apostila de ele-32nota-se que um sinal pode não ser nem de potência nem de energia....
TRANSCRIPT

APOSTILA DE ELE-32Introdução a Comunicações
Prof. Manish SharmaRedigida pelaCOMP-19 &
COMP-20
2018.2


SUMÁRIO
1 Sistemas de Telecomunicação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.1 Informação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.2 Tempo/Espaço . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.3 Eficiência . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.4 Recursos disponíveis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.5 Esquemas de sistemas de comunicação . . . . . . . . . . . . . . . . . . . . . . . . 61.6 Classificação de Sinais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2 Fundamentos Matemáticos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92.1 Série de Fourier . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92.2 Transformada de Fourier . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122.3 Convolução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172.4 Exercícios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 192.5 Soluções . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3 Representação Espectral de Sinais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 213.1 Impulsos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 213.2 Decaimento espectral de sinais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 233.3 Representação de sinais no tempo discreto . . . . . . . . . . . . . . . . . . . . . 273.4 Exercícios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 303.5 Soluções . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
4 Sistemas lineares e invariantes no tempo . . . . . . . . . . . . . . . . . . . . . . . . 344.1 Lineariedade e Invariância no tempo . . . . . . . . . . . . . . . . . . . . . . . . . . 344.2 Caracterização do sistema pela resposta ao impulso . . . . . . . . . . . . . . . 354.3 Função de transferência . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 364.4 Resposta sem distorção . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 384.5 Filtros e filtragem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 384.6 Análise por diagramas de blocos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
5 Densidade Espectral de Potência . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 415.1 Correlação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 415.2 Autocorrelação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 475.3 Como a correlação se altera quando temos SLI . . . . . . . . . . . . . . . . . . . 485.4 Função de Densidade Espectral . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 495.5 Relação entre sinais e sistema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 505.6 Transformada de Hilbert . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
6 Sinais e sistemas em banda base e banda passante . . . . . . . . . . . . . . . . . . 576.1 Sinais de Banda Base e Banda Passante . . . . . . . . . . . . . . . . . . . . . . . . 57
3
6.2 Equivalente em Banda Base de Sinais em Banda Passante . . . . . . . . . . . 596.3 Equivalente em Banda Base para Sistema em Banda Passante . . . . . . . . 626.4 Representação vetorial de sinais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
7 Modulações Digitais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 737.1 Definições básicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 737.2 1a Modulação: Modulação em amplitude de pulso - PAM . . . . . . . . . . . 747.3 2o Caso - Modulação em Fase (PSK: Phase Shift Keying) . . . . . . . . . . . . 767.4 Combinação dos dois casos anteriores: QAM (Quadrature Amplitude
Modulation) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 787.5 3o Caso: Sinalização multidimensional . . . . . . . . . . . . . . . . . . . . . . . . 797.6 Sinalização Ortogonal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 807.7 Caso Especial: FSK (Frequency Shift Keying) . . . . . . . . . . . . . . . . . . . . . 827.8 Modulação Simples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
8 Variáveis aleatórias e Processos Estocáticos . . . . . . . . . . . . . . . . . . . . . . . 858.1 Revisão de variáveis aleatórias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 858.2 Entropia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 918.3 Sequências e processos aleatórios . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
9 Modelos de Canal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 979.1 Ruído Gaussiano Branco . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 979.2 Modelo de canal AWGN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 999.3 Representação vetorial de um canal Gaussiano . . . . . . . . . . . . . . . . . . 1009.4 Receptor ótimo para o canal Gaussiano . . . . . . . . . . . . . . . . . . . . . . . . 1029.5 Evento de erro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1049.6 Desempenho de detector ótimo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1119.7 Comparação entre métodos de modulação . . . . . . . . . . . . . . . . . . . . . 119
10 Transmissão em canais limitados em banda . . . . . . . . . . . . . . . . . . . . . . 12110.1 Características do Canal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12110.2 Projeto de sinais para canais limitados em banda . . . . . . . . . . . . . . . . . 12110.3 Filtro Casado (Opcional) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12310.4 Projeto de sinais com zero ISI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12410.5 Equalização . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
11 Sistemas com múltiplos usuários . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13511.1 Métodos de compartilhamento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13511.2 Tipos de sistema de comunicação múltipla . . . . . . . . . . . . . . . . . . . . . 13611.3 Capacidade em métodos de acesso múltiplo . . . . . . . . . . . . . . . . . . . . 137

CAPÍTULO 1
Sistemas de Telecomunicação
Definição 1.1. Sistema de telecomunicação
Um sistema de telecomunicação é uma coleção de redes de co-municação individuais, sistemas de transmissão, aquisição, ar-mazenamento e manipulação de dados que funcionam de formainterconectada. Esse sistema tem por objetivo transferir infor-mação de um tempo/espaço para outro de forma eficiente, usandoos recursos disponíveis.
1.1 Informação
Informalmente, informação é aquilo que não se sabe e depois sesabe.
Definição 1.2. Informação
Informação é a resultante do processamento, manipulação e or-ganização de dados, de tal forma que represente uma modifica-ção (quantitativa ou qualitativa) no conhecimento do sistemaque a recebe.
Podemos representar informações por bytes (cadeias constituídasde sequências de 0 ou 1), e podemos medir a quantidade de infor-mação a partir da entropia1.
1.2 Tempo/Espaço
CRIAR FIGURA AQUIOs canais corrompem as mensagens de algumas maneiras:
• Distorção da mensagem: Perturbação do fator de forma cau-sado por uma resposta imperfeita do sistema ao sinal da men-sagem. Comum quando a natureza do canal é diferente da na-tureza da mensagem.
1ver capítulo 6
5

CAPÍTULO 1 ELE32 - Introdução a Comunicações
Exemplo: alteração no timbre da voz causada por um micro-fone.
• Adição de ruído: sinais aleatórios e imprevisíveis;não-controláveisproduzidos por processos naturais tanto de dentro quanto defora do sistema.Exemplo: barulho dos carros na rua atrapalhando uma reu-nião dentro do prédio.
• Interferência: contaminação por sinais externos que estejamusando o mesmo canal para se comunicar.Exemplo: superposição de conversas próximas.
1.3 Eficiência
Eficiência2 é garantir a transmissão de uma certa quantidade de in-formação com probabilidade de falha tão baixa quanto se queira.Porém, há um limite máximo para sinais elétricos causado pelas duaslimitações fundamentais: largura de banda e ruído. Pode-se relaci-onar as duas limitações pela Lei de Hartley-Shannon[1]:
R <C =W log2
1+S
N
(1.1)
onde R é a taxa de transmissão de informação, C é definido como ca-pacidade do canal, W é a largura de banda e S/N é a razão de potên-cia entre o sinal e o ruído (signal-to-noise ratio, também chamadode SNR).
1.4 Recursos disponíveis
São, entre outros:
– Potência (Energia por bit);
– Banda disponível;
– Capacidade computacional;
– Delay Tolerável;
– Percentual de falhas toleráveis;
– Número de usuários no mesmo canal.
1.5 Esquemas de sistemas de comunicação
CRIAR FIGURAS2ver capítulo 10
6

ELE32 - Introdução a Comunicações CAPÍTULO 1
1.6 Classificação de Sinais
Os sinais podem ser classificados de diferentes modos, de acordocom suas características. Algumas das classificações possíveis são:
1.6.1 Contínuo ou discreto
Um sinal é dito contínuo se o seu domínio forR ou um intervalo deR. A maioria dos sinais são contínuos.Notação: x (t ),∀t ∈R
Um sinal é dito discreto se o seu domínio for Z ou um intervalo deZ. Os sinais discretos podem ser armazenados e processados emcomputadores digitais.Notação: x [n ],∀n ∈Z, com x [n ] = x (n∆t )
1.6.2 Quantizado ou não
Se x (t ) puder assumir apenas alguns valores de C, ele é dito quan-tizado.
1.6.3 Determinístico ou aleatório
Um sinal aleatório é aquele sobre o qual há incerteza com respeitoao seu valor em qualquer instante de tempo.Exemplo: Ruído branco, como mostra a figura 1.1aUm sinal determinístico é aquele sobre o qual não há nenhuma in-certeza com respeito ao seu valor em qualquer instante de tempo.Exemplo: x (t ) = 10s e n (t ), como mostra a figura 1.1b
(a) Exemplo de sinal aleatório:um sinal com ruído
(b) Exemplo de sinal determinístico:uma senoidal
Figura 1.1. Tipos de sinal quanto a incerteza
Sinais não têm dimensão. Por convenção, são tensões ou correntesaplicadas a um resistor de 1 Ω. Nesse caso, a potência instantânea édada por
Px (t ) =V 2(t )/1= 1 · I 2(t ) = |x (t )|2
A potência média é dada pela Equação (1.2) e a energia do sinal é
7

CAPÍTULO 1 ELE32 - Introdução a Comunicações
dada pela Equação (1.3).
Px = limT→∞
1
T
∫ +∞
−∞Px (t ) d t (1.2)
Ex =
∫ +∞
−∞Px (t ) d t =
∫ +∞
−∞|x (t )|2 d t (1.3)
1.6.4 De potência ou de energia
Se 0< Ex <∞, o sinal x é dito um sinal de energia.Se 0< Px <∞, o sinal x é dito um sinal de potência.Nota-se que um sinal pode não ser nem de potência nem de energia.
1.6.5 Periódico ou não-periódico
O sinal é dito periódico se ∃T 6= 0 | x (t +T ) = x (t ),∀t .Temos que T = nT0, n ∈Z, onde T0 é o menor valor de T que satisfaza equação acima e é chamado de período fundamental.Nesse caso, temos que
Px =1
T0
∫ τ+T0
τ
| x (t ) |2 d t .
Quando não existe T que satisfaça o critério, o sinal é dito não-periódico.
1.6.6 Simétrico ou assimétrico
O sinal pode apresentar simetrias:Par: x (t ) = x (−t ),∀t ;Ímpar: x (t ) =−x (−t ),∀t ;Hermitiana: x (t ) = x ∗(−t ),∀t .
1.6.7 Causal ou limitado no tempo
Um sinal é causal se x (t ) = 0,∀t < 0.Um sinal é limitado no tempo se ∃ t1, t2 | x (t ) = 0, t < t1 ou t > t2, t1 <t2.
8
CAPÍTULO 2
Fundamentos Matemáticos
2.1 Série de Fourier
2.1.1 Série de Fourier
Definição 2.1. Série de Fourier
Uma função periódica pode ser decomposta em uma soma in-finita de exponenciais complexas. Essa série é chamada Sériede Fourier. Sendo v (t ) um sinal de potência periódico com pe-ríodo fundamental T0, temos a série de Fourier associada dadapor
v (t ) =∞∑
n=−∞cn exp
j 2πn f0t
(2.1)
para n inteiro, com coeficientes cn dados por
cn =1
T0
∫
T0
v (t ) ·exp(− j 2πn f0t )dt = |cn |exp( j ·arg(cn ))
(2.2)onde arg(cn ) retorna a fase do número complexo cn , e f0 =
1T0
.Note que caso o sinal v (t ) seja real, o termo geral da série possuia simetria c−n = c ∗n .
Exemplo 2.1. Trem de pulsos retangulares
v (t ) =∞∑
k=−∞
A ·Π
t −k T0
τ
onde τ é a largura do pulso centrado em k T0, e a função Π é de-
finida como: Π(x )¬
1 |x |< 1/20 c .c .
.
9
CAPÍTULO 2 ELE32 - Introdução a Comunicações
−1 −0.5 0 0.5 1
0
0.2
0.4
0.6
0.8
1
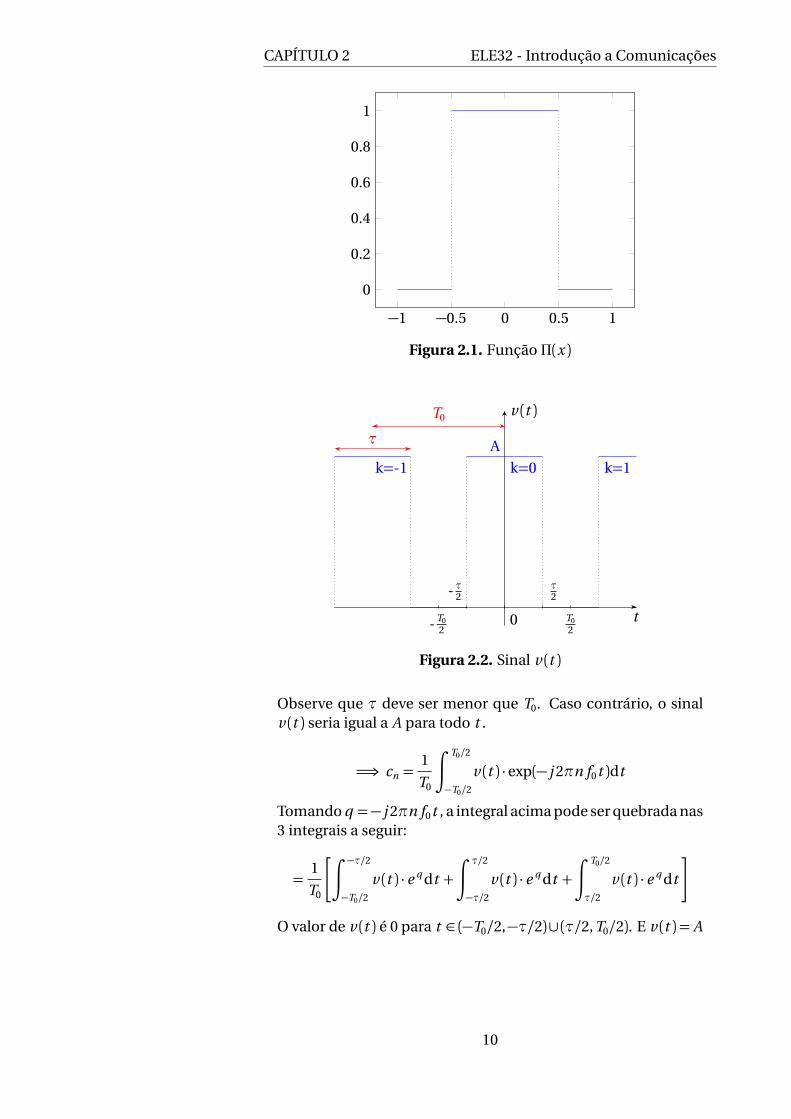
Figura 2.1. Função Π(x )
t
v (t )
k=-1
A
k=0 k=1
τ
T0
0
τ2-τ2
T02- T0
2
Figura 2.2. Sinal v (t )
Observe que τ deve ser menor que T0. Caso contrário, o sinalv (t ) seria igual a A para todo t .
=⇒ cn =1
T0
∫ T0/2
−T0/2
v (t ) ·exp(− j 2πn f0t )dt
Tomando q =− j 2πn f0t , a integral acima pode ser quebrada nas3 integrais a seguir:
=1
T0
∫ −τ/2
−T0/2
v (t ) · e q dt +
∫ τ/2
−τ/2v (t ) · e q dt +
∫ T0/2
τ/2
v (t ) · e q dt
O valor de v (t ) é 0 para t ∈ (−T0/2,−τ/2)∪ (τ/2, T0/2). E v (t ) = A
10

