dispositivo para recolhimento de mangueiras …gaia.liberato.com.br/mecanica/dispositivo_para... ·...
TRANSCRIPT

FUNDAÇÃO ESCOLA TÉCNICA LIBERATO SALZANO VEIRA DA CUNHA
CURSO TÉCNICO DE MECÂNICA
CAROLINA FUHRMANN
JUAN LUCAS SILVA FOGAÇA
DISPOSITIVO PARA RECOLHIMENTO DE MANGUEIRAS AUTOMÁTICO
NOVO HAMBURGO
2016

CarolinaFuhrmann
Juan Lucas Silva Fogaça
DISPOSITIVO PARA RECOLHIMENTO DE MANGUEIRAS AUTOMÁTICO
Projeto de Integração Disciplinar apresentado para o curso Técnico de Mecânica da Fundação Escola Técnica Liberato Salzano Vieira da Cunha. Orientador: Prof. Ms. Fábio de Souza
Novo Hamburgo
2016
FOLHA DE ASSINATURAS
CAROLINA FUHRMANN
JUAN LUCAS SILVA FOGAÇA
DISPOSITIVO PARA RECOLHIMENTO DE MANGUEIRAS AUTOMÁTICO
FUNDAÇÃO ESCOLA TÉCNICA LIBERATO SALZANO VEIRA DA CUNHA
CURSO TÉCNICO DE MECÂNICA
Novo Hamburgo, setembro de 2016.
_______________________________________
Carolina Fuhrmann – (51)98581822
______________________________________
Juan Lucas Silva Fogaça – (51)92455775
________________________________________________
Ms. Fábio Ricardo de Oliveira de Souza
Professor Orientador
RESUMO
O presente projeto é uma pesquisa tecnológica que visa o desenvolvimento
do protótipo de um dispositivo para enrolar mangueiras automaticamente. Este
dispositivo é formado por um carretel onde a mangueira é enrolada, um motor de
passo ligado a um mancal de rolamento, que é soldado a uma engrenagem motora,
cuja função é fazer o corpo do dispositivo girar. Além disso, existe um fuso que é
rotacionado por uma engrenagem que está em contato com a engrenagem motora.
Ligado a esse fuso, estaria um posicionador, com três furos, um para o mesmo,
outro para a guia e outro para a mangueira. Este conjunto tem a função de fazer a
mangueira se enrolar sem interferência no carretel. O projeto da área de engenharia
mecânica é viável para fabricação, entretanto, este não apresenta uma boa relação
custo-benefício, por ter preço elevado. O protótipo virtual foi realizado nas
dimensões exatas que a forma física teria. Considera-se que a relevância principal
do projeto encontra-se na realização de um modelo virtual do protótipo.
SUMÁRIO
1 INTRODUÇÃO ......................................................................................................... 5
2 REFERENCIAL TEÓRICO ....................................................................................... 6
2.1 Recolhedor de mangueiras automático ............................................................ 6
2.2 Carretel Pneumático ........................................................................................... 7
2.3 Recolhedor de Mangueiras Retrátil Automático Worker ................................. 8
2.4 Dispositivo para Recolhimento da Mangueira de Calibrador de Pneu ........... 8
2.5 Motor de Passo .................................................................................................... 9
2.6 Arduino ................................................................................................................. 9
2.7 Servomotor ........................................................................................................ 10
2.8 Mangueira de ar comprimido ........................................................................... 11
3 METODOLOGIA .................................................................................................... 13
3.1 Dimensionamento ............................................................................................. 13
3.1.1 Força de enrolamento ...................................................................................... 13
3.1.2 Carretel ............................................................................................................. 14
3.1.3 Mancais ............................................................................................................ 14
3.1.4 Varão ................................................................................................................ 14
3.1.5 Posicionador ..................................................................................................... 14
3.1.6 Motor ................................................................................................................ 15
3.1.7 Rolamento ........................................................................................................ 15
3.1.8 Engrenagens .................................................................................................... 15
3.1.9 Arduino ............................................................................................................. 15
3.2 Protótipo Virtual ................................................................................................ 16
4 RESULTADOS ....................................................................................................... 19
5 CONCLUSÃO ........................................................................................................ 21
REFERÊNCIAS ......................................................................................................... 22
APÊNDICE A – PROTÓTIPO VIRTUAL VISTA SUPERIOR .................................... 24
5
1 INTRODUÇÃO
Anualmente os alunos da Fundação Escola Técnica Liberato Salzano Vieira
da Cunha são incentivados a desenvolver projetos de pesquisa. No curso Técnico de
Mecânica da instituição os alunos de terceiros e quartos anos são encorajados a
desenvolver o Projeto de Integração Disciplinar, PID, que consiste no
desenvolvimento de uma pesquisa nas áreas de abrangência do curso.
Dessa forma, a presente pesquisa tecnológica pretende desenvolver um
dispositivo para recolhimento automático de mangueiras de calibradores de pneus.
O projeto foi iniciado no ano de 2014 por outro grupo de alunos do curso, porém,
eles não apresentaram um protótipo físico do dispositivo como é o objetivo do
presente projeto.
Calibradores de pneus hoje são encontrados em postos de gasolina; entretanto
a maioria deles não é guardada com o devido cuidado, fazendo com que o material
sofra com o desgaste precoce. Sabendo disso o grupo decidiu que seria importante
desenvolver um dispositivo que tivesse a função de enrolar a mangueira do
calibrador para que esta sofra com o menor desgaste possível. A pergunta que
originou o desenvolvimento desta pesquisa foi: é possível desenvolver um protótipo
do enrolador automático que supra a demanda de mercado?
Este relatório está dividido em cinco capítulos sendo o presente que introduz
os aspectos a serem tratados neste relatório; outro em que constam todas as
pesquisas bibliográficas realizadas durante o desenvolvimento do projeto; o terceiro
capítulo que mostra os métodos utilizados para o desenvolvimento do protótipo. Foi
dedicado, também, um capítulo para a apresentação dos resultados do projeto e um
para as conclusões da pesquisa.
.
6
2 REFERENCIAL TEÓRICO
Este capítulo aborda os principais termos e conceitos apresentados no
trabalho. Foi importante pesquisar sobre o funcionamento de recolhedores de
mangueira automáticos, carretéis retráteis, dispositivos de mangueiras de
calibradores de pneus, arduino, motores, entre outros elementos. As fontes de
consulta variaram desde bibliográficas até fontes disponíveis em sites da internet
que apresentavam informações importantes para o desenvolvimento da pesquisa.
2.1 Recolhedor de mangueiras automático
Em seu vídeo no youtube, o estudante Guilherme Felipe da Silva (2013),
demonstra um projeto feito para uma disciplina específica de seu curso. Nele é
mostrado o funcionamento de um enrolador automático de mangueira de jardim.
Para que o equipamento funcione, conforme Silva (2013) é necessário que haja
motor com caixa de redução que faça girar o eixo, isso devido ao peso do
equipamento.
