estimação de parâmetros em modelos não lineares · 2.1.1 objectivos dos cursos de engenharia na...
TRANSCRIPT

Isabel Alexandra Costa Pinho do Espírito Santo
Estimação de Parâmetros em Modelos NãoLineares
UNIVERSIDADE DO MINHONovembro de 2001

Estimação de Parâmetros em Modelos NãoLineares
por
Isabel Alexandra Costa Pinho do Espírito Santo
Componente Pedagógica a apresentar nasProvas de Aptidão Pedagógica e Capacidade Científica
Ramo da Engenharia de Produção e SistemasÁrea de Métodos Numéricos e Estatísticos
UNIVERSIDADE DO MINHONovembro de 2001

Dedico este trabalho ao meu filho e ao meu marido.

Nearly every subject has a shadow, or imitation. It would, I suppose, be quite possible to teach aa deaf and dumb child to play the piano. When it played a wrong note, it would see the frown of itsteacher, and try again. But it would obviously have no idea of what it was doing, or why anyone shoulddevote hours to such an extraordinary exercise. It would have learnt an imitation of music. And it wouldhave learnt to fear the piano exactly as most students fear what is supposed to be mathematics.
(W. W. Sawyer)

Conteúdo
Agradecimentos iii
1 Introdução 11.1 Objectivos e plano de trabalho . . . . . . . . . . . . . . . . . . . . . . . . . 11.2 Estrutura do relatório . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
2 Enquadramento da disciplina e do tema da aula 32.1 Licenciatura em Engenharia Biológica . . . . . . . . . . . . . . . . . . . . . 3
2.1.1 Objectivos dos cursos de engenharia na Universidade do Minho . . 32.1.2 Estrutura curricular das licenciaturas em engenharia . . . . . . . . 42.1.3 Enquadramento profissional da Licenciatura em Engenharia Biológica 4
2.2 A disciplina de Métodos Numéricos II . . . . . . . . . . . . . . . . . . . . . 52.2.1 Objectivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52.2.2 Enquadramento e programa da disciplina . . . . . . . . . . . . . . . 62.2.3 Escolaridade e esquema das aulas . . . . . . . . . . . . . . . . . . . 7
3 Aula sobre mínimos quadrados 93.1 Algumas considerações pedagógicas . . . . . . . . . . . . . . . . . . . . . . 93.2 Objectivos e conteúdo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103.3 Planificação da aula . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
3.3.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113.3.2 Motivação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113.3.3 Exercícios propostos . . . . . . . . . . . . . . . . . . . . . . . . . . 11
4 Exercícios propostos 134.1 Exercício 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 144.2 Exercício 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 154.3 Exercício 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
5 Resolução dos exercícios propostos 205.1 Resolução do Exercício 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
i

CONTEÚDO ii
5.1.1 Resolução com calculadora científica . . . . . . . . . . . . . . . . . 215.1.2 Resolução com o software CONUM . . . . . . . . . . . . . . . . . . 245.1.3 Resolução com o software MATLAB . . . . . . . . . . . . . . . . . 295.1.4 Comparação gráfica entre os dados experimentais e as estimativas
dadas pelo modelo calculado . . . . . . . . . . . . . . . . . . . . . . 325.2 Resolução do Exercício 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
5.2.1 Resolução com calculadora científica . . . . . . . . . . . . . . . . . 335.2.2 Resolução com o software CONUM . . . . . . . . . . . . . . . . . . 445.2.3 Resolução com o software MATLAB . . . . . . . . . . . . . . . . . 54
5.3 Proposta de resolução do Exercício 3 . . . . . . . . . . . . . . . . . . . . . 585.3.1 Resolução com calculadora científica . . . . . . . . . . . . . . . . . 585.3.2 Resolução com o software CONUM . . . . . . . . . . . . . . . . . . 605.3.3 Resolução com software MATLAB . . . . . . . . . . . . . . . . . . 61
6 Conclusões 63
A Programa detalhado de Métodos Numéricos II 64
Bibliografia 65

Agradecimentos
A todos quantos de forma directa ou indirecta ajudaram à realização deste trabalho, omeu sincero apreço.Desejo expressar, em primeiro lugar, um profundo e sentido agradecimento à Doutora
Edite, quer pela sua reconhecida e indiscutível competência orientadora, quer pela amizadeque, apesar da escassez de tempo disponível, consegue dispensar.À Doutora Madalena, um agradecimento especial, pelas sugestões apresentadas, pela
sua simpatia e presença sempre amiga.Agradeço ainda a todos os meus colegas de trabalho pela amizade, não podendo deixar
de destacar o Ismael, pela constante disponibilidade, e sem o qual a escrita destas provasteria sido, sem dúvida, muito mais complicada.Ao Acácio, ummuito obrigada pelo profissionalismo, dedicação, companheirismo e boa
disposição constantes.Um agradecimento muito especial para a Teresa (Doutora Teresa!), que já não posso
incluir só na categoria dos colegas. Muito obrigada por tudo, amiga.A toda a minha família, agradeço por todo o apoio incondicional, em particular à
minha irmã e à minha sobrinha. Aos meus pais, agradeço toda uma vida.Ao meu marido, o Paulo, para além do ombro querido em todas as horas, agradeço
ainda as sugestões na parte pedagógica do trabalho.Ao Fernando, o maior agradecimento de todos por ter sido, ainda dentro da minha
barriga, o supremo incentivo à conclusão deste trabalho.
iii

Capítulo 1
Introdução
1.1 Objectivos e plano de trabalho
Este relatório constitui a componente pedagógica a apresentar em Provas de Aptidão Pe-dagógica e Capacidade Científica, ao abrigo do Decreto - Lei no19/80 de 16 de Julho,artigos 53oa 60o, para acesso à categoria de Assistente da Assistente Estagiária do De-partamento de Produção e Sistemas da Universidade do Minho, Isabel Alexandra CostaPinho do Espírito Santo.Pretende-se ao longo deste relatório apresentar uma aula sobre estimação de parâme-
tros em modelos não lineares, através da técnica dos Mínimos Quadrados, a alunos daLicenciatura em Engenharia Biológica.Esta aula está inserida na disciplina de Métodos Numéricos II, leccionada aos alunos
da referida licenciatura, no segundo semestre do segundo ano.Trata-se de uma aula em que se faz uma abordagem teórico-prática e prática (com
o auxílio de pacotes de software) de alguns exercícios relacionados com o tema e comaplicações no domínio da Engenharia Biológica.Para além dos exercícios e sua resolução, faz-se o enquadramento do tema da aula e
da disciplina na licenciatura da qual fazem parte os alunos destinatários. Fazem-se aindaalgumas considerações pedagógicas e fala-se do modo como decorrerá a aula. Apresentam-se, por fim, algumas conclusões sobre este trabalho.
1.2 Estrutura do relatório
Este relatório está dividido em seis capítulos, distribuídos da forma que a seguir se apre-senta.No capítulo dois é apresentado o enquadramento da disciplina de Métodos Numéricos
II e do tema da aula. Para isso, começa-se por apresentar a Licenciatura em EngenhariaBiológica em termos de objectivos gerais, de currículo e de enquadramento profissional.
1

CAPÍTULO 1. INTRODUÇÃO 2
Passa-se, então, à disciplina de Métodos Numéricos II, em que se referem os objectivosna referida licenciatura, faz-se um enquadramento da disciplina, com apresentação doprograma e, por fim, descreve-se a escolaridade e esquema das aulas.No capítulo três fala-se pormenorizadamente da aula a ser apresentada. Para isso são
feitas algumas considerações pedagógicas, são referidos os seus objectivos e conteúdo efaz-se uma planificação sobre a forma como decorrerá a aula.Os capítulos quatro e cinco dizem respeito, respectivamente, aos exercícios propostos
aos alunos e sua resolução. São apresentados três exercícios, todos eles exemplos deaplicação na área da Engenharia Biológica. É exposta a resolução pormenorizada dedois dos exercícios com calculadora científica e com os softwares CONUM e MATLAB.Do terceiro exercício, mostra-se apenas uma proposta de resolução para que os alunospossam consolidar os conhecimentos em forma de trabalho individual.Para terminar, no sexto e último capítulo tiram-se algumas conclusões sobre esta aula.Em anexo apresenta-se o programa detalhado da disciplina de Métodos Numéricos II
na Licenciatura em Engenharia Biológica.

Capítulo 2
Enquadramento da disciplina e dotema da aula
A aula a apresentar foca a estimação de parâmetros pela técnica dos mínimos quadrados.Neste capítulo faz-se um enquadramento, não só da disciplina onde se insere esta unidade,mas também da disciplina no curso de Engenharia Biológica, leccionado na Universidadedo Minho.
2.1 Licenciatura em Engenharia Biológica
2.1.1 Objectivos dos cursos de engenharia na Universidade doMinho
O Minho é uma província densamente povoada, com um grau elevado de industrializaçãocomparativamente ao restante território nacional.É possível constatar o predomínio das indústrias textil e metalomecânica num universo
industrial em que dominam as pequena e média empresas.A produtividade destas empresas fica aquém da média geral do país. A explicação
para este baixo nível de produtividade assenta em factores como o carácter tradicionaldas indústrias dominantes e a sua dimensão reduzida, bem como o escasso número depessoal com um grau universitário.Os cursos de engenharia da Universidade do Minho procuram satisfazer, entre outras
e pelas razões citadas, as seguintes condições:
• ser dirigidos para os sectores industriais dominantes;• induzir maiores produtividades e um melhor conseguido dimensionamento das ins-talações, sendo orientados para a optimização da produção;
3

CAPÍTULO 2. ENQUADRAMENTO DA DISCIPLINA E DO TEMA DA AULA 4
• formar licenciados com uma elevada capacidade de adaptação, capazes de solucionarmúltiplos problemas, mesmo aqueles que não se incluem nas suas competências [1].
2.1.2 Estrutura curricular das licenciaturas em engenharia
Existe um tronco comum aos diversos cursos de engenharia, que integra disciplinas dequatro componentes fundamentas: Ciências Básicas, Ciências de Engenharia, Engenhariade Produção, Humanidades e Ciências Sociais. A designação de cada curso está depen-dente da Componente Vocacional inerente, a qual é composta por um conjunto coerentede disciplinas orientadas para uma tecnologia específica.A componente de Engenharia de Produção tem por objectivo dotar os estudantes
de conhecimento adequado da ciência de sistemas, investigação operacional, economia,organização e gestão, abordando também as implicações humanas inerentes.As componentes de Ciências Básicas e de Ciências de Engenharia visam fornecer os
conhecimentos científicos suficientes para habilitar os estudantes a acompanharem o rápidodesenvolvimento da ciência e da tecnologia.O plano curricular inclui ainda um estágio ou um projecto individual [1].
2.1.3 Enquadramento profissional da Licenciatura em Engenha-ria Biológica
A Licenciatura em Engenharia Biológica visa formar profissionais para a indústria e in-vestigação nos domínios da biotecnologia e dos processos químicos. Vigoram actualmenteo Ramo Tecnologia Química e Alimentar e o Ramo Controlo da Poluição.Os licenciados em qualquer dos ramos estão habilitados a exercerem as suas activi-
dades em sectores industriais onde predominem os processos biológicos e químicos, oufísico-químicos: indústrias alimentares (fermentativas ou não), indústria farmacêutica ede cosméticos/ perfumaria, indústria química e afins (celulose, couro, cortiça), indústriade tratamento de água e efluentes, entre outras.O Ramo Tecnologia Química e Alimentar está mais vocacionado para a optimização
do projecto e operação do equipamento industrial, enquanto que o Ramo Controlo daPoluição faculta uma maior especialização no âmbito dos tratamentos de efluentes e resí-duos, salientando-se a capacidade na modificação dos processos de fabrico, integrando-osnuma filosofia de prevenção da poluição industrial na origem.De seguida apresenta-se a contribuição das diferentes áreas científicas nesta licenciatura
[1].A cada uma destas áreas é atribuído um factor de ponderação (Fi), que é usado no
cômputo global das unidades de crédito da licenciatura.As unidades de crédito (U. C.) dependem da escolaridade das disciplinas que integram
cada uma das áreas científicas.

