avalia¸c˜ao de robustez, desempenho e aplicac˜ao do
TRANSCRIPT

Universidade Federal do Rio Grande do Norte
Centro de Tecnologia
Programa de Pos-Graduacao em Engenharia Eletrica
Avaliacao de Robustez, Desempenho e Aplicacao do
Controlador Adaptativo por Posicionamento de Polos
e Estrutura Variavel
Marcelo Brandao dos Santos
Orientador: Prof. Dr. Aldayr Dantas de Araujo
Co-orientador: Prof. Dr. Ricardo Lucio de Araujo Ribeiro
Natal/RN - Brasil
Outubro de 2007

Universidade Federal do Rio Grande do Norte
Centro de Tecnologia
Programa de Pos-Graduacao em Engenharia Eletrica
Avaliacao de Robustez, Desempenho e Aplicacao do
Controlador Adaptativo por Posicionamento de Polos
e Estrutura Variavel
Marcelo Brandao dos Santos
Dissertacao submetida ao Programa de Pos-
Graduacao em Engenharia Eletrica da Uni-
versidade Federal do Rio Grande do Norte
como parte dos requisitos para a obtencao
do grau de Mestre em Ciencias.
Orientador: Prof. Dr. Aldayr Dantas de Araujo
Co-orientador: Prof. Dr. Ricardo Lucio de Araujo Ribeiro
Natal/RN - Brasil
Outubro de 2007


Avaliacao de Robustez, Desempenho e Aplicacao do
Controlador Adaptativo por Posicionamento de Polos
e Estrutura Variavel
Marcelo Brandao dos Santos
Dissertacao de Mestrado aprovada em 19 de outubro de 2007 pela banca examinadora
composta pelos seguintes membros:
Prof. Dr. Aldayr Dantas de Araujo
Orientador - DEE/UFRN
Prof. Dr. Ricardo Lucio de Araujo Ribeiro
Co-orientador - DEE/UFRN
Prof. Dr. Francisco das Chagas Mota
Examinador interno - DCA/UFRN
Prof. Dr. Shankar P. Bhattacharyya
Examinador externo - TAMU/Texas A&M University

Aos meus pais - Raimundo Oliveira e Iracema Brandao
A minha avo - Rita
Ao meu irmao - Magno
A minha namorada - Marılia

Agradecimentos
A Deus pelo dom da vida e por mais esta conquista.
Aos Professores Aldayr Dantas de Araujo e Ricardo Lucio de Araujo Ribeiro, pelos
ensinamentos e orientacao academica.
Aos professores da UFBA, em especial, Antonio Cezar de Castro e Lima, Leizer Schnit-
man e Adhemar de Barros Fontes, pelos conhecimentos transmitidos, por me apresentarem
a pesquisa academica e me incetivarem a fazer o mestrado.
A todos os meus familiares e amigos, que me incetivaram e me apoiaram nessa etapa
de minha vida. Aos meus amigos Artur, Nara e Otavio e minha namorada Marılia que,
mesmo distante, acompanharam e me apoiaram nos momentos difıceis. A meu grande
amigo Rean, que sempre me incetivou a superar obstaculos, e que nos deixou a poucos
meses.
Aos amigos do LACI que me ajudaram sempre que precisei. A todos os professores
do PPGEE que me transmitiram seus conhecimentos e experiencias profissionais durante
este perıodo.
Aos funcionarios da UFRN e a todos que, direta ou indiretamente, contribuıram para
a realizacao deste trabalho.

Resumo
Neste trabalho, a robustez e o desempenho do controlador adaptativo por posiciona-
mento de polos e estrutura variavel (VS-APPC) sao avaliados e este algoritmo e aplicado
em um sistema de controle de um motor. A avaliacao de robustez deste controlador
sera realizada atraves de simulacoes, onde serao introduzidas as seguintes adversidades
no sistema: atraso de transporte, limites da resposta no atuador, perturbacoes, variacao
parametrica e dinamica nao modelada. O VS-APPC sera comparado com o controlador
PI, com o controlador por posicionamento de polos (PPC) e com o controlador adaptativo
por posicionamento de polos (APPC). O VS-APPC sera simulado para rastrear uma re-
ferencia degrau e senoidal. Sera tambem aplicado no sistema de controle de um motor de
inducao trifasico para rastrear um sinal senoidal no referencial estatorico. Os resultados
das simulacoes e experimentais comprovarao a eficiencia e robustez desta estrategia de
controle.
Palavras-chave: Robustez, Controle Adaptativo, Posicionamento de Polos e Sistema
com Estrutura Variavel.

Abstract
In this work, the variable structure adaptive pole placement controller (VS-APPC)
robustness and performance are evaluated and this algorithm is applied in a motor con-
trol system. The controller robustness evaluation will be done through simulations, where
will be introduced in the system the following adversities: time delay, actuator response
boundeds, disturbances, parametric variation and unmodeled dynamics. The VS-APPC
will be compared with PI control, pole placement control (PPC) and adaptive pole place-
ment controller (APPC). The VS-APPC will be simulated to track a step and a sine
reference. It will be applied in a three-phase induction motor control system to track a
sine signal in the stator reference frame. Simulation and experimental results will prove
the efficiency and robustness of this control strategy.
Keywords: Robustness, Adaptive Control, Pole Placement and Variable Structure
System.

Conteudo
Conteudo i
Lista de Figuras iii
Glossario de Termos vii
1 Introducao 1
1.1 Sistemas de Controle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Controle Classico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.3 Controle Adaptativo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.3.1 Controle Adaptativo por Posicionamento de Polos . . . . . . . . . . 4
1.4 Sistemas com Estrutura Variavel . . . . . . . . . . . . . . . . . . . . . . . 5
1.4.1 Descricao Geral . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.5 Avaliacao de Robustez . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.6 Sistema de Controle de um Motor de Inducao . . . . . . . . . . . . . . . . 8
1.7 Estrutura do Trabalho . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2 Controle Adaptativo por Posicionamento de Polos e Estrutura Variavel 11
2.1 Introducao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.2 Descricao do Problema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.3 APPC: Metodo Polinomial . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.4 Descricao do Metodo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.5 Calculo dos Parametros do Controlador . . . . . . . . . . . . . . . . . . . . 17
2.5.1 Referencia Degrau . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.5.2 Referencia Senoidal . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
i

3 Robustez e Desempenho de um Sistema 21
3.1 Estabilidade e Desempenho . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.1.1 Avaliacao do Comportamento Estacionario . . . . . . . . . . . . . . 22
3.1.2 Avaliacao do Comportamento Transitorio . . . . . . . . . . . . . . . 22
3.2 Robustez do Sistema de Controle . . . . . . . . . . . . . . . . . . . . . . . 22
3.2.1 Limitacao da Resposta do Atuador . . . . . . . . . . . . . . . . . . 23
3.2.2 Perturbacoes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.2.3 Atraso de Transporte . . . . . . . . . . . . . . . . . . . . . . . . . . 24
3.2.4 Variacoes Parametricas . . . . . . . . . . . . . . . . . . . . . . . . . 24
3.2.5 Dinamica nao Modelada . . . . . . . . . . . . . . . . . . . . . . . . 25
3.2.6 Ruıdos de Leitura . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
4 Simulacoes e Aplicacao do VS-APPC em um Motor de Inducao 26
4.1 Motor de Inducao Trifasico . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
4.1.1 Modelagem de um Motor de Inducao . . . . . . . . . . . . . . . . . 29
4.1.2 Parametros do Motor . . . . . . . . . . . . . . . . . . . . . . . . . . 30
4.2 Simulacoes: Controle Malha Externa . . . . . . . . . . . . . . . . . . . . . 31
4.2.1 Avaliacao de Robustez e Desempenho do Sistema . . . . . . . . . . 32
4.3 Simulacoes: Controle Malha Interna . . . . . . . . . . . . . . . . . . . . . . 40
4.3.1 Avaliacao de Robustez e Desempenho do Sistema . . . . . . . . . . 43
4.4 Implementacao do VS-APPC . . . . . . . . . . . . . . . . . . . . . . . . . 52
5 Conclusoes e Perspectivas 54
Apendices 56
A Conceitos sobre Sistemas 56
A.1 Representacao de um Sistema . . . . . . . . . . . . . . . . . . . . . . . . . 56
A.2 Funcao de Transferencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
A.3 Polinomios Coprimos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
B Conceitos sobre Estabilidade 60
B.1 Definicao de Estabilidade . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
B.2 Metodo Direto de Lyapunov . . . . . . . . . . . . . . . . . . . . . . . . . . 61ii

B.2.1 Funcoes Definidas Positivas e Negativas . . . . . . . . . . . . . . . . 61
B.2.2 Translacao da Origem do Sistema de Coordenadas . . . . . . . . . . 61
B.2.3 Teoremas sobre Estabilidade (Segundo Lyapunov) . . . . . . . . . . 62
B.2.4 Analise de Sistemas baseado no Metodo Direto de Lyapunov . . . . 63
C Princıpio do Modelo Interno 64
C.1 Princıpio do Modelo Interno . . . . . . . . . . . . . . . . . . . . . . . . . . 64
D Ambiente de Simulacoes 65
D.1 Ambiente para Avaliacao de Robustez de Algoritmos de Controle . . . . . 65
D.2 Apresentacao do Ambiente de Simulacoes . . . . . . . . . . . . . . . . . . . 66
D.2.1 Parametros do Sistema . . . . . . . . . . . . . . . . . . . . . . . . . 66
D.2.2 Parametros de Simulacao . . . . . . . . . . . . . . . . . . . . . . . . 67
D.2.3 Introducao de Adversidades . . . . . . . . . . . . . . . . . . . . . . 68
D.2.4 Opcoes de Algoritmos de Controle . . . . . . . . . . . . . . . . . . . 68
D.2.5 Parametros dos Algoritmos de Controle . . . . . . . . . . . . . . . . 69
D.2.6 Apresentacao dos Resultados . . . . . . . . . . . . . . . . . . . . . . 69
D.2.7 Orientacao ao Usuario . . . . . . . . . . . . . . . . . . . . . . . . . 72
Referencias Bibliograficas 74
iii

Lista de Figuras
1.1 Sistema de Controle. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Controlador PID. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.3 Estrutura de um Controlador Adaptativo. . . . . . . . . . . . . . . . . . . 4
1.4 APPC Indireto. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.5 Superfıcie de deslizamento em um sistema com estrutura variavel. . . . . . 6
1.6 Diagrama de blocos do controle de velocidade do motor de inducao com
controle de corrente. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.1 Diagrama de blocos do controle por posicionamento de polos. . . . . . . . . 15
4.1 Diagrama de blocos do controle de velocidade do motor de inducao. . . . . 27
4.2 Diagrama de blocos do controle de corrente do motor de inducao. . . . . . 27
4.3 Diagrama de blocos do controle de velocidade do motor de inducao uti-
lizando o VS-APPC. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
4.4 Diagrama de blocos do controle de corrente do motor de inducao utilizando
o VS-APPC. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
4.5 Simulacao 1 - saıda da planta e sinal de controle. . . . . . . . . . . . . . . 33
4.6 Simulacao 1 - saıda estimada e parametros do VS-APPC. . . . . . . . . . . 34
4.7 Simulacao 2 - saıda da planta e sinal de controle. . . . . . . . . . . . . . . 34
4.8 Simulacao 2 - introducao de uma perturbacao no sinal de controle. . . . . . 35
4.9 Simulacao 2 - mudanca na referencia. . . . . . . . . . . . . . . . . . . . . . 35
4.10 Simulacao 2 - introducao de uma variacao parametrica. . . . . . . . . . . . 36
4.11 Simulacao 2 - introducao de uma perturbacao no sinal de saıda. . . . . . . 36
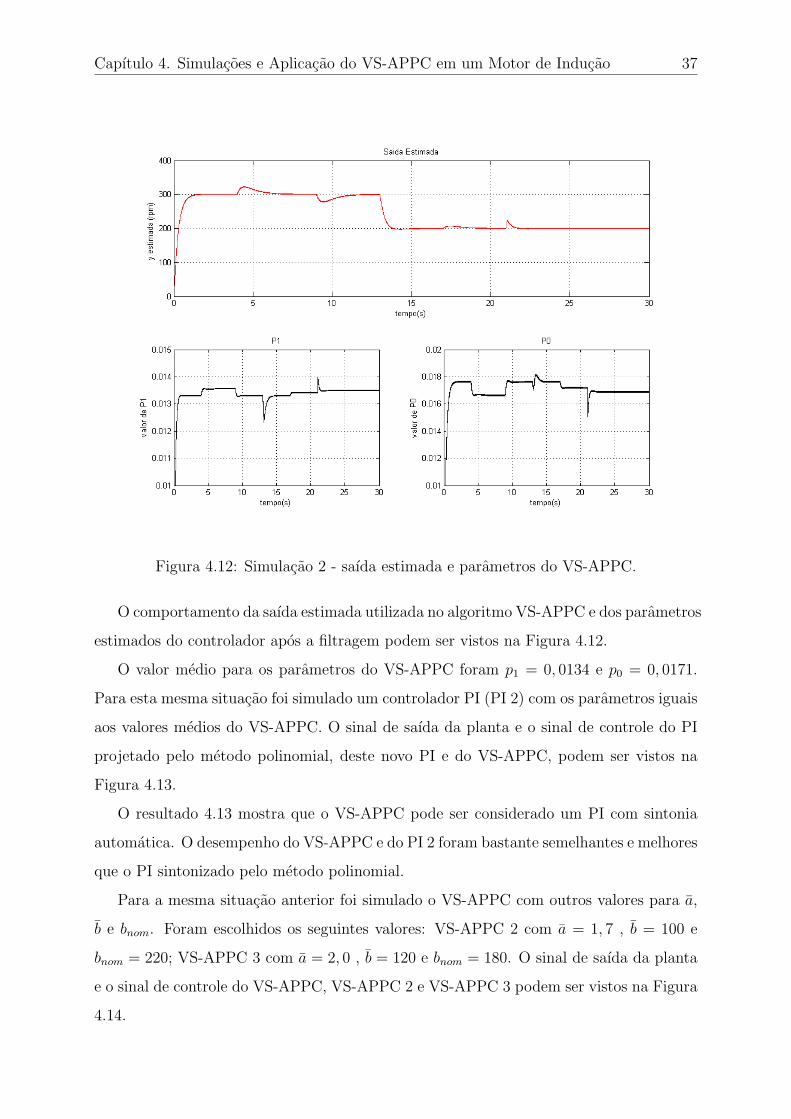
4.12 Simulacao 2 - saıda estimada e parametros do VS-APPC. . . . . . . . . . . 37
4.13 Simulacao 3 - saıda da planta e sinal de controle. . . . . . . . . . . . . . . 38
iv

