david um robÔ mÓvel de autonomia para inspeÇÃo de tubulaÇÕes de … · 40 . sbai- sp, 08 -10...
TRANSCRIPT

40. SBAI- Simpósio Brasileiro de Automação Inteligente. São Paulo. SP, 08-10 de Setembro de 1999
DAVID - UM ROBÔ MÓVEL COM ALTO GRAU DE AUTONOMIA PARAINSPEÇÃO DE TUBULAÇÕES DE ESGOTO
M.Sc. Humberto Ferasoli FilhoDepto de Computação - Faculdade de Ciências
Universidade Estadual Paulista - UNESP - Campus de Bauru.Av. Luiz Edmundo Carrijo Coube, s/nCEP 17033-360 Bauru -SP - Brasile-mail: ferasoli@bauru .unesp.br
M.Sc. Marcelo Nicoletti FranchinDepto de Engenharia Elétrica - Faculdade de Engenharia
Universidade Estadual Paulista - UNESP - Campus de Bauru.Av. Luiz Edmundo Carrijo Coube , s/nCEP 17033-360 Bauru -SP - Brasile-mail: franchinrêbauru.unesp.br
r»,Márcio RilloDepto de EngenhariaEletrônica - Escola Politécnica da USP
Av. Luciano Gualberto, 158, trav3CEP 05508-900 - São Paulo - SP - Brasil
e-mail : [email protected]
-
Resumo: Este artigo apresenta o desenvolvimento de um robômóvel com alto grau de autonomia para a inspeção de·tubulações . O robô está atualmente dirigido à inspeções detubulações de esgoto .
O desenvolvimento deste robô, denominado DAVID(Dispositivo com alto grau de Autonomia Veicular paraInspeção de Dutos), foi motivado pelos problemasapresentados pelo Departamento de Água e Esgoto da cidadede Bauru (DAE) .
O robô tem como objetivo a missão de navegar noambiente inspecionando possíveis falhas no sistema físico dasredes coletoras de esgoto. A missão de inspeção levantaráproblemas de declividade, diâmetro dos tubos, obstruções,deposição de materiais e rompimentos na rede coletora deesgoto. O objetivo final é ter um diagnósticos destes problemase a posição em que eles -ocorreram para serem realizadas asmanutenções.
A arquitetura de controle usada no DAVID é umaarquitetura híbrida em três camadas. As camadas conferem aflexibilidade de adaptação a outros contextos de aplicações emodularidade para o desenvolvimento. A camada mais baixada arquitetura, camada de Navegação, foi implementada porcomportamentos específicos para o deslocamento na tubulação.A camada intermediária, camada de Sobrevivência, tem aresponsabilidade de diagnosticar os problemas do robô e doambiente que possam comprometer a sua integridade. A
476
camada de Sobrevivência usa de um conjunto deprocedimentos para atuar na camada de Navegação e arbitrarseus comportamentos. Ela também oferece serviços a camadade Aplicação e tem mecanismo para o cancelamento da missãoe emergenciais, em situações onde o robô não consegue selocomover. A camada de Aplicação é responsável por coletar earmazenar as informações sensoriais durante a missão.
Palavras Chaves: robôs móveis autônomos, arquitetura decontrole.
Abstract: This article introduces lhe development of anautonomous mobile robot for pipeline inspection. The robotwithin this work is actually directed for sewerage systems.
The development of this robot, named DAVID (translated fromportuguese: Vehicular autonomous device for ductsinspection), was motivated by the problerns presented by thewater and sewerage departrnent (DAE) located in lhe city ofBauru.
Its objective is to navigate within the pipes checking forpossible failures in lhe physical sewerage system. Theinspection mission will raise problerns such as declivity, ductdiameter, obstructions, deposited matter and leakage in thesewerage network. The final goal is to diagnostic these sort offailures and to find lhe locations where they happened forcorrective maintenance planning.
A Hirose & Yoneda Laboratory' possui uma série de robôs,com vários tipos de sistema de deslocamento, para diversas -áreas de aplicação. Especificamente, para inspeção emtubulações este laboratório desenvolveu a família de robôsdenominados Thes-I, Thes-2 e Thes-3.
