equipamento para mediÇÃo de tempo de resposta...
TRANSCRIPT
!
EQUIPAMENTO PARA MEDIÇÃO DE TEMPO DE RESPOSTA APLICADO À DEFESA PESSOAL
Ioav Lichtenstein
Projeto de Graduação apresentado ao Curso de Engenharia Eletrônica e de Computação da Escola Politécnica, Universidade Federal do Rio de Janeiro, como parte dos requisitos necessários à obtenção do título de Engenheiro.
Orientador: Alexandre Visintainer Pino
Rio de Janeiro
Setembro de 2017



UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
Escola Politécnica – Departamento de Eletrônica e de Computação
Centro de Tecnologia, bloco H, sala H-217, Cidade Universitária
Rio de Janeiro – RJ CEP 21949-900
Este exemplar é de propriedade da Universidade Federal do Rio de Janeiro, que
poderá incluí-lo em base de dados, armazenar em computador, microfilmar ou adotar qualquer
forma de arquivamento.
É permitida a menção, reprodução parcial ou integral e a transmissão entre bibliotecas
deste trabalho, sem modificação de seu texto, em qualquer meio que esteja ou venha a ser
fixado, para pesquisa acadêmica, comentários e citações, desde que sem finalidade comercial
e que seja feita a referência bibliográfica completa.
Os conceitos expressos neste trabalho são de responsabilidade do(s) autor(es).

AGRADECIMENTO
Agradeço, primeiramente, à turma de Engenharia Eletrônica e de Computação 2012.1,
em especial a Artur B. Lemos, Gabriel Alboretti, Igor Sanz e Thiago Costa Lobo, meus
colegas e amigos, com os quais compartilhei cada desafio durante esta longa jornada e sem os
quais nada disso seria possível.
Gostaria de agradecer também à minha família, em especial ao meu pai Kobi
Lichtenstein, à minha mãe Sandra Lichtenstein e à minha irmã Maayan Lichtenstein, que,
como sempre, apoiaram, incentivaram, ensinaram e acreditaram em mim.
Por fim, agradeço aos excelentes professores e profissionais da Escola Politécnica da
Universidade Federal do Rio de Janeiro, com quem tive a honra de aprender muito; e ao
governo e povo brasileiros, que contribuíram de forma significativa à minha formação e
estada nesta universidade.
Este projeto é uma pequena forma de retribuir o investimento e confiança em mim
depositados.

RESUMO
O trabalho consiste no desenvolvimento de uma tecnologia capaz de mensurar o tempo
de resposta de praticantes de Krav Maga, uma arte de defesa pessoal. Mais especificamente,
foi desenvolvido um equipamento que realiza a medição, análise de desempenho e
acompanhamento de resultados dos praticantes e geração de estímulos visuais para o
treinamento. Nos testes realizados, cada voluntário precisou executar golpes com os membros
superiores e/ou inferiores na direção dos dispositivos que se encontravam ao seu redor, porém
sem tocá-los, à medida que era exposto a diferentes condições, como níveis de fadiga, e
limitações de movimento, como restrições de lateralidade ou membro corporal para a prática
dos exercícios, para que seu tempo de resposta fosse medido e avaliado em cada caso. Os
resultados mostraram que foi possível realizar medições de tempo de resposta com um grau
de erro associado de 1 milissegundo e que estímulos distratores, nível de tensão emocional e
muscular, lateralidade do corpo e idade, dentre outros, são fatores que podem influenciar a
velocidade de resposta.
Palavras-Chave: reação, tempo de resposta, defesa pessoal, Krav Maga.

ABSTRACT
This work consists of the development of a technology capable of measuring the
response time of Krav Maga practitioners, a self-defense technique. More specifically, an
equipment has been built to offer means of measurement and performance analysis of the
practitioner's results in order to contribute significantly in his/her training. In the tests
performed, each volunteer had to perform Krav Maga attacks with his/her upper or lower
limbs towards the devices that were around him/her, but without touching them, as he/she was
exposed to different conditions, such as levels of fatigue, and limitations of movement, such
as body's side and limbs which could be used in the exercise, so that their response time could
be measured and evaluated in each case. The results of this work showed that it was possible
to perform measurements of response times with a degree of uncertainty of 1 millisecond and
that distracting stimuli, levels of physical fatigue, body side and age, among others, are
factors that might influence the response speed.
Key-words: reaction, response time, self-defense, Krav Maga.

Sumário
Capítulo 1 9 Introdução 9
1.1 Tema 9
1.2 Delimitação 9
1.3 Justificativa 9
1.4 Objetivos 10
1.5 Metodologia 10
1.6 Descrição 11
Capítulo 2 12 Fundamentação Teórica 12
2.1 Reação motora em esportes de combate e defesa pessoal 12
2.1.1 Defesa pessoal 12
2.1.2 Etapas da resposta 13
2.1.3 Estímulo desencadeador de uma reação 13
2.1.4 Fatores que influenciam o tempo de resposta 14
2.2 Trabalhos relacionados 18
2.2.1 Sistema web para medição de tempo de resposta 18
2.2.2 Tempo de resposta aplicado ao karatê 19
2.2.3 Sistema comercial Zemita 20
2.2.4 Avaliação dos trabalhos analisados 20
2.3 Linguagem de programação e kits de desenvolvimento 21
2.3.1 Orientação a objetos 22
2.3.2 Arduino 23
2.3.3 Bluetooth 25
2.3.3.1 Modulação 26
2.3.3.2 Arquitetura de redes 26
Capítulo 3 28 Materiais e Métodos 28
3.1 Arquitetura e funcionamento geral 28
3.2 Dispositivo 30
3.2.1 Programação do Arduino 35

3.3 Programa central 36
3.3.1 Estrutura do código 36
3.3.2 Gestão de usuários 37
3.3.3 Módulos de treinamento 38
3.3.4 Apresentação e análise de resultados 43
3.3.5 Armazenamento de dados 44
3.3.6 Interface Gráfica do Usuário 46
3.3.6.1 Interação Homem-Máquina 46
3.3.6.2 Gráficos 48
3.3.7 Comunicação Computador - Dispositivo 48
3.4 Testes 49
Capítulo 4 52 Resultados e Discussões 52
Capítulo 5 58 Conclusão 58
Capítulo 6 60 Trabalhos Futuros 60
6.1 Treinamento 60
6.2 Aplicações 60
6.3 Módulos Eletrônicos 61
6.4 Estímulos 61
6.5 Monitoramento de Posição e Movimento 62
Referências 64 Apêndice A 69
Características de cada aluno participante dos testes 69

Lista de Figuras Figura 1 - Relação entre a intensidade do estímulo emitido e o tempo de resposta, sendo "i" a intensidade mínima capaz de disparar uma resposta. 14
Figura 2 - Arquitetura geral do sistema de medição de tempos de resposta 28
Figura 3 - Funcionamento geral do sistema de medição de tempos de resposta 29
Figura 4 - Interação computador-dispositivo 30
Figura 5 - Módulo Bluetooth HC-05 31
Figura 6 - Módulo detector de obstáculos FC-51 32
Figura 7 - Placa com microcontrolador Arduino Nano V3.0 32
Figura 8 - Placa de circuito impresso 33
Figura 9 - Resultado final da montagem do dispositivo 33
Figura 10 - Dispositivo completo 34
Figura 11 - Fluxograma do funcionamento do dispositivo 35
Figura 12 - Fluxograma do treinamento aleatório 39
Figura 13 - Fluxograma do treinamento grupo 40
Figura 14 - Fluxograma do treinamento sequencial 42
Figura 15 - Configuração de exibição de resultados 44
Figura 16 - Página de design 46
Figura 17 - Processos realizados pelo dispositivo durante as medições de tempo de resposta 50
Figura 18 - Resultados do primeiro tipo de teste 54
Figura 19 - Resultados do segundo tipo de teste 55
Figura 20 - Resultados do terceiro tipo de teste 56
Figura 21 - Resultados do quarto tipo de teste 57

Lista de Tabelas Tabela 1- Versões do Bluetooth e suas velocidades máximas de transmissão de dados. 25
Tabela 2 - Latência de comunicação entre o computador e o dispositivo. 52

9
Capítulo 1
Introdução
1.1 Tema
O trabalho consiste em desenvolver um dispositivo para a mensuração do tempo de
resposta de praticantes de Krav Maga, uma arte de defesa pessoal. Mais especificamente, a
ideia é desenvolver um equipamento capaz de emitir estímulos luminosos para medir e
acompanhar a evolução dos praticantes no que diz respeito ao tempo de resposta, fornecendo
meios de análise de resultados e, consequentemente, auxiliando em seus treinamentos.
1.2 Delimitação
Os módulos de treinamento são voltados especificamente a pessoas praticantes de
Krav Maga. Os estímulos aos quais elas foram submetidas foram visuais e tiveram a
finalidade de provocar reações de técnicas específicas.
O equipamento deve ser utilizado em ambientes fechados, os quais não podem ser
muito luminosos, de modo que não atrapalhem a percepção das luzes emitidas durante a
utilização do dispositivo. O espaço escolhido não deve possuir mais de 30 m² devido ao
alcance do Bluetooth e deve ter disponível ao menos uma parede vazia para o correto
posicionamento dos dispositivos.
Os módulos de treinamento se comunicam com um software escrito em Java, que
também é responsável pela interface com o usuário, programação dos módulos e visualização
dos resultados. A interface com o usuário foi feita na língua portuguesa.
1.3 Justificativa
Quando o assunto é defesa pessoal, a percepção do perigo e o tempo de resposta são
de extrema importância, pois, para que uma pessoa consiga se defender de um ataque, ela
precisa reagir antes que a agressão seja consumada e atinja o seu alvo. De nada adianta saber
a técnica de defesa correta se a reação for tardia.
Além de desenvolver suas habilidades, é importante que o praticante tenha
conhecimento de sua evolução e de sua capacidade atual. Desse modo, ele conseguirá avaliar

10
os seus resultados passados e presentes e identificar possíveis deficiências, o que possibilita a
realização de treinamentos mais direcionados a necessidades específicas [1]. Nesse sentido,
seria interessante obter alguma espécie de retorno do sistema acerca de seu desempenho.
Contudo, a maioria dos locais que ensinam defesa pessoal no Brasil ainda não utilizam os
benefícios do mundo da tecnologia em seu auxílio [1]. O treinamento é planejado com base
empírica, porém sem fundamentação científica ou auxílio tecnológico.
Devido a isto, faz-se necessário a criação de uma tecnologia que seja capaz de medir e
avaliar o tempo de resposta do praticante.
1.4 Objetivos
O objetivo geral é desenvolver um equipamento capaz de medir e avaliar o tempo de
resposta de praticantes de defesa pessoal. Desta forma, tem-se como objetivos específicos do
projeto: (1) produzir um equipamento que gere estímulos e meça o tempo de resposta do
usuário; (2) desenvolver um programa de computador com diferentes módulos, de modo a
estimular o participante de forma a reagir de maneiras diferentes; (3) fornecer meios de
exibição, avaliação e acompanhamento de resultados.
1.5 Metodologia
Através de diodos emissores de luz (LEDs), dois dispositivos espalhados pelo
ambiente darão os estímulos para que o voluntários reajam. O objetivo dos voluntários será o
de reagir aos comandos o mais rápido possível e realizar um movimento de soco ou chute na
direção do LED que estiver aceso, chegando bem próximo aos dispositivos. Estes, por sua
vez, estarão munidos de sensores infravermelhos que identificarão tal proximidade e cessarão
o comando inicial, isto é, apagarão os LEDs. Em seguida, o usuário precisará alcançar o
próximo dispositivo, e assim por diante, até que aquele treino acabe.
De modo geral, os dispositivos serão compostos por 2 LEDs, 1 sensor infravermelho
para detecção de proximidade, 1 módulo Bluetooth para comunicação com o computador
central, 1 microcontrolador e 1 bateria. Eles serão controlados por um programa de
computador e trabalharão de forma aleatória, sendo os parâmetros de aleatoriedade nativos do
próprio Java, ou segundo algum protocolo específico.

11
Há uma interface com o usuário para que ele possa escolher o tipo de exercício que
deseja realizar. Ao final dele, o programa fornece um relatório de retorno, contendo
informações relevantes àquele módulo de treinamento, como, por exemplo, o tempo gasto
para alcançar os dispositivos; o histórico de treino do usuário; e comparações entre diferentes
exercícios. Desse modo, o usuário pode avaliar a sua evolução e comparar com colegas e
utilizar estes dados para o planejamento da estratégia de treino.
1.6 Descrição
No capítulo 2, a teoria será fundamentada por trabalhos e estudos relacionados já
realizados. Além disso, serão explicados os conceitos fundamentais para o entendimento do
projeto que foi desenvolvido. Já o capítulo 3 apresentará a solução para o problema,
explicando os materiais que foram utilizados na construção do equipamento, a arquitetura do
sistema e os detalhes de como foram desenvolvidos os dispositivos e o programa de
computador. Nele, entender-se-á todas as funcionalidades da tecnologia desenvolvida.
No capítulo 4, serão mostrados os resultados obtidos pela tecnologia desenvolvida,
com os dados e medições adquiridos, baseados em testes feitos com voluntários. O capítulo
seguinte tratará da conclusão do trabalho, avaliando o que foi feito e verificando se os
objetivos iniciais do projeto foram atingidos. Por último, o capítulo 7 irá propor algumas
ideias que podem dar continuidade ao trabalho.
12
Capítulo 2
Fundamentação Teórica
2.1 Reação motora em esportes de combate e defesa pessoal
2.1.1 Defesa pessoal
No presente trabalho, foi escolhido o Krav Maga como a técnica de defesa pessoal
cujos alunos serão testados. O Krav Maga foi criado em Israel, no início da década de 1940,
por um homem chamado Imi Lichtenfeld, quando o povo judeu vivia em um cenário de
guerra [7]. Nesse sentido, foram desenvolvidos movimentos de defesa e ataque que, segundo
Lichtenstein [7], podem ser utilizados por qualquer pessoa, independente de sexo, idade ou
preparo físico. A prática do Krav Maga manteve-se restrito a unidade de elite das Forças de
Defesa de Israel (FDI) até 1968, quando foi liberado o ensino ao público civil [7].
As técnicas são baseadas nos movimentos naturais do corpo humano. Portanto, não
encontraremos imitações de movimentos de animais ou da natureza, como ocorre em muitas
artes marciais [1]. Os golpes sempre percorrem a trajetória mais curta em direção ao alvo,
pois isso os torna mais rápidos [7].
Os alvos são sempre os pontos mais sensíveis no corpo do agressor, de modo que não
seja necessária muita força para se alcançar bons resultados [7]. Apesar disso, a potência do
golpe é exaustivamente treinada. O aproveitamento dos momentos angular e linear (ambos
muito relevantes para a ampliação de potência) possuem grande importância e também são
trabalhados.
As técnicas de ataque incluem socos e chutes frontais e circulares, cada um usado em
uma situação específica. A escolha do golpe a ser utilizado deve considerar, entre outros
fatores, a distância em relação ao alvo [1]. Cada golpe possui a sua distância ideal de atuação
e uma escolha errada pode gerar movimentos mais lentos e menos potentes.
De modo geral, as técnicas do Krav Maga visam a oferecer respostas simples para
diferentes tipos de agressão, de maneira que seja fácil a sua utilização no momento em que
forem necessárias. Os movimentos utilizam princípios da física, como momento, quantidade
de movimento, pressão, dentre outros, a fim de aumentar a sua eficiência.

