estudo experimental de atenuadores de viv · neste sentido a empresa contribuiu não somente com a...
TRANSCRIPT

Universidade de São Paulo
Escola Politécnica
Departamento de Engenharia Mecânica
Daniel Felício de Medeiros
Estudo Experimental de Atenuadores de VIV
São Paulo
2006
A-PDF MERGER DEMO

Daniel Felício de Medeiros
Estudo Experimental de Atenuadores de VIV
Relatório final do trabalho de formatura apresentado ao departamento de Engenharia Mecânica da Universidade de São Paulo.
Área de concentração: Engenharia Mecânica; Dinâmica de Fluidos; Vibrações Induzidas por Vórtices. Orientador: Prof. Dr. Júlio R. Meneghini
São Paulo
2006

FICHA CATALOGRÁFICA
Medeiros, Daniel Felício de
Estudo experimental da atenuação do fenômeno de VIV / D.F. de Medeiros. -- São Paulo, 2006.
p. 91
Trabalho de Formatura - Escola Politécnica da Universidade de São Paulo. Departamento de Engenharia Mecânica.
1.Vibrações induzidas por vórtices 2.Dinâmica dos fluidos
3.Mancais I.Universidade de São Paulo. Escola Politécnica. Departamento de Engenharia Mecânica II.t.

AGRADECIMENTOS
Inicialmente agradeço a Petrobrás pelo apoio dado ao desenvolvimento deste projeto.
Neste sentido a empresa contribuiu não somente com a motivação necessária, mas também
com o patrocínio técnico e financeiro utilizado no desenvolvimento do projeto. Por ser um
trabalho que faz parte de um projeto maior desenvolvido para a Petrobrás convém ressaltar
que todas as informações presentes neste trabalho são de propriedade dos autores e da
Petrobrás, ficando a publicação a cargo dos mesmos.
Gostaria de agradecer também aos alunos Ivan Korkischo e Rafael Giória que
contribuíram efetivamente na realização deste trabalho e estiveram presentes em todas as
etapas do desenvolvimento do presente estudo. Ao professor André Fujarra e ao aluno
Guilherme Franzini um agradecimento pela contribuição no desenvolvimento da base elástica
com mancais a ar.
Ao orientador Prof. Dr. Julio R. Meneghini meu especial agradecimento não somente
pelo auxilio prestado durante a preparação do presente estudo, mas durante os últimos 2,5
anos na qual desenvolvi meu projeto de iniciação cientifica. Com certeza a experiência
acadêmica adquirida neste período foi e será de grande importância para o crescimento
pessoal e profissional e será carregada para toda a vida.
Por fim agradecimento aos pais, familiares e amigos que sempre me apoiaram durante
todo o período acadêmico e são aqueles que realmente dão sentido a vida.

1. RESUMO
A análise de vida útil de “risers” depende fortemente do fenômeno de Vibrações
Induzidas por Vórtices (VIV). Para o critério de projeto que impõe uma vida útil superior a
200 anos, o fenômeno de VIV deve ser evitado, o que implica na adoção de sistemas de
supressão ou ao menos atenuação de VIV.
Algumas soluções atualmente aplicadas para minimizar essas VIV são extremamente
onerosas, chegando à cifra de 4 milhões de dólares por riser instalado e podendo alcançar 80
milhões de dólares por sistema de produção! Assim, analisar a natureza dos fenômenos,
estudar sua influência sobre conjuntos de estruturas e propor novas soluções viáveis que
reduzam os efeitos danosos e aumente a durabilidade dos dutos são fundamentais.
O presente estudo buscará avaliar experimentalmente um dos métodos de atenuação
do fenômeno de VIV mais utilizados e que apresenta interesse pratico de aplicação pela
Petrobras: os “strakes”. A síntese do projeto é a obtenção dos parâmetros ótimos de strakes e
uma melhor compreensão do fenômeno a qual proporcionará as condições para o
desenvolvimento de novos mecanismos de atenuação de VIV.
Neste projeto pretende-se investigar o fenômeno segundo duas abordagens distintas
mas complementares: obtenção da curva de resposta A/D x Vr, para cilindros com strakes
montados em base elástica e obtenção dos campos de vorticidade utilizando sistema PIV.
Os ensaios mostraram que todos os modelos com strake ensaiados apresentaram
redução da amplitude de oscilação. O caso que apresentou a menor resposta foi aquele com
passo p=10D e h=0.2D. O strake com pequena altura (h=0.1D), apresentou uma amplitude de
oscilação da ordem de 50% da amplitude do cilindro liso, muito superior a amplitude de
oscilação do strake com altura maior (h=0.2D) que foi de aproximadamente 10% da
amplitude do cilindro liso. Conclui-se a principio que o parâmetro de maior relevância no
projeto dos strakes é a altura do strake e não o passo.

1
ÍNDICE
2. Introdução...........................................................................................................................4 3. Escoamento ao Redor de Cilindros Oscilando ...................................................................7
3.1. Introdução...................................................................................................................7 3.2. Base Elástica...............................................................................................................7 3.3. Parâmetros do Problema.............................................................................................8 3.4. Modos de Formação de Vórtices ..............................................................................10 3.5. Amplitude Máxima...................................................................................................11
4. Atenuadores de VIV .........................................................................................................14 4.1. Introdução.................................................................................................................14 4.2. Desenvolvimento ......................................................................................................16
4.2.1. Protusões na superfície ...........................................................................................16 4.2.2. Mecanismos de Promoção de turbulência na Camada Limite................................16 4.2.3. “Strakes”.................................................................................................................20
4.3. Conclusões.....................................................................................................................32 5. Desenvolvimento da Base Elástica...................................................................................35
5.1. Objetivos do Projeto .................................................................................................35 5.2. Estudo da solução adotada........................................................................................36 5.3. Projeto da Base Elástica ...........................................................................................38
5.3.1. Mancais Aerostáticos..............................................................................................38 5.3.2.Engaste ....................................................................................................................42 5.3.3.Base Fixadora ..........................................................................................................44 5.3.4.Molas .......................................................................................................................46 5.3.5.Projeto Final ............................................................................................................46
6. Base Elástica com Lâminas Fletoras ................................................................................48 7. Ensaios: Cilindro Liso e Cilindro com Strake ..................................................................53
7.1. Ensaios com Base Elástica Fletora ...........................................................................53 7.2. Ensaios com Base Elástica com Mancais a Ar .........................................................65
8. Medições do Campo de Vorticidade Utilizando Sistema PIV .........................................80 8.1. Cilindro liso oscilando..............................................................................................80 8.2. Cilindro com strakes oscilando ................................................................................82
9. Referencias Bibliográficas................................................................................................91

2
ÍNDICE DE FIGURAS
Figura 2-1 - Foto do transporte de uma “spar” no Golfo do México. Reproduzido de Brankovic [9].....6Figura 3-1 - Amplitude de resposta A*max = Amax/D, versus a velocidade reduzida U*, mostrando os ramos de excitação. Reproduzida de Khalak e Williamson [2]..............................................................10Figura 3-2 – Resposta de amplitude máxima em função da velocidade reduzida, com destaque para os modos de formação de vórtices para cada faixa de velocidade. Reproduzida de Govardhan e Williansom [6] .......................................................................................................................................11Figura 3-3 - Coletânia de resultados de amplitude máxima de oscilação para um cilindro montado em base elástica. Reproduzida de Khalak e Williamson [2] ........................................................................12Figura 4-1. Mecanismos de atenuação de VIV baseados em protusões de superfície: (a) mecanismos omnidirecionais, (b) mecanismos unidirecionais, reproduzida de Meneghini [8]. ................................15Figura 4-2. Mecanismos de atenuação de VIV que utilizam invólucros metálicos, reproduzidas de Meneghini [8].........................................................................................................................................16Figura 4-3. Mecanismos de atenuação de VIV que utilizam estabilizadores da região da esteira próxima ao cilindro, reproduzida de Meneghini [8]...............................................................................16Figura 4-4. Efeito do coeficiente de arrasto de um fio soldado à superfície do cilindro (reproduzido de Fage & Warsap apud. Meneghini [8])....................................................................................................19Figura 4-5 Efeito do coeficiente de arrasto de um fio soldado à superfície do cilindro (reproduzido de James & Truong (1981) apud Meneghini [8])........................................................................................20Figura 4-6. Efeito da altura dos “strakes” na oscilação devido a vórtices em um cilindro bidimensional (reproduzido de Scruton and Walshe, apud Meneghini [8]). .................................................................23Figura 4-7. Parâmetro de Massa-amortecimento, m* , versus máxima amplitude de Khalak & Williamson [2]. ......................................................................................................................................24Figura 4-8. Variação da amplitude versus velocidade reduzida para o quarto cilindro em uma linha de quatro (reproduzido de Vickery & Watkins (1964) apud Meneghini [8]...............................................26Figura 4-9. Invólucro Perfurado (reproduzido de Price (1956) apud Meneghini [8])............................28Figura 4-10. Mecanismos de atenuação ensaiados por Wong e Kokkalis (1982) apud Meneghini [8])29Figura 4-11. Amplitude máxima de oscilação (pico a pico) de cilindros com diversos mecanismos de atenuação de VIV instalados (reproduzida de Wong e Kokkalis (1982) apud Meneghini [8]). ............30Figura 4-12. Amplitude de oscilação versus Velocidade Reduzida para um parâmetro de amortecimento estrutural igual a 1.8 (reproduzida de Wong e Kokkalis (1982) apud Meneghini [8]). 30Figura 4-13. Coeficientes de arrasto versus o número de Reynolds para cilindros com vários mecanismos de atenuação (reproduzida de Wong e Kokkalis (1982) apud Meneghini [8])..................32Figura 5-1 – Vista lateral do modelo de base elástica unidimensional que será construído no NDF, similar ao modelo existente no Imperial College e no Cornell University. Reproduzido de Khalak e Williansom [2] .......................................................................................................................................36Figura 5-2 – Base elástica unidimensional similar, em funcionamento no Imperial College. ...............37Figura 5-3 - Modelo de mancal aerostático que será utilizado no projeto da base elástica. Reproduzido de Brankovic [9].....................................................................................................................................38Figura 5-4 - Desenho em CAD da bucha do mancal projetada..............................................................41Figura 5-5 - Desenho em CAD do mancal projetado (corpo + bucha). .................................................42Figura 5-6 - Desenho em CAD do engaste.............................................................................................43Figura 5-7 - Desenho em CAD do engaste com as guias cilíndricas. ....................................................44Figura 5-8 - Desenho em CAD da base fixadora. ..................................................................................45Figura 5-9 – Desenho em CAD do projeto final da base elástica com as partes agrupadas, exceto as molas. .....................................................................................................................................................47Figura 5-10. Fotos da base elástica com mancais a ar sendo instalada no canal de águas circulante do NDF. (ainda sem guias, engaste e molas). .............................................................................................47Figura 6-1: Base fletora com um par de lâminas na posição deslocada. Reproduzido de Ássi [10]. .....49Figura 6-2: Modelo de cilindro e base fletora montados na seção de testes dos canais. Reproduzido de Ássi [10]. ................................................................................................................................................49Figura 6-3: Exemplo de uma curva de calibração para base fletora. Reproduzido de Ássi [10]. ..........50

3
Figura 6-4: Carregamento combinado de momento e compressão em uma lâmina. Reproduzido de Ássi [10]. ................................................................................................................................................51Figura 6-5: Base fletora tripla para cilindro isolado. Reproduzido de Ássi [10]....................................52Figura 6-6: (esquerda) Detalhe da base elástica tripla em uma posição levemente flexionada e (direita) detalhe da célula de carga e seus elementos estruturais. Reproduzido de Ássi [10]. ............................52Figura 7-1. Curva de resposta, cilindro liso hw 52cm, m
*1.277 . ......................................................54
Figura 7-2. Coeficiente de arrasto cilindro liso mantido fixo e ensaiado com hw 52cm. .................55Figura 7-3. Ensaio de decaimento, cilindro com strakes, passo p=5D e altura h= 0.1D........................56Figura 7-4. Curva de resposta, cilindro com strake, passo p=5D e altura h= 0.1D................................56Figura 7-5. Ensaio de decaimento, cilindro com strake, passo p=5D e altura h= 0.2D. ........................57Figura 7-6. Curva de resposta, cilindro com strake, passo p=5D e altura h= 0.2D................................57Figura 7-7. Ensaio de decaimento, cilindro com strakes, passo p=10D e altura h= 0.1D......................58Figura 7-8. Curva de resposta, cilindro com strake, passo p=10D e altura h= 0.1D..............................59Figura 7-9. Ensaio de decaimento, cilindro com strake, passo p=10D e altura h= 0.2D. ......................60Figura 7-10. Curva de resposta, cilindro com strake, passo p=10D e altura h= 0.2D............................60Figura 7-11. Ensaio de decaimento, cilindro com strake, passo p=15D e altura h= 0.1D. ....................61Figura 7-12. Curva de resposta, cilindro com strake, passo p=15D e altura h= 0.1D............................61Figura 7-13. Ensaio de decaimento, cilindro com strake, passo p=15D e altura h= 0.2D. ....................62Figura 7-14. Curva de resposta, cilindro com strake, passo p=15D e altura h= 0.2D............................63Figura 7-15. Comparações das curvas de resposta: cilindros liso e com strakes. ..................................64Figura 7-16. Comparações do coeficiente de arrasto, cilindros lisos e com strake, mantidos fixos. .....64Figura 7-17. Curva de resposta, cilindro liso *69 , 2.055wh cm m ......................................................66
Figura 7-18. Ensaio de decaimento, cilindro com strakes, passo p=5D e altura h= 0.1D......................68Figura 7-19. Curva de resposta, cilindro com strake, passo p=5D e altura h= 0.1D..............................68Figura 7-20. Ensaio de decaimento, cilindro com strake, passo p=5D e altura h= 0.2D. ......................69Figura 7-21. Curva de resposta, cilindro com strake, passo p=5D e altura h= 0.2D..............................69Figura 7-22. Ensaio de decaimento, cilindro com strakes, passo p=10D e altura h= 0.1D....................70Figura 7-23. Curva de resposta, cilindro com strake, passo p=10D e altura h= 0.1D............................71Figura 7-24. Ensaio de decaimento, cilindro com strake, passo p=10D e altura h= 0.2D. ....................72Figura 7-25. Curva de resposta, cilindro com strake, passo p=10D e altura h= 0.2D............................72Figura 7-26. Ensaio de decaimento, cilindro com strake, passo p=15D e altura h= 0.1D. ....................73Figura 7-27. Curva de resposta, cilindro com strake, passo p=15D e altura h= 0.1D............................73Figura 7-28. Ensaio de decaimento, cilindro com strake, passo p=15D e altura h= 0.2D. ....................74Figura 7-29. Curva de resposta, cilindro com strake, passo p=15D e altura h= 0.2D............................75Figura 7-30. Ensaio de decaimento, cilindro com strake, passo infinito e altura h= 0.1D.....................76Figura 7-31. Curva de resposta, cilindro com strake, passo infinito e altura h= 0.1D. ..........................76Figura 7-32. Ensaio de decaimento, cilindro com strake, passo infinito e altura h= 0.2D.....................77Figura 7-33. Curva de resposta, cilindro com strake, passo infinito e altura h= 0.2D. ..........................78Figura 7-34. Síntese dos ensaios realizados ...........................................................................................79Figura 8-1: Dinâmica da esteira. Cilindro isolado oscilando . U*=4,4. Reproduzida de Assi [10] .......81Figura 8-2- Da esquerda para direita, de cima para baixo respectivamente ângulo 0º, 30º, 60º e 90º. ..83Figura 8-3- Posição relativa no ciclo de oscilação das imagens obtidas com o sistema PIV.................83Figura 8-4- Campo de vorticidade, passo p = 5D e altura h = 0.1D. Da esquerda para direita, de cima para baixo respectivamente ângulo (a) 0º, (b) 30º, (c) 60º e (d) 90º. .....................................................85Figura 8-5 - Campo de vorticidade, passo p = 5D e altura h = 0.2D. Da esquerda para direita, de cima para baixo respectivamente ângulo (a) 0º, (b) 30º, (c) 60º e (d) 90º. .....................................................86Figura 8-6 - Campo de vorticidade, passo p =10D e altura h = 0.1D. Da esquerda para direita, de cima para baixo respectivamente ângulo (a) 0º, (b) 30º, (c) 60º e (d) 90º. .....................................................87Figura 8-7- Campo de vorticidade, passo p = 10D e altura h = 0.2D. Da esquerda para direita, de cima para baixo respectivamente ângulo (a) 0º, (b) 30º, (c) 60º e (d) 90º. .....................................................88Figura 8-8- Campo de vorticidade, passo p = 15D e altura h = 0.1D. Da esquerda para direita, de cima para baixo respectivamente ângulo (a) 0º, (b) 30º, (c) 60º e (d) 90º. .....................................................89Figura 8-9- Campo de vorticidade, passo p = 15D e altura h = 0.2D. Da esquerda para direita, de cima para baixo respectivamente ângulo (a) 0º, (b) 30º, (c) 60º e (d) 90º. ................................................90