O Laboratório de Propulsão a Jato (Jet Propulsion Lab -.JPL)desenvolveu um robô com a forma de urna serpente que é umprotótipo de um manipulador projetado para navegar edesempenhar tarefas de inspeção em ambientes obstruídos erestritos [Jug, 1995]. .INTRODUÇÃO
40 . SBAI - SimpósioBrasileirode Automação Inteligente, SãoPaulo,SP. 08-10 de Setembrode 1999
DAVID's control architecture is a three layered hybrid O Instituto de Pesquisa de Stanford (Stanford Researcharchitecture. The layered approach provides flexibility for work Institute - SRI) desenvolveu um robô miniatura para inspeçãowith many similar appl ícations and design modularity. The denominado MAGPIE2 (Magnetically Attached Generallower layer, named navigation layer, was implemented with Purpose Inspection Engine). O robô foi desenvolvido com opipe moving specific behaviours. The mid-layer, named intuito de realizar inspeção em tubulações. podendo sersurvival layer, concerns with robot's integrity making reconfigurado para estruturas de ferro tais como pontes.diagnostic tasks to keep lhe robot working properly. The estruturas submarinas. tanques, cascos de navios. etc.survival layer uses a set of procedures that can be applied overlhe navigation layer to change its behaviours, offer services tolhe application layer and consists of emergencial and abortmission mechanisms to handle situations where lhe robot cannot move. The upper layer, named applicationlayer, concernswith collecting and storing of sensory information during lhemission.
1
Keywords: autonomous mobile robot, control architecture.
O avanço na pesquisa em robôs móveis com alto grau deautonomia se deve, por um lado. as amplas perspectivas de suaaplicação e, por outro , do desenvolvimento e redução de custosde áreas como a eletrônica, que propiciou o avanço dacomputação, dos dispositivos sensores e da mecânica fina. Estecenário, somado às pesquisas em Inteligência Artificial eCiência Cognitiva, permite, atualmente, a proposição deprojetos robóticos ambiciosos e complexos.
As aplicações, na maioria dos casos, possuem objetivoscomplexos em ambientes que, por algum motivo, são hostis apresença humana. A exploração de planetas e de terrenosminados, a inspeção de vulcões e de tubulações , são exemplosde áreas de aplicações.
Entre os projetos existentes, alguns se assemelham em algunsaspectos ao projeto em questão. como o robô móvel autônomopara inspeção em sistemas de esgoto, desenvolvido no GMD(Gesellschaft Mathematik und Datenverarbeitung) alemão. Oprojeto chamado KURT [Kirchner, 1997] é um robô móvelautônomo de 6 rodas para operar em um sistema de esgotoseco, e foi testado em tubulações de concreto de 600 mm dediâmetro.
Existem vários outros trabalhos na área de Inspeção, como osrobôs móveis não autônomos tele-operados para limpeza desistemas de ar condicionado. O nosso interesse maior está nosrobôs móveis com alto grau .de autonomia para realizarinspeção de tubulações.
Assim, os robôs deixam de realizar apenas as tarefas repetitivasna substituição a mão de obra humana, para serem usados emoutras aplicações como na substituição humana em atividadesde risco ou em situações, que, pelas dimensões, impossibilitema presença do homem [Nitzan, 1985].
Alguns trabalhos na área de inspeção usando robôs móveisautônomos foram apresentados pela comunidade científica nosúltimos anos. Entre eles está o AGROBOT, um robô móvelpara operações em agricultura dentro de estufas [Buemi, 1994],em desenvolvimento no Centro Interuniversitário de ·RobóticaAgrícola e Ambiental em Gênova, Itália. Ele é um robô móvel,composto de um manipuIador e uma garra, que navega porestufas identificando através de um sistema de visão os frutosdurante os seus estágios de desenvolvimento, pulverizando-os erealizando a colheita quando estes estão maduros.
O Centro de Robótica de Campo da Carnegie MellonUniversity (CMU) apresenta vários projetos nesta área, entreeles o NEPTUNE. O projeto NEPTUNE [Schernpf, 1995] é umrobô móvel para inspeção de interiores de tanques dearmazenamento de combustível. Ele inspeciona deterioraçõesvisíveis, usando urna câmera de vídeo e inspeciona a corrosãode paredes, locomovendo-se com esteiras magnetizadas.
O Robinspec.' é um robô para inspeção. emna Universidade da Catalunia, com o propósito de solucionarproblemas de inspeção em ambientes perigosos ou de difícilacesso como tanques de reservação, tubulações, colunas dedestilação, etc.
