estudo biomecânico na marcha de indivíduos amputados do...
TRANSCRIPT

Faculdade de Engenharia da Universidade do Porto
Estudo Biomecânico na Marcha de Indivíduos Amputados do Membro Inferior
José António Luz Viegas
VERSÃO DE TRABALHO TEÓRICO
Relatório realizado no âmbito da Unidade Curricular de Preparação da Dissertação
Mestrado em Engenharia Biomédica
Orientador: Professor Doutor João Manuel R. S. Tavares (FEUP/DEMec)
Co-orientador: Professora Doutora Andreia S. P. Sousa (ESTSP)
Porto, 22 de Janeiro de 2017
© José António Luz Viegas, 2017

i
Resumo
A presente Dissertação enquadra-se especificamente na análise da marcha de
indivíduos com amputações de membro inferior. Na actualidade a marcha é uma actividade
da vida diária que apresenta um grande impacto relativamente a factores físicos,
psicológicos e sociais. A análise da marcha tornou-se então numa ferramenta tanto de
avaliação clínica como também de investigação do movimento humano.
A amputação é a cirurgia mais antiga da história da medicina, definida como o corte
cirúrgico parcial ou total de um determinado segmento corporal. Com o decorrer das
épocas vieram-se a desenvolver diferentes membros artificiais por diferentes materiais
como madeira, couro e alumínios, no qual proporcionava locomoção dos amputados,
embora realizando uma marcha desajeitada. Foi então que após as grandes guerras
mundiais tornou-se fulcral a reabilitação das pessoas lesadas desta época. O objectivo de
colocar um membro artificial apenas pela estética ou proporcionar uma mobilidade mínima
tornou-se uma ideia vaga, o ideal principal era promover conforto, tal como reabilitar e
promover uma marcha o mais semelhante a marcha de indivíduos com os membros
inferiores sãos.
O objectivo desta Dissertação baseia-se na comparação de parâmetros
espaciotemporais, cinemáticos e cinéticos da marcha entre indivíduos amputados e os
indivíduos sem qualquer patologia.
Esta Dissertação encontra-se dividida em duas partes: a primeira parte apresenta uma
revisão bibliográfica de forma a abordar os conceitos teóricos da temática, como a
anatomia e fisiologia do membro inferior, amputação e próteses de membro inferior,
análise biomecânica e ferramentas/instrumentos para a sua realização e os conceitos do
ciclo de marcha; a segunda parte baseia-se no trabalho experimental que se pretende
realizar no estudo biomecânico, onde se realizará a comparação dos diversos parâmetros
referidos anteriormente.

ii

iii
Abstract
The present dissertation is specifically focused on the gait analysis of individuals
with lower limb amputations. At present, walking is an activity of daily living that has a
great impact on physical, psychological and social factors. The gait analysis then became a
tool for both clinical evaluation and research into human movement.
The amputation is the oldest surgery in the history of medicine, defined as the
partial or total surgical cut of a certain body segment. Throughout the epochs different
artificial limbs were developed by different materials such as wood, leather and
aluminum, in which it provided locomotion of the amputees, although carrying out an
awkward march. It was then that after the great world wars the rehabilitation of the
injured people of this time became central. The aim of placing an artificial limb only for
esthetics or providing minimal mobility became an empty idea; the main ideal was to
promote comfort, such as rehabilitating and promoting a gait the most similar to walking
of individuals with healthy lower limbs.
The aim of this Dissertation is based on the comparison of spatiotemporal,
kinematic and gait parameters of gait between amputated individuals and individuals
without any pathology.
This dissertation is divided into two parts: the first part presents a bibliographical
review in order to approach the theoretical concepts of the subject, such as anatomy and
physiology of the lower limb, amputation and lower limb prostheses, biomechanical
analysis and tools / instruments for Its realization and the concepts of the running cycle;
The second part is based on the experimental work to be carried out in the biomechanical
study, where the various parameters referred to above will be compared.

iv
Agradecimentos
Ao orientador Professor João Manuel R.S. Tavares pela disponibilidade, orientação e bases
bibliográficas fornecidas para elaboração do que é o conhecimento teórico para aplicação na
dissertação.
À co-orientadora Professora Andreia S.P. Sousa pela orientação, bases bibliográficas e apoio
informativo relativamente a comissão de ética e de laboratórios biomecânicos.
À Dra. Ermelinda Nicolau e ao Dr. Carlos Quelhas, directores da empresa Padrão Ortopédico,
relativamente a área de ortoprotesia, pelo interesse, apoio e parceria já demonstrado pela
temática.

v
Índice
Resumo………………………………………………………………………………………………………………………………………… i
Abstract………………………………………………………………………………………………………………………………………… iii
Agradecimentos…………………………………………………………………………………………………………………………… iv
Índice…………………………………………………………………………………………………………………………………………… v
Lista de Figuras…………………………………………………………………………………………………………………………… Ix
Lista de Tabelas…………………………………………………………………………………………………………………………… Xii
Abreviaturas e Simbolos ……………………………………………………………………………………………………………… Xiv
Capítulo 1 – Introdução………………………………………………………………………………………………………………… 1
1.1. Objectivo Geral………………………………………………………………………………………………………………… 2
1.2. Motivação…………………………………………………………………………………………………………………………… 2
1.3. Estrutura…………………………………………………………………………………………………………………………… 3
Capítulo 2 – Anatomia & Fisiologia……………………………………………………………………………………………… 5
2.1. Terminologia e Planos do Corpo Humano………………………………………………………………………… 5
2.1.1. Termos de Descrição e Referência………………………………………………………………………………… 5
2.2. Anatomia e Fisiologia………………………………………………………………………………………………………… 6
2.2.1. Sistema Ósseo………………………………………………………………………………………………………………… 7
2.2.2. Sistema Articular e Ligamentos……………………………………………………………………………………… 9
2.2.3. Sistema Muscular…………………………………………………………………………………………………………… 10
2.3. Processo Fisiológico da Marcha………………………………………………………………………………………… 14
Capítulo 3 – Amputação e Próteses de Membro Inferior……………………………………………………………… 17
3.1. Amputação de Membro Inferior………………………………………………………………………………………… 17
3.1.1. Condições Gerais…………………………………………………………………………………………………………… 18
3.1.2. Etiologia da Amputação………………………………………………………………………………………………… 19
3.1.3. Níveis de Amputação e Classificação do Nível Funcional……………………………………………… 20
3.2. Próteses de Membro Inferior……………………………………………………………………………………………… 22
3.2.1. Componentes Protésicos………………………………………………………………………………………………… 24
3.2.1.1. Encaixe Protésicos……………………………………………………………………………………………………… 24
3.2.1.2. Meios de Suspensão……………………………………………………………………………………………………… 24

vi
3.2.1.3. Joelhos Protésicos……………………………………………………………………………………………………… 25
3.2.1.4. Pés Protésicos……………………………………………………………………………………………………………… 27
3.3. Tipos de Próteses de Membro Inferior……………………………………………………………………………… 28
3.4. Fabricação de Próteses de Membro Inferior……………………………………………………………………… 34
Capítulo 4 – Métodos de Análise de Marcha………………………………………………………………………………… 37
4.1. Análise da Marcha……………………………………………………………………………………………………………… 37
4.1.1. Análise Visual do Ciclo da Marcha………………………………………………………………………………… 38
4.2. Sistemas de Medição de Análise da Marcha……………………………………………………………………… 38
4.2.1. Parâmetros de Medição da Marcha………………………………………………………………………………… 39
4.2.1.1. Parâmetros Espaciais…………………………………………………………………………………………………… 39
4.2.1.2. Parâmetros Temporais ……………………………………………………………………………………………… 40
4.2.2. Cinemetria ……………………………………………………………………………………………………………………… 41
4.2.2.1. Potenciómetro……………………………………………………………………………………………………………… 41
4.2.2.2. Electrogoniómetro……………………………………………………………………………………………………… 42
4.2.2.3. Acelerómetro……………………………………………………………………………………………………………… 42
4.2.2.4. Giroscópio…………………………………………………………………………………………………………………… 43
4.2.2.5. Sistemas de Vídeo-câmara…………………………………………………………………………………………… 43
4.2.3. Dinamometria………………………………………………………………………………………………………………… 44
4.2.3.1. Plataformas de Força…………………………………………………………………………………………………… 44
4.2.3.2. Baropodometria…………………………………………………………………………………………………………… 44
4.2.4. Electromiografia……………………………………………………………………………………………………………… 44
4.3. Parâmetros de Análise do Ciclo de Marcha……………………………………………………………………… 45
4.3.1. Parâmetros Cinemáticos………………………………………………………………………………………………… 45
4.3.2. Parâmetros Cinéticos……………………………………………………………………………………………………… 47
4.4. Aplicações da Análise de Marcha……………………………………………………………………………………… 49
Capítulo 5 – Sistemas de Análise de Movimento………………………………………………………………………… 51
5.1. Posição da Câmara……………………………………………………………………………………………………………… 51
5.2. Velocidade da Câmara, Frequência de Amostragem e Velocidade do Obturador…………… 52
5.3. Sincronização das Câmaras………………………………………………………………………………………………… 52
5.4. Calibração Espacial da Imagem………………………………………………………………………………………… 53
5.4.1. Calibração Estática………………………………………………………………………………………………………… 53
5.4.2. Calibração Dinâmica……………………………………………………………………………………………………… 54
5.4.3. Correcção das Lentes……………………………………………………………………………………………………… 54
5.5. Captação dos Dados…………………………………………………………………………………………………………… 55
5.5.1. Aglomerados e Marcadores……………………………………………………………………………………………… 55
5.5.2. Colocação de Marcadores e Erros Relacionados…………………………………………………………… 56
5.6. Digitalização, Transformação e Filtração de Dados………………………………………………………… 57
5.6.1. Transformação………………………………………………………………………………………………………………… 57

vii
5.6.2. Filtração de Dados………………………………………………………………………………………………………… 57
5.7. Configuração das Câmaras para Captação do Movimento………………………………………………… 58
5.8. Modelos Anatómicos e Conjunto de Marcadores……………………………………………………………… 59
5.8.1. Calibração Anatómica de Marcadores Estáticos …………………………………………………………… 62
5.8.2. Localização dos Marcadores Dinâmicos………………………………………………………………………… 62
5.8.3. Métodos de Identificação dos Marcadores……………………………………………………………………… 62
5.8.4. Sistemas de Coordenadas……………………………………………………………………………………………… 63
Capítulo 6 – Análise do Ciclo de Marcha……………………………………………………………………………………… 64
6.1. Divisão das Fases do Ciclo de Marcha………………………………………………………………………………… 66
6.2. Observação Detalhada do Ciclo de Marcha……………………………………………………………………… 68
6.3. Modelos Biomecânicos……………………………………………………………………………………………………… 76
6.3.1. Teoria do Pêndulo Invertido…………………………………………………………………………………………… 76
6.3.2. Teoria dos Seis Determinantes da Marcha……………………………………………………………………… 77
Capítulo 7 – Ciclo de Marcha nos Amputados……………………………………………………………………………… 79
7.1. Causas para Marcha Anormal……………………………………………………………………………………………… 80
7.2. Marcha de Amputados………………………………………………………………………………………………………… 80
7.2.1. Análise de Marcha em Amputados Transtibiais……………………………………………………………… 82
7.2.2. Análise de Marcha em Amputados Transfemorais ………………………………………………………… 83
7.3. Desvios Corporais da Marcha …………………………………………………………………………………………… 84
7.4. Alinhamento de Próteses de Membro Inferior…………………………………………………………………… 86
7.4.1. Transmissão de Forças Durante a Marcha……………………………………………………………………… 88
7.4.2. Biomecânica dos Encaixes……………………………………………………………………………………………… 89
Capítulo 8 – Trabalho Prático Futuro…………………………………………………………………………………………… 90
8.1. Materiais e Métodos…………………………………………………………………………………………………………… 90
8.2. Resultados e Conclusões Esperados…………………………………………………………………………………… 91

viii
ix
Lista de figuras
Figura 1- Posição anatómica, com os 3 planos de referência e 6 direcções fundamentais (Wittle, 2007). 6
Figura 2 - Ossos do membro inferior (Wittle, 2007). 7
Figura 3 - Ossos do pé (tarsos, metatarsos e falanges) (Wittle, 2007). 8
Figura 4 - Tipos de articulações sinoviais. Anfiartrose; Efipiartrose; Trocleartrose; Trocartrose; Enartrose; Condilartrose (da esquerda para a direita e de cima para baixo) (Seeley et al., 2003). 9
Figura 5 - Músculos do membro inferior, vista anterior e posterior (Wittle, 2007). 11
Figura 6 - Músculos agonistas para flexão da anca. (1) Grande psoas; (2) Ilíaco; (3) Recto femoral; (4) Costureiro (P. P. Correia, 2012). 11
Figura 7 - Músculos agonistas da extensão da coxa. (1) Grande glúteo; (2) Bicípite Femoral; (3) Semitendinoso; (4) Semimebranoso (P. P. Correia, 2012). 12
Figura 8 - Músculos agonitstas da extensão da perna. Músculo quadricípete crural (1) Crural; (2) Vasto externo; (3) Vasto interno; (4) Recto femoral (P. P. Correia, 2012). 12
Figura 9 - Músculos agonistas da flexão da perna. (1) Semitendinoso; (2) Semimembranoso; (3) Bicípite femoral (longa porção); (4) Bicípite femoral (curta porção) (P. P. Correia, 2012). 13
Figura 10 - Músculos agonistas da flexão plantar. Músculo tricípite sural (1) Gémeo interno; (2) Gémeo externo; (3) Solear (P. P. Correia, 2012). 14
Figura 11- Componentes principais da base funcional da marcha (Vaughan et al., 1999). 15
Figura 12 - Representação dos movimentos do membro inferior(Wittle, 2007). 16
Figura 13 - Método de amputação realizado na Idade Média (Carvalho, 2003). 18
Figura 14 - Principais níveis de amputação de membro inferior (Comprehensive Prosthetics & Orthotics, 2016). 21
Figura 15 - Divisão do Coto segundo o seu comprimento (Comprehensive Prosthetics & Orthotics, 2016). 21
Figura 16 - Classificação das próteses. Prótese endosquelética (esquerda) e prótese exosquelética (direita) (Muilenburg & A. Bennett Wilson, 1996). 23

x
Figura 17 - Sistemas de suspensão através de liners (Eshraghi et al., 2013; Ossur, 2016). 25
Figura 18 - Joelho de bloqueio manual e joelho de autofreio (Endolite, 2016; Ossur, 2016). 26
Figura 19 - Joelho policêntrico, jolho de sistema hidráulico e joelho de microprocessador (da esquerda para direita) (Endolite, 2016; Ossur, 2016). 27
Figura 20 - Pé protésico não articulado, monoaxial e multiaxial (da esquerda para direita) (Endolite, 2016). 28
Figura 21 - Pés de resposta dinâmica (Endolite, 2016). 28
Figura 22 - Tipos de encaixes transtibiais, PTB, KBM e PTS (da esquerda para direita) (Pedrinelli, 2004). 30
Figura 23 - Forma dos encaixes quadriláteros e CAT-CAM, na vista transversal (Munarriz et al., 2003). 32
Figura 24 - Desenho lateral dos encaixes CAT-CAM (esquerda) e MAS (direita) (Traballesi et al., 2011). 33
Figura 25 - Impressão tridimensional de encaixe transtibial (Rodin4D, 2016). 36
Figura 26 - Parâmetros espaciais (Richards, 2008). 40
Figura 27 - Parâmetros temporais (Richards, 2008). 40
Figura 28 - Equipamento de análise de marcha utilizado em laboratório com 6 a 12 câmaras de movimento, 2 a 4 plataformas de força e sensores EMG (Davis & Deluca, 2006). 43
Figura 29 - Parâmetros de estudo para análise do movimento (A. Completo & Fonseca, 2011). 45
Figura 30 - Definição da convenção dos ângulos dos segmentos anatómicos e articulares (A. Completo & Fonseca, 2011). 46
Figura 31 - Relação entre modelo anatómico, modelo do segmento e o diagrama de corpo livre (A. Completo & Fonseca, 2011). 47
Figura 32 - Marcadores passivos e aglomerados (Richards, 2008). 56
Figura 33 - Modelo anatómico simples (Richards, 2008). 59
Figura 34 - Modelo anatómico de Vaughn (Richards, 2008). 60
Figura 35 - Modelo anatómico Helen Hayes (Richards, 2008). 61
Figura 36- Ciclo de marcha humana com as principais fases (Perry, 1992). 65
Figura 37 - Ciclo de marcha e posições do membro inferior(Wittle, 2007). 67
Figura 38- Contacto inicial: FRS do MI direito na forma de vector no início do contacto do calcanhar (Wittle, 2007). 68
Figura 39 - Contacto inicial: FRS do MI direito, na forma de vector no fim do contacto do calcanhar (Wittle, 2007). 69
Figura 40 - Resposta de carga: FRS do MI após o CI, na forma de vector (Wittle, 2007). 70
Figura 41 - Apoio médio: FRS do MI após o AI, na forma de vector (Wittle, 2007). 71

xi
Figura 42 - Apoio final: FRS do MI após o AM, na forma de vector (Wittle, 2007). 72
Figura 43 - Pré-balanço: FRS do MI após AF, na forma de vector (Wittle, 2007). 73
Figura 44 - Balanço inicial: FRS na forma de vector (Wittle, 2007). 74
Figura 45 - Balanço médio: posicionamento dos membros nesta fase (Wittle, 2007). 75
Figura 46 - Balanço final: posicionamento dos membros nesta fase (Wittle, 2007). 76
Figura 47 - Ciclo de Marcha dos Amputados (Rajt’úkova et al., 2014). 82
Figura 48 - Desvios posturais, inclinação excessiva e movimento de torção (Rajt’úkova et al., 2014). 85
Figura 49 - Alinhamento das Próteses TT. (a) Linha de construção; (b) Linha de carga (Rajt’úkova et al., 2014). 87
Figura 50 - Alinhamento de próteses TF. (a) Linha de construção; (b) Linha de carga (Rajt’úkova et al., 2014). 88
Figura 51 - Divisão dos encaixes por secção (Rajt’úkova et al., 2014). 89
Figura 52 - Vista transversal, do tipo de processo de recolha de dados para captação e análise do movimento (Vickers, Palk, Mcintosh, & Beatty, 2008). 91


xiii
Lista de tabelas
Tabela 1- Posicionamento dos componentes de acordo a construção de próteses TT e TF (Rajt’úkova et al., 2014). 34
Tabela 2 - Anomalias comuns da marcha e direcção de observação (Wittle, 2007). 38
Tabela 3 - Determinação de objectivos e actividade do grupo muscular nas diferentes fases e períodos do ciclo de marcha (A. Completo & Fonseca, 2011). 67
Tabela 4 - Parâmetros espaciotemporais do Grupo de Controlo (Kadaba et al., 1989). 92
Tabela 5 - Parâmetros da amplitude articular do Grupo de Controlo (Kadaba et al., 1989). 92
Tabela 6 - Parâmetros de forças e momentos do Grupo de Controlo (Kadaba et al., 1989). 93
Tabela 7 - Parâmetros electromiográficos do Grupo de Controlo (Kadaba et al., 1989). 93
Tabela 10 - Comparação do parâmetro do tempo do passo em diferentes velocidades (Nolan et al., 2003). 94
Tabela 9 - Comparação do parâmetro de impulsão em diferentes velocidades (Nolan et al., 2003). 94
Tabela 8 - Comparação do parâmetro de FRS em diferentes velocidades (Nolan et al., 2003). 95
Tabela 11 - Comparação do parâmetro do tempo da fase de apoio em diferentes velocidades (Nolan et al., 2003). 95
Tabela 12 - Comparação do parâmetro do tempo da fase de balanço em diferentes velocidades (Nolan et al., 2003). 95
Tabela 13 - Comparação do consumo de oxigénio em diferentes velocidades (Schmalz et al., 2002). 96
Tabela 14 - Comparação das diferentes amplitudes ao nível das amputações TF (Klotz et al., 2011). 97


xv
Abreviaturas e Símbolos
Lista de abreviaturas
3D 3 Dimensões
ABAD Amplitude Abdução/Adução
AF Apoio Final
AG Amplitude Global
AI Apoio Inicial
AM Apoio Medial
AVD Actividade de Vida Diária
BF Balanço Final
BI Balanço Inicial
BM Balanço Medial
CAT-CAM Countered Adducted Trochanteric – Controled Allignment Method
CI Contacto Inicial
CG Centro de Gravidade
CCM Coeficientes de Correlação Múltipla
CV Coeficiente de Variação
DLT Direct Linear Transformation
DP Desvio Padrão
EMG Electromiografia4
FE Amplitude da Amplitude Flexão/Extensão
FRS Força de Reacção ao Solo
I Membro Intacto
IF Infravermelhos
KBM Kondylen Bettung Munster
LABAD Perda da Amplitude Abdução/Adução
LAG Perda da Amplitude Global
LED Díodo Emissor de Luz
LFE Perda de Flexão/Extensão
MAS Marlo Anatomical Socket
MI Membro Inferior

xvi
P Membro Protetizado
PB Pré-Balanço
PE Polietileno
PP Polipropileno
PTB Patellar Tendon Bearing
PTS Prothese Tibiale Supracondyliennne
SGA Sistema de Coordenadas das Articulações
SGC Sistema Global Coordenadas
SGS Sistema de Coordenadas dos Segmentos
SLA Stereolithography
SLS Selective Laser Sintering
SNC Sistema Nervoso Central
SNP Sistema Nervoso Periférico
TF Transfemoral
TSB Total Surface Bearing
TT Transtibiais
vGRF Força Vertical de Reacção ao Solo
VM Valor Médio
Lista de símbolos
ω Velocidade angular
α Ângulo do segmento corporal
θ Ângulo da articulação
Ax Aceleração linear
Ec(l) Energia cinética linear
Ec(a) Energia cinética angular
Ep Energia potencial gravítica
Et Energia total
F Força
Fc Força centrípeta
Fz1 Pico de força vertical da reacção ao solo registado
g Aceleração gravítica
L Comprimento de um segmento
m Massa
M Momento articular
P Potência da articulação
Pm Potência muscular
Vx Velocidade linear

xvii
W Energia muscular

1
Capítulo 1
Introdução
A análise do ciclo de marcha é uma temática que abrange diversas áreas científicas desde a área
da saúde como a anatomia e fisiologia do corpo humano até as áreas de engenharia como a
biomecânica.
O estudo do ciclo de marcha é uma ferramenta importante não só de diagnóstico para avaliação
de patologias neuro-musculo-esqueléticas e avaliação clínica do seguimento das lesões e eventuais
doenças. Desta forma é possível classificar a natureza e gravidade e a eventual necessidade da
utilização de dispositivos médicos, como as próteses, de forma a reabilitar e de proporcionar maior
independência ao indivíduo.
A amputação é definida como o corte cirúrgico parcial ou total de um segmento corporal, esta
pode ter diferentes etiologias tal como diferentes níveis de amputação. Este corte vai levar a
limitações da mobilidade do indivíduo, dependendo do tipo de amputação mais a um tipo que a
outro, no entanto para indivíduos com amputações nos membros inferiores. Seja qual for o nível de
amputação nos membros inferiores esta vai levar a incapacidade de locomoção, a excepção das
amputações parciais dos dedos (desarticulações interfalângicas) que permitem a realização da
marcha mas não a adequada.
A falta de mobilidade do membro amputado que por sua vez leva a atrofia muscular e a
eventuais incapacidades da amplitude articular do membro e desta forma começaram a ser
desenvolvido membros artificiais, denominadas por próteses. No início do desenvolvimento as
próteses foram criadas para proporcionar uma maior estética e para permitir algum movimento e
proporcionar equilíbrio na posição ortostática. Na actualidade as próteses já não servem para
melhorar a estética ou permitir algum movimento, elas são desenvolvidas para proporcionar um
melhor conforto ao membro amputado, segundo a anatomia e fisiologia do individuo, proporcionar
uma marcha mais próxima a de um individuo são, melhorando a estabilidade e segurança, as
próteses são utilizadas não só para reabilitação mas para a vida quotidiana do indivíduo como para
actividades recreativas e desportivas.
O desenvolvimento das próteses deve-se ao investimento da investigação da sinergia entre
da fisiologia humana, ao nível articular e do segmento corporal do pé e da engenharia relativamente
a materiais e análise da mecânica não só dos indivíduos como dos materiais.

2 Fundamentação Teórica
1.1. Objectivo Geral
O desenvolvimento do tema desta dissertação “Estudo Biomecânico na Marcha de Indivíduos
Amputados do Membro Inferior” tem como objectivo principal a análise e comparação das
informações recolhidas dos parâmetros cinemáticos, cinéticos e electromiográficos do ciclo de
marcha.
Para além da comparação dos parâmetros outro objectivo da dissertação é observar a amplitude
articular do membro amputado com e sem prótese, numa posição estática e equilibrada de forma a
analisar eventuais causas que possam limitar amplitude articular referida por alguns autores nas
referências utilizadas para descrição da dissertação.
Nesta primeira fase pretende-se adquirir o maior conhecimento teórico relativamente as
temáticas da anatomia e fisiologia humana, amputações e próteses existentes, os métodos e
sistemas de análise do movimento e os padrões do ciclo de marcha naturais tal como os de
indivíduos amputados.
1.2. Motivação
A origem desta dissertação foi encorajada pelo interesse na área de análise biomecânica do
ciclo de marcha, sobretudo em indivíduos com uma patologia que os limita a realizar uma das
principais actividades físicas do ser humano. Apesar dessa incapacidade quando é colocado um novo
membro artificial é possível observar uma diferença enorme e óbvia em termos da locomoção. No
entanto essa locomoção apresentará lacunas devido a compensações de movimento e alguns desvios
posturais para realização da marcha.
Através das ferramentas de análise de marcha é possível diagnosticar, avaliar e investigar uma
determinada patologia mas também compreender os movimentos e a mecânica para sua realização
e dessa forma procurar soluções não só para serem utilizadas na reabilitação mas no dia-a-dia do
indivíduo.
Apesar dos valores dos parâmetros a serem observados sejam diferentes é possível sempre
melhorar e/ou reduzir essa diferença seja ao nível da reabilitação, seja ao nível da aplicação dos
diferentes componentes existentes. A aplicação de próteses deve servir não só ajudar o indivíduo
amputado relativamente aos factores físicos, psicológicos ou sociais, a prótese deve fazer a ligação
física com o ambiente exterior a este, deve se tornar não no membro artificial e mecânico mas no
novo membro que faça parte do individuo.
Existe uma grande variabilidade de componentes de próteses desde os joelhos protésicos, de
mecânicos a microprocessadores até os pés que não realizam qualquer movimento ao de resposta de
dinâmica com retorno do gasto energético. Relativamente aos encaixes podemos verificar a
existência de certos encaixes e a sua importância no entanto é uma área que necessita ser
observada e analisada, desde o contacto com o coto, as forças biomecânicas existentes até mesmo
o design do encaixe utilizado e os seus materiais.

3
1.3. Estrutura
A presente dissertação encontra-se organizada em oito capítulos. O primeiro capítulo apresenta
a introdução ao trabalho e no qual se baseia o enquadramento do trabalho, a motivação e o
objectivo geral do mesmo. Com o início do segundo capítulo inicia-se a descrição dos conteúdos
teóricos, abordado inicialmente os conceitos da anatomia e fisiologia do membro inferior do ser
humano. Relativamente ao terceiro capítulo, este aborda os conceitos da amputação, as etiologias e
os níveis de amputação, tal como os conceitos das próteses e seus componentes. O quarto capítulo
apresenta os tipos de parâmetros existentes e que tipos de instrumentos são utilizados para a
realização do estudo biomecânico como a análise de marcha. O quinto capítulo aborda os sistemas
de análise do movimento e os seus processos. O sexto capítulo apresenta os conceitos teóricos da
análise do ciclo de marcha, desde a divisão a observação detalhada da marcha. Seguido do último
capítulo teórico da dissertação, o sétimo capítulo refere-se ao ciclo de marcha em indivíduos
amputados, desde as principais causas e desvios da marcha aos alinhamentos e biomecânica dos
encaixes das próteses.
O último capítulo da presente dissertação, o oitavo capítulo, refere-se agora ao trabalho
experimental, referindo que tipos de materiais e métodos se pretende utilizar para realização do
estudo como os parâmetros que se pretende observar e analisar para a realizar do trabalho
experimental.

5
Capítulo 2
Anatomia & Fisiologia
O capítulo 2 “Anatomia e Fisiologia” apresenta os conceitos gerais da terminologia e planos do
corpo humano, tal como a anatomia e fisiologia do membro inferior e ainda os movimentos e o
processo fisiológico da marcha.
2.1. Terminologia e Planos do Corpo Humano
O conceito da posição anatómica, também denominada por posição ortostática é compreendida
por uma posição de pé e erecta, com a face voltada para a frente e com os membros superiores
posicionados ao longo do corpo com as faces palmares voltadas para a frente. Um individuo está
numa posição de supinação quando deitado de costas e numa posição de pronação quando deitado
de barriga para baixo (Seeley, Stephens, & Tate, 2003).
A posição do corpo afecta a descrição das partes do corpo, isto significa que uma determinada
parte anatómica pode estar acima de outra na posição ortostática mas numa determinada posição,
como a supinação ou pronação essas duas partes podem estar na mesma posição. Desta forma para
evitar eventuais confusões os termos de descrição são baseados segundo a posição anatómica,
independentemente da posição do indivíduo.
2.2.1. Termos de Descrição e Referência
Os termos de descrição têm a funcionalidade de descrever partes do corpo humano. Os termos
de direita e esquerda mantêm-se como termos de descrição da terminologia anatómica.
Relativamente a analogia de em cima e em baixo são substituídos por superior e inferior,
correspondentemente, e a analogia de frente e atrás, corresponde respectivamente, anterior e
posterior.
Nos seres humanos a descrição de superior é utilizado como cefálico, que significa em direcção
à cabeça, pois é o ponto anatómico mais elevado do corpo humano, inversamente a descrição de

6 Fundamentação Teórica
inferior é utilizado como caudal, que significa em direcção à cauda ou seja ao final da coluna
vertebral. Estes dois termos podem ser utilizados para descrever movimentos do tronco mas não ao
nível de movimento dos membros.
Relativamente a palavra anterior, que significa “antes de”, e ventral significa abdómen, isto
significa que a superfície anterior do corpo humano, sendo o abdómen a região mais proeminente
numa posição anatómica. A palavra posterior, significa “depois de”, e dorsal significa costas/dorso,
sendo a superfície dorsal mais proeminente na região posterior.
O termo proximal significa, “mais próximo”, enquanto distal, “mais distante”, sendo termos
utilizados para referir estruturas lineares, como os membros, que se encontram ligados ao corpo por
uma extremidade proximal e uma extremidade distal a uma região anatómica mais distal.
Outros termos utilizados e aplicados são os termos como interno, termo utilizado quando uma
determinada região se encontra mais próxima da linha média e o termo externo quando esteja
afastado da mesma linha. Por fim os termos superficial e profundo referem-se, a uma e estrutura
mais perto da superfície do corpo e em direcção ao interior do corpo, respectivamente(Seeley et
al., 2003; Vaughan, Davis, & C., 1999; Wittle, 2007).
2.2. Anatomia e Fisiologia do Membro Inferior
O corpo humano encontra-se dividido por regiões anatómicas como a cabeça, o tronco e os
membros superiores e inferiores. Nesta dissertação será realizada apenas uma abordagem ao nível
do membro inferior sendo a região de incidência do trabalho.
Figura 1- Posição anatómica, com os 3 planos de referência e 6 direcções fundamentais (Wittle, 2007).
7
O membro inferior (MI) encontra-se dividido em coxa, perna, tornozelo e pé. No qual a coxa
estende-se desde a anca até o joelho, a perna estende-se do joelho até ao tornozelo.
Os membros inferiores (MI) funcionam como o suporte do corpo humano e são essenciais para o
ser humano se colocar em posição ortostática e realização da marcha. O MI está ligado ao corpo
através da cintura pélvica, estrutura bastante firme. O MI é a estrutura do corpo humano que
apresenta a função de suportar e realizar o movimento do corpo (Correia, 2012; Muscolino, 2006;
Seeley et al., 2003).
Nesta secção vão ser abordados apenas as estruturas anatómicas do MI, a nível ósseo, articular e
ligamentos tal com ao nível muscular.
2.2.1. Sistema Ósseo
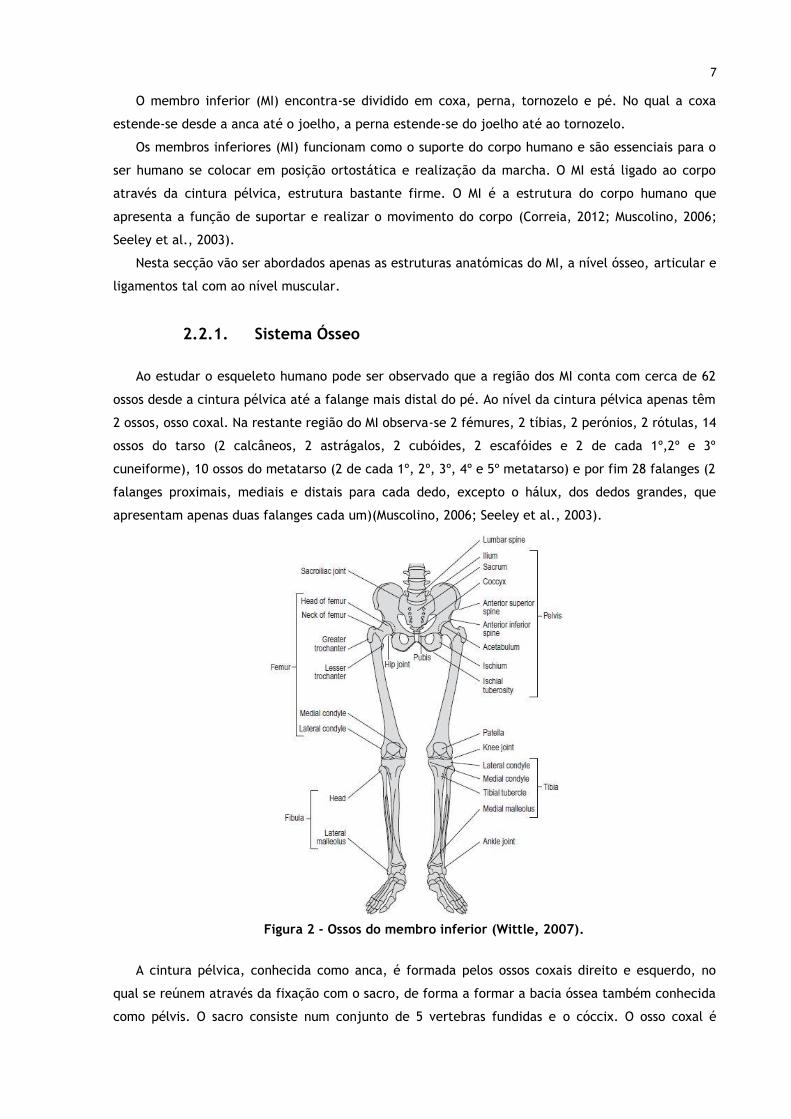
Ao estudar o esqueleto humano pode ser observado que a região dos MI conta com cerca de 62
ossos desde a cintura pélvica até a falange mais distal do pé. Ao nível da cintura pélvica apenas têm
2 ossos, osso coxal. Na restante região do MI observa-se 2 fémures, 2 tíbias, 2 perónios, 2 rótulas, 14
ossos do tarso (2 calcâneos, 2 astrágalos, 2 cubóides, 2 escafóides e 2 de cada 1º,2º e 3º
cuneiforme), 10 ossos do metatarso (2 de cada 1º, 2º, 3º, 4º e 5º metatarso) e por fim 28 falanges (2
falanges proximais, mediais e distais para cada dedo, excepto o hálux, dos dedos grandes, que
apresentam apenas duas falanges cada um)(Muscolino, 2006; Seeley et al., 2003).
A cintura pélvica, conhecida como anca, é formada pelos ossos coxais direito e esquerdo, no
qual se reúnem através da fixação com o sacro, de forma a formar a bacia óssea também conhecida
como pélvis. O sacro consiste num conjunto de 5 vertebras fundidas e o cóccix. O osso coxal é
Figura 2 - Ossos do membro inferior (Wittle, 2007).

