dispositivos adequados à realidade virtual - de/ufpblabteve/publi/2004_svrps2.pdf · são...
TRANSCRIPT
Dispositivos Adequados à Realidade Virtual
Alexandre Cardoso1, Liliane dos Santos Machado2
1 Faculdade de Engenharia Elétrica Universidade Federal de Uberlândia (UFU)Av. João Naves de Ávila, 2121 – Uberlândia MG – Brazil
2 Departamento de Informática – Universidade Federal da Paraíba (UFPB)Cidade Universitária s/n João Pessoa PB 58059900
[email protected], [email protected]
Resumo. Este capítulo visa apresentar os dispositivos mais utilizados em sistemas de Realidade Virtual. As principais características dos equipamentos de entrada e saída de dados são destacadas, bem como a possibilidade e adequação de utilização.
2.1. Introdução
Visandose garantir que o usuário se sinta imerso e possa interagir com o ambiente virtual, as tecnologias de entrada e saída de dados associadas à Realidade Virtual (RV) pretendem estimular, de maneira eficiente, a maior quantidade de sentidos e capturar com grande fidelidade os diversos movimentos do usuário, tais como os movimentos das mãos, da cabeça ou dos olhos.
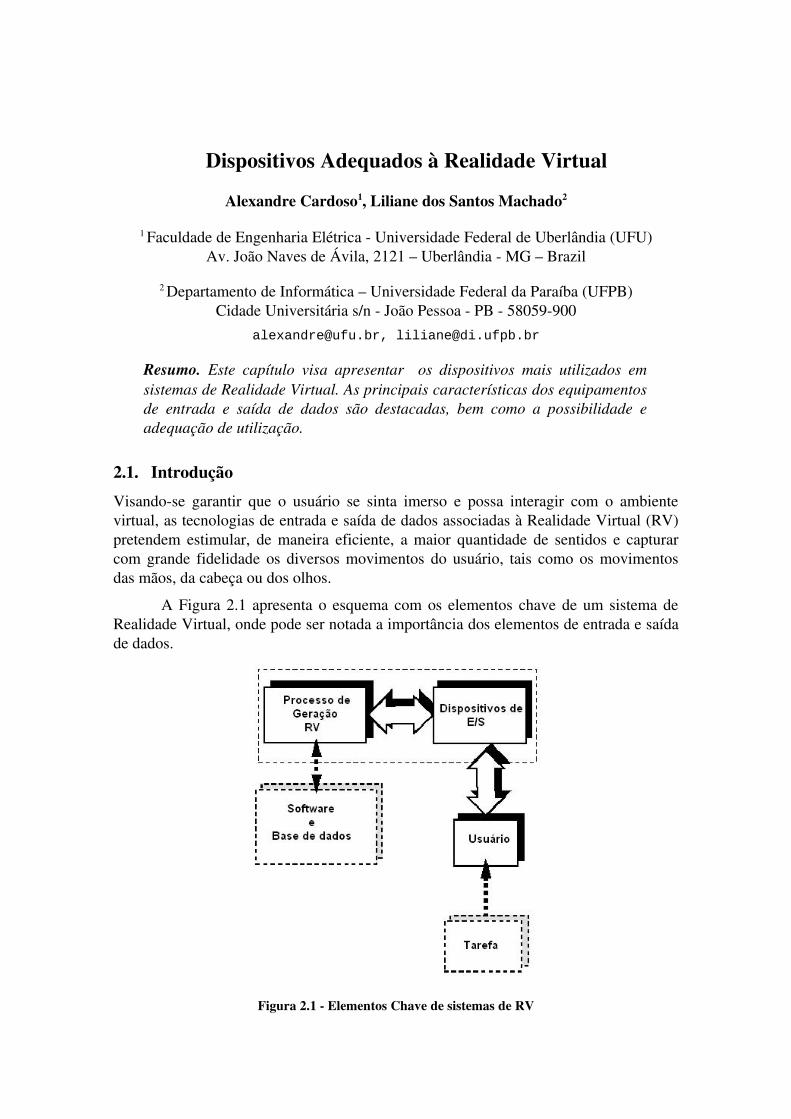
A Figura 2.1 apresenta o esquema com os elementos chave de um sistema de Realidade Virtual, onde pode ser notada a importância dos elementos de entrada e saída de dados.