No material apresentado, o autor usou uma pequena polia de diâmetro de 90
mm; esta polia faz a conexão com uma correia de canal. Liga-se a correia a uma
embreagem automática eletromagnética, que é formada, em um lado, por uma
bobina, que prende o platô ao outro lado, por uma diferença de potencial, conectado
a um eixo com ponta estriada. Ainda segundo Silva, esse eixo tem uma entrada para
a mangueira internamente e é conectado por meio de um engate rápido à estrutura
do protótipo por meio de mancais. Um desses mancais é conectado a uma espécie
de rolamento, que é impulsionado pela engrenagem eletromagnética. A força dessa
engrenagem é dada pelo motor com caixa de redução, que é conectado à estrutura
do protótipo por meio de um suporte para o motor, “para que a mangueira não
tranque na estrutura, ela passa por duas roldanas” (SILVA, 2013).
Na parte eletrônica o ponto mais importante do projeto de Silva (2013) é o
arduino. Esse é uma placa de programação de fácil acesso, sendo assim até leigos
no assunto podem aprender a programá-la. Outro componente desta parte é um
relé, que serve para ligar e desligar o motor e tem a embreagem eletromagnética.
Ainda existe um receptor que recebe sinal através de um controle. O controle manda
sinais de radiofrequência para os relés que são ligados no mesmo instante. Foi
7
colocado ainda um sensor indutivo, este detecta a presença de metal em sua ponta
e, após, retorna o sinal a uma placa que está ligada a todas as partes eletrônicas do
dispositivo e é alimentada por uma fonte ETX. Todos estes elementos eletrônicos
estão encontrados dentro de uma caixa.
Já o acionamento é feito através de um botão que, quando acionado, envia
sinal a placa arduino, por radiofrequência, então os relés são acionados e,
consequentemente, ativam o motor e a embreagem eletromagnética. No fim da
mangueira está colocado um anel de metal com um sensor indutivo que envia sinais
a placa quando o conjunto deve parar de trabalhar (SILVA, 2013).
2.2 Carretel Pneumático
A empresa Wurth desenvolveu um carretel retrátil com mangueira de
polímero híbrido para rede de ar comprimido. Segundo a empresa, as principais
vantagens são:
Mangueira de polímero híbrido sem efeito memória de dobra e torção. Suporte articulável que permite conforto e movimento na utilização. Retrátil, mantém as mangueiras recolhidas e organizadas. Fácil instalação e utilização (WURTH, [s.d]).
Esse instrumento tem como objetivo recolher e liberar uma mangueira de
ar comprimido em oficinas que utilizam esta matéria prima. O produto tem um custo
de R$ 980,13, o que pode mostrar uma vantagem do nosso, pois visamos diminuir
os custos com materiais mais simples. Em seguida será mostrada a tabela de
descrição do produto disponibilizada pela empresa.
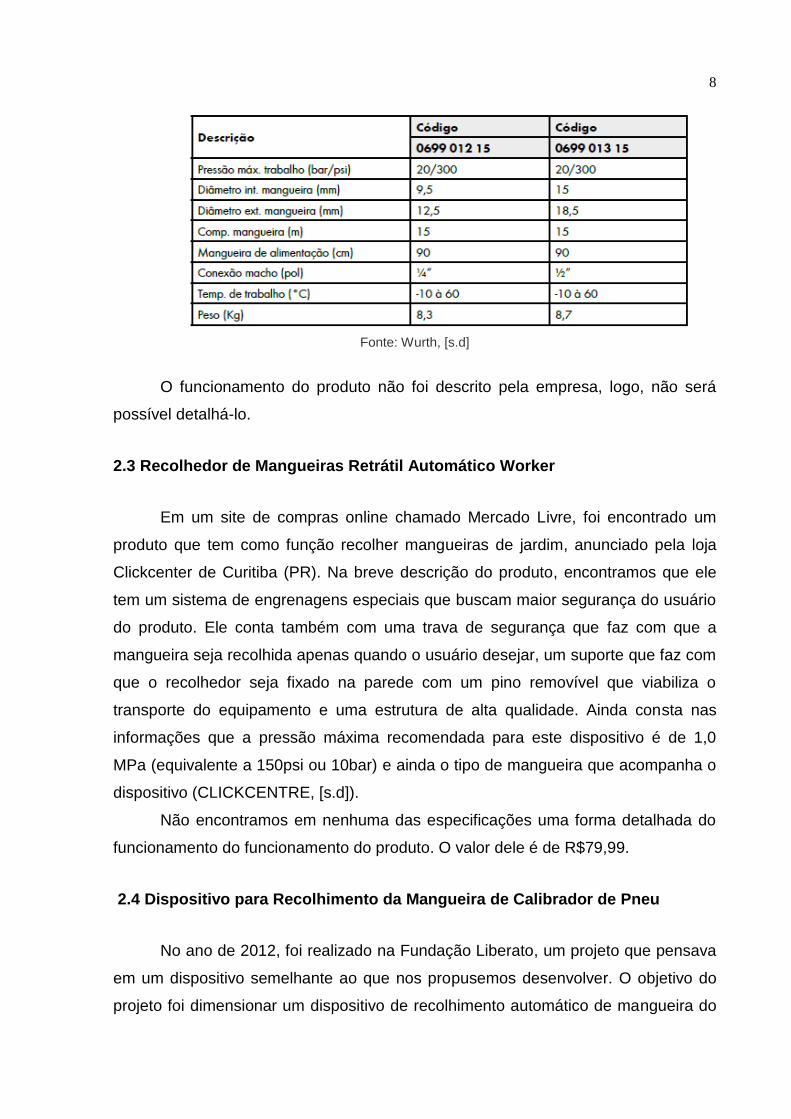
Figura 1. Tabela de descrição de carretel retrátil da empresa Wurth
8
Fonte: Wurth, [s.d]
O funcionamento do produto não foi descrito pela empresa, logo, não será
possível detalhá-lo.
2.3 Recolhedor de Mangueiras Retrátil Automático Worker
Em um site de compras online chamado Mercado Livre, foi encontrado um
produto que tem como função recolher mangueiras de jardim, anunciado pela loja
Clickcenter de Curitiba (PR). Na breve descrição do produto, encontramos que ele
tem um sistema de engrenagens especiais que buscam maior segurança do usuário
do produto. Ele conta também com uma trava de segurança que faz com que a
mangueira seja recolhida apenas quando o usuário desejar, um suporte que faz com
que o recolhedor seja fixado na parede com um pino removível que viabiliza o
transporte do equipamento e uma estrutura de alta qualidade. Ainda consta nas
informações que a pressão máxima recomendada para este dispositivo é de 1,0
MPa (equivalente a 150psi ou 10bar) e ainda o tipo de mangueira que acompanha o
dispositivo (CLICKCENTRE, [s.d]).
Não encontramos em nenhuma das especificações uma forma detalhada do
funcionamento do funcionamento do produto. O valor dele é de R$79,99.
