automação e comando
TRANSCRIPT

AUTOMAÇÃO E COMANDO
Curso Profissional de
Técnico de Electrónica, Automação e Comando
1ª Edição: Julho de 2009
Luís Jerónimo

ÍndiceIntrodução� 1�
� �
Capítulo�1�–�Autómatos�Programáveis� 3�
� Iniciação�–�Apontamentos�para�CEFs� 4�
� Introdução�à�Automação� 19�
� � Questionário� 22�
� Teoria�–�Autómatos�CPM1A/2A�–�OMRON� 24�
� � Questionário� 32�
� Exemplos�de�Programação�(Funções�Básicas)� 35�
� Exemplos�de�Programação�(Blocos�Lógicos)� 42�
� Exemplos�de�Programação�(memória,�temporização,�contadores)� 48�
� CX�Programmer�–�Tutorial� 60�
� Exemplos�Práticos�de�Aplicação� 69�
� Trabalhos�de�Avaliação� 73�
� Tutorial�Trilogi� 81�
� Teste�Sumativo� 92�
� �
Capítulo�2:�Projectos�de�Automatismos�Sequenciais�(Grafcet)� 102�
� Método�Grafcet� 103�
� Projecto�Exemplo�“Parque�Estacionamento”�em�CX�Programmer� 114�
� Trabalhos�de�Avaliação� 139�
� Teste�Sumativo� 148�
� �
Capítulo�3:�Automatismos�Electromecânicos� 151�
� Relé� 152�
� � Questionário� 154�
� Contactor� 156�
� � Questionário� 158�
� Sensores�e�Detectores� 162�
� � Questionário�� 165�
� Montagens� 168�
� �

Capítulo�4:�Pneumática� 171�
� Introdução� 172�
Versão�1:�� Compressores� 173�
� � � Questionário� 179�
� � Actuadores�(Cilindros�e�Motores)� 182�
� � � Questionário� 184�
� � Válvulas� 187�
� � � Questionário� 190�
Versão�2:�� Compressores� 192�
� � � Questionário� 197�
� � Circuitos�de�Accionamento�de�Actuadores�Pneumáticos� 201�
� � Trabalhos�de�Laboratório� 206�
� � Introdução�à�Pneumática�(3)� 210�
� � Actuadores�Pneumáticos� 211�
� � Válvulas�Electropneumáticas� 213�
� � Accionamento�de�Actuadores�Pneumáticos� 217�
� � Trabalhos�de�Laboratório� 224�
� � Teste�Sumativo� 225�
� �
Recursos�Online� 229�
O�Autor� 231�
�

Automação�e�Comando� � Introdução�
�
INTRODUÇÃO��O� presente� livro� tenta� preencher� uma� lacuna� que� se� verifica� na� existência� de� manuais�
adequados�ao�Curso�Profissional�de�Técnico�de�Electrónica,�Automação�e�Comando.�
Com� o� lançamento� do� ensino� profissional� de� nível� 3,� secundário� (10º,� 11º� e� 12º� ano� de�
escolaridade),� em� 2006/2007,� constata�se� que� a� área� técnica� destes� cursos� é� muito�
abrangente�e�que,�assim,�não�existe�literatura�adaptada�à�sua�leccionação�e�aprendizagem.��
Os�livros�que�existem�no�mercado�sobre�os�temas�a�abordar�cobrem,�todos�eles�,�apenas�uma�
parte�de�uma�qualquer�disciplina�do�curso.�Por�outro�lado,�a�espera(nça)�que�possamos�ver�no�
futuro�algo�editado�que�corresponda�às�expectativas�e�necessidades�de�alunos�e�professores,�é�
muito�ténue,�devido�precisamente�à�estreiteza�de�mercado.�
Perante� este� panorama� e� com� base� na� nossa� experiência� de� professores� deste� curso,�
decidimos� avançar� para� a� elaboração� de� manuais� adaptados� à� necessidade� da� nossa�
escola/curso,�mas�que�poderão� ser�úteis� noutras� escolas�que�ministrem�o�mesmo� curso,� ou�
outro�similar,�em�que�alguns�dos�temas�aqui�tratados�também�façam�parte�do�seu�programa.�
Para� os� técnicos� que� laboram� diariamente� em� trabalhos� relacionados� com� alguma� das�
temáticas�por�nós�abordadas�e�para�o�público�curioso�em�geral�acerca�da�automação,�os�livros�
também�poderão�ser�de�alguma�utilidade.�
Lançámos�pois,�no�ano�lectivo�transacto,�dois�livros:�
�� Tecnologias� Aplicadas,� módulos� 1� a� 6� –� Curso� Profissional� de� Técnico� de� Electrónica,�
Automação�e�Comando�
�� Curso� Básico� de� Electrónica� Prática� –� Essencialmente� dedicado� à� construção� de� placas� de�
circuito� impresso,�profusamente� ilustrado,�com�metodologia�passo�a�passo,�abarcando�ainda�
outros�temas�da�electrónica�prática�como�as�ferramentas�a�usar,�cuidados�a�ter,�aparelhagem�
de�medida,�componentes,�etc.�
Publicamos�agora�este�livro,�cujo�conteúdo�é�maioritariamente�dedicado�ao�estudo�e�aplicação�
de� Autómatos� Programáveis� mas� que,� como� pretendemos� que� o� mesmo� seja� adoptado� na�
disciplina�de�Automação�e�Comando,�terá�também�capítulos�dedicados�aos:�
��Módulo�1�–�Automatismos�Industriais�(Relés�e�Contactores,�Força�Motriz);�
��Módulo�2�–�Pneumática�
O�grosso�do�livro,�todavia,�como�afirmámos,�centra�se�nos�autómatos�programáveis.�
Quanto�a�este�aspecto�há�que�salientar:�
��Todo�o�texto�do�livro�que�se�refere�a�aplicações�práticas�se�baseia�nos�autómatos�da�Omron,�
uma� vez� que� são� aqueles� que� temos� disponíveis� na� nossa� escola.� No� entanto,� como� a�
3

Automação�e�Comando� � Introdução�
�
abordagem�que�utilizamos�é�a�da�introdução�primordial�de�conceitos�teóricos�que�servirão�de�
sustentação�aos� trabalhos�práticos�a� realizar,�muito�do�que�aqui�é�explanado�é�utilizável�em�
autómatos� de� qualquer� marca� ou,� nalguns� casos,� sê�lo�á� após� algumas� pequenas�
transformações�e�adaptações�às�especificidades�dos�mesmos.�
��Sendo�esta�última�(a�aprendizagem�genérica�da�programação�de�autómatos)�a�nossa�intenção�
primordial,� desenvolvemos� no� nosso� livro� a� aprendizagem� da� utilização� de� um� software�
genérico�(independente�do�autómato�que�se�vá�usar).�
��O�objectivo�principal�das�nossas�aulas,�e�que�se�reflecte�na�presente�obra,�é�a�aprendizagem�
da�programação�dos�autómatos.�Neste�aspecto,�como�sabemos,�“para�saber�programar,�nada�
melhor�que�começar�a�programa”,�razão�pela�qual�privilegiámos�uma�abordagem�extensiva�da�
aprendizagem�através�de�problemas�práticos�que�os�alunos�têm�de�resolver�de�forma�o�mais�
autónoma� possível.� Como� consequência,� o� livro� está� pejado� desses� exemplos,� dos� quais�
tentamos�sempre�apresentar�o�respectivo�programa�(grafcet�e/ou�ladder),� fornecendo�ainda,�
no�fim�do�livro,�os�links�em�que�esses�programas�podem�ser�recolhidos.�
�� A� nível� de� software� utilizado,� para� além� do� já� citado� generalista� Trilogi,� usámos� ainda� o�
Syswin�e�o�CX�Programmer,�ambos�da�Omron,�sendo�este�último�o�software�que�é�utilizado�no�
dia�a�dia�de�trabalho�dos�programadores�de�autómatos�actuais.�
�� O� livro� inicia�se� com� uma� abordagem� básica� aos� autómatos� programáveis� e� à� sua�
programação,� sendo� que� esta� primeira� parte� foi� elaborada� tendo� em� atenção� o� Curso� de�
Educação�e�Formação�de�Electricista�de�Instalações,�nível�2,�que�também�ministramos.�
No� entanto� ela� aproveitará� a� todos� como� “porta� de� entrada”� neste�mundo�maravilhoso� da�
automação,� designadamente� da� programação;� Segue�se� depois� a� abordagem� mais�
desenvolvida�e�aprofundada�da�mesma�temática.�
��Tivemos�ainda�o�cuidado�de,�em�cada�capítulo,�correspondente�a�um�módulo�da�disciplina,�
incluir� vários� links� para� recursos� online� sejam� eles� vídeo�tutoriais,� vídeos� de� trabalhos�
efectuados� pelos� alunos,� representação� dos� programas� correspondentes� aos� trabalhos,� e�
mesmo�os�próprios�programas�para�download,�entre�outros.�
��No�final�de�cada�capítulo�existe�também�um�teste�de�avaliação�sobre�o�capítulo/módulo,�para�
além�dos�questionários�que�povoam�esses�mesmos�capítulos.�
��O�manual�estrutura�se�da�seguinte�forma:�
Capítulo�1:�Autómatos�Programáveis;�
Capítulo�2:�Programação�de�Autómatos�Programáveis�(Ladder);�
Capítulo�3:�Projectos�de�Automatismos�Industriais�(Grafcet);�
Capítulo�4:�Automatismos�Industriais�(Relés,�Contactores,�Força�Motriz);�
Capítulo�5:�Pneumática.�
4

Automação e Comando Capítulo 1: Autómatos Programáveis
�
Capítulo 1 � Autómatos Programáveis
o Iniciação – Apontamentos para CEFs o Introdução à Automação o Teoria – Autómatos CPM1A/2ª – OMRON o Exemplos de Programação o Tutorial CX-Programmer o Tutorial Trilogi
5

Automação e Comando Capítulo 1: Autómatos Programáveis
Iniciação – Apontamentos para CEFs
Autómatos Programáveis 1. Definição
São equipamentos destinados a controlar e comandar uma enorme variedade de circuitos eléctricos, quer de iluminação quer de força motriz (motores). Por exemplo, numa fábrica, todos os circuitos eléctricos podem ser comandados e controlados por autómatos programáveis. No caso da iluminação as lâmpadas podem ser ligadas e desligadas automaticamente, a horas diferentes, a iluminação de uma zona da fábrica pode ser reduzida a uma determinada hora, etc. No caso da força motriz, os autómatos podem controlar, sem presença humana, a velocidade de uma passadeira rolante contendo peças, o manuseamento dessas peças por robots, a montagem e embalagem das peças, o funcionamento de um elevador, etc. Esta flexibilidade consegue-se porque os autómatos são programáveis, isto é, como num computador, podemos gravar na sua memória a sequência de acções que pretendemos que ele faça. Depois de concluída a programação e ligados os equipamentos, é só correr o programa. 2. Objectivo
No nosso caso vamos aprender como programar o autómato, de forma a comandarmos a iluminação de uma escada de um prédio de 4 andares, mas de forma completamente flexível, ao contrário do que conseguimos com o automático de escada. Por exemplo, podemos querer que : - Por razões de economia, só acendam as lâmpada de 1 andar, à medida que a pessoa vai subindo as escadas e premindo o botão do andar respectivo; - Acendam as lâmpadas da metade dos andares correspondente ao botão premido, como fizemos através de 2 automáticos de escada; - O tempo de acendimento das lâmpadas de cada andar (ou grupo de andares) seja diferente; - Outras combinações. Sublinhe-se que esta flexibilidade ainda é acrescida de uma outra vantagem importante: Podemos alterar a forma como queremos que o circuito funcione, mexendo apenas no autómato, mais propriamente na sua programação, enquanto no caso dos circuitos clássicos teríamos de mexer também no circuito (ligar/desligar fios, montar/desmontar aparelhos, etc.) 3. Metodologia
- Aprender as Funções Básicas de programação do autómato, necessárias a que possamos atingir os nossos objectivos de comandar a iluminação da escada do prédio; - Programar essas funções no autómato; - Elaborar o programa de comando pretendido; - Testar o programa no autómato; - Aprender como se liga o autómato à aparelhagem do circuito (botões, lâmpadas, etc.); - Programar o autómato com o programa de comando pretendido;
6

Automação e Comando Capítulo 1: Autómatos Programáveis
- Experimentar. 4. Representação de um Programa/Circuito F N I L Nesta representação da derivação simples, para a lâmpada (L) acender (ON), temos de ligar (ON) o interruptor (I). Se o interruptor estiver desligado (OFF), como na figura, a lâmpada está apagada (OFF). Dizemos que o interuptor é a entrada do circuito e a lâmpada, a saída. Isto ainda não é um programa. Para colocar este circuito como um programa de autómato programável, temos 2 hipóteses: - Programação gráfica ou Ladder; - Programação com lista de instruções 5. Programação Gráfica / Ladder
00.01 01.07 Os “nomes” do interruptor e da lâmpada têm de obedecer às regras impostas pelo fabricante para as entradas e saídas. Entradas começam por 00.00 e podem ir até 00.15; as saídas começam por 01.00 e podem ir até 01.07 6. Programação com Lista de Instruções (do mesmo circuito) Endereço Instrução Operando 0000 LD 00.01 > Write 0001 OUT 01.07 > Write 0002 END > Write Para já, não nos preocupemos com os “ > Write ” que serão explicados adiante. 7. Funções Básicas 7.1 Função AND (“E”, em Português) Suponhamos que agora complicávamos um pouco o circuito. Pretendemos que a lâmpada só acenda se 2 interruptores estiverem ligados em simultâneo. Outra forma de dizer isto é que “pretendemos que a lâmpada acenda (ON) apenas quando o interruptor I1 e o interruptor I2 estiverem ligados (ON)”. A palavra chave na frase anterior é “e”, daí o nome da função.
7

Automação e Comando Capítulo 1: Autómatos Programáveis
a) Programação Gráfica (ou Ladder)
00.01 00.02 01.07
b) Programação com Lista de Instruções Endereço Instrução Operando 0000 LD 00.01 0001 AND 00.02 0002 OUT 01.07 0003 END 7.2. Função OR (“OU” em Português) Desta vez, vamos supor que queremos que a lâmpada acenda logo que um dos 2 interruptores do circuito seja ligado ou, dito de outra forma, que “a saída fique activada (ON) se o Interruptor 1 ou o Interruptor 2 forem activados/ligados (ON)”. Agora, a palavra chave é o “ou”, daí o nome desta função.
a) Programação Gráfica (ou Ladder)
00.01 01.07 00.02 b) Programação com Lista de Instruções Endereço Instrução Operando 0000 LD 00.01 0001 OR 00.02 0002 OUT 01.07 0003 END Apenas com estas 2 funções básicas, podemos construir uma infinidade de circuitos de controlo, através da associação de várias. Vejamos um exemplo:
8

Automação e Comando Capítulo 1: Autómatos Programáveis
Programação Gráfica ou Ladder
00.01 00.05 00.11 01.07 00.02 00.00 Serás capaz de escrever o programa ladder correspondente? Tenta, antes de ver a resolução: Programação com Lista de Instruções Endereço Instrução Operando 0000 LD 00.01 0001 OR 00.02 0002 LD 00.05 0003 LD 00.11 0004 OR 00.00 0005 AND LD 0006 AND LD 0007 OUT 01.07 0008 END Nota que há outras maneiras de efectuar este programa. Por exemplo: Endereço Instrução Operando 0000 LD 00.01 0001 OR 00.02 0002 LD 00.05 0003 AND LD 0004 LD 00.11 0005 OR 00.00 0006 AND LD 0005 OUT 01.07 0006 END Ou seja, cada vez que se faz um LD o autómato vai interpretá-lo como um bloco. Depois podemos fazer qualquer operação (AND ou OR) com os 2 últimos blocos definidos. Se usarmos o AND LD ou o OR LD é feita a operação com os 2 últimos blocos definidos e dá-se origem a um outro bloco, resultado dessa operação. 7.3. Entradas (ou Saídas) Negadas Até aqui temos trabalhado apenas com entradas e saídas não negadas. Isso corresponde, por exemplo no caso das entradas, a termos no circuito real, por exemplo, um interruptor Normalmente Aberto (NA). Quando escrevemos a instrução, o Autómato vai ler o estado real do Interruptor (ON ou OFF). Por vezes (por ex. quando temos um interruptor Normalmente Fechado (NF) ) pode-nos interessar ler a entrada (estado do interruptor) negada, isto é, se o interruptor estiver ON o Autómato lê OFF e
9

Automação e Comando Capítulo 1: Autómatos Programáveis
vice-versa. Vejamos como funciona, através de um exemplo que não é mais que a alteração do último exemplo que vimos:
a) Programação Gráfica ou Ladder
00.01 00.05 00.11 01.07 00.02 00.00 Serás capaz de escrever o programa ladder correspondente? Tenta, antes de ver a resolução: b) Programação com Lista de Instruções Endereço Instrução Operando 0000 LD 00.01 0001 OR 00.02 0002 LD 00.05 0003 LD NOT 00.11 0004 OR NOT 00.00 0005 AND LD 0006 AND LD 0007 OUT 01.07 0008 END Como vemos, basta acrescentar a instrução NOT na entrada a ser lida.
7.4. Temporizações Uma das componentes muito usada, e que vamos utilizar no nosso circuito de comando da iluminação de uma escada de um edifício de 4 andares, é a temporização. Para implementar uma temporização:
10

Automação e Comando Capítulo 1: Autómatos Programáveis
Programação Gráfica ou Ladder 00.00 00.01 HR15 TIM0 01.05 Repare-se que: a) A entrada 00.00 é um um interruptor ou botão de pressão que vamos usar para iniciar a temporização. b) O bloco KEEP é uma instrução que funciona como memória (pode estar ON ou OFF como resultado da nossa actuação em 00.00. Ele tem 2 entradas. 1 para pôr (a saída do) bloco a 1 ( a de cima) e outra para pôr o bloco a zero ( a de baixo). A saída do bloco KEEP é identificada, neste exemplo, por HR15. Existem outras que podemos usar se precisarmos. No nosso caso, o botão/entrada 00.00 serve para pôr o KEEP a 1 (ON) e a entrada 00.01 para o pôr a 0 (OFF). c) O bloco TIM0 faz a temporização pretendida. Como funciona por décimos de segundo, vamos ter de fornecer o nº de décimos de segundo que queremos, prcedido sempre pelo carácter #. No nosso caso queremos fazer uma temporização de 10 segundos ( = 100 décimos de segundo), por isso temos de indicar #100 d) Funcionamento do circuito/programa: Premimos a entrada/botão de pressão 00.00; Isso coloca o bloco KEEP a 1 (ON), ou seja coloca a 1 (ON) a sua saída HR15; Como HR15 funciona como entrada do bloco TIM0, nessa altura o bloco TIM0 começa a contar o tempo indicado (10 segundos); No final do tempo, a saída do temporizador (inicialmente a OFF) passa a ON e fica assim até o limparmos, o que se consegue actuando na sua entrada de Reset (no nosso caso a entrada 00.01), ficando então pronto pra nova temporização. Como TIM0 funciona como entrada da saída 01.05, ao fim dos 10 segundos (depois de premirmos o botão 00.00) a saída também fica activada (ON), por exemplo lâmpada acesa se ligarmos essa saída a uma lâmpada.
KEEP
HR15
TIM0
#0100
11

Automação e Comando Capítulo 1: Autómatos Programáveis
Está assim consumada a temporização. Neste caso usámos a temporização para ligar uma lâmpada ao fim de 10 segundos. b) Programação com Lista de Instruções LD 00.00 LD 00.01 KEEP HR 015 LD HR 015 TIM 00 #100 LD TIM 00 OUT 01.05 END 8. Comando da Iluminação das Escadas de Um Edifício de 4 Pisos Com aquilo que já vimos, estamos em condições de executar o nosso projecto de comando de um circuito de iluminação para de uma escada de um edifício de 4 pisos. E com uma flexibilidade total. Podemos, por exemplo, programar o autómato de modo a que: a) Sempre que se prime qualquer dos 4 botões de pressão (1 por piso), as lâmpadas acendem todas durante um determinado intervalo de tempo (ex: 1 minuto), ao fim do qual voltam a apagar-se; b) Quando se prime um dos botões dos 2 primeiros pisos, acendem apenas as lâmpadas referentes as esses pisos. O mesmo para para os 2 restantes pisos; c) Cada botão faça apenas acender a lâmpada correspondente a esse piso; d) O tempo em que cada lâmpada (ou grupo de lâmpadas) está aceso, seja diferente; e) Etc. A imaginação (e a necessidade) é o limite. Vamos mostrar de seguida como se implementa/programa uma dessas possíveis soluções:
12

Automação e Comando Capítulo 1: Autómatos Programáveis
Alternativa 1: Cada botão de pressão comanda apenas a lâmpada do seu piso a) Diagrama Ladder RC 00.00 TIM0 PRI 00.01 TIM 01 SEG 00.02 TIM 02 TER 00.03 TIM 03
HR 00 HR 01 HR 02 HR 03 HR 00 SRC 01.00 HR 01 SPRI 01.01
KEEP
HR 00
KEEP HR 01
KEEP
HR 02
KEEP
HR 03
TIM0
#0100
TIM1
#0100
TIM2
#0100
TIM3
#0100
13

Automação e Comando Capítulo 1: Autómatos Programáveis
HR 02 SSEG 01.02 HR 03 STER 01.03
Funcionamento do Circuito
Esta solução corresponde ao caso em que cada botão de cada andar (entradas 00.00, 00.01, 00.02 e 00.03) comandam apenas a lâmpada, ou lâmpadas, respeitantes ao seu andar. Assim, nesta implementação, o morador deveria premir o botão correspondente a cada andar por onde ia passando.
O tempo que cada lâmpada de cada andar está acesa pode ser definido independentemente, isto é, posso ter tempos diferentes para cada piso. No exemplo foi escolhido um tempo de acendimento igual para todas as lâmpadas – 10 segundos. Isso é denotado pelos #0100 explicitados em cada Temporizador. De salientar que o Autómato, no que toca a temporizadores, trabalha com a unidade décimo de segundo, isto é, para programarmos uma temporização de um segundo devemos escrever #0010 (10 unidades/décimos de segundo). Agora já se vê porque 10 segundos corresponde ao nosso #0100. Cada bloco KEEP funciona como uma memória. Como o arranque do circuito se dá através de um botão de pressão ( e não um interruptor que mantém a sua posição de fechado), é preciso que o sistema memorize que o botão já foi premido. Essa informação precisa ser memorizada, pois se o botão actuasse directamente no Temporizador (TIM) não se conseguia fazer a temporização pois estes TIM só realizam a temporização se a sua entrada estiver activa. Assim, quando actuamos no botão de pressão (mesmo que apenas momentaneamente), isso faz a saída do KEEP ficar ON (de forma permanente) – a entrada de cima do KEEP é a entrada de SET do KEEP (põe a sua saída a ON) - . Essa saída funciona como entrada do TIM e, como fica permanentemente ON, permite ao temporizador contar o tempo programado. Esta saída do KEEP também funciona como entrada das nossas lâmpadas, por isso estas acendem logo que o KEEP correspondente fica ON, isto é, logo que o botão de pressão é activado, como queremos. e ficam acesas por quanto tempo? Para isso temos de ver que no final da temporização o Temporizador ( a sua saída) passa a ON. Como esta saída funciona como entrada de Reset do KEEP, este é, nessa altura, posto OFF e, consequentemente, a lâmpada respectiva apaga-se. b) Lista de Instruções LD 00.00 LD TIM 00 KEEP HR 00 LD 00.01 LD TIM 01 KEEP HR 001
14

Automação e Comando Capítulo 1: Autómatos Programáveis
LD 00.02 LD TIM 02 KEEP HR 002 LD 00.03 LD TIM 03 KEEP HR 003 LD HR 000 TIM 00 #0100 LD HR 001 TIM 01 #0100 LD HR 002 TIM 02 #0100 LD HR 003 TIM 03 #0100 LD HR 000 OUT 01.00 LD HR 001 OUT 01.01 LD HR 002 OUT 01.02 LD HR 003 OUT 01.03 END 2ª Alternativa – Acendem todas as lâmpadas do edifício logo que qualquer botão de pressão é actuado Lista de Instruções LD 00.00 OR 00.01 OR 00.02 OR 00.03 LD TIM 00 KEEP HR 001 LD HR 001 TIM 00 #0100 LD HR 000 OUT 01.00 OUT 01.01 OUT 01.02
15

Automação e Comando Capítulo 1: Autómatos Programáveis
OUT 01.03 END Como exercício, desenhe o respectivo diagrama Ladder 3ª Alternativa – Os botões dos 2 primeiros pisos fazem acender as lâmpadas deses 2 primeiros pisos e os botões dos 2 últimos pisos fazem acender as lâmpadas desses 2 últimos pisos. Lista de Instruções LD 00.00 OR 00.01 LD TIM 00 KEEP HR 000 LD 00.02 OR 00.03 LD TIM 01 KEEP HR 001 LD HR 000 TIM 00 #0100 LD HR 001 TIM 01 #0100 LD HR 000 OUT 01.00 OUT 01.01 LD HR 001 OUT 01.02 OUT 01.03 END
16

Automação e Comando Capítulo 1: Autómatos Programáveis
9. Questões Práticas Para poderes inserir e testar estes programas, e todos os outros, no Autómato, há que ter em atenção os seguintes pontos: a) Inserir e Gravar o Programa a.1. Ao ligar o autómato, aparece no seu visor o pedido para inserir o password. Como o nosso não tem qualquer password inserido (veremos depois como se faz), devemos Premir sequencialmente as teclas: CLEAR > MONTR > CLEAR a.2. Colocar o Autómato no modo Program (há um selector para isso – tem 3 posições: Program / Monitor / Run) de modo a que possamos inserir e gravar o nosso programa. a.3. Limpar o autómato de outros programas que possa conter. Para isso, premir sequencialmente as seguintes teclas: CLEAR > PLAY/SET > NOT > REC/RESET > MONTR > CLEAR a.4. O Autómato mostra o endereço inicial da sua memória (0000), que é o endereço em que devemos, sempre, começar a escrever o nosso programa, isto é devemos escrever a 1ª instrução do programa na posição de memória 0000. a.5. Após escrevermos a 1ª instrução, premir a tecla WRITE. a.6. O autómato posiciona-se na posição de memória seguinte (0001), onde devemos, da mesma maneira, escrever a 2ª instrução do nosso programa, seguindo-se WRITE. a.7. Escrever as instruções seguintes do programa, concluindo sempre cada uma delas com a pressão na tecla WRITE. Esta tecla (WRITE) serve para que o Autómato grave na sua memória a instrução que acabámos de escrever. a.8. A instrução END serve para concluir o programa e deve ser, sempre, a última instrução de cada programa. Para a escrever, temos de: premir a tecla FUN > escrever 01 (código da instrução) > WRITE b) Testar o Programa Para testar o programa introduzido, devemos: b.1. Mudar o modo do Autómato de Program para RUN (quer dizer que vamos correr – run – o programa antes introduzido e gravado). b.2. Premir a tecla CLEAR para podermos ver o conteúdo dos endereços onde escrevemos o programa, e assim podermos ver o que está a acontecer com as entradas e/ou saídas. Podemos mudar o endereço do programa a observar através das teclas de direcção:
17

Automação e Comando Capítulo 1: Autómatos Programáveis
c) Ligar as Entradas e Saídas a Componentes concretos (Botões de Pressão, Lâmpadas, etc.) Entradas do circuito: Podem ser interruptores, botões de pressão, etc. São ligadas às entradas do autómato, que são identificadas por 000 a 011 (usando o nosso autómato como exemplo). Deve ter-se em atenção o COMUM (COM) de cada uma das entradas ou grupos de entradas a usar. A figura mostra a ligação de um interruptor à entrada 011 do autómato. Só se deve ligar o que está fora do rectângulo que representa o autómato. 24V DC 000 001 COM 002 . . . 010 011 COM Saídas do circuito: Podem ser lâmpadas, motores, etc. Devem ser ligadas às saídas do autómato (100 a 107). A figura mostra a entrada 100 ligada a uma lâmpada, usando o COMUM dessa saída; as saídas 104 e 105 ligadas cada uma delas a um motor, usando o COMUM do grupo de saídas 104 a 107. Como existem vários comuns, significa que podemos ligar saídas alimentadas a várias tensões (contínuas ou alternadas), como por ex. 220VAC, 24VDC, 24VAC, etc.
18

Automação e Comando Capítulo 1: Autómatos Programáveis
bobina 100 COM . . . 104 105 106 107 COM 220V 24V 24V
19

Automação e Comando Capítulo 1: Autómatos Programáveis
Ligação de Entradas e Saídas
20

Automação e Comando Capítulo 1: Autómatos Programáveis
INTRODUÇÃO À AUTOMAÇÃO Definição
A automação é a tecnologia relacionada com a aplicação de sistemas mecânicos, eléctricos e electrónicos, apoiados em meios computacionais, na operação e controlo dos sistemas de produção.
Objectivos Gerais da Automação
� Segurança – melhoria das condições de trabalho e de segurança das pessoas e bens. Exemplos em que automação protege as pessoas pois limita muito a
intervenção humana:
o Tarefas de perigo imediato – corte, prensagem, furação, etc.; o Tarefas de perigo a prazo – soldadura (com o consequente esforço
dos olhos) pintura (com a consequente inalação de gases); o Tarefas repetitivas – conduzem a estado de cansaço e de redução de
concentração. � Mercado – aumento da produtividade e da competitividade global do produto e
da empresa, para além do aumento da qualidade dos produtos, motivado pelo maior rigor das máquinas.
Objectivos Específicos da Automação:
o Diminuição dos custos; o Maior produtividade; o Maior flexibilidade; o Melhor qualidade; o Maior capacidade tecnológica; o Integração.
Componentes da Automação
o Accionamento – fornece o sistema de energia para atingir os objectivos. Exemplos: motores eléctricos ou pneumáticos, pistões hidráulicos, etc.
o Sensoriamento – mede o desempenho do sistema de automação ou mede a propriedade particular de algum elemento desse sistema, informando-o de modo a que este possa actuar em conformidade com os valores medidos pelos sensores. Exemplos: termopares para medição da temperatura, encoders para medição
da velocidade.
21

Automação e Comando Capítulo 1: Autómatos Programáveis
o Controlo – Utiliza a informação dos sensores para regular o accionamento. Exemplos: para manter o nível de água num reservatório, usamos um
controlador de fluxo que abre ou fecha uma válvula, de acordo com o consumo; Um robot requer um controlador para accionar o motor eléctrico que o movimenta.
o Comparador (ou elemento de decisão) – compara os valores medidos com valores preestabelecidos e toma a decisão de quando actuar o sistema. Exemplos: termóstatos, programas de computadores.
o Programas – contêm informações de processo e permitem controlar as interacções entre os diversos componentes.
Figura 1
22
Automação e Comando Capítulo 1: Autómatos Programáveis
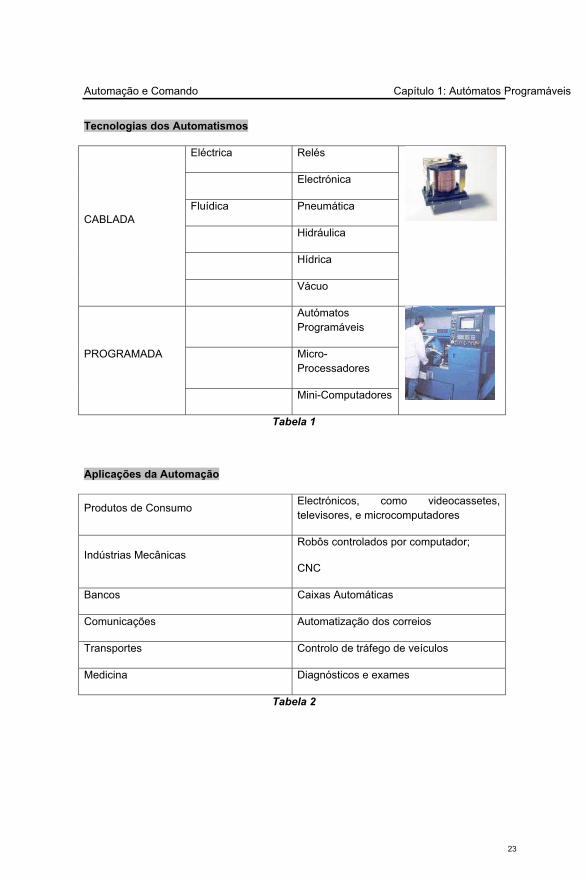
Tecnologias dos Automatismos
CABLADA
Eléctrica Relés
Electrónica
Fluídica Pneumática
Hidráulica
Hídrica
Vácuo
PROGRAMADA
Autómatos Programáveis
Micro-Processadores
Mini-Computadores
Tabela 1
Aplicações da Automação
Produtos de Consumo Electrónicos, como videocassetes, televisores, e microcomputadores
Indústrias Mecânicas Robôs controlados por computador;
CNC
Bancos Caixas Automáticas
Comunicações Automatização dos correios
Transportes Controlo de tráfego de veículos
Medicina Diagnósticos e exames
Tabela 2
23