Figura 2.1 Elementos Chave de sistemas de RV

A seguir, uma análise dos dispositivos de saída e entrada de dados é efetuada, analisandose cada um deles e apresentandose suas características mais importantes.
2.2. Dispositivos de Entrada de Dados
O participante da experiência de Realidade Virtual se sente imerso no ambiente virtual através dos dispositivos de saída de dados. Os dispositivos de entrada de dados, por sua vez, permitem a movimentação e interação do usuário com o mundo virtual, no esquema de interação em primeira pessoa.
Os dispositivos de entrada de dados podem ser separados em duas categorias:
• de interação;
• de trajetória.
Os dispositivos de interação permitem ao usuário a movimentação e manipulação de objetos no mundo virtual, de forma direta ou indireta. Neste contexto, tais dispositivos conectam ações do usuário com elementos de cena do ambiente virtual.
Os dispositivos de trajetória, por sua vez, monitoram movimentos de partes do corpo do usuário, para criar a sensação de presença no mundo virtual. Assim, ao movimento do usuário, percebido por tais dispositivos, uma atualização do ambiente virtual é efetuada.
É importante observar que objetos dos ambientes virtuais geralmente podem moverse com seis graus de liberdade (6DOF1), o que implica na possibilidade de três rotações e três translações, como pode ser visto na Figura 2.2.
Figura 2.2 Seis graus de liberdade dos elementos de Ambientes Virtuais
2.2.1. Dispositivos de Interação
Existem diferentes dispositivos de interação com diferentes finalidades, sendo importante escolher o mais adequado para a aplicação de RV em questão. A escolha do
1 DOF – do inglês degrees of freedom (graus de liberdade)

dispositivo de interação mais adequado leva em conta não apenas a finalidade do sistema, mas também o software utilizado, pois a eficiência do sistema vai depender da capacidade do software de aproveitar as características do dispositivo.
2.2.2. Luvas de dados (data gloves)
Através das luvas de dados o sistema de RV pode reconhecer os movimentos dos dedos da mão do usuário que veste a luva.
Para a determinação dos movimentos dos dedos são utilizados, na maioria dos equipamentos disponíveis, sensores mecânicos ou de fibra ótica. Os sensores de fibra ótica são utilizados nas versões mais populares de luvas de dados. Seu uso consiste em um fio de fibra ótica com junções. Quando a junta é movida o cabo dobrase reduzindo a passagem de luz por ele. Essas variações de luz são resumidas e transmitidas para o computador. Às luvas de dados também pode ser adicionado um sensor de movimentos, neste caso um dispositivo de trajetória permitirá a localização da mão do usuário no espaço atvés deste sensor. O esquema básico deste tipo de luva pode ser visto na Figura 2.3.
Figura 2.3 Elementos de uma Data Glove
Atualmente existem diversos modelos de luvas disponíveis no mercado de RV, utilizados em sistemas de diferentes finalidades.
2.2.3. Dispositivos com 2DOF
Interagir com um mundo virtual nem sempre requer o uso de um complicado e/ou caro dispositivo. Muitas tarefas podem ser executadas com simples dispositivos com 2DOF, como um mouse ou um joystick. Apesar de limitar as possibilidades de movimento, estes dispositivos reduzem o tempo de resposta do sistema (seus eventos são mais rapidamente processados) e são fáceis de serem utilizados.
2.2.4. Dispositivos com 6DOF
Os dispositivos de interação com 6DOF permitem uma movimentação bastante ampla quando utilizados em sistemas de RV, pois permitem a movimentação em todas as direções do espaço 3D incluindo movimentos de rotação. .
Os dispositivos chamados isométricos, ou bolas isométricas são fáceis de manipular e apresentam uma diferença crucial em relação aos demais dispositivos 6DOF, pois são capazes de medir a quantidade de força aplicada a eles. Costumam constituirse de uma bola sobre uma plataforma com botões (normalmente um deles é utilizado para a reinicialização do sistema) que são configurados via software.
Algumas empresas procuram modificar o projeto do mouse padrão para que este possa funcionar com sensores de trajetória de 6DOF ou 3DOF. Esses mouses (o plural correto seria mice) passam então a utilizar dispositivos de rastreamento ultrassônicos ou eletromagnéticos, ficando sua eficiência dependente da qualidade do sistema de rastreamento dos movimentos.
2.2.5. Sensores de Entrada Biológicos
Sensores de entrada biológicos processam atividades chamadas de indiretas, como comando de voz e sinais elétricos musculares.