CAPÍTULO 2. ENQUADRAMENTO DA DISCIPLINA E DO TEMA DA AULA 5
Ramo Tecnologia Química e Alimentar
Área científica U. C. FiCiências Básicas 54.5 1.0Ciências de Engenharia 31.0 2.0Produção e Sistemas 23.0 1.5Tecnologia Química 30.0 2.0Biotecnologia 29.0 2.0Ciências Político-Sociais e Humanidades 4.0 1.0Estágio (projecto individual) 14.0 2.0
Áreas OptativasProdução e SistemasTecnologia QuímicaBiotecnologia
ª6.5 2.0
Ramo Controlo da Poluição
Área científica U. C. FiCiências Básicas 54.5 1.0Ciências de Engenharia 31.0 2.0Produção e Sistemas 23.0 1.5Tecnologia Química 32.5 2.0Biotecnologia 33.0 2.0Ciências Político-Sociais e Humanidades 4.0 1.0Estágio (projecto individual) 14.0 2.0
2.2 A disciplina de Métodos Numéricos II
2.2.1 Objectivos
Nas disciplinas de Métodos Numéricos, pretende-se dar solução a uma grande variedade deproblemas matemáticos que surgem em engenharia, para os quais, pela sua complexidadeou pela sua dimensão, não é possível obter soluções analíticas. Os computadores são umaferramenta importante na resolução numérica eficiente destes problemas, face à reduçãoverificada nos tempos de execução.Esta solução leva, muitas vezes, ao aparecimento de determinado tipo de erros, que
podem, se não forem tomadas as devidas precauções, influenciar significativamente osresultados.Alguns destes efeitos numéricos causados pelo uso da aritmética de vírgula flutuante e
discreta nos computadores são a perda de algarismos significativos (quando se subtraem

CAPÍTULO 2. ENQUADRAMENTO DA DISCIPLINA E DO TEMA DA AULA 6
dois valores muito próximos ou se somam vários termos, nem todos com o mesmo sinal, emque as somas parciais são elevadas), a instabilidade numérica e o mau condicionamento.Podem ainda referir-se erros causados pela aproximação de um problema complexo
e contínuo a um outro discreto e simples, ou ainda pela substituição de um problemainfinito por um finito.Grande parte destas dificuldades podem ser ultrapassadas se o problema for reformu-
lado, de tal forma que o novo problema tenha a mesma solução que o problema original,com a diferença de determinar soluções mais precisas.Ao incluir-se a disciplina de Métodos Numéricos II na Licenciatura em Engenharia
Biológica, pretende-se cobrir uma área do conhecimento que complemente os conhecimen-tos adquiridos na disciplina de Métodos Numéricos I, leccionada no mesmo ano lectivo,mas no semestre anterior. Pretende-se, especificamente, efectuar um estudo, análise e im-plementação de algoritmos numéricos aplicáveis neste ramo de engenharia. De um modomais pormenorizado, pretende-se para os problemas abordados:
• fornecer uma lista, tão exaustiva quanto possível, dos métodos numéricos existentespara a sua resolução;
• saber controlar os erros de arredondamento, escolhendo técnicas estáveis para a suaresolução;
• saber distinguir os algoritmos estáveis dos que sofrem de instabilidade;
• estudar e analisar detalhadamente o comportamento dos métodos mais simples,eficientes, robustos, estáveis e económicos;
• implementar critérios e os métodos mais usados para a resolução de problemas degrande dimensão, com a ajuda do computador;
• comparar os resultados obtidos pela implementação de vários algoritmos, tentandojustificar as razões do seu comportamento;
• saber escolher e utilizar, sempre que possível, software já existente nos Centros deComputação;
• saber interpretar e analisar os resultados obtidos [5].
2.2.2 Enquadramento e programa da disciplina
A disciplina de Métodos Numéricos II é assegurada pelo subgrupo de Métodos Numéricose Estatísticos, do grupo de Engenharia de Sistemas e de Processos Industriais, do Depar-tamento de Produção e Sistemas. É leccionada à Licenciatura em Engenharia Biológica no

CAPÍTULO 2. ENQUADRAMENTO DA DISCIPLINA E DO TEMA DA AULA 7
segundo semestre do segundo ano e vale 3.5 unidades de crédito, com um factor atribuídode 1.5.O programa da disciplina divide-se em três capítulos: equações diferenciais, optimi-
zação não linear e mínimos quadrados não lineares. O programa detalhado de MétodosNuméricos II encontra-se no Apêndice A.
2.2.3 Escolaridade e esquema das aulas
A sua escolaridade semanal é a seguinte:Teórica 2 horasTeórico-prática 2 horas.As aulas teórico-práticas acompanham a matéria leccionada nas aulas teóricas, sendo
que seis horas destas aulas são reservadas ao Laboratório de Computação, para ser intro-duzido o uso de software já existente para a resolução dos problemas que fazem parte doprograma. Foram usados, nestas aulas, o MATLAB e CONUM.O esquema usado para as aulas teórico-práticas (TP), também com componente prá-
tica (P), tendo como base treze semanas de aulas (número de aulas médio, efectivamenteleccionado, de acordo com o calendário escolar), foi o seguinte:
Primeiro capıtulo−Equações diferenciais
Tipo de aula TP TP TP + P TP TP + PNúmero de horas 2 2 1 + 1 2 1 + 1
Segundo capıtulo−Optimização não linear sem restrições
Tipo de aula TP TP TP + P TP TP + PNúmero de horas 2 2 1 + 1 2 1 + 1
Terceiro capıtulo−Mínimos quadrados não lineares
Tipo de aula TP TP + P TP + PNúmero de horas 2 1 + 1 1 + 1
• Nas cinco primeiras horas são introduzidos e implementados alguns métodos para aresolução de problemas de equações diferenciais com condições iniciais;
CAPÍTULO 2. ENQUADRAMENTO DA DISCIPLINA E DO TEMA DA AULA 8
• Na hora seguinte são resolvidos alguns dos problemas anteriores com o softwareCONUM.
• Nas três horas subsequentes são apresentados métodos para a resolução de equaçõesdiferenciais com condições de fronteira.
• Na última hora das cinco primeiras semanas, alguns dos problemas anteriores sãoresolvidos com o software CONUM.
• O capítulo dois, que consiste na optimização não linear sem restrições, é introduzidoe explorado em termos teórico-práticos na décima primeira hora e é leccionado aolongo de mais nove. Duas destas horas (nas oitava e décima semanas) são reservadasà resolução de alguns destes problemas no computador, uma delas com o softwareCONUM e outra com o software MATLAB.
• Nas últimas três semanas são resolvidos problemas de mínimos quadrados não li-neares. São reservadas duas horas para a resolução de problemas com o softwareCONUM e MATLAB.

Capítulo 3
Aula sobre mínimos quadrados
3.1 Algumas considerações pedagógicas
Há um manifesto crescente interesse pelo Ensino Superior, sobretudo no que se refere àsua relação função/ formação, pelo facto de se ter diagnosticado uma crise da Universi-dade, expressa, entre outros sintomas, na sua inadaptação às solicitações sociais e/ou aoinsucesso dos estudantes universitários. Porém, não obstante esta constatação, só rarasvezes se invocam os problemas pedagógicos como uma possível causa dessa crise.Não parece merecer contestação a evidência que o modelo pedagógico tradicional se
apresenta cada vez mais inadequado na resposta necessária às modificações nas funções,público e estruturas da Universidade, dadas as novas questões colocadas perante a neces-sidade de diminuir a taxa de insucesso escolar ou a preparação para o exercício de umaprofissão. Estes são problemas que suscitam uma reflexão pedagógica.A reflexão pedagógica deve debruçar-se, antes de tudo o mais, sobre os meios a dispo-
nibilizar aos estudantes, nas suas diferenças intrínsecas, para que ocorra uma verdadeiraapropriação dos saberes. Esta reflexão implica todo o sistema de Ensino Superior, peloque a sua abordagem ultrapassa em larga medida os objectivos destas considerações, queapenas se vão limitar ao âmbito da disciplina de Métodos Numéricos II.Os inquéritos já realizados aos estudantes universitários permitiram a detecção, para
além de uma generalizada ausência de motivação, inerente à inexistência de um projectopessoal bem definido, da consciência de que parte dos obstáculos sentidos no EnsinoSuperior derivam da falta de método no trabalho individual.Os esforços que o docente da disciplina de Métodos Numéricos II pode desenvolver, no
domínio restrito da mesma, devem concentrar-se ao nível da motivação dos discentes. Amotivação para a realização de um trabalho individual aprofundado pode estimular-se ourefrear-se pela forma como esta actividade se inscreve na formação global (licenciatura) epelo seu interesse profissional (Engenharia). O que se verifica, contudo, é um desfasamentoentre a aprendizagem das técnicas numéricas e suas hipotéticas aplicações: só ao nível
9

CAPÍTULO 3. AULA SOBRE MÍNIMOS QUADRADOS 10
de um terceiro e quarto anos da Licenciatura em Engenharia Biológica, os alunos seencontram em condições de fazer uma utilização consciente dessas técnicas.A prática de exercícios a realizar fora da aula, e diferentes para cada curso, confere
maior liberdade à execução dos mesmos e ajuda os alunos na aquisição de todo um saber-fazer metodológico, para além de ser um elemento de motivação dos mesmos [2].
3.2 Objectivos e conteúdo
Como já foi referido em 2.2.1, os objectivos da disciplina de Métodos Numéricos II no cursode Engenharia Biológica são apresentar algoritmos que permitem solucionar problemaspráticos de engenharia, com a utilização de computadores.No caso do capítulo a que diz respeito esta aula, os problemas de mínimos quadrados
não lineares, pretende-se apresentar aos alunos uma forma prática e eficaz de aproximarum conjunto de dados ou uma função complexa.Na Licenciatura em Engenharia Biológica, os alunos deparam-se numerosas vezes com
dados que é necessário tratar e aproximar a modelos, já que é um curso com uma fortecomponente laboratorial. Podem citar-se, como exemplos, as cinéticas de crescimentomicrobiano, de reacções químicas ou transferência de calor, que são descritos por modelosbem conhecidos, em que se torna necessário determinar os parâmetros que descrevem essesprocessos. Nos trabalhos laboratoriais recolhem-se uma grande quantidade de dados, nãofazendo, por isso, sentido uma aproximação do tipo interpolação, em que se obriga afunção modelo a passar por todos os dados experimentais.Nesta aula, que se enquadra na última semana do período lectivo, pretende-se dar aos
alunos alguns exemplos de aplicação dos mínimos quadrados na área em que normalmentetrabalham. Depois de nas duas aulas anteriores terem sido explorados alguns exemplosacadémicos sobre este assunto, para domínio dos algoritmos de Newton e Gauss-Newton,os problemas apresentados nesta aula abordam uma linguagem bem conhecida pelos alu-nos, fazendo assim a ponte entre uma disciplina considerada genérica e as disciplinasespecíficas do curso.É ainda objectivo desta aula estabelecer uma ligação entre as disciplinas Métodos
Numéricos I e Métodos Numéricos II.Serão propostos três exercícios e serão, para cada um deles, abordadas três resoluções:
com calculadora científica, com o software CONUM e com o software MATLAB.Com o Exercício 1, os alunos terão que recordar os mínimos quadrados lineares de
Métodos Numéricos I e no Exercício 3 a integração numérica, abordada na mesma dis-ciplina. No Exercício 2 exige-se a resolução de um sistema de equações diferenciais, jáanteriormente exposta em Métodos Numéricos II.Por uma questão de tempo, apenas serão resolvidos os Exercícios 1 e 2. Para o Exercí-
cio 3 apresenta-se uma proposta de resolução e propõe-se a sua finalização em casa. Destaforma os alunos poderão consolidar os seus conhecimentos sobre este assunto. Este exercí-

CAPÍTULO 3. AULA SOBRE MÍNIMOS QUADRADOS 11
cio é particularmente interessante, já que se trata de um trabalho experimental levado acabo pelo Departamento de Engenharia Biológica em colaboração com o Departamentode Produção e Sistemas, o que intensificará o interesse dos alunos pelo tema, uma vez quea linguagem utilizada lhes é familiar.
3.3 Planificação da aula
3.3.1 Introdução
Nesta aula começa-se por evidenciar o interesse prático dos mínimos quadrados, quandose está na presença de uma grande quantidade de dados experimentais, o que acontece namaior parte dos trabalhos laboratoriais da Licenciatura em Engenharia Biológica.
3.3.2 Motivação
Uma das tarefas mais complicadas para um professor de Métodos Numéricos é sempreconseguir motivar os alunos para exercícios normalmente muito trabalhosos e por vezesenfadonhos. Por essa razão são apresentados exercícios práticos da área de estudos destesalunos, inclusivamente um trabalho prático realizado em colaboração com o departamentoem que estão inseridos.Salienta-se ainda a importância de começar os exercícios pela resolução com calcula-
dora científica, normalmente muito trabalhosa, pois torna-se muito mais fácil de seguidaresolvê-los em computador, em especial quando é necessário usar mais que uma rotina emCONUM ou realizar um programa em MATLAB.
3.3.3 Exercícios propostos
A resolução do Exercício 1 com calculadora científica vai sendo feita no quadro para quetodos os alunos possam acompanhar. A parte que os alunos não conhecem sobre esteexercício é a linerização do modelo. Tudo o resto são revisões de Métodos Numéricos I.Passa-se então à resolução deste exercício com os softwares CONUM e MATLAB, que osalunos já conhecem de outros capítulos. Ainda em MATLAB, realiza-se um gráfico paracomparação dos resultados e discute-se a validade do modelo calculado.De seguida resolve-se o Exercício 2, também com calculadora científica e acompa-
nhado no quadro. Devido à grande quantidade de cálculos que é necessário efectuar,são fornecidos alguns resultados intermédios. Este exercício é já mais complexo e en-volve a resolução de um sistema de equações diferenciais já abordada nesta disciplina (verApêndice A). Mais uma vez, os passos seguintes serão resolver o problema em CONUMe MATLAB. Nesta última resolução é necessária a realização de um pequeno programa,além das funções comuns do MATLAB, e serão dadas orientações aos alunos no sentido

CAPÍTULO 3. AULA SOBRE MÍNIMOS QUADRADOS 12
de ajudá-los neste propósito. Por fim, comparam-se os resultados obtidos em cada umadas abordagens e são discutidas as diferenças observadas.Para terminar a aula, propõe-se a resolução do Exercício 3 em casa, com calculadora
científica, CONUM e MATLAB, apresentando-se algumas linhas gerais de resolução.

