faculdade de engenharia ana karla oliveira...
TRANSCRIPT

FACULDADE DE ENGENHARIA PROGRAMA DE PÓS-GRADUAÇÃO
MESTRADO EM ENGENHARIA ELÉTRICA
ANA KARLA OLIVEIRA LEITE
DESENVOLVIMENTO DE UM SISTEMA DE SIMULAÇÃO DE MARCHA EM HIPOGRAVIDADE
Porto Alegre
2017

1
PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL
PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA ELÉTRICA
ANA KARLA OLIVEIRA LEITE
DESENVOLVIMENTO DE UM SISTEMA DE SIMULAÇÃO DE
MARCHA EM HIPOGRAVIDADE
Porto Alegre
2017

2
ANA KARLA OLIVEIRA LEITE
DESENVOLVIMENTO DE UM SISTEMA DE SIMULAÇÃO DE
MARCHA EM HIPOGRAVIDADE
Dissertação apresentada como requisito para a
obtenção do título de Mestre em Engenharia
Elétrica pelo Programa de Pós-Graduação em
Engenharia Elétrica da Pontifícia Universidade
Católica do Rio Grande do Sul, área de
concentração de Sinais, Sistemas e Tecnologia
da Informação, linha de pesquisa em
Engenharia Biomédica.
Orientadora: Thais Russomano, PhD
Co-Orientador: Dr. Rafael Reimann Baptista
Porto Alegre
2017

3

4

5
Dedico esta dissertação a minha mãe, pelo apoio e amor.

6
AGRADECIMENTOS
Gostaria de agradecer, primeiramente, a minha mãe pelo apoio, carinho e dedicação.
A minha orientadora Thais pela confiança, ajuda, conselhos de vida e puxões de
orelha. Vou sempre me lembrar de você;
A Michele, Ingrid e Felipe pela ajuda com os materiais, parte burocrática e
conselhos;
Ao professor Júlio por TUDO! Não tenho palavras para descrever a gratidão que
sinto por todo o apoio e toda a ajuda em todo o processo. MUITO OBRIGADA;
Ao Professor Rafael, que me apresentou o MicroG e me apoiou em muitos
momentos;
Aos meus amigos, principalmente aqueles que estiveram ao meu lado durante todo o
mestrado;
A HP (Hewlett-Packard) e a Capes, pelo apoio a pesquisa brasileira.
A Lígia.
Muito obrigado!

7
“Não se nasce mulher: torna-se.”
(Simone de Beauvoir)
8
RESUMO
Em missões espaciais os sistemas cardiovascular, muscular e ósseo são afetados pela
falta da ação da força gravitacional terrestre. O descondicionamento muscular pode limitar a
capacidade de trabalho da tripulação devido à atrofia e à fraqueza muscular. Em
microgravidade e hipogravidade há também mudanças nas estruturas e funções de células
ósseas incluindo morfologia, citoesqueleto, crescimento celular e diferenciação, dando início
a osteopenia que pode evoluir para osteoporose. Ao analisar que o alto impacto da corrida e
caminhada causa estresse necessário para estimular os músculos e ossos responsáveis pela
manutenção da postura reduzindo os danos causados pela hipogravidade, as pesquisas
relacionadas aos sistemas simuladores de marcha aumentaram consideravelmente tornando-os
necessários para evitar descondicionamento ósseo, muscular e cardiovascular antes, durante e
após missão espacial.
A criação de um Sistema de Simulação de Marcha em Hipogravidade (SSMH)
possibilita o estudo das ações nocivas desse ambiente em órbita. Sendo assim, o presente
estudo objetivou desenvolver um sistema de simulação de marcha em hipogravidade para
estudos sobre fisiologia e biomecânica aeroespacial. Para que esse sistema seja possível, um
planejamento estrutural e funcional foi elaborado. Para o desenvolvimento de um protótipo
funcional foram necessários os subsistemas: estrutural, utilizando uma estrutura já existente
no laboratório de engenharia aeroespacial; suspensão, que envolve a soldagem do suporte para
fixação da esteira e adaptação dos suportes cabide, bem como os cabos, fitas e colete
envolvidos; de Força, composto pela esteira ergométrica e plataforma de força composta por
um CPU de transferência de dados; de comunicação, que é responsável pela comunicação
entre plataforma de força e interagir com uma CPU para o recebimento, visualização e
armazenamento de dados; e, por fim, simulação, composto por um dinamômetro e um
conjunto de cordas elásticas causando diferentes tensões.
Os resultados apresentados mostraram que a SSMH foi capaz de simular os ambientes
de Marte, Lua e Terra e também, capaz de aumentar ou diminuir o peso aparente do
voluntário através da tensão imposta pelas cordas na superfície da esteira. O sub-sistema de
comunicação mostrou-se apto a armazenar transferir os dados recebidos da CPU da
plataforma de força para o computador, em casos de armazenamento, e transmitir os dados
aos avaliadores em caso de teste. E, por fim, a estrutura permaneceu não apresentando tremor
ou oscilação quando as cargas eram manuseadas para execução dos testes.
Palavras-Chave: Microgravidade, Hipogravidade, Marcha Humana.
9
ABSTRACT
Development of a gait simulation system in hypogravity
In space missions, the cardiovascular, muscular and bony systems are affected by the
lack of the action of the terrestrial gravitational force. Muscle deconditioning may limit the
crew's ability to work due to atrophy and muscle weakness. In microgravity and hypogravity,
there are also changes in the structures and functions of bone cells, including morphology,
cytoskeleton, cell growth and differentiation, leading to osteopenia, which can progress to
osteoporosis. When analyzing that the high impact of running and walking causes the stress
necessary to stimulate the muscles and bones responsible for maintaining the posture by
reducing the damage caused by the hypogravity, the investigations related to the gait
simulator systems have increased considerably making them necessary to avoid bone
deconditioning, Muscular and cardiovascular before, during and after space mission.
The development of Gait System in Hypogravity Simulation (GSHS) allows the
study of the harmful actions of the extraterrestrial environment. Thus, the present study aimed
to develop a GSHS to study aerospace biomechanics and physiology. For this system to be
possible, a structural and functional planning was elaborated. For the development of a
functional prototype, the sub-systems were necessary: Structural, using an already existing
structure in the aerospace engineering laboratory; Suspension, which involves welding the
support for fixing the mat and adapting the hanger supports, as well as the cables, ribbons and
vest involved; Strength, consisting of treadmill and a force platform with a CPU to transfer;
Which is responsible for communicating between force platform and interacting with a CPU
for receiving, store and visualization data; And, finally, simulation, composed of a
dynamometer and a set of elastic cords causing different stresses.
The results showed that the GSHS is able to simulate the environments of Mars,
Moon and Earth being able also to increase or decrease the apparent weight of the volunteer
through the tension imposed by the ropes on the surface of the treadmill. The communication
sub-system was able to store transfer data received from the CPU from the power platform to
the computer in case of storage and transmit the data to the evaluators in case of testing. And
finally, the structure remained stable with no tremor or oscillation when the loads were
handled for the tests.
Keywords: Microgravity, Hypogravity, Human Gait.
10
LISTA DE FIGURAS
Figura 1 - O Sistema de Simulação de Marcha em Hipogravidade. ......................................... 20
Figura 2–Diagrama de blocos da integração final do sistema de simulação de marcha em
hipogravidade. .......................................................................................................................... 21
Figura 3 - Fases de apoio e balanço da marcha, juntamente com as subdivisões da fase de
apoio e os oito ciclos de toda a Marcha. ................................................................................... 33
Figura 4 - Ciclo da marcha onde é possível notar a predominância da fase de apoio (60%) em
relação a fase de balanço (40%). .............................................................................................. 34
Figura 5 - Ponte de Wheatstone. ............................................................................................... 37
Figura 6 - Sistemas de simulação de marcha. (a;b) Sistema Vertical descrito por Cavagna et
al, 1972; Donelan e Kram, 1997; Donelan e Kram, 2000. (c;d) Sistema de Suspensão Corporal
(BWS) Lateral descrito por Bogdanov, 1971; Genc, 2006. (e) Sistema de Suspensão
Horizontal descrito por Perusek, 2007. (f) Sistema de Deambulação Passiva para Simulação
de Gravidade descrito por Lu et al, 2009; Lu et al, 2011; Ma e Wang, 2012. ......................... 38
Figura 7 - Esteira vertical com apoio em banco inclinável, VertiRun. .................................... 41
Figura 8 - Sistema de controle em malha aberta do SSMH. ..................................................... 43
Figura 9 - Estrutura Piramidal desenvolvida para a simulação de ressuscitação cardíaca em
microgravidade. ........................................................................................................................ 44
Figura 10 - Sistema de Simulação de Marcha em Hipogravidade (SSMH). ............................ 45
Figura 11 - (a) Colete de imobilização dorsal KED; (b) Fitas Tubulares. ................................ 45
Figura 12 -Mosquetão oval em aço carbono com resistência de 25kN. ................................... 46
Figura 13 - Cordas Elásticas de 12mm. .................................................................................... 46
Figura 14 - Suportes cabide. ..................................................................................................... 47
Figura 15 - Dinamômetro ou Balança Dinamométrica. ........................................................... 47
Figura 16 - Cabos Elásticos 6mm. ............................................................................................ 48
Figura 17 – a) Esteira Ergométrica; b) esteira fixada na estrutura. .......................................... 48
Figura 18 - Células de Carga. ................................................................................................... 49
Figura 19 - Microcontrolador MSP430F2619. ......................................................................... 50
Figura 20 - Módulo HX711. ..................................................................................................... 51
Figura 21 - Módulo ZigBee XBee S2C. ................................................................................... 52
Figura 22 - Display LCD. ......................................................................................................... 52
Figura 23 - Microcontrolador MSP430F2274. ......................................................................... 53
Figura 24 - Diagramas de bloco do funcionamento do Sistema de Simulação de Marcha. ..... 53

11
Figura 25 - Desenho assistido por computador da estrutura metálica. ..................................... 54
Figura 26 - (a) tubo de 170cm para parte inferior de fixação da esteira;(b) tubos de 50cm para
estabilizar os dois tubos de 80cm; (c) tubos de 80cm para dar suporte a barra de 170cm; (d)
tubos de 25cm para fixar a barra de 170cm; (e) tubo de 70cm para a parte superior de fixação
da esteira; (f) suportes cabide 60cm; (g) suportes cabide 80cm. .............................................. 55
Figura 27 - Cubos vazados. ...................................................................................................... 55
Figura 28 - Localização dos suportes em relação ao corpo humano e em relação ao colete
KED. ......................................................................................................................................... 56
Figura 29 - Fixação da célula de carga em uma placa de MDF com fitas metálicas. .............. 58
Figura 30 - Posicionamento da placa de MDF com a célula de carga na estrutura. ................. 59
Figura 31 - Diagrama de Blocos da integração da célula de carga com o HX711. .................. 60
Figura 32- Esquema elétrico da instrumentação da plataforma de força. ................................ 60
Figura 33 - PCI da plataforma de força instrumentada. ........................................................... 61
Figura 34 - Esquema elétrico da instrumentação do Sub-sistema de comunicação. ................ 62
Figura 35 - Fonte de alimentação. ............................................................................................ 63
Figura 36 - (a) Manequim simulador massagem cardíaca vestido com colete de imobilização
dorsal KED; (b) Manequim preso a estrutura. .......................................................................... 68
Figura 37 -- (a) Balança doméstica marca Geom apoiada na esteira e recebendo compressão;
(b) Gráfico da calibração da plataforma de força da SSMH. ................................................... 69
Figura 38 - Motovibrador IP66 MVL vibradores industriais. .................................................. 71
Figura 39 - "Perna mecânica" para simulação de marcha. ....................................................... 71
Figura 40 - Tornozelo articulado para simular o toque inicial do calcanhar na esteira durante a
marcha. ..................................................................................................................................... 72
Figura 41 - Gráfico de amostras por segundo no teste de pressão continua. ............................ 73
Figura 42 - Teste de marcha SSMH caminhada lenta .............................................................. 74
Figura 43 - Teste de marcha SSMH caminhada rápida ............................................................ 74
12
LISTA DE EQUAÇÕES
Equação 1 - Representação matemática de força como sendo produto da massa inercial de um
corpo pela aceleração da gravidade.
Equação 2 - Fórmula da força gravitacional de Newton.
Equação 3 - Definição matemática de intensidade do campo gravitacional.
Equação 4 - Lei de Hooke.
Equação 5 - Resistência elétrica R de um condutor metálico homodêneo.
Equação 6 - Variação da resistência elétrica pela resistência elétrica do fio de um
extensômetro.
Equação 7 – Cálculo do erro percentual entre CPP e SSMH.
Equação 8 – Cálculo do erro percentual utilizando a medida de peso adquirida através da
balança e a medida de peso adquirida pela plataforma de força.
Equação 9 – Cálculo da velocidade de rotação do motor.

13
LISTA DE TABELAS
Tabela 1 - Tabela comparativa entre estudos com simuladores de marcha em ambientes de
gravidade reduzida. ................................................................................................................... 41
Tabela 2 - Descrição de cargas suportadas por cada material presente no SSMH. .................. 57
Tabela 3 - Descrição e valores dos materiais utilizados no SSMH. ......................................... 66
Tabela 4 - Comparação de valores de alguns sistemas de suspensão corporal que estão no
mercado. ................................................................................................................................... 67

14
LISTA DE ABREVIATURAS, SIGLAS E SÍMBOLOS
SSMH Sistema de Simulação de Marcha em Hipogravidade
GSSH Gait Simulation System in Hypogravity
eZLS enhanced Zero-gravity Locomotion Simulator
LBNP Low-Body Negative Pressure
RGS Reduced Gravity Simulator
CPP Câmara de Pressão Positiva
UGS Underwater body for Gait Simulation
NASA National Aeronautics and Space Administration
URSS União das Repúblicas Socialistas Soviéticas
ICRP International Commission on Radiological Protection
ISS International Space Station
MIR Primeira estação espacial modular
IEEE Institute Electric Electronic Engineer
PC Personal Computer
LCD Liquid Crystal Display
CPU Central Processing Unit
DMS Dispositivos Montados em Superfície
RISC Reduced Instruction Set Computer
UART Transmissão e Recepção Assíncrona Universal
JTAG Joint Test Action Group
GAP Ganho dos Amplificadores Programáveis
MIPS Millions of Instructions Per Second
OSI Open Systems Interconnection
KED Kendrick Extrication Device
PVC Policloreto de polivinila (ou policloreto de vinil)
MDF Medium Density Fiberboard
LRT Locomotion Replacement Training
CE Com Exercício
SE Sem Exercício
EP Em pé
BCAA Branch Chain Amino Acids
COM Centro de Massa
AST Área de Secção Transversa
DMO Densidade Mineral Óssea
aDMO Área de Densidade Mineral Óssea
vDMO Volume de Densidade Mineral Óssea
VE Ventrículo Esquerdo

15
VD Ventrículo Direito
VO2 Volume de Oxigênio
n Elementos da Amostra
p Probabilidade de significância
h Hora
kN Quilonewton
kgf Quilograma força
F Força (N)
m Massa (kg)
a Aceleração (m/s2)
G Constante gravitacional
g Aceleração da gravidade em Terra
A/D Analógico/Digital
µC Microcontrolador
1G Gravidade Terrestre
Ca2+ Cálcio (Biologia)
mV/V Mili Volt por Volt
V Volts
hp Horse-Power
CC Corrente Contínua
mA Miliampere
mW Miliwatt
µA Micro Ampere
Ghz Giga-Hertz

16
SUMÁRIO
1 INTRODUÇÃO .............................................................................................................. 19
2 OBJETIVOS ................................................................................................................... 20
3 FUNDAMENTAÇÃO TEÓRICA ................................................................................. 22
3.1 CONCEITOS FÍSICOS.......................................................................................... 22
3.1.1 Força ............................................................................................................ 22
3.1.2 Primeira Lei de Newton .............................................................................. 23
3.1.3 Massa ........................................................................................................... 23
3.1.4 Segunda Lei de Newton .............................................................................. 23
3.1.5 Força Gravitacional ..................................................................................... 24
3.1.6 Peso ............................................................................................................. 25
3.1.7 Terceira Lei de Newton ............................................................................... 25
3.1.8 Mola ............................................................................................................ 26
3.2 EXPLORAÇÃO ESPACIAL ................................................................................. 26
3.3 FISIOLOGIA AEROESPACIAL .......................................................................... 27
3.3.1 O Sistema Muscular em Microgravidade .................................................... 28
3.3.2 O Sistema Ósseo em Microgravidade ......................................................... 30
3.3.3 O Sistema Cardiovascular em Microgravidade ........................................... 31
3.4 A MARCHA HUMANA ....................................................................................... 32
3.4.1 Locomoção em Hipogravidade ................................................................... 34
3.5 PLATAFORMAS DE FORÇA .............................................................................. 35
3.5.1 Células de Carga.......................................................................................... 36
3.5.2 Extensômetros ............................................................................................. 36
3.5.3 Ponte de Wheatstone ................................................................................... 37
3.6 SISTEMAS DE SIMULAÇÃO DE MARCHA EM HIPOGRAVIDADE ........... 37
3.6.1 Simuladores de Marcha em Hipogravidade na Reabilitação ...................... 42
4 MATERIAIS E MÉTODOS .......................................................................................... 43

17
4.1 SISTEMA DE CONTROLE EM MALHA ABERTA .......................................... 43
4.2 IDENTIDFICAÇÃO E ADAPTAÇÃO DOS EQUIPAMENTOS ........................ 44
4.2.1 A Estrutura .................................................................................................. 44
4.2.2 A Suspensão ................................................................................................ 45
4.2.3 A Simulação ................................................................................................ 47
4.2.4 A Esteira Ergométrica ................................................................................. 48
4.2.5 A Plataforma de Força................................................................................. 48
4.2.6 A Comunicação ........................................................................................... 52
4.3 DESENVOLVIMENTO DE MATERIAIS E EQUIPAMENTOS ........................ 53
4.3.1 Estrutura Metálica ....................................................................................... 54
4.3.2 A Suspensão Corporal ................................................................................. 56
4.3.3 Preparação das células de carga .................................................................. 58
4.3.4 Instrumentação do Sub-Sistema de Força ................................................... 59
4.3.5 Instrumentação do Sub-Sistema de Comunicação ...................................... 61
4.3.6 Fonte de Alimentação.................................................................................. 62
4.3.7 Circuito de Emergência ............................................................................... 63
4.4 O VOLUNTÁRIO E A RELIZAÇÃO DOS TESTES........................................... 63
4.5 INTEGRAÇÃO E VERSÃO FINAL DO SISTEMA ............................................ 65
4.6 ORÇAMENTO FINAL DO SSMH ....................................................................... 65
5 RESULTADOS E DISCUSSÕES ................................................................................. 68
5.1 TESTE DE MATERIAIS E EQUIPAMENTOS ................................................... 68
5.1.1 A Estrutura, Suspensão Corporal ................................................................ 68
5.1.2 Calibração.................................................................................................... 69
5.1.3 A Plataforma de Força e o Sub-sistema de Comunicação .......................... 69
5.1.4 Teste de Marcha .......................................................................................... 70
5.1.5 Resultados dos Testes.................................................................................. 72
5.2 CONCLUSÃO E DISCUSSÕES ........................................................................... 74
6 CONSIDERAÇÕES FINAIS ......................................................................................... 76

18
7 REFERÊNCIAS ............................................................................................................. 77
ANEXOS.................................................................................................................................. 85

19
1 INTRODUÇÃO
A humanidade sempre foi fascinada pela imensidão do universo e suas estrelas. Nosso
espírito naturalmente explorador e aventureiro nos faz buscar, cada vez mais, desvendar o
espaço. Observando o céu, os sumérios calcularam a posição e o movimento dos planetas,
deram nomes as constelações do zodíaco, explicações para as estações meteorológicas, viram
e previram eclipses, etc (Robayo, 2014).
Um dos objetivos dos programas espaciais em enviar seres vivos ao ambiente extraterrestre
foi o de observar o desempenho humano em tal situação e trazê-los de volta à Terra a salvo.
As pesquisas avançaram muito nos anos 60, dando a oportunidade para Gherman S. Titov
orbitar a terra por 25h, realizando o primeiro teste de resposta humana à exposição prolongada
à microgravidade. Com o monitoramento médico realizado antes, durante e após as missões
compreendeu-se que, quanto mais tempo a tripulação permanecia no espaço, mais mudanças
fisiológicas como perda óssea e muscular, disfunções cardiovasculares e redução da função
imune, eram relatadas, o que motivou a comunidade científica a desenvolverem
contramedidas, para evitar os danos causados pela microgravidade (Clément, 2011; Grimm et
al, 2016).
Mesmo com uma rotina de exercícios diária em sistemas como ciclo-ergômetro com
vibração (Hughson, 1994); Flywheel ou volante de inércia para treinamento isoinercial
(Shackelford, 2004; Tesch, 2004); sistema de vibração isolada (Trappe, 2007); e a caixa de
pressão negativa ou LBNP box (Guell, 1995), músculos e ossos posturais (ou
antigravitacionais), como o músculo sóleo (Lambertz, 2001) e os ossos do quadril (Lang,
2004), não apresentaram melhoras relevantes.
Ao analisar que o alto impacto da corrida e caminhada causa estresse necessário para
estimular os músculos e ossos responsáveis pela manutenção da postura reduzindo os danos
causados pela hipogravidade, as pesquisas relacionadas aos sistemas simuladores de marcha
aumentaram consideravelmente tornando-os necessários para evitar descondicionamento
ósseo, muscular e cardiovascular antes, durante e após missão espacial (Cadore, 2005;
Clément, 2011).
Diante disso, foram desenvolvidos sistemas de simulação de marcha em hipogravidade,
tendo como um componente essencial esteiras ergométricas. Tais sistemas foram aprimorados
com o passar dos anos, mas algumas limitações continuam presentes, sendo elas: o
desconforto apresentado pelos sistemas de suspensão vertical (Donelan e Kram, 1997 e 2000;