13
O Krav Maga possui um sistema de graduações por faixa, no qual cada uma possui uma
cor que representa um nível de conhecimento e habilidade. Cada graduação exige um tempo
mínimo de treino, que varia de 6 meses a 2 anos, e, para passar de faixa, o praticante deve
realizar um exame físico e técnico, que avalia se o aluno aprendeu as técnicas da graduação
anterior e se ele está apto a ir para a próxima etapa. As graduações obedecem à seguinte
ordem: branca, amarela, laranja, verde, azul, marrom e preta.
2.1.2 Etapas da resposta
A resposta é um processo complexo composto por várias etapas. Cada uma destas
etapas possui suas peculiaridades e repercutem no processo global, de modo que um impasse
em uma delas compromete toda a reação [8][9]. Dividiremos, aqui, a resposta em 2 partes,
cada qual responsável por uma parcela do tempo total:
• Tempo de reação: refere-se ao tempo gasto para perceber e interpretar o estímulo
recebido somado ao tempo relativo à tomada de decisão. Toda reação é uma
resposta a uma ação anterior e esta etapa é responsável por identificar esta ação e
decidir como o corpo reagirá a ela. Este é o momento em que o praticante de defesa
pessoal irá escolher os movimentos que irá realizar;
• Tempo de ação: refere-se ao tempo de preparação somado ao tempo de
movimento. O tempo de preparação diz respeito às etapas em que o corpo se
prepara para realizar a ação escolhida na fase anterior, enquanto o tempo de
movimento consiste exatamente no tempo gasto para efetuar esta ação. Os dois
somados resultam no tempo de ação;
Os fatores capazes de influenciar a resposta são descritos na seção 2.1.4 deste capítulo.
2.1.3 Estímulo desencadeador de uma reação
Os estímulos que desencadeiam o processo de reação podem ser de vários tipos:
visuais, auditivos, táteis, etc. Como o presente trabalho é aplicado ao ramo da defesa pessoal,
dar-se-á preferência aos estímulos visuais, pois, para que uma pessoa consiga se defender, “é
necessário aprender a visualizar um ataque […]” [13].
O estímulo pode possuir diferentes intensidades (potência do sinal luminoso, volume
do sinal auditivo, etc.), o que irá influenciar o tempo de resposta do usuário. De acordo com

14
Piéron [11] e Luce [12], quanto mais fraco for o estímulo, maior será o tempo de resposta a
ele, conforme a Figura 1. Existe uma intensidade mínima que torna possível a detecção do
estímulo, chamada na figura de "i", e, após o estímulo alcançar determinada intensidade, o
tempo de resposta se torna constante.
Figura 1 - Relação entre a intensidade do estímulo emitido e o tempo de resposta, sendo "i" a intensidade mínima capaz de disparar uma resposta.
2.1.4 Fatores que influenciam o tempo de resposta
Além do tipo e intensidade do estímulo ao qual o usuário é submetido, outros fatores
também influenciam a velocidade de resposta, e são discutidos nesta seção com base nos
trabalhos de Rodrigues [8] e Kosinski [9].
O tempo de resposta é maior em um estado intermediário de tensão psicológica e/ou
muscular, e piora quando a pessoa está muito relaxada ou muito tensa [14][15][16]. Da
mesma forma, de acordo com Sanne Boesveldt et al. [17], quanto mais essencial for o
estímulo à sobrevivência do ser, mais rápidas serão suas reações. Os seus experimentos foram
realizados com estímulos odoríferos e provaram que a reação do ser humano é mais rápida
quando há indicações de ameaça à sua integridade.
Além do conteúdo, a forma também influencia a velocidade de resposta. Isto foi
comprovado por McKeown et al. [13] que, em seus testes, mostraram que um alerta de
colisão em uma situação de direção automotiva dado de forma realista e dramática gera
reações mais rápidas do que mensagens escritas ou faladas.
O tempo de resposta de uma pessoa aumenta da infância até os quase 30 anos de
idade. A partir deste ponto, sua reação vai se tornando vagarosamente mais lenta até os 50 ou
Tem
po d
e R
espo
sta
Intensidade do Estímuloi

15
60 anos, quando ela começa a retardar mais rapidamente [18][19][20][21][22]. Quanto ao
gênero, de acordo com os experimentos realizados por Jean Hodgkins [23], de modo geral,
homens são mais rápidos do que mulheres quando o assunto é tempo de resposta,
independentemente da faixa etária analisada. Hodgkins realizou testes com 930 homens e
mulheres de 6 a 84 anos de idade para chegar a esta conclusão.
Cada parte do cérebro humano é responsável por realizar tarefas específicas. O
hemisfério direito, por exemplo, é encarregado da criatividade, relações espaciais,
reconhecimento facial e emoções, enquanto o hemisfério esquerdo é incumbido da parte
verbal e lógica [9]. Cada um possui a sua função. Vale lembrar também que o hemisfério
esquerdo controla o lado direito do corpo, ao passo que o hemisfério direito controla o lado
esquerdo, o que nos leva a pensar que o lado esquerdo do corpo deveria ser mais rápido do
que o lado direito no que diz respeito a reações envolvendo relações espaciais. Este
pensamento foi comprovado por Barthélémy e Boulinguez [24] [25] [26], em suas pesquisas
sobre as influências dos hemisférios cerebrais no tempo de resposta das pessoas.
Contudo, foi inferido por Dane e Erzurumluoglu [27], em seus experimentos com
jogadores de handball, que pessoas destras são mais rápidas com a mão direita, à medida que
pessoas canhotas são mais rápidas com a mão esquerda. Além disso, eles constataram que os
canhotos foram mais rápidos do que os destros em testes em que ambos utilizaram a mão
esquerda, porém nenhuma diferença significativa foi notada quando os testes foram realizados
com a mão direita.
O tempo de resposta também depende da porção do olho que percebe o estímulo. Se
este é visto pela visão periférica, a reação será mais lenta do que se tivesse sido visto pela
visão central (Brebner e Welford apud Kosinski [9]). Além disso, quando uma pessoa comete,
ou é acusada de cometer, erros, a sua reação ao próximo estímulo é mais lenta [28]. É como se
o cérebro tomasse mais cuidado para não falhar novamente, ficando, consequentemente, mais
lento.
É possível treinar o nosso cérebro para que fiquemos cada vez mais rápidos. Em outras
palavras, a prática melhora o tempo de resposta. Estudos mostram que as pessoas necessitam
de um tempo de resposta maior quando realizam uma tarefa nova e que, com a prática, este
tempo tende a diminuir e se torna cada vez mais consistente (Sanders apud Kosinski [9]). No
entanto, durante um treino, não devemos esperar que a reação se torne mais rápida, pois a

16
fadiga torna-a mais lenta, e sua influência aumenta à medida que a complexidade da tarefa
também aumenta. Ou seja, quanto mais complicada for a tarefa, mais demorada será a reação
do sujeito devido à fadiga [10].
Foi mostrado por Gutierrez et al. [29], através de seus estudos com atletas em jejum
por 3 dias, que o jejum não retarda o tempo de resposta. Tampouco uma alimentação com
restrições de carboidratos consegue influenciar a velocidade de resposta, como constata
Cheatham et al. [30] em seus testes com pessoas em dieta com restrições calóricas por 6
meses. Por outro lado, a falta de sono, esta sim, prolonga o tempo de resposta, conforme
afirma Jauch-Chara et al. [31].
A complexidade dos movimentos também afeta o tempo de resposta e, quanto mais
complexa for a tarefa que o indivíduo precisar realizar, mais lenta será sua reação [8][10].
Além disso, diversas experiências comprovam a influência da distração no tempo de resposta.
Trimmel e Poelzl [32] mostraram que a presença de ruídos sonoros retarda a reação, pois inibe
partes do cortex cerebral; Richard et al. [33] e Lee et al. [34] realizaram simulações de
direção automotiva com estudantes e descobriram que suas reações eram mais lentas quando
eles possuíam, além dos encargos do exercício, tarefas auditivas simultâneas; Hsieh et al. [35]
provaram que vibrações do monitor de um computador deixa a reação a estímulos exibidos
por este mesmo monitor mais lenta e imprecisa; Gerdes et al. [36] mostraram que a influência
da distração na velocidade de resposta também está relacionada ao estado emocional e a
experiências vividas por cada pessoa. Em seus experimentos, eles descobriram que indivíduos
com fobia de aranhas tiveram reações mais lentas quando foram distraídos por imagens de
aranhas do que quando distraídos por imagens de objetos ou plantas, porque levaram mais
tempo para desviar o olhar dos aracnídeos mostrados.
Portanto, fica claro que o nível de atenção está diretamente relacionado à velocidade
de resposta. Quando possuímos outras tarefas, quando há variações e estímulos distratores no
ambiente ou ainda quando estamos abalados emocionalmente, nossas reações tornam-se mais
lentas.
Segundo Brebner e Welford [37], a resposta é sempre mais rápida quando o indivíduo
sabe que será estimulado em breve. Em outras palavras, quando uma pessoa não espera o
estímulo, ela precisa de mais tempo para reagir.

17
Outro assunto muito debatido é o efeito do álcool na velocidade de resposta, o que
acaba se tornando alvo de muitos estudos devido à sua importância quando aplicado à
condução automotiva. O efeito desta droga varia de acordo com o organismo de cada pessoa
[38]. Ou seja, alguns indivíduos são mais afetados do que outros pela mesma quantidade de
álcool ingerido. Contudo, estudos revelam que a maioria das pessoas sofre os efeitos da droga
quando a sua quantidade no sangue é maior ou igual a 0,05g/dl (0,05 grama de álcool por
decilitro de sangue) [38]. Por outro lado, de acordo com Durlach et al. [39], o efeito do café é
inverso: apenas uma xícara de café consegue diminuir o tempo de resposta de seu consumidor
minutos após a ingestão do produto. Ou seja, estimulantes, como a cafeína, mesmo em
pequenas doses, conseguem alcançar resultados nesse sentido.
Quando há vários tipos de estímulo, a resposta se torna mais rápida quando estímulos
iguais são apresentados juntos. Isso é chamado de “efeito sequencial” e ocorre porque o
desvio de atenção de um tipo de estímulo para outro causa um aumento no tempo de resposta
a ambos [40].
Pessoas extrovertidas ou ansiosas, de modo geral, reagem mais rapidamente quando
comparadas a indivíduos com personalidades de caráter mais calmo [16][41][42]. Da mesma
maneira, a prática de atividade(s) física(s) influencia o tempo de resposta. Foi comprovado
por Welford [16] que as pessoas que praticam algum tipo de exercício físico regularmente são
mais rápidas do que as outras quando o assunto é velocidade de resposta. Além disso, de
acordo com Buchsbaum e Callaway [43], a velocidade de resposta é maior quando o estímulo
ocorre durante a expiração do que quando ocorre durante a inspiração.
Outro ponto interessante foi descoberto por Levitt, Gutin e Sjoberg [44][45], que
observaram que a reação é mais rápida quando o batimento cardíaco está a uma frequência de
115 batimentos por minuto. Isto pode estar relacionado à tensão física e mental, pois o grau de
cansaço interfere no nível de tensão.
É interessante notar que existe um tradeoff entre velocidade e precisão, isto é, eles são
inversamente proporcionais. Desse modo, quanto mais rápido um sujeito agir, menos preciso
ele será, e vice versa. Se, em um treinamento, um indivíduo for recompensado por sua
rapidez, ou punido por sua lentidão, suas reações serão mais rápidas, porém mais imprecisas
[46]. Isso nos leva a concluir que o tradeoff comentado pode ser ajustado por cada um,
dependendo da situação em que se encontra.

18
Sob a ótica mental, existe uma linha tênue entre inteligência e velocidade de resposta.
Em geral, pessoas com retardo mental grave apresentam tempos de resposta mais longos [47].
Já entre indivíduos com inteligência normal, há uma tendência de pessoas mais inteligentes
reagirem mais rapidamente, e essa diferença temporal é diretamente proporcional ao nível de
complexidade da tarefa que deve ser realizada [48][49]. Por outro lado, lesões na região da
cabeça podem causar retardo na reação [50]. Porém, é importante frisar que esse resultado
depende do grau de severidade da lesão, isto é, quanto mais grave for o trauma, mais intensas
serão suas consequências.
Nesse sentido, é de se esperar que algumas doenças causem um maior atraso na reação
de quem as possui. E isto é verdade: pessoas com retardo mental, déficit de atenção,
problemas respiratórios ou distúrbios de aprendizagem apresentam velocidade de resposta
menor [8]. Contudo, foi comprovado que os remédios que os ajudam em suas doenças
também têm um impacto positivo no tempo de suas reações [9].
Portanto, podemos concluir que diversos fatores, internos e externos, passageiros e
duradouros, exercem influência na velocidade de resposta.
2.2 Trabalhos relacionados
Existem inúmeros métodos para se medir tempo de resposta, desde a utilização de
cronômetros manuais até aparelhos mais complexos e exatos. Cada um deles possui uma
determinada finalidade e, baseado nela, são escolhidos o estímulo e a forma usada na medição
do tempo. A seguir, serão discutidas algumas formas de medição de tempo de resposta: umas
mais simples, genéricas e baratas e outras mais complexas, caras e direcionada ao público de
artes marciais e defesa pessoal.
2.2.1 Sistema web para medição de tempo de resposta
O trabalho realizado por Jim Allen [51] consiste em um sistema web que pode ser
acessado via Internet por qualquer navegador. Nele, o participante observa, em seu monitor,
um semáforo virtual trocar as luzes e, quando a luz verde acende, ele deve apertar alguma
tecla. Neste momento, é guardado o tempo de resposta, que nada mais é do que o tempo
passado entre o acendimento do sinal verde e a detecção do clique da tecla pelo computador.

