
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ
CAMPUS CURITIBA
HENRIQUE SIMIÃO FERREIRA
PAULO HENRIQUE GUAZZI ROSA
RELATÓRIO FINAL
DISPLAY 3D DE LED
CURITIBA
2013
2
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ
CAMPUS CURITIBA
HENRIQUE SIMIÃO FERREIRA
PAULO HENRIQUE GUAZZI ROSA
RELATÓRIO FINAL
DISPLAY 3D DE LED
Trabalho apresentado no curso de
Engenharia de Computação, na
Universidade Tecnológica Federal do
Paraná - UTFPR, Campus Curitiba,
como requisito parcial para aprovação
na disciplina de oficina de integração II.
Orientador: Prof. Gustavo Borba
CURITIBA
2013

3
RESUMO
FERREIRA, Henrique Simião; ROSA, Paulo Henrique Guazzi. Display 3D de
LED. 2013. Universidade Tecnológica Federal do Paraná – Curitiba, Paraná.
O presente projeto, desenvolvido para a disciplina de Oficina de Integração II
do curso de Engenharia da Computação, consiste no planejamento, elaboração
e documentação de um dispositivo eletrônico-mecânico fundamentado no
fenômeno da persistência de visão capaz de reproduzir imagens e figuras
através de LED. Todas as etapas da construção desse dispositivo serão
abordadas de forma a explicar como os mecanismos estão envolvidos e quais
suas atribuições para o perfeito funcionamento do display 3D de LED.
Palavras-chave: LED, Microcontrolador, Shift Register, motor brushless,
Persistencia da visão, Eletronic speed controller.

4
ABSTRACT
FERREIRA, Henrique Simião; ROSA, Paulo Henrique Guazzi. Display 3D de
LED. 2013. Universidade Tecnológica Federal do Paraná – Curitiba, Paraná.
This Project, developed for the computer engineering’s discipline “Oficina de
Integração II”, consists in planning, elaborating and documenting an electronic-
mechanic device, based on persistence of vision phenomenon, able to
reproduce images and figures by LED. All building stages will be consider to
explain how the project’s parts are involved and what they are responsible for,
to ensure the correct operation of “3D display of LED”.
Keywords: LED, Microcontroller, Shift Register, motor brushless, Persistence
of vision, Electronic speed controller.
5
ÍNDICE
1. INTRODUÇÃO .................................................................................................................... 6
2. OBJETIVOS ........................................................................................................................ 7
2.1. Objetivo geral .................................................................................................................. 7
2.2. Objetivos específicos ................................................................................................. 7
3. O DISPOSITIVO ................................................................................................................. 8
3.1 Microcontrolador ......................................................................................................... 8
3.2 Circuito Integrado 74HC164 ..................................................................................... 8
3.3 LED ............................................................................................................................... 9
3.4 Resistor ........................................................................................................................ 9
3.5 Motor brushless .......................................................................................................... 9
3.6 Eletronic Speed Controller ...................................................................................... 10
3.7 Estrutura de rotação ................................................................................................. 10
4. CONTEÚDOS ENVOLVIDOS ........................................................................................ 14
4.1. Resistor ...................................................................................................................... 14
4.2. Materiais semicondutores ....................................................................................... 15
4.3. Diodos ........................................................................................................................ 15
4.3.1. Diodo emissor de luz – LED ........................................................................... 16
4.4. Circuitos integrados.................................................................................................. 17
4.4.1. Shift Register Serial-In Parallel-Out ............................................................... 17
4.5. Microcontrolador ....................................................................................................... 18
4.6. Motor elétrico de corrente contínua sem escovas............................................... 20
4.7. Controlador eletrônico de velocidade – ESC ....................................................... 21
4.8. Modulação de largura de pulso - PWM ................................................................. 22
4.9. Percepção de uma imagem pela visão ................................................................. 24
4.9.1. Persistência Retiniana ..................................................................................... 25
5. ETAPAS DO PROJETO .................................................................................................. 26
6. CUSTOS DO PROJETO ................................................................................................. 28
7. DESENVOLVIMENTO ..................................................................................................... 29
8. PRINCIPAIS DESAFIOS ................................................................................................. 34
9. DEFESA ............................................................................................................................. 36
10. CONCLUSÃO ............................................................................................................... 37
11. REFERÊNCIAS ............................................................................................................ 38
12. ANEXOS ........................................................................................................................ 40
6
1. INTRODUÇÃO
O olho é uma das mais complexas estruturas no corpo humano. Atua
como uma câmera, coletando, focando e convertendo a luz em sinais elétricos
que serão “traduzidos” pelo cérebro em imagens. Essa complexidade faz com
que o sistema ótico seja considerado um sistema de complexidade irredutível,
ou seja, precisa de todos os componentes para funcionar. [1]
O fenômeno conhecido como persistência retiniana, ou persistência de
visão (ver item 4.9.1), é conhecido desde o antigo Egito [2] e é através dele que
está fundamentado o desenvolvimento desse projeto.
Existem inúmeras experiências baseadas nesse fenômeno e várias
formas de representá-lo ou modelá-lo. Movimentar de um lado para o outro um
objeto com as mãos rapidamente ou passar rapidamente desenhos em um
bloco de papel são algumas formas de constatar tal efeito.
Aliado aos conhecimentos adquiridos em outras disciplinas do curso,
como propõe a ementa da disciplina de oficina de integração II, esse trabalho
apresentará todo o processo de desenvolvimento de um display composto por
diodos emissores de luz que formam imagens de acordo com o algoritmo
utilizado.
Serão abordados, também, conceitos necessários e relevantes para o
desenvolvimento desse projeto, assim como as dificuldades e soluções
encontradas nesse período.
7
2. OBJETIVOS
2.1. Objetivo geral
O objetivo desse projeto é construir um dispositivo que exibe imagens,
figuras ou texto através de diodos emissores de luz, com o auxílio de shift
registers e um microcontrolador.
2.2. Objetivos específicos
Construir um projeto mecânico para sustentar a estrutura de LED;
Construir um projeto eletrônico para controlar o funcionamento
dos LED;
Desenvolver um algoritmo para controlar o acendimento dos LED;
Utilizar um motor elétrico para garantir uma velocidade de rotação
dos LED;
Integrar os componentes eletrônicos e mecânicos e, baseado na
persistência de visão, exibir as imagens, figuras ou texto.