ELE32 - Introdução a Comunicações CAPÍTULO 2
para t ∈ (−τ/2,τ/2). Logo,
=1
T0
∫ τ/2
−τ/2A · e − j 2πn f0t dt
=A
T0·
1
− j 2πn f0·exp(− j 2πn f0t )
τ/2
−τ/2
=A
T0·
1
nπ f0sin
2πn f0
τ
2
=Aτ
T0·
sin(nπ f0τ)nπ f0τ
∴ cn =Aτ
T0· sinc(n f0τ)
onde sinc(x )¬ sin(πx )πx .
−15 −10 −5 0 5 10 15
0
0.1
0.2
n
c n
Figura 2.3. Exemplo de coeficientes cn para A = 1 e f0τ=14
2.1.2 Teorema de Parseval
É possível calcular a potência média de v (t ) utilizando cn :
Pv =1
T0
∫
T0
|v (t )|2dt =1
T0
∫
T0
v (t ) · v ∗(t )dt
=1
T0
∫
T0
v (t ) ·∞∑
n=−∞c ∗n ·exp(− j 2πn f0t )
dt
=∞∑
n=−∞c ∗n ·
1
T0
∫
T0
v (t )exp(− j 2πn f0t )dt
=∞∑
n=−∞c ∗n · cn =
∞∑
n=−∞|cn |2
∴ Pv =∞∑
n=−∞|cn |2 (2.3)
11

CAPÍTULO 2 ELE32 - Introdução a Comunicações
2.2 Transformada de Fourier
Quando tomamos lim f0→0, isto é, no limite do contínuo de f0, o so-matório torna-se uma integral, e obtemos a chamada Transformadade Fourier (TF). A Transformada de Fourier nos permite, agora, ana-lisar também sinais de energia não periódicos.A Transformada de Fourier de um sinal v (t ) é uma função V ( f ) cal-culada através de:
V ( f )¬F v (t )¬∫ ∞
−∞v (t ) ·exp(− j 2π f t )dt (2.4)
Nota: em outras referências, é possível encontrar transformadas cujointegrando é a frequência angular, ω, em cujas integrais haverá umfator 1
2π ; como a integral acima é calculada no domínio da frequên-cia, f , esse fator não está presente. A Transformada de Fourier In-versa (TFI) é definida como:
V ( f )¬F −1v (t )¬∫ ∞
−∞V ( f ) ·exp(+ j 2π f t )d f (2.5)
Exemplo 2.2. Pulso retangular
v (t ) = A ·Π
t
τ
t
v (t )
A
0 τ2-τ2
Figura 2.4. Sinal v (t )
V ( f ) =
∫ τ/2
−τ/2A ·exp(− j 2π f t )dt ∴V ( f ) = A ·τsinc( f τ)
12

ELE32 - Introdução a Comunicações CAPÍTULO 2
−4 −2 2 4−0.2
0.2
0.4
0.6
0.8
1
fτ
V ( f )Aτ
Figura 2.5. Função V ( f )
Um caso particular:
Π (t )←→ s i n c
f
2.2.1 Teorema de Rayleigh
De maneira semelhante ao teorema de Parseval temos, para sinaisde energia, a seguinte identidade:
E =
∫ ∞
−∞V ( f ) ·V ∗( f )d f =
∫ ∞
−∞|V ( f )|2 (2.6)
O valor de |V ( f )|2 indica a densidade de energia no espaço de frequên-cias. E pode ser entendido como a densidade de energia em frequên-cia. Obs.: para que um sinal seja limitado em frequência é condiçãonecessária que ele seja ilimitado no tempo.
2.2.2 Propriedades da Transformada de Fourier
Linearidade
Se v (t ) = a1 · v1(t ) + a2 · v2(t ), então F v (t ) = a1 ·V1( f ) + a2 ·V2( f ),ou, de maneira mais genérica:
F
¨
∑
k
ak · vk (t )
«
=∑
k
ak ·Vk ( f ) (2.7)
Teorema da dualidade
Se F v (t )=V ( f ) e existe z (t ) tal que z (t ) =V ( f = t ) então
F V (t )= v (− f ) (2.8)
13

CAPÍTULO 2 ELE32 - Introdução a Comunicações
isto é, a TF de uma função z (t ) pode ser calculada através da TFI,com uma troca de variáveis e de sinal, desde que z(t) tenha o formatode uma função cuja TFI conhecemos.
Exemplo 2.3. Par TF/TFI
F Π(t )= sinc( f ) =⇒ F sinc(t )=Π(− f ) =Π( f )
Note que sempre que o resultado da TF for uma função par, comoé o caso de Π( f ), o resultado da transformada pode ser represen-tado sem o sinal negativo, tornando-se ainda mais simples!
Deslocamento no tempo
Dada uma função v (t ), ela pode ser atrasada em td ao escrevermosv ′(t ) = v (t − td ). Neste caso:
F v ′(t )=∫ ∞
−∞v (t − td ) ·exp(− j 2π f t )dt
Com uma transformação de variáveis t ′ = t − td =⇒ t = t ′ + td ,chegamos em:
F v ′(t )=∫ ∞
−∞v (t ′) ·exp[− j 2π f (t ′+ td )]dt ′
= exp(− j 2π f td ) ·∫ ∞
−∞v (t ′) ·exp(− j 2π f t ′)dt ′
∴F v (t − td )=V ( f ) ·exp(− j 2π f td ) (2.9)
Mudança de escala
Se fizermos a mudança de escala de tempo t ′ =αt , obtemos:
F v (αt =∫ ∞
−∞v (t ′) ·exp
− j 2π ft ′
α
dt
|α|
=1
|α|V ( f ′)
∴F v (αt )=1
|α|·V
f
α
(2.10)
14

ELE32 - Introdução a Comunicações CAPÍTULO 2
Deslocamento em frequência
Seja v (t ) um sinal com TF V ( f ). A multiplicação no tempo por umaexponencial complexa causa a translação em frequência, isto é:
F v (t ) ·exp( j 2π f0t =V ( f − f0) (2.11)
isto é, o espectro fica centrado em f0. Assim, se v(t) é um sinal realcom conteúdo de energia entre ±W , podemos fazer esse sinal ocu-par a faixa de fc ±W multiplicando v (t ) pela exponencial complexaapropriada. O espectro resultante ocupará uma banda de 2W ; sefizermos, ainda, fc >W , as frequências serão exclusivamente posi-tivas, e o novo sinal não possuirá simetria em torno de f = 0. Assim,o sinal resultante é complexo, o que pode ser um problema para otratamento de sinais reais. A solução encontrada é multiplicar v (t )por um seno ou cosseno, resultando no teorema da modulação:
F v (t ) · cos(2π fc t +φ)
=F
§
v (t )e x p [ j (2π fc t +φ)]+ e x p [− j (2π fc t +φ)]
2
ª
=e x p ( jφ)
2F
v (t )e x p ( j 2π fc t )
+e x p (− jφ)
2F
v (t )e x p (− j 2π fc t )
v (t ) · cos(2π fc t +φ)←→V ( f − fc ) ·exp( jφ)
2+V ( f + fc ) ·
exp(− jφ)2
(2.12)Logo, multiplicar um sinal por uma onda senoidal equivale a trans-ladar o seu espectro para ± fc e dividir cada uma de suas cópias pordois. Isso implica que um sinal real possui simetria hermitiana.
Derivada
v (t ) =∫∞−∞V ( f ) ·exp(+ j 2π f t )d f
=⇒d
dtv (t ) =
∫ ∞
−∞
d
dt
V ( f ) ·exp( j 2π f t )
d f
=⇒d
dtv (t ) =
∫ ∞
−∞( j 2π f ) ·V ( f ) ·exp( j 2π f t )d f
∴F
§
d
dtv (t )
ª
=V ( f ) · ( j 2π f )
Ou, de forma mais geral, temos o teorema da diferenciação:
F
§
dn
dt nv (t )
ª
=V ( f ) · ( j 2π f )n (2.13)
15

CAPÍTULO 2 ELE32 - Introdução a Comunicações
É interessante notar nesta expressão que a aplicação da derivada dosinal no tempo amplia altas frequências no sinal, devido ao expo-ente em f .
Integral
Seja z (t ) um sinal de energia que satisfaz:
z (t ) =
∫ t
−∞v (λ)dλ
Se F v (t ) = V ( f ), utilizando o caminho contrário da demonstra-ção anterior temos que, se existir F z (t ), vale a seguinte igualdade:
F
∫ t
−∞v (λ)dλ
=1
j 2π f·V ( f ) (2.14)
Analogamente à aplicação da derivada, a integração atenua altasfrequências.
Relação com a Transformada de Laplace
A Transformada de Laplace (TL) é definida como:
L v (t )=∫
v (t ) ·exp(−s t )dt
em que s ∈ C. Podemos, a partir dela, obter a TF do sinal restrin-gindo o valor de s ao círculo complexo unitário:
F v (t )= L v (t )|s= j 2π f
Exemplo 2.4. TF a partir da TL
v (t ) = u (t ) ·exp(−b t )
onde u (t ) =
1 t > 00 c .c .
L v (t )=∫ ∞
−∞u (t ) ·exp(−b t ) ·exp(−s t )dt
=
∫ ∞
0
exp[−(b + s )t ]dt =exp[−(b + s )t ]−(b + s )
∞
t=0
=1
b + s
∴F v (t )=1
b + s
s= j 2π f
=1
b + j 2π f
16

ELE32 - Introdução a Comunicações CAPÍTULO 2
2.3 Convolução
A convolução de duas funções pode ser definida no tempo contínuo:
z (t ) = x (t ) ∗ y (t ) =
∫ ∞
−∞x (τ) · y (t −τ)dτ (2.15)
e, também, no tempo discreto:
z [n ] = x [n ] ∗ y [n ] =∞∑
k=−∞
x [k ] · y [n −k ]dτ (2.16)
Exemplo 2.5. Convolução de pulsos retangulares
Seja v (t ) =Π
tτ1
e w (t ) =Π
tτ2
, com τ1 >τ2 > 0. Temos que:
v (t )∗w (t ) =∫ ∞
−∞Π
τ
τ1
·Π
t −ττ2
d t =
∫ ∞
−∞Π
τ
τ1
·Π
τ− t
τ2
d t
Imaginando t como sendo o deslocamento do segundo pulsoem relação à origem, podemos separar a integral em três par-tes: uma quando ambos os pulsos coincidem completamente eoutras duas quando eles se coincidem parcialmente. Assim,
v (t ) ∗w (t ) =
τ1τ2
x + τ1+τ22
, −τ1+τ22 < x <−τ1−τ2
2
τ1, −τ1−τ22 < x < τ1−τ2
2
−τ1τ2
x − τ1+τ22
, τ1−τ22 < x < τ1+τ2
2
0, caso contrário
17