19
Este procedimento é repetido 5 vezes e a média de todos os tempos é calculada. Assim, é
possível se ter uma noção do tempo de resposta de uma pessoa de modo bastante simples.
Vale destacar que esse teste é afetado pela latência do computador e do monitor.
Portanto, a utilização de um computador rápido, equipamentos de mouse e teclado com fios e
um monitor com alta taxa de quadros por segundo torna o desempenho do participante
melhor.
De modo geral, este método é utilizado para medir o tempo de reação, pois consegue
isolá-lo muito bem, visto que o movimento que o participante deve realizar é extremamente
curto e, consequentemente, rápido. O seu principal objetivo é comparar a velocidade de
reação de diferentes pessoas. É um método comum e fácil de realizar. Quando falamos de
medições de tempo de resposta, esta é, talvez, a primeira opção que surge.
2.2.2 Tempo de resposta aplicado ao karatê
O estudo realizado por Silvio Cláudio Pereira Rodrigues [7] data de 1984 e possuiu o
objetivo de estudar a relação entre as diferentes etapas de uma resposta em 2 tipos de chutes
específicos do karatê. Para isto, foi montado um equipamento que consistiu nos seguintes
elementos: alvo (saco de pancadas) envolto em papel laminado; papel laminado fixo ao solo;
bloco de registros gráficos tipo ECG; baterias; e um sinal luminoso. Durante os testes, o
participante deveria permanecer sobre o papel laminado fixo ao solo e chutar o saco de
pancadas.
Unindo os componentes mencionados, o autor pôde criar um sistema capaz de
diferenciar o tempo referente à reação (tempo decorrido até a retirada de um dos pés do solo)
do tempo de ação (tempo decorrido entre a retirada de um dos pés do solo e o choque com o
alvo). Deste modo, ele conseguiu realizar os experimentos com atletas de karatê de 18 a 30
anos de idade da Universidade Gama Filho e do Clube Federal do Rio de Janeiro. Os tipos de
chutes realizados foram os frontais e os circulares e os resultados variaram em torno de 700
milissegundos.
A conclusão final foi a de que não há correlações significativas entre as etapas da
resposta nos tipos de chute testados. Ademais, Rodrigues percebeu que os atletas demoraram
mais para reagir ao estímulo do que para executar o movimento. Por fim, o autor compara o
20
chute frontal e o circular, observando que o primeiro obteve velocidades mais altas em ambas
as etapas da resposta medidas em relação ao segundo.
2.2.3 Sistema comercial Zemita
Zemita [52] é um produto comercial desenvolvido pela empresa Dynamics World que
possui o objetivo de ajudar no treinamento de artistas marciais. Este equipamento é composto
por protetores de corpo, meias e luvas, todos com sensores, e por um tablet, onde o aplicativo
criado por eles funciona. Basicamente, o protetor de corpo serve como alvo e pode ser
colocado de modo que envolva um saco de pancadas, enquanto as meias e luvas são vestidas
pelo(s) participante(s). No aplicativo, o usuário escolhe o tipo de treinamento que deseja
realizar.
Durante o exercício, o indivíduo deve acertar o alvo com as mãos ou com os pés,
considerando o objetivo do treinamento escolhido. Caso seja um treino de força, ele deve
realizar os golpes o mais forte que conseguir; caso seja de velocidade, ele deve executá-los o
mais rápido possível; e assim por diante. Com este equipamento, é possível trabalhar a
potência, a velocidade, a energia e a precisão dos movimentos.
Os sensores utilizados são do tipo piezoelétricos, os quais convertem pressão,
aceleração, tensão ou força em corrente elétrica. Em vista disso, a força dos golpes é
convertida em um sinal elétrico por este sensor e passada ao tablet para que as informações de
tempo e força do movimento realizado sejam guardadas e aproveitadas. A comunicação entre
os dispositivos envolvidos no treinamento é realizada via Bluetooth.
Em síntese, trata-se de uma ferramenta mais prática que tem uma preocupação
comercial, possuindo diversas opções de treinamento e jogos que tornam a aula mais
dinâmica e divertida, ao mesmo tempo em que são realizadas as medições de tempo ou
potência dos golpes.
2.2.4 Avaliação dos trabalhos analisados
Nesta seção, avaliaremos os trabalhos mencionados a fim de compará-los e expor suas
principais vantagens e desvantagens.
O trabalho de Jim Allen é simples, barato, de fácil acesso e rápido de ser realizado.
Trata-se de um método capaz de medir o tempo de reação quase que isoladamente e não

21
possui um público específico. Desse modo, ele consegue atingir um maior número de pessoas,
o que dá uma maior base estatística para a análise de resultados e comparações. Contudo, vale
lembrar que as medições estão sujeitas a variações de desempenho do computador do
participante.
Já o trabalho de Silvio Rodrigues é mais complexo e direcionado ao público de artistas
marciais, permitindo ao autor chegar a conclusões que relacionam o tipo de movimento
realizado às diferentes etapas da resposta. Nesse sentido, foi possível analisar as diferenças de
tempo de resposta entre os 2 diferentes chutes de karatê testados. Este equipamento foi
desenvolvido com um intuito acadêmico e não apresentou grandes preocupações com a
instalação e a portabilidade. Além disso, como o alvo consiste em um saco de pancadas
envolto de papel laminado, este pode ser danificado pelos golpes e a sua troca pode ser
necessária após várias repetições dos ataques.
Por outro lado, com um apelo mais comercial, o Zemita é uma ferramenta capaz de
realizar diversos tipos de treinamento, sendo fácil de instalar e usar, além de ser resistente a
impactos. Com suas várias funcionalidades, ele consegue medir a velocidade e a potência dos
golpes do(s) participante(s) e mostrar os resultados a ele(s). No entanto, os testes de tempo de
resposta não são muito elaborados. O que estimula a reação do participante é a mudança de
cor da tela do aplicativo, que pode estar conectada a uma televisão. Deste modo, o estímulo
provém sempre do mesmo lugar. Ademais, os lugares da tela e do alvo não possuem ligação,
ou seja, as direções de onde o estímulo é realizado e para onde o usuário deve reagir não estão
relacionadas.
Portanto, podemos concluir que os 3 métodos analisados possuem suas vantagens e
desvantagens e podem ser considerados mais ou menos apropriados de acordo com suas
aplicações. No caso deste projeto, o ideal seria unir a simplicidade do primeiro com o
conceito do segundo e a facilidade de uso do terceiro. Para isso, um método diferente de
estímulo, medição e análise de resultados foi desenvolvido.
2.3 Linguagem de programação e kits de desenvolvimento
Para entender o sistema de medição de tempo de resposta desenvolvido neste projeto,
é necessário entender alguns conceitos, que são explicados nesta seção.

22
2.3.1 Orientação a objetos
A orientação a objetos é um paradigma de análise, modelagem e desenvolvimento de
software que procura resolver problemas, dividindo-o em partes menores que,
individualmente, sejam de mais fácil resolução [2]. Para isso, ela se baseia na utilização de
componentes (objetos) que colaboram um com o outro a fim de chegar à solução final. Dentre
as vantagens deste tipo de programação, encontram-se a facilidade de entendimento e
reutilização de códigos, uma maior proximidade da modelagem do sistema ao mundo real e a
simplicidade de alteração e adaptação da lógica desenvolvida[3].
Uma linguagem orientada a objetos carrega com sigo alguns conceitos importantes,
como classe, objeto, herança e polimorfismo, cujos entendimentos são essenciais para a sua
utilização e compreensão. A seguir, tais conceitos serão descritos.
Uma classe consiste em um modelo que descreve um conjunto de propriedades,
chamadas de atributos, e funções, conhecidas como métodos. A uma instância de uma classe é
dada o nome de objeto. Assim, um objeto é apenas uma unidade do modelo especificado pela
classe. Aplicando isso ao mundo real, se observarmos um telefone, por exemplo,
perceberemos que ele realiza diversas operações, como ligar e enviar mensagens, e possui
muitas características, como cor e tamanho. Desse modo, uma classe modelaria a concepção
de um telefone, com métodos e atributos específicos para cada operação e característica,
respectivamente; cada unidade de telefone seria um objeto desta classe.
Determinada classe pode herdar características de outra classe. Neste caso, estabelece-
se uma relação do tipo pai-filha, na qual a classe filha reaproveita os atributos e métodos da
classe pai. As classes filhas, por sua vez, também podem ter suas filhas, gerando uma família
de classes com relação hierárquica entre si. Voltando ao exemplo anterior, cada marca de
telefone possui suas particularidades, porém todas realizam as funções básicas de um telefone.
Portanto, cada marca seria uma classe filha da classe pai telefone, reaproveitando suas
características e acrescentando as próprias.
Para que uma classe de determinada marca consiga realizar uma operação já
implementada pela classe telefone, porém de um jeito particular, ela poderá utilizar o conceito
de polimorfismo, através do qual os métodos podem ser redefinidos. Isto pode ser feito de 2
formas: sobrescrita ou sobrecarga [2][3]. Na primeira, a presença do método na classe filha
substitui o método da classe pai. Já na segunda, os 2 métodos são mantidos e o escolhido é

23
aquele que possui os parâmetros iguais, em número, tipo e organização, aos que foram
passados a ele. Dessa maneira, uma marca de telefone poderá realizar uma ação específica ao
enviar mensagens, mesmo esta sendo uma operação padrão da classe pai.
Vale destacar que a sobrecarga de métodos é um conceito que não se restringe somente
à relações hierárquicas. Dentro de uma mesma classe, podem existir funções com o mesmo
nome, sendo que os parâmetros passados ditarão qual função será chamada.
2.3.2 Arduino
O Arduino é uma plataforma de prototipagem eletrônica de código aberto, baseado em
um microcontrolador que se conecta ao computador através de uma porta serial ou USB. Ele
possui uma linguagem de programação própria que é compilada pelo ambiente de
desenvolvimento (IDE), também próprio e escrito em java, o qual pode ser utilizado em
diversos sistemas operacionais. A sua alimentação se dá pela porta USB conectada ao
computador ou por uma fonte externa [4].
A linguagem de programação do Arduino é simples e sua sintaxe se assemelha muito ao
C++. Um programa típico possui duas funções básicas: o void setup(), que é executada
quando o programa é iniciado, ou seja, quando a placa é ligada ou o botão de reset é
pressionado. Ela é utilizada para inicializar variáveis, modos de entrada ou saída dos pinos,
dentre outros; e o void loop(), a qual é executada repetidamente pelo microcontrolador e o
controla até o seu desligamento ou até que o botão de reset seja pressionado [4].
A maioria das placas Arduino consistem em um microcontrolador com quantidades
variáveis de memória flash, pinos e outros recursos. Os microcontroladores são pré-
programados com um carregador de inicialização que simplifica o upload de programas para a
sua memória flash e os códigos do programa são carregados através de uma conexão serial
com um computador.
A placa Arduino expõe a maioria dos pinos de entrada e saída do microcontrolador para
uso por outros circuitos. Dentre eles, encontramos pinos I/O digitais e analógicos, de
alimentação e de transferência de dados, os quais ficam na parte superior da placa.
Há diversos tipos de placas Arduino, cada qual com seus próprios tipos e números de
microcontroladores, portas, conexões e memória. O mais conhecido dentre eles é o Arduino
Uno, que utiliza o processador ATmega328 e possui 14 portas digitais e 6 portas analógicas.

24
Além deste, existe o Arduino Mega, que é mais recomendável para projetos que necessitam de
um grande número de entradas e saídas, já que ele possui 54 portas digitais e 15 portas
analógicas e utiliza o processador ATmega2560. Outra opção é o Arduino Leonardo, o qual é
parecido com o Arduino Uno, possuindo 20 portas digitais e 12 portas analógicas e utiliza o
processador Atmega32u4. Os 3 Arduinos citados acima possuem um clock de 16Mhz [5].
Dentre as placas Arduino, a mais poderosa é a placa Arduino Due. Ela utiliza o
processador AT91SAM3X8E e possui a maior capacidade de processamento, com um clock
de 84Mhz, e memória, com 512 Kb de memória disponível. Esta placa oferece um total de 54
portas digitais e 12 portas analógicas. Por último, temos o Arduino Nano (versão 3.x), com
32Kb de memória, sendo que 2Kb são usados pelo bootloader, 14 portas digitais e 8
analógicas. Ela utiliza o processador ATmega328 e possui um clock de 16Mhz. Sua grande
vantagem encontra-se em seu pequeno tamanho, que consiste em apenas 4,3cm de
comprimento por 1,85cm de largura, tornando-se ideal para projetos compactos [4]. Há
diversos outros tipos de placas Arduino, porém estas são as mais conhecidas e utilizadas.
Existem, também, muitas placas compatíveis e derivadas do Arduino. Algumas são
equivalentes a ela do ponto de vista funcional e podem substituí-las sem grandes problemas.
Outras são alteradas, adicionando módulos que facilitem ou acrescentem funcionalidades.
Ainda há outras que são eletricamente equivalentes, mas alteram a forma e podem apresentar
problemas de compatibilidade com módulos (acessórios) feitos para placas Arduino. Algumas
variantes usam diferentes processadores, de compatibilidade variável. Em síntese, devido ao
fato de ser um hardware aberto, existem réplicas com e sem alterações na versão original da
placa.
Diversos módulos para Arduino estão disponíveis no mercado, o que amplia as suas
possibilidades de atuação. Controle de motores, utilização de telas de LCD, emprego de GPS,
uso de redes Ethernet, comunicação via Bluetooth ou WiFi e aplicações com diversos tipos de
sensores são apenas alguns exemplos de funções proporcionadas pelos módulos fabricados
para a plataforma Arduino. Desse modo, placas de circuito impresso se encaixam nos pinos do
próprio Arduino, acrescentando funcionalidades a ele e, assim, oferecendo uma grande
quantidade de possibilidade de ação.
De modo geral, a plataforma Arduino representa uma ferramenta para a realização de
projetos simples nas áreas de automação, eletrônica e computação. Por isso, muitas pessoas a

