectivo coeficiente adi-mensional para asas finitas e ` e C` para os casos correspondentes a perfis («asasinfinitas»). É importante não confundir C`, que é o coeficiente de sustentação do per-fil, com Cl que é o coeficiente do momento de rolamento e que será definido mais àfrente. Note-se ainda que C` se define como
C` =`
(1/2)ρV 2c.
A figura 1.12 mostra a variação do coeficiente de sustentação com o ângulo deataque, para asas com perfil simétrico e com curvatura positiva. A forma das curvas ésemelhante, mas os valores de C`max e de C`0 = C`(α = 0) são diferentes.
Na figura 1.13 mostra-se o efeito da curvatura do perfil na curva C` vs. α. Aforma das curvas é semelhante, sofrendo uma translação para cima quando a curvaturaaumenta. Por isso, quanto maior for a curvatura do perfil, maior é o valor de C`max ede C`0 = C`(α = 0). As asas com curvatura positiva permitem ter sustentação comângulos de ataque nulos.
Após atingir o valor C`max , se o ângulo de ataque α continuar a aumentar, o coe-ficiente de sustentação diminui: a asa entra em perda. Habitualmente vamos estarinteressados em que o ângulo de ataque esteja dentro da zona de variação linear doC` com α, bem longe da zona de perda.
O declive da curva do C` em função do ângulo de ataque, constante na zona linear,
8

Figura 1.13: Efeito da curvatura do perfil na curva C` vs. α
é designada por C`α :
C`α =∂C`∂α.
Na teoria de perfis delgados o C`α tem um valor bem determinado: C`α = 2π rad−1 ≈0.1097/o. Esta aproximação permite ter uma ideia dos valores típicos do C`α , mas paraperfis reais é necessário usar teorias mais exactas.
Em primeira aproximação pode afirmar-se que a sustentação de um perfil é causadapela vorticidade do escoamento em torno do perfil (figura 1.14). Se uma aeronaveestá inicialmente em repouso num fluido ideal, a vorticidade total é nula. Quandoa aeronave começa a voar, forma-se um vórtice que permanece ligado à asa e queprovoca sustentação e é libertado um outro vórtice, de vorticidade oposta, de modoque a vorticidade total se mantenha nula, como representado na figura 1.15. Note-seque a jusante da asa o escoamento é deflectido verticalmente para baixo (downwash),como consequência do vortice ligado e portanto do aparecimento da sustentação. Odownwash será tanto maior quanto maior for a sustentação criada.
1.5.2 Coeficiente de sustentação de asas finitas
Numa asa infinita o escoamento pode ser considerado bidimensional e a única coisaque interessa é o perfil. Numa aeronave real a asa é finita e perto do bordo marginal daasa o escoamento torna-se tridimensional. Como a pressão é superior na parte inferiorda asa, o ar tende a deslocar-se da parte inferior para a parte superior e forma-se umvórtice do bordo marginal. Este vórtice cria na asa um campo de velocidades verticaispara baixo que tem como efeito uma diminuição do ângulo de ataque efectivo na asa,levando a uma diminuição da sustentação e também a uma diminuição do declive dacurva do coeficiente de sustentação vs. α.
A importância dos efeitos tridimensionais é tanto maior quanto menor for o alonga-mento da asa. Entre os declives das curvas do coeficiente de sustentação com o ângulode ataque para asas finitas (CLα ) e para perfis ou asas infinitas (C`α ) verifica-se que:
• CLα < C`α
• CLα decresce mais para A menores
9

Figura 1.14: A sustentação de um perfil é causada pela vorticidade do escoamento emtorno do perfil. Fonte: Aircraft Flight, Barnard & Philpott
Figura 1.15: Vórtice ligado, vórtice libertado e downwash
10

Figura 1.16: Vórtice do bordo marginal. Fonte: Aircraft Flight, Barnard & Philpott
Figura 1.17: Variação do CL com α para asas com o mesmo perfil e alongamentosdiferentes
A figura 1.17 exemplifica a variação do coeficiente de sustentação para asas com omesmo perfil mas com alongamentos diferentes. É possível estabelecer relações maisexplícitas entre CLα e Clα em muitas situações. O caso mais simples é o de uma distri-buição elíptica de sustentação, em que
CLα = C`αA
A+ 2(1.6)
Na zona de linearidade com α, o coeficiente de sustentação é dado por
CL = CL0 + CLαα (1.7)
O coeficiente de resistência aerodinâmica (drag) pode ser dado através da polar:
CD = CD0 + CDi (1.8)
CDi =1πeA
C2L (coeficiente de resistência induzida) (1.9)
11

Figura 1.18: Ângulo de ataque em relação à linha de corda
Figura 1.19: Ângulo de ataque absoluto: medido em relação à linha de sustentaçãonula
1.5.3 Ângulo de ataque absoluto
Na relação (1.7), exemplificada na figura 1.18, aparece o coeficiente de sustentaçãopara ângulo de ataque nulo, CL0 . Normalmente é conveniente medir os ângulos deataque em relação à linha de sustentação nula (l. s. n.), que é direcção do escoamentocorrespondente ao ângulo de ataque que torna a sustentação nula (CL = 0), com o seexemplifica na figura 1.19. Nesse caso, temos:
CL = CL0 + CLαα (1.10)
αL=0 = −CL0
CLα(1.11)
αabs = α−αL=0 (1.12)
αabs = α+CL0
CLα(1.13)
Os ângulo de ataque medidos relativamente à linha de sustentação nula são chama-dos ângulos de ataque absolutos, αabs, relativamente aos quais se tem simplesmente:
CL = CLααabs (1.14)
Note-se que o declive CLα não se altera, porque apenas foi feita uma mudança deorigem da curva.
12

Capítulo 2
Equilíbrio, Estabilidade eControlo Longitudinais
Neste capítulo pretendem-se estabelecer as condições de equilíbrio e estabilidadepara uma aeronave em voo rectilíneo. Trataremos apenas do equilíbrio e da estabi-lidade longitudinais, isto é, relativos aos movimentos em que a aeronave se mantémno seu plano de simetria. O equilíbrio e estabilidade laterais serão tratados noutrocapítulo.
2.1 Voo de uma asa: equilíbrio e estabilidade
Começaremos por determinar as condições para que uma asa com perfil com cur-vatura positiva e sem torção possa voar em equilíbrio e verificar se esse equilíbrio éestável.
2.1.1 Equilíbrio de uma asa voadora
As condições de equilíbrio a verificar são, no referencial da asa,∑~F =m
(d~Vdt+ ~ω× ~V
)= 0 (2.1)
∑~MG =
(d ~HGdt
+ ~ω× ~HG)= 0 (2.2)
Vamos considerar o caso simples de um voo rectilíneo horizontal (p = q = r = 0),com velocidade constante (u = v = w = 0), e sem derrapagem (v = 0) de uma asa comperfil com curvatura positiva e sem torção. Supomos que a asa dispõe de um sistemade propulsão que lhe permite vencer a resistência aerodinâmica. Começaremos pordeterminar que forças e momentos aerodinâmicos estão aplicados na asa.
Forças aerodinâmicas
As forças e momentos aerodinâmicos aplicados à asa voadora que se desloca comvelocidade V com um ângulo de ataque αw (medido relativamente à sua linha de sus-
13

Figura 2.1: Forças e momentos aerodinâmicos aplicados numa asa em voo com veloci-dade V e ãngulo de ataque αw .
tentação nula) estão representados na figura 2.1, onde L designa a sustentação, D aresistência aerodinâmica e Mac o momento de picada relativo ao centro aerodinâmico.
A distância (na direcção x) entre o bordo de ataque da asa e o centro de massa érepresentada por hc. Dito doutro modo, h é a distância entre o bordo de ataque da asae o centro de massa, adimensionalizado pela corda média c. A distância (na direcçãox) entre o bordo de ataque da asa e o seu centro aerodinâmico, adimensionalizadopela corda média c, é representada por hnw .
Para além das forças aerodinâmicas, estão também aplicadas à asa a força de pro-pulsão, cuja linha de acção admitimos ser Gx, e o peso, cuja linha de acção é vertical.
Para pequenos ângulos de ataque α são válidas as seguintes aproximações:
• cosα ≈ 1
• sinα ≈ αEstas aproximações são válidas se α2 1, com α em radianos. Note-se que 0.3 rad ≈17, pelo que esta aproximação é razoável para a maioria dos casos de interesse.
A componente segundo x das forças aerodinâmicas é, pela figura 2.1,
(FA)x = L sinαw −D cosαw ≈ Lαw −D. (2.3)
Supomos que a força de propulsão T é a necessária para garantir o equilíbrio na direc-ção Cx:
T = D cosαw − L sinαw ≈ D − Lαw . (2.4)
Uma vez que a força de propulsão é determinada pelo piloto, esta condição pode sersempre verificada.
A componente segundo z das forças aerodinâmicas é
(FA)z = L cosαw +D sinαw . (2.5)
14

Dado que supomos que o ângulo de ataque é pequeno (α2 1) e que a resistên-cia aerodinâmica é muito menor que a sustentação, podemos supôr que L cosαw D sinalphaw . A condição de equilíbrio para as forças segundo Gz é, para voo rectilí-neo horizontal, ∑
Fz = 0⇒ W = L cosαw +D sinαw ≈ L. (2.6)
Concluímos que, de forma aproximada, para haver equilíbrio
L = W. (2.7)
Em voo rectilíneo horizontal a sustentação tem de igualar o peso da aeronave.
Momento de picada relativamente ao centro de massa
O momento de picada relativamente ao centro de massa é dado por
MG = Macw + (hc − hnw c) [L cosαw +D sinαw]+ zG [L sinαw −D cosαw] (2.8)
Para pequenos valores do ângulo de ataque α,
MG = Macw + (hc − hnw c) [L+Dαw]+ zG [Lαw −D] (2.9)
Usando os coeficientes de sustentação (1.4) e de resistência aerodinâmica (1.5),
CL =L
12ρV 2S
, CD =D
12ρV 2S
,
e definindo o coeficiente do momento de picada relativamente ao centro de massacomo
Cm =M
12ρV 2Sc
, (2.10)
obtemos, para pequenos ângulos αw
Cm = Cmacw + (h− hnw )CLw +zGc[CLwαw − CDw ] (2.11)
Supondo agora que o centro de massa da asa voadora se encontra aproximadamenteno eixo x, ou seja, que (zG/c) e, atendendo a que αw é pequeno e a que habitualmenteem voo de cruzeiro CDw CLw , o último termo pode ser desprezado face aos outrosdois. Obtemos então
Cmw = Cmacw + (h− hnw )CLw (2.12)
Sustentação e velocidade de equilíbrio
A condição (2.7) de equilíbrio para as forças segundo z permite encontrar um valorpara o coeficiente de sustentação que garante esse equilíbrio se a asa voar a umavelocidade V :
L = W ⇒ CLw =W
12ρV 2S
. (2.13)
No caso do momento de picada, a condição de equilíbrio é M = 0 ⇒ Cm = 0, peloque
Cmw = Cmacw + (h− hnw )CLw = 0. (2.14)
15

Figura 2.2: Variação de Cm com CL
Como CL > 0 e, para asas com curvatura positiva, Cmacw < 0, é sempre possível encon-trar um valor de CLw que garante o equilíbrio do momento de picada:
CLeq =−Cmacw
(h− hnw ),
como se mostra na figura 2.2. A este valor CLeq corresponde uma velocidade de equilí-brio dada por
CLw =W
12ρV 2S
⇒ V 2 = W12ρCLwS
.
CLeq =−Cmacw
(h− hnw ), logo Veq =
√√√√−W(h− hnw )12CmacwρS
. (2.15)
Na equação (2.15) os parâmetros que estão fixos em cada situação de voo são W , hnw ,Cmacw , ρ e S. O único parâmetros que é fácil modificar é a posição do centro de massa,h. Logo, na ausência de leme de profundidade ou superfícies de controlo equivalentes,Veq fica determinada por h (posição do CM)!
2.1.2 Estabilidade do ponto de equilíbrio
A variação de Cm com CL é linear, como mostra a equação (2.12) e o ponto deequilíbrio é aqele para o qual Cm = 0. Dado que o coeficiente de sustentação dependedo ângulo de ataque, o coeficiente do momento vai também depender de αw . Na zonade linearidade, CLw = CLαwαw ⇒ Cm = Cmacw+CLαw (h−hnw )αw , como se representa nafigura 2.3. O valor de αeq é o que garante Cm = 0, e este valor por sua vez, determinaCLeq .
Para determinarmos se este ponto de equilíbrio é estável, vejamos o que acontecese por alguma razão o ângulo de ataque for ligeiramente aumentado relativamente aαeq. Como se pode verificar pela figura 2.4, se existir uma perturbação no voo quefizer α aumentar, o coeficiente de sustentação CL aumentará também, o que leva auma resultante não nula na vertical, conduzindo a uma aceleração vertical para cima.
16

Figura 2.3: Variação de CL (esquerda) e Cm (direita) com αw
Figura 2.4: Efeito da variação de α no CL.
Figura 2.5: Efeito da variação de α no Cm.
17

Figura 2.6: Forma da variação de Cm com α desejável para se conseguir um voo emequilíbrio estável.
Esta aceleração faz aparecer uma componente vertical da velocidade da asa, para cima,que provoca uma diminuição do ângulo de ataque, o qual, por sua vez, implica umadiminuição do CL e um retorno à situação inicial. Uma situação em tudo semelhante,mas com os sentidos invertidos, aconteceria se a perturbação no voo fizesse diminuiro ângulo de ataque. Conclui-se que, relativamente ao movimento na direcção vertical,o voo é estável. (Uma análise mais pormenorizada será feita quando tratarmos daestabilidade dinâmica e, em particular, do modo de periodo curto).
Na figura 2.5 representa-se o efeito sobre o momento de picada de um aumento doângulo de ataque. Verifica-se que um aumento de α leva a um aumento de Cm, o queconduz a uma aceleração angular de picada q > 0 e portanto ao aparecimento de umavelocidade angular de picada q > 0, de modo que o bordo de ataque da asa levanta;isto leva a um aumento ainda maior de α, que por sua vez faz Cm aumentar ainda maise o bordo de ataque levantar ainda mais etc. Produz-se um afastamento da situaçãoinicial, pelo que se conclui que o equilíbrio não é estável relativamente ao momento depicada. Chegar-se-ía à mesma conclusão se inicialmente se admitisse uma diminuiçãodo ângulo de ataque.
Em resumo, conclui-se que uma asa pode voar em equilíbrio, mas esse equilíbrionão é estável. Para se ter um ponto de equilíbrio estável a configuração projectadadeve conduzir a uma variação do Cm com α como mostrado na figura 2.6, cortandoo eixo dos α de modo a garantir o equilíbrio e com um declive negativo de modo agarantir estabilidade. O valor de Cm para α = 0 terá então de ser positivo. A maneiramais frequente de conseguir uma variação deste tipo é acrescentar um estabilizadorhorizontal, e é este tipo de configuração que analisaremos em seguida.
Note-se, finalmente, que é possível projectar asas voadoras, mas é necessário nessecaso usar asas com perfil, flecha e torção não habituais na maioria das aeronaves con-vencionais.
18

2.2 Sustentação e momento de picada de uma aeronave
Vimos que uma asa voadora pode voar em equilíbrio, mas esse equilíbrio não éestável. Uma maneira de resolver este problema é acoplar um estabilizador horizontalà asa. Nas configurações convencionais a asa e o estabilizador estão ligados a umafuselagem, e o sistema de propulsão pode estar ligado à asa ou à fuselagem.
Note-se que, por enquanto, não nos vamos preocupar com o controlo da velocidadede equilíbrio, que se consegue com um leme de profundidade (elevator).
O equilíbrio do voo e a sua estabilidade dependem da sustentação e do momento depicada da aeronave. Por isso, começaremos por determinar as contribuições devidas àasa+fuselagem, ao sistema de propulsão e ao estabilizador horizontal separadamentee usaremos os índices wb (de wing-body), P (de propulsão) e t (de tail) para indicar asrespectivas contribuições.
2.2.1 Contribuição da asa + fuselagem
Os escoamentos em torno da asa e da fuselagem interferem mutuamente. No en-tanto, a asa é a superfície sustentadora mais importante e a sua contribuição para L eM é a mais importante. Por isso podemos admitir que a contribuição da asa+fuselagempara a sustentação e o momento de picada é semelhante à da asa, variando apenas aposição do centro aerodinâmico, o momento de picada relativamente ao CA e o decliveda curva CL vs. α:
• hnwb < hnw ≈ 0.25,
• CLαwb < CLαw ,
• Cmacwb < Cmacw < 0.
Para simplificar a escrita vamos usar a seguinte notação simplificada para o decliveda curva CL vs. α:
a ≡ CLα =∂CL∂α. (2.16)
Por exemplo, aw = CLαw e awb = CLαwb .Como referido acima, admite-se que o coeficiente do momento de picada relativa-
mente ao centro de massa da aeronave tem a mesma forma da contribuição da asa:
Cmwb = Cmacwb + (h− hnwb)CLwb . (2.17)
Na zona de linearidade de CL com α podemos escrever
CLwb = awbαwb, (2.18)
Cmwb = Cmacwb + (h− hnwb)awbαwb. (2.19)
Note-se que αwb é medido relativamente à linha de sustentação nula da asa+fuselagem,que não é a mesma que a linha de sustentação nula apenas da asa.
19
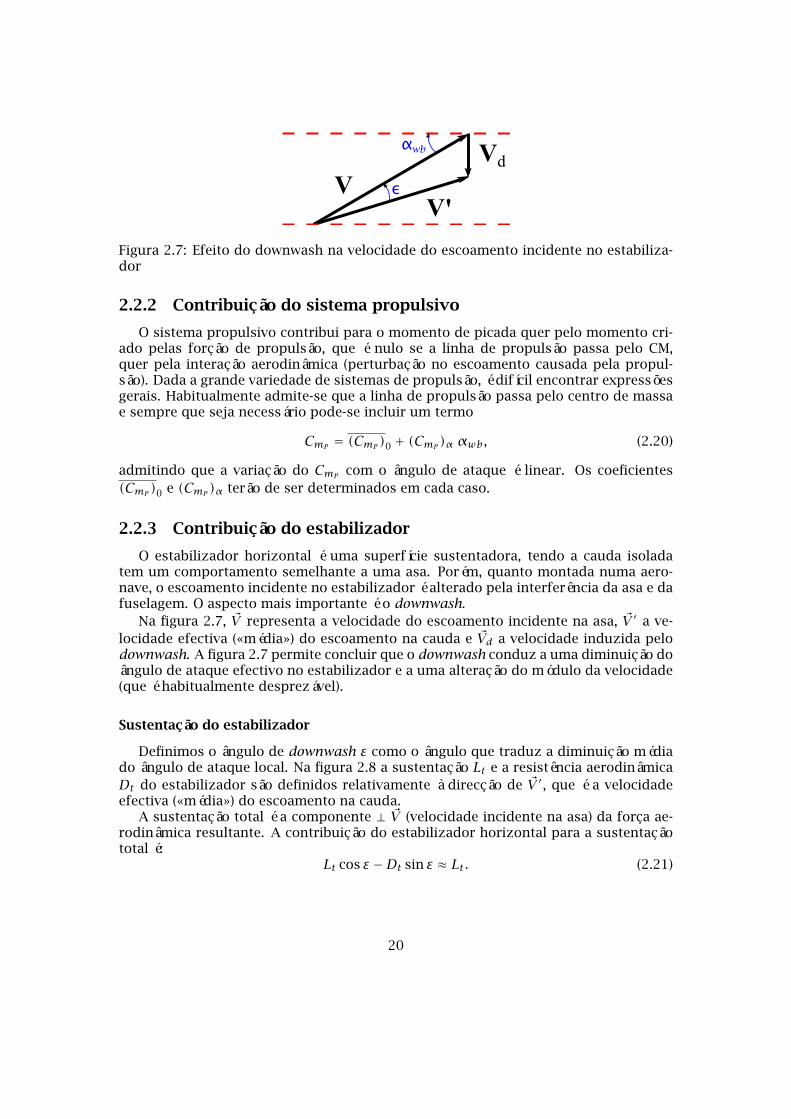
Figura 2.7: Efeito do downwash na velocidade do escoamento incidente no estabiliza-dor
2.2.2 Contribuição do sistema propulsivo
O sistema propulsivo contribui para o momento de picada quer pelo momento cri-ado pelas forção de propulsão, que é nulo se a linha de propulsão passa pelo CM,quer pela interação aerodinâmica (perturbação no escoamento causada pela propul-são). Dada a grande variedade de sistemas de propulsão, é difícil encontrar expressõesgerais. Habitualmente admite-se que a linha de propulsão passa pelo centro de massae sempre que seja necessário pode-se incluir um termo
CmP = (CmP )0 + (CmP )α αwb, (2.20)
admitindo que a variação do CmP com o ângulo de ataque é linear. Os coeficientes(CmP )0 e (CmP )α terão de ser determinados em cada caso.
2.2.3 Contribuição do estabilizador
O estabilizador horizontal é uma superfície sustentadora, tendo a cauda isoladatem um comportamento semelhante a uma asa. Porém, quanto montada numa aero-nave, o escoamento incidente no estabilizador é alterado pela interferência da asa e dafuselagem. O aspecto mais importante é o downwash.
Na figura 2.7, ~V representa a velocidade do escoamento incidente na asa, ~V ′ a ve-locidade efectiva («média») do escoamento na cauda e ~Vd a velocidade induzida pelodownwash. A figura 2.7 permite concluir que o downwash conduz a uma diminuição doângulo de ataque efectivo no estabilizador e a uma alteração do módulo da velocidade(que é habitualmente desprezável).
Sustentação do estabilizador
Definimos o ângulo de downwash ε como o ângulo que traduz a diminuição médiado ângulo de ataque local. Na figura 2.8 a sustentação Lt e a resistência aerodinâmicaDt do estabilizador são definidos relativamente à direcção de ~V ′, que é a velocidadeefectiva («média») do escoamento na cauda.
A sustentação total é a componente ⊥ ~V (velocidade incidente na asa) da força ae-rodinâmica resultante. A contribuição do estabilizador horizontal para a sustentaçãototal é:
Lt cos ε −Dt sin ε ≈ Lt. (2.21)
20

Figura 2.8: Sustentação e resistência aerodinâmica na cauda e ângulos de ataque e dedownwash
Para a adimensionalização da sustentação da cauda usa-se a pressão dinâmica nacauda (1
2ρV′2) e a área do estabilizador (St). Logo
CLt =Lt
12ρV ′
2St. (2.22)
No regime linear,CLt = atαt. (2.23)
Note-se que at e αt devem ser medidos in situ, não com a cauda isolada. Deste modoat inclui já os efeitos da interferência da asa e da fuselagem no escoamento incidenteno estabilizador.
A sustentação total da aeronave (L) é a soma da contribuição da asa+fuselagem, Lwbe da contribuição da cauda, Lt :
L = Lwb + Lt. (2.24)
Para a adimensionalização da sustentação total convém ter em conta que a asaconstitui claramente a contribuição mais importante para a sustentação. Por isso (eporque as contas ficam facilitadas) adimensionaliza-se a sustentação total pela área daasa S ≡ Sw .
CL =L
12ρV 2S
= Lwb12ρV 2S
+ Lt12ρV 2S
= CLwb +Lt
12ρV 2S
. (2.25)
Mas, tendo em conta (2.22),
Lt =12ρV ′2StCLt =
12ρV 2S
(V ′
V
)2 StSCLt =
12ρV 2S ηt
StSCLt (2.26)
em que
ηt ≡(V ′
V
)2
. (2.27)
O módulo da velocidade é habitualmente pouco afectado pelo downwash, admitindo-senormalmente que ηt ≈ 1. A sustentação total é então
CL = CLwb + ηtStSCLt ≈ CLwb +
StSCLt (2.28)
21
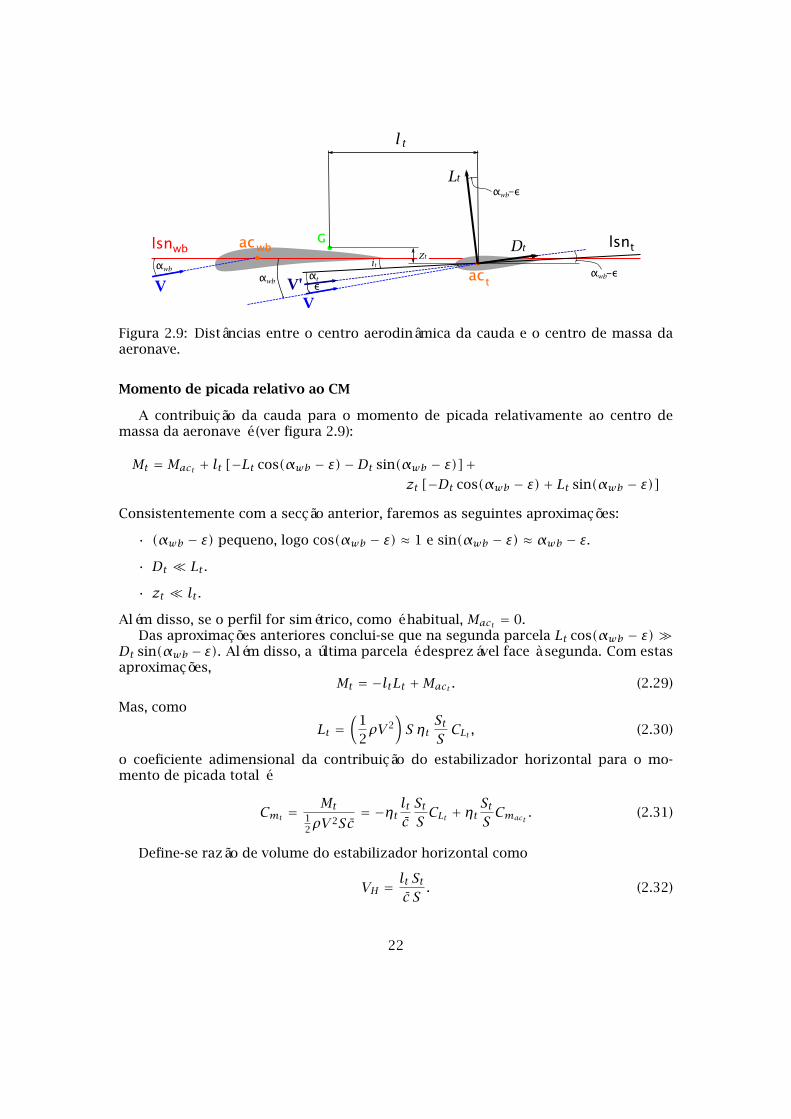
Figura 2.9: Distâncias entre o centro aerodinâmica da cauda e o centro de massa daaeronave.
Momento de picada relativo ao CM
A contribuição da cauda para o momento de picada relativamente ao centro demassa da aeronave é (ver figura 2.9):
Mt = Mact + lt [−Lt cos(αwb − ε)−Dt sin(αwb − ε)]+zt [−Dt cos(αwb − ε)+ Lt sin(αwb − ε)]
Consistentemente com a secção anterior, faremos as seguintes aproximações:
• (αwb − ε) pequeno, logo cos(αwb − ε) ≈ 1 e sin(αwb − ε) ≈ αwb − ε.
• Dt Lt .
• zt lt .
Além disso, se o perfil for simétrico, como é habitual, Mact = 0.Das aproximações anteriores conclui-se que na segunda parcela Lt cos(αwb − ε)
Dt sin(αwb − ε). Além disso, a última parcela é desprezável face à segunda. Com estasaproximações,
Mt = −ltLt +Mact . (2.29)
Mas, como
Lt =(
12ρV 2
)S ηt
StSCLt , (2.30)
o coeficiente adimensional da contribuição do estabilizador horizontal para o mo-mento de picada total é
Cmt =Mt
12ρV 2Sc
= −ηtltcStSCLt + ηt
StSCmact
. (2.31)
Define-se razão de volume do estabilizador horizontal como
VH =lt Stc S
. (2.32)
22

Figura 2.10: Distância entre o centro aerodinâmica do estabilizador e o centro de massalt ou o centro aerodinâmica lt da aeronave.
Assim, podemos concluir finalmente que
Cmt = −ηtVHCLt + ηtStSCmact
. (2.33)
O centro de massa (CM) de uma aeronave não é fixo, pelo que VH depende da po-sição deste. Convém-nos explicitar a posição do CM nas nossas equações e para issointroduzimos a distância entre os centros aerodinâmicos da asa+fuselagem e do esta-bilizador horizontal, lt . Pela figura 2.10 vemos que
lt = lt + (h− hnwb)c. (2.34)
Definindo
VH =lt Stc S
, (2.35)
podemos escrever
VH = VH +StS(h− hnwb). (2.36)
A equação (2.33) pode então escrever-se numa forma que explicita a dependência daposição do centro de massa:
Cmt = −ηtVHCLt + CLtηtStS(h− hnwb)+ ηt
StSCmact
. (2.37)
O momento de picada total é dado pela soma das várias contribuições, Cm = Cmwb+Cmt + CmP . Substituindo as expressões de cada uma das contribuições, e notando queCL = CLwb + ηt(St/S)CLt , obtém-se
Cm = Cmacwb + CL(h− hnwb)− ηtVHCLt + CmP + ηtStSCmact
. (2.38)
Se, como é habitual, ηt ≈ 1 e o perfil dos estabilizadores é simétrico (Cmact= 0), a
expressão acima simplifica-se:
Cm = Cmacwb + CL(h− hnwb)− VHCLt + CmP . (2.39)
23

Cmα e Ponto neutro
O coeficiente Cmα (pitch stiffness) é de grande importância para a estabilidade deuma aeronave. Para o calcular derivamos (2.39):
Cmα ≡∂Cm∂α
= ∂Cmacwb
∂α+ CLα(h− hnwb)− VH
∂CLt∂α
+ ∂CmP
∂α. (2.40)
Por definição de centro aerodinâmico,
∂Cmacwb
∂α= 0. (2.41)
Logo
Cmα = CLα(h− hnwb)− VH∂CLt∂α
+ ∂CmP
∂α. (2.42)
A condição de estabilidade é Cmα < 0. Ora, o valor de Cmα depende da posição doCM. Logo, variando h podemos fazer Cmα positivo ou negativo. A posição do CM quetorna Cmα = 0 separa regiões de estabilidade e instabilidade.
O ponto neutro hn pode definir-se como posição que o CM do avião deveria ter paraque Cmα = 0. O ponto neutro é então o centro aerodinâmico do avião: o momento depicada calculado relativamente a ele não depende do ângulo de ataque.
Para a determinação do ponto neutro basta colocar Cmα = 0 em (2.42), e resolverem ordem a h, obtendo-se
hn = hnwb −1CLα
(∂Cmacwb
∂α− VH
∂CLt∂α
+ ∂CmP
∂α.)
(2.43)
Substituindo na expressão de Cmα , obtém-se
Cmα = CLα(h− hn). (2.44)
A margem estática Kn define-se como a distância (adimensional) entre o centro demassa e o ponto neutro:
Kn = hn − h.Logo, podemos escrever
Cmα = −CLαKn. (2.45)
Daqui podemos concluir que
• Kn < 0⇒ Cmα > 0: a aeronave é instável.
• Kn > 0⇒ Cmα < 0: a aeronave é estável.
• Kn > 0⇒ h < hn: CM à frente do PN é estável.
Quando mais à frente do ponto neutro estiver o centro de massa, maior será amargem estática e maior a estabilidade estática do avião, mas uma estabilidade estáticaexagerada diminui manobrabilidade do avião.
24

Figura 2.11: Ângulos de ataque e sustentação na asa e no estabilizador.
Definição alternativa de ponto neutro
Por vezes define-se ponto neutro como a localização do CM para o qual
dCmdCL
= 0. (2.46)
No entanto, esta definição só coincide com a anterior em algumas condições de voobem definidas (ex: voo de planeio de uma aeronave rígida a baixo número de Mach),pois só nesse caso Cm e CL dependem apenas de α. Nesse caso,
dCmdCL
=
(∂Cm∂α
)(∂CL∂α
)e portanto
dCmdCL
= 0⇒ ∂Cm∂α
= 0.
Mas tanto CL como Cm dependem não apenas de α mas também do número deMach (efeitos de compressibilidade) e da pressão dinâmica (efeitos aeroelásticos). Adefinição da equação (2.46) é por isso, quando muito, uma aproximação (apesar demuito usada e frequentemente útil).
2.3 Sustentação e momento de picada em função do ân-gulo de ataque
Como habitualmente, vamos admitir que a aeronave está a voar com um ângulo deataque dentro da zona de linearidade, isto é, que as forças de sustentação e o momentode picada total variam linearmente com o ângulo de ataque. Iremos determinar asexpressões para CL e Cm em função do(s) ângulo(s) de ataque, bem como expressõespara a posição do ponto neutro hn.
2.3.1 Coeficiente de sustentação total
Considere-se uma aeronave numa configuração convencional: asa + fuselagem +estabilizador horizontal. Na figura 2.11 estão representados os ângulos de ataque na
25

Figura 2.12: Relação entre ângulos de ataque na asa e no estabilizador, e sustentaçãono estabilizador.
asa e no estabilizador (tendo em conta os ângulos de incidência do estabilizador e oângulo de downwash) e as respectivas forças de sustentação. Como admitimos estarna zona de linearidade, os coeficientes de sustentação na asa e na cauda são dados por
CLwb = awbαwb, (2.47)
CLt = atαt = at(αwb − it − ε). (2.48)
Na equação (2.48) usou-se a relação entre os ângulos de ataque absolutos na asa+fuse-lagem αwb e no estabilizador αt ,
αt = αwb − it − ε, (2.49)
que se pode obter a partir da figura 2.12.O ângulo de downwash é proporcional à sustentação criada pela asa. Por isso po-
demos admitir que varia linearmente com αwb:
ε = ε0 +∂ε∂ααwb = ε0 + εααwb. (2.50)
Nesta equação ε0 é a contribuição do campo de velocidades induzido pela fuselagem epela torção da asa, não variando com o ângulo de ataque, e εα é contribuição da esteirade vórtices do bordo de fuga, cuja intensidade é proporcional a CL, e portanto a αwb.
Escrevendo agora a equação (2.48) numa forma que explicita os termos constantese os que dependem de αwb, obtém-se
CLt = at [αwb(1− εα)− (it + ε0)] . (2.51)
Usando (2.47) e (2.51) na equação para o coeficiente de sustentação total (2.28) obtém-se uma expressão em função de αwb
CL = awbαwb + atαwb(1− εα)StSη− at(it + ε0)
StSη
= awb[
1+ atStawbS
η(1− εα)]αwb − at
StSη(it + ε0).
(2.52)
26

Figura 2.13: Curvas CL vs. αwb e vs. α absoluto da aeronave.
Podemos escrever a expressão anterior na forma
CL = CL0 + a αwb, (2.53)
com
a = awb[
1+ atStawbS
(1− εα)η], (2.54)
CL0 = −atStS(it + ε0)η. (2.55)
Note-se que CL0 < 0 e que habitualmente podemos usar a aproximação η ≈ 1.O ângulo de ataque absoluto da aeronave total, representado simplesmente por
α, é o ângulo de ataque do escoamento incidente medido relativamente à linha desustentação nula da aeronave. Assim,
CL = CL0 + aαwb = aα. (2.56)
Daqui podemos deduzir que
α = αwb +CL0
a= αwb −
ataStSη(it + ε0). (2.57)
Como se pode constatar na figura 2.13, usar o ângulo de ataque absoluto implica ape-nas a mudança da origem do referencial de modo a que a curva CL vs. α passe pelaorigem, mas o declive CLα da curva permanece o mesmo.
2.3.2 Momento de picada total
O momento de picada total é dado pela equação (2.39). Podemos escrever CL eCLt em função tanto de αwb. Além disso, o momento de picada devido ao sistemade propulsão pode ser escrito como a soma de um termo constante e um termo quedepende de αwb. Admitimos que a variação com αwb é linear, pelo que
CmP = (CmP )0 +∂CmP
∂ααwb. (2.58)
27
Habitualmente podemos desprezar esta contribuição. Quando for necessário incluí-la,
teremos de determinar (CmP )0) e∂CmP∂α .
Substituindo em (2.39) as expressões de CL, dadas por (2.53), (2.54) e (2.55), de CLt ,dada por (2.51), e de CmP , dada por (2.58), obtemos
Cm = Cm0 + Cmααwb, (2.59)
em que o termo constante Cm0 é dado por
Cm0 = Cmacwb + at(it + ε0)VH + (CmP )0,
e o declive Cmα (pitch stiffness) se pode escrever de duas formas equivalentes,
Cmα = a(h− hnwb)− atVH(1− εα)+∂CmP
∂α(2.60)
= awb(h− hnwb)− atVH(1− εα)+∂CmP
∂α. (2.61)
Muitas vezes é mais útil escrever Cm em função do ângulo de ataque absoluto α.Para isso comecemos por escrever a relação do momento de picada devido ao sistemade propulsão com α, que continua a ser linear mas em que o termo constante é dife-rente:
CmP = (CmP )0 +∂CmP
∂ααwb, (2.62)
em que (CmP )0 será determinado em cada caso. Agora podemos substituir em (2.39)as expressões de CL, dada por (2.56), de CLt , dada por (2.51) juntamente com a relaçãoente ângulos de ataque (2.57), e de CmP , dada por (2.62), obtendo
Cm = Cm0 + Cmαα, (2.63)
sendo o coeficiente Cm0 dado por
Cm0 = Cmacwb + at(it + ε0)VH[
1− ataStS(1− εα)
]+ (CmP )0. (2.64)
Note-se que Cmα é, tal como no caso anterior, dado por (2.60) ou (2.61).
Ponto neutro
Por definição de ponto neutro, Cmα = 0 quando h = hn. Usando (2.60),
a(hn − hnwb)− atVH(1− εα)+∂CmP
∂α= 0.
Resolvendo em ordem a hn obtemos
hn = hnwb +ataVH(1− εα)+
1a∂CmP
∂α. (2.65)
Note-se que com frequência a contribuição da propulsão pode ser desprezada.
28

Figura 2.14: As forças e momentos aerodinâmicos aplicados a uma aeronave podemser decompostos em: sustentação aplicada no ponto neutro e momento de picadarelativamente ao ponto neutro. (Fonte: [1])
Como vimos, o coeficiente de sustentação é dado em função do ângulo de ataqueabsoluto por CL = CLαα, enquanto que o momento de picada, dado por (2.63), podetomar uma forma muito útil se usarmos a expressão para o ponto neutro:
Cm = Cm0 + Cmαα = Cm0 + CLα(h− hn)α. (2.66)
As forças (de sustentação) e momentos aplicados numa aeronave podem portanto serdescritas através da força de sustentação aplicada no ponto neutro e do momento depicada Cm0 relativamente ao ponto neutro, como representado na figura 2.14. Note-seque a configuração analizada não inclui leme de profundidade (elevator) pelo que asua contribuição não foi incluída em (2.66).
2.4 Equilíbrio, Estabilidade e Controlo Longitudinais
2.4.1 Equilíbrio sem leme de profundidade
Para a configuração asa + fuselagem + estabilizador horizontal (fixo), as condiçõesde equilíbrio são L = W e M = 0.
L = W ⇒ CLeq =W
12ρV 2S
. (2.67)
Como CL = aα, temos:
CLeq = aαeq e Veq =√√√√ W
12ρSCLeq
. (2.68)
e tambémCm = Cm0 + (h− hn)CLααeq = 0. (2.69)
Existe um ângulo de ataque de equilíbrio,
αeq =−Cm0
(h− hn)CLα. (2.70)
29

Figura 2.15: A deflexão do leme de profundidade, δe, é positiva quando aumenta acurvatura efectiva da cauda, aumentando a sustentação no estabilizador horizontal
Uma vez que todas as outras grandezas são constantes, αeq só pode variar mudandoh! Podemos alterar o ponto de equilíbrio (αeq e Veq) mudando posição do CM, mas issoé pouco prático e altera também curva Cm vs. α. Uma outra possibilidade é modificara configuração aerodinâmica. Para isso pode usar-se um estabilizador com ângulo deincidência it variável, o que permite modificar o valor de Cm0 e desta forma alteraro ângulo de ataque e, consequentemente, a velocidade de equilíbrio. Uma alternativamais frequente é usar um leme de profundidade (elevator) acoplado ao estabilizador.
2.4.2 Leme de profundidade
O efeito da deflexão do leme pode traduzir-se como o aumento da curvatura efectivado estabilizador. Como se mostra na figura 2.15, define-se a deflexão como positiva sea curvatura do estabilizador aumenta (isto é, torna-se mais positiva), o que conduz aum aumento da sustentação no estabilizador: δe > 0 se ∆Lt > 0.
Para garantir que o leme é sempre eficaz a deflexão máxima permitida não deveultrapassar certos limites. Para deflexões demasiado grandes o estabilizador poderiaentrar em perda e o leme deixaria de ser eficaz. Iremos sempre, além disso, admitirque a relação entre δe e ∆Lt é linear (cfr. figura 2.16).
Uma variação da sustentação na cauda conduz a uma variação da sustentação total,que é pequena quando comparada com a sustentação total e é dada por
∆CL = CLδeδe, (2.71)
em que, de acordo com a definição do sinal de δe,
CLδe ≡∂CL∂δe
> 0. (2.72)
O momento de picada total irá também variar e esta variação não é desprezável faceao momento total, o que permite ajustar o ponto de equilíbrio da aeronave. A variaçãodo momento de picada devido a uma deflexão δe do leme de profundidade pode serdada por
∆Cm = Cmδeδe, (2.73)
em que o coeficiente de proporcionalidade entre Cm e δe é negativo:
Cmδe ≡∂Cm∂δe
< 0. (2.74)
30

CLt = atαt CLt = atαt + aeδe
Figura 2.16: Sustentação na cauda sem (esquerda) e com (direita) deflexão δe do lemede profundidade.
A sustentação e o momento de picada totais de uma aeronave dependem do ângulode ataque absoluto e de δe, e temos:
CL = CL(α)+ CLδeδe,Cm = Cm(α)+ Cmδeδe.
(2.75)
Na gama de valores de α em que a variação é linear, podemos escreverCL = CLαα+ CLδeδe,Cm = Cm0 + Cmαα+ Cmδeδe.
(2.76)
Estas expressões são válidas quer para o caso de asas voadoras ou asas em delta,em que o leme está montado na própria asa, quer quando a aeronave tem o lemede profundidade montado num estabilizador horizontal. Neste último caso podem-sedeterminar expressões para CLδe e Cmδe em função das características do leme, o quefaremos em seguida.
Eficácia de sustentação do leme de profundidade
A eficácia de sustentação do leme de profundidade, ae, mede a capacidade que oleme tem para criar sustentação no estabilizador para uma dada deflexão δe:
ae =∂CLt∂δe
. (2.77)
Uma vez que CL = CLwb +StSCLt , a derivada CLδe é dada por
CLδe =∂CLwb∂δe
+ StSae, (2.78)
e, como para aeronaves com estabilizador horizontal∂CLwb∂δe ≈ 0,
CLδe =StSae. (2.79)
Para determinar a derivada Cmδe para aeronaves com estabilizador partimos de
Cm = Cmacwb + CL(h− hnwb)− VHCLt + CmP ,
31

de onde se deduz
Cmδe =∂Cmacwb
∂δe+ CLδe (h− hnwb)− VH
∂CLt∂δe︸ ︷︷ ︸ae
+ ∂CmP
∂δe︸ ︷︷ ︸≈0
. (2.80)
Para aeronaves com estabilizador horizontal,∂Cmacwb∂δe ≈ 0 e CLδe = ae
StS . Logo,
Cmδe = −ae[VH −
StS(h− hnwb)
]. (2.81)
2.4.3 Deflexão do leme de profundidade para equilíbrio
A partir do sistema de equações (2.76) podem-se determinar as condições de equi-líbrio da aeronave que, para voo horizontal, são
Leq = W,Meq = 0.
(2.82)
O índice eq designa a situação de equilíbrio. Para designar o valor da deflexão do lemede profundidade e ângulo de ataque e correspondente coeficiente de sustentação (ede momento de picada) que permitem à aeronave voar em equilíbrio com uma certavelocidade, usaremos o índice trim. (O índice trim refere-se ao equilíbrio numa certasituação de voo.)
É conveniente usar as equações de equilíbrio (2.82) na forma adimensionalCLtrim =
Leq12ρV
2trimS
= W12ρV
2trimS
,
Cmtrim = 0,(2.83)
que nos permitem escrever, tendo em conta (2.76),CLtrim = CLααtrim + CLδeδetrim ,
0 = Cm0 + Cmααtrim + Cmδeδetrim .(2.84)
Estas são as equações de equilíbrio para αtrim e δetrim . Para as resolver podemos escrevê-las na forma matricial: [
CLα CLδeCmα Cmδe
][αtrim
δetrim
]=[CLtrim
−Cm0
]. (2.85)
A solução de (2.85) permite obter os valores do ângulo de ataque e da deflexão do lemede profundidade que garantem o voo em equilíbrio à velocidade Vtrim:
αtrim =CLtrimCmδe + Cm0CLδe
det,
δetrim = −CLαCm0 + CLtrimCmα
det.
(2.86)
em que det representa o determinante da matriz do sistema:
det = CLαCmδe − CmαCLδe . (2.87)
32

Embora o valor do determinante possa ser facilmente calculado conhecidas as de-rivadas CLα , Cmα , CLδe e Cmδe , é muitas vezes útil usar expressões explícitas em funçãodas características da aeronave. Para aeronaves com cauda,
Cmα = CLα(h− hn),Cmδe = CLδe (h− hnwb)− aeVH ,
CLδe = aeStS.
Logo,
det = CLα[CLδe (hn − hnwb)− aeVH
](2.88)
= a ae[StS(hn − hnwb)− VH
]. (2.89)
Variação da deflexão do leme com a velocidade
Como vimos,
δetrim = −CLαCm0
det+ CLtrimCmα
det.
Mantendo constante a posição do centro de massa, h, a deflexão do leme de profun-didade necessária para equilíbrio, δetrim , é uma função exclusiva de CLtrim (supondo quenão há efeitos aeroelásticos, de compressibilidade, etc.). Na figura 2.17 representa-sea variação de δetrim com CLtrim para vários valores de h. Quando h = hn, verifica-se queδetrim não depende de CLtrim e toma um valor constante. Para h < hn a variação é linear,com declive negativo: δetrim diminui quando CLtrim aumenta, e é negativo para valoreselevados de CLtrim .
Interessa também estudar como varia a velocidade de equilíbrio com δetrim . Paramais facilmente compararmos diferentes situações de voo, é conveniente usarmos avelocidade equivalente (EAS), VE , definida por
VE =√ρρ0V, (2.90)
em que ρ é a massa volúmica à altitude de voo e ρ0 é massa volúmica ao nível do mar(SSL).
Em voo horizontal,
CLtrim =W
12ρV 2S
= W12ρ0V 2
ES. (2.91)
Em situação de equilíbrio, a variação da deflexão do leme com a velocidade equivalenteé então
δetrim = −CLαCm0
det− 2wCmα
ρ0 det1V 2E, (2.92)
em que w = W/S é a carga alar.Na figura 2.18 representa-se a variação de δetrim com VE para vários valores da mar-
gem estática Kn. Quando h = hn, Kn = 0 e δetrim é constante, não dependendo de VE .Neste caso a velocidade de equilíbrio não pode ser determinada pela deflexão do leme
33

Figura 2.17: Variação de δetrim com CLtrim para vários valores da posição do centro demassa h. (Fonte: [1])
de profundidade: não é possível usar esta superfície de controlo para alterar a veloci-dade. Quando Kn > 0 ⇒ h < hn, δetrim é negativo para valores reduzidos da velocidadee aumenta com VE . O declive da curva é maior para velocidades mais baixas, o quesignifica que há maior sensibilidade do controlo com VE reduzido. Pelo contrário, paravelocidades maiores, pequenas variações de δetrim correspondem a grandes variaçõesde VE . à medida que aumenta a margem estática, a curva apresenta uma curvaturamaior e os valores de δetrim necessários para um dado valor de VE vão aumentando(até atingir valores demasiado altos para garantir a eficácia do controlo). Vemos quea manobrabilidade do avião e a sua capacidade de ser controlado diminuem quandoaumenta a margem estática.
34

Kn = 0.0
Kn = 0.1
Kn = 0.2
40 60 80 100VE
-30
-25
-20
-15
-10
-5
5
∆e trim
Figura 2.18: Variação de δetrim com VE para margem estática Kn = 0, 0.1 e 0.2, para umaaeronave com características baseadas num Cessna 182. (δetrim medido em graus e VEem m/s.)
35

