estudo da influÊncia da forma de proa nas...
TRANSCRIPT
ESTUDO DA INFLUÊNCIA DA FORMA DE PROA NAS
ACELERAÇÕES EM HEAVE E PITCH DE UM CASCO
DE PLANEIO
Amaury Menezes Pereira Filho
Projeto de Graduação apresentado ao Curso de
Engenharia Naval e Oceânica da Escola
Politécnica, Universidade Federal do Rio de
Janeiro, como parte dos requisitos necessários à
obtenção do título de Engenheiro Naval.
Orientador: Alexandre Teixeira de Pinho Alho
RIO DE JANEIRO – BRASIL
DEZEMBRO DE 2018
ii
ESTUDO DA INFLUÊNCIA DA FORMA DE PROA NAS ACELERAÇÕES EM
HEAVE E PITCH DE UM CASCO DE PLANEIO
Amaury Menezes Pereira Filho
PROJETO FINAL SUBMETIDO AO CORPO DOCENTE DO DEPARTAMENTO DE
ENGENHARIA NAVAL E OCEÂNICA DA ESCOLA POLITÉCNICA DA UNIVERSIDADE
FEDERAL DO RIO DE JANEIRO, COMO PARTE DOS REQUISITOS NECESSÁRIOS
PARA OBTENÇÃO DO GRAU DE ENGENHEIRO NAVAL.
Examinado por:
Profo Alexandre Teixeira de Pinho Alho, D.Sc.
Profo Carl Horst Albrecht, D.Sc.
Profo José Henrique Erthal Sanglard, D. Sc.
Profo Joel Sena Sales Junior, D. Sc.
RIO DE JANEIRO – BRASIL
DEZEMBRO DE 2018

iii
Filho, Amaury M. P. de
Estudo da influência da forma de proa nas
acelerações em heave e pitch de um casco de
planeio / Amaury Menezes Pereira Filho. – Rio de
Janeiro: UFRJ / Escola Politécnica, 2018.
43 p.: il.; 29,7 cm.
Orientador: Alexandre Teixeira de Pinho Alho
Projeto de Graduação – UFRJ/ Escola
Politécnica/
Curso de Engenharia Naval e Oceânica,
2018. Referências bibliográficas: p
43.
1. Embarcações de Planeio 2. Geometria
do Casco 3. Seakeeping 4. CFD.
I. Alexandre Teixeira Pinho, Alho. II.
Universidade Federal do Rio de Janeiro, Escola
Politécnica, Curso de Engenharia Naval e
Oceânica. III. Análise de Comportamento em
Ondas com Alteração da Geometria do Casco por
CFD.

iv
Resumo do Projeto de Graduação apresentado à POLI/ UFRJ como parte dos requisitos
necessários para obtenção do grau de Engenheiro Naval.
ESTUDO DA INFLUÊNCIA DA FORMA DE PROA NAS ACELERAÇÕES EM
HEAVE E PITCH DE UM CASCO DE PLANEIO
Amaury Menezes Pereira Filho
Dezembro/2018
Orientador: Alexandre Teixeira de Pinho Alho
Curso: Engenharia Naval e Oceânica
O trabalho visa testar a ideia de modificar a geometria do casco, em região de proa, para
mitigação das acelerações em heave e pitch de uma embarcação planadora, tendo como foco uma
embarcação militar, na presença de ondas.
Para tal, partiu-se de uma geometria já existente de uma lancha planadora militar, tratada
como base, e foram realizadas duas alterações na forma, gerando convexidades que se alongam,
de forma sutil, por todo casco.
Foram realizadas simulações em CFD, através do software STAR CCM+, da navegação
na presença de ondas e coletou-se dados referentes aos movimentos e acelerações em heave e
pitch e sobre o campo de pressões incidente sob o fundo do casco.
Após análise dos resultados, constatou-se mitigação em ambas acelerações superior a
43% no casco com maior convexidade e a 15% no casco com menor convexidade, tendo como
objeto de comparação o casco base.

v
Abstract of Undergraduate Project presented to POLI/UFRJ as a partial fulfillment of the
requirements for the degree of Naval Architect and Marine Engineer.
STUDY OF PROW SHAPE INFLUENCE IN HEAVE AND PITCH ACCELERATIONS OF
A PLANE HULL
Amaury Menezes Pereira Filho
December/2018
Advisor: Alexandre Teixeira de Pinho Alho
Course: Naval Architect and Marine Engineer
The objective is to test the idea of changing the geometry on the prow area to mitigate
heave and pitch accelerations of a planing vessel, focusing on a military vessel, in regular head
waves.
An existing geometry was used as a database of a military planing vessel, and two changes
of shape were made, generating a convexity that stretches, subtly, throughout the hull.
CFD Simulations were carried out using STAR CCM+ software, sailing in the presence of
waves to collect data on the field of pressure incident under the bottom of the hull, the heave and
pitch movements and accelerations.
After results analysis, was verified a mitigation in both accelerations superior to 43% on
the hull with greater convexity and to 15% on the hull with less convexity, having as object of
comparison the base hull.

vi
The fishermen know that the sea is dangerous and
the storm terrible, but they have never found these
dangers sufficient reason for remaining ashore.
(Vincent Van Gogh)

vii
Dedicatória:
Dedico este trabalho a minha família, em
especial à minha mãe, pai (in memorian) e avó,
com amor e gratidão, por tudo que fizeram e
vem fazendo por mim.

viii
AGRADECIMENTOS
Aos meus pais, Tânia Leda Revinthis e Amaury Menezes Pereira, que além de amor, nunca
mediram esforços para garantir aos filhos a melhor educação possível e sólidos valores morais,
hoje vejo que são as coisas mais importantes que possuo na vida.
À minha família, em especial à minha Avó, Maria do Carmo Gedeão Santos, que sempre
deu o maior suporte, tanto na criação como na formação de princípios que são levados em minha
vida.
Aos meus amigos que convivo ou que recordo com carinho, vocês fazem parte do que eu
sou. São responsáveis e dividem comigo não só essa, mas todas a minhas conquistas.
Ao meu orientador Alexandre Alho, exemplo de professor, tanto pela didática como pela
vontade em transmitir conhecimento aos alunos. Um dos professores mais importantes na minha
formação como engenheiro naval. Obrigado pelo empenho nos ensinamentos que sempre
carregarei comigo.
Ao meu chefe e professor no período de estágio, Comandante Miyoshi, por todos os
ensinamentos sobre construção, reparos, operação e história naval, além dos ensinamentos como
militar, que levo para vida, com muito carinho.