Capítulo 4
Exercícios propostos
São apresentados neste capítulo três enunciados de exercícios de mínimos quadrados,propostos para uma aula teórico-prática de duas horas. De acordo com a calendarizaçãoapresentada, esta insere-se na décima terceira semana de aulas.No primeiro exercício é apresentado um modelo não linear, que facilmente se pode
linearizar e que será resolvido não só com o auxílio de uma calculadora científica, mastambém recorrendo aos softwares CONUM e MATLAB. É também feita uma comparaçãográfica dos resultados obtidos através do modelo com os valores experimentais. Esteexercício acaba por ser uma revisão de Métodos Numéricos I, já que se trata de um modelolinear de mínimos quadrados, abordado naquela disciplina. Introduz-se, no entanto, alinearização e a resolução com os softwares já referidos.O segundo e terceiro exercícios são sobre modelos não lineares. No segundo os alunos
terão que recorrer, além dos conhecimentos sobre mínimos quadrados não lineares, maisconcretamente sobre o método de Gauss-Newton, às equações diferenciais, abordadasno início do semestre desta disciplina. São apresentadas resoluções com a calculadoracientífica e com os softwares CONUM e MATLAB.Finalmente, no terceiro exercício, a ser resolvido pelo mesmo método, os alunos terão
que recordar de Métodos Numéricos I sobre integração numérica, uma das fórmulas com-postas. Para este exercício apenas se introduzem (na aula) alguns passos, propondo-sea resolução total com calculadora científica e com o software CONUM como trabalho decasa. Apresenta-se ainda um pequeno programa de proposta de resolução em MATLAB.
13

CAPÍTULO 4. EXERCÍCIOS PROPOSTOS 14
4.1 Exercício 1
Os modelos de crescimento de populações microbianas são muito importantes em várioscampos da engenharia. Para este tipo de modelos é fundamental assumir que a taxa devariação da população (dp
dt) é proporcional à população actual (p) a qualquer momento
(t), ou na forma de equaçãodp
dt= kp (4.1)
em que k é um factor de proporcionalidade chamado taxa específica de crescimento, e estáem (unidades de tempo)−1. Se k for constante, a solução da equação (4.1) será
p(t) = p0ekt, (4.2)
em que p0 é a população quando t = 0. Como pode ser observado pela equação (4.2), p(t)aproxima-se de infinito à medida que t aumenta, o que é incomportável para sistemas reais.Assim, o modelo tem que ser modificado de forma a tornar-se mais realista. Em primeirolugar, não é razoável assumir k constante à medida que t aumenta, uma vez que à medidaque p se aproxima de infinito os organismos a serem estudados ficam limitados por factores,tais como falta de alimentação e produção de resíduos tóxicos. Uma forma de exprimireste caso matematicamente é usar um modelo de taxa de saturação de crescimento, talque
k = kmaxf
K + f(4.3)
em que kmax é a taxa máxima de crescimento em abundância de alimento (f) e K é aconstante de meia saturação, ou seja, K é a quantidade de alimento disponível que suportauma taxa de crescimento igual a metade da máxima.Suponha-se que a população p representa uma levedura para produção de cerveja
comercial e f é a concentração da fonte de carbono a ser fermentada. Apresentam-se deseguida os resultados obtidos em laboratório de k versus f para as leveduras.
Tabela 4.1: Valores obtidos em laboratório para a taxa de crescimento em dias (k),para alguns valores de concentração da fonte de carbono a ser fermentada em mg/L (f).
f 7 9 15 25 40 75 100 150k 0.29 0.37 0.48 0.65 0.80 0.97 0.99 1.00
.
Determine para esta levedura, através da técnica dos mínimos quadrados e usando ainformação dos dados obtidos experimentalmente, apresentados na tabela acima, kmax eK. Verifique se o modelo se ajusta bem aos dados experimentais [3].

CAPÍTULO 4. EXERCÍCIOS PROPOSTOS 15
4.2 Exercício 2
A cinética do crescimento de leveduras pode ser descrita pela equação diferencial
dy1dt= k1y1
µ1− y1
k2
¶. (4.4)
O termo³1− y1
k2
´representa a cessação de crescimento devido à limitação de nutrientes,
à semelhança do que acontecia no Exercício 1.Este modelo tem sido usado com bastante sucesso na produção de penicillium chryso-genum, um organismo produtor de penicilina. A taxa de produção deste antibiótico emunidades por mL (y2), num fermentador batch em condições rigorosamente controladas,é proporcional à concentração de células em peso seco (y1) e pode ser quantificada pelaequação
dy2dt= k3y1 − k4y2. (4.5)
Os dados experimentais apresentados na tabela seguinte representam duas experiênciasrealizadas em condições de operação semelhantes.
Tabela 4.2: Valores laboratoriais obtidos em duas experiências ao longo do tempo, emcondições de operação semelhantes, para a concentração de células, em percentagem depeso seco (y1) e concentração de penicilina produzida, em unidades/mL (y2).
Experiência no1 Experiência no2
Tempo y1 y20 0.40 0.01022 0.99 0.00893446 1.95 0.14465870 2.52 0.68548294 3.09 1.6118106118 4.06 2.2170130142 4.48 2.8096154166 4.25 2.8738178190 4.36 2.8828
y1 y20.18 0.00.12 0.00.48 0.00891.46 0.06421.56 0.22661.73 0.43731.99 0.69432.62 1.24592.88 1.43153.43 2.04023.37 1.92783.92 2.18483.96 2.42043.58 2.46153.58 2.28303.34 2.70783.47 2.6542

CAPÍTULO 4. EXERCÍCIOS PROPOSTOS 16
Pretendem-se estimar as constantes k1,k2, k3 e k4 usando o método de Gauss-Newtonpara mínimos quadrados não lineares. Use como aproximação inicial aos parâmetros osvalores k1 = 0.1, k2 = 4, k3 = 0.02 e k4 = 0.02. Para resolver as equações diferenciaisdeve usar equações variacionais e aplicar o método de Runge-Kutta de segunda ordem.Para condições iniciais de y1(0) e y2(0), use os valores fornecidos em laboratório para otempo inicial t = 0 horas, e como valores iniciais das equações variacionais use sempreyi(0) = 0, i = 3, . . . , 10 [4].

CAPÍTULO 4. EXERCÍCIOS PROPOSTOS 17
4.3 Exercício 3
Num biofilme, a velocidade intrínseca do consumo de substrato limitante é, na maior partedos casos, descrita pela cinética de Monod
rf = rfmax
Cf
Cf +Ks. (4.6)
Apesar de ser admitido numerosas vezes, e por uma questão de simplicidade, a aplicaçãonesta expressão de parâmetros cinéticos determinados para culturas em suspensão, istoparece pouco credível. Isto porque num biofilme os microrganismos estão mais próximose existe uma matriz polimérica que envolve as células, o que inevitavelmente afecta aspropriedades fisico-químicas do meio envolvente, para além de induzir resistências difu-sionais ao transporte de metabolitos. Propõe-se, com base em trabalhos laboratoriaisefectuados em biofilmes de Pseudomonas flurescens, comparar os resultados obtidos paraos parâmetros cinéticos com os existentes para culturas em suspensão e assim obter ummodelo válido para estas condições.O efeito da resistência difusional interna na velocidade de reacção pode ser estimado
pelo factor de eficiência, que representa a razão entre a velocidade de reacção observávele a velocidade de reacção teórica, caso não existissem limitações difusionais no interior dobiofilme.A velocidade observável por unidade de área de biofilme pode ser representada pela
seguinte equação:
rfa =
Z 1
0
LfrfmaxCf (x)
Ks
Cs+ Cf (x)
dx, (4.7)
em que rfmaxrepresenta a velocidade de consumo de substrato máxima por unidade de
área de biofilme, Ks a taxa específica de consumo de substrato, Cs a concentração desubstrato à superfície do biofilme, Cf (x) o perfil de concentração de substrato ao longodo biofilme e Lf a espessura do biofilme. A variável independente x representa a espessuraao longo do biofilme.Pretende-se minimizar a diferença entre os valores experimentais e teóricos através da
técnica dos mínimos quadrados, ou seja,
minnXi=1
·rfi −
Z 1
0
rfmaxLfiCsiCf (x)
Ks + CsiCf (x)dx
¸2. (4.8)
O modelo pretendido é então
M = rfmaxLfCs
Z 1
0
Cf (x)
Ks + CsCf (x)dx, (4.9)
em que os parâmetros a determinar pela técnica dos mínimos quadrados são rfmaxe Ks.
É necessário determinar previamente o integral através de integração numérica, fórmula

CAPÍTULO 4. EXERCÍCIOS PROPOSTOS 18
composta de Simpson. Para isso vão usar-se 21 pontos obtidos através de uma estimativacom um espaçamento de 0.05, para cada um dos casos em estudo em que se formou biofilmepara 5 números de Reynolds diferentes, ou seja, para diferentes condições de fluxo (Tabela4.3).
Tabela 4.3: Dados simulados para Cf , considerando uma reacção de primeira ordemno interior do biofilme, para cada uma das cinco condições de formação de biofilme.
x Cf1(x) Cf2(x) Cf3(x) Cf4(x) Cf5(x)
0 0.312651 0.172789 0.021538 0.027667 0.0022500.05 0.313855 0.174150 0.022098 0.028333 0.0023810.10 0.318072 0.178231 0.023776 0.030250 0.0027880.15 0.324699 0.185034 0.026713 0.033583 0.0035210.20 0.333735 0.193878 0.031049 0.038417 0.0046640.25 0.346386 0.206122 0.036923 0.045083 0.0063490.30 0.360843 0.221769 0.044755 0.053833 0.0084230.35 0.378916 0.240136 0.054825 0.065000 0.0120830.40 0.400602 0.261905 0.068392 0.079167 0.0170310.45 0.424699 0.288435 0.083916 0.096667 0.0238200.50 0.453012 0.318367 0.104895 0.119167 0.0333720.55 0.484940 0.353741 0.130769 0.146667 0.0469510.60 0.521084 0.393878 0.164336 0.181667 0.0659380.65 0.561446 0.440136 0.205594 0.246667 0.0966630.70 0.608434 0.493197 0.257343 0.277500 0.1300350.75 0.656627 0.553061 0.322378 0.343333 0.1829690.80 0.710843 0.621769 0.404196 0.425000 0.2566170.75 0.771084 0.700680 0.506993 0.526667 0.3601840.90 0.843373 0.789116 0.635664 0.651667 0.5063290.95 0.915663 0.884354 0.797203 0.807500 0.7123131.00 1 1 1 1 1
Apresentam-se ainda os resultados obtidos em laboratório da espessura do biofilme(Lf), concentração de substrato à superfície do biofilme (Cs) e estimativas para a taxa decrescimento máxima, rfmax
, para cada um dos casos (Tabela 4.4).
Tabela 4.4: Dados experimentais para cada uma das cinco situações estudadas.
i 1 2 3 4 5
Lfi 460× 10−6 672× 10 776× 10−6 979× 10−6 129× 10−5Csi 16.6× 103 14.7× 10−3 14.3× 10−3 12.0× 10−3 8.69× 10−3rfi 5.47× 10−8 6.71× 10−8 5.25× 10−8 8.19× 10−8 9.78× 10−8
Quer a altura de biofilme, x, quer a concentração de substrato, Cf , encontram-seadimensionadas.