Capítulo 3
Estabilidade com Manche Livre eForças de Controlo
3.1 Momento de charneira de superfície de controlo
O controlo longitudinal de uma aeronave faz-se habitualmente por meio do leme deprofundidade (elevator). O compensador (trim tab) usa-se para facilitar a deflexão doleme ou para manter o avião em equilíbrio (trim) sem necessidade de actuação do leme.Nesta última função o compensador permite voar em equilíbrio mantendo o manchelivre.
Neste capítulo iremos determinar condições de equilíbrio e de estabilidade no casode voo com manche livre. Note-se que se o manche está livre, o leme também o es-tará. Iremos também procurar determinar qual a força de controlo necessária paraestabelecer certa deflexão no leme ou certa velocidade de equilíbrio.
3.1.1 Momento de charneira
Para manter ou alterar a deflexão de uma superfície de controlo é necessário aplicarum momento na charneira (dobradiça) que permita contrariar os momentos devidosàs forças aerodinâmicas.
A figura 3.1 representa uma parte de um estabilizador horizontal com um lemede profundidade e um compensador (tab). Definimos Se como a área da parte doleme a jusante da linha de charneira e ce como a corda média da parte do leme ajusante da linha de charneira. O momento de charneira, isto é, o momento das forçasaerodinâmicas exercidas no leme calculado em relação à linha de charneira do lemede profundidade, é designado por He. Supondo η ≈ 1, o coeficiente do momento decharneira é
Che =He
12ρV 2Sece
. (3.1)
O sentido positivo de deflexão de δt > 0 é definido da mesma forma que para δe.Assim, na figura 3.2, δe < 0 e δt > 0. Admitimos uma relação linear entre Che e αt , δee δt , pelo que
Che = b0 + b1αt + b2δe + b3δt. (3.2)
36

Figura 3.1: Geometria do leme. (Fonte: Etkin)
Por definição,
b1 =∂Che∂αt
, b2 =∂Che∂δe
, b3 =∂Che∂δt
.
Se o perfil do estabilizador for simétrico não há forças ou momentos aerodinâmicosquando αt = 0 = δe = δt , pelo que nesse caso b0 = 0.
Na equação (3.2) e na definição de b1 o ângulo de ataque considerado é αt . Dadoque αt = αwb(1 − εα) − (it + ε0) e que o ângulo de ataque absoluto da aeronave éα = αwb − at
aStS (it + ε0), podemos escrever
b1αt = b1
[α+ at
aStS(it + ε0)
](1− εα)− (it + ε0)
= b1(1− εα)α− b1(it + ε0)
[1− at
aStS(1− εα)
].
Substituindo em (3.2) obtemos uma expressão para o coeficiente do momento de char-neira em função do ângulo de ataque absoluto:
Che = Che0 + Cheαα+ b2δe + b3δt, (3.3)
37

Figura 3.2: Deflexões do leme de profundidade e do compensador. (Fonte: Etkin)
com
Che0 = b0 − b1(it + ε0)[
1− ataStS(1− εα)
], (3.4)
Cheα = b1(1− εα). (3.5)
3.2 Sustentação e momento de picada com manche livre
Na situação tratada na secção 2.4 supôs-se que o leme de profundidade estava fixo,isto é, que a deflexão do leme permanecia constante, δe = constante. A condição quevai ser considerada agora é a de leme completamente livre. Neste caso a deflexão doleme é aquela que anula o momento de charneira, ou seja, aquela para a qual He = 0(Che = 0).
Ambos os casos são ideais. O leme não está nunca completamente fixo tanto por-que em muitas aeronaves é difícil manter o manche completamente fixo como porquea estrutura das aeronaves não é totalmente rígida e existem sempre deformações quealteram ligeiramente a posição do leme. Por outro lado o leme nunca está comple-tamente livre porque existe sempre algum atrito, o que leva ao aparecimento de ummomento de charneira de atrito. No entanto estes casos ideais estão suficientementeperto da realidade para podermos aplicar os resultados que obtemos.
3.2.1 Deflexão do leme com manche livre
Como vimos, a condição de manche livre é He = 0 a Che = 0. Vamos supor que δtestá fixo, mas que o leme está livre, pelo que usamos a notação δe = δefree . Da equação(3.3) obtemos, para manche livre,
Che = Che0 + Cheαα+ b2δefree + b3δt = 0. (3.6)
O leme de profundidade deflecte até He se anular e o valor de δefree é
δefree = −1b2
(Che0 + Cheαα+ b3δt
). (3.7)
38

3.2.2 Sustentação e momento de picada em função do ângulo de ata-que
Tendo em conta a contribuição do compensador, a sustentação total é
CL = CLαα+ CLδeδe + CLδtδt. (3.8)
No entanto a contribuição do compensador para a sustentação total é pequena, peloque CLδt é pequeno quando comparado com as outras derivadas e a última parcela éhabitualmente desprezada. Com manche livre a deflexão do leme verifica (3.7), dondese conclui que o coeficiente de sustentação total no caso de voo com manche livre, quevamos designar por C′L, é dado por
C′L = CLαα− CLδe1b2
(Che0 + Cheαα+ b3δt
), (3.9)
que se pode escrever na formaC′L = C′L0
+ C′Lαα (3.10)
com
C′L0= −
CLδeb2
(Che0 + b3δt
), (3.11)
a′ = C′Lα = CLα −CLδeb2Cheα . (3.12)
Num voo com manche livre a relação entre CL e α continua a ser linear, mas a linha desustentação nula altera-se (C′L0
≠ 0) e o declive da recta diminui (a′ < a).Analogamente, para o momento de picada total relativo ao centro de massa temos
Cm = Cm0 + Cmαα+ Cmδeδe + Cmδtδt. (3.13)
Dado que o compensador é normalmente pequeno, tanto a sustentação como o mo-mento de picada adicionais criados pela deflexão δt são pequenos e, em primeiraaproximação, podemos fazer Cmδt
≈ 0 e desprezar o último termo. Usando (3.7),obtemos
C′m = Cm0 + Cmαα− Cmδe
1b2
(Che0 + Cheαα+ b3δt
), (3.14)
em que C′m designa o momento de picada total relativamente ao centro de massa paravoo com manche livre. A equação anterior tem a forma
C′m = C′m0+ C′mα
α, (3.15)
com
C′m0= Cm0 −
Cmδe
b2
(Che0 + b3δt
), (3.16)
C′mα= Cmα −
Cmδe
b2Cheα . (3.17)
Tendo em conta que Cmδe , b2 e Cheα são negativos, |C′mα| < |Cmα|. O declive da curva de
Cm com α é menos negativo e isto significa que, com manche livre, há uma diminuiçãoda estabilidade estática.
39

3.2.3 Sustentação na cauda e factor de manche livre
Pretende-se agora determinar a variação da sustentação na cauda com αt para umaaeronave com um estabilizador horizontal com perfil simétrico (donde b0 = 0) e mu-nido de um leme de profundidade. Supomos que existe um compensador, mas que asua contribuição para a sustentação é desprezável. Com manche livre
Che = Che0 + b2αt + b2δefree + b3δt = 0,
pelo que
δefree = −1b2(b1αt + b3δt) .
Então o coeficiente de sustentação na cauda é
C′Lt = atαt + aeδefree +∂CLt∂δt
δt
= atαt − ae1b2(b1αt + b3δt)+
∂CLt∂δt︸ ︷︷ ︸≈0
δt
Logo,
C′Lt =(at −
aeb1
b2
)αt −
aeb3
b2δt.
A variação com αt é linear e o declive da recta é dado por
∂C′Lt∂αt
= at −aeb1
b2= at
(1− aeb1
atb2
)= atF, (3.18)
em que F é designado por factor de manche livre,
F = 1− aeb1
atb2. (3.19)
3.2.4 Ponto neutro de manche livre
O momento de picada total relativo ao centro de massa depende das contribuiçõesda asa e do estabilizador (ver equação (2.39)),
C′m = Cmacwb + CLwb(h− hnwb)−StSltcC′Lt
= Cmacwb + CLwb(h− hnwb)−StS(h− hnwb)C′Lt − VHC
′Lt .
Tendo em conta que (ver equação (2.28))
C′L = CLwb + ηtStSC′Lt ,
obtemos finalmente
C′m = Cmacwb + C′L(h− hnwb)− VHC′Lt . (3.20)
40

Derivando (3.20) em ordem a α, obtém-se
C′mα= C′Lα(h− hnwb)− VH
∂C′Lt∂α
. (3.21)
O ponto neutro de manche livre define-se-se como o ponto para o qual C′mα= 0.
Logo, com C′Lα ≡ a′ e tendo em conta que
∂C′Lt∂αt
= atF ⇒∂C′Lt∂α
=∂C′Lt∂αt
∂αt∂α
= Fat(1− εα),
obtemos
h′n = hnwb +Fata′VH(1− εα). (3.22)
Pode-se obter facilmente uma expressão alternativa usando C′mα= C′Lα(h− h′n):
h− h′n =C′mα
C′Lα= 1a′
(Cmα −
Cmδe
b2Cheα
)= 1a′
(a(h− hn)−
Cmδe
b2Cheα
).
Usando as expressões para a′, CLδe , Cmδe e Cheα , obtemos finalmente
h′n = hn −aeb1
a′b2(1− εα)
[VH −
StS(hn − hnwb)
]. (3.23)
Dado que hn = hnwb+ ata VH(1−εα), pode-se mostrar sem dificuldade que (3.22) e (3.23)são equivalentes.
A margem estática de manche livre define-se de forma análoga ao caso de manchefixo:
K′n = h′n − h. (3.24)
Habitualmente h′n < hn o que implica K′n < Kn. Com manche livre verifica-se portantouma redução da estabilidade estática.
3.3 Compensadores e equilíbrio com manche livre
A condição de manche livre determina para a deflexão do leme de profundidade umvalor δefree ≠ δetrim . Sem compensador, a velocidade de equilíbrio fica determinada pelacondição de manche livre. O compensador permite alterar velocidade de equilíbriomantendo livre o leme de profundidade.
As condições de equilíbrio com manche livre sãoChe = Che0 + Cheααfree + b2δefree + b3δt = 0,CL = CLααfree + CLδeδefree + CLδtδt = CLtrim ,Cm = Cm0 + Cmααfree + Cmδeδefree + Cmδt
δt = 0.(3.25)
A velocidade de voo pretendida, Vtrim, determina o valor de CLtrim . O sistema de equa-ções (3.25) pode resolver-se para obter os valores de αfree, δefree e δt que satisfazem as
41

condições de equilíbrio para uma velocidade Vtrim. O sistema (3.25) pode ser resolvidode forma aproximada supondo CLδt ≈ 0 e Cmδt
≈ 0, isto é, desprezando a contribuiçãodo compensador para a sustentação total e o momento de picada total. O compensa-dor é importante apenas para garantir a condição de manche livre (primeira equaçãodo sistema (3.25)). Nesta aproximação as duas últimas equações conduzem a
CLααfree + CLδeδefree = CLtrim
Cm0 + Cmααfree + Cmδeδefree = 0
O sistema (3.3) é idêntico a (2.84), pelo que as soluções serão também idênticas ao casode manche fixo. Logo, nesta aproximação,
δefree = δetrim
αfree = αtrim
(3.26)
A condição de manche livre é (3.6):
Che0 + Cheααfree + b2δefree + b3δttrim = 0,
e permite obter
δttrim = −1b3
(Che0 + Cheααtrim + b2δetrim
). (3.27)
Em conclusão, nesta aproximação (3.27) permite obter o valor de δttrim que faz δefree =δetrim e αfree = αtrim. Substituindo as expressões para δetrim e αtrim, dadas por (2.86),obtém-se
δttrim = −1b3
[Che0 +
Cm0
det
(CheαCLδe − b2CLα
)− a
′b2
det(h− h′n)CLtrim
]. (3.28)
Conclui-se que δttrim varia linearmente com CLtrim (mantendo h cte), e varia linearmentecom h.
3.4 Equilíbrio com deflexão do compensador
Note-se que o compensador pode ter uma deflexão não nula δt e a aeronave estar avoar com manche fixo. Nesse caso as equações de equilíbrio são apenas
CL = CLααtrim + CLδeδetrim + CLδtδt = CLtrim ,Cm = Cm0 + Cmααtrim + Cmδeδetrim + Cmδt
δt = 0,(3.29)
e a condição de manche livre, Che = 0, não se verifica. A solução do sistema éαtrim =
CLtrimCmδe + Cm0CLδe +(CLδeCmδt
− CLδtCmδe
)δt
det,
δetrim = −CLαCm0 + CLtrimCmα +
(CLαCmδt
− CLδtCmα
)δt
det.
(3.30)
42

Figura 3.3: Ligações entre manche e leme de profundidade. (Fonte: Etkin)
Os valores de equilíbrio αtrim e δetrim dependem da deflexão do compensador, δt . Noentanto, se pudermos admitir que o compensador tem uma contribuição desprezá-vel para a sustentação total (CLδt ≈ 0) e para o momento de picada total (Cmδt
≈ 0),obtemos a seguinte solução aproximada:
αtrim ≈CLtrimCmδe + Cm0CLδe
det
δetrim ≈CLαCm0 + CLtrimCmα
det
(3.31)
Nesta aproximação os valores de equilíbrio αtrim e δetrim não dependem da deflexão docompensador, δt . Esta influi apenas no coeficiente do momento de charneira e, comoveremos, na força de controlo.
3.5 Forças de Controlo
Nesta secção pretende-se determinar a força necessária para deflectir o leme deprofundidade em função de CLtrim ou Vtrim.
3.5.1 Forças de controlo e momento de charneira
Vamos considerar uma aeronave com um estabilizador horizontal com leme deprofundidade e compensador. Admitimos que todos os elementos são rígidos e que oatrito é desprezável.
A figura 3.3 representa esquematicamente as ligações entre manche e leme de pro-fundidade. Estas ligações podem ser, como nas aeronaves mais antigas, puramentemecânicas ou podem incluir sistemas hidráulicos, pneumáticos ou electrónicos. Emqualquer dos casos podemos supor que a força que é necessário exercer no manche,P , é proporcional ao momento de charneira He, isto é,
P = GHe. (3.32)
43

O coeficiente de proporcionalidade G é chamado factor de engrenagem (gear factor,em m-1). O sentido da força P é definido como positivo se está dirigida para a caudado avião. Tendo em conta a definição (3.1) do coeficiente do momento de charneira,
P = G 12ρV 2 Sece Che. (3.33)
Para prosseguir, é necessário encontrar uma expressão para Che em função de CLtrim
ou Vtrim. O coeficiente do momento de charneira pode ser dado pela equação (3.2):
Che = Che0 + Cheαα+ b2δe + b3δt.
Como vimos anteriormente (equações (3.6) e (3.27)), quando δt = δttrim , o equilíbrioatinge-se com manche livre, e nesse caso a força é nula:
P = 0⇒ Che = 0⇒ δttrim = −1b3
(Che0 + Cheααtrim + b2δetrim
). (3.34)
Consideremos agora o caso em que, mantendo a mesma velocidade de equilíbrio, δt ≠δttrim . Como referido na secção 3.4, o equilíbrio neste caso é ainda definido, pelo menosde forma aproximada, por α = αtrim e δe = δetrim , mas agora o momento de charneiranão se anula e a força não é nula. O coeficiente do momento de charneira pode entãoescrever-se
Che = Che0 + Cheααtrim + b2δetrim + beδt ≠ 0, (3.35)
ou, usando (3.34),Che = b3(δt − δttrim). (3.36)
Usando a expressão (3.28) para δttrim , obtém-se
Che = b3δt + Che0 +Cm0
det
(CheαCLδe − b2CLα
)− a
′b2
det(h− h′n)CLtrim . (3.37)
Num voo horizontal o coeficiente de sustentação é dado por
CLtrim =W
12ρV 2 S
= w12ρV 2
, (3.38)
em que w = W/S é a carga alar. Substituindo (3.38) e (3.37) em (3.33) e ordenando ostermos de modo a pôr em evidência a dependência de V , obtém-se a expressão para aforça de controlo:
P = A+ B12ρV 2, (3.39)
com
A = −GSe cewa′b2
det(h− h′n), (3.40)
B = GSe ce[b3δt + Che0 +
Cm0
det
(CheαCLδe − b2CLα .
)](3.41)
A é um termo independente da velocidade (depende de w e K′n), enquanto que B entrano termo relativo à dependência com a pressão dinâmica (com V 2).
Na figura 3.4 representa-se a variação da força de controlo com a velocidade. Daanálise da figura e das equações (3.39), (3.40) e (3.41) podemos concluir que a força de
44

Figura 3.4: Variação da força de controlo com a velocidade. (Fonte: Etkin)
controlo P é proporcional a Sece (isto é, ao cubo da dimensão linear do avião), ao factorde engrenagem G e à pressão dinâmica (P aumenta com ρ, diminuindo com altitude, eé proporcional a V 2). A posição do centro de massa afecta apenas o termo constante (seh diminui, P aumenta). A carga alar também afecta apenas termo constante (se cargaalar w aumenta, P aumenta). Finalmente, a variação da deflexão do compensador, δt ,altera o valor de B. Deste modo altera a curvatura da parábola, controla a intersecçãocom eixo V e portanto determina Vtrim, isto é, o valor de V para o qual P = 0.
3.5.2 Gradiente da força de controlo
O gradiente da força de controlo traduz a variação de P necessária para alterar avelocidade V . Se o gradiente é grande, o controlo é pesado, ou seja, é preciso variarmuito a força para mudar a velocidade; se é pequeno, o controlo é leve e uma pequenavariação da força altera muito a velocidade.
O termo A depende da margem estática de manche livre, enquanto que B não de-pende da posição do centro de massa mas depende da deflexão do compensador. As-sim, se alteramos a posição do centro de massa de h = h1 para h = h1 + ∆h (se oCM se deslocar para a cauda do avião) e ao mesmo tempo alteramos δttrim para manterVtrim constante, verifica-se que o gradiente diminui com K′n, como ilustra a figura 3.5.Quando K′n = 0, A anula-se e o declive também se anula se mantivermos a condição deVtrim permanecer constante.
Para determinar o gradiente da força de controlo, deriva-se P em (3.39) em ordema V obtendo-se
P = A+ B12ρV 2 ⇒ dP
dV= BρV.
Para valores típicos das derivadas de estabilidade o gradiente da força de controlo énegativo e varia linearmente com V .
45

Figura 3.5: Variação da força de controlo com a velocidade V da aeronave para dife-rentes valores de h, mantendo fixo o valor de Vtrim. (Fonte: [1])
Considere-se agora o caso de manche livre, em que P = 0. A deflexão do compen-sador é δt = δttrim e determina a velocidade de equilíbrio Vtrim. Da equação (3.39) comP = 0 segue-se que
B = − A12ρV
2trim
. (3.42)
Logo, obtemos (dPdV
)trim= −2
AVtrim
. (3.43)
Usando expressão para A, obtém-se finalmente(dPdV
)trim= 2GSecew
a′b2
det(h− h′n)
1Vtrim
. (3.44)
Conclui-se que quando o avião voa em equilíbrio com manche livre (sendo a forçade controlo nula por definição e a velocidade Vtrim determinada por δt = δttrim ), ogradiente da força de controlo é proporcional ao cubo da dimensão linear do avião(porque proporcional a Sece), à carga alar e à margem estática de manche livre K′n, e éinversamente proporcional a Vtrim. Logo, o controlo do leme de profundidade é «maispesado» a baixa velocidade, quando o centro de massa está mais à frente (margemestática maior) e com maior peso.
46

Capítulo 4
Efeitos de superfícieshiper-sustentadoras e dapropulsão na estabilidadelongitudinal
4.1 Influência de superfícies hiper-sustentadoras
As superfícies hiper-sustentadoras são elementos que provocam alteração da con-figuração das asas. Os seus efeitos na estabilidade de uma aeronave decorrem princi-palmente da modificação dos valores de hnwb , Cmacwb
e CLwb .
4.1.1 Influência dos flaps
Vamos considerar apenas o caso de flaps que cobrem parte da envergadura, nobordo de fuga.
Os efeitos aerodinâmicos dos flaps estão esquematizados na figura 4.1. A distri-buição de sustentação na asa é alterada e o ângulo de downwash aumenta (porque asustentação aumenta). Localmente, o efeito deflexão dos flaps é equivalente a aumen-tar a curvatura da asa. Como se mostra nas figuras 4.2 e 4.3, isto conduz a variações nasustentação da asa, no coeficiente do momento relativamente ao centro aerodinâmico
Figura 4.1: Efeitos aerodinâmicos. (Fonte: Etkin & Reid, Dynamics of Flight)
47

Figura 4.2: Efeitos da deflexão dos flaps. (Fonte: Etkin & Reid, Dynamics of Flight)
Figura 4.3: Efeito da deflexão dos flaps no coeficiente de sustentação (esquerda), ân-gulo de downwash (centro) e coeficiente do momento de picada (direita). (Fonte: Etkin& Reid, Dynamics of Flight)
da asa e no ângulo de downwash, resultando em
∆Cmwb = ∆Cmacwb+∆CLwb(h− hnwb), (4.1)
∆CL = ∆CLwb − atStS∆ε, (4.2)
∆Cmt = atVH∆ε. (4.3)
Dado que, como se referiu acima, o efeito da deflexão dos flaps é equivalente aaumentar a curvatura do perfil, as variações ∆Cmacwb
e ∆CLwb não dependem de α masapenas do ângulo de deflexão dos flaps. Admitiremos ainda que ∆hnwb é desprezável.Neste caso, o único efeito que a deflexão dos flaps tem em CLα e em Cmα é devido àvariação do ângulo de downwash ε.
Recordando que
CLα ≡ a = awb[
1+ atawb
StS(1− εα)
],
Cmα = a(h− hnwb)− atVH(1− εα),
conclui-se que
∆a ≡ ∆CLα = awbatawb
StS(−∆εα) = −at
StS∆εα, (4.4)
∆Cmα = (h− hnwb)∆a+ atVH∆εα (4.5)
=[−(h− hnwb)
StS+ VH
]at∆εα. (4.6)
Como ∆a < 0 e ∆Cmα > 0, a deflexão dos flaps diminui a estabilidade.
48

Figura 4.4: Forças laterais no hélice devido a ângulo de ataque. (Fonte: [1])
4.2 Influência da propulsão no equilíbrio e na estabili-dade
Há tipos de propulsão muito diversos (hélice, turboprops, jacto, etc.), pelo que édifícil fazer tratamento exaustivo. Faremos uma referência apenas aos tipos de pro-pulsão mais usados e mais estudados: hélice e jacto.
Formalmente, para descrever a influência da propulsão no equilíbrio e na estabi-lidade de uma aeronave basta introduzir nas equações os termos Cm0P
e ∂CmP /∂αe incluir os efeitos indirectos da propulsão nos coeficientes da asa+fuselagem e dacauda.
4.2.1 Propulsão a hélice
A força resultante da propulsão tem duas componentes: a força de propulsão T , aolongo do eixo (não afecta Cmα ), e uma força NP , no plano do hélice.
A contribuição devido à força NP no plano do hélice é
∆Cm = CNPxPcSPS, (4.7)
em que SP é a área varrida pelo hélice e
CNP =NP
12ρV 2SP
. (4.8)
Para pequenos ângulos de ataque podemos admitir que CNP é proporcional αP .Logo, NP contribui para Cm0P
e para ∂CmP /∂α. Esta última contribuição pode ser esti-mada a partir de (4.7):
∆Cm = CNPxPcSPS
⇒ ∂CmP
∂α= SPSxPc∂CNP∂αP
∂αP∂α
(4.9)
Se o hélice se encontra longe da asa, ∂αP∂α = 1. A colocação mais comum do hélice éperto da asa, o que induz upwash no hélice, caracterizado pelo ângulo de upwash εP .Deste modo,
αP = α+ εP + cte ⇒ ∂αP∂α
= 1+ ∂εP∂α
(4.10)
49

Figura 4.5: A direcção do escoamento incidente o do jacto não são iguais, o que provocauma força normal à linha de propulsão. (Fonte: [1])
Conclui-se portanto que a contribuição da propulsão para Cmα é
∂CmP
∂α= SPSxPc∂CNP∂αP
(1+ ∂εP
∂α
)(4.11)
Outros efeitos que a propulsão pode produzir são:
• Aumento da sustentação na asa (se escoamento a jusante do hélice incide sobrea asa)
• Aumento do valor efectivo de at e ae (depende de quão afectada é a cauda peloescoamento induzido pelo hélice)
• Aumento do ângulo de downwash (difícil de estimar)
4.2.2 Propulsão a jacto
A influência da propulsão a jacto na derivada cmα decorre de vários efeitos. Doisdeles estão representados nas figuras 4.5 e 4.6.
Na figura 4.5 mostra-se que num motor a jacto a direcção do escoamento incidentee a direcção do jacto podem não ser exactamente iguais, havendo uma variação domomento linear do fluido na direcção normal ao escoamento. Como consequência,existe uma força normal, representada na figura por Nj , a qual provoca um momentode picada relativamente ao centro de massa do avião.
Outro efeito está representado na figura 4.6. O jacto, saindo do motor, vai-se pro-gressivamente misturando com o ar circundante, criando uma zona de mistura que vaiaumentando de dimensões à medida que a distância à sa´da do motor aumenta. Paraesta zona de mistura contribuem tanto o jacto como o ar circundante. Neste, à medidaque parte do ar vai sendo integrado na zona de mistura, gera-se um escoamento nadirecção do jacto (designado por jet induced inflow) o qual altera o escoamento emtorno da cauda e deste modo o ângulo de ataque efectivo na cauda.
50

Figura 4.6: Jet induced flow: o diâmetro do jacto vai crescendo à custa de um fluxo dear do meio circundante, o que pode provoca uma alteração do escoamento incidentena cauda. (Fonte: [1])
51

Capítulo 5
Estabilidade Lateral-Direccional
A maioria dos aviões tem um plano de simetria e é este tipo de aeronaves queiremos ter em conta. Um movimento diz-se longitudinal se não altera a posição doplano de simetria e lateral se altera o plano de simetria. Portanto, há movimentolateral se existir derrapagem (sideslip), isto é, velocidade com componente segundo y ,ou velocidade angular de rolamento p (roll) ou velocidade angular de guinada r (yaw).Habitualmente há acoplamento entre movimentos (e controlo) laterais.
Em voo rectilíneo estacionário simétrico as forças e momentos laterais são nulos.Portanto, há equilíbrio para deflexão nula dos ailerons e do rudder, o que significa quenum voo rectilíneo simétrico o trim lateral está garantido. Por esta razão a posição docentro de massa não é importante na estabilidade lateral-direccional.
A estabilidade estática lateral-direccional permite estabelecer condições para que,após uma pequena perturbação que induza uma velocidade de derrapagem ou um ân-gulo de pranchamento, o avião retorne à posição de voo simétrico com asas niveladas.
5.1 Estabilidade direccional
5.1.1 Condições de estabilidade
O ângulo de derrapagem β é o ângulo entre a velocidade da aeronave (airspeed) e oplano de simetria. Como se pode constatar da figura 5.1,
β = arcsinvV. (5.1)
Num voo simétrico v = 0 e não existe derrapagem nem momento aerodinâmico deguinada. Pelo contrário, num voo com derrapagem existe um momento aerodinâmicode guinada N (ver figura 5.1). Para que um voo simétrico seja estável face a pequenasperturbações da velocidade lateral, é necessário que N > 0 para β > 0. A condição deestabilidade pode escrever-se como
∂N∂β> 0 (5.2)
O coeficiente do momento de guinada define-se como
Cn =N
12ρV 2Sb
, (5.3)
52

Figura 5.1: Voo com derrapagem.
em que b é a envergadura da asa. A condição de estabilidade para o estado não per-turbado é
Cnβ(β = 0) ≡(∂Cn∂β
)β=0
> 0. (5.4)
Para simplificar a notação omitir-se-á a menção a β = 0 sempre que isso não conduzira ambiguidades.
A principal contribuição para Cnβ provém do estabilizador vertical (fin), e tem umefeito estabilizador, isto é, se β > 0, o momento gerado pelo estabilizador vertical épositivo. A fuselagem tem uma contribuição pequena, frequentemente desprezável,mas tem um efeito desestabilizador. Estas contribuições estão representadas na figura5.2
A contribuição do estabilizador vertical depende do escoamento que nele incide. Oângulo de ataque efectivo no estabilizador vertical designa-se por αF e convenciona-seque αF > 0 se provoca força de sustentação LF no sentido positivo de y (ver figura5.3). Desta forma, omitindo a influência do(s) hélice(s), da asa e da fuselagem noescoamento, αF = −β. Esta influência pode ser incluída através de um ângulo desidewash σ :
αF = −β+ σ. (5.5)
O estabilizador vertical é uma superfície sustentadora, pelo que o coeficiente da forçaaerodinâmica na empenagem vertical depende linearmente do ângulo de ataque αF eda deflexão δr do leme de direcção (rudder),
CLF = aFαF + arδr = aF(−β+ σ)+ arδr . (5.6)
Aqui, aF é o declive da curva de CL com α para o estabilizador vertical, dado por (5.7),
53

Figura 5.2: Forças aerodinâmicas devido a derrapagem.
Figura 5.3: Estabilizador vertical. (Fonte: [1])
54

e ar é eficiência do leme de direcção (rudder), dado por (5.8):
aF ≡∂CLF∂αF
, (5.7)
ar ≡∂CLF∂δr
. (5.8)
O momento de guinada devido à força aerodinâmica aplicada no estabilizador verticalé (ver figura 5.3)
NF = −LF · lF = −CLF12ρV 2
F SF lF , (5.9)
em que VF é a velocidade do escoamento incidente no estabilizador vertical, SF é aárea do estabilizador vertical e lF é distância ao longo da direcção longitudinal entre ocentro aerodinâmico do estabilizador e o centro de massa (ou seja, é o módulo da coor-denada x do centro aerodinâmico do estabilizador vertical). O coeficiente do momentode guinada é
CnF =NF
12ρV 2Sb
= −CLF
12ρV
2F SF lF
12ρV 2Sb
= −CLFVV(VFV
)2
. (5.10)
em que se usou a razão de volume do estabilizador vertical, VV , é definida por
VV =SF lFSb
. (5.11)
Recordando a equação (5.6), obtém-se
CnF = − [aF(−β+ σ)+ arδr ]VV(VFV
)2
. (5.12)
Derivando em ordem ao ângulo de derrapagem β, obtemos finalmente
∂CnF∂β
= aFVV(VFV
)2(
1− ∂σ∂β
). (5.13)
O factor de sidewash ∂σ∂β é difícil de estimar pois depende da alteração do escoa-
mento devido à fuselagem e aos hélices. A asa têm também uma contribuição devidaao escoamento assimétrico (importante para asas com alongamento pequeno e comflecha). Com frequência desprezaremos este termo.
A razão de velocidades do escoamento incidente na asa e no estabilizador verticalé(VFV
)= 1, excepto se o estabilizador vertical estiver na esteira do hélice. Nesse caso
VF > V .Em conclusão, a contribuição do estabilizador vertical para a derivada Cnβ é posi-
tiva, pelo que tem um efeito estabilizador, e é proporcional a aF e VV .
5.1.2 Controlo de guinada
O controlo de guinada é feito através do leme de direcção (rudder), como se mostrana figura 5.4. Num voo simétrico com trajectória rectilínea a deflexão do rudder (δr ) énula. O rudder é importante quando se quer manter β ≠ 0, como nas situações de voo
55

Figura 5.4: A deflexão do leme de direcção rudder leva ao aparecimento de uma forçaaerodinâmica no estabilizador vertical que provoca um momento de guinada.
com derrapagem (ex: aproximação à pista), quando um motor deixa de funcionar (OEI:One Engine Inoperative) ou em manobras.
Atendendo a que CLF = aF(−β+ σ)+ arδr ,
CnF = −CLFVV(VFV
)2
,
conclui-se que
Cnδr =∂CnF∂δr
= −arVV(VFV
)2
. (5.14)
Num voo com ângulo de derrapagem estacionário, β ≠ 0. Se apenas houver deflexãodo rudder e não existir deflexão dos ailerons,
Cn = Cnββ+ Cnδr δr .
Para que o movimento seja estacionário Cn = 0. Logo, obtemos
βδr= −
CnδrCnβ
. (5.15)
Esta relação entre o ângulo de derrapagem e o ângulo de deflexão do rudder é apenasaproximada porque a deflexão do rudder provoca também um momento de rolamento.Este é compensado com os ailerons, o que provoca um momento adicional de guinadae a consequente necessidade de alterar de δr .
A deflexão do leme de direcção implica um momento de charneira e a correspon-dente força de controlo do rudder. Analogamente ao que acontece com o elevator, omomento de charneira é
Chr = b1αF + b2δr , (5.16)
56

enquanto que a força de controlo é dada por
P = G12ρV 2
F Sr cr (b1αF + b2δr ) (5.17)
= G12ρV 2
F Sr cr [b1(−β+ σ)+ b2δr ]. (5.18)
No caso de leme de direcção livre, Chr = 0⇒ δrfree = −b1
b2αF .
C′LF = aFαF + ar(−b1
b2αF)= aF
(1− arb1
aFb2
)︸ ︷︷ ︸
factor de rudder livre
αF (5.19)
5.2 Estabilidade lateral
Os movimentos de rolamento e guinada estão acoplados e a análise da estabili-dade deve ser feita considerando os dois movimentos em conjunto. No entanto, podeconseguir-se uma ideia aproximada acerca dos parâmetros de que depende a estabi-lidade lateral considerando apenas o grau de liberdade de rolamento, como se fosseindependente da guinada.
Supomos um voo estacionário rectilíneo, horizontal e de asas niveladas. Existeestabilidade de rolamento se, quando uma pequena perturbação conduzir a um ângulode pranchamento φ, o momento criado fizer a aeronave voltar a voo nivelado, ou seja,Clφ < 0.
5.2.1 Efeitos que induzem derrapagem num voo com pranchamento
Num voo rectilíneo com ângulo de pranchamento φ a derrapagem pode iniciar-se devido a um efeito dinâmico: o peso não se encontra no plano de simetria e temcomponente segundo y dada por W sinφ (ver figura 5.5). A aceleração lateral causadapor esta componente lateral do peso faz aparecer uma velocidade lateral, ou seja, umavelocidade de derrapagem.
Existe também um efeito «geométrico», que decorre do eixo de rotação do aviãonão ser a direcção da velocidade. Consideremos um voo rectilíneo horizontal em queo avião tem um ângulo de ataque αx , como exemplificado na figura 5.6. Nesta situaçãoa velocidade do avião está no plano de simetria e vy = 0. Admitamos agora que umapequena perturbação faz o avião rolar em torno do eixo x, passando o avião a ter umângulo de pranchamento φ (figura 5.7). Se a perturbação não fez alterar a velocidadelinear do avião, então esta deixou de estar no plano de simetria e tem uma componentesegundo o novo eixo y , ou seja, existe uma velocidade de derrapagem.
5.2.2 Momento de rolamento para estabilidade
Para existir estabilidade lateral, a derrapagem deve induzir um momento de rola-mento que volta a nivelar a aeronave.
Se considerarmos o efeito «dinâmico», a figura 5.5 permite concluir que se φ > 0a derrapagem induzida é β > 0 e que o momento a criar para nivelar as asas deve ser∆Cl < 0. Mas este momento deve depender da derrapagem criada, pelo que, na zona
57

Figura 5.5: Voo com pranchamento: o peso tem componente lateral não compensadapela sustentação, o que induz derrapagem.
Figura 5.6: Voo nivelado: vista de perfil (esquerda) e a partir da cauda (direita). Avelocidade do avião encontra-se no plano de simetria.
Figura 5.7: Voo com asas não niveladas, com ângulo de pranchamento φ. Agora avelocidade não se encontra no plano de simetria e tem componente v segundo y .
58

de lineridade, ∆Cl = Clββ e, tendo em conta o sinal pretendido para ∆Cl, conclui-seque a condição para existir estabilidade lateral é Clβ < 0.
A mesma conclusão se obtém considerando o efeito «geométrico». De facto, numvoo nivelado com ângulo de ataque αx a velocidade do avião tem componentes
~V =V cosαx
0V sinαx
, (5.20)
enquanto que num voo não nivelado, com ângulo de pranchamento φ, tem componen-tes
~V = V cosαxV sinαx sinφV sinαx cosφ
. (5.21)
Nos novos eixos há componente de ~V segundo y , pelo que
sinβ = vV= V sinαx sinφ
V= sinαx sinφ, (5.22)
isto é, existe um ângulo de derrapagem que depende de φ. Esta derrapagem induz ummomento de rolamento que é proporcional ao ângulo de derrapagem β,
∆Cl = Clββ, (5.23)
ou, usando (5.22),∆Cl = Clββ = Clβ arcsin(sinαx sinφ). (5.24)
Logo, quando as asas deixam de estar niveladas e existe um ângulo de pranchamentoφ é induzido momento de rolamento que é proporcional a
∂Cl∂φ
= ∂Cl∂β
∂β∂φ= Clβ
sinαx cosφ(1− sin2αx sin2φ)1/2
.
Se αx for pequeno, sinβ = sinαx sinφ⇒ β ≈ αx sinφ. Conclui-se que
∂Cl∂φ
= Clβsinαx cosφ
(1− sin2αx sin2φ)1/2≈ Clβαx cosφ
e, supondo αx > 0, o momento de rolamento induzido tem sinal de Clβ . Mas para haverestabilidade lateral o momento de rolamento induzido deve contrariar o rolamento,isto é, ∂Cl∂φ deve ser negativo. Conclui-se então que, para haver estabilidade lateral, énecessário que
Clβ < 0. (5.25)
5.2.3 «Efeito diedro»
A asa, a fuselagem e o estabilizador vertical contribuem para a derivada Clβ . Acontribuição mais importante é devida ao ângulo de diedro (é tão importante que Clβé por vezes chamada efeito diedro). O alongamento e afilamento da asa, bem como aflecha também são importantes para Clβ . Um outro factor importante é a posição daasa relativamente à fuselagem (asa alta ou asa baixa).
59

Figura 5.8: Efeito diedro: num voo nivelado sem derrapagem (figura de cima) a susten-tação é igual em ambas as asas, enquanto que num voo com ângulo de pranchamento(figura de baixo), para um avião com ângulo de diedro Γ > 0, a derrapagem induzidaleva a uma diferença de sustentação em cada uma das asas, que provoca um momentode rolamento que tende a nivelar as asas.
Contribuição do diedro das asas
Quando as asas têm um ângulo de diedro, a existência de velocidade de derrapagemleva a uma diferença na sustentação nas asas que provoca um momento de rolamento.Este contraria o pranchamento inicial (ver figura 5.8) e tem por isso um efeito estabili-zador.
Para determinar uma expressão aproximada para a contribuição do diedro das asaspara a derivada Clβ comecemos por notar que o ângulo de ataque numa asa dependeda razão entre a componente da velocidade perpendicular à linha de corda do perfil,Vn, e a componente segundo a linha de corda do perfil. De forma aproximada,
α ≈ VnV. (5.26)
No caso de asas com diedro, a figura 5.9 permite constatar que a componente normalda velocidade é, para a asa direita,
Vn = w cos Γ + v sin Γ ≈ w + vΓ , (5.27)
e para a asa esquerda,Vn = w cos Γ − v sin Γ ≈ w − vΓ . (5.28)
Para pequenos ângulos de derrapagem, β = v/V ⇒ v = βV . Tendo em conta (5.26),a variação de ângulo de ataque devido ao ângulo de diedro é, na asa direita ∆α =
60

Figura 5.9: Diferença de ângulo de ataque devido ao diedro.
+βΓ , enquanto que na asa esquerda é ∆α = −βΓ . Esta variação de ângulo de ataqueleva a uma diferença de sustentação entre a asa esquerda e a asa direita que gera ummomento de rolamento. Para perceber de que depende este momento, consideremosuma pequena secção da asa a uma distância y da raiz (y é positivo para a asa direita enegativo para a asa esquerda), de largura dy e com uma corda c. O perfil da secção écaracterizado pela curva de sustentação com o ângulo de ataque, que representaremospor a0, que pode depender da posição y pois o perfil pode variar ao longo da asa. Asustentação adicional criada devida à derrapagem pela secção considerada é(
12ρV 2
)a0∆αc dy.
Como existem duas secções em posições simétricas ±y , para as quais δα = ±βΓ , acontribuição delas para o momento de rolamento criado é
−2y(
12ρV 2
)a0(βΓ) c dy. (5.29)
O momento de rolamento obtém-se integrando estas contribuições para toda a asa. Ocoeficiente Cl é então
Cl =1
12ρV 2Sb
(−2)(
12ρV 2
)βΓ∫ b/2
0a0cydy. (5.30)
Note-se que tanto a corda c como a0 podem depender de y . A derivada Clβ obtémimediatamente de (5.30) por derivação em ordem a β(
Clβ)
diedro= − 2
SbΓ∫ b/2
0a0cydy. (5.31)
Para irmos mais longe, temos de fazer alguma hipóteses sobre a asa. Admitindouma asa em que a0 é constante ao longo da envergadura e em que o afilamento élinear, caso em que
c(y) = croot −(croot − ctip)
b/2y = croot
(1− (1− λ)
b/2y), (5.32)
S = crootb2(1+ λ), (5.33)
61
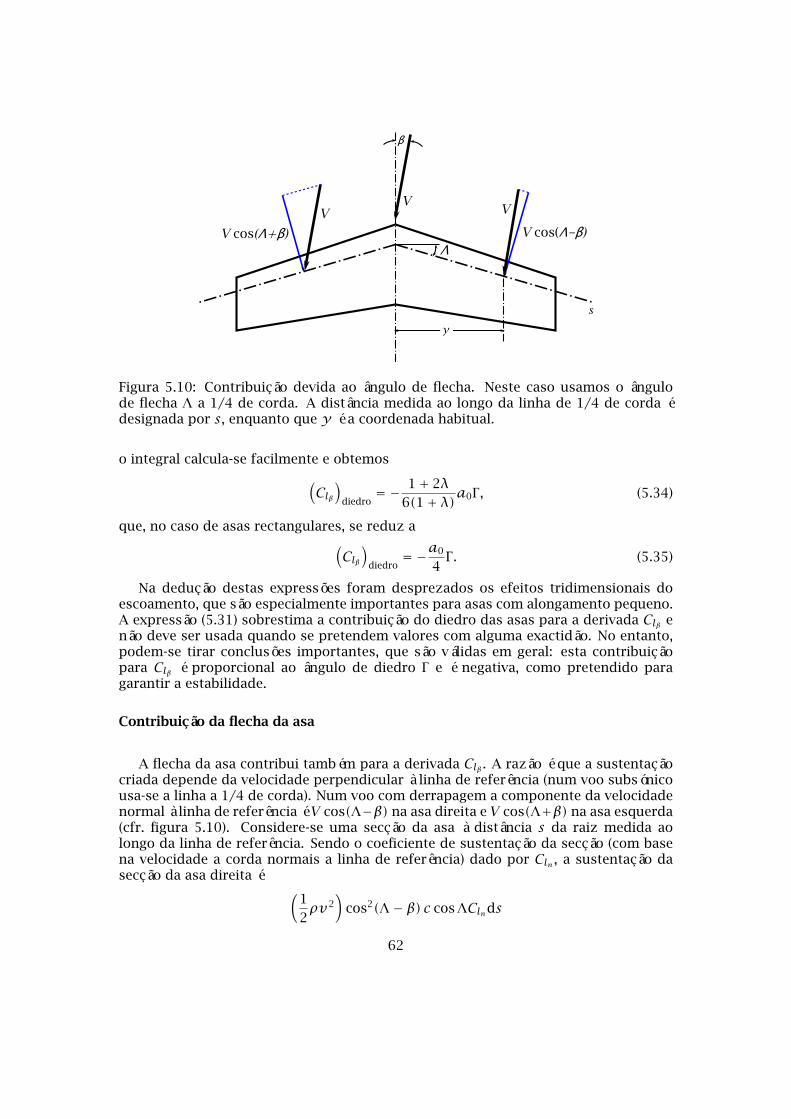
Figura 5.10: Contribuição devida ao ângulo de flecha. Neste caso usamos o ângulode flecha Λ a 1/4 de corda. A distância medida ao longo da linha de 1/4 de corda édesignada por s, enquanto que y é a coordenada habitual.
o integral calcula-se facilmente e obtemos(Clβ)
diedro= − 1+ 2λ
6(1+ λ)a0Γ , (5.34)
que, no caso de asas rectangulares, se reduz a(Clβ)
diedro= −a0
4Γ . (5.35)
Na dedução destas expressões foram desprezados os efeitos tridimensionais doescoamento, que são especialmente importantes para asas com alongamento pequeno.A expressão (5.31) sobrestima a contribuição do diedro das asas para a derivada Clβ enão deve ser usada quando se pretendem valores com alguma exactidão. No entanto,podem-se tirar conclusões importantes, que são válidas em geral: esta contribuiçãopara Clβ é proporcional ao ângulo de diedro Γ e é negativa, como pretendido paragarantir a estabilidade.
Contribuição da flecha da asa
A flecha da asa contribui também para a derivada Clβ . A razão é que a sustentaçãocriada depende da velocidade perpendicular à linha de referência (num voo subsónicousa-se a linha a 1/4 de corda). Num voo com derrapagem a componente da velocidadenormal à linha de referência é V cos(Λ−β) na asa direita e V cos(Λ+β) na asa esquerda(cfr. figura 5.10). Considere-se uma secção da asa à distância s da raiz medida aolongo da linha de referência. Sendo o coeficiente de sustentação da secção (com basena velocidade a corda normais a linha de referência) dado por Cln , a sustentação dasecção da asa direita é (
12ρv2
)cos2(Λ− β) c cosΛClnds
62

e a da secção correspondente da asa esquerda é(12ρv2
)cos2(Λ+ β) c cosΛClnds.
Esta diferença de sustentações dá origem a um momento de rolamento
y(
12ρv2
)[cos2(Λ+ β)− cos2(Λ− β)
]c cosΛCln ds.
Tendo em conta que y = s cosλ ⇒ dy = ds cosλ, o coeficiente do momento de rola-mento é dado por
Cl =1
12ρv2Sb
(12ρv2
)[cos2(Λ+ β)− cos2(Λ− β)
]Cln
∫ b/20cy dy
= − 1SbCln sin(2Λ) sin(2β)
∫ b/20cy dy.
(5.36)
A derivada Clβ é calculada em β = 0:
Clβ =(∂Cl∂β
)β=0
. (5.37)
Por outro lado a sustentação total obtém-se por integração ao longo da envergaduradas contribuições das secções, e para β = 0 é
L = 2(
12ρv2
)cos2ΛCln
∫ b/20c dy = 2
(12ρv2
)cos2ΛCln
S2, (5.38)
donde se conclui queCL = Cln cos2Λ. (5.39)
Podemos finalmente escrever
(Clβ)
flecha= −
∫ b/20 cy dySb
CLcos2Λ
sin(2Λ) · 2 = −4CL tanΛ
∫ b/20 cy dySb
. (5.40)
Para uma asa com afilamento linear (5.32), obtém-se(Clβ)
flecha= − 1+ 2λ
3(1+ λ)CL tanΛ. (5.41)
Estes resultados são apenas qualitativamente correctos, mas permitem concluir quea contribuição da flecha da asa para a derivada Clβ é proporcional a CL e a tanΛ e énegativa, ou seja, tem um efeito estabilizador.
Contribuição da posição da asa na fuselagem
A posição da asa na fuselagem influencia o modo como a componente cruzada doescoamento (devida à componente da velocidade segundo y) altera o ângulo de ataqueefectivo na asa. Na figura 5.11 comparam-se as configurações de asa baixa e asa alta.
63