ix
SUMÁRIO
1 Introdução ............................................................................................................................. 1
2 Revisão Bibliográfica............................................................................................................ 2
3 Considerações a respeito da Navegação em Planeio ............................................................ 4
3.1 Correlação entre a Forma do Casco e a Resposta em Ondas......................................... 5
3.2 Mitigação das Acelerações em Heave e Pitch ............................................................... 7
4 Caso de Estudo .................................................................................................................... 10
4.1 Alterações na Forma da Proa ....................................................................................... 11
4.2 Condição de Carregamento ......................................................................................... 13
5 Modelo Numérico ............................................................................................................... 14
5.1 Configuração do Modelo Numérico ............................................................................ 14
5.2 Domínio Fluido ........................................................................................................... 15
5.3 Condições de Contorno ............................................................................................... 16
5.4 Malha Computacional ................................................................................................. 17
6 Apresentação e Análise dos Resultados .............................................................................. 20
7 Conclusões .......................................................................................................................... 37
Referencias Bibliográficas ......................................................................................................... 39
1
1 INTRODUÇÃO
Já se faz registro de embarcações de planeio desde o início do século passado. Porém, o
grande avanço se deu nas décadas de 60 e 70. Tal impulso pode ser explicado pelo avanço
tecnológico e a maior utilização de embarcações de planeio para fins de esporte e lazer, missões
militares, e serviços de transporte de passageiros e de resgate.
Cascos de planeio tendem a experimentar excessivas respostas quando em operação em
ondas. Tal comportamento afeta, particularmente, a tripulação, devido ao desconforto causado
pelos elevados valores de deslocamentos e acelerações verticais (heave e pitch).
Contextualizando este aspecto para embarcações de uso militar, que é o caso do presente estudo,
a capacidade operacional da tripulação pode ser sensivelmente prejudicada, principalmente em
situações de perseguição e abordagem, as quais exigem do militar plena condição física. Diante
deste problema, a solução mais frequentemente empregada pela indústria náutica é a utilização
de assentos com amortecimento dinâmico, tratando, assim, o problema pelo efeito e não pela
causa.
O presente estudo teve por objetivo a análise da efetividade de alterações de forma na
região de vante do casco quanto à redução das acelerações em heave e pitch, principais fatores
responsáveis pelo desconforto dos tripulantes. O conceito de mitigação de resposta adotado é
baseado na utilização de formas convexas para as balizas de proa, cujas características
geométricas proporcionam a redução dos níveis de pressão atuantes no casco, resultantes dos
impactos em ondas.
O estudo foi realizado tendo por base três configurações de formas distintas, a saber: forma
base (sem convexidade), forma com menor nível de convexidade e forma com maior nível de
convexidade. O comportamento hidrodinâmico da embarcação foi analisado através de um
modelo numérico em CFD, desenvolvido para simulações do escoamento ao redor de cascos
planadores, através do software STAR-CCM+. O modelo desenvolvido é baseado na solução
implícita das Equações RANS (Reynolds Averaged Navier-Stokes Equations).
Os resultados obtidos mostraram uma significativa redução dos níveis de aceleração em
heave e pitch do casco para as condições estudadas. Tais resultados sugerem que alterações de
forma na região de vante do casco podem ser efetivas quanto à mitigação das respostas em ondas
para embarcações de planeio.
2
2 REVISÃO BIBLIOGRÁFICA
Seter (1992) fornece diretrizes para o projeto de cascos de planeio que melhor satisfaçam
os requisitos de resposta em ondas. O autor discute a influência do formato do casco no
comportamento em ondas. Em seu trabalho, o autor mostra que cascos com seções em V
satisfazem mais facilmente os requisitos de comportamento em ondas quando comparados
àqueles projetados com seções do tipo U. Este trabalho forneceu diretrizes para melhor
compreensão sobre ângulo de deadrise, que tem grande importância no presente trabalho. Devido
ao fato de apenas a angulação do casco não garantir a navegação segura e confortável, partiu-se
por buscar solução por alteração da forma.
Kim et al. (2013) realizaram um estudo envolvendo alterações de forma de cascos de
planeio, destinadas à redução da resistência ao avanço e à melhoria do comportamento em ondas.
Nesse estudo, foram analisadas três formas de casco, todas com formato deep-V e deslocamento
semelhante, testadas empiricamente para velocidades elevadas. Neste trabalho, o autor testa a
ideia de alterar a forma utilizando concavidade para analisar na navegação com ondas. É feita
análise dos movimentos da embarcação, assim como da potência requerida. Esta referência tem
importância similar a anterior quando se trata de ângulo de deadrise, porém, acrescentou a ideia
de como explorar a alteração da forma. No caso, o autor optou pela concavidade, diferentemente
do presente trabalho onde optou-se pela convexidade. A forma convexa foi escolhida por intuito
pessoal, motivado pela física do escoamento ser facilitada quando comparado a uma placa plana,
por exemplo em um movimento de queda vertical. O experimento citado será explicado no tópico
3.2.
Thalles Aguiar (2018) realizou um estudo de análise do comportamento dinâmico de
embarcações de planeio por modelo numérico, via CFD, em águas tranquilas e com ondas, tendo
o foco em analisar heave e pitch. A embarcação de análise é a mesma do trabalho, uma lancha
militar de ação rápida, navegando a 35 nós. Neste estudo, são coletados dados de resistência ao
avanço, heave, pitch, pressões exercidas sob o fundo do casco, interface ar-água e elevação da
superfície livre. A monografia de Thalles Aguiar foi uma diretriz, apresenta o mesmo objeto de
estudo, lancha militar, e por isso, a configuração do modelo numérico utilizada neste trabalho é
similar, também devido aos bons resultados obtidos por Thalles utilizando este modelo.
Igor Jablausky (2018) validou um modelo numérico em CFD para analisar o desempenho
hidrodinâmico em cascos de planeio. Para tal, foram comparados os resultados da simulação aos

3
de testes experimentais realizados em modelo de escala reduzida em águas tranquilas. As
condições de contorno, configuração de malha e domínio computacional da simulação foram
muito exploradas em análise neste trabalho, verificando, exaustivamente, sua influência nos
resultados. Lembrando que o programa utilizado para análise de modelo numérico em CFD, foi
o STAR CCM+. A monografia de Jablausky foi fundamental para o melhor entendimento de
conceitos explorados em modelos numéricos via CFD. O texto tem boa fluidez para melhor
compreensão e proporcionou grande ajuda nos tópicos 5.3 e 5.4 da atual monografia.
Hirt e Nichols (1981) fizeram a primeira publicação em jornal sobre o método VOF. No
artigo, os autores explicam o método VOF, que consiste em um método numérico de
rastreamento da superfície livre, em abordagem euleriana. Lembrando que as equações de
Navier-Stokes devem ser resolvidas separadamente. Os autores mostram que o método é mais
simples e eficaz para resolver configurações complexas de superfície livre. A leitura do texto de
Hirt e Nichols proporcionou um melhor entendimento de como funciona um método VOF,
embora este tópico não tenha sido aprofundado neste trabalho.
4
3 CONSIDERAÇÕES A RESPEITO DA NAVEGAÇÃO EM PLANEIO
Embarcações de deslocamento possuem um limitante de velocidade máxima, governado
pela configuração das ondas gravitacionais geradas pelo casco. O comprimento destas ondas
gravitacionais está relacionado à magnitude da velocidade de avanço da embarcação. Quando o
comprimento da onda gerada se aproxima do comprimento de linha d’água do casco, observa-se
uma condição de equilíbrio caracterizada por um acentuado trim à ré. Qualquer tentativa de
aumento da velocidade, a partir de então, resulta na magnificação do trim pela popa e no
consequente aumento da resistência ao avanço. Tal fenômeno possui um caráter assintótico
quanto ao aumento da resistência ao avanço, o que virtualmente inviabiliza o aumento de
velocidade da embarcação [1, 9].
Uma alternativa para a superação da velocidade limite na condição de deslocamento,
condição está na qual a sustentação da embarcação é, fundamentalmente, de origem hidrostática,
é adotar uma forma de casco que promova a geração de forças de origem hidrodinâmica, aptas a
sustentar a embarcação sobre a crista da onda gerada pela proa. Em tal condição, diz-se que
embarcação se encontra em condição de planeio, cujo desempenho hidrodinâmico, superior em
termos de resistência ao avanço, permite à embarcação atingir velocidades elevadas de forma
eficiente.
O princípio básico por trás da condição de navegação em planeio envolve a ação de forças
hidrodinâmicas e hidrostáticas, exercidas sobre o casco. Podemos melhor compreender os
fenômenos físicos do planeio analisando a distribuição de pressão em uma placa plana. Quando
uma placa plana se desloca com determinada velocidade e ângulo de trim, é gerada uma força de
sustentação dinâmica, com ponto de aplicação no centro de pressão do perfil (Figura 3.1).
Conforme observado, o pico de pressão acontece no ponto de estagnação, sendo seu valor
definido pela magnitude da energia cinética do escoamento (½V2).

5
Figura 3.1: Sustentação hidrodinâmica em placa plana [11].
O equilíbrio dinâmico da embarcação de planeio é alcançado quando o centro de pressão
do casco, definido pelas contribuições de origem tanto hidrostática quanto hidrodinâmica, e o
centro de gravidade estão verticalmente alinhados (Figura 3.2).
Figura 3.2: Equilíbrio dinâmico em casco de planeio.
3.1 CORRELAÇÃO ENTRE A FORMA DO CASCO E A RESPOSTA EM ONDAS
Os cascos de planeio possuem diversos parâmetros característicos de sua forma. Cada
parâmetro influencia no desempenho hidrodinâmico da embarcação, sendo que, para uma
navegação em regime estável, as linhas do casco devem apresentar características específicas,
envolvendo, principalmente, a adoção de quinas em configuração hard chine, fundo plano em
“V” e popa do tipo transom, dentre outras (Figura 3.3).