Automação e Comando Capítulo 1: Autómatos Programáveis
Questionário:
1. O que entende por automação industrial?
_______________________________________________________________________________________________________________________________________________________________________________________________________________
2. Quais são os objectivos essenciais da automação?
__________________________________________________________________________________________________________________________________________
3. Explique em que medida a automação pode contribuir para a segurança dos trabalhadores.
____________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
4. Explique em que medida a automação pode contribuir para uma fábrica aumentar a sua produtividade.
____________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
5. Explique em que medida a automação pode contribuir para o aumento da qualidade dos produtos fabricados.
______________________________________________________________________________________________________________________________________________________________________________________________________________
6. Quais os elementos principais de um sistema de automação?
_______________________________________________________________________________________________________________________________________________________________________________________________________________
7. Tendo em atenção o esquema da figura 1, elabore um esquema equivalente mas para uma situação concreta: um sistema que enche um tanque de água através de uma bomba de água, que depois vai sendo consumida pelo sistema de refrigeração das máquinas da fábrica. Quando o tanque atinge um determinado nível (máximo) de água, a bomba pára a trabalhar; quando o tanque atinge um determinado nível (mínimo) de água, a bomba começa a trabalhar.
24

Automação e Comando Capítulo 1: Autómatos Programáveis
8. Quais as vantagens e desvantagens da automatização por tecnologia cablada relativamente à tecnologia programada?
____________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
9. Dê 5 exemplos de automatização usados no dia-a-dia, para além dos explicitados na tabela 2.
_________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
10. Suponha que uma oficina de reparação automóvel pretende automatizar uma parte dos seus processos. Dê 2 sugestões de automatização que possam ser usados e enquadre essas sugestões nas tecnologias dadas na tabela 1.
_________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
25

Automação e Comando Capítulo 1: Autómatos Programáveis
Teoria – Autómatos CPM1A/2A - OMRON Objectivos - Aprender a constituição dos autómatos CPM1A/2A, da OMRON, uma vez que são estes os modelos que temos na escola; - Conhecer os seus mapas de memória, modo de utilização com consola e usando software apropriado (Syswin e CX-Programmer); - Conhecer as instruções básicas do autómato (entradas e saídas, funções lógicas AND, OR e NOT, operações de memorização, operações de temporização, utilização de contadores, etc.) através de vários exemplos e exercícios práticos de programação em linguagem Ladder e Lista de Instruções; - Saber ligar as entradas e saídas do autómato perante uma situação prática concreta; - O capítulo é completado com um questionário e com diversos problemas para resolução/programação.
AUTÓMATOS CPM1A/2A - OMRON Podem ser programados através de:
� Consola em Linguagem de Lista de Instruções � Computador em Linguagem de Contactos (Ladder) ou em Lista de Instruções
Cada autómato pode ser expandido por módulos de forma a aumentar o número de entradas e saídas (E/S)
Figura 1 – Autómato CPM1A – 20 E/S
26

Automação e Comando Capítulo 1: Autómatos Programáveis
Memória dos Autómatos Está organizada por áreas Designação Código Descrição Bits Internos IR Podem memorizar estado de variáveis ou resultado
de equações, durante a execução do programa. São formados pelos bits de trabalho e pelos bits de E/S.
Bits Especiais SR Disponibilizam sinais de relógio, flags, estado do autómato.
Bits de Retenção HR Para guardar dados quando o autómato é desligado. Usam-se da mesma forma que os bits de trabalho.
Bits Auxiliares AR Funções similares aos SR Bits de Ligação LR Usados na comunicação com outros autómatos ou
como bits de trabalho. Temporizadores/ Contadores
TC Para se usarem como temporizadores ou contadores. Activam-se no final da temporização ou contagem.
Memória de Dados DM Para armazenar dados, entre os quais os programas.
Endereçamento da Memória Os bits localizados nas diferentes áreas da memória do autómato, são acedidos através de um endereço constituído pela indicação da área de memória e por um valor numérico que indica, dentro da área, o número da palavra e o número do bit. XXX YYY.ZZ XX - Indica a área YYY - Indica a palavra (2 ou 3 dígitos) ZZ - Indica o bit (00 a 15) Exemplo: 250 Significa a palavra nº 250 da área de memória SR 000.04 Significa o bit nº 4 da palavra nº 0 da área de memória IR HR 18.15 Significa o bit nº 15 da palavra nº 18 da área de memória HR Nota: no endereçamento de palavras das áreas IR e SR, estas não precisam de ser identificadas. Representa-se a seguir, como exemplo, a palavra IR 200 com os respectivos bits Bits 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0 Palavra IR 200 Valor 0 0 0 0 0 0 1 0 0 0 0 0 0 1 0 1 Neste exemplo, no endereço IR 200.00, IR 200.02 e IR 200.9, ou seja, nos bits 0, 2 e 9 da palavra IR 200 está guardado o valor lógico “1” e na palavra IR 200 está guardado o valor: 0000001000000101 A área DM só pode ser acedida por palavra.
27

Automação e Comando Capítulo 1: Autómatos Programáveis
Endereços dos Bits (CPM1A) Áreas de Memória Palavras Bits
Bits Internos
Bits de Entrada (Input bits)
IR 000 a IR 009 (10)
IR 000.00 a IR 009.15 (160)
Bits de Saída (Output bits)
IR 010 a IR 019 (10)
IR 010.00 a IR 019.15 (160)
Bits de Trabalho (Work bits)
IR 200 a IR 231 (32)
IR 200.00 a IR 231.15 (512)
Bits Especiais SR 232 a SR 255 (24)
SR 232.00 a SR 255.15 (384)
Bits de Retenção HR 00 a HR 19 (20)
HR 00.00 a HR 19.15 (320)
Bits Auxiliares AR 00 a AR 15 (16)
AR 00.00 a AR 15.15 (256)
Bits de Ligação LR 00 a LR 15 (16)
LR 00.00 a LR 15.15 (256)
Memória de Dados
Leirura/Escrita 1024 palavras DM 0000 a DM 1023
Só Leitura 456 palavras DM 6144 a DM 6599
Setup 56 palavras DM 6600 a DM 6655
Bits Temporários TR0 a TR7 (8)
Bits de Temporizadores/Contadores TIM/CNT 000 a TIM/CNT 127 (128)
28

Automação e Comando Capítulo 1: Autómatos Programáveis
Endereços dos Terminais de E/S A diferença destes bits em relação a todos os outros é que são acessíveis fisicamente (terminais) enquanto todos os outros só são acessíveis por programação. CPM1A CPUs
Nº E/S 10 E/S (6E/4S)
20 E/S (12E/8S)
30 E/S (18E/12S)
40 E/S (24E/16S)
Terminais das Entradas
000.00 a 000.05 (6E)
000.00 a 000.11 (12E)
000.00 a 000.11 (12E) 001.00 a 001.05 (6E)
000.00 a 000.11 (12E) 001.00 a 001.11 (12E)
Terminais das Saídas
010.00 a 010.03 (4S)
010.00 a 010.07 (8S)
010.00 a 010.07 (8S) 011.00 a 011.03 (4S)
010.00 a 010.07 (8S) 011.00 a 011.07 (8S)
Endereços dos Principais Bits/Palavras Especiais Bit Função 253.08 Bit que informa sobre defeito na bateria 253.13 Bit que está sempre ON 253.14 Bit que está sempre OFF
253.15 Bit que vai a “1” no 1º ciclo após ordem de execução do programa
254.00 Bit de relógio com T = 1 min (30 s em ON – 30 s em OFF)
254.01 Bit de relógio com T = 0,02 s (0,01 s em ON – 0,01 s em OFF)
255.00 Bit de relógio com T = 0,1 s (0,05 s em ON – 0,05 s em OFF)
255.01 Bit de relógio com T = 0,2 s (0,1 s em ON – 0,1 s em OFF)
255.02 Bit de relógio com T = 1 s (0,5 s em ON – 0,5 s em OFF)
255.03 Bit de erro de execução de instrução (ER)
255.05 Bit indicador de maior que (GR) (vai a ON se o resultado é maior)
255.06 Bit indicador de igual (EQ) (vai a ON se o resultado é igual)
255.07 Bit indicador de menor que (LE) (vai a ON se o resultado é menor)
250 Palavra que contém o valor digital do ponto de regulação analógico 0
29

Automação e Comando Capítulo 1: Autómatos Programáveis
251 Palavra que contém o valor digital do ponto de regulação analógico 1
Ligação das Entradas e Saídas
30

Automação e Comando Capítulo 1: Autómatos Programáveis
Instruções Básicas
Instrução Código
Significado Mnemónica Função
Load LD - Carrega um valor (início de uma rede ou um bloco)
Load Not LD NOT - Carrega um valor invertido (início negado de uma rede ou bloco)
And AND - Produto lógico (contacto série aberto) And Not AND NOT - Produto lógico negado (contacto série fechado) Or OR - Soma lógica (contacto paralelo aberto) Or Not OR NOT - Soma lógica negada (contacto paralelo
fechado) Not NOT - Negação de resultado And Load AND LD - Operação lógica And entre dois blocos Or Load OR LD - Operação lógica Or entre dois blocos Output OUT - Saída do resultado Output Not OUT NOT - Saída do resultado invertido Set SET - Coloca um bit no estdo “1” Reset RSET - Coloca um bit no estado “0” Timer TIM - Temporizador (0,1 s) Counter CNT - Contador No Operation
NOP 00 Sem operação (instrução nula)
End Program END 01 Fim do programa
Interlock IL 02 Encravamento Interlock Clear
ILC 03 Fim do encravamento
Keep KEEP 11 Bloco biestável Reversible Counter CNTR 12 Contagem ascendente e descendente
Differentiate Up DIFU 13
Na transição 0 � 1 de um bit é gerado, num scan, o valor lógico “1”
Differentiate Down DIFD 14
Na transição 1 � 0 de um bit é gerado, num scan, o valor lógico “1”
High-Speed Timer
TIMH 15 Temporizador rápido (0,01 s)
Compare CMP 20 Compara dois valores Move MOV 21 Transfere valor
31

Automação e Comando Capítulo 1: Autómatos Programáveis
Consola de Programação Modos de Operação
� Program � Monitor � Run
Program – O autómato está em repouso, não executa o programa, as saídas estão desactivadas. Utiliza-se este modo para escrever/editar o programa e para verificar erros de programação; Monitor – O autómato executa o programa que tem em memória, permitindo a monitorização e alteração dos dados. Este modo é usado na fase de teste e afinação do programa; Run – O autómato executa o programa que tem em memória, sendo possível a monitorização dos dados mas não é permitida a sua alteração. Funções das Teclas Teclas Numéricas (cor branca) Teclas numeradas de 0 a 9, usadas para introduzir endereços, dados constantes, etc. e, recorrendo à tecla SHIFT, valores alfanuméricos. Tecla CLR (cor vermelha) Tecla usada para cancelar a operação em curso e limpar o ecrã. Se for pressionada várias vezes permite obter a linha/endereço inicial “00000”. Teclas Operativas (cor amarela) Teclas usadas na edição do programa SRCH Procura instruções MONTR Visualizar estado do autómato ou valores de variáveis (monitorização) EXT Visualizar, em simultâneo, 3 palavras consecutivas no ecrã CHG Em modo Monitor permite alterar valores INS Inserir instruções DEL Apagar instruções WRITE Validar as linhas do programa � e � Deslocar o cursor para cima e para baixo Teclas de Instruções (cor cinzenta) Para inserir as instruções no programa: SHIFT Para aceder à indicação superior das teclas. Carregar em SHIFT, soltar e, depois, carregar na tecla pretendida. FUN Seleccionar uma função com código numérico CNT Contador TIM Temporizador CH Especifica uma palavra da área de memória do autómato CONT Especifica um bit (contacto) SFT Registo de deslocamento (Shift Register) # Especifica um constante numérica
32

Automação e Comando Capítulo 1: Autómatos Programáveis
* Especifica um endereçamento indirecto Como Programar o Autómato com a Consola Algumas operações com o Autómato 1. Preparar o autómato
� Seleccionar o modo Program � Colocar o autómato sob tensão � Deve aparecer no ecrã a seguinte indicação <PROGRAM>
PASSWORD! � Escreva a password CLR + MONTR + CLR
2. Limpar a Memória (modo Program)
� Premir a tecla CLR as vezes necessárias até se obter a linha/endereço inicial “00000”
� Premir, por ordem, as teclas SET + NOT + RESET + MONTR
3. Escrever o programa (modo Program)
� Seleccionar o modo Program � Premir a tecla CLR até se obter a primeira linha de programa, endereço
“00000” � Escrever o programa em lista de instruções, linha a linha, validando cada linha
com a tecla “WRITE”. � Terminar obrigatoriamente o programa com a instrução END (FUN 01)
4. Ir para uma linha do Programa
� Premir a tecla CLR até obter a linha/endereço inicial “00000” � Escrever o endereço da linha � Premir a tecla � � Premir a teclas de direcção �� para percorrer o programa
5. Inserir Instruções (modo Program)
� Posicionar-se na linha de instrução posterior à instrução a inserir � Escrever a nova instrução e premir a tecla INS � Premir a tecla � para validar a nova instrução
6. Apagar instruções (modo Program)
� Posicionar-se na linha de instrução que se pretende apagar � Premir a tecla DEL � Premir a tecla � para validar a instrução
7. Procurar Instruções (qualquer modo)
� Ir para a linha/endereço inicial “00000” � Escrever a instrução que se deseja encontrar e premir a tecla SRCH � Premir novamente a tecla SRCH para continuar a busca
33

Automação e Comando Capítulo 1: Autómatos Programáveis
8. Visualizar Estados ou Valores de Variáveis (qualquer modo)
� Se se pretender visualizar um contacto (bit) ou um canal (palavra), ir para a linha inicial “00000”, premir as teclas SHIFT + CONT ou SHIFT + CH, escrever o respectivo endereço e, de seguida, pressionar a tecla MONTR
� Para se visualizar valores de temporizadores (TIM), contadores (CNT) ou saídas (OUT), ir para a linha inicial “00000”, depois escrever TIM, CNT ou OUT, com o respectivo endereço e, de seguida, pressionar a tecla MONTR.
Questionário: 1. As duas formas de programar um autómato são através de: a) Computador e consola � b) Computador e ligação de fios � c) Computador e lista de instruções � 2. As duas linguagens de programação dos autómatos são: a) Consola e Computador � b) Lista de instruções e Consola � c) Lista de instruções e Ladder � 3. O autómato representado na figura 1 tem: a) 20 entradas e 20 saídas � b) 12 entradas e 8 saídas � c) 8 entradas e 12 saídas � 4. As entradas e as saídas do autómato são representadas internamente como a) Bits Internos (IR) � b) Bits de Ligação (LR) � c) Bits Especiais (SR) � 5. Se quisermos que alguns valores se mantenham mesmo que desliguemos e voltemos a ligar o autómato, esses valores devem ser guardados como a) Bits de Retenção (HR) � b) Bits Especiais (SR) � c) Bits Internos (IR) � 6. A zona da memória que utilizamos para escrever e guardar os programas chama-se a) Zona de bits internos � b) Zona de programação � c) Zona de memória de dados � 7. Qual o significado de (indique a área, a palavra, e o bit, quando o houver): a) 005.08 __________________________________________________________________________________________________________________________________________
34

Automação e Comando Capítulo 1: Autómatos Programáveis
b) 008 __________________________________________________________________________________________________________________________________________ c) 012.01 __________________________________________________________________________________________________________________________________________ d) IR230 __________________________________________________________________________________________________________________________________________ e) 244.15 __________________________________________________________________________________________________________________________________________ f) HR 18.14 __________________________________________________________________________________________________________________________________________ g) HR 00 __________________________________________________________________________________________________________________________________________ h) DM 1000 __________________________________________________________________________________________________________________________________________ i) TIM 000 __________________________________________________________________________________________________________________________________________ j) CNT 001 __________________________________________________________________________________________________________________________________________ 8. Quais os modos de operação do autómato que conhece? _______________________________________________________________________________________________________________________________________________________________________________________________________________ 9. Para inserir um programa no autómato, que modo de operação deve usar? _____________________________________________________________________ 10. Escreva, no autómato, o seguinte programa (antes, não se esqueça de preparar o autómato e limpar a sua memória; depois, coloque o bit de entrada 03 a “1” e o bit de entrada 05 a “0”): Endereço Instrução Observações 0000 LD 000.03 0001 OUT 010.02 0002 LD 000.05 0003 OUT 010.03 0004 SET 244.01 0005 SET HR 00.00 0006 RSET 244.01 0007 LD 000.03 0008 AND 000.05
35

Automação e Comando Capítulo 1: Autómatos Programáveis
0009 OUT 010.04 0010 END a) Quais os valores lógicos que espera encontrar, no fim de correr o programa, nas posições de memória:
� 000.03 ____________________________________________________ � 010.02 ____________________________________________________ � 000.05 ____________________________________________________ � 010.03 ____________________________________________________ � 244.01 ____________________________________________________ � HR 00.00 ____________________________________________________ � 010.04 ____________________________________________________
b) Confirme os valores que indicou na alínea anterior, por inspecção do autómato, e indique o modo de confirmação que usou para cada caso (junte os casos em que o método de confirmação/inspecção utilizado foi o mesmo) c) Insira, entre as instruções escritas nos endereços 0006 e 0007, a seguinte instrução: …. SET LR 01 d) Apague a instrução …. RSET 244.01 e) Transcreva o programa que tem carregado, neste momento, no autómato: Endereço Instrução Observações 0000 0001 0002 0003 0004 0005 0006 0007 0008 0009 0010
36

Automação e Comando Capítulo 1: Autómatos Programáveis
EXEMPLOS DE PROGRAMAÇÃO A – Circuitos Lógicos com Bits
A.1. – Funções Lógicas Básicas
A.1.1. – Função AND (“E”)
Neste caso, a saída só assume o valor “1” (activa) quando todas as entradas estiverem a “1” (ligadas).
a) LADDER
b) Lista de Instruções
Endereço Instrução Operando Observações
0000 LD 000.00
0001 AND 000.01
0002 OUT 010.01
0003 END
A.1.2. – Função OR (“OU”)
Neste caso, a saída assume o valor “1” (activa) quando, pelo menos uma das entradas estiver a “1” (ligada).
a) LADDER
37

Automação e Comando Capítulo 1: Autómatos Programáveis
b) Lista de Instruções
Endereço Instrução Operando Observações
0000 LD 000.00
0001 OR 000.01
0002 OUT 010.01
0003 END
A.1.2. – Função NOT (“NÃO / NEGAÇÃO”)
Neste caso, a saída assume o valor “1” (activa) quando a entrada estiver a “0” e vice-versa. Ou seja, a entrada é lida negada, isto é, com o valor contrário àquele que efectivamente tem.
a) LADDER
b) Lista de Instruções
Endereço Instrução Operando Observações
0000 LD NOT 000.00
0002 OUT 010.01
0003 END
Exercícios:
1. Circuito que lê o valor da entrada e passa esse valor para a saída
a) LADDER
38

Automação e Comando Capítulo 1: Autómatos Programáveis
b) Lista de Instruções
Endereço Instrução Operando Observações
0000 LD 000.00
0001 OUT 010.00
0002 END
Nota: Este circuito funciona como uma derivação simples com uma lâmpada
2. Circuito que passa o valor de uma entrada para duas saídas independentes
a) LADDER
b) Lista de Instruções
Endereço Instrução Operando Observações
0000 LD 000.00
0001 OUT 010.00
0002 OUT 010.01
0003 END
Nota: Este circuito funciona como uma derivação simples, com duas lâmpadas
3. Circuito que activa uma saída se uma das entradas estiver ligada e a outra desligada
a) LADDER
39

Automação e Comando Capítulo 1: Autómatos Programáveis
b) Lista de Instruções
Endereço Instrução Operando Observações
0000 LD 000.00
0001 AND NOT 000.01
0002 OUT 010.00
0003 END
4. Circuito que activa uma saída se, pelo menos, uma de duas entradas estiver ligada (circuito ou)
a) LADDER
b) Lista de Instruções
Endereço Instrução Operando Observações
0000 LD 000.00
0001 OR 000.01
0002 OUT 010.00
0003 END
Nota: Este circuito funciona como um comando de uma lâmpada a partir de dois locais diferentes; ou de um motor a partir de dois locais diferentes.
40

Automação e Comando Capítulo 1: Autómatos Programáveis
5. Circuito em que a saída é um relógio, com período de 1 s, comandado por uma entrada
a) LADDER
b) Lista de Instruções
Endereço Instrução Operando Observações
0000 LD 000.00
0001 AND 255.02
0002 OUT 010.00
0003 END
6.
a) LADDER
b) Lista de Instruções
Endereço Instrução Operando Observações
0000 LD 000.00
0001 OR 000.01
0002 AND NOT 000.02
0003 AND 000.03
0004 OUT 010.00
0005 END
41

Automação e Comando Capítulo 1: Autómatos Programáveis
7.
a) LADDER
b) Lista de Instruções
Endereço Instrução Operando Observações
0000 LD NOT 000.00
0001 OR 000.01
0002 OR NOT 000.02
0003 AND 000.03
0004 AND NOT 000.04
0005 OUT 010.00
0006 OUT 010.01
0007 OUT 010.02
0008 END
8.
a) LADDER
42

Automação e Comando Capítulo 1: Autómatos Programáveis
b) Lista de Instruções
Endereço Instrução Operando Observações
0000 LD 000.00
0001 AND NOT 000.01
0002 OR 000.02
0003 OR 000.03
0004 AND 000.04
0005 OUT 010.00
0006 AND 000.05
0007 OUT 010.01
0008 END
43

Automação e Comando Capítulo 1: Autómatos Programáveis
EXEMPLOS DE PROGRAMAÇÃO B – Blocos Lógicos
Quando o circuito lógico começa a complicar-se, a melhor maneira para passar de Ladder para Lista de Instruções é formar blocos lógicos mais simples e depois agrupá-los com instruções que se destinam a isso mesmo.
As instruções que se utilizam para agrupar blocos lógicos são:
AND LD e
OR LD
Ambas fazem a junção dos dois últimos blocos carregados, a primeira aplica-lhes um “e” lógico (os blocos estão em série), e a segunda um “ou” lógico (os blocos estão em paralelo), ficando esses dois blocos reduzidos a um bloco.
Depois, se houver mais blocos carregados anteriormente, tem de se aplicar novamente a instrução, e assim sucessivamente até se terem agrupado todos os blocos previamente carregados.
O número máximo de blocos que se podem agrupar desta forma é de 8.
Vejamos alguns exemplos para se perceber melhor:
1.
1.1 Ladder (Diagrama de Contactos)
44

Automação e Comando Capítulo 1: Autómatos Programáveis
1.2 Lista de Instruções
Endereço Instrução Operando Observações
0000 LD 000.00 Carrega a primeira entrada (1º bloco)
0001 LD 000.01 Carrega a 2ª entrada (início de 2º bloco)
0002 AND 000.02 Carrega a 3ª entrada (fim do 2º bloco)
0003 OR LD Agrupa as instruções que, assim, formam o 2º bloco
0004 OUT 010.00 Envia valor para a saída
0005 END Termina o programa
2.
2.1 Ladder (Diagrama de Contactos)
2.2 Lista de Instruções
Endereço
Instrução Operando
Observações
0000 LD 000.00 Carrega a primeira entrada (início do 1º bloco)
0001 AND NOT 000.01 Carrega a 2ª entrada (fim do 1º bloco)
0002 LD NOT 000.02 Carrega a 3ª entrada (início do 2º bloco)
0003 AND 000.03 Carrega a 4ª entrada (fim do 2º bloco)
0004 OR LD Junta os dois blocos, formando um outro bloco
45

Automação e Comando Capítulo 1: Autómatos Programáveis
(3º)
0005 LD 000.04 Carrega a 5ª entrada (início do 4º bloco)
0006 AND 000.05 Carrega a 6ª entrada (fim do 4º bloco)
0007 OR LD Junta os dois blocos (3º e 4º) formando o bloco final
0008 OUT 010.00 Envia resultado para a saída
0009 END Termina o programa
Ou
Endereço
Instrução Operando
Observações
0000 LD 000.00 Carrega a primeira entrada (início do1º bloco)
0001 AND NOT 000.01 Carrega a 2ª entrada (fim de 1º bloco)
0002 LD NOT 000.02 Carrega a 3ª entrada (início do 2º bloco)
0003 AND 000.03 Carrega a 4ª entrada (fim do 2º bloco)
0004 LD 000.04 Carrega a 5ª entrada (início do 3º bloco)
0005 AND 000.05 Carrega a 6ª entrada (fim do 3º bloco)
0006 OR LD Junta os dois últimos blocos carregados (o 2º e o 3º), formando um novo bloco (4º)
0007 OR LD Junta este último bloco (4º) com o 1º, formando o bloco final
0008 OUT 010.00 Envia resultado para a saída
0009 END Termina o programa
46

Automação e Comando Capítulo 1: Autómatos Programáveis
3.
3.1 Ladder (Diagrama de Contactos)
3.2 Lista de Instruções
Endereço Instrução Operando Observações
0000 LD 000.00 Carrega a primeira entrada (1º bloco)
0001 LD 000.01 Carrega a 2ª entrada (início de 2º bloco)
0002 AND 000.02 Carrega a 3ª entrada (fim do 2º bloco)
0003 OR LD Agrupa as instruções que, assim, formam o 2º bloco
0004 OUT 010.00 Envia valor para a saída
0005 END Termina o programa
Ou
Endereço Instrução Operando Observações
0000 LD 000.00 Carrega a primeira entrada (início do1º bloco)
0001 OR 000.01 Carrega a 2ª entrada (fim do 1º bloco)
0002 LD 000.02 Carrega a 3ª entrada (início do 2º bloco)
0003 OR 000.03 Carrega a 4ª entrada (fim do 2º bloco)
0004 AND LD Junta os dois blocos, formando um outro (3º)
0005 LD 000.04 Carrega a 5ª entrada (início do 4º bloco)
47

Automação e Comando Capítulo 1: Autómatos Programáveis
0006 OR 000.05 Carrega a 6º entrada (fim do 4º bloco)
0007 AND LD Junta os dois últimos blocos (3º e 4º), formando o bloco final
0008 OUT 010.00 Envia resultado para a saída
0009 END Termina o programa
4.
4.1 Ladder (Diagrama de Contactos)
4.2 Lista de Instruções
Endereço
Instrução Operando
Observações
0000 LD 000.00
0001 LD 000.01
0002 AND 000.02
0003 OR LD
0004 LD 000.03
0005 OR 000.04
0006 AND LD
0007 AND NOT 000.05
0008 OUT 010.00
0009 END
48

Automação e Comando Capítulo 1: Autómatos Programáveis
5.
5.1 Ladder (Diagrama de Contactos)
5.2 Lista de Instruções
Endereço
Instrução Operando
Observações
0000 LD 000.00
0001 LD NOT 000.01
0002 LD NOT 000.02
0003 OR 000.03
0004 AND LD
0005 OR LD
0006 AND NOT 000.04
0007 OUT 010.00
0008 END
49

Automação e Comando Capítulo 1: Autómatos Programáveis
INSTRUÇÕES SET/RESET E KEEP
1. Arranque e paragem de um motor, usando as instruções Set/Reset
As instruções Set e Reset permitem manipular o estado de um bit: Set põe esse bit a “1” e Reset põe o bit operando a “0”.
Diagrama de Contactos
Lista de Instruções
Endereço Instrução Operando Observações
0000 LD 000.01
0001 SET 010.00
0002 LD 000.00
0003 RSET 010.00
0004 END
2. Exemplo igual ao anterior mas usando a instrução KEEP (Fun 11)
Marcha
Paragem
Motor
Motor
50

Automação e Comando Capítulo 1: Autómatos Programáveis
Lista de Instruções
Endereço Instrução Operando Observações
0000 LD 000.01
0001 LD 000.00
0002 KEEP 010.00
0003 END
3. Exemplo igual aos anteriores mas usando operadores lógicos básicos e fazendo uso da realimentação através do contacto 010.00. No exemplo usa-se, no botão de marcha, uma instrução que detecta o flanco ascendente do contacto (DIFU)
Lista de Instruções
Endereço Instrução Operando Observações
0000 LD 000.01
0001 DIFU 000.01
0002 LD 000.01
0003 OR 010.00
51

Automação e Comando Capítulo 1: Autómatos Programáveis
0004 AND NOT 000.00
0005 OUT 010.00
0006 END
TEMPORIZADORES – TIM e TIMH (Fun 15)
O CPM 1ª tem dois tipos de temporizadores:
Os TIM – permitem programar temporizações com valores entre 0,1 s e 999,9 s
Os TIMH – permitem programar temporizações com valor entre 0,01 e 99,99 s
Funcionamento
Os temporizadores são sempre antecedidos por uma condição lógica
Quando essa condição se verifica, o temporizador começa a contar
Ele conta diminuindo o valor que o utilizador carregou (#xxxx), até zero
Quando atinge zero, o contacto desse temporizador, fecha, isto é toma o valor “1”
Logo que a condição lógica referida volte a “0”, o temporizador também volta a “0” e o seu contacto abre.
52

Automação e Comando Capítulo 1: Autómatos Programáveis
Exemplo 1:
Temporizador com atraso à operação (temporizador ao trabalho) que vai a “1” 5 segundos após se ligar a condição de comando (000.00).
Ladder
Lista de Instruções
Endereço Instrução Operando Observações
0000 LD 000.00
0001 TIM 010 #0050
0002 LD TIM 010
0003 OUT 010.00
0004 END
53

Automação e Comando Capítulo 1: Autómatos Programáveis
2. Temporizador com atraso à desoperação (temporizador ao repouso), que desliga a saída (010.00) 3 s após se desligar a entrada (000.00).
Ladder
Lista de Instruções
Endereço Instrução Operando Observações
0000 LD 000.01
0001 LD TIM 001
0002 KEEP 010.00
0003 LD NOT 000.00
0004 TIM 001 #0030
0005 END
54

Automação e Comando Capítulo 1: Autómatos Programáveis
3. Temporizador que gera um impulso com a duração de 1 s, após se aplicar na entrada de comando um flanco ascendente.
Ladder
Lista de Instruções
Endereço Instrução Operando Observações
0000 LD 000.00
0001 OR 010.00
0002 TIM 005 #0010
0003 AND NOT TIM 005
0004 OUT 010.00
0005 END
55

Automação e Comando Capítulo 1: Autómatos Programáveis
4. Temporizador que efectua uma temporização de 20 minutos
Ladder
Lista de Instruções
Lista de Instruções
Endereço Instrução Operando Observações
0000 LD 000.00
0001 TIM 010.00
0002 AND 000.00
0003 TIM 010.00
0004 LD TIM 001
0005 OUT 010.00
56