I System and Control Laboratory - University of Catalunia<http://sunI58.dees.unictitl-giovannilROBIN.HTM>
O fato de não existir uma forma de verificação da execução deprojetos de redes de esgoto, por ser uma obra enterrada. oDepartamento de Água e Esgoto (DAE) de Bauru solicitou odesenvolvimento de um robô para este fim. Com o intuito deconstatar se as normas de declividade mínima foram seguidas,se o diâmetro da tubulação segue o projeto e se não há"embarrigamento" na rede, um robô deverá navegar por esteambiente inspecionando estes e outros itens [Ferasoli, 1998].
2 ROBÔSMÓVEIS AUTÔNOMOSO desenvolvimento de um robô móvel autônomo para umadeterminada aplicação é um trabalho complexo por causa dosvários problemas encontrados durante sua execução sobretudopela interdisciplinaridade envolvida e exigida do projetista.Neste aspecto, arquiteturas que .propiciem facilidades deadaptações para aplicações diferentes são bastante atraentes.
O ambiente da aplicação tem forte influencia na determinaçãoda arquitetura. As restrições impostas pelo ambiente ditam ascaracterísticas físicas do robô, os sensores .necessários para amanutenção de sua integridade e para a missão, assim 'comodas estratégias de navegação e controle da arquitetura.
Os sensores para os robôs móveis podem ser divididos, de umaforma mais ampla, em duas partes: os scnsores internos e osexternos. Os sensores internos indicam o estado dos
2 Stanford Research Institute<http://www.erg.sri.comldiv-services/aatclhtmllmagpie>3 Hirose&Yoneda Laboratory .<http://mozu.mes.titech.ac.jp/research/mobile/thes/lhes.html>
477

40. SBAI - Simpósio Brasileiro de Automação Inteligente. São Paulo. SP. 08-10 de Setembro de 1999
componentes do robô como temperatura de motores , estado deenergia das baterias, etc . Os sensores externos estão envolvidoscom as tarefas de navegação e da aplicação no sentido de serelacionar com o mundo. A escolha, baseada no tipo denavegação e aplicação, ocorre num amplo universo de sensoresdisponíveis[Everett, 1995J[Brooks, 1997J.
Um robô móvel com alto grau de autonomia é um dispositivoque pode se locomover harmoniosamente, evitando obstáculosfixos e móveis , por um ambiente na busca de seu objetivo sema necessidade de intervenção humana.
A mobilidade de um robô móvel pode ser defin ida como sendoa habilidade de locomoção de um robô num ambiente
Uma definição que bem situa a idéia de autonomia ouinteligência nos robôs móveis foi apresentada por Arkin[Ark.in, 1990J: "O robô é uma máquina capaz de extrairinformações de seu ambiente e usar conhecimentó sobre o seumundo para mover-se seguramente de forma adequada eobjetiva".
Como a autonomia absoluta é difícil de ser atingida, usamos otermo alto grau de autonomia para defin ir uma habilidade desobrev ivência não plena. Entendemos que a autonomi a de umrobô é relativa, por exemplo , as baterias que o equipam, aograu de tolerância a falhas dc seus módulos de hardware csoftware, ou seja, de sua capacidade de sobreviv ência noambiente na busca de seu objetivo.
As definições de arquiteturas de controle de robôs móveisautônomos são escassas na literatu ra. Este termo tem sidoproposto e utilizado com diferentes significados e referindo-sea diferentes partes dos robôs.
Uma definição clara de arquitetura é apresentada por Rembold[Rembold , 1987J: "A arquitetura de um robô é definida peloprincípio de operação dos módulos de controle. O princípio daoperação descreve o comportamento funcional da arquitetura,defin indo as estruturas de informação e de controle".
As arquiteturas de controle dos robôs móveis sãocaracterizadas pelo princípio de funcionamento do sistema decontrole. Elas estão limitadas num extremo por sistemasplenamente reativos e, no outro, por sistemas plenamentedeliberativos. Os sistemas plenamente reativos possuempouquíssimo tratamento das informações , se reduzindo a umlaço de controle entre sensores e atuadores. Sua princ ipalcaracterística é o tempo de resposta rápido entre um estímulosensorial e a ação. Os sistemas plenamente deliberativos secaracterizam por um laço aberto não recebendo informaçõessensorial sobre o mundo e nem de suas ações nele.
Tanto o sistema puramente reati vo quanto o puramentedeliberativo não encontram aplicações práticas reais em robôsmóveis . A arquitetura com sistema puramente reativo foiestudado por Kaelbling [Kaelbling, 1986J enquanto que umsistema puramente deliberativo pode ser exemplificado com ouso do STRIPS [Fikes, 1971J no controle de um robô.
