VALIDAÇÃO DE UM MODELO NUMÉRICO EM CFD
PARA ANÁLISE DO DESEMPENHO HIDRODINÂMICO DE
CASCOS DE PLANEIO
Igor Jablausky
Projeto de Graduação apresentado ao
Curso de Engenharia Naval e Oceânica da
Escola Politécnica, Universidade Federal
do Rio de Janeiro, como parte dos
requisitos necessários à obtenção do título
de Engenheiro Naval.
Orientador: Alexandre Teixeira de Pinho
Alho
RIO DE JANEIRO – BRASIL
OUTUBRO DE 2018

ii
VALIDAÇÃO DE UM MODELO NUMÉRICO EM CFD PARA ANÁLISE DO
DESEMPENHO HIDRODINÂMICO DE CASCOS DE PLANEIO
Igor Jablausky
PROJETO FINAL SUBMETIDO AO CORPO DOCENTE DO DEPARTAMENTO
DE ENGENHARIA NAVAL E OCEÂNICA DA ESCOLA POLITÉCNICA DA
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO, COMO PARTE DOS
REQUISITOS NECESSÁRIOS PARA OBTENÇÃO DO GRAU DE ENGENHEIRO
NAVAL
Examinado por:
Profo Alexandre Teixeira de Pinho Alho, D.Sc.
Profo Carl Horst Albrecht, D.Sc.
Profo José Henrique Erthal Sanglard, D. Sc.
RIO DE JANEIRO – BRASIL
OUTUBRO DE 2018

iii
Jablausky, Igor
Validação de um modelo numérico em CFD para análise do
desempenho hidrodinâmico de cascos de planeio / Igor Jablausky.
– Rio de Janeiro: UFRJ/ Escola Politécnica, 2018.
XII, 36 p.: il.; 29,7 cm.
Orientador: Prof. Alexandre Teixeira de Pinho Alho
Projeto de Graduação – UFRJ / Escola Politécnica/ Curso
de Engenharia Naval e Oceânica, 2018.
Referências Bibliográficas: p. 35
1. Projeto de embarcações. 2. CFD. 3. Cascos de planeio.

iv
Dedico este trabalho à memória da
minha avó Yolanda Fermino, que
sempre cuidou de mim com muito amor
e muito carinho.
Você vai deixar saudades vovó!
Que você esteja em paz, dançando e
pedalando como sempre fez. Te amo.
v
AGRADECIMENTOS
Gostaria de agradecer às inúmeras pessoas que estiveram comigo nesta jornada
que não foi breve. Ao meu grande amigo Davi Pegado por me dar suporte nas várias
oportunidades que precisei, ao meu irmão Renan Jablausky por estar presente e por ser
indispensável no final da minha graduação, à minha avó Yolanda Fermino por estar
sempre comigo e me ensinar a crescer, você sempre terá um lugar especial no meu
coração, à minha mãe Magda Jablausky que foi mais que uma mãe e me incentivou
sempre a sonhar mais alto, à minha namorada Paula Brandão que me ensinou a
importância de me esforçar para conseguir o que eu desejasse, ao meu colega e guia
Rafael Flores por me proporcionar grandes aventuras e aos meus amigos que moraram
comigo e fizeram desta uma experiência que eu nunca poderei esquecer, em especial ao
Leonardo Trisciuzzi por ter participado dessa jornada desde o início.
Agradeço à minha família que esteve sempre comigo em todas às horas, ao meu
grande amigo Thiago Nascimento que me incentivou a me esforçar e estudar para ter
um ganho futuro, ao meu grande chefe Joselito Câmara, o qual sempre quis que eu
aprendesse o máximo possível e me deu oportunidades únicas, à toda a equipe do
Vetting por terem me recebido e me ensinado ao longo do estágio e ao meu professor
Alexandre Alho por ter me ensinado o que é engenharia.
Gostaria de deixar um agradecimento especial ao Mojtaba Amiri, que sempre foi
muito atencioso para tirar quaisquer dúvidas que tive durante este trabalho e que foi
imprescindível para a realização do mesmo.
Um muito obrigado a todos os amigos que estiveram comigo de uma maneira ou
de outra, todos vocês sempre me ajudaram a cada vez mais dar um passo em direção a
este final que não poderia ter sido melhor.

vi
Resumo do Projeto de Graduação apresentado à POLI/ UFRJ como parte dos requisitos
necessários para obtenção do grau de Engenheiro Naval.
VALIDAÇÃO DE UM MODELO NUMÉRICO EM CFD PARA ANÁLISE DO
DESEMPENHO HIDRODINÂMICO DE CASCOS DE PLANEIO
Igor Jablausky
Outubro/2018
Orientador: Alexandre Teixeira de Pinho Alho
Curso: Engenharia Naval e Oceânica
Este trabalho trata da utilização do CFD como ferramenta de projeto. O trabalho
tem por objetivo realizar a validação de um modelo numérico em CFD para análise do
desempenho hidrodinâmico de cascos de planeio, tendo por base resultados
experimentais obtidos em testes com modelos reduzidos em águas tranquilas. O
trabalho envolverá avaliações exaustivas da influência das condições de contorno,
configuração da malha e do domínio fluido. O modelo numérico foi desenvolvido tendo
por base um código comercial (Star-CCM+). A validação dos resultados obtidos foi
realizada através da análise de parâmetros representativos das características do
escoamento ao redor do casco. Estudos adicionais sobre como as condições iniciais, o
equilíbrio dinâmico e a prescrição de rugosidade influenciam a resistência ao avanço
também foram realizados.

vii
Abstract of Undergraduate Project presented to POLI/UFRJ as a partial fulfillment of
the requirements for the degree of Naval Architect and Marine Engineer.
VALIDATION OF A CFD MODEL FOR THE ANALYSIS OF HYDRODYNAMIC
PERFORMANCE OF PLANING HULLS
Igor Jablausky
October/2018
Advisor: Alexandre Teixeira de Pinho Alho
Course: Naval and Ocean Engineering
This work is about the use of CFD numerical methods as a design tool. This work
had aimed to validate a CFD numeric model developed to the analysis of the
hydrodynamic performance of planning hulls. The results were validated against
experimental data obtained with model tests in calm waters. This work made use of
exhaustive investigations of the influence of boundary conditions, mesh configuration
and fluid domain on the results. The numeric model to be validated was developed
based on a commercial code (Star-CCM+). The validation of the results obtained was
conducted through the analysis of significant parameters about the flow around the hull.
Additional studies of how the initial conditions, dynamic equilibrium and the use of a
roughness model influence the vessel’s resistance were also executed.
.
viii
LISTA DE FIGURAS
Figura 1.1 – Características de forma de um casco de planeio......................................... 2
Figura 2.1 – Linhas de corrente abaixo com casco com visualização da fração do
volume de água dos elementos (Fonte: [8])...................................................................... 5
Figura 2.2 – Padrões do escoamento após um degrau no casco (Fonte: [8]). .................. 6
Figura 3.1 – Regiões da camada limite turbulenta (Fonte: [11]). ..................................... 7
Figura 4.1 – Imagens dos ensaios experimentais (Fonte: [14]). ..................................... 10
Figura 4.2 – Geometria 3D do modelo C, em CAD (Fonte: [14]) ................................. 11
Figura 4.3 – Plano de balizas do modelo reduzido de referência (Fonte: [14]) ............. 11
Figura 4.4 – Planos de linhas do alto do modelo reduzido de referência (Fonte: [14]) . 11
Figura 5.1 – Domínio fluido de referência. .................................................................... 13
Figura 5.2 – Exemplo do refinamento da malha computacional. ................................... 16
Figura 5.3 – Volume de controle para refinamento da malha computacional na região da
superfície livre. ............................................................................................................... 18
Figura 5.4 – Volume de controle para refinamento de malha computacional na região ao
redor da overset mesh. .................................................................................................... 18
Figura 5.5 – Volume de controle para refinamento da malha computacional na região da
esteira. ............................................................................................................................. 18
Figura 5.6 – Refinamento da malha computacional na região da esteira do casco. ....... 19
Figura 5.7 – Detalhe da configuração da malha Prism Layer Mesh ao redor do casco. 20
Figura 5.8 – Volume de controle para refinamento de malha computacional na região ao
redor da overset mesh. .................................................................................................... 21
Figura 5.9 – Descrição dos referenciais experimental e numérico. ................................ 22
Figura 6.1 – Sistema de ondas: malha com refinamento baixo. ..................................... 24
Figura 6.2 – Sistema de ondas: malha com refinamento médio. .................................... 24
Figura 6.3 – Sistema de ondas: malha com refinamento alto. ........................................ 24
Figura 6.4 – Sistema de onda; domínio com 5,0 Lpp a ré.do casco. .............................. 27
Figura 6.5 – Sistema de onda; domínio com 2,0 Lpp a ré.do casco. .............................. 27
Figura 7.1 – Campo de pressões do casco com maior discretização. ............................. 30
Figura 7.2 – Campo de pressões obtido através de CFD para cascos de planeio em
velocidades transientes (Fonte: [10]). ............................................................................. 31

ix
Figura 7.3 – Detalhe do fundo do casco ilustrando o tamanho de elemento de superfície
refinado. .......................................................................................................................... 31
Figura 7.4 – Pressões no fundo do casco, retiradas no plano diametral. A origem do
gráfico representa o espelho de popa da embarcação. .................................................... 32
Figura 7.5 – Seções transversais com velocidade limitada para U=0.99 V, ilustrando os
efeitos da rugosidade sobre a camada limite (Fonte: [20]). ............................................ 33
x
LISTA DE TABELAS
Tabela 4.1 – Características principais dos modelos reduzidos. .................................... 10
Tabela 5.1 - Condições de contorno do domínio fluido. ................................................ 14
Tabela 5.2 – Configuração dos graus de liberdade do casco. ......................................... 15
Tabela 5.3 – Configuração do refinamento de malha de acordo com o volume de
controle da região de interesse........................................................................................ 17
Tabela 6.1 – Condições observadas no teste de reboque (Fonte: [14]). ......................... 23
Tabela 6.2 – Configuração do refinamento de malha de acordo com o volume de
controle da região de interesse........................................................................................ 23
Tabela 6.3 – Configuração das malhas computacionais segundo o nível de refinamento.
........................................................................................................................................ 23
Tabela 6.4 – Comparação entre os resultados experimentais e numéricos. ................... 25
Tabela 6.5 – Configurações adotadas para verificação da independência de domínio. . 26
Tabela 6.6 – Resultados de simulações com domínios diferentes. ................................. 27
Tabela 7.1 – Resultado comparativo da influência das condições iniciais. .................... 28
Tabela 7.2 – Configurações adotadas para verificação da independência de domínio. . 29
Tabela 7.4 – Refinamento dos elementos de malha na superfície do casco. .................. 30
Tabela 7.4 – Resultados obtidos com a utilização do modelo de rugosidade e
comparação com os resultados sem o modelo de rugosidade. ....................................... 33

xi
SUMÁRIO
1 TABLE OF CONTENTS 1 INTRODUÇÃO ................................................................................................... 1
2 REVISÃO BIBLIOGRÁFICA ........................................................................... 3
3 MODELO NUMÉRICO BASEADO NAS EQUAÇÕES RANS .................... 6
4 RESULTADOS EXPERIMENTAIS DE REFERÊNCIA ............................... 9
4.1 CASO DE ESTUDO ........................................................................................ 10
5 MODELO NUMÉRICO ................................................................................... 12
5.1 CONFIGURAÇÃO DO DOMÍNIO FLUIDO ................................................ 12
5.1.1 DIMENSÕES DE REFERÊNCIA ............................................................... 12
5.1.2 CONDIÇÕES DE CONTORNO ................................................................. 13
5.1.3 GRAUS DE LIBERDADE DE MOVIMENTO .......................................... 15
5.2 CONFIGURAÇÃO DA MALHA COMPUTACIONAL ................................ 15
5.2.1 CONFIGURAÇÃO DA MALHA TRIMMED MESH ................................ 15
5.2.2 CONFIGURAÇÃO DA MALHA PRISM LAYER MESH ........................ 19
5.2.3 CONFIGURAÇÃO DA MALHA OVERSET MESH ................................ 20
5.3 CONFIGURAÇÃO DO PASSO DE TEMPO (TIME STEP) ......................... 21
5.4 ANALOGIA ENTRE OS REFERENCIAS EXPERIMENTAL E NUMÉRICO
21
6 VALIDAÇÃO DO MODELO NUMÉRICO .................................................. 22
6.1 VERIFICAÇÃO DA INDEPENDÊNCIA DE MALHA ................................. 22
6.2 VERIFICAÇÃO DA INDEPENDÊNCIA DE DOMÍNIO FLUIDO .............. 25
7 INVESTIGAÇÕES ADICIONAIS .................................................................. 27
7.1 INFLUÊNCIA DA CONDIÇÃO DE EQUILÍBRIO INICIAL ...................... 28
7.2 INFLUÊNCIA DO EQUILÍBRIO DINÂMICO NA ESTIMATIVA DE RT.. 29

xii
7.3 INFLUÊNCIA DA PRESCRIÇÃO DE RUGOSIDADE AO CASCO ........... 32
8 CONCLUSÕES ................................................................................................. 32
9 BIBLIOGRAFIA ............................................................................................... 35