8 Fundamentação Teórica
formado pela fusão de três ossos na fase de desenvolvimento, o ílion (virilha), o ísquion (anca) e a
púbis, no qual se reúnem perto do acetábulo, que se encontra no lado lateral do osso coxal, com
forma uma forma de tigela e o local no qual o fémur irá se ligar de forma a criar a articulação entre
a coxa e o fémur.
A ligação entre o acetábulo do osso coxal e do fémur é dada pela cabeça do fémur, devido às
suas características de proeminência e arredondado, criando um colo bem definido. A nível proximal
o fémur tem duas tuberosidades, o grande trocânter (na região lateral ao colo) e o pequeno
trocânter (região posterior), ambos são pontos de inserção de músculos que unem a coxa e anca. Ao
nível distal o fémur apresenta côndilo interno e externo que superfícies lisas e arredondadas que se
articulam com a tíbia e numa localização proximal a estes côndilos estão os epicôndilos interno e
externo, que tal como o grande e pequeno trocânter é pontos importantes de inserção muscular.
O osso da rótula é importante na articulação do joelho de modo a criar uma superfície articular
lisa na extremidade distal do fémur e modificando o ângulo do tendão entre o quadricípite crural e
a tíbia. Com a modificação do ângulo a força aplicada pelo músculo da tíbia é ampliada, o que vai
levar a uma menor contracção muscular.
A perna é a zona do MI que se situa entre o joelho e o tornozelo e consistem em apenas 2 ossos,
a tíbia e o perónio. A tíbia é o osso desta região que suporta a maior parte do peso. A extremidade
distal da tíbia é alargada formando o maléolo interno (medial) que contribui na face interna da
articulação do tornozelo. Relativamente ao perónio tem uma cabeça proximal para se articular com
a tíbia e na sua extremidade distal ele alarga ligeiramente de forma a criar a face externa da
articulação do tornozelo, o maléolo externo (lateral). Estes maléolos podem ser facilmente
observados devido a sua proeminência de ambos os lados.
Na região óssea mais distal do MI o pé é composto por ossos társicos, metatársicos e falângicos.
Na região proximal localizam-se os ossos társicos, onde o astrágalo articula-se com a tíbia e perónio,
criando a articulação do tornozelo, e o calcâneo é o osso que se localiza abaixo do astrágalo e o
suporta. Em relação aos ossos metatársicos e as falanges do pé, são a região medial e distal do pé
respectivamente. No geral o pé apresenta uma forma convexa a nível dorsal e concavo a nível
ventral o que forma as arcadas plantares do pé. Estas arcadas são conhecidas como arcada
longitudinal interna e externa e a arcada transversal (Muscolino, 2006b; Pina, 1999; Seeley et al.,
2003).
Figura 3 - Ossos do pé (tarsos, metatarsos e falanges) (Wittle, 2007).

9
2.2.2. Sistema Articular e Ligamentos
Ao nível das articulações do MI estas são maioritariamente articulações do tipo sinoviais. Este
tipo de articulação contém líquido sinovial o que permite um movimento considerável entre os ossos
que aí se articulam. As principais articulações do MI a articulação da anca, joelho, tornozelo e
articulações do pé.
As articulações sinoviais podem ser classificadas segundo a forma das superfícies articulares:
anfiartrose (forma plana), superfícies planas opostas de dimensões semelhantes no qual ocorre um
deslizamento entre eles; efipiartroses (forma em sela) consiste em duas superfícies articulares em
forma de sela orientadas em ângulo recto, uma em relação a outra; trocleartroses (forma em
roldana) consiste numa escavação em forma de duplo cone, em que os troncos se unem pela base
menor, na extremidade que se aplica numa saliência correspondente do outro osso; trocartroses
(forma cilíndrica) consiste numa apófise óssea cilíndrica que roda em anel composto parcialmente
por osso e ligamentos; enartroses (forma esférica) consistem numa cabeça esférica na extremidade
de um osso e num encaixe que é adjacente; e condilartroses (contorno elíptico) são articulações
esféricas modificadas, de forma elipsoidal, no qual não permite rotação (Muscolino, 2006b; Seeley
et al., 2003).
A articulação coxofemoral (anca), como referido anteriormente é composta pela cabeça do
fémur e do acetábulo do osso coxal é uma articulação do tipo enartrose, articulação multi-axial, por
permitir movimentos bastante amplos em todos os eixos de rotação, abdução/adução e
extensão/flexão.
Figura 4 - Tipos de articulações sinoviais. Anfiartrose; Efipiartrose; Trocleartrose; Trocartrose; Enartrose; Condilartrose (da esquerda para a direita e de cima para baixo) (Seeley et al., 2003).

10 Fundamentação Teórica
Em termos de ligamentos que unem a articulação coxofemoral eles são: o transverso do
acetábulo; iliofemoral; pubofemoral; isquiofemoral; e o ligamento redondo. Estes ligamentos têm a
função de tornar a articulação mais estável e com um determinado movimento controlado.
Relativamente a articulação do joelho é possível dividir devido a sua complexidade articular.
Esta é composta por uma articulação sinovial anfiartrose entre o fémur e a patela, articulação
patelofemoral, no qual apenas se movimenta num plano, sendo mono-axial. A outra articulação
existente é do tipo sinovial trocleartrose entre o fémur e a tíbia, é uma articulação que também só
permite um tipo de movimento, mono-axial (flexão e extensão).
Ainda na articulação do joelho existem diversos ligamentos: tendão rotuliano; asas da rótula;
poplíteo oblíquo; poplíteo arqueado; lateral interno e externo; cruzado anterior e posterior;
coronário; transverso; menisco-femoral (anterior-posterior).
A seguinte articulação é a articulação tibiotársica (tornozelo), constituída pela tíbia, perónio e
astrágalo é classificada como uma articulação sinovial do tipo trocleartrose. Esta articulação
permite bastante movimento, sendo uma articulação multi-axial.
Ao nível das restantes articulações do pé, as articulações tarsometatarsais, intermetatarsais,
metatatrsofalângicas e as interfalângicas são articulações do tipo anfiartroses.
Os ligamentos ao nível do tornozelo e das arcadas dos pés têm a função de manter os ossos e as
arcadas nas devidas posições. Esses ligamentos são: o lateral interno e externo; feixe perónio-
calcaniano; feixe perónio-astragaliano; grande ligamento plantar do pé; ligamento calcâneo-cubóide
plantar; e pequeno ligamento plantar do pé (Muscolino, 2006; Pina, 1999; Seeley et al., 2003).
2.2.3. Sistema Muscular
Os músculos são os principais responsáveis pelo movimento corporal, devido a ligação aos ossos
e controlo postural. As principais características funcionais dos músculos são a contractilidade,
capacidade do músculo tem de contracção para uma determinada força; excitabilidade, capacidade
de resposta que um músculo tem num determinado estímulo; extensibilidade, estiramento que um
determinado músculo possui; e a elasticidade, capacidade do músculo retornar a repouso após
estiramento.
Para a realização de um determinado movimento é necessário que ocorra uma contracção
muscular. Existem 4 tipos de contracções musculares: contracção isotónica, no qual o músculo
produz uma tensão constante durante a contracção, ocorre um encurtamento do músculo; a
contracção isométrica, o músculo produz um aumento na tensão durante a contracção e o
comprimento mantêm-se constante durante a contracção; a contracção concêntrica, quando a
tensão aumenta ocorre um encurtamento muscular; e a contracção excêntrica, o músculo produz
uma determinada tensão e comprimento muscular aumenta.
Quando se fala de tónus muscular deve se ter em conta que este é a tensão constante produzida
pelos músculos durante longos períodos de tempo e é este o principal responsável por manter os MI
erectos tal como o restante corpo.
A musculatura do membro inferior é dividida segundo os movimentos realizados ao nível da
coxa, perna e tornozelo, pé e os seus dedos (Muscolino, 2006b; Seeley et al., 2003).

11
O músculo que se localizam na região da coxa, na maioria, têm como origem a anca e vão se
inserir no fémur. Esta região devido a articulação existente permite movimentos nos 3 planos
anatómicos realizando os movimentos de extensão/flexão, abdução/adução e rotação
externa/interna. No movimento de flexão da coxa os principais músculos agonistas passam na região
anterior e são conhecidos como: o psoasilíaco; o recto femoral, o costureiro o tensor da fáscia lata
e o pequeno glúteo. A extensão da coxa é realizada por músculos agonistas na região posterior da
coxa como: o grande glúteo, a longa porção do bicípite femoral, o semimembranoso e o
semitendinoso (Correia, 2012; Muscolino, 2006).
Figura 5 - Músculos do membro inferior, vista anterior e posterior (Wittle, 2007).
Figura 6 - Músculos agonistas para flexão da anca. (1) Grande psoas; (2) Ilíaco; (3) Recto femoral; (4) Costureiro (Correia, 2012).
12 Fundamentação Teórica
A abdução da coxa é realizada pelos músculos que se localizam no lado externo da articulação
coxofemoral: os 3 glúteos (pequeno, médio e grande), o tensor da fáscia lata e o costureiro.
Relativamente a adução da coxa, os músculos localizam no lado interno da articulação e com origem
na púbis: os 3 adutores (pequeno, médio e grande), o pectíneo e o recto interno. Para a realização
da rotação externa existe uma variedade de músculos agonistas como: o grande glúteo, o
psoasilíaco, os adutores, o costureiro e todos os músculos pelvi-trocantéricos (piramidal da bacia,
obturador interno, obturador externo, gémeo superior, gémeo inferior e o quadrado crural. No
sentido inverso da rotação (interno) da coxa apenas existem 2 músculos agonistas: o pequeno glúteo
e o tensor da fáscia lata.
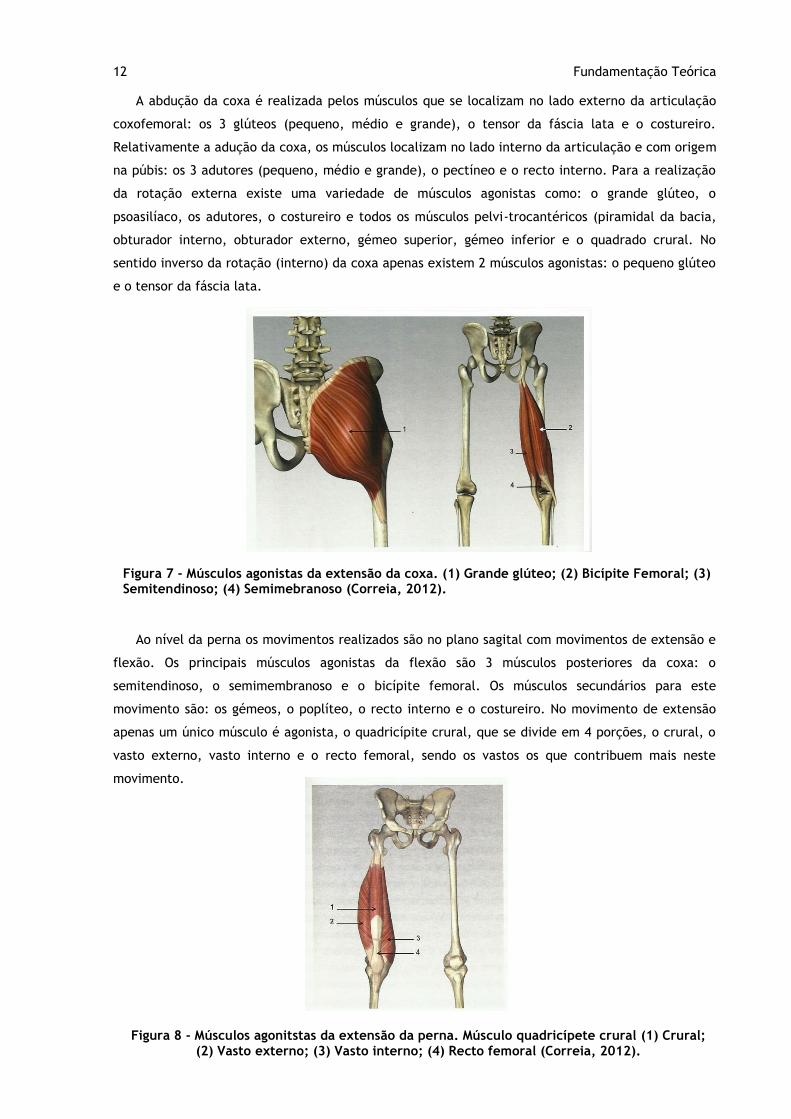
Ao nível da perna os movimentos realizados são no plano sagital com movimentos de extensão e
flexão. Os principais músculos agonistas da flexão são 3 músculos posteriores da coxa: o
semitendinoso, o semimembranoso e o bicípite femoral. Os músculos secundários para este
movimento são: os gémeos, o poplíteo, o recto interno e o costureiro. No movimento de extensão
apenas um único músculo é agonista, o quadricípite crural, que se divide em 4 porções, o crural, o
vasto externo, vasto interno e o recto femoral, sendo os vastos os que contribuem mais neste
movimento.
Figura 7 - Músculos agonistas da extensão da coxa. (1) Grande glúteo; (2) Bicípite Femoral; (3) Semitendinoso; (4) Semimebranoso (Correia, 2012).
Figura 8 - Músculos agonitstas da extensão da perna. Músculo quadricípete crural (1) Crural; (2) Vasto externo; (3) Vasto interno; (4) Recto femoral (Correia, 2012).

13
Ainda na perna esta apresenta uma certa rotação interna da perna, no qual os músculos
agonistas envolvidos são: semitendinoso, semimembranoso, o recto interno, o costureiro e o
poplíteo. Para rotação externa os agonistas serão: o bicípite femoral (principal) e o tensor da fáscia
lata (secundário). A mobilidade da estrutura do pé este é capaz de realizar movimentos como a
flexão plantar e flexão dorsal; eversão e inversão; rotação interna e rotação externa; flexão e
extensão dos dedos; e adução e abdução dos dedos. Estes movimentos são possíveis devido à
sinergia entre os músculos presentes no MI. Estes músculos podem ser divididos em músculos
extrínsecos, realizam flexão plantar/dorsal, eversão/inversão e rotação interna/externa do pé; e os
intrínsecos, realizam a flexão/extensão e adução/abdução dos dedos (Correia, 2012).
Os músculos extrínsecos são divididos em 3 grupos: compartimento anterior (extensor comum
dos dedos e próprio do hálux, tibial anterior e peronial anterior); compartimento posterior
(músculos superficiais: gémeos, plantar delgado, solhar; músculos profundos: longo flexor comum
dos dedos e do hálux, poplíteo e tibial posterior); compartimento externo (curto e longo peronial
lateral);
Os músculos intrínsecos localizados na região plantar do próprio pé: abdutor do 5º dedo e hálux,
adutor do hálux, curto extensor dos dedos, curto flexor do 5º dedo, hálux e comum dos dedos,
interósseos dorsais e plantares, lombricóides e o quadrado de Sylvius (longo flexor comum dos
dedos) (Muscolino, 2006; Seeley et al., 2003).
Figura 9 - Músculos agonistas da flexão da perna. (1) Semitendinoso; (2) Semimembranoso; (3) Bicípite femoral (longa porção); (4) Bicípite femoral (curta porção) (Correia, 2012).

14 Fundamentação Teórica
2.3. Processo Fisiológico da Marcha
Segundo Enoka (1988), a locomoção é um processo que ocorre devido a sinergia entre a
programação dos centros supre espinhais e que envolve os padrões de actividade muscular da
marcha (Vaughan et al., 1999).
O output neural que resulta dessa programação supre espinhal é como se fosse um comando
transmitido para o tronco cerebral e medula espinhal. A execução desse comando envolve 2
componentes:
A activação dos centros neurais inferiores que subsequentemente estabelecem a sequência dos
padrões de actividade muscular;
O feedback sensorial dos músculos, articulações e dos outros receptores modificam o
movimento.
O movimento é realizado pela interacção entre o sistema nervoso central (SNC), o sistema
nervoso periférico (SNP) e o sistema musculosquelético. Desta forma quando os músculos são
activados é gerado uma tensão nos mesmos, que vai criar uma determinada força e levar a um
determinado momento, através das articulações (Correia, 2012; Vaughan et al., 1999).
Este processo é realizado através de uma sequências de acontecimentos que ocorrem no
decorrer da locomoção:
1. Registo e activação do comando de marcha no SNC;
2. Transmissão dos sinais de marcha para SNP;
3. Contracção muscular que vai gerar consequentemente tensão nessa região;
4. Geração de forças e de momentos através das articulações;
5. Regulação das forças articulares e dos momentos dos segmentos rígidos do esqueleto
baseados na sua antropometria;
6. Deslocamento dos segmentos de maneira a proporcionar uma marcha funcional;
Figura 10 - Músculos agonistas da flexão plantar. Músculo tricípite sural (1) Gémeo interno; (2) Gémeo externo; (3) Solear (Correia, 2012).

15
7. Criação das forças de reacção ao solo (FRS) (Vaughan et al., 1999).
A realização da marcha depende do controlo motor, ou seja, padrão complexo e de coordenação
dos sinais nervosos, enviados para os músculos que por sua vez realizam movimento nas
articulações, dessa forma movendo os segmentos corporais de uma determinada região. O SNC é
onde são gerados os impulsos nervosos, não se localizam num só ponto mas numas rede de neurónios
localizados nas diversas secções do cérebro e da espinhal medula (Wittle, 2007).
Recordando os movimentos do MI, anteriormente referidos, são definidos como:
Flexão da Coxa – movimento da coxa na direcção da região anterior;
Extensão da Coxa – movimento da coxa na direcção da região posterior;
Abdução da Coxa – movimento de elevação (abertura) da coxa no sentido lateral do
membro;
Adução da Coxa – movimento de depressão (encerramento) da coxa no sentido medial do
membro;
Rotação interna – movimento de rotação do membro em direcção da região medial;
Rotação externa – movimento de rotação do membro em direcção da região lateral;
Flexão da perna – movimento da perna na direcção da região posterior;
Extensão da perna – movimento da perna na direcção da região anterior;
Flexão dorsal – movimento dos pés na direcção da região anterior da perna (flexão);
Flexão plantar – movimento dos pés na direcção da região posterior da perna (extensão);
Eversão – movimento do pé que consiste em virar a região tibiotársica, de modo a que a
superfície plantar fique voltada para a zona medial;
Figura 11- Componentes principais da base funcional da marcha (Vaughan et al., 1999).

16 Fundamentação Teórica
Inversão – movimento do pé que consiste em virar a região tibiotársica, de modo a que a
superfície plantar fique voltada para a zona lateral;
Adução – movimento em direcção da linha mediana em plano transversal;
Abdução – movimento de afastamento da linha mediana em plano transversal (Correia,
2012; Muscolino, 2006; Pina, 1999).
O pé pode ainda realizar um outro tipo de movimento ao nível da articulação astrágalo-
calcaneana, num plano oblíquo e composto por três tipos de movimento referidos anteriormente,
realização de pronação do pé, sendo a junção dos movimentos de eversão, flexão dorsal e abdução
do pé; e supinação, junção dos movimentos de inversão, flexão plantar e adução (Correia, 2012;
Muscolino, 2006; Pina, 1999).
Figura 12 - Representação dos movimentos do membro inferior(Wittle, 2007).

17
Capítulo 3
Amputação e Próteses de Membro Inferior
O capítulo 3 “Amputação e Próteses de Membro Inferior” apresenta os conceitos gerais da
amputação, como as condições gerais, etiologias e níveis de amputação. Ainda neste capítulo serão
abordados os conceitos gerais das próteses desde a sua classificação, aos componentes e aos
métodos de fabricação.
3.1. Amputação de Membro Inferior
A palavra amputação é derivada do latim “ambiputatio” com significado: “ambi”, ao redor ou
em volta de, e “putatio”, cortar ou retirar. Esta é definida como corte cirúrgico total ou parcial de
um membro. Esta palavra encontra-se relacionada acontecimentos de terror, derrota e mutilação e
de certa forma transmite uma noção de incapacidade e dependência (Mann, Teixeira, & Mota,
2008)(Carvalho, 2003; Pedrinelli, 2004).
Segundo Dennis Barbosa a amputação é a cirurgia mais antiga realizada na história da medicina.
Em algumas escavações arqueológicas foram encontrados membros amputados referentes ao
período neolítico (Pedrinelli, 2004).
A descrição mais antiga sobre a descrição de técnicas de amputação pertence a Hipócrates (460-
377 a.C.), considerado o pai da medicina científica daquela época. Essas amputações eram
realizadas por guilhotinas, nos tecidos necróticos sem sensibilidade, no qual gangrena era a única
indicação para amputações e a cauterização era realizada através de óleo e ferro quente (Carvalho,
2003; Pedrinelli, 2004).

18 Fundamentação Teórica
O século XV é caracterizado pelo início da protetização dos cotos, onde foram criados membros
de ferro acoplados a armaduras, pois a maioria dos amputados da época eram guerreiros.
Desde o século XX com a 1ª e 2ª Guerra Mundial houve uma evolução ao nível das amputações
sendo que na 1ª o conceito era realizar cotos cónicos para permitir a protetização sem qualquer
cuidado relativamente ao nível de amputação ou cuidados com os amputados, no qual a partir da 2ª
guerra o conceito alterou, a preocupação não era simplesmente protetizar os amputados era
permitir maior conforto ao nível do coto, maior funcionalidade e se possível sem dores.
Foi a partir de eventos históricos como as guerras que se iniciou o estudo mais aprofundado em
relação a indivíduos amputados, que desde essas épocas, houve um aumento do conhecimento e da
prática médica cirúrgica relativamente aos meios de amputação e forma do coto. Apesar de
actualmente de se saber o mesmo ou pouco mais que algumas décadas atrás a nível da prática
cirúrgica, os membros artificias, as próteses tornaram-se as ferramentas de estudo para optimização
da qualidade de vida dos amputados e no qual têm ocorrido uma evolução relativamente aos
componentes que fazem parte destes membros artificiais (Carvalho, 2003; Pedrinelli, 2004b)
3.1.1. Condições Gerais
As amputações podem ser indicadas como tratamento não urgente para casos de doença ou
malformações, ou podem ser indicadas como tratamento urgente, devido a um trauma ou infecção
grave.
Actualmente as amputações são dedicadas primeiramente para a eliminação dos tecidos moles e
ósseos que são irremediáveis e depois da eliminação ocorre a preocupação de reconstruir o coto a
nível ósseo, muscular e cutâneo de forma a proporcionar maior funcionalidade ao coto, mobilidade
e capacidade de sustentação.
Figura 13 - Método de amputação realizado na Idade Média (Carvalho, 2003).

19
Para se considerar que um determinado se encontra em boas condições, este deve ser firme,
sem aderência cicatriciais ou contracturas articulares e neuromas, no qual vai depender de alguns
factores, como:
Mioplastia: utilizada para fixação das extremidades dos músculos antagónicos e para
protecção do coto ósseo distal;
Miodese: é a reinserção dos músculos e tendões seccionados à extremidade óssea
amputada, proporcionado à musculatura e poder de contracção;
Hemostasia: é a cauterização dos vasos sanguíneos, de forma a conter a hemorragia;
Neurectomia: deve-se realizar um corte com leve tracção nervosa, de forma a proteger o
coto nervoso pelos tecidos musculares de forma a prevenir neuromas terminais;
Tecidos ósseos: uma boa ressecção das arestas e arredondamento das bordas distais de
forma a evitar a saliência óssea;
Suturas: devem ser realizadas em planos para evitar aderências cicatriciais e tensões
elevadas;
Posicionamento: deve se posicionar correctamente o coto de forma a evitar retracções e
encurtamento muscular.
O sucesso do processo de reabilitação de um amputado não depende apenas nestes factores ou
no trabalho de uma equipa multidisciplinar, composta por médios e técnicos de saúde mas também
pela aceitação da amputação, colaboração na reabilitação e motivação e dedicação do próprio
indivíduo (Pedrinelli, 2004b).
3.1.2. Etiologia da Amputação
Relativamente a etiologia ou processos de causa fisiológica que leva as amputações dos MI
podem ser: vasculares, traumáticas, tumorais, congénitas ou infecciosas.
As amputações por causa vascular atingem indivíduos com uma faixa etária mais avançada e
mais susceptíveis a doenças degenerativas. Este tipo de indivíduos apresenta insuficiência arterial e
encontram-se num grupo com factores como a hipertensão, altos níveis de colesterol e tabagismo.
Dentro deste tipo de etiologia encontram-se patologias vasculares como doenças arteriais, venosas e
linfáticas. Eles podem apresentar ainda neuropatia periférica que pode ser causada por doenças
sistemáticas (diabetes mellitus), distúrbios nutricionais (alcoolismo), doenças infecciosas e
alterações medulares (espinha bífida).
Caso esta amputação esteja no parâmetro de neuropatia diabética, significa que manifesta
alterações do sistema autónomo, alterações motoras e sensoriais. Este tipo de patologia apresenta
perda de sensibilidade, vibratória, térmica, táctil e dolorosa tal como o aumento de risco de
ulceração. Este tipo de patologia em indivíduos amputados aumenta as dores e o consumo de
oxigénio durante a realização de actividades, devido a necessidade de oxigenar os músculos.
Relativamente às amputações traumáticas ocorre maioritariamente em indivíduos de uma faixa
etária mais jovem, no qual ocorre devido a acidentes de trabalho ou devido a acidentes de viação.

20 Fundamentação Teórica
Outras causas que levam a este tipo de etiologia são minas perdidas em certos países, ou descargas
eléctricas, queimaduras muito graves ou armas de fogo.
As amputações tumorais afectam principalmente as crianças e adolescentes, esta etiologia tem
vindo a diminuir consideravelmente devido aos resultados obtidos em diagnósticos precoces,
processos como radioterapia e quimioterapia e cirurgias conservadoras. Estes tumores afectam não
só as partes moles do membro como envolvem o sistema nervoso e a musculatura.
Os indivíduos com amputações de etiologia congénita apresentam deformidades irregulares que
podem impossibilitar a protetização ou que dificultam a funcionalidade do membro amputado. Este
tipo de amputação deve ocorrer ou acontece nos primeiros anos de vida do indivíduo, para uma
eventual reabilitação precoce e maior aceitação do por parte do indivíduo.
O último tipo da etiologia de amputação é o tipo menos frequente devido aos avanços realizados
laboratorialmente e de desenvolvimento de medicamentos. Este tipo de amputação pode criar
lesões cutâneas que podem levar a necroses das extremidades e estão relacionadas com processos
traumáticos e vasculares(Carvalho, 2003; Pedrinelli, 2004).
3.1.3. Níveis de Amputação e Classificação do Nível Funcional
Como referido anteriormente é denominado coto ao membro residual, também conhecido como
o novo membro, é o principal responsável pelo controlo das próteses durante o ortostatismo e na
deambulação. Para que isso seja possível é necessário apresentar boas características como foi
mencionado nas condições gerais: o coto deve ser estável, a pele deve se encontrar num bom
estado, ausência de neuromas, boa circulação arterial e venosa, boa cicatrização e a ausência de
edema.
Para uma boa protetização de amputados do MI devem apresentar bons locais de cicatrização,
com boa descarga da carga realizada e deve estar de acordo com os princípios básicos cirúrgicos. Os
níveis de amputação de MI são:
Desarticulação Interfalângica;
Desarticulação Metatarsofalangiana;
Desarticulação Lisfranc (tarsometatársica);
Desarticulação de Chopart (metatársica);
Desarticulação de Syme ou Pirogoff ou Boyd (desarticulação tibiotársica);
Amputação Transtibial;
Desarticulação do Joelho;
Amputação Transfemoral;
Desarticulação da Anca (Carvalho, 2003; Pedrinelli, 2004; Periago, 2009).

21
As amputações transtibiais e transfemorais são amputações que podem ser divididas segundo o
tamanho do coto, isto significa, em três níveis:
1/3 Distal, é o nível que apresenta maior comprimento do coto (alavanca);
1/3 Medial, é o nível que apresenta um comprimento médio do coto;
1/3 Proximal, é o nível que apresenta menor comprimento do coto (Carvalho, 2003).
A avaliação a nível funcional é feita com base em avaliações físicas, psicológicas e sociais,
realizadas no período de reabilitação antes da protetização. A classificação pelos níveis funcionais
deve ser utilizada de imediato na decisão médica e abranger todos os componentes existentes da
prótese para cada indivíduo como o encaixe, meio de suspensão, pés protésicos e joelhos, caso
aplicável.
Figura 14 - Principais níveis de amputação de membro inferior (Comprehensive Prosthetics & Orthotics, 2016).
Figura 15 - Divisão do Coto segundo o seu comprimento (Comprehensive Prosthetics & Orthotics, 2016).

22 Fundamentação Teórica
A prescrição destes componentes deve ser baseada segundo o potencial funcional e intelectual
do indivíduo amputado, seguindo 3 parâmetros:
História clínica do indivíduo amputado (como patologias, tempo e tipo de amputação);
Estudo clínico (como condições do coto e funcionalidade do membro residual e membros
superiores);
Desejo do indivíduo amputado de superação para retomar a sua vida.
A classificação do nível funcional engloba 5 níveis, de 0 a 4, desde o indivíduo amputado menos
activo até indivíduos com elevado grau de actividade, respectivamente. Os níveis funcionais de um
amputado são então:
Nível 0 – indivíduos sem potencial para transferir o peso para o membro protetizado,
devido a condições clínicas ou limitação do aparelho locomotor, como ou sem produtos de
apoio e no qual a prótese não trará benefícios à qualidade de vida. Conhecidos como
indivíduos sem mobilidade;
Nível 1 – indivíduos que apresentam condições e potencial para utilização da prótese e
transferência de peso para mesma, realização de marcha em superfícies planas e numa
determinada cadência; Denominados como indivíduos de mobilidade domestica;
Nível 2 – indivíduos que apresentam condições e potencial, com ou sem auxílio de produtos
de apoio de ultrapassar barreiras arquitectónicas, como degraus e terrenos irregulares.
Estes indivíduos são conhecidos pela mobilidade activa mas com certas limitações;
Nível 3 – indivíduos que apresentam condições e potencial de marcha com diversas
cadências e realizam transferência de peso para prótese com maior facilidade, com
capacidade de ultrapassar barreiras arquitectónicas mais complexas, e realização de
actividades profissionais, terapêuticas ou recreativas com a prótese. Denominados por
indivíduos com mobilidade activa;
Nível 4 – indivíduos que apresentam um potencial com a prótese que exceda as condições
físicas necessárias para além da marcha, ou seja, apresentam capacidade de elevado
esforço físico, realização de actividades de alto impacto, como a realização de desporto e
mesmo de competição. Estes indivíduos são conhecidos por possuir uma mobilidade muito
activa (Carvalho, 2003; Pedrinelli, 2004b).
3.2. Próteses de Membro Inferior
As próteses são as ferramentas que vão substituir uma determinada região inexistente do
organismo. No início de fabricação de próteses estas eram confeccionadas por artesões em materiais
como couro, madeira e aço. No século XX, período pós-guerra, determinadas empresas
especializaram-se na produção de componentes pré-fabricados, no qual permitiu uma maior
dedicação na confecção de encaixes e alinhamento dos componentes.
As próteses podem ser divididas em duas categorias segundo as características próprias. Essas
categorias podem ser em próteses exosqueléticas e endosqueléticas.

23
As próteses exosqueléticas são também conhecidas como próteses convencionais,
confeccionadas com componentes de madeira ou plástico, que ervem de conexão entre o encaixe e
o pé. As paredes desta prótese para além da sustentação como param o acabamento estético. Estas
próteses podem ser utilizadas para todo o tipo de amputações, apesar dos componentes utilizados
são mais simples e não permitem aos indivíduos amputados realizar actividades sofisticadas. Este
tipo de prótese apresenta algumas vantagens como a grande nível de resistência e durabilidade, a
necessidade de pouca manutenção e podem ser utilizadas como próteses de banho no entanto
apresenta muitas desvantagens, como menos opções de componentes, dificuldades no alinhamento
e a impossibilidade de uma mudança rápida de componentes quando necessário.
As próteses endosqueléticas são conhecidas como próteses modulares, as conexões entre o
encaixe e os restantes componentes é realizada a partir de tubos e outros componentes modulares.
Pode se ter que utilizar uma espuma para revestimento estético e meia cosmética conforme as
medidas do membro contralateral (caso seja um membro não amputado). Estas próteses podem ser
utilizadas em todos os níveis de amputação, excepto em amputações parciais do pé e tornozelo.
Este tipo de prótese apresenta diversos componentes, relativamente aos joelhos existem diversos
tipos desde monocêntricos de trava manual a policêntricos de sistema hidráulico ou pneumático, a
partir de materiais como o alumínio, titânio ou aço. A fixação dos componentes é realizada por um
sistemas de parafusos que permitem adaptar um melhor alinhamento entre os componentes e
finalmente para a prótese em si, nos planos sagital, frontal e transversal. A nível funcional e
cosmético este tipo de prótese apresenta muito superior às próteses convencionais, pois permite
maior liberdade de movimentos e uso confortável para além da troca de componentes ser mais
facilitada e rápida. Apesar de se apresentar superior às próteses convencionais, este tipo de prótese
é menos resistente e necessita de maior manutenção (Carvalho, 2003; Herrero, Guillem, et al.,
2004; R. Z. Periago, 2009)
Figura 16 - Classificação das próteses. Prótese endosquelética (esquerda) e prótese exosquelética (direita) (Muilenburg & A. Bennett Wilson, 1996).