Figura 5.11: Posição da asa na fuselagem
Para aviões com asa baixa, α é maior na asa esquerda, o que leva a um aumentoda sustentação na asa esquerda, e portanto a um momento de rolamento Cl > 0. Paraaviões com asa alta, α aumenta na asa direita, pelo que a sustentação aumenta naasa direita, o que conduz a Cl < 0. Conclui-se que a posição de asa alta contribuipara a estabilidade lateral, enquanto que a asa baixa tem um efeito desestabilizador.Habitualmente os aviões de asa baixa necessitam de maiores ângulos de diedro.
Como estimativa para as contribuição da posição da asa na fuselagem podem usar-se os seguintes valores [3]:
Asa alta : (Clβ)pos. asa = −0.00016/
Asa média : (Clβ)pos. asa = 0
Asa baixa : (Clβ)pos. asa = +0.00016/
Evidentemente que estes valores dão apenas uma indicação da ordem de grandezaesperada para o efeito da posição da asa na fuselagem.
Contribuição do estabilizador vertical
A força lateral causada pela derrapagem é dada por:
LF = aF(−β+ σ)12ρV 2
F SF
O coeficiente do momento de rolamento respectivo é:
∆Cl =LFzF
12ρV 2Sb
= aF(−β+ σ)SFzFSb
(VFV
)2
.
64
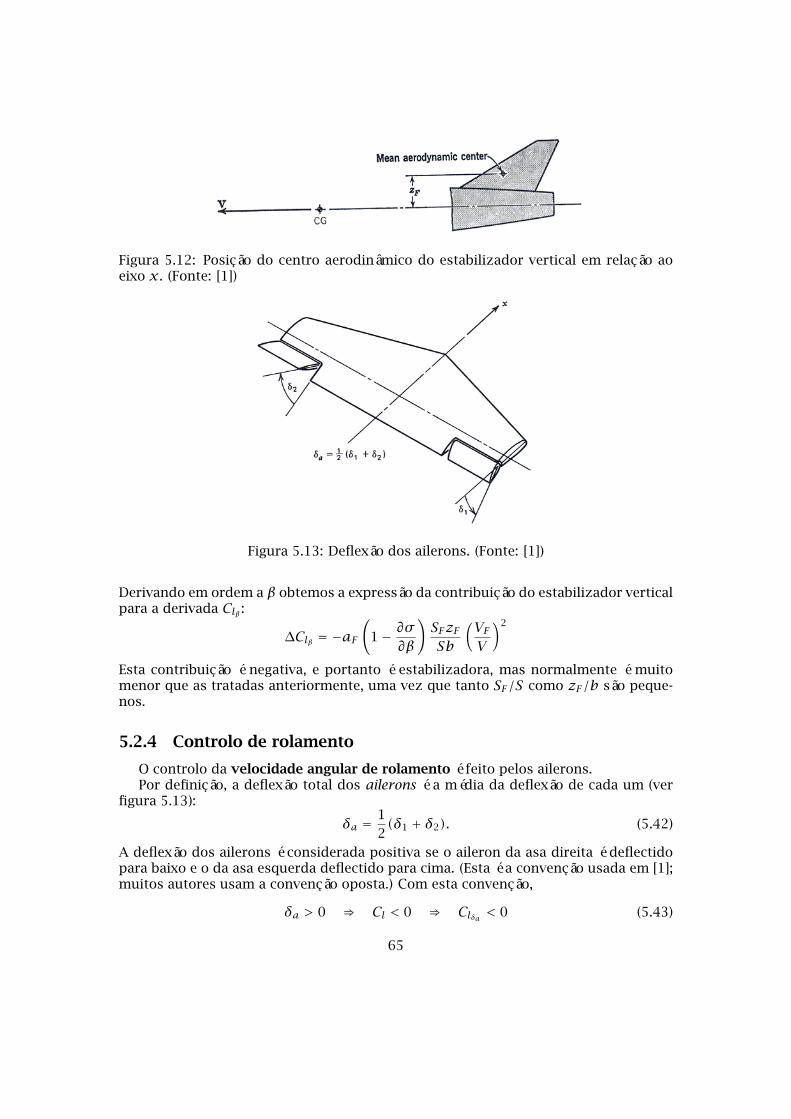
Figura 5.12: Posição do centro aerodinâmico do estabilizador vertical em relação aoeixo x. (Fonte: [1])
Figura 5.13: Deflexão dos ailerons. (Fonte: [1])
Derivando em ordem a β obtemos a expressão da contribuição do estabilizador verticalpara a derivada Clβ :
∆Clβ = −aF(
1− ∂σ∂β
)SFzFSb
(VFV
)2
Esta contribuição é negativa, e portanto é estabilizadora, mas normalmente é muitomenor que as tratadas anteriormente, uma vez que tanto SF/S como zF/b são peque-nos.
5.2.4 Controlo de rolamento
O controlo da velocidade angular de rolamento é feito pelos ailerons.Por definição, a deflexão total dos ailerons é a média da deflexão de cada um (ver
figura 5.13):
δa =12(δ1 + δ2). (5.42)
A deflexão dos ailerons é considerada positiva se o aileron da asa direita é deflectidopara baixo e o da asa esquerda deflectido para cima. (Esta é a convenção usada em [1];muitos autores usam a convenção oposta.) Com esta convenção,
δa > 0 ⇒ Cl < 0 ⇒ Clδa < 0 (5.43)
65

Figura 5.14: Guinada adversa
Note-se que a deflexão dos ailerons produz também momento de guinada. Por isso aderivada Cnδa não é nula.
Guinada adversa
No caso de ailerons simples (tipo flap), a sua deflexão para baixo leva a um aumentode sustentação e de resistência induzida. Assim, δa > 0 leva a um aumento de resistên-cia aerodinâmica na asa direita e a uma diminuição na asa esquerda. O diferencial deresistência aerodinâmica provoca um momento de guinada positivo (nose-right). Ora,normalmente δa > 0 usa-se para iniciar viragem à esquerda e o momento de guinadaprovocado tem o efeito inverso, chamando-se por isso guinada adversa (aileron ad-verse yaw). O efeito da guinada adversa é mais importante em aeronaves com grandealongamento.
O efeito da guinada adversa é normalmente corrigido usando o rudder. Para mini-mizar a necessidade de correcção é possível usar-se frise ailerons, spoilers ou aileronsdiferenciais. Também se pode recorrer ao acoplamento de ailerons e rudder.
Reversão dos ailerons (aileron reversal)
A deflexão de uma superfície de controlo (tipo flap) faz variar a carga aerodinâ-mica aplicada. O seu centróide está localizado perto de c/2 para velocidades baixas edesloca-se para trás quando velocidade aumenta (especialmente para velocidades su-persónicas). Quando o centróide está atrás do eixo de torsão da asa, a deflexão de umaileron provoca uma torsão na asa e esta conduz a uma variação do ângulo de ata-que, com a consequente variação da sustentação. A torsão na asa, sendo causada pelacarga aerodinâmica devida à deflexão do aileron, é proporcional à pressão dinâmica.Além disso, para uma deflexão igual nos ailerons esquerdo e direito, a torsão na asadeverá ser antissimétrica. Assim, uma deflexão nos ailerons provoca um momento derolamento dado por
∆Cl =(Clδa
)rígido
δa + ctorsão
(12ρV 2
)δa,
66

Figura 5.15: Perfil alar simétrico com um flap. A mola de torsão modela a rotação doperfil quando sujeito a momentos aerodinâmicos. Se inicialmente ângulo de ataque énulo e se o flap for deflectido de um ângulo δ, o momento aerodinâmico criado leva operfil a rodar de um ângulo α. A mola de torsão provoca um momento contrário kθα.Em equilíbrio os dois momentos anulam-se.
em que ctorsão é um coeficiente de proporcionalidade positivo nos casos de interesse.A derivada Clδa é então
Clδa =(Clδa
)rígido
+ ctorsão
(12ρV 2
).
Quando a velocidade aumenta, |Clδa | diminui, podendo mesmo anular-se. A velocidadepara a qual Clδa = 0 é chamada velocidade de reversão VR; nessa situação (Clδa )rígido +ctorsão
(ρV 2/2
)= 0 e podemos escrever
Clδa =(Clδa
)rígido
(1− V
2
V 2R
). (5.44)
Acima da velocidade de reversão, uma deflexão positiva dos ailerons conduz a uma di-minuição de sustentação na asa direita, a um aumento de sustentação na asa esquerda,e consequentemente a um momento de rolamento negativo (reversão do comporta-mento habitual dos ailerons).
Para investigar quais as grandezas que influenciam a velocidade de reversão, consi-deremos um modelo simples de um perfil alar simétrico montado numa mola de torsãocom constante kθ (modelando a torsão da asa real). Quando o flap tem uma deflexãoδ, o momento aerodinâmico criado leva o perfil a rodar de um ângulo α (figura 5.15.Em equilíbrio
kθα =(
12ρV 2
)c2Cmδδ. (5.45)
Note-se que Cmδ é negativo, pelo que uma deflexão positiva do flap dá origem a umarotação nose-down e a uma diminuição do ângulo de ataque. O coeficiente de susten-tação é
C` = C`αα+ C`δδ, (5.46)
e usando (5.45),
C` =C`α
(12ρV
2)c2Cmδ
kθ+ C`δ
δ. (5.47)
A velocidade de reversão atinge-se quando o coeficiente de sustentação não dependeda deflexão do leme, ou seja, quando o termo entre parêntesis em (5.47) se anula.
67

Obtemos então
VR =√√√− 2kθC`δρc2C`αCmδ
. (5.48)
Conclui-se que o quadrado da velocidade de reversão é proporcional à rigidez da asa(pois kθ aumenta com a rigidez da asa) e inversamente proporcional à densidade doar. O aileron reversal é mais pronunciado para asas finas e flexíveis e para altitudesmaiores.
68

Capítulo 6
Equações do Movimento
Neste capítulo estabelecer-se-ão as equações que regem a dinâmica de um avião,considerado como um corpo rígido. Na realidade um avião é um corpo deformável,mas na maior parte das situações dinâmicas os efeitos da elasticidade não são muitoimportantes e é possível, quando necessário, tratá-los como pequenas modificaçõesrelativamente ao caso rígido.
6.1 Referenciais
Como referencial inercial vamos usar um referencial fixo na Terra (OxEyEzE), de-signado por FE . Uma vez que pretendemos analisar apenas o voo durante intervalosde tempo relativamente curtos (da ordem de minutos), podemos desprezar a curva-tura da Terra e considerar a aceleração da gravidade ~g como vertical. O eixo OzE éescolhido segundo a direcção e sentido da gravidade (é vertical e aponta para baixo). Oreferencial (Cxyz) fixo no avião é designado por FB . Tem origem no centro de massada aeronave e move-se solidário com ela. A figura 6.1 representa os dois referenciais.
Qualquer dos referenciais pode ser usado para medir grandezas físicas. Assim,podemos medir a velocidade do ar relativamente ao avião ou relativamente à Terra.Por outro lado, os eixos e os vectores de base de qualquer dos referenciais pode serusado para escrever qualquer vector. Podemos, por exemplo, escrever a velocidade doar relativamente ao avião tanto no referencial do avião como no referencial da Terra.Sempre que possa haver ambiguidades usaremos a notação
~Vab
em que o expoente a identifica o referencial relativamente ao qual medimos o vectore o índice b identifica o referencial no qual escrevemos as componentes do vector.Exemplificando o uso da notação, a velocidade relativamente à Terra é ~VE , e tantopode ser escrita no referencial da Terra, ~VEE = (xE, yE, zE), como no referencial doavião, ~VEB = (uE, vE,wE). A velocidade do avião relativamente ao ar (airspeed), podeser designada simplesmente por ~VB = (u,v,w), escrita no referencial do avião. Note-se que, se o vento tiver velocidade ~W relativamente à Terra,
~VE = ~V + ~W.
69

Figura 6.1: Referencial inercial ligado à Terra, FE , de eixos (OxEyEzE) e referencialligado ao avião, FB , de eixos (Cxyz).
6.2 Ângulos de Euler e matrizes de rotação
6.2.1 Definição dos Ângulos de Euler
Os ângulos de Euler permitem descrever a orientação relativa dos dois referenciais(FE fixo na Terra e FB solidário com o avião). Existem muitas definições possíveis paraos ângulos de Euler, mas em aeronáutica são usados os ângulos de guinada (yaw),picada/cabragem (pitch) e pranchamento ou rolamento (bank/roll) que definem trêsrotações sucessivas.
A primeira rotação, em torno do eixo vertical fixo CzE , define o ângulo de guinadaψ, como se mostra na figura 6.2. A segunda rotação, representada na figura 6.3, éfeita em torno do eixo Cy1 obtido após a rotação anterior, e define o ângulo de picada(usa-se também cabragem quando o ângulo é negativo), θ. A terceira rotação faz-se emtorno do eixo Cx2, como se mostra na figura 6.4 e define o ângulo de pranchamento(ou rolamento) φ.
6.2.2 Matrizes de rotação
Para relacionar as componentes de um vector no sistema de eixos da Terra e nosistema de eixos do avião temos de introduzir a matriz de rotação entre os dois sis-temas de eixos. Uma matriz de rotação relaciona as componentes de um vector nossistemas de eixos antes e depois da rotação. Como os ângulos de Euler são definidoscomo rotações em torno de sucessivos eixos coordenados, definiremos em primeirolugar as matrizes para rotações em torno de cada um dos eixos coordenados para osângulos mostrados na figura 6.5. Para uma rotação de um ângulo α em torno do eixo
70

Figura 6.2: Rotação que define o ângulo de guinada, em torno do eixo fixo vertical CzE .
Figura 6.3: Rotação que define o ângulo de picada, em torno do eixo Cy1.
71

Figura 6.4: Rotação que define o ângulo de rolamento, em torno do eixo Cx2 ≡ Cx.
x
y
z
α
α
(A)
β
βx
y
z
(B)
x
y
z
γ
γ
(C)
Figura 6.5: Rotações em torno de cada um dos eixos coordenados: (A) rotação emtorno de Ox; (B) rotação em torno de Oy ; (C) rotação em torno de Oz.
72

Ox, a matriz de rotação é
Rx(α) =1 0 0
0 cosα sinα0 − sinα cosα
; (6.1)
para uma rotação de um ângulo β em torno do eixo Oy a matriz de rotação é
Ry(β) =cosβ 0 − sinβ
0 1 0sinβ 0 cosβ
; (6.2)
finalmente, para uma rotação de um ângulo γ em torno do eixo Oz a matriz de rotaçãoé dada por
Rz(γ) = cosγ sinγ 0− sinγ cosγ 0
0 0 1
. (6.3)
Para obtermos a matriz de rotação do referencial fixo na Terra FE para o referen-cial fixo na aeronave FB basta-nos aplicar multiplicar (da direita para a esquerda) asmatrizes correspondentes às rotações de guinada, picada e pranchamento:
RBE = Rx(φ) · Ry(θ) · Rz(ψ). (6.4)
Para transformar as componentes de um vector escritas no referencial da Terra para ascomponentes do mesmo vector escritas no referencial do avião basta-nos multiplicarpela matriz de rotaçao:
~VB = RBE ~VE. (6.5)
A matriz RBE de rotação do referencial fixo na Terra FE para o referencial fixo naaeronave FB que se obtém a partir de (6.4) e das matrizes (6.1), (6.2) e (6.3) é
RBE = Rx(φ) · Ry(θ) · Rz(ψ) =1 0 00 cosφ sinφ0 − sinφ cosφ
·cosθ 0 − sinθ
0 1 0sinθ 0 cosθ
· cosψ sinψ 0− sinψ cosψ 0
0 0 1
= cosθ cosψ cosθ sinψ − sinθ
sinφ sinθ cosψ− cosφ sinψ sinφ sinθ sinψ+ cosφ cosψ sinφ cosθcosφ sinθ cosψ+ sinφ sinψ cosφ sinθ sinψ− sinφ cosψ cosφ cosθ
. (6.6)
Como exemplo, vamos determinar as componentes do peso no referencial do avião.No referencial da Terra o peso é (m~g)E = (0,0,mg). Para obtermos as suas compo-nentes no referencial do avião usamos (6.5):
(m~g)B =
cosθ cosψ cosθ sinψ − sinθsinφ sinθ cosψ− cosφ sinψ sinφ sinθ sinψ+ cosφ cosψ sinφ cosθcosφ sinθ cosψ+ sinφ sinψ cosφ sinθ sinψ− sinφ cosψ cosφ cosθ
0
0mg
=
−mg sinθmg cosθ sinφmg cosθ cosφ
.
73

Também é possível definir a matriz de rotação inversa, do referencial fixo na aero-nave FB para o referencial fixo na Terra FE :
REB = R−1BE = Rz(−ψ) · Ry(−θ) · Rx(−φ).
Agora as rotações devem ser feitas pela ordem inversa e os ângulos são simétricosdos ângulos da rotação inicial. A relação entre as componentes dos vectores nos doisreferenciais é
~VE = REB ~VB, (6.7)
sendo a matriz REB de rotação do referencial fixo na aeronave FB para o referencialfixo na Terra FE dada por
REB = R−1BE = Rz(−ψ) · Ry(−θ) · Rx(−φ) =
=cosθ cosψ sinφ sinθ cosψ− cosφ sinψ cosφ sinθ cosψ+ sinφ sinψ
cosθ sinψ sinφ sinθ sinψ+ cosφ cosψ cosφ sinθ sinψ− sinφ cosψ− sinθ sinφ cosθ cosφ cosθ
.(6.8)
6.2.3 Velocidade e frequências angulares
A velocidade angular de um avião é habitualmente referida a partir das componen-tes ao longo dos eixos coordenados do avião:
~ω = p~iB + q~jB + r ~kB. (6.9)
Por outro lado, da definição dos ângulos de Euler deduz-se que a velocidade angularse pode escrever em função das frequências angulares ψ, θ e φ. Para relacionar p, q er com as frequências angulares comecemos por notar que
~ω = ψ~k1B + θ ~j2B + φ~i3B . (6.10)
Mas, pela definição dos ângulos de Euler:~i3B = ~iB,~j2B = cosφ~jB − sinφ~kB,~k1B = cosθ(sinφ~jB + cosφ~kB)− sinθ~iB.
(6.11)
Substituindo (6.11) em (6.10), obtém-se
~ω = ψ~k1B + θ ~j2B + φ~i3B= ψ[cosθ(sinφ~jB + cosφ~kB)− sinθ~iB]+ θ[cosφ~jB − sinφ~kB]+ φ~iB= (φ− ψ sinθ)~iB + (ψ cosθ sinφ+ θ cosφ)~jB + (ψ cosθ cosφ− θ sinφ)~kB.
Por comparação com (6.9), constata-se facilmente quep = φ− ψ sinθ,
q = ψ cosθ sinφ+ θ cosφ,
r = ψ cosθ cosφ− θ sinφ.
(6.12)
74

Destas equações se vê que as velocidades angulares não se identificam com as corres-pondentes taxas de variação dos ângulos de Euler: a velocidade angular de rolamentonão é igual à taxa de variação do ângulo de rolamento/pranchamento, e o mesmo sepode dizer relativamento à picada e à guinada.
6.3 Equações de Euler
6.3.1 Equações do movimento
Considerando o avião como um corpo rígido e sendo ~F a resultante das forçasexteriores aplicadas ao avião, ~MC o momento resultante relativo ao centro de massa Cdo avião e ~HC o momento angular total relativamente a C , as equações do movimentono referencial inercial FE são
~F =m[
ddt(~VE)
]FE
(6.13)
~MC =[
ddt( ~HC)
]FE
(6.14)
respectivamente para a dinâmica de translação e para a dinâmica de rotação.O referencial do avião é um referencial em rotação com velocidade angular ~ω. Por
isso, se os vectores ~VE e ~HC estiverem escritos no referencial do avião, a equação dadinâmica de translação é
(~F)B =m[
ddt(~VE)
]FE=m
[(~VE)B + ( ~ω)B × (~VE)B
], (6.15)
enquanto que para a dinâmica de rotação temos
( ~MC)B =[
ddt( ~HC)
]FE=[( ~HC)B + ( ~ω)B × ( ~HC)B
]. (6.16)
São estas equações, em que as grandezas vectoriais estão expressas no referencial doavião, que vamos procurar desenvolver e resolver.
6.3.2 Equações do movimento no referencial do avião
As forças externas aplicadas a uma aeronave incluem a força gravítica m(~g)B , asforças aerodinâmicas, aqui designadas genericamente por ~A, e a força de propulsão ~T .
Como vimos, no referencial do avião a força gravítica pode escrever-se
m(~g)B =mg(− sinθ~iB + cosθ sinφ~jB + cosθ cosφ~kB
)(6.17)
Por outro lado, podemos por enquanto agrupar as forças aerodinâmicas e de propulsãosob uma designação genérica,
( ~A)B + (~T)B = X~iB + Y ~jB + Z~kB. (6.18)
75

Note-se que, uma vez que as forças aerodinâmicas dependem tanto da velocidade comoda velocidade angular do avião, as forças X, Y e Z dependem das variáveis dinâmicas(~V e ~ω). Teremos também de incluir em X, Y e Z as forças de controlo.
Tendo em conta que no referencial do avião ( ~ω)B = p ~iB + q ~jB + r ~kB(~VE)B = uE~iB + vE ~jB +wE~kBas componentes segundo x, y e z da equação da dinâmica de translação (6.15) são
X −mg sinθ =m(uE + qwE − rvE),Y +mg cosθ sinφ =m(vE + ruE − pwE),Z +mg cosθ cosφ =m(wE + pvE − quE).
(6.19)
O momento resultante das forças externas relativamente ao centro de massa C daaeronave é
( ~MC)B = L~iB +M ~jB +N ~kB, (6.20)
em que L, M , e N são chamados respectivamente momentos de rolamento, picada eguinada. O momento angular relativamente a C é dado por
[( ~HC)B] = [IB][( ~ω)B]. (6.21)
A matriz de inércia é
[IB] = Ixx −Ixy −Ixz−Ixy Iyy −Iyz−Ixz −Iyz Izz
, (6.22)
sendo os momentos de inércia definidos por Ixx =∫(y2+z2)dm, Iyy =
∫(x2+z2)dm
e Izz =∫(x2 + y2)dm; e os produtos de inércia definidos como Ixy =
∫xy dm, Ixz =∫
xz dm e Iyz =∫yz dm.
Substituindo todas estas expressões na equação da dinâmica de rotação (6.16) ascomponentes segundo x, y e z são
L = Ixxp − Iyz(q2 − r 2)− Izx(r + pq)− Ixy(q − rp)− (Iyy − Izz)qr ,M = Iyy q − Izx(r 2 − p2)− Ixy(p + qr)− Iyz(r − pq)− (Izz − Ixx)rp,N = Izzr − Ixy(p2 − q2)− Iyz(q + rp)− Izx(p − qr)− (Ixx − Iyy)pq.
(6.23)
Em resumo, temos nove equações diferenciais não lineares acopladas: três equações(6.19) para a dinâmica de translação, três equações (6.23) para a dinâmica de rotaçãoe três equações (6.12) que relacionam as velocidades angulares com as frequências deEuler.
As incógnitas são também nove: as três componentes da velocidade linear, as trêscomponentes da velocidade angular e os três ângulos de Euler: (u,v,w,p, q, r ,ψ, θ,φ).A resolução das equações permite obter cada uma destas incógnitas em função dotempo, dadas as necessárias condições iniciais.
Para a resolução das equações, uma simplificação que é válida na maior parte doscasos é a de considerar que a aeronave é simétrica, o que implica Ixy = 0 = Iyz.
Note-se que só é possível separar completamento o movimento longitudinal do mo-vimento lateral se p = 0 = r , e isto exige φ = 0 (pois pelas equações (6.12) se vê que,se φ ≠ 0, então q ≠ 0 ⇒ θ ≠ 0 ⇒ r ≠ 0). Portanto, se as asas não estiverem niveladasnão é possível um voo com movimento apenas longitudinal.
76

6.3.3 Equações da trajectória
A trajectória (flight path) é definida no referencial solidário com a Terra, FE . Nestereferencial ~VEE = (xE, yE, zE) e ~VEB = (uE, vE,wE). As velocidades uE , vE e wE sãoobtidas pelas equações do movimento, e os vectores velocidade estão relacionadospor [~VEE ] = [REB][~VEB ]. Daqui obtém-se o sistema de equações diferenciais para ascoordenadas da trajectória.
xE = uE cosθ cosψ+ vE(sinφ sinθ cosψ− cosφ sinψ)+wE(cosφ sinθ cosψ+ sinφ sinψ)
yE = uE cosθ sinψ+ vE(sinφ sinθ sinψ+ cosφ cosψ)+wE(cosφ sinθ sinψ− sinφ cosψ)
zE = −uE sinθ + vE sinφ cosθ +wE cosφ cosθ
Conhecidas as velocidades e os ângulos de Euler em função do tempo, estas equaçõespodem facilmente ser integradas para se obterem as coordenadas da trajectória emfunção do tempo.
6.4 Rotores em movimento
Mesmo desprezando os efeitos de elasticidade, um avião não é um corpo rígido. Nocaso de propulsão a hélice, os hélices dos motores são partes em movimento rotativo,como o são as turbinas e compressores no caso de propulsão a jacto. Quando esta-belecemos as equações de Euler, admitimos que o avião era um corpo rígido, mas nãoé difícil introduzir o efeito dos rotores nas equações, bastando somar ao momentoangular do avião o termo correspondente o momento angular dos rotores:
[( ~HC)B] = [IB][( ~ω)B]+ [~hrotB ], (6.24)
em que ~hrotB é momento angular dos rotores (devido ao seu movimento de rotação
relativo ao avião) e [IB][( ~ω)B] é momento angular do avião, já anteriormente conside-rado. É este momento angular total que deve ser usado na equação para a dinâmica derotação (6.16)
( ~MC)B =[
ddt( ~HC)
]FE=[( ~HC)B + ( ~ω)B × ( ~HC)B
]Quando a velocidade dos rotores é constante, é necessário apenas acrescentar os se-guintes termos adicionais na equação dos momentos:
na equação segundo x, qhrotz − rhrot
y ;
na equação segundo y , rhrotx − phrot
z ;
na equação segundo z, phroty − qhrot
x .
6.5 Sistemas de eixos do corpo
Qualquer sistema de eixos solidários com o corpo pode ser usado como referencialFB . Na prática, os sistemas de eixos com utilidade seguem as seguintes regras:
77

Figura 6.6: Sistema de eixos em que o eixo Cx é a linha de sustentação nula do avião.O ãngulo α entre a velocidade e a linha de sustentação nula é o ângulo de ataqueabsoluto do avião.
• Os eixos Cx e Cz encontram-se no plano de simetria do avião,
• Cx aponta «para a frente»,
• Cz aponta «para baixo», e
• Cy forma com os anteriores um triedro directo.
O eixo Cy é portanto o eixo que é perpendicular ao plano de simetria e passa pelocentro de massa. Quanto aos eixos Cx e Cz, existem muitas possibilidades de escolha.
Uma das possibilidades é escolher o eixo Cx na direcção da linha de sustentaçãonula do avião, como se mostra na figura 6.6. Nesse caso, o ângulo de ataque do eixoCx é o ângulo de ataque da aeronave e o ângulo de subida (ou de rota) γ é dado porγ = θ −α.
Uma outra escolha que apresenta vantagens, representada na figura 6.7, é a de usarcomo Cx e Cz os eixos principais de inércia (num avião simétrico, a nossa escolha paraCy garante que é sempre um eixo principal de inércia). Assim, Ixy = Ixz = Iyz = 0, e omomento angular do avião (excluindo rotores) é apenas
Hx = IxpHy = IyqHz = Izr
o que traz simplicações consideráveis nas equações do movimento de rotação. Agora,porém, αx ≠ α. O ângulo de subida é γ = θ −αx , mas é necessário conhecer a relaçãoentre α e αx , ou, equivalentemente, é necessário saber a relação entre o eixo dos x e alinha de sustentação nula da aeronave.
Em estudos de estabilidade é frequente usar um outro sistema de eixos, conhecidoprecisamente como sistema de eixos de estabilidade (xS , yS , zS) e que se apresenta nafigura 6.8. O eixo Cx é aqui escolhido segundo a direcção do vector velocidade. Agrande vantagem é que por definição, w = 0, e portanto αx = 0. Este é o sistemas deeixos que iremos usar mais frequentemente no estudo da estabilidade dinâmica.
78

Figura 6.7: Sistema de eixos em que os eixos Cx e Cz são eixos principais de inérciado avião. O ângulo γ entre a velocidade e a horizontal é o ângulo de subida do avião.
Figura 6.8: Sistema de eixos de estabilidade: o eixo CxS coincide com a direcção davelocidade do avião. Por definição αx = 0. O ângulo ξ é o ângulo entre o sistema deeixos principal de inércia e o sistema de eixos de estabilidade.
79

Designando por ξ o ângulo entre os eixos de estabilidade e os eixos principais deinércia, os novos momentos e produtos de inércia são
IxS = IxP cos2 ξ + IzP sin2 ξ,
IzS = IxP sin2 ξ + IzP cos2 ξ,
IxSzS =12(IzP − IxP ) sin 2ξ.
Neste sistema de eixos o ângulo de subida coincide com o ângulo de picada: γ = θ.
80

Capítulo 7
Estados Estacionários eManobras
Num voo típico, um avião encontra-se habitualmente num estado estacionário:subida ou descida com ângulo constante, voo de cruzeiro, volta coordenada, etc.Interessa-nos caracterizar estes estados estacionários, que serão a base para o estudoda estabilidade dinâmica para pequenas perturbações.
Alguns estados estacionários podem caracterizar-se por ser apenas longitudinais,enquanto noutros entram também em jogo variáveis laterais. Vamos procurar carac-terizar estes tipos de movimentos. Além disso trataremos de manobras estacionárias:volta coordenada e manobra de descida-subida simétrica (pull-up).
Começaremos por caracterizar um pouco melhor as forças e momentos aplicados auma aeronave.
7.1 Forças e momentos aplicados a uma aeronave
Para além do peso, as forças e momentos aplicados a uma aeronave podem terorigem aerodinâmica (sustentação, resistência aerodinâmica) ou ser forças e momen-tos de controlo. Estes podem ser devidos à propulsão ou a modificação das forças emomentos aerodinâmicos pela deflexão de superfícies de controlo, como o leme deprofundidade (elevator, ou em alternativa, stabilator), o leme de direcção (rudder) ouos ailerons.
Para as forças e momentos usamos a seguinte notação: XA, ZA, ZA designam ascomponentes aerodinâmicas das forças e LA, MA, NA designam as componentes aero-dinâmicas dos momentos. As componentes devidas ao controlo são designadas porum índice C : ∆XC , ∆YC , ∆ZC para as forças e ∆LC , ∆MC , ∆NC para os momentos. Asforças totais são então
X = XA +∆XC ,Y = YA +∆YC ,Z = ZA +∆ZC ,
(7.1)
81

e os momentos totais L = LA +∆LC ,M = MA +∆MC ,N = NA +∆NC .
(7.2)
7.1.1 Variáveis dinâmicas e sua adimensionalização
Os momentos e forças aerodinâmicos dependem das variáveis dinâmicas: as ve-locidades lineares u, v e w, e as velocidades angulares p, q e r . Com frequência éconveniente usar estas variáveis na sua versão adimensional. As velocidades linearesadimensionalizam-se dividindo pelo módulo da velocidade, isto é,
u = uV, v = v
V, w = w
V. (7.3)
As velocidades angulares adimensionalizam-se de modo diferente consoante são va-riáveis laterais (p e r ) ou longitudinal (q):
p = p b2V, (7.4)
q = q c2V, (7.5)
r = r b2V. (7.6)
Note-se que se os ângulos de derrapagem e de ataque são pequenos, então sãoválidas as aproximações
β = arcsinvV≈ vV= v, (7.7)
α = arctanwV≈ wV= w. (7.8)
Normalmente admite-se que as forças e momentos aerodinâmicos não dependemdas derivadas das variáveis dinâmicas, com uma excepção: podem depender de w, ouseja, de α. A adimensionalização da derivada temporal é feita dividindo pelo factor2V/c, isto é,
ˆα = α c2V. (7.9)
7.1.2 Forças e momentos aerodinâmicos para o movimento longitu-dinal
Relativamente ao movimento longitudinal, isto é, o que não altera a posição doplano de simetria do avião, as forças e momentos aerodinâmicos relevantes são XA,ZA e MA que, se o movimento é verdadeiramente longitudinal, dependem apenas dasvariáveis dinâmicas longitudinais, isto é, de u, w, q e w:
XA = Xuu+Xww +Xq q +Xw w,ZA = Zuu+ Zww + Zq q + Zw w,MA = Muu+Mww +Mq q +Mw w,
(7.10)
82

Por definição, as derivadas (dimensionais) são
Xu ≡∂X∂u
Zu ≡∂Z∂u
Mu ≡∂M∂u
Xw ≡∂X∂w
Zw ≡∂Z∂w
Mw ≡∂M∂w
Xq ≡∂X∂q
Zq ≡∂Z∂q
Mq ≡∂M∂q
Xw ≡∂X∂w
Zw ≡∂Z∂w
Mw ≡∂M∂w
Com frequência é preferível usar coeficientes adimensionais em vez de forças e mo-mentos dimensionais. Para o movimento longitudinal, os coeficientes adimensionaisdas forças e momentos aerodinâmicos são
XA =12ρV 2S CxA , (7.11)
ZA =12ρV 2S CzA , (7.12)
MA =12ρV 2Sc CmA . (7.13)
A versão adimensionalizada de (7.10) éCxA = Cxuu+ Cxαα+ Cxq q + Cx ˆα
ˆα,
CzA = Czuu+ Czαα+ Czq q + Cz ˆαˆα
CmA = Cmuu+ Cmαα+ Cmq q + Cm ˆαˆα.
(7.14)
Note-se que as derivadas são obtidas derivando os coeficientes adimensionais em or-dem às variáveis adimensionais, isto é,
Cxu ≡∂Cx∂u, Cxα ≡
∂Cx∂α, Cxq ≡
∂Cx∂q, Cx ˆα
≡ ∂Cx∂ ˆα, etc.
Forças e momentos de controlo longitudinal
Para controlo longitudinal dispomos habitualmente de uma superfície de controlo(leme de profundidade ou equivalente, cuja deflexão é δe) e podemos também controlara potência desenvolvida pelo motor, sendo a posição relativa da manete de potênciadada por δT . Assim, temos
∆XC = Xδeδe +XδTδT ,∆ZC = Zδeδe + ZδTδT ,∆MC = Mδeδe +MδTδT .
(7.15)
83

Os coeficientes das forças e momentos de controlo longitudinal obtém-se por adimen-sionalização das equações acima:
∆Cx = Cxδeδe + CxδT δT ,∆Cz = Czδeδe + CzδT δT ,∆Cm = Cmδeδe + CmδT
δT .(7.16)
Tendo em conta (7.1) e (7.2), os coeficientes das forças e momento longitudinaistotais, incluindo controlo, são
Cx = Cxuu+ Cxαα+ Cxq q + Cx ˆαˆα+ Cxδeδe + CxδT δT ,
Cz = Czuu+ Czαα+ Czq q + Cz ˆαˆα+ Czδeδe + CzδT δT ,
Cm = Cmuu+ Cmαα+ Cmq q + Cm ˆαˆα+ Cmδeδe + CmδT
δT .
(7.17)
7.1.3 Forças e momentos aerodinâmicos para o movimento lateral
Para o movimento lateral, em que a posição do plano de simetria do avião é alterada,as forças e momentos aerodinâmicos relevantes são YA, LA eNA, que dependem apenasdas variáveis dinâmicas longitudinais, isto é, de v , p e r :
YA = Yvv + Ypp + Yrr ,LA = Lvv + Lpp + Lrr ,NA = Nvv +Npp +Nrr .
(7.18)
As derivadas (dimensionais) são
Yv ≡∂Y∂v, Lv ≡
∂L∂v, Nv ≡
∂N∂v,
Yp ≡∂Y∂p, Lp ≡
∂L∂p, Np ≡
∂N∂p,
Yr ≡∂Y∂r, Lr ≡
∂L∂r, Nr ≡
∂N∂r.
Para o movimento lateral, os coeficientes adimensionais das forças e momentosaerodinâmicos são
YA =12ρV 2S CyA , (7.19)
LA =12ρV 2Sb ClA , (7.20)
NA =12ρV 2Sb CnA . (7.21)
A versão adimensionalizada de (7.18) éCyA = Cyββ+ Cyp p + Cyr r ,ClA = Clββ+ Clp p + Clr r ,CnA = Cnββ+ Cnp p + Cnr r .
(7.22)
84

Note-se que, tal como anteriormente, as derivadas são obtidas derivando os coeficien-tes adimensionais em ordem às variáveis adimensionais, isto é,
Cyβ ≡∂Cy∂β, Cyp ≡
∂Cy∂p, Cyr ≡
∂Cx∂r, etc.
Forças e momentos de controlo lateral
Para controlo lateral as superfícies de controlo habitualmente disponíveis são oleme de direcção (rudder, cuja deflexão é δr ) e os ailerons, cuja deflexão é dada por δa.Assim, temos
∆YC = Yδaδa + Yδrδr ,∆LC = Lδaδa + Lδrδr ,∆NC = Nδaδa +Nδrδr .
(7.23)
Estas equações podem facilmente adaptar-se a outras configurações (como, por exem-plo, um par adicional de ailerons). Note-se também que frequentemente se faz a apro-ximação Yδa = 0, pois a força lateral devido à deflexão dos ailerons é praticamentenula.
Os coeficientes das forças e momentos de controlo lateral obtêm-se facilmente pelaadimensionalização das equações acima:
∆Cy = Cyδaδa + Cyδr δr ,∆Cl = Clδaδa + Clδr δr ,∆Cn = Cnδaδa + Cnδr δr .
(7.24)
Tendo em conta (7.1) e (7.2), os coeficientes das forças e momento laterais totais,incluindo controlo, são
Cy = Cxββ+ Cyp p + Cyr r + Cyδaδa + Cyδr δr ,Cl = Clββ+ Clp p + Clr r + Clδaδa + Clδr δr ,Cy = Cnββ+ Cnp p + Cnr r + Cnδaδa + Cnδr δr .
(7.25)
7.2 Estados estacionários longitudinais
Estamos agora em condições de abordar alguns estados estacionários. Começare-mos por verificar em que condições é que podem existir estados estacionários longitu-dinais «puros».
Por definição, num estado estacionário as derivadas temporais são nulas, isto é,u = 0 = v = w, p = 0 = q = r e ψ = 0 = θ = φ. Se o estado estacionárioé longitudinal, são nulas as velocidades angulares laterais p = r = 0, bem como avelocidade lateral (de derrapagem) v = 0, donde β = 0. Adicionalmente, se o estadoestacionário corresponder a um voo rectilíneo, não existe velocidade angular de picada,q = 0. As equações do movimento de translação (6.19) reduzem-se então a
X −mg sinθ = 0,Y +mg cosθ sinφ = 0,Z +mg cosθ cosφ = 0,
(7.26)
85

e as equações do movimento de rotação (6.23) aL = 0,M = 0,N = 0.
(7.27)
Dado que L = Lvv + Lpp + Lrr + Lδaδa + Lδrδr ,N = Nvv +Npp +Nrr +Nδaδa +Nδrδr ,
e que v = p = r = 0, conclui-se que δa = 0 = δr . Logo Y = Yvv + Ypp + Yrr + Yδaδa +Yδrδr = 0. Da segunda equação de (7.26) segue-se finalmente que sinφ = 0.
Em conclusão, só pode haver estados (estacionários) longitudinais para voo comasas niveladas, i.e., com ângulo de pranchamento nulo. Se φ ≠ 0, passa a existiracoplamento entre movimento longitudinal e lateral. Os estados estacionários longitu-dinais possíveis são voos simultaneamente rectilíneos e com asas niveladas e podemser horizontais ou com ângulo de subida.
7.2.1 Voo com ângulo de subida constante
O estado estacionário longitudinal mais simples é o voo horizontal rectilíneo comasas niveladas. No entanto, este já foi tratado anteriormente com pormenor. O estadoestacionário longitudinal que iremos tratar agora é o de um voo rectilíneo com ângulode subida constante. Como se afirmou acima, para ser estado estacionário longitudi-nal, este voo terá de ser nivelado, ou seja, é necessário que φ = 0.
O eixo Cx é escolhido segundo a direcção da linha de sustentação nula do avião.Suporemos que a linha de propulsão coincide com o eixo Cx (no caso mais geral existeum ângulo constante entre a linha de propulsão e o eixo Cx, que aqui supomos nulo).
As forças aplicadas no avião estão representadas na figura 7.1. As componentesdas segundo x e z das forças aerodinâmicas e de propulsão são dadas por
X = T + L sinα−D cosα,Z = −L cosα−D sinα.
(7.28)
De (7.26) com φ = 0 e de (7.27), as equações do movimento neste caso sãoT + L sinα−D cosα−mg sinθ = 0,− L cosα−D sinα+mg cosθ = 0,M = 0
(7.29)
Se α for suficientemente pequeno para podermos desprezar os termos em sinα, aprimeira equação é
T = D +mg sinθ (7.30)
e a intensidade da força de propulsão determina θ e deste modo o ângulo de subidaγ = θ − α. Esta é uma aproximação um pouco grosseira, mas permite perceber que oângulo de subida é determinado principalmente pela força de propulsão.
Numa aproximação menos grosseira, em que sinα ≈ α e cosα ≈ 1, teríamosT + Lα−D −mg sinθ = 0,− L+mg cosθ = 0,M = 0.
(7.31)
86

Figura 7.1: Voo rectilíneo com ângulo de subida constante.
Na segunda equação o termo D sinα foi desprezado face aos outros dois. Adimensio-nalizando (7.31), obtém-se
CT + CLα− CD − CW sinθ = 0,CL = CW cosθ,Cm = 0.
(7.32)
As duas últimas equações são idênticas às equações de equilíbrio habituais para voorectilíneo horizontal, mas com CLtrim = CW cosθ. Os valores de α e de δe resultam dasolução de
CW cosθ = CLααtrim + CLδeδetrim ,0 = Cm0 + Cmααtrim + Cmδeδetrim ,
(7.33)
ou seja, αtrim =
(CW cosθ)Cmδe + Cm0CLδedet
,
δetrim = −CLαCm0 + (CW cosθ)Cmα
det.
(7.34)
Como CLtrim = CW cosθ < CW (que é o valor de CLtrim para voo horizontal), o valor deαtrim será menor e o de δetrim será maior (isto é, mais positivo ou menos negativo) quepara voo horizontal para a mesma velocidade. Isto deve-se a que agora a sustentaçãotem de equilibrar apenas uma parte do peso, sendo a outra parte equilibrada por umacréscimo da força de propulsão. A primeira equação de (7.32) é agora
CT = CD + CW sinθ − CLαtrim = CD + CW (sinθ −αtrim cosθ), (7.35)
e usando o valor de αtrim obtido acima (e calculando CD a partir de CL ou do ângulode ataque), o valor de CT necessário para garantir um ângulo de subida θ pode serdeterminado.
87

Em conclusão, a velocidade e o ângulo de subida são determinados pelo sistema(7.32) e controlados por δe e pela força de propulsão.
7.3 Estados estacionários laterais
O estado estacionário lateral que vamos tratar é a derrapagem estacionária. A voltacoordenada é também um estado estacionário lateral, mas iremos descrevê-la comomanobra estacionária.
7.3.1 Derrapagem estacionária
Tal como anteriormente, «estacionária» implica que as derivadas temporais sãonulas (excepto, evidentemente, xE). Num voo apenas de derrapagem, as velocidadesangulares devem também ser nulas:
p = 0 = q = r . (7.36)
As equações do movimento lateral são (para aeronaves simétricas):Y +mg cosθ sinφ =m(v + ru− pw) = 0,L = Ixxp − Izx(r + pq)− (Iyy − Izz)qr = 0,N = Izzr − Izx(p − qr)− (Ixx − Iyy)pq = 0.
Tendo em conta (7.36) e o anulamento das derivadas temporais, obtemosY +mg sinφ cosθ = 0,L = 0,N = 0.
Recordando (7.18) e (7.23), as forças e momentos aerodinâmicos são dados porY = Yvv + Ypp + Yrr + Yδrδr = Yvv + Yδrδr ,L = Lvv + Lpp + Lrr + Lδrδr + Lδaδa = Lvv + Lδrδr + Lδaδa,N = Nvv +Npp +Nrr +Nδrδr +Nδaδa = Nvv +Nδrδr +Nδaδa.
Obtem-se então o sistema de equações para a derrapagem estacionária:Yvv + Yδrδr +mg cosθ sinφ = 0
Lvv + Lδrδr + Lδaδa = 0
Nvv +Nδrδr +Nδaδa = 0
Este sistema pode escrever-se na forma matricial. Dada a velocidade de derrapagem,obtemos os valores das deflexões dos ailerons e do leme de direcção, bem como doângulo de pranchamento necessários para a manobra.Yδr 0 mg cosθ
Lδr Lδa 0Nδr Nδa 0
δrδa
sinφ
= −YvLvNv
v. (7.37)
88

Note-se que as equações (7.37) podem também ser escritas na forma adimensional:Cyδr 0 CW cosθClδr Clδa 0Cnδr Cnδa 0
δrδa
sinφ
= −CyβClβCnβ
β. (7.38)
A relação entre as derivadas dimensionais e as derivadas dos coeficientes adimensio-nais será tratada mais à frente.
Alguns casos particulares de especial interesse são os de voo com vento lateral ede voo na situação de One engine inoperative (OEI). No caso de One engine inoperative(OEI) a propulsão não é simétrica e há forças adicionais de resistência do(s) motor(es)parado(s). Por este motivo gera-se um momento de guinada devido à propulsão, NT ,que é necessário adicionar às equações acima. O momento total de guinada passa aser não nulo: N = NT .
7.4 Manobras
As manobras efectuadas pelos aviões são em geral não estacionárias. Com frequên-cia nas manobras os efeitos aerodinâmicos transientes são importantes e os ângulosde guinada e rolamento (e até de picada) podem ser elevados. Como não são estadosde equilíbrio, também não faz sentido falar de estabilidade das manobras, embora aestabilidade da aeronave seja relevante para a capacidade de efectuar manobras facil-mente e com segurança.
Existem, porém, algumas manobras que podem ser consideradas estacionárias eque iremos considerar em seguida: a manobra de descida-subida simétrica, ou pull-upsimétrico, que é uma manobra longitudinal, e a viragem estacionária, ou volta coorde-nada, que é uma manobra lateral.
7.5 Manobra de descida-subida simétrica
A manobra longitudinal que vamos considerar é a manobra de descida-subida (pull-up) simétrica. A figura 7.2 representa esta manobra na situação em que o avião seencontra no ponto mais baixo da trajectória. A trajectória de voo é circular num planovertical, pelo que existe uma aceleração normal. Além disso, existe uma velocidadeangular de picada q. Em rigor esta manobra não é estacionária porque as componen-tes do peso quer segundo a velocidade quer perpendicular a ela não são constantesdurante o movimento. No entanto, considerando uma vizinhança próxima do pontomais baixo da trajectória podemos desprezar essa variação da direcção das forças econsiderar a manobra como simétrica.
Define-se factor de carga n como a razão entre a sustentação e o peso da aeronave:
n = LWa L = nW. (7.39)
Logo, na direcção vertical L−W = (n− 1)W = (n− 1)mg, e a aceleração normal é
an =L−Wm
= (n− 1)g. (7.40)
89
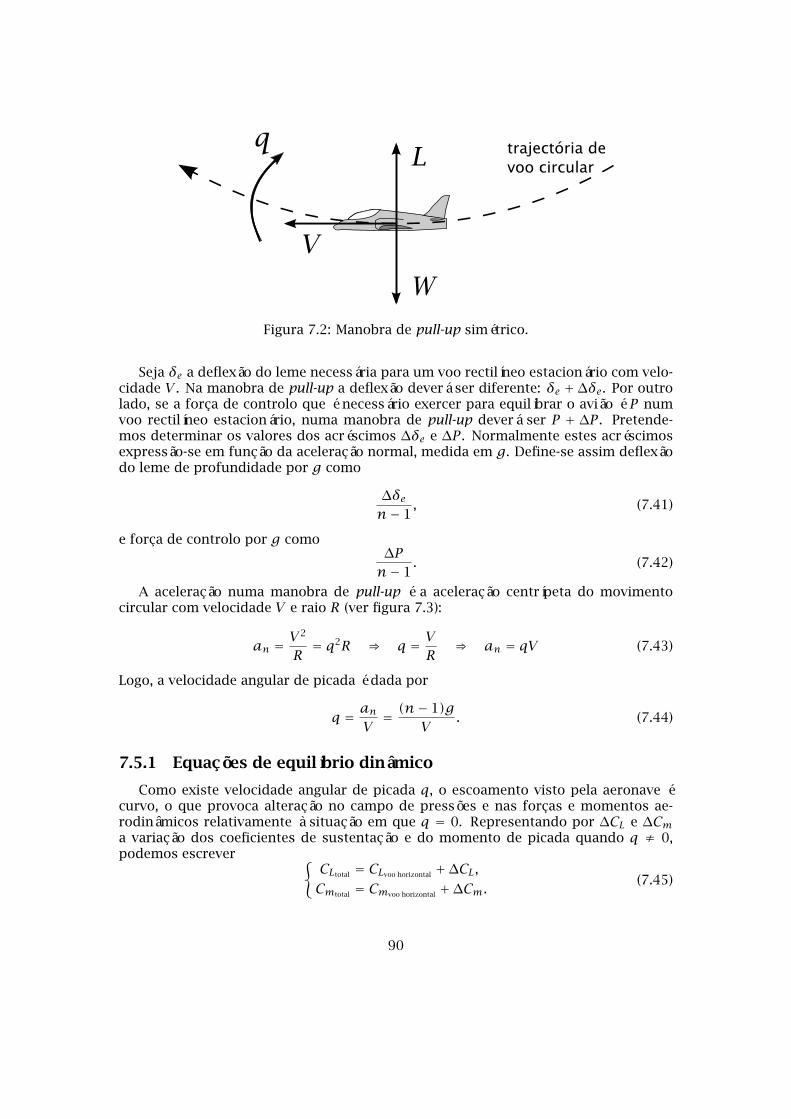
Figura 7.2: Manobra de pull-up simétrico.
Seja δe a deflexão do leme necessária para um voo rectilíneo estacionário com velo-cidade V . Na manobra de pull-up a deflexão deverá ser diferente: δe + ∆δe. Por outrolado, se a força de controlo que é necessário exercer para equilíbrar o avião é P numvoo rectilíneo estacionário, numa manobra de pull-up deverá ser P + ∆P . Pretende-mos determinar os valores dos acréscimos ∆δe e ∆P . Normalmente estes acréscimosexpressão-se em função da aceleração normal, medida em g. Define-se assim deflexãodo leme de profundidade por g como
∆δen− 1
, (7.41)
e força de controlo por g como∆Pn− 1
. (7.42)
A aceleração numa manobra de pull-up é a aceleração centrípeta do movimentocircular com velocidade V e raio R (ver figura 7.3):
an =V 2
R= q2R ⇒ q = V
R⇒ an = qV (7.43)
Logo, a velocidade angular de picada é dada por
q = anV= (n− 1)g
V. (7.44)
7.5.1 Equações de equilíbrio dinâmico
Como existe velocidade angular de picada q, o escoamento visto pela aeronave écurvo, o que provoca alteração no campo de pressões e nas forças e momentos ae-rodinâmicos relativamente à situação em que q = 0. Representando por ∆CL e ∆Cma variação dos coeficientes de sustentação e do momento de picada quando q ≠ 0,podemos escrever
CLtotal = CLvoo horizontal +∆CL,Cmtotal = Cmvoo horizontal +∆Cm.
(7.45)
90