4
2. INTRODUÇÃO
Estruturas não afiladas submetidas a um escoamento são caracterizadas por grandes
regiões de instabilidade e de separação da camada limite, proporcionando a formação de
vórtices. Um cilindro circular é o exemplo clássico do que conveciona-se chamar “corpo
rombudo”, neste tipo de estrutura, ocorre formação de vórtices para valores de Reynolds
próximos a 50.
A formação de vórtices pode modificar sensivelmente a dinâmica da estrutura,
provocando flutuações no campo de pressões e conseqüentemente alterações nas forças de
sustentação e arrasto. Se o cilindro estiver livre para oscilar esta flutuação gera o fenômeno
conhecido como Vibrações Induzidas por Vórtices (VIV).
Vibrações Induzidas por Vórtices em estruturas apresentam interesses práticos para
vários campos da engenharia. Esse fenômeno está relacionado com vibrações em trocadores
de calor tubulares, dinâmica de “risers” que conduzem petróleo do fundo do mar para as
plataformas, além de ser de vital importância para o desenvolvimento de estruturas ligadas à
Engenharia Civil, como pontes e chaminés, e de veículos marítimos e terrestres.
Estes são apenas alguns exemplos dos muitos problemas relacionados com vibrações
induzidas por vórtices. A importância prática do fenômeno de VIV tem impulsionado um
grande número de estudos fundamentais a respeito, tanto no Brasil como no exterior.
As considerações do presente estudo serão especificamente relacionadas a problemas
da indústria offshore, isso porque a Petrobrás apresenta interesse prático no desenvolvimento
deste trabalho e nos resultados a serem obtidos. A característica fundamental dos problemas
envolvendo VIV na indústria offshore é que as estruturas envolvidas possuem densidade
semelhantes a densidade do fluido além de baixo amortecimento estrutural.
Estruturas como os “risers” submetidas a VIV podem apresentar estresse dinâmico e
oscilações de grande amplitude, isso porque um corpo submetido a VIV está sujeito a um

5
efeito não linear, chamado “lock-in” no qual a oscilação da estrutura e a formação de vórtices
possuem a mesma freqüência. Existe uma faixa de velocidades na qual a geração de vórtices
se sincroniza com a oscilação do corpo, aumentando a amplitude de oscilação.
Nessas condições, pode haver uma redução substancial da vida útil de um “riser”
devido a fadiga, além do perigo de impacto entre “risers” adjacentes. A conseqüência de uma
falha decorrente de um dos problemas citados pode envolver desde a diminuição da produção
de óleo até mesmo o ocasionamento de um gravíssimo desastre ecológico, com perdas de
bilhões de dólares e reparos irreversíveis ao meio ambiente.
Desta forma, a análise de vida útil de “risers” depende fortemente do fenômeno de
Vibrações Induzida por Vórtices (VIV). Os valores calculados de vida-útil, associados aos
movimentos de primeira e segunda ordens e ao fenômeno de VIV, devem ser devidamente
ponderados com as probabilidades de ocorrência associadas às duas direções.
Para o critério de projeto que impõe uma vida útil superior a 200 anos, o fenômeno de
VIV deve ser evitado. Isto implica na adoção de sistemas de supressão ou ao menos atenuação
de VIV.
No final da década de 80 e início da década de 90, uma série de trabalhos em
estabilidade hidrodinâmica mostrou que é impossível suprimir totalmente o desprendimento
de vórtices no escoamento ao redor de corpos rombudos acima de um valor do número de
Reynolds próximo a 80.
No entanto uma série de mecanismos de atenuação do fenômeno de VIV foi
desenvolvida com sucesso nos últimos anos e sua atuação tem se mostrado bastante eficaz.
Estes mecanismos em geral envolvem a alteração geométrica do corpo, introduzindo uma
tridimensionalidade no escoamento.
Além dos problemas citados anteriormente envolvendo VIV, sabe-se que algumas
soluções atualmente aplicadas podem chegar à cifra de 4 milhões de dólares por riser

6
instalado, podendo alcançar 80 milhões de dólares por sistema de produção, portanto a
otimização desses sistemas de atenuação pode significar redução significativa nos custos.
Um exemplo da aplicação de atenuadores de VIV pode ser observado na Figura 2-1,
que mostra o transporte de uma “spar” no Golfo do México.
Figura 2-1 - Foto do transporte de uma “spar” no Golfo do México. Reproduzido de Brankovic [9]
O objetivo deste estudo é, essencialmente, responder à questão de eficiência do strake
e compreender os mecanismos hidrodinâmicos responsáveis pela atenuação de VIV causada
por esse tipo de supressor.
No presente estudo, procurou-se identificar experimentalmente a adequação de strakes
como aparato atenuador de VIV, determinar as amplitudes das oscilações e verificar a
existência e fenômenos de sincronismo entre as excitações do meio fluido e as oscilações da
estrutura. A síntese do projeto é a obtenção dos parâmetros ótimos de strakes e uma melhor
compreensão do fenômeno a qual proporcionará as condições para o desenvolvimento de
novos mecanismos de atenuação de VIV.

7
3. ESCOAMENTO AO REDOR DE CILINDROS OSCILANDO
3.1. Introdução
Um corpo oscilando em meio fluido pode alterar significativamente os mecanismo de
geração e desprendimento de vórtices. Neste tópico será apresentada uma introdução teórica
sobre o fenômeno, bem como alguns estudos preliminares de outros pesquisadores.
Existem duas maneiras típicas de se tratar o problema de escoamentos ao redor de
cilindros oscilando. A primeira é através do uso de oscilações forçadas, ou seja, as oscilações,
neste caso, são manipuladas pelo pesquisador. A segunda é deixar o cilindro livre para oscilar
através de um aparato experimental conhecido como base elástica. É nesta segunda maneira
que o presente estudo irá se concentrar.
3.2. Base Elástica
O caso relativo à vibração de um cilindro montado em base elástica decorrente
exclusivamente da força do fluído incidente é um dos mais básicos e reveladores casos
relacionados ao assunto de vibrações induzidas por vórtice. O interesse prático na obtenção
destas amplitudes está ligado ao fato deste parâmetro estar diretamente relacionado à
estimativa da vida útil de elementos cilíndricos sujeitos a VIV.
Com este tipo de aparato, oscilações ocorrem somente para faixas de velocidade
reduzida nas quais a energia transferida do fluido para o corpo é positiva e a freqüência de
desprendimento de vórtices está próxima da freqüência natural do sistema ou de um dos seus
múltiplos ou submúltiplos.
A vantagem de simular o escoamento ao redor de um cilindro montado em base
elástica reside no fato de que neste caso medimos diretamente as amplitudes de oscilação.
Neste aspecto, experimentos em base elástica são mais realistas do que aqueles nos quais as
oscilações são impostas.

8
Na maioria dos ensaios, o único grau de liberdade para oscilação é o transversal. Isto
ocorre devido ao fato da amplitude de oscilação do arrasto ser muito pequena comparando-se
com a amplitude de oscilação da sustentação, ou seja, embora as oscilações na direção da
corrente existam, elas sempre são inferiores àquelas no plano transversal.
3.3. Parâmetros do Problema
Antes de analisarmos questões referentes a cilindro oscilando em base elástica é
necessário definir alguns parâmetros que serão utilizados para a abordagem do problema. O
desenvolvimento será realizado baseado no raciocínio aplicado por Khalak e Williansom [2] e
Meneghini [1]. Neste tópico serão apenas apresentadas as definições dos parâmetros
adimensionais utilizados e a equação de regimento do problema.
A equação básica do problema é aquela de um oscilador:
.. .
tm y c y ky F ( 1 )
onde: m=massa estrutural c=amortecimento estrutural k=constante da mola f=força na direção transversal em relação a corrente (sustentação)
Para o caso de oscilações no sentido da corrente, a força transversal é substituída pela
força de arrasto.
Parâmetro de massa:
É dado pela razão entre a massa estrutural e a massa de fluido deslocada.
*2
4
d
m mm
m D L ( 2 )
onde: m=massa estrutural md=massa deslocada D=diâmetro do cilindro L=comprimento do cilindro
=massa específica do fluido

9
Parâmetro de amortecimento:
É dado pela razão entre os amortecimentos estrutural e do fluido.
2 ( ) 2 ( )a
a a
c c
k m m k m C md
( 3 )
onde: c=amortecimento estrutural k=constante da mola m=massa estrutural ma=massa adicional Ca= coeficiente potencial de massa adicional md=massa deslocada
Período e Freqüência de Oscilação
A freqüência adimensional é dada pela razão entre a freqüência do oscilador e a
freqüência natural do sistema
*
a
osca
n
ff
f ( 4 )
A freqüência natural do sistema e o período são dados por:
1 2 2 2a
a a
n
n n
a a
Tf k k
m m m C md
( 5 )
onde: k=constante da mola m=massa estrutural ma=massa adicional Ca= coeficiente potencial de massa adicional md=massa deslocada
Velocidade Reduzida:
É dada pela razão velocidade do fluido por velocidade de oscilação do cilindro.
r
n
UV
f D ( 6 )
onde: U=velocidade do fluido fn=freqüência natural do sistema D=diâmetro do cilindro

10
Amplitude Adimensional
É dado pela relação entre a amplitude de oscilação e o diâmetro do cilindro
* AA
D ( 7 )
onde: A=amplitude de oscilação do cilindro D=diâmetro do cilindro
Todos os parâmetros apresentados estão definidos para o caso onde o fluido é água.
No entanto muitas vezes é interessante determinar tais parâmetros em ar, neste caso devemos
admitir que a massa adicional é praticamente nula.
3.4. Modos de Formação de Vórtices
O interesse prático na obtenção das curvas de resposta está intimamente ligado aos
modos de formação de vórtices. Durante os experimentos de Khalak e Williamson [2] com
baixos valores de massa e amortecimento eles encontraram 4 ramos de amplitude máxima em
função da velocidade reduzida e classificaram-nos como sendo o ramo da excitação inicial
(“initial excitation branch”), ramo superior (“upper branch”), ramo inferior (“lower branch”)
e ramo de desincronização (“desynchronization branch”).
Figura 3-1 - Amplitude de resposta A*max = Amax/D, versus a velocidade reduzida U*, mostrando os
ramos de excitação. Reproduzida de Khalak e Williamson [2].

11
Khalak e Williamson [4] mostraram ainda, analisando resultados experimentais, que
existem dois valores possíveis de amplitudes máximas, cada um deles associados a um ramo
da curva amplitude versus velocidade reduzida. Eles mostraram que existe histerese associada
com a alternância da resposta entre estes dois ramos. É interessante notar que a amplitude do
ramo inferior é aproximadamente 0,6D, a qual é muito similar ao valor máximo obtido
numericamente por Saltara e apresentados em Meneghini [1].
Os modos de geração e desprendimento de vórtices são diferentes nos dois ramos.
Seguindo a nomenclatura de Williamson e Roshko [5], eles relacionaram o modo 2P ao ramo
inferior e o modo 2S ao ramo superior. No modo 2S, dois vórtices com circulações opostas
são gerados a cada ciclo de oscilação e no modo 2P dois pares de vórtices são formados em
cada ciclo.
Figura 3-2 – Resposta de amplitude máxima em função da velocidade reduzida, com destaque para os
modos de formação de vórtices para cada faixa de velocidade. Reproduzida de Govardhan e Williansom
[6]
3.5. Amplitude Máxima
A questão que ainda intriga muitos pesquisadores, diz respeito à máxima amplitude de
oscilação. A análise da Figura 3-3 mostra claramente que mesmo os resultados experimentais
com Reynolds elevado indicam uma dispersão muito grande para o valor de Amax/D na faixa

12
de 0,8 < A* < 1,5. O mais intrigante ocorre quando estes resultados experimentais são
comparados com resultados de simulações numéricas: diversas pesquisas utilizando CFD
minimizam o valor da amplitude máxima consideravelmente. Esta evidência, aliada ao fato da
maioria das simulações terem sido realizadas com valores baixos de Reynolds (Re < 1000),
nos leva a concluir que existe uma dependência do valor de amplitude máxima de oscilação
com o valor de Re. Esta dependência ocorre mesmo na faixa na qual o número de Strouhal é
constante, i.e. 180 ~ 200 < Re < 5 × 105.
Figura 3-3 - Coletânia de resultados de amplitude máxima de oscilação para um cilindro montado em
base elástica. Reproduzida de Khalak e Williamson [2]
Na Figura 3-3, reproduzida de Khalak e Williamson [2], estão compilados resultados
experimentais e numéricos obtidos em laboratórios diversos e utilizando diferentes métodos

13
numéricos. Em todos os casos, o fluido era água e o coeficiente m* < 0,2. Analisando os
resultados lá apresentados, podemos verificar que para cilindros rígidos montados em base
elástica e com número de Reynolds no intervalo 2,5 × 103 < Re < 105, a amplitude máxima
está compreendida entre 0,54 < Amax/D < 1,13.
O intuito do atual projeto é verificar os valores de amplitude máxima obtidas para o
aparato desenvolvido e fornecer parâmetros para que outros pesquisadores possam continuar a
investigação a respeito do assunto. No entanto para efeito de desenvolvimento do projeto e
estimativa de valores a serem obtidos, será utilizada a aproximação de amplitude máxima
obtida por Khalak e Williansom [2], cujo desenvolvimento resulta na fórmula:
2** *max 3 *
1
4 ( * )y
a
C sen UA f
m C f ( 8 )
onde: A*max: amplitude máxima adimensional
Cy: coeficiente de força transversal (sustentação) m*: massa adimensional Ca: coeficiente potencial de massa adicional
: amortecimento adimensional f*: freqüência adimensional U*: velocidade reduzida

14
4. ATENUADORES DE VIV
4.1. Introdução
A classificação geral de atenuadores de VIV pode ser feita segundo dois critérios
diversos. No primeiro deles a classificação é realizada de acordo com o mecanismo
fenomenológico envolvido na atenuação da formação e emissão de vórtices. Nesta forma de
classificação as três categorias principais são:
1- Protusões de superfície: são mecanismos que afetam a posição do ponto de
separação e como as camadas cisalhantes separam da parede do cilindro. Neste grupo
podemos incluir os “strakes”, dispositivos amplamente utilizados em estruturas cilíndricas
sujeitas a vento e em tecnologia marítima. Atenuadores desta classe são apresentados na
Figura 4-1 A, reproduzida de Meneghini [8].
Esta categoria de classificação pode ser ainda subdividida em duas outras categorias:
a- Atenuadores omnidirecionais: estes não são afetados pela direção da corrente
de fluido. Exemplos deste tipo de atenuador pode ser encontrados na Figura 4-1 A.
b- Atenuadores unidirecionais: estes são efetivos apenas para uma única direção
da corrente de fluido e exemplos são apresentados na Figura 4-1 B.
2- Invólucros metálicos: são mecanismos que afetam a forma como o fluido é
levado da região recirculante posterior à separação para a região de formação dos vórtices.
Neste grupo estão os invólucros perfurados, tela metálica, barras axiais e fendas axiais.
Atenuadores desta classe são apresentados na Figura 4-2, reproduzida de Meneghini [8].
3- Estabilizadores da região próxima da esteira: mecanismos que interferem
com a forma de interação entre as duas camadas cisalhantes de fluido na região de formação
dos vórtices na esteira. Neste grupo podemos incluir placas divisórias (“splitter plates”),
placas com formato de dente-de-serra, palhetas e placas guias, orifícios de descarga na base

15
do cilindro (“base-bleed”), fendas ao longo do cilindro. Atenuadores nesta classe são
apresentados na Figura 4-3, Meneghini [8].
Na próxima seção deste relatório, intitulada Desenvolvimento, é feita uma análise
crítica de cada uma das classes de atenuadores omnidirecionais de VIV de forma a fornecer
subsídios para a escolha e especificação de um destes para o SCR. A análise é feita
concentrando-se nos dispositivos desta classe apenas e não nos unidirecionais. Isto é devido
às óbvias limitações práticas encontradas em tecnologia marítima, i.e. correntes com sentidos
omnidirecionais. A necessidade de se efetuarem experimentos em modelo reduzido também é
discutida.
Figura 4-1. Mecanismos de atenuação de VIV baseados em protusões de superfície: (a) mecanismos omnidirecionais,
(b) mecanismos unidirecionais, reproduzida de Meneghini [8].