20
Disiuta, 2014); alto custo do protótipo (Perusek, 2007); técnicas de execução complexas
(Mirvis, 2011).
Procurando mudar essa realidade, o presente projeto apresenta o desenvolvimento de um
sistema de simulação de marcha em ambiente de hipogravidade, sendo composto por:
Estrutura, sub-sistema de suspensão, sub-sistema de simulação, sub-sistema de força, sub-
sistema de comunicação Wireless (Figura 1).
Figura 1 - O Sistema de Simulação de Marcha em Hipogravidade.
Fonte: A Autora (2016).
A estrutura utilizada para desenvolvimento do simulador, é a mesma utilizada para a
simulação de massagem cardíaca externa (Dalmarco, 2006). Esse projeto visou aprimorar e
adaptar a estrutura existente. Um sub-sistema de suspensão foi desenvolvido especificamente
para a estrutura, assim como o suporte para fixação da esteira ergométrica, compondo então
uma estrutura mecânica que permite simular a combinação de suspensão e marcha
simultaneamente.
Para simulação dos ambientes de hipogravidade um conjunto de cordas elásticas foram
fixadas nas laterais da esteira e presas ao colete, simulando Terra, Marte e Lua através de
diferentes tensões elásticas. O sub-sistema de força é composto por esteira ergométrica e a
plataforma de força. O sub-sistema de comunicação sem fio com conexão por wifi, permite
que o pesquisador tenha acesso aos dados das células de carga.
2 OBJETIVOS
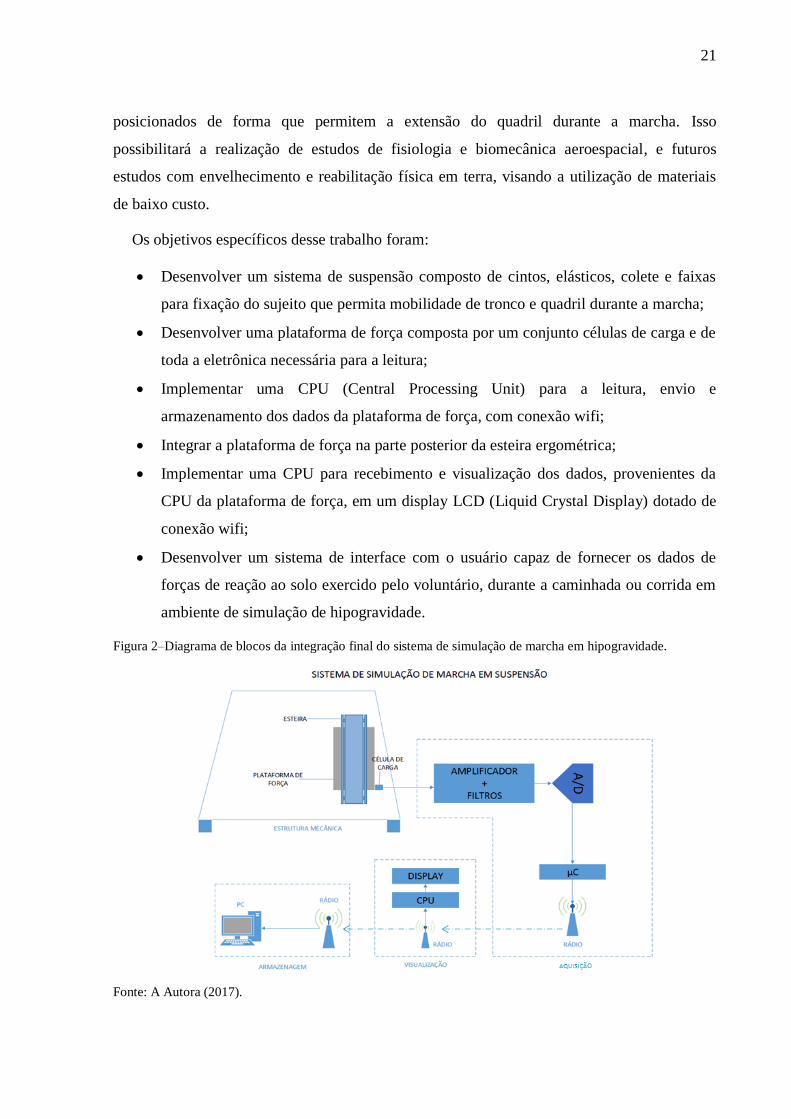
O presente estudo objetivou desenvolver um protótipo funcional de um sistema de
simulação de marcha em hipogravidade, dotada de um sistema eletrônico capaz de medir, com
a utilização de células de carga, o peso aparente do voluntário, simulando marcha em
ambientes de microgravidade (Figura 2). As fitas, cintas e o colete foram escolhidos e
21
posicionados de forma que permitem a extensão do quadril durante a marcha. Isso
possibilitará a realização de estudos de fisiologia e biomecânica aeroespacial, e futuros
estudos com envelhecimento e reabilitação física em terra, visando a utilização de materiais
de baixo custo.
Os objetivos específicos desse trabalho foram:
• Desenvolver um sistema de suspensão composto de cintos, elásticos, colete e faixas
para fixação do sujeito que permita mobilidade de tronco e quadril durante a marcha;
• Desenvolver uma plataforma de força composta por um conjunto células de carga e de
toda a eletrônica necessária para a leitura;
• Implementar uma CPU (Central Processing Unit) para a leitura, envio e
armazenamento dos dados da plataforma de força, com conexão wifi;
• Integrar a plataforma de força na parte posterior da esteira ergométrica;
• Implementar uma CPU para recebimento e visualização dos dados, provenientes da
CPU da plataforma de força, em um display LCD (Liquid Crystal Display) dotado de
conexão wifi;
• Desenvolver um sistema de interface com o usuário capaz de fornecer os dados de
forças de reação ao solo exercido pelo voluntário, durante a caminhada ou corrida em
ambiente de simulação de hipogravidade.
Figura 2–Diagrama de blocos da integração final do sistema de simulação de marcha em hipogravidade.
Fonte: A Autora (2017).
22
3 FUNDAMENTAÇÃO TEÓRICA
A revisão da literatura e as teorias principais para o entendimento adequado desse estudo
podem ser encontradas nas seções a seguir.
3.1 CONCEITOS FÍSICOS
Devido ao caráter multidisciplinar (física, engenharia e medicina) desta pesquisa, torna-se
necessário um bom entendimento de conceitos básicos de física. A física é a mais
fundamental das ciências naturais por preocupar-se, inclusive, com os princípios básicos do
universo. Desenvolvida antes de 1900, a física clássica, inclui conceitos, teorias, leis e
experimentos em mecânica clássica, termodinâmica, eletromagnetismo e óptica.
Galileu Galilei (1564-1642) por meio de trabalho das leis de movimento com aceleração
constante contribuiu significativamente com a mecânica clássica. Johannes Kepler (1571-
1630) desenvolveu leis empíricas em relação ao movimento de corpos planetários. Isaac
Newton (1642-1727) é considerado um dos mais importantes teóricos da mecânica clássica
que, além de suas leis, foi um dos criadores do cálculo como ferramenta matemática. James
Clerk Maxwell criou uma teoria unificada do eletromagnetismo tornando-a básica para todas
as áreas da física juntamente com a mecânica. Além de muitos outros teóricos importantes
para as descobertas feitas até os dias de hoje (Serway e Jewett, 2015).
No fim do século XIX a física moderna começou a aparecer devido a gama de fenômenos
físicos que a física clássica não conseguia explicar. A teoria da relatividade e a mecânica
quântica foram os dois desenvolvimentos mais importantes da era moderna (Serway e Jewett,
2015).
3.1.1 FORÇA
Força pode significar poder, energia, impulso, etc. Nem sempre está ligado à ação
muscular ou alguma mudança no estado de movimento de um corpo. A força é uma ação
física que causa deformação ou altera o estado de repouso ou de movimento de um
determinado objeto. É uma grandeza capaz de vencer a inércia de um corpo. Os tipos de
forças conhecidas nos dias de hoje são as forças de contato (puxando uma mola ou
arremessando uma bola de basquete) que representa o resultado do contato físico entre dois
corpos, e as forças de campo que não envolvem contato físico, agindo através do espaço vazio
(Serway e Jewett, 2015).

23
Um exemplo de forças de campo é a força gravitacional entre dois corpos que provoca a
aceleração em queda livre. Ela mantém os corpos ligados a Terra e da origem ao que
comumente chamamos de peso de um corpo. A força gravitacional também é a força que
mantém os planetas do nosso sistema solar ligados ao sol. Outro exemplo é a força elétrica
que uma carga elétrica exerce sobre a outra, por exemplo, um elétron e um próton formando
um átomo de hidrogênio. E por último a força que um imã em uma barra exerce sobre um
pedaço de ferro. Já a nível atômico todas as forças classificadas como de contato acabam
sendo causadas por forças elétricas semelhantes à força elétrica de atração. A distinção de
campo e contato é usada somente a nível macroscópico (Serway e Jewett, 2015).
3.1.2 PRIMEIRA LEI DE NEWTON
Por vezes chamada de Lei da inércia, a primeira lei do movimento de Newton, pode ser
enunciada em termos mais simples como, “Se um corpo interage com outros corpos, é
possível identificar um sistema de referência em que o corpo tem aceleração zero” (Serway e
Jewett, 2015). Essa lei diz que a velocidade de um corpo tende a permanecer constante caso
nenhuma força atue sobre ele, mantendo seu estado de movimento. E no caso de uma força
agir sobre esse corpo, ocorrerá uma mudança no movimento, a qual será medida pela
aceleração (Serway e Jewett, 2015).
3.1.3 MASSA
Pode ser caracterizada como propriedade de um corpo que caracteriza o quanto ele pode
resistir a mudanças na sua velocidade. Quanto maior a massa de um corpo, menos ele acelera
sob ação de determinada força aplicada. Massa e Peso são grandezas físicas distintas, essa
diferença fica visível quando mudamos o ambiente gravitacional em questão, ou seja, um
corpo que pesa 60 kg na Terra pesa apenas 20 kg em Marte e 10 kg na Lua, mas a massa
desse corpo é sempre a mesma, independente do ambiente (Serway e Jewett, 2015).
3.1.4 SEGUNDA LEI DE NEWTON
Como descrito no tópico 3.1.2., a primeira lei de Newton preocupa-se em explicar o que
acontece com um corpo quando nenhuma força atua sobre ele, permanecendo em repouso ou
movendo-se em linha reta com velocidade constante. Mas o que aconteceria com esse corpo
se uma ou mais forças agissem sobe ele é facilmente explicado pela Segunda Lei de Newton,
que diz que “Quando vista de um referencial inercial, a aceleração de um corpo é diretamente
proporcional a resultante das forças que agem sobre ele é inversamente proporcional a sua

24
massa” (Serway e Jewett, 2015). Matematicamente podemos descrever a força como sendo
produto da massa inercial de um corpo pela aceleração da gravidade na Equação 1 (Serway e
Jewett, 2015):
𝑭 = 𝒎 . 𝒂 (1)
3.1.5 FORÇA GRAVITACIONAL
A força gravitacional está tão presente no dia-a-dia terrestre que quase não é notada. Todos
os corpos são atraídos pela Terra graças a força gravitacional Fg, direcionada ao seu centro.
Essa força é uma das forças fundamentais da natureza e é mútua de atração entre quaisquer
dois corpos no universo. Apesar de ser forte entre dois corpos macroscópicos, é a mais fraca
dentre as forças fundamentais (Serway e Jewett, 2015).
Newton sabia que uma força resultante atuava sobre a Lua, pois, se essa força não
existisse, a Lua se moveria numa trajetória em linha reta e não orbitaria de forma circular. Ele
percebeu que essa força atrativa entre Lua e Terra e entre Sol e Planetas não era algo
particular de cada destes sistemas, mas sim, uma atração geral e universal entre os corpos
(Serway e Jewett, 2015).
A Lei da gravitação universal de Newton afirma que “cada partícula do Universo atrai
todas as outras com uma força que é diretamente proporcional ao produto das suas massas e
inversamente proporcional ao quadrado da distância entre elas” (Serway e Jewett, 2015).
Cavendish (1731-1810) determinou a constante de gravitação universal G com valor de
6,67x10-11N.m2/kg2, analisando a força de atração entre duas pequenas esferas, que, ao ser
inserido na fórmula da força gravitacional de Newton, definida pela Equação 2, permite que a
mesma possa ser expressa como uma equação exata em forma de proporcionalidade universal
(Serway e Jewett, 2015):
𝑭 = 𝑮.𝑴𝟏.𝒎𝟐
𝒅𝟐 (2)
OndeM1é o corpo de maior massa, o qual gera o campo gravitacional, e m2é o corpo
orbitante, d é a distância entre eles (não há limite para d e o numerador nunca se anula,
mostrando que a gravidade é presente em todo espaço) e G é a constante gravitacional
universal.
Para Newton, a intensidade do campo gravitacional é definida pela Equação 3 (Serway e
Jewett, 2015):
𝒈 = 𝑮.𝑴𝟏
𝒅𝟐 (3)

25
A aceleração da gravidade na superfície da Terra é definida como g e seu valor varia
minimamente em relação à latitude em diferentes pontos do planeta. Em algumas regiões do
espaço temos a microgravidade, o qual pode possuir um intervalo de 10-2 até 10-6 g e pode ser
definido como um ambiente em que o peso aparente de um sistema é menor em relação ao seu
peso real devido à gravidade (Rogers, 1997). Já os valores compreendidos entre 10-2 g e 1g
são denominados hipogravidade e dentro desse termo temos a aceleração da gravidade em
Marte de 3,71m/s2 e na Lua de 1,62 m/s2 (Rogers, 1997).
Em 1916, Einstein publicou sua teoria da gravitação, conhecida como teoria geral da
relatividade em resposta ao fato de a massa que possui duas propriedades aparentemente
diferentes, por um lado determina uma força de atração gravitacional mútua entre dois corpos
(lei da gravitação universal de Newton) e também representa uma resistência de um único
corpo à aceleração. O que Einstein queria dizer com sua teoria é que a gravidade causa uma
deformação do tecido espaço-tempo (Russel, 2005; Serway e Jewett, 2015).
3.1.6 PESO
O peso não é uma propriedade inerente de um corpo, mas sim, uma medida da força
gravitacional entre o corpo e o Planeta em questão. Como dito, o peso depende da aceleração
da gravidade (g) ele varia com a localização, em Terra g = 9,80 m/s2. Um corpo pode pesar
menos em altitudes elevadas do que ao nível do mar pela diminuição de g devido ao aumento
da distância do centro da Terra (Serway e Jewett, 2015).
3.1.7 TERCEIRA LEI DE NEWTON
Essa lei declara que as forças sempre ocorrem em pares, ou que uma única força isolada
não pode existir. Pode-se dizer que “se dois corpos interagem, a força F12 exercida pelo corpo
1 sobre o corpo 2 é igual em módulo e oposta em sentido à força F21 exercida pelo corpo 2
sobre o corpo 1, ou seja: F12 = - F21”. A força que o corpo 1 exerce sobre o corpo 2 pode ser
chamada de força de ação e a que o corpo 2 exerce sobre o corpo 1 pode ser chamada de
reação. A força de ação é igual em módulo à de reação e oposta em sentido, lembrando que
essas forças atuam sobre corpos diferentes. Por exemplo, a força que age sobre um projétil
que cai livremente é a força gravitacional exercida pela Terra no projétil e a reação desta força
é a força gravitacional exercida pelo projétil sobre a Terra, acelerando a mesma em direção ao
projétil. Como a Terra tem uma massa muito maior que a do projétil, sua aceleração por causa
dessa força de reação é quase desprezível de tão pequena (Serway e Jewett, 2015).

26
3.1.8 MOLA
Faz-se necessário entender a deformação sofrida por distensão e compressão de sistemas,
tendo em vista que, esse projeto possui diversos materiais elásticos como, cordas, cabos e
molas. A lei que está relacionada à elasticidade dos corpos e que é capaz de calcular a
deformação causada pela força exercida sobre o mesmo é chamada de Lei de Hooke.
Compreendida pela Equação 4:
𝑭𝒎 = −𝒌𝒙 (4)
Onde, x é a posição do objeto e k é a constante elástica do componente elástico. A força
requerida para distender ou comprimir um sistema elástico é proporcional a quantidade de
distensão ou compressão x, e o valor de k mede a rigidez da mola (Serway e Jewett, 2015).
3.2 EXPLORAÇÃO ESPACIAL
À medida que os seres humanos se aventuram em regiões ainda inexploradas do espaço,
um novo conhecimento científico acerca das adaptações a microgravidade irá afetar os
esforços da exploração. Através da história da exploração aeroespacial, a conquista de cada
novo marco fomentou novos desafios destinados a aprimorar a segurança e a saúde humana,
enquanto ao mesmo tempo se procurava emparelhar o desempenho das aeronaves com as
demandas ambiciosas de voar mais rapidamente e em altitudes cada vez mais elevadas
(McArdle, 2013; Robayo, 2014)
Com o fim da segunda guerra mundial e o início da guerra fria, Estados Unidos (EUA) e
União das Repúblicas Socialistas Soviéticas (URSS) iniciaram a corrida espacial. A corrida
espacial possibilitou descobertas que afetaram nossas vidas em todos os aspectos. Essas
descobertas incluíam desenho, construção e voo de foguetes, teleguiados e sistemas de
propulsão, as demandas de adaptações fisiológicas aos voos espaciais tripulados e as mais de
30.000 aplicações práticas de “transferência de tecnologia” em virtude das experiências
interdisciplinares em físico-química, microbiologia, genética, medicina e fisiologia do
exercício (Robayo, 2014)
A URSS surpreendeu o mundo ao lançar o Sputinik I, primeiro satélite artificial a orbitar a
terra, em 4 de outubro de 1957. Esse satélite era uma esfera de metal constituído por uma liga
de alumínio com 83,6kg e 58 centímetros de diâmetro. Orbitou a Terra por três meses
completando 1400 voltas. Em novembro do mesmo ano, o Sputinik II foi lançado com um ser
vivo a bordo, a cadela Laika, com o objetivo de provar que era possível sobreviver à ausência
de gravidade e sobreviver em órbita (Robayo, 2014, Winter, 2007).

27
Em julho de 1958 a National Aeronautics and Space Administration (NASA) é criada,
sendo responsável por administrar o programa espacial dos Estados Unidos. Após esse
lançamento os experimentos e pesquisas com animais continuaram a todo vapor, até no dia 1
de abril de 1961 o primeiro ser humano é enviado pela URSS ao espaço na Vostok I. Yuri
Gagarin orbitou a terra por uma hora. Para não ficar para trás, no dia 5 de maio de 1961, os
Estados Unidos enviaram o astronauta Alan Shepard para um voo sub-orbital de 15 minutos a
bordo da Freedom7. Ainda em 1961, mais precisamente no dia 7 de agosto, Titov foi ao
espaço como o mais jovem, segundo soviético e terceiro homem a ter viajado. Essa missão
investigou os efeitos da longa exposição à gravidade reduzida no organismo humano e a
habilidade humana de trabalhar nesse ambiente (McArdle, 2013; Robayo, 2014, Winter,
2007).
Em 20 de fevereiro de 1962 os Estados Unidos enviam John Gleen para orbitar a Terra a
bordo da capsula espacial Friendship7, na qual completou três voltas em volta do planeta.
O discurso de Kennedy na Universidade Rice com a famosa frase:
“We choose to go to the moon. We choose to go to the Moon in this decade and do the other
things, not because they are easy, but because they are hard”.
“Nós decidimos ir à Lua. Nós decidimos ir à Lua nessa década e fazer as outras coisas, não
porque elas são fáceis, mas porque elas são difíceis”.
Deu início ao ambicioso programa espacial tripulado iniciado com o Projeto Mercury,
seguido do Gemini, até chegar no projeto Apolo, que foi responsável por aflorar o interesse na
exploração Lunar. A Apollo 8 foi pioneira circundando a Lua e em 1969 o Apollo 11 pousa
em superfície lunar dando oportunidade para outras seis missões Apollo alcançarem solo
Lunar. A exploração Marciana iniciou-se com a URSS enviando as sondas gêmeas Marte 2 e
3, onde somente a sonda 3 teve êxito ao aterrissar no planeta vermelho (McArdle, 2013;
Winter, 2007).
3.3 FISIOLOGIA AEROESPACIAL
A ausência de gravidade, altos níveis de radiação entre outras mudanças induzidas pelo
voo espacial afetam o corpo humano como um todo, causando mudanças significativas em
vários sistemas, um exemplo clássico é a desorientação espacial presente nas transições de
gravidade. Tanto ao entrar em um ambiente microgravitacional quanto ao se readaptar ao
ambiente terrestre, as funções neurais autonômicas são afetadas. A ausência de peso envolve a
adaptação dos efeitos reflexivos e de orientação mediados pelo sistema vestibular e também a
acomodação de todo o sistema de controle postural e muscular do corpo em um ambiente de

28
força completamente diferente. A exposição a microgravidade pode também alterar as
estratégias cognitivas utilizadas em tarefas que envolvem navegação e representação mental
do espaço tridimensional (Goswami et al. 2013; Clément, 2003).
A alta incidência de intolerância ortostática pode ser o resultado da alteração
hemodinâmica cerebral em voos espaciais levando alguns astronautas a apresentarem pré-
sincope (Blaberet al. 2011; Goswami et al. 2013). Essa intolerância é na verdade um
problema do sistema de controle cardiopostural que engloba o controle de volume sanguíneo,
controle barorreflexo, efetividade da musculatura esquelética, auto-regulação cerebral,
descondicionamento cardíaco e muscular, e controle sensório-motor (Blaberet al. 2009). O
sistema cardiovascular consegue se ajustar, dentro de poucas horas, após entrar em
microgravidade. Essa adaptação ao ambiente de gravidade reduzida causa
descondicionamento cardiovascular que podem ser notados imediatamente após a reentrada
em ambiente terrestre.
O sistema musculoesquelético sofre descondicionamento devido a mudanças no
metabolismo em consequência da ausência de gravidade, perda crônica de cálcio e diminuição
drástica do estresse causado pelo impacto (Goswami et al. 2013; Clément, 2011). E por fim, o
equilíbrio térmico, a termorregulação e os ritmos de temperatura circadiana são alterados
durante os voos espaciais reais e simulados, devido a mudanças na transferência de calor (área
de superfície corporal de troca de calor atenuada), deslocamento de fluido para o núcleo
central, alterações no sistema nervoso autônomo e alterações no metabolismo e na
composição corporal (Goswami et al. 2013).
Diante das breves mudanças fisiológicas apresentadas acima, pode-se dizer que a atividade
física é considerada necessária para manutenção da aptidão física durante as missões
espaciais. As contramedidas adotadas até os dias de hoje nas estações espaciais e em órbita
fornecem informações importantes sobre estímulos capazes de impactar na regulação da
homeostase de diversos sistemas. Os tópicos abaixo dão ênfase nos sistemas cardiovascular,
muscular e esquelético em situações reais e simuladas de ambientes microgravitacionais.
3.3.1 O SISTEMA MUSCULAR EM MICROGRAVIDADE
A carga imposta pela gravidade no corpo humano ajuda na manutenção da homeostase
corporal e a ausência dela coloca os músculos e ossos em situação de uso reduzido. Em
missões espaciais de longa duração, o descondicionamento muscular pode limitar a
capacidade de trabalho da tripulação, além de ser negativo na transição de gravidade zero
(zero G) para gravidade terrestre (1G), devido à atrofia e fraquezas musculares. Os músculos