Figura 7.3: Manobra de pull-up simétrico: aceleração normal e factor de carga n.
Se q, ∆α e ∆δe forem «pequenos», os coeficientes CL e Cm dependem linearmentedas variáveis dinâmicas, que neste caso incluem a velocidade angular de picada:
CLtotal = CLα(α+∆α)+ CLq q + CLδe (δe +∆δe),Cmtotal = Cm0 + Cmα(α+∆α)+ Cmq q + Cmδe (δe +∆δe),
sendo
CLq =∂CL∂q, Cmq =
∂Cm∂q
.
Tendo em conta que num voo horizontal CLvoo horizontal e Cmvoo horizontal devem verificar (2.76),obtemos
∆CL = CLα∆α+ CLq q + CLδe∆δe,∆Cm = Cmα∆α+ Cmq q + Cmδe∆δe.
(7.46)
A equação (7.44) permite escrever a velocidade angular de picada q como
q = qc2V= (n− 1)gc
2V 2= (n− 1)
mg12ρSV 2
12ρSc2m
= (n− 1)CW2µ, (7.47)
tendo sido usados o coeficiente adimensional do peso, CW , e a razão de massa, µ,definidos respectivamente por
CW =mg
12ρV 2S
, (7.48)
µ = m12ρSc
. (7.49)
91

Na descida-subida estacionária não há aceleração angular. Por isso, Cmtotal = 0 im-plica ∆Cm = 0. Por outro lado, os coeficientes de sustentação verificam
CLtotal =L
12ρV 2S
, (7.50)
CLvoo horizontal =W
12ρV 2S
= CW , (7.51)
∆CL =L−W12ρV 2S
= (n− 1)W12ρV 2S
= (n− 1)CW . (7.52)
Das equações de equilíbrio dinâmico deduz-se portanto que∆CL = (n− 1)CW = CLα∆α+ CLq(n− 1)
CW2µ+ CLδe∆δe
∆Cm = 0 = Cmα∆α+ Cmq(n− 1)CW2µ+ Cmδe∆δe
(7.53)
Na forma matricial: [CLα CLδeCmα Cmδe
]· ∆αn−1
∆δen−1
=CW
(1− CLq
2µ
)−CW
Cmq2µ
. (7.54)
A deflexão adicional do elevator necessária para que se dê a manobra de pull-up é
∆δen− 1
= −CWdet
[Cmα −
12µ
(CLqCmα − CLαCmq
)]. (7.55)
O acréscimo no ângulo de ataque pode ser dado por
∆αn− 1
= 1CLα
[CW − CLq
CW2µ− CLδe
∆δen− 1
], (7.56)
ou ainda por∆αn− 1
= CWdet
[Cmδe −
12µ
(CLqCmδe − CLδeCmq
)]. (7.57)
7.5.2 Ponto e margem de manobra
O acréscimo de deflexão ∆δe depende da posição do centro de massa por via dasderivadas Cmα , CLq e Cmq . Explicitando apenas a contribuição de Cmα e fazendo uso de(2.44) obtemos
∆δen− 1
= −CWdet
[CLα(h− hn)
(1− 1
2µCLq
)+CLαCmq
2µ
]
= −CWCLα(2µ − CLq)
2µ det
(h− hn +
Cmq
2µ − CLq
). (7.58)
92

Figura 7.4: (Fonte: Etkin & Reid, Dynamics of Flight)
Define-se ponto de manobra (hm) como a posição do centro de massa para a qual∆δen−1 = 0. Assim,
∆δen− 1
= −CWCLα(2µ − CLq)
2µ det
(h− hn +
Cmq
2µ − CLq
)= 0,
e conclui-se que o ponto de manobra é dado por
hm = hn −Cmq(hm)
2µ − CLq(hm). (7.59)
Na equação (7.59) explicitou-se a dependência de CLq e Cmq relativamente à posiçãodo centro de massa. Na maioria dos casos pode-se simplicar a equação (7.59) poisCLq 2µ. Além disso, em aeronaves com cauda a variação de Cmq com h é pequena.A variação de ∆δe com h é aproximadamente linear e a posição do ponto de manobrapode ser aproximada por
hm = hn −Cmq
2µ. (7.60)
Em função do ponto de manobra, a deflexão (adicional) do leme por g vem dadapor
∆δen− 1
= −CWCLα(2µ − CLq)
2µ det(h− hm) . (7.61)
Define-se margem de manobra com controlo fixo como (hm − h). Na hipótese de quea variação de CLq e Cmq com h pode ser desprezada, a deflexão do leme por g varialinearmente com a margem de manobra. O declive da recta é proporcional a CW .
93

7.5.3 Força de controlo por g e ponto de manobra de manche livre
Como vimos, para realizar a manobra de pull-up é necessária uma deflexão adicio-nal de leme de profundidade. A esta deflexão adicional corresponderá uma força decontrolo adicional, que vamos determinar de seguida.
A força de controlo depende do momento de charneira, pelo que
P = GSece12ρV 2Che ⇒ ∆P = GSece
12ρV 2∆Che (7.62)
Mas, em voo rectilíneo e estacionário,
Chevoo rectilíneo = Che0 + Cheαα+ b2δe + b3δt.
na manobra de pull-up teremos
Chetotal = Chevoo rectilíneo +∆Che, (7.63)
em que ∆Che depende não apenas de α e δe, mas também da velocidade angular depicada q, dado que esta modifica o escoamento em torno do avião:
∆Che = Cheα∆α+ Cheq q + b2∆δe. (7.64)
Usando as expressões (7.56) e (7.47) para substituir ∆α e q, respectivamente, obtém-se
∆Chen− 1
= −CheαCLα
[CW − CLq
Cw2µ− CLδe
∆δen− 1
]+ Cheq
CW2µ+ b2
∆δen− 1
= − CW2µCLα
[(2µ − CLq)Cheα + CheqCLα
]+ ∆δen− 1
(b2 −
CheαCLδeCLα
)
Finalmente, usando (7.61) e tendo em conta que
a′ = CLα −CheαCLδeb2
⇒ a′b2
CLα= b2 −
CheαCLδeCLα
,
conclui-se que∆Chen− 1
= −CW2µa′b2
det(2µ − CLq)(h− h′m). (7.65)
Na equação (7.65) introduziu-se o ponto de manobra com manche livre, h′m, definidopor
h′m = hm +deta′b2
(CheαCLα
+Cheq
2µ − CLq
)(7.66)
A equação (7.62) permite determinar a força de controlo por g, representada porQ:
Q = ∆Pn− 1
= GSece12ρV 2 ∆Che
n− 1
= −GSece12ρV 2CW
12µa′b2
det(2µ − CLq)(h− h′m)
= −GSeceWSa′b2
2µ det(2µ − CLq)(h− h′m)
94

Figura 7.5: Força de controlo por g: dependência da posição do centro de massa.(Fonte: Etkin & Reid, Dynamics of Flight)
Em função da carga alar (wing loading) w = W/S, a força de controlo por g vemdada por
Q = −GSecewa′b2
2µ det(2µ − CLq)(h− h′m). (7.67)
Podemos concluir que Q aumenta linearmente com h à medida que o CG se deslocapara a frente, é proporcional à carga alar w, é proporcional a (Sece), i.e., ao cubo dasdimensões lineares da aeronave, e é independente da velocidade do avião, V .
Na figura 7.5 mostra-sea dependência da força de controlo por g com a posição docentro de massa da aeronave.
7.6 Manobra de Viragem Estacionária
Define-se volta coordenada como uma manobra de viragem em que a velocidadeangular de viragem é vertical e constante e em que a força resultante não tem compo-nente lateral (no referencial do avião). Note-se que por vezes se considera que numavolta coordenada a derrapagem é nula, o que é apenas aproximadamente verdade.
Habitualmente φ é grande, pelo que existe acoplamento entre equações longitudi-nais e laterais. As outras variáveis (ângulos de ataque, ângulo de subida, etc.) sãopequenas e podemos linearizar as equações nessas variáveis. Por exemplo, são válidasas aproximaçõescosθ ≈ 1 e sinθ ≈ θ.
As componentes da velocidade angular obtém-se aplicando a matriz de rotação aovector ~ω: pq
r
= RBE
00ω
= − sinθ
cosθ sinφcosθ cosφ
ω (7.68)
95

Figura 7.6: Viragem estacionária com subida. A velocidade angular ~ω é vertical e aaceleração centrípeta está no plano horizontal.
96

Figura 7.7: Forças numa manobra de viragem estacionária. No plano yz a resultanteda sustentação e do peso é a aceleração centrípeta.
ou seja, p = −ω sinθq =ω sinφ cosθr =ω cosφ cosθ
(7.69)
Comecemos por determinar as equações do movimento de translação segundo ye z, que dependem das forças aerodinâmicas aplicadas. O sistema de eixos de esta-bilidade é o mais adequado neste problema. O eixo Gx é definido como estando nadirecção da projecção da velocidade no plano de simetria e portanto αx = 0 = w.Admitiremos também que não há vento. As equações do movimento de translaçãosegundo y e z são então
Y +mg cosθ sinφ =m(v +ur − pw) =murZ +mg cosθ cosφ =m(w + vp − qu) =m(vp − qu)
Numa volta coordenada o ângulo de derrapagem é quase nulo, pelo que podemossupor v pequeno, e portanto u ≈ V . Além disso, se v e p são pequenos, podemosdesprezar o produto vp. Logo, o sistema pode aproximar-se por
Y ≈ −mg sinφ cosθ +mrV = 0
Z ≈ −mg cosφ cosθ −mqV (7.70)
Note-se que Y = 0 pela definição de volta coordenada, e que Y = 0⇒ Cy = 0.
97

0 = −mg sinφ cosθ +mrV ⇒ sinφ = rVg cosθ
r =ω cosφ cosθ ⇒ cosφ = rω cosθ
⇒ tanφ = ωVg.
O factor de carga (vertical) nz é a razão entre a força vertical e o peso, donde
nz = −Zmg
= cosφ cosθ + qVg= cosφ cosθ + (ω sinφ cosθ)V
g=
= cosφ cosθ + sinφ tanφ cosθ = cosθcosφ
= cosθ secφ
Para eixos de estabilidade Z = −L, pelo que
n = LW= nz = cosθ secφ (7.71)
O incremento do coeficiente de sustentação relativamente ao valor necessário para umvoo estacionário rectilíneo é
∆CL =L−mg12ρV 2S
= (n− 1)CW . (7.72)
Este incremento é conseguido à custa da contribuição da velocidade angular de picadae dos incrementos ∆α e ∆δe relativamente aos valores de equilíbrio para voo rectilíneohorizontal.
Consideremos agora as equações para o movimento de rotação. Para uma aeronavesimétrica as equações dos momentos são
L = Ixp − Izx r + qr(Iz − Iy)− Izxpq + qh′z − rh′yM = Iy q + rp(Ix − Iz)+ Izx(p2 − r 2)+ rh′x − ph′zN = Izr − Izxp + pq(Iy − Ix)− Izxqr + ph′y − qh′x
Num estado estacionário as derivadas temporais são nulas. Por outro lado as veloci-dades angulares sopõem-se pequenas e pode-se desprezar os termos quadráticos (qr ,pq, rp, p2 e r 2). Finalmente, desprezam-se as contribuições dos rotores. Conclui-seportanto que L = M = N = 0 ⇒ Cl = Cm = Cn = 0.
Tendo em conta (7.25), as equações para o movimento lateral direccional são0 = Cl = Clββ+ Clp p + Clr r + Clδr δr + Clδaδa0 = Cn = Cnββ+ Cnp p + Cnr r + Cnδr δr + Cnδaδa0 = Cy = Cyββ+ Cyp p + Cyr r + Cyδr δr
Para o movimento longitudinal as equações são∆CL = CLα∆α+ CLq q + CLδe∆δe = (n− 1)CWCm = Cmα∆α+ Cmq q + Cmδe∆δe = 0
em que, tal como no caso da manobra de pull-up, ∆α e ∆δe são os incrementos doângulo de ataque e da deflexão do elevator relativamente ao caso de voo rectilíneoestacionário (em equilíbrio).
98

Usando (7.69) para escrever todas as velocidades angulares em função de ω, asequações na forma matricial para as variáveis laterais sãoCyβ Cyδr 0
Clβ Clδr ClδaCnβ Cnδr Cnδa
· βδrδa
=Cyp CyrClp ClrCnp Cnr
· [ sinθ− cosφ cosθ
]× ωb
2V, (7.73)
e para as variáveis longitudinais são[CLα CLδeCmα Cmδe
]·[∆α∆δe
]= −
[CLqCmq
]× ωc
2Vsinφ cosθ +
[0
(n− 1)CW
]. (7.74)
O incremento da deflexão do leme de profundidade pode obter-se resolvendo a equa-ção (7.74), obtendo-se
∆δe =1
det
Cmα
[−CLq
ωc2V
sinφ cosθ + (n− 1)CW]+ CLα
(Cmq
ωc2V
sinφ cosθ)
= 1det
ωc2V
sinφ cosθ(CmqCLα − CmαCLq
)+ (n− 1)CWCmα
= 1det
n2 − 1n
CW2µ
cosθ(CmqCLα − CmαCLq
)+ (n− 1)CWCmα
.
Nas equações acima usou-se
ωc2V
sinφ = (g tanφ/V)c2V
sinφ = mg12ρV 2S
ρSc2× 2m
sin2φcosφ
=
= CW2µ(1− 1
n2)n = CW
2µn2 − 1n
.
A expressão para ∆δe pode também escrever-se como
∆δe = −(n− 1)CWCmα + n+1
2µn cosθ(CmqCLα − CmαCLq
)CLαCmδe − CLδeCmα
. (7.75)
Note-se a semelhança desta expressão com a obtida para o caso da manobra de pull-up.Resolvendo o sistema (7.73) podem-se encontrar os valores da deflexão dos ailerons
e do rudder necessários para que se realize a volta coordenada, bem como o valor doângulo de derrapagem (que é habitualmente quase nulo).
99
Capítulo 8
Teoria para PequenasPerturbações
No capítulo 6 deduziram-se as equações gerais do movimento de uma aeronave.Estas equações são não lineares, mas é possível encontrar soluções particulares paraalguns estados estacionários, como foi feito no capítulo 7. Interessa saber se esses es-tados estacionários são estáveis para pequenas perturbações das variáveis dinâmicas.Para isso é necessário estabelecer as equações que regem a evolução temporal dessaspequenas perturbações. Começaremos por linearizar as equações do movimento e emseguida tendo em conta as equações do movimento do estado estacionário, obteremosum sistema de equações diferenciais lineares para as pequenas perturbações.
8.1 Definição do estado estacionário
As variáveis dinâmicas vão ser decompostas na soma do valor que assumem noestado estacionário com o valor da pequena perturbação. Usaremos o índice 0 paraidentificar as variáveis do estado estacionário.
O estado estacionário relativamente ao qual vamos procurar estabelecer as equa-ções de evolução das pequenas perturbações é o correspondente a um movimentorectilíneo uniforme sem derrapagem e com asas niveladas. Logo, são nulas a acelera-ção linear (u0 = v0 = w0 = 0), a velocidade angular p0 = q0 = r0 = 0, a velocidadelateral (v0 = 0) e o ângulo de pranchamento (φ0 = 0). Vamos além disso usar ângulode rumo nulo: ψ = 0 (é sempre possível sem perda de generalidade).
Usaremos um sistema de eixos de estabilidade, pelo que o eixo Cx tem a direcçãode ~V0 (o que é sempre possível porque v0 = 0). Logo,w0 = 0, o que implica que αx = 0,pelo que θ0 coincide com o ângulo de subida.
Admitiremos que o efeito dos rotores é desprezável. Esta hipótese é válida se oavião está em voo planado ou se o momento angular de cada rotor é pequeno ou aindase os rotores são simétricos e rodam em sentidos opostos.
Se existir vento com velocidade constante, a velocidade do avião relativamente àTerra é ~VE = ~V + ~W e, dado que v0 = 0 = w0, conclui-se que vE0 = Wy e wE0 = Wz. Ainfluência do vento na dinâmica será tratada mais à frente. Por enquanto admitir-se-áque não existe vento, pelo que ~VE = ~V , donde uE = u, vE = v e wE = w.
100

Finalmente, no estado estacionário temos δa = 0 e δr = 0 (mas, evidentemente,δe ≠ 0).
8.1.1 Notação para estado estacionário e perturbação
As variáveis dinâmicas vão ser decompostas na soma do valor que assumem noestado estacionário com o valor da pequena perturbação. Por exemplo, representandopor x o valor total de uma determinada variável, o seu valor no estado estacionário éx0 e o valor da perturbação é ∆x. Logo, x = x0+∆x. No caso em que x0 = 0, a variáveltotal é x = ∆x. Neste caso usaremos apenas x para a perturbação.
Tendo em conta o estado estacionário definido acima, a velocidade linear éu = u0 +∆u,v ≡ ∆v,w ≡ ∆w.
(8.1)
Por sua vez, a velocidade angular ép ≡ ∆p (p0 = 0),q ≡ ∆q (q0 = 0),r ≡ ∆r (r0 = 0),
(8.2)
e os ângulos de Euler são ψ ≡ ∆ψ (ψ0 = 0),θ = θ0 +∆θ,φ ≡ ∆φ (φ0 = 0).
(8.3)
Dado que, por hipótese, ∆θ é pequeno, podemos usar as aproximações habituais:cos∆θ ≈ 1 e sin∆θ ≈ ∆θ. Logo,
sin(θ0 +∆θ) = sinθ0 cos∆θ + cosθ0 sin∆θ ≈ sinθ0 +∆θ cosθ0,cos(θ0 +∆θ) = cosθ0 cos∆θ − sinθ0 sin∆θ ≈ cosθ0 −∆θ sinθ0.
8.1.2 Equações para o estado estacionário
Substituindo as definições do estado estacionário nas equações gerais do movi-mento (6.19), (6.23) e (6.12), obtemos para a dinâmica de translação as equações
X0 −mg sinθ0 = 0,Y0 = 0,Z0 +mg cosθ0 = 0.
Para as equações da dinâmica de rotação temosL0 = 0,M0 = 0,N0 = 0.
101

Por sua vez, as equações da trajectória do estado estacionário são simplesmentexE0 = u0 cosθ0,yE0 = 0,zE0 = −u0 sinθ0.
8.2 Linearização das equações
Como foi visto acima, supomos que as perturbações são pequenas e por isso pode-mos desprezar os termos quadráticos (isto é, todos aqueles em que aparecem produtosdas variáveis da perturbação) face aos termos lineares.
Para linearizar as equações do movimento para pequenas perturbações é necessáriosubstituir todas as variáveis de estado pela soma da contribuição do estado estacio-nário com a da perturbação. Em seguinda usamos as equações do estado estacionáriopara eliminar os termos que contenham apenas contribuições do estado estacionário.Finalmente, desprezamos os termos quadráticos nas pequenas perturbações.
8.2.1 Forças e momentos aerodinâmicos
As forças e os momentos aerodinâmicos são função das variáveis de estado. Parapequenas perturbações, as variáveis de estado longitudinais são ∆u, w, q e a derivadatemporal w (∆u e q não são relevantes). As variáveis de estado laterais são v , p e r .
Supomos que as perturbações nas forças e momentos dependem linearmente dasvariáveis de estado. Admitimos ainda que em configurações simétricas as forças e mo-mentos laterais só dependem das variáveis laterais e desprezamos a contribuição dasvariáveis laterais (assimétricas) para as forças e momentos longitudinais (simétricas).Assim, admitimos que as forças e momentos longitudinais dependem linearmente de∆u,w,q, w e que as forças ou momentos laterais dependem linearmente de v,p, r .
∆X = Xu∆u+Xww +Xww +Xqq +∆Xc (8.4)
∆Y = Yvv + Ypp + Yrr +∆Yc (8.5)
∆Z = Zu∆u+ Zww + Zww + Zqq +∆Zc (8.6)
∆L = Lvv + Lpp + Lrr +∆Lc (8.7)
∆M = Mu∆u+Mww +Mww +Mqq +∆Mc (8.8)
∆N = Nvv +Npp +Nrr +∆Nc (8.9)
Habitualmente a dependência da força segundo x em q e w pode ser desprezada. Issosignifica que Xw ≈ 0 e Xq ≈ 0. Também não vamos considerar a variação da densidadeρ com a altitude.
8.2.2 Linearização das equações longitudinais
O movimento longitudinal é aquele em que o plano de simetria do avião não sealtera. As equações longitudinais a linearizar são as equações de translação segundox e z e a equação do movimento de rotação segundo y .
102

Equação do movimento de translação segundo x
Comecemos pela linearização da equação do movimento de translação segundo x,
X −mg sinθ =m(uE + qwE − rvE).
Substituindo todas as variáveis como a soma da contribuição do estado estacionáriocom a da perturbação, obtém-se
(X0 +∆X)−mg sin(θ0 +∆θ) =m(u0 +∆u+ qw − rv) (8.10)
Dado que sin(θ0 + ∆θ) ≈ sinθ0 + ∆θ cosθ0 e tendo em conta as equações do estadoestacionário,
(X0 −mg sinθ0)︸ ︷︷ ︸=0 (Est. estacionário)
+∆X −mg cosθ0∆θ =m(u0︸︷︷︸=0
+∆u+ qw − rv). (8.11)
A linearização implica que qw ≈ 0 e que rv ≈ 0, pelo que
∆X −mg cosθ0∆θ =m∆u. (8.12)
Por outro lado, desprezando os termos que incluem as derivadas Xq e Xw , a equação(8.4) reduz-se a
∆X = Xu∆u+Xww +∆Xc , (8.13)
donde:Xu∆u+Xww +∆Xc −mg cosθ0∆θ =m∆u
ou, resolvendo para a aceleração ∆u,
∆u = Xum∆u+ Xw
mw +−g cosθ0∆θ +
∆Xcm. (8.14)
Equação do movimento de translação segundo z
De forma análoga, usando as equações do estado estacionário e linearizando a equa-ção segundo z
Z +mg cosθ cosφ =m(wE + pvE − quE),se chega a:
w = ∆Zm− g sinθ0∆θ +u0q. (8.15)
Desenvolvendo ∆Z de acordo com (8.6) obtém-se
w = Zum∆u+ Zw
mw + Zw
mw + Zq
mq − g sinθ0∆θ +u0q +
∆Zcm, (8.16)
e resolvendo em ordem a w, obtém-se finalmente:
w = Zum− Zw
∆u+ Zwm− Zw
w +
(mu0 + Zq
)m− Zw
q − mg sinθ0
m− Zw∆θ + ∆Zc
m− Zw. (8.17)
103

Equação do movimento de rotação segundo y
A equação do movimento de rotação em torno de y é
M = Iyy q − Izx(r 2 − p2)− Ixy(p + qr)− Iyz(r − pq)− (Izz − Ixx)rp.
No caso de uma aeronave com um plano de simetria Ixy = 0 = Iyz e a sua linearizaçãoconduz a
q = ∆MIy. (8.18)
Usando (8.8) e (8.17), obtém-se finalmente
q = 1Iy
[(Mu +
MwZum− Zw
)∆u+
(Mw +
MwZwm− Zw
)w+
(Mq +
Mw(mu0 + Zq)m− Zw
)q − Mwmg sinθ0
m− Zw∆θ +∆Mc +
Mw∆Zcm− Zw
]. (8.19)
Fecho do sistema de equações
Obtivemos até ao momento três equações, mas temos como variáveis ∆u, w, q e∆θ. A quarta equação pode obter-se da linearização de
q = ψ cosθ sinφ+ θ cosφ,
sendo simplesmente∆θ = q. (8.20)
Resumo das equações longitudinais para pequenas perturbações
Escrevendo o sistema de equações (8.14), (8.19), (8.17) e (8.20) na forma matricial,
∆u
w
q
∆θ
=
Xum
Xwm 0 −g cosθ0
Zum−Zw
Zwm−Zw
(mu0+Zq)m−Zw −mg sinθ0
m−Zw
1Iy
(Mu + MwZu
m−Zw
)1Iy
(Mw + MwZw
m−Zw
) (MqIy+ Mw (mu0+Zq)
Iy (m−Zw )
)−Mwmg sinθ0Iy (m−Zw )
0 0 1 0
∆u
w
q
∆θ
. (8.21)
No sistema de equações acima omitiu-se o vector das variáveis de controlo, dadopor [
∆Xcm,∆Zc
m− Zw,
1Iy
(∆Mc +
Mw∆Zcm− Zw
),0]T
(8.22)
As equações linearizadas para o «flight path» são
∆xE = ∆u cosθ0 +w sinθ0 −u0∆θ sinθ0, (8.23)
∆zE = −∆u sinθ0 +w cosθ0 −u0∆θ cosθ0. (8.24)
104

8.2.3 Linearização das equações laterais
O processo de linearização das equações laterais é idêntico ao das equações longi-tudinais. Da equação para o movimento de translação segundo y obtemos a aceleraçãov , enquanto que p e r se obtêm das equações para o movimento de rotação segundo xe z, respectivamente. A quarta equação, necessária para fechar o sistema de equações,pode obter-se da linearização da primeira e terceira equações de (6.12), que conduz aφ = p + r tanθ0.
Para exemplificar o procedimento vamos obter a equação para p. partimos da pri-meira equação do sistema (6.23):
L = Ixxp − Iyz(q2 − r 2)− Izx(r + pq)− Ixy(q − rp)− (Iyy − Izz)qr .
Recordando que, para aviões com plano de simetria, Ixy = 0 = Iyz e que no estadoestacionário se tem L0 = 0, a linearização desta equação conduz a
∆L = Ixxp − Ixzr . (8.25)
Esta equação depende de r , pelo que necessitamos de usar simultaneamente a equaçãoque resulta de linearizar a terceira equação do sistema (6.23), ou seja,
∆N = Izzr − Ixzp.
Tendo em conta (8.9), podemos escrever
r = IxzIzzp + Nv
Izzv + Np
Izzp + Nr
Izzr + ∆Nc
Izz. (8.26)
Substituindo em (8.25) e tendo em conta que ∆L é dado por (8.7), vem(Ixx −
I2xzIzz
)p =
(Lv +
IxzNvIzz
)v+
(Lp +
IxzNpIzz
)p+
(Lr +
IxzNrIzz
)r+
(∆Lc +
Ixz∆NcIzz
).
Para simplificar a escrita desta equação definimos
I′x = Ixx −I2xzIzz= IxxIzz − I
2xz
Izz, (8.27)
I′xz =IxzIzzI′x
= IxzIxxIzz − I2xz
. (8.28)
Note-se que para eixos principais de inércia Ixz = 0, então I′x = Ixx e I′xz = 0. Comestas definições a equação pode escrever-se
p =(LvI′x+ I′xzNv
)v +
(LpI′x+ I′xzNp
)p +
(LrI′x+ I′xzNr
)r +
(∆LcI′x+ I′xz∆Nc
). (8.29)
De forma análoga procederíamos para deduzir a equação para r , sendo convenientedefinir igualmente
I′z =IxxIzz − I2xz
Ixx. (8.30)
Para eixos principais de inércia teríamos I′z = Izz.
105

Resumindo na forma matricial o sistema de equações diferenciais de primeira or-dem para a evolução das pequenas perturbações laterais, obtém-se
v
p
r
φ
=
Yvm
Ypm
(Yrm −u0
)g cosθ0
(LvI′x + I
′zxNv
) (LpI′x + I
′zxNp
) (LrI′x + I
′zxNr
)0
(I′zxLv + Nv
I′z
) (I′zxLp +
NpI′z
) (I′zxLr + Nr
I′z
)0
0 1 tanθ0 0
v
p
r
φ
. (8.31)
O vector das variáveis de controlo[∆Ycm,(∆LcI′x+ I′zx∆Nc
),(I′zx∆Lc +
∆NcI′z
), 0]T
(8.32)
foi omitido também aqui.Para completar as equações para o «flight path», a equação linearizada para ∆yE é
∆yE = u0ψ cosθ0 + v. (8.33)
Esta equação só é necessária para perturbações laterais e para perturbações longitudi-nais reduz-se a ∆yE = 0.
Finalmente, a linearização da equação de (6.12) que se refere à velocidade angularde guinada, r = ψ cosθ cosφ− θ sinφ, leva a
ψ = r secθ0. (8.34)
8.3 Forma geral das equações
Como vimos, podem existir perturbações puramente longitudinais se o avião tiverum plano de simetria, se não houver efeitos giroscópicos do rotor. As condições para aexistência de perturbações puramente laterais são as referidas, mas é necessário aindaque não existam acoplamentos aerodinâmicos cruzados, isto é, se as forças e momen-tos longitudinais não dependerem das variáveis laterais e se as forças e momentoslaterais não dependerem das variáveis longitudinais.
As equações para as pequenas perturbações têm, em ambos os casos, a mesmaforma matricial
x = Ax+ Bc. (8.35)
Esta equação matricial representa um sistema de equações diferenciais lineares de 1ªordem, em que a matriz do sistema A é determinada a partir de (8.21) para perturações
106

longitudinais,
A =
Xum
Xwm 0 −g cosθ0
Zum−Zw
Zwm−Zw
(mu0+Zq)m−Zw −mg sinθ0
m−Zw
1Iy
(Mu + MwZu
m−Zw
)1Iy
(Mw + MwZw
m−Zw
)1Iy
(Mq + Mw(mu0+Zq)
m−Zw
)−Mwmg sinθ0
Iy(m−Zw)
0 0 1 0
, (8.36)
e a partir de (8.31) para perturbações laterais,
A =
Yvm
Ypm
(Ypm −u0
)g cosθ0
(LvI′x + I
′zxNv
) (LpI′x + I
′zxNp
) (LrI′x + I
′zxNr
)0
(I′zxLv + Nv
I′z
) (I′zxLp +
NpI′z
) (I′zxLr + Nr
I′z
)0
0 1 tanθ0 0
. (8.37)
A matriz B e o vector c são a matriz e o vector de controlo, a determinar a partirdas mesmas equações. O vector de estado x é, para perturbações longitudinais, x =[∆u w q ∆θ]T , a para parturbações laterais, x = [v p r φ]T .
O nosso objectivo é resolver o sistema x = Ax + Bc em ambos os casos, mas paraisso temos de saber determinar todos os termos das matrizes A e B e do vector c.
107

Capítulo 9
Derivadas de Estabilidade
Neste capítulo pretende-se calcular as derivadas de estabilidade que figuram nasequações para pequenas perturbações. Em primeiro lugar estabelecer-se-ão as rela-ções entre as derivadas dimensionais e as adimensionais, para em seguida se procurarencontrar expressões que permitam calcular ou, pelo menos, obter uma estimativa,para as derivadas de estabilidade adimensionais.
9.1 Relações entre derivadas de estabilidade dimensio-nais e adimensionais
As equações do movimento (para pequenas perturbações) foram escritas na formadimensional, usado as derivadas de estabilidade na forma dimensional. Porém, asderivadas são normalmente obtidas na forma adimensional, por exemplo, por meio detestes de modelos em túnel aerodinâmico. Torna-se por isso necessário relacionar asderivadas de estabilidade dimensionais com as adimensionais.
9.1.1 Derivadas de estabilidade dimensionais e adimensionais
As forças e momentos longitudinais correspondentes a pequenas perturbações sãodados por (8.4), (8.6) e (8.8), sendo as derivadas calculadas no estado estacionário.Exemplificando com a equação (8.6),
∆Z = Zu∆u+ Zww + Zww + Zqq +∆Zc ,
se usarmos o índice 0 para identificar o estado estacionário, as derivadas de estabili-dade são
Zu =(∂Z∂u
)0, Zw =
(∂Z∂w
)0, Zq =
(∂Z∂q
)0
, Zw =(∂Z∂w
)0.
As forças e momentos laterais correspondente à pequena perturbação são dados por(8.5), (8.7) e (8.9), sendo também aqui as derivadas calculadas no estado estacionário.
As variáveis dinâmicas são adimensionalizadas, no caso de pequenas perturbações,usando a velocidade do estado estacionário, isto é, V = u0. Logo, as velocidades
108

adimensionais são
u = uu0, v = v
u0, w = w
u0,
e as velocidades angulares adimensionais são
p = p2u0
b
, q = q2u0
c
, r = r2u0
b
.
Finalmente, adimensionaliza-se a derivada temporal do ângulo de ataque, tendo emconta (7.9), como
ˆα = α2u0
c
.
Os coeficientes adimensionais longitudinais são definidos por (7.11), (7.12) e (7.13).Em termos das variáveis dinâmicas, os coeficientes Cx , Cz e Cm são dados por (7.14),sendo as derivadas calculadas no estado estacionário. Assim, por exemplo,
Cz = Czuu+ Czαα+ Czq q + Czα ˆα,
em que
Czu =(∂Cz∂u
)0, Czα =
(∂Cz∂α
)0, Czq =
(∂Cx∂q
)0
, Czα =(∂Cz∂ ˆα
)0.
Os coeficientes adimensionais laterais são definidos, por sua vez, por (7.19), (7.20)e (7.21) e são dados, em termos das variáveis dinâmicas adimensionais laterais, por(7.22). De novo, as derivadas são calculadas no estado estacionário.
De seguida vamos estabelecer a relação entre as derivadas dimensionais e adimen-sionais.
9.1.2 Derivadas longitudinais
Derivadas da força segundo z
A relação entre a força segundo Z e o respectivo coeficiente é Z = 12ρV
2SCz. Avelocidade da aeronave é
V 2 = u2 + v2 +w2.
No estado estacionário, u = u0, v0 = 0, e w0 = 0. Logo,(∂V 2
∂u
)0
= 2u0,(∂V 2
∂v
)0
= 0,(∂V 2
∂w
)0
= 0.
A derivada relativamente a u é
Zu ≡(∂Z∂u
)0= ∂∂u
[12ρV 2SCz
]0=[∂∂u
(12ρV 2S
)]0(Cz)0 +
(12ρV 2S
)0
(∂Cz∂u
)0
= 12ρ(2u0)S (Cz)0 +
12ρu2
0S(∂Cz∂u
)0= ρu0S (Cz)0 +
12ρu2
0S(∂Cz∂u
)0. (9.1)
109

No estado estacionário: Z0 = −mg cosθ0. Logo:
(Cz)0 =Z0
12ρSu
20
= −mg cosθ012ρSu
20
= −CW0 cosθ0. (9.2)
Por outro lado,
Czu =(∂Cz∂u
)0=(∂u∂u
)0
(∂Cz∂u
)0=(∂ uu0
∂u
)0
(∂Cz∂u
)0= 1u0Czu . (9.3)
Finalmente, substituindo (9.2) e (9.3) em (9.1), obtém-se
Zu = −ρu0S cosθ0CW0 +12ρSu0Czu . (9.4)
A derivada relativamente a w calcula-se de forma semelhante:
Zw ≡(∂Z∂w
)0= ∂∂w
[12ρV 2SCz
]0=[∂∂w
(12ρV 2S
)]0(Cz)0 +
(12ρV 2S
)0
(∂Cz∂w
)0
= 12ρ(2w0︸︷︷︸
0
)S (Cz)0 +12ρu2
0S(∂Cz∂w
)0= 1
2ρu2
0S(∂Cz∂w
)0. (9.5)
Note-se que (∂Cz∂w
)0=(∂w∂w
)0
(∂Cz∂w
)0=(∂ wu0
∂w
)0
(∂Cz∂w
)0= 1u0
(∂Cz∂w
)0.
Por outro lado, para pequenas perturbações w = α, pelo que(∂Cz∂w
)0≡ Czα . Por substi-
tuição em (9.5) conclui-se de que
Zw =12ρSu0Czα . (9.6)
O cálculo da derivada relativamente a w faz-se da mesma forma.
Zw ≡(∂Z∂w
)0= ∂∂w
[12ρV 2SCz
]0
=[∂∂w
(12ρV 2S
)]0(Cz)0 +
(12ρV 2S
)0
(∂Cz∂w
)0= 0+ 1
2ρu2
0S(∂Cz∂w
)0
(9.7)
Para pequenas perturbações w = w/u0 = αx , donde w = u0αx . Por outro lado,ˆαx = αx c/(2u0). Logo,(
∂Cz∂w
)0= 1u0
(∂Cz∂α
)0= 1u0
c2u0
(∂Cz∂ ˆα
)0= c
2u20Czα ,
obtendo-se finalmente
Zw =14ρScCzα . (9.8)
110

Por fim, calcula-se a derivada relativamente a q:
Zq ≡(∂Z∂q
)0
= ∂∂q
[12ρV 2SCz
]0=[
∂∂q
(12ρV 2S
)]0
(Cz)0 +(
12ρV 2S
)0
(∂Cz∂q
)0
= 0+ 12ρu2
0S(∂Cz∂q
)0
. (9.9)
Tendo em conta que q = q c/(2u0), tem-se(∂Cz∂q
)0
= c2u0
(∂Cz∂q
)0
= c2u2
0Czq , (9.10)
pelo que facilmente se obtém
Zq =14ρu0ScCzq . (9.11)
Derivadas da força segundo x
Para o cálculo das derivadas da força segundo x procede-se de forma idêntica aocaso anterior, mas agora X = 1
2ρV2SCx.
A derivada relativamente a u é:
Xu ≡(∂X∂u
)0= ∂∂u
[12ρV 2S Cx
]0
=[∂∂u
(12ρV 2S
)]0(Cx)0 +
(12ρV 2S
)0
(∂Cx∂u
)0= ρu0S (Cx)0 +
12ρu2
0S(∂Cx∂u
)0.
Note-se que agora X0 =mg sinθ0, o que implica Cx0 = CW0 sinθ0, e por outro lado,
(∂Cx∂u
)0=(∂u∂u
)0
(∂Cx∂u
)0=(∂ uu0
∂u
)0
(∂Cx∂u
)0= 1u0Cxu .
O resultado final é
Xu = ρu0S sinθ0 CW0 +12ρSu0 Cxu . (9.12)
Para as outras derivadas procede-se exactamente como para o caso das derivadasda força segundo z, obtendo-se:
Xw =12ρSu0Cxα , (9.13)
Xw =14ρScCxα , (9.14)
Xq =14ρu0ScCxq . (9.15)
111

Derivadas do momento de picada
Para o cálculo das derivadas do momento de picada, partimos de M = 12ρV
2ScCm.A única diferença face aos cálculos anteriores é que o momento de picada no estadoestacionário M0 = 0, donde (Cm)estado estacionário = 0, obtendo-se agora
Mu =12ρSu0cCmu , (9.16)
Mw =12ρSu0cCmα , (9.17)
Mq =14ρSu0c2Cmq , (9.18)
Mw =14ρSc2Cmα . (9.19)
9.1.3 Derivadas laterais
Derivadas do momento de rolamento
A relação entre o momento de rolamento L e o seu coeficiente adimensional Cl éL = 1
2ρV2Sb Cl. No estado estacionário, as variáveis dinâmicas são nulas: v0 = 0 e
p0 = r0 = 0. Além disso, o momento de rolamento no estado estacionário é nulo,L0 = 0, e portanto Cl0 = 0.
Começamos por calcular a derivada em ordem a v .
Lv ≡(∂L∂v
)0= ∂∂v
[12ρV 2SbCl
]0
=[∂∂v
(12ρV 2Sb
)]0Cl0 +
(12ρV 2Sb
)0
(∂Cl∂v
)0= 0+ 1
2ρu2
0Sb(∂Cl∂v
)0. (9.20)
Recorde-se que, para pequenas perturbações
β = arcsinvV≈ vu0= v,
pelo que (∂Cl∂v
)0=(∂v∂v
)0
(∂Cl∂v
)0= 1u0Clβ .
Por substituição em (9.20), deduz-se facilmente que
Lv =12ρu0Sb Clβ . (9.21)
O cálculo da derivada em ordem a p é semelhante:
Lp ≡(∂L∂p
)0
=[∂∂p
(12ρV 2Sb
)]0
Cl0 +(
12ρV 2Sb
)0
(∂Cl∂p
)0
= 0+ 12ρu2
0Sb(∂Cl∂p
)0
,
112

mas agora p = p/(2u0/b), pelo que(∂Cl∂p
)0
=(∂p∂p
)0
(∂Cl∂p
)0
= b2u0
Clp .
O resultado final é então
Lp =14ρu0Sb2 Clp . (9.22)
Finalmente, para a derivada em ordem a r temos
Lr ≡(∂L∂r
)0=[∂∂r
(12ρV 2Sb
)]0Cl0 +
(12ρV 2Sb
)0
(∂Cl∂r
)0= 0+ 1
2ρu2
0Sb(∂Cl∂r
)0,
e, como r = r/(2u0/b), (∂Cl∂r
)0=(∂r∂r
)0
(∂Cl∂r
)0= b
2u0Clr ,
obtendo-se por fim
Lr =14ρu0Sb2 Clr . (9.23)
Derivadas do momento de guinada
Para as derivadas do momento de guinada partimos de N = 12ρV
2Sb Cn. No estadoestacionário N0 = 0⇒ Cn0 = 0.
De forma análoga ao caso do momento de rolamento, obtém-se
Nv =12ρu0Sb Cnβ , (9.24)
Np =14ρu0Sb2 Cnp , (9.25)
Nr =14ρu0Sb2 Cnr . (9.26)
Derivadas da força lateral
Finalmente, para as derivadas da força lateral usamos Y = 12ρV
2S Cy . No estadoestacionário Y0 = 0⇒ Cy0 = 0. De forma análoga aos casos anteriores obtemos
Yv =12ρu0S Cyβ , (9.27)
Yp =14ρu0Sb Cyp , (9.28)
Yr =14ρu0Sb Cyr . (9.29)
113
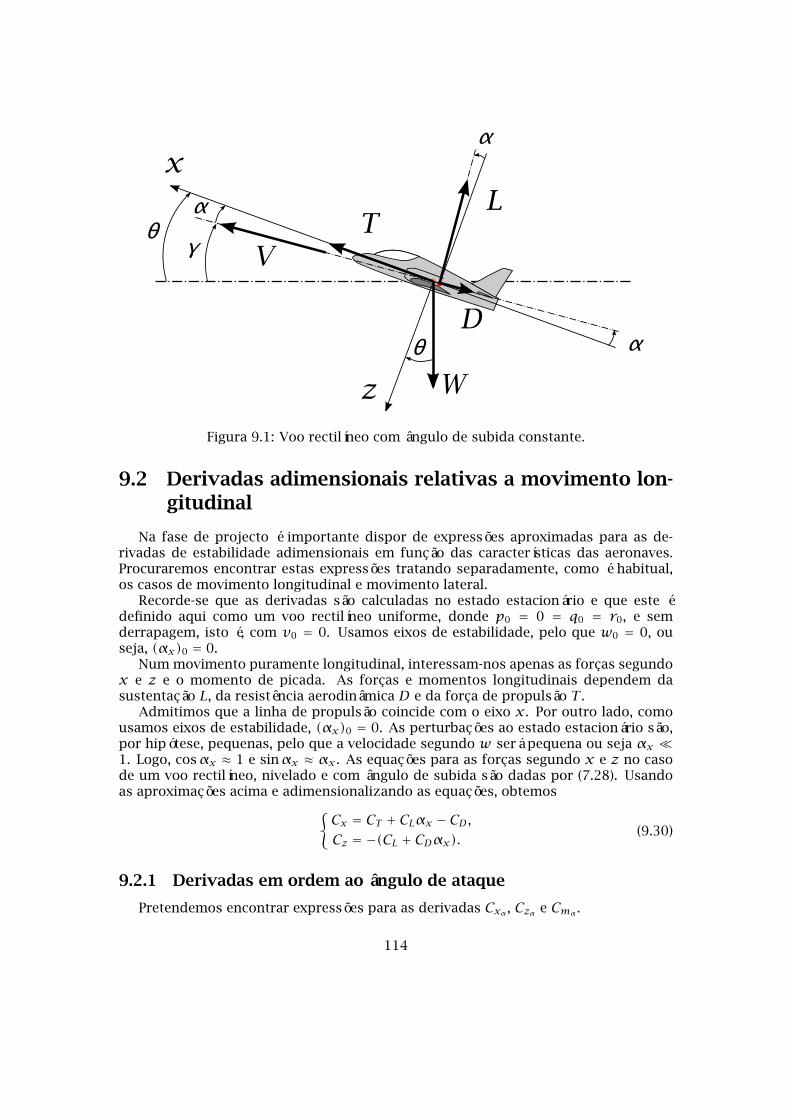
Figura 9.1: Voo rectilíneo com ângulo de subida constante.
9.2 Derivadas adimensionais relativas a movimento lon-gitudinal
Na fase de projecto é importante dispor de expressões aproximadas para as de-rivadas de estabilidade adimensionais em função das características das aeronaves.Procuraremos encontrar estas expressões tratando separadamente, como é habitual,os casos de movimento longitudinal e movimento lateral.
Recorde-se que as derivadas são calculadas no estado estacionário e que este édefinido aqui como um voo rectilíneo uniforme, donde p0 = 0 = q0 = r0, e semderrapagem, isto é, com v0 = 0. Usamos eixos de estabilidade, pelo que w0 = 0, ouseja, (αx)0 = 0.
Num movimento puramente longitudinal, interessam-nos apenas as forças segundox e z e o momento de picada. As forças e momentos longitudinais dependem dasustentação L, da resistência aerodinâmica D e da força de propulsão T .
Admitimos que a linha de propulsão coincide com o eixo x. Por outro lado, comousamos eixos de estabilidade, (αx)0 = 0. As perturbações ao estado estacionário são,por hipótese, pequenas, pelo que a velocidade segundo w será pequena ou seja αx 1. Logo, cosαx ≈ 1 e sinαx ≈ αx . As equações para as forças segundo x e z no casode um voo rectilíneo, nivelado e com ângulo de subida são dadas por (7.28). Usandoas aproximações acima e adimensionalizando as equações, obtemos
Cx = CT + CLαx − CD,Cz = −(CL + CDαx).
(9.30)
9.2.1 Derivadas em ordem ao ângulo de ataque
Pretendemos encontrar expressões para as derivadas Cxα , Czα e Cmα .
114

Por definição, a derivada Cxα , calculada no estado estacionário, é
Cxα ≡(∂Cx∂α
)0.
Mas, da primeira equação de (9.30),(∂Cx∂α
)0=(∂∂α(CT + CLαx − CD)
)0
(∂CT∂α
)0︸ ︷︷ ︸
=0
+(CL)0 +(∂CL∂α(αx)0
)0︸ ︷︷ ︸
=0⇐(αx)0=0
−(∂CD∂α
)0.
Para evitar ambiguidades usaremos a notação CL1 ≡ (CL)0 para o coeficiente de susten-tação no estado estacionário. De igual forma, designaremos por CD1 o coeficiente daresistência aerodinâmica no estado estacionário. Obtém-se então
Cxα = CL1 −(∂CD∂α
)0≡ CL1 − CDα . (9.31)
Se o coeficiente de resistência estiver relacionado com o coeficiente de sustentaçãoatravés da polar CD = CD0 + C2
L/(πAe), então
CDα ≡(∂CD∂α
)0= 2CL0
πAeCLα ,
e este valor de CDα pode ser usado em (9.31).Para calcular a derivada Czα no estado estacionário partimos da definição
Czα =(∂Cz∂α
)0
e da segunda equação de (9.30), o que leva a(∂Cz∂α
)0= −
(∂∂α(CL + CDαx)
)0= −
(CLα + CDααx + CD
)0 = −(CLα + CD1).
Em conclusão, pode-se escrever
Czα = −(CLα + CD1). (9.32)
Resta-nos determinar a derivada Cmα . Mas o seu valor é dado, como se sabe, por
Cmα = a(h− hn).
9.2.2 Derivadas em ordem à velocidade longitudinal
As derivadas em ordem a u traduzem as alterações de forças e momentos quandovaria a velocidade horizontal, supondo α, T , etc. constantes.
Os coeficientes CL e CD dependem de u devido a efeitos de compressibilidade (istoé, dependem do número de Mach Ma), a efeitos aeroelásticos (isto é, dependem dapressão dinâmica pd = 1/2ρV 2) e à interacção da propulsão com a airframe (asa efuselagem), especialmente no caso de propulsão a hélice.
115

