disciplina de cálculo numérico · arbitramento de um valor, que tem por objetivo determinar um...
TRANSCRIPT

Engenharia de Telecomunicações (1º Ano – 2º Semestre)
ISUTIC - Instituto Superior para as Tecnologias de Informação e
Comunicação
Disciplina de Cálculo
Numérico

Instituto Superior para Tecnologias de Informação e Comunicação - ISUTIC
Disciplina de Cálculo Nunérico – 1º Ano – 2º Semestre 1
ÍNDICE
Capítulo 1 – ERROS
Capítulo 2 – ZEROS DAS FUNÇÕES
Capítulo 3 – SISTEMAS DE EQUAÇÕES LINEARES – SELA`s
Capítulo 4 – INTERPOLAÇÃO
Capítulo 5 – AJUSTE DE CURVA
Capítulo 6 – INTEGRAÇÃO NUMÉRICA
Instituto Superior para Tecnologias de Informação e Comunicação - ISUTIC
Disciplina de Cálculo Numérico – 1o Ano – 2º Semestre 2
CAPÍTULO 1
ERROS
1.1 – INTRODUÇÃO
A obtenção de uma solução numérica para um problema físico por meio de métodos numéricos nem sempre fornece valores dentro de limites razoáveis. Esta afirmação é correta mesmo quando se aplica um método adequado e os cálculos são efetuados de uma maneira correta.
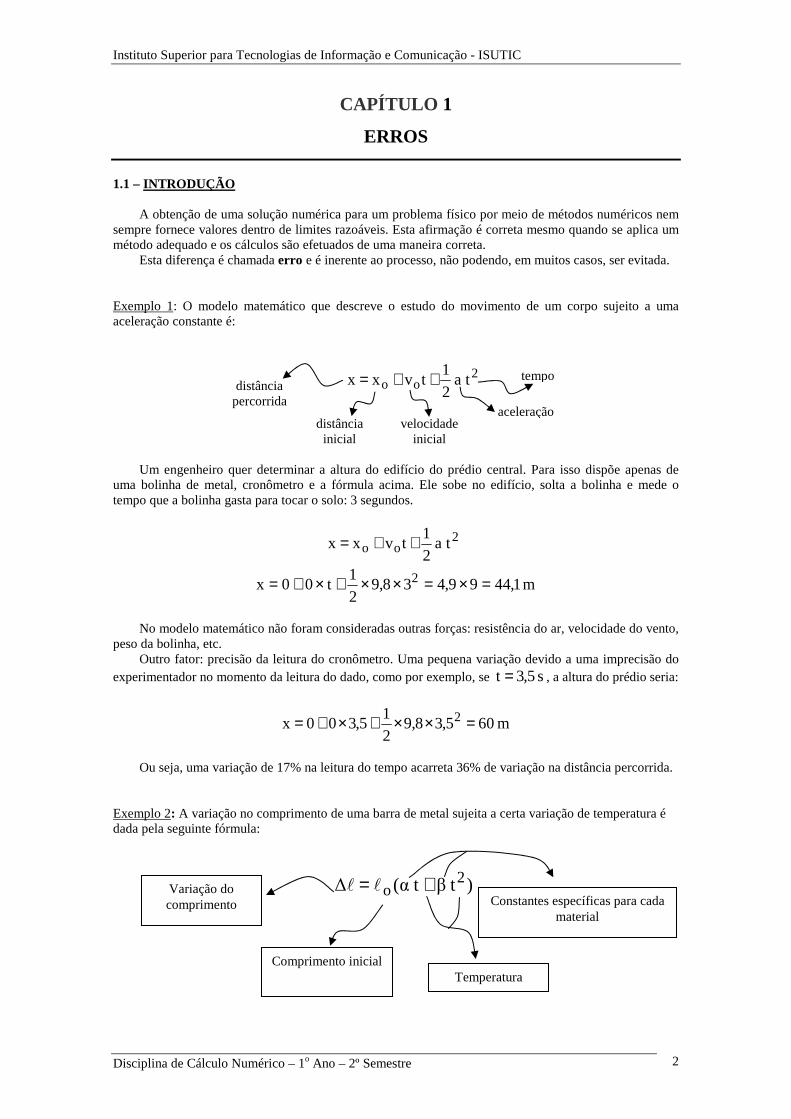
Esta diferença é chamada erro e é inerente ao processo, não podendo, em muitos casos, ser evitada. Exemplo 1: O modelo matemático que descreve o estudo do movimento de um corpo sujeito a uma aceleração constante é:
2oo t a
2
1tvxx ++=
Um engenheiro quer determinar a altura do edifício do prédio central. Para isso dispõe apenas de uma bolinha de metal, cronômetro e a fórmula acima. Ele sobe no edifício, solta a bolinha e mede o tempo que a bolinha gasta para tocar o solo: 3 segundos.
2oo t a
2
1tvxx ++=
m 1,4499,43 8,9 2
1t00x 2 =×=××+×+=
No modelo matemático não foram consideradas outras forças: resistência do ar, velocidade do vento,
peso da bolinha, etc. Outro fator: precisão da leitura do cronômetro. Uma pequena variação devido a uma imprecisão do
experimentador no momento da leitura do dado, como por exemplo, se s 5,3t = , a altura do prédio seria:
m 605,38,92
15,300x 2 =××+×+=
Ou seja, uma variação de 17% na leitura do tempo acarreta 36% de variação na distância percorrida.
Exemplo 2: A variação no comprimento de uma barra de metal sujeita a certa variação de temperatura é dada pela seguinte fórmula:
)t β t α(∆ 2o += ll
distância percorrida
distância inicial
aceleração velocidade
inicial
tempo
Variação do comprimento
Comprimento inicial Temperatura
Constantes específicas para cada material

Instituto Superior para Tecnologias de Informação e Comunicação - ISUTIC
Disciplina de Cálculo Numérico – 1o Ano – 2º Semestre 3
Um físico quer determinar a variação no comprimento de uma barra de metal quando sujeita a uma
variação de temperatura de 10ºC, sendo:
m1o =l
000068,0
001253,0
=β=α
Então:
m 0,019330 )10 . 0,000068 10 . (0,001253 . 1 2 =+=∆l
Como os valores de α e β foram obtidos experimentalmente com a precisão da ordem de 610− ,
tem-se:
001254,0001252,0 <α<
000069,0000067,0 <β<
Então:
m 0,019220 )10 . 0,000067 10 . (0,001252 . 1 2 =+>∆l
m 0,019440 )10 . 0,000069 10 . (0,001254 . 1 2 =+<∆l
Logo:
m 0,019440 019220,0 <∆< l
Ou, ainda:
m 10 0,0193 4−±=∆l
OBS: Veja que uma imprecisão na sexta casa decimal de α e β implicou numa imprecisão na quarta
casa decimal de l∆ . Neste caso temos uma imprecisão dos dados de entrada. O processo de uma solução numérica de um problema físico por meio da aplicação de métodos
numéricos é representado segundo o diagrama:
PROBLEMA FÍSICO
MODELO MATEMÁTICO
SOLUÇÃO modelagem resolução
Através de um dado problema físico
Raramente se tem uma descrição correta desse fenômeno
Constrói-se um
Instrumentos de cálculo que necessitam que sejam feitas certas aproximações
Obtém-se a solução com a aplicação de métodos numérico
Obtidos experimentalmente
Instituto Superior para Tecnologias de Informação e Comunicação - ISUTIC
Disciplina de Cálculo Numérico – 1o Ano – 2º Semestre 4
Os erros são cometidos em todos os passos do esquema: MODELAGEM: erros iniciais ou inerentes RESOLUÇÃO: erros de arredondamento e truncamento É de vital importância conhecer os tipos de erros a que estão sujeitos os métodos numéricos para
identificá-los, quantifica-los, evita-los, minimiza-los e controla-los.
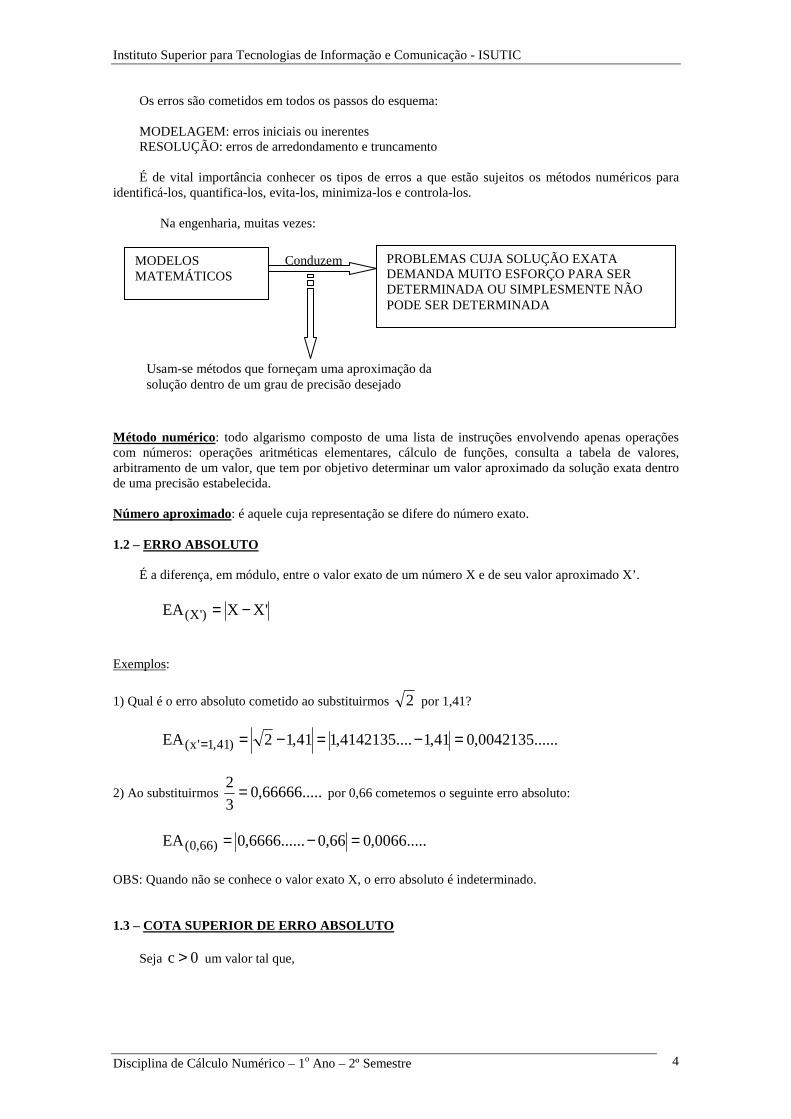
Na engenharia, muitas vezes: Método numérico: todo algarismo composto de uma lista de instruções envolvendo apenas operações com números: operações aritméticas elementares, cálculo de funções, consulta a tabela de valores, arbitramento de um valor, que tem por objetivo determinar um valor aproximado da solução exata dentro de uma precisão estabelecida. Número aproximado: é aquele cuja representação se difere do número exato. 1.2 – ERRO ABSOLUTO
É a diferença, em módulo, entre o valor exato de um número X e de seu valor aproximado X’.
'XXEA )'X( −=
Exemplos:
1) Qual é o erro absoluto cometido ao substituirmos 2 por 1,41?
......0042135,041,1....4142135,141,12EA )41,1'x( =−=−==
2) Ao substituirmos .....66666,03
2 = por 0,66 cometemos o seguinte erro absoluto:
.....0066,066,0......6666,0EA )66,0( =−=
OBS: Quando não se conhece o valor exato X, o erro absoluto é indeterminado. 1.3 – COTA SUPERIOR DE ERRO ABSOLUTO
Seja 0c > um valor tal que,
MODELOS MATEMÁTICOS
PROBLEMAS CUJA SOLUÇÃO EXATA DEMANDA MUITO ESFORÇO PARA SER DETERMINADA OU SIMPLESMENTE NÃO PODE SER DETERMINADA
Conduzem
Usam-se métodos que forneçam uma aproximação da solução dentro de um grau de precisão desejado