2.4 Dispositivo para Recolhimento da Mangueira de Calibrador de Pneu
No ano de 2012, foi realizado na Fundação Liberato, um projeto que pensava
em um dispositivo semelhante ao que nos propusemos desenvolver. O objetivo do
projeto foi dimensionar um dispositivo de recolhimento automático de mangueira do
9
calibrador de pneus, porém o público a que se destinava era de pessoas cadeirantes
que, segundo grupo, tem mais dificuldade nesta parte (ALVES, 2012)
Não encontramos, no entanto, dados relevantes sobre o dispositivo em si,
neste projeto, pois a pesquisa foi mais bibiográfica. O objetivo daquele grupo, de
dimensionar o protótipo, não foi alcançado conforme era a ideia do projeto.
2.5 Motor de Passo
Para realizar o movimento do protótipo deve ser usado um motor de passo. O
motor de passo tem um funcionamento diferente da maioria dos motores, que
quando sofrem uma tensão giram continuamente, pois precisa receber pulsos
elétricos na sequência correta para que assim ele gire e, incrementos separados
(PETRUZELLA, 2013). Já o sistema de passos é utilizado apenas nos sistemas de
controle chamados de “malha aberta”, em que um controlador manda sinais para o
motor com a quantidade de passos que este deve mover e também informa em qual
velocidade isso deve ocorrer (PETRUZELLA, 2013).
2.6 Arduino
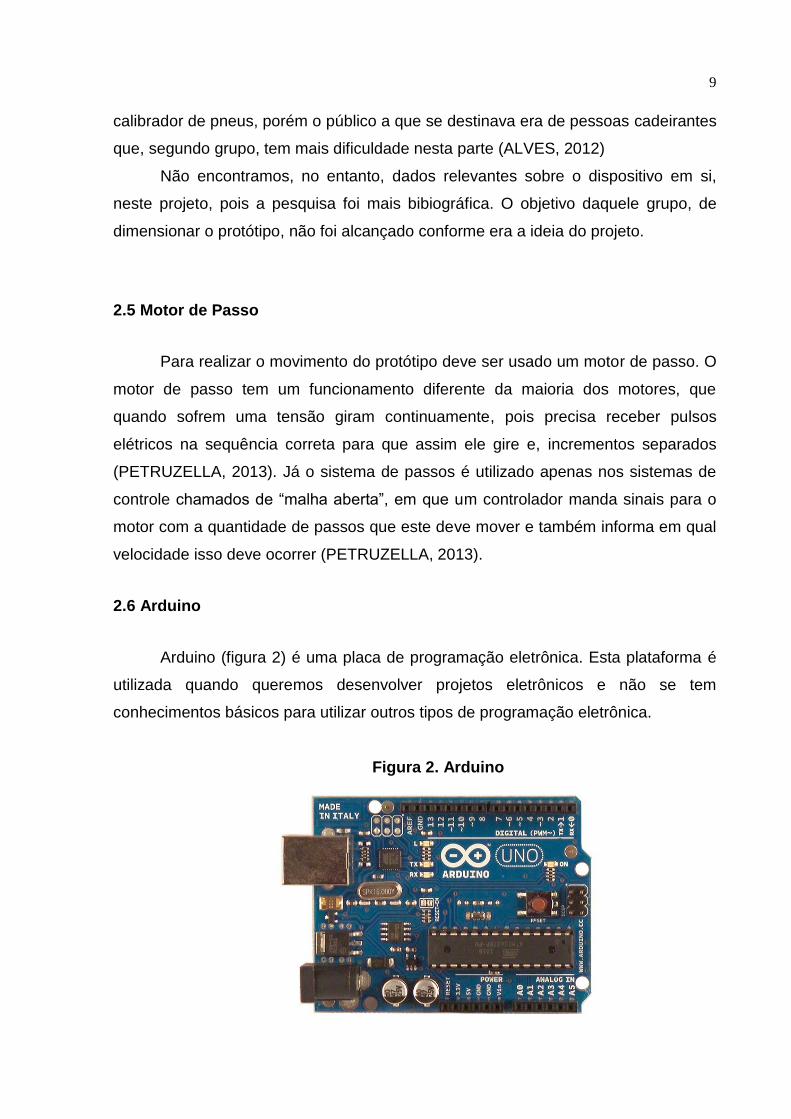
Arduino (figura 2) é uma placa de programação eletrônica. Esta plataforma é
utilizada quando queremos desenvolver projetos eletrônicos e não se tem
conhecimentos básicos para utilizar outros tipos de programação eletrônica.
Figura 2. Arduino
10
Fonte: Soares, 2013
A placa é de fácil acesso, por ser de código aberto, e pode ser programada
com software e hardware (ARDUINO, 2016).
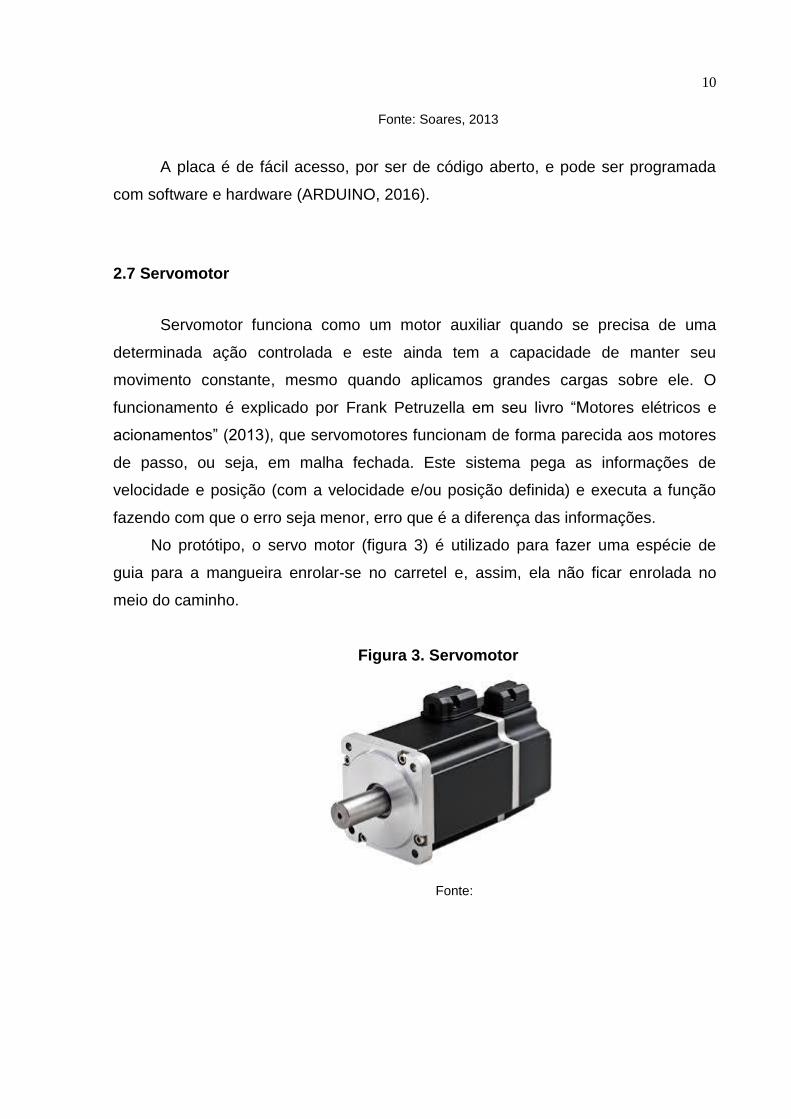
2.7 Servomotor
Servomotor funciona como um motor auxiliar quando se precisa de uma
determinada ação controlada e este ainda tem a capacidade de manter seu
movimento constante, mesmo quando aplicamos grandes cargas sobre ele. O
funcionamento é explicado por Frank Petruzella em seu livro “Motores elétricos e
acionamentos” (2013), que servomotores funcionam de forma parecida aos motores
de passo, ou seja, em malha fechada. Este sistema pega as informações de
velocidade e posição (com a velocidade e/ou posição definida) e executa a função
fazendo com que o erro seja menor, erro que é a diferença das informações.
