estudo experimental do modelo de uma turbina auto
TRANSCRIPT

Estudo experimental do modelo de uma turbina auto-retificadorade ação axial com pás fixas
Ana Filipa Furtado Ponte
Dissertação para obtenção do Grau de Mestre em
Engenharia Mecânica
Orientadores: Prof. Luís Manuel de Carvalho GatoProf. João Carlos de Campos Henriques
Júri
Presidente: Prof. Carlos Frederico Neves Bettencourt da Silva
Orientador: Prof. Luís Manuel de Carvalho Gato
Vogal: Prof. José Manuel Paixão Conde
Maio 2019


Aos meus avós, Conceição, Genuína e Edgar.
i

ii
Agradecimentos
Em primeiro lugar, gostaria de agradecer ao Professor Luís Gato, orientador desta dissertação, pela partilha
de conhecimentos, tanto teóricos como práticos, pela disponibilidade incondicional. Pelo desafio proposto e pela
confiança depositada.
Ao Professor João Henriques, co-orientador desta tese, pela sua disponibilidade e partilha de conhecimentos e
experiências.
À Eng.ª Ana Alexandra Carrelhas pelo apoio incondicional, pelas discussões construtivas, conselhos e partilha
de experiências. Foi uma pessoa incansável ao longo deste percurso.
À Sr.ª Maria José Neves, pelo apoio e execução da parte burocrática deste projeto e por toda a paciência.
Ao Sr. Joaquim Frade e Sr. Pedro Alves, pelo apoio na instalação e manutenção dos modelos. Pelas discussões
produtivas e partilha de conhecimentos. Sem eles não seria possível a concretização deste projeto.
Ao Eng.º João Nunes pelo apoio prestado no início deste percurso, relativamente ao modo de fixação das pás e
compreensão do escoamento.
Aos meus pais, João Pedro e Graça do Natal, que mesmo longe, estiveram sempre presentes. Pelo apoio
incondicional desde sempre, por proporcionarem a concretização deste percurso académico e por acreditarem
sempre em mim.
À restante família por me acompanharem neste percurso.
iii
iv
Resumo
A turbina auto-retificadora de ação axial é uma alternativa à turbina Wells, para implementação nos sistemas
Coluna de Água Oscilante. É constituída por dois conjuntos de pás diretrizes, posicionadas simetricamente
em relação ao plano perpendicular ao eixo de rotação. Contrariamente à turbina Wells, esta não apresenta a
abrupta diminuição do rendimento para elevados coeficientes de caudal, produzindo energia sob estados de mar
muito energéticos. No entanto, estas turbinas são caracterizadas por um pico de rendimento limitado, devido à
incompatibilidade entre o ângulo do escoamento e o ângulo de entrada das pás a jusante do rotor, as quais produzem
grandes perdas de pressão de estagnação.
A presente dissertação reporta os resultados experimentais de uma turbina auto-retificadora de ação axial com
uma geometria tradicional, com uma coroa de pás e uma nova geometria. A nova geometria, inspirada no projeto de
pás concêntricas desenvolvido para a turbina auto-retificadora de ação bi-radial, compreende três coroas de pás, que
permitem uma grande deflexão à entrada do rotor e, simultaneamente, uma redução da obstrução do escoamento,
proporcionando uma diminuição das perdas de pressão de estagnação à saída do rotor e um aumento do rendimento,
quando comparada com a geometria tradicional.
Um modelo com um rotor de 0,59 m foi construído e testado na instalação uni-direcional de 55 kW do IST,
em regime permanente. Medições como a diferença de pressão no rotor, queda de pressão, caudal volumétrico,
velocidade de rotação, binário fornecido ao veio e atravessamentos no rotor, permitiram avaliar e comparar o
comportamento de ambas geometrias.
Palavras-chave: Energia das ondas, turbina auto-retificadora, turbina de ação axial, estudo experimental
do modelo, resultados experimentais, coluna de água oscilante.
v

vi

Abstract
The self-rectifying axial-flow impulse turbine is one popular alternative to theWells turbine to equip Oscillating
Water Column devices. This turbine does not exhibit the sharp efficiency drop at large flow rate coefficients that
occurs for the Wells turbine, being able to produce positive power under very energetic sea states. Self-rectifying
impulse turbines are known to have limited peak efficiency due to the inherent misalignment between the flow
direction and the inlet direction of the guide-vanes at the downstream stator, which introduces large flow blockage
that produces high flow stagnation pressure losses.
This thesis reports the results of the experimental testing of an axial-flow self-rectifying impulse turbine with a
traditional and a new guide-vanes geometry, both designed to produce a large deflection of the flow at the rotor inlet.
The new stator design is inspired in the concentric annular rows guide-vane design developed for the self-rectifying
biradial impulse turbine. The new geometry comprises three guide-vane rows, which enable high flow deflection
at the rotor inlet with a reduced blockage, smaller stagnation pressure loss at the downstream guide-vane system,
and increased efficiency, in comparison with the traditional geometry.
A 0.59 m rotor diameter axial-flow self-rectifying impulse turbine model was constructed and tested at the
55 kW IST blow-down test rig under unidirectional steady-state conditions. Measurements of the air pressure head,
the pressure difference across the rotor, flow rate, rotational speed and flow traversing at the rotor allowed the
performance assessment and comparison of both turbine designs.
Keywords: Wave energy, self-rectifying air turbine, impulse axial-flow turbine, model testing, experi-
mental results, oscillating water column.
vii

viii
Conteúdo
Agradecimentos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . iii
Resumo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . v
Abstract . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . vii
Lista de Tabelas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xii
Lista de Figuras . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xvi
Lista de Abreviaturas e Símbolos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xvii
1 Introdução 1
1.1 A energia das ondas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Turbinas auto-retificadoras . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.2.1 Turbina Wells . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.2.2 Turbina de ação axial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.2.3 Turbina de ação bi-radial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.3 Motivação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.4 Objetivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.5 Publicações . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.6 Estrutura da dissertação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2 Descrição e construção do modelo 11
2.1 Características do modelo da turbina . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.1.1 Escoamento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.1.2 Pás diretrizes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.1.3 Rotor e difusor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.2 Construção do modelo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.2.1 Pás diretrizes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.2.2 Difusor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.2.3 Modelo da turbina . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3 Instalação experimental e instrumentação 21
3.1 Instalação experimental . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.2 Instrumentação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
3.2.1 Condições atmosféricas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
ix
3.2.2 Pressão . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.2.3 Binário e velocidade de rotação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3.2.4 Caudal volumétrico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
3.2.5 Velocidade e direção do escoamento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
3.2.6 Sistema de aquisição de dados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
3.2.7 Pós-processamento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
3.3 Análise de incerteza das medições . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
4 Análise dos resultados experimentais 41
4.1 Ensaio de atravessamento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
4.1.1 Atravessamento à entrada do rotor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
4.1.2 Atravessamento à saída do rotor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
4.1.3 Estudo do escoamento no rotor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
4.2 Perdas ao longo da turbina . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
4.3 Ensaio de binário de atrito . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
4.3.1 Ensaio com caudal nulo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
4.4 Ensaio para obtenção das curvas de funcionamento . . . . . . . . . . . . . . . . . . . . . . . . . 61
4.5 Outros resultados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
4.5.1 Influência do difusor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
4.5.2 Rendimento total-total do rotor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
4.5.3 Incertezas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
4.5.4 Comparação de resultados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
5 Conclusões e trabalho futuro 73
5.1 Conclusões . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
5.2 Trabalho futuro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
A Construção das pás diretrizes 81
A.1 Procedimento para produção do molde de silicone . . . . . . . . . . . . . . . . . . . . . . . . . . 81
B Retas de calibração dos manómetros 82
B.1 Instalação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
B.2 Sondas direcionais de três furos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
C Ensaios de atravessamento 85
C.1 Rotina . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
C.2 Construção dos sistemas de atravessamento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
D Imagens da instalação 88
D.1 Montagem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
D.2 Instrumentação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
x
Lista de Tabelas
2.1 Valores de projeto: ângulo da velocidade absoluta à entrada α1d e saída α2d de cada coroa de pás
diretrizes e a percentagem de bloqueamento. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3.1 Características dos manómetros e respetivas retas de calibração. . . . . . . . . . . . . . . . . . . 25
3.2 Características dos sensores de binário e respetivas retas de calibração. A precisão para ambos os
sensores é de ±0,1% do valor lido. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
3.3 Caudais e pressões medidos durante calibração da tubeira convergente. . . . . . . . . . . . . . . . 29
3.4 Retas de calibração das sondas direcionais de três furos utilizadas, referentes à primeira fase da
calibração. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
3.5 Retas de calibração das sondas de 3 furos utilizadas, referentes ao segundo teste . . . . . . . . . . 33
3.6 Principais características da placa de aquisição de dados NI PCI-6221. . . . . . . . . . . . . . . . 36
4.1 Nomenclatura utilizada. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
4.2 Coeficientes de caudal Φ estudados, nos ensaios de atravessamento. . . . . . . . . . . . . . . . . 42
4.3 Sonda utilizada, posição axial relativa ao rotor ∆x, discretização radial ∆r e dimensão radial r . . . 44
4.4 Passo circunferencial e número de pontos circunferenciais estudados na secção 2, para cada estator. 44
4.5 Valores médios da velocidade absoluta à entrada e saída do rotor. . . . . . . . . . . . . . . . . . . 53
4.6 Valores do caudal integrado à entrada e saída do rotor e respetivo erro, para ambos os estatores. . . 55
4.7 Intervalos de Ω, Re, Φ e Ma estudados. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
4.8 ηts,max e Φηts,max para as configurações estudadas. . . . . . . . . . . . . . . . . . . . . . . . . . . 64
4.9 Análise de incertezas - Curva de rendimento para modelo de turbina com configuração M1CM. . . 67
4.10 Análise de incertezas - Curva de rendimento para modelo de turbina com configuração M3CM. . . 67
4.11 Análise de incertezas - Curva de rendimento para modelo de turbina com configuração M1CJ, sem
correção. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
4.12 Análise de incertezas - Curva de rendimento para modelo de turbina com configuração M3CJ. . . 68
4.13 Análise de incertezas - Curva de rendimento para modelo de turbina com configuração M1CM sem
difusor. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
4.14 Resumo das características das turbinas de ação axiais em comparação. . . . . . . . . . . . . . . 68
4.15 Resumo das características das geometrias utilizadas na turbina bi-radial. . . . . . . . . . . . . . 71
B.1 Características dos manómetros utilizados nas sondas direcionais de três furos e respetivas retas de
calibração. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
xi

xii
Lista de Figuras
1.1 Coluna de água oscilante: (a) estrutura fixa, Central das Ondas da Ilha do Pico, Açores; (b) estrutura
flutuante, Spar Buoy. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2 Turbina Wells na configuração original: (a) esquema da turbina; (b) triângulo de velocidades. . . . 3
1.3 Curvas de funcionamento da turbina Wells: (a) coeficiente de pressão (esquerda) e rendimento
(direita) em função do coeficiente de caudal para turbina Wells de rotor isolado com e sem pás
diretrizes, para um fator de bloqueamento de σ = 0,44 (símbolos abertos - sem pás diretrizes
MP, símbolos cheios - com pás diretrizes GV); (b) rendimento (esquerda) e coeficiente de pressão
(direita) em função do coeficiente de caudal para turbina Wells de rotor isolado (MP) e de duplo
plano (BP), ambos sem pás directrizes, para σ = 0,64; (c) rendimento (esquerda) e coeficiente de
pressão (direita) em função do coeficiente de caudal turbina Wells contra-rotativa (CR) e de duplo
plano (BP), sem pás diretrizes, para σ = 1,28. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.4 Turbina de ação axial: (a) configuração com as pás diretrizes e o rotor; (b) triângulo de velocidades. 5
1.5 Curvas de rendimentos para a turbina Wells e de ação axial. . . . . . . . . . . . . . . . . . . . . . 6
1.6 Curvas de funcionamento da turbina de ação axial com pás fixas: (a) rendimento em função
do coeficiente de caudal para diferentes valores de fatores de bloqueamento de pás diretrizes, ε
(quadrados - ε = 0,56; triângulos - ε = 0,63; trapézios - ε = 0,87; círculos - ε = 1,00); (b1) coefiente
de binário em função do coeficiente de caudal, para diferentes valores de ângulo de incidência α;
(b2) rendimento da turbina em função do coeficiente de caudal, para diferentes valores de ângulo
de incidência α. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.7 Turbina auto-retificadora de ação bi-radial: (a) configuração de pás deslizantes; (b) configuração
de pás fixas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.8 Conceito do efeito de pás sombra. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
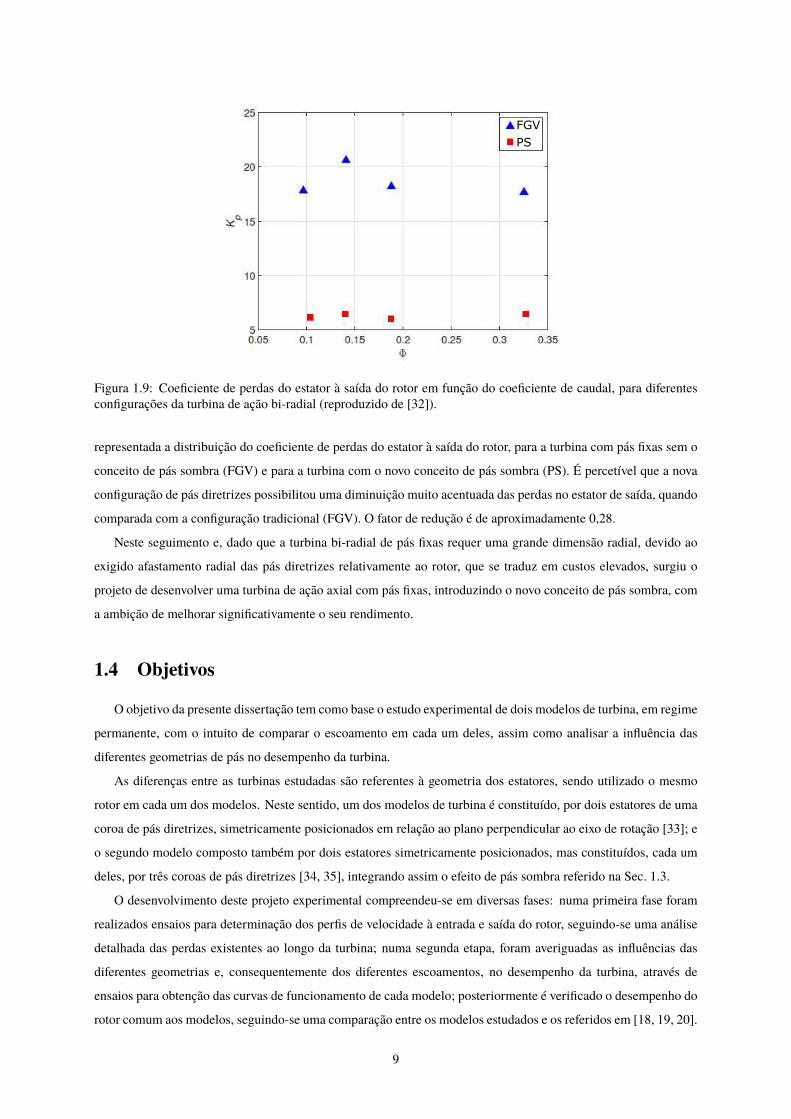
1.9 Coeficiente de perdas do estator à saída do rotor em função do coeficiente de caudal, para diferentes
configurações da turbina de ação bi-radial. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
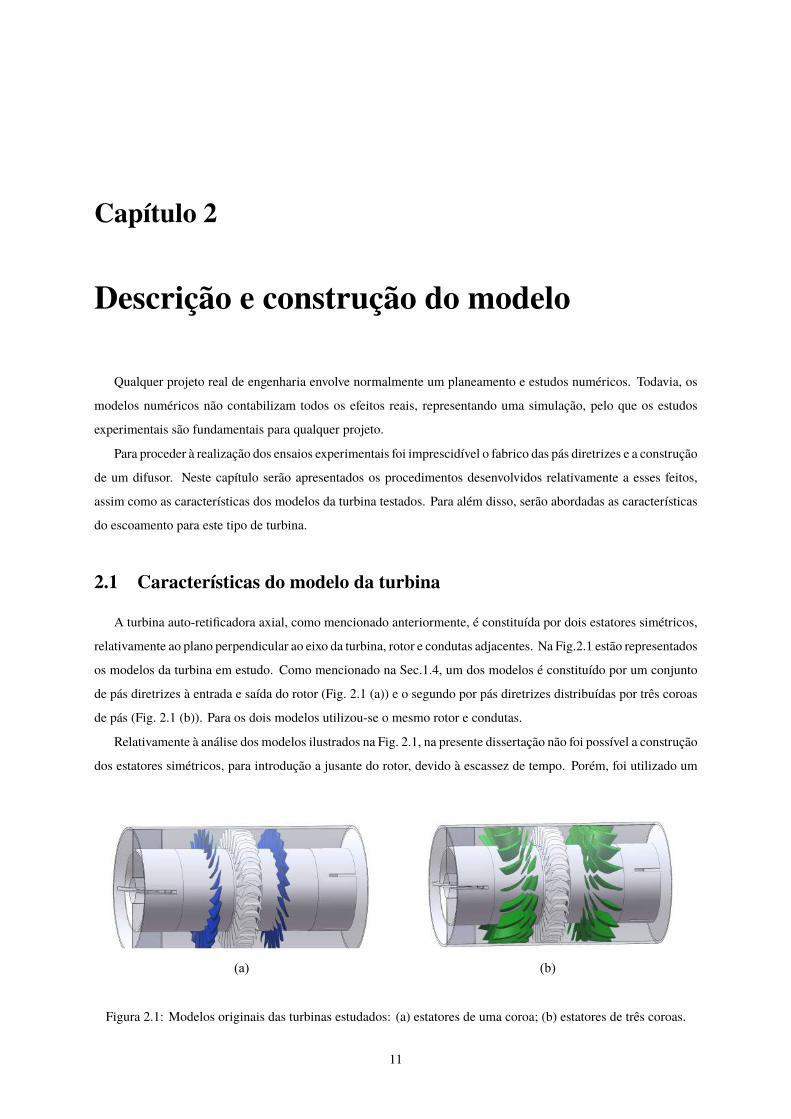
2.1 Modelos originais das turbinas estudados: (a) estatores de uma coroa; (b) estatores de três coroas. 11
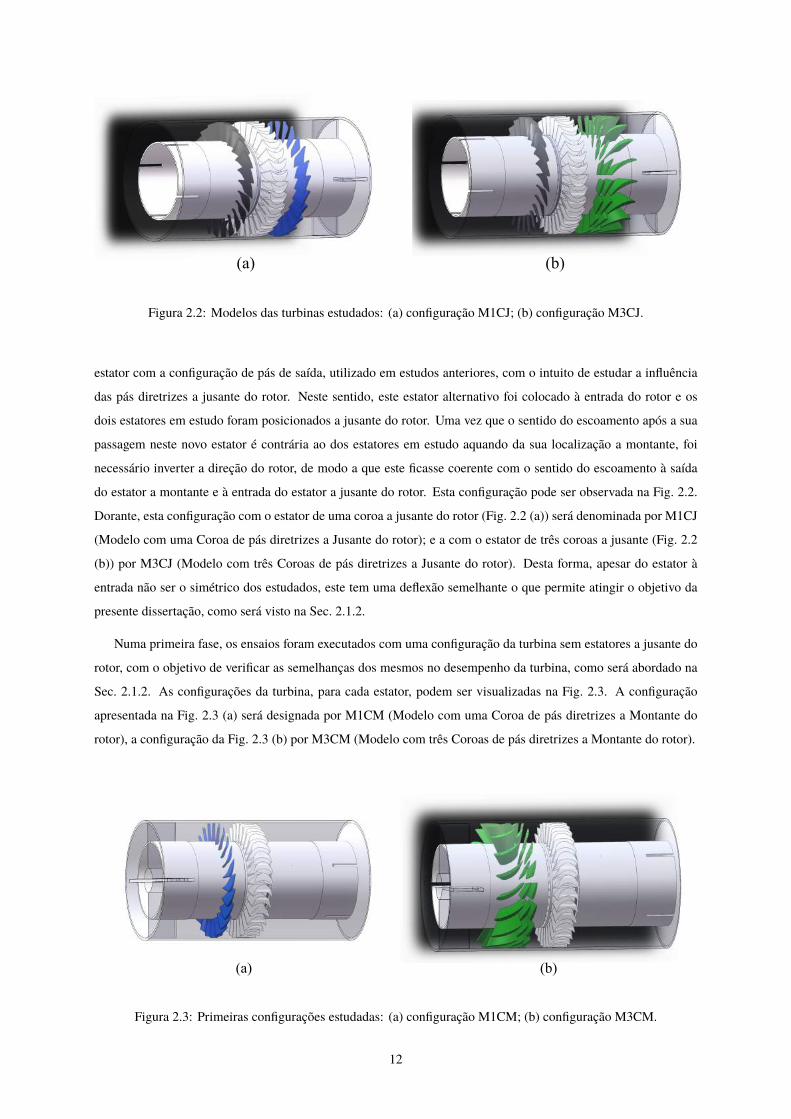
2.2 Modelos das turbinas estudados: (a) configuração M1CJ; (b) configuração M3CJ. . . . . . . . . . 12
2.3 Primeiras configurações estudadas: (a) configuração M1CM; (b) configuração M3CM. . . . . . . 12
2.4 Triângulo de velocidades genérico para uma turbina axial: (a) entrada do rotor; (b) saída do rotor. 13
2.5 Representação do escoamento à saída do rotor, em condições de projeto e demonstração do espaço
circunferencial livre existente: (a) estator de uma coroa; (b) estator de três coroas. . . . . . . . . . 14
xiii
2.6 Imagem 3D dos estatores em estudo: (a) configuração de uma coroa singular, E1C; (b) configuração
de três coroas, E3C; (c) estator E1C*, alternativo aos simétricos de E1C e E3C. . . . . . . . . . . 14
2.7 Rotor: (a) fotografia de uma pá; (b) fotografia do rotor; (c) rotor a ser instalado na turbina, com o
veio roscado. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
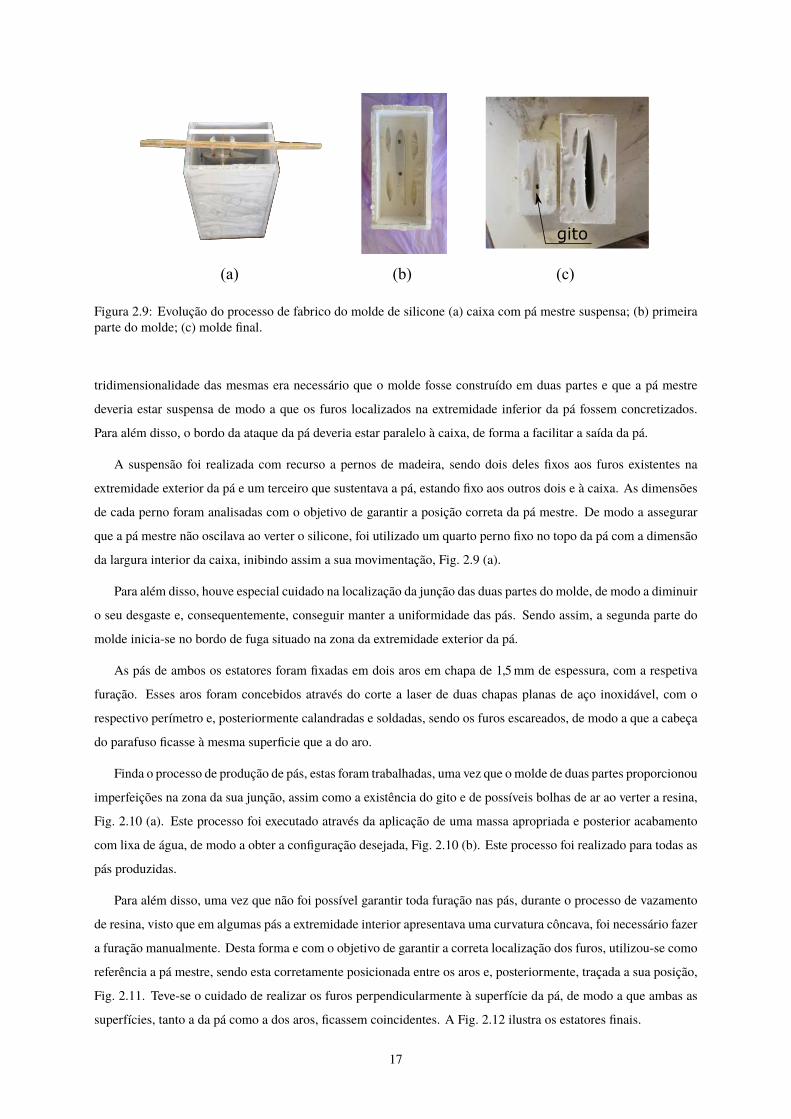
2.8 Pás mestres do estator de três coroas maquinadas em alumínio: (a) coroa 1; (b) coroa 2; (c) coroa 3. 16
2.9 Evolução do processo de fabrico do molde de silicone (a) caixa com pá mestre suspensa; (b)
primeira parte do molde; (c) molde final. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.10 Processo de acabamento manual das pás: (a) forma da pá depois de retirada do molde de silicone
((1) imperfeição da junção do molde, (2) imperfeição devido ao gito, (3) imperfeição devido a
bolha de ar ao verter a resina); (b) pá final, após acabamento manual. . . . . . . . . . . . . . . . . 18
2.11 Execução da furação nas pás. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.12 Fotografia dos estatores produzidos: (a) estator de uma só coroa (E1C); (b) estator de três coroas
(E3C). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.13 Diferentes perspetivas do modelo da turbina. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3.1 Esquema da instalação. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.2 Instrumentação para medição das condições atmosféricas: (a) termómetro para medição da tempe-
ratura húmida, Thum; (b) Testo 511 à esquerda e Testo 175H1 à direita. . . . . . . . . . . . . . . . 23
3.3 Caixa construída com os sensores de pressão: (a) exterior da caixa, junto à turbina, com o
interruptor, indicador luminoso e tubos de pressão; (b) interior da caixa com os manómetros, fonte
de alimentação e terminal RJ45; (c) suporte dos manómetros e placa do circuito elétrico. . . . . . 24
3.4 Reta de calibração do manómetro associado à pressão p3 . . . . . . . . . . . . . . . . . . . . . . 25
3.5 Montagem para calibração do sensor de binário TG5/BP. . . . . . . . . . . . . . . . . . . . . . . 26
3.6 Reta de calibração do binário, T do sensor TG5/BP. . . . . . . . . . . . . . . . . . . . . . . . . . 27
3.7 Reta de calibração da velocidade de rotação, Ω, do sensor TG5/BP. . . . . . . . . . . . . . . . . . 28
3.8 Montagem para calibração do caudal à entrada do estator de entrada. . . . . . . . . . . . . . . . . 28
3.9 Perfil da velocidade axial Va1 , em função da coordenada radial adimensionalizada r∗ para Q =
1,182 m3/s. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
3.10 Reta de calibração do caudal volumétrico. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
3.11 Sondas direcionais de três furos: (a) visão geral, à esquerda sonda cilíndrica, à direita sonda cobra;
(b) pormenor da cabeça da sonda cilíndrica; (c) pormenor da cabeça da sonda cobra. . . . . . . . 30
3.12 Montagem para calibração da sonda de direcional de 3 furos: (a) túnel de vento, suporte da sonda
e bancada de aquisição de dados com os manómetros utilizados; (b) sonda direcional de três furos,
tubo de Pitot e medidor de ângulos manual. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
3.13 Resultados entre as pressões lidas pelo Pitot e pela sonda, para ambas as sondas: (a) pressão
dinâmica; (b) pressão total. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
3.14 Resultados dos coeficientes total, angular e dinâmico em função do ângulo de alinhamento: (a)
sonda cilíndrica; (b) sonda cobra. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
3.15 Sistemas de atravessamentos desenvolvidos: (a) sistema A; (b) sistema B. . . . . . . . . . . . . . 34
xiv

3.16 Componentes eletrónicas dos sistemas de atravessamento: (a) Arduino UNO Rev3 e placa Adafruit
Motor Shield V2; (b) imagem geral do sistema eletrónico. . . . . . . . . . . . . . . . . . . . . . . 35
3.17 Esquema de aquisição de dados para os ensaios. . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
3.18 Sinal de binário filtrado e não filtrado, em função do tempo. . . . . . . . . . . . . . . . . . . . . 38
4.1 Fotografia da ranhura existente na parede da turbina e demonstração do passo circunferencial,Θpasso
para o caso do estator de coroa singular, E1C. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
4.2 Ângulo da velocidade absoluta do escoamento com a componente axial à entrada do rotor α2 em
função da distribuição radial adimensionalizada r∗: (a) E1C; (b) E3C; (c) E1C*. . . . . . . . . . . 46
4.3 Distribuição radial da velocidade absoluta adimensionalizada à entrada do rotor, para os diferentes
modelos: E1C, Θ∗ = 0,776 - (a1) V2∗, (a2) Va2
∗, (a3) Vt2∗; E3C, Θ∗ = 1,000 - (b1) V2
∗, (b2) Va2∗,
(b3) Vt2∗; E1C*, Θ∗ = 0,009 - (c1) V2
∗, (c2) Va2∗, (c3) Vt2
∗. . . . . . . . . . . . . . . . . . . . . . 47
4.4 Ângulo médio da velocidade absoluta do escoamento com a componente axial à entrada do rotor
α2 em função da distribuição radial adimensionalizada r∗: (a) E1C; (b) E3C; (c) E1C*. . . . . . . 48
4.5 Perfil de velocidade absoluta adimensionalizada pela componente axial média absoluta, V2∗ à
entrada do rotor, para um passo: E1C - (a1) Φ = 0,14, (a2) Φ = 0,18; E3C - (b1) Φ = 0,12, (b2)
Φ = 0,17; E1C* - (c1) Φ = 0,10, (c2) Φ = 0,13. . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
4.6 Ângulo da velocidade absoluta à saída do rotor α3 em função da coordenada radial r∗: (a) E1C; (b)
E3C; (c) E1C*. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
4.7 Ângulo médio da velocidade absoluta à saída do rotor α3 em função da coordenada radial r∗ para
todos os estatores. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
4.8 Distribuição radial da velocidade absoluta adimensionalizada à saída do rotor, para os diferentes
modelos: E1C - (a1) V3∗, (a2) Va3
∗, (a3) V3∗; E3C - (b1) V3
∗, (b2) Va3∗, (b3) V3
∗; E1C* - (c1) V3∗,
(c2) Va3∗, (c3) V3
∗. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
4.9 Ângulo médios da velocidade relativa em função do coeficiente de caudal: (a) entrada do rotor; (b)
saída do rotor. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
4.10 Distribuição dos coeficientes de perda de estagnação em função do coeficiente de caudal: (a)
M1CM; (b) M3CM. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
4.11 Distribuição dos coeficientes de perda de pressão de estagnação em função do coeficiente de caudal:
(a) M1CJ; (b) M3CJ. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
4.12 Distribuição dos coeficientes de perda em função de Φ: (a) coeficiente de perda no estator λA−2;
(b) coeficientes de perda de pressão de estagnação Λ corrigidos. . . . . . . . . . . . . . . . . . . 59
4.13 Curva do binário de atrito Ta. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
4.14 Curvas de funcionamento da turbina dos modelos: M1CM e M3CM - (a1) ηts(Φ), (a2) Π(Φ), (a3)
Ψ(Φ); M1CJ e M3CJ - (b1) ηts(Φ), (b2) Π(Φ), (b3) Ψ(Φ). . . . . . . . . . . . . . . . . . . . . . . 63
4.15 Curvas de funcionamento: (a) coeficiente de potência em função do coeficiente de caudal para
M3CJ, M3CM e M1CJ; (b) rendimento corrigido em função do coeficiente de caudal para M1CJ. 64
4.16 Curva de rendimento ηts em função do coeficiente de caudal Φ para o caso do modelo sem difusor,
com a configuração de pás a montante do rotor de uma só coroa. . . . . . . . . . . . . . . . . . . 65
xv

4.17 Rendimento total-total do rotor em função do coeficiente de caudal. . . . . . . . . . . . . . . . . 66
4.18 Curvas de rendimento para as diferentes configurações em análise. . . . . . . . . . . . . . . . . . 69
4.19 Coeficiente de perdas no estator de saída em função do coeficiente de caudal, para a turbina de ação
e bi-radial. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
B.1 Reta de calibração de p1 da instalação. R2 = 0,999. . . . . . . . . . . . . . . . . . . . . . . . . . 82
B.2 Reta de calibração de p2 da instalação. R2 = 1,000. . . . . . . . . . . . . . . . . . . . . . . . . . 82
B.3 Reta de calibração de p4 da instalação. R2 = 1,000. . . . . . . . . . . . . . . . . . . . . . . . . . 82
B.4 Reta de calibração de p5 da instalação. R2 = 0,999. . . . . . . . . . . . . . . . . . . . . . . . . . 82
B.5 Reta de calibração de p6−7 da instalação. R2 = 1,000. . . . . . . . . . . . . . . . . . . . . . . . . 83
B.6 Reta de calibração de p1 da sonda de entrada. R2 = 1,000. . . . . . . . . . . . . . . . . . . . . . 83
B.7 Reta de calibração de p1 da sonda de saída. R2 = 1,000. . . . . . . . . . . . . . . . . . . . . . . . 83
B.8 Reta de calibração de p2 da sonda de entrada. R2 = 0,999. . . . . . . . . . . . . . . . . . . . . . 84
B.9 Reta de calibração de p2 da sonda de saída. R2 = 0,999. . . . . . . . . . . . . . . . . . . . . . . . 84
B.10 Reta de calibração de p3 da sonda de entrada. R2 = 1,000. . . . . . . . . . . . . . . . . . . . . . 84
B.11 Reta de calibração de p3 da sonda de saída. R2 = 1,000. . . . . . . . . . . . . . . . . . . . . . . . 84
B.12 Reta de calibração de ∆p1−2 da sonda de entrada. R2 = 0,999. . . . . . . . . . . . . . . . . . . . 84
B.13 Reta de calibração de ∆p1−2 da sonda de saída. R2 = 0,999. . . . . . . . . . . . . . . . . . . . . . 84
C.1 Construção do sistema de atravessamento A: (a) componente para movimento na direção radial; (b)
diferentes perspetivas da componente responsável pelo movimento de rotação da sonda; (c) peça
para acoplamento dos dois sistemas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
C.2 Construção do sistema de atravessamento B: (a) diferentes perspetivas da componente para movi-
mento na direção radial; (b) diferentes perspetivas da componente responsável pelo movimento de
rotação da sonda; (c) peça para acoplamento dos dois sistemas. . . . . . . . . . . . . . . . . . . . 87
C.3 Construção da caixa com as componentes eletrónicas: (a) diferentes etapas do processo de ligações;
(b) diferentes perspetivas da caixa acoplada ao sistema linear. . . . . . . . . . . . . . . . . . . . . 87
D.1 Montagem do gerador e sensor de binário. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
D.2 Montagem das pás diretrizes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
D.3 Construção da bancada dos sensores de pressão das sondas direcionais. . . . . . . . . . . . . . . . 89
D.4 Evolução da construção da caixa dos sensores de pressão. . . . . . . . . . . . . . . . . . . . . . . 89
D.5 Diferentes perspetivas dos sistemas de atravessamento durante ensaio. . . . . . . . . . . . . . . . 89
xvi
Lista de Abreviaturas e Símbolos
Abreviaturas
AC = Corrente alternada
ADC = Analog to Digital Converter
AI = Entrada analógica
AMCA = Air Movement and Control Association International
AO = Saída analógica
BP = Turbina Wells de duplo plano
CAO = Coluna de Água Oscilante
CNC = Computer Numerical Control
CR = Turbina Wells contra-rotativa
DC = Corrente contínua
DIN = Deutsches Institut für Normung (German Institute for Standardization)
DIO = Entradas e saídas digitais
E1C = Estator de uma coroa
E1C* = Estator de uma coroa alternativo
E3C = Estator de três coroas
FGV = Turbina de ação bi-radial com pás fixas sem efeito de pás sombra, turbina de ação axial
com pás fixas sem efeito de pás sombra
GV = Turbina Wells com pás diretrizes à entrada e saída do rotor
IST = Instituto Superior Técnico
LIMPET = Land Installed Marine Power Energy Transmitter
M1C = Modelo com estator de uma coroa de pás diretrizes
M1CJ = Modelo com estator de uma coroa de pás diretrizes a jusante do rotor
M1CM = Modelo com estator de uma coroa de pás diretrizes a montante do rotor
M3C = Modelo com estator de três coroas de pás diretrizes
M3CJ = Modelo com estator de três coroas de pás diretrizes a jusante do rotor
M3CM = Modelo com estator de três coroas de pás diretrizes a montante do rotor
MGV = Turbina de ação axial com de pás diretrizes móveis
MP = Turbina Wells de rotor isolado
xvii
NI = National Instruments
PCI = Peripherical Component Interconnect
PS = Turbina bi-radial com pás diretrizes fixas com efeito de pás sombra
SSG = Sea-wave Slot-cone Generator
USB = Universal Serial Bus
Símbolos Romanos
A = Condições na atmosfera
b = Braço do suporte estático
C = Condições no interior da câmara de pleno
Cdin = Coeficiente dinâmico
Ctotal = Coeficiente total
Cγ = Coeficiente angular
d = Diâmetro
Ec = Energia cinética
Ep = Energia mecânica dissipada
Er = Energia por unidade de massa de fluido fornecida pelo fluido ao rotor
g = Aceleração da gravidade
m = Massa, número de variáveis
Ma = Número de Mach
n = Número de elementos de uma amostra
p = Pressão
Q = Caudal volúmico
r = Raio, oordenada radial
R = Constante universal dos gases perfeitos
R2 = fator de correlação
Re = Número de Reynolds
S = Desvio padrão
t = Tempo, variável da distribuição t-Student
T = Temperatura, binário
U = Velocidade de transporte, incerteza total da variável medida
UbY = Incertezza sistemática da variável Y
Up = Incertezza aleatória da variável medida
UpY = Incertezza aleatória da variável Y
UY = Incertezza total da variável Y
V = Velocidade absoluta do escoamento, tensão
VAC = Tensão em corrente alternada
xviii
VDC = Tensão em corrente contínua
Va = Componente axial da velocidade absoluta do escoamento
Vt = Componente tangencial da velocidade absoluta do escoamento
W = Velocidade relativa do escoamento
Wa = Componente axial da velocidade relativa do escoamento
Wt = Componente tangencial da velocidade relativa do escoamento
xi = Valor da variável i em cada leitura
y = Corda circunferencial
Z = Número de pás diretrizes
Símbolos Gregos
α = Ângulo absoluto do escoamento
β = Ângulo relativo do escoamento
γ = Ângulo de alinhamento da sonda direcional, relação de calores específicos
∆ = Variação
ε = Fator de bloqueamento das pás diretrizes
ε = Erro
η = Rendimento
θ = Domínio circunferêncial
Θ = Coordenada circunferencial
λ = Coeficiente de perda no estator
Λ = Coeficiente de perda de pressão de estagnação
µ = Viscosidade cinemática do ar
ν = Rácio hub-to-tip
Π = Coeficiente de potência
ρ = Massa específica do ar
σ = Fator de bloqueamento do rotor
Φ = Coeficiente de caudal
Ψ = Coeficiente de pressão
Ω = Velocidade de rotação
Índices Inferiores
0 = Referente à pressão de estagnação
1 = Secção de entrada das pás diretrizes de entrada, tomada de pressão estática na entrada
das pás diretrizes de entrada, referente à pressão do furo periférico esquerdo da sonda
xix
direcional
2 = Secção de entrada do rotor, tomada de pressão estática na entrada do rotor, referente à
pressão do furo periférico direito da sonda direcional
3 = Secção de saída do rotor, tomada de pressão estática na saída do rotor, referente à
pressão central da sonda direcional
4 = Referente à tomada de pressão na entrada do difusor
5 = Referente à tomada de pressão na câmara de pleno
6 = Referente à tomada de pressão a montante da tubeira convergente
7 = Referente à tomada de pressão a jusante da tubeira convergente
1-2 = Referente à diferença de pressões periféricas da sonda direcional
2-3 = Referente à entrada e saída do rotor
3-C = Referente à sa´da do rotor e câmara de pleno
6-7 = Referente à queda de pressão na tubeira convergente
a = Atrito
A, atm = Referente à atmosfera
aero = Aerodinâmico
ar = Ar
atrito = Atrito
A-2 = Referente à atmosfera e entrada do rotor
C = Referente à câmara de pleno
d = Referente ao projeto
din = Referente à pressão dinâmica
est = Estática
ext = Exterior
hum = Referente à temperatura húmida
i = Secção da turbina
int = Interior, integrado
mec = Mecânico
medido = Medido
pá = Pá
pás diretrizes = Pás diretrizes
passo = Referente a um passo circunferencial
pesos = Pesos calibrados
prato = Prato de calibração
Q = Referente ao coeficiente de caudal
rotor = Rotor
rotor,máx = Referente ao rendimento total-total máximo do rotor
seca = Referente à temperatura seca
sonda = Referente à pressão dinâmica da sonda
xx

