capítulo 3 - modelagem no domínio do...
TRANSCRIPT

CAPÍTULO TRÊS
Modelagem no Domínio do TempoSOLUÇÕES DE DESAFIOS DOS ESTUDOS DE CASO
Controle de Antena: Representação no Espaço de Estados
Para o amplificador de potência,
E s
V s sa
p
( )
( )�
�
150
150. Usando a transformada de Laplace inversa,
e e va a p� �150 150 . Assim, a equação de estado é
Para o motor e a carga, definimos como variáveis de estado x1 � �m e x m2 � � . Portanto,
Usando a função de transferência do motor, multiplicando em cruz, aplicando a transformada de Laplace in-versa, e usando as definições das variáveis de estado,
Usando a relação de engrenagem, a equação de saída é
Além disso J J D DK
R J
ej
DK K
RUsando as Eqs e juntamente com os valores anteriores as equações
m a m at
a m
mm
t a
a
, ( ) , , , , ( ) , , , ,( )( , )
, ( ) , . . ( ), ( ) ( ) ,
� � � � � � � � � � � �
� �
51
50 05 0 2 0 25 3
1
50 01 012 013
1
5 0 25
0 81
132 1 2 3
2 2
dede estado e de saída são,
Aqüífero: Representação no Espaço de Estados
Dividindo cada equação por Ci e definindo o vetor de estado como x � [h1 h2 h3]T

onde u(t) � função degrau unitário.
RESPOSTAS DAS PERGUNTAS DE REVISÃO
1. (1) Poder modelar outros sistemas além dos lineares, com coeficientes constantes; (2) Usado para simu-lação digital.
2. Fornece uma visão global qualitativa.
3. O menor conjunto de variáveis que descreve completamente o sistema.
4. O valor das variáveis de estado.
5. O vetor cujos componentes são as variáveis de estado.
6. O espaço n-dimensional cujas bases são as variáveis de estado
7. Equações de estado, uma equação de saída e um vetor de estado inicial (condições iniciais)
8. Oito
9. Formas de combinações lineares das variáveis de estado e da entrada para formar a saída desejada.
10. Nenhuma variável do conjunto pode ser escrita como uma soma linear das outras variáveis do conjunto.
11. (1) Devem ser linearmente independentes; (2) O número de variáveis de estado deve coincidir com a or-dem da equação diferencial que descreve o sistema; (3) O grau de dificuldade na obtenção das equaçõesde estado para um dado conjunto de variáveis de estado.
12. As variáveis que estão sendo diferenciadas em cada elemento armazenador de energia linearmente inde-pendente
13. Sim, dependendo da escolha das variáveis do circuito e da técnica usada para escrever as equações dosistema. Por exemplo, um problema com três malhas com três elementos armazenadores de energia pode-ria levar a três equações diferenciais de segunda ordem simultâneas, que então seriam descritas por seisequações diferenciais de primeira ordem. Esta é a situação exata que aparece quando escrevemos as equa-ções diferenciais para sistemas mecânicos e então prosseguimos para achar as equações de estado.
14. As variáveis de estado são derivadas sucessivas.
SOLUÇÕES DE PROBLEMAS
1.Adicione ao circuito as correntes dos ramos e as tensões de nós.
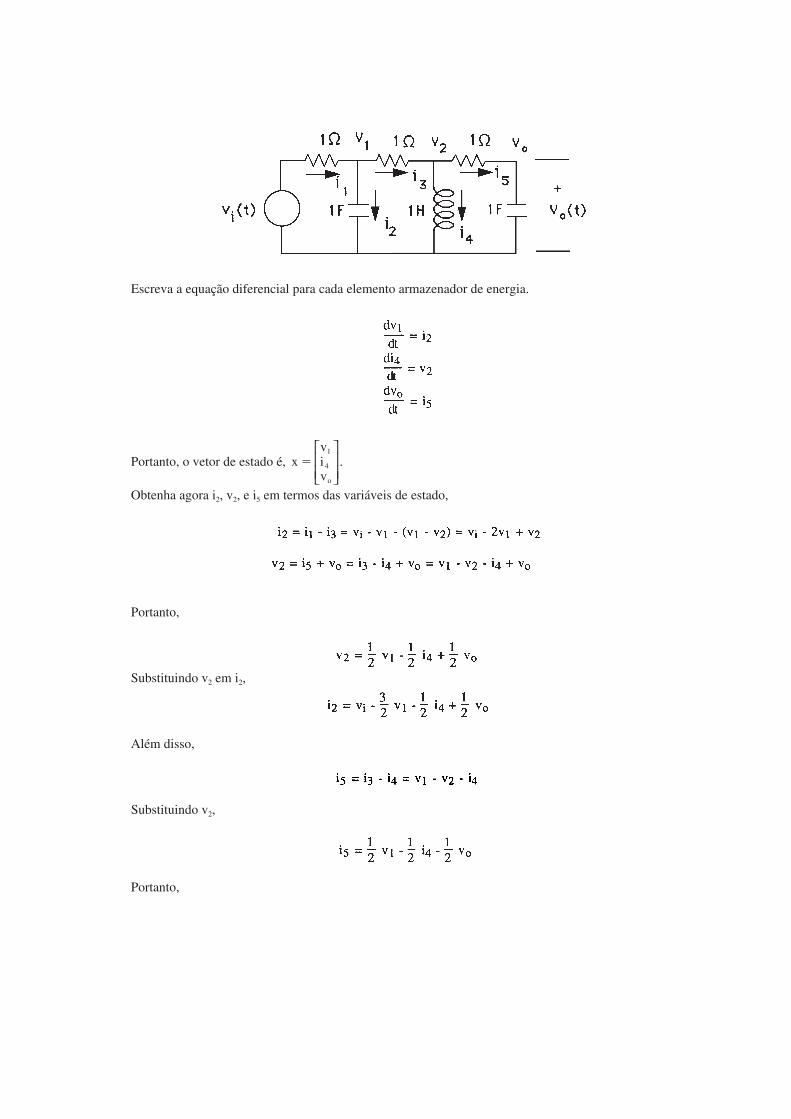
Escreva a equação diferencial para cada elemento armazenador de energia.