1
1 INTRODUÇÃO
O projeto do casco de uma embarcação tem sido um foco de estudo desde muitos
anos. Dentre os aspectos envolvidos no projeto de um casco, a correta predição da
resistência ao avanço, bem como do seu comportamento hidrodinâmico, podem ser
considerados como aqueles de grande importância. Tradicionalmente, tanto um quanto
outro aspecto têm sido previstos a partir de ensaios com modelos reduzidos. Apesar de
plenamente consolidados e efetivos em termos da qualidade dos resultados obtidos, os
ensaios em tanques de provas são custosos e demandam tempo. Além disso, qualquer
alteração no projeto requer a construção de um novo modelo, o que torna praticamente
inviável qualquer tentativa de otimização do projeto.
Nos anos recentes, os avanços observados no campo da dinâmica dos fluidos
computacional, bem como a disponibilidade de recursos computacionais de alto
desempenho a um custo acessível, têm incentivado o desenvolvimento de modelos
numéricos baseados na solução das equações RANS para a estimativa do desempenho
hidrodinâmico de embarcações. Durante as fases iniciais de projeto, nas quais diferentes
soluções de projeto são discutidas, a disponibilidade de um modelo numérico apto a
fornecer resultados confiáveis, em tempo reduzido, representa uma ferramenta
fundamental para a tomada de decisões.
Cabe citar a experiência acumulada com a utilização de modelos numéricos em
CFD na área aeroespacial. Tem sido observada uma crescente redução no número de
ensaios experimentais em túnel de vento de novos projetos de asas. De acordo com
Johnson et al. (2005), envolvidos por mais de 30 anos na área de desenvolvimento e
aplicação de CFD na empresa Boeing, “... uma rápida aplicação comercial é o valor
adicionado ao produto (a aeronave) devido ao uso do CFD em seu desenvolvimento...
Valor é adicionado à aeronave ao se atingir soluções de projeto que, de outra maneira,
seriam inalcançáveis durante o desenvolvimento tradicional de uma nova aeronave.
Nenhum protótipo é construído!”
Não é somente na área aeroespacial que o CFD é utilizado como ferramenta de
projeto. Em seu sítio na internet, a equipe de competição Emirates Team New Zealand,
vencedora da edição 2018 da America’s Cup, declara [3]: “No caso do Emirates Team
New Zealand, a informação das simulações em CFD eram na verdade fornecidas a um
simulador de desempenho. Isso parece óbvio.. ou então eu pensei.. o time teve que
testar centenas de projetos e ajustes cada semana! O que me surpreendeu foi que eles
2
não precisaram testar apenas alguns deles, (...) mas sim centenas de projetos toda
semana. Tamanha utilização de CFD para determinar o desempenho ótimo de uma
embarcação é surpreendente.”
Hoje em dia, as embarcações de planeio são utilizadas nas mais diversas
aplicações, como, por exemplo, militar, recreativa, esportiva e de serviço. A principal
característica de uma embarcação de planeio, quando comparada às embarcações de
deslocamento e semi-deslocamento, é a de que sua sustentação é, predominantemente,
de origem hidrodinâmica, devido à ação do escoamento no fundo do casco. Quando em
navegação na condição de planeio, o equilíbrio dinâmico é alcançado quando o centro
de pressão do casco, definido pelas contribuições de origem tanto hidrostática quanto
hidrodinâmica, e o centro de gravidade da embarcação estão verticalmente alinhados.
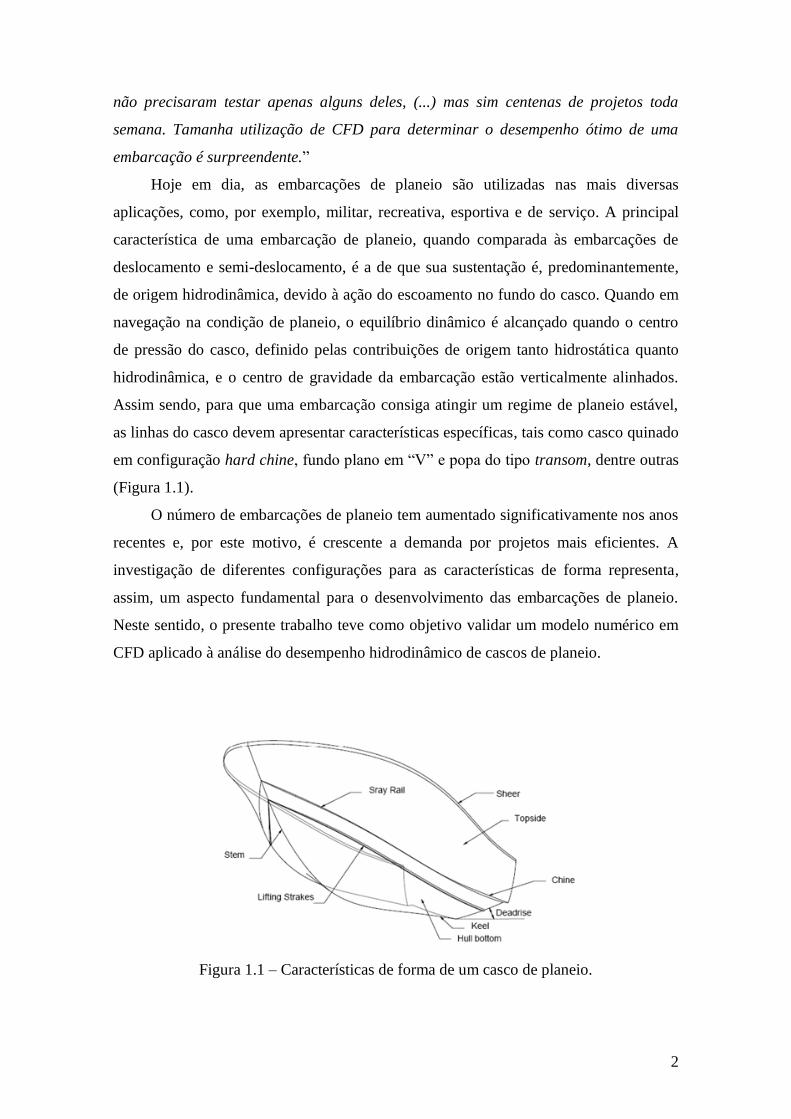
Assim sendo, para que uma embarcação consiga atingir um regime de planeio estável,
as linhas do casco devem apresentar características específicas, tais como casco quinado
em configuração hard chine, fundo plano em “V” e popa do tipo transom, dentre outras
(Figura 1.1).
O número de embarcações de planeio tem aumentado significativamente nos anos
recentes e, por este motivo, é crescente a demanda por projetos mais eficientes. A
investigação de diferentes configurações para as características de forma representa,
assim, um aspecto fundamental para o desenvolvimento das embarcações de planeio.
Neste sentido, o presente trabalho teve como objetivo validar um modelo numérico em
CFD aplicado à análise do desempenho hidrodinâmico de cascos de planeio.
Figura 1.1 – Características de forma de um casco de planeio.

3
O estudo desenvolvido foi particularmente dedicado à avaliação do modelo
numérico quanto à predição da resistência ao avanço e das condições de equilíbrio
dinâmico experimentadas pelo casco. A validação do modelo numérico foi centrada na
verificação da independência do domínio fluido e da malha computacional, tendo como
referência resultados experimentais realizados em testes de reboque com modelos
reduzidos de uma embarcação de planeio típica.
2 REVISÃO BIBLIOGRÁFICA
O desenvolvimento de modelos numéricos para a predição do desempenho
hidrodinâmico de embarcações de planeio têm sido o objeto de interesse de diversos
estudos (Ahmad e Ayob, 2017). Brizzolara e Serra (2007) realizaram um estudo da
acurácia dos resultados de modelos em CFD tendo por base resultados experimentais
obtidos com um modelo com geometria simples de casco na forma de cunha. Em seu
trabalho, o modelo numérico foi baseado nas equações RANS, desenvolvido a partir do
código comercial Star-CCM+. Os resultados obtidos para a faixa de velocidades de 4,66
m/s até 19,86 m/s foram considerados satisfatórios, tendo sido observadas discrepâncias
em torno de 10% para a resistência ao avanço e de 5% para a força de sustentação.
Brizzolara e Villa (2010) realizaram um estudo de validação de um modelo em
CFD, utilizando como referência uma forma de casco de planeio típica, apresentando
spray rails. Os resultados numéricos foram comparados com aqueles obtidos em
ensaios com modelos, bem como os fornecidos pelo semi-empírico de Savitsky.
Igualmente a Brizzolara e Serra (2007), os autores adotaram o código comercial Star-
CCM+ e o um modelo numérico baseado nas equações RANS. As simulações foram
realizadas em duas configurações, a saber: ângulo de trim fixo e liberdade de
movimento vertical (heave); liberdade de movimento angular (pitch) e vertical (heave).
Os resultados encontrados mostraram uma boa concordância com as características
observadas nos campos de pressões e velocidades sob o casco, bem como adequadas
previsões para os valores de resistência ao avanço e de calado e trim dinâmicos.
Já Caponnetto (2001) utilizou o código comercial Comet, devenvolvido no
Institute of Computational Continuum Mechanics, para simulações de casco de planeio,
tendo comparado os resultados numéricos obtidos com aqueles fornecidos pelo método
semi-empírico de Savitsky. As simulações foram realizadas utilizando uma malha
computacional variando entre 300.000 e 800.000 elementos de malha, tendo sido
4
encontrada a melhor relação entre a qualidade dos resultados e o custo computacional
para o modelo com, aproximadamente, 500.000 elementos de malha. O autor conclui
que o modelo numérico foi apto a descrever o sistema de ondas típico gerado por cascos
de planeio e que a comparação com o método semi-empírico de Savitsky é aceitável.
Porém, o autor sugere que modelos numéricos em CFD são particularmente adequados
para a análise de cascos não monoédricos.
Azcueta et al. (2003) fez a comparação entre um método semi-empírico e modelos
numéricos em CFD para a predição do comportamento de embarcações de planeio sob a
ação de ondas. Os autores compararam os resultados obtidos pelo método de Söding,
baseado na teoria de Wagner, com aqueles fornecidos por dois modelos numéricos
distintos desenvolvidos com base no software comercial Comet, ambos baseados na
solução das equações RANS (Caponnetto, 2001, e Azcueta et al., 2003). A principal
diferença entre os modelos numéricos consistiu na configuração da liberdade de
movimento da malha computacional. Num dos modelos numéricos, os elementos de
malha situados nos extremos do domínio fluido foram mantidos fixos, enquanto que
aqueles ao redor do casco tinha liberdade de movimento. Já no outro modelo numérico
foi adotada configuração inversa. A validação dos modelos numéricos teve como
referência os resultados experimentos publicados por Katayama et al. (2000). Os
autores concluíram que os resultados obtidos pelo método de Söding não foram
satisfatórios, tendo do modelos numéricos baseados nas equações RANS mostrado
desempenho superior.
Lotfi et al. (2015) realizaram a investigação de um modelo numérico aplicado à
predição do desempenho hidrodinâmico, em águas tranquilas, de um casco de planeio
com degrau. O modelo numérico foi baseado nas equações RANS, tendo sido
desenvolvido com base no código comercial ANSYS CFX 14. As malhas
computacionais geradas possuíam, respectivamente, 1,2, 2,6 e 5,9 milhões de
elementos. O método empírico de Svahn foi utilizado para a estimativa das condições
de equilíbrio dinâmico, as quais foram aplicadas como condição inicial de modo a
reduzir o tempo computacional. Os resultados numéricos apresentaram discrepâncias da
ordem de 5%, 13% e 31%, respectivamente, para os valores de resistência ao avanço,
heave e trim dinâmicos. Os autores sugerem que os resultados numéricos baseados em
simulações em CFD são mais confiáveis que aqueles obtidos através de métodos semi-
empíricos.
5
De Marco et al. (2017) utilizam o um modelo em CFD para a análise do
desempenho de embarcações de planeio com degrau. O código comercial Star-CCM+
foi utilizado para o desenvolvimento dos modelos numéricos, sendo utilizadas duas
abordagens, a saber: as equações RANS e o método LES – Large Eddy Simulation. Os
autores também empregaram diferentes configurações de malha: Morphing Mesh e
Overset Mesh. As simulações RANS, baseadas na configuração Overset Mesh,
utilizaram uma malha computacional formada por 2,5 milhões de elementos, enquanto
que as simulações LES utilizaram uma malha com 12 milhões de elementos. Na
validação com resultados experimentais, o modelo baseados nas equações RANS
mostraram um desempenho superior.
Su et al. (2012) realizaram a validação de um modelo em CFD para a simulação
de cascos de planeio em altas velocidades. Os autores apresentam um método para
resolver as equações RANS, tendo adotado o método VOF para a resolução da
superfície livre e uma malha computacional com aproximadamente 2,0 milhões de
elementos. A validação com resultados experimentais indicou um bom desempenho do
modelo, sendo observado um aumento gradual da discrepância com o aumento da
velocidade.
Já Kim (2012) utilizou um modelo em CFD para estimar o desempenho de
embarcações de planeio em velocidades de transição, e os comparou com resultados
experimentais. O autor realizou simulações para números de Froude entre 0,26 a 1,12,
tendo por base um modelo numérico baseado nas equações RANS e malhas
computacionais formadas por 0,5, 1,0 e 2,0 milhões de elementos. Dois graus de
liberdade foram permitidos à embarcação: pitch e heave. Os resultados obtidos
indicaram que a resistência ao avanço foi subestimada, sendo crescente a discrepância
com o aumento da velocidade.
Ghassemi et al. (2015) apresentam um método dedicado à seleção das
características principais de embarcações de planeio. Os autores utilizam um modelo
numérico em CFD para a análise dos resultados fornecidos pelo método. O modelo
numérico foi desenvolvido através do código comercial ANSYS CFX, tendo por base as
equações RANS e uma malha computacional formada por 5,1 milhões de elementos. Os
autores concluem que o método apresentou um desempenho satisfatório, tendo sido
observadas discrepâncias da ordem de 10% entre as estimativas fornecidas pelo método
e os resultados obtidos via CFD.