total = Referente à pressão total
ts = Referente ao rendimento total-estático
ts,max = Referente ao rendimento total-estático máximo
tt = Referente ao rendimento total-total
ηts,max = Referente a rendimento total-estático máximo
θ = Referente ao domínio circunferencial
Índices Superiores
− = Referente à média
∗ = Referente a um valor adimensionalisado′ = Referente ao ângulo das pás do rotor
xxi
xxii
Capítulo 1
Introdução
Hoje em dia, é inimaginável viver nummundo sem eletricidade. Com o crescimento do consumo de eletricidade
(estima-se que em 2040 a eletricidade global requerida seja 60% superior à de 2016 [1]) e com a preocupação
do rápido desenvolvimento do aquecimento global é necessário a implementação de alterativas aos combustíveis
fósseis. Neste sentido, as energias renováveis representam um grande papel no mundo da geração de energia,
proporcionando uma diminuição no que diz respeito à emissão de CO2 e outros poluentes originados na combustão
de combustíveis fósseis [2].
Ao longo dos anos têm sido desenvolvidos e implementados inúmeros sistemas para aproveitamento da energia
proveniente de recursos naturais renováveis, sendo as mais utilizadas a solar e a eólica. Não obstante, a energia
das ondas, apesar de ser uma tecnologia em desenvolvimento e, atualmente alvo de várias investigações, tem um
potencial estimado de 1-10 TW, sendo da mesma ordem de magnitude que o consumo mundial de energia elétrica
[3]. Para além disso, espera-se que a energia das ondas tenha uma contribuição a nível de produção, com um número
de horas equivalente semelhante à da solar. Atualmente, o principal desafio é o de desenvolver um mecanismo de
configuração simples, rentável, duradouro e mecanicamente fiável.
1.1 A energia das ondas
Ao contrário do que se possa pensar, a ideia do aproveitamento da energia das ondas advém de há muitos anos,
datanto-se em 1799 a primeira patente nesta área, da autoria de dois franceses, seguindo-se inúmeras patentes
registadas.
Em 1965, o oficial da marinha Yoshio Masuda inventou uma bóia de navegação alimentada pela energia das
ondas, do tipoColuna deÁguaOscilante (CAO), sendo este o primeiromecanismo industrializado e comercializado.
Onze anos depois, surge o projeto Kaimei, também da autoria de Masuda, onde foi desenvolvida uma embarcação
de grande porte com 13 turbinas de ar instaladas. Apesar dos resultados não serem muito favoráveis, este evento
representou um grande marco na história da energia das ondas, uma vez que demonstrou o seu grande potencial.
Com a crise do petróleo em 1973, o aproveitamento de energia das ondas em grandes escalas suscitou um enorme
interesse, impulsionando investigações sobre o estudo teórico e experimental do complexo processo hidrodinâmico
da absorção da energia das ondas, até 1990. Em 1985 foram instalados na costa Norueguesa os dois primeiros
1
protótipos em escala real. Em 1991 ocorreu uma grande alteração na história da energia das ondas, sendo esta
introduzida pela Comissão Europeia, o que inclui o financiamento de projetos de energia das ondas, no seu programa
de Energias Renováveis. Em 1992 iniciou-se o primeiro projeto dentro deste âmbito.
Atualmente, existem três principais grupos de tecnologias de extração da energia das ondas, conforme o
príncipio de funcionamento: os corpos oscilantes, overtopping e a coluna de água oscilante (CAO). Para uma
análise mais detalhada vejam-se as referências [4, 5, 6].
Os corpos oscilantes funcionam através do trabalho de um flutuador contra o fundo do mar ou contra um ou
mais corpos oscilantes. Este tipo de dispositivos têm capacidade para extrair energia das ondas mais energéticas
em águas profundas. Podem ser flutuantes como é o caso do PowerBuoy ou submersos como é o exemplo do
WaveRoller testado em 2012 na zona costeira de Portugal, em Peniche. Este tipo de dispositivos são, de um modo
geral, muito complexos e apresentam alguns problemas, nomeadamente, as amarrações e o acesso para manutenção.
Para a conversão de energia são utilizados turbinas hidráulicas ou com óleo a alta pressão e geradores elétricos
lineares.
Relativamente ao sistema overtopping, este tem como objetivo o aproveitamento da quantidade de movimento
das ondas, aquando da elevação da água nas cristas das ondas, para armazenameto em reservatórios, situados a
um nível superior à superfície média do mar. Deste modo, através deste desnível é possível aproveitar a energia
potencial da água armazenada, através de turbinas hidráulicas de baixa queda, associadas a geradores elétricos.
Este tipo de dispositivo pode ser de estrutura fixa como é o caso do SSG ou flutuante como é o exemplo do Wave
Dragon.
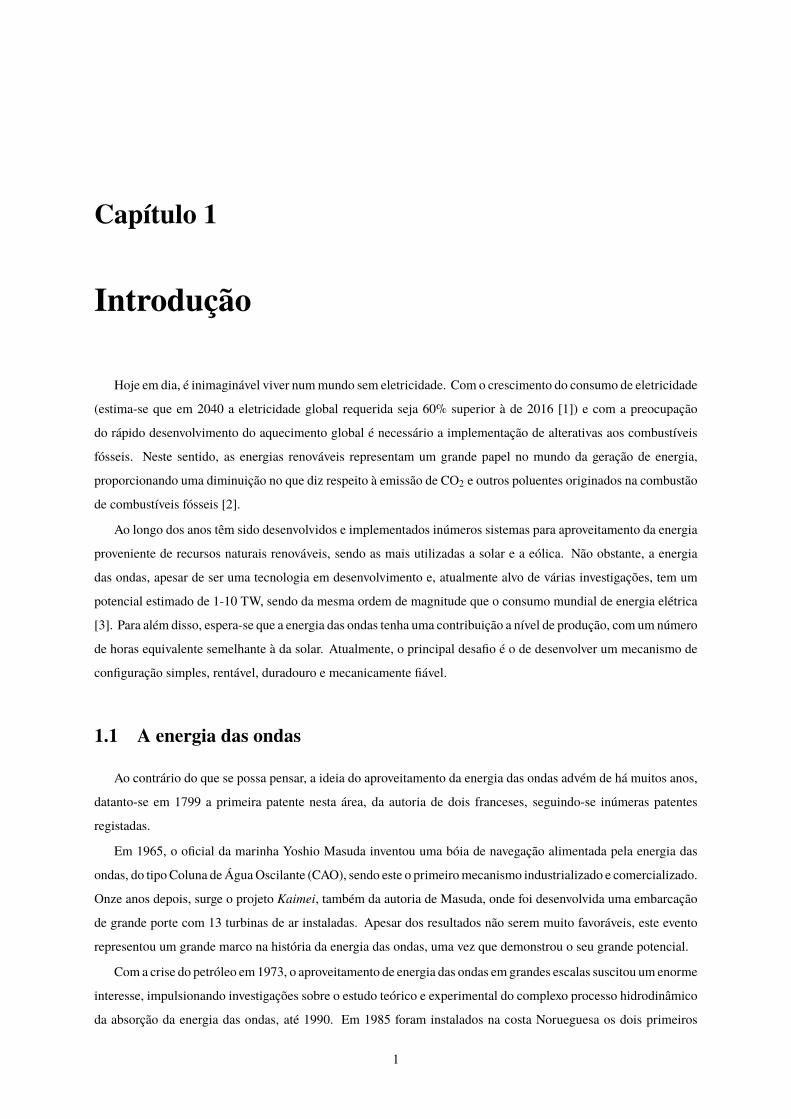
A coluna de água oscilante é constituída por uma estrutura com uma câmara pneumática no seu interior, aberta
na parte inferior, a qual está abaixo da superfície da água. Esta estrutura pode ser fixa, como a Central das Ondas
da Ilha do Pico, Açores (Fig. 1.1 (a)) ou flutuante, como por exemplo a Spar Buoy (Fig. 1.1 (b)). O seu princípio de
funcionamento baseia-se na oscilação da água existente no seu interior, que provoca a compressão e descompressão
do ar, obrigando-o a atravessar pela turbina de ar, instalada na parte superior da estrutura e associada a um gerador
elétrico. Deste modo, é possível a conversão da energia do fluido em energia mecânica ao veio da turbina e,
consequentemente, em energia elétrica. Este é o tipo de dispositivo mais simples e provavelmente o mais estudado
e com mais protótipos testados e implementados em condições reais [7]. A turbina em estudo é para incorporação
(a) (b)
Figura 1.1: Coluna de água oscilante: (a) estrutura fixa, Central das Ondas da Ilha do Pico, Açores (retirado de[7]); (b) estrutura flutuante, Spar Buoy (retirado de [7]).
2
neste tipo de dispositivos.
Um tipo de turbina de ar possível para implementação nos dispositivos CAO são as turbinas de ar uni-direcionais,
as quais requerem o uso de sistemas de condutas e válvulas retificadoras. Este tipo de turbina foi instalada com
sucesso em pequenos dispositivos (bóia de sinalização auto-alimentada de Masuda), no entanto, a sua utilização
para sistemas de grande escala não é a mais adequada, devido às perdas nas válvulas.
Uma alternativa às turbinas uni-direcionais são as turbinas auto-retificadoras, que dispensam a utilização de
um sistema retificador. Uma vez que é desejada a bi-direcionalidade do escoamento na turbina, ou seja, que
esta seja insensível à direcção do escoamento, este tipo de turbinas de ar são simétricas em relação ao plano
perpendicular ao seu eixo de rotação, permitindo assim que a sua velocidade de rotação e, consequentemente o
binário, mantenham-se inalterados, independentemente da direção do escoamento.
1.2 Turbinas auto-retificadoras
Existem diversas variantes deste tipo de turbina para implementação dos sistemas de conversão de energia do
tipo coluna de água oscilante, sendo as mais conhecidas a turbina Wells, inventada por Allan Wells em 1976 e a
turbina de ação ou impulse turbine em inglês. Nesta secção serão abordadas a turbina Wells, turbina de ação axial
e bi-radial. Para uma revisão mais detalhada das turbinas auto-retificadoras, consultar [7, 8, 9].
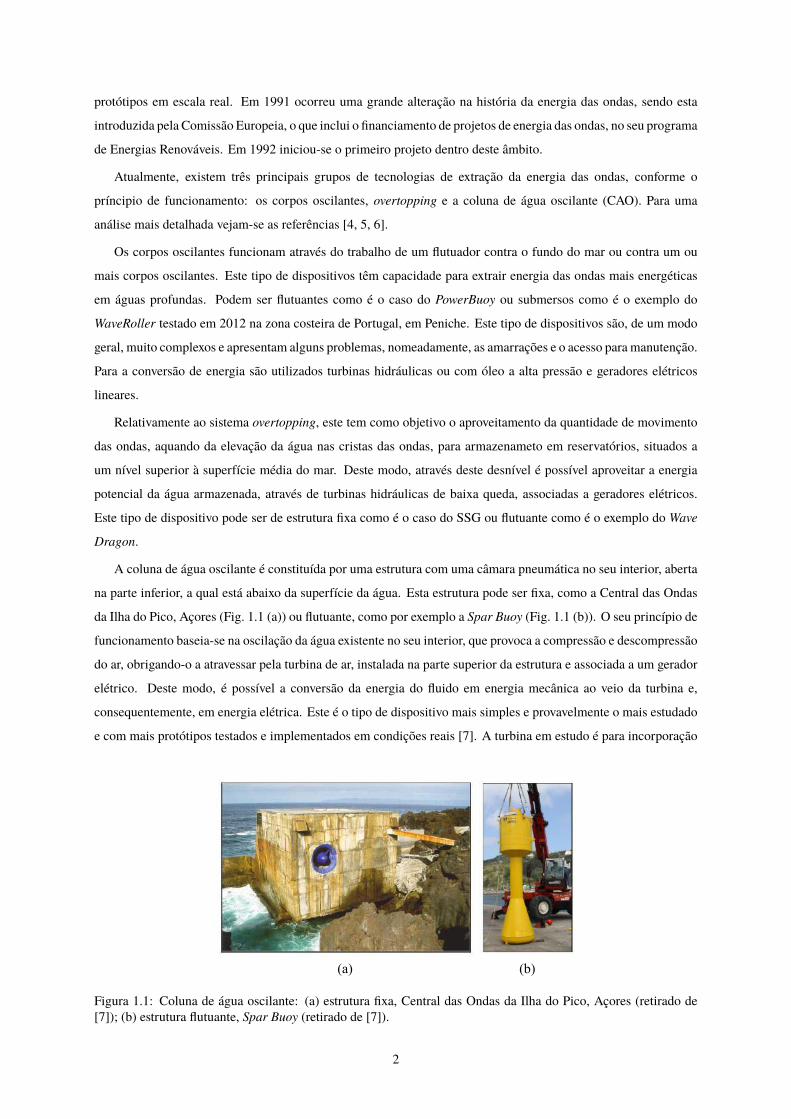
1.2.1 Turbina Wells
A turbina Wells é uma máquina axial e atualmente a turbina de ar mais simples, para incorporação de sistemas
CAO. Foi implementada em diversos projetos como: Projeto Mighty Whale em 1998, no Japão; Central piloto
Europeia na Ilha do Pico, Açores em 1999 [10]; projeto LIMPET em 2000 na Escócia [11]; e o mais recente Central
de Energia das Ondas do Mutriku, Espanha em 2009 [12]. Esta é caracterizada pela simplicidade das suas pás,
sendo estas um perfil alar sem curvatura, simétricas relativamente ao plano perpendicular ao eixo de rotação e com
um ângulo de calagem de 90, Fig. 1.2 (a).
A geometria das pás do rotor permitem que, para um dado ângulo de incidência da velocidade relativa do
escoamento, β1, seja originada uma força tangencial, independentemente do sentido do escoamento, não sendo
necessário a implementação de pás diretrizes, Fig. 1.2 (b). No entanto, para valores elevados de coeficiente de
caudal, ou seja, para ângulos de incidência superiores ao ângulo de perda, ocorre separação do escoamento nas pás
(a) (b)
Figura 1.2: TurbinaWells na configuração original: (a) esquema da turbina; (b) triângulo de velocidades (Retiradosde [7]).
3

Figura 1.3: Curvas de funcionamento da turbina Wells: (a) coeficiente de pressão (esquerda) e rendimento (direita)em função do coeficiente de caudal para turbina Wells de rotor isolado com e sem pás diretrizes, para um fatorde bloqueamento de σ = 0,44 (símbolos abertos - sem pás diretrizes MP, símbolos cheios - com pás diretrizesGV), (retirado de [14]); (b) rendimento (esquerda) e coeficiente de pressão (direita) em função do coeficiente decaudal para turbina Wells de rotor isolado (MP) e de duplo plano (BP), ambos sem pás directrizes, para σ = 0,64(retirado de [15]); (c) rendimento (esquerda) e coeficiente de pressão (direita) em função do coeficiente de caudalpara turbina Wells contra-rotativa (CR) e de duplo plano (BP), sem pás diretrizes, para σ = 1,28 (retirado de [15]).
do rotor, prejudicando o seu rendimento [13].
Para mitigar a perda de energia cinética de rotação à saída do rotor, surgiram variantes da turbina de rotor isolado
(MP): a turbina Wells com pás diretrizes à entrada e saída do rotor, posicionadas simetricamente em relação ao
plano perpendicular do eixo de rotação (GV); duplo plano ou biplano com estator intermédio, que consiste em dois
rotores idênticos, cujos movimentos são na mesma direcção e sobre o mesmo veio (BP); e a turbina contra-rotativa
que é constituída por dois rotores que se movimentam em sentidos opostos, montados sobre o mesmo veio (CR).
A Fig. 1.3 ilustra as curvas de funcionamento de cada uma das turbinas em função do coeficiente de caudal.
Primeiramente, é visível através da Fig. 1.3 (a) que a presença das pás diretrizes na turbina de rotor isolado,
permitiram a redução das perdas de energia cinética rotativa à saída do rotor, proporcionando o aumento do
rendimento. No entanto, a queda abrupta do rendimento ocorre para valores de coeficiente de caudal mais baixos,
dado que o ângulo de perda limite é atingido mais rapidamente. Note-se que a presença das pás diretrizes originam
um coeficiente de queda de pressão menor. Relativamente à turbina (BP), quando comparada com a (MP), Fig. 1.3
(b), é possível visualizar que o rendimento manteve-se praticamente semelhante, uma vez que esta não evita a
existência de uma componente tangencial da velocidade absoluta à saída do rotor, dado que proporciona uma maior
deflexão do escoamento. No entanto, permite atrasar e atenuar a queda do rendimento. Importa referir que a
diferença entre os rendimentos obtidos para a MP da Fig. 1.3 (a) e (b) está associada aos diferentes valores do fator
de bloqueamento (razão entre a área total das pás do rotor e a área anular do mesmo). Por último, a CR apresenta
um rendimento máximo substancialmente mais elevado, quando comparado com a turbina BP (Fig. 1.3 (c)), devido
à sua capacidade de recuperar energia cinética à saída do rotor, contrariamente à BP.
De uma forma geral, a turbinaWells é a turbina mais simples até hoje desenvolvida, com um pico de rendimento
de aproximadamente 70%, tendo atingido 75% [16]. Porém, esta não é uma turbina apropriada para altas quedas
de pressão, uma vez que a velocidade de rotação requerida para um bom comportamento aerodinâmico, atingiria
o limite da velocidade periférica da pá, originando problemas de tensões centrífugas. Para além disso, o fraco
desempenho no arranque e a queda abrupta do rendimento para valores elevados do coeficientes de caudal,
4
caracterizada pelas perdas devido à separação do escoamento nas pás do rotor, cultinam com os aspetos referidos.
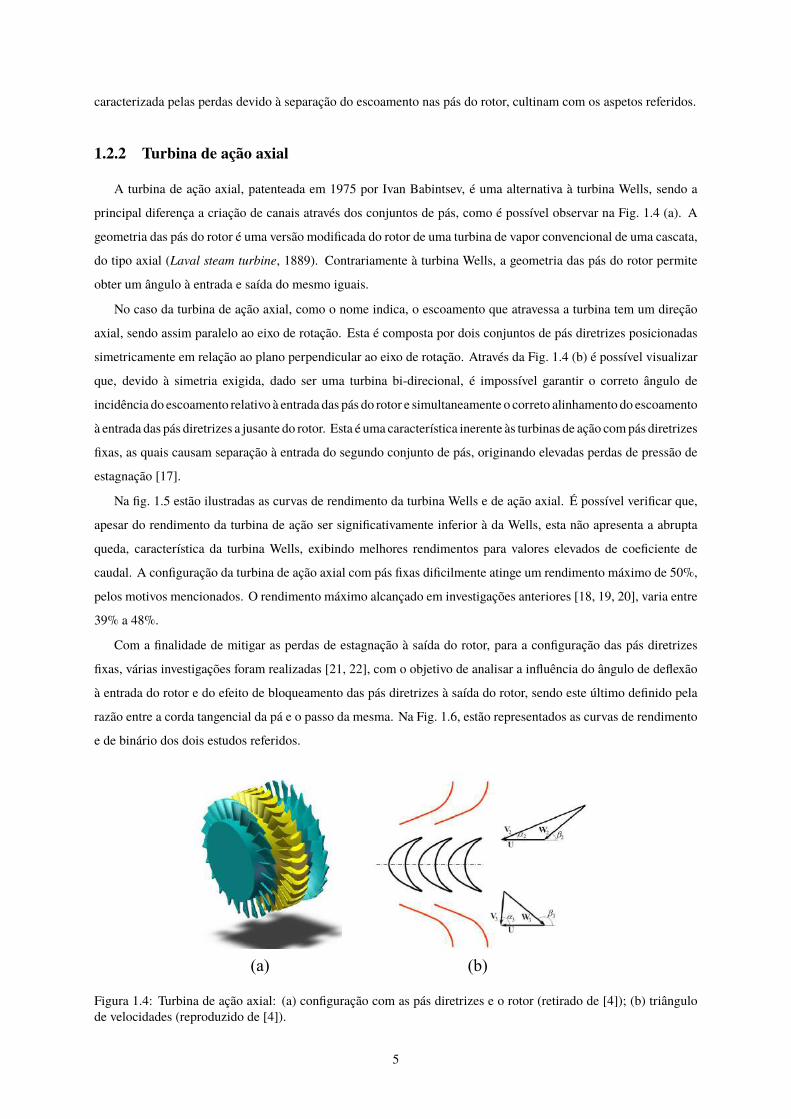
1.2.2 Turbina de ação axial
A turbina de ação axial, patenteada em 1975 por Ivan Babintsev, é uma alternativa à turbina Wells, sendo a
principal diferença a criação de canais através dos conjuntos de pás, como é possível observar na Fig. 1.4 (a). A
geometria das pás do rotor é uma versão modificada do rotor de uma turbina de vapor convencional de uma cascata,
do tipo axial (Laval steam turbine, 1889). Contrariamente à turbina Wells, a geometria das pás do rotor permite
obter um ângulo à entrada e saída do mesmo iguais.
No caso da turbina de ação axial, como o nome indica, o escoamento que atravessa a turbina tem um direção
axial, sendo assim paralelo ao eixo de rotação. Esta é composta por dois conjuntos de pás diretrizes posicionadas
simetricamente em relação ao plano perpendicular ao eixo de rotação. Através da Fig. 1.4 (b) é possível visualizar
que, devido à simetria exigida, dado ser uma turbina bi-direcional, é impossível garantir o correto ângulo de
incidência do escoamento relativo à entrada das pás do rotor e simultaneamente o correto alinhamento do escoamento
à entrada das pás diretrizes a jusante do rotor. Esta é uma característica inerente às turbinas de ação compás diretrizes
fixas, as quais causam separação à entrada do segundo conjunto de pás, originando elevadas perdas de pressão de
estagnação [17].
Na fig. 1.5 estão ilustradas as curvas de rendimento da turbina Wells e de ação axial. É possível verificar que,
apesar do rendimento da turbina de ação ser significativamente inferior à da Wells, esta não apresenta a abrupta
queda, característica da turbina Wells, exibindo melhores rendimentos para valores elevados de coeficiente de
caudal. A configuração da turbina de ação axial com pás fixas dificilmente atinge um rendimento máximo de 50%,
pelos motivos mencionados. O rendimento máximo alcançado em investigações anteriores [18, 19, 20], varia entre
39% a 48%.
Com a finalidade de mitigar as perdas de estagnação à saída do rotor, para a configuração das pás diretrizes
fixas, várias investigações foram realizadas [21, 22], com o objetivo de analisar a influência do ângulo de deflexão
à entrada do rotor e do efeito de bloqueamento das pás diretrizes à saída do rotor, sendo este último definido pela
razão entre a corda tangencial da pá e o passo da mesma. Na Fig. 1.6, estão representados as curvas de rendimento
e de binário dos dois estudos referidos.
22
22
3 333
(a) (b)
Figura 1.4: Turbina de ação axial: (a) configuração com as pás diretrizes e o rotor (retirado de [4]); (b) triângulode velocidades (reproduzido de [4]).
5
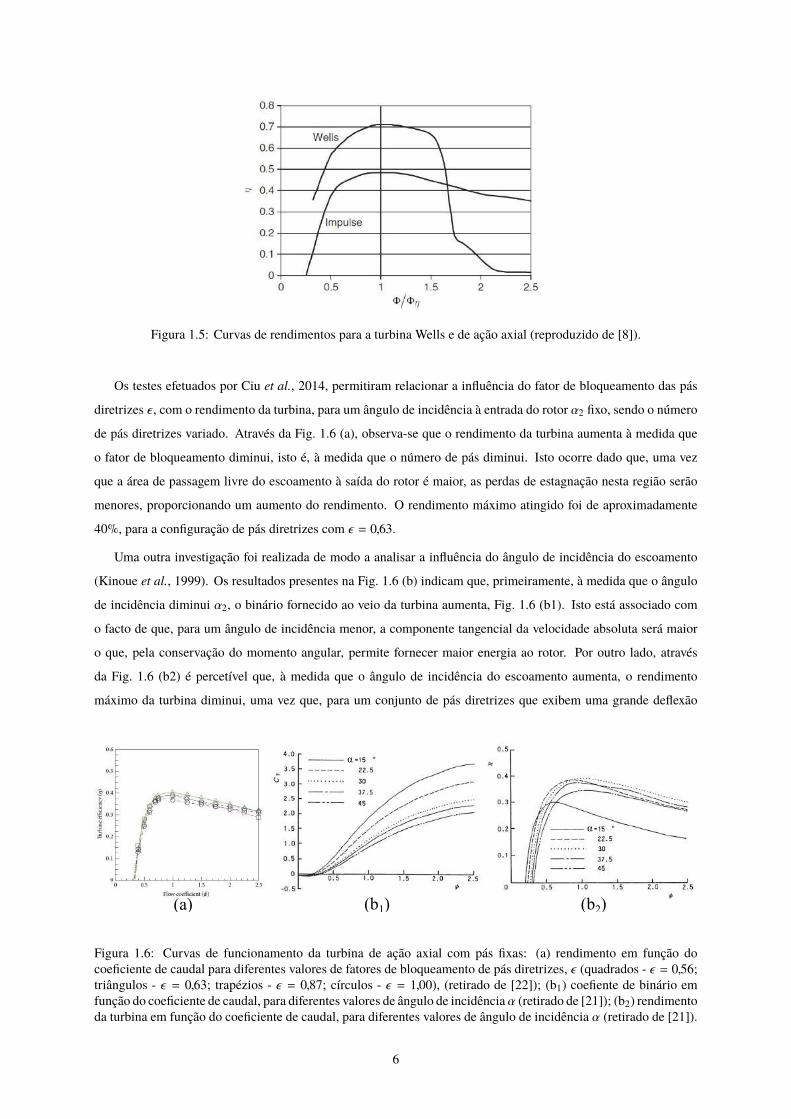
Figura 1.5: Curvas de rendimentos para a turbina Wells e de ação axial (reproduzido de [8]).
Os testes efetuados por Ciu et al., 2014, permitiram relacionar a influência do fator de bloqueamento das pás
diretrizes ε , com o rendimento da turbina, para um ângulo de incidência à entrada do rotor α2 fixo, sendo o número
de pás diretrizes variado. Através da Fig. 1.6 (a), observa-se que o rendimento da turbina aumenta à medida que
o fator de bloqueamento diminui, isto é, à medida que o número de pás diminui. Isto ocorre dado que, uma vez
que a área de passagem livre do escoamento à saída do rotor é maior, as perdas de estagnação nesta região serão
menores, proporcionando um aumento do rendimento. O rendimento máximo atingido foi de aproximadamente
40%, para a configuração de pás diretrizes com ε = 0,63.
Uma outra investigação foi realizada de modo a analisar a influência do ângulo de incidência do escoamento
(Kinoue et al., 1999). Os resultados presentes na Fig. 1.6 (b) indicam que, primeiramente, à medida que o ângulo
de incidência diminui α2, o binário fornecido ao veio da turbina aumenta, Fig. 1.6 (b1). Isto está associado com
o facto de que, para um ângulo de incidência menor, a componente tangencial da velocidade absoluta será maior
o que, pela conservação do momento angular, permite fornecer maior energia ao rotor. Por outro lado, através
da Fig. 1.6 (b2) é percetível que, à medida que o ângulo de incidência do escoamento aumenta, o rendimento
máximo da turbina diminui, uma vez que, para um conjunto de pás diretrizes que exibem uma grande deflexão
(a) (b1) (b2)
α
α
Figura 1.6: Curvas de funcionamento da turbina de ação axial com pás fixas: (a) rendimento em função docoeficiente de caudal para diferentes valores de fatores de bloqueamento de pás diretrizes, ε (quadrados - ε = 0,56;triângulos - ε = 0,63; trapézios - ε = 0,87; círculos - ε = 1,00), (retirado de [22]); (b1) coefiente de binário emfunção do coeficiente de caudal, para diferentes valores de ângulo de incidência α (retirado de [21]); (b2) rendimentoda turbina em função do coeficiente de caudal, para diferentes valores de ângulo de incidência α (retirado de [21]).
6
do escoamento, a área livre de passagem do escoamento à saída do rotor será menor, introduzindo assim grandes
perdas de pressão de estagnação.
Dado que os rendimentos apresentados pelas turbinas de ação axial com pás fixas são baixos, outras configu-
rações foram exploradas. A turbina de ação axial com pás movéis é um destes exemplos, [23]. Esta consiste na
movimentação alternada das pás diretrizes, permintindo que à entrada do rotor as pás exibem a deflexão desejada
do escoamento e, simultaneamente que quase não exista qualquer perda de estagnação à saída do rotor, uma vez que
estas se encontram paralelas ao escoamento. Aquando da reversão do escoamento, a posição das pás é alternada,
permitindo o mesmo efeito para o escoamento reversível. Apesar desta turbina permitir um rendimento de 60%
[24], o elevado número de peças em movimento levanta dúvidas de fiabilidade.
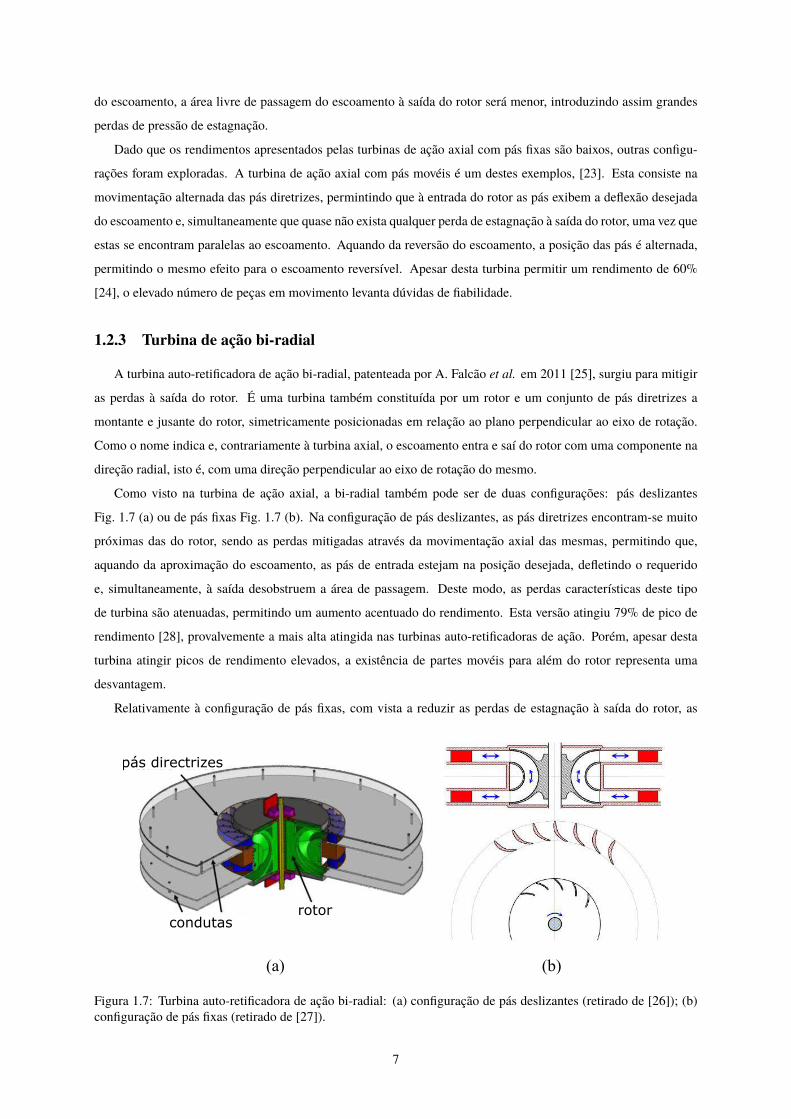
1.2.3 Turbina de ação bi-radial
A turbina auto-retificadora de ação bi-radial, patenteada por A. Falcão et al. em 2011 [25], surgiu para mitigir
as perdas à saída do rotor. É uma turbina também constituída por um rotor e um conjunto de pás diretrizes a
montante e jusante do rotor, simetricamente posicionadas em relação ao plano perpendicular ao eixo de rotação.
Como o nome indica e, contrariamente à turbina axial, o escoamento entra e saí do rotor com uma componente na
direção radial, isto é, com uma direção perpendicular ao eixo de rotação do mesmo.
Como visto na turbina de ação axial, a bi-radial também pode ser de duas configurações: pás deslizantes
Fig. 1.7 (a) ou de pás fixas Fig. 1.7 (b). Na configuração de pás deslizantes, as pás diretrizes encontram-se muito
próximas das do rotor, sendo as perdas mitigadas através da movimentação axial das mesmas, permitindo que,
aquando da aproximação do escoamento, as pás de entrada estejam na posição desejada, defletindo o requerido
e, simultaneamente, à saída desobstruem a área de passagem. Deste modo, as perdas características deste tipo
de turbina são atenuadas, permitindo um aumento acentuado do rendimento. Esta versão atingiu 79% de pico de
rendimento [28], provalvemente a mais alta atingida nas turbinas auto-retificadoras de ação. Porém, apesar desta
turbina atingir picos de rendimento elevados, a existência de partes movéis para além do rotor representa uma
desvantagem.
Relativamente à configuração de pás fixas, com vista a reduzir as perdas de estagnação à saída do rotor, as
condutas
pás directrizes
rotor
(a) (b)
Figura 1.7: Turbina auto-retificadora de ação bi-radial: (a) configuração de pás deslizantes (retirado de [26]); (b)configuração de pás fixas (retirado de [27]).
7
pás diretrizes estão posicionadas a uma distância radial considerável do rotor. Desta forma, o escoamento é
desacelerado desde a saída do rotor até ao segundo conjunto de pás, permitindo assim diminuir a energia cinética
e, consequentemente, reduzir as perdas por separação da camada limite. Porém, o problema das perdas de pressão
de estagnação à saída do rotor mantém-se, pelo que em 2017, surgiu uma nova versão da turbina bi-radial de pás
fixas [29, 30]. Esta nova versão consiste em distribuir o ângulo requerido à entrada por mais do que uma coroa de
pás diretrizes, permitindo que, desta forma, a área livre de passagem à saída do rotor seja maior, diminuindo assim
as perdas por estagnação, nessa região. O rendimento máximo atingido foi de 73%, em laboratório, valor elevado
para uma turbina auto-retificadora de ação de pás fixas.
1.3 Motivação
A tecnologia dos sistemas para aproveitamento da energia das ondas é uma área ainda em investigação, incluindo
as turbinas de ar para implementação dos dispositivos CAO.Neste ramomais específico das turbinas de ar, o objetivo
é o de desenvolver uma turbina económica, simples e com um bom rendimento. Na secção anterior foi realizada
uma análise seletiva das turbinas auto-retificadoras, onde foram abordados os pontos fortes e fracos de cada uma.
A turbina de ação axial de pás fixas, apesar de ser uma turbina simples e económica não apresenta um rendimento
muito elevado, quando comparada com as restantes.
Para mitigar o problema das turbinas de ação com pás fixas, mencionado anteriormente, a empresa portuguesa
Kymaner, no âmbito do projeto nacional ModOndas [31], propôs um novo conceito que consiste na disposição das
pás diretrizes em mais do que uma coroa de pás concêntricas, Fig. 1.8. Através deste conceito é possível distribuir
a deflexão requerida por mais do que uma coroa de pás, permitindo que, por um lado à saída do rotor exista uma
maior área de passagem livre do escoamento e, por outro lado, as pás estejam alinhadas pela esteira da pá mais
próxima do rotor. Desta forma, é possível minimizar as perdas de estagnação à saída da roda, característica inerente
das turbinas auto-retificadoras de ação com pás fixas. Este efeito é denominado por efeito de pás sombra.
Este conceito foi aplicado, em 2017 na turbina bi-radial, como mencionado na Sec.1.2.3. Na Fig.1.9 está
Figura 1.8: Conceito do efeito de pás sombra (retirado de [31]).
8
FGVPS
Figura 1.9: Coeficiente de perdas do estator à saída do rotor em função do coeficiente de caudal, para diferentesconfigurações da turbina de ação bi-radial (reproduzido de [32]).
representada a distribuição do coeficiente de perdas do estator à saída do rotor, para a turbina com pás fixas sem o
conceito de pás sombra (FGV) e para a turbina com o novo conceito de pás sombra (PS). É percetível que a nova
configuração de pás diretrizes possibilitou uma diminuição muito acentuada das perdas no estator de saída, quando
comparada com a configuração tradicional (FGV). O fator de redução é de aproximadamente 0,28.
Neste seguimento e, dado que a turbina bi-radial de pás fixas requer uma grande dimensão radial, devido ao
exigido afastamento radial das pás diretrizes relativamente ao rotor, que se traduz em custos elevados, surgiu o
projeto de desenvolver uma turbina de ação axial com pás fixas, introduzindo o novo conceito de pás sombra, com
a ambição de melhorar significativamente o seu rendimento.
1.4 Objetivos
O objetivo da presente dissertação tem como base o estudo experimental de dois modelos de turbina, em regime
permanente, com o intuito de comparar o escoamento em cada um deles, assim como analisar a influência das
diferentes geometrias de pás no desempenho da turbina.
As diferenças entre as turbinas estudadas são referentes à geometria dos estatores, sendo utilizado o mesmo
rotor em cada um dos modelos. Neste sentido, um dos modelos de turbina é constituído, por dois estatores de uma
coroa de pás diretrizes, simetricamente posicionados em relação ao plano perpendicular ao eixo de rotação [33]; e
o segundo modelo composto também por dois estatores simetricamente posicionados, mas constituídos, cada um
deles, por três coroas de pás diretrizes [34, 35], integrando assim o efeito de pás sombra referido na Sec. 1.3.
O desenvolvimento deste projeto experimental compreendeu-se em diversas fases: numa primeira fase foram
realizados ensaios para determinação dos perfis de velocidade à entrada e saída do rotor, seguindo-se uma análise
detalhada das perdas existentes ao longo da turbina; numa segunda etapa, foram averiguadas as influências das
diferentes geometrias e, consequentemente dos diferentes escoamentos, no desempenho da turbina, através de
ensaios para obtenção das curvas de funcionamento de cada modelo; posteriormente é verificado o desempenho do
rotor comum aos modelos, seguindo-se uma comparação entre os modelos estudados e os referidos em [18, 19, 20].
9
Para a concretização das diferentes etapas foram necessários a construção de dois estatores e de um difusor,
desenvolvimento de bancadas de aquisição de dados, elaboração de dois sistemas de movimentação em torno de
dois eixos e calibração de toda a instrumentação utilizada.
No decorrer dos ensaios, foram assumidas as seguintes condições: (1) o escoamento é permanente e (2) o
escoamento é incompressível. Sendo a turbina em estudo bi-direcional, o escoamento deveria ser reversível. No
entanto, devido à sua simetria, os ensaios foram realizados através de um escoamento uni-direcional, sendo este
comportamento representativo tanto da compressão como da expansão do ar, a qual seria submetida.
1.5 Publicações
O trabalho realizado e apresentado nesta dissertação deu origem a um artigo de conferência submetido para a
European Wave and Tidal Energy Conference (2019):
1. A. F. F. Ponte, A. A. D. Carrelhas, L. M. C. Gato, J. C. C. Henriques, A. F. O. Falcão. Experimental results
of a self-rectifying impulse axial-flow air turbine with fixed guide-vanes. Submited to the 13th European
Wave and Tidal Energy Conference, Napoles, Italy, September 2019.
1.6 Estrutura da dissertação
A presente dissertação está dividida pelos seguintes capítulos:
No capítulo 2 é descrito com detalhe a constituição e características dos modelos de turbina, assim como todo o
processo de contrução. O escoamento na turbina de ação axial, assim como a influência do efeito das pás sombras,
são abordados com mais pormenor.
No capítulo 3 apresenta-se a instalação onde decorreu os ensaios e descreve-se toda a instrumentação e modo
de calibração. É também referido o processo de construção dos dois sistemas de movimentação em torno de dois
eixos desenvolvidos, mencionando todas as suas características.
No capítulo 4 apresentam-se primeiramente os resultados obtidos pelos ensaios de atravessamento, realizados à
entrada e saída do rotor, para as diferentes configurações da turbina, assim como as perdas ao longo da turbina. De
seguida é apresentado o ensaio de binário de atrito executado, assim como os resultados dos ensaios para obtenção
das curvas de funcionamento. É também elaborado um estudo sobre o rotor. Para além disso, é realizada uma
comparação entre as turbinas aqui apresentadas e as mencionadas na Sec. 1.2.2, [19, 20].
Por último, no capítulo 5 são referidas as conclusões do estudo executado e mencionado o trabalho futuro a
realizar.
10
Capítulo 2
Descrição e construção do modelo
Qualquer projeto real de engenharia envolve normalmente um planeamento e estudos numéricos. Todavia, os
modelos numéricos não contabilizam todos os efeitos reais, representando uma simulação, pelo que os estudos
experimentais são fundamentais para qualquer projeto.
Para proceder à realização dos ensaios experimentais foi imprescidível o fabrico das pás diretrizes e a construção
de um difusor. Neste capítulo serão apresentados os procedimentos desenvolvidos relativamente a esses feitos,
assim como as características dos modelos da turbina testados. Para além disso, serão abordadas as características
do escoamento para este tipo de turbina.
2.1 Características do modelo da turbina
A turbina auto-retificadora axial, como mencionado anteriormente, é constituída por dois estatores simétricos,
relativamente ao plano perpendicular ao eixo da turbina, rotor e condutas adjacentes. Na Fig.2.1 estão representados
os modelos da turbina em estudo. Como mencionado na Sec.1.4, um dos modelos é constituído por um conjunto
de pás diretrizes à entrada e saída do rotor (Fig. 2.1 (a)) e o segundo por pás diretrizes distribuídas por três coroas
de pás (Fig. 2.1 (b)). Para os dois modelos utilizou-se o mesmo rotor e condutas.
Relativamente à análise dos modelos ilustrados na Fig. 2.1, na presente dissertação não foi possível a construção
dos estatores simétricos, para introdução a jusante do rotor, devido à escassez de tempo. Porém, foi utilizado um
(a) (b)
Figura 2.1: Modelos originais das turbinas estudados: (a) estatores de uma coroa; (b) estatores de três coroas.
11
(a) (b)
Figura 2.2: Modelos das turbinas estudados: (a) configuração M1CJ; (b) configuração M3CJ.
estator com a configuração de pás de saída, utilizado em estudos anteriores, com o intuito de estudar a influência
das pás diretrizes a jusante do rotor. Neste sentido, este estator alternativo foi colocado à entrada do rotor e os
dois estatores em estudo foram posicionados a jusante do rotor. Uma vez que o sentido do escoamento após a sua
passagem neste novo estator é contrária ao dos estatores em estudo aquando da sua localização a montante, foi
necessário inverter a direção do rotor, de modo a que este ficasse coerente com o sentido do escoamento à saída
do estator a montante e à entrada do estator a jusante do rotor. Esta configuração pode ser observada na Fig. 2.2.
Dorante, esta configuração com o estator de uma coroa a jusante do rotor (Fig. 2.2 (a)) será denominada por M1CJ
(Modelo com uma Coroa de pás diretrizes a Jusante do rotor); e a com o estator de três coroas a jusante (Fig. 2.2
(b)) por M3CJ (Modelo com três Coroas de pás diretrizes a Jusante do rotor). Desta forma, apesar do estator à
entrada não ser o simétrico dos estudados, este tem uma deflexão semelhante o que permite atingir o objetivo da
presente dissertação, como será visto na Sec. 2.1.2.
Numa primeira fase, os ensaios foram executados com uma configuração da turbina sem estatores a jusante do
rotor, com o objetivo de verificar as semelhanças dos mesmos no desempenho da turbina, como será abordado na
Sec. 2.1.2. As configurações da turbina, para cada estator, podem ser visualizadas na Fig. 2.3. A configuração
apresentada na Fig. 2.3 (a) será designada por M1CM (Modelo com uma Coroa de pás diretrizes a Montante do
rotor), a configuração da Fig. 2.3 (b) por M3CM (Modelo com três Coroas de pás diretrizes a Montante do rotor).
(a) (b)
Figura 2.3: Primeiras configurações estudadas: (a) configuração M1CM; (b) configuração M3CM.
12