24 Fundamentação Teórica
3.2.1. Componentes Protésicos
Qualquer que seja o tipo de prótese utilizada para membro inferior, todas apresentam
componentes protésicos como os encaixes, meio de suspensão, joelhos protésicos, tubos de conexão
entre componentes e pés protésicos.
3.2.1.1. Encaixe Protésico
O encaixe é o componente mais importante de uma prótese, pois qualquer que seja o tipo ou
nível de amputação, este componente é a ligação entre o coto do amputado e a prótese. Este
componente tem uma extrema importância na qualidade final da prótese e as suas funções baseiam-
se: na realização do contacto total, do encaixe com o coto sem inibir a circulação sanguínea; região
de fixação entre o coto e prótese; transmissão de forças e peso corporal; e controlo do movimento.
Para cada nível existente de amputação é possível observar diferentes tipos de encaixes. Os
pontos de pressão para fixação, descarga do peso e a suspensão da prótese são definidos e ajustados
de forma a evitar eventuais lesões do coto e movimentos de pistão entre o encaixe e o coto.
O coto do amputado por vezes sofre alterações volumétricas no período de utilização de uma
prótese e nesses casos ou se reajusta o encaixe ou troca-se. Os tipos de encaixes existentes vão ser
retratados no subcapítulo 3.3. Tipos de Próteses de Membro Inferior (Carvalho, 2003; Periago,
2009).
3.2.1.2. Meios de Suspensão
Apesar do encaixe ser o componente mais importante na prótese, ele necessita de um sistema
de fixação entre o coto e o encaixe. Este sistema é conhecido como meio de suspensão e pode
adquirir diversas formas de suspensão, como a partir de interfaces (liners) através de um sistema de
correias ou cintas.
Este componente é essencial não só pela fixação como para o sucesso na marcha do amputado,
para além de se tornar mais confortável e proporcionar ao membro mais funcionalidade.
As funcionalidades deste tipo de componente baseiam-se na fixação restrita do encaixe ao coto
de forma a evitar actuação e forças compressivas no coto durante uma determinada actividade que
possa resultar do efeito de pistão, movimento axial do coto, relativamente ao encaixe, para além
de evitar irritações da pele e criação de úlceras, desconforto ou redução da actividade do coto
(Carvalho, 2003; Klute, Berge, Biggs, & Pongnumkul, 2011; Periago, 2009).
Os meios de suspensão existentes para próteses de MI são:
Sistema de sucção – é o sistema que utiliza a própria configuração do encaixe para fixação
deste no coto através do efeito de sucção, que é mantido através de uma válvula, que se
encontra na região distal do encaixe. Este sistema permite a libertação do ar do interior
do encaixe durante a descarga do peso;

25
Sistema por pino – é o sistema que utiliza um liner, compatível com o volume do coto, no
qual a extremidade distal apresenta um parafuso, que se vai conectar a uma estrutura
agrupada na região distal do encaixe fixando o coto ao encaixe;
Cinturão de suspensão elástica – este sistema utiliza um cinturão, de material macio, que
é colocado à volta da cintura do amputado, que se estende até a região proximal do
encaixe;
Cintas de ombro – é o sistema que utiliza cintas que vão desde a prótese e cintura e
terminam nos ombros (Carvalho, 2003; Periago, 2009);
Sistema magnético – é um sistema idêntico ao sistema por pino, utiliza um liner de silicone
com uma peça magnética na região distal que se vai fixar a um íman localizado também na
região distal do encaixe e que vão ser atraídos por forças magnéticas fixando desta forma
o coto ao encaixe (Eshraghi et al., 2013).
3.2.1.3. Joelhos Protésicos
A principal funcionalidade do joelho protésico é proporcionar estabilidade na fase de apoio do
membro protetizado e o controlo do mesmo na fase de balanço da marcha.
Existem diversos tipos de joelhos mecânicos que podem ser classificados segundo a sua
funcionalidade:
Bloqueio Manual – joelho monocêntrico que apresenta um sistema de desbloqueio manual,
utilizado em casos de muita debilitação e insegurança. Para realização da marcha o joelho
encontra-se sempre em extensão, criando um padrão de marcha anormal;
Fricção – joelho monocêntrico com fricção que permite ajustes através de pressão no eixo
de rotação. Joelho que se caracteriza pela simplicidade, baixo peso e de pouca
manutenção, apesar de pouco estável e a velocidade marcha restrita;
Autofreio – joelho monocêtrico que funciona como um joelho autobloqueador, indicado
para indivíduos com baixa velocidade de marcha, fraco controlo muscular e inseguros,
apesar de ser necessário total confiança ao retirar o peso total para flexão do joelho na
fase impulso (Carvalho, 2003; Periago, 2009).
Figura 17 - Sistemas de suspensão através de liners (Eshraghi et al., 2013; Ossur, 2016).

26 Fundamentação Teórica
Policêntricos – joelho policêntrico também conhecido como quatro barras, são mais
fisiológicos e comparativamente com joelho monocêntricos, apenas realizam
flexão/extensão, estes permitem movimentos de flexão do joelho, translação e rotação.
São joelhos indicados para cotos longos, com boa estabilidade e segurança, porém são
pesados e de elevado custo;
Sistema Pneumático – são joelhos compostos por cilindros controlados por sistema a ar o
qual é compressivo, podem ser joelhos monocêntricos ou policêntricos, utilizado para
naturalizar a marcha nas mudanças de velocidade e impedir flexões excessivas tal como
extensões bruscas. Este tipo de joelho é aplicável para indivíduos considerados activos e
que apresentem variações de velocidade da marcha, apesar de ser um joelho de grande
custo e de alta manutenção;
Sistema Hidráulico – são joelhos compostos por cilindros controlados por sistema de óleo,
totalmente compressivo, aplicados em joelhos monocêntricos e policêntricos, também
utilizados para naturalizar a marcha nas mudanças de velocidade e quando aparece um
obstáculo como degraus e rampas com passos alternados. Este tipo de joelho é aplicável a
indivíduos de baixa a alta actividade e apresenta as mesmas desvantagens que o sistema
pneumático;
Microprocessadores – sistema cujas características são as mais aproximadas a um joelho
fisiológico, no qual funciona através de sensores electrónicos que são os responsáveis pela
medição do ângulo de flexão do joelho e da velocidade angular da perna, dependendo do
comprimento e frequência de cada passo. Este género de joelho adapta-se
automaticamente aos diferentes tipos de terrenos e marchas não havendo a necessidade
do indivíduo ter de controlar o joelho. As suas características são estabelecidas através da
utilização de um computador com o devido software do microprocessador (Carvalho, 2003;
Periago, 2009).
Figura 18 - Joelho de bloqueio manual e joelho de autofreio (Endolite, 2016; Ossur, 2016).

27
3.2.1.4. Pés Protésicos
O pé protésico é o componente mais distal da prótese e é esta que realiza o contacto com o
solo. Este componente tem como funções a transmissão das FRS, amortecimento do impacto do pé
com o solo, compensar a ausência da articulação do tornozelo e pé.
Este componente tem uma importância fundamental pois tem que substituir a falta de
musculatura desta região e de facilitar a progressão da marcha do membro amputado. Um pé
protésico devidamente aplicado deve permitir a propulsão do MI, estabilização da carga, absorção
do choque, minimização do consumo de oxigénio e impedir que o centro de gravidade se desloque
em excesso.
Os pés protésicos são classificados segundo o movimento que permitem durante a marcha, ou
seja: pé não articulado; pé articulado (monoaxial ou multiaxial); e de resposta dinâmica.
Os pés não articulados são compostos por materiais internos de diferentes densidades e
características, que fazem com que o choque ao solo se torne num movimento harmónico. Este tipo
de pé protésico é caracterizado pela sua simplicidade, baixo custo e peso e durabilidade e apesar
de não ser capaz de realizar qualquer movimento articular é capaz de simular o movimento de
flexão dorsal devido a sua estrutura flexível. Essa estrutura flexível envolve o núcleo de madeira do
pé (parte rígida) e a estrutura flexível para além de permitir a simulação de movimento serve
também como a estética deste componente.
Os pés articulados podem se dividir em dois os pés monoaxiais e os pés multiaxiais. Os pés
monoaxiais apenas realizam o movimento do tornozelo no plano sagital, com uma flexão plantar de
15º e os pés multiaxiais são pés que permitem movimentos para além dos movimentos sagitais,
como os movimentos nos planos frontais e transversais. Estes pés são pés que adaptam a qualquer
Figura 19 - Joelho policêntrico, jolho de sistema hidráulico e joelho de microprocessador (da esquerda para direita) (Endolite, 2016; Ossur, 2016).

28 Fundamentação Teórica
tipo de irregularidades do solo, apesar de serem componentes pesados e para além de necessitar de
bastante manutenção são o tipo de pé que causa instabilidade na marcha (Carvalho, 2003; Herrero,
Barberà i Guillem, et al., 2004; Pedrinelli, 2004; Periago, 2009).
Os últimos tipos de pés protésicos são os de resposta dinâmica, sendo considerados também
como não articulados, eles possuem características próprias como a compressão axial elásticas com
grande absorção de energia, no qual é transferida na fase de impulso. Estes pés são confeccionados
a partir de fibras de carbono e grafite, podendo ter ou não revestimento estético e diferentes
designs dependendo da aplicação.
Referentemente a escolha destes pés protésicos, os pés não articulados devem ser aplicados a
indivíduos com um baixo grau de actividade para além de proporcionar mais estabilidade e
segurança, comparativamente com os articulados devem ser escolhidos a indivíduos activos ou
bastante activos e com confiança que não necessitem de tanta estabilidade/segurança. Os pés de
resposta dinâmica são pés que podem ser aplicados a qualquer tipo de pessoa devido a sua principal
característica de absorção e transferência de energia (Carvalho, 2003; Herrero, Barberà i Guillem,
et al., 2004; Pedrinelli, 2004; Periago, 2009).
Figura 20 - Pé protésico não articulado, monoaxial e multiaxial (da esquerda para direita) (Endolite, 2016).
Figura 21 - Pés de resposta dinâmica (Endolite, 2016).

29
3.3. Tipos de Próteses de Membro Inferior
As próteses desenvolvidas e utilizadas até os dias de hoje são aplicadas para todos os diferentes
níveis de amputação. Desta forma é possível dividir as próteses para amputações por regiões, como:
próteses parciais de pé e de tornozelo; próteses transtibiais (TT), próteses de desarticulação do
joelho; próteses transfemorais (TF); e próteses de desarticulação da anca (Carvalho, 2003; Herrero,
Barberà i Guillem, et al., 2004; Hunter & Mackillop, 1997; Pedrinelli, 2004; Periago, 2009).
No primeiro nível, próteses parciais de pé e tornozelo a função é reequilibrar o pé, de forma a
restaurar a capacidade de carga totalmente e compensar a funcionalidade do segmento amputado.
Neste tipo de próteses encontram-se englobadas as próteses para amputações de Lisfranc, Chopart,
Pirogoff, Boyd e Syme.
Neste nível de amputação e relativamente às amputações parciais do pé (interfalângicas e
metatarsofalângianas) é possível o indivíduo amputado realizar a marcha sem a prótese e caso
aplicável é colocado uma prótese estética ou ortótese plantar com calçado especial. A aplicação
deste tipo de dispositivos tem como objectivo: preencher a região amputada para evitar desvios
laterais; equilibrar os arcos plantares; alívio de pressões de regiões excessivas; prevenção de
úlceras de pressão; e realização de um movimento natural na realização da marcha (Carvalho, 2003;
Herrero, Barberà i Guillem, et al., 2004; Hunter & Mackillop, 1997; Periago, 2009).
As próteses utilizadas para amputações de Lisfranc tem o objectivo de evitar deformações de
equinovaro, para além de preencher a região amputada, através de uma forma em sapatilha e
outras funcionalidades como a estabilização da região do calcâneo para um melhor posicionamento
do retropé, prevenindo os desvios laterais, aliviar excessos de pressão e manter a região do antepé
flexível. Outro aspecto importante sobre este tipo de prótese como todos os outros tipos é o
contacto entre o coto e a prótese, por meio de um encaixe, não deve permitir quaisquer
movimentos de atrito entre estes dois.
Relativamente a protetização de indivíduos amputados do tipo Chopart é complexa devido ao
desequilíbrio muscular que proporciona um coto em equinovaro, para além de esteticamente
desagradável, pelo aumento do volume distal do encaixe. Nestes casos existe baixa tolerância a
carga distal no coto, por isso é confeccionado um encaixe mais proximal com apoio no tendão
patelar. Este encaixe é confeccionado em resina acrílica e carbono com uma abertura posterior,
para uma colocação do coto mais fácil, com um forro interior de forma a evitar ferimentos e
movimentos internos entre o coto e o encaixe é fixado através de velcros.
As últimas próteses para amputações parciais de tornozelo e pé são as amputações de Syme,
Pirogoff e Boyd. Estas permitem a carga do peso distal, caso não haja boa aceitação deve se realizar
um encaixe com apoio pré-patelar. A borda superior do encaixe deve terminar abaixo da
tuberosidade da tíbia. O encaixe tal como nas próteses de anteriores deve ser realizada por
materiais como resina acrílica e carbono, com um encaixe interno flexível e pode conter uma
abertura posterior ou lateral para facilitar a colocação (Carvalho, 2003; Herrero, Barberà i Guillem,
et al., 2004; Periago, 2009).

30 Fundamentação Teórica
A próxima região pertence às próteses TT, que podem ser exoesqueléticas ou endosqueléticas.
Para este tipo de prótese o encaixe é o responsável pelos locais de carga e suspensão da prótese.
Deve-se ter em conta que os encaixes têm regiões de carga e de alívio. As regiões de carga são
sobretudo nas regiões de tecidos moldes, como tendão infrapatelar, tecidos localizados abaixo do
côndilo tibial medial, musculatura posterior e na região distal do encaixe deve haver uma certa
carga, mas o importante é realizar o contacto total e retorno venoso. As regiões de alívio são as
áreas de saliências ósseas, como os côndilos femorais, borda inferior da patela, côndilos tibiais,
tuberosidade tibial, região anterior e extremidade distal da tíbia e a cabeça, extremidade do
perónio, tal como alguns tendões dos músculos semitendinoso, semimembranoso e bíceps femoral.
Actualmente as próteses TT possuem 4 tipos de encaixes que são os mais aplicados:
PTB (Patellar Tendon Bearing) – encaixe que possui um encaixe interno flexível; o bordo
superior do encaixe cobre metade inferior da patela e lateralmente o bordo superior
termina um pouco acima da linha articular do joelho; a carga é realizada no tendão
patelar e tecidos moles;
PTS (Prothese Tibiale Supracondylienne) – encaixe aplicado a indivíduos de coto curto;
com encaixe interno flexível; bordo superior acima da patela (vista anterior); a carga é
realizada no tendão patelar e tecidos moles; auto-suspendido devido às orelhas do encaixe
que ficam acima dos côndilos femorais e acima da patela;
KBM (Kondylen Bettung Munster) – encaixe possui um encaixe interno flexível; bordo
superior baixo, com a patela livre (vista anterior); a carga é realizada no tendão patelar e
tecidos moles; possuí o mesmo tipo de suspensão que um encaixe PTS mas com libertação
da patela;
TSB (Total Surface Bearing) – é o encaixe mais recente com a finalidade de melhorar as
distribuições de pressões no encaixe. As pressões são exercidas a nível do tendão rotuliano
com a contrapressão ao nível da poplítea mais suave; as superfícies de apoio do encaixe e
da interface estão mais distribuídas, não diferenciando as zonas ósseas da musculatura de
forma a redistribuir a pressão através da interface por todo o coto.
Figura 22 - Tipos de encaixes transtibiais, PTB, KBM e PTS (da esquerda para
direita) (Pedrinelli, 2004).

31
Apesar de alguns destes encaixes serem auto-suspendidos, por vezes é necessário a aplicação de
meio de suspensão auxiliar que pode ser um dos referidos anteriormente ou ainda a suspensão
através de joelheiras elásticas ou de neopreno (Carvalho, 2003; Herrero, Barberà i Guillem, et al.,
2004; Pedrinelli, 2004b).
Na região seguinte das amputações encontra-se as próteses de desarticulação do joelho.
Antigamente este tipo de amputação era evitada e substituída por uma amputação TF devido a
dificuldade de protetização, como a colocação adequada de joelhos protésicos, os quais havia um
grande discrepância relativamente às dimensões e o peso era maior. Nos dias de hoje este tipo de
amputação não exige tanta complexidade na protetização, devido aos diversos componentes ao
nível de funcionalidades e dimensões e até apresenta a vantagem de um maior coto, relativamente
às amputações TF e acima desta, por ter uma maior alavanca.
Estas próteses são compostas por dois encaixes, interno e externo. O encaixe interno é flexível e
o externo rígido, novamente com materiais como resina acrílica e fibra de carbono. Estes encaixes
apresentam características muito específicas, como: a carga distal do indivíduo amputado
proporciona uma boa propriocepção durante a marcha ou em posição ortostática; a fixação
supracondiliana é realizada pelo afunilamento dos dois encaixes; e o bordo superior proximal evita o
deslocamento lateral na marcha. Caso não haja aceitação deste tipo de prótese por não suportar o
peso a nível distal deve ser realizada na tuberosidade isquiática e tecidos moles como nas próteses
TF (Herrero, Barberà i Guillem, et al., 2004; Pedrinelli, 2004; Periago, 2009).
A seguinte região é das próteses para amputações TF, aplicável para os dois tipos de próteses,
exoesqueléticas e endosqueléticas. Neste tipo de próteses o encaixe não deve realizar carga distal,
devido ao tecido seccionado revestido por tecidos moles, no entanto deve efectuar contacto total
entre o coto e a prótese (Herrero, Barberà i Guillem, et al., 2004; Pedrinelli, 2004; Periago, 2009).
Para este tipo de prótese existem 3 tipos de encaixes possíveis: o encaixe quadrilátero, o
encaixe de contenção isquiática (Contoured Adducted Trochanteric-Controlled Allignment Method –
CAT-CAM) e o encaixe Marlo Anatomical Socket (MAS) (Herrero, Barberà i Guillem, et al., 2004;
Klotz, Colobert, Botino, & Permentiers, 2011; Pedrinelli, 2004; Periago, 2009; Traballesi et al.,
2011).
O primeiro encaixe é mais antigo e pode ser aplicado para qualquer caso deste tipo de
amputação, principalmente quando a musculatura é muito flácida e cotos curtos. O encaixe
quadrilátero apresenta uma forma idêntica a um quadrado, segundo o plano transversal. A parede
anterior tem uma forma achatada ao nível do triângulo de Scarpa e na parte externa é convexa,
com um limite superior de 2 cm acima do apoio isquiático. A parede posterior apoia o ísquion e é
esta parede suporta cerca de 1/3 do peso do encaixe. A parede medial é a parede com a altura
menor do encaixe, cerca de 0.5 a 1cm abaixo do apoio isquiático. A parede lateral é a parede com
maior altura do encaixe, 5cm acima do apoio isquiático e apresenta uma inclinação de 35º (adução)
para estabilização do fémur.
Este encaixe apresenta algumas desvantagens a nível prático e de utilização, como: forte
possibilidade de rotação pélvica sobre o encaixe; abdução do fémur que causa uma inclinação

32 Fundamentação Teórica
lateral do coto; desconforto provocado devido a pressão realizada no ísquion; e desconforto pela
pressão causado pela abdução do fémur no interior do encaixe.
O encaixe de contenção isquiática (CAT-CAM), foi desenvolvido para colocar o fémur numa
posição mais fisiológica, proporcionar uma marcha mais harmonizada e com menor gasto
energético. Este encaixe apresenta características diferentes do encaixe quadrilátero: a medida
médio-lateral é menor que a ântero-posterior e no qual a sua diminuição força o fémur a aduzir e
manter o glúteo médio em tensão; a abertura da dimensão ântero-posterior permite a contracção
dos músculos extensores e flexores; não existe pressões ao nível do triângulo de Scarpa e dos
músculos adutores; a inclinação da região isquiática no plano frontal (aproximadamente de 30º)
alivia a pressão da tuberosidade isquiática e aumenta o apoio da musculatura glútea; o bordo lateral
proximal envolve o grande trocânter e os tecidos moles abaixo da crista ilíaca.
O encaixe CAT-CAM apresenta uma forma mais semelhante a fisiologia do membro amputado. A
sua parede anterior situa-se abaixo da prega inguinal. A parede posterior encontra-se no mesmo
limite da parede anterior, no qual as duas paredes (anterior e posterior) não realizam pressões
excessivas; A parede medial é elevada cerca de 3 a 4cm de forma a conter a tuberosidade isquiática
e para dentro, englobando o ísquion e realizar pressão no ramo isquiático. A parede lateral é a mais
alta do encaixe, englobando o grande trocânter, encontra-se em adução de forma a evitar a
abdução criada geralmente nos cotos.
O CAT-CAM é o encaixe que pode ser aplicado para todos os casos deste tipo de amputações
excepto para amputados que possuam cotos curtos ou que não se ambientem a este encaixe devido
a pressão realizada sobre a parede lateral do ísquion (Herrero, Barberà i Guillem, et al., 2004;
Pedrinelli, 2004; Periago, 2009).
Depois de terem sido realizados estudos relacionados com estes dois encaixes, Marlo Ortiz
modificou o conceito de contenção isquiática para um encaixe de contenção ísquio-ramal,
conhecido como MAS. Este encaixe em vez de envolver o ísquion envolve agora o ramo isquiopúbico.
Figura 23 - Forma dos encaixes quadriláteros e CAT-CAM, na vista transversal (Munarriz et
al., 2003).

33
A contenção do ramo isquiopúbico ocorre de 2 a 3cm acima deste ramo, com uma largura de 5 a
6cm. O bordo medial está sob o ramo isquiopúbico. A linha de corte anterior é posicionada ao nível
do ramo púbico e sobe aproximadamente 0,6cm sob a espinha ilíaca ântero-superior. Segue-se a
prega inguinal para se ligar com a parede lateral que inclui o trocânter. Ao nível posterior do
encaixe vai apresentar uma forma em “U” no ponto médio, posicionado a 1,2cm sob o ramo
isquiopúbico para os homens e 2,5cm para mulheres. Ao nível lateral a forma em “U” junta-se à
parede externa (Klotz et al., 2011; Traballesi et al., 2011).
Por último a região das próteses para desarticulação da anca, devem ser próteses
endosqueléticas devido a complexidade mecânica das articulações do joelho e da anca e a redução
do peso existente com esses componentes. Este tipo prótese utiliza um cesto pélvico, que engloba a
região abdominal realizando suspensão acima das cristas ilíacas e a carga do peso distal é realizado
sobre o ísquion e da parede lateral. O cesto pélvico tem uma abertura anterior e a fixação é feita
por meio de velcros.
A tabela 1 apresenta a construção das próteses TT e TF, baseado na tabela 2 do estudo
realizado por Rajt’úkova, Michalíková, Bednarcíkova, Balogová, & Zivcák (2014), referindo os
principais componentes protésicos e seu posicionamento tal como os tipos de correcções existentes
com os diferentes planos de execução.
Figura 24 - Desenho lateral dos encaixes CAT-CAM (esquerda) e MAS (direita) (Traballesi et al., 2011).

34 Fundamentação Teórica
Construção Transtibial Transfemoral
Const
rução B
ási
ca Pé
Plano Sagital Anterior-Posterior
(AP)
Altura da Região do Calcanhar (Eficiente) - 5mm. Centro do pé adiantado cerca de 30mm da linha de construção.
Plano Transversal Rotação Externa de 5 a 7º.
Encaixe
Plano Sagital (AP)
Flexão do Encaixe –
apresenta um ângulo de flexão médio de
+5º.
Flexão do Encaixe – valor médio do ângulo de flexão de +5 a 10º.
Plano Frontal
Ângulo de adução depende do comprimento do MI são, aproximadamente 3, 7, 12º.
Joelho
Plano Sagital (AP)
-
Posição de acordo com a construção do centro de rotação, 20mm acima do tendão patelar do
segundo membro.
Corr
ecção E
státi
ca
Plano Frontal Comprimento da
Prótese. Posição ML do Pé.
Pronação-Supinação.
Comprimento da Prótese. Posição ML do Joelho/Pé.
Pronação-Supinação.
Plano Sagital (AP)
Flexão Plantar. Posição AP do Pé.
Flexão Plantar. Posição AP do Joelho/Pé.
Plano Transversal
Alteração de Pé
Protésico
Alteração de Pé Protésico
Corr
ecção D
inâm
ica
Plano Frontal
O controlo do movimento articular do joelho na fase de suporte da marcha deve ter forças ML mínimas.
Plano Sagital (AP) O controlo do movimento articular do joelho na fase de suporte deve
realizar uma extensão e flexão natural quando exercida pressão no solo.
Realização de testes de marcha em diversos ambiente e de diferentes condições.
3.4. Fabricação de Próteses de Membro Inferior
Antes de se fabricar uma prótese é necessário realizar um exame clínico, no qual inicialmente
se deve analisar o segmento corporal amputado, observar as condições do coto, estado psicológico e
desejo do amputado e a mobilidade do coto para se examinar até que ponto o amputado consegue
melhorar. Deve-se anotar os dados do indivíduo, desde o histórico clínico até às medidas do
segmento, informação sobre o desenho do dispositivo, medidas, materiais, componentes e
acessórios (Herrero, Guillem, et al., 2004; Periago, 2009).
Apesar da maioria dos componentes existentes serem pré-fabricados, os encaixes, são o único
componente que se pode pré-fabricar devido às dimensões de coto que são para além de individual
Tabela 1- Posicionamento dos componentes de acordo a construção de próteses TT e
TF (Rajt’úkova et al., 2014).

35
são pessoais a um indivíduo amputado. Existem duas formas de fabricar este tipo de dispositivos, o
fabrico tradicional ou convencional e o fabrico aditivo.
O primeiro tipo de fabrico é o método mais antigo no fabrico das próteses e inicia-se
primariamente pela recolha das dimensões (comprimentos, circunferências e dimensões médio-
lateral e ântero-posterior), do coto. Após esta primeira etapa é realizado o molde negativo do coto
no qual pode é realizado através de ligaduras de gesso, o coto é envolvido numa capa maleável para
protecção do coto, como uma pelicula aderente, onde são marcados as proeminências ósseas a lápis
para ficarem devidamente registados no molde negativo. Este é posteriormente, transformado em
molde positivo (colocação de gesso no interior do molde negativo), rectificado através de gesso, no
qual se retira material, para fazer pressões nas regiões dos tecidos moldes e outras possíveis e
acrescentar eventualmente nas regiões das proeminências ósseas para evitar lesões na pele. O
molde negativo pode ser realizado ainda através da digitalização a 3 dimensões (3D) do membro e
corrigido futuramente num software apropriado deforma a produzir o molde positivo, que é
posteriormente fabricado por espuma de poliuretano e pode se continuar a fabricar a prótese a
partir desse molde
Após rectificação do molde positivo pode se realizar dois processos que dependem da finalidade
do processo. Realiza-se ou uma termomoldagem, normalmente utilizado para realização de provas,
com materiais termoplásticos que permitam observar o interior do encaixe como polietileno (PE) e
polipropileno (PP) ou a combinação dos dois criando um copolímero; ou laminado através de
materiais como a resina acrílica e fibra de carbono, geralmente utilizados para produção do encaixe
final.
No processo final deste tipo de fabricação é realizado o alinhamento de bancada e a montagem
para depois a nível clínico se realizar as provas e os últimos ajustes de forma a adequar a prótese ao
indivíduo amputado (Herrero, Barberà i Guillem, et al., 2004; Periago, 2009).
O seguinte tipo de fabrico, fabricação aditiva, é o método mais recente no fabrico de próteses,
neste caso encaixes protésicos. O primeiro passo deste tipo de fabrico é a digitalização 3D do coto.
De seguida é realizado o processamento da digitalização, integrando o molde do coto e realizando
as correcções através do software (Alves, Braga, Simão, Neto, & Duarte, 2001; Colombo, Filippi,
Rizzi, & Rotini, 2010; Summit, 2014).
Numa terceira etapa é utilizado um dos métodos de fabricação aditiva existente, a
Stereolithography (SLA) ou a Selective Laser Sintering (SLS).
O método de SLA consiste na fabricação de objectos por adição sucessiva de camadas utiliza
resina epoxy líquida foto curável, que quando exposta a um laser de raios laser vai realizar o
processo de fotopolimorização nas zonas superficiais no qual o feixe incide. Este processo utiliza
sistemas electromecânicos de grande precisão, no qual se utiliza um modelo de varrimento para
retirar excessos. No final de um processo de SLA o dispositivo criado encontra-se no interior de
resina líquida e com suportes criados para fixação do dispositivo. Quando terminado o dispositivo
deve passar por um processo de pós-cura e posteriormente deve ser submetido a processos de
lixagem e/ou polimento (Alves et al., 2001).

36 Fundamentação Teórica
O método de SLS, a sinterização selectiva por laser, este tipo de fabricação consiste na
utilização de pós finos de materiais de plástico, compósitos com matriz polimérica, metais
revestidos a termoplásticos ou ligas metálicas no qual são ligados entre si através de varrimento por
feixe laser. A câmara de construção é pré-aquecida, é laminada uma camada em pó que
corresponde à espessura de cada camada de construção, utilizando sistemas electromagnéticos de
precisão. O feixe ao incidir nas partículas provoca a fusão parcial das interfaces dos pós, obtendo
uma estrutura sólida (Alves et al., 2001; Jin, Plott, Chen, Wensman, & Shih, 2015)).
A fabricação aditiva demonstrou ser de fácil implementação e pode ser utilizado em quase todos
os materiais do tipo termoplástico. Neste tipo de processo de fabricação existe a necessidade de
criar uma estrutura de suporte que permita realizar a construção do dispositivo adequada.
A última etapa tal como no método de fabrico convencional é verificar com o indivíduo
amputado e caso seja necessário realizar os últimos acabamentos e realiza-se a entrega da prótese
final, devidamente montada e alinhada (Jin et al., 2015).
Figura 25 - Impressão tridimensional de encaixe transtibial (Rodin4D, 2016).

37
Capítulo 4
Métodos de Análise de Marcha
O capítulo 4 “Métodos de Análise de Marcha” apresenta os conceitos gerais da análise de
marcha, como os tipos de análise existentes, os parâmetros que podem ser observados, os
instrumentos que são aplicados e as aplicações da análise de marcha.
4.1. Análise da Marcha
A análise da marcha tem como objectivo principal a medição quantitativa e avaliação da
locomoção humana. Esta pode ser utilizada para duas finalidades muito distintas: uma serve ajudar
directamente no tratamento de pacientes com determinadas patologias ou mesmo limitações; a
outra finalidade serve para melhorar a compreensão da marcha, por investigação.
Ao nível dos estudos fundamentais da marcha o objectivo é compreender a relação entre os
mecanismos utilizados na locomoção para realização de actividades funcionais como uma simples
caminhada até a biomecânica desportiva de forma a evitar lesões (Davis & Deluca, 2006; Richards,
2008; Wittle, 2007).
Relativamente à análise de marcha num ambiente clínico, os médicos e profissionais de saúde,
devem interpretar e avaliar os padrões de marcha dos indivíduos portadores de deficiências, de
forma a planear protocolos de tratamento, como a prescrição de dispositivos ortopédicos ou
intervenções cirúrgicas. Desta forma a análise clínica da marcha torna-se numa ferramenta de
avaliação, permitindo determinar a gravidade e extensão de uma patologia diagnosticada
anteriormente, como amputações, paralisia cerebral, doenças degenerativas nas articulações,
esclerose múltipla, distrofia muscular, artrites reumatóides, lesões na coluna vertebral e acidentes
vasculares cerebrais (Davis & Deluca, 2006; Wittle, 2007).
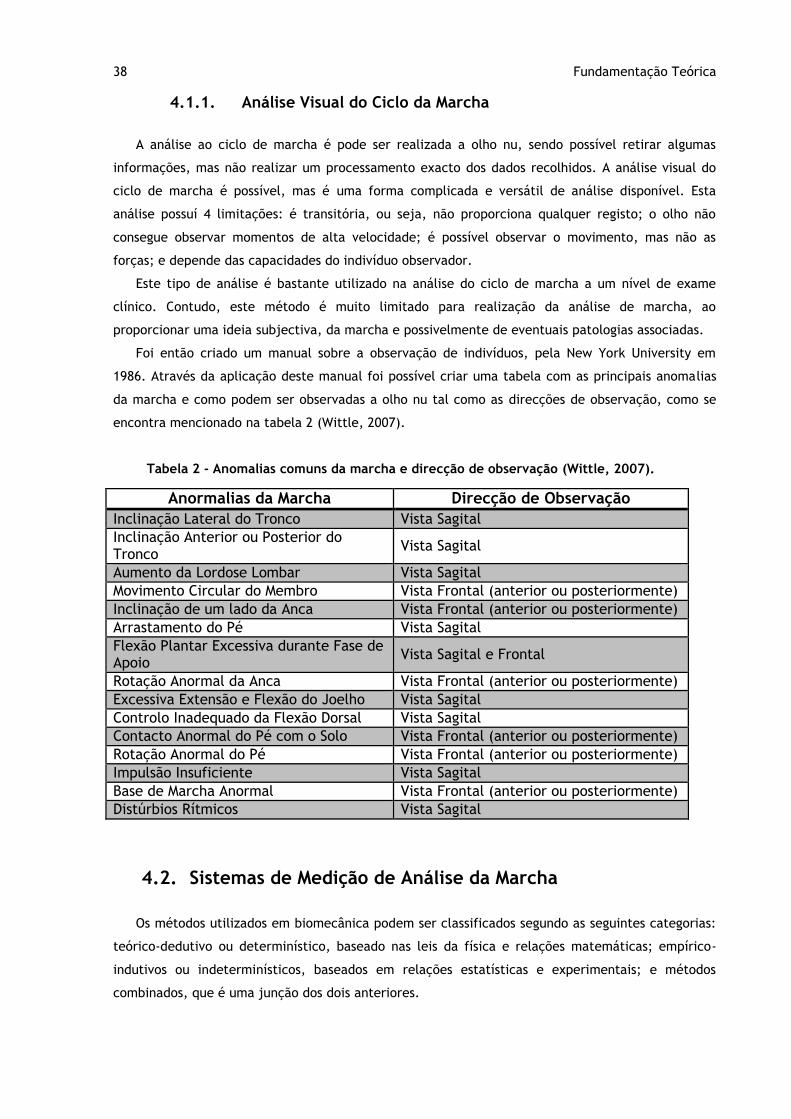
38 Fundamentação Teórica
4.1.1. Análise Visual do Ciclo da Marcha
A análise ao ciclo de marcha é pode ser realizada a olho nu, sendo possível retirar algumas
informações, mas não realizar um processamento exacto dos dados recolhidos. A análise visual do
ciclo de marcha é possível, mas é uma forma complicada e versátil de análise disponível. Esta
análise possuí 4 limitações: é transitória, ou seja, não proporciona qualquer registo; o olho não
consegue observar momentos de alta velocidade; é possível observar o movimento, mas não as
forças; e depende das capacidades do indivíduo observador.
Este tipo de análise é bastante utilizado na análise do ciclo de marcha a um nível de exame
clínico. Contudo, este método é muito limitado para realização da análise de marcha, ao
proporcionar uma ideia subjectiva, da marcha e possivelmente de eventuais patologias associadas.
Foi então criado um manual sobre a observação de indivíduos, pela New York University em
1986. Através da aplicação deste manual foi possível criar uma tabela com as principais anomalias
da marcha e como podem ser observadas a olho nu tal como as direcções de observação, como se
encontra mencionado na tabela 2 (Wittle, 2007).
Anormalias da Marcha Direcção de Observação
Inclinação Lateral do Tronco Vista Sagital
Inclinação Anterior ou Posterior do Tronco
Vista Sagital
Aumento da Lordose Lombar Vista Sagital
Movimento Circular do Membro Vista Frontal (anterior ou posteriormente)
Inclinação de um lado da Anca Vista Frontal (anterior ou posteriormente)
Arrastamento do Pé Vista Sagital
Flexão Plantar Excessiva durante Fase de Apoio
Vista Sagital e Frontal
Rotação Anormal da Anca Vista Frontal (anterior ou posteriormente)
Excessiva Extensão e Flexão do Joelho Vista Sagital
Controlo Inadequado da Flexão Dorsal Vista Sagital
Contacto Anormal do Pé com o Solo Vista Frontal (anterior ou posteriormente)
Rotação Anormal do Pé Vista Frontal (anterior ou posteriormente)
Impulsão Insuficiente Vista Sagital
Base de Marcha Anormal Vista Frontal (anterior ou posteriormente)
Distúrbios Rítmicos Vista Sagital
4.2. Sistemas de Medição de Análise da Marcha
Os métodos utilizados em biomecânica podem ser classificados segundo as seguintes categorias:
teórico-dedutivo ou determinístico, baseado nas leis da física e relações matemáticas; empírico-
indutivos ou indeterminísticos, baseados em relações estatísticas e experimentais; e métodos
combinados, que é uma junção dos dois anteriores.
Tabela 2 - Anomalias comuns da marcha e direcção de observação (Wittle, 2007).