4.14 Simulacao 4 - saıda da planta e sinal de controle. . . . . . . . . . . . . . . 38
4.15 Simulacao 5: saıda da planta e sinal de controle. . . . . . . . . . . . . . . . 39
4.16 Simulacao 6: saıda da planta e sinal de controle. . . . . . . . . . . . . . . . 40
4.17 Diagrama de Blocos do sistema do motor de inducao. . . . . . . . . . . . . 42
4.18 Simulacao 7 - corrente de saıda issd e corrente de referencia is∗sd (PI sıncrono). 43
4.19 Simulacao 7 - corrente de saıda issq e corrente de referencia is∗sq (PI sıncrono). 44
4.20 Simulacao 8 - corrente de saıda issd e corrente de referencia is∗sd (PPC). . . . 44
4.21 Simulacao 8 - corrente de saıda issq e corrente de referencia is∗sq (PPC). . . . 45
4.22 Simulacao 9 - corrente de saıda issd e corrente de referencia is∗sd (VS-APPC). 45
4.23 Simulacao 9 - corrente de saıda issq e corrente de referencia is∗sq (VS-APPC). 46
4.24 Simulacao 8 e 9 - erro quadratico entre corrente de saıda issd e corrente de
referencia is∗sd. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
4.25 Simulacao 8 e 9 - erro quadratico entre a corrente de saıda issq e corrente
de referencia is∗sq. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
4.26 Simulacao 10 - corrente de saıda issd e corrente de referencia is∗sd (PI sıncrono). 48
4.27 Simulacao 10 - corrente de saıda issq e corrente de referencia is∗sq (PI sıncrono). 49
4.28 Simulacao 11 - corrente de saıda issd e corrente de referencia is∗sd (PPC). . . 49
4.29 Simulacao 11 - corrente de saıda issq e corrente de referencia is∗sq (PPC). . . 50
4.30 Simulacao 12 - corrente de saıda issd e corrente de referencia is∗sd (VS-APPC). 50
4.31 Simulacao 12 - corrente de saıda issq e corrente de referencia is∗sq (VS-APPC). 51
4.32 Simulacao 11 e 12- erro quadratico entre corrente de saıda issd e corrente de
referencia is∗sd. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
4.33 Simulacao 11 e 12- erro quadratico entre a corrente de saıda issq e corrente
de referencia is∗sq. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
4.34 Resultado experimental - corrente de saıda issd e corrente de referencia is∗sd. . 53
4.35 Resultado experimental - corrente de saıda issq e corrente de referencia is∗sq. . 53
D.1 Janela Principal. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
D.2 Parametros do Sistema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
D.3 Parametros de Simulacao . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
D.4 Introducao de Perturbacoes. . . . . . . . . . . . . . . . . . . . . . . . . . . 68
D.5 Introducao de Adversidades. . . . . . . . . . . . . . . . . . . . . . . . . . . 68v
D.6 Opcoes de Algoritmos de Controle. . . . . . . . . . . . . . . . . . . . . . . 69
D.7 Controlador PID. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
D.8 Controle Adaptativo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
D.9 Controle Adaptativo Robusto com Estrutura Variavel. . . . . . . . . . . . 71
D.10 Apresentacao dos Resultados. . . . . . . . . . . . . . . . . . . . . . . . . . 72
D.11 Orientacao ao Usuario. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
vi
Glossario de Termos
APPC - Adaptive Pole Placement Control (Controle Adaptativo por Posicionamento
de Polos)
LTI - Linear Time Invariant (Linear Invariante no Tempo)
MIMO - Multiple Input Multiple Output (Multivariavel)
MRAC - Model Reference Adaptive Control (Controle Adaptativo por Modelo de
Referencia)
PIVSC - Proportional Integrative Variable Structure Control (Controle Porporcional
Integrativo por Estrutura Variavel)
PPC - Pole Placement Control (Controle por Posicionamento de Polos)
RFO - Rotor Flux Oriented (Orientacao pelo Fluxo Rotorico)
SISO - Single Input Single Output (Monovariavel)
VS-APPC - Variable Structure Adaptive Pole Placement Control (Controle Adapta-
tivo por Posicionamento de Polos e Estrutura Variavel)
VSC - Variable Structure Control (Controle por Estrutura Variavel)
vii

Capıtulo 1
Introducao
1.1 Sistemas de Controle
Um sistema a ser controlado pode ser representado, de forma simplificada, conforme
a Figura 1.1.
O sistema a ser controlado e chamado de processo ou planta. O sinal aplicado na(s)
entrada(s) de controle e chamado sinal de controle, e tambem conhecido como variavel
manipulada. O sinal de saıda do processo e chamado de variavel controlada ou variavel
de processo, e e a variavel cujo comportamento se deseja controlar. Alem disso, o sistema
esta, em geral, sujeito a acao de sinais exogenos chamados de perturbacoes, que sao sinais
de entrada cujos valores nao podem ser manipulados [1].
A classificacao de um sistema de controle divide-se em malha aberta e malha fechada.
Em um controle em malha aberta, o sinal de saıda nao e medido nem realimentado para
comparacao com o sinal de entrada. No controle em malha fechada, o sinal de erro
atuante, que e a diferenca entre o sinal de entrada e o sinal realimentado (que pode ser o
Figura 1.1: Sistema de Controle.

Capıtulo 1. Introducao 2
proprio sinal de saıda ou uma funcao do sinal de saıda e suas derivadas), e introduzido no
controlador de modo a reduzir o erro e trazer a saıda do sistema a um valor desejado. As
desvantagens dos sistemas a malha aberta, especificamente a sensibilidade a perturbacoes
e a incapacidade de corrigir os efeitos destas perturbacoes, podem ser superadas no sistema
a malha fechada.
O controlador e um dispositivo que realiza determinadas operacoes matematicas sobre
o sinal de erro a fim de produzir uma acao de controle que, ao ser aplicado ao processo, faz
com que sejam satisfeitos determinados objetivos de desempenho do sistema de controle.
A estas acoes matematicas da-se o nome de acoes de controle [1].
O calculo do sinal de controle pode ser realizado a partir de sinais do sistema (sinal
de referencia, da saıda da planta, do proprio sinal de controle) ou baseado nas variaveis
de estado do sistema. Neste trabalho e suposto que apenas sao mensurados os sinais de
referencia, de saıda e de controle. A forma de calcular as acoes de controle depende da
teoria de controle utilizada.
1.2 Controle Classico
Dentro da teoria de controle classico, a acao de controle pode ser calculada de diversas
formas. As principais formas sao: atraves da combinacao da acao proporcional, integral e
derivativa (PID), do posicionamento de polos, de um compensador em atraso, em avanco
e da realimentacao de estado.
Estes controladores possuem uma estrutura fixa, ou seja, seus parametros sao estaticos
no tempo, sao sintonizados para um ponto ou uma regiao de operacao de um processo e
essa sintonia nao e modificada automaticamente caso seja necessario. Assim, a modelagem
do processo e uma etapa importante para uma boa sintonia do controlador.
Atualmente, controladores de estrutura simples e padronizada, como os controladores
PID, representam a imensa maioria das malhas de controle industriais em todo o mundo [1].
Nos controladores PID comercializados, apenas os ganhos dessas acoes sao ajustados. Este
possui uma estrutura fixa e permite realizar seu projeto de forma simples e eficiente.
A depender da necessidade do projeto, uma ou mais acoes do controlador PID podem
nao ser utilizadas. A acao proporcional usualmente e empregada e assim, as quatro

Capıtulo 1. Introducao 3
Figura 1.2: Controlador PID.
configuracoes utilizadas sao: P, PD, PI e PID, sendo admissıvel utilizar as acoes separadas
em uma malha ou em diferentes malhas do sistema.
O sinal de controle, em um controlador PID, e calculado em funcao do sinal de erro,
e a estrutura, em diagrama de blocos, mais utilizada, pode ser vista na Figura 1.2.
1.3 Controle Adaptativo
O projeto de um controlador, em sua maioria, depende do modelo da planta em
uma determinada condicao de operacao. Porem, a exatidao de uma modelagem e de
extrema dificuldade, alem de, em diversos processos, alguns parametros da planta serem
desconhecidos ou parcialmente conhecidos (conhecidos com incertezas). Assim, surgiu a
necessidade de tecnicas de estimacao desses parametros com o intuito de melhor entender
o comportamento da planta.
A motivacao da adaptacao em sistemas de controle surgiu do desenvolvimento de
um piloto automatico de alto desempenho no inıcio da decada de 50, devido a aeronave
operar em uma grande faixa de velocidades e alturas, e sua dinamica ser nao linear e
conceitualmente variante no tempo [3].
Uma estrutura de controle adaptativo, em geral, contem uma malha de realimentacao,
um estimador de parametros e um controlador com ganhos ajustaveis, como mostra a
Figura 1.3.
A estimacao de parametros pode ser feita off-line, ou seja, apos um certo tempo os
parametros sao estimados atraves do processamento dos dados armazenados, ou a es-
timacao pode ser feita on-line, onde periodicamente os parametros sao atualizados com

Capıtulo 1. Introducao 4
Figura 1.3: Estrutura de um Controlador Adaptativo.
base em estimativas anteriores e novos dados, e assim, esta estimacao e executada con-
correntemente com o sistema de controle.
Controle adaptativo consiste, portanto, em aplicar alguma tecnica de estimacao para
obter os parametros do modelo do processo e de seu meio a partir de medicoes de sinais
da entrada e da saıda da planta, e usar este modelo para projetar um controlador [2].
A estrutura de controle adaptativo e classificada em indireta e direta. No controle
adaptativo indireto (tambem chamado de controle adaptativo explıcito) os parametros da
planta sao estimados on-line e usados para calcular os parametros do controlador. No con-
trole adaptativo direto, o modelo da planta e parametrizado em termos dos parametros
do controlador, os quais sao estimados diretamente sem calculos intermediarios envol-
vendo estimativas dos parametros da planta. E tambem chamado de controle adaptativo
implıcito por ser baseado na estimacao de um modelo implıcito da planta [3]. Em ambas
as estruturas, os calculos dos parametros do controlador sao feitos por leis de adaptacao.
As principais tecnicas de controle adaptativo sao: PID adaptativo, controle adaptativo
por modelo de referencia (MRAC - Model Reference Adaptive Control), controle adapta-
tivo por posicionamento de polos (APPC - Adaptive Pole Position Control), controlador
adaptativo auto oscilatorio e controlador com ganhos ajustaveis (gain scheduling).
1.3.1 Controle Adaptativo por Posicionamento de Polos
Uma estrategia de controle que e popular no caso em que os parametros da planta
sao conhecidos e aquela que modifica os polos da planta sem envolver cancelamentos
de zeros e polos. Esta estrategia e conhecida como controle por posicionamento de polos

Capıtulo 1. Introducao 5
(PPC- Pole Placement Controller) e e aplicavel em plantas lineares e invariantes no tempo
(LTI-Linear Time Invariant) tanto de fase mınima e nao mınima. A combinacao da lei
de controle por posicionamento de polos com uma estimacao de parametros ou uma lei
adaptativa originou o controlador APPC, tambem conhecido como self-tunning [3].
Tradicionalmente, o APPC vem sendo desenvolvido em uma abordagem indireta (Figura
1.4). Esta e facil de projetar, e aplicavel a uma grande variedade de plantas LTI e nao e
necessario que seja de fase mınima ou estavel. Devido a sua flexibilidade em escolher a
metodologia do projeto do controlador (realimentacao de estado, projeto de compensador,
metodo polinomial, etc.) e a lei adaptativa (mınimos quadrados, metodo do gradiente,
estrutura variavel, etc.), o APPC indireto e o mais geral tipo de controle adaptativo [3].
O metodo escolhido para projetar a lei de controle, neste trabalho, foi o metodo
polinomial, e e suposto que apenas os sinais de referencia e saıda sao mensuraveis.
Figura 1.4: APPC Indireto.
1.4 Sistemas com Estrutura Variavel
A teoria de modos deslizantes em sistemas com estrutura variavel [4] tem sido utilizada
em sistemas de controle. Neste metodo, as funcoes de chaveamento das variaveis de
controle devem ser projetadas de modo a restringir a dinamica do sistema a uma superfıcie
deslizante no espaco de estado. Assim, as trajetorias do sistema tendem a alcancar e
manter-se na superfıcie de deslizamento, tornando-se, entao, insensıveis as incertezas da
planta.

Capıtulo 1. Introducao 6
As principais caracterısticas de um controle adaptativo com estrutura variavel sao a
rapidez no transitorio e a robustez a variacoes parametricas e perturbacoes, dentro de uma
certa faixa de tolerancia. Contudo, tem tambem como caracterıstica, um chaveamento
em alta frequencia no sinal de controle e/ou em variaveis onde este metodo e aplicado,
fenomeno conhecido como chattering.
A tecnica de estrutura variavel foi aplicada, neste trabalho, nas leis de adaptacao do
APPC na estrutura indireta. Desta juncao surgiu o VS-APPC - Variable Structure Pole
Placement Adaptive Control.
Em seguida e apresentada, resumidamente, a teoria para sistemas com estrutura
variavel.
1.4.1 Descricao Geral
Para as demonstracoes sera considerado o seguinte sistema de segunda ordem
x1 = x2
x2 = a1x1 + a2x2 + u(1.1)
com a1 e a2 conhecidos com incertezas.
Define-se uma superfıcie de chaveamento s como
s =x ∈ R2 | s(x) = cx1 + x2 = 0, c > 0
(1.2)
na qual deseja-se que permanecam as variaveis de estado x1 e x2 (dinamica do sistema).
Deve ser satisfeita a condicao ss < 0 para se ter o comportamento ilustrado na Figura
1.5.
Figura 1.5: Superfıcie de deslizamento em um sistema com estrutura variavel.

Capıtulo 1. Introducao 7
Em um problema de estabilizacao deve-se ter limt→∞
x1(t) = 0 e limt→∞
x2(t) = 0.
Defini-se u(x) da forma
u(x) =
u+(x), se s(x) > 0
u−(x), se s(x) < 0(1.3)
com u = g(θ1, θ2, x1, x2), onde
θ1 = −θ1sgn(sx1), θ1 > |a1|
θ2 = −θ2sgn(sx2), θ2 > |c+ a2|(1.4)
Os valores dos parametros θ determinam a rapidez com que a trajetoria atinge a
superfıcie de deslizamento.
Desta forma, o sistema torna-se
x =
f+(x), se s(x) > 0
f−(x), se s(x) < 0(1.5)
tendo como condicao de deslizamento
s(x) · s(x) < 0 (1.6)
Pode-se interpretar a condicao de deslizamento como a derivada (negativa) da funcao
12s(x)2, que e uma medida da distancia a superfıcie de deslizamento s(x) = 0.
Se a condicao de deslizamento s(x) · s(x) < 0 e satisfeita em uma vizinhanca de s(x) <
0, os campos vetoriais representados por f+(x) e f−(x) apontam para esta superfıcie e,
portanto, se uma trajetoria alcanca s(x), e forcada a permanecer (deslizar) sobre esta.
1.5 Avaliacao de Robustez
Um problema de controle a ser solucionado e obtido de um processo fısico, como um
aviao, um motor, uma planta de destilacao, etc. As especificacoes de desempenho sao
formuladas em termos das variaveis envolvidas na experiencia fısica: angulo de ataque,
velocidade de um motor, concentracao de uma substancia na destilacao de um produto,
etc. Em diversos casos, apos o problema pratico ser formulado, e obtido um modelo
matematico do processo, o mais proximo possıvel do processo fısico real. Posteriormente,
o projeto do controlador e realizado e o sistema pode ser testado em simulacoes.