2.1.1 Escoamento
Para uma melhor compreensão sobre as vantagens da utilização do estator em cascata, analisemos com melhor
detalhe o triângulo de velocidades para um escoamento típico uni-direcional à entrada e saída do rotor, Fig. 2.4 (a)
e Fig. 2.4 (b), respetivamente. Os vectores U, V e W representam as velocidades de transporte, absoluta e relativa
do escoamento, respetivamente.
(b)(a)
2222
Va23 3 3
3Va3
Figura 2.4: Triângulo de velocidades genérico para uma turbina axial: (a) entrada do rotor; (b) saída do rotor.
Sendo um máquina axial, tem-se que U1 = U2 = U = Ωr , onde Ω é a velocidade de rotação do rotor e r o raio
do mesmo.
Através da equação de Euler de turbomáquinas [36], a energia por unidade de massa de fluido fornecida pelo
fluido ao rotor Er é dada por:
Er = Ωr(Va2 cotα2 + Va3 cotα3) = U(Va2 cot β2 − Va3 cot β3), (2.1)
onde Va2 e Va3 é a componente axial da velocidade absoluta à entrada e saída do rotor, respetivamente, α2 e α3
os ângulos entre a velocidade absoluta V e a direção tangencial e β2 e β3 os ângulos entre a velocidade relativa
W e a direção tangencial. Considerando escoamento incompressível obtém-se que Va2 = Va3 = Va, através da
conservação de massa, pelo que, substituindo na Eq. 2.1 tem-se que:
Er = UVa(cotα2 + cotα3) = UVa(cot β2 − cot β3). (2.2)
Ao considerar os efeitos de escorregamento desprezáveis, tem-se que o ângulo da velocidade relativa com a
direção tangencial à saída do rotor β3 é igual ao ângulo das pás do rotor nessa região β′3. Logo, pela simetria do
rotor, obtém-se que β2 = β′2 = β3 = β′3. Desta forma, em condições nominais, o escoamento entra no rotor com
um ângulo de incidência nulo β2 − β′2 = 0 e sai com uma componente tangencial nula Vt3 = 0, ou seja, α3 = 90.
Neste seguimento, a otimização do estator foi executada no âmbito de que, atendendo a esta condição, as pás
exibem o efeito de sombra ótimo, proporcionando um ângulo de incidência nulo do escoamento à entrada do rotor
e simultaneamente, uma diminuição das perdas à saída do rotor, devido à diminuição da obstrução do escoamento
nessa região. A Fig. 2.5 ilustra este efeito.
2.1.2 Pás diretrizes
As duas configurações de pás diretrizes produzidas e que constituem os modelos da Fig. 2.1, estão ilustradas na
Fig. 2.6. O estator presente na Fig. 2.6 (a) é constituído por 23 pás diretrizes e doravante será designado por E1C
(Estator de uma Coroa), sendo o da Fig. 2.6 (b) composto no total por 51 pás, distribuídas por 3 coroas (17 pás
13
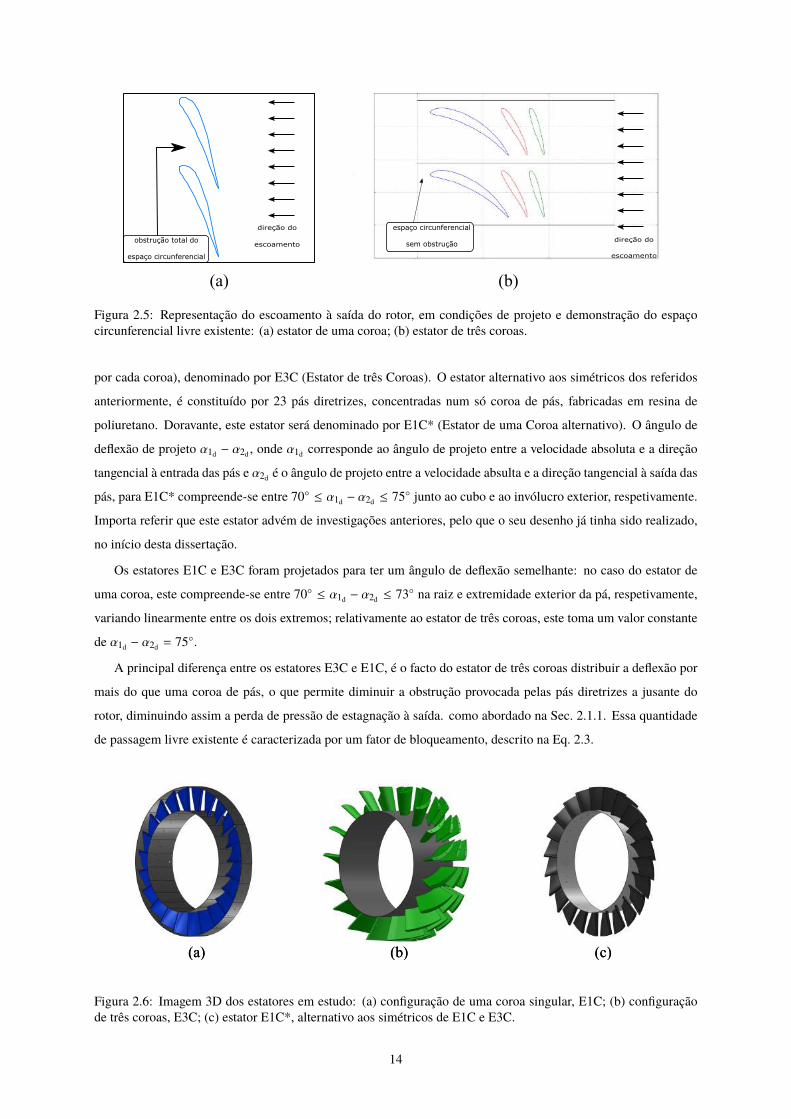
Figura 2.5: Representação do escoamento à saída do rotor, em condições de projeto e demonstração do espaçocircunferencial livre existente: (a) estator de uma coroa; (b) estator de três coroas.
por cada coroa), denominado por E3C (Estator de três Coroas). O estator alternativo aos simétricos dos referidos
anteriormente, é constituído por 23 pás diretrizes, concentradas num só coroa de pás, fabricadas em resina de
poliuretano. Doravante, este estator será denominado por E1C* (Estator de uma Coroa alternativo). O ângulo de
deflexão de projeto α1d − α2d , onde α1d corresponde ao ângulo de projeto entre a velocidade absoluta e a direção
tangencial à entrada das pás e α2d é o ângulo de projeto entre a velocidade absulta e a direção tangencial à saída das
pás, para E1C* compreende-se entre 70 ≤ α1d − α2d ≤ 75 junto ao cubo e ao invólucro exterior, respetivamente.
Importa referir que este estator advém de investigações anteriores, pelo que o seu desenho já tinha sido realizado,
no início desta dissertação.
Os estatores E1C e E3C foram projetados para ter um ângulo de deflexão semelhante: no caso do estator de
uma coroa, este compreende-se entre 70 ≤ α1d − α2d ≤ 73 na raiz e extremidade exterior da pá, respetivamente,
variando linearmente entre os dois extremos; relativamente ao estator de três coroas, este toma um valor constante
de α1d − α2d = 75.
A principal diferença entre os estatores E3C e E1C, é o facto do estator de três coroas distribuir a deflexão por
mais do que uma coroa de pás, o que permite diminuir a obstrução provocada pelas pás diretrizes a jusante do
rotor, diminuindo assim a perda de pressão de estagnação à saída. como abordado na Sec. 2.1.1. Essa quantidade
de passagem livre existente é caracterizada por um fator de bloqueamento, descrito na Eq. 2.3.
(a) (b) (c)(a) (b) (c)
Figura 2.6: Imagem 3D dos estatores em estudo: (a) configuração de uma coroa singular, E1C; (b) configuraçãode três coroas, E3C; (c) estator E1C*, alternativo aos simétricos de E1C e E3C.
14
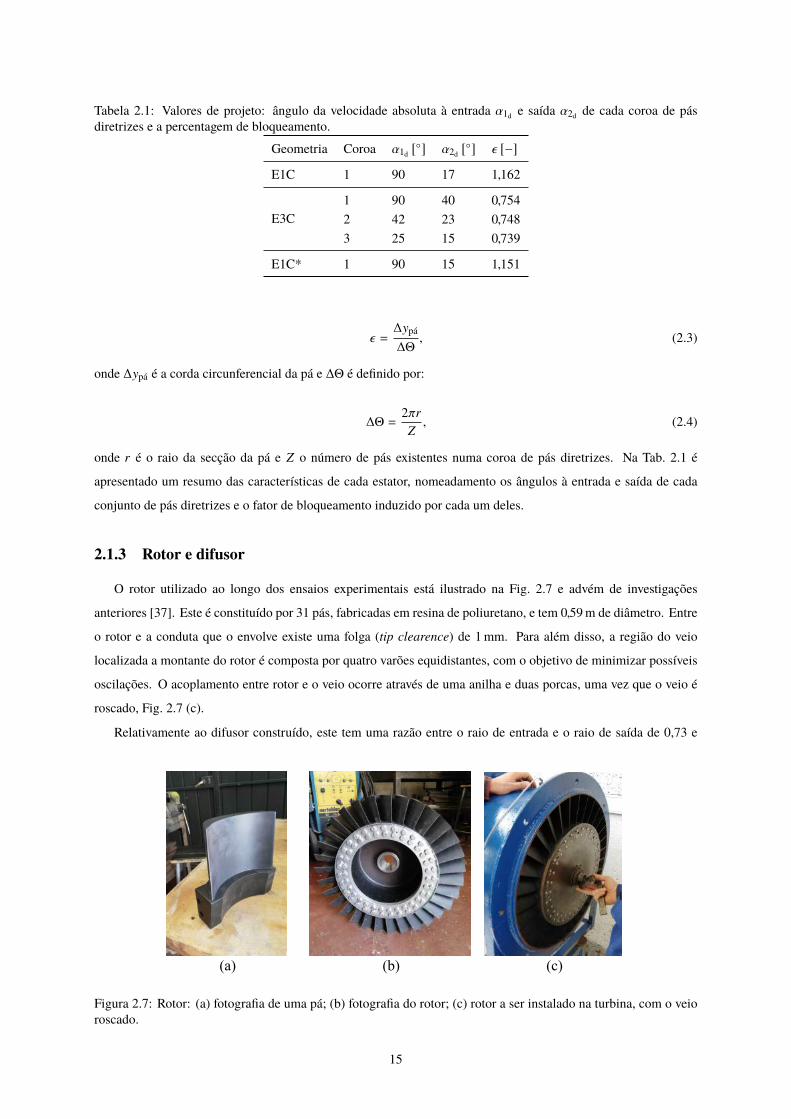
Tabela 2.1: Valores de projeto: ângulo da velocidade absoluta à entrada α1d e saída α2d de cada coroa de pásdiretrizes e a percentagem de bloqueamento.
Geometria Coroa α1d [] α2d [
] ε [−]
E1C 1 90 17 1,162
E3C1 90 40 0,7542 42 23 0,7483 25 15 0,739
E1C* 1 90 15 1,151
ε =∆ypá
∆Θ, (2.3)
onde ∆ypá é a corda circunferencial da pá e ∆Θ é definido por:
∆Θ =2πrZ, (2.4)
onde r é o raio da secção da pá e Z o número de pás existentes numa coroa de pás diretrizes. Na Tab. 2.1 é
apresentado um resumo das características de cada estator, nomeadamento os ângulos à entrada e saída de cada
conjunto de pás diretrizes e o fator de bloqueamento induzido por cada um deles.
2.1.3 Rotor e difusor
O rotor utilizado ao longo dos ensaios experimentais está ilustrado na Fig. 2.7 e advém de investigações
anteriores [37]. Este é constituído por 31 pás, fabricadas em resina de poliuretano, e tem 0,59 m de diâmetro. Entre
o rotor e a conduta que o envolve existe uma folga (tip clearence) de 1 mm. Para além disso, a região do veio
localizada a montante do rotor é composta por quatro varões equidistantes, com o objetivo de minimizar possíveis
oscilações. O acoplamento entre rotor e o veio ocorre através de uma anilha e duas porcas, uma vez que o veio é
roscado, Fig. 2.7 (c).
Relativamente ao difusor construído, este tem uma razão entre o raio de entrada e o raio de saída de 0,73 e
(a) (b) (c)
Figura 2.7: Rotor: (a) fotografia de uma pá; (b) fotografia do rotor; (c) rotor a ser instalado na turbina, com o veioroscado.
15
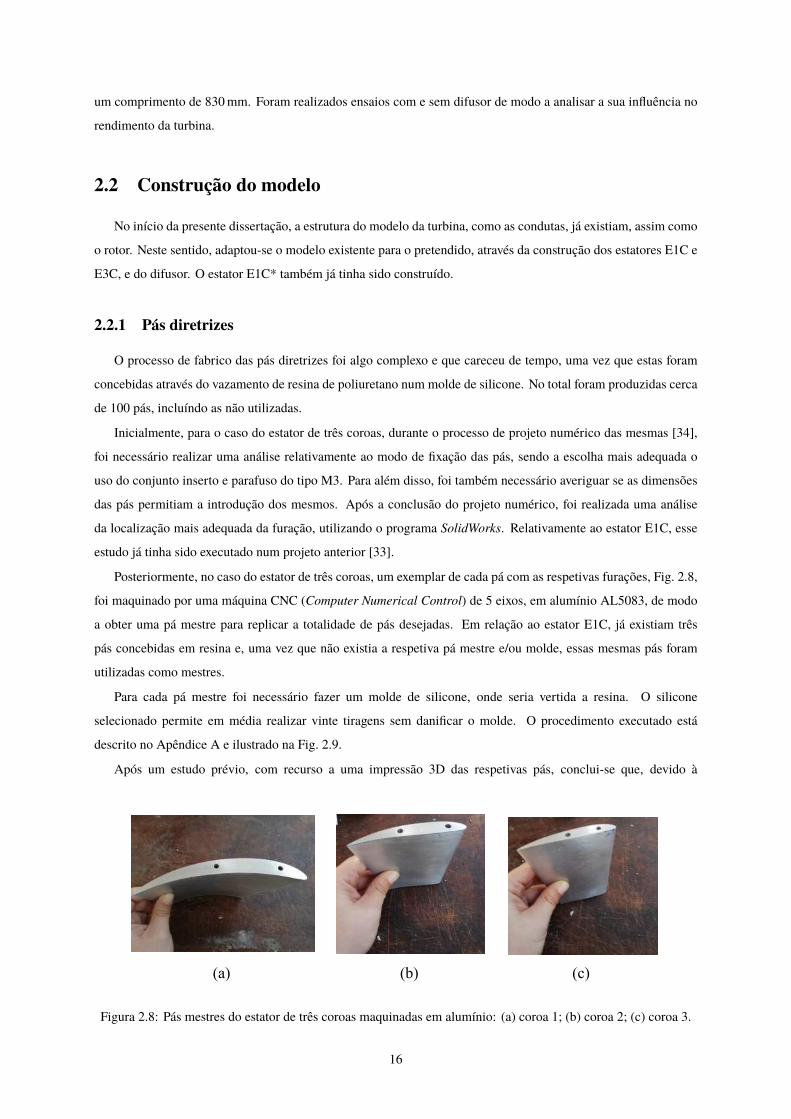
um comprimento de 830 mm. Foram realizados ensaios com e sem difusor de modo a analisar a sua influência no
rendimento da turbina.
2.2 Construção do modelo
No início da presente dissertação, a estrutura do modelo da turbina, como as condutas, já existiam, assim como
o rotor. Neste sentido, adaptou-se o modelo existente para o pretendido, através da construção dos estatores E1C e
E3C, e do difusor. O estator E1C* também já tinha sido construído.
2.2.1 Pás diretrizes
O processo de fabrico das pás diretrizes foi algo complexo e que careceu de tempo, uma vez que estas foram
concebidas através do vazamento de resina de poliuretano num molde de silicone. No total foram produzidas cerca
de 100 pás, incluíndo as não utilizadas.
Inicialmente, para o caso do estator de três coroas, durante o processo de projeto numérico das mesmas [34],
foi necessário realizar uma análise relativamente ao modo de fixação das pás, sendo a escolha mais adequada o
uso do conjunto inserto e parafuso do tipo M3. Para além disso, foi também necessário averiguar se as dimensões
das pás permitiam a introdução dos mesmos. Após a conclusão do projeto numérico, foi realizada uma análise
da localização mais adequada da furação, utilizando o programa SolidWorks. Relativamente ao estator E1C, esse
estudo já tinha sido executado num projeto anterior [33].
Posteriormente, no caso do estator de três coroas, um exemplar de cada pá com as respetivas furações, Fig. 2.8,
foi maquinado por uma máquina CNC (Computer Numerical Control) de 5 eixos, em alumínio AL5083, de modo
a obter uma pá mestre para replicar a totalidade de pás desejadas. Em relação ao estator E1C, já existiam três
pás concebidas em resina e, uma vez que não existia a respetiva pá mestre e/ou molde, essas mesmas pás foram
utilizadas como mestres.
Para cada pá mestre foi necessário fazer um molde de silicone, onde seria vertida a resina. O silicone
selecionado permite em média realizar vinte tiragens sem danificar o molde. O procedimento executado está
descrito no Apêndice A e ilustrado na Fig. 2.9.
Após um estudo prévio, com recurso a uma impressão 3D das respetivas pás, conclui-se que, devido à
(a) (b) (c)
Figura 2.8: Pás mestres do estator de três coroas maquinadas em alumínio: (a) coroa 1; (b) coroa 2; (c) coroa 3.
16
gito
(a) (b) (c)
Figura 2.9: Evolução do processo de fabrico do molde de silicone (a) caixa com pá mestre suspensa; (b) primeiraparte do molde; (c) molde final.
tridimensionalidade das mesmas era necessário que o molde fosse construído em duas partes e que a pá mestre
deveria estar suspensa de modo a que os furos localizados na extremidade inferior da pá fossem concretizados.
Para além disso, o bordo da ataque da pá deveria estar paralelo à caixa, de forma a facilitar a saída da pá.
A suspensão foi realizada com recurso a pernos de madeira, sendo dois deles fixos aos furos existentes na
extremidade exterior da pá e um terceiro que sustentava a pá, estando fixo aos outros dois e à caixa. As dimensões
de cada perno foram analisadas com o objetivo de garantir a posição correta da pá mestre. De modo a assegurar
que a pá mestre não oscilava ao verter o silicone, foi utilizado um quarto perno fixo no topo da pá com a dimensão
da largura interior da caixa, inibindo assim a sua movimentação, Fig. 2.9 (a).
Para além disso, houve especial cuidado na localização da junção das duas partes do molde, de modo a diminuir
o seu desgaste e, consequentemente, conseguir manter a uniformidade das pás. Sendo assim, a segunda parte do
molde inicia-se no bordo de fuga situado na zona da extremidade exterior da pá.
As pás de ambos os estatores foram fixadas em dois aros em chapa de 1,5 mm de espessura, com a respetiva
furação. Esses aros foram concebidos através do corte a laser de duas chapas planas de aço inoxidável, com o
respectivo perímetro e, posteriormente calandradas e soldadas, sendo os furos escareados, de modo a que a cabeça
do parafuso ficasse à mesma superficie que a do aro.
Finda o processo de produção de pás, estas foram trabalhadas, uma vez que omolde de duas partes proporcionou
imperfeições na zona da sua junção, assim como a existência do gito e de possíveis bolhas de ar ao verter a resina,
Fig. 2.10 (a). Este processo foi executado através da aplicação de uma massa apropriada e posterior acabamento
com lixa de água, de modo a obter a configuração desejada, Fig. 2.10 (b). Este processo foi realizado para todas as
pás produzidas.
Para além disso, uma vez que não foi possível garantir toda furação nas pás, durante o processo de vazamento
de resina, visto que em algumas pás a extremidade interior apresentava uma curvatura côncava, foi necessário fazer
a furação manualmente. Desta forma e com o objetivo de garantir a correta localização dos furos, utilizou-se como
referência a pá mestre, sendo esta corretamente posicionada entre os aros e, posteriormente, traçada a sua posição,
Fig. 2.11. Teve-se o cuidado de realizar os furos perpendicularmente à superfície da pá, de modo a que ambas as
superfícies, tanto a da pá como a dos aros, ficassem coincidentes. A Fig. 2.12 ilustra os estatores finais.
17
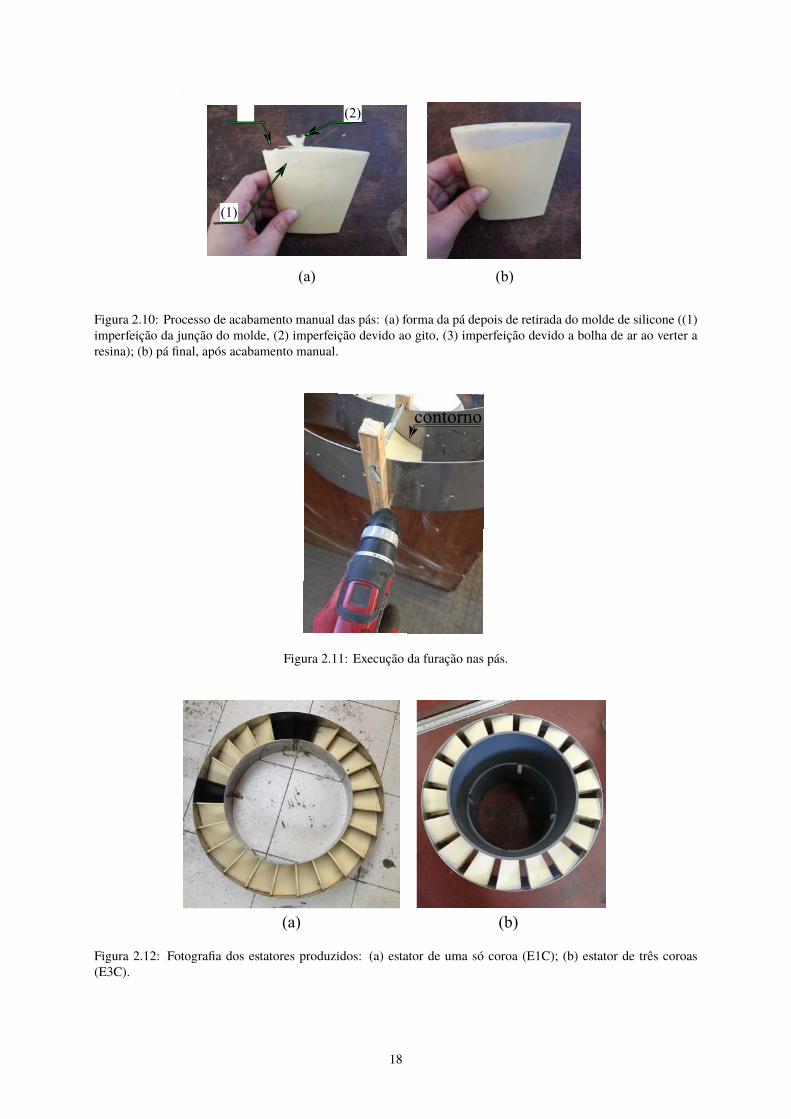
(a) (b)
(1)
(3)
(2)
Figura 2.10: Processo de acabamento manual das pás: (a) forma da pá depois de retirada do molde de silicone ((1)imperfeição da junção do molde, (2) imperfeição devido ao gito, (3) imperfeição devido a bolha de ar ao verter aresina); (b) pá final, após acabamento manual.
contorno
Figura 2.11: Execução da furação nas pás.
(a) (b)
Figura 2.12: Fotografia dos estatores produzidos: (a) estator de uma só coroa (E1C); (b) estator de três coroas(E3C).
18

2.2.2 Difusor
Para a construção do difusor foi primeiramente cortada um chapa de 1,5 mm de espessura, em forma de cone
planificado, através do corte a laser. Posteriormente, essa chapa foi calandrada e soldada, a fim de atingir a forma
cónica pretendida.
Para além disso, foram produzidas duas flanges para junção do difusor à conduta existente e à câmara de pleno.
Cada junção foi executada através de seis conjuntos de parafuso e porca do tipo M10. As flanges também foram
fabricadas através do corte a laser de duas chapas de 5 mm de espessura, com a respetiva furação. Teve-se o cuidado
de nas zonas de junção colocar fita isoladora, para evitar possíveis fugas.
2.2.3 Modelo da turbina
Na Fig. 2.13, encontra-se o modelo da turbina na instalação experimental, a qual será descrita no Cap. 3.
(a) (b)
(c) (d)
gerador difusor
câmara de pleno
Figura 2.13: Diferentes perspetivas do modelo da turbina.
19

20
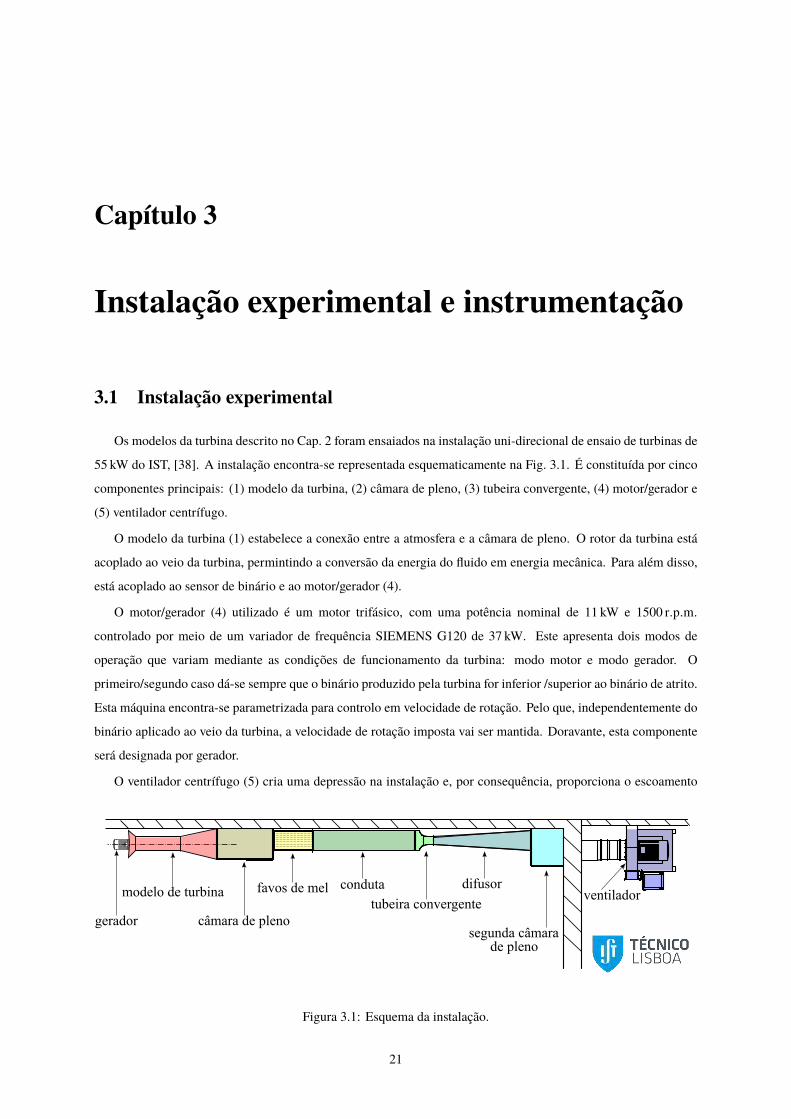
Capítulo 3
Instalação experimental e instrumentação
3.1 Instalação experimental
Os modelos da turbina descrito no Cap. 2 foram ensaiados na instalação uni-direcional de ensaio de turbinas de
55 kW do IST, [38]. A instalação encontra-se representada esquematicamente na Fig. 3.1. É constituída por cinco
componentes principais: (1) modelo da turbina, (2) câmara de pleno, (3) tubeira convergente, (4) motor/gerador e
(5) ventilador centrífugo.
O modelo da turbina (1) estabelece a conexão entre a atmosfera e a câmara de pleno. O rotor da turbina está
acoplado ao veio da turbina, permintindo a conversão da energia do fluido em energia mecânica. Para além disso,
está acoplado ao sensor de binário e ao motor/gerador (4).
O motor/gerador (4) utilizado é um motor trifásico, com uma potência nominal de 11 kW e 1500 r.p.m.
controlado por meio de um variador de frequência SIEMENS G120 de 37 kW. Este apresenta dois modos de
operação que variam mediante as condições de funcionamento da turbina: modo motor e modo gerador. O
primeiro/segundo caso dá-se sempre que o binário produzido pela turbina for inferior /superior ao binário de atrito.
Esta máquina encontra-se parametrizada para controlo em velocidade de rotação. Pelo que, independentemente do
binário aplicado ao veio da turbina, a velocidade de rotação imposta vai ser mantida. Doravante, esta componente
será designada por gerador.
O ventilador centrífugo (5) cria uma depressão na instalação e, por consequência, proporciona o escoamento
gerador
modelo de turbina
câmara de pleno
favos de meltubeira convergente
ventiladorconduta difusor
de plenosegunda câmara
Figura 3.1: Esquema da instalação.
21
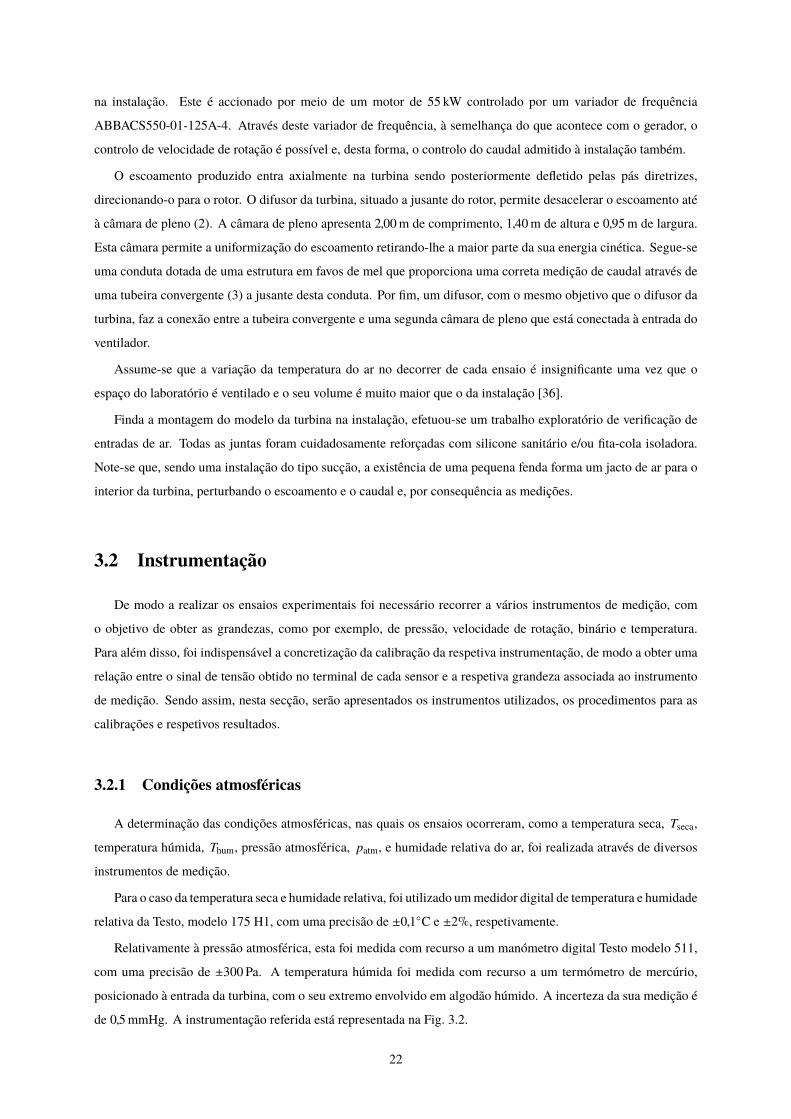
na instalação. Este é accionado por meio de um motor de 55 kW controlado por um variador de frequência
ABBACS550-01-125A-4. Através deste variador de frequência, à semelhança do que acontece com o gerador, o
controlo de velocidade de rotação é possível e, desta forma, o controlo do caudal admitido à instalação também.
O escoamento produzido entra axialmente na turbina sendo posteriormente defletido pelas pás diretrizes,
direcionando-o para o rotor. O difusor da turbina, situado a jusante do rotor, permite desacelerar o escoamento até
à câmara de pleno (2). A câmara de pleno apresenta 2,00 m de comprimento, 1,40 m de altura e 0,95 m de largura.
Esta câmara permite a uniformização do escoamento retirando-lhe a maior parte da sua energia cinética. Segue-se
uma conduta dotada de uma estrutura em favos de mel que proporciona uma correta medição de caudal através de
uma tubeira convergente (3) a jusante desta conduta. Por fim, um difusor, com o mesmo objetivo que o difusor da
turbina, faz a conexão entre a tubeira convergente e uma segunda câmara de pleno que está conectada à entrada do
ventilador.
Assume-se que a variação da temperatura do ar no decorrer de cada ensaio é insignificante uma vez que o
espaço do laboratório é ventilado e o seu volume é muito maior que o da instalação [36].
Finda a montagem do modelo da turbina na instalação, efetuou-se um trabalho exploratório de verificação de
entradas de ar. Todas as juntas foram cuidadosamente reforçadas com silicone sanitário e/ou fita-cola isoladora.
Note-se que, sendo uma instalação do tipo sucção, a existência de uma pequena fenda forma um jacto de ar para o
interior da turbina, perturbando o escoamento e o caudal e, por consequência as medições.
3.2 Instrumentação
De modo a realizar os ensaios experimentais foi necessário recorrer a vários instrumentos de medição, com
o objetivo de obter as grandezas, como por exemplo, de pressão, velocidade de rotação, binário e temperatura.
Para além disso, foi indispensável a concretização da calibração da respetiva instrumentação, de modo a obter uma
relação entre o sinal de tensão obtido no terminal de cada sensor e a respetiva grandeza associada ao instrumento
de medição. Sendo assim, nesta secção, serão apresentados os instrumentos utilizados, os procedimentos para as
calibrações e respetivos resultados.
3.2.1 Condições atmosféricas
A determinação das condições atmosféricas, nas quais os ensaios ocorreram, como a temperatura seca, Tseca,
temperatura húmida, Thum, pressão atmosférica, patm, e humidade relativa do ar, foi realizada através de diversos
instrumentos de medição.
Para o caso da temperatura seca e humidade relativa, foi utilizado ummedidor digital de temperatura e humidade
relativa da Testo, modelo 175 H1, com uma precisão de ±0,1C e ±2%, respetivamente.
Relativamente à pressão atmosférica, esta foi medida com recurso a um manómetro digital Testo modelo 511,
com uma precisão de ±300 Pa. A temperatura húmida foi medida com recurso a um termómetro de mercúrio,
posicionado à entrada da turbina, com o seu extremo envolvido em algodão húmido. A incerteza da sua medição é
de 0,5mmHg. A instrumentação referida está representada na Fig. 3.2.
22