CAPÍTULO 2 ELE32 - Introdução a Comunicações
t
v (t ) ∗w (t )
τ1
0-τ1+τ22
τ1+τ22-τ1−τ2
2τ1−τ2
2
Figura 2.6. Sinal v (t ) ∗w (t )
No caso particular em que τ1 =τ2 = 1, temos:
Π(t ) ∗Π(t ) =Λ(t ) =
¨
1− |t |, |t |< 1
0, caso contrário
t
Λ(t )
0−1 1
Figura 2.7. Sinal Λ(t )
2.3.1 Propriedades da convolução
Comutativa:x (t ) ∗ y (t ) = y (t ) ∗ x (t )
Associativa:
x (t ) ∗ [y (t ) ∗ z (t )] = [x (t ) ∗ y (t )] ∗ z (t )
Distributiva:
x (t ) ∗ [y (t ) + z (t )] = x (t ) ∗ y (t ) + x (t ) ∗ z (t )
2.3.2 Teorema da convolução
O teorema da convolução afirma que:
v (t ) ∗w (t )←→V ( f ) ·W ( f ) (2.17)
18

ELE32 - Introdução a Comunicações CAPÍTULO 2
Isso pode ser provado conforme se segue:
F v (t ) ∗w (t )=∫ ∞
−∞
∫ ∞
−∞v (λ) ·w (t −λ)dλ
·exp(− j 2π f t )dt
=
∫ ∞
−∞v (λ)
∫ ∞
−∞w (t −λ) ·exp(− j 2π f t )dt
dt
=
∫ ∞
−∞v (λ) · [W ( f )] ·exp(− j 2π f t )dλ
=W ( f ) ·V ( f )
Vale, também, a seguinte relação:
v (t ) ·w (t )←→V ( f ) ∗W ( f ) (2.18)
2.4 Exercícios
1. Seja x (t ) = sinc2(t ). Calcule X ( f ).2. Temos duas funções: x (t ) =Π(t ) e y (t ) =Π(t ) +δ(t − 2.5) +δ(t +2.5). Definimos z (t ) = x (t ) ∗ y (t ), onde ∗ indica a convolução. Cal-cule Z ( f ) e z (t ).3. Projete um sinal no tempo cujo espectro decai proporcionalmentea f 3 e que não seja nem mesmo parcialmente senoidal. Obtenha aequação do seu espectro. O sinal final deve obrigatoriamente termédia zero. Dica: Use a transformada de Laplace na função
s g n (t ) =
¨
−1, x < 0
1, x > 0
.4. Classifique os sinais abaixo no que se refere à sua periodicidadee se são sinais de potência/energia, justificando sucintamente: (a)x (t ) do problema anterior; (b) o sinal sonoro do Hino Nacional Bra-sileiro; (c) o sinal sonoro de um alarme que acorda pessoas de ma-nhã; (d) um sinal x (t ) = 418
419 (cuidado neste item).
2.5 Soluções
1.Z ( f ) =F x (t )=F s i n c 2(t )=F s i n c (t ) · s i n c (t )
=F s i n c (t ) ∗F s i n c (t )=Π( f ) ∗Π( f ) =Λ( f )
2.Z ( f ) =F x (t ) ∗ y (t )=F x (t ) ·F y (t )
=⇒ Z ( f ) = sinc( f )·sinc( f )+F δ(t )·[exp(+2π f j ·2.5)+exp(−2π f j ·2.5)]
19

CAPÍTULO 2 ELE32 - Introdução a Comunicações
∴ Z ( f ) = sinc( f ) · [sinc( f ) +2 cos(5π f )]
z (t ) =Π(t ) ∗Π(t ) +Π(t ) ∗δ(t −2.5) +Π(t ) ∗δ(t +2.5)
=⇒ z (t ) =Π(t ) ∗Π(t ) +Π(t −2.5) +Π(t +2.5)
∴ z (t ) =Λ(t ) +Π(t −2.5) +Π(t +2.5)
3.
F t n · v (t )=
j
2π
n
·dn
d f n· (V ( f ))
Assim, tomando v (t ) tal que F v (t ) = Kf , teremos F t 2 · v (t ) =
− 14π2 · K
f 3 .Temos também que F sgn(t )=L sgn(t )|s= j 2π f =L 2u (t )−1|s= j 2π f =( 2s −δ(s ))|s= j 2π f =
1jπ f , em que u (t ) é a função degrau.
Logo, F t 2 · sgn(t )= −14π2 · 1
2π ·2
jπ f 3 =j
4π4 · 1f 3
4.(a) v (t ) = t 2 sgn(t ). Não é sinal de energia, pois
∫∞−∞Px (t )dt =∞.
Por outro lado, limT→∞1T
∫T2
− T2
Px (t )dt = limT→∞1T
∫T2
− T2
t 4dt = limT→∞2T 4
5 =∞. Logo, não é sinal de potência. Também não é periódico.(b) Não é periódico, mas é de energia.(c) É Periódico, e se não for desligado, é de potência.(d) Não é periódico: por definição, constantes não são periódicas,
pois T0 = 0. Como Px (t ) =
418419
2= c (constante), E =
∫∞−∞ c dt =∞.
Logo, não é sinal de energia. P = limT→∞1T
∫T2
− T2
c dt = c > 0. Logo, é
sinal de potência.
20
CAPÍTULO 3
Representação Espectral de Sinais
3.1 Impulsos
Para continuar o desenvolvimento teórico, é necessário definir umafunção chamada impulso e representada por δ(t ) que satisfaça asseguintes propriedades:
∫ t2
t1
v (t ) ·δ(t )dt =
v (0) t1 < 0< t2
0 c .c .
Se tomarmos v (t ) = 1, teremos:∫ ∞
−∞δ(t )dt = 1=
∫ ε
−εδ(t )dt
com ε tão pequeno quanto se queira.Para que se possa obter a função δ(t ), definimos δε(t ) que tende aδ(t )quandoε→ 0. Além disso, pode-se afimar que
∫∞−∞v (t )·δε(t )dt =
v (0), para qualquer função v (t ) contínua em t = 0.Há, pois, dois candidatos para δε(t ). Eles são apresentados a seguir:
δε(t ) =1
εΠ
t
ε
δε(t ) =1
εsinc
t
ε
3.1.1 Propriedades do impulso
Replicação: v (t ) ∗δ(t − td ) = v (t − td )Amostragem:
∫∞−∞ v (t ) ·δ(t − td )dt = v (td )
Mudança de escala: δ(αt ) = 1|α| ·δ(t )
3.1.2 Transformada de Fourier de um impulso
Se v (t ) = A · sinc(2W t )←→V ( f ) = A2W Π
f2W
Podemos escrever:
δε(t ) =1
εsinc
t
ε
←→Π( f ε)
21

CAPÍTULO 3 ELE32 - Introdução a Comunicações
=⇒ limε→0δε(t ) =δ(t )←→Π(0) = 1
δ(t )←→ 1 (3.1)
Nota-se que a energia do impulso é infinita:
Eδ =
∫ ∞
−∞|1|2d f =∞
3.1.3 Impulsos em frequência
Sabemos que:
F v (t ) ·exp(+ j 2π fc t )=V ( f − fc )
Se v (t ) = A =⇒ V ( f ) = A ·δ( f ) (teorema da dualidade)Então, se v (t ) = A ·exp(+ j 2π fc t ) =⇒ V ( f ) = A ·δ( f − fc ).Como:
cos(2π fc t ) =exp( j 2π fc t ) +exp(− j 2π fc t )
2
sin(2π fc t ) =exp( j 2π fc t )−exp(− j 2π fc t )
2 j
Concluímos, finalmente, que:
∴F cos(2π fc t )=δ( f − fc ) +δ( f + fc )
2(3.2)
∴F sin(2π fc t )=δ( f − fc )−δ( f + fc )
2 j(3.3)
Com isso, dada a série de Fourier de um sinal periódico, pode-sefacilmente encontrar sua transformada de Fourier. Veja a seguir:
v (t ) =∞∑
n=−∞cn ·exp( j 2πn f0t )←→V ( f ) =
∞∑
n=−∞cn ·δ( f −n · f0)
3.1.4 Transformada de Fourier da função degrau e si-nal
A função sinal é definida da seguinte maneira:
sgn(t ) =
1 t > 0−1 t < 0
22

ELE32 - Introdução a Comunicações CAPÍTULO 3
O objetivo é calcular a transformada de Fourier do degrau, mas antesserá necessário encontrar a TF da função sinal. Para isso, define-seo sinal x (t ) como sendo:
x (t ) = exp(−bt ) ·u(t )
Nota-se que podemos definir a função sinal a partir de x (t ):
sgn(t ) = limb→0[x (t )− x (−t )]
Aplicando-se a transformada de Laplace na expressão envolvendox (t ), chega-se a:
L x (t )− x (−t ) ≡1
b+ s−
1
b− s=
b− s −b− s
b2− s 2
Aplicando-se o limite b→ 0:
limb→0
L x (t )− x (−t )=−2s
−s 2=
2
s
Da relação existente entre as transformadas de Laplace e Fourier, épossível obter a transformada de Fourier da função sinal:
F sgn(t )=2
s
s= j 2π f
∴F sgn(t )=1
jπ f(3.4)
Para que possamos encontrar a transformada de Fourier do degrau,escrevemos a seguinte relação;
sgn(t ) = 2u(t )−1
Aplicando-se a transformada de Fourier em ambos os lados da equa-ção e conhecendo-se a TF da função sinal:
1
jπ f= 2F u(t )−δ( f )
F u(t )=1
2π f+δ( f )
2(3.5)
3.2 Decaimento espectral de sinais
É interessante que o nosso sinal de interesse possua um rápido de-caimento espectral, para que, assim, ocupe a menor faixa de frequên-cias possível. Vamos, pois, analisar como se comporta o decaimento
23