As arquiteturas de controle se desenvolveram, inicialmente, apartir dos sistemas plenamente deliberativos. Estas arquiteturasusam conceitos de Inteligência Artificia! (IA) para explorar asbases de conhecimento sobre o mundo e planejar um caminhoque leve o robô ao objetivo. Os sensores são usados paraextrair informações do ambiente e verificar as ações do robônele durante a execuç ão dos planos . Portanto, .o laço de
478
controle é fechado e a arquitetura passa a reagi r às alteraçõesno mundo .
Por outro lado, a partir das carac terísticas dos sistemasplenamente reativos, ocorreu o desenvolvimento dasarquiteturas baseadas em compo rtamento, cuja linha se baseounas reações comportamentais de pequenos animais.Fundamentalmente diferem da abordagem deliberativa por nãofazerem uso de qualqu er tipo de raciocínio e, por conseqüência,qualquer planejamento de forma expl ícita. Elas não trabalhamcom modelos de mundo , sendo apoiadas no fundamento de queo melhor modelo do mundo é ele próprio. Estas arquiteturasrespondem muito mais rapidamente aos estímulos provocadospelo ambiente .
De uma forma geral, as abordagens se diferenciam no sentidoque a abordagem reativa se baseia na idéia que muitas tarefaspodem ser executadas num mundo sem necessitar de raciocínioextensivo, enquanto a deliberativa, se baseia no modelamentodo mundo e no raciocínio intensivo sobre ele.
As arquiteturas deliberativas utilizam modelos de mundo epodem variar na sua estrutura de acordo com a forma dcraciocínio sobre ele. O sistema de controle pode ser compostopor vários módulos internos como: percepção, model amento domundo, planejamento, etc.
Entre estas arquiteturas aparecem as híbrid as que apresentamcaracterísticas das duas abordagens citadas [Saffiot ti, 1996J.Uma definição precisa sobre este tipo de arquitetura éapresentada por Mataric [Mataric, 1992J: "O sistema híbridooferece um compromisso de utilizar um sistema reativo para ocontrole de baixo nível e para um nível mais alto 11mplanejador para tomar decisões" .
Existem várias formas para organi zar os subsi stemas reativos cos deliberativos numa arquitetura híbrida. Isto é verifi cado emvárias arquiteturas apresentadas nos últimos anos: [Blaasvaer,1994)[Fergusson, 1994)[Oat , 1992].
Existe uma comunidade pequena que pesquisa arquiteturas decontrole em três camadas dispostas em hierarquia. A camadamais baixa opera segundo a abordagem por comportamentos deBrooks [Brooks, 1986J ou até reativa pura. A camada mais altausa sistemas de planejamento e modelamento de mundo daabordagem deliberativa. A camada intermediária ainda não estábem definida uma vez que ela é uma ponte entre estas duasabordagens [Zelek , 1996].
Exemplos desta abordagem são encontrados na arquit eturaAtlantis, testada com sucesso no protót ipo "Mars Rover" [Gat,1992), e na arquitetura DAMN (Distributed Arch itecture forMobile Navigation) [Rosemblatt, 1997J. A arquiteturaimplementada no robô DAVID segue esta linha .
3 O ROBÔ DAVID
3.1 Objetivos da Inspeçãoo Departamento de Água e Esgoto de Bauru (DAE), segundosua Divisão de Planejamento, possui uma rede coletora deesgoto na ordem de 1000 Km. Deste valor , apenas 50%,aproximadamente, possui cadastro e mesmo assim, asinformações conhecidas e cadastradas são imprecisas.

Figura 1 - Simulação da Base Móvel do DAVID.
Além disto, inspeções de rotina podem reduzir o prejuizoecológico provocado por tubulações de esgoto rompidas eainda , determinar os pontos de avarias, agilizando amanutenção e evitando escavações desnecessárias.
Os relatórios se destinam ao cadastramento de redes, antigas ounovas, para manutenção de trechos através do conhecimento doponto de ocorrência e em laudos de novas redes recebidas deloteamentos particulares não realizadas por este departamento,podendo assim, verificar a execução da obra quanto as normasvigentes na sua execução.
40, SBAI- Simpósio Brasile iro de Automação Inteligente, São Paulo, SP, 08-10 de Setembro de 1999
A tarefa de inspeção deverá levantar dados ao longo da perpendicular ao eixo de deslocamento, e três são livres,tubulação de esgoto quanto a uniformidade do diâmetro, a também dispostas num mesmo plano e paralelo ao anterior.declividade e a retilinidade, resultando informações sobreproblemas de amassamentos, deposição de materiais ,rompimentos e "ernbarrigamento" de trechos.
