iii seminário da pós-graduação em engenharia mecânica ... · essa é a “lei do mínimo” de...
TRANSCRIPT

III Seminário da Pós-Graduação em Engenharia Mecânica – Unesp - Bauru
DESENVOLVIMENTO E ANÁLISE DE UM PROTÓTIPO PARA FORMULAÇÃO, DOSAGEM E APLICAÇÃO DE FERTILIZANTES SÓLIDOS (N, P E K) A TAXAS
VARIÁVEIS DE MANEIRA LOCALIZADA EM MÁQUINAS DE PLANTIO DIRETO.
Conrado Di Raimo Aluno do Programa de Pós-Graduação em Engenharia Mecânica – Unesp – Bauru
Prof. Dr. Edson Antonio Capello Souza Orientador – Depto de Engenharia Mecânica – Unesp – Bauru
RESUMO
A crescente demanda por alimentos no mundo, com a mesma área agrícola e com os
recursos financeiros para a fabricação de fertilizantes, cada vez mais escassos é inevitável a
utilização de novas tecnologias para fazer frente a essa nova realidade, pois com o uso dessas
pode-se produzir mais alimentos com menos fertilizantes. Na busca por novas tecnologias que
fazem o processo produtivo mais eficiente é que surge a chamada “Agricultura de Precisão”
que, embora não seja um conceito novo, vem tomando espaço nos Países desenvolvidos como
uma alternativa para aperfeiçoar o processo produtivo agrícola. As ações que conduzem à
chamada agricultura de precisão exigem diversas etapas para sua implementação. Contudo,
uma das mais importantes está relacionada com a formulação dosagem e aplicação de
fertilizantes agrícolas a taxas variáveis de maneira localizada e precisa. Para isto, tem-se a
necessidade de desenvolver equipamentos capazes de executar tais tarefas. Com esse intuito
está sendo estudado o comportamento de um protótipo que tem como objetivo formular, dosar
e aplicar no momento do plantio, três fertilizantes sólidos (N, P e K) a taxas variáveis de
acordo com as quantidades desejáveis da cultura em questão e de maneira localizada. Para a
avaliação do protótipo foi construída uma bancada de testes onde foram acoplados os
dosadores helicoidais e seus respectivos motores elétricos (12 Vdc) e três tanques para
armazenamento de fertilizantes. Também foram utilizados equipamentos periféricos como:
Uma fonte (12 Vdc); três drivers de potência (MOSFET); um notebook; uma placa de
aquisição e controle e um software de Instrumentação Virtual. Os ensaios serão realizados
com um software de instrumentação e controle virtual (LabVIEW), que tem como função
controlar a rotação dos eixos dos três motores de maneira independente, baseando-se em
dados de um mapa de fertilidade do solo com localização baseada em informações
geográficas, obtendo a vazão mássica do produto desejado ponto a ponto conforme tamanho
da grade amostral do solo. Os valores da vazão mássica determinada em função do tempo
serão comparados com os valores da massa de fertilizantes indicados no mapa de fertilidade
do solo, a precisão do sistema será maior quanto menor for a diferença desses valores. Nos
ensaios realizados com o software de simulação os resultados obtidos para alta vazão foram
satisfatórios uma vez que o tipo de controle preliminarmente usado foi o proporcional, pode-
se dizer também que na baixa vazão o comportamento do sistema foi oscilatório em torno do
setpoint, mas acredita-se que com a implementação de um controlador do tipo PID esse
problema será resolvido.

III Seminário da Pós-Graduação em Engenharia Mecânica – Unesp - Bauru
PALAVRAS-CHAVE: Agricultura de Precisão, Fertilização a Taxas Variáveis e Plantio
Direto.
1 INTRODUÇÃO
No contexto global, todas as formas de economia sofrem com a redução das margens
de lucros, fazendo surgir à necessidade de se obter níveis de competitividade internacionais.