16
Figura 4-2. Mecanismos de atenuação de VIV que utilizam invólucros metálicos, reproduzidas de Meneghini
[8].
Figura 4-3. Mecanismos de atenuação de VIV que utilizam estabilizadores da região da esteira próxima ao cilindro,
reproduzida de Meneghini [8].
4.2. Desenvolvimento
4.2.1. Protusões na superfície
Protusões na superfície representam a classe de mecanismos que interferem com o
fenômeno de desprendimento de vórtices mais utilizados na prática. Os dispositivos de
promoção de turbulência, “strakes”, fios soldados segundo a forma de uma hélice e variações
de “strakes” estão nesta classe. Logicamente, alguns destes mecanismos, e.g. dispositivos de
promoção de turbulência, não atenuam VIV de maneira direta, mas sim causam uma
diminuição do coeficiente estático de arrasto.
4.2.2. Mecanismos de Promoção de turbulência na Camada Limite
Uma forma de se diminuir o coeficiente de arrasto ao redor de um cilindro consiste em
fazer com que a separação do escoamento se dê com uma camada limite turbulenta. O efeito

17
de uma separação com camada limite turbulenta no coeficiente de arrasto, é conhecido desde
o início do século. O fenômeno da “crise do arrasto”, i.e. uma queda brusca deste coeficiente
à medida que o escoamento ultrapassa um valor de Reynolds crítico, pode ser antecipado com
a presença de certos mecanismos.
A diminuição do arrasto está diretamente relacionada à intensificação da transferência
de quantidade de movimento quando as camadas cisalhantes são turbulentas antes mesmo da
separação. A camada limite turbulenta, devido à esta intensificação, é capaz de resistir
melhor ao gradiente de pressão adverso, o qual tende a retardar o fluido próximo à parede e
causar a separação. Sendo capaz de resistir melhor a este gradiente, a separação ocorre em um
ponto mais a jusante, fazendo com que a região posterior à separação seja menor. O arrasto
elevado em um corpo rombudo deve-se fundamentalmente à parcela devido à pressão. Esta,
por sua vez, é estabelecida devido à separação e formação dos vórtices na esteira. Diminuindo
a região sujeita a esta baixa pressão faz com que o arrasto seja minimizado. Foi Prandtl (1914)
o primeiro a propor a colocação de um fio na superfície do corpo de forma a forçar o
aparecimento de turbulência na camada limite mesmo para número de Reynolds abaixo do
valor crítico.
Exemplos da utilização de mecanismos baseados nesse fenômeno, podem ser
encontrados no estudo pioneiro realizado por Fage & Warsap (1929). Neste estudo, foi
analisado o efeito no arrasto de um fio com diâmetro d soldado na superfície do cilindro, na
posição a 65 do ponto de estagnação frontal. Na Figura 4-4 é apresentado o valor do
coeficiente de arrasto para diferentes valores de d/ , em função do número de Reynolds (Re),
com Re = UD/ (U é velocidade ao longe, D o diâmetro do cilindro e a viscosidade
cinemática) e com indicando a espessura estimada da camada limite. Analisando esta figura
verifica-se que a queda no arrasto é tanto maior quanto maior a relação d/ . Mesmo com fios
com diâmetro da ordem de 3% do valor do diâmetro do cilindro a diminuição do arrasto é

18
significativa. Fage & Warsap também analisaram o efeito de se colocar o fio mais próximo
do ponto de estagnação frontal. Quando isto é feito, a diminuição do arrasto tende a não se
tornar tão elevada; para fios colocados a um ângulo de 25 não foi observado nenhum efeito.
Resultados mais recentes obtidos por James & Truong (1972) corroboraram os resultados de
Fage & Warsap, i.e. o valor ótimo para diminuição do arrasto é para um angulo de 65º. Na
Figura 4-5 são apresentados os resultados por eles obtidos com d/ = 1. No entanto, é
interessante notar que o arrasto para valores abaixo do Re crítico foram maiores com o fio
instalado do que o caso do cilindro sem o mesmo. James & Truong obtiveram um valor de
pico a pico para o coeficiente de sustentação ao redor de 1·0 quando o fio está localizado no
angulo ótimo, valor este muito próximo àquele obtido para o cilindro sem o fio. Esta
observação é importante quando se deseja analisar o efeito da colocação de um fio na
superfície do cilindro para atenuação de VIV.
Para os casos de interesse da Petrobrás, a colocação deste tipo de mecanismo somente
seria interessante se o mesmo atenuasse VIV e não apenas o coeficiente de arrasto. Este
último efeito, logicamente, é importante no que se refere ao carregamento estático do “riser”.
O efeito em VIV da colocação de fios na parede do cilindro pode ser encontrada no trabalho
de Price (1956). O experimentos foram realizados em água com Re = 4·23 x 104. Ele obteve
amplitudes de pico a pico máximas de oscilação da ordem de 2·5D, com um cilindro montado
elasticamente com uma mola com coeficiente k baixo, sendo fixado um fio de 0·023D na
superfície em posições variando de 0o até 60o. O resultado de amplitude obtido é da mesma
ordem do valor obtido em experimentos com o cilindro sem qualquer fio o que leva a concluir
que o efeito do mesmo em VIV é desprezível. Price também testou o caso de um cilindro com
três fios presos na superfície seguindo uma forma helicoidal com passo 20D. Houve uma
diminuição da amplitude máxima para um valor de 1·5D. O autor deste relatório desconhece
outros estudo que tenham realizados experimentos para outros valores de passo. Na seção

19
final deste relatório é sugerido à Petrobrás a realização de ensaios visando investigar se
poderiam ser alcançados valores menores da amplitude quando o passo fosse variado.
Figura 4-4. Efeito do coeficiente de arrasto de um fio soldado à superfície do cilindro (reproduzido de Fage & Warsap
apud. Meneghini [8]).

20
Figura 4-5 Efeito do coeficiente de arrasto de um fio soldado à superfície do cilindro (reproduzido de James &
Truong (1981) apud Meneghini [8]).
4.2.3. “Strakes”
O princípio de operação dos strakes baseia-se no fato que na presença destes a
correlação das forças fluidodinâmicas ao longo da envergadura do cilindro é quebrada. A
tridimensionalidade introduzida no escoamento interfere com a periodicidade da formação e
desprendimento dos vórtices na esteira fazendo com que a intensidade destes seja menor
quando comparada àquela de vórtices predominantemente bidimensionais.

21
Uma das primeiras referências de estudo sobre o efeito da utilização de “strakes” é o
trabalho de Scruton and Walshe (1957). Neste estudo são apresentados resultados para atenuar
oscilações excitadas pelo vento em estruturas cilíndricas. Foram ensaiados “strakes” com
seção retangular com cantos vivos, fixados ao redor do cilindro na forma de três hélices
distintas, i.e em uma dada seção transversal do corpo eles estão eqüipaçados de 120o. O passo
das hélices eram de 15D. Scruton & Wash observaram que mesmo um “strake” com uma
altura da sua seção transversal da ordem de 3% do diâmetro do cilindro fazia com que
houvesse uma substância diminuição da amplitude devido a VIV. Este resultado pode ser
visto na Figura 4-6, na qual são apresentados os valores do parâmetro de massa-
amortecimento em função da velocidade reduzida (Vr), com
2
2
D
M s (9)
na qual M é a massa do corpo por unidade de comprimento, s o decremento
logarítmico de amortecimento do sistema oscilante no ar, é massa específica do fluido e D
o diâmetro do cilindro; e com Vr definida com sendo
ND
VV c
r (10)
com Vc sendo a velocidade do escoamento, e N a freqüência de oscilação.
Aumentando o valor da altura do “strake”, partindo de um valor de h = 0.03D, a
oscilação devido ao desprendimento de vórtices era reduzida substancialmente. Para um valor
de h = 0.118D, bastava apenas um amortecimento estrutural muito pequeno para a oscilação
ser praticamente suprimida. É interessante notar que para valores de h > 0.059D, a velocidade
reduzida na qual a oscilação máxima era atingida estava deslocada na direção de valores
maiores, comparando-se com o resultado do cilindro sem “strakes”. Este trabalho mostra
claramente que se a atenuação da oscilação devido a VIV for o único efeito a ser atenuado,
valores suficientes de altura da seção transversal do “strake” são da ordem de 10% do valor

22
do diâmetro do cilindro. No entanto, como será visto a seguir, isto fatalmente acarreta uma
elevação considerável do coeficiente de arrasto, o que, inclusive, pode tornar a solução
inviável.
Em um trabalho posterior também realizado no National Physics Laboratory (Reino
Unido), Woodgate and Maybrey (1959) foi feito um estudo do passo ideal para as hélices da
configuração de três “strakes”. O valor ótimo que estes pesquisadores chegaram foi ao valor
de 5D. No que se refere à altura do “strake”, os valores ótimos encontravam-se na faixa de
0.09D < h < 0.12D, similar aqueles de Scruton and Walshe (1957). É interessante notar que a
utilização de “strakes” apenas no 1/3 superior da estrutura cilíndrica mostrou-se suficiente
para prevenir a instabilidade do modo fundamental. Neste aspecto, Zdravkovitz afirma que o
principio geral é utilizar os “strakes” nas regiões de anti-nós.
Como foi anteriormente citado, o aspecto negativo na utilização de “strakes” reside no
fato destes provocam um aumento substancial do coeficiente de arrasto (Cd). Cowdrey &
Lawes (1959) ensaiaram cilindros com “strakes” com alturas de 0.06D e 0.12D obtiveram
valores de Cd iguais a 1.35 e 1.45, sendo este último para o caso da maior altura. O mais
importante resultado por eles observado é que estes valores do arrasto permaneceram
constantes numa faixa de Re no regime subcrítico (Re = 1 x 105) até um valor pós-crítico (Re
= 4 x 106). Comparando-se estes valores com o valor encontrado para o caso do cilindro liso,
no qual Cd = 0.5 no regime crítico, pode-se ter uma idéia do aumento substancial do arrasto
devido a presença do “strake”.

23
Figura 4-6. Efeito da altura dos “strakes” na oscilação devido a vórtices em um cilindro bidimensional
(reproduzido de Scruton and Walshe, apud Meneghini [8]).
Um questão interessante que surge da análise dos resultados aqui apresentados, i.e.
cilindros imersos em uma corrente de ar, refere-se à eficiência dos “strakes” quando utilizados
em água. No caso de um cilindro liso montado em uma base elástica imerso em uma corrente
de água, a principal diferença comparando-se com o caso do cilindro em ar, reside no fato que
o parâmetro de massa deste último ser pelo menos uma ordem de grandeza maior do que em
ar. O parâmetro de massa é aqui definido como sendo
d
sistema
m
mm* (11)
com sendo a massa do corpo (sistema oscilante) e a massa deslocada de
fluido. Cilindro em água apresenta um valor de m
sistemam dm
* da ordem da unidade enquanto que para
ar m* é da ordem de 103. Cilindros oscilando em ar, alcançam valores máximos de amplitudes
de oscilação por volta de 0.5 enquanto que cilindros em água alcançam valores próximos à

24
unidade. O produto do parâmetro de massa com o parâmetro de amortecimento, definido
através da expressão
sistema
sistema
crítico
sistema
km2 (12)
com sistema sendo o amortecimento do sistema, e k a rigidez do sistema elástico. O
coeficiente combinado massa-amortecimento é o que, na realidade, define as amplitudes que
serão alcançadas quando o cilindro oscila. Quanto menor este parâmetro maiores serão as
amplitudes. A relação entre eles pode ser observada na Figura 4-7, reproduzida de Khalak &
Williamson.
Figura 4-7. Parâmetro de Massa-amortecimento, m* , versus máxima amplitude de Khalak & Williamson [2].
Outra diferença observada quando resultados obtidos para cilindros oscilando imersos
em uma corrente de água são comparados aqueles obtidos em uma corrente de ar, reside no

25
valor da freqüência da oscilação. Conforme pode ser visto em Bearman (1984), a relação
entre No/nv, com No sendo a freqüência de natural de oscilação sem amortecimento, e nv a
freqüência de oscilação, é dada por
*
1cos
41
2
02
0
my
D
DN
UCl
n
N
v
(13)
na qual Cl é a amplitude do coeficiente de força transversal à corrente, U a velocidade
de escoamento, y a amplitude da oscilação do cilindro, e o ângulo de fase entre a força
transversal e o deslocamento nessa direção. Esta expressão indica que quando o cilindro está
oscilando no ar, m* é da ordem de 103 o que faz com que a freqüência de oscilação seja
próxima da freqüência natural. No entanto, quando estamos em água, como m* é da ordem da
unidade, podemos ter uma freqüência de oscilação consideravelmente diferente da freqüência
natural. Com estas duas diferenças em mente, a pergunta que surge é: dados experimentais
relacionados ao uso de “strakes” em ar podem ser diretamente aplicados no caso de “strakes”
em água?
Os resultados de Vickery & Watkins (1964) indicam que a resposta é afirmativa. Estes
pesquisadores realizaram testes em água e verificaram que o uso de “strakes” são tão efetivos
em atenuar oscilações de cilindros imersos em uma corrente de água como em uma de ar.
Estes pesquisadores também realizaram ensaios para verificar a influência de “strakes”
quando temos um agrupamento de cilindros. Na figura Figura 4-8 são apresentados os
resultados da amplitude versus velocidade reduzida para o quarto cilindro em uma linha de
quatro. Os valores de um cilindro isolado são apresentados para comparação. Na análise dos
resultados desta figura torna-se claro que existe uma certa perda da eficiência dos “strakes”
quando temos um agrupamento de cilindros. Para velocidade reduzida 10, os “strakes” são
praticamente ineficazes no que concerne a atenuação da amplitude de oscilação. Mesmo
variando o passo da hélice e aumentando a altura Vickery & Watkins não alcançaram sucesso

26
na supressão da oscilação. Esta questão, inclusive, será discutida nas conclusões deste
relatório e sugestões para futuros estudos a serem realizados.
Figura 4-8. Variação da amplitude versus velocidade reduzida para o quarto cilindro em uma linha de quatro
(reproduzido de Vickery & Watkins (1964) apud Meneghini [8].
4.2.4. Invólucros perfurados e fendas axiais
4.2.4.1. Invólucros perfurados
Invólucros perfurados foram propostos por Price (1956). Este pesquisador propôs este
dispositivo conforme pode ser visto na Figura 4-2, após extensivas pesquisas com
mecanismos baseados em fios fixos enrolados no cilindro e aletas. Estes mecanismos foram
testados no regime subcrítico e apresentaram resultados relativos a atenuação de VIV somente
de efeito limitado. Price, após obter estes resultados, passou a testar dispositivos constituídos
por estrutura externa ao cilindro, chegando então à forma que obteve melhores resultados: a
utilização de um invólucro perfurado conforme apresentado na Figura 4-2. Analisando
visualizações do escoamento com cilindros com estes mecanismos atenuadores de VIV, Price

27
sugeriu que o invólucro quebraria o escoamento em um elevado número de pequenos vórtices,
com o resultado de minimizar a assimetria periódica do escoamento ao redor do cilindro. Nas
visualizações, podia-se observar que ao longo da passagem entre o invólucro e o cilindro,
ocorria uma mistura forçada e o crescimento dos vórtices na esteira seria restringido. Na
região da base do cilindro escoamentos inversos e descarga de fluido ocorreriam.
Washe e Wooton (1970) estabeleceram as configurações ótimas. Eles obtiveram estes
valores com sendo perfurações quadradas, com uma abertura de 0.12D e a porosidade (relação
entre área de todos os furos dividida pela área total do invólucro). Na Figura 4-9 são
apresentados os resultados obtidos por Price (1956). O invólucro mostrou ser um mecanismos
eficiente para todos os valores de rigidez da mola do sistema no qual o cilindro estava
montado. Nesta curva pode-se verificar que a fronteira obtida com a amplitudes de oscilação
com o cilindro liso sofre um decréscimo considerável para todos os valores de rigidez. Este
efeito é ainda mais evidente quando k > 400, resultado em que há uma supressão total da
oscilação do cilindro com o invólucro perfurado, havendo ainda uma oscilação considerável
no caso do cilindro liso. Na faixa de 20 < k < 200 o efeito da utilização deste mecanismo
atenuador de VIV não é tão vigoroso.