Instituto Superior para Tecnologias de Informação e Comunicação - ISUTIC
Disciplina de Cálculo Numérico – 1o Ano – 2º Semestre 5
c'XXEA )'X( <−=
Onde m105,0c −×= . O valor de m indica que a aproximação X’ do valor exato X possui pelo
menos as m primeiras casas decimais corretas. Exemplo: se tomarmos a aproximação 3,1428 para o número irracional ....141592,3π = , o erro
absoluto cometido nesta aproximação é da ordem de:
2)1428,3( 105,0001207,01428,3πEA −×<=−=
A aproximação 'π de π possui somente as duas primeiras casas decimais corretas.
1.4 – ERRO RELATIVO
O erro relativo é definido como:
( )'X
'XX
'X
EAER
'X)'X(
−==
Erro percentual relativo é:
ER100EPR ×= Exemplos:
00005,0'X
00006,0X
==
� ( )( ) 20% 2,0ER
00001,0EA
'X
'X
=>=
=
100000'Y
100500Y
==
� ( )( ) 0,5% 005,0ER
500EA
'Y
'Y
=>=
=
Qual foi a aproximação mais precisa?
( ) ( )'Y'X EAEA < => a aproximação utilizada para X é mais precisa que Y
( ) ( )'Y'X ERER > => Y é mais preciso
OBS: Quanto menor for o erro relativo maior será a precisão do resultado da equação. 1.5 – ERROS DE ARREDONDAMENTO
Erro cometido quando se assume uma representação decimal finita para um número real que admite representação infinita, através do abandono das casas decimais de mais baixa ordem.
2m =

Instituto Superior para Tecnologias de Informação e Comunicação - ISUTIC
Disciplina de Cálculo Numérico – 1o Ano – 2º Semestre 6
De modo a limitar esse erro a meia unidade da última casa decimal conservada, adota-se o critério universal de arredondamento. • 1º algarismo decimal a ser eliminado <5, o último algarismo conservado fica como está.
• 1º algarismo decimal a ser eliminado 5≥ , o último algarismo conservado é aumentado de uma unidade.
Exemplos:
1) Valor exato: ....7320508,13 = Valor aproximado: 1,732
2) Valor exato: ....5707963,12π = Valor aproximado: 1,571
1.6 – ERROS DE TRUNCAMENTO
Erros provenientes da utilização de processos que deveriam ser infinitos (ou grandes) para a determinação de um valor e que, por razões práticas, são truncados. Essa interrupção gera o erro de truncamento.
Esses processos são utilizados na avaliação de funções matemáticas: exponenciação, logaritmos, funções trigonométricas, etc. Exemplos:
1) ....!7
x
!5
x
!3
xx)x(sen
753+−+−=
2) .......!3
x
!2
xx1e
32x ++++=
3) .....!4
1
!3
1
!2
1
!1
11e +++++=
1.7 - ALGARISMOS SIGNIFICATIVOS
Na matemática aplicada, algarismos significativos são utilizados para monitorar os erros
ao se representar números reais na base 10. Diz-se que uma representação tem n algarismos significativos quando admite-se um erro
no algarismo seguinte da representação.
Exemplos: 1/7 = 0,14 com dois algarismos significativos (já que o erro está na terceira casa decimal: 1/7 = 0,142857142857...). 1/30 = 0,0333 com três algarismos significativo (erro na quinta casa decimal).
Dada uma representação decimal:
1. os algarismos zero que correspondem às ordens maiores não são significativos.

Instituto Superior para Tecnologias de Informação e Comunicação - ISUTIC
Disciplina de Cálculo Numérico – 1o Ano – 2º Semestre 7
Exemplos: em 001234,56 os dois primeiros zeros não são significativos; em 0,000543 os quatro primeiros zeros não são significativos.
2. os algarismos zero que correspondem às menores ordens, se elas são fracionárias, são significativos.
Exemplo: em 12,00 os dois últimos zeros são significativos .
3. os algarismos de 1 a 9 são sempre significativos.
4. zeros entre algarismos de 1 a 9 são significativos.
Exemplo: em 1203,4 todos algarismos são significativos.
5. Se existir uma vírgula decimal, todos os zeros à direita da vírgula decimal são significativos (ex: 1,000 e 33,30 possuem 4 algarismos significativos).
Exemplos: 157,0 � 4 algarismos significativos. 157 � 3 algarismos significativos. 0,00157 � 3 algarismos significativos. 1,3800 � 5 algarismos significativos. 35,6 � 3 algarismos significativos. 3,56 � 3 algarismos significativos. 0,356 � 3 algarismos significativos. 0,00356 � 3 algarismos significativos. Exemplos com potência de 10: 3200 ou 3,2 x 103 � 2 algarismos significativos 3200, ou 3,200 x 103 � 4 algarismos significativos 3200,0 ou 3,2000 x 103 � 5 algarismos significativos 32.050 ou 3,205 x 104 � 4 algarismos significativos 0,032 ou 3,2 x 10-2 � 2 algarismos significativos 0,03200 ou 3,200 x 10-2 � 4 algarismos significativos
OBS: A posição da vírgula não influi no número de algarismos significativos, por exemplo, o comprimento de 0,0240m possui três algarismos significativos e pode ter a posição da vírgula alterado de várias formas usando uma potência de dez adequada, e sem alterar o seu número de algarismos significativos. Veja abaixo:
dm 240,0m10240,0m 0240,0 1 =×= −
cm 40,2m1040,2m 0240,0 2 =×= −
mm 0,24m100,24m 0240,0 3 =×= −
Observe que o número de algarismos significativos é sempre três, independentemente da forma que o número foi escrito e da posição de sua vírgula. Outro ponto importante é que o valor da medida é sempre a mesma, visto que:
0,0240m = 0,240dm = 2,40 cm = 24,0mm.

Instituto Superior para Tecnologias de Informação e Comunicação - ISUTIC
Disciplina de Cálculo Numérico – 1o Ano – 2º Semestre 8
EXERCÍCIOS
1) Se 373,3876A = e só desejarmos a parte inteira A’, qual será o erro absoluto e a cota superior
de erro absoluto cometidos nesta aproximação? 2) Seja o número 2113x = representado por 9,2112'x = e seja o número 2,5y = representado
por 3,5'y = . Pode-se dizer que ambos os números estão representados com a mesma precisão?
3) Qual a cota superior de erro absoluto da aproximação !3
)(3h
hhsen −= para 5,0h −= ?
4) Suponhamos que o valor 6640,0'y = é um valor aproximado de Y=2/3. Das 6 afirmativas
abaixo, estão corretas: a) o valor aproximado tem 5 algarismos significativos; b) o valor aproximado só tem 4 algarismos significativos; c) o valor aproximado só tem 3 algarismos significativos; d) só tem 3 algarismos significativos corretos; e) só tem 2 algarismos significativos corretos; f) só tem 1 algarismo significativo correto. 5) Arredonde e trunque cada um dos números abaixo para 4 algarismos significativos: a) 432431,85 b) 003134499,0 c) 075414,998
6) Para o número arredondado para 4 algarismos significativos do exercício 5-a), determine o erro
absoluto, a cota superior de erro absoluto, o erro relativo e o erro percentual relativo.
7) Determine o erro relativo cometido no cálculo do valor numérico de 523)( 2 −+= xxxy ,
sendo 16,3x = e o erro absoluto cometido nesta medida igual a 001,0 .

Instituto Superior para Tecnologias de Informação e Comunicação - ISUTIC
Disciplina de Cálculo Numérico – 1o Ano – 2º Semestre 9
CAPÍTULO 2
ZEROS DE FUNÇÕES
2.1 – INTRODUÇÃO
Em muitos problemas de Ciência e Engenharia, há necessidade de se determinar um número α para
o qual uma função f(x) seja zero, ou seja, 0)(f =α . O número α é chamado raiz da equação 0)x(f =
ou zero da função f(x).
Para a determinação aproximada de uma raiz, têm-se duas etapas: ETAPA DE ISOLAMENTO e ETAPA DE REFINAMENTO. 1 – Etapa de Isolamento: achar um intervalo [a,b], o menor possível, que contenha uma e somente uma
raiz da equação 0)x(f = .
Enumerar – localizar 2 – Etapa de Refinamento: melhorar o valor da raiz aproximada, isto é, refiná-la, através de métodos
iterativos até o grau de exatidão requerido.
Calcular seus valores, se não exatos, aproximados 2.2 – ETAPA DE ISOLAMENTO Utilizam-se dois métodos distintos para separar as raízes reais de uma função: - Método do TABELAMENTO - Método GRÁFICO 2.2.1 – Método do Tabelamento Nós intervalos em que f(x) for contínua e mudar de sinal enquanto sua derivada f’(x) mantiver seu sinal constante, tem-se garantida a existência de uma única raiz real. Equações Algébricas: quando nas expressões que definem f(x), a variável independente x estiver
submetida apenas às operações fundamentais da álgebra ( ) ,a /,, , , b×−+ .
Ex: 4x3x3
5x)x(f 34 ++−=
x3x41x3)x(f 2 −++=
Equações Transcendentes: quando nas expressões que definem f(x), a variável independente x estiver submetida às operações logarítmicas, exponenciais, trigonométricas e suas inversas.
Ex: 2senxe)x(f x −−=
2)x(arctg)x(f +=
Algumas equações algébricas de 1º e 2º graus, certas classes de 3º e 4º graus e algumas equações transcendentes podem ter suas raízes computadas através de métodos analíticos. Para polinômios de grau maior que 4 e para a grande maioria das equações transcendentes o problema de se calcular as raízes só pode ser resolvido através de métodos que aproximam as soluções. NÃO SE TEM UMA FÓRMULA PARA ACHAR AS RAÍZES.

Instituto Superior para Tecnologias de Informação e Comunicação - ISUTIC
Disciplina de Cálculo Numérico – 1o Ano – 2º Semestre 10
Embora estes métodos não forneçam raízes exatas, elas podem, a menos de limitações de máquinas, serem calculadas com a exatidão que o problema requeira, desde que certas condições sobre f sejam satisfeitas. 2.2.2 – Teorema da Existência e Unicidade – T.E.U I – Seja uma função contínua no intervalo [a,b].
OBS: Continuidade:
Dizer que uma função é contínua em cx = significa que o gráfico de f(x) não tem interrupções em c.
Uma função é descontínua quando: 1 – A função não está definida em x = c. 2 – O limite de f(x) não existe em x = c. - comportamento ilimitado - comportamentos diferentes à esquerda e à direita (saltos) 3 – O limite de f(x) existe em x = c, mas não é igual a f(c). II – A função assume valores com sinais diferentes (opostos) nos pontos extremos do intervalo [a,b] , ou seja, 0f(b) . )a(f < . Neste caso, a função corta o eixo das abscissas uma vez ou um número ímpar de
vezes. III – A derivada de 1ª ordem de )x(f existe e não muda de sinal dentro do intervalo [a,b], ou seja,
0)x('f > ou 0)x('f < para bxa << .
1α
2α
3α
4α
x
f(x)
a b
1αx
f(x)
a
b
x c
f(c)
f(x)
x c1
f(x)
c2 c2 c3

Instituto Superior para Tecnologias de Informação e Comunicação - ISUTIC
Disciplina de Cálculo Numérico – 1o Ano – 2º Semestre 11
* Com a prova do TEU fica garantida a existência de apenas uma raiz real no intervalo [a,b]. * O atendimento apenas de II e III não garante a existência de uma única raiz no intervalo [a,b]. * O atendimento apenas de I e II não garante a existência de uma única raiz no intervalo [a,b].
Exemplo: Localizar as raízes da função 4xe)x(f 2x −+=
x2e)x('f x +=
x ∞− -10 -3 -2 -1 0 1 2 10 ∞
)x(f + + 96 + 5 + 0,13 6,2− 3− 28,0− + 7,38 + 22,1 +
)x('f - - - 8,3− 6,1− + 1 71,4+ 3,11+ + +
Decrescente Crescente
Logo, podemos concluir que em cada um dos intervalos ]1,2[ −− e [1,2] existe apenas uma única
raiz. 2.2.3 – Método Gráfico Para a análise gráfica da função )x(f , ou seja, na análise de 0)x(f = podemos usar um dos
seguintes processos:
2α
x
f(x)
a
b
b][a,x ,0)x('f ∈∀>
2α
x
f(x)
a
b
b][a,x ,0)x('f ∈∀<
f(x)
x crescente
crescente
1α 2α
3α 5α x
f(x)
a
b
+
4α

Instituto Superior para Tecnologias de Informação e Comunicação - ISUTIC
Disciplina de Cálculo Numérico – 1o Ano – 2º Semestre 12
1º) Consiste em plotar o gráfico de )x(fy =
Uma raiz real de uma função é o ponto onde a função f(x) toca o eixo dos x’s.
1α , 2α , 3α e 4α são raízes de f(x) no intervalo [a,b].
0)(f)(f)(f)(f 4321 =α=α=α=α
2º) Consiste em substituir f(x) por duas funções g(x) e h(x) equivalentes a f(x), ou seja, )x(h)x(g)x(f −=
0)x(f =
0)x(h)x(g =−
)x(h)x(g =
)(h)(g 0)(f α=α→=α→α => funções que têm a mesma raiz.
As raízes reais de f(x) corresponderão às abscissas dos pontos de interseção do gráfico de g(x) com o gráfico de h(x)
1α , 2α e 3α são raízes reais de )x(h)x(g)x(f −= no intervalo [a,b].
No 2º processo, representar a função em análise através da subtração de duas componentes e não realizar operações na determinação dessas componentes para não alterar a definição da função original, pode-se perder raízes ou surgir raízes “estranhas”. Exemplos:
0)x(f = => 0)x(h)x(g =− => )x(h)x(g =
1) 030x20x2x)x(f 23 =+−−= 2) 02)x(sene)x(f x =−−=
1α 2α 3α 4α
x
f(x)
a b
1α
3α 3α
x
f(x)
a b
g(x) h(x)