25
utilizam, o que gera duas consequências principais: em primeiro lugar, muitos outros
fabricantes procuram fazer seus módulos e dispositivos eletrônicos compatíveis com o
Arduino; e, em segundo lugar, muitas pessoas escrevem e discutem soluções de seus trabalhos
(que incluem o Arduino) abertamente. Tudo isso torna a utilização desta plataforma mais fácil
e viabiliza muitas possibilidades de projetos. Juntando a isto o fato de ser uma plataforma de
código aberto e que não exige o emprego de dispositivos muito caros, ela também se torna
uma ferramenta acessível.
2.3.3 Bluetooth
A tecnologia Bluetooth permite a comunicação entre dispositivos através de uma
frequência de rádio de curto alcance. Trata-se de um padrão de comunicação global sem fio e
de baixo consumo de energia.
O alcance e o consumo de energia estão diretamente relacionados à potência do sinal.
Baseado neste conceito, o Bluetooth é dividido em 3 classes [6]:
• Classe 1: com potência de 100 mW e alcance de 100 metros, no máximo;
• Classe 2: com potência de 2,5 mW e alcance de 10 metros, no máximo;
• Classe 3: com potência de 1 mW e alcance de 1 metro, no máximo.
Além disso, a taxa de transmissão de dados via Bluetooth também apresenta algumas
possibilidades e varia de versão para versão. Na Tabela 1, podemos ver estes valores
relacionados a cada uma das versões desta tecnologia [6].
Tabela 1- Versões do Bluetooth e suas velocidades máximas de transmissão de dados.
O Bluetooth é uma tecnologia que está presente na grande maioria dos computadores,
laptops e celulares do mercado. Consequentemente, não é necessária a instalação de módulos
adicionais para que um computador pessoal consiga se comunicar segundo este protocolo. No
Versão Taxa de transmissão
1.2 1 Mbit/s
2.0 + EDR 3 Mbit/s
3.0 24 Mbit/s
4.0 25 Mbit/s
5.0 50 Mbit/s

26
entanto, ainda que isso seja necessário, a compra de módulos Bluetooth para serem
adicionados aos dispositivos apresenta baixo custo.
2.3.3.1 Modulação
Os sistemas Bluetooth operam na frequência de 2,4Ghz e utilizam a modulação GFSK
(Gaussian Frequency Shift Keying) para transformarem os bits a serem transmitidos em
sinais. Nela, os dados são codificados na forma de variações de frequência em uma portadora,
ou seja, esta modulação atribui frequências diferentes à portadora de acordo com o bit a ser
transmitido. Até este momento, não há diferenças entre esta modulação e a modulação FSK
(Frequency Shift Keying) e o modulador a ser utilizado pode ser o mesmo. No entanto, os
impulsos passam por um filtro gaussiano antes de entrarem no modulador de pulso a fim de
diminuir a largura espectral do mesmo.
2.3.3.2 Arquitetura de redes
A arquitetura de redes da tecnologia Bluetooth pode ser de dois tipos: piconet e
scatternet.
Em uma rede do tipo piconet, até 8 equipamentos podem participar, sendo 1 mestre e 7
escravos, os quais sincronizam seus clocks com o primeiro. Em uma rede deste tipo, a
portadora muda constantemente o seu canal de frequência, usando uma sequência de saltos
definida pelo clock e endereço Bluetooth do dispositivo mestre, de modo que tanto a emissora
quanto a receptora saibam a sequência correta. Isto é feito para que diversas redes piconets na
mesma área interfiram o mínimo possível umas com as outras. É importante destacar que a
troca de informações ocorre sempre entre um mestre e um escravo, não podendo haver
comunicação direta entre 2 escravos.
É possível incluir mais dispositivos na rede através da combinação de redes piconet.
Deste modo, um dispositivo escravo de uma rede piconet seria o mestre de outra, unindo,
assim, os dispositivos de duas redes diferentes em uma só. É importante frisar que um
dispositivo pode ser escravo em várias redes do tipo piconet, porém só pode ser mestre em
uma delas. Isto ocorre porque é o mestre que define as características da rede e, se um
dispositivo for o mestre em mais de uma rede, deveríamos tratá-la como uma rede única, e

27
não como uma combinação de redes diferentes. A esta união de redes piconet damos o nome
de scatternet.

28
Capítulo 3
Materiais e Métodos
Este capítulo contém todas as informações referentes ao desenvolvimento do sistema
proposto. Aqui, é explicado como cada parte dele funciona e como elas se integram. O
desenvolvimento do software, o funcionamento do hardware, a estrutura, a comunicação e a
lógica são descritos e detalhados a seguir.
3.1 Arquitetura e funcionamento geral
O sistema é composto por um computador central e dois dispositivos espalhados pelo
ambiente. A comunicação entre eles se dá via rede Bluetooth do tipo piconet. No caso deste
projeto, o computador fará o papel de mestre enquanto os dispositivos atuarão como escravos
(Figura 2).
Figura 2 - Arquitetura geral do sistema de medição de tempos de resposta
Computador Central
Dispositivo 1
Dispositivo 2 Dispositivo 3
Dispositivo 4

29
De modo geral, o programa que estiver rodando no computador central irá coordenar
as ações dos dispositivos ao seu redor para que o exercício seja realizado corretamente. Para
isto, ele irá se comunicar com o usuário através da interface gráfica desenvolvida e com os
dispositivos via Bluetooth. De maneira genérica, a seguinte sequência de acontecimentos
ocorre (Figura 3).
Figura 3 - Funcionamento geral do sistema de medição de tempos de resposta
Primeiramente, o usuário escolhe se deseja realizar login no sistema, criar um novo
usuário ou visualizar resultados de treinamentos anteriores. Caso uma das duas primeiras
opções seja selecionada, ele poderá configurar as posições de cada dispositivo espalhado pelo
ambiente e iniciar um treinamento, escolhendo um dentre os 3 módulos de treinamento
possíveis. Caso ele opte por visualizar resultados anteriores, o usuário deverá definir as
características do treinamento cujos dados ele deseja analisar para que estes sejam exibidos
pelo programa.
Durante um treinamento, o computador envia comandos e recebe dados dos
dispositivos, conforme a Figura 4. Deste modo, os LEDs dos dispositivos estimulam o
participante e o programa calcula o tempo levado por ele para reagir.

30
Figura 4 - Interação computador-dispositivo
Basicamente, o programa central seleciona um ou mais dispositivos e envia um
comando para que liguem seus LEDs. O(s) dispositivo(s) recebe(m) a mensagem, liga(m) os
LEDs e espera(m) pela reação do usuário. Quando o usuário chega perto de um determinado
dispositivo, este detecta a sua presença e, então, desliga os LEDs, enviando ao programa
central o tempo que os LEDs ficaram ligados. Por fim, o programa central recebe as
informações de tempo e as armazena. Este ciclo se repete até que o treinamento seja
encerrado. Os códigos desenvolvidos e implementados nos dispositivos e no programa central
estão disponíveis para visualização e download [53].
3.2 Dispositivo
Os dispositivos recebem um comando do programa central e retornam a ele um tempo.
A caixa-preta com esta relação de entrada e saída deve realizar alguns processos
intermediários, que incluem: ligar os LEDs; perceber a reação do indivíduo; desligar os
LEDs; e contar o tempo em que eles permaneceram ligados. Essas tarefas demandam a
presença e a coordenação entre diversos módulos eletrônicos, centralizados por uma placa

31
microcontroladora Arduino Nano V3.0. O Arduino se comunica com o programa central
escrito em Java, no computador do usuário, por meio de um módulo Bluetooth HC05. Quando
um comando de ativar é recebido, um LED é ligado e o tempo é guardado pelo Arduino. O
indivíduo avaliado dará um chute ou um soco na frente do LED e este movimento é detectado
pelo módulo detector de obstáculos FC51. Quando o movimento é detectado, o tempo de
resposta é calculado e enviado via Bluetooth para o computador central. Para permitir
diferentes arranjos com os dispositivos, sem a necessidade de estruturas fixas nem fios, eles
são alimentados com baterias.
Para permitir o uso do dispositivo em academias e manter baixo o seu consumo de
energia, o módulo Bluetooth escolhido pertence à classe 2 e, como a quantidade de dados a
serem transmitidas não é alta, praticamente qualquer taxa de transmissão serve para a
aplicação. O módulo escolhido implementa a versão 2.0 + EDR (Figura 5).
Figura 5 - Módulo Bluetooth HC-05
A troca de informações entre o Bluetooth e o Arduido é feita com dois pinos de
comunicação serial RX/TX (1 start bit, 8 bits de dados sem paridade e 1 stop bit). O
pareamento do Bluetooth com o computador é feito com a senha padrão do módulo (1234).
Com o intuito de manter a portabilidade e a simplicidade do circuito, foi escolhido um
módulo detector de proximidade (obstáculos) por reflexão de infravermelho com saída digital
(Figura 6). O cone de detecção tem ângulo de ±35º com relação a normal e um potenciômetro
acessível ao usuário permite a regulagem de distância de detecção do obstáculo, limitada entre
2 e 30 centímetros.

32
Figura 6 - Módulo detector de obstáculos FC-51
O microcontrolador escolhido para o controle dos dispositivos é um dos menores da
família Arduino, mas, mesmo assim, é suficiente para gerenciar a comunicação Bluetooth, o
tempo de resposta e o detector de obstáculos, mantendo o baixo consumo e volume desejados
para os dispositivos (Figura 7). Dois LEDs azuis com intensidade de 14 cd, corrente de 20 mA
e cone de luz de ±20º foram ligados às portas digitais do Arduino e são acionados com nível
lógico 0. Resistores de 220 Ω limitam a corrente dos LEDs. O Arduino Nano pode ser
alimentado através da conexão USB Mini-B, de uma fonte de alimentação externa não
regulada de 6 até 20V ou de uma fonte de alimentação externa regulada de 5V, o que permite
a programação e depuração de código via USB e alimentação com baterias após a sua
programação.
Figura 7 - Placa com microcontrolador Arduino Nano V3.0
Uma placa de circuito impresso foi utilizada para interconectar o Arduino, os módulos
Bluetooth, o detector de obstáculos e os LEDs sinalizadores (Figura 8).

33
Figura 8 - Placa de circuito impresso
O resultado final da montagem do dispositivo e o dispositivo completo, com a bateria e o suporte, podem ser vistos nas figuras 9 e 10 respectivamente.
Figura 9 - Resultado final da montagem do dispositivo

34
Figura 10 - Dispositivo completo
O consumo de energia do dispositivo foi calculado através da soma do consumo
individual de cada um de seus componentes. Sabendo que o Arduino Nano consome uma
corrente de 19 mA, o detector de obstáculos FC-51 consome 23 mA, o módulo Bluetooth
HC-05 consome 50 mA e cada conjunto de resistor + LED consome 12 mA, concluímos que o
dispositivo, como um todo, consome uma corrente de 100 mA.

35
Assim, para permitir o uso contínuo em uma academia (manhã, tarde e noite), a bateria
escolhida para alimentar cada dispositivo é do tipo Íon de Lítio com saída de 5 V e capacidade
de 1800 mAh, o que confere uma autonomia de 18 horas aos dispositivos.
3.2.1 Programação do Arduino
A lógica implementada no dispositivo funciona conforme o fluxograma da Figura 11.
Figura 11 - Fluxograma do funcionamento do dispositivo
Os losangos verdes correspondem a decisões e os retângulos azuis a processos. Pondo
em palavras, o dispositivo começa aguardando um comando para ligar os seus LEDs. Quando
este comando chega, via Bluetooth, do programa central, o dispositivo os liga e armazena o
tempo naquele instante, que corresponde ao tempo, em milissegundos, desde a inicialização
do Arduino. Em seguida, ele aguarda um comando para desligá-los vindo do programa central
ou uma percepção de presença feita pelo módulo detector de obstáculos. Em qualquer uma
destas ocasiões, o dispositivo desliga os LEDs, calcula o tempo passado desde que eles foram
ligados e o envia ao computador, reiniciando todo o processo.

36
Cada dispositivo possui um número único de identificação que o distingue dos demais.
Este número é passado ao programa central junto com o tempo de resposta de modo que seja
possível identificar o dispositivo responsável pelo envio daquela informação. Desta maneira,
os dispositivo possuem todas as ferramentas necessárias, tanto de hardware quanto de
software, para realizarem suas funções.
A seguir, serão discutidas a estrutura, a lógica e a implementação do programa que irá
rodar no computador central.
3.3 Programa central
O programa central roda em um computador e é o responsável por fazer a interação
com o usuário e comandar os dispositivos. Ele permite ao indivíduo navegar pelo sistema para
escolher e configurar os módulos de treinamento que deseja realizar; faz a gestão de usuários
para poder salvar os resultados corretamente; exibe, na forma de gráficos, resultados
alcançados anteriormente pelas pessoas escolhidas, podendo fazer diversas comparações; e
controla os dispositivos de acordo com o módulo de treinamento selecionado. É a parte mais
complexa do trabalho sob a ótica do desenvolvimento de software.
Nesta seção, serão discutidas a estrutura, a lógica e a implementação deste programa
que roda no computador central.
3.3.1 Estrutura do código
O código foi organizado em 11 classes, cada qual responsável por um tipo de função
específico, que serão descritas a seguir.
• GUI: classe principal do código, pois contém o método main, que inicia a execução
do programa. Além disso, ela realiza as funções relacionadas à interface gráfica que
fará a interação com o usuário, incluindo a criação e a organização de telas e seus
componentes, juntamente com suas respectivas funcionalidades;
• ChartBuilder: classe responsável pela construção de gráficos, segundo dados
coletados de um arquivo de texto;
• FileManager: classe que realiza manipulação de arquivos de texto;

37
• CommunicateArduino: classe encarregada de trocar informações entre o programa
central e os dispositivos. Isto é realizado por meio de comunicação por portas
seriais via rede Bluetooth;
• SinglePort: classe dedicada a uma porta específica, de modo que é criado um
objeto desta classe para cada uma das portas de comunicação serial abertas. Ela
contém suas informações básicas e trata os dados que chegam à ela. Para isto, a
classe implementa a interface SerialPortEventListener a fim de conseguir captar as
mensagens que chegam à porta no momento em que elas chegam;
• Training: classe pai de todos os treinamentos, possuindo as variáveis e os métodos
comuns e necessários a todos eles. Ela estende a classe CommunicateArduino, de
maneira que consiga ter acesso às portas seriais;
• RandomTraining: classe filha da classe Training, estendendo-a. Ela contém as
funcionalidades necessárias para a realização do treinamento “aleatório";
• AgainstGroupTraining: classe filha da classe Training, estendendo-a. Ela contém
as funcionalidades necessárias para a realização do treinamento “grupo";
• SequenceTraining: classe filha da classe Training, estendendo-a. Ela contém as
funcionalidades necessárias para a realização do treinamento “sequencial”;
• BasicInfo: classe que contém as informações e funções básicas dos treinamentos e
seus respectivos usuários, fazendo a integração entre os dados que foram, ou serão,
salvos e as classes que os utilizarão;
• InputData: classe usada como uma estrutura que contém 2 variáveis: uma que
concerne ao tempo retornado por um dispositivo e outra referente ao número deste
dispositivo.
Mais detalhes a respeito de cada uma destas classes serão discutidos durante as
próximas seções.
3.3.2 Gestão de usuários
A realização de login no sistema possui o objetivo de tornar possível salvar e
relacionar os resultados alcançados a uma pessoa específica. Quando isso ocorre, o programa
verifica se o usuário existe. Em caso positivo, é fornecido acesso aos módulos de treinamento.