CAPÍTULO 3 ELE32 - Introdução a Comunicações
espectral de alguns sinais para que se possa, a partir disso, encontraralgum tipo de regra ou relação.No caso de um sinal no formato de um pulso, o decaimento é pro-porcional a 1
f . Confira a transformada de Fourier a seguir:
A ·Π
t
τ
←→ A ·τsinc( f τ) = A ·τ ·sin(π f t )π f t
Fazendo-se uma análise mais geral, tomamos um sinal v (t ) e supo-mos que algumas de suas derivadas existam, até encontrarmos umadescontinuidade no tempo. Fica mais claro com a escrita da gene-ralização que se segue.Existem:
v (t ), v ′(t ), ..., v (n−1)(t )
v (n−1)(t ): primeira derivada a possuir descontinuidade no tempo.
=⇒ v (n )(t ) =∑
k
δ(t − tk ) ·dk +w (t )
em que dk é a amplitude do k -ésimo impulso.Notamos que a n-ésima derivada contém impulsos, dado que a (n−1)-ésima derivada possui uma descontinuidade no tempo.Como o que se deseja analisar é o decaimento espectral, é necessá-rio aplicar a Transformada de Fourier para que se possa analisar osinal no domínio da frequência.Segue da propriedade da derivada da TF a seguinte expressão:
=⇒ F v (n )(t )=V ( f ) · ( j 2π f )n =W ( f ) +∑
k
dk ·exp(+ j 2π f tk )
E, portanto, o sinal V ( f ) pode ser escrito como:
∴V ( f ) =W ( f )( j 2π f )n
+∑
k
dk ·exp( j 2π f tk )( j 2π f )n
Nota-se que o decaimento espectral nesse resultado é proporcional
a
1f
n.
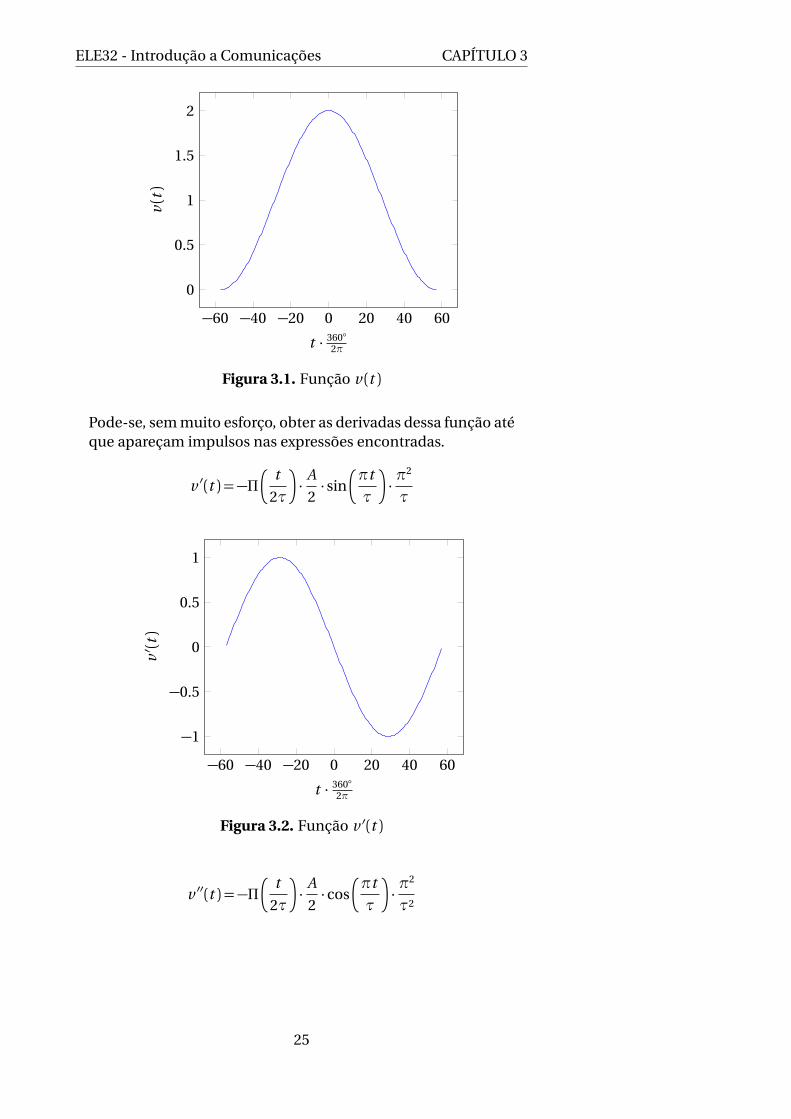
Exemplo 3.1.
Função do cosseno levantado
v (t ) =§
cos
πt
τ
+1
A
2
ª
·Π
t
2τ
24
ELE32 - Introdução a Comunicações CAPÍTULO 3
−60 −40 −20 0 20 40 60
0
0.5
1
1.5
2
t · 360
2π
v(t)
Figura 3.1. Função v (t )
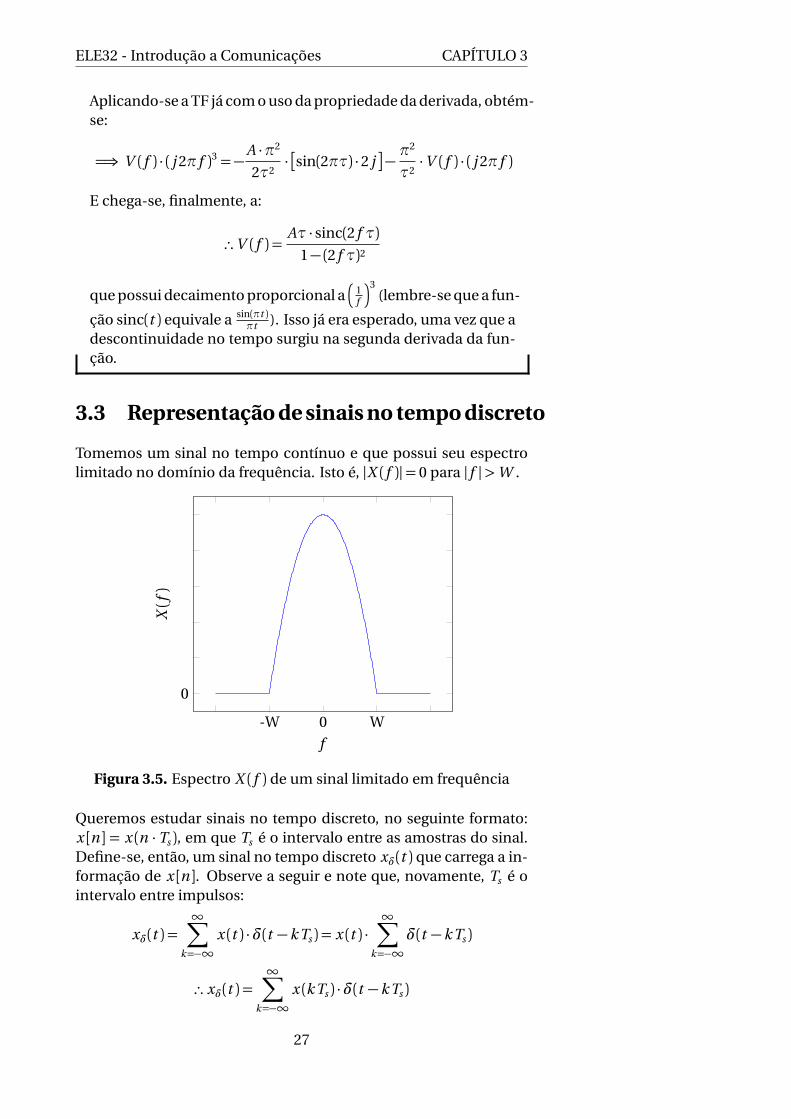
Pode-se, sem muito esforço, obter as derivadas dessa função atéque apareçam impulsos nas expressões encontradas.
v ′(t ) =−Π
t
2τ
·A
2· sin
πt
τ
·π2
τ
−60 −40 −20 0 20 40 60
−1
−0.5
0
0.5
1
t · 360
2π
v′ (t)
Figura 3.2. Função v ′(t )
v ′′(t ) =−Π
t
2τ
·A
2· cos
πt
τ
·π2
τ2
25

CAPÍTULO 3 ELE32 - Introdução a Comunicações
−60 −40 −20 0 20 40 60
−1
−0.5
0
0.5
1
t · 360
2πv′′(t)
Figura 3.3. Função v ′′(t )
v ′′′(t ) =Π
t
2τ
·A
2· sin
πt
τ
·π3
τ3+
A ·π2
2 ·τ2· [δ(t +τ)−δ(t −τ)]
−60 −40 −20 0 20 40 60
−1
−0.5
0
0.5
1
t · 360
2π
v′′′(t)
Figura 3.4. Função v ′′′(t )
Percebe-se que a segunda derivada já possui descontinuidadesno tempo e que a terceira derivada possui impulsos. Ademais,pode-se escrever:
v ′′′(t ) =−v ′(t ) ·π2
τ2+
A ·π2
τ2· [δ(t +τ)−δ(t −τ)]
26
ELE32 - Introdução a Comunicações CAPÍTULO 3
Aplicando-se a TF já com o uso da propriedade da derivada, obtém-se:
=⇒ V ( f ) · ( j 2π f )3 =−A ·π2
2τ2·
sin(2πτ) ·2 j
−π2
τ2·V ( f ) · ( j 2π f )
E chega-se, finalmente, a:
∴V ( f ) =Aτ · sinc(2 f τ)
1− (2 f τ)2
que possui decaimento proporcional a
1f
3(lembre-se que a fun-
ção sinc(t ) equivale a sin(πt )πt ). Isso já era esperado, uma vez que a
descontinuidade no tempo surgiu na segunda derivada da fun-ção.
3.3 Representação de sinais no tempo discreto
Tomemos um sinal no tempo contínuo e que possui seu espectrolimitado no domínio da frequência. Isto é, |X ( f )|= 0 para | f |>W .
-W 0 W
0
f
X(f)
Figura 3.5. Espectro X ( f ) de um sinal limitado em frequência
Queremos estudar sinais no tempo discreto, no seguinte formato:x [n ] = x (n ·Ts ), em que Ts é o intervalo entre as amostras do sinal.Define-se, então, um sinal no tempo discreto xδ(t ) que carrega a in-formação de x [n ]. Observe a seguir e note que, novamente, Ts é ointervalo entre impulsos:
xδ(t ) =∞∑
k=−∞
x (t ) ·δ(t −k Ts ) = x (t ) ·∞∑
k=−∞
δ(t −k Ts )
∴ xδ(t ) =∞∑
k=−∞
x (k Ts ) ·δ(t −k Ts )
27

CAPÍTULO 3 ELE32 - Introdução a Comunicações
Qual é, afinal, o espectro de xδ(t )? A resposta obtida pela mera apli-cação da TF não é boa:
X ( f ) ∗∞∑
k=−∞
exp( j 2π f k Ts )
Pode-se encontrar uma resposta melhor, em que a análise fica maisintuitiva. Veja seu desenvolvimento. Inicialmente, definimos s (t ),em que k vai de −∞ até∞.
s (t ) =∞∑
k=−∞
Π
t −k Ts
τ
Tal função é par e periódica. Assim, pode ser escrita com o auxílioda série de Fourier:
s (t ) = c0+∞∑
n=1
2cn · cos(2πn fs t )
onde cn = fs ·τ · sinc(n fsτ). Nesse modelo, fs equivale a 1Ts
. A partirde s (t ), é possível definir sδ(t ) com a aplicação de um limite.
sδ(t ) = limτ→0
1
τ· s (t ) =
∑
k
δ(t −k Ts )
Agora, com o uso do limite sobre a série de Fourier:
sδ(t ) = limτ→0
1
τ
∞∑
n=0
2 fsτ · sinc(n fsτ) · cos(2πn fs t )
= limτ→0
∞∑
n=0
2 fs · sinc(n fsτ) · cos(2πn fs t ) =∞∑
n=0
2 fs · cos(2πn fs t )
Aplicando-se a TF em sδ(t ):
sδ( f ) =∞∑
n=0
2 fs ·§
δ( f −n fs ) +δ( f +n fs )2
ª
=∞∑
n=−∞fs ·δ( f −n fs )
Então
Xδ( f ) = X ( f ) ∗Sδ( f ) = fs ·∞∑
n=−∞X ( f −n fs )
Isso é representado graficamente pela replicação do espectro de X ( f ).
28

ELE32 - Introdução a Comunicações CAPÍTULO 3
f =− fs f = 0 f = fs
0
f
|X(f)|
Figura 3.6. Replicação do espectro de |X ( f )|
Há três situações possíveis para este cenário, são elas:
fs > 2W
fs = 2W
fs < 2W
Para que seja possível recuperar o sinal, é necessário que fs > 2Wpara que não haja sobreposição de duas ou mais replicações do sinalem frequência. A figura a seguir ilustra o caso em que fc < 2W .
0
f
|X(f)|
Figura 3.7. fs < 2W
Há uma outra questão para ser levada em consideração. Sabemosque o impulso não existe fisicamente (lembre-se que ele foi defi-nido como sendo um limite). Dessa forma, deve-se explorar as con-sequências do uso de um pulso real, aqui chamado de p (t ).Primeiramente, encontra-se a relação entre os impulsos real e ideal.
sδ(t ) =∞∑
k=−∞
p (t −k Ts ) = p (t ) ∗∞∑
k=−∞
δ(t −k Ts )
29

CAPÍTULO 3 ELE32 - Introdução a Comunicações
Utilizando o impulso real para o cálculo de xδ(t ), obtemos:
xδ(t ) = x (t ) ·∑
k
p (t −k Ts ) = x (t ) ·
p (t ) ∗∑
k
δ(t −k Ts )
= p (t ) ∗
∑
k
x (k Ts ) ·δ(t −k Ts )
E, portanto,
Xδ( f ) = P ( f ) · fs
∞∑
n=−∞X ( f −n fs )
Nota-se que P ( f ) gera uma distorção no espectro a partir de umefeito de abertura.
3.4 Exercícios
1. Projete um sinal no tempo cujo espectro decai proporcionalmentea f 3 e que não seja nem mesmo parcialmente senoidal. Obtenha aequação do seu espectro. O sinal deve obrigatoriamente ter médiazero.
2. Há dois sinais: x1(t ) =Π(t fc )·cos(2π fc t )e x2(t ) =Π(t fc )·sin(2π fc t ).Ambos possuem a mesma energia. Qual dos dois sinais possui po-tencialmente energia mais concentrada no domínio da frequênciaem torno da origem? Não é necessário desenvolver equações pararesponder esta questão corretamente. Sugestão: desenhe ambos ossinais no tempo.
3. Calcule a transformada de Fourier de z (t ) = z (t )·y (t ), onde x (t ) =∑∞
n=−∞δ(t −nTs ) e y (t ) = A ·Π
tτ
. Considere que τ > Ts . Esboce oformato de z (t ) no tempo e o seu espectro, indicando os valores quedependem de Ts , A e/ou τ. É possível recuperar a onda quadrada apartir de z (t ) com conhecimento de Ts mas sem conhecimento deτ? Justifique.
3.5 Soluções
1. Ideia: comece com um sinal formado por impulsos. Ao integrá-lono tempo, terá um sinal que decai com 1
f . Integre-o novamente e
o sinal decairá com
1f
2. Ao integrá-lo novamente, o sinal decairá
com
1f
3. É o caminho inverso da dedução do decaimento espec-
tral.
30

ELE32 - Introdução a Comunicações CAPÍTULO 3
t
x(t)
Figura 3.8. x (t )
t
y(t)
Figura 3.9. y (t ) =∫
x (t )dt
t
z(t)
Figura 3.10. z (t ) =∫
y (t )dt
31