Além disto, a procura pela conservação dos recursos naturais impõe à atividade agrícola,
novos processos e técnicas de produção, aliados à eficiência e maior controle dos resultados
alcançados no campo, em relação ao que vinha sendo praticado. Como uma resposta para
minimizar estes problemas e com o avanço da tecnologia, foi possível que satélites,
computadores e sensores auxiliassem a agricultura. Fazendo com que surgisse um novo
sistema de produção que, há alguns anos já é utilizada pelos agricultores de países de
tecnologia avançada, chamado de Precision Agriculture, Precision Farming e no Brasil de
Agricultura de Precisão (AP). Este sistema vem fazer cumprir a capacidade de conhecer cada
metro quadrado da lavoura, que foi perdido à medida que as áreas cultivadas foram se
desenvolvendo.
A riqueza dos solos está condicionada pelas rochas que lhe deram origem. Existem
solos com grande potencial do ponto de vista do teor, equilíbrio e disponibilidade de
elementos essenciais às plantas. Nessas condições, a qualidade das culturas é garantida
durante um bom tempo. Outros solos foram menos afortunados na sua origem ou passaram
por transformações na sua história e não apresentam as qualidades exigidas para uma nutrição
mineral adequada das plantas. De modo geral, após sucessivas colheitas, os solos apresentam
dificuldades em nutrir convenientemente as plantas. Utilizando-se da adubação, o homem,
apoiado em bases científicas e experimentais, interfere no processo, fornecendo ao solo aquilo
que está necessitando. A reposição dos elementos essenciais deve respeitar as quantidades
adequadas e no momento necessário, pois do contrário provocaria alterações nos vegetais e
prejuízo da qualidade das colheitas, justificando assim o uso de ferramentas mais precisas
para depositar o adubo no local mais próximo e na quantidade ideal para a planta.
O processo da agricultura de precisão inicia-se com o propósito de buscar a
variabilidade espacial da fertilidade prévia do solo, utilizando para isso uma amostragem
programada e criteriosa. Com todas as informações obtidas da amostragem, parte-se para o
tratamento direcionado da fertilidade do solo, aplicando corretivos e fertilizantes à taxas
variáveis, buscando resolver problemas que podem vir a depreciar a qualidade e a
produtividade da lavoura por falta ou excesso dos nutrientes essenciais. Nos dias de hoje,
consegue-se fazer todo o processo de amostragem de solo georreferenciada, ou seja, mapear a
área retirando amostras de solo e delimitando os pontos com suas respectivas coordenadas
geográficas. Esse processo de marcação dos pontos amostrais com o Sistema de
Posicionamento Global (SPG) ou Global Positioning System (GPS) permite, posteriormente, a
confecção de mapas de fertilidade de solo, ferramenta fundamental para a tomada de decisão
sobre a recomendação de adubação para a cultura que se pretende trabalhar. De posse das
análises de solo e das coordenadas geográficas dos pontos amostrais, são gerados os mapas de
fertilidade, onde se tem para cada elemento analisado e para cada área amostrada um mapa
mostrando as variações de concentrações de cada elemento no solo. Com o mapa de aplicação
introduzido na máquina, a mesma aplica o fertilizante em quantidades variáveis obedecendo à
análise prévia da fertilidade do solo, tratando de forma diferenciada cada ponto amostrado
anteriormente. Destacam-se duas motivações que induzem à agricultura de precisão. Uma diz
respeito à preservação do meio ambiente, onde se deseja cada vez mais a redução das

III Seminário da Pós-Graduação em Engenharia Mecânica – Unesp - Bauru
quantidades de fertilizantes e agroquímicos jogados ao solo. A outra diz respeito à margem de
lucro cada vez menor, o que faz com que se deseje diminuir a quantidade de insumos
fabricados principalmente fertilizantes e agroquímicos necessários ao processo produtivo.
Atualmente as máquinas que tem o propósito de fazer adubação na linha de plantio o
fazem com adubos pré-formulados, ou seja, com uma mistura de proporções já definidas dos
macros elementos (Nitrogênio, Fósforo e Potássio), fazendo assim com que elemento que já
existe no solo seja depositado novamente sem a necessidade prévia do mesmo causando,
portanto um aumento no custo de plantio e o desperdício de fertilizante químico. A proposta
deste trabalho é fazer a formulação, dosagem e aplicação localizada ponto a ponto no
momento do plantio, ou seja, depositar no ponto desejado somente o elemento necessário e na
quantidade requerida, com isso a adubação torna-se mais precisa e econômica, maximizando o
uso do fertilizante e minimizando os danos ao meio ambiente.