Instituto Superior para Tecnologias de Informação e Comunicação - ISUTIC
Disciplina de Cálculo Numérico – 1o Ano – 2º Semestre 13
23 x2x)x(g −= xe)x(g =
30x20)x(h −= 2)x(sen)x(h +=
3) )x(sen)xlog()x(f 2 += 4) 1xx)x(f +−=
)xlog()x(g 2= x)x(g =
)x(sen)x(h −= 1x)x(h −=
OBS:
0)x(sen)xlog()x(f 2 =+= 01xx)x(f =+−=
)x(sen)xlog( 2 −= 1xx −=
)x(sen)xlog(2 −= 2)1x(x −=
)x(sen 5,0)xlog( −= 1x2xx 2 +−=
? ? ? ? Perda de raiz Aparecimento de uma raiz

Instituto Superior para Tecnologias de Informação e Comunicação - ISUTIC
Disciplina de Cálculo Numérico – 1o Ano – 2º Semestre 14
Exemplo Aula: Encontrar as raízes da função 3x9x)x(f 3 +−= , usando os dois métodos gráficos:
1º Método:
3x9x)x(f 3 +−=
9x3)x('f 2 −=
3x0)x('f ±=⇒=
x f(x) f’(x) 4− 25− 39
3− 3 18
13,3923 0
1− 11 -6 0 3 -9 1 -6
3923,7− 0
2 7− 3
3 3 18 2º Método:
3x9x)x(f 3 +−=
3x)x(g =
3x9)x(h −=
3−
5−3
]3,2[
]1,0[
]3,4[
3
2
1
∈α∈α
−−∈α
]3,2[
]1,0[
]3,4[
3
2
1
∈α∈α
−−∈α

Instituto Superior para Tecnologias de Informação e Comunicação - ISUTIC
Disciplina de Cálculo Numérico – 1o Ano – 2º Semestre 15
2.3 – ETAPA DE REFINAMENTO O método do ISOLAMENTO é uma aproximação inicial da raiz exata α . Esta aproximação é grosseira e precisa ser refinada. Os métodos de aproximação da raiz exata são iterativos. Um método iterativo consiste em uma sequência de instruções que são executadas passo a passo, algumas das quais são repetidas em ciclos (iterações). Os resultados obtidos em cada iteração do processo dependem dos valores calculados na iteração anterior. Principais Métodos: � Método da Bissecção (dicotomia) – divisão ao meio - Método das Partes Proporcionais (da falsa posição) - Método da Iteração Linear � Método de Newton-Raphson - Método das secantes Torna-se necessário estabelecer critérios de parada para esses processos iterativos, porque em alguns casos você realiza infinitas iterações e não determina o valor exato. 2.3.1 – Método da Bissecção - Simples: fácil de aplicar - Seguro: inexistência de descontinuidade no intervalo [a,b]
- Pouco eficiente: de convergência lenta, muitas iterações até que seja atingida a precisão desejada do valor aproximado da raiz (leva à raiz muito lentamente).
- Estrutura baseada no TEU: ter uma única raiz real contida no intervalo de análise [a,b] Consiste em, obtido um intervalo contendo uma única raiz, ir dividindo-o ao meio, sucessivamente, mantendo a raiz enquadrada (num intervalo) até aproximar-se suficientemente dela. Método: )x(f => contínua no intervalo [a,b]
0f(b) . )a(f < => número ímpar de raízes
0)x('f < ou 0)x('f > em [a,b] => uma única raiz
Divide-se [a,b] ao meio, obtém-se xo e tem-se dois subintervalos [a,xo] e [xo,b]:
• Se 0)x(f o = → a raiz α é xo (exato)
• Senão, ela estará no subintervalo onde a função tem sinais opostos nos pontos extremos.
• Se 0)f(x . )a(f o < , ]x,a[ o∈α
• Senão se 0)f(x . )a(f o > , ]b,x[ o∈α
O novo intervalo ]b,a[ 11 que contém α é dividido ao meio e obtém-se x1 e o processo se repete até
que se obtenha uma “boa” aproximação para a raiz exata α . Interpretação geométrica do Método da Bissecção:

Instituto Superior para Tecnologias de Informação e Comunicação - ISUTIC
Disciplina de Cálculo Numérico – 1o Ano – 2º Semestre 16
O processo se repete até que se obtenha uma boa aproximação para a raiz exata α . (atenda-se a tolerância ε ) Número mínimo de iterações necessárias para se alcançar a tolerância pré-fixada:
12ln
)]/)abln[(n −ε−≥
OBS: Se o intervalo inicial é tal que ε>>− ab , a convergência será muito lenta, pois, o numero de interações tende a um número muito grande.
Por exemplo, se 3ab =− e 710−=ε => 25n =
Exemplo Aula: Encontrar a raiz da função 3x9x)x(f 3 +−= , que se encontra no intervalo
]1,0[I2 = com erro de 210−<ε . Usar quatro casas decimais.
Número de interações: 12ln
)]10/)01ln[(n
2−−≥
− => 64,5n ≥ => 6n =
n an + bn - xn f(xn) ε 0 0 1 0,5 -1,3750 0,5 1 0 0,5 0,25 +0,7656 0,25 2 0,25 0,5 0,375 -0,3223 0,125 3 0,25 0,375 0,3125 +0,2180 0,0625 4 0,3125 0,375 0,3438 -0,0536 0,0313 5 0,3125 0,3438 0,3282 +0,0816 0,0157 6 0,3282 0,3438 0,3360 0,0139 0,0078 210−<
Então, 3360,0x6 ==α
f(x)
x ox
a
b 1x 2x
[ ][ ][ ][ ]
M
o2
o1
o
x,x
x,x
x,a
b,a
∈α∈α∈α∈α

Instituto Superior para Tecnologias de Informação e Comunicação - ISUTIC
Disciplina de Cálculo Numérico – 1o Ano – 2º Semestre 17
Exemplo 1: Calcular a raiz da equação 10x)x(f 3 −= , com 1,0<ε e ]3,2[∈α . Usar quatro casas
decimais. Teste do TEU:
1) Contínua no intervalo definido.
2) 2)2(f)a(f −== 0f(b) . )a(f <
17)3(f)b(f == 2
ab−=ε
3) 2x3)x('f =
+= 12)2('f Crescente
+= 27)3('f
+= 2,5 . 3)5,2('f
Número de interações: Se o intervalo é [2,3] e 1,0<ε
12ln
)]1,0/)23ln[(n −−≥ => 32,2n ≥ => 3n =
n an - bn + xn f(xn) ε 0 2 3 2,5 +5,625 0,5 1 2 2,5 2,25 +1,3906 0,25 2 2 2,25 2,125 -0,4043 0,125 3 2,125 2,25 2,1875 +0,4675 0,0625
1875,2x3 =≅α
2.3.2 – Método de Newton-Raphson - Validas todas as condições do TEU - As derivadas )x('f )0)x('f( ≠ e )x(''f devem também ser contínuas e preservarem o sinal do
intervalo. - Método mais rápido (processo leva à raiz mais rapidamente). - O método pode divergir.
O método de Newton-Raphson é equivalente a substituir um pequeno arco de curva )x(fy = por
uma reta tangente, traçada a partir de um ponto da curva. Observação:
Derivada de 1ª ordem de uma função:
Traçar uma reta tangente à curva )x(fy = num ponto é obter
a inclinação da curva neste ponto (a tangente do ângulo que esta reta faz com o eixo x é a inclinação)
22
4
adjacente cateto
oposto catetotg ===θ => 2)x('y =
f(x)
x
4
2
1 2
x2y =
θ

Instituto Superior para Tecnologias de Informação e Comunicação - ISUTIC
Disciplina de Cálculo Numérico – 1o Ano – 2º Semestre 18
Interpretação geométrica do método: Para se obter uma melhor aproximação x1 da raiz α , traça-se uma reta tangente à curva )x(fy = a
partir do ponto )]x(f,x[B ooo que intercepta o eixo x no ponto x1.
- Do ponto )]x(f,x[B 111 traça-se outra tangente à curva que corta o eixo x no ponto x2, obtendo-
se uma melhor aproximação da raiz.
- O processo se repete até encontrar α≅nx com a exatidão requerida.
Portanto,
)x('fxx
)x(ftg o
1o
o =−
=α 21
1xx
)x(ftg
−=β
1o
oo xx
)x(f)x('f
−=
21
11 xx
)x(f)x('f
−=
)x('f
)x(fxx
o
o1o =−
)x('f
)x(fxx
1
121 =−
)x('f
)x(fxx
o
oo1 −=
)x('f
)x(fxx
1
112 −=
Generalizando tem-se:
)x('f
)x(fxx
n
nn1n −=+ p/ ..... 2, 1, ,0n = � Fórmula do Método de Newton
1nn xx −−=ε
Condições e observações para a convergência do método de Newton-Raphson (de Fourier: estabelecem duas condições para garantir a convergência) 1ª) )x('f e )x(''f com sinais constantes no intervalo [a,b].

Instituto Superior para Tecnologias de Informação e Comunicação - ISUTIC
Disciplina de Cálculo Numérico – 1o Ano – 2º Semestre 19
)x(''f não deve se anular no intervalo.
Se 0)x(''f = , então )x(f sofre mudança de concavidade no intervalo.
2ª) A escolha de xo A má escolha pode causar divergência no método. xo deve ser o ponto extremo de [a,b] onde a função f(x) apresenta o mesmo sinal de f’’(x).
0
ou
0
0)(x'f' . )x(f oo
>−−
>++>
1º Caso:
0)a(f <
0)b(f >
0)x(''f > (concavidade para cima)
Em qual extremo 0)(x'f' . )x(f > ?
0)(b'f' . )b(f > => bxo =
f(x)
x a
b x1 x2
0)x(''f =
As tangentes podem conduzir a aproximações fora do intervalo.
f(x)
x 1'xb =
0)x(''f =
1xa =
Aproximações repetidas.
f(x)
x b
a
1x
Tangente que diverge

Instituto Superior para Tecnologias de Informação e Comunicação - ISUTIC
Disciplina de Cálculo Numérico – 1o Ano – 2º Semestre 20
2º Caso:
0)a(f <
0)b(f >
0)x(''f < (concavidade para baixo)
0)(a'f' . )a(f > => axo =
3º Caso:
0)a(f >
0)b(f <
0)x(''f >
0)(a'f' . )a(f > => axo =
4º Caso:
0)a(f >
0)b(f <
0)x(''f <
0)(b'f' . )b(f > => bxo =
Exemplo 1: Calcular a raiz 1,5] , 5,0[∈α de 3xx5x)x(f 23 ++−= com 001,010 3 ≅≤ε −
TEU: 1) contínua => OK
2) 0 .
0)b(f).a(f
<−+<
=> OK
3) 0)x('f < no intervalo => OK
3xx5x)x(f 23 ++−=
1x10x3)x('f 2 +−=
10x6)x(''f −=
f(x)
x b
a 1x
Tangente que diverge
f(x)
x b
a 1x
f(x)
x b a
1x

Instituto Superior para Tecnologias de Informação e Comunicação - ISUTIC
Disciplina de Cálculo Numérico – 1o Ano – 2º Semestre 21
)( 375,2)5,0(f +=
)( 375,3)5,1(f −−=
)( 25,3)5,0('f −−=
)( 25,7)5,1('f −−=
)( 6)1('f −−=
)( 7)5,0(''f −−=
)( 1)5,1(''f −−=
Escolha de xo
0
0)b(''f).b(f
>−−>
=> bxo =)x('f
)x(fxx
n
nn1n −=+ e 1nn xx −−=ε
n xn )x(f n )x('f n ε
0 1,5 - 3,3750 - 7,2500 ----
1 1,0345 - 0,2093 - 6,1344 0,4655
2 1,0004 - 0,0024 - 6,0016 0,0341
3 1,0000 0
1x3 ==α
(neste caso a raiz é exata) Não se deve usar esse método quando f(x) próxima do ponto de interseção com x é quase horizontal ( ???(x)f(x)/f' 0)x('f =→≈ ).
Exemplo Aula: Considerando a função 3x9x)x(f 3 +−= , determinar a raiz que está no intervalo
]1,0[I2 = com erro de 210−=ε .
TEU: 1) contínua => OK
2) 0 .
0)b(f).a(f
<−+<
=> OK
3) 0)x('f < no intervalo => OK
3x9x)x(f 3 +−= => 9x3)x('f 2 −= => x6)x(''f =
3)0(f += (+) )( 9)0('f −−= 0)0(''f = � muda concav.
)( 5)1(f −−= )( 6)1('f −−= 6)1(''f =
x 0 0,2 1
f(x) 3+ 1,208 5− f'(x) 9− 88,8− 6−
Podemos reduzir o intervalo I=[0,2 , 1]