29
anti-gravitacionais, mais conhecidos como posturais, devem sua importância e força à
gravidade (Pompero, 2003). Como os músculos correspondem a cerca de 40% da massa
corporal, mudanças no peso durante e após uma viagem espacial podem ser indicadores de
atrofia muscular (Pompero, 2003; Clément, 2011).
Um grupo de pesquisadores utilizou um Ankle Ergometer (dispositivo mecânico voltado
para estudos da biomecânica dos músculos da panturrilha expostos a microgravidade)
(Tognella et al, 1997) para avaliar os flexores plantares de quatorze cosmonautas antes e
depois da exposição a 90-180 dias de voo espacial, com o objetivo de investigar mudanças em
força, velocidade e rigidez de músculos, tendões e articulações. Os resultados mostraram uma
redução de 17% no torque de isometria máxima, 31% na velocidade máxima de
encurtamento, 39% na ativação muscular máxima, 21% de diminuição na rigidez pós voo e
aumento de 25% na rigidez do tendão muscular (Lambertz et al., 2001).
Trappe e colaboradores (2009) avaliaram 9 tripulantes da International Space Station (ISS)
que passaram por um regime de seis meses de exercícios (5h/semana exercícios aeróbios e 3-6
dias/semana de exercícios de resistência para membros inferiores, segundo o artigo). As
análises musculares foram feitas 40 dias antes da missão e quatro dias após o retorno. O
volume muscular da panturrilha diminuiu 13±2%, o Sóleo apresentou uma atrofia 15±2%
maior que o gastrocnêmio, pico de força muscular diminuiu 32% após missão, velocidade
caiu de -20% para -29%, houve diminuição de fibras do tipo I e redistribuição de fibras de
contração rápida no gastrocnêmio e sóleo. Para continuar a observação de mudanças causadas
à nível celular, Widrick et al. (1999) avaliaram 4 astronautas após 17 dias de voo espacial,
mostrando uma diminuição no diâmetro de fibras do tipo I de 8%, redução de 15% na área de
secção transversa da fibra, reduzindo a capacidade de produção de força em 21% (declínio no
pico de Ca2+).
Por fim, em estudos de acamamento (bed rest), juntamente com exercício, Mulder et al
(2015) avaliaram a eficácia de um regime de exercícios diários nomeado LRT- locomotion
replacement training (agachamento, saltos e flexão plantar), em dez indivíduos divididos em:
sem exercício (SE) e com exercício (CE), que consistia em LRT ou 25min em pé (EP) por
cinco dias de acamamento (bed rest) a inversão postural de 6°. Foi identificada uma redução
na área de secção transversa (AST) dos extensores de joelho e flexores plantares de 2-3% para
o grupo SE e CE-EP, e não houve alteração para CE-LTR. A força de extensão isométrica de
joelho diminuiu 8% para SE, manteve-se para CE-EP, e aumentou 12% para CE-LTR. Força
isométrica de flexores plantares, ativação neural e capacidade de fadiga dos extensores de

30
joelho mantiveram-se inalterada para todas as condições.
3.3.2 O SISTEMA ÓSSEO EM MICROGRAVIDADE
A remodelação óssea é essencial para a “saúde do osso” e acontece graças aos processos de
formação dos osteoblastos e reabsorção pelos osteoclastos. Esse tecido é um sistema orgânico,
dinâmico e sensível a doenças e lesões (Rossi, 2008). Segundo Shang (2013), na presença da
microgravidade, há mudança nas estruturas e funções dessas células ósseas, incluindo
morfologia, citoesqueleto, crescimento celular e diferenciação. Além disso, a formação óssea
reduzida pelos osteoblastos e a reabsorção óssea aumentada pelos osteoclastos são induzidas,
causando um grande desequilíbrio na remodelação óssea.
O efeito osteopênico do voo espacial começou a ser observado nas missões Vostok II e III
devido ao aumento da excreção de cálcio na urina de cosmonauta, o que aumenta a incidência
de formação de urolitíase (para analisar a incidência de urolitíase é necessário estimar a
supersaturação de compostos formadores de pedra presentes na urina e assim como uma
análise química da mesma) (Colleranet al. 2000). Foi o que descobriu Smith et al. (1999) ao
examinar dois cosmonautas e um astronauta antes, durante e após missão espacial (115 dias –
MIR 18). Os pesquisadores observaram que a ingestão e absorção de cálcio estavam 50%,
diferente da reabsorção óssea e excreção de cálcio pela urina que se encontravam 50%
aumentadas, totalizando uma perda de 250mg de cálcio por dia durante a missão.
Os experimentos usando ratos em suspensão caudal mostraram que a manutenção do osso
também depende da correta distribuição, pressão e fluxo do sangue. Doty (1990) fez um
experimento com 5 ratos Wistar expostos a 12,5 dias de voo espacial, mostrando uma
diminuição no número de complexos de Golgi em ratos expostos ao ambiente
microgravitacional de 11,3±6,1 de complexos por célula em comparação aos ratos controle
em cativeiro com uma média de 14,4±3,4 complexos por célula. Os autores sugerem que o
voo espacial cria uma diminuição de energia dentro dos osteoblastos alterando a síntese de
colágeno.
Em seu estudo, Sibongaet al (2007) analisaram coluna vertebral, trocânter, pélvis, colo do
fémur, lombar e calcâneo em 45 astronautas que tripularam uma missão de longa duração (> 4
meses), a perda de massa óssea variou entre 2% a 9% em todos os ossos analisados, os
autores afirmaram que são necessários cerca de nove meses para restaurar 50% da perda óssea
e três anos para ter uma recuperação total.
Um estudo com 14 tripulantes em uma missão espacialcom duração de 6 meses avaliou a
densidade mineral óssea (DMO) em área (aDMO) e volume cortical e trabecular (vDMO) do

31
quadril e coluna, os resultados mostraram uma diminuição de 0,9%/mês, na coluna, 1,4-
1,5%/mês no quadril e 0,9%/mês após 4, 5 e 6 meses de período de voo (aDMO). Perda de
vDMO total na coluna de 0,9% e vDMOtrabecular diminuiu 0,7% por mês. No quadril
vDMO cortical e trabecular 1,2% - 1,5% e 2,2 – 2,7% respectivamente (Lang, 2004).
3.3.3 O SISTEMA CARDIOVASCULAR EM MICROGRAVIDADE
O sistema cardiovascular envolve muitos subsistemas que interagem uns com os outros, e,
com outros sistemas fisiológicos para assegurar a homeostase geral. Em microgravidade, há
uma perda do gradiente de pressão hidrostática nos sistemas venoso e arterial, fazendo com
que o sangue seja deslocado da parte inferior para o tórax e cabeça, aumentando a quantidade
de sangue dentro do coração. Em resposta a isso, o coração aumenta a quantidade de sangue
bombeado e inicia uma redistribuição e diminuição do volume plasmático. Essa diminuição
de volume plasmático aumenta os níveis de hematócritos, a secreção de eritropoietina diminui
e a massa absoluta de glóbulos vermelhos também é diminuída. Esses mecanismos
compensatórios acontecem para retornarem o volume venoso central, débito cardíaco e
volume sistólico aos valores pré voo. Longas exposiçõesaoambiente de microgravidade
também reduzem a capacidadeaeróbiacausando descondicionamento cardiovascular pós-voo
(Santos e Bonamino, 2003; Hargens, 2009; Clément, 2011; Vaquer e Mesquida, 2013).
Uma hipóteselevantadaporHargens e Watenpaugh (1996) mostra que a remoção da
compressão vascular, exercidapelosórgãos, causaria diminuição das pressõesintravasculares,
levando a redução da pressãovenosa central. A ausência da gravidade provoca a inibição dos
reflexos induzidos pelo barorreceptor, resultando em grandes mudanças na distensão
necessária para induzir as mesmas alterações na frequência cardíaca em micro ou
hipogravidade comparado com a gravidade da Terra. Consequentemente, observa-se uma
redução da resistência vascular sistêmica e uma ligeira diminuição da pressão arterial durante
o voo espacial. (Vaquer e Mesquida, 2013; Russomano, 2012; Clément, 2011).
Uma avaliação de massa e volume do ventrículo esquerdo (VE) e ventrículo direito
(VD)foi realizada por Dorfman e colaboradores (2007) em 24 mulheres saudáveis após 60
dias de acamamento com inversão posturas de 6º (headdown-tiltbedrest). As voluntárias
foram divididas em grupo controle (1), grupo exercício (que realizaram exercícios em uma
esteira vertical em câmara de pressão negativa a 40-80% do volume de O2 (Oxigênio)
consumidopré-acamamento e treino de resistência com Flywheel) (2) e grupo suplementado
de proteína e aminoácido de cadeia ramificada (BCAA) (3). O Grupo 1 mostrou redução no
volume de VE (96±26 para 77±25 ml; P=0.03) e VD (104±33 para 86±25 ml; P=0.02), massa

32
de VE (2.2±0.2 para 2.0±0.2 g/kg; P=0.003) e VD (0.8±0.1 para 0.6±0.1 g/kg; P<0.001), no
Grupo 2 não houveram mudanças no volume de VE e VD, mas houveram aumentos
significativos na massa do VE (1.9±0.4 para 2.3±0.3 g/kg; P<0.001) e VD (0.7±0.1 para
0.8±0.2 g/kg; P=0.002), já o Grupo 3 não apresentou redução na massa do VE e VD mas
houveram diminuições no volume de VE (103±14 para 80±16 ml; P=0.02). Esse estudo levou
os pesquisadores à conclusão de que o uso de suplementação combinado com exercícios
físicos poderia ser uma potente contramedida para evitar o descondicionamento
cardiovascular.
Um estudo recrutou uma série de participantes onde, 8 homens sedentários foram expostos
a 6 (n=5) e 12 (n=3) semanas de acamamento (bedrest) horizontal e 4 astronautas expostos a
eliminação completa dos gradientes hidrostáticos durante voo espacial de 10 dias. Dentre as
amostras coletadas destaca-se a análise da massa muscular do ventrículo esquerdo (VE).
Durante 6 semanas de acamamento (bedrest) houve diminuição de massa do VE de 8.0±2.2%
(p=0.005), com uma atrofia adicional de 7.6±2.3% em 12 semanas e após 10 dias de voo
houve diminuição de massa do VE de 12±6.9% (p=0.07). Os autores sugerem um
remodelamento fisiológico em respeito às mudanças de carga, mostrando a redução de
trabalho do miocárdio induzida por um ambiente de microgravidade real ou simulado
demonstra a plasticidade do músculo cardíaco sob condições adversas (Perhonen et al, 2001).
3.4 A MARCHA HUMANA
A locomoção é uma forma eficiente e única de sobreviver no reino animal, permitindo
escapar do perigo ou perseguir uma presa e buscar um clima melhor. Nós, seres humanos, nos
locomovemos usando as pernas, o que não é muito eficaz devido ao continuo
reposicionamento do pé no chão e a consequente desaceleração, mas, com a vantagem de que
elas permitem a mudança brusca de direção, saltar obstáculos, escalar, entre outras
características (Saibene, 2003).
Caminhar e correr são movimentos básicos presentes no dia-a-dia do homem e por mais
comuns que pareçam são movimentos muito complexos. Eles podem ser descritos usando
dois modelos simples: um pêndulo invertido e uma mola. A marcha humana é um processo de
locomoção onde o corpo ereto em movimento é primeiramente apoiado por uma perna e logo
pela outra. O ato de andar é caracterizado pela ação de forças contínuas de reação do solo que
apoiam o corpo e pelo movimento periódico de cada um dos pés durante cada fase de apoio.
Os músculos se contraem em cada etapa para mover os segmentos corporais na sequência

33
correta, e o trabalho é feito pela interação de energias mecânicas, potencial, cinética e elástica.
(Vaughan, 1992; Saibene, 2003).
“A locomoção humana envolve a transferência de um centro de massa (COM) através de
uma determinada distância. O ciclo da marcha descreve os parâmetros de tempo e espaço que
ocorrem nas distintas atividades de caminhada e corrida. Os membros inferiores do corpo
experimentam ambos os períodos de apoio e balanço, mas o tempo de contato destas fases de
apoio e balanço diferenciam as duas tarefas de caminhada e corrida” (Dicharry, 2010). O
padrão de marcha humana pode ser associado ao movimento de uma roda, pois o padrão
cíclico do movimento é repetido diversas vezes, passo após passo.
A Marcha é dividida em duas fases, a fase de apoio (pés no chão) e a fase de balanço (onde
o pé não está mais em contato com o chão e a perna correspondente está se deslocando para
frente preparando-se para o próximo passo). A fase de apoio, por sua vez, é subdividida em
três partes: Primeiro apoio duplo, onde os dois pés estão em contato com o chão; Apoio
simples, quando o pé direito está apoiado e o pé esquerdo está em movimento; e Segundo
apoio duplo, quando os pés estão novamente em contato com o solo (Figura 3) (Vaughan,
1992).
Figura 3 - Fases de apoio e balanço da marcha, juntamente com as subdivisões da fase de apoio e os oito
ciclos de toda a Marcha.
Fonte: Adaptado de Vaughan (1992).
Segundo Dicharry (2010) e Vaughan (1992) a marcha humana pode ser subdividida em
oito ciclos, onde cinco deles acontecem na fase de apoio (Figura 4): contato inicial, onde o
ciclo se inicia e é representado o ponto em que o centro de gravidade do corpo está na posição
mais baixa; resposta a carga, onde a superfície plantar toca o solo; apoio médio, onde o pé em
movimento passa o pé de apoio e o centro de gravidade está na posição mais alta; postura
final, quando o calcanhar perde o contato com o solo; e, por fim, pré-balanço, onde temos o

34
término da fase de apoio e o pé deixa o chão. E os outros três estão compreendidos na fase de
balanço: balanço inicial ou aceleração, a qual começa quando o pé deixa o chão ativando os
músculos flexores do quadril; balanço médio que acontece quando o pé passa pelo outro
apoiado coincidindo a fase de apoio médio do outro pé; e a fase de balanço final ou
desaceleração, onde os músculos agem desacelerando o movimento e preparando o próximo
pé para o contato inicial.
Figura 4 - Ciclo da marcha onde é possível notar a predominância da fase de apoio (60%) em relação a fase
de balanço (40%).
Fonte: Adaptado de Vaughan (1992).
Cerca de 60% do tempo é gasto durante a fase de apoio e os outros 40% são gastos durante
a fase de balanço em um ciclo normal de marcha. Ao contrário de caminhar, correr possui
características reversas onde, menos de 40% do tempo é gasto na fase de apoio e mais de 60%
é gasto na fase de balanço. Na corrida, o aumento do comprimento da passada é associado ao
aumento na velocidade e limitado pelo comprimento da perna e da habilidade para realizar a
passada. Apesar da cadencia poder ser treinada, é um impacto direto no contato com o solo e a
força de reação do solo atuando no corredor, refletem que uma cadência preferencial pode ser
escolhida para conter as forças de impacto e taxas de carga (Dicharry, 2010).
3.4.1 LOCOMOÇÃO EM HIPOGRAVIDADE
A gravidade é uma força onipresente que desenvolve um papel essencial na vida e
desenvolvimento neuromuscular durante o movimento, isso implica em orientação espacial,
tonificação da musculatura antigravitacional e regras de movimentação em um campo
gravitacional. Como os humanos nasceram e se desenvolveram sob a aceleração constante
dessa força, o sistema nervoso central, presumivelmente percebe a gravidade como um
parâmetro constante, por isso, para estudar a marcha hipogravidade estando na Terra a

35
comunidade cientifica depende do desenvolvimento de simuladores de marcha em
hipogravidade (como pode ser visto no tópico 3.6) esses dispositivos mostram como pode ser
o comportamento da fisiologia e biomecânica em um ambiente extraterrestre (Newman and
Alexander, 1993; Grambelli et al., 2016).
Em um ambiente com hipogravidade real, como a Lua (0,16 G), astronautas adotaram uma
forma de incomum de marcha chamada de looping, que nada mais é que um salto sem troca
de base como em uma marcha normal. Isso gera questionamentos como: Quais as mudanças
no padrão de marcha humana causadas pela redução na força gravitacional? (Grambelli et al.,
2016).
Pavei e colaboradores (2015), fizeram uma comparação entre o salto (skipping) e a corrida,
para isso, construíram um sistema de suspensão corporal para simulação de marcha em
hipogravidade e analisaram o gasto metabólico e a biomecânica da locomoção. O estudo
mostrou que o skipping em gravidade lunar é metabolicamente mais econômico que a corrida
em Terra, aproximando-se aos valores da caminhada em Terra. Outro estudo de Pavei e
Minetti (2015) também mostra que o skipping é metabolicamente caro em Terra, mas, esse
gasto é reduzido consideravelmente com a gravidade reduzida tanto em Marte quanto em Lua.
Corroborando com os estudos de 1992 feitos por Farley, et al (1992), que descobriram que
com uma redução de 75% houve uma redução do consumo de energia em 72% na corrida e
33% na caminhada.
3.5 PLATAFORMAS DE FORÇA
A plataforma de força é um dispositivo capaz de medir as forças aplicadas em sua
superfície durante qualquer tipo de apoio, permitindo a caracterização biomecânica de cada
força. Para isso, o dimensionamento, transdutores e método de aquisição de dados deve ser
desenvolvido de acordo com o tipo de análise (Oliveira, 2011; Urquiza, 2007). Essas
plataformas medem as três componentes das forças de reação do solo e cada um de seus
sensores é capaz de registrar a força aplicada nas direções médio-lateral (X), ântero-posterior
(Y) e vertical (Z) (Barela & Duarte, 2011).
O centro de pressão pode ser obtido a partir das componentes das forças de reação do solo
e das componentes do momento de força. Ele é o ponto de aplicação das forças verticais que
agem sobre a superfície do suporte e refere-se a uma medida de posição definida por duas
coordenadas na superfície da plataforma que são identificadas em relação à orientação do
indivíduo que se encontra sobre a plataforma (Barela, 2011).