39
Os procedimentos de medição podem ser assim classificados: procedimentos mecânicos, cuja
funcionalidade é a observação das grandezas por observação directa e que não se alteram
rapidamente; procedimentos electrónicos, transformação de grandezas mecânicas em grandezas
eléctricas, de forma a facilitar a medição de grandezas que se alteram rapidamente com o tempo e
se adaptar ao processamento dos dados, permitindo assim medições dinâmicas; e procedimentos
óptico-electrónicos ou processamento de imagens, no qual utiliza a representação óptica e
geométrica de um determinado indivíduo a ser analisado (A.C. Amadio, P.H. Lobo da Costa, I.C.N.
Sacco, J.C. Serrão, R.C. Araujo, 2013).
Segundo as classificações mencionadas anteriormente as diversas tecnologias para a medição de
variáveis dinâmicas no ciclo de marcha, foram divididas da seguinte forma: parâmetros espaciais e
temporais, cinemetria, dinamometria e electromiografia (EMG) (Davis & Deluca, 2006; Richards,
2008).
4.2.1. Parâmetros de Medição da Marcha
O tempo dos eventos do ciclo de marcha, como o contacto inicial e apoio final, devem ser
calculados e observados por parâmetros espaciais e temporais. Estes parâmetros podem ser obtidos
através de uma variedade de abordagens, desde a utilização de ferramentas simples, como a
utilização de uma fita e cronometro para um monitor óptico sofisticado como a aplicação de
palmilhas com sensores, colocados sob a superfície plantar.
A relação entre o comprimento da passada, frequência de passos, tempo da fase de balanço e a
velocidade da marcha para crianças e adultos tem sido estudada por diversos autores usados nas
relações entre os parâmetros espaciais e temporais de forma a investigar se a marcha sofreu alguma
modificação ou limitação a um destes níveis. Nestas relações são verificados aspectos como:
modificação do ritmo da marcha; modificação ao nível da velocidade; marcha com subidas e descida
cuja inclinação seja de 5º.
Ao nível clínico a colocação deste tipo de instrumento pode ser um desafio pelas inúmeras
deformidades dos pés e padrões de contacto com o solo. Esta dificuldade pode ser evitada através
da aplicação de palmilhas instrumentadas com sensores ao longo da superfície plantar ou através de
passadeiras instrumentadas. Estes eventos podem ser ainda quantificados pela medição de
movimento por uma camara baseada na tecnologia de plataformas de força (Richards, 2008; Wittle,
2007).
4.2.1.1. Parâmetros Espaciais
De forma a definir os parâmetros espaciais da marcha deve ter em conta os contactos realizados
pelo pé. Segundo Murray et al (1964 & 1970) e Rigas (1984)), os parâmetros espaciais da marcha
são: o comprimento do passo, o comprimento da passada, o ângulo do pé e a largura de base.
Os parâmetros do comprimento do passo e da passada são ambos definidos pela distância entre
dois contactos iniciais seja ela por diferentes pés como contacto consecutivo do mesmo pé,
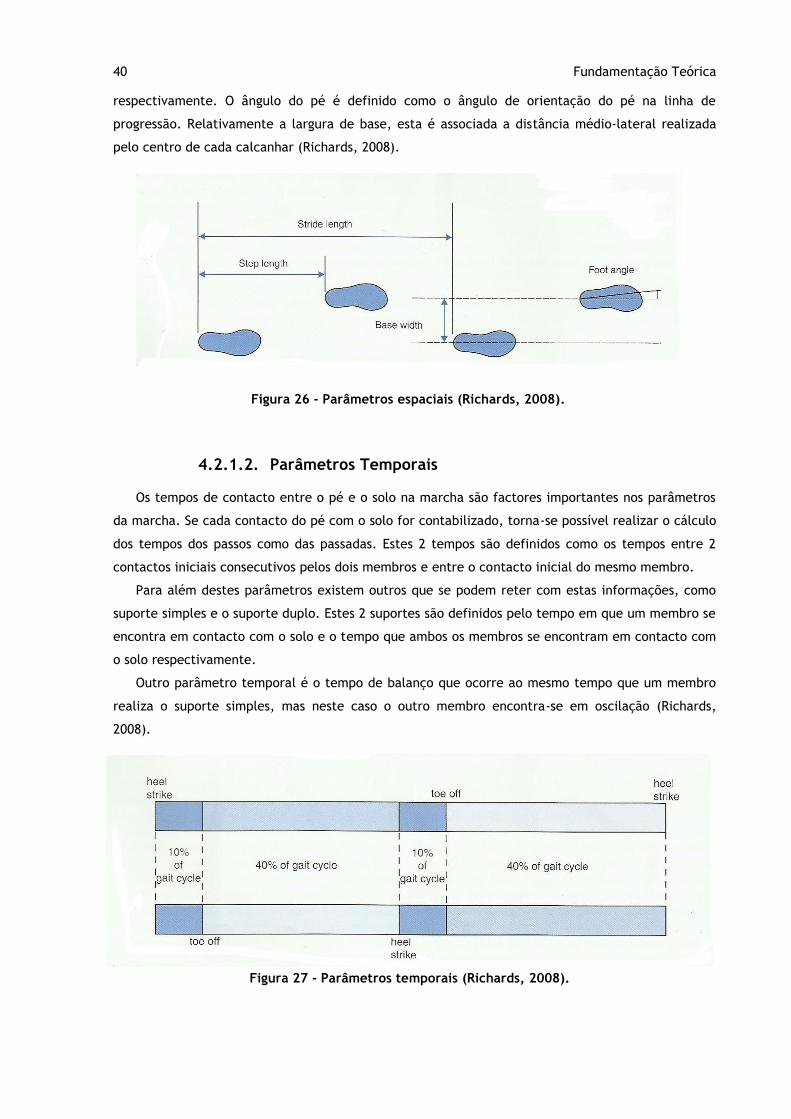
40 Fundamentação Teórica
respectivamente. O ângulo do pé é definido como o ângulo de orientação do pé na linha de
progressão. Relativamente a largura de base, esta é associada a distância médio-lateral realizada
pelo centro de cada calcanhar (Richards, 2008).
4.2.1.2. Parâmetros Temporais
Os tempos de contacto entre o pé e o solo na marcha são factores importantes nos parâmetros
da marcha. Se cada contacto do pé com o solo for contabilizado, torna-se possível realizar o cálculo
dos tempos dos passos como das passadas. Estes 2 tempos são definidos como os tempos entre 2
contactos iniciais consecutivos pelos dois membros e entre o contacto inicial do mesmo membro.
Para além destes parâmetros existem outros que se podem reter com estas informações, como
suporte simples e o suporte duplo. Estes 2 suportes são definidos pelo tempo em que um membro se
encontra em contacto com o solo e o tempo que ambos os membros se encontram em contacto com
o solo respectivamente.
Outro parâmetro temporal é o tempo de balanço que ocorre ao mesmo tempo que um membro
realiza o suporte simples, mas neste caso o outro membro encontra-se em oscilação (Richards,
2008).
Figura 26 - Parâmetros espaciais (Richards, 2008).
Figura 27 - Parâmetros temporais (Richards, 2008).

41
A partir de todos estes parâmetros e das informações mencionadas é possível calcular
parâmetros como a cadência e a velocidade da marcha, como é apresentado nas seguintes fórmulas:
𝑪𝒂𝒅ê𝒏𝒄𝒊𝒂 (𝒑𝒂𝒔𝒔𝒐𝒔/𝒎𝒊𝒏) = 𝑷𝒂𝒔𝒔𝒐𝒔 𝑪𝒐𝒏𝒕𝒂𝒅𝒐𝒔 𝒙𝟔𝟎
𝑻𝒆𝒎𝒑𝒐(𝒔) (I)
𝑽𝒆𝒍𝒐𝒄𝒊𝒅𝒂𝒅𝒆 (𝒎/𝒔) =𝑪𝒐𝒎𝒑𝒓𝒊𝒎𝒆𝒏𝒕𝒐 𝒅𝒐 𝑷𝒂𝒔𝒔𝒐 (𝒎)∗𝑪𝒂𝒅ê𝒏𝒄𝒊𝒂(𝒑𝒂𝒔𝒔𝒐𝒔/𝒎𝒊𝒏)
𝟔𝟎 (II)
Relativamente a estas fórmulas o número “60” refere-se ao número de segundos num minuto.
A cadência é um factor que pode ser medido com o auxílio do cronómetro. Este factor
contabiliza o número de passos durante um período de tempo pré-definido, normalmente de 10 a 15
segundos. O indivíduo deve realizar a marcha normalmente e ao chegar a velocidade que este
considera normal o observador inicia a contagem de passos. O seguinte parâmetro, a velocidade,
utiliza o cálculo do tempo em que o indivíduo leva para percorrer uma distância pré-estabelecida,
de 6 a 10 metros, no qual é necessário que o indivíduo efectue a uma velocidade que lhe é habitual
(Wittle, 2007).
Com estes parâmetros é ainda possível medir a simetria do comprimento do passo e do
comprimento da passada através da divisão entre o lado direito e esquerdo, como é referido nas
seguintes fórmulas:
𝑺𝒊𝒎𝒆𝒕𝒓𝒊𝒂 𝒅𝒐 𝑪𝒐𝒎𝒑𝒓𝒊𝒎𝒆𝒏𝒕𝒐 𝒅𝒐 𝑷𝒂𝒔𝒔𝒐 =𝑷𝒂𝒔𝒔𝒐 𝒅𝒐 𝑴𝑰 𝑬𝒔𝒒𝒖𝒆𝒓𝒅𝒐
𝑷𝒂𝒔𝒔𝒐 𝒅𝒐 𝑴𝑰 𝑫𝒊𝒓𝒆𝒊𝒕𝒐 (III)
𝑺𝒊𝒎𝒆𝒕𝒓𝒊𝒂 𝒅𝒐 𝑪𝒐𝒎𝒑𝒓𝒊𝒎𝒆𝒏𝒕𝒐 𝒅𝒂 𝑷𝒂𝒔𝒔𝒂𝒅𝒂 =𝑷𝒂𝒔𝒔𝒂𝒅𝒂 𝒅𝒐 𝑴𝑰 𝑬𝒔𝒒𝒖𝒆𝒓𝒅𝒐
𝑷𝒂𝒔𝒔𝒂𝒅𝒂 𝒅𝒐 𝑴𝑰 𝑫𝒊𝒓𝒆𝒊𝒕𝒐 (IV)
4.2.2. Cinemetria
No método de medição da cinemetria, é a medição do movimento e neste método existe um
diverso número de tecnologias para a medição do segmento corporal na posição espacial e
orientação. Neste tipo de medição encontram-se envolvidos dispositivos como o electrogoniómetro,
acelerómetro, giroscópio e sistemas de vídeo-camara (Davis & Deluca, 2006).
4.2.2.1. Potenciómetro
Os potenciómetros realizam a medição da mudança dos deslocamentos lineares ou angulares,
gravando essas mudanças em valores em valores de voltagem de saída. Os potenciómetros de
deslocamento angular permitem a realização num plano com a extensão/flexão do joelho.
Geralmente são robustos e de métodos de baixo custo na recolha de dados cinemáticos que permite
ser observado em tempo real. No entanto quando são avaliados mais do que uma articulação, pode
ocorrer uma ligeira sobrecarga dos movimentos (Richards, 2008).

42 Fundamentação Teórica
4.2.2.2. Electrogoniómetro
Este dispositivo é constituído por peças muito finas e por fios sensíveis quando ocorre a torção
dos mesmos, no qual possuem braços fixos ao veio e base pegados aos segmentos corporais,
electrogoniómetros, para a realizar as medições no plano de maior interesses (Tesio, Monzani,
Gatti, & Franchignoni, 1995).
O goniómetro é um instrumento simples para medição de ângulos e amplitude do movimento de
extrema importância na posição ortostática ou na realização de um determinado movimento, no
entanto a análise dinâmica do movimento, o goniómetro têm muito pouca importância.
O electrogoniómetro tem a capacidade de realizar medições nos três planos simultaneamente ao
nível de amplitude articular, apesar de serem usados mais os electrogoniómetros biaxiais e
uniaxiais, nas medições de extensão/flexão e abdução/adução. Segundo Nicon é esperado que meça
movimentos articulares de aproximadamente de 90º em dois planos simultaneamente, sendo um
evento raro (Tesio et al., 1995)
Relativamente aos electrogoniómetros, ele apresenta a desvantagem de ser monetariamente
mais dispendioso e a apresentar uma certa limitação na medição dos ângulos relativos e numa
aplicação clínica é de difícil aplicação quando se realiza avaliações simultâneas, mas apresenta
vantagens como o dispositivo não intrusivo, que não realiza modificações mínimas da marcha e
ainda permite visualizar em tempo real e a rápida recolha de informação de um único conjunto
sobre muitos assuntos (Richards, 2008; Wittle, 2007).
4.2.2.3. Acelerómetro
Os acelerómetros são dispositivos utilizados para medir tanto as acelerações, lineares como as
angulares (caso os transdutores estejam devidamente configurados). Este tipo de instrumento
permite uma avaliação contínua e sem impedimentos de utilização dentro e fora do laboratório para
além de precisar de muita pouca energia para o seu funcionamento o que torna este instrumento
utilizável continuamente a longo prazo (Boutaayamou et al., 2015)
Para realizar a medição da aceleração dos MI é necessário colocar um acelerómetro em cada
membro. Estes dispositivos permitem um sinal de saída imediata e directa, promovendo a
visualização em tempo real e o biofeedback.
Este instrumento tende a ser de baixo custo, no qual depende da medição da aceleração da
posição do segmento corporal, caso seja uma análise de múltiplos segmentos do MI o custo pode se
tornar significativo. A sua principal desvantagem é que este apresenta uma maior facilidade para se
partir devido a sua sensibilidade ao choque numa desaceleração momentânea. Os dados de
velocidade e posição podem ser obtidos através da ingressão numérica embora se deva ter em
atenção relativamente com a selecção das condições iniciais e a manipulação de efeitos
gravitacionais (Richards, 2008; Wittle, 2007).

43
4.2.2.4. Giroscópio
O giroscópio é utilizado para medir a orientação do segmento corporal no espaço e ainda pode
ser utilizado para medir a velocidade e aceleração angular através da integração destas variáveis,
apesar de esses dados poderem ser distorcidos por eventuais deslocamentos ou derivações.
Este instrumento normalmente é utilizado em conjunto com o acelerómetro para a
quantificação de actividades de vida diária (AVD) (Richards, 2008; Tong & Granat, 1999; Wittle,
2007).
4.2.2.5. Sistemas de Vídeo-câmara
Este método de medição do movimento humano envolve a utilização de marcadores externos
que são colocados em segmentos corporais do individuo e alinhado com a trajectória específica.
Esses pontos vão ser monitorizados por um sistema de câmaras de captura de movimento,
geralmente de 6 a 12, colocados em torno de uma medição de volume.
Na análise de imagem, as técnicas de estereofotograma são usados para produzir coordenadas
instantâneas tridimensionais de cada marcador.
Os sistemas baseados em vídeo-câmara empregam tanto marcadores passivos, retrorreflectivo,
ou activos, díodos emissores de luz (LED). Os sistemas de câmara com marcador passivo incorporam
uma fonte de luz estroboscópica, com anéis de LED a volta da lente da câmara. Em seguida as
câmaras capturam a luz de volta para os marcadores de alta reflexão. Os marcadores activos do
sistema da câmara gravam a luz que é produzida pelos LED’s que estão colocados directamente no
indivíduo.
As vantagens e desvantagens deste método estão associadas com o tipo de abordagem utilizado,
como por exemplo a localização anatómica para cada marcador usado nos marcadores activos do
sistema é sabido de imediato devido a sequência de pulsação dos marcadores controlados por
computador. A interacção do individuo é necessária para identificação dos marcadores passivos do
sistema apesar dos algoritmos tenham sido criados para acelerar o processo, ou seja, de seguimento
automático. O sistema de cabos necessário para controlar os LED’s dos marcadores activos do
sistema podem, possivelmente, resultar num aumento da distracção e de alterações na marcha
(Davis III, Ounpuu, Tyburski, & Gage, 1991; Davis & Deluca, 2006; Richards, 2008; Wittle, 2007).
Figura 28 - Equipamento de análise de marcha utilizado em laboratório com 6 a 12 câmaras de movimento, 2 a 4 plataformas de força e sensores EMG (Davis & Deluca, 2006).

44 Fundamentação Teórica
4.2.3. Dinamometria
As medições através da dinamometria, utilizam as FRS considerada uma forma especializada na
análise de marcha que é de grande interesse devido aos diferentes casos existentes de realização de
pressões excessivas. As medições podem ser realizadas através de palmilhas instrumentadas no
interior do calçado ou podem ser realizadas sem qualquer calçado, plataformas de força e
baropodometria (Davis & Deluca, 2006; Richards, 2008).
4.2.3.1. Plataformas de Força
Este tipo de medição, através de plataformas de força colocadas passadeiras sobre utiliza as
forças de reacção vectoriais do solo 3D, o momento de reacção vertical do solo e o ponto de
aplicação do vector da força de reacção do solo (centro de pressão). Estas plataformas de força
possuem uma dimensão superficial típica de 0,5 x 0,5m são compostos de vários medidores de
tensão ou com um conjunto de sensores piezoeléctricos rigidamente montados juntos (Davis &
Deluca, 2006; Richards, 2008; Villeger, Costes, Watier, & Moretto, 2014; Wittle, 2007).
4.2.3.2. Baropodometría
A distribuição de carga dinâmica corresponde à força de reacção vertical do solo pode ser
avaliada com o uso da matriz plana, bidimensionais com pequenos sensores piezoresistivos. A
resolução global do transdutor depende do tamanho do sensor das “células”. O conjunto de sensores
configurados para as palmilhas com calçado ou descalço de forma a proporcionar duas medições
clínicas alternativas (Davis & Deluca, 2006; Rosa, 2014; Whittle, 1996; Wittle, 2007).
4.2.4. Electromiografia
Neste tipo de medição são colocados eléctrodos na superfície da pele ou aplicação de fios finos
inseridos no músculo, através de uma agulha hipodérmica, ou a utilização de eléctrodos agulha, as
agulhas utilizadas são também agulhas hipodérmicas para medir os potenciais de tensão produzidos
pela contracção muscular. Tanto os eléctrodos por fio fino e eléctrodos de agulha são bastante
incómodos e potencializam dores ao utilizador, mas retiram informações mais apropriadas a níveis
fisiológicos da análise de marcha, comparativamente com os eléctrodos de superfície que são mais
cómodos e capta as informações dos potenciais de acção ao nível mais superficial. A actividade dos
músculos do membro inferior é avaliada segundo o tempo e a intensidade de contracção.
As variáveis dos dados recolhidos afectam a qualidade do sinal EMG, incluindo a colocação e a
distância entre os eléctrodos de gravação, as condições da pele, a distância entre o electro e o
músculos alvos, amplificação de sinal e filtragem e a taxa de aquisição de dados. As características
das diferentes fases da actividade muscular podem ser estimadas a partir do sinal EMG. Os dados

45
EMG podem ser apresentados como uma forma de onda rectificada e integrada. Para a avaliação da
intensidade da contracção, as amplitudes EMG dinâmicos são tipicamente normalizadas por um valor
de referência, como exemplo, a amplitude EMG durante a contracção voluntária máxima. Este
último ponto de observação é difícil de alcançar de forma consistente para indivíduos que tenham
um controlo limitado e isolado dos músculos individualmente, como as crianças que sofrem de
paralisia cerebral (PC) (J. H. Correia & Carmo, 2013; Davis & Deluca, 2006; Strazza et al., 2017;
Wittle, 2007).
4.3. Parâmetros de Análise do Ciclo de Marcha
A análise biomecânica do ciclo de marcha envolve a interacção entre as variáveis permitindo
através da cinemática estudar os parâmetros de posição e orientação, tal como os parâmetros da
cinética como as forças envolvidas no movimento, os parâmetros da antropometria como os padrões
do modelo corporal e ainda complementar com os parâmetros da actividade muscular proporcionada
pela EMG.
Estes parâmetros podem ser estudos individualmente ou colectivamente, sendo o último tipo de
estudo o mais completo por interligar dois ou mais parâmetros. A recolha destes parâmetros é
realizada pelos instrumentos referidos anteriormente (A. Completo & Fonseca, 2011).
4.3.1. Parâmetros Cinemáticos
O estudo cinemático tal como referido anteriormente avalia o movimento isto é feito pela
análise dos cálculos do deslocamentos, das velocidades e das acelerações lineares e angulares
observados no ciclo de marcha.
Através dos valores obtidos no modelo 3D desenvolvido no ciclo de marcha e através da
tecnologia óptica é possível adquirir a imagem em 2D para um determinado plano que se queira
estudar. Para este estudo o MI é dividido em quatro corpos rígidos (pélvis, coxa, perna e pé) que são
ligados por três articulações (anca, joelho e tornozelo).
Figura 29 - Parâmetros de estudo para análise do movimento (A. Completo & Fonseca, 2011).

46 Fundamentação Teórica
Quando os segmentos anatómicos se encontram devidamente referenciados é então possível
determinar a evolução angular dos segmentos durante o ciclo de marcha. Os ângulos dos segmentos
anatómicos são determinados através das coordenadas distais e proximais das suas extremidades,
como é referido na expressão:
𝜶𝒔𝒆𝒈𝒎𝒆𝒏𝒕𝒐 = 𝐭𝐚𝐧−𝟏[
𝒀𝒑𝒓𝒐𝒙𝒊𝒎𝒂𝒍−𝒀𝒅𝒊𝒔𝒕𝒂𝒍
𝑿𝒑𝒓𝒐𝒙𝒊𝒎𝒂𝒍−𝑿𝒅𝒊𝒔𝒕𝒂𝒍] (V)
De acordo a figura 4.5 é possível verificar a definição angular dos segmentos anatómicos e das
articulações.
Por sua vez os segmentos articulares podem ser calculados pelas seguintes formas:
𝜽𝒂𝒏𝒄𝒂 = 𝜶𝒑é𝒍𝒗𝒊𝒔 − 𝜶𝒄𝒐𝒙𝒂 (VI)
𝜽𝒋𝒐𝒆𝒍𝒉𝒐 = 𝜶𝒄𝒐𝒙𝒂 − 𝜶𝒑𝒆𝒓𝒏𝒂 (VII)
𝜽𝒕𝒐𝒓𝒏𝒐𝒛𝒆𝒍𝒐 = 𝜶𝒑𝒆𝒓𝒏𝒂 − 𝜶𝒑é + 𝟗𝟎° (VIII)
Relativamente a velocidade angular esta pode ser calculada através da informação dos
deslocamentos angulares, caso a informação se encontre na forma discreta, permitindo obter o
valor do deslocamento angular num determinado tempo e desta forma obtendo o valor da
velocidade média entre duas posições angulares como é demonstrado na seguinte fórmula:
𝑽𝒙 =𝑿𝒇−𝑿𝒊
∆𝒕 (IX)
A velocidade angular dos segmentos do MI apresenta uma velocidade mais elevada ao nível do
pé seguida da perna e coxa posteriormente sendo estas velocidades alcançadas nas fases finais de
apoio ou balanço. Quanto a velocidade angular das articulações do MI dependem directamente da
cadência de passos. Neste parâmetro a velocidade de rotação mais baixa pertence ao tornozelo na
Figura 30 - Definição da convenção dos ângulos dos segmentos anatómicos e articulares (A. Completo & Fonseca, 2011).
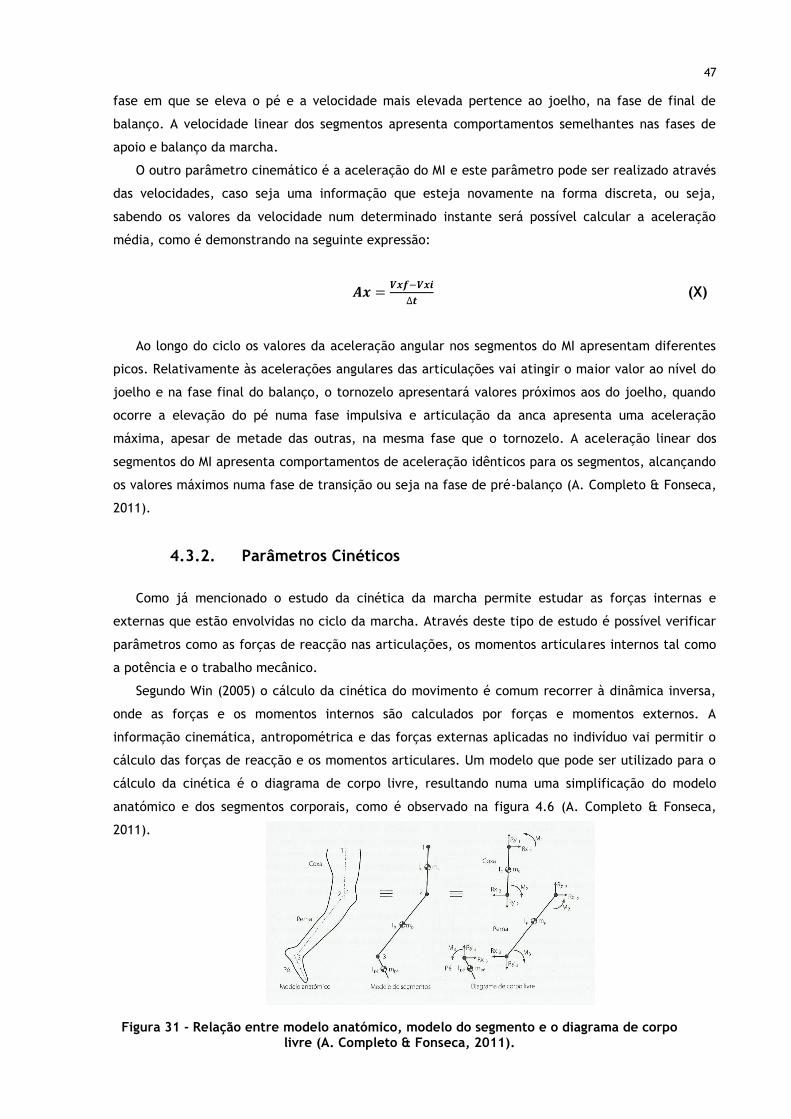
47
fase em que se eleva o pé e a velocidade mais elevada pertence ao joelho, na fase de final de
balanço. A velocidade linear dos segmentos apresenta comportamentos semelhantes nas fases de
apoio e balanço da marcha.
O outro parâmetro cinemático é a aceleração do MI e este parâmetro pode ser realizado através
das velocidades, caso seja uma informação que esteja novamente na forma discreta, ou seja,
sabendo os valores da velocidade num determinado instante será possível calcular a aceleração
média, como é demonstrando na seguinte expressão:
𝑨𝒙 =𝑽𝒙𝒇−𝑽𝒙𝒊
∆𝒕 (X)
Ao longo do ciclo os valores da aceleração angular nos segmentos do MI apresentam diferentes
picos. Relativamente às acelerações angulares das articulações vai atingir o maior valor ao nível do
joelho e na fase final do balanço, o tornozelo apresentará valores próximos aos do joelho, quando
ocorre a elevação do pé numa fase impulsiva e articulação da anca apresenta uma aceleração
máxima, apesar de metade das outras, na mesma fase que o tornozelo. A aceleração linear dos
segmentos do MI apresenta comportamentos de aceleração idênticos para os segmentos, alcançando
os valores máximos numa fase de transição ou seja na fase de pré-balanço (A. Completo & Fonseca,
2011).
4.3.2. Parâmetros Cinéticos
Como já mencionado o estudo da cinética da marcha permite estudar as forças internas e
externas que estão envolvidas no ciclo da marcha. Através deste tipo de estudo é possível verificar
parâmetros como as forças de reacção nas articulações, os momentos articulares internos tal como
a potência e o trabalho mecânico.
Segundo Win (2005) o cálculo da cinética do movimento é comum recorrer à dinâmica inversa,
onde as forças e os momentos internos são calculados por forças e momentos externos. A
informação cinemática, antropométrica e das forças externas aplicadas no indivíduo vai permitir o
cálculo das forças de reacção e os momentos articulares. Um modelo que pode ser utilizado para o
cálculo da cinética é o diagrama de corpo livre, resultando numa uma simplificação do modelo
anatómico e dos segmentos corporais, como é observado na figura 4.6 (A. Completo & Fonseca,
2011).
Figura 31 - Relação entre modelo anatómico, modelo do segmento e o diagrama de corpo livre (A. Completo & Fonseca, 2011).

48 Fundamentação Teórica
Os momentos articulares e as potências mecânicas estabelecem informação grande parte da
informação relevante numa análise biomecânica, principalmente quando se adiciona os parâmetros
obtidos por EMG. A potência mecânica (Pm, potência muscular (W)) é o resultado do produto entre
o momento articular (M, momento interno (Nm)) e a velocidade angular (ω, velocidade angular
(rad/s) de uma determinada articulação, como é representado na seguinte expressão:
𝑷𝒎 = 𝑴 𝒙 𝝎 (XI)
Através da potência é possível identificar que tipo de acção o músculo se encontra a realizar,
caso a acção seja concêntrica, então P>0, caso a acção seja excêntrica, o P<0 e se a acção for
isométrica então P=0.
No ciclo de marcha é possível medir a energia despendida através do trabalho mecânico. Desta
forma é possível calcular o trabalho realizado durante um período de tempo na marcha, isto
significa que a energia (W, energia muscular (J)) pode ser calculada pela integração da potência (P,
potência na articulação (W)) num período de tempo (tf-ti), como é possível verificar na seguinte
fórmula:
𝑾 = ∫ 𝑷 ∗ 𝒅𝒕𝒕𝒇
𝒕𝒊 (XII)
Relativamente às FRS como o nome indica é uma força que é exercida sobre o solo, com uma
determinada intensidade e de factores intrínsecos e de factores dinâmicos. Pela aplicação da 3ª Lei
de Newton é possível afirmar que a superfície de apoio devolve a força de igual magnitude e numa
direcção oposta.
Esta força pode ser dividida em 3 componentes: vertical; ântero-posterior; e médio-lateral. A
sua magnitude oscila em torno do valor do peso/massa do indivíduo, no qual varia devido ao efeito
de aceleração dos movimentos de elevação e depressão do centro de massa durante o ciclo.
Na fase inicial da marcha devido a aceleração a deslocar-se para cima o centro de massa
corporal tende a elevar-se o que coincide com a FRS, o que torna o seu valor superior ao peso do
corpo. Quando se encontra na parte final e o centro de massa do corpo tende a voltar ao inicial
verifica-se uma desaceleração o que leva uma diminuição da FRS (A. Completo & Fonseca, 2011;
Richards, 2008).
Para além dos parâmetros abordados anteriormente existe ainda a energia e trabalho do ciclo
de marcha. Estes dois encontram-se inteiramente relacionados, ou seja quando se realiza trabalho
num determinado sistema a energia no sistema aumenta O trabalho é realizado quando a força é
deslocada linearmente a uma certa distância ao longo de uma determinada linha de acção ou
quando um momento da força é deslocado em rotação de um certo ângulo. O trabalho pode ser
quantificado pela variação de energia potencial gravítica (Ep), que pode ser calculado pela seguinte
expressão:
𝑬𝒑 = 𝒎𝒈 𝒙 𝒉 (XIII)

49
Este cálculo baseia-se no produto do peso do segmento corporal (mg) valor que se obtém em
Newton (N) com o deslocamento do centro de massa do segmento (h) valor em metros (m), desta
forma obtém-se o valor de Ep em Joule (J).
Dentro deste parâmetro é possível calcular o valor da energia do movimento, conhecido como a
energia cinética, que pode ser determinada por base da velocidade linear e velocidade angular,
como pode ser verificável nas próximas fórmulas:
𝑬𝒄(𝒍) =𝟏
𝟐𝒙𝒎𝒙𝒗𝟐 (XIV)
𝑬𝒄(𝒂) =𝟏
𝟐𝒙𝑰𝒙𝝎𝟐 (XV)
No qual Ec(l) simboliza a energia cinética do movimento em translação (J), Ec(a) simboliza a
energia cinética do movimento em rotação (J), m é a massa do segmento (Kg), v a velocidade linear
do segmento (m/s), I o momento de inércia do segmento no eixo de rotação (Kg.m2) e ω a
velocidade angular do segmento (rad/s).
O último parâmetro possível de ser calculado neste tipo de estudo é a energia total do
segmento, que depende não só da massa e altura do centro de massa como também das velocidades
lineares e angulares. Pode-se afirmar que a energia total é o resultado da adição da energia
potencial gravítica, energia cinética de translação e de rotação, como é demonstrado na seguinte
expressão (A. Completo & Fonseca, 2011):
𝑬𝒕 = 𝑬𝒑 + 𝑬𝒄(𝒍) + 𝑬𝒄(𝒂) (XVI)
4.4. Aplicações da Análise de Marcha
Como referido anteriormente as aplicações da análise de marcha são divididas em duas
categorias: avaliação clínica da marcha e pesquisa do ciclo de marcha. A primeira categoria
mencionada tem o objectivo de ajudar directamente um indivíduo específico; relativamente a
segunda categoria possui o objectivo de melhorar o conhecimento da análise de marcha.
As duas categorias possuem diferenças consideráveis relativamente às técnicas aplicadas nesta
área. Na pesquisa do ciclo de marcha é possível levar um dia inteiro a preparar, realizar medições e
processar os dados obtidos, sendo considerado normal e aceitável, mas relativamente a avaliação
clínica da marcha existe a necessidade de utilizar instrumentos de fácil aplicação e de obtenção de
resultados rapidamente.
A precisão dos requisitos estudados é melhor na pesquisa do ciclo de marcha que na avaliação
clínica, por norma. Por isso existe a necessidade de verificar e interpretar os erros de forma a não
causar uma interpretação errada das condições clínicas.

50 Fundamentação Teórica
Existe um grande número de patologias de nível neuromuscular e musculosquelética que leva a
distúrbios da locomoção, para além das amputações de MI as patologias as mais importantes,
relativamente a locomoção, são:
1. Paralisia Cerebral;
2. Doença de Parkinson;
3. Distrofia Muscular;
4. Osteoartrose;
5. Artrite Reumatóide;
6. Acidentes Vasculares Cerebrais (AVC);
7. Traumatismo Craniano;
8. Lesões da Coluna Vertebral;
9. Mielodisplasia;
10. Esclerose Múltipla.
Neste grupo de patologias existe um maior potencial de benefícios e melhorias relativamente a
locomoção para um determinado grupo de patologias comparativamente com outras e mesmo numa
determinada patologia é possível verificar indivíduos com uma melhor evolução de locomoção do
que os outros mas isso vai depender da gravidade da patologia de cada indivíduo (Richards, 2008;
Whittle, 1996).