Instituto Superior para Tecnologias de Informação e Comunicação - ISUTIC
Disciplina de Cálculo Numérico – 1o Ano – 2º Semestre 22
)( 208,1)2,0(f += )( 88,8)2,0('f −−= )( 2,1)2,0(''f +=
)( 5)1(f −−= )( 6)1('f −−= )( 6)1(''f +=
Escolha de xo
0
0)a(''f).a(f
>++>
=> 2,0axo == )x('f
)x(fxx
n
nn1n −=+
n xn )x(f n )x('f n ε
0 0,2 1,208 88,8− ----
1 0,33604 0,01359 66123,8− 0,13604
2 0,33761 61004,9 −×− 65806,8− 0,00157
33761,0x3 ==α

Instituto Superior para Tecnologias de Informação e Comunicação - ISUTIC
Disciplina de Cálculo Numérico – 1o Ano – 2º Semestre 23
EXERCÍCIOS
1) Isolar todas as raízes da função pelo método do tabelamento.
30x20x2x)x(f 23 +−−=
Tabela de valores de f(x):
x -10 -8 -5 -4 -2 -1 0 1 2 3 4 5 10
f(x) -970 -450 -45 14 54 47 30 9 -10 -21 -18 5 630
2) Localizar as raízes da função contínua pelo método do tabelamento.
11x20x5,7x2x)x(f 234 −−−+=
Tabela de sinais de f(x) e f’(x):
x -6 -4 -3 -2,5 -2 -1,5 -1 -0,5 0 0,5 1 2 3 4
sinais
f(x) + + + - - + + - - - - - - +
f’(x) - - - - + + - - - - - + + +
3) Faça a tabela de valores da função 1x3x)x(f 3 −+= e indique o(s) intervalo(s) em que houver
zeros reais.
4) Ao estudar as raízes reais da função )x(senx
1)x(f += , foi montada a seguinte tabela de sinais:
x (em radianos) -12 -10 -4,5 -2 1 3 10 12 sinal de f(x) + + + - + + - -
E chegou-se à conclusão que esta função possui raízes reais únicas nos intervalos [-4,5 , -2],
[-2, 1] e [3, 10]. Verifique se esta conclusão é verdadeira justificando sua resposta. 5) Localize pelo método do tabelamento as raízes das equações a seguir:
a) 0e)xcos(4 x2 =−
b) 0)xln(x1 =−
6) Localize graficamente as raízes das equações a seguir:
a) 0x32x =−
b) 01000xx3 =−+ 7) Calcular, usando o método da bissecção, o valor aproximado da raiz pertencente ao intervalo [0,5,
1] da função 1xx2x)x(f 34 −−+= sabendo-se que esse valor aproximado deverá ter 2 casas
decimais corretas.
8) Calcular pelo método da bissecção a raiz da equação )xln(x)x(f 2 += com є ≤ 0.01 no
intervalo [0,5 , 1,0].

Instituto Superior para Tecnologias de Informação e Comunicação - ISUTIC
Disciplina de Cálculo Numérico – 1o Ano – 2º Semestre 24
9) O polinômio x21
5x
9
10x)x(p 35 +−= tem cinco zeros reais, todos no intervalo [-1,1].
Encontre pelo método da bissecção a maior raiz negativa com є ≤ 10-5.
10) Achar pelo método de Newton-Raphson a raiz de 5)xln(x2)x(f 3 −+= , com є ≤ 10-7 no
intervalo [1, 2].
11) Calcular a raiz negativa pelo método de Newton-Raphson de 3xx5x)x(f 23 ++−= com є ≤
10-5. 12) Use o método de Newton-Raphson para obter a menor raiz positiva das equações a seguir com
precisão є ≤ 10-4:
a) 0)x(tg2x =−
b) 2e)xcos(2
x=
c) 06x5 =−
13) Aplique o método de Newton-Raphson à equação 010x3x2x 23 =+−− com x0=1,9. Justifique o que acontece.

Instituto Superior para Tecnologias de Informação e Comunicação - ISUTIC
Disciplina de Cálculo Numérico – 1o Ano – 2º Semestre 25
CAPÍTULO 3
SISTEMAS DE EQUAÇÕES LINEARES – SELAs
3.1 – DEFINIÇÃO Um sistema de equações lineares com n equações e n incógnitas na forma
=++++
=++++=++++
=
nnnn33n22n11n
2nn2323222121
1nn1313212111
bxa.........xaxaxa
bxa.........xaxaxa
bxa..........xaxaxa
sM
∑=
==n
1jijijn bxas n,...,3,2,1i/p =
Onde,
→ija Coeficientes das incógnitas
→jx Incógnitas
→ib Termos independentes
Pode ser colocado sob a forma
=
×
n
2
1
n
2
1
nn2n1n
n22221
n11211
b
b
b
x
x
x
aaa
aaa
aaa
MM
L
M
L
L
Vetor dos termos independentes
Matriz de coeficiente Vetor das incógnitas O sistema pode ainda ser colocado sob a forma matricial mais compacta => A.X = b
Matriz ampliada ou matriz aumentada �
nnn2n1n
2n22221
1n11211
baaa
baaa
baaa
L
M
L
L
Vetor solução �
=
n
2
1
x
x
x
xM

Instituto Superior para Tecnologias de Informação e Comunicação - ISUTIC
Disciplina de Cálculo Numérico – 1o Ano – 2º Semestre 26
3.2 – CLASSIFICAÇÃO
� Natureza dos coeficientes e termos independentes: • Reais: todos os coeficientes e termos independentes são números reais. • Complexos: pelo menos um coeficiente ou termo independente for número complexo.
� Valor dos termos independentes:
• Homogêneo: todos os termos independentes são nulos (b = 0). • Heterogêneo: pelo menos um termo independente não é nulo.
� Número de soluções: • Possível e Determinado: uma única solução. • Possível e Indeterminado: infinitas soluções. • Impossível /Incompatível: não possui soluções.
Exemplo 1: Seja o sistema:
=→=−−=→=+
2121
2121
xx 0xx
xx 0xx
Qual é a solução do sistema? Um ponto comum entre as retas. Possui uma única solução: )0,0( => origem
OBS: De acordo com a Regra de Cramer, se o 0)Adet( ≠ , o sistema é possível e determinado.
−=
11
1 1A => 0211
11
1 1)Adet( ≠−=−−=
−=
Logo, o sistema é real, homogêneo, possível e determinado. Exemplo 2: Seja o sistema:
21
2121
2121
x x
x2x2 0x2x2
xx 0xx
−=
−=→=+−=→=+
Qual é a solução do sistema? Retas coincidentes => infinitas soluções OBS:
=
22
11A => 022
22
11)Adet( =−==
1
2
2
1
1
2
2 1

Instituto Superior para Tecnologias de Informação e Comunicação - ISUTIC
Disciplina de Cálculo Numérico – 1o Ano – 2º Semestre 27
=
02
01A I => 000
02
01)Adet( I =−==
Det(AI) => substitui-se a i-ésima coluna de A pelo vetor coluna dos termos independentes.
Se o 0)Adet()Adet( I == , o sistema é possível e indeterminado
Logo, o sistema é real, homogêneo, possível e indeterminado. Exemplo 3: Seja o sistema:
−=→=+−=→=+
2121
2121
x1x 1xx
xx 0xx
Qual é a solução do sistema? Retas paralelas => não têm ponto em comum => não tem solução OBS:
=
11
11A => 011
11
11)Adet( =−==
=
11
01A I => 101
11
01)Adet( I =−==
Se o 0)Adet( = e o 0)Adet( I ≠ , o sistema é impossível.
Logo, o sistema é real, heterogêneo e impossível. 3.3 – SISTEMA TRIANGULAR SUPERIOR Um sistema é chamado triangular superior se é da forma
=
=++=+++=++++
=
nnnn
3nn3333
2nn2323222
1nn1313212111
bxa
bxa.........xa
bxa.........xaxa
bxa..........xaxaxa
s
M
e é chamada triangular inferior se é da forma
1
2
2 1

Instituto Superior para Tecnologias de Informação e Comunicação - ISUTIC
Disciplina de Cálculo Numérico – 1o Ano – 2º Semestre 28
=++++
=++=+=
=
nnnn33n22n11n
3333232131
2222121
1111
bxa.........xaxaxa
b xaxaxa
b xaxa
b xa
s
M
Exemplo 1: Resolver o sistema linear triangular abaixo:
==−
−=−+−=+−+
=
2 x2
3 x5x4
1 x2x x
10x x5x4x3
s
4
43
432
4321
�
−=
1
2
1
1
x
2x2 4 = 3x5x4 43 =− 1x2xx 432 −=−+ 10xx5x4x3 4321 −=+−+
1x4 = 3)1(5x4 3 =− 1)1(22x2 −=−+ 101)2(5)1(4x3 1 −=+−−+
2x3 = 1x2 −= 1x1 =
Exemplo 2:
==−=−
−=+−+
=
2 x2
3 x5x4
0 x2x
10x x5x4x3
s
4
43
43
4321
�
α
α+−
=
1
2
3
41
x
2x2 4 = 3x5x4 43 =− 0x2xx0 432 =−+ 10xx5x4x3 4321 −=+−+
1x4 = 3)1(5x4 3 =− 0)1(22x0 2 =−+ 101)2(54x3 1 −=+−α+
2x3 = α=→= 22 x0x0 3
41x1
α+−=
Obs: x2 pode assumir qualquer valor. É uma variável livre (ou independente) Exemplo 3:
==−
−=−−=+−+
=
2 x2
3 x5x4
1 x2x
10x x5x4x3
s
4
43
43
4321

Instituto Superior para Tecnologias de Informação e Comunicação - ISUTIC
Disciplina de Cálculo Numérico – 1o Ano – 2º Semestre 29
2x2 4 = 3x5x4 43 =− 1x2xx0 432 −=−+
1x4 = 3)1(5x4 3 =− 1)1(22x0 2 −=−+
2x3 = →−= 1x0 2 Nenhum valor de x2 satisfaz a equação
O sistema é impossível (ou incompatível).
3.4 – SISTEMA INSTÁVEL Em um sistema instável, uma pequena alteração em um dos coeficientes provoca uma grande alteração na solução do sistema.
=+=+
=01,2x.01,1x
2xxS
21
21
=+=+
=01,2x.01,1x
2xx.99,0S
21
21
=
1
1x
−=
101
100x
Para verificar se um sistema é instável, calcula-se a grandeza do determinante da matriz A. O sistema será instável se 0))A(normdet( ≅ .
n21 ......
)Adet())A(normdet(
ααα=
onde,
2in
22i
21ii )a(.....)a()a( +++=α n,...,2,1i/p =
Para o exemplo anterior:
211)a()a( 22212
2111 =+=+=α
0201,201,11)a()a( 222212
2212 =+=+=α
005,001,2
01,0
0201,2.2
11101,1))A(normdet( ≅=×−×=
Logo, o sistema é instável, pois, comparando este resultado com a unidade, 0))A(normdet( ≅
3.5 – RESTOS OU RESÍDUOS Restos ou Resíduos da solução de Sistemas Lineares é definido como:
X.ABR −=

Instituto Superior para Tecnologias de Informação e Comunicação - ISUTIC
Disciplina de Cálculo Numérico – 1o Ano – 2º Semestre 30
×
−
=
=
n
2
1
nn2n1n
n22221
n11211
n
2
1
n
2
1
x
x
x
aaa
aaa
aaa
b
b
b
r
r
r
RM
L
MMMM
L
L
MM
Se todas as componentes forem nulas, o vetor solução será a solução exata do sistema. Se todas forem aproximadamente zero, tem-se que a solução corresponde a uma boa aproximação da solução exata (em sistemas estáveis) 3.6 – SISTEMAS EQUIVALENTES Dois sistemas são equivalentes se possuem a mesma solução, ou seja,
'xx 'ss ≈⇒≈ Dado um sistema s, pode-se obter um sistema equivalente s’ realizando sobre s uma ou mais das operações abaixo: - Trocar a ordem de duas equações do sistema. - Multiplicar uma equação do sistema por uma constante não nula. - Substituir uma equação pela combinação linear desta com outra equação do sistema. s → compatível s’ → compatível s → determinado s’ → determinado s → indeterminado s’ → indeterminado 3.7 – MÉTODOS DE RESOLUÇÃO DE SELA’s DIRETOS Eliminação Gaussiana Permitem a solução de um sistema a Pivotação partir de um número finito de operações aritméticas lementares. ITERATIVOS Jacobi Partem de uma aproximação inicial Gauss-Seidel utilizam sucessões infinitas de aproximações Através da aplicação de um algoritmo. 3.8 – ELIMINAÇÃO DE GAUSS Consiste em operar com transformações elementares sobre as equações do sistema, a fim de anular certos coeficientes, até que obtenha um sistema triangular superior equivalente. Em seguida, resolve-se o sistema triangular por substituições retroativas cuja solução também é solução do sistema dado. Exemplo: Resolver o sistema abaixo pelo método da eliminação de Gauss. Verifique o resultado.
−=+−=−+
=−+=
1xx3x2
3x3x4x4
5xx3x2
s
321
321
321
1a etapa: escrever a matriz aumentada do sistema.

