exemplo roda+veiculo
TRANSCRIPT

EM697 EXEMPLO VIBRAÇÕES: SUSPENSÃO VEICULAR – P. Kurka Junho 2013
Equação de movimento de ¼ de veículo:
[
] [
] [
] [
] [
] [
] [
]
Valores típicos (veículo Baja):
Componentes Parâmetro Valor
Massa de ¼ do veículo 35 kg
Massa do pneu 13 kg
Rigidez elástica do pneu 80 kN/m
Rigidez elástica da mola de suspensão 3 kN/m
Coeficiente do amortecedor viscoso 450 N.s/m
1. ANÁLISE DO MODELO (INDEPENDE DO CÁLCULO DE QUALQUER SOLUÇÃO DE MOVIMENTO)
Solução do auto-problema quadrático [ ] :
o Matrizes de auto-valores ⌈
⌋ e ⌈
⌋ .
o Matrizes de auto-vetores e
.
o Condições de normalização dos auto- vetores do problema quadrático:
e ,
e. .
ou
Solução do auto-problema generalizado :
o Matriz de auto-valores ⌈
⌋ .
o Matriz de auto-vetores
.
o Condições de normalização dos auto- vetores do problema geral:
e
.
o Relação entre as matrizes do auto-problema geral e quadrático:
[
], [
],
[ ], [
]

Valores numéricos:
⌈
⌋ (Rd/s)
[
] (m)
Interpretações:
AUTO- VALORES:
o Parte real: amortecimentos modais ou naturais :
, .
Amortecimentos naturais fornecem medidas do decaimento exponencial das
respostas do sistema nos modos naturais de vibração.
o Parte imaginária: frequências modais ou naturais amortecidas:
,
ou
, .
Frequências naturais fornecem medidas dos valores de ressonância do sistema,
isso é, o sistema atingirá amplitude de vibração extrema caso seja excitado por
uma força oscilatória com frequência igual a uma de suas frequências de
ressonância.
AUTO- VETORES:
o Primeiro modo de vibrar:
[
] (
)
ou
| | [
] (
) , [
] .
o Segundo modo de vibrar:
[
]

ou
| | [
] (
) e [
]
As amplitudes dos modos de vibrar indicam as relações de deslocamento entre os graus
de liberdade do sistema, nas respectivas ressonâncias (durante uma excitação do
sistema numa frequência de ressonância). Os valores de fase dos modos de vibrar
indicam as relações de fase de movimento das massas nodais do sistema, nas condições
de ressonância.
RESPOSTA EM FREQUÊNCIA: Embora os auto-vetores ou modos de vibrar indiquem as
relações de deslocamento entre graus de liberdade do sistema em uma dada vibração
de ressonância, nada informam sobre as relações de amplitude de vibração existente
entre diferentes graus de liberdade, devido a uma excitação harmônica em uma
frequência qualquer. A função de resposta em frequência, ou função de transferência,
calculada a partir dos auto-valores e auto-vetores do sistema é capaz de fornecer tal
informação.S egue a apresentação da função de resposta em frequência.
o Relação vetorial de transferência entre entrada e saída do sistema, domínio de
Laplace:
[
] [
] [
],
onde [
] .
o Relação vetorial de transferência entre entrada e saída do sistema, domínio da
frequência:
[
] [
] [
],
onde [
] .
o Relação escalar transferência da resposta de vibração do sistema dinâmico no
grau de liberdade “ ”, a uma excitação harmônica de frequência qualquer,
aplicada no grau de liberdade “ ”:
∑
,
Onde representa o i-ésimo elemento do auto-vetor normalizado, .

Apresentação das FRFs utilizando os valores numéricos do exemplo dado:
o Expressão da resposta em frequência no grau de liberdade (movimento do
veículo), para uma entrada de vibração harmônica de amplitude unitária no
grau de liberdade t (movimento da roda):
ou
o Gráficos da resposta em frequência no grau de liberdade (movimento do
veículo), para uma entrada de vibração harmônica de amplitude unitária no
grau de liberdade t (movimento da roda):
o Expressão da resposta em frequência no grau de liberdade (movimento da
roda), para uma entrada de vibração harmônica de amplitude unitária no grau
de liberdade t (movimento da roda):