2 REVISÃO BIBLIOGRÁFICA
Nos vegetais, o desenvolvimento, a produção e a multiplicação dependem de três
fatores: herança genética, ambiente e grau de nutrição, que é limitado pelo elemento que
estiver em menor disponibilidade no solo. Essa é a “lei do mínimo” de Liebig, como ficou
conhecida no campo da nutrição vegetal. Pode ser representada por uma barrica, cujo
conteúdo máximo corresponde à altura da tábua menor, como mostra a Fig. (1).
Figura 1: Representação da “lei do mínimo” de Liebig, (Alcarde et al.,1998)
Sendo assim de nada adianta colocar um elemento químico no solo se o mesmo já se
encontra no local se esse elemento for de característica residual, vale lembrar que alguns dos
elementos usados na formulação de fertilizantes químicos não são residuais, por exemplo, o
Nitrogênio. Portanto deve-se fazer um nivelamento dos elementos e usar quantidades
próximas a real necessidade no que diz respeito aos macros elementos (N, P e K), evitando
assim uma superposição dos elementos químicos no solo.
A solução hoje utilizada é a de enfocar grandes áreas e entendê-las como homogêneas,
levando ao conceito da necessidade média para a aplicação dos insumos - fertilizantes,
defensivos, água, etc. O que faz com que, por exemplo, a mesma formulação e/ou quantidade
do fertilizante seja utilizada para toda a área, atendendo apenas as necessidades médias e não
considerando, desta forma, as necessidades específicas de cada parte do campo. O mesmo
acontece para os demais insumos, causando como resultado uma lavoura com produtividade
não uniforme (CAPELLI, 1999).
A variabilidade espacial nas lavouras brasileiras não é nenhuma novidade. Em
conversa com produtores e técnicos de campo percebe-se o reconhecimento dessa natureza,
III Seminário da Pós-Graduação em Engenharia Mecânica – Unesp - Bauru
reafirmando que uma parte da área produz mais que a outra ou, que em determinado local, os
teores de nutrientes são mais elevados que a média da lavoura. A valorização da variabilidade
espacial e a possibilidade de manejá-la visando aumentar a eficiência do uso de insumos tem
sido um desafio para técnicos e produtores. A partir desse contexto, tem ganhado espaço a
chamada Agricultura de Precisão. As novas ferramentas da tecnologia da AP vêm sendo
incorporadas como meio de gerenciar a variabilidade de atributos de solo na propriedade e
subsidiar o aprimoramento do manejo do solo e das culturas. O aumento na eficiência da-se
com base no manejo diferenciado, respeitando a variabilidade existente na área. A integração
da computação e da eletrônica são os meios de se elevar os níveis de controle e
monitoramento da atividade agrícola em locais específicos da lavoura. Através de análise
detalhada das lavouras e do aprimoramento das técnicas de manejo, novos níveis de
eficiência qualitativos e quantitativos da produção das culturas podem ser alcançados
sucessivamente, (SANTI, et al. , 2009).