CAPÍTULO 3 ELE32 - Introdução a Comunicações
−2 −1 0 1 2
0
0.5
1
t
v(t)
Figura 3.11. v (t ) =∫
z (t )dt
Adicione os impulsos necessários em x (t )para que v (t ) tenha média
zero. Note que v (t ) decairá com
1f
3.
2.
−200 −100 0 100 200
−1
0
1
Figura 3.12. x1(t )
−200−150−100 −50 0 50 100 150 200
−1
0
1
Figura 3.13. x2(t )
x1(t )possui descontinuidades no tempo, o que não ocorre para x2(t ).
32

ELE32 - Introdução a Comunicações CAPÍTULO 3
Assim, espera-se que x2(t ) tenha energia mais concentrada no do-mínio da frequência em torno da origem.
3. Definimos s (t ) =∑∞
k=−∞Π
t−k Tsτ
e sδ(t ) = limτ→01τ ·s (t ) =
∑∞k=−∞δ(t−
k Ts ) = s (t ). Ou seja, x (t ) = limτ→01τ · s (t ).
Série de Fourier:
s (t ) = c0+∞∑
n=1
2 · cn · cos(2πn1
Tst ), cn =
1
Tsτsinc
nτ
Ts
x (t ) = limτ→0
1
τ·∞∑
n=0
2 ·1
Ts·τ · sinc
nτ
Ts
· cos
2πn t
Ts
=⇒ x (t ) =∞∑
n=0
2 ·1
Ts· cos
2πn t
Ts
=⇒ X ( f ) =∞∑
n=0
2 ·1
Ts
¨
δ
f − nTs
+δ
f + nTs
2
«
=∞∑
n=−∞
1
Ts·δ
f −n
Ts
∴ Z ( f ) = X ( f ) ∗Y ( f ) = X ( f ) ∗A ·Π
t
τ
=1
Ts·∞∑
n=−∞Y
f −n
Ts
33

CAPÍTULO 4
Sistemas lineares e invariantes no tempo
Sistemas lineares e invariantes no tempo podem ser usados paramodelar canais, transmissores e receptores e, portanto, são de im-portância central para o estudo de sistemas de telecomunicações.Um sistema é uma caixa preta que, ao receber um sinal de entrada,gera um sinal de saída. Exemplos de sistemas são: um algoritmo deprocessamento, um filtro ou até mesmo um dispositivo mecânico.
x(t) Sistema y(t)
Figura 4.1. Representação básica de um sistema em que x(t) repre-senta o sinal de entrada e y(t) representa o sinal de saída
4.1 Lineariedade e Invariância no tempo
Definição 4.1. Sistema linear
Seja um sistema tal que a resposta a um sinal de entrada x (t ) sejadado pela aplicação do operador L a este sinal, ou seja, L [x (t )].Este sistema é linear se:
L [a1 · x1(t ) +a2 · x2(t )] = a1 · L [x1(t )]+a2 · L [x2(t )]
A lineariedade do sistema implica que todas as operações feitas pelosistema sejam lineares e, portanto, qualquer sistema linear pode serdecomposto em blocos de processamento lineares.
Definição 4.2. Sistema invariante no tempo
Seja um sistema tal que a resposta a um sinal de entrada x (t ) sejadado pela aplicação do operador L a este sinal, ou seja, L [x (t )]e seja td uma constante. Este sistema é invariante no tempo se:
L [x (t )] = y (t ) =⇒ L [x (t − td )] = y (t − td )
34

ELE32 - Introdução a Comunicações CAPÍTULO 4
A invariância no tempo diz que a resposta do sistema não dependedo tempo e, portanto, apenas do sinal de entrada.
4.2 Caracterização do sistema pela respostaao impulso
Em geral, é difícil obter diretamente uma relação entre a entrada ea saída de um sistema. Porém, uma relação em especial se mostrabastante útil neste aspecto. Seja h (t ) a resposta do sistema ao im-pulso no tempo.
h (t ) = L [δ(t )]
Esta relação se mostra útil pois um sinal qualquer x (t ) pode ser re-escrito como:
x (t ) = x (t ) ∗δ(t )
E portanto:
y (t ) = L [x (t ) ∗δ(t )] = L
∫ ∞
−∞x (λ)δ(t −λ)dλ
Usando a lineariedade do operador L e o fato de x (λ) ser constantepara dado t :
y (t ) =
∫ ∞
−∞x (λ)L [δ(t −λ)]dλ=
∫ ∞
−∞x (λ)h (t −λ)dλ =⇒
y (t ) = x (t ) ∗h (t )
A reposta ao impulso é difícil de se obter diretamente, se não impos-sível. Porém, ela pode ser obtida indiretamente através da respostaao degrau, afinal, o impulso é a derivada do degrau no tempo, e osistema é linear.
g (t ) = L [u (t )] =⇒ h (t ) =d g (t )
d t
Exemplo 4.1.
Seja um circuito RC em série em que x(t) é a tensão de entrada ey(t) é a tensão de saída.
35

CAPÍTULO 4 ELE32 - Introdução a Comunicações
x (t )
R
C y (t )
Figura 4.2. Circuito RC em série
A soma de tensões no sistema resulta em:
y (t ) +R Cd y (t )
d t= x (t )
No caso em que a tensão de entrada é a função degrau (u (t )), asaída do sistema se torna:
y (t ) =
1−exp
−t
R C
u (t )
A resposta do sistema ao impulso se torna então:
h (t ) =d y (t )
d t=⇒ h (t ) =
1
R Cexp
−t
R C
4.3 Função de transferência
A análise no domínio da frequência é interessante para o estudo dossinais. A função de transferência é definida pela transformada deFourier da resposta do sistema ao impulso:
H ( f ) =F [h (t )]
Como a transformada de Fourier da convolução no tempo gera umamultiplicação em frequência:
y (t ) = x (t ) ∗h (t ) ↔ Y ( f ) = X ( f )H ( f )
↔ H ( f ) = Y ( f )/X ( f )
Algumas relações interessantes que decorrem desta equação são:
|Y ( f )|= |X ( f )||H ( f )|Ar g [Y ( f )] = Ar g [X ( f )]+Ar g [H ( f )]
36

ELE32 - Introdução a Comunicações CAPÍTULO 4
Onde Ar g (x ) representa a fase de um número complexo x . Temosainda que o último termo no lado direito da equação anterior (Ar g [H ( f )])é conhecido como o desvio de fase causado pelo sistema.
4.3.1 Teste da resposta em frequência
É possível descobrir o valor da resposta de um sistema em frequên-cia para valores específicos de frequência através do método a se-guir. Consequetemente, este método pode ser usado para se estimara função de transferência ao se descobrir seu valor para múltiplospontos.Para um dado valor de fx que se queira descobrir a resposta em frequên-cia do sistema, toma-se como entrada do sistema o seguinte sinal:
x (t ) = Ax exp( jφx )exp( j 2π fx t )
A transforma de Fourier deste sinal é:
X ( f ) = Ax exp( jφx )δ( f − fx )
A resposta do sistema a este sinal no tempo será, então:
y (t ) = h (t ) ∗ x (t ) =
∫ ∞
−∞h (λ)Ax exp( jφx )exp[ j 2π fx (t −λ)]dλ
y (t ) = Ax exp( jφx )exp( j 2π fx t )
∫ ∞
−∞h (λ)exp(− j 2π fxλ)dλ
y (t ) = Ax exp( jφx )exp( j 2π fx t )H ( fx ) =H ( fx )x (t )
Alternativamente, podemos escrever y (t ) como:
y (t ) = A y exp( jφy )exp( j 2π fx t )
Desta forma, é possível encontrar o valor de H ( fx ):
|H ( fx )|=A y
Axe Ar g [H ( fx )] =φy −φx
Usando as expressões anteriores, pode-se chegar a valores de res-posta em frequência para entradas senoidais do tipo
x (t ) = Ax cos(2π fx t +φx )
sendo que a resposta em frequência pode ser expressa por
y (t ) = A y cos(2π fx t +φy )
onde
A y = |H ( fx )|Ax
φy = a r g (H ( fx ))+φx
37

CAPÍTULO 4 ELE32 - Introdução a Comunicações
4.4 Resposta sem distorção
Estudando o comportamento de um sinal ao passar por um sistema,convém definir o que seria uma resposta não distorcida.
Definição 4.3. Resposta sem distorção
Seja um sistema tal que a resposta a um sinal de entrada x (t )seja y (t ). Esta resposta é considerada não distorcida se y (t ) édiferente de x (t ) apenas por um atraso temporal e/ou uma mu-dança de amplitude, isto é:
y (t ) = K · x (t − td )
Sendo K e td constantes.
4.5 Filtros e filtragem
Um filtro serve para selecionar/rejeitar uma certa banda de frequên-cia e possuem múltiplas utilidades, como isolar um sinal, reduziro ruído ou eliminar interferências. Os filtros apresentados a seguirsão ideais e, portanto, não causam distorções e removem totalmente(ganho zero) as bandas não desejadas. Nas equações apresentadasa seguir, K é o ganho do filtro, B é a banda e td é o deslocamento notempo.Devido a seleção de frequências, os filtros serão definido em frequên-cia, isto é, eles serão definidos através de sua função de transferên-cia. Conforme dito anteriormente, considera-se a ausência de dis-torção dentro das respectivas faixas de interesse.
4.5.1 Filtro passa baixas (LPF)
H ( f ) =
¨
K exp(− j 2π f td ), se f ≤ |B |0, caso contrário
Em tempo:h (t ) = 2B K sinc(2B (t − td ))
4.5.2 Filtro passa altas
H ( f ) =
¨
K exp(− j 2π f td ), se f ≥ |B |0, caso contrário
Em tempo:
h (t ) = K δ(t − td )−2B K sinc(2B (t − td ))
38

ELE32 - Introdução a Comunicações CAPÍTULO 4
4.5.3 Filtro passa faixas
H ( f ) =
¨
K exp(− j 2π f td ), se f1 ≤ | f | ≤ f2
0, caso contrário
A banda é então: B = f2− f1
Em tempo:
h (t ) = 2B K sinc(B (t − td ))cos(2π fc (t − td ))
onde fc = ( f2+ f1)/2.
4.5.4 Filtro rejeitor de faixas
H ( f ) =
¨
0, se f1 ≤ | f | ≤ f2
K exp(− j 2π f td ), caso contrário
A banda é então: B = f2− f1
Em tempo, temos:
h (t ) = K δ(t − td )−2B K sinc(B (t − td ))cos(2π fc (t − td ))
onde fc = ( f2+ f1)/2.
4.6 Análise por diagramas de blocos
É possível combinar múltiplos sistemas usando um diagrama de blo-cos e fazer uma análise da combinação através das funções de trans-ferências.
4.6.1 Sistemas em série
Um sistema composto pela combinação de dois sistemas em sérietem como função de transferência o produto de ambas funções detransferências
H1( f ) H2( f )
Figura 4.3. Representação básica de um sistema em série
H ( f ) =H1( f )H2( f )
39
CAPÍTULO 4 ELE32 - Introdução a Comunicações
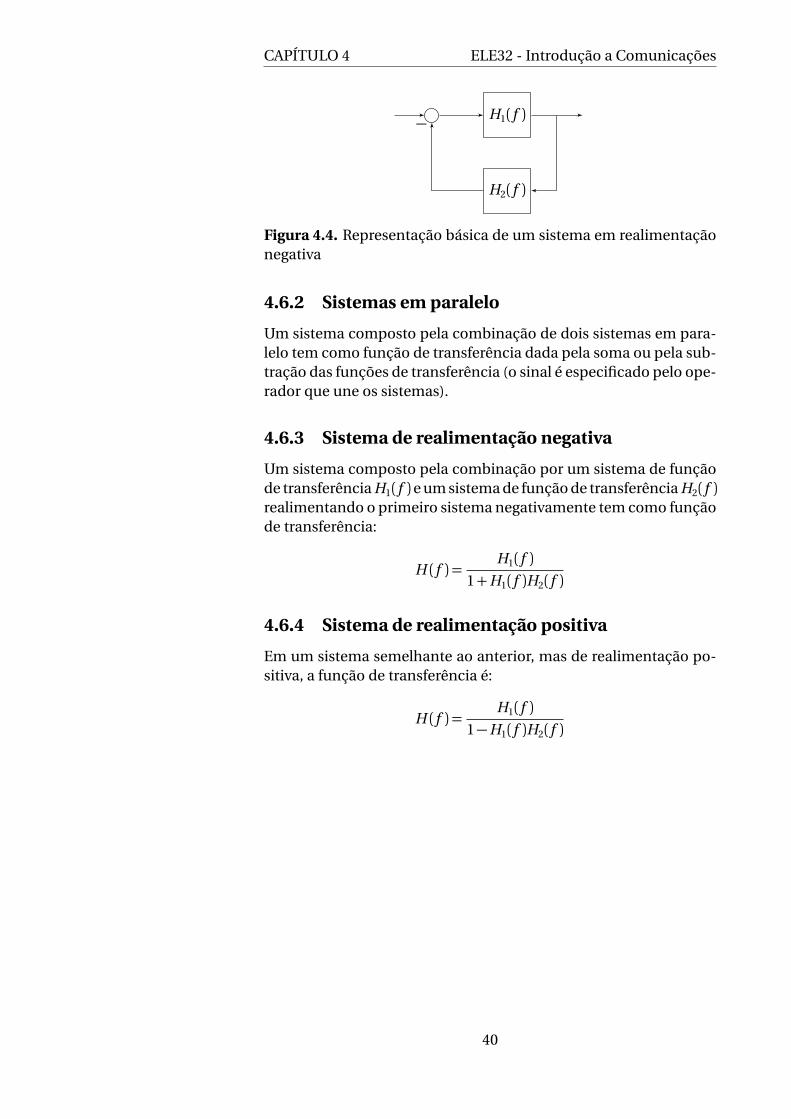
H1( f )
H2( f )
−
Figura 4.4. Representação básica de um sistema em realimentaçãonegativa
4.6.2 Sistemas em paralelo
Um sistema composto pela combinação de dois sistemas em para-lelo tem como função de transferência dada pela soma ou pela sub-tração das funções de transferência (o sinal é especificado pelo ope-rador que une os sistemas).
4.6.3 Sistema de realimentação negativa
Um sistema composto pela combinação por um sistema de funçãode transferência H1( f )e um sistema de função de transferência H2( f )realimentando o primeiro sistema negativamente tem como funçãode transferência:
H ( f ) =H1( f )
1+H1( f )H2( f )
4.6.4 Sistema de realimentação positiva
Em um sistema semelhante ao anterior, mas de realimentação po-sitiva, a função de transferência é:
H ( f ) =H1( f )
1−H1( f )H2( f )
40