3.2 Ambiente da AplicaçãoAs tubulações de água e esgoto possuem vários diâmetros quepodem apresentar superfícies lisas , quando ainda nãoutilizados, ou rugosa devido a deposição e acúmulo demateriais durante sua utilização.
As rodas de tração possuem movimento rotacional síncrono(Syncro Drive) de até 90 graus, semelhante ao usado no robôRover desenvolvido pela Carnegie Mellon University[Borenstein, 1996]. O sistema permite manobras e revoluçõesdo robô em torno do eixo de deslocamento.
Em ambos os casos, o ambiente pode estar em uso e portanto,com líquido ou secos para manutenção ou inspeção. Nestesentido estamos propondo inicialmente um robô para redes deesgoto, novas e em uso, com diâmetro mínimo inicial de 250mm e sem líquido (redes "sangradas").
3.4 Arquitetura do robô DAVIDA principal característica desta arquitetura está namodularidade propiciada pelas três camadas distintas que acompõe (figura 2). As camadas são chamadas de: Navegação,Sobrevivência e Aplicação.
3.3 A Base MóvelO sistema mecânico, ou base móvel, do robô DAVID estádiretamente ligado as características impostas pelo ambiente daaplicação . Estas características do ambiente influíram nasdimensões físicas do robô, no material de sua construção, noseu sistema de tração [McKerrow, 1991], no sistema sensorialnecessário para sua sobrevivência neste meio e,principalmente, na arquitetura adequada para alcançar osobjetivos propostos.
A concepção da base móvel está determinada pela análise doambiente e na aptidão mecânica do projetista no sentido decriar uma máquina capaz de propiciar a mobilidade desejadapara que a arquitetura de controle tenha maior potencial denegociação com ambiente na busca de seus objetivos. Emtubulações de seção transversal circular de diâmetropreestabelecido, como o caso em questão, impõem váriosaspectos que ditam restrições na concepção da estrutura físicaou mecânica da base móvel.
Devido o fato da superfície ser lisa e permeada por óleos egraxas o sistema deve ser o mais aderente possível para evitarpatinações. A aderência obtida devido ao peso próprio doveículo pode não ser suficiente. A colocação de sobrecargaspara melhorar este aspecto piora o problema de consumo, quepor sua vez deve ser o menor possível, para não comprometeruma missão longa .
Algumas simulações de base mecamcas foram realizadas eoptamos por um sistema de seis braços, três na frente e trêsatrás, dispostos a 120 graus uns dos outros . Cada braçopressiona uma roda de encontro a parede do .tubo garantindoaderência e tração (figura I) . Três das rodas são de tração,posicionadas num mesmo lado e num mesmo plano
A camada de Navegação apresenta as característicasexploratórias através de comportamentos previamenteescolhidos, semelhantes aos apresentados pela arquitetura"subsumption" [Brooks , 1986]. Estes comportamentos podemser arbitrados segundo os interesses da camada da Aplicação e,principalmente, da camada de Sobrevivência.
A navegação é desenvo lvida recebendo dados de sensores quedisparam comportamentos pré-definidos. Desta forma , aarquitetura não trabalha com modelos de mundo exigindopouco esforço computacional.
Figura 2 • Camadas da Arquitetura do DAVID
A navegação pela tubulação poderá encontrar dificuldades quepoderão exigir maior consumo de energia em um dado instante,o que poderia comprometer o final da missão. Mesmo assim,não significa que a energia gasta num sentido é a mesma nosentido contrário, o que torna mais difícil ainda determinar omomento de cancelar a missão.
A camada de Sobrevivência tem como atribuição ogerenciamento dos recursos físicos do robô se preocupandocom a integridade do mesmo e com o desenvolvimento damissão. Esta camada monitora informações dos sensores de
479

40. SBAI- Simpósio Brasileiro de Automação Inteligente, São Paulo, SP, 08-10 de Setembro de 1999
odometria, de umidade, de estado da carga das baterias e deinclinação lateral e longitudinal. Com estas informações elapode interferir nos comportamentos da camada de Navegação eno funcionamento da camada de Aplicação.
A camada de Sobrevivência pode tomar a decisão de cancelar amissão. O cancelamento pode ser motivado por situações comoobstáculos intransponíveis e por falta de energia para concluir amissão. Nesta situação, a camada de Sobrevivência impõe o 'retorno a camada de Navegação e desliga a camada deAplicação e seus sensores para contenção de energia.