Automação e Comando Capítulo 1: Autómatos Programáveis
0006 END
CONTADORES – CNT e CNTR (Fun 12)
Os contadores CNT efectuam contagens a partir de um valor inicial, carregado pelo utilizador, até zero.
Os contadores CNTR podem efectuar contagens descendentes ou ascendentes.
O valor limite de ambos os contadores é 9999.
O contador CNT tem 2 entradas:
- Entrada de contagem: sempre que ocorrer um impulso ascendente nesta entrada, o valor do contador é decrementado. Quando esse valor chegar a zero, o contacto associado a esse contador (CNT n) é posto a “1”
- Entrada de Reset: sempre que esta entrada for posta a “1”, o valor do contador é posto no valor inicial carregado pelo utilizador, e o contacto CNT n é posto a “0”
O Contador CNTR (Fun 12) tem 3 entradas
Entrada de contagem ascendente (Up)
Entrada de contagem descendente (Down)
Entrada de Reset
O funcionamento é idêntico ao anterior
57

Automação e Comando Capítulo 1: Autómatos Programáveis
Exemplos:
1. Contador que activa uma saída quando o valor da contagem for igual a 5
Ladder
Lista de Instruções
Endereço Instrução Operando Observações
0000 LD 000.00
0001 LD 000.01
0002 CNT 001 #0005
0003 LD CNT 001
0004 OUT 010.00
0005 END
58

Automação e Comando Capítulo 1: Autómatos Programáveis
2. Contador que activa uma saída quando a contagem for igual a 5 e, após um corte da alimentação com o autómato em Run ou alteração do modo de operação de Program para Monitor/Run, o contador é carregado com o valor pré-definido.
Ladder
Lista de Instruções
Endereço Instrução Operando Observações
0000 LD 000.00
0001 LD 253.15
0002 CNT 001 #0005
0003 LD CNT 001
0004 OUT 010.00
0005 END
59

Automação e Comando Capítulo 1: Autómatos Programáveis
3. Contador reversível (CNTR) que activa uma saída de forma intermitente quando o valor da contagem for igual a 6.
Ladder
Lista de Instruções
Endereço Instrução Operando Observações
0000 LD 000.00
0001 LD 000.01
0002 LD 000.02
0003 CNTR 002 #0005
0004 LD CNT 002
0005 AND 255.02
0006 OUT 010.00
0007 END
60

Automação e Comando Capítulo 1: Autómatos Programáveis
4. Temporização de 10 s, com retenção do tempo decorrido, mesmo no caso de existir uma falha de alimentação no autómato ou alteração do modo de operação de Program para Monitor/Run.
Ladder
Lista de Instruções
Endereço Instrução Operando Observações
0000 LD 255.02
0001 LD 000.00
0002 CNT 012 #0010
0003 LD CNT 012
0004 OUT 010.00
0005 END
61

Automação e Comando Capítulo 1: Autómatos Programáveis
Tutorial CX-Programmer Objectivo Aprender a trabalhar com o software CX-Programmer que permite a simulação mesmo sem termos o autómato e, depois, quando testado, descarregado para o autómato para implementação prática. O tutorial é composto por: - Introdução à utilização do software – utilização de entradas e saídas - Utilização de relés (memorização) - Utilização de Temporizadores - Utilização de Contadores - Exemplos práticos de Programas – feitos nas aulas (Iluminação: comutação de escada com botões de pressão; comutação de escada com botões de pressão usando contadores; Força-Motriz: arranque directo de motor; encravamento simples; encravamento duplo; arranque sequencial de motores; inversão de marcha; arranque estrela-triângulo. Este tutorial é complementado com a sua versão vídeo-screencast que pode ser vista em: Introdução ao CX-Programmer: http://www.screencast-o-matic.com/watch/cQVFQMndG Temporizadores no CX-Programmer: http://www.screencast-o-matic.com/watch/cQVqjpnKI Contadores no CX-Programmer: http://www.screencast-o-matic.com/watch/cQVqjQnK6 Ou http://www.youtube.com/watch?v=egp_RDSqHkA&feature=channel_page Os ficheiros programa correspondentes podem ser descarregados a partir de: Exemplos 1. Arranque directo de motor http://www.profelectro.info/Uploads/luisj/arranqueDirecto.cxp�2. Comutação de Escada com botões de pressão (usando contadores) http://www.profelectro.info/Uploads/luisj/CEscadaComContadoreseBotoes.cxp�3. Código de trinco/porta com 3 botões e mais um de Reset http://www.profelectro.info/Uploads/luisj/codigoPorta.cxp�4. Comutação de Escada com interruptores http://www.profelectro.info/Uploads/luisj/comutacaoEscada.cxp�5. Encravamento duplo entre 2 motores http://www.profelectro.info/Uploads/luisj/encravamentoDuplo.cxp�6. Encravamento simples entre dois motores http://www.profelectro.info/Uploads/luisj/encravamentoSimples.cxp�7. Arranque estrela-triângulo http://www.profelectro.info/Uploads/luisj/estrelaTriangulo.cxp�8. Inversão de marcha de motor
62

Automação e Comando Capítulo 1: Autómatos Programáveis
http://www.profelectro.info/Uploads/luisj/InversaoMarcha.cxp�9. Arranque sequencial de motores http://www.profelectro.info/Uploads/luisj/Sequenciais.cxp� Introdução Este tutorial foi escrito com o intuito de fornecer as indicações básicas para que os alunos do Curso Profissional de Electrónica, Automação e Comando da Escola Secundária Alfredo da Silva pudessem testar os seus programas para Autómatos Programáveis. Os autómatos programáveis que temos na nossa escola são: Modelo CPM1A – 4 Modelo CPM2A – 3 As razões porque se julgou pertinente a utilização deste software específico, foram:
� O número de autómatos existentes na nossa oficina não é suficiente para manter todos os alunos / grupos a trabalhar;
� O software que temos instalado em 3 dos computadores da oficina é o Syswin, que é um software da OMRON já obsoleto e que não permite a simulação dos programas; sem que primeiro se passem para o autómato, enquanto o CX-Programmer o permite.
� É de toda a utilidade os alunos praticarem com software actual; � É de toda a utilidade que esses testes / estudo possam ocorrer na escola e/ou
em casa dos alunos, sem necessidade de possuírem um autómato. Nota: Apesar de os autómatos que temos serem da família CPM e o CX-Programmer os contemplar, não fomos capazes de testar virtualmente os programas elaborados com / para esse autómato. A solução adoptada foi a utilização de autómatos de outras famílias (CS1H), que apesar de ligeiras diferenças, é praticamente igual, pelo menos nas instruções que precisámos. 1. Escolher o modelo do autómato Depois de abrir a aplicação, procedemos à escolha do Tipo de Autómato. De acordo com as limitações que indicámos na nota acima, escolhemos o Device Type: CS1H PLC >> Change PLC >> Device Type: CS1H Se quiserem podem dar-lhe um nome.
63

Automação e Comando Capítulo 1: Autómatos Programáveis
2. Área de Trabalho / Programação A área de trabalho, que entretanto aparece, é a que mostramos a seguir
3. Escrita do Programa Escrevemos o programa em linguagem ladder usando os elementos / instruções que estão presentes na barra de ferramentas. Ver figura abaixo com essa área indicada
Nota: A tecla de função é a
64

Automação e Comando Capítulo 1: Autómatos Programáveis
4. Exemplo de programa terminado Ligação de uma saída com um botão para ligar e outro para desligar essa saída.
5. Simulação do programa Menu Simulation >> Work Online Simulator A aplicação compila o programa que escrevemos (a compilação pode ser feita à priori em Program >> Compilation). Se houver erros na zona inferior do ecrã eles aparecem registados.
Mesmo quando estamos a escrever o programa a área de trabalho onde o estamos a fazer vai-nos dando indicações de erros através da cor vermelha, embora não saibamos que erro se trata. Para isso temos mesmo que compilar. No caso da figura a seguir o erro (vermelho) indica que aquela rede ainda não está completa, e se compilarmos o programa assim, ele indica-nos esse erro.
Quando a compilação não originar erros estamos prontos para simular o comportamento do programa.
65

Automação e Comando Capítulo 1: Autómatos Programáveis
6. Simulação Pelo menos nos programas mais básicos, que são aqueles que num curso de iniciação elaboramos, o que queremos frequentemente é saber o comportamento das saídas (lâmpadas, motores) de acordo com o comportamento das entradas. Então basta clicar em cada uma das entradas que queremos estudar e forçá-las a tomar o valor ON ou OFF e observar o comportamento do circuito e das saídas.
66

Automação e Comando Capítulo 1: Autómatos Programáveis
Tudo o que está activo fica bordejado de verde. Tudo o resto fica na mesma.
Por exemplo, no caso acima, vemos que ao forçar o botão 1 (botão de ligar) a ficar ON, a saída também fica ON (ligada), o que se vê através da cor verde que a cobre. Para parar a simulação e voltar ao modo editor para podermos continuar a escrever o nosso programa ou emendar alguma coisa, basta clicar de novo em Menu Simulation >> Work Online Simulator
67

Automação e Comando Capítulo 1: Autómatos Programáveis
Adendas: 1. Podemos também programar em lista de instruções (ou vê-las depois de termos programado em ladder), bastando clicar no botão
Ou fazer Menu View >> Mnemonics.
Para voltar a edição em ladder clico no botão
Ou faço Menu View >> Diagram 2. Para inserir uma nova linha no programa Basta ir para o fim da linha anterior àquela onde quero acrescentar abaixo outra linha (posicionar o cursor do rato na linha e clicar na tecla End do teclado do computador) e depois fazer Enter. Ou então Posicionar o cursor do rato na linha e fazer Menu Insert >> Row E é inserida uma linha abaixo. Nota: as linhas que ficarem a mais, o programa elimina-as automaticamente. 3. Se quisermos adicionar uma nova rede Menu Insert >> Rung >> Below (abaixo) ou Above (acima) E é inserida uma rede abaixo ou acima daquela onde nos encontramos.
68
Automação e Comando Capítulo 1: Autómatos Programáveis
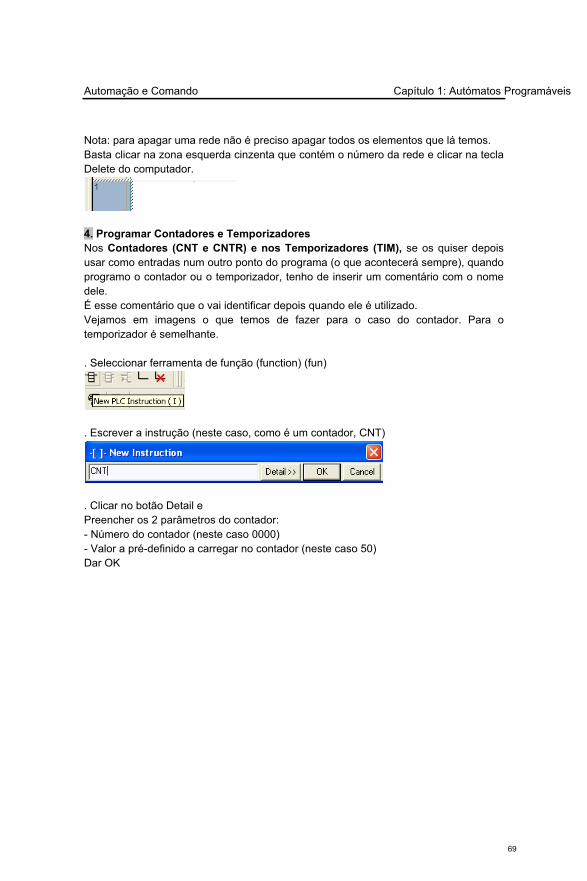
Nota: para apagar uma rede não é preciso apagar todos os elementos que lá temos. Basta clicar na zona esquerda cinzenta que contém o número da rede e clicar na tecla Delete do computador.
4. Programar Contadores e Temporizadores Nos Contadores (CNT e CNTR) e nos Temporizadores (TIM), se os quiser depois usar como entradas num outro ponto do programa (o que acontecerá sempre), quando programo o contador ou o temporizador, tenho de inserir um comentário com o nome dele. É esse comentário que o vai identificar depois quando ele é utilizado. Vejamos em imagens o que temos de fazer para o caso do contador. Para o temporizador é semelhante. . Seleccionar ferramenta de função (function) (fun)
. Escrever a instrução (neste caso, como é um contador, CNT)
. Clicar no botão Detail e Preencher os 2 parâmetros do contador: - Número do contador (neste caso 0000) - Valor a pré-definido a carregar no contador (neste caso 50) Dar OK
69

Automação e Comando Capítulo 1: Autómatos Programáveis
. Aparece o campo comentário Preencham-no com o nome que vai identificar o contador (neste caso coloquei C0)
. Quando for preciso usar o contador noutra parte do programa é só pôr o nome e no comentário o mesmo valor que puseram no campo do comentário quando estavam a programar o contador
. Vejam o programa completo.
70

Automação e Comando Capítulo 1: Autómatos Programáveis
5. Para alterarmos as características (ou apagar, ou fazer outra coisa) de um elemento do programa, devemos usar o elemento de selecção.
Depois é: . Clicar em cima do elemento para o seleccionar ou . Fazer duplo clique para o editar, e alterar as características (nome, comentário, etc.0 Caso detectem algum erro, omissão, item mal explicado ou outra dificuldade que tenham, favor contactar-me pessoalmente ou por email ([email protected]), para poder melhorar este tutorial. Obrigado. Exemplos: 1. Comutação de Escada com botões
71

Automação e Comando Capítulo 1: Autómatos Programáveis
2. Comutação de escada com botões (e contador)
3. Arranque directo de motor
4. Encravamento simples
5. Encravamento duplo
72

Automação e Comando Capítulo 1: Autómatos Programáveis
6. Arranque sequencial de motores
73

Automação e Comando Capítulo 1: Autómatos Programáveis
7. Inversão de marcha
8. Arranque estrela-triângulo
74

Automação e Comando Capítulo 1: Autómatos Programáveis
Trabalhos de Avaliação do Módulo 2008/2009 (enunciados) Como avaliação do módulo 3 – Autómatos programáveis –, para além do teste final, foram elaborados os seguintes sete enunciados, correspondentes a 14 trabalhos diferentes, que os alunos tiveram de resolver e implementar na prática, em grupos de dois alunos. Os ficheiros/programas solução dos 7 trabalhos (partes 1) podem ser descarregados em: �http://www.profelectro.info/Uploads/luisj/T1.cxp �http://www.profelectro.info/Uploads/luisj/T2.cxp �http://www.profelectro.info/Uploads/luisj/T3.cxp �http://www.profelectro.info/Uploads/luisj/T4.cxp �http://www.profelectro.info/Uploads/luisj/T5.cxp http://www.profelectro.info/Uploads/luisj/T6.cxp http://www.profelectro.info/Uploads/luisj/T7.cxp Material necessário: Instruções Necessárias para o (nosso) curso O manual completo do C20K (e toda a família C20) pode ser encontrado em http://www.fileqube.com/shared/vCKuXXU183933 O manual completo do CPM1A pode ser encontrado em http://www.fileqube.com/shared/yQOtkyn183935 CX-Programmer Manual Introdutório http://www.fileqube.com/shared/GAJQCW185017 Manual de Operação http://www.fileqube.com/shared/TtWRr185016 Manual de Operação para Blocos Estruturados http://www.fileqube.com/shared/NovzCC185015
75

Automação e Comando Capítulo 1: Autómatos Programáveis
GRUPO 1 Trabalho 1 Programe um circuito com 1 botão de pressão e três lâmpadas, cujo funcionamento deverá obedecer às seguintes condições. . Quando pressiona o botão a lâmpada 1 deverá acender por dez segundos; . Seguidamente essa lâmpada deverá apagar-se e, simultaneamente, a lâmpada 2 acender por 10 segundos; . Em seguida a lâmpada 2 apagar-se-à e a lâmpada 3 acenderá por 10 segundos; . Quando passarem estes últimos 10 segundos, sistema volta ao início, isto é acenderá a lâmpada 1 por 10 segundos e assim sucessivamente; . Quando carregar de novo no botão, a lâmpada acesa apagar-se-à e permanecerão todas apagadas até que pressione de novo o botão, altura em que o sistema voltará ao início, e assim sucessivamente. Trabalho 2 Programe um sistema com 4 interruptores e 2 lâmpadas em que: . A lâmpada 1 apaga quando abro o interruptor 2 e o interruptor 4 e o interruptor 3 está aberto; ou então quando: . O interruptor 3 está fechado e o interruptor 1 está fechado. . A lâmpada 2 acende quando o interruptor 4 está fechado e os interruptores 1 e 3 estão abertos; ou então quando: . O interruptor 4 está aberto e o interruptor 2 está aberto, desde que o interruptor 2 esteja aberto.
76

Automação e Comando Capítulo 1: Autómatos Programáveis
GRUPO 2 Trabalho 1 Programe um circuito com 1 botão de pressão e 2 lâmpadas em que quando premir o botão todas as lâmpadas entrarão numa situação de pisca-pisca: acesas por 0,5 segundos e apagadas por 0,5 segundos. Quando carregar de novo no botão, as lâmpadas deverão apagar-se e permanecer todas apagadas até que pressione de novo o botão, altura em que o sistema voltará ao início, e assim sucessivamente. Trabalho 2 Programe um sistema com 4 interruptores e 2 lâmpadas em que: . A lâmpada 1 acende quando fecho o interruptor 1 e o interruptor 2 e o interruptor 3 está aberto; ou então quando: . O interruptor 2 está aberto e o interruptor 1 está fechado. . A lâmpada 2 apaga quando o interruptor 4 está aberto e os interruptores 1 e 3 estão fechados; ou então quando: . O interruptor 4 está aberto e o interruptor 3 está aberto, desde que o interruptor 2 esteja fechado.
77

Automação e Comando Capítulo 1: Autómatos Programáveis
GRUPO3 Trabalho 1 Programe um circuito com 2 botões de pressão e três lâmpadas, cujo funcionamento deverá obedecer às seguintes condições. . Quando pressiona o botão 1 a lâmpada 1 deverá acender por dez segundos; . Seguidamente essa lâmpada deverá apagar-se e, simultaneamente, a lâmpada 2 acender por 10 segundos; . Em seguida a lâmpada 2 apagar-se-à e a lâmpada 3 acenderá por 10 segundos; . Quando passarem estes últimos 10 segundos, sistema volta ao início, isto é acenderá a lâmpada 1 por 10 segundos e assim sucessivamente; . Quando carregar no botão 2, a lâmpada acesa apagar-se-à e permanecerão todas apagadas até que pressione de novo o botão 1, altura em que o sistema voltará ao início, e assim sucessivamente. Trabalho 2 Programe um sistema com 4 interruptores e 2 lâmpadas em que: . A lâmpada 1 apaga quando fecho o interruptor 2 e o interruptor 4 e o interruptor 3 está aberto; ou então quando: . O interruptor 3 está fechado e o interruptor 4 está aberto. . A lâmpada 2 apaga quando o interruptor 2 está aberto e os interruptores 4 e 3 estão abertos; ou então quando: . O interruptor 4 está fechado e o interruptor 1 está aberto, desde que o interruptor 2 esteja aberto.
78

Automação e Comando Capítulo 1: Autómatos Programáveis
GRUPO 4 Trabalho 1 Programe um circuito com 2 botões de pressão e 3 lâmpadas em que: . Quando premir o botão 1 as lâmpadas acenderão logo e ao fim de 20 segundos e apagar-se-ão depois de se manterem 10 segundos acesas. . Se premir o botão 1 quando as lâmpadas estão acesas, apagar-se-ão as lâmpada números 1 e 2 apenas. . Se premir o botão 2 quando as lâmpadas estão acesas, apagar-se-à apenas a número 2. Trabalho 2 Programe um sistema com 4 interruptores e 2 lâmpadas em que: . A lâmpada 1 acende quando fecho o interruptor 1 e o interruptor 2 e o interruptor 3 está aberto; ou então quando: . O interruptor 2 está aberto e o interruptor 1 está fechado. . A lâmpada 2 apaga quando o interruptor 3 está aberto ou os interruptores 4 e 3 estão abertos; ou então quando: . O interruptor 4 está fechado e o interruptor 1 está fechado, desde que o interruptor 3 esteja fechado.
79

Automação e Comando Capítulo 1: Autómatos Programáveis
GRUPO 5 Trabalho 1 Programe um circuito com um botão de pressão e 3 lâmpadas em que: . Quando premir o botão as lâmpadas acenderão ao fim de 5 segundos e apagar-se-ão depois de se manterem 15 segundos acesas. . Se premir o botão quando as lâmpadas estão acesas, apagar-se-ão todas menos a número 1. Trabalho 2 Programe um sistema com 4 interruptores e 2 lâmpadas em que: . A lâmpada 1 acende quando fecho o interruptor 1 e o interruptor 2 e o interruptor 3 está aberto; ou então quando: . O interruptor 3 está aberto e o interruptor 4 está fechado. . A lâmpada 2 acende quando o interruptor 4 está aberto e os interruptores 2 e 3 estão abertos; ou então quando: . O interruptor 4 está fechado e o interruptor 1 está aberto, desde que o interruptor 2 esteja fechado.
80

Automação e Comando Capítulo 1: Autómatos Programáveis
GRUPO 6 Trabalho 1 Programe um circuito dois botões de pressão e 3 lâmpadas em que: . Quando premir o botão 1 as lâmpadas acenderão ao fim de 5 segundos e apagar-se-ão depois de se manterem 15 segundos acesas. . Se premir o botão 2 quando as lâmpadas estão acesas, apagar-se-ão todas menos a número 1. Trabalho 2 Programe um circuito com 2 botões de pressão e 3 lâmpadas em que: . Quando premir o botão 1 a lâmpada 1 acende ao fim de 5 segundos e mantém-se acesa por 20 segundos; a lâmpada 2 acende ao fim de 10 segundos e mantém-se acesa por 15 segundos e a lâmpada 3 acende ao fim de 15 segundos e mantém-se acesa por 10 segundos. . Em qualquer altura, quando premir o botão 2, todas as lâmpadas que estiverem acesas apagar-se-ão, só voltando a acender quando premir o botão 1, altura em que o sistema volta ao início.
81

Automação e Comando Capítulo 1: Autómatos Programáveis
GRUPO 7 Trabalho 1 Programe um circuito com 2 botões de pressão e 2 lâmpadas em que quando premir o botão 1todas as lâmpadas entrarão numa situação de pisca-pisca: acesas por 0,5 segundos e apagadas por 0,5 segundos. Quando carregar no botão 2, as lâmpadas deverão apagar-se e permanecer todas apagadas até que pressione de novo o botão 1, altura em que o sistema voltará ao início, e assim sucessivamente. Trabalho 2 Programe um sistema com 4 interruptores e 2 lâmpadas em que: . A lâmpada 1 apaga quando fecho o interruptor 2 e o interruptor 3 e o interruptor 3 está aberto; ou então quando: . O interruptor 2 está aberto ou o interruptor 4 está fechado. . A lâmpada 2 acende quando o interruptor 1 está aberto e os interruptores 4 e 2 estão abertos; ou então quando: . O interruptor 2 está fechado e o interruptor 3 está aberto, desde que o interruptor 2 esteja aberto.
82

Automação e Comando Capítulo 1: Autómatos Programáveis
Tutorial Trilogi O Trilogi é um software muito fácil de trabalhar e, por isso, ideal para quem se inicia nestas lides da programação de autómatos. Acresce-lhe outra vantagem: como é independente de marcas/tipos de autómatos, a sua programação é generalista, isto é, aqui o que se aprende é a programar. As nuances de cada uma das marcas (Siemens, Omron, etc.) ficam adiadas para aquando da confrontação com os autómatos concretos mas são, a meu ver, o menos importante. O mais importante é mesmo saber programar, resolver os problemas de maneira lógica e implementar o programa que os resolve. Segue-se o vídeo correspondente ao que foi explicitado acima: A criação de um programa que permite ligar e desligar uma lâmpada (ou motor, ou outra saída/actuador qualquer) através de botões de pressão/interruptores dedicados. Nota: Na simulação (final do vídeo) para as entradas funcionarem como botão de pressão basta fazer um clique com o botão da esquerda do rato; para funcionar como interruptor (manter o estado ON) temos de clicar com o botão direito do rato. Para breve fica prometido um tutorial mais completo, incluindo as funções de Temporização, Contadores e Relés o que, a juntar com a ligação das entradas e saídas mostradas neste vídeo já constitui um conjunto de ferramentas suficientes para lidar com a maioria dos programas exigíveis a este nível (secundário, nível III)
Encontrei este programa para simular circuitos escritos em Ladder (Diagrama de contactos) para PLC - Autómatos Programáveis.Na minha escola utilizamos os autómatos da OMRON e o programa, também da OMRON, SYSWIN. Se bem que este programa seja bem mais completo, ele apresenta uma grande lacuna: não permite a simulação dos circuitos “em ambiente caseiro”.O software que agora vos apresento vem colmatar essa falha, pelo que julgo ser de grande utilidade.
1. Ecrã principal da aplicação, com um programa/circuito desenhado
83

Automação e Comando Capítulo 1: Autómatos Programáveis
2. Ecrã da aplicação em que é simulado o circuito anterior. Vê-se que coloquei as entradas 1, 3 e 6 a “1� lógico (ficam a vermelho), pelo que a saída 1, e única, fica com o valor lógico “1�. Depois basta ir alterando os valores na(s) entrada(s) e ver o que acontece na(s) saída(s).
O programa pode ser obtido “just right here” http://mig.pand.googlepages.com/SetupTL5Edu.exe Relés Os relés internos são muito úteis para podermos guardar uma informação que mais tarde iremos utilizar (funcionam pois como uma variável interna lógica, que pode estar ON ou OFF, a 0 ou a 1). Funcionam como as saídas mas apenas a nível de software. Embora existam vários bits internos dos autómatos que podem ser utilizados com esse fim, no caso dos autómatos OMRON que temos usado e nos exemplos que aqui temos mostrado, temos utilizado para esse fim os bits de retenção HR (de 00 a 19) com essa finalidade. No caso do software trilogi, por ser uma aplicação genérica, isto é, sem qualquer ligação com as especificidades dos autómatos das várias marcas e modelos, usam-se os relés internos (Relays) com esta função. É uma utilização desse relés que aqui vamos demonstrar: Realização de uma porta NAND utilizando um relé interno.
84

Automação e Comando Capítulo 1: Autómatos Programáveis
1. Inserção de um relé interno como saída de um And entre as entradas X1 e X2 Reparem que tenho de escolher a opção Relays na janela I/O Labels.
2. Depois dou o nome que quiser a esse meu relé. No meu caso dei o nome de Relé_Interno.
85

Automação e Comando Capítulo 1: Autómatos Programáveis
3. E finalmente apresenta-se a simulação do circuito em que podemos ver a implementação do NAND: Só se as entradas X1 e X2 estiverem ON em simultâneo é que o relé fica a 1 e, conforme está a sua ligação no circuito, a saída Y1 fica a OFF.
TIMER (TEMPORIZADOR) Este primeiro exemplo de utilização de um temporizador mostra uma aplicação que funciona do seguinte modo: . Quando activo ointeruptor Iniciar (entrada) coloco a ON um relé interno (bi_est_inic) que, uma vez activo, vai activar a saída Y1 (trata-se de uma bobina de uma electroválvula que faz expandir a haste de um cilindro). . Quando a haste chega ao seu final faz activar um sensor fim-de-curso (a) que por sua vez faz iniciar um Temporizador (Timer_1) configurado para contar 10 segundos (o valor a carregar tem de ser 100 uma vez que os temporizadores dos autómatos trabalham, normalmente, em décimas de segundo. . Quando o Temporizador chega ao fina da contagem desse tempo fica a ON (“1” lógico) o que faz com que (linha 1 do programa) a sua negação fique a zero e desactivando o relé, desactiva também a saída Y1 (electroválvula) permitindo assim que a haste do cilindro volte à posição inicial (se contraia), uma vez quue se trata de um cilindro de acção simples, com mola de retorno. Na figura abaixo vemos que o temporizador já chegou ao fim (o seu valor está a 0) pelo que a saída já está desactivada.
86

Automação e Comando Capítulo 1: Autómatos Programáveis
Nesta figura vemos a configuração do valor de um Temporizador, 100 equivale a 10 segundos pois a unidade dos temporizadores dos autómatos é o décimo de segundo.
87

Automação e Comando Capítulo 1: Autómatos Programáveis
Neste segundo exemplo de utilização de temporizadores: . Quando pressiono momentaneamente o botão de pressão Iniciar, activo o relé interno (bi_est_Inic). Mesmo que depois liberte o botão, a realimentação do relé (o paralelo com o botão) segura-o no estado activo. De notar que a entrada a é um fim-de-curso que está colocado no final do campo de expansão da haste do cilindro que é comandada pela electroválvula Y1 que corresponde à saída deste nosso circuito. . A activação do relé faz com que: O temporizador inicie a contagem do tempo para o qual foi configurado (linha 2)
o Alarme soe (linha 3) . No final da contagem do tempo o temporizador fica a 1 pelo que o alarme é desligado e a saída é activada. . Quando a haste do cilindro chega ao final faz activar o fim-de-curso a e, como ele está negado (linha 1) faz desactivar o relé, o que por sua vez desactiva o Timer (linha 2) e, assim, por consequência desactiva a saída (linha 4)
88
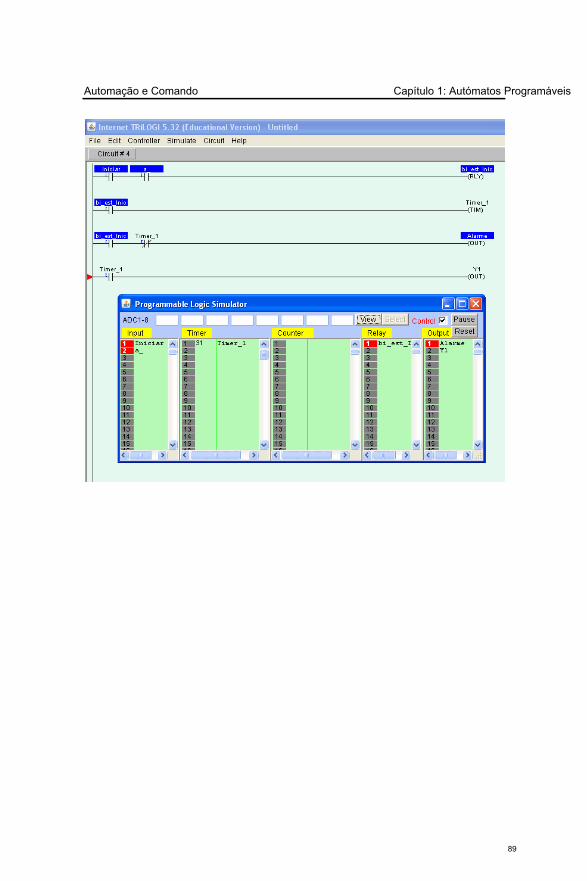
Automação e Comando Capítulo 1: Autómatos Programáveis
89

Automação e Comando Capítulo 1: Autómatos Programáveis
Neste terceiro exemplo: . Quando activo a entrada (botão de pressão) Inic o relé Inic_Enable é activado. Uma vez que esse relé está por sua vez a servir de entrada (paralelo – OR – com o botão de pressão), tratando-se pois de uma realimentação, isso permite que, mesmo que liberte o botão de pressão o relé continua activado. . A activação do relé faz com que o Temporizador (Timer_1) inicie a contagem do tempo para o qual foi programado, ao fim do qual a saída Y1 é activada, e dando ainda início à contagem do tempo pelo Temporizador Timer_2. . Quando este termina a contagem do seu tempo fica a 1, o que faz o Timer_1 passar a 0 e assim desligar a saída. Só que também desliga o Timer_2 o que, por sua vez faz novamente iniciar o Timer_1 (condições iniciais), repetindo-se todo o processo até que se prima o botão de entrada Parar, que desliga o relé e assim desactiva tudo (Timer_1, Timer_2 e Saída Y1). Por exemplo, se a saída for uma electroválvula, esta pode ser ligada durante o tempo marcado no Timer_2 (ex: 5 segundos), isto é, enquanto o Timer_2 está a fazer a sua temporização que corresponderá ao tempo de expansão da haste do cilindro; e desligada durante o tempo marcado no Timer_1 (ex: 2 segundos), que corresponderá ao retorno da haste. Trata-se pois de um cilindro de dupla acção: expansão (5s) e contracção (2s) – os tempos são meros exemplos.
90