CAPÍTULO 4. EXERCÍCIOS PROPOSTOS 19
Os valores iniciais de rfmaxe Ks foram obtidos para culturas análogas em suspensão,
e os seus valores são, respectivamente, 0.376344× 10−3 e 0.9804× 10−1 [8].

Capítulo 5
Resolução dos exercícios propostos
Nesta aula, a resolução dos exercícios propostos será abordada de três formas distintas.Na primeira, que se denominará resolução com calculadora científica, os algoritmos cor-respondentes aos métodos pretendidos vão ser seguidos e será usada apenas uma máquinacalculadora científica como auxílio aos cálculos. Serão empregues sempre seis casas deci-mais nos cálculos, apesar dos resultados (intermédios e finais) serem apresentados apenascom quatro, por uma questão de leveza da notação.De seguida, far-se-á uma resolução recorrendo ao auxílio do software CONUM (de
COmputação NUMérica), que é uma aplicação desenvolvida em C++, que corre em am-biente Windows e que faz parte do livro de Fernandes [6]. Por defeito, o software CONUMapresenta os resultados com seis casas decimais. Para alterar esta opção pode recorrer-se ao menu opções . De qualquer forma, mais uma vez, e apenas por uma questão denotação adoptada, os resultados serão apresentados com apenas quatro casas decimais.A última abordagem dos exercícios será com o software MATLAB (de MAtrix LABo-
ratory), que é um sistema interactivo, baseado na representação matricial para a resoluçãode problemas. Trata-se de um software de computação numérica que integra computação,visualização e programação [7]. O software MATLAB apresenta, por defeito, os resultadoscom quatro casas decimais. Esta opção pode ser alterada através do comando ’format ’.Para terminar, faz-se uma visualização, através de um gráfico construído emMATLAB,
do ajuste do modelo aos pontos experimentais.
20

CAPÍTULO 5. RESOLUÇÃO DOS EXERCÍCIOS PROPOSTOS 21
5.1 Resolução do Exercício 1
5.1.1 Resolução com calculadora científica
A resolução deste exercício com calculadora científica pode dividir-se em cinco etapas. Naprimeira, procede-se à linearização do modelo, na segunda, faz-se o cálculo dos polinómiosortogonais e coeficientes do modelo linearizado e a seguir, determinam-se os parâmetrospretendidos kmax eK. Para finalizar, num quarto passo, apresenta-se o modelo pretendido,seguido do cálculo do resíduo total para se ter uma ideia da qualidade do ajuste do modelo,no quinto e último passo.
1. Linearização do modeloPode transformar-se este modelo não linear num outro linear, pela simples inversão
dos termos:1
k=
K + f
kmaxf=
K
kmaxf+
1
kmax,
que de uma forma mais simplificada vem
y = ax+ b
com y = 1k, x = 1
f, a = K
kmaxe b = 1
kmax, o que permite estimar K e kmax através da
técnica dos mínimos quadrados lineares, modelo polinomial.
2. Cálculo dos polinómios ortogonais e coeficientes do modeloPara garantir que o modelo calculado é estável, vai recorrer-se aos polinómios ortogo-
nais. Assim, o modelo (forma polinomial de grau um) será do tipo
p1(x) = c0P0(x) + c1P1(x),
em que P0(x) e P1(x) são respectivamente os polinómios ortogonais de grau 0 e 1, e c0 ec1 são os coeficientes do modelo. Usando a fórmula de recorrência
P1(x) = A0 (x−B0)P0(x)− C0P−1(x),
P0(x) = 1,
A0 = 1,
P−1(x) = 0 (por convenção),
C0 = 0,
B0 =hxP0(x), P0(x)ihP0(x), P0(x)i =
8Pi=1
xi
8Pi=1
1
,

CAPÍTULO 5. RESOLUÇÃO DOS EXERCÍCIOS PROPOSTOS 22
c0 =
8Pi=1
yiP0 (xi)
8Pi=1
P0 (xi)2
=
8Pi=1
yi
8Pi=1
1
,
c1 =
8Pi=1
yiP1 (xi)
8Pi=1
P1 (xi)2
.
Para facilitar o cálculo dos somatórios, pode construir-se uma tabela.
Tabela 5.1: Cálculo dos somatórios necessários ao cálculo dos polinómios ortogonais edos parâmetros do modelo.
xi³1fi
´yi³1ki
´P1(xi) yiP1(xi) P1(xi)
2
0.1429 3.4483 0.0909 0.3135 0.00830.1111 2.7027 0.0592 0.1599 0.00350.0667 2.0833 0.0147 0.0307 0.00020.0400 1.5383 −0.0120 −0.0184 0.00010.0250 1.2500 −0.0270 −0.0337 0.00070.0133 1.0309 −0.0386 −0.0398 0.00150.0100 1.0101 −0.0420 −0.0424 0.00180.0067 0.9346 −0.0453 −0.0423 0.0021
8Pi=1
0.4156 13.9984 – 0.3274 0.0182
Com base nesta tabela, obtém-se sucessivamente
B0 = 0.0520,
P1(x) = x− 0.0520,c0 = 1.7498,
c1 = 18.0362
e finalmente
p1(x) = 1.7498 + 18.0362 (x− 0.0520) = 18.0362x+ 0.8127,
logoa = 18.0362 e b = 0.8127.

CAPÍTULO 5. RESOLUÇÃO DOS EXERCÍCIOS PROPOSTOS 23
3. Determinação dos parâmetros kmax e KComo o objectivo inicial era estimar kmax eK, facilmente se calculam estes parâmetros
a partir do modelo, obtendo-se
kmax =1
b=
1
0.8127= 1.2304
eK = a× kmax = 18.0362× 1.2304 = 22.1918.
5. Modelo obtidoO modelo obtido foi
k = 1.2304f
22.1918 + f.
4. Cálculo do resíduo totalPara se ter uma ideia do ajuste do modelo, calcula-se o resíduo total dado por
S =8X
i=1
(yi − p1 (xi))2 .
Constrói-se novamente uma tabela para facilitar os cálculos do somatório.
Tabela 5.2: Cálculo do somatório necessário ao cálculo do resíduo total.
xi yi p1(xi) yi − p1(xi) (yi − p1(xi))2
0.1429 3.4483 3.3893 0.0589 0.00350.1111 2.7027 2.8168 −0.1141 0.01300.0667 2.0833 2.0152 0.0682 0.00460.0400 1.5385 1.5342 0.0043 0.00000.0250 1.2500 1.2636 −0.0136 0.00020.0133 1.0309 1.0532 −0.0223 0.00050.0100 1.0101 0.9931 0.0170 0.00030.0067 0.9346 0.9330 0.0016 0.0000
8Pi=1
– – – – 0.0221
S = 0.0221.O resíduo total obtido é pequeno quando comparado com a ordem de grandeza dos valoresda variável yi = 1
ki, o que significa que este modelo se ajusta de forma eficiente aos dados
experimentais fornecidos.

CAPÍTULO 5. RESOLUÇÃO DOS EXERCÍCIOS PROPOSTOS 24
5.1.2 Resolução com o software CONUM
A resolução deste exercício com CONUM pode dividir-se em seis etapas. Na primeira,procede-se à linearização do modelo, na segunda faz-se a introdução de dados no programa,de seguida constroem-se os polinómios ortogonais e coeficientes do modelo linearizado.Determinam-se, então, os parâmetros pretendidos kmax e K. Para finalizar, num quintopasso, apresenta-se o modelo pretendido, seguido do cálculo do resíduo total para se teruma ideia da qualidade do ajuste do modelo, no sexto e último passo.
1. Linearização do modeloO passo 1 é o mesmo que para a resolução com calculadora científica.
2. Introdução dos dados no programa
(a) Selecciona-se no menu Problemas Mínimos Quadrados e de seguida escolhe-sea rotinaMQPOLI-Modelo Polinomial, que é a adequada ao problema em questão.
(b) Escolhe-se o grau do polinómio, que neste caso é um.

CAPÍTULO 5. RESOLUÇÃO DOS EXERCÍCIOS PROPOSTOS 25
(c) Introduz-se o número de pontos disponíveis, relativamente aos quais existe infor-mação (dados experimentais). Neste problema são oito.
(d) (i) De seguida introduzem-se os valores da variável independente ( 1f),

CAPÍTULO 5. RESOLUÇÃO DOS EXERCÍCIOS PROPOSTOS 26
(ii) seguidos dos respectivos valores da função (1k).
(e) É pedido, então, pelo programa o ponto interpolador caso se pretenda conhecer ovalor dado pelo modelo em determinado ponto desconhecido (estimativa de 1
k). Neste pro-
blema, como apenas se pretendem calcular os parâmetros do modelo, o ponto interpoladorescolhido não terá qualquer influência no resultado.

CAPÍTULO 5. RESOLUÇÃO DOS EXERCÍCIOS PROPOSTOS 27
(f) Finalmente, o programa devolve a informação quanto aos coeficientes da relação derecorrência, B0, e coeficientes do polinómio, c0 e c1. Fornece ainda o valor do polinómiocalculado no ponto interpolador assim como o resíduo total (soma dos quadrados dosresíduos).
3. Construção do polinómioSabendo que P0(x) = 1 e P1(x) = x − B0 (ver resolução com calculadora científica,
ponto 2 de I), obtém-se
p1(x) = 1.7498 + 18.0365 (x− 0.0520) = 18.0365x+ 0.8127.
4. Determinação dos parâmetros kmax e KO procedimento é o mesmo que na resolução com calculadora científica, ponto 3 de I.
Obtêm-se os valoreskmax =
1
0.8127= 1.2304
eK = 18.036514× 1.230425 = 22.1926.

CAPÍTULO 5. RESOLUÇÃO DOS EXERCÍCIOS PROPOSTOS 28
5. Modelo obtidoO modelo obtido foi
k = 1.2304f
22.1926 + f.
6. Cálculo do resíduo totalNeste caso não é necessário fazer qualquer cálculo adicional, já que o programa dá este
valor directamente,S = 0.0221.

CAPÍTULO 5. RESOLUÇÃO DOS EXERCÍCIOS PROPOSTOS 29
5.1.3 Resolução com o software MATLAB
A resolução deste exercício com MATLAB pode dividir-se em seis etapas, que são exac-tamente as mesmas que na resolução com CONUM em 5.1.2.
1. Linearização do modeloO passo 1 é o mesmo que para a resolução com calculadora científica.
2. Introdução dos dados no programa
(a) Começa-se por introduzir os valores de x e y, ou seja, da variável independente³1f
´e da variável dependente
¡1k
¢, na forma de vectores. Em MATLAB os vectores são
fornecidos entre parêntesis rectos e os valores são separados por espaços.
(b) A função disponível em MATLAB para estimação de parâmetros em modeloslineares polinomiais, através da técnica dos mínimos quadrados é a função polyfit, e asua sintaxe é a seguinte:
p = polyfit(x, y, n),
em que x é o conjunto de valores da variável independente, y é o conjunto de valoresda variável dependente que correspondem aos valores de x e n é o grau do polinómioque se pretende estimar. O programa vai devolver os valores de p1, p2, . . . , pn+1, quecorrespondem aos coeficientes do polinómio, já na forma
p(x) = p1xn + p2x
n−1 + · · ·+ pnx+ pn+1.
Neste exercício, uma vez que o polinómio é de grau um, surgem dois valores, p1 e p2, e opolinómio pretendido terá a forma
p(x) = p1x+ p2.

CAPÍTULO 5. RESOLUÇÃO DOS EXERCÍCIOS PROPOSTOS 30
3. Construção do polinómioObteve-se do programa p1 = 18.0365 e p2 = 0.8127, logo, o polinómio pretendido será
p(x) = 18.0365x+ 0.8127.
4. Determinação dos parâmetros kmax e KO procedimento é o mesmo que na resolução com calculadora científica, ponto 3 de
5.1.1. Obtêm-se os valoreskmax =
1
0.8127= 1.2305
eK = 18.0365× 1.2305 = 22.1939.
5. Modelo obtidoO modelo obtido foi
k = 1.2305f
22.1939 + f.
6. Cálculo do resíduo total
(a) Avaliação do modelo nos pontos experimentaisA função do MATLAB que permite avaliar os pontos no polinómio obtido pela estimaçãoda função ’polyfit’ é a função ’polyval’ . A sintaxe é a seguinte:
f = polyval(p, x),
em que f vai ser o vector com os valores do polinómio estimado nos pontos do vector x.
(b) Cálculo do resíduo totalPara calcular o resíduo total para o modelo linear polinomial o MATLAB não possui
nenhuma função específica, bastando para isso introduzir a sua fórmula, que é a seguinte:
resıduo = sum((y − f).ˆ2),

CAPÍTULO 5. RESOLUÇÃO DOS EXERCÍCIOS PROPOSTOS 31
ou seja, o resíduo é o somatório dos quadrados das diferenças entre os valores da funçãoexperimentais (y) e os valores obtidos pelo modelo estimado (f).
Obteve-se, assim,resıduo = 0.0221.