51
Capítulo 5
Sistemas de Análise de Movimento
O capítulo 5 “Sistemas de Análise de Movimento” abrange o funcionamento dos sistemas de
análise do movimento, sistemas de câmara-vídeo.
Os sistemas de análise de movimento podem ser realizados a partir de uma simples camara ou
por diversas delas de forma a reconstruir os dados do movimento em 2D e 3D, o que permite a
quantificar a cinemática dos diferentes movimentos.
Para realizar esta tarefa de forma eficiente é importante considerar a recolha de dados das
camaras, o método de processamento dos dados cinemáticos em 2D e 3D, tal como os métodos de
análise e modelação desses mesmos dados. Para tal é necessário ter em conta os seguintes aspectos
da análise do movimento:
Posição das câmaras;
Velocidade da câmara, frequência de amostragem e velocidade do obturador;
Sincronização das câmaras;
Calibração espacial das imagens;
Captação de dados;
Digitalização e transformação;
Filtração de dados;
Modelos anatómicos e conjunto de marcadores (Davis III et al., 1991; Richards, 2008;
Vaughan et al., 1999).
5.1. Posição da Câmara
A recolha de dados consiste na filmagem de uma determinada actividade através da utilização
de câmaras. O número de câmaras utilizadas e a posição das mesmas são essenciais na realização de
estudos a 2D ou 3D. No caso dos estudos em 2D apenas é necessário a aplicação de 1 câmara,
posicionada no plano de interesse. Os estudos em 3D precisam de pelo menos 2 câmaras, cujas
52 Fundamentação Teórica
posições devem se ortogonais (90º) de forma a obter melhor precisão e é a que apresenta melhores
resultados, apesar de ser aplicável um conjunto de câmaras que apresentem uma localização entre
60º e 120º.
O número e a posição das câmaras não só afectam o rastreamento e identificação dos
marcadores, como calcula com precisão as coordenadas finais dos marcadores e dos pontos de
interesse.
Quanto maior o número de câmaras aplicadas num determinado estudo menor será o erro no
cálculo das coordenadas em 3D, tendo em conta que as câmaras devem se localizar nos devidos
locais. Isto significa que ao se optar pela utilização de um número mínimo de câmaras isto pode
levar com alguns marcadores não sejam localizados influenciando os resultados. Contudo o número
de câmaras necessárias para um estudo depende da acção a ser analisada e dos modelos anatómicos
e conjunto de marcadores a aplicar. No caso de um ciclo de marcha a recolha de dados é simples ao
qual se pode recorrer apenas a 4 câmaras, mas quando é aplicado um conjunto de marcadores
complexos essa recolha pode fraca, sendo necessário aplicação de mais câmaras. Para determinar o
melhor sistema de câmaras é necessário observar os custos, o espaço do local e a complexidade dos
modelos anatómicos e conjunto de marcadores (Richards, 2008)
5.2. Velocidade da Câmara, Frequência de Amostragem e
Velocidade do Obturador
O número de imagens por segundo nas câmaras de vídeo standard possuem um factor limitante,
elas opera com 25 a 30 imagens por segundo fornecendo uma taxa de amostragem de 50 Hz a 60 Hz.
Nos novos desenvolvimentos da tecnologia de vídeo ocorreu melhoramentos ao nível da simplicidade
de operar, baixos custos e a criação de câmaras de alta velocidade.
A aplicação do sistema de câmaras de alta velocidade permite a recolha de movimentos com
padrões rápidos, isto significa que quanto mais rápido for realizada um determinado movimento
maior deve ser a frequência de amostragem ou a velocidade da câmara deve ser.
A velocidade do obturador ou o factor de obturação é de extrema importância quando se obtém
uma imagem nítida. A velocidade do obturador é a junção do tempo da obturação da câmara que
está aberta. Caso se encontre aberta durante muito tempo a imagem pode ficar desfocada ou
manchada. Para uma marcha “normal” a velocidade de obturação deve ser de 1/250 de um segundo
no mínimo, no qual actividades com acções muito rápidas deve ser pelo menos de 1/1000 de um
segundo (Richards, 2008).
5.3. Sincronização das Câmaras
No decorrer da filmagem de uma determinada actividade, no qual se utilize mais que uma
câmara é necessário que recolham os dados simultaneamente e só depois estes dados podem ser
combinados de forma a obter um movimento em 3D.

53
O único requisito que deve ser conhecido de forma a combinar simultaneamente as câmaras é
que todas elas devem gravar um evento distinto, ao qual se denomina de evento de sincronização.
Este varia de sistema para sistema, a luz do flash, o bip electrónico e os sinais do computador
quando iniciam a captação de uma acção. Alguns sistemas sincronizam a entrada e saída de
obturação em cada câmara, dessa forma assegura a precisão da mesma imagem é capturada por
cada câmara e não apenas uma imagem no mesmo quadrado (Richards, 2008).
5.4. Calibração Espacial da Imagem
O processo de obtenção das coordenadas em 3D é conseguido pela extrapolação de imagens 2D
no qual requer informações de duas fontes, uma externa e outra interna a câmara, referentemente
às propriedades extrínsecas e intrínsecas da mesma. Os parâmetros extrínsecos referem-se a
informação como a orientação e posição da câmara e imagem no sistema de coordenadas do
cálculo. Os parâmetros intrínsecos são mencionados como o comprimento focal e o centro da
imagem em relação a lente e aos seus parâmetros de distorção. Estes dois parâmetros podem
obtidos através de técnicas de calibração, no qual para cada parâmetro difere significativamente.
Estas calibrações são feitas ao nível da linearização das lentes ou do sistema da câmara (Richards,
2008).
5.4.1. Calibração Estática
Na imagem espacial a área no qual o movimento está a ser captado deve ser calibrado pelo
cálculo de informação posicional conhecido na imagem referenciada. Para calibrar a localização dos
pontos fixos da imagem espacial deve-se saber a área da imagem no qual ocorrerá o movimento.
Esta informação é gravada e a imagem removida para que os dados obtidos sejam recolhidos.
A precisão dos dados produzidos pelos sistemas de análise de movimento depende
consideravelmente da calibração realizada. As coordenadas da imagem devem ser extremamente
precisas, em trabalho de laboratório deve ser de ± 0.1mm nos 3 planos. Qualquer erro na
localização da calibração das coordenadas vai afectar a precisão da recolha do movimento.
O número de pontos necessários vai depender do tipo de estudo, no caso de ser em 2D, a
posição necessita de pelo menos 4 pontos co-planares que devem ser conhecidos para definir as
medições num plano. Este tipo de sistema sofre de erro de perspectiva que ocorre quando os pontos
de interesse ou os marcadores se movem demasiado perto ou longe da câmara que está a captar o
movimento. Desta forma é importante que a calibração da imagem deva ser no mesmo plano da
actividade captada.
Relativamente ao sistema de análise do movimento para calibração em 3D é necessário pelo
menos 6 pontos não co-planares. Isto significa que são necessários pontos de controlo nos 3 planos e
desta forma abranger uma maior área na recolha de dados e alcançar uma melhor precisão. De
forma a recolher uma maior área na recolha de dados com uma melhor precisão as imagens de
calibradas do sistema devem ter mais de 6 pontos de calibração.

54 Fundamentação Teórica
A configuração da calibração do controlo dos pontos deve ser visível para todas as câmaras, no
qual a calibração pode estar comprometida se não seguir seriamente esta condição. A área dos
pontos de controlo devem ser aproximadamente do mesmo tamanho da actividade a ser filmada. De
acordo com os testes realizados por Dabnichki em 1997, a precisão e a confiabilidade da recolha de
dados variam segundo 5 factores: distância entre a câmara e o objecto, distância da área calibrada,
tamanho da área calibrada, posição da área calibrada e a velocidade de rotação do segmento. No
qual os resultados demonstram que o erro é relativamente sensível às pequenas mudanças dos
primeiros 4 factores (Richards, 2008).
5.4.2. Calibração Dinâmica
De forma a definir os parâmetros extrínsecos da câmara, posição e orientação, as coordenadas
globais do sistema devem ser definidas. A calibração dinâmica é conseguida de diversas formas; no
entanto a mais comum é utilizando a imagem estática para definir a origem, ou a posição zero e a
direcção dos eixos de x e y.
Adicionalmente a imagem estática é movido uma vara dinamicamente dentro do volume das
câmaras, gerando muitos valores de coordenadas ao nível 2D. Segundo Brown (1996), a posição e a
orientação das câmaras e as coordenadas 3D da vara, podem ser verificadas pelo processo de bundle
adjustment. A partir deste processo são calculados os valores da posição, orientação e as
coordenadas 3D (Richards, 2008).
5.4.3. Correcção das Lentes
As lentes de todas as câmaras são afectadas por distorções aos diferentes alcances. Isto deve-se
aos materiais e imperfeições produzidas durante o processo de fabricação. A introdução de
pequenos erros no sistema vai levar a erros de maiores dimensões na reconstrução das imagens em
2D. O estudo da distorção as lentes, realizado em alguns estudos como de Tasi (1986) utilizando um
método com 60 pontos calibrados ou como o estudo mais detalhado de Antonsson e Mann (1989) que
utilizaram mais de 12.000 pontos calibrados, os pontos devem se encontrar numa posição
conhecida, para serem filmados (Richards, 2008).
Segundo o estudo de Ladin (1990), sobre a distorção em duas dimensões, filmando a área com
posições conhecidas com espaços iguais entre os pontos, demonstrando diferenças entre estes
valores, representados como vectores, demonstrando que quando maior a magnitude do vector
maior a distorção da lente. O estudo demonstrou a possibilidade de mapear a distorção das lentes e
que os erros substanciais ocorrem frequentemente devido a distorção da lente quando a acção
filmada move-se do centro da área de interesse. Através dos muitos sistemas de análise do
movimento das câmaras, a distorção das lentes são verificadas pelos produtores e a correcção da
matriz da lente é incorporada no software, desta forma minimiza o efeito de distorção da lente
(Richards, 2008).

55
5.5. Captação dos Dados
Após a recolha dos dados estar completa, é transferido para o disco rígido do computador,
dando origem a captação dos dados. Muitos dos sistemas de análise do movimento recolhem a
informação das imagens directamente para o disco rígido, conhecidas como sistemas baseados em
vídeo ou câmara. O primeiro sistema recolhe a informação na primeira fita, transferindo de
imediato para o disco rígido, de forma a diminuir ligeiramente a resolução do sistema a imagem é
gravada em fita analógica e digitalizada novamente. Com a utilização digital dos vídeos já não
existe esta desvantagem, apesar de ter de alterar o formato quando os dados são processados pelo
computador. Relativamente ao segundo sistema este regista directamente da saída das câmaras,
mantendo a resolução.
A utilização do sistema baseado em vídeo tem a vantagem de gravar os valores do movimento na
fita, o que permite recolher a informação caso a transferência não seja bem-sucedida (Davis III et
al., 1991; Richards, 2008).
5.5.1. Aglomerados e Marcadores
Para muitos sistemas de análise de movimento é necessário colocar marcadores em vários
pontos anatómicos de forma a representar o segmento corporal. Estes marcadores podem ser
activos ou passivos. Segundo Brand e Crowninshield (1981) a utilização dos marcadores não deve
alterar ou influenciar os padrões do movimento.
Os marcadores podem ser colocados singularmente ou colocados num aglomerado de forma a
representa o segmento corporal. De acordo com Cappazzo & Cappello (1997) e Manal et al (2000) é
aceitável a aplicação de um aglomerado, ou seja, uma placa rígida com 4 marcadores.
O sistema baseado a vídeo tendem a usar um contraste claro para escuro ou escuro para claro
com o fundo. Relativamente ao sistema baseado na câmara os marcadores possuem são feitos de
materiais retro-reflectivos, Scotchlite, este material reflecte a luz emitida ao redor da câmara para
a lente da câmara. Esta técnica permite contrastar os marcadores claros num fundo escuro, com o
efeito de mostrar os marcadores como pontos brilhantes.
Segundo Chiari et al (2005), os marcadores activos produzem luz numa determinada frequência,
desta forma o sistema não necessita de iluminação o que facilita na identificação e localização dos
marcadores. Dos marcadores activos os mais utilizados são os que apresentam emissão de sinais
infravermelhos (IF) como os LED. Estes são colocados da mesma forma que os marcadores passivos,
mas estes apresentam uma fonte de energia e uma unidade de controlo para cada LED
individualmente. Este tipo de marcadores apresenta uma frequência específica o que permite a
detecção automática, isto permite vantagens como a estabilização tempo-real do movimento em 3D
ao nível da localização dos marcadores de forma a não haver erro de identificação, outra vantagem
relativamente a estes marcadores é que podem ser utilizados fora de ambiente fechado, ou seja,
interior de um laboratório (Richards, 2008).

56 Fundamentação Teórica
5.5.2. Colocação de Marcadores e Erros Relacionados
Existem dois tipos de erros, relacionados com a posição dos marcadores, os erros relativos, erros
definidos por movimentos relativos entre 2 ou mais marcadores que definem o segmento rígido; e os
erros absolutos representam o movimento do marcador que deve representar uma marcação óssea.
Ambos os tipos de erros ocorrem devido às propriedades dos tecidos moles.
Os marcadores geralmente são colocados sobre a pele num determinado ponto anatómico. Em
certos casos verifica-se um certo desconforto na aplicação dos marcadores directamente sobre a
pele principalmente ao nível da pélvis, para tal é colocado um material justo ao corpo como a licra,
no qual Hazelwood (1997), consideram preferível a aplicação de uma vestimenta justa a colocação
directa na pele, pois segundo o seu estudo superestimação do movimento anatómico principalmente
na região da pélvis.
Segundo diversos estudos realizados, Cappozzo et al (1996), Ladin et al (1990) & Lesh et al
(1979) cit in Richards (2008), ambos os erros devem-se devido ao movimento dos tecidos moles
relativamente ao ponto anatómico colocado. De acordo com diversos estudos realizados por Leardini
et al (2005), Alexander & Andriacchi (2001), Lucchetti et al (1998), Cappello et al (1997) e Fuller
(1997) o movimento da pele ocorre devido ao deslizamento da pele durante a rotação das
articulações ou devido a respostas de impacto ou devido a contracções musculares.
Existem algumas sugestões para minimizar e compensar estes erros, como aplicação de um
aglomerados rígidos segundo Chéze et al (1995) e não-rígidos Ball & Pierrynowski (1998) de forma a
ajustar ao segmentos corporais. Este método não é aplicável para erros absolutos. Outra sugestão
aplicável em casos de flexão é a técnica do sistema de calibração anatómica, técnica proposta por
Cappozzo et al (1995), método que visa a identificação de imagens anatómicas para cada segmento
através da identificação dos pontos anatómicos e o segmento do marcador ou aglomerado
localizado. Com este tipo de calibração o modelo criado obtêm as mudanças relativamente aos
pontos dos marcadores entre as posições de flexão e extensão. Uma outra maneira de visualizar este
tipo de problema conhecendo a optimização global (posição e orientação), o que envolve uma
estimação simultânea de modelos segmentados e interligados. Com a utilização deste método a
soma ponderada das distâncias dos quadrados é minimizada entre os marcadores simulados e
determinados por um modelo constrangido com uma articulação esférica entre correntes
interligadas (Groen, Geurts, Nienhuis, & Duysens, 2012; Richards, 2008; Vaughan et al., 1999).
Figura 32 - Marcadores passivos e aglomerados (Richards, 2008).

57
5.6. Digitalização, Transformação e Filtração de Dados
A digitalização é o processo de identificação dos pontos no corpo usando os marcadores ou a
impressão visual dos centros articulares. Existem dois métodos de digitalização o manual e o
automático.
A digitalização manual utiliza o cursor do computador o que permite seleccionar e colocar no
computador a localização de cada articulação do corpo do indivíduo, de acordo o estudo de Ariel
(1974). Uma vez executado para a imagem a informação é armazenada no disco rígido pode se
avançar uma imagem com os mesmos pontos identificados no corpo. Isto necessita de ser executado
em cada imagem formando assim uma vara do movimento, o que permite analisar o movimento com
ou sem marcadores o que pode se tornar bastante lento, principalmente se for ao nível 3D.
A digitalização automática, segundo o estudo de Mann & Antonsson (1983) e Keemink et al
(1991) a utilização dos marcadores necessários para identificar a primeira imagem e
automaticamente localizar as seguintes. Nestes casos o ponto central dos marcadores é calculado e
desta forma produz um ponto representado em cada marcador para cada vista da câmara. Este tipo
de digitalização é a mais rápida apesar de depender da utilização dos marcadores (Richards, 2008).
5.6.1. Transformação
A transformação é a computação das coordenadas 2D e 3D dos marcadores nos pontos escolhido
no corpo. A computação é realizada por base da transformação directamente linear (DLT), tendo
sido desenvolvida por Abdel-Aziz e Karara (1971). Este método relaciona as coordenadas 2D dos
marcadores para cada câmara e a localização 3D no espaço. Para utilizar este método é necessário
que os dados gravados das diferentes câmaras estejam sincronizados, simultaneamente no momento
de uma determinada actividade.
A transformação pode ser utilizada na análise do movimento em 2D e 3D. Os cálculos das
coordenadas são realizados pelo computador desde o momento de calibração. A posição exacta dos
pontos calibrados são armazenados no computador, no qual podem ser utilizados para calcular o
ponto exacto de um marcador numa área de calibração. As coordenadas 2D e 3D de cada marcador
podem ser extraídos de um sistema e utilizado para representar um segmento como o corpo rígido
(Richards, 2008).
5.6.2. Filtração de Dados
A operação de filtração ou suavização é realizada nas coordenadas de cada marcador ou posição
para remover pequenos erros de digitalização, através de diversos algoritmos, sendo os mais comuns
os filtros digitais e as técnicas de spline.
De acordo com os estudos de Woltring (1985) e Wood & Jeenings (1979) as técnicas de spline são
peças fundamentalmente polinomiais que ligam pontos, conhecidos como knots. A técnica de
suavização mais utilizada na análise de movimento é a cúbica. Alguns softwares dos sistemas de

58 Fundamentação Teórica
análise do movimento permitem que o operador escolha o algoritmo e o nível de suavização
enquanto outras realizam estas acções automaticamente. A limitação de quadrados neste tipo de
técnica faz com que o operador realize um parâmetro de suavização, de forma a controlar a
suavização e proximidade do ajuste. Segundo Woltring (1985) a validação geral cruzada desta
técnica envolve a estimação dos parâmetros baseados nos pontos de dados e prevendo o melhor
ajuste da curvatura.
Neste tipo de sistemas são utilizados filtros de passa-baixo, sendo comum o uso de filtros de 2ª e
4ª ordem de Butterworth com uma frequência de corte entre os 6 e 7 Hz dos dados da marcha. Este
tipo de filtro permite a passagem de baixa frequência e desta forma previne a passagem dos dados
das altas frequências.
Com isto têm-se vindo a desenvolver diferentes técnicas de filtragem ao nível do tempo e
frequência para a remoção dos erros de altas frequências, como séries de filtração de Fourier e
filtração digital são das mais utilizadas, contudo este tipo de filtros não consideram as altas
frequências geradas pelos impactos ou das rápidas transferências de energia (Richards, 2008).
5.7. Configuração das Câmaras para Captação do Movimento
Os sistemas de captura utilizados nos laboratórios de análise do movimento podem ser
agrupados em 2D e 3D. O tipo de sistema utilizado varia dependendo da profundidade da análise a
realizar. Os sistemas a 2D baseiam-se no uso simples das câmaras de vídeo posicionadas
ortogonalmente para capturar apenas num plano o movimento, no qual proporciona informações
importantes sobre o movimento realizado naquele plano. Este sistema pode ser configurado de três
formas diferentes. A primeira forma da configuração da câmara baseia-se na aplicação da câmara
directamente no plano sagital, desta forma permite uma análise das articulações neste plano, tendo
o cuidado de que a câmara se encontra no plano exacto para captura do movimento. A segunda
forma envolve a colocação da câmara no plano coronal, de forma a capturar a imagem da região
anterior do movimento, sendo um plano de bastante interesse para detecção de deformidades. A
última configuração baseia-se no mesmo plano que a configuração 2 mas este tende a captar a
imagem da região posterior.
Relativamente aos sistemas a 3D são utilizados o maior número de câmaras, de 4 a 10 câmaras,
de forma a obter a análise do movimento em 3D. Este último é um sistema muito mais caro que o
primeiro sistema devido ao número de câmaras, custo do hardware e a conta para suportar o
software. Este tipo de sistema pode ser configurado de 2 formas. A primeira é a configuração linear
da câmara, que permite armazenar um maior volume de dados, não sendo necessário que todas as
câmaras obtenham as mesmas imagens, contudo, existe o risco das câmaras não captarem
correctamente os dados marcadores. A segunda é a configuração em guarda-chuva, sendo aplicada
nos casos em que os marcadores são mais avançados. As câmaras são posicionadas para que pelo
menos 3 câmaras consigam captar os dados dos marcadores, no qual vai resultar num menor
resultado na calibração ao nível do volume (Davis III et al., 1991; Richards, 2008; Vaughan et al.,
1999).

59
5.8. Modelos Anatómicos e Conjunto de Marcadores
Nos dias de hoje existem diversos tipos de sistemas aplicados na análise da marcha humana.
Apesar da diversidade dos sistemas dos modelos anatómicos, estes possuem o objectivo comum de
obter valores mais fidedignos para uma melhor interpretação e análise. O que difere entre estes
sistemas são os parâmetros utilizados como: o tipo de cuidado utilizado nas medições retiradas na
antropometria; a quantidade de marcadores e como são colocados no sujeito em estudo; e a
calibração utilizada (Davis III et al., 1991; Richards, 2008; Vaughan et al., 1999).
A aplicação do conjunto de marcadores simples envolve a fixação directa dos marcadores na
pele do indivíduo, num determinado ponto anatómico e próximo do centro de rotação de uma
articulação. A posição do segmento corporal é definida por uma linha entre dois marcadores. Os
pontos anatómicos utilizados para a fixação dos marcadores são: a cabeça do 5º metatarso,
maléolos lateral, côndilos laterais femorais, grande trocânteres, crista ilíaca ântero-superior,
acrómio, côndilos laterais do úmero e no punho (Richards, 2008).
Outro modelo é a aplicação do conjunto de marcadores por Vaughan. Ao nível antropométrico
utiliza um conjunto detalhado das medidas do MI. Essas medidas baseiam-se na distância interna
entre as Cristas Ilíacas ântero-superiores, largura da anca, comprimento da coxa, circunferência
medial da coxa, comprimento da perna, circunferência da perna, diâmetro do joelho, comprimento
Figura 33 - Modelo anatómico simples (Richards, 2008).

60 Fundamentação Teórica
do pé, altura do maléolo, largura do maléolo e a largura do pé. Este modelo consiste na fixação de
15 marcadores nos membros inferiores e pélvis, o que vai levar a um maior detalhe na localização
do centro articular do joelho. Os pontos anatómicos utilizados as cabeças do 5º metatarso, maléolo
lateral, calcâneo, tuberosidade tibial, epicôndilo femoral, grande trocânter, crista ilíaca ântero-
superior e o sacro (para uma melhor referência funcional da inclinação pélvica no plano sagital).
Um outro modelo é o de Helen Hayes, que tal como o modelo anterior, os marcadores vão
permitir a inclusão de um marcador no calcâneo e outro no sacro o que permite uma melhor
referência funcional do pé e da pélvis, contudo este método incluem uma vara ao nível da tíbia e
fémur, o que permite quantificar os valores das rotações que ocorrem nestes segmentos. Ao nível
antropométrico ele apenas utiliza as medições do comprimento do MI, a largura do joelho e a
largura do tornozelo (através dos maléolos). Os pontos anatómicos utilizados são: a cabeça do 2º
metatarso, maléolo lateral, calcâneo, vara na tíbia, epicôndilo femoral, vara no fémur, grande
trocânter, crista ilíaca ântero-posterior e sacro.
Figura 34 - Modelo anatómico de Vaughn (Richards, 2008).

61
Outra forma de aplicar os marcadores no estudo da marcha é através da aplicação de estruturas
rígidas ou directamente sobre a pele no qual se baseia na aplicação de um conjunto de marcadores
que representam uma determinada região em estudo. Um dos modelos que utiliza este tipo de
sistema é o modelo Cleveland Clinic MAC Orthotrack, ou pelo modelo de Sistema Técnico de
Calibração Anatómica (STCA) no qual a orientação da coxa é definida pelo usuário e indicando o
eixo do joelho.
Para além destes sistemas existem outros tantos a serem aplicados no qual se baseiam nos
mesmos princípios dos que já foram referenciados como exemplo Qualysis, Elite e Ariel, aplicados
ao nível não só da análise de marcha como também na investigação da marcha (Heisenberg, 2016).
5.8.1. Calibração Anatómica de Marcadores Estáticos
Os marcadores são colocados ao nível lateral e medial das articulações dos pontos anatómicos
nas regiões proximais e distais do segmento. Os marcadores dos pontos anatómicos são fixados nas
extremidades, ou seja, a nível distal e proximal de cada segmento de forma a relacionar os
marcadores. Para técnicas que utilizem cinemáticas 3D as coordenadas aplicadas em laboratório ou
o sistema de coordenadas global definem o segmento e transformam num sistema de coordenadas
local ou sistema de coordenadas segmentadas através das transformações de coordenadas.
Os diferentes marcadores anatómicos podem ser usados para definir os segmentos, como
exemplo: o pé, as cabeças do 1º e 5º metatarso e os maléolos, medial e lateral; tíbia, maléolos,
medial e lateral e epicôndilos femorais; fémur, epicôndilos femorais e grande trocânter; pélvis,
crista ilíaca ântero-superior e a póstero-superior (Richards, 2008).
Figura 35 - Modelo anatómico Helen Hayes (Richards, 2008).

62 Fundamentação Teórica
5.8.2. Localização dos Marcadores Dinâmicos
A posição exacta dos marcadores não interessa com a utilização da técnica do sistema de
calibração anatómica, pois esta utiliza posições anatómicas relativas usadas na calibração
anatómica. Durante a colocação deve-se verificar se é possível localizar eficientemente os
marcadores ou aglomerados colocados. Para obter maior taxa de sucesso os marcadores são
colocados com um determinado ângulo entre os planos coronal e sagital.
São necessários pelo menos 3 marcadores não colineares para localizar a posição e orientação de
um corpo rígido para qualquer imagem relativamente a outra de acordo com a liberdade de 6 graus,
segundo Cappozzo et al (2005). Um número de marcadores aceitáveis é de 4 a 5 marcadores por
segmento o que permite realizar a acção mesmo que 1 ou 2 marcadores se percam no decorrer do
movimento vai recolher os dados nos 6 graus de liberdade.
Qualquer segmento corporal pode mover-se de 6 maneiras diferentes, o que em termos
funcionais demonstra-se num mecanismo adaptativo, contudo a compreensão do funcionamento do
movimento de cada segmento torna-se mais complexa. Os 6 graus de liberdade do movimento de um
segmento corporal são: 3 movimentos lineares ou translações, ao nível vertical, médio-lateral e
ântero-posterior; e 3 movimentos rotacionais ou angulares no plano transversal, coronal e sagital.
Contudo quando se estuda a interacção de 2 segmentos corporais deve-se considerar 12 graus de
liberdade, 6 graus para cada segmento (Richards, 2008).
De acordo com Richards (2008) a aplicação dos 6 graus de liberdade não proporciona muito mais
informação clínica da marcha, para o qual existem outras aplicações mais simples para determinar
as mudanças funcionais a nível cirúrgico, reabilitação e aplicação de dispositivos de auxílio na
marcha, no entanto não demonstram a interacção e funcionalidade articular do corpo o que
eventualmente levará a ocasiões de erros de medições e de informações incorrectas.
5.8.3. Métodos de Identificação dos Marcadores
Para realizar a identificação dos marcadores é necessário obter os segmentos de referência
médio-lateral e proximal e distal. Os marcadores anatómicos podem ser determinados através da
aplicação da vara com pelo menos 2 marcadores coincidentes para identificar o marcador
anatómico. Se a distância entre os marcadores for conhecida, relativamente ao final da vara, a
posição final da mesma pode ser determinada.
Os centros articulares funcionais dos conjuntos de marcadores podem ser identificados pelo
cálculo da posição entre dois segmentos corporais em movimento e define o ponto comum de
rotação desses segmentos. Este método estuda o movimento pela aplicação dos 6 graus de liberdade
de dois segmentos corporais adjacentes definidos por aglomerados e os eixos de rotação dos dois
segmentos corporais são computorizados. A partir da informação obtida na intersecção dos eixos
destes dois segmentos vai ser possível obter a posição do centro articular. Este método pode ser
utlizado para todo o tipo de articulação.

63
5.8.4. Sistemas de Coordenadas
Existem diversas formas de definir as articulações e segmentos corporais, no qual varia desde os
métodos mais simples como sistemas de coordenadas globais e trigonometria a métodos mais
avançados.
Os métodos mais comuns neste tipo de processo são: o sistema global de coordenadas (SGC);
sistema de coordenadas do segmento (SCS); e o sistema de coordenadas das articulações (SCA). O
SGC é o sistema que calcula os ângulos dos segmentos a partir dos eixos x, y, z da imagem. O SCS
utiliza os últimos pontos (proximal e distal) do segmento para determinar a orientação dos eixos x,
y, z da articulação. O SCA é o sistema que utiliza os eixos dos dois segmentos para criar um terceiro
eixo flutuante para os segmentos distais e proximais. Os últimos dois sistemas identificam o local do
sistema de coordenadas pela articulação, no que se torna anatomicamente mais significativo que
aplicação do primeiro sistema.
A existência de erros entre o sistema de coordenadas global e de segmentos deve ser reflectido
quando se realiza a interpretação dos dados do SGC. A natureza destes erros deve-se ao interesse
de estudar o movimento em mais de um plano, ou seja, para além de se estudar no plano sagital,
interligar esse plano com os planos transversal e coronal. Com este tipo de situação é necessário
verificar se as medições estão a ser realizadas correctamente.
No estudo da marcha é aplicado a sequência de Cardan sendo o método que descreve o sistema
do segmento ou global de coordenadas relativamente um ao outro. Esta sequência assume que o
eixo de x encontra-se na direcção médio-lateral, o eixo do y na direcção ântero-posterior e o eixo
do z em direcção axial. Desta forma esta sequência pode ser descrita segundo os eixos: eixo x =
flexão/extensão; eixo y = abdução/adução; eixo z = rotação interna/externa (Richards, 2008).

64 Fundamentação Teórica
Capítulo 6
Análise do Ciclo de Marcha
Neste capítulo é abordado o ciclo de marcha humana “normal”, sendo referido as fases do ciclo
de marcha e os aspectos cinéticos e cinemáticos e ainda as teorias utilizadas no estudo da marcha.
O estudo do movimento humano é realizado desde há muito tempo, suscitando interesse a
grandes nomes da história, deste o tempo de Aristóteles a Galileu que evidenciaram curiosidade
sobre a temática. Apesar de ter sido durante a metade do século XX, que ocorreu a necessidade de
realizar estudos aprofundados relativamente a locomoção humana, de forma a reabilitar e de
fornecer tratamento a veteranos da II Guerra Mundial (A. Completo & Fonseca, 2011; Gafaniz,
Lopes, & Pires, 2005).
A marcha humana é uma ferramenta de diagnóstico de elevada importância na avaliação de
patologias neuromusculares e músculo-esqueléticas, seja a um nível temporário, permanente, local
ou geral. Actualmente é possível identificar um indivíduo pela sua marcha, pois cada indivíduo
possui um comportamento específico na marcha, desde sua passada, velocidade até a intensidade e
som realizado por passo. Existem diversos factores que influenciam o ciclo de marcha, estes podem
ser: factores extrínsecos, intrínsecos, fisiológicos ou patológicos e físicos ou psíquicos (Collado,
2002).
O ciclo da marcha humana consiste numa sucessão de movimentos rítmicos e alternados dos
membros inferiores e tronco, e desta forma provocando um movimento anterior do centro de
gravidade do corpo (Calhau, Pisco, Valente, & Santos, 2007). Movimento este que é desenvolvido
nos primeiros anos de vida e com o passar do tempo o sistema sensoriomotor vai se adaptar ao
movimento e automaticamente, permite caminhar sem esforço consciente, resultando assim num
processo simples e necessário para as actividades de vida diária (Mann, Teixeira, & Mota, 2008;
Winter, 1990). Esta consiste num deslocamento seguro do individuo numa posição bípede e postura
erecta com uma estabilidade adequada e com o menor gasto energético possível (Ribeiro, 2006).
Os padrões de marcha considerados normais são compreendidos num intervalo ou sucessão de
movimentos que ocorrem em cada passada, isto significa que no espaço temporal entre o contacto

65
inicial do membro de referência no solo até ao novo contacto desse mesmo membro no solo. Este
evento é composto por duas fases principais: a fase de apoio e a fase de balanço, sendo estas
subdivididas e analisadas em diversos momentos (António Completo & Fonseca, 2011).
O estudo do ciclo de marcha começa sempre com o indivíduo em posição ortostática e é iniciado
no momento em que um dos pés entra em contacto com o solo, com a zona posterior do pé, retropé
(região do calcâneo). Como exemplo se o pé direito inicia o ciclo com o primeiro contacto ao solo,
este vai terminar com o seguinte contacto ao solo do mesmo pé (Sebastião, 2009), no qual se
denomina de passada(A. Completo & Fonseca, 2011). Cada ciclo de marcha é limitado a dois
contactos ao solo, um do pé direito e outro do pé esquerdo no qual a ordem de sequência não é
relevante no ciclo.
Como já foi referido, anteriormente, um ciclo completo da marcha passa pelas duas fases
principais do ciclo: a fase de apoio, a qual o pé entra em contacto com a superfície de apoio, esta
fase têm início com o contacto inicial ao solo e termina com a descolagem da parte do antepé do
membro e a fase de balanço, em que o pé se encontra no suspenso e ao mesmo tempo a preparar o
novo contacto com a superfície de apoio, no qual esta fase é executada desde o momento da
descolagem do antepé até o seguinte contacto com a superfície de apoio.
Em condições normais a duração destas duas fases do ciclo de marcha tem uma duração de
aproximadamente 60% para a fase de apoio, sendo os restantes 40% para fase de balanço. Quando é
visualizado o membro contralateral considera-se que 50% do tempo, destaca as duas fases de apoio
duplo (apoio bipodal), no qual cada uma tem a duração de 10% do tempo. Estas duas fases
dependem e muito da velocidade do indivíduo, pois com o aumento da proporção da oscilação
durante o apoio, ocorre o aumento da velocidade geral e gradualmente reduz os períodos de apoio
duplo, que acaba por desaparecer numa transição da marcha para corrida (Perry, 1992)
Figura 36- Ciclo de marcha humana com as principais fases (Perry, 1992).

66 Fundamentação Teórica
6.1. Divisão das Fases do Ciclo de Marcha
Como referido anteriormente o ciclo de marcha pode ser dividido em duas fases principais, a
fase de apoio e fase de balanço, que por sua vez podem ser divididos em subfases devido a sua
diversidade de eventos específicos e de forma a facilitar a descrição de cada uma das subfases.
No ciclo de marcha “normal” os eventos produzidos nos eventos sucessivos, para cada membro
ocorre inicialmente o contacto do calcanhar com o solo, passa a apoio completo da superfície
plantar do pé, depois ocorre a descolagem do retropé seguido da descolagem do antepé, colocando
o membro em oscilação e termina com o contacto do seguinte calcanhar.
Apesar de se observar, normalmente, este conjunto de etapas mencionadas, podem existir
determinadas alterações da marcha. Devido a este factor existe a necessidade de realizar uma
subdivisão adequada, definindo fronteiras entre as subfases existentes em qualquer ciclo de
marcha, originando as seguintes fases: fase de recepção da carga; fase média de apoio; fase de
descolagem; fase inicial de balanço; e a fase final de balanço (Winter, 1990).
A subdivisão mais utilizada na investigação e análise do ciclo de marcha e locomoção humana é
a divisão da fase de apoio em cinco subfases e a divisão da fase de balanço por outros três subfases
(Perry, 1992). Iniciando pela fase apoio a divisão é realizada da seguinte forma:
Fase de Apoio:
Contacto Inicial (CI) – momento exacto em que o pé contacta o solo com o principal
objectivo o posicionamento do membro para se iniciar o apoio, geralmente através do
calcanhar (0-2%);
Apoio Inicial e Resposta de Carga (AI) – momento prolongado até o retirar do pé oposto do
solo, no qual ocorre um período de flexão do joelho e do tornozelo, realizando a flexão
plantar controlada pelos quadríceps e o tibial anterior de forma a estabilizar o quadril (0-
10%);
Apoio Médio (AM) – momento inicial da saída do pé contralateral do solo e que contínua
até o peso corporal se encontrar na região anterior do pé apoiado (10-30%);
Apoio Final (AF) – momento inicial da elevação do retropé apoiado e estende-se até o
contacto inicial do pé oposto (30-55%);
Pré-Balanço (PB) – momento de contacto inicial do pé contralateral e termina com a
descolagem do antepé (50-60%).
No seguimento do ciclo de marcha segue-se a fase de balanço dividida na seguinte forma:
Fase de Balanço:
Balanço Inicial (BI) – momento em que o pé de apoio perde o contacto com o solo e ocorre
a aceleração do MI no sentido do movimento (60-73%);
Balanço Médio (BM) – momento em que os dois membros se cruzam e termina com a linha
longitudinal da perna em suspensão (73-87%);
Balanço Final (BF) – momento de desaceleração do MI, no qual ocorre uma preparação para
contacto com o solo, originando um novo passo (87-100%) (Perry, 1992; Sebastião, 2009).