Estudos sobre reconhecimento de voz existem há mais de vinte anos, e em sistemas de RV o reconhecimento de comandos de voz pode facilitar a execução de tarefas no mundo virtual, principalmente quando as mãos estiverem ocupadas em outra tarefa e não possam acessar o teclado.
Já os dispositivos que utilizam sinais elétricos musculares são utilizados para, através de eletrodos colocados sobre a pele, detectar a atividade muscular, permitindo ao usuário movimentarse pelo mundo virtual através do simples movimento dos olhos, por exemplo.
2.2.6. Dispositivos de Trajetória
Alguns dispositivos de interação estão associados a um dispositivo responsável pela tarefa de detecção ou rastreamento da trajetória, conhecido como dispositivo de trajetória (tracking).
Os dispositivos de trajetória trabalham baseados na diferença de posição ou orientação em relação a um ponto ou estado de referência. Basicamente existe uma fonte que emite o sinal (que pode estar localizada no dispositivo de interação), um sensor que recebe este sinal e uma caixa controladora que processa o sinal e faz a comunicação com o computador.
A maioria das aplicações que utilizam detecção de trajetória fazem uso de pequenos sensores colocados sobre as partes do corpo ou sobre o objeto (se for o caso), técnica conhecida como tracking ativo. Dispositivos de trajetória de dispositivos de interação com 6DOF utilizam técnicas eletromagnéticas, ultrassônicas, mecânicas ou óticas para fazer a medida dos movimentos.
Como alternativa, o tracking passivo utiliza câmeras ou sensores óticos ou de inércia para “observar” o objeto e determinar sua posição e orientação. Diferente dos

dispositivos que utilizam tracking ativo, os dispositivos de tracking passivo utilizam apenas um sensor para rastrear o objeto.
Como exemplo, para o desenvolvimento de luvas de dados existem três tecnologias predominantes no que diz respeito à localização da mão no espaço e orientação da palma da mão. A primeira baseiase no uso de câmeras para monitorar a luva a uma certa distância (tracking passivo), a segunda trabalha com a radiação de pulsos magnéticos emitidos pela luva (tracking ativo), e a terceira baseiase na acústica (tracking ativo), onde dispositivos ultrassônicos transmitem a posição da mão.
As principais características técnicas avaliadas para os dispositivos de trajetória são:
• número de medidas efetuadas em um intervalo de tempo de 1 segundo;
• sensibilidade;
• isenção ao ruído;
• erros: qualidade das medidas efetuadas;
• tempo de medição;
• com ou sem fio;
• área de captura.
Dispositivos de trajetória mecânicos consistem de uma série de estruturas cinemáticas que, em paralelo, são capazes de detectar alterações da posição dos elementos às quais se encontram conectados. Para tanto, usam sensores associados ao corpo do usuário. Apresentam baixas latências e são imunes à interferência de campos magnéticos.
Tais dispositivos, no entanto, são limitados pela liberdade de movimento do usuário, podendo dificultar o movimento dos usuários pela dureza do material da qual são constituídos. A Figura 2.4 apresenta um exemplo de dispositivo de trajetória mecânico.
Dispositivos de trajetória magnéticos (Figura 2.5) são capazes de efetuar medições sem o contato direto com o corpo do usuário. Para tanto, fazem medidas do campo magnético produzido por um transmissor estacionário para determinar, em tempo real, a posição do receptor (que está em movimento). Suas principais características são:
• usam baixa freqüência de campos magnéticos;
• os campos são produzidos por uma fonte fixa;
• tamanho da fonte está relacionado com o tamanho da área de captura do dispositivo;
• o receptor está associado ao objeto que está sendo rastreado e tem três antenas perpendiculares entre si; a distância é inferida com base nas voltagens induzidas nas antenas e para isto uma acurada calibração deve ser efetuada.

Figura 2.4 Exemplo de dispositivo de trajetória (tracker) mecânico
Figura 2.5 Componentes de um dispositivo de trajetória magnético
Os dispositvos de trajetória ultrassônicos são dispositivos que não entram em contato com o usuário e usam um sinal ultrassônico produzido por um transmissor estacionário para determinar a posição do objeto em tempo real, em função da mudança de posição do receptor. Características principais:
• usam sinais ultrassônicos de baixa frequência para medir posição;
• o som é produzido por fontes fixas, dispostas triangularmente;
• o número de fontes é proporcional à area de atuação do dispositivo;
• o receptor é triangular e permanence preso ao objeto que está sendo rastreado;
• o objeto possuim três microfones;

• a distância é inferida a partir do tempo de captura do som pelo dispositivo fixo;
• alterações na temperatura do ar e ruídos ambientes atrapalham a medida;
• requerem que a fonte “enxergue” o receptor;
• são mais lentos que os dispositivos magnéticos.