8
3. O DISPOSITIVO
O projeto consiste na construção de um dispositivo que, fundamentado
nos princípios da persistência de imagens na retina, descrito conforme item
2.9.1 deste trabalho, será capaz de mostrar imagens através da rotação em
alta velocidade de oito placas contendo fileiras alinhadas de LED fixadas a um
eixo comum. O funcionamento somente é possível devido ao controle de
acendimento dos LED dependendo da posição e da placa na qual estes
estarão. Para que isso seja possível, utilizam-se os componentes descritos a
seguir (ver Figura 1).
3.1 Microcontrolador
O principal componente desse projeto, o MSP430, é um
microcontrolador baseado na arquitetura RISC (Reduced Instruction Set
Computer) e sua principal característica é o baixo consumo de energia [2]. A
escolha desse componente foi feita levando-se em conta o baixo custo (ver
tabela 2) se comparado a outros microcontroladores da mesma categoria, a
facilidade e flexibilidade para o desenvolvimento e o prazo de entrega pelo
fornecedor.
3.2 Circuito Integrado 74HC164
Um dos desafios do projeto é controlar o acendimento de cada um dos
LED de forma independente, utilizando o menor número de pinos de saída do
microcontrolador. Com a utilização do shift register da família CMOS 74HC164
8-bit Serial-In Parallel-Out [4], é possível utilizar apenas dois pinos de saída do
microcontrolador para controlar qualquer LED ligado ao CI, sendo um pino para
os dados e um pino para o clock. Dessa forma, ao invés de controlarmos
apenas um LED com um pino, pode-se controlar todos os 64 LED do
dispositivo com 16 pinos, sendo que serão 8 LED por shift register o que
totaliza um total de 8 shift registers.

9
3.3 LED
Os LED, responsáveis pela formação da imagem propriamente dita,
possuem diâmetro de 5 mm, alto brilho, cor branca e possuem um limite de
corrente de 25 mA.
3.4 Resistor
Os resistores de 220 Ω usados no dispositivo são responsáveis por
garantir que a corrente que percorrerá o CI e os LED não exceda o limite aceito
por cada componente. Dessa forma, conforme o anexo 1, pode-se notar que,
com uma tensão constante de 5 V, a utilização de um resistor de 220 Ω,
limitaria a corrente elétrica em 22 mA.
3.5 Motor brushless
Para que os LED do projeto causem o efeito esperado (persistência na
retina) é necessário que toda a estrutura mecânica seja rotacionada em
elevadas velocidades. Para isso, dimensionou-se o uso de um motor brushless
de 1000kV (rpm/V) comumente utilizado em aeromodelos. Esse motor varia
sua velocidade de acordo com a tensão aplicada. A cada volt a rotação do
motor aumenta em 1000 rpm, aproximadamente. Entretanto, para que isso seja
possível, é necessária a utilização de um eletronic speed controller, pois a
tensão aplicada ao motor será pulsada de forma síncrona com a velocidade, a
Figura 1 representa o diagrama desta construção.
Figura 1 – Diagrama CPU / ESC / MOTOR

10
3.6 Eletronic Speed Controller
O eletronic speed controller utilizado nesse dispositivo será um modelo
simples, com capacidade de 20 A. Isso é possível, tendo em vista que o motor
utilizado possui uma limitação de corrente de 13 A. O sinal PWM para controle
enviado pelo ESC será controlado pela unidade controladora 2 (MSP430).
3.7 Estrutura de rotação
Os conjuntos de 8 LED e o circuito integrado 74HC164 serão fixados em
placas de fenolite, no anexo 1 está descrito de forma informal o posicionamento
dos componentes nestas placas. Por sua vez, as placas de fenolite, serão
fixadas em uma estrutura de metal com um eixo principal, tal qual a estrutura
de hélices em um ventilador. O material das hélices foi determinado através do
levantamento do estado da arte, o qual nos direcionou a estes modelos de
barra/material.
Para que seja possível garantir um movimento de rotação suave do eixo
principal, serão utilizados rolamentos. Os rolamentos, retirados de rodas de
skates, terão seu lado externo soldado em uma base fixa e o seu lado interno
soldado ao eixo de sustentação das placas.
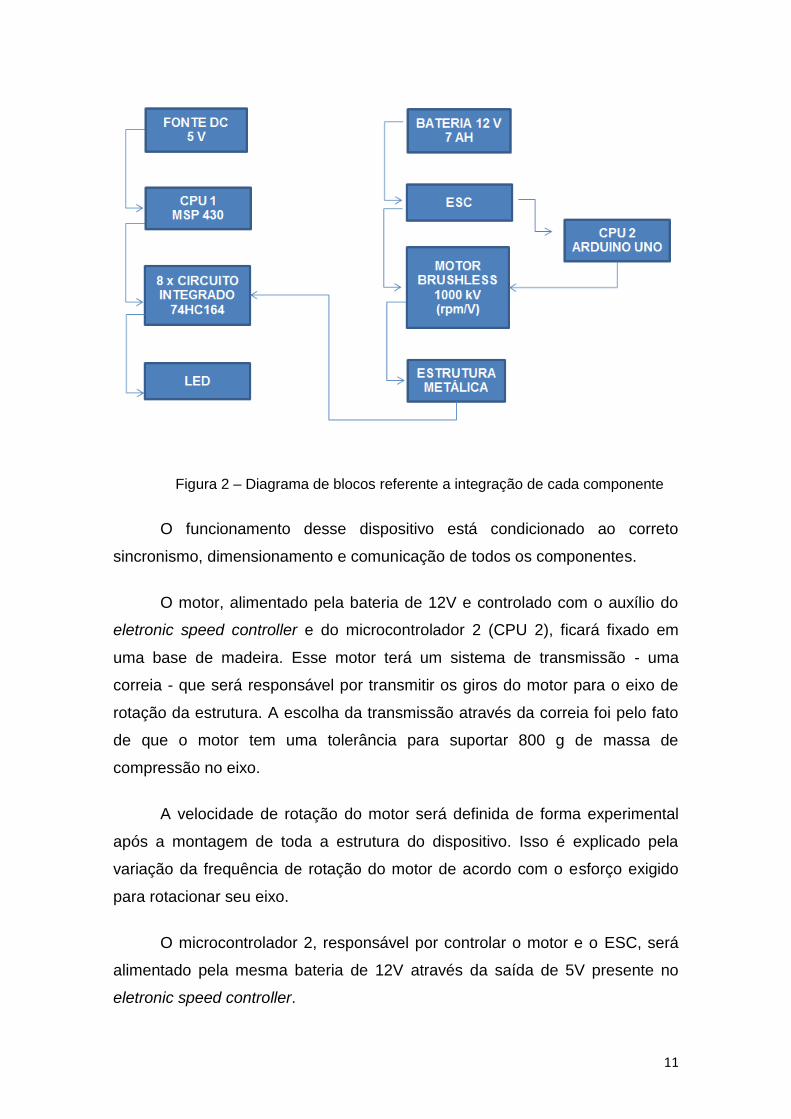
O diagrama, representado na Figura 2 retrata de forma simples os
componentes desse equipamento.
11
Figura 2 – Diagrama de blocos referente a integração de cada componente
O funcionamento desse dispositivo está condicionado ao correto
sincronismo, dimensionamento e comunicação de todos os componentes.
O motor, alimentado pela bateria de 12V e controlado com o auxílio do
eletronic speed controller e do microcontrolador 2 (CPU 2), ficará fixado em
uma base de madeira. Esse motor terá um sistema de transmissão - uma
correia - que será responsável por transmitir os giros do motor para o eixo de
rotação da estrutura. A escolha da transmissão através da correia foi pelo fato
de que o motor tem uma tolerância para suportar 800 g de massa de
compressão no eixo.
A velocidade de rotação do motor será definida de forma experimental
após a montagem de toda a estrutura do dispositivo. Isso é explicado pela
variação da frequência de rotação do motor de acordo com o esforço exigido
para rotacionar seu eixo.
O microcontrolador 2, responsável por controlar o motor e o ESC, será
alimentado pela mesma bateria de 12V através da saída de 5V presente no
eletronic speed controller.