28
Figura 4-9. Invólucro Perfurado (reproduzido de Price (1956) apud Meneghini [8]).
4.2.4.2. Fendas axiais
Um sistema de atenuação de VIV constituído por fendas axiais ao longo do cilindro foi
proposto por Wong (1979). O princípio de funcionamento deste dispositivo é baseado em uma
premissa de que ocorre uma troca de energia, na acepção de que fluido da região frontal com
elevada energia é conduzido para as regiões laterais e para a região posterior do cilindro de
forma a se contrapor a formação dos vórtices. Como no caso de um invólucro perfurado, o
dispositivo que utiliza fendas também envolve uma série de mecanismos físicos que alteram a
formação dos vórtices da esteira. No caso de escoamento unidirecional, a eficiência deste
mecanismo pode ser ainda maximizada permitindo aberturas ainda maiores na região próxima
à estagnação frontal e posterior, permitindo assim que uma quantidade considerável de fluido
alcance a região de formação da esteira.
Wong e Kokkalis (1982) fizeram uma série de ensaios com o intuito de comparar
diretamente a eficiência de “strakes”, invólucros perfurados e fendas axiais (veja Figura
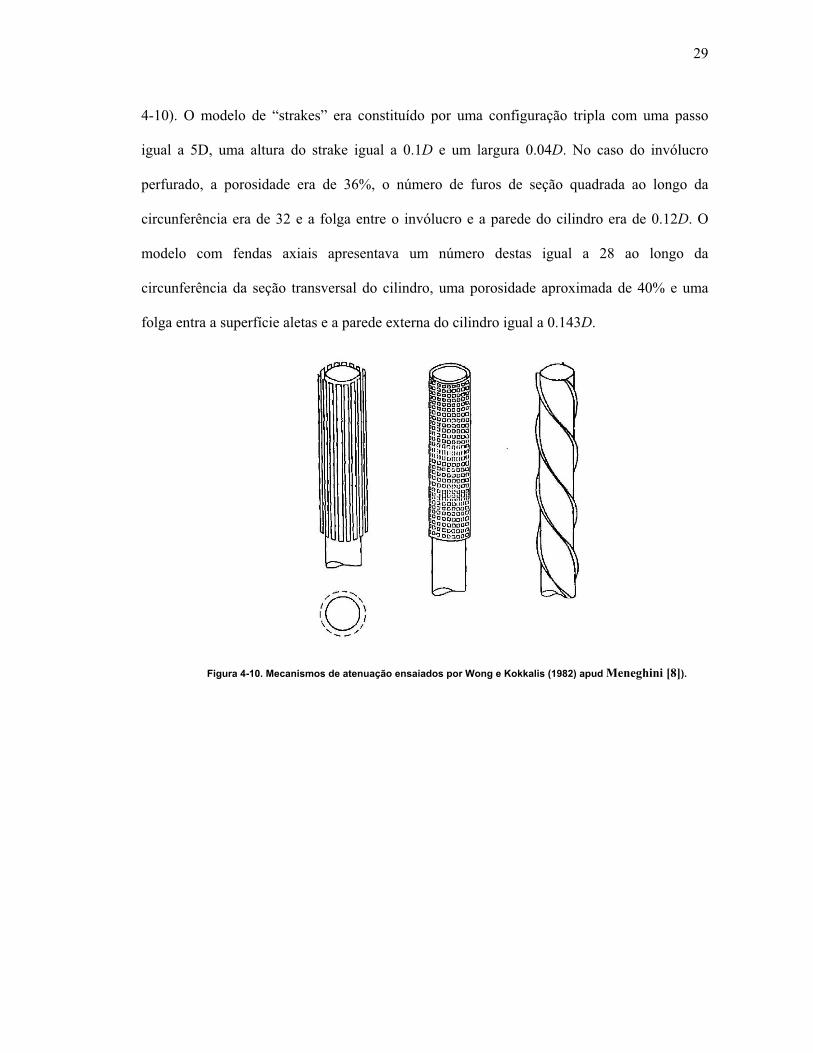
29
4-10). O modelo de “strakes” era constituído por uma configuração tripla com uma passo
igual a 5D, uma altura do strake igual a 0.1D e um largura 0.04D. No caso do invólucro
perfurado, a porosidade era de 36%, o número de furos de seção quadrada ao longo da
circunferência era de 32 e a folga entre o invólucro e a parede do cilindro era de 0.12D. O
modelo com fendas axiais apresentava um número destas igual a 28 ao longo da
circunferência da seção transversal do cilindro, uma porosidade aproximada de 40% e uma
folga entra a superfície aletas e a parede externa do cilindro igual a 0.143D.
Figura 4-10. Mecanismos de atenuação ensaiados por Wong e Kokkalis (1982) apud Meneghini [8]).

30
Figura 4-11. Amplitude máxima de oscilação (pico a pico) de cilindros com diversos mecanismos de
atenuação de VIV instalados (reproduzida de Wong e Kokkalis (1982) apud Meneghini [8]).
Figura 4-12. Amplitude de oscilação versus Velocidade Reduzida para um parâmetro de amortecimento
estrutural igual a 1.8 (reproduzida de Wong e Kokkalis (1982) apud Meneghini [8]).
Inicialmente, Wong e Kokkalis (1982) obtiveram os valores de massa e de decremento
logarítmico sob várias condições de amortecimento para se poder estimar o coeficiente de

31
amortecimento estrutural dos modelos (equação 1 deste relatório). Os resultados de máximas
amplitudes (pico a pico) foram plotados versus o coeficiente de amortecimento e são
mostrados na Figura 4-11. Os resultados para um cilindro liso foram apresentados de forma a
que pudéssemos compará-los com os casos nos quais os atenuadores estavam presentes.
Analisando a figura é possível constatar que os casos com as fendas axiais, indicados por
“slats” no gráfico, foram os que apresentaram uma maior atenuação. Quando o parâmetro de
amortecimento era maior do que 3.0, todos os três casos de mecanismos atenuadores de VIV
mostram ser eficientes em suprimir as oscilações. Para valores do parâmetro de
amortecimento menor do que 3.0, o cilindro com “strakes” e o cilindro com as fendas axiais
mostraram ser equivalentes. Tomando toda a faixa de amortecimento as fendas axiais
apresentam a melhor eficiência.
Na Figura 4-12 são apresentados os resultados gerais obtidos por Wong e Kokkalis
(1982). Nesta figura a amplitude máxima em função da velocidade reduzida pode ser vista
para um coeficiente de amortecimento igual a 1.8. Como aquilo que foi mostrado na figura
anterior, o cilindro com fendas axiais e com uma abertura próxima ao ponto de estagnação
frontal e posterior foi o que apresentou as maiores atenuações de oscilação. Para este valor do
coeficiente de amortecimento, a amplitude máxima de oscilação para o caso de um invólucro
perfurado é aproximadamente duas vezes maior do que aquele com as fendas axiais. Este
último mecanismo mostrou-se o mais eficiente dos três.
Analisando a Figura 4-12, verifica-se que a amplitude máxima de oscilação medida é
da mesma ordem tanto para o caso dos “strakes” como para o caso do cilindro com fendas
axiais. No entanto, no cilindro com “strakes”, para 7 < Vr < 7.6, o pico de oscilação persistiu
sem qualquer tendência de declínio. Isto acaba implicando em uma maior possibilidade de
ocorrência de VIV para elevadas amplitudes de oscilação.

32
Na Figura 4-13 são apresentados os valores de coeficientes de arrasto para os três
casos. Como já foi discutido nas seções anteriores, para o caso do cilindro com “strakes” o
arrasto foi o mais elevado. Dos modelos testados por Wong e Kokkalis (1982) aquela com um
invólucro perfurado foi o que apresentou o menor valor deste coeficiente.
Figura 4-13. Coeficientes de arrasto versus o número de Reynolds para cilindros com vários mecanismos de
atenuação (reproduzida de Wong e Kokkalis (1982) apud Meneghini [8]).
4.3. Conclusões
Nesta seção são apresentadas as conclusões do estudo para especificação dos sistemas
atenuadores de emissão de vórtices em SCRs. Neste estudo foram apresentados, de maneira
crítica, os mecanismos de atenuação passíveis de serem utilizados em tecnologia marítima e,
especificamente, no SCR. A análise concentrou-se, fundamentalmente, nos mecanismos
denominados de “strakes”, naqueles que utilizam um invólucro perfurado, e naqueles que são
constituídos por fendas axiais. Mecanismos de atenuação que operam apenas quando temos
um sentido particular de corrente, i.e. mecanismos unidirecionais, não foram analisados. Com
o que foi exposto nas seções anteriores, é possível sintetizar as seguintes conclusões:

33
No aspecto hidrodinâmico os atenuadores de fendas axiais são aquelas que apresentam
o melhor desempenho para uma ampla faixa de velocidade reduzida e valores de coeficiente
de amortecimento (veja resultados de Wong e Kokkalis (1982)). Além de apresentarem a
melhor relação de atenuação das amplitudes de oscilação transversal, o valor do coeficiente de
arrasto é para uma ampla faixa do número de Reynolds equivalente ao valor crítico de um
cilindro liso. No entanto, este atenuador de VIV é aquele de maior custo, o que apresenta a
maior dificuldade de montagem e aquele que apresenta a maior suscetibilidade a incrustações,
as quais comprometeriam sua eficiência. Estas últimas limitações somente poderiam ser
ultrapassadas fazendo-se um estudo experimental detalhado ou através de análise de dados
experimentais de um protótipo instrumentado e instalado em condições ambientais similares
daquelas da operação normal.
Atenuadores baseados em invólucros perfurados não apresentam a mesma eficiência
hidrodinâmica encontrada nos de fendas axiais analisados no parágrafo anterior. Além disso,
estes atenuadores apresentam as mesmas limitações daqueles, i.e. custo elevado e
possibilidade de ocorrência de incrustações.
Devido ao baixo custo e facilidade de fabricação, os “strakes” são os mecanismos de
atenuação de VIV que apresentam a melhor relação custo/benefício. Apesar da eficiência
destes não ser tão elevada quanto àquela encontrada nos atenuadores de fendas axiais, o baixo
custo para fabricação compensaria este fator. O principal inconveniente destes mecanismos
reside no fato de haver um aumento substancial do coeficiente de arrasto. Mesmo para valores
de Reynolds crítico e pós-crítico, o arrasto permanece por volta de 1.3 a 1.4. O
dimensionamento estático do SCR deve, por esta razão, levar em conta este valor para Cd.
Restam três aspectos para o pré-dimensionamento dos “strakes” que, provavelmente,
necessitariam de um estudo experimental detalhado complementar. O primeiro deles está
relacionado ao comprimento do SCR no qual seria instalado o elemento atenuador. O segundo

34
aspecto diz respeito à possibilidade de a inclusão do “strake” no sistema, causar a excitação
de algum outro modo de oscilação. Isto deve-se ao fato do “strake” introduzir um
comprimento de onda fixo no problema devido ao passo da hélice. Finalmente, outro aspecto
não abordado na literatura diz respeito ao efeito dos “strakes” quando temos um agrupamento
de “risers”. Todos estes três tópicos necessitariam de um estudo experimental complementar
que pudesse dar subsídios para o dimensionamento detalhado dos elementos atenuadores.

35
5. DESENVOLVIMENTO DA BASE ELÁSTICA
5.1. Objetivos do Projeto
O objetivo fundamental do presente estudo é desenvolver um aparato experimental
para o estudo de forças e respostas associadas com vibrações induzidas por vórtices em
cilindros rígidos com baixos coeficientes adimensionais de massa (m*) e amortecimento ( ).
Os critérios definidos por Khalak e Williansom [2] para o desenvolvimento de uma
base elástica satisfatória são:
Extrema linearidade do sistema;
Baixo parâmetro de massa (m*);
Baixo parâmetro de amortecimento (
Medição instantânea e direta de posição;
Controle das condições de contorno.
A estratégia de projeto será traçada a partir da otimização desses critérios,
considerando-se ainda os parâmetros físicos do canal e parâmetros dos ensaios experimentais.
Abaixo estão listadas algumas atitudes que foram tomadas durante a concepção do
projeto, que serão detalhadas quando da definição do projeto da solução final:
Para a linearidade do sistema serão utilizados eixos e cilindros rígidos para evitar
flexões, proveniente da excitação do fluido.
A obtenção de baixo parâmetro de massa (m*) será realizada empregando-se materiais
de baixa densidade e volume, para reduzir o peso da estrutura. Por exemplo, utilizar eixos
vazados de pequena espessura.
O baixo amortecimento será obtido utilizando-se mancais aerostáticos diminuído o
atrito entre os mancais e eixos. Molas com constantes mais elevadas também podem ser
utilizadas para a redução do parâmetro de amortecimento (

36
O sistema de medição será projetado para não haver contato, evitando aumento da
massa estrutural.
5.2. Estudo da solução adotada
Neste capitulo será detalhada a solução desenvolvida pela doutoranda Masã Brankovic
(2004) [9] no Imperial College, para a realização de seus ensaios experimentais a cerca da
atenuação do fenômeno de VIV em cilindros com baixo amortecimento e massa.
A Figura 5.1 mostra a vista lateral da base elástica unidimensional. A base consiste em
um engaste que suporta o cilindro verticalmente em meio ao fluido. Duas molas foram
utilizadas de modo que a freqüência de oscilação do sistema massa-mola seja próxima a
freqüência de liberação de vórtices do sistema imerso. Neste caso o cilindro está livre para
oscilar no sentido transversal do canal, ou seja, perpendicularmente ao sentido do escoamento.
Figura 5-1 – Vista lateral do modelo de base elástica unidimensional que será construído no NDF, similar
ao modelo existente no Imperial College e no Cornell University. Reproduzido de Khalak e Williansom [2]
O engaste possui ainda dois eixos que são acoplados a quatro mancais aerostáticos que
fornecem baixo amortecimento estrutural. Dessa forma, é formado um filme de ar por onde o
eixo desliza sem contato direto com os mancais. Este arranjo fornece um parâmetro de

37
amortecimento adimensional, isto é amortecimento no ar dividido pelo amortecimento crítico,
da ordem de .
O engaste é formado por dois retângulos de alumínio em cada lado, onde são fixados
os dois eixos dos mancais e o cilindro de teste, o que fornece um sistema rígido de pouco
peso.
A massa baixa é obtida construindo-se um cilindro selado em alumínio escovado, em
todas as junções, foi usado vedador para impedir que a água adentre o interior do cilindro. O
cilindro estende-se até o piso do tanque com um espaço de menos de 5mm entre a
extremidade inferior do cilindro e o assoalho. Além disso, um peso no fundo do cilindro
impede qualquer inclinação mensurável do cilindro.
A massa adimensionalizada é mantida na faixa entre 2,6 e 1,4. Conseqüentemente o
parâmetro massa-amortecimento total é m* =0,0084.
As duas molas possuem, cada uma delas, uma extremidade fixa em uma pequena placa
de alumínio retangular que por sua vez é fixa em um par de mancais e a outra extremidade
fixa no engaste. Cada mola possui um comprimento de 100 mm e rigidez média de 12,5 N/m.
A figura 7.2 mostra o aparato em funcionamento no Imperial College.
Figura 5-2 – Base elástica unidimensional similar a proposta, em funcionamento no Imperial College.