A Figura 2.6 apresenta o esquema básico deste tipo de dispositivo.
Figura 2.6 Esquema básico dos dispositivos de rastreamento ultrassônicos
Os dispositivos ópticos são medidores que não exigem contato com o usuário e que utilizam sensores ópticos para determinação de posição e orientação de um dado objeto. A Figura 2.7 apresenta configurações possíveis para tais tipos de equipamentos.
Figura 2.7 Esquemas de Rastreadores Ópticos [Burdea e Coiffet, 2003].

2.3. Dispositivos de Saída de Dados
2.3.1. Dispositivos Visuais
Uma grande porção do cérebro é dedicada ao processamento e organização dos estímulos visuais. Devido a isto, os dispositivos visuais e o tipo de imagem gerada por um sistema de RV são fatores muito importantes na obtenção e na determinação do nível de imersão de um sistema de RV.
Conforme o tipo de dispositivo utilizado, podemos ter sistemas de RV monoscópicos ou estereoscópicos. No caso de um sistema monoscópico, a mesma imagem será exibida para os dois olhos: apenas uma imagem passa pelo processo de renderização e é exibida para os dois olhos. Já no sistema estereoscópico, cada olho verá uma imagem ligeiramente diferente, sendo necessário a construção de um par de imagens. Neste caso é importante ressaltar que uma característica fundamental da visão humana é que, em função da colocação dos olhos na frente da cabeça, o campo visual não é de 360 graus como o das aves, mas, a visão é binocular. A visão binocular (esterescópica) se caracteriza pelo reconhecimento de duas imagens obtidas por pontos de vista diferentes, que permite uma comparação capaz de originar a sensação de profundidade. O Capítulo 11 discute o assunto “estereoscopia” com maior profundidade.
Um outro fator importante quanto à parte visual da RV referese ao número de quadros por segundo que aparecem no vídeo, ou seja, a velocidade da simulação. Filmes projetados para o cinema apresentam aproximadamente 24 quadros por segundo, enquanto os projetados para TV apresentam aproximadamente 30 quadros por segundo. Em RV, buscase entre 15 e 22 quadros por segundo.
Podemos separar os dispositivos de visualização em duas categorias:
- de visualização individual;
- de visualização coletiva ou baseados em sistemas de projeção.
Na primeira categoria, encontramos representantes como os videocapacetes (HMDs) e headcoupled displays (dispositivos que utilizamse de braços mecânicos para permanecerem diante do usuário). Na segunda categoria, temos os monitores de computador e os sistemas de projeção.
Óculos Obturadores Sincronizados
Os óculos obturadores sincronizados são constituídos por um par de lentes feitas de cristal líquido, que podem ficar instantaneamente transparentes ou opacas, de acordo com um controle eletrônico gerado pelo sistema computacional associado. Tal controle é sincronizado com um sinal de vídeo, fazendo com que a lente da esquerda fique opaca e a da direita transparente, quando a imagem em um dispositivo (como uma tela) for a imagem direita e vice versa, para a imagem esquerda.
Neste caso, o sinal de vídeo deve estar bem sincronizado com as obturações e possuir taxas de atualização das imagens suficientemente rápidas (30 ou 60Hz), de maneira a usar eficientemente a retenção das imagens pelo cérebro. De forma alternativa, o sinal de vídeo pode ser entrelaçado (linhas pares mostram a imagem

esquerda e linhas ímpares mostram a imagem direita) para reduzir o cintilamento da imagem.
Há óculos em que a obturação das lentes é controlada por um emissor de infravermelho, dispensando a conexão por fios com o sistema computacional para envio de sinais de sincronização. A Figura 2.8 apresenta um exemplo de óculos obturadores com emissor de infravermelho e a Figura 2.9 um exemplo de óculos obturadores comuns.