Instituto Superior para Tecnologias de Informação e Comunicação - ISUTIC
Disciplina de Cálculo Numérico – 1o Ano – 2º Semestre 31
−−−
−=
1
3
5
1
3
1
3
4
3
2
4
2
AoA
2a etapa: Montar um sistema triangular equivalente, ou seja, eliminar todos os coeficientes abaixo da diagonal principal.
OBS: É impossível realizar uma eliminação quando o pivô for nulo (trocar linhas de posição para evitar o pivô nulo)
Multiplicador: o pivô é o termo 2ao11 =
22
4
a
aM
o11
o21o
21 −=−=−=
12
2
a
aM
o11
o31o
31 −=−=−=
Faz-se as seguintes transformações elementares sobre as linhas de AA
o1
11 LL =
o1
o2
o1
o21
o2
12 L2LLMLL ×−=×+=
o1
o3
o1
o31
o3
13 L1LLMLL ×−=×+=
O novo pivô é o termo 2a122 −=
32
6
a
aM
122
1321
32 −=−−−=−=
11
21 LL =
12
22 LL =
12
13
12
132
13
23 L3LLMLL ×−=×+=
Como o 020522Adet ≠−=×−×= (produto dos coeficientes da diagonal principal), o sistema é possível e determinado
s
15x5
7xx2
5xx3x2
's
3
32
321
≈
=−=−−
=−+=
3x3 = 73x2 2 −=−− 5323x2 1 =−×+
4x2 2 −=− 53x2 1 =+
2x2 = 2x2 1 =
1x1 =
−−−
−
−−=
6
7
5
2
1
1
6
2
3
0
0
2
A1A
−−−
−=15
7
5
5
1
1
0
2
3
0
0
2
A2A

Instituto Superior para Tecnologias de Informação e Comunicação - ISUTIC
Disciplina de Cálculo Numérico – 1o Ano – 2º Semestre 32
Logo, a solução do sistema será
=3
2
1
x
Verificação:
−=+×−×=×−×+×
=−×+×
132312
3332414
532312
�
−=−==
11
33
55
� OK
3.9 – MÉTODO DA PIVOTAÇÃO Parte de x1 e em cada etapa seleciona-se como linha pivotal aquela cujo coeficiente da incógnita que se elimina tenha módulo máximo. - Evita pivô nulo - Minimiza erros de arredondamento Exemplo: resolver o sistema abaixo usando o método da Pivotação. Verificar o resultado.
=++=−+=+−
=6xx3x4
2xxx4
16x3xx
s
321
321
321
−−
=6
2
16
1
1
3
3
1
1
4
4
1
AoA
−−=
6
16
2
1
3
1
3
1
1
4
1
4
AoA
4
1
a
aM
o11
o21o
21 −=−= 14
4
a
aM
o11
o31o
31 −=−=−=
o1
11 LL =
o1
o2
o1
o21
o2
12 L
4
1LLMLL ×−=×+=
o1
o3
o1
o31
o3
13 L1LLMLL ×−=×+=
−
−=
4
314
2
4
132
1
4
52
1
0
0
4
A1A
8
5
2
1
4
5
a
aM
122
1321
32 =×=−=
−−=
42
312
24
131
24
51
0
0
4
A1A

Instituto Superior para Tecnologias de Informação e Comunicação - ISUTIC
Disciplina de Cálculo Numérico – 1o Ano – 2º Semestre 33
11L2L =
12
22 LL =
12
13
12
132
13
23 L
85
LLMLL ×+=×+=
Logo a solução deste sistema equivalente, que é a mesma solução do sistema original é:
−=4
2
2
x
Verificação:
=+−×+×=−−×
=×+−−
64)2(324
24224
1643)2(2
�
===
66
22
1616
� OK
3.10 – MÉTODO DE JACOBI Os métodos iterativos consistem de algoritmos que a partir de um vetor aproximação inicial xo produzem uma série de aproximações (x1, x2, ....., xn) da solução exata do sistema. Para garantir a convergência do método de Jacobi, a matriz deve ser estritamente diagonalmente dominante, ou seja,
n1,2,...,i ,aan
ij1j
ijii =>∑≠=
Exemplo: Resolver o sistema abaixo, pelo método de Jacobi, com 110−≤ε ou 5k > (k é o número de
iterações) e
=
0
0xo . Verificar o resultado.
=+=−
=3x2x
1xx2s
21
21
−=
2 1
12A => 514Adet =+= (única solução)
Gerar as equações iterativas explicitando x1 na 1a equação, x2 na 2a equação e assim por diante.
−=
+=
+
+
2
x3x
2
x1x
k11k
2
k21k
1 p/ k = 0, 1, 2, ....
−=
18
4
2
2
9
2
1
0
2
1
0
0
4
A2A

Instituto Superior para Tecnologias de Informação e Comunicação - ISUTIC
Disciplina de Cálculo Numérico – 1o Ano – 2º Semestre 34
Para k = 0, tem-se:
=−=
=+=
5,12
03x
5,02
01x
12
11
�
=
5,1
5,0x1
Para k = 1, tem-se:
=−=
=+=
25,12
5,03x
25,12
5,11x
22
21
�
=
25,1
25,1x2
Para, k = 2 tem-se:
=−=
=+=
88,02
25,13x
13,12
25,11x
32
31
�
=
88,0
13,1x3
k k1x k
2x k1
1k1 xx −≥ε + k
21k
2 xx −≥ε +
0 0,00 0,00 --- --- 1 0,50 1,50 0,50 1,50 2 1,25 1,25 0,75 0,25 3 1,13 0,88 0,12 0,37 4 0,94 0,94 0,19 0,06 5 0,97 1,03 0,03 0,09
A solução será:
=
03,1
97,0x
Verificação:
=×+=−×
303,1297,0
103,197,02 �
≅≅
303,3
191,0 � OK
3.11 – MÉTODO DE GAUSS-SEIDEL - Possui convergência mais rápida. O método de converge se a matriz for estritamente diagonalmente dominante.
- Para calcular kix , utiliza-se todos os valores que já foram calculados na iteração atual, mais os
valores calculados na iteração anterior.
- Critério de parada é o mesmo do método de Jacobi => ki
1ki xx −≥ε +
Exemplo: Resolver o sistema abaixo pelo método de Gauss-Seidel. Verificar o resultado.
110−≤

Instituto Superior para Tecnologias de Informação e Comunicação - ISUTIC
Disciplina de Cálculo Numérico – 1o Ano – 2º Semestre 35
=+=−
=3x2x
1xx2s
21
21, com
=
0
0xo e 110−≤ε
As equações iterativas são:
−=
+=
++
+
2x3
x
2
x1x
1k11k
2
k21k
1 p/ k = 0, 1, 2, ....
1a iteração:
=−=
=+=
25,12
5,03x
5,02
01x
12
11
A solução será:
=
00,1
01,1x
Verificação:
=×+=−×
300,1201,1
100,101,12 �
≅≅
301,3
102,1 � OK
k k1x k
2x k1
1k1 xx −≥ε + k
21k
2 xx −≥ε +
0 0,00 0,00 --- --- 1 0,50 1,25 0,50 1,25 2 1,13 0,94 0,63 0,31 3 0,97 1,02 0,16 0,08 4 1,01 1,00 0,04 0,02 110−≤

Instituto Superior para Tecnologias de Informação e Comunicação - ISUTIC
Disciplina de Cálculo Numérico – 1o Ano – 2º Semestre 36
EXERCÍCIOS
1) Classificar os sistemas abaixo e resolvê-los por substituições retroativas ou progressivas:
a)
=+−+=+−
=+=
2xxx4x2
0x2xx
2x3x
4x2
4321
321
21
1
b)
==−−=−
−=+−+
2x2
3x5x4
1x2x
10xx5x4x3
4
43
43
4321
2) Determinar o vetor solução dos sistemas lineares abaixo:
a)
=+++=++
−=+=
3xxxx
3xxx
1xx
1x
4321
321
21
1
b)
=+−+−−=++=++
−=+=
3xxxxx
1xxx
0x3xx2
1xx
1x
54321
321
321
21
1
3) Determinar o vetor solução do sistema linear através do método de eliminação de Gauss:
a)
=+++=+++
=+++=+++
72,20xx2x6x4
90,14x2xx5x2
02,12x6x5xx
12,7x4x2xx
4321
4321
4321
4321
4) Resolver pelo método da Pivotação os sistemas:
a)
−=−−=−−=++
1xxx
0xxx2
4x2xx
321
321
321

Instituto Superior para Tecnologias de Informação e Comunicação - ISUTIC
Disciplina de Cálculo Numérico – 1o Ano – 2º Semestre 37
b)
=+++=+++=+++=+++
5xx2x3x4
6x2xx2x3
7x3x2xx2
10x4x3x2x
4321
4321
4321
4321
5) Determinar o vetor solução dos sistemas lineares abaixo, através do método de Jacobi, com no
máximo 10 iterações:
a ) Com [ ]xT( )0 0 0 0 0= e E ≤ −10 2
=+−=−+−=−+−
=−−
25,0xx25,0
25,0x25,0xx25,0
0x25,0xx25,0
0x25,0x25,0x
42
431
421
321
b) Com [ ]xT( )0 1 3 1 3= e E ≤ −10 2
=+−+−−=+−
=+−+=−+−
33x10x3x2x2
7x2x7x3
26x4x3x9x
5xx2xx5
4321
432
4321
4321
6) Determinar o vetor solução dos sistemas lineares abaixo, através do método de Gauss-Seidel, com
no máximo 10 iterações:
a) Com [ ]xT( )0 0 0 0 0= e E ≤ −10 2
=+−=−+−=−+−
=−−
25,0xx25,0
25.0x25,0xx25,0
0x25,0xx25,0
0x25,0x25,0x
42
431
421
321
b) Com [ ]xT( )0 0 0 0 0 0= e E ≤ −10 2
=−+−−=+−−+−
=+−=−+−−
=+−+
7x7xxxx2
4x2x10x3x2x
13x7x4x2
5x3xx2x8
2x3xx4x10
54321
54321
321
5432
4321

Instituto Superior para Tecnologias de Informação e Comunicação - ISUTIC
Disciplina de Cálculo Numérico – 1o Ano – 2º Semestre 38
CAPÍTULO 4
INTERPOLAÇÃO
4.1 – INTRODUÇÃO
Muitas funções são conhecidas apenas em um conjunto finito de pontos de um intervalo [ ]b,a e não
se dispõe de sua forma analítica.
xi oxa = x1 x2 x3 ...... xn
( )ixf ( )oxf ( )1xf ( )2xf ( )3xf ......
A interpolação consiste em, a partir desses dados tabelados, aproximar f(x) para qualquer [ ]b,ax ∈
por meio de outra função g(x) que satisfaça a condição:
)x(g)x(f ii = para todo n,...,3,2,1,0i =
As funções que substituem as funções dadas podem ser de tipos variados, tais como: exponencial, logarítmica, trigonométrica e polinomial. Estudaremos as funções polinomiais.
Por exemplo, para 3n = , indicamos graficamente: A necessidade de se obter a função interpoladora g(x) surge pelas situações:
1) Quando a expressão analítica de f(x) é muito complicada e exige muito esforço no seu manuseio (ex: operações de integração e diferenciação);
2) Quando realmente só se conhecem os valores de f(x) para o conjunto de n pontos e é necessário
calcular o valor aproximado desta função em qualquer outro ponto ixx ≠ com [ ]b,ax ∈ (ex:
tabela de pontos obtida a partir de resultados experimentais). Seja a função )x(fy = . Deseja-se determinar )x(f onde,
a) [ ]3o x,xx ∈ e ixx ≠ para 3,2,1,0i =
Devemos fazer uma interpolação, ou seja, determinar um polinômio interpolador que é uma aproximação da função tabelada.
( )nxf
x
f(x)
g(x)
oxa = 1x 2x bx3 =