12
O microcontrolador 1 (CPU 1) e a fonte de 5V também serão fixados em
uma placa de fenolite que deverá girar em conjunto com as placas contendo os
LED. Essa solução é necessária pois não seria possível conectar fios e cabos
entre um componente fixado fora da estrutura de rotação e as placas que
girarão em alta velocidade.
O desenvolvimento do software para controle dos LED está em fase
inicial. A IDE para desenvolvimento utilizada é a Energia [3], com uma interface
simples e linguagem bastante intuitiva. O código abaixo foi utilizado pelos
membros da equipe para realizar testes em um circuito composto por 8 LED e
um shift register 74HC164, tal qual será feito no dispositivo.
int const dataPin = 3;
int const clockPin = 5;
void setup()
pinMode(dataPin, OUTPUT);
pinMode(clockPin, OUTPUT);
void loop()
for (int i=0; i<=8; i++)
shiftOut(dataPin, clockPin, MSBFIRST, B00000001 << i);
delay(125);
for (int i=0; i<=8; i++)
shiftOut(dataPin, clockPin, MSBFIRST, B10000000 >> i);
delay(125);
A estrutura do projeto pode ser analisada conforme os modelos nas
Figura 3 e Figura 4.

13
Figura 3 – Modelo esquemático da estrutura com placas e motor - vista lateral.
Figura 4 – Modelo esquemático da estrutura com placas e motor - vista superior.

14
4. CONTEÚDOS ENVOLVIDOS
4.1. Resistor
O resistor é um componente eletrônico que tem como funções
transformar energia elétrica em energia térmica (através do efeito Joule) e
limitar a corrente de um circuito. Normalmente é composto de carbono ou
bobinado, podendo também ser fabricado utilizando óxido bruto ou filmes de
metal fino[5][6].
A definição de resistência pode ser descrita conforme relação
matemática da lei de Ohm, explícita na equação 1,
O resistor possui algumas formas de representação gráfica, conforme
figura 5.
Figura 5 – Representação de resistor [7]

15
4.2. Materiais semicondutores
Materiais semicondutores são os que possuem um nível de
condutividade entre os extremos de um isolante e um condutor.
Na tabela periódica são representados pela família 4ª, ou seja, são os
elementos que possuem 4 elétrons em sua camada de valência [8].
(Carbono, silício, germânio, estanho e chumbo).
A principal importância dos semicondutores para a eletrônica é o fato de
que é possível controlar a condutividade variando a temperatura. Ou seja ao
contrário do comportamento que é observado em metais, os semicondutores
apresentam baixa condutividade em temperatura ambiente, logo tornando-se
isolantes em tais condições. Ao elevar a temperatura de forma considerável é
que passarão a ser condutores.
Os semicondutores podem sofrer o processo de dopagem, ou seja,
adição de impurezas (átomos), para modificação das propriedades elétricas do
semicondutor, viabilizando, dessa forma, condições específicas controladas
para aplicação em dispositivos [9].
Após este processo o semicondutor recebe o nome de material
extrínseco, o qual pode ser dividido em:
Material do Tipo n: semicondutor dopado com impurezas
pentavalentes (5 eletrons de valencia);
Material do Tipo p: semicondutor dopado com impurezas
trivalentes (tres eletrons de valencia).
4.3. Diodos
O diodo é um componente eletrônico constituído por uma união de
materiais semicondutores, geralmente silício (Si) ou germânio (Ge) dopados,
um do tipo n e outro do tipo p. A simbologia do diodo está representada na
figura 6, onde a letra A representa o ânodo e o K representa o cátodo [9].