CAPÍTULO 5. RESOLUÇÃO DOS EXERCÍCIOS PROPOSTOS 32
5.1.4 Comparação gráfica entre os dados experimentais e as es-timativas dadas pelo modelo calculado
O modelo obtido, como pode ver-se em cada uma das resoluções propostas, é sempre omesmo, devendo-se as pequenas diferenças a erros de arredondamento, mais acentuadosnos cálculos com calculadora científica, já que alguns resultados intermédios são arredon-dados quando da sua apresentação. Como pode ver-se pela Figura 5.1, o ajuste do modeloaos pontos experimetais é bastante bom.Este gráfico foi realizado pelo MATLAB através da função ’plot ’, cuja sintaxe é
plot(x, y, xe, ye,0 o0)
com x e y os vectores que contém os dados obtidos directamente a partir do modelocalculado e xe e ye os correspondentes valores experimentais. O parâmetro ’o’ representao símbolo com o qual se pretende que apareça este último conjunto de valores. A legendaé adicionada com o comando ’legend ’ e os nomes dos eixos vão ser dados, respectivamente,pelas funções ’xlabel ’ e ’ylabel ’.
Figura 5.1: Comparação entre os dados experimentais e os obtidos através do modelo.

CAPÍTULO 5. RESOLUÇÃO DOS EXERCÍCIOS PROPOSTOS 33
5.2 Resolução do Exercício 2
Na resolução deste exercício é mostrado apenas o cálculo para o primeiro conjunto dedados (Experiência 1) e para uma iteração. Os resultados finais são apresentados apenasna resolução com MATLAB, já que nos outros casos se torna muito complicado e morosoefectuar mais cálculos.
5.2.1 Resolução com calculadora científica
A resolução do Exercício 2 com calculadora científica segue cinco etapas na realização decada iteração. Na primeira faz-se o cálculo das equações variacionais, na segunda resolve-se o sistema de equações diferenciais, na terceira constroem-se as matrizes do Jacobiano,na quarta resolve-se o sistema de equações lineares para determinar a direcção de procurae, finalmente, na quinta etapa calcula-se a nova estimativa para os parâmetros k1, k2, k3 ek4.
1. Cálculo das equações variacionaisO cálculo das equações variacionais é necessário para a construção das matrizes do
Jacobiano, que são dadas por
Ai =
∂yi,1∂k1
· · · ∂yi,1∂kn· · · · · · · · ·
∂yi,m∂k1
· · · ∂yi,m∂kn
,
com i = 1, 2 (número de equações do modelo), n = 4 (número de parâmetros do modelo),m = 9 (número de pontos experimentais).As equações variacionais são obtidas da seguinte maneira:
∂
∂k
µdy
dt
¶=
∂g
∂k
e rearranjando a ordem de diferenciação
d
dt
µ∂y
∂k
¶=
∂g
∂k.
Estas equações serão integradas juntamente com as equações do modelo de forma a seremobtidas as matrizes do Jacobiano. Assim, as equações do modelo são
dy1dt= k1y1
µ1− y1
k2
¶(5.1)

CAPÍTULO 5. RESOLUÇÃO DOS EXERCÍCIOS PROPOSTOS 34
edy2dt= k3y1 − k4y2 (5.2)
e as equações variacionais
d
dt
µ∂y1∂k1
¶=
µk1 − 2k1
k2y1
¶∂y1∂k1
+ y1 − y21k2, (5.3)
d
dt
µ∂y1∂k2
¶=
µk1 − 2k1
k2y1
¶∂y1∂k2
+ k1
µy1k2
¶2, (5.4)
d
dt
µ∂y1∂k3
¶=
µk1 − 2k1
k2y1
¶∂y1∂k3
, (5.5)
d
dt
µ∂y1∂k4
¶=
µk1 − 2k1
k2y1
¶∂y1∂k4
, (5.6)
d
dt
µ∂y2∂k1
¶= k3
µ∂y1∂k1
¶− k4
µ∂y2∂k1
¶, (5.7)
d
dt
µ∂y2∂k2
¶= k3
µ∂y1∂k2
¶− k4
µ∂y2∂k2
¶, (5.8)
d
dt
µ∂y2∂k3
¶= k3
µ∂y1∂k3
¶− k4
µ∂y2∂k3
¶+ y1 (5.9)
ed
dt
µ∂y2∂k4
¶= k3
µ∂y1∂k4
¶− k4
µ∂y2∂k4
¶− y2. (5.10)
Os valores iniciais e a nomenclatura adoptada na resolução encontram-se na Tabela 5.3.

CAPÍTULO 5. RESOLUÇÃO DOS EXERCÍCIOS PROPOSTOS 35
Tabela 5.3: Valores iniciais e nomenclatura adoptada para a resolução do Exercício 2.
Variáveis dependentes Nomenclatura Valor inicialy1 y1 0.40y2 y2 0.0
Variáveis variacionais∂y1∂k1
y3 0.0
∂y1∂k2
y4 0.0
∂y1∂k3
y5 0.0
∂y1∂k4
y6 0.0
∂y2∂k1
y7 0.0
∂y2∂k2
y8 0.0
∂y2∂k3
y9 0.0
∂y2∂k4
y10 0.0

CAPÍTULO 5. RESOLUÇÃO DOS EXERCÍCIOS PROPOSTOS 36
2. Resolução do sistema de equações diferenciaisEste sistema de 10 equações diferenciais ordinárias com valor inicial será resolvido pelo
método de Runge-Kutta de segunda ordem. As equações deste método são
y1,i+1 = y1,i +1
2(p1 + q1),
y2,i+1 = y2,i +1
2(p2 + q2),
· · ·y10,i+1 = y10,i +
1
2(p10 + q10),
em que
p1 = hf1 (xi, y1,i, y2,i, . . . , yn,i)
q1 = hf1 (xi+1, y1,i + p1, y2,i + p2, . . . , y10,i + p10) ,
p2 = hf2 (xi, y1,i, y2,i, . . . , y10,i)
q2 = hf2 (xi+1, y1,i + p1, y2,i + p2, . . . , y10,i + p10) ,
· · ·
p10 = hf10 (xi, y1,i, y2,i, . . . , y10,i)
q10 = hf10 (xi+1, y1,i + p1, y2,i + p2, . . . , y10,i + p10) .
A sequência de cálculos será calcular inicialmente os valores de p1, p2, . . . , p10 seguidosde q1, q2, . . . , q10. Só então se calculam os valores de y1,i+1, y2,i+1, . . . , y10,i+1, referentesao passo i, i = 0, 1, . . .. Para a primeira etapa o valor do espaçamento é h = 22. Nas

CAPÍTULO 5. RESOLUÇÃO DOS EXERCÍCIOS PROPOSTOS 37
restantes etapas, h = 24. O sistema de equações diferenciais resultante será
dy1dt= k1y1
µ1− y1
k2
¶dy2dt= k3y1 − k4y2
dy3dt=
µk1 − 2k1
k2y1
¶y3 + y1 − y21
k2dy4dt=
µk1 − 2k1
k2y1
¶y4 + k1
µy1k2
¶2dy5dt=
µk1 − 2k1
k2y1
¶y5
dy6dt=
µk1 − 2k1
k2y1
¶y6
dy7dt= k3y3 − k4y7
dy8dt= k3y4 − k4y8
dy9dt= k3y5 − k4y9 + y1
dy10dt
= k3y6 − k4y10 − y2
e substituindo os valores iniciais dos parâmetros k1 = 0.1, k2 = 4, k3 = 0.02 e k4 = 0.02,obtém-se
f1 = 0.1y1 (1− 0.25y1)f2 = 0.02 (y1 − y2)f3 = (0.1− 0.05y1) y3 + y1 − 0.25y21f4 = (0.1− 0.05y1) y4 + 0.00625y21f5 = (0.1− 0.05y1) y5f6 = (0.1− 0.05y1) y6f7 = 0.02 (y3 − y7)f8 = 0.02 (y4 − y8)f9 = 0.02 (y5 − y9) + y1f10 = 0.02 (y6 − y10)− y2

CAPÍTULO 5. RESOLUÇÃO DOS EXERCÍCIOS PROPOSTOS 38
1aetapa
p1 = h [0.1y1,0 (1− 0.25y1,0)] = 0.7920p2 = h [0.02 (y1,0 − y2,0)] = 0.1760p3 = h
£(0.1− 0.05y1,0) y3,0 + y1,0 − 0.25y21,0
¤= 7.9200
p4 = h£(0.1− 0.05y1,0) y4,0 + 0.00625y21,0
¤= 0.0220
p5 = h [(0.1− 0.05y1,0) y5,0] = 0.0000p6 = h [(0.1− 0.05y1,0) y6,0] = 0.0000p7 = h [0.02 (y3,0 − y7,0)] = 0.0000p8 = h [0.02 (y4,0 − y8,0)] = 0.0000p9 = h [0.02 (y5,0 − y9,0) + y1,0] = 8.8000p10 = h [0.02 (y6,0 − y10,0)− y2,0] = 0.0000
q1 = h [0.1 (y1,0 + p1) (1− 0.25 (y1,0 + p1))] = 1.8409q2 = h [0.02 ((y1,0 + p1)− (y2,0 + p2))] = 0.4470
q3 = h£(0.1− 0.05 (y1,0 + p1)) (y3,0 + p3) + (y1,0 + p1)− 0.25 (y1,0 + p1)
2¤ = 25.4485q4 = h
£(0.1− 0.05 (y1,0 + p1)) (y4,0 + p4) + 0.00625 (y1,0 + p1)
2¤ = 0.2149q5 = h [(0.1− 0.05 (y1,0 + p1)) (y5,0 + p5)] = 0.0000q6 = h [(0.1− 0.05 (y1,0 + p1)) (y6,0 + p6)] = 0.0000q7 = h [0.02 ((y3,0 + p3)− (y7,0 + p7))] = 3.4848q8 = h [0.02 ((y4,0 + p4)− (y8,0 + p8))] = 0.0097q9 = h [0.02 ((y5,0 + p5)− (y9,0 + p9)) + (y1,0 + p1)] = 22.3520q10 = h [0.02 ((y6,0 + p6)− (y10,0 + p10))− (y2,0 + p2)] = −3.8720
y1,1 = y1,0 + 0.5 (p1 + q1) = 1.7165y2,1 = y2,0 + 0.5 (p2 + q2) = 0.3115y3,1 = y3,0 + 0.5 (p3 + q3) = 16.6843y4,1 = y4,0 + 0.5 (p4 + q4) = 0.1185y5,1 = y5,0 + 0.5 (p5 + q5) = 0.0000y6,1 = y6,0 + 0.5 (p6 + q6) = 0.0000y7,1 = y7,0 + 0.5 (p7 + q7) = 1.7424y8,1 = y8,0 + 0.5 (p8 + q8) = 0.0048y9,1 = y9,0 + 0.5 (p9 + q9) = 15.5760y10,1 = y10,0 + 0.5 (p10 + q10) = −1.9360
Para as restantes etapas, procede-se de modo análogo. Os resultados obtidos encon-tram-se resumidos na Tabela 5.4.