Capıtulo 1. Introducao 8
Na pratica, a interacao da planta fısica com o sistema de controle e realizado por
sinais fornecidos da planta para sensores e por sinais enviados do sistema de controle para
atuadores. Estes sinais de entrada e saıda, e as leis que descrevem o comportamento do
sistema fısico, sao as unicas informacoes do processo. Em varios casos, nao sao obtidas
leis fısicas que representam a planta, ou estas sao bastante complexas [5].
As informacoes de um sistema - sinais de entrada e saıda e leis fısicas - comumente
nao representam o sistema completamente. A descricao de um determinado processo
fısico incluindo todos os aspectos envolvidos pode ser impraticavel. Em alguns casos,
tambem e realizada uma simplificacao das leis fısicas para descrever o sistema. Assim,
por estes fatos, pode-se concluir que em problemas praticos de controle existe uma certa
“quantidade”de incertezas [5].
O objetivo principal do estudo de robustez em algoritmos de controle e reproduzir
resultados teoricos, que sao comprovados computacionalmente, em sistemas fısicos com
incertezas presentes.
Neste trabalho, adversidades sao incluıdas nas simulacoes, e assim, o sistema simulado
sera mais semelhante ao sistema real, para que se possa avaliar a robustez do VS-APPC
antes de implementa-lo em sistemas fısicos.
1.6 Sistema de Controle de um Motor de Inducao
Apos o surgimento da teoria de controle vetorial [6], que e baseada na orientacao dada
pelo campo do rotor, surgiram ferramentas teoricas para controlar a velocidade do motor
de inducao de forma desacoplada, semelhante ao motor de corrente contınua (d.c. - direct
current).
Um motor de inducao de alto desempenho pode utilizar a estrategia de controle vetorial
direta ou indireta orientada pelo fluxo rotorico (RFO - rotor flux oriented) [7]. Esta
tecnica de controle permite que uma maquina de inducao tenha um desempenho no torque
similar a maquinas d.c..
No sistema de um motor de inducao, pode-se controlar a velocidade do motor (variavel
controlada) com apenas um controlador, porem este controlador nao garante o controle da
corrente. O controle da corrente apresenta a vantagem de permitir uma protecao de sobre-

Capıtulo 1. Introducao 9
corrente mais efetiva na maquina. Logo, e desejado um controle em cascata para o motor
(Figura 1.6), ou seja, duas malhas de controle no sistema, uma interna e outra externa.
Para que isto possa ser feito e necessario que a malha interna de controle seja mais rapida
que a externa. Isso e possıvel porque em geral a constante de tempo mecanica e bem
superior a constante de tempo eletrica [8]. Na Figura 1.6 pode-se observar a referencia
(ωref ) e o sinal de controle da malha externa (iref ), a referencia da malha interna, que e
o sinal de controle da malha externa, o sinal de controle da malha interna (V ), e os sinais
de saıda das malhas interna e externa, respectivamente (i e ω).
Figura 1.6: Diagrama de blocos do controle de velocidade do motor de inducao com
controle de corrente.
Alem da protecao mais efetiva da maquina, o controle em cascata permite um projeto
mais simples dos controladores ao considerar separadamente os sistemas de acionamento
e de controle propriamente dito.
Neste trabalho, sera aplicado o controlador VS-APPC na malha interna e na malha
externa do sistema de controle do motor de inducao.
1.7 Estrutura do Trabalho
Este trabalho esta organizado da seguinte forma: o capıtulo 2 apresenta a descricao
e o desenvolvimento matematico do VS-APPC utilizando a abordagem polinomial; no
capıtulo 3 e analisado o conceito de robustez, desempenho e as possıveis adversidades
encontradas na pratica; o capıtulo 4 apresenta um modelo para o motor de inducao,
simulacoes do VS-APPC aplicado na malha externa e interna de um motor de inducao,
a avaliacao de robustez do controlador a adversidades, a comparacao de seu desempenho
com o controlador PI, PPC e APPC utilizando o metodo do gradiente para estimar os

Capıtulo 1. Introducao 10
parametros e a analise dos resultados experimentais do VS-APPC; o capıtulo 5 apresenta
as conclusoes, perspectivas deste trabalho e futuras pesquisas.

Capıtulo 2
Controle Adaptativo por
Posicionamento de Polos e Estrutura
Variavel
2.1 Introducao
O VS-APPC pode ser considerado um controlador hıbrido que agrega as caracterısticas
do APPC e da estrutura variavel na lei de adaptacao, isto e, aplicabilidade a plantas de
fase nao-mınima, transitorio rapido e robustez.
Alem disso, por utilizar o princıpio do modelo interno, esta estrategia de controle leva
o sistema a obter erro de rastreamento igual a zero em regime permanente para uma dada
referencia.
Controladores hıbridos que utilizam a tecnica de posicionamento de polos, podem ser
vistos em [11], [12], [13] e [14]. Em [11] sao utilizadas multiplas tecnicas em paralelo para
estimar os parametros e em [12] sao utilizadas redes neurais na lei adaptativa. Em [13]
foi utilizado o metodo dos mınimos quadrados recursivos e esta tecnica foi aplicada em
um robo, e em [14] tem-se a aplicacao da estrutura variavel na lei adaptativa, semelhante
a este trabalho, e a simulacao deste controlador em um veıculo aquatico autonomo.
Para o caso da referencia senoidal, em [15] foi desenvolvido o APPC na forma direta,
utilizando o princıpo do modelo interno para obter erro em regime permanente nulo.
Em [16] foi desenvolvida uma tecnica semelhante a este trabalho, denominada PIVSC

Capıtulo 2. Controle Adaptativo por Posicionamento de Polos e Estrutura Variavel 12
(Proportional Integrative Variable Structure Control), e esta foi aplicada em referencias
degrau e senoidal. E em [17] pode ser visto um controlador que utiliza a tecnica de modos
deslizantes acoplada ao princıpio do modelo interno.
O VS-APPC desenvolvido neste trabalho, difere de outros trabalhos, principalmente,
pela simplicidade do projeto, pelo algoritmo de adaptacao reduzido, e pela semelhanca a
um controlador PI adaptativo (referencia degrau).
Resultados satisfatorios do VS-APPC podem ser vistos em [18], [19], [20], [21], [23]
e [24]. E em [25] foi realizada uma comparacao entre algoritmos de controle, entre estes
o VS-APPC, e uma avaliacao de robustez a algumas adversidades.
2.2 Descricao do Problema
Analisa-se uma planta SISO e LTI, representada pela funcao de transferencia abaixo
y = Gp(s)u, Gp(s) =Zp(s)
Rp(s)(2.1)
onde Gp(s) e uma funcao de transferencia propria e Rp(s) e um polinomio monico. O
objetivo de controle e escolher uma entrada para a planta (u) tal que os polos em malha
fechada sejam as raızes do polinomio monico Hurwitz A∗(s). O polinomio A∗(s) e o
polinomio caracterıstico desejado em malha fechada, que e escolhido a partir dos requisitos
de desempenho em malha fechada. Para alcancar o objetivo de controle sao feitas as
seguintes suposicoes:
S1. Rp(s) e um polinomio cujo grau n e conhecido;
S2. Zp(s) e Rp(s) sao coprimos e grau (Zp) < n.
Em geral, pela atribuicao dos polos de malha fechada as raızes de A∗(s), pode-se
garantir a estabilidade e a convergencia da saıda da planta (y) para zero em malha fechada
sem a utilizacao de uma entrada externa (caso regulador). O objetivo do APPC pode
ser estendido com a inclusao do rastreamento de sinais, onde y e requerido seguir uma
determinada classe de sinais de referencia usando o princıpio do modelo interno. Neste
caso, o sinal de referencia r uniformemente limitado e assumido satisfazer [3]
Qm(s) · r = 0 (2.2)
onde Qm(s) e o modelo interno de r, ou seja, e um polinomio monico conhecido de grau
q com raızes nao repetidas no eixo jω e que satisfaz

Capıtulo 2. Controle Adaptativo por Posicionamento de Polos e Estrutura Variavel 13
S3. Qm(s) e Zp(s) sao coprimos.
Por exemplo, se y e requerido seguir o sinal de referencia r = 4 + sen(3t), entao
Qm(s) = s(s2 + 9) e, portanto, de acordo com a suposicao S3, Zp(s) nao deveria ter s ou
(s2 + 9) como um fator.
2.3 APPC: Metodo Polinomial
Considera-se a lei de controle
Qm(s)L(s)u = −P (s)y +M(s)r (2.3)
onde P (s), L(s) (polinomio monico) e M(s) sao polinomios de grau n + q − 1, n − 1 e
n+ q − 1, respectivamente, a serem calculados e Qm(s) satisfaz (2.2) e a suposicao S3.
Aplica-se (2.3) em (2.1) e a funcao de transferencia em malha fechada obtida e
y =Zp(s)M(s)
Qm(s)L(s)Rp(s) + P (s)Zp(s)r (2.4)
cuja equacao caracterıstica
Qm(s)L(s)Rp(s) + P (s)Zp(s) = 0 (2.5)
tem grau 2n+ q − 1. O objetivo agora e escolher P e L, tal que
Qm(s)L(s)Rp(s) + P (s)Zp(s) = A∗(s) (2.6)
seja satisfeita por um polinomio Hurwitz monico A∗(s) de grau 2n + q − 1. Devido as
suposicoes S2 e S3 garantirem que Qm, Rp, Zp sao coprimos, existe solucao para que L e
P satisfacam (2.6) e esta solucao e unica [3]. A solucao para os coeficientes de L(s), P (s)
da equacao (2.5) pode ser obtida pela resolucao da equacao algebrica
Slβl = α∗l (2.7)
onde Sl e a matriz de Sylvester de QmRp e Zp de dimensao 2(n+ q)× 2(n+ q)
βl = [lTq , pT ]T , α∗l = [0, ..., 0︸ ︷︷ ︸
q
, 1, α∗T ]T

Capıtulo 2. Controle Adaptativo por Posicionamento de Polos e Estrutura Variavel 14
lq = [0, ..., 0︸ ︷︷ ︸q
, 1, lT ]T ∈ <n+q
l = [ln−2, ln−3, ..., l1, l0]T ∈ <n−1
p = [pn+q−1, pn+q−2, ..., p1, p0]T ∈ <n+q
α∗ = [α∗2n+q−2, α∗2n+q−3, ..., α
∗1, α
∗0]
T ∈ <2n+q−1
li, pi e α∗i sao os coeficientes de
L(s) = sn−1 + ln−2sn−2 + ...+ l1s+ l0 = sn−1 + lTαn−2(s)
P (s) = pn+q−1sn+q−1 + pn+q−2s
n+q−2 + · · ·+ p1s+ p0 = pTαn+q−1(s)
A∗(s) = s2n+q−1 + α∗2n+q−2s2n+q−2 + · · ·+ α∗1s+ α0 = s2n+q−1 + α∗Tα2n+q−2(s)
O fato de QmRp e Zp serem coprimos garante que Sl e nao-singular e, portanto, os
coeficientes de L(s) e P (s) podem ser computados da equacao
βl = S−1l α∗l (2.8)
Usando (2.5), a planta em malha fechada e descrita por
y =ZpM
A∗ r (2.9)
Similarmente, da equacao da planta em (2.1), da lei de controle em (2.3) e (2.6), e
obtido
u =RpM
A∗ r (2.10)
Devido r ser um sinal uniformemente limitado [3] e ZpM
A∗ e RpM
A∗ serem proprias com
polos estaveis, y e u sao uniformemente limitados para qualquer polinomio M(s) de grau
n+ q− 1. Por isso, o objetivo do posicionamento de polos e alcancado pela lei de controle
(2.3) sem ter que adicionar restricoes em M(s) e Qm(s). Quando r = 0, (2.9) e (2.10)
implicam que y e u convergem para zero exponencialmente rapido. Quando r 6= 0, o erro
de rastreamento e = r − y e dado por
e =A∗ − ZpM
A∗ r =LRp
A∗ Qmr −Zp
A∗ (M − P ) r (2.11)
Para erro de rastreamento nulo, (2.11) sugere a escolha de M(s) = P (s) para anular o
segundo termo em (2.11). O primeiro termo em (2.11) e anulado usando Qmr = 0 . Por

Capıtulo 2. Controle Adaptativo por Posicionamento de Polos e Estrutura Variavel 15
Figura 2.1: Diagrama de blocos do controle por posicionamento de polos.
isso, o posicionamento de polos e o objetivo de rastreamento sao conseguidos pela lei de
controle
QmLu = −P (y − r) (2.12)
que e implementada como mostrado na Figura 2.1 usando n + q − 1 integradores para a
realizacao do controlador.
Quando L(s) tem raızes no semi-plano direito, uma realizacao alternativa de (2.12) e
obtida reescrevendo (2.10) como
u =Λ− LQm
Λu− P
Λ(y − r) (2.13)
onde Λ e um polinomio Hurwitz de grau n+ q − 1.
2.4 Descricao do Metodo
Considera-se a seguinte planta
y =b
s+ au⇒ y = −ay + bu (2.14)
onde a e b sao os parametros da planta. O objetivo deste controlador adaptativo e estimar
a e b, gerar um sinal de controle u para que y tenda assintoticamente ao sinal de referencia
r e para que os polos de malha fechada sejam alocados nas raızes de A∗(s) (polinomio
escolhido de acordo com os polos desejados em malha fechada).
Seja am > 0. Entao, pode-se escrever (2.14) como
y = −amy + (am − a)y + bu (2.15)
Um modelo para a planta pode ser escrito como
˙y = −amy + (am − a)y + bu (2.16)

Capıtulo 2. Controle Adaptativo por Posicionamento de Polos e Estrutura Variavel 16
onde a e b sao estimativas para a e b, respectivamente [3].
Defini-se o erro de estimacao e0 como
e0 = y − y (2.17)
e, portanto,
e0 = −ame0 + ay − bu (2.18)
com
a = a− a
b = b− b(2.19)
Sendo a e b constantes, por hipotese, tem-se
˙a = ˙a
˙b =˙b
(2.20)
Nos algoritmos com leis integrais de estimacao, as leis adaptativas utilizadas sao
˙a = −γ1e0y, γ1 > 0
˙b = γ2e0u, γ2 > 0
(2.21)
onde γ1 e γ2 sao os ganhos adaptativos.
Utilizando a seguinte candidata a funcao de Lyapunov
V (e0, a, b) =1
2
(e20 +
a2
γ1
+b2
γ2
)> 0 (2.22)
encontra-se que
V (e0, a, b) = −ame20 ≤ 0 (2.23)
que garante [e0, a, b]T = [0, 0, 0]T como um ponto de equilıbrio estavel.
As leis de estimacao por estrutura variavel, utilizadas neste trabalho, para o calculo
de a e b sao
a = −a · sgn(e0 · y), a > |a|
b = b · sgn(e0 · u), b > |b|(2.24)
onde a funcao sgn e a funcao sinal.
As amplitudes de a e b devem ser marjorantes dos valores maximos dos parametros
da planta, para que se possa garantir a estabilidade assintotica. Utilizando a seguinte
candidata a funcao de Lyapunov,
V (e0) =1
2e20 > 0 (2.25)

Capıtulo 2. Controle Adaptativo por Posicionamento de Polos e Estrutura Variavel 17
e efetuando os seguintes calculos algebricos
V (e0) = e0e0
= −ame20 + a · e0 · y − b · e0 · u
= −ame20 + (a− a)e0 · y − (b− b)e0 · u
= −ame20 + [−a · sgn(e0 · y)− a]e0 · y − [b · sgn(e0 · u)− b]e0 · u
= −ame20 − (a|e0 · y|+ a · e0 · y)− (b|e0 · u| − b · e0 · u)
(2.26)
encontra-se que
V (e0) ≤ −ame20 < 0 (2.27)
com as restricoes a > |a| e b > |b|. Isto garante que e0 = 0 e um ponto de equilıbrio
globalmente assintoticamente estavel.
Por fim, um pequena modificacao e feita no algoritmo (introducao de um valor nominal
para o parametro b). Assim, o algoritmo utilizado para sintetizar os parametros do sinal
de controle e
a = −a · sgn(e0 · y), a > |a|
b = b · sgn(e0 · u) + bnom, b > |b− bnom|(2.28)
onde y e o sinal de saıda da planta, u e o sinal de controle, e0 e o erro de estimacao, a e
b sao constantes da lei de adaptacao e bnom e um valor nominal para o parametro b.
2.5 Calculo dos Parametros do Controlador
A lei de controle no VS-APPC e calculada pela equacao (2.12) e os parametros do
controlador sao calculados de acordo com a equacao (2.6). Como o polinomio Qm(s) e
escolhido de acordo com a referencia a ser seguida, para cada tipo de referencia tem-se
expressoes diferentes para os parametros do controlador.
Em seguida, serao desenvolvidas as expressoes para o calculo dos parametros do con-
trolador para uma referencia degrau e para uma referencia senoidal.
O desenvolvimento e uma aplicacao do VS-APPC em um sistema com referencia de-
grau podem ser vistos em [18], [19], [20] e [21]. Enquanto para uma referencia senoidal,
uma aplicacao do VS-APPC pode ser vista em [23].