(a) (b)
Figura 3.2: Instrumentação para medição das condições atmosféricas: (a) termómetro para medição da temperaturahúmida, Thum; (b) Testo 511 à esquerda e Testo 175H1 à direita.
3.2.1.1 Massa específica do ar
A obtenção das condições atmosféricas contribuíram para o cálculo da massa específica do ar que atravessa a
turbina. Esta foi determinada através da norma AMCA210/67 [39], pela Eq. 3.1.
ρar =patm − 0,378pp
R(Tseca + 273,15), (3.1)
onde
pp = pe − patmTseca − Thum
1500, (3.2)
e
pe = 3,25 T2seca + 18,6 Thum + 692. (3.3)
Nas equações anteriores, Eq. 3.1, 3.2 e 3.3, patm, pp e pe são dadas em Pa; Tseca e Thum em C; R = 287,1J/ kgK e
ρar em kg/m3.
3.2.2 Pressão
A medição da pressão do escoamento ao longo da turbina foi realizada com recurso a: (1) oito tomadas de
pressão estática existentes na instalação; (2) tubo de Pitot; e (3) duas sondas direcionais de três furos.
As oito tomadas de pressão existentes ao longo da parede da turbina e da instalação, estão localizadas nas
seguintes regiões: entrada do estator de entrada, p1, entrada do rotor, p2, saída do rotor, p3, entrada do difusor, p4,
câmara do pleno, p5, entrada da tubeira convergente, p6 e saída da tubeira convergente, p7. Existem quatro tomadas
de pressão equidistantes relativamente ao plano radial da turbina, em cada secção, exceto na secção 5 onde apenas
existe uma única tomada de pressão. No caso da existência de quatro tomadas de pressão estas estão associadas em
paralelo, através de tubos de pressão e conectadas a um manómetro diferencial, o que permite a leitura da pressão
estática relativa à atmosférica nessa secção, para o caso das secções 1 a 5. As ligações são feitas de acordo com a
norma AMCA210/67 , [39].
De modo a organizar o espaço de aquisição de dados, foi construído um quadro de raiz, presente na Fig. 3.3,
com um conjunto de cinco manómetros diferenciais, com intervalos de funcionamento escolhidos em função das
pressões espectáveis durante os ensaios. O quadro construído está localizado junto à turbina e, para além dos
sensores de pressão, contêm uma fonte da alimentação 5VDC/240VAC para alimentar os respetivos sensores;
23
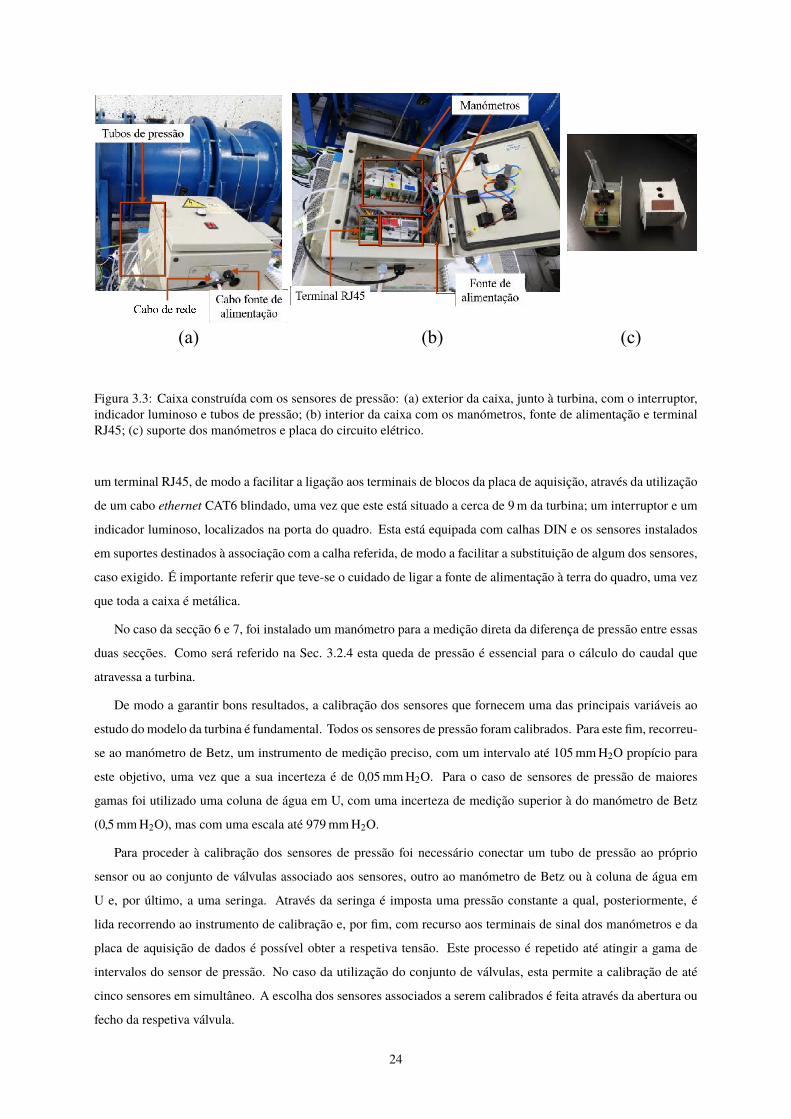
(a) (b) (c)
Figura 3.3: Caixa construída com os sensores de pressão: (a) exterior da caixa, junto à turbina, com o interruptor,indicador luminoso e tubos de pressão; (b) interior da caixa com os manómetros, fonte de alimentação e terminalRJ45; (c) suporte dos manómetros e placa do circuito elétrico.
um terminal RJ45, de modo a facilitar a ligação aos terminais de blocos da placa de aquisição, através da utilização
de um cabo ethernet CAT6 blindado, uma vez que este está situado a cerca de 9 m da turbina; um interruptor e um
indicador luminoso, localizados na porta do quadro. Esta está equipada com calhas DIN e os sensores instalados
em suportes destinados à associação com a calha referida, de modo a facilitar a substituição de algum dos sensores,
caso exigido. É importante referir que teve-se o cuidado de ligar a fonte de alimentação à terra do quadro, uma vez
que toda a caixa é metálica.
No caso da secção 6 e 7, foi instalado um manómetro para a medição direta da diferença de pressão entre essas
duas secções. Como será referido na Sec. 3.2.4 esta queda de pressão é essencial para o cálculo do caudal que
atravessa a turbina.
De modo a garantir bons resultados, a calibração dos sensores que fornecem uma das principais variáveis ao
estudo do modelo da turbina é fundamental. Todos os sensores de pressão foram calibrados. Para este fim, recorreu-
se ao manómetro de Betz, um instrumento de medição preciso, com um intervalo até 105 mm H2O propício para
este objetivo, uma vez que a sua incerteza é de 0,05 mm H2O. Para o caso de sensores de pressão de maiores
gamas foi utilizado uma coluna de água em U, com uma incerteza de medição superior à do manómetro de Betz
(0,5 mm H2O), mas com uma escala até 979 mm H2O.
Para proceder à calibração dos sensores de pressão foi necessário conectar um tubo de pressão ao próprio
sensor ou ao conjunto de válvulas associado aos sensores, outro ao manómetro de Betz ou à coluna de água em
U e, por último, a uma seringa. Através da seringa é imposta uma pressão constante a qual, posteriormente, é
lida recorrendo ao instrumento de calibração e, por fim, com recurso aos terminais de sinal dos manómetros e da
placa de aquisição de dados é possível obter a respetiva tensão. Este processo é repetido até atingir a gama de
intervalos do sensor de pressão. No caso da utilização do conjunto de válvulas, esta permite a calibração de até
cinco sensores em simultâneo. A escolha dos sensores associados a serem calibrados é feita através da abertura ou
fecho da respetiva válvula.
24
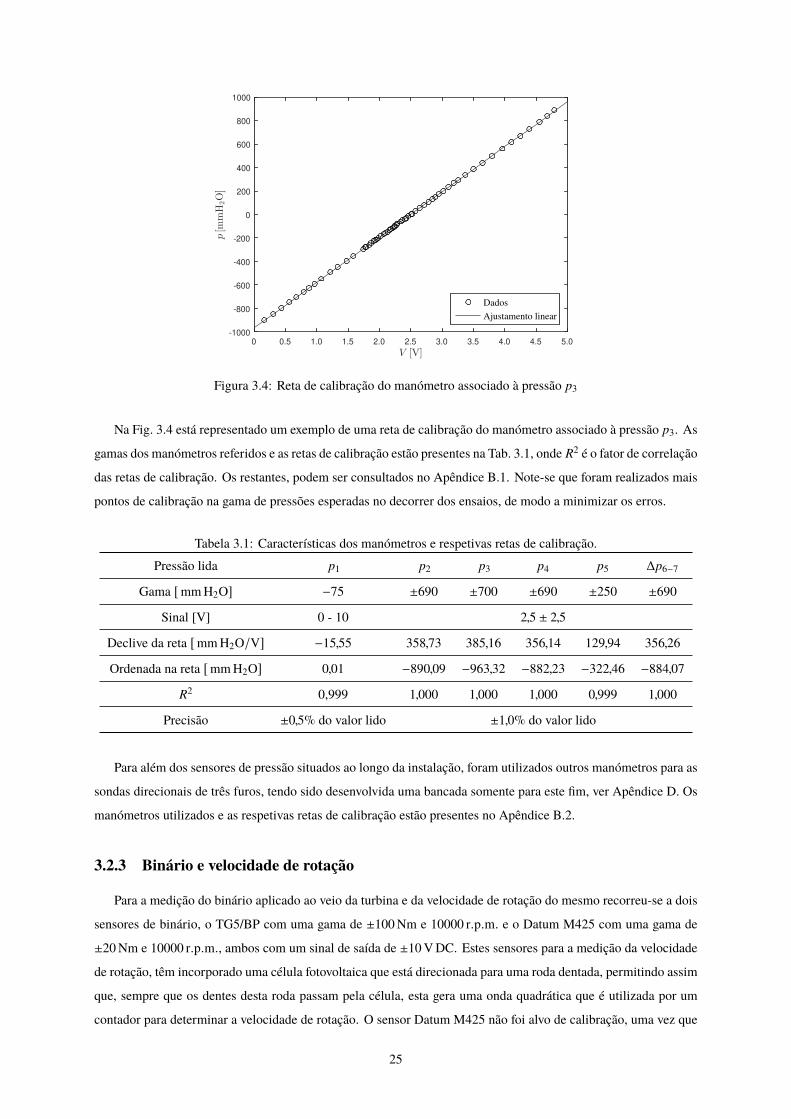
0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0 4.5 5.0
V [V]
-1000
-800
-600
-400
-200
0
200
400
600
800
1000
p[m
mH
2O]
Dados
Ajustamento linear
Figura 3.4: Reta de calibração do manómetro associado à pressão p3
Na Fig. 3.4 está representado um exemplo de uma reta de calibração do manómetro associado à pressão p3. As
gamas dos manómetros referidos e as retas de calibração estão presentes na Tab. 3.1, onde R2 é o fator de correlação
das retas de calibração. Os restantes, podem ser consultados no Apêndice B.1. Note-se que foram realizados mais
pontos de calibração na gama de pressões esperadas no decorrer dos ensaios, de modo a minimizar os erros.
Tabela 3.1: Características dos manómetros e respetivas retas de calibração.
Pressão lida p1 p2 p3 p4 p5 ∆p6−7
Gama [mm H2O] −75 ±690 ±700 ±690 ±250 ±690
Sinal [V] 0 - 10 2,5 ± 2,5
Declive da reta [mm H2O/V] −15,55 358,73 385,16 356,14 129,94 356,26
Ordenada na reta [mm H2O] 0,01 −890,09 −963,32 −882,23 −322,46 −884,07
R2 0,999 1,000 1,000 1,000 0,999 1,000
Precisão ±0,5% do valor lido ±1,0% do valor lido
Para além dos sensores de pressão situados ao longo da instalação, foram utilizados outros manómetros para as
sondas direcionais de três furos, tendo sido desenvolvida uma bancada somente para este fim, ver Apêndice D. Os
manómetros utilizados e as respetivas retas de calibração estão presentes no Apêndice B.2.
3.2.3 Binário e velocidade de rotação
Para a medição do binário aplicado ao veio da turbina e da velocidade de rotação do mesmo recorreu-se a dois
sensores de binário, o TG5/BP com uma gama de ±100Nm e 10000 r.p.m. e o Datum M425 com uma gama de
±20Nm e 10000 r.p.m., ambos com um sinal de saída de ±10VDC. Estes sensores para a medição da velocidade
de rotação, têm incorporado uma célula fotovoltaica que está direcionada para uma roda dentada, permitindo assim
que, sempre que os dentes desta roda passam pela célula, esta gera uma onda quadrática que é utilizada por um
contador para determinar a velocidade de rotação. O sensor Datum M425 não foi alvo de calibração, uma vez que
25
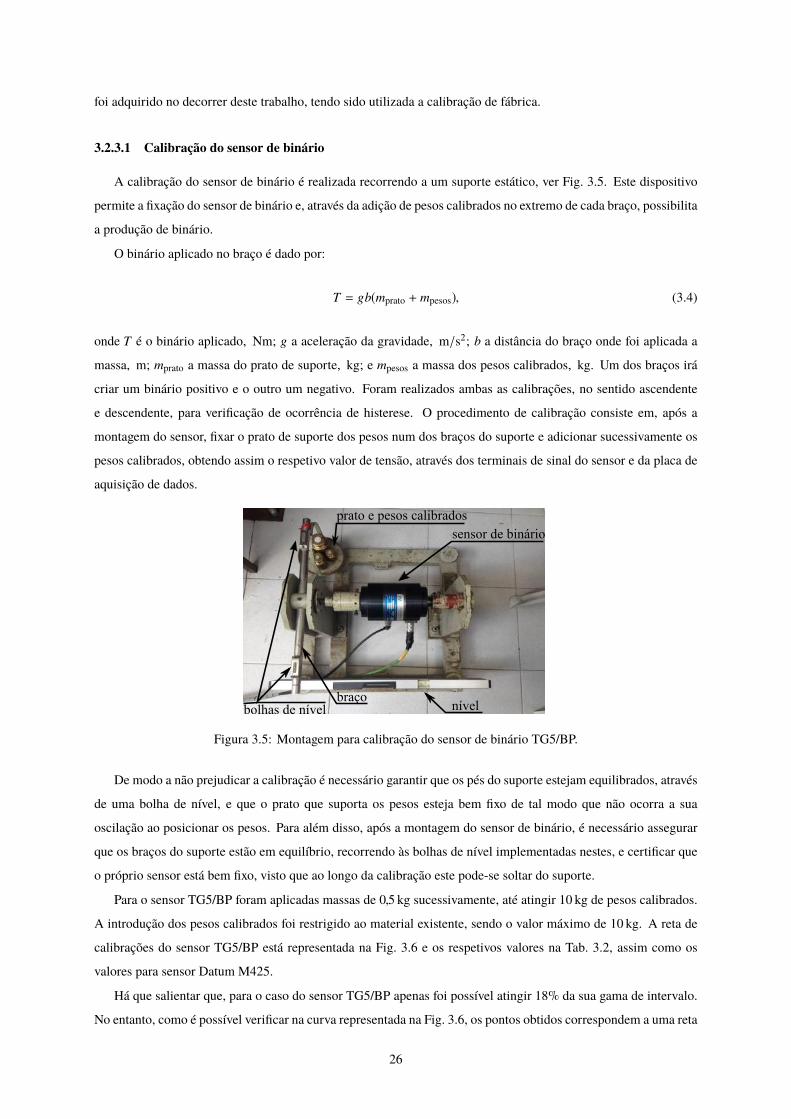
foi adquirido no decorrer deste trabalho, tendo sido utilizada a calibração de fábrica.
3.2.3.1 Calibração do sensor de binário
A calibração do sensor de binário é realizada recorrendo a um suporte estático, ver Fig. 3.5. Este dispositivo
permite a fixação do sensor de binário e, através da adição de pesos calibrados no extremo de cada braço, possibilita
a produção de binário.
O binário aplicado no braço é dado por:
T = gb(mprato + mpesos), (3.4)
onde T é o binário aplicado, Nm; g a aceleração da gravidade, m/s2; b a distância do braço onde foi aplicada a
massa, m; mprato a massa do prato de suporte, kg; e mpesos a massa dos pesos calibrados, kg. Um dos braços irá
criar um binário positivo e o outro um negativo. Foram realizados ambas as calibrações, no sentido ascendente
e descendente, para verificação de ocorrência de histerese. O procedimento de calibração consiste em, após a
montagem do sensor, fixar o prato de suporte dos pesos num dos braços do suporte e adicionar sucessivamente os
pesos calibrados, obtendo assim o respetivo valor de tensão, através dos terminais de sinal do sensor e da placa de
aquisição de dados.
sensor de binário
braço
prato e pesos calibrados
nívelbolhas de nível
Figura 3.5: Montagem para calibração do sensor de binário TG5/BP.
De modo a não prejudicar a calibração é necessário garantir que os pés do suporte estejam equilibrados, através
de uma bolha de nível, e que o prato que suporta os pesos esteja bem fixo de tal modo que não ocorra a sua
oscilação ao posicionar os pesos. Para além disso, após a montagem do sensor de binário, é necessário assegurar
que os braços do suporte estão em equilíbrio, recorrendo às bolhas de nível implementadas nestes, e certificar que
o próprio sensor está bem fixo, visto que ao longo da calibração este pode-se soltar do suporte.
Para o sensor TG5/BP foram aplicadas massas de 0,5 kg sucessivamente, até atingir 10 kg de pesos calibrados.
A introdução dos pesos calibrados foi restrigido ao material existente, sendo o valor máximo de 10 kg. A reta de
calibrações do sensor TG5/BP está representada na Fig. 3.6 e os respetivos valores na Tab. 3.2, assim como os
valores para sensor Datum M425.
Há que salientar que, para o caso do sensor TG5/BP apenas foi possível atingir 18% da sua gama de intervalo.
No entanto, como é possível verificar na curva representada na Fig. 3.6, os pontos obtidos correspondem a uma reta
26
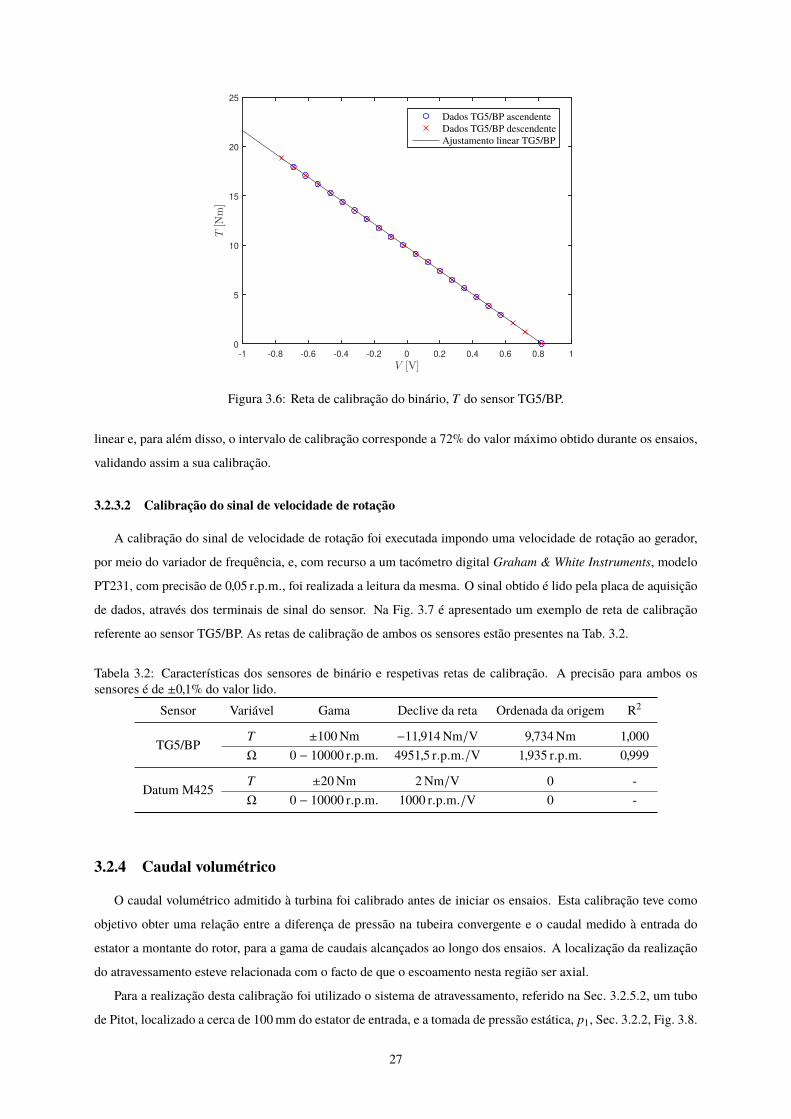
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1
V [V]
0
5
10
15
20
25
T[N
m]
Dados TG5/BP ascendente
Dados TG5/BP descendente
Ajustamento linear TG5/BP
Figura 3.6: Reta de calibração do binário, T do sensor TG5/BP.
linear e, para além disso, o intervalo de calibração corresponde a 72% do valor máximo obtido durante os ensaios,
validando assim a sua calibração.
3.2.3.2 Calibração do sinal de velocidade de rotação
A calibração do sinal de velocidade de rotação foi executada impondo uma velocidade de rotação ao gerador,
por meio do variador de frequência, e, com recurso a um tacómetro digital Graham & White Instruments, modelo
PT231, com precisão de 0,05 r.p.m., foi realizada a leitura da mesma. O sinal obtido é lido pela placa de aquisição
de dados, através dos terminais de sinal do sensor. Na Fig. 3.7 é apresentado um exemplo de reta de calibração
referente ao sensor TG5/BP. As retas de calibração de ambos os sensores estão presentes na Tab. 3.2.
Tabela 3.2: Características dos sensores de binário e respetivas retas de calibração. A precisão para ambos ossensores é de ±0,1% do valor lido.
Sensor Variável Gama Declive da reta Ordenada da origem R2
TG5/BPT ±100Nm −11,914Nm/V 9,734Nm 1,000Ω 0 − 10000 r.p.m. 4951,5 r.p.m./V 1,935 r.p.m. 0,999
Datum M425T ±20Nm 2Nm/V 0 -Ω 0 − 10000 r.p.m. 1000 r.p.m./V 0 -
3.2.4 Caudal volumétrico
O caudal volumétrico admitido à turbina foi calibrado antes de iniciar os ensaios. Esta calibração teve como
objetivo obter uma relação entre a diferença de pressão na tubeira convergente e o caudal medido à entrada do
estator a montante do rotor, para a gama de caudais alcançados ao longo dos ensaios. A localização da realização
do atravessamento esteve relacionada com o facto de que o escoamento nesta região ser axial.
Para a realização desta calibração foi utilizado o sistema de atravessamento, referido na Sec. 3.2.5.2, um tubo
de Pitot, localizado a cerca de 100 mm do estator de entrada, e a tomada de pressão estática, p1, Sec. 3.2.2, Fig. 3.8.
27
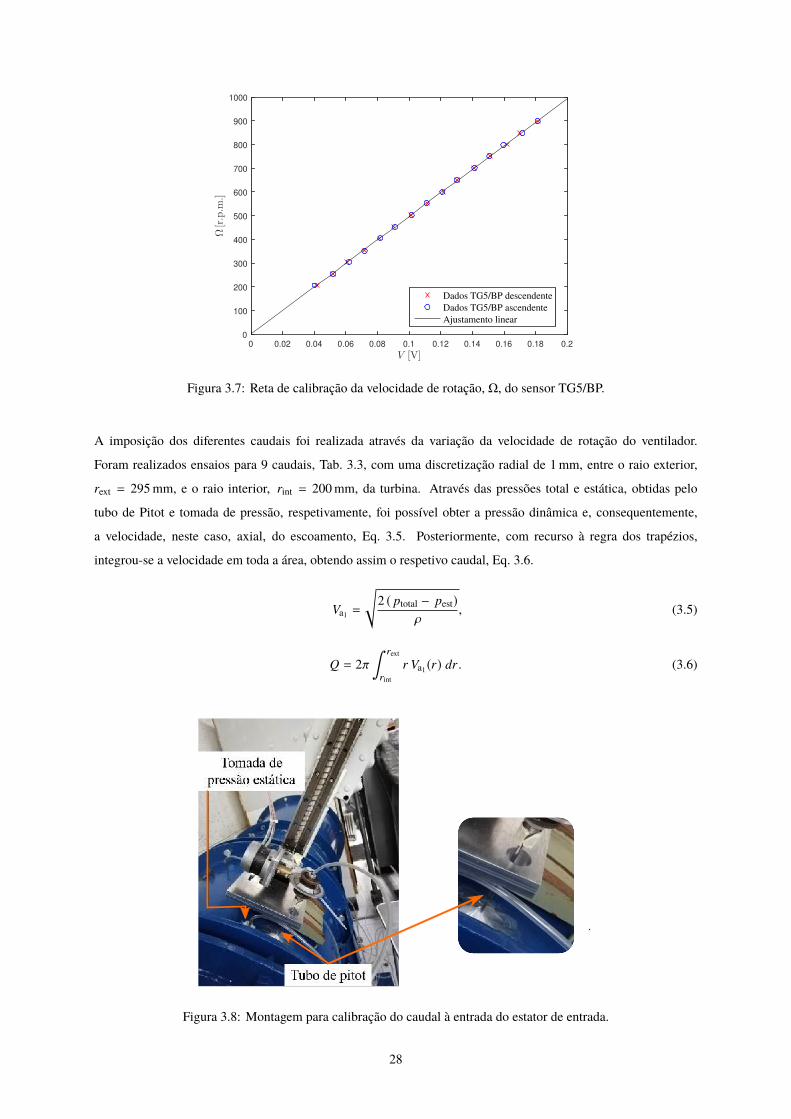
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2
V [V]
0
100
200
300
400
500
600
700
800
900
1000
Ω[r.p.m
.]
Dados TG5/BP descendente
Dados TG5/BP ascendente
Ajustamento linear
Figura 3.7: Reta de calibração da velocidade de rotação, Ω, do sensor TG5/BP.
A imposição dos diferentes caudais foi realizada através da variação da velocidade de rotação do ventilador.
Foram realizados ensaios para 9 caudais, Tab. 3.3, com uma discretização radial de 1 mm, entre o raio exterior,
rext = 295 mm, e o raio interior, rint = 200 mm, da turbina. Através das pressões total e estática, obtidas pelo
tubo de Pitot e tomada de pressão, respetivamente, foi possível obter a pressão dinâmica e, consequentemente,
a velocidade, neste caso, axial, do escoamento, Eq. 3.5. Posteriormente, com recurso à regra dos trapézios,
integrou-se a velocidade em toda a área, obtendo assim o respetivo caudal, Eq. 3.6.
Va1 =
√2 ( ptotal − pest)
ρ, (3.5)
Q = 2π∫ rext
rint
r Va1 (r) dr . (3.6)
Figura 3.8: Montagem para calibração do caudal à entrada do estator de entrada.
28
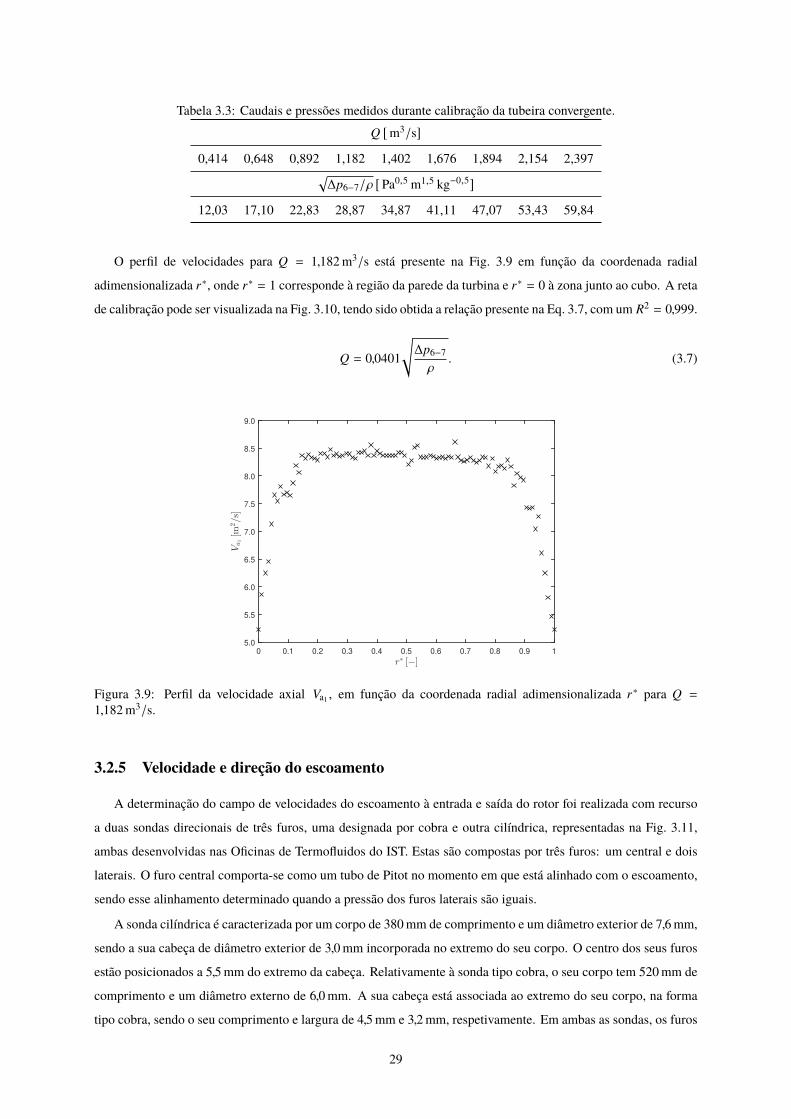
Tabela 3.3: Caudais e pressões medidos durante calibração da tubeira convergente.
Q [m3/s]
0,414 0,648 0,892 1,182 1,402 1,676 1,894 2,154 2,397√∆p6−7/ρ [Pa0,5 m1,5 kg−0,5]
12,03 17,10 22,83 28,87 34,87 41,11 47,07 53,43 59,84
O perfil de velocidades para Q = 1,182 m3/s está presente na Fig. 3.9 em função da coordenada radial
adimensionalizada r∗, onde r∗ = 1 corresponde à região da parede da turbina e r∗ = 0 à zona junto ao cubo. A reta
de calibração pode ser visualizada na Fig. 3.10, tendo sido obtida a relação presente na Eq. 3.7, com um R2 = 0,999.
Q = 0,0401
√∆p6−7ρ
. (3.7)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
r∗ [−]
5.0
5.5
6.0
6.5
7.0
7.5
8.0
8.5
9.0
Va1[m
2/s]
Figura 3.9: Perfil da velocidade axial Va1 , em função da coordenada radial adimensionalizada r∗ para Q =1,182 m3/s.
3.2.5 Velocidade e direção do escoamento
A determinação do campo de velocidades do escoamento à entrada e saída do rotor foi realizada com recurso
a duas sondas direcionais de três furos, uma designada por cobra e outra cilíndrica, representadas na Fig. 3.11,
ambas desenvolvidas nas Oficinas de Termofluidos do IST. Estas são compostas por três furos: um central e dois
laterais. O furo central comporta-se como um tubo de Pitot no momento em que está alinhado com o escoamento,
sendo esse alinhamento determinado quando a pressão dos furos laterais são iguais.
A sonda cilíndrica é caracterizada por um corpo de 380 mm de comprimento e um diâmetro exterior de 7,6 mm,
sendo a sua cabeça de diâmetro exterior de 3,0 mm incorporada no extremo do seu corpo. O centro dos seus furos
estão posicionados a 5,5 mm do extremo da cabeça. Relativamente à sonda tipo cobra, o seu corpo tem 520 mm de
comprimento e um diâmetro externo de 6,0 mm. A sua cabeça está associada ao extremo do seu corpo, na forma
tipo cobra, sendo o seu comprimento e largura de 4,5 mm e 3,2 mm, respetivamente. Em ambas as sondas, os furos
29
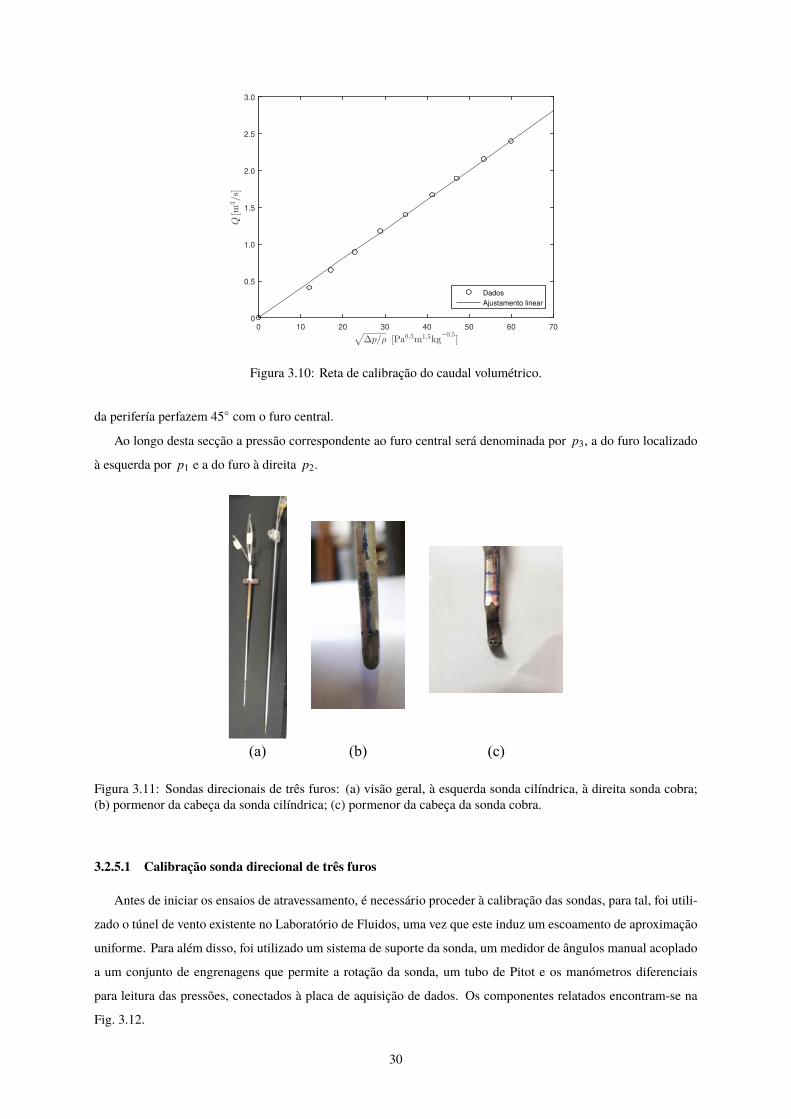
0 10 20 30 40 50 60 70√
∆p/ρ [Pa0,5m1,5kg−0,5
]
0
0.5
1.0
1.5
2.0
2.5
3.0
Q[m
3/s]
Dados
Ajustamento linear
Figura 3.10: Reta de calibração do caudal volumétrico.
da perifería perfazem 45 com o furo central.
Ao longo desta secção a pressão correspondente ao furo central será denominada por p3, a do furo localizado
à esquerda por p1 e a do furo à direita p2.
(a) (b) (c)
Figura 3.11: Sondas direcionais de três furos: (a) visão geral, à esquerda sonda cilíndrica, à direita sonda cobra;(b) pormenor da cabeça da sonda cilíndrica; (c) pormenor da cabeça da sonda cobra.
3.2.5.1 Calibração sonda direcional de três furos
Antes de iniciar os ensaios de atravessamento, é necessário proceder à calibração das sondas, para tal, foi utili-
zado o túnel de vento existente no Laboratório de Fluidos, uma vez que este induz um escoamento de aproximação
uniforme. Para além disso, foi utilizado um sistema de suporte da sonda, um medidor de ângulos manual acoplado
a um conjunto de engrenagens que permite a rotação da sonda, um tubo de Pitot e os manómetros diferenciais
para leitura das pressões, conectados à placa de aquisição de dados. Os componentes relatados encontram-se na
Fig. 3.12.
30

(a) (b)
suporte da sonda
Figura 3.12: Montagem para calibração da sonda de direcional de 3 furos: (a) túnel de vento, suporte da sonda ebancada de aquisição de dados com os manómetros utilizados; (b) sonda direcional de três furos, tubo de Pitot emedidor de ângulos manual.
A calibração da sonda foi concretizada em duas fases: uma primeira fase onde foi analisado a influência do
número de Reynolds, através da variação do caudal do escoamento de aproximação; e uma segunda fase onde foi
averiguado a influência do ângulo de alinhamento da sonda, γ.
Para a realização da primeira etapa da calibração, inicia-se por colocar a sonda alinhada com o escoamento,
para tal, é necessário garantir a perpendicularidade do suporte da sonda, relativamente à saída do túnel de vento,
através de um esquadro, e assegurar que a sonda, ou seja, o furo central desta, esteja alinhado com o zero do
medidor de ângulos, uma vez que este se encontra também perpendicular ao túnel de vento. Para além disso, é
fundamental que o tubo Pitot também esteja alinhado com o escoamento, garantindo que se encontra na posição
correspondente ao valor máximo de pressão, lido por este. É de realçar que, tanto o tubo de Pitot como a sonda,
têm de estar à mesma distância do túnel de vento e à mesma altura. De seguida, acciona-se o ventilador do túnel
de vento e, através da abertura da respetiva válvula, altera-se sucessivamente o caudal de ar que atravessa o túnel.
Registam-se os sinais de tensão correspondentes às pressões de cada furo, para o respetivo caudal. Repete-se o
procedimento para toda a gama de caudais possíveis. Para verificação, foi realizado o procedimento para o fecho
da válvula, diminuindo assim o caudal.
Sendo a pressão dinâmica dada pela Eq. 3.8 e uma vez que o tubo de Pitot está suficientemente afastado do
túnel de vento, a sua pressão total será igual à dinâmica, pdin, visto que a pressão estática é igual à atmosférica.
Relativamente à pressão dinâmica da sonda, psonda, esta é dada pela Eq. 3.9, uma vez que a pressão estática, pest,
é proporcional à pressão lida pelos furos laterais (estando a sonda alinhada com o escoamento, verifica-se que
p1 = p2), e a pressão total corresponde à pressão lida pelo furo central, p3.
pdin = ptotal − pest, (3.8)
psonda = p3 −p1 + p2
2. (3.9)
31

(a) (b)
Figura 3.13: Resultados entre as pressões lidas pelo Pitot e pela sonda, para ambas as sondas: (a) pressão dinâmica;(b) pressão total.
Na Fig. 3.13 estão representadas as retas de pressão dinâmica do escoamento de aproximação em função da
pressão dinâmica lida pelas sondas referidas Fig. 3.13 (a), e de pressão total do escoamento em função da pressão
total lida por ambas as sondas Fig. 3.13 (b). Na tabela Tab. 3.4 estão presentes os coeficientes de cada reta,
assim como o respetivo fator de correlação. É possível verificar que a pressão total lida por ambas as sondas não
corresponde à pressão lida pelo tubo de Pitot. Este facto pode estar essencialmente associado com a excessiva
dimensão dos furos da sonda, uma vez que de acordo com [40], estes devem ser inferior a18do diâmetro da sonda.
Para a realização do segundo teste, é igualmente necessário garantir que o tubo de Pitot e o suporte da sonda
estejam perpendiculares à saída do túnel de vento e à mesma distância do túnel de vento e chão. Posteriormente,
fixa-se um caudal e, através do conjunto de engrenagens, varia-se o ângulo de alinhamento da sonda. Registam-se
os sinais de tensão correspondente à pressão de cada furo, para todos os ângulos. O teste foi realizado para uma
variação do ângulo de alinhamento γ de ±20.
Este teste permite estabelecer a relação do coeficiente angular Cγ, dinâmico Cdin, e total Ctotal da sonda em
função do ângulo de alinhamento da mesma. A definição dos coeficientes está presente nas Eq. 3.12, Eq. 3.11 e
Eq. 3.10, respetivamente.
Cγ =p1 − p2psonda
, (3.10)
Tabela 3.4: Retas de calibração das sondas direcionais de três furos utilizadas, referentes à primeira fase dacalibração.
Sonda Reta de calibração R2
Cilíndricapsonda = 1,384 pdin 1,000p3 = 0,975 ptotal 1,000
Cobrapsonda = 0,472 pdin 0,999p3 = 0,855 ptotal 1,000
32
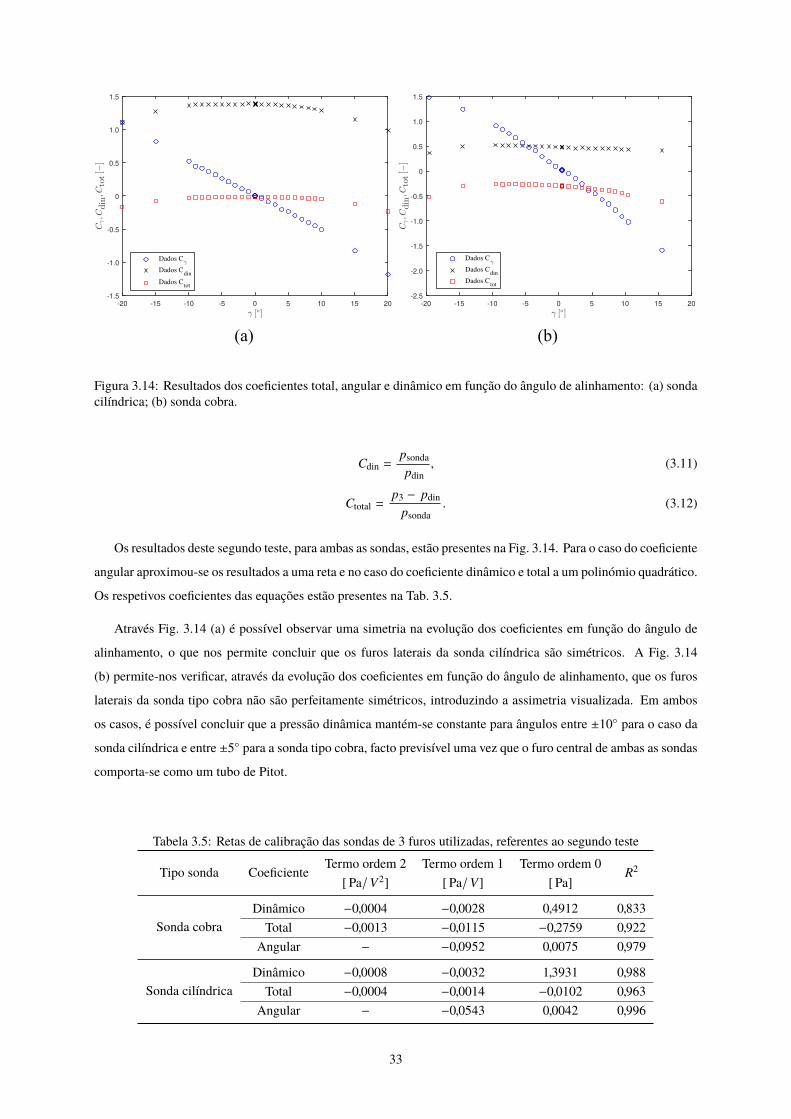
(a) (b)
Figura 3.14: Resultados dos coeficientes total, angular e dinâmico em função do ângulo de alinhamento: (a) sondacilíndrica; (b) sonda cobra.
Cdin =psondapdin
, (3.11)
Ctotal =p3 − pdin
psonda. (3.12)
Os resultados deste segundo teste, para ambas as sondas, estão presentes na Fig. 3.14. Para o caso do coeficiente
angular aproximou-se os resultados a uma reta e no caso do coeficiente dinâmico e total a um polinómio quadrático.
Os respetivos coeficientes das equações estão presentes na Tab. 3.5.
Através Fig. 3.14 (a) é possível observar uma simetria na evolução dos coeficientes em função do ângulo de
alinhamento, o que nos permite concluir que os furos laterais da sonda cilíndrica são simétricos. A Fig. 3.14
(b) permite-nos verificar, através da evolução dos coeficientes em função do ângulo de alinhamento, que os furos
laterais da sonda tipo cobra não são perfeitamente simétricos, introduzindo a assimetria visualizada. Em ambos
os casos, é possível concluir que a pressão dinâmica mantém-se constante para ângulos entre ±10 para o caso da
sonda cilíndrica e entre ±5 para a sonda tipo cobra, facto previsível uma vez que o furo central de ambas as sondas
comporta-se como um tubo de Pitot.
Tabela 3.5: Retas de calibração das sondas de 3 furos utilizadas, referentes ao segundo teste
Tipo sonda CoeficienteTermo ordem 2 Termo ordem 1 Termo ordem 0
R2[Pa/V2] [ Pa/V] [Pa]
Sonda cobraDinâmico −0,0004 −0,0028 0,4912 0,833Total −0,0013 −0,0115 −0,2759 0,922
Angular − −0,0952 0,0075 0,979
Sonda cilíndricaDinâmico −0,0008 −0,0032 1,3931 0,988Total −0,0004 −0,0014 −0,0102 0,963
Angular − −0,0543 0,0042 0,996
33

3.2.5.2 Sistema de Atravessamento
De forma a realizar os ensaios de atravessamento simultaneamente à entrada e saída do rotor, foram construídos
dois sistemas que suportassem e movimentassem a respetiva sonda direcional de três furos, linearmente com a
direção radial e em rotação em torno do seu eixo. Desta forma era possível diminuir o tempo de duração dos
ensaios e, mais importante ainda, garantir as mesmas condições de funcionamento da turbina e do escoamento dos
atravessamentos à entrada e saída do rotor, ou seja, a mesma velocidade de rotação do gerador, o mesmo coeficiente
de caudal do escoamento e as mesmas condições atmosféricas para ambos os ensaios.
Ambos os sistemas têm a mesma configuração, Fig. 3.15. De forma geral, são constituídos por um sistema
linear, dois motores de passo, um Arduino UNO Rev3 e uma placa Adafruit Motor-Stepper-Servo Shield V2, ambos
componentes destinados à programação dos motores.
Um dos sistemas, dorante designado por sistemaA é constituído por um conjunto de um fuso de 10 mm de passo,
chumaceiras e rolamento, destinados ao movimento transversal da sonda, e um conjunto de roda dentada e parafuso
sem fim, com uma razão de redução de 1:50, associado ao movimento de rotação da sonda, tem no total 460 mm
de distância a percorrer transversalmente. Relativamente ao segundo sistema, designado por B, este é constituído
por um veio roscado de 2 mm de passo, destinado ao movimento transversal e por uma caixa redutora de razão
1:40, associado ao movimento de rotação, com 320 mm de distância disponível para movimentação transversal. O
processo de construção dos sistemas é abordado com mais detalhe no Apêndice C.2.
Em ambos os casos, como mencionado, foram utilizados componentes mecânicos responsáveis pela rotação da
sonda, por forma a atingir uma boa precisão na movimentação angular, obtendo assim uma precisão de 0,04 para
o sistema A e 0,05 para o sistema B. Todos os motores de passo utilizados são caracterizados por 200 passos por
revolução.
A placa Adafruit Motor-Stepper-Servo Shield v2 é responsável pela associação dos motores com o Arduino
(a) (b)
Figura 3.15: Sistemas de atravessamentos desenvolvidos: (a) sistema A; (b) sistema B.
34
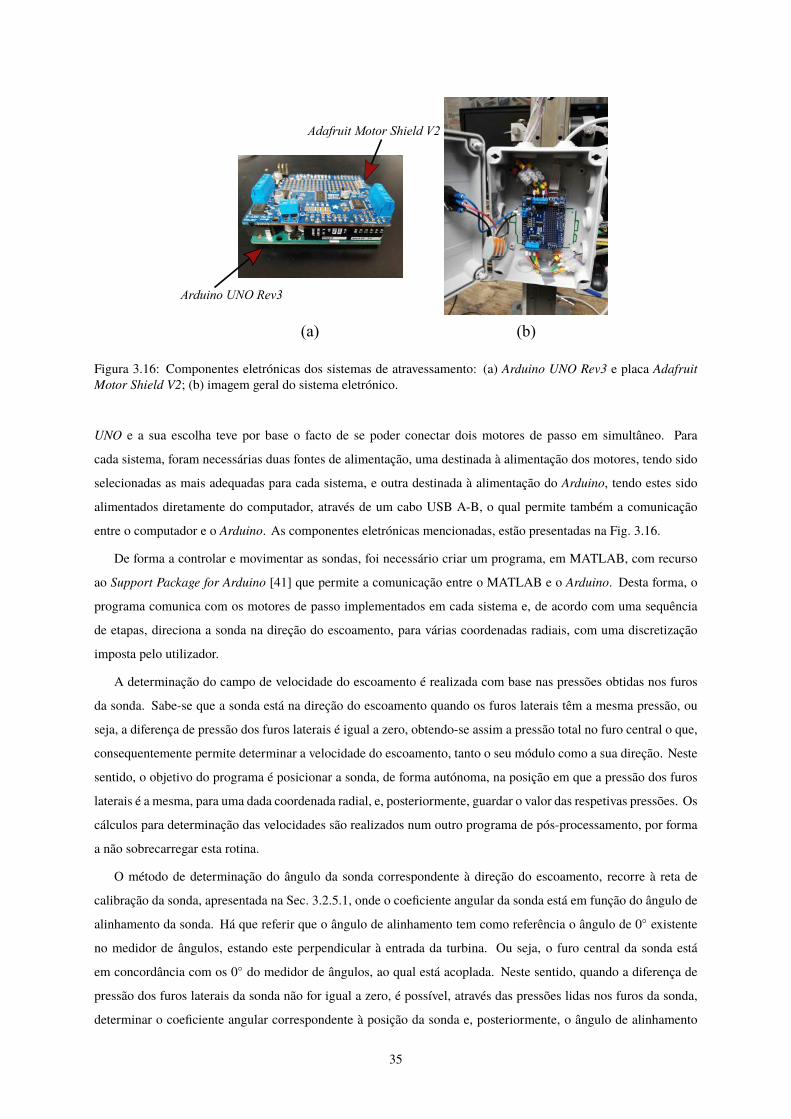
Arduino UNO Rev3
Adafruit Motor Shield V2
(a) (b)
Figura 3.16: Componentes eletrónicas dos sistemas de atravessamento: (a) Arduino UNO Rev3 e placa AdafruitMotor Shield V2; (b) imagem geral do sistema eletrónico.
UNO e a sua escolha teve por base o facto de se poder conectar dois motores de passo em simultâneo. Para
cada sistema, foram necessárias duas fontes de alimentação, uma destinada à alimentação dos motores, tendo sido
selecionadas as mais adequadas para cada sistema, e outra destinada à alimentação do Arduino, tendo estes sido
alimentados diretamente do computador, através de um cabo USB A-B, o qual permite também a comunicação
entre o computador e o Arduino. As componentes eletrónicas mencionadas, estão presentadas na Fig. 3.16.
De forma a controlar e movimentar as sondas, foi necessário criar um programa, em MATLAB, com recurso
ao Support Package for Arduino [41] que permite a comunicação entre o MATLAB e o Arduino. Desta forma, o
programa comunica com os motores de passo implementados em cada sistema e, de acordo com uma sequência
de etapas, direciona a sonda na direção do escoamento, para várias coordenadas radiais, com uma discretização
imposta pelo utilizador.
A determinação do campo de velocidade do escoamento é realizada com base nas pressões obtidas nos furos
da sonda. Sabe-se que a sonda está na direção do escoamento quando os furos laterais têm a mesma pressão, ou
seja, a diferença de pressão dos furos laterais é igual a zero, obtendo-se assim a pressão total no furo central o que,
consequentemente permite determinar a velocidade do escoamento, tanto o seu módulo como a sua direção. Neste
sentido, o objetivo do programa é posicionar a sonda, de forma autónoma, na posição em que a pressão dos furos
laterais é a mesma, para uma dada coordenada radial, e, posteriormente, guardar o valor das respetivas pressões. Os
cálculos para determinação das velocidades são realizados num outro programa de pós-processamento, por forma
a não sobrecarregar esta rotina.
O método de determinação do ângulo da sonda correspondente à direção do escoamento, recorre à reta de
calibração da sonda, apresentada na Sec. 3.2.5.1, onde o coeficiente angular da sonda está em função do ângulo de
alinhamento da sonda. Há que referir que o ângulo de alinhamento tem como referência o ângulo de 0 existente
no medidor de ângulos, estando este perpendicular à entrada da turbina. Ou seja, o furo central da sonda está
em concordância com os 0 do medidor de ângulos, ao qual está acoplada. Neste sentido, quando a diferença de
pressão dos furos laterais da sonda não for igual a zero, é possível, através das pressões lidas nos furos da sonda,
determinar o coeficiente angular correspondente à posição da sonda e, posteriormente, o ângulo de alinhamento
35
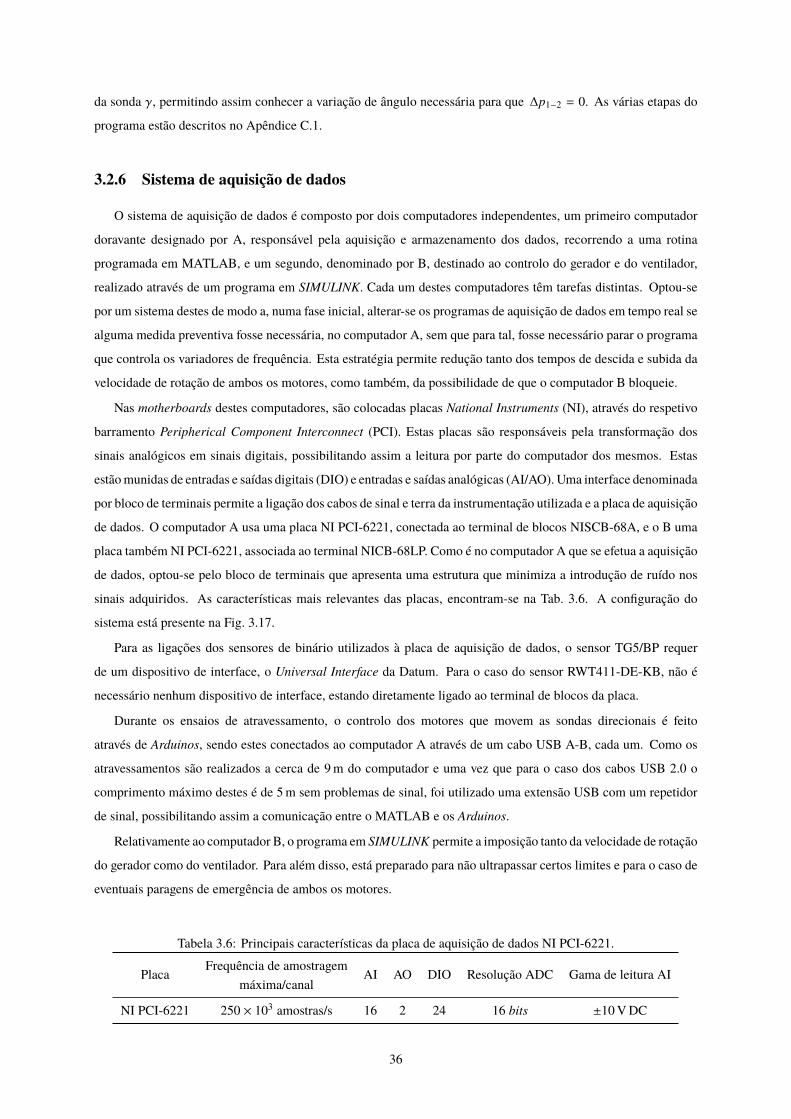
da sonda γ, permitindo assim conhecer a variação de ângulo necessária para que ∆p1−2 = 0. As várias etapas do
programa estão descritos no Apêndice C.1.
3.2.6 Sistema de aquisição de dados
O sistema de aquisição de dados é composto por dois computadores independentes, um primeiro computador
doravante designado por A, responsável pela aquisição e armazenamento dos dados, recorrendo a uma rotina
programada em MATLAB, e um segundo, denominado por B, destinado ao controlo do gerador e do ventilador,
realizado através de um programa em SIMULINK. Cada um destes computadores têm tarefas distintas. Optou-se
por um sistema destes de modo a, numa fase inicial, alterar-se os programas de aquisição de dados em tempo real se
alguma medida preventiva fosse necessária, no computador A, sem que para tal, fosse necessário parar o programa
que controla os variadores de frequência. Esta estratégia permite redução tanto dos tempos de descida e subida da
velocidade de rotação de ambos os motores, como também, da possibilidade de que o computador B bloqueie.
Nas motherboards destes computadores, são colocadas placas National Instruments (NI), através do respetivo
barramento Peripherical Component Interconnect (PCI). Estas placas são responsáveis pela transformação dos
sinais analógicos em sinais digitais, possibilitando assim a leitura por parte do computador dos mesmos. Estas
estãomunidas de entradas e saídas digitais (DIO) e entradas e saídas analógicas (AI/AO). Uma interface denominada
por bloco de terminais permite a ligação dos cabos de sinal e terra da instrumentação utilizada e a placa de aquisição
de dados. O computador A usa uma placa NI PCI-6221, conectada ao terminal de blocos NISCB-68A, e o B uma
placa também NI PCI-6221, associada ao terminal NICB-68LP. Como é no computador A que se efetua a aquisição
de dados, optou-se pelo bloco de terminais que apresenta uma estrutura que minimiza a introdução de ruído nos
sinais adquiridos. As características mais relevantes das placas, encontram-se na Tab. 3.6. A configuração do
sistema está presente na Fig. 3.17.
Para as ligações dos sensores de binário utilizados à placa de aquisição de dados, o sensor TG5/BP requer
de um dispositivo de interface, o Universal Interface da Datum. Para o caso do sensor RWT411-DE-KB, não é
necessário nenhum dispositivo de interface, estando diretamente ligado ao terminal de blocos da placa.
Durante os ensaios de atravessamento, o controlo dos motores que movem as sondas direcionais é feito
através de Arduinos, sendo estes conectados ao computador A através de um cabo USB A-B, cada um. Como os
atravessamentos são realizados a cerca de 9 m do computador e uma vez que para o caso dos cabos USB 2.0 o
comprimento máximo destes é de 5 m sem problemas de sinal, foi utilizado uma extensão USB com um repetidor
de sinal, possibilitando assim a comunicação entre o MATLAB e os Arduinos.
Relativamente ao computador B, o programa em SIMULINK permite a imposição tanto da velocidade de rotação
do gerador como do ventilador. Para além disso, está preparado para não ultrapassar certos limites e para o caso de
eventuais paragens de emergência de ambos os motores.
Tabela 3.6: Principais características da placa de aquisição de dados NI PCI-6221.
PlacaFrequência de amostragem
AI AO DIO Resolução ADC Gama de leitura AImáxima/canal
NI PCI-6221 250 × 103 amostras/s 16 2 24 16 bits ±10VDC
36
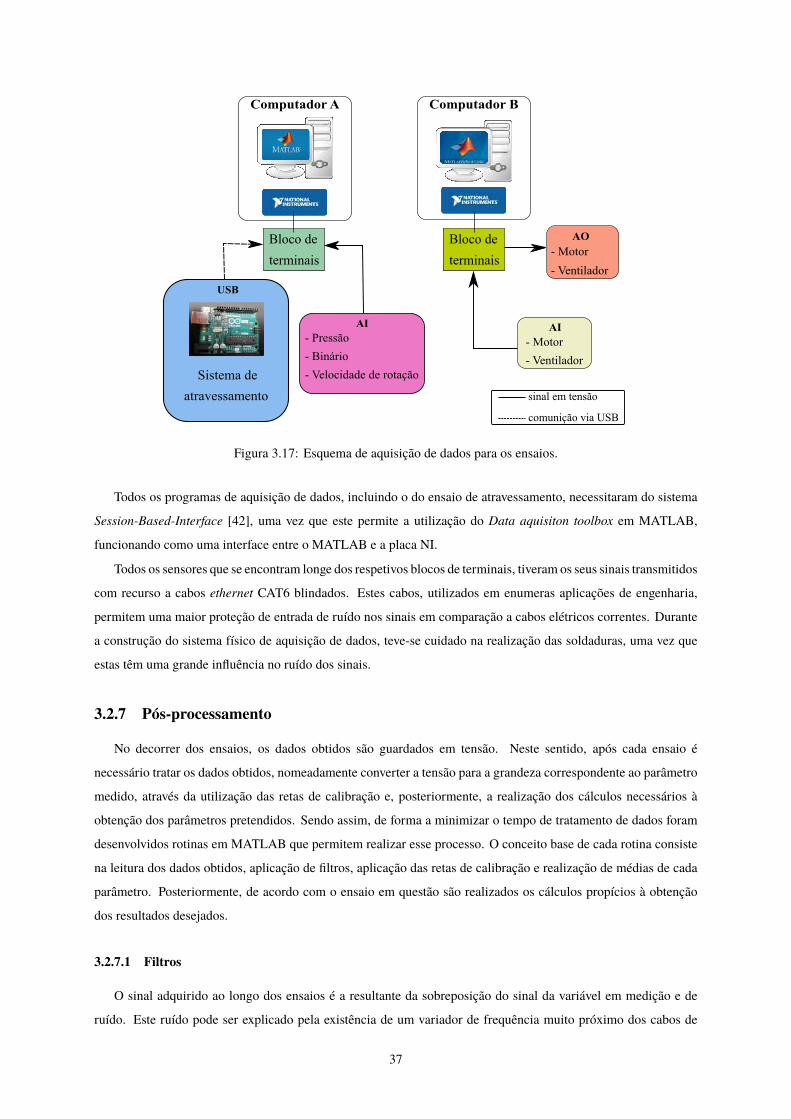
- Motor
- Ventilador
AO
- Motor
- Ventilador
AI- Pressão
- Binário
- Velocidade de rotação
AI
USB
Sistema de
atravessamento
Computador A
Bloco de
terminais
Computador B
Bloco de
terminais
sinal em tensão
comunição via USB
Figura 3.17: Esquema de aquisição de dados para os ensaios.
Todos os programas de aquisição de dados, incluindo o do ensaio de atravessamento, necessitaram do sistema
Session-Based-Interface [42], uma vez que este permite a utilização do Data aquisiton toolbox em MATLAB,
funcionando como uma interface entre o MATLAB e a placa NI.
Todos os sensores que se encontram longe dos respetivos blocos de terminais, tiveram os seus sinais transmitidos
com recurso a cabos ethernet CAT6 blindados. Estes cabos, utilizados em enumeras aplicações de engenharia,
permitem uma maior proteção de entrada de ruído nos sinais em comparação a cabos elétricos correntes. Durante
a construção do sistema físico de aquisição de dados, teve-se cuidado na realização das soldaduras, uma vez que
estas têm uma grande influência no ruído dos sinais.
3.2.7 Pós-processamento
No decorrer dos ensaios, os dados obtidos são guardados em tensão. Neste sentido, após cada ensaio é
necessário tratar os dados obtidos, nomeadamente converter a tensão para a grandeza correspondente ao parâmetro
medido, através da utilização das retas de calibração e, posteriormente, a realização dos cálculos necessários à
obtenção dos parâmetros pretendidos. Sendo assim, de forma a minimizar o tempo de tratamento de dados foram
desenvolvidos rotinas em MATLAB que permitem realizar esse processo. O conceito base de cada rotina consiste
na leitura dos dados obtidos, aplicação de filtros, aplicação das retas de calibração e realização de médias de cada
parâmetro. Posteriormente, de acordo com o ensaio em questão são realizados os cálculos propícios à obtenção
dos resultados desejados.
3.2.7.1 Filtros
O sinal adquirido ao longo dos ensaios é a resultante da sobreposição do sinal da variável em medição e de
ruído. Este ruído pode ser explicado pela existência de um variador de frequência muito próximo dos cabos de
37
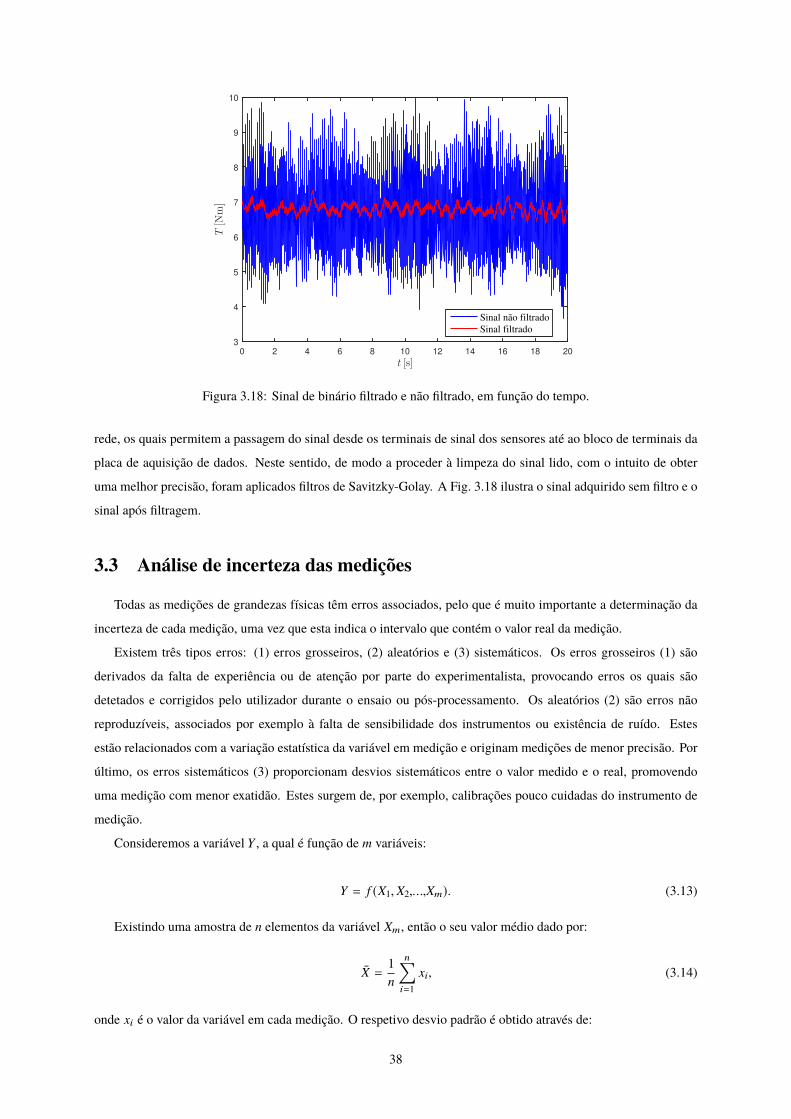
0 2 4 6 8 10 12 14 16 18 20
t [s]
3
4
5
6
7
8
9
10
T[N
m]
Sinal não filtrado
Sinal filtrado
Figura 3.18: Sinal de binário filtrado e não filtrado, em função do tempo.
rede, os quais permitem a passagem do sinal desde os terminais de sinal dos sensores até ao bloco de terminais da
placa de aquisição de dados. Neste sentido, de modo a proceder à limpeza do sinal lido, com o intuito de obter
uma melhor precisão, foram aplicados filtros de Savitzky-Golay. A Fig. 3.18 ilustra o sinal adquirido sem filtro e o
sinal após filtragem.
3.3 Análise de incerteza das medições
Todas as medições de grandezas físicas têm erros associados, pelo que é muito importante a determinação da
incerteza de cada medição, uma vez que esta indica o intervalo que contém o valor real da medição.
Existem três tipos erros: (1) erros grosseiros, (2) aleatórios e (3) sistemáticos. Os erros grosseiros (1) são
derivados da falta de experiência ou de atenção por parte do experimentalista, provocando erros os quais são
detetados e corrigidos pelo utilizador durante o ensaio ou pós-processamento. Os aleatórios (2) são erros não
reproduzíveis, associados por exemplo à falta de sensibilidade dos instrumentos ou existência de ruído. Estes
estão relacionados com a variação estatística da variável em medição e originam medições de menor precisão. Por
último, os erros sistemáticos (3) proporcionam desvios sistemáticos entre o valor medido e o real, promovendo
uma medição com menor exatidão. Estes surgem de, por exemplo, calibrações pouco cuidadas do instrumento de
medição.
Consideremos a variável Y , a qual é função de m variáveis:
Y = f (X1,X2,...,Xm). (3.13)
Existindo uma amostra de n elementos da variável Xm, então o seu valor médio dado por:
X =1n
n∑i=1
xi, (3.14)
onde xi é o valor da variável em cada medição. O respetivo desvio padrão é obtido através de:
38