Instituto Superior para Tecnologias de Informação e Comunicação - ISUTIC
Disciplina de Cálculo Numérico – 1o Ano – 2º Semestre 39
b) [ ]3o x,xx ∉
Devemos realizar uma extrapolação, ou seja, a função interpoladora não garante boa aproximação.
4.2 – INTERPOLAÇÃO LINEAR
Dados dois pontos distintos de uma função )x(fy = : ( )oo y,x e ( )11 y,x . Deseja-se calcular o
valor de y para um determinado valor de x entre ox e 1x .
O grau do polinômio interpolador é uma unidade menor que o número de pontos conhecidos. Neste caso, o polinômio interpolador tem grau 1 (dados 2 pontos).
xaa)x(p 1o1 +=
onde ao e a1 devem ser calculados de forma que se tenha:
ooo1 y)x(f)x(p ==
1111 y)x(f)x(p ==
=+=+
111o
oo1o
yxaa
yxaa � ao e a1 são incógnitas
=
1
o
x1
x1A � matriz dos coeficientes
O 0Adet ≠ , pois 1o xx ≠ (pontos distintos) � solução única
Exemplo: Seja a função )x(fy = definida pelos pontos ( )35,1 ;0 e ( )94,2 ;1 , determine
aproximadamente o valor de ( )73,0f .
35,10.aa)x(p 1oo1 =+= � 35,1ao =
94,21.aa)x(p 1o12 =+= � 94,2a35,1 1 =+ � 59,1a1 =
Logo, x59,135,1)x(p1 +=
Então, 51,2)73,0(p1 =
4.3 – INTERPOLAÇÃO QUADRÁTICA Se, de uma função são conhecidos 3 pontos distintos, o polinômio interpolador será:
221o2 xaxaa)x(P ++=

Instituto Superior para Tecnologias de Informação e Comunicação - ISUTIC
Disciplina de Cálculo Numérico – 1o Ano – 2º Semestre 40
=++
=++
=++
222221o
121211o
o2o2o1o
yxaxaa
yxaxaa
yxaxaa
�
=222
211
2oo
xx1
xx1
xx1
A � 0DetA≠ (pontos distintos)
Exemplo: Determine o polinômio que interpola os pontos da tabela dada a seguir. Calcule )5,0(f .
Verifique o resultado.
xi -2 0 2 f(x i) 18 4 6
Expressão do polinômio interpolador: 2
21o2 xaxaa)x(P ++=
18)2(a)2(aa)x(P 221oo2 =−+−+=
4)0(a)0(aa)x(P 221o12 =++=
6)2(a)2(aa)x(P 221o22 =++=
=++=
=+−
6a4a2a
4a
18a4a2a
21o
o
21o
�
=++=+−
6a4a24
18a4a24
21
21�
16a8
2a4a2
14a4a2
2
21
21
=
=++=+−
224a2 1 =×+ � 2
82a1
−= �
Logo, 22 x2x34)x(P +−=
Então, 3)5,0(P2 =
Verificação:
Para 1818 18)2(2)2(34)2(P 2x 22 =→=−×+−×−=−→−=
Para 44 4)0(2)0(34)0(P 0x 22 =→=×+×−=→= � OK
Para 66 6)2(2)2(34)2(P 2x 22 =→=×+×−=→=
4.4 – INTERPOLAÇÃO POLINOMIAL As interpolações lineares e quadráticas são casos particulares da interpolação polinomial. Sendo dados 1n + pontos distintos, será determinado o polinômio interpolador de grau menor ou igual a n.
nn
221on xa.....xaxaa)x(p ++++= ou ∑
==
n
0i
iin xa)x(p
Logo,
2a2 =
3a1 −=

Instituto Superior para Tecnologias de Informação e Comunicação - ISUTIC
Disciplina de Cálculo Numérico – 1o Ano – 2º Semestre 41
=++++
=++++
=++++
=
nnnn
2n2n1o
1n1n
21211o
onon
2o2o1o
yxa.....xaxaa
yxa.....xaxaa
yxa.....xaxaa
sM
ao, a1, a2, ......, na são as incógnitas, resolvendo-se o sistema tem-se o polinômio pn(x). 4.5 – ERRO DE TRUNCAMENTO PARA A INTERPOLAÇÃO POLIN OMIAL
( ) ( ) ( ))!1n(
)x(f xx ..... xx xx)x(E
)1n(
n1oT +−−−=
+
ou
)x(p)x(f)x(E nT −=
Na interpolação linear, xaa)x(p 1o += , aproxima a função f(x) para uma reta que passa pelos
pontos )y,x( oo e )y,x( 11 , como mostra a figura abaixo:
O erro de truncamento no ponto x depende de sua localização. Se x coincidir com ox ou 1x o
erro é nulo, pois,
( ) ( ) ( ))!1n(
)x(f xx ..... xx xx)x(E
)1n(
n1ooT +−−−=
+
Exemplo: Seja a função senx)x(f = , calcule )2/(p1 π e )2/(Et π pelas duas fórmulas.
Dados: x07,077,0)x(p1 +=
88,0)2/(p1 =π
1) )x(p)x(fEt 1−= � 12,088,01)2/(p)2/(fEt 1 =−=π−π=
2) ( ) ( )!2
)x(''f xx xx)x(Et 1o −−=
ox 1x x
oy
1y Et
p(x)
f(x)
0
xi yi
1 0,84 2 0,91

Instituto Superior para Tecnologias de Informação e Comunicação - ISUTIC
Disciplina de Cálculo Numérico – 1o Ano – 2º Semestre 42
−−=π−
−π
−π=
π2
1).43,0).(57,0(
2
))2/(sen(2
21
22Et � 12,0)x(Et =
4.6 – INTERPOLAÇÃO DE LAGRANGE Com o intuito de evitar resolução do sistema de equações lineares durante a determinação do polinômio interpolador, pode-se representar pn(x) da seguinte maneira:
)x(L y.......)x(L y)x(L y)x(p nn11oon +++=
ou
∑=
=n
0iiin )x(L y)x(p
Onde, Li(x) é um polinômio qualquer de grau menor ou igual a n com 1n + pontos distintos conhecidos (alguns coeficientes podem se anular).
)xx)......(xx).(xx)......(xx).(xx).(xx(
)xx)......(xx).(xx)......(xx).(xx).(xx()x(L
ni1ii1ii2i1ioi
n1i1i21oi −−−−−−
−−−−−−=+−
+−
ou
∏
∏
≠=
≠=
−
−
=n
ij,0jji
n
ij,0jj
i
)xx(
)xx(
)x(L
logo
∏∑≠== −
−=
n
ij0j ji
jn
0iin )xx(
)xx( y)x(p

Instituto Superior para Tecnologias de Informação e Comunicação - ISUTIC
Disciplina de Cálculo Numérico – 1o Ano – 2º Semestre 43
Exemplo: Determinar o polinômio interpolador de Lagrange para a função conhecida pelos pontos tabelados abaixo e calcule )5,1(p . Verificar o resultado.
)xx).(xx).(xx(
)xx).(xx).(xx( y
)xx).(xx).(xx(
)xx).(xx).(xx( y
)xx).(xx).(xx(
)xx).(xx).(xx( y
)xx).(xx).(xx(
)xx).(xx).(xx( y)x(p
2313o3
21o3
3212o2
31o2
3121o1
32o1
3o2o1o
321o3
−−−−−−+
−−−−−−+
+−−−
−−−+−−−
−−−=
)1( )2( )3(
)2x).(1x).(0x( 60
)2( )1( )1(
)3x).(2x).(0x( 2
)3( )2( )1(
)3x).(2x).(1x( 4)x(p3
−−−−+−−
−−−+−−−
−−−=
)2x3x(x)6x5x(x)3x)(2x3x(6
4)x(p 222
3 +−−+−+−+−−=
x2x3xx6x5x)6x2x9x3x3x(6
4)x(p 2323223
3 −+−+−+−++−−−=
x4x2)6x11x6x(3
2)x(p 223
3 +−−+−−=
x4x24x3
22x4x
3
2)x(p 223
3 +−+−+−=
25,1)5,1(p3 =
Verificação:
44 4403
10020
3
2)0(p 23
3 =→=+×−×+×−=
22 2413
10121
3
2)1(p 23
3 =→=+×−×+×−= � OK
00 0423
10222
3
2)2(p 23
3 =→=+×−×+×−=
66 6433
10323
3
2)3(p 23
3 −=−→−=+×−×+×−=
xi yi
0 4 1 2 2 0 3 -6
∏∑≠== −
−=
3
ij0j ji
j3
0ii3 )xx(
)xx( y)x(p
4x3
10x2x
3
2)x(p 23
3 +−+−=

Instituto Superior para Tecnologias de Informação e Comunicação - ISUTIC
Disciplina de Cálculo Numérico – 1o Ano – 2º Semestre 44
4.7 - INTERPOLAÇÃO COM DIFERENÇAS DIVIDIDAS (FÓRMULA DE NEWTON)
O polinômio )x(pn de grau menor ou igual a n que interpola f(x) em 1n + pontos distintos pode
ser obtido através da expressão:
)xx).....(xx)(xx(d.......)xx)(xx(d)xx(dd)x(p 1n1on1o2o1on −−−−++−−+−+=
Os coeficientes dk, com n,....,2,1,0k = são as diferenças divididas.
Tem-se que:
]x[fd oo =
]x,x[fd 1o1 =
M
]x,x,......,x,x,x[fd n1n21on −=
==
====
⇒
nnn
111
ooo
y)x(f]f[x
y)x(f]f[x
y)x(f]f[x
0 ORDEMM
−−=
−−=
−−=
⇒
−
−
1nn
1nnn1-n
12
1221
o1
o11o
xx
)x(f)x(f]x,f[x
xx
)x(f)x(f]x,f[x
xx
)x(f)x(f]x,f[x
1 ORDEM
M
−−=
−−=
−−=
⇒
−
−−−
2nn
1n2nn1nn1-n2-n
13
2132321
o2
1o2121o
xx
]x,x[f]x,x[f]x,x,f[x
xx
]x,x[f]x,x[f]x,x,f[x
xx
]x,x[f]x,x[f]x,x,f[x
2 ORDEM
M
on
1n1on21n1n1o xx
]x,....,x,x[f]x,...,x,x[f]x,x,.....,x,f[x :N ORDEM
−−= −
−
Assim,

Instituto Superior para Tecnologias de Informação e Comunicação - ISUTIC
Disciplina de Cálculo Numérico – 1o Ano – 2º Semestre 45
x ORDEM 0
ORDEM 1 ORDEM 2 ORDEM 3
ox )x(f o [ ]o1
o11o xx
)x(f)x(fx,xf
−−= [ ]
o2
1o2121o xx
]x,x[f]x,x[fx,x,xf
−−=
[ ]
o3
21o321
321o
xx
]x,x,x[f]x,x,x[f
x,x,x,xf
−−
=
1x
)x(f 1
2x
)x(f 2 [ ]12
1221 xx
)x(f)x(fx,xf
−−=
3x
)x(f 3 [ ]23
2332 xx
)x(f)x(fx,xf
−−=
[ ]13
2132321 xx
]x,x[f]x,x[fx,x,xf
−−=
Exemplo: Construir a tabela das diferenças divididas e obter, pela fórmula de Newton, o polinômio interpolador dos pontos dados na tabela abaixo. Verifique o polinômio encontrado.
xi -2 0 2 f(x i) 18 4 6
Na tabela tem-se 31n =+ pontos conhecidos, logo 2n = . O polinômio interpolador de f(x), pela fórmula de Newton será dado por:
)xx)(xx(d)xx(dd)x(p 1o2o1o2 −−+−+=
)0x)(2x(d)2x(dd)x(p 21o2 −++++=
)x2x(d)2x(dd)x(p 221o2 ++++=
Quando se tem 1n + pontos conhecidos, pode-se calcular n diferenças divididas de 1ª ordem, 1n − de 2ª ordem e assim sucessivamente, até uma diferença dividida de ordem n.
31n =+ 2 dd de 1ª ordem
2n = 1 dd de 2ª ordem
x ORDEM 0 ORDEM 1 ORDEM 2
2xo −= 18)2(fdo =−= [ ] 72184
x,xfd 1o1 −=−== [ ]21o2 x,x,xfd =
24
8
22
)7(1d2 ==
+−−=
0x1 = 4)0(f =
2x2 = 6)2(f = [ ] 12
46x,xf 21 =−=
O polinômio será: x4x214x718)x2x(2)2x(718)x(p 222 ++−−=+++−=
Verificação:
1818 184)2(3)2(2)2(p 22 =→=+−−−=−
44 44)0(3)0(2)0(p 22 =→=+−= � OK
66 64)2(3)2(2)2(p 22 =→=+−=
4x3x2)x(p 22 +−=