Para exemplificar, consideremos o robô se deslocando pelatubulação que lhe impõe, devido a seu estado, uma série deobstáculos. A necessidade de driblar as dificuldades significaconsumo de energia. Este consumo é monitorado pela camadade Sobrevivência. Portanto, numa situação prevista como fimde missão, a camada de Sobrevivência desliga parte de seussensores e desperta o comportamento de retorno, arbitrandosobre o conjunto de comportamentos da camada de Navegação.
Continuando com o exemplo, consideremos a situação, dentrodeste novo plano de missão cancelada e navegação invertida,onde no caminho de volta um obstáculo da ida impeça a volta,isolando o robô. Nesta situação a camada de Sobrevivêncianovamente intercede, desligando também a camada deNavegação, uma vez que a camada de Aplicação já estavadesligada, e coloca o plano de pedido de socorro realizando oseguinte procedimento:
1. Desliga as camadas de Navegação e da Aplicaçãoe todos os sensores do robô.
2. A rotina de emergência começa a transmissão dodeslocamento relativo (valor da odometria) dorobô para futuro resgate. Este procedimento nãomais é interrompido até a bateria atingir seu nívelmais baixo que não comprometa a armazenagemdos dados coletados até aquele momento.
A camada da Aplicação possui, como a de Sobrevivência,características deliberativas que o permite mudar o planosegundo a ocorrência de determinadas situações. Além disto, éresponsável por toda integração sensorial e armazenagem dedados sobre a missão, escrevendo durante a navegação o diáriode bordo.
A camada da Aplicação recebe de sensores externos dadossobre o comportamento do ambiente sob inspeção como asmedidas de odometria, inclinação lateral. inclinaçãolongitudinal e do diâmetro da tubulação. Os dados são entãofundidos gerando informações sobre os aspectos buscados pelamissão.
O sistema de odometria utiliza as emendas da tubulação comouma referência (landmark) para , aferir suas medidas. Ocomprimento das barras é conhecido e pode ser detectado.Quando a camada de Aplicação atinge leituras odometricaspróximas ao comprimento 'da barra de tubo que estánavegando, ela espera ,por uma leitura de diâmetro que ' aconduza a emenda. Se os dados recebidos não caracterizam oesperado, a camada de Aplicação pede para que umprocedimento de retorno e revolução reposicione o robô eefetue leituras que possam dirimir a duvida.
Cada camada desempenha suas competências individuaissimultaneamente. A camada de Sobrevivência se relaciona coma camada da Aplicação não somente pelo compartilhamento de
480
dados sensoriais mas para resolver políticas de sobrevivência,como o desligamento da camada da Aplicação. A camada daAplicação pode atuar na camada de Navegação. através deserviços oferecidos pela camada de Sobrevivência, inibindoseus comportamentos para executar revoluções no sentido dedetectar algum aspecto interessante para a inspeção.
A arquitetura do DAVID em camadas é interessante, devido amodularidade de desenvolvimento e atualizações . segundo asvariantes de aplicações similares.
As camadas foram implementadas através demicrocontroladores da linha PIC e interligadas por canaisseriais. A aquisição de dados sensoriais e de controle dosmotores foram separados do software de controle particular decada camada em microcontroladores específicos para cadatarefa. Assim, a modularidade ficou garantida e a adaptação anovas situações facilitada.
Portanto. a arquitetura reúne vários atributos que a tornaflexível a uma classe de robôs m6veis envolvidos com tarefasde inspeção de tubulações de uma forma geral.
3.5 Sistema Sensorial do DAVIDO sistema sensorial do robô,DAVID possui sensores voltados anavegação, para verificar as condições do robô e os exigidospela aplicação. A camada de Navegação da arquitetura usasomente de sensores de contato. A camada de Sobrevivênciausa sensores de odornetria, de umidade, de inclinaçãotransversal e longitudinal e de estado da carga das baterias. Acamada da Aplicação usa a maioria de seus sensorescompartilhados com a camada de Sobrevivência. Os sensoresde odometria, de inclinação longitudinal e transversal sãocompartilhados com estas duas camadas além do uso exclusivodos sensores de ângulo da rodas livres e dos movimentos dosbraços.