S =
[1
n − 1
n∑i=1(xi − x)2
]1/2
. (3.15)
A incerteza aleatória da variável Xm, designada por Up(Xm), tem como base a distribuição t-Student [43]:
Up(Xm) =t√
nS, (3.16)
onde t é um valor tabelado e depende do número de leituras da variável em estudo, assim como do nível de confiança
pretendido, tendo sido selecionado uma confiança de 95%.
Aplicando a lei de propragação da incerteza e, assumindo que as variáveis Xm são independentes, obtemos a
incerteza aleatória de Y [43]:
UpY =
√(∂ f∂X1
Up(X1)
)2+
(∂ f∂X2
Up(X2)
)2+ ... +
(∂ f∂Xm
Up(Xm)
)2. (3.17)
Relativamente à incerteza sistemática de Y , UbY , esta é calculada através da lei linear de propagação de erros
dada por:
UbY =
(∂ f∂X1
Ub(X1)
)+
(∂ f∂X2
Ub(X2)
)+ ... +
(∂ f∂Xm
Ub(Xm)
), (3.18)
onde Ub(Xm) é a precisão do respetivo instrumento de medição.
Com base na incerteza aleatória UpY e sistemática UbY , a incerteza total da variável Y é definida por:
UY =
√UpY
2 +UbY2. (3.19)
Desta forma é obtido o intervalo que contém o valor real da variável Y ± UY , sendo o valor real da variável
medida X ±U.
39

40
Capítulo 4
Análise dos resultados experimentais
Com o objetivo de analisar e avaliar o comportamento, funcionamento e escoamento da turbina, foram executa-
dos vários ensaios, os quais serão apresentados e descritos neste capítulo. Serão abordados os procedimentos para
realização dos ensaios de atravessamento, binário de atrito e para obtenção das curvas de funcionamento, assim
como todos os resultados que deles advêm.
Como mencionado na Sec. 2.1, para além dos dois estatores em estudo (E1C e E3C), um terceiro foi utilizado
como alternativa à produção dos respetivos estatores simétricos. Neste sentido, este terceiro estator (E1C*) será
alvo de um estudo, de modo a analisar a sua influência no escoamento aquando da sua introdução à entrada do
rotor, Fig. 2.2.
Neste capítulo, serão primeiramente descritos e analisados os resultados dos ensaios de atravessamento à entrada
e saída do rotor, para os três estatores utilizados (E1C, E3C e E1C*), com o objetivo de caracterizar o escoamento
em ambas as regiões e averiguar as diferenças impostas por cada conjunto de pás diretrizes no escoamento,
prosseguindo-se de uma análise de perdas. De seguida, será apresentado o procedimento e resultados do ensaio
de binário de atrito. Posteriormente, caracterizar-se-á o procedimento dos ensaios para obtenção das curvas de
rendimento, seguindo-se da análise dos respetivos resultados. Nesta etapa, primeiramente serão analisados o
desempenho dos estatores E1C e E3C a montante do rotor (doravante designados por modelos M1CM e M3CM,
respetivamente) Fig. 2.3; e em segundo lugar o desempenho dos modelos denominados por M1CJ e M3CJ,
caracterizados pela introdução do estator E1C* à entrada do rotor e os estatores E1C e E3C a jusante do rotor,
Fig. 2.2. A Tab. 4.1 resume e descreve o significado da nomenclatura utilizada. Ainda neste capítulo será realizado
um estudo sobre o rotor, seguindo-se de uma comparação entre os modelos estudados e os presentes em [19, 20].
Para proceder a estas análises, apresentemos os parâmetros adimensionais que permitem a análise entre diversas
Tabela 4.1: Nomenclatura utilizada.Configuração Estator entrada Estator saída
M1CM E1C -
M3CM E3C -
M1CJ E1C* E1C
M3CJ E1C* E3C
41
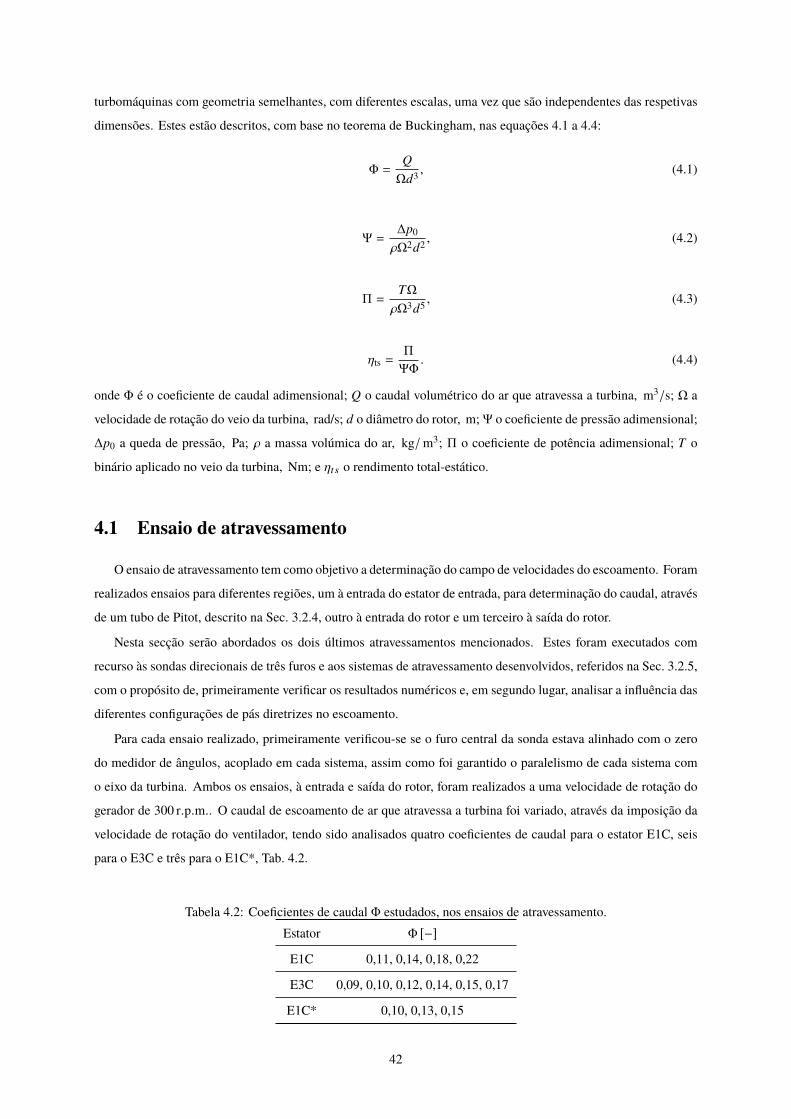
turbomáquinas com geometria semelhantes, com diferentes escalas, uma vez que são independentes das respetivas
dimensões. Estes estão descritos, com base no teorema de Buckingham, nas equações 4.1 a 4.4:
Φ =QΩd3 , (4.1)
Ψ =∆p0
ρΩ2d2 , (4.2)
Π =TΩρΩ3d5 , (4.3)
ηts =Π
ΨΦ. (4.4)
onde Φ é o coeficiente de caudal adimensional; Q o caudal volumétrico do ar que atravessa a turbina, m3/s; Ω a
velocidade de rotação do veio da turbina, rad/s; d o diâmetro do rotor, m; Ψ o coeficiente de pressão adimensional;
∆p0 a queda de pressão, Pa; ρ a massa volúmica do ar, kg/m3; Π o coeficiente de potência adimensional; T o
binário aplicado no veio da turbina, Nm; e ηts o rendimento total-estático.
4.1 Ensaio de atravessamento
O ensaio de atravessamento tem como objetivo a determinação do campo de velocidades do escoamento. Foram
realizados ensaios para diferentes regiões, um à entrada do estator de entrada, para determinação do caudal, através
de um tubo de Pitot, descrito na Sec. 3.2.4, outro à entrada do rotor e um terceiro à saída do rotor.
Nesta secção serão abordados os dois últimos atravessamentos mencionados. Estes foram executados com
recurso às sondas direcionais de três furos e aos sistemas de atravessamento desenvolvidos, referidos na Sec. 3.2.5,
com o propósito de, primeiramente verificar os resultados numéricos e, em segundo lugar, analisar a influência das
diferentes configurações de pás diretrizes no escoamento.
Para cada ensaio realizado, primeiramente verificou-se se o furo central da sonda estava alinhado com o zero
do medidor de ângulos, acoplado em cada sistema, assim como foi garantido o paralelismo de cada sistema com
o eixo da turbina. Ambos os ensaios, à entrada e saída do rotor, foram realizados a uma velocidade de rotação do
gerador de 300 r.p.m.. O caudal de escoamento de ar que atravessa a turbina foi variado, através da imposição da
velocidade de rotação do ventilador, tendo sido analisados quatro coeficientes de caudal para o estator E1C, seis
para o E3C e três para o E1C*, Tab. 4.2.
Tabela 4.2: Coeficientes de caudal Φ estudados, nos ensaios de atravessamento.Estator Φ [−]
E1C 0,11, 0,14, 0,18, 0,22
E3C 0,09, 0,10, 0,12, 0,14, 0,15, 0,17
E1C* 0,10, 0,13, 0,15
42

Para cada ponto de funcionamento da turbina e com recurso ao programa desenvolvido, descrito na Sec.3.2.5.2,
foram obtidos os ângulos de incidência do escoamento, para cada secção, assim como as pressões de cada furo das
sondas, diferença de pressão na tubeira convergente e binário.
Uma vez que as sondas se encontram alinhadas com o eixo da turbina, o ângulo diretamente lido por elas
corresponde ao ângulo de incidência do escoamento α2 e α3. Importa referir, que a determinação do ângulo de
incidência foi feito através da medição direta da diferença de pressão dos furos laterais de cada sonda, a fim de
minimizar os erros de medição. Para além disso, foram medidos a temperatura seca, temperatura húmida do ar e
pressão atmosférica.
Comecemos então por definir a velocidade absoluta, para as secções i = 2,3, assim como as suas componentes
axial e tangencial, Eq. 4.5 a Eq. 4.7.
Vi =
√2pdiniρar
, (4.5)
Vai = Vi sin(αi), (4.6)
Vti = Vi cos(αi), (4.7)
onde pdin é a pressão dinâmica, descrita na Sec. 3.2.5.1 e αi é o ângulo lido diretamente pela sonda direcional de
três furos.
A componente axial média da velocidade absoluta, assim como a componente tangencial média, são definidas
pela Eq. 4.8 e Eq. 4.9 , onde Vai e Vti são as componentes axial e tangencial, respetivamente:
Vai =
∫ 2π0
∫ rextrint
Vai rdrdθ∫ 2π0
∫ rextrint
rdrdθ, (4.8)
V ti =
∫ 2π0
∫ rextrint
Vti Vai rdrdθ∫ 2π0
∫ rextrint
Vai rdrdθ. (4.9)
Consequentemente, a velocidade absoluta média e o ângulo de incidência médio são definidos pelas Eq. 4.10 e
Eq. 4.11.
V i =
√Vai
2+ V ti
2, (4.10)
αi = arctanVai
V ti. (4.11)
Por fim, as velocidades adimensionalizadas são obtidas por:
Vi∗ =
Vi
Vai, Vai
∗ =Vai
Vai, Vti
∗ =Vti
Vai. (4.12)
Para cada secção, as sondas foram posicionadas à mesma cota axial que as tomadas de pressão p2 e p3 referidas
43
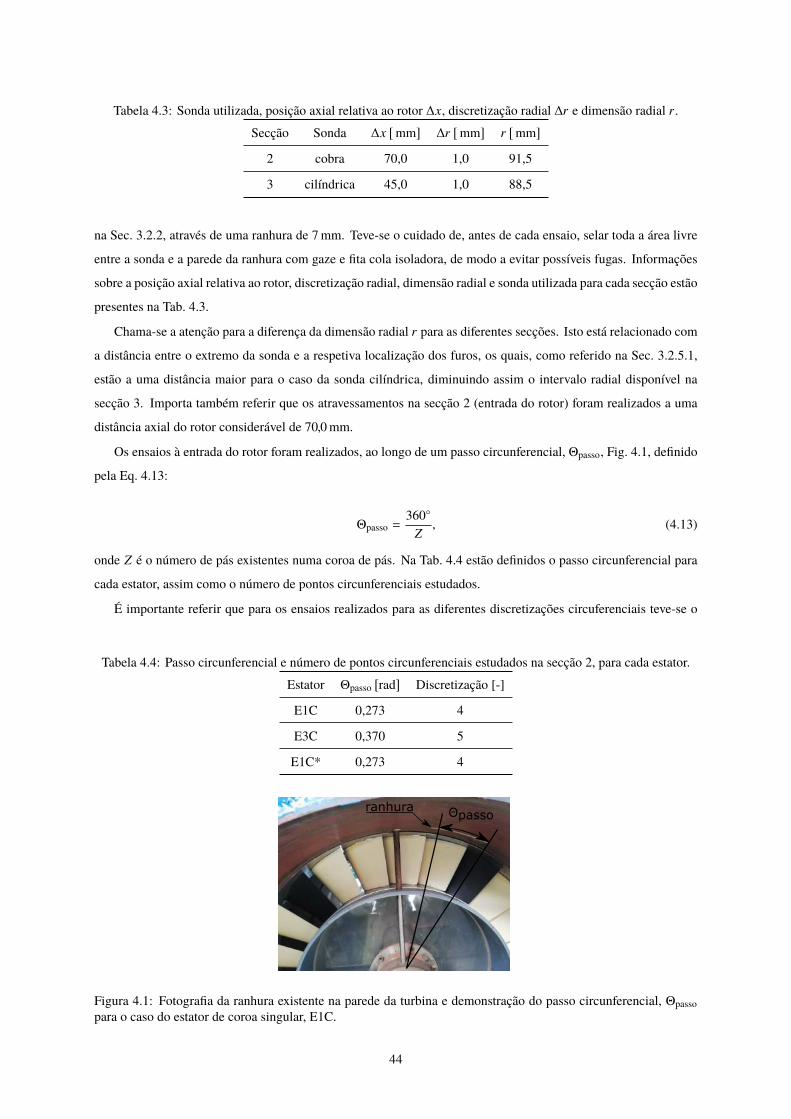
Tabela 4.3: Sonda utilizada, posição axial relativa ao rotor ∆x, discretização radial ∆r e dimensão radial r .
Secção Sonda ∆x [mm] ∆r [mm] r [mm]
2 cobra 70,0 1,0 91,5
3 cilíndrica 45,0 1,0 88,5
na Sec. 3.2.2, através de uma ranhura de 7 mm. Teve-se o cuidado de, antes de cada ensaio, selar toda a área livre
entre a sonda e a parede da ranhura com gaze e fita cola isoladora, de modo a evitar possíveis fugas. Informações
sobre a posição axial relativa ao rotor, discretização radial, dimensão radial e sonda utilizada para cada secção estão
presentes na Tab. 4.3.
Chama-se a atenção para a diferença da dimensão radial r para as diferentes secções. Isto está relacionado com
a distância entre o extremo da sonda e a respetiva localização dos furos, os quais, como referido na Sec. 3.2.5.1,
estão a uma distância maior para o caso da sonda cilíndrica, diminuindo assim o intervalo radial disponível na
secção 3. Importa também referir que os atravessamentos na secção 2 (entrada do rotor) foram realizados a uma
distância axial do rotor considerável de 70,0 mm.
Os ensaios à entrada do rotor foram realizados, ao longo de um passo circunferencial, Θpasso, Fig. 4.1, definido
pela Eq. 4.13:
Θpasso =360
Z, (4.13)
onde Z é o número de pás existentes numa coroa de pás. Na Tab. 4.4 estão definidos o passo circunferencial para
cada estator, assim como o número de pontos circunferenciais estudados.
É importante referir que para os ensaios realizados para as diferentes discretizações circuferenciais teve-se o
Tabela 4.4: Passo circunferencial e número de pontos circunferenciais estudados na secção 2, para cada estator.
Estator Θpasso [rad] Discretização [-]
E1C 0,273 4
E3C 0,370 5
E1C* 0,273 4
Θpassoranhura
Figura 4.1: Fotografia da ranhura existente na parede da turbina e demonstração do passo circunferencial, Θpassopara o caso do estator de coroa singular, E1C.
44
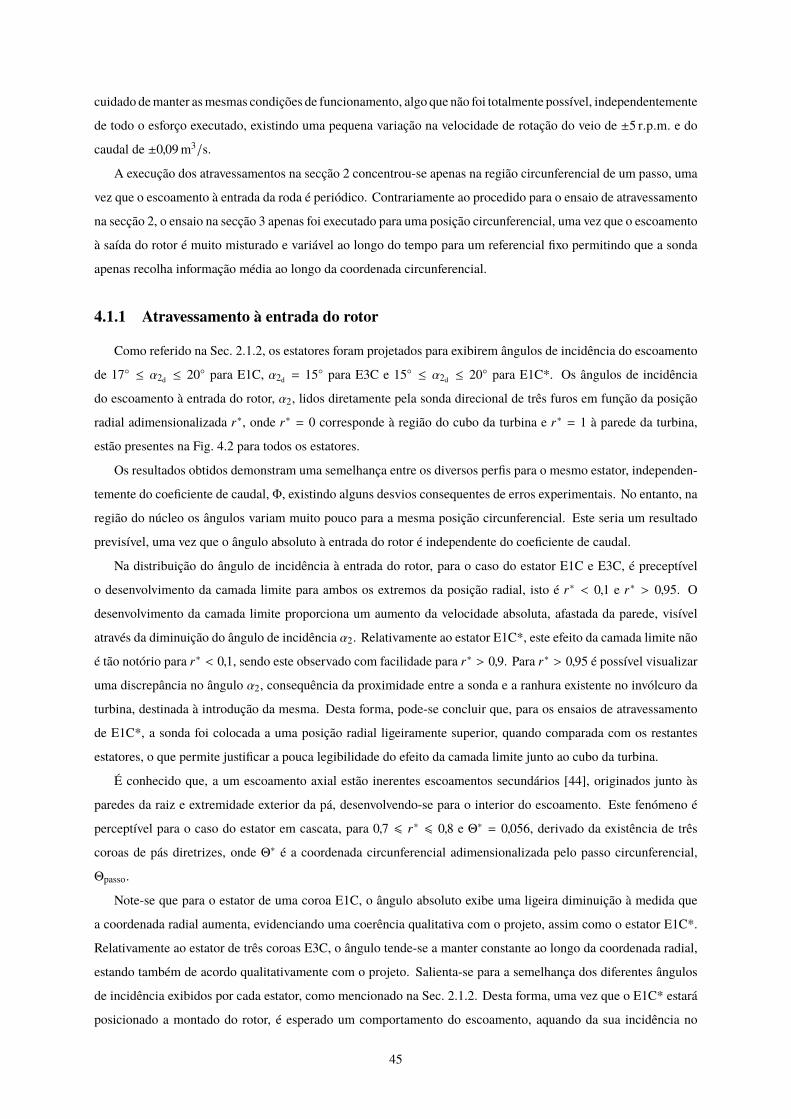
cuidado demanter asmesmas condições de funcionamento, algo que não foi totalmente possível, independentemente
de todo o esforço executado, existindo uma pequena variação na velocidade de rotação do veio de ±5 r.p.m. e do
caudal de ±0,09 m3/s.
A execução dos atravessamentos na secção 2 concentrou-se apenas na região circunferencial de um passo, uma
vez que o escoamento à entrada da roda é periódico. Contrariamente ao procedido para o ensaio de atravessamento
na secção 2, o ensaio na secção 3 apenas foi executado para uma posição circunferencial, uma vez que o escoamento
à saída do rotor é muito misturado e variável ao longo do tempo para um referencial fixo permitindo que a sonda
apenas recolha informação média ao longo da coordenada circunferencial.
4.1.1 Atravessamento à entrada do rotor
Como referido na Sec. 2.1.2, os estatores foram projetados para exibirem ângulos de incidência do escoamento
de 17 ≤ α2d ≤ 20 para E1C, α2d = 15 para E3C e 15 ≤ α2d ≤ 20 para E1C*. Os ângulos de incidência
do escoamento à entrada do rotor, α2, lidos diretamente pela sonda direcional de três furos em função da posição
radial adimensionalizada r∗, onde r∗ = 0 corresponde à região do cubo da turbina e r∗ = 1 à parede da turbina,
estão presentes na Fig. 4.2 para todos os estatores.
Os resultados obtidos demonstram uma semelhança entre os diversos perfis para o mesmo estator, independen-
temente do coeficiente de caudal, Φ, existindo alguns desvios consequentes de erros experimentais. No entanto, na
região do núcleo os ângulos variam muito pouco para a mesma posição circunferencial. Este seria um resultado
previsível, uma vez que o ângulo absoluto à entrada do rotor é independente do coeficiente de caudal.
Na distribuição do ângulo de incidência à entrada do rotor, para o caso do estator E1C e E3C, é preceptível
o desenvolvimento da camada limite para ambos os extremos da posição radial, isto é r∗ < 0,1 e r∗ > 0,95. O
desenvolvimento da camada limite proporciona um aumento da velocidade absoluta, afastada da parede, visível
através da diminuição do ângulo de incidência α2. Relativamente ao estator E1C*, este efeito da camada limite não
é tão notório para r∗ < 0,1, sendo este observado com facilidade para r∗ > 0,9. Para r∗ > 0,95 é possível visualizar
uma discrepância no ângulo α2, consequência da proximidade entre a sonda e a ranhura existente no invólcuro da
turbina, destinada à introdução da mesma. Desta forma, pode-se concluir que, para os ensaios de atravessamento
de E1C*, a sonda foi colocada a uma posição radial ligeiramente superior, quando comparada com os restantes
estatores, o que permite justificar a pouca legibilidade do efeito da camada limite junto ao cubo da turbina.
É conhecido que, a um escoamento axial estão inerentes escoamentos secundários [44], originados junto às
paredes da raiz e extremidade exterior da pá, desenvolvendo-se para o interior do escoamento. Este fenómeno é
perceptível para o caso do estator em cascata, para 0,7 6 r∗ 6 0,8 e Θ∗ = 0,056, derivado da existência de três
coroas de pás diretrizes, onde Θ∗ é a coordenada circunferencial adimensionalizada pelo passo circunferencial,
Θpasso.
Note-se que para o estator de uma coroa E1C, o ângulo absoluto exibe uma ligeira diminuição à medida que
a coordenada radial aumenta, evidenciando uma coerência qualitativa com o projeto, assim como o estator E1C*.
Relativamente ao estator de três coroas E3C, o ângulo tende-se a manter constante ao longo da coordenada radial,
estando também de acordo qualitativamente com o projeto. Salienta-se para a semelhança dos diferentes ângulos
de incidência exibidos por cada estator, como mencionado na Sec. 2.1.2. Desta forma, uma vez que o E1C* estará
posicionado a montado do rotor, é esperado um comportamento do escoamento, aquando da sua incidência no
45
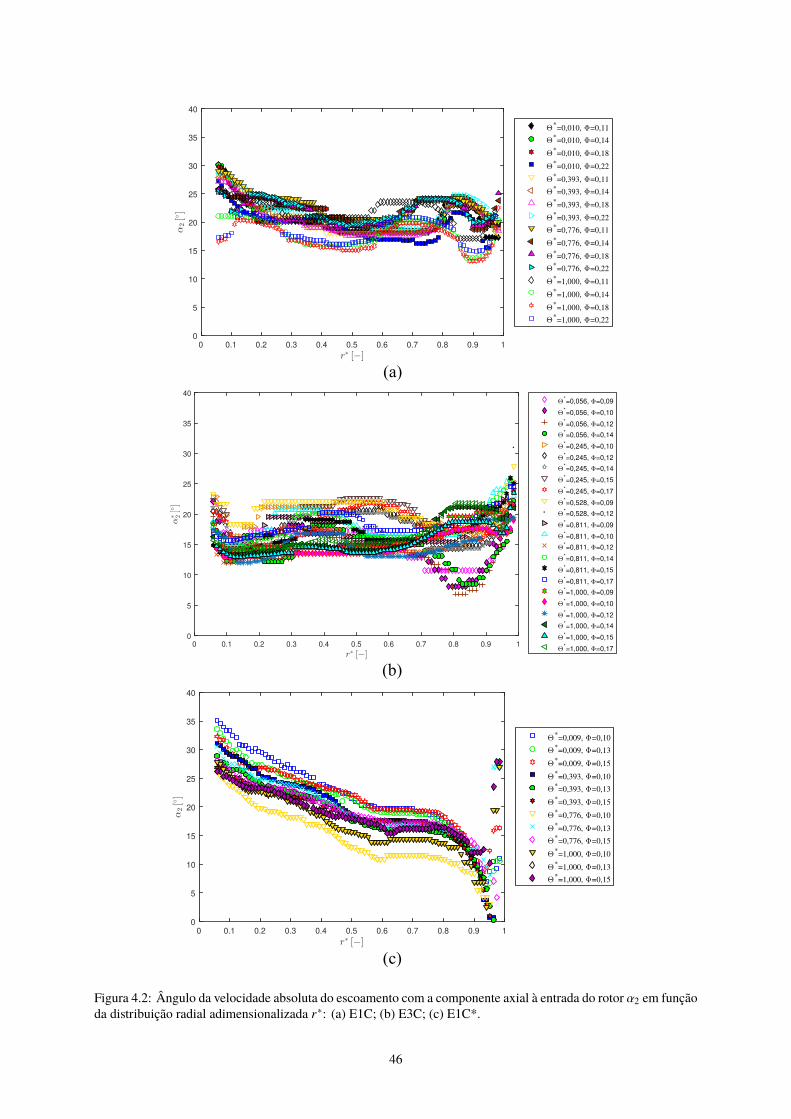
(a)
(b)
(c)
5
7
9
9
5
7
9
5
7
9
Figura 4.2: Ângulo da velocidade absoluta do escoamento com a componente axial à entrada do rotor α2 em funçãoda distribuição radial adimensionalizada r∗: (a) E1C; (b) E3C; (c) E1C*.
46
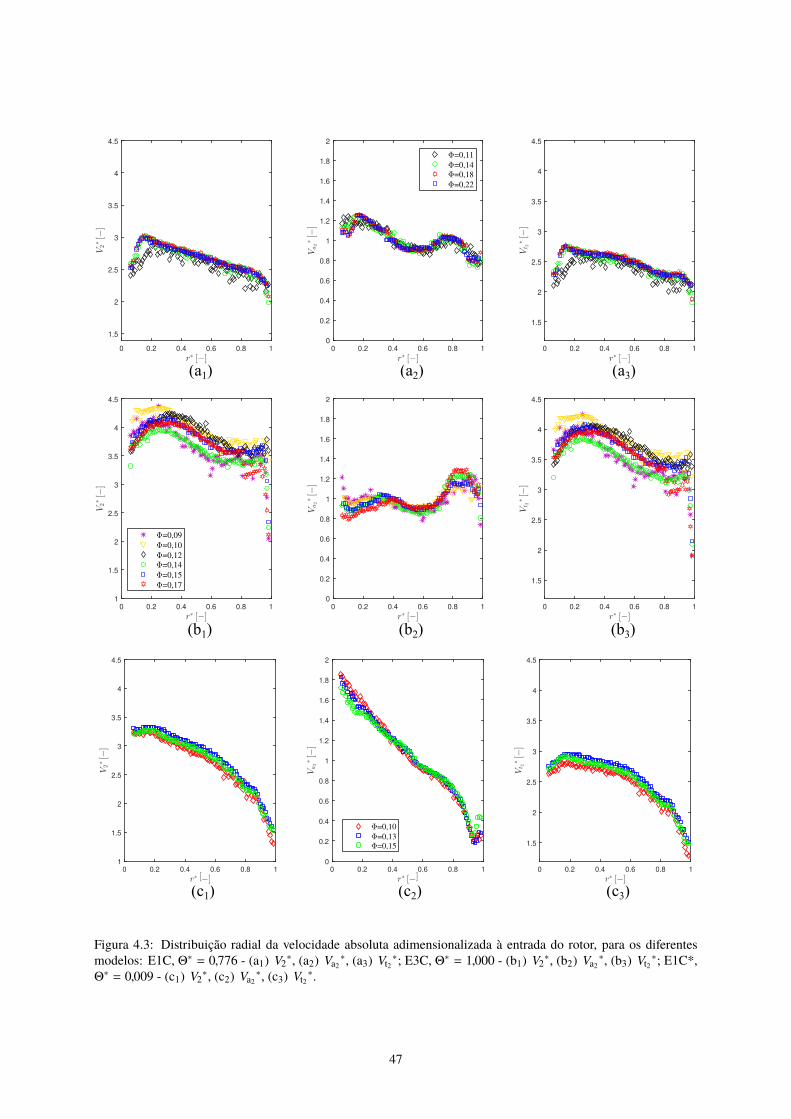
(a3)(a2)(a1)
(b1) (b2) (b3)
(c1) (c3)(c2)
Figura 4.3: Distribuição radial da velocidade absoluta adimensionalizada à entrada do rotor, para os diferentesmodelos: E1C, Θ∗ = 0,776 - (a1) V2
∗, (a2) Va2∗, (a3) Vt2
∗; E3C, Θ∗ = 1,000 - (b1) V2∗, (b2) Va2
∗, (b3) Vt2∗; E1C*,
Θ∗ = 0,009 - (c1) V2∗, (c2) Va2
∗, (c3) Vt2∗.
47
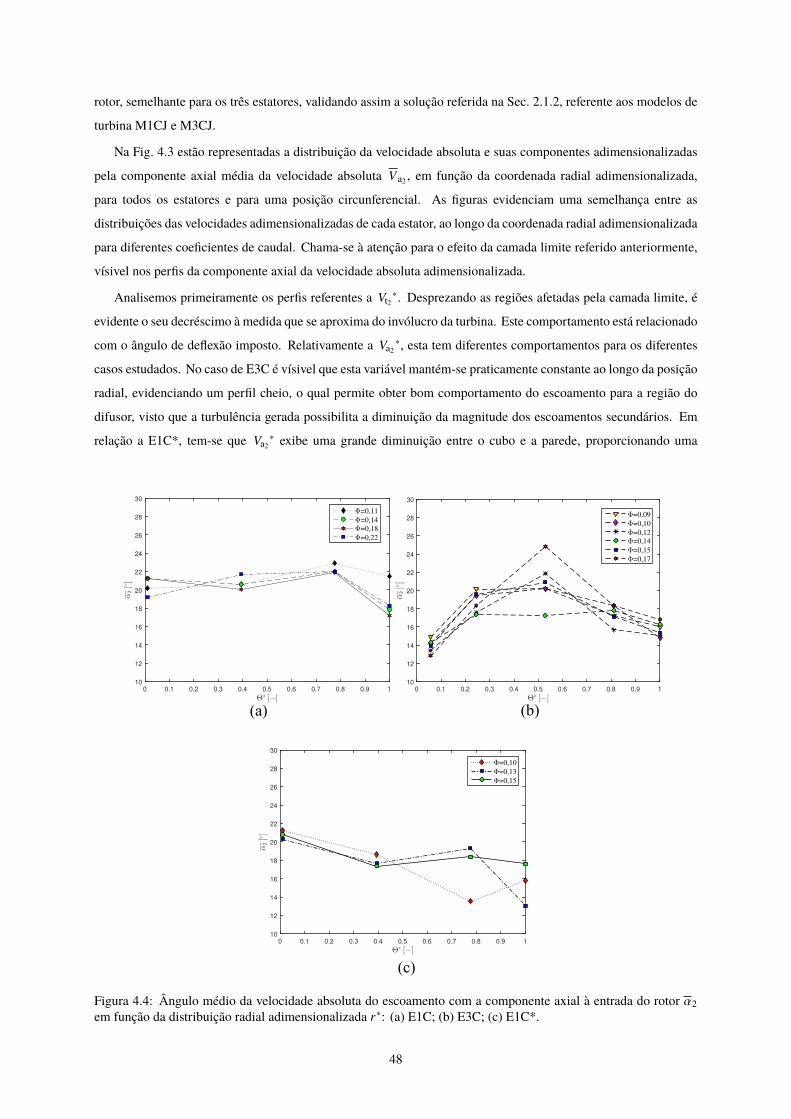
rotor, semelhante para os três estatores, validando assim a solução referida na Sec. 2.1.2, referente aos modelos de
turbina M1CJ e M3CJ.
Na Fig. 4.3 estão representadas a distribuição da velocidade absoluta e suas componentes adimensionalizadas
pela componente axial média da velocidade absoluta Va2 , em função da coordenada radial adimensionalizada,
para todos os estatores e para uma posição circunferencial. As figuras evidenciam uma semelhança entre as
distribuições das velocidades adimensionalizadas de cada estator, ao longo da coordenada radial adimensionalizada
para diferentes coeficientes de caudal. Chama-se à atenção para o efeito da camada limite referido anteriormente,
vísivel nos perfis da componente axial da velocidade absoluta adimensionalizada.
Analisemos primeiramente os perfis referentes a Vt2∗. Desprezando as regiões afetadas pela camada limite, é
evidente o seu decréscimo à medida que se aproxima do invólucro da turbina. Este comportamento está relacionado
com o ângulo de deflexão imposto. Relativamente a Va2∗, esta tem diferentes comportamentos para os diferentes
casos estudados. No caso de E3C é vísivel que esta variável mantém-se praticamente constante ao longo da posição
radial, evidenciando um perfil cheio, o qual permite obter bom comportamento do escoamento para a região do
difusor, visto que a turbulência gerada possibilita a diminuição da magnitude dos escoamentos secundários. Em
relação a E1C*, tem-se que Va2∗ exibe uma grande diminuição entre o cubo e a parede, proporcionando uma
(a) (b)
(c)
Figura 4.4: Ângulo médio da velocidade absoluta do escoamento com a componente axial à entrada do rotor α2em função da distribuição radial adimensionalizada r∗: (a) E1C; (b) E3C; (c) E1C*.
48
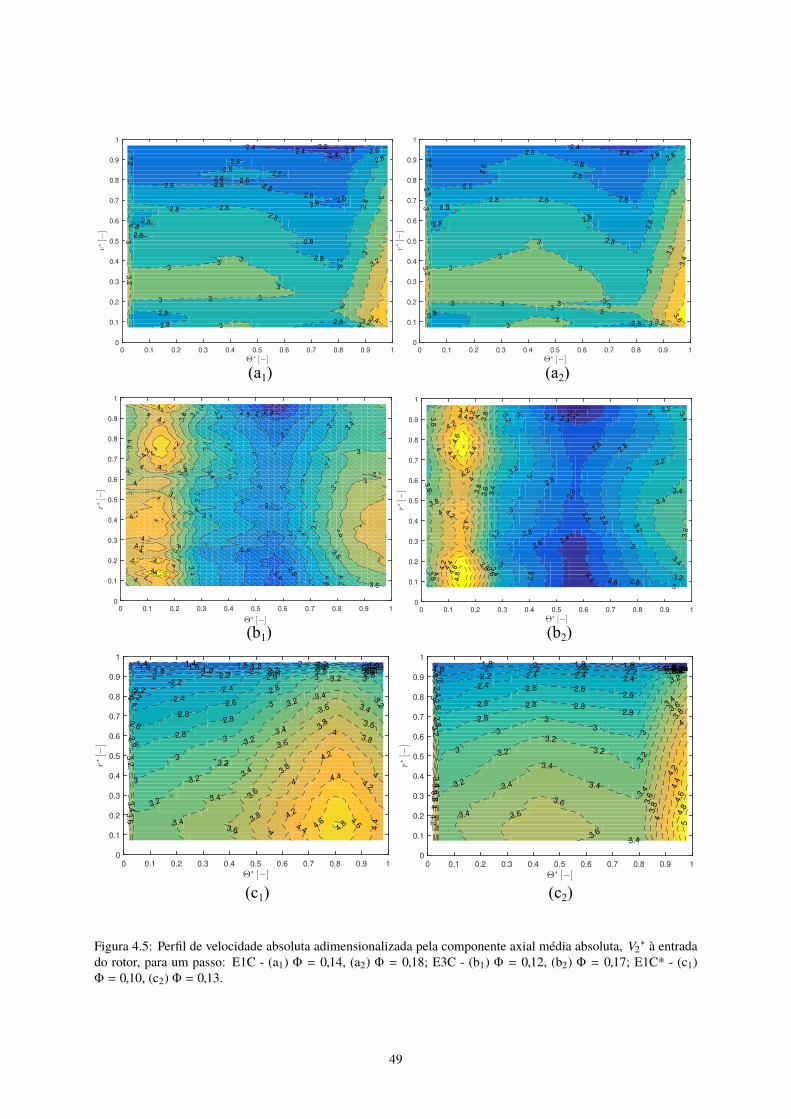
(a1) (a2)
(b1) (b2)
(c1) (c2)
Figura 4.5: Perfil de velocidade absoluta adimensionalizada pela componente axial média absoluta, V2∗ à entrada
do rotor, para um passo: E1C - (a1) Φ = 0,14, (a2) Φ = 0,18; E3C - (b1) Φ = 0,12, (b2) Φ = 0,17; E1C* - (c1)Φ = 0,10, (c2) Φ = 0,13.
49
velocidade muito baixo junto ao invólucro exterior, originando a ocorrência de eventual separação do escoamento
no difusor. No caso de E1C, o perfil de velocidades situa-se entre os dois extremos referidos. Para além disso, é
notório os valores elevados de Vt2∗ e V2
∗ no caso do estator de três coroas quando comparado com os de uma só
coroa (E1C e E1C*). Verifica-se também o enquadramento do perfil de velocidades do estator E1C*.
O ângulo médio de deflexão exibido pelos estatores a montante do rotor α2, para cada coeficiente de caudal Φ
em função da coordenada circunferêncialΘ∗ estão presentes na Fig. 4.4. A Fig. 4.4 reporta uma boa coerência entre
os ângulos médios obtidos para cadaΦ ao longo de um passo, evidenciando os desvios anteriormente mencionados,
devido à presença de esteiras. O ângulo médio de incidência para o estator de uma coroa E1C é de α2 ' 20,9,
α2 ' 17,1 para o de três coroas E3C e, α2 ' 17,9 para E1C*.
Na Fig. 4.5 estão representados os perfis de velocidade absoluta adimensionalizada V2∗ dos três estatores ao
longo de um passo, para dois valores de Φ. Chama-se à atenção para a semelhança dos perfis de cada estator, para
os diferentes valores deΦ. Como esperado, é evidente a uniformidade do escoamento relativamente ao estator E1C
e E1C*, uma vez que estes são compostos apenas por uma coroa de pás diretrizes. Pelo contrário, o estator de três
coroas E3C, apresenta um escoamento muito pouco uniforme, com presença de escoamentos secundários, como
verificado anteriormente. É ainda de salientar, o aumento da velocidade absoluta adimensionalizada aquando da
presença de E3C e E1C*, quando comparada com E1C. Facto associado com a elevada deflexão exibidos por estes,
que permite um maior aceleramento do escoamento.
4.1.2 Atravessamento à saída do rotor
Na Fig. 4.6 está representado o ângulo absoluto à saída do rotor α3, em função da coordenada radial adimen-
sionalizada r∗. Salienta-se que r∗ = 0 corresponde à região do cubo e r∗ = 1 à parede da turbina. Os resultados
ilustrados correspondem ao esperado, visto que o ângulo α3 varia com o coeficiente de caudal Φ, ou seja, à medida
que Φ diminui, α3 torna-se inferior a 90. Há que salientar a semelhança entre os dados obtidos para os diferentes
estatores, facto que ocorre uma vez que o rotor utilizado foi o mesmo, permitindo assim obter um ângulo semelhante
independentemente do estator a montante do rotor.
O ângulomédio do escoamento à saída do rotor em função da coordenada radial adimensionalizada está presente
na Fig. 4.7. É possível analisar que, como mencionado anteriormente, a componente tangencial da velocidade
absoluta pode ser positiva ou negativa, isto é, ângulos superiores ou inferiores a 90. Aquando do alinhamento do
escoamento com o eixo da turbina, isto é α3 = 90, espera-se que o rendimento seja máximo. Neste sentido, para o
caso do estator de coroa singular, E1C este ponto situa-se para 0,14 < Φ < 0,18 e para o de três coroas E3C, assim
como para o de uma coroa E1C*, Φ ' 0,15. Estes valores diferem dos obtidos nas curvas de rendimento, Sec. 4.4.
Os perfis de velocidade absoluta adimensionalizada em função da coordenada radial adimensionalizada r∗
estão representados na Fig. 4.8, para os três casos em estudo. Na Fig. 4.8 é possível observar primeiramente, que
à medida que Φ aumenta, Vt3∗ torna-se negativa. Para além disso, à medida que se aproxima-se de Φηts,max , a
velocidade absoluta adimensionalizada tende para V3∗ = 1 e a componente tangencial para Vt3
∗ = 0, uma vez que
nesta circunstância, ou seja, em condições nominais, a componente tangencial da velocidade absoluta será nula e
V3 = Va3 . Salienta-se também para o facto de que os perfis dos três estatores terem uma distribuição semelhante,
sendo mais uma vez devido à utilização do mesmo rotor.
50
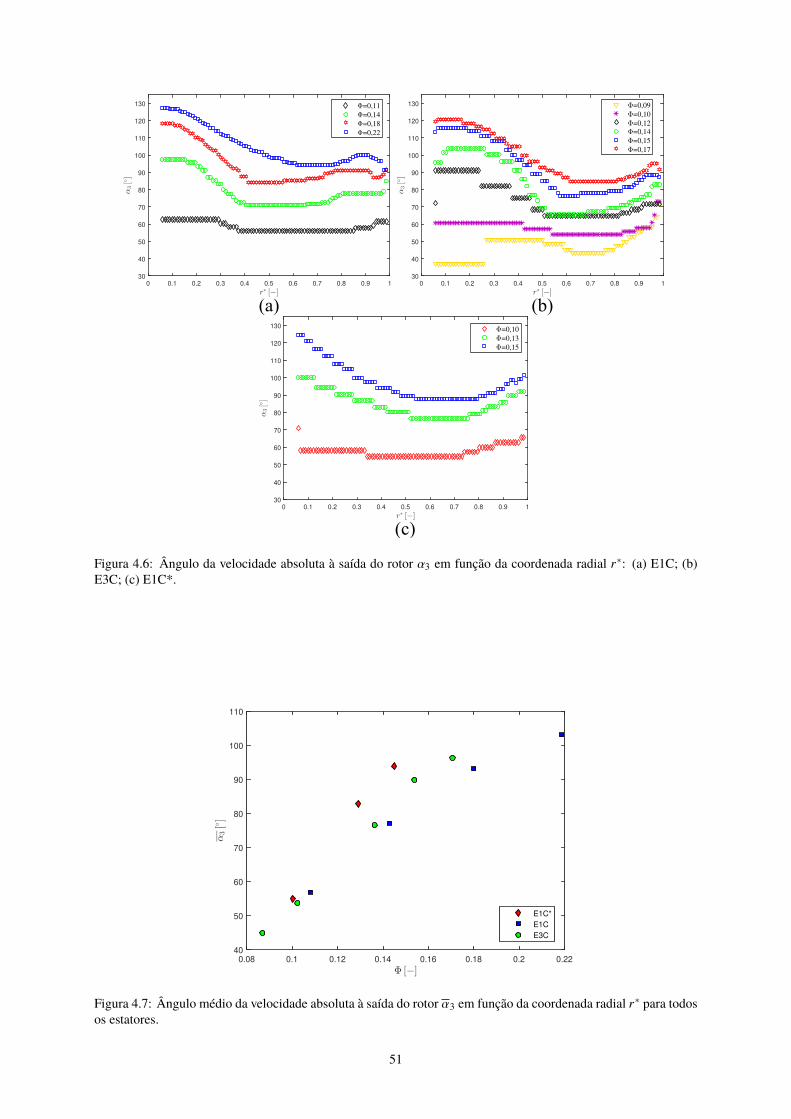
(a) (b)
(c)
Figura 4.6: Ângulo da velocidade absoluta à saída do rotor α3 em função da coordenada radial r∗: (a) E1C; (b)E3C; (c) E1C*.
0.08 0.1 0.12 0.14 0.16 0.18 0.2 0.22
Φ [−]
40
50
60
70
80
90
100
110
α3[]
E1C*
E1C
E3C
Figura 4.7: Ângulo médio da velocidade absoluta à saída do rotor α3 em função da coordenada radial r∗ para todosos estatores.
51
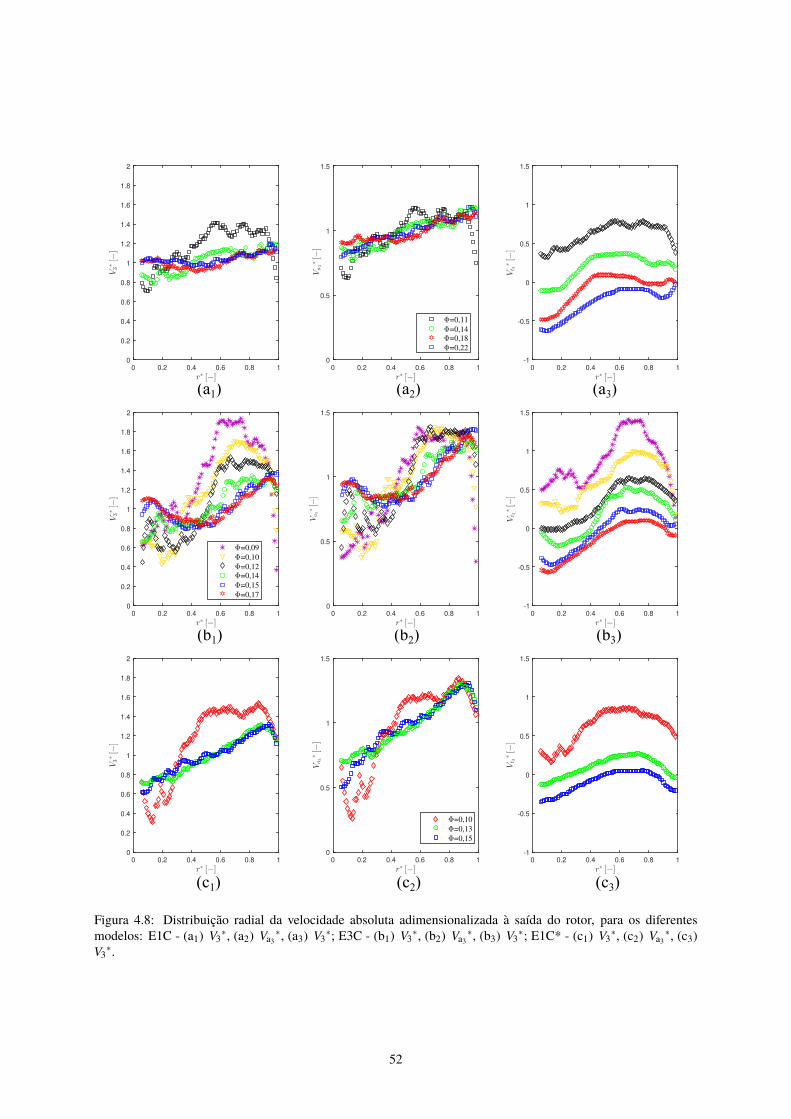
(a1) (a2) (a3)
(b1) (b3)(b2)
(c1) (c3)(c2)
Figura 4.8: Distribuição radial da velocidade absoluta adimensionalizada à saída do rotor, para os diferentesmodelos: E1C - (a1) V3
∗, (a2) Va3∗, (a3) V3
∗; E3C - (b1) V3∗, (b2) Va3
∗, (b3) V3∗; E1C* - (c1) V3
∗, (c2) Va3∗, (c3)
V3∗.
52
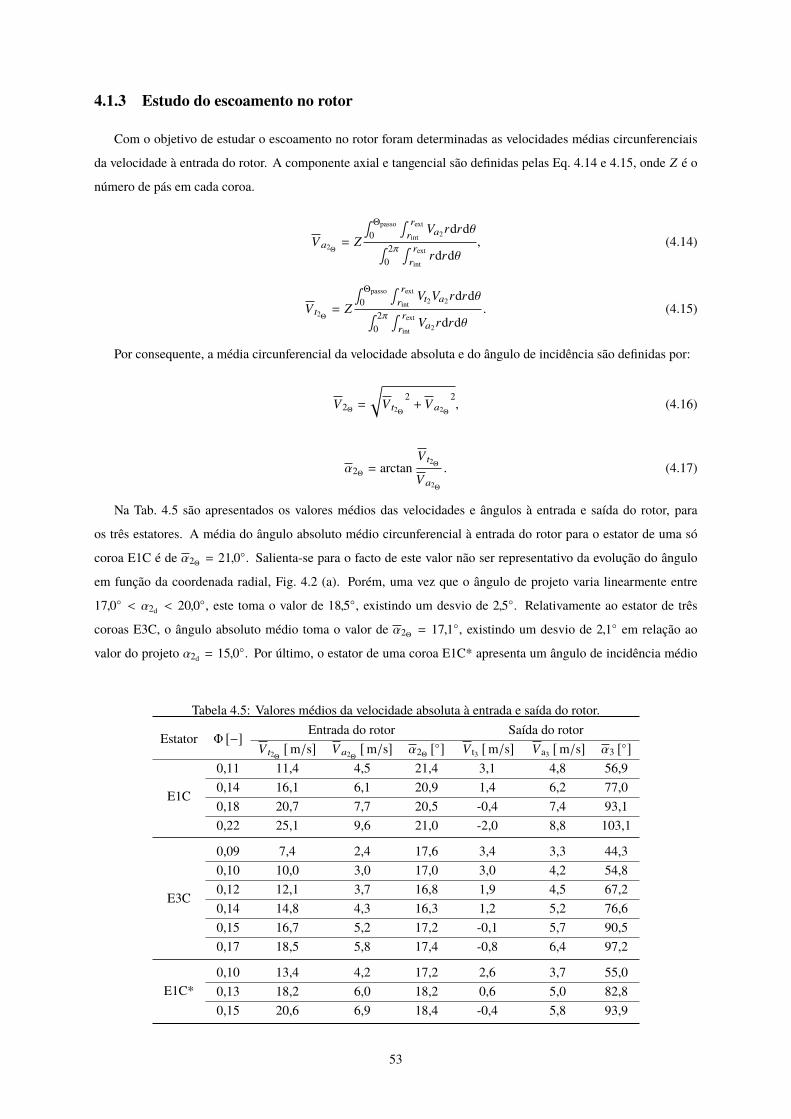
4.1.3 Estudo do escoamento no rotor
Com o objetivo de estudar o escoamento no rotor foram determinadas as velocidades médias circunferenciais
da velocidade à entrada do rotor. A componente axial e tangencial são definidas pelas Eq. 4.14 e 4.15, onde Z é o
número de pás em cada coroa.
Va2Θ= Z
∫ Θpasso0
∫ rextrint
Va2rdrdθ∫ 2π0
∫ rextrint
rdrdθ, (4.14)
V t2Θ= Z
∫ Θpasso0
∫ rextrint
Vt2Va2rdrdθ∫ 2π0
∫ rextrint
Va2rdrdθ. (4.15)
Por consequente, a média circunferencial da velocidade absoluta e do ângulo de incidência são definidas por:
V2Θ =
√V t2Θ
2+ Va2Θ
2, (4.16)
α2Θ = arctanV t2Θ
Va2Θ
. (4.17)
Na Tab. 4.5 são apresentados os valores médios das velocidades e ângulos à entrada e saída do rotor, para
os três estatores. A média do ângulo absoluto médio circunferencial à entrada do rotor para o estator de uma só
coroa E1C é de α2Θ = 21,0. Salienta-se para o facto de este valor não ser representativo da evolução do ângulo
em função da coordenada radial, Fig. 4.2 (a). Porém, uma vez que o ângulo de projeto varia linearmente entre
17,0 < α2d < 20,0, este toma o valor de 18,5, existindo um desvio de 2,5. Relativamente ao estator de três
coroas E3C, o ângulo absoluto médio toma o valor de α2Θ = 17,1, existindo um desvio de 2,1 em relação ao
valor do projeto α2d = 15,0. Por último, o estator de uma coroa E1C* apresenta um ângulo de incidência médio
Tabela 4.5: Valores médios da velocidade absoluta à entrada e saída do rotor.
Estator Φ [−]Entrada do rotor Saída do rotor
V t2Θ[m/s] Va2Θ
[m/s] α2Θ [] V t3 [m/s] Va3 [m/s] α3 [
]
E1C
0,11 11,4 4,5 21,4 3,1 4,8 56,90,14 16,1 6,1 20,9 1,4 6,2 77,00,18 20,7 7,7 20,5 -0,4 7,4 93,10,22 25,1 9,6 21,0 -2,0 8,8 103,1
E3C
0,09 7,4 2,4 17,6 3,4 3,3 44,30,10 10,0 3,0 17,0 3,0 4,2 54,80,12 12,1 3,7 16,8 1,9 4,5 67,20,14 14,8 4,3 16,3 1,2 5,2 76,60,15 16,7 5,2 17,2 -0,1 5,7 90,50,17 18,5 5,8 17,4 -0,8 6,4 97,2
E1C*0,10 13,4 4,2 17,2 2,6 3,7 55,00,13 18,2 6,0 18,2 0,6 5,0 82,80,15 20,6 6,9 18,4 -0,4 5,8 93,9
53