16
Figura 6 – Simbologia do diodo
Este componente permite a passagem de corrente seguindo o seguinte
princípio:
Diodo conduz em polarização direta se: (ID > 0) e VD > 0, ou seja
VA > VK + Vj
Diodo não conduz se: (ID = 0) e VD =< 0, ou seja VA =< VK + Vj
OBS: Vj = Tensão de barreira de potencial.
4.3.1. Diodo emissor de luz – LED:
LED é um diodo semicondutor, baseado na junção de um material tipo n
e um material tipo p, que quando polarizado diretamente emite luz. Sua
simbologia é representada conforme figura 7 [9].
Figura 7 – Simbologia do diodo emissor de luz

17
4.4. Circuitos integrados
Os circuitos integrados são circuitos eletrônicos formados por um
conjunto de componentes eletrônicos, tais quais: transistor, diodos, resistor,
dentre outros. A ligação entre estes componentes é que determina a função do
circuito integrado. Baseado sobre uma estrutura de silício, os C.I. podem
exercer diversas tarefas.
Suas principais vantagens são a redução de custos, peso, tamanho;
aumento da velocidade para trabalho; redução do consumo de energia e
simplificação para produção industrial. Em contrapartida possui como grande
limitação as tensões de funcionamento e redução na potência dissipada [10].
Uma forma de classificação amplamente utilizada em circuitos
integrados é a separação por famílias, dentre as quais as duas principais estão
descritas de forma resumidamente abaixo:
Família TTL: Transistor-Transistor Logic (Lógica transistor-transistor),
necessita de alimentação de 5V, família mais utilizada, mais conhecida por
possuir as séries que começam com as dezenas 54 para componentes
militares e 74 para componentes de uso comercial.
Família CMOS: Complementary Metal Oxide Semiconductor
(Semicondutor de óxido-metal complementar), possui como características
principais o baixo consumo de corrente, pouco ruído e alimentação de 3 a 18V.
É a mais lenta dentre todas as famílias.
4.4.1. Shift Register Serial-In Parallel-Out
O registrador de deslocamento, ou shift register, é um circuito integrado
com o atributo de poder armazenar e deslocar serialmente uma palavra binária
para a direita ou para a esquerda, através de um sinal de clock [11]. Por
exemplo:
11000 - > 01100 -> 00110 -> 00011-> 00001 -> 00000 -> ...

18
O shift register Serial-In Parallel-Out recebe um dado digital através de
uma “linha única”, um bit de cada vez e tem como saída dados dispostos, em
um dado instante de tempo, em tantas linhas quanto forem os bits. Nesse caso,
para transferir N bits através de um SIPO (Serial-In Parallel-Out), os dados
serão entrados em uma única sequência, bit a bit, e, quando todos estiverem
no registrador, serão apresentados de forma paralela nas N saídas dos flip-
flops. [12]
4.5. Microcontrolador
Microcontroladores são sistemas complexos, que nos dias atuais estão
presentes em equipamentos comumente utilizados, como por exemplo: mp3
player, câmeras digitais, telefones celulares, forno de micro-ondas, e etc [13].
Os microcontroladores são formados basicamente por três
componentes:
Processador (Unidade Central de Processamento – CPU): A
unidade central de processamento é composta por uma unidade aritmética
lógica, por uma unidade de controle e por registradores (memórias especiais).
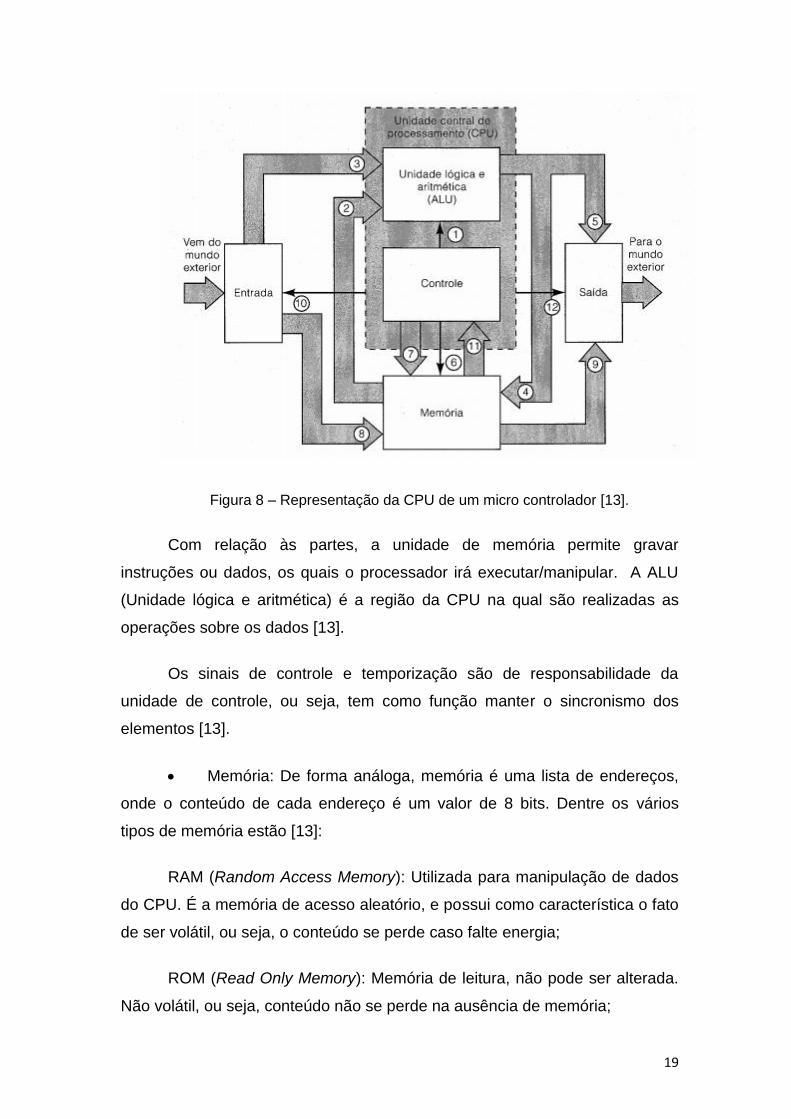
Para que a CPU consiga executar as tarefas são necessários outros
componentes como unidades de memória e unidades de entradas e saídas. A
figura 8, representa esquematicamente a unidade central de processamento
[13].
19
Figura 8 – Representação da CPU de um micro controlador [13].
Com relação às partes, a unidade de memória permite gravar
instruções ou dados, os quais o processador irá executar/manipular. A ALU
(Unidade lógica e aritmética) é a região da CPU na qual são realizadas as
operações sobre os dados [13].
Os sinais de controle e temporização são de responsabilidade da
unidade de controle, ou seja, tem como função manter o sincronismo dos
elementos [13].
Memória: De forma análoga, memória é uma lista de endereços,
onde o conteúdo de cada endereço é um valor de 8 bits. Dentre os vários
tipos de memória estão [13]:
RAM (Random Access Memory): Utilizada para manipulação de dados
do CPU. É a memória de acesso aleatório, e possui como característica o fato
de ser volátil, ou seja, o conteúdo se perde caso falte energia;
ROM (Read Only Memory): Memória de leitura, não pode ser alterada.
Não volátil, ou seja, conteúdo não se perde na ausência de memória;