ou
o Gráficos da resposta em frequência no grau de liberdade (movimento da
roda), para uma entrada de vibração harmônica de amplitude unitária no grau
de liberdade t (movimento da roda):
Resposta ao impulso unitário: A resposta ao impulso unitário do sistema é a versão, no
domínio do tempo, da função de resposta em frequência. Seguem, portanto, as relações
vetoriais e escalares que definem a função de resposta ao impulso unitário do sistema.
o Relação vetorial de transferência entre entrada e saída do sistema, domínio de
Laplace, quando as entradas são impulsos unitários:
[
] [
] [
],

o Matriz de resposta o impulso unitário (transformada de Laplace inversa da
matriz [
]):
[
] .
o Relação escalar da resposta do sistema dinâmico no grau de liberdade “ ”, a
uma excitação impulso unitário, aplicada no grau de liberdade “ ”:
∑
,
Apresentação das FRIUs utilizando os valores numéricos do exemplo dado:
o Expressão da resposta no grau de liberdade (movimento do veículo), para um
impulso unitário aplicado no grau de liberdade t (movimento da roda):
ou
o Gráfico da resposta no grau de liberdade (movimento do veículo), para um
impulso unitário aplicado no grau de liberdade t (movimento da roda):

o Expressão da resposta no grau de liberdade (movimento da roda), para um
impulso unitário aplicado no grau de liberdade t (movimento da roda):
ou
o Gráfico da resposta no grau de liberdade (movimento da roda), para um
impulso unitário aplicado no grau de liberdade t (movimento da roda):
2. RESPOSTAS DO MODELO DEPENDENTES DA SOLUÇÃO DAS EQUAÇÕES DE MOVIMENTO
Resposta a degrau:
A equação de movimento do sistema pode ser resolvida, supondo a excitação “degrau unitário”
aplicada aos diferentes graus de liberdade. Seguem, portanto, as relações vetoriais e escalares
que definem a resposta do sistema a um degrau.
o Relação vetorial de transferência entre entrada e saída do sistema, domínio de
Laplace, quando as entradas são degraus unitários:
[
] [
] (
) [
],
o Solução de movimento de resposta do sistema ao degrau:

[
] [
].
Apresentação das respostas ao degrau utilizando os valores numéricos do exemplo dado:
o Expressão da resposta no grau de liberdade (movimento do veículo), para um
degrau unitário aplicado no grau de liberdade t (movimento da roda):
ou
( )
( )
o Gráfico da resposta no grau de liberdade (movimento do veículo), para um
degrau aplicado no grau de liberdade t (movimento da roda):
o Expressão da resposta no grau de liberdade (movimento da roda), para um
degrau unitário aplicado no grau de liberdade t (movimento da roda):

ou
( )
( )
o Gráfico da resposta no grau de liberdade (movimento do veículo), para um
degrau aplicado no grau de liberdade t (movimento da roda):
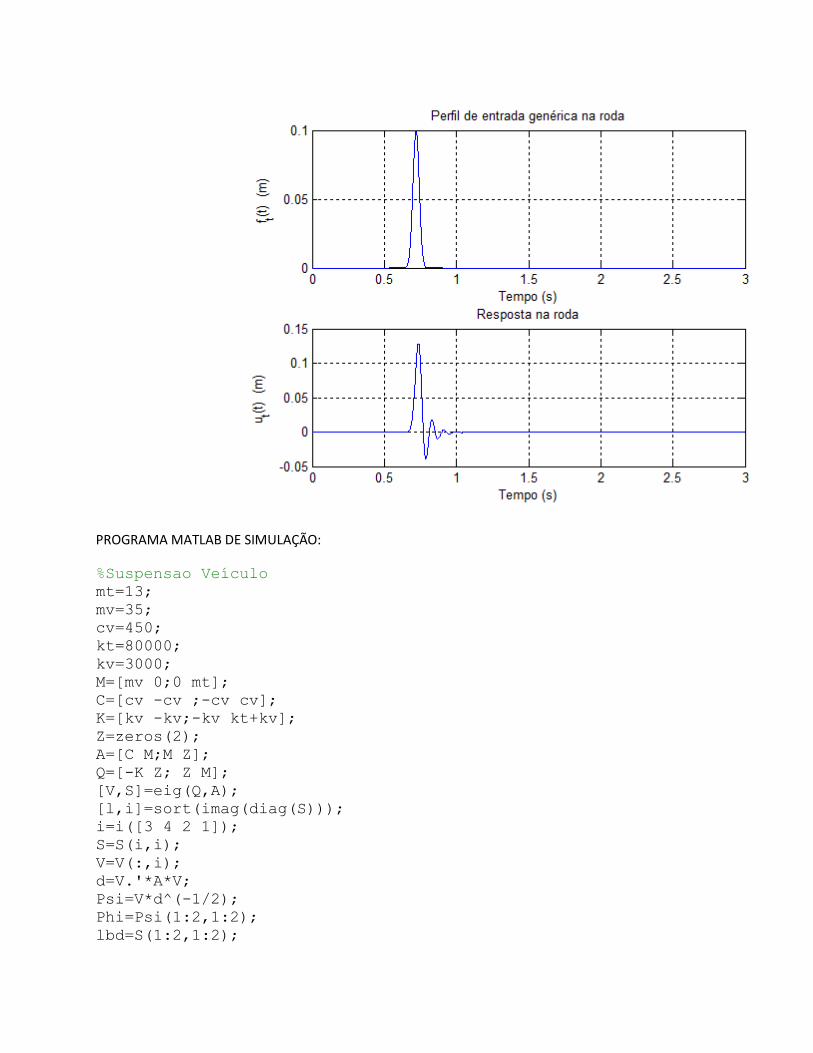
Resposta entrada genérica
A equação de movimento do sistema pode ser resolvida, supondo uma excitação genérica
qualquer, aplicada aos diferentes graus de liberdade. Seguem, portanto, as relações vetoriais e
escalares que definem a resposta do sistema a uma entrada genérica.
o Relação vetorial de transferência entre entrada e saída do sistema, domínio de
Laplace, quando as entradas são funções genéricas:
[
] [
] [
],
o Solução de movimento do sistema sujeito a uma entrada genérica:

[
] ∫ ( ( ) ( ) [
])
.
Apresentação das respostas utilizando os valores numéricos do exemplo dado:
o Gráficos da resposta no grau de liberdade (movimento do veículo), para uma
entrada genérica aplicada no grau de liberdade t (movimento da roda):
o Gráficos da resposta no grau de liberdade (movimento da roda), para uma
entrada genérica aplicada no grau de liberdade t (movimento da roda):
PROGRAMA MATLAB DE SIMULAÇÃO:
%Suspensao Veículo
mt=13;
mv=35;
cv=450;
kt=80000;
kv=3000;
M=[mv 0;0 mt];
C=[cv -cv ;-cv cv];
K=[kv -kv;-kv kt+kv];
Z=zeros(2);
A=[C M;M Z];
Q=[-K Z; Z M];
[V,S]=eig(Q,A);
[l,i]=sort(imag(diag(S)));
i=i([3 4 2 1]);
S=S(i,i);
V=V(:,i);
d=V.'*A*V;
Psi=V*d^(-1/2);
Phi=Psi(1:2,1:2);
lbd=S(1:2,1:2);

A1=abs(Phi);%Amplitude dos auto-valores
F1=angle(Phi);%ângulos de fase dos auto-valores
[A1 F1]
%Funçoes de reposta em frequencia
Ms=3000;%Número de amostras de frequência
dw=2*pi/100;%Interalo de discretização em frequência
w=dw*(0:Ms-1);
j=sqrt(-1);
H12=Phi(1,1)*Phi(2,1)./(j*w-lbd(1,1))+Phi(1,2)*Phi(2,2)./(j*w-
lbd(2,2));
H12=H12+conj(Phi(1,1))*conj(Phi(2,1))./(j*w-
conj(lbd(1,1)))+conj(Phi(1,2))*conj(Phi(2,2))./(j*w-
conj(lbd(2,2)));
figure(1),subplot(211),plot(w,abs(H12));
grid, title('FRF H_{12}(\omega)'); xlabel('Frequência
(Rd/s)');ylabel('|H_{12}(\omega)| (m/m)')
subplot(413),plot(w,angle(H12))
grid, xlabel('Frequência (Rd/s)');ylabel('Fase(H_{12}(\omega))
(Rd)')
H22=Phi(2,1)^2./(j*w-lbd(1,1))+Phi(2,2)^2./(j*w-lbd(2,2));
H22=H22+conj(Phi(2,1))^2./(j*w-
conj(lbd(1,1)))+conj(Phi(2,2))^2./(j*w-conj(lbd(2,2)));
figure(2),subplot(211),plot(w,abs(H22));
grid,title('FRF H_{22}(\omega)'); xlabel('Frequência
(Rd/s)');ylabel('|H_{22}(\omega)| (m/m)')
subplot(413),plot(w,angle(H22))
grid, xlabel('Frequência (Rd/s)');ylabel('Fase(H_{22}(\omega))
(Rd)')
%Funçoes de reposta ao impulso unitário
dt=0.001;%Intervalo de discretização no tempo\
Mt=1000;%Número de amostras de tempo
t=dt*(0:Mt-1);
h12=Phi(1,1)*Phi(2,1)*exp(lbd(1,1)*t)+Phi(1,2)*Phi(2,2)*exp(lbd(
2,2)*t);
h12=2*real(h12);
figure(3),subplot(211),plot(t,h12);
grid, title('FRIU h_{12}(t)'); xlabel('Tempo
(s)');ylabel('h_{12}(t) (m)')
h22=Phi(2,1)*Phi(2,1)*exp(lbd(1,1)*t)+Phi(2,2)*Phi(2,2)*exp(lbd(
2,2)*t);
h22=2*real(h22);
figure(4),subplot(211),plot(t,h22);
grid, title('FRIU h_{22}(t)'); xlabel('Tempo
(s)');ylabel('h_{22}(t) (m)')%Funçoes de reposta ao impulso
unitário