de α2Θ = 17,9, relativamente a α2d = 17,5, exibindo um desvio de −0,4. Como no caso de E1C, este valor de
α2Θ para E1C*, não é representativo da sua distribuição. Porém este valor assemelha-se aos obtidos para E1C e
E3C, aproximando-se mais de E3C, como visto na Sec. 4.1.1. Pelo que é de esperar que ambos (E1C* e E3C)
apresentem uma influência semelhante no escoamento à entrada do rotor.
Com base nos resultados apresentados na Tab. 4.5, pode-se determinar os ângulos da velocidade relativa à
entrada e saída do rotor, β2 e β3. Sendo uma turbina axial, sabe-se que a componente axial da velocidade absoluta
é igual à da velocidade relativa.
Wai = Vai , (4.18)
onde Vai para i = 2 corresponde a Va2Θ.
Por outro lado, pela análise dos triângulos de velocidades apresentados na Fig. 2.4, tem-se que a componente
tangencial da velocidade relativa é dada por:
W ti = V ti −U. (4.19)
Logo, obtém-se o ângulo médio da velocidade relativa com a componente axial:
βi = tanWai
W ti
. (4.20)
A distribuição dos ângulos médios da velocidade relativa em função do coeficiente de caudal estão presentes
na Fig. 4.9. Na Fig. 4.9 (a), é visível a diminuição de β2 à medida que o coeficiente de caudal aumenta. Note-se
que o facto de β2 ser ligeiramente superior para o caso de E1C está relacionado com a ligeira diminuição do ângulo
de deflexão, quando comparado com E3C.
Relativamente à Fig. 4.9 (b), os β3 exibidos por ambos os estatores são aproximadamente constantes ao longo
de Φ, algo expectável, dado que o ângulo da velocidade relativa é constante à saída do rotor, independentemente do
coeficiente de caudal. Neste sentido, tem-se que β3 = −32,3 para o estator E3C e β3 = −38,2 para o E1C. Seria
de esperar que o valor de β3 fosse semelhante para ambos os estatores, uma vez que o rotor utilizado é o mesmo,
(a) (b)
Figura 4.9: Ângulo médios da velocidade relativa em função do coeficiente de caudal: (a) entrada do rotor; (b)saída do rotor.
54
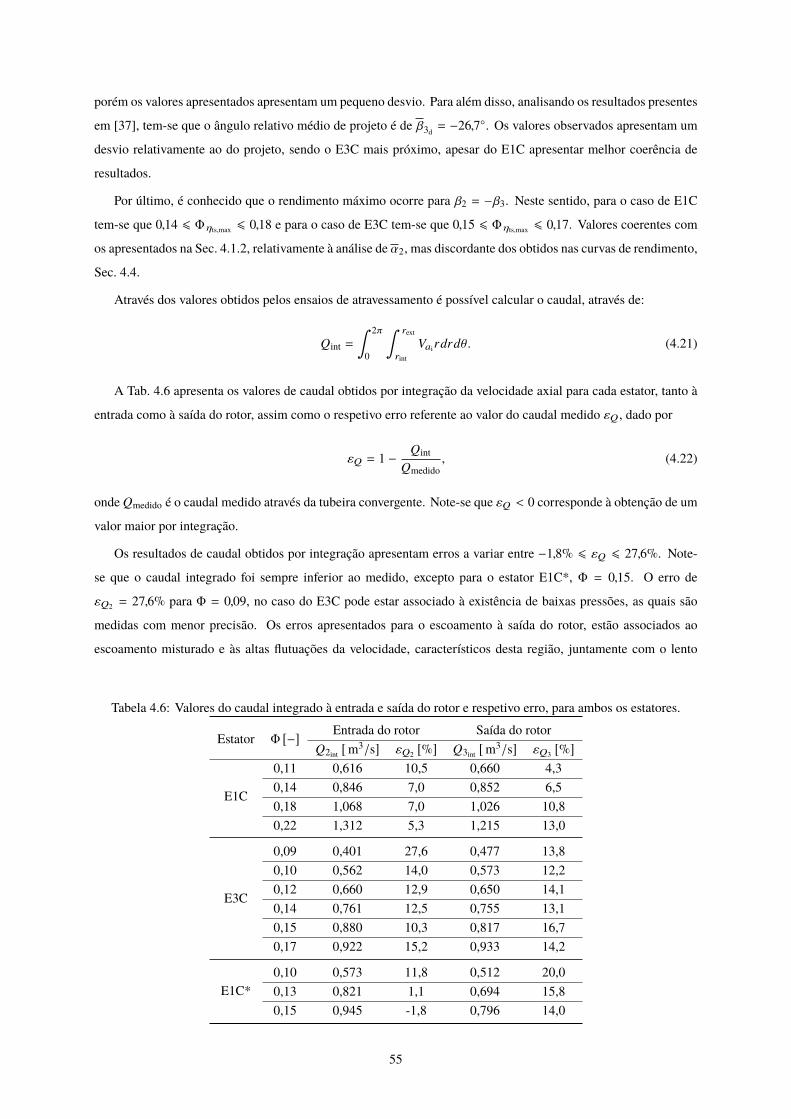
porém os valores apresentados apresentam um pequeno desvio. Para além disso, analisando os resultados presentes
em [37], tem-se que o ângulo relativo médio de projeto é de β3d = −26,7. Os valores observados apresentam um
desvio relativamente ao do projeto, sendo o E3C mais próximo, apesar do E1C apresentar melhor coerência de
resultados.
Por último, é conhecido que o rendimento máximo ocorre para β2 = −β3. Neste sentido, para o caso de E1C
tem-se que 0,14 6 Φηts,max 6 0,18 e para o caso de E3C tem-se que 0,15 6 Φηts,max 6 0,17. Valores coerentes com
os apresentados na Sec. 4.1.2, relativamente à análise de α2, mas discordante dos obtidos nas curvas de rendimento,
Sec. 4.4.
Através dos valores obtidos pelos ensaios de atravessamento é possível calcular o caudal, através de:
Qint =
∫ 2π
0
∫ rext
rint
Vairdrdθ. (4.21)
A Tab. 4.6 apresenta os valores de caudal obtidos por integração da velocidade axial para cada estator, tanto à
entrada como à saída do rotor, assim como o respetivo erro referente ao valor do caudal medido εQ, dado por
εQ = 1 −Qint
Qmedido, (4.22)
onde Qmedido é o caudal medido através da tubeira convergente. Note-se que εQ < 0 corresponde à obtenção de um
valor maior por integração.
Os resultados de caudal obtidos por integração apresentam erros a variar entre −1,8% 6 εQ 6 27,6%. Note-
se que o caudal integrado foi sempre inferior ao medido, excepto para o estator E1C*, Φ = 0,15. O erro de
εQ2 = 27,6% para Φ = 0,09, no caso do E3C pode estar associado à existência de baixas pressões, as quais são
medidas com menor precisão. Os erros apresentados para o escoamento à saída do rotor, estão associados ao
escoamento misturado e às altas flutuações da velocidade, característicos desta região, juntamente com o lento
Tabela 4.6: Valores do caudal integrado à entrada e saída do rotor e respetivo erro, para ambos os estatores.
Estator Φ [−]Entrada do rotor Saída do rotor
Q2int [m3/s] εQ2 [%] Q3int [m3/s] εQ3 [%]
E1C
0,11 0,616 10,5 0,660 4,30,14 0,846 7,0 0,852 6,50,18 1,068 7,0 1,026 10,80,22 1,312 5,3 1,215 13,0
E3C
0,09 0,401 27,6 0,477 13,80,10 0,562 14,0 0,573 12,20,12 0,660 12,9 0,650 14,10,14 0,761 12,5 0,755 13,10,15 0,880 10,3 0,817 16,70,17 0,922 15,2 0,933 14,2
E1C*0,10 0,573 11,8 0,512 20,00,13 0,821 1,1 0,694 15,80,15 0,945 -1,8 0,796 14,0
55
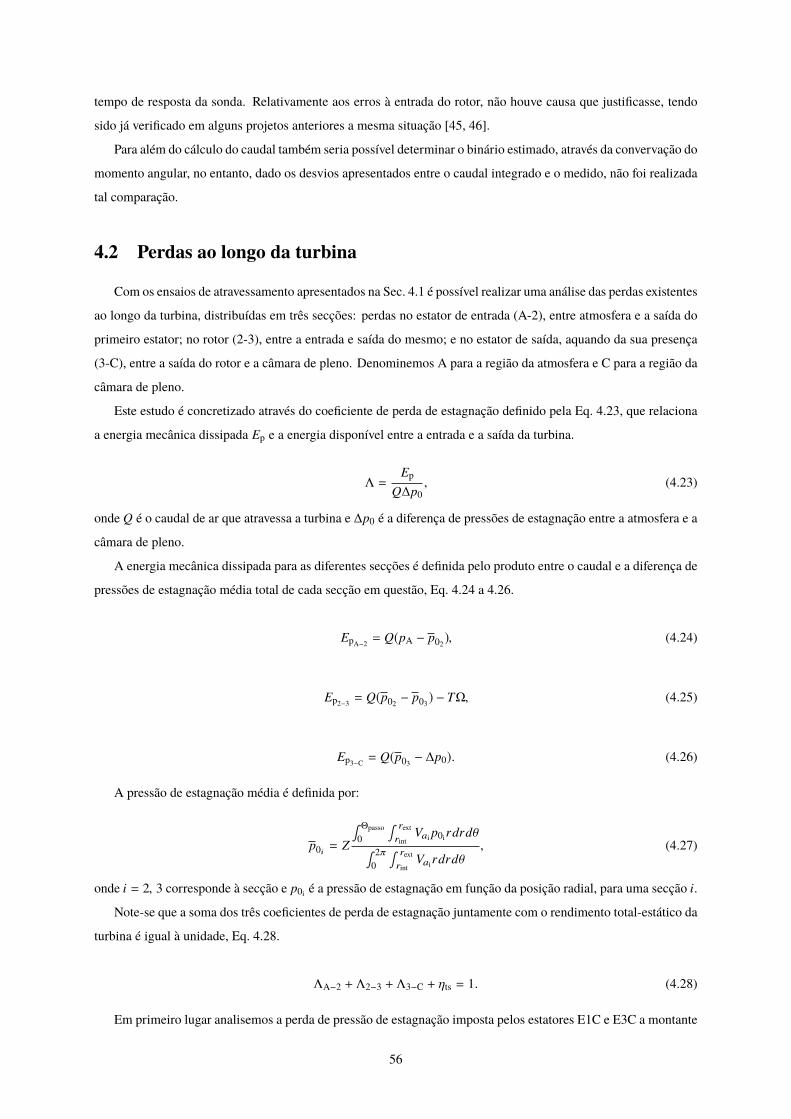
tempo de resposta da sonda. Relativamente aos erros à entrada do rotor, não houve causa que justificasse, tendo
sido já verificado em alguns projetos anteriores a mesma situação [45, 46].
Para além do cálculo do caudal também seria possível determinar o binário estimado, através da convervação do
momento angular, no entanto, dado os desvios apresentados entre o caudal integrado e o medido, não foi realizada
tal comparação.
4.2 Perdas ao longo da turbina
Com os ensaios de atravessamento apresentados na Sec. 4.1 é possível realizar uma análise das perdas existentes
ao longo da turbina, distribuídas em três secções: perdas no estator de entrada (A-2), entre atmosfera e a saída do
primeiro estator; no rotor (2-3), entre a entrada e saída do mesmo; e no estator de saída, aquando da sua presença
(3-C), entre a saída do rotor e a câmara de pleno. Denominemos A para a região da atmosfera e C para a região da
câmara de pleno.
Este estudo é concretizado através do coeficiente de perda de estagnação definido pela Eq. 4.23, que relaciona
a energia mecânica dissipada Ep e a energia disponível entre a entrada e a saída da turbina.
Λ =Ep
Q∆p0, (4.23)
onde Q é o caudal de ar que atravessa a turbina e ∆p0 é a diferença de pressões de estagnação entre a atmosfera e a
câmara de pleno.
A energia mecânica dissipada para as diferentes secções é definida pelo produto entre o caudal e a diferença de
pressões de estagnação média total de cada secção em questão, Eq. 4.24 a 4.26.
EpA−2 = Q(pA − p02 ), (4.24)
Ep2−3 = Q(p02 − p03 ) − TΩ, (4.25)
Ep3−C = Q(p03 − ∆p0). (4.26)
A pressão de estagnação média é definida por:
p0i = Z
∫ Θpasso0
∫ rextrint
Vai p0irdrdθ∫ 2π0
∫ rextrint
Vairdrdθ, (4.27)
onde i = 2, 3 corresponde à secção e p0i é a pressão de estagnação em função da posição radial, para uma secção i.
Note-se que a soma dos três coeficientes de perda de estagnação juntamente com o rendimento total-estático da
turbina é igual à unidade, Eq. 4.28.
ΛA−2 + Λ2−3 + Λ3−C + ηts = 1. (4.28)
Em primeiro lugar analisemos a perda de pressão de estagnação imposta pelos estatores E1C e E3C a montante
56
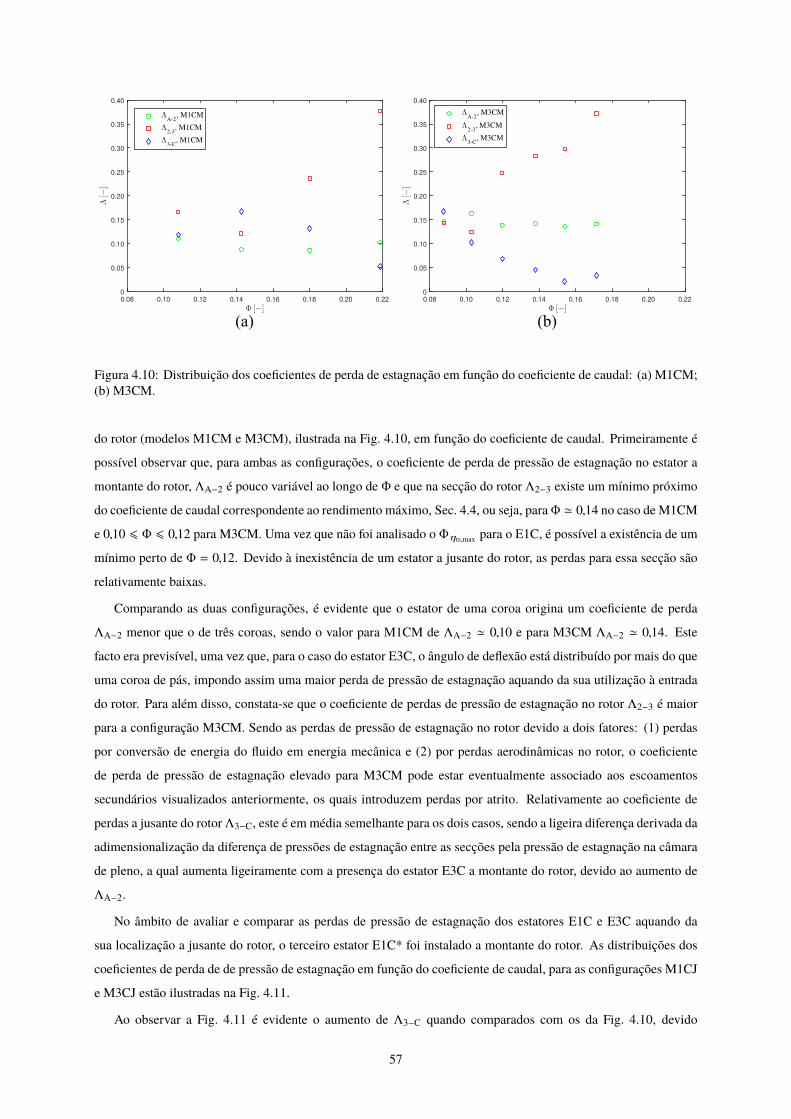
(a) (b)
Figura 4.10: Distribuição dos coeficientes de perda de estagnação em função do coeficiente de caudal: (a) M1CM;(b) M3CM.
do rotor (modelos M1CM e M3CM), ilustrada na Fig. 4.10, em função do coeficiente de caudal. Primeiramente é
possível observar que, para ambas as configurações, o coeficiente de perda de pressão de estagnação no estator a
montante do rotor, ΛA−2 é pouco variável ao longo de Φ e que na secção do rotor Λ2−3 existe um mínimo próximo
do coeficiente de caudal correspondente ao rendimento máximo, Sec. 4.4, ou seja, paraΦ ' 0,14 no caso de M1CM
e 0,10 6 Φ 6 0,12 para M3CM. Uma vez que não foi analisado o Φηts,max para o E1C, é possível a existência de um
mínimo perto de Φ = 0,12. Devido à inexistência de um estator a jusante do rotor, as perdas para essa secção são
relativamente baixas.
Comparando as duas configurações, é evidente que o estator de uma coroa origina um coeficiente de perda
ΛA−2 menor que o de três coroas, sendo o valor para M1CM de ΛA−2 ' 0,10 e para M3CM ΛA−2 ' 0,14. Este
facto era previsível, uma vez que, para o caso do estator E3C, o ângulo de deflexão está distribuído por mais do que
uma coroa de pás, impondo assim uma maior perda de pressão de estagnação aquando da sua utilização à entrada
do rotor. Para além disso, constata-se que o coeficiente de perdas de pressão de estagnação no rotor Λ2−3 é maior
para a configuração M3CM. Sendo as perdas de pressão de estagnação no rotor devido a dois fatores: (1) perdas
por conversão de energia do fluido em energia mecânica e (2) por perdas aerodinâmicas no rotor, o coeficiente
de perda de pressão de estagnação elevado para M3CM pode estar eventualmente associado aos escoamentos
secundários visualizados anteriormente, os quais introduzem perdas por atrito. Relativamente ao coeficiente de
perdas a jusante do rotorΛ3−C, este é emmédia semelhante para os dois casos, sendo a ligeira diferença derivada da
adimensionalização da diferença de pressões de estagnação entre as secções pela pressão de estagnação na câmara
de pleno, a qual aumenta ligeiramente com a presença do estator E3C a montante do rotor, devido ao aumento de
ΛA−2.
No âmbito de avaliar e comparar as perdas de pressão de estagnação dos estatores E1C e E3C aquando da
sua localização a jusante do rotor, o terceiro estator E1C* foi instalado a montante do rotor. As distribuições dos
coeficientes de perda de de pressão de estagnação em função do coeficiente de caudal, para as configurações M1CJ
e M3CJ estão ilustradas na Fig. 4.11.
Ao observar a Fig. 4.11 é evidente o aumento de Λ3−C quando comparados com os da Fig. 4.10, devido
57
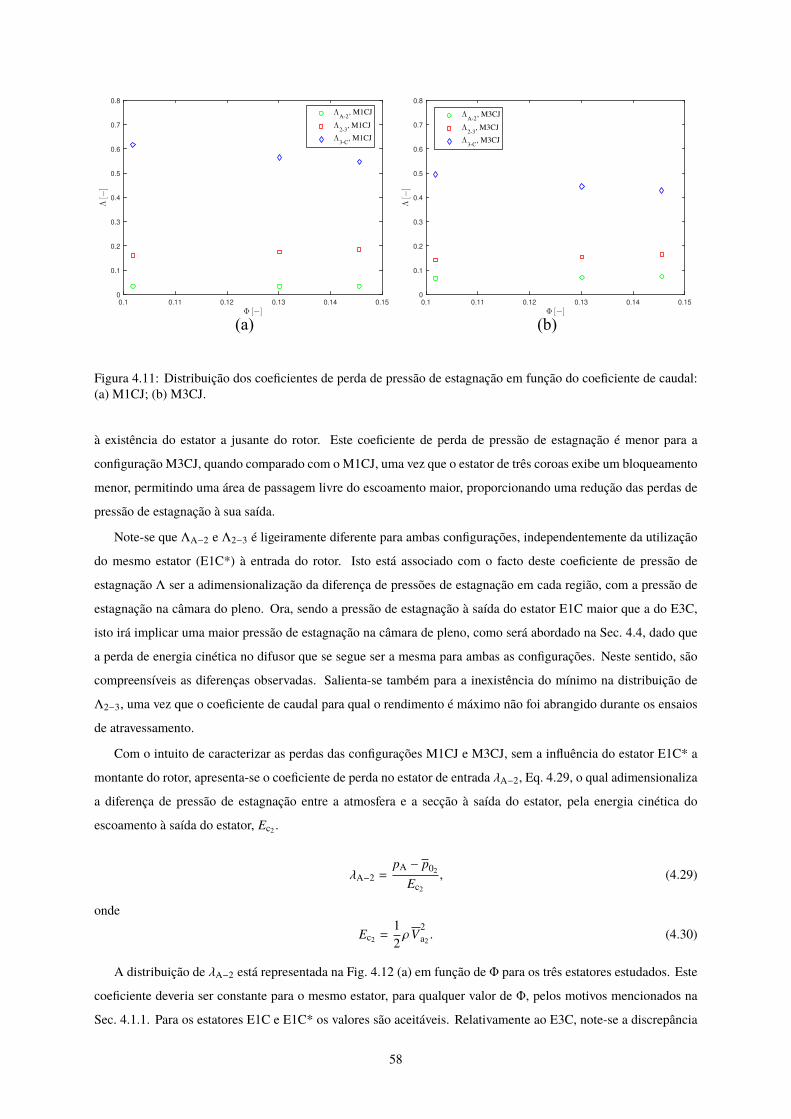
(a) (b)
Figura 4.11: Distribuição dos coeficientes de perda de pressão de estagnação em função do coeficiente de caudal:(a) M1CJ; (b) M3CJ.
à existência do estator a jusante do rotor. Este coeficiente de perda de pressão de estagnação é menor para a
configuração M3CJ, quando comparado com oM1CJ, uma vez que o estator de três coroas exibe um bloqueamento
menor, permitindo uma área de passagem livre do escoamento maior, proporcionando uma redução das perdas de
pressão de estagnação à sua saída.
Note-se que ΛA−2 e Λ2−3 é ligeiramente diferente para ambas configurações, independentemente da utilização
do mesmo estator (E1C*) à entrada do rotor. Isto está associado com o facto deste coeficiente de pressão de
estagnação Λ ser a adimensionalização da diferença de pressões de estagnação em cada região, com a pressão de
estagnação na câmara do pleno. Ora, sendo a pressão de estagnação à saída do estator E1C maior que a do E3C,
isto irá implicar uma maior pressão de estagnação na câmara de pleno, como será abordado na Sec. 4.4, dado que
a perda de energia cinética no difusor que se segue ser a mesma para ambas as configurações. Neste sentido, são
compreensíveis as diferenças observadas. Salienta-se também para a inexistência do mínimo na distribuição de
Λ2−3, uma vez que o coeficiente de caudal para qual o rendimento é máximo não foi abrangido durante os ensaios
de atravessamento.
Com o intuito de caracterizar as perdas das configurações M1CJ e M3CJ, sem a influência do estator E1C* a
montante do rotor, apresenta-se o coeficiente de perda no estator de entrada λA−2, Eq. 4.29, o qual adimensionaliza
a diferença de pressão de estagnação entre a atmosfera e a secção à saída do estator, pela energia cinética do
escoamento à saída do estator, Ec2 .
λA−2 =pA − p02
Ec2
, (4.29)
onde
Ec2 =12ρV
2a2 . (4.30)
A distribuição de λA−2 está representada na Fig. 4.12 (a) em função de Φ para os três estatores estudados. Este
coeficiente deveria ser constante para o mesmo estator, para qualquer valor de Φ, pelos motivos mencionados na
Sec. 4.1.1. Para os estatores E1C e E1C* os valores são aceitáveis. Relativamente ao E3C, note-se a discrepância
58
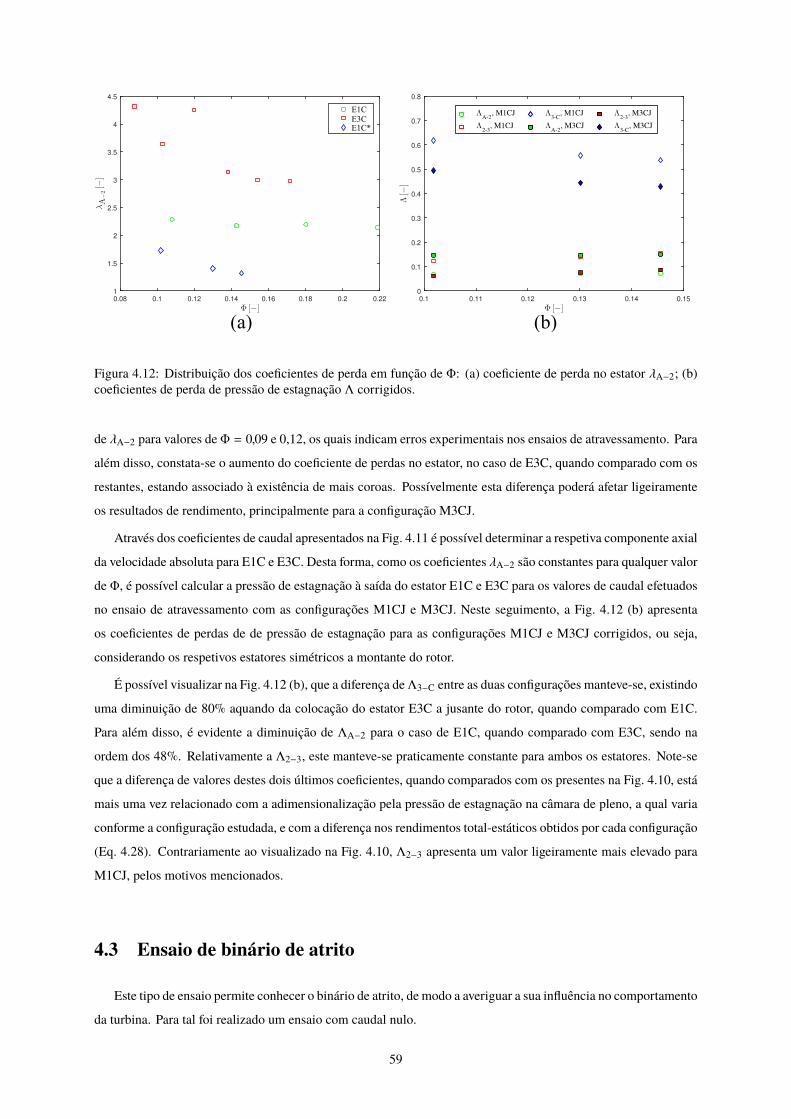
(a) (b)
E1CE3CE1C*
Figura 4.12: Distribuição dos coeficientes de perda em função de Φ: (a) coeficiente de perda no estator λA−2; (b)coeficientes de perda de pressão de estagnação Λ corrigidos.
de λA−2 para valores deΦ = 0,09 e 0,12, os quais indicam erros experimentais nos ensaios de atravessamento. Para
além disso, constata-se o aumento do coeficiente de perdas no estator, no caso de E3C, quando comparado com os
restantes, estando associado à existência de mais coroas. Possívelmente esta diferença poderá afetar ligeiramente
os resultados de rendimento, principalmente para a configuração M3CJ.
Através dos coeficientes de caudal apresentados na Fig. 4.11 é possível determinar a respetiva componente axial
da velocidade absoluta para E1C e E3C. Desta forma, como os coeficientes λA−2 são constantes para qualquer valor
de Φ, é possível calcular a pressão de estagnação à saída do estator E1C e E3C para os valores de caudal efetuados
no ensaio de atravessamento com as configurações M1CJ e M3CJ. Neste seguimento, a Fig. 4.12 (b) apresenta
os coeficientes de perdas de de pressão de estagnação para as configurações M1CJ e M3CJ corrigidos, ou seja,
considerando os respetivos estatores simétricos a montante do rotor.
É possível visualizar na Fig. 4.12 (b), que a diferença deΛ3−C entre as duas configurações manteve-se, existindo
uma diminuição de 80% aquando da colocação do estator E3C a jusante do rotor, quando comparado com E1C.
Para além disso, é evidente a diminuição de ΛA−2 para o caso de E1C, quando comparado com E3C, sendo na
ordem dos 48%. Relativamente a Λ2−3, este manteve-se praticamente constante para ambos os estatores. Note-se
que a diferença de valores destes dois últimos coeficientes, quando comparados com os presentes na Fig. 4.10, está
mais uma vez relacionado com a adimensionalização pela pressão de estagnação na câmara de pleno, a qual varia
conforme a configuração estudada, e com a diferença nos rendimentos total-estáticos obtidos por cada configuração
(Eq. 4.28). Contrariamente ao visualizado na Fig. 4.10, Λ2−3 apresenta um valor ligeiramente mais elevado para
M1CJ, pelos motivos mencionados.
4.3 Ensaio de binário de atrito
Este tipo de ensaio permite conhecer o binário de atrito, de modo a averiguar a sua influência no comportamento
da turbina. Para tal foi realizado um ensaio com caudal nulo.
59