No protótipo, o servo motor (figura 3) é utilizado para fazer uma espécie de
guia para a mangueira enrolar-se no carretel e, assim, ela não ficar enrolada no
meio do caminho.
Figura 3. Servomotor
Fonte:
11
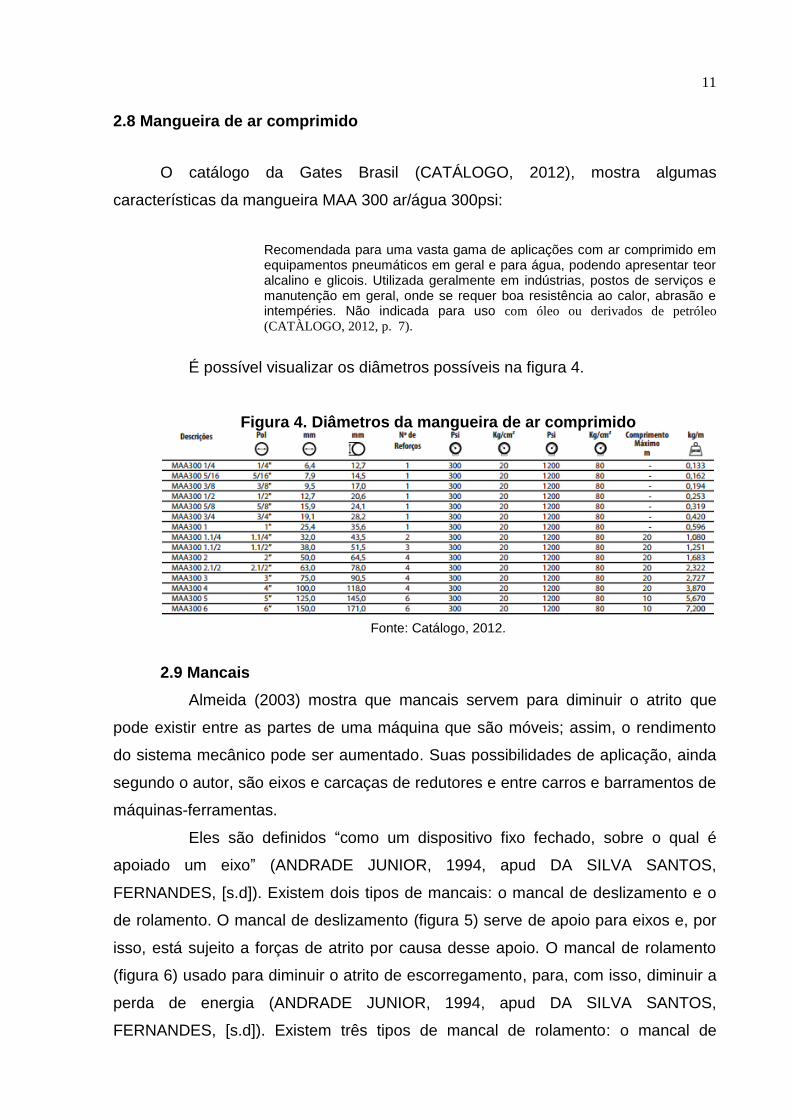
2.8 Mangueira de ar comprimido
O catálogo da Gates Brasil (CATÁLOGO, 2012), mostra algumas
características da mangueira MAA 300 ar/água 300psi:
Recomendada para uma vasta gama de aplicações com ar comprimido em equipamentos pneumáticos em geral e para água, podendo apresentar teor alcalino e glicois. Utilizada geralmente em indústrias, postos de serviços e manutenção em geral, onde se requer boa resistência ao calor, abrasão e intempéries. Não indicada para uso com óleo ou derivados de petróleo
(CATÀLOGO, 2012, p. 7).
É possível visualizar os diâmetros possíveis na figura 4.
Figura 4. Diâmetros da mangueira de ar comprimido
Fonte: Catálogo, 2012.
2.9 Mancais
Almeida (2003) mostra que mancais servem para diminuir o atrito que
pode existir entre as partes de uma máquina que são móveis; assim, o rendimento
do sistema mecânico pode ser aumentado. Suas possibilidades de aplicação, ainda
segundo o autor, são eixos e carcaças de redutores e entre carros e barramentos de
máquinas-ferramentas.
Eles são definidos “como um dispositivo fixo fechado, sobre o qual é
apoiado um eixo” (ANDRADE JUNIOR, 1994, apud DA SILVA SANTOS,
FERNANDES, [s.d]). Existem dois tipos de mancais: o mancal de deslizamento e o
de rolamento. O mancal de deslizamento (figura 5) serve de apoio para eixos e, por
isso, está sujeito a forças de atrito por causa desse apoio. O mancal de rolamento
(figura 6) usado para diminuir o atrito de escorregamento, para, com isso, diminuir a
perda de energia (ANDRADE JUNIOR, 1994, apud DA SILVA SANTOS,
FERNANDES, [s.d]). Existem três tipos de mancal de rolamento: o mancal de
12
rolamento de esferas que é utilizado em altas rotações; o de roletes, que serve para
velocidades menores e cargas maiores; e, por fim, o de agulha que é utilizado para
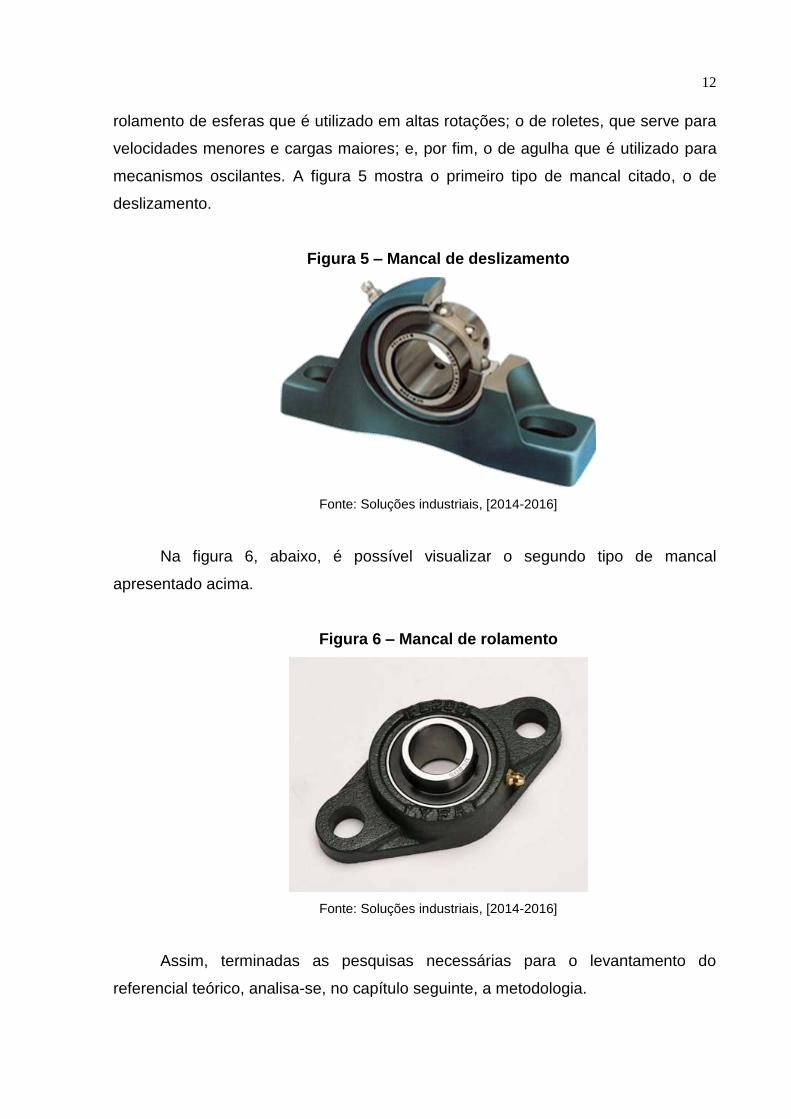
mecanismos oscilantes. A figura 5 mostra o primeiro tipo de mancal citado, o de
deslizamento.