Os sensores foram escolhidos segundo a necessidade particularde cada camada dentre os muitos sensores disponíveis. Oambiente impõe restrições quanto ao uso de sensores,principalmente aqueles que exploram o campo magnético daTerra, quando a tubulação é de ferro.
Os sensores foram escolhidos de acordo com a exigênciasimpostas por esta missão entretanto, outros sensores comocarneras, ultra-som. etc poderão equipar a arquitetura parainspecionar outros tipos de problemas. Nesta linha, os sensorespodem ser substituídos ou complementados camada à camadaou de forma geral. segundo a missão e o ambiente em questão.
Os dados obtidos pela camada da Aplicação são integradospara produzir informações do perfil longitudinal e transversalda tubulação ao longo da missão.
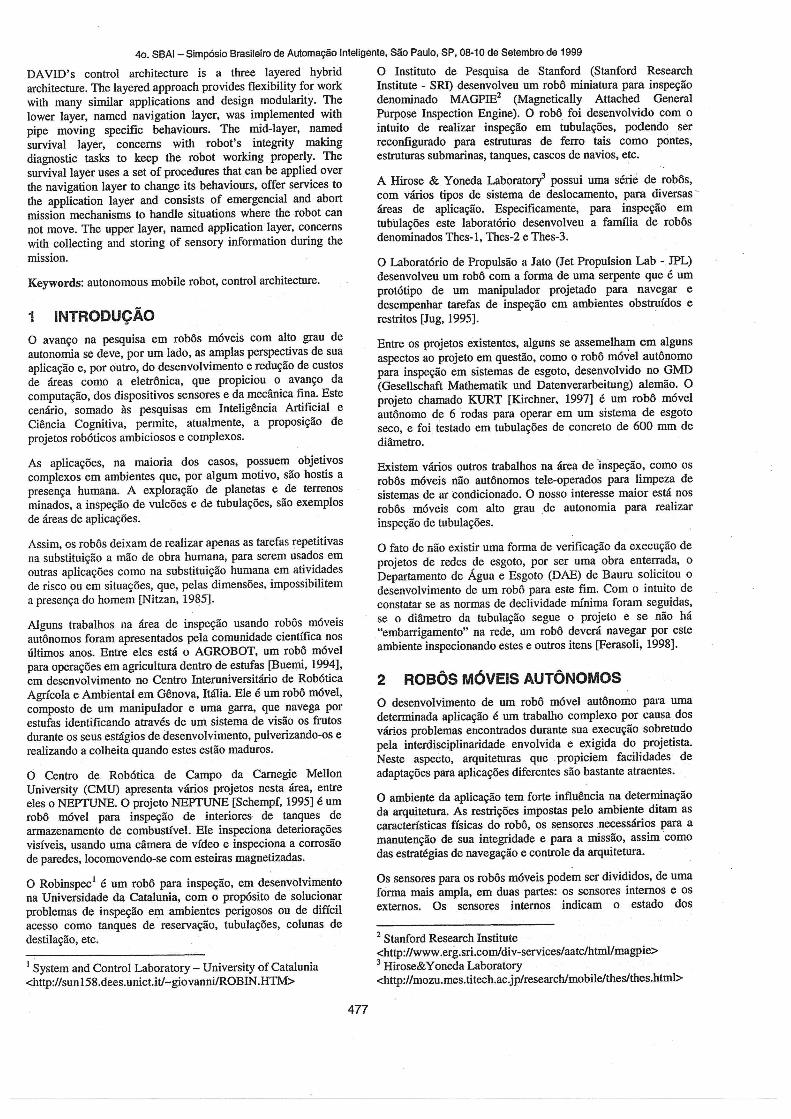
4 CONSIDERAÇÕES FINAISO robô DAVID. mostrado na figura 3, está em teste noLaboratório de Robôs M6veis da UNESP - Bauru.
A versatilidade propiciada pela arquitetura e pelaimplementação em m6dulos bem definidos das camadasincentivam a aplicação deste robô em outras aplicações deinspeção.
[Gat, 1992] GAT, E. Integrating Planning and Reacting in aHeterogeneous Asynchronous Architecture forControlling Real-World Mobile Robots. Proceedings oftheAAAI92.
[Kaelbling, 1986] KAELBLING, L.P. An Architecture forIntelligente Reactive Systems. Technical Note 400,Artficial Intelligence Center SRI International, StanfordUniversity, October 1986.
[Jug, 1995] JUG, E. P. et al. The JPL Serpentine Robot : a 12DOF System for Inspection. InternaI Report, JetPropulsion Laboratory, Pasadena, 1995.