Se CLu e CDu forem conhecidos, as derivadas calculam-se facilmente a partir de(9.30):
Cxu = CTu − CDu (9.33)
Czu = −CLu (9.34)
Caso contrário, é necessário determinar todas as contribuições separadamente. Porexemplo, para a derivada Cxu teríamos
Cxu ≡(∂Cx∂u
)0=(∂Cx∂Ma
)0
(∂Ma∂u
)0+(∂Cx∂pd
)0
(∂pd∂u
)0+(∂Cx∂CT
)0
(∂CT∂u
)0︸ ︷︷ ︸
CTu
.
As derivadas(∂Ma∂u
)0
e(∂pd∂u
)0
podem calcular-se facilmente, mas não as derivadas deCx em ordem a Ma, pd e CT .
Derivada CTu
A derivada CTu é necessária para calcular Cxu a partir de (9.33). De acordo com adefinição, CT = T
1/2ρV2S , donde
∂CT∂u
=∂T∂u
1/2ρV 2S− 2T
1/2ρV 3S∂V∂u.
Ora, tendo em conta que V =√u2 + v2 +w2 e que no estado estacionário V = u0,
CTu =(∂CT∂u
)0= u0
(∂CT∂u
)0=
(∂T∂u
)0
1/2ρu0S− 2T
1/2ρu20S,
e chegamos finalmente a
CTu =
(∂T∂u
)0
1/2ρu0S− 2CT0
O cálculo da derivada ∂T∂u depende do tipo de voo. Para voo planado, T = 0 pelo que
CTu = 0. (9.35)
Para voo com propulsão constante (boa aproximação para aviões a jacto em voo decruzeiro),
∂T∂u= 0,
e conclui-se imediatamente queCTu = −2CT0 . (9.36)
Para voo com potência constante (boa aproximação para aviões com propulsão a hélicecom velocidade constante, em voo de cruzeiro),
TV = cte = T0V0 ⇒ T =T0V0
V.
116

Logo (∂T∂u
)0= −
(T0V0
V 2
)0= −T0
V0⇒ CTu =
−T0
1/2ρu20S− 2CT0 .
Conclui-se portanto queCTu = −3CT0 . (9.37)
Resta-nos calcular CT0 . Se admitirmos que no estado estacionário a força de propul-são e a velocidade são aproximadamente colineares, e usando eixos de estabilidade, oequilíbrio na direcção x exige
CT0 = CD0 + CW0 sinθ0.
Para voo horizontal, em que θ0 = 0, obtemos simplesmente CT0 = CD0 .
9.2.3 Derivadas em ordem à velocidade angular de picada
As derivadas em ordem a q são calculadas mantendo constantes α e as outrasvariáveis.
A contribuição mais importantes é a da cauda; a contribuição da asa é menos impor-tante e mais difícil de estimar. É prática corrente estimar a contribuição da asa como10% da contribuição da cauda (i.e., a derivada total ≈ 1.1× contribuição da cauda).
Recorde-se que, de acordo com (9.10),
Czq =2u0
c
(∂Cz∂q
)0
.
Por outro lado, (9.30) permite relacionar Czq com CLq :
Cz = −(CL + CDαx) ⇒(∂Cz∂q
)0
= −(∂CL∂q
)0
, (9.38)
e portantoCzq = −CLq . (9.39)
Contribuição da cauda
As contribuições da cauda para as derivadas em ordem a q devem-se principalmenteà variação do ângulo de ataque efectivo na cauda, ∆αt , causada pela velocidade angularde picada q.
Admitimos que a sustentação na cauda Lt se altera instantaneamente quando αtvaria. A figura 9.2 permite concluir que ∆αt = qlt/u0. A variação do coeficiente desustentação da cauda devida à velocidade angular de picada é
∆CLt = at∆αt = atqltu0⇒ ∆CL =
StS∆CLt =
StSatqltu0.
A contribuição da cauda para a derivada de CL em ordem a q é então(∂CL∂q
)tail
= StSatltu0.
117

Figura 9.2: Variação do ângulo de ataque na cauda devido à velocidade angular depicada. (Fonte: [1])
Usando (9.38) conclui-se que
(CLq
)tail= 2u0
c
(∂CL∂q
)tail
= 2u0
cStSatltu0,
que se pode escrever na forma mais compacta(CLq
)tail= 2VHat. A contribuição da
cauda para a derivada Czq é portanto(Czq
)tail= −2VHat. (9.40)
Para determinar a contribuição da cauda para Cmq , partimos de
∆Cm = −VH∆CLt = −atVHqltu0⇒ ∂Cm∂q
= −atVHltu0.
Tendo em conta a adimensionalização da velocidade angular de picada,(Cmq
)tail= 2u0
c∂Cm∂q
= −2u0
catVH
ltu0.
Conclui-se finalmente que (Cmq
)tail= −2VHat
ltc. (9.41)
118

Figura 9.3: A velocidade angular produz uma distribuição de velocidades normais àasa que é equivalente a ter uma curvatura adicional na asa. (Fonte: [1])
Figura 9.4: Dependência do centro de massa. (Fonte: [1])
Contribuição da asa
Como se afirmou acima, é frequente estimar a contribuição da asa como 10% dacontribuição da cauda. No entanto, especialmente para asas com flecha elevada oualongamento pequeno esta contribuição pode ser mais importante e nesse caso é ne-cessário uma estimativa mais exacta.
Como se ilustra na figura 9.3, a velocidade angular é equivalente a uma curvaturaadicional da asa. Para determinarmos essa curvatura, impomos a condição de quea componente normal à asa da velocidade do escoamento deve igualar a velocidadeadicional induzida por q na asa real:
u0∂z∂x= qx ⇒ ∂z
∂x= qxu0⇒ z = q
2u0x2.
Asa equivalente, que produz uma distribuição de velocidades normais equivalente, tempois um arco parabólico.
A velocidade angular q é definida relativamente ao centro de massa do avião. Porisso, como se ilustra na figura 9.4, a contribuição da asa para CLq e Cmq depende daposição do centro de massa. Se o centro de massa se desloca de A para B, o ângulo deataque efectivo na asa induzido pela velocidade angular de picada varia:
∆α = −qcu0∆h.
119

Figura 9.5: Variação de Cmq com h. (Fonte: [1])
A esta variação corresponde uma variação do coeficiente de sustentação:
∆CL = CLα∆α = −CLαqcu0∆h = −2CLα q∆h.
Derivando em ordem a h obtemos
∂CL∂h
= ∆CL∆h
= −2CLα q ⇒∂2CL∂h∂q
= −2CLα ⇒∂∂hCLq = −2CLα ⇒ CLq = −2CLα(h−h0).
A contribuição da asa para o coeficiente do momento de picada é
Cm = Cmac + CL(h− hnw ).
Derivando em ordem a h obtém-se
Cmq =∂Cmac
∂q+ CLq(h− hnw ) ⇒ Cmq =
∂Cmac
∂q− 2CLα(h− h0)(h− hnw )
A variação de Cmq com h é quadrática e está representada na figura 9.5. Pode-seescrever na forma
Cmq = Cmq − 2CLα(h− h)2.Na aproximação da teoria linear bi-dimensional de asas finas, para voo supersónico,h0 = h = 1/2, e Cmq = 2/(3
√Ma2 − 1), enquanto que para voo subsónico: h0 = 3/4,
h = 1/2 e Cmq = 0.
9.2.4 Derivadas em ordem a αOs coeficientes de sustentação e do momento de picada dependem de α porque
quando o ângulo de ataque varia a distribuição de pressões na asa e na cauda não seajusta instantaneamente ao valor de equilíbrio (enquanto α varia o escoamento deixade ser estacionário).
A contribuição da asa para as derivadas pode ser calculada a partir da respostaem frequência de uma asa com movimento oscilatório harmónico. No entanto, podetambém estimar-se como sendo 10% da contribuição da cauda. Para esta última, oefeito mais importante é o de lag-of-downwash.
120

Contribuição da cauda (atraso no downwash)
Quando o ângulo de ataque α se modifica, o escoamento em torno de todas assuperfícies do avião altera-se. Esta alteração não é instantânea e só se faz sentir nacauda passado algum tempo porque a vorticidade do bordo de fuga é convectada peloescoamento. O atraso é da ordem de ∆t ≈ lt/u0. O ângulo de downwash na caudano instante t, ε(t), corresponde ao ângulo de ataque que existia na asa no instante(t − ∆t). Dado que ε = ε0 + εααwb, a diferença ∆ε entre o ângulo de downwash queexiste no instante t e o que existiria se αwb fosse constante é dado por
∆ε = [ε0 + εααwb(t−∆t)]− [ε0 + εααwb(t)] = εα[αwb(t−∆t)−αwb(t)]
≈ −εαα∆t = −εααltu0
Devido ao atraso no downwash o ângulo de ataque na cauda, αt = αwb − ε − it , temuma variação
∆αt = −∆ε = εααltu0,
do qual resulta uma variação no coeficiente de sustentação da cauda
∆CLt = atαt = atεααltu0
e a correspondente variação no coeficiente de sustentação total,
∆CL =StS∆CLt = atεαα
ltu0
StS.
Tendo em conta que ˆα = α c/(2u0),
Czα =∂Cz∂ ˆα
= 2u0
c∂Cz∂α
= 2u0
c∂(−CL)∂α
.
A contribuição da cauda para a derivada em ordem a ˆα é então(Czα
)tail = −2atεαVH . (9.42)
Contribuição da cauda para Cmα
Contribuição da cauda para Cmα deduz-se facilmente da variação do coeficiente desustentação da cauda devido ao atraso no downwash,
∆Cm = −VH∆CLt = −VHatεααltu0
Devido à adimensionalização,
ˆα = αc2u0
⇒ Cmα =∂Cm∂ ˆα
= 2u0
c∂Cm∂α
,
de que resulta (Cmα
)tail = −2atεαVH
ltc. (9.43)
121

Figura 9.6: Geometria e forças laterais devidas à derrapagem. (Fonte: [5])
9.3 Derivadas relativas ao movimento lateral
9.3.1 Derivadas em ordem ao ângulo de derrapagem
As derivadas Clβ e Cnβ já foram tratadas nas secções 5.2.3 e 5.1.1, respectivamente.As estimativas obtidas para as contribuições da cauda são razoavelmente exactas, maspara as contribuições da asa e da fuselagem os resultados que se obtém com as ex-pressões deduzidas são menos exactos. Quando é necessário ter estimativas precisasé preferivel usar resultados obtidos em ensaios em túnel aerodinâmica ou usando [2].Resta-nos determinar a derivada Cyβ .
Derivada Cyβ
Normalmente a derivada Cyβ é negativa e pequena. As contribuições mais impor-tantes são da fuselagem e do estabilizador vertical.
A contribuição da cauda deve-se à força de sustentação no estabilizador verticalgerada pela derrapagem, dada por
(Cy)
cauda= −aF(β− σ)
SFS
(VFV
)2
.
Admitindo que VF/V = 1, obtém-se
(Cyβ
)cauda
= −aF(
1− ∂σ∂β
)SFS. (9.44)
Note-se que ∂σ∂β é difícil de estimar.
122

Figura 9.7: Variação do ângulo de ataque local devido à velocidade angular de rola-mento. (Fonte: [1])
9.3.2 Derivadas em ordem a pDevido ao rolamento, o escoamento em torno de todas as superfícies aerodinâmicas
é afectado. Dá-se uma alteração do ângulo de ataque local, que conduz a uma alteraçãona distribuição de pressões, e uma modificação da esteira de vórtices atrás da asa. Adistribuição de vorticidade passa a ser assimétrica relativamente a x, o que provoca oaparecimento de sidewash no estabilizador vertical.
A figura 9.7 mostra a variação do ângulo de ataque local devido à velocidade angularde rolamento. Na cauda essa variação é
∆αF = −pzu0+ p∂σ
∂p.
Na asa, a variação é nula na raiz, toma o valor
∆α = pyu0
(9.45)
ao longo da asa, na coordenada y , e atinge o valor máximo
∆α = pb2u0
(9.46)
na ponta da asa.
123

Figura 9.8: Distribuição de sustentação devido à velocidade angular de rolamento.(Fonte: [1])
Derivada Cyp
Usando a altura «média» do estabilizador zF , e p = 2u0
b p,
∆αF = −2u0
bpzFu0+ p ∂σ
∂p=(−2zFb+ ∂σ∂p
)p
∆CyF = aF∆αF = aF(−2zFb+ ∂σ∂p
)p (9.47)
Para a aeronave completa:
∆Cy =SFS∆CyF = aF
SFS
(−2zFb+ ∂σ∂p
)p
(Cyp
)tail= −aF
SFS
(2zFb− ∂σ∂p
)(9.48)
Derivada Clp (damping in roll)
Para a derivada Clp a contribuição mais significativa é a da asa. Devido ao rolamentoa distribuição de sustentação na asa é assimétrica porque o ângulo de ataque aumentana asa direita e diminui na asa esquerda. Consequentemente, é criado um momentode rolamento L que é proporcional a p e tem o sinal negativo (faz subir a asa direita).
Pode obter-se uma estimativa da derivada Clp a partir da distribuição de sustentaçãoao longo da envergadura. Considere-se uma aeronave a voar com velocidade longitudi-nal u0 e velocidade angular de rolamento p. Desprezando os efeitos tridimensionais,a variação devida a p da sustentação numa secção arbitrária da asa a uma distância ydo centro de massa e de largura dy é
Clα ∆α(
12ρu2
0
)c(y)dy.
124

A variação do ângulo de ataque ∆α é dada por (9.45), a derivada Clα é a correspondenteao perfil da secção da asa em consideração e c(y) é a respectiva corda. A contribuiçãodesta secção para o momento de rolamento é
dL = −y Clα(pyu0
)(12ρu2
0
)c(y)dy.
O momento total obtém-se por integração ao longo de toda a envergadura da asa:
L =∫
dL = 2∫ b/2
0−y d(Sustentação) = −
∫ b/20Clαpy
2u0c(y)dy.
O coeficiente do momento de rolamento é dado por
Cl = −2pu0Sb
∫ b/20Clαy
2u0c(y)dy.
Confirma-se que Cl é negativo e proporcional a p, correspondendo a um amorteci-mento do movimento de rolamento. Segue-se que a derivada Clp é dada por
Clp =∂Cl∂p= 2u0
b∂Cl∂p= − 4
Sb2
∫ b/20C`αy
2c(y)dy.
Se aproximarmos C`α de cada perfil pelo valor da derivada para a asa inteira, isto é,admitindo que C`α ≈
(CLα
)w = aw , obtém-se
Clp = −4awSb2
∫ b/20y2c(y)dy. (9.49)
Na dedução destas expressões desprezaram-se os efeitos tridimensionais devidos aovórtice de bordo marginal e efeitos induzidos, que para esta derivada são importantes.É possível calcular o integral admitindo uma forma determinada da asa, mas os resul-tados obtidos serão pouco exactos. Por exemplo, para uma asa com afilamento linear,o integral pode exprimir-se facilmente em termos do afilamento λ, obtendo-se
Clp = −aw12
1+ 3λ1+ λ . (9.50)
Para asas rectangulares a expressão anterior reduz-se a clp = −aw/6. Para se obteremmelhores aproximações podem usar-se os métodos recomendados em [2].
A discussão anterior sobre a relação entre Cl e p pressupõe que a velocidade angu-lar de rolamento é suficientemente pequena para que a variação do ângulo de ataquenão leve parte da asa a entrar em perda. Para velocidades angulares de rolamento su-ficientemente elevadas, a parte da asa mais perto da ponta entra em perda (ver figura9.9), a assimetria na distribuição de sustentação diminui, o momento de rolamento Ldiminui e |Clp | diminui. Se uma parte importante da asa está em perda, Clp pode atémudar de sinal, situação que leva à autorotação da asa (cfr. spin).
Derivada Cnp
A derivada Cnp é uma derivada cruzada e conduz a acoplamento entre rolamento eguinada. As principais contribuições são da asa e da empenagem vertical. Esta últimacontribuição estima-se a partir da força lateral.
125
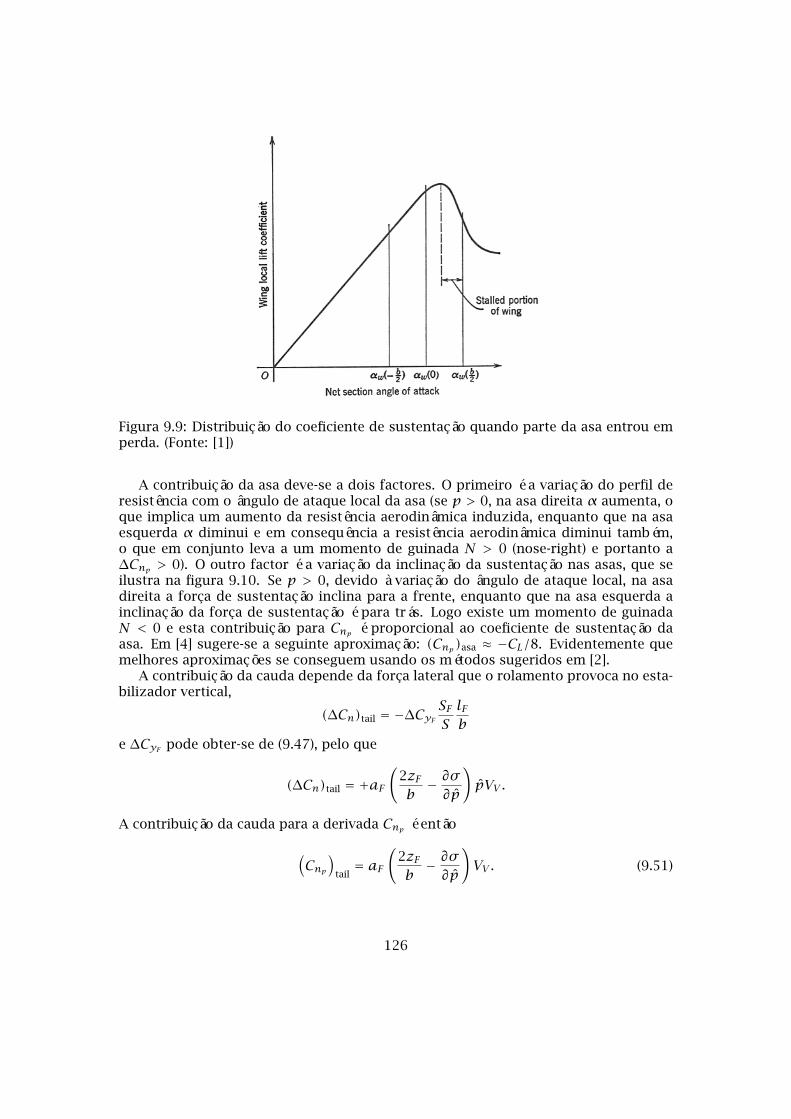
Figura 9.9: Distribuição do coeficiente de sustentação quando parte da asa entrou emperda. (Fonte: [1])
A contribuição da asa deve-se a dois factores. O primeiro é a variação do perfil deresistência com o ângulo de ataque local da asa (se p > 0, na asa direita α aumenta, oque implica um aumento da resistência aerodinâmica induzida, enquanto que na asaesquerda α diminui e em consequência a resistência aerodinâmica diminui também,o que em conjunto leva a um momento de guinada N > 0 (nose-right) e portanto a∆Cnp > 0). O outro factor é a variação da inclinação da sustentação nas asas, que seilustra na figura 9.10. Se p > 0, devido à variação do ângulo de ataque local, na asadireita a força de sustentação inclina para a frente, enquanto que na asa esquerda ainclinação da força de sustentação é para trás. Logo existe um momento de guinadaN < 0 e esta contribuição para Cnp é proporcional ao coeficiente de sustentação daasa. Em [4] sugere-se a seguinte aproximação: (Cnp)asa ≈ −CL/8. Evidentemente quemelhores aproximações se conseguem usando os métodos sugeridos em [2].
A contribuição da cauda depende da força lateral que o rolamento provoca no esta-bilizador vertical,
(∆Cn)tail = −∆CyFSFSlFb
e ∆CyF pode obter-se de (9.47), pelo que
(∆Cn)tail = +aF(
2zFb− ∂σ∂p
)pVV .
A contribuição da cauda para a derivada Cnp é então
(Cnp
)tail= aF
(2zFb− ∂σ∂p
)VV . (9.51)
126

Figura 9.10: Variação da inclinação da sustentação nas asas quando há rolamento,devido à variação do ângulo de ataque. (Fonte: [1])
9.3.3 Derivadas em ordem a rA velocidade angular de guinada provoca alterações no escoamento que são gran-
des se a asa tem ângulo de flecha elevado. A componente normal a 1/4 de corda davelocidade varia da raiz para a ponta da asa e aumenta na asa esquerda enquanto quediminui na asa direita, como se ilustra na figura 9.11. Portanto, as forças e momen-tos aumentam na asa esquerda e diminuem na asa direita. Existe também o efeito desidewash.
Contribuição da cauda para a derivada da força lateral
A variação do ângulo de ataque efectivo na cauda devido à velocidade angular deguinada é
∆αF =rlFu0+ r ∂σ
∂r= r
(lFu0+ ∂σ∂r
).
Em função da velocidade angular de guinada adimensional, r ,
∆αF = r2u0
b
(lFu0+ b
2u0
∂σ∂r
)= r
(2lFb+ ∂σ∂r
).
A força lateral devida a esta variação do ângulo de ataque é
(Cy)tail = aF ∆αFSFS= aF r
SFS
(2lFb+ ∂σ∂r
),
127

Figura 9.11: Variação da componente da velocidade perpendicular a uma asa comflecha. (Fonte: [1])
128

Figura 9.12: Devido à velocidade angular de guinada, a velocidade do escoamentoincidente na asa direita é diminuida e na asa esquerda é aumentada (para r > 0).
donde se deduz a contribuição da cauda para Cyr ,
(Cyr )tail = aFSFS
(2lFb+ ∂σ∂r
). (9.52)
Derivada Clr
A derivada Clr é uma derivada cruzada e por isso contribui para o acoplamentoentre guinada e rolamento.
A contribuição da asa deve-se ao diferencial de sustentação entre as duas asas cau-sado pela diferente velocidade efectiva. Como se ilustra na figura 9.12, para r > 0 avelocidade efectiva na secção de largura dy que se encontra a uma distância y da raizé V − ry na asa direita e V + ry na asa esquerda. Como a sustentação é proporcionalà pressão dinâmica (e por isso ao quadrado da velocidade), a sustentação será maiorna asa esquerda e menor na asa direita, o que conduz a um momento de rolamento
yCL[
12ρ(V + ry)2 − 1
2ρ(V − ry)2
]c(y)dy.
(aproximando o coeficiente de sustentação do perfil, C`, pelo coeficiente de sustenta-ção da asa, CL, isto é, C` ≈ CL). O coeficiente do momento de rolamento obtém-seintegrando em y e adimensionalizando:
Cl =1
12ρV 2Sb
∫ b/20CLy
12ρ(4Vry) c(y)dy = 4r
VSbCL∫ b/2
0c(y)y2 dy. (9.53)
Dado que r = (rb)/(2V),
Cl =8rSb2
CL∫ b/2
0c(y)y2 dy,
a contribuição da asa para a derivada Clr é
(Clr)
asa =8Sb2
CL∫ b/2
0c(y)y2 dy. (9.54)
129

Esta contribuição é positiva e proporcional a CL. Se a asa tiver um afilamento linear, ointegral calcula-se facilmente e obtém-se
(Clr)
asa =CL6
1+ 3λ1+ λ . (9.55)
Como habitualmente, esta expressão não é exacta devido às aproximações realizadasna sua dedução, mas permite estabelecer o sinal da derivada e a sua proporcionalidadecom o coeficiente de sustentação.
A contribuição da cauda é devida à força lateral na cauda que o movimento deguinada provoca, e pode estimar-se de forma semelhante às outras contribuições dacauda, obtendo-se
(Clr )tail = aFSFSzFb
(2lFb+ ∂σ∂r
). (9.56)
Esta contribuição é também positiva.
Derivada Cnr (damping-in-yaw)
A derivada Cnr deve ser sempre negativa para existir amortecimento do movimentode guinada.
A contribuição da asa deve-se ao aumento da resistência induzida na asa esquerda,que resulta do aumento da sustentação já discutido acima, e à sua diminuição na asadireita, e provoca N < 0. A contribuição da cauda deve-se à força lateral na caudaque o movimento de guinada provoca e pode determinar-se a partir do momento deguinada que esta força gera, obtendo-se
(Cnr )tail = −aFVV(
2lFb+ ∂σ∂r
). (9.57)
Ambas as contribuições são negativas, como pretendido para que exista amorteci-mento em guinada.
130

Capítulo 10
Estabilidade DinâmicaLongitudinal
10.1 Introdução
Neste capítulo dar-se-á início ao estudo da estabilidade dinâmica de uma aeronave.Abordar-se-ão métodos de resolução das equações para pequenas perturbações (semcontrolo). Em seguida estudar-se-ão as características habituais das soluções e, a par-tir destas, definir-se-ão os «modos» típicos para perturbações longitudinais. Por fim,pretende-se encontrar expressões aproximadas para os modos longitudinais. Os mo-dos laterais serão tratados no capítulo seguinte.
As equações do movimento para pequenas perturbações foram deduzidas no capí-tulo 8 supondo que o estado estacionário é um voo rectilíneo uniforme (com aceleraçãolinear e velocidade angular nulas, sem derrapagem e com asas niveladas) e foram usa-dos eixos de estabilidade, em que o eixo Cx é paralelo à velocidade da aeronave.
Por enquanto não vamos estar interessados na resposta à actuação das superfíciesde controlo. Por isso o sistema de equações (8.35), que pretendemos resolver, toma aforma
x = A x. (10.1)
Este é um sistema de equações diferenciais ordinárias lineares de 1ª ordem com coefi-cientes constantes.
Recorde-se que para o movimento longitudinal a matriz A é dada por (8.36) e que ovector de estado é x = [∆u w q ∆θ]T .
10.2 Sistemas de equações diferenciais ordinárias de 1ªordem
Uma equação diferencial linear de primeira ordem
x = ax adxx= adt (10.2)
tem soluções da forma:x(t) = x0eλt (10.3)
131

desde que λ = a. Note-se que x0 é o valor de x para t = 0. No caso de um sistemas deequações diferenciais
x = A x, (10.4)
as soluções são da formax(t) = x0eλt, (10.5)
sendo x0 o vector de estado inicial, isto é, para t = 0. Dado que a derivada temporaldo vector de estado é
x = λx0eλt,
substituindo em (10.4) temos
λx0eλt = A x0eλt ⇒ λx0 = A x0.
Esta última equação pode escrever-se
(A − λI)x0 = 0 (10.6)
que é a equação aos valores próprios da matriz A. Esta equação só tem soluções nãotriviais (isto é, não identicamente nulas) se
(A − λI) = 0. (10.7)
Esta é chamada a equação característica do sistema e permite determinar os valorespróprios λ da matriz A.
Uma matriz N × N tem N valores próprios λ1, . . . , λN . A cada valor próprio λkcorresponde um vector próprio x0k . Admitindo que todos os vectores próprios sãodiferentes, a solução geral de (10.4) é sobreposição das soluções correspondentes acada valor/vector próprio:
x(t) =N∑k=1
x0keλkt. (10.8)
(Este resultado generaliza-se facilmente ao caso degenerado de dois ou mais valorespróprios iguais, mas nas situações que nos interessam isto não se verifica.) Uma matriz4× 4 tem 4 valores próprios, pelo que a solução geral vai ser
x(t) = x01eλ1t + x02e
λ2t + x03eλ3t + x04e
λ4t.
Note-se que, como (10.6) é uma equação homogénea, os vectores próprios determinamapenas uma direção, isto é, estão definidos a menos de uma constante multiplicativa.Essas constantes (uma para cada vector próprio) podem ser definidas à custa das con-dições iniciais.
10.2.1 Modos do sistema
A matriz do sistema, A, é uma matriz real (todos os seus elementos são númerosreais). Pode mostrar-se que os valores próprios de uma matriz real são ou númerosreais ou pares de valores próprios complexos conjugados. Para uma matriz 4×4 temosas seguintes possibilidades: 4 valores próprios reais, ou 2 valores próprios reais e umpar de complexos conjugados, ou 2 pares de valores próprios complexos conjugados.
132

Cada par de valores próprios complexos conjugados, representados aqui por λ1 eλ2, podem ser escritos como
λ1 = n+ iω ⇒ x1 = a1eλ1t = a1e(n+iω)t (10.9)
λ2 = n− iω ⇒ x0 = a2eλ2t = a2e(n−iω)t (10.10)
As constantes a1 e a2 são complexas conjugadas porque correspondem a vectorespróprios de valores próprios complexos conjugados. Podemos por isso escrevê-lascomo
a1 = aeiϕ,
a2 = ae−iϕ.
A soma dos modos correspondentes a um par de valores próprios complexos conjuga-dos é
x1 + x2 = a1eλ1t + a2eλ2t
= a eiϕe(n+iω)t + ae−iϕe(n−iω)t
= a ent(eiϕeiωt + e−iϕe−iωt
)= a ent
(ei(ωt+ϕ) + e−i(ωt+ϕ)
)= 2a ent cos(ωt +ϕ).
Conclui-se que a soma das duas soluções complexas conjugadas correspondentes avalores próprios complexos conjugados é afinal um único modo real oscilatório.
Em resumo, podemos afirmar que os modos possíveis no caso presente, em quea matriz do sistema é real são os seguintes: se dois valores próprios são complexosconjugados, obtemos um modo oscilatório com frequência angular ω, período T =2π/ω e amplitude variando exponencialmente (aumenta se n > 0), o que correspondea um modo instável, diminui se n < 0, o que corresponde a um modo estável); seum valor próprio é real, obtemos um modo aeλt cuja «amplitude» aumenta se λ > 0(instável) e diminui se λ < 0 (estável). A figura 10.1 ilustra os modos descritos.
Em qualquer dos casos um modo é dinamicamente estável se a sua amplitude dimi-nui ao longo do tempo, ou seja, se Re(λ) < 0. Pelo contrário, se Re(λ) > 0 a amplitudeaumenta ao longo do tempo e o modo é instável.
Alguns parâmetros importantes que caracterizam os modos são o tempo necessáriopara a amplitude passar a metade/dobro (t1/2 ou t2) e, quando o modo é oscilante, operíodo (T ) e o número de ciclos necessário para a amplitude passar a metade/dobro(N1/2 ou N2).
ent1/2 = 12
⇒ t1/2 =log 1/2n
= log 2|n| (10.11)
ent2 = 2 ⇒ t2 =log 2n
= log 2|n| (10.12)
N1/2 =t1/2T
ou N2 =t2T
(10.13)
133

Figura 10.1: Modos com valor próprio real: instável (a) e estável (b); Modos correspon-dentes a pares de valores próprios complexos conjugados: instável (c) e estável (d).Fonte: [1].
134

Outros parâmetros importantes são a frequência natural, definida por
ωn =√ω2 +n2, (10.14)
e o factor de amortecimento, dado por
ζ = − nωn. (10.15)
No caso de modos estáveis,
t1/2 =log 2|ζ|ωn
,
N1/2 =ω2π
log 2|ζ|ωn
= log 22π
√1− ζ2
|ζ| .
10.2.2 Critério de estabilidade de Routh
Um sistema tem modos instáveis se a equação característica det(A − λI) = 0 tiverpelo menos uma raiz com parte real positiva. Para sistemas de 4ª ordem, como no casovertente, a equação característica é um polinómio de grau 4, que podemos escrevercomo
Aλ4 + Bλ3 + Cλ2 +Dλ+ E = 0. (10.16)
Existem formas de determinar se uma equação característica tem todas as raízes comparte real negativa (isto é, se o sistema é estável) sem ter de as calcular. Uma dessasformas é a utilização do critério de Routh-Hurwitz: aplicado a sistemas de 4ª ordem,afirma que uma condição necessária e suficiente para que todas as raízes tenham partereal negativa é que se verifique simultaneamente
• B > 0,
• D > 0,
• E > 0,
• R = D(BC −AD)− B2E > 0 (R é o discriminante de Routh).
Estas condições são válidas se A > 0 e delas se deduz que C > 0.Com frequência em aeronáutica E > 0 e R > 0 representam casos críticos significa-
tivos. Se uma configuração de uma aeronave é estável e um parâmetro de projecto éalterado de forma que passa a haver uma instabilidade, se apenas E passa a negativo,uma raiz real passa de negativa a positiva; se apenas R passa a negativo, a parte realde um par de raízes complexas conjugadas passa de negativa a positiva. As superfíciesE = 0 e R = 0 definem fronteiras entre regiões de estabilidade e instabilidade.
10.3 Modos longitudinais: características típicas
Começaremos por determinar os modos longitudinais num caso concreto e usar aspropriedades dos modos obtidos para definir características típicas para estes modos.
Os passos a seguir na determinação dos modos de uma aeronave são:
135

Tabela 10.1: Características do Cessna 182
S = 16.17 m2 c = 1.49m W = 11787 NIx = 1285.0 kg m2 Iy = 1824.4 kg m2 Iz = 2666.2 kg m2
Ixz = 0 kg m2
Tabela 10.2: Derivadas adimensionais do Cessna 182
CD CL CT Cmu 0 0 -0.096 0α 0.121 4.41 – -0.613q 0 3.9 – -12.4ˆα 0 1.7 – -7.27
(Fonte: [5])
1. Cálcular as derivadas dimensionais (conhecidas as adimensionais)
2. Cálcular os elementos da matriz A
3. Determinar as soluções da equação característica (valores próprios de A)
4. Para cada valor próprio determinar o respectivo vector próprio (a menos de umaconstante multiplicativa)
10.3.1 Exemplo: Cessna 182 Skylane
Para exemplificar a aplicação dos passos referidos, vamos determinar os modoslongitudinais de um Cessna 182 Skylane que se encontra em voo horizontal a 5000ft, com velocidade u0 = 67.08m/s (Ma = 0.201). O estado estacionário caracteriza-se por θ0 = 0, CL1 = 0.307 e CD1 = 0.032. De acordo com a atmosfera padrão, ρ =1.055 kg/m3.
Na tabela 10.1 apresenta-se algumas características do Cessna 182 usado nesteexemplo e na tabela 10.2 apresentam-se as derivadas de estabilidade adimensionais.Com estes valores e usando as expressões deduzidas no capítulo 9, podemos determi-nar o valor das derivadas adimensionais segundo os eixos x e z:
Cxu = CTu − CDu = −0.096,Cxα = CL1 − CDα = 0.186,Cxq = 0,Cxα = 0,Czu = −CLu = 0,Czα = −(CLα + CD1) = −4.442,Czq = −CLq = −3.9,Czα = −CLα = −1.7.
136

As derivadas dimensionais podem agora ser calculadas:
Xu = ρu0SCW0 sinθ0 +12ρu0SCxu = −54.9456 Ns/m,
Zu = −ρu0SCW0 cosθ0 +12ρu0SCzu = −351.485 Ns/m,
Mu =12ρu0cSCmu = 0,
Xw =12ρu0SCxα = 106.457 Ns/m,
Zw =12ρu0SCzα = −2542.38 Ns/m,
Mw =12ρu0ScCmα = −524.002 Ns/m,
Xq =14ρu0ScCxq = 0,
Zq =14ρu0ScCzq = −1666.89 Ns,
Mq =14ρu0Sc2Cmq = −7915.44 Ns/m,
Xw =14ρScCxα = 0,
Zw =14ρScCzα = −10.8307 Ns/m,
Mw =14ρSc2Cmα = −69.1756 Ns/m.
Estamos agora em condições de calcular todos os elementos da matriz do sistema, queneste caso é dada por (8.36). Nas condições de voo indicadas,
A =
−0.0457289 0.0885998 0 −9.81
−0.289913 −2.09701 65.1123 0
0.0109923 −0.207702 −6.80735 0
0 0 1 0
.
estando todos os termos calculados no Sistema Internacional de unidades.A equação característica, det(A− λI) = 0, é agora
λ4 + 8.95009λ3 + 28.2319λ2 + 1.4905λ+ 0.816844 = 0.
Tendo em conta que A, B e D são positivos, e que
E = 0.816844 > 0,
R = D(BC −AD)− B2E = 308.96 > 0,
os critérios de estabilidade permitem afirmar que todos os modos vão ser estáveis.
137

Tabela 10.3: Vectores próprios obtidos para o Cessna 182
Fugóide Período curto
Módulo Fase (ϕ) Módulo Fase (ϕ)
∆u 1.0 0º 0.0065 -37.7ºα = w 0.045 179.1º 1.0 0ºq 0.0030 -1.8º 0.0564 129.8º∆θ 0.0175 -99.2º 0.0107 -17.8º
As raízes da equação característica, que são os valores próprio de A, são
λ1,2 = −0.0220954± 0.169956i (modo fugóide)λ3,4 = −4.45295± 2.82492i (modo de período curto)
Obtemos dois pares de raízes complexas conjugadas, pelo que vamos ter dois modososcilatórios, normalmente conhecidos por modo fugóide e modo de período curto.
Podemos determinar a frequência, o período, t1/2 e N1/2 para ambos os modos. Parao modo fugóide temos
ωf = |Im(λ1,2)| = 0.17 rad/s, Tf =2πωf
= 37.0 s, t1/2 =log 2|n| = 31.4 s,
nf = Re(λ1,2) = −0.022 s-1, N1/2 =t1/2Tf= 0.85.
Por sua vez, para o modo de período curto obtém-se
ωpc = |Im(λ2,3)| = 2.82 rad/s, Tpc =2πωpc
= 2.22 s, t1/2 =log 2|n| = 0.156 s,
npc = Re(λ2,3) = −4.45 s-1, N1/2 =t1/2Tpc
= 0.07.
Verifica-se que o modo fugóide tem um período mais longo, da ordem das dezenasde segundos, e é fracamente amortecido. Pelo contrário, o modo de período curtotem um período de poucos segundos, fazendo jus ao nome, e é muito amortecido.Estas características são típicas destes modos e são comuns para muitas aeronaves econdições de voo.
Determinação dos vectores próprios
Como se viu anteriormente, os vectores próprios x0 são as soluções da equação(A − λI)x0 = 0 e são determinados a menos de uma constante multiplicativa. Natabela 10.3 apresentam-se os valores próprios obtidos no exemplo presente para osdois modos oscilatórios (normalizando os resultados obtidos de forma que o valorinicial do modo com maior amplitude seja 1).
138

50 100 150 200t
-1.0
-0.5
0.5
1.0
Θ
Α
u
Figura 10.2: Oscilações do modo fugóide para um Cessna 182 nas condições de voodescritas no texto.
10.3.2 Modo fugóide
Os dados da tabela 10.3 permitem obter a evolução temporal de cada uma dasvariáveis dinâmicas longitudinais no modo fugóide:
∆u = (∆u)inicial e−0.022t cos(0.17t) (10.17)
α = (∆u)inicial × 0.045 e−0.022t cos(0.17t − 179.1 × (π/180)
)(10.18)
q = (∆u)inicial × 0.0030 e−0.022t cos(0.17t + 1.8 × (π/180)
)(10.19)
∆θ = (∆u)inicial × 0.0175 e−0.022t cos(0.17t + 99.2 × (π/180)
)(10.20)
A figura 10.2 apresenta esta mesma evolução de forma gráfica. Pode-se constatar queo modo fugóide apresenta variações grandes da velocidade longitudinal u, e variaçõesdesprezáveis do ângulo de ataque α, da velocidade angular de picada q e do ângulo depicada θ. O ângulo de ataque oscila aproximadamente em oposição de fase com a ve-locidade longitudinal, enquanto que as oscilações do ângulo de picada estão atrasadasde aproximadamente 90.
Para se obter a trajectória do avião, parte-se das equações linearizadas para o «flightpath», que neste caso são
∆xE = ∆u (10.21)
∆zE = w −u0∆θ = u0α−u0∆θ (10.22)
Após a substituição de (10.17) em (10.21) e de (10.18) e (10.20) na equação (10.22), a
139

50 100 150 200t
-2
2
4
xE - t u0
50 100 150 200t
-10
-5
5
zE
Figura 10.3: Variações da posição em xE e zE relativamente ao estado estacionário nomodo fugóide, para o exemplo do Cessna 182.
integração das equações conduz a
∆xE = (∆u)inicialent
[n cos(ωt)+ω sin(ωt)
]n2 +ω2
(10.23)
para a perturbação na coordenada xE devida ao modo fugóide, e a
∆zE =u0
n2 +ω2ent(∆u)inicial ×
[0.045n cos(ωt +ϕα)+ 0.045ω sin(ωt +ϕα)
− 0.0175n cos(ωt +ϕθ)− 0.0175ω sin(ωt +ϕθ)]
(10.24)
para a correspondente perturbação na coordenada zE (em que ϕα e ϕθ são os valoresda tabela 10.3). Note-se se xE = (xE)0 + ∆xE , sendo (xE)0 = u0t. Por outro lado,zE = (zE)0 + ∆zE , mas a cota (zE)0 é constante no estado estacionário e podemosescolher a origem do sistema de eixos de forma a tornar (zE)0 = 0.
A variação de ∆xE e ∆zE está representada na figura 10.3. Neste exemplo as va-riações na altitude do avião estão desfazadas das variações na posição longitudinalde aproximadamente 90. O período das oscilações é o do modo fugóide e elas sãopouco amortecidas. A figura 10.4 representa a posição do centro de massa do aviãonu referencial centrado no sistema de eixos de estabilidade do estado estacionário (eque se desloca com velocidade (u0,0,0) relativamente à Terra). Pode observar-se quequando o avião desce a sua velocidade aumenta, enquanto que quando ele sobe a suavelocidade diminui. O mesmo se pode observar na figura 10.5, em que se mostra avariação da velocidade longitudinal total uE , comparando-a com a variação na altitudedo avião. Como o modo é pouco amortecido, esta conversão entre energia cinética epotencial e feita mantendo a energia mecânica total do avião aproximadamente cons-tante. Esta constatação está na base da aproximação mais simples ao modo fugóide, aaproximação de Lanchaster, como veremos mais à frente.
140

-15 -10 -5 0 5 10 15-15
-10
-5
0
5
10
15
x - t u0
z
Figura 10.4: Modo fugóide: posição do centro de massa do avião no referencial doestado estacionário.
10.3.3 Modo de período curto
Com os dados da tabela 10.3 pode-se obter a evolução temporal de cada uma dasvariáveis dinâmicas longitudinais no modo de período curto:
∆u = αinicial × 0.0065 e−4.45t cos(
2.82t − 37.7π
180
)α = αinicial e−4.45t cos(2.82t)
q = αinicial × 0.0564 e−4.45t cos(
2.82t + 129.8π
180
)∆θ = αinicial × 0.0107 e−4.45t cos
(2.82t − 17.8
π180
)Na figura 10.6 esta mesma evolução é representada de forma gráfica. Pode-se constatarque o modo fugóide apresenta variações grandes do ângulo de ataque α, e variaçõesdesprezáveis da velocidade angular de picada q e do ângulo de picada θ. A variaçãoda velocidade longitudinal ∆u é também desprezável e toma valores tão pequenos quenem foi representada na figura.
As equações da trajectória podem obter-se de forma semelhante à descrita para omodo fugóide. A figura 10.7 apresenta as variações da posição em xE e zE relativa-mente ao estado estacionário. As variações na posição longitudinal são desprezáveis,tal como as variações na velocidade longitudinal representadas na figura 10.8. As úni-cas variações importantes são da altitude do avião, mas as oscilações são fortementeamortecidas, como é próprio deste modo.
141
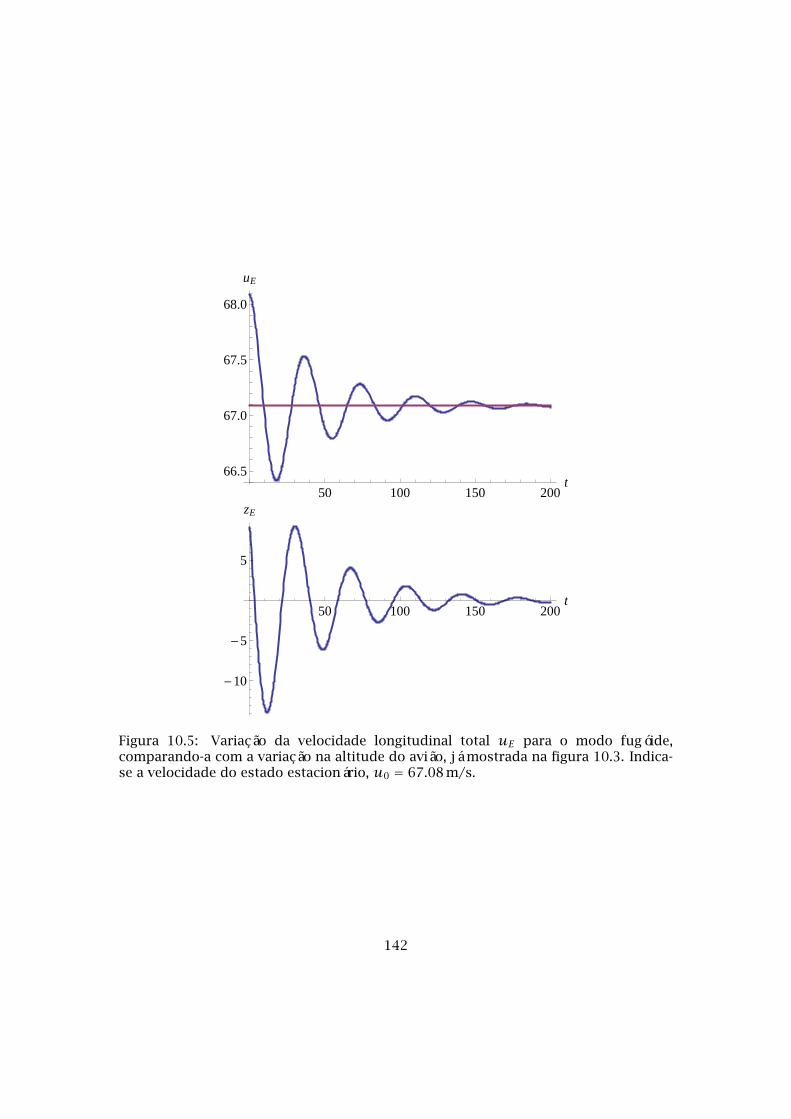
50 100 150 200t
66.5
67.0
67.5
68.0
uE
50 100 150 200t
-10
-5
5
zE
Figura 10.5: Variação da velocidade longitudinal total uE para o modo fugóide,comparando-a com a variação na altitude do avião, já mostrada na figura 10.3. Indica-se a velocidade do estado estacionário, u0 = 67.08 m/s.
142

0.5 1.0 1.5 2.0 2.5t
-0.2
0.2
0.4
0.6
0.8
1.0
Θ
q
Α
Figura 10.6: Oscilações das variáveis dinâmicas no modo de período curto.
0.5 1.0 1.5 2.0 2.5t
-0.0012
-0.0010
-0.0008
-0.0006
-0.0004
-0.0002
xE - t u0
0.5 1.0 1.5 2.0 2.5t
-2
2
4
6
8
10-zE
Figura 10.7: Variações da posição em xE e zE relativamente ao estado estacionário nomodo de período curto, para o exemplo do Cessna 182.
143
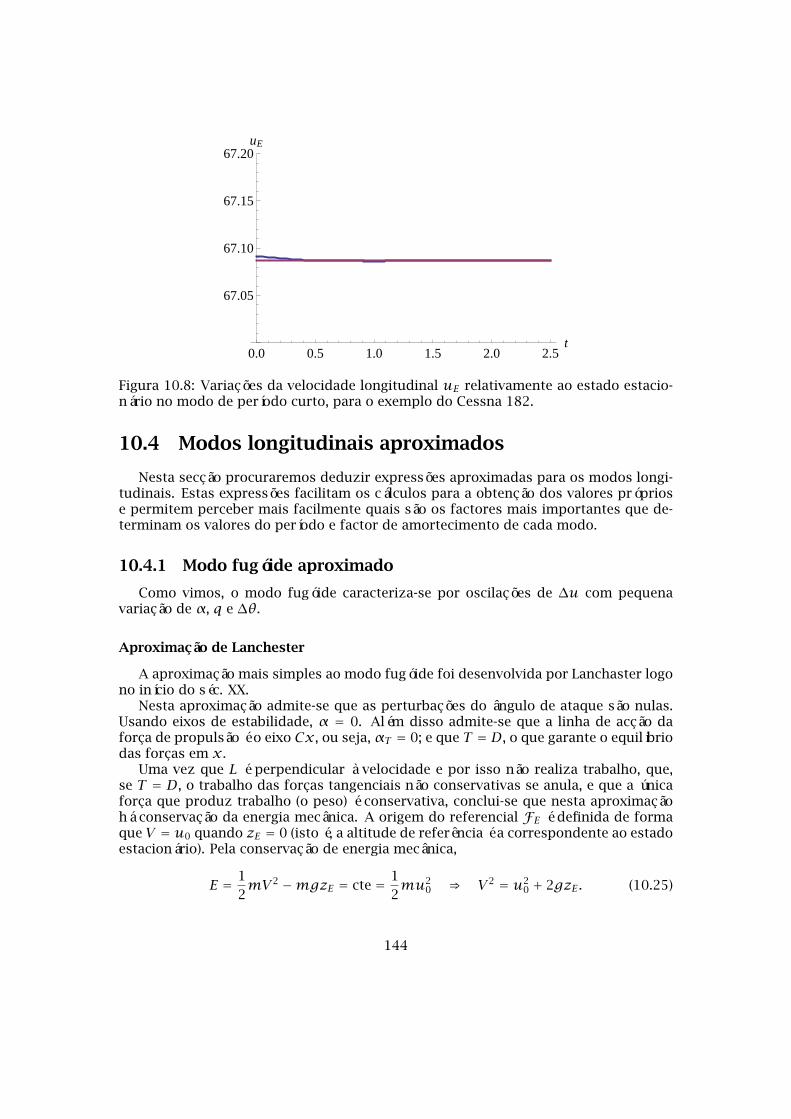
0.0 0.5 1.0 1.5 2.0 2.5t
67.05
67.10
67.15
67.20uE
Figura 10.8: Variações da velocidade longitudinal uE relativamente ao estado estacio-nário no modo de período curto, para o exemplo do Cessna 182.
10.4 Modos longitudinais aproximados
Nesta secção procuraremos deduzir expressões aproximadas para os modos longi-tudinais. Estas expressões facilitam os cálculos para a obtenção dos valores própriose permitem perceber mais facilmente quais são os factores mais importantes que de-terminam os valores do período e factor de amortecimento de cada modo.
10.4.1 Modo fugóide aproximado
Como vimos, o modo fugóide caracteriza-se por oscilações de ∆u com pequenavariação de α, q e ∆θ.
Aproximação de Lanchester
A aproximação mais simples ao modo fugóide foi desenvolvida por Lanchaster logono início do séc. XX.
Nesta aproximação admite-se que as perturbações do ângulo de ataque são nulas.Usando eixos de estabilidade, α = 0. Além disso admite-se que a linha de acção daforça de propulsão é o eixo Cx, ou seja, αT = 0; e que T = D, o que garante o equilíbriodas forças em x.
Uma vez que L é perpendicular à velocidade e por isso não realiza trabalho, que,se T = D, o trabalho das forças tangenciais não conservativas se anula, e que a únicaforça que produz trabalho (o peso) é conservativa, conclui-se que nesta aproximaçãohá conservação da energia mecânica. A origem do referencial FE é definida de formaque V = u0 quando zE = 0 (isto é, a altitude de referência é a correspondente ao estadoestacionário). Pela conservação de energia mecânica,
E = 12mV 2 −mgzE = cte = 1
2mu2
0 ⇒ V 2 = u20 + 2gzE. (10.25)
144