38
5.3. Projeto da Base Elástica
O projeto da base elástica foi realizado a partir de duas frentes de estudo distintas. A
primeira delas foi considerando o estudo bibliográfico e as estimativas e parâmetros
apresentados anteriormente. A segunda delas foi através das informações fornecidas pelo
orientador e pelo aluno de mestrado Gustavo Ássi a respeito do aparato desenvolvido no
Imperial College pela doutoranda croata Masã Brankovic [9], durante visita de ambos a tal
instituto. Dessa forma, foi possível o desenvolvimento de um aparato otimizado e adequado as
condições físicas do canal e de acordo com as necessidades do grupo de pesquisa do NDF.
O detalhamento do projeto de construção de cada parte da base elástica, bem como o
processo de seleção de matérias a serem utilizados será apresentado a partir de agora.
5.3.1. Mancais Aerostáticos
O mancal aerostático projetado apresenta, em sua constituição, duas partes
fundamentais e que posteriormente soldadas constituem o mancal propriamente dito. Estas
partes, denominadas bucha e corpo, serão detalhadas separadamente a fim de facilitar a
compreensão e a visualização do aparato.
Figura 5-3 - Modelo de mancal aerostático que será utilizado no projeto da base elástica. Reproduzido de
Brankovic [9]

39
No entanto antes da apresentação do projeto dos mancais será feita uma síntese do
material bibliográfico estudado pelo aluno no período, a respeito do tema relativo ao
funcionamento e dimensionamento de mancais aerostáticos.
5.3.1.1. Revisão Bibliográfica
Em um mancal aerostático o ar proveniente de um sistema pneumático passa através
de um restritor de orifício acompanhado por uma determinada queda de pressão e então flui
axialmente em direção à atmosfera através do fino filme de ar existente entre o eixo e o
mancal, causando assim uma segunda queda de pressão.
Se o eixo sofrer um deslocamento para baixo no sentido de diminuir a espessura do
filme na parte de baixo do mancal, a resistência desse filme na parte de baixo do mancal
aumentaria. Com isso a pressão em baixo do mancal se tornaria maior do que me cima e uma
força restauradora iria ser exercida sobre o eixo.
Todo o desenvolvimento do estudo de mancais aerostáticos está baseado na análise da
distribuição de pressão dentro do mancal. No entanto, geralmente, determinar a distribuição
de pressão dentro do filme é uma tarefa não muito trivial, principalmente, devido à
complexidade geométrica do mancal. Portanto são necessárias uma serie de simplificações
para a obtenção da distribuição de pressão em um mancal.
No entanto, o dimensionamento de mancais aerostáticos é facilitado, pois este é
habitualmente realizado através da utilização de ábacos. Para isso são necessários alguns
parâmetros de entrada a partir dos quais conseguimos obter os adimensionais relativos à
rigidez, carga e vazão dos mancais.
Coeficiente de Restrição
2
3
6
1s
s
n a R T
p C 2 (14)

40
onde: : viscosidade do gás n: numero total de orifícios de admissão a: raio do orifício R: constante universal dos gases T: temperatura Ps: pressão da fonte C: espessura do filme : razão entre a área do orifício e a área anular em torno do orifício
5.3.1.2.Bucha
A bucha é a parte do mancal que transmite o ar comprimido da fonte de alimentação
para os eixos, ou seja, é a parte que fica efetivamente em “contato” com os eixos. Esta bucha
nada mais é do que um tubo cilíndrico com um rebaixo central no qual existem vários furos de
diâmetro reduzido por onde o ar deve sair para os eixos e conseqüentemente para a atmosfera.
O projeto da bucha do mancal constitui-se basicamente no dimensionamento do
diâmetro interno do tubo e do numero e diâmetro dos furos de admissão. O dimensionamento
da bucha foi feito através da consulta as tabelas apresentadas anteriormente e o resultado
posteriormente comparado ao obtido no desenvolvimento feito no Imperial College.
Desta forma o valor do diâmetro interno da bucha obtido foi de 28,5 mm. O numero de
furos de admissão foi de 36 furos de 0,05 mm cada, dispostos em fileiras de três e separados
igualmente em planos de 30º de diferença.
Para a escolha do material a ser utilizado para a fabricação da bucha foram
considerados os seguintes aspectos: Como a bucha necessita ser usinada com precisão,
principalmente considerando-se a quantidade e o diâmetro reduzido dos furos, o material
selecionado deve ser de fácil usinagem. Além disso, como os mancais ficarão em contato com
a umidade do canal é necessário que este não oxide com o tempo. Outro fato relevante é que a
bucha deve ser soldada ao corpo do mancal, sendo assim é necessária a escolha de um
material que seja soldável.
Portanto, o material escolhido para a fabricação da bucha foi o latão.
O esquema da bucha projetada é apresentado abaixo:

41
Figura 5-4 - Desenho em CAD da bucha do mancal projetada.
5.3.1.3.Corpo
O corpo é a parte externa do mancal e suas funções são: permitir a entrada do ar
comprido proveniente da fonte de alimentação e transmiti-lo a bucha e conseqüentemente ao
eixo; fixar o conjunto no plano de atuação do mancal; manter a vedação do mancal,
garantindo que o ar proveniente da fonte de alimentação saia somente pelos furos de
admissão. O corpo do mancal nada mais é do que um bloco metálico com um furo central no
plano de atuação e um furo de admissão de ar.
O projeto do corpo do mancal constitui-se basicamente no dimensionamento dos
diâmetros do furo central e do furo de admissão que possibilitaram a escolha das demais
dimensões do corpo do mancal.
O furo central foi determinado como sendo a diferença entre o diâmetro da bucha e o
espaço requerido para o ar atingir toda a superfície da mesma, desta forma o diâmetro
escolhido foi de 35mm. Já o furo de admissão foi dimensionado através da escolha da
mangueira de ar escolhida, no caso 19 mm (3/4”). Dessa forma as dimensões do bloco foram:
35 x 50 x 45 mm.

42
Analogamente ao projeto da bucha o material selecionado foi o latão seguindo os
mesmos critérios de seleção já citados anteriormente.
O esquema do corpo do mancal já com a bucha soldada é apresentado abaixo:
Figura 5-5 - Desenho em CAD do mancal projetado (corpo + bucha).
5.3.2.Engaste
Analogamente ao projeto do mancal, o engaste será dividido em duas sub-partes,
sendo elas o engaste propriamente dito e as guias cilíndricas, e o detalhamento do projeto de
tais partes será apresentado abaixo:
5.3.2.1.Engaste
O engaste é a parte onde serão fixados o cilindro de testes e eventualmente a célula de
carga e/ou um sistema bidimensional com laminas fletoras. As funções do engaste são:
permitir a fixação de cilindros de diversos diâmetros, fixar as molas, possibilitar a utilização
de uma célula de carga e/ou um sistema bidimensional com laminas fletoras, acoplar-se
perfeitamente às guias cilíndricas.

43
Como não existem restrições físicas significantes para o projeto do engaste, as
dimensões utilizadas foram semelhantes às utilizadas no Imperial College. No caso, 150 x 80
x 10mm.
A placa, nas áreas de contato com as guias cilíndricas, foi usinada com o diâmetro das
guias, de tal forma que ambas as partes pudessem ser encaixadas perfeitamente, garantindo a
linearidade do sistema. A fixação do cilindro de testes foi feita através da utilização de dois
parafusos perpendiculares ao cilindro, fixos ao engaste em sua lateral.
Foram feitos alguns furos para redução de peso e que posteriormente poderiam ser
utilizados para a fixação da célula de carga e/ou do sistema bidimensional.
O material utilizado na confecção do engaste deveria apresentar as seguintes
características: baixa densidade e alta rigidez. Dessa forma optou-se pelo acrílico.
O esquema do engaste é representado a seguir:
Figura 5-6 - Desenho em CAD do engaste.
5.3.2.2.Guias Cilíndricas
As funções das guias cilíndricas são: fixar o engaste ao sistema móvel e movimentar-
se por entre os mancais.

44
O projeto das guias cilíndricas consiste basicamente no dimensionamento do diâmetro
externo e no comprimento dos cilindros.
Para o dimensionamento do diâmetro externo foi considerada a espessura do filme de
ar formado entre os eixos e a bucha do mancal, mais uma vez seguindo o estudo a respeito de
mancais aerostáticos obteve-se que os cilindros deveriam possuir o diâmetro de 28,3 mm,
conseqüentemente a espessura do filme de ar é de 0,2 mm. Já o comprimento foi determinado
de acordo com a largura do canal e a estimativa da amplitude máxima de oscilação obtida,
desta forma, o comprimento dos cilindros é de 600 mm.
Para a escolha do material a ser utilizado nas guias cilíndricas foram seguidos os
seguintes critérios: baixa densidade, alta rigidez e baixa rugosidade superficial. Desta forma o
material que melhor se adequou às características desejadas foi o acrílico.
O esquema final do engaste juntamente com as guias cilíndricas é representado abaixo:
Figura 5-7 - Desenho em CAD do engaste com as guias cilíndricas.
5.3.3.Base Fixadora
A base fixadora é a parte responsável pela fixação do sistema no canal de águas
circulantes, além disso, a base deve permitir a colocação de um cilindro fixo para ensaios de

45
tandem e possibilitar o alinhamento do sistema com o plano horizontal. Portanto a base nada
mais é do que uma placa metálica com um furo central por onde o cilindro pode oscilar
livremente.
O projeto da base fixadora consiste basicamente nas dimensões da placa e do furo
central. Tal dimensionamento foi realizado levando-se em consideração as dimensões do
canal e as estimativas de amplitude máxima.
Dessa forma, as dimensões da placa escolhidas foram: 600 x 350 x 6mm e o furo
central 400 x 250 mm. Além disso, em cada um dos quatro cantos foram colocados
niveladores para que seja possível regular o alinhamento com o plano horizontal e foram
distribuídos alguns furos para permitir a fixação de um outro cilindro para ensaios em tandem.
Para a escolha do material a ser utilizado na placa fixadora foram seguidos os
seguintes critérios: alta rigidez. Desta forma o material escolhido foi o alumínio.
O esquema da placa fixadora é representado abaixo:
Figura 5-8 - Desenho em CAD da base fixadora.

46
5.3.4.Molas
As molas são as responsáveis pela oscilação propriamente dita do sistema. No total
serão duas molas fixadas perpendicularmente ao sentido de escoamento do fluido. As molas
terão uma de suas extremidades fixas ao engaste e a outra num suporte a ser instalado entre
cada par de mancais e seu comprimento será de 120 mm cada.
O dimensionamento das molas será feito analogamente ao calculo realizado na
estimativa:
2 nf (15)
22 ( est ak m )m (16)
No entanto sabemos que o valor da constante das molas depende da massa do sistema.
Além disso, o diâmetro e o material deverão seguir a relação:
4
38
Gdk
D N (17)
Dadas essas incógnitas o projeto da mola será realizado depois que a construção da
base estiver terminada.
5.3.5.Projeto Final
Desta forma obtemos o esquema do projeto final da base elástica com todos elementos
agrupados:

47
Figura 5-9 – Desenho em CAD do projeto final da base elástica com as partes agrupadas, exceto as molas.
Cuidado especial foi tomado na usinagem do aparato, uma vez que as reduzidas folgas
entre eixos e mancais requeriam um elevado índice de alinhamento e acabamento. Dessa
forma, toda a usinagem foi realizada com grande precisão, os eixos foram retificados e as
tolerâncias foram reduzidas.
Algumas fotos da base elástica com mancais a ar durante a instalação da mesma no
canal de águas circulantes do NDF podem ser vistas na Figura 5.10 abaixo:
Figura 5-10. Fotos da base elástica com mancais a ar sendo instalada no canal de águas circulante do
NDF. (ainda sem guias, engaste e molas).
Os desenhos de fabricação da base elástica podem ser encontrados no anexo 1.

48
6. BASE ELÁSTICA COM LÂMINAS FLETORAS
Esta seção descreve o aparato experimental empregado no estudo. Uma descrição
completa dos critérios utilizados para o projeto das bases elásticas empregadas neste estudo
pode ser encontrada em Ássi [10]. Todos os cilindros livres para oscilar, com e sem strakes,
possuem apenas o grau de liberdade transversal.
A primeira base construída, chamada de Base Fletora, foi baseada no modelo simples
de uma plataforma sustentada por um conjunto de lâminas esbeltas livres para fletir em uma
direção. Fujarra [11], em seus experimentos de VIV com um cilindro rígido, empregou com
sucesso uma base elástica similar com dois graus de liberdade. A Figura 6-1 ilustra o
funcionamento da base fletora, construída com um par de lâminas, oscilando na direção
transversal. A base é composta por duas plataformas usinadas em alumínio. A plataforma
superior é engastada na estrutura do canal, enquanto a plataforma inferior está livre para
oscilar na direção de menor rigidez das lâminas. As duas plataformas são ligadas apenas pelo
conjunto de lâminas, de modo que não há escorregamento ou rotação entre quaisquer
componentes, apenas flexão das lâminas de aço-mola. Esta característica confere à base
fletora um baixo parâmetro de amortecimento, já que um único conjunto de lâminas é
responsável pelo suporte do modelo e força de restauração elástica do oscilador. Nesta base
não há mancais de escorregamento nem molas extras para ajustar o coeficiente de restauração
elástica. Conseqüentemente, esta base fletora também apresenta uma reduzida massa, visto
que os elementos que oscilam com o cilindro são apenas as leves lâminas de aço e a
plataforma oscilante inferior.

49
Figura 6-1: Base fletora com um par de lâminas na posição deslocada. Reproduzido de Ássi [10].
Figura 6-2: Modelo de cilindro e base fletora montados na seção de testes dos canais. Reproduzido de Ássi
[10].
A Figura 6-1 apresenta a base fletora com um par de lâminas de aço-mola em uma
posição deslocada de do seu centro. É possível verificar que as lâminas de aço fletidas
apresentam dupla curvatura, mantendo sempre a plataforma oscilante inferior paralela à
plataforma engastada. A Figura 6-2 ilustra a montagem do modelo cilíndrico e a base fletora
na seção de testes dos canais. Em ambas as figuras, o nível da água é representado por WL ,
mostrando que praticamente todo o comprimento do cilindro está submerso ( ).WL WL
A medição do deslocamento transversal do cilindro foi obtida de maneira indireta pela
flexão das lâminas. Nas faces internas do par de lâminas foram instalados quatro

50
extensômetros nos pontos de máxima tensão. Assim, observando-se a face interna da lâmina à
esquerda na Figura 6-1, é possível perceber que enquanto a metade superior sofre compressão,
a metade inferior está tracionada para a dada posição deslocada no exemplo. Os quatro
extensômetros foram conectados formando uma ponte de Wheatstone completa, de modo que
o sinal de saída da ponte tem relação linear com o sinal de entrada proporcional à deflexão das
lâminas. Resumindo, a base elástica não é apenas o sistema oscilador, mas o próprio
transdutor do sinal de deslocamento.
Curva de Calibração: Base fletora A_03
-2,5
-2
-1,5
-1
-0,5
0
0,5
1
1,5
2
2,5
-128 -96 -64 -32 0 32 64 96 128
Deslocamento transversal [mm]
Sin
al d
a B
ase
[V
]
Figura 6-3: Exemplo de uma curva de calibração para base fletora. Reproduzido de Ássi [10].
As bases fletoras foram calibradas em função do deslocamento transversal dos
modelos, de modo que uma série de deslocamentos impostos conhecidos foi relacionada ao
sinal de saída para cada configuração de massa. Os valores de deslocamento variaram até
para cada direção, sabendo-se que os deslocamentos típicos de VIV raramente ultrapassam
. Desta forma, obteve-se uma curva de calibração para cada configuração de base fletora.
Todas apresentaram comportamento linear bem definido e incerteza na medição da ordem de
. Um exemplo de curva de calibração é apresentado na Figura 6-3.
4D
2D
0,1mm

51
O projeto das bases fletoras objetiva um sistema com rigidez estrutural na direção
longitudinal, freqüência natural de oscilação bem determinada na direção transversal e a
menor massa estrutural possível. Fujarra [11] descreve em detalhes o dimensionamento de
bases deste tipo, explicitando os esforços e solicitações envolvidas.
Primeiramente, foram construídas duas bases fletoras com um par de lâminas, às quais
chamamos de base fletora dupla. Contudo, durante os primeiros ensaios, verificou-se que as
lâminas sofriam um forte efeito de flambagem devido ao momento causado pela força de
arrasto do cilindro nas velocidades mais altas.
Figura 6-4: Carregamento combinado de momento e compressão em uma lâmina. Reproduzido de Ássi
[10].
O momento causado pela força de arrasto combinado com a compressão da força de
empuxo do cilindro favorece a flambagem, impondo um carregamento ilustrado na Figura
6-4. O problema da flambagem poderia ser resolvido ajustando-se as dimensões das lâminas,
mas a nova freqüência natural não seria compatível com a faixa de velocidades dos canais.
Assim, uma terceira lâmina idêntica foi instalada enrijecendo o sistema na direção
longitudinal e evitando a flambagem do conjunto, mantendo a freqüência natural na mesma
ordem de grandeza da anterior. Esta base, chamada de base fletora tripla, foi empregada em
todos os ensaios descritos neste relatório e é ilustrada na Figura 6-5.