36
A força aplicada na superfície é detectada pelos sensores e os sinais elétricos são
amplificados filtrados e armazenados em um microcontrolador. Para que a aquisição e
processamento de dados aconteçam, as informações adquiridas pela plataforma passam por
um condicionador de sinais, em seguida por um conversor A/D, até chegar ao computador.
3.5.1 CÉLULAS DE CARGA
Esse componente é um dos mais importantes transdutores, medindo deformações
ocasionadas por diversos tipos de forças. Sendo assim, podemos classifica-la como“um
transdutor que converte força mecânica em variações de resistência elétrica devido à
deformação de extensômetros colados em uma peça metálica (alumínio, aço liga ou aço
inoxidável), denominada corpo da célula de carga”. O corpo da célula de carga é inteiramente
solidário a deformação, transmitindo-a aos extensômetros que, por sua vez, medem a
intensidade dessa força. Os extensômetros baseiam-se na variação da resistência ôhmica de
seus sensores, e cada célula de carga, comumente, possui quatro extensômetros,
compreendendo a ponte completa de Wheatstone (Urquiza, 2005; Barela, 2011; Oliveira,
2011).
3.5.2 EXTENSÔMETROS
Um extensômetro, nada mais é que, um medidor de deformação axial e transversal através
de rosetas de 90°.Esses componentes de resistência elétrica, são pequenas grades formadas
por finas lâminas metálicas que são coladas a superfície de um corpo. Sua resistência varia
entre 120 ou 350 Ω e em usos especiais 500 e 1000 Ω. As cargas mecânicas aplicadas a ele
provocam deformações que são transmitidas a grade. A sensibilidade desses materiais leva a
mudança na resistência elétrica do extensômetros em função da carga induzida a ele (Dally et
al., 1991Urquiza, 2005; Fraga, 2013).
Seu princípio de operação é baseado na relação entre deformação mecânica e resistência
elétrica dos condutores, pois, um condutor tem sua resistência alterada quando sofre algum
tipo de tensão mecânica. A Equação 5, abaixo, representa a resistência elétrica R de um
condutor metálico homodêneo de comprimento L, área A e resistividade elétrica p, sendo
(Urquiza, 2005):
𝑹 =𝒑∗𝑳
𝑨 (5)
A variação da resistência elétrica ∆R, pela resistência elétrica do fio R, quando em função
dos parâmetros K (constante característica do extensômetro) e Ꜫ (deformação específica
37
(m/m) do fio), pode ser dada pela Equação 6, abaixo. Está sendo denominado de fio, o
condutor da grade de medida de extensômetro (Urquiza, 2005).
∆𝐑
𝑹= 𝐊Ꜫ (6)
Esses extensômetros sofrem variação de sua resistência elétrica, para isso, são conectados
em um circuito tipo ponte de Wheatstone para obtenção de saída desse sinal em desequilíbrio,
essa ponte de Wheatstone é um circuito essencial a operação de um transdutor extensométrico
(Urquiza, 2005).
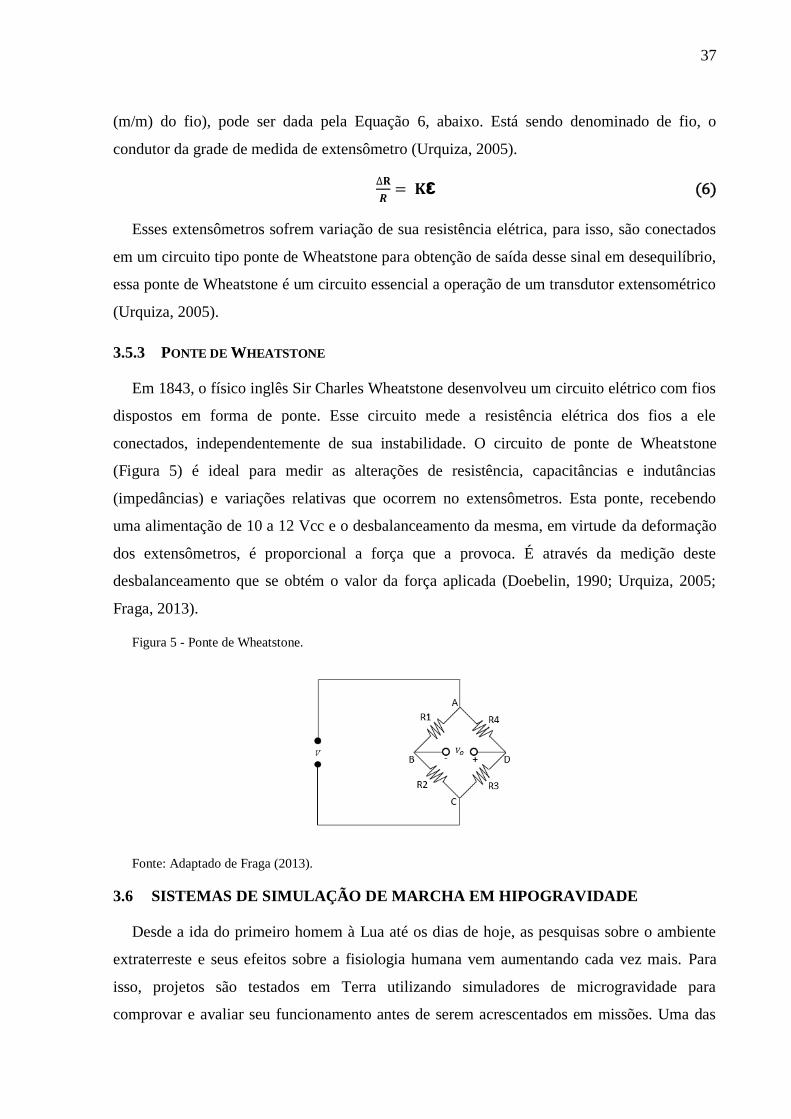
3.5.3 PONTE DE WHEATSTONE
Em 1843, o físico inglês Sir Charles Wheatstone desenvolveu um circuito elétrico com fios
dispostos em forma de ponte. Esse circuito mede a resistência elétrica dos fios a ele
conectados, independentemente de sua instabilidade. O circuito de ponte de Wheatstone
(Figura 5) é ideal para medir as alterações de resistência, capacitâncias e indutâncias
(impedâncias) e variações relativas que ocorrem no extensômetros. Esta ponte, recebendo
uma alimentação de 10 a 12 Vcc e o desbalanceamento da mesma, em virtude da deformação
dos extensômetros, é proporcional a força que a provoca. É através da medição deste
desbalanceamento que se obtém o valor da força aplicada (Doebelin, 1990; Urquiza, 2005;
Fraga, 2013).
Figura 5 - Ponte de Wheatstone.
Fonte: Adaptado de Fraga (2013).
3.6 SISTEMAS DE SIMULAÇÃO DE MARCHA EM HIPOGRAVIDADE
Desde a ida do primeiro homem à Lua até os dias de hoje, as pesquisas sobre o ambiente
extraterreste e seus efeitos sobre a fisiologia humana vem aumentando cada vez mais. Para
isso, projetos são testados em Terra utilizando simuladores de microgravidade para
comprovar e avaliar seu funcionamento antes de serem acrescentados em missões. Uma das

38
formas mais utilizadas para estudar o comportamento do corpo em ambientes hipogravidade é
a simulação da marcha nesse ambiente. Para isso, inúmeros protótipos foram desenvolvidos
tentando alcançar a simulação mais fidedigna possível, como é mostrado na figura 6.
Figura 6 - Sistemas de simulação de marcha. (a;b) Sistema Vertical descrito por Cavagna et al, 1972;
Donelan e Kram, 1997; Donelan e Kram, 2000. (c;d) Sistema de Suspensão Corporal (BWS) Lateral descrito por
Bogdanov, 1971; Genc, 2006. (e) Sistema de Suspensão Horizontal descrito por Perusek, 2007. (f) Sistema de
Deambulação Passiva para Simulação de Gravidade descrito por Lu et al, 2009; Lu et al, 2011; Ma e Wang,
2012.
Fonte: Adaptado de Sylos-Labini (2014).

39
Donelan e Kram (1997, 2000) desenvolveram um sistema de suspensão (Reduced Gravity
Simulator – RGS) que exerce uma força ascendente constante ao tronco do indivíduo, através
de uma sela construída, a partir de um assento de bicicleta anexado a um suporte de tubos de
plástico em forma de U. Para simular o peso em certo ambiente gravitacional, foi usado um
sistema de amortecimento por mola, cabos e roldanas. Três anos depois, esses autores
trocaram a sela por um cinto Harness. Os outros componentes do sistema eram uma esteira
ergométrica, plataforma de força, os fios de suspensão eram ligados a um carrinho que se
deslocava horizontalmente composto de uma polia de rolamento. O sistema faz uma
suspensão através de roldanas, cabos e molas, diferentemente de outros sistemas que usam
contrapesos para esse fim. Salisbury et al (2015) mostraram em seu estudo a percepção
subjetiva de dor e conforto dos 11 sujeitos de pesquisa em um sistema de suspensão vertical
por cintos, onde as médias para dor e conforto em Lua e Marte, respectivamente, foram
5,73±2,57 e 1,64±0,50 (marte) 7±2,28 e 1,55±0,68 (Lua).
O centro de pesquisa Glenn (NASA) e colaboradores realizaram o projeto “Exercise
Countermeasures Project” com o objetivo de desenvolver o enhanced Zero-Gravity
Locomotion Simulator (eZLS), que consiste em um sistema de suspensão para manter o
sujeito em decúbito dorsal; uma esteira vertical composta de uma mesa de mais ou menos 8
rolamentos de ar; uma interface para exibir dados de forças de reação vindos da plataforma de
força; e 4 molas isoladoras imitar a dinâmica em órbita. Esse dispositivo foi desenvolvido
para simular a marcha em hipogravidade ajudando na manutenção da saúde e segurança das
tripulações de astronautas e a próxima geração de exploradores espaciais. Ele permite também
o desenvolvimento e validação de dispositivos avançados de contramedidas e criar requisitos
e prescrições de exercícios para diminuir os efeitos fisiológicos prejudiciais do voo espacial
de longa duração. Os pesquisadores realizaram um teste de conforto para avaliar dois tipos de
cintos o US Harness e o CCF Prototype Harness, 6 sujeitos foram suspensos e deveriam
correr por 3 minutos com 50, 75 e 100% do peso corporal e através de uma escala analógica
visual onde o lado esquerdo continha a palavra “No Pain (Sem dor)” e o lado direito “ Worst
Imaginable Pain (Pior dor imaginável)” avaliando o nível de conforto nas categorias: pescoço,
quadril, ombros, costas, cintura e geral. Os resultados mostraram que o US Harness se
mostrou mais desconfortável para ombros, costas e pescoço, enquanto que o CCF Prototype
Harness mostrou-se desconfortável apenas para costas e quadris. Os autores concluem que
ainda precisam de mais testes para melhorar a questão do conforto durante a suspensão e os
testes (Perusek, 2007).

40
A imersão subaquática é uma técnica que também já foi utilizada para simulações de
marcha com diminuição do peso aparente, devido ao fenômeno do empuxo de Arquimedes.
Um underwater body for gait simulation (UGS) foi desenvolvido por um mestrando na
University of Maryland com o objetivo de simular a marcha com mudança de peso aparente
através do empuxo em diferentes ambientes gravitacionais. A composição do sistema se dá
por uma esteira ergométrica modificada para submersão, uma plataforma estacionaria para
fixar a esteira, um sistema de lastro para manter o sujeito na esteira, suprimento de ar. O
problema encontrado para simulação foram as forças de arrasto que, durante o exercício,
geram forças opostas ao movimento, mudando parâmetros fundamentais para análise
científica (Mirvis, 2011).
Em 2014, o Laboratório de Engenharia Aeroespacial do Centro de Microgravidade da
PUCRS desenvolveu uma Câmara de Pressão Positiva(CPP) para simulação da marcha em
ambientes de hipogravidade. Esse sistema é composto de um soprador; sensores de pressão,
umidade, temperatura; células de carga; válvulas de emergência; microcontrolador, circuito de
emergência; interface humana e coleta de dados; estrutura metálica; câmara principal em
PVC; esteira ergométrica; short de Neopreme. O objetivo do desenvolvimento da CPP é servir
de alternativa para diminuir o peso aparente do sujeito, através da pressão positiva, sobre um
sistema de exercícios físicos, gerando um ambiente de hipogravidade para estudos em
fisiologia aeroespacial. As limitações observadas no sistema se dão pelo fato de que, a forma
como o sujeito é suspenso causa grande pressão na virilha, podendo gerar alterações
fisiológicas ou biomecânicas durante o teste devido ao desconforto (Disiuta, 2014).
Com a finalidade de criar um sistema capaz de ajudar na reabilitação de atletas com lesões
em membros inferiores Jordan e Colaboradores (2017) criaram uma esteira vertical com um
sistema de simulação de marcha em posição horizontal (Figura 7). O sistema de suspensão é
composto por cabos presos aos membros inferiores e um banco com inclinação a 40° e 70° ea
esteira não é motorizada. O artigo não oferece informações mais claras sobre a parte
eletrônica do sistema e não informa também, se existe um sistema de mensuração de Forças
de Reação ao Solo (FRS). Um ponto interessante para questionar esse sistema seria se o apoio
dos membros superiores em um banco inclinável diminui o impacto pelas forças de reação ao
solo causadas pela marcha, por não deixar o corpo livre para dissociação normal de quadril
diminuindo a mobilidade da marcha? Para responder essa pergunta, seria interessante realizar
um teste comparativo entre a suspensão livre com colete e cabos e a suspensão com apoio em
banco fixo.

41
Figura 7 - Esteira vertical com apoio em banco inclinável, VertiRun.
Fonte: Adaptado de Jordan et al (2017).
A Tabela 1 apresenta um quadro comparativo dos sistemas desenvolvidos para simulação
da marcha em hipogravidade, incluindo características e limitações.
Tabela 1 - Tabela comparativa entre estudos com simuladores de marcha em ambientes de gravidade
reduzida.
Sistema
Posição da
esteira
ergométrica
Sistema de
suspensão Limitações
Coleta de forças
de reação
RGS
(1997,
2000)
Horizontal Roldanas e cinto
Harness
Desconforto e
dores causados
pela suspensão
Plataforma de força
eZLS
(2007) Vertical
Cabos e Colete –
Suspensão
Horizontal
Desconforto
causado pelo cinto
em ombros,
pescoço, quadril e
costas
Quadro de forças
de reação
UGS
(2011) Horizontal Empuxo Forças de arrasto (Não ficou claro)
CPP
(2014) Horizontal
Pressão Positiva e
Short – suspensão
vertical
Desconforto e
dores causados
pela suspensão
Células de Carga

42
Fonte: A Autora (2016).
3.6.1 SIMULADORES DE MARCHA EM HIPOGRAVIDADE NA REABILITAÇÃO
Para que seja possível simular marcha em hipogravidade estando em Terra, a comunidade
cientifica vem desenvolvendo sistemas de suspensão corporal que permitem a diminuição do
peso aparente. Essa suspensão corporal pode ser feita por meio de coletes, pressão positiva
(Disiuta, 2014), submersão total ou parcial em meio líquido (Mirvis, 2011), Suspensão
corporal vertical (Donelan e Kram, 1997 e 2000), Suspensão corporal horizontal (Perusek,
2007; Jordan, 2017) entre outros, podendo adotar posição vertical, horizontal ou inclinada,
juntamente com uma esteira ergométrica e tem como objetivo suspender o voluntário e
colocá-lo sobre a mesma.
Esses simuladores permitem não só a ampliação do conhecimento sobre a fisiologia e
biomecânica aeroespacial como também auxiliam no processo de reabilitação neuromuscular
de crianças e adultos com Paralisia Cerebral (PC) (Matsuno et al. 2010; Cernack et al, 2008),
pacientes que sofreram Acidente Vascular Cerebral (AVC) (Ortoboni et. al, 2002; Eng, J.J;
Tang, P. F, 2007; McCain, K.J et al., 2008), Lesão Medular (LM) (Dutra et al., 2013), pessoas
em reabilitação de traumas em membros inferiores (Jordan et al. 2017), entre outras
patologias que dificultem capacidade de executar a marcha.
Os benefícios de utilizar um sistema de suspensão corporal para simulação de marcha estão
no fato de que tais sistemas são capazes de reduzir o peso aparente. É o que mostra o estdo de
Finch e colaboradores (1999) onde gatos adultos com lesão medular completa submetidos a
estimulados a andar com treino locomotor com suporte de peso corporal (TLSP), conseguiram
dar passos com as patas traseiras em sete meses de treino locomotor. Mostrando que o
movimento continuo da esteira juntamente com a repetição das passadas podem ser os
responsáveis por estimular os circuitos neurais de controle locomotor ou gerador central de
padrões a nível medular (Finch et al, 1999; Dutra et al, 2013; Capaday, 2002).
Esse aprendizado motor é capaz de trazer melhoras biomecânicas nos membros inferiores
aumentando a amplitude de movimento, força e estabilidade para executar a marcha e
proporcionando um novo padrão de marcha principalmente por meio de plasticidade neural.
Ou seja, a repetição pode melhorar o output motor promovendo a ativação do sistema
Vertirun
(2017) Vertical
Banco inclinável e
Cabos nos membros
inferiores
Esteira não
motorizada. (Não ficou claro)
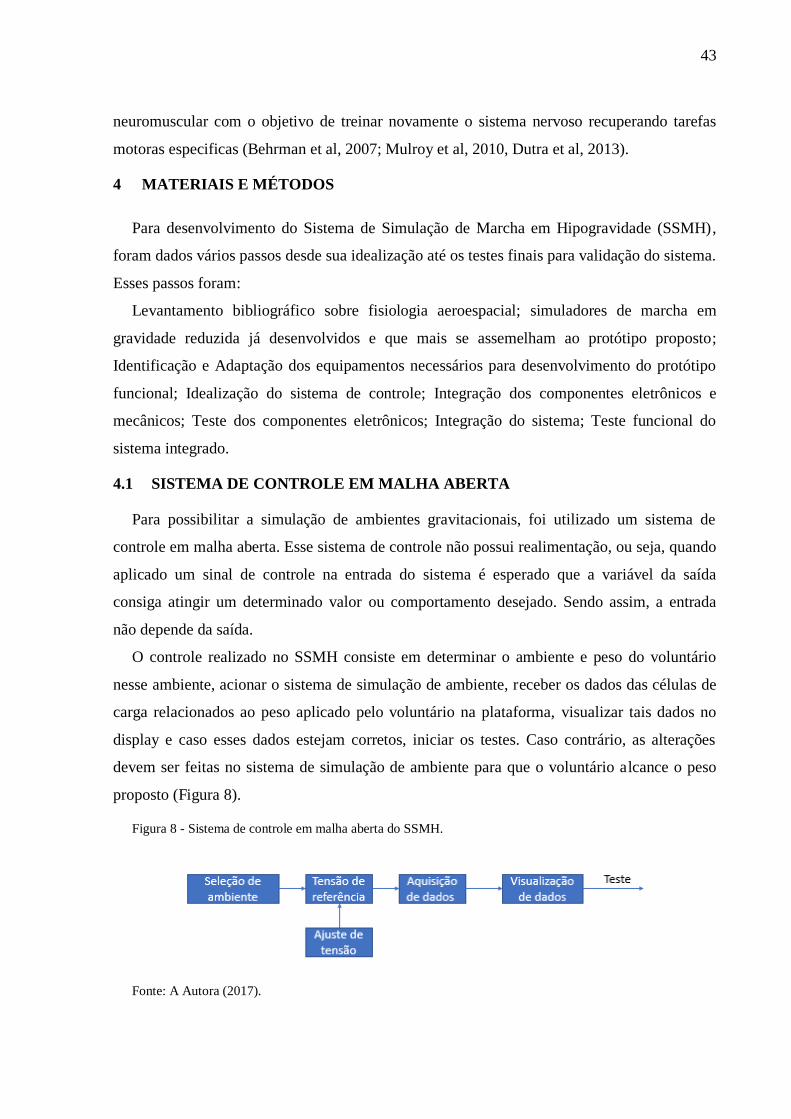
43
neuromuscular com o objetivo de treinar novamente o sistema nervoso recuperando tarefas
motoras especificas (Behrman et al, 2007; Mulroy et al, 2010, Dutra et al, 2013).
4 MATERIAIS E MÉTODOS
Para desenvolvimento do Sistema de Simulação de Marcha em Hipogravidade (SSMH),
foram dados vários passos desde sua idealização até os testes finais para validação do sistema.
Esses passos foram:
Levantamento bibliográfico sobre fisiologia aeroespacial; simuladores de marcha em
gravidade reduzida já desenvolvidos e que mais se assemelham ao protótipo proposto;
Identificação e Adaptação dos equipamentos necessários para desenvolvimento do protótipo
funcional; Idealização do sistema de controle; Integração dos componentes eletrônicos e
mecânicos; Teste dos componentes eletrônicos; Integração do sistema; Teste funcional do
sistema integrado.
4.1 SISTEMA DE CONTROLE EM MALHA ABERTA
Para possibilitar a simulação de ambientes gravitacionais, foi utilizado um sistema de
controle em malha aberta. Esse sistema de controle não possui realimentação, ou seja, quando
aplicado um sinal de controle na entrada do sistema é esperado que a variável da saída
consiga atingir um determinado valor ou comportamento desejado. Sendo assim, a entrada
não depende da saída.
O controle realizado no SSMH consiste em determinar o ambiente e peso do voluntário
nesse ambiente, acionar o sistema de simulação de ambiente, receber os dados das células de
carga relacionados ao peso aplicado pelo voluntário na plataforma, visualizar tais dados no
display e caso esses dados estejam corretos, iniciar os testes. Caso contrário, as alterações
devem ser feitas no sistema de simulação de ambiente para que o voluntário alcance o peso
proposto (Figura 8).
Figura 8 - Sistema de controle em malha aberta do SSMH.
Fonte: A Autora (2017).

44
4.2 IDENTIDFICAÇÃO E ADAPTAÇÃO DOS EQUIPAMENTOS
Nesse capítulo serão apresentados os subsistemas que compõem o Sistema de Simulação
de Marcha em hipogravidade.
4.2.1 A ESTRUTURA
A estrutura mecânica utilizada no presente estudo já era existente no Laboratório de
Engenharia Aeroespacial da PUCRS (Dalmarco, 2006), a qual consiste em uma estrutura
piramidal cuja base tem comprimento de 3000mm por largura 2260mm e a altura da estrutura
é de 2000mm e é feita em barras de aço de carbono de 60mm x 30mm e espessura de parede
de 1,5mm (Figura 9).
Figura 9 - Estrutura Piramidal desenvolvida para a simulação de ressuscitação cardíaca em microgravidade.
Fonte: Dalmarco (2006).
Para possibilitar o desenvolvimento do projeto, foi soldado um suporte vertical, de mesmo
material, para fixar a esteira ergométrica adequadamente, permitindo diversificar a utilização
nesta estrutura (Figura 10). Essa esteira poderá ser removida sempre que preciso, deixando
apenas o suporte o qual foi projetado de modo a não atrapalhar as coletas de dados do sistema
de simulação de massagem cardíaca em hipogravidade, por exemplo.

45
Figura 10 - Sistema de Simulação de Marcha em Hipogravidade (SSMH).
Fonte: A Autora (2017).
4.2.2 A SUSPENSÃO
Para permitir a suspensão horizontal do sujeito, foi criado um sub-sistema de suspensão
composto por um colete imobilizador KED (Kendrick Extrication Device), quatro pares de
fitas tubulares com dois metros de comprimento (cada), três pares de cordas elásticas de
12mm e dois metros de comprimento (cada) e seis suportes cabide de 70mm x 50mm.
O colete KED (Figura 11a) foi projetado para imobilizar toda a coluna utilizado
geralmente para vítimas de trauma que precisam ser imobilizadas. Possui alças de nylon e
revestimento interno de tacos de madeira maciça que garante firmeza e resistência do
equipamento, respeitando as curvaturas da coluna e servindo de apoio da cabeça até a cintura
pélvica. Este colete tem 82cm de comprimento por 82 cm de largura e é capaz de suportar até
120kg (Biotecmed, 2017; APH, 2017).
Figura 11 - (a) Colete de imobilização dorsal KED; (b) Fitas Tubulares.
Fonte: A Autora (2017).
Para garantir a suspensão, foram adaptadas quatros pares de fitas tubulares (utilizadas em
esportes de aventura como o rapel) com resistência de até 16 kN (Figura 11b) e dois metros de
comprimento (cada) que foram presas ao colete KED e aos suportes cabide. Para que isso
(a) (b)

46
fosse possível, quatro pares de mosquetões ovais e em aço carbono com acabamento
bicromatizado; trava de rosca; resistência longitudinal de 25kN e dimensões de 10,9 cm de
altura x 5,7 cm de largura (Figura 12), foram costurados no colete KED e fixados nos suportes
cabide.
Figura 12 -Mosquetão oval em aço carbono com resistência de 25kN.
Fonte: A Autora (2017).
Conectando pernas, coxas e braços, três pares de corda elástica de 12mm (Figura 13), com
capacidade de 2200kgf com dois metros de comprimento, cada, foram adaptadas a estrutura
ligando os membros citados aos suportes cabide.
Figura 13 - Cordas Elásticas de 12mm.
Fonte: A Autora (2017).
Seis suportes em formato de cabide (Figura 14), feitos em barras de aço de carbono de
70mm x 50mm e espessura de parede de 2,25mm,foram fixados na parte superior da estrutura
piramidal.