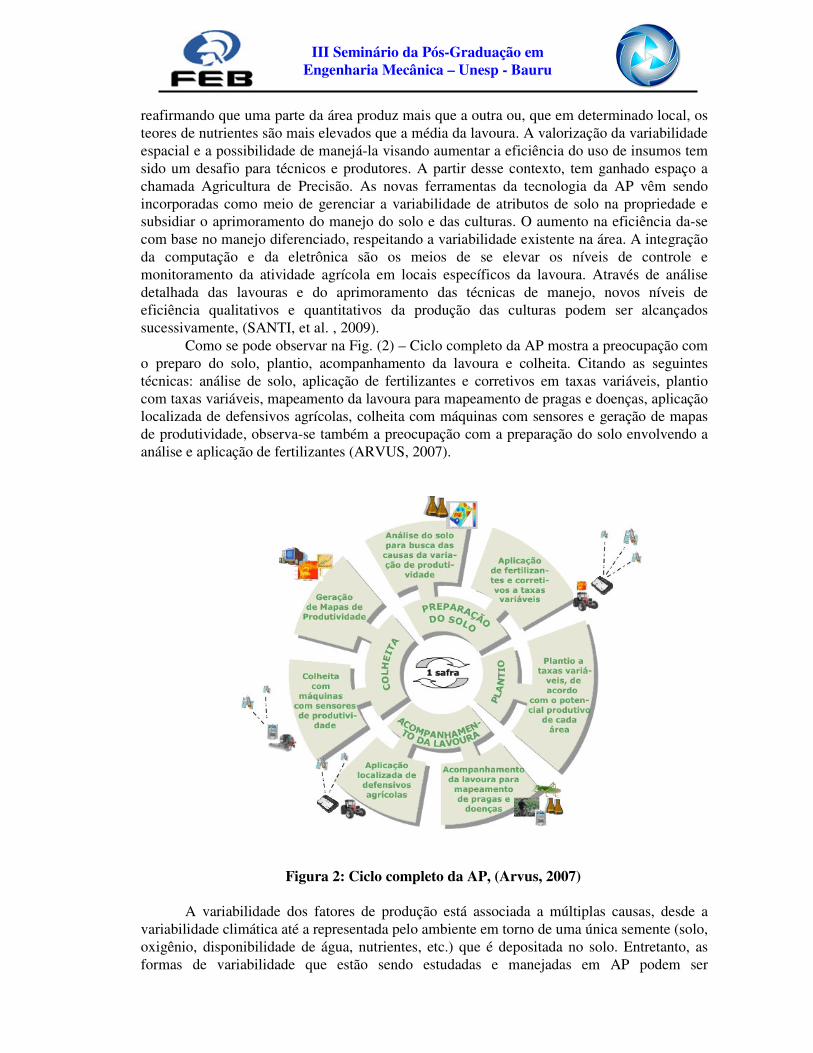
Como se pode observar na Fig. (2) – Ciclo completo da AP mostra a preocupação com
o preparo do solo, plantio, acompanhamento da lavoura e colheita. Citando as seguintes
técnicas: análise de solo, aplicação de fertilizantes e corretivos em taxas variáveis, plantio
com taxas variáveis, mapeamento da lavoura para mapeamento de pragas e doenças, aplicação
localizada de defensivos agrícolas, colheita com máquinas com sensores e geração de mapas
de produtividade, observa-se também a preocupação com a preparação do solo envolvendo a
análise e aplicação de fertilizantes (ARVUS, 2007).
Figura 2: Ciclo completo da AP, (Arvus, 2007)
A variabilidade dos fatores de produção está associada a múltiplas causas, desde a
variabilidade climática até a representada pelo ambiente em torno de uma única semente (solo,
oxigênio, disponibilidade de água, nutrientes, etc.) que é depositada no solo. Entretanto, as
formas de variabilidade que estão sendo estudadas e manejadas em AP podem ser

III Seminário da Pós-Graduação em Engenharia Mecânica – Unesp - Bauru
classificadas em “Variabilidade Espacial” (aquela que ocorre com um atributo na área, por
exemplo: variação da concentração de fósforo no solo em uma área de 20 hectares),
“Variabilidade Temporal” (aquela que ocorre ao longo do tempo, por exemplo:
disponibilidade de água no solo em função da sazonalidade da precipitação pluvial) e uma
terceira (que representa a ação do homem nas duas primeiras), chamada “Variabilidade
Induzida pelo Manejo” (aquela criada pelas decisões de manejo tomadas nas áreas de cultivo,
por exemplo: alocação de culturas e regulagem de máquinas). Esta última ocorre, por
exemplo, quando há máquinas desgastadas e desreguladas, sistemas de cultivo diferenciados,
partes da lavoura deixadas em descanso por vários anos e deficiência no controle de plantas
daninhas (FARNHAM, 2000).