67
Segundo as fases apresentadas e as suas subdivisões é possível determinar o objectivo mecânico
de cada uma delas tal como os grupos musculares activos e os principais músculos como é
demonstrado na tabela 3.
Tabela 3 - Determinação de objectivos e actividade do grupo muscular nas diferentes fases e
períodos do ciclo de marcha (A. Completo & Fonseca, 2011).
Fase Período Objectivo Mecânico Grupo Muscular Músculos
Fase de Apoio
Contacto Inicial
Posicionamento do pé, início da
desaceleração
Flexores dorsais do tornozelo; Extensores da anca; Flexores
do joelho
Tibial anterior;
Grande glúteo; Isquiotibiais
Apoio Inicial / Resposta de Carga
Recepção da carga, estabilização da
pélvis, desaceleração do corpo
Extensores do joelho; Abdutores da anca; Flexores
plantares do tornozelo
Médio glúteo; Vasto Interno
e Externo; Gémeos
Apoio Médio
Estabilização do joelho, preservação
do momento de força
Flexores plantares do tornozelo (contracção
isométrica)
Gémeos; Solear
Apoio Final
Aceleração do corpo para frente
Flexores plantares do tornozelo (contracção
concêntrica)
Gémeos; Solear
Pré-balanço
Preparação do balanço do membro
Flexores da anca
Ilíaco e Grande psoas; Recto femoral
Figura 37 - Ciclo de marcha e posições do membro inferior(Wittle, 2007).

68 Fundamentação Teórica
Fase de Balanço
Balanço Inicial
Elevação do pé, variação da cadência
Flexores dorsais do tornozelo; Flexores da anca
Tibial anterior; Ilíaco e Grande
psoas; Recto femoral
Balanço Médio
Suspensão do pé Flexores dorsais do tornozelo Tibial anterior
Balanço Final
Desaceleração da coxa e perna,
posicionamento do pé e preparação do
contacto com o solo
Flexores do joelho; Extensores da anca; Flexores
dorsais do tornozelo; Extensores do joelho
Tibial anterior; Grande glúteo; Isquiotibiais e
Vasto Interno e Eterno
6.2. Observação Detalhada do Ciclo de Marcha
De seguida é apresentado a descrição mais detalhada do ciclo de marcha das subfases referidas
anteriormente:
Fase de Apoio: Contacto Inicial (CI)
No ciclo de marcha realiza-se inicialmente a fase de apoio, ao qual se denomina o primeiro
momento de CI. A principal preocupação é a colocação correcta do pé, no instante em que o
calcanhar contacta o solo (Perry, 1992). As direcções das forças de reacção ao solo geralmente
alteram-se para cima durante a transição do contacto ao solo e de cima para baixo durante a
resposta de carga, seguidamente (Wittle, 2007).
O tornozelo encontra-se numa posição neutra no momento de CI e após o contacto do calcanhar
o pé realiza uma ligeira supinação. A activação muscular do tibial anterior ocorre durante as fases
de balanço para manter a flexão dorsal. O joelho vai se encontrar praticamente estendido no CI,
no qual antes do primeiro contacto este realiza uma flexão. Ao nível da anca esta apresenta uma
flexão de 30º, com possibilidade de se alterar até ao final do CI. Ocorre a activação dos músculos
isquiotibiais, de forma a prevenir a hiperextensão do joelho, os grandes glúteos contraem-se e em
sinergia, estes músculos iniciam a contracção da anca, no qual se manterá até o CI do MI oposto
(Wittle, 2007).
Figura 38- Contacto inicial: FRS do MI direito na forma de vector no início do contacto do calcanhar (Wittle, 2007).
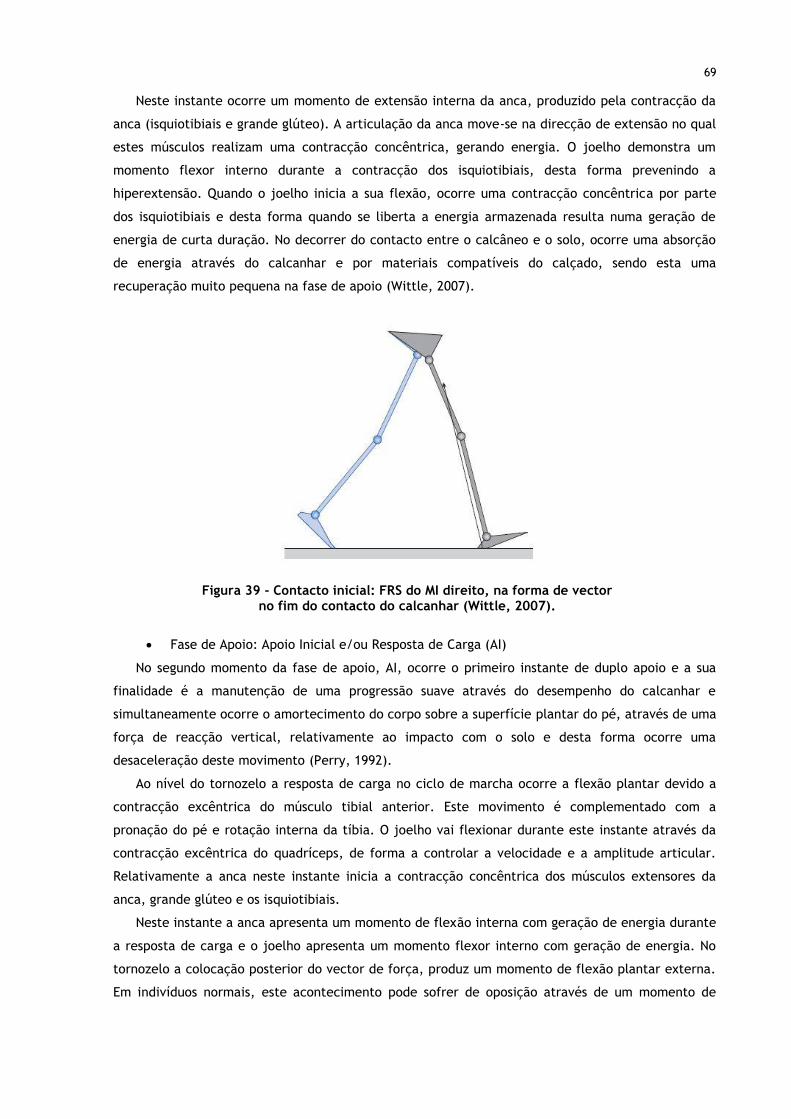
69
Neste instante ocorre um momento de extensão interna da anca, produzido pela contracção da
anca (isquiotibiais e grande glúteo). A articulação da anca move-se na direcção de extensão no qual
estes músculos realizam uma contracção concêntrica, gerando energia. O joelho demonstra um
momento flexor interno durante a contracção dos isquiotibiais, desta forma prevenindo a
hiperextensão. Quando o joelho inicia a sua flexão, ocorre uma contracção concêntrica por parte
dos isquiotibiais e desta forma quando se liberta a energia armazenada resulta numa geração de
energia de curta duração. No decorrer do contacto entre o calcâneo e o solo, ocorre uma absorção
de energia através do calcanhar e por materiais compatíveis do calçado, sendo esta uma
recuperação muito pequena na fase de apoio (Wittle, 2007).
Fase de Apoio: Apoio Inicial e/ou Resposta de Carga (AI)
No segundo momento da fase de apoio, AI, ocorre o primeiro instante de duplo apoio e a sua
finalidade é a manutenção de uma progressão suave através do desempenho do calcanhar e
simultaneamente ocorre o amortecimento do corpo sobre a superfície plantar do pé, através de uma
força de reacção vertical, relativamente ao impacto com o solo e desta forma ocorre uma
desaceleração deste movimento (Perry, 1992).
Ao nível do tornozelo a resposta de carga no ciclo de marcha ocorre a flexão plantar devido a
contracção excêntrica do músculo tibial anterior. Este movimento é complementado com a
pronação do pé e rotação interna da tíbia. O joelho vai flexionar durante este instante através da
contracção excêntrica do quadríceps, de forma a controlar a velocidade e a amplitude articular.
Relativamente a anca neste instante inicia a contracção concêntrica dos músculos extensores da
anca, grande glúteo e os isquiotibiais.
Neste instante a anca apresenta um momento de flexão interna com geração de energia durante
a resposta de carga e o joelho apresenta um momento flexor interno com geração de energia. No
tornozelo a colocação posterior do vector de força, produz um momento de flexão plantar externa.
Em indivíduos normais, este acontecimento pode sofrer de oposição através de um momento de
Figura 39 - Contacto inicial: FRS do MI direito, na forma de vector no fim do contacto do calcanhar (Wittle, 2007).

70 Fundamentação Teórica
flexão dorsal interno, produzido pelo tibial anterior que realiza uma contracção excêntrica, de
forma a absorver energia e permitir ao pé um contacto subtil com o solo (Wittle, 2007).
Fase de Apoio: Apoio Médio (AM)
O terceiro momento da fase de apoio tem como objectivo principal manter a estabilidade das
articulações do joelho e da anca enquanto o corpo se move sobre um único apoio e no mesmo
instante o membro de apoio inicia a fase de balanço (Perry, 1992).
Neste momento o pé de apoio mantem a superfície plantar em contacto total com o solo, no
qual o ângulo articular é alterado da flexão plantar para flexão dorsal, devido a contracção
excêntrica do tríceps sural. Ao longo da AM ocorre a rotação externa da tíbia junto com uma
supinação do pé. O joelho alcança o pico da sua flexão e começa a estender outra vez, por
contracção concêntrica do músculo quadríceps. No caso da anca este permanece em extensão,
durante este período a contracção concêntrica do grande glúteo e dos isquiotibiais termina, pois a
extensão da anca permanece através das forças de inercia e gravitacionais. Quando o pé oposto
deixa o solo, a pélvis é suportada apenas pela zona da anca do MI que se encontra em contacto com
o solo. Este mantém-se na mesma posição devido à contracção dos abdutores da anca,
principalmente do médio glúteo e do tensor da fáscia lata.
O momento extensor interno da anca é gerado pela contracção dos músculos extensores, no qual
desaparece para ser reposto pelo momento na direcção oposta. No joelho o vector de força
permanece na região posterior da articulação produzindo um momento flexor externo sofrendo
oposição do momento extensor interno da contracção do quadríceps, estando apenas o músculo
recto femoral activo neste instante. Devido a mudança dos movimentos do joelho de flexão para
extensão, é novamente gerado energia. Relativamente ao tornozelo ocorre um aumento do
momento interno da flexão plantar, gerado pelo tríceps sural por contracção excêntrica e de
absorção energética. Neste instante ocorrendo ainda um deslocamento do vector da força para a
região do antepé (Wittle, 2007)
Figura 40 - Resposta de carga: FRS do MI após o CI, na forma de vector (Wittle, 2007).

71
Fase de Apoio: Apoio Final (AF)
No seguinte momento da fase de apoio, o AF, o objectivo é a produção de uma aceleração
adequada tal como o comprimento do passo. A aceleração é o componente que exige maior parte da
energia necessária para a realização da marcha num adulto que realize um marcha considerada
normal, em termos percentuais pode chegar até os 80% da energia, aproximadamente.
O tornozelo chega ao pico da flexão dorsal, depois de passar pelo levantamento do calcanhar.
Inicialmente o músculo do tríceps sural mantem o ângulo do tornozelo assim que o joelho começa a
sua flexão, através da flexão plantar. A tíbia realiza rotação externa tal como o pé realiza o
movimento de supinação, estando estas duas interligadas no movimento da articulação subtalar.
Com o levantamento do calcanhar os dedos permanecem no contacto com o solo e ocorre a
extensão ao nível das articulações metatarsofalângicas, tornando a região do antepé o único apoio,
criando assim uma inclinação no eixo ântero-posterior de 60º aproximadamente. Relativamente ao
joelho este encontra-se perto do pico de extensão e com a realização da flexão plantar do tornozelo
dirige a força de reacção ao solo para além do antepé como para frente da articulação do joelho.
Com a contracção do músculo dos gémeos ocorre um aumento na acção do músculo soleus na
articulação do tornozelo, de forma a iniciar a realização da flexão do joelho. Ao nível da anca esta
continua em a realizar a extensão chegando ao seu pico no momento de em que se inicia o CI do MI
contralateral. Ao nível frontal a actividade dos músculos abdutores são necessários para
estabilização da pélvis.
Com o levantamento do calcanhar ocorre um ligeiro aumento do momento interno de flexão da
anca. Relativamente ao joelho, contracção do músculo do quadríceps termina o momento interno é
revertido para se torna em flexão, pois segundo Perry (1992) a região superior do corpo move-se
mais rapidamente que a tíbia. Caso a articulação do tornozelo esteja livre o movimento de avanço
do corpo simplesmente realiza a flexão dorsal, contudo a contracção do músculo do tríceps sural
diminui a velocidade do movimento de avanço da tíbia e por isso avança-se também o fémur no
movimento de avanço, gerando desta forma um momento esterno de extensão do joelho tendo
resistência pelo momento interno de flexão. Na região do tornozelo o momento de flexão interna
Figura 41 - Apoio médio: FRS do MI após o AI, na forma de vector (Wittle, 2007).
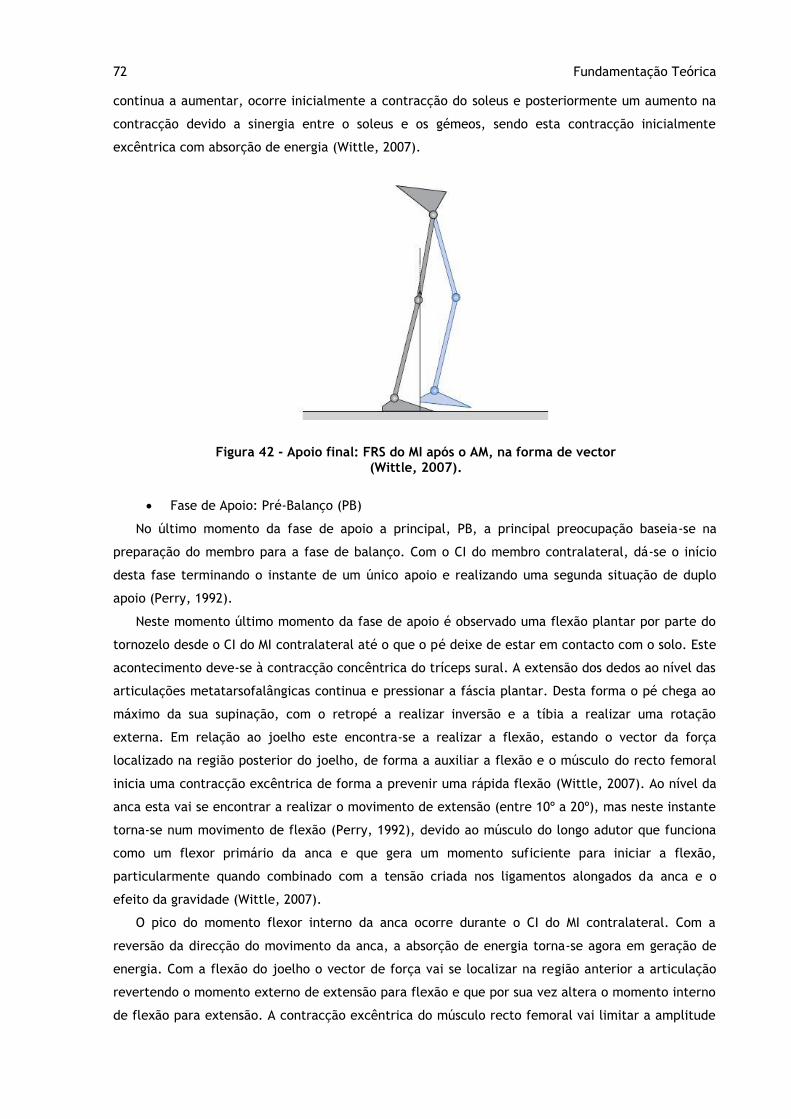
72 Fundamentação Teórica
continua a aumentar, ocorre inicialmente a contracção do soleus e posteriormente um aumento na
contracção devido a sinergia entre o soleus e os gémeos, sendo esta contracção inicialmente
excêntrica com absorção de energia (Wittle, 2007).
Fase de Apoio: Pré-Balanço (PB)
No último momento da fase de apoio a principal, PB, a principal preocupação baseia-se na
preparação do membro para a fase de balanço. Com o CI do membro contralateral, dá-se o início
desta fase terminando o instante de um único apoio e realizando uma segunda situação de duplo
apoio (Perry, 1992).
Neste momento último momento da fase de apoio é observado uma flexão plantar por parte do
tornozelo desde o CI do MI contralateral até o que o pé deixe de estar em contacto com o solo. Este
acontecimento deve-se à contracção concêntrica do tríceps sural. A extensão dos dedos ao nível das
articulações metatarsofalângicas continua e pressionar a fáscia plantar. Desta forma o pé chega ao
máximo da sua supinação, com o retropé a realizar inversão e a tíbia a realizar uma rotação
externa. Em relação ao joelho este encontra-se a realizar a flexão, estando o vector da força
localizado na região posterior do joelho, de forma a auxiliar a flexão e o músculo do recto femoral
inicia uma contracção excêntrica de forma a prevenir uma rápida flexão (Wittle, 2007). Ao nível da
anca esta vai se encontrar a realizar o movimento de extensão (entre 10º a 20º), mas neste instante
torna-se num movimento de flexão (Perry, 1992), devido ao músculo do longo adutor que funciona
como um flexor primário da anca e que gera um momento suficiente para iniciar a flexão,
particularmente quando combinado com a tensão criada nos ligamentos alongados da anca e o
efeito da gravidade (Wittle, 2007).
O pico do momento flexor interno da anca ocorre durante o CI do MI contralateral. Com a
reversão da direcção do movimento da anca, a absorção de energia torna-se agora em geração de
energia. Com a flexão do joelho o vector de força vai se localizar na região anterior a articulação
revertendo o momento externo de extensão para flexão e que por sua vez altera o momento interno
de flexão para extensão. A contracção excêntrica do músculo recto femoral vai limitar a amplitude
Figura 42 - Apoio final: FRS do MI após o AM, na forma de vector (Wittle, 2007).
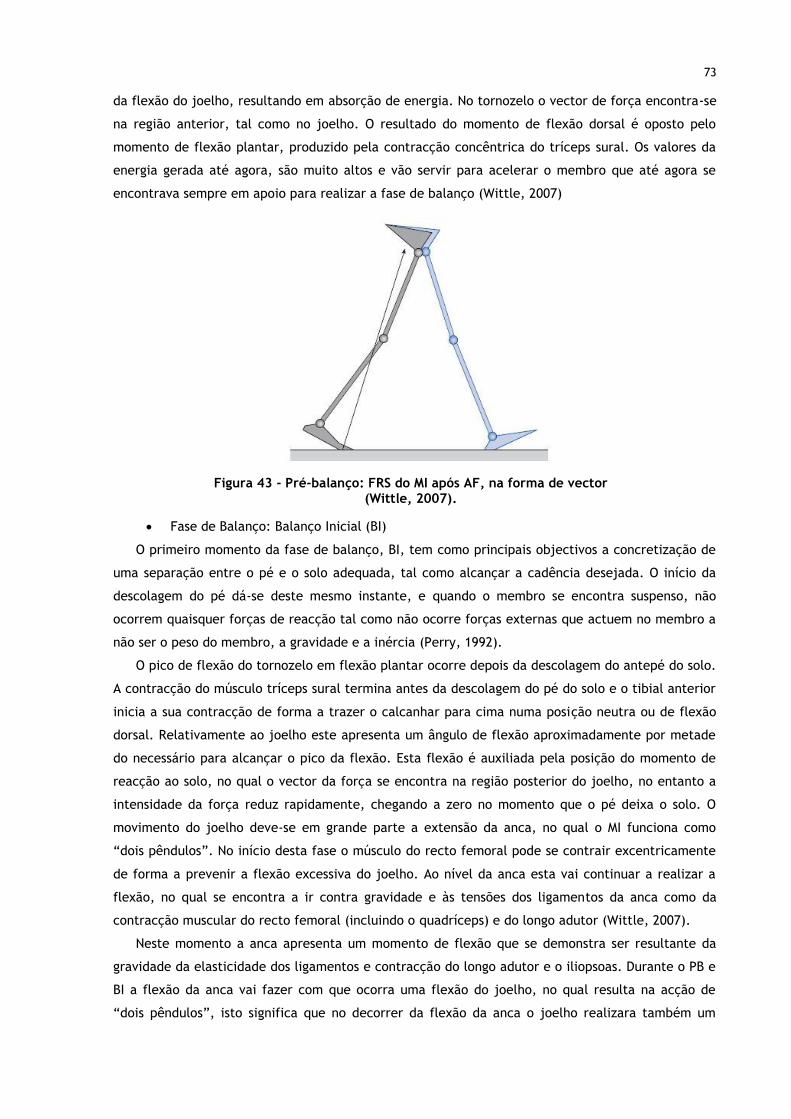
73
da flexão do joelho, resultando em absorção de energia. No tornozelo o vector de força encontra-se
na região anterior, tal como no joelho. O resultado do momento de flexão dorsal é oposto pelo
momento de flexão plantar, produzido pela contracção concêntrica do tríceps sural. Os valores da
energia gerada até agora, são muito altos e vão servir para acelerar o membro que até agora se
encontrava sempre em apoio para realizar a fase de balanço (Wittle, 2007)
Fase de Balanço: Balanço Inicial (BI)
O primeiro momento da fase de balanço, BI, tem como principais objectivos a concretização de
uma separação entre o pé e o solo adequada, tal como alcançar a cadência desejada. O início da
descolagem do pé dá-se deste mesmo instante, e quando o membro se encontra suspenso, não
ocorrem quaisquer forças de reacção tal como não ocorre forças externas que actuem no membro a
não ser o peso do membro, a gravidade e a inércia (Perry, 1992).
O pico de flexão do tornozelo em flexão plantar ocorre depois da descolagem do antepé do solo.
A contracção do músculo tríceps sural termina antes da descolagem do pé do solo e o tibial anterior
inicia a sua contracção de forma a trazer o calcanhar para cima numa posição neutra ou de flexão
dorsal. Relativamente ao joelho este apresenta um ângulo de flexão aproximadamente por metade
do necessário para alcançar o pico da flexão. Esta flexão é auxiliada pela posição do momento de
reacção ao solo, no qual o vector da força se encontra na região posterior do joelho, no entanto a
intensidade da força reduz rapidamente, chegando a zero no momento que o pé deixa o solo. O
movimento do joelho deve-se em grande parte a extensão da anca, no qual o MI funciona como
“dois pêndulos”. No início desta fase o músculo do recto femoral pode se contrair excentricamente
de forma a prevenir a flexão excessiva do joelho. Ao nível da anca esta vai continuar a realizar a
flexão, no qual se encontra a ir contra gravidade e às tensões dos ligamentos da anca como da
contracção muscular do recto femoral (incluindo o quadríceps) e do longo adutor (Wittle, 2007).
Neste momento a anca apresenta um momento de flexão que se demonstra ser resultante da
gravidade da elasticidade dos ligamentos e contracção do longo adutor e o iliopsoas. Durante o PB e
BI a flexão da anca vai fazer com que ocorra uma flexão do joelho, no qual resulta na acção de
“dois pêndulos”, isto significa que no decorrer da flexão da anca o joelho realizara também um
Figura 43 - Pré-balanço: FRS do MI após AF, na forma de vector (Wittle, 2007).

74 Fundamentação Teórica
momento de flexão, através da contracção excêntrica (incluindo o quadríceps) de forma a limitar a
velocidade de flexão do joelho e desta forma absorvendo energia. No tornozelo o momento de
flexão plantar reduz substancialmente no PB tal como a amplitude tal como a redução das forças de
reacção ao solo e neste instante a geração de energia na região do tornozelo é igual a zero (Wittle,
2007).
Fase de Balanço: Balanço Médio (BM)
No segundo momento da fase de balanço, BM, o principal interesse é manter a separação entre
o pé e o solo. Esta separação pode ser obtida pela extensão do joelho, mas que simultaneamente a
pélvis se mantenha relativamente numa postura horizontal, ou seja anca necessita de realizar uma
certa flexão e o tornozelo realiza a flexão dorsal (Winter, 1990).
No decorrer desta fase o tornozelo realiza um movimento de passagem de flexão plantar para
flexão dorsal ou para um postura neutra até alcançar o próximo instante. Este movimento requer a
contracção muscular do tibial anterior, apesar da força de contracção ser menor que o necessário
para o controlo do MI no próximo CI, no qual o pé apresenta uma ligeira supinação. Ao nível do
joelho, a perna funciona como um pêndulo no qual não ocorre qualquer acção muscular nesta
região. O pico da amplitude articular da flexão do joelho neste instante chega a alcançar valores
entre 60º e 70º no qual ocorre antes terminar a fase de BM após este instante o joelho tende a
realizar um momento de extensão novamente. Relativamente a região da anca, esta tende a
flexionar, aproximadamente 20º, sendo realizada uma forte contracção muscular do iliopsoas em
combinação da gravidade.
O movimento de flexão da anca é gerado pela gravidade tal como a contracção do recto femoral
e dos adutores, adicionando os ligamentos elásticos no início do movimento e a contracção do
músculo iliopsoas no final. A resposta a este movimento, corresponde ao pico de energia gerada na
anca, sendo utilizada para acelerar a oscilação do membro para a frente. A resultante da energia
cinética é posteriormente transferida para a região acima da cintura pélvica com a desaceleração
do membro em oscilação no final da fase de balanço. Entre o instante de BI e BM o joelho
demonstra um pequeno momento extensor, devido ao músculo recto femoral (incluindo o
quadríceps) que previne o joelho desde a rápida flexão até a rápida resposta do momento flexor
Figura 44 - Balanço inicial: FRS na forma de vector (Wittle, 2007).

75
transferido pela anca. Enquanto o joelho se encontra a realizar um momento de flexão, ocorre
absorção de energia. Relativamente ao tornozelo este não sofre quaisquer alterações ao nível do
momento ou de energia, mas no caso de ocorrer serão alternações muito pequenas e que apenas
envolvem o peso do pé (Wittle, 2007).
Fase de Balanço: Balanço Final (BF)
No último momento da fase de balanço e conclusão de um ciclo de marcha, BF, os principais
objectivos baseiam-se na desaceleração da perna tal como a correcta colocação da superfície
plantar no contacto com o solo (Perry, 1992).
No decorrer deste momento, antes da tíbia do membro oscilante se encontrar numa posição
vertical, o comportamento do tornozelo não é muito importante, no qual pode apresentar um certo
grau tanto de flexão plantar com dorsal antes do seguinte instante de CI de um novo ciclo de
marcha. Neste caso o músculo tibial anterior continua a contrair, controlando a posição do
tornozelo, que normalmente ocorre um aumento da sua actividade antes de realizar o novo CI de
forma a antecipar as forças de contracção necessárias durante a fase de resposta de carga.
Relativamente à região do joelho, quando a tíbia se localiza numa posição vertical ocorre durante
um período uma extensão do joelho, quase total para o seguinte CI. Esta extensão ocorre a partir da
contracção excêntrica dos músculos isquiotibiais, prevenindo o movimento de causa uma
hiperextensão repentina do joelho no final desta fase. Com o decorrer da posição vertical da tíbia a
anca tende a terminar a sua flexão, obtendo um valor de flexão aproximadamente de 27º de flexão
desde este instante até o seguinte CI. Com o aumento da contracção dos isquiotibiais durante este
instante, de forma a limitar o angulo de extensão do joelho de forma a manter a articulação da
anca numa posição flectida.
No momento em que a tíbia se posiciona verticalmente, a anca sofre um aumento no momento
de extensão, gerado pela contracção dos isquiotibiais tal como do grande glúteo que inicia a sua
contracção antes do seguinte CI. Este momento permite a transferência do momento do BF para a
região corporal superior, recuperando alguma energia cinética transmitida para o MI que vai iniciar
Figura 45 - Balanço médio: posicionamento dos membros nesta fase (Wittle, 2007).

76 Fundamentação Teórica
uma nova fase. O ângulo da articulação da anca vai se encontrar estático durante o BF, ocorre uma
quantidade pequena na troca de energia da articulação. O joelho demonstra um aumento
relativamente ao momento de flexão, gerando uma contracção excêntrica dos isquiotibiais, com
absorção de energia que ocorre devido a resposta no momento de extensão gerado pela inércia da
oscilação da perna. Este momento ao nível do tornozelo como referido anteriormente sofre de uma
troca de energia muito pequena (Wittle, 2007).
6.3. Modelos Biomecânicos da Marcha
A marcha humana é o resultado de uma complexa interacção de forças musculares, movimentos
articulares e de comandos motores neurais. Desde o último século que se tem vindo a estudar as
variáveis internas que contribuem para o estudo da marcha, no qual se incluem a EMG, as FRS, o
movimento dos membros e custos energéticos e metabólicos como referidos anteriormente. Através
dos dados recolhidos por estas variáveis é possível interpretar e organizar os princípios
fundamentais do mecanismo da marcha. Existem duas teorias que se associam ao estudo da marcha:
a teoria do pêndulo invertido e os seis determinantes da marcha.
6.3.1. Teoria do Pêndulo Invertido
O modelo do pêndulo invertido refere que a marcha humana pode ser assemelhada ao
mecanismo de um pêndulo, onde a energia cinética é convertida em energia potencial gravítica e
vice-versa, mantendo cerca de 60 a 70% da energia mecânica. A força mais importante e que
determina o pêndulo invertido é a gravidade (F=mg) pelo que tem de ser igual à força centrípeta
(Fc=mv2/L). A razão entre estas duas forças vai originar o número de Froude.
Figura 46 - Balanço final: posicionamento dos membros nesta fase (Wittle, 2007).