Mas, como α = 0, CL = CL1 = CW0 . Note-se que no modo fugóide q é suficientementepequeno para não alterar significativamente o valor de CL. Então,
L = 12ρV 2SCW0 =
12ρu2
0SCW0 +12ρ2gzESCW0 = W + kzE, (10.26)
em que se define k = ρSgCW0 .A equação do movimento segundo z pode escrever-se W − L cosθ = mzE . Mas,
dado que θ0 = 0 e que no modo fugóide as oscilações ∆θ são desprezáveis, θ 1,cosθ ≈ 1. Usando (10.26) a equação do movimento toma a forma de uma equação demovimento harmónico simples,
mzE + kzE = 0, (10.27)
para oscilações verticais de frequência
ω =√km. (10.28)
Pela conservação de energia conclui-se que há também oscilações em V = u0 +∆u.O período das oscilações é
T = 2πω= 2π
√mk= 2π
√m
ρSgCW0
. (10.29)
Usando CW0 =mg/(12ρu
20S), obtém-se finalmente
T = π√
2u0
g. (10.30)
O período depende apenas de u0 e não depende nem das características da aeronave,nem de ρ (nem, por isso, da altitude).
Para verificarmos até que ponto a aproximação de Lanchester dá resultados fiáveis,comparemos o valor do período obtido usando esta aproximação com o valor exactoobtido anteriormente para o Cessna 182:
• Texacto = 37 s,
• Taprox = 30.3 s.
Tendo em conta que a aproximação de Lanchaster permite obter valores razoávelmenteaproximados para o período (o erro é, neste caso, inferior a 20%), mas não há amor-tecimento das oscilações. Necessitamos, pois, de outra aproximação que nos permitadeterminar de forma aproximada o factor de amortecimento.
Modo fugóide: outra aproximação (com amortecimento)
Para esta aproximação usar-se-á uma abordagem diferente: fazemos as aproxima-ções directamente nas equações do movimento para pequenas perturbações de modoa obter um sistema de ordem inferior à inicial.
As aproximações que serão feitas decorrem das características do modo fugóide:q e ∆θ são pequenos e podem ser desprezados nas equações. Além disso, como o
145

estado estacionário é um voo horizontal, θ0 = 0. Omitindo os termos de controlo, asequações para o movimento longitudinal são:
∆u = Xum∆u+ Xw
mw +−g cosθ0︸ ︷︷ ︸
≈1
∆θ
w = Zum∆u+ Zw
mw + Zw
mw︸ ︷︷ ︸
≈0
+ Zqmq︸ ︷︷ ︸
≈0
−g sinθ0︸ ︷︷ ︸≈0
∆θ +u0q
q︸︷︷︸≈0
= ∆MIy≈ 1Iy(Mu∆u+Mww)
∆θ = q
Com as aproximações indicadas anteriormente, e escrevendo as equações na formamatricial, temos
∆u
w
0
∆θ
=
Xum
Xwm 0 −g
Zum
Zwm u0 0
Mu Mw 0 0
0 0 1 0
∆u
w
q
∆θ
.
Este sistema de equações diferenciais ordinárias pode ser resolvido de forma análogaao sistema completo. Admitindo soluções na forma x = x0eλt ⇒ x = λx, obtém-se
∆u = λ∆u,w = λw,∆θ = λ∆θ,
e substituindo nas equações anteriores vem
λ∆u
λw
0
λ∆θ
=
Xum
Xwm 0 −g
Zum
Zwm u0 0
Mu Mw 0 0
0 0 1 0
∆u
w
q
∆θ
⇒
Xum − λ
Xwm 0 −g
Zum
Zwm − λ u0 0
Mu Mw 0 0
0 0 1 −λ
∆u
w
q
∆θ
= 0.
(10.31)A equação característica para o modo fugóide aproximado é∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
Xum − λ
Xwm 0 −g
Zum
Zwm − λ u0 0
Mu Mw 0 0
0 0 1 −λ
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣= 0,
146

e daqui se deduz
(−u0Mw)︸ ︷︷ ︸A
λ2 +[gMu +
u0
m(MwXu −MuXw)
]︸ ︷︷ ︸
B
λ+[gm(MwZu −MuZw)
]︸ ︷︷ ︸
C
= 0. (10.32)
Obtemos portanto uma equação característica que é de 2ª ordem, o que mostra que osistema aproximado é também de 2ª ordem. Note-se que a equação se pode escrever
Aλ2 + Bλ+ C = 0 ⇒ λ2 + BAλ+ C
A= 0.
Num sistema de 2ª ordem, a frequência natural e factor de amortecimento de ummodo oscilante podem obter-se facilmente a partir da equação característica. Se λ1 =n+ iω e λ∗1 = n− iω são soluções de
λ2 + (B/A)λ+ (C/A) = 0,
então(λ− λ1)(λ− λ∗1 ) = λ2 + (B/A)λ+ (C/A).
Mas
(λ− λ1)(λ− λ∗1 ) = 0⇒ (λ− (n+ iω)) (λ− (n− iω)) = 0
⇒ λ2 − 2nλ+ (n2 +ω2) = 0
⇒ λ2 + 2ζωnλ+ω2n = 0,
em que se usou n = −ζωn e ωn = (n2 +ω2). Conclui-se imediatamente que
ω2n =
CA, (10.33)
2ζωn =BA. (10.34)
A frequência natural e factor de amortecimento para o modo fugóide aproximadopodem determinar-se usando A, B e C definidos na equação (10.32), obtendo-se
ω2n = −
gmu0
(Zu −
ZwMw
Mu), (10.35)
ζ = −12
[gmu0
(ZwMw
Mu − Zu)]−1/2 [ gMu
u0Mw+ 1m
(Xu −
MuXuXw
)]. (10.36)
Para muitas aeronaves e situações de voo é possível fazer ainda a aproximaçãoMu = 0.Nesse caso, os valores para a frequência natural e o factor de amortecimento são dadospor
ω2n = −
gZumu0
, (10.37)
ζ = −12
[− gZumu0
]−1/2 Xum= −Xu
2
√− u0
mgZu. (10.38)
147

Note-se que, se Czu ≈ 0, e com θ0 = 0,
Zu = −ρu0SCW0 cosθ0 +12ρu0SCzu = −ρu0SCW0
A frequência natural será nesta aproximação dada por
ω2n = −
g(−ρu0SCW0)mu0
= 2g2
u20⇒ ωn =
√2gu0.
Note-se que recuperamos a aproximação de Lanchester para o período:
Tn =2πωn
=√
2πu0
g.
Para se verificar de que depende o factor de amortecimento consideremos o casode um jacto. Sendo a propulsão aproximadamente constante, tem-se CTu = −2CT0 . Poroutro lado CT0 ≈ CD1 . Desprezando as derivadas de CD, CL e Cm em ordem a u,
Cxu ≈ CTu = −2CT0 = −2CD1
Supondo θ0 = 0, de (9.12) e (9.4) obtém-se
Xu = 1/2ρu0SCxu = −ρu0SCD1 ,Zu = −ρu0SCW0 = −ρu0SCL1 .
O factor de amortecimento é então:
ζ = −Xu2
√− u0
mgZu= 1√
2CD1
CL1
,
ou seja, é proporcional ao inverso da razão L/D:
ζ ∼ 1L/D
.
Conclui-se que o amortecimento da fugóide se degrada quando melhora a eficiênciaaerodinâmica pelo aumento de L/D. Um amortecimento da fugóide demasiado baixopode dificultar a pilotagem do avião, especialmente se o piloto está a voar por instru-mentos. Os sistemas de aumento de estabilidade permitem eliminar este problema.
Na tabela 10.4 comparam-se os valores exactos obtidos para o período e o factorde amortecimento do modo fugóide com os valores obtidos para a aproximação deLanchester e a segunda aproximação feita. Neste caso Cmu = 0 (cfr. tabela 10.2), peloque se usaram as expressões (10.37) e (10.38). Em ambas as aproximações o valordo período é semelhante e apresenta um erro relativo inferior a 20% relativamente aovalor exacto. O factor de amortecimento só pode ser calculado mediante a segundaaproximação, e o valor obtido tem um erro relativo da ordem dos 14%. Isto mostra queestas aproximações são razoáveis desde que não seja necessário grande precisão.
148

Tabela 10.4: Comparação entre as aproximações e o valor exacto para o modo fugóide
Factor dePeríodo (T ) amortecimento (ζ)
Valor exacto 37.0 s 0.129Aproximação de Lanchester 30.4 s —Aproximação com amortecimento 30.6 s 0.111
10.4.2 Modo de período curto aproximado
O modo de período curto caracteriza-se por ∆u ≈ 0. Por isto para se obter omodo aproximado ignorar-se-á a equação em x, que determina a evolução de ∆u.Admitir-se-á ainda que Zw m, pelo que (m − Zw) ≈ m, e também que Zq mu0,donde (Zq +mu0) ≈mu0. Finalmente, usar-se-á o facto de que o estado estacionáriocorresponde a um voo horizontal, pelo que θ0 = 0.
As equações para o movimento longitudinal (omitindo os termos de controlo) são
∆u =Xum∆u+ Xw
mw +−g cosθ0∆θ [equação ignorada]
w = Zum− Zw
∆u︸︷︷︸≈0
+ Zwm− Zw︸ ︷︷ ︸≈Zw/m
w +
(mu0 + Zq
)m− Zw︸ ︷︷ ︸≈u0
q − mg sinθ0
m− Zw︸ ︷︷ ︸≈0 (θ0≈0)
∆θ
q = 1Iy
[(Mu +
MwZum− Zw
)∆u︸︷︷︸≈0
+(Mw +
MwZwm− Zw︸ ︷︷ ︸MwZw/m
)w +
(Mq +
Mw(mu0 + Zq)m− Zw︸ ︷︷ ︸Mwu0
)q
− Mwmg sinθ0
m− Zw︸ ︷︷ ︸≈0 (θ0≈0)
∆θ]
∆θ =q
Com as aproximações indicadas a 2ª e a 3ª equações dependem apenas dew e q e suasderivadas. Desta forma, obtém-se o sistema de equações:w
q
=
Zwm u0
1Iy
[Mw + MwZw
m
]1Iy
[Mq +Mwu0
]wq
,cuja equação característica é∣∣∣∣∣∣∣
Zwm − λ u0
1Iy
[Mw + MwZw
m
]1Iy
[Mq +Mwu0
]− λ
∣∣∣∣∣∣∣ = 0.
149
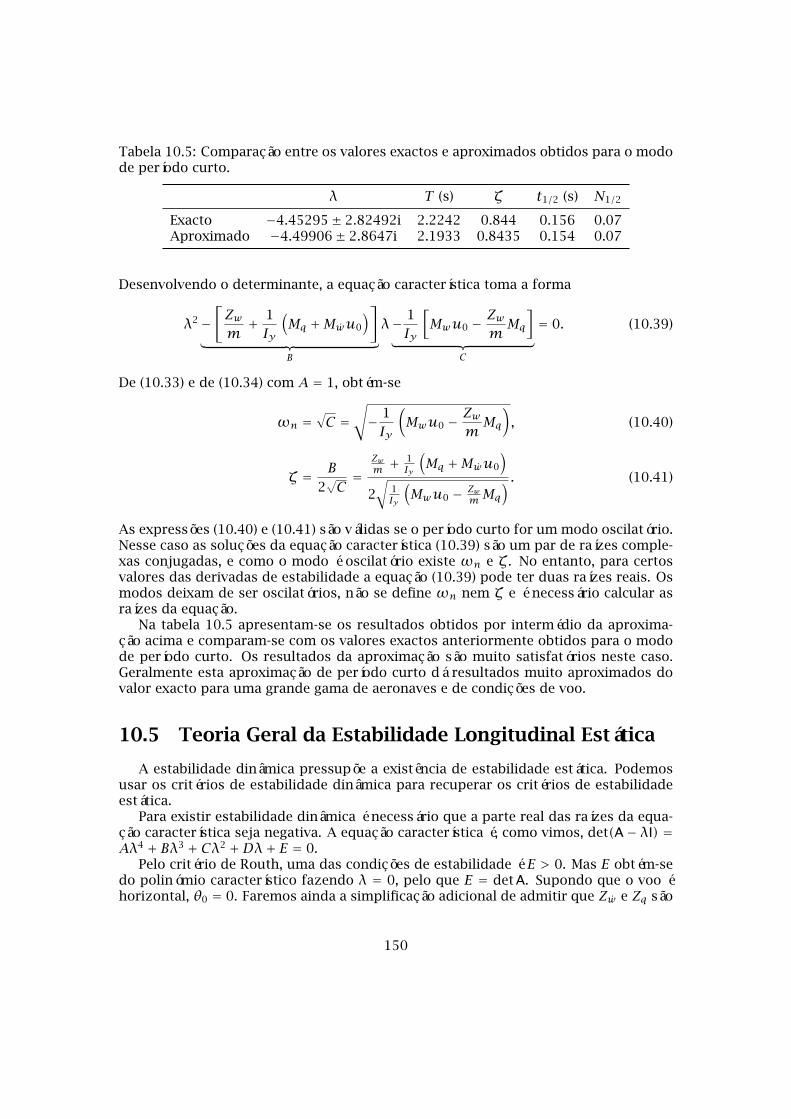
Tabela 10.5: Comparação entre os valores exactos e aproximados obtidos para o modode período curto.
λ T (s) ζ t1/2 (s) N1/2
Exacto −4.45295± 2.82492i 2.2242 0.844 0.156 0.07Aproximado −4.49906± 2.8647i 2.1933 0.8435 0.154 0.07
Desenvolvendo o determinante, a equação característica toma a forma
λ2−[Zwm+ 1Iy
(Mq +Mwu0
)]︸ ︷︷ ︸
B
λ− 1Iy
[Mwu0 −
ZwmMq]
︸ ︷︷ ︸C
= 0. (10.39)
De (10.33) e de (10.34) com A = 1, obtém-se
ωn =√C =
√− 1Iy
(Mwu0 −
ZwmMq), (10.40)
ζ = B2√C=
Zwm +
1Iy
(Mq +Mwu0
)2√
1Iy
(Mwu0 − Zw
mMq) . (10.41)
As expressões (10.40) e (10.41) são válidas se o período curto for um modo oscilatório.Nesse caso as soluções da equação característica (10.39) são um par de raízes comple-xas conjugadas, e como o modo é oscilatório existe ωn e ζ. No entanto, para certosvalores das derivadas de estabilidade a equação (10.39) pode ter duas raízes reais. Osmodos deixam de ser oscilatórios, não se define ωn nem ζ e é necessário calcular asraízes da equação.
Na tabela 10.5 apresentam-se os resultados obtidos por intermédio da aproxima-ção acima e comparam-se com os valores exactos anteriormente obtidos para o modode período curto. Os resultados da aproximação são muito satisfatórios neste caso.Geralmente esta aproximação de período curto dá resultados muito aproximados dovalor exacto para uma grande gama de aeronaves e de condições de voo.
10.5 Teoria Geral da Estabilidade Longitudinal Estática
A estabilidade dinâmica pressupõe a existência de estabilidade estática. Podemosusar os critérios de estabilidade dinâmica para recuperar os critérios de estabilidadeestática.
Para existir estabilidade dinâmica é necessário que a parte real das raízes da equa-ção característica seja negativa. A equação característica é, como vimos, det(A− λI) =Aλ4 + Bλ3 + Cλ2 +Dλ+ E = 0.
Pelo critério de Routh, uma das condições de estabilidade é E > 0. Mas E obtém-sedo polinómio característico fazendo λ = 0, pelo que E = det A. Supondo que o voo éhorizontal, θ0 = 0. Faremos ainda a simplificação adicional de admitir que Zw e Zq são
150

desprezáveis. Então,
E = det A =
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
Xum
Xwm 0 −g
Zum
Zwm u0 0
1Iy
(Mu + MwZu
m
)1Iy
(Mw + MwZw
m
)1Iy
(Mq +Mwu0
)0
0 0 1 0
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣=
= gmIy
[ZuMw − ZwMu] .
A condição de estabilidade dinâmica implica então que
E = gmIy
[ZuMw − ZwMu] > 0⇒ ZuMw − ZwMu > 0.
Mas, tendo em conta que
Zu = −ρu0SCW0 +12ρu0SCzu ,
Zw =12ρu0SCzα ,
Mu =12ρu0cSCmu ,
Mw =12ρu0cSCmα ,
a condição de estabilidade é
(Czu − 2CW0)Cmα − CmuCzα > 0.
Se Czu ≈ 0 ≈ Cmu , a condição acima é apenas
−2CW0Cmα > 0 ⇒ Cmα < 0. (10.42)
Obtemos assim uma das condições de estabilidade estática como consequência dascondições necessárias e suficientes para estabilidade dinâmica.
10.6 Efeito da posição do centro de massa
Várias derivadas longitudinais dependem da posição do centro de massa, como porexemplo, Cmα , Cmq e CLq . Consequentemente, os modos longitudinais dependem deh. Para exemplificar essa dependência calcularam-se as raízes da equação caracterís-tica completa para os modos longitudinais de um Cessna 182 nas condições de vooanteriormente descritas, para várias posições do centro de massa.
Habitualmente a variação das derivadas Cmq e CLq com h é menos importante quea variação de Cmα . Por isso neste exemplo supomos que apenas Cmα depende de h, eusamos a bem conhecida expressão Cmα = CLα(h− hn) = −CLαKn.
151

Raízes para −0.1 < Kn < 0.5
-8 -6 -4 -2n
-5
5
Ω
Comportamento perto da origem
-0.6 -0.4 -0.2 0.2n
-0.4
-0.2
0.2
0.4Ω
Figura 10.9: Localização das raízes λ = n + iω da equação característica longitudinalexacta de um Cessna 182. A vermelho: raízes para −0.1 < Kn < 0; a azul: raízes para0 < Kn < 0.5.
As raízes da equação característica longitudinal exacta de um Cessna 182 foram cal-culadas para margens estáticas no intervalo −0.1 < Kn < 0.5. Na figura 10.9 apresenta-se a localização das raízes, e o comportamento perto da origem. Verifica-se que paraKn < 0 existem raízes com parte real positiva, que correspondem a modos instáveis.
Na figura 10.10 mostra-se a localização das raízes para margem estática positivae distinguindo o modo fugóide do modo de período curto. Para 0.5 ≥ Kn ≥ 0.08 asraízes correspondem às características habituais dos modos: o modo fugóide é osci-latório (pares de raízes complexas conjugadas) e pouco amortecido (a parte real dasraízes está próximo da origem); o modo de período curto é oscilatório (pares de raízescomplexas conjugadas), é muito amortecido (parte real negativa de valor elevado) etem frequência elevada. No entanto, para o modo de período curto a sua frequênciadiminui à medida que a margem estática diminui, e anula-se para Kn = 0.08. Nessaaltura passamos a ter duas raízes reais positivas e o modo deixa de ser oscilatório.Para margem estática na gama 0.08 > Kn ≥ 0.0019 o modo fugóide continua a seroscilatório mas a frequência vai-se aproximando de zero; por sua vez, as raízes reaiscorrespondentes ao modo de período curto afastam-se, uma delas aumentando e aoutra diminuindo de valor. Finalmente, para 0.0019 > Kn ≥ 0 o modo fugóide deixade ser oscilatório e passamos a ter duas raízes reais, aproximando-se uma delas daorigem.
Finalmente, na figura 10.11 mostra-se a localização das raízes para margem estáticanegativa. Observa-se que, à medida que a margem estática se torna mais negativa, araiz real positiva, que corresponde a um modo instável, se torna mais positiva. Poroutro lado, uma das raízes reais correspondente ao modo fugóide e uma das raízesreais correspondente ao modo de período curto aproximam-se e tornam-se iguais paraKn ≈ −0.03. Para valores mais negativos de Kn estas raízes passam a ser um par deraízes complexas conjugadas, correspondendo a um modo oscilatório. A quarta raíz,não mostrada na figura, é real e toma valores crescentemente negativos à medida queKn se torna mais negativo.
152

Fugóide
-0.07 -0.06 -0.05 -0.04 -0.03 -0.02 -0.01n
-0.2
-0.1
0.1
0.2Ω
Período curto
-6 -4 -2n
-5
5
Ω
Figura 10.10: Localização das raízes da equação característica longitudinal exacta deum Cessna 182 para 0 < Kn < 0.5, para o modo fugóide (esquerda) e o modo deperíodo curto (direita). A azul: raízes para 0.5 ≥ Kn ≥ 0.08; a verde: raízes para0.08 > Kn ≥ 0.0019; a vermelho: raízes para 0.0019 > Kn ≥ 0.
-1.0 -0.8 -0.6 -0.4 -0.2 0.2n
-0.3
-0.2
-0.1
0.1
0.2
0.3
Ω
Figura 10.11: Localização das raízes da equação característica longitudinal exacta deum Cessna 182 para Kn < 0. Para 0 > Kn > −0.03: a vermelho, «modo fugóide»; aazul, »modo de período curto». Para −0.03 ≥ Kn ≥ −0.1, a verde, modo oscilatório; alaranja, raiz real.
153

10.7 Efeito do Vento nos Modos Longitudinais
O vento pode influenciar a dinâmica de uma aeronave de várias formas, especial-mente se existe turbulência atmosférica ou se o vento apresenta gradientes espaciais.Entre estes incluem-se as correntes verticais ascendentes (térmicas), os downbursts eos gradientes devido à camada limite atmosférica. No que se segue abordar-se-á ape-nas efeito do vento de frente ou vento de cauda num voo horizontal na camada limiteatmosférica.
Supomos que o vento é horizontal, isto é, que no referencial FE fixo na Terra ~W sótem componente horizontal. Na camada limite atmosférica a variação da velocidadedo vento com a altitude tem a forma W = khn, em que W é a velocidade do vento,h é altura acima do solo e k e n são constantes que dependem das características doterreno. A velocidade do vento aumenta com a altitude, e por isso n > 0.
10.7.1 Equações do movimento para pequenas perturbações na pre-sença de vento
O estado estacionário é o definido na secção 8.1, isto é, um voo horizontal niveladocom velocidade u0. Assim, u0 = v0 = w0 = 0, p0 = q0 = r0 = 0, v0 = 0, θ0 = 0 e φ = 0.Além disso, supomos sem perda de generalidade que ψ0 = 0. Usaremos um sistemade eixos de estabilidade, pelo que w0 = 0, ou seja, αx = 0 no estado estacionário.
A diferença relativamente ao caso tratado no capítulo 8 é que agora a velocidade dovento não é nula.
~VE = ~V + ~W ⇒
uE = u+WxvE = v +WywE = w +Wz
Assim, as equações linearizadas (8.12), (8.15), e (8.24) dependem agora da velocidaderelativa à Terra e não apenas do velocidade relativa ao ar. As equações (8.18) e (8.20)permanecem iguais. O sistema de equações no referencial do avião é agora
∆X −mg∆θ =m(∆uE + qWz − rWy
)∆Z =m(wE + pWy − quE0)∆M = Iy q∆θ = q∆zE = wE −uE0∆θ
(10.43)
A última equação é importante porque as velocidades relativas a FE dependem davelocidade do vento e este depende da altitude, e portanto da coordenada zE . Defacto, como a velocidade do vento depende da altitude, as componentes Wi = Wi(zE)dependem também da altitude.
Vamos tratar apenas o caso de vento na direcção do movimento do avião (vento defrente ou de cauda) e em que não existe vento lateral. No referencial da terra
~WE = (W(zE),0,0). (10.44)
Definindo a posição vertical da aeronave no estado estacionário por zE0 e supondoque durante a fase de voo em consideração zE não varia muito relativamente a zE0 ,
154

podemos desenvolver W(zE) em série de Taylor e tomar apenas o termo linear:
W(zE) = W0 +dWdze
∆zE = W0 + Γ ∆zE, (10.45)
em que W0 = W(zE0) e
Γ ≡ dWdze
. (10.46)
No referencial fixo na Terra, a velocidade do vento é então
~WE =W0
0
=W0 + Γ∆zE
00
,e no referencial do avião ~WB = [Wx,Wy ,WZ]T vem dado por
~WB = LBE ~WE =W cosθ
0W sinθ
≈ W0 + Γ∆zE
0(W0 + Γ∆zE)∆θ
≈W0 + Γ∆zE
0W0∆θ
. (10.47)
Usando (10.47) podemos escrever
uE = ddt[u+Wx] =
ddt[(u0 +∆u)+ (W0 + Γ∆zE)] = ∆u+ Γ∆zE (10.48)
wE = ddt[w +Wz] =
ddt[w + (W0∆θ)] = w +W0∆θ (10.49)
Substituindo (10.48) na primeira equação de (10.43) e (10.49) na segunda e na quintaequações de (10.43), obtém-se
∆X −mg∆θ =m(∆u+ Γ∆zE)∆Z =m(w +W0∆θ − quE0)∆M = Iy q∆θ = q∆zE = (w +W0∆θ)−uE0∆θ = w + (W0 −uE0)∆θ
Mas uE0 = u0 +W0 ⇒ W0 −uE0 = −u0, pelo que se pode simplificar o sistema:
∆X −mg∆θ =m(∆u+ Γ∆zE) =m[∆u+ Γ(w −u0∆θ)]
∆Z =m(w +W0∆θ − quE0) =m(w − qu0)∆M = Iy q∆θ = q∆zE = w + (W0 −uE0)∆θ = w −u0∆θ
155

Conclui-se que o sistema de equações se pode escrever como
∆Xm− Γw − (g − Γu0)∆θ = ∆u
∆Zm+ qu0 = w
∆MIy= q
q = ∆θ
(10.50)
Comparando estas equações com (8.12), (8.15), (8.18) e (8.20), constata-se que aúnica diferença ocorre na primeira equação: o 2º termo é novo e no 3º termo apareceuma parcela adicional. Desenvolvendo ∆X, ∆Z e ∆M e procedendo como no capítulo8, chega-se a um novo sistema de equações diferenciais em que a única diferençarelativamente ao sistema (8.21) é o aparecimento dos termos referidos. Logo, o novosistema de equações é
∆u
w
q
∆θ
=
Xum
(Xwm − Γ
)0 (−g+Γu0) cosθ0
Zum−Zw
Zwm−Zw
(mu0+Zq)m−Zw −mg sinθ0
m−Zw
1Iy
(Mu+ MwZu
m−Zw
)1Iy
(Mw+ MwZw
m−Zw
)1Iy
(Mq+ Mw (mu0+Zq)
m−Zw
)−Mwmg sinθ0Iy (m−Zw )
0 0 1 0
∆u
w
q
∆θ
,
em que se omitiu o vector das variáveis de controlo por questão de espaço.
Alterações na dinâmica da aeronave
As contribuições explícitas do vento nos modos longitudinais são apenas as in-dicadas. No entanto, existem muitas alterações à dinâmica longitudinal devidas aogradiente de vento que não estão explícitas e que se devem à variação da pressão dinâ-mica quando a aeronave altera a sua atitude. Por exemplo, se α varia e a cauda desce,a velocidade na cauda diminui, e Lt diminui, donde |Cmα| diminui; ou se φ ≠ 0 e a asadireita desce, a sustentação da asa direita diminui e a da asa esquerda aumenta o queprovoca um aparecimento de Clφ e Cnφ .
Excluindo as contribuições implícitas, a única alteração que se verifica é na matrizdo sistema para o movimento longitudinal. A matriz é semelhantes, com as alterações:
Xwm
é substituído por(Xwm− Γ
)−g é substituído por
(−g + Γu0
)Logo, para os modos longitudinais aproximados apenas o modo fugóide é afectadopelo gradiente de vento, bastando usar os novos termos da matriz na determinaçãodas raízes da equação características ou da frequência natural e do factor de amorte-cimento.
156

10.8 Modos longitudinais em atmosferas estratificadas
Numa atmosfera estratificada a densidade varia com a altitude, isto é, ρ = ρ(zE).Dado que no modo fugóide há variações apreciáveis de zE , os gradientes de ρ influen-ciam este modo. Quando o avião desce, a densidade aumenta e há um acréscimo desustentação, acontecendo o inverso quando o avião sobe. Esta variação da sustentaçãoe das outras forças aerodinâmicas com zE influencia principalmente as característicasda fugóide, sendo modo de período curto menos afectado.
10.8.1 Modificação das Equações do Movimento
Numa atmosfera estratificada um estado estacionário tem de ser um voo horizontal(altitude constante). A sustentação, bem como a resistência aerodinâmica e o momentode picada, dependem de ρ e portanto da altitude. Para incluir este efeito nas equaçõespara pequenas perturbações é necessário incluir a equação para zE nas equações dadinâmica e explicitar a dependência de forças e momentos em zE .
Das equações para o flight path, a equação linearizada para zE é:
∆zE = −∆u sinθ0 +w cosθ0 −u0∆θ cosθ0.
Num voo horizontal:∆zE = w −u0∆θ.
Explicitando a dependência das forças e momentos longitudinais com zE , obtém-se
∆X = Xu∆u+Xww ++XzzE +∆Xc ,
∆Z = Zu∆u+ Zww + Zww + Zqq + ZzzE +∆Zc ,
∆M = Mu∆u+Mww +Mww +Mqq +MzzE +∆Zc ,
onde
Xz =∂X∂zE
∣∣∣∣0, Zz =
∂Z∂zE
∣∣∣∣0, Mz =
∂M∂zE
∣∣∣∣0.
Comecemos por calcular a derivada Zz. Dado que Z = 12ρV
2SCz,
∂Z∂zE
= ∂Z∂ρ
∂ρ∂zE
= 12V 2S
[Cz + ρ
∂Cz∂ρ
]∂ρ∂zE
Admitindo que a densidade varia exponencialmente com a altitude (exacto para atmos-fera isotérmica):
ρ = ρ0eκzE ⇒ ∂ρ∂zE
= κρ (10.51)
Desprezando as variações de Cz com ρ (isto é, supondo que CL não depende de ρ),
∂Z∂zE
= 12V 2SCzκρ.
A derivada é calculada no estado estacionário, donde
Zz =∂Z∂zE
∣∣∣∣0= κ 1
2ρu2
0S(Cz)0 = κZ0 = −κmg.
157
Procedendo de forma análoga, mostrar -se-ia que
Xz = κX0,Mz = κM0.
Mas, no estado estacionário, X0 −mg sinθ0 = 0, pelo que, num voo horizontal, X0 =0⇒ Xz = 0. Por outro lado, Mz = κM0 = 0.
As equações longitudinais para pequenas perturbações a um voo horizontal numaatmosfera estratificada são então
∆u
w
q
∆θ
zE
=
Xum
Xwm 0 −g 0
Zum−Zw
Zwm−Zw
(mu0+Zq)m−Zw 0 Zz
m
Qu Qw Qq 0 1Iy
(MwZzm−Zw
)0 0 1 0 0
0 1 0 −u0 0
∆u
w
q
∆θ
zE
, (10.52)
em que se omitiram os termos de controlo e se usaram as seguintes abreviaturas:Qu = 1
Iy
(Mu + MwZu
m−Zw
); Qw = 1
Iy
(Mw + MwZw
m−Zw
); Qq = 1
Iy
(Mq + Mw(mu0+Zq)
m−Zw
)10.8.2 Estimativa para a variação do período do modo fugóide
Do sistema de equações (10.52) é possível calcular a frequência e factor de amor-tecimento do modo fugóide usando os métodos habituais. Para que se possa saberem que circunstâncias é importante usar esta correcção convém começar por obteruma estimativa da variação do período. A estimativa mais simples é a baseada naaproximação de Lanchester.
Nas hipóteses da aproximação de Lanchester há conservação de energia e verifica-se (10.25), pelo que V 2 = u2
0 + 2gzE . A equação (10.26) tem de ser modificada, porqueagora a sustentação é
L = 12ρ0
(1+ ∆ρ
ρ0
)V 2SCW . (10.53)
Mas, usando (10.51),∆ρρ0= 1ρ0
∂ρ∂zE
zE = κzE.
Logo, tendo em conta (10.25), após linearização das equações obtém-se
L = W + kzE + κWzE. (10.54)
Daqui, obtém-semzE = W − L = −(k+ k′)zE, (10.55)
158

em que k′ = κW e k = ρgSCW0 . Esta equação corresponde a um movimento harmónicosimples com período T ′ = 2π
√m/(k+ k′). O período T do modo fugóide que se obtém
na aproximação de Lanchester é dado pela equação (10.29). Assim, obtemos
T ′
T= F, com F =
√k
k+ k′ =√
11+ k′/k
Mas, usando os valores de k e k′,
k′
k= κWCW0ρ0gS
= κu20
2g⇒ F = 1√
1+ κu20
2g
O factor de correcção F depende apenas de κ e u0. O período é menor do que parauma atmosfera uniforme e a correcção é mais importante para maiores velocidades.
10.8.3 Exemplos de variação do modo fugóide
Exemplo 1: Cessna 182
Voo horizontal a 5000 ft, com velocidade u0 = 67m/s.Determinação de uma estimativa para κ:h1 = 1200 m ρ1 = 1.0900 kg/m3;h = 1500 m ρ0 = 1.0900 kg/m3;h2 = 1800 m ρ2 = 1.0269 kg/m3.
Logo, obtém-se
κ = ρ2 − ρ1
−(h2 − h1)ρ0= 9.9392× 10−5 /m
T ′/T ζ′/ζ
Aprox. Lanchester 0.98881 —Cálculo exacto 0.99466 0.98472
Exemplo 2: Boeing 747
Voo horizontal a 40000 ft, com velocidade u0 = 265.5m/s.Determinação de uma estimativa para κ:h1 = 12000 m ρ1 = 0.31194 kg/m3
h2 = 12300 m ρ2 = 0.29758 kg/m3;
κ = ρ2 − ρ1
−(h2 − h1)ρ1= 1.53448× 10−4 /m
Estimativa com base na aproximação de Lanchester: F = T ′/T = 0.802756.Comparando estes dois exemplos constata-se que para voos a maior altitude e,
principalmente, a maior velocidade, o factor de correcção é maior e os efeitos da estra-tificação da atmosfera são importantes. Quando a velocidade é baixa a estratificação daatmosfera não altera significativamente nem o período nem o factor de amortecimentoda fugóide.
159

Capítulo 11
Estabilidade Dinâmica Lateral
11.1 Modos laterais
A determinação dos modos laterais de uma aeronave faz-se da mesma forma quepara os modos longitudinais: em primeiro lugar calculam-se as derivadas dimensio-nais (conhecidas as adimensionais), em seguida calculam-se os elementos da matriz A(neste caso, a matriz para as equações do movimento lateral) e determinam-se as solu-ções da equação característica, que são os valores próprios de A; finalmente, para cadavalor próprio determina-se o respectivo vector próprio (a menos de uma constantemultiplicativa).
O sistema de equações que rege a evolução das pequenas perturbações do movi-mento lateral, na ausência de controlo, pode ser escrito na forma x = Ax, sendo ovector de estado x = [v p r φ]T e a matriz do sistema dada por (8.37). Tal comono caso de modos longitudinais, supõe-se que a solução da equação do movimento éda forma x = x0eλt e, substituindo na equação, obtém-se (A − λI)x0 = 0. Os valorespróprios da matriz, λ, são obtidos pela equação característica det(A−λI) = 0, e x0 sãoos vectores próprios correspondentes. Como exemplo, vamos em seguida determinaros modos laterais de um Cessna 182.
11.1.1 Exemplo: modos laterais de um Cessna 182
Os modos laterais de um Cessna 182 serão determinados para a mesma situação devoo para o qual se calcularam os modos longitudinais: voo horizontal a 5000 ft, comvelocidade u0 = 67.08m/s (Ma = 0.201).
As características geométricas do Cessna 182 estão resumidas na tabela 10.1. Natabela 11.1 apresentam-se as derivadas adimensionais da força lateral e do momentode rolamento e de guinada em ordem a β, p e r .
160

Tabela 11.1: Derivadas adimensionais laterais (por radiano). Fonte: [5]
Cy Cl Cnβ -0.393 -0.0923 0.0587p -0.075 -0.484 -0.0278r 0.214 0.0798 -0.0937
As derivadas dimensionais laterais, calculadas no Sistema Internacional, são:
Yv =12ρu0SCyβ = −224.9 kg s−1
Yp =14ρu0SbCyp = −235.5 kg m s−1
Yr =14ρu0SbCyr = 671.99 kg m s−1
Lv =12ρu0SbClβ = −579.67 kg m s−1
Lp =14ρu0Sb2Clp = −16676.8 kg m2 s
−1
Lr =14ρu0Sb2Clr = 2749.6 kg m2 s
−1
Nv =12ρu0SbCnβ = 368.6 kg m s−1
Np =14ρu0Sb2Cnp = −957.88 kg m2 s
−1
Nr =14ρu0Sb2Cnr = −3228.54 kg m2 s
−1
Usando as derivadas acima, determinam-se todos os termos da matriz do sistema,
A =
−0.1872 −0.1960 −67.27 9.81
−0.4511 −12.978 2.1398 0
0.13827 −0.3593 −1.211 0
0 1 0 0
,
calculada em SI. A equação característica det(A − λI) = 0 conduz a uma equação qua-drática:
λ4 + 14.3764λ3 + 28.3543λ2 + 139.089λ+ 2.45636 = 0.
Mais uma vez podemos recorrer aos critérios de estabilidade, e como
E = 2.45636 > 0,
R = D(BC −AD)− B2E = 36843.8 > 0,
concluimos que todos os modos vão ser estáveis.
161

Tabela 11.2: Características de cada modo
Modo Período (s) t1/2 (s) N1/2
Espiral — 39.1 —Rolamento — 0.053 —Rolamento holandês 1.967 1.03 0.525
Tabela 11.3: Vectores próprios laterais obtidos para o Cessna 182. representa-se tam-bém o ângulo de guinada ψ, que se obtém a partir de (8.34)
Espiral Rolamento Rolamento holandês
Módulo Fase
β = v 1 0.22004 1 0ºp -0.0149 1 0.035 178.2ºr 0.12038 0.02785 0.046 -80.5ºφ 0.84249 -0.0768 0.0107 76.3º
ψ -83.049 -0.0262 0.849 99.5º
As raízes da equação características são os valores próprio de A:
λ1 = −0.0177239 s−1 (modo espiral)
λ2 = −13.018 s−1 (modo de rolamento)
λ3,4 = −0.670368± 3.19323 i (s−1) (modo de rolamento holandês)
Na tabela 11.2 apresentam as características dos modos laterais correspondentes. Doisdos valores próprios são reais e negativos, pelo que os modos correspondentes sãoestáveis. O modo correspondente à raiz mais perto da origem é chamado de modoespiral e o outro modo é chamado de modo de rolamento, por razões que veremosmais à frente. Os outros dois valores próprios constituem um par de raízes complexasconjugadas, e o modo correspondente é oscilante. Como a parte real destas raízes énegativa, este modo, habitualmente chamado de rolamento holandês, é também es-tável. Na tabela 11.3 apresentam-se os resultados obtidos para os vectores próprioscorrespondentes aos modos laterais do Cessna 182, considerando que o valor maiselevado é unitário.
11.1.2 Características típicas de cada modo
A análise das soluções obtidas permite determinar as características típicas dosmodos laterais.
Modo espiral
A figura 11.1 representa a variação dos ângulos de guinada, derrapagem e prancha-mento no modo espiral do Cessna 182, obtidos a partir da tabela 11.3. Constata-se
162

0 50 100 150 200t
20
40
60
80
ÈΦÈ
ÈΒÈ
ÈΨÈ
Figura 11.1: Modo espiral: variação dos ângulos de guinda, derrapagem e prancha-mento.
50 100 150 200t
0.2
0.4
0.6
0.8
1.0
r
p
Β
Figura 11.2: Modo espiral: variáveis dinâmicas
facilmente que o ângulo de guinada tem a variação mais importante. O modo espiral écaracterizado por ter derrapagem «pequena» e ângulo de rolamento «pequeno» com-parados com ψ, pelo que é uma viragem com pranchamento (banked turn) com raiovariável.
As variáveis importantes para a determinação das forças e momentos aerodinâmi-cos são β, p e r , que estão representadas graficamente para o modo espiral na figura11.2. Da tabela 11.3 vem β : p : r = 1 : −0.0149 : 0.120. Ora, β já tinha módulo«pequeno» (comparado com ψ). Conclui-se portanto que todas as variáveis dinâmicasenvolvidas têm módulo pequeno e as forças e momentos por elas criados têm intensi-dade pequena; daí que o modo seja «fraco», com constantes de tempo grandes. Se forestável, o modo espiral converge lentamente; se for instável, o modo espiral divergelentamente.
163

0 10 20 30 40 50y0
20
40
60
80
100
120
140
x100
Figura 11.3: Trajectória no modo espiral, no exemplo do Cessna 182 e com ângulo deguinada inicial ψinicial = 20º.
As equações para a trajectória (flight path) relevantes para modos laterais são
∆xE = ∆u cosθ0 +w cosθ0 −uo∆θ sinθ0, (11.1)
∆yE = u0ψ cosθ0 + v. (11.2)
Para o modo espiral,
ψ = (ψ)inicial eλSt,
v = u0β =(βψ
)(ψ)inicial eλSt,
e sendo ∆u = 0 = w e θ0 = 0, obtém-se ∆xE = 0, donde xE = u0t. Por outro lado,
yE =u0
(βψ
)(ψ)inicial
λSeλSt.
A trajectória no modo espiral do Cessna 182, em que o valor próprio é λS =−0.0177239 s-1 e supondo um ângulo de guinada inicial de ψinicial = 20º, está re-presentada na figura 11.3 para os primeiros 180 s. Neste exemplo este modo é estável,pelo que se observa uma lenta aproximação do avião à trajectória não perturbada, istoé, com yE = 0 (note-se a diferença de escalas nas abcissas e nas ordenadas).
Convergência de rolamento
O modo de rolamento tem um valor próprio real e habitualmente negativo e comvalor absoluto grande, sendo a constante de tempo associada, τ = −1/λ, pequena. É
164

0.2 0.4 0.6 0.8 1.0t
-0.2
0.2
0.4
0.6
0.8
1.0
r
Ψ
p
Β
Φ
Figura 11.4: Modo de rolamento: representação da evolução temporal das variáveisdinâmicas e dos ângulos de pranchamento e guinada.
por isso um modo estável, com grande atenuação, e é chamado de convergência derolamento.
A partir da tabela 11.3 determinam-se facilmente as relações entre ângulos (β, φe ψ) e entre variáveis dinâmicas (β,p e hatr ) e a sua evolução temporal está repre-sentada na figura 11.4. Verifica-se que o modo de rolamento é caracterizado aproxi-madamente por derrapagem «pequena» e um ângulo e velocidade angular de guinada«pequenos». A principal variável dinâmica é a velocidade angular de rolamento, o quejustifica o nome dado ao modo.
A componente mais importante para as forças aerodinâmicas é Clp p (e é estabiliza-dora porque Clp < 0). A contribuição de Clr r é desprezável. Este modo é estável, comconstantes de tempo pequenas e muito atenuado.
Modo de rolamento holandês
O terceiro modo que se obteve para o Cessna 182 é uma oscilação lateral e corres-ponde ao modo conhecido como dutch roll.
Na figura 11.5 pode ver-se a evolução temporal das variáveis dinâmicas e dos ângu-los de pranchamento e de guinada. Embora neste exemplo β seja a variável predomi-nante, como se pode confirmar na tabela 11.3, habitualmente no modo de rolamentoholandês todas as variáveis dinâmicas têm ordem de grandeza semelhante e contri-buem para o movimento.
A figura 11.6 representa a trajectória seguida pelo centro de massa do avião noexemplo em estudo para o modo de rolamento holandês. Observa-se que a trajectóriaseguida é oscilatória, mas centrada em torno de yE = 0. O centro de massa do aviãosegue uma trajectória aproximadamente rectilínea.
Na figura 11.7 apresenta-se um gráfico paramétrico da variação de φ e ψ, a quecorresponde o movimento da ponta da asa do avião. Neste exemplo as oscilações emφ são muito menores que as oscilações em ψ, mas observa-se que a ponta da asavai descrevendo uma elipse cada vez mais apertada, com oscilações amortecidas deamplitude cada vez menor.
165
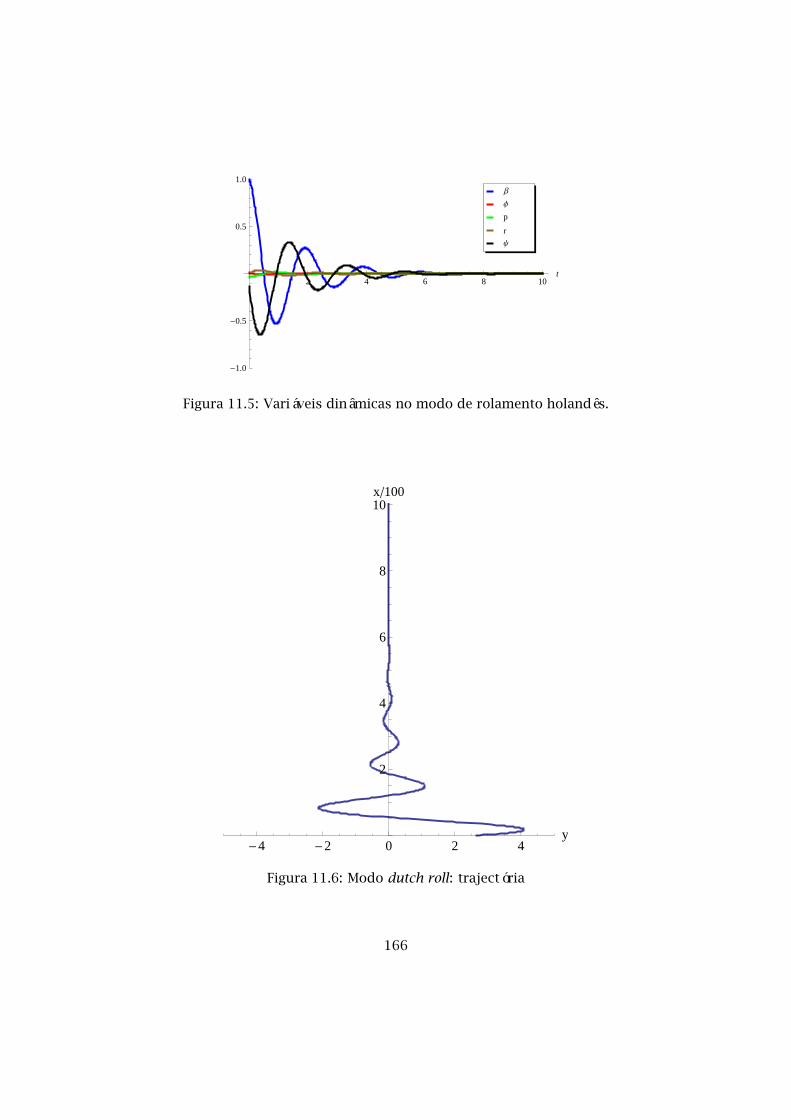
2 4 6 8 10t
-1.0
-0.5
0.5
1.0
Ψ
r
p
Φ
Β
Figura 11.5: Variáveis dinâmicas no modo de rolamento holandês.
-4 -2 0 2 4y
2
4
6
8
10x100
Figura 11.6: Modo dutch roll: trajectória
166

