capítulo 1 - ufjf · o que também significa que a equação diferencial que representa ... para...
TRANSCRIPT

Dinâmica de Sistemas: Análise Matemática 1
_
Capítulo 1
Várias situações –problemas do nosso cotidiano podem ser entendidas como sendo sistemas.
Denominamos de sistema um conjunto de elementos interligados com o objetivo dedesempenhar uma determinada função. Por exemplo, uma Caderneta de Poupança é umsistema, pois é composta de elementos como Depósito, Taxa de Rendimento, Poupança, etc,que interligados desempenham a função própria de uma caderneta.
Modelo Padrão de um Sistema
Qualquer sistema pode ser representado da seguinte maneira:
Figura 1.1 – Representação geral de um sistema.
Onde:
• u = Entrada do Sistema: É um estímulo forçante através do qual se desejaobservar ou obter uma resposta do sistema.
• y = Saída ou Resposta do Sistema: É a variável de interesse do sistema.
Internamente os sistemas podem ser constituídos por variáveis de estoque (x(t)), ou seja,variáveis que representam o estado do sistema em um instante de tempo t. O estoque éresponsável pelo armazenamento das condições iniciais do sistema. Diz-se que um sistema éde ordem n quando possui n variáveis de estoque (também chamadas de variáveis de estado),o que também significa que a equação diferencial que representa esse sistema é de ordem n.
Figura 1.2 – Representação geral de um sistema de ordem n com seus elementosarmazenadores.

Dinâmica de Sistemas: Análise Matemática 2
_
Assim:
• x = Estado do Sistema: É a variável que contém a condição inicial do sistema erepresenta o seu estado (ou condição) a cada instante de tempo t.
O Modelo Padrão é a forma de representação de um sistema em função das variáveis:
• u = Entrada do Sistema.
• y = Saída ou Resposta do Sistema.
• x = Estado do Sistema.
Como exemplo, tomemos um sistema de Caderneta de Poupança:
Figura 1.3 – Modelo Detalhado do sistema de Caderneta de Poupança.
Nesse sistema há um Depósito de valor constante U efetuado mensalmente, representandoum fluxo de entrada de dinheiro de valor constante na Poupança.
A esse fluxo de entrada soma-se uma parcela que corresponde a um valor percentual dapoupança a cada instante. Este valor é determinado pela Taxa de Rendimento (Tr) mensal daCaderneta de Poupança.
A condição inicial (estado inicial do sistema) é representada pela constante x(0).
Observando o sistema da figura 1.3 concluímos que:
• Depósito → Entrada (u)
• Poupança → Saída ou Resposta (y)
• Poupança → Estado (x)
Como o fluxo é a taxa de variação no tempo do estado correspondente:
• Fluxo de Dinheiro → Taxa de Variação do Estado ( x
)

Dinâmica de Sistemas: Análise Matemática 3
_
Portanto podemos representar esse sistema conforme figura 1.4:
Figura 1.4 – Modelo Padrão do sistema de Caderneta de Poupança.
O modelo da figura 1.4 é chamado de Modelo Padrão, pois é a representação do sistema emfunção da sua variável de entrada (u = constante U), variável de saída (y) e variável de estado(x).
Assim, esse sistema pode ser completamente descrito pelas equações:
UxTx r +⋅=
(1.1a)
xy = (1.1b)
conhecendo-se sua condição inicial (x(0)).
A equação (1.1a) é chamada de equação de estado e a equação (1.1b) de equação de saídado sistema.
Efeitos da Realimentação Positiva
Vamos agora analisar o Modelo Causal do sistema de Caderneta de Poupança:
Dinâmica de Sistemas: Análise Matemática 4
_
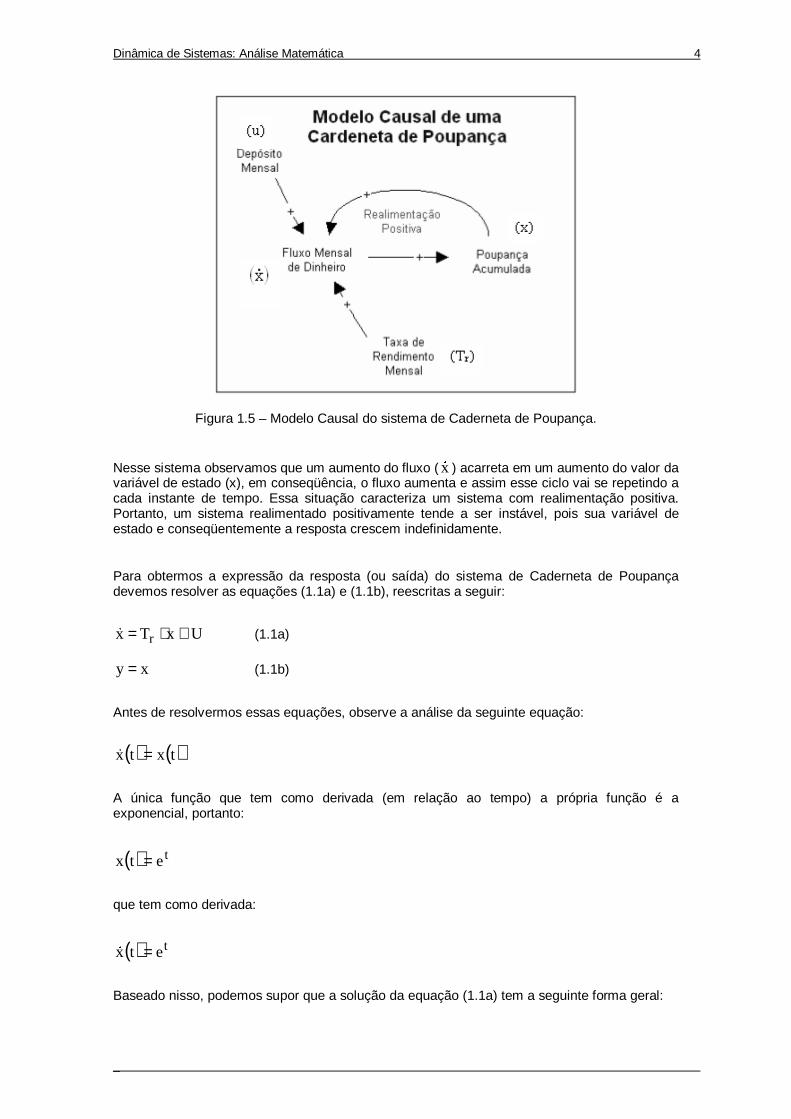
Figura 1.5 – Modelo Causal do sistema de Caderneta de Poupança.
Nesse sistema observamos que um aumento do fluxo ( x
) acarreta em um aumento do valor davariável de estado (x), em conseqüência, o fluxo aumenta e assim esse ciclo vai se repetindo acada instante de tempo. Essa situação caracteriza um sistema com realimentação positiva.Portanto, um sistema realimentado positivamente tende a ser instável, pois sua variável deestado e conseqüentemente a resposta crescem indefinidamente.
Para obtermos a expressão da resposta (ou saída) do sistema de Caderneta de Poupançadevemos resolver as equações (1.1a) e (1.1b), reescritas a seguir:
UxTx r +⋅=
(1.1a)
xy = (1.1b)
Antes de resolvermos essas equações, observe a análise da seguinte equação:
( ) ( )txtx =
A única função que tem como derivada (em relação ao tempo) a própria função é aexponencial, portanto:
( ) tetx =
que tem como derivada:
( ) tetx =
Baseado nisso, podemos supor que a solução da equação (1.1a) tem a seguinte forma geral:

Dinâmica de Sistemas: Análise Matemática 5
_
( ) Ukektx 3tk
12 ⋅+⋅= ⋅ (1.2)
Derivando em relação ao tempo, temos:
( ) tk12
2ekktx ⋅⋅⋅=
(1.3)
pois U é constante.
Substituindo as equações (1.2) e (1.3) na equação (1.1a):
( ) UUkekTekk
x
3tk
1r
x
tk12
22 +⋅+⋅⋅=⋅⋅ ⋅⋅
( ) ( ) 0U1kTekTkk 3rtk
1r122 =⋅+⋅−⋅⋅−⋅∴ ⋅
Para que a última igualdade seja verdadeira independentemente do valor de t e de U oscoeficientes entre parênteses devem ser nulos, portanto:
0kTkk 1r12 =⋅−⋅ 1r12 kTkk ⋅=⋅ r2 Tk =∴
E ainda:
01kT 3r =+⋅ 1kT 3r −=⋅r
3 T
1k −=∴
Para a determinação de k1 devemos ter o conhecimento da condição inicial do sistema, ouseja, do valor inicial da variável poupança (x(0)). Da equação (1.2) temos:
( ) Ukek0x 30k
12 ⋅+⋅= ⋅ ( ) Ukk0x 31 ⋅+=∴ (1.4)
Substituindo o valor de k3 na equação (1.4):
( ) UT
1k0x
r1 ⋅−= ( ) U
T
10xk
r1 ⋅+=∴
A equação que descreve o estado desse sistema em função do tempo é obtida substituindo osvalores de k1, k2 e k3 na equação (1.2):
( ) ( ) UT
1eU
T
1e0xtx
r
tT
r
tTrr ⋅−⋅⋅+⋅= ⋅⋅

Dinâmica de Sistemas: Análise Matemática 6
_
( ) ( ) ( )1eT
Ue0xtx tT
r
tTrr −⋅+⋅=∴ ⋅⋅ (1.5)
Da equação (1.1b), a resposta (saída) é igual ao estado do sistema, portanto:
( ) ( ) ( )1eT
Ue0xty tT
r
tTrr −⋅+⋅= ⋅⋅ (1.6)
A equação (1.6) que descreve a resposta do sistema corresponde à curva da figura 1.6:
Figura 1.6 – Curva da resposta do sistema de Caderneta de Poupança.
Conclusão: Sistemas com realimentação positiva geram termos expon enciais crescentesna expressão do estado e, conseqüentemente, na expressão da resposta do sistema. Assim ovalor da resposta cresce indefinidamente, por isso esses sistemas são instáveis.
Análise da Resposta Transitória e em Regime Permanente
Se, por exemplo, U = 0, ou seja, a entrada do sistema é nula em qualquer instante de tempo, aequação (1.6) que descreve o comportamento da resposta do sistema se transformará em:
( ) ( ) ( )1eT
0e0xty tT
r
tTrr −⋅+⋅= ⋅⋅
( ) ( ) tTre0xty ⋅⋅=∴ (1.7)
A equação (1.7) é chamada resposta livre do sistema. A resposta livre corresponde à respostado sistema quando a entrada é nula, ou seja, quando não há uma variável de entrada forçante.Portanto, a resposta dependerá somente da condição inicial e das características do sistema.
No entanto, se considerarmos x(0) = 0, ou seja, a condição inicial do sistema nula, da equação(1.6):