Para minimizar a variabilidade é necessário conhecer sua magnitude, identificando-a e
quantificando-a por meio de parâmetros de solo, de planta e de clima, mapeando “áreas
problemas” (com níveis abaixo dos considerados adequados) e, posteriormente, empregando
práticas de manejo capazes de minimizá-las.
O Sistema de Plantio Direto (SPD) promove alterações no comportamento do solo,
pela eliminação das ações mecânicas que promovem a homogeneização do solo. Com a
distribuição predominantemente na superfície, e a ação das plantas acumulando nutrientes na
biomassa aérea, ocorre o acumulo de nutrientes, especialmente P e K, na camada superficial
grumosa, nos primeiros 10 cm. Com o tempo, há uma tendência de aumento da eficiência dos
adubos aplicados e da disponibilidade de nutrientes, pela ação de microrganismos (N),
diminuição da fixação de nutrientes pela argila do solo (P), e movimentação de cátions no
perfil do solo (Ca, Mg). A fertilidade do solo deve também considerar os aspectos físicos e
biológicos, tais como a porosidade (distribuição de tamanho de poros, volume total e
continuidade), susceptibilidade à compactação, friabilidade em diferentes umidades, teor e
qualidade da matéria orgânica e, atividade biológica (FREITAS, 1994).
A partir da consolidação do SPD, a recomendação da adubação (baseada na análise do
solo), passa a considerar o sistema, e não as culturas de forma individual. Por fim, o manejo
da fertilidade passa a conjugar a utilização de adubos químicos com o poder de reciclagem
biológica de culturas de cobertura e da rotação (Souza & Lobato, 2002).
Existem várias possibilidades para a aplicação em taxa variável, que incluem os
principais nutrientes de plantas (N, P e K), calcário, sementes, genótipos, agroquímicos, água
e práticas de manejo do solo. Para cada insumo, deve ser desenvolvida uma estratégia para
guiar com precisão a aplicação variável (DOERGE, 2000).
Com o mapa de aplicação de fertilizantes gerado por softwares específicos e com o
auxílio do GPS de alta precisão todos interligados a um computador de bordo e inseridos na
máquina, a mesma aplica o fertilizante em quantidades variáveis ou fixa, obedecendo à análise
prévia de fertilidade do solo processada anteriormente, fazendo com que as quantidades
requeridas e os elementos necessários (N, P e K) dos mapas sejam depositados no local exato
e no momento do plantio.
Neste contexto, a AP apresenta-se como uma moderna ferramenta para auxiliar o
produtor na definição das melhores estratégias de manejo a serem adotadas, visando aumentar
a eficiência da atividade agrícola. Especificamente, no manejo do solo, a AP tem como
principal conceito aplicar no local correto (espaço), no momento adequado (tempo), as
quantidades de insumos necessários (quantidade) à produção agrícola, para áreas cada vez
menores e mais homogêneas, tanto quanto a tecnologia e os custos envolvidos o permitam
(DODERMANN & PING, 2004).
Com a popularização do GPS (Global Positioning System) que utiliza satélites como
mostra a Fig. (3), permitiu-se que os processos de desenvolvimento da agricultura de precisão

III Seminário da Pós-Graduação em Engenharia Mecânica – Unesp - Bauru
se consolidassem, pois pode-se atribuir qualquer propriedade a uma determinada coordenada,
sendo ela, química ou física do solo, produtividade, pragas, doenças entre inúmeras outras.
Figura 3: Satélite em órbita (Serrana, 2007)
Para a coleta das amostras de solo por georreferenciamento, pode-se utilizar um
quadriciclo capaz de fazer todo o processo de amostragem de solo por coordenadas, ou seja,
mapear a área retirando amostras de solo e delimitando os pontos com suas respectivas
coordenadas geográficas, como mostra a Fig. (4).