-40 -30 -20 -10 10 20100 Φ
-30
-20
-10
10
20Ψ
Figura 11.7: Modo dutch roll: gráfico paramétrico da variação de φ e ψ (movimento daponta da asa).
Figura 11.8: Movimento esquemático de um avião no modo de rolamento holandês.(Fonte: [4])
167

O movimento de um avião no modo de rolamento holandês está esquematizado nafigura 11.8.
11.2 Modos laterais aproximados
Como se sabe, a matriz do sistema (para modos laterais) é dada por
A =
Yvm
Ypm
(Yrm −u0
)g cosθ0(
LvI′x + I
′zxNv
) (LpI′x + I
′zxNp
) (LrI′x + I
′zxNr
)0
(I′zxLv + Nv
I′z
) (I′zxLp +
NpI′z
) (I′zxLr + Nr
I′z
)0
0 1 tanθ0 0
.
Para simplificar a escrita das expressões vamos usar as seguintes abreviaturas:
Yv =Yvm, (11.3)
Yp =Ypm, (11.4)
Yr =Yrm−u0, (11.5)
Lv =LvI′x+ I′xzNv , (11.6)
Lp =LpI′x+ I′xzNp, (11.7)
Lr =LrI′x+ I′xzNr , (11.8)
Nv = I′xzLv +NvI′z, (11.9)
Np = I′xzLp +NpI′z, (11.10)
Nr = I′xzLr +NrI′z. (11.11)
A matriz A pode então escrever-se como
A =
Yv Yp Yr g cosθLv Lp Lr 0Nv Np Nr 00 1 tanθ 0
.Tendo em conta que se pode normalmente fazer a aproximação Yp ≈ 0,
A− λI =
Yv − λ 0 Yr g cosθ
Lv Lp − λ Lr 0Nv Np Nr − λ 00 1 tanθ −λ
,168

e a equação característica do sistema completo, no caso de modos laterais, é dada por
det(A− λI) = λ4 + Bλ3 + Cλ2 +Dλ+ E = 0, (11.12)
em que os coeficientes do polinómio são definidos por
B = −Lp −Nr − Yv ,C = −LrNp +LpNr −NvYr +LpYv +NrYv ,D = −LvNpYr +LpNvYr +LrNpYv −LpNrYv − gLv cosθ − gNv sinθ,E = g(LvNr cosθ −LrNv cosθ −LvNp sinθ +LpNv sinθ).
Com base nestas expressões pode-se encontrar uma aproximação para o modo espiral.
11.2.1 Aproximação para o modo espiral
No modo espiral a raiz real está perto da origem (λS 1). Por isso, na equaçãocaracterística podemos desprezar os termos em λ2, λ3 e λ4, obtendo
Dλ+ E = 0 ⇒ λS = −ED.
O coeficiente D pode ser escrito como
D = (−LvNp +LpNv)Yr + (LrNp −LpNr )Yv − g(Lv cosθ +Nv sinθ).
Tendo em conta a definição (11.5) e os valores típicos para uma aeronave, Yr = Yr/m−u0 ≈ −u0. Por outro lado, comparando os valores numéricos, |Yv| = |Yv|/m |Yr | ≈u0 (usando o exemplo do Cessna 182, Yv = −0.187203/s, Yr = −67.2737 m/s ≈ −u0 =−67.05m/s). Logo, o termo (LrNp −LpNr )Yv pode ser desprezado em na expressãode D, obtendo-se
D ≈ (LvNp −LpNv)u0 − g(Lv cosθ +Nv sinθ),
e obter então a raiz aproximada do modo espiral:
λS = −g(LvNr cosθ0 −LrNv cosθ0 −LvNp sinθ0 +LpNv sinθ0)
(LvNp −LpNv)u0 − g(Lv cosθ0 +Nv sinθ0). (11.13)
Se o estado estacionário corresponde a um voo horizontal, em que θ0 = 0, e expressãoanterior simplifica-se:
λS = −g(LvNr −LrNv)
(LvNp −LpNv)u0 − gLv. (11.14)
Para obter o resultado desta aproximação ao exemplo do Cessna 182, comecemos
169

por usar as definições (8.27)–(8.28) e (11.3)–(11.11), obtendo-se
I′x =IxIz − I2zx
Iz= 1284.97 kg m2,
I′z =IxIz − I2zx
Ix= 2666.18 kg m2,
I′xz =Izx
IxIz − I2zx= 0,
Yv =Yvm= −0.187203 s-1,
Yp =Ypm= −0.196006 m s-1,
Yr =Yrm−u0 = −67.2737 m s-1,
Lv =LvI′x+ I′xzNv = −0.451115 m-1s-1,
Lp =LpI′x+ I′xzNp = −12.978 s-1,
Lr =LrI′x+ I′xzNr = 2.1398 s-1,
Nv = I′xzLv +NvI′z= 0.13827 m-1s-1,
Np = I′xzLp +NpI′z= −0.359271 s-1,
Nr = I′xzLr +NrI′z= −1.21092 s-1.
A raiz aproximada do modo espiral, que se obtém de (11.14), pode comparar-secom o valor exacto obtido anteriormente:
λS(exacto) = −0.0177239 s−1,
λS(aprox) = −0.0176542 s−1,
concluindo-se que, neste caso, esta é uma boa aproximação para o modo espiral. Estaconclusão pode generalizar-se, porque esta aproximação do modo espiral conduz habi-tualmente a resultados muito próximos do valor exacto obtido por cálculo dos valorespróprios da matriz total do sistema.
O modo espiral é com frequência instável. Habitualmente isso não causa dificulda-des no voo, porque este é um modo lento e não é difícil ao piloto efectuar as correcçõesnecessárias. No entanto, interessa usar os critérios de estabilidade para determinarcondições a verificar caso se pretenda que o modo seja estável. Como se referiu atrás,uma condição necessária para a estabilidade no caso de uma equação característica de4ª ordem, como (11.12), é E > 0:
E = g[(LvNr −LrNv) cosθ + (LpNv −LvNp) sinθ)
]> 0
Substituindo na equação acima as expressões para os termos (11.3) a (11.11) e as ex-pressões para as derivadas de estabilidade obtemos a condição de estabilidade:
(ClβCnr − ClrCnβ) cosθ0 + (ClpCnβ − ClβCnp) sinθ0 > 0. (11.15)
170

No caso em que o estado estacionário é um voo horizontal, θ0 = 0 e a condiçãosimplifica-se:
ClβCnr − ClrCnβ > 0. (11.16)
11.2.2 Aproximação para o modo de rolamento
Modo de rolamento: aproximação 1
No modo de rolamento a principal variável dinâmica é p. É um movimento quaseunidimensional de rolamento em torno de x. Por isso, a aproximação mais simplesconsiste em considerar v = 0 = r . A 2ª equação do sistema é então
p = Lpp. (11.17)
Logo, o valor próprio para o modo de rolamento nesta aproximação é
λR = Lp =LpI′x+ I′xyNp. (11.18)
Comparando com o valor exacto anteriormente obtido para o exemplo do Cessna 182,esta aproximação, apesar de muito simples, dá resultados bastante aproximados:
λR(aprox) = −12.9783 s−1,
λR(exacto) = −13.018 s−1.
No entanto, noutras situações e para outras aeronaves os resultados não são tão satis-fatórios e é necessário recorrer a outras aproximações.
Aproximação para os modo de rolamento e espiral
Nesta aproximação pretende-se encontrar um sistema de 2ª ordem cujas raízessejam os valores próprios correspondentes aos modos espiral e rolamento.
Admitiremos que o estado estacionário é um voo horizontal, pelo que θ0 = 0. Parasimplificar a primeira equação lateral faremos a hipótese de que a força lateral to-tal é apenas devida à derrapagem (mv = Yvv) e que a força lateral devida ao rola-mento é desprezável (ou seja, desprezamos Yp/m). Logo, a componente lateral dopeso deve ser anulada pela força lateral produzida pela taxa de guinada r . Admitindoque Yr/m u0, a equação
v = Yvmv + Yp
mp +
(Yrm−u0
)r + g cosθ0φ
reduz-se a−u0r + gφ = 0. (11.19)
Logo, o sistema de equações é:0 = −u0r + gφp = Lvv +Lpp +Lrrr = Nvv +Npp +Nrr
φ = p
171

Na forma matricial, escreve-se0prφ
=
0 0 −u0 gLv Lp Lr 0Nv Np Nr 00 1 0 0
vprφ
. (11.20)
A equação característica é∣∣∣∣∣∣∣∣0 0 −u0 g
Lv (Lp − λ) Lr 0Nv Np (Nr − λ) 00 1 0 −λ
∣∣∣∣∣∣∣∣ = 0, (11.21)
que se pode escrever como uma equação de 2ª grau,
CSRλ2 +DSRλ+ ESR = 0, (11.22)
sendo os coeficientes de (11.22) dados por
CSR = u0Nv , (11.23)
DSR = u0(LvNp −LpNv)− gLv , (11.24)
ESR = g(LvNr −LrNv). (11.25)
Comparando os resultados exactos para o exemplo do Cessna 182 com os obtidoscom este modo «rolamento + espiral» e com as aproximações anteriores, temos, parao modo espiral,
λS(exacto) = −0.0177239 s−1
λS(aprox. S) = −0.0176542 s−1
λS(aprox. S+R) = −0.0181258 s−1
e para o modo de rolamento,
λR(exacto) = −13.018 s−1
λR(aprox. R) = −12.9783 s−1
λR(aprox. S+R) = −14.6094 s−1
Ambas as raízes aproximadas têm valores próximos dos exactos. Em geral esta aproxi-mação (S+R) dá resultados aceitáveis para ambos os modos e frequentemente constituiuma melhoria face à aproximação de rolamento mais simples anteriormente apresen-tada. Neste exemplo esta aproximação não melhora os resultados anteriores.
11.2.3 Modo de rolamento holandês aproximado
Este modo é difícil de aproximar porque todas as variáveis são importantes. Noentanto, tendo em conta que no exemplo do Cessna 182 as variáveis com menor am-plitude eram p e φ, podemos simplificar as equações admitindo que um movimento
172

Tabela 11.4: Valores próprios, período e N1/2 exactos e aproximados para o modo derolamento holandês.
λDR T (s) N1/2 (ciclos)
Valor Exacto −0.670368± i3.19323 1.97 0.525Aproximação −0.699063± i3.00234 2.09 0.47
de guinada/derrapagem sem rolamento (movimento «plano»), com p = 0 = φ. Alémdisso, admitimos Yr desprezável. As equações do movimento são então
v = Yvmv + Yp
mp︸︷︷︸≈0
+(Yrm−u0
)︸ ︷︷ ︸
−u0
r + g cosθ0 φ︸︷︷︸≈0
,
p =(LvI′x+ I′zxNv
)v +
(LpI′x+ I′zxNp
)p +
(LrI′x+ I′zxNr
)r ,
r =(I′zxLv +
NvI′z
)v +
(I′zxLp +
NpI′z
)p︸︷︷︸≈0
+(I′zxLr +
NrI′z
)r ,
φ = p + tanθ0 r .
A segunda equação pode ser ignorada pois, com as aproximações anteriores, a primeirae a terceira equação constituem um sistema fechado:
v = Yvmv −u0r ,
r =(I′zxLv +
NvI′z
)v +
(I′zxLr +
NrI′z
)r .
Usando (11.3), (11.9) e (11.11), temosv = Yvv −u0r ,r = Nvv +Nrr .
(11.26)
A equação característica do sistema aproximado é
λ2 − (Yv +Nr )λ+ (YvNr +u0Nv) = 0. (11.27)
A comparação para o exemplo do Cessna 182 dos valores próprios exactos parao modo de rolamento holandês com as raízes de (11.27) encontra-se na tabela 11.4.Constatamos que neste caso esta aproximação é razoável tanto para o período comopara o factor de amortecimento. Note-se, no entanto, que esta aproximação nem sem-pre dá valores aceitáveis para o factor de amortecimento.
173

Capítulo 12
Resposta à Actuação de Controlo
12.1 Matrizes e vectores de controlo
As equações do movimento para pequenas perturbações têm a mesma forma tantopara perturbações longitudinais como para perturbações laterais:
x = A · x+ B · c.
Aqui x é o vector de estado, A é a matriz do sistema, B é a matriz de controlo e c é ovector de controlo, diferentes para movimento longitudinal e movimento lateral.
O vector de controlo é dado por c = [∆δe ∆δP]T para o movimento longitudinale c = [∆δa ∆δr ]T para o movimento lateral. A matriz de controlo B não foi aindadeterminada para nenhum dos dois casos.
Para encontrar os elementos da matriz B para um movimento longitudinal parte-seda definição (8.22):
B · c =
∆Xcm∆Zcm−Zw
1Iy
[∆Mc + Mw∆Zc
m−Zw
]0
,
em que ∆XC = Xδe∆δe +XδP∆δP ,∆ZC = Zδe∆δe + ZδP∆δP ,∆MC = Mδe∆δe +MδP∆δP .
Como é habitual, supôs-se que a relação entre as variáveis de controlo e as forças emomentos é linear. Fazendo as substituições necessárias, obtém-se:
B · c =
Xδem
XδPm
Zδem−Zw
ZδPm−Zw
MδeIy +
Mw ZδeIy(m−Zw)
MδPIy +
Mw ZδPIy(m−Zw)
0 0
[∆δe∆δP
],
174

ou seja, a matriz B para o movimento longitudinal é
B =
Xδem
XδPm
Zδem−Zw
ZδPm−Zw
MδeIy +
Mw ZδeIy(m−Zw)
MδPIy +
Mw ZδPIy(m−Zw)
0 0
. (12.1)
As derivadas de controlo são obtidas a partir das derivadas adimensionais por:
Xδe =12ρu2
0SCxδe , XδP =12ρu2
0SCxδP ,
Zδe =12ρu2
0SCzδe , ZδP =12ρu2
0SCzδP ,
Mδe =12ρu2
0ScCmδe , MδP =12ρu2
0ScCmδP.
A matriz B para o movimento lateral obtém-se de forma análoga. Da definição dovector das variáveis de controlo para perturbações laterais (8.32) obtém-se
B · c =
∆Ycm
∆LcI′x + I
′zx∆Nc
I′zx∆Lc + ∆NcI′z
0
.
Por outro lado: ∆YC = Yδa∆δa + Yδr∆δr ,∆LC = Lδa∆δa + Lδr∆δr ,∆NC = Nδa∆δa +Nδr∆δr .
Fazendo as substituições necessárias, obtém-se:
B · c =
Yδam
Yδrm
LδaI′x + I
′zxNδa
LδrI′x + I
′zxNδr
I′zxLδa +NδaI′z I′zxLδr +
NδrI′z
0 0
[∆δa∆δr
],
ou seja, a matriz B para o movimento lateral é
B =
Yδam
Yδrm
LδaI′x + I
′zxNδa
LδrI′x + I
′zxNδr
I′zxLδa +NδaI′z I′zxLδr +
NδrI′z
0 0
, (12.2)
175

sendo as derivadas dimensionais de controlo dadas por
Yδ = 1/2 ρu20SCyδ , (12.3)
Lδ = 1/2 ρu20SbClδ , (12.4)
Nδ = 1/2 ρu20SbCnδ , (12.5)
em que δ designa genericamente δa ou δr .
12.2 Resolução de equações diferenciais ordinárias nãohomogéneas: método das transformadas de Laplace
12.2.1 Transformadas de Laplace
A Transformada de Laplace Lx(t) de uma função x(t) define-se como
x(s) ≡ Lx(t) =∫ +∞
0x(t)estdt.
A notação x(s) é muitas vezes usada em vez de Lx(t). Se xe−st → 0 quando t → +∞,mostra-se facilmente que
L x(t) = −x(0)+ sx(s).A transformada de Laplace inversa é dada por
x(t) = 12π i
limω→∞
∫ γ+iω
γ−iωest x(s)ds
onde γ é um número real maior que a parte real qualquer dos pólos de x(s). Habi-tualmente a transformada de Laplace inversa é calculada não pela definição mas poroutros métodos incluindo o método das fracções parciais, a aplicação do teorema daexpansão de Heaviside e o uso de tabelas.
Pelo Teorema da expansão de Heaviside afirma-se que, se x(s) pode ser escritocomo o quociente de dois polinómio na forma
x(s) = N(s)D(s)
, (12.6)
em que D(s) é um polinómio de grau n e N(s) é um polinómio de grau inferior a n, edesignando por ar (n = 1, . . . , n) as raízes de D(s), de modo que
D(s) = (s − a1)(s − a2) · · · (s − an),
então a transformada de Laplace inversa de x(s) é
x(t) =n∑r=1
[(s − ar )N(s)
D(s)
]s=ar
ear t. (12.7)
176

12.2.2 Resolução de sistemas de equações diferenciais não homogé-neas e funções de transferência
Comecemos por considerar uma equação diferencial ordinária não homogénea
x = ax(t)+ bc(t), (12.8)
em que a e b são constantes e c(t) é uma função dada. Se a condição inicial é x(0) = 0,a aplicação da transformada de Laplace conduz a
sx(s) = ax(s)+ bc(s) ⇒ x(s) = bs − ac(s), (12.9)
e a solução obtém-se por inversão da transformada de Laplace.Analogamente, se a um sistema de equações
x = A · x(t)+ B · c(t)
aplicarmos a transformada de Laplace, obtemos
sx(s) = A · x(s)+ B · c(s), (12.10)
e a transformada de Laplace do vector de estado x(t) é dada por
x(s) = (sI− A)−1 · B · c(s).
Logo, obtemosx(s) = G(s) · c(s), (12.11)
em que a matriz G(s), de elementos Gij(s), é dada por
G(s) = (sI− A)−1 · B. (12.12)
As soluções do sistema são obtidas por inversão da transformada de Laplace:
x(t) = L−1x(s) = L−1[G(s) · c(s)]. (12.13)
De (12.11) obtém-se a resposta da i-ésima variável de estado:
xi(s) =∑j
Gij(s)cj(s).
A resposta a uma «soma» de entradas é a soma das respostas individuais a cada umadas entradas.
Quando dois sistemas estão em série, a entrada do segundo é a resposta do pri-meiro. Conclui-se portanto que
x1 = G1(s)c(s),x2 = G2(s)x1(s) = G2(s)G1(s)c(s).
Logo, a função de transferência total é o produto das funções de transferência
G(s) = x2(s)c(s)
= G2(s)G1(s).
Pode-se generalizar este resultado para um número arbitrário de sistemas em série.
177

Matriz das funções de transferência
A matriz das funções de transferência G é dada por (12.12). Mas
(sI− A)−1 = adj(sI− A)det(sI− A)
, (12.14)
em que adj(sI − A) é a matriz adjunta de (sI − A), isto é, a transposta da matriz doscofactores. Sendo f(s) = det(A − sI) o polinómio característico do sistema e n a suadimensão, det(sI− A) = (−1)nf(s). Logo
G(s) = 1(−1)nf(s)
adj(sI− A) · B. (12.15)
Os elementos da matriz das funções de transferência são então dados por
Gij(s) =(−1)n[adj(sI− A) · B]ij
f(s)= Nij(s)(s − λ1)(s − λ2) · · · (s − λn)
.
Aqui, Nij(s) representa um polinómio em s e λ1, . . . , λn são os valores próprios do sis-tema. Os valores próprios podem ser reais e nesse caso aparece um termo (s − λk) nopolinómio característico (o que leva a sistema de 1ª ordem); ou pares de raízes comple-xas conjugadas (λk, λk+1), que conduzem a termos (s−λk)(s−λk+1) = (s2+aks+bk) nopolinómio característico (e portanto o sistema é de 2ª ordem). Os elementos da matrizdas funções de transferência são produtos de termos de 1ª ordem e de 2ª ordem.
Podemos analisar separadamente a resposta de cada um dos subsistemas. Habitu-almente analisam-se respostas a entradas do tipo impulso e escalão ou a resposta emfrequência.
12.2.3 Resposta a impulso e a escalão
Resposta a impulso
Se a função cj(t) é um impulso, pode ser representada por um delta de Dirac:
cj(t) = δ(t). (12.16)
Mas pode mostrar-se que δ(s) = 1. Por isso
xi,j(s) = Gij(s)cj(s) = Gij(s)δ(s) = Gij(s). (12.17)
Designamos por h(t) a resposta a impulso, isto é,
hij(t) = L−1xi,j(s) = L−1Gij(s).
Mas
hij(t) = L−1Gij(s) =1
2π i
∫CGij(s) estds = 1
2π
∫ +∞−∞Gij(iω) eiωtdω. (12.18)
Se o sistema é estável, os pólos de Gij estão no semi-plano esquerdo e o contorno Cdo integral pode ser o eixo imaginário (s = iω), o que justifica a última igualdade.
178
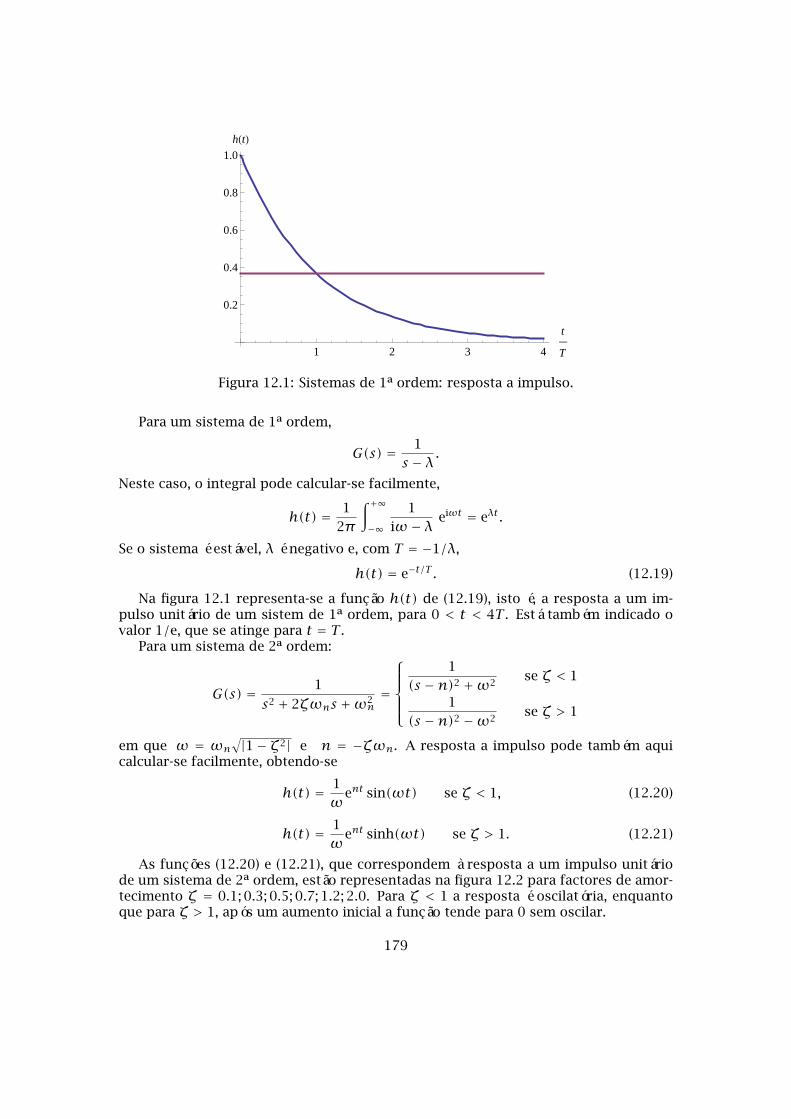
1 2 3 4
t
T
0.2
0.4
0.6
0.8
1.0
hHtL
Figura 12.1: Sistemas de 1ª ordem: resposta a impulso.
Para um sistema de 1ª ordem,
G(s) = 1s − λ.
Neste caso, o integral pode calcular-se facilmente,
h(t) = 12π
∫ +∞−∞
1iω− λ eiωt = eλt.
Se o sistema é estável, λ é negativo e, com T = −1/λ,
h(t) = e−t/T . (12.19)
Na figura 12.1 representa-se a função h(t) de (12.19), isto é, a resposta a um im-pulso unitário de um sistem de 1ª ordem, para 0 < t < 4T . Está também indicado ovalor 1/e, que se atinge para t = T .
Para um sistema de 2ª ordem:
G(s) = 1s2 + 2ζωns +ω2
n=
1
(s −n)2 +ω2se ζ < 1
1(s −n)2 −ω2
se ζ > 1
em que ω = ωn√|1− ζ2| e n = −ζωn. A resposta a impulso pode também aqui
calcular-se facilmente, obtendo-se
h(t) = 1ω
ent sin(ωt) se ζ < 1, (12.20)
h(t) = 1ω
ent sinh(ωt) se ζ > 1. (12.21)
As funções (12.20) e (12.21), que correspondem à resposta a um impulso unitáriode um sistema de 2ª ordem, estão representadas na figura 12.2 para factores de amor-tecimento ζ = 0.1; 0.3; 0.5; 0.7; 1.2; 2.0. Para ζ < 1 a resposta é oscilatória, enquantoque para ζ > 1, após um aumento inicial a função tende para 0 sem oscilar.
179

0.5 1.0 1.5 2.0
t Ωn
2 Π
-0.6
-0.4
-0.2
0.2
0.4
0.6
0.8
hHtL Ωn
Figura 12.2: Sistemas de 2ª ordem: resposta a impulso (azul: ζ = 0.1; roxo: ζ = 0.3;laranja: ζ = 0.5; castanho: ζ = 0.7; preto: ζ = 1.2; vermelho: ζ = 2.0).
Resposta a escalão
Um escalão corresponde à função de entrada cj(t) ser uma função de Heaviside,
cj(t) = H(t).
Tendo em conta a transformada de Laplace da função de Heaviside, obtemos
cj(s) = H(s) = 1/s.
Designando porAij(t) a resposta a escalão,
xi,j(s) ≡Aij(s) = Gij(s)H(s) =Gij(s)s
.
Mas, como hij(t) = L−1Gij(s) tem-se que hij(s) = Gij(s), donde
Aij(s) =hij(s)s
.
Logo, pelas propriedades da transformada de Laplace
Aij(t) =∫ t
0hij(τ)dτ.
Note-se que para t ≤ 0, se tem hij(t) = 0 eAij(t) = 0.Para um sistema de 1ª ordem, usando (12.19) obtém-se
Aij(t) = T(1− e−t/T
). (12.22)
Na figura 12.3 representa-se a função A(t) de (12.22), que corresponde à resposta deum sistema de 1ª ordem a um escalão unitário.
180

1 2 3 4
t
T
0.2
0.4
0.6
0.8
1.0
AHtL
T
Figura 12.3: Sistemas de 1ª ordem: resposta a escalão
Para um sistema de 2ª ordem, usando (12.20) se ζ < 1 e (12.21) se ζ > 1, obtém-se
Aij(t) =1ω2
[1− ent
(cos(ωt)− n
ωsin(ωt)
)]se ζ < 1, (12.23)
Aij(t) =1ω2
[1+ n−ω
2ωe(n+ω)t − n+ω
2ωe(n−ω)t
]se ζ > 1. (12.24)
As funções (12.23) e (12.24), que correspondem à resposta a um escalão unitário deum sistema de 2ª ordem, estão representadas na figura 12.2 para factores de amorte-cimento ζ = 0.1; 0.3; 0.5; 0.7; 1.2; 2.0. Para ζ < 1 a resposta é oscilatória, enquanto quepara ζ > 1, a função tende sem oscilar para o valor limite.
O ganho estático K é o valor assimptótico de A quando t → ∞. Pelo teorema dovalor final,
limt→+∞
A(t) = lims→0sA(s) = lim
s→0G(s), (12.25)
concluindo-se queK = lim
s→0G(s). (12.26)
Resposta em frequência
Neste caso, a entrada é uma função oscilatória. A representação complexa de umaentrada com frequência ω é
cj(t) = Ajeiωt ⇒ cj =Aj
s − iω.
A resposta da variável xi será dada por
xi(s) =Aj
s − iωGij(s).
181

0.5 1.0 1.5 2.0
t Ωn
2 Π
0.5
1.0
1.5
Ω2
AHtL
Figura 12.4: Sistemas de 2ª ordem: resposta a escalão (azul: ζ = 0.1; roxo: ζ = 0.3;laranja: ζ = 0.5; castanho: ζ = 0.7; preto: ζ = 1.2; preto: ζ = 2.0).
Pode mostrar-se que a resposta estacionária (para t →∞) é dada por
xi(t) = Gij(iω)Ajeiωt = Gij (iω)cj(t) = |Gij(iω)|eiϕ cj(t).
Aqui usou-se a forma polar,
Gij(iω) = |Gij(iω)|eiϕ,
em que |Gij(iω)| é o ganho total e ϕ é a diferença de fase entre a entrada e a respostaem frequência do sistema.
12.3 Resposta longitudinal
12.3.1 Funções de transferência
Como vimos, a resposta do sistema a uma entrada obtém-se por inversão de (12.11).Para o movimento longitudinal a matriz das funções de transferência (12.12) pode serrepresentada por
G(s) = (sI− A)−1 · B =
Guδe(s) GuδP (s)Gwδe(s) GwδP (s)Gqδe(s) GqδP (s)Gθδe(s) GθδP (s)
,e portanto
x(s) =
∆u(s)
w(s)
q(s)
θ(s)
=Guδe(s) GuδP (s)Gwδe(s) GwδP (s)Gqδe(s) GqδP (s)Gθδe(s) GθδP (s)
∆δe(s)∆δP(s)
.
182

Resposta longitudinal: resposta ao elevator
Como já vimos, devido à linearidade do sistema, resposta a uma «soma» de entradasé a soma das respostas individuais a cada uma das entradas. Vamos por isso analisarseparadamente a resposta a uma variação da deflexão do leme de profundidade e auma variação da força de propulsão.
Começando pela resposta do sistema a uma variação da deflexão do leme de pro-fundidade, em que ∆δP = 0 e portanto ∆δP = 0,
∆u(s)
w(s)
q(s)
θ(s)
= G(s)
∆δe(s)0
=
Guδe(s)
Gwδe(s)
Gqδe(s)
Gθδe(s)
∆δe(s). (12.27)
As funções de transferência podem ser representadas genericamente na forma
∆u(s)∆δe(s)
= Guδe(s) =Nuδe(s)f (s)
,
w(s)∆δe(s)
= Gwδe(s) =Nwδe(s)f (s)
,
q(s)∆δe(s)
= Gqδe(s) =Nqδe(s)f (s)
,
θ(s)∆δe(s)
= Gθδe(s) =Nθδe(s)f (s)
,
em que Nuδe(s), Nwδe(s), Nqδe(s) e Nθδe(s) são polinómios que se obtém em cada casomediante a equação (12.27).
Resposta à variação na propulsão
A resposta à variação na propulsão throttle obtém-se fazendo ∆δe = 0:∆u(s)
w(s)
q(s)
θ(s)
= (sI− A)−1B
0
∆δP(s)
. (12.28)
As funções de transferência obtém-se de forma análoga ao caso anterior.
12.3.2 Resposta longitudinal: exemplo do Cessna 182
Como exemplo, vamos determinar a resposta longitudinal de um Cessna 182 nascondições de voo já referidas em exemplos anteriores: voo horizontal a 5000 ft comvelocidade u0 = 67m/s. As caracerísticas da aeronave neste voo já foram referidas
183

Tabela 12.1: Derivadas adimensionais
CD CL CT Cmu 0 0 -0.096 0α 0.121 4.41 – -0.613q 0 3.9 – -12.4ˆα 0 1.7 – -7.27δe 0 0.43 – -1.122
anteriormente. Na tabela 12.1 apresentam-se as derivadas adimensionais, incluíndo asderivadas de controlo longitudinal.
A partir dos dados fornecidos podemos calcular as derivadas adimensionais se-gundo os eixos e as respectivas derivadas dimensionais:
Cxδe = CTδe − CDδe = 0 ⇒ Xδe =12ρu2
0SCxδe = 0,
CZδe = −CLδe = −0.43, ⇒ Zδe =12ρu2
0SCzδe = −16510.7 N/rad
Cmδe = −1.122, ⇒ Mδe =12ρu2
0ScCmδe = −64342.9 Nm/rad
A matriz do sistema é a mesma que foi calculada anteriormente,
A =
−0.0457289 0.0885998 0 −9.81
−0.289913 −2.09701 65.1123 0
0.0109923 −0.207702 −6.80735 0
0 0 1 0
,
e a matriz de controlo é
B =
0 2.943
−13.6184 0
−34.7508 0
0 0
.Para a determinação dos elementos da matriz de controlo admitimos que
XδP = 0.3mg,ZδP = 0 = MδP .
Note-se que os elementos das matrizes estão calculadas em SI.A equação característica é
det(sI− A) = 0⇒ f(s) = s4 + 8.950s3 + 28.232s2 + 1.490s + 0.8168 = 0,
cujas raízes, já calculadas anteriormente, são
s1,2 = −0.0220954± 0.169956i; s3,4 = −4.45295± 2.82492i
184

Uma vez que:
(s − s1)(s − s2) = s2 + 0.04419s + 0.0293734,
(s − s3)(s − s4) = s2 + 8.9059s + 27.809,
o polinómio característico escreve-se:
f(s) =(s2 + 0.04419s + 0.0293734
)(s2 + 8.9059s + 27.809
)(12.29)
As funções de transferência relativamente a δe são obtidas fazendo δP = 0 e resol-vendo
∆u(s)
w(s)
q(s)
θ(s)
= (sI− A)−1 · B
∆δe(s)0
=Guδe(s)
Gwδe(s)
Gqδe(s)
Gθδe(s)
·∆δe(s),ou seja,
∆u(s)∆δe(s)w(s)∆δe(s)q(s)∆δe(s)θ(s)∆δe(s)
=
Guδe(s)
Gwδe(s)
Gqδe(s)
Gθδe(s)
=
=
s + 0.0457289 −0.0885998 0 9.81
0.289913 s + 2.09701 −65.1123 0
−0.0109923 0.207702 s + 6.80735 0
0 0 −1 s
·
0
−13.6184
−34.7508
0
.
obtendo-se
∆u(s)∆δe(s)
= Guδe(s) =Nuδe(s)f (s)
= 687.134+ 132.216s − 1.20659s2
(s2 + 0.04419s + 0.0293734)(s2 + 8.9059s + 27.809), (12.30)
w(s)∆δe(s)
= Gwδe(s) =Nwδe(s)f (s)
= −100.301− 107.71s − 2356.03s2 − 13.6184s3
(s2 + 0.04419s + 0.0293734)(s2 + 8.9059s + 27.809), (12.31)
q(s)∆δe(s)
= Gqδe(s) =Nqδe(s)f (s)
= s(−4.10893− 71.6334s − 34.7508s2)(s2 + 0.04419s + 0.0293734)(s2 + 8.9059s + 27.809)
, (12.32)
θ(s)∆δe(s)
= Gθδe(s) =Nθδe(s)f (s)
= −4.10893− 71.6334s − 34.7508s2
(s2 + 0.04419s + 0.0293734)(s2 + 8.9059s + 27.809). (12.33)
Para se obter a função de transferência do ângulo de ataque, note-se que α = w/u0,pelo que
Gαδe(s) =α(s)∆δe(s)
= 1u0
w(s)∆δe(s)
= 1u0Gwδe(s). (12.34)
185

Outras funções de transferência importantes são as do ângulo de subida,
∆γ = ∆θ −∆α ⇒ Gγδe = Gθδe −Gαδe , (12.35)
e do factor de carga. Este é definido por nz = −Z/W, e a variação do factor de cargapara pequenas perturbações é
∆nz = −∆ZW= − 1
W
(Zu∆u+ Zww + Zqq + Zww + Zδe∆δe
).
Logo, a função de transferência para o factor de carga é
Gnδe =∆nz∆δe
= − 1W
(ZuGuδe + ZwGwδe + ZqGqδe + ZwGwδe + Zδe
). (12.36)
As funções de transferência relativas a δP podem ser calculadas de maneira análogaa partir de (12.28), obtendo-se neste caso
∆u(s)∆δP(s)
= GuδP (s) =NuδP (s)f (s)
= 81.8126s + 26.2055s2 + 2.943s3
(s2 + 0.04419s + 0.0293734)(s2 + 8.9059s + 27.809), (12.37)
w(s)∆δP(s)
= GwδP (s) =NwδP (s)f (s)
= −3.70171s − 0.853214s2
(s2 + 0.04419s + 0.0293734)(s2 + 8.9059s + 27.809), (12.38)
q(s)∆δP(s)
= GqδP (s) =NqδP (s)f (s)
= 0.245053s + 0.0323505s2
(s2 + 0.04419s + 0.0293734)(s2 + 8.9059s + 27.809), (12.39)
θ(s)∆δP(s)
= GθδP (s) =NθδP (s)f (s)
= 0.245053+ 0.0323505s(s2 + 0.04419s + 0.0293734)(s2 + 8.9059s + 27.809)
. (12.40)
De igual modo, GαδP (s) = GwδP (s)/u0 e GγδP = GθδP −GαδP .
Resposta a um variação da deflexão do leme de profundidade do tipo escalão
Comecemos por determinar a resposta a uma variação da deflexão do leme de pro-fundidade do tipo escalão, admitindo que δe aumenta de 1, isto é, que ∆δe = 1 =0.01745 rad.
Dado que ∆u(s) = Guδe ∆δe(s) e que neste caso ∆δe(s) = ∆δes =
0.01745s rad,
∆u(s) = 687.134+ 132.216s − 1.20659s2
(s2 + 0.04419s + 0.0293734)(s2 + 8.9059s + 27.809)0.01745 rad
s(12.41)
Aplicando a transformada inversa a (12.41) obtém-se
∆u(t) = 14.6818 + e−4.45295t[−0.001338 cos(2.82492t)+ 0.01744 sin(2.82492t)]
− e−0.0220954t[14.68 cos(0.169956t)+ 2.234 sin(0.169956t)], (12.42)
calculado em SI. O primeiro termo oscilatório tem a frequência e amortecimento domodo de período curto, enquanto que o segundo termo oscilatório tem a frequência eamortecimento do modo fugóide.
Do mesmo modo se procede para determinar as outras variáveis em função de t.
186

0 1 2 3 4 5t
5
10
15
20
25Du HmsL
1 2 3 4 5t
-2.5
-2.0
-1.5
-1.0
-0.5
DΑ HºL
1 2 3 4 5t
-10
-8
-6
-4
-2
DΓ HºL
0 50 100 150 200t
5
10
15
20
25Du HmsL
50 100 150 200t
-2.5
-2.0
-1.5
-1.0
-0.5
DΑ HºL
50 100 150 200t
-15
-10
-5
5DΓ HºL
Figura 12.5: Resposta longitudinal a escalão: evolução da velocidade longitudinal, doângulo de ataque e do ângulo de subida após uma variação da deflexão do leme deprofundidade de ∆δe = 1 para os primeiros 5 s (esquerda) e para os promeiros 200 s(direita).
187

Na figura 12.5 está representada a evolução da velocidade longitudinal, do ângulode ataque e do ângulo de subida após uma variação da deflexão do leme de profun-didade de ∆δe = 1. Está representada a evolução inicial, para os primeiros 5 s, e aevolução para os primeiros 200 s. Na evolução inicial verifica-se que só α varia sig-nificativamente, sendo as oscilações amortecidas rapidamente. Constata-se portantoque o movimento inicial é dominado pelo modo de período curto. Após os primeirossegundos subsistem oscilações de u (e de α, com menos amplitude). Estas oscilaçõessão pouco amortecidas: o movimento é dominado pelo modo fugóide.
O novo estado estacionário atinge-se após um tempo suficientemente grande paratodas as oscilações serem amortecidas. Relativamente ao estado estacionário inicial,as variações da velocidade longitudinal, do ângulo de ataque e do ângulo de subidasão
limt→+∞
∆u = lims→0
s Guδe(s) ∆δe(s) = 14.68m/s
limt→+∞
∆α = lims→0
s Gαδe(s) ∆δe(s) = −1.83o
limt→+∞
∆γ = lims→0
s Gγδe(s) ∆δe(s) = −3.20o
A variação da deflexão do leme de profundidade resulta, neste exemplo, em vari-ações significativa de u, de α e do ângulo de subida. A variação tanto da velocidadelongitudinal como do ângulo de ataque são típicos, mas a variação do ângulo de subidapode ser mais ou menos acentuada, dependendo da aeronave e da situação de voo.
Resposta à actuação do throttle
Para determinar a resposta a uma variação da força de propulsão procede-se deforma análoga, usando agora as funções de transferência (12.37)–(12.40). Na figura12.6 representa-se a evolução da velocidade longitudinal, do ângulo de ataque e do ân-gulo de subida após uma variação da força de propulsão correspondente a ∆δP = 1/6(incremento na força de propulsão de 0.05W ). Observam-se oscilações de u com valormédio nulo, com a frequência do modo fugóide e pouco amortecidas, sendo α apro-ximadamente constante. O ângulo de subida γ oscila e tende para valor estacionárioγ = 2.86º. Verifica-se, pois, que o principal efeito da variação da força de propulsão éa alteração do ângulo de subida.
Resposta em frequência
Na figura 12.7 apresenta-se a resposta em frequência para os modos longitudinaisdo Cessna 182. A resposta nas variáveis ∆u e γ, que definem a trajectória da aeronave,são dominadas pelo pico nas baixas frequências devido ao modo fugóide — recorde-seque as frequências naturais para este exemplo do Cessna 182 são ωn = 0.17 rad/spara o modo fugóide eωn = 5.27 rad/s. Devido ao fraco amortecimento deste modo opico é bem marcado. Pelo contrário, o pico correspondente ao modo de período curtoé pouco pronunciado, quase imperceptível, nas respostas de ∆u e γ. Para frequênciasmaiores o ganho decresce rapidamente e a resposta torna-se desprezável. A fase ϕuδeé aproximadamente nula para baixas frequências, decresce rapidamente de cerca de180º perto da frequência natural do modo fugóide (o que é típico para um modo poucoamortecido, cuja raiz tem parte real negativa mas pequena) e volta a decrescer, emboramenos, perto da frequência natural do modo de período curto (o que também é típico
188

50 100 150 200t
-1
1
2
Du HmsL
50 100 150 200t
-0.05
0.05
DΑ HºL
50 100 150 200t
1
2
3
4
DΓ HºL
Figura 12.6: Evolução do velocidade longitudinal, do ângulo de ataque e do ângulo desubida após uma variação tipo escalão da força de propulsão.
189

para modos muito amortecidos, cuja raiz está longe do eixo real). A fase ϕγδe temum comportamento semelhante embora para frequências baixas tome valores pertode −150º.
As respostas das variáveis w e q, relacionadas com a atitude do avião, tomam va-lores grandes quer para frequências próximas da frequência natural do modo fugóide,quer para frequências maiores, próximas da frequência natural do modo de períodocurto. O comportamento de |Gwδe| para ω entre 0.1 e 0.3 ilustra a situação em quea função de transferência tem um polo e um zero próximos. A variação da fase, comuma diminuição abrupta seguida de um crescimento igualmente rápido, é igualmentetípico dessa situação. Para frequências acima da frequência natural do modo de pe-ríodo curto o ganho diminui rapidamente também neste caso.
12.3.3 Resposta longitudinal: modos aproximados
Pretende-se, para cada um dos modos aproximados (fugóide e de período curto),resolver as equações do movimento (com controlo) pelo método das transformadas deLaplace e determinar as funções de transferência.
Modo fugóide
As equações para o modo fugóide aproximado (incluindo termos de controlo) são
∆u = Xum∆u+ Xw
mw +−g∆θ + Xδe
mδe +
XδPmδP
w = Zum∆u+ Zw
mw +u0q +
Zδemδe +
ZδPmδP
0 = Mu∆u+Mww +Mδeδe +MδPδP
∆θ = q
Considerando apenas a variação da deflexão do leme de profundidade, e aplicando atransformada de Laplace, obtemos, na forma matricial,
s∆u
sw
0 · q
s∆θ
=
Xum
Xwm 0 −g
Zum
Zwm u0 0
Mu Mw 0 0
0 0 1 0
∆u
w
q
∆θ
+
Xδem
Zδem
Mδe
0
∆δe,
ou, deixando no 2º membro apenas a parte de controlo,
(s − Xu
m
)−Xwm 0 g
−Zum(s − Zw
m
)−u0 0
−Mu −Mw 0 0
0 0 −1 s
∆u
w
q
∆θ
=
Xδem
Zδem
Mδe
0
∆δe (12.43)
190

0.1 1 10 100Ω
0.01
1
100
ÈGu ∆e È
0.1 1 10 100Ω
0.5
1.0
5.0
10.0
50.0
100.0
ÈGw ∆e È
0.1 1 10 100Ω
0.1
0.2
0.5
1.0
2.0
5.0
10.0
ÈGq ∆e È
0.1 1 10 100Ω
0.01
0.1
1
10
ÈGΓ ∆e È
0.1 1 10 100Ω
-150
-100
-50
0
50
100
150
ju ∆e
0.1 1 10 100Ω
50
100
150
jw ∆e
0.1 1 10 100Ω
-150
-100
-50
0
50
100
150
jq ∆e
0.1 1 10 100Ω
-150
-100
-50
0
50
100
150
jΓ ∆e
Figura 12.7: Resposta longitudinal em frequência: ganho total |G(iω)| (esquerda) efase ϕ (direita) da velocidade longitudinal, da velocidade w segundo z, da velocidadeangular q e do ângulo de subida γ em função da frequência angular ω.
191
Resolvendo este sistema em ordem a ∆u/∆δe, w/∆δe, q/∆δe e ∆θ/∆δe obtemos asfunções de transferência Guδe , Gwδe e Gθδe :
x(s) =
∆u/δe
w/δe
q/δe
θ/δe
=
Guδe(s)
Gwδe(s)
Gqδe(s)
Gθδe(s)
=
(s − Xu
m
)−Xwm 0 g
−Zum(s − Zw
m
)−u0 0
−Mu −Mw 0 0
0 0 −1 s
−1
·
Xδem
Zδem
Mδe
0
Começando por Guδe ,
∆u(s)∆δe(s)
= Guδe =a1s + a0
f(s), (12.44)
em que os coeficientes são
a1 = u0
(Mδe
Xum−Mw
Xδem
)− gMδe , (12.45)
a0 = g(Mδe
Zwm−Mw
Zδem
). (12.46)
O polinómio característico para o modo fugóide aproximado é
f(s) = As2 + Bs + C, (12.47)
sendo os coeficientes A, B e C dados por
A = −u0Mw (12.48)
B = gMu +u0
m(XuMw −MuXw) (12.49)
C = gm(ZuMw −MuZw) (12.50)
A função de transferência Gwδe é dada por
w(s)∆δe(s)
= Gwδe =b2s2 + b1s + b0
f(s), (12.51)
em que os coeficientes são:
b2 = u0Mδe
b1 = u0MuXδem
b0 = g(MuZδem−Mδe
Zum
)Finalmente,
θ(s)∆δe(s)
= Gθδe =c2s2 + c1s + c0
f(s), (12.52)
192

em que os coeficientes são
c2 = Mδe
c1 = MuXδem+Mw
Zδem−Mδe
(Xum+ Zwm
)c0 = Mδe
(XumZwm− XwmZum
)+ Zδem
(MuXwm−Mw
Xum
)+ Xδem
(Mw
Zum−Mu
Zwm
)
Modo de período curto aproximado
O sistema de equações para o modo aproximado de período curto (incluindo termosde controlo) éw
q
=
Zwm u0
1Iy
[Mw + MwZw
m
]1Iy
[Mq +Mwu0
]wq
+ Zδe
mMδeIy +
MwIyZδem
∆δeAs funções de transferência obtém-se aplicando a transformada de Laplace e usandoos métodos descritos acima.
Notando que q = s∆θ, obtém-se:
Gwδe =ass + a0
f(s), (12.53)
Gθδe =b1s + b0
sf (s)= Gqδe
s, (12.54)
sendo o polinómio característico
f(s) = s2 + c1s + c0
e os coeficientes dados por
a1 =Zδemu0
, (12.55)
a0 = u0MδeIy− MqIyZδem, (12.56)
b1 =MδeIy+ MwIyZδem, (12.57)
b0 =ZδemMwIy− ZwmMδeIy, (12.58)
c1 = −[Zwm+ 1Iy
(Mq +Mwu0
)], (12.59)
c0 = −1Iy
[Mwu0 −
ZwmMq]. (12.60)
193