6
Figura 3.3: Parâmetros de forma característicos um casco de planeio.
A pressão dinâmica exercida pelo fluido atua perpendicularmente à superfície do casco.
Assim sendo, a força de sustentação hidrodinâmica representa, de fato, a projeção vertical da
resultante de forças dinâmicas exercidas no fundo do casco. O ângulo de deadrise, também
conhecido como ângulo de pé de caverna ou simplesmente “V” do casco, representa a
inclinação transversal do fundo do casco em relação ao plano de base (Figura 3.4). Um dos
principais parâmetros no projeto de cascos de planeio é o ângulo de deadrise, este está
diretamente relacionado à magnitude da resistência ao avanço e às características de resposta em
ondas do casco [6, 10].
Figura 3.4: Ângulo de Deadrise.
A inclinação do fundo resulta, consequentemente, em perda de sustentação. Porém, o
formato em “V” característico dos cascos de planeio tem por finalidade contribuir para o
amortecimento dos movimentos de heave e pitch quando em navegação na presença de ondas.
Considerando que tais aspectos são antagônicos, a definição do ângulo de deadrise representa

7
uma solução de compromisso entre a sustentação hidrodinâmica requerida e o amortecimento
das acelerações em heave e pitch do casco, para uma dada velocidade de operação.
Tal aspecto também justifica a adoção de diferentes ângulos de deadrise ao longo do
comprimento do casco, sendo, obviamente, observada uma variação crescente desde o espelho
de popa até à proa. Em vista disso, o ângulo de deadrise medido no espelho de popa é usualmente
empregado como referência para a descrição das características de forma dos cascos planadores.
Valores mais altos de ângulo deadrise, entre 20° e 22°, são normalmente adotados para
embarcações projetadas para operação em águas abertas, tipo offshore ou de lazer, onde os
aspectos de conforto e a segurança se tornam fatores críticos de projeto. Em projetos para águas
interiores são usados, em geral, valores entre 12° e 16°, podendo variar ainda de acordo com as
necessidades operacionais da embarcação.
Apesar de efetiva para o amortecimento dos movimentos de heave e pitch, a concepção em
“V” do casco não garante, muitas vezes, uma navegação confortável e segura quando se navega
em ondas. Este representa um aspecto particularmente negativo das embarcações de planeio, pois
resulta em um desgaste físico e psicológico da tripulação e dos passageiros. Além de causar mal-
estar e enjoos, acelerações excessivas decorrentes dos impactos do casco com a superfície da
água podem causar sérias contusões e ferimentos às pessoas a bordo.
3.2 MITIGAÇÃO DAS ACELERAÇÕES EM HEAVE E PITCH
Uma alternativa efetiva para a mitigação dos efeitos negativos decorrentes das acelerações
em heave e pitch do casco consiste em equipar a embarcação com assentos especiais providos de
sistemas de amortecimento dinâmico, tais como os produzidos pela empresa Ullman Dynamics
[12] (Figura 3.4). Porém, tais equipamentos possuem um custo elevado, particularmente no caso
de embarcações de uso militar e paramilitar, nas quais as exigências operacionais são mais
rigorosas em termos de desempenho hidrodinâmico, consequentemente, necessitando assentos
mais sofisticados.

8
Figura 3.5: Assento com sistema de amortecimento da Ullman Dynamics [12].
Concavidades e convexidades são exploradas por projetistas em embarcações planadoras,
com o objetivo de melhorar o comportamento em ondas sem prejudicar, significativamente, o
planeio (Figura 3.5). A forma convexa empregada em um casco de planeio reduz as pressões
incidentes ao casco, pois favorece o fluxo lateral de escoamento.
Figura 3.6: Configurações de forma das balizas.
Para uma melhor compreensão, pode-se analisar os aspectos relacionados ao impacto de
uma forma convexa e de uma placa plana em uma superfície livre. Uma placa plana lançada
perpendicularmente sobre uma superfície livre, a atinge com toda a área ao mesmo instante. Por
este motivo, o fluido tem dificuldade de escoar lateralmente pela placa plana, quando observado
por vista frontal ou lateral, gerando um intenso campo de pressões incidente sob a placa, definido
como impacto. A diferença para a forma convexa, em experimento de lançamento vertical sobre
superfície livre, é que neste formato o contato entre objeto e o fluido ocorre gradativamente com
o movimento de queda da geometria convexa. Pela pressão no ponto primário de contato ser
maior, tende a ocorrer escoamento lateral de fluido para os bordos, onde a pressão é menor, tal
como ilustrado na Figura 3.6 [4].
9
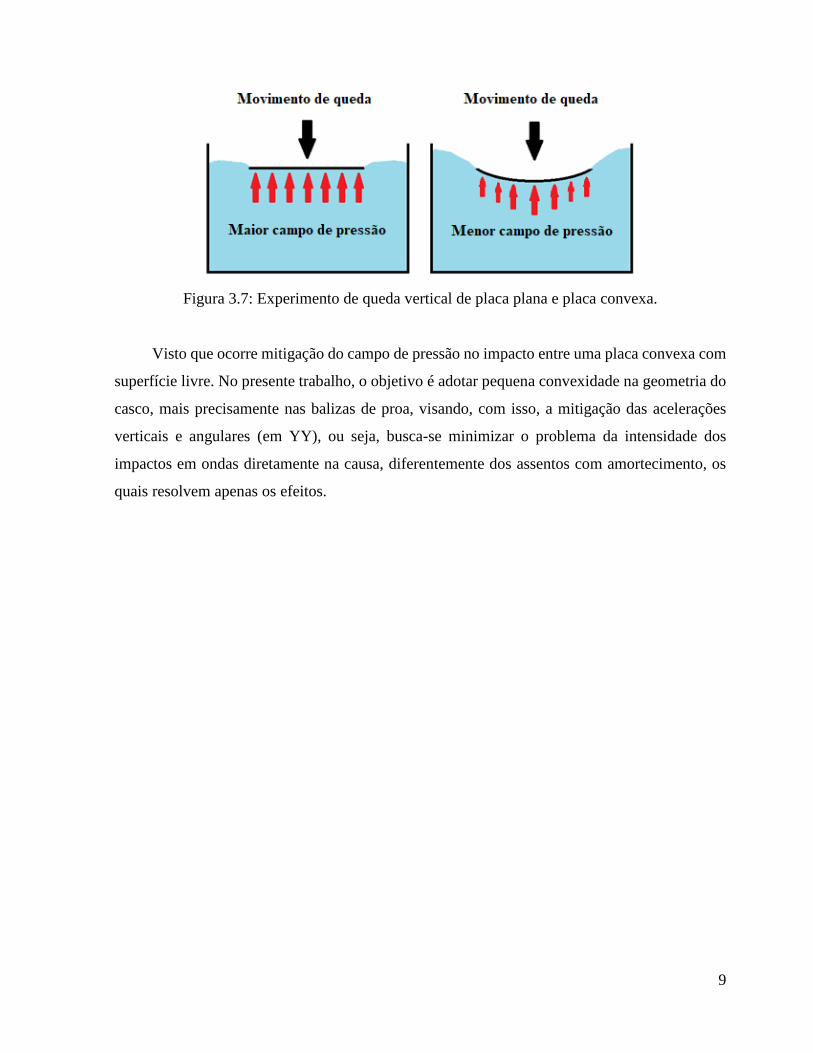
Figura 3.7: Experimento de queda vertical de placa plana e placa convexa.
Visto que ocorre mitigação do campo de pressão no impacto entre uma placa convexa com
superfície livre. No presente trabalho, o objetivo é adotar pequena convexidade na geometria do
casco, mais precisamente nas balizas de proa, visando, com isso, a mitigação das acelerações
verticais e angulares (em YY), ou seja, busca-se minimizar o problema da intensidade dos
impactos em ondas diretamente na causa, diferentemente dos assentos com amortecimento, os
quais resolvem apenas os efeitos.

10
4 CASO DE ESTUDO
A embarcação utilizada como referência para o presente trabalho foi desenvolvida no Polo
Náutico da UFRJ, no âmbito de um programa de desenvolvimento de embarcações de planeio de
uso militar e paramilitar, destinadas à operação em águas interiores. Usualmente referenciadas
como Lanchas de Ação Rápida – LAR, tais embarcações possuem valores de comprimento
máximo entre 6,0 m e 10,0 m, sendo empregadas em diferentes aplicações, desde missões de
interceptação até o uso no transporte de tropas e cargas. Assim sendo, o projeto de tais
embarcações precisa ser versátil o suficiente, a fim de permitir sua utilização de forma eficiente
em diferentes missões.
O casco apresenta um ângulo de deadrise de 14º, uma vez que o perfil operacional da
embarcação é voltado para operação em águas interiores ou, em casos excepcionais, parcialmente
abrigadas, com grande importância para a capacidade de planeio e obtenção de altas velocidades
para missões de interceptação (Figura 4.1). Na Tabela 4.1 são apresentadas as características
principais da embarcação.
Tabela 4.1: Características principais da embarcação de referência.
Comprimento total: 7,40 m
Comprimento de linha d’água: 6,24 m
Boca: 2,40 m
Pontal: 1,17 m
Deslocamento de projeto: 3,3 t
Calado de projeto: 0,40 m
Passageiros: 13
Velocidade máxima: 35 nós