Capıtulo 2. Controle Adaptativo por Posicionamento de Polos e Estrutura Variavel 18
2.5.1 Referencia Degrau
Considerando a planta dada pela equacao 2.14. Igualando a equacao caracterıstica em
malha fechada a A∗(s)
Qm(s)L(s)Rp(s) + P (s)Zp(s) = A∗(s) (2.29)
e fazendo Qm(s) = s e A∗(s) = s2 + α1s+ α0, obtem-se L(s) = 1 e P (s) = p1s+ p0.
Resolvendo a equacao Diofantina abaixo
s(s+ a) + (p1s+ p0)b = s2 + α1s+ α0 (2.30)
encontra-se que a solucao para a equacao (2.30) e
p1 =α1 − a
b(2.31)
p0 =α0
b(2.32)
Como foi suposto que os parametros da planta sao conhecidos com incertezas, o
princıpio da equivalencia a certeza sugere o uso da mesma lei de controle e, portanto,
os parametros do controlador sao calculados da seguinte forma
p1 =α1 − a
b(2.33)
p0 =α0
b(2.34)
onde p1 e p0 sao as estimativas dos parametros do controlador que precisam ser geradas
em tempo real.
Assim, a funcao de transferencia do controlador VS-APPC para uma referencia degrau
e dada por
Cd(s) =p1s+ p0
s(2.35)
a qual tem a mesma estrutura do controlador PI (2.36). Logo, pode-se considerar, para
este caso, o VS-APPC como um controlador PI adaptativo por posicionamento de polos
e estrutura variavel.
CPI(s) =k(s+ 1/τi
)s
(2.36)

Capıtulo 2. Controle Adaptativo por Posicionamento de Polos e Estrutura Variavel 19
O sinal de controle discreto e calculado da seguinte forma
P = p1 · e
I = Iant + p0 · eant · h
u = P + I
(2.37)
sendo e o erro (r − y), eant o erro anterior, P a parte proporcional, I a parte integrativa,
Iant a parte integrativa anterior e h o perıodo de amostragem.
2.5.2 Referencia Senoidal
Supoe-se um sinal senoidal como referencia, dado por
r = A · sen(ωot+ φ) (2.38)
onde A e a amplitude, ωo e a frequencia e φ e a fase do sinal senoidal.
Igualando a equacao caracterıstica em malha fechada a A∗(s)
Qm(s)L(s)Rp(s) + P (s)Zp(s) = A∗(s) (2.39)
e fazendo Qm(s) = s2 + ω20 e A∗(s) = s3 + β2s
2 + β1s + β0, obtem-se L(s) = 1 e P (s) =
p2s2 + p1s+ p0, e resolvendo a equacao Diofantina abaixo
(s2 + ω20)(s+ a) + (p2s
2 + p1s+ p0)b = s3 + β2s2 + β1s+ β0 (2.40)
encontra-se que a solucao para o sistema acima e
p2 =β2 − a
b(2.41)
p1 =β1 − ω2
o
b(2.42)
p0 =β0 − ω2
oa
b(2.43)
Pelo princıpio da equivalencia a certeza, calcula-se os parametros do controlador da
seguinte forma
p2 =β2 − a
b(2.44)
p1 =β1 − ω2
o
b(2.45)

Capıtulo 2. Controle Adaptativo por Posicionamento de Polos e Estrutura Variavel 20
p0 =β0 − ω2
o a
b(2.46)
onde p2, p1 e p0 sao as estimativas dos parametros do controlador que precisam ser geradas
em tempo real.
Assim, a funcao de transferencia do controlador VS-APPC para uma referencia senoidal
e dada por
Cs(s) =p2s
2 + p1s+ p0
s2 + ω2o
(2.47)
Esta resulta no seguinte modelo no espaco de estado
·x1 = x2 + p1e (2.48)
·x2 = −ω2
ox1 + (p0 − ω2o p2)e (2.49)
u = x1 + p2e (2.50)
e a versao discreta do calculo do sinal de controle, baseada em [9], e dada por
x1(t) = cos(ωoh)·x1(t−h)+sen(ωoh)
ωo
x2(t−h)+[sen(ωoh)
ωo
p2 +1− cos(ωoh)
ω2o
(p0 − ω2o p2)
]e(t)
(2.51)
x2(t) = −ωosen(ωoh)·x1(t−h)+cos(ωoh)·x2(t−h)+[(cos(ωoh)− 1)p2 +
sen(ωoh)
ωo
(p0 − ω2o p2)
]e(t)
(2.52)
u(t) = x1(t) + p2 · e(t) (2.53)
sendo x1 e x2 as variaveis de estado do sistema e h o perıodo de amostragem.

Capıtulo 3
Robustez e Desempenho de um
Sistema
3.1 Estabilidade e Desempenho
Estabilidade e desempenho sao dois aspectos fundamentais no projeto, na analise e na
avaliacao de um sistema de controle. Estabilidade, em sistemas lineares, significa que, na
ausencia de excitacao externa, todos os sinais do sistema tendem a zero. Um sistema de
controle deve ser projetado de forma que a estabilidade seja preservada na presenca de
classes de incertezas. Esta propriedade e conhecida como estabilidade robusta [26].
O desempenho de um sistema, em geral, esta relacionado com a capacidade de rastrear
um sinal de referencia e rejeitar perturbacoes. Assim, deve ser inerente a um sistema de
controle a capacidade de rastrear todas as referencias pertencentes a uma classe de sinais,
sem grandes erros, na presenca de diversos tipos de incertezas. Analisando de outra forma,
o pior caso de desempenho do sistema sob a acao destas incertezas, deve ser aceitavel.
Isto esta relacionado com a robustez do sistema.
Em resumo, os requisitos de estabilidade e de desempenho robusto devem assegurar
que o sistema de controle opere satisfatoriamente apesar da presenca de incertezas signi-
ficativas, considerando o modelo do sistema e a exatidao da descricao dos sinais externos
a serem rastreados ou rejeitados [26].

Capıtulo 3. Robustez e Desempenho de um Sistema 22
3.1.1 Avaliacao do Comportamento Estacionario
Para controlar o sinal de saıda de uma planta, um sinal de referencia e enviado ao
sistema de controle. Em geral, o objetivo do sistema de controle e tornar zero o erro entre
o sinal de referencia e a saıda da planta. Ou seja, fazer com o sinal de saıda rastreie a
referencia.
A depender do processo, pode ser desejado rastrear diversos sinais, os mais comuns
sao: degrau, rampa, senoide e onda triangular. Neste trabalho, os sinais de referencia a
serem rastreados pelo controlador sao degrau e senoidal.
O comportamento do sinal de saıda de um sistema, quando este e estavel, divide-se em
transitorio e regime permanente ou estacionario. Os criterios de desempenho usualmente
requisitados incluem aspectos no comportamento do sinal em ambas as situacoes. No
regime permanente e desejado rastrear a referencia e apresentar robustez a incertezas.
3.1.2 Avaliacao do Comportamento Transitorio
Os aspectos usualmente avaliados no transitorio estao relacionados a um sinal degrau
como referencia.
Quando o sinal de saıda tem uma resposta tıpica de um sistema de primeira ordem
apenas e analisado, no transitorio, o tempo de subida e o tempo de assentamento. En-
quanto que, para sistemas de segunda ordem subamortecidos sao avaliados o sobre-passo
maximo ou over-shoot, o tempo de subida, o tempo de pico e o tempo de assentamento.
Outros possıveis criterios de desempenho sao margem de fase e margem de ganho.
3.2 Robustez do Sistema de Controle
O projeto de um sistema de controle na presenca de incertezas significativas requer,
em geral, um sistema adaptativo e robusto.
Intuitivamente, adaptacao em controle quer dizer que o controlador pode modificar seu
comportamento em resposta a mudancas na dinamica do processo e a perturbacoes [2].
Um sistema de controle e robusto quando tem baixa sensibilidade, e estavel sobre
um intervalo de variacoes parametricas e seu desempenho e mantido na presenca de um
conjunto de mudancas nos parametros do sistema. Nao ser robusto e ter sensibilidade aos

Capıtulo 3. Robustez e Desempenho de um Sistema 23
efeitos nao considerados na fase de analise e projeto, por exemplo: disturbios, ruıdo de
medida, e dinamica nao modelada [28].
Com o intuito de avaliar a robustez de algoritmos de controle, alguns desses efeitos
serao introduzidos nas simulacoes. Essas adversidades sao: limitacao da resposta do
atuador, perturbacoes no sinal de controle e na saıda da planta, atraso de transporte,
variacoes parametricas e dinamica nao modelada.
A introducao de um desses fatores em um sistema pode leva-lo ate a instabilidade,
como pode ser visto em [29].
3.2.1 Limitacao da Resposta do Atuador
O problema de restricoes sobre a amplitude do sinal de controle se faz presente em
todos os sistemas de controle. Devido a limitacoes fısicas, tecnologicas ou mesmo por mo-
tivos de seguranca, os atuadores nao sao capazes de fornecer sinais de amplitude ilimitada
aos processos a serem controlados [1].
Assim, e imprescindıvel introduzir uma saturacao do sinal de controle. Enquanto o
sinal enviado pelo controlador estiver dentro da faixa toleravel pelo atuador, o sinal de
controle sera o sinal enviado, senao o sinal de controle sera os valores limıtrofes do atuador
umin e umax (equacao 3.1). Para u ≥ 0, tem-seu = umax se uenviado ≥ umax
u = uenviado se umin < uenviado < umax
u = umin se uenviado ≤ umin
(3.1)
Esse comportamento nao linear pode provocar uma degradacao no sistema. Tal
degradacao pode ser sentida tanto em regime permanente, com a perda do seguimento de
referencias ou a nao rejeicao assintotica de perturbacoes constantes, quanto na resposta
transitoria, com o sistema apresentando tempo de estabilizacao e sobre-passos maiores [1].
3.2.2 Perturbacoes
Em um sistema podem existir disturbios externos, perturbacoes ou entradas inde-
sejaveis. Na maioria dos processos, e desejado que o sistema siga o sinal de referencia
independentemente de quais sejam essas perturbacoes.

Capıtulo 3. Robustez e Desempenho de um Sistema 24
Estes disturbios podem estar onde houver qualquer processamento de sinal do sistema
ou pode ser um sinal considerado como perturbacao na modelagem do sistema. Usual-
mente sao analisados somados ao sinal de controle ou somados ao sinal de saıda.
Os disturbios no sinal de controle podem ser oriundos do sistema de acionamento, do
atuador, ou pode ate ser uma variavel do processo que deve ser rejeitada. A rejeicao desta
perturbacao pode ser realizada atraves da soma de um sinal oposto ao disturbio ao sinal
de controle.
Os disturbios no sinal de saıda podem ser oriundos de um sensor, da conversao do
sinal ou de outro processamento do sinal de saıda. A rejeicao desta perturbacao nao e
trivial, pois o sinal que poderia rejeitar essa perturbacao, o sinal de controle, e processado
antes pela planta e sua saıda nao necessariamente rejeitara a perturbacao.
3.2.3 Atraso de Transporte
O atraso de transporte pode acontecer antes do processo (entre o sistema de controle e a
planta) ou apos o processo (entre os sensores e o sistema de controle). Assim, estes atrasos
sao, respectivamente, o intervalo de tempo que o sinal de saıda leva para efetivamente
“sentir” uma variacao no sinal de referencia ou de controle, ou o intervalo de tempo que
o sinal de erro leva para efetivamente “sentir” uma variacao no sinal de saıda.
O atraso de transporte pode ocorrer devido a um atraso na medicao do sinal de saıda,
na operacao do atuador, na acao do proprio controlador ou a um atraso computacional.
A funcao de transferencia de um atraso de transporte e dada pela equacao 3.2. O
tempo T e o atraso de transporte
D(s) = e−Ts (3.2)
Em geral, quanto maior o atraso de transporte, maior a dificuldade de controlar o
processo.
3.2.4 Variacoes Parametricas
Na analise e no projeto de um controlador usualmente utiliza-se um modelo matematico
nominal para o processo e assume-se que o sistema e linear e invariante no tempo, pois,
em geral, a teoria de controle e destinada a esta classe de sistemas. Este modelo e uma

Capıtulo 3. Robustez e Desempenho de um Sistema 25
aproximacao do sistema real. Na realidade, a maioria dos sistemas sao nao-lineares e um
modelo linear e obtido com a linearizacao do sistema em torno do ponto de operacao [26].
Pode ocorrer que alguns parametros do modelo de uma planta tenham seus valores
modificados devido a uma mudanca do ponto de operacao, a variacoes climaticas, ao
desgaste de equipamentos ou devido a outros fatores. Essas variacoes sao conhecidas
como variacoes parametricas e podem degradar o desempenho de um sistema de controle
se nao forem consideradas.
As variacoes parametricas serao introduzidas neste trabalho atraves da variacao dos
coeficientes da funcao de transferencia que representam elementos do sistema.
3.2.5 Dinamica nao Modelada
Na modelagem de um processo, usualmente, alguns fatores que pouco influenciam
na dinamica da planta sao desconsiderados com o intuito de simplificar esse modelo. A
dinamica do processo devido a esses fatores e conhecida como dinamica nao modelada ou
parasita.
Como essa dinamica nao foi modelada, o sistema de controle foi projetado sem con-
sidera-la, e assim, esta pode afetar o desempenho do sistema. Contudo, a robustez de um
controlador deve evitar essa degradacao.
A dinamica parasita sera introduzida nas simulacoes atraves de uma funcao de trans-
ferencia com ganho unitario e com tempo de estabilizacao muito inferior ao tempo da
dinamica dominante do processo.
3.2.6 Ruıdos de Leitura
Na transmissao ou na leitura de um sinal em um sistema de controle, e normal o
aparecimento de ruıdos a este, provenientes do proprio processo, de sensores, atuadores
ou de outros equipamentos. Estes sao indesejados e, para elimina-los ou reduzir sua
magnitude, pode-se utilizar filtros.
Neste trabalho, sera visto que na implementacao experimental do controlador e ine-
rente ao sinal de saıda do sistema um certo ruıdo.