Figura 2.8 Óculos obturadores sem fio (controlados por infravermelho)
Figura 2.9 Óculos obturadores com fio
Videocapacetes (HMDs)
O videocapacete (HMD2) é o dispositivo de saída de dados que mais isola o usuário do mundo real. Ele é constituído basicamente de duas minúsculas telas de TV e um conjunto de lentes especiais. As lentes ajudam a focalizar imagens que estão a alguns milímetros dos olhos do usuário, ajudando também a estender o campo de visão do vídeo. O vídeocapacete funciona também como um dispositivo de entrada de dados quando contém sensores de rastreamento que medem a posição e orientação da cabeça transmitindo esses dados para o computador. Neste caso, o computador gera uma seqüência de imagens por quadro, correspondentes às ações e perspectiva do usuário
2 HMD – do inglês headmounted display

A Figura 2.10 apresenta o esquema de um HMD dotado de um rastreador de posição.
Figura 2.10 HMD profissional
2.2.1. HeadCoupled Display
Este dispositivo basicamente constituise de um display montado sobre um braço mecânico com um contrapeso, fazendo com que o display possua “peso zero”. Sensores ligados ao braço mecânico mais os controles presentes próximos ao display permitem movimentos com 6DOF.
O formato do headcoupled display permite uma transição fácil entre a visualização do mundo virtual e a interação com teclados, monitores e outros dispositivos que possam estar controlando a simulação. Além disso, o fato deste dispositivo utilizar sensores de posição mecânicos e não eletromagnéticos diminui o tempo de latência das imagens. Devido a essas características e ao seu preço ser inferior ao dos HMDs, os headcoupled displays são bastante populares entre a comunidade científica.
Monitores e Sistemas de Projeção
Dispositivos visuais baseados em monitores e sistemas de projeção não constumam oferecer um alto nível de imersão. Neste caso, o usuário precisa estar constantemente olhando para a tela e utilizar algum dispositivo de entrada para fazer sua movimentação pelo mundo virtual.
Mas isso não implica que as imagens não possam ser vistas em estéreo. Há monitores que apresentam as imagens associadas aos olhos esquerdo e direito simultaneamente e que dispensam o uso de óculos especiais. Tratase dos monitores autoestereoscópicos (Figura 2.11).
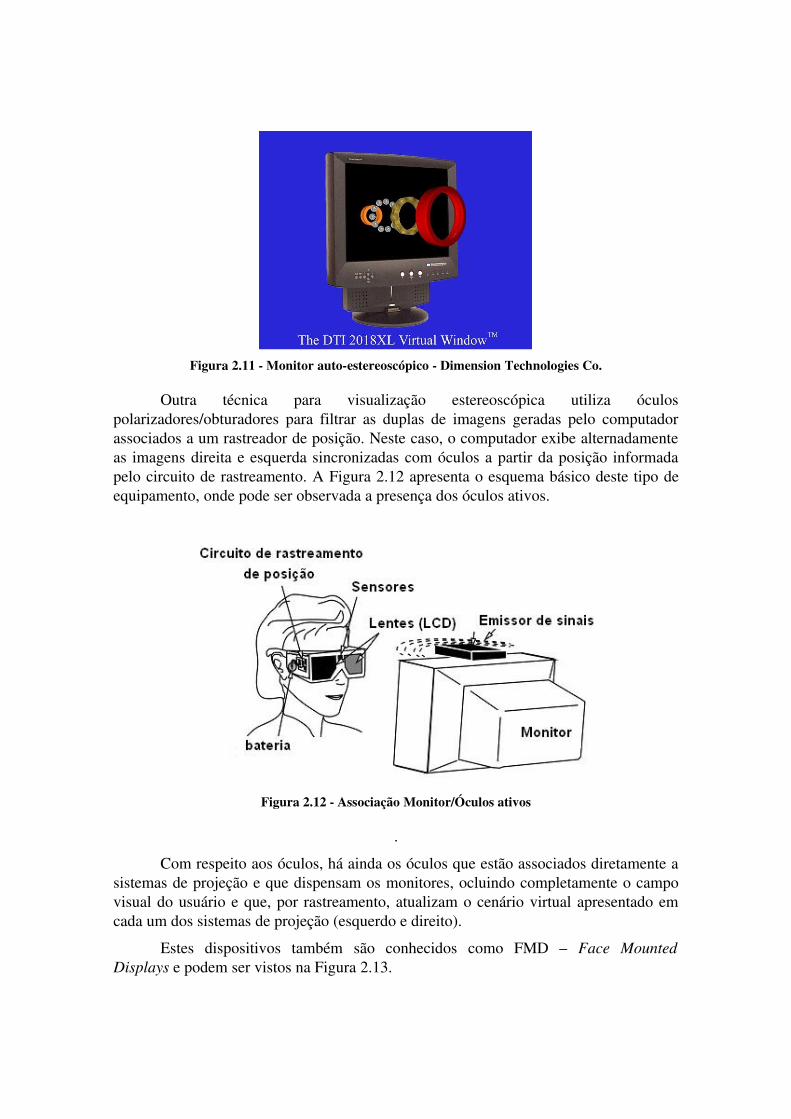
Figura 2.11 Monitor autoestereoscópico Dimension Technologies Co.