20
EPROM (Erasable and Programmable Read-Only Memory): Memória
não volátil, é a variante da memória ROM, com a diferença de que é editável.
Dispositivos de entrada e saída: responsáveis pela interação com
o mundo externo.
Algumas das características mais importantes dos microcontroladores
são:
Número de pinos de entradas e saídas
Tamanho da memória de programa (FLASH)
Tamanho da memória de dados (RAM)
Tamanho da memória não volátil (EEPROM)
Máxima velocidade de trabalho
Quantidade de interfaces de comunicação
Custo e disponibilidade
4.6. Motor elétrico de corrente contínua sem escovas
O motor elétrico de corrente contínua sem escovas, também conhecido
como BLDC motor (do inglês de Brush-Less Direct Current) é uma evolução do
motor de corrente contínua. O BLDC, diferentemente do motor DC com
escovas, possui colados no rotor 4 ímãs. O estator do motor é composto por 4
ímãs, com ângulos de 90º. Devido a estes ímãs permanentes, o motor
brushless não necessita alimentação para o rotor [14].

21
Figura 9 – Motor DC brushless [15]
As principais vantagens deste motor perante o motor com escovas são
Confiabilidade elevada;
Ruído reduzido;
Vida útil prolongada;
Redução da interferência eletromagnética (de forma genérica
interferência eletromagnética refere-se a ruídos que interferem no
funcionamento de um circuito);
Menor consumo de energia.
A desvantagem, porém, é o fato de que um motor BLDC necessita da
utilização de um controlador eletrônico de velocidade, chamado de ESC.
4.7. Controlador eletrônico de velocidade – ESC
O controlador eletrônico de velocidade é um componente que controla a
velocidade de um motor elétrico a partir da técnica de modulação por largura
de pulso, conhecida como PWM (Pulse –Width Modulation) [16]. O ESC tem

22
como entrada um sinal para controle em Pulse –Width Modulation, e através da
variação da largura dos pulsos recebidos é que a velocidade do motor sofre
alterações.
Com base na modulação, o ESC altera os transistores que estão ligados
e desligados para determinar o quanto de energia deve chegar ao motor em
questão.
A figura 10 representa fisicamente um ESC genérico.
Figura 10 – Controlador Eletrônico de velocidade [15].
4.8. Modulação de largura de pulso - PWM
Modulação de largura de pulso é uma técnica que permite dividir um
sinal contínuo em pulsos, onda retangular, que serão manipulados para a
necessidade existente. Alterando a largura dos pulsos estaremos modulando-
os. As figuras 12, 13, e 14 representam o PWM de um sinal com amplitude 6 V.

23
Figura 11 – Exemplo do PWM [16]
Figura 12 – Modulando o sinal para ciclo de trabalho de 50% [16]
Figura 13 – Modulando o sinal para ciclo de trabalho de 30% [16]
A figura 11 representa uma modulação genérica, onde há um impulso
contínuo (representado em vermelho) de 6 V. A onda quadrada sobreposta na
imagem significa o “PWM” do sinal (linha vermelha na figura 11), tendo como
T1 a parte do ciclo que está ativo, e como T2 o período inativo. A relação entre
T1 por T2 é chamado Duty Cycle.

24
As figuras 13 e 14 ilustram a variação da tensão média através da
alteração de T1 e T2. No caso para o duty cycle de 50% a tensão média é de 3
V e, alterando esta relação para 30%, a tensão média diminui para 1,8 V.
4.9. Percepção de uma imagem pela visão
A luz que entra no olho é focada pela córnea sobre a retina que se
localiza na outra extremidade do globo ocular. Antes de chegar ao cristalino, a
luz passa pelo espaço existente no centro da íris (região que possui pigmento e
fornece a coloração dos nossos olhos), chamado de pupila. A íris funciona
como um diafragma, promovendo a abertura ou fechamento da pupila, através
de expansão e contração (depende da luminosidade). A figura 15 representa
esquematicamente estas regiões.
Figura 15 – Representação do olho humano
Após focar a imagem na retina, cerca de 125 milhões de fotorreceptores,
existentes ao longo da superfície da retina, geram pequenos potenciais. Estes
sinais através de sinapses são passados pelas células presentes na complexa
rede que formam a retina. Os sinais convergem para as células ganglionares
da retina onde partem os axônios, os quais formam em conjunto o nervo

25
óptico1[17]. Deste ponto os sinais são encaminhados ao cérebro, onde
ocasionam diferentes sinais que são distribuídos para regiões com funções
distintas.
4.9.1. Persistência Retiniana
A persistência retiniana é conhecida desde o antigo Egito, no entanto
somente em 1824, Peter Mark Roger definiu como a capacidade que a retina
possui de armazenar a imagem de um objeto por cerca de 0,05 à 0,2
segundos.
Conforme visto anteriormente, o olho humano é um sistema complexo
voltado a percepção de luz e cor. Dentre seus mecanismos a persistência de
visão ocorre quando as células fotossensíveis da retina, os cones e bastonetes,
convertem a energia luminosa em sinais elétricos os quais são enviados para o
cérebro, o qual é responsável por interpretar a imagem. No entanto a retina
continua a enviar sinais para o cérebro em um intervalo próximo a 0,1 segundo.
Portanto se a imagem for alterada em um intervalo menor que este, o cérebro
vai unir as imagens, o que causa a sensação de continuidade na imagem, ou
seja, movimento. [18]
1 No contexto da anatomia o nervo ótico é pertencente ao aparelho auditivo. O nervo óptico, entretanto, é o responsável por transmitir os estímulos visuais ao cérebro.