Dinâmica de Sistemas: Análise Matemática 7
_
( ) ( )1eT
Ue0ty tT
r
tTrr −⋅+⋅= ⋅⋅
( ) ( )1eT
Uty tT
r
r −⋅=∴ ⋅ (1.8)
A equação (1.8) é chamada de resposta forçada do sistema. A resposta forçada correspondeà resposta do sistema quando a sua condição inicial é nula. Assim a resposta dependerásomente da entrada e das características do sistema.
Portanto a resposta completa de um sistema é a soma da sua resposta livre com a suaresposta forçada:
( ) ( ) ( )
Forçada_spostaRe
tT
rLivre_spostaRe
tT 1eT
Ue0xty rr −⋅+⋅= ⋅⋅
Observa-se que a resposta livre desse sistema em particular tem um comportamentoexponencial crescente (Tr é sempre positivo) e a resposta forçada tem um comportamento deuma exponencial crescente subtraída de uma constante. Portanto, a resposta completa dessesistema nunca “estaciona” em um valor finito, ou seja, nunca se estabiliza, crescendoindefinidamente com o passar do tempo.
Isso é comprovado matematicamente quando:
( ) ∞=∞→
tylimt
Simulação do Sistema: Influência do Método de IntegraçãoNumérica
O estado de um sistema pode ser obtido integrando-se, no tempo, o seu fluxo correspondente.Além disso, o estado do sistema pode ser considerado a sua resposta.
Se o fluxo de uma variável de estado é uma função do tempo representada por:
( ) ( )txdt
tdx = ( ) ( ) dttxtdx ⋅=
Para obtermos o estado e conseqüentemente a reposta do sistema devemos integrar o fluxo notempo. Assim, integrando os dois lados da equação anterior temos:

Dinâmica de Sistemas: Análise Matemática 8
_
( )( )
( )( ) dttxtdx
t
t
tx
tx00
∫∫ ⋅= ( ) ( ) ( ) dttxtxtx
t
t0
0
∫ ⋅=− ( ) ( ) ( )
A
t
t0 dttxtxtx
0
∫ ⋅+=∴
( ) ( ) Atxtx 0exato +=∴
onde A é a área sob a curva do fluxo obtida analiticamente e limitada pelo instante t0 (instanteinicial da simulação) e o instante t (instante desejado), veja a figura 1.7:
Figura 1.7 – Curva do fluxo e área A.
Contudo, o software Powersim, assim como qualquer outro que utilize o computador, nãocalcula o valor exato de uma integral. Os valores do computador são obtidos através deintegração numérica. Diferentes métodos de integração numérica podem apresentar diferentesresultados para os valores de estado e também de resposta de um mesmo sistema. Além doerro introduzido pelo método, o passo de simulação também pode originar discrepâncias. Porisso é crucial o conhecimento do método de integração numérica usado pelo software nasimulação, para que se determine corretamente a resposta do sistema.
Veremos a seguir alguns métodos de integração numérica.
Método d e Euler (Passo Fixo)
Nesse método, a área sob a curva do fluxo é aproximada por um retângulo (Área B - Figura1.8):
Figura 1.8 – Área exata (A) e área do Método de Euler (B).
Dinâmica de Sistemas: Análise Matemática 9
_
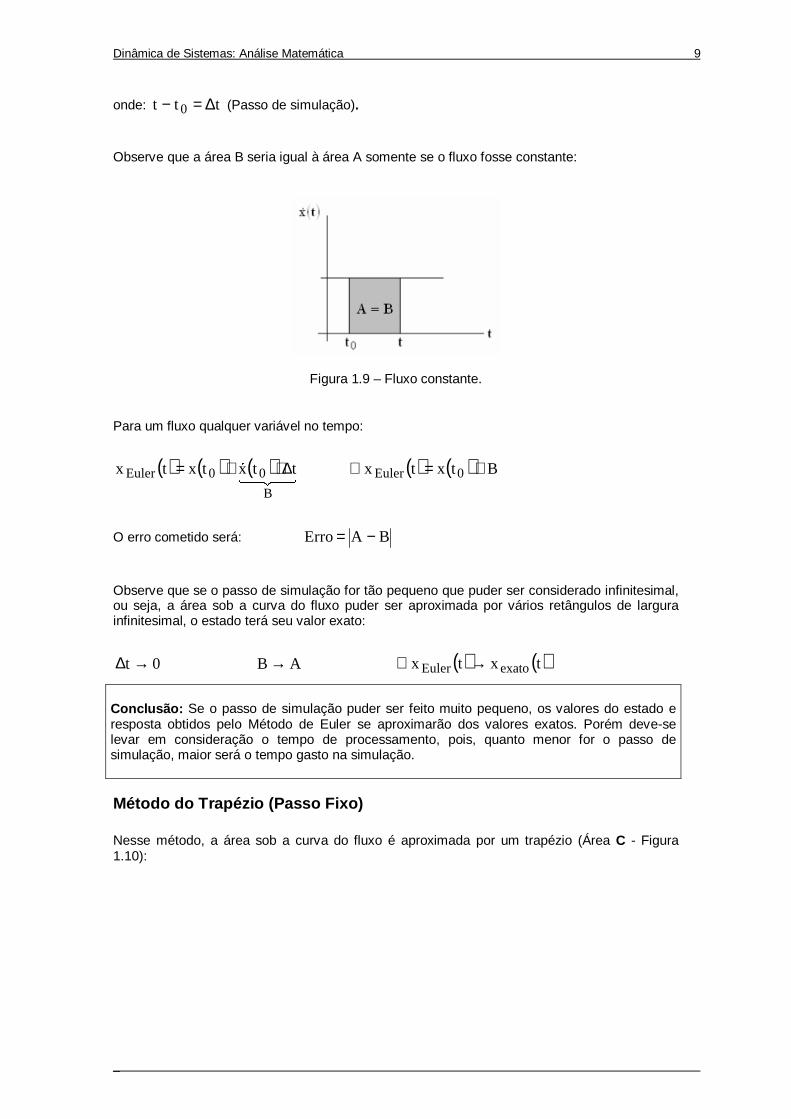
onde: ttt 0 ∆=− (Passo de simulação).
Observe que a área B seria igual à área A somente se o fluxo fosse constante:
Figura 1.9 – Fluxo constante.
Para um fluxo qualquer variável no tempo:
( ) ( ) ( )
B
00Euler ttxtxtx ∆⋅+= ( ) ( ) Btxtx 0Euler +=∴
O erro cometido será: BAErro −=
Observe que se o passo de simulação for tão pequeno que puder ser considerado infinitesimal,ou seja, a área sob a curva do fluxo puder ser aproximada por vários retângulos de largurainfinitesimal, o estado terá seu valor exato:
0t →∆ AB → ( ) ( )txtx exatoEuler →∴
Conclusão: Se o passo de simulação puder ser feito muito pequeno, os valores do estado eresposta obtidos pelo Método de Euler se aproximarão dos valores exatos. Porém deve-selevar em consideração o tempo de processamento, pois, quanto menor for o passo desimulação, maior será o tempo gasto na simulação.
Método do Trapézio (Passo Fixo)
Nesse método, a área sob a curva do fluxo é aproximada por um trapézio (Área C - Figura1.10):

Dinâmica de Sistemas: Análise Matemática 10
_
Figura 1.10 – Área exata (A) e área do Método do Trapézio (C).
ttt 0 ∆=− (Passo de simulação).
Nesse caso:
( ) ( ) ( ) ( )
C
00Trapézio t
2
txtxtxtx ∆⋅
++= ( ) ( ) Ctxtx 0Trapézio +=∴
O erro cometido será: CAErro −=
Novamente, se o passo de simulação for tão pequeno que puder ser considerado infinitesimal,temos:
0t →∆ AC → ( ) ( )txtx exatoTrapézio →∴
Observação: No Powersim não encontramos o Método do Trapézio.
Método Runge-Kutta n (RK-n)
Nesse método, a área sob a curva do fluxo é aproximada por uma área sob um polinômio degrau n que se aproxime da curva original. No Powersim temos:
• RK-2: polinômio de grau 2;
• RK-3: polinômio de grau 3;
• RK-4: polinômio de grau 4;
• RK-4: polinômio de grau 4 com passo de simulação variável;
O RK-4 de passo variável é um método onde o passo de simulação varia constantementedurante a simulação.

Dinâmica de Sistemas: Análise Matemática 11
_
Um algoritmo que calcula o estado ou a resposta de um sistema utilizando o Método RK-4 podeser obtido como descrito a seguir:
( )( )( )( )( )( )
( )( )( ) ( ) ( )4,n3,n2,n1,nn1n
3,nnn4,n
2,nnn3,n
1,nnn2,n
nn1,n
kk2k2kt61txtx
kttx,ttfk
kt21tx,t2
1tfk
kt21tx,t2
1tfk
tx,tfk
+⋅+⋅+⋅∆⋅+=
⋅∆+∆+=
⋅∆⋅+∆⋅+=
⋅∆⋅+∆⋅+=
=
+
onde t∆ é o passo de simulação e n é o índice do instante de tempo considerado.
Exemplo 1.1:
Se considerarmos que uma caderneta de poupança possui um valor inicial de R$ 100,00 e umataxa de rendimento mensal de 1% e ainda são realizados depósitos mensais de R$ 100,00,qual será o valor da poupança no segundo mês? Utilize o Método RK-4 usando o algoritmo edepois compare com o obtido na simulação do sistema no Powersim.
Solução:
As equações desse sistema são as equações (1.1a) e (1.1b) reescritas a seguir:
UxTx r +⋅=!
(1.1a)
xy = (1.1b)
onde: Tr = 0,01, U = 100, x(0) = 100 e ( )( ) ( )( )nnnn tx,txtx,tf!
=
Considerando um 1t =∆ temos:
( ) 100tx;0t 00 ==
( )( )"
( )# #
10110010001,00x;0fkU0xT
1,0
r
=+⋅==⇒
( ) 5,1501015,0100k2
t0x 1,0 =⋅+=⋅∆+⇒
( ) 505,1011005,15001,05,150;5,0fk 2,0 =+⋅==⇒
Dinâmica de Sistemas: Análise Matemática 12
_
( ) 7525,150505,1015,0100k2
t0x 2,0 =⋅+=⋅∆+⇒
( ) 50753,1011007525,15001,07525,150;5,0fk 3,0 =+⋅==⇒
( ) 50753,20150753,101100kt0x 3,0 =+=⋅∆+⇒
( ) 01508,10210050753,20101,050753,201;1fk 4,0 =+⋅==⇒
( ) ( ) 50669,20101508,10250753,1012505,10121016
1100tx 1 =+⋅+⋅+⋅+=⇒
( ) 50669,201tx;1t 11 ==∴
( )( ) 01507,10210050669,20101,01x;1fk 1,1 =+⋅==⇒
( ) 51422,25201507,1025,050669,201k2
t1x 1,1 =⋅+=⋅∆+⇒
( ) 52514,10210051422,25201,051422,252;5,1fk 2,1 =+⋅==⇒
( ) 76926,25252514,1025,050669,201k2
t1x 2,1 =⋅+=⋅∆+⇒
( ) 52769,10210076926,25201,076926,252;5,1fk 3,1 =+⋅==⇒
( ) 03438,30452769,10250669,201kt1x 3,1 =+=⋅∆+⇒
( ) 04034,10310003438,30401,003438,304;2fk 4,1 =+⋅==⇒
( ) +=⇒ 50669,201tx 2
( ) 03353,30404034,10352769,102252514,102201507,1026
1 =+⋅+⋅+⋅+
( ) 03353,304tx;2t 22 ==∴
Portanto no segundo mês a poupança será de aproximadamente R$ 304,03353 (no entanto, deacordo com o sistema bancário real, seu valor seria de R$ 303,01).
Em seguida serão realizados alguns exemplos numéricos para comparação da respostaanalítica com a obtida da simulação do sistema no software Powersim. É interessante que oleitor teste cada um dos métodos de integração disponíveis no Powersim e tire suasconclusões baseadas na comparação dos valores obtidos na simulação com os valores obtidosanaliticamente.
Para alterar o método de integração do Powersim siga os seguintes passos:

Dinâmica de Sistemas: Análise Matemática 13
_
• Abra o Powersim;
• Clique em Simulate na barra de ferramentas;
• Escolha a opção Simulation Setup.
Figura 1.11 – Opção Simulation Setup.
A janela da figura 1.12 aparecerá. No campo Method estará escolhido o método Euler (fixedstep) que é a opção default do Powersim. Substitua-o pelo método desejado.
Figura 1.12 – Opção Method.
Dessa maneira, a integração na simulação do Powersim será feita utilizando-se o métodoescolhido.
Exemplo 1.2:
Se considerarmos que uma caderneta de poupança possui um valor inicial de R$ 1.000,00 euma taxa de rendimento mensal de 1%, qual deverá ser o valor dos depósitos constantes

Dinâmica de Sistemas: Análise Matemática 14
_
mensais para que esta poupança atinja o dobro do seu valor inicial em 6 meses? Primeiroresponda analiticamente e em seguida simule no Powersim usando cada um dos métodos deintegração disponíveis e compare os resultados.
Solução analítica:
x(0) = 1000
Tr = 0,01
u = U = ?
t = 6
y(6) = 2.x(0)
Da equação (1.6) temos:
( ) ( ) ( ) ( )0x21e01,0
Ue0x6y 601,0601,0 ⋅=−⋅+⋅= ⋅⋅
( )1e01,0
Ue10002000 06,006,0 −⋅+⋅= ( )1eUe1020 06,006,0 −⋅+⋅=
( ) 06,006,0 e10201eU ⋅−=−⋅1e
e1020U
06,0
06,0
−
⋅−=∴ 72,151U ≅∴
Portanto os depósitos mensais deverão ser de aproximadamente R$ 151,72.
Exemplo 1.3:
Se uma caderneta de poupança possui um valor inicial diferente de zero, qual deverá ser ataxa de rendimento mensal para que esta poupança atinja o dobro do seu valor inicial em 6meses se nesse período não for efetuado nenhum depósito? Primeiro responda analiticamentee em seguida simule no Powersim usando cada um dos métodos de integração disponíveis ecompare os resultados.
Solução analítica:
Tr = ?
y(6) = 2.x(0)
t = 6
U = 0
Como a entrada é nula, da equação (1.7) temos:

Dinâmica de Sistemas: Análise Matemática 15
_
( ) ( ) 6Tre0x6y ⋅⋅= ( ) ( ) 6Tre0x0x2 ⋅⋅=⋅ 2e 6Tr =⋅
2lneln 6Tr =⋅ 2ln6Tr =⋅6
2lnTr =∴ 1155,0Tr ≅∴
A taxa de rendimento mensal deverá ser de aproximadamente de 11,55%.
Exemplo 1.4:
Qual deverá ser o valor inicial da poupança para que se tenha R$ 1.000,00 em 5 meses se suataxa de rendimento mensal é de 5% e não há depósitos realizados nesse período? Primeiroresponda analiticamente e em seguida simule no Powersim usando cada um dos métodos deintegração disponíveis e compare os resultados.
Solução analítica:
Tr = 0,05
y(5) = 1000
t = 5
U = 0
Como a entrada é nula, da equação (1.7) temos:
( ) ( ) 1000e0x5y 505,0 =⋅= ⋅ ( )25,0e
10000x =∴ ( ) 80,7780x ≅∴
Portanto o valor inicial da poupança deverá ser de aproximadamente de R$ 778,80.
Observação: Se a entrada for nula como no último exemplo, quando rT
1t = , a poupança
atinge 272% do seu valor inicial.
Da equação (1.7) temos:
( ) r
r T
1T
re0xT
1x⋅
⋅=
Como 72,2e1 = temos: ( )0x72,2T1x
r⋅=

Dinâmica de Sistemas: Análise Matemática 16
_
Desafio 1
Se no sistema de Caderneta de Poupança da figura 1.3 houvesse um fluxo de saída dedinheiro proporcional ao valor da poupança em cada instante de tempo t, definida como umvalor percentual dessa poupança através de uma Taxa de Saques (Ts) mensal (veja figura1.13), como seria o seu Modelo Padrão e quais seriam suas equações de estado e de saída?Baseado em suas respostas, o que você pode concluir?
Figura 1.13 – Modelo Detalhado do sistema de Caderneta de Poupança com fluxo de saída dedinheiro.

Dinâmica de Sistemas: Análise Matemática 17
_
Capítulo 2
Analisaremos agora o comportamento da seguinte situação-problema:
Um aluno deseja encher um copo com um certo volume de água. Assim ele tem em mente umnível desejado de água no copo. Ele fica constantemente observando o nível da água nocopo enquanto controla a abertura da torneira com as mãos. No início o copo está vazio e adiferença percebida entre o nível desejado de água e o nível da água no copo é grande e,portanto, ele abre bastante a torneira e conseqüentemente o fluxo de água é grande. Àmedida que o nível da água no copo vai aumentando, a diferença percebida diminui,fazendo com que o aluno diminua a abertura da torneira e o fluxo de água. Quandofinalmente o nível da água no copo alcança o nível desejado de água a diferençapercebida é nula, fazendo com que ele feche a torneira, interrompendo o fluxo de água.
O nível da água indica o volume desejado ou o contido no copo em ml.
Figura 2.1 – Diagrama Causal do sistema de Nível de Água. Fonte: A Quinta Disciplina, PeterSenge.
Figura 2.2 – Modelo Detalhado do sistema de Nível de Água.

Dinâmica de Sistemas: Análise Matemática 18
_
Para a construção do Modelo Detalhado da figura 2.2 levou-se em consideração que aabertura da torneira é equivalente ao fluxo de água.
E ainda, o fluxo de água é igual à defasagem percebida, por unidade de tempo (T). Adefasagem percebida, por sua vez, é a diferença entre o nível desejado de água(considerado de valor constante U) e o nível da água no copo.
Observando o sistema da figura 2.2 concluímos que:
• Nível Desejado de Água → Entrada (u)
• Nível da Água no Copo → Saída ou Resposta (y)
• Nível da Água no Copo → Estado (x)
Como o fluxo é a taxa de variação no tempo do estado correspondente, temos:
• Fluxo de Água → Taxa de Variação do Estado ( x)
Portanto podemos representar esse sistema conforme figura 2.3:
Figura 2.3 – Modelo Padrão do sistema de Nível de Água.
Esse sistema pode ser completamente descrito pelas equações:
T
xUx
−=
UT
1x
T
1x +⋅−=
(2.1a)
xy = xy = (2.1b)
conhecendo-se sua condição inicial.

Dinâmica de Sistemas: Análise Matemática 19
_
A constante T corresponde ao intervalo de tempo para se encher o copo até o nível desejadode água se o fluxo inicial fosse mantido constante, ou seja, quanto menor for T maisrapidamente o nível da água no copo atingirá o nível desejado de água.
Efeitos da Realimentação Negativa
Observe o Modelo Causal do sistema de Nível de Água:
Figura 2.4 – Modelo Causal do sistema de Nível de Água.
Nesse sistema observamos que um aumento do fluxo ( x) acarreta em um aumento do valor da
variável de estado (x); porém, o incremento da variável de estado faz com que o fluxo diminuae assim esse ciclo vai se repetindo a cada instante de tempo. Essa situação caracteriza umsistema com realimentação negativa. Um sistema realimentado negativamente tende a serestável, pois sua variável de estado e conseqüentemente a resposta (ou saída) tendem a umvalor finito.
Para conhecermos a resposta desse sistema devemos resolver as equações (2.1a) e (2.1b),reescritas a seguir:
UT
1x
T
1x +⋅−=
(2.1a)
xy = (2.1b)
A solução geral da equação (2.1a) é:
( ) Ukektx 3tk
12 ⋅+⋅= ⋅ (2.2)
Derivando em relação ao tempo, temos:

Dinâmica de Sistemas: Análise Matemática 20
_
( ) tk12
2ekktx ⋅⋅⋅=
(2.3)
Substituindo as equações (2.2) e (2.3) na equação (2.1a):
( ) UT
1Ukek
T
1ekk
x
3tk
1
x
tk12
22 +⋅+⋅⋅−=⋅⋅ ⋅⋅
0UT
1k
T
1ek
T
1kk 3
tk112
2 =⋅
−⋅+⋅
⋅+⋅∴ ⋅
Para que a última igualdade seja verdadeira independentemente de t e de U, os coeficientesentre parênteses devem ser nulos:
0kT
1kk 112 =⋅+⋅ 112 k
T
1kk ⋅−=⋅
T
1k 2 −=∴
0T
1k
T
13 =−⋅
T
1k
T
13 =⋅ 1k3 =∴
Para a determinação de k1 temos que ter o conhecimento da condição inicial do sistema, ouseja, do valor inicial da variável nível da água no copo (x(0)). Da equação (2.2) temos:
( ) Ukek0x 30k
12 ⋅+⋅= ⋅ ( ) Ukk0x 31 ⋅+= (2.4)
Substituindo o valor de k3 na equação (2.4):
( ) Uk0x 1 += ( ) U0xk1 −=∴
A equação que descreve o estado deste sistema em função do tempo é obtida substituindo osvalores de k1, k2 e k3 na equação (2.2):
( ) ( ) UeUe0xtxt
T
1t
T
1
+⋅−⋅=⋅−⋅−
Como consideramos que inicialmente o copo estava vazio, x(0)=0:
( ) UeUe0txt
T
1t
T
1
+⋅−⋅=⋅−⋅−
( ) UeUtxt
T
1
+⋅−=⋅−
( )
−⋅=∴
⋅− tT
1
e1Utx (2.5)
Da equação (2.1b), a resposta em função do tempo é igual ao estado do sistema:
Dinâmica de Sistemas: Análise Matemática 21
_
( )
−⋅=∴
⋅− tT
1
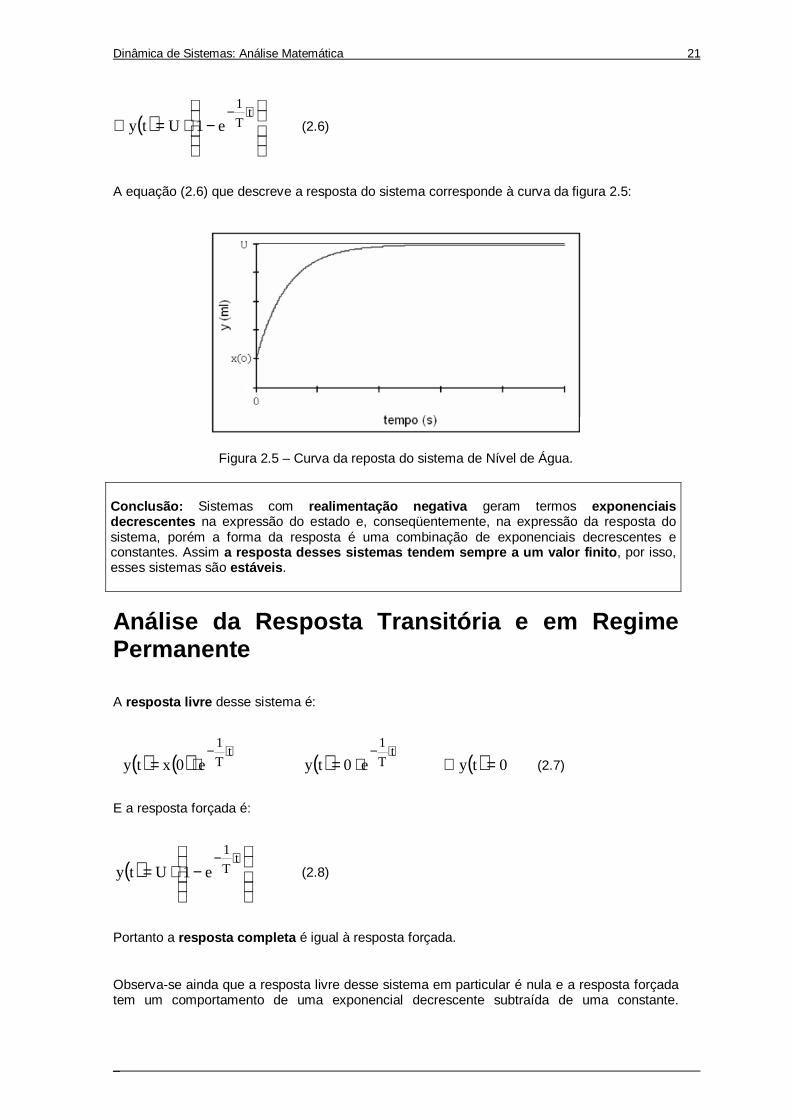
e1Uty (2.6)
A equação (2.6) que descreve a resposta do sistema corresponde à curva da figura 2.5:
Figura 2.5 – Curva da reposta do sistema de Nível de Água.
Conclusão: Sistemas com realimentação negativa geram termos exponenciaisdecrescentes na expressão do estado e, conseqüentemente, na expressão da resposta dosistema, porém a forma da resposta é uma combinação de exponenciais decrescentes econstantes. Assim a resposta desses s istemas tendem sempre a um valor finito, por isso,esses sistemas são estáveis.
Análise da Resposta Transitória e em RegimePermanente
A resposta livre desse sistema é:
( ) ( )t
T
1
e0xty⋅−
⋅= ( )t
T
1
e0ty⋅−
⋅= ( ) 0ty =∴ (2.7)
E a resposta forçada é:
( )
−⋅=
⋅− tT
1
e1Uty (2.8)
Portanto a resposta completa é igual à resposta forçada.
Observa-se ainda que a resposta livre desse sistema em particular é nula e a resposta forçadatem um comportamento de uma exponencial decrescente subtraída de uma constante.

Dinâmica de Sistemas: Análise Matemática 22
_
Portanto, a resposta completa desse sistema “estaciona” em um valor finito em algum instante,ou seja, se estabiliza com o passar do tempo.
Isso é comprovado matematicamente quando:
( ) Ctylimt
=∞→
onde C é um valor finito qualquer.
Um parâmetro importante de alguns sistemas de 1ª ordem realimentados negativamente é aconstante de tempo ( τ ) do sistema. A constante de tempo representa o instante no qual aresposta atingiria seu valor final se o fluxo inicial fosse mantido (fluxo constante).
Figura 2.6 – Indicação da constante de tempo do sistema
O fluxo inicial (em t = 0) pode ser determinado da equação (2.1a):
( ) ( ) UT
10x
T
10x ⋅+⋅−=
( ) UT
10
T
10x ⋅+⋅−=
( ) UT
10x ⋅=∴
Se o fluxo fosse mantido constante, para qualquer instante de tempo, ele seria:
( ) ( )0xtx
= ( )
tetanCons
UT
1tx ⋅=∴ (2.9)
Então, o estado do sistema seria a integral no tempo da equação (2.9):
( )( )
dtUT
1dttx
t
0tetanCons
tx
0
⋅⋅=⋅ ∫∫
( ) tUT
10tx ⋅⋅=− ( ) tU
T
1tx ⋅⋅=∴

Dinâmica de Sistemas: Análise Matemática 23
_
Da equação (2.1b), teríamos a seguinte resposta:
( ) tUT
1ty ⋅⋅=∴ (2.10)
O valor final da resposta desse sistema é:
( ) ( )∞=∞→
ytylimt
Da equação (2.6):
( )
−⋅=∞
∞⋅−T
1
e1Uy ( )
−⋅=∞∞⋅
T
1
e
11Uy ( ) ( )01Uy −⋅=∞
( ) Uy =∞∴
E da equação (2.10) temos que:
( ) TUT
1Ty ⋅⋅= ( ) UTy =∴
Assim, a resposta atingiria seu valor final (U), quando t = T.
Portanto, a constante de tempo desse sistema é igual à unidade de tempo do fluxo escolhida( T=τ ). Quanto menor for T, mais rapidamente a resposta atingirá seu valor final.
Observação: Se a condição inicial do sistema de Nível de Água é nula, quando Tt = , o nívelda água no copo atinge 63% do seu valor final:
A resposta desse sistema é dada pela equação (2.8):
( )
−⋅=
⋅− TT
1
e1UTy ( )
−⋅= −
37,0
1e1UTy ( ) U63,0Ty ⋅=∴
Analog ia de Sistemas de 1ª Ordem
Observe agora um exemplo de sistema análogo ao de Nível de Água:

Dinâmica de Sistemas: Análise Matemática 24
_
Figura 2.7 – Circuito elétrico de 1ª ordem.
A partir do modelo desse sistema deseja-se saber a tensão ( e(t)) sobre o capacitor (C) quandoa chave é fechada considerando-se que a corrente i é constante.
Para esse sistema temos:
• i → Entrada (u)
• e → Saída ou Resposta (y)
• e → Estado (x)
A equação diferencial que descreve esse sistema é obtida pela Lei de Kirchhoff das correntes:
0eCR
ei =⋅++−
ou 0xC
R
xU =⋅++−
U
C
1x
CR
1x ⋅+⋅
⋅−=∴
Portanto esse sistema pode ser descrito pelas equações:
UC
1x
CR
1x +⋅
⋅−=
(2.11a)
xy = (2.11b)
E das equações (2.11a) e (2.11b) podemos obter seu Modelo Padrão:
Figura 2.8 – Modelo Padrão do sistema elétrico.

Dinâmica de Sistemas: Análise Matemática 25
_
Onde:
CR
1A
⋅−=
C
1B =
Assim podemos representar esse sistema através das equações:
UBxAx ⋅+⋅=
(2.12a)
xy = (2.12b)
A resolução das equações (2.12a) e (2.12b) é semelhante à das equações (2.1a) e (2.1b).Dessa maneira:
( ) ( ) UA
BeU
A
Be0xtx tAtA ⋅−⋅⋅+⋅= ⋅⋅
( ) ( ) UA
BeU
A
Be0xty tAtA ⋅−⋅⋅+⋅= ⋅⋅
Observe as semelhanças entre os conjuntos de equações (2.1) e (2.11) e as semelhançasentre os modelos das figuras 2.3 e 2.8. O que você conclui?
Exemplo 2.1:
Simule o sistema de nível de água quando o nível desejado de água é 100ml (U = 100) e noinstante inicial não há água no copo (x(0) = 0). Adote T = 1 segundo. Utilize o método deintegração RK-4.
Exemplo 2.2:
Simule o sistema elétrico quando a fonte de corrente é de 100 mA (U = 100), R = 1Ω e C = 1 Festando este inicialmente descarregado (x(0) = 0). Utilize o método de integração RK-4. Qual aconstante de tempo desse sistema? Qual a semelhança da resposta desse sistema com aresposta do exemplo 2.1?