Capıtulo 4
Simulacoes e Aplicacao do VS-APPC
em um Motor de Inducao
4.1 Motor de Inducao Trifasico
Um sistema de controle convencional para o motor de inducao e o controle em cascata.
O sistema e subdividido em duas funcoes de transferencia, simplificando assim o modelo
da maquina. Entao, e projetado um controlador para a malha externa (Figura 4.1) e outro
para a malha interna do sistema (Figura 4.2). Estao representadas nas Figuras 4.1 e 4.2
perturbacoes no sinal de controle e na saıda da planta a serem rejeitadas pelo sistema de
controle.
O controle de velocidade (fluxo e conjugado) do motor de inducao (malha externa)
pode ser feito por escorregamento ou em quadratura, com o fluxo rotorico ou fluxo es-
tatorico e de forma direta ou indireta. Neste trabalho, a estrategia de controle utilizada
foi vetorial indireta em quadratura com o fluxo rotorico. O controlador usualmente em-
pregado neste malha e o controlador PI.
Neste sistema, o valor da constante de tempo rotorica pode variar e depende das
condicoes de operacao, mudando o comportamento do sistema. Assim, uma estrategia
de controle adaptativo ou robusto pode ser explorada para aumentar a robustez do sis-
tema. Em [32] encontra-se o desenvolvimento de um controlador adaptativo VSC (Vari-
able Structure Control), para o controle de velocidade de um motor de inducao, com a
obtencao de resultados satisfatorios.

Capıtulo 4. Simulacoes e Aplicacao do VS-APPC em um Motor de Inducao 27
Figura 4.1: Diagrama de blocos do controle de velocidade do motor de inducao.
No esquema de controle RFO, o desempenho do torque da maquina de inducao de-
pende da eficacia da estrategia de controle da malha da corrente (malha interna). Neste
sistema, variacoes parametricas podem ocorrer devido a possıveis variacoes nas condicoes
de operacao do motor de inducao.
Figura 4.2: Diagrama de blocos do controle de corrente do motor de inducao.
Entao, e desejavel para um alto desempenho do controle vetorial, um sistema de
controle adaptativo robusto na malha de corrente, que modifique seu comportamento em
resposta a mudancas na dinamica do motor.
A estrategia mais comum de controle de corrente empregada no referencial sıncrono e
o controlador PI [30]. Outra estrategia comum e o uso de controle por histerese [31]. No
entanto, utilizando esta solucao, erros de corrente podem surgir em regime permanente
devido a interacoes das fases do motor, e a frequencia de chaveamento variavel tambem
degrada o desempenho do sistema.
O controlador VS-APPC pode ser aplicado no sistema de controle de um motor de
inducao tanto na malha externa no referencial rotorico [21] e [22](Figura 4.3), como na
malha interna no referencial estatorico [23](Figura 4.4). Na malha externa, o sinal de
referencia a ser rastreado e um degrau, e a estrutura do VS-APPC, para este caso, e a
mesma do controlador PI, porem os parametros do controlador se modificam a depender
das adversidades e variacoes parametricas. O VS-APPC, quando implementado na malha

Capıtulo 4. Simulacoes e Aplicacao do VS-APPC em um Motor de Inducao 28
interna no referencial estatorico, evita a transformacao para o referencial rotorico, e a
referencia e um sinal senoidal. Nas Figuras 4.3 e 4.4 estao representadas perturbacoes no
sinal de controle e na saıda da planta a serem rejeitadas pelo sistema de controle.
Figura 4.3: Diagrama de blocos do controle de velocidade do motor de inducao utilizando
o VS-APPC.
Figura 4.4: Diagrama de blocos do controle de corrente do motor de inducao utilizando o
VS-APPC.
Por utilizar o princıpio do modelo interno em sua estrutura, este controlador e capaz
de rastrear diferentes sinais e obter erro de regime nulo em ambos casos.
A seguir, o modelo do motor de inducao e seus parametros serao apresentados. Os
resultados das simulacoes do VS-APPC aplicado na malha externa e interna serao anali-
sados. Estes resultados serao comparados com resultados obtidos utilizando o controlador
PI e o controlador APPC, utilizando o metodo do gradiente para estimar os parametros,
na malha externa, e com resultados obtidos utilizando o controlador PPC e PI sıncrono,
na malha interna. Tambem sera avaliada a robustez do sistema a adversidades. E por

Capıtulo 4. Simulacoes e Aplicacao do VS-APPC em um Motor de Inducao 29
fim, o VS-APPC sera implementado na pratica no sistema de controle da malha interna
de um motor de inducao.
4.1.1 Modelagem de um Motor de Inducao
As equacoes das tensoes de um motor de inducao em um referencial arbitrario podem
ser representadas pelas equacoes abaixo
vgsd =
(rs +
ls − σlsτr
)igsd + σls
digsddt
− ωgσlsigsq −
(ls − σlslm
)(ωrφ
grq +
φgrd
τr
)(4.1)
vgsq =
(rs +
ls − σlsτr
)igsq + σls
digsqdt
+ ωgσlsigsd +
(ls − σlslm
)(ωrφ
grd −
φgrq
τr
)(4.2)
e o conjugado eletromagnetico da maquina pode ser calculado por
Ce =2
3Plmlrψrd · irsq (4.3)
onde P e o numero de pares de polos, vgsd, v
gsq, i
gsd e igsq sao as tensoes e as correntes
estatoricas no eixo dq em um referencial generico, respectivamente; rs, ls e lm sao a
resistencia, a indutancia estatorica e a indutancia mutua , respectivamente; ωg e ωr sao as
frequencias angulares de referencia generica dq e de referencial rotorico, respectivamente;
σ =(1− l2m
lslr
)e τr = lr
rrsao o coeficiente de dispersao da maquina e a constante de
tempo rotorica, respectivamente; ψrrd e irsq sao o fluxo rotorico no eixo direto e a corrente
estatorica no referencial rotorico.
Analisando a equacao 4.3 e mantendo o fluxo ψrrd constante, obtem-se que a relacao
entre o torque eletrico e a corrente irsq (referencia), e igual a
Ce = K · irsq (4.4)
onde K e uma constante obtida a partir de (4.3).
Sabe-se que
P (Ce − Cm) = Jdωr
dt+ Fωr (4.5)
onde J e o momento de inercia do motor e F e o atrito da maquina.

Capıtulo 4. Simulacoes e Aplicacao do VS-APPC em um Motor de Inducao 30
Pode-se obter a funcao de transferencia entre velocidade do rotor (ωr) e a corrente
estatorica (irsq) atraves das equacoes 4.4 e 4.5, supondo o motor em vazio e sem conjugado
de carga(Cm = 0), comoΩ(s)
Irsq(s)
=KJ
s+ FJ
(4.6)
A funcao de transferencia 4.6 representa o sistema da malha externa do motor de
inducao.
O modelo dado por 4.1 e 4.2 pode ser simplificado escolhendo o referencial estatorico
(ωg = 0). Assim, as equacoes 4.1 e 4.2 podem ser reescritas como
vssd = rsri
ssd + σls
dissddt
+ essd (4.7)
vssq = rsri
ssq + σls
dissqdt
+ essq (4.8)
sendo a letra s a representacao do referencial estatorico (stator), rsr = rs + ls−σlsτr
, essd e
essq as forcas contra-eletromotrizes (fcems) das fases dq da maquina, dadas por
essd = −(ωrφ
srq +
φsrd
τr)(ls − σls)
lm(4.9)
essq = (ωrφ
srd −
φsrq
τr)(ls − σls)
lm(4.10)
A funcao de transferencia entre a corrente e a tensao da maquina de inducao pode ser
obtida pelas equacoes 4.7 e 4.8
Issd(s)
V s′sd(s)
=Issq(s)
V s′sq (s)
=1/rsr
sτs + 1(4.11)
onde τs = σls/rsr, V′ssd(s) = V s
sd(s) − Essd(s) e V ′s
sq (s) = V ssq(s) − Es
sq(s). As fcems
Essd(s) e Es
sq(s) sao consideradas perturbacoes nao modeladas a serem compensadas pelo
controlador.
A funcao de transferencia 4.11 representa o sistema da malha interna do motor de
inducao.
4.1.2 Parametros do Motor
As simulacoes e a implementacao pratica foram realizadas em um motor de inducao
de 0, 25HP com 4 polos. Os parametros do motor, fornecidos pelo fabricante, sao apre-
sentados na tabela abaixo.

Capıtulo 4. Simulacoes e Aplicacao do VS-APPC em um Motor de Inducao 31
Tabela 4.1: Parametros Nominais do Motor de Inducao
rs = 31.0Ω rr = 27.2Ω ls = 0.8042H lr = 0.7992H
lm = 0.7534H J = 0.0133kg.m2 F = 0.0146kg.m/s P = 2
Substituindo os parametros do motor em 4.6, encontra-se o seguinte modelo nominal
Ω(s)
Irsq(s)
=286
s+ 1, 1(4.12)
Substituindo os parametros do motor na equacao 4.11, encontra-se o seguinte modelo
nominalIssd(s)
V s′sd(s)
=Issq(s)
V s′sq (s)
=10
s+ 587(4.13)
A seguir sera simulado, independentemente, o sistema de controle da malha externa,
utilizando o modelo 4.12, e o sistema de controle da malha interna (malha de corrente),
utilizando o modelo 4.13.
4.2 Simulacoes: Controle Malha Externa
O projeto do controlador e as simulacoes da malha externa foram realizados sem aplicar
um sistema de controle interno (controle da corrente). Assim, o sistema nao e analisado
em cascata.
Neste sistema o sinal de referencia e um degrau. A exigencia de desempenho imposta
no projeto do controlador para o sistema descrito em 4.12 foi um tempo de estabilizacao
menor que em malha aberta, over-shoot e erro de regime permanente nulos. Foram
projetados os controladores PI, APPC e VS-APPC.
Para atender o criterio de desempenho foi escolhido o seguinte polinomio caracterıstico:
A∗(s) = (s+ 1, 5)2 = s2 + 3s+ 2, 25 (4.14)
Como a funcao de transferencia do motor tem a mesma estrutura da equacao 2.14,
faz-se Qm(s) = s, L(s) = 1 e P (s) = p1s+ p0.
Os parametros do controlador APPC e VS-APPC sao calculados por:
p1 =3− a
b(4.15)

Capıtulo 4. Simulacoes e Aplicacao do VS-APPC em um Motor de Inducao 32
p0 =2, 25
b(4.16)
As estimativas para o APPC e VS-APPC sao calculadas de acordo com as equacoes
2.21 e 2.28, respectivamente. Os valores dos ganhos adaptativos do APPC utilizados nas
simulacoes foram: γ1 = 0, 5 e γ2 = 0, 5.
As constantes do controlador VS-APPC foram escolhidas de forma que a > a, a < 3
para que o valor de p1 seja sempre positivo, bnom > b para que b seja sempre positivo,
bnom − b < b < bnom + b, bnom < b e bnom ≥ 1.5b para que haja pequenas variacoes nos
valores de p0 e p1. Assim, foram escolhidos os seguintes valores: a = 1, 8 , b = 100 e
bnom = 200. O valor de am, utilizado em 2.16, foi escolhido igual ao valor do polo desejado
em malha fechada (am = 1.5)
O controlador PI foi projetado pelo metodo polinomial, considerando o modelo do
sistema conhecido e invariante no tempo. Assim, p0 = 0, 00787 e p1 = 0, 00664, ou seja,
τi = p0
p1e k = p0.
O calculo do sinal de controle para os tres controladores e efetuado de acordo com o
algoritmo da equacao 2.37.
O sistema completo foi simulado no Matlab com um passo de amostragem de h = 1ms
e o sinal de referencia foi de r = 300 rpm.
4.2.1 Avaliacao de Robustez e Desempenho do Sistema
A avaliacao de robustez foi realizada atraves da introducao de adversidades no sistema.
Os controladores PI, APPC e VS-APPC serao comparados em relacao ao desempenho no
transitorio e a robustez a essas adversidades.
Inicialmente, o sistema foi simulado para um ambiente ideal. Em todas as simulacoes
foi introduzida uma limitacao no sinal de controle (umax = 3 e umin = 0). O tempo de
simulacao foi de 5s. O sinal de saıda da planta e o sinal de controle de cada controlador
podem ser vistos na Figura 4.5.
Os controladores levaram a um mesmo desempenho em regime permanente, e no tran-
sitorio, com o VS-APPC foi obtido o menor tempo de acomodacao, e o maior foi obtido
com o controlador PI.
O comportamento da saıda estimada com o algoritmo VS-APPC e os parametros
estimados do controlador apos uma filtragem (a funcao de transferencia do filtro e dada

Capıtulo 4. Simulacoes e Aplicacao do VS-APPC em um Motor de Inducao 33
Figura 4.5: Simulacao 1 - saıda da planta e sinal de controle.
em 4.17), podem ser vistos na Figura 4.6.
Gfiltro(s) =10
s+ 10(4.17)
Os valores medios para os parametros do VS-APPC foram p1 = 0, 0134 e p0 = 0, 0173.
Atraves dos resultados observa-se que os parametros do controlador PI sintonizados com
os parametros medios do VS-APPC levaram a um desempenho melhor.
Posteriormente, foram introduzidas no sistema algumas adversidades. Entre 4s e 9s
foi introduzida uma perturbacao degrau no sinal de controle com amplitude de 0,5mA,
em 13s a amplitude do sinal de referencia foi reduzida para 200 rpm, em 17s o parametro
a da planta foi reduzido para 80% do seu valor nominal e em 21s foi introduzida uma
perturbacao degrau no sinal de saıda da planta com amplitude de 30 rpm. O tempo de
simulacao foi de 30s. O sinal de saıda da planta e o sinal de controle de cada controlador
podem ser vistos na Figura 4.7. A saıda da planta no perıodo em que cada adversidade
foi introduzida sera analisado detalhadamente.

Capıtulo 4. Simulacoes e Aplicacao do VS-APPC em um Motor de Inducao 34
Figura 4.6: Simulacao 1 - saıda estimada e parametros do VS-APPC.
Figura 4.7: Simulacao 2 - saıda da planta e sinal de controle.

Capıtulo 4. Simulacoes e Aplicacao do VS-APPC em um Motor de Inducao 35
A robustez do sistema em relacao a perturbacao no sinal de controle, ao rastreio
do sinal de saıda apos uma mudanca na referencia, a robustez em relacao a variacao
parametrica e em relacao a perturbacao no sinal de saıda podem ser vistas nas Figuras
4.8, 4.9, 4.10, 4.11, respectivamente .
Figura 4.8: Simulacao 2 - introducao de uma perturbacao no sinal de controle.
Figura 4.9: Simulacao 2 - mudanca na referencia.

Capıtulo 4. Simulacoes e Aplicacao do VS-APPC em um Motor de Inducao 36
Figura 4.10: Simulacao 2 - introducao de uma variacao parametrica.
Figura 4.11: Simulacao 2 - introducao de uma perturbacao no sinal de saıda.
Como pode ser visto nas figuras, o controlador VS-APPC foi mais robusto as adver-
sidades que o controlador PI e APPC. A contrapartida desta maior robustez pode ser
vista no sinal de controle do VS-APPC (Figura 4.7), verifica-se que este e menos suave,
exigindo assim uma resposta mais rapida do atuador. Na pratica, esta maior velocidade
do atuador pode nao ser obtida em determinados casos.
Capıtulo 4. Simulacoes e Aplicacao do VS-APPC em um Motor de Inducao 37
Figura 4.12: Simulacao 2 - saıda estimada e parametros do VS-APPC.
O comportamento da saıda estimada utilizada no algoritmo VS-APPC e dos parametros
estimados do controlador apos a filtragem podem ser vistos na Figura 4.12.
O valor medio para os parametros do VS-APPC foram p1 = 0, 0134 e p0 = 0, 0171.
Para esta mesma situacao foi simulado um controlador PI (PI 2) com os parametros iguais
aos valores medios do VS-APPC. O sinal de saıda da planta e o sinal de controle do PI
projetado pelo metodo polinomial, deste novo PI e do VS-APPC, podem ser vistos na
Figura 4.13.
O resultado 4.13 mostra que o VS-APPC pode ser considerado um PI com sintonia
automatica. O desempenho do VS-APPC e do PI 2 foram bastante semelhantes e melhores
que o PI sintonizado pelo metodo polinomial.
Para a mesma situacao anterior foi simulado o VS-APPC com outros valores para a,
b e bnom. Foram escolhidos os seguintes valores: VS-APPC 2 com a = 1, 7 , b = 100 e
bnom = 220; VS-APPC 3 com a = 2, 0 , b = 120 e bnom = 180. O sinal de saıda da planta
e o sinal de controle do VS-APPC, VS-APPC 2 e VS-APPC 3 podem ser vistos na Figura
4.14.