26
5. ETAPAS DO PROJETO
No início do projeto foi criado um ambiente de colaboração e controle de
atividades a serem desenvolvidas através do site scrummy.com. Boa parte
dessas tarefas já foram cumpridas conforme podemos verificar no link
http://scrumy.com/Led3DPersistence.
As atividades foram divididas basicamente em 4 etapas. A saber:
Realizar uma reunião com professor orientador para que ele pudesse
nos auxiliar na escolha dos componentes que serão utilizados no
projeto. Essa reunião ocorreu no dia 12/07 no período da manhã e, após
a escolha dos componentes que utilizaríamos, deu-se início a mais duas
etapas;
Compra dos componentes para realização de testes e criação de um
protótipo. Alguns itens desse projeto precisaram ser importados. Esse
fato fez com que a realização de testes e desenvolvimento de um
protótipo fossem adiados. Nesse tempo de espera, entretanto, foi
possível estudar os conteúdos envolvidos no desenvolvimento do
projeto, a forma como utilizaríamos cada conceito em nosso projeto e
procurar documentações e modelos de dispositivos parecidos;
Com a chegada dos principais componentes iniciou-se a etapa de testes
de componentes (etapa atual). Nessa etapa está sendo colocado em
prática o conhecimento levantado até agora para verificar a real
possibilidade e viabilidade do desenvolvimento do projeto. Ainda como
parte dessa etapa, será construído um protótipo para realizar testes
mais precisos e garantir o funcionamento do dispositivo;
A última etapa consiste na montagem do modelo final. Esse etapa,
apesar de mais importante, deverá ser a mais simples, haja vista que
todo o processo de obtenção de conhecimento, desenvolvimento da
aplicação e o acionamento dos LED já estarão prontos. Será necessário
apenas adaptar algumas funcionalidades para o modelo final.
As etapas de desenvolvimento foram definidas e programadas conforme
a tabela 1.

27
Tabela 1 – Cronograma de Atividades¹
Semana / Atividade 12/07 a
19/07
19/07 a
26/07
26/07 a
02/08
02/08 a
09/08
09/08 a
16/08
16/08 a
23/08
23/08 a
30/08
30/08 a
06/09
06/09 a
13/09
Reunião com o Prof. Gustavo Borba
(Orientador)
Compra dos componentes: - 32 Led;
- 1 placa padrão de fenolite; - 8 Circuitos Integrados
74HC164; - 10 resistores de 340 ohms.
Teste de funcionamento dos componentes comprados
Encomenda e Recebimento de: - 2 Microcontroladores MSP430;
- Motor Brushless A1222/13T
"Auto aprendizado" utilização do C.I. 74HC164, executando o Shif
Register para acionamento de de 8 LED em sequência
Confecção da 1ª hélice: - Soldagem de 8 LED, 1 C.I
74HC164 e dos jumpers para ligação e transmissão do sinal
através do MSP430
Teste do motor, utilizando o ESC e uma bateria de 12 V 2200 mAh
Planejamento da estrutura metálica
- A estrutura é baseada nos rolamentos, no eixo de rotação,
no motor e no suporte para fixação destes elementos.
Montagem e confecção da estrutura metálica
Montagem do protótipo: - Consiste em uma versão
reduzida do produto final (Menor nº hélices - apenas 2)
Elaboração do Relatório Final da disciplina
Construção do produto final
¹ As atividades marcadas em verde já foram executadas. As atividades em amarelo
foram suprimidas.

28
6. CUSTOS DO PROJETO
Para o desenvolvimento deste projeto, foi feito um orçamento, o qual
resultou nos valores listados na tabela 2:
Tabela 2 - Orçamento do projeto
QUANTIDADE PREÇO UNITÁRIO PRODUTO PREÇO
1 R$ 22,77 Microcontrolador MSP430(Texas
instruments) R$ 22,77
8 R$ 0,83 Circuito Integrado 74HC164 R$ 6,64
32 R$ 0,50 LED 5 mm R$ 16,00
1 R$ 27,60 Motor Turning Aerodrive 1000kV R$ 27,60
40 R$ 0,03 Resistores R$ 1,20
2 R$ 12,00 Placa padrão fenolite perfurada (20x10
cm) R$ 24,00
1 R$ 30,00 Eletronic Speed Control R$ 30,00
1 R$ 36,00 Bateria 12V 2200 mAh R$ 36,00
PREÇO TOTAL
R$ 164,21
Todos os gastos estão sendo arcados pelos desenvolvedores do projeto,
Henrique Simião Ferreira e Paulo Henrique Guazzi Rosa.
Com relação à procedência, a tabela 3 mostra com detalhes os produtos
e estabelecimentos em que foram comprados.
Tabela 3 - Procedência e contatos
PRODUTO LOJA MEIO CONTATO
Microcontrolador MSP 430 (Texas Instruments) [13]
Texas Instruments
Loja Online
www.ti.com
Circuito Integrado 74HC164 [14] Beta Eletrônica Loja Física (41) 3233-2425
LED 5 mm Beta Eletrônica Loja Física (41) 3233-2425
Motor Turning Aerodrive 1000kV Deal Extreme Loja
Online http://dx.com
Resistores Beta Eletrônica Loja Física (41) 3233-2425
Placa padrão fenolite perfurada (20x10 cm) Beta Eletrônica Loja Física (41) 3233-2425
Eletronic Speed Control JSPHobby Loja
Online jsphobby.com.br
Bateria 12V 7AH Multipeças Loja Fisica (41) 3322-9571

29
7. DESENVOLVIMENTO
Conforme descrito previamente neste documento, seguem abaixo as
imagens referentes aos componentes utilizados e subconjuntos do projeto.
Figura 16 – Motor Turning Aerodrive 1000kV
Figura 17 – Eletronic Speed Control