Figura 4: Quadriciclo amostrador de solo (Serrana, 2007)
O processo de marcação dos pontos amostrais com o GPS permite, posteriormente, a
confecção de mapas de fertilidade de solo, ferramenta fundamental para a tomada de decisão
sobre a recomendação de adubação para a cultura que se pretende implantar no sistema. Após
mapear determinado talhão, faz-se necessário a subdivisão do mesmo em áreas menores para
que se possa trabalhar pequenas glebas gerando um número maior de informações sobre a
fertilidade local, para isso utiliza-se uma malha sobre o perímetro da área, é o que se

III Seminário da Pós-Graduação em Engenharia Mecânica – Unesp - Bauru
denomina de grids de amostragem, como mostra a Fig. (5). O tamanho do grid depende de
alguns fatores como: uniformidade de produção, relevo e histórico da área (SERRANA,
2007).
Figura 5: Grid de amostragem de solo com pontos amostrais determinados (Zulli, 2008)
A partir das análises de solo e das coordenadas geográficas dos pontos amostrais, são
gerados os mapas de fertilidade, onde se tem para cada elemento analisado e para cada talhão
amostrado um mapa mostrando as variações de concentrações de cada elemento no solo, como
mostra a Fig. (6).

III Seminário da Pós-Graduação em Engenharia Mecânica – Unesp - Bauru
Figura 6: Mapa de fertilidade de solo (Zulli, 2008)
Utilizando um mapa de aplicação obtido após todo o estudo de fertilidade do solo e
inserido em um computador com o auxilio de um GPS para a informação exata das
coordenadas geográficas, o mesmo fará o controle dos três motores elétricos independentes,
cuja função será de regular a rotação através de um software de instrumentação e controle
virtual, sendo que a vazão é uma variável dependente da rotação fazendo com que cada motor
tenha uma rotação diferente, dependendo da quantidade de fertilizante necessária em cada
ponto amostral do solo no momento do plantio. Com esse procedimento espera-se uma
adubação mais eficiente e econômica, pois só será depositada no local a quantidade exata de
elemento químico necessária para o desenvolvimento da planta. Os valores da vazão mássica,
determinados em função do tempo serão comparados com os valores da massa de fertilizantes
indicados no mapa de aplicação, a precisão desse sistema será maior quanto menor for a
diferença encontrada entre eles.
3 MATERIAL E MÉTODOS
De posse do mapa de aplicação da Fig. (7), elaborado a partir de estudos da fertilidade
do solo e obtidos através da amostragem georreferênciada para cada elemento (N, P e K),
inicia-se o processo de simulação do protótipo com o objetivo de analisar o comportamento
dos dosadores e fazer a verificação da vazão mássica de cada elemento.

III Seminário da Pós-Graduação em Engenharia Mecânica – Unesp - Bauru
Figura 7: Mapa de aplicação de fertilizantes (Zulli, 2008) A bancada para testes foi confeccionada em aço carbono (metalon de 20 x 30mm) com
3 tanques de vidro para o armazenamento dos elementos químicos, 3 dosadores helicoidais
marca (John Deere), 3 mangueiras de borracha de 2 polegadas por 50 cm de comprimento, 3
recipientes de polietileno para coleta dos elementos químicos e com 4 rodízios para facilitar o
transporte da mesma, como mostra a Fig. (8).
Os motores que acionam os dosadores helicoidais da bancada estão acoplados por uma
transmissão de coroa e sem fim e são alimentados por uma fonte de 12 Vdc, cada um ligado
no driver e controlado por um software de aquisição e controle instalado em um Desktop, que
auxiliado por um mapa de aplicação e um GPS manda sinal (Tensão) para os motores
fazendo com que seja variada a rotação dos mesmos, obtendo assim a variação da vazão
mássica do produto.

III Seminário da Pós-Graduação em Engenharia Mecânica – Unesp - Bauru
Figura 8: Protótipo
A grande vantagem do sistema elétrico de fertilização a taxa variável em relação a
outros sistemas é o baixo custo, outra vantagem é a possibilidade de controle preciso e
compacto, pois utilizam componentes eletrônicos de tamanho reduzido e de fácil construção,
como mostra a Fig. (9).
Figura 9: Componentes eletrônicos O ideal para o trabalho proposto seria usar um motor cujo comportamento do gráfico
de rotação pela tensão fosse linear e obter assim também dosagens próximas de zero, o motor
utilizado no ensaio é de baixa rotação e alto torque de tamanho reduzido e de baixo custo, o
motor é de fabricação Mabuchi, Cod. ED454908, 12 Vdc, Fig. (10).