52
Figura 6-5: Base fletora tripla para cilindro isolado. Reproduzido de Ássi [10].
Figura 6-6: (esquerda) Detalhe da base elástica tripla em uma posição levemente flexionada e (direita)
detalhe da célula de carga e seus elementos estruturais. Reproduzido de Ássi [10].

53
7. ENSAIOS: CILINDRO LISO E CILINDRO COM STRAKE
7.1. Ensaios com Base Elástica Fletora
Nesta seção são apresentados os resultados dos ensaios de cilindros com strakes,
juntamente com resultados complementares de cilindros lisos. Os casos com strakes ensaiados
são aqueles descritos na Tabela 1. A espessura dos strakes para todos os casos é de 0.06D.
Ensaios de decaimento para levantamento dos parâmetros de cada ensaio (freqüência,
amortecimento e m*) foram realizados. Com a montagem do strakes no cilindro, o valor de
m* teve uma pequena variação quando comparado com o valor deste parâmetro para o
cilindro liso. No entanto, a diferença observada foi sempre inferior a 15%.
A mesma técnica de extensometria empregada para os casos descritos na seção
anterior, foi utilizada para determinação das curvas de amplitude A/D versus velocidade
reduzida. A base utilizada foi aquela com três lâminas fletoras e com parâmetro de massa
. Foram também realizados ensaios com cilindros liso imersos em uma lâmina de água
e nas mesmas condições de ensaio dos cilindros com strake h .
m*
1
hw 52cm w 69cm
Tabela 1. Descrição dos casos ensaios de cilindros com strakes.
Descrição Passo do
Strake
Altura do
Strake
Massa (g) M*
5D01D 5D 0.1D318,8 0,993 0,1173
5D02D 5D 0.2D352,5 1,054 0,1098
10D01D 10D 0.1D344,8 1,040 0,1605
10D02D 10D 0.2D375,4 1,096 0,1520
15D01D 15D 0.1D372 1,091 0,1866
15D02D 15D 0.2D353,6 1,056 0,1737
Liso - -318,8 1,277 0,0344

54
0
0.2
0.4
0.6
0.8
1
1.2
0 2 4 6 8 10
U*
12
Figura 7-1. Curva de resposta, cilindro liso .hw 52cm, m*
1.277
Figura 7-1 apresenta a resposta dinâmica de um cilindro isolado com . Para
velocidade reduzida não foram verificadas oscilações. O cilindro inicia as oscilações
logo após U e desenvolve rapidamente o ramo inicial até a amplitude máxima. Daí
perdura no ramo superior com pico de até próximo de U . Inicia uma descida
suave sem evidências claras de um ramo inferior. As oscilações perduram com amplitude
até U . Este ensaio foi limitado pelas condições da base elástica que não
suportaria a elevada força de arrasto acima desta velocidade. O final desta faixa não foi
observado até o final destes ensaios. O coeficiente de arrasto deste modelo foi também
medido para compararmos com aqueles obtidos para os cilindros com strakes. Os valores de
Cd no intervalo de Reynolds ensaiado é apresentada na Figura 7-2.
m*
1.277
U * 2
* 2
A* 1.0 * 6
A* 0,8 * 12

55
Liso
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
0 1000 2000 3000 4000 5000 6000 7000 8000
Reynolds
Figura 7-2. Coeficiente de arrasto cilindro liso mantido fixo e ensaiado com hw 52cm.
O primeiro cilindro com strakes ensaiado foi aquele com passo p = 5D e altura h =
0.1D. O ensaio de decaimento em água é apresentado na Figura 7-3. Pode-se verificar que o
valor em água da freqüência natural do sistema é fN 0.8789Hz e o coeficiente de
amortecimento estrutural 0.1173 . A resposta deste cilindro e a comparação com o
cilindro liso são mostradas na Figura 7-4. A amplitude máxima observada para o cilindro liso
é e para o cilindro com strake . A redução na amplitude
máxima é de aproximadamente 50%. O ramo inicial do cilindro com strakes se desenvolve
rapidamente de maneira similar ao caso do cilindro liso. No entanto, para o caso com strakes
esse ramo ocorre com uma velocidade reduzida ligeiramente superior, entre . A
seguir, é observado um ramo para o caso com strakes com amplitude constante aproximada
que se estende entre . O ramo superior verificado no caso do
cilindro liso não está presente para o cilindro com strakes. Aumentando-se a velocidade
reduzida, a oscilação decai atingindo valores para V .
Amax
/ D ; 0.96 Amax
/ D ; 0.45
4 Vr
5
Amax
/ D ; 0.45 5 Vr
7
A / D ; 0.15 r10

56
Figura 7-3. Ensaio de decaimento, cilindro com strakes, passo p=5D e altura h= 0.1D.
0
0.2
0.4
0.6
0.8
1
1.2
0 2 4 6 8 10 12 14
U*
Liso
Strake
Figura 7-4. Curva de resposta, cilindro com strake, passo p=5D e altura h= 0.1D.
O ensaio de decaimento do caso do cilindro com strakes com passo p = 5D e altura h =
0.2D é apresentado na Figura 7-5. A freqüência natural nesse caso é . A resposta
deste cilindro, por sua vez, é mostrada na Figura 7-6. É evidente, analisando esta figura, que a
vibração induzida por vórtices foi fortemente atenuada, praticamente não ocorrendo para a
faixa de velocidade reduzida ensaiada. Em relação ao caso anterior, a única diferença diz
Hzfn 7813.0

57
respeito à altura dos strakes. É interessante notar que a amplitude máxima de oscilação do
cilindro com strakes não ocorre para o valor de velocidade reduzida na qual ocorreu a
amplitude máxima para o caso do cilindro liso. Um pequena oscilação é observada apenas
para . A amplitude cresce suavemente atingindo valores máximos próximos a Vr 5
A / D ; 0.1 . A velocidade reduzida máxima ensaiada foi Vr 11 . Acima desse valor, ocorre
flambagem das lâminas fletoras devido ao elevado valor da força de arrasto.
Figura 7-5. Ensaio de decaimento, cilindro com strake, passo p=5D e altura h= 0.2D.
0
0.2
0.4
0.6
0.8
1
1.2
0 2 4 6 8 10 12
U*
Liso
Strake
Figura 7-6. Curva de resposta, cilindro com strake, passo p=5D e altura h= 0.2D.

58
O ensaio de decaimento do caso do cilindro com strakes com passo p = 10D e altura h
= 0.1D é apresentado na Figura 7-7. A freqüência natural nesse caso é . A
resposta deste cilindro, por sua vez, é mostrada na Figura 7-8. É evidente que a vibração
induzida por vórtices foi reduzida, mas não foi suprimida. Em relação ao caso anterior, a
única diferença diz respeito à altura dos strakes. É interessante notar que o ramo no qual a
amplitude de oscilação permaneceu aproximadamente constante passou a se estender por uma
faixa mais longa de velocidade reduzida quando comparado com o caso do cilindro liso e com
o caso do cilindro com strakes com passo p=5D e mesma altura. A redução de amplitude
máxima observada foi de aproximadamente 50%. Ocorre oscilação somente a partir de
, e essa oscilação cresce até
Hzfn 9766.0
Vr ; 5 A / D 0.5D para Vr 5 . A partir dessa velocidade
reduzida, a amplitude fica constante até V , a partir da qual a amplitude inicia uma decida
aproximadamente linear até . O valor máximo de velocidade reduzida ensaiado foi
.
r ; 8
Vr ; 12
Vr 13
Figura 7-7. Ensaio de decaimento, cilindro com strakes, passo p=10D e altura h= 0.1D.

59
0
0.2
0.4
0.6
0.8
1
1.2
0 2 4 6 8 10 12 14
U*
Liso
Strake
Figura 7-8. Curva de resposta, cilindro com strake, passo p=10D e altura h= 0.1D.
O ensaio de decaimento do caso do cilindro com strakes com passo p = 10D e altura h
= 0.2D é apresentado na Figura 7-9. A freqüência natural nesse caso é . A resposta
deste cilindro, por sua vez, é mostrada na Figura 7-10. É evidente, analisando esta figura, que a
vibração induzida por vórtices foi fortemente atenuada, praticamente não ocorrendo para a
faixa de velocidade reduzida ensaiada. Aqui, mais uma vez, a única diferença diz respeito à
altura dos strakes em relação ao caso anterior. É interessante também notar que a amplitude
máxima do cilindro com strakes não ocorre para o valor de velocidade reduzida na qual
ocorreu a amplitude máxima para o caso do cilindro liso. As oscilações começam a ocorrer
somente para valores de velocidade reduzida V . A partir desse valor, a amplitude cresce
continuamente até atingir um valor máximo aproximado
Hzfn 7813.0
r 5
A / D ; 0.1 para uma velocidade
reduzida . Para este caso, o valor máximo de velocidade reduzida atingida no ensaio
foi V .
Vr ; 12
r 14

60
Figura 7-9. Ensaio de decaimento, cilindro com strake, passo p=10D e altura h= 0.2D.
0
0.2
0.4
0.6
0.8
1
1.2
0 2 4 6 8 10 12 14 16
U*
Liso
Strake
Figura 7-10. Curva de resposta, cilindro com strake, passo p=10D e altura h= 0.2D.
O ensaio de decaimento do caso do cilindro com strakes com passo p = 15D e altura h
= 0.1D é apresentado na Figura 7-11. A freqüência natural nesse caso é . A
resposta deste cilindro, por sua vez, é mostrada na Figura 7-12. Aqui, mais uma vez, é evidente
analisando esta figura que a vibração induzida por vórtices foi reduzida, mas não suprimida.
A redução foi de aproximadamente 50% e ocorreu oscilação para uma ampla faixa de
velocidade reduzida. O mesmo comportamento observado nos casos anteriores com valores
inferiores de passo e com a mesma altura (h=0.1D) é aqui constado. Existe um ramo inicial
Hzfn 7813.0
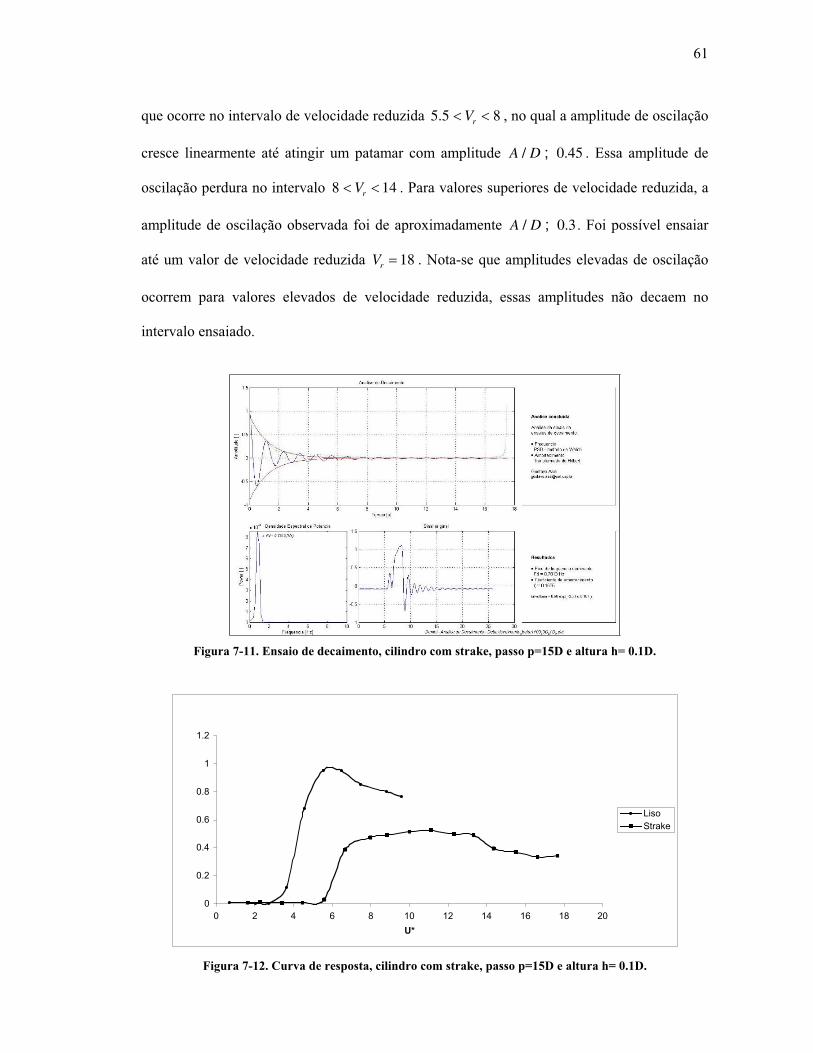
61
que ocorre no intervalo de velocidade reduzida 5.5 Vr 8 , no qual a amplitude de oscilação
cresce linearmente até atingir um patamar com amplitude A / D ; 0.45 . Essa amplitude de
oscilação perdura no intervalo 8 Vr 14 . Para valores superiores de velocidade reduzida, a
amplitude de oscilação observada foi de aproximadamente A / D ; 0.3 . Foi possível ensaiar
até um valor de velocidade reduzida Vr 18 . Nota-se que amplitudes elevadas de oscilação
ocorrem para valores elevados de velocidade reduzida, essas amplitudes não decaem no
intervalo ensaiado.
Figura 7-11. Ensaio de decaimento, cilindro com strake, passo p=15D e altura h= 0.1D.
0
0.2
0.4
0.6
0.8
1
1.2
0 2 4 6 8 10 12 14 16 18 20
U*
Liso
Strake
Figura 7-12. Curva de resposta, cilindro com strake, passo p=15D e altura h= 0.1D.

62
Finalmente, o ensaio de decaimento do caso do cilindro com strakes com passo p =
15D e altura h = 0.2D é apresentado na Figura 7-13. A freqüência natural nesse caso é
. A resposta deste cilindro, por sua vez, é mostrada na Figura 7-14. É mais uma
vez evidente, analisando esta figura, que a vibração induzida por vórtices foi fortemente
atenuada, praticamente não ocorrendo para a faixa de velocidade reduzida ensaiada. Também
podemos notar que a amplitude máxima do cilindro com strakes não ocorre para o valor de
velocidade reduzida na qual ocorreu a amplitude máxima para o caso do cilindro liso. As
oscilações começam a ocorrer para valores de velocidade reduzida V . A partir desse
valor, a amplitude cresce continuamente até atingir um valor máximo aproximado
Hzfn 8789.0
r 5
A / D ; 0.2
para uma velocidade reduzida . Para este caso, o valor máximo de velocidade reduzida
atingida no ensaio foi V .
Vr ; 10
r 13
Figura 7-13. Ensaio de decaimento, cilindro com strake, passo p=15D e altura h= 0.2D.