%Funções de resposta ao degrau
uv=Phi(1,1)*Phi(2,1)/lbd(1,1)*(exp(lbd(1,1)*t)-
1)+Phi(1,2)*Phi(2,2)/lbd(2,2)*(exp(lbd(2,2)*t)-1);
uv=uv+conj(Phi(1,1))*conj(Phi(2,1))/conj(lbd(1,1))*(exp(conj(lbd
(1,1))*t)-
1)+conj(Phi(1,2))*conj(Phi(2,2))/conj(lbd(2,2))*(exp(conj(lbd(2,
2))*t)-1);
uv=real(uv);
figure(5),subplot(211),plot(t,uv);
grid, title('Resposta ao degrau u_v(t)'); xlabel('Tempo
(s)');ylabel('u_v(t) (m)')
ut=Phi(2,1)*Phi(2,1)/lbd(1,1)*(exp(lbd(1,1)*t)-
1)+Phi(2,2)*Phi(2,2)/lbd(2,2)*(exp(lbd(2,2)*t)-1);
ut=ut+conj(Phi(2,1))*conj(Phi(2,1))/conj(lbd(1,1))*(exp(conj(lbd
(1,1))*t)-
1)+conj(Phi(2,2))*conj(Phi(2,2))/conj(lbd(2,2))*(exp(conj(lbd(2,
2))*t)-1);;
ut=real(ut);
figure(6),subplot(211),plot(t,ut);
grid, title('Resposta ao degrau u_t(t)'); xlabel('Tempo
(s)');ylabel('u_t(t) (m)')
%Resposta a uma força qualquer, causada por um obstáculo
t=dt* (0:Ms-1);%Vetor de tempos;
a=0.1;%altura do obstaculo
sig=0.3;%largura do obstaculo;
v=50/3.6;%Velocidade da roda em m/s
L=10;%Posição da base do obstáculo a partir do instante 0
x=a*exp(-(v*t-L).^2/(2*sig^2));
% ddx=a*((L^2*t*v + L*sig^2 - 2*L*t.^2*v^2 - 2*sig^2*t*v +
t.^3*v^3)./(sig^4*exp((L - t*v).^2/(2*sig^2))));
% force=-[mv;mt]*ddx;
force=[0;kt]*x;
figure(7),subplot(211),plot(t,x);
grid, title('Perfil de entrada genérica na roda'); xlabel('Tempo
(s)');ylabel('f_t(t) (m)')
PHI_f=Phi.'*force;
ET=exp(diag(lbd)*t);
ETPHI=(ifft(fft(PHI_f.').*fft(ET.')).');
uv=2*real(Phi*ETPHI)*dt;
subplot(212),plot(t,uv(1,:),'b')
grid, title('Resposta no veículo'); xlabel('Tempo
(s)');ylabel('u_v(t) (m)')
figure(8),subplot(211),plot(t,x);
grid, title('Perfil de entrada genérica na roda'); xlabel('Tempo
(s)');ylabel('f_t(t) (m)')

subplot(212),plot(t,uv(2,:),'b')
grid, title('Resposta na roda'); xlabel('Tempo
(s)');ylabel('u_t(t) (m)')