6
A revisão bibliográfica apresentada demostra que os modelos numéricos em CFD
aplicados à análise do desempenho hidrodinâmico de cascos de planeio têm sido objeto
de diversos estudos. Os resultados obtidos indicam que modelos numéricos baseados
nas equações RANS representam a abordagem preferencialmente adotada, e que, apesar
do seu evidente desenvolvimento, ainda constitui um tema de interesse para estudos
envolvendo ferramentas aplicadas ao projeto de embarcações de planeio.
3 MODELO NUMÉRICO BASEADO NAS EQUAÇÕES RANS
Os modelos numéricos baseados nas equações RANS - Reynolds-Averaged
Navier-Stokes representam a alternativa tipicamente adotada para simulação do
escoamento ao redor de cascos de embarcações. As equações RANS são obtidas ao
aplicar o conceito de decomposição de campos de Reynolds às equações de Navier-
Stokes, e obtendo suas médias temporais. O método da decomposição de campos de
Reynolds é uma alternativa consolidada para a solução de problemas envolvendo um
largo espectro de escalas de tempo e comprimento, caso típico dos escoamentos
turbulentos. Esse método separa os campos de velocidades e pressões em parcelas
médias, �̅�(𝑥) 𝑒 �̅�(𝑥), e parcelas flutuantes, 𝑢′(𝑥, 𝑡) 𝑒 𝑝′(𝑥, 𝑡), a saber:
𝑢(𝑥, 𝑡) = �̅�(𝑥) + 𝑢′(𝑥, 𝑡) (3.1)
𝑝(𝑥, 𝑡) = �̅�(𝑥) + 𝑝′(𝑥, 𝑡) (3.2)
Considerando a hipótese de incompressibilidade do fluido, as equações RANS
(Reynolds Averaged Navier-Stokes Equations) são expressas por
𝜕�̅�𝑖
𝜕𝑡+ 𝑢𝑗
𝜕�̅�𝑖
𝜕𝑥𝑗= −
1
𝜌
𝜕�̅�
𝜕𝑥𝑖+
𝜕
𝜕𝑥𝑗(𝜐
𝜕�̅�𝑖
𝜕𝑥𝑗− 𝑢𝑖
′𝑢𝑗′̅̅ ̅̅ ̅̅ ) , (3.3)
onde ρ representa a massa específica do fluido, p a pressão instantânea, ui(xi ,t) a
velocidade instantânea, a viscosidade cinemática, e ui’uj’ o tensor de Reynolds. Os
subscritos i e j representam, apropriadamente, as três coordenadas cartesianas.
Como pode ser observado na Equação (3.3), a decomposição dos campos introduz
novas variáveis através das parcelas flutuantes, 𝑢𝑖′𝑢𝑗
′̅̅ ̅̅ ̅̅ , o que resulta em um sistema de
7
equações indeterminado, no qual há mais variáveis do que equações disponíveis para
sua solução.
Tal resultado é conhecido como o “problema do fechamento”, o que promoveu o
desenvolvimento dos chamados “modelos de turbulência”, cujo objetivo é fornecer
aproximações satisfatórias para propriedades representativas das contribuições das
flutuações turbulentas ao escoamento.
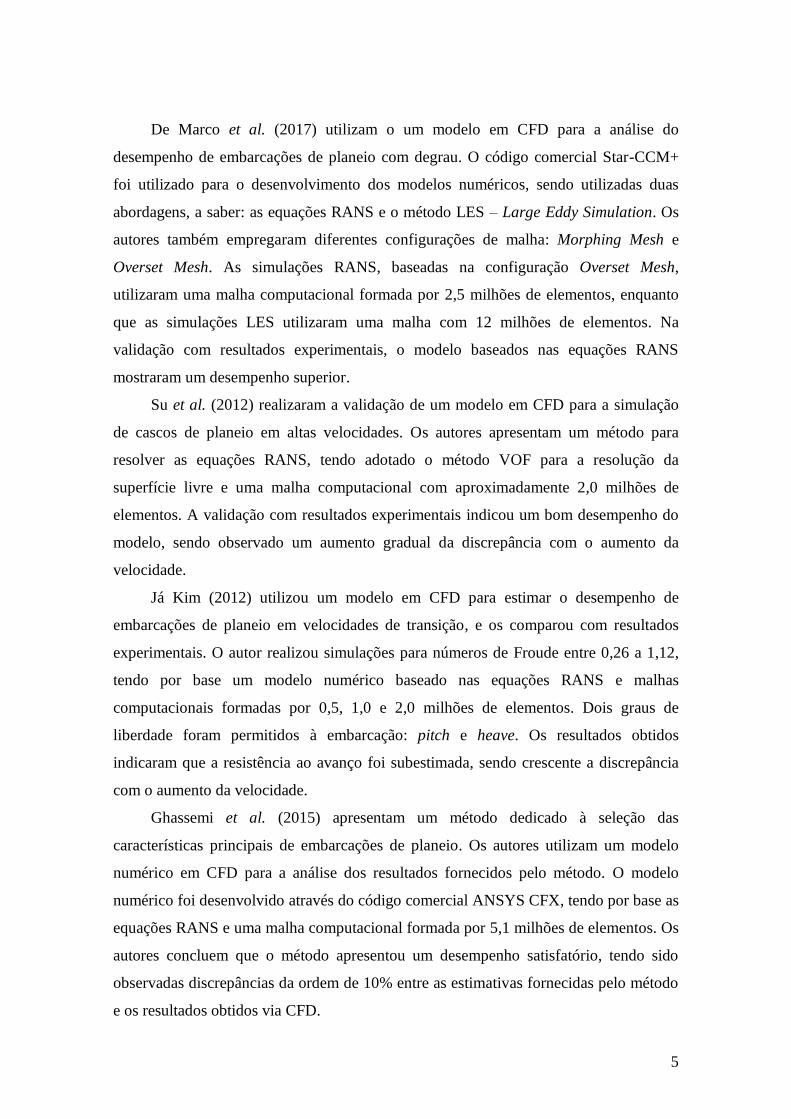
Nos escoamentos turbulentos, a camada limite é usualmente dividida em três
regiões distintas, a saber: a subcamada laminar, a camada buffer e, finalmente, a camada
turbulenta ou logarítmica (Figura 3.1). Tais regiões são descritas através dos
adimensionais y+ e u+, a saber:
𝑦+ =𝑦𝑢𝜏
𝜈 , 𝑢𝜏 = √
𝜏𝑤
𝜌 (3.4)
𝑢+ =𝑢
𝑢𝜏 (3.5)
onde y representa a distância em relação à parede, u a velocidade de atrito e w a tensão
na parede.
Cada uma destas regiões apresenta uma característica específica. Na subcamada
laminar, onde y+ < 5, há o predomínio das forças de viscosidade, na qual se observa a
relação
𝑦+ = 𝑢+ . (3.6)
Figura 3.1 – Regiões da camada limite turbulenta (Fonte: [11]).
8
Na região turbulenta, onde y+ > 30, a relação entre u+ e y+, é conhecida como a
Lei de Parede, sendo dada pela relação logarítmica
𝑢+ =1
𝜅ln(𝑦+) + 𝐵 , (3.7)
onde 𝜅 e B são constantes obtidas experimentalmente.
De acordo com a descrição da camada limite turbulenta, mostrada na Figura 3.1,
conclui-se que, para uma adequada estimativa dos efeitos viscosos na parede, faz-se
necessária uma boa discretização da subcamada laminar. Este é o caso dos escoamentos
que apresentam gradientes adversos de pressão, nos quais há a possibilidade de
ocorrência da separação do escoamento. Nestes casos, é necessário que o primeiro
elemento da malha computacional próximo à parede esteja situado em y+ < 2 ou menos.
Um dos modelos de turbulência mais conhecidos e utilizados para o fechamento
das equações RANS é o chamado modelo k-, o qual possui duas equações de transporte
para a predição das propriedades turbulentas, a saber: energia cinética turbulenta, k, e
sua respectiva taxa dissipação, .
Este é um modelo bastante utilizado para escoamentos que não apresentam
gradientes adversos de pressão, não sendo adequado para resolver a subcamada laminar.
Por este motivo, recomenda-se que o refinamento da malha próxima à parede apresente
um valor de y+ > 30 para o primeiro elemento de malha. Desse modo, a estimativa do
gradiente de velocidades próximo à parede será realizada com base na Lei de Parede.
O modelo k- foi desenvolvido ao longo do tempo, ganhando variações tais como
Two Layer k-, Realizable k- e Two Layer Realizable k-. Os modelos chamados de
Two Layer combinam o modelo k- padrão com um tratamento que o permite ser
aplicado tanto na subcamada laminar quanto na região turbulenta. Já o modelo
Realizable k- possui características que o tornam adequado para a predição de
resultados melhores para escoamentos envolvendo gradientes de pressão adversos,
separação e recirculação [12]. O modelo Two Layer Realizable k- congrega ambas as
características dos modelos Realizable e Two Layer, podendo ser utilizado tanto para y+
< 5 quanto para 30 < y+ < 100.
Outros modelos mais sofisticados foram desenvolvidos ao longo do tempo,
embora com menos validações experimentais, os quais podem oferecer soluções mais
precisas de acordo com o tipo de fenômeno estudado. Modelos mais sofisticados,

9
porém, demandam maior esforço computacional. Uma análise detalhada sobre os
modelos de turbulência pode ser encontrada nas referências [16] e [17].
Em vista do seu desempenho para o problema em estudo, o modelo de turbulência
Two Layer Realizable k- foi adotado para predição do campo de propriedades
turbulentas no escoamento ao redor do casco (Parolini, 2004). No presente trabalho, as
simulações numéricas foram desenvolvidas através do pacote comercial Star CCM+,
versão 9.06.009-R8, o qual disponibiliza, dentre várias opções de modelo de
turbulência, o modelo Two Layer Realizable k-. O computador utilizado no presente
estudo é equipado com um processador Intel i7 3,60 GHz e 16 GB de memória RAM.
Para a discretização da superfície livre foi adotado o modelo VOF (Volume of
Fluid), baseado no método de Front Capturing. Tal configuração é particularmente
adequada para a resolução da superfície livre ao redor de geometrias complexas
(Parolini, 2004). O modelo VOF foi configurado adotando-se um modelo de corrente
sem geração de ondas (FlatVOFWave), de modo a caracterizar uma condição de teste
em águas tranquilas.
4 RESULTADOS EXPERIMENTAIS DE REFERÊNCIA
A validação do modelo numérico foi realizada tendo como referência os ensaios
com modelos reduzidos realizados por Taunton et al. (2010). Os testes de reboque
envolveram quatro tipos de modelos de casco de planeio (Tabela 4.1), sendo igualmente
testadas mais duas variações do modelo C, caracterizadas pela presença de degraus nos
cascos (modelos C1 e C2). O casco C possui a forma básica, típica de embarcações de
planeio. Os demais cascos foram desenvolvidos a partir do modelo C, considerando-se
um valor constante de comprimento total.
O ponto de reboque dos modelos reduzidos foi localizado no LCG (centro
gravidade longitudinal), em uma posição vertical equivalente a 1,1 vezes o calado de
teste. Os ensaios foram realizados no tanque de prova No 03 da GKN Westland
Aerospace, Ilha de Wight (Inglaterra), sob condições de liberdade de movimento apenas
em heave e pitch. Os modelos foram testados em águas calmas, com velocidades
variando entre 4,0 m/s e 12,0 m/s, tendo sido realizadas medições da resistência ao
avanço e dos deslocamentos em heave e pitch. Adicionalmente, fotografias e vídeos dos
ensaios foram utilizados para a determinação do valor da superfície molhada dinâmica.

10
Tabela 4.1 – Características principais dos modelos reduzidos.
Em acordo com os procedimentos recomendados pelo ITTC, não houve
estimulação da turbulência, já que a faixa de velocidades adotada nos ensaios garante
valores do número de Reynolds além do limite crítico de 5 × 106. Na Figura 4.1 são
apresentadas imagens dos ensaios experimentais realizados.
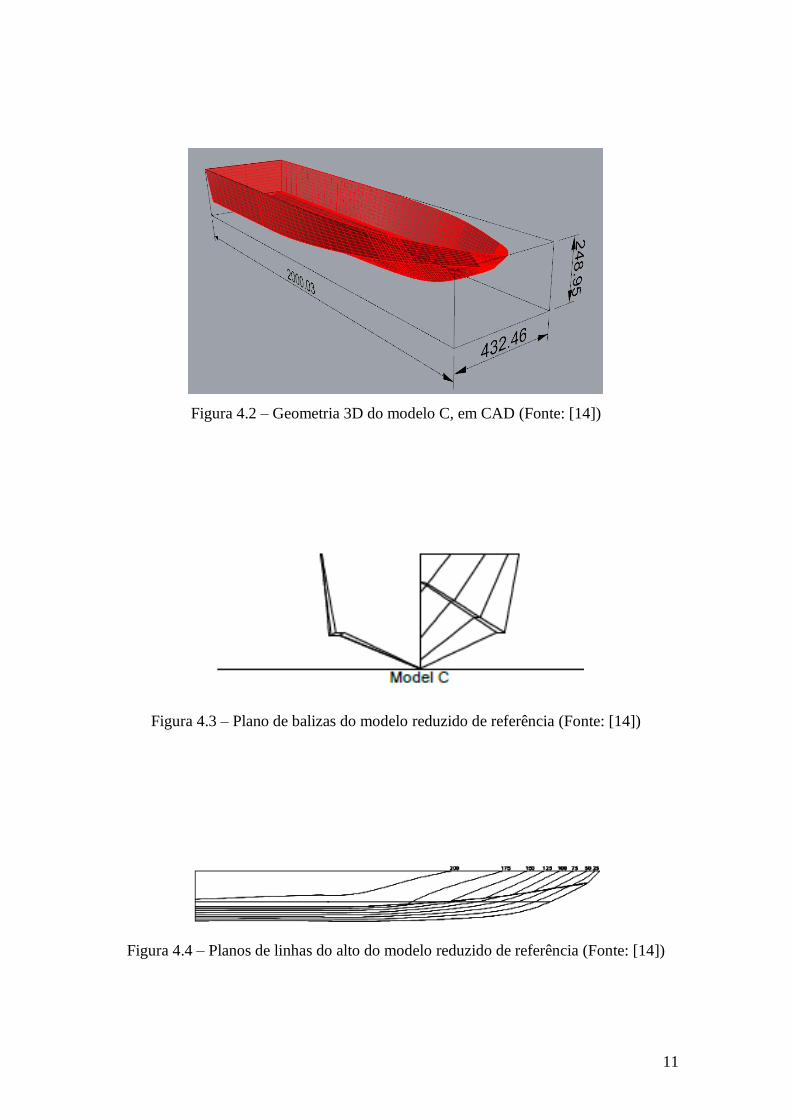
4.1 CASO DE ESTUDO
Os resultados experimentais obtidos para o modelo C foram adotados como
referência para a validação do modelo numérico em estudo. A geometria 3D do modelo,
em CAD, foi fornecida diretamente pelos autores (Figura 4.2). O plano de balizas e o
plano de linhas do alto do modelo C são apresentados, respectivamente, nas Figuras 4.3
e 4.4. O modelo C possui como características: raio de giração de 0,32 L, 𝑋𝑔 =
0,33% 𝐿, 𝑍𝑔 = 1,1 𝑇 = 0,099 𝑚. Os resultados experimentais obtidos para a
velocidade de ensaio de 6,23 m/s foram adotados como referência para a validação do
modelo numérico.
Figura 4.1 – Imagens dos ensaios experimentais (Fonte: [14]).
11
Figura 4.2 – Geometria 3D do modelo C, em CAD (Fonte: [14])
Figura 4.3 – Plano de balizas do modelo reduzido de referência (Fonte: [14])
Figura 4.4 – Planos de linhas do alto do modelo reduzido de referência (Fonte: [14])