4.3.1 Ensaio com caudal nulo
Existem dois tipos de binário de atrito Ta, como descreve a Eq. 4.31: um designado por mecânico, Tamec , que é
constante e não depende da velocidade de rotação, associado às perdas de atrito devido aos acoplamentos existentes,
e um segundo designado por aerodinâmico, Taaero , associado às perdas de atrito aerodinâmicas existentes no rotor,
o qual varia quadraticamente com a velocidade de rotação para números de Reynolds elevados. O binário de atrito
mecânico depende da instalação.
Ta = TaaeroΩ2 + Tamec . (4.31)
O objetivo deste ensaio foi determinar as constantes Taaero e Tamec . Neste sentido, o ventilador permaneceu
sempre desligado e foram impostas ao gerador sucessivas velocidades de rotação, entre 50 a 900 r.p.m., de modo
a obter os respetivos valores de binário. Teve-se em atenção à possibilidade de existência de histerese, pelo que
foram realizadas ensaios na ordem crescente e decrescente da velocidade de rotação. Para além disso, antes da
realização deste ensaio, a turbina esteve em funcionamento de forma contínua durante uma hora e meia, a uma
velocidade de 300 r.p.m., de modo a garantir o aquecimento dos rolamentos.
Uma vez que foram utilizados dois sensores de binários diferentes, como mencionado na Sec. 3.2.3.1, os
acoplamentos requeridos para cada um divergem, sendo necessário a realização deste ensaio para os dois casos.
No entanto, uma vez que o sensor Datum M425 tem uma gama de intervalo mais adequada aos valores de binário
obtidos ao longo dos ensaios, optou-se pela não utilização do sensor TG5/BP. Neste sentido, a curva do binário de
atrito associada ao sensor Datum M425, está presente na Fig. 4.13.
A curva correspondente ao ajustamento quadrático dos dados obtidos está descrita na Eq. 4.32, com R2 = 0,997.
Ta = 2 × 10−4Ω
2 + 0,284, (4.32)
onde Ta e Ω têm as unidades de Nm e rad/s, respetivamente.
Como seria de esperar, o termo associado ao binário de atrito aerodinâmico da Eq. 4.32 é desprezável, uma vez
0 10 20 30 40 50 60 70 80 90 100
Ω[r.p.m.]
0
0.5
1
1.5
2
2.5
Ta[N
m]
Dados
Ajusto quadrático
Figura 4.13: Curva do binário de atrito Ta.
60
que o número de Reynolds atingido foi de Re = 2,1 × 106.
Como o binário de atrito mecânico corresponde a uma perda que depende unicamente da instalação este foi
contabilizado como um ganho para efeitos de avaliação da turbina, sendo adicionado ao binário lido diretamente
pelo sensor de binário.
4.4 Ensaio para obtenção das curvas de funcionamento
Um dos principais focos deste ensaio consiste em analisar o rendimento da turbina, para diferentes condições
de funcionamento. Para além disso, é possível verificar a variação do coeficiente de potência e queda de pressão
gerados em função do coeficiente de caudal, permitindo uma avaliação do comportamento da turbina para diferentes
condições de funcionamento.
O ensaio é executado impondo uma velocidade de rotação ao veio, através do gerador, e um caudal, com
recurso ao ventilador (Sec. 3.1) e, para cada condição de funcionamento da turbina são obtidas as grandezas de
pressão, binário, velocidade de rotação e temperatura, através dos sensores incorporados na instalação e laboratório,
presentes na Sec. 3.2.
Primeiramente foram executados ensaios para os modelos M1CM e M3CM, compostos apenas pelo estator
E1C e E3C, respetivamente a montante do rotor (Fig. 2.3); seguindo-se de uma análise dos modelos M1CJ e M3CJ,
constituídos pelo estator E1C* a montante do rotor e os E1C e E3C a jusante do rotor (Fig. 2.2). Dado que o estator
E1C* foi utilizado como uma alternativa à construção dos estatores simétricos de E1C e E3C, este não foi alvo
de análise relativamente à sua influência no desempenho da turbina, sendo apenas analisadas as caracteríticas do
escoamento à saída do mesmo, Sec. 4.1 e Sec. 4.2.
Os intervalos de velocidade de rotação do veio, coeficiente de caudal, número de Reynolds e número de Mach,
definidos pelas Eq. 4.33 e Eq. 4.34, abrangidos durante este ensaio estão presentes na Tab.4.7, para as diferentes
configurações do modelo da turbina.
Re =ρΩd2
µ, (4.33)
Ma =Ωd
2√γRT
, (4.34)
onde µ é a viscosidade cinemática do ar, kg/ms; γ é a relação de calores específicos; T a temperatura do ar,
K; e R = 287,1J/ kgK. Constata-se que o número de Reynolds varia muito pouco e que o número de Mach é
suficientemente baixo, de forma a que o escoamento seja considerado incompressível.
Os resultados obtidos relativamente à variação do rendimento, do coeficiente de queda de pressão e de potência,
Tabela 4.7: Intervalos de Ω, Re, Φ e Ma estudados.Modelo Ω [ r.p.m.] Re [−] Φ [−] Ma [−]
M1CM 400 − 800 9,6 × 105 − 1,9 × 106 0,06 − 0,20 <0,1M1CJ 400 − 800 9,6 × 105 − 1,9 × 106 0,05 − 0,16 <0,1M3CM 400 − 700 9,6 × 105 − 1,7 × 106 0,05 − 0,19 <0,1M3CJ 400 − 800 9,6 × 105 − 1,9 × 106 0,05 − 0,18 <0,1
61
em função do coeficiente de caudal para todas as configurações estudados estão presentes na Fig.4.14.
Primeiramente, analisemos as curvas de funcionamento dos modelos M1CM eM3CM (Fig.4.14 (a)). Constata-
se que, relativamente ao rendimento, o estator de uma coroa, configuração M1CM, atingiu um valor máximo de
ηts,max = 0,67, para Φηts,max = 0,12. Em relação à configuração M3CM o rendimento máximo foi ligeiramente
inferior, sendo o seu valor de ηts,max = 0,63 e ocorreu para Φηts,max = 0,11. Em primeiro lugar, a diferença do valor
de Φ correspondente ao ηts,max está relacionado com o menor ângulo de incidência do estator de três coroas. Isto
é, dado que o estator de três coroas impõe um ângulo de incidência absoluto à entrada do rotor menor, o ângulo
do escoamento relativo estará mais próximo do ângulo de projeto, permitindo assim atingir o rendimento máximo
para um coeficiente de caudal inferior. Por outro lado, a ligeira diferença do pico de rendimento está associado com
as perdas de pressão de estagnação mais elevados apresentadas pelo estator E3C, devido à distribuição do ângulo
de deflexão por três coroas de pás diretrizes, como observado na Sec. 4.2. Note-se que o coeficiente de queda de
pressão Ψ, é maior para o caso da configuração M3CM. É possível também averiguar que a curva de rendimento
para o estator de três coroas apresenta uma diminuição mais acentuada para Φ > Φηts,max , quando comparada com
a curva do estator de uma só coroa de pás.
Em relação à variação de Π, conclui-se que o coeficiente de potência é superior para o caso do estator de três
coroas, indicando que a sua configuração permite fornecer um maior binário ao veio, apesar de apresentar uma
maior queda de pressão. Como visto na Sec. 1.2.2, um menor ângulo de incidência, ou seja, uma maior deflexão
do escoamento à entrada do rotor, proporciona um coeficiente de potência superior, quando comparado com uma
deflexão pequena. Isto é, uma vez que a componente tangencial da velocidade absoluta é maior, observado na
Sec. 4.1.1 e, tendo em conta a conservação do momento angular, o binário fornecido ao rotor será maior para um
ângulo de incidência menor.
De um modo geral, apesar de o estator de três coroas obter um coeficiente de potência superior ao do estator de
um coroa, o aumento do coeficiente de pressão é mais significativo, o que permite justificar a ligeira diminuição
do rendimento associado à configuração M3CM, quando comparado com a M1CM. Eventualmente, no caso da
configuração M3CM, o facto de Ψ ter um aumento muito mais acentuado, à medida que Φ aumenta, quando
comparado com o Π, pode justificar o acentuado decréscimo do rendimento para Φ > Φηts,max , visualizado na
Fig.4.14 (a1).
Relativamente às curvas de funcionamento dosmodelosM1CJ eM3CJ (Fig.4.14 (b)), constata-se que a presença
do estator de três coroas permitiu obter um rendimento superior, quando comparado com o de uma só coroa. Neste
sentido, para o caso do M1CJ ηts,max = 0,26 para Φηts,max ' 0,13 e para o M3CJ ηts,max = 0,33 e ocorreu para
Φηts,max ' 0,12. Note-se a diferença entre os Φηts,max . Esta constatação está relacionada com o facto do estator
E1C proporcionar maiores perdas à saída do rotor, o qual implica um aumento do Φηts,max , quando comparado com
o modelo M3CJ, que é constituído por um estator com menor bloqueamento à saída do rotor [47]. É também
visível que a presença do estator de três coroas permitiu obter um coeficiente de queda de pressão menor quando
comparado com o estator de uma só coroa. Este facto está relacionado com o baixo bloqueamento associado ao
estator de três coroas, proporcinando uma área livre de passagem maior, permitindo diminuir as perdas de pressão
de estagnação à saída do rotor, como visto na Sec. 4.2. Em relação ao coeficiente de potência, Π, observe-se que
este é igual para ambas as configurações. Isto está associado ao facto do estator à entrada (E1C*) ser o mesmo
para ambos os modelos. Logo não existirá uma variação do binário fornecido ao rotor, uma vez que este depende
62
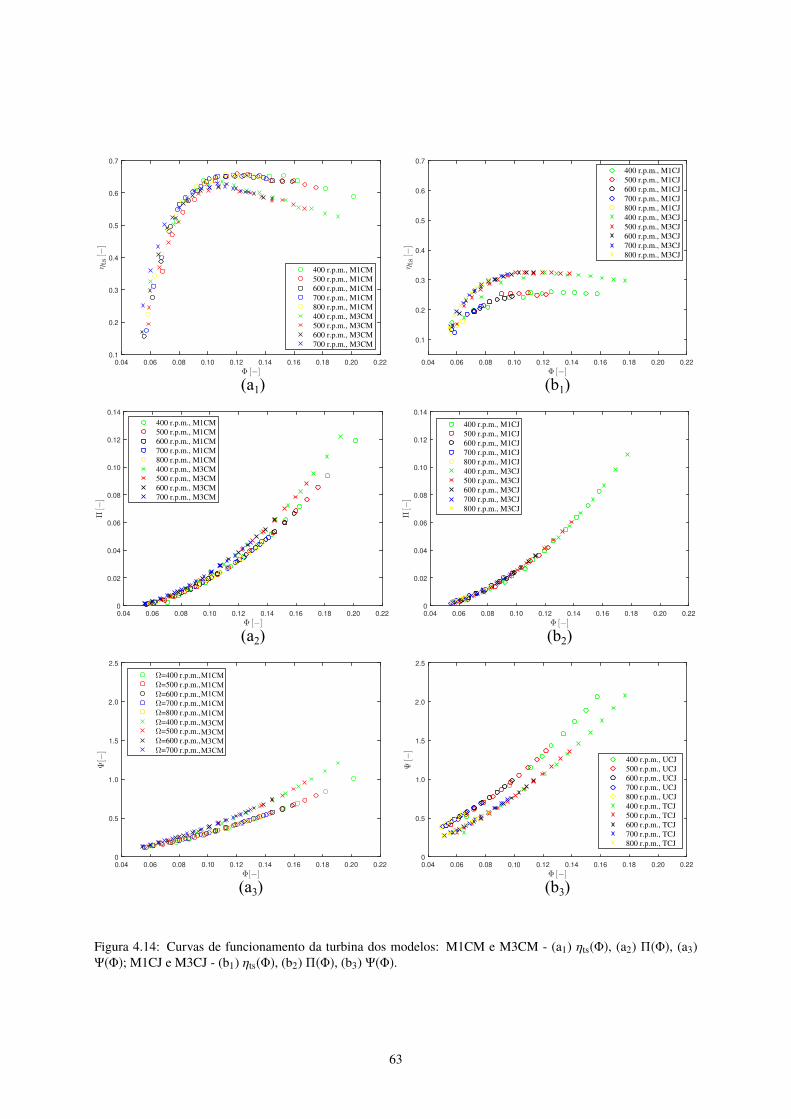
(a1) (b1)
(a2) (b2)
(a3) (b3)
M1CMM1CMM1CMM1CMM1CMM3CMM3CMM3CMM3CM
Figura 4.14: Curvas de funcionamento da turbina dos modelos: M1CM e M3CM - (a1) ηts(Φ), (a2) Π(Φ), (a3)Ψ(Φ); M1CJ e M3CJ - (b1) ηts(Φ), (b2) Π(Φ), (b3) Ψ(Φ).
63
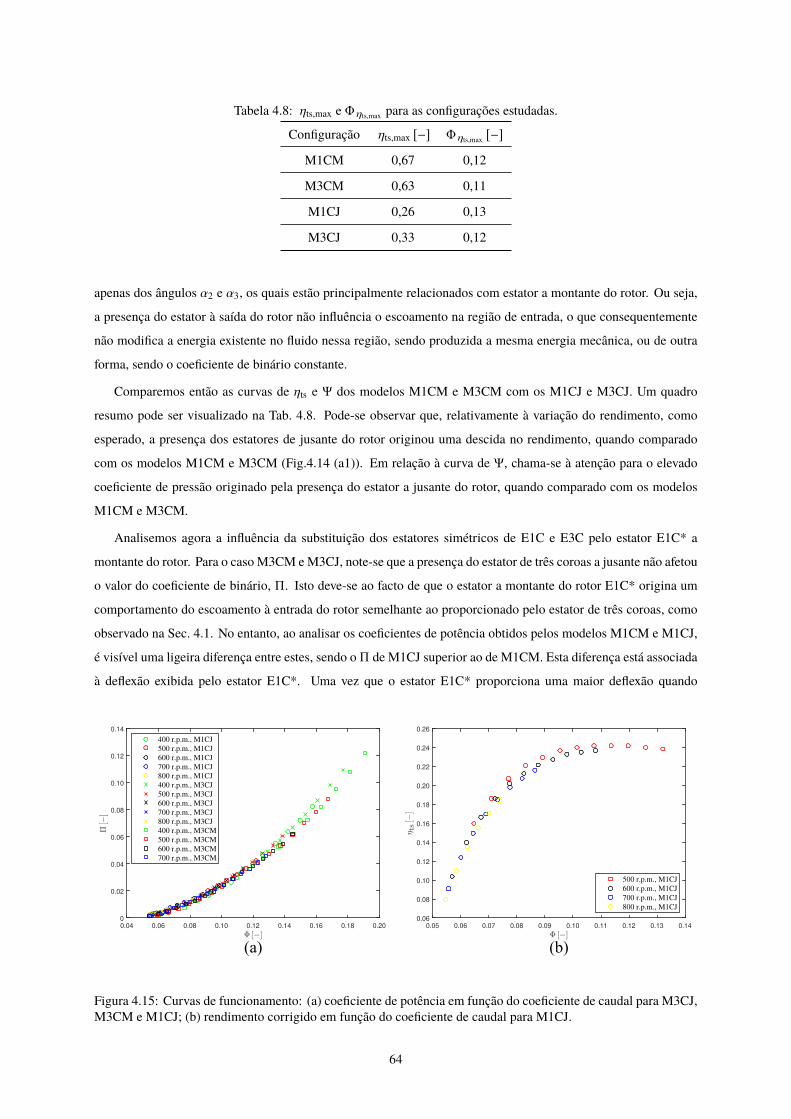
Tabela 4.8: ηts,max e Φηts,max para as configurações estudadas.
Configuração ηts,max [−] Φηts,max [−]
M1CM 0,67 0,12
M3CM 0,63 0,11
M1CJ 0,26 0,13
M3CJ 0,33 0,12
apenas dos ângulos α2 e α3, os quais estão principalmente relacionados com estator a montante do rotor. Ou seja,
a presença do estator à saída do rotor não influência o escoamento na região de entrada, o que consequentemente
não modifica a energia existente no fluido nessa região, sendo produzida a mesma energia mecânica, ou de outra
forma, sendo o coeficiente de binário constante.
Comparemos então as curvas de ηts e Ψ dos modelos M1CM e M3CM com os M1CJ e M3CJ. Um quadro
resumo pode ser visualizado na Tab. 4.8. Pode-se observar que, relativamente à variação do rendimento, como
esperado, a presença dos estatores de jusante do rotor originou uma descida no rendimento, quando comparado
com os modelos M1CM e M3CM (Fig.4.14 (a1)). Em relação à curva de Ψ, chama-se à atenção para o elevado
coeficiente de pressão originado pela presença do estator a jusante do rotor, quando comparado com os modelos
M1CM e M3CM.
Analisemos agora a influência da substituição dos estatores simétricos de E1C e E3C pelo estator E1C* a
montante do rotor. Para o caso M3CM eM3CJ, note-se que a presença do estator de três coroas a jusante não afetou
o valor do coeficiente de binário, Π. Isto deve-se ao facto de que o estator a montante do rotor E1C* origina um
comportamento do escoamento à entrada do rotor semelhante ao proporcionado pelo estator de três coroas, como
observado na Sec. 4.1. No entanto, ao analisar os coeficientes de potência obtidos pelos modelos M1CM e M1CJ,
é visível uma ligeira diferença entre estes, sendo o Π de M1CJ superior ao de M1CM. Esta diferença está associada
à deflexão exibida pelo estator E1C*. Uma vez que o estator E1C* proporciona uma maior deflexão quando
(a) (b)
Figura 4.15: Curvas de funcionamento: (a) coeficiente de potência em função do coeficiente de caudal para M3CJ,M3CM e M1CJ; (b) rendimento corrigido em função do coeficiente de caudal para M1CJ.
64
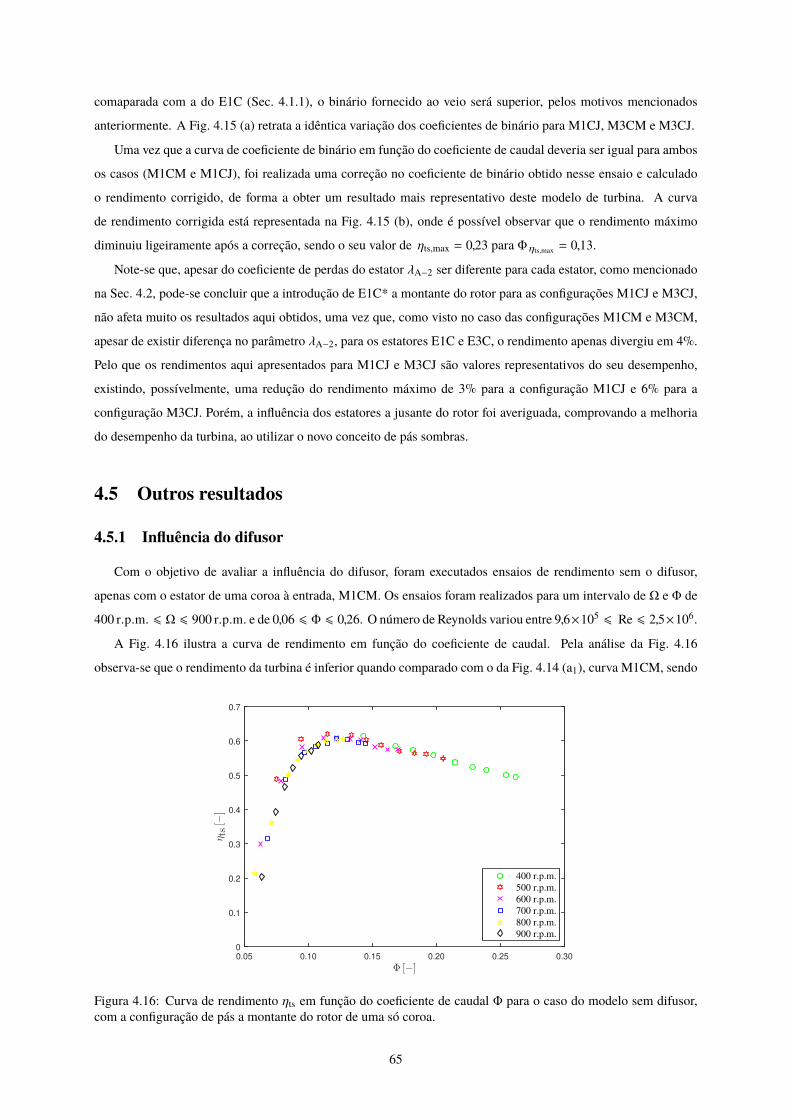
comaparada com a do E1C (Sec. 4.1.1), o binário fornecido ao veio será superior, pelos motivos mencionados
anteriormente. A Fig. 4.15 (a) retrata a idêntica variação dos coeficientes de binário para M1CJ, M3CM e M3CJ.
Uma vez que a curva de coeficiente de binário em função do coeficiente de caudal deveria ser igual para ambos
os casos (M1CM e M1CJ), foi realizada uma correção no coeficiente de binário obtido nesse ensaio e calculado
o rendimento corrigido, de forma a obter um resultado mais representativo deste modelo de turbina. A curva
de rendimento corrigida está representada na Fig. 4.15 (b), onde é possível observar que o rendimento máximo
diminuiu ligeiramente após a correção, sendo o seu valor de ηts,max = 0,23 para Φηts,max = 0,13.
Note-se que, apesar do coeficiente de perdas do estator λA−2 ser diferente para cada estator, como mencionado
na Sec. 4.2, pode-se concluir que a introdução de E1C* a montante do rotor para as configurações M1CJ e M3CJ,
não afeta muito os resultados aqui obtidos, uma vez que, como visto no caso das configurações M1CM e M3CM,
apesar de existir diferença no parâmetro λA−2, para os estatores E1C e E3C, o rendimento apenas divergiu em 4%.
Pelo que os rendimentos aqui apresentados para M1CJ e M3CJ são valores representativos do seu desempenho,
existindo, possívelmente, uma redução do rendimento máximo de 3% para a configuração M1CJ e 6% para a
configuração M3CJ. Porém, a influência dos estatores a jusante do rotor foi averiguada, comprovando a melhoria
do desempenho da turbina, ao utilizar o novo conceito de pás sombras.
4.5 Outros resultados
4.5.1 Influência do difusor
Com o objetivo de avaliar a influência do difusor, foram executados ensaios de rendimento sem o difusor,
apenas com o estator de uma coroa à entrada, M1CM. Os ensaios foram realizados para um intervalo de Ω e Φ de
400 r.p.m. 6 Ω 6 900 r.p.m. e de 0,06 6 Φ 6 0,26. O número de Reynolds variou entre 9,6×105 6 Re 6 2,5×106.
A Fig. 4.16 ilustra a curva de rendimento em função do coeficiente de caudal. Pela análise da Fig. 4.16
observa-se que o rendimento da turbina é inferior quando comparado com o da Fig. 4.14 (a1), curva M1CM, sendo
Figura 4.16: Curva de rendimento ηts em função do coeficiente de caudal Φ para o caso do modelo sem difusor,com a configuração de pás a montante do rotor de uma só coroa.
65
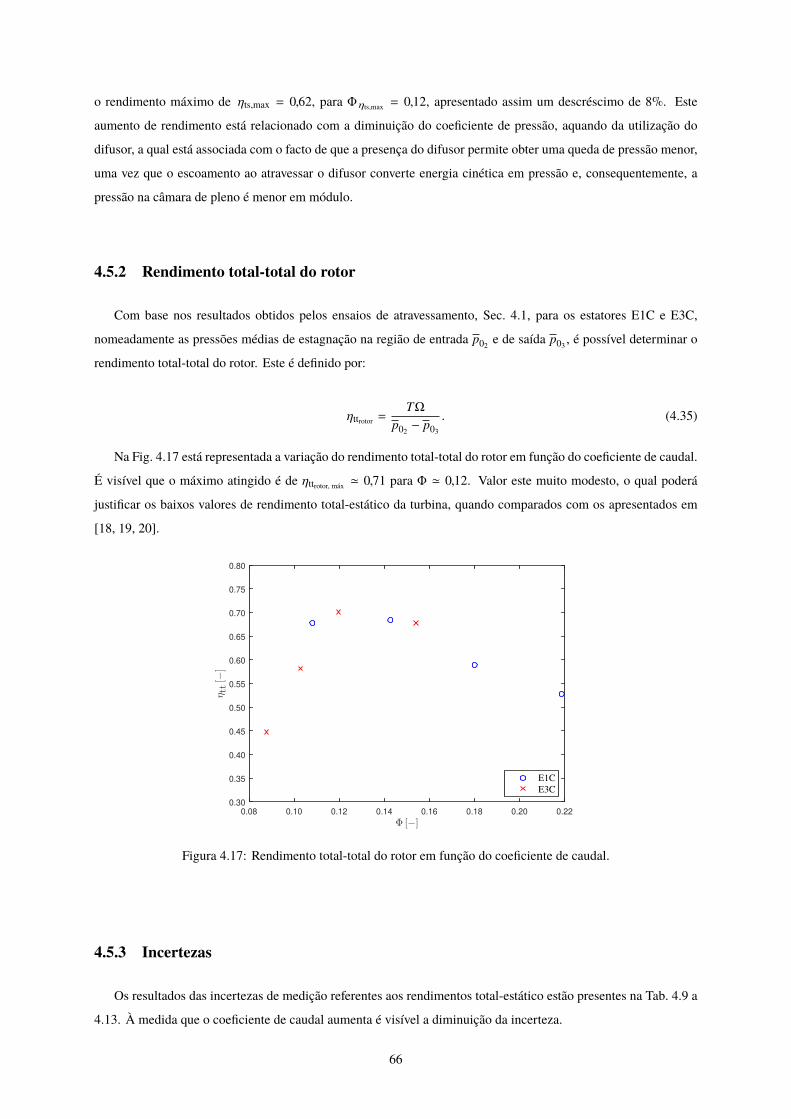
o rendimento máximo de ηts,max = 0,62, para Φηts,max = 0,12, apresentado assim um descréscimo de 8%. Este
aumento de rendimento está relacionado com a diminuição do coeficiente de pressão, aquando da utilização do
difusor, a qual está associada com o facto de que a presença do difusor permite obter uma queda de pressão menor,
uma vez que o escoamento ao atravessar o difusor converte energia cinética em pressão e, consequentemente, a
pressão na câmara de pleno é menor em módulo.
4.5.2 Rendimento total-total do rotor
Com base nos resultados obtidos pelos ensaios de atravessamento, Sec. 4.1, para os estatores E1C e E3C,
nomeadamente as pressões médias de estagnação na região de entrada p02 e de saída p03 , é possível determinar o
rendimento total-total do rotor. Este é definido por:
ηttrotor =TΩ
p02 − p03
. (4.35)
Na Fig. 4.17 está representada a variação do rendimento total-total do rotor em função do coeficiente de caudal.
É visível que o máximo atingido é de ηttrotor, máx ' 0,71 para Φ ' 0,12. Valor este muito modesto, o qual poderá
justificar os baixos valores de rendimento total-estático da turbina, quando comparados com os apresentados em
[18, 19, 20].
Figura 4.17: Rendimento total-total do rotor em função do coeficiente de caudal.
4.5.3 Incertezas
Os resultados das incertezas de medição referentes aos rendimentos total-estático estão presentes na Tab. 4.9 a
4.13. À medida que o coeficiente de caudal aumenta é visível a diminuição da incerteza.
66
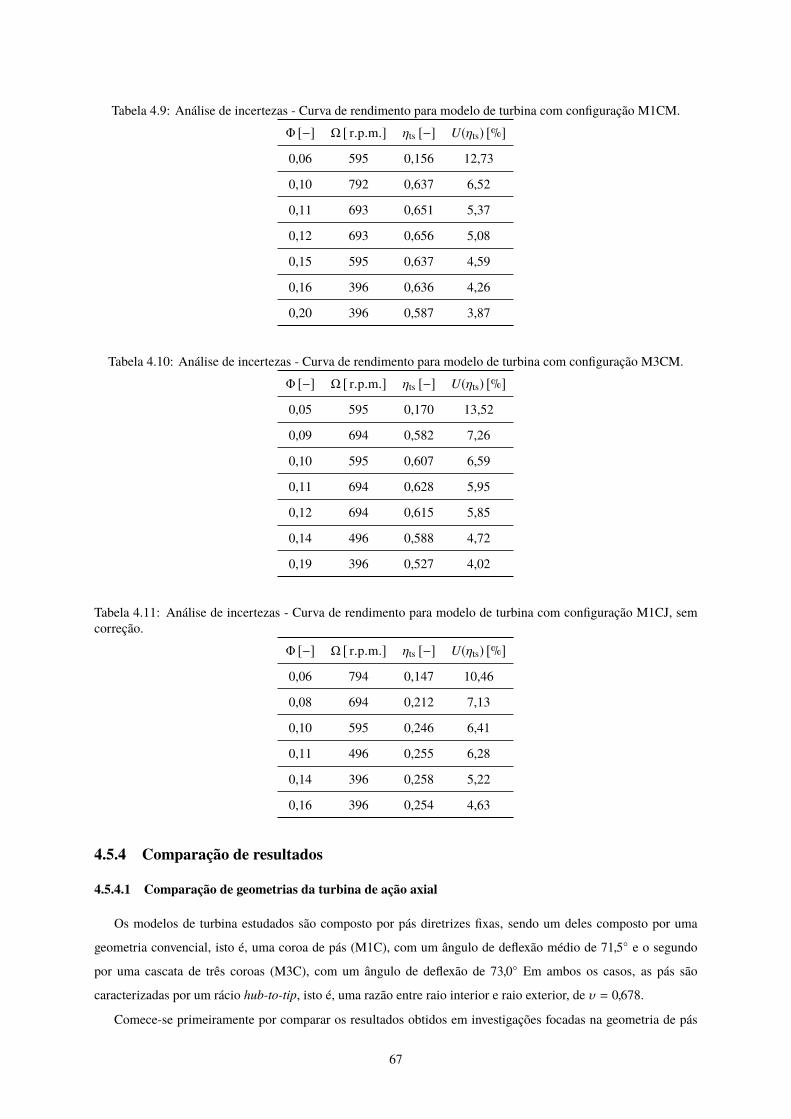
Tabela 4.9: Análise de incertezas - Curva de rendimento para modelo de turbina com configuração M1CM.
Φ [−] Ω [ r.p.m.] ηts [−] U(ηts) [%]
0,06 595 0,156 12,73
0,10 792 0,637 6,52
0,11 693 0,651 5,37
0,12 693 0,656 5,08
0,15 595 0,637 4,59
0,16 396 0,636 4,26
0,20 396 0,587 3,87
Tabela 4.10: Análise de incertezas - Curva de rendimento para modelo de turbina com configuração M3CM.
Φ [−] Ω [ r.p.m.] ηts [−] U(ηts) [%]
0,05 595 0,170 13,52
0,09 694 0,582 7,26
0,10 595 0,607 6,59
0,11 694 0,628 5,95
0,12 694 0,615 5,85
0,14 496 0,588 4,72
0,19 396 0,527 4,02
Tabela 4.11: Análise de incertezas - Curva de rendimento para modelo de turbina com configuração M1CJ, semcorreção.
Φ [−] Ω [ r.p.m.] ηts [−] U(ηts) [%]
0,06 794 0,147 10,46
0,08 694 0,212 7,13
0,10 595 0,246 6,41
0,11 496 0,255 6,28
0,14 396 0,258 5,22
0,16 396 0,254 4,63
4.5.4 Comparação de resultados
4.5.4.1 Comparação de geometrias da turbina de ação axial
Os modelos de turbina estudados são composto por pás diretrizes fixas, sendo um deles composto por uma
geometria convencial, isto é, uma coroa de pás (M1C), com um ângulo de deflexão médio de 71,5 e o segundo
por uma cascata de três coroas (M3C), com um ângulo de deflexão de 73,0 Em ambos os casos, as pás são
caracterizadas por um rácio hub-to-tip, isto é, uma razão entre raio interior e raio exterior, de υ = 0,678.
Comece-se primeiramente por comparar os resultados obtidos em investigações focadas na geometria de pás
67
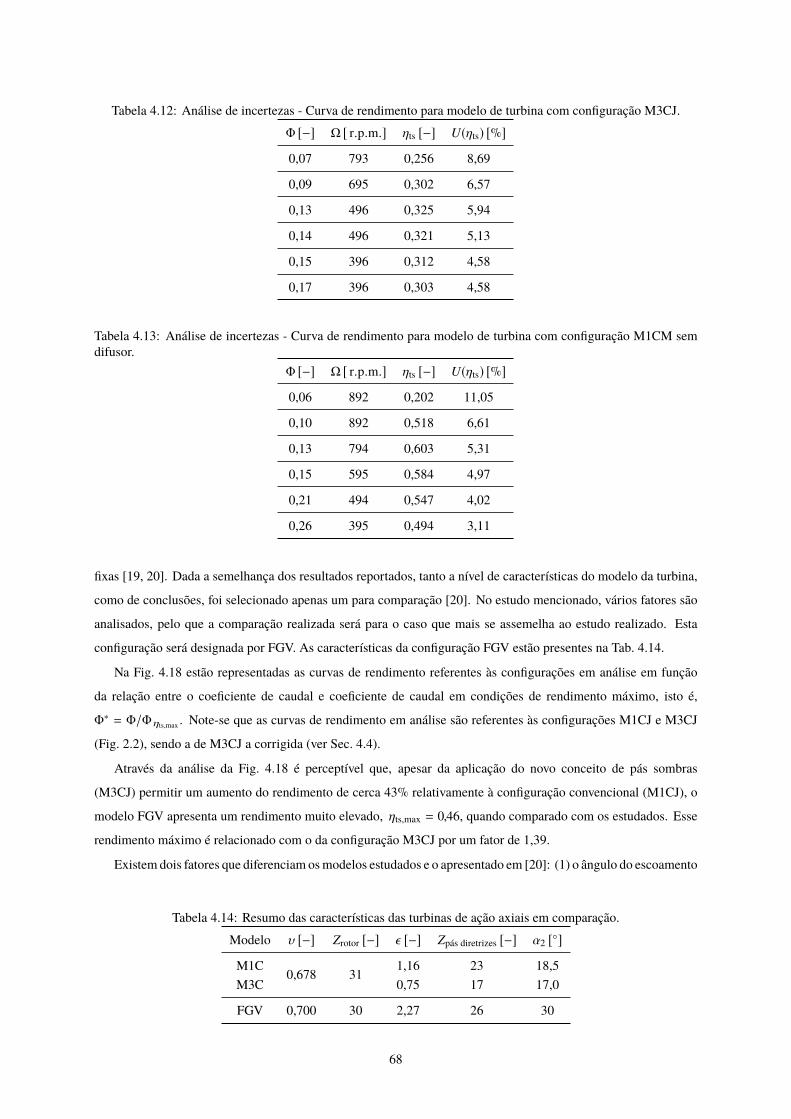
Tabela 4.12: Análise de incertezas - Curva de rendimento para modelo de turbina com configuração M3CJ.
Φ [−] Ω [ r.p.m.] ηts [−] U(ηts) [%]
0,07 793 0,256 8,69
0,09 695 0,302 6,57
0,13 496 0,325 5,94
0,14 496 0,321 5,13
0,15 396 0,312 4,58
0,17 396 0,303 4,58
Tabela 4.13: Análise de incertezas - Curva de rendimento para modelo de turbina com configuração M1CM semdifusor.
Φ [−] Ω [ r.p.m.] ηts [−] U(ηts) [%]
0,06 892 0,202 11,05
0,10 892 0,518 6,61
0,13 794 0,603 5,31
0,15 595 0,584 4,97
0,21 494 0,547 4,02
0,26 395 0,494 3,11
fixas [19, 20]. Dada a semelhança dos resultados reportados, tanto a nível de características do modelo da turbina,
como de conclusões, foi selecionado apenas um para comparação [20]. No estudo mencionado, vários fatores são
analisados, pelo que a comparação realizada será para o caso que mais se assemelha ao estudo realizado. Esta
configuração será designada por FGV. As características da configuração FGV estão presentes na Tab. 4.14.
Na Fig. 4.18 estão representadas as curvas de rendimento referentes às configurações em análise em função
da relação entre o coeficiente de caudal e coeficiente de caudal em condições de rendimento máximo, isto é,
Φ∗ = Φ/Φηts,max . Note-se que as curvas de rendimento em análise são referentes às configurações M1CJ e M3CJ
(Fig. 2.2), sendo a de M3CJ a corrigida (ver Sec. 4.4).
Através da análise da Fig. 4.18 é perceptível que, apesar da aplicação do novo conceito de pás sombras
(M3CJ) permitir um aumento do rendimento de cerca 43% relativamente à configuração convencional (M1CJ), o
modelo FGV apresenta um rendimento muito elevado, ηts,max = 0,46, quando comparado com os estudados. Esse
rendimento máximo é relacionado com o da configuração M3CJ por um fator de 1,39.
Existem dois fatores que diferenciam osmodelos estudados e o apresentado em [20]: (1) o ângulo do escoamento
Tabela 4.14: Resumo das características das turbinas de ação axiais em comparação.
Modelo υ [−] Zrotor [−] ε [−] Zpás diretrizes [−] α2 []
M1C0,678 31
1,16 23 18,5M3C 0,75 17 17,0
FGV 0,700 30 2,27 26 30
68
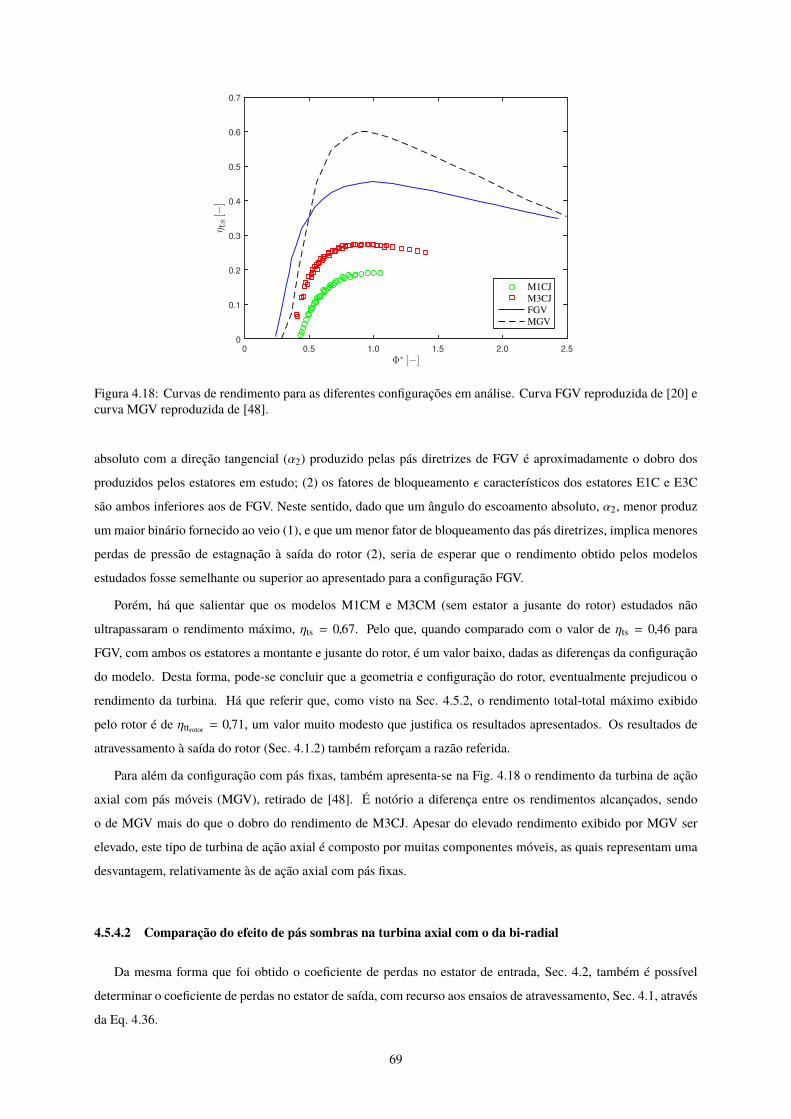
Figura 4.18: Curvas de rendimento para as diferentes configurações em análise. Curva FGV reproduzida de [20] ecurva MGV reproduzida de [48].
absoluto com a direção tangencial (α2) produzido pelas pás diretrizes de FGV é aproximadamente o dobro dos
produzidos pelos estatores em estudo; (2) os fatores de bloqueamento ε característicos dos estatores E1C e E3C
são ambos inferiores aos de FGV. Neste sentido, dado que um ângulo do escoamento absoluto, α2, menor produz
um maior binário fornecido ao veio (1), e que um menor fator de bloqueamento das pás diretrizes, implica menores
perdas de pressão de estagnação à saída do rotor (2), seria de esperar que o rendimento obtido pelos modelos
estudados fosse semelhante ou superior ao apresentado para a configuração FGV.
Porém, há que salientar que os modelos M1CM e M3CM (sem estator a jusante do rotor) estudados não
ultrapassaram o rendimento máximo, ηts = 0,67. Pelo que, quando comparado com o valor de ηts = 0,46 para
FGV, com ambos os estatores a montante e jusante do rotor, é um valor baixo, dadas as diferenças da configuração
do modelo. Desta forma, pode-se concluir que a geometria e configuração do rotor, eventualmente prejudicou o
rendimento da turbina. Há que referir que, como visto na Sec. 4.5.2, o rendimento total-total máximo exibido
pelo rotor é de ηttrotor = 0,71, um valor muito modesto que justifica os resultados apresentados. Os resultados de
atravessamento à saída do rotor (Sec. 4.1.2) também reforçam a razão referida.
Para além da configuração com pás fixas, também apresenta-se na Fig. 4.18 o rendimento da turbina de ação
axial com pás móveis (MGV), retirado de [48]. É notório a diferença entre os rendimentos alcançados, sendo
o de MGV mais do que o dobro do rendimento de M3CJ. Apesar do elevado rendimento exibido por MGV ser
elevado, este tipo de turbina de ação axial é composto por muitas componentes móveis, as quais representam uma
desvantagem, relativamente às de ação axial com pás fixas.
4.5.4.2 Comparação do efeito de pás sombras na turbina axial com o da bi-radial
Da mesma forma que foi obtido o coeficiente de perdas no estator de entrada, Sec. 4.2, também é possível
determinar o coeficiente de perdas no estator de saída, com recurso aos ensaios de atravessamento, Sec. 4.1, através
da Eq. 4.36.
69

λ3−C =p03 − ∆p0
Ec3
, (4.36)
Ec3 =12ρV
2a3, (4.37)
onde p03 é a pressão média de estagnação à saída do rotor, ∆p0 a diferença de pressões de estagnação entre a
atmosfera e a câmara de pleno e Va3 a componente axial média da velocidade absoluta.
Os resultados obtidos para o estator E1C e E3C da turbina axial, assim como os resultados experimentais
presentes em [32], para a turbina bi-radial estão ilustrados na Fig. 4.19, sendo FGV referentes à geometria da
bi-radial sem efeito de pás sombra e PS com o efeito de pás sombra.
Atente-se primeiramente aos resultados obtidos para a turbina de ação axial (E1C e E3C), Fig. 4.19. Como
verificado anteriormente, Sec. 4.2, relativamente ao coeficiente de perdas de pressão de estagnação à saída do rotor,
é vísivel a diminuição do coeficiente de perdas no estator à saída do rotor, aquando da introdução do estator de três
coroas, quando comparado com o estator de uma coroa. Seria expectável uma distribuição constante ao longo de Φ
dos valores obtidos, no entanto, este facto não é verificado, devido à influência do número de Reynolds. Porém, é
perceptível que em ambos os estatores, o coeficiente de perdas no estator de saída, tende para valores constantes à
medida que o coeficiente de caudal aumenta, ou seja, à medida que o número de Reynolds aumenta. Neste sentido,
considerando apenas a média dos dois últimos valores de λ3−C, para cada estator, a geometria E3C estudada reduz
significativamente o coeficiente de perdas do estator à saída do rotor, quando comparada com E1C, por um fator
de redução de 0,53.
Compare-se então a turbina axial com a bi-radial. Informações referentes às configurações FGV e PS podem
ser consultadas na Tab. 4.15, [32]. Importa referir que para o caso da bi-radial, para além de serem consideradas
as perdas no difusor, assim como na turbina axial, também são tidas em contas as perdas devido ao afastamento
radial das pás diretrizes em relação ao rotor.
Em primeiro lugar, é possível visualizar um ligeiro aumento de λ3−C para a geometria de uma coroa estudada
0.05 0.1 0.15 0.2 0.25 0.3 0.35
Φ [−]
5
10
15
20
25
30
λ3−c[−
]
E1C
E3C
FGV
PS
Figura 4.19: Coeficiente de perdas no estator de saída em função do coeficiente de caudal, para a turbina de ação ebi-radial. Dados FGV e PS reproduzidos de [32].
70

Tabela 4.15: Resumo das características das geometrias utilizadas na turbina bi-radial.
Configuração Coroas [−] ε [−]
FGV 1 0,70
PS 2 0,55
na turbina axial (E1C), quando comparada com a da bi-radial (FGV). Este facto está relacionado com o menor fator
de bloqueamento característico da configuração FGV, o qual permite uma diminuição das perdas à saída do rotor,
quando comparada com a E1C. Em relação às configurações com efeito de pás sombra, constata-se um aumento
do coeficiente de perdas no estator de saída, para a configuração utilizada na turbina axial. Mais uma vez, o facto
do fator de bloqueamento apresentado pela configuração PS ser 20% menor que o da E3C, pode justificar esse
aumento.
O fator de redução do coeficiente de perdas do estator de saída da configuração PS da bi-radial, em relação à
FGV, é de 0,28. Note-se que a redução do fator de bloqueamento nas geometrias da bi-radial, isto é, da configuração
FGV para PS, é de 0,79, enquanto que para o caso da turbina axial (E1C para E3C) este é de 0,64. Logo, apesar
da redução do bloqueamento ser maior para a turbina axial, constata-se que a turbina bi-radial permitiu uma maior
redução das perdas exibidas pelo estator à saída do rotor. Desta forma, pode-se concluir que o efeito de pás sombra
aplicado na turbina bi-radial proporcionou um melhor desempenho da mesma, quando comparada com a axial.
71