30
Figura 18 – MSP430 (vermelho) e Arduino UNO (azul)
Figura 19 – Rolamentos com braçadeira e eixo.
31
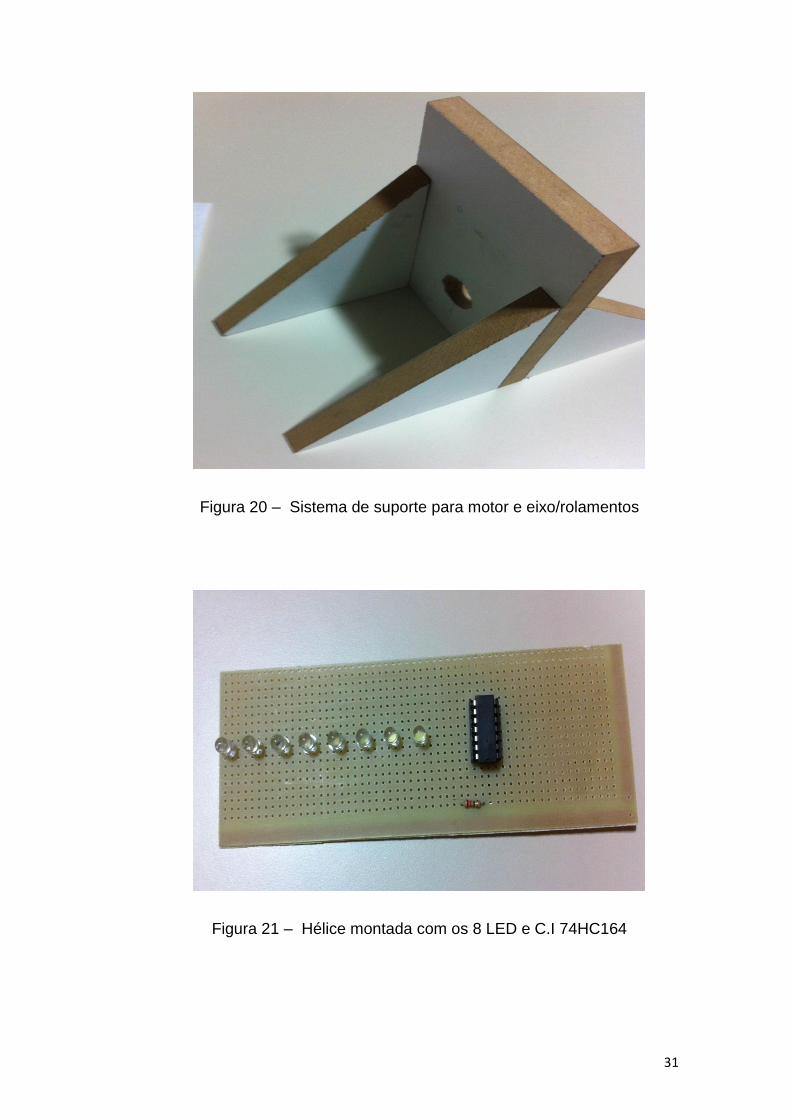
Figura 20 – Sistema de suporte para motor e eixo/rolamentos
Figura 21 – Hélice montada com os 8 LED e C.I 74HC164

32
Figura 22 – Eixo de rotação com 3 hélices
Figura 23 – Vista frontal da montagem final do projeto

33
Figura 24 – Vista superior da montagem final do projeto

34
8. PRINCIPAIS DESAFIOS
Na execução do projeto “display 3D de LED”, foram encontrados
diversos desafios, uma vez que para a sua construção se fazem necessários
conhecimentos de computação, eletrônica e mecânica.
Dentre os principais desafios destacam-se:
Com a utilização de 64 LED, 8 em cada hélice, seria necessário
utilizar o mesmo número de portas de saída do microcontrolador, o que tornaria
o projeto economicamente e fisicamente inviável. Com a ajuda do professor
orientador, Gustavo Borba, identificamos a possibilidade de utilizar o C.I
74HC164, que devido a sua característica de shift register, foi possível diminuir
para 16 saídas, quantidade que um MSP430 consegue suportar.
Conforme descrito previamente foi escolhido um motor DC
Brushless para garantir uma alta rotação. Entretanto, para o controle e
acionamento deste motor é necessário a utilização do ESC (Eletronic Speed
Controller), componente que possui um valor elevado. Primeiramente obtemos
um modelo por doação, no entanto não atendeu às necessidades do projeto. A
solução foi comprar um modelo novo para dar continuidade. Esse fato
ocasionou um atraso no cronograma pré-estabelecido.
Projetar a estrutura de sustentação do eixo de rotação envolveu a
interação com demais departamentos da UTFPR. Através do contato com a
área da manutenção, conseguimos todo o material necessário gratuitamente.
A união e montagem do conjunto final, que inclui todos os
subconjuntos: estrutura de sustentação, estrutura de rotação, motor e hélices.
Desenvolvimento de um encoder para medir a velocidade real de
rotação do conjunto eixo / motor.

35
Apesar de o projeto atingir um patamar próximo ao que foi proposto,
sugerimos como opção para trabalhos futuros e formas para melhorar o
presente trabalho o:
Desenvolvimento do algoritmo para reprodução de uma imagem
qualquer no display 3D de LED.
36
9. DEFESA
A defesa do projeto ocorrerá no dia 02 de Outubro de 2013 às 13:00.
Os membros da comissão examinadora serão:
Professor Mario Sergio Teixeira;
Aluno Diego Lee;
Professor convidado Douglas Jakubiak;
Professor orientador Gustavo Borba;
37
10. CONCLUSÃO
Apesar de todas as dificuldades encontradas durante o desenvolvimento
desse projeto, podemos afirmar que chegamos em uma etapa em que o
dispositivo provou ser viável e onde é possível vislumbrar alcançar os objetivos
traçados no começo dessa disciplina.
Os circuitos utilizados nas hélices foram elaborados e construídos, a
estrutura de sustentação do eixo está pronta e mostra-se firme, o eixo para
sustentação das placas ainda precisa de alguns últimos ajustes com os outros
componentes e, após diversas adversidades, foi possível garantir o
funcionamento do motor e do ESC.
Como um último objetivo, temos a necessidade de juntar todas as partes
para então formar o dispositivo como um todo e assim, garantir que os
algoritmos elaborados para o controle provem-se úteis.
Após todas as etapas do projeto, é notável o esforço da equipe para
produzir algo que estava ao nosso alcance. O conhecimento adquirido durante
esse período extrapola as barreiras da sala de aula e do conhecimento
científico. O relacionamento entre as pessoas e a necessidade de lidar com
situações de dificuldade mostraram que são tão importantes quanto o
desenvolvimento científico e o estudo dos componentes.
A equipe defende que disciplinas como Oficina de Integração II são
essenciais para o desenvolvimento acadêmico e pessoal do aluno. A
experiência e aplicação de conhecimentos além dos já vistos até o momento
nos cursos da ementa acadêmica propiciam um ambiente de aprendizado
único no âmbito pessoal, acadêmico e até mesmo profissional.