12
5 MODELO NUMÉRICO
O presente estudo teve como objetivo a validação de um modelo numérico,
dedicado à predição da resistência ao avanço e das condições de equilíbrio dinâmico de
cascos de planeio, quanto à independência do domínio fluido e da malha computacional.
Neste capítulo são discutidos aspectos importantes relacionados à configuração do
modelo numérico desenvolvido.
5.1 CONFIGURAÇÃO DO DOMÍNIO FLUIDO
O domínio fluido em CFD representa o volume no qual são discretizadas as
equações de governo envolvidas no problema em estudo. As características geométricas
das superfícies formadoras do domínio fluido, bem como as condições de contorno a
estas aplicadas, são de fundamental importância para o desempenho do modelo
numérico. Caso as dimensões do domínio fluido sejam excessivamente pequenas,
haverá interferência das condições de contorno na solução. Por sua vez, caso o domínio
fluido seja excessivamente grande, será observado um esforço computacional
desnecessário.
5.1.1 DIMENSÕES DE REFERÊNCIA
No presente estudo, de modo a reduzir as incertezas envolvidas na verificação da
independência do domínio fluido, a geometria do tanque de provas foi integralmente
reproduzida, a menos dos seus valores de comprimento e largura. Considerando a
hipótese de simetria do escoamento, é possível posicionar um plano de simetria no
plano diametral do domínio fluido. Tal hipótese tem como vantagem a redução do
esforço computacional ao reduzir a largura do domínio e, consequentemente, da malha
computacional pela metade. Considerando a largura total de 4,7 m do tanque de provas,
foi, então, adotado um valor de 2,285 m para o domínio fluido.
Assim sendo, apenas as dimensões de comprimento à vante e à ré do casco
representam objetos de interesse para a verificação da independência do domínio fluido.
O ITTC [15] recomenda, para a modelos numéricos aplicados à analise do escoamento
ao redor de casco de deslocamento, que a superfície de entrada do escoamento no
domínio fluido (Inlet) deve ser localizada entre 1,0 e 2,0 comprimentos entre
perpendiculares, Lpp, a vante do casco. Já a superfície oposta, de saída do escoamento

13
do domínio fluido (Outlet) deve ser posicionada entre 3,0 e 5,0 Lpp à ré do casco.
Considerando que o objetivo do presente estudo refere-se à validação de um modelo
numérico aplicado a simulações de cascos em regime de planeio, foi adotado,
conservadoramente, para o comprimento total do domínio fluido de referência, um valor
equivalente a 10,0 Lpp, sendo o espelho de popa casco posicionado a meio deste valor,
ou seja, a 5,0 Lpp da superfície Outlet.
A profundidade do domínio fluido equivale à profundidade do tanque de provas,
ou seja, 1,68 m. O mesmo valor foi utilizado para representar a porção do domínio
fluido acima da superfície livre e, portanto, sua altura total equivale a 3,36 m, tal como
ilustrado na Figura 5.1.
Figura 5.1 – Domínio fluido de referência.
5.1.2 CONDIÇÕES DE CONTORNO
O domínio fluido representa a parcela do mundo real incorporada ao modelo
numérico. Para representar sua interação com o restante do mundo real, faz-se
necessária a aplicação de condições de contorno representativas às superfícies do
domínio fluido. O pacote comercial Star CCM+ oferece as seguintes opções de
configurações de condições de contorno aplicadas ao problema em questão [16]:
Velocity Inlet;
Pressure Outlet;
Wall; e
Symmetry.
14
A configuração do tipo Velocity inlet permite a definição de condições de
contorno de velocidade e demais propriedades relevantes às superfícies com fluxo de
entrada no domínio fluido. No caso de fluidos incompressíveis, o valor de pressão
representa uma variável a ser calculada nas superfícies Velocity Inlet.
A configuração do tipo Pressure Outlet é utilizada em conjunto à do tipo Velocity
Inlet para as superfícies de saída de fluxo nos escoamentos de fluidos incompressíveis.
Esta configuração demanda, basicamente, a definição de condições de contorno de
pressão. Nos modelos com presença de superfície livre, a condição de contorno de
pressão nas superfícies Pressure Outlet representa a distribuição de pressão hidrostática
da coluna líquida. Uma diferença importante entre as configurações tipo Velocity Inlet e
Pressure Outlet é a de que apenas esta última permite o refluxo do escoamento para o
domínio fluido. Esta característica é particularmente importante nos casos em que se
observa a convecção de vórtices através do domínio fluido.
Condições de contorno do tipo Wall são utilizadas em superfícies nas quais é
observada a condição de parede, ou seja, velocidade normal igual a zero. No caso geral,
tal condição de contorno também incorpora a condição de não escorregamento.
Todavia, é possível prescrever condições de contorno especiais, incluindo, por exemplo,
valores de velocidade ou tensões tangenciais na parede.
Condições de contorno do tipo Symmetry são utilizadas somente quando há
características de simetria do escoamento em relação a algum plano. Tal condição de
contorno tem como principal objetivo reduzir o tamanho do domínio fluido e, em
virtude, o esforço computacional requerido pela para a execução do modelo numérico.
As condições de contorno adotadas para as superfícies do domínio fluido são
apresentadas na Tabela 5.1.
Tabela 5.1 - Condições de contorno do domínio fluido.
Superfície Tipo Observação
Entrada (fluxo), Topo Velocity Inlet -----
Saída (fluxo) Pressure Outlet -----
Plano Diametral Symmetry -----
Casco Wall s/ escorregamento
Lateral e Fundo (tanque de provas) Wall c/ escorregamento

15
5.1.3 GRAUS DE LIBERDADE DE MOVIMENTO
Conforme comentado, os ensaios de reboque com os modelos reduzidos foram
realizados com grau de liberdade apenas para os movimentos de heave e pitch. Assim
sendo, configuração idêntica foi aplicada ao modelo numérico (Tabela 5.2).
Tabela 5.2 – Configuração dos graus de liberdade do casco.
Eixo Liberdade Raio de Giração
Z sim -----
YY sim 0,32 L
X, Y, XX, ZZ não -----
Em virtude de o estudo ter foco no comportamento dinâmico da lancha com dois
graus de liberdade específicos, heave e pitch, fez-se necessária a utilização do módulo
DFBI (Dynamic Body Fluid Interaction), cuja função é realizar o cálculo do
comportamento de corpo rígido da lancha. O módulo DFBI foi configurado com valores
com valores de Release e Ramp Time equivalentes a 0,5 s. Tais configurações têm por
finalidade garantir a estabilidade necessária à solução das equações de governo nas
fases iniciais do processo de convergência.
5.2 CONFIGURAÇÃO DA MALHA COMPUTACIONAL
Neste trabalho foram utilizadas malhas do tipo trimmed mesh, prism layer mesh e
overset mesh. Com o objetivo de facilitar alterações no refinamento da malha
computacional, a distribuição de tamanho dos elementos de malha foi referenciada a um
valor base equivalente a 2,0 m, tendo por referência o recomendado pelo ITTC [12].
5.2.1 CONFIGURAÇÃO DA MALHA TRIMMED MESH
A malha do tipo trimmed mesh é uma malha de uso geral, baseada em elementos
do tipo hexagonal. Esta malha apresenta várias vantagens, dentre elas:
Rápida de ser gerada e possui alta qualidade quando usada corretamente;
Pode ser configurada de maneira anisotrópica; e
Apresenta bons resultados quando utilizada em casos em que os escoamentos
possam ser alinhados com a malha.

16
Deve-se ter atenção quando este tipo malha é utilizado, pois é sugerido que seu
refinamento seja feito tendo por base a variação dos tamanhos dos elementos de malha
segundo uma potência de 2. Portanto, se um tamanho específico de elemento de malha
deve ser atingido em uma dada região do domínio fluido, este deve ser consistente com
uma potência de 2 do valor base [16]. Este tipo de malha foi utilizado em todo o
domínio fluido, com exceção da região mais próxima ao casco, na qual foi utilizada uma
malha do tipo prism layer mesh, de modo a proporcionar uma melhor discretização dos
gradientes de velocidade no interior da camada limite (Figura 5.2).
Uma discretização de malha suficientemente refinada foi desenvolvida de modo a
permitir uma adequada descrição do escoamento ao redor da superfície livre. Utilizando
como base as sugestões apresentadas pelo ITTC [15], a discretização de malha na região
da superfície livre deve apresentar, no mínimo:
80 elementos de malha ao longo do comprimento de onda (esquema de 2ª
ordem); e
20 elementos de malha ao longo da amplitude da onda.
O comprimento da onda gerada pelo casco foi estimado utilizando a teoria de
ondas para águas profundas e a relação de dispersão, obtendo-se, então
𝜆 =2𝜋𝑐²
𝑔=
2𝜋 ∗ 6,23²
9,81= 24,86 𝑚 .
Figura 5.2 – Exemplo do refinamento da malha computacional.