72
Capítulo 5
Conclusões e trabalho futuro
5.1 Conclusões
Na presente dissertação foi realizado um estudo experimental de dois modelos de turbinas de ação axial, de
0,59 m de diâmetro, com pás fixas. O primeiro modelo constituído por pás diretrizes concentradas numa só coroa
de pás e o segundo modelo composto por um conjunto de pás diretrizes distribuídas em três coroas de pás, com o
efeito de pás sombra. O rotor e condutas adjacentes foram os mesmos para ambos os modelos. Foram construídos
os respetivos estatores e um difusor, para posteriores ensaios na instalação uni-direcional de 55 kW do IST.
Dois sistemas com movimentação em torno de dois eixos, assim como uma rotina para programação simul-
tânea de ambos, foram desenvolvidos, com o intuito de optimizar e melhorar o procedimento dos ensaios de
atravessamento. Estes resultaram em dois sistemas robustos e com boa precisão.
Os resultados de atravessamento realizados permitiram verificar o estipulado pelos projetos numéricos. Ambos
defletiram o desejado. O facto de existirem três coroas de pás induziu um escoamento pouco uniforme, com
desenvolvimento de escoamentos secundários, os quais provocaram perdas de pressão de estagnação mais elevadas
à entrada do rotor. Porém, o maior ângulo de deflexão exibido por este estator permitiu um maior binário fornecido
ao veio, permitindo que a diferença de rendimentos com apenas o estator a montante do rotor, fosse pequena.
O estator de uma coroa atingiu um rendimento máximo de ηts,max = 0,67 para Φ = 0,11 e o de três coroas de
ηts,max = 0,63 para Φ = 0,12.
Para uma análise do modelo completo, com os estatores simétricos a montante e jusante do rotor, foi utilizado
um estator de uma só coroa com um ângulo de deflexão semelhante aos em estudo, como alternativa à produção dos
estatores simétricos, através do vazamento de resina de poliuretano emmoldes de silicone. Os perfis de velocidades
e deflexão do escoamento foram estudados a fim de compreender as influências do posicionamento deste terceiro
estator a montante do rotor. Os resultados permitiram concluir que este tinha um comportamento muito semelhante
ao estator de três coroas. Para além disso, foi realizado uma análise de perdas relativamente aos três estatores a
montante do rotor. Concluiu-se que o terceiro estator induzia uma menor perda, sendo o estator de três coroas o que
mais perdas produzia. Neste sentido, a influência do terceiro estator a montante do rotor iria provocar um melhor
desempenho de ambos os modelos completos.
Os estudos experimentais dos modelos completos permitiram verificar um acentuado decréscimo das perdas
73
de pressão de estagnação à saída do rotor, aquando do posicionamento do estator de três coroas. O coeficiente de
perdas de pressão de estagnação atingido pelo estator de três coroas a jusante do rotor foi de aproximadamente
Λ3−C = 0,46 e o de uma coroa de Λ3−C = 0,57, representando uma diminuição de 80%. O conceito de pás
sombras possibilitaram a diminuição da obstrução do escoamento à saída do rotor, transmitindo-se num aumento
de 43% do rendimento, relativamente ao estator de uma coroa. A influência do terceiro estator a montante do rotor,
eventualmente influenciou o rendimento do modelo de uma coroa em 3% e o de três coroas em, aproximadamente
6%.
Uma comparação entre os resultados obtidos e os de [20] foi realizada. Para modelos de turbinas semelhantes,
verificou-se que o modelo de [20], apesar de apresentar uma deflexão de entrada de aproximadamente metade dos
estatores em estudo e de ser característico de um fator de bloqueamento muito superior (cerca do dobro do fator
de bloqueamento maior dos estatores em análise), este atingiu um rendimento máximo muito superior aos obtidos.
Todas as características das pás diretrizes estudadas incentivavam a um melhor desempenho da turbina, dado que
a um ângulo de deflexão maior está inerente um maior binário fornecido ao veio, e, para além disso, um fator de
bloqueamento provoca menores perdas à saída do rotor. Neste sentido, conclui-se que o rotor não é o adequado.
Num estudo sobre o rendimento total-total do rotor observou-se que o pico de rendimento é de aproximadamente
ηttrotor = 0,71. Um valor muito modesto que prejudica o rendimento total-estático da turbina. Para além disso,
durante os ensaios de atravessamento à saída do rotor, verificou-se que a condição nominal ocorria para um
coeficiente de caudal, Φ muito maior, quando comparado com os observados nas curvas de funcionamento, para
rendimento máximo.
A influência do difusor foi alvo de um estudo, tendo sido observado um aumento de 8% no rendimento aquando
da introdução do difusor a montante da câmara de pleno, dado que este implica uma conversão de energia cinética
do escoamento em pressão, proporcionando uma menor perda de pressão de estagnação entre a atmosfera e a
câmara de pleno.
Em suma, pode-se concluir que, apesar dos rendimentos apresentados serem muito modestos, a aplicação do
conceito de pás sombra para alcançar deflexões elevadas e baixas perdas à saída do rotor, é um conceito promissor
para atingir valores de rendimento elevados.
5.2 Trabalho futuro
Relativamente ao rotor, este deveria ser alvo de um novo projeto, dado que não se adequa aos perfis de
velocidades apresentados, introduzindo perdas de incidência no mesmo. Neste sentido, seria necessário projetar
um rotor tendo como base os perfis de velocidades e ângulos apresentados. A optimização passaria por estudar
os coeficientes de caudal para os quais a energia cinética à saída fosse mínima. Para além disso, recomenda-se a
optimização do efeito de pás sombra, em função do ângulo de saída do rotor, a fim de minimizar as perdas à saída
do mesmo.
Apesar de se ter obtido um estator com um bloqueamento menor, esse fator ainda é excessivo, pelo que
aconselha-se um melhoramento da geometria do mesmo. Realça-se a importância para um compromisso entre três
fatores: a deflexão exibida por este, o bloqueamento e as perdas introduzidas à entrada do rotor. Sabe-se que um
estator com uma maior deflexão induz uma maior energia extraída pelo rotor, porém, quanto maior o ângulo de
74

deflexão, maior o bloqueamento e, consequentemente, maior as perdas à saída do rotor.
Sugere-se então que, por um lado analise-se o aumento do número de coroas, uma vez que desta forma será
possível obter um ângulo de deflexão maior, com diminuição do fator do bloqueamento. No entanto, para além
desta solução implicar um investimento superior, seria importante averiguar as perdas introduzidas à entrada do
rotor, dado que um aumento do número de coroas reduz-se a um aumento das perdas no estator de entrada. Uma
outra abordagem passaria por manter ou reduzir o número de coroas e diminuir o ângulo de deflexão exibido por
estas, garantindo que o menor bloqueamento, responsável pela diminuição das perdas à saída do rotor, e as perdas
no estator a montante do rotor justificassem o decréscimo da energia fornecida à roda.
O difusor também poderia ser alvo de melhoria. Seria necessário um equilíbrio entre a sua dimensão e
a capacidade para conversão de energia cinética em pressão. Um difusor com uma maior razão entre o raio
de entrada e o de saída, permitiria uma diminuição da energia cinética à sua saída. Um fator importante é o
desenvolvimento da camada limite, o qual, caso haja um abrupto aumento da área de passagem do escoamento,
pode causar separação do escoamento. Pelo contrário, se o aumento da razão de raios for realizada de forma muito
gradual, irá exigir um difusor de elevado comprimento, o qual pode-se tornar num inconveniente para aplicação
nos sistemas CAO, assim como irá ter custos acrescidos.
75

76
Bibliografia
[1] ExxonMobil. The outlook for energy: A view to 2040. Technical report, ExxonMobil, Oct 2018.
[2] S. Sareen, D. Baillie, and J. Kleinwachter. Transitions to future energy systems: Learning from a community
test field. Sustainability, 10(12):4513, 2018. doi: 10.3390/su10124513.
[3] M. Esteban and D. Leary. Current developments and future prospects of offshore wind and ocean energy.
Applied Energy, 90:128–136, 2012. doi: 10.1016/j.apenergy.2011.06.011.
[4] A. F. O. Falcão. Wave energy utilization: A review of the technologies. Renewable and Sustainable Energy
Reviews, 14(3):899 – 918, 2010. doi: 10.1016/j.rser.2009.11.003.
[5] B. Drew, A. R. Plummer, and M. N. Sahinkaya. A review of wave energy converter technology. Proceedings
of the Institution of Mechanical Engineers, Part A: Journal of Power and Energy, 223(8):887–902, 2009. doi:
10.1243/09576509JPE782. URL https://doi.org/10.1243/09576509JPE782.
[6] S. S. Prakash, K. A. Mamun, F. R. Islam, R. Mudliar, C. Pau’u, M. Kolivuso, and S. Cadralala. Wave energy
converter: A review of wave energy conversion technology. In 2016 3rd Asia-Pacific World Congress on
Computer Science and Engineering (APWC on CSE), pages 71–77, Dec 2016. doi: 10.1109/APWC-on-CSE.
2016.023.
[7] A. F. O. Falcão and J. C. C. Henriques. Oscillating-water-column wave energy converters and air turbines: A
review. Renewable Energy, 85:1391 – 1424, 2016. doi: 10.1016/j.renene.2015.07.086.
[8] A. F. O. Falcão and L. M. C. Gato. Air turbines. In A. Sayigh, editor, Comprehensive Renewable Energy,
volume 8: Ocean Energy, pages 111 – 149. Elsevier, Oxford, 2012. ISBN 978-0-08-087873-7. doi: 10.1016/
B978-0-08-087872-0.00805-2.
[9] M. Takao and T. Setoguchi. Air turbines for wave energy conversion. International Journal of Rotating
Machinery, 2012. doi: 10.1016/j.renene.2015.07.086.
[10] A. F. O. Falcão. The shoreline OWC wave power plant at the Azores. In Proc. 4th European Wave Energy
Conf., Aalborg, Denmark, pages 42–47, 01 2000.
[11] T. Heath. Chapter 334 - the development and installation of the LIMPET wave energy converter. In A. Sayigh,
editor,World Renewable Energy Congress VI, pages 1619 – 1622. Pergamon, Oxford, 2000. ISBN 978-0-08-
043865-8. doi: https://doi.org/10.1016/B978-008043865-8/50334-2.
77

[12] T.VHeath. The development of a turbo-generation system for application inOWCbreakwaters. InProceedings
of the 7th European Wave and Tidal Energy Conference, Sep 2007.
[13] R. Starzmann and T. Carolus. Model-based selection of full-scale Wells turbines for ocean wave energy
conversion and prediction of their aerodynamic and acoustic performances. Proc Inst Mech Eng Part A: J
Power Energy, 228:2–16, 2014.
[14] L. M. C. Gato and A. F. O. Falcão. Performance of the Wells turbine with a double row of guide vanes. JSME
International Journal, 33(2):265–271, 1990. doi: 10.1299/jsmeb1988.33.2_265.
[15] R. Curran and L. M. C. Gato. The energy conversion performance of several types of Wells turbine designs.
Proceedings of the Institution of Mechanical Engineers, Part A: Journal of Power and Energy, 211(2):
133–145, 1997. doi: 10.1243/0957650971537051.
[16] R. Starzmann, T. Zhu, C.Moisel, and T. Carolus. Aero-acostic analysis of the Wells turbine with guide vanes.
In 4th International Conference on Ocean Energy, Dublin, Ireland, October 2012.
[17] A. Thakker and T. Dhanasekaran. Experimental and computational analysis on guide vane losses of impulse
turbine fow wave energy conversion. Renewable Energy, 30:1359–1372, 2005. doi: 10.1016/j.renene.2004.
10.013.
[18] K. Mala, S. N. Badrinath, S. Chidanand, G. Kailash, and V. Jayashankar. Analysis of power modules
in the Indian wave energy plant. In 2009 Annual IEEE India Conference, pages 1–4, Dec 2009. doi:
10.1109/INDCON.2009.5409360.
[19] A. Thakker, H. Khaleeq, M. Takao, and T. Setoguchi. Effects of hub-to-tip ratio and reynolds number on
the performance of impulse turbine for wave energy power plant. KSME International Journal, 17(11):
1767–1774, 2003.
[20] T. Setoguchi, M. Takao, S. Santhakumar, and K. Kaneko. Study of an impulse turbine for wave power
conversion: Effects of Reynolds number and hub-to-tip ratio on performance. Journal of Offshore Mechanics
and Artic Engineering, 126:137–140, 2004. doi: 10.1115/1.1710868.
[21] Y. Kinoue and K. Kaneko. Performance of an impulse turbine with fixed guide vanes for wave power
conversion. Renewable Energy, 17:533–547, 1999.
[22] Y. Cui and Z. Liu. Effects of solidity ratio on performance of OWC impulse turbine. Advances in Mechanical
Engineering, 7(1):121373–121373, 2014. doi: 10.1155/2014/121373.
[23] F. Thiebaut, D. Sullivan, P. Kracht, S. Ceballos, J. López, C. Boake, J. Bard, N. Brinquete, J. Varandas,
L. Gato, R. Alcorn, and A. Lewis. Testing of a floating OWC device with movable guide vane impulse turbine
power take-off. In Proc 9th European Wave and Tidal Energy Conf, 2011.
[24] R. Alcorn, A. Blavette, M. Healy, and A. Lewis. FP7 EU funded CORES wave energy project: a coordinators’
perspective on the Galway Bay sea trials. Underwater Technology, 2014. doi: 10.3723/ut.32.051. URL
https://hal.archives-ouvertes.fr/hal-01313276.
78
[25] A. F. O. Falcão and L. M. C. Gato. Turbine with radial inlet and outlet rotor for use in bidirectional flows.
WO Patent App. PCT/PT2011/000003, 2011.
[26] A. F. O. Falcão, J. C. C. Henriques, and L. M. C. Gato. Self-rectifying air turbines for wave energy energy
conversion: A comparative analysis. Renewable and Sustainable Energy Reviews, 91:1231–1241, 2018. doi:
10.1016/j.rser.2018.04.019.
[27] A. F. O. Falcão, L. M. C. Gato, and E. P. A. S. Nunes. A novel radial self-rectifying air turbine for use in wave
energy converters. Renewable Energy, 50:289 – 298, 2013. doi: 10.1016/j.renene.2012.06.050.
[28] A. F. O. Falcão, L. M. C. Gato, and E. P. A. S. Nunes. A novel radial self-rectifying air turbine for use in
wave energy converters. Part 2. Results from model testing. Renewable Energy, 53:159 – 164, 2013. doi:
10.1016/j.renene.2012.11.018.
[29] A. A. D. Carrelhas, A. R. Maduro, L. M. C. Gato, J. C. C. Henriques, and A. F. O. Falcão. Performance of
the self-rectifying biradial air turbine with fixed guide vanes arranged into concentric annular rows. In Proc
12th European Wave Tidal Energy Conf, Cork, Ireland, 2017.
[30] C. 654444. OPERA - Open Sea Operating Experience to Reduce Wave Energy Cost. European Commission,
2016-2019.
[31] L. Trigo. The OWC option. In Workshop on Powering the Future? Marine Energy Oportunities, Lisbon,
2009. URL http://www.wavec.org/eventos/marine_energy_2009#.WG-14dKLSos.
[32] A. R. Maduro, L. M. C. Gato, A. A. D. Carrelhas, J. C. C. Henriques, and A. F. O. Falcão. Design and
experimental validation of guide-vanes arranged into multiple concentric annular rows for a self-rectifying
biradial air-turbine. submitted for publication in Renewable Energy, 2018.
[33] J. Brás. Projeto de uma turbina de ação auto-retificadora para dispositivos CAO. Technical report, LAETA,
IDMEC, Instituto Superior Técnico, Universidade de Lisboa, 2005.
[34] J. Nunes. Development of a new design methodology of axial-flow impulse turbine stators. Technical report,
LAETA, IDMEC, Instituto Superior Técnico, Universidade de Lisboa, 2018.
[35] A. R. Maduro, L. M. C. Gato, J. C. C. Henriques, and D. N. Ferreira. Design and optimization of fixed guide
vanes arranged into concentric annular rows for a self-rectifying biradial air-turbine. In Proc 12th European
Wave Tidal Energy Conf, Cork, Ireland, 2017.
[36] J. C. Páscoa. Turbomáquinas, Uma abordagem moderna. Engebook, Julho (2017).
[37] R. P. F. Gomes, J. C. C. Henriques, L. M. C. Gato, and A. F. O. Falcão. Multi-point aerodynamic optimization
of the rotor blade section of an axial-flow impulse air turbine for wave energy conversion. Energy, 45:570–580,
2012.
[38] F. X. C. da Fonseca, J. C. C. Henriques, L. M. C. Gato, and A. F. O. Falcão. Oscillating flow rig for air turbine
testing. Renewable Energy, 142:373–382, 2019.
79
[39] Laboratory Methods of Testing Fans for Aerodynamic Performance Rating. Air Movement and Control
Association International Inc, 1999.
[40] S. Chue. Pressure Probes For Fluids Measurement. Progress in Aerospace Sciences, 16(2):147–223, 1975.
[41] MATLAB. Getting started with matlab support package for arduino hardware.
https://www.mathworks.com/help/supportpkg/arduinoio/getting-started-with-matlab-support-package-
for-arduino-hardware.html. Acedido a 30-10-2018, 2018.
[42] MATLAB. Getting started with session-based interface using NI devices.
https://www.mathworks.com/help/daq/examples/getting-started-with-session-based-interface-using-ni-
devices.html. Acedido a 30-10-2018, 2018.
[43] J. P. Holman. Experimental Methods for Engineers. McGraw-Hill, 8th edition edition, 2012.
[44] S. L. Dixon and C. A. Hall. Fluid mechanics and thermodynamics of turbomachinery. Butterworth-
Heinemann, Oxford, 7th edition edition, 2013.
[45] A. A. D. Carrelhas. Experimental study of the model and the prototype of a self-rectifying biradial air turbine
with fixed guide-vanes. Master thesis, Instituto Superior Técnico, Universidade de Lisboa, 2017.
[46] J. S. Alves. Experimental and CFD Analysis of a Biplane Wells Turbine for Wave Energy Harnessing. Master
thesis, Royal Institute of Technology, 2013.
[47] A. F. O. Falcão. Sebenta de turbomáquinas. Associação de Estudantes do Instituto Superior Técnico, 2014.
[48] T. Setoguchi, S. Santhakumar, H. Maeda, M. Takao, and K. Kaneko. A review of impulse turbines for wave
energy conversion. Renewable Energy, 23:261–292, 2000.
80
Apêndice A
Construção das pás diretrizes
A.1 Procedimento para produção do molde de silicone
A metodologia utilizada para a produção do molde de silicone consiste em:
1. Construir uma caixa em forma de paralelipípedo com o topo aberto, num material do género de k-line, com
as dimensões adequadas para o molde, isto é, com dimensões superiores às da pá. Nesta etapa é necessário
assegurar que todas as junções da caixa estão bem vedadas;
2. Limpar a pá mestre;
3. Com recurso a pernos de madeira, garantir a suspensão da pá na posição correta;
4. Determinar o volume de silicone necessário;
5. Misturar os dois componentes conforme indicação do fabricante;
6. Retirar o maior número de bolhas de ar;
7. Verter cuidadosamente o silicone na caixa até alcançar o bordo de fuga da extremidade exterior da pá,
alternando o lado de vazamento, de modo que a pá mestre não oscile;
8. Esperar vinte e quatro horas até o silicone solidificar;
9. Retirar os pernos de madeira. Primeira parte do molde criada;
10. Retirar excesso de silicone das arestas da primeira parte do molde;
11. Limpar a superfície da primeira parte do molde;
12. Criar rasgos de guiamento;
13. Aplicar cera e esperar que seque;
14. Executar os passos 4 a 8;
15. Desmontar a caixa. Tampa do molde criada;
16. Abrir o molde e retirar a pá mestre;
17. Fazer um gito na tampa do molde.
81
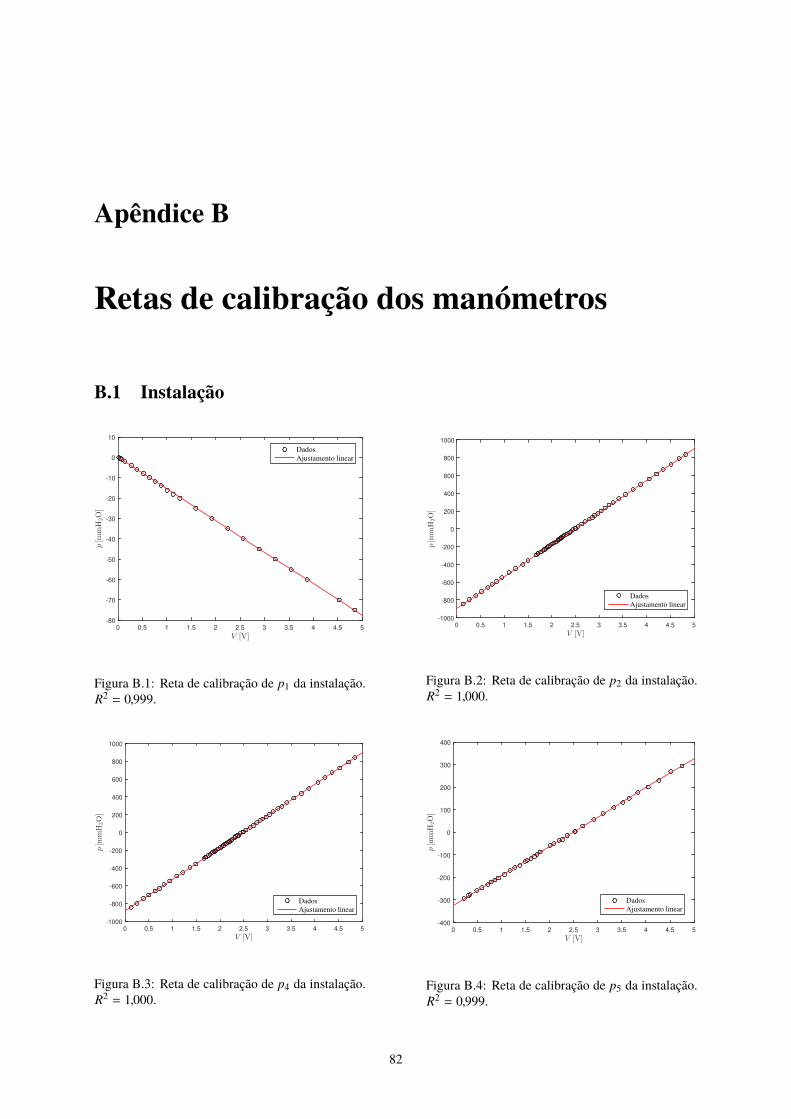
Apêndice B
Retas de calibração dos manómetros
B.1 Instalação
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
V [V]
-80
-70
-60
-50
-40
-30
-20
-10
0
10
p[m
mH
2O]
Dados
Ajustamento linear
Figura B.1: Reta de calibração de p1 da instalação.R2 = 0,999.
Figura B.2: Reta de calibração de p2 da instalação.R2 = 1,000.
Figura B.3: Reta de calibração de p4 da instalação.R2 = 1,000.
Figura B.4: Reta de calibração de p5 da instalação.R2 = 0,999.
82
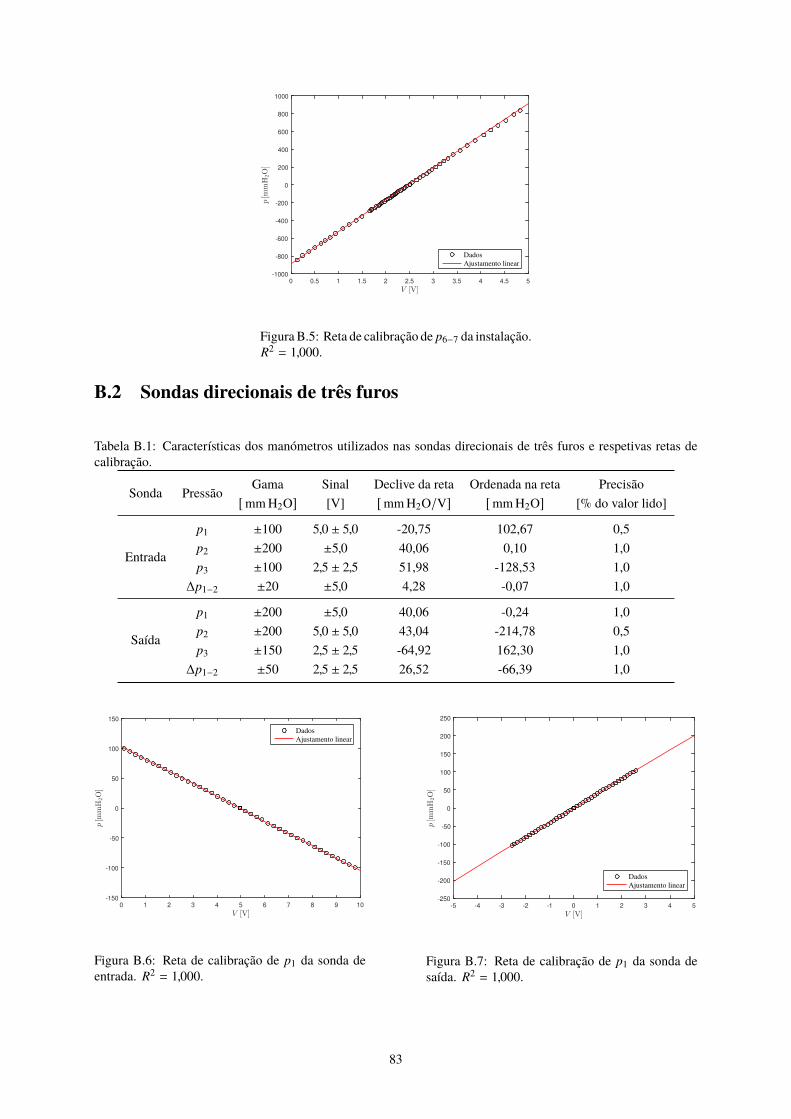
FiguraB.5: Reta de calibração de p6−7 da instalação.R2 = 1,000.
B.2 Sondas direcionais de três furos
Tabela B.1: Características dos manómetros utilizados nas sondas direcionais de três furos e respetivas retas decalibração.
Sonda PressãoGama Sinal Declive da reta Ordenada na reta Precisão[mm H2O] [V] [mm H2O/V] [mm H2O] [% do valor lido]
Entrada
p1 ±100 5,0 ± 5,0 -20,75 102,67 0,5p2 ±200 ±5,0 40,06 0,10 1,0p3 ±100 2,5 ± 2,5 51,98 -128,53 1,0∆p1−2 ±20 ±5,0 4,28 -0,07 1,0
Saída
p1 ±200 ±5,0 40,06 -0,24 1,0p2 ±200 5,0 ± 5,0 43,04 -214,78 0,5p3 ±150 2,5 ± 2,5 -64,92 162,30 1,0∆p1−2 ±50 2,5 ± 2,5 26,52 -66,39 1,0
0 1 2 3 4 5 6 7 8 9 10
V [V]
-150
-100
-50
0
50
100
150
p[m
mH
2O]
Dados
Ajustamento linear
Figura B.6: Reta de calibração de p1 da sonda deentrada. R2 = 1,000.
-5 -4 -3 -2 -1 0 1 2 3 4 5
V [V]
-250
-200
-150
-100
-50
0
50
100
150
200
250
p[m
mH
2O]
Dados
Ajustamento linear
Figura B.7: Reta de calibração de p1 da sonda desaída. R2 = 1,000.
83
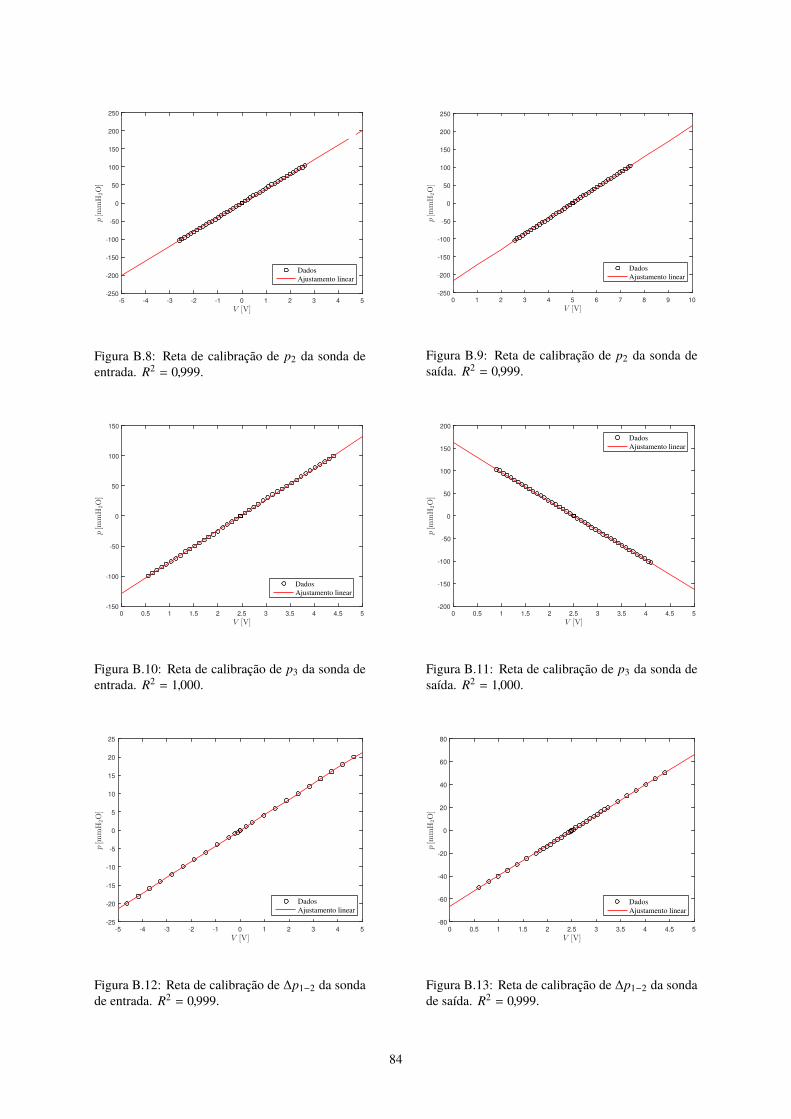
Figura B.8: Reta de calibração de p2 da sonda deentrada. R2 = 0,999.
0 1 2 3 4 5 6 7 8 9 10
V [V]
-250
-200
-150
-100
-50
0
50
100
150
200
250
p[m
mH
2O]
Dados
Ajustamento linear
Figura B.9: Reta de calibração de p2 da sonda desaída. R2 = 0,999.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
V [V]
-150
-100
-50
0
50
100
150
p[m
mH
2O]
Dados
Ajustamento linear
Figura B.10: Reta de calibração de p3 da sonda deentrada. R2 = 1,000.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
V [V]
-200
-150
-100
-50
0
50
100
150
200p[m
mH
2O]
Dados
Ajustamento linear
Figura B.11: Reta de calibração de p3 da sonda desaída. R2 = 1,000.
Figura B.12: Reta de calibração de ∆p1−2 da sondade entrada. R2 = 0,999.
Figura B.13: Reta de calibração de ∆p1−2 da sondade saída. R2 = 0,999.
84
Apêndice C
Ensaios de atravessamento
C.1 Rotina
Os vários passos do programa desenvolvido para os ensaios de atravessamento à entrada e saída do rotor,
simultaneamente, são:
Estado 1: Verificação da posição radial da sonda localizada à entrada do rotor. Caso a sonda esteja numa das
situações extremas, posição inicial ou posição final, ambas as variáveis impostas pela utilizador, então passará
para o estado 3. Caso não esteja em nenhuma das duas situações passará para o estado 2.
Estado 2: Ocorre a alteração da posição radial da sonda de entrada, através da implementação do incremento
radial da sonda de entrada imposto pelo utilizador.
Estado 3: Verificação da posição radial da sonda localizada à saída do rotor. Caso a sonda esteja na posição radial
inicial, imposta pelo utilizador, passará ao estado 5. Para a situação em que a sonda se encontra na posição
radial final existem duas opções: caso a sonda de entrada esteja na sua posição radial final avança para o
estado 15; caso contrário irá para o estado 5. Por último, para o caso em que não esteja em nenhuma das
duas situações passará para o estado 4.
Estado 4: Ocorre a alteração da posição radial da sonda de saída, através da implementação do incremento radial
da sonda de saída imposto pelo utilizador. Avança para o estado 5.
Estado 5: Aquisição dos dados, através da placa NI. Conversão do sinal de tensão para as respetivas unidades e
cálculo das médias. Avança para o estado 6.
Estado 6: Verificação da diferença de pressão dos furos laterais da sonda de entrada. Caso seja igual a zero, com
um certo desvio imposto pelo utilizador, passará ao estado 10. Caso contrário irá para o estado 7.
Estado 7: Verificação do número de tentativas realizadas para encontrar o ângulo associado à diferença de pressão
dos furos laterais da sonda de entrada. Caso tenha atingido o número máximo, passará para o estado 10.
Caso contrário irá para o estado 8.
Estado 8: Cálculo do incremento angular da sonda de entrada, recorrendo à respetiva reta de calibração. Passa
para o estado 9.
Estado 9: Alteração da posição angular da sonda de entrada. Avança para o estado 10.
Estado 10: Verificação da diferença de pressão dos furos da sonda de saída. Caso seja igual a zero, com um certo
85
desvio, passará ao estado 14. Caso contrário irá para o estado 11.
Estado 11: Verificação do número de tentativas realizadas para encontrar o ângulo associado à diferença de pressão
dos furos laterais da sonda de saída. Caso tenha atingido o número máximo, passará para o estado 14. Caso
contrário irá para o estado 12.
Estado 12: Cálculo do incremento angular da sonda de saída, recorrendo à respetiva reta de calibração. Avança
para o estado 13.
Estado 13: Alteração da posição angular da sonda de saída. De seguida o programa regressa ao estado 5.
Estado 14: Nesta etapa, o programa irá guardar os valores obtidos num ficheiro .txt e num .mat. Existem duas
possibilidades: se o ângulo da sonda correspondente à diferença de pressão dos furos laterais das sondas for
igual a zero, dentro de um certo desvio, então o programa irá guardar apenas os dados correspondentes a essa
situação, caso contrário, irá guardar um número de dados, à escolha do utilizador, de modo a, posteriormente,
seja possível ter a noção do quão longe esteve do ponto desejado. Regressa ao estado 1.
Estado 15: Ambos os sistemas regressam à sua posição radial inicial e fecham-se as portas dos Arduinos e da
placa NI.
C.2 Construção dos sistemas de atravessamento
A evolução do processo de construção dos sistemas de atravessamento está ilustrada nas Fig. C.1 e C.2.
A construção dos sistemas de atravessamento teve como base a reutilização de dois sistemas de movimento
lineares não automatizados, Fig. C.1 (a) e Fig. C.2 (a), e um sistema de movimento de rotação manual, Fig. C.1 (b).
O processo de construção baseou-se na automatização destes sistemas, através da integração de motores de
passo. A seleção deste tipo de motor prendeu-se pelo facto de estes serem os mais adequados e económicos para a
obtenção de mecanismos precisos. O segundo sistema de rotação (Fig. C.2 (b)), foi adquirido, tendo como base o
fator de redução pretendido. Foi necessário a análise e projeção do modo de acoplamento dos sistemas de rotação
aos lineares, Fig. C.1 (c) e Fig. C.2 (c). Ao longo deste processo teve-se o cuidado de garantir a perpendicularidade
dos sistemas de rotação, relativamente à base dos lineares.
A escolha dos motores teve por base o seu número de passos por revolução, de modo a que, em conjunto com as
características dos sistemas fosse possível a obtenção da precisão pretendida; e o torque nominal, dada as diferentes
funcionalidades de cada sistema. O controlo dos motores foi realizado através de uma placa Arduino, juntamente
com uma placa Adrafuit. Estas componentes encontram-se dentro de uma caixa, acoplacada cada uma, ao respetivo
sistema linear. O acionamento das componentes referidas é realizado através de um interruptor introduzido na
tampa da caixa. A evolução da construção da caixa e ligações das componentes eletrónicas estão representadas na
Fig. C.3.
86
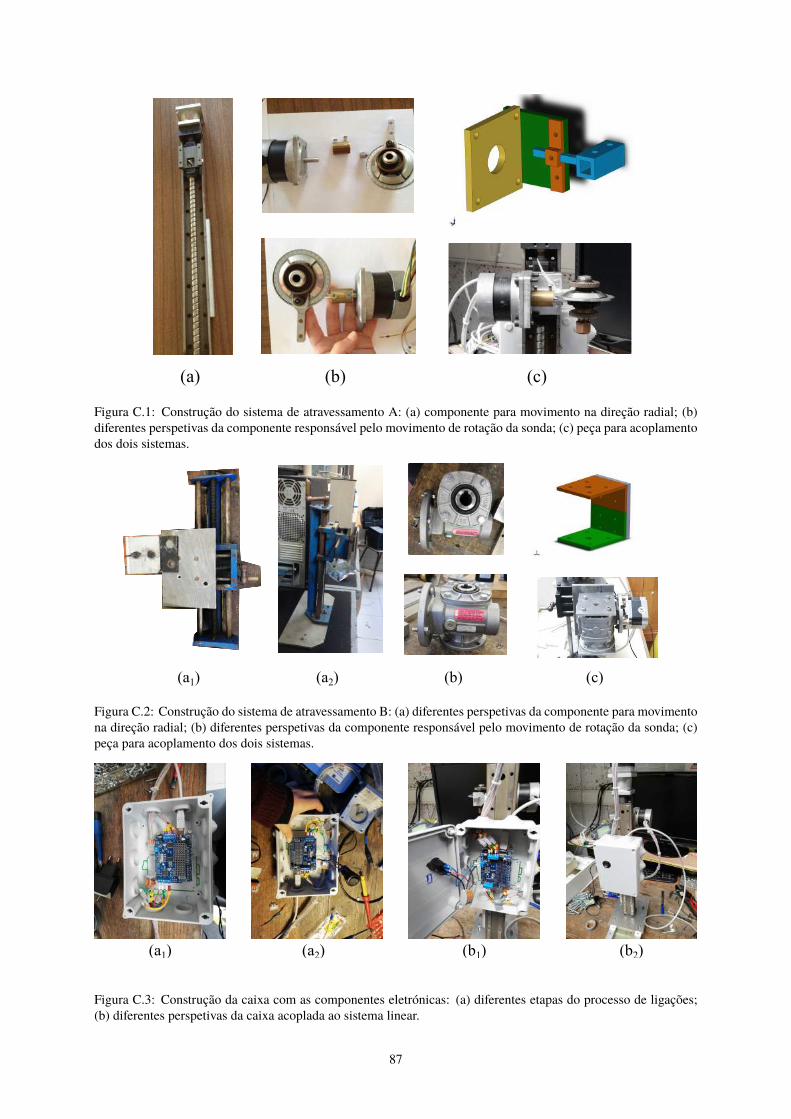
(a) (b) (c)
Figura C.1: Construção do sistema de atravessamento A: (a) componente para movimento na direção radial; (b)diferentes perspetivas da componente responsável pelo movimento de rotação da sonda; (c) peça para acoplamentodos dois sistemas.
(a1) (b) (c)(a2)
Figura C.2: Construção do sistema de atravessamento B: (a) diferentes perspetivas da componente para movimentona direção radial; (b) diferentes perspetivas da componente responsável pelo movimento de rotação da sonda; (c)peça para acoplamento dos dois sistemas.
(a1) (a2) (b2)(b1)
Figura C.3: Construção da caixa com as componentes eletrónicas: (a) diferentes etapas do processo de ligações;(b) diferentes perspetivas da caixa acoplada ao sistema linear.
87
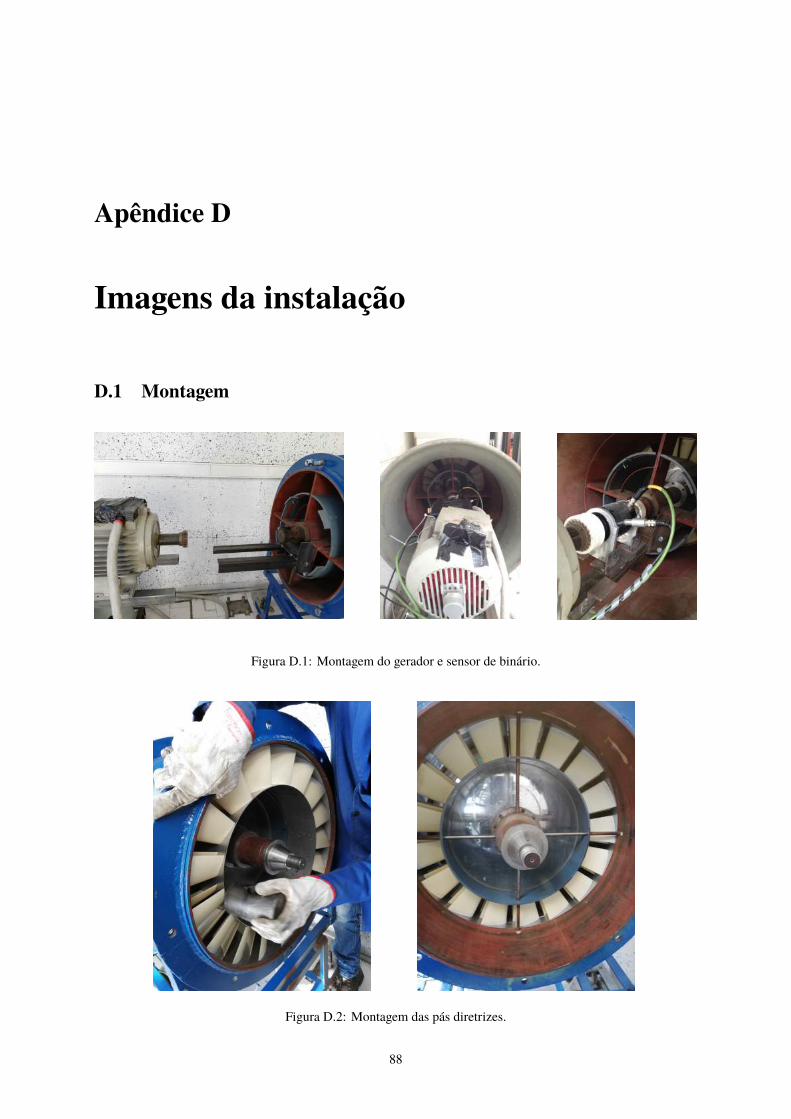
Apêndice D
Imagens da instalação
D.1 Montagem
Figura D.1: Montagem do gerador e sensor de binário.
Figura D.2: Montagem das pás diretrizes.
88
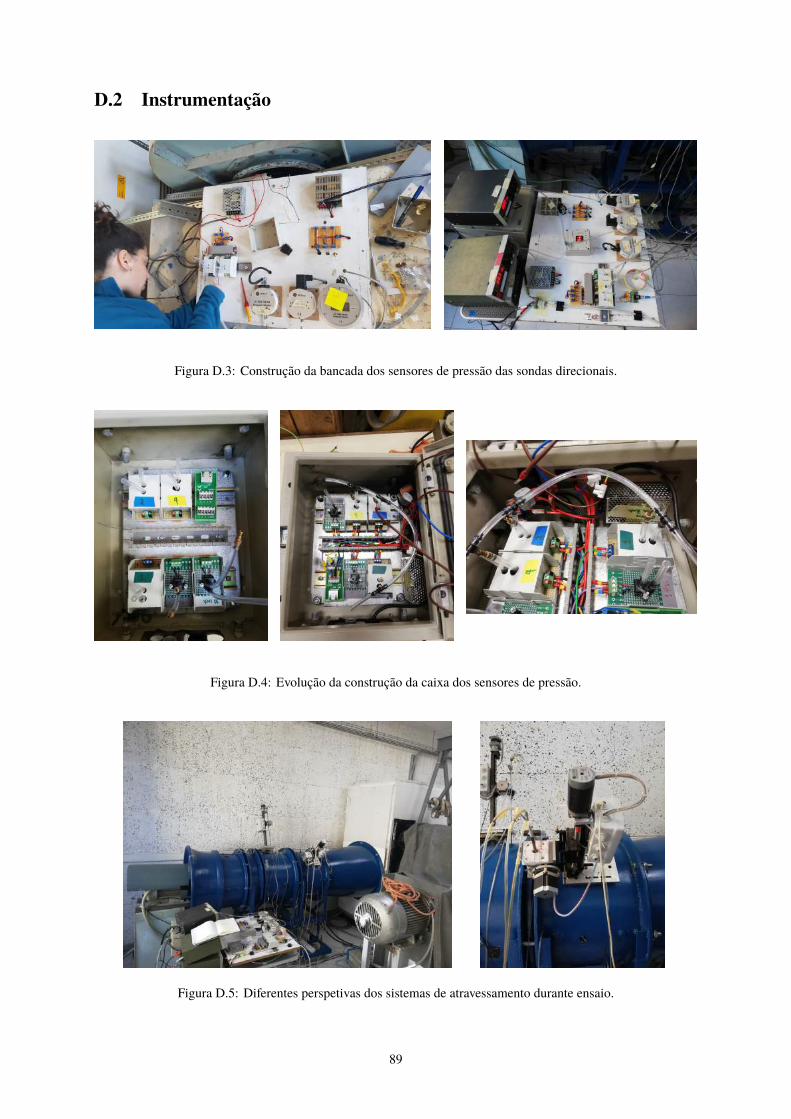
D.2 Instrumentação
Figura D.3: Construção da bancada dos sensores de pressão das sondas direcionais.
Figura D.4: Evolução da construção da caixa dos sensores de pressão.
Figura D.5: Diferentes perspetivas dos sistemas de atravessamento durante ensaio.
89