38
Em caso negativo, é exibida uma mensagem avisando que o nome de usuário é inválido, já
que não fora cadastrado anteriormente.
Caso seja a primeira vez que um sujeito utilize o programa, ele poderá criar um novo
usuário, bastando, para isso, inserir um nome ainda não cadastrado e que não possua caractere
de espaço ou de quebra de linha. Deste modo, ele poderá realizar os treinamentos e salvar os
seus resultados para, depois, visualizá-los, analisá-los e compará-los com outros.
A gestão de usuários foi implementada na classe BasicInfo. Como o programa não
armazena informações ou realiza funções críticas que devem ser protegidas, não há
necessidade de confirmação de autenticidade por meio de senhas ou similares. Isso apenas
dificultaria o acesso ao sistema.
3.3.3 Módulos de treinamento
A ideia por trás de cada treinamento é simular alguma situação para medir e analisar o
tempo de resposta de determinada pessoa. Portanto, cada módulo é responsável por reproduzir
um cenário específico relacionado à realidade de praticantes de Krav Maga.
Para isto, cada dispositivo representará um agressor. Quando seus respectivos LEDs
acenderem, significa que ele surgiu. Este é o momento em que se deve reagir, se
movimentando em direção ao dispositivo e executando um chute ou um soco até que este
detecte a reação e desligue os LEDs, indicando que o atacante fictício foi neutralizado. Logo,
bastaria substituir os dispositivos por verdadeiros agressores para que a simulação se
transforme em realidade.
A lógica implementada no programa central para realizar cada treinamento foi
estruturada em 4 classes, sendo 1 classe pai e 3 classes filhas que herdam as características da
primeira. A classe pai armazena o número de dispositivos conectados ao computador, assim
como os tempos de resposta enviados por eles durante o exercício. Ao final dele, esta classe
apaga todos os LEDs, enviando uma ordem de desligamento a todos os dispositivos
conectados, e calcula os tempos menor, maior e médio alcançados pelo participante durante o
treinamento. Isto é feito percorrendo todos os tempos de resposta já armazenados daquele
treino específico.
Foram implementados 3 tipos de treinamentos diferentes, que são representados pelas
classes RandomTraining, AgainstGroupTraining e SequenceTraining.

39
O objetivo do primeiro módulo de treinamento consiste em criar um ambiente de
simulação no qual uma pessoa tenha que reagir a um estímulo que possa aparecer de qualquer
lugar ao seu redor, a qualquer momento. Nesse sentido, os LEDs dos dispositivos acendem,
um de cada vez, em ordem e ritmo aleatórios. A ideia aqui é simular o surgimento repentino
de um agressor. Durante o treinamento, o usuário deverá perceber os estímulos e reagir a eles
o mais rápido possível.
Este módulo foi implementado conforme o fluxograma da Figura 12.
Figura 12 - Fluxograma do treinamento aleatório
Tudo começa com a escolha aleatória de um dispositivo. A ele, é enviado um comando
para que acenda os seus LEDs, indicando ao usuário que ele foi acionado. Quando estes LEDs
forem apagados, o programa central salva o tempo de resposta enviado a ele pelo dispositivo e
reinicia o ciclo. O fim do exercício se dá quando o tempo destinado a ele acaba ou quando o
usuário decide encerrar o treino através de um clique de botão na interface do programa.

40
O segundo módulo desenvolvido tem o intuito de simular situações em que haja mais
do que um agressor presente ao mesmo tempo. Para isto, os dispositivos são acionados
simultaneamente em grupos e o usuário tem que lidar com eles de modo eficiente. Trata-se de
um exemplo aplicado do problema do caixeiro-viajante, no qual o usuário deve optar pelo
percurso ótimo que passa por todos os LEDs acesos através do caminho mais curto, e
consequentemente mais rápido, possível.
A lógica de implementação deste módulo é, na verdade, uma expansão da lógica
elaborada no módulo anterior. Trata-se de escolhas aleatórias de dispositivos e de espera de
respostas deles. A diferença básica encontra-se no fato de que, por se tratar de um grupo, tais
escolhas e esperas devem ser realizadas de modo conjunto (Figura 13).
Figura 13 - Fluxograma do treinamento grupo

41
Primeiramente, o usuário escolhe quantos dispositivos são acionados
simultaneamente. Em seguida, são eleitos aleatoriamente quais dispositivos dentre os
conectados ao computador irão participar desta etapa do treinamento, de forma que o número
de dispositivos acionados seja sempre o mesmo, mas que os dispositivos em si variem. Em
seguida, envia-se um sinal para que liguem os seus respectivos LEDs. Cada um destes
dispositivo que perceber a movimentação do indivíduo manda o tempo de resposta para o
programa e, após o recebimento do tempo de todos os dispositivos que foram acionados
(todos os LEDs estiverem apagados), a reação é dada como concluída. Então, salva-se o
tempo total deste ciclo e repete-se o processo até que o tempo do treinamento acabe ou o
usuário decida parar.
Há também a possibilidade de o número de dispositivos do grupo ser escolhido de
modo dinâmico pelo programa, de forma que este valor mude a cada ciclo. Desta maneira, o
usuário terá que lidar com um número diferente de dispositivos a cada rodada do treinamento.
O terceiro módulo de treinamento possui a intenção de simular a aproximação de um
agressor, o que é feito através do controle inteligente do momento e da ordem em que os
dispositivos são acionados. Para que isto se torne possível, tais dispositivos devem ser
posicionados um ao lado do outro de forma que o acendimento sequencial de seus LEDs se
pareça com uma progressão. Desse modo, a função do usuário é analisar a sequência de
acendimento de luzes para conseguir calcular quais LEDs estarão ligados no instante seguinte,
e acertá-los. O objetivo do participante é atingir o alvo o mais distante de si possível, pois isso
caracteriza uma reação mais rápida. A lógica deste módulo foi implementada conforme o
fluxograma da Figura 14.

42
Figura 14 - Fluxograma do treinamento sequencial
Essencialmente, o que é realizado consiste no acendimento sequencial dos LEDs, ou
seja, os dispositivos, já organizados e ordenados, serão acionados segundo uma ordem pré-
determinada. Nesse sentido, o programa envia uma ordem para ligar e desligar os LEDs de
dispositivos consecutivos, até chegar ao último ou até o movimento (soco ou chute) do
participante ser percebido por um deles. Nesse momento, comanda-se o primeiro dispositivo a
acender seus LEDs novamente. Este ciclo se repete até a pessoa desejar encerrar o
treinamento ou o seu tempo se esgotar.
É importante destacar que, em todos os treinamentos, os tempos são contabilizados
somente quando algum movimento é detectado. Além disso, chutes e socos em alvos que não
ascenderam também não são considerados.

43
3.3.4 Apresentação e análise de resultados
Após cada treinamento, são exibidos os tempos menor, maior e médio alcançados pelo
usuário, que correspondem, respectivamente, ao menor, ao maior e à média de tempo de
resposta dentre todos os tempos daquele exercício. Desta forma, ele poderá ter uma noção de
sua atuação naquele ocasião. Além disso, é possível salvar estes tempos para futuras análises e
comparações.
Antes de iniciar cada treinamento, o participante deve definir as seguintes
características: o módulo de treinamento; a duração; o seu estado físico, enunciando se está
cansado ou não; os membros do corpo (superiores e/ou inferiores) que irão participar do
treinamento; o lado do corpo (direito e/ou esquerdo) que poderá reagir; a distância entre os
dispositivos a fim de informar se estes estão muito ou pouco dispersos no ambiente; e a
posição relativa de cada um dos dispositivos que estão sendo utilizados. Tais definições
permitem a análise e a comparação de diferentes treinamentos de acordo com determinadas
características.
O usuário, então, pode visualizar os resultados de treinamentos anteriores,
comparando os tempos de resposta de seus membros e lados do corpo, estudando como o
cansaço influencia a sua velocidade de resposta e verificando as posições dos dispositivos que
geraram reações mais rápidas. Além disso, é possível comparar os resultados de até 4 usuários
diferentes. Tudo isso de acordo com os filtros selecionados e preenchidos na tela de busca de
resultados (Figura 15).

44
Figura 15 - Configuração de exibição de resultados
Todos os resultados são exibidos em forma de gráficos, com título, legenda e cores
característicos de cada um. As escalas de cada eixo são dinâmicas e, consequentemente,
aumentam e diminuem conforme a necessidade, sendo esta dita pela extensão de valores
presentes e pelo tamanho da tela. O eixo x mostra o número do treinamento, enquanto o eixo y
indica o tempo médio de determinada pessoa naquele treinamento em milissegundos, além do
menor e do maior tempo alcançado em cada treino. Desse modo, é possível analisar a média e
a consistência dos resultados.
3.3.5 Armazenamento de dados
Após cada treinamento, é dada, ao usuário, a opção de salvar ou descartar os seus
resultados. Caso seja escolhida a opção “salvar”, os dados são guardados para que seja
possível acessá-los posteriormente. São estas informações que são exibidas em forma de
gráfico ao usuário quando ele visualiza, analisa e compara resultados passados, conforme
explicado na seção 3.3.4.
Os dados são salvos em um arquivo de texto (.txt) chamado “Resultados.txt”. Cada
linha nele escrita corresponde ao resultado de um treinamento específico e contém as
seguintes informações, respectivamente: nome de usuário de quem realizou o treino; nome do

45
módulo de treinamento realizado (Aleatório, Grupo ou Sequencial); membros que
participaram do treinamento (superiores, inferiores ou ambos); estado físico do usuário antes
de iniciar o exercício (cansado ou descansado); lado do corpo do usuário que participou do
treino (direito, esquerdo ou ambos); distâncias entre os dispositivos (longas ou curtas) para
informar o grau de dispersão deles; tempo de resposta médio alcançado naquele treinamento
em milissegundos; o menor tempo de resposta daquele treinamento em milissegundos; o
maior tempo de resposta daquele treinamento em milissegundos; e a posição do dispositivo
em questão (ad - alto à direito, ae - alto à esquerda, bd - baixo à direita ou be - baixo à
esquerda).
Para escrever informações no arquivo, foi criado um método que recebe o nome do
arquivo e o texto a ser salvo nele como parâmetros. Com isso, é criado um arquivo de texto na
pasta “files” dentro do diretório do programa com o nome passado ao método quando ele foi
chamado, escolhendo a opção de acrescentar ao arquivo ao invés de sobrescrevê-lo caso ele já
exista. Em seguida, o texto é escrito no arquivo acompanhado de um “\n”, o qual garante que
haverá apenas um resultado por linha . Por fim, o arquivo é fechado. É válido frisar que, para
tratar erros de exceções, foram usados blocos try/catch/finally.
Enquanto o método de escrita de arquivos utiliza objetos da classe FileWriter, os
métodos de leitura usam objetos das classes BufferedReader e FileReader. Com eles, é
possível abrir o arquivo cujo nome é passado ao método e cujos caminho e extensão são os
mesmos de quando ele foi criado. Em seguida, lê-se linha por linha do arquivo até que ele
acabe, realizando uma ação específica com cada uma delas. No final, fecha-se os objetos
envolvidos nos processos de abertura e leitura do arquivo em questão. Aqui, assim como no
método de escrita, também são utilizados blocos try/catch/finally para realizar o tratamento de
erros e evitar falhas no programa em tempo de execução.
Todos os métodos de leitura realizam o mesmo procedimento, diferenciando-se uns
dos outros apenas na ação que tomam com cada linha lida. Eles podem carregar usuários
existentes ou informações específicas de treinamentos passados, de acordo com a necessidade.