Capıtulo 4. Simulacoes e Aplicacao do VS-APPC em um Motor de Inducao 38
Figura 4.13: Simulacao 3 - saıda da planta e sinal de controle.
Figura 4.14: Simulacao 4 - saıda da planta e sinal de controle.

Capıtulo 4. Simulacoes e Aplicacao do VS-APPC em um Motor de Inducao 39
Observa-se que houve uma pequena diferenca no desempenho dos controladores, porem
ambos ainda tem desempenho superior ao APPC e ao controlador PI.
Foi introduzida uma dinamica nao modelada no sistema, em conjuto com as adversi-
dades anteriores, representada pela funcao de transferencia da equacao 4.18.
Gdin(s) =200
s2 + 20s+ 200(4.18)
O sinal de saıda da planta e o sinal de controle do PI projetado pelo metodo polinomial,
do APPC e do VS-APPC podem ser vistos na Figura 4.15.
O desempenho transitorio do sistema utilizando ambos os controladores foi deterio-
rado devido a dinamica nao modelada. Pode-se observar, para o caso do VS-APPC, o
surgimento de um over-shoot de aproximadamente 10%, e de um under-shoot quando
houve a mudanca no sinal de referencia.
Por ultimo, foi simulado isoladamente um atraso de transporte do sistema de controle
para a planta, sendo o tempo morto igual a 0,5s. O resultado desta simulacao pode ser
visto na Figura 4.16.
Figura 4.15: Simulacao 5: saıda da planta e sinal de controle.

Capıtulo 4. Simulacoes e Aplicacao do VS-APPC em um Motor de Inducao 40
Figura 4.16: Simulacao 6: saıda da planta e sinal de controle.
Os controladores foram robustos ao atraso de transporte introduzido no sistema.
As simulacoes demonstraram a eficiencia e robustez do VS-APPC. Comparando com o
APPC e o controlador PI, o desempenho do VS-APPC foi mais robusto, a nao ser quando
foi introduzida a dinamica nao modelada. Foi observado que os valores dos parametros
p0 e p1 medios do VS-APPC representaram uma boa sintonia para o controlador PI.
Assim, tanto pode-se interpretar o VS-APPC como um PI adaptativo, como este pode ser
utilizado apenas no inıcio do processamento do sistema para auto-sintonizar o controlador
PI.
4.3 Simulacoes: Controle Malha Interna
Como o algoritmo VS-APPC inclui o princıpio do modelo interno (2.2), e possıvel
rastrear uma referencia senoidal, conforme 2.38 e, assim, o controlador VS-APPC foi
implementado na malha interna do motor de inducao no referencial estatorico. Foram

Capıtulo 4. Simulacoes e Aplicacao do VS-APPC em um Motor de Inducao 41
tambem projetados os controladores PPC e PI sıncrono afim de comparar os resultados
obtidos.
A exigencia de desempenho imposta no projeto dos controladores para o sistema des-
crito pela funcao de transferencia 4.13 foi um tempo de estabilizacao menor que 0.015s e
reduzir o erro em regime permanente.
Para atender o criterio de desempenho foi escolhido o seguinte polinomio caracterıstico:
A∗(s) = (s+ 587)3 = s3 + 1761s2 + 1033707s+ 202262003 (4.19)
Como a funcao de transferencia deste sistema tem a mesma estrutura da equacao 2.14,
faz-se Qm(s) = s2 + ω20, L(s) = 1 e P (s) = p2s
2 + p1s+ p0.
Os parametros do controlador VS-APPC sao calculados por (2.44 - 2.46)
p2 =1761− a
b(4.20)
p1 =1033707− ω2
o
b(4.21)
p0 =202262003− ω2
o a
b(4.22)
As estimativas para o VS-APPC sao calculadas de acordo com a equacao 2.28. As
constantes do controlador VS-APPC foram escolhidas de forma que a > a, a < 1761
para que o valor de p2 sempre seja positivo, bnom > b para que b sempre seja positivo,
bnom − b < b < bnom + b, bnom < b e bnom ≥ 1.5b para que haja pequenas variacoes nos
valores de p2, p1 e p0. Assim foram escolhidos os seguintes valores: a = 600, b = 2 e
bnom = 9. O valor de am, utilizado em 2.16, foi escolhido igual ao valor do polo desejado
em malha fechada (am=587).
O projeto do PPC foi realizado supondo os parametros da planta conhecidos e cons-
tantes. Sua estrutura e igual ao do VS-APPC, mas nao ha adaptacao dos parametros.
Assim, os parametros deste controlador sao fixos e iguais a
p2 =1761− 587
10= 117, 4 (4.23)
p1 =1033707− ω2
o
10= 99817, 64 (4.24)
p0 =202262003− 587ω2
o
10= 18140555, 50 (4.25)

Capıtulo 4. Simulacoes e Aplicacao do VS-APPC em um Motor de Inducao 42
O calculo do sinal de controle no VS-APPC e no PPC e efetuado de acordo com o
algoritmo das equacoes 2.51, 2.52 e 2.53.
A funcao de transferencia do controlador PI projetado e dada por
Cs(s) =kp + kis
s=
900 + 0, 005s
s(4.26)
O modelo no espaco de estado do controlador PI na forma sıncrona, de acordo com
[10], e dado por·x1 = 2ki · e+ x2 (4.27)
·x2 = −ω2
o · x1 (4.28)
u = x1 + 2kp · e (4.29)
e a versao discreta do calculo do sinal de controle, baseada em [10], e dada por
x1(t) = cos(ωoh) · x1(t− h) +sen(ωoh)
ωo
x2(t− h) +2ki · sen(ωoh) · e(t− h)
ωo
(4.30)
x2(t) = −ωosen(ωoh) · x1(t− h) + cos(ωoh) · x2(t− h) + 2ki [cos(ωoh)− 1] e(t− h) (4.31)
u(t) = x1(t) + kp · e(t) (4.32)
Na simulacao, foi implementado o sistema do motor de inducao com inversor de
potencia trifasico (Figura 4.17). O sistema foi simulado no Borland C++ com um
passo de amostragem de h = 0, 1ms. O sinal de referencia foi de i∗sd = sen(2πft)A e
i∗sq = cos(2πft)A, sendo f = 30Hz.
Figura 4.17: Diagrama de Blocos do sistema do motor de inducao.

Capıtulo 4. Simulacoes e Aplicacao do VS-APPC em um Motor de Inducao 43
4.3.1 Avaliacao de Robustez e Desempenho do Sistema
A avaliacao de robustez, para este caso, foi realizada atraves da introducao de uma
variacao parametrica no sistema. E importante lembrar que as fcems Essd(s) e Es
sq(s)
foram consideradas perturbacoes nao modeladas a serem compensadas pelo controlador.
Os controladores PI sıncrono, PPC e VS-APPC serao comparados em relacao ao desem-
penho no transitorio e a robustez a essas adversidades.
Inicialmente, o sistema foi simulado para rastrear o sinal de referencia (is∗sd e is∗sq), sendo
que a amplitude deste sinal foi alterada para 0,8A no tempo igual a 0,15s. O tempo de
simulacao foi de 0,30s.
Os sinais de saıda da planta issd e issq, os sinais de referencia is∗sd e is∗sq e os sinais de erro,
utilizando o controlador PI sıncrono, PPC e VS-APPC, podem ser vistos, respectivamente,
nas Figuras 4.18, 4.19, 4.20, 4.21, 4.22 e 4.23. Os sinais de controle sao sinais senoidais
apenas com amplitude e fase diferentes dos sinais de saıda da planta, por isso, optou-se
por nao apresenta-los.
Figura 4.18: Simulacao 7 - corrente de saıda issd e corrente de referencia is∗sd (PI sıncrono).

Capıtulo 4. Simulacoes e Aplicacao do VS-APPC em um Motor de Inducao 44
Figura 4.19: Simulacao 7 - corrente de saıda issq e corrente de referencia is∗sq (PI sıncrono).
Figura 4.20: Simulacao 8 - corrente de saıda issd e corrente de referencia is∗sd (PPC).

Capıtulo 4. Simulacoes e Aplicacao do VS-APPC em um Motor de Inducao 45
Figura 4.21: Simulacao 8 - corrente de saıda issq e corrente de referencia is∗sq (PPC).
Figura 4.22: Simulacao 9 - corrente de saıda issd e corrente de referencia is∗sd (VS-APPC).

Capıtulo 4. Simulacoes e Aplicacao do VS-APPC em um Motor de Inducao 46
Figura 4.23: Simulacao 9 - corrente de saıda issq e corrente de referencia is∗sq (VS-APPC).
Como pode ser visto nas Figuras 4.18 - 4.23, as referencias foram rastreadas, e apos a
mudanca na amplitude do sinal de referencia, os sinais de saıda convergiram rapidamente
para a referencia.
Observa-se que o sinal de erro, quando foi utilizado o PPC e o VS-APPC, ficou
dentro de uma faixa menor que quando foi aplicado o controlador PI sıncrono. Assim,
subentende-se que a integral do erro quadratico e menor quando se utiliza o PPC ou VS-
APPC. Este conceito e comumente utilizado para qualificar a sintonia de controladores.
Entao, foi analisado o comportamento do erro quadratico para o caso do PPC e VS-
APPC. Os sinais do erro quadratico em relacao aos sinais isd e isq, podem ser vistos,
respectivamente, nas Figuras 4.24 e 4.25
Graficamente ainda nao e possıvel visualizar qual controlador obteve o menor valor
da integral do erro quadratico. A integral do erro quadratico foi calculada, tanto para a
referencia isd quanto para a isq, e os valores obtidos quando foi utilizado o PPC foram,
respectivamente, iguais a 2,2356 e 0,2837. Quando foi utilizado o VS-APPC, a integral do
erro em relacao a referencia isd foi igual a 1,9900, e em relacao a referencia isq foi igual

Capıtulo 4. Simulacoes e Aplicacao do VS-APPC em um Motor de Inducao 47
Figura 4.24: Simulacao 8 e 9 - erro quadratico entre corrente de saıda issd e corrente de
referencia is∗sd.
Figura 4.25: Simulacao 8 e 9 - erro quadratico entre a corrente de saıda issq e corrente de
referencia is∗sq.
a 0,2299. Assim, observa-se que o VS-APPC obteve os menores valores das integrais do
erro quadratico.

Capıtulo 4. Simulacoes e Aplicacao do VS-APPC em um Motor de Inducao 48
Tambem foi simulada uma variacao (reducao em 50%) no valor da resistencia no
estator e no rotor, respectivamente rs e rr. Entre 0,0s e 0,1s foi simulada a variacao de
rs, entre 0,1s e 0,2s rs assumiu seu valor nominal e o valor de rr foi reduzido em 50%,
e entre 0,2s e 0,3s o valor de ambas as resistencias foi reduzido. A mudanca no valor
das resistencias modifica apenas o polo da funcao de transferencia, e os novos valores dos
polos nos perıodos da variacao parametrica sao, respectivamente: -4,22, -4,58 e -2,94.
Os sinais de saıda da planta issd e issq, os sinais de referencia is∗sd e is∗sq e os sinais de erro,
utilizando o controlador PI sıncrono, PPC e VS-APPC, podem ser vistos, respectivamente,
nas Figuras 4.26, 4.27, 4.28, 4.29, 4.30 e 4.31.
Como pode ser visto nas Figuras 4.26 - 4.31, apos as variacoes parametricas, para os
casos do PPC e VS-APPC, surgiu um maior erro de rastreamento. Entretanto, este foi
rapidamente reduzido.
Foi analisado o comportamento do erro quadratico para o caso do PPC e VS-APPC. Os
sinais do erro quadratico em relacao aos sinais isd e isq, podem ser vistos, respectivamente,
nas Figuras 4.32 e 4.33.
Figura 4.26: Simulacao 10 - corrente de saıda issd e corrente de referencia is∗sd (PI sıncrono).

Capıtulo 4. Simulacoes e Aplicacao do VS-APPC em um Motor de Inducao 49
Figura 4.27: Simulacao 10 - corrente de saıda issq e corrente de referencia is∗sq (PI sıncrono).
Figura 4.28: Simulacao 11 - corrente de saıda issd e corrente de referencia is∗sd (PPC).

Capıtulo 4. Simulacoes e Aplicacao do VS-APPC em um Motor de Inducao 50
Figura 4.29: Simulacao 11 - corrente de saıda issq e corrente de referencia is∗sq (PPC).
Figura 4.30: Simulacao 12 - corrente de saıda issd e corrente de referencia is∗sd (VS-APPC).

Capıtulo 4. Simulacoes e Aplicacao do VS-APPC em um Motor de Inducao 51
Figura 4.31: Simulacao 12 - corrente de saıda issq e corrente de referencia is∗sq (VS-APPC).
Figura 4.32: Simulacao 11 e 12- erro quadratico entre corrente de saıda issd e corrente de
referencia is∗sd.

Capıtulo 4. Simulacoes e Aplicacao do VS-APPC em um Motor de Inducao 52
Figura 4.33: Simulacao 11 e 12- erro quadratico entre a corrente de saıda issq e corrente
de referencia is∗sq.
A integral do erro quadratico foi calculada, tanto para a referencia isd quanto para a
isq e os valores obtidos quando foi utilizado o PPC foram, respectivamente, iguais a 2,2176
e 0,2264. Quando foi utilizado o VS-APPC, a integral do erro em relacao a referencia isd
foi igual a 1,9692, e em relacao a referencia isq foi igual a 0,1884. Assim, observa-se que
o VS-APPC obteve os menores valores das integrais do erro quadratico.
Os resultados obtidos foram bastante satisfatorios e demonstraram a eficiencia e ro-
bustez do VS-APPC. O desempenho deste controlador foi testado experimentalmente, e
este resultado e analisado a seguir.
4.4 Implementacao do VS-APPC
A aplicacao experimental do VS-APPC na malha externa do motor de inducao foi
realizada em [21]. Neste trabalho, o VS-APPC foi implementado na malha interna do
motor de inducao, assim como em [23] e [24] .
Para a realizacao dos testes experimentais foi utilizada uma plataforma composta por
um microcomputador equipado com um cartao de aquisicao de dados e um algoritmo de
controle, um conversor de potencia trifasico e um motor de inducao.