Automação e Comando Capítulo 1: Autómatos Programáveis
De notar ainda que este programa permite a inserção de comentários nas redes/circuito criados, bastando para tal colocar o cursor sobre a rede que queremos comentar e actuar no menu: Circuit >> Insert Comment Depois é só escrever o comentário e fazer Enter.
Nesta figura mostra-se (janela da simulação) que o Timer_2 está a contar (vai em 40) pelo que a saída está activada – cilindro a expandir.
91

Automação e Comando Capítulo 1: Autómatos Programáveis
Contadores (Counters) Finalmente, para terminarmos este pequeno tutorial sobre o software de programação e simulação de autómatos, o Trilogi, vamos apresentar um screencast alusivo à utilização de Contadores. O que o circuito faz é o seguinte: . Quando primo o Botão_Iniciar um motor (saída Y1) começa a trabalhar . Ao mesmo tempo inicializo um contador com o valor = 10 . Existe um sensor (d) que vai contando as rotações do motor . Quando o número de rotações chega a 10, o contador fica a zero (não esquecer que os contadores começam do valor carregado e vão decrementando) a sua saída fica activa, o que faz com que o motor pare, isto é a saída Y1 fique inactiva. . Quando volto a premir o Botão_Iniciar, tudo se repete.
92

Automação e Comando Capítulo 1: Autómatos Programáveis
Ver os Vídeos/Screencasts a que se referem as palavras anteriores em: Trilogi – Autómatos Programáveis: (1m25s) http://www.screentoaster.com/watch/stVENTREVLRllcQVleXVtc/automatos_programaveis_trilogi_tutorial 1ª versão (reduzida) de um tutorial para utilização do software aplicacional Trilogi, para programação (generalista) de autómatos Trilogi – Relés Internos: (1m44s) http://www.screentoaster.com/watch/stVENTREVLRllWQ1VcWVhc/trilogi_reles_internos Este screencast mostra como trabalhar com relés internos, sendo que nesta utilização um relé interno é usado para implementar a função lógica NAND. Trilogi – Timer: (3m02s) http://www.screentoaster.com/watch/stVENTREVLRllcSVtcUlxQ/trilogi_timer Um botão de pressão liga um relé que activa a saída Y1 que por sua vez fornece energia a um solenóide de uma electroválvula que inicia o percurso de um cilindro a ela ligado (extensão). Quando este atinge o seu final de extensão actua um fim-de-curso (a) que por sua vez vai iniciar uma temporização de 5 segundos (Timer_01) ao fim da qual o relé e a saída Y1 são desactivados permitindo assim o recuo do cilindro à sua posição inicial (compressão). Trilogi – Contadores : (3m33s) http://www.screentoaster.com/watch/stVENTREVLRllbR1RdXF1Y/trilogi_tutorial_contadores Há uma máquina (Y1) que é posta a funcionar através de um botão de pressão (Botão_Iniciar). Existe ainda um sensor (d) que conta as rotações dessa máquina: por cada rotação o sensor emite um sinal que faz decrementar o contador (previamente carregado com o valor 10). Ao dar 10 rotações o contador atinge o valor 0 e, consequentemente, é activado, isto é, a sua saída fica a 1, o que faz parar a máquina (a saída Y1 fica a zero). Para se iniciar um novo ciclo basta premir de novo o botão_Iniciar.
93

Automação e Comando Capítulo 1: Autómatos Programáveis
Teste�Sumativo�do�Módulo��1.�Escolha�a�frase�correcta�acerca�da�figura��
�
a)�Y1�fica�on�se�X1�está�off�OU�então�se�X2�está�on�E�X3�está�off.� � � ��
b)�Y1�fica�on�se�X1�está�on�e�X2�está�off�OU�então�se�X1�está�on�e�X3�está�on. ��
c)�Y1�fica�on�se�X1�está�on�OU�então�se�X2�está�off�E�X3�está�on. ��
d)�Y1�fica�on�se�X1�está�off�E�X2�está�on�ou�então�se�X2�está�on�OU�X3�está�off.�� � ��
�2.�Escolha�a�frase�incorrecta�acerca�da�figura��
�
a)�Y2�fica�on�se�X1�está�on�E�X2�E�X4�estão�on. ��
b)�Y2�fica�on�se�X1�está�on�E�X3�E�X4�estão�on. ��
c)�Y2�fica�on�se�X1�está�off�E�X2�E�X3�estão�off�E�X4�está�on. ��
d)�Y2�fica�on�se�Y1�E�X4�estão�ambos��on. ��
�����
94

Automação e Comando Capítulo 1: Autómatos Programáveis
3.�Que�porta�lógica�é�representada�na�figura�abaixo:�
�
a)�OR� � � � � � � � � � � ��
b)�NOR�� � � � � � � � � � ��
c)�AND� � � � � � � � � � � ��
d)�NAND� � � � � � � � � � ��
�4.�Que�porta�lógica�é�representada�na�figura�abaixo:��
�
a)�NOR� � � � � � � � � � � ��
b)�NAND� � � � � � � � � � ��
c)�OR� � � � � � � � � � � ��
d)�AND� � � � � � � � � � � ��
�5.�Escolha�a�frase�incorrecta�tendo�em�atenção�a�figura�seguinte:��
�
a)�Fechando�S1�a�lâmpada�apaga.� � � � � � � ��
b)�Quando�o�alarme�está�on,�também�a�lâmpada�está�on.� � � � ��
c)�Fechando�S1�e�S2�o�alarme�toca.� � � � � � � ��
95

Automação e Comando Capítulo 1: Autómatos Programáveis
d)�Fechando�S2�o�alarme�toca.� � � � � � � � ��
�6.�Escolha�a�frase�incorrecta�acerca�da�figura�seguinte:��
�
a)�Quando�o�alarme�fica�a�on�ele�continua�a�tocar�até�que�S3�mude�para�on.� � ��
b)�S1�e�S2�formam�um�OU�EXCLUSIVO�(XOR). ��
c)�O�alarme�passa�a�on�quando�S1�ou�S2�ou�S3�ficam�on. ��
d)�O�alarme�começa�a�tocar�quando�S1�ou�S2�passam�a�on��
desde�que�não�estejam�os�dois�on�ao�mesmo�tempo. ��
�7.�Escolha�a�frase�correcta�no�que�respeita�à�figura�seguinte:��
�
a)�Se�o�interruptor�S3�fecha�a�luz�acende.� � � � � � ����
b)�Quando�a�lâmpada�está�on�fica�nesse�estado�até�que�S1�ou�S2�sejam�fechados.� ��
c)�S1�e�S2�forma�um�OU�EXCLUSIVO�(XOR) ��
d)�A�lâmpada�passa�a�on�quando�se�fecha�S1�ou�S2� � � � � ����
��
96

Automação e Comando Capítulo 1: Autómatos Programáveis
8.�Escolha�a�frase�correcta�sobre�a�figura�seguinte:��
��a)�Quando�o�botão�S1�é�pressionado�e�depois�libertado�há�um�atraso,�igual�ao�tempo�contado�
pelo�temporizador,�antes�de�o�alarme�tocar. ��
b)�Se�S1�é�largado�imediatamente�após�ter�sido�pressionado,�um�contacto�normalmente�aberto�
do�temporizador�deve�ser�ligado�em�paralelo�com�ele.� � � � � ��
c)� Quando� o� botão� S1� é� pressionado� e� libertado� o� alarme� soa� durante� um� tempo� igual� ao�
marcado�no�temporizador. ��
d)�O�contacto�normalmente� fechado�do� temporizador�previne�que�o�alarme�toque�ou�que�o�
temporizador�seja�alimentado. ��
��������������
97

Automação e Comando Capítulo 1: Autómatos Programáveis
9.�Na�figura�abaixo,�o�contador�é�carregado�com�o�valor�5.�Escolha�a�frase�incorrecta:��
�a)� Quando� S1� (botão)� é� momentaneamente� pressionado� a� lâmpada� acende� e� permanece�
acesa. ��
b)�Quando�a�lâmpada�apaga�o�contador�é�resetado. ��
c)� Quando� o� botão� S1� é� pressionado� a� lâmpada� acende� e� fica� acesa� até� que� S2� seja�
pressionado.� � � � � � � � � � ���������
d)� Quando� o� botão� S1� é� pressionado� a� lâmpada� acende� e� fica� acesa� até� que� o� S2� seja�
pressionado�5�vezes. ��
�10.�Um�autómato�é�utilizado�para�controlar�uma� lâmpada� indicadora�de� inundação.�Quando�um� sensor� com� um� contacto� normalmente� aberto� detecta� movimento� a� lâmpada� deve�acender�por�10�segundos�e�depois�apagar�se.�Desenhe�o�diagrama�de�contactos�(LADDER)�que�implemente�este�circuito.������������
98

Automação e Comando Capítulo 1: Autómatos Programáveis
11.�Um�autómato�é�utilizado�para�controlar�o�elevador�de�vidros�de�uma�janela�de�um�carro.�Quando�um�botão�é�pressionado�momentaneamente�a�janela�começa�a�abrir.�Se�o�botão�for�pressionado�por�mais�de�um� segundo,� a� janela� continua�abrir� até� ao� seu� final.�Um� segundo�botão� faz� a� mesma� coisa� no� que� respeita� a� fechar� a� janela.� O� sistema� comporta� ainda� 2�interruptores� de� fim�de�curso� para� detectar� quando� a� janela� está� totalmente� aberta� ou�totalmente�fechada.�Desenhe�o�diagrama�de�contactos�(LADDER)�que�implemente�este�circuito.�����������������12.�Um�autómato�é�utilizado�para�controlar�um�sistema�de�passadeira�rolante.�Um�sensor�com�um�contacto�normalmente�aberto�“vê”�peças�a�passar�sobre�a�passadeira.�Quando�dez�peças�tiverem�passado�a�passadeira�deve�parar,�um�motor�faz�deslocar�uma�haste�que�depois�volta�ao� lugar� inicial� e� a� passadeira� começa� de� novo� a� andar� até� que� outras� 10� peças� tenham�passado�junto�do�sensor,�e�assim�sucessivamente.�Desenhe�o�diagrama�de�contactos�(LADDER)�que�implemente�este�circuito.����������������
99

Automação e Comando Capítulo 1: Autómatos Programáveis
13.�Para�o�diagrama�de�contactos�(LADDER)�abaixo�representado,�escreva�a�respectiva�lista�de�instruções:��
���������������������������������
100

Automação e Comando Capítulo 1: Autómatos Programáveis
14.�Para�o�diagrama�de�contactos�(LADDER)�abaixo�representado,�escreva�a�respectiva�lista�de�instruções:�
��������������������������
101

Automação e Comando Capítulo 1: Autómatos Programáveis
15.�Para�a�seguinte�lista�de�instruções�desenhe�o�diagrama�de�contactos�(LADDER)�respectivo.��LD�00.00�OR�NOT�00.01�LD�NOT�00.02�OR�01.01�AND�LD�LD�01.01�KEEP�HR�01�LD�HR�01�OUT�01.01�END��16.�Para�a�seguinte�lista�de�instruções�desenhe�o�diagrama�de�contactos�(LADDER)�respectivo.��LD�00.00�AND�NOT�01.01�TIM�00�#100�LD��NOT��TIM�00�CNT�00�#45�CNR�00���OR��00.02�OUT��01.01�END��17.�Programe�um�circuito�com�um�botão�de�pressão�e�3�lâmpadas�em�que:�.�Quando�premir�o�botão�as�lâmpadas�acenderão�ao�fim�de�20�segundos�e�apagar�se�ão�depois�de�se�manterem�10�segundos�acesas.�.�Se�premir�o�botão�quando�as�lâmpadas�estão�acesas,�apagar�se�à�a�lâmpada�número�1.����������������
102

Automação e Comando Capítulo 1: Autómatos Programáveis
18.�Programe�um�sistema�com�4�interruptores�e�2�lâmpadas�em�que:�.�A� lâmpada�2�acende�quando� fecho�o� interruptor�3�ou� interruptor�4,�e�o� interruptor�2�está�fechado;�ou�então�quando:�.�O�interruptor�2�está�aberto�e�o�interruptor�4�está�fechado.�.� A� lâmpada� 1� acende� quando� o� interruptor� 4� está� aberto� e� os� interruptores� 2� e� 3� estão�fechados;�ou�então�quando:�.�O�interruptor�1�está�fechado�e�o�interruptor�2�está�aberto,�desde�que�o�interruptor�4�esteja�aberto.�������������19.�Programe�um�sistema�com�4�interruptores�e�2�lâmpadas�em�que:�.� A� lâmpada� 1� apaga� quando� fecho� o� interruptor� 2� e� o� interruptor� 4� e� o� interruptor� 3� está�aberto;�ou�então�quando:�.�O�interruptor�3�está�fechado�e�o�interruptor�4�está�aberto.�.�A�lâmpada�2�apaga�quando�o�interruptor�2�está�aberto�e�os�interruptores�4�e�3�estão�abertos;�ou�então�quando:�.�O�interruptor�4�está�fechado�e�o�interruptor�1�está�aberto,�desde�que�o�interruptor�2�esteja�aberto.���������������
103

Automação e Comando Módulo 2: Projectos de Automatismos
�
Capítulo 2 � Projectos de Automatismos
o Método Grafcet o Tutorial CX-Programmer (Grafcet) o Projectos Exemplo o Projectos de Automatismos
104

Automação e Comando Módulo 2: Projectos de Automatismos
GRAFCETO capítulo começa com uma introdução teórica sobre o método Grafcet, onde são referidos todos os elementos que o compõem (estados, transições, ligações e condições de transição) e os seus vários tipos. Segue-se a aplicação, passo a passo, do método a um automatismo prático concreto (controlo de uma Guilhotina Industrial), de forma completamente manual, desde a interpretação do problema em fluxograma até à obtenção da lista de instruções a carregar no autómato programável. O respectivo programa pode ser descarregado em: http://www.profelectro.info/Uploads/luisj/Grafcet_Guilhotina.cxp (versão 1)�http://www.profelectro.info/Uploads/luisj/Guilhotina_AMF.cxp (versão 2)�Segue-se um tutorial sobre a utilização do software CX-Programmer na aplicação da metodologia Grafcet. Este tutorial é acompanhado pelo seu irmão gémeo em vídeo-screencast (…). De seguida apresentamos a aplicação do método Grafcet, usando o software CX-Programmer à resolução de um automatismo concreto (controlo de um parque de estacionamento). O respectivo programa pode ser descarregado em http://www.profelectro.info/Uploads/luisj/EstacionamentoKeep.cxp (versão 1)�http://www.profelectro.info/Uploads/luisj/EstacionamentoSetRset.cxp (versão 2) http://www.profelectro.info/Uploads/luisj/EstacionamentoOut.cxp�(versão�3)��
Método Grafcet
Definição – é um método que descreve, em forma de diagrama gráfico, as várias fases de funcionamento de um sistema automatizado sequencial.
VantagensO método Grafcet (Gráfico Funcional de Comando Etapa Transição) foi dado por concluído em 1993 e veio permitir ultrapassar alguns problemas que se verificavam anteriormente no projecto de sistemas automáticos, nomeadamente:
1. Permite que os projectos de automatismos mais complexos sejam feitos por mais pessoas.Anteriormente, com a linguagem de contactos (Ladder) apenas os projectistas mais experientes estavam capacitados para a realização de programas mais complexos uma vez que a programação era feita, em ladder, de forma mais ou menos intuitiva;
2. Permite que mais pessoas possam facilmente discutir qualquer projecto; 3. Por se tratar de uma linguagem gráfica e universal, e não dirigida a qualquer
tipo/marca de autómato, permite a comunicação mais fácil entre técnicos; 4. Facilita a manutenção e reparação posteriores; 5. Como é elaborado de modo a explicar o funcionamento sequencial dos
automatismos, este tipo de lógica casa-se muito melhor com a forma como o nosso cérebro actua;
105

Automação e Comando Módulo 2: Projectos de Automatismos
6. Tem ainda a enorme facilidade de poder ser passada facilmente a código máquina (lista de instruções,…) através de software próprio, que foi criado por todas as marcas de autómatos (Siemens, Omron, Telemecanique, etc.).
Elementos constituintes Em Grafcet temos os seguintes elementos que, interligados, explicitam o funcionamento sequencial dos automatismos:
� Estados ou Etapaso Correspondem a estados do sistema a automatizar. o Em cada uma das etapas/estados podem ser realizadas um conjunto de
acções no sistema que podem ser internas ao autómato (ex: temporizador arranca, contador incrementa) ou externas (ex: alarme soa, motor arranca)
o Em cada momento do funcionamento do sistema cada uma das etapas pode estar activa (1) ou inactiva (0), sendo que as acções só são realizadas quando a etapa está activa
6 •
Etapa 6 está activa (E6=1). Se não estivesse activa não aparecia o pontinho no esquema.
Notas:. Em cada instante pode haver mais que uma etapa activa no sistema; . As etapas iniciais do sistema são aquelas para as quais o sistema evolui logo que é ligada a alimentação. Diferenciam-se no Grafcet por terem um traço duplo.
� Transiçõeso Correspondem à possibilidade de o sistema passar de uma etapa
activa para outra, activando esta e desactivando a original; o Estas transições apenas se dão se se verificarem as condições
exigidas, isto é, se as condições que o projectista idealizou forem todas verdadeiras nesse momento;
o Entre etapas tem de haver uma transição; o A transição é representada no Grafcet através de um traço sobre a
linha que une as etapas em causa. o Uma transição é válida se entre duas etapas existir uma união/ligação
e a etapa com o nº mais baixo estiver activa o Uma transição é transposta se for válida e se as condições de
transição (receptividades forem todas verdadeiras (1).
106

Automação e Comando Módulo 2: Projectos de Automatismos
o Entre etapas só pode existir uma transição
� Ligações� Receptividades (ou Condições de Transição)
o São as condições que se têm de verificar para que as transições entre etapas ocorram;
o Estão associadas a condições lógicas, como por ex: externas -o sensor detectou uma peça, o botão de pressão 1 foi pressionado, o motor parou, etc.; internas - o contador chegou a um certo número, o temporizador terminou a sua contagem de tempo, etc.
Tipos de Ligações Entre Etapas 1. Sequência única
o É apenas uma sucessão de etapas. Cada etapa é seguida por uma só transição e cada transição é válida para uma só etapa;
o Em cada instante só está activa uma etapa; o Aplica-se por exemplo no arranque de motores, uma etapa para a
marcha do motor e outra para a paragem.
2. Sequências Alternativaso A partir de uma determinada etapa o automatismo pode evoluir por um de
vários caminhos possíveis a) Divergência OU
107

Automação e Comando Módulo 2: Projectos de Automatismos
A partir de uma determinada etapa o Grafcet evolui por um (e só um) de vários caminhos possíveis. Na figura, como a condição de transição b é verdadeira, o Grafcet evolui do estado 3 para o estado 10
b) Convergência OU
o Para que a transição seja transposta uma das etapas tem de estar activa e a condição de transição associada tem de ser verdadeira;
o No exemplo da figura a etapa 12 está activa e a condição de transição h é verdadeira, pelo que o sistema evolui para a etapa 8 que fica activa;
o É usada por exemplo no arranque de motores com rotação em dois sentidos.
Nota: As sequências alternativas iniciam-se por uma Divergência OU e terminam numa convergência OU. Não pode haver caminhos abertos.
3. Sequências Simultâneaso Usam-se quando a partir de uma etapa se pretende que o sistema evolua
por dois ou mais caminhos em simultâneo; o Iniciam-se pelo que se chama uma divergência E e terminam,
obrigatoriamente, por uma convergência E.
108

Automação e Comando Módulo 2: Projectos de Automatismos
a) Divergência E
o A etapa 3 está activa e a condição associada a ela (a) é verdadeira. Então o sistema evolui pelos dois caminhos tornando activos os estados 4 e 10 em simultâneo.
b) Convergência E
o Para que o sistema evolua é necessário que todas as etapas terminais da convergência estejam activas e a s condições de transição (comuns) se verifiquem.
o No caso da figura acima, as etapas 7 e 13 estão activas e a condição (f=1) verifica-se, pelo que o sistema evolui para o estado 8.
o Ex. de utilização das sequências simultâneas: motores com funcionamento simultâneo ou sincronização de processos.
109

Automação e Comando Módulo 2: Projectos de Automatismos
4. Salto de Etapas (JUMP)
o É um caso particular da divergência OU; o Permite saltar uma ou mais etapas; o Usam-se quando uma série de etapas não são necessárias para uma
determinada condição do automatismo.
5. Repetição de Etapas (LOOP)
o Usa-se quando se pretende repetir uma série de etapas até que uma determinada condição se verifique (por exemplo um contador que chegou a um valor pré-definido ou um botão que foi pressionado), altura em que o sistema sai do loop e prossegue.
110

Automação e Comando Módulo 2: Projectos de Automatismos
TIPOS DE RECEPTIVIDADES / CONDIÇÕES DE TRANSIÇÃO 1. Condições de transição prioritárias
a. Sequência única Ex. comando marcha / paragem de um motor
Se pressionarmos ao mesmo tempo o botão de marcha m e o botão de paragem p, qual deve ser o comportamento do sistema? Somos nós que definimos. No caso dos motores é normal que a paragem tenha prioridade, por motivos de segurança, pelo que o Grafcet fica:
Isto é, o sistema só passa para o estado 1 se premirmos o botão m e o botão p não esteja premido também, daí o NOT p (/p)
b. Sequências alternativas Se estamos num dado estado, à beira de uma divergência OU, pode acontecer que as duas condições se verifiquem e nós queiramos dar prioridade a uma delas. Como se faz isso? Vejamos o exemplo abaixo:
Neste caso estamos a dar prioridade à transição de 4 para 5 pois ela é transposta caso a condição a e b sejam verdadeiras simultaneamente, enquanto, nesse caso, a
111

Automação e Comando Módulo 2: Projectos de Automatismos
transição de 4 para 10 não é efectuada devido à inserção do /a, isto é, só é transposta se se verifica b e, ao mesmo tempo, não se verificar a.
2. Condições de Transição Exclusivas Acontece quando queremos que entre várias sequências alternativas apenas possa ser “escolhida” uma delas. Então temos de fazer:
TIPOS DE ACÇÕES
Letra AcçãoN (ou nenhuma) Não memorizada S Memorizada R Colocar a zero L Limitada no tempo D Temporizada C Condicionada P Impulso SD Memorizada e temporizada DS Temporizada e memorizada SL Memorizada e limitada no tempo
112

Automação e Comando Módulo 2: Projectos de Automatismos
1. Acções não memorizadas São acções que são executadas apenas durante o tempo de activação dos respectivos estados.
2. Acções Memorizadas Mantêm-se ao longo de vários estados, para além do estado onde se iniciaram.
3. Outras formas de memorização a) Função Set/Reset
O set é feito no estado em que se pretende começar a acção e o reset naquele em que se pretende que ela termine.
113

Automação e Comando Módulo 2: Projectos de Automatismos
4. Acções Dependentes do Tempo
a.Aqui é indicado que ao chegar ao estado 4 o motor 1 começa a trabalhar. Todavia a passagem para o estado 5 é só feita após 6 s. Então, podemos dizer que o motor 1 foi programado para trabalhar 6 segundos, uma vez que no estado 5 essa acção já não está presente.
b.Neste caso o motor trabalha durante 3 s e pára, mesmo que o sistema não evolua para o estado seguinte devido à condição de transição não se verificar.
c.Neste caso o motor começa a trabalhar ao fim de 3 segundos após o sistema entrar no estado 4 e só pára quando a condição de transição a se verificar, isto é, quando o sistema evoluir para o estado 5.
5. Acções Condicionadas Neste caso a acção só é realizada, num determinado estado, se se verificarem algumas condições.
No exemplo da figura acima o motor M1 só arranca se o sistema estiver no estado 4 e a condição b for verdadeira. Nota: A acção também pode ser condicionada por outro estado que não aquele em que o sistema se encontra.
114

Automação e Comando Módulo 2: Projectos de Automatismos
6. Acções Impulso São acções de duração muito pequena (instantânea)
Aqui, neste exemplo da figura acima, a temporização é iniciada com a activação do estado 4, tomando o temporizador o valor “1” ao final de 6s, altura em que o sistema evolui imediatamente para o estado 5 que desactiva de imediato o temporizador. O impulso que falamos é dado pelo temporizador.
115

Automação e Comando Módulo 2: Projectos de Automatismos
PROJECTO – EXEMPLO (1) Vamos ver agora, através de um exemplo, como se faz um projecto em Grafcet na sua totalidade. Neste primeiro projecto vamos fazer o projecto todo “manualmente”, fazendo-se, no final a programação ladder resultante, que poderá se depois carregada para o autómato.Na secção seguinte faremos todo o projecto (desde o grafcet) em software específico, o CX-Programmer, software esse que é depois capaz de descarregar automaticamente o programa para o autómato, a partir exactamente do Grafcet.
Enunciado:Queremos criar um automatismo para comandar uma guilhotina, com as seguintes características. . No estado inicial o automatismo encontra-se no estado de espera; . Quando o operador prime um dos dois botões de pressão do sistema, este deve passar para um estado em que aguarda que seja pressionado o outro botão. Nota: Por razões de segurança a guilhotina só pode cortar se o operador tiver as duas mãos ocupadas, cada uma a premir um dos botões. Caso passem 5 segundos sem que o 2º botão seja premido, o sistema volta ao estado inicial. Se antes de passarem os cinco segundos entre o premir de um botão e o premir do outro, ou seja, com os dois botões premidos em simultâneo, o sistema avança para outro estado, no qual a guilhotina inicia a operação de corte; . Aqui, enquanto o corte é efectuado, se algum dos botões deixa de ser premido o sistema evolui para um novo estado e só sai dele, para o estado inicial, quando os dois botões deixarem de estar pressionados (assim se evita o reinício do processo se algum botão ficar “encravado”) Caso os botões continuem premidos a guilhotina corta e quando atinge o final do corte passa para um estado novo . Neste novo estado é lançada uma temporização de 5 segundos (tempo de segurança até novo corte) mas só passa para o estado inicial ao fim destes 5 segundos quando nenhum dos dois botões estiver premido. Nota: assim se obriga o operador a largar os dois botões antes de se iniciar um novo processo de corte e se garante também que nenhum botão fica “encravado”.
116

Automação e Comando Módulo 2: Projectos de Automatismos
Grafcet
Atribuição de Bits / Endereços:
Estados:Estado BitsE0 200.00 E1 200.01 E2 200.02 E3 200.03 E4 200.04
TransiçõesTransições Externas Entradas Descriçãob1 000.01 Botão mão direita b2 000.02 Botão mão esquerda fc 000.03 Fim de curso lâmina
117

Automação e Comando Módulo 2: Projectos de Automatismos
Transições Internas Entradas Descriçãot1 TIM001 Tempo máximo entre
botõest2 TIM002 Tempo entre cortes
AcçõesAcção Externa Bit / Estado Saída Operação A+ (cilindro) 200.002 010.00 Guilhotina efectua o
corte
Acções Internas Bit / Estado Saída Operação T1 200.01 TIM001 Temporizador de 0,5 s T2 200.04 TIM002 Temporizador de 5 s
Equações dos Estados E0: 253.15 + 200.01 • TIM001 + 200.03 • /000.01 • /000.02 + 200.04 • /000.01 • /000.02 • TIM02 [ SET (200.00), RSET (200.01, 2003.03, 200.04) ]
E1: 200.00 • (000.01 + 000.02) [SET (200.01), RSET (200.00)]
E2: 200.01 • 000.01 • 000.02 • /TIM001 [SET (200.02), RSET (200.01)]
E3: 200.02 • (/000.01 + /000.02) [SET (200.03), RSET (200.02) ]
E4: 200.02 • 000.01 • 000.02 • 000.03 [SET (200.04), RSET (200.02)]
118

Automação e Comando Módulo 2: Projectos de Automatismos
Programa Ladder
119

Automação e Comando Módulo 2: Projectos de Automatismos
Agora era só digitar este programa, por exemplo no software Syswin, e depois carregá-lo para o autómato através de cabo próprio, por exemplo para o CPM1A. Ou então, passar este programa ladder para lista de instruções e introduzi-lo manualmente no autómato, por exemplo no C20K.
120

Automação e Comando Módulo 2: Projectos de Automatismos
PROJECTO – EXEMPLO (2) Neste segundo exemplo/projecto, vamos ver então como se faz um projecto em Grafcet, aproveitando o mesmo para aprender a trabalhar com o software CX-Programmer nesta vertente.
Metodologia Em qualquer projecto que realize deve seguir, por ordem, os seguintes passos: 1. Definir as operações do projecto / Compreender o enunciado do projecto 2. Criar o projecto, usando o CX-Programmer 3. Criar o Grafcet do projecto: Estados – Accções – Transições – Programas associados a cada transição 4. Compilar para verificação de eventuais erros 5. Simular as Transições do projecto 6. Programar e associar as Acções correspondentes a cada Estado 7. Testar e Simular todo o projecto
Exemplo – Enunciado
Quando um carro se aproxima de uma cancela é emitido um Ticket e o Display exibe a mensagem “Retire Ticket”. Quando o Ticket é retirado a cancela começa a abrir e o display exibe “Cancela a Abrir”. Quando a cancela está totalmente aberta, o Display apresenta a mensagem “Siga”. Quando o carro passa a cancela, a cancela fecha-se (começa a fechar-se ao fim de 3 segundos). Quando a cancela está totalmente fechada o display exibe “Cancela Fechada” e o sistema volta ao estado inicial.
121

Automação e Comando Módulo 2: Projectos de Automatismos
122

Automação e Comando Módulo 2: Projectos de Automatismos
1. Iniciar o CX-Programmer 1. 1.No ambiente de trabalho seleccione Iniciar >> Todos os Programas – OMRON – CX-One – CX-Programmer.Aparecerá então a janela principal do CX-Programmer.
2. Criar um Novo Projecto Clique em New
Aparecerá a caixa de diálogo Change PLC
123

Automação e Comando Módulo 2: Projectos de Automatismos
3. Selecção do tipo de autómato e tipo de rede 3.1. Seleccione o seu tipo de autómato a partir da “drop-down list” Device Type3.2. Clique em SettingsA caixa de diálogo Device Type Settings aparecerá e poderá configurá-la. No nosso exemplo vamos usar o CJ1G-CPU42-H
3.3. Clique em OK 3.4. Seleccione o tipo de rede a partir da “drop-down list” Network Type; seleccione por exemplo Toolbus.
124

Automação e Comando Módulo 2: Projectos de Automatismos
3.5. Clique OK
CRIAÇÃO DOS PROGRAMAS GRAFCET 1. Apagar o programa ladder Como não vamos usar, neste exemplo, programação ladder, vamos apagar o programa ladder existente e adicionar um programa em Grafcet. 1.1. No espaço de trabalho do projecto: Clique da direita em New Program 1 (00), e seleccione Delete.
125

Automação e Comando Módulo 2: Projectos de Automatismos
Confirme clicando em Yes na janela pop-up que aparece.
2. Adicionar um Programa Ladder 2.1. No espaço de trabalho do projecto: Clique da direita em Programs e seleccione Insert Program – SFC
Um novo programa a será registado. O editor de SFC (Grafcet) b será mostrado.
126