46
3.3.6 Interface Gráfica do Usuário
Dividiremos o desenvolvimento da interface gráfica em 2 partes. A primeira abordará
a interface através da qual o usuário navega pela aplicação, enquanto a segunda irá tratar da
criação de gráficos.
3.3.6.1 Interação Homem-Máquina
Para construir as telas que interagem com o usuário, foi utilizado o plug-in
WindowBuilder do Eclipse. Esta ferramenta permite que a edição dos componentes das telas
seja feita através do código fonte ou da página de design, de maneira que uma mudança em
um deles seja replicada automaticamente no outro. Por este motivo, o recurso é considerado
bidirecional. Nele, escolhemos o tipo de tela (container) que é exibida, o seu layout e os
componentes que irão compô-la. Na Figura 16, pode ser vista uma imagem deste artifício.
Figura 16 - Página de design
O principal container utilizado foi o JPanel, que corresponde a cada uma das telas
criadas. Em cada um destes containers, foram utilizados os seguintes layouts:
• CardLayout: consiste em um gerenciador de layout que trata cada componente
como se fosse uma carta. Somente uma carta por vez fica visível e quem possui este

47
layout atua como um manipulador destas cartas. Assim, é possível alternar as telas
exibidas de acordo com a necessidade;
• GridBagLayout: este layout trata a tela como se fosse uma tabela, sendo que cada
componente ocupa uma ou mais células desta tabela. Ao variarmos os tamanhos das
linhas e colunas, conseguimos modificar os tamanhos dos elementos, suas
localizações e nos tornamos capazes de alinhá-los verticalmente e horizontalmente.
Deste modo, os componentes da tela são estruturados de maneira lógica e ordenada.
É importante frisar que as células da tabela se ajustam dinamicamente com o
aumento ou diminuição do tamanho da tela, o que possibilita a centralização e a
reorganização dinâmicas dos elementos;
• BorderLayout: este layout organiza e dimensiona os componentes da tela para
caberem em até 5 regiões: Norte, Sul, Leste, Oeste e Centro. Cada uma destas
regiões pode conter apenas um elemento, o qual deve preencher o espaço
completamente. Esta opção foi escolhida para a exibição de gráficos, de forma que
eles ocupem o maior espaço possível, expandindo-se automaticamente, e que
mudem os seus tamanhos de acordo com o tamanho da tela. Esta decisão foi tomada
baseada na possibilidade de existência de muitos dados no gráfico, o que exige uma
dimensão maior para uma fácil e agradável visualização.
Na construção das telas, foram utilizados os seguintes componentes:
• JButton: trata-se de um botão e sua principal e mais útil função é a detecção de um
clique. Todas as ações (troca de tela, captação de dado, etc.) relacionadas à interface
gráfica ocorrem após o usuário clicar em um botão da tela. É graças a esse
componente que conseguimos navegar pelo programa;
• JLabel: permite a inserção de textos na tela;
• JTextField: possibilita a captação de dados. É aqui que o usuário digita as
informações pedidas pelo sistema para que sejam utilizadas no programa;
• JComboBox: viabiliza a escolha dentre alternativas oferecidas pelo sistema. Este
componente exibe algumas opções para que o usuário selecione apenas uma.
Com isto, foram criadas e organizadas todas as telas e seus componentes. Agora, o
usuário consegue interagir com o sistema através de uma interface gráfica simples e bem
estruturada.

48
3.3.6.2 Gráficos
Os gráficos foram implementados com o auxílio da biblioteca JFreeChart. Eles são do
tipo XY e se baseiam em uma série de dados, que consistem em uma lista de valores x e y,
para serem construídos. Cada par de valores (x, y) corresponde a um ponto em um sistema de
coordenadas, de forma que o primeiro determina a posição horizontal e o segundo a posição
vertical.
Para gerar um gráfico deste tipo, são determinados: o título, com o(s) nome(s) do(s)
usuário(s) e as demais informações referentes ao que está sendo mostrado; os nomes dos eixos
x e y; a série de dados a serem utilizados; e, por último, a cor e a espessura das linhas que são
desenhadas. Para definir a série de dados, são extraídos os valores dos tempos de resposta de
cada treinamento do arquivo. Isto é feito de modo que somente sejam exibidos os dados dos
exercícios com as características específicas que o usuário deseja visualizar.
3.3.7 Comunicação Computador - Dispositivo
A comunicação entre o computador e os dispositivos é feita de forma serial, enviando
e recebendo as informações sequencialmente, bit a bit. Para isto, foi utilizada a biblioteca
RXTX e criadas as classes CommunicateArduino e SinglePort no programa central.
Basicamente, o que é feito consiste em percorrer todas as portas encontradas no
sistema e verificar se são portas seriais e referentes a algum dos dispositivos. Em caso
positivo, elas são abertas e os parâmetros de comunicação serial são definidos da seguinte
maneira. Em seguida, a porta é configurada para avisar em caso de chegada de novos dados a
ela, tratando, deste modo, a chegada assíncrona de informação. Então, cria-se um objeto da
classe SinglePort, que é registrado para ouvir eventos na porta serial. É este objeto que irá
agir quando novas informações estiverem disponíveis. Por fim, adiciona-se a porta em
questão à lista de portas da classe CommunicateArduino. Vale destacar que são usados blocos
try/catch para tratar erros e excessões.
Para enviar comandos a um dispositivo, há um método que escreve, na porta
responsável pela comunicação entre aquele dispositivo e o programa central, a informação
que é passada a ele como um parâmetro. Quando uma informação nova chega à porta serial,
outro método da classe singlePort referente à porta em questão é chamado automaticamente e
adiciona o byte lido a uma lista da classe CommunicateArduino que contém todos os bytes

49
lidos. Por se tratar de um método do tipo synchronized, caso ele seja chamado por duas
threads diferentes, uma terá que esperar a outra terminar as suas ações para conseguir
executar um comando, o que evita erros de sincronismo.
Cada mensagem recebida é composta por 5 bytes, sendo o primeiro referente ao
número de identificação do dispositivo que enviou a informação e os 4 seguintes relacionados
ao tempo de resposta. Tais dados são colocados em uma lista de bytes de maneira ordenada.
Em vista disso, foram criados métodos que acusam se há dados disponíveis na porta de
comunicação e, em caso positivo, os retornam, de maneira que seja possível identificar o
dispositivo e o tempo de resposta enviados.
Ao final da utilização do programa, todas as portas que foram abertas são fechadas.
3.4 Testes
Com o objetivo de calcular a latência de comunicação entre o dispositivo e o
computador, foi realizado o seguinte teste. O computador enviava mensagens para um
dispositivo específico, que havia sido programado para enviar uma resposta assim que
recebesse qualquer mensagem, sem realizar processos intermediários. O computador, então,
guardava os tempos nos instantes em que a mensagem era enviada e em que a resposta do
dispositivo era recebida por ele. Desse modo, foi possível calcular o tempo necessário para
enviar e receber um sinal do dispositivo. Todas essas medições foram realizadas pelo
computador, sendo que distância entre este e o dispositivo variou entre 1 e 8 metros, com
saltos de 1 metro entre cada variação. A cada salto, foram realizadas 10 repetições do teste,
somando, então, 80 repetições ao todo.
Em seguida, foi medido o tempo gasto pelo dispositivo para realizar as tarefas
necessárias durante a mensuração do tempo de resposta, incluindo o tempo que o dispositivo
leva para guardar o tempo inicial, ler e verificar a entrada do sensor de obstáculos, desligar os
LEDs e calcular a diferença entre o tempo inicial armazenado e o tempo naquele instante, o
que corresponde ao tempo de resposta (Figura 17). Para isto, foi forçada uma saída positiva no
sensor, de modo que um obstáculo fosse detectado desde o princípio. Em outras palavras, foi
avaliado o tempo total gasto pelas funções realizadas pelo microcontrolador quando uma
reação é detectada. Todas essas medições foram realizadas pelo dispositivo, com precisão de 1
milissegundo, variando-se a distância de percepção de obstáculos em relação ao sensor, que

50
pode ser ajustada em seu potenciômetro, de maneira que foram testadas 4 distâncias de
detecção: 3 cm, 8 cm, 13 cm e 18 cm. Em cada uma delas, foram realizadas 10 repetições
deste teste.
Figura 17 - Processos realizados pelo dispositivo durante as medições de tempo de resposta
Além destes testes, o equipamento foi usado em campo com alunos de Krav Maga.
Deste modo, foi possível medir, na prática, os tempos de resposta de praticantes de defesa
pessoal. Para isto, foram realizados 4 tipos de testes, variando-se as posições dos dispositivos
e foram impostas condições de lateralidade corporal, diferentes níveis de fadiga e presença de
estímulos distratores. São esperados valores que variem em torno de 700 milissegundos,
similares aos resultados encontrados por Silvio Cláudio Pereira Rodrigues [7] , conforme
descrito na seção 2.3.2, e que estes valores sejam influenciados pelos fatores descritos em
2.1.4.
No primeiro teste com os voluntários, alternou-se a distância entre os dispositivos
entre 1 e 2 metros (consideradas aqui como distâncias curtas e longas, respectivamente). Os
voluntários que participaram deste teste estavam descansados e podiam usar o lado e membro
que achassem mais adequado para socar ou chutar na direção dos dispositivos. Cada exercício

51
teve duração de 30 segundos e os dispositivos permaneceram a uma altura de 1 metro em
relação ao solo. Em média, cada participante conseguiu realizar 15 golpes por treino.
O segundo tipo de teste foi realizado com estas mesmas pessoas. Desta vez, as
distâncias entre os dispositivos foram fixadas em 1 metro e a altura em relação ao solo
manteve-se como 1 metro. Os alunos, descansados, poderiam utilizar suas pernas e braços
para socar e chutar, porém, em cada caso, limitou-se o lado do corpo que poderia executar os
golpes. O teste foi repetido 3 vezes: na primeira vez, o participante poderia utilizar ambos os
lados; na segunda, ele poderia usar somente o lado direito; já na terceira, somente o lado
esquerdo.
No terceiro tipo de teste, o objetivo era medir o tempo de resposta quando o
participante estava descansado e, em seguida, quando ele estava cansado. Não houve
limitações de lado ou membros do corpo e os dispositivos permaneceram a 1 metro do solo e
a 2 metros de distância entre si (considerada distância longa). Desta vez, participaram
voluntários que não haviam realizado nenhum teste anteriormente, sendo todos iniciantes com
até 6 meses de treino. Entre cada teste, os alunos realizaram uma sequência de 20 pulos
elevando os joelhos seguidos de 15 flexões de braço.
No quarto e último tipo de teste, participaram alunos mais experientes. Desta vez, eles
estavam descansados e podiam usar os lados e membros do corpo de desejassem para
realizarem os chutes e socos. Os dispositivos ficaram a uma distância curta (1 metro) um do
outro e a uma altura próxima às cabeça dos participantes. A ideia deste teste consistiu em
medir o tempo de resposta dos alunos no momento em que eles também precisavam
considerar outros fatores além do teste. Para isso, outra pessoa foi chamada para auxiliar no
exercício, que foi realizado da seguinte forma.
Enquanto o sujeito principal reagia aos dispositivos o mais rápido possível, a outra
pessoa, de vez em quando, tentava chutá-lo. O participante principal, por sua vez, deveria se
defender dos ataques contra ele. Desta maneira, o aluno precisou se preocupar tanto com os
dispositivos quanto com os ataques executados contra ele.

52
Capítulo 4
Resultados e Discussões
Os testes de medida de latência de comunicação entre o computador e o dispositivo
apresentaram o resultado da Tabela 2.
Tabela 2 - Latência de comunicação entre o computador e o dispositivo.
A primeira coluna da tabela informa a distância entre o computador e o dispositivo,
enquanto a segunda representa a média dos valores obtidos e a terceira o desvio padrão, o qual
mede a dispersão dos dados obtidos em torno da média. Vale lembrar que os valores
encontrados representam o tempo de envio somado ao tempo de recebimento de uma
mensagem, resultados da comunicação entre o computador e o dispositivo, de modo que cada
via da comunicação leva metade deste tempo.
Como podemos observar, as médias dos valores de latência encontram-se numa faixa
de 18 a 56 milissegundos, com desvio padrão entre 14 e 34 milissegundos, não havendo
correlações significativas entre as diferentes distâncias testadas. Estes dados nos informam a
rapidez de interação entre o computador e o dispositivo e não interferem no tempo de resposta
medido pelo aparelho, já que este é calculado pelo próprio dispositivo e não depende da
comunicação deste com o computador. Além disso, não foram constatadas falhas de
comunicação entre o computador e o dispositivo durante os testes.
Distância computador-dispositivo (m) Média (ms) Desvio padrão (ms)
1 38 29
2 26 19
3 36 15
4 56 33
5 31 14
6 18 21
7 43 34
8 37 17