CAPÍTULO 5
Densidade Espectral de Potência
5.1 Correlação
Muitas vezes estamos interessados em analisar a similaridade en-tre 2 fenômenos. Correlação, em termos gerais, é uma métrica deorigem estatística que é capaz de traduzir o quanto um evento estárelacionado (ou influenciado) a outro. Vamos definir a Correlaçãode Sinais como:
Definição 5.1. Correlação
É uma medida da similaridade (ou diferença) entre dois sinais,por meio da semelhança em potência, para sinais de potência,ou semelhança em energia, para sinais de energia.
5.1.1 Correlação de sinais de potência
Motivação
Sabemos que a média
f (t )
Tde uma função f (t ) em um intervalo
T em torno de 0 é dado por
f (t )
T=
1
T
∫ +T /2
−T /2
f (t ) d t (5.1)
Sinais de potência tem energia infinita e, por esse motivo, utiliza-sepotência como métrica de similaridade. Se analisamos um intervalofinito claramente a energia
εv (T ) =
∫ +T /2
−T /2
v (t )v ∗(t ) d t (5.2)
é limitada se sua potência instantânea for limitada em T . Dessa ma-neira, a potência média no intervalo também é limitada:
Pv (T ) =1
T
∫ +T /2
−T /2
v (t )v ∗(t ) d t (5.3)
41

CAPÍTULO 5 ELE32 - Introdução a Comunicações
E podemos traçar o paralelo de que a potência de um sinal em um in-tervalo é exatamente a média de sua potência instantânea v (t )v ∗(t )nesse intervalo.
Pv (T ) = ⟨v (t )v ∗(t )⟩T (5.4)
Como estamos interessados na potência da onda completa Pv , ex-pandimos os limites do intervalo para obter
Pv = limT→∞
Pv (T ) = limT→∞
1
T
∫ +T /2
−T /2
v (t )v ∗(t ) d t (5.5)
Que é exatamente a equação (1.2) da potência de um sinal. Dasequações (5.4) e (5.5) concluímos
Pv4= ⟨v (t ) · v ∗(t )⟩= lim
T→∞
1
T
∫ T /2
−T /2
v (t ) · v ∗(t )d t (5.6)
Propriedades da média
• Linearidade: ⟨a1z1(t ) +a2z2(t )⟩= a1 ⟨z1(t )⟩+a2 ⟨z2(t )⟩
Demonstração.
⟨a1z1(t ) +a2z2(t )⟩= limT→∞
1
T
∫ T /2
−T /2
a1z1(t ) +a2z2(t )d t
= limT→∞
1
T
∫ T /2
−T /2
a1z1d t +
∫ T /2
−T /2
a2z2d t
= a1 limT→∞
1
T
∫ T /2
−T /2
z1d t +a2 limT→∞
1
T
∫ T /2
−T /2
z2d t
= a1 ⟨z1(t )⟩+a2 ⟨z2(t )⟩
• Comutação com conjugado: ⟨z ∗(t )⟩= ⟨z (t )⟩∗
Demonstração. Da linearidade temos que:
⟨z ∗(t )⟩=
Re(z )− Im(z ) j
= ⟨Re(z )⟩− ⟨Im(z )⟩ j
⟨z (t )⟩=
Re(z ) + Im(z ) j
= ⟨Re(z )⟩+ ⟨Im(z )⟩ j
Concluimos que:
⟨z ∗(t )⟩= ⟨z (t )⟩∗
42
ELE32 - Introdução a Comunicações CAPÍTULO 5
• Invariância em defasagem: ⟨z (t − td )⟩= ⟨z (t )⟩
Demonstração. Usando que∫ −T /2
−T /2−td
z (t )d t =
∫ 0
−td
z (t −T /2)d t <∞
e analogamente que∫ T /2
T /2−td
z (t )d t =
∫ 0
−td
z (t +T /2)d t <∞
temos:
⟨z (t − td )⟩= limT→∞
1
T
∫ T /2
−T /2
z (t − td )d t
= limT→∞
1
T
∫ T /2−td
−T /2−td
z (t )d t
= limT→∞
1
T
∫ −T /2
−T /2−td
z (t )d t +1
T
∫ T /2
−T /2
z (t )d t −1
T
∫ T /2
T /2−td
z (t )d t
= limT→∞
1
T
∫ T /2
−T /2
z (t )d t
= ⟨z (t )⟩
Correlação cruzada e propriedades
Sabemos que a média de v (t ) e v ∗(t ) nos dá a potência de v (t ), mase se fizessemos a média de v (t ) com algum outro w ∗(t )? Esta é umaforma bastante útil de medir a similaridade entre dois sinais v (t ) ew (t ), ainda mais quando pela Desigualdade de Schwarz (5.7) essamédia é limitada:
| ⟨v (t ) ·w ∗(t )⟩ |2 ≤ Pv Pw (5.7)
Demonstração. Considere t ∈C e analisemos a média
Pv−t w =
(v (t )− t w (t )) · (v (t )− t w (t ))∗
= ⟨v (t )v ∗(t )− t v ∗(t )w (t )− t ∗v (t )w ∗(t ) + t t ∗w (t )w ∗(t )⟩= ⟨v v ∗⟩− ⟨v ∗w ⟩ t −⟨v w ∗⟩ t ∗+ ⟨w w ∗⟩ |t |2
= Pv −⟨v ∗w ⟩ t −⟨v w ∗⟩ t ∗+Pw |t |2
43

CAPÍTULO 5 ELE32 - Introdução a Comunicações
Como potências são reais e não negativas por definição, escolhemost = ⟨v w ∗⟩/Pw e temos:
Pv −⟨v ∗w ⟩ t −⟨v w ∗⟩ t ∗+Pw |t |2 ≥ 0,∀t ∈C
Pv −⟨v ∗w ⟩ · ⟨v w ∗⟩
Pw−⟨v w ∗⟩ · ⟨v w ∗⟩∗
Pw+| ⟨v w ∗⟩ |2
Pw≥ 0
Pv −|⟨v w ∗⟩ |2
Pw≥ 0
| ⟨v w ∗⟩ |2 ≤ Pv Pw
Portanto, essa formulação por média se traduz numa escala com-plexa de módulo 0 a
p
Pv Pw em similaridade de v e w , atingindoo máximo para v = w . Por esse motivo, costuma-se referir a essaoperação como um produto interno entre v e w (cuidado para nãoconfundir as notações):
⟨v, w ⟩ 4= ⟨v (t ) ·w ∗(t )⟩ (5.8)
Definimos a Correlação Cruzada de um par de sinais de potência ve w como:
Rv w (τ)4= ⟨v (t ), w ∗(t −τ)⟩ (5.9)
A Correlação Cruzada é também conhecida como Produto InternoDeslizante, já que para cada τ que deslocamos w (t ) a correlaçãocruzada é o produto interno conforme (5.8). Rv w (τ) é, portanto, a si-milaridade de um sinal com o outro em função de um deslocamentovirtual relativo.A correlação cruzada também pode ser definida para sinais aleató-rios de potência:
Rv w (τ)4= ε [v (t ) ·w ∗(t −τ)] (5.10)
Onde ε
f (t )
é a esperança de f (t ).Propriedades da correlação cruzada, Rv w :
• |Rv v (0)|=Rv v (0) = Pv
Demonstração. Imediato pelas definições (5.9) e (5.6).
• |Rv w (τ)|2 ≤ Pv Pw , a igualdade ocorre quando v =w e τ= 0
Demonstração. Observe que em nenhum momento da provade (5.7) foi utilizada a definição do operador ⟨, ⟩, apenas que⟨v, v ⟩ ≥ 0 e que ⟨v, w ⟩∗ = ⟨v ∗, w ∗⟩.
44

ELE32 - Introdução a Comunicações CAPÍTULO 5
É possível repetir a prova de (5.7), utilizando
x (t ), y (t −τ)
=|Rx y (τ)|, e obtemos:
|Rv w (τ)|2 ≤ |Rv v (τ)||Rw w (τ)|
Com igualdade valendo para v =w . Nos resta provar que |Rv v (τ)| ≤|Rv v (0)|= Pv . Isso é feito na seção 5.2.
• Rv w (τ) =R ∗w v (−τ)
Demonstração.
R ∗v w (−τ) = (v (−τ) ∗w ∗(τ))∗
= v ∗(−τ) ∗w (τ)=w (τ) ∗ v ∗(−τ)=Rw v (τ)
Exemplo 5.1. Correlação entre duas exponenciais complexas:
v (t ) =Cv exp ( j 2π f1t ) (5.11)
w (t ) =Cw exp ( j 2π f2t ) (5.12)
Rv w (τ) = limT→∞
1
T
∫ T /2
−T /2
v (t )w ∗(t −τ)d t (5.13)
Rv w (τ) =Cv C ∗w limT→∞
1
T
∫ T /2
−T /2
exp ( j 2π f1t − j 2π f2t + j 2π f2τ)d t
(5.14)Retirando o termo em τ da integral:
Rv w (τ) =Cv C ∗w exp ( j 2π f2τ) limT→∞
1
T
∫ T /2
−T /2
exp ( j 2π( f1− f2)t )d t
(5.15)Lembrando que a exponencial complexa possui modulo unita-rio:
Rv w (τ) =
Cv C ∗w exp ( j 2π f2τ), s e f1 = f2
0, C .C .(5.16)
5.1.2 Correlação para sinais de energia
Com uma motivação similar ao que foi desenvolvido para sinais depotência, buscamos uma medida de correlação que agora utilize ener-gia como métrica. Para um sinal v (t ), sua energia é dada por:
45

CAPÍTULO 5 ELE32 - Introdução a Comunicações
Ev4=
∫ ∞
−∞v (t )v ∗(t )d t (5.17)
Similarmente à equaçao (5.5), definimos a correlação entre dois si-nais de energia por:
Rv w (τ)4=
∫ ∞
−∞v (t )w ∗(t −τ)d t (5.18)
Como esperado, as mesmas propriedades de sinais de potência semantém. Para quaisquer par de sinais de energia, temos que:
• |Rv v (0)|=Rv v (0) = Ev
• |Rv w (τ)|2 ≤ Ev Ew , a igualdade acontece para v =w e τ= 0.
• Rv w (τ) =R ∗w v (−τ)
Correlação Cruzada em sinais de energia é um conceito muito pró-ximo ao de convolução, e ambos estão de fato ligados por uma rela-ção simples:
Rv w (τ) = v (τ) ∗w ∗(−τ) (5.19)
Demonstração.
Rv w (τ) =
∫ ∞
−∞v (t )w ∗(t −τ)d t
=
∫ ∞
−∞v (t )w ∗ (− (τ− t ))d t
= v (τ) ∗w ∗(−τ)
46