17
Portanto, os elementos de malha localizados próximos a superfície livre devem ter
um valor de comprimento máximo equivalente a
𝑆. 𝐿.𝑙𝑜𝑛𝑔𝑖𝑡𝑢𝑑𝑖𝑛𝑎𝑖𝑠 =𝜆
80= 0,31 𝑚 .
A amplitude da onda gerada pelo casco foi estimada segundo a expressão [17]
𝐻1 = 0.17(𝐾 + 0.03𝐿𝐾𝜏1.5) sin [𝜋
𝐶𝑣(
𝑥
3) 1.5] = 0,37 𝑚 . (5.1)
onde 𝐻1 é a amplitude da onda formada por uma embarcação de planeio, 𝜏 é o ângulo
de trim e 𝐿𝑘 é o comprimento molhado. O valor do seno foi assumido como sendo valor
igual à unidade, já que representa a onda com a maior amplitude possível.
Portanto, segundo a sugestão do ITCC [15], tem-se que como valor de altura
máxima dos elementos de malha próximos a superfície livre
𝑆. 𝐿.𝑣𝑒𝑟𝑡𝑖𝑐𝑎𝑖𝑠 =𝐻1
20= 0,0187 𝑚 .
Para que as configurações calculadas sejam aplicadas nas regiões de interesse,
volumes de controle pré-definidos, como mostrados nas Figuras 5.3 a 5.5, são
utilizados. Nestes, pode-se definir o tamanho dos elementos de malha e, portanto,
fazendo com que a discretização necessária seja aplicada.
A malha computacional da região ao redor da superfície livre foi refinada através
de um volume de controle delimitando toda a região esperada da superfície livre, tal
como ilustrado pela Figura 5.3. Os valores de refinamento da superfície livre nas
direções X, Y e Z, em relação ao valor base, podem ser vistos na Tabela 5.3.
Tabela 5.3 – Configuração do refinamento de malha de acordo com o volume de
controle da região de interesse.
Região de Interesse Refinamento em X, Y e Z (% do valor base)
Superfície Livre [15,54%; 15,54%; 1,842%]
Ao redor da Overset Mesh [15,54%; 15,54%; 1,842%]
Esteira [7,77%; 7,77%; 0,921 %]
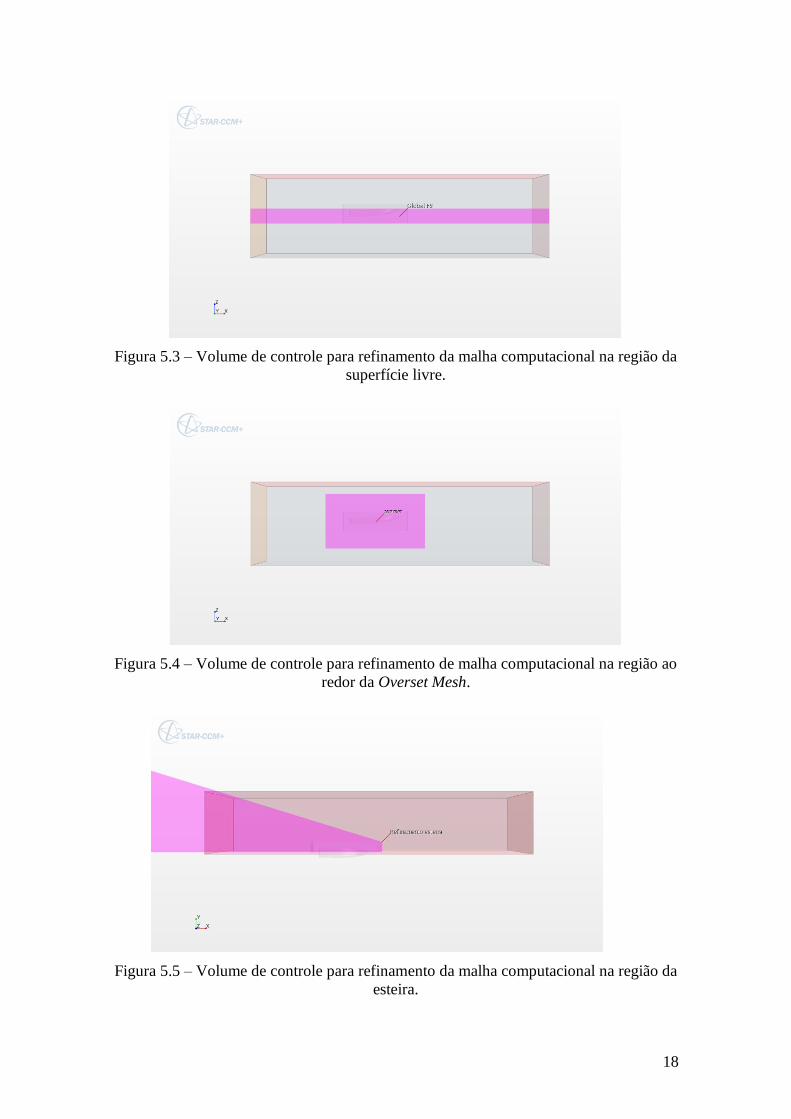
18
Figura 5.3 – Volume de controle para refinamento da malha computacional na região da
superfície livre.
Figura 5.4 – Volume de controle para refinamento de malha computacional na região ao
redor da Overset Mesh.
Figura 5.5 – Volume de controle para refinamento da malha computacional na região da
esteira.
19
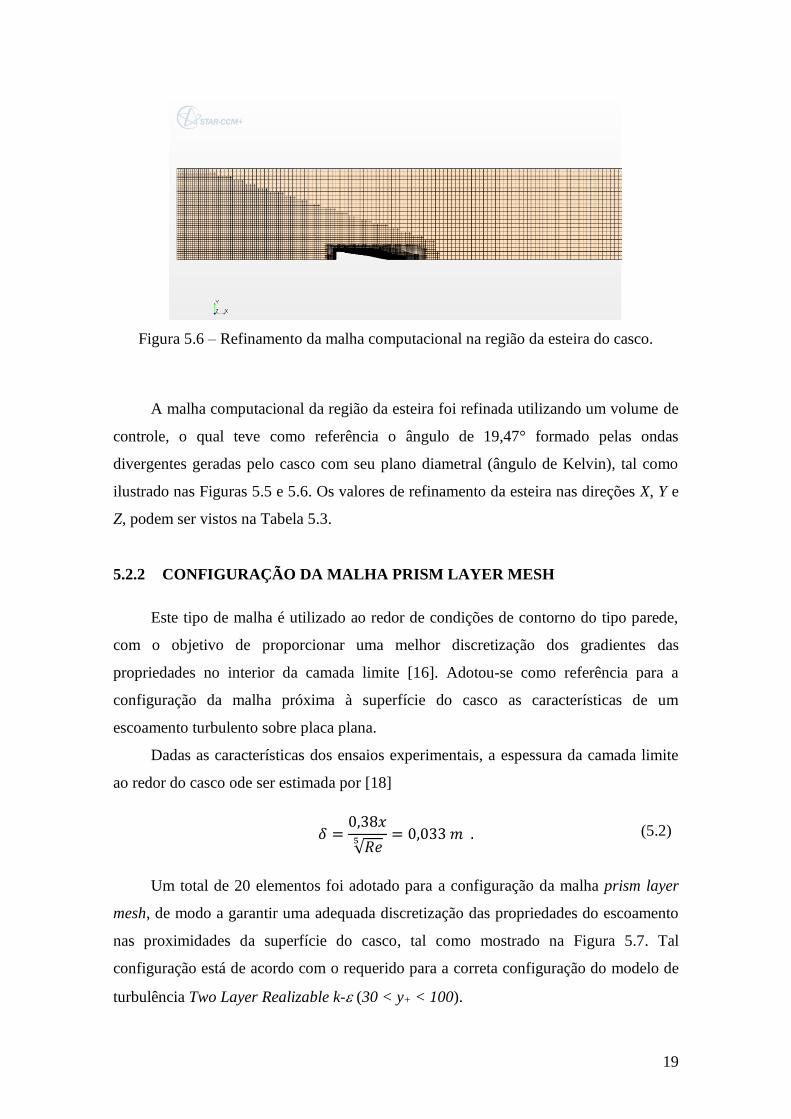
Figura 5.6 – Refinamento da malha computacional na região da esteira do casco.
A malha computacional da região da esteira foi refinada utilizando um volume de
controle, o qual teve como referência o ângulo de 19,47° formado pelas ondas
divergentes geradas pelo casco com seu plano diametral (ângulo de Kelvin), tal como
ilustrado nas Figuras 5.5 e 5.6. Os valores de refinamento da esteira nas direções X, Y e
Z, podem ser vistos na Tabela 5.3.
5.2.2 CONFIGURAÇÃO DA MALHA PRISM LAYER MESH
Este tipo de malha é utilizado ao redor de condições de contorno do tipo parede,
com o objetivo de proporcionar uma melhor discretização dos gradientes das
propriedades no interior da camada limite [16]. Adotou-se como referência para a
configuração da malha próxima à superfície do casco as características de um
escoamento turbulento sobre placa plana.
Dadas as características dos ensaios experimentais, a espessura da camada limite
ao redor do casco ode ser estimada por [18]
𝛿 =0,38𝑥
√𝑅𝑒5 = 0,033 𝑚 . (5.2)
Um total de 20 elementos foi adotado para a configuração da malha prism layer
mesh, de modo a garantir uma adequada discretização das propriedades do escoamento
nas proximidades da superfície do casco, tal como mostrado na Figura 5.7. Tal
configuração está de acordo com o requerido para a correta configuração do modelo de
turbulência Two Layer Realizable k- (30 < y+ < 100).

20
Figura 5.7 – Detalhe da configuração da malha Prism Layer Mesh ao redor do casco.
5.2.3 CONFIGURAÇÃO DA MALHA OVERSET MESH
A malha Overset Mesh é, de fato, um artifício adotado para permitir a simulação
de movimento em uma malha computacional rígida, sendo aplicada ao redor do objeto
de interesse. A região definida como Overset Mesh pode ser configurada como sendo
móvel ou fixa em relação a um referencial fixo. Ao se configurar a malha Overset Mesh
como fixa, impõe-se que o restante da malha computacional seja móvel.
No caso de simulações em presença de superfície livre, é vantajoso configurar a
malha Overset Mesh como móvel, visto que desse modo é garantido o refinamento do
restante da malha computacional na região próxima à superfície livre.
No presente estudo, a região da malha Overset Mesh foi definida como 2,9 metros
de comprimento, 0,4 metros de largura (para meio casco) e 0,8 metros de altura (Figura
5.4). Em relação às dimensões principais da embarcação (comprimento, L, meia boca,
B/2 e pontal, D), tais valores representam, respectivamente, 145% L, 185% B/2 e 323%
D.
A malha ao da região definida como Overset Mesh foi refinada de modo a ter o
dobro do tamanho dos de elementos da esteira. Tais valores foram referenciados a um
valor base de modo a facilitar o processo de refinamento. Os graus de refinamento da
malha Overset Mesh nas direções X, Y e Z equivalem, em relação ao valor base,
[15,54%; 15,54%; 1,842%], como mencionado anteriormente na Tabela 5.3.
21
5.3 CONFIGURAÇÃO DO PASSO DE TEMPO (TIME STEP)
De acordo com o sugerido pelo ITTC [15], o valor do passo de tempo (time step)
deve equivaler a 1/60 do período da onda e, portanto
∆𝑡 =𝑇𝑜𝑛𝑑𝑎
60= 0,066 𝑠
Aproximações de primeira ordem foram adotadas para a discretização no tempo.
Esta escolha foi feita tendo por referência a configuração da malha computacional. já
que, devido às suas características de refinamento, mostra-se mais vantajosa a utilização
de um método mais robusto.
5.4 ANALOGIA ENTRE OS REFERENCIAS EXPERIMENTAL E NUMÉRICO
Uma observação importante deve ser feita em relação às condições iniciais. Os
resultados experimentais foram referenciados a uma condição de calado equivalente,
como mencionado em [11]. A condição inicial é a condição de calado equivalente com
9,0 cm. Portanto, os movimentos vertical e angular do casco foram medidos a partir
deste referencial.
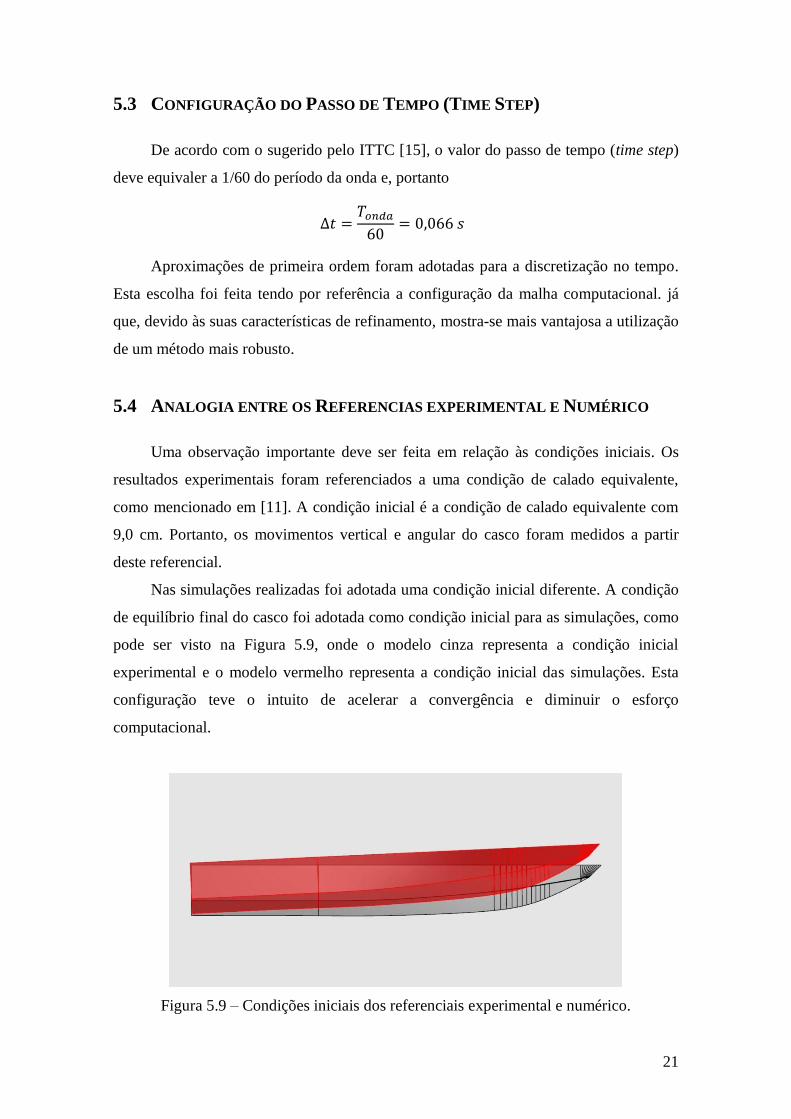
Nas simulações realizadas foi adotada uma condição inicial diferente. A condição
de equilíbrio final do casco foi adotada como condição inicial para as simulações, como
pode ser visto na Figura 5.9, onde o modelo cinza representa a condição inicial
experimental e o modelo vermelho representa a condição inicial das simulações. Esta
configuração teve o intuito de acelerar a convergência e diminuir o esforço
computacional.
Figura 5.9 – Condições iniciais dos referenciais experimental e numérico.
22
Em vista disso, é razoável prever que as variações calculadas para o deslocamento
vertical e para o trim dinâmico sejam mínimas, ou até mesmo, nulas, o que significa que
os resultados obtidos convergiram para os valores experimentais. A influência desta
configuração será abordada na seção 7.1, na qual uma condição genérica foi utilizada
como condição inicial e seus resultados analisados.
6 VALIDAÇÃO DO MODELO NUMÉRICO
6.1 VERIFICAÇÃO DA INDEPENDÊNCIA DE MALHA
A verificação da independência da malha computacional representa o processo
através do qual suas características são sucessivamente alteradas até ser alcançada uma
configuração na qual qualquer modificação adicional não promove efeitos relevantes
nos resultados obtidos. A verificação de malha consiste, portanto, em um processo
iterativo, no qual diferentes configurações de malha são testadas tendo como referência
sua influência na variação observada em parâmetros representativos do escoamento. No
presente trabalho foram selecionados como parâmetros representativos os valores de
resistência ao avanço, RT, e as condições de equilíbrio dinâmico do casco, envolvendo o
deslocamento em heave, Zv, e o ângulo de trim dinâmico, v. Na Tabela 6.1, são
apresentados os respectivos valores de referência dos parâmetros representativos.
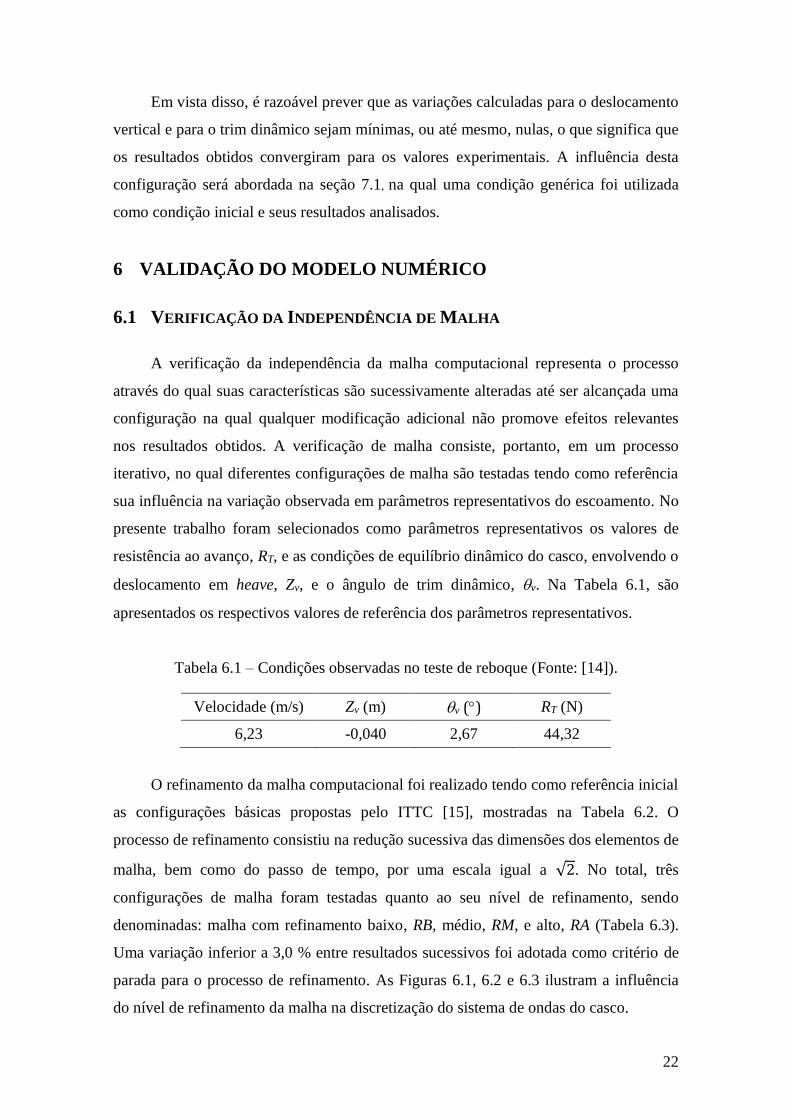
Tabela 6.1 – Condições observadas no teste de reboque (Fonte: [14]).
Velocidade (m/s) Zv (m) v () RT (N)
6,23 -0,040 2,67 44,32
O refinamento da malha computacional foi realizado tendo como referência inicial
as configurações básicas propostas pelo ITTC [15], mostradas na Tabela 6.2. O
processo de refinamento consistiu na redução sucessiva das dimensões dos elementos de
malha, bem como do passo de tempo, por uma escala igual a √2. No total, três
configurações de malha foram testadas quanto ao seu nível de refinamento, sendo
denominadas: malha com refinamento baixo, RB, médio, RM, e alto, RA (Tabela 6.3).
Uma variação inferior a 3,0 % entre resultados sucessivos foi adotada como critério de
parada para o processo de refinamento. As Figuras 6.1, 6.2 e 6.3 ilustram a influência
do nível de refinamento da malha na discretização do sistema de ondas do casco.