[Kirchner, 1997] KlRCHNER F.; HERTZBERG J. APrototype Study of autonomous Robot Platform forSewerage System Maintenance. Journal ofAutonomous Robot , 1997.
[Mataric, 1992] MATARIC, M.J. Integration of RepresentationInto Goal-Driven Behavior-Based Robots. IEEETransactions on Robotics and Automation, Vol. 8,No 3, pages 304-312, June 1992.
[McKerrow, 1991] MCKERROW, P.J. Introduction toRobotics. Addison-Wesley, New York, 1991.
[Nitzan85] NITZAN, D. Development of Intelligent Robots:Achievements and Issues. IEEE Transactions onRobo tics and Automation, VoI. RA-I , No I, pp. 3-13,March 1985.
[Rembold, 1987] REMBOLD, U.; LEVI, P. Sensors andControl for Autonomous Robots. Encyclopedia ofIntelligence Artificial. pp. 79-95, John Wiley and Sons,1987.
[Rosenblatt, 1997] ROSENBLATT, J. DAMN: A DistributedArchitecture for Mobile Robot. Thesís, The RoboticsInstitute Carnegie Mellon University, Pittsburgh, 1997.
[Saffiotti, 1996] SAFFIOTTI, A.; KANOLIGE, K.; RUSPINI,E.H. A Multivalued Logic Approach to IntegratingPlanning and Control. Internal Report, ArtificialIntelligence Center SRI International, 1995.
[Schempf, 1995] SCHEMPF, H.; CHEMEL, B.; EVERETT, N.Neptune: Above-Ground Storage Tank InspectionRobot System. IEEE Robotics and AutomationMagazine, VaI. 2, No 2, June 1995.
[Zelek, 1996] ZELEK, J. S. SPOTT: A Real-Time, Distributedand Scalable Architecture for Autonomous MobileRobot ControI. Thesis, Centre for Intelligent MachinesDepartament of Eletrical Engineering McGillUniversity, 1996.
40. SBAI- Simpósio Brasileiro de Automação Inteligente, São Paulo, SP, 08-10 de Setembro de 1999
[Ferguson, 1994] FERGUSON, I. A. Models and Behaviours: aWay Forward for Robotics. AISB Workshop S éries,Leeds, UK, April, 1994.
[Fikes, 1971] FIKES, R.E; Nilsson, N.J. STRIPS: A NewApproach to the application of Theorem Provinz toProblem Solving. Artificial Intelligence, n2, pp 189-208,1971.
[Blaasvaer, 1994] BLAASVAER, H. et al. AMOR - AnAutonomous Mobile Robot Navigation System. IEEEInternational Conference on Systems, Man andCybernetics, San Antonio, Texas, pp. 2266-2277,october 1994.
o DAVID está sendo testado em ambiente simulado quanto aofuncionamento individual de cada camada e dos sensoresusados pela camada de Aplicação.
Figura 3 - Versão da Base Móvel do robô DAVID.
[Borestein, 1996] BORESTEIN, J. et aI. Where Am I? Sensorand Methods for Mobile Robot Positioning.University ofMichigan, Apri11996.
[Brooks, 1986] BROOKS, R.A. A Robust Layered ControlSystem for a Mobile Robot. IEEE Journal of Roboticsand Automation, VoI. RA-2, No I, pp. 14-23, March1986.
5 BIBLIOGRAFIA[Arkin, 1990] ARKlN, R.C. Integrating Behavioural,
Perceptual and World K.nowledge in ReactiveNavigation. Robotics and Autonomous Systerns, n6,pp.105-122, 1990.
[Brooks, 1997] BROOKS, R.R.; IYENGAR S.S. Multi-sensorFusion - FundamentaIs and Applications with Software.Printice-Hall, New Jersey 1997.
[Buemi, 1994] BUEMI, F. et aI. The vision system for lheAgrobot Project. Proc. Of ASAE 5th InternationalConference on Computers.in Agriculture, Orlando,Florida, February 1994.
[Everett, 1995] EVERETT, H.R. Senso r for Mobile Robot -Theory and Application. A.K. Peters, Ltd, Wellesley,MA, 1995.
[Ferasoli, 1998] FERASOLI, H.F.; FRANCHIN, M.N.;RILLO, M. Robôs com Alto Grau de Autonomia paraInspeção em Tubulações. 80 Congresso e ExposiçãoInternacional de Automação - CONAI'98, pp. 56-63,São Paulo, BR, April 1998.
481