11
Figura 4.1: Ilustração da embarcação de referência.
4.1 ALTERAÇÕES NA FORMA DA PROA
O objetivo do trabalho envolve a análise da efetividade de alterações na forma de proa da
embarcação como alternativa para a redução das acelerações em heave e pitch. A resposta de
uma embarcação em função do seu impacto com uma onda está diretamente relacionada à
magnitude do campo de pressões gerado no fundo do casco. Assim sendo, a concepção de
mitigação das acelerações em estudo é baseada na adoção de formas com características
convexas para as balizas de proa do casco. Uma baliza localizada a 7/8 do comprimento da linha
d’água (Lwl), doravante denominada de Baliza 7/8, foi adotada como referência para a aplicação
das alterações de forma. Tal localização é particularmente conveniente, pois representa,
comumente, a região de impacto de um casco de planeio com as ondas.
Figura 4.2: Comprimento “A”, relativo à Baliza 7/8.
12
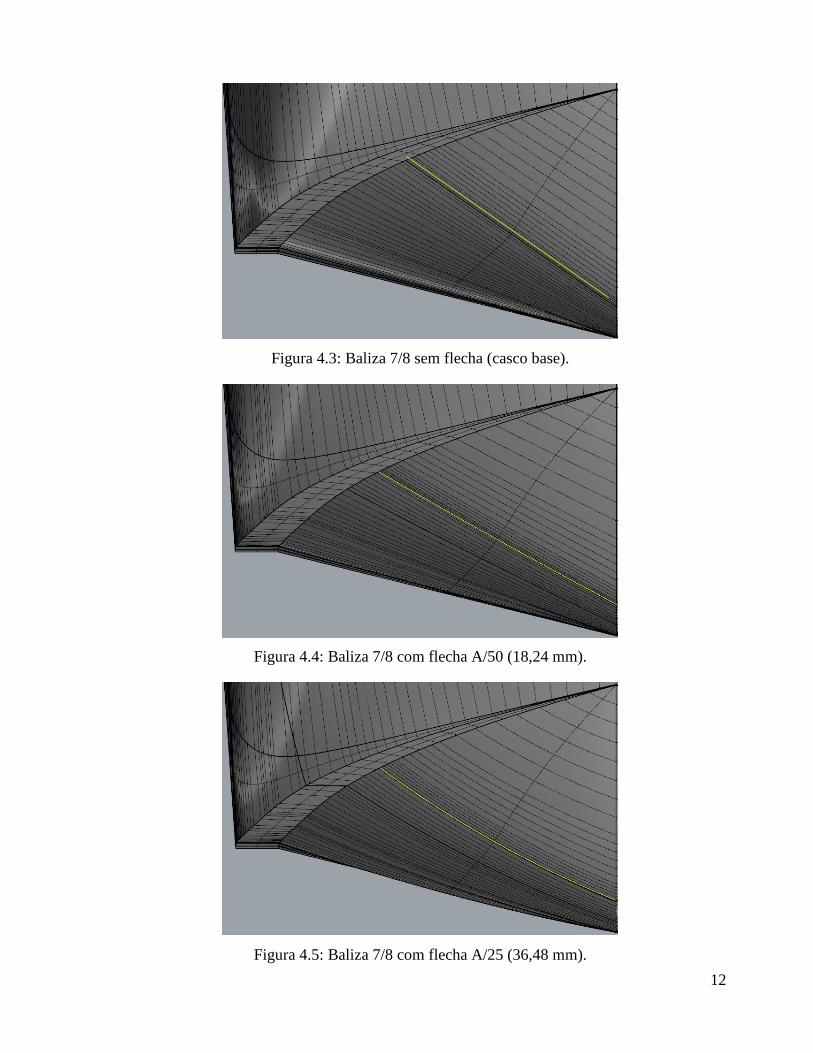
Figura 4.3: Baliza 7/8 sem flecha (casco base).
Figura 4.4: Baliza 7/8 com flecha A/50 (18,24 mm).
Figura 4.5: Baliza 7/8 com flecha A/25 (36,48 mm).
13
A convexidade das balizas da região de proa do casco foi controlada através da variação
da flecha da Baliza 7/8 em relação a sua configuração original retilínea (Figura 4.2). Na
configuração original, a Baliza 7/8 possui flecha nula e um comprimento total de 912 mm,
denominada comprimento “A”. Tal configuração é ilustrada na (Figura 4.2).
A variação da flecha da Baliza 7/8 foi realizada através da aplicação de deslocamentos
ortogonais ao ponto mediano do seu comprimento. Para fins de análise foram adotados dois
valores de flecha, equivalentes, respectivamente, a:
• Flecha A/50 = 18,24 mm; e
• Flecha A/25 = 36,48 mm.
Nas configurações com as flechas A/50 e A/25, a forma da Baliza 7/8 consiste em um arco
de círculo, interpolado considerando-se seus pontos extremos e o ponto mediano deslocado
ortogonalmente. Como pode ser observado nas Figuras 4.3 a 4.5, a mudança na forma da região
de proa é sutil, uma vez que a ideia é gerar apenas uma pequena convexidade a fim de melhor as
respostas em heave e pitch, sem prejudicar, significativamente, a capacidade de planeio e a
resistência ao avanço do casco.
4.2 CONDIÇÃO DE CARREGAMENTO
A condição de carregamento em deslocamento máximo foi adotada como referência para
o desenvolvimento do estudo. Esta condição de carregamento representa uma condição típica de
operação, envolvendo o transporte de tropas. Nesta condição é observada a posição mais elevada
do centro de gravidade da embarcação. As condições de equilíbrio iniciais da lancha são
apresentadas na Tabela 4.2.
Tabela 4.2: Características da condição de equilíbrio inicial.
Condição de equilíbrio inicial
Deslocamento: 3,30 t
Calado de operação: 0,40 m
Centro de gravidade: (2,37 m; 0 m, 0,5 m)
14
5 MODELO NUMÉRICO
5.1 CONFIGURAÇÃO DO MODELO NUMÉRICO
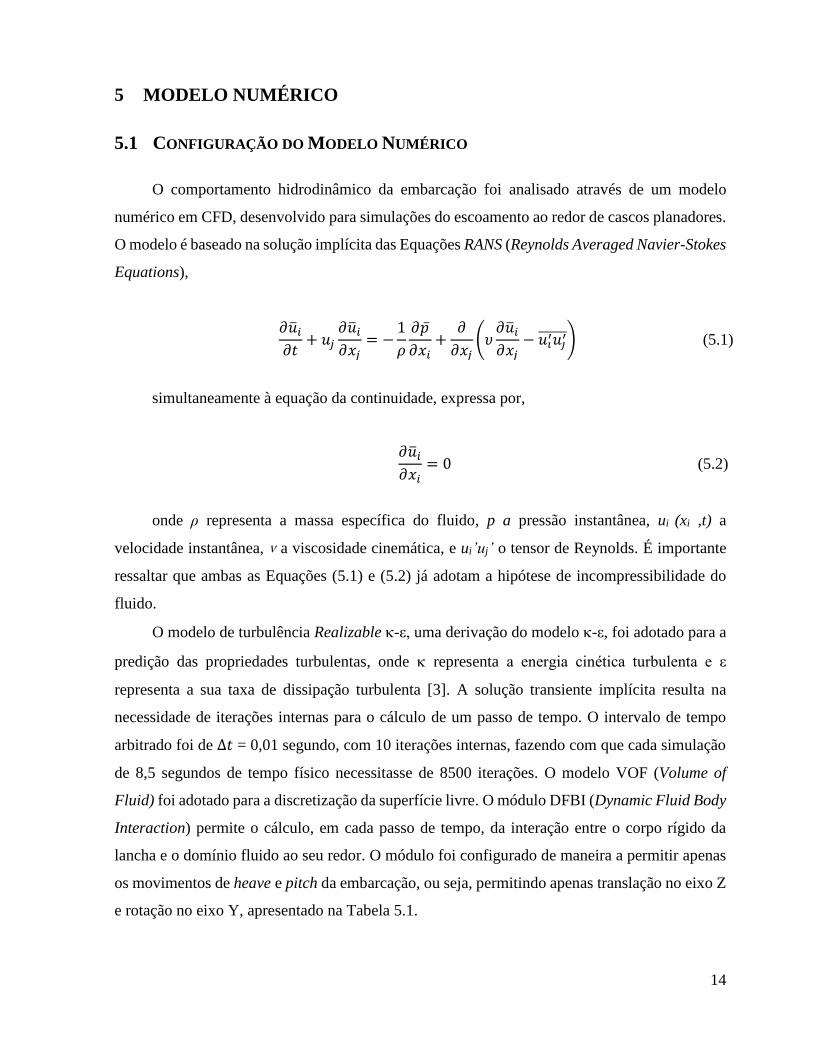
O comportamento hidrodinâmico da embarcação foi analisado através de um modelo
numérico em CFD, desenvolvido para simulações do escoamento ao redor de cascos planadores.
O modelo é baseado na solução implícita das Equações RANS (Reynolds Averaged Navier-Stokes
Equations),
𝜕�̅�𝑖
𝜕𝑡+ 𝑢𝑗
𝜕�̅�𝑖
𝜕𝑥𝑗= −
1
𝜌
𝜕�̅�
𝜕𝑥𝑖+
𝜕
𝜕𝑥𝑗(𝜐
𝜕�̅�𝑖
𝜕𝑥𝑗− 𝑢𝑖
′𝑢𝑗′̅̅ ̅̅ ̅̅ ) (5.1)
simultaneamente à equação da continuidade, expressa por,
𝜕�̅�𝑖
𝜕𝑥𝑖= 0 (5.2)
onde ρ representa a massa específica do fluido, p a pressão instantânea, ui (xi ,t) a
velocidade instantânea, a viscosidade cinemática, e ui’uj’ o tensor de Reynolds. É importante
ressaltar que ambas as Equações (5.1) e (5.2) já adotam a hipótese de incompressibilidade do
fluido.
O modelo de turbulência Realizable -ε, uma derivação do modelo -ε, foi adotado para a
predição das propriedades turbulentas, onde representa a energia cinética turbulenta e ε
representa a sua taxa de dissipação turbulenta [3]. A solução transiente implícita resulta na
necessidade de iterações internas para o cálculo de um passo de tempo. O intervalo de tempo
arbitrado foi de ∆𝑡 = 0,01 segundo, com 10 iterações internas, fazendo com que cada simulação
de 8,5 segundos de tempo físico necessitasse de 8500 iterações. O modelo VOF (Volume of
Fluid) foi adotado para a discretização da superfície livre. O módulo DFBI (Dynamic Fluid Body
Interaction) permite o cálculo, em cada passo de tempo, da interação entre o corpo rígido da
lancha e o domínio fluido ao seu redor. O módulo foi configurado de maneira a permitir apenas
os movimentos de heave e pitch da embarcação, ou seja, permitindo apenas translação no eixo Z
e rotação no eixo Y, apresentado na Tabela 5.1.
15
Tabela 5.1: Configuração dos graus de liberdade do casco.
Movimento Liberdade Rotação Liberdade
X Não X Não
Y Não Y Sim
Z Sim Z Não
Em uma fase inicial da simulação, o casco é mantido fixo, restringido em todos os seus
graus de liberdade. Tal configuração tem por finalidade garantir a estabilidade necessária à
solução das equações de governo nas fases iniciais do processo de convergência, em simulações
com presença de superfície livre. O intervalo de tempo em que o casco é mantido fixo chama-se
Realise Time. Em seguida ao Realise Time, as forças e momentos provenientes do escoamento
são progressivamente aplicados ao casco. Este intervalo de tempo é denominado de Ramp Time.
Nas simulações realizadas, ambos os intervalos de tempo foram fixados em 0,25 s, totalizando
0,5 s até que o casco fosse totalmente liberado para responder em heave e pitch.
5.2 DOMÍNIO FLUIDO
O domínio fluido é o volume de controle onde são calculados os fenômenos físicos através
dos modelos numéricos adotados, respeitando determinados limites espaciais. Os limites
espaciais devem ser definidos de maneira que a interação entre o fluido e as regiões fronteiriças
não interfiram na confiabilidade da simulação. É valido ressaltar que o domínio não deve ser
superdimensionado, uma vez que isto acarretaria em um número maior de elementos de malha,
e, consequentemente, a um esforço computacional desnecessário. Analogamente a experimentos
em tanques de prova, a geometria do domínio fluido se fez por um prisma retangular [11].
O ponto de origem foi definido na interseção do espelho de popa com a linha d’água.
Considerando-se a hipótese de simetria do escoamento, o domínio fluido compreende apenas um
dos bordos do casco. Tal configuração é particularmente conveniente quanto à redução do
esforço computacional.