Portanto, o vetor de estado é,
xvivo
�1
4
.
Obtenha agora i2, v2, e i5 em termos das variáveis de estado,
Portanto,
Substituindo v2 em i2,
Além disso,
Substituindo v2,
Portanto,

3.Escrevendo as equações para os componentes armazenadores de energia, resulta
Onde L1 é o indutor na malha com i1, L2 é o indutor na malha com i2, iL1 � i1 � i3, e iL2 �i2 � i3. Agora,
Além disso, escrevendo a equação do nó vo,
Escrevendo LKC ao longo da malha externa, resulta
Resolvendo (2) e (3) para i2 e i3, resulta
Substituindo (1) e (4) nas equações de estado. Para achar a equação de saída,
Usando (5)
Resumindo os resultados na forma matricial vetorial,

5.Escrevendo as equações de movimento,
Aplicando a transformada de Laplace inversa,
Simplificando,
Definindo as variáveis de estado,
Escrevendo as equações de estado usando as equações simplificadas anteriores, resulta
Convertendo para a forma matricial vetorial,
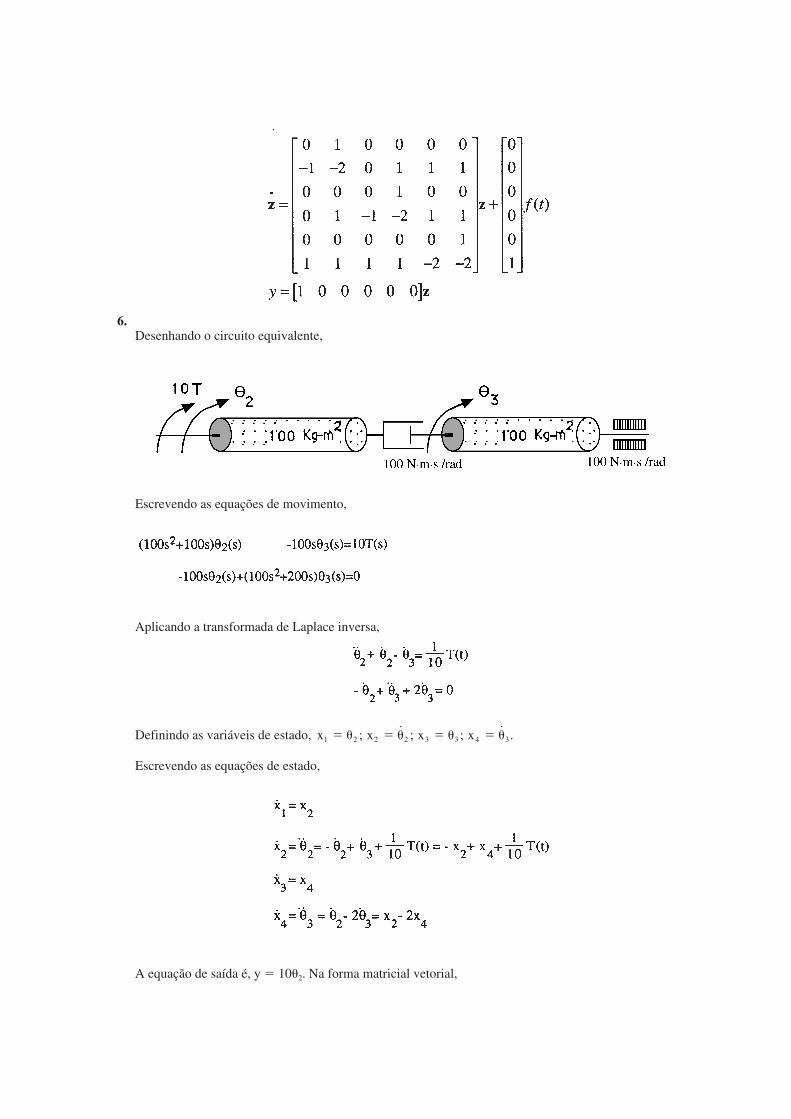
6.Desenhando o circuito equivalente,
Escrevendo as equações de movimento,
Aplicando a transformada de Laplace inversa,
Definindo as variáveis de estado, x x x x1 2 2 2 3 3 4 3� � � � � � � �; ˙ ; ; ˙ .
Escrevendo as equações de estado,
A equação de saída é, y � 10�2. Na forma matricial vetorial,

8.
Resolvendo as Eqs. (3.44) e (3.45) no texto para as funções de transferência X s
F s1( )
( ) e
X s
F s2( )
( ):
Assim,
e
Multiplicando cada uma das funções de transferência anteriores por s para achar a velocidade, ocorre umcancelamento de pólo com zero na origem e uma função de transferência resultante de terceira ordem.