Automação e Comando Módulo 2: Projectos de Automatismos
CRIAÇÃO DAS ETAPAS/ESTADOS E DAS TRANSIÇÕES Quando um programa Grafcet é criado, são também criados automaticamente 2 estados e uma transição, que termos que renomear.
1. Renomear um Estado Inicial No nosso exemplo, o estado inicial representa o sistema de estacionamento num estado de espera. 1.1. Clique da direita em Step 1 e seleccione Edit Step Name
2. Digite “Estado_Inicial” e <ENTER>
Atenção: Os nomes dos Estados não podem conter espaços. Pode usar “undersore” em vez de espaços.
2. Renomear uma Transição 2.1. Duplo clique em Trans12.2. Digite “Flag_Deteccao_Veiculo” e <ENTER>
127

Automação e Comando Módulo 2: Projectos de Automatismos
3. Renomear o segundo Estado Como fez para o estado inicial, renomeie o segundo estado para “Emissao_Ticket”
ADICIONAR ESTADOS E TRANSIÇÕES Vamos agora adicionar os Estados e Transições seguintes do nosso projecto. 1. Adicionar uma Transição 1.1. Clique da direita no Estado “Emissao_Ticket” e seleccione “Add Transition”
Uma nova transição foi adicionada 2. Adicionar um Estado 2.1. Clique da direita na transição Trans1, antes adicionada, e seleccione “Add Step”
128

Automação e Comando Módulo 2: Projectos de Automatismos
Um novo Estado foi adicionado.
Criar Estados e Transições Os estados e transições podem ser adicionados e depois ligados, usando conectores. Vamos ver esse procedimento para ligar um estado a uma transição. Antes, apague o estado que criou.
Ligar um Estado a uma Transição Crie um novo estado num ponto superior do Grafcet (basta fazer clique da direita nesse local e clicar em “Add Step”
1. Clique da direita no Estado “Step1” antes criado e selecccione “Add Connection to Step”.Verá um conector a estender-se a partir do Estado até onde estiver o rato.
129

Automação e Comando Módulo 2: Projectos de Automatismos
2. Mova o cursor para a transição-alvo, isto é, para a transição que quer ligar a esse estado.O cursor transforma-se então numa seta.
3. Clique da esquerda do rato O estado e a transição ficarão ligados. 4. Clique da direita na transição e seleccione “Tidy Descendant SFC Elements”O estado ficará alinhado abaixo da respectiva transição.
130

Automação e Comando Módulo 2: Projectos de Automatismos
CRIAR TRANSIÇÕES As transições são criadas como programas ladder 1. Registar uma transição de programa Para a transição “Flag_Deteccao_Veiculo” vamos definir as condições de transição, como programa ladder. 1.1. Clique da direita na pasta Transitions e seleccione “Insert Transition – Ladder”.Será adicionada um programa de transição à pasta Transitions
1.2. Clique da direita em Transition1 e seleccione Rename
131

Automação e Comando Módulo 2: Projectos de Automatismos
1.3. Digite “Veiculo_Detectado”O programa ladder dessa transição verá o nome alterado para “Veiculo_Detectado”
2. Criar o programa ladder para essa transição Quando a condição de transição for satisfeita, o valor da transição mudará de FALSE para TRUE. Para sabermos quando um veículo se aproxima, a usaremos a entrada Sensor_Veiculo . Por isso vamos criar um programa de modo a que o valor da condição de transição se torne TRUE quando a entrada Sensor_Veiculo ficar a ON. 2.1. Duplo clique no programa da transição “Veiculo_Detectado” antes criado. Aparece o editor de programação ladder 2.2. Criar o programa ladder Insira o endereço da entrada, 0.00 por exemplo e nos comentários insira Sensor_Veiculo. Insira uma saída. Para a saída digite o “endereço” Veiculo_Detectado.
132
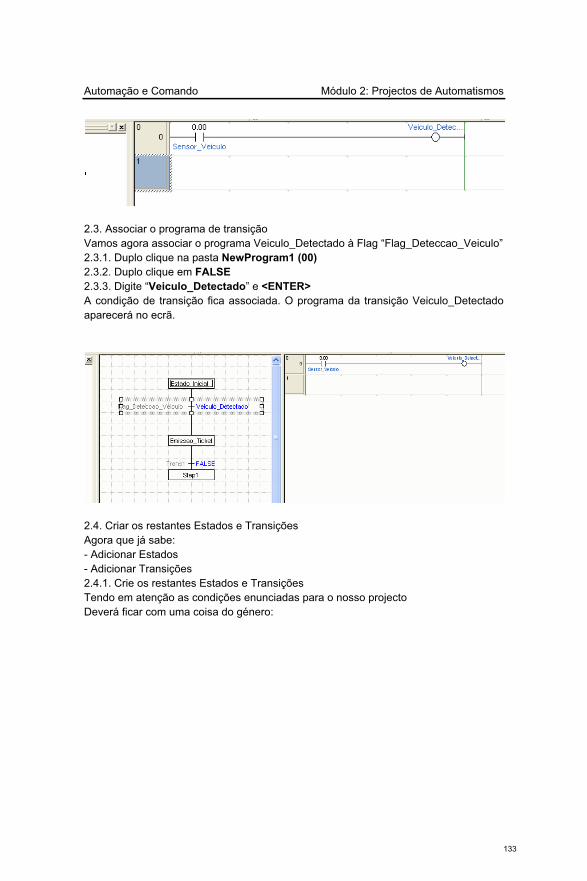
Automação e Comando Módulo 2: Projectos de Automatismos
2.3. Associar o programa de transição Vamos agora associar o programa Veiculo_Detectado à Flag “Flag_Deteccao_Veiculo” 2.3.1. Duplo clique na pasta NewProgram1 (00)2.3.2. Duplo clique em FALSE2.3.3. Digite “Veiculo_Detectado” e <ENTER> A condição de transição fica associada. O programa da transição Veiculo_Detectado aparecerá no ecrã.
2.4. Criar os restantes Estados e Transições Agora que já sabe: - Adicionar Estados - Adicionar Transições 2.4.1. Crie os restantes Estados e Transições Tendo em atenção as condições enunciadas para o nosso projecto Deverá ficar com uma coisa do género:
133

Automação e Comando Módulo 2: Projectos de Automatismos
2.5. Criar programas ladder e associá-los à transição respectiva Neste exemplo estamos a usar sensores como entradas para as condições de transição se verificarem ou não. Por exemplo, quando o sensor que detecta o veículo a aproximar-se (“Sensor_Veiculo” no programa ladder que fizemos) ele detecta-o e activa a saída/flag “Veiculo_Detectado”, que é precisamente a condição (que fica a TRUE quando isso acontece) para o sistema passar do estado inicial para o 2º estado (Emissao_Ticket). O mesmo se passará para as restantes transições. 2.5.1. Crie os programas ladder para as restantes transições e associe esses programas de transição da mesma maneira que fez para a transição entre o estado inicial e o estado “Emissao_Ticket” Deverá ficar com:
134

Automação e Comando Módulo 2: Projectos de Automatismos
CRIAR O LOOP PARA O ESTADO INICIAL Agora temos de criar uma ligação entre a transição final e o estado inicial, uma vez que quando o procedimento para um veículo chega ao fim, temos de colocar o sistema novamente no estado inicial para que este fique pronto para processar o próximo veículo.1. Traçar uma conexão a partir de uma transição 1.1. Clique da direita na última transição e seleccione Connections – Add Connection From Transition. Um traço/conector estender-se-á da transição até ao cursor do rato. 1.2. Mova o cursor do rato para o “Estado_Inicial”. O cursor tornar-se-á uma seta. 1.3. Clique da esquerda do rato. O estado e a transição ficarão ligados e ficará com:
135

Automação e Comando Módulo 2: Projectos de Automatismos
6. COMPILAR Antes de simularmos o nosso projecto vamos compilá-lo para saber se há erros ou não.1. Verificar todos os programas 1.1. Prima a tecla F7 A compilação começa e rapidamente aparecerá uma janela de informação com os resultados dessa compilação. Deverá obter 0 errors, 0 warnings na penúltima linha. Caso contrário terá de corrigir o seu projecto antes de o simular.
2. Gravar o Projecto 2.1. Seleccione Menu File >> Save As… 2.2. Dê um nome ao seu projecto e clique em Save.
136

Automação e Comando Módulo 2: Projectos de Automatismos
7. TESTE DE SIMULAÇÃO DAS TRANSIÇÕES Antes de criarmos as Acções convém verificar como o programa funciona quando as condições de transição são satisfeitas, para ver se essa parte está bem. Vamos então fazer isso.
1. Estabelecer uma ligação online 1.1. Seleccione Menu Simulation >> Work Online Simulator1.2. Clique OKO software fará um “download” do seu programa para o Autómato, download este virtual como é óbvio. Apenas no final de todos os testes faremos o download real para o Autómato. 1.3. Clique OK
2. Configurar as Condições de Transição 2.1. Seleccione Menu PLC >> Operating Mode – Monitor2.2. Clique Yes2.3. Clique na “Flag_Deteccao_Veiculo”.Deverá aparecer-lhe, do lado direito do ecrã, o respectivo programa ladder dessa transição
2. Colocar a Entrada a ON Vamos forçar / simular a entrada 0.00 (que, como se lembram corresponde ao “Sensor_Veiculo_Detectado”) a ON, isto é, aproxima-se um veículo. 2.1. Clique da direita em “Sensor_Veiculo” e seleccione Set-On Então a saída Veiculo_Detectado (ladder) deve ficar a ON e a correspondente flag no Grafcet (“Flag_Deteccao_Veiculo”) deve ficar a TRUE, pelo que o estado do sistema passará do Estado_Inicial para o estado Emissao_Ticket.
2.2. Do mesmo modo que testou esta transição, teste todas as restantes.
3. Fim da Simulação 3.1. Seleccione Menu Simulation >> Work Online Simulator
137

Automação e Comando Módulo 2: Projectos de Automatismos
3.2. Seleccione Menu Simulation >> Exit Simulator
8. CRIAR AS ACÇÕES Cada estado tem associadas alguma(s) acção(ões) que se dão quando o sistema está nesse estado. As acções também são programadas como programas ladder. 1. Registar o programa da acção O estado inicial não tem nenhuma acção associada, pelo que vamos começar com a acção associada ao estado 2, “Emissao_Ticket” 1.1. Clique da direita no estado “Emissao_Ticket” e selecione Add Action – New Ladder Action 1.2. Clique da direita em Action 1, que foi adicionada pelo passo anterior, e seleccione Rename1.3. Digite o nome da acção como “Emitir_Ticket”
2. Criar o Programa da acção 2.1. Duplo clique no programa “Emitir_Ticket”, do lado esquerdo do ecrã Deverá aparecer o espaço de trabalho ladder à direita do ecrã 2.2. Criar o programa ladder: Para tornar uma entrada ON quando o estado fica activo, vamos usar a flag P_On, que é uma flag que fica sempre a On (neste caso fica sempre a On quando estamos nesse estado, naturalmente). Na saída vamos usar o endereço 10.00 para o mecanismo que vai emitir o ticket, e o 20.00 para a saída/contacto que vai activar a painel de mensagem.
3. Criar as restantes acções Agora que já sabe como criar acções, crie as restantes acções da mesma forma que fez para a anterior. Deverá ficar com:
138
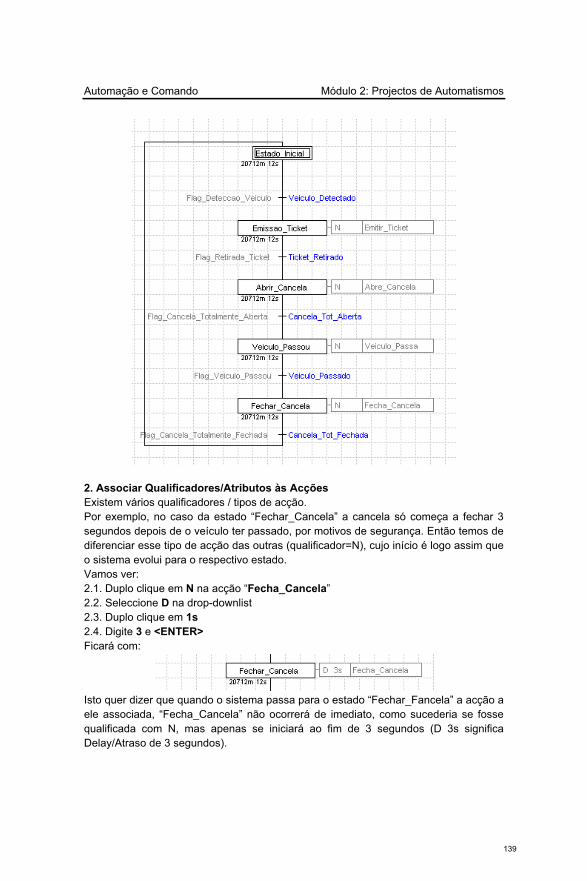
Automação e Comando Módulo 2: Projectos de Automatismos
2. Associar Qualificadores/Atributos às Acções Existem vários qualificadores / tipos de acção. Por exemplo, no caso da estado “Fechar_Cancela” a cancela só começa a fechar 3 segundos depois de o veículo ter passado, por motivos de segurança. Então temos de diferenciar esse tipo de acção das outras (qualificador=N), cujo início é logo assim que o sistema evolui para o respectivo estado. Vamos ver: 2.1. Duplo clique em N na acção “Fecha_Cancela”2.2. Seleccione D na drop-downlist 2.3. Duplo clique em 1s2.4. Digite 3 e <ENTER>Ficará com:
Isto quer dizer que quando o sistema passa para o estado “Fechar_Fancela” a acção a ele associada, “Fecha_Cancela” não ocorrerá de imediato, como sucederia se fosse qualificada com N, mas apenas se iniciará ao fim de 3 segundos (D 3s significa Delay/Atraso de 3 segundos).
139

Automação e Comando Módulo 2: Projectos de Automatismos
9. SIMULAÇÃO Vamos agora testar o sistema completo. 1. Estabelecer uma Ligação Online – Mude para modo Monitor Tal como já fez quando testou as transições: Menu Simulation >> Work Online Simulator
2. Forçar as transições a ON 2.1. Clique da direita em “Flag_Deteccao_Veiculo” e seleccione Force transition – On O estado activo deve passar para o estado “Emissao_Ticket” 2.2. Duplo clique na acção “Emitir_Ticket”Verifique o estado de execução do programa da acção, em ladder, no lado direito do ecrã. Ambas as saídas devem estar a ON. 2.3. Clique da direita na “Flag_Retirada_Ticket” e seleccione Force Transition – On O estado activo deverá passar para o 3º estado, “Abrir_Cancela” 2.4. Duplo clique na acção associada a esse estado, “Abre_Cancela”2.5. Clique na acção acima “Emitir_Ticket” de novo. Na zona ladder, confirme que as acções associadas ao estado anterior “Emissao_Ticket”, saídas 10.00 e 20.00 estão agora OFF. Isto porque o sistema já evoluiu para o estado seguinte.
3. Testar a Operação das Acções 3.1. Force a “Flag_Cancela_Tot_Aberta” a ON Verifique a operação das acções à medida que os estados vão ficando activos/desactivados. Logo que o Sensor_Veiculo_Passado na transição Veiculo_passado fica a OFF, a transição “Veiculo_Passado” é satisfeita. O estado activo passa para imediatamente para “Fechar_Cancela” e acção a ele associada, “Fecha_Cancela” iniciar-se-á passados 3 segundos. 3.2. Quando a transição “Cancela_Tot_Fechada” for satisfeita, o sistema voltará a ir para o “Estado_Inicial” e tudo volta ao início (loop).
4. Terminar a Simulação 4.1. Seleccione Menu Simulation >> Work Online Simulator 4.2. Menu Simulation >> Exit Simulator
That’s all.
140

Automação e Comando Módulo 2: Projectos de Automatismos
Trabalhos de Avaliação a Executar em Laboratório
Grupo 1
Projecte, programe e monte um sistema automatizado que corresponda aos requisitos do enunciado.
Critérios de Avaliação: Projecto e Programa (50%) .Relatório com ..Grafcet;..Atribuição de Bits/Endereços a Estados, Transições (internas e externas), Acções (internas e externas); ..Equações dos Estados; ..Ladder;..Lista de Instruções; Montagem (50%)
Abertura e Fecho Automático de Porta
Descrição do Processo:� Veículo aproxima-se; � Sensor ultrasónico detecta essa aproximação; � Porta abre-se totalmente; � Sensor fotoeléctrico detecta veículo a passar e quando já passou
completamente pela porta � três segundos após essa detecção porta começa a fechar; � Porta fecha totalmente.
141

Automação e Comando Módulo 2: Projectos de Automatismos
Grupo 2 Projecte, programe e monte um sistema automatizado que corresponda aos requisitos do enunciado.
Critérios de Avaliação: Projecto e Programa (50%) .Relatório com ..Grafcet;..Atribuição de Bits/Endereços a Estados, Transições (internas e externas), Acções (internas e externas); ..Equações dos Estados; ..Ladder;..Lista de Instruções; Montagem (50%)
Lubrificadora
Descrição do Processo:� Objecto/peça a ser localizado chega à posição pré-definida; � Sensor detecta essa chegada; � Máquina aplica óleo ao objecto/peça (é aberta uma válvula electromagnética
durante um período pré-definido – cinco segundos); � Nível de óleo da máquina lubrificadora é permanentemente monitorizado por
um sensor; � Quando esse nível desce abaixo de um nível pré-definido, acende-se uma
lâmpada vermelha avisadora.
142

Automação e Comando Módulo 2: Projectos de Automatismos
Grupo 3 Projecte, programe e monte um sistema automatizado que corresponda aos requisitos do enunciado.
Critérios de Avaliação: Projecto e Programa (50%) .Relatório com ..Grafcet;..Atribuição de Bits/Endereços a Estados, Transições (internas e externas), Acções (internas e externas); ..Equações dos Estados; ..Ladder;..Lista de Instruções; Montagem (50%)
Passadeiras Sequenciais
Descrição do Processo:� Três ramos de passadeira podem transportar placas metálicas; � Há três sensores de proximidade (um no início de início de cada ramo de
passadeira); � Cada ramo de passadeira começa a andar quando é detectada a aproximação
de uma peça e passados 3 segundos o ramo de passadeira anterior pára.
143

Automação e Comando Módulo 2: Projectos de Automatismos
Grupo 4 Projecte, programe e monte um sistema automatizado que corresponda aos requisitos do enunciado.
Critérios de Avaliação: Projecto e Programa (50%) .Relatório com ..Grafcet;..Atribuição de Bits/Endereços a Estados, Transições (internas e externas), Acções (internas e externas); ..Equações dos Estados; ..Ladder;..Lista de Instruções; Montagem (50%)
Lavagem e Secagem de Veículo
Descrição do Processo:� Sensor detecta veículo em posição; � Operador põe passadeira em andamento, premindo botão de pressão; � Válvula de spray de água é aberta; � Passados dez segundos é ligado motor de secagem; � Passados 50 segundos, após a sua abertura, spray de água pára; � Dez segundos após a paragem do spray de água, motor de secagem é
desligado; � Sensor deixa de detectar veículo e passadeira pára;
144

Automação e Comando Módulo 2: Projectos de Automatismos
Grupo 5 Projecte, programe e monte um sistema automatizado que corresponda aos requisitos do enunciado.
Critérios de Avaliação: Projecto e Programa (50%) .Relatório com ..Grafcet;..Atribuição de Bits/Endereços a Estados, Transições (internas e externas), Acções (internas e externas); ..Equações dos Estados; ..Ladder;..Lista de Instruções; Montagem (50%)
Detecção de Produtos Defeituosos
Descrição do Processo:� Passadeira A é posta a andar através de botão de pressão; � Célula fotoeléctrica detecta garrafa “defeituosa” (sem etiqueta); � Passadeira A pára; � Braço de robot tira a garrafa da passadeira A e coloca-a na passadeira B que
começa a andar; � Braço de robot volta à posição inicial e passadeira A reinicia a sua marcha; � Além de tudo o que foi dito anteriormente, também são contadas as garrafas
defeituosas e quando se atinge um número pré-definido (cinco), acende uma lâmpada vermelha de alarme.
145

Automação e Comando Módulo 2: Projectos de Automatismos
Grupo 6 Projecte, programe e monte um sistema automatizado que corresponda aos requisitos do enunciado.
Critérios de Avaliação: Projecto e Programa (50%) .Relatório com ..Grafcet;..Atribuição de Bits/Endereços a Estados, Transições (internas e externas), Acções (internas e externas); ..Equações dos Estados; ..Ladder;..Lista de Instruções; Montagem (50%)
Sistema de Rega AutomáticaNum sistema de rega automática, constituído por três bombas: B1, B2 e B3, a colocação em funcionamento é feita por um contacto s1, tipo botão de pressão, com detecção do flanco ascendente, funcionando o sistema de acordo com as seguintes condições: - Após ordem de marcha (m), entram em funcionamento simultâneo as três bombas; - A primeira bomba (B1) funciona continuamente durante dez minutos; - A segunda bomba (B2) durante dois minutos; - A terceira bomba (B3) funciona dez minutos, pára nos dez minutos seguintes e volta a funcionar durante dez minutos. No final do ciclo de funcionamento, que tem a duração de 30 minutos, o automatismo regressa à situação inicial, posicionando-se para novo ciclo de rega. Este inicia-se quando o botão de marcha (m) for novamente pressionado. Caso se pretenda parar as bombas, a qualquer momento, existe um botão de paragem (p) para esse fim.
146

Automação e Comando Módulo 2: Projectos de Automatismos
Grupo 7 Projecte, programe e monte um sistema automatizado que corresponda aos requisitos do enunciado.
Critérios de Avaliação: Projecto e Programa (50%) .Relatório com ..Grafcet;..Atribuição de Bits/Endereços a Estados, Transições (internas e externas), Acções (internas e externas); ..Equações dos Estados; ..Ladder;..Lista de Instruções; Montagem (50%)
Portão Automático
Descrição do Processo:� A ordem para a abertura do portão é fornecida por um emissor de comando à
distância. Quando o sinal do emissor é recebido pelo receptor (Rx) existente junto ao portão, neste é ligado um contacto (s0=1), o portão abre e uma lâmpada sinalizadora L1 acende de forma intermitente;
� No final da abertura do portão são actuados interruptores fim de curso, fc1 e fc2, colocados, respectivamente, nos êmbolos roscados dos motores M1 e M2. Estes fim de curso fornecem a informação para paragem dos motores M1 e M2 e para desligar a lâmpada sinalizadora;
� O portão está aberto durante 60 s (t1), fechando automaticamente no final deste tempo.
� Durante o fecho, a lâmpada sinalizadora L1 volta a funcionar de forma intermitente;
� A operação de fecho do portão é efectuada durante 20 s (t2), não existindo interruptores fim de curso para detectar o final do fecho;
� Durante o fecho do portão se o emissor do telecomando for novamente pressionado (s0=1= ou a barreira de infravermelhos (IR), existente na parte de dentro do portão, for interrompida (s1=0), o portão volta a abrir.
147

Automação e Comando Módulo 2: Projectos de Automatismos
Grupo Turma ( A projectar e montar por todos os grupos, antes dos trabalhos de avaliação, por forma a treinar)
Projecte, programe e monte um sistema automatizado que corresponda aos requisitos do enunciado.
Critérios de Avaliação: Projecto e Programa (50%) .Relatório com ..Grafcet;..Atribuição de Bits/Endereços a Estados, Transições (internas e externas), Acções (internas e externas); ..Equações dos Estados; ..Ladder;..Lista de Instruções; Montagem (50%) Semáforos
Descrição do Processo:Automatismo para comando de semáforos, designados por A e B, num cruzamento com vias de trânsito num só sentido (ver figura) – de acordo com as seguintes condições:
� - O sinal vermelho e o verde no semáforo oposto estão ligados durante 30 s (t1);
� - Após o sinal verde, acende o sinal amarelo durante 3 s(t2); � - Na passagem do sinal amarelo para vermelho, os sinais vermelhos de ambos
os semáforos estão acesos em simultâneo durante 1,5 s (t3); � - Após o sinal vermelho, acende o sinal verde. � Um interruptor i1 permite ligar/desligar manualmente os semáforos. Quando
desligado, o sinal amarelo é colocado em intermitente em ambos os semáforos.
� De segunda a quinta-feira, das 00.00 h às 06h00 h, em que o fluxo de trânsito é reduzido, os semáforos funcionam com o sinal amarelo intermitente, de sexta-feira a domingo os sinais funcionam normalmente durante 24 h. Esta informação é fornecida por um bit interno (M10).�
148

Automação e Comando Módulo 2: Projectos de Automatismos
RelatórioExemplo de relatório: Relatórios�/�Powerpoints�Automação� e� Comando� –� Módulo� 3:� Projectos� de� Automatismos� Industriais� (Grafcet)� –�Relatório�dos�Trabalhos�1.�Relatório�Powerpoint�Nuno+Virgílio�http://www.profelectro.info/?p=1242�ou�http://www.slideshare.net/luisj/grafcet�v�n?type=powerpoint�������������������������������������
149

Automação e Comando Módulo 2: Projectos de Automatismos
Teste�de�Avaliação�Sumativa��
1.� Indique� três� vantagens� da� utilização� da� metodologia� Grafcet� na� implementação� de�
automatismos,�quando�comparada�com�a�metodologia�“ad�hoc”�_______________________________________________________________________________________________________________________________________________________________________________________________________________________________________��
2.�Quais�os�três�elementos�principais�que�constituem�um�Grafcet?�
_____________________________________________________________________________��
3.� Diga� o� que� entende� por� “Divergência� OU”� e� represente� um� exemplo� deste� tipo� de�
sequência�/�tipo�de�ligação�entre�etapas�__________________________________________________________________________________________________________________________________________________________������������
4.� Represente� o� Grafcet� de� um� automatismo� que� permite� pôr� um� motor� em� marcha� e�
também�pará�lo.�Considere�como�condição�de�transição�prioritária�a�paragem�do�motor.����������
�����
150

Automação e Comando Módulo 2: Projectos de Automatismos
5.�Explique,�por�palavras,�o�funcionamento�da�parte�seguinte�de�um�Grafcet:�
�____________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________�
6.�Explique,�por�palavras,�o�funcionamento�da�parte�seguinte�de�um�Grafcet:�
�_____________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________��
7.�Elabore�um�projecto�para�o�enunciado�seguinte,�usando�a�metodologia�Grafcet.�
No� seu� projecto� deve� indicar� todos� os� passos� /� tabelas� que� constituem� esta� metodologia,�designadamente:�Desenho�do�Grafcet;�Tabela�de�atribuição�de�bits/endereços�aos�estados;�Tabela�de�Transiçoes�(internas�e�externas);�Tabela�de�Acções�(internas�e�externas);�Equações�dos�Estados;�Programa�Ladder.����
151

Automação e Comando Módulo 2: Projectos de Automatismos
Enunciado/Procedimento�1.�Um�motor�(M1)�entra�em�funcionamento�quando�se�pressiona�um�botão�de�pressão�(b1);�2.�Esse�motor�pára�ao�fim�de�2�minutos;�3.�Quando�o�motor�pára,�passados�5�segundos,�acende�uma�lâmpada�que�fica�a�piscar;�4.� Existe� ainda� um� botão� de� pressão� de� Reset� (b2)� que,� quando� pressionado,� faz� o�automatismo�regressar�ao�estado�inicial�parando�o�motor�ou�apagando�a�lâmpada,�conforme�o�dispositivo�que�esteja�accionado�na�altura.���Cotação:�1.�1,5�valores�2.�1,5�valores�3.�2�valores�4.�2�valores�5.�1,5�valores�6.�1,5�valores�7.�10�valores��
152

Automação e Comando Capítulo 3: Automatismos Electromecânicos
�
Capítulo 3 � Automatismos Electromecânicos
o Reléso Contactoro Sensores e Detectores o Automatismos Industriais - Montagens
153

Automação e Comando Capítulo 3: Automatismos Electromecânicos
RELÉ
MotivoA razão da existência dos relés prende-se com o facto de, frequentemente, em aplicações eléctricas/electrónicas, se pretender isolar dois circuitos, um de comando e outro de potência. E porquê? O circuito de potência é alimentado, geralmente, por tensões elevadas e percorrido por correntes também elas elevadas. Daqui ressalta logo o aspecto da segurança, não só das pessoas mas também dos equipamentos; mas também uma questão de operacionalização. Imagine, por exemplo, que desejava controlar um desses circuitos de correntes e tensões elevadas, a partir de uma porta do seu computador. Trabalhando este com tensões e corrente baixas, a ligação directa daquele circuito seria ruinosa para o seu PC. Então concluímos que deveremos ter, em certos casos, um circuito de potência a ser comandado por um circuito de comando, este funcionando com tensões e correntes muito mais baixas. Os dois circuitos deverão estar, pois, isolados electricamente. É aqui que entra o relé. Constituição
Um relé não é mais do que uma bobina ligada através de dois terminais ao circuito de comando (baixa tensão) e um, ou mais, pares de contactos, isolados dos anteriores terminais, ligados ao circuito alimentado por tensão elevada (de potência). A figura é elucidativa:
FuncionamentoComo se sabe, um fio condutor percorrido por uma corrente eléctrica cria ao seu redor um campo magnético. Se em vez de um fio linear, usarmos uma bobina (um fio enrolado em espiras/circunferências) o campo magnético criado é maior. Caso o núcleo (parte central da bobina) seja de um material ferroso o campo magnético será maior do que se for o ar. Finalmente, outra forma de aumentar o valor do campo magnético é aumentar o valor da corrente que percorre a bobina.
154

Auto
Ora conscampQuanEsta correSe amovetenhaquanPor ocorreNo cmagnnoutr
QuanbobincircucontaHá pQuanFechactuaExistNormNo c
mação e C
o campo mstituída por po. nto menor f
força magente que pe peça a queer de uma a duas po
ndo isso nãooutro lado, eente. caso do relénético que ros casos) o
ndo fechamna cria um
uito exterior acto entre u
pouco dissendo ela forhados (NF)ado e abremtem outros malmente Acaso da figu
omando
magnético pmaterial fer
for a distâncgnética pod
ercorre a boe nos referiposição pasições poso acontece.esse campo
é, a parte avai exerce
o circuito de
mos o interrcampo mag(de potênc
um circuito emos que a r usada pa) / Normallym quando e
contactos Abertos (NAra acima tra
pode ser utrromagnétic
cia entre a bde ser de bina. mos for móra outra. No
ssíveis, um. o magnético
alimentada er a força se potência.
uptor do cirgnético quecia) que é ae o outro. força magnra abrir, quy Closed (Nele é actuad
em que tA) / Normalata-se de co
Capít
ilizado paraco que estej
bobina e a repulsão o
óvel, é óbvioormalmentea quando
o assim cria
com baixa sobre uma Observe a
rcuito alimee vai atrair aalimentado
nética pode uer dizer qNC), isto é do. tudo se pally Opened ontactos NA
tulo 3: Auto
a exercer uja colocada
peça maior ou atracção
o que a forçe o sistemase exerce
ado pode se
tensão é upeça móvefigura:
entado por ua peça móva 480 V CA
fechar ou aue os contestão fech
assa ao co(NO)
A.
matismos E
uma força sa perto da b
será a forço, conform
ça pode sera é feito de
a força m
er “desligad
utilizada parel que irá f
uma bateriavel do relé eA. Isto sem
abrir o circutactos eram
hados quan
ontrário. Sã
Electromecâ
sobre uma bobina que c
ça. me o sentid
r utilizada pmodo a qu
magnética,
do”, desligan
ra criar o cafechar (ou
a de 12 V Ce assim fec
m haver qua
ito de potênm Normalmdo o relé n
ão os cont
ânicos
peça cria o
do da
para a ue ela outra
ndo a
ampo abrir,
CC, a char o alquer
ncia. mentenão é
actos
155