16
Figura 5.1: Configuração do domínio fluido.
Considerando-se o ponto de origem, as dimensões adotadas para o domínio fluido
totalizam (Figura 5.1):
• 20,0 metros à ré, representando, aproximadamente, 2,5 LOA;
• 20,0 metros à vante, representando, aproximadamente, 2,5 LOA;
• 12,5 metros a bombordo da linha de simetria;
• 6,25 metros acima da superfície livre; e
• 12,0 metros abaixo da superfície livre.
5.3 CONDIÇÕES DE CONTORNO
O software STAR-CCM+ possui condições de contorno previamente estabelecidas para
serem empregadas nas regiões fronteiriças do domínio fluido. As condições de contorno
aplicadas ao modelo numérico desenvolvido são apresentadas a seguir (Figura 5.2).
• Symmetry: Esta condição representa o plano de simetria, tem função de espelhar os
resultados de maneira a reduzir o esforço computacional. Esta característica deve ser
utilizada quando o escoamento em estudo possui simetria em relação a um plano. Ao
plano diametral do casco foi aplicada esta condição de contorno;
• Pressure Outlet ou Outlet: Condição que deve ser aplicada em todas as faces
de saída do escoamento do domínio fluido. Esta condição de contorno foi
aplicada à superfície posterior do domínio fluido; e
• Wall: Esta condição deve ser atribuída a todas as superfícies que representam
um corpo sólido, onde se aplica a condição de não escorregamento. A
superfície do casco recebeu esta condição de contorno.

17
• Velocity Inlet ou Inlet: Condição que deve ser aplicada às faces com entrada
de escoamento no domínio fluido. Assim sendo, todas as demais superfícies
do domínio fluido tiveram esta condição de contorno aplicada, no caso, as
superfícies inferior, superior, lateral a bombordo e frontal.
Figura 5.2: Condições de contorno do domínio fluido.
5.4 MALHA COMPUTACIONAL
O software STAR-CCM+ possui modelos de geração de malhas poliédricas, hexaédricas e
tetraédricas. Optou-se pela malha hexaédrica, do tipo Trimmed, alinhada ao sistema de
coordenadas e passível de refinamento, onde desejado (Figura 5.3). A escolha por esta malha
tem origem no trabalho de Thalles Aguiar [11] que realiza simulação com a mesma embarcação,
obtendo bons resultados.
Em algumas regiões do domínio espera-se a ocorrência de maiores variações nos campos
de velocidade e de pressão. Desta forma, realizou-se refinamento mais detalhado nessas regiões.
As zonas de maior interesse correspondem à região ao redor do casco e também a região de
esteira no entorno da superfície livre. A malha do tipo Prism Layer Mesh foi adotada ao redor do
casco a fim de melhor representar as propriedades do escoamento no interior da camada limite
[4,7].
As características da malha do tipo Prism Layer Mesh foram definidas segundo as
demandas do modelo de turbulência adotado, tendo como referência o adimensional y+ [7].
Considerando o modelo de escoamento turbulento sobre placa plana, a espessura da camada