12.4 Resposta lateral
As funções de transferência para o movimento lateral obtêm-se da mesma formaque para o movimento longitudinal, resolvendo a equação das trasforlsdas de Laplace:
(sI− A) ·
v(s)p(s)r(s)φ(s)
= B ·[δa(s)δr (s)
].
A matriz das funções da transferência é
G(s) = (sI− A)−1 · B =
Gvδa(s) Gvδr (s)Gpδa(s) Gpδr (s)Grδa(s) Grδr (s)Gφδa(s) Gφδr (s)
, (12.61)
e portanto
x(s) =
∆v(s)
p(s)
r(s)
φ(s)
=Gvδa(s) Gvδr (s)Gpδa(s) Gpδr (s)Grδa(s) Grδr (s)Gφδa(s) Gφδr (s)
∆δa(s)∆δr (s)
.A matriz de controlo para o movimento lateral é dada por (12.2).
As funções de transferência podem escrever-se na forma genérica
Gvδa =Nvδa(s)f (s)
Grδa =Nrδa(s)f (s)
Gvδr =Nvδr (s)f (s)
Grδr =Nrδr (s)f (s)
Gpδa =Npδa(s)f (s)
Gφδa =Nφδa(s)f (s)
Gpδr =Npδr (s)f (s)
Gφδr =Nφδr (s)f (s)
em que no numerador está um polinómio em s e em denominador se encontra o poli-nómio característico do sistema (lateral), f(s).
12.4.1 Exemplo do Cessna 182
Na tabela 12.2 encontram-se as derivadas adimensionais relativas às variáveis decontrolo lateral do Cessna 182 na situação de voo descrita anteriormente. O polinómiocaracterístico é dado neste caso por
f(s) = s4 + 14.3764s3 + 28.3543s2 + 139.089s + 2.45636 (12.62)
194
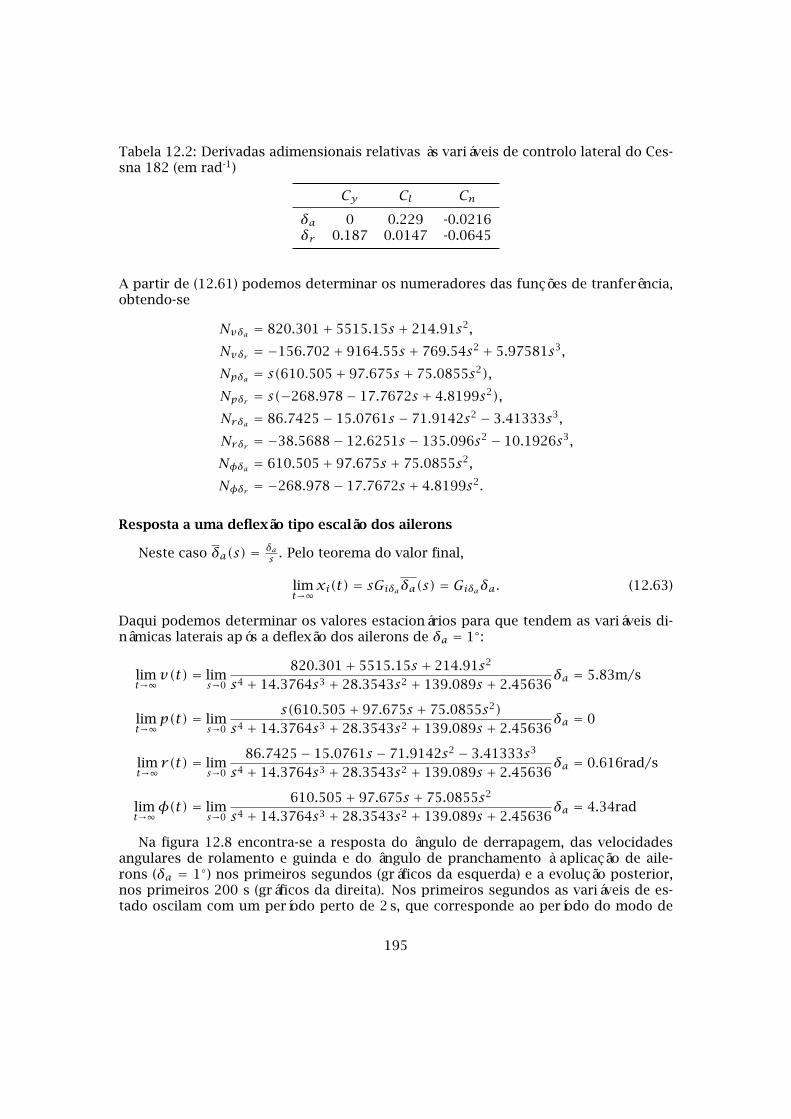
Tabela 12.2: Derivadas adimensionais relativas às variáveis de controlo lateral do Ces-sna 182 (em rad-1)
Cy Cl Cnδa 0 0.229 -0.0216δr 0.187 0.0147 -0.0645
A partir de (12.61) podemos determinar os numeradores das funções de tranferência,obtendo-se
Nvδa = 820.301+ 5515.15s + 214.91s2,
Nvδr = −156.702+ 9164.55s + 769.54s2 + 5.97581s3,
Npδa = s(610.505+ 97.675s + 75.0855s2),
Npδr = s(−268.978− 17.7672s + 4.8199s2),
Nrδa = 86.7425− 15.0761s − 71.9142s2 − 3.41333s3,
Nrδr = −38.5688− 12.6251s − 135.096s2 − 10.1926s3,
Nφδa = 610.505+ 97.675s + 75.0855s2,
Nφδr = −268.978− 17.7672s + 4.8199s2.
Resposta a uma deflexão tipo escalão dos ailerons
Neste caso δa(s) = δas . Pelo teorema do valor final,
limt→∞
xi(t) = sGiδaδa(s) = Giδaδa. (12.63)
Daqui podemos determinar os valores estacionários para que tendem as variáveis di-nâmicas laterais após a deflexão dos ailerons de δa = 1:
limt→∞
v(t) = lims→0
820.301+ 5515.15s + 214.91s2
s4 + 14.3764s3 + 28.3543s2 + 139.089s + 2.45636δa = 5.83m/s
limt→∞
p(t) = lims→0
s(610.505+ 97.675s + 75.0855s2)s4 + 14.3764s3 + 28.3543s2 + 139.089s + 2.45636
δa = 0
limt→∞
r(t) = lims→0
86.7425− 15.0761s − 71.9142s2 − 3.41333s3
s4 + 14.3764s3 + 28.3543s2 + 139.089s + 2.45636δa = 0.616rad/s
limt→∞
φ(t) = lims→0
610.505+ 97.675s + 75.0855s2
s4 + 14.3764s3 + 28.3543s2 + 139.089s + 2.45636δa = 4.34rad
Na figura 12.8 encontra-se a resposta do ângulo de derrapagem, das velocidadesangulares de rolamento e guinda e do ângulo de pranchamento à aplicação de aile-rons (δa = 1) nos primeiros segundos (gráficos da esquerda) e a evolução posterior,nos primeiros 200 s (gráficos da direita). Nos primeiros segundos as variáveis de es-tado oscilam com um período perto de 2 s, que corresponde ao período do modo de
195

2 4 6 8 10t
0.2
0.4
0.6
0.8
1.0
1.2
ΒHºL
1 2 3 4 5t
0.02
0.04
0.06
0.08
p HradsL
1 2 3 4 5t
-0.02
-0.01
0.01
0.02
0.03
0.04
0.05r HradsL
1 2 3 4 5t
5
10
15
20
Φ HºL
50 100 150 200t
1
2
3
4
5ΒHºL
50 100 150 200t
0.02
0.04
0.06
0.08
p HradsL
50 100 150 200t
0.1
0.2
0.3
0.4
0.5
0.6
r HradsL
50 100 150 200t
50
100
150
200
Φ HºL
Figura 12.8: Resposta à aplicação de ailerons (δa = 1) nos primeiros segundos (es-querda) e evolução posterior, nos primeiros 200 s (direita). Estão representadas asevoluções do ângulo de derrapagem, das velocidades angulares de rolamento e gui-nada e do ângulo de pranchamento.
196

rolamento holandês. Após os primeiros segundos as oscilações são amortecidas e aresposta passa a ser dominada pelo modo espiral. A velocidade angular de rolamentotende para zero e as outras variáveis tendem para valores fixos seguindo uma evoluçãoaproximadamente exponencial.
Resposta a uma deflexão tipo escalão do rudder
Daqui podemos determinar os valores estacionários para que tendem as variáveisdinâmicas laterais após a deflexão dos ailerons de δa = 1:
Dado que δr (s) = δrs , e que pelo teorema do valor final,
limt→∞
xi(t) = sGiδrδr (s) = Giδrδr , (12.64)
os valores dos estados estacionários para que tendem as variáveis de estado apósdeflexão do rudder de δr = 1 são
limt→∞
v(t) = lims→0
156.702+ 9164.55s + 769.54s2 + 5.97581s3
s4 + 14.3764s3 + 28.3543s2 + 139.089s + 2.45636δa = −1.11m/s
limt→∞
p(t) = lims→0
s(268.978− 17.7672s + 4.8199s2)s4 + 14.3764s3 + 28.3543s2 + 139.089s + 2.45636
δa = 0
limt→∞
r(t) = lims→0
38.5688− 12.6251s − 135.096s2 − 10.1926s3
s4 + 14.3764s3 + 28.3543s2 + 139.089s + 2.45636δa = −0.274rad/s
limt→∞
φ(t) = lims→0
268.978− 17.7672s + 4.8199s2
s4 + 14.3764s3 + 28.3543s2 + 139.089s + 2.45636δa = −1.91rad
Na figura 12.9 encontra-se a resposta do ângulo de derrapagem, das velocidadesangulares de rolamento e guinda e do ângulo de pranchamento à aplicação do rudder(δr = 1) nos primeiros segundos (gráficos da esquerda) e a evolução posterior, nosprimeiros 200 s (gráficos da direita). Também neste caso nos primeiros segundos aresposta é oscilatória com um período de cerca de 2 s, ou seja, o período do modo derolamento holandês. A evolução posterior das variáveis de estado segue uma varia-ção aproximadamente exponencial negativa; p tende para zero e as outras variáveistendem para valores fixos.
Analisando os estados estacionários que se obtém após aplicação de um escalãoquer nos ailerons quer no leme de direcção, podemos concluir que em ambos os casoslimt→∞ p(t) = 0 e que β, r e φ tendem para valores finitos. Para valores «normais»de δ, esses limites são elevados e por isso a teoria linear só é válida para δ muitoreduzidos. Além disso, para valores elevados de φ há acoplamento entre movimentolateral e longitudinal. Por estas razões a resposta para t grande não pode ser tratadaconvenientemente pela teoria linear.
12.4.2 Funções de transferência para os modos laterais aproximados
Vamos obter as funções de transferência para os modos aproximados espiral +rolamento e rolamento holandês. Trata-se em ambos os casos de resolver
(sI− A) · x(s) = B
[δa(s)δr (s)
]
197

2 4 6 8 10t
0.2
0.4
0.6
0.8
1.0
1.2
1.4
ΒHºL
1 2 3 4 5t
-0.05
-0.04
-0.03
-0.02
-0.01
p HradsL
1 2 3 4 5t
-0.04
-0.03
-0.02
-0.01
0.01
r HradsL
1 2 3 4 5t
-8
-6
-4
-2
Φ HºL
50 100 150 200t
-0.5
0.5
1.0
1.5
ΒHºL
50 100 150 200t
-0.05
-0.04
-0.03
-0.02
-0.01
p HradsL
50 100 150 200t
-0.25
-0.20
-0.15
-0.10
-0.05
r HradsL
50 100 150 200t
-100
-80
-60
-40
-20
Φ HºL
Figura 12.9: Resposta à aplicação do leme de direcção (δr = 1) nos primeiros segundos(esquerda) e evolução posterior, nos primeiros 200 s (direita). Estão representadas asevoluções do ângulo de derrapagem, das velocidades angulares de rolamento e guinadae do ângulo de pranchamento.
198

para as aproximações espiral+rolamento e rolamento holandês.Usar-se-ão as abreviaturas
Yδ =Yδm
(12.65)
Lδ =LδI′x+ I′zxNδ (12.66)
Nδ = I′zxLδ +NδI′z
(12.67)
em que δ = δa ou δr , conforme o caso.
Aproximação espiral/rolamento
Incluíndo os termos de controlo na equação (11.20) e aplicando a transformada deLaplace, obtemos
0 0 u0 −g−Lv (s −Lp) −Lr 0−Nv −Np (s −Nr ) 0
0 −1 0 0
v(s)p(s)r(s)φ(s)
=Yδa YδrLδa LδrNδa Nδr
0 0
[δa(s)δr (s)
](12.68)
O polinómio característico é
f(s) = CSRs2 +DSRs + ESRem que as constantes CSR, DSR e ESR são dadas por
C = u0Nv ,D = u0(LvNp −LpNv)− gLv ,E = g(LvNr −LrNv).
As funções de transferência são obtidas a partir de (12.68), resultando
Gvδ = Nvδ/f(s), Nvδ = a3s3 + a2ss + a1s + a0,Gφδ = Nφδ/f(s), Nφδ = b1s + b0,
Grδ = Nrδ/f(s), Nrδ = d2s2 + d1s + d0,Gpδ = Npδ/f(s), Npδ = s Nφδ,
com os coeficientes das equações anteriores dados por
a0 = g(LrNδ −LδNr ),a1 = Yδ(LpNr −LrNp)−u0(LδNp −LpNδ)+Lδg,a2 = −Yδ(Lp +Nr )−u0Nδ,a3 = Yδb0 = u0(LδNv −LvNδ)+Yδ(LvNr −LrNv),b1 = YδLvd0 = g(LδNv −LvNδ),d1 = Yδ(LvNp −LpNv),d2 = YδNv .
199

Aproximação de rolamento holandês
O sistema de equações para o modo aproximado de rolamento holandês é, incluindoos termos de controlo,[
(s −Yv) u0
−Nv (s −Nr )
][v(s)r(s)
]=[
0 YδrNδa Nδr
][δa(s)δr (s)
], (12.69)
O polinómio característico é
f(s) = s2 − (Yv +Nr ) s + (YvNr +u0Nv)
e as funções de transferência são
Gvδa = Nvδa/f(s), Nvδa = −u0Nδa ,Grδa = Nrδa/f(s), Nrδa =Nδas −YvNδa ,Gvδr = Nvδr /f(s), Nvδr = Yδr s − (YδrNr +u0Nδr ),Grδr = Nrδr /f(s), Nrδr =Nδr s − (NδrYv −YδrNv).
12.5 Resposta transiente a ailerons e rudder
Os estados estacionários laterais são pouco frequentes. Por outro lado, é impor-tante estudar a resposta transiente, que aparece em manobras, etc.
Começaremos por estudar resposta a escalão (ailerons ou rudder) imediatamenteapós a sua aplicação, isto é, para t = 0+.
12.5.1 Resposta Inicial
Em t = 0, todas as variáveis laterais são nulas. Logo, as equações do movimentosão apenas
v = Yδrδrp = Lδaδa +Lδrδrr =Nδaδa +Nδrδr
(12.70)
Daqui pode concluir-se que a taxa de derrapagem inicial só depende da deflexão doleme de direcção, sendo v > 0 se δr > 0.
A aceleração angular inicial, t = 0+, é ~ω = p~i + r ~k. Como em t = 0, ~ω = 0, adirecção de ~ω define a direcção inicial do eixo de rotação da aeronave. O ângulo doeixo de rotação inicial com eixo x é
ξ = tan−1 rp
(12.71)
Admitirmos como válida a simplificação Lδr = 0 = Nδa (isto é, os ailerons produ-zem um movimento de rolamento puro e o rudder um movimento de guinada puro).Partindo de (12.70) e tendo em conta as definições (12.65), (12.66) e (12.67), obtém-se,no caso de resposta a rudder (δa = 0):
tanξR =rp= rp= NδrLδr
= Nδr /I′z
I′zxNδr= 1Iz′I′zx
= IxIzx, (12.72)
200

e no caso de resposta a aileron (δr = 0):
tanξA =IzxIz. (12.73)
A resposta para eixos principais de inércia, isto é, quando Izx = 0, é, como seria deesperar,
Rudder : tanξR =IxIzx= ∞ ⇒ ξR = 90o
Ailerons: tanξA =IzxIz= 0⇒ ξA = 0
Se os eixos de estabilidade do avião forem diferentes dos eixos principais de inércia,a rotação faz-se em torno de um eixo que depende do ângulo ε entre os dois sistemas.Os valores de IxS , IzS e IzSxS são dados por
IxS = IxP cos2 ε+ IzP sin2 ε
IzS = IxP sin2 ε+ IzP cos2 ε
IxSzS =12(IzP − IxP ) sin 2ε
Como exemplo, admita-se que IxP /IzP = 0.4 (caso de jacto de transporte) e ε = 20o
(ângulo de ataque elevado). Com estes dados podemos calcular ξA e ξR. Na figura12.10 estão representados estes ângulos. O gráfico da figura 12.11 representa ξA eξR em função do ângulo ε. Dos gráficos podemos concluir que após deflexão dosailerons a aeronave passa a ter movimento de rolamento em torno de um eixo entreo eixo principal xP e x (tendência a rolar em torno do eixo principal de inércia); apósdeflexão do rudder a aeronave passa a ter movimento de guinada em torno de eixodiferente de zP e z (e mais afastado de zP ).
12.5.2 Soluções para Valores Elevados dos Ângulos
A análise anterior referiu-se à resposta para t = 0+, isto é, imediatamente após adeflexão dos ailerons ou rudder. Para saber o que acontece em instantes posteriores énecessário resolver as equações exactas, não-lineares, o que se afigura difícil em geral.Existe uma abordagem que estabelece um compromisso razoável entre a exactidão dassoluções encontradas e a dificuldade para as obter. Consiste em usar uma representa-ção linear para as forças de inércia e aerodinâmicas, na hipótese de que as variaçõesdas velocidades e velocidades angulares são pequenas, e em usar uma descrição exactapara as forças gravíticas, uma vez que os ângulos de pranchamento, picada e guinadapodem ser grandes.
As equações do movimento são agora, para as variáveis longitudinais,
u = ∆Xm− g sinθ
w = ∆Zm− g(1− cosθ cosφ)+u0q
q = ∆MIy
θ = q cosφ
201

Figura 12.10: Resposta inicial...
Figura 12.11: ângulos ξA e ξR em função do ângulo ε entre os eixos do corpo e os eixosprincipais de inércia.
202

e para as variáveis laterais,
v = ∆Ym+ g cosθ sinφ−u0r
p = ∆LI′x+ I′zx∆N
r = ∆NI′z+ I′zx∆L
θ = p + (q sinφ+ r cosφ) tanθψ = (q sinφ+ r cosφ) secθ
Estas equações podem ser resolvidas numericamente (usando, por exemplo, um mé-todo Runge-Kutta).
Nas figuras 12.12 apresentam-se os resultados da integração numérica das equa-ções para uma deflexão dos ailerons de -15º para um Boeing 747 em voo de cruzeiro a40000 ft com Ma = 0.8.
Observa-se que a velocidade angular de rolamento p aumenta rapidamente e emconsequência, o ângulo de pranchamento φ aumenta (e quase linearmente com otempo). O ângulo de derrapagem β, a velocidade ãngular de guinada r e o ângulode guinada ψ permanecem pequenos. O aumento de φ leva a uma diminuição da com-ponente vertical de L e por isso a um ângulo de picada θ negativo e a um aumento de∆u. Note-se que ao fim de 30 s ∆u ≈ 0.1u0 o que implica que a aproximação linearcomeça a não ser válida. Por outro lado p = 0.05rad/s⇒ p = 0.01, pelo que se justificater desprezado as forças aerodinâmicas e inerciais não-lineares.
203
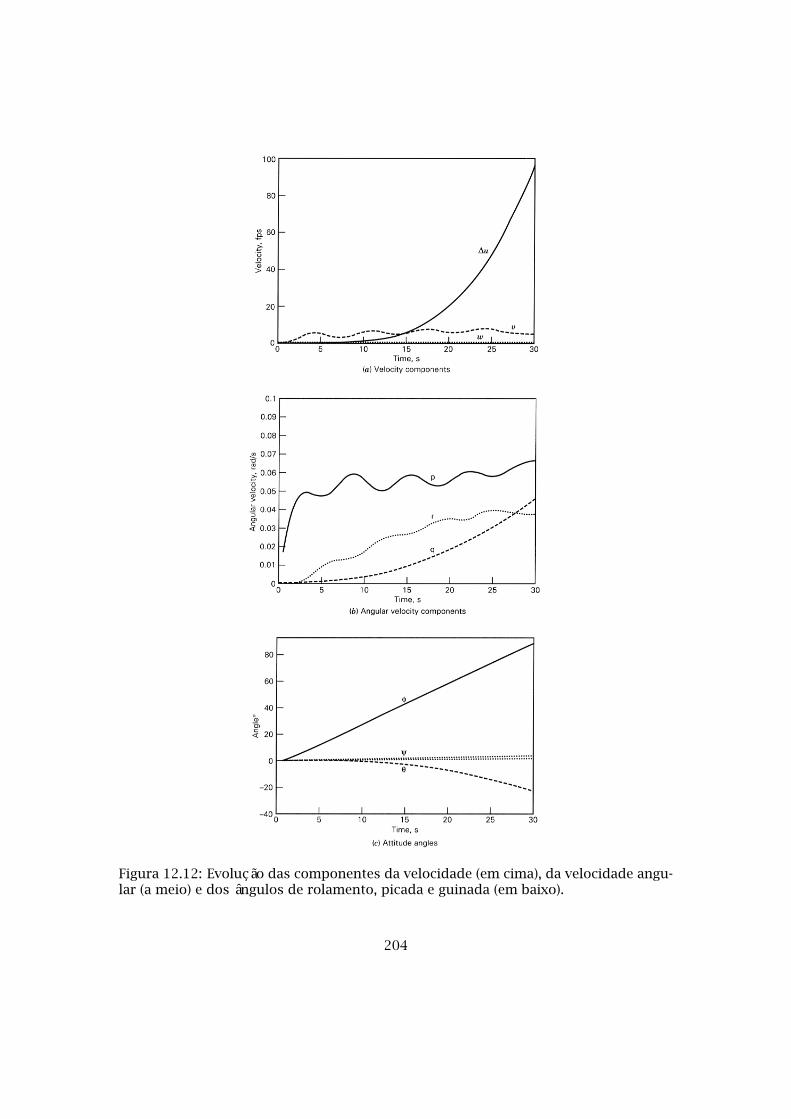
Figura 12.12: Evolução das componentes da velocidade (em cima), da velocidade angu-lar (a meio) e dos ângulos de rolamento, picada e guinada (em baixo).
204

Capítulo 13
Qualidades de Voo
Qualidades de voo são as características de estabilidade e de controlo importantespara a impressão que o piloto forma da aeronave. Os factores que influenciam essaimpressão são a dinâmica longitudinal e lateral do avião, a força de controlo necessáriae os gradientes da força de controlo. As qualidades de voo esperadas pelo pilotodependem do tipo de aeronave e da fase de voo em que se encontra.
Para que um avião tenha boas qualidades de voo é necessário não só que as forçasmáximas que é necessário aplicar para controlar o avião tenham valores aceitáveis,mas também que as forças a aplicar durante a maior parte do voo sejam nulas.
13.1 Classificação de aeronaves e fases de voo
A impressão que um piloto forma de uma aeronave depende muito do tipo de ae-ronave: é muito diferente pilotar um jacto militar, um avião de linha aérea ou umaavionete de recreio. Por isso é necessário calssificar as aeronaves em classes de acordocom as suas características. A tabela 13.1 mostra a classificação habitualmente usada.As classes de aeronaves dependem da dimensão e peso da aeronave, mas também damanobrabilidade esperada durante os voos típicos a efectuar.
A fase de voo em que o avião se encontra é também muito importante para definiçãodas qualidades de voo. É classificada em três categorias, descritas na tabela 13.2.Durante a maior parte do tempo de voo as aeronaves permanece na fase de voo decategoria B e por isso esta categoria é particularmente importante no que diz respeitoàs qualidades de voo. Nas outras fases de voo é esperada uma maior intervençãodo piloto e por isso as características esperadas podem degradar-se um pouco semprejuízo das qualidades de voo.
13.2 Níveis de qualidades de voo
13.2.1 Escala de Cooper Harper e níveis de qualidades de voo
Como se afirmou anteriormente, as qualidades de voo são aquelas características deestabilidade e controlo importantes para a impressão que o piloto forma da aeronave.Esta impressão é evidentemente subjectiva. A escala de Cooper-Harper, apresentada
205

Tabela 13.1: Classes of aircraft (source: [4])
Class I Small, light airplanes (such as light utility, primary trainer, andlight observation craft)
Class II Medium-weight, low-to-medium maneuverability airplanes (suchas heavy utility / search and rescue, light or medium transport/ cargo / tanker, reconnaissance, tactical bomber, heavy attackand trainer for Class II)
Class III Large, heavy, low-to-medium maneuverability airplanes (such asheavy transport / cargo / tanker, heavy bomber, and trainer forClass III)
Class IV Heavy maneuverability airplanes (such as fighter/interceptor, at-tack, tactical reconnaissance, observation and trainer for ClassIV)
Tabela 13.2: Flight phase categories
Category A Nonterminal flight phases that require rapid maneuvering, pre-cision tracking or precise flight path control, such as air-to-aircombat, in-flight refueling (receiver) , terrain-following, and closeformation flying (applies only to military aircraft).
Category B Nonterminal flight phases that are normally accomplished usinggradual maneuvers and no precision tracking, although accurateflight path control may be required. Includes climb, cruise, loiter,descent, in-flight refueling (for tanker) and aerial delivery.
Category C Terminal flight phases requiring gradual maneuvers but preciseflight path control. Include takeoff, catapult takeoff, approach,wave-off/go-around, and landing.
206

Is it controllable?
Improvement Mandatory
Is adequate performance
attainable with a tolerable pilot
workload?
Is it satisfactory without
improvement?
Pilot Decisions
Deficiencies require
improvement.
Deficiencies warrant
improvement.
Major deficiencies Control will be lost during some portion of the required operation 10
Major deficiencies Intense pilot compensation is required to retain control 9
Major deficiencies Considerable pilot compensation is required for control 8
Major deficienciesAdequate performance not attainable with
maximum tolerable pilot compensation Controllability not in question
7
Very objectionable but tolerable deficiencies
Adequate performance requires extensive pilot compensation 6
Moderately objectionable deficiencies
Adequate performance requires considerable pilot compensation 5
Minor but annoying deficiencies
Desired performance requires moderate pilot compensation 4
Fair - Some mildly unpleasant deficiencies
Minimal pilot compensation required for desired performance 3
Good, negligible deficiencies
Pilot compensation not a factor for desired performance 2
Excellent, highly desireable
Pilot compensation not a factor for desired performance 1
Adequacy for Selected Task or Required Operation*
AircraftCharacteristics Demands on the Pilot in Selected
Task or Required Operation*Pilot
Rating
Yes
No
Yes
No
No
Yes
* Definition of required operation involves designation of flight phaseand/or subphases with accompanying conditions.
Handling Qualities Rating Scale
Figura 13.1: Escala de Cooper-Harper. Fonte: Wikipedia, https://en.wikipedia.org/wiki/Cooper-Harper_rating_scale.
na figura 13.1, permite quantificar essa impressão subjectiva. A partir das respostasdos pilotos as aeronaves são classificadas de 1 (melhor) a 10 (pior).
As qualidades de voo são habitualmente definidas em termos dos três níveis apre-sentados na tabela 13.3. A escala de Cooper-Harper pode relacionar-se com os níveisde qualidades de voo de acordo com o apresentado na tabela 13.4.
Os níveis de qualidade de voo e a escala de Cooper-Harper são estabelecidos atravésdas impressões e opiniões dos pilotos. A relação entre estes níveis de qualidades devoo e parâmetros de controlo e estabilidade objectivos e mensuráveis é difícil e muitasvezes vaga, sendo difícil estabelecer critérios muito estritos relativamente aos valoresque os parâmetros podem tomar. No entanto, apresentar-se-ão em seguida os valoresque são habitualmente seguidos para relacionar os níveis de qualidades de voo e afrequência natural e o factor de amortecimento dos modos.
13.2.2 Qualidades de voo longitudinais
Na tabela 13.5 indicam-se os limites para o factor de amortecimento corresponden-tes a cada nível de qualidades de voo. Note-se que para uma aeronave ser de nível 2,basta o modo fugóide ser estável, e para ser de nível 3 o modo fugóide pode até serinastável, bastando que t2 seja suficientemente elevado para que o avião seja contro-lável.
207

Tabela 13.3: Flying qualities levels
Level 1 Flying qualities clearly adequate for the mission flight phase
Level 2 Flying qualities adequate to accomplish the mission flight phase butwith some increase in pilot workload and/or degradation in missioneffectiveness
Level 3 Flying qualities such that the airplane can be controlled safely but pi-lot workload is excessive and/or mission effectiveness is inadequate.
Tabela 13.4: Relação entre os níveis de qualidades de voo e a escala de Cooper-Harper
Level 1 Cooper-Harper scale = 1–3.5
Level 2 Cooper-Harper scale = 3.5–6.5
Level 3 Cooper-Harper scale = 6.5–9+
Os valores limite para o factor de amortecimento do modo de período curto paracada nível de qualidades de voo estão indicados na tabela 13.6. Neste caso, para osníveis 1 e 2 existe um valor máximo e um valor mínimo para o factor de amortecimento.
13.2.3 Qualidades de voo laterais
Para descrever as qualidades de voo do modo de rolamento convém definir a cons-tante do modo como τ = −1/λ. A dependência temporal do modo é então e−t/τ :quanto menor o valor de τ , mais amortecido é o modo e mais rapidamente decresce aperturbação.
Na tabela 13.7 apresentam-se as qualidades de voo do modo de rolamento em ter-mos da constante de tempo τ .
Relativamente ao modo de rolamento holandês as qualidades de voo estão repre-sentadas na tabela 13.8. Neste caso interessam não só os valores do factor de amorte-cimento e da frequência natural, mas também o produto ζωn.
13.3 Aplicação dos critérios a um Cessna 182
Como exemplo, vamos aplicar estes critérios ao Cessna 182, na situação de voo jádescrita anteriormente.
Tabela 13.5: Limites para as qualidades de voo para o modo fugóide
Nível 1 ζ > 0.04
Nível 2 ζ > 0
Nível 3 t2 > 55 s
208

Tabela 13.6: Limites para o factor de amortecimento do modo de período curto
Categorias A e C Categoria B
Níveis Mínimo Máximo Mínimo Máximo
1 0.35 1.30 0.30 2.00
2 0.25 2.00 0.20 2.00
3 0.15 — 0.15 —
Tabela 13.7: Valor máximo da constante para o modo de rolamento
Level
Categoria da fase de voo Classe 1 2 3
A I, IV 1.0 1.4II, III 1.4 3.0
B Todas 1.4 3.0 10
C I, II-C, IV 1.0 1.4II-L, III 1.4 3.0
Tabela 13.8: Valores mínimos da frequência natural e do factor de amortecimento parao modo de rolamento holandês
Níveis Fase de Voo Classe Min ζ Min ζωn Min ωn1 A I, IV 0.19 0.35 1.0
II, III 0.19 0.35 0.4
B Todas 0.08 0.15 0.4
C I, II-CIV 0.08 0.15 1.0
II-L, III 0.08 0.15 0.4
2 Todas Todas 0.02 0.05 0.4
3 Todas Todas 0.02 — 0.4
(Nota: ωn em rad s-1)
Tabela 13.9: Valor mínimo para o tempo para a amplitude aumentar para o dobro (t2)para o modo espiral
Classe Fase de Voo Nível 1 (s) Nível 2 (s) Nível 3 (s)
I e IV A 12 12 4B e C 20 12 4
II e III Todas 20 12 4
209
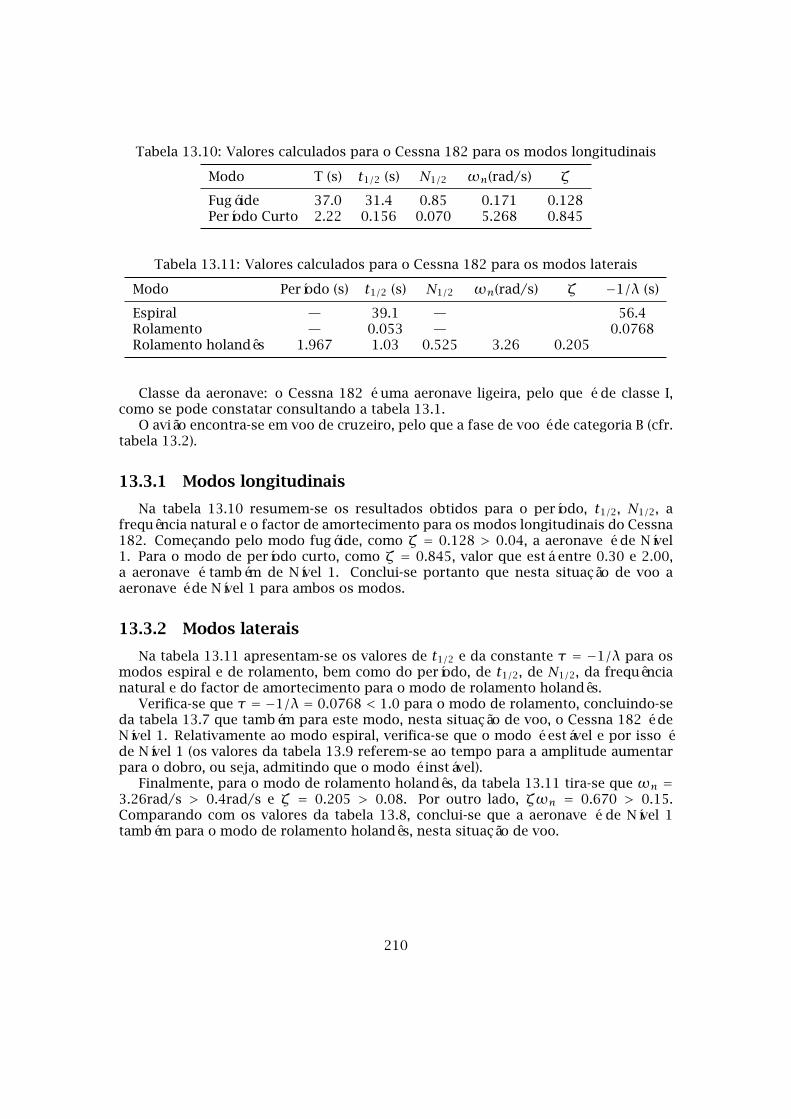
Tabela 13.10: Valores calculados para o Cessna 182 para os modos longitudinais
Modo T (s) t1/2 (s) N1/2 ωn(rad/s) ζ
Fugóide 37.0 31.4 0.85 0.171 0.128Período Curto 2.22 0.156 0.070 5.268 0.845
Tabela 13.11: Valores calculados para o Cessna 182 para os modos laterais
Modo Período (s) t1/2 (s) N1/2 ωn(rad/s) ζ −1/λ (s)
Espiral — 39.1 — 56.4Rolamento — 0.053 — 0.0768Rolamento holandês 1.967 1.03 0.525 3.26 0.205
Classe da aeronave: o Cessna 182 é uma aeronave ligeira, pelo que é de classe I,como se pode constatar consultando a tabela 13.1.
O avião encontra-se em voo de cruzeiro, pelo que a fase de voo é de categoria B (cfr.tabela 13.2).
13.3.1 Modos longitudinais
Na tabela 13.10 resumem-se os resultados obtidos para o período, t1/2, N1/2, afrequência natural e o factor de amortecimento para os modos longitudinais do Cessna182. Começando pelo modo fugóide, como ζ = 0.128 > 0.04, a aeronave é de Nível1. Para o modo de período curto, como ζ = 0.845, valor que está entre 0.30 e 2.00,a aeronave é também de Nível 1. Conclui-se portanto que nesta situação de voo aaeronave é de Nível 1 para ambos os modos.
13.3.2 Modos laterais
Na tabela 13.11 apresentam-se os valores de t1/2 e da constante τ = −1/λ para osmodos espiral e de rolamento, bem como do período, de t1/2, de N1/2, da frequêncianatural e do factor de amortecimento para o modo de rolamento holandês.
Verifica-se que τ = −1/λ = 0.0768 < 1.0 para o modo de rolamento, concluindo-seda tabela 13.7 que também para este modo, nesta situação de voo, o Cessna 182 é deNível 1. Relativamente ao modo espiral, verifica-se que o modo é estável e por isso éde Nível 1 (os valores da tabela 13.9 referem-se ao tempo para a amplitude aumentarpara o dobro, ou seja, admitindo que o modo é instável).
Finalmente, para o modo de rolamento holandês, da tabela 13.11 tira-se que ωn =3.26rad/s > 0.4rad/s e ζ = 0.205 > 0.08. Por outro lado, ζωn = 0.670 > 0.15.Comparando com os valores da tabela 13.8, conclui-se que a aeronave é de Nível 1também para o modo de rolamento holandês, nesta situação de voo.
210
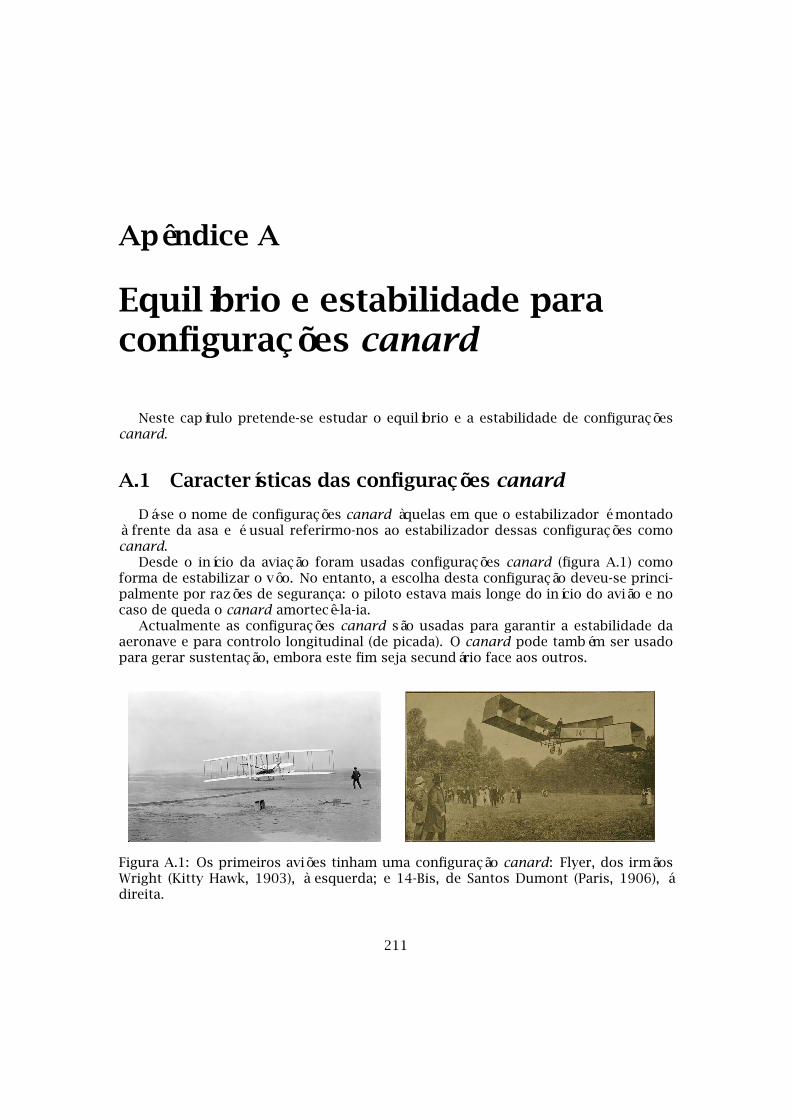
Apêndice A
Equilíbrio e estabilidade paraconfigurações canard
Neste capítulo pretende-se estudar o equilíbrio e a estabilidade de configuraçõescanard.
A.1 Características das configurações canard
Dá-se o nome de configurações canard àquelas em que o estabilizador é montadoà frente da asa e é usual referirmo-nos ao estabilizador dessas configurações comocanard.
Desde o início da aviação foram usadas configurações canard (figura A.1) comoforma de estabilizar o vôo. No entanto, a escolha desta configuração deveu-se princi-palmente por razões de segurança: o piloto estava mais longe do início do avião e nocaso de queda o canard amortecê-la-ia.
Actualmente as configurações canard são usadas para garantir a estabilidade daaeronave e para controlo longitudinal (de picada). O canard pode também ser usadopara gerar sustentação, embora este fim seja secundário face aos outros.
Figura A.1: Os primeiros aviões tinham uma configuração canard: Flyer, dos irmãosWright (Kitty Hawk, 1903), à esquerda; e 14-Bis, de Santos Dumont (Paris, 1906), ádireita.
211

O canard pode ser fixo (não usado para controlo, apenas para estabilidade), fixomas com elevators que permitem controlo longitudinal (esta configuração é semelhanteao de estabilizador na cauda + leme de profundidade) ou ser totalmente móvel, sendoneste caso o controlo longitudinal efectuado por deflexão de todo o canard (é umaconfiguração semelhante a stabilator).
As vantagens das configurações canard face às configurações convencionais in-cluem uma maior manobrabilidade, maior dificuldade do avião entrar em perda emaiores valores de CLmax (sem flaps). Por outro lado, as configurações canard apre-sentam também algumas desvantagens, como uma maior distância entre os centros demassa do combustível e da aeronave, o que pode levar a maiores variações do centrode massa em voo, e uma diminuição de visibilidade. Além disso a aerodinâmica deuma configuração canard é mais complicada que a de uma configuração convencionale o dimensionamento do canard é crítico: é fácil fazer mau projecto.
A.2 Equilíbrio e estabilidade
iremos estudar uma configuração em que o canard é a única superfície estabili-zadora e a única superfície para controlo longitudinal. Supomos também um canardmóvel, sem elevator.
Usaremos a seguinte notação:
• ic : ângulo de incidência do canard, é variável;
• ic positivo se Lc > 0;
• hc: posição do CM, medida a partir do bordo de ataque da asa;
• hc pode ser negativo se estiver à frente do bordo de ataque da asa;
• hnwb c: posição do CA da asa;
• lc : distância entre CA do canard e CM;
• lc : distância entre CA do canard e CA da asa.
A.2.1 Sustentação e momento de picada
A interacção aerodinâmica entre canard e asa é complexa. O canard está na zonade upwash da asa, a asa está na zona de downwash do canard e o vórtice do bordomarginal do canard tem efeito de upwash na asa. O efeito global destas interações nosângulos de ataque efectivos é que αwb < αc . Modelamos este efeito por meio de umângulo de upwash ε no canard.
Da figura A.2 podemos determinar a relação entre os ângulos de ataque do canarde da asa, o ângulo de upwash ε e o ângulo de incidência do canard,
αc = αwb + ε + ic . (A.1)
Vamos admitir que o ângulo de upwash varia linearmente com αwb,
ε = ε0 + εααwb, (A.2)
212

Figura A.2: Relação entre ângulos de ataque da asa e do canard e distâncias entre ocentro aerodinâmico do canard e o centro aerodinâmico da asa (lc) e o centro de massa(lc).
e a relação entre αc e αwb é
αc = αwb(1+ εα)+ (ε0 + ic). (A.3)
A figura A.2 permite ainda relacionar as distâncias entre o centro aerodinâmico docanard e o centro aerodinâmico da asa (lc) e entre o centro aerodinâmico do canard eo centro de massa (lc). Note-se que h pode ser negativo se o centro de massa estiver àfrente da asa.
lc = lc + (h− hnwb)c ⇒lcSccS
= lcSccS
+ (h− hnwb)ScS. (A.4)
Analogamente ao que fizemos para configurações convencionais, podemos definir asrazões de volume do canard como
Vc =lcSccS, (A.5)
Vc =lcSccS, (A.6)
e de (A.4) a relação entre elas é
Vc = Vc + (h− hnwb)ScS. (A.7)
A velocidade do escoamento incidente no canard V ′ e na asa V diferem tanto nadirecção (pelo ângulo de upwash) como no módulo. No entanto, o módulo das duasvelocidades é habitualmente muito semelhante, pelo que admitiremos que V ′ ≈ V .
A sustentação do canard é então adimensionalizada pela pressão dinâmica da asae pela área do canard. No caso do momento de picada usamos ainda a corda média docanard, cc .
CLc =Lc
12ρV 2Sc
, (A.8)
Cmacc =Macc
12ρV 2Sc cc
. (A.9)
213

Figura A.3: Forças e momentos aerodinâmicos aplicados na asa e no canard.
Na figura A.3 representam-se as forças e momentos aerodinâmicos aplicados na asae no canard. Admitindo que os ângulos de ataque e o ãngulo de incidência do canardsão pequenos, a sustentação total é dada por
L = Lwb + Lc (A.10)
e o respectivo coeficiente de sustentação é
CL =L
12ρV 2S
= CLwb +ScSCLc (A.11)
Na zona de linearidade entre o coeficiente de sustentação e o ângulo de ataque,
CLwb = awbαwb, (A.12)
CLc = acαc = acαwb(1+ εα)+ ac(ε0 + ic). (A.13)
Logo:
CL =[awb + ac
ScS(1+ εα)
]αwb + ac
ScS(ε0 + ic). (A.14)
Esta relação pode ser escrita de forma mais simplificada como
CL = a αwb + acScS(ε0 + ic), (A.15)
em que
a = awb + acScS(1+ εα). (A.16)
Para o momento de picada, a figuraA.3 permite escrever
M = Macc + lcLc +Macwb + (h− hnwb)cLwb (A.17)
A adimensionalização do momento de picada total relativamente ao centro de massa é
Cm =M
12ρV 2Sc
,
pelo que
Cm =ScccScCmacc +
lcSccSCLc + Cmacwb
+ (h− hnwb)CLwb . (A.18)
214

O canard pode ter uma contribuição para a sustentação e por isso o seu perfil podeter curvatura positiva, sendo Cmacc ≠ 0, pelo que mantemos este termo. Usando (A.7)obtém-se
Cm = Cmac + VcCLc + (h− hnwb)CL, (A.19)
com
Cmac =(ScccScCmacc + Cmacwb
). (A.20)
Finalmente, usando (A.15), (A.12) e (A.13), obtém-se:
Cm = Cm0 + Cmααwb, (A.21)
em que
Cm0 = Cmac + ac(ε0 + ic)[ScS(h− hnwb)+ Vc
](A.22)
= Cmac + ac(ε0 + ic)Vc (A.23)
Cmα = a(h− hnwb)+ Vcac(1+ εα) (A.24)
A.2.2 Ponto neutro
Por definição, no ponto neutro Cmα = 0, e (A.24) mostra que a sua posição, hn, édada por
hn = hnwb − Vcaca(1+ εα). (A.25)
A equação (A.24) permite ainda escrever
Cmα = a(h− hn) = −aKn, (A.26)
em que a margem estática Kn = hn − h é definida da forma habitual.
A.3 Condições de equilíbrio
As expressões deduzidas são válidas tanto para canards fixos como para canardscom ângulo de incidência variável. No caso de canard móvel, controlo longitudinal érealizado fazendo variar ic . No caso de um canard com ângulo de incidência fixo e comleme de profundidade, é necessário acrescentar o termo de controlo correspondente.
A.3.1 Canard móvel
A sustentação total é dada por (A.15). Supondo ε0 = 0, temos:
CL = CLααwb + CLic ic (A.27)
com: CLα ≡ a
CLic ≡∂CL∂ic
= acScS
(A.28)
215

Das equações (A.21), (A.23), (A.22) e (A.24), com ε0 = 0, o momento de picada é
Cm = Cmac + Cmααwb + Cmic ic (A.29)
em que Cmα = a(h− hn)
Cmic = acVc = ac[ScS(h− hnwb)+ Vc
] (A.30)
As equações de equilíbrio são CL = CLtrim
Cm = 0
Logo: CL = CLααwb + CLic ic = CLtrim
Cm = Cmac + Cmααwb + Cmic ic = 0(A.31)
As soluções de (A.31) determinam os valores de αwb e ic de equilíbrio:αwbtrim =
CLtrimCmic + CmacCLicdet
ictrim = −CLαCmac + CLtrimCmα
det
(A.32)
em que det = CLαCmic − CmαCLic . Note-se que como ic é variável, não é útil usar oângulo de ataque absoluto da aeronave, pois ele varia com ic . É preferível usar αwb.
A.3.2 Configuração com canard fixo e elevator
A análise da configuração com canard com ângulo de incidência fixo e leme é seme-lhante á análise da configuração com estabilizador horizontal e leme de profundidade.Representando por δe a deflexão do leme, pode-se admitir que a relação entre a sus-tentação no canard e δe é linear: CLc = acαc + aeδe.
A dedução das expressões para o ângulo de ataque absoluto da aeronave α e paraCm0 , CLδe e Cmδe no caso de canard fixo com elevator fica como exercício.
216
Bibliografia
[1] Bernard Etkin and Lloyd Duff Reid. Dynamics of Flight: Stability and Control. JohnWiley and Sons, 3rd edition, 1996.
[2] R. D. Finck. USAF Stability and Control Datcom. Technical Report AFWAL-TR-83-3048, Air Force Wright Aeronautical Laboratories, 1978.
[3] Barnes W. McCormick. Aerodynamics, Aeronautics and Flight Mechanics. John Wileyand Sons, 2nd edition, 1995.
[4] Robert C. Nelson. Flight Stability and Automatic Control. McGraw-Hill, 2nd edition,1998.
[5] Jan Roskam. Airplane Flight Dynamics and Automatic Flight Controls, Part I. DAR-corporation, 2003.
217