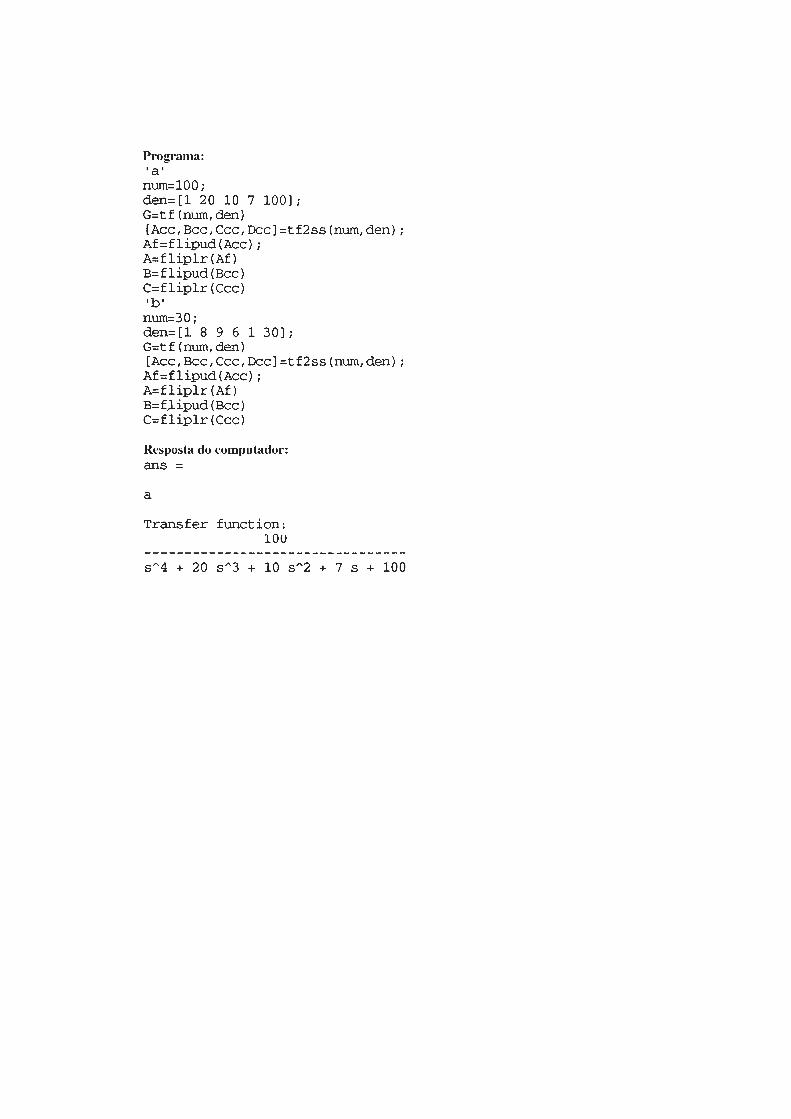
10.
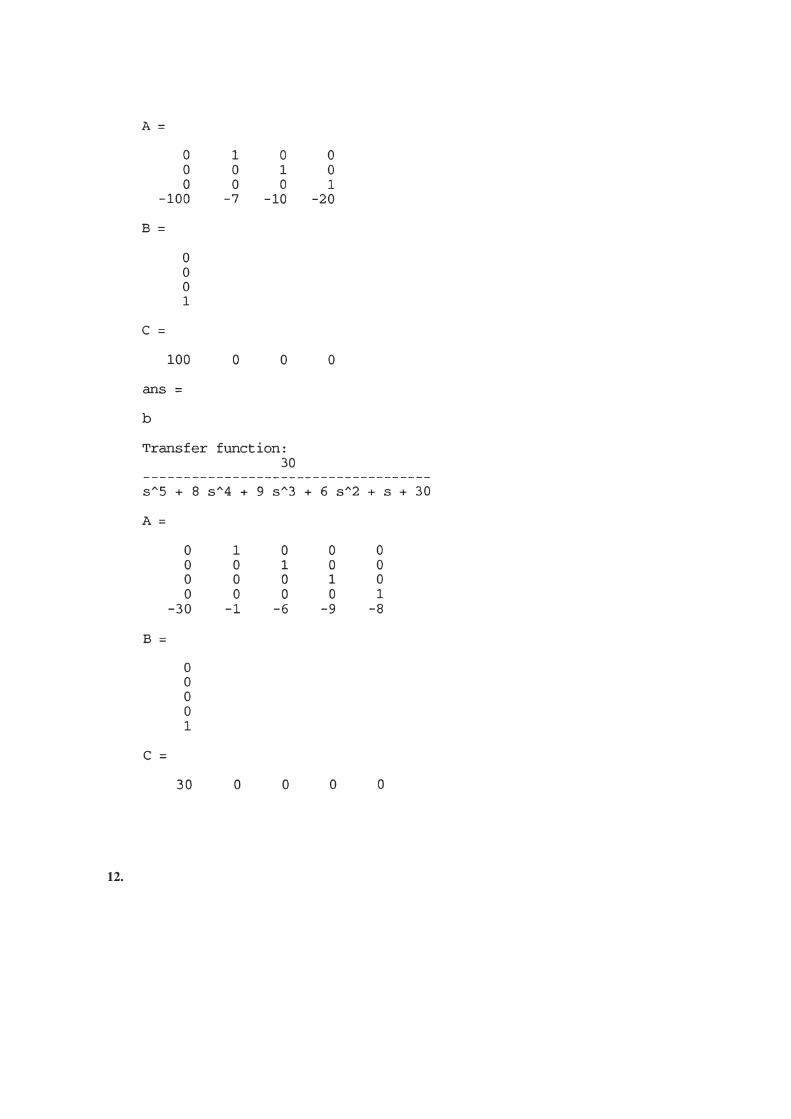
12.