18
limite pode ser estimada por [4]:
𝛿 =0,16𝑥
√𝑅𝑒7 = 0,081 𝑚, (5.7)
onde x representa a distância em relação ao bordo de ataque.
A partir do valor estimado da camada limite ao redor do casco, o espaçamento
perpendicular entre a parede do casco e o primeiro elemento foi calculado considerando-se um
valor de y+ = 100, obtendo-se, assim, um valor de 2,0 mm.
Para o refinamento da superfície livre foram adotadas as recomendações do ITTC [2], a
saber:
• 80 elementos de malha para o comprimento de onda (Equação 5.8); e
• 20 elementos de malha para a amplitude da onda (Equação 5.9).
Então,
𝑆. 𝐿.𝑙𝑜𝑛𝑔𝑖𝑡𝑢𝑑𝑖𝑛𝑎𝑖𝑠 =𝜆
80= 0,15 𝑚 (5.8)
𝑆. 𝐿.𝑣𝑒𝑟𝑡𝑖𝑐𝑎𝑖𝑠 =𝐻1
20= 0,015 𝑚 (5.9)
A discretização da malha foi aplicada em toda a superfície livre, priorizando as regiões de
maior interesse. A Tabela 5.2 apresenta as características de refinamento da malha
computacional, relembrando que o ponto de origem do domínio fluido é a interseção entre o
espelho de popa e a linha d’água. A malha computacional desenvolvida para as simulações
apresentou um total de 1.747.353 elementos.
Tabela 5.2: Regiões de refinamento de malha computacional (a partir do ponto de origem).
Região Comprimento Largura Altura Elemento
Global -20,0 m a 20,0 m 0,0 m a 12,5 m -3,0 m a 3,0 m 498,0 mm
Far Field -7,5 m a 10,7 m 0,0 m a 5,0 m -3,0 m a 3,0 m 259,4 mm
Medium Field -4,5 m a 10,7 m 0,0 m a 3,9 m -3,0 m a 3,0 m 129,7 mm
Near Field -1,5 m a 7,7 m 0,0 m a 3,0 m -3,0 m a 3,0 m 32,4 mm
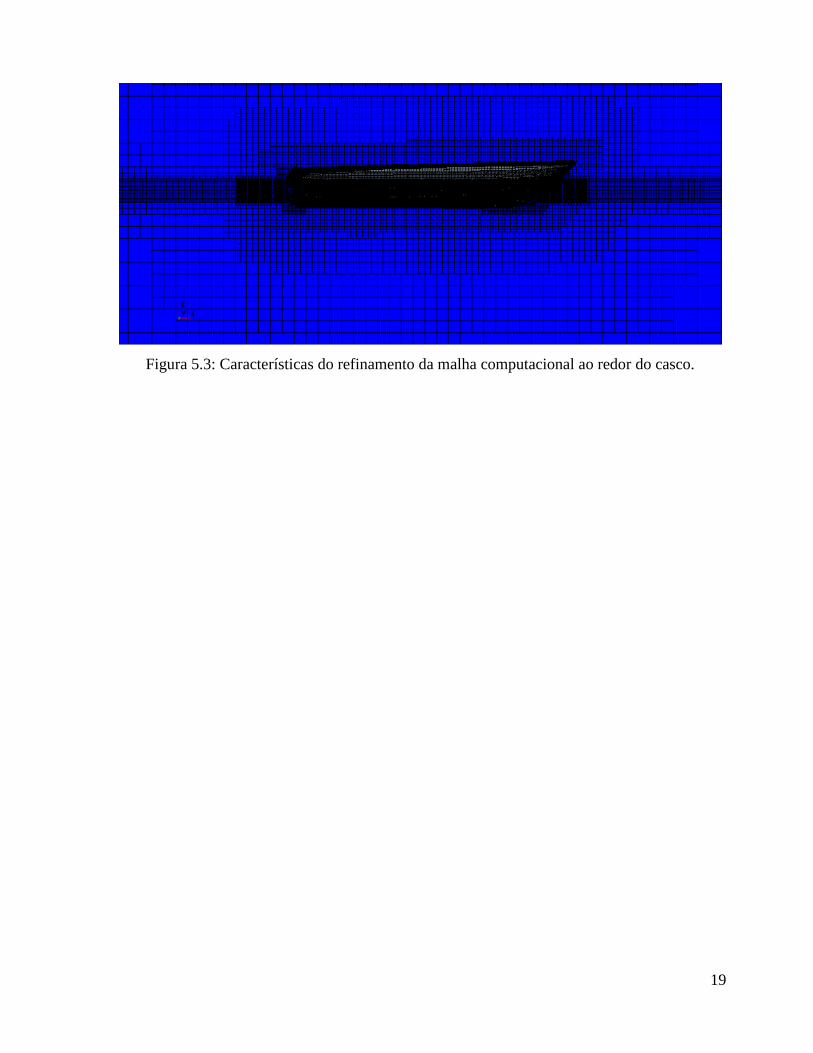
19
Figura 5.3: Características do refinamento da malha computacional ao redor do casco.

20
6 Apresentação e Análise dos Resultados
A efetividade de alterações de forma na região de vante do casco quanto à redução das
acelerações em heave e pitch foi analisada considerando-se configurações de velocidade de
operação e de características de onda tais que promovessem impactos na região de proa. Assim
sendo, foi adotada uma velocidade de operação de 35 nós e uma onda de quinta ordem com 0,6
m de altura e 12,0 m de comprimento, considerando-se uma profundidade de 15 m. Para a
definição da onda, foram realizadas simulações variando os parâmetros atribuídos à uma onda
de quinta ordem, altura, comprimento, profundidade foi fixada. Tendo por objetivo criar uma
ondulação que impactasse com o casco na região onde foi gerada a convexidade, para analisar,
corretamente, a mitigação do campo de pressões e acelerações.
Inicialmente, foi realizada a simulação com o casco base, utilizado como referência para
análise comparativa de resultados. Em cada simulação, foram realizadas 8.500 iterações,
resultando em um tempo de execução de, aproximadamente, 18 horas. Os resultados obtidos para
as acelerações em heave e pitch são apresentados nas Figuras 6.1 a 6.12. Os campos de pressões
no fundo do casco em um intervalo representativo dos valores máximos observados são
apresentados nas Figuras 6.13 a 6.39.
É possível observar que os dois primeiros picos de aceleração, tanto em pitch como em
heave, não apresentam boa conformidade em relação aos demais resultados. Sendo assim, optou-
se por descartá-los da análise. O mesmo processo de descarte foi realizado no último pico,
durante a simulação do casco base aconteceu algum problema no CPU, parando a simulação, ao
reiniciar ocorre problema de convergência, afetando os resultados e tornando-o inconfiável.
Sendo assim, os quatro picos restantes apresentam um comportamento cíclico estável. Observa-
se que os resultados obtidos para os cascos A/50 e A/25 apresentam uma discrepância de fase de
apenas 0,04 s e 0,06 s, respectivamente, em relação ao casco base.
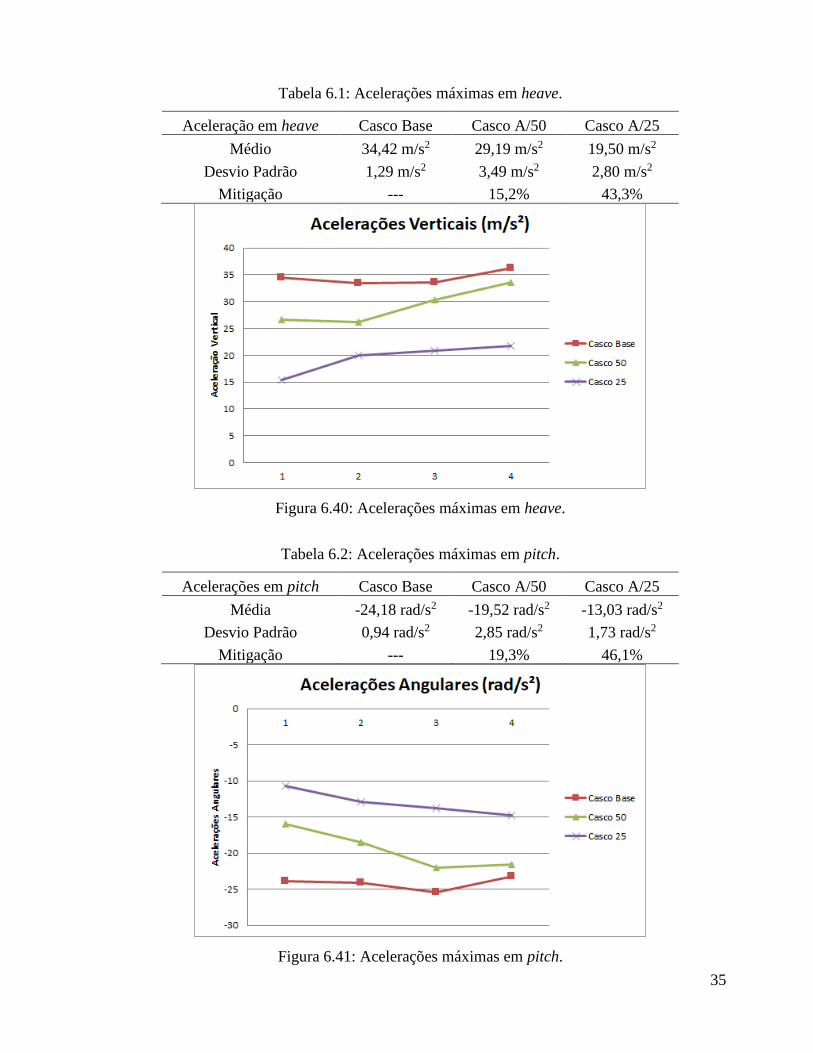
Nas Figuras 6.40 e 6.41 são apresentados os resultados referentes aos cinco picos de
acelerações analisados no presente estudo. O eixo das abscissas representa a sequência de picos
no tempo. As Tabelas 6.1 e 6.2 apresentam a síntese dos resultados para as acelerações em heave
e em pitch, respectivamente. O desvio padrão expressa o grau de dispersão dos conjuntos de
dados. Nota-se que os valores de desvio padrão variam entre 3,7% a 14,6% do valor médio,
indicando, assim, uma boa uniformidade de resultados.
Em relação à diminuição das acelerações em heave, o casco A/50 apresentou uma redução

21
de 15,2%, enquanto que para o casco A/25 observou-se uma redução significativa da ordem de
43,3% em relação ao casco base. Analisando a mitigação das acelerações em pitch, os resultados
para casco A/50 indicaram uma redução de 19,3%. Novamente, foi registrada uma redução
marcante para o casco A/25, da ordem de 46,1% em relação ao casco base. Tais resultados
sugerem que a adoção das formas convexas para as balizas de proa em cascos de planeio
representa uma alternativa efetiva para a mitigação das acelerações em heave e pitch.