CAPÍTULO 5. RESOLUÇÃO DOS EXERCÍCIOS PROPOSTOS 39
Tabela 5.4: Resultados obtidos na integração do sistema de equações diferenciais, pelométodo de Runge-Kutta de segunda ordem da segunda à oitava etapa.
t 46 70 94 118 142 166 190
p1 2.3518 2.0072 2.1594 2.2028 2.2100 2.2110 2.2111p2 0.6744 0.6819 0.1175 −0.2029 −0.3877 −0.5015 −0.5734p3 29.1944 45.7852 58.0681 54.5201 51.2912 50.4388 50.2817p4 0.4822 0.3531 0.4857 0.5400 0.5511 0.5526 0.5527p5 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000p6 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000p7 7.1721 −19.5281 −28.0072 −24.1100 −19.6756 −17.8432 −17.0378p8 0.0545 0.3328 0.1103 −0.0198 −0.0825 −0.1170 −0.1382p9 33.7186 34.0946 5.8744 −10.1453 −19.3867 −25.0771 −28.6680p10 −6.5472 −26.1211 −36.6638 −37.1934 −33.7812 −29.3487 −25.1182t 46 70 94 118 142 166 190
q1 −0.1665 −2.3590 −2.2793 −2.2240 −2.2128 −2.2113 −2.2111q2 1.4795 1.3181 1.0976 0.9518 0.8592 0.8005 0.7632q3 −115.5303 −88.8205 −56.5282 −46.5208 −48.9435 −49.9937 −50.2090q4 0.9917 −0.6048 −0.6272 −0.5721 −0.5555 −0.5531 −0.5528q5 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000q6 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000q7 17.7428 11.8223 13.3090 13.6324 14.3885 14.9321 15.2756q8 0.2598 0.3426 0.2905 0.2489 0.2216 0.2044 0.1934q9 73.9760 65.9029 54.8810 47.5920 42.9597 40.0229 38.1582q10 −19.5895 −29.9484 −21.8849 −14.4708 −8.2606 −3.2243 0.6992
t 46 70 94 118 142 166 190
y1 2.8091 2.6332 2.5733 2.5627 2.5613 2.5611 2.5611y2 1.3885 2.3884 2.9960 3.3705 3.6062 3.7557 3.8506y3 −26.4837 −48.0014 −47.2314 −43.2318 −42.0579 −41.8354 −41.7991y4 0.8554 0.7296 0.6588 0.6428 0.6406 0.6403 0.6403y5 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000y6 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000y7 14.1998 10.3469 2.9978 −2.2410 −4.8845 −6.3401 −7.2212y8 0.1620 0.4997 0.7001 0.8147 0.8842 0.9283 0.9559y9 69.4233 119.4221 149.7998 168.5231 180.3096 187.7825 192.5276y10 −15.0043 −43.0391 −72.3135 −98.1456 −119.1665 −135.4530 −147.6625

CAPÍTULO 5. RESOLUÇÃO DOS EXERCÍCIOS PROPOSTOS 40
3. Construção das matrizes do JacobianoCom base na tabela anterior, as duas matrizes do Jacobiano resultantes para cada
uma das variáveis dependentes são, de acordo com a definição dada no ponto 1 de 5.2.1:
A1 =
0.0000 0.0000 0.0000 0.000016.6843 0.1185 0.0000 0.0000−26.4837 0.8554 0.0000 0.0000−48.0014 0.7296 0.0000 0.0000−47.2314 0.6588 0.0000 0.0000−43.2318 0.6428 0.0000 0.0000−42.0579 0.6406 0.0000 0.0000−41.8354 0.6403 0.0000 0.0000−41.7991 0.6403 0.0000 0.0000
e
A2 =
0.0000 0.0000 0.0000 0.00001.7424 0.0048 15.5760 −1.936014.1998 0.1620 69.4233 −15.004310.3469 0.4993 119.4221 −43.03912.9978 0.7001 149.7998 −72.3135−2.2410 0.8147 168.5231 −98.1456−4.8845 0.8842 180.3096 −119.1665−6.3401 0.9283 187.7825 −135.4530−7.2212 0.9559 192.5276 −147.6625
4. Resolução do sistema de equações lineares (obtido do método de Gauss-Newton)para determinação da direcção de procuraPretende-se resolver o sistema de equações lineares dado por¡
AT1A1 +AT
2A2¢∆k = AT
1 (y∗1 − y1) +AT
2 (y∗2 − y2)
em que A1 e A2 são as matrizes do Jacobiano anteriormente definidas, ∆k é o vector dadirecção de procura pretendida para calcular as novas estimativas dos parâmetros k1, k2, k3e k4, y∗1 e y
∗2 são os valores experimentais das variáveis dependentes dados na Tabela 4.2 e
y1 e y2 são os valores das variáveis dependentes dados pela estimativa do modelo aquandoda resolução do sistema de equações diferenciais (Tabela 5.4).
(a) Cálculo da matriz dos coeficientes
AT1A1 =
12649.9104 −195.0989 0.0000 0.0000−195.0989 3.3556 0.0000 0.00000.0000 0.0000 0.0000 0.00000.0000 0.0000 0.0000 0.0000
,

CAPÍTULO 5. RESOLUÇÃO DOS EXERCÍCIOS PROPOSTOS 41
AT2A2 =
441.9400 −9.3540 −1141.5550 1848.5585−9.3540 3.9872 830.9604 −526.7926−1141.5550 830.9604 175004.5697 −108935.66321848.5585 −526.7926 −108935.6632 71295.4435
e
AT1A1 +AT
2A2 =
13091.8504 −204.4529 −1141.5550 1848.5585−204.4529 7.3428 830.9604 −526.7926−1141.5550 830.9604 175004.5697 −108935.66321848.5585 −526.7926 −108935.6632 71295.4435
(b) Cálculo do vector dos termos independentes
y∗1 − y1 =
0.400.991.952.523.094.064.484.254.36
−
0.40001.71652.80912.63322.57332.56272.56132.56112.5613
=
0.0000−0.7265−0.8591−0.11320.51671.49731.91871.68891.7989
,
y∗2 − y2 =
0.00000.00890.14460.68541.61182.21702.80962.87382.8828
−
0.00000.31151.38852.38842.99603.37053.60623.75573.8506
=
0.0000−0.3026−1.2439−1.7030−1.3842−1.1535−0.7966−0.8819−0.9678
,
AT1 (y
∗1 − y1) =
−299.61313.86160.00000.0000
,
AT2 (y
∗2 − y2) =
−20.9056−5.4109−1191.7340663.1275

CAPÍTULO 5. RESOLUÇÃO DOS EXERCÍCIOS PROPOSTOS 42
e finalmente
AT1 (y
∗1 − y1) +AT
2 (y∗2 − y2) =
−320.5187−1.5493−1191.7340663.1275
(c)Resolução do sistema de equações lineares por Eliminação de Gauss com Pivotagem
ParcialEscolheu-se este método para a resolução do sistema, já que se trata de um método
directo e estável.
13091.8504 −204.4529 −1141.5550 1848.5585−204.4529 7.3428 830.9604 −526.7926−1141.5550 830.9604 175004.5697 −108935.66321848.5585 −526.7926 −108935.6632 71295.4435
−320.5187−1.5493−1191.7340663.1275
−−−−−−−−−−−−→m21 = 0.0156m31 = 0.0872m41 = −0.1412
13091.8504 −204.4529 −1141.5550 1848.55850.0000 4.1499 813.1329 −497.92410.0000 813.1329 174905.0309 −108774.47660.0000 −497.9241 −108774.4766 71034.4286
−320.5187−6.5548−1219.6819708.38447
−−−−−−−−−−−−−→trocar linhas 2 e 3
13091.8504 −204.4529 −1141.5550 1848.55850.0000 813.1329 174905.0309 −108774.47660.0000 4.1499 813.1329 −497.92410.0000 −497.9241 −108774.4766 71034.4286
−320.5187−1219.6819−6.5548708.38447
−−−−−−−−−−−−→m32 = −0.0051m42 = 0.6124
13091.8504 −204.4529 −1141.5550 1848.55850.0000 813.1329 174905.0309 −108774.47660.0000 0.0000 −79.5186 57.22120.0000 0.0000 −1670.9254 4426.0945
−320.5187−1219.6819−0.3300−38.4909
−−−−−−−−−−−−−→trocar linhas 3 e 4
13091.8504 −204.4529 −1141.5550 1848.55850.0000 813.1329 174905.0309 −108774.47660.0000 0.0000 −1670.9254 4426.09450.0000 0.0000 −79.5186 57.2212
−320.5187−1219.6819−38.4909−0.3300
−−−−−−−−−→m43 = 0.0476
13091.8504 −204.4529 −1141.5550 1848.55850.0000 813.1329 174905.0309 −108774.47660.0000 0.0000 −1670.9254 4426.09450.0000 0.0000 0.0000 −153.4147
−320.5187−1219.6819−38.49091.5018
.

CAPÍTULO 5. RESOLUÇÃO DOS EXERCÍCIOS PROPOSTOS 43
Por substituição inversa vem:
∆k =
−0.0575−2.1870−0.0029−0.0098
.
5. Cálculo das novas estimativas para k1, k2, k3 e k4
knovo = kanterior +∆k =
0.10004.00000.02000.0200
+−0.0575−2.1870−0.0029−0.0098
=
0.04251.81300.01710.0102
,
ou sejak1 = 0.0425, k2 = 1.8130, k3 = 0.0171 e k4 = 0.0102.
O cálculo apresentado diz respeito apenas a uma iteração. O processo iterativo deveriacontinuar, repetindo os passos anteriores, até se obter um vector para ∆k suficientementepequeno.

CAPÍTULO 5. RESOLUÇÃO DOS EXERCÍCIOS PROPOSTOS 44
5.2.2 Resolução com o software CONUM
A resolução em CONUM segue exactamente as mesmas etapas que a resolução com cal-culadora científica.
1. Cálculo das equações variacionaisO passo 1 é o mesmo que para a resolução com calculadora científica.
2. Resolução do sistema de equações diferenciaisTal como na resolução com calculadora científica, a primeira etapa tem que ser re-
solvida separadamente, já que o valor do espaçamento é diferente para este caso. Oprocesso é idêntico ao que se descreve a seguir para a resolução do resto do intervalo.A única diferença é que o valor inicial de x é 0 e o vector de valores iniciais de y é£0.4 0 0 0 0 0 0 0 0 0
¤. O espaçamento é h = 22. Os valores obtidos no fim
desta primeira etapa (Tabela 5.5) serão usados como valores iniciais para as etapas se-guintes, que podem ser resolvidas ao mesmo tempo, uma vez que o espaçamento a partirdaqui é sempre constante.
Tabela 5.5: Valores obtidos em CONUM para a primeira etapa da resolução do sistemade equações diferenciais.
t 22
y1 1.7165y2 0.3115y3 16.6843y4 0.1185y5 0.0000y6 0.0000y7 1.7424y8 0.0048y9 15.5760y10 −1.9360
De seguida, faz-se a introdução dos dados no programa.

CAPÍTULO 5. RESOLUÇÃO DOS EXERCÍCIOS PROPOSTOS 45
(a) Selecciona-se no menu Problemas Equações Diferenciais Ordinárias e deseguida escolhe-se a rotina SISDIF-Sistemas de Equações, que é a adequada ao pro-blema em questão.
(b) Indica-se a dimensão do sistema, ou seja, o número de equações diferenciais, queneste caso são dez.

CAPÍTULO 5. RESOLUÇÃO DOS EXERCÍCIOS PROPOSTOS 46
(c) Introduz-se o vector de funções, que é o mesmo do ponto 2 de 5.2.1. A variávelindependente é denominada aqui por x1 e as variáveis dependentes respectivamente porx2, . . . , x11.
(d) (i) De seguida introduz-se o valor inicial da variável independente, t,

CAPÍTULO 5. RESOLUÇÃO DOS EXERCÍCIOS PROPOSTOS 47
(ii) seguido dos valores iniciais das variáveis dependentes, y1, . . . , y10,
(iii) limite superior do intervalo,

CAPÍTULO 5. RESOLUÇÃO DOS EXERCÍCIOS PROPOSTOS 48
(iv) e espaçamento entre os pontos, h.
(e) Escolhe-se então o tipo de fórmula com a qual se pretende que o problema sejaresolvido. Neste caso é o método de Runge-Kutta (de segunda ordem).