Capıtulo 4. Simulacoes e Aplicacao do VS-APPC em um Motor de Inducao 53
Os sinais de comando do conversor de potencia sao gerados pelo computador com um
perıodo de amostragem de 0, 1ms. O cartao de aquisicao de dados emprega sensores de
efeito Hall e conversores A/D.
Os resultados experimentais (Figuras 4.34 e 4.35) exibem as saıdas do sistema super-
postas pelos sinais de referencia. Em ambos os graficos o sinal de referencia tem amplitude
de 1A e frequencia igual a 30Hz.
Comparando o comportamento dos sinais da simulacao com o experimental, observa-se
que sao similares. Assim, o desempenho do VS-APPC foi verificado experimentalmente.
Figura 4.34: Resultado experimental - corrente de saıda issd e corrente de referencia is∗sd.
Figura 4.35: Resultado experimental - corrente de saıda issq e corrente de referencia is∗sq.

Capıtulo 5
Conclusoes e Perspectivas
Neste trabalho foi avaliada a robustez e o desempenho do VS-APPC aplicado a um
motor de inducao. Foi possıvel aplicar este sistema de controle, devido o algoritmo conter
o princıpio do modelo interno, tanto em um sistema com referencia degrau, para obter
erro em regime permanente nulo, como em um sistema com referencia senoidal para
reduzir o erro em regime permanente. Nao foi obtido erro nulo em regime permanente
nas simulacoes na malha interna devido a geracao de erros numericos pelo metodo (Runge-
Kutta) utilizado nas simulacoes do modelo do motor de inducao.
O VS-APPC foi simulado em diversas situacoes na malha interna e externa do motor
de inducao e obteve resultados satisfatorios. Na malha externa, o sinal de referencia foi
um degrau, seu desempenho foi comparado com o APPC e o controlador PI, obtendo
melhores resultados que estes na maioria dos casos. Na malha interna este foi simulado
em conjunto com um inversor de potencia trifasico, seu desempenho foi comparado com
o PPC e o controlador PI sıncrono, obtendo melhores resultados que estes. Alem disso,
foi implementado experimentalmente, e os resultados das simulacoes foram comprovados
na pratica.
A robustez a perturbacoes, variacoes parametricas, dinamica nao modelada e atraso de
transporte foi comprovada na malha externa, e a robustez as duas primeiras adversidades
tambem foram comprovadas na malha interna.
Em sistemas de 1a ordem, como neste trabalho, e comum a aplicacao de um controlador
PI para o rastreamento de um sinal degrau. Contudo, neste trabalho foi comprovada a
maior robustez do VS-APPC a maioria dos casos de adversidades estudadas.

Capıtulo 5. Conclusoes e Perspectivas 55
O desempenho do VS-APPC aplicado na malha interna do motor de inducao foi supe-
rior ao PI sıncrono e ao PPC, tanto para o caso ideal (sem a introducao de adversidades),
quanto para o caso em que foram simuladas variacoes parametricas.
Este controlador adaptativo indireto apresentou simplicidade em seu projeto. Sua es-
trutura (referencia degrau) por ser igual ao controlador mais convencional, controlador PI,
ajudou na interpretacao da adaptacao dos parametros. Assim, este pode ser interpretado
como um controlador PI adaptativo.
A continuacao deste trabalho sera o desenvolvimento desta tecnica para plantas de
ordem 2 e, assim, para uma referencia degrau, deveremos obter um VS-APPC com uma
estrutura de um PID adaptativo.
Alem disso, pode-se pensar em agregar este trabalho com [27] a fim de obter as cons-
tantes do VS-APPC atraves da resposta em frequencia do sistema. Consequentemente,
teremos um controlador PID adaptativo por estrutura variavel projetado de forma au-
tomatica pela resposta em frequencia do sistema.
Os resultados obtidos na avaliacao de robustez do VS-APPC a adversidades (malha
interna e externa) foram bastante satisfatorios, contudo esta avaliacao foi realizada de
forma independente. Assim, o proximo trabalho sera avaliar esse sistema de controle em
cascata utilizando o VS-APPC nos dois controladores. Para isso, sera necessario realizar
alguns ajustes pois a frequencia da referencia senoidal na malha interna nao e constante
e sua variacao esta relacionada com o sistema de controle da malha externa.

Apendice A
Conceitos sobre Sistemas
A.1 Representacao de um Sistema
Um sistema pode ter diversas variaveis de entrada e saıda. Quando este tem uma
entrada e uma saıda e denominado SISO (single input, single output), enquanto que o
sistema MIMO (multiple input, multiple output) tem mais de uma variavel de entrada e
mais de uma variavel de saıda.
Se as caracterısticas de um sistema nao mudarem com o tempo, este sistema e denomi-
nado de invariante no tempo, fixo ou estacionario, e se satisfaz o princıpio da superposicao,
e classificado como linear.
Um sistema SISO e SLIT (Sistema Linear Invariante no Tempo) pode ser escrito por
uma equacao diferencial (A.1). Aplicando-se a Transformada de Laplace nesta equacao
e considerando este relaxado (condicoes iniciais nulas), pode-se obter a funcao de trans-
ferencia do sistema (A.2), que corresponde a relacao entre a Transformada de Laplace do
sinal de saıda (Y (s)) e a Transformada de Laplace do sinal de entrada (U(s)).
y(n)(t) + an−1y(n−1)(t) + · · ·+ a0y(t) = bmu
(m)(t) + bm−1u(m−1)(t) + · · ·+ b0u(t) (A.1)
G(s) ,Y (s)
U(s)=bms
m + bm−1sm−1 + · · ·+ b0
sn + an−1sn−1 + · · ·+ a0
(A.2)
Classifica-se G(s) como propria se G(∞) e finita, ou seja, n ≥ m e estritamente propria
se G(∞) = 0, ou seja, n > m.
56

Apendice A. Conceitos sobre Sistemas 57
A equacao caracterıstica do sistema (A.1) e definida como a equacao sn + an−1sn−1 +
· · ·+ a0 = 0.
Este sistema tambem pode ser representado no espaco de estados (A.3), sendo x o
vetor das variaveis de estados e x sua derivada, y a saıda da planta, u a entrada da
planta, e as matrizes A, B, C e D, respectivamente, a matriz de estado, a matriz de
controle, a matriz de saıda e a matriz de transmissao direta.
x = A · x+B · u
y = C · x+D · u(A.3)
A.2 Funcao de Transferencia
As raızes do polinomio do denominador de uma funcao de transferencia sao conhecidas
como polos e as raızes do numerador, como zeros. Um sistema e classificado como estavel
quando todos os polos de sua funcao de transferencia tem parte real negativa e, caso esta
condicao nao seja atendida, este e instavel. Um sistema e classificado como de fase nao
mınima quando pelo menos um de seus zeros tem parte real positiva e, e classificado como
de fase mınima quando todos os zeros tem parte real negativa.
O comportamento do sinal de saıda de um sistema e determinado pelos valores de seus
polos e zeros. Os polos e zeros possuem parte real e imaginaria. Quanto mais proximos
os polos estiverem do eixo imaginario, maior a sua influencia no comportamento do sinal
de saıda.
Usualmente, aproxima-se um sistema com mais de dois polos a um sistema com um ou
dois polos, atraves do conceito de polos dominantes, para facilitar o estudo do sistema. A
estabilidade relativa de um sistema refere-se a distancia dos polos dominantes em relacao
ao eixo imaginario. Na situacao em que a distancia e maior e dito “relativamente mais
estavel”.
A.3 Polinomios Coprimos
As propriedades de um sistema representado por uma funcao de transferencia G(s)
dependem dos polinomios do seu numerador e denominador. Nesta secao, algumas pro-

Apendice A. Conceitos sobre Sistemas 58
priedades e definicoes de polinomios sao revisadas.
Definicao A.3.1 Considere o polinomio X(s) = αnsn+αn−1s
n−1+ · · ·+α0. Classifica-se
X(s) como monico se αn = 1 e X(s) e Hurwitz se todas as raızes de X(s) = 0 estao
em Re[s] < 0. E dito que o grau de X(s) e n quando o coeficiente αn de sn satisfaz
αn 6= 0.
Definicao A.3.2 Dois polinomios a(s) e b(s) sao ditos coprimos (ou relativamente
coprimos) se eles nao tem fatores comuns diferentes de uma constante.
Uma forma de verificar se dois polinomios sao coprimos e dada pelo seguinte Lema.
Lema A.3.1 (Identidade de Bezout) Dois polinomios a(s) e b(s) sao coprimos se, e
somente se, existem dois polinomios c(s) e d(s) tais que
c(s)a(s) + d(s)b(s) = 1 (A.4)
Uma prova para este Lema pode ser encontrada em [3].
Teorema A.3.1 Se a(s) e b(s) sao coprimos e de graus na e nb, respectivamente, onde
na > nb, entao, para algum polinomio arbitrario a∗ de grau na∗ ≥ na, a equacao polinomial
a(s)l(s) + b(s)p(s) = a∗(s) (A.5)
tem uma unica solucao l(s) e p(s) cujos graus nl e np, respectivamente, satisfazem as
restricoes np < na e nl ≤ max(na∗ − na, nb − 1).
Teorema A.3.2 (Teorema de Sylvester) Dois polinomios a(s) = ansn + an−1s
n−1 +
· · · + a0, b(s) = bnsn + bn−1s
n−1 + · · · + b0 sao coprimos se e somente se sua matriz de

Apendice B. Conceitos sobre Estabilidade 59
Sylvester Se e nao singular, onde Se e definida como a seguinte matriz 2n× 2n:
Se ,
an 0 0 · · · 0 0 bn 0 0 · · · 0 0
an−1 an 0 0 0 bn−1 bn 0 0 0
· an−1 an. . .
... · bn−1 bn. . .
...
· · · · . . .... · · · · . . .
...
· · · · · 0 · · · · · 0
a1 · · · · an b1 · · · · bn
a0 a1 · · · an−1 b0 b1 · · · bn−1
0 a0 · · · · 0 b0 · · · ·
0 0 · · · · 0 0 · · · ·...
. . . · · · ... 0. . . · · ·
.... . . a0 a1
.... . . b0 b1
0 0 · · · 0 0 a0 0 0 · · · 0 0 b0

Apendice B
Conceitos sobre Estabilidade
B.1 Definicao de Estabilidade
Considerando sistemas descritos por equacoes diferenciais nao-lineares da forma
x = f(t, x), x(t0) = x0 (B.1)
onde f e uma funcao vetorial nao-linear n × 1, x e um vetor de estado n × 1 e cada
elemento deste vetor e uma variavel de estado. Um valor particular do vetor de estado e
tambem chamado de ponto, porque ele corresponde a um ponto no espaco de estado. O
numero de variaveis de estado n e chamado ordem do sistema. Uma solucao de x(t) para
(B.1) corresponde a uma curva no espaco de estado com t variando de zero a infinito.
Definicao B.1.1 Um estado x∗ e dito ser um ponto de equilıbrio do sistema descrito
por (B.1) se f(t, x∗) = 0, ou seja, se x(0) = x∗ implica x(t) = x∗, para todo t ≥ 0.
Definicao B.1.2 O ponto de equilıbrio x∗ e dito ser estavel se para um t0 arbitrario e
ε > 0 existe um δ(ε, t0) tal que |x0−x∗| < δ implica |x(t; t0, x0)−x∗| < ε para todo t ≥ t0.
Caso contrario, o ponto de equilıbrio e instavel.
Definicao B.1.3 O ponto de equilıbrio x∗ e dito ser assintoticamente estavel se este
e estavel e se existe um δ(t0) tal que |x0 − x∗| < δ implica limt→∞ |x(t; t0, x0)− x∗| = 0.
Definicao B.1.4 O conjunto de todos x0 ∈ Rn tal que x(t; t0, x0) → x∗ quando t → ∞
para algum t0 ≥ 0 e chamado regiao de atracao do ponto de equilıbrio x∗.60

Apendice B. Conceitos sobre Estabilidade 61
Definicao B.1.5 O ponto de equilıbrio x∗ de (B.1) e globalmente assintoticamente
estavel se este e estavel e cada solucao de (B.1) tende a x∗ conforme t → ∞ (isto e, a
regiao de atracao de x∗ e todo o Rn).
B.2 Metodo Direto de Lyapunov
Este metodo utiliza funcoes de energia para a verificacao de estabilidade do sistema. Se
a energia total de um sistema e continuamente dissipada, seja este sistema linear ou nao-
linear, tende a convergir para um ponto de equilıbrio. Portanto, pode-se tirar conclusoes
sobre a estabilidade de um sistema observando a variacao de uma funcao de energia.
B.2.1 Funcoes Definidas Positivas e Negativas
Definicao B.2.1 Uma funcao V (x) e definida positiva (V (x) > 0) em uma vizinhanca
de x = 0, se V (x) > 0, ∀x tal que ‖x‖ < ε, ε > 0, x 6= 0 e V (0) = 0.
Definicao B.2.2 Uma funcao V (x) e semidefinida positiva (V (x) ≥ 0) em uma vizi-
nhanca de x = 0, se V (x) ≥ 0, ∀x tal que ‖x‖ < ε, ε > 0 e V (0) = 0.
Definicao B.2.3 Uma funcao V (x) e definida negativa (V (x) < 0) em uma vizinhan-
ca de x = 0, se V (x) < 0, ∀x tal que ‖x‖ < ε, ε > 0, x 6= 0 e V (0) = 0.
Definicao B.2.4 Uma funcao V (x) e semidefinida negativa (V (x) ≤ 0) em uma vi-
zinhanca de x = 0, se V (x) ≤ 0, ∀x tal que ‖x‖ < ε, ε > 0 e V (0) = 0.
B.2.2 Translacao da Origem do Sistema de Coordenadas
Seja x∗ um ponto de equilıbrio de (B.1), ou seja, f(x∗) = 0. Para analisar o compor-
tamento do sistema em uma vizinhanca de x∗, e feita a seguinte translacao do ponto de
equilıbrio para a origem
x = x− x∗
˙x = x− x∗ = x
˙x = f(x+ x∗)
Ponto de equilıbrio: x = 0 (para x = 0 ⇒ ˙x = f(x∗) = 0).

Apendice B. Conceitos sobre Estabilidade 62
B.2.3 Teoremas sobre Estabilidade (Segundo Lyapunov)
Teorema B.2.1 Se para o sistema (B.1), existe uma funcao V (x) continuamente dife-
renciavel tal que
(i) V (x) > 0
(ii) V (x) ≤ 0
entao x∗ = 0 e estavel.
Teorema B.2.2 Se para o sistema (B.1), existe uma funcao V (x) continuamente dife-
renciavel tal que
(i) V (x) > 0
(ii) V (x) < 0
entao x∗ = 0 e assintoticamente estavel.
Teorema B.2.3 Se para o sistema (B.1), existe uma funcao V (x) continuamente dife-
renciavel tal que
(i) V (x) > 0
(ii) V (x) ≤ 0
(iii) V (x) →∞ quando ‖x‖ → ∞
entao x∗ = 0 e globalmente assintoticamente estavel.
Teorema B.2.4 (Teorema de La Salle) Se para o sistema (B.1), existe uma funcao
V (x) continuamente diferenciavel tal que
(i) V (x) > 0
(ii) V (x) ≤ 0
(iii) nao existe x 6= 0 tal que V (x) = 0, para todo t ≥ 0
entao x∗ = 0 e assintoticamente estavel.

Apendice C. Princıpio do Modelo Interno 63
B.2.4 Analise de Sistemas baseado no Metodo Direto de Lya-
punov
Para que o teorema sobre estabilidade (segundo Lyapunov) possa ser utilizado em
um determinado sistema deve-se conhecer a funcao explıcita de Lyapunov. Nao ha um
modo geral de encontrar funcoes de Lyapunov para sistemas nao-lineares. Este e o prin-
cipal ponto negativo do metodo direto de Lyapunov. Assim, deve-se utilizar experiencia,
intuicao e percepcao para encontrar um funcao de Lyapunov apropriada.