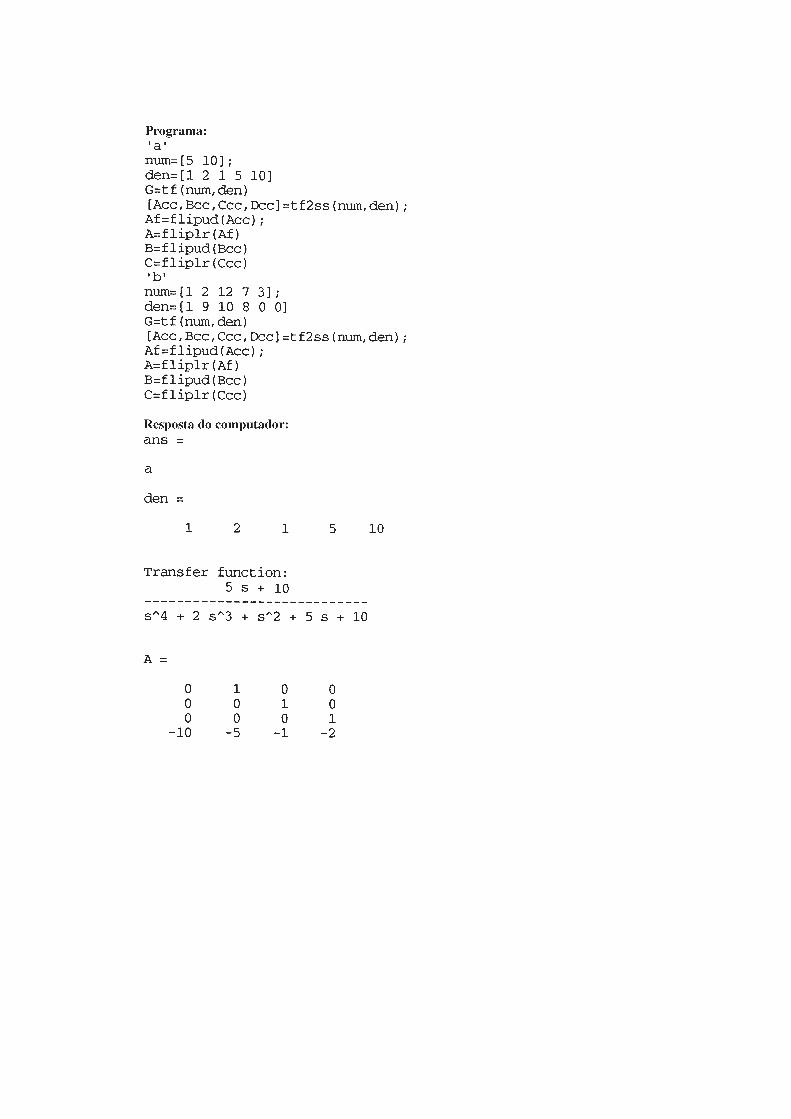
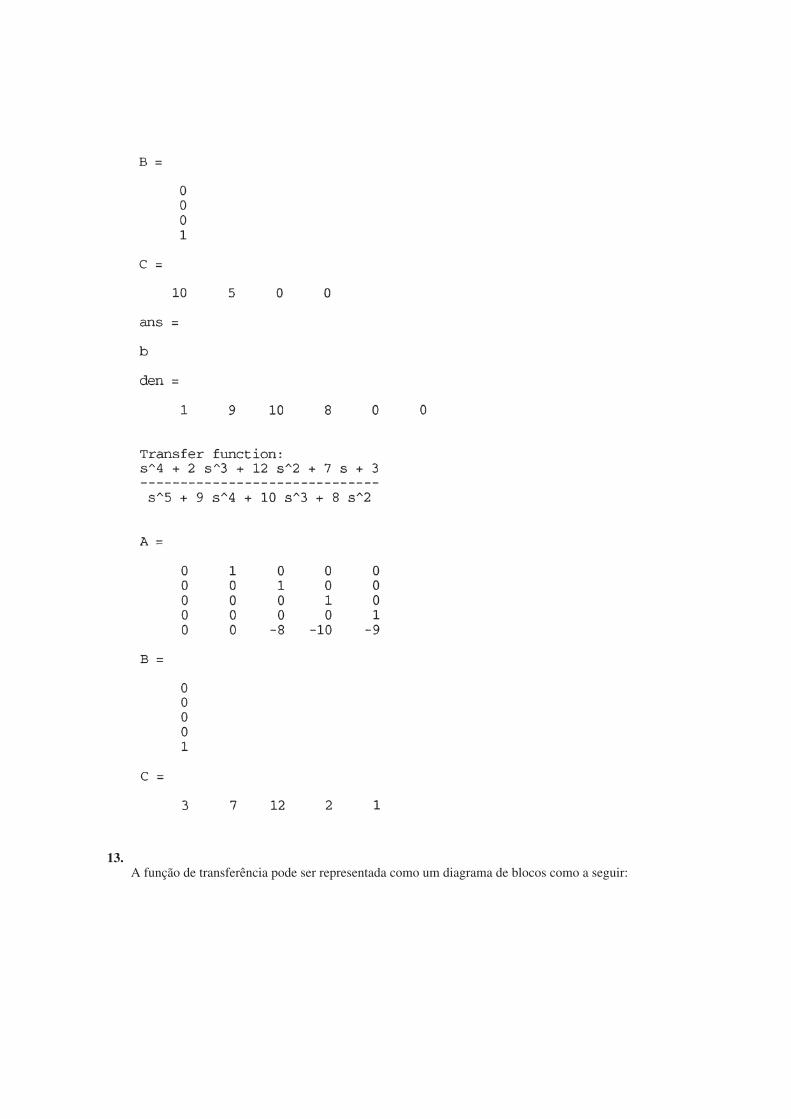
13.A função de transferência pode ser representada como um diagrama de blocos como a seguir:

Escrevendo a equação diferencial para o primeiro bloco:
Definindo as variáveis de estado:
Assim,
Do segundo bloco,
Na forma matricial vetorial:
14.