Figura 5 – Mancal de deslizamento
Fonte: Soluções industriais, [2014-2016]
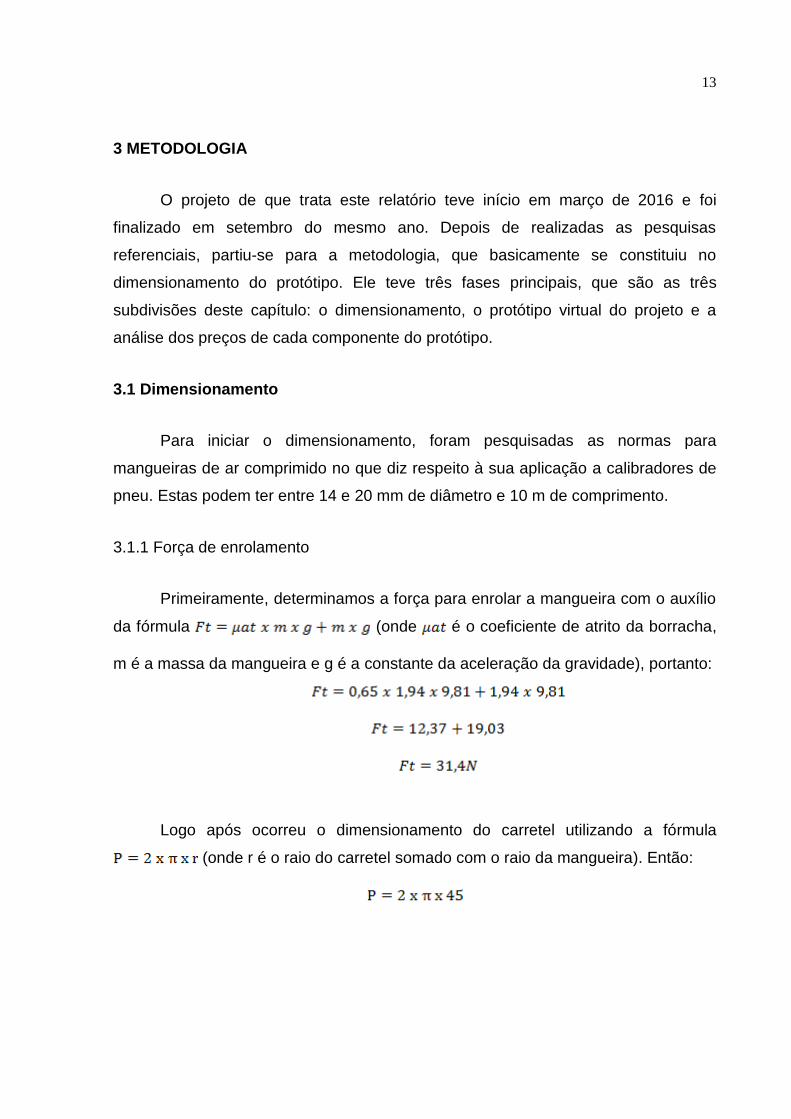
Na figura 6, abaixo, é possível visualizar o segundo tipo de mancal
apresentado acima.
Figura 6 – Mancal de rolamento
Fonte: Soluções industriais, [2014-2016]
Assim, terminadas as pesquisas necessárias para o levantamento do
referencial teórico, analisa-se, no capítulo seguinte, a metodologia.
13
3 METODOLOGIA
O projeto de que trata este relatório teve início em março de 2016 e foi
finalizado em setembro do mesmo ano. Depois de realizadas as pesquisas
referenciais, partiu-se para a metodologia, que basicamente se constituiu no
dimensionamento do protótipo. Ele teve três fases principais, que são as três
subdivisões deste capítulo: o dimensionamento, o protótipo virtual do projeto e a
análise dos preços de cada componente do protótipo.
3.1 Dimensionamento
Para iniciar o dimensionamento, foram pesquisadas as normas para
mangueiras de ar comprimido no que diz respeito à sua aplicação a calibradores de
pneu. Estas podem ter entre 14 e 20 mm de diâmetro e 10 m de comprimento.
3.1.1 Força de enrolamento
Primeiramente, determinamos a força para enrolar a mangueira com o auxílio
da fórmula (onde é o coeficiente de atrito da borracha,
m é a massa da mangueira e g é a constante da aceleração da gravidade), portanto:
Logo após ocorreu o dimensionamento do carretel utilizando a fórmula
(onde r é o raio do carretel somado com o raio da mangueira). Então:
14
3.1.2 Carretel
Para o carretel onde a mangueira deverá ser enrolada, primeiramente, foi
determinado que o seu diâmetro deveria ser de 50 mm, após uma série de cálculos
para ver se a dimensão suportaria o peso da mangueira e também se com este
diâmetro a mangueira poderia dar o número de voltas desejado. Com esta
dimensão, o perímetro de enrolamento da mangueira seria de 210 mm, ou seja, a
cada volta que o carretel desse em seu eixo seriam enrolados 21 cm de mangueira.
Determinou-se que a melhor maneira de enrolamento seria se a mangueira fosse
enrolada em 30 voltas, para que o processo não fosse tão lento e o usuário
realmente tenha a otimização do seu tempo. Ao levar em conta a força que seria
necessária para enrolar, foi preciso fazer alterações em algumas partes do desenho
do protótipo. O diâmetro do carretel, portanto, deveria ser de 150 mm e seu
comprimento, 375 mm. Com esses valores, teríamos um perímetro de 534 mm e
seriam necessárias 18 voltas para enrolar os 10 m de mangueira.