Apendice C
Princıpio do Modelo Interno
C.1 Princıpio do Modelo Interno
Em muitos problemas de controle, a entrada de referencia r e assumido satisfazer [3]
Qr(s)r = 0 (C.1)
onde Qr e um polinomio conhecido, e s , ddt
e o operador diferencial. Por exemplo,
quando r = constante, Qr(s) = s. Quando r = t, Qr(s) = s2 e quando r = Asen(ω0t)
para algumas constantes A e ω0, Qr(s) = s2+ω20, etc. Similarmente, para uma perturbacao
determinıstica d pode-se assumir satisfazer
Qd(s)d = 0 (C.2)
para algum Qd conhecido, em casos onde existe informacao suficiente sobre d. Por exem-
plo, se d e um sinal senoidal com amplitude e fase desconhecida, mas com frequencia ωd
entao ele pode ser modelado por (B.2) com Qd(s) = s2 + ω2d.
Devido o princıpio do modelo interno incluir o fator 1Qr(s)Qd(s)
no controlador C(s), e
possıvel anular o efeito de r e d no erro de rastreamento e = r − y. Assim, o modelo
interno e um operador que pode ser aplicado a uma referencia com o objetivo da planta
rastrea-la.
64

Apendice D
Ambiente de Simulacoes
D.1 Ambiente para Avaliacao de Robustez de Algo-
ritmos de Controle
Um ambiente para avaliacao de robustez de algoritmos de controle e apresentado
nesse apendice. Este consiste em um ambiente de simulacoes simultaneas de algoritmos de
controle com o intuito de comparar seus desempenhos em regime transitorio e permanente.
Foi desenvolvido sobre a ferramenta GUI do Matlab R© 7.0 MathWorks, em linguagem de
alto nıvel.
Neste ambiente, existe a possibilidade de incluir nas simulacoes adversidades encon-
tradas no campo, como disturbios externos, nao-linearidade no atuador, atraso de trans-
porte, regiao de zona-morta, variacoes parametricas, dinamicas nao modeladas e ruıdos
na leitura.
Este programa podera ser utilizado para a analise de robustez em diversos trabalhos
que estao sendo desenvolvidos no LACI - Laboratorio de Acionamento Controle e Instru-
mentacao do Centro de Tecnologia da UFRN, que utilizam o VS-APPC, VS-MRAC (Con-
trole Adaptativo por Modelo de Referencia e Estrutura Variavel) e DMARC (Controle em
Modo Dual Adaptativo Robusto), e compara-los com tecnicas de controle convencionais.
E tambem no ambiente academico, demonstrando adaptacao, robustez em algoritmos de
controle e as possıveis condicoes de operacao adversas encontradas no campo.
Outros algoritmos de controle poderao ser introduzidos ou modificacoes poderao ser
realizadas em qualquer parte do programa.65

Apendice D. Ambiente de Simulacoes 66
D.2 Apresentacao do Ambiente de Simulacoes
Este ambiente contem seis janelas. Na janela principal (Figura D.1) existem 4 paineis,
nestes o usuario especifica os parametros do sistema, os parametros da simulacao, introduz
e configura adversidades externas.
Para prosseguir no processo de simulacao o usuario deve apertar o botao “Next” na
parte inferior a direta das janelas.
Figura D.1: Janela Principal.
D.2.1 Parametros do Sistema
O sistema a ser simulado deve ser modelado, e o usuario deve encontrar a funcao de
transferencia ou os polos e zeros do processo. Assim o modelo da planta e introduzido no
programa atraves dos coeficientes da funcao de transferencia (esta deve ser no maximo de
segunda ordem), ou pelo valor dos polos e zeros (o maximo numero de polos e zeros sao
dois). O usuario deve especificar qual a ordem do sistema.

Apendice D. Ambiente de Simulacoes 67
A Figura D.2 mostra esse painel na janela principal.
Figura D.2: Parametros do Sistema
D.2.2 Parametros de Simulacao
No painel dos parametros de simulacao, o usuario deve informar o tempo de simulacao,
o perıodo de amostragem, o passo de integracao da simulacao, o valor inicial do sinal de
saıda. E importante observar que o perıodo de amostragem utilizado para o controlador
deve ser maior que o passo de integracao.
Alem disso, o usuario deve especificar o sinal de referencia. E possıvel ter como
referencia um sinal degrau, senoidal, degrau e senoidal juntos ou rampa. Os parametros
do sinal de referencia escolhido devem ser informados.
A Figura D.3 mostra o painel dos parametros da simulacao.
Figura D.3: Parametros de Simulacao

Apendice D. Ambiente de Simulacoes 68
D.2.3 Introducao de Adversidades
Neste ambiente, as adversidades externas sao dividas em dois grupos: perturbacoes
e outras adversidades. Na Figura D.4, o usuario escolhe se deseja introduzir uma per-
turbacao no sinal de controle e, ou no sinal de saıda da planta, se sim, qual o tipo de sinal
destas perturbacoes.
Os possıveis sinais sao: degrau, senoidal e degrau e senoidal juntos. Os parametros
destes sinais e o tempo em que a perturbacao ocorrera devem ser informados.
Figura D.4: Introducao de Perturbacoes.
Na Figura D.5, o usuario escolhe se deseja introduzir as seguintes adversidades: limitacao
do atuador, atraso de transporte, regiao de zona morta, variacoes parametricas, dinamica
nao modelada e ruıdos de leitura. O tempo em que a variacao parametrica ocorrera deve
ser informado.
Figura D.5: Introducao de Adversidades.
D.2.4 Opcoes de Algoritmos de Controle
Na segunda janela (Figura D.6), as opcoes de algoritmos de controle sao exibidas
dentro dos seguintes paineis: “PID Control”, “Adaptive Control” e “Robust Control with
Variable Structure”.

Apendice D. Ambiente de Simulacoes 69
Figura D.6: Opcoes de Algoritmos de Controle.
A escolha de um algoritmo em um painel acarreta na execucao de uma janela referente
a este painel onde o usuario informara os parametros do controlador.
O usuario pode escolher para simular apenas um ou ate todos os algoritmos de controle
presentes nesta janela.
D.2.5 Parametros dos Algoritmos de Controle
Em seguida, o usuario deve informar os parametros do controlador. As janelas relativas
ao “PID Control”, ao ”Adaptive Control” e ao “Robust Control with Variable Structure”,
podem ser vistas nas figuras D.7, D.8 e D.9, respectivamente.
Nas janelas “Adaptive Control” e “Robust Control with Variable Structure” encontra-
se, atualmente, apenas os parametros para realizar uma simulacao de uma planta de 1a
ordem. Apos informar todos os parametros, a simulacao e processada e a janela que
apresenta os resultados e executada.
D.2.6 Apresentacao dos Resultados
Os resultados das simulacoes sao exibidos na janela “Results” (Figura D.10). E possıvel
visualizar o sinal de saıda da planta, o sinal de controle e o sinal do erro entre a referencia

Apendice D. Ambiente de Simulacoes 70
Figura D.7: Controlador PID.

Apendice D. Ambiente de Simulacoes 71
Figura D.8: Controle Adaptativo.
Figura D.9: Controle Adaptativo Robusto com Estrutura Variavel.

Apendice D. Ambiente de Simulacoes 72
Figura D.10: Apresentacao dos Resultados.
e a saıda. Os valores limites dos eixos do resultado da simulacao podem ser modificados
em “Change the axes limits”.
O usuario podera implementar um algoritmo de controle simulado clicando no botao
com o nome do controlador e o programa armazenara em um arquivo os parametros do
controlador. O meio de comunicacao com o ambiente externo esta sendo estudado. Uma
possibilidade e a comunicacao utilizando a ferramenta Simulink do Matlab ou o software
Borland.
D.2.7 Orientacao ao Usuario
No ambiente de simulacao existem caixas de dialogo para ajudar na escolha dos
parametros e informar ao usuario os erros cometidos em todo processo. Um exemplo
de uma caixa de ajuda pode ser visto na Figura D.11.

Apendice D. Ambiente de Simulacoes 73
Figura D.11: Orientacao ao Usuario.

Bibliografia
[1] Bazanella, A. S. e Silva, Jr., J. M. G., “Sistemas de Controle: Princıpios e Metodos
de Projeto”, 1a edicao, Ed. da UFRGS, 2005.
[2] Astrom, K. J. e Wittenmark, B., “Adaptive Control”, Addison-Wesley Publishing
Company, Reading, Massachusetts, 1989.
[3] Ioannou, P. A. e Sun, J., “Robust Adaptive Control”, Prentice Hall, 1996.
[4] Utkin, V. I., “Sliding Modes and Their Application in Variable Structure Systems”,
Mir Publishers, Moscou, 1978.
[5] Sanchez-Pena, R. S. e Szanaier, M., “Robust Systems Theory and Applications”, John
Wiley e Sons, Inc., 1998.
[6] Blashcke, F., “The Principle of Field Orientation as Applied to the New Transvektor
Closed Loop Control System for Rotating Field Machines”, Siemens Review, Pag.
217-220, 1972.
[7] Vas, P., “Sensorless Vector and Direct Torque Control”, Oxford University Press,
1998.
[8] Jacobina, C.B., “Sistema de Acionamento Estatico de Maquina Eletrica”, Minicurso
COBEP, 8o Congresso Brasileiro de Eletronica de Potencia, Junho, 2005.
[9] Jacobina, C.B., Carvalho Jr., R.O., Correa, M.B.R., Lima, A.M.N., Silva, E. R.
C., “Digital Current Control of Unbalanced Three-Phase Power Electronic Systems”,
IEEE Power Electronics Specialists Conference, v.2, Pag. 767-772, 2000.
74

Referencias Bibliograficas 75
[10] Jacobina, C.B., Correa, M.B.R., Pinheiro, R. F., Silva, E. R. C., Lima, A.M.N.,
“Modeling and Control of Unbalanced Three-Phase Systems Containing PWM Con-
verters”, IEEE Transactions on Industry Application, v.37, n.6, Pag. 1807-1816,
2001.
[11] de la Sen, M., Ibeas-Hernandez, A. e Bilbao-Guillerna, A.,“A Pole-Placement Based
Scheme for Robustly Stable Adaptive Control of Continuous Linear Systems with Mul-
tiestimation”, 2005 IEEE International Symposium on Intelligent Control, Mediter-
rean Conference on Control and Automation, Pag. 1055-1061, 2005.
[12] Hussain, A., Zayed, A.S. e Smith,L.S., “A New Neural Network and Pole Placement
Based Adaptive Composite Controller”, IEEE INMIC, Pag. 267-271, 2001.
[13] Takagi, S. e Uchiyama, N., “Robust Control System Design for SCARA Robots Using
Adaptive Pole Placement”, IEEE Transactions on Industrial Electronics, v.52, Pag.
915-921, 2005.
[14] Cristi, R. e Healey, A.J., “Adaptive Identification and Control of an Autonomous
Underwater Vehicle”, Proceedings of the 6th International Symposium on Unmanned
Untethered Submersible Technology, Pag. 563-572, 1989.
[15] Youping, Z., “Direct Pole Placement Adaptive Control for Sinusoidal Signal Track-
ing”, American Control Conference, Pag. 561-565, 1999.
[16] Yu, Ker-Wei e Wu, Chen-En, “Tracking Control of a Ship by PI-type Sliding Con-
troller”, Journal of Marine Science and Technology, v.12, n.3, Pag. 183-188, 2004.
[17] Lu, Yu-Sheng, “Sliding-mode Controller design with Internal Model Principle for
Systems Subject to Periodic Signals”, American Control Conference, v.3, Pag. 1952-
1957, 2004.
[18] Silva, Jr., F. C., Araujo, A. D. e Oliveira, J. B., “A Proposal for a Variable Structure
Adaptive Pole Placement Control”, 8th International Workshop on Variable Structure
Systems, Barcelona-Espanha, 2004.

Referencias Bibliograficas 76
[19] Silva, Jr., F. C., “Uma Proposta de um Controlador Adaptativo por Posicionamento
de Polos e Estrutura Variavel”, Dissertacao de Mestrado, Universidade Federal do
Rio Grande do Norte, 2005.
[20] Silva, Jr., F. C. e Araujo, A. D., “Variable Structure Adaptive Pole Placement Con-
trol”, 44th IEEE Conference on Decision and Control, Sevilha-Espanha, Pag. 2859-
2864, 2005.
[21] Silva, Jr., F. C. e Araujo, A. D., “A Variable Structure Adaptive Pole Placement Con-
trol Applied to the Speed Control of a Three-phase Induction Motor”, VIII COBEP,
Recife-PE, Pag. 438-442, 2005.
[22] Silva, Jr., F. C. e Araujo, A. D., “Variable Structure Adaptive Pole Placement Control
Applied to the Speed Control of a Three-Phase Induction Motor”, 7th IFAC Sympo-
sium on Nonlinear Control Systems, Pretoria-Africa do Sul, Pag. 928-933, 2007.
[23] Ribeiro, R.L.A., Santos, M. B., Araujo, A. D., Jacobina, C. B. e Oliveira, A. C., “A
Non-Standard Robust Adaptive Stator Current Control Strategy for Induction Mo-
tor Drives”, 39th IEEE Power Electronics Specialists Conference, Orlando-Estados
Unidos, Pag. 2113-2119, Junho, 2007.
[24] Ribeiro, R.L.A., Santos, M. B., Araujo, A. D., Jacobina, C. B. e Oliveira, A. C.,
“Two Different Approaches for Robust Adaptive Stator Current Control Strategies for
Induction Motor Drives”, 42th IEEE Industry Application Society Annual Meeting,
New Orleans-Estados Unidos, Setembro, 2007.
[25] Santos, M. B. e Araujo, A. D., “Ambiente para Analise de Robustez de Algoritmos
de Controle”, VIII Simposio Brasileiro de Automacao Inteligente, Outubro, 2007.
[26] Bhattacharya, S.P., Chapellat, H. e Keel, L. H., “Robust Control: The Parametric
Approach”, Ed. Prentice Hall PTR, Edicao Har/Dsk, 1995.
[27] Bhattacharya, S.P. e Keel, L. H., “Data Driven Synthesis of Three Term Digital
Controllers”, Proceedings of 25th American Control Conference, Pag. 262-267, 2006.
[28] Dorf, R. C. e Bishop, R. H., “Modern Control Systems”, 9th ed., Prentice-Hall, Inc.,
New Jersey, 2001.
Referencias Bibliograficas 77
[29] Rohrs, C. E., Valavani, L. S., Athaus, M. e Stein, G., “Robustness of Continuous-
Time Adaptive Control Algorithms in the Presence of Unmodeled Dynamics”, IEEE
Transactions on Automatic Control, Vol. AC-30, n.9, Pag. 881-889, 1985.
[30] Kazmierkowski, M.P. e Malesani, L., “Current Control Techniques for Three-Phase
Voltage-Source PWM Convertes: a Survey”, IEEE Transactions on Industrial Appli-
cation, v.45, n.5, Pag. 601-703, 1998.
[31] Plunkett, B., “A Current Controlled PWM Transistor Inverter Drive”, In Conference
Rec. IAS, v.9, Pag. 785-792, 1979.
[32] Shyu,K., Lin,F., Shieh,H. e Juang,B., “Robust Variable Structure Speed Control for
Induction Motor Drive”, IEEE Transactions on Aerospace and Electronic Systems,
v.35, n.1, 1999.