47
Figura 14 - Suportes cabide.
Fonte: A Autora (2017).
4.2.3 A SIMULAÇÃO
Para simulação de Terra, Marte e Lua, foram utilizados seis pares de cabos elásticos de
6mm, um dinamômetro e dois pares de mosquetões ovais em aço (dois ligados ao colete e
dois ligados a esteira). A balança de medição de força com capacidade de até 100kg, utilizada
neste projeto, pode ser considerada um tipo de dinamômetro. Um dinamômetro (Figura 15)
usa a deformação linear de uma mola para medir força, podendo ter valores expressos em
Newtons (N) ou quilograma-força (kgf) (Serway e Jewett, 2015).
Figura 15 - Dinamômetro ou Balança Dinamométrica.
Fonte: A Autora (2017).
Os cabos possuem cobertura em poliéster trançado com boa resistência a abrasão, alma em
borracha natural de multifilamentos. Foram utilizados 24 metros de cabo elástico de 6mm de
espessura (Figura 16), com capacidade de 650 kgf.

48
Figura 16 - Cabos Elásticos 6mm.
Fonte: A Autora (2017).
4.2.4 A ESTEIRA ERGOMÉTRICA
Para a simulação da marcha em ambiente de hipogravidade, foiadaptada uma esteira da
marca Polimet modelo EP-1600, motor de 1,6 hp (CC), tensão bivolt (127/220v), capacidade
de indivíduos de até 110 kg, velocidade de até 9 km/h, dimensões de 66cm de largura, 133 cm
de altura e 130cm de comprimento (Figura 17a). Essa esteira foi fixada na estrutura triangular,
em posição vertical através de um suporte soldado na estrutura piramidal (Figura 17b).
Figura 17 – a) Esteira Ergométrica; b) esteira fixada na estrutura.
Fonte: A Autora (2017).
4.2.5 A PLATAFORMA DE FORÇA
Uma plataforma de força, uni vetorial, foi utilizada para medir a força do impacto da
pisada durante a coleta de dados. Esse dispositivo tem a finalidade de coletar esses dados para
mostrar as forças de reação da pisada com o solo em diferentes ambientes. As dimensões
estimadas da plataforma de força a ser acoplada ao sistema deve ser de aproximadamente
95cm de comprimento por 33cm de largura, que corresponde a área da lona da esteira
ergométrica.
(a)
(b)
(a)
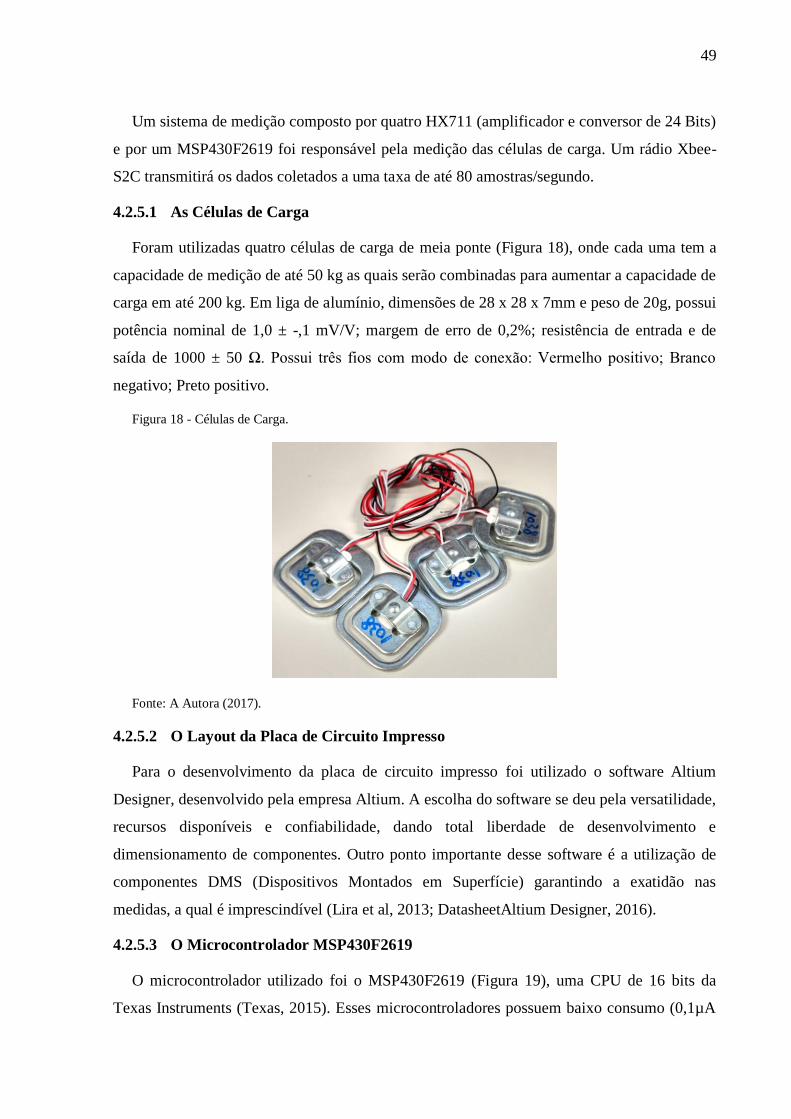
49
Um sistema de medição composto por quatro HX711 (amplificador e conversor de 24 Bits)
e por um MSP430F2619 foi responsável pela medição das células de carga. Um rádio Xbee-
S2C transmitirá os dados coletados a uma taxa de até 80 amostras/segundo.
4.2.5.1 As Células de Carga
Foram utilizadas quatro células de carga de meia ponte (Figura 18), onde cada uma tem a
capacidade de medição de até 50 kg as quais serão combinadas para aumentar a capacidade de
carga em até 200 kg. Em liga de alumínio, dimensões de 28 x 28 x 7mm e peso de 20g, possui
potência nominal de 1,0 ± -,1 mV/V; margem de erro de 0,2%; resistência de entrada e de
saída de 1000 ± 50 Ω. Possui três fios com modo de conexão: Vermelho positivo; Branco
negativo; Preto positivo.
Figura 18 - Células de Carga.
Fonte: A Autora (2017).
4.2.5.2 O Layout da Placa de Circuito Impresso
Para o desenvolvimento da placa de circuito impresso foi utilizado o software Altium
Designer, desenvolvido pela empresa Altium. A escolha do software se deu pela versatilidade,
recursos disponíveis e confiabilidade, dando total liberdade de desenvolvimento e
dimensionamento de componentes. Outro ponto importante desse software é a utilização de
componentes DMS (Dispositivos Montados em Superfície) garantindo a exatidão nas
medidas, a qual é imprescindível (Lira et al, 2013; DatasheetAltium Designer, 2016).
4.2.5.3 O Microcontrolador MSP430F2619
O microcontrolador utilizado foi o MSP430F2619 (Figura 19), uma CPU de 16 bits da
Texas Instruments (Texas, 2015). Esses microcontroladores possuem baixo consumo (0,1µA

50
para retenção de dados na RAM, 0,8 µA para funcionamento no modo de relógio de tempo
real e 250 µA/MIPS em funcionamento normal); Baixa tensão de operação (a partir de
1,8Volts até 3,6Volts); Conjunto de instruções ortogonais (disponibilidade de qualquer modo
de endereçamento para qualquer instrução); Arquitetura RISC (número reduzido de
instruções, 27 físicas e 24 emuladas); Grande quantidade de periféricos; Facilidade de
gravação e de depuração (interface Joint Test ActionGroup, ou JTAG, que permite ao
programador fazer a gravação e a depuração diretamente na placa); São disponíveis em
diversos tipos de encapsulamento (Pereira, 2005; Texas, 2015).
O MSP430 é uma poderosa ferramenta. “Sua arquitetura RISC combina um conjunto
reduzido de instruções com uma arquitetura de barramento clássica Von Neumann,
permitindo que a CPU possua um espaço único de endereçamento de memória”. O MSP430
possui um grande número de periféricos internos capazes, por exemplo, de realizar a leitura
de células de carga (conversores A/D de 12 bits) além de diversos tipos de portas de
comunicação, entre elas a USART, utilizada para se comunicar com o XBee (Pereira, 2005;
Texas, 2015).
Figura 19 - Microcontrolador MSP430F2619.
Fonte: Texas Instruments (2016).
4.2.5.4 O Módulo HX711
O módulo HX711 (Figura 20) foi projetado para ler e condicionar o sinal de duas células
de carga e digitalizar esses sinais em um único componente podendo ser utilizado em
aplicações como balanças, sensoriamento de peso e controle de processos industriais. Utiliza
como base o chip HX711 responsável por digitalizar os sinais de leitura dos extensômetros
para posteriormente serem processados. Os pontos relevantes para utilização desse
componente são: Conversor interno A/D de 24 bits; Tensão de referência interna; Seleção de
ganho dos amplificadores programáveis (GAP) entre 32, 64 e 128; Interface de comunicação
serial simples (similar a uma porta SPI); Oscilador incluso no próprio dispositivo; Baixo

51
consumo de energia, na faixa de 1,5 mA (em operação normal); Tensão de operação entre 2,6
– 5,5 Volts (Datasheet HX711, 2016).
Figura 20 - Módulo HX711.
Fonte: A Autora (2017).
4.2.5.5 O Módulo ZigBee
A tecnologia ZigBee designa um conjunto de especificações para a comunicação sem fio
entre dispositivos eletrônicos, com ênfase na baixa potência de operação, baixa taxa de
transmissão de dados e no baixo custo de implantação. Tal conjunto de especificações define
camadas do modelo OSI subsequentes àquelas estabelecidas pelo padrão IEEE 802.15.4. Esse
módulo ZigBee XBee S2C (Figura 21) possui características como: Alcance de até 100m em
ambiente fechado ou urbano; potência de transmissão 1mW; Baixo consumo de energia na
ordem de 10 µA em condições normais; Tensão de utilização 2,8 a 3,4 V; Comunicação serial
via USART; Módulo compacto e antena integrada; Simples configuração dos módulos e da
rede de comunicação dos mesmos; Topologia em estrela; Banda de frequência de operação
2,4 Ghz (Digi, 2016).

52
Figura 21 - Módulo ZigBee XBee S2C.
Fonte: A Autora (2017).
4.2.6 A COMUNICAÇÃO
Para maior mobilidade e praticidade, o sistema de comunicação é sem fio via
radiofrequência. Para recepção de dados do microcontrolador do sub-sistema de força foi
utilizado mais um módulo ZigBeeXBee S2C fabricado pela DigiInternational Inc. (Digi,
2016), um módulo microcontrolador MSP430F2274 fabricado pela Texas Instruments Inc.
(Texas, 2015), e um Display LCD 16x2 fabricado pela Xiamen Amotec Display CO., LTD
(Datasheet Display LCD, 2017) fixados em uma placa de circuito impresso desenhada com
Altium Designer (DatasheetAltium Designer, 2016). Essa PCI, possui ainda, uma entrada
USB fêmea mini para transferência de dados para o computador.
4.2.6.1 O Display LCD
Para visualização dos dados recebidos da plataforma de força, foi utilizado um Módulo
LCD No. ADM1602K-NSW-FBS/3.3V (Figura 22), com 16 caracteres e duas linhas; 4-bit ou
8-bit MPU interface; controlador ST7066 embutido; Modo de exibição e variações de luz
negra; Compatível com ROHS (Datasheet Display LCD, 2017).
Figura 22 - Display LCD.

53
Fonte:https://www.felipeflop.com.br/produto/display-lcd-16x2-backlight-azul/. Acessado em: 08 de ago.
2017.
4.2.6.2 O Microcontrolador MSP430F2274
Este microcontrolador é escravo do sistema de medição de carga e tem a finalidade de
indicar as leituras feitas nas células de carga (Figura 23). Possui características como: Baixa
tensão de operação 1,8V a 3,6V; Baixo consumo, modo ativo 270µA a 1 MHz 2,2V, modo
standby 0,7µA e modo off (retenção de RAM) 0,1µA; Arquitetura RISC 16-bit; Dois
amplificadores operacionais configuráveis; Módulo de emulação On-Chip; Memória flash de
32KB + 256B e 1KB RAM.
Figura 23 - Microcontrolador MSP430F2274.
Fonte: Texas Instruments (2016).
4.3 DESENVOLVIMENTO DE MATERIAIS E EQUIPAMENTOS
Este capítulo foi destinado para descrição do desenvolvimento dos materiais e
equipamentos componentes do Sistema de Simulação de Marcha em Hipogravidade (Figura
24).
Figura 24 - Diagramas de bloco do funcionamento do Sistema de Simulação de Marcha.
Fonte: A Autora (2017).
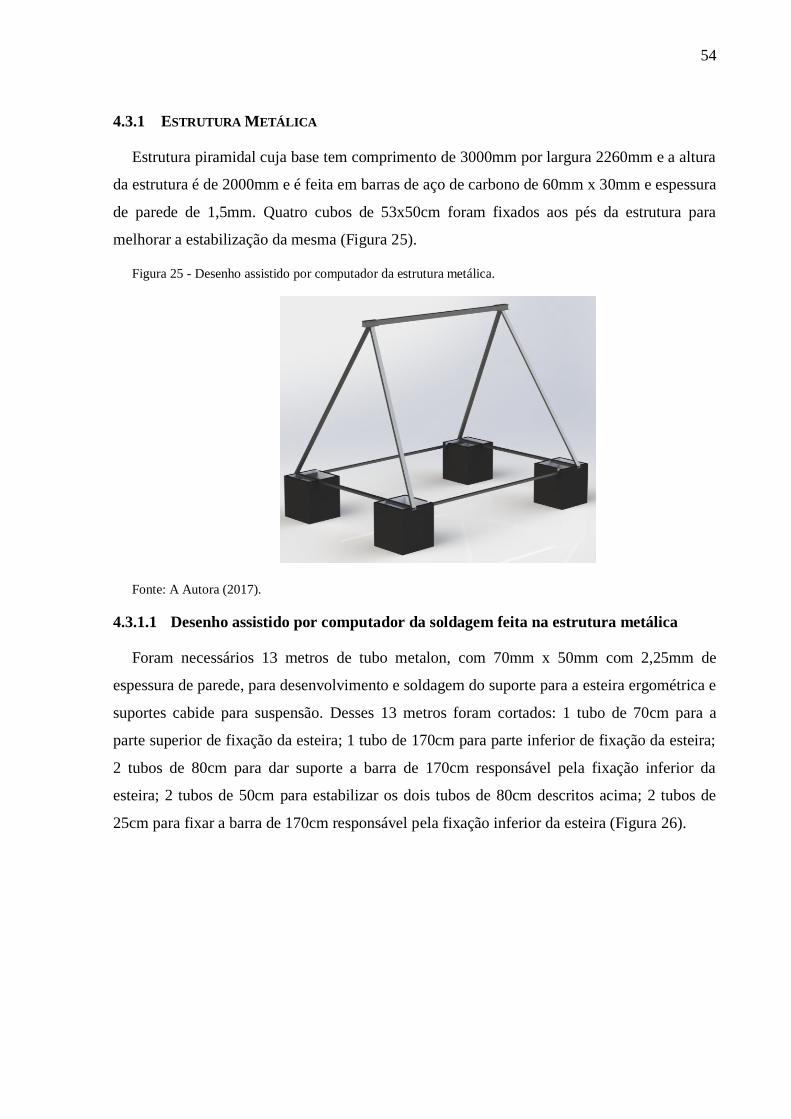
54
4.3.1 ESTRUTURA METÁLICA
Estrutura piramidal cuja base tem comprimento de 3000mm por largura 2260mm e a altura
da estrutura é de 2000mm e é feita em barras de aço de carbono de 60mm x 30mm e espessura
de parede de 1,5mm. Quatro cubos de 53x50cm foram fixados aos pés da estrutura para
melhorar a estabilização da mesma (Figura 25).
Figura 25 - Desenho assistido por computador da estrutura metálica.
Fonte: A Autora (2017).
4.3.1.1 Desenho assistido por computador da soldagem feita na estrutura metálica
Foram necessários 13 metros de tubo metalon, com 70mm x 50mm com 2,25mm de
espessura de parede, para desenvolvimento e soldagem do suporte para a esteira ergométrica e
suportes cabide para suspensão. Desses 13 metros foram cortados: 1 tubo de 70cm para a
parte superior de fixação da esteira; 1 tubo de 170cm para parte inferior de fixação da esteira;
2 tubos de 80cm para dar suporte a barra de 170cm responsável pela fixação inferior da
esteira; 2 tubos de 50cm para estabilizar os dois tubos de 80cm descritos acima; 2 tubos de
25cm para fixar a barra de 170cm responsável pela fixação inferior da esteira (Figura 26).
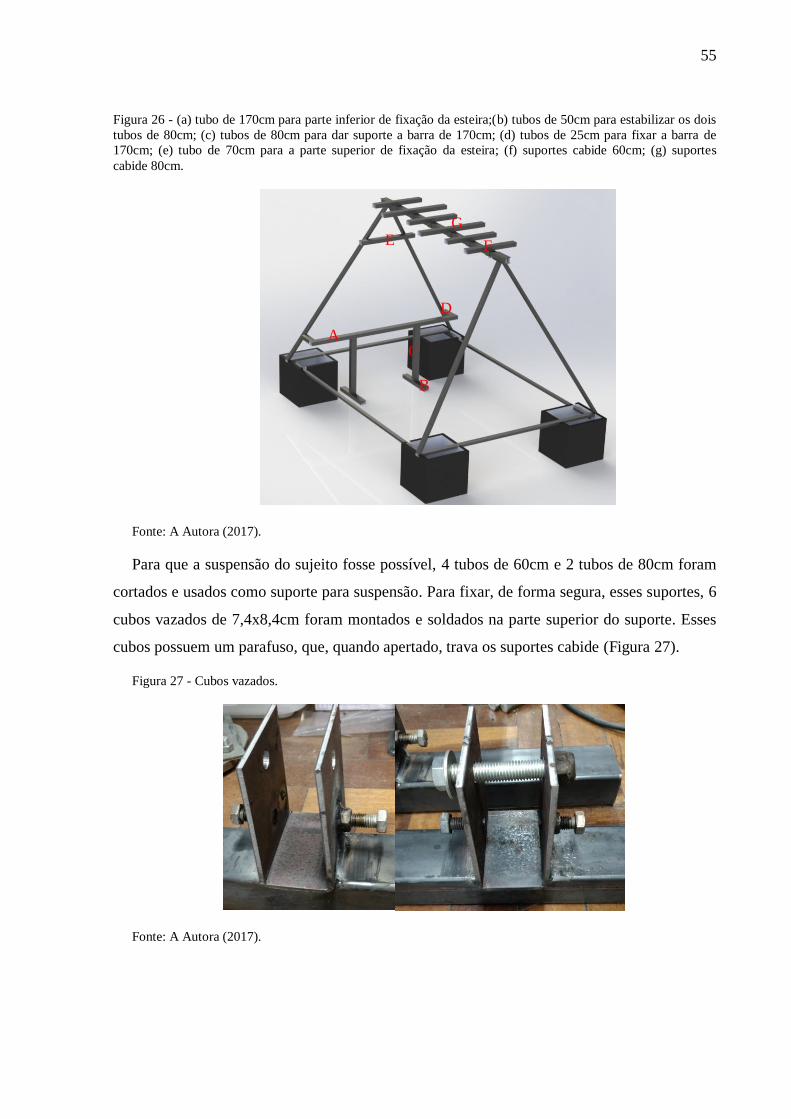
55
Figura 26 - (a) tubo de 170cm para parte inferior de fixação da esteira;(b) tubos de 50cm para estabilizar os dois
tubos de 80cm; (c) tubos de 80cm para dar suporte a barra de 170cm; (d) tubos de 25cm para fixar a barra de
170cm; (e) tubo de 70cm para a parte superior de fixação da esteira; (f) suportes cabide 60cm; (g) suportes
cabide 80cm.
Fonte: A Autora (2017).
Para que a suspensão do sujeito fosse possível, 4 tubos de 60cm e 2 tubos de 80cm foram
cortados e usados como suporte para suspensão. Para fixar, de forma segura, esses suportes, 6
cubos vazados de 7,4x8,4cm foram montados e soldados na parte superior do suporte. Esses
cubos possuem um parafuso, que, quando apertado, trava os suportes cabide (Figura 27).
Figura 27 - Cubos vazados.
Fonte: A Autora (2017).
A
B
C
D
E F
E
G
E

56
4.3.2 A SUSPENSÃO CORPORAL
Sete barras de aço carbono (4 barras de 60cm e 2 barras de 80cm) foram fixadas na parte
superior da estrutura piramidal, similar a uma espinha de peixe. Esses cintos serão atados no
colete. Cinco suportes estarão localizados na região do tórax (cabeça, ombros, braços e
cintura), um na altura da coxa e um na altura da perna (Figura 28).
Para dar maior mobilidade ao movimento de pernas e braços do voluntário, foram
colocadas fitas com velcro no bíceps, coxa e perna e, conectando os velcros aos suportes,
foram adaptados três pares de cordas elásticas de 12mm e dois metros de comprimento (cada).
O colete KED foi adaptado com ganchos para que os cintos liguem sujeito e estrutura. Esse
colete é independente da estrutura e o sujeito terá que vesti-lo antes de começar o teste.
Figura 28 - Localização dos suportes em relação ao corpo humano e em relação ao colete KED.
Fonte: A Autora (2017).
4.3.2.1 Peso suportado pela estrutura
Levando em consideração os pesos suportados por cada material utilizado tanto na
suspensão quanto na estrutura (Tabela 2), é possível definir uma carga máxima levando em
consideração o peso suportado por todos os componentes. O componente que suporta
menores cargas é a esteira ergométrica (110kg). Afim de não colocar nenhum equipamento
em situação de carga máxima e consequentemente manter a segurança de todo o sistema e dos
voluntários, a carga máxima que será colocada no SSMH será de 100kg.