ELE32 - Introdução a Comunicações CAPÍTULO 5
Figura 5.1. Interpretação da Correlação Cruzada como uma convo-lução. No primeiro esquema g e f se combinam enquanto g se des-loca com relação a f . No segundo esquema, f se desloca em relaçãoa g .
5.2 Autocorrelação
A autocorrelação é a correlação de um sinal com ele mesmo, atra-sado em τ.
Rv (τ)4=Rv v (τ) (5.20)
Para qualquer sinal, a autocorrelação tem simetria hermitiana, logo:
Rv (τ) =R ∗v (−τ) (5.21)
• v (t ) real→ V ( f ) simetria hermitiana
• v (t ) simetria hermitiana→ V ( f ) real
5.2.1 Autocorrelação de sinal de potência
Propriedades da autocorrelação:
• Rv (τ= 0) = Pv
• |Rv (τ)| ≤ Pv
Exemplo 5.2.
Definindo z (t ) = cos(2π f0t +φ), temos que:
z (t ) =1
2[exp ( j (2π f0t +φ))+exp (− j (2π f0t +φ))] (5.22)
47

CAPÍTULO 5 ELE32 - Introdução a Comunicações
Logo, utilizando o exemplo anterior, obtemos:
Rz (τ) =1
2
exp( j 2π f0τ) +exp(− j 2π f0τ)2
(5.23)
Rz (τ) =1
2cos(2π f0τ) (5.24)
5.2.2 Autocorrelação de sinal de energia
Propriedades da autocorrelação:
• Rv (τ= 0) = Ev
• |Rv (τ)| ≤ Ev
A Transformada de Fourier permite escrever:
Rv (τ= 0) =
∫ ∞
−∞v (t )v ∗(t )d t =
∫ ∞
−∞|V ( f )|2d f (5.25)
Rv w (τ= 0) =
∫ ∞
−∞v (t )w ∗(t )d t =
∫ ∞
−∞|V ( f )||W ∗( f )|d f (5.26)
5.3 Como a correlação se altera quando te-mos SLI
Dado x (t ) com Rx (τ) entrada de um sistema linear invariante notempo com resposta ao degrau h (t ), obtemos uma saída y (t ). Que-remos analisar Ry (τ) como uma função de Rx (τ).Primeiro Passo: Encontrar Ry x (τ)
Ry x (τ)4=< y (t ) · x ∗(t −τ)> 6=Rx y (τ) (5.27)
Ry x (τ) =
∫ ∞
−∞y (t )x ∗(t −τ)d t =
∫ ∞
−∞[h (t ) ∗ x (t )]x ∗(t −τ)d t (5.28)
Ry x (τ) =
∫ ∞
−∞[
∫ ∞
−∞h (λ)x (t −λ)dλ]x ∗(t −τ)d t (5.29)
Ry x (τ) =
∫ ∞
−∞h (λ)[
∫ ∞
−∞x (t −λ)x ∗(t −τ)d t ]dλ (5.30)
Substituindo t = t −λ, temos que :
Ry x (τ) =
∫ ∞
−∞h (λ)[
∫ ∞
−∞x (t )x ∗(t−(τ−λ)d t ]dλ=
∫ ∞
−∞h (λ)Rx (τ−λ)dλ
(5.31)
48
ELE32 - Introdução a Comunicações CAPÍTULO 5
Ry x (τ) = h (τ)Rx (τ) (5.32)
Segundo passo: Encontrar Ry (τ)
Ry (τ)4=< y (t ) · y ∗(t −τ)>=
∫ ∞
−∞y (t )y ∗(t −τ)d t (5.33)
Ry (τ) =
∫ ∞
−∞y (t +τ)y ∗(t )d t (5.34)
Ry (τ) =
∫ ∞
−∞
∫ ∞
−∞y (t +τ)h ∗(λ)x ∗(t −λ)dλd t (5.35)
Ry (τ) =
∫ ∞
−∞h ∗(λ)[
∫ ∞
−∞y (t )x ∗(t −λ−τ)d t ]dλ (5.36)
Ry (τ) =
∫ ∞
−∞h ∗(λ)Ry x (τ+λ)dλ (5.37)
Fazendo λ=−λ⇒d λ
dλ=−1, temos que:
Ry (τ) =
∫ ∞
−∞h ∗(−λ)Ry x (τ− λ)d λ (5.38)
Ry (τ) = h ∗(−τ)Ry x (τ) (5.39)
Ry (τ) = h ∗(−τ) ∗h (τ) ∗Rx (τ) =Rh (τ) ∗Rx (τ) (5.40)
Onde Rh (τ) = h ∗(−τ) ∗ h ∗(τ) é a autocorrelação da resposta ao im-pulso.
5.4 Função de Densidade Espectral
Definição 5.2. Densidade Espectral de Potência
A Densidade Espectral de Potência (Sx ( f )) de um sinal x (t ) éuma função que descreve a distribuição de potência em funçãoda frequênciaA densidade espectral é a Transformada de Fourier da autocor-relação:
Sx ( f ) =
∫ ∞
−∞Rx (τ)exp(− j 2π f τ)dτ (5.41)
Ou seja, a Densidade Espectral de Potência é o par dual da Au-
49

CAPÍTULO 5 ELE32 - Introdução a Comunicações
tocorrelação de um sinal.
Rx (τ)↔ Sx ( f ) (5.42)
Note que, como Rx (τ) =R ∗(τ), Rx (τ) tem simetria hermitiana e Sx ( f )é real.Para sinais de energia, pela equação 5.19 e a definição de Autocor-relação, temos:
Sx ( f ) =F x (τ) ∗ x ∗(−τ)= X ( f )X ∗( f ) (5.43)
Sx ( f ) = |X ( f )|2 (5.44)
Se x (t ) é um sinal de potência periódico com série de Fourier:
x (t ) =∞∑
n=−∞c (n )exp( j 2πn f0) (5.45)
então a sua densidade espectral de potência será:
Sx ( f ) =∞∑
n=−∞|c (n )|2δ( f −n f0) (5.46)
5.5 Relação entre sinais e sistema
x (t )↔Rx (τ)↔ Sx ( f ) (5.47)
Ry x (τ) = h (τ) ∗Rx (τ) (5.48)
y (t ) = x (t ) ∗h (t )↔Ry (τ) = h (τ) ∗h ∗(−τ) ∗Rx (τ) (5.49)
↔ Sy ( f ) = |H ( f )|2Sx ( f ) (5.50)
g (τ)↔G ( f )⇒ Sy ( f ) =G ( f )Sx ( f ) (5.51)
5.6 Transformada de Hilbert
Definição 5.3.
A transformada de Hilbert H [g (t )] de um sinal g (t ) é definidacomo:
H
g (t )
= H= g (t ) ∗1
πt=
1
π
∫ ∞
−∞
g (τ)t −τ
dτ=−1
π
∫ ∞
−∞
g (t −τ)τ
dτ
(5.52)
50
ELE32 - Introdução a Comunicações CAPÍTULO 5
Essa transformada é a resposta a g (t ) de um filtro linear invari-ante no tempo (denominado um transformados de Hilbert) tendo
resposta ao impulso1
πt.
A utilidade dessa transformada é a sua participação na conver-são de um sinal em banda passante para banda base.
Em frequência:
H ( f ) =− j s g n ( f ) =
j f < 0− j f > 0
No tempo: h (t ) =F −1H ( f )=− j
−πt j=
1
πt
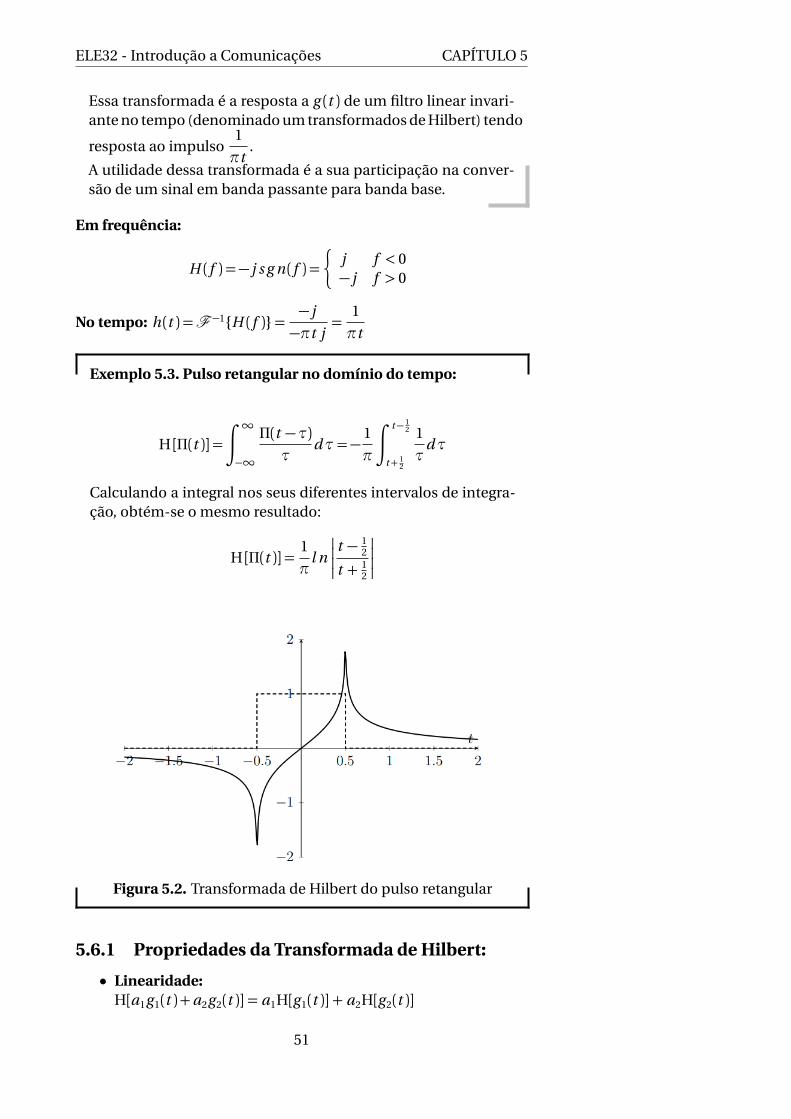
Exemplo 5.3. Pulso retangular no domínio do tempo:
H [Π(t )] =
∫ ∞
−∞
Π(t −τ)τ
dτ=−1
π
∫ t− 12
t+ 12
1
τdτ
Calculando a integral nos seus diferentes intervalos de integra-ção, obtém-se o mesmo resultado:
H [Π(t )] =1
πl n
t − 12
t + 12
Figura 5.2. Transformada de Hilbert do pulso retangular
5.6.1 Propriedades da Transformada de Hilbert:
• Linearidade:H[a1g1(t ) +a2g2(t )] = a1H[g1(t )] + a2H[g2(t )]
51

CAPÍTULO 5 ELE32 - Introdução a Comunicações
Demonstração.
H
a1g1(t ) +a2g2(t )
=1
π
∫ ∞
−∞
a1g1(τ) +a2g2(τ)t −τ
dτ
=1
π
∫ ∞
−∞
a1g1(τ)t −τ
dτ+1
π
∫ ∞
−∞
a2g2(τ)t −τ
dτ
=1
πa1
∫ ∞
−∞
g1(τ)t −τ
dτ+1
πa2
∫ ∞
−∞
g2(τ)t −τ
dτ
= a1H
g1(t )
+a2H
g2(t )
• Transformada de Hilbert de uma constante:se g (t ) = c ⇒ g (t ) = 0.
Demonstração.
H
g (t )
= g (t ) ∗1
πt=
1
π
∫ ∞
−∞
c
τdτ= 0
• Deslocamento temporal e dilatação temporal:Se g (t ) tem como transformada de Hilbert g (t )⇐ a transfor-mada de Hilbert de g (t − t0) é g (t − t0). A transformada de Hil-bert de g (a t ) é s g n (a )g (a t ).
Demonstração. Deslocamento temporal
H
g (t − t0)
=1
π
∫ ∞
−∞
g (τ− t0)t −τ
dτ
Fazendo a mundança de variável µ=τ− t0:
H
g (t − t0)
=1
π
∫ ∞
−∞
g (τ− t0)t −τ
dτ =1
π
∫ ∞
−∞
g (µ)t − t0−µ
dµ
= g (t − t0)
Demonstração. Dilatação temporal
H
g (a t )
=1
π
∫ ∞
−∞
g (aτ)t −τ
dτ
52
ELE32 - Introdução a Comunicações CAPÍTULO 5
Fazendo a mudança de variável µ= aτ:
H
g (a t )
=1
π
∫ ∞
−∞
g (aτ)t −τ
dτ=1
π
∫ ∞
−∞
g (µ)a t −µ
dµ= g (a t )
Se a > 0:
H
g (−a t )
=1
π
∫ ∞
−∞
g (−aτ)t −τ
dτ
Fazendo a mudança de variável µ=−aτ:
H
g (−a t )
=1
π
∫ ∞
−∞
g (−aτ)t −τ
dτ=−1
π
∫ ∞
−∞
g (µ)−a t −µ
dµ=−g (−a t )
Ou seja: H
g (a t )
= s g n (a )g (a t )
• Convolução:H
g1(t ) ∗ g2(t )
= g1(t ) ∗ g2(t ) = g1(t ) ∗ g2(t )
Demonstração.
Pelo lado esquerdo da primeira relação:
H
g1(t ) ∗ g2(t )
=1
π
∫ ∞
−∞
1
t −τ
∫ ∞
−∞g1(λ)g2(τ−λ)dλdτ
Pelo lado direito da primeira relação:
g1(t ) ∗ g2(t ) =1
π
∫ ∞
−∞
∫ ∞
−∞
g1(τ)λ−τ
dτ
g2(t −λ)dλ
Aplicando a mudança de variáveis µ=τ−λ+ t , temos:
g1(t ) ∗ g2(t ) =1
π
∫ ∞
−∞
∫ ∞
−∞
g1(λ− t +µ)t −µ
g2(t −λ)dτdλ
Mudando a ordem de integração e fazendo µ′ =λ− t +µ:
g1(t )∗g2(t ) =1
π
∫ ∞
−∞
1
t −µ
∫ ∞
−∞g1(µ
′)g2(µ−µ′)dµ′dµ=H
g1(t ) ∗ g2(t )
De modo similar, prova-se a igualdade para g1(t ) ∗ g2(t )
• Derivação temporal:
H
d g (t )d t
=d
d tH[g (t )]
53