III Seminário da Pós-Graduação em Engenharia Mecânica – Unesp - Bauru
Figura 10: Motor elétrico
Os dosadores são fabricados em polietileno de alta resistência e aço inox, com rosca
transportadora de aço carbono de 1 polegada de passe, como mostra a Fig.(11).
Figura 11: Dosador Helicoidal (John Deere)
4. RESULTADOS
Utilizando-se o mapa de aplicação de fertilizantes foram realizados ensaios com um só
elemento (Potássio), num grid definido no mapa de pontos amostrais com células de 223,60 x
223,60 metros sendo assim cada célula com 50000 m2 ou 5 hectares. Nota-se no mapa que ha
uma variação de 0 a 85 kg/ha de potássio, numa rota traçada para passar por 8 células
amostrais que deverá ser seguida em linha e com velocidade constante de 1,6 m/s para a
aplicação exata do produto, obtendo-se os valores da vazão mássica como mostra a Tab. (1),
vale ressaltar que os ensaios foram realizados apenas para um motor e que o dosador usado
foi de rosca transportadora de 1Polegada de passe.
Tabela 1: Valores da vazão mássica do Dosador Helicoidal
N°. Das
Células
Necessidade Requerida do Mapa de Aplicação em kg/ha na Respectiva
Célula
Produto Aplicado Pelo Dosador Helicoidal em kg/ha na Respectiva
Célula
Rotação do eixo (rpm)

III Seminário da Pós-Graduação em Engenharia Mecânica – Unesp - Bauru
1 0 0 0
2 45 45 17,5
3 45 45 17,5
4 45 45 17,5
5 85 71 25,3
6 85 71 25,3
7 45 45 17,5
8 0 0 0
Com os valores obtidos nos ensaios construiu-se um gráfico da Rotação pelo Duty
Cycle (PWM), como mostra a Fig. (12), notou-se que não se obteve rotação na faixa de 0 a
10% duty cycle, a rotação apresenta um aumento acentuado na faixa de 10 a 15% duty cycle,
de 15 a 60% duty cycle a rotação permanece na proporcionalidade e a partir de 60% duty
cycle a rotação se estabiliza, esse comportamento da curva se da devido à redução coroa e
sem fim, necessária para o aumento do torque do motor elétrico, sabe-se que os motores
elétricos de corrente contínua tem sua rotação proporcional a tensão de alimentação.
Figura 12: Curva Rotação pela Duty Cycle
5. CONCLUSÃO
O dosador helicoidal testado mostrou-se eficiente na dosagem entre 30 e 71 kg/ha
porem, não alcançou os valores máximos requeridos no mapa de aplicação devido ao passe da
rosca transportadora ser de 1 polegada, para solucionar esse problema basta trocar a rosca
transportadora por uma de 2 polegadas de passe, no entanto os valores mínimos foram
providos, vale ressaltar que para dosagens diferentes das usadas, faz-se necessário a troca das
roscas transportadoras optando por um dos 3 passes: ¾, 1 ou 2 polegadas. Notou-se que
variando a rotação varia-se a vazão mássica, isso era o que se almejava no inicio do trabalho e
que foi comprovado com os ensaios que foram realizados em laboratório. Como os motores e
dosadores são iguais o mesmo se aplica aos demais, portanto basta estabelecer uma
comunicação entre eles a partir de um software de aquisição e controle para obter o
funcionamento do sistema. Esperava-se dos motores um comportamento linear no gráfico de

III Seminário da Pós-Graduação em Engenharia Mecânica – Unesp - Bauru
rotação e tensão, porém isso não ocorreu devido a redução da coroa e sem fim que diminui a
rotação e aumenta o torque, com isso obteve-se uma amperagem constante mesmo com carga
máxima e com a rotação variando de 10 a 25 rpm, foi observado também no gráfico de
rotação x tensão que a diferença entre o torque estático e o dinâmico não permitiu a rotação do
motor entre 0 a 10% da tensão aplicada, isso pode ser resolvido a partir da implementação de
um controle de malha fechada com os controladores do tipo PID, ou seja o sistema será
realimentado conforme a necessidade, fazendo com que o motor trabalhe na rotação desejada.