57
Tabela 2 - Descrição de cargas suportadas por cada material presente no SSMH.
MATERIAL PESO SUPORTADO
Células de Carga 50kg cada (200kg total)
Colete KED 120kg
Esteira Ergométrica 110kg
Mosquetão Oval 25kN cada
Fitas Tubulares 16kN
Cordas elásticas (12mm) 2200kgf
Cordas elásticas (6mm) 650kgf
Fonte: A Autora (2017).
4.3.2.2 Simulação de ambiente gravitacional
O sistema de simulação de marcha em hipogravidade tem como uma das finalidades,
simular Lua, Marte e Terra. Para isso, vinte e quatros metros de cabo elástico de 6mm foram
utilizados para simular os diversos ambientes. Esses cabos foram cortados em seis pares de
dois metros (cada). O uso dos cabos varia de acordo com o peso do sujeito e o ambiente a ser
simulado, ou seja, quanto maior o peso a ser simulado, maior a quantidade de cabos fixados
entre esteira e sujeito.
Os cabos foram presos ao colete KED por meio de mosquetões, a outra ponta dos cabos
foram unidas e presas a um único mosquetão, e esse, preso ao dinamômetro localizado atrás
da esteira, os cabos foram tensionados ou afrouxados de acordo com o ambiente proposto e o
peso apresentado pelo dinamômetro. O dinamômetro serve para garantir que a força peso
dada pela plataforma de força é o mais próximo possível do esperado. É importante ressaltar
que, após a calibração da plataforma de força (que deverá ser feita antes do início de cada
coleta), o dinamômetro pode ser retirado não tendo a necessidade de permanecer conectado
aos cabos durante as coletas.
O sistema de controle para simulação de ambiente será em malha aberta onde o sinal de
entrada é independente do sinal de saída. Espera-se que o sinal de saída apresente os valores
desejados sem que seja preciso utilizar esses valores para modificar a entrada.

58
4.3.3 PREPARAÇÃO DAS CÉLULAS DE CARGA
Antes da instrumentação da plataforma de força, foi necessário preparar a célula de carga
(Figura 29) para que ela pudesse ser fixada entre o tubo metalon e o solo da esteira. Essa
fixação foi precisa para que a célula de carga ficasse próxima o suficiente da esteira afim de
captar as forças de reação da pisada.
Figura 29 - Fixação da célula de carga em uma placa de MDF com fitas metálicas.
Fonte: A Autora (2017).
Para fixar a esteira na estrutura, foram colocados quatro parafusos próximos a cada pé da
esteira. Esses parafusos permitem criar um espaço entre o tubo metalon e o solo da esteira
para que as células de carga sejam posicionadas. Como esses dispositivos possuem apenas
7mm de espessura, foram coladas a uma placa de MDF de 1 cm de espessura (Figura 30) e
colocadas entre esteira e estrutura com uma fita dupla face.
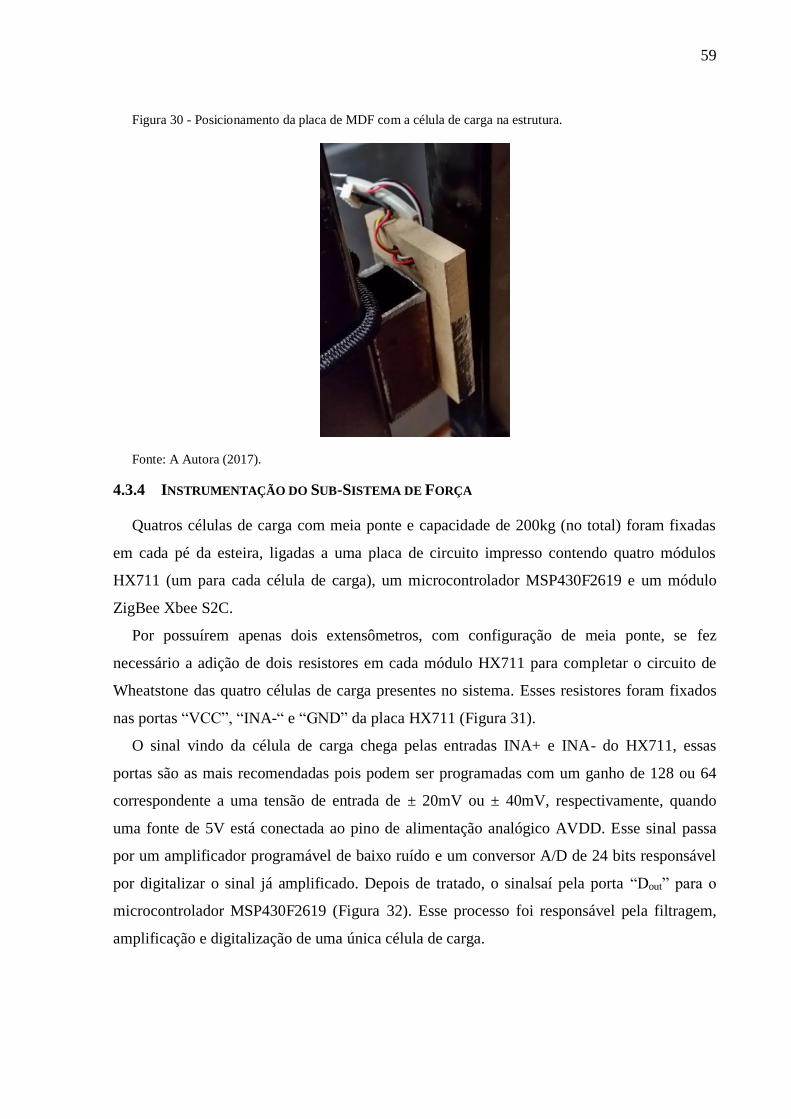
59
Figura 30 - Posicionamento da placa de MDF com a célula de carga na estrutura.
Fonte: A Autora (2017).
4.3.4 INSTRUMENTAÇÃO DO SUB-SISTEMA DE FORÇA
Quatros células de carga com meia ponte e capacidade de 200kg (no total) foram fixadas
em cada pé da esteira, ligadas a uma placa de circuito impresso contendo quatro módulos
HX711 (um para cada célula de carga), um microcontrolador MSP430F2619 e um módulo
ZigBee Xbee S2C.
Por possuírem apenas dois extensômetros, com configuração de meia ponte, se fez
necessário a adição de dois resistores em cada módulo HX711 para completar o circuito de
Wheatstone das quatro células de carga presentes no sistema. Esses resistores foram fixados
nas portas “VCC”, “INA-“ e “GND” da placa HX711 (Figura 31).
O sinal vindo da célula de carga chega pelas entradas INA+ e INA- do HX711, essas
portas são as mais recomendadas pois podem ser programadas com um ganho de 128 ou 64
correspondente a uma tensão de entrada de ± 20mV ou ± 40mV, respectivamente, quando
uma fonte de 5V está conectada ao pino de alimentação analógico AVDD. Esse sinal passa
por um amplificador programável de baixo ruído e um conversor A/D de 24 bits responsável
por digitalizar o sinal já amplificado. Depois de tratado, o sinalsaí pela porta “Dout” para o
microcontrolador MSP430F2619 (Figura 32). Esse processo foi responsável pela filtragem,
amplificação e digitalização de uma única célula de carga.
(a) (b)

60
Figura 31 - Diagrama de Blocos da integração da célula de carga com o HX711.
Fonte: Datasheet HX711 (2016).
O sinal digitalizado chega ao MSP430F2619 pelas entradas P1.5, P4.4, P5.5 e P5.6, uma
entrada para cada HX711. O clock de cada HX711 foi colocado no mesmo pino P5.4 para que
fossem sincronizados. O MSP430 realiza a leitura do sinal digitalizado e amplificado vindo
do modulo HX711 integrando os quatro sinais. Em seguida, transfere os dados através de
comunicação cruzada até o ZigBee pelas portas de comunicação USART, ou seja, o MSP430
e o Modulo ZigBee comunicam-se pelas portas P3.7, P3.6 (MSP430) e Rx, Tx (ZigBee). Esse
sistema foi alimentado por uma fonte de 5V de tensão. A comunicação e todo a
instrumentação da plataforma de força pode ser vista na Figura 30.
Figura 32- Esquema elétrico da instrumentação da plataforma de força.
Fonte: A Autora (2017).

61
Para fins de calibração das células de carga e equilíbrio da Ponte de Wheatstone, foi
montado um circuito em protoboard onde as quatro células de carga foram instrumentadas,
mas sua calibração foi feita de forma individual. Para ajuste do potenciômetro e equilíbrio das
células de carga, foi utilizado um multímetro da marca FLUKE modelo 117 com medida de
tensão em mV. A calibração foi realizada através do ajuste do ganho de saída, onde foram
adicionadas cargas conhecidas. Foram utilizadas anilhas de ferro com massa de 6,2kg,
medidas por uma balança doméstica da marca Geom B530. Essa massa, gerou um sinal de
saída, medido pelo multímetro, com valor de 62mV, ou seja, 100g/mV.
Após a calibração, os componentes foram instrumentados na placa de circuito impresso
usinada pela prototipadora CNC para circuito impresso modelo LPKF ProtoMAt S103 do
Laboratório de Ensino e Pesquisa da PUCRS. Uma placa contendo os quatro módulos
HX711, o microcontrolador e o módulo ZigBee, foram o suficiente para receber o sinal das
quatro células de carga (Figura 33).
Figura 33 - PCI da plataforma de força instrumentada.
Fonte: A Autora (2017).
4.3.5 INSTRUMENTAÇÃO DO SUB-SISTEMA DE COMUNICAÇÃO
O sub-sistema de comunicação é composto por um módulo ZigBee S2C, o qual se
comunica com o módulo ZigBee S2C da placa presente na plataforma de força via
radiofrequência. Ao chegarem no módulo ZigBee, esses dados são transferidos ao
MSP430F2274 através das portas USART de comunicação cruzada, ou seja, o MSP430 e o
Modulo ZigBee comunicam-se pelas portas P3.5, P3.4 (MSP430) e Rx, Tx (ZigBee) (Figura
34).
Recebido os dados, por ser um microcontrolador escravo do sistema de medição de carga,
o MSP430F2274 tem a finalidade de indicar as leituras feitas nas células de carga. O display
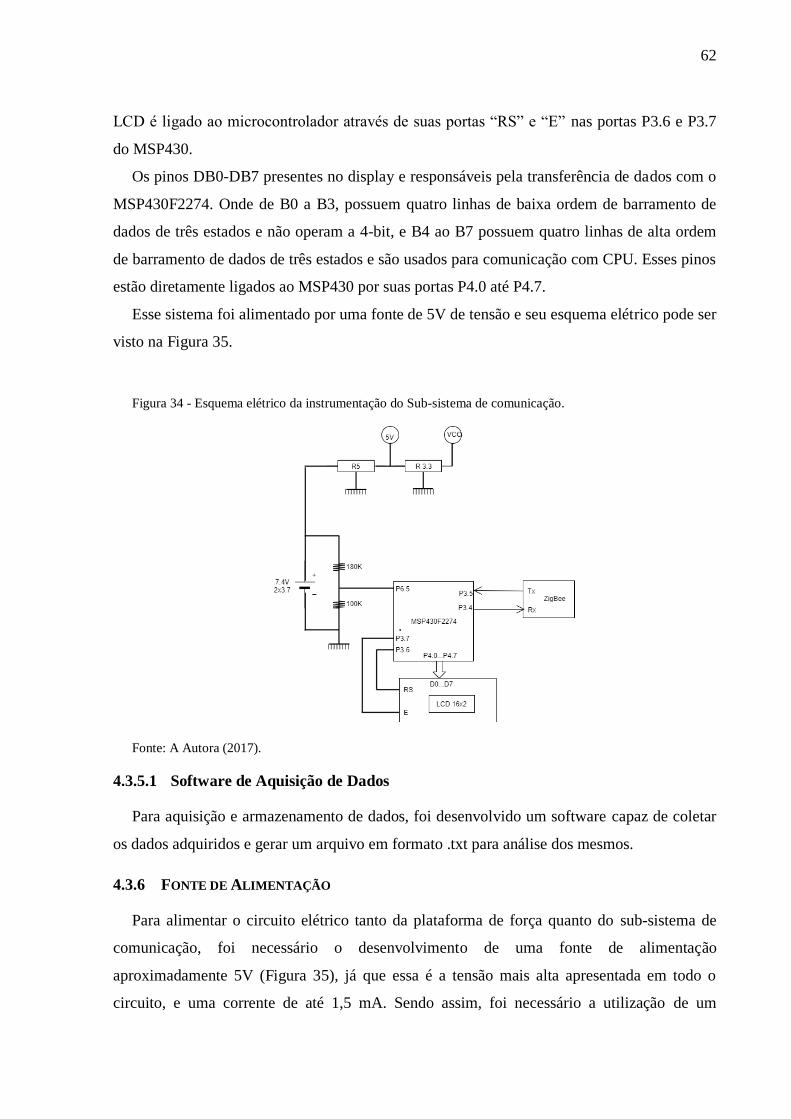
62
LCD é ligado ao microcontrolador através de suas portas “RS” e “E” nas portas P3.6 e P3.7
do MSP430.
Os pinos DB0-DB7 presentes no display e responsáveis pela transferência de dados com o
MSP430F2274. Onde de B0 a B3, possuem quatro linhas de baixa ordem de barramento de
dados de três estados e não operam a 4-bit, e B4 ao B7 possuem quatro linhas de alta ordem
de barramento de dados de três estados e são usados para comunicação com CPU. Esses pinos
estão diretamente ligados ao MSP430 por suas portas P4.0 até P4.7.
Esse sistema foi alimentado por uma fonte de 5V de tensão e seu esquema elétrico pode ser
visto na Figura 35.
Figura 34 - Esquema elétrico da instrumentação do Sub-sistema de comunicação.
Fonte: A Autora (2017).
4.3.5.1 Software de Aquisição de Dados
Para aquisição e armazenamento de dados, foi desenvolvido um software capaz de coletar
os dados adquiridos e gerar um arquivo em formato .txt para análise dos mesmos.
4.3.6 FONTE DE ALIMENTAÇÃO
Para alimentar o circuito elétrico tanto da plataforma de força quanto do sub-sistema de
comunicação, foi necessário o desenvolvimento de uma fonte de alimentação
aproximadamente 5V (Figura 35), já que essa é a tensão mais alta apresentada em todo o
circuito, e uma corrente de até 1,5 mA. Sendo assim, foi necessário a utilização de um

63
conversor chaveado CC-CC PT78ST105 conectado a fonte de 24 V, responsável por gerar a
saída de 5V. Essa saída de tensão foi ideal para alimentar o display LCD com corrente de mA
ideal para consumo, o HX711 com 1,5mA de corrente ideal para consumo. Para gerar uma
saída de 3,3, foi utilizado um CC-CC PT78ST133 também conectado a fonte de 24 V. Essa
saída de tensão serviu para alimentar o ZigBee com corrente de 10 µA ideal para consumo e o
MSP430F2619 e o MSP430F2274 250 µA de corrente ideal para consumo.
Figura 35 - Fonte de alimentação.
Fonte: A Autora (2017).
4.3.7 CIRCUITO DE EMERGÊNCIA
Para garantir a segurança do participante, em relação ao sistema de suspensão corporal,
durante as pesquisas, em caso de qualquer emergência, um botão de parada estará posicionado
ao alcance do voluntário e que, quando acionado, têm a finalidade de para o movimento da
esteira, desabilitando seu comando. O botão utilizado para esse fim é um botão da marca
SCHMERSAL E2-40/03 opaco em policarbonato/poliamida com 30% de fibra de vidro, com
vida mecânica de 5x104 operações, com acoplamento RMF-02 e bloco de contato CLP em
termoplástico, vida mecânica de 5x104 operações, com conector tipo parafuso e ambos
resistentes ao choque e a vibração (Schmersal E2-40/03, 2017).
4.4 O VOLUNTÁRIO E A RELIZAÇÃO DOS TESTES
Para validação do SSMH como um todo, será necessário a realização de testes com
humanos para avaliação de comunicação entre CPU da plataforma de força e CPU de
recebimento de dados tentando minimizar ao máximo os erros e melhorar a eletrônica do

64
sistema; desconforto gerado pelo sistema de suspensão para que os testes não sejam
comprometidos caso algum voluntário venha a desistir por dor ou desconforto; segurança
geral, avaliando tanto a parte mecânica quanto elétrica para que a saúde e integridade física de
voluntários e pesquisadores não seja comprometida durante as pesquisas e também, para
tentar
4.4.1.1 Posicionamento e segurança do voluntário durante os testes
Uma maca de 89cm de altura por 198cm de comprimento e 60cm de largura será
posicionada na direção dos suportes cabide para que o voluntário deite e as fitas e cordas
sejam fixadas ao colete KED e as faixas localizadas no bíceps, coxa medial e perna. A altura
da maca é a mesma altura que o voluntário permanecerá em suspensão. Após a fixação das
fitas a maca será retirada e um colchão inflável de casal da marca Bestway com o peso
máximo suportado de 295kg e com medidas de 0,22m de altura, 1,37m de largura e 1,91m de
profundidade, será colocado no chão, abaixo do voluntário para que, em casos de falha na
suspensão e eventuais quedas, o colchão amorteça o impacto com o chão e, pelo largura e
profundidade, tente evitar que o voluntário bata alguma parte do corpo no chão.
Alguns materiais para o desenvolvimento do SSMH foram escolhidos por serem utilizados
em situações que exigem segurança e precisão. Como por exemplo, esportes de aventura
como rapel, bungee jump, etc (fitas tubulares, mosquetões ovais e cordas elásticas), com
grande capacidade de sustentar peso (25kN) e impactos, e resgate de vítimas de trauma que
precisam ser imobilizadas e carregadas até um veículo ou local para atendimento (Colete
KED).
4.4.1.2 Conforto durante os testes
Para avaliar o conforto do sistema de suspensão durante os testes será utilizada a Escala
Analógica Visual ou Visual Analog Scale (VAS) para mensurar dor e conforto que podem ser
geradas pelo colete durante os testes assim como feito no estudo de Perusek (2007), onde os
autores avaliaram o conforto dos cintos e de todo sistema de suspensão nas regiões dos
ombros, pescoço, quadril, lombar, pernas e braços utilizando uma escala analógica visual
(como citado no item 3.6 dessa dissertação).
Bijur e colaboradores (2001) fizeram um estudo onde avaliavam a confiabilidade do VAS
mostrando que o mesmo é altamente confiável para medição de dor aguda. Sendo assim, o
VAS será utilizado para mensurar dor e conforto na região dos ombros, pescoço, quadril,
lombar, pernas e braços após o teste em cada ambiente para que seja possível analisar tanto o

65
conforto do colete e do sistema de suspensão, quanto o conforto em relação a cada ambiente
simulado. Essa escala consiste em uma linha horizontal onde o lado esquerdo contém a
palavra “No Pain (Sem dor)” e o lado direito “ Worst Imaginable Pain (Pior dor imaginável)”
e os vountários devem apontar onde encontram-se no momento.
4.5 INTEGRAÇÃO E VERSÃO FINAL DO SISTEMA
Com a integração de todo o sistema é possível obter o peso aparente do voluntário em
Terra, Marte e Lua. Para isso, são necessários alguns passos desde a chegada do voluntário ao
laboratório até o fim do experimento. Serão necessários, pelo menos, dois pesquisadores, um
para operar o sistema eletrônico e um para operar o sistema mecânico e ajudar o voluntário.
Os passos são:
• Após assinar o Termo de Consentimento, o voluntário é medido e pesado e veste o colete
KED e deita na maca que estará localizada abaixo da suspensão. O pesquisador prende os
mosquetões com fitas vermelhas ao colete KED e as cordas elásticas, também com
mosquetões, as faixas localizadas nas pernas, coxas e braços. Após esse passo, o pesquisador
verifica todos as fitas e cordas para garantir que todas estejam presas e niveladas;
• Com o voluntário suspenso, o pesquisador responsável por operar o sistema eletrônico
seleciona-se o ambiente inicial;
• O pesquisador responsável pelo sistema mecânico tensiona os cabos utilizando o
dinamômetro como guia para calibração da plataforma de força. Ao tensionar o cabo, o
voluntário é pressionado levemente junto da esteira, essa pressão é captada pelas células de
carga, que enviam um sinal para o sistema eletrônico repensável por processar esses dados. O
pesquisador visualiza esses dados e, caso não sejam os valores esperados, muda a tensão dos
mesmos até que os valores ideais para cada ambiente sejam alcançados pela plataforma de
força. Após isso, o dinamômetro é retirado e os cabos permanecem presos a esteira;
• Ao alcançar tal ambiente, o teste pode ser iniciado.
• Em caso de problemas com o voluntário ou o sistema como um todo, um botão de
emergência poderá ser pressionado causando o desligamento da esteira e o teste é
interrompido.
4.6 ORÇAMENTO FINAL DO SSMH
Um dos objetivos dessa dissertação foi desenvolver um protótipo funcional com materiais
de baixo custo, para isso, a Tabela 3 apresenta os valores de cada componente e ao fim, o
valor total que foi destinado ao projeto.