Outra técnica para visualização estereoscópica utiliza óculos polarizadores/obturadores para filtrar as duplas de imagens geradas pelo computador associados a um rastreador de posição. Neste caso, o computador exibe alternadamente as imagens direita e esquerda sincronizadas com óculos a partir da posição informada pelo circuito de rastreamento. A Figura 2.12 apresenta o esquema básico deste tipo de equipamento, onde pode ser observada a presença dos óculos ativos.
Figura 2.12 Associação Monitor/Óculos ativos
.
Com respeito aos óculos, há ainda os óculos que estão associados diretamente a sistemas de projeção e que dispensam os monitores, ocluindo completamente o campo visual do usuário e que, por rastreamento, atualizam o cenário virtual apresentado em cada um dos sistemas de projeção (esquerdo e direito).
Estes dispositivos também são conhecidos como FMD – Face Mounted Displays e podem ser vistos na Figura 2.13.

Figura 2.13 Face Mounted Display
Existe ainda a técnica dos filtros coloridos, onde as imagens de cada olho são exibidas em cores complementares, como vermelho e azul (ou vermelho e verde). As imagens são observadas por óculos que têm a mesma correspondência de cores (são os filtros), permitindo a cada olho ver a sua respectiva imagem. No entanto, esses óculos cansam os olhos após algum tempo de uso.
Uma vantagem dos óculos na visualização baseada em monitores ou sistemas de projeção é que eles permitem que várias pessoas participem da experiência de RV, além do custo ser inferior ao de um HMD.
Um outro dispositivo utilizado é o chamado “capuz” de visualização: uma peça plástica anexada à superfície frontal do monitor. Neste sistema o computador exibe as imagens esquerda e direita ao mesmo tempo e lado a lado no monitor, sendo que o “capuz” separa e reflete a dupla de imagens de forma que o usuário só percebe um único objeto flutuando à sua frente.
Considerando os monitores, pode ainda ser concebida uma associação de monitores, simulando a construção de um muro de monitores – Figura 2.14. Como esta concepção geralmente utiliza os monitores do tipo LCD3, a luminosidade local pode ter grande interferência ( já que os mesmos produzem em torno de 300 lumens somente).
3 LCD – do inglês liquid crystal display (monitor de cristal líquido)
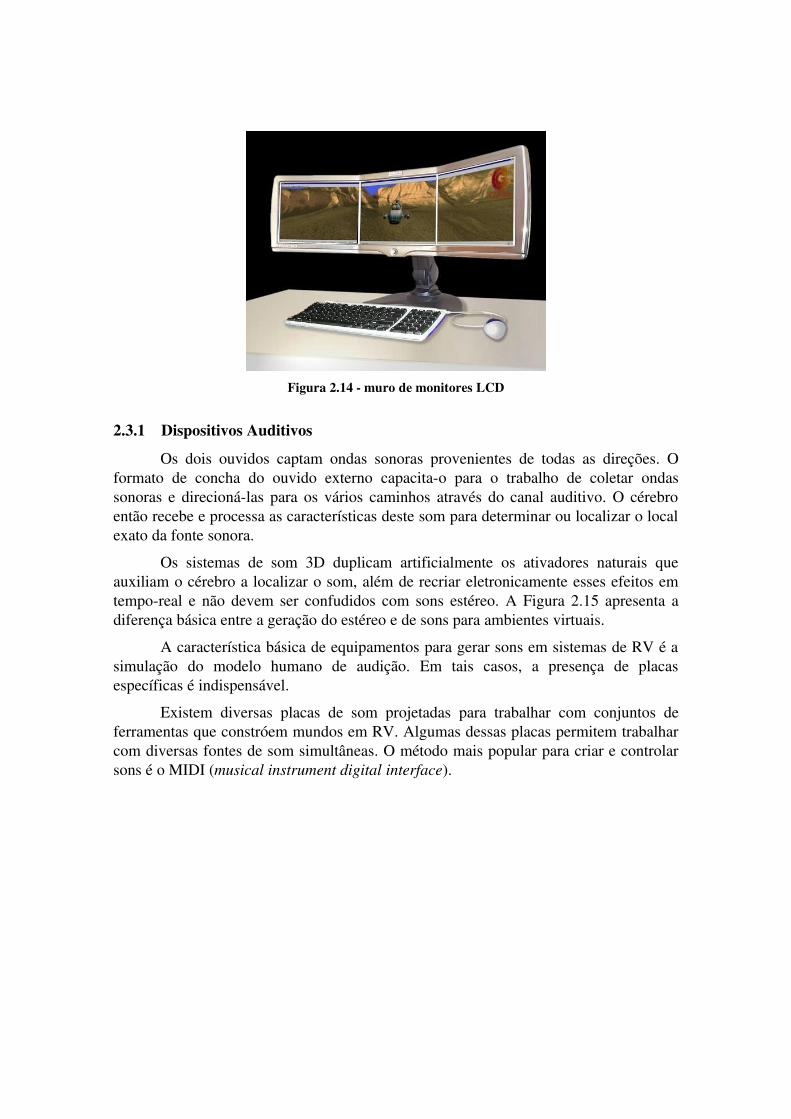
Figura 2.14 muro de monitores LCD
2.3.1 Dispositivos Auditivos
Os dois ouvidos captam ondas sonoras provenientes de todas as direções. O formato de concha do ouvido externo capacitao para o trabalho de coletar ondas sonoras e direcionálas para os vários caminhos através do canal auditivo. O cérebro então recebe e processa as características deste som para determinar ou localizar o local exato da fonte sonora.