Fazendo uma comparação com um sistema hidráulico. Umezu, (2003), um trabalho na
mesma linha de pesquisa com propósitos semelhantes porem, com métodos e materiais
diferentes, nota-se a existência de problemas semelhantes em ambos, talvez o mais evidente
seja o controle dos motores no sistema de malha aberta, por outro lado no sistema elétrico
nota-se comportamento semelhante entre os motores, o que mais chama a atenção nos
sistemas hidráulicos são os elevados custos dos equipamentos.
Segundo Umezu, (2003) os testes iniciais mostraram uma boa correlação e linearidade
entre a tensão de comando e a rotação dos motores hidráulicos. Porém, verificou-se a
existência de problemas devido à ocorrência de histerese e alteração no comportamento da
rotação com o aquecimento do óleo hidráulico. Esses fenômenos prejudicaram o desempenho
do controle de rotação dos motores em malha aberta. Outros resultados importantes foram os
comportamentos semelhantes entre os três motores e a não interdependência entre eles.
6. REFERENCIAS
ALCARDE, J.C; Guidolim, J.A. & Lopes, A.S. Os adubos e a eficiência das adubações. São Paulo, ANDA, 1998, 35p. 3ª ed. (Boletim Técnico, 6).
ARVUS: Agricultura de precisão. Ano 2007. Disponível em:
http://www.cnps.embrapa.br. Acesso em: 13 de abr. 2007.
CAPELLI, N. L. Agricultura de Precisão - Novas Tecnologias para o Processo Produtivo. LIE/DMAQAG/FEAGRI/UNICAMP, 1999. Disponível na Internet.
http://wwwbases.cnptia.embrapa.br/cria/gip/gipap/capelli.doc, em 15 Out. 1999.
DODERMANN, A.; Ping, J.L. Geostatistical integration of yield monitor data and remote sensing improves yield maps. Agronomy Journal, Madison, v.96, n.1, p.285-297,
2004.
DOERGE, T. A. Management zone concepts. Site-Specific management guidelines.
2000. Disponível em: <http://www.farmresearch.com/ssmg/ssmg-02/002-print.ftm> Engel,
R.; Long, D.; Carlson, G. On-the-go grain protein sensing is near. Does it have a future in
precision nitrogen management for wheat? Better Crops, Norcross, v. 81, n. 4, p. 20-23, 1997.
FARNHAM, D. E. Site-specific crop management: what have we learned and where
do we go from here? Ames: Iowa State University-Department of Agronomy, 2000. 6 p.
FREITAS, P. L. Aspectos físicos e biológicos do solo. In: LANDERS, J. N. (Ed.).
Fascículo de experiências de Plantio Direto no Cerrado. Goiânia: APDC, 1994. p. 199-213.
SANTI, A. L; Amado T. J. C; Della Flora, L. P. & Smaniotto, R. F. F. Revista Plantio Direto, RS, Aldeia Norte Editora, 2009, ed. 109, Passo Fundo.
SERRANA: Tecnologia em serviços – Agricultura de Precisão. Ano, 2007.
Disponível em: http://www.serrana.com.br. Acesso em: 02 de abr. 2007.
SOUZA, D. M. G.; Lobato, E. (Ed.) Cerrado: correção do solo e adubação.
Planaltina, DF: Embrapa Cerrados, 2002.416p.
UMEZU, C. K. Sistema de controle de um equipamento de formulação, dosagem e aplicação de fertilizantes sólidos a taxas variáveis. Tese UNICAMP. Campinas, SP: [s.n.],
2003.

III Seminário da Pós-Graduação em Engenharia Mecânica – Unesp - Bauru
ZULLI, M. R. Seminário Aprosoja: Agricultura de precisão – Racionalizando Custos. Tangará da Serra, MT. Ano, 2008. Disponível em: http://www.aprosoja.com.br.
Acesso em: 26 de abr. 2009.