3.1.3 Mancais
São estruturas projetadas para suportar forças axiais e também radias, ou a
combinação das duas, conforme já visto. Existem dois tipos de mancais os de
rolamento e os de deslizamento (ALMEIDA, 2013).
Após as leituras chegou-se a conclusão que para este protótipo deveria ser
usado mancal pedestal com rolamento ucd 204 e eixo de 20 mm.
3.1.4 Varão
É uma espécie de eixo roscado que neste protótipo tem a função de
movimentar o posicionador da mangueira. A peça é de fabricação própria dos
alunos, portanto tem custos praticamente irrisórios.
3.1.5 Posicionador
Posicionador é uma peça com dois furos que, no protótipo tem o objetivo de
posicionar a mangueira no carretel de forma que esta se enrole da melhor maneira.
Este posicionador ficará acoplado ao varão, em um dos furos, e, quando
15
movimentado, transferirá seu movimento fazendo com que o posicionador se mova
horizontalmente. No outro furo ficará acoplada a mangueira. O posicionador pode
ser fabricado pelo grupo ou encomendado em alguma loja.
3.1.6 Motor
Definimos que o motor a ser utilizado deve ser um NEMA (National Elerical
Manufecturers Assosiation) 23. Segundo o professor orientador do projeto, este seria
o melhor motor para desenvolvimento deste protótipo, pois para puxar 10 m de
mangueira é necessário um motor que tenha um torque alto, pois a mangueira é
pesada. O motor tem corrente de 2,40A, torque de 7,60 kgf.cm e tensão de 4,32Vdc
(NEYOMA, [s.d]).
3.1.7 Rolamento
É encontrado dentro dos mancais. Ele auxilia na rotação que é feita pelo
motor, soldado a uma engrenagem motora, que está ligada ao carretel, fazendo com
que ele se mova. Com isto outra engrenagem ligada ao carretel é acionada. Esta
engrenagem está soldada ao varão, que se movimenta e desloca o posicionador
horizontalmente, fazendo com que a mangueira se enrole sem interferências.
3.1.8 Engrenagens
Para este protótipo foram selecionadas duas engrenagens, uma motora e
outra reta. Elas foram dimensionadas pelo grupo, definimos que a engrenagem
motora deve ter 80 dentes, enquanto a outra, 16 dentes. Enquanto a maior
engrenagem realiza uma volta a menor, cinco. A segunda engrenagem tem a função
de girar um fuso, de passo 2 mm com duas entradas.
3.1.9 Arduino
Existem diversos tipos de placa arduino, cada uma das placas tem uma
quantidade diferente de portas e especificações próprias. O grupo decidiu que a
melhor escolha para a programação deste dispositivo seria a placa Arduino Mini,
pois esta placa é ideal para projetos fixos, que não precisem de uma manutenção
16
constante em sua estrutura (ARDUINO, 2016; THOMSEN, 2014), como é o caso do
protótipo do grupo.
Esta placa funciona com o microcontrolador ATmega168 que roda a 8Mhz na
versão 3.3v ou 16Mhz na versão 5v. Nesta placa temos 14 portas digitais (6 delas
usadas como PWM) e 8 portas analógicas, esta placa não tem alimentação externa,
USB (ARDUINO, 2016; THOMSEN, 2104) (GENUINO, 2016)
3.2 Protótipo Virtual
Como não foi possível desenvolver um protótipo físico, devido ao alto custo
da produção, fizemos um protótipo virtual no Software Inventor, feito pela empresa
Autodesk. Que “[...] oferece ferramentas profissionais de engenharia mecânica 3D,
documentos e simulação de produtos.” (AUTODESK, 2016).
Inicialmente partiu-se de um primeiro esboço e também pelos resultados
encontrados no dimensionamento. Para desenhar no software foi necessária a ajuda
do Professor Fábio, professor orientador do grupo e também professor da disciplina
de CAD da Fundação Liberato.
Uma breve explicação de como funcionaria o recolhedor é valida. A
mangueira de compressor seria acoplada ao carretel por meio de um acoplador, que
estaria conectado a um conector e este estaria ligado a mangueira. Esses estariam
no interior do carretel e a mangueira sairia em por um furo no fim do mesmo. Ao
clicar em um botão, o arduíno seria acionado e, faria com que o motor girasse uma
engrenagem motora de oitenta dentes e o carretel. A engrenagem motora giraria
uma outra engrenagem, essa com 16 dentes. A cada volta da motora, a menor daria
cinco voltas. Ligado a engrenagem menor se encontraria o varão, que teria uma
rosca com passo de 4 mm. O posicionador da mangueira estaria conectado a esse
conjunto e teria três furos, um para o varão, um para a guia do mesmo, e outro para
a mangueira. A engrenagem motora, ao dar uma volta, deslocaria o posicionador 20
mm e por consequência a mangueira.

17
Figura 7 – Vista superior do protótipo detalhado
Fonte: Os autores.
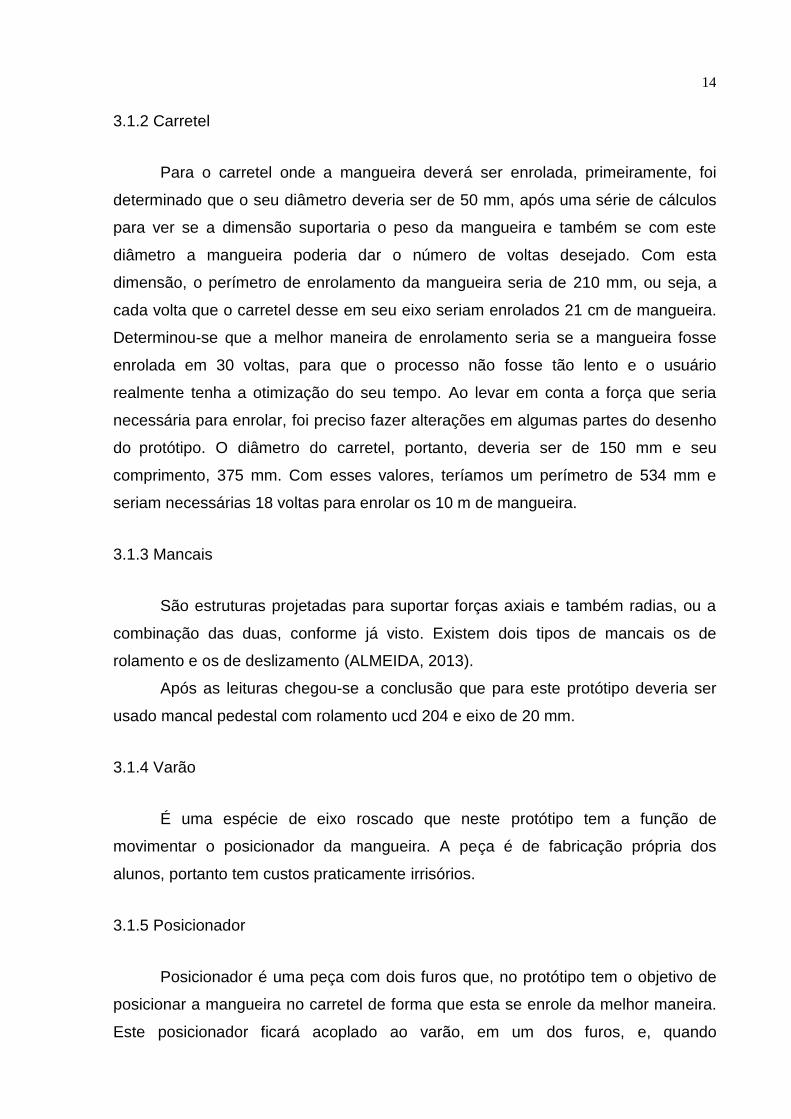
Pode ser relevante também, como seria fabricado o protótipo. A estrutura
seria comprada em uma empresa que faz peças por encomenda. Os acopladores(4)
seriam roscados no mancal esquerdo(6) e o conector(5) é encaixado com o
acoplador, permitindo a passagem do ar. O carretel(1) seria firmado pelos
mancais(6), que estariam parafusados a dois apoios(8) e o mesmo teria duas
paredes(7). A engrenagem motora(3) estaria suspensa(apoiada) pelo eixo de
apoio(2), que por sua vez, estaria soldado a parede do carretel. A engrenagem
menor, de 16 dentes, estaria conectada a um eixo que estaria acoplado a um
rolamento na parede próxima a mesma. O fuso(varão)(11) estaria soldado à
engrenagem menor e a guia(10) do mesmo estaria soldada às paredes da estrutura.