Os sistemas de som 3D duplicam artificialmente os ativadores naturais que auxiliam o cérebro a localizar o som, além de recriar eletronicamente esses efeitos em temporeal e não devem ser confudidos com sons estéreo. A Figura 2.15 apresenta a diferença básica entre a geração do estéreo e de sons para ambientes virtuais.
A característica básica de equipamentos para gerar sons em sistemas de RV é a simulação do modelo humano de audição. Em tais casos, a presença de placas específicas é indispensável.
Existem diversas placas de som projetadas para trabalhar com conjuntos de ferramentas que constróem mundos em RV. Algumas dessas placas permitem trabalhar com diversas fontes de som simultâneas. O método mais popular para criar e controlar sons é o MIDI (musical instrument digital interface).

Figura 2.15 – Comparação entre som 3D Virtual e som Estéreo.
Dispositivos Físicos
Os dispositivos físicos procuram estimular as sensações relacionadas ao tato, tensão muscular e temperatura. Diferente dos dispositivos de saída de visão e audição, os dispositivos físicos requerem uma sofisticada interação eletromecânica com o corpo do usuário.
A tecnologia dos dispositivos físicos existente não é capaz de estimular os sentidos do usuário com a mesma qualidade de realismo que atinge os sentidos visuais e auditivos: o problema está além da criação de dispositivos físicos, pois envolve também a compreensão e simulação das forças apropriadas.
Dispositivos Hápticos
Dispositivos hápticos são aqueles que incorporam sensores e atuadores, permitindo o monitoramento das ações do usuário e fornecendo-lhe sensação tátil e/ou de força. A sensação tátil está associada à natureza do contato com o objeto, como textura ou rugosidade, enquanto a sensação de força refere-se ao senso de posição e movimentação junto com as forças associadas ao movimento durante a interação com um objeto [Burdea e Coiffet, 2003].
Os dispositivos hápticos que fornecem sensação de força podem ser divididos em duas categorias básicas: fixos (groundbased) ou móveis (bodybased). Os dispositivos hápticos fixos, como os joysticks, são aqueles que estão fisicamente atrelados a uma plataforma ou superfície estável que permite o envio de reações de
força ao usuário. Já os dispositivos hápticos móveis utilizam um ponto de conexão do próprio dispositivo para fornecer a reação de força e apresentam a vantagem de poderem ser portáteis na maioria das vezes, como no caso das luvas e exoesqueletos.
A Figura 2.16 apresenta o esquema de uma luva associada a atuadores, de forma a prover resposta de força à solicitações do usuário.