Automação e Comando Capítulo 3: Automatismos Electromecânicos Este tipo de contactos pode ser usado em simultâneo num mesmo sistema, isto é, existem sistemas que possuem um (ou mais) contactos NA e um (ou mais) contactos NF. Ver artigo sobre relés, com animações interactivas, em http://www.profelectro.info/?p=25 Questões:
1 – Qual a principal razão para a utilização de relés? _______________________________________________________________________________________________________________________________________________________________________________________________________________________________________ 2 – Em automatismos industriais, o circuito de comando é normalmente alimentado por:
� Tensão baixa �
� Tensão média �
� Tensão elevada �
3 – Em automatismos industriais, o circuito de potência é normalmente alimentado por:
� Tensão baixa �
� Tensão média �
� Tensão elevada �
4 – O circuito de potência é aquele que alimenta o
� Relé �
� Motor �
� Circuito de comando �
5 – Por que razão o circuito de comando deve ser alimentado por baixa tensão? _______________________________________________________________________________________________________________________________________________________________________________________________________________________________________
156

Automação e Comando Capítulo 3: Automatismos Electromecânicos 6 – Os circuitos de comando e potência estão
� Isolados electricamente entre si �
� Ligados electricamente entre si �
� Tanto faz �
7 – Um relé é um componente eléctrico formado por uma ____________ , que quando percorrida por uma _________________ cria um ________________ que vai exercer uma __________ que é utilizada para _________ ou _____________ um circuito alimentado por uma tensão elevada ( circuito de ____________ ).
8 – A força produzida por um relé é
� Atractiva �
� Repulsiva �
� Uma ou outra conforme o sentido da corrente �
9 – Quanto maior for a corrente que atravessa a bobina do relé
� Maior é a força exercida por este �
� Menor é a força exercida por este �
� A força exercida pelo relé é sempre igual �
10 - Quanto maior for a distância que atravessa da bobina do relé e da parte móvel deste
� Maior é a força exercida por este �
� Menor é a força exercida por este �
� A força exercida pelo relé é sempre igual �
11 – Explique o que entende por contactos Normalmente Fechados e contactos Normalmente Abertos _________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
157

Automação e Comando Capítulo 3: Automatismos Electromecânicos
CONTACTOR
DefiniçãoÉ um aparelho de corte e comando accionado em geral por meio de um electroíman, concebido para executar um elevado número de manobras, em circuitos com correntes e potências que podem atingir valores relativamente elevados.
Vantagens adicionaisPodem se comandados à distância por meio de botões de pressão ou automaticamente por meio de detectores como termóstatos interruptores de fim de curso, de bóia, etc.
Contactor de Translação
Componentes Principais
- Contactos principais ou pólos: asseguram o fecho e a abertura das correntes principais
(circuito de potência) � parte fixa e parte móvel. Os contactos são equipados de pastilhas
de materiais adequados e substituíveis. - Electroíman: é o órgão motor do contactor. Compreende um circuito magnético e
uma bobina - Contactos Auxiliares: São de 2 tipos:
� Instantâneos – destinam-se a assegurar a auto-alimentação do contactor, os
encravamentos, as sinalizações, etc. Podem ser
o Normalmente Abertos (NA) – os contactos estão abertos e fecham quando o electroíman é alimentado.
158

Automação e Comando Capítulo 3: Automatismos Electromecânicos
o Normalmente Fechados (NF) – os contactos estão fechados e abrem logo que o electroíman é alimentado.
Cada contactor em concreto pode ter uma associação particular destes tipos de contactos auxiliares. � Temporizados - estabelecem ou abrem um circuito, algum tempo depois do
fecho ou abertura do contactor que acciona. A sua principal aplicação é no arranque automático de motores.
Podem ser Temporizados ao Trabalho ou Acção ou ao Repouso. FuncionamentoLogo que o circuito de comando fica fechado (premindo um botão de pressão, por exemplo), a corrente circula pela bobina do electroíman do contactor (5). Esta corrente cria um campo magnético que vai puxar toda a estrutura acima e vencer a forçada mola, fazendo com que os contactos (2) e (3) encostem. Nestas circunstâncias a corrente IO pode fluir da esquerda (fase) para a direita (carga/motor) e colocar o circuito de potência (motor) a funcionar. Logo que interrompamos o circuito de comando (premindo outro botão de pressão, por exemplo) a corrente deixa de atravessar a bobina do electroíman do contactor, o que faz com que este deixe de exercer força sobre a estrutura acima e, assim, a força da mola fazer com que os terminais (2) seja puxados para cima e deixarem de estar em contacto com os terminais (3), o que faz com que a corrente IO deixe de fluir e a carga/motor deixe de ser alimentado e pare. EsquematicamenteEm desenho esquemático, os circuitos de comando e de potência aparecem, normalmente, separados, embora, na prática, isto é, na montagem, os dois circuitos se misturem, já que ambos usam o(s) mesmo(s) contactor(es). Exemplo para montagem prática: Comando Local de Motor Trifásico
Circuito de Comando
159

Automação e Comando Capítulo 3: Automatismos Electromecânicos Este trabalho prático pode ser simulado interactivamente em http://www.profelectro.info/?p=114 Numeração dos Terminais dos Aparelhos (Contactores, Botoneiras, etc.)
Contactos principais – de potência: são referenciados por um só algarismo.
O lado dos números pares (cima) constitui a entrada das 3 fases (R S T ) e o
lado de baixo a saída dessas mesmas 3 fases. Contactos auxiliares: são referenciados por nºs com 2 algarismos: - os da direita (unidades) indicam a função do contacto auxiliar:
- 1 e 2 : contacto normalmente fechado (NF) - 3 e 4 : contacto normalmente aberto (NA)
- os da esquerda (dezenas) indica o nº de ordem de cada contacto do aparelho Bobinas de Comando - As referências são alfanuméricas, estando a letra colocada em primeiro lugar. Ex. A1 e A2 indicam os dois extremos/bornes de ligação da bobina
electromagnética de comando do contactor.
O circuito de potência é desenhado a traço grosso enquanto o circuito de comando é desenhado a traço fino. Questões:1 – O que entende por contactor? ___________________________________________________________________________________________________________________________________________________________________________________________________________________________________ 2 – Os contactos principais de um contactor pertencem ao
� Circuito de comando �
� Circuito de potência �
� Podem pertencer a ambos �
3 – Os contactos principais de um contactor são
� Fixos �
� Móveis �
� Têm uma parte fixa e outra móvel �
160

Automação e Comando Capítulo 3: Automatismos Electromecânicos 4 – Os contactos auxiliares do contactor fazem parte do
� Circuito de comando �
� Circuito de potência �
� Nenhum dos dois �
5 – O circuito de comando pode trabalhar com
� Apenas alta tensão �
� Apenas baixa tensão �
� Alta ou baixa tensão �
6 – O electroíman do contactor faz parte do
� Circuito de comando �
� Circuito de potência �
� Circuito de Tensão �
7 – O electroíman de um contactor serve para
� Ser excitado e assim fechar o circuito de potência �
� Comandar o circuito de potência à distância �
� Ser comandado pelo circuito de potência �
8 – Qual a diferença entre contactos auxiliares instantâneos e contactos auxiliares temporizados? ________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
9 – Os contactos auxiliares instantâneos podem ser NA (ou NO) e NF (ou NC). O que é que tudo isso quer dizer? __________________________________________________________________________________________________________________________________________________________
161

Automação e Comando Capítulo 3: Automatismos Electromecânicos 10 – Os contactos auxiliares NA (NO) quando activados
� Abrem �
� Fecham �
� Mantêm-se na posição em que se encontram �
11 – Para um contacto auxiliar NF (NC) abrir, o que tem de acontecer? _______________________________________________________________________________________________________________________________________________________
12 – Os contactos auxiliares são activados pelo
� Circuito de Comando �
� Circuito de Potência �
� Fase e neutro �
13 – Os contactos NA (NO) de uma botoneira, quando em repouso, estão
� Fechados �
� Abertos �
� Depende do circuito �
14 – Na figura 2, os contactos do botão S1 é:
� NF �
� NA �
� NC �
15 – Na figura 2, o botão S1 serve para:
� Ligar o circuito de potência/motor �
� Desligar o circuito de potência/motor �
� Depende se o motor está ligado ou desligado �
162

Automação e Comando Capítulo 3: Automatismos Electromecânicos
16 – Em desenho esquemático, S quer dizer
� Contactor �
� Motor �
� Botão �
17 – Em desenho esquemático K quer dizer
� Contactor �
� Motor �
� Botão �
18 – Na figura 2, circuito de comando, os contactos 13-14 da direita fazem parte de que aparelho real
� Motor �
� Botoneira �
� Contactor �
19 – Monte, no seu painel, o circuito da figura 2. Tenha o cuidado de: Respeitar convenção de cores para os fios condutores Respeitar a secção adequada para os fios condutores Arrumar os fios condutores o melhor possível
163

Automação e Comando Capítulo 3: Automatismos Electromecânicos
SENSORES E DETECTORES Sensor – é um dispositivo que mede o valor de uma determinada grandeza (ex: temperatura) e a transforma numa grandeza eléctrica (ex: tensão) com um valor relacionado com o valor da grandeza inicial. Este valor da grandeza eléctrica vai servir de entrada a um circuito eléctrico, que actuará de acordo com o valor medido. Vemos assim que o sensor mede (detector) e transforma (transdutor). Por exemplo: o termóstato de um frigorífico mede a temperatura do interior do electrodoméstico e transforma esse valor de temperatura num valor de tensão. À medida que a temperatura vai subindo, a tensão também. Quando a temperatura atinge um determinado valor, o valor da tensão é de tal modo elevada que o circuito a que o termóstato está ligado (motor refrigerador) entra em funcionamento e faz baixar a temperatura no interior do frigorífico, parando quando esta atinge um determinado valor (medido pelo termóstato). A partir daí o ciclo repete-se. Detector – é a parte do sensor que mede o valor da grandeza não eléctrica, sobre a qual queremos actuar. Exemplos de detectores mais utilizados: Detectores de Posição / Movimento Interruptor de Fim-de-Curso São aparelhos destinados a controlar a posição de um órgão de uma máquina. Este órgão, móvel, acciona, quando em movimento, contactos (do interruptor fim-de-curso) colocados em determinadas posições do seu percurso, permitindo o arranque ou paragem da máquina. Exemplos de aplicação: Elevadores, para paragem nos andares Tornos automáticos, para mudança de sentido do carro desta máquina-ferramenta.
Fig. 1 Exemplos de Interruptores de Fim-de-Curso
164

Automação e Comando Capítulo 3: Automatismos Electromecânicos Detector Fotoeléctrico Permite assinalar a presença ou passagem de um objecto, através de um feixe luminoso. A interrupção do feixe luminoso leva à mudança do estado de condução de uma célula fotoeléctrica, a qual comanda, após amplificação do sinal, a comutação do aparelho de potência.
Exemplos de aplicação: Alarme de uma porta Abertura de portas por aproximação.
Fig. 2 – Exemplo de aplicação de um detector fotoeléctrico
Detectores de Nível Interruptor de Bóia O flutuador actua sobre um interruptor de contacto, provocando a abertura ou o fecho do circuito da electrobomba, fazendo com que esta pare se o nível de líquido no tanque já está acima de um certo valor, ou que entre em funcionamento quando o nível do liquido atinge um valor extremamente baixo.
Fig. 3 – Interruptor de bóia e Electrobomba comandada por interruptor de bóia
165

Automação e Comando Capítulo 3: Automatismos Electromecânicos Detectores de Pressão PressostatosControla o valor da pressão nos circuitos pneumáticos ou hidráulicos. Quando a pressão atinge o valor para que foi regulado o detector, o contacto abertura-fecho muda de posição permitindo que o circuito seja cheio de ar (ou pare de o ser), por exemplo, se se tratar de um circuito pneumático. Detector de Temperatura TermostatosDestinam-se a controlar e regular uma variação de temperatura, como já vimos acima. Usam-se para Controlo de temperatura de habitações Frigoríficos
Segurança dos Circuitos com Contactores Os circuitos de força-motriz (Automatismos Industriais) que usam contactores como aparelhos de comando, são normalmente caros, complexos e trabalham em regime intenso, pelo que precisamos de ter muita atenção com a sua protecção. Assim é de todo o interesse a comunicação dos defeitos ocorridos num equipamento, pois permite a localização rápida da avaria, a respectiva resolução ou a tomada de outras providências. Para isso, usam-se normalmente: Relés Térmicos ou Magnetotérmicos – São dispositivos de protecção que protegem os contactores e motores de Automatismos Industriais. São colocados em série com as fases do circuito de potência. Funcionamento:Quando a corrente que circula no circuito atinge um determinado valor (previamente calculado pelo projectista do circuito) que comece a pôr em risco a segurança do circuito, o Relé abre e o circuito é interrompido. A diferença entre um e outro é que o Relé Térmico actua apenas a partir da temperatura, isto é, à medida que a corrente vai aumentando o dispositivo vai aquecendo até que, quando uma determinada temperatura é atingida (correspondente a um valor de corrente), dispara. Já o magnetotérmico, dispara devido ao campo magnético criado pela corrente. Ambos são térmicos de modo a que não se consigam armar de novo de imediato, isto é, dever-se-à investigar o motivo que fez disparar o dispositivo e corrigir esse problema antes de voltar a pôr o circuito em funcionamento. Vemos pois que ambos os aparelhos protegem o circuito contra sobrecargas / sobreintensidades. Por exemplo, se excedermos a carga de um elevador, este terá de desenvolver um maior esforço, pelo que “pedirá” mais corrente à alimentação (sobrecarga), levando ao disparo do relé.
166

Automação e Comando Capítulo 3: Automatismos Electromecânicos FusíveisUm outro dispositivo que se costuma usar nestes circuitos é o fusível, este para protecção contra curto-circuitos, uma vez que a sua actuação é mais rápida, o que convém, face à maior gravidade (em princípio) do problema. Lâmpadas de Sinalização Em conjunto com estes dois tipos de sinalizadores de defeitos (relés e fusíveis) costumam usar-se lâmpadas (e ou campainhas / sirenes) inseridas no circuito, colocadas em vários pontos, de modo a que o operador veja ou ouça, de imediato que algo de anormal se está a passar e actue em conformidade. Costumam usar-se lâmpadas verdes para indicar que tudo está bem e vermelhas para indicar problemas. Nos próximos trabalhos usaremos todos estes dispositivos de sinalização de defeito e protecção (relés, fusíveis, lâmpadas indicadores). Questões: 1 – Um sensor é a mesma coisa que um detector? Justifique. ____________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
2 – Um sensor é um dispositivo que
Mede � Transforma �
Mede e transforma �
3 – A saída de um sensor é uma grandeza
Eléctrica �
Mecânica �
Térmica �
167

Automação e Comando Capítulo 3: Automatismos Electromecânicos 4 – Um transdutor, no sentido em que o estudámos, é um dispositivo que
Transforma uma grandeza eléctrica numa grandeza térmica �
Transforma uma grandeza eléctrica numa de outro tipo �
Transforma uma grandeza de um dado tipo numa grandeza eléctrica �
5 – Indique três exemplos de detectores que conhece __________________________________________________________________________________________________________________________________________________________ 6 – O que entende por termóstato? _______________________________________________________________________________________________________________________________________________________________________________________________________________________________________ 7 – O que entende por interruptor de fim-de-curso _______________________________________________________________________________________________________________________________________________________________________________________________________________________________________ 8 – Suponha que desejo saber quando uma ponte rolante chega a 5 metros de distância de uma parede, de modo a que pare de imediato e assim evitar que colida com esta. Qual o sensor/detector que utilizaria, de entre aqueles que estudámos? _____________________________________________________________________________ 9 – O que entende por sobrecarga? _______________________________________________________________________________________________________________________________________________________________________________________________________________________________________ 10 – O que entende por curto-circuito? _______________________________________________________________________________________________________________________________________________________________________________________________________________________________________ 11 – Qual o dispositivo que se usa em Automatismos Industriais, para prevenir danos por motivos de sobrecargas?
168

Automação e Comando Capítulo 3: Automatismos Electromecânicos __________________________________________________________________________________________________________________________________________________________ 12 – A diferença entre um relé térmico e um relé magnetotérmico é que
O primeiro actua com a corrente e o segundo com o campo magnético �
O primeiro actua devido ao excesso de temperatura provocado pelo aumento de corrente e o segundo devido ao aumento do valor do campo magnético
provocado pelo aumento da corrente �
O primeiro actua devido ao excesso de corrente provocado pelo aumento de temperatura e o segundo devido ao aumento do valor do campo magnético
provocado pelo aumento da corrente �
13 – Indique um motivo possível para que um relé térmico do circuito que controla uma passadeira rolante dispare. _____________________________________________________________________________________________________________________________________________________
14 – Qual a cor das lâmpadas que se devem usar para prevenir o operador de uma máquina que esta está com problemas?
Verde �
Amarela �
Vermelha �
Qualquer cor �
169

Automação e Comando Capítulo 3: Automatismos Electromecânicos
AUTOMATISMOS INDUSTRIAIS - MONTAGENS
Teoria1. Inversor Também conhecido por “inversão de marcha” este circuito permite inverter o sentido de rotação de um motor, o que é útil quando falamos de elevadores, pontes rolantes, passadeiras e escadas rolantes, etc. Usam-se dois contactores: KM5 para o arranque do motor num sentido e KM6 para a rotação noutro sentido. De notar que, para mudar o sentido de rotação, é necessário primeiro parar o motor, pois se assim não fosse o “esticão” envolvido seria grande e perigoso para o motor. O circuito que iremos usar já previne qualquer engano do operador não permitindo uma inversão do sentido sem prévia paragem. A mudança de sentido consegue-se por troca de duas fases na alimentação do motor, quando passamos o funcionamento através de KM5 para KM6 e vice-versa, o que se pode constatar no esquema abaixo.
2. Arrancador Estrela-Triângulo Esta montagem usa-se muito pois deste modo a corrente de arranque (ligação em estrela) é reduzida para 1/3 do seu valor em funcionamento normal (triângulo), de modo a que o motor não sofra um arranque brusco com uma corrente elevada, o que poderia pôr em risco a sua segurança. A passagem da ligação estrela no arranque para a ligação triângulo é feita automaticamente ao fim de algum tempo, programado no temporizador introduzido no KM2. Prática1. Monte, no painel que lhe for dado, os automatismos industriais cujos esquemas e mostram abaixo:
� Inversor; � Arrancador Estrela-Triângulo.
Deve observar as seguintes indicações, que contarão para nota: � Os aparelhos devem ficar bem fixados ao painel; � Os fios condutores devem encontrar-se bem fixados nos respectivos terminais
de ligação; � Os fios condutores devem ser bem arrumados, direitos em troços rectos e com
curvas a 90º ;
170

Automação e Comando Capítulo 3: Automatismos Electromecânicos 2. Faça o relatório de um dos trabalhos, onde deverá constar:
� Capa com escola, curso, ano, nome, nº, turma, nome do trabalho e data; � Índice; � Introdução – apresentação do trabalho; � Esquema do trabalho; � Explicação do funcionamento do trabalho (é a parte mais valorizada do
relatório); � Como decorreu o trabalho no laboratório – dificuldades encontradas, como
foram resolvidas, o que de mais significativo aprendeu, …; � Conclusões.
3. No caso do circuito inversor, faça o esquema, inserindo no mesmo, a sinalização de defeito e de serviço luminosa. Explique porque colocou as respectivas lâmpadas no local em que as colocou, ou seja, como elas funcionam atendendo ao funcionamento do circuito. INVERSORCircuito de Comando Circuito de Potência
171

Automação e Comando Capítulo 3: Automatismos Electromecânicos ARRANCADOR ESTRELA-TRIÂNGULO Circuito de Comando Circuito de Potência
�
172

Automação e Comando Capítulo 4: Pneumática
Capítulo 4 � Pneumática
o Compressoreso Actuadoreso Válvulas Electropneumáticas o Circuito Pneumáticos
173

Automação e Comando Capítulo 4: Pneumática
PNEUMÁTICA Versão 1
1. INTRODUÇÃO o O termo pneumática, refere-se ao estudo e aplicação de sistemas de ar
comprimido, que não são mais que sistemas de transmissão de energia. o A razão para se usar a pneumática, ou qualquer outro tipo de transmissão de
energia numa máquina, é a realização de trabalho. o A realização de trabalho exige a aplicação de energia cinética a um objecto
resistente, o que resulta no movimento desse objecto duma determinada distância.
o Num sistema pneumático, a energia é armazenada num estado potencial, na forma de ar comprimido.
o Num sistema pneumático, a energia que produz trabalho (energia cinética e pressão) obtém resultados quando se permite que o ar comprimido se expanda. Por exemplo, um tanque é carregado com 100 PSIA com ar comprimido. Quando a válvula do tanque é aberta, o ar dentro dele expande-se até que a pressão dentro do tanque fique igual à pressão atmosférica. A expansão do ar toma a forma de um fluxo de ar que, se devidamente canalizado, pode produzir trabalho.
o Então, para executar uma qualquer quantidade de trabalho, é preciso um dispositivo que possa fornecer ar com uma quantidade suficiente de ar a uma pressão desejada. Esse dispositivo é o compressor.
o Vantagens da energia pneumática: o Limpa; o Não existe perigo de explosão; o Disponível; o Custos energéticos médios; o É acumulável (reservatório da central de ar comprimido).
o Desvantagens da energia pneumática:o Transporte é caro (por tubagens); o Forças não muito elevadas; o Velocidade de sinal é baixa; o Ruído de escape do ar.
174

Automação e Comando Capítulo 4: Pneumática 2. COMPRESSORES
2.1. Definição� Compressor é uma máquina que comprime o ar reduzindo o seu volume e
aumentando a sua pressão. O compressor usa, normalmente, uma bomba que comprime o ar e que é alimentada por um motor eléctrico.
2.2. TiposOs compressores podem ser de dois tipos:
o Deslocamento Positivo e Dinâmicos. Os de Deslocamento Positivo podem ser ainda subdivididos em:
� Alternados e Rotativos. Os Dinâmicos podem, por sua vez, ser subdivididos em:
� Centrífugos e Axiais.
Nota Importante: podem (e devem, pois ajudam bastante a perceber o funcionamento dos vários tipos de compressores) ser vistas animações do funcionamento de todos os 4 tipos de compressor em: http://www.profelectro.info/?p=133
Vejamos então cada um destes tipos, dando mais ênfase aos de Deslocamento positivo Alternados, por serem os mais usados na Indústria.
2.3. Compressores de Deslocamento Positivo Definição São compressores que aumentam a pressão de uma dada quantidade de ar reduzindo-lhe o espaço que esse ar pode ocupar à pressão original.
2.3.1. Compressor De Deslocamento Positivo Alternado Baseia-se fundamentalmente na redução de volume. O ar é admitido numa câmara isolada do meio exterior, onde o seu volume é gradualmente diminuído, processando-se a compressão. Quando uma certa pressão é atingida, provoca a abertura de válvulas de descarga, ou simplesmente o ar é empurrado para o tubo de descarga durante a contínua diminuição do volume da câmara de compressão. Um compressor de deslocamento positivo consiste basicamente numa peça móvel dentro de um invólucro/câmara. O compressor tem um pistão como elemento móvel. O pistão está ligado a um eixo de manivela, o qual, por sua vez, está ligado uma peça móvel principal (motor eléctrico, motor de combustão interna). Nas portas de entrada e de saída, válvulas permitem que o ar entre e saia da câmara.
175

Automação e Comando Capítulo 4: Pneumática Esquemas:
Como Funciona um Compressor de Deslocamento Positivo AlternadoÀ medida que o eixo de manivela empurra o pistão para baixo, forma-se um volume cada vez maior dentro da câmara. Esta acção origina que o ar preso pelo pistão fure para se expandir, reduzindo a sua pressão. Por isso, antes que isso aconteça, quando a diferença de pressões se torna suficientemente grande, a válvula de entrada abre, permitindo que o ar da atmosfera entre. Com o pistão no fundo do seu curso, a válvula de entrada fecha. O pistão começa então o seu movimento ascendente para reduzir o volume de ar o que consequentemente aumenta a sua pressão e temperatura. Quando a diferença de pressão entre a câmara do compressor e a linha de descarga for suficientemente grande, a válvula de descarga abre, permitindo que o ar passe para dentro de um tanque, para armazenamento.
176

Automação e Comando Capítulo 4: Pneumática Controlo da Energia PneumáticaA energia que produz trabalho transmitida pneumaticamente tem de ser direccionada e sob controlo completo em todos os momentos. Se não estiver sob controlo, não será realizado trabalho útil e as máquinas podem estragar-se ou os seus operadores serem feridos. Uma das vantagens de transmitir energia sob a forma pneumática é que essa energia pode ser controlada facilmente usando válvulas. Controlo da PressãoA pressão num sistema pneumático tem de ser controlada em dois pontos - no compressor e no tanque de recepção. O controlo da pressão é necessário no compressor como medida de segurança do sistema. É necessário no tanque de recepção de forma a que um actuador receba uma fonte de pressão constante, sem perdas de energia. Controlo de Pressão Num CompressorNum sistema pneumático, a energia entregue por um compressor não é geralmente usada de imediato, mas é armazenada como energia potencial num tanque receptor, na forma de ar comprimido. Na maioria dos casos, um compressor é projectado para integrar um sistema e operar intermitentemente. Um compressor, habitualmente, entrega ar comprimido a um tanque receptor até que seja atingida uma alta pressão e depois é desligado. Quando a pressão do ar no tanque diminui, o compressor liga-se e recarrega o tanque. A maneira de funcionar intermitente do compressor é um benefício para o sistema em termos de poupança de energia. Um modo comum de sensorizar a pressão do tanque e, assim, controlar a acção e inacção de compressores relativamente pequenos (2-15 HP), é com um interruptor de pressão. Interruptor de PressãoA pressão do sistema é sensorizada com um pistão de mola dentro do invólucro do interruptor. Quando a pressão no sistema está num nível baixo, a mola empurra o pistão para baixo. Nessa posição é feito um contacto que origina um sinal eléctrico para ligar o compressor. À medida que a pressão no tanque de recepção cresce, isso força o pistão a subir. Com a pressão ao seu mais alto nível, o pistão quebra o contacto eléctrico e o compressor desliga-se. Válvula de Alívio de SegurançaA máxima pressão desenvolvida por um compressor é projectada para ser regulada por um sistema de controlo que sensoriza a descarga ou a pressão do tanque. No caso de uma emergência, tal como uma falha do sistema de controlo em funcionar adequadamente, um sistema de compressor de deslocamento positivo é geralmente equipado com uma válvula de alívio de segurança. Uma válvula de alívio de segurança é normalmente uma válvula fechada. A rosca da válvula de segurança está assente na entrada da válvula. Uma mola segura a rosca firmemente no seu lugar. O ar não consegue passar através da válvula até que a força na mola não ultrapasse o seu valor de “quebra” da rosca. A pressão do ar à saída do compressor é sensorizada directamente no fundo da rosca.
177

Automação e Comando Capítulo 4: Pneumática Quando a pressão do ar fica a um nível exageradamente alto, a mola é comprimida, a rosca move-se do seu lugar, e o ar sai através da válvula. Uma válvula de segurança num compressor não tem a finalidade de operar frequentemente. Ela é usada apenas como um dispositivo de segurança. Muitas vezes estas válvulas de segurança são equipadas com apitos ou cornetas para alertar as pessoas que há alguma falha no sistema ou que existe um problema. Regulador de PressãoNum sistema pneumático, a energia que será usada pelo sistema e transmitida através dele encontra-se armazenada como energia potencial num tanque receptor de ar, na forma de ar comprimido. Um regulador de pressão está posicionado no tanque receptor e é utilizado para encaminhar, na quantidade necessária, esta energia, para cada parte do circuito. Um regulador de pressão é, normalmente, uma válvula aberta Com um regulador posicionado no tanque de recepção, o ar do tanque pode expandir-se (fluir) através da válvula, para qualquer ponto do circuito. À medida que a pressão após o regulador cresce, isso é detectado numa passagem piloto interna conduzindo até ao lado de baixo do pistão. Este pistão tem uma grande área exposta a esta pressão fluente e, por esta razão, é muito sensível a detectar as flutuações de pressão que flui. Quando a pressão fluente se aproxima de um nível pré-definido, o pistão move-se para cima puxando a rosca na direcção de repouso. A rosca, uma vez nessa posição, não permite que o ar comprimido continue a fluir. Desta forma, uma fonte constante de ar comprimido torna-se acessível para um actuador móvel. 2.3.2. Compressores de Deslocamento Positivo Rotativos
Esquema:
178

Automação e Comando Capítulo 4: Pneumática Como Funciona um Compressor de Deslocamento Positivo Rotativo
São máquinas em que palhetas espiraladas giram radialmente solidárias com um rotor que está montado excentricamente dentro de um cilindro. O rotor encaixa com as lâminas ou palhetas de modo a que há um espaço livre entre ambos para o ar ir passando longitudinalmente, mantendo contacto com as paredes do cilindro através da força centrífuga. Quando em funcionamento, à medida que as palhetas espiraladas vão rodando no sentido da saída, os respectivos compartimentos vão ficando com o ar que lá se encontra, comprimido. Cada compartimento varia entre um máximo volume enquanto suga o ar do compartimento anterior e um mínimo volume na outra metade da revolução da palheta. Assim se obtém um deslocamento positivo do ar. Uma (outra) animação mostrando o seu funcionamento pode ser vista aqui: http://www.pneumofore.com/img/operation.swf 2.4. Compressores Dinâmicos DefiniçãoOs compressores Dinâmicos são máquinas rotativas contínuas nas quais um elemento de alta rotação acelera o ar à medida que este passa através desse elemento, convertendo o aumento de velocidade em aumento de pressão, parcialmente no elemento rotativo e parcialmente em difusores estáticos ou lâminas. A capacidade de um compressor Dinâmico varia consideravelmente com a pressão de trabalho.
179

Automação e Comando Capítulo 4: Pneumática 2.4.1. Compressores Dinâmicos Centrífugos Esquema:
Funcionamento:Os compressores Centrífugos produzem uma descarga de alta pressão através da conversão de um momento angular resultante da rotação do impulsor (deslocamento dinâmico). De forma fazê-lo eficientemente eles rodam a maiores velocidades do que os outros tipos de compressores. Estes compressores são também projectados e desenhados para altas capacidades porque o fluir do ar através do compressor é contínuo. Ajustar as palhetas de guia de entrada do ar é o método mais comum para controlar a capacidade de um compressor centrífugo. Fechando as palhetas guia, o fluido volumétrico e, consequentemente, a capacidade são reduzidas e vice-versa.
2.4.2. Compressores Dinâmicos Axiais Esquema:
Funcionamento:No compressor Axial, o ar flui paralelo ao eixo de rotação. O compressor é composto de várias linhas de cascatas de superfícies de sustentação. Algumas destas linhas, chamadas rotores, são ligadas à haste central e rodam a alta velocidade. Os maiores utilizadores deste tipo de compressores são as fábricas de aeronaves e motores de aeronaves. As suas propriedades únicas, permitem que este tipo de desenho seja facilmente incorporado num engenho “flui através”, tal como são hoje usados nas modernas aeronaves.
180

Automação e Comando Capítulo 4: Pneumática Questionário: 1. A palavra pneumática refere-se a) Ao estudo da ciência dos pneus b) Ao estudo da tecnologia do ar comprimido c) Ao estudo da tecnologia do ar comprimido mais a informática 2. A finalidade última dos sistemas pneumáticos usam-se é a) Produzir energia b) Produzir trabalho c) Produzir ar comprimido 3. Explique as condições necessárias para podermos dizer que foi produzido trabalho _______________________________________________________________________________________________________________________________________________________________________________________________________________ 4. Nos sistemas pneumáticos a energia que irá produzir trabalho é armazenada na forma a) Cinética b) Eléctrica c) Ar comprimido (potencial) 5. O equipamento que produz o ar comprimido chama-se a) Compressor b) Dispersor c) Válvula 6. O compressor, ao produzir ar comprimido a) Aumenta a sua pressão b) Diminui a sua pressão c) Mantém a pressão do ar 7. Explique sucintamente o funcionamento do compressor _______________________________________________________________________________________________________________________________________________________________________________________________________________ 8. O ar que entra no compressor a) Está à mesma pressão do ar que sai do compressor b) Está a maior pressão do que o ar que sai do compressor c) Está a menor pressão do que o ar que sai do compressor
181