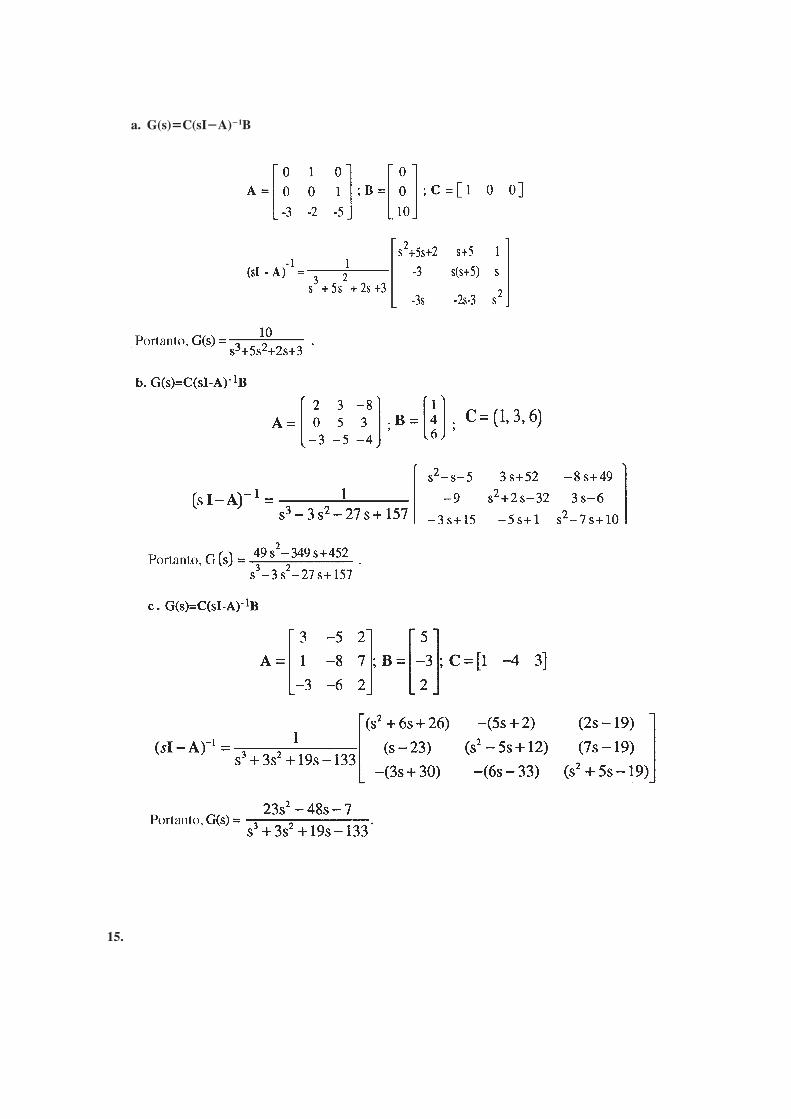
a. G(s)�C(sI�A)�1B
15.
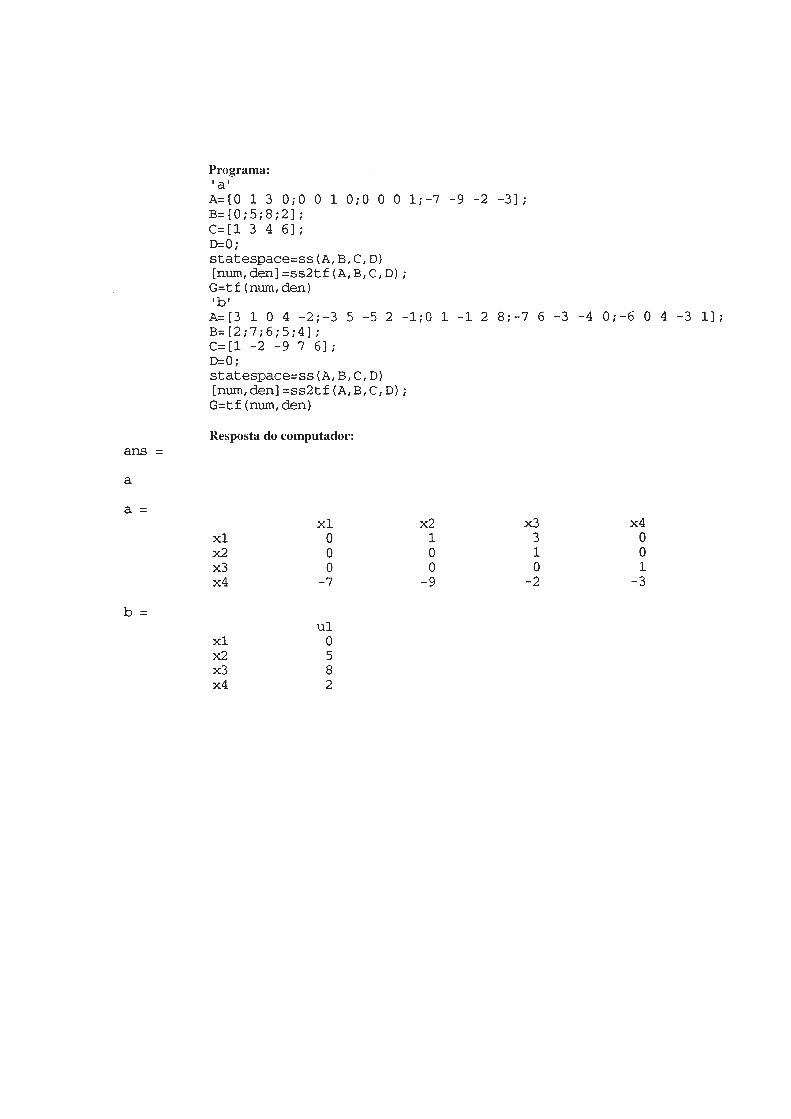