Instituto Superior para Tecnologias de Informação e Comunicação - ISUTIC
Disciplina de Cálculo Numérico – 1o Ano – 2º Semestre 46
EXERCÍCIOS
1) Calcule o número aproximado de habitantes de Belo Horizonte em 1975 usando os valores dados pela tabela abaixo para os anos de 1970 e 1980.
Número de habitantes de Belo Horizonte nos censos de 1950, 1960, 1970 e 1980:
ANO 1950 1960 1970 1980 Habitantes 352.724 683.908 1.235.030 1.814.990
3) Dada a tabela abaixo:
xi 0 π/6 π/4 π/3 π/2 f(x i) 0,00 0,33 0,56 0,74 0,78
a) Determine uma função quadrática interpoladora e ache f(π/5). b) Determine f(11π/18).
3) Utilizando os valores da função 1x3x)x(f 2 +−= , dados na tabela abaixo:
xi 0,5 1,0 1,5 f(x i) 25,0− 1− 25,1−
a) Determinar f(1,2) usando interpolação linear e calcular o erro de truncamento. b) Determinar f(1,2) usando interpolação quadrática e calcular o erro de truncamento.
4) Calcular um valor aproximado de 25,0e usando os valores abaixo e calcular o erro de truncamento.
x 0,1 0,2 0,3 0,4
xe 1,105 1,221 1,350 1,492
a) usando interpolação linear. b) usando interpolação quadrática
5) Obtenha o polinômio interpolador da função dada pela tabela.
xi 0 1 2 3 yi 4 2 0 -6
6) Determine o polinômio interpolador de Lagrange de acordo com a tabela.
xi 1 2 3 f(x i) 1 2 3
7) Determine o polinômio interpolador de Lagrange de acordo com a tabela.
xi -2 0 2 f(x i) 18 4 6
8) Construa a tabela de diferenças divididas e obtenha o polinômio interpolador da função dada na tabela.
xi 0 1 2 3 f(x i) 4 2 0 -6

Instituto Superior para Tecnologias de Informação e Comunicação - ISUTIC
Disciplina de Cálculo Numérico – 1o Ano – 2º Semestre 47
9) Calcule pelo método de Newton o valor interpolado de f(1.26), usando um polinômio de
grau 2 e a tabela abaixo.
xi 0.5 0.7 0.9 1.1 1.3 f(x i) 4,0 3,0 4,5 3,5 5,0
10) Ajuste os pontos da tabela abaixo a uma parábola.
xk -2 -1 0 1 2 3 yk -3 -2 0 4 8 11

Instituto Superior para Tecnologias de Informação e Comunicação - ISUTIC
Disciplina de Cálculo Numérico – 1o Ano – 2º Semestre 48
CAPÍTULO 5
AJUSTE DE CURVA
5.1 – INTRODUÇÃO O Ajuste de curva consiste no traçado de uma curva c mais próxima quanto possível do sistema de
pontos )y,x(p iii com n,...,3,2,1i = .
A obtenção de uma função )x(f ik que seja uma “boa aproximação” para os valores tabelados e que
permita extrapolar com certa margem de segurança é conhecida como função de ajuste. Interpolação: a função interpoladora tem que coincidir com os pontos tabelados. Ajuste: não é necessário que os pontos tabelados coincidam com a função ajuste, mas que a diferença
entre o valor de ajuste e o tabelado seja pequena. 5.2 – MÉTODO DOS MÍNIMOS QUADRADOS Defini-se como resíduo do ajuste para cada ponto:
)x(f)x(fR kkk
k −= n,1,2,3,....k /p =
O mmq determina que a função que melhor se ajusta aos m pontos dados é aquela para a qual a soma dos quadrados dos resíduos seja mínima:
[ ] 0 )x(f)x(fRm
1k
2kk
k →−= ∑=
5.3 – AJUSTE A UM POLINÔMIO DE GRAU N Para ajustar f(x) por um polinômio de grau 1n ≥ , a função de ajuste deverá ter a seguinte expressão:
nn
221o
k xa....xaxaa)x(f ++++=
Os coeficientes n21o a ,....,a ,a ,a podem ser obtidos a partir da resolução do seguinte sistema:
y
x x1 x2 x3 xn
y1
y2
y3 yn
c

Instituto Superior para Tecnologias de Informação e Comunicação - ISUTIC
Disciplina de Cálculo Numérico – 1o Ano – 2º Semestre 49
=
∑
∑∑∑
∑∑∑∑
∑∑∑∑∑∑∑∑∑∑∑
++
+
+
knk
k2k
kk
k
n
2
1
o
n2k
2nk
1nk
nk
2nk
4k
3k
2k
1nk
3k
2kk
nk
2kk
y.x
y.x
y.x
y
a
a
a
a
.
xxxx
xxxx
xxxx
xxxm
MM
L
MMMM
L
L
L
Onde m é o número de pontos da tabala dada. 5.3.1 – Ajuste Linear Exemplo: A tabela abaixo mostra o desempenho de um torno de parafusos em função de sua idade. Faça a projeção anual de 5 até 8 anos.
t (anos) 1 2 3 4 p (parafusos/dia) 240 200 180 150
Fazendo um diagrama com os pontos dados, verifica-se que uma reta é um bom ajuste para a função tabelada. Logo,
Construindo a tabela, tem-se:
k kx 2kx ky kk y.x
1 1 1 240 240 2 2 4 200 400 3 3 9 180 540 4 4 16 150 600
∑ 10 30 770 1780
∑
∑=
∑∑
∑
kk
k
1
o2kk
k
y.x
y
a
a .
xx
xm �
=
1780
770
a
a .
3010
104
1
o
=+=+
1780a30a10
770a10a4
1o
1o
1o a3178a −=
770a10)a3178(4 11 =+− � 770a10a12712 11 =+− � 58a2 1 =−
y
x 1 2 3 4
50
100
150
200
250
xaa)x(f 1ok +=
Instituto Superior para Tecnologias de Informação e Comunicação - ISUTIC
Disciplina de Cálculo Numérico – 1o Ano – 2º Semestre 50
29a1 −=
)29(3178ao −−= � 265ao =
Projetando a produção, tem-se:
t (anos) 5 6 7 8 p (parafusos/dia) 120 91 62 33
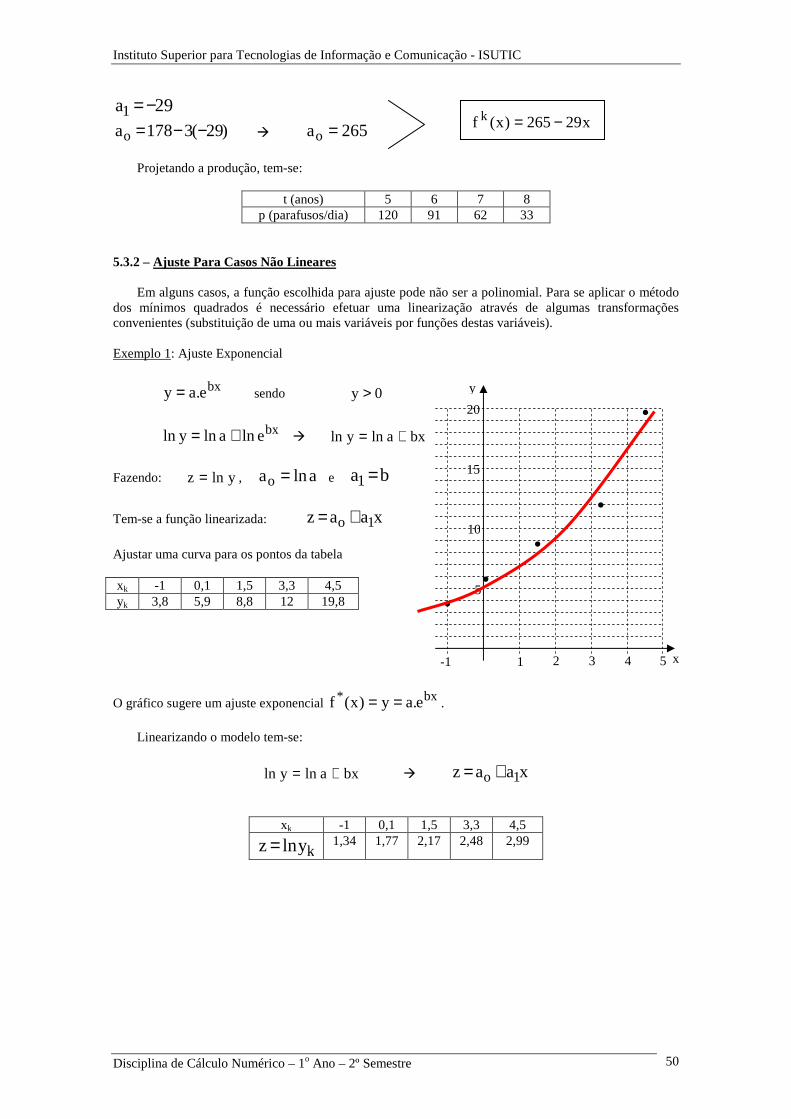
5.3.2 – Ajuste Para Casos Não Lineares Em alguns casos, a função escolhida para ajuste pode não ser a polinomial. Para se aplicar o método dos mínimos quadrados é necessário efetuar uma linearização através de algumas transformações convenientes (substituição de uma ou mais variáveis por funções destas variáveis). Exemplo 1: Ajuste Exponencial
bxe.ay = sendo 0y >
bxelnalnyln += � bxalnyln +=
Fazendo: ylnz = , alnao = e ba1=
Tem-se a função linearizada: xaaz 1o +=
Ajustar uma curva para os pontos da tabela xk -1 0,1 1,5 3,3 4,5 yk 3,8 5,9 8,8 12 19,8
O gráfico sugere um ajuste exponencial bx* e.ay)x(f == .
Linearizando o modelo tem-se:
bxalnyln += � xaaz 1o +=
xk -1 0,1 1,5 3,3 4,5
kylnz= 1,34 1,77 2,17 2,48 2,99
x29265)x(f k −=
-1 1 2 3 4 5 x
y
5
10
15
20

Instituto Superior para Tecnologias de Informação e Comunicação - ISUTIC
Disciplina de Cálculo Numérico – 1o Ano – 2º Semestre 51
Para obter ao e a1, tem-se:
k xk 2kx
zk kk z.x
1 -1 1 1,34 -1,34 2 0,1 0,01 1,77 0,18 3 1,5 2,25 2,17 3,26 4 3,3 10,89 2,48 8,18 5 4,5 20,25 2,99 13,46
∑ 8,4 34,40 10,75 23,74
=
×
74,23
75,10
a
a
40,344,8
4,85
1
o
=+=+
74,23a40,34a4,8
75,10a4,8a5
1o
1o �
==
28,0a
68,1a
1
o
Levando estes valores nas expressões deduzidas para o caso linear tem-se:
37,5a ea 68,1alna 68,1o =→=→==
28,0ba1 ==
Logo, 0,28x* e 37,5)x(f =
Exemplo 2: bxc.ay = sendo 0y > , 0c > e 1c≠
)c.a(logylog bxcc = �
bxccc clogalogylog +=
1o
cc
a a z
bxalogylog
↓↓↓
+=
�
==
=
ba
aloga
ylogz
1
co
c
Função linearizada: xaaz 1o +=
Exemplo 3: xb.ay = sendo 0y >
)b.aln(yln x= � xblnalnyln +=
1o a a z
bln.xalnyln
↓↓↓+=
�
==
=
blna
alna
ylnz
1
o
Função linearizada: xaaz 1o +=
Exemplo 4: bx.ay = sendo 0y > e 0x >

Instituto Superior para Tecnologias de Informação e Comunicação - ISUTIC
Disciplina de Cálculo Numérico – 1o Ano – 2º Semestre 52
)x.aln(yln b= � bxlnalnyln +=
ta a z
xln.balnyln
1o
↓↓↓↓+=
�
===
=
xlnt
ba
alna
ylnz
1
o
Função linearizada: taaz 1o +=
Exemplo 5: bxa
1y
+=
1o a a z
bxay
1
↓↓↓
+=
�
==
=
ba
aa
y
1z
1
o
Função linearizada: xaaz 1o +=
Exemplo 6: xcos.bay +=
ta a z
xcos.bay
1o
↓↓↓↓+=
�
===
=
xcost
ba
aa
yz
1
o
Função linearizada: taaz 1o +=

Instituto Superior para Tecnologias de Informação e Comunicação - ISUTIC
Disciplina de Cálculo Numérico – 1o Ano – 2º Semestre 53
EXERCÍCIOS
1) Ajuste os dados da tabela ao modelo bx10.ay = .
xk -1 0.1 1.5 3.3 4.5 yk 3.8 5.9 8.8 12 19.8
2) O número de bactérias (Y) por unidade de volume em cultura após (X) horas é apresentado na
tabela a seguir.
xi 2 3.5 6 8 yi 8.4 13 19 24
Ajuste os dados à curva bx.ay = e determine a quantidade de bactérias para x=10 horas.
3) Para a tabela abaixo, ajuste pelo método dos mínimos quadrados uma fórmula do tipo kxe.ay = .
xk 1 2 3 4 5 yk 7 11 17 27 41
4) Para os dados da tabela abaixo, ajustar pelo método dos mínimos quadrados uma fórmula do tipo
bx.ay = .
xi 2 3 3.5 4 yi 65 60 55 50
5) Ache a curva trigonométrica do tipo )xcos(bay += pelo métodos dos mínimos quadrados para
a tabela abaixo.
xk 0.1 0.2 0.5 0.7 0.9 1.3 yk 2.31 2.29 2.24 2.17 2.10 1.95