Automação e Comando Capítulo 4: Pneumática 9. Quais os tipos e subtipos de compressores que conhece? Apresente a sua resposta numa forma gráfica, utilizando “chavetas” 10. Qual a característica principal dos compressores de Deslocamento Positivo? __________________________________________________________________________________________________________________________________________ 11. Num compressor de Deslocamento Positivo, qual a função do motor? _____________________________________________________________________ 12. Num compressor de Deslocamento Positivo, qual a função do pistão? __________________________________________________________________________________________________________________________________________ 13. Explique como funciona o compressor de Deslocamento Positivo, mas fazendo referência a todas as peças que o compõem (câmara de compressão, válvulas, pistão, eixo da manivela, motor) e à respectiva função. ____________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________ 14. Como se chamam as peças que controlam o fluxo do ar de acordo com o trabalho que queremos fazer? a) Válvulas b) Pistões c) Compressores 15. Num sistema pneumático em funcionamento como é feita a produção de ar comprimido? a) O compressor produz ar comprimido ao mesmo ritmo que ele é necessário para o sistema produzir trabalho b) Um trabalhador tem de estar sempre a ligar e desligar o compressor conforme é necessário ar comprimido para produzir trabalho ou não. c) O compressor produz ar comprimido que armazena. Quando está na pressão máxima pára, quando passa abaixo um certo nível de pressão, recomeça a trabalhar para produzir mais.
182

Automação e Comando Capítulo 4: Pneumática 16. Como se chama a peça com que se consegue fazer com que o sistema obtenha sempre o ar comprimido à pressão que é necessária (ora maior, ora menor) a) Interruptor de Pressão b) Regulador de Pressão c) Válvula de Alívio de Segurança 17. Para que serve o Interruptor de Pressão? __________________________________________________________________________________________________________________________________________ 18. Para que serve o Regulador de Pressão __________________________________________________________________________________________________________________________________________ 19. Para que serve a Válvula de Alívio de Segurança __________________________________________________________________________________________________________________________________________ 20. Qual o princípio de funcionamento dos compressores dinâmicos? a) Transformam energia cinética em ar comprimido b) Transformam energia cinética em trabalho c) Transforma velocidade em ar comprimido 21. Dos tipos de compressor que estudou, qual é o que roda com mais velocidade, o rotativo ou o centrífugo? _____________________________________________________________________ 22. Como se pode variar a pressão do ar obtido através de um compressor centrífugo? __________________________________________________________________________________________________________________________________________ 23. Quais as vantagens da energia pneumática quando comparada, por exemplo, com a energia eléctrica? ____________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
183

Automação e Comando Capítulo 4: Pneumática ACTUADORES (CILINDROS e MOTORES)
O que são? São componentes que convertem a energia pneumática (ar comprimido) em movimento (energia mecânica), produzindo assim trabalho. Como funcionam? São ligados mecanicamente à carga a ser movimentada e, assim, ao ser influenciados pelo ar comprimido, transmitem à carga essa energia pneumática, sob a forma de força. Tipos e respectivas Utilizações Cilindros – a energia pneumática é transformada em movimento linear (rectilíneo) Motores – A energia pneumática é transformada em movimento rotativo ou oscilante Critério de Selecção Para cada tipo existem muitos modelos, fazendo-se a sua escolha de acordo com a utilização que se pretende:
- Tipo de movimento a executar: rotativo ou linear - Sentido de rotação e inversão - Número de rotações e velocidade - Torque e Força a executar - Potência a desenvolver - Uniformidade da força e velocidade - Características em relação às influências ambientais internas e externas - Aspectos ergonométricos
ACTUADORES EX. UTILIZAÇÃO
Movimento rotativo
Motor Pneumático Unidirecional
Motor Pneumático Bidirecional
Oscilador Pneumático ou
Atuador Giratório
Movimento rotativo
Furador
Roscador
Lixadeira
Aparafusadora
Serra
Tesoura para chapa
Movimento de percussão
Martelo
Britadeira
Rebitadora
Estampa para gravação
Pregador
184

Automação e Comando Capítulo 4: Pneumática
Movimento linear
Cilindro de acção simples com recuo
Cilindro de acção simples com avanço
Cilindro de acção simples sem mola
Cilindro de dupla ação
Cilindro de dupla ação com haste passante
Cilindro de dupla ação sem haste
Cilindro de pressão diferencial
Cilindro com travamento
Movimento Linear
Macaco Pneumático
Morsa Pneumática
Prensa Pneumática
Tesoura de Corte
Tabela 1
185

Automação e Comando Capítulo 4: Pneumática
Questionário:
1. Num sistema pneumático, o que entende por actuadores?
_________________________________________________________________________________________________________________________________________________________________________________________________________
2. Explique como são aplicados os actuadores num sistema pneumático.
_________________________________________________________________________________________________________________________________________________________________________________________________________
3. Diga quais são os grandes tipos de actuadores que existem e quais as diferenças entre eles.
_________________________________________________________________________________________________________________________________________________________________________________________________________
4. Num actuador, qual a forma de energia inicial e qual a forma de energia final?
______________________________________________________________________________________________________________________________________
5. De acordo com a Tabela 1, diga qual o tipo e modelo de actuador que escolheria para cada uma das seguintes aplicações:
a) Macaco pneumático de oficina de automóveis
___________________________________________________________________
b) Serra circular
___________________________________________________________________
c) Serra linear
___________________________________________________________________
d) Escada rolante
___________________________________________________________________
e) Martelo pneumático
___________________________________________________________________
f) Passadeira rolante de duplo sentido
___________________________________________________________________
g) Bomba de encher pneus de veículos
___________________________________________________________________
186

Automação e Comando Capítulo 4: Pneumática
Exercícios
6. Um cilindro de dupla acção possui o diâmetro de êmbolo de 80 mm e o diâmetro de haste de 25 mm. A pressão de trabalho do cilindro é de 6 bar (60 N/cm2). Quais são as forças teóricas que ele desenvolve no curso de avanço e retorno ?
7. O actuador pneumático abaixo recebe, ao mesmo tempo, uma pressão de 142,2 PSI nos pontos a e b. Calcular a força de distensão, em kgf, do seu pistão, sabendo-se que os diâmetros de sua haste é de 2 cm e de seu êmbolo é de 20 cm.
Figura 1 – Actuador pneumático com pressão nas duas áreas
0a b
187

Automação e Comando Capítulo 4: Pneumática
8. Uma bomba de encher pneu de bicicleta, figura abaixo, recebe uma força de 20 kgf na sua haste, cujo cilindro tem 3 cm de diâmetro, volume inicial de 10 cm3, isso numa temperatura ambiente de 30º C. Calcular a pressão final aplicada no pneu, em PSI, quando o pistão é comprimido até o volume de 2 cm3 e sua temperatura aumenta para 50º C.
Figura 2 – Bomba pneumática
Força = 20 lkgf
Volume inicial = 10 cm3Volume f inal = 2 cm3
Temperatura inical = 30º CTemperatura f inal = 50º CBOMBA PNEUMÁTICA
haste êmbolopneu
188

Automação e Comando Capítulo 4: Pneumática
Equivalências entre unidades:
1 Kgf/cm2 = 14,22 PSI ;
1 bar = 14,5 PSI ;
1PSI = 6894,76 pa ;
1 atm = 14,73 PSI = 29,92 “Hg = 100 Kpa .
VÁLVULAS (PNEUMÁTICAS DIRECCIONAIS)
O que são? São aparelhos de comando do arranque, paragem e direcção do sistema pneumático que produz trabalho. As válvulas pneumáticas direccionais são portanto os componentes dos circuitos pneumáticos que recebem nossos comandos, comandos do computador ou comandos do CLP, e depois para accionam os elementos de trabalho (actuadores) de acordo com esses comandos. É através delas que arrancamos os atuadores e são elas que determinam o tempo que os actuadores permanecerão pressurizados ou acionados. Como funcionam? Conforme a sua posição elas deixam passar o ar comprimido ou não, para além de poderem mudar a direcção de fluxo desse mesmo ar comprimido. A mudança de posição das válvulas pode ser feita manualmente por um operador ou automaticamente através de um outro sistema de comando, eléctrico ou também ele pneumático.
Simbologia� O número de quadrados indica o número de posições (de comando) que a
válvula tem; � As vias através das quais o ar comprimido pode passar são indicadas por
traços e são desenhadas dentro dos quadrados de cada posição; � A direcção do fluxo do ar comprimido é indicada por uma seta; � A função é também desenhada dentro dos quadrados de cada posição; � Quando a válvula se encontra fechada isso é indicado por dois traços
transversais ; Designação dos vários tipos de Válvulas;
� O nome da válvula tem a ver com o seu nº de posições e vias.; � O primeiro número indica a quantidade de vias e o segundo número indica a
quantidade das posições de comando da válvula;
189

Automação e Comando Capítulo 4: Pneumática Número de Posições das Válvulas Pneumáticas Direccionais A simbologia do número de posições das válvulas direccionais segue uma lógica de fácil entendimento e dão uma idéia de seu funcionamento real. Basicamente os símbolos são em forma de quadradinhos, no mínimo dois, que significam o número de posições que a válvula poderá assumir. Uma válvula direcional simbolizada com dois quadradinhos significa que ele tem duas posições. Quando possuir três quadradinhos, três posições; quatro quadradinhos, quatro posições e assim por diante. Exemplos a seguir :
Figura 1 – Posições das válvulas direcionais
Número de Vias das Válvulas Pneumáticas DireccionaisAs vias das válvulas direcionais são as suas passagens de ar, ligadas através das tubos provenientes dos mais diversos locais do circuito. São representadas externamente através de traços contínuos, onde serão ligadas as mangueiras de ar. Internamente, são representadas através de setas direccionais que indicam o caminho seguido pelo ar, na posição (quadradinho) desenhada. Uma regra básica é que o ar segue sempre na direção da seta, nunca contra ela. Podemos encontrar, também, internamente o símbolo de bloqueio de ar que indica a NÃO passagem do mesmo na posição (quadradinho) desenhada. As letras ao lado das vias significam: P = pressão, A = utilização (alternada), B = utilização (alternada), S = escape. Exemplos:
Válvula direcional 2 posições
Válvula direcional 3 posições
Válvula direcional 4 posições
190

Automação e Comando Capítulo 4: Pneumática
Figura 2 – Vias das válvulas direccionais
Válvula direcional 2 vias/2 posições NF
Válvula direcional 2 vias/2 posições NA
Válvula direcional 3 vias/2 posições NF
Válvula direcional 3 vias/2 posições NA
Válvula direcional 5 vias/3 posições Válvula direcional
5 vias/3 posições
Válvula direcional 5 vias/4 posições
Válvula direcional 4 vias/2 posições
Válvula direcional 4 vias/2 posições
P
A
P
A
A A
P PS S
P PS S
A AB B
P P
P
S SS S
SS
AA
A
BB
B
191

Automação e Comando Capítulo 4: Pneumática Tipos de Comando das Válvulas Pneumáticas Direccionais As válvulas direccionais são comandadas através de sinais eléctricos ou mecânicos. A seguir vemos os tipos de comandos mais comuns:
Figura 3 – Comandos das válvulas direcionais
Questionário: 1. O que entende por válvulas pneumáticas direccionais? _______________________________________________________________________________________________________________________________________________________________________________________________________________ 2. Tendo em consideração o sistema pneumático completo (compressor, válvulas direccionais, actuadores) explique se que forma se enquadram as válvulas direccionais nesse sistema. _______________________________________________________________________________________________________________________________________________________________________________________________________________ 3. De que formas se pode comandar o funcionamento das válvulas pneumáticas direccionais? __________________________________________________________________________________________________________________________________________ 4. Indique os nomes das seguintes válvulas direccionais a)
Válvula direcional 2/2 vias NFBotão com trava
Válvula direcional 2/2 vias NFBotão/mola
Válvula direcional 2/2 vias NAAlavanca com trava
Válvula direcional 2/2 vias NAAlavanca/mola
Válvula direcional 3/2 vias NFPiloto/mola
Válvula direcional 3/2 vias NFPedal/mola
Válvula direcional 3/2 vias NABobina/mola
Válvula direcional 3/2 vias NARolete/mola
Válvula direcional 4/2 vias DuplaBobina-servo/mola
Válvula direcional 5/2 vias DuplaBobina-servo/mola
Válvula direcional 4/3 vias DuplaBobina-servo/molaCentro-fechado
Válvula direcional 5/3 vias DuplaBobina-servo/molaCentro-fechado
192

Automação e Comando Capítulo 4: Pneumática b) c) 5. Para a válvula direccional seguinte, indique o significado de 6. Para a válvula direccional seguinte, indique o significado de 7. Desenhe o símbolo de uma válvula direccional com 2 vias e 3 posições 8. Explique o funcionamento da válvula seguinte: 9. Explique o funcionamento da válvula seguinte: 10. Explique de que modo é feito o comando da seguinte válvula: 11. Explique de que modo é feito o comando da seguinte válvula:
193

Automação e Comando Capítulo 4: Pneumática
Versão 2 COMPRESSORES DE AR
O que são?
São máquinas destinadas a elevar a pressão de um dado volume de ar (admitido no compressor nas condições atmosféricas normais) até uma determinada pressão exigida para a execução dos trabalhos dos actuadores pneumáticos do sistema pneumático.
Tipos de Compressores
Há dois grandes tipos
1. Compressores de Deslocamento Positivo
Como funcionam?
O seu funcionamento baseia-se na redução do volume do ar. O ar é recolhido da atmosfera para uma câmara isolada do exterior, sendo depois aí reduzido o seu volume, com o consequente aumento de pressão, resultando pois em ar comprimido para utilização do sistema pneumático.
Existem dois (sub)tipos de compressores de deslocamento positivo:
� Rotativos – Root e Palhetas; � Alternativos – Diafragma e Pistão
2. Compressores de Deslocamento Dinâmico (ou Dinâmicos)
Como funcionam?
Neste caso a elevação de pressão é obtida pela conversão de energia cinética em energia de pressão, durante a passagem do ar pelo interior do compressor. Ou seja, o ar é recolhido da atmosfera para o interior do compressor; aí é acelerado, atingindo altas velocidades (ganhando energia cinética); depois, antes de sair do compressor, pelo outro lado, é desacelerado. Esta desaceleração provoca a conversão da energia cinética do ar, antes ganha, em energia de pressão, isto é o ar fica a uma pressão maior do que aquela com que entrou no compressor.
Existem 3 (sub)tipos de compressores de deslocamento dinâmico:
� Ejector; � Radial; � Dinâmico;
194

Automação e Comando Capítulo 4: Pneumática Vejamos agora em mais pormenor cada um dos (sub)tipos
Compressor (de Deslocamento Positivo Alternativo) de Pistão
Como funciona?
O ar é aspirado da atmosfera através da válvula de aspiração. Depois, no interior, esse ar é comprimido pelo avanço do pistão que reduz o espaço inicialmente ocupado pelo ar. O pistão recua enquanto o ar é novamente aspirado, e assim sucessivamente.
Características:
� Este tipo de compressor é o mais utilizado para pequenos sistemas (pequeno caudal e potência);
� Refrigeração por dissipadores de calor metálicos; � Precisa de lubrificação.
Figura 1 – Compressor de Pistão
Compressor (de Deslocamento Positivo Rotativo) “Root”
Como funciona?
O ar é transportado de um lado para o outro sem grande alteração de volume. A compressão do ar efectua-se pelos cantos de duas células rotativas, cujo ar é forçado a passar para o outro lado do compressor, sendo daí enviado para um recipiente fechado, em que o ar vai aumentando de pressão devido ao aumento da sua quantidade um mesmo volume (do recipiente).
Características
� Apresenta baixa capacidade de compressão mas, em contrapartida, é capaz de enviar grandes cargas (volume) de ar para ambientes com grandes necessidades de caudal de ar, como por exemplo as cabinas pressurizadas dos aviões;
� Não precisa de lubrificação no seu interior.
195

Automação e Comando Capítulo 4: Pneumática
Figura 2 – Compressor “Roots”
Compressor (Dinâmico) Axial) também conhecido por Turbocompressor
Como funciona?
Trabalha segundo o princípio do fluxo e é também adequado para fornecer grandes caudais de ar. O ar é colocado em movimento (fluindo da entrada do compressor para a saída) por uma ou mais turbinas, e esta energia cinética é depois transformada em energia de pressão. Para aumentar a pressão, alguns destes compressores utilizam várias turbinas em série.
Características
Este tipo de compressores utiliza-se mais em grandes fábricas, com grandes necessidades de grandes caudais e a pressão significativa.
Figura 3 – Compressor Axial
Compressor Radial (Centrífugo)
Como funciona?
Tal como o anterior, trabalha segundo o princípio do fluxo (no qual a energia cinética é convertida em pressão) adequado para grandes caudais de ar. A diferença em relação ao axial é que embora também aqui o ar seja aspirado no sentido axial, ele é depois condizido no sentido radial (90º em relação ao eixo) para a saída.
Características:
Também se podem ligar unidades em série para obter maior pressão.
196

Automação e Comando Capítulo 4: Pneumática
Figura 4 – Compressor Radial (Centrífugo)
Caudal de Ar dos Compressores
O que é?
O caudal de ar fornecido pelos compressores é a quantidade de ar que o compressor fornece por unidade de tempo, e é através dele que escolhemos o compressor adequado para o nosso sistema pneumático. Mede-se em m3/minuto.
Uma grande indústria ou um avião, por exemplo, precisa de um grande caudal, logo utiliza, normalmente compressores do tipo axial ou radial.
Um pintor de veículos numa pequena oficina de automóveis precisa de um pequeno caudal, logo utiliza, normalmente, um compressor do tipo pistão.
Regulação e Accionamento dos Compressores
Como é feita?
O accionamento dos compressores é normalmente feito por motor eléctrico (ligado aum eixo de manivela que faz mover o pistão, por exemplo) , mas, para equipamentos móveis, pode também ser feito por motor de explosão (gasolina ou gasóleo).
A regulação é feita marcando-se, no compressor (através do seu manómetro), uma pressão mínima e uma pressão máxima. Quando metemos o compressor a trabalhar, ele começa a aspirar ar da atmosfera e a comprimi-lo para um reservatório. Quando a pressão do ar nesse reservatório atinge o valor máximo, o compressor deixa de trabalhar. Quando, por força do fornecimento de ar comprimido ao sistema pneumático, o ar do reservatório atinge a pressão mínima, o compressor começa de novo a trabalhar, aspirando e comprimindo o ar, e assim sucessivamente.
O sinal de comando para o motor eléctrico do compressor começar a trabalhar ou parar é dado por um pressostato (interruptor eléctrico sensível à pressão) ligado ao motor.
197

Automação e Comando Capítulo 4: Pneumática Refrigeração dos Compressores
Por que é necessária?
O ar quando comprimido aumenta a sua temperatura para valores muito elevados, aquecendo em demasia as paredes do cilindro que aloja o pistão. Para evitar os perigos de sobreaquecimento, o compressor possui um sistema de refrigeração.
Como é feita?
Esse sistema de refrigeração podem ser apenas palhetas dissipadoras de metal, para os pequenos compressores; para os maiores poderá ainda existir um ventilador; para os ainda maiores a refrigeração pode ter de ser feita com água.
Reservatório de Ar Comprimido
Para que serve?
Serve para a estabilização da distribuição do ar comprimido para o sistema pneumático. Para além disso:
� Elimina as oscilações de pressão; � Quando há um momentâneo acréscimo de consumo de ar, é uma garantia de
reserva; � Refrigera o ar através das suas grandes paredes; � Recolhe a humidade misturada com o ar seco, depositando-a, em forma de
água, num recipiente existente no seu fundo.
Figura 5 – Reservatório de Ar Comprimido
198

Automação e Comando Capítulo 4: Pneumática Questionário
1. O equipamento que produz o ar comprimido chama-se a) Compressor � b) Dispersor � c) Válvula � 2. O compressor, ao produzir ar comprimido a) Aumenta a sua pressão � b) Diminui a sua pressão � c) Mantém a pressão do ar � 3. Explique sucintamente o funcionamento do compressor. _______________________________________________________________________________________________________________________________________________________________________________________________________________ 4. O ar que entra no compressor a) Está à mesma pressão do ar que sai do compressor � b) Está a maior pressão do que o ar que sai do compressor � c) Está a menor pressão do que o ar que sai do compressor � 5. Quais os tipos e subtipos de compressores que conhece? Apresente a sua resposta numa forma gráfica, utilizando “chavetas” 6. Num compressor de Deslocamento Positivo, qual a função do motor? ________________________________________________________________________ 7. Num compressor de Deslocamento Positivo de Pistão, qual a função do pistão? __________________________________________________________________________________________________________________________________________ 8. Explique como funciona o compressor de Deslocamento Positivo de Pistão, mas fazendo referência a todas as peças que o compõem (câmara de compressão, válvulas, pistão, eixo da manivela, motor) e à respectiva função. _______________________________________________________________________________________________________________________________________________________________________________________________________________ 9. Como se chamam as peças que controlam o fluxo do ar de acordo com o trabalho que queremos fazer? a) Válvulas � b) Pistões � c) Compressores �
199
Automação e Comando Capítulo 4: Pneumática 10. Num sistema pneumático em funcionamento como é feita a produção de ar comprimido? a) O compressor produz ar comprimido ao mesmo ritmo que ele é necessário para o sistema produzir trabalho � b) Um trabalhador tem de estar sempre a ligar e desligar o compressor conforme é necessário ar comprimido para produzir trabalho ou não. � c) O compressor produz ar comprimido que armazena. Quando está na pressão máxima pára, quando passa abaixo um certo nível de pressão, recomeça a trabalhar para produzir mais. � 11. Como se chama a peça com que se consegue fazer com que o sistema obtenha sempre o ar comprimido à pressão que é necessária (ora maior, ora menor) a) Interruptor de Pressão � b) Regulador de Pressão � c) Válvula de Alívio de Segurança � 12. Para que serve o Interruptor de Pressão? __________________________________________________________________________________________________________________________________________ 13. Para que serve o Regulador de Pressão __________________________________________________________________________________________________________________________________________ __________________________________________________________________________________________________________________________________________ 14. Para que serve a Válvula de Alívio de Segurança __________________________________________________________________________________________________________________________________________
15. Qual o princípio de funcionamento dos compressores dinâmicos? a) Transformam energia cinética em ar comprimido � b) Transformam energia cinética em trabalho � c) Transforma velocidade em ar comprimido � 16. Dos tipos de compressor que estudou, qual é o que roda com mais velocidade, o rotativo ou o centrífugo? _____________________________________________________________________
17. Como se pode variar a pressão do ar obtido através de um compressor centrífugo? __________________________________________________________________________________________________________________________________________
18. Se precisar de um compressor para uma fábrica com necessidade permanente de consumo de grandes quantidades de ar comprimido, quais os tipos de compressor que ponderaria utilizar?
200

Automação e Comando Capítulo 4: Pneumática __________________________________________________________________________________________________________________________________________
19. Por que razão é necessário que um compressor tenha sistema de refrigeração?
__________________________________________________________________________________________________________________________________________
20. Quais os sistemas de refrigeração de compressores que conhece?
_________________________________________________________________________________________________________________________________________
21. Para um compressor de grande potência, qual o sistema de refrigeração que usaria?
__________________________________________________________________________________________________________________________________________
22. Qual dos seguintes compressores usaria para pressurizar a cabina de um avião?
a) 22,5 m3/min �
b) 2250000000 cm3/min �
c) 2250000 m3/h �
23. Coloque por ordem os seguintes passos de regulação da pressão de um compressor (considere o reservatório de ar comprimido vazio no início do processo).
a) Marcação de uma pressão máxima e uma pressão mínima no manómetro do compressor
b) Motor arranca e o ar é aspirado para dentro da câmara do compressor
c) Pistão avança e comprime o ar na câmara do compressor
d) Pistão recua e o ar é aspirado para dentro da câmara do compressor
e) E assim sucessivamente
f) Motor pára
g) Ar comprimido é passado para o reservatório
h) Motor pára
i) E assim sucessivamente
_____________________________________________________________________
201

Automação e Comando Capítulo 4: Pneumática 24. Que dispositivo dá o sinal para o motor parar e arrancar?
_____________________________________________________________________
25. Qual a função principal do reservatório de ar comprimido?
_____________________________________________________________________
202

Automação e Comando Capítulo 4: Pneumática ACCIONAMENTO DE ACTUADORES PNEUMÁTICOS
Os actuadores pneumáticos (cilindros ou motores) são sempre accionados pelas válvulas direccionais.
ACCIONAMENTO DE ACTUADORES PNEUMÁTICOS DE ACÇÃO SIMPLES
1. Temos, a alimentar o circuito, o nosso compressor, neste caso com uma pressão de 90 PSI;
2. Todavia, não é essa pressão que vai para o circuito, pois antes temos uma unidade de condicionamento de 70 PSI, que é a pressão que efectivamente alimenta o circuito;
3. Uma Unidade de Condicionamento é: a combinação de um filtro de ar comprimido (para manter o ar absolutamente limpo no circuito e não estragar as peças desse circuito), um regulador de pressão (neste caso regula para 70 PSI, sempre abaixo da pressão que o compressor pode fornecer, através do manómetro que podemos ver), um lubrificador (para lubrificar as partes móveis dos mecanismos, de modo a poderem manter os seus movimentos livres e uniformes);
4. De seguida temos uma válvula de bloqueio de 2 vias NF. Quando queremos pôr o circuito em funcionamento, abrimos esta válvula, o que permite que o ar comprimido flua do compressor para o circuito.
Começando agora da esquerda para a direita:
5. Temos uma válvula direccional de 3 vias/2 posições de botão/mola NF, que comanda um cilindro de acção simples com retorno por mola.
0
Compressor 90 PSI
Unidade de Condicionamento 70 PSI
Válvula de bloqueio 2/2 vias NF
Cilindro simples ação retorno por mola
Cilindro simples ação avanço por mola
Cilindro simples ação sem mola
Motor pneumático unidirecional
V. dir 3/2 viasbotão/mola NF V. dir 3/2 vias
botão c/ trava NAV. dir 3/2 viasalavanca/mola NF
V. dir 3/2 viaspedal/mola NF
203

Automação e Comando Capítulo 4: Pneumática 5.a) Quando a válvula está na posição da direita, o ar flui no sentido do cilindro para a válvula, saindo pela via de escape desta para a atmosfera. É nesta posição que o cilindro faz o retorno (através da sua mola), isto é, se desloca da direita para a esquerda e empurra o ar para a tal via de escape da válvula;
5.b) Para que a haste do cilindro se desloque para a direita, é preciso que a válvula direccional passe para a posição da esquerda, sendo que neste caso o ar flui (conforme indica a seta), do compressor para a entrada da esquerda do cilindro e força este a deslocar-se para a direita. O ar que se encontrava na parte direita do cilindro é expulso para a atmosfera através da sua saída da direita;
5.c) Quando deixamos de fornecer o ar comprimido, isto é, quando a válvula direccional volta à posição da direita, a haste do cilindro volta à sua posição de repouso, forçada pela sua mola (é a posição que vemos no símbolo e que analisámos em 5.a);
5.d) De notar que a válvula passa para a posição da esquerda se carregarmos no seu botão. Assim que o deixamos de fazer, por acção da sua mola, volta à posição da direita, que é sua posição de repouso;
5.e) Em resumo, o funcionamento do circuito é:
Em repouso, a válvula direccional está na posição da direita e a haste do cilindro encostada à esquerda; quando premimos o botão da válvula esta passa para a posição da esquerda, permitindo que o ar comprimido force a haste do cilindro a encostar à direita; quando deixamos de premir o botão da válvula tudo volta à posição de repouso, por força das 2 molas (da válvula e do cilindro).
6. Seguidamente temos um sistema composto por uma válvula de 3 vias e 2 posições com um botão com trava NA, a comandar um cilindro de acção simples com avanço por mola.
6.a) Quando a válvula está na posição direita (sua posição de repouso), o ar flui no sentido do compressor para o cilindro, e faz com que a haste deste se desloque para o lado esquerdo (avanço), ficando a haste recolhida. O ar que estava na parte esquerda do cilindro é expulso para a atmosfera através da sua saída da esquerda. É esta a posição de repouso do sistema;
6.b) Quando carregamos no botão da válvula (e o travamos), a válvula passa para a posição da esquerda e, como o cilindro deixa de ser alimentado pelo ar comprimido que vem do compressor, a sua mola faz com que este se desloque para a direita (retorno);
6.c) Quando destravamos o botão da válvula, este volta à sua posição de repouso, deixamos de fornecer o ar comprimido, voltando a válvula direccional à sua posição de repouso (direita), a haste do cilindro volta a avançar, pelas razões já expostas em 6.a);
204

Automação e Comando Capítulo 4: Pneumática 6.d) Em resumo, o funcionamento do circuito é:
Em repouso, a válvula direccional está na posição da direita, o ar comprimido passa para o cilindro, a sua haste avança para a esquerda e o ar sai do cilindro pelo seu escape; quando premimos o botão da válvula e o travamos, esta passa para a posição da esquerda, o que faz com que a haste do cilindro retorne à sua posição inicial (encostado à direita) por força da sua mola.
7. Seguidamente vamos ver como se comporta o sistema com uma válvula de 3 vias, duas posições com alavanca e mola NF a comandar um cilindro de acção simples sem mola
7.a) Na posição de repouso da válvula, como é NF, está fechada (posição da direita no símbolo. Isto faz com que o ar comprimido não passe do compressor para o cilindro e este fique imobilizado na posição em que estava anteriormente, pois não tem mola que o force;
7.b) Quando actuamos na alavanca da válvula, esta passa para a posição 2 (esquerda no símbolo) e o ar comprimido passa através dela indo empurrar o cilindro para a direita, aí ficando até que algo o empurre pois não tem mola que o force a retornar, mesmo após termos deixado de actuar na alavanca da válvula;
7.c) Quando deixamos de actuar na alavanca da válvula, esta volta de imediato à posição inicial (da direita no símbolo), por força da sua mola, ficando pois naquela que é a sua posição de repouso, fechada;
8. Finalmente analisemos o sistema mais à direita, em que uma válvula de 2 posições e 3 vias com pedal e mola NF comanda um motor pneumático que roda apenas num sentido.
8.a) Em repouso, como a válvula é NF, ela está fechada e não deixa passar o ar comprimido do compressor para o motor (posição da direita);
8.b) Quando accionamos o pedal ligado à válvula, esta passa para a posição 2 (da esquerda) e deixa o ar comprimido passar para o motor, colocando-o em marcha. Como a válvula tem mola de retorno à sua posição de repouso, quando deixamos de carregar no pedal, a válvula volta à posição inicial, fechando, o ar deixa de passar para o motor e este pára.
205