CAPÍTULO 5 ELE32 - Introdução a Comunicações
Demonstração.
H
g (t )
=−1
π
∫ ∞
−∞
g (t −τ)τ
dτ
Aplicando a derivada em ambos os lados:
d
d tH
g (t )
=d
d t
−1
π
∫ ∞
−∞
g (t −τ)τ
dτ
=−1
π
∫ ∞
−∞
d
d t
g (t −τ)τ
dτ
=−1
π
∫ ∞
−∞
g ′(t −τ)τ
dτ=H
d g (t )d t
• Transformada de Fourier:
O sinal1
πttem como transformada de Fourier:
=− j s g n ( f ) =
j f < 0− j f > 0
E a transformada de Fourier de g (t ) fica:G ( f ) =− j s g n ( f )G ( f )
Demonstração. A partir da definição:
g (t ) = g (t ) ∗1
πt
Aplicando a Transformada de Fourier:
G ( f ) =F g (t )=G ( f )F 1
πt=− j s g n ( f )G ( f )
• Densidade Espectral de Energia:Suponha que g (t ) seja um sinal de energia. Temos que a trans-formada de Hilbert não muda a densidade espectral de ener-gia.
Demonstração.
x (t ) = x (t ) ∗h (t )
Sx ( f ) = |X ( f )|2
SX ( f ) = |X ( f )|2|= |X ( f )|2|H ( f )|2 = |X ( f )|2
SX ( f ) = SX ( f )
54
ELE32 - Introdução a Comunicações CAPÍTULO 5
• Simetria:Se g (t ) é real, então G ( f ) possui simetria hermitiana, isto é,G (− f ) = G ∗( f ). Com isso, G ( f ) também possui simetria her-mitiana.
Demonstração.
G (− f ) =− j s g n (− f )G (− f ) = j s g n ( f )G ∗( f )
= (− j s g n ( f )G ( f ))∗ = G ∗( f )
• Ortogonalidade:Se g (t ) é um sinal de energia real, então g (t )↔ g (t ), logo:
g (t ), g (t )
= 0
Demonstração.
Usando o teorema de Rayleigh:
g (t ), g (t )
=
∫ ∞
−∞g (t )g (t )d t =
∫ ∞
−∞G ( f )G ( f )d f
Aplicando a Transformada de Fourier de g (t ):
g (t ), g (t )
=
∫ ∞
−∞G ( f )(− j s g n ( f )G ( f ))d f
=− j
∫ ∞
−∞G 2( f ) j s g n ( f )d f
Como o integrando é uma função ímpar, já que é produto deuma função par com uma função ímpar, a sua integral é nulaporque o intervalo de integração é simétrico em relação a ori-gem.
A ortogonalidade também vale para sinais de potência e suademonstração é similar.
5.6.2 Transformada Inversa de Hilbert:
A Transformada de Hilbert, quando usada duas vezes em uma fun-ção real retorna a mesma função real com o sinal alterado:
g (t ) =−H [g (t )] =−g (t ) ∗1
πt+ c
H [g (t )] =−g (t )
55
CAPÍTULO 5 ELE32 - Introdução a Comunicações
Então se a Transformada de Hilbert for usada quatro vezes na mesmafunção real, a resposta é a função original. Uma propriedade inte-ressante ocorre quando a transformada é aplicada três vezes, isto é:
H3H= I⇒H−1 =H3
onde I é o operador identidade.No domínio da frequência, um método simples de se obter múl-tiplas Transformadas de Hilbert é multiplicar pelo operador dessatransformada no domínio da frequência (− j s g n ( f )).
Exemplo 5.4. Calcular a Transformada Inversa de Hilbert nodomínio da frequência:
Dada a função f (t ), sua transformada de Fourier é:
F ( f ) =
∫ ∞
−∞f (t )exp (− j 2π f t )d t
usando a transformada de Hilbert três vezes no domínio da frequên-cia:
H3 = (− j s g n ( f ))3
Por fim, utiliza-se a transformada inversa de Fourier:
H−1
f (t )
=
∫ ∞
−∞H3F ( f )exp ( j 2π f t )d f
Deste exemplo percebe-se que trabalhando no domínio da frequên-cia foi necessário calcular duas integrais, em comparação as trêsintegrais que seriam necessárias trabalhando com domínio notempo.
56

CAPÍTULO 6
Sinais e sistemas em banda base e bandapassante
O processo de comunicação se baseia na transmissão da saída deuma fonte de informação por um canal de comunicação. Na maio-ria dos casos, as características espectrais da informação não estãode acordo com as características espectrais do canal, e portanto estesinal de informação não pode ser transmitido diretamente pelo ca-nal. Suponha, por exemplo, que um canal consiga apenas transmitirinformação para frequências altas enquanto que o sinal à ser trans-mitido possui seu espectro preso num intervalo de baixa frequência.Para que a comunicação seja possível, no transmissor, a informaçãoé traduzida para um sinal aceitável pelo canal. Este é o processo demodulação pelo qual a informação em banda base é transformadaem banda passante.
6.1 Sinais de Banda Base e Banda Passante
Definição 6.1. Sinal em Banda Base (B.B. ou L.P.)
Sinal cujo espectro de frequência é não nulo somente em um es-treito intervalo em torno da origem. A largura de banda W deum sinal real ou complexo em banda base é a metade do inter-valo de frequências para o qual X
f
6= 0. No caso real, o sinalpossui simetria hermitiana em frequência. Exemplo na figura6.1.
Definição 6.2. Sinal em Banda Passante(B.P. ou P.B.)
Sinal real cujo espectro de frequência é não nulo somente emum estreito intervalo em torno de uma frequência central con-vencionada f0. A largura de banda (W ) de um sinal em bandapassante é o filtro passa-faixa mais estreito que não distorce osinal. Exemplo na figura 6.2.
57
CAPÍTULO 6 ELE32 - Introdução a Comunicações
Definição 6.3. Espectro Positivo e Espectro Negativo
Trata-se, como diz o nome, do conteúdo isolado, positivo ou ne-gativo, do espectro em frequência de um sinal x (t ), matemati-camente:
X+
f
=
X
f
f > 012 X (0) f = 0
0 f < 0
X−
f
=
X
f
f < 012 X (0) f = 0
0 f > 0
(6.1)
ou de forma mais curta:
X+
f
= X
f
u
f
X−
f
= X
f
u
− f
(6.2)
em que u
f
é a função degrau de Heaviside unitária conformedefinida no Capítulo 3.
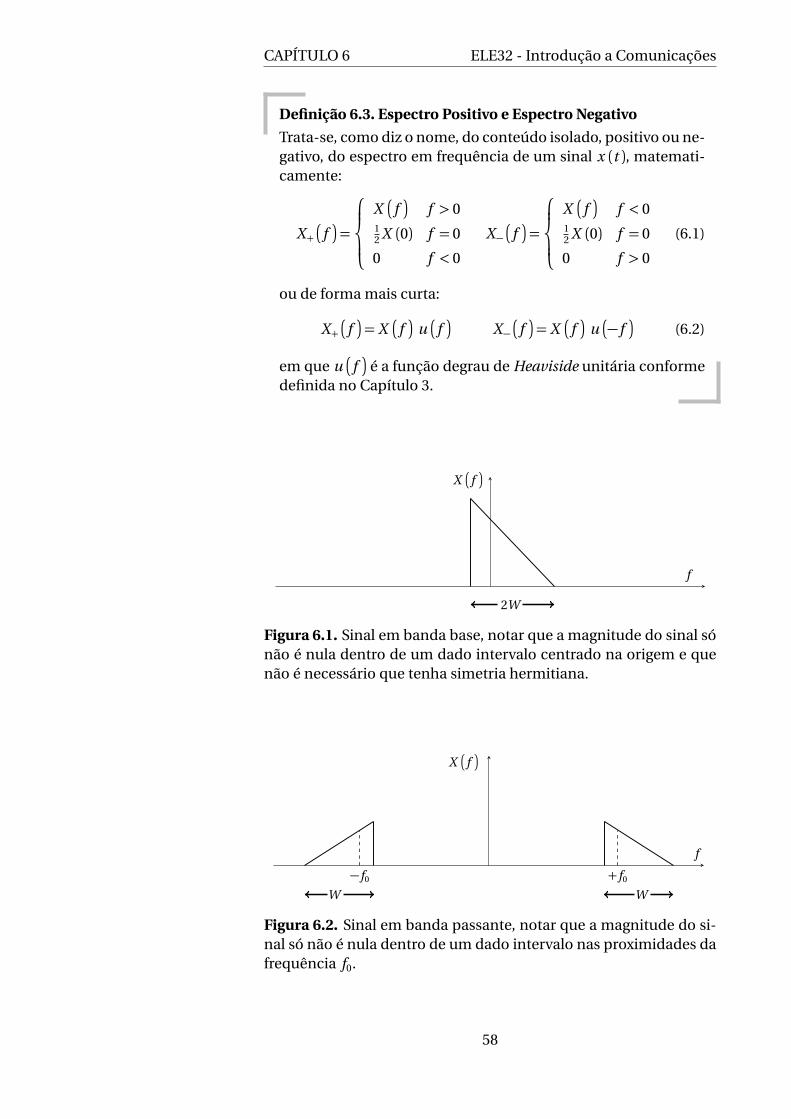
2W
f
X
f
Figura 6.1. Sinal em banda base, notar que a magnitude do sinal sónão é nula dentro de um dado intervalo centrado na origem e quenão é necessário que tenha simetria hermitiana.
W
+ f0
W
− f0
f
X
f
Figura 6.2. Sinal em banda passante, notar que a magnitude do si-nal só não é nula dentro de um dado intervalo nas proximidades dafrequência f0.
58

ELE32 - Introdução a Comunicações CAPÍTULO 6
6.2 Equivalente em Banda Base de Sinais emBanda Passante
Um sinal em banda passante, por ser um sinal real, sempre apre-senta simetria hermitiana conforme mostrado na figura 6.2. Devidoa esta simetria no espectro, pode-se escrever:
X
f
= X+
f
+X−
f
= X+
f
+X ∗+
− f
(6.3)
o que mostra que apenas o conteúdo de X+
f
é suficiente para re-
construir X
f
.
A ideia geral do processo que será aqui descrito se resumirá em des-locar o espectro positivo até a origem e então encontrar a transfor-mada de Fourier inversa deste espectro deslocado. O resultado seráum sinal no tempo em banda base equivalente.
Comecemos então definindo o sinal analítico, ou pré-envelope:
Definição 6.4. Pré-envelope
O pré envelope correspondente de um sinal x (t ) é o sinal x+ (t )cuja transformada de Fourier é o espectro positivo X+
f
. As-sim:
x+ (t ) =F −1
X+
f
=F −1
X
f
u
f
= x (t ) ∗
1
2δ (t )+ j
1
2π t
=1
2x (t )+
j
2bx (t )
x+ (t ) =1
2x (t )+
j
2bx (t ) (6.4)
onde bx (t ) é a transformada de Hilbert de x (t ).
59
CAPÍTULO 6 ELE32 - Introdução a Comunicações
Agora definimos o equivalente em banda base ou envelope complexode x (t ):
Definição 6.5. Equivalente em banda base
xB B (t ), o equivalente em banda base de x (t ), é o sinal cujo es-pectro é dado por:
XB B
f
= 2 X+
f + f0
= 2X ( f + f0)u ( f + f0) (6.5)
Notar que com esta definição, o espectro de xB B (t ) está certamentecentrado na origem. O motivo da multiplicação por 2 será mostradonos cálculos que seguem.
Encontramos o espectro do equivalente em banda base mas deseja-mos encontrar o sinal no tempo. Aplicaremos então a transformadainversa de Fourier:
xB B (t ) =F −1
XB B
f
=F −1
2 X+
f + f0
= 2x+ (t ) e − j 2π f0 t
=
x (t )+ j bx (t )
e − j 2π f0 t