Dinâmica de Sistemas: Análise Matemática 26
_
Capítulo 3
Até aqui, vimos apenas exemplos de sistemas de 1ª ordem, ou seja, aqueles que têm apenasum estoque. Iremos estudar agora o comportamento de um sistema com 2 estoques. Para isso,considere a seguinte situação-problema:
Um aluno segura um bloco de massa M (kg) mantendo-o em uma posição S(0) dada emmetros (o aluno exerce uma força constante de valor U (N)). Esse bloco está preso a umaparede por uma mola de constante elástica K e também possui rodinhas, podendo-sedesprezar o atrito desse bloco com a superfície em que se apóia. Considerando que este blocoestá no vácuo, pode-se desprezar também o efeito do atrito viscoso que seria causado pelo arem volta do bloco.
O aluno deseja conhecer a posição desse bloco a cada instante de tempo quando soltá-lo,deixando-o livre.
Figura 3.1 – Configuração do sistema Massa-Mola.
Assim, para t > 0, a equação que descreve esse sistema pode ser obtida das Leis de Newton:
∑ = 0F 0SKaM =⋅+⋅∴ (3.1)
onde a é a aceleração e S a posição do bloco.
2
2
dt
Sd
dt
dva == Sa
=∴ (3.2)
onde v é a velocidade do bloco.
Substituindo a equação (3.2) na equação (3.1):

Dinâmica de Sistemas: Análise Matemática 27
_
0SKSM =⋅+⋅
(3.3)
A equação (3.3) é de 2ª ordem, isso significa que temos duas variáveis de estado (estoque) nomodelo desse sistema:
Figura 3.2 – Modelo preliminar do sistema com duas variáveis de estado.
Se considerarmos:
Sx1 = (3.4a)
Sx 2
= (3.4b)
Derivando a equação (3.4a) em relação ao tempo, temos:
Sx1
=
Portanto, da equação (3.4b):
21 xx =
Derivando a equação (3.4b) em relação ao tempo, temos:
Sx 2
=
Da equação (3.3):
0SKSM =⋅+⋅
12xxS
M
KS ⋅−=
12 x
M
Kx ⋅−=∴
Nessa situação-problema, podemos considerar que:
• f (força com a qual o aluno segura o bloco) → Entrada (u)
• S (posição do bloco) → Saída ou Resposta (y)

Dinâmica de Sistemas: Análise Matemática 28
_
• S (posição do bloco) → Estado 1 ( 1x )
• S
(velocidade do bloco) → Estado 2 ( 2x )
E ainda:
• S
(velocidade do bloco) → Taxa de variação do Estado 1 ( 1x
)
• S (aceleração do bloco) → Taxa de variação do Estado 2 ( 2x
)
Portanto, o sistema pode ser representado pelo seguinte Modelo Padrão:
Figura 3.3 – Modelo Padrão do sistema Massa-Mola.
Onde:
M
KA21 −= (coeficiente da variável de estado 1x presente no fluxo 2x
).
Como U = 0 para t > 0, esse sistema pode ser completamente descrito pelas equações aseguir:
21 xx =
(3.5a)
1
A
2 xM
Kx
21
⋅−=
(3.5b)
1xy = (3.5c)
Dinâmica de Sistemas: Análise Matemática 29
_
conhecendo-se suas condições iniciais.
Efeitos da Realimentação Positiva-Negativa
Observe que a equação (3.5a) indica uma realimentação positiva (estado 1x realimentado
positivamente pelo estado 2x ), e a equação (3.5b) uma realimentação negativa (estado 2xrealimentado negativamente pelo estado 1x ). Isso significa que:
1. Quando o estado 2x é negativo, o fluxo 1x
é negativo também.
2. Enquanto o fluxo 1x
é negativo, o estado 1x decresce.
3. O estado 1x vai decrescendo até tornar-se negativo, quando isso acontece o
fluxo 2x
se torna positivo.
4. Enquanto o fluxo 2x
é positivo, o estado 2x cresce.
5. O estado 2x vai crescendo até tornar-se positivo, quando isso acontece o fluxo
1x
se torna positivo também.
6. Enquanto o fluxo 1x
é positivo, o estado 1x cresce.
7. O estado 1x vai crescendo até tornar-se positivo novamente, quando isso
acontece o fluxo 2x
se torna negativo.
8. Enquanto o fluxo 2x
é negativo, o estado 2x decresce
e assim o ciclo com as situações 1-2-3-4-5-6-7-8-1-2-..., vão se repetindo.
Nesse sistema observamos que as variáveis de estado estão sempre alternando o seu sinal(em alguns momentos é positivo, em outros é negativo), ou seja, as variáveis de estado sãooscilatórias. Essa situação caracteriza um tipo de sistema com realimentação po sitiva-negativa. Neste exemplo, a realimentação de um estado é feita somente a partir do ou troEstado.
Para obtermos a expressão da resposta desse sistema devemos resolver as equações (3.5a),(3.5b) e (3.5c), reescritas a seguir:
21 xx =
(3.5a)
12 xM
Kx ⋅−=
(3.5b)
1xy = (3.5c)

Dinâmica de Sistemas: Análise Matemática 30
_
Uma variável oscilatória pode ser descrita por uma expressão cossenoidal. Portanto, a soluçãogeral da equação (3.5a) é:
( )tkcoskx 211 ⋅⋅= (3.6)
Derivando a equação (3.6) em relação ao tempo, temos:
( )tksenkkx 2121 ⋅⋅⋅−=
(3.7)
Substituindo a equação (3.7) na equação (3.5a):
( )
1
x
2122 tksenkkx ⋅⋅⋅−= (3.8)
Derivando a equação (3.8) em relação ao tempo, temos:
( )tkcoskkx 21222 ⋅⋅⋅−=
(3.9)
Substituindo as equações (3.6) e (3.9) em (3.5b):
( ) ( )
12
x
21
x
2122 tkcosk
M
Ktkcoskk ⋅⋅⋅−=⋅⋅⋅−
M
Kk 2
2 −=−
M
Kk 2 =∴
Para a determinação de k1 devemos conhecer a condição inicial do sistema. Da equação (3.6):
( ) ( )0kcosk0x 211 ⋅⋅= ( ) 1k0x 11 ⋅= ( )0xk 11 =∴
Assim, a equação que descreve o estado 1x desse sistema em função do tempo é obtidasubstituindo os valores de k1 e k2 na equação (3.6):
( ) ( )
⋅⋅=∴ t
M
Kcos0xtx 11 (3.10)
Observe que o argumento do cosseno da equação (3.10) tem como unidade o radiano:
[ ][ ] [ ] [ ]( )radcosss
radcos =
⋅

Dinâmica de Sistemas: Análise Matemática 31
_
A equação que descreve o estado 2x em função do tempo é obtida substituindo os valores dek1 e k2 na equação (3.8):
( ) ( )
⋅⋅⋅−=∴ t
M
Ksen0x
M
Ktx 12 (3.11)
Da equação (3.5c), a resposta desse sistema em função do tempo é igual ao estado 1x :
( ) ( )
⋅⋅=∴ t
M
Kcos0xty 1 (3.12)
A equação (3.12) que descreve a resposta do sistema em função do tempo corresponde àcurva da figura 3.4:
Figura 3.4 – Curva da reposta do sistema Massa-Mola.
Conclusão: Sistemas com 2 variáveis de estado (estoque) com realimentação positiva-negativa onde um estado é realimentado somente pelo outro estado geram termoscosseno idais na expressão do estado e, conseqüentemente, na expressão da resposta dosistema. Assim a resposta desses sistemas não tende a um valor finito, mas, fica oscilandoentre dois valores finitos, por isso eles são estáveis dentro de uma faixa limitada pelaamplitude do cosseno.
Análise da Resposta Transitória e em Regime Permanente
A resposta li vre desse sistema é:
( ) ( )
⋅⋅= t
M
Kcos0xty 1 (3.13)
E a resposta forçada é:

Dinâmica de Sistemas: Análise Matemática 32
_
( ) 0ty = (3.14)
Portanto a resposta completa é a própria resposta livre.
Observa-se que a resposta livre desse sistema em particular tem um comportamento oscilatórioe a resposta forçada é nula. Assim, a resposta completa desse sistema nunca “estaciona” emum valor finito, mas oscila entre dois valores finitos.
Um parâmetro importante de alguns sistemas de 2ª ordem realimentados positivamente enegativamente é o período (T) ou freqüência natural ( n) de oscilação da resposta.
Figura 3.5 – Indicação do período de oscilação (T) da resposta.
Da equação (3.12) podemos obter a freqüência natural de oscilação da resposta:
( ) ( )
⋅⋅=
ω
tM
Kcos0xty
n
1 M
Kn =ω∴ (3.15)
Como:
T
2n
π⋅=ω (3.16)
Substituindo a equação (3.16) na equação (3.15) temos o período da resposta:
M
K
T
2 =π⋅K
M2T ⋅π⋅=∴
Até aqui consideramos que nesse sistema não havia atrito. Como seria a resposta dessesistema se este bloco estivesse em um meio viscoso, como o ar por exemplo, sofrendo assimuma força de atrito contrária ao seu?

Dinâmica de Sistemas: Análise Matemática 33
_
Figura 3.6 – Configuração do sistema Massa-Mola com atrito viscoso.
A força de atrito viscoso é dada por:
vDFatrito ⋅= (v é a velocidade do bloco) SDFatrito
⋅=∴ (3.17)
onde D é o coeficiente de atrito viscoso.
Neste caso, para t > 0, a equação que descreve o sistema é obtida da equação (3.3)acrescentando-se a ela a força de atrito dada pela equação (3.17):
∑ = 0F 0SKSDSMatritoF
=⋅+⋅+⋅
(3.18)
Assim como no sistema sem atrito, se considerarmos:
Sx1 = (3.19a)
Sx 2
= (3.19b)
Derivando a equação (3.19a) em relação ao tempo, temos:
Sx1
=
Portanto, da equação (3.19b):
21 xx =
Derivando a equação (3.19b) em relação ao tempo, temos:

Dinâmica de Sistemas: Análise Matemática 34
_
Sx 2
=
Da equação (3.18):
0SKSDSM =⋅+⋅+⋅
212xxxS
M
DS
M
KS
⋅−⋅−=
212 xM
Dx
M
Kx ⋅−⋅−=∴
(3.20)
O Modelo Padrão do sistema com atrito pode ser obtido do modelo sem atrito, porém quandose tem atrito aparece uma realimentação do estado 2x no próprio fluxo 2x
(observe a
equação (3.20)):
Figura 3.7 – Modelo Padrão do sistema Massa-Mola com atrito.
Onde:
M
KA21 −= (coeficiente da variável de estado 1x presente no fluxo 2x
).
M
DA22 −= (coeficiente da variável de estado 2x presente no fluxo 2x
).
Como U = 0 para t > 0, esse sistema pode ser completamente descrito pelas equações aseguir:

Dinâmica de Sistemas: Análise Matemática 35
_
21 xx =
(3.21a)
2
A
1
A
2 xM
Dx
M
Kx
2221
⋅−⋅−=
(3.21b)
1xy = (3.21c)
conhecendo-se suas condições iniciais.
Comparando as equações (3.21a), (3.21b) e (3.21c) com as equações (3.5a), (3.5b) e (3.5c),observamos que além do comportamento oscilatório, os estados têm um comportamentoexponencial decrescente (realimentação negativa) originada da realimentação com ocoeficiente A22.
Portanto os estados e conseqüentemente a resposta desse sistema são oscilações comamplitudes que decrescem exponencialmente até atingirem um valor finito.
Para obtermos a expressão da resposta desse sistema devemos resolver as equações (3.21a),(3.21b) e (3.21c), reescritas a seguir:
21 xx =
(3.21a)
212 xM
Dx
M
Kx ⋅−⋅−=
(3.21b)
1xy = (3.21c)
Uma variável oscilatória com amplitude que decresce exponencialmente pode ser descrita poruma expressão exponencial decrescente multiplicada por uma expressão cossenoidal.Portanto, a solução geral da equação (3.21a) é:
( )tkcosekx 2tk
113 ⋅⋅⋅= ⋅ (3.22)
Derivando a equação (3.22) em relação ao tempo, temos:

Dinâmica de Sistemas: Análise Matemática 36
_
( ) ( )tkcosekktksenekkx 2tk
132tk
12133 ⋅⋅⋅⋅+⋅⋅⋅⋅−= ⋅⋅
(3.23)
Substituindo a equação (3.23) na equação (3.21a):
( ) ( ) ( ) !"
#1
33
x
2tk
132tk
122 tkcosekktksenekktx ⋅⋅⋅⋅+⋅⋅⋅⋅−= ⋅⋅ (3.24)
Derivando a equação (3.24) em relação ao tempo e após alguma manipulação, temos:
( ) ( ) ( )tksenekkk2tkcosekkkx 2tk
1322tk
123
222
33 ⋅⋅⋅⋅⋅⋅−⋅⋅⋅⋅+−= ⋅⋅(3.25)
Substituindo as equações (3.22), (3.24) e (3.25) em (3.21b) e após manipulação:
( ) ( ) ( ) ( ) ( )tksenkM
Dtkcosk
M
D
M
Ktksenkk2tkcoskk 22232322
23
22 ⋅⋅⋅+⋅⋅
⋅−−=⋅⋅⋅⋅−⋅⋅+−
Para que a última igualdade seja verdadeira independentemente do tempo t, os coeficientesdos termos em cosseno e seno devem ser nulos:
( ) ( ) 0tksenkM
Dkk2tkcosk
M
D
M
Kkk 223223
23
22 =⋅⋅
⋅+⋅⋅−⋅⋅
⋅+++−
0kM
Dkk2 232 =⋅+⋅⋅ (3.26)
M2
Dk3 ⋅
−=∴
0kM
D
M
Kkk 3
23
22 =⋅+++− (3.27)
Substituindo o valor de k3 na equação (3.27):
0M2
D
M
K
M4
Dk
2
2
2
222 =
⋅−+
⋅+−
M
K
M4
Dk
2
222 −
⋅=−
2
222
M4
D
M
Kk
⋅−=
2
2
2M4
D
M
Kk
⋅−=∴
Para a determinação de k1 devemos conhecer a condição inicial do sistema. Da equação(3.22):
Dinâmica de Sistemas: Análise Matemática 37
_
( ) ( )0kcosek0x 20k
113 ⋅⋅⋅= ⋅ ( ) 11k0x 11 ⋅⋅= ( )0xk 11 =∴
Assim, a equação que descreve o estado 1x desse sistema em função do tempo é obtidasubstituindo os valores de k1, k2 e k3 na equação (3.22):
( ) ( )
⋅
⋅−⋅⋅=∴
⋅⋅
−t
M4
D
M
Kcose0xtx
2
2tM2
D
11 (3.28)
A equação que descreve o estado 2x em função do tempo é obtida substituindo os valores dek1, k2 e k3 na equação (3.24).
Da equação (3.21c), a resposta desse sistema em função do tempo é igual ao estado 1x :
( ) ( )
⋅
⋅−⋅⋅=∴
⋅⋅
−t
M4
D
M
Kcose0xty
2
2tM2
D
1 (3.29)
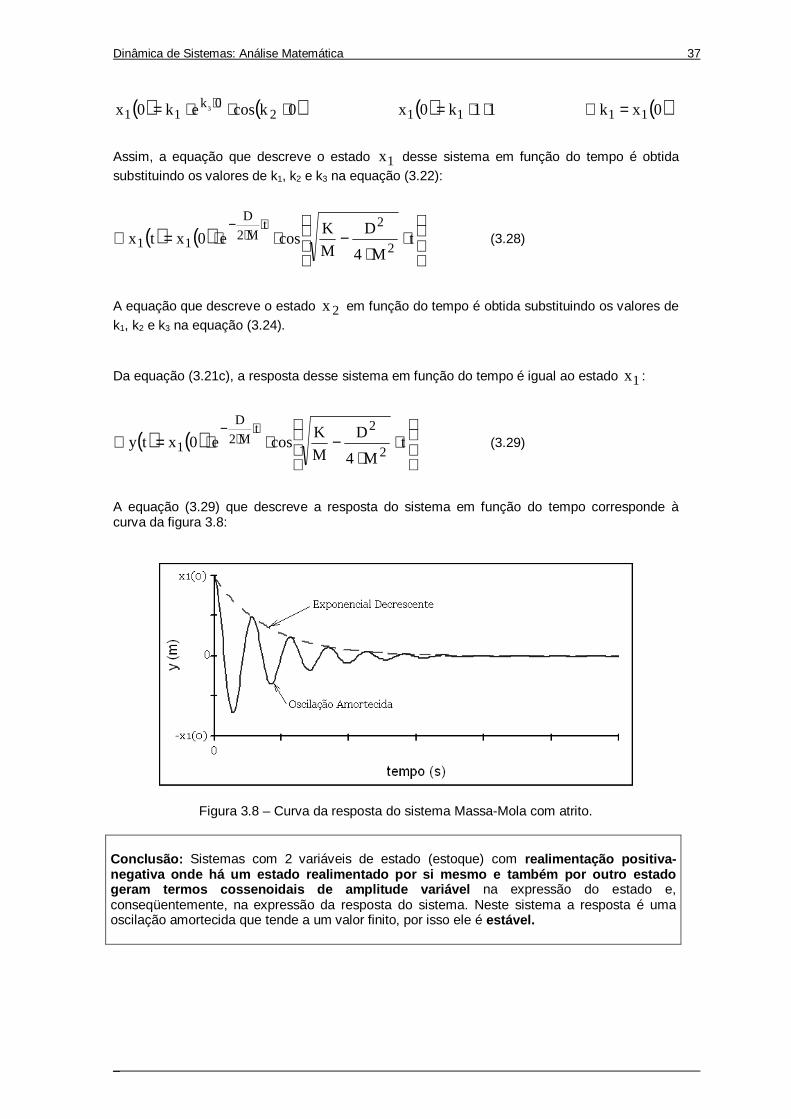
A equação (3.29) que descreve a resposta do sistema em função do tempo corresponde àcurva da figura 3.8:
Figura 3.8 – Curva da resposta do sistema Massa-Mola com atrito.
Conclusão: Sistemas com 2 variáveis de estado (estoque) com realimentação positiva-negativa onde há um estado realimentado po r si mesmo e também por ou tro estadogeram termos cossenoidais de ampli tude variável na expressão do estado e,conseqüentemente, na expressão da resposta do sistema. Neste sistema a resposta é umaoscilação amortecida que tende a um valor finito, por isso ele é estável.

Dinâmica de Sistemas: Análise Matemática 38
_
Análise da Resposta Transitória e em Regime Permanente
A resposta li vre desse sistema é:
( ) ( )
⋅
⋅−⋅⋅=
⋅⋅
−t
M4
D
M
Kcose0xty
2
2tM2
D
1 (3.30)
E a resposta forçada é:
( ) 0ty = (3.31)
Portanto a resposta completa é a própria resposta livre.
Observa-se que a resposta livre desse sistema em particular tem um comportamentooscilatório-amortecido e a resposta forçada é nula. Portanto, a resposta completa dessesistema em algum instante “estaciona” em um valor finito.
Veremos agora alguns parâmetros importantes de sistemas de 2ª ordem realimentadospositivamente e negativamente:
• Freqüência Natural Amortecida ( $ d): pode ser obtida da equação (3.29).
( ) ( )
⋅⋅
−⋅⋅=
ω
⋅⋅
−t
M4
D
M
Kcose0xty
d
2
2tM2
D
1%% &%% '(
2
2
dM4
D
M
K
⋅−=ω∴ (3.31)
A freqüência natural amortecida também é definida como:
2nd 1 ξ−⋅ω=ω (3.32)
Onde:
=ωn Freqüência Natural (dada pela equação (3.15))
=ξ Coeficiente de Amortecimento.
• Coeficiente de Amortecimento: pode ser obtido da equação (3.31).
2
2
dM4
D
M
K
⋅−=ω
K
M
M4
D1
M
K2
2
d ⋅⋅
−⋅=ω (3.33)

Dinâmica de Sistemas: Análise Matemática 39
_
Comparando a equação (3.33) com a equação (3.32), concluímos que:
K
M
M4
D2
22 ⋅
⋅=ξ
K
M
M4
D2
2⋅
⋅=ξ
K
M
M2
D ⋅⋅
=ξ∴ (3.34)
De acordo com o valor do coeficiente de amortecimento (ξ ), 4 situações podem ocorrer:
• 0=ξ : O sistema será oscilatório puro.
• 10 <ξ< : Haverá oscilação da resposta e o sistema será subamortecido .
• 1=ξ : Não haverá oscilação da resposta e o sistema será criticamenteamortecido.
• 1>ξ : Não haverá oscilação da resposta e o sistema será sobreamortecido.
Especificação da Resposta de Sistemas Subamortecidos
Se o sistema tem coeficiente de amortecimento 10 <ξ< , sua resposta terá umcomportamento oscilatório-amortecido. Neste caso temos as seguintes especificações:
Tempo d e Atraso - ta
É o tempo necessário para a resposta alcançar pela 1ª vez a metade da diferença entre o seuvalor inicial e seu valor final.
Figura 3.9 – Tempo de atraso da resposta.
Cálculo:n
a7,01
tω
ξ⋅+≅K2
D7,0
K
Mt a ⋅
⋅+≅∴ (3.35)

Dinâmica de Sistemas: Análise Matemática 40
_
Tempo d e Descida (ou Subida)– td
É o tempo necessário para a resposta passar do seu valor inicial a 100% do seu valor final.
Figura 3.10 – Tempo de descida da resposta.
Cálculo:( )
d
1
dcos
tω
ξ−π=−
2
2
1
d
M4
D
M
K
K
M
M2
Dcos
t
⋅−
⋅
⋅−π
=∴
−
(3.36)
Instante de Pico - tp
É o tempo necessário para a resposta alcançar o 1º pico de sobre-sinal (acima ou abaixo dovalor final da resposta).
Figura 3.11 – Instante de pico da resposta.