O posicionador estaria vinculado aos dois. O motor(12) estaria ligado ao eixo de
apoio(2) e parafusado na parede da da estrutura. O arduino estaria parafusado à
parede da estrutura assim como o motor e o botão estaria na parte da frente, na
direira, da estrutura. A parte base da estrutura teria um rasgo no meio para passar a
mangueira.
Concluído esse levantamento metodológico, conforme proposto no início do
capítulo, faz-se necessário expor a análise dos resultados obtidos. Essa análise é
apresentada no próximo capítulo. A seguir segue uma imagem de como seria o
protótipo mostrando as partes mencionadas acima. Segue uma imagem do protótipo
em três dimensões:
Figura 8 – Protótipo virtual sem a estrutura na parte da frente
18
Fonte: Os Autores.
19
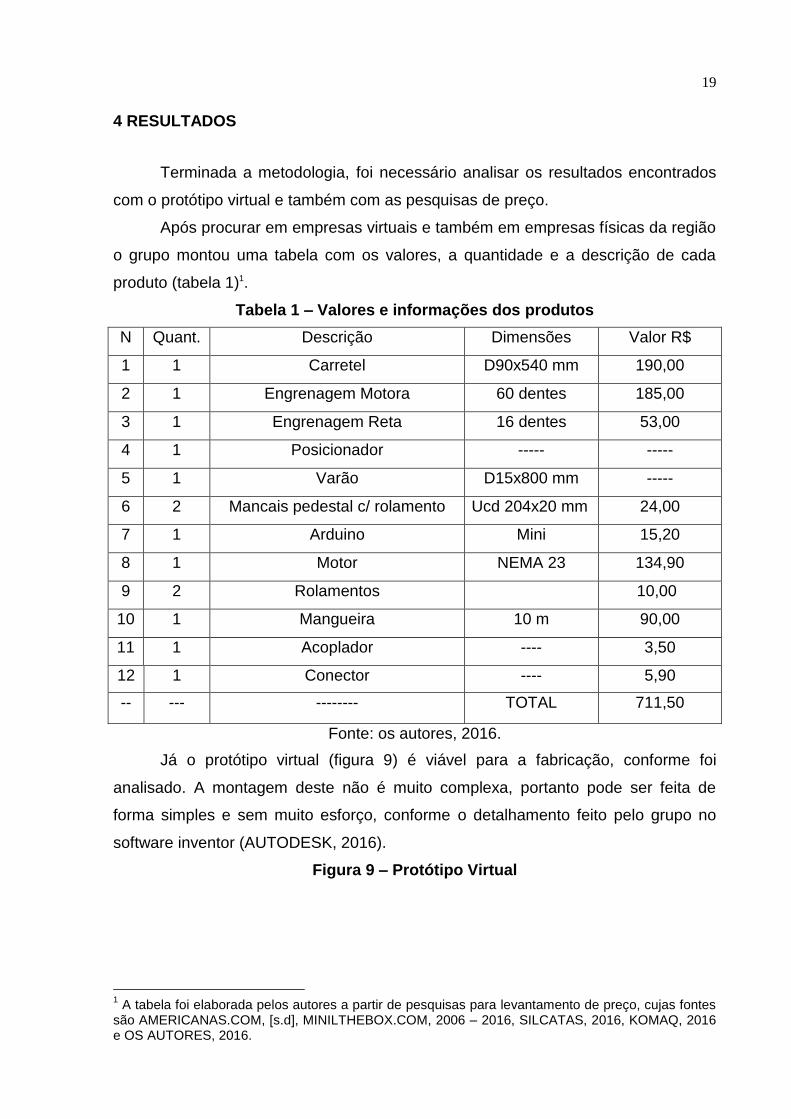
4 RESULTADOS
Terminada a metodologia, foi necessário analisar os resultados encontrados
com o protótipo virtual e também com as pesquisas de preço.
Após procurar em empresas virtuais e também em empresas físicas da região
o grupo montou uma tabela com os valores, a quantidade e a descrição de cada
produto (tabela 1)1.
Tabela 1 – Valores e informações dos produtos
N Quant. Descrição Dimensões Valor R$
1 1 Carretel D90x540 mm 190,00
2 1 Engrenagem Motora 60 dentes 185,00
3 1 Engrenagem Reta 16 dentes 53,00
4 1 Posicionador ----- -----
5 1 Varão D15x800 mm -----
6 2 Mancais pedestal c/ rolamento Ucd 204x20 mm 24,00
7 1 Arduino Mini 15,20
8 1 Motor NEMA 23 134,90
9 2 Rolamentos 10,00
10 1 Mangueira 10 m 90,00
11 1 Acoplador ---- 3,50
12 1 Conector ---- 5,90
-- --- -------- TOTAL 711,50
Fonte: os autores, 2016.
Já o protótipo virtual (figura 9) é viável para a fabricação, conforme foi
analisado. A montagem deste não é muito complexa, portanto pode ser feita de
forma simples e sem muito esforço, conforme o detalhamento feito pelo grupo no
software inventor (AUTODESK, 2016).
Figura 9 – Protótipo Virtual
1 A tabela foi elaborada pelos autores a partir de pesquisas para levantamento de preço, cujas fontes
são AMERICANAS.COM, [s.d], MINILTHEBOX.COM, 2006 – 2016, SILCATAS, 2016, KOMAQ, 2016 e OS AUTORES, 2016.

20
Fonte: Os autores, 2016.