77
𝒏º 𝒅𝒆 𝑭𝒓𝒐𝒖𝒅𝒆 =𝑽𝒆𝒍𝒐𝒄𝒊𝒅𝒂𝒅𝒆𝟐(𝒗𝟐)
𝑨𝒄𝒆𝒍𝒆𝒓𝒂çã𝒐 𝑮𝒓𝒂𝒗í𝒕𝒊𝒄𝒂 (𝒈)∗𝑪𝒐𝒎𝒑𝒓𝒊𝒎𝒆𝒏𝒕𝒐 𝒅𝒂 𝑷𝒆𝒓𝒏𝒂 (𝑳) (XVII)
Este modelo afirma que a maior parte do trabalho realizado durante a marcha não é realizado
através de trabalho muscular activo mas por mecanismo passivo de troca de energia cinética e
potencial, uma vez que o centro de gravidade (CG) por uma acção de pêndulo invertido oscila de
acordo com o membro na fase de apoio, o que reduz o trabalho necessário para elevação e
aceleração do centro de massa. Desta forma a acção muscular necessária para realização da
oscilação do membro é reduzida devido ao mecanismo semelhante a um pêndulo, a medida que o
membro se desloca anteriormente.
Quando se realiza uma análise biomecânica do deslocamento do centro de massa, observa-se
que no final do estado aéreo, o CG da cabeça, tronco e membros situam-se posteriormente ao
membro mais anterior, durante a fase inicial de apoio, iniciando a elevação sobre o membro e
seguido do contacto ao solo. A elevação do CG é gerada por energia cinética. Quando a elevação do
CG atinge o ponto máximo vertical na fase média de apoio, a velocidade do centro de massa diminui
e neste momento realiza-se a conversão de energia cinética em energia potencial. A energia
potencial é reconvertida em energia cinética no final da fase de apoio, quando o CG passa sobre o
pé e dessa forma aumentando a velocidade.
Através deste processo é possível a transferência de energia entre os passos sucessivos
realizados na marcha, bem como a manutenção do valor aproximado da constante do nível da
energia mecânica total, ou seja, a soma da energia cinética e potencial (Rico, 2014; Sousa, 2010).
6.3.2. Teoria dos Seis Determinantes da Marcha
Esta teoria caracteriza a marcha como um conjunto de mecanismos considerados determinantes
na realização e padrões da marcha. Esses mecanismos baseiam-se nos diversos movimentos
realizados pelo MI ao nível das articulações da anca, pélvis, joelho, tornozelo e pé de forma a
manter o CG num único plano horizontal. A estes movimentos se chama de determinantes da
marcha e o objectivo desta teoria é maximizar a eficácia e diminuir o gasto energético de forma a
absorver o choque e suavizar os pontos de inflexão do CG e FRS vertical (Rico, 2014; Sousa, 2010).
O CG desloca-se duas vezes no eixo vertical durante um ciclo completo da marcha. O ponto de
elevação máximo ocorre na metade da fase de apoio em que o membro que suporta o peso está em
posição vertical. O ponto mais baixo ocorre quando os dois membros suportam o peso, ou seja nas
fases de duplo apoio. A ondulação do CG é representada por ciclo, com um deslizamento que pode
chegar aos 5cm.
Rotação pélvica - produz a diminuição na amplitude das oscilações verticais onde a pélvis
oscila em relação ao eixo da região lombar da coluna vertebral. Pode se observar que um
dos lados da pélvis desloca-se anteriormente com o membro homolateral a oscilar na
mesma direcção e desta forma reduzindo os ângulos da pélvis e coxa e do membro com o
78 Fundamentação Teórica
solo e diminuindo a descida da pélvis durante o passo. A cintura pélvica roda
alternadamente para direita e esquerda relativamente a linha de progressão a magnitude
é aproximadamente de 8º e desta forma produz uma diminuição da ondulação vertical do
CG de 1 cm;
Inclinação da pélvis – o movimento do centro de massa é produzida pela inclinação lateral
da pélvis que implica a flexão do joelho do membro em oscilação que mantem a energia
devido ao encurtamento do pêndulo;
Flexão do joelho na fase de apoio (unilateral) – o joelho deve-se encontrar totalmente
estendido no contacto entre a região do calcanhar e o solo para iniciar a fase de apoio do
membro, flexionando quando o CG é deslocado aproximadamente 15º até toda a superfície
plantar apoiar o solo. De seguida o peso do corpo é transferido para o pé contralateral e
ocorre a extensão do joelho até terminar a fase de apoio;
Joelho e pé – o quarto e o quinto determinante que quando são combinados realizam o
movimento do joelho e tornozelo. A articulação do tornozelo encontra-se em flexão dorsal
no momento do contacto com o solo e posteriormente para colocar toda a superfície
plantar, realiza a flexão plantar, desta forma o corpo aproxima-se do CG comum da
posição ortostática. A rotação efectuada na articulação do tornozelo desloca-se sobre o
calcanhar que suporta o peso, formando dois arcos no movimento que desaparecem devido
a flexão do joelho.
Deslocamento lateral da pélvis – o sexto determinando, o deslocamento lateral da pélvis,
ocorre para conservar o equilíbrio corporal quando o membro se levanta do solo. O
membro que realiza o suporte do peso encontra-se em adução, originando um movimento
uniforme e facilitando a conservação de equilíbrio.
A velocidade da marcha depende do comprimento do passo e não do aumento da cadência, isto
significa que os determinantes da marcha são factores que permitem uma maior velocidade de
deslocamento sem aumentar a cadência da marcha (Pedrinelli, 2004; Sousa, 2009).
79
Capítulo 7
Ciclo de Marcha nos Amputados
Neste capítulo é abordado o ciclo de marcha humana nos indivíduos amputados, sendo referido
as causas, a importância da protetização, uma análise teórica a marcha de amputações TT e TF, tal
como os principais desvios corporais realizados no decorrer da marcha e uma pequena abordagem
aos conceitos e importância do alinhamento e biomecânica do encaixe.
O ciclo de marcha apresenta algumas variabilidades, de indivíduo para indivíduo,
particularmente na utilização dos músculos. Através do ciclo de marcha “normal” é possível
identificar os parâmetros normais da marcha e os valores normais das variáveis podem ser
quantificadas (Carvalho, 2003b; Herrero, Guillem, et al., 2004; Pedrinelli, 2004b; R. Periago, 2009).
O sistema de locomoção afectado por uma determinada patologia vai produzir um padrão de
marcha com anormalidades. Estas anormalidades podem ser identificadas através da observação a
olho nu, caso não seja possível é necessário identificar através de um sistema de medição.
Para que um indivíduo possa realizar a marcha, é necessário que o sistema locomotor realize 4
condições essenciais:
Cada membro inferior deve ser capaz de suportar o restante corpo sem colapsar;
O equilíbrio deve ser mantido, estática com dinamicamente durante a fase de apoio para
cada membro;
O membro oscilante deve ser capaz de se deslocar para um posição, onde possa servir
como apoio na seguinte fase;
Ambos os membros devem ser capazes de providenciar energia/força suficiente para os
movimentar tal como avançar o restante corpo (Pedrinelli, 2004b).
Existem diversos tipos patologias que afectam de diferentes maneiras o sistema locomotor, isto
significa que dependendo do tipo de patologia teremos movimentos anormais, comparativamente
com a marcha considerada normal. Ao nível do gasto energético na marcha, indivíduos que possuam
uma determinada patologia que afecte a sua locomoção apresentam um maior gasto de energia.
Caso seja necessário deve se aplicar dispositivos como produtos de apoio, ortóteses ou mesmo

80 Fundamentação Teórica
próteses, para promover a locomoção. Caso a patologia ou aplicação destes dispositivos não cumpra
uma das 4 condições mencionadas anteriormente o indivíduo não vai ser capaz de realizar a marcha.
A marcha apesar de parecer uma actividade simples é no entanto um processo bastante
complexo e a presença de uma patologia que afecte os padrões normais da marcha, torna a
execução desta actividade muito mais difícil de se realizar.
Este tipo de marcha pode resultar devido a presença de dor, isto mesmo para um indivíduo que
não possua qualquer patologia, vai levar a uma identificação da locomoção que seja mais
confortável mesmo que leve a realização de movimentos anormais (Carvalho, 2003; Pedrinelli,
2004).
7.1. Causas para Marcha Anormal
Para realizar uma marcha considerada normal é necessário que o sistema locomotor funcione
satisfatoriamente em muitos níveis. Funcionando através de uma sinergia entre os sistemas do corpo
humano, principalmente o sistema nervoso, muscular e esquelético. Se a marcha apresentar alguma
irregularidade nos padrões da marcha é de notar que estamos a presenciar um caso com limitação
ou incapacidade num destes 3 sistemas.
De forma geral o controlo de uma marcha normal é proveniente do córtex motor e de outras
regiões do cérebro. A criação da coordenação e padrões da marcha do indivíduo são fornecidos pelo
sistema extrapiramidal, no cerebelo.
As tensões geradas individualmente por cada músculo, de um determinado instante a outro, que
é modulado pelos reflexos espinais pelo que recebem input sensorial pelos receptores sensoriais dos
músculos, órgãos tendinosos de Golgi e receptores proprioceptivos. Os músculos devem ser capazes
de responder ao nível da actividade neural, de forma a realizar tensões adequadas às diferentes
situações (Pedrinelli, 2004).
As articulações devem se mover de acordo com os padrões de amplitude normais dos mesmos,
sem demonstrar qualquer dor angulações anormais. Os ossos não devem conter deformidades e
serem capazes de transmitir as forças necessárias para o movimento.
Qualquer que seja a natureza da lesão ou deformidade vai afectar a interacção dos 3 sistemas,
apresentando alterações de actuação ao nível do cérebro, espinhal medula, nervos periféricos,
músculos, articulações e ossos. Estas alterações vão levar a uma marcha anormal ou mesmo
incapacitar a marcha. Devido às patologias mencionadas no capítulo 3 e agora com a situação de
acontecimentos definidos por cada sistema demonstra a necessidade da aplicação de análise de
marcha para identificação deste tipo de deformidades e incapacidades e posteriormente o
tratamento (Carvalho, 2003; Herrero, Guillem, et al., 2004; Pedrinelli, 2004).
7.2. Marcha de Amputados
A marcha dos indivíduos amputados comparativamente com a dos indivíduos saudáveis apresenta
maiores níveis de consumo energético e um menor controlo da sucessão de desequilíbrios realizados

81
durante a marcha (Livro amputação do MI). De forma geral a amputação proporciona, em qualquer
nível, um aumento do consumo energético para realização da marcha, em relativamente a
quantidade necessário de consumo vai depender do nível da amputação, dos componentes aplicados
na prótese e do alinhamento do mesmo. Este tipo de patologia possui um maior grau de
incapacidade quanto maior for o nível de amputação do indivíduo (Wittle, 2007).
Isto significa que para além do nível de amputação o aumento da actividade muscular do
membro, dependendo das suas condições, é a principal razão para o aumento do consumo
energético. Este aumento do consumo energético deve-se ao aumento da flexão da anca necessário
na flexão do joelho realizado na fase final de apoio criado pelo esforço muscular (Schmalz,
Blumentritt, & Jarasch, 2002).
A amputação não é um resultado apenas físico mas sim de todo o mecanismo integrado entre o
tronco e os membros inferiores. Esta patologia leva a perda do mecanismo de controlo neural
(aferente e eferente) e a nível dos membros inferiores. A aplicação da prótese deve ter o objectivo
de compensação da perda funcional de forma a proporcionar uma melhor funcionalidade na marcha
e com um menor gasto energético (Livro amputação do MI). Apesar da existência da amputação e do
seu nível, se os músculos e nervos remanescentes estiverem minimamente operacionais, então
significa que os grupos musculares se encontram funcionais, permitindo realizar movimento (Wittle,
2007).
O tamanho do coto pode interferir mas não influencia muito o gasto energético da marcha para
indivíduos com amputação abaixo do joelho comparativamente com as amputações acima do joelho,
apesar de poder influenciar entre o mesmo tipo de amputação.
A marcha em amputados bilaterais é muito difícil e de grande complexidade e por isso deve
haver a preocupação de preservar as articulações de joelho de forma a obter algum tipo de marcha
(Carvalho, 2003; Pedrinelli, 2004).
A principal dificuldade na marcha dos amputados é falta de sincronização da actividade
muscular, que não recebe a devida informação proprioceptiva. Desta forma o indivíduo deve ser
capaz de substituir a funcionalidade do pé, transferindo as informações proprioceptivas e de
absorção de impacto para locais de carga do peso do coto através do encaixe da prótese.
Deste tipo de indivíduos é esperado uma marcha assimétrica, com maior oscilação do centro de
gravidade e de maior consumo energético. Para este tipo de marchas os indivíduos que sejam
amputados mas com níveis abaixo do joelho apresentam benefícios devido a preservação desta
articulação. No caso de o indivíduo ter um coto com o comprimento adequado, terá maior
estabilidade da articulação e um melhor controlo na fase de balanço. A actividade muscular
realizada pelos grupos ao nível tibial e flexores plantares deverão ser compensadas pelos pés
protésicos, tal como a acção dos extensores e flexores do joelho. Ao nível dos músculos
extensores/flexores e abdutores/adutores da anca, estes vão permitir o reequilíbrio da marcha.
Os principais aspectos a ter em conta na marcha de um indivíduo protetizado são: a maior
segurança; maior eficiência; e a transformação da marcha o mais simétrica possível. Quando
ocorrem desvios na marcha, pode-se dever a causas relacionadas com carências do indivíduo
amputado como, a fraqueza muscular, contracturas articulares ou a hipersensibilidade de

82 Fundamentação Teórica
neuromas, como a causas de nível protésicos, o mau alinhamento, o encaixe aplicado não ser o mais
adequado ou a escolha incorrecta de componentes aplicáveis ao indivíduo. Esses desvios podem ser
observados nas duas fases da marcha, apesar de muitas das vezes ser de difícil avaliação e
quantificação a partir de observação clínica (Carvalho, 2003).
7.2.1. Análise de Marcha em Amputados Transtibiais
Iniciando a abordagem pelo CI deve-se observar a existência de simetria com o comprimento do
passo do membro contralateral, se a articulação do joelho realiza uma semi-flexão no contacto
inicial e se o pé mantém uma linha de progressão sem momentos rotacionais.
Nesta fase pode ocorrer ou a extensão ou flexão excessiva da articulação do joelho. A extensão
excessiva pode ser causada por uma suspensão inadequada da prótese; ou devido a excessiva flexão
plantar; ou devido a região do calcâneo ser muito flexível; ou o comprimento da prótese ser curto.
Caso ocorra a flexão excessiva, pode-se dever flexão dorsal excessiva; ou região do calcâneo ser
muito rígida; ou ainda pelo comprimento da prótese ser muito grande.
Na fase de AI o joelho deve apresentar alguns graus de flexão de forma a aliviar o impacto e
realizar uma transferência do movimento mais suave, a região do calcâneo deve ser comprimida de
forma a simular a flexão plantar e não deve ocorrer nenhum movimento do coto relativamente ao
encaixe.
A rotação do pé protésico pode ocorrer pelo facto da superfície plantar ser rígida. A extensão
excessiva pode ser provocada devido a flexão plantar excessiva, região do calcâneo muito flexível
ou a cunha da região posterior ser baixa. A flexão excessiva pode por sua vez ser provocada devido
a superfície plantar rígida, do pé protésico, ou devido a este se encontrar em flexão dorsal
excessiva. Nesta fase ainda o movimento de pistão tem relação directa com o volume do encaixe ou
o sistema de suspensão.
De seguida na fase AM o objectivo deve ser a estabilização da articulação do joelho e a
progressão suave para a fase de impulso. O apoio no bordo medial está relacionado com a pronação
do pé, com a superfície plantar do calçado assimétrica ou alinhamento com o pé numa posição mais
Figura 47 - Ciclo de Marcha dos Amputados (Rajt’úkova et al., 2014).

83
lateral do que o normal. No caso do apoio estiver no bordo lateral do pé, realiza-se a supinação do
pé, assimetria da superfície plantar do pé protésico ou alterações nessa mesma superfície.
Neste momento que o joelho se encontro em valgo ou varo, está relacionado ao alinhamento,
com uma linha de carga localizada medialmente ou lateralmente, respectivamente, em relação ao
vector da força de reacção ao solo. A inclinação lateral do tronco para o lado da prótese pode ser
causada por discrepância do comprimento da prótese relativamente ao membro são. A elevação do
calcâneo está relacionada com o excesso de flexão dorsal ou com a aplicação de salto alto, no qual
a elevação atrasada do calcâneo se encontra relacionado com os saltos baixos.
Na fase final da fase de apoio, ao longo de AF e PB, o joelho inicia a sua flexão e o calcâneo
eleva-se preparando-se para a realização da impulsão enquanto o peso é transferido para o membro
contralateral.
A flexão precoce do joelho pode ser causada pelo posicionamento posterior do pé, salto alto ou
excesso de flexão dorsal, no caso de ocorrer um atraso na flexão do joelho pode-se dever a
anteriorização do pé, salto baixo ou excesso de flexão plantar. O movimento que eventualmente
ocorra nesta fase entre o coto e o encaixe deve estar relacionado com uma suspensão inadequada
ou as paredes do encaixe se apresentarem com uma abertura maior do que suposto, para fixação do
coto.
Seguidamente ocorre a fase de balanço, sendo um movimento de progressão sem qualquer tipo
de rotações e sem qualquer contacto com o solo. Posteriormente a toda esta fase, na fase final de
balanço, caso o contacto com o solo seja inadequado, pode se dever a suspensão inadequada ou
uma flexão excessiva ou ainda ao comprimento da prótese ser demasiado comprida (Carvalho,
2003).
7.2.2. Análise de Marcha em Amputados Transfemorais
Ao realizar a abordagem pelo CI e AI, tal como realizado anteriormente, é observável que o
joelho mecânico deve estar completamente estendido e o pé deve manter o contacto total com o
solo para uma transferência do peso mais adequada.
Durante estas duas fases, a instabilidade do joelho está relacionada com a contractura dos
músculos flexores da anca ou por fraqueza dos músculos extensores. No caso da força muscular
estar adequada, deve-se analisar a prótese, observando o seu eixo de rotação, no qual não deve
estar anteriorizado, a flexão do encaixe não deve estar muito flectido, se o pé não apresenta uma
grande flexão dorsal ou se a região do calcâneo não é muito rígido, no caso de o ser, observa-se
uma rotação externa do pé, que através da interface entre o coto e o encaixe vai provocar
desconforto e irritações no coto.
Depois nas fases de AM, AF e PB vai acontecer a progressão sobre o pé protésico e a preparação
de impulsão. Durante estas fases o indivíduo pode ter que realizar uma elevação pélvica excessiva
para compensar a progressão sobre o pé, que pode estar relacionado com a excessiva flexão
plantar. Se a progressão for brusca, pode-se estar presente perante um pé com excessiva flexão
dorsal o que vai proporcionar instabilidade para o indivíduo.

84 Fundamentação Teórica
Ainda durante estas fases a inclinação lateral do tronco para o lado da prótese é observado com
frequência e pode estar relacionado com dor ou desconforto na região da virilha causada por
excesso de pressão ou a parede medial ter os limites superiores muito altos, ou um alinhamento
inadequado com a linha de carga posicionada lateralmente ao pé, ou um encaixe abduzido ou por
fraqueza do glúteo médio.
Na segunda fase da marcha, fase de balanço e no início desta o indivíduo amputado deve iniciar
o balanço com a flexão da anca para posteriormente realizar a flexão do joelho protésico e
posicionar em extensão para preparar o próximo contacto inicial. Durante esta fase é possível
encontrar desvios ao nível do tronco, criação de hiperlordose, sendo compensação funcional
aplicada pelos amputados transfemorais que apresentem um coto com o comprimento no 1/3
proximal. A flexão do joelho, geralmente associada aos ajustes do joelho causados por inadequação
da resistência à flexão ou à inadequação dos músculos extensores. Observando no plano sagital, o
impacto final gerado pela extensão do joelho, na fase de BF geralmente é audível e relacionado
com os ajustes do joelho mecânico causados por insuficiente resistência na extensão ou por um
movimento brusco da flexão da anca no início da impulsão e dos músculos extensores da anca no
final da fase de balanço.
Ainda durante a fase de balanço o movimento de chicote observado, relativamente a linha de
progressão do joelho e pé devem ocorrer na mesma linha, estando associadas a uma inadequação da
colocação e suspensão da prótese. A assimetria no comprimento dos passos e na velocidade do
balanço deve ser observada durante o alinhamento dinâmico.
Ao longo do processo deve-se realizar um levantamento de questões principalmente ao nível do
desconforto e eventuais dores na fase de apoio e observar o aparecimento de eventuais
contracturas dos músculos flexores da anca. O alinhamento inadequado pode provocar instabilidade
da articulação do joelho, insegurança do indivíduo e alterações do equilíbrio que pode levar a
alterações da marcha (Carvalho, 2003).
7.3. Desvios Corporais da Marcha
Ao longo do processo deve-se realizar um levantamento de questões principalmente ao nível do
desconforto e eventuais dores na fase de apoio e observar o aparecimento de eventuais
contracturas dos músculos flexores da anca. O alinhamento inadequado pode provocar instabilidade
da articulação do joelho, insegurança do indivíduo e alterações do equilíbrio que pode levar a
alterações da marcha.
Para se realizar uma marcha sem desvios posturais e o mais fisiológica possível é necessário que
a prótese siga os princípios de construção e com o devido alinhamento. Caso contrário estes desvios
vão resultar num maior gasto energético e consumo metabólico no decorrer do movimento, pode
originar sobrecargas em determinados grupos musculares e ainda danificar tanto as estruturas
articulares como a pele, para além de ocorrer um desconforto estético da marcha, como assimetrias
nos ciclos do passo, inclinação indesejada.
Muitos destes desvios ao qual permitem verificar a incorrecta construção de uma prótese, são:

85
O amputado realiza a elevação da anca, do lado em que realiza o passo, com a finalidade
terminar o passo. Este acontecimento ocorre quando a prótese se encontra com um
comprimento muito grande ou no caso de uma resistência excessiva do joelho protésico;
O amputado pode apresentar desvios anormais do passo, lado medial ou lateral, o que
significa que o calcanhar do pé protésico vai ultrapassar a linha medial ou nem chegar
perto. Isto ocorre devido ao eixo do joelho protésico estar em rotação externa ou interna
excessivamente ou a própria prótese se encontra com uma rotação externa ou interna;
A seguinte anomalia é o movimento circular do pé, no qual o pé oscila para fora, numa
forma de arco exagerado durante a fase de balanço. Esta ocorrência deve-se a resistência
da flexão do joelho protésico, o que limita o mecanismo articular, pode causar dor e pode
se dever ao comprimento da prótese excessivamente longo;
Outro tipo de anomalia na marcha é a flexão lateral do tronco, no qual o amputado realiza
uma marcha em inclinação e os ombros tendem a deslocar-se em direcção do lado
afectado. A inclinação ocorre a prótese tem um comprimento incorrecto ou por
insuficiência de adução do encaixe ou por o amputado demonstrar hipersensibilidade;
A seguinte anomalia é a elevação excessiva do calcanhar relativamente a velocidade.
Novamente a resistência da flexão do joelho protésico ser inadequada ao amputado;
Durante a fase de apoio tardia ocorre uma flexão do joelho excessiva, este acontecimento
ocorre devido a região do calcanhar do pé protésico ser demasiado flexível e a alavanca do
pé protésico ser muito curto ou a altura do calcanhar no sapato ser demasiado elevada
para o pé protésico utilizado;
Um outro tipo de desvio é o rápido movimento de flexão plantar imediatamente ao
contacto do calcanhar. As causas devem se a resistência insuficiente no pé protésico;
A hiperextensão do joelho para o lado afectado, ocorre no membro que se encontra na
fase de apoio médio, observável no plano sagital. Isto ocorre devido a alavanca ser muito
comprido e fixo, relativamente ao peso e o nível de actividade do amputado;
O efeito de pistão é o último desvio, dos que existem na maioria para indivíduos
amputados ocorre movimento vertical durante a transferência do peso. Isto deve-se às
dimensões do encaixe serem demasiado grandes comparativamente com o volume do coto
ou o meio de suspensão seja inadequado para o amputado (Herrero, Guillem, et al., 2004;
Pedrinelli, 2004b; R. Periago, 2009).
Figura 48 - Desvios posturais, inclinação excessiva e movimento de torção (Rajt’úkova et al., 2014).

86 Fundamentação Teórica
7.4. Alinhamento de Próteses de Membro Inferior
O alinhamento protésico é o principal factor na relação entre o conforto do encaixe,
estabilização das articulações e na harmonia da marcha de um indivíduo amputado. Segundoo
estudo de Schmalz et al., (2002), o alinhamento das próteses afecta claramente a amplitude do
movimento dos amputados, sendo os amputados TF mais afectados do que os TT, principalmente no
consumo energético. O alinhamento de uma prótese do tipo modular é realizado em três etapas: 1º
alinhamento de bancada; 2º alinhamento estático; e 3º alinhamento dinâmico.
O primeiro alinhamento é realizado em laboratório e não é necessário a presença do amputado.
Vai ser neste alinhamento que se determina a posição entre o encaixe e o pé protésico, no qual se
baseia por observação do coto do amputado como os desvios no plano frontal e sagital.
Após o alinhamento de bancada, durante a montagem da prótese, deve-se deixar a altura total
um pouco maior que a medição inicial do comprimento, visto que se torna mais fácil diminuir o
tamanho da prótese que o aumento da mesma.
No seguinte alinhamento, estático, deve ser realizado com o amputado. Este deve se encontrar
numa posição idêntica ao ortostatismo, no qual a participação do amputado baseia-se na
distribuição do peso sobre a prótese e membro residual. Durante o processo de alinhamento estático
o amputado não deve sentir nem dor nem desconforto no coto e o pé protésico deve se encontrar
sempre em contacto total com o solo.
Este alinhamento tem a funcionalidade de verificar a posição do coto no plano frontal e sagital,
de forma a analisar desvios em varo, valgo ou flexão do joelho, abdução ou flexão da anca e desvios
rotacionais. Neste alinhamento deve se verificar a altura e dimensões da prótese tendo em conta o
MI remanescente.
No alinhamento de amputações TT e de Syme a linha de carga deve passar pelo centro do
encaixe e posteriormente ao centro do pé, aproximadamente 10 a 20mm, dependendo do tipo de pé
protésico aplicado, no plano sagital. No plano frontal o pé protésico deve estar discretamente
posicionado lateralmente ao centro do encaixe e existe uma rotação lateral do pé que é
aproximadamente de 5mm (Carvalho, 2003; Rajt’úkova, Michalíková, Bednarcíkova, Balogová, &
Zivcák, 2014).
Para este tipo de amputações é necessário ter cuidado com as alterações realizadas no
alinhamento, como altura do salto do calçado, no plano sagital, quando se realiza o alinhamento a
altura deve ser a mesma que do salto do calçado habitual do amputado. Caso de ser um salto mais
baixo leva a uma hiperextensão do joelho e no caso de ser mais alto vai provocar uma flexão do
joelho. No plano frontal se o amputado tiver um varo ou valgo exagerado, deve-se realinhar a
prótese, sendo necessário observar e registar a posição do pé relativamente ao solo e a sua rotação.

87
(a) (b)
Relativamente ao alinhamento de próteses TF, no plano sagital a linha de carga deve passar pelo
centro do encaixe, utilizando sempre como referência o bordo superior e anteriormente ao eixo de
rotação do joelho. Caso o coto se encontre em flexão, deve-se respeitar a sua postura e a linha de
carga para o alinhamento da prótese é muito específica, no qual depende do tipo de joelho e pé
protésico. Para estes casos o objectivo fundamental é manter a estabilidade da articulação do
joelho na posição em pé. No plano frontal o alinhamento difere entre encaixes devido às suas
configurações. No encaixe quadrilátero a linha de carga deve passar mais próximo do ísquion,
proporcionalmente de 40-60% na relação da distância médio-lateral. No entanto para encaixes tipo
CAT-CAM a linha de carga deve-se encontrar no centro do encaixe (R. Periago, 2009; Rajt’úkova et
al., 2014).
No alinhamento estático de próteses TF deve-se ter cuidados de alinhamento segundo os planos:
Plano Sagital – no qual se deve observar a projecção do centro de gravidade
relativamente ao joelho e pé protésico e ter atenção a altura do salto do calçado. A
linha de carga deve passar anteriormente ao eixo de rotação do joelho, promove a
estabilidade da articulação, no caso de passar posteriormente tornará o sistema
articular bastante instável;
Plano Frontal – deve-se observar eventuais desvios anormais do coto (abdução/adução),
verificar se o eixo de rotação do joelho protésico se encontra paralelo ao solo e sem
varo ou valgo acentuado. Relativamente ao pé protésico também deve estar em paralelo
e em contacto total com o solo (Rajt’úkova et al., 2014).
Figura 49 - Alinhamento das Próteses TT. (a) Linha de construção; (b) Linha de carga (Rajt’úkova et al., 2014).

88 Fundamentação Teórica
(a) (b)
O terceiro e último alinhamento, o alinhamento dinâmico, realizado após os outros dois
alinhamentos terem sido realizados, e é realizado pela observação da marcha do amputado nos
planos frontais (vista anterior e posterior), e no plano sagital, em solo plano e irregular. Os desvios
da marcha deverão ser apurados para se verificar se existe ou não relação directa com o
alinhamento da prótese (Rajt’úkova et al., 2014).
7.4.1. Transmissão de Forças Durante a Marcha
Quando um indivíduo amputado realiza a marcha com a prótese, a força gerada pelo peso é
absorvida pelo coto. Os efeitos desta força vão depender da qualidade de confecção do encaixe
protésico, alinhamento e características do coto. No entanto são tão importantes estes factores
como a correcta posição do pé protésico, directamente relacionado com os locais de pressão
sentidos pelo amputado no uso da prótese.
Ao nível mecânico, entre a relação amputação-prótese nunca se equivale ao membro são de um
indivíduo sem patologia por 3 razões:
1ª A alavanca entre a articulação da anca e o encaixe é relativamente pequena, o que reduz o
momento no qual os músculos da anca podem aplicar na prótese;
2ª Existe sempre algum tipo de movimento entre o coto e o encaixe, devido às compressões nos
tecidos moles, sendo exagerado nos casos de encaixes mal ajustados ao coto;
3ª Se o encaixe não for confortável, o indivíduo pode ser sujeito a aplicar forças excessivas na
prótese (Herrero, Guillem, et al., 2004; Pedrinelli, 2004b).
Figura 50 - Alinhamento de próteses TF. (a) Linha de construção; (b) Linha de carga (Rajt’úkova et al., 2014).

89
7.4.2. Biomecânica dos Encaixes
Qualquer que seja o encaixe das próteses de MI pode ser dividido em 3 partes:
Sector superior é região que realiza o assento do encaixe com o coto, também
conhecida como a face de assento;
Sector Medial é a região que permite o controlo do movimento correcto e restrito na
direcção posterior e anterior, durante a marcha;
Sector inferior é a região mais distal e que num caso ideal deve realizar apenas a
transferência de 10% do peso de um indivíduo amputado, evitando transferências
inadequadas de carga e danos nos tecidos moles (Rajt’úkova et al., 2014).
O encaixe deve ser capaz de realizar a transferência de carga, garantir estabilidade e fornecer o
controlo um controlo eficiente durante a mobilidade. Em ortostatismo o músculo médio glúteo
encontra-se esticado, assegurando que a pélvis é mantida numa posição de equilíbrio. Visto num
individuo saudável este acontecimento é realizado pela fixação do fémur ao chão pelo MI. No caso
de um amputado de MI essa função é assumida pelo encaixe da prótese, o que demonstra que o
desenho do encaixe deve conter uma forma adequada relativamente às dimensões de médio-laterais
e ântero-posteriores.
Segundo diversos as próteses TF que apresentam uma forma oval, no plano transversal,
demonstram uma pressão na extremidade distal do fémur excessiva realizando um movimento de
inclinação lateral para reduzir essa pressão. Apresentando uma transferência de carga não
fisiológica, realizada pela tuberosidade isquiática, reduzindo a força exercida na alavanca e ocorre
um aumento dos momentos gerados. No entanto os encaixes que demonstrem a tal forma oval ao
nível longitudinal facilitam a transferência fisiológica, uma vez que o centro de rotação se encontra
na articulação da anca e a pélvis não produz nenhum movimento de rotação, devido a posição
equilibrada, e não é necessário movimentos corporais de estabilização que não sejam naturais
(Rajt’úkova et al., 2014).
Figura 51 - Divisão dos encaixes por secção (Rajt’úkova et al., 2014).

90 Fundamentação Teórica
Capítulo 8
Trabalho Prático Futuro
Este capítulo representa o futuro trabalho experimental da dissertação, que apesar de ainda não
se ter iniciado a parte prática do estudo, foi realizado uma metodologia de trabalho.
Neste capítulo será abordado os objectivos, alguns materiais necessários e metodologias tal
como eventuais resultados esperados para o trabalho experimental.
Tal como o título da dissertação indica este estudo baseia-se numa análise biomecânica da
marcha com o principal objectivo de comparação entre os indivíduos com amputações no MI e
indivíduos sem patologias. O outro objectivo é a observação e verificação da amplitude articular do
membro amputado com e sem prótese numa posição ortostática.
8.1. Materiais e Métodos
O estudo biomecânico baseia-se numa análise cinemática, cinética e electromiográfica, onde
serão observados e discutidos parâmetros espaciotemporais como a cadência, velocidade,
comprimento do passo e da passada no decorrer da marcha, tal como a amplitude articular
realizada e as forças e momentos gerados.
Antes da realização do estudo serão integrados no participante e na prótese do mesmo
marcadores e sensores, para recolha de dados e informações. O estudo deve ser iniciado quando os
participantes se sintam familiarizados com os instrumentos neles integrados.
Os participantes vão ser propostos a realizar a marcha num percurso rectilíneo, com um
comprimento entre os 10 e os 12 metros, realizando este processo aproximadamente 12 vezes.
Desta forma será pedido ao participante para iniciar 3 vezes com o pé esquerdo e o mesmo número
de vezes com o pé direito de forma a obter os valores não só individuais de cada teste como
também obter um valor médio. O participante deve ser capaz de realizar o processo 6 vezes na

91
velocidade que considere normal mais 6 vezes numa velocidade mais rápida, sendo a última fase um
potencial risco de queda, o que leva a esta fase ser de precaução na sua execução. A concretização
de cada teste deverá ter um intervalo de tempo simbólico, como exemplo 1 a 2 minutos na primeira
fase e 3 a 5 minutos a segunda.
Esta etapa deverá conter um número de 6 câmaras integradas com o sistema de captura de
movimento e incorporadas num software próprio que efectue os registos cinemáticos para análise
da captura do movimento em 2D e 3D com os 6 graus de liberdade. Simultaneamente este estudo
deverá utilizar plataformas de força de forma a medir as FRS que cada participante exerce no solo
para executar o movimento.
Para o segundo objectivo deste estudo pretende-se que o participante se encontre numa posição
ortostática e que realize os movimentos de flexão/extensão para qualquer que seja o nível de
amputação e para o plano sagital realizar os movimentos de adução/abdução para o plano frontal,
no caso de amputações TF. Desta forma será possível recolher não só recolher a amplitude articular
na marcha como também numa posição estática. Tal como o teste anterior os participantes deverão
repetir 3 vezes cada fase e para este caso também será necessário realizar para cada movimento. O
teste terá duas fases, no qual a primeira consistirá na realização de cada movimento 3 vezes, com a
prótese; na segunda fase será realizado o mesmo procedimento que na fase anterior mas sem
utilizar a prótese. Esta segunda fase deve-se proporcionar a maior segurança possível ao
participante, devido a falta de estabilidade pela razão óbvia de apresentar apenas um MI em
contacto com o solo e que eleva o risco de queda do participante.
8.2. Resultados e Conclusões Esperados
Esta etapa deverá conter um número de 6 câmaras integradas com o sistema de captura de
movimento e incorporadas num software próprio que efectue os registos cinemáticos para análise
da captura do movimento em 2D e 3D com os 6 graus de liberdade. Simultaneamente este estudo
deverá utilizar plataformas de força de forma a medir as FRS que cada participante exerce no solo
para executar o movimento.
A realização deste trabalho prático envolve a comparação de valores entre os indivíduos
saudáveis e indivíduos amputados. Neste estudo a comparação dos parâmetros será realizada
Figura 52 - Vista transversal, do tipo de processo de recolha de dados para captação e análise do movimento (Vickers, Palk, Mcintosh, & Beatty, 2008).
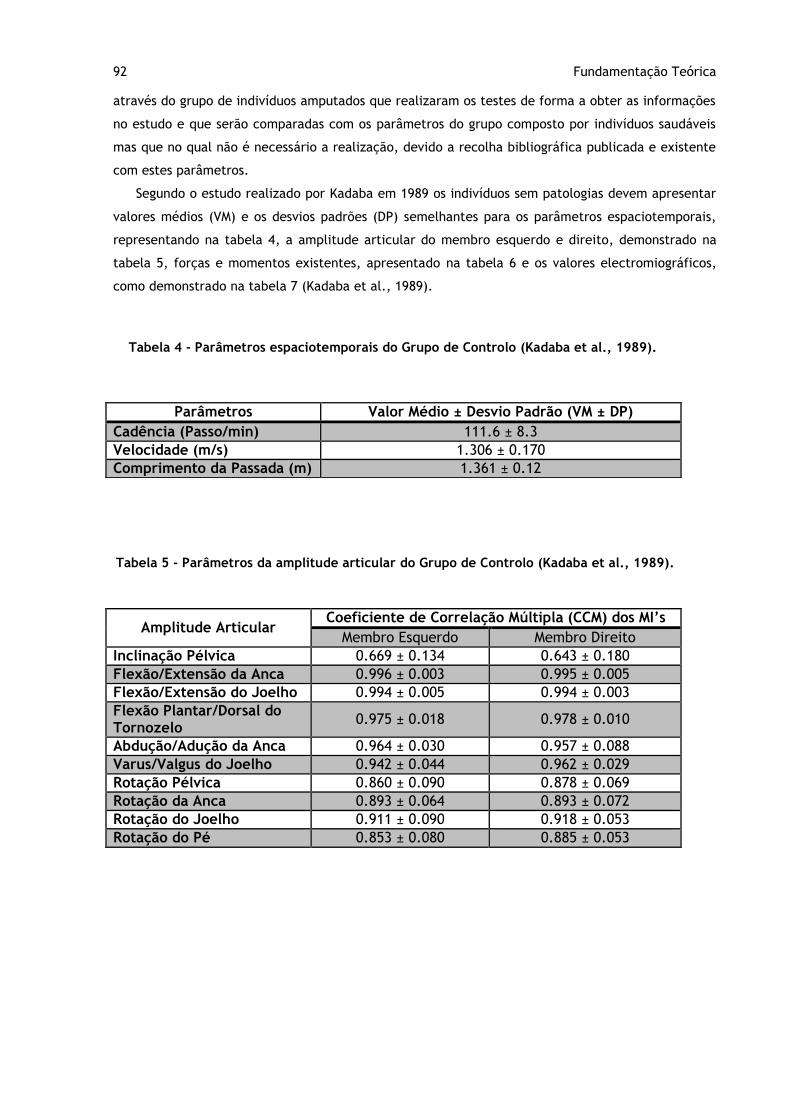
92 Fundamentação Teórica
através do grupo de indivíduos amputados que realizaram os testes de forma a obter as informações
no estudo e que serão comparadas com os parâmetros do grupo composto por indivíduos saudáveis
mas que no qual não é necessário a realização, devido a recolha bibliográfica publicada e existente
com estes parâmetros.
Segundo o estudo realizado por Kadaba em 1989 os indivíduos sem patologias devem apresentar
valores médios (VM) e os desvios padrões (DP) semelhantes para os parâmetros espaciotemporais,
representando na tabela 4, a amplitude articular do membro esquerdo e direito, demonstrado na
tabela 5, forças e momentos existentes, apresentado na tabela 6 e os valores electromiográficos,
como demonstrado na tabela 7 (Kadaba et al., 1989).
Parâmetros Valor Médio ± Desvio Padrão (VM ± DP)
Cadência (Passo/min) 111.6 ± 8.3
Velocidade (m/s) 1.306 ± 0.170
Comprimento da Passada (m) 1.361 ± 0.12
Amplitude Articular Coeficiente de Correlação Múltipla (CCM) dos MI’s
Membro Esquerdo Membro Direito
Inclinação Pélvica 0.669 ± 0.134 0.643 ± 0.180
Flexão/Extensão da Anca 0.996 ± 0.003 0.995 ± 0.005
Flexão/Extensão do Joelho 0.994 ± 0.005 0.994 ± 0.003
Flexão Plantar/Dorsal do Tornozelo
0.975 ± 0.018 0.978 ± 0.010
Abdução/Adução da Anca 0.964 ± 0.030 0.957 ± 0.088
Varus/Valgus do Joelho 0.942 ± 0.044 0.962 ± 0.029
Rotação Pélvica 0.860 ± 0.090 0.878 ± 0.069
Rotação da Anca 0.893 ± 0.064 0.893 ± 0.072
Rotação do Joelho 0.911 ± 0.090 0.918 ± 0.053
Rotação do Pé 0.853 ± 0.080 0.885 ± 0.053
Tabela 4 - Parâmetros espaciotemporais do Grupo de Controlo (Kadaba et al., 1989).
Tabela 5 - Parâmetros da amplitude articular do Grupo de Controlo (Kadaba et al., 1989).