Dinâmica de Sistemas: Análise Matemática 41
_
Cálculo:d
ptωπ=
2
2p
M4
D
M
Kt
⋅−
π=∴ (3.37)
Sobre-sinal Máximo - Mp
É o máximo valor de pico da resposta medido a partir do seu valor final.
Figura 3.12 – Sobre-sinal máximo da resposta.
Cálculo: 100e%M.
pd
n
⋅=π⋅ξ
ωω−
100e%M2
2
M4
D
M
KM2
D
p ⋅=∴ ⋅−⋅⋅
π⋅−
(3.38)
Tempo d e Acomodação - tac
É o tempo para a resposta alcançar e permanecer no interior de uma faixa especificada emtorno de seu valor final.
Figura 3.13 – Tempo de acomodação da resposta.

Dinâmica de Sistemas: Análise Matemática 42
_
Cálculo: Para um critério de 2%n
ac4
tω⋅ξ
=D
M8t ac ⋅=∴ (3.39)
Exemplo 3.1:
Qual deve ser a massa (M) do bloco para que ele tenha um sobre-sinal máximo de 20% se D =1 e K = 2? Verifique o valor do coeficiente de amortecimento e compare com a curva daresposta obtida. Primeiro resolva analiticamente e depois simule no Powersim usando RK-4.
Solução Analítica:
D = 1;
K = 2;
M = ?
Mp = 0,2
Da equação (3.38):
100e%M2
2
M4
D
M
KM2
D
p ⋅= ⋅−⋅⋅
π⋅−
2
2
M4
1
M
2M2
1
e2,0 ⋅−⋅⋅
π⋅−
=
2M4
1
M
2M2
2,0ln
⋅−⋅⋅
π−=
2
22
M4
M4
M
M82,0ln
⋅
⋅−⋅
π−=
1M82,0ln
−⋅π−=
2,0ln1M8
π−=−⋅2
2,0ln1M8
π=−⋅
8
2,0ln1
M
2
π+
=∴ kg601,0M ≅
Portanto a massa do bloco deverá ser de aproximadamente 0,601 kg.
O coeficiente de amortecimento será:
Da equação (3.34):K
M
M2
D ⋅⋅
=ξ2
601,0
601,02
1 ⋅⋅
=ξ
456,0≅ξ 10 <ξ<∴ O sistema é subamortecido.

Dinâmica de Sistemas: Análise Matemática 43
_
Exemplo 3.2:
Qual deve ser o coeficiente de atrito viscoso (D) para que um bloco de 1 kg preso a uma molade constante K = 3 oscile, com uma amplitude maior do que 2% da diferença entre a posiçãoinicial e a final, até 10 segundos? Verifique o valor do coeficiente de amortecimento e comparecom a curva da resposta obtida. Primeiro resolva analiticamente e depois simule usando RK-4.
Solução Analítica:
D = ?
K = 3;
M = 1
tac = 10
Da equação (3.39):
D
M8t ac ⋅=
D
1810 ⋅=
10
8D = 8,0D =∴
Portanto o coeficiente de atrito viscoso deverá ser de 0,8.
O coeficiente de amortecimento será:
Da equação (3.34):K
M
M2
D ⋅⋅
=ξ3
1
12
8,0 ⋅⋅
=ξ
231,0≅ξ 10 <ξ<∴ O sistema é subamortecido.
Qual deverá ser o novo D se é desejada uma oscilação da mesma forma até os 25 primeirossegundos?
Da equação (3.39):
D
M8t ac ⋅=
D
1825 ⋅= .
25
8D = 32,0D =∴
Portanto o coeficiente de atrito viscoso deverá ser de 0,32.
O coeficiente de amortecimento será:

Dinâmica de Sistemas: Análise Matemática 44
_
Da equação (3.34):K
M
M2
D ⋅⋅
=ξ3
1
12
32,0 ⋅⋅
=ξ
092,0≅ξ 10 <ξ<∴ O sistema é subamortecido.

Dinâmica de Sistemas: Análise Matemática 45
_
Capítulo 4
Neste capítulo faremos a análise de um outro tipo de sistema de 2ª ordem que possuirealimentações positivas e negativas.
Para isso, considere o modelo de um sistema de Rebanho Leiteiro conforme mostrado nafigura 4.1.
Figura 4.1 – Modelo Detalhado do sistema de Rebanho Leiteiro.
A partir do modelo desse sistema deseja-se saber que número de Bezerras e de Vacasexistirá a cada ano se não são realizadas Compras de Bezerras.
Assim temos:
• As Aquisições de Bezerras compreendem as provenientes de Compras (nestecaso, Compras = 0) mais as provenientes da reprodução das Vacas adultas. AsBezerras reproduzidas são diretamente proporcionais ao número de Vacas deacordo com a Taxa de Natalidade de Bezerras desse rebanho (TxN) que é igual a30%.
• Os animais deixam de pertencer ao “estoque de bezerras” quando morrem ouquando crescem. As Mortes compreendem um percentual de Bezerrasrepresentado pela Taxa de Mortalidade (TxM) igual a 2%. O Crescimento ocorrecom todas as Bezerras que não morrerem.
• O “estoque de vacas” compreende todas as Bezerras que cresceram. Deixam depertencer a este “estoque” todas as Vacas que vão fazer parte das Vendas docriador. Essas Vendas são um percentual do número de Vacas representado pelaTaxa de Vendas (TxV) igual a 30%.
Observando o sistema da figura 4.1 concluímos que:

Dinâmica de Sistemas: Análise Matemática 46
_
• Compras → Entrada (u)
• Bezerras → Saída ou Resposta 1 (y1)
• Vacas → Saída ou Resposta 2 (y2)
• Bezerras → Estado 1 (x1)
• Vacas → Estado 2 (x2)
Os fluxos correspondem à taxa de variação no tempo dos seus estados correspondentes:
• Fluxo Líquido de Bezerras→ Taxa de Variação do Estado 1 ( 1x
)
• Fluxo Líquido de Vacas→ Taxa de Variação do Estado 2 ( 2x
)
Os fluxos líquidos 1x
e 2x
são obtidos a partir da diferença entre o fluxo de entrada e desaída de animais de cada estoque:
( )
Sai
1x
Entra
2x1 xMT1xNTx ⋅+−⋅=
Sai
2xEntra
12 xVTxx ⋅−=
Portanto podemos representar esse sistema conforme figura 4.2:
Figura 4.2 – Modelo Padrão do sistema de Rebanho Leiteiro.
Como U = 0 para t>0, esse sistema pode ser completamente descrito pelas equações:

Dinâmica de Sistemas: Análise Matemática 47
_
( )
2
A
x1
A
x1 xNTxMT1x1211
⋅+⋅−−=
(4.1a)
( ) 2
A
x1A
2 xVTx1x
2221
⋅−+⋅=
(4.1b)
11 xy = (4.1c)
22 xy = (4.1d)
conhecendo-se suas condições iniciais.
O Modelo Padrão em função dos coeficientes A11, A12, A21 e A22 é mostrado na figura 4.3:
Figura 4.3 – Modelo Padrão do sistema de Rebanho Leiteiro.
Efeitos da Realimentação Positiva e Negativa
Observando as equações (4.1a) e (4.1b) nota-se que esse sistema tem realimentaçõespositivas e negativas. Além disso, observa-se que cada estado (ou estoque) é realimentadonegativamente por si mesmo e positivamente pelo outro estado. Esse tipo de configuraçãode sistema dá origem a estados que são representados por combinações de funçõesexponenciais, conseqüentemente, suas respostas também serão funções exponenciais.
Para obtermos a expressão das respostas desse sistema devemos resolver as equações(4.1a), (4.1b), (4.1c) e (4.1d) reescritas a seguir em função de A11, A12, A21 e A22:
2121111 xAxAx ⋅+⋅=
(4.2a)
2221212 xAxAx ⋅+⋅=
(4.2b)

Dinâmica de Sistemas: Análise Matemática 48
_
11 xy = (4.2c)
22 xy = (4.2d)
Onde:
VTA
1A
NTA
MT1A
x22
21
x12
x11
−===
−−=
ou
30,0A
1A
30,0A
02,1A
22
21
12
11
−===
−=
(4.3)
Sabendo que cada realimentação dá origem a uma função exponencial, a solução geral daequação (4.2b) é:
( ) tk3
tk12
42 ekektx ⋅⋅ ⋅+⋅= (4.4)
Derivando a equação (4.4), temos:
( ) tk34
tk122
42 ekkekktx ⋅⋅ ⋅⋅+⋅⋅=
(4.5)
Substituindo as equações (4.4) e (4.5) na equação (4.2b):
( ) ! !
"2
42
2
42
x
tk3
tk122121
x
tk34
tk12 ekekAxAekkekk ⋅⋅⋅⋅ ⋅+⋅⋅+⋅=⋅⋅+⋅⋅
tk
21
32234tk
21
122121 42 e
A
kAkke
A
kAkkx ⋅⋅ ⋅
⋅−⋅+⋅
⋅−⋅=∴ (4.6)
Derivando a equação (4.6) em relação ao tempo:
tk
21
3224324tk
21
1222122
1 42 eA
kAkkke
A
kAkkkx ⋅⋅ ⋅
⋅⋅−⋅+⋅
⋅⋅−⋅=#
(4.7)
Substituindo as equações (4.7), (4.6) e (4.4) em (4.2a) e após alguma manipulação:
( )( ) 0ekAAkAAkkAkAkkk
ekAAkAAkkAkAkkk
tk3211232211341132243
24
tk1211212211121112221
22
4
2
=⋅⋅⋅−⋅⋅+⋅⋅−⋅⋅−⋅
+⋅⋅⋅−⋅⋅+⋅⋅−⋅⋅−⋅⋅
⋅
Para que a última igualdade seja verdadeira independentemente do tempo t, seus coeficientesdevem ser nulos:

Dinâmica de Sistemas: Análise Matemática 49
_
0kAAkAAkkAkAkkk 121121221112111222122 =⋅⋅−⋅⋅+⋅⋅−⋅⋅−⋅
( ) ( ) 0AAAAkAAk 211222112112222 =⋅−⋅+⋅+−∴ (4.8)
Substituindo na equação (4.8) os valores numéricos de A11, A12, A21 e A22 conforme asequações (4.3):
0006,0k32,1k 222 =+⋅+
0046,0k
3154,1k''2
'2
−=
−=
Observe que a mesma solução é obtida para 4k :
0046,0k
3154,1k''4
'4
−=
−=
Porém, para que 2x tenha a forma da função dada pela equação (4.4), 2k deve ser diferente
de 4k , assim adotaremos:
0046,0k
3154,1k
4
2
−=−=
Para a determinação de 1k e 3k devemos conhecer as condições iniciais do sistema. Da
equação (4.4):
( ) 0k3
0k12
42 ekek0x ⋅⋅ ⋅+⋅= ( ) 312 kk0x += ( ) 321 k0xk −=∴ (4.9)
Da equação (4.6):
( ) 0k
21
322340k
21
122121
42 eA
kAkke
A
kAkk0x ⋅⋅ ⋅
⋅−⋅+⋅
⋅−⋅=
( ) 321
2241
21
2221 k
A
Akk
A
Ak0x ⋅
−+⋅
−=∴ (4.10)
Substituindo a equação (4.9) na equação (4.10):
( ) ( ) 321
2243
21
2222
21
2221 k
A
Akk
A
Ak0x
A
Ak0x ⋅
−+⋅
−−⋅
−=