23
Tabela 6.2 – Configuração do refinamento de malha de acordo com o volume de
controle da região de interesse.
Região de interesse Refinamento em X, Y, Z (m)
Superfície Livre [0,31; 0,31; 0,04]
Redor da Overset Mesh [0,31; 0,31; 0,04]
Esteira [0,16; 0,16; 0,02]
Os resultados obtidos para os diferentes níveis de refinamento são apresentados na
Tabela 6.4. Observa-se que não há uma correlação direta entre o nível de refinamento da
malha e a qualidade dos resultados. A menor discrepância para a estimativa de
resistência ao avanço foi obtida com a malha com o menor nível de refinamento,
enquanto que os melhores resultados para os movimentos de heave e picth foram
alcançados com a malha de refinamento médio. Nota-se, também, que a estimativa do
movimento de heave apresenta a maior sensibilidade quanto à variação das
características de refinamento da malha, sendo o pior resultado obtido para a malha de
refinamento alto.
Em termos comparativos, a malha com refinamento médio apresentou o melhor
desempenho. A malha com refinamento alto não apresentou ganhos significativos em
relação à configuração com refinamento médio. De fato, observa-se apenas uma
pequena melhora em relação à estimativa da resistência ao avanço, enquanto que a
condição final de equilíbrio em heave apresenta a maior discrepância em relação aos
resultados experimentais. Ambas as variações das estimativas da resistência a avanço e
trim dinâmico entre as configurações com refinamento médio e alto são inferiores ao
critério de aceitação estipulado em 3,0 %. Assim sendo, o nível de refinamento médio
foi considerado como aceitável em termos de verificação da independência da malha.
Tabela 6.3 – Configuração das malhas computacionais segundo o nível de refinamento.
Simulação # Células Execução Tempo físico
RB (Base 1,4) 820.000 5,3 h 5,0 s
RM (Base 1,0) 1.710.000 5,2 h 3,0 s
RA (Base 0,7) 3.900.000 15,0 h 3,0 s

24
Figura 6.1 – Sistema de ondas: malha com refinamento baixo.
Figura 6.2 – Sistema de ondas: malha com refinamento médio.
Figura 6.3 – Sistema de ondas: malha com refinamento alto.
25
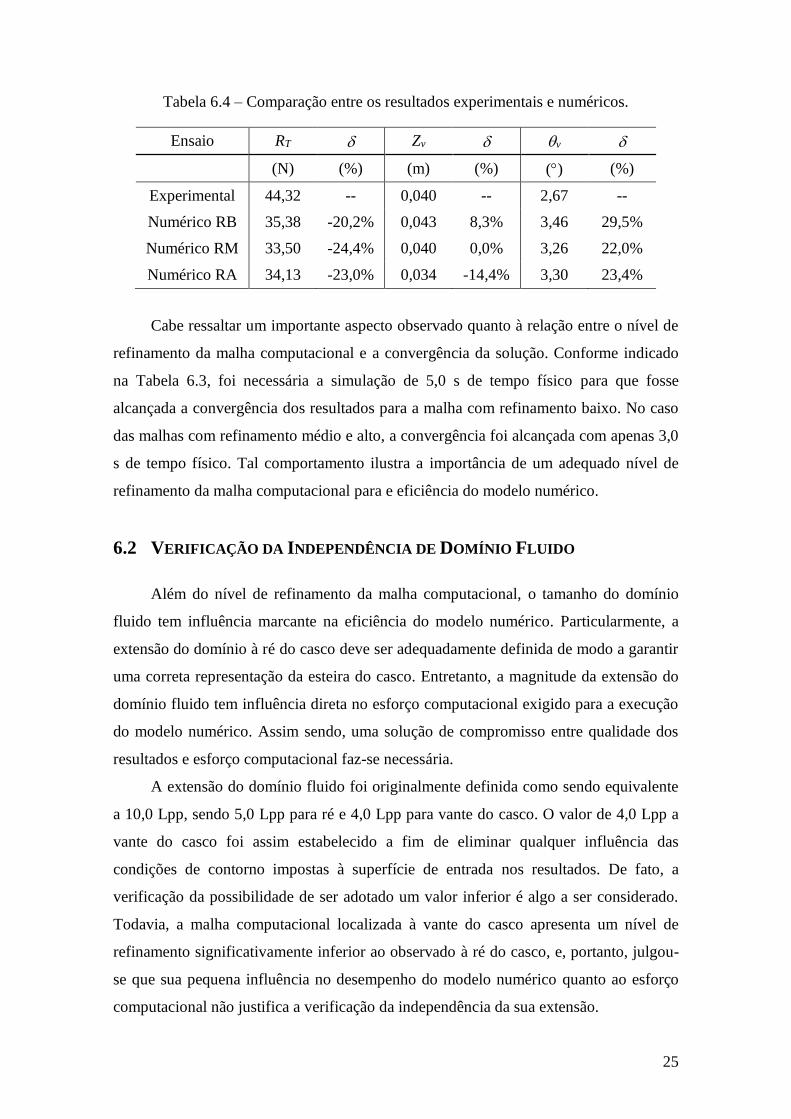
Tabela 6.4 – Comparação entre os resultados experimentais e numéricos.
Ensaio RT Zv v
(N) (%) (m) (%) () (%)
Experimental 44,32 -- 0,040 -- 2,67 --
Numérico RB 35,38 -20,2% 0,043 8,3% 3,46 29,5%
Numérico RM 33,50 -24,4% 0,040 0,0% 3,26 22,0%
Numérico RA 34,13 -23,0% 0,034 -14,4% 3,30 23,4%
Cabe ressaltar um importante aspecto observado quanto à relação entre o nível de
refinamento da malha computacional e a convergência da solução. Conforme indicado
na Tabela 6.3, foi necessária a simulação de 5,0 s de tempo físico para que fosse
alcançada a convergência dos resultados para a malha com refinamento baixo. No caso
das malhas com refinamento médio e alto, a convergência foi alcançada com apenas 3,0
s de tempo físico. Tal comportamento ilustra a importância de um adequado nível de
refinamento da malha computacional para e eficiência do modelo numérico.
6.2 VERIFICAÇÃO DA INDEPENDÊNCIA DE DOMÍNIO FLUIDO
Além do nível de refinamento da malha computacional, o tamanho do domínio
fluido tem influência marcante na eficiência do modelo numérico. Particularmente, a
extensão do domínio à ré do casco deve ser adequadamente definida de modo a garantir
uma correta representação da esteira do casco. Entretanto, a magnitude da extensão do
domínio fluido tem influência direta no esforço computacional exigido para a execução
do modelo numérico. Assim sendo, uma solução de compromisso entre qualidade dos
resultados e esforço computacional faz-se necessária.
A extensão do domínio fluido foi originalmente definida como sendo equivalente
a 10,0 Lpp, sendo 5,0 Lpp para ré e 4,0 Lpp para vante do casco. O valor de 4,0 Lpp a
vante do casco foi assim estabelecido a fim de eliminar qualquer influência das
condições de contorno impostas à superfície de entrada nos resultados. De fato, a
verificação da possibilidade de ser adotado um valor inferior é algo a ser considerado.
Todavia, a malha computacional localizada à vante do casco apresenta um nível de
refinamento significativamente inferior ao observado à ré do casco, e, portanto, julgou-
se que sua pequena influência no desempenho do modelo numérico quanto ao esforço
computacional não justifica a verificação da independência da sua extensão.
26
Tabela 6.5 – Configurações adotadas para verificação da independência de domínio.
Simulação # Células Execução Tempo físico
5,0 Lpp à ré 1.710.000 5,2 h 3,0 s
2,0 Lpp à ré 1.180.000 3,6 h 3,0 s
Optou-se pela aplicação de uma redução agressiva ao valor da extensão do
domínio fluido à ré do casco, visto que o impacto na quantidade de elementos de malha
e, consequentemente, no esforço computacional, devido a pequenas alterações em
apenas uma dimensão do domínio fluido é, geralmente, pouco expressivo. Portanto,
uma simulação com a malha de refinamento médio e apenas 2,0 Lpp de extensão à ré do
casco foi realizada para fins de verificação da independência do domínio fluido. As
configurações dos domínios adotados na presente análise são apresentadas na Tabela
6.5.
Nota-se pelos resultados apresentados na Tabela 6.6 que a influência causada pela
redução do domínio fluido foi inferior a 1%. Tal resultado indica que um domínio com
2,0 Lpp de extensão à ré do casco é suficientemente adequando para o desempenho do
modelo numérico. Os ganhos em termos de esforço computacional devido à redução da
extensão do domínio fluido são apresentados na Tabela 6.5, na qual se observa uma
redução da ordem de 30% no tempo de execução.
Um resultado importante a ser observado através das Tabelas 6.5 e 6.6 é que o a
redução do domínio fluido não teve influência no valor do tempo físico requerido para a
convergência da solução, o que não é intuitivo. Este fato indica que o refinamento da
malha computacional teve maior importância do que as características do domínio
fluido quanto à definição das configurações do modelo numérico.
Tabela 6.6 – Resultados de simulações com domínios diferentes.
Simulação RT Zv v
(N) (%) (m) (%) () (%)
5,0 Lpp a ré 33,50 -24,4% 0,0397 -0,8% 3,257 22,0%
2,0 Lpp a ré 33,63 -24,1% 0,0401 0,1% 3,245 21,5%
27
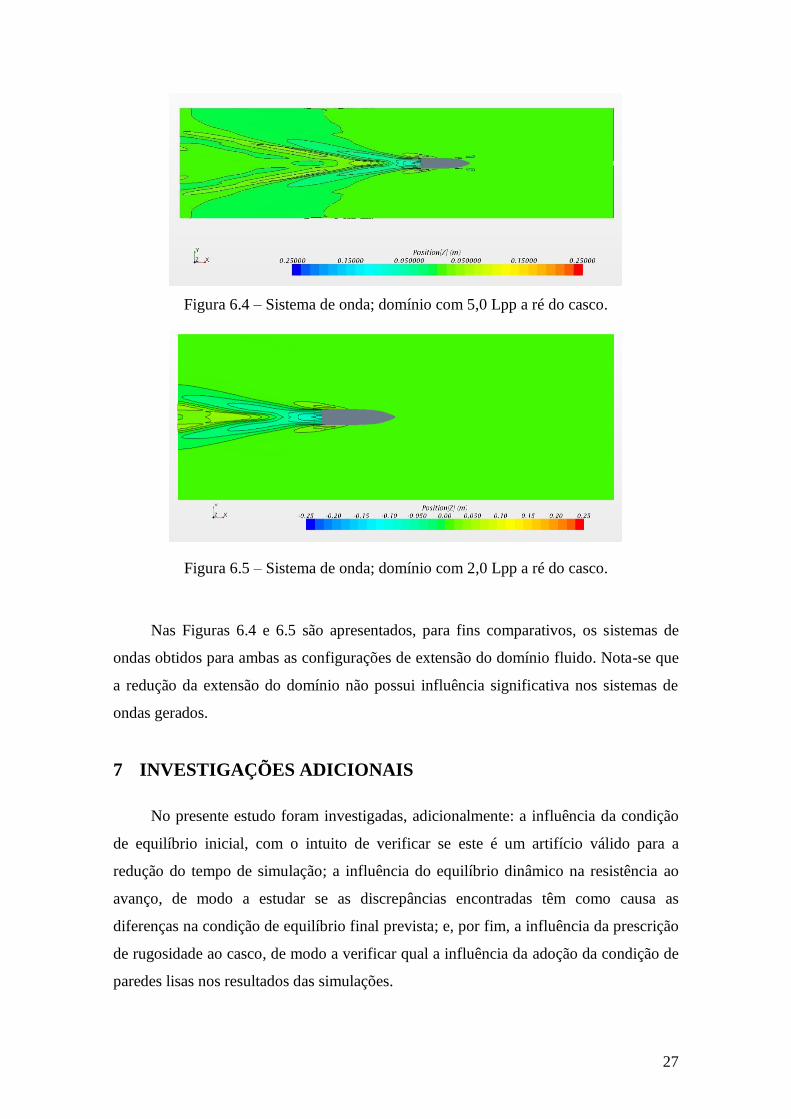
Figura 6.4 – Sistema de onda; domínio com 5,0 Lpp a ré do casco.
Figura 6.5 – Sistema de onda; domínio com 2,0 Lpp a ré do casco.
Nas Figuras 6.4 e 6.5 são apresentados, para fins comparativos, os sistemas de
ondas obtidos para ambas as configurações de extensão do domínio fluido. Nota-se que
a redução da extensão do domínio não possui influência significativa nos sistemas de
ondas gerados.
7 INVESTIGAÇÕES ADICIONAIS
No presente estudo foram investigadas, adicionalmente: a influência da condição
de equilíbrio inicial, com o intuito de verificar se este é um artifício válido para a
redução do tempo de simulação; a influência do equilíbrio dinâmico na resistência ao
avanço, de modo a estudar se as discrepâncias encontradas têm como causa as
diferenças na condição de equilíbrio final prevista; e, por fim, a influência da prescrição
de rugosidade ao casco, de modo a verificar qual a influência da adoção da condição de
paredes lisas nos resultados das simulações.
28
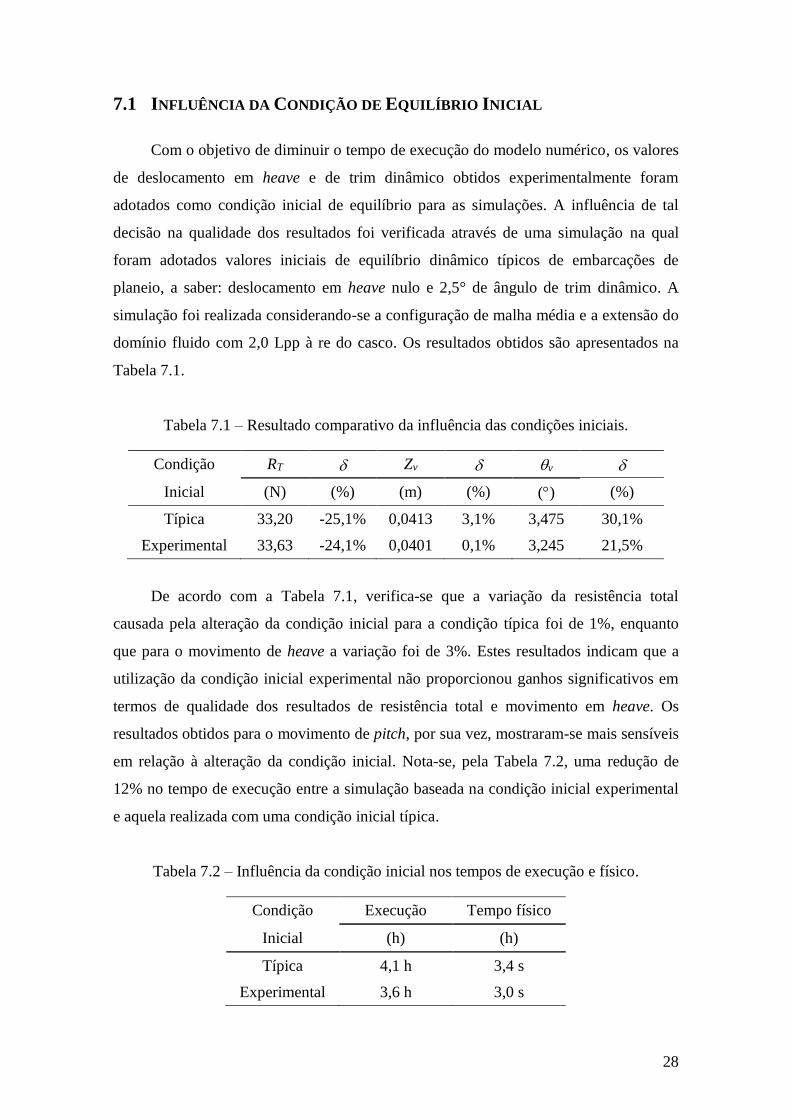
7.1 INFLUÊNCIA DA CONDIÇÃO DE EQUILÍBRIO INICIAL
Com o objetivo de diminuir o tempo de execução do modelo numérico, os valores
de deslocamento em heave e de trim dinâmico obtidos experimentalmente foram
adotados como condição inicial de equilíbrio para as simulações. A influência de tal
decisão na qualidade dos resultados foi verificada através de uma simulação na qual
foram adotados valores iniciais de equilíbrio dinâmico típicos de embarcações de
planeio, a saber: deslocamento em heave nulo e 2,5° de ângulo de trim dinâmico. A
simulação foi realizada considerando-se a configuração de malha média e a extensão do
domínio fluido com 2,0 Lpp à re do casco. Os resultados obtidos são apresentados na
Tabela 7.1.
Tabela 7.1 – Resultado comparativo da influência das condições iniciais.
Condição RT Zv v
Inicial (N) (%) (m) (%) () (%)
Típica 33,20 -25,1% 0,0413 3,1% 3,475 30,1%
Experimental 33,63 -24,1% 0,0401 0,1% 3,245 21,5%
De acordo com a Tabela 7.1, verifica-se que a variação da resistência total
causada pela alteração da condição inicial para a condição típica foi de 1%, enquanto
que para o movimento de heave a variação foi de 3%. Estes resultados indicam que a
utilização da condição inicial experimental não proporcionou ganhos significativos em
termos de qualidade dos resultados de resistência total e movimento em heave. Os
resultados obtidos para o movimento de pitch, por sua vez, mostraram-se mais sensíveis
em relação à alteração da condição inicial. Nota-se, pela Tabela 7.2, uma redução de
12% no tempo de execução entre a simulação baseada na condição inicial experimental
e aquela realizada com uma condição inicial típica.
Tabela 7.2 – Influência da condição inicial nos tempos de execução e físico.
Condição Execução Tempo físico
Inicial (h) (h)
Típica 4,1 h 3,4 s
Experimental 3,6 h 3,0 s