38
11. REFERÊNCIAS
[1] LAMB, Trevor D. A Fascinante evolução do olho. Disponível em
<http://www2.uol.com.br/sciam/reportagens/a_fascinante_evolucao_do_olho.ht
ml> acesso em 12 de Setembro de 2013.
[2] RODRIGUES, Tarso Paulo. Física: Persistência da visão. Disponível em:
<http://www1.folha.uol.com.br/folha/educacao/ult305u13406.shtml> acesso em
12 de Setembro de 2013.
[3] Texas Instruments, Documentação referente à placa controladora MSP430
e ambiente de desenvolvimento. Disponível em:
<http://www.ti.com/lsds/ti/microcontroller/16-bit_msp430/overview.page>.
[4] ST, Documentação referente ao circuito Integrado 74HC164. Disponível em:
<http://html.alldatasheet.com/html-
pdf/23047/STMICROELECTRONICS/74HC164/1621/1/74HC164.html>
[5] IRWIN, J. David – “Análise de Circuitos em Engenharia”. Quarta edição,
EUA, Alabama, Pearson Makron Books, 2005.
[6]aMARQUES, Dominiciano – “Resistores”. Disponível em
<http://www.brasilescola.com/fisica/resistores.htm> acessado em 21 de Agosto
de 2013
[7] BLITZER, Richard – “Basic Eletricity for Eletronics”, EUA, Editora Wiley,
1974.
[8] USBERCO, João – “Quimica”, 7ª Edição, Editora Saraiva, Rio de Janeiro.
[9] MILLMAN e HALKIAS – “Eletrônica”, volume 2, Editora Mcgraw-Hill.
São.Paulo, 1981
[10] SCANDELARI, “Apresentação sobre Famílias Lógicas”, Eletrônica Digital,
UTFPR, 2013.
[11] MENDONÇA, Alexandre – “Eletrônica Digital: Curso prático e exercícios”,
2ª Edição, Editora MZ, Rio de Janeiro, 2007.

39
[12] TAUB, Herbert – “Eletrônica Digital”, Editora McGraw-Hill, São Paulo,
1982.
[13] DENARDIN, Gustavo – “Apostila de Microcontroladores”, UTFPR,
disponível em: <http://pessoal.utfpr.edu.br/gustavo/apostila_micro.pdf>
acessado em 21 de Agosto de 2013
[14] HENDERSHOT, J. R. – “Desgin of brushless permanent-magnet motors”,
Magna Physics Publishing, Oxford, 1984
[15] BRAIN, Marshall, “How does a brushless electric motor work?”. Disponível
em: <http://electronics.howstuffworks.com/brushless-motor.htm> Acesso em
18/09/2013
[16]aPNCA ROBÓTICA E ELETRÔNICAa–“EntendaaoaPWM”adisponívelaem:
<http://www.pnca.com.br/index.php?option=com_content&view=article&id=67:p
wm&catid=42:saiba-mais&Itemid=150> acessado em 24 de Agosto de 2013
[17]aASSOCIAÇÃOABRITÂNICAADEANERUROCIÊNCIASa”Visão”,aUFRJ,a
disponívelaem:a<http://www.anato.ufrj.br/material/NeuroIbro_06Visao.pdf>
acessado em 23 de Agosto de 2013
[18] RODRIGUES, Tarso Paulo. Física: Persistência da Visão. Disponível em:
<http://www1.folha.uol.com.br/folha/educacao/ult305u13406.shtml> Acesso em
11/08/2013.

40
12. ANEXOS
Anexo 1 – Esquema do circuito utilizado na hélice
41
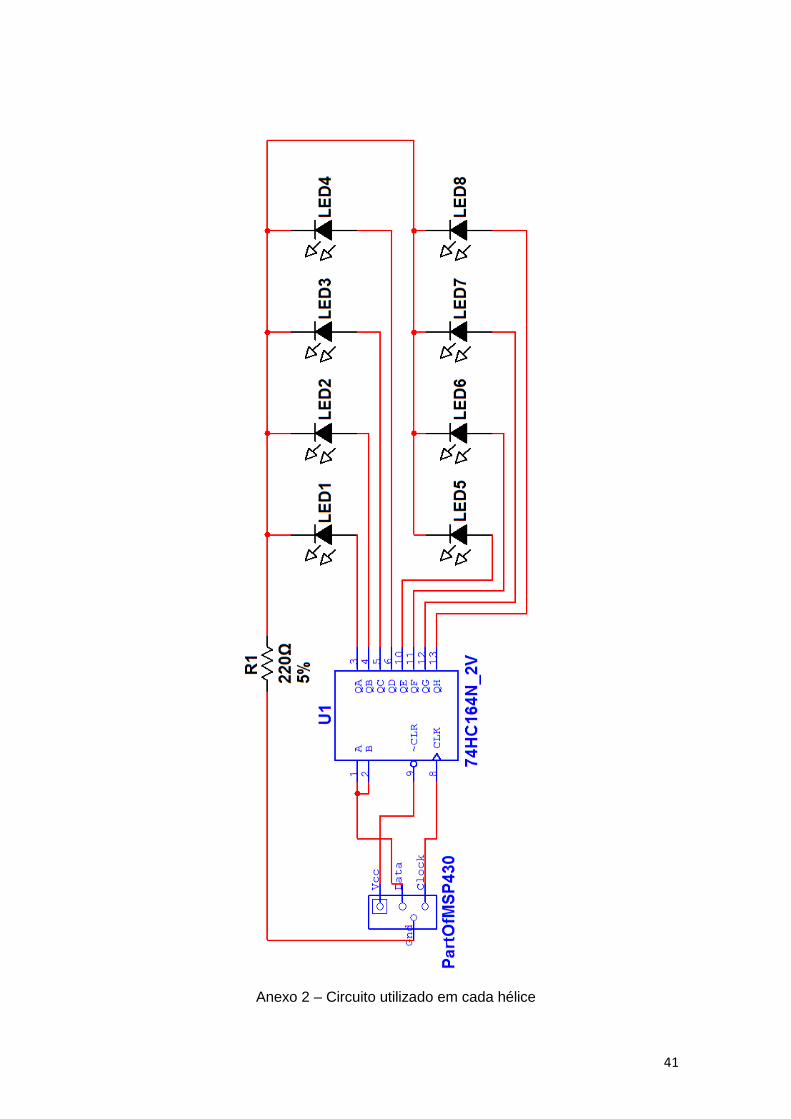
Anexo 2 – Circuito utilizado em cada hélice