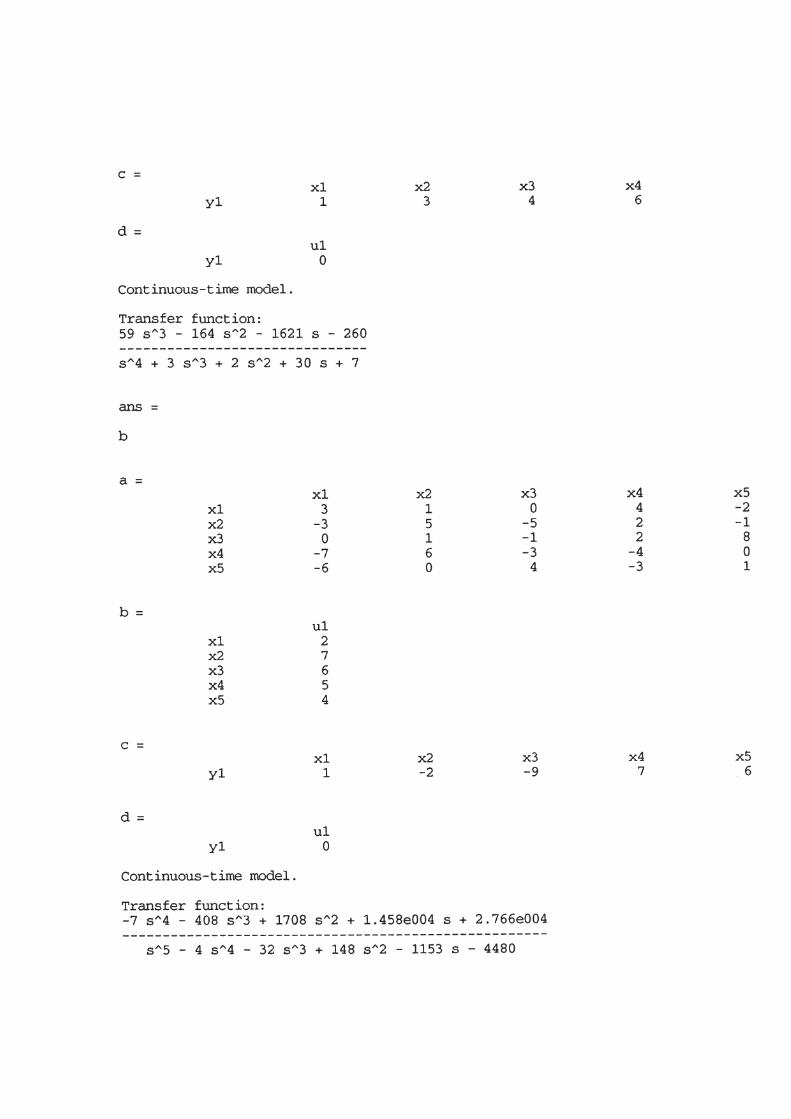
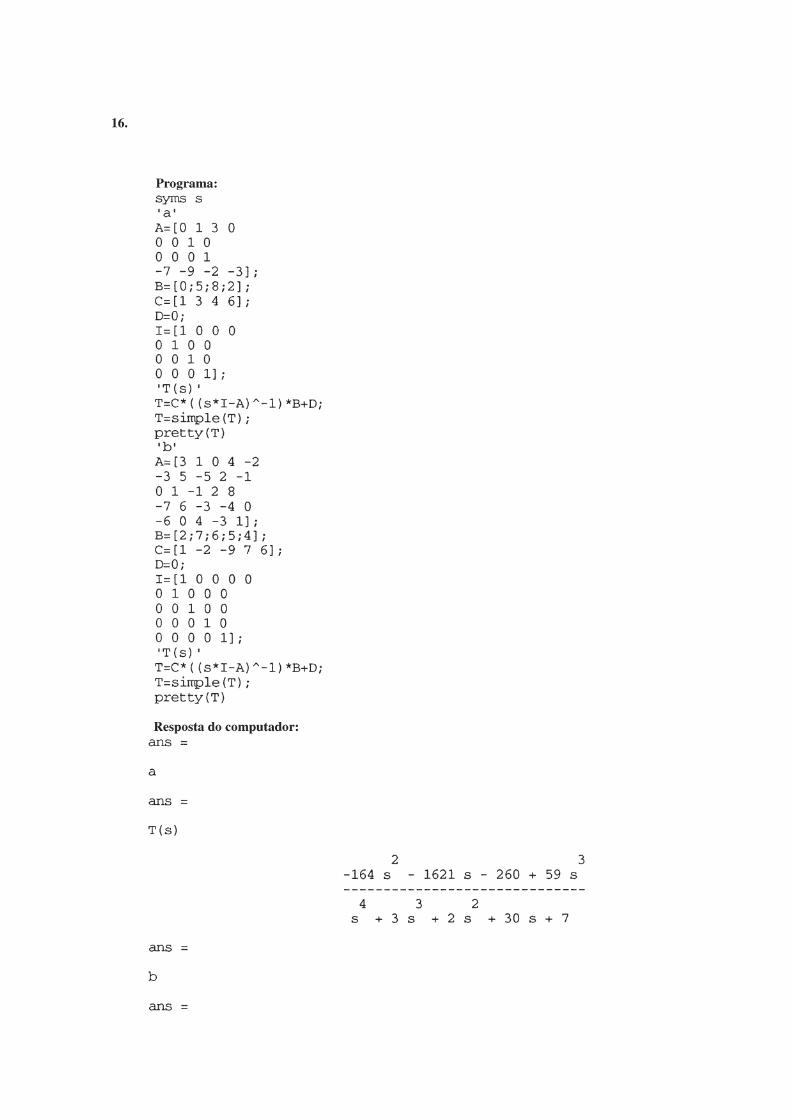
16.