29
Os resultados obtidos mostram que a adoção da condição final experimental como
condição inicial nas simulações cumpriu com a hipótese de acelerar a convergência da
solução e diminuir o esforço computacional, tendo sido, então, vantajosa para a
realização do presente trabalho. Todavia, em termos da utilização de um modelo
numérico em CFD como ferramenta de projeto de cascos de planeio, o caso comum é a
adoção de condições iniciais típicas. A magnitude das discrepâncias observadas entre os
resultados obtidos para ambas as configurações de condições iniciais indica uma
adequada robustez do modelo numérico.
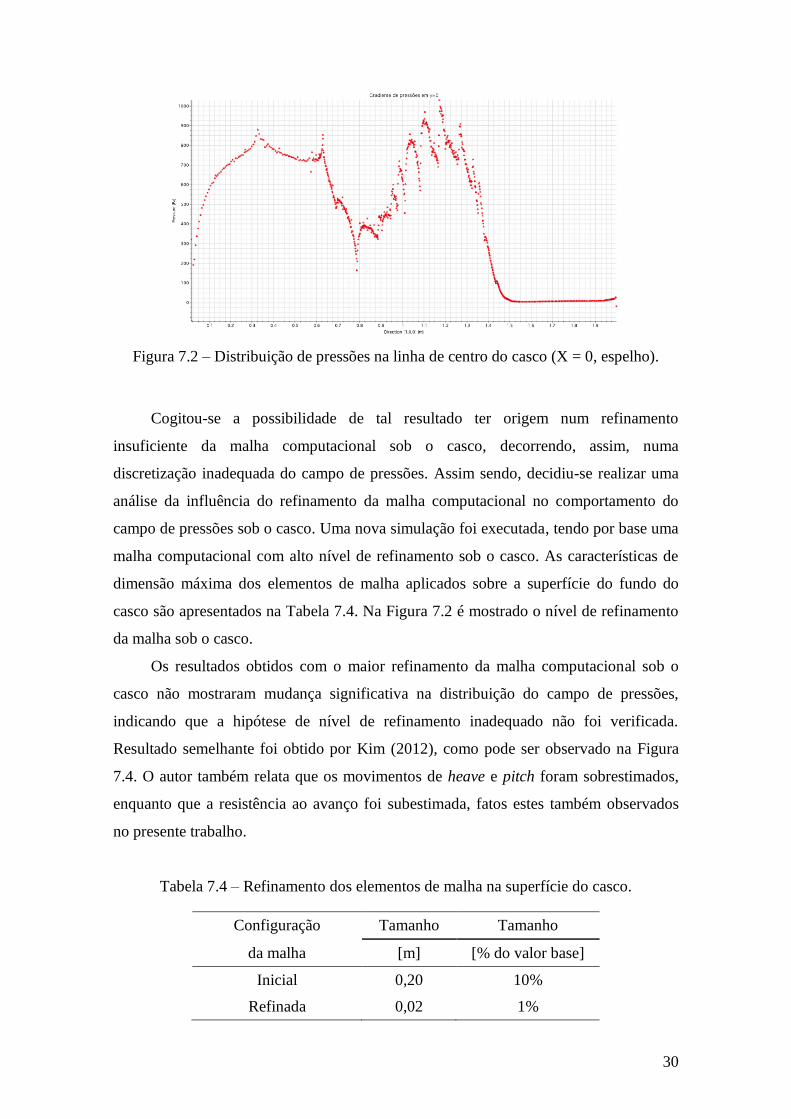
7.2 INFLUÊNCIA DO EQUILÍBRIO DINÂMICO NA ESTIMATIVA DE RT
O equilíbrio dinâmico de uma embarcação de planeio tem influência direta na
resistência ao avanço. De modo a verificar a magnitude de tal influência, uma análise
detalhada do campo de pressões atuantes sob o casco foi realizada. Na Figura 7.1, é
apresentada a distribuição de pressões sob o casco obtido pela simulação com
refinamento médio, 2 Lpp à ré e condição inicial típica. Nota-se que há duas regiões de
grande variação de pressão, a saber: uma região logo após a linha de estagnação e outra
região mais a ré. Nota-se uma grande oscilação do campo de pressões logo a ré da linha
de estagnação. Tal oscilação no campo de pressões é melhor ilustrada na Figura 7.2, na
qual a distribuição de pressões ao longo da linha de centro do casco é apresentada. Além
da característica oscilatória, observa-se um comportamento atípico do campo de
pressões sob o casco, em função do surgimento de uma segunda região de elevação da
pressão mais a ré.
Figura 7.1 – Campo de pressões do casco.
30
Figura 7.2 – Distribuição de pressões na linha de centro do casco (X = 0, espelho).
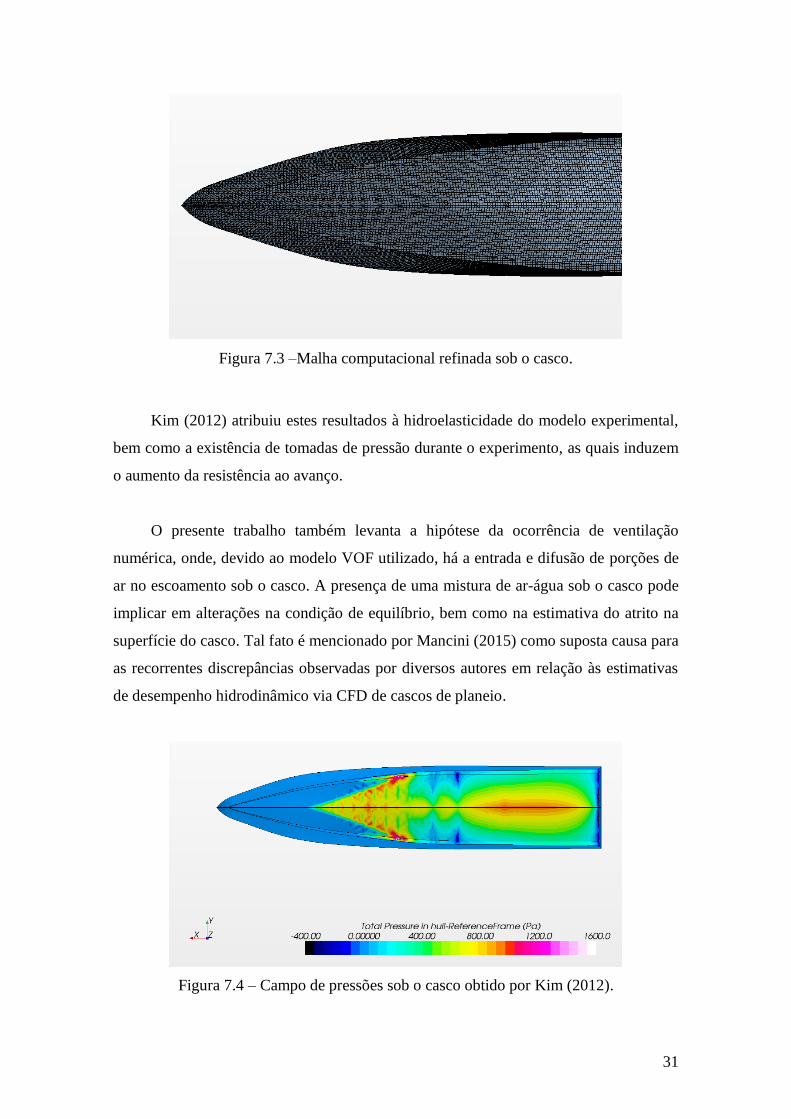
Cogitou-se a possibilidade de tal resultado ter origem num refinamento
insuficiente da malha computacional sob o casco, decorrendo, assim, numa
discretização inadequada do campo de pressões. Assim sendo, decidiu-se realizar uma
análise da influência do refinamento da malha computacional no comportamento do
campo de pressões sob o casco. Uma nova simulação foi executada, tendo por base uma
malha computacional com alto nível de refinamento sob o casco. As características de
dimensão máxima dos elementos de malha aplicados sobre a superfície do fundo do
casco são apresentados na Tabela 7.4. Na Figura 7.2 é mostrado o nível de refinamento
da malha sob o casco.
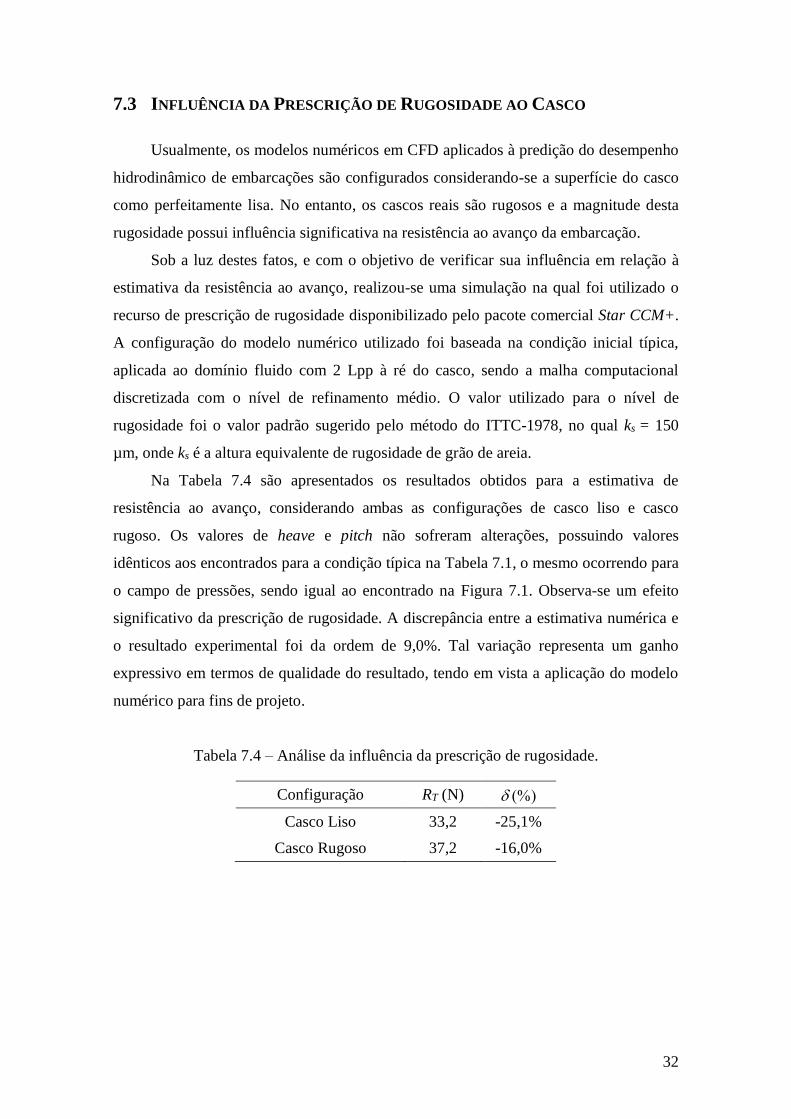
Os resultados obtidos com o maior refinamento da malha computacional sob o
casco não mostraram mudança significativa na distribuição do campo de pressões,
indicando que a hipótese de nível de refinamento inadequado não foi verificada.
Resultado semelhante foi obtido por Kim (2012), como pode ser observado na Figura
7.4. O autor também relata que os movimentos de heave e pitch foram sobrestimados,
enquanto que a resistência ao avanço foi subestimada, fatos estes também observados
no presente trabalho.
Tabela 7.4 – Refinamento dos elementos de malha na superfície do casco.
Configuração Tamanho Tamanho
da malha [m] [% do valor base]
Inicial 0,20 10%
Refinada 0,02 1%
31
Figura 7.3 –Malha computacional refinada sob o casco.
Kim (2012) atribuiu estes resultados à hidroelasticidade do modelo experimental,
bem como a existência de tomadas de pressão durante o experimento, as quais induzem
o aumento da resistência ao avanço.
O presente trabalho também levanta a hipótese da ocorrência de ventilação
numérica, onde, devido ao modelo VOF utilizado, há a entrada e difusão de porções de
ar no escoamento sob o casco. A presença de uma mistura de ar-água sob o casco pode
implicar em alterações na condição de equilíbrio, bem como na estimativa do atrito na
superfície do casco. Tal fato é mencionado por Mancini (2015) como suposta causa para
as recorrentes discrepâncias observadas por diversos autores em relação às estimativas
de desempenho hidrodinâmico via CFD de cascos de planeio.
Figura 7.4 – Campo de pressões sob o casco obtido por Kim (2012).
32
7.3 INFLUÊNCIA DA PRESCRIÇÃO DE RUGOSIDADE AO CASCO
Usualmente, os modelos numéricos em CFD aplicados à predição do desempenho
hidrodinâmico de embarcações são configurados considerando-se a superfície do casco
como perfeitamente lisa. No entanto, os cascos reais são rugosos e a magnitude desta
rugosidade possui influência significativa na resistência ao avanço da embarcação.
Sob a luz destes fatos, e com o objetivo de verificar sua influência em relação à
estimativa da resistência ao avanço, realizou-se uma simulação na qual foi utilizado o
recurso de prescrição de rugosidade disponibilizado pelo pacote comercial Star CCM+.
A configuração do modelo numérico utilizado foi baseada na condição inicial típica,
aplicada ao domínio fluido com 2 Lpp à ré do casco, sendo a malha computacional
discretizada com o nível de refinamento médio. O valor utilizado para o nível de
rugosidade foi o valor padrão sugerido pelo método do ITTC-1978, no qual ks = 150
µm, onde ks é a altura equivalente de rugosidade de grão de areia.
Na Tabela 7.4 são apresentados os resultados obtidos para a estimativa de
resistência ao avanço, considerando ambas as configurações de casco liso e casco
rugoso. Os valores de heave e pitch não sofreram alterações, possuindo valores
idênticos aos encontrados para a condição típica na Tabela 7.1, o mesmo ocorrendo para
o campo de pressões, sendo igual ao encontrado na Figura 7.1. Observa-se um efeito
significativo da prescrição de rugosidade. A discrepância entre a estimativa numérica e
o resultado experimental foi da ordem de 9,0%. Tal variação representa um ganho
expressivo em termos de qualidade do resultado, tendo em vista a aplicação do modelo
numérico para fins de projeto.
Tabela 7.4 – Análise da influência da prescrição de rugosidade.
Configuração RT (N)
Casco Liso 33,2 -25,1%
Casco Rugoso 37,2 -16,0%