66
Tabela 3 - Descrição e valores dos materiais utilizados no SSMH.
MATERIAL FORNECEDOR QUANTIDADE VALOR
UNIDADE
VALOR
TOTAL
Esteira ergométrica Life
Zone 1660 dobrável e
bivolt
Loja virtual shoptime 1 unidade R$ 849,99 R$ 849,99
Células de Carga 50kg Loja virtual Eletrogate 4 unidades R$ 18,90 R$ 75,60
Módulo A/D 24 bits
HX711
Loja virtual Auto Core
Robótica 4 unidades R$ 18,90 R$ 75,60
Módulo Digi XBee
802.15.4 – Antena Wire –
Low Power
Loja virtual XBee
Store 2 unidades R$ 151,47 R$ 302,94
Fita Tubular 25kN Loja virtual Alpimonte 16 metros R$ 6,90
(metro) R$ 110,40
Corda elástica 12mm Loja virtual Casa das
Cordas 12 metros
R$ 5,50
(metro) R$ 66,00
Cabo elástico 6mm Loja virtual Armazém
Naval 24 metros
R$ 6,00
(metro) R$ 144,00
KED imobilizador dorsal
adulto
Loja virtual
Biotecmed 1 unidade R$ 179,90 R$ 179,90
Dinamômetro 100kg Loja virtual Agroline 1 unidade R$ 35,00 R$ 35,00
Tubos Metalon 70x50mm Loja virtual Tubonasa 3 unidades (6
metros cada) R$ 138,00 R$ 414,00
TOTAL R$ 2253,45
Fonte: A Autora (2017).
Com a finalidade de comparar os preços de outros sistemas de simulação de marcha em
esteira ou piso fixo com suspensão corporal para diminuição do peso corporal, foi realizada
uma pesquisa online utilizando os termos: Unweighing System; Suporte de peso corporal para
treino de marcha; Underwater treadmill systems; Simuladores de marcha com suporte de peso
corporal. Com isso, foram selecionadas cinco marcas que possuíam sistema de suspensão
corporal voltados para fitness e reabilitação.

67
Tabela 4 - Comparação de valores de alguns sistemas de suspensão corporal que estão no mercado.
MARCA CARACTERÍSTICAS VALORES
Biodex Suporte para suspensão corporal; controle
para elevação elétrica; Harness; leitor digital;
ajustável para adultos e crianças; treinamento
para o terapeuta; 1 ano de garantia; Sem
esteira.
USD 24700,00
Physiogate Suporte para suspensão corporal; Harness;
Display com informações de peso corporal e
descarga de peso em cada membro; Sem
esteira.
USD 9999,00
Glidecicle Suspensão por cintos e com uma espécie de
banco; suporte com rodas.
USD 1649,00
AquaCiserIII Esteira; Tanque para água com todo aparato
necessário para o funcionamento do mesmo;
painel Touch Screen; Variações de programa
na esteira; Usado para fitness e reabilitação;
Instalação; 1 ano de garantia.
USD 106326,00
Usilever Suporte para suspensão corporal; controle
para elevação elétrica; Harness; Sem Esteira;
1 ano de garantia.
R$ 7200,00
Fonte: A Autora (2017).
Como pode ser visto na Tabela 4, de oito marcas pesquisadas apenas cinco delas possuíam
informações sobre valores. Dessas cinco marcas, apenas a AquaCiserIII possui todo sistema
completo e já vem com a esteira ergométrica adaptada para água. As marcas Usilever, Biodex
e Physiogate possuem apenas o suporte para suspensão, Harness, elevação eletrônica e leito
digital, mas, não vem acompanhadas de esteira ergométrica. E por fim, a Glidecicle que é
apenas um suporte para suspensão corporal com rodas, banco e guidão imitando uma
bicicleta.
O SSMH apesar de simples, desempenha as funções básicas como suspensão, simulação de
marcha em diferentes ambientes, plataforma de força e leitura digital das células de carga, e é
composto por uma esteira ergométrica, um colete KED, uma plataforma de força, um leitor
digital de cargas, conjunto de cabos e cintos para suspensão e simulação de ambiente. Os

68
materiais utilizados nesse projeto foram escolhidos de acordo com o melhor custo benefício.
E, é possível aprimorar ainda mais o sistema sem aumentar absurdamente o orçamento final.
5 RESULTADOS E DISCUSSÕES
Esta seção apresenta os testes realizados para fazer a coleta de resultados e as discussões
das análises descritas nessa dissertação.
5.1 TESTE DE MATERIAIS E EQUIPAMENTOS
Para validação do Sistema de Simulação de Marcha em Hipogravidade, foi necessária a
realização de teste funcionais nos componentes eletrônicos e em estruturas de grande
importância para o sistema. A plataforma de força foi testada juntamente com o sub-sistema
de comunicação e simulação e, a estrutura foi testada juntamente com a suspensão corporal. A
frequência de amostragem da plataforma de força variou de 0 a 80 amostras por segundo,
podendo estar mais alta ou mais baixa dependendo do teste realizado. O objetivo dessa
oscilação foi para testar o sub-sistema de aquisição de dados que está interligado
funcionalmente com o sub-sistema de comunicação e armazenamento de dados.
5.1.1 A ESTRUTURA, SUSPENSÃO CORPORAL
Para testar a suspensão corporal e seus componentes, foi utilizado um manequim de
simulação de massagem cardíaca de aproximadamente 15kg. Esse manequim foi vestido com
o colete KED (Figura 36a) e preso a estrutura (Figura 36b). Após estar preso a estrutura, um
nível com ampola foi colocado em cima de seu tronco para que fosse possível ajustar todas as
cordas na mesma altura
Figura 36 - (a) Manequim simulador massagem cardíaca vestido com colete de imobilização dorsal KED; (b)
Manequim preso a estrutura.
Fonte: A Autora 2017.
(b) (a)

69
5.1.2 CALIBRAÇÃO
O processo de calibração foi realizado com a utilização de uma balança doméstica. Esta
balança foi colocada sobre a plataforma e aplicou-se uma carga conhecida. Com a indicação
feita no display da balança corrigiu-se o valor indicado na plataforma de força. Uma vez feito
isto, fez a tara da plataforma de força. O sinal mostrado na figura mostra o valor inicial sem
carga. Os dois pequenos picos são a aplicação de dois pequenos toques necessários para
acordar a balança. Segue então a aplicação de uma carga de 23kg a qual pode ser lida no
gráfico. Ao final a carga é eliminada e a plataforma de força volta para a indicação de 0kg
(Figura 37).
Figura 37 -- (a) Balança doméstica marca Geom apoiada na esteira e recebendo compressão; (b) Gráfico da
calibração da plataforma de força da SSMH.
Fonte: A Autora (2017).
5.1.3 A PLATAFORMA DE FORÇA E O SUB-SISTEMA DE COMUNICAÇÃO
Para validação dos componentes eletrônicos do sub-sistema de força foi utilizada uma
técnica de simulação de forças aplicadas sobre a superfície da esteira com o uso de um saco
de boxe de aproximadamente 72kg. Para prender o saco, foram utilizados os cabos e ganchos
do sub-sistema de simulação. O saco foi pressionado contra a plataforma e mantido ali por
118s, obtendo 100 amostras a uma frequência de 1,2s. Esse teste foi chamado de “pressão
continua”.
0
5
10
15
20
25
1 8
15
22
29
36
43
50
57
64
71
78
85
92
99
Calibração
Pes
o(k
g)
Amostras (n)
b)
a)
a)

70
Fonte: A Autora (2017).
Para comparação, o mesmo procedimento foi adotado com uma balança da marca GEOM
para estipular o peso real do saco de boxe. Para análise dos dados recebidos pela plataforma
de força, foi utilizada uma planilha de cálculo, através de regressão linear por mínimos
quadrados. A Equação 8 foi utilizada para calcular o erro percentual entre a medida de peso
adquirida através da balança e a medida de peso adquirida pela plataforma de força.
𝑬𝒓𝒓𝒐 (%) = 𝑴𝒓𝒂−𝑴𝒂
𝑴𝒓𝒃 𝐱 𝟏𝟎𝟎 (8)
Onde Mra é o peso real adquirido pela balança digital multiplicado pela aceleração da
gravidade no ambiente simulado, Ma é o peso adquiro pela plataforma de força do SSMH e
Mrb é o peso real adquirido pela balança digital.
5.1.4 TESTE DE MARCHA
Com a finalidade de testar a plataforma de força em uma situação mais parecida com a
marcha, um motor que converte movimento rotacional em linear, assíncrono, fundido em liga
especial de alumínio, resistente a esforços intermitentes, modelo IP66 da MVL vibradores
industriais (Figura 38) com duas hastes e um pé mecânico em cada uma das pontas (Figura
39) foi preso próximo a esteira a uma distância que o pé mecânico articulado tocasse o solo
em todas as fases de apoio da marcha.

71
Figura 38 - Motovibrador IP66 MVL vibradores industriais.
Fonte: A Autora (2017).
Figura 39 - "Perna mecânica" para simulação de marcha.
Fonte: A Autora (2017).
O pé mecânico é articulado na região do tornozelo (Figura 40) para que, ao tocar a esteira,
ele deslize para que seja possível simular o toque inicial do pé com o solo durante a marcha e
também, analisar o tempo de toque de cada pé na esteira.

72
Figura 40 - Tornozelo articulado para simular o toque inicial do calcanhar na esteira durante a marcha.
Fonte: A Autora (2017).
Com um tacômetro, foi obtida a velocidade de rotação do motor para obter sua taxa
amostral (Equação 9) e sincronizar a velocidade de passada do motor com a velocidade da
esteira ergométrica. As leituras de dados feitas pelo conversor A/D foram de 10 amostras por
segundo.
𝑇𝑡𝑎𝑐ô𝑚𝑒𝑡𝑟𝑜 = 𝑛.1
𝑓𝑎𝑚𝑜𝑠𝑡𝑟𝑎𝑔𝑒𝑚 (9)
5.1.5 RESULTADOS DOS TESTES
Ao pesar o saco de boxe, a balança acusou um peso de 72 kg e, a média de peso
apresentada pela plataforma do SSMH foi de 74,47kg. Com uma taxa de amostragem de 1,2s
e tempo de coleta de 118,8s, foram coletadas aproximadamente 100 amostras entre elas,
amostras transitórias de colocação e retirada de peso da plataforma e tempo sem estímulo que
corresponde a segundos que antecedem e procedem o contato da massa de peso conhecido
com a superfície da esteira (Figura 41). Com esses dados sabemos que o Erro % do SSMH
encontra-se em 2,84 %.

73
Figura 41 - Gráfico de amostras por segundo no teste de pressão continua.
Fonte: A Autora (2017).
5.1.5.1 Resultado Teste de Marcha
Os testes foram realizados em duas situações, caminhada lenta (Figura 43) e caminhada
rápida (Figura 44). O teste de caminhada lenta durou quase um minuto e, com a frequência de
amostragem em 10 a 80 amostras por segundo, cerca de 500 amostras foram coletadas durante
o teste. Utilizando a equação 9, foi possível quantificar a rotação do motor da esteira a 50rpm
durante a coleta de dados.
0
10
20
30
40
50
60
70
80
90
1 5 9 13 17 21 25 29 33 37 41 45 49 53 57 61 65 69 73 77 81 85 89 93 97
Teste de pressão continua
Amostras (n)
Pes
o(k
g)

74
Figura 42 - Teste de marcha SSMH caminhada lenta
Fonte: A Autora (2017); Fay (2017).
O teste de caminhada rápida teve duração menor (em torno de 30 segundos) mantendo a
frequência de amostragem de 10 a 80 amostras por segundo e com o motor ainda a 50rpm,
onde aumentamos apenas a velocidade do motovibrador em relação ao teste anterior.
Figura 43 - Teste de marcha SSMH caminhada rápida
Fonte: A Autora (2017); Fay (2017).
5.2 CONCLUSÃO E DISCUSSÕES
Levando em consideração custo e tempo para execução do projeto como um todo, os
resultados mostraram que o erro percentual do SSMH foi de 2,84%, mantendo-se abaixo de
5%. Comparando esse sistema com a CPP (0,36 de erro percentual) e as balanças comerciais
que possuem um erro de 1% (Leite, 2017) podemos perceber que apesar de ser um sistema

75
simples, de baixo custo e protótipo primário, o erro da SSMH em 2,84 % não ficou muito
distante dos sistemas já validados.
Outro fato que deve ser levado em consideração é que, a balança comercial e a CPP estão
na posição horizontal e não precisaram de nenhum tipo de pressão ou tração para atingir o
peso aparente na gravidade terrestre, pois já estavam em posição privilegiada para o mesmo.
E ainda, o sistema da CPP foi aprimorado e encontra-se muito mais robusto devido aos seus
equipamentos mais precisos. Como o SSMH é um projeto de baixo custo, certos componentes
não puderam ser adquiridos em sua versão mais sofisticada, como por exemplo, as células de
carga.
No caso do SSMH, para que a plataforma de força entre em operação é necessário que o
sub-sistema de simulação e suspensão estejam funcionando adequadamente, conseguindo
manter qualquer massa pressionando a superfície da esteira pelo valor de Erro %, pois, devido
a posição vertical da esteira, só é possível causar algum tipo de pressão e estímulo na
superfície da esteira se houver um sistema que pressiona os objetos contra a esteira. No caso
do SSMH, esse sistema é composto por cordas elásticas que podem ceder dependendo do
tempo de exposição a certa tensão.
O teste de marcha foi realizado com uma frequência de amostragem de 10 amostras por
segundo. Em seu estudo, Chung (2000) realizou uma bateria de testes para analisar a cinética
e cinemática da marcha de 44 homens adultos utilizando duas plataformas de força a uma
frequência de 60Hz e seis câmeras. Além dos resultados esperados, o autor registrou uma
cadência de 128,7±7,7 passos/min. Levando em consideração esse número de passos já
registrado na literatura, assim como Cairns et al. (1986) em 124,8±5,4 passos/min, Kadaba et
al. (1989) em 111,6±8,3 passos/min e, por fim, Kerrigan et al. (1998) em 119,0±10
passos/min. Analisando o número de passos médio dado pelos participantes dos quatro
estudos, foi possível obter uma média de 2,01 passos por segundo, ou, duas amostras por
segundo.
Podemos concluir que apesar do erro percentual ser maior que o de balanças comerciais,
ele ainda se encontra em um limiar abaixo de 5%. Sendo assim, a plataforma de força foi
capaz de captar os sinais, ler, filtrar, amplificar, processar e transmiti-los de forma digitalizada
para transmissão desses dados em um display LCD do sub-sistema de comunicação, podendo
ainda, gravar esses dados para armazenamento em um computador. Ao submeter a suspensão
a tal massa de 72kg foi possível observar que o sub-sistema estrutural e de suspensão corporal
são capazes de suportar uma pessoa de aproximadamente 70kg em contato constante com a

76
esteira, e, corroborando com esse raciocínio, a Tabela 2 mostra a capacidade de carga de cada
material utilizado pela SSMH, podendo dizer que esse sistema é capaz de suportar cargas de
aproximadamente 100kg.
6 CONSIDERAÇÕES FINAIS
Quando comparado o erro% da CPP de 0,36% e o peso adquirido pelo SSMH com um erro
percentual de 2,84 % nota-se que ainda é necessário o maior aprimoramento do sistema como
um todo. A comparação com um sistema extremamente preciso como a CPP é necessária pois
quanto mais precisão, mais robustos serão os dados. Outros sistemas necessitam de
aprimoramento para que o sistema de simulação de marcha seja mais versátil e prático,
possibilitando pesquisas em outras áreas de conhecimento futuramente.
Os estudos de Chung (2000); Cairns et al. (1986); Kadaba et al. (1989); Kerrigan et al.
(1998) citados acima servem para justificar a utilização de uma zona de frequência amostral
de até 80 amostras por segundo. A análise dos testes desses autores foi feita utilizando dados
de análise de marcha de voluntários adultos, por isso a média de passos foi de 2
passos/segundo, ou seja, duas amostras por segundo. Ao definir uma taxa amostral de até 80
amostras/segundo torna o SSMH capaz de coletar dados em intensidades maiores de exercício
como no caso da caminhada rápida ou até mesmo corrida.
A multidisciplinaridade no campo da pesquisa e desenvolvimento de equipamentos e
soluções que contribuam com o bem-estar da sociedade tem sido cada vez mais notada. Os
campos da Engenharia, Medicina, Educação Física, Fisioterapia, Nutrição, entre outros, tem
acolhido e fomentado desafios interessantes com este fim. Para simular um ambiente com
gravidade reduzida no SSMH diminuímos a tração dos cabos elásticos diminuindo,
consequentemente, o peso aparente e a força de impacto no momento em que o pé toca a
superfície da esteira. Ao desenvolver um sistema desse tipo, amplia-se a variedade de
pesquisas que podem ser realizadas. A sarcopenia, osteopenia ou osteoporose, por exemplo,
são problemas observados em astronautas que retornam de missões espaciais e em simulações
de exposição a microgravidade (acamamento com e sem inversão postural) com duração de 5
dias a 6 meses (Doty, 1990; Widrick et al, 1999; Lambertz et al, 2001;Perhonen 2001; Lang,
2004; Dorfman, 2007; Trappe et al, 2009; Mulder et al (2015) e em idosos sedentários ou
longevos.
O SSMH foi projetado para, futuramente, possibilitar pesquisas na área da reabilitação,
envelhecimento, obesidade e todas as outras áreas que relacionam impacto e corpo humano,

77
porque, querendo ou não, a gravidade é a responsável pelo impacto que o corpo sofre a cada
passo dado e, em algumas patologias, esse impacto pode ser nocivo para articulações, ossos e
músculos. Sendo assim, torna-se necessário o aprimoramento constante do sistema para que
futuramente o campo de pesquisa aumente.
7 REFERÊNCIAS
APH – ATENDIMENTO PRÉ-HOSPITALAR. Colete de Imobilização Dorsal - KED.
<Disponível em: http://www.resgatecnica.com.br/wp-content/uploads/2014/09/colete-
Ked.pdf> Acessado em: 12 de set. 2017.
ARMAZEM NAVAL: Cabos elásticos 6mm <disponível em:
www.armazemnaval.com.br/WebForms/produto.aspx?campo=489> Acessado em: 3 de jun.
2017.
BEHRMAN, A.L; HARKEMA, S.J. Physical rehabilitation as an agent for recovery after
spinal cord injury. Physical medicine and rehabilitation clinics of North America, Vol. 18,
No. 2 (2007) pp. 183-202.
BIOTECMED: Distribuidora de materiais para saúde <disponível em:
https://design.jet.com.br/biotecmed/documentos/Colete%20Imobilizador%20Dorsal%20Ked
%20Adulto%20-%20Cod.1123.pdf> Acessado em: 22 jan. 2017.
BIJUR, P.E; SILVER, W; GALLAGHER, E.J. Reliability of the visual analog scale for
measurement of acute pain. Academic Emergency Medicine, Vol. 8 (2001), pp. 1153-1157.
BLABER, A.P; GOSWAMI, N; BONDAR, R.L; KASSAM, M.S. Impairment of cerebral
blood flow regulation in astronauts with post flight orthostatic intolerance. Stroke, Vol. 42
(2011), pp. 1844–1850.
BLABER, A.P, LANDROCK, C.K; SOUVESTRE, P.A. Cardio-postural deconditioning: a
model for post-flight orthostatic intolerance. Respir Physiol Neurobiol, Vol. 169, No. 1
(2009), pp. S21–S25.
BOGDANOV, V.A; GURFINKEL, V.S; PANFILOV, V.E. Human motion under lunar
gravity conditions (Human performance in various locomotive tasks under simulated lunar
reduced gravity conditions, classifying test stands and equipment). Kosmicheskaya
Biologiya i Meditsina, Vol. 5, (1971), pp. 3–13.
CADORE EL; BRETANO, MICHEL ARIAS; KRUEL; MARTINS LF. Efeitos da Atividade
Física na Densidade Mineral Óssea e na Remodelação do Tecido Ósseo. Revista Brasileira
de Medicina do Esporte, Vol.11, No.9, (2005), pp.373-379.
CAIRNS, M.A.; BURDETT, R.G.; PISCIOTTA, J.C.; SIMON, S.R. A biomechanical
analysis of racewalking gait. Medicine and Science in Sports and Exercise, Vol.18, No. 4
(1986) pp.446-453.
CAPADAY, C. The special nature of human walking and its neural control. TRENDS in
Neurosciences, Vol. 25, No. 7 (2002) pp. 370-376.

78
CAVAGNA, G.A; ZAMBONI, A; FARAGGIANA, T; MARGARIA, R. Jumping on the
moon: power output at different gravity values. Aerospace Medicine, Vol. 43, No. 4 (1972).
pp. 408–414.
CERNACK, K. Locomotor Training using Body-Weight Support on a Treadmill in
conjunction with ongoing physical Therapy in Child with severe Cerebellar Ataxia. Physical
Therapy. Vol. 88, No. 1 (2008), pp 88-97.
CHUNG, T.M. Avaliação cinética e cinemática da marcha em homens adultos do sexo
masculino. Acta Fisiátrica, Vol. 7, No. 2 (2000), pp. 61-67.
CLÉMENT, G. A review of the effects of space flight on the asymmetry of vertical
optokinetic and vestibulo-ocular reflexes. J Vestibul, Vol. 13 (2003), pp. 255–263.
CLÉMENT, G. Fundamentals of Space Medicine. France: Springer. 2011.
COLLERAN, P.N; WILKERSON, M.K; BLOOMFIELD, S.A; SUVA, L.J; TURNER, R.T;
DELP, M.D. Alterations in skeletal perfusion with simulated microgravity: a possible
mechanism for bone remodeling. J Appl Physiol, Vol.89 (2000), pp.1046–1054.
CONVERTINO, V. Spaceflight and Cardiovascular Countermeasures. Gravitational and
Space Biology, Vol. 18, No. 2 (2005), pp. 59-70.
DALLY, J. W.; RILEY, W. F. Experimental Stress Analysis. New York: McGraw-Hill,
1991.
DALMARCO, G. Desenvolvimento e validação de um sistema de hipo e microgravidade
simuladas para realização de massagem cardíaca externa. Porto Alegre: PUCRS, 2006.
Dissertação (Mestrado em Engenharia Elétrica), Faculdade de Engenharia Elétrica, Pontifícia
Universidade Católica do Rio Grande do Sul, 2006.
DATASHEET ALTIUM DESIGNER, Disponível em:
<http://www.altium.com/files/altiumdesigner/s08/learningguides/ar0104%20component,%20
model%20and%20library%20concepts.pdf> (Acesso: 30 de abr. 2016)
DATASHEET HX711. Disponível em:
<https://cdn.sparkfun.com/datasheets/Sensors/ForceFlex/hx711_english.pdf> (Acesso em: 17
de fev. 2016).
DATASHEET DISPLAY LCD 1602. Disponível em:
<https://www.sparkfun.com/datasheets/LCD/ADM1602K-NSW-FBS-3.3v.pdf>(Acessado
em: 08 de ago. 2017).
DIGI INTERNATIONAL. Disponível em: http:<//www.digi.com/>(Acesso em: 16 de abr.
2016).
DICHARRY, J. Kinematics and Kinetics of Gait: From Lab to Clinic. Clin Sports Med,
Vol.29 (2010), pp. 347–364.
Di PRAMPERO, P.E., NARICI, M.V. Muscles in microgravity: from fibres to human motion.
Journal of Biomechanics, Vol. 36 (2003), pp. 403-412.