21
5 CONCLUSÃO
O dispositivo para enrolar mangueiras automático é uma ferramenta que visa
o enrolamento da mangueira do calibrador de pneu ao redor de um carretel com o
auxílio de um motor de passo e outros componentes. A partir disso, o motor gira,
fazendo com que a mangueira enrole-se de forma organizada, graças a um
posicionador acoplado na parte de baixo, ao redor de um carretel.
O principal objetivo deste projeto era desenvolver um protótipo físico do
dispositivo. Porém, isso não foi possível devido ao alto valor para a sua produção.
Entretanto, o dimensionamento do protótipo foi feito, como também um protótipo
virtual do mesmo com todo o seu detalhamento e provando que o desenvolvimento
deste é possível. Assim, fica para um próximo trabalho o desenvolvimento físico do
projeto, se encontradas formas alternativas de obtenção de recursos.
22
REFERÊNCIAS
ALMEIDA, Francisco José de. Elementos de máquinas - Mancais, 2003, p.1-12. Apostila. Disponível em http://goo.gl/AMjvHI Acesso em
AMERICANAS.COM. Motor de passo NEMA 23. [s.d] Disponível em:
http://goo.gl/EYdSvt Acesso 09 set. 2016.
ARDUINO home. 2016. Disponível em: http://goo.gl/k9elIx Acesso em abr. 2016
AUTODESK. Inventor. 2016. Disponível em: http://goo.gl/9FD8rq Acesso em 08 set. 2016.
CATÁLOGO. Mangueiras Industriais, Gates. 2012. Disponível em: http://goo.gl/6BS12b. Acesso em abr. 2016.
CLICKCENTER, Loja. Recolhedor de Mangueira Retrátil Automático Worker. Disponível em: http://goo.gl/Zva1ra. Acesso em 28 de jun. de 2016.
DA SILVA, Débora Ariana Correa; SANTOS, Érika Barbosa dos; FERNANDES, Ulysses de Barros. Conceitos essenciais sobre mancais de rolamento e de deslizamento. Tecnologia em Mecatrônica Industrial. Faculdade de Tecnologia da Garça, [s.d]. Disponível em: http://goo.gl/Abyk6e Acesso em: 18 jul. 2016.
DA SILVA, Guilherme. Recolhedor de Mangueiras Automático. Vídeo. Disponível em: http://goo.gl/OIVZ5F Acesso em 28 de jun. de 2016.
GENUINO. Arduino products: Arduino Pro Mini, 2016. Disponível em http://goo.gl/XH8l1J Acesso em 27 ago. 2016
KONMAQ, Equipamentos. Engrenagem 16 dentes retos. 2016. Disponível em: http://goo.gl/hNI6Cu Acesso em 10 set. 2016.
23
MECTROL. Servo Motor [s.d]. Disponível em: http://goo.gl/91EQm Acesso em 08 set. 2016.
MINILNTHEBOX.COM. Módulo PRO MINI Atmega328. [2006-2016] Disponível em:
http://goo.gl/bX6SJU Acesso em 10 set. 2016.
NEOYAMA. Motor de Passo - NEMA: 23. Joiville, [s.d]. Disponível em: http://goo.gl/qEB323 Acesso em 27 ago. 2016.
PETRUZELLA, Frank. Motores elétricos e acionamentos. 1. Porto Alegre, Bookman, 2013.
SILCATAS. Engrenagem 80 dentes. 2016. Disponível em: http://goo.gl/9j1RbE
Acesso em 10 set. 2016
SOARES, Karla. Techtudo. G1. 04 de outubro de 2013. Disponível em: http://goo.gl/IX6rhn Acesso em 15 ago. 2016
SOLUÇÕES INDUSTRIAIS. [2014-2016] Disponível em: http://goo.gl/k9UKcs Acesso em 18 jul. 2016.
THOMSEN, Adilson. Qual arduino comprar? Blog Felipeflop, 2014. Disponível em http://goo.gl/A2Jx9P Acesso em 27 ago. 2016.
XRT – FABRICANTE DE ROLAMENTO DE PRECISÃO. Disponível em: http://goo.gl/LL4XhU Acesso em 18 jul. 2016.
WURTH. Carretel Pneumático. Disponível em: http://goo.gl/ukv2vN. Acesso em 28 de jun. de 2016.
.
24
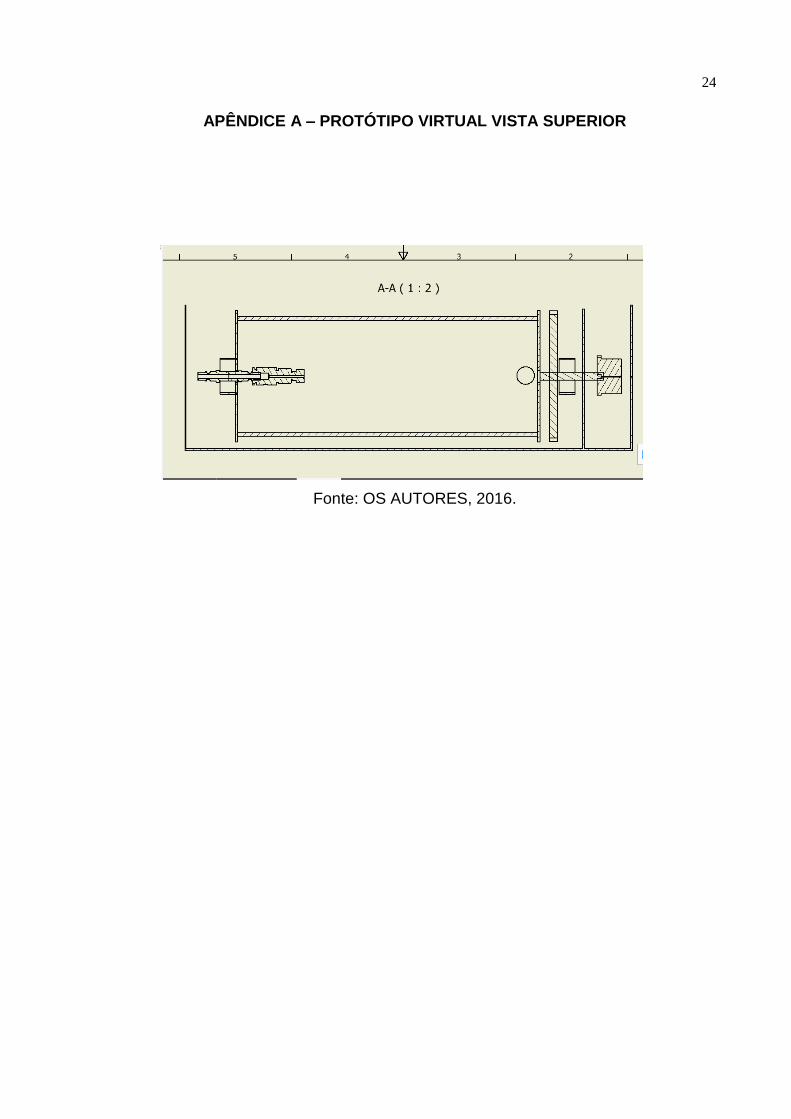
APÊNDICE A – PROTÓTIPO VIRTUAL VISTA SUPERIOR
Fonte: OS AUTORES, 2016.