33
8 CONCLUSÕES
O crescente emprego de embarcações de planeio tem demandado o
desenvolvimento de projetos mais eficientes. O desenvolvimento dos programas de
simulação numérica baseados na dinâmica dos fluidos computacional e o advento de
recursos computacionais de alto desempenho a um custo acessível têm incentivado o
desenvolvimento de modelos numéricos em CFD dedicados à predição do desempenho
hidrodinâmico de cascos de planeio.
O presente trabalho foi dedicado ao desenvolvimento e à avaliação de um modelo
numérico em CFD aplicado a estimativa da resistência ao avanço e das condições de
equilíbrio dinâmico de embarcações de planeio. O trabalho foi centrado na validação do
modelo numérico quanto aos aspectos de independência do domínio fluido e da malha
computacional, tendo como referência resultados experimentais realizados com modelos
reduzidos de uma embarcação de planeio típica.
Diferentes parâmetros de configuração do modelo numérico foram avaliados,
incluindo desde as dimensões do domínio fluido até as características de refinamento da
malha computacional. O modelo numérico desenvolvido apresentou um desempenho
satisfatório quanto à qualidade das estimativas da resistência ao avanço e do equilíbrio
dinâmico da embarcação. Verificou-se que uma boa relação custo-benefício para o
modelo numérico é alcançada com um nível de refinamento médio da malha
computacional, associado a um extensão do domínio fluido com apenas 2 Lpp à ré do
casco. Os resultados encontrados no presente estudo estão condizentes com a literatura,
apresentando valores subestimados para a resistência ao avanço e, simultaneamente,
valores sobrestimados para os movimentos de heave e pitch.
Investigações adicionais foram realizadas quanto à influência das condições
iniciais na convergência da solução, bem como do equilíbrio dinâmico e da prescrição
de rugosidade na estimativa da resistência ao avanço. Em particular, a prescrição de
rugosidade mostrou um efeito significativo na estimativa da resistência ao avanço. A
possibilidade de que houve um problema de ventilação numérica foi levantada, uma vez
que o refinamento da superfície não produziu resultados sobre a falta de convergência
da pressão na região após a linha de estagnação, assim como descrito por Mancini
(2015).
Apesar da importância do estudo da ventilação numérica, devido ao fato de
influencar diretamente nos resultados, o presente trabalho optou por enfatizar o estudo

34
de independência do domínio fluido para que a validação do modelo numérico fosse
realizada, sendo este o objetivo maior do mesmo. Ademais, a redução do domínio fluido
proporcionou uma otimização do tempo de execução, justificando a escolha tomada
devido ao enfoque de projeto adotado no presente trabalho.
Este trabalho abre margem para que outras configurações não testadas aqui sejam
estudadas, de modo a aperfeiçoar a utilização de modelos numéricos em CFD como
ferramenta de projeto de embarcações de planeio. Seguindo esta linha de raciocínio,
sugere-se como tema para estudos futuros:
A redução do domínio fluido quanto à distância do casco à superfície Inlet e
sua largura;
O desempenho de outros tipos de malha computacional;
O problema de ventilação numérica e os erros associados sobre o campo de
pressões;
O desempenho de outros modelos de turbulência;
O estudo da influência da rugosidade sobre cascos em regime de planeio.
Como mencionado anteriormente, a principal discussão aberta pelo presente
trabalho foi a utilização de modelos numéricos em CFD como ferramenta de projeto. Os
resultados obtidos mostraram ser esta uma opção efetiva para a avaliação de soluções de
projeto de embarcações de planeio.
35
9 BIBLIOGRAFIA
[1] H. A. Ahmad e A. F. Ayob, “State of the Art Review of the Application of
Computational Fluid Dynamics for High Speed Craft”, vol. 39, no 39, p. 7–17,
2017.
[2] S. Brizzolara e F. Serra, “Accuracy of CFD codes in the prediction of planing
surfaces hydrodyamic characteristics”, 2nd Int. Conf. Mar. Res. Transp., p. 147–
158, 2007.
[3] S. Brizzolara e D. Villa, “CFD Simulation of Planing Hulls”, Seventh Int. Conf.
High-Performance Mar. Veh., no October, 2010.
[4] M. Caponnetto, “Practical CFD simulations for planing hulls”, Int. Conf. High
Perform. Mar. Veh. (HIPER’ 01), no May, 2001.
[5] R. Azcueta, M. Caponnetto, e H. Soeding, “Planing Boats in Waves”, Numer.
Towing Tank Symp., p. 3–15, 2003.
[6] H. Ghassemi, M. Kamarlouei, S. Taj, e G. Veysi, “A Hydrodynamic
Methodology and Cfd Analysis for Performance Prediction of Stepped Planing
Hulls”, vol. 22, no 2, p. 23–31, 2015.
[7] P. Lotfi, M. Ashrafizaadeh, e R. K. Esfahan, “Numerical investigation of a
stepped planing hull in calm water”, Ocean Eng., vol. 94, p. 103–110, 2015.
[8] A. De Marco, S. Mancini, S. Miranda, R. Scognamiglio, e L. Vitiello,
“Experimental and numerical hydrodynamic analysis of a stepped planing hull”,
Appl. Ocean Res., vol. 64, p. 135–154, 2017.
[9] Y. Su, Q. Chen, H. Shen, e W. Lu, “Numerical simulation of a planing vessel at
high speed”, J. Mar. Sci. Appl., vol. 11, no 2, p. 178–183, 2012.
10] B. Y. D. Kim, “The Performance of Planing Hulls in Transition Speeds”, in
STAR Korean Conference 2012, 2012.
[11] Leap CFD Team, “Computational Fluid Dynamics (CFD) Blog - Leap Australia
& New Zealand”, Turbulence Part 3 - Selection of wall functions and Y+ to best
capture the Turbulent Boundary Layer, 2013. [Online]. Available at:
https://www.computationalfluiddynamics.com.au/turbulence-part-3-selection-of-
wall-functions-and-y-to-best-capture-the-turbulent-boundary-layer/. [Acessado:
07-ago-2018].
[12] ANSYS, “FLUENT 6.3 Documentation”.

36
[13] Nicola Parolini, “Computational Fluid Dynamics for Naval Engineering
Problems”, vol. 3138, p. 184, 2004.
[14] D. J. Taunton, D. A. Hudson, e R. A. Shenoi, “Characteristics of a Series of High
Speed Hard Chine Planing Hulls-Part I: Performance in Calm Water”, Int. J.
Small Cr. Technol., vol. 152, p. 55–75, 2010.
[15] M. Hydrodynamics, “ITTC – Recommended Procedures and Guidelines ITTC –
Recommended Procedures and Guidelines Practical Guidelines for Ship CFD”,
2011.
[16] C. Adapco, “Star-CCM+ 9.06.009 Manual”, .
[17] F. Ii, S. Mancini, T. Coordinatore, C. Pensa, e L. De Luca, “UNIVERSITÀ
DEGLI STUDI DI NAPOLI THE PROBLEM OF THE VERIFICATION AND
VALIDATION PROCESSES OF CFD SIMULATIONS OF PLANING
HULLS”, 2015.
[18] C. Yunus e J. Cimbala, Fluid Mechanics Fundumentals and Applications. 2015.
[19] D. Svahn, “Performance Prediction of Hulls with Transverse Steps”, KTH Centre
for Naval Architecture, 2009.