Instituto Superior para Tecnologias de Informação e Comunicação - ISUTIC
Disciplina de Cálculo Numérico – 1o Ano – 2º Semestre 54
CAPÍTULO 6
INTEGRAÇÃO NUMÉRICA
6.1 – INTRODUÇÃO Se uma função f(x) é contínua em um intervalo [a,b] e sua primitiva F(x) é conhecida, então a integral definida desta função neste intervalo é dada por:
∫ −=b
a
F(a)F(b) dx )x(f , onde )x(f)x('F =
Por exemplo:
∫ =3
0
2 9 dx x , pois, 3
x)x(F
3= é uma função cuja derivada é 2x)x(f =
Assim, ∫ =−==3
0
332 9
3
0
3
3F(0)-F(3) dx x
Em alguns casos o valor dessa primitiva F(x) não é conhecido ou é de difícil obtenção e, em situações práticas, nem sempre se tem a função a ser integrada definida por uma fórmula analítica (mas definida por tabela de pontos). Assim é necessária a utilização de métodos numéricos para calcular o valor da integral definida f(x). A seguir estudaremos dois métodos numéricos de integração: Método dos trapézios e Método de Simpson. 6.2 – REGRA DO TRAPÉZIO Consiste em substituir a função integrando f(x) por um polinômio interpolador de grau 1 que a interpole nos extremos do intervalo de integração [a,b]. 6.2.1 – Interpretação Geométrica
[ ] )(2
)()(2
hdx )( 111
1
yyh
xfxfxPI o
xb
xa
oT
o
+=+== ∫=
=
� área do trapézio da geometria
A integral do polinômio interpolador é a área do trapézio de altura h e bases f(xo) e f(x1).
oxa = 1xb=
)x(f o
)x(f 1
)x(f
)x(P1

Instituto Superior para Tecnologias de Informação e Comunicação - ISUTIC
Disciplina de Cálculo Numérico – 1o Ano – 2º Semestre 55
6.2.2 – Erro de Truncamento A diferença entre a integral exata de f(x) e a integral aproximada (trapézio) é o erro de integração:
)c("f12h
E3
T −= , bca ≤≤
OBS:
a) )c("f deve ser o maior valor de )x("f , no intervalo [a,b].
b) Se 0)c("f > o erro na integração é por excesso e se 0)c("f < o erro na integração é por falta.
6.2.3 – A Integral pela Regra do Trapézio A integral resultante da Regra do Trapézio será dada pela expressão:
[ ] )c("f12h
)x(f)x(f2h
EII3
1oTT −+=+=
Exemplo: Calcular, pela regra do trapézio o valor de ∫=6,3
0,3xdx
I
1o) cálculo de IT:
x1
)x(f =
6,00,36,3xxh o1 =−=−=
[ ] 18333,0]2778,03333,0[26,0
)x(f)x(f2h
I 1oT =+=+=
2o) cálculo de ET:
1x)x(f −= � 2x)x('f −−= � 3x2)x(''f −=
33
3
33
T 10333,127
2.
12
6,0
x
2.
12
h)c("f
12
hE −×−=−=−=−=
3o) cálculo de I:
1820,010333,11833,0EII 3TT =×−=+= −
Pelo cálculo integral (analiticamente):
18232,0)0,3ln()6,3ln(x
dxI
6,3
0,3
=−== ∫
xi f(x i) 3,0 3,6
0,3333 0,2778
xi f’’(x i) 3,0 3,6
0,074 0,043

Instituto Superior para Tecnologias de Informação e Comunicação - ISUTIC
Disciplina de Cálculo Numérico – 1o Ano – 2º Semestre 56
6.3 – METODO DOS TRAPÉZIOS REPETIDOS OU FÓRMULA COM POSTA DOS
TRAPÉZIOS Podemos constatar que quanto maior for o intervalo de integração, maior será o erro cometido pelo método dos trapézios. Uma forma de se melhorar o resultado obtido (minimizar o erro) é subdividir o intervalo [a,b] em n intervalos de amplitude h (partes iguais) e a cada subintervalo aplica-se a regra dos trapézios. Somando a área dos n trapézios temos:
[ ])x(f)x(f2...)x(f2)x(f2)x(f2
hI n1n21oTR +++++= −
O erro total cometido é a soma dos erros cometidos na aplicação da fórmula dos trapézios a cada subintervalo.
n21TR E...EEE +++=
)c("fn.12
)ab(E
2
3
TR−−=
Assim: TRTR EII +=
OBS: Quanto maior o número de subintervalos, menor será o erro. Exemplo: Calcular a integral abaixo utilizando a regra dos trapézios composta subdividindo o intervalo [a,b] em 6 subintervalos.
∫=6,3
0,3xdx
I � 1,06
0,36,3n
abh =−=−=
1o) cálculo de ITR:
x1
)x(f = � 2x
1)x('f −= �
3x
12)x(''f =
xi f(x i) 3,0 3,1 3,2 3,3 3,4 3,5 3,6
0,3333 0,3226 0,3125 0,3030 0,2941 0,2857 0,2778
ox 1x
)x(f
2x 3x 4x 5x 6x 7x 8x 9x 10x L x
Instituto Superior para Tecnologias de Informação e Comunicação - ISUTIC
Disciplina de Cálculo Numérico – 1o Ano – 2º Semestre 57
[ ])x(f)x(f2)x(f2)x(f2)x(f2)x(f2)x(f2
hI 654321oTR ++++++=
18235,0]2778,02857,0.22941,0.23030,0.23125,0.23226,0.23333,0[2
0,1ITR =++++++=
2o) cálculo de ETR:
52
3
2
3
TR 10704,327
2
612
)0,36,3()c("f
n.12
)ab(E −×−=×
×−−=−−=
3o) cálculo de I:
182313,010704,318235,0EII 5TRTR =×−=+= −
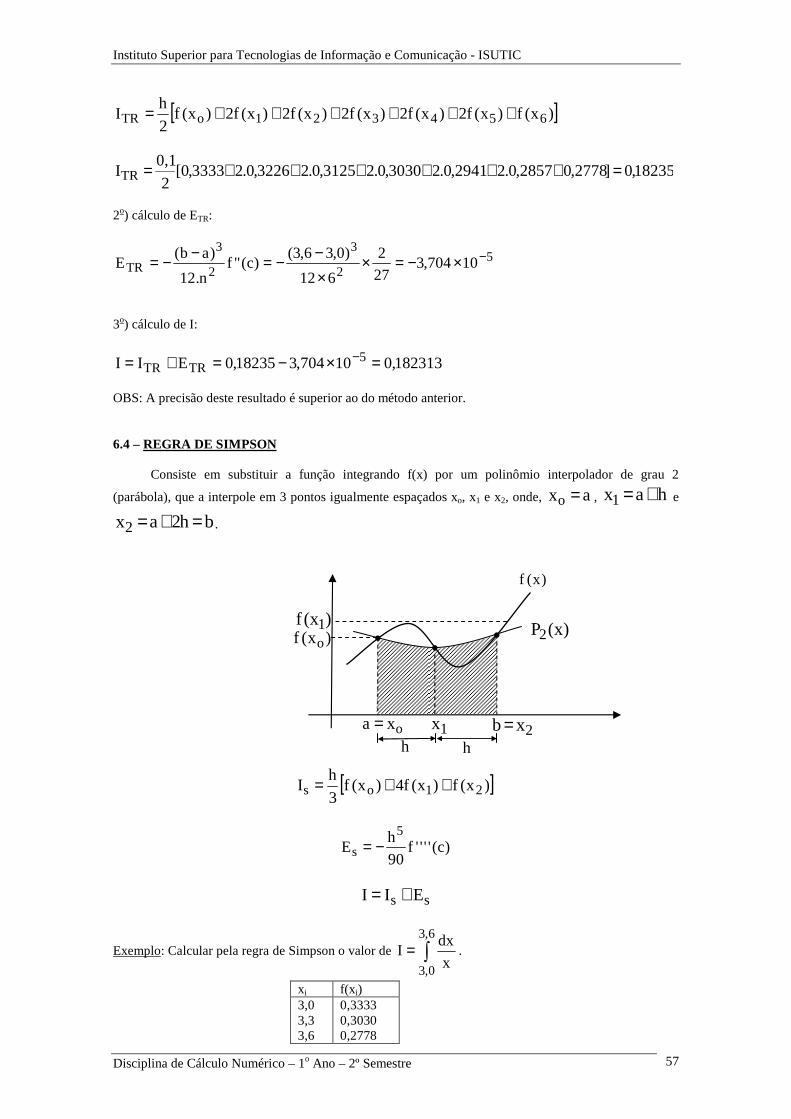
OBS: A precisão deste resultado é superior ao do método anterior. 6.4 – REGRA DE SIMPSON Consiste em substituir a função integrando f(x) por um polinômio interpolador de grau 2
(parábola), que a interpole em 3 pontos igualmente espaçados xo, x1 e x2, onde, axo = , hax1 += e
bh2ax2 =+= .
[ ])x(f)x(f4)x(f3
hI 21os ++=
)c(''''f90
hE
5
s −=
ss EII +=
Exemplo: Calcular pela regra de Simpson o valor de ∫=6,3
0,3 x
dxI .
xi f(x i) 3,0 3,3 3,6
0,3333 0,3030 0,2778
oxa = 2xb=
)x(f o
)x(f 1
)x(f
)x(P2
1x
h h

Instituto Superior para Tecnologias de Informação e Comunicação - ISUTIC
Disciplina de Cálculo Numérico – 1o Ano – 2º Semestre 58
3,02
abh =−=
[ ] [ ] 18232323,02778,03030,043333,03
3,0)x(f)x(f4)x(f
3
hI 21oS =+×+=++=
x1
)x(f = � 2x
1)x('f −= �
3x
2)x(''f = �
4x
6)x('''f −= �
5x
24)x(''''f =
65
55
S 106667,23
24
90
3,0)c(''''f
90
hE −×−=×−=−=
1823206,0106667,218232323,0EII 6SS =×−=+= −
6.5 – REGRA DE SIMPSON REPETIDA Deve-se substituir o intervalo de integração [a,b] em n subintervalos (n par) iguais de amplitude h e a cada par de subintervalos aplicar a regra de simpson simples:
Área do 1o par de subintervalos: [ ])x(f)x(f4)x(f3
h21o ++
Área do 2o par de subintervalos: [ ])x(f)x(f4)x(f3
h432 ++
M
Área do último par de subintervalos: [ ])x(f)x(f4)x(f3
hn1n2n ++ −−
Somando as áreas temos:
[ ])x(f)x(f4)x(f2)x(f2)x(f4)x(f2)x(f4)x(f3
hI n1n2n4321oSR ++++++++= −−L
( ))c(''''f
n 180
abE
4
5
SR−−=
SRSR EII +=
Exemplo: Calcular o valor da integral I aplicando a regra de Simpson repetida. Usar n = 4.
∫ ++=2
1
2 dx )1x2x(I
xi f(x i) 1,00 1,25 1,50 1,75 2,00
4,0000 5,0625 6,2500 7,5625 9,0000

Instituto Superior para Tecnologias de Informação e Comunicação - ISUTIC
Disciplina de Cálculo Numérico – 1o Ano – 2º Semestre 59
25,04
12
4
abh =−=−=
[ ] 333333,695625,742500,620625,5443
25,0ISR =+×+×+×+=
1x2x)x(f 2 ++= � 2x2)x('f += � 2)x(''f = � 0)x(''''f)x('''f ==
( )0)c(''''f
n 180
abE
4
5
SR =−−=
3333333,6EII SRSR =+=
Analiticamente, o valor desta integral será:
333333,6xx3
xdx )1x2x(I
2
1
232
1
2 =++=++= ∫
Referências Bibliográficas RUGGIERO, M. A. G. e LOPES, V. L. R. - Cálculo Numérico: Aspectos Teóricos e Computacionais, 2. ed. Makron Books: São Paulo, 1997. SPERANDIO, D., e outros. Cálculo Numérico: Características Matemáticas e Computacionais dos Métodos Numéricos. Prentice Hall: Sao Paulo, 2003.
Créditos: Inatel – Instituto Nacional de Telecomunicações Professora: Karina Perez Mokarzel