CAPÍTULO 5. RESOLUÇÃO DOS EXERCÍCIOS PROPOSTOS 49
(f) Finalmente, o programa devolve a informação pretendida, ou seja, a solução dosistema de equações diferenciais.
Os resultados destas etapas (dois a oito) não serão apresentados, já que com quatrocasas decimais são praticamente os mesmos que na resolução com calculadora científica.
3. Construção das matrizes do JacobianoEste passo é exactamente igual ao da resolução com calculadora científica.
4. Resolução do sistema de equações lineares para determinação da direcção de procuraPara calcular a matriz dos coeficientes e o vector dos termos independentes, o proce-
dimento é exactamente o mesmo que para a resolução com calculadora científica (pontos4 (a) e 4 (b) de 5.2.1, respectivamente).O sistema será também resolvido através de Eliminação de Gauss com Pivotagem
Parcial. Apresenta-se de seguida o sistema a resolver, bem como os passos a seguir paraa sua resolução em CONUM.
CAPÍTULO 5. RESOLUÇÃO DOS EXERCÍCIOS PROPOSTOS 50
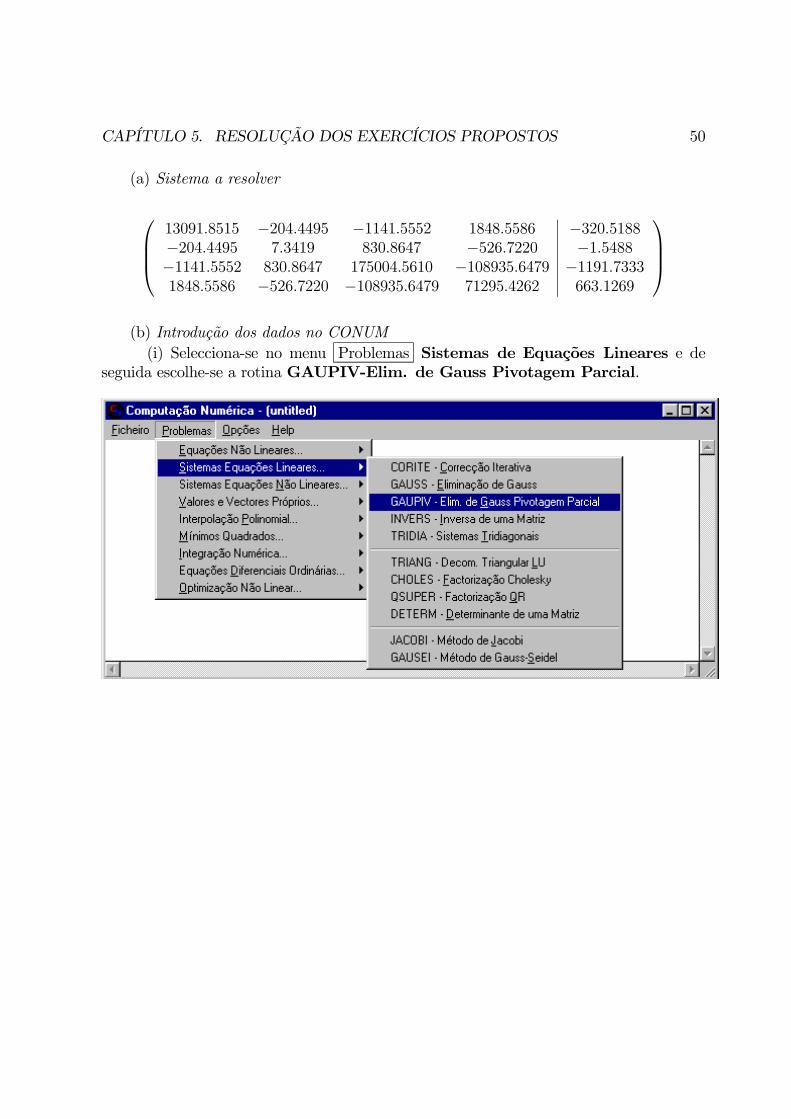
(a) Sistema a resolver
13091.8515 −204.4495 −1141.5552 1848.5586−204.4495 7.3419 830.8647 −526.7220−1141.5552 830.8647 175004.5610 −108935.64791848.5586 −526.7220 −108935.6479 71295.4262
−320.5188−1.5488−1191.7333663.1269
(b) Introdução dos dados no CONUM(i) Selecciona-se no menu Problemas Sistemas de Equações Lineares e de
seguida escolhe-se a rotina GAUPIV-Elim. de Gauss Pivotagem Parcial.

CAPÍTULO 5. RESOLUÇÃO DOS EXERCÍCIOS PROPOSTOS 51
(ii) Introduz-se a dimensão do sistema, ou seja, o número de equações e variáveis,que neste caso são quatro.
(iii) É pedida, então, a matriz dos coeficientes, AT1A1 +AT
2A2,

CAPÍTULO 5. RESOLUÇÃO DOS EXERCÍCIOS PROPOSTOS 52
(iv) bem como o vector dos termos independentes AT1 (y
∗1 − y1) +AT
2 (y∗2 − y2).
(v) Finalmente, o programa devolve a solução pretendida, bem como a matriz doscoeficientes na sua forma triangular superior.

CAPÍTULO 5. RESOLUÇÃO DOS EXERCÍCIOS PROPOSTOS 53
Os valores obtidos para a direcção de procura são
∆k =
−0.0575−2.1868−0.0029−0.0098
.
5. Cálculo das novas estimativas para k1, k2, k3 e k4Este cálculo é idêntico ao realizado com calculadora científica (ver ponto 5 de 5.2.1).
Assim, vem
knovo =
0.04251.81320.01710.0102
,
ou sejak1 = 0.0425, k2 = 1.8132, k3 = 0.0171 e k4 = 0.0102.
Mais uma vez, à semelhança do que acontece na resolução com calculadora científica,o cálculo apresentado diz respeito apenas a uma iteração. O processo deveria repetir-seaté se verificar um valor de ∆k suficientemente pequeno.

CAPÍTULO 5. RESOLUÇÃO DOS EXERCÍCIOS PROPOSTOS 54
5.2.3 Resolução com o software MATLAB
Para a resolução em MATLAB vai realizar-se um pequeno programa que permita resolvero problema. Apesar deste software conter uma função para a resolução de problemasde mínimos quadrados não lineares através do método de Gauss-Newton, não é possível,neste caso, usá-la, uma vez que se trata de um caso particular em que é necessário, emcada iteração, integrar um sistema de equações diferenciais.
1. Cálculo das equações variacionaisO passo 1 é o mesmo que para a resolução com calculadora científica.
2. Elaboração do programa para determinar a direcção de procuraConstrói-se uma m-file com o sistema de equações diferenciais (eqdif.m). É necessário,
aqui, indicar a estimativa dos parâmetros, o vector k, que para facilidade estará numaoutra m-file (kks.m). Assim, torna-se simples alterar este vector após cada nova iteração.
O pequeno programa a construir estará numa terceira m-file (exercício2.m) e vai conter:

CAPÍTULO 5. RESOLUÇÃO DOS EXERCÍCIOS PROPOSTOS 55
• A resolução do sistema de equações diferenciais pelo método de Runge-Kutta, queobedece à seguinte sintaxe
[x, y] = ode45(’eqdif’, xi, y0)
em que x é a variável independente, y é a variável dependente, ’eqdif’ é o nome da m-file onde se encontra o sistema de equações diferenciais a resolver, xi são os valores davariável dependente para os quais se pretende ter a solução do sistema de equaçõesdiferenciais e y0 é o conjunto de valores iniciais para as variáveis dependentes.
• Os valores experimentais das variáveis dependentes y∗1 e y∗2 (Y1E e Y2E).• A construção dos vectores y1 e y2 através da solução do sistema de equações dife-renciais resolvido acima (Y1 = y(:, 1) e Y2 = y(:, 2)).
• A construção das matrizes do Jacobiano A1 e A2 através da solução do sistema deequações resolvido acima (A1 = [y(:, 3) y(:, 4) y(:, 5) y(:, 6)] e A2 = [y(:, 7) y(:, 8)y(:, 9) y(:, 10)]).
• A resolução do sistema de equações lineares, pela eliminação de Gauss com pivota-gem parcial, que obedece à sintaxe
delta = A\b,
em que A é a matriz dos coeficientes (A = AT1A1+AT
2A2) e b é o vector dos termosindependentes (b = AT
1 (y∗1 − y1) +AT
2 (y∗2 − y2)).
• Cálculo das novas estimativas para k1, k2, k3 e k4 (k = k + delta).

CAPÍTULO 5. RESOLUÇÃO DOS EXERCÍCIOS PROPOSTOS 56
3. Resultados obtidos por iteração para cada uma das experiênciasPara realizar iterações com este programa, basta ir alterando os valores de k na m-
file kks. Seguindo este procedimento, realizaram-se cinco iterações para cada uma dasexperiências, apresentando-se os resultados na Tabela 5.6.
Comparando os valores do vector∆k da Tabela 5.6, relativos aos dados da Experiência1, para a primeira iteração, com os obtidos pelo CONUM, verifica-se que existem ligeirasdiferenças. Contribuem para estas diferenças, não só os erros de arredondamento, mastambém os erros de truncatura. A função ode45 implementa o método de Runge-Kuttade quarta e quinta ordem, adaptativo, enquanto o CONUM implementa o método deRunge-Kutta de segunda ordem, não adaptativo. Sendo assim, os resultados obtidos emMATLAB são os melhores.

CAPÍTULO 5. RESOLUÇÃO DOS EXERCÍCIOS PROPOSTOS 57
Tabela 5.6: Resultados por iteração, obtidos pelo programa realizado em MATLAB,para os dois conjuntos de dados relativos às duas experiências (veja-se enunciado doExercício 2 em 4.2).
Experiência 1
iteração 0 1 2 3 4 5
∆k1 − −0.0668 0.0053 −0.0005 −0.0000 0.0000∆k2 − −0.2322 0.6419 0.0142 0.0046 −0.0010∆k3 − −0.0104 0.0080 −0.0022 0.0012 −0.0002∆k4 − −0.0089 0.0145 −0.0068 0.0027 −0.0005k1 0.1 0.0332 0.0385 0.0380 0.0379 0.0379k2 4 3.7678 4.4096 4.4238 4.4284 4.4273k3 0.02 0.0096 0.0177 0.0155 0.0167 0.0164k4 0.02 0.0111 0.0254 0.0188 0.0215 0.0210
Experiência 2
iteração 0 1 2 3 4 5
∆k1 − −0.0401 −0.0105 0.0005 −0.0000 −0.0000∆k2 − −0.7318 0.2975 0.0681 0.0002 0.0000∆k3 − −0.0052 0.0035 0.0021 0.0000 0.0000∆k4 − −0.0036 0.0064 0.0038 −0.0000 0.0000
k1 0.1 0.0599 0.0494 0.0499 0.0499 0.0499k2 4 3.2682 3.5657 3.6338 3.6340 3.6340k3 0.02 0.0148 0.0183 0.0205 0.0205 0.0205k4 0.02 0.0164 0.0228 0.0265 0.0265 0.0265
4. Modelo obtidoConsiderando a média dos valores obtidos pelas duas experiências, obtém-se para o
vector dos parâmetros (no final das cinco iterações)
k =
0.04394.03070.01850.0238
e o modelo pretendido é (veja-se em 4.2)
dy1dt= 0.0439y1
³1− y1
4.0307
´dy2dt= 0.0185y1 − 0.0238y2.

CAPÍTULO 5. RESOLUÇÃO DOS EXERCÍCIOS PROPOSTOS 58
5.3 Proposta de resolução do Exercício 3
5.3.1 Resolução com calculadora científica
O modelo em questão é
M (Lf , Cs, Cf ; rfmax,Ks) = rfmaxLfCs
Z 1
0
Cf (x)
Ks + CsCf (x)dx. (5.11)
Os parâmetros que se pretendem calcular são rfmax e Ks, o que implica a resoluçãonumérica de um integral em cada iteração.O método a usar é o de Gauss-Newton.Por uma questão de simplicidade de notação, passam a denominar-se rfmax por k1 e
Ks por k2.A resolução deste exercício pode dividir-se em oito etapas. Na primeira etapa calcu-
lam-se as derivadas parciais em função dos parâmetros k1 e k2, de seguida procede-se àdiscretização do integral para resolvê-lo numericamente. Depois de obtidas as derivadasparciais constroem-se a matriz do Jacobiano e equações normais, nos terceiro e quartopassos respectivamente. Na quinta etapa resolve-se o sistema linear proveniente das etapasanteriores. Obtido o vector com a direcção de procura, faz-se a procura unidimensionaldo escalar α, de modo a garantir uma redução no valor da função S (5.17). Numa sétimaetapa calcula-se uma nova estimativa para k1 e k2. Para finalizar, a oitava etapa consisteem realizar novas iterações, ou seja, repetir todas as etapas anteriores.
1. Cálculo das derivadas parciais do modelo em ordem a k1 e k2.Deve derivar-se o modelo (5.12) em ordem aos parâmetros k1 e k2 de modo a ser
possível construir a matriz do Jacobiano e as equações normais.
2. Discretização do integralPara tornar os cálculos mais leves, sugere-se a utilização de apenas alguns dos valores
experimentais de Cf (x) no cálculo do integral. Optando-se por um espaçamento h = 0.25obtêm-se cinco pontos igualmente espaçados (quatro subintervalos), o que leva à escolhada fórmula composta de Simpson. Assim, para cada um dos cinco conjuntos de valores ointegral é aproximado pela sua fórmula correspondente, o que origina, por exemplo, parao modelo, a seguinte aproximação:
M ≈ k1LfCsh
3
µCf (0)
k2 + CsCf (0)+ 4
Cf (0.25)
k2 + CsCf (0.25)+ 2
Cf (0.5)
k2 + CsCf (0.5)(5.12)
+4Cf (0.75)
k2 + CsCf (0.75)+
Cf (1)
k2 + CsCf (1)
¶.