Automação e Comando Capítulo 4: Pneumática ACCIONAMENTO DE ACTUADORES PNEUMÁTICOS DE ACÇÃO DUPLA
1. Vejamos como funciona o sistema mais à esquerda, em que uma válvula direccional de 4 vias e 2 posições com alavanca e mola, comanda um cilindro de acção dupla. O cilindro ser de acção dupla, quer dizer que pode realiza trabalho nos dois sentidos.
1.1. Em repouso, isto é, sem actuar na alavanca da válvula, esta, por força da sua mola, fica na posição da direita.
Neste caso o ar comprimido passa pela via da esquerda e vai fazer deslocar o cilindro para a esquerda, saindo o ar que se encontrava à esquerda do cilindro, pelo escape do cilindro e daí pelo escape da válvula direccional;
1.2. Quando accionamos a alavanca, o ar comprimido passa no sentido do compressor para o cilindro, faz com que este se encoste ao lado direito e o ar que lá se encontrava sai pelo escape do cilindro (o da direita) e acaba por sair pelo escape da válvula (via da direita) para a atmosfera;
1.3. A válvula redutora de fluxo unidireccional com retenção, permite, regulando-a, que o movimento do cilindro para a esquerda seja feito à velocidade que queremos: se regularmos essa válvula de retenção para deixar passar menos ar, o movimento do cilindro é mais lento, e vice-versa. No limite, como ela permite a retenção, não deixamos passar ar nenhum e o cilindro pára.
2. Sistema central, em que 2 válvulas de 3 vias, 2 posições NF com botão e mola, mais uma válvula de 5 vias, 2 posições com piloto, comandam dois cilindros: um de acção dupla com haste passante e outro de acção dupla sem haste.
2.1. Em repouso, por acção das molas das 2 válvulas iniciais NF, estas encontram-se fechadas e o sistema está “parado”, pois não passa ar nenhum do compressor;
0
Compressor 90 PSI
Unidade de Condicionamento 70 PSI
Válvula de bloqueio 2/2 vias NF
V. dir 3/2 viasbotão/mola NF
V. dir 5/2 viasduplo-piloto
V. dir 5/3viasalavanca c/ trava
V. dir 4/2 viasalavanca/mola
Cilindro ação dupla Cilindro ação dupla haste passante
Cilindro ação dupla sem haste
Motor pneumático bidirecional
V. Redutora f luxounidirecional c/ restrição
206

Automação e Comando Capítulo 4: Pneumática 2.2. Se premirmos o botão da válvula da esquerda, isso faz com que o ar passe e vá passar a válvula seguinte para a posição da esquerda;
2.3. Nestas circunstâncias, o ar empurra os cilindros para a direita (o ar do compressor passa pela via central) e o ar que lá se encontrava saia através do seu escape e do da válvula, para a atmosfera;
2.4. Quando premimos o botão da válvula inferior da direita, fazemos a válvula superior passar para a posição da direita;
2.5. Isso faz com que os cilindros se desloquem para a esquerda e o ar que lá se encontrava saia através do seu escape e do da válvula, para a atmosfera;
2.6. Se premirmos os dois botões ao mesmo tempo nenhum dos cilindros se move pois são actuados por duas forças de igual intensidade e sentidos opostos.
3. Finalmente vejamos como funciona o sistema da direita, em que um válvula de 5 vias, 3 posições com alavanca com trava comanda um motor pneumático bidireccional, isto é que pode rodar nos dois sentidos.
3.1. Em repouso, sem actuar na alavanca da válvula, o motor está parado pois ela fica na posição central, não havendo fluxo de ar do compressor para o motor;
3.2. Quando actuamos na alavanca e a colocamos na posição 1, digamos, a válvula passa para a posição da esquerda e o motor roda para a direita. O ar que passa pelo motor e o põe a rodar, sai pelo escape da válvula para a atmosfera;
3.3. Quando actuamos na alavanca e a travamos na posição 2, digamos, tudo se passa de forma idêntica, mas rodando agora o motor para a esquerda.
207

Automação e Comando Capítulo 4: Pneumática TRABALHO DE LABORATÓRIO Nº 1
DISPOSITIVO SIMPLES DE APERTO
Projecte um circuito pneumático que simule um dispositivo simples de aperto.
Este tipo de dispositivo a simular é o circuito base das vulgares pistolas pneumáticas de apertar parafusos que, certamente, conhece.
1. Tipo de cilindro (actuador) a usar
2. Tipo de válvula a usar
3. Esquema do circuito
4. Descrição do funcionamento do circuito
____________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
208

Automação e Comando Capítulo 4: Pneumática 5. Monte o circuito no laboratório
6. Proceda às correcções necessárias até obter um funcionamento pleno
Data: ____ / ____ / ______
Aluno:________________________________________________________________
Professor:__________________________ Classificação: ______________________
Observações: _________________________________________________________
209

Automação e Comando Capítulo 4: Pneumática TRABALHO DE LABORATÓRIO Nº 2
DISPOSITIVO DE ESTAMPAGEM DE CINTOS DE COURO
Projecte um circuito pneumático que simule um dispositivo de estampagem de cintos de couro, com o seguinte funcionamento:
1. Deve haver um botão que, enquanto premido, faça a máquina (cilindro) deslocar-se num sentido (estampagem). Quando deixamos de premir esse botão o cilindro deixa de fazer força mas mantém a sua posição;
2. Deve haver outro botão que faça a recolha (retorno) do cilindro para a sua posição inicial.
1. Tipo de cilindro (actuador) a usar
2. Tipo de válvulas a usar
3. Esquema do circuito
210

Automação e Comando Capítulo 4: Pneumática 4. Descrição do funcionamento do circuito
________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
5. Monte o circuito no laboratório
6. Proceda às correcções necessárias até obter um funcionamento pleno
Data: ____ / ____ / ______
Aluno: _______________________________________________________________
Professor:__________________________ Classificação: _______________________
Observações:__________________________________________________________
211

Automação e Comando Capítulo 4: Pneumática
Versão 3 (a dada em 2008/2009) INTRODUÇÃO À PNEUMÁTICA Energia Pneumática A utilização do ar como forma de energia é conhecida há milhares de anos. A própria palavra “pneumática” deriva do grego “pneuma” que significa respiração, vento, movimento do ar, e que trata do comportamento das substâncias no estado gasoso. A energia pneumática que é utilizada nos processos industriais vem da compressão do ar da nossa atmosfera, compressão essa que é realizada por um equipamento que se chama… adivinharam, compressor. Esta máquina comprime o ar e guarda-o num reservatório, sendo depois utilizado à medida das suas necessidades pelo nosso sistema pneumático a ele ligado. Sistemas Electropneumáticos Nos actuais processos industriais cada vez mais se assiste à combinação, num mesmo sistema automatizado, de vários tipos de equipamentos que, por sua vez, são alimentados pelas mais variadas formas de energia. Daí a necessidade dos actuais técnicos conhecerem todos estes equipamentos quer eles sejam pneumáticos, hidráulicos, eléctricos ou electrónicos. É essa a única forma de compreenderem todo o sistema no seu conjunto e poderem assim actuar sobre ele, quer projectando-o quer procedendo à sua montagem, manutenção e reparação.
Elementos de ControloTrata-se de um circuito eléctrico que recebe as informações dadas pelos sensores e em função dessas informações, atendendo ainda à sequência de operações que foi projectada para o sistema, gera os sinais eléctricos que envia para os elementos de comando, que irão actuar em conformidade com a natureza desses sinais.
212

Automação e Comando Capítulo 4: Pneumática Elementos de ComandoNo caso da electropneumática são válvulas pneumáticas que recebem os sinais dos elementos de controlo e, face a esses sinais, accionam em conformidade os elementos de trabalho. Elementos de TrabalhoSão os equipamentos que transformam a energia pneumática noutras formas de energia. No nosso caso serão os cilindros pneumáticos ou motores pneumáticos, que transformam a energia pneumática em energia mecânica. Para além disso, estes elementos de trabalho também dão sinal aos sensores sobre a situação em que se encontram, de forma a estes poderem, por sua vez, informar os elementos de controlo. Elementos de SinalSão sensores eléctricos que informam continuamente os elementos de controlo sobre a situação em que se encontram os elementos de trabalho, fechando-se assim o ciclo do processo. Exemplo: Um cilindro pneumático atinge uma determinada posição e ao fazê-lo faz actuar um sensor de movimento. Este, uma vez actuado, informará o elemento de controlo, que dará ordem ao elemento de comando para ordenar ao elemento de trabalho que pare nessa posição. ACTUADORES PNEUMÁTICOS Como vimos, são os elementos de trabalho, responsáveis pela transformação da energia pneumática em mecânica.
Actuadores Pneumáticos de Movimento Rectilíneo 1. Cilindro de Acção Simples - É accionado pelo ar comprimido apenas de um lado, realizando pois trabalho apenas num sentido; - Para ser desaccionado é necessária uma força externa ou interna (mola).
213

Automação e Comando Capítulo 4: Pneumática
2. Cilindro de Dupla Acção - O ar comprimido produz movimento nos dois sentidos: avanço e retorno.
3. Cilindro de Dupla Acção com Haste Passante - A forças de avanço e retorno são iguais pois as duas faces do êmbolo apresentam a mesma área para aplicação da pressão; - A haste é melhor guiada.
Cilindro de Dupla Acção com acoplamento Magnético - O êmbolo é feito de um material magnético cilíndrico, o que permite que um cursor magnético exterior acompanhe o movimento do êmbolo, facilitando assim o sensoreamento.
214

Automação e Comando Capítulo 4: Pneumática
VÁLVULAS ELECTROPNEUMÁTICAS São os componentes que recebem sinais de comando do circuito eléctrico de controlo e actuam em conformidade (abrindo ou fechando para deixar passar o ar comprimido ou não) accionando os elementos e trabalho.
Características - Número de Vias - Número de Posições / Estados - Solenóides (Bobinas) Vias- São os orifícios que a válvula possui para a passagem do ar comprimido. Estes orifícios podem ter um de três tipos de função: . Entrada de ar comprimido (pressão); . Alimentação dos actuadores pneumáticos (utilização); . Escape Conforme a sua função os orifícios são identificados com letras e números, de acordo com a tabela seguinte: Vias Letras Números Pressão P 1 Utilização A, B, C 2, 4, 6 Escapes R, S, T 3, 5, 7 Posições / Estados - Correspondem ao número de estados em que a válvula pode estar; - Cada posição dessas é representada por um quadrado. . As linhas dentro desses quadrados indicam as vias de passagem do ar comprimido; . As setas indicam o sentido de passagem do ar comprimido; . O bloqueio das vias é representado através de traços horizontais. - As ligações da válvula com o sistema são representadas por linhas externas no estado de repouso da válvula, juntamente com a identificação dessas ligações.
215

Automação e Comando Capítulo 4: Pneumática - O estado de repouso é a posição que a válvula assume enquanto não é accionada electricamente. Bobinas- O sistema de accionamento das válvulas é representado no seu exterior (no exterior do quadrado) por meio de bobinas. Podemos ter válvulas accionadas por apenas uma bobina – válvulas com comando unidireccional; E válvulas accionadas por duas bobinas – válvulas com comando bidireccional. Tipos de Válvulas1. Válvula Electropneumática Direccional 1.1. Válvula Electropneumática de 2 Vias e 2 Posições (2/2) com Accionamento Unidireccional- A posição de repouso desta válvula é normalmente fechada, bloqueando a passagem do ar comprimido (quadrado da direita).
Accionando-se a bobina Y, a válvula muda de estado, permitindo a passagem do ar comprimido do orifício P para o A (quadrado da esquerda). Enquanto a bobina estiver accionada pela corrente eléctrica, a válvula permanece neste estado. Quando isso deixa de acontecer, retorna à posição de repouso. 1.2. Válvula Electropneumática de 3 Vias e 2 Estados (3/2) com Accionamento Unidireccional- Na posição de repouso (quadrado da direita) a via de pressão P é bloqueada e o orifício de utilização A é direccionado para o orifício de escape R; - Quando accionamos electricamente a bobina Y, a válvula muda de estado (quadrado da esquerda), bloqueando o orifício de escape R e possibilitando a passagem do ar comprimido do orifício P para o A; Enquanto a bobina estiver accionada pela corrente eléctrica, a válvula permanece neste estado. Quando isso deixa de acontecer, retorna à posição de repouso.
216

Automação e Comando Capítulo 4: Pneumática 1.3. Válvula Electropneumática de 4 Vias e 2 Estados (4/2) com Accionamento Unidireccional- Na posição de repouso, o orifício P é direccionado para a via B e a via A é ligada ao escape R; - Accionando a bobina Y, a válvula muda de estado, ligando o orifício P ao A e a sua via B ao escape R; Enquanto a bobina estiver accionada pela corrente eléctrica, a válvula permanece neste estado. Quando isso deixa de acontecer, retorna à posição de repouso.
1.4. Válvula Electropneumática de 5 Vias e 2 Estados (5/2) com Accionamento Unidireccional- Na posição de repouso, o orifício P é direccionado ao B e a via A é ligada ao escape R, não sendo, neste caso, utilizado o escape S; - Accionando-se a bobina Y, a válvula muda de estado, ficando o orifício P ligado ao A, a via B ligada a S e o R não é utilizado.
1.5. Válvula Electropneumática de 4 Vias e 2 Estados (4/2) com Accionamento BidireccionalNas válvulas bidireccionais não há necessidade de manter a corrente eléctrica na bobina para que ela permaneça num determinado estado. O accionamento e desaccionamento são executados por impulsos de corrente eléctrica de curta duração. - Um impulso de corrente na bobina Y1 faz com que a válvula mude de estado, ligando o orifício P ao A e o B ao R. Mesmo que esse impulso de corrente pare, a válvula mantém-se neste estado, até que seja dado um impulso na bobina Y2. - Um impulso na bobina Y2 faz com que a válvula mude novamente de estado, ficando agora o orifício P ligado ao B e a via A ligada ao escape R. Mesmo que esse impulso de corrente pare, a válvula mantém-se neste estado, até que seja dado um impulso na bobina Y1.
217

Automação e Comando Capítulo 4: Pneumática Funciona pois como memória. No caso de accionamento das duas bobinas a válvula permanece no estado relativo à bobina que primeiro foi accionada.
1.6. Válvula Electropneumática de 5 Vias e 2 Estados (5/2) com Accionamento Bidireccional O funcionamento é similar ao da válvula anterior, com a diferença de que os dois orifícios de utilização A e B têm escapes próprios individuais R e S.
218

Automação e Comando Capítulo 4: Pneumática ACCIONAMENTO DE ACTUADORES PNEUMÁTICOS
1. Comando através de Válvulas Electropneumáticas Direccionais com Accionamento Unidireccional 1..1.A figura seguinte apresenta um cilindro de acção simples ligado a uma válvula electropneumática 3/2 com o seu respectivo circuito eléctrico de comando.
Funcionamento1. Inicialmente o interruptor S está aberto, a válvula no estado de repouso e o cilindro recuado (figura da esquerda). Nesta situação: - Ar comprimido é bloqueado - Entrada do cilindro ligada ao escape R 2. Fechando o interruptor S, a válvula muda de estado devido à corrente eléctrica na bobina (figura da direita). Nesta situação: - O ar comprimido é enviado para o cilindro, forçando o seu avanço. - O escape R é bloqueado. 3. Abrindo o interruptor S, a válvula volta à posição de repouso devido à acção da sua mola. Nesta situação = 1.: - Entrada do cilindro ligada ao escape R. - Devido ao anterior, a mola do cilindro fica livre para forçar o retorno da haste. 1.2.A figura seguinte mostra o circuito eléctrico de comando dos cilindros de dupla acção que estão ligados, respectivamente, às válvulas electropneumáticas 4/2 e 5/2. As duas válvulas realizam a mesma função tendo apenas diferenças de construção.
219

Automação e Comando Capítulo 4: Pneumática
Funcionamento1. Inicialmente o interruptor S está aberto (a) Nesta situação: - Válvula mantém-se no estado de repouso; - Cilindro encontra-se recuado. 2. Fecho o interruptor S (b) Nesta situação: - A válvula muda de estado devido à acção da corrente eléctrica na bobina; - Em consequência, a haste do cilindro avança 3. Abro o interruptor S (a) - A válvula retorna à posição de repouso devido à acção da mola - A haste do cilindro retorna à posição inicial
220

Automação e Comando Capítulo 4: Pneumática 2. Accionamento de Cilindros de Acção Simples ou de Dupla Acção, através de Botões de Pressão (usando circuito de comando com auto-retenção e válvulas unidireccionais) 2.1.
221

Automação e Comando Capítulo 4: Pneumática Funcionamento:1. Inicialmente (a): - Bobina Y não está alimentada com energia eléctrica - Logo, a válvula mantém-se no estado de repouso - Logo, a haste do cilindro está recuada 2. Premindo o botão S1 (b) - O relé K é alimentado, fechando-se os seus contactos auxiliares K - Isso faz com que a válvula mude de estado devido à acção da corrente eléctrica na bobina Y - Devido a isso, a haste do cilindro avança 3. Deixo de premir o botão S1 (c) - O relé K e a bobina Y continuam a receber energia eléctrica, agora através dos contactos auxiliares K, pelo que a haste do cilindro continua avançada. 4. Premimos S2 (d) - O relé K, e consequentemente a bobina Y, deixam de receber energia eléctrica - Logo, a válvula volta à sua posição de repouso, devido à acção da sua mola - Logo, a haste do cilindro executa o movimento de retorno 5. Deixo de premir S2, que fica de novo fechado (a) - Nem o cilindro nem a válvula são accionados pois S1 e os contactos auxiliares estão abertos. 2.2. Retorno Automático de Cilindros de Acção Simples ou de Dupla Acção
FuncionamentoA diferença em relação ao caso anterior é que agora o botão de pressão S2, que servia para fazer o retorno da haste do cilindro, foi substituído por um sensor Sf (NF) – fim-de-curso – que é accionado pelo próprio movimento do cilindro. Quando premimos o botão S, o cilindro avança até ao fim do curso. Chegado a esta posição, o sensor fim-de-curso é accionado pela haste do cilindro. O circuito que alimenta a bobina Y é, por isso, aberto, fazendo pois a haste retornar à posição inicial.
222

Automação e Comando Capítulo 4: Pneumática 2.3. Movimento Oscilante do Cilindro A diferença em relação ao circuito anterior é que o botão S1 (que fazia avançar o cilindro manualmente) é substituído por um sensor Si (NA), localizado no início do percurso do cilindro e que vai ser accionado pelo próprio cilindro. FuncionamentoO interruptor S quando fechado vai fazer com que o cilindro oscile dum lado para o outro sem parar. Com o cilindro recuado, o sensor Si é accionado e o cilindro avança (S fechado) até ao fim do curso. Nessa posição, o sensor Sf é accionado, fazendo o cilindro regressar à sua posição inicial. E assim sucessivamente até… Abrirmos S, o que faz o cilindro regressar sempre ao seu início 3. Comando Através de Válvulas Electropneumáticas Direccionais com Accionamento Bidireccional 3.1. (a)
223

Automação e Comando Capítulo 4: Pneumática
Funcionamento1. Inicialmente (a): - Bobinas Y1 e Y2 estão sem energia (não alimentadas). - Cilindro recuado. 2. Fecho o interruptor S1 (b) - A válvula muda de estado devido à acção da bobina Y1 que está agora alimentada - Então a haste do cilindro avança 3. Deixo de premir S1 (c) - A haste do cilindro mantém-se avançada 4. Fecho o interruptor S2 (d): - A válvula muda de novo de estado devido à acção da bobina Y2 agora alimentada. - Então, a haste do cilindro retorna. 5. Deixo de premir S2 (a) - A haste do cilindro permanece recuada. 3.2.Para efectuar o retorno automático dos cilindros (simples ou dupla acção), basta substituir o botão de pressão S2 por um sensor Sf (NA) localizado no final do curso do cilindro.
224

Automação e Comando Capítulo 4: Pneumática 3.3. Para efectuar o movimento oscilante dos cilindros (simples ou dupla acção) deve substituir-se os botões de pressão S1 e S2, por sensores NA (Sf e Si), localizados, respectivamente, no início e no fim do curso do cilindro.
4. Temporização (Manter o cilindro numa dada posição durante um tempo pré-determinado) Basta adicionar um relé com “atraso ao trabalho”
A diferença é que, neste caso, o cilindro ao chegar ao fim do seu curso, acciona o relé temporizado K. Após algum tempo (regulável no relé) este fecha e a bobina Y2 é alimentada, o que faz retornar o cilindro.
225

Automação e Comando Capítulo 4: Pneumática Trabalhos de Laboratório 1. Cilindro avança e pára 3 segundos totalmente avançado; Retorna e pára 3 segundos totalmente recolhido; Repete os dois passos anteriores durante 2 minutos. Pára 10 segundos e repete os três passos anteriores 3 vezes. 2. Cilindro avança e recua 10 vezes e pára; Premindo um botão arranca novamente ao fim de 20 segundos, repetindo o movimento anterior mas apenas 5 vezes. 3. Cilindro avança e recua 10 vezes e pára quando se premir um botão (o que acontecer primeiro); Premindo um botão arranca novamente ao fim de 20 segundos, repetindo o movimento anterior mas apenas 5 vezes. Vídeo deste trabalho em: http://www.profelectro.info/?p=1272 4. Cilindro avança e recua 3 vezes. Ao quarto avanço pára 3 segundos. Faz isto 4 vezes. Premindo um botão arranca novamente ao fim de 20 segundos, repetindo o movimento anterior mas apenas 2 vezes. Vídeo deste trabalho em: http://www.profelectro.info/?p=1272 5. Cilindro avança e retorna 5 vezes. Cada vez que retorna pára por 5 segundos. Premindo um botão arranca novamente ao fim de 20 segundos, repetindo o movimento anterior mas apenas 2 vezes. 6. Cilindro avança e retorna 10 vezes; Ao terceiro retorno pára 5 segundos; Há um botão para parar quando terminar o movimento que está a fazer. Só pode ser posto de novo em movimento ao fim de 20 segundos. 7. Cilindro avança e retorna durante 1 minuto e pára; ou avança e retorna 15 vezes (o que acontecer primeiro); Premindo um botão arranca novamente ao fim de 20 segundos, repetindo o movimento anterior mas apenas 5 vezes.
226

Automação e Comando Capítulo 4: Pneumática Teste Sumativo
1. (1) Complete os espaços em branco A energia ______________ que é utilizada nos processos industriais vem da compressão do ar da nossa atmosfera, ______________ essa que é realizada por um equipamento que se chama ________________ . Esta máquina comprime o ar e guarda-o num ______________, sendo depois utilizado à medida das suas necessidades pelo nosso sistema _____________ a ele ligado. 2. (1) Na sua óptica, por que razão os técnicos actuais de manutenção industrial devem aprender também como funcionam os sistemas pneumáticos? _____________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________ 3. (2) Diga o que representa a figura abaixo e explique, por palavras suas, o funcionamento do sistema representado.
________________________________________________ . __________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
227

Automação e Comando Capítulo 4: Pneumática 4. (2) Diga o que entende por Elementos de Controlo e Elementos de Trabalho num sistema pneumático. ___________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________ 5. (1) Quais os dois grandes tipo de Cilindros Pneumáticos que conhece? ______________________________________________________________________________________________________________________________________________________ 6. (2) Diga o nome completo do cilindro pneumático representado na figura abaixo e identifique todos os seus elementos/componentes (quatro, ao todo): Nome: ____________________________________________________________________
7. (1) Quais as características principais da válvulas pneumáticas, isto é, aquilo que permite distingui-las umas das outras? ___________________________________________________________________________________________________________________________________________________________________________________________________________________________________ 8. (1) Diga o que entende por Vias de uma válvula pneumática. ______________________________________________________________________________________________________________________________________________________ 9. (1) Qual a função das bobinas eléctricas nas válvulas pneumáticas? ______________________________________________________________________________________________________________________________________________________
228

Automação e Comando Capítulo 4: Pneumática 10. (2) Complete a tabela seguinte Vias Letras Números Pressão 2, 4, 6 R, S, T 11. (3) Considere a seguinte válvula pneumática
a) Qual o nome completo da válvula representada? ______________________________________________________________________________________________________________________________________________________ b) Qual o significado das letras… A____________________________________________________________________ B ___________________________________________________________________ R ___________________________________________________________________ P ___________________________________________________________________ S ___________________________________________________________________ Y ___________________________________________________________________ c) Qual o significado das linhas dentro dos dois quadrados centrais? ___________________________________________________________________________________________________________________________________________________________________________________________________________________________________ d) Explique o funcionamento da válvula _____________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
229

Automação e Comando Capítulo 4: Pneumática __________________________________________________________________________________________________________________________________________________ 11. (3) Considere a figura seguinte
Complete os espaços nos parágrafos seguintes, que explicam o funcionamento do sistema pneumático acima representado. Funcionamento: 1. Inicialmente o interruptor S está _____________, a válvula no estado de _________ e o cilindro ____________ (figura da esquerda). Nesta situação: - Ar comprimido é _____________ - Entrada do cilindro ligada ao ____________ R 2. ____________ o interruptor S, a válvula __________ de estado devido à corrente eléctrica na _____________ (figura da direita). Nesta situação: - O ar comprimido é ___________ para o cilindro, forçando o seu _________________. - O escape R é _______________. 3. Abrindo o interruptor S, a válvula volta à posição de ___________ devido à acção _____________.
230

Recursos�online��
1.�http://www.profelectro.info/�Site� de� apoio� ao� Curso� Profissional� de� Técnico� de� Electrónica,� Automação� e� Comando� e� ao�presente�livro,�onde�poderá�encontrar:���Muito�do�conteúdo�do�livro;���Material�completamente�novo�acrescentado�após�a�escrita�do�livro;��� (Outros)� Projectos� desenvolvidos� nas� aulas,� com� resolução,� vídeos,� fotos� e� programas�que�poderá�descarregar;��
2.��http://www.youtube.com/user/luisj2222�Canal� do� youtube� que� poderá� subscrever� e� onde� serão� colocados� os� vídeos� referentes� aos�projectos�elaborados�nas�aulas�do�nosso�curso��http://www.slideshare.net/luisj�onde�coloco�os�powerpoints:�trabalhos�e�relatórios�dos�alunos,�etc.��
3.��Capítulo�1��Manual�do�C20K�http://profelectro.info/Uploads/luisj/C20.zip�É�um�autómato�programável�da�Omron,�já�muito�velhinho,�mas�que�ainda�nos�vai�fazendo�um�jeitão.�Completamente�funcional�para�a�matéria�do�curso/livro�aqui�explicitada.�Possivelmente�outras�escolas�ainda�os�terão�também.�Como�o�respectivo�manual� já�não�será�muito�fácil�de�encontrar,�deixo�vo�lo�aqui.��Trabalhos�dos�alunos:�vídeos,�representação�ladder,�ficheiros�Syswin�Avaliação�sumativa�http://www.profelectro.info/?p=1117�http://www.profelectro.info/Uploads/luisj/T1.cxp�http://www.profelectro.info/Uploads/luisj/T2.cxp�http://www.profelectro.info/Uploads/luisj/T3.cxp�http://www.profelectro.info/Uploads/luisj/T4.cxp�http://www.profelectro.info/Uploads/luisj/T5.cxp�http://www.profelectro.info/Uploads/luisj/T6.cxp�http://www.profelectro.info/Uploads/luisj/T7.cxp���
231

Outros�trabalhos�http://www.profelectro.info/Uploads/luisj/arranqueDirecto.cxp�http://www.profelectro.info/Uploads/luisj/CEscadaComContadoreseBotoes.cxp�http://www.profelectro.info/Uploads/luisj/codigoPorta.cxp�http://www.profelectro.info/Uploads/luisj/comutacaoEscada.cxp�http://www.profelectro.info/Uploads/luisj/encravamentoDuplo.cxp�http://www.profelectro.info/Uploads/luisj/encravamentoSimples.cxp�http://www.profelectro.info/Uploads/luisj/estrelaTriangulo.cxp�http://www.profelectro.info/Uploads/luisj/impulso.cxp�http://www.profelectro.info/Uploads/luisj/InversaoMarcha.cxp�http://www.profelectro.info/Uploads/luisj/ParqueEstacionamento_Grafcet.cxp�http://www.profelectro.info/Uploads/luisj/Sequenciais.cxp��
Capítulo�2��Grafcet�Problema�da�Guilhotina�http://www.profelectro.info/Uploads/luisj/Grafcet_Guilhotina.cxp�http://www.profelectro.info/Uploads/luisj/Guilhotina_AMF.cxp�Problema�do�Estacionamento�http://www.profelectro.info/Uploads/luisj/EstacionamentoKeep.cxp�http://www.profelectro.info/Uploads/luisj/EstacionamentoSetRset.cxp�http://www.profelectro.info/Uploads/luisj/EstacionamentoOut.cxp�Parque�Estacionamento:�vídeo�e�representação�grafcet���ladder�http://www.profelectro.info/?p=988�Semáforos�http://www.profelectro.info/?p=1089��Trabalhos�dos�Alunos�Avaliação�Sumativa�http://www.profelectro.info/Uploads/luisj/NUNOO.SWP�http://www.profelectro.info/Uploads/luisj/Portao_AutomaticoVIRGILIO.SWP��Relatórios�/�Powerpoints�Automação� e� Comando� –� Módulo� 4:� Projectos� de� Automatismos� Industriais� (Grafcet)� –�Relatório�dos�Trabalhos�1.�Relatório�Powerpoint�Nuno+Virgílio�http://www.profelectro.info/?p=1242�ou�http://www.slideshare.net/luisj/grafcet�v�n?type=powerpoint��
Capítulo�4�Trabalhos�dos�alunos:�vídeos�http://www.profelectro.info/?p=1272�
232

O�AUTOR�
��O�autor�é� licenciado�em�Engenharia�Electrotécnica,�ramo�de�Telecomunicações�e�Electrónica,�pelo� Instituto� Superior� Técnico� de� Lisboa� (1984)� e� possui� também� uma� licenciatura� em�Informática�pela�Universidade�Aberta�de�Lisboa�(2006).�É�pai� de�dois�maravilhosos� filhos,� o�Miguel� e� a�Pandora,� além�de�dono�de�dois� “manhosos”�gatos:�Mr.�Nielsen�e�Mr�Chester.�Profissionalmente� exerce� a� sua� actividade� docente� na� Escola� Secundária� Alfredo� da� Silva� –�Barreiro�há� cerca�de�20�anos,�depois�de� ter�passado�esporadicamente�por�mais� três�escolas�secundárias� onde� também� leccionou,� servido� a� pátria� no� exército� por� 16� longos� meses� e�passado�por�duas�empresas�industriais,�uma�de�montagem�de�“puzzles”�em�que�no�final�saíam�carros�e�outra�de�produção�de�energia�eléctrica�mas�que�já�não�produzia�a�dita�há�mais�de�uma�década,�num�total�de�cinco�anos.�Presentemente� encontra�se� no� antigo� 7º� escalão� profissional� e,� como� as� coisas� andam,� não�deve�ir�muito�mais�longe�neste�aspecto.�Além�das�matérias�das�áreas�que�lecciona�(electricidade,�electrónica,�automação�e�comando,�domótica,� etc.)� interessa�se� por� muitas� outras� coisas,� algumas� delas� em� grau� bastante�superior,�como:�Preguiçar,�informática,�música,�cinema,�gastronomia,�psicologia,�notícias,�tv,�futebol,�desporto�em� geral,� filosofia,� matemática,� ciência,� pedagogia,� livros,� internet,� Web� 2.0,� literatura,�línguas,�filosofia,�história,�revistas,�geometria�descritiva,�cavalos�de�Tróia,�passeios�pedestres,�praia,�campo,�cidade,�guitarra�eléctrica,�natação,�desenhos�animados,�o�programa�do�Aleixo,�juntar�dinheiro,�gatos,�gastar�dinheiro,�yadda,�yadda,�yadda.�Ao�contrário�do�que�possa� transparecer�ainda�há�muitas�mais�coisas�que�não�gosta�e�outras�tantas�que�abomina�e�algumas�que�lhe�causam�urticária�só�de�ouvir�falar�nelas.�Uma�coisa�que�apreciaria�bastante�é�que,�sabendo�que�o�presente�livro�foi�todo�ele�elaborado�em�regime�de�hiperactividade�solitária,�sem�qualquer�trabalho�de�revisão,�o�maior�número�de�pessoas�lhe�apontasse�os�seus�(do�livro)�defeitos,�erros,�omissões,�parvoíces,�etc.,�de�forma�a,�talvez�um�dia,�o�melhore�um�pouco.�Ah,�se�o�quiserem�utilizar�também�agradeço.�E�quanto�ao�seu�conteúdo,�podem�alterar,�copiar,�cortar,�colar,�comprimir,�rasgar�e�tudo�o�que�lhes�aprouver.�Abraços�e�beijos!��Contacto:�[email protected]�
233