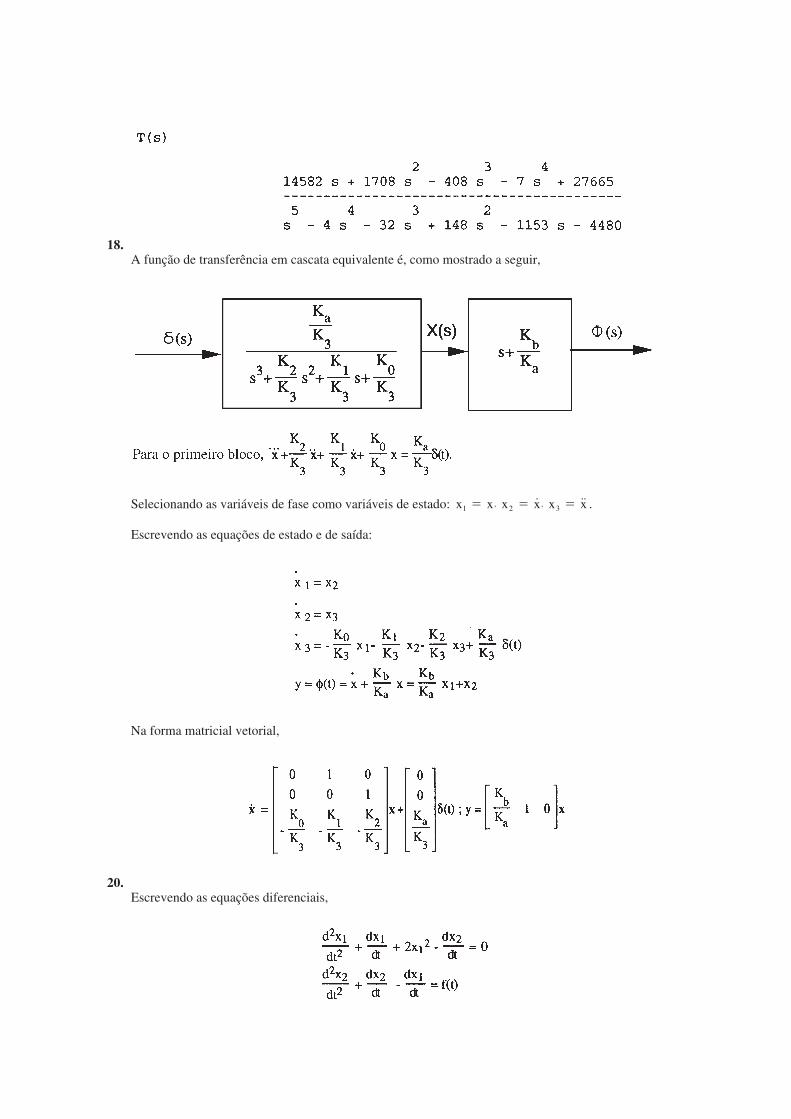
18.A função de transferência em cascata equivalente é, como mostrado a seguir,
Selecionando as variáveis de fase como variáveis de estado: x x x x x x1 2 3� � �’ ’˙ ˙ .
Escrevendo as equações de estado e de saída:
Na forma matricial vetorial,
20.Escrevendo as equações diferenciais,

Definindo como variáveis de estado x1, v1, x2, v2, onde os v�s são velocidade,
Em torno de x1 � 1, x1 � 1��x1, e ˙x x1 1� � . Além disso,
Portanto, as equações de estado e de saída são,
Na forma matricial vetorial,
onde f(t) � 2 � �f(t), uma vez que a força não-linear da mola é 2N e deve ser equilibrada por 2N de forçano amortecedor.
21.