Dinâmica de Sistemas: Análise Matemática 50
_
( ) ( )0xA
kA0xk
A
kk2
21
22213
21
24 ⋅
−+=⋅
−
( ) ( )
−
⋅
−+=∴
21
24
221
2221
3
A
kk
0xA
kA0x
k (4.11)
Substituindo os valores de 2k , 4k , A21 e A22 na equação (4.11):
( ) ( )3108,1
0x0154,10xk 21
3⋅+= (4.12)
O valor de 1k é obtido substituindo o valor de 3k na equação (4.9):
( ) ( )3108,1
0x0x2954,0k 12
1−⋅= (4.13)
Se considerarmos que:
( )( ) 1000x
1000x
2
1
==
Teremos das equações (4.13) e (4.12) respectivamente:
75,153k
75,53k
3
1
=−=
Portanto o estado 2x , em função do tempo, desse sistema é obtido substituindo os valores de
1k , 2k , 3k e 4k na equação (4.4):
( ) t0046,0t3154,12 e75,153e75,53tx ⋅−⋅− ⋅+⋅−=∴
O estado 1x , em função do tempo, é obtido substituindo os valores de 1k , 2k , 3k , 4k , A21 e
A22 na equação (4.6):
( ) t0046,0t3154,11 e42,45e58,54tx ⋅−⋅− ⋅+⋅=∴
As respostas, em função do tempo, desse sistema são dadas pelas equações (4.2c) e (4.2d),portanto:

Dinâmica de Sistemas: Análise Matemática 51
_
( ) t0046,0t3154,11 e75,153e75,53ty ⋅−⋅− ⋅+⋅−= (4.14)
( ) t0046,0t3154,12 e42,45e58,54ty ⋅−⋅− ⋅+⋅= (4.15)
As equações (4.14) e (4.15) que descrevem as respostas em função do tempo correspondemàs curvas da figura 4.4:
Figura 4.4 – Curva das respostas do sistema de Rebanho Leiteiro.
Conclusão: Sistemas que possuem 2 variáveis de estado (estoque) com realimentaçõespositivas e negativas onde cada estado é realimentado po sitivamente pelo outro enegativamente por si mesmo geram, na expressão do estado e conseqüentemente naresposta, uma combinação de termos exponenciais que podem ser crescentes oudecrescentes, dependendo do valor dos coeficientes (A11, A12, A21 e A22). O sistema seráestável se o valor da resposta tender a um valor finito e instável caso contrário.
Análise da Resposta Transitória e em Regime Permanente
As respostas li vres desse sistema são:
( ) t0046,0t3154,11 e75,153e75,53ty ⋅−⋅− ⋅+⋅−=
( ) t0046,0t3154,12 e42,45e58,54ty ⋅−⋅− ⋅+⋅=
E as respostas forçadas são:
( ) 0ty1 = ( ) 0ty2 =
Portanto as respostas completas são as próprias respostas livres.

Dinâmica de Sistemas: Análise Matemática 52
_
Observa-se ainda que as respostas livres desse sistema em particular têm um comportamentoexponencial decrescente e as respostas forçadas são nulas (pois U=0). Portanto, as respostascompletas “estacionam” em um valor finito, ou seja, se estabilizam com o passar do tempo.
Desafio 2
Se neste rebanho leiteiro a Taxa de Natalidade de bezerras é de 30% e a Taxa de Mortalidadeé de 2% e estes valores não podem ser alterados, qual deverá ser a Taxa de Vendas para queo número de vacas desse rebanho fique praticamente constante por um longo período detempo?

Dinâmica de Sistemas: Análise Matemática 53
_
Anexo A
Desafio 1 Solucionado
Figura A.1 – Modelo Detalhado do sistema de Caderneta de Poupança com fluxo de saída dedinheiro.
Observando o sistema da figura A.1 concluímos que:
• Depósito → Entrada (u)
• Poupança → Saída ou Resposta (y)
• Poupança → Estado (x)
O fluxo líquido desse sistema é o fluxo de entrada menos o fluxo de saída, de dinheiro, ouseja:
( )$ ( ) ( )% &% '(% &% '(
)
Saindo_Fluxo
s
Entrando_Fluxo
rLíquido_Fluxo
txTtxTUtx ⋅−⋅+= ( ) ( ) ( ) UtxTTtx sr +⋅−=)
( )sreq TTT −=∴
Como o fluxo é a taxa de variação no tempo do estado correspondente, temos:
• Fluxo Líquido → Taxa de Variação do Estado ( x))
Portanto podemos representar esse sistema conforme figura A.2:

Dinâmica de Sistemas: Análise Matemática 54
_
Figura A.2 –Modelo Padrão do sistema de Caderneta de Poupança com fluxo de saída dedinheiro.
Onde Teq = Taxa de Rendimento – Taxa de Saques.
Assim, esse sistema pode ser completamente descrito pelas equações:
UxTx eq +⋅=*
(A.1a)
xy = (A.1b)
conhecendo-se sua condição inicial (x(0)).
Podemos observar que:
• Se Tr > Ts, ou seja, Teq > 0: O estado, e, portanto a resposta, tem umcomportamento exponencial crescente. Assim o sistema será instável.
• Se Ts > Tr, ou seja, Teq < 0: O estado, e, portanto a resposta, tem umcomportamento exponencial decrescente. Assim o sistema será estável, pois aresposta tende a zero.
• Se Ts = Tr, ou seja, Teq = 0: O estado, e, portanto a resposta, tem umcomportamento constante. Assim o sistema será estável, pois a resposta tende aser uma constante.
Conclui-se que, independentemente do número de fluxos entrando ou saindo, qualquer sistemade primeira ordem pode ser representado através do Modelo Padrão semelhante ao da figuraA.2. Além disso, qualquer sistema desse tipo tem equações semelhantes às equações (A.1a) e(A.1b) mudando apenas os coeficientes de um sistema para o outro.

Dinâmica de Sistemas: Análise Matemática 55
_
Anexo B
Generalização Sobre Sistemas de 1ª Ordem
Qualquer sistema de 1ª ordem tem o mesmo Modelo Padrão, variando apenas os coeficientesda realimentação do estado (A) e da Entrada (B) que fazem parte da equação do fluxo:
Figura B.1 – Modelo Padrão de qualquer sistema de 1ª ordem.
Equações do Modelo Padrão do sistema de 1ª ordem:
UBxAx ⋅+⋅=+
(B.1a)
xy = (B.1b)
As expressões do estado e da resposta desse sistema para uma entrada qualquer se t0 = 0são:
( ) ( ) ( ) ( )∫ λ⋅λ⋅⋅+⋅= λ−⋅⋅t
0
tAtA duBe0xetx (B.2a)
( ) ( ) ( ) ( )∫ λ⋅λ⋅⋅+⋅= λ−⋅⋅t
0
tAtA duBe0xety (B.2b)
onde λ é uma variável de integração e os parâmetros A e B são os coeficientes das equações(B.1a) e (B.1b)

Dinâmica de Sistemas: Análise Matemática 56
_
Demonstração das Equações (B.2a) e (B.2b):
Considerando que:( )
AeeAdt
ed tAtAtA
⋅=⋅= ⋅⋅⋅
, temos:
( )[ ] ( ) ( )txeAtxedt
txed tAtAtA
⋅⋅−⋅=⋅ ⋅−⋅−⋅− ,
Logo:
( )[ ] ( ) ( )[ ]txAtxedt
txed tAtA
⋅−⋅=⋅ ⋅−⋅− ,
ou( )[ ] ( )[ ]tuBe
dt
txed tAtA
⋅⋅=⋅ ⋅−⋅−
Portanto, integrando os dois lados da última equação:
( )[ ] ( ) λ⋅λ⋅⋅=λ⋅ ∫∫ λ⋅−λ⋅− duBexedt
t
At
t
A
00
( ) ( ) λ⋅λ⋅⋅=λ⋅ ∫ λ⋅−λ⋅− duBexet
t
At
t
A
00
( ) ( ) ( ) λ⋅λ⋅⋅=⋅−⋅ ∫ λ⋅−⋅−⋅− duBetxetxet
t
A0
tAtA
0
0
Multiplicando os dois lados da equação anterior por tAe ⋅ :
( ) ( ) ( ) λ⋅λ⋅⋅⋅=⋅⋅−⋅⋅ ∫ λ⋅−⋅⋅−⋅⋅−⋅ duBeetxeetxeet
t
AtA0
tAtAtAtA
0
0
( ) ( ) ( ) ( ) ( ) λ⋅λ⋅⋅=⋅− ∫ λ−⋅−⋅ duBetxetxt
t
tA0
ttA
0
0
( ) ( ) ( ) ( ) ( ) λ⋅λ⋅⋅+⋅=∴ ∫ λ−⋅−⋅ duBetxetxt
t
tA0
ttA
0
0
Se considerarmos t0 = 0, temos:

Dinâmica de Sistemas: Análise Matemática 57
_
( ) ( ) ( ) ( )∫ λ⋅λ⋅⋅+⋅= λ−⋅⋅t
0
tAtA duBe0xetx
( ) ( ) ( ) ( )∫ λ⋅λ⋅⋅+⋅= λ−⋅⋅t
0
tAtA duBe0xety
que são iguais às equações (B.2a) e (B.2b).
Então, se o coeficiente A é positivo, temos uma realimentação po sitiva originando termosexpon enciais crescentes na expressão da resposta sendo o sistema neste caso instável.
Se o coeficiente A é negativo, temos uma realimentação negativa originando termosexpon enciais decrescentes na expressão da resposta sendo o sistema neste caso estável.
Sistemas de 1ª Ordem
Realimentação Positiva Realimentação Negativa
A > 0 A < 0
Resposta com termos exponenciaiscrescentes
Resposta com termos exponenciaisdecrescentes
Sistema Instável Sistema Estável

Dinâmica de Sistemas: Análise Matemática 58
_
Referências Bibliográficas
VILLELA, P. R. C., 2001 – “Dinâmica de Sistemas Agroindustriais”. Curso de Especialização aDistância em Gestão da Informação no Agronegócio.
OGATA, K., 1993 - “Engenharia de Controle Moderno”, Editora PHB.
CLOSE, C. M., 1975 - “Circuitos Lineares”, Editora LTC.