22
Figura 6.1: Aceleração em heave – Casco Base.
Figura 6.2: Aceleração em heave – Casco A/50.
Figura 6.3: Aceleração em heave – Casco A/25.

23
Figura 6.4: Aceleração em pitch – Casco Base.
Figura 6.5: Aceleração em pitch – Casco A/50.
Figura 6.6: Aceleração em pitch – Casco A/25.

24
Figura 6.7: Deslocamento em heave – Casco Base.
Figura 6.8: Deslocamento em heave – Casco A/50.
Figura 6.9: Deslocamento em heave – Casco A/25.

25
Figura 6.10: Deslocamento em pitch – Casco Base.
Figura 6.11: Deslocamento em pitch – Casco A/50.
Figura 6.12: Deslocamento em pitch – Casco A/25.

26
Figura 6.13: Campo de pressões no fundo: t = 4,00 s – Casco Base.
Figura 6.14: Campo de pressões no fundo: t = 4,01 s – Casco Base.
Figura 6.15: Campo de pressões no fundo: t = 4,02 s – Casco Base.

27
Figura 6.16: Campo de pressões no fundo: t = 4,03 s – Casco Base.
Figura 6.17: Campo de pressões no fundo: t = 4,04 s – Casco Base.
Figura 6.18: Campo de pressões no fundo: t = 4,05 s – Casco Base.

28
Figura 6.19: Campo de pressões no fundo: t = 4,06 s – Casco Base.
Figura 6.20: Campo de pressões no fundo: t = 4,07 s – Casco Base.
Figura 6.21: Campo de pressões no fundo: t = 4,08 s – Casco Base.

29
Figura 6.22: Campo de pressões no fundo: t = 4,04 s – Casco A/50.
Figura 6.23: Campo de pressões no fundo: t = 4,05 s – Casco A/50.
Figura 6.24: Campo de pressões no fundo: t = 4,06 s – Casco A/50.

30
Figura 6.25: Campo de pressões no fundo: t = 4,07 s – Casco A/50.
Figura 6.26: Campo de pressões no fundo: t = 4,08 s – Casco A/50.
Figura 6.27: Campo de pressões no fundo: t = 4,09 s – Casco A/50.

31
Figura 6.28: Campo de pressões no fundo: t = 4,10 s – Casco A/50.
Figura 6.29: Campo de pressões no fundo: t = 4,11 s – Casco A/50.
Figura 6.30: Campo de pressões no fundo: t = 4,12 s – Casco A/50.

32
Figura 6.31: Campo de pressões no fundo: t = 4,06 s – Casco A/25.
Figura 6.32: Campo de pressões no fundo: t = 4,07 s – Casco A/25.
Figura 6.33: Campo de pressões no fundo: t = 4,08 s – Casco A/25.
33
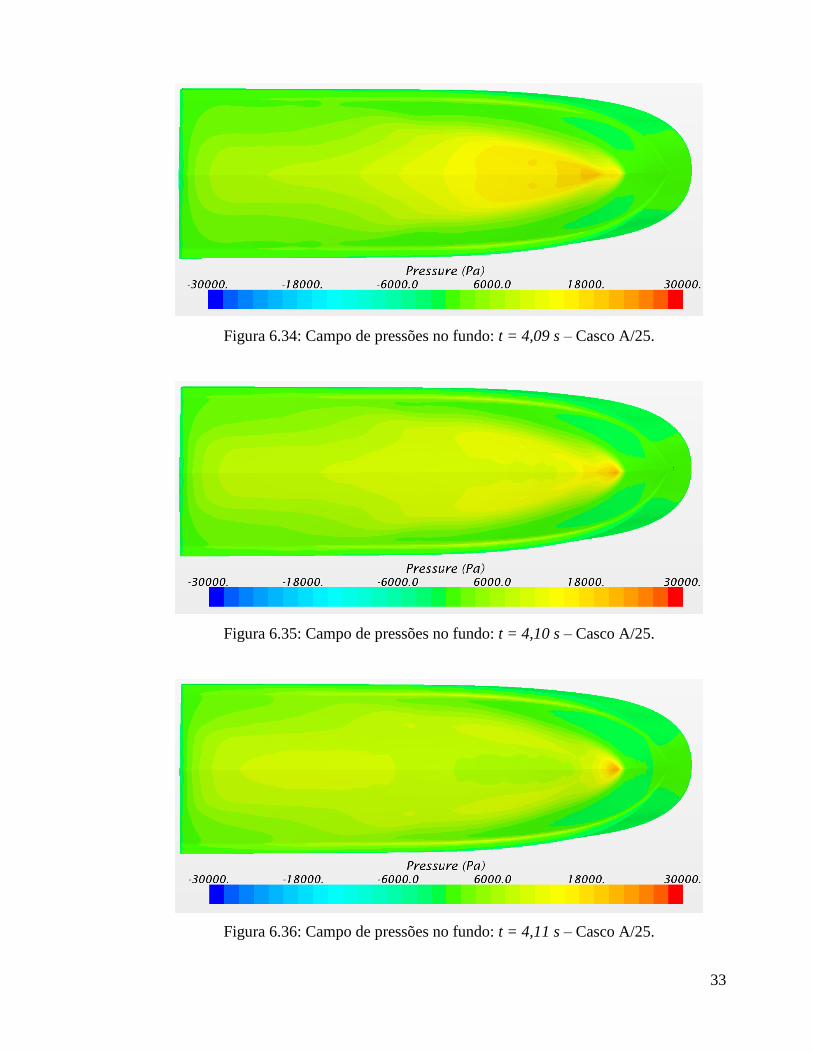
Figura 6.34: Campo de pressões no fundo: t = 4,09 s – Casco A/25.
Figura 6.35: Campo de pressões no fundo: t = 4,10 s – Casco A/25.
Figura 6.36: Campo de pressões no fundo: t = 4,11 s – Casco A/25.
34
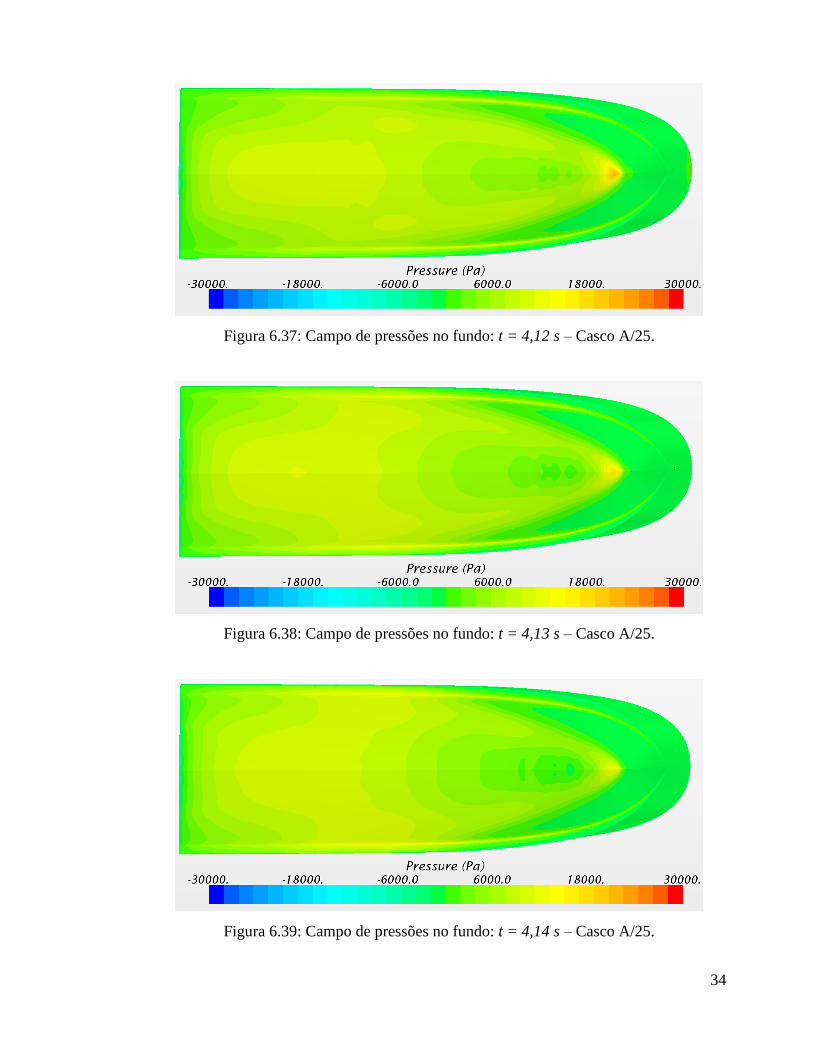
Figura 6.37: Campo de pressões no fundo: t = 4,12 s – Casco A/25.
Figura 6.38: Campo de pressões no fundo: t = 4,13 s – Casco A/25.
Figura 6.39: Campo de pressões no fundo: t = 4,14 s – Casco A/25.
35
Tabela 6.1: Acelerações máximas em heave.
Aceleração em heave Casco Base Casco A/50 Casco A/25
Médio 34,42 m/s2 29,19 m/s2 19,50 m/s2
Desvio Padrão 1,29 m/s2 3,49 m/s2 2,80 m/s2
Mitigação --- 15,2% 43,3%
Figura 6.40: Acelerações máximas em heave.
Tabela 6.2: Acelerações máximas em pitch.
Acelerações em pitch Casco Base Casco A/50 Casco A/25
Média -24,18 rad/s2 -19,52 rad/s2 -13,03 rad/s2
Desvio Padrão 0,94 rad/s2 2,85 rad/s2 1,73 rad/s2
Mitigação --- 19,3% 46,1%
Figura 6.41: Acelerações máximas em pitch.