63
0
0.2
0.4
0.6
0.8
1
1.2
0 2 4 6 8 10 12 14
U*
Liso
Strake
Figura 7-14. Curva de resposta, cilindro com strake, passo p=15D e altura h= 0.2D.
Todos os resultados dos ensaios de cilindros montados em base elástica descritos neste
relatório estão sintetizados na Figura 7-15. Analisando esta figura, fica evidente a importância
da altura dos strakes no processo de supressão. A amplitude de oscilação é baixa para todos os
cilindros com strakes com altura h=0.2D (indicados pelas linhas azuis nessa figura). Os
cilindros com strakes com altura h=0.1D (linhas vermelhas), por sua vez, apresentaram
oscilação elevada, porém abaixo da amplitude do caso do cilindro liso (linhas pretas na Figura
7-15. Dos cilindros ensaiados, aquele que apresentou a menor amplitude de oscilação foi
aquele com h=0.2D e passo p=10D. É também possível observar que o passo aparentemente
afeta a extensão do intervalo de velocidade reduzida na qual se observa o ramo inferior da
resposta. Quanto maior o passo, maior esse intervalo.
Foram medidos os valores do coeficiente de arrasto, com os cilindros fixos, no
intervalo de Reynolds dos ensaios. O arrasto foi medido utilizando uma célula de carga e foi
considerada a área submersa do cilindro. Esses resultados são apresentados na Figura 7-16. Os
cilindros com maior altura de strakes apresentaram os maiores coeficientes de arrasto, como
era de se esperar. Para o cálculo do coeficiente de arrasto utilizou-se o mesmo valor da área
de referencia para todos os cilindros (S = DL, D é o diâmetro e L o comprimento submerso do

64
cilindro). Para valores de Reynolds , o cilindro liso apresenta o menor coeficiente
de arrasto (
Re 3000
Cd ; 1.05 ). O cilindro que apresentou o maior coeficiente em todo o intervalo de
Reynolds ensaiado foi o cilindro com p=10D e h=0.2D. Para esse caso, Cd ; 1.6 para Re >
3000.
0
0.2
0.4
0.6
0.8
1
1.2
0 2 4 6 8 10 12 14
Velocidade reduzida
Liso - m*=1,277 05D01D 05D02D 10D01D 10D02D 15D01D 15D02D Liso - m*=0,958
Figura 7-15. Comparações das curvas de resposta: cilindros liso e com strakes.
Coeficientes de arrasto
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
0 1000 2000 3000 4000 5000 6000 7000 8000
Reynolds
Liso 05D01D 05D02D 10D01D 10D02D 15D01D 15D02D
Figura 7-16. Comparações do coeficiente de arrasto, cilindros lisos e com strake, mantidos fixos.

65
7.2. Ensaios com Base Elástica com Mancais a Ar
Analogamente a seção anterior é apresentada os resultados dos ensaios de cilindros
com strakes e do cilindro liso, desta vez utilizando-se a base elástica com mancais a ar
desenvolvida no capitulo 4 deste trabalho. Os casos com strakes ensaiados são os mesmos
descritos na etapa anterior. No entanto com os resultados preliminares obtidos verificou-se
que o fator de maior relevância na atenuação de VIV é a altura do strake, portanto nesta etapa
foram construídos mais 2 modelos com passo infinito ou seja neste caso os strakes ficam
paralelos a direção do comprimento do cilindro.
Na Tabela 2 estão apresentados os parâmetros dos ensaios obtidos após os ensaios de
decaimento realizados com a base elástica de mancais a ar. O parâmetro de massa para a nova
base elástica foi de para todos os casos ensaiados, embora este valor seja bem maior
do que o valor obtido com a base elástica fletora, em contrapartida nota-se, através da
visualização dos parâmetros de ensaio (Tabela 2) que os valores de amortecimento foram bem
menores do que os obtidos na etapa anterior. Mais uma vez ressalta-se que a diferença entre
os valores de m* obtidos foram sempre inferiores a 15%.
* 2m
Para determinação das curvas de amplitude A/D versus velocidade reduzida na base
elástica com mancais a ar utilizou-se um sensor óptico. O funcionamento deste sensor está
baseado na emissão de luz de led fixo a base e que pode ser captada por dois sensores
resistivos fixos em cada uma das 2 extremidades do aparato. A quantidade de luz captada por
cada um desses sensores é relacionada com uma tensão de saída que posteriormente pode ser
calibrada linearmente com o deslocamento do led. O desenvolvimento completo e detalhes do
funcionamento deste sensor pode ser obtido em Assi[10].
A lamina de lâmina de água na qual os cilindros estavam imersos foi de hw 69cm
para todos os cilindros ensaiados: lisos ou com strakes.

66
Tabela 2. Descrição dos casos ensaios de cilindros com strakes.
Descrição Passo do
Strake
Altura do
Strake
Massa (g) M*
05D01D5D 0.1D
318,8 2,005773 0,0533
10D01D10D 0.1D
352,5 2,066945 0,0589
15D01D15D 0.1D
344,8 2,052968 0,0634
inf01Dinfinito 0.1D
345,6 2,05442 0,0736
05D02D5D 0.2D
375,4 2,108513 0,0702
10D02D10D 0.2D
372 2,102341 0,0883
15D02D15D 0.2D
353,6 2,068942 0,0890
inf02Dinfinito 0.2D
369,3 2,09744 0,0741
liso- -
318,8 2,005773 0,0344
A/D x Vr
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
1
0 2 4 6 8 10 12 14 16
Vr
Série1
Figura 7-17. Curva de resposta, cilindro liso .*69 , 2.055wh cm m
Figura 7-17 apresenta a resposta dinâmica de um cilindro isolado com .
Para velocidade reduzida não foram verificadas oscilações. O cilindro inicia as
oscilações logo após e desenvolve rapidamente o ramo inicial até a amplitude
* 2.055m
* 3U
* 3U

67
máxima. Daí perdura no ramo superior com pico de até próximo de . Inicia
uma descida suave sem evidências claras de um ramo inferior. As oscilações vão decrescendo
até antigir o valor de para
* 0.8A U * 6
* 0.1A * 14U . Nota-se que o problema existente no caso da
utilização de uma base elástica fletora relacionado a flambagem não ocorre para a base
elástica com mancais a ar e o experimento pode ser tranquilamente conduzido para valores de
sem grandes influencias da força de arrasto. * 10U
O primeiro cilindro com strakes ensaiado foi aquele com passo p = 5D e altura h =
0.1D. O ensaio de decaimento em água é apresentado na Figura 7-3. Pode-se verificar que o
valor em água da freqüência natural do sistema é 0.7813Nf Hz e o coeficiente de
amortecimento estrutural 0.0533 . A resposta deste cilindro e a comparação com o
cilindro liso são mostradas na Figura 7-4. A amplitude máxima observada para o cilindro liso
é e para o cilindro com strake . A redução na amplitude
máxima é de aproximadamente 35%. O ramo inicial do cilindro com strakes se desenvolve
rapidamente de maneira similar ao caso do cilindro liso. No entanto, para o caso com strakes
esse ramo ocorre com uma velocidade reduzida ligeiramente superior, entre . A
seguir, é observado um ramo para o caso com strakes com amplitude constante aproximada
que se estende entre . O ramo superior verificado no caso do
cilindro liso não está presente para o cilindro com strakes. Aumentando-se a velocidade
reduzida, a oscilação decai atingindo valores para .
max / 0.7A D 6
0
Amax
/ D ; 0.45
4 Vr
5
Amax
/ D ; 0.45 5 Vr
7
/ 0.1A D 11rV

68
Figura 7-18. Ensaio de decaimento, cilindro com strakes, passo p=5D e altura h= 0.1D.
A/D x Vr
0
0,2
0,4
0,6
0,8
1
1,2
0 2 4 6 8 10 12 14 16 18
Vr
05D01D liso
Figura 7-19. Curva de resposta, cilindro com strake, passo p=5D e altura h= 0.1D.
O ensaio de decaimento do caso do cilindro com strakes com passo p = 5D e altura h =
0.2D é apresentado na Figura 7-5. A freqüência natural nesse caso é . A resposta
deste cilindro, por sua vez, é mostrada na Figura 7-6. É evidente, analisando esta figura, que a
vibração induzida por vórtices foi fortemente atenuada, praticamente não ocorrendo para a
Hzfn 7813.0

69
faixa de velocidade reduzida ensaiada. Em relação ao caso anterior, a única diferença diz
respeito à altura dos strakes. É interessante notar que a amplitude máxima de oscilação do
cilindro com strakes não ocorre para o valor de velocidade reduzida na qual ocorreu a
amplitude máxima para o caso do cilindro liso. Uma pequena oscilação é observada apenas
para . A amplitude cresce suavemente atingindo seu valor máximo próximo de 9rV
A / D ; 0.15 para .13rV
Figura 7-20. Ensaio de decaimento, cilindro com strake, passo p=5D e altura h= 0.2D.
A/D x Vr
0
0,2
0,4
0,6
0,8
1
1,2
0 2 4 6 8 10 12 14 16 18
Vr
05D02D liso
Figura 7-21. Curva de resposta, cilindro com strake, passo p=5D e altura h= 0.2D.

70
O ensaio de decaimento do caso do cilindro com strakes com passo p = 10D e altura h
= 0.1D é apresentado na Figura 7-7. A freqüência natural, assim como nos demais casos, é
0.7813nf Hz . A resposta deste cilindro, por sua vez, é mostrada na Figura 7-8. É evidente
que a vibração induzida por vórtices foi reduzida, mas não foi suprimida. Em relação ao caso
anterior, a única diferença diz respeito à altura dos strakes. É interessante notar que o ramo no
qual a amplitude de oscilação permaneceu aproximadamente constante passou a se estender
por uma faixa mais longa de velocidade reduzida quando comparado com o caso do cilindro
liso e com o caso do cilindro com strakes com passo p=5D e mesma altura. A redução de
amplitude máxima observada foi de aproximadamente 40%. Ocorre oscilação somente a partir
de , e essa oscilação cresce até Vr ; 5 A / D 0.5D para 7rV . A partir dessa velocidade
reduzida, a amplitude fica constante até 10rV , a partir da qual a amplitude inicia uma
decida aproximadamente linear até V . O valor máximo de velocidade reduzida ensaiado
foi .
r ; 12
16rV
Figura 7-22. Ensaio de decaimento, cilindro com strakes, passo p=10D e altura h= 0.1D.

71
A/D x Vr
0
0,2
0,4
0,6
0,8
1
1,2
0 2 4 6 8 10 12 14 16 18
Vr
10D01D liso
Figura 7-23. Curva de resposta, cilindro com strake, passo p=10D e altura h= 0.1D.
O ensaio de decaimento do caso do cilindro com strakes com passo p = 10D e altura h
= 0.2D é apresentado na Figura 7-9. A freqüência natural nesse caso também é .
A resposta deste cilindro, por sua vez, é mostrada na Figura 7-10. É evidente, analisando esta
figura, que a vibração induzida por vórtices foi fortemente atenuada, praticamente não
ocorrendo para a faixa de velocidade reduzida ensaiada. Aqui, mais uma vez, a única
diferença diz respeito à altura dos strakes em relação ao caso anterior. É interessante também
notar que a amplitude máxima do cilindro com strakes não ocorre para o valor de velocidade
reduzida na qual ocorreu a amplitude máxima para o caso do cilindro liso. As oscilações
começam a ocorrer somente para valores de velocidade reduzida . A partir desse valor,
a amplitude cresce continuamente até atingir um valor máximo aproximado para
uma velocidade reduzida . Para este caso, o valor máximo de velocidade reduzida
atingida no ensaio foi .
Hzfn 7813.0
9rV
/ 0.0A D 5
13rV
16rV

72
Figura 7-24. Ensaio de decaimento, cilindro com strake, passo p=10D e altura h= 0.2D.
A/D x Vr
0
0,2
0,4
0,6
0,8
1
1,2
0 2 4 6 8 10 12 14 16 18
Vr
10D02D liso
Figura 7-25. Curva de resposta, cilindro com strake, passo p=10D e altura h= 0.2D.
O ensaio de decaimento do caso do cilindro com strakes com passo p = 15D e altura h
= 0.1D é apresentado na Figura 7-11. A freqüência natural nesse caso é a mesma dos casos
anteriores . A resposta deste cilindro, por sua vez, é mostrada na Figura 7-12.
Aqui, mais uma vez, é evidente analisando esta figura que a vibração induzida por vórtices foi
reduzida, mas não suprimida exatamante como observado nos casos anteriores com a mesma
Hzfn 7813.0

73
altura (h=0.1D). Existe um ramo inicial que ocorre no intervalo de velocidade reduzida
, no qual a amplitude de oscilação cresce até atingir um patamar com amplitude
. Essa amplitude de oscilação perdura no intervalo 8
5.5 Vr 8
/ 0A D .4 11rV , quando começa um
comportamento de decrescimento praticamente linear. Para valores superiores de velocidade
reduzida, a amplitude de oscilação cai até aproximadamente para ./ 0A D .1 16rV
Figura 7-26. Ensaio de decaimento, cilindro com strake, passo p=15D e altura h= 0.1D.
A/D x Vr
0
0,2
0,4
0,6
0,8
1
1,2
0 2 4 6 8 10 12 14 16
Vr
18
15D01D liso
Figura 7-27. Curva de resposta, cilindro com strake, passo p=15D e altura h= 0.1D.

74
O ensaio de decaimento do caso do cilindro com strakes com passo p = 15D e altura h
= 0.2D é apresentado na Figura 7-13. A freqüência natural nesse caso é . A
resposta deste cilindro, por sua vez, é mostrada na Figura 7-14. É mais uma vez evidente,
analisando esta figura, que a vibração induzida por vórtices foi fortemente atenuada,
praticamente não ocorrendo para a faixa de velocidade reduzida ensaiada. Também podemos
notar que a amplitude máxima do cilindro com strakes não ocorre para o valor de velocidade
reduzida na qual ocorreu a amplitude máxima para o caso do cilindro liso. As oscilações
começam a ocorrer para valores de velocidade reduzida . A partir desse valor, a
amplitude cresce continuamente até atingir um valor máximo aproximado para
uma velocidade reduzida . Para este caso, o valor máximo de velocidade reduzida
atingida no ensaio foi .
Hzfn 7813.0
7rV
/ 0.1A D 5
11rV
16rV
Figura 7-28. Ensaio de decaimento, cilindro com strake, passo p=15D e altura h= 0.2D.

75
A/D x Vr
0
0,2
0,4
0,6
0,8
1
1,2
0 2 4 6 8 10 12 14 16 18
Vr
15D02D liso
Figura 7-29. Curva de resposta, cilindro com strake, passo p=15D e altura h= 0.2D.
Como citado anteriormente as conclusões obtidas na primeira etapa do trabalho
utilizando-se a base elástica fletora sugeriu que o parâmetro de maior relevância na atenuação
de VIV em strakes é a altura do strake, o que acabou sendo confirmado nos ensaios com a
base elástica de mancais a ar. Desta forma pensou-se em construir modelos com passo infinito
para validar o fato de o passo ser irrelevante na concepção dos strakes.
O ensaio de decaimento do caso do cilindro com strakes com passo infinito e altura h
= 0.1D é apresentado na Figura 7-13. A freqüência natural nesse caso também foi de
. A resposta deste cilindro, por sua vez, é mostrada na Figura 7-14. Percebe-se
neste caso que assim como os demais casos com altura h = 0.1D a oscilação foi atenuada, mas
não suprimida. No entanto verificou-se que a amplitude máxima do cilindro com strakes desta
vez bem próxima ao ponto de máxima amplitude do cilindro liso
Hzfn 7813.0
5rV . A amplitude máxima
atingida foi de . A partir desse valor, a amplitude cai para um valor máximo
aproximado para uma velocidade reduzida
/ 0.4A D 5
5/ 0.3A D 7rV e permanece praticamente
constante neste valor até o final do ensaio 16rV .

76
Figura 7-30. Ensaio de decaimento, cilindro com strake, passo infinito e altura h= 0.1D.
A/D x Vr
0
0,2
0,4
0,6
0,8
1
1,2
0 2 4 6 8 10 12 14 16 18
Vr
inf 01D liso
Figura 7-31. Curva de resposta, cilindro com strake, passo infinito e altura h= 0.1D.
Para o ensaio do cilindro com strakes com passo infinito e altura h = 0.2D de
decaimento do caso é apresentado na Figura 7-132. A freqüência natural nesse caso também
foi de . A resposta deste cilindro, por sua vez, é mostrada na Figura 7-14. Ao
contrario das expectativas não houve atenuação de VIV para esse caso, pelo contrario, o
Hzfn 7813.0

77
cilindro aumentou a amplitude máxima de oscilação. Verificou-se que a amplitude máxima do
cilindro com strakes foi de e aconteceu para / 1.0A D 0 10rV . A partir deste ponto
decresceu linearmente para amplitude para uma velocidade reduzida / 0.0A D 5 13rV e daí
em diante não houve mais oscilação até o final do ensaio 16rV . Acredita-se que o motivo
deste resultado seja o fato que os strakes estavam posicionados aleatoriamento no cilindro em
relação ao sentido do escoamento, percebeu-se durante o ensaio que a oscilação do cilindro
era desordenada realizando dois picos para um dos lados e apenas um para o outro em cada
ciclo. Isso aliado ao fato de a curva ser obtida pela média dos 10% maiores picos resultou
neste resultado aparentemente incoerente.
Figura 7-32. Ensaio de decaimento, cilindro com strake, passo infinito e altura h= 0.2D.