79
DISIUTA, L. Desenvolvimento de uma câmara de pressão positiva para estudos em
fisiologia aeroespacial. Porto Alegre: PUCRS, 2014. Dissertação (Mestrado em Engenharia
Elétrica), Faculdade de Engenharia Elétrica, Pontifícia Universidade Católica do Rio Grande
do Sul, 2014.
DOEBELIN, E. O. Measurements Systems Applications and design. Ohio: McGraw-Hill
,1990.
DONELAN, J.W; KRAM, R. The effect of reduced gravity on the kinematics of human
walking: a teste of the dynamic similarity hypothesis for locomotion. The Journal of
Experimental Biology, Vol. 200 (1997), pp. 3193-3201.
DONELAN, J.W; KRAM, R. Exploring dynamics similarity in human running using
simulated reduced gravity. The Journal of Experimental Biology, Vol. 203 (2000), pp.
2405-2415.
DORFMAN, T.A; LEVINE, B.D; TILLERY, T; PESHOCK, R.M; HASTINGS, J.L;
SCHNEIDER, S.M; MACIAS, B.R; BIOLO, G; HARGENS, A.R. Cardiac atrophy in women
following bed rest. J ApplPhysiol, Vol. 103 (2007), pp. 8-16.
DOTY, S.B; MOREY-HOLTON, E.R; DURNOVA, G.N; KAPLANSKY, A.S. Cosmos
1887: morphology, histochemistry, and vasculature of the growing rat tibia. Faseb J, Vol. 4
(1990), pp.16–23.
DUTRA, C.M.R; DUTRA, C.M.R, MOSER, A.D.L; MANFFRA, E.F. Treino locomotor com
suporte parcial do peso corporal na reabilitação de lesão medular: revisão de literatura.
Fisioter. Mov. Vol. 26, No. 4 (2013), pp. 907-920.
FARLEY, C.T; McMAHON, T.A. Energetics of walking and running: Insights from
simulated reduced-gravity experiments. J Appl Physiol. Vol. 73, No. 6 (1992), pp. 2709-
2712.
FAY, S.R. Construção de um sistema de desenvolvimento para plataforma de medição
de força. Porto Alegre: PUCRS, 2017. Trabalha de conclusão de curso (Graduação em
Engenharia Elétrica), Faculdade de Engenharia Elétrica, Pontifícia Universidade Católica do
Rio Grande do Sul, 2017.
FRAGA, C. E. N. Desenvolvimento de um sistema de medição das forças de reação com o
solo. Porto Alegre: PUCRS, 2013. Dissertação (Mestrado em Engenharia Elétrica), Faculdade
de Engenharia Elétrica, Pontifícia Universidade Católica do Rio Grande do Sul, 2013.
FINCH, L; BARBEAU, H; ARSENAULT, B. Influence of body weight support on normal
human gait: development of a gait retraining strategy. Physical Therapy, Vol. 71, No 11
(1991) pp. 842-855.
GAMBELLI, C.N; THEISEN, D; WILLEMS, P.A; SHEPENS, B. Motor control of landing
from a countermovement jump in simulated microgravity. J Appl Physiol, Vol. 120 (2016), p.
1230-1240.

80
GENC, K.O; MANDES, V.E; CAVANAGH, P.R. Gravity replacement during running in
simulated microgravity. Aviation Space and Environmental Medicine, Vol. 77, No. 11
(2006), pp. 1117–1124.
GOSWAMI, N; BATZEL, J.J; CLÉMENT, G; STEIN, T.P; HARGENS, A.R; SHARP, M.K;
BLABER, A.P; ROMA, P.G; HINGHOFER-SZALKAY, H.G. Maximizing information from
space data resources: a case for expanding integration across research disciplines. Eur J Appl
Physiol, Vol. 113, (2013), pp. 1645-1654.
GRIMM, D; GROSSE, J; WEHLAND, M; MANN, V; RESELAND, J.E; SUNDARESAN,
A; CORYDOM, T.J. The impact f microgravity on bone in humans. Bone, Vol. 87, (2016),
pp. 44-56.
GUELL, A. Lower body negative pressure (LBNP) as a countermeasure for long term
spaceflight, ActaAstronauticaVol.35 (1995), pp.271–280.
HALL, S. J. Biomecânica Básica. Barueri, SP: Manole, 2009.
HARGENS, A.R., RICHARDSON, S. Cardiovascular adaptations, fluid shifts, and
countermeasures related to space flight. Respiratory Physiology & Neurobiology. Vol. 169S
(2009), pp.S30–S33.
HUGHSON, R.I; MAILLET, A; GHARIB, C; FORTRAT, J.O; YAMAMOTO, Y; PAVY-
LETRAON, A; RIVIERE, D; GUELL, A. Reduced spontaneous baroreflex response slope
during lower body negative pressure after 28 days of head-down bed rest. Journal of Applied
Physiology, Vol.77 (1994), pp.69–77.
INTERNATIONAL COMMISSION ON RADIOLOGICAL PROTECTION, Report of the
task group on reference man. Oxford, 1974 (ICRP-23).
JORDAN, A.R; BARNES, A; CLAXTON, D; PURVIS, A; FYSH, M. Kinematics and
neuromuscular recruitment during vertical treadmill exercise. Journal of Exercise
Reabilitation, Vol 13, No. 3 (2017), pp.307-314.
KADABA, M.P.; RAMAKRISHNAN, H.K.; WOOTTEN, M.E. Measurement of lower
extremity kinematics during level walking. J Orthop Rese, Vol. 8, No.3 (1990) pp. 383-392.
KERRIGAN, D.C.; TODD, M.K.; DELLA CROCE, U.; LIPSITZ, L.A.; COLLINS, J.J.
Biomechanical gait alterations independent of speed in the healthy elderly: evidence for
specific limiting impairments. Arch Phys Med Rehabil, Vol. 79 (1998) pp.317-322.
LAMBERTZ, D., PE’ROT, C., KASPRANSKI, R., GOUBEL F. Effects of long-term
spaceflight on mechanical properties of muscle in humans. J Appl Physiol, Vol.90 (2001),
pp. 179-188.
LANG, T. LeBLANC, A; EVANS, H; LU, Y; GENANT, H; YU, A. Cortical and Trabecular
Bone Mineral Loss from the Spine and Hip in Long-Duration Spaceflight. J Bone Miner Res,
Vol. 19 (2004), pp. 1006-1012.
81
LEITE, A.K.O; MACKAILL, C.L.M; GOMES, M.S; SPONCHIADO, G.S; de LIMA, J.C.M;
RUSSOMANO, T. Validação da Plataforma de Força do Sistema de Simulação de Marcha
em Hipogravidade. XVII Congresso Brasileiro de Biomecânica, Porto Alegre/RS, 2017.
LU, Q; ORTEGA, C; MA, O. Passive gravity compensation mechanisms: technologies and
applications. Recent Patents on Engineering, Vol. 5, No. 1 (2011), pp. 32–44.
MA, O; WANG.J. Apparatus and method for reduced-gravity simulation. Patent US 8152699
B1, 2012.
MATSUNO, V.M; CAMARGO, M.R; PALMA, G.C; ALVENO, D; BARELA, A.M.F.
Análise do uso de suporte parcial de peso corporal em esteira e em piso fixo durante o andar
de crianças com paralisia cerebral. Rev Bras Fisioter, Vol. 14, No. 5 (2010), pp. 404-410.
McARDLE, W.D; KATCH, V.L; KATCH, F.I. Fisiologia do Exercício: nutrição, energia e
desempenho humano. Rio de Janeiro: Guanabara Koogan, 2013.
McCAIN, K.J; POLLO, F.E; BAUM, B.S; COLEMAN, S.C; BAKER, S; SMITH, P.S.
Locomotor Treadmill Training with Partial Body-Weight Support Before Overground Gait in
Adults with Acute Stroke: A Pilot Study. Arch Phys Med Rehabil. Vol 89 (2008), pp. 684-
691.
MIRVIS, Adam D. A Dynamics-Based Fidelity Assessment of Partial Gravity Gait
Simulation Using Underwater Body Segment Ballasting. 2011. Dissertação de Mestrado.
University of Maryland.
MULDER, E; CLÉMENT, G; LINNARSSON, D; PALOSKI, W.H; WUYTS, F.P; ZANGE,
J; FRINGS-MEUTHEN, P; JOHANNES, B; SHUSHAKOV, V; GRUNEWALD, M;
MAASSEN, N; BUEHLMEIER, J; RITTWEGER, J. Musculoskeletal effects of 5 days of bed
rest with and without locomotion replacement training. Eur J ApplPhysiol, Vol. 115 (2015),
pp. 727–738.
MULROY, S.J. Gait parameters associated with responsiveness to treadmill training with
body-weight support after stroke: an exploratory study. Physical therapy, Vol. 90, n. 2,
(2010) pp. 209-223.
NEWMAN, D.J; ALEXANDER, H.J. Human locomotion and workload for simulated lunar
and Martian environments. Acta Astronautica, Vol. 29, No. 8 (1993), p. 613-620.
ORTOBONI, C; FONTES, S.V; FUKUJIMA, M.M. Estudo comparativo entre a marcha
normal e a de pacientes hemiparéticos por acidente vascular encefálico: aspectos
biomecânicos. Revista Neurociências, Vol. 10, No.1 (2002), pp. 10-16.
PAVEI, G; BIANCARDI, C.M; MINETTI, A.E. Skipping vs. running as the bipedal gait of
choice in hypogravity. Journal of Applied Physiology, Vol. 119, n. 1 (2015), pp. 93-100.
PAVEI, G; MINETTI, A.E. Hopping locomotion at different gravity: metabolism and
mechanics in humans. Journal of Applied Physiology, Vol. 120, No. 10 (2015) pp. 1223-
1229.
82
PERHONEN, M.A; FRANCO, F; LANE, L.D; BUCKEY, J.C; BLOMQVIST, C.G;
ZERWEKH, J.E; PESHOCK, R.M; WEATHERALL, P.T; LEVINE, B.D. Cardiac atrophy
after bed rest and spaceflight. J Appl Physiol, Vol. 91 (2001), pp. 645-653.
PERUSEK, G.P; LEWANDOWSKI, B; GILKEY, K; NALL, M. Exercise countermeasures
and a new ground-based partial-g analog for exploration.45th AAIA Aerospace Sciences
Metting and Exhibit, Nevada, 2007.
POLIMET : MANUAL EP:1600 <disponível em:
http://img.shoptime.com.br/produtos/01/01/manual/110263872.pdf> Acessado em: 22 jan.
2017.
ROBAYO, L.C. Historia espacial: recuento histórico de su evolución y desarrollo. Revista
de Derecho, Comunicaciones y Nuevas Tecnologías No. 12 (2014).
ROGERS, Melissa JB; VOGT, Gregory L.; WARGO, Michael J. Microgravity: A Teacher's
Guide with Activities in Science, Mathematics, and Technology - NASA, Oberlin, 1997.
ROSSI, E. Envelhecimento do sistema osteoarticular. Einstein (São Paulo), Vol. 6, No. 1
(2008), pp. S7-S12.
RUSSELL, Bertrand. ABC da Relatividade. Zahar, Rio de Janeiro, 2005.
RUSSOMANO, T., CASTRO, J.C. Fisiologia Aeroespacial: Conhecimentos essenciais
para voar com segurança. Porto Alegre: EdiPUCRS, 2012.
SAIBENE, F; MINETTI, A.E. Biomechanical and physiological aspects of legged locomotion
in humans. Eur J ApplPhysiol, Vol. 88 (2003), pp. 297-316.
SANTOS, P.E.B., BONAMINO, M.H. Efeitos cardiovasculares agudos da exposição ao
ambiente microgravitacional. Arq Bras Cardiol, Vol. 80, No. 1 (2003), pp. 105-115.
SCOTT, M.S; ZWART, S.R; HEER, M; HUDSON, E.K; SHACKELFORD, L; MORGAN,
J.L.L. Men and Women in Space: Bone Loss and Kidney Stone Risk After Long‐Duration
Spaceflight. Journal of Bone and Mineral Research, Vol. 29, No. 7 (2014), pp 1639–1645.
SENAI. Sistemas Eletrônicos: Instalação. São Paulo: SENAIS-SP Editora, 2014.
SENAI. Serviço Nacional de Aprendizagem Industrial. Sistemas eletrônicos. São Paulo:
SENAI-SP, 2014.
SERWAY, R.A; JEWETT Jr, J.W. Princípios de Física: Mecânica Clássica e Relatividade.
São Paulo: Cengage Learning, 2015.
SHACKELFORD, L.C., LEBLANC, A.D., DRISCOLL, T.B., EVANS, H.J., RIANON, N.J.,
SMITH, S.M., SPECTOR, E., FEEBACK, D.L., LAI, D. Resistance exercise as a
countermeasure to disuse-induced bone loss, Journal of Applied Physiology Vol.97 (2004),
pp.119–129.
SHANG, P; ZHANG, J; QIAN, A; LI, J; MENG, R; DI, S; HU, L; GU, Z. Bone cells under
microgravity. J Mech Med Biol, Vol. 13, No. 5 (2013).

83
SCHMERSAL E2-40/03. Botão de emergência. Disponível em:
file:///C:/Users/Ana%20Karen/Documents/bota_de_emergencia_e240.pdf. (Acesso em: 17 de
ago. 2017)
SIBONGA, J.D; EVANS, H.J; SUNG, H.G; SPECTOR, E.R; LANG, T.F; OGANOV, V.S;
BAKULIN, A.V; SHACKELFORD, L.C; LeBLANC, A.D. Recovery of spaceflight-induced
bone loss: Bone mineral density after long-duration missions as fitted with an exponential
function. Bone, Vol. 41 (2007), pp. 973-978.
SMITH, S.M; WASTNEY, M.E; MORUKOV, B.V; LARINA, I.M; NYQUIST, L.E;
ABRAMS, S; TARAN, E. N; SHIH, CHIH-YU; NILLEN, J.L; DAVIS-STREET, J.E; RICE,
B.L; LANE, H.W. Calcium metabolism before, during, and after a 3-mo spaceflight: kinetic
and biochemical changes. Am. J. Physiol, Vol. 277, No. 46 (1999), R1–R10.
SYLOS-LABINI, F; LACQUANITI, G; IVANENKO, Y.P. Human locomotion under
reduced gravity conditions: Biomechanical and neurophysiological considerations. BioMed
Research International, (2014), pp. 1-12.
TESCH, P.A., TRIESCHMANN, J.T., EKBERG, A. Hypertrophy of chronically unloaded
muscle subjected to resistance exercise, Journal of Applied Physiology, Vol.96 (2004),
pp.1451–1458.
TEXAS INSTRUMENTS. Disponível em: http://www.ti.com/ (Acesso em: 15 de dez. 2015).
TOGNELLA, F; MAINAR, A; VANHOUTTE, C; GOUBEL, F.A mechanical device for
studying mechanical properties of human muscle in vivo. Journal of Biomechanics, Vol. 30,
No. 10 (1997), pp. 1077-1080.
TRAPPE, S; CREER, A; SLIVKA, D; MINCHEV, K; TRAPPE, T. Single muscle fiber
function with concurrent exercise or nutrition countermeasures during 60 days of bed rest in
women, Journal of Applied Physiology, Vol.103 (2007), pp.1242–1250.
TRAPPE, S; COSTILL, D; GALLAGHER, P; CREER, A; PETERS, J.R; EVANS, H;
RILEY, D.A; FITTS, R.H. Exercise in space: human skeletal muscle after 6 months aboard
the International Space Station. J Appl Physiol, Vol. 106 (2009), pp. 1159 –1168.
URQUIZA, M.A. Desenvolvimento de uma Plataforma de Força Multiaxial para
Instrumentação Biomédica. Uberlândia: UFU, 2005. Dissertação (Mestrado em Ciências),
Faculdade de Engenharia Elétrica, Universidade Federal de Uberlândia, 2005.
VAQUER, S; MESQUIDA, J. Hemodynamic Monitoring in Space. Aviation in Focus, Vol.
4, No. 2 (2013), pp. 93-105.
VAUGHAN, C.L; DAVIS, B.L; O'CONNOR, J.C. Dynamics of human gait. Champaign,
Illinois: Human Kinetics Publishers, 1992.
WIDRICK, J.J; KNUTH, S.T; NORENBERG, K.M; ROMATOWSKI, J.G; BAIN, J.L.W;
RILEY, D.A; KARHANEK, M; TRAPPR, S.W; TRAPPE, D; COSTILL, L; FITTS, R.H.
Effect of a 17-day spaceflight on contractile properties of human soleus muscle fibers.
Journal of physiology, Vol. 516, No. 3 (1999), pp. 915-930.

84
WINTER, O.C; PRADO, A.F.B.A. A conquista do Espaço: Do Sputnik à Missão
Centenário. São Paulo: Livraria da Física, 2007.

85
ANEXOS
Anexo 1 - Programa de teste de aquisição de dados.
// oooO XCTU Oooooooooooooooooooooooooooooo // oo // oo DAN5 DAN3 oo // oo Xbee 802.15.4 Xbee 802.15.4 oo // oo 115200 8-N-1 115200 8-N-1 oo // oo Channel: C Channel: C oo // oo PAN ID: AAAA PAN ID: AAAA oo // oo DH: 0000 DH: 0000 oo // oo DL: FFF3 DL: FFF4 oo // oo MY: FFF4 MY: FFF3 oo // oo oo // oooooooooooooooooooooooooooooooooooooooo #include<windows.h> #include<stdio.h> // Baudrate.... #define br9600 9600 #define br19200 19200 #define br38400 38400 #define br57600 57600 #define br115200 115200 // Comm Name #define COM1 1 #define COM2 2 #define COM3 3 #define COM4 4 HANDLE serialOpen(char *comPort, DWORD serialBaud) HANDLE hcom; DCB dcbSerialParams = 0; COMMTIMEOUTS timeouts = 0; char serialName[30] = "\\\\.\\"; strcat(serialName, comPort); hcom = CreateFile(serialName, GENERIC_READ|GENERIC_WRITE, 0, NULL, OPEN_EXISTING, FILE_ATTRIBUTE_NORMAL, NULL ); if (hcom != INVALID_HANDLE_VALUE) dcbSerialParams.DCBlength = sizeof(dcbSerialParams); dcbSerialParams.BaudRate = serialBaud; dcbSerialParams.ByteSize = 8; dcbSerialParams.StopBits = ONESTOPBIT; dcbSerialParams.Parity = NOPARITY; SetCommState(hcom, &dcbSerialParams); // Set COM port timeout settings timeouts.ReadIntervalTimeout = 50; timeouts.ReadTotalTimeoutConstant = 50; timeouts.ReadTotalTimeoutMultiplier = 10; timeouts.WriteTotalTimeoutConstant = 50;

86
timeouts.WriteTotalTimeoutMultiplier = 10; SetCommTimeouts(hcom, &timeouts); // Verificar se hcom é diferente de INVALID_HANDLE_VALUE return hcom; void serialClose(HANDLE hcom) CloseHandle(hcom); int serialWrite(HANDLE hcom, unsignedchar *send, int nbytes) DWORD bytes_written; if (WriteFile(hcom, send, nbytes, &bytes_written, NULL) == 0) bytes_written = 0; return bytes_written; int serialRead(HANDLE hcom, unsignedchar *receive, int nbytes) DWORD bytes_readden; if (ReadFile(hcom, receive, nbytes, &bytes_readden, NULL) == 0) bytes_readden = 0; return bytes_readden; char uart_getchar(HANDLE hcom) char ch; int erro; do erro = serialRead(hcom, &ch, 1); while(erro == 0); return ch; float serialReadScale(HANDLE hcom) DWORD n; char start = 0, c = 0; float peso = 0; while(start != '*') start = uart_getchar(hcom); while(c != ',') c = uart_getchar(hcom); if(c != ',') peso = 10*peso + (c - '0'); c = uart_getchar(hcom); peso = peso + 0.1*(c - '0'); return peso; int positChar(char *str, char ch)

87
int p = 0, i = 0; char x; do x = *(str+i); if (x == ch) p = i; else i++; while((p == 0) && (x != NULL)); return p; // oooO XCTU Oooooooooooooooooooooooooooooo // oo oo // oo DAN5 DAN3 oo // oo Xbee 802.15.4 Xbee 802.15.4 oo // oo 115200 8-N-1 115200 8-N-1 oo // oo Channel: C Channel: C oo // oo PAN ID: AAAA PAN ID: AAAA oo // oo DH: 0000 DH: 0000 oo // oo DL: FFF3 DL: FFF4 oo // oo MY: FFF4 MY: FFF3 oo // oo oo // oooooooooooooooooooooooooooooooooooooooo int main(void) HANDLE hSerial; FILE *f; char fname[]="SSMH.csv", str[100]; int n, p; float tara, peso; f = fopen(fname, "w"); hSerial = serialOpen("COM1", br115200); if(hSerial != INVALID_HANDLE_VALUE) printf("Fazendo a tara do peso...\n"); tara = 0; for(n=0; n<20; n++) peso = 1.6*(serialReadScale(hSerial)+2875+4.3); tara = tara + peso; tara = tara/20; printf("Fazendo a coleta de dados...\n"); for(n=0; n<100; n++) peso = 1.6*(serialReadScale(hSerial)+2875+4.3) - tara; if (peso<0) peso = 0; printf("Peso: %.2f\n", peso); sprintf(str, "%.1f", peso); p = positChar(str, '.'); if(p > 0) str[p] = ','; fprintf(f, "%s\n", str); printf("Dados coletados...\n"); serialClose(hSerial);

88
else printf("Falha ao abrir porta COM\n"); serialClose(hSerial); fclose(f); system("PAUSE"); return 0;