Controlador:
A função de transferência pode ser representada como um diagrama de blocos conforme se segue:
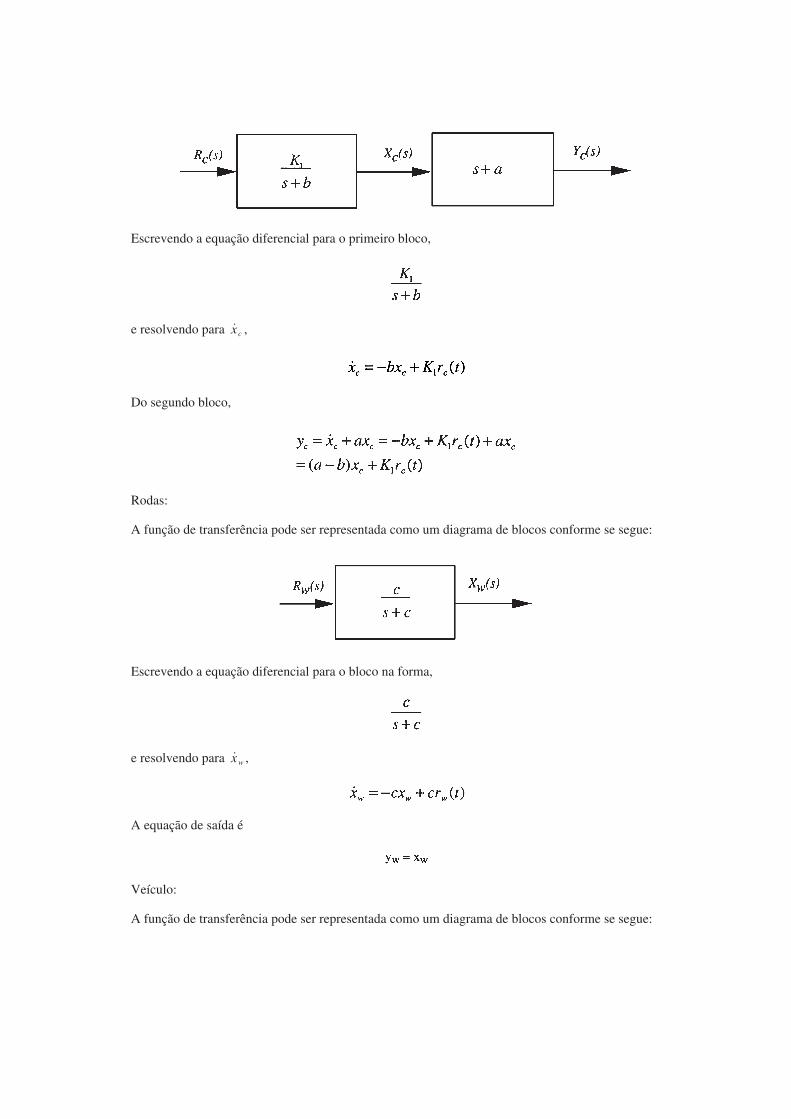
Escrevendo a equação diferencial para o primeiro bloco,
e resolvendo para x c ,
Do segundo bloco,
Rodas:
A função de transferência pode ser representada como um diagrama de blocos conforme se segue:
Escrevendo a equação diferencial para o bloco na forma,
e resolvendo para x w ,
A equação de saída é
Veículo:
A função de transferência pode ser representada como um diagrama de blocos conforme se segue:
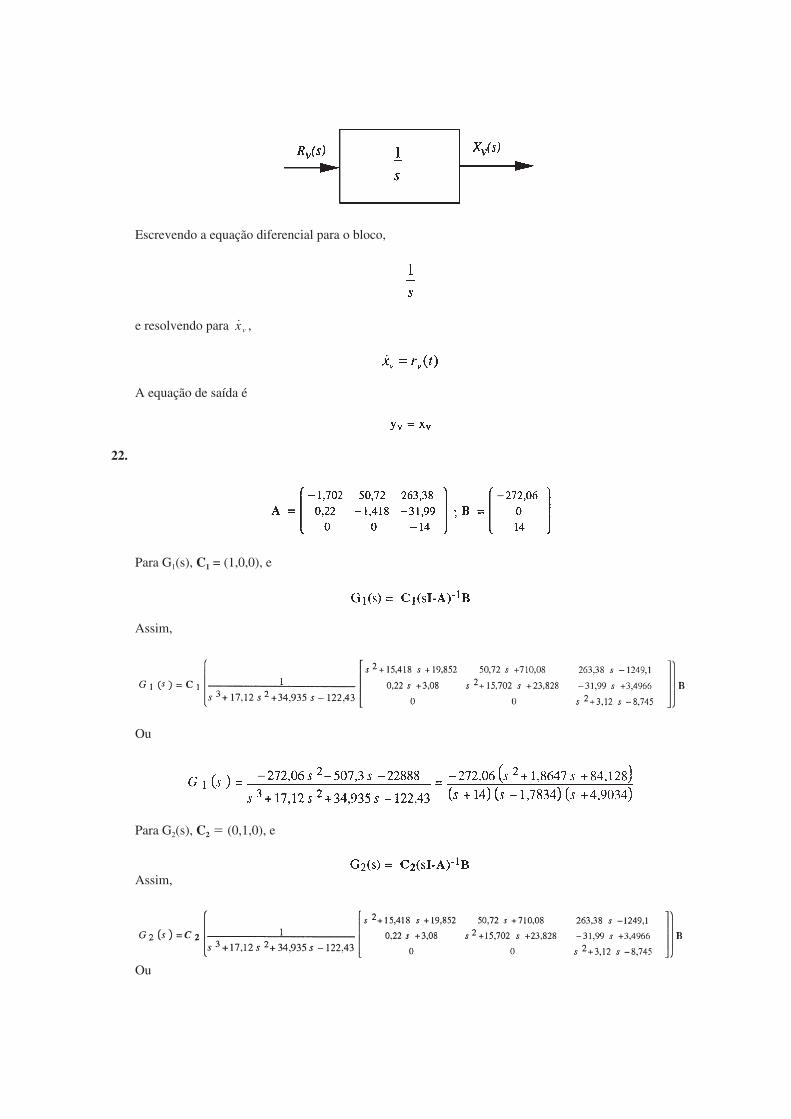
Escrevendo a equação diferencial para o bloco,
e resolvendo para x v ,
A equação de saída é
22.
Para G1(s), C1 = (1,0,0), e
Assim,
Ou
Para G2(s), C2 � (0,1,0), e
Assim,
Ou

24.Escrevendo as equações de movimento
A última equação diz que
Definindo as variáveis de estado para as duas primeiras equações de movimento,
Resolvendo para os maiores termos da derivada na primeira das duas equações de movimento, resulta
Escrevendo as equações de estado,
A saída é yh � ycat. Portanto

Simplificando, rearrumando, e colocando as equações de estado na forma matricial vetorial, resulta
Substituindo valores numéricos,