53
Nos testes de atraso referente aos processos internos que ocorrem no dispositivo
quando uma reação é detectada, foi medido o valor 0 ± 1 ms em todos os casos. Desse modo,
percebe-se que a medição de tempo de resposta realizada pelo dispositivo não é afetada,
consideravelmente, por este atraso.
Em campo, foram realizadas 85 diferentes medições, que contaram com a participação
de 25 pessoas, todos praticantes de Krav Maga. Destes, 19 são homens e 6 são mulheres.
Além disso, 22% estão na faixa de 10 a 20 anos de idade, 18% na faixa de 20 a 30, 22% têm
entre 30 e 40 anos e 38% possuem mais de 40 anos de idade. A maioria das pessoas que
participaram dos testes é destra, representando 89% do total. Uma tabela com mais detalhes a
respeito de cada aluno encontra-se no Apêndice A.
Em relação ao tempo de treino e nível dos alunos, podemos dividi-los em 3 grupos. O
primeiro grupo engloba os iniciantes (faixas brancas), que possuem até 6 meses de treino; já o
segundo compreende os alunos faixas amarelas, que treinam de 6 meses a 2 anos; e, por
último, o terceiro grupo representa um nível mais avançado, incluindo alunos com mais de 2
anos de treino (a partir da faixa laranja).
Somente o módulo “aleatório" foi testado durante as medições realizadas. Os testes
foram realizados dentro de uma academia, ao lado do tatame onde os alunos treinam. Um a
um, todos os 25 participantes testaram suas velocidades de resposta nos 4 tipos de testes
diferentes.
Para exibir os resultados, foi utilizado o programa desenvolvido neste projeto, de
maneira que os gráficos que serão mostrados consistem em imagens retiradas do próprio
programa. O eixo vertical exibe o tempo de resposta em milissegundos alcançado por certa
pessoa, que é mostrada no eixo horizontal. Portanto, ao organizarmos os participantes em
ordem crescente de idade, obtemos os gráficos da Figura 18, relativos ao primeiro teste, sendo
o primeiro referente aos resultados quando os dispositivos estavam próximos e o segundo
quando eles estavam mais afastados um do outro. Vale destacar que este grupo foi composto
por 13 pessoas apresenta uma distribuição homogênea pelas idades no que se refere ao sexo e
experiência em Krav Maga.
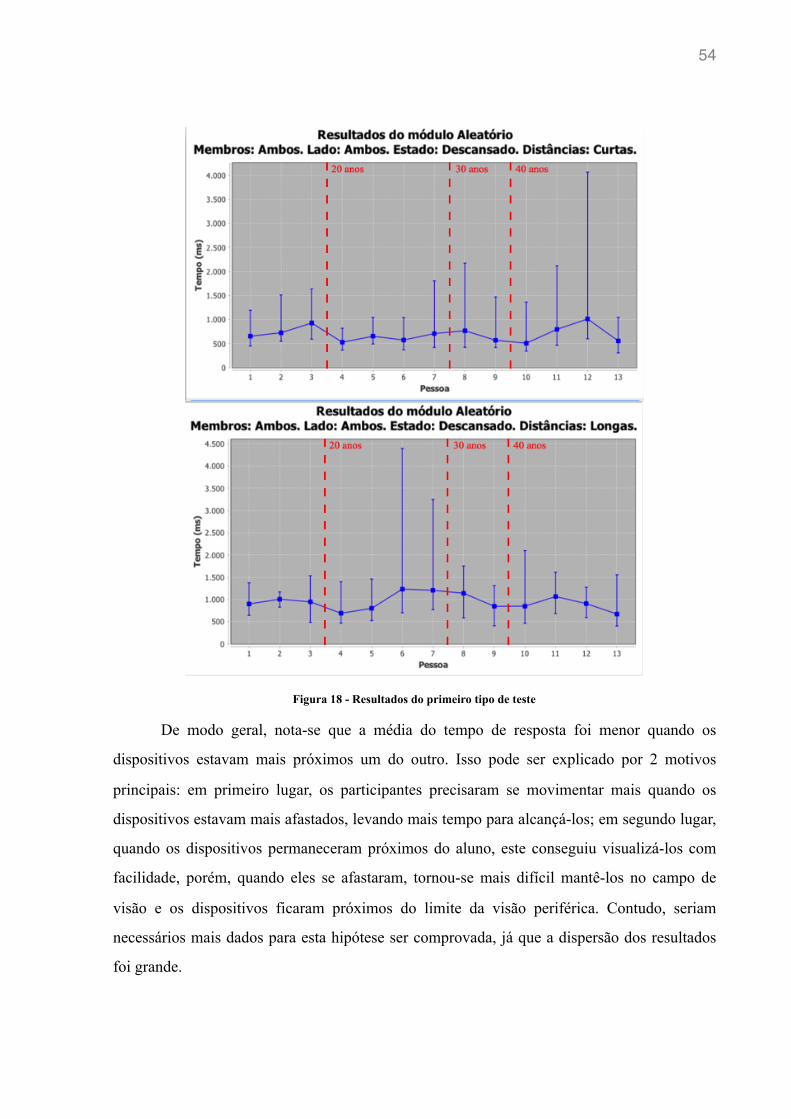
54
Figura 18 - Resultados do primeiro tipo de teste
De modo geral, nota-se que a média do tempo de resposta foi menor quando os
dispositivos estavam mais próximos um do outro. Isso pode ser explicado por 2 motivos
principais: em primeiro lugar, os participantes precisaram se movimentar mais quando os
dispositivos estavam mais afastados, levando mais tempo para alcançá-los; em segundo lugar,
quando os dispositivos permaneceram próximos do aluno, este conseguiu visualizá-los com
facilidade, porém, quando eles se afastaram, tornou-se mais difícil mantê-los no campo de
visão e os dispositivos ficaram próximos do limite da visão periférica. Contudo, seriam
necessários mais dados para esta hipótese ser comprovada, já que a dispersão dos resultados
foi grande.

55
O segundo teste foi realizado com os mesmos 13 alunos e os resultados obtidos no
foram os da Figura 19.
Figura 19 - Resultados do segundo tipo de teste
Como a grande maioria dos alunos é destra, é natural esperar uma reação mais rápida
do lado direito do corpo em relação ao esquerdo. E foi exatamente isto que ocorreu. No
gráfico, a linha vermelha, representando o lado esquerdo, permanece acima da linha verde,
que representa o lado direito, em quase todos os casos. A faixa etária entre 20 e 30 anos de
idade apresentou os menores tempos médios de resposta e uma menor disparidade entre os
resultados referentes a cada um dos lados do corpo, de modo que os tempos obtidos em cada
um dos testes foram semelhantes. Em média, cada participante conseguiu realizar 15 golpes
por treino.
Os resultados, em ordem crescente de idade, do terceiro teste encontram-se na Figura
20. Este contou com a participação de 5 alunos.

56
Figura 20 - Resultados do terceiro tipo de teste
Como podemos perceber, a atuação dos participantes com menos de 30 anos de idade
foi melhor quando estavam cansados do que quando estavam descansados, enquanto o inverso
ocorreu com os participantes com mais de 30 anos. Isso pode ser explicado pela diferença de
resistência física que cada idade traz consigo. Ou seja, os indivíduos mais novos não
cansaram tanto quanto os mais velhos devido a realização dos exercícios propostos.
Sabendo que reagimos mais rapidamente em um estado intermediário de tensão
muscular e/ou psicológica, os exercícios físicos realizados entre cada teste colocaram os
alunos mais novos em uma faixa referente a este estado intermediário, fazendo com que suas
reações se tornassem mais rápidas. Por outro lado, os participantes mais velhos ultrapassaram
esse estado intermediário e ficaram realmente cansados, o que tornou suas reações ainda mais
lentas. Isto nos leva a entender que nossas reações são mais lentas quando estamos cansados
do que quando estamos relaxados, porém, quando não estamos nem relaxados nem realmente
cansados, nossa velocidade de resposta é ainda mais alta.
Além disso, vale notar que, de modo geral, os tempos de resposta deste teste foram
maiores do que os dos testes anteriores. Isso pode estar associado ao tempo de treino dos
alunos, pois este último teste contou com a presença de alunos menos experientes que os
testes anteriores. Em média, cada participante conseguiu realizar 15 golpes por treino.
Os resultados do quarto e último teste, desta vez ordenados em ordem crescente de
tempo de treino de Krav Maga, encontram-se na Figura 21. Participaram, deste teste, 7

57
voluntários, sendo 43% possuem entre 8 meses e 2 anos de treino e os 57% restantes possuem
mais de 2 anos de treino.
Figura 21 - Resultados do quarto tipo de teste
Neste teste, algo interessante ocorreu. De modo geral, os alunos com menos de 2 anos
de treino obtiveram resultados melhores no caso normal, enquanto os alunos mais experientes
foram mais rápidos quando estavam sendo atacados. Isto pode ser observado no gráfico
através da inversão de posição entre as linhas vermelha e azul. Tal fenômeno pode ser
explicado pelo fato de que os alunos que treinam a mais tempo ficam mais atentos quando
estão em perigo e, consequentemente, suas velocidades de resposta tornam-se mais rápidas.
Em média, cada participante conseguiu realizar 15 golpes por treino.

58
Capítulo 5
Conclusão
O equipamento desenvolvido foi capaz de corroborar algumas informações descritas
na seção 2.1.4, que permite ver diversos fatores que exercem influência na velocidade de
resposta. Como exemplo, é possível citar aspectos como a lateralidade corporal, tensão
muscular e emocional, idade e treinamento, dentre outros.
Há algumas diferenças básicas entre o equipamento desenvolvido e os analisados na
seção 2.3. Em primeiro lugar, neste, a reação deve ser realizada na exata direção de onde
estímulo é efetuado. Em segundo lugar, há mais do que um dispositivo responsável por
estimular e detectar a reação do participante, permitindo a realização de exercícios que
trabalhem a visão periférica e a estratégia de movimentação, além da velocidade de resposta.
Em terceiro lugar, não é necessário tocar no equipamento para que o golpe seja percebido por
ele, bastando apenas que o movimento chegue perto dele. Em quarto lugar, os módulos de
treinamento controlam os dispositivos de forma inteligente e única, baseada nas configurações
escolhidas pelo usuário. Em quinto lugar, o hardware consiste apenas em alguns pequenos
dispositivos e um computador ou laptop, o que o torna portátil. Além disso, há diversas outras
diferenças técnicas, como peças utilizadas e detalhes de programação, que tornam o
equipamento desenvolvido único.
Por fim, relembramos que o presente trabalho se propôs a desenvolver um
equipamento capaz de medir e avaliar o tempo de resposta de um praticante de defesa pessoal.
Para isto, ele deveria cumprir 3 objetivos: o primeiro consiste em construir um dispositivo
capaz de medir o tempo de resposta do seu usuário; o segundo diz respeito ao
desenvolvimento de diferentes módulos que controlem o acionamento dos dispositivos
construídos; e o terceiro refere-se ao fornecimento de meios de visualização e análise de
resultados.
Com este propósito, foi desenvolvida a solução aqui apresentada. A medição de tempo
de resposta realizada pelo dispositivo demonstrou uma incerteza de 1ms e não sofreu
interferências significativas de atrasos resultantes de processos internos, podendo ser
considerada, então, como satisfatória para os fins deste projeto, que não obteve resultados

59
abaixo de 300 ms durante os testes com os alunos. Da mesma maneira, a comunicação entre o
computador e o dispositivo apresentou uma latência da ordem de poucas dezenas de
milissegundos e não foi notada nos testes em campo.
Além disso, foi mostrada a capacidade do computador de controlar os dispositivos
através do módulo de treinamento selecionado. Por fim, os resultados foram exibidos na
forma de gráficos, tornando possível a análise dos tempos médios obtidos e seus valores
mínimos e máximos referentes a cada um dos exercícios realizados.
Portanto, podemos concluir que o equipamento desenvolvido foi capaz de cumprir os
seus objetivos. O único ponto testado, porém não utilizado nos testes em campo, foi o
emprego de 2 módulos específicos de treinamento desenvolvidos. Isto ocorreu porque estes
módulos fazem sentido quando há mais do que 2 dispositivos presentes no exercício e, como
foram construídos apenas 2 destes, os módulos não foram utilizados com os alunos. Contudo,
eles foram testados e funcionam conforme descrito na seção 3.3.3.

60
Capítulo 6
Trabalhos Futuros
Nesta seção, serão apresentadas algumas opções de melhorias e continuidades para o
projeto. Cada uma delas propõe uma evolução do sistema em um aspecto específico e são
totalmente independentes umas das outras. Deste modo, pode-se combiná-las a fim de
melhorar o(s) fator(es) desejado(s).
6.1 Treinamento
Primeiramente, poderiam ser construídos mais dispositivos para que os outros 2
módulos de treinamento desenvolvidos também sejam testados. Desse modo, seria possível
realizar testes, medições e análises mais complexos, observando o comportamento do
participante na presença de mais de 2 dispositivos, nos diversos módulos.
Em segundo lugar, o equipamento construído poderia ser utilizado para treinamento, e
não somente para realizar medições e análises. Para isto, bastaria realizar um uso contínuo
dele, de modo que a velocidade de resposta seja treinada sistematicamente com o intuito de
torná-la mais rápida. Assim, seria possível obter os resultados de cada pessoa no decorrer do
tempo, analisando a sua evolução e identificando as deficiências que devem ser trabalhadas.
6.2 Aplicações
O objetivo da tecnologia desenvolvida neste trabalho é medir o tempo de resposta de
um praticante de defesa pessoal. Para isto, foram desenvolvidos módulos de treinamento
específicos para este público de modo que sejam simuladas situações ligadas a este contexto.
Contudo, isso não precisa se limitar a isto e pode ser estendido para diversos esportes onde o
tempo de resposta seja um ponto crítico.
Goleiros; artistas marciais; líberos. Estas categorias de atletas, e outras mais,
dependem de reações rápidas para que seja alcançado um bom resultado e, em seus
cotidianos, treinam exaustivamente com a intenção aperfeiçoar seus movimentos e realizá-los
cada vez mais rapidamente. Portanto, seria interessante desenvolver módulos de treinamento

61
diferentes e específicos para outras necessidades, possibilitando, assim, a utilização do
equipamento elaborado por outros ramos da atividade física.
6.3 Módulos Eletrônicos
Para escolher os módulos dos dispositivos que realizaram a comunicação Bluetooth e
a detecção de obstáculos, foram considerados o valor, a facilidade de acesso e a qualidade dos
produtos. Contudo, cada projeto possui exigências diferentes destes 3 fatores e isso deve ser
ponderado no momento da escolha. Não existe uma solução ótima para todos os casos, mas
sim a melhor opção para cada necessidade específica.
Portanto, a proposta aqui é simples: trocar os módulos escolhidos por outros de modo
que cumpram melhor os requisitos de um determinado projeto. Existem, no mercado,
módulos Bluetooth com maior potência de sinal e, consequentemente, com maior alcance,
porém são mais caros e consomem mais energia. Ademais, há módulos para detecção de
obstáculos com maior, ou menor, grau de sensibilidade. Assim sendo, seria válido mudar esses
módulos eletrônicos para que se adaptem às exigências de outras aplicações, tornando o
equipamento mais especializado.
6.4 Estímulos
Neste projeto, foram utilizados LEDs para estimular a reação do indivíduo durante os
treinamentos. O seu acendimento indicava à pessoa que ela deveria reagir, enquanto o seu
desligamento assinalava que a reação estava completa. Entretanto, é possível utilizar outras
formas de estímulos para apontar o início e o fim do exercício.
Primeiramente, seria possível acrescentar movimento aos dispositivos, através de
trilhos ou sistema similar. Desta maneira, o indivíduo teria que reagir ao estímulo luminoso o
mais rápido possível e, além disso, teria que se preocupar em acertar um alvo em movimento,
dificultando ainda mais o exercício. Em segundo lugar, ao invés da visão, o sentido da
audição poderia ser estimulado. Neste caso, os dispositivos emitiriam sons, e não luzes, e a
pessoa teria que reagir a eles. Outra opção seria utilizar o tato como o sentido que percebe os
estímulos. Para isto, um instrumento seria acoplado ao participante e tremeria em um
determinado momento, instigando uma reação por parte do participante.
62
Por último, seria interessante combinar diferentes estímulos e sentidos humanos de
percepção em um único exercício, tornando possível a criação de um ambiente no qual o
participante precisasse utilizar todos os seus sentidos para tomar uma decisão e agir. Um
treinamento deste tipo exigiria reações específicas à cada estímulo gerado. Assim, a
complexidade aumentaria consideravelmente, assim como a proximidade da simulação à vida
real, onde utilizamos todos os nossos sentidos para analisar tudo o que acontece ao nosso
redor para, então, (re)agir.
6.5 Monitoramento de Posição e Movimento
A fim de tornar o controle dos diversos dispositivos mais inteligente e interessante,
uma opção seria monitorar a posição destes dispositivos e da pessoa que realiza o exercício
em tempo real. Com o monitoramento de posições, o programa central poderia comandar os
dispositivos e avaliar se o percurso realizado pelo indivíduo foi ótimo, isto é, o mais curto
possível. Desse modo, situações de hesitações e erros de movimentação por parte do usuário
poderiam ser identificados facilmente. Além disso, seria possível alterar os dispositivos
acionados, desligando alguns e ligando outros, durante uma reação do indivíduo, baseado em
sua posição.
Além disso, o programa poderia identificar padrões de localização, gerando relatórios
para o indivíduo analisá-los. Se ele permanecer, por exemplo, mais próximo de um dispositivo
do que de outro, sem motivo aparente, isto seria alertado pelo sistema. Muitas vezes, estar no
lugar certo, na hora certa, pode fazer uma grande diferença e, desse modo, tornar-se-ia
possível identificar erros de posicionamento e consertá-los.
Outra opção seria realizar o monitoramento de movimentos, possibilitando ao
programa analisar o tipo de movimento realizado pelo indivíduo. Assim, utilizando uma base
de dados, ele poderia avaliar a técnica executada. Existem, no mercado, diversas tecnologias
capazes de modelar partes do corpo humano e classificar os movimentos realizados de forma
detalhada. Deste modo, o equipamento conseguiria identificar o membro mobilizado, a
trajetória percorrida por este e o tipo de movimento feito para, então, dar um retorno ao
participante.
Assim como no monitoramento de posições, aqui também seria possível repetir os
cenários onde foram identificados mais erros a fim de consertá-los. Treinar as deficiências

63
para torná-las especialidades é o que todo profissional faz, cada um em sua área de atuação, e
ter uma tecnologia que ajude, avaliando, relatando, trabalhando e melhorando as dificuldades
encontradas, seria extremamente proveitoso.
Na verdade, com estas novas melhorias, a tecnologia deixaria de ser simplesmente
uma ferramenta para medir o tempo de resposta do participante e se tornaria algo muito maior,
conseguindo analisar, trabalhar e melhorar a qualidade dos movimentos realizados. Seria um
equipamento capaz de aperfeiçoar o movimento propriamente dito, além da velocidade de
reação e ação, oferecendo, assim, uma solução mais completa ao seu usuário.