78
A/D x Vr
0
0,2
0,4
0,6
0,8
1
1,2
0 2 4 6 8 10 12 14 16 18
Vr
inf 02D liso
Figura 7-33. Curva de resposta, cilindro com strake, passo infinito e altura h= 0.2D.
Todos os resultados dos ensaios de cilindros montados em base elástica descritos neste
relatório estão sintetizados na Figura 7-15. Analisando esta figura, fica evidente a importância
da altura dos strakes no processo de supressão. A amplitude de oscilação é baixa para todos os
cilindros com strakes com altura h=0.2D (indicados pelas linhas azuis nessa figura). Os
cilindros com strakes com altura h=0.1D (linhas vermelhas), por sua vez, apresentaram
oscilação elevada, porém abaixo da amplitude do caso do cilindro liso (linhas pretas na Figura
7-15. Dos cilindros ensaiados, aquele que apresentou a menor amplitude de oscilação foi
aquele com h=0.2D e passo p=10D. É também possível observar que o passo aparentemente
afeta a extensão do intervalo de velocidade reduzida na qual se observa o ramo inferior da
resposta. Quanto maior o passo, maior esse intervalo.

79
A/D x Vr
0
0,2
0,4
0,6
0,8
1
1,2
0 2 4 6 8 10 12 14 16 18
Vr
05D01D 10D01D 15D01D 05D02D 10D02D 15D02D inf 01D inf 02D liso
Figura 7-34. Síntese dos ensaios realizados
Como já vimos o arrasto é um fator importante no estudo de atenuadores de VIV, na
primeira etapa do projeto com a realização dos experimentos montados em uma base elástica
fletora não foi possível analisarmos o efeito do arrasto para o cilindro oscilando, pois o aparato
não permitia tal analise. Desta forma foram apresentados somente os valores de arrasto para o
cilindro fixo.
Na base elástica com mancais a ar esperava obter o arrasto para um cilindro oscilando,
mas novamente não foi possível obtermos esses dados. Para obter o arrasto foram instalados 4
extensômetros no inserto que conecta o modelo ao engaste da base elástica na direção
perpendicular ao fluido, formando uma ponte de Wheastone.
No entanto durante a montagem dos extensômetros houve algum problema e a
sensibilidade não ficou adequada não sendo possível obter-se uma relação coerente da força de
arrasto.

80
8. MEDIÇÕES DO CAMPO DE VORTICIDADE UTILIZANDO SISTEMA PIV
A técnica experimental de PIV (Velocimetria por Imagens de Partículas) de alta
densidade de partículas foi empregada para obtenção do campo de velocidades na esteira. O
plano transversal ao cilindro onde as imagens foram capturas está localizado na metade do
comprimento do cilindro submerso, isto é, sua distância do fundo da seção de testes é Lw
2 .
8.1. Cilindro liso oscilando
A esteira de vórtices emitida de um cilindro oscilando apresenta características
diferentes da de um cilindro isolado fixo. A Figura 8-1 apresenta imagens de PIV coletadas
durante as oscilações livres de um cilindro isolado. No topo de cada uma delas mostra-se a
série temporal do deslocamento do cilindro ao longo da tomada das imagens. Os pontos
numerados de 1 a 20 mostram em que momento das oscilações a imagem foi capturada. Deste
modo é possível identificar a exata posição e direção do movimento do cilindro em cada
captura. A figura também informa o valor de Reynolds, a velocidade e a amplitude reduzidas
e o intervalo entre as capturas de PIV, identificado por D .t
A Figura 8-1 apresenta a dinâmica da esteira para uma velocidade reduzida ,
imediatamente antes do início da transição dos modos de emissão. Nesta região o padrão da
esteira é claramente identificado por 2S. Nas capturas 4, 5, 12 e 16, por exemplo, é possível
identificar apenas um vórtice sendo desprendido para cada lado.
U* = 4,4
As imagens apresentadas nestas figuras serão utilizadas como referência para a
comparação com os casos de oscilações em cilindros com strakes, apresentados na seqüência.

81
102 104 106 108 110 112 114 116
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
A*
t*
1 2 3 4
5 6 7 8
9 10 11 12
13 14 15 16
17 18 19 20
Re = 5280 U* = 4,4 D t = 0,5sA* = 0,73
Figura 8-1: Dinâmica da esteira. Cilindro isolado oscilando . U*=4,4. Reproduzida de Assi [10]

82
As técnicas experimentais e a metodologia de tratamento de sinais foram validadas por
estes experimentos iniciais, de modo que podemos aplicá-las para os próximos ensaios de
cilindros com strakes. A técnica de PIV mostrou-se uma poderosa ferramenta para
mapeamento da esteira. Os padrões de emissão encontrados estão de acordo com os dados
consagrados na literatura, de modo que este método também será utilizado para mapeamento
do campo de velocidades nos casos de interferência. Outra importante conclusão,
principalmente para os próximos ensaios de interferência, foi a observação do encurtamento
do comprimento de formação à medida que Reynolds aumenta.
Em suma, estes ensaios preliminares com um cilindro oscilando isoladamente
serviram para obtenção dos dados de referência para as próximas comparações. Além disso,
serviram para a validação dos procedimentos empregados daqui em diante. Por exemplo:
verificamos que a base elástica tripla resistiu melhor à flambagem; que o sinal de
deslocamento pode ser medido tanto diretamente (com o sensor óptico de posição) quanto
indiretamente (pela flexão das lâminas) com a mesma precisão.
8.2. Cilindro com strakes oscilando
Para as visualizações do escoamento ao redor do cilindro com strakes foram feitos
quatro mapeamentos para cada um dos casos ensaiados. O cilindro foi girado de um angulo de
30º a partir da posição com uma das lâminas do strake no ponto de estagnação frontal (Figura
8-2). Procurou-se obter cada uma das visualizações quando o cilindro encontrava-se na
posição de máximo ao longo do ciclo (Figura 8-3). As visualizações foram feitas para uma
velocidade reduzida U *6 , o que corresponde a um número de Reynolds .Re 4200

83
Figura 8-2- Da esquerda para direita, de cima para baixo respectivamente ângulo 0º, 30º, 60º e 90º.
Figura 8-3- Posição relativa no ciclo de oscilação das imagens obtidas com o sistema PIV.
Na Figura 8-4 são apresentadas as visualizações do campo de vorticidade no escoamento
ao redor do riser com strakes de passo p=5D e altura h=0.1D. Procurou-se obter os detalhes
da esteira na região próxima à parede do cilindro. Os dados foram tomados quando o cilindro
estava na posição de deslocamento máximo, a Figura 8-4(a) na posição ao longo da
envergadura correspondente a um dos strakes localizado no ponto de estagnação frontal, a
figura (b) com o mesmo strake localizado a 30º para a direita, a figura (c) a 60º e a figura (d) a
90º (veja esquema explicativo da Figura 8-2). A análise destas figuras mostra claramente a
formação de um vórtice com rotação horária (cor azulada) e outro com rotação anti-horária
(cor avermelhada) na região muito próxima da parede do cilindro.
Ao longo da envergadura, a formação desses vórtices não ocorre em fase: nas posições
apresentadas nas figuras (a) e (b) o vórtice com rotação horária está próximo da parede,

84
enquanto que a camada cisalhante com fluido com rotação anti-horária está começando a se
enrolar para formar um vórtice. Nas figuras (c) e (d) por sua vez, um vórtice com rotação anti-
horária está praticamente formado e numa posição muito próxima da parede. Aparentemente,
o strake com pequena altura (h=0.1D) deste caso, não impediu a formação de vórtices em
uma região muito próxima da parede do corpo. Apesar da hélice do strake ter causado um
desprendimento não correlacionado ao longo da envergadura do corpo, esta falta de
correlação não foi suficiente para diminuir substancialmente a resposta de amplitude de
oscilação.
Na Figura 8-5 são apresentadas as visualizações do campo de vorticidade no escoamento
ao redor do riser com strakes de passo p=5D e altura h=0.2D. Também procurou-se obter os
detalhes da esteira na região próxima à parede do cilindro. Da mesma maneira que o caso
anterior, os dados foram tomados quando o cilindro estava na posição de deslocamento
máximo, a Figura 8-4(a) na posição ao longo da envergadura correspondente a um dos strakes
localizado no ponto de estagnação frontal, a figura (b) com o mesmo strake localizado a 30º
para a direita, a figura (c) a 60º e a figura (d) a 90º. Em relação ao caso com altura de strake
menor, a diferença é pronunciada. A análise das figuras mostra claramente que a camada
cisalhante não se enrola próxima do corpo. Isto faz com que a formação de vórtices não
ocorra próxima do cilindro. A inexistência de uma região de baixa pressão próxima a parede
do cilindro é claramente notada nas figuras. Esse fato aliado a não observação de correlação
ao longo da envergadura do corpo faz com que a resposta seja de baixa amplitude.

85
(a) (b)
(c) (d)
Figura 8-4- Campo de vorticidade, passo p = 5D e altura h = 0.1D. Da esquerda para direita, de cima para
baixo respectivamente ângulo (a) 0º, (b) 30º, (c) 60º e (d) 90º.

86
Figura 8-5 - Campo de vorticidade, passo p = 5D e altura h = 0.2D. Da esquerda para direita, de cima para
baixo respectivamente ângulo (a) 0º, (b) 30º, (c) 60º e (d) 90º.
Na Figura 8-6, por sua vez, são apresentadas as visualizações do campo de vorticidade
no escoamento ao redor do riser com strakes de passo p=10D e altura h=0.1D. Os dados
também foram tomados quando o cilindro estava na posição de deslocamento máximo. Na
Figura 8-6(a), um dos strakes está na posição ao longo da envergadura correspondente ao ponto
de estagnação frontal, a figura (b) com o mesmo strake localizado a 30º para a direita, a figura
(c) a 60º e a figura (d) a 90º. O que é observado neste caso é muito similar ao caso com passo
p=5D e mesma altura (h=0.1D). A análise das figuras mostra claramente a formação de um
vórtice com rotação horária (cor azulada) e outro com rotação anti-horária (cor avermelhada)
na região muito próxima da parede do cilindro. Neste caso também a formação desses vórtices

87
não ocorre em fase ao longo da envergadura. O strake com pequena altura (h=0.1D) deste
caso, não impediu a formação de vórtices em uma região muito próxima da parede do corpo.
Apesar da hélice do strake ter causado um desprendimento não correlacionado ao longo da
envergadura do corpo, esta falta de correlação não foi suficiente para diminuir
substancialmente a resposta de amplitude de oscilação. O comportamento é totalmente
análogo ao caso com passo menor, mas com a mesma altura de strakes.
Figura 8-6 - Campo de vorticidade, passo p =10D e altura h = 0.1D. Da esquerda para direita, de cima
para baixo respectivamente ângulo (a) 0º, (b) 30º, (c) 60º e (d) 90º.

88
Na Figura 8-7 é apresentado o caso com passo p=10D e h=0.2D. Esse foi aquele que
apresentou a menor resposta de amplitude de oscilação. A análise das figuras mostra
claramente que a camada cisalhante não se enrola próxima do corpo. Aqui, mais uma vez, a
formação de vórtices não ocorre nas vizinhanças da parede do cilindro. A inexistência de uma
região de baixa pressão próxima a parede é claramente notada nas figuras. Esse fato, aliado a
não observação de correlação ao longo da envergadura do corpo, faz com que a resposta seja
de baixa amplitude. Comparando-se com o caso p=5D e h=0.2D, as camadas cisalhantes estão
ainda mais afastadas uma da outra, dificultando o processo de formação de vórtices.
Figura 8-7- Campo de vorticidade, passo p = 10D e altura h = 0.2D. Da esquerda para direita, de cima
para baixo respectivamente ângulo (a) 0º, (b) 30º, (c) 60º e (d) 90º.

89
Na Figura 8-8 são apresentados os resultados para p=15D e h=0.1D. O que ocorre é
similar aos outros dois casos com a mesma altura de strakes. Vórtices com intensidade
elevada se formam na região próxima do cilindro. Apesar dos strakes o cilindro apresenta uma
reposta de oscilação elevada (A*=0.5D).
Figura 8-8- Campo de vorticidade, passo p = 15D e altura h = 0.1D. Da esquerda para direita, de cima
para baixo respectivamente ângulo (a) 0º, (b) 30º, (c) 60º e (d) 90º.
Na Figura 8-9 são apresentados os resultados para p=15D e h=0.2D. A altura elevada do
strake impede, mais uma vez, uma comunicação entre as duas camadas cisalhantes. Vórtices
não se formam devido ao fato das camadas cisalhantes não se enrolarem. Não havendo
formação alternada de vórtices próximos ao cilindro a resposta do corpo é de baixa amplitude.

90
Figura 8-9- Campo de vorticidade, passo p = 15D e altura h = 0.2D. Da esquerda para direita, de cima
para baixo respectivamente ângulo (a) 0º, (b) 30º, (c) 60º e (d) 90º.
Os resultados das visualizações indicam claramente qual é o principal efeito do
strakes: este mecanismo de atenuação de VIV altera a maneira como ocorre a geração e
desprendimento de vórtices na região próxima à parede. Não se forma uma esteira
convencional de von Kármán. Aparentemente, para os cilindros com strakes com altura
h=0.2D, as camadas cisalhantes se formam e interagem a uma distância muito superior àquela
que ocorre para o caso do cilindro liso e para os casos com strakes de altura h=0.1D. Para
esses últimos, a altura da protuberância não foi suficiente para alterar a dinâmica de formação
de vórtices a ponto de impedir que eles se formem próximos ao cilindro.
91
9. REFERENCIAS BIBLIOGRÁFICAS
[1] MENEGHINI, J.R.; Projetos de pesquisa no tópico geração e desprendimento de vórtices no escoamento ao redor de cilindros.; Livre Docência; Escola Politécnica da Universidade de São Paulo; São Paulo; 2002.
[2] KHALAK, A., WILLIANSOM, C.H.K.; Dynamics Of A Hydroelastic Cylinder With Low Mass And Damping ; Journal of Fluids and Structures 10 (1996): 455-472.
[3] KHALAK, A., WILLIANSOM, C.H.K.; Fluid Forces and Dynamics Of A Hydroelastic Structure With Very Low Mass And Damping ; Journal of Fluids and Structures 11 (1997): 973-982.
[4] KHALAK, A., WILLIANSOM, C.H.K.; Motions, Forces And Mode Transitions In Vortex-Induced Vibrations At Low Mass-Damping ; Journal of Fluids and Structures 13 (1999): 813-851.
[5] GOVARDHAN , R., WILLIANSOM, C.H.K.; Modes of vortex formation and frequency response of a freely vibrating cylinder; Journal of Fluids Mechanicals 420 (2000): 85-130.
[6] GOVARDHAN , R., WILLIANSOM, C.H.K.; Vortex-Induced Vibration; Annuary Review of Fluids Mechanicals 36 (2004): 413-455.
[7] DOWNES , K., ROCKWELL, D.; Oscillations of a vertical elastically mounted cylinder in a wave: imaging of vortex patterns; Journal of Fluids and Structures 17 (2003): 1017-10331.
[8] MENEGHINI, J.R.; Revisão Bibliográfica: Atenuadores de Vibração Induzida por Vórtices.; Programa de Simulação do Escoamento ao Redor de Risers: Flomar3d – Fase 2(VIV); Escola Politécnica da Universidade de São Paulo; São Paulo; 2005.
[9] BRANKOVIC, M.; Vortex-induced vibration attenuation of circular cylinders with low mass and damping; PhD Thesis Imperial College; (2004); 68-91
[10] ÁSSI, G.R.S.; Estudo Experimental do Efeito de Interferência no Escoamento ao Redor de Cilindros Alinhados; Dissertação de Mestrado, Escola Politécnica da Universidade de São Paulo (2005).
[11] FUJARRA, A.L.C.; Estudos experimentais e analíticos das vibrações induzidas pela emissão de vórtices em cilindros flexíveis e rígidos; Tese de doutorado apresentada à Escola Politécnica da Universidade de São Paulo (2002).