93
Parâmetros CCM dos MI’s
Membro Esquerdo Membro Direito
Forças
Força Vertical 0.997 ± 0.001 0.997 ± 0.001
Força Ântero-posterior 0.993 ± 0.003 0.993 ± 0.003
Força Médio-lateral 0.956 ± 0.025 0.953 ± 0.030
Torque no Centro de Pressão
0.920 ± 0.062 0.948 ± 0.04
Momentos
Flexão/Extensão da Anca 0.980 ± 0.047 0.987 ± 0.007
Flexão/Extensão do Joelho
0.971 ± 0.024 0.972 ± 0.017
Flexão Plantar/Dorsal do Tornozelo
0.992 ± 0.006 0.992 ± 0.007
Abdução/Adução da Anca 0.982 ± 0.012 0.972 ± 0.014
Abdução/Adução do Joelho
0.944 ± 0.050 0.951 ± 0.047
Abdução/Adução do Tornozelo
0.961 ± 0.029 0.937 ± 0.071
Rotação da Anca 0.916 ± 0.064 0.906 ± 0.068
Rotação do Joelho 0.879 ± 0.059 0.856 ± 0.095
Rotação do Tornozelo 0.976 ± 0.018 0.967 ± 0.030
Grupo Muscular/Músculo CMC dos MI’s Coeficiente de Variação (CV) %
Grande Glúteo 0.851 ± 0.060 56 ± 9
Médio Glúteo 0.854 ± 0.061 54 ± 9
Longo Adutor 0.746 ± 0.095 63 ± 11
Vasto Lateral 0.883 ± 0.050 56 ± 8
Recto Femoral 0.856 ± 0.052 55 ± 7
Vasto medial 0.871 ± 0.060 56 ± 8
Isquiotibiais Laterais 0.837 ± 0.070 60 ± 10
Isquiotibiais Mediais 0.811 ± 0.101 62 ± 11
Tibiais Anteriores 0.840 ± 0.066 49 ± 6
Gémeo Medial 0.899 ± 0.030 58 ± 8
Estudos mais recentes demonstram comparações entre os valores de um grupo de controlo
comparativamente com tipos de amputações como TT e TF, como pode ser verificado no estudo de
Nolan em 2003 que demonstra as diferenças relativamente aos VM e DP dos parâmetros de FRS e
espaciotemporais aos tempos de impulsão, apoio, balanço e passo em diferentes velocidades como é
possível verificar nas seguintes tabelas 8, 9, 10, 11 e 12.
Tabela 6 - Parâmetros de forças e momentos do Grupo de Controlo (Kadaba et al., 1989).
Tabela 7 - Parâmetros electromiográficos do Grupo de Controlo (Kadaba et al., 1989).
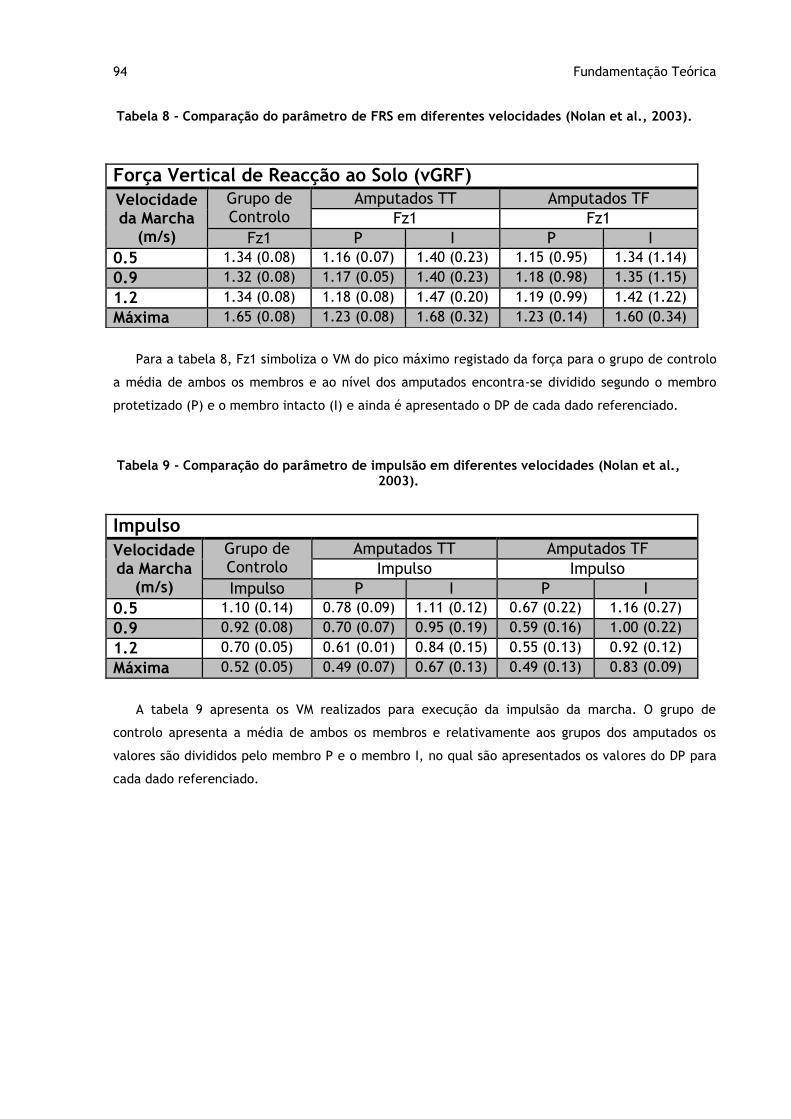
94 Fundamentação Teórica
Para a tabela 8, Fz1 simboliza o VM do pico máximo registado da força para o grupo de controlo
a média de ambos os membros e ao nível dos amputados encontra-se dividido segundo o membro
protetizado (P) e o membro intacto (I) e ainda é apresentado o DP de cada dado referenciado.
Impulso
Velocidade da Marcha
(m/s)
Grupo de Controlo
Amputados TT Amputados TF
Impulso Impulso
Impulso P I P I
0.5 1.10 (0.14) 0.78 (0.09) 1.11 (0.12) 0.67 (0.22) 1.16 (0.27)
0.9 0.92 (0.08) 0.70 (0.07) 0.95 (0.19) 0.59 (0.16) 1.00 (0.22)
1.2 0.70 (0.05) 0.61 (0.01) 0.84 (0.15) 0.55 (0.13) 0.92 (0.12)
Máxima 0.52 (0.05) 0.49 (0.07) 0.67 (0.13) 0.49 (0.13) 0.83 (0.09)
A tabela 9 apresenta os VM realizados para execução da impulsão da marcha. O grupo de
controlo apresenta a média de ambos os membros e relativamente aos grupos dos amputados os
valores são divididos pelo membro P e o membro I, no qual são apresentados os valores do DP para
cada dado referenciado.
Força Vertical de Reacção ao Solo (vGRF)
Velocidade da Marcha
(m/s)
Grupo de Controlo
Amputados TT Amputados TF
Fz1 Fz1
Fz1 P I P I
0.5 1.34 (0.08) 1.16 (0.07) 1.40 (0.23) 1.15 (0.95) 1.34 (1.14)
0.9 1.32 (0.08) 1.17 (0.05) 1.40 (0.23) 1.18 (0.98) 1.35 (1.15)
1.2 1.34 (0.08) 1.18 (0.08) 1.47 (0.20) 1.19 (0.99) 1.42 (1.22)
Máxima 1.65 (0.08) 1.23 (0.08) 1.68 (0.32) 1.23 (0.14) 1.60 (0.34)
Tabela 9 - Comparação do parâmetro de impulsão em diferentes velocidades (Nolan et al., 2003).
Tabela 8 - Comparação do parâmetro de FRS em diferentes velocidades (Nolan et al., 2003).

95
Tempo de Balanço (s)
Velocidade da Marcha
(m/s)
Grupo de Controlo
Amputados TT Amputados TF
Balanço Balanço
Balanço P I P I
0.5 0.53 (0.03) 0.54 (0.08) 0.48 (0.04) 0.78 (0.17) 0.42 (0.18)
0.9 0.48 (0.04) 0.48 (0.10) 0.42 (0.05) 0.62 (0.13) 0.38 (0.12)
1.2 0.42 (0.04) 0.44 (0.04) 0.40 (0.03) 0.59 (0.09) 0.39 (0.09)
Máxima 0.37 (0.04) 0.37 (0.02) 0.35 (0.04) 0.55 (0.09) 0.38 (0.07)
Tempo do Passo (s)
Velocidade da Marcha
(m/s)
Grupo de Controlo
Amputados TT Amputados TF
Passo Passo
Passo P I P I
0.5 0.80 (0.03) 0.82 (0.08) 0.72 (0.06) 0.97 (0.05) 0.72 (0.10)
0.9 0.71 (0.03) 0.72 (0.06) 0.69 (0.04) 0.82 (0.07) 0.62 (0.08)
1.2 0.60 (0.02) 0.61 (0.03) 0.60 (0.03) 0.75 (0.04) 0.58 (0.07)
Máxima 0.45 (0.03) 0.51 (0.05) 0.50 (0.05) 0.67 (0.08) 0.53 (0.08)
O ciclo de macha de indivíduos amputados vai apresentar valores de consumo de oxigénio mais
elevados comparativamente com o do grupo de controlo como é representado na tabela de consumo
de oxigénio para não amputados e amputado TT e TF do artigo de Schmalz. Isto significa que com a
maior necessidade de consumo de oxigénio maior será o gasto energético, especialmente ao nível
Tempo de Apoio (s)
Velocidade da Marcha
(m/s)
Grupo de Controlo
Amputados TT Amputados TF
Apoio Apoio
Apoio P I P I
0.5 1.09 (0.08) 1.01 (0.07) 1.10 (0.12) 0.91 (0.21) 1.26 (0.18)
0.9 0.93 (0.06) 0.89 (0.08) 0.95 (0.12) 0.82 (0.06) 1.06 (0.06)
1.2 0.75 (0.03) 0.75 (0.04) 0.79 (0.02) 0.75 (0.07) 0.95 (0.03)
Máxima 0.53 (0.03) 0.62 (0.08) 0.64 (0.09) 0.63 (0.07) 0.80 (0.09)
Tabela 10 - Comparação do parâmetro do tempo da fase de apoio em diferentes velocidades (Nolan et al., 2003).
Tabela 11 - Comparação do parâmetro do tempo da fase de balanço em diferentes
velocidades (Nolan et al., 2003).
Tabela 12 - Comparação do parâmetro do tempo do passo em diferentes
velocidades (Nolan et al., 2003).

96 Fundamentação Teórica
das amputações TF. A principal razão para este aumento é devido ao aumento da actividade
muscular do coto. Outros factores que influenciam o aumento do consumo de oxigénio são: o
alinhamento incorrecto da prótese e o aumento do momento flector da anca, necessário para a
realização da extensão do joelho.
Velocidade (km/h)
Consumo de O2 (ml/min/Kg)
Grupo de Controlo
Amputação TT
% Grupo de Controlo
Amputação TF
% Grupo de Controlo
2 7.4 9.1 123 11.4 155
3 9.0 11.0 123 14.2 158
4 11.2 13.8 123 18.1 162
5 14.1 17.2 123 23.1 164
Através destes estudos é possível retirar conclusões segundo os valores obtidos e que poderão
ser semelhantes ao trabalho experimental. Segundo Jaergers, que no geral os indivíduos amputados
realizam um ciclo da passada; os indivíduos amputados apresentam uma marcha assimétrica,
passando mais tempo sobre o membro intacto que o amputado; quanto menor o comprimento do
coto, maior a fase de apoio e menor a fase de balanço; quando realizam uma marcha com maior
velocidade demonstram uma menor assimetria; relativamente ao aumento da velocidade os
indivíduos amputados compensam com o aumento do comprimento do passo em vez do número de
passos; no geral estes apresentam uma maior amplitude no movimento de extensão na fase final de
apoio (menos em cotos curtos); e os indivíduos com cotos curtos e médios apresentam uma
transição mais rápida da extensão para flexão da anca. Estas conclusões são observadas para
indivíduos com amputações TF, no qual são apresentados os valores mais significativos. Os
indivíduos com amputações abaixo do joelho principalmente os TT, vão apresentar valores com
menor discrepância devido a preservação do maior número de articulações, no entanto segundo o
que é referido no artigo de Rueda et al., (2013), este grupo de indivíduos apresenta diferentes
estratégias de controlo motor no plano frontal, no qual está directamente relacionado com as áreas
de pressão e desconforto criadas nos momentos gerados entre o coto e o encaixe.
Através dos estudos encontrados é possível concluir que quando comparado com um grupo de
controlo a velocidade confortável dos amputados será menor, sendo a maior discrepância nas
amputações de maior nível. Quando se compara a testes cuja velocidade é mais elevada verifica-se
que a discrepância dos valores é menor comparativamente com um grupo de controlo, independente
do nível de amputação (Boonstra, Fidler, & Eisma, 1993; Detrembleur, Vanmarsenille, Cuyper, &
Dierick, 2005).
Contudo é possível verificar diferenças em alguns parâmetros entre indivíduos com o mesmo
nível de amputação, no qual se verifica que os indivíduos possam sofrer de algum trauma ou receio
Tabela 13 - Comparação do consumo de oxigénio em diferentes velocidades (Schmalz et al., 2002).

97
de queda, o que demonstra diferença nos valores obtidos quando se realiza estudos de marcha
(Parker, Hanada, & Adderson, 2013).
Ao abordar o alinhamento das próteses foi verificado que este aspecto influência nas
capacidades motoras do amputado, isto significa que o alinhamento da prótese encontra-se
directamente relacionado com a reacção dos momentos proporcionados na marcha, seja no plano
sagital como coronal. Com as alterações do alinhamento para qualquer que seja a prótese esta vai
levar a uma alteração dos valores do parâmetro da cadência da marcha (Kobayashi, Arabian,
Orendurff, Rosenbaum-chou, & Boone, 2014; Kobayashi, Orendurff, & Boone, 2013).
Relativamente ao aspecto da segunda fase da metodologia deve-se aos dados encontrados
comparativamente aos parâmetros de amplitude articular, principalmente ao nível das amputações
acima do joelho.
De acordo com o estudo desenvolvido por Klotz et al., (2011) os encaixes ao nível TF
demonstram um impacto negativo em termos de funcionalidade fisiológica da articulação da anca,
identificando o encaixe MAS como o encaixe que menos limita a amplitude articular, ao nível global
e nos planos sagital e frontal.
Valores Médios
Amplitude Articular (Plano Sagital)
Amplitude Articular (Plano Frontal)
Amplitude Global
FE ± DP (°) LFE (%) ABAD ± DP (°) LABAD
(%) AG ± DP (°) LAG (%)
Sem Encaixe 97.4 ± 15.5 - 69.6 ± 3.6 - 167.0 ±
20.8 -
Encaixe MAS 84.1 ± 15.7 12.6 54.4 ± 5.2 21.8 139.5 ±
20.4 16.4
Encaixe CAT-CAM
74.8 ± 13.9 23.2 50.6 ± 6.0 27.3 125.4 ±
19.6 24.9
Encaixe Quadrilátero
77.2 ± 14.2 20.7 50.1 ± 5.2 28.0 127.3 ±
18.8 23.8
O nível de amputação mais preocupante é a amputação TF, devido ao número limitado de
encaixes que existem, apesar dos estudos realizados demonstrarem que o encaixe MAS é o que
apresenta melhores valores ao nível da amplitude articular e ser o encaixe que mais respeita a
fisiologia do coto, é o encaixe CAT-CAM que é o mais aplicado, devido a evitar as rotações do
encaixe relativamente ao coto e adução do mesmo. Os restringimento da anca, por parte de todos
os encaixes, demonstram que a posição longitudinal do encaixe indica a necessidade do
desenvolvimento de um encaixe inteligente e que se adapte ao coto(Rabuffetti, Recalcati, &
Ferrarin, 2005).
Tabela 14 - Comparação das diferentes amplitudes ao nível das amputações TF (Klotz et al., 2011).

98 Fundamentação Teórica
O encaixe MAS é referido como encaixe mais apropriado não só devido aos parâmetros referidos
na amplitude articular como também o que apresenta menor gasto energético na marcha dos
indivíduos com amputações de nível TF (Traballesi et al., 2011).
Relativamente aos encaixes TT, não apresentam valores de grande discrepância ao nível
funcional devido a preservação da articulação do joelho e anca, no entanto dos encaixes referidos
anteriormente o encaixe que demonstra maior respeito anatómico e apresenta os melhores valores
ao nível da funcionalidade do joelho e permite maior estabilidade nas fases de balanço e de apoio
da marcha é o encaixe TSB, caracterizado também por ser o tipo de encaixe TT mais confortável
nestas fases (Hachisuka, Dozono, Ogata, & Ohmine, 1998).
Quando se aplica uma determinada prótese deve determinar que tipos de componentes serão os
mais indicados para o indivíduo diante a necessidade de um dispositivo destes. Deve-se
compreender eventuais desconfortos, condições cutâneas, eventuais dificuldades na locomoção de
forma a elaborar um dispositivo cujos componentes aplicados permitam um membro adequado, que
não fatigue, que seja confortável e de fácil utilização. Isto pode ser alcançado com o devido
acompanhamento, com a realização de um treino específico a cada indivíduo que torne esta
complexa actividade numa actividade eficiente e mais simples de se realizar (Czerniecki & Gitter,
1996; Sjödahl, Jarnlo, Söderberg, & Persson, 2002).
Tendo conhecimento destes aspectos existe a necessidade de realizar mais estudos e que sejam
o mais completos, utilizando todos os instrumentos necessário para uma recolha de dados mais
detalhada e com todos os parâmetros referenciados e devidamente ligados entre si tendo em conta
as capacidades e necessidades do individuo e aproveitando o máximo de conhecimento existente
sobre os componentes de uma determinada prótese, de forma a adequar ao mesmo (Kark, Vickers,
Mcintosh, & Simmons, 2012; Thevenon, Sagawa, Turcot, Vuillerme, & Watelain, 2011).

99
Referências
A.C. Amadio, P.H. Lobo da Costa, I.C.N. Sacco, J.C. Serrão, R.C. Araujo, L. M. e M. D. (2013).
Introducao a Biomecanica Analise Movimento Humano: Descrição Aplicação dos Metodos Medição.
Retrieved December 16, 2016, from http://www.ebah.com.br/content/ABAAAAuPwAF/introducao-
a-biomecanica-analise-movimento-humano-descricao-aplicacao-dos-metodos-medicao#
Alves, F. J. L., Braga, F. J. S., Simão, M. S., Neto, R. J. L., & Duarte, T. M. G. P. (2001).
ProtoClick! Prototipagem Rápida.
Boonstra, A. M., Fidler, V., & Eisma, W. H. (1993). Walking speed of normal subjects and
amputees : aspects of validity of gait analysis. Prosthetics and Orthotics International, 17, 78–82.
Boutaayamou, M., Schwartz, C., Stamatakis, J., Denoël, V., Maquet, D., Forthomme, B., …
Brüls, O. (2015). Development and validation of an accelerometer-based method for quantifying gait
events. Medical Engineering and Physics, 37, 226–232.
http://doi.org/10.1016/j.medengphy.2015.01.001
Bovi, G., Rabuffetti, M., Mazzoleni, P., & Ferrarin, M. (2011). A multiple-task gait analysis
approach : Kinematic , kinetic and EMG reference data for healthy young and adult subjects. Gait &
Posture, 33(1), 6–13. http://doi.org/10.1016/j.gaitpost.2010.08.009
Calhau, A., Pisco, A., Valente, L., & Santos, N. (2007). ”Análise cinemática da marcha”.
Relatório de Biomecânica do movimento.
Carvalho, J. (2003). Amputações de Membros Inferiores. Em Busca da Plena Reabilitação (2a
Edição). São Paulo: MANOLE.
Collado. (2002). Análisis de la Marcha Humana con Plantaformas Dinamométricas, Influencia en
el Transporte de Cargas. Universidad Complutense de Madrid.
Colombo, G., Filippi, S., Rizzi, C., & Rotini, F. (2010). Computers in Industry A new design
paradigm for the development of custom-fit soft sockets for lower limb prostheses. Computers in
Industry, 61(6), 513–523. http://doi.org/10.1016/j.compind.2010.03.008
Completo, A., & Fonseca, F. (2011). Fundamentos de Biomecânica: Musculo-Esquelética e
Ortopédica. Publindústrias, Edições Técnicas.
Comprehensive Prosthetics & Orthotics. (2016). Prosthetics - Lower Limb. Retrieved December
14, 2016, from http://www.cpousa.com/prosthetics/lower-extremity/
Correia, J. H., & Carmo, J. P. (2013). Introdução à Instrumentação Médica (1a Edição). Lisboa:
LIDEL.

100 Referências
Correia, P. P. (2012). Aparelho Locomotor: Função Neuromuscular e Adaptações à Actividade
Física. Cruz Quebrada: Edições FMH.
Czerniecki, J., & Gitter, A. (1996). Gait analysis in the amputee: Has it helped the amputee or
contributed to the development of improved prosthetic components? Gait & Posture, 4, 258–268.
Davis III, R., Ounpuu, S., Tyburski, D., & Gage, J. R. (1991). A gait analysis data collection and
reduction technique. Human Moviment Science, 10, 575–587.
Davis, R. B., & Deluca, P. A. (2006). Analysis of Gait. In Biomedical Engineering Fundamentals.
Detrembleur, C., Vanmarsenille, J., Cuyper, F. De, & Dierick, F. (2005). Relationship between
energy cost , gait speed , vertical displacement of centre of body mass and efficiency of pendulum-
like mechanism in unilateral amputee gait. Gait & Posture, 21, 333–340.
http://doi.org/10.1016/j.gaitpost.2004.04.005
Di, F., Mengarelli, A., Maranesi, E., Burattini, L., & Fioretti, S. (2015). Assessment of the ankle
muscle co-contraction during normal gait : A surface electromyography study. Journal of
Electromyography and Kinesiology, 25(2), 347–354. http://doi.org/10.1016/j.jelekin.2014.10.016
Drevelle, X., Villa, C., Bonnet, X., Loiret, I., Fodé, P., & Pillet, H. (2014). Clinical Biomechanics
Vaulting quanti fi cation during level walking of transfemoral amputees. Journal Clinical
Biomechanics, 29(6), 679–683. http://doi.org/10.1016/j.clinbiomech.2014.04.006
Endolite. (2016a). Feet. Retrieved December 14, 2016, from
http://www.endolite.com/products/category/feet
Endolite. (2016b). Knees. Retrieved December 14, 2016, from
http://www.endolite.com/products/category/knees
Eshraghi, A., Azuan, N., Osman, A., Gholizadeh, H., Ali, S., Karl, S., … Wan, B. (2013). Clinical
Biomechanics An experimental study of the interface pressure pro fi le during level walking of a new
suspension system for lower limb amputees. Journal Clinical Biomechanics, 28(1), 55–60.
http://doi.org/10.1016/j.clinbiomech.2012.10.002
Gafaniz, A., Lopes, G., & Pires, P. (2005). “Análise Biomecânica da marcha”. Relatório de
Biomecânica do Movimento.
Groen, B. E., Geurts, M., Nienhuis, B., & Duysens, J. (2012). Sensitivity of the OLGA and VCM
models to erroneous marker placement : Effects on 3D-gait kinematics. Gait & Posture, 35(3), 517–
521. http://doi.org/10.1016/j.gaitpost.2011.11.019
Hachisuka, K., Dozono, K., Ogata, H., & Ohmine, S. (1998). Total Surface Bearing Below-Knee
Prosthesis : Advantages , Disadvantages , and Clinical Implications. APMR, 79, 783–789.
Heisenberg, W. (2016). Gait Analysis Models in Common Use. Retrieved December 17, 2016,
from http://www.clinicalgaitanalysis.com/faq/sets/
Herrero, E. V., Barberà i Guillem, R., Maya, M. F. P., Gracia, C. S., Pastor, J. M. P., Fabregat,
A. C., … Bartolomeu, J. M. (2004). Guía de uso y prescripción de productos ortoprotésicos a medida.
Valência: Instituto de Biomecánica de Valência.
Hunter, G. A., & Mackillop, J. (1997). Prosthetic fitting of adult lower limb amputees following
trauma and peripheral vascular disease. Current Orthopaedics, 11, 275–280.

Referências 101
Isakov, E., Keren, O., & Benjuya, N. (2000). Trans-tibial amputee gait : time-distance
parameters and EMG activity. Prosthetics and Orthotics International, 24, 216–220.
Jin, Y., Plott, J., Chen, R., Wensman, J., & Shih, A. (2015). Additive Manufacturing of Custom
Orthoses and Prostheses – A Review. Procedia CIRP, 36, 199–204.
http://doi.org/10.1016/j.procir.2015.02.125
Kadaba, M. P., Ramakrishnan, H. K., Wootten, M. E., Gainey, J., Gorton, G., & Cochran, G. V.
B. (1989). Repeatability of Kinematic , Kinetic , and Electromyographic Data in Normal Adult Gait.
Journal of Orthopaedic Research, 7, 849–860.
Kark, L., Vickers, D., Mcintosh, A., & Simmons, A. (2012). Use of gait summary measures with
lower limb amputees. Gait & Posture, 35(2), 238–243.
http://doi.org/10.1016/j.gaitpost.2011.09.013
Klotz, R., Colobert, B., Botino, M., & Permentiers, I. (2011). Influence of different types of
sockets on the range of motion of the hip joint by the transfemoral amputee. Annals of Physical and
Rehabilitation Medicine, 54(7), 399–410. http://doi.org/10.1016/j.rehab.2011.08.001
Klute, G. K., Berge, J. S., Biggs, W., & Pongnumkul, S. (2011). Vacuum-Assisted Socket
Suspension Compared With Pin Suspension for Lower Extremity Amputees : Effect on Fit , Activity ,
and Limb Volume. APMR, 92(10), 1570–1575. http://doi.org/10.1016/j.apmr.2011.05.019
Kobayashi, T., Arabian, A. K., Orendurff, M. S., Rosenbaum-chou, T. G., & Boone, D. A. (2014).
Effect of alignment changes on socket reaction moments while walking in transtibial prostheses with
energy storage and return feet. Journal Clinical Biomechanics, 29(1), 47–56.
http://doi.org/10.1016/j.clinbiomech.2013.11.005
Kobayashi, T., Orendurff, M. S., & Boone, D. A. (2013). Effect of alignment changes on socket
reaction moments during gait in transfemoral and knee-disarticulation prostheses : Case series.
Journal of Biomechanics, 46(14), 2539–2545. http://doi.org/10.1016/j.jbiomech.2013.07.012
Mann, L., Teixeira, C. S., & Mota, C. B. (2008). “A marcha humana: interferências de cargas e
de diferentes situações.” Arq. Ciênc. Saúde Unipar, 12(3).
Muilenburg, A. L., & A. Bennett Wilson, J. (1996). A Manual for Above-Knee Amputees Shanks.
Retrieved December 12, 2016, from
http://www.oandp.com/resources/patientinfo/manuals/ak9.htm
Munarriz, R., Kulaksizoglu, H., Hakim, L., Gholami, S., Nehra, A., & Goldstein, I. (2003). Lower
extremity above-knee prosthesis-associated erectile dysfunction. International Journal of Impotence
Research, 15, 290–292. http://doi.org/10.1038/sj.ijir.3901015
Muscolino, J. (2006). Cinesiologia: O Sistema Esquelético e a Função Muscular. Loures:
LUSODIDACTA.
Nolan, L., Wit, A., Dudzin, K., Lees, A., Lake, M., & Wychowan, M. (2003). Adjustments in gait
symmetry with walking speed in trans-femoral and trans-tibial amputees. Gait & Posture, 17, 142–
151.
Ossur. (2016). Dinamic Solucions. Retrieved December 14, 2016, from
https://www.ossur.com/prosthetic-solutions/products/dynamic-solutions

102 Referências
Parker, K., Hanada, E., & Adderson, J. (2013). Gait variability and regularity of people with
transtibial amputations. Gait & Posture, 37(2), 269–273.
http://doi.org/10.1016/j.gaitpost.2012.07.029
Pedrinelli, A. (2004). Tratamento do Paciente com Amputação (1a Edição). São Paulo: ROCA.
Periago, R. Z. (2009). Protesis, Ortesis y Ayudas técnicas. Barcelona: ELSEVIER.
Perry. (1992). Gait Analysis. Normal and Pathological Funciton. USA: Slack Incorporated.
Pina, E. (1999). Anatomia Humana da Locomoção (3a Edição). Lousã: LIDEL.
Rabuffetti, M., Recalcati, M., & Ferrarin, M. (2005). Trans-femoral amputee gait : Socket –
pelvis constraints and compensation strategies. Prosthetics and Orthotics International, 29(August
2005), 183–192. http://doi.org/10.1080/03093640500217182
Rajt’úkova, V., Michalíková, M., Bednarcíkova, L., Balogová, A., & Zivcák, J. (2014).
Biomechanics of Lower Limb Prostheses. Procedia Engineering, 96, 382–391.
http://doi.org/10.1016/j.proeng.2014.12.107
Ribeiro, R. C. S. (2006). “Analise computadorizada da marcha em adultos jovens saudáveis.”
Universidade Católica de Góias.
Richards, J. (2008). Biomechanics in Clinic and Research (1a Edição). Philadelphia: ELSEVIER.
Rico, C. L. (2014). Marcha Normal e Patológica: Estudo Teórico e Experimental de uma Ortótese
de Tornozelo e Pé. Faculdade de Engenharia da Universidade do Porto.
Rodin4D. (2016). 3D Priting. Retrieved December 15, 2016, from
http://rodin4d.com/en/Products/manufacturing/3d-printing
Rosa, P. (2014). A review of the utilization of baropodometry in postural assessment. Journal of
Bodywork & Movement Therapies, 18, 215–219. http://doi.org/10.1016/j.jbmt.2013.05.016
Rueda, F. M., Diego, I. M. A., Sa, A. M., Miguel, F., Montero, R., Carlos, J., & Page, M. (2013).
Knee and hip internal moments and upper-body kinematics in the frontal plane in unilateral
transtibial amputees. Gait & Posture, 37, 436–439. http://doi.org/10.1016/j.gaitpost.2012.08.019
Schmalz, T., Blumentritt, S., & Jarasch, R. (2002). Energy expenditure and biomechanical
characteristics of lower limb amputee gait : The influence of prosthetic alignment and different
prosthetic components. Gait & Posture, 16.
Schwarze, M., Hurschler, C., Seehaus, F., Oehler, S., & Welke, B. (2013). Loads on the
prosthesis – socket interface of above-knee amputees during normal gait : Validation of a multi-
body simulation. Journal of Biomechanics, 46(6), 1201–1206.
http://doi.org/10.1016/j.jbiomech.2013.02.005
Sebastião, R. (2009). “Análise Cinética da Marcha: Estudo Comparativo entre Membros
Amputado e Membro Remanescente de Amputados Transfemorais.” Universidade do Porto.
Seeley, Rod; Stephens, Trent; Tate, P. (2003). Anatomia & Fisiologia (6a Edição). Loures:
LUSOCIÊNCIA.
Sjödahl, C., Jarnlo, G., Söderberg, B., & Persson, B. M. (2002). Kinematic and kinetic gait
analysis in the sagittal plane of trans-femoral amputees before and after special gait re-education.
Prosthetics and Orthotics International, 26, 101–112.
Referências 103
Sousa. (2009). Análise da Marcha Baseada em Correlação Multifactorial. Faculdade de
Engenharia da Universidade do Porto.
Sousa, A. (2010). Controlo Postural e Marcha Humana: Análise Multifactorial. Faculdade de
Engenharia da Universidade do Porto.
Strazza, A., Mengarelli, A., Fioretti, S., Burattini, L., Agostini, V., Kna, M., & Di, F. (2017).
Surface-EMG analysis for the quanti fi cation of thigh muscle dynamic co-contractions during normal
gait. Gait & Posture, 51, 228–233. http://doi.org/10.1016/j.gaitpost.2016.11.003
Su, P., Gard, S. A., Lipschutz, R. D., & Kuiken, T. A. (2007). Gait characteristics of persons with
bilateral transtibial amputations. Journal of Rehabilitation Research and Development, 44(4), 491–
502. http://doi.org/10.1682/JRRD.2006.10.0135
Summit, S. (2014). Additive manufacturing of a prosthetic limb. Rapid prototyping of
biomaterials: Principles and applications. Woodhead Publishing Limited.
http://doi.org/10.1533/9780857097217.285
Tesio, L., Monzani, M., Gatti, R., & Franchignoni, F. (1995). Flexible electrogoniometers:
kinesiological advantages with respect to potentiometric goniometers. Journal Clinical
Biomechanics, 10(5), 2–4.
Thevenon, A., Sagawa, Y., Turcot, K., Vuillerme, N., & Watelain, E. (2011). Biomechanics and
physiological parameters during gait in lower-limb amputees : A systematic review. Gait & Posture,
33, 511–526. http://doi.org/10.1016/j.gaitpost.2011.02.003
Tong, K., & Granat, M. H. (1999). A practical gait analysis system using gyroscopes. Medical
Engineering and Physics, 21, 87–94.
Traballesi, M., Sofia, A., Averna, T., Pellegrini, R., Paradisi, F., & Brunelli, S. (2011). Energy
cost of walking in transfemoral amputees : Comparison between Marlo Anatomical Socket and
Ischial Containment Socket. Gait & Posture, 34(2), 270–274.
http://doi.org/10.1016/j.gaitpost.2011.05.012
Vanicek, N., Strike, S., Mcnaughton, L., & Polman, R. (2009). Gait & Posture Gait patterns in
transtibial amputee fallers vs . non-fallers : Biomechanical differences during level walking, 29,
415–420. http://doi.org/10.1016/j.gaitpost.2008.10.062
Vaughan, C. L., Davis, B. L., & C., O. J. (1999). DYNAMICS OF HUMAN GAIT (2a Edição). Cape
Town: Kiboho Publishers.
Vickers, D. R., Palk, C., Mcintosh, A. S., & Beatty, K. T. (2008). Elderly unilateral transtibial
amputee gait on an inclined walkway : A biomechanical analysis, 27, 518–529.
http://doi.org/10.1016/j.gaitpost.2007.06.008
Villeger, D., Costes, A., Watier, B., & Moretto, P. (2014). An algorithm to decompose ground
reaction forces and moments from a single force platform in walking gait. Medical Engineering and
Physics, 36(11), 1530–1535. http://doi.org/10.1016/j.medengphy.2014.08.002
Whittle, M. W. (1996). Clinical gait analysis : A review. Human Moviment Science, 15, 369–387.
Winter, D. A. (1990). “Biomechanics and motor control of human movement.” (W.-I.
Publication, Ed.) (2o ed.).
Wittle, M. (2007). Gait Analysis an Introduction (4a Edição). Philadelphia: ELSEVIER.