CAPÍTULO 5. RESOLUÇÃO DOS EXERCÍCIOS PROPOSTOS 59
3. Construção da matriz do JacobianoOs elementos da matriz do Jacobiano, A (k), são obtidos através de
ajl (k) =5X
i=1
∂M (Lfi, Csi, Cfi; k1, k2)
∂kl
∂M (Lfi, Csi, Cfi; k1, k2)
∂kj, para j,l = 1, 2. (5.13)
4. Construção das equações normaisAs equações normais podem ser obtidas através de
Fj (k) = −5X
i=1
(rfi −M (Lfi, Csi, Cfi; k1, k2))∂M (Lfi, Csi, Cfi; k1, k2)
∂kj, j = 1, 2. (5.14)
5. Resolução do sistema de equações lineares na iteração sPara a aproximação k(s), forma-se o sistema
A¡k(s)¢∆k = −F ¡k(s)¢ (5.15)
que deve ser resolvido por Eliminação de Gauss com Pivotagem Parcial.
6. Procura unidimensional de αDepois de determinado o vector ∆k através da resolução do sistema (5.15), deve
determinar-se o valor do escalar αk, que dá o comprimento do passo ao longo de ∆k,de modo a que se verifique
S¡k(s) + αk∆k
¢< S
¡k(s)¢, (5.16)
com
S (k) =5X
i=1
[rfi −M (Lfi, Csi, Cfi; k1, k2)]2 . (5.17)
Pode usar-se, para determinar αk, o algoritmo das repetidas divisões de α por dois, queconsiste em começar com α = 1, e ir dividindo este valor por dois até se verificar adesigualdade (5.16).
7. Cálculo das novas estimativas de k1 e k2As novas estimativas dos parâmetros são conseguidas através de
k(s+1) = k(s) + αk∆k.
Os elementos do vector k(s+1) são, respectivamente, k1 e k2.
8. Novas iteraçõesO processo iterativo deve ser repetido até se obter um valor para ∆k suficientemente
pequeno. Para trabalho de casa pretende-se que seja realizada apenas uma iteração.

CAPÍTULO 5. RESOLUÇÃO DOS EXERCÍCIOS PROPOSTOS 60
5.3.2 Resolução com o software CONUM
Os passos 1 e 2 vão ser exactamente os mesmos que para a resolução com calculadoracientífica (1 e 2 de 5.3.1).Para resolver os passos 3 a 8 usa-se a rotina do CONUM MQGAN-Aproximação
Gauss-Newton, seleccionando no menu Problemas Mínimos Quadrados. Os dadospedidos nesta rotina são sucessivamente:
1. o número de parâmetros, que neste caso são 2, Ks e rfmax;
2. o número de variáveis independentes, que são 7. Serão denominadas porCf (0) → x1,Cf (0.25) → x2,Cf (0.5) → x3,Cf (0.75) → x4,Cf (1) → x5,Lf → x6,Cs → x7;
3. o número de pontos experimentais, que são 5;
4. o vector dos valores das variáveis independentes, que são sete conjuntos de cincopontos;
5. os valores da função, rf , que são cinco;
6. o modelo, tal como foi discretizado e definido em (5.12);
7. as primeiras derivadas do modelo, já discretizadas, tal como se fez no ponto 2 de5.3.1, para o modelo;
8. aproximação inicial aos parâmetros k1 e k2,que são 0.376344×10−3 e 0.9804×10−1;9. o parâmetro de redução de S, β = 10−6, por exemplo, que é o valor que aparece noprograma por defeito;
10. os parâmetros do critério de paragem, por exemplo, ε1 = 10−10 e ε2 = 10−10;
11. finalmente, o CONUM pede o número máximo de iterações, pode experimentar-secom 50. Se este número não for suficiente pode aumentar-se, até que o processoiterativo convirja.

CAPÍTULO 5. RESOLUÇÃO DOS EXERCÍCIOS PROPOSTOS 61
5.3.3 Resolução com software MATLAB
A sugestão para resolver este exercício em MATLAB, consiste em construir duas m-files.Uma com os dados do problema e resolução do integral pela fórmula composta de Simpson,a outra com a resolução do problema de optimização que permite determinar os parâmetrospretendidos, k1 e k2. O MATLAB permite, com a Toolbox de optimização, resolver esteproblema pelo método de Gauss-Newton e também pelo método de Levenberg-Marquardt.
1am-file
Esta m-file deverá conter os dados de Lf , Cs, e rf sob a forma de vectores (de cincoelementos), assim como os cinco conjuntos de dados de Cf sob a forma de matriz (5×21).Neste caso, sugere-se a utilização do conjunto inteiro dos dados referentes à variável Cf
(veja-se Tabela 4.3 em 4.3).De seguida, deverá resolver-se o integral, que surge no modelo M, pela fórmula com-
posta de Simpson. O vector das diferenças entre os valores experimentais de rf e osobtidos do modelo através da resolução do integral, será a função a ser usada na segundam-file para determinação dos parâmetros.
2am-file
Nesta m-file deve aparecer em primeiro lugar o vector com os valores iniciais dos parâme-tros a estimar, ou seja, (0.376344× 10−3, 0.9804× 10−1).O passo seguinte consiste em definir as opções. Deverá aqui constar a informação
acerca do método que se pretende usar para resolver o problema. Assim, se se pretendero método de Gauss-Newton, deverá colocar-se nas opções ’LevenbergMarquardt’,’off’.Se, pelo contrário, se pretender resolver o mesmo problema pelo método de Levenberg-Marquardt, esta opção deverá passar a ’on’. Ainda nas opções deve definir-se a escalado problema. Neste caso o problema é de dimensão média, uma vez que o número deequações é inferior ao número de variáveis independentes, por isso nas opções colocar-se-á’LargeScale’,’off’. Caso não se coloque esta informação, o MATLAB é capaz de detectara dimensão do problema e usa os algoritmos de média dimensão. Por fim, nas opções,deve definir-se a precisão que se pretende, quer nos valores dos parâmetros, ’TolX’, querno valor do resíduo total ’TolFun’. Estas opções, quando não definidas, usam por defeitoo valor 10−4. A definição das opções faz-se com a estrutura options através da funçãooptimset e a sua sintaxe é
options = optimset(0LevenbergMarquardt0,0 off 0,0 LargeScale0,0 off 0,0 TolX 0, 1e− 15,0TolFun0, 1e− 15).
Finalmente, invoca-se a rotina de optimização, cuja sintaxe é
[X, resnorm, residual, exitflag, output] = lsqnonlin(0bio0, k0, [], [], options),

CAPÍTULO 5. RESOLUÇÃO DOS EXERCÍCIOS PROPOSTOS 62
em que X devolve o vector com os parâmetros do modelo pretendido, resnorm é o valordo resíduo total, residual é o somatório dos resíduos, exitflag dá informação quanto àconvergência do método, ou seja, se o seu valor for positivo, o método convergiu, se fornulo não se atingiu a precisão desejada, quer nos parâmetros, quer no resíduo total, paraum certo número de iterações pré-determinado, se for negativo o método não convergiu.output dá informações sobre o processo iterativo, tais como o número de iterações, onúmero de cálculos da função e o algoritmo usado. 0bio0 é a m-file que contém a funçãodefinida pela diferença entre os valores de rf experimentais e os valores de rf obtidos pelomodelo. O algoritmo implementado pela função lsqnonlin, por defeito, eleva cada um doselementos da função 0bio0 ao quadrado. Neste caso, a função 0bio0 é um vector com cincotermos que vem da primeira m-file, resultante da resolução do integral. k0 é o vector comos valores iniciais dos parâmetros e os campos em branco assinalados com [] correspondema limites, se existirem, o que não é o caso deste exercício. A estrutura options contém osparâmetros já descritos em cima.Esta segunda m-file é facultativa, já que as intruções que contém podem ser feitas
directamente na janela de comandos do MATLAB.

Capítulo 6
Conclusões
Após realizada alguma pesquisa sobre os métodos de ensino no ensino superior, e conhecen-do-se de antemão as dificuldades por que passa um professor de Métodos Numéricos,principalmente no que diz respeito à motivação dos alunos para esta disciplina, facilmentese constata que um professor empenhado não terá tarefa fácil. Por esta razão se evidenciaao longo deste relatório a importância extrema de uma boa selecção de exercícios, demodo a mostrar aos alunos, aos quais surge esta disciplina logo no segundo ano da sualicenciatura, a imensa importância da mesma na sua formação básica como engenheiros.Mais do que a análise matemática fundamental, na sua vida prática futura vão sur-
gir-lhes problemas concretos, os quais, na maior parte dos casos, não é possível solucionaranaliticamente, ou pelo menos não é conveniente, por serem muito complexos, ou por sepretender uma resolução por computador.Pela teoria estudada e também por alguma prática pedagógica, os alunos são muito
mais sensíveis aos métodos numéricos quando se apresentam exercícios numa linguagemque lhes é familiar, fazendo-se assim a ponte entre a disciplina de Métodos Numéricos eas disciplinas específicas da sua licenciatura.A resolução com o auxílio de computadores é também uma boa motivação, já que
lhes abre uma visão totalmente diferente e muito mais prática da forma como hoje emdia se resolvem a grande maioria dos problemas matemáticos. Uma aula teórico-práticadesta natureza é particularmente gratificante, uma vez que os alunos desta licenciaturatêm uma componente informática muito reduzida, e esta aprendizagem é vista, também,como um atenuar desta lacuna, bastante evidente nas primeiras abordagens laboratoriais.Relativamente aos exercícios trabalhados no decurso da aula, há a preocupação de
incentivar os alunos a efectuarem a sua resolução, apoiada pelo docente com sugestõesadequadas.Saliente-se ainda a importância de ser dado um exercício de trabalho individual, a
realizar fora da aula, o que permite aos alunos testarem e consolidarem os próprios co-nhecimentos sobre a matéria leccionada. Normalmente, as dúvidas só surgem a partir domomento em que se tenta resolver um exercício sem auxílio do professor.
63

Apêndice A
Programa detalhado de MétodosNuméricos II
O programa da disciplina proposto para o ano lectivo de 2000/ 2001 é o seguinte:
Resolução de equações diferenciais ordináriasForma geral do problema. Problemas com condições iniciais, método de Euler, errode truncatura, métodos de Runge-Kutta de segunda e quarta ordem, método implí-cito de Adams-Moulton (equações lineares e não lineares), método preditor-correctorde Adams de segunda ordem. Sistemas de equações diferenciais, implementação dométodos de Runge-Kutta de segunda ordem e preditor-corrector de Adams de se-gunda ordem. Equações diferenciais de ordem superior (resolução numérica). Pro-blemas com condições de fronteira, método das diferenças finitas.
Optimização não linear sem restriçõesForma geral do problema. Classificação de mínimos. Condições de optimalidade.Problema unidimensional, método de Newton para o cálculo de um ponto estacioná-rio, critério de paragem, método de Fibonacci, método de procura e aproximaçãoDavies Swann e Campey (DSC), critério de paragem. Problema multidimensional,método de procura de Nelder-Mead, critério de paragem, método de segurança deNewton. Globalização: procura unidimensional exacta, método de DSC e algoritmodas repetidas divisões de alfa por dois, critério de paragem. Métodos Quasi-Newton:fórmulas de actualização DFP e BFGS. Método dos gradientes conjugados para pro-blemas de grandes dimensões.
Aproximação dos mínimos quadradosForma do problema e objectivos. Modelo não linear, método Newton, método deGauss-Newton, critério de paragem.
64

Bibliografia
[1] Guia da Universidade do Minho, Universidade do Minho, 2000.
[2] A. Bireaud, Os métodos pedagógicos no ensino superior, Porto Editora, 1995.
[3] S. C. Chapra e R. P. Canale, Numerical methods for engineers, McGraw-Hill Interna-tional Editions, 1990.
[4] A. Constantinides, Applied numerical methods with personal computers, McGraw-Hill,Inc., 1987.
[5] E. M. G. P. Fernandes, Programa da disciplina de Métodos Numéricos, Universidadedo Minho, 1985.
[6] , Computação numérica, segunda edição, Universidade do Minho, Braga, 1998.
[7] The Math Works, MATLAB (version 6) - The language of technical computing, 2000.
[8] M. T. Monteiro, M. J. Vieira, G. Machado, E. M. G. P. Fernandes, e L. Melo, Para-meter estimation using a least squares technique for modelling biofilm kinetics, Opti-mization 98, Coimbra, 20 a 22 de Julho de 1998.
65