36
Cabe ressaltar a consistência física dos resultados obtidos. Nota-se nas respostas em
heave que os valores máximos das acelerações estão relacionados aos valores mínimos do
movimento, e vice-versa, como esperado. O mesmo pode ser observado para a resposta em
pitch, onde é possível notar que os valores mínimos das acelerações estão relacionados aos
valores máximos de movimento.
Nas Figuras 6.13 a 6.39 é apresentada uma sequência de imagens referentes à variação
do campo de pressões atuante no fundo do casco no decorrer de um impacto em uma onda.
É importante salientar que as imagens apresentam o início do encontro entre o casco e a
onda, antes de tal momento, a embarcação encontra-se fora d’água. As imagens apresentadas
referem-se ao impacto ocorrido em 4,0 s. Os resultados mostram, claramente, a mitigação
progressiva do nível de pressões no fundo em função da convexidade da Baliza 7/8.
37
7 CONCLUSÕES
A ideia inicial do trabalho surgiu para buscar solução ao problema de acelerações e
pressões sob o fundo do casco, resultando em impactos, que geram o mal-estar da tripulação.
Sendo assim, optou-se por analisar lanchas militares em condição de mar com presença de ondas,
pois a tripulação de uma lancha de ação rápida (LAR) necessita de plenas condições físicas e
psicológicas para operar e realizar abordagens.
Diferentemente da solução mais adotada pela indústria náutica, que busca solucionar o
problema no efeito, utilizando-se do emprego de cadeiras de amortecimento dinâmico, o trabalho
visa encontrar solução diretamente na causa.
Sendo assim, o estudo foi realizado com a modificação geométrica do casco em região de
proa. Para tal, foi escolhida a baliza 7/8, referente ao comprimento da linha d’água, para criação
de convexidade em sua mediana, reforçando que esta convexidade é sutilmente alongada por
todo casco pelo software Rhinoceros. Optou-se por esta baliza por estar em região onde ocorre
o impacto frontal do casco com a onda. A forma convexa tende a induzir o escape do fluido por
fluxo lateral de escoamento, mitigando o campo de pressões exercido sob o casco e,
consequentemente, as acelerações verticais e angulares.
Como já apresentado, foram simuladas três formas de casco em ondas, duas com
modificação geométrica e uma já existente, tida como referência para o estudo. Lembrando que
as duas formas modificadas tiveram aumento progressivo no abaulamento gerado a partir de uma
baliza em região de proa. A alteração geométrica gerou redução de acelerações, tanto verticais
como angulares e de pressões, o que possibilita uma melhor condição de bem-estar ao tripulante.
A análise dos resultados aprovou a ideia e mostrou que uma pequena modificação
geométrica pode modificar em muito o comportamento da embarcação em ondas, no caso do
estudo, mitigando de forma considerável os efeitos de impacto, indesejáveis principalmente em
embarcações militares, mas também em todas as embarcações.
Mesmo não sendo o objetivo principal, por se tratar de uma embarcação militar, o custo é
reduzido. A alteração geométrica não gera aumento significativo no custo do casco, devido ao
processo produtivo ser o mesmo. O desuso de assentos com amortecimento dinâmico ou sua
substituição por modelos mais singelos representa uma valiosa economia de recursos, reforçando
que a lancha possui capacidade para 13 tripulantes.
Conclui-se que o trabalho é uma real possibilidade para implementação na indústria

38
náutica, podendo melhor estudar outros fatores como planeio, resistência ao avanço e trim
dinâmico para estabilidade. Não foi simulado, neste trabalho, a condição de navegação em águas
tranquilas. Sendo assim, fica como sugestão para trabalhos futuros, a investigação sobre
resistência ao avanço, comportamento hidrodinâmico, tendo foco o fenômeno de planeio e trim
dinâmico, testar outras velocidades para experimento do presente trabalho e, por fim, realizar a
validação experimental do modelo.
39
REFERENCIAS BIBLIOGRÁFICAS
[1] Azevedo, G. M. (1996). Relatório Técnico - Um Estudo de Embarcações de Superfície
de Alto Desempenho. DENO/UFRJ.
[2] M. Hydrodynamics, “ITTC – Recommended Procedures and Guidelines ITTC –
Recommended Procedures and Guidelines Practical Guidelines for Ship CFD,” 2011.
[3] CFD Online. (s.d.). K-epsilon models. Disponível em http://www.cfd-
online.com/Wiki/K-epsilon_models.
[4] C. Yunus and J. Cimbala, Fluid Mechanics Fundumentals and Applications. 2015.
[5] Hirt, C. W., & Nichols, B. D. (1981). Volume of Fluid (VOF) Method for the
Dynamics of Free Boundaries. JOURNAL OF COMPUTATIONAL PHYSICS (39), 201-225.
[6] "How Deadrise Affects Vee-Hull Performance" (Part 1), Disponível em
http://www.aeromarineresearch.com/download/TBPNews/tbpnews161.html.
[7] Y+ Theory, https://www.cfd-online.com/Wiki/Dimensionless_wall_distance_(y_plus).
[8] C. Adapco, STAR-CCM+ 9.06.009 Manual.
[9] Schachter, R. D., Isaltino, A. G., Santos, M. A. T. "Um Enfoque para Projeto
Conceitual de Cascos Planadores de Alta Velocidade”. DENO/UFRJ.
[10] Serter, E. (1992). Geometry of Deep Vee Hull Forms. Ship and Boat Internatinal.
[11] Aguiar, Thalles (2018), “Análise do Comportamento de uma Embarcação de Planeio via
CFD”.
[12] Ullman Dynamics, site da fabricante, http://ullmandynamics.com/?lang=pt-br.
[13] Kim D. J., Kim S. Y., You J. Y., Key Rhee K. P., Kim S. H. e Kim Y. G. (2013). Design
of high-speed planing hulls for the improvement of resistance and seakeeping performance.
[14] Jablausky, I. (2018). Validação de um modelo numérico em CFD para análise do
desempenho hidrodinâmico de cascos de planeio.
[15] Parolini, N. “Computational fluid dynamics for naval engineering problems.” 2004. 170 f.
Tese (Doutorado em Sciences) - École Polytecnique Fédérale de Lausanne, Lausanne, 2004.