64
Referências
[1] LICHTENSTEIN, Kobi (comunicação pessoal, 10 de abril, 2017).
[2] BORGES, K. S., "Orientação a objetos". In: Rodrigo Prestes Machado, Márcia Häefele Islabão Franco, Silvia de Castro Bertagnolli. (Org.). Desenvolvimento de Software III: programação de sistemas Web orientada a objetos em Java. 1ed.: Bookman, v. , pp. 5-26, Porto Alegre, 2015.
[3] SOUZA, Cleidson, “Orientação a objetos”, Universidade Federal do Pará, [2016].
[4] LS-DROID, "Fundamentação Teórica - Microcontrolador", http://roboticalivre.org/portal/?q=node/96, 2011, (Acesso em 4 de julho de 2017).
[5] THOMSEN, Adilson, "Qual Arduino Comprar? Conheça os Tipos de Arduino”, https://www.filipeflop.com/blog/tipos-de-arduino-qual-comprar/, 2017, (Acesso em 11 de agosto de 2017).
[6] ALECRIM, Emerson, "Tecnologia Bluetooth: o que é e como funciona?”, https://www.infowester.com/bluetooth.php, 2017, (Acesso em 6 de julho de 2017).
[7] LICHTENSTEIN, Kobi, Krav Maga A Filosofia da Defesa Israelense, Rio de Janeiro, Imago, 2006.
[8] RODRIGUES, Silvio Cláudio Pereira, "Estudo de Correlação entre Tempo de Reação e Tempo de Movimento no Karatê". Kinesis n. esp, 1984.
[9] KOSINSKI, Robert J., A Literature Review on Reaction Time, Clemson University, 2010.
[10] SINGLETON, W. T., "Deterioration of performance on a short-term perceptual-motor task". In: W. F. Floyd and A. T. Welford (Eds.), Symposium on Fatigue, pp. 163-172, H. K. Lewis and Co., Oxford, 1953.
[11] PIÉRON, Henri, "Nouvelles recherches sur l'analyse du temps de latence sensorielle et sur la loi qui relie ce temps a l'intensité de l’excitation". L'année Psychologique 22: 58-142, 1920.
[12] LUCE, R. Duncan, Response Times: Their Role in Inferring Elementary Mental Organization, Oxford University Press, New York, 1986.
[13] MCKEOWN, D., ISHERWOOD, S., CONWAY, G., "Auditory displays as occasion setters”, Human Factors 52(1): 54-63, 2010.
[14] BROADBENT, Donald Eric, Decision and Stress, Academic Press, London, 1971.

65
[15] FREEMAN, G. L., "The facilitative and inhibitory effects of muscular tension upon performance". American Journal of Psychology 26: 602-608, 1933.
[16] WELFORD, A. T., "Choice reaction time: Basic concepts". In: A. T. Welford (Ed.), Reaction Times. Academic Press, New York, pp. 73-128, 1980.
[17] BOESVELDT, Sanne, FRASNELLI, Johannes, GORDON, Amy R., LUNDSTRÖM, Johan N., "The fish is bad: Negative food odors elicit faster and more accurate reactions than other odors". Biological Psychology 84(2): 313-317, 2010.
[18] WELFORD, A. T., "Motor performance". In: J. E. Birren and K. W. Schaie (Eds.), Handbook of the Psychology of Aging, pp. 450-496, Van Nostrand Reinhold, New York, 1977.
[19] JEVAS, S., YAN, J. H., "The effect of aging on cognitive function: a preliminary quantitative review". Research Quarterly for Exercise and Sport 72: A-49, 2001.
[20] LUCHIES, C. W., SCHIFFMAN, J., RICHARDS, L. G., THOMPSON, M. R., BAZUIN, D., DEYOUNG, A. J., "Effects of age, step direction, and reaction condition on the ability to step quickly". The Journals of Gerontology, Series A, Biological Sciences and Medical sciences 57(4): M246, 2002.
[21] ROSE, S. A., FELDMAN, J. F., JANKOWSKI, J. J., CARO, D. M., "A longitudinal study of visual expectation and reaction time in the first year of life". Child Development 73(1): 47, 2002.
[22] DER, G., DEARY, I. J., "Age and sex differences in reaction time in adulthood: Results from the United Kingdom health and lifestyle survey". Psychology and Aging 21(1): 62-73, 2006.
[23] HODGKINS, Jean, "Reaction Time and Speed of Movement in Males and Females of Various Ages”. Research Quarterly. American Association for Health, Physical Education and Recreation, pp. 335-343, 2013.
[24] BARTHÉLÉMY, S., BOULINGUEZ, P., "Manual reaction time asymmetries in human subjects: the role of movement planning and attention". Neuroscience Letters 315(1): 41-44, 2001.
[25] BARTHÉLÉMY, S., BOULINGUEZ, P., "Orienting visuospatial attention generates manual reaction time asymmetries in target detection and pointing". Behavioral Brain Research 133(1): 109-116, 2002.
[26] BOULINGUEZ, P., BARTHÉLÉMY, S., DEBÛ, B., "Influence of the movement parameter to be controlled on manual RT asymmetries in right-handers". Brain and Cognition 44(3): 653-661, 2000.

66
[27] DANE, S., ERZURUMLUOGLU, A., "Sex and handedness differences in eye-hand visual reaction times in handball players". International Journal of Neuroscience 113(7): 923-929, 2003.
[28] KOEHN, J. D., DICKENSON, J., GOODMAN, D, "Cognitive demands of error processing". Psychological Reports 102(2): 532-539, 2008.
[29] GUTIERREZ, A., GONZALEZ-GROSS, M., DELGADO, M., CASTILLO, M. J., "Three days fast in sportsmen decrease physical work capacity but not strength or perception-reaction time". International Journal of Sport Nutrition and Exercise Metabolism 11(4): 420, 2001.
[30] CHEATHAM, R. A., ROBERTS, S. B., DAS, S. K., GILHOOLY, C. H., GOLDEN, J. K., HYATT, R., LERNER, D., SALTZMAN, E., LIEBERMAN, H. R., "Long-term effects of provided low- and high-glycemic-load low-energy diets on mood and cognition". Physiology and Behavior 98(3): 374-379, 2009.
[31] JAUCH-CHARA, K., HALLSCHMID, M., SCHMID, S., BANDORF, N., BORN, J., SCHULTES, B. "Sleep loss does not aggravate the deteriorating effect of hypoglycemia on neurocognitive function in healthy men". Psychoneuroendocrinology 35(4): 624-628, 2010.
[32] TRIMMEL, M., POELZL, G., "Impact of background noise on reaction time and brain DC potential changes of VDT-based spatial attention", Ergonomics 49(2): 202-209, 2006.
[33] RICHARD, C. M., WRIGHT, R. D., EE, C., PRIME, S. L., SHIMIZU, U., VAVRIK, J., "Effect of a concurrent auditory task on visual search performance in a driving-related image-flicker task", Human Factors 44(2): 108, 2002.
[34] LEE, J. D., CAVEN, B., HAAKE, S., BROWN, T. L., "Speech-based interaction with in-vehicle computers: The effect of speech-based e-mail on drivers' attention to the roadway”, Human Factors 43(4): 631, 2001.
[35] HSIEH, Y., LIN, C. J., CHEN, H., "Effect of vibration on visual display terminal work performance”, Perceptual and Motor Skills 105(3): 1055-1059, 2007.
[36] GERDES, A. B. M., ALPERS , G. W., PAULI, P., "When spiders appear suddenly: spider-phobic patients are distracted by task-irrelevant spiders”, Behavior Research and Therapy 46(2): 174-188, 2008.
[37] BREBNER, J. T., WELFORD, A. T., "Introduction: an historical background sketch". In: A. T. Welford (Ed.), Reaction Times. Academic Press, New York, pp. 1-23, 1980.
67
[38] MOSKOWITZ, H., FIORENTINO, D., A Review of the Literature on the Effects of Low Doses of Alcohol on Driving-Related Skills, Report DOT HS 809 028, Washington: National Highway Traffic Safety Administration, Department of Transportation, 2000.
[39] DURLACH, P. J., EDMUNDS, R., HOWARD, L., TIPPER, S. P., "A rapid effect of caffeinated beverages on two choice reaction time tasks”, Nutritional Neuroscience 5(6): 433-442, 2002.
[40] HSIEH, S., "Tasking shifting in dual-task settings”, Perceptual and Motor Skills 94(2): 407, 2002.
[41] BREBNER, J. T., "Reaction time in personality theory”. In: A. T. Welford (Ed.), Reaction Times. Academic Press, New York, pp. 309-320, 1980.
[42] NETTELBECK, T., "Individual differences in noise and associated perceptual indices of performance”, Perception 2: 11-21, 1973.
[43] BUCHSBAUM, M., CALLAWAY, E., "Influence of respiratory cycle on simple RT”, Perceptual and Motor Skills 20: 961-966, 1965.
[44] LEVITT, S., GUTIN, B., "Multiple choice reaction time and movement time during physical exertion”, Research Quarterly 42: 405-410, 1971.
[45] SJOBERG, H., "Relations between heart rate, reaction speed, and subjective effort at different work loads on a bicycle ergometer". Journal of Human Stress 1: 21-27, 1975.
[46] SIMEN, P. D. CONTRERAS, BUCK, C., HU, P., HOLMES, P., COHEN, J. D., "Reward rate optimization in two-alternative decision making: empirical tests of theoretical predictions”, Journal of Experimental Psychology: Human Perception and Performance 35(6): 1865-1898, 2009.
[47] DEARY, I. J., DER, G., FORD, G., "Reaction times and intelligence differences: A population-based cohort study”, Intelligence 29(5): 389, 2001.
[48] NETTELBECK, T., "Factors affecting reaction time: Mental retardation, brain damage, and other psychopathologies”. In: A. T. Welford (Ed.), Reaction Times. Academic Press, New York, pp. 355-401, 1980.
[49] SCHWEITZER, K., "Preattentive processing and cognitive ability". Intelligence, v. 29 i. 2: pp. 169-186, 2001.
[50] BASHORE, T. R., RIDDERINKHOF, K. R., "Older age, traumatic brain injury, and cognitive slowing: some convergent and divergent findings”, Psychological Bulletin 128(1): 151, 2002.

68
[51] ALLEN, Jim, “The Online Reaction Time Test”, https://faculty.washington.edu/chudler/java/redgreen.html, 2002, (Acesso em 6 de julho de 2017).
[52] ZEMITA, http://www.zemita.com/?lang=en, 2016, (Acesso em 15 de agosto de 2017).
[53] LICHTENSTEIN, Ioav, “reactionSpeed”, https://github.com/ioavkm/reactionSpeed, 2017.

69
Apêndice A
Características de cada aluno participante dos testes
Participante Idade Gênero Graduação Tempo de treino
Lateralidade Dominante
1 16 Feminino Laranja 2 anos Canhoto
2 12 Masculino Laranja 2 anos Destro
3 37 Masculino Amarela 7 meses Destro
4 51 Masculino Amarela 10 meses Destro
5 32 Feminino Laranja 2 anos Destro
6 28 Masculino Amarela 8 meses Destro
7 15 Masculino Amarela 1 ano e 6 meses
Destro
8 29 Masculino Branca 6 meses Destro
9 23 Feminino Laranja 2 anos Destro
10 23 Feminino Amarela 1 ano e 2 meses
Destro
11 54 Masculino Amarela 1 ano e 2 meses
Destro
12 50 Masculino Amarela 1 ano e 6 meses
Destro
13 51 Masculino Branca 1 mês Destro
14 30 Masculino Branca 4 meses Destro
15 57 Masculino Branca 4 meses Destro
16 16 Masculino Branca 3 meses Destro
17 19 Feminino Branca 3 meses Destro
18 43 Masculino Branca 3 meses Canhoto
19 33 Feminino Laranja 2 anos e 6 meses
Destro
20 43 Masculino Laranja 2 anos Destro
21 31 Masculino Amarela 1 ano Destro
22 15 Masculino Amarela 8 meses Destro
23 54 Masculino Verde 5 anos Destro

70
24 22 Masculino Branca 7 meses Destro
25 63 Masculino Verde 4 anos Destro
Participante Idade Gênero Graduação Tempo de treino
Lateralidade Dominante