Figura 2.16 Luva associada a atuadores (feedback de força)
Atualmente já existe uma série de dispositivos hápticos que permitem manipulação com retorno tátil e/ou de força. Estes dispositivos podem permitir movimentos com diferentes graus de liberdade, suportam e reagem com diferentes valores de força, oferecem manipulação em um espaço limitado e utilizam tecnologias diversas [Netto, 2002].
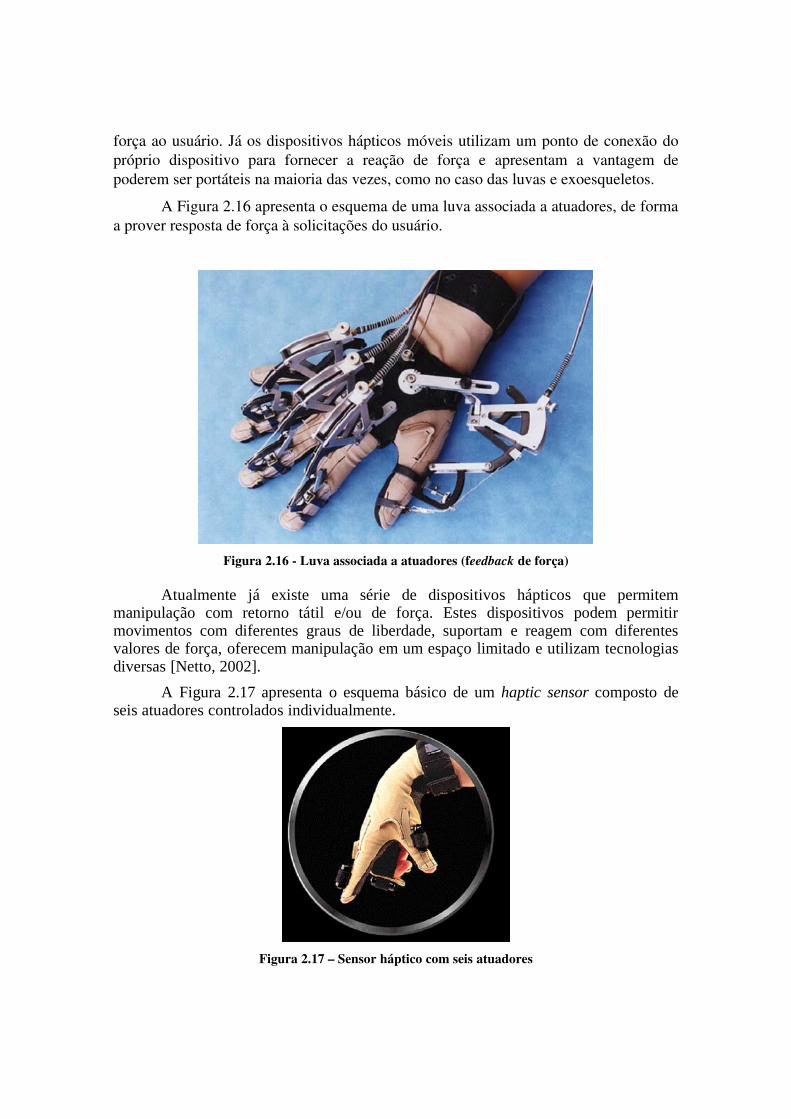
A Figura 2.17 apresenta o esquema básico de um haptic sensor composto de seis atuadores controlados individualmente.
Figura 2.17 – Sensor háptico com seis atuadores

Dispositivos de resposta térmica
Um outro tipo de estímulo que também pode ser fornecido por um sistema de RV é a resposta térmica. Este tipo de resposta poderia ser fornecida, por exemplo, quando o usuário se aproximasse de uma fogueira no mundo virtual.
A Figura 2.18 apresenta o esquema elétrico de um dispositivo térmico, com destaque para a presença de semicondutores, fonte DC, receptor e fonte de calor.
Figura 2.18 Sensor térmico esquema básico
Plataformas móveis
As plataformas móveis também são consideradas um dispositivo de resposta física, pois fornecem a sensação de movimento. Normalmente são utilizadas em videogames, simuladores de vôo e simuladores de movimento.
2.4. Referências
Burdea e Coiffet, Virtual Reality Technology. Addison Wesley. 2003.
Netto, A.V.; Machado, L.S.; Oliveira, M.C.F. Realidade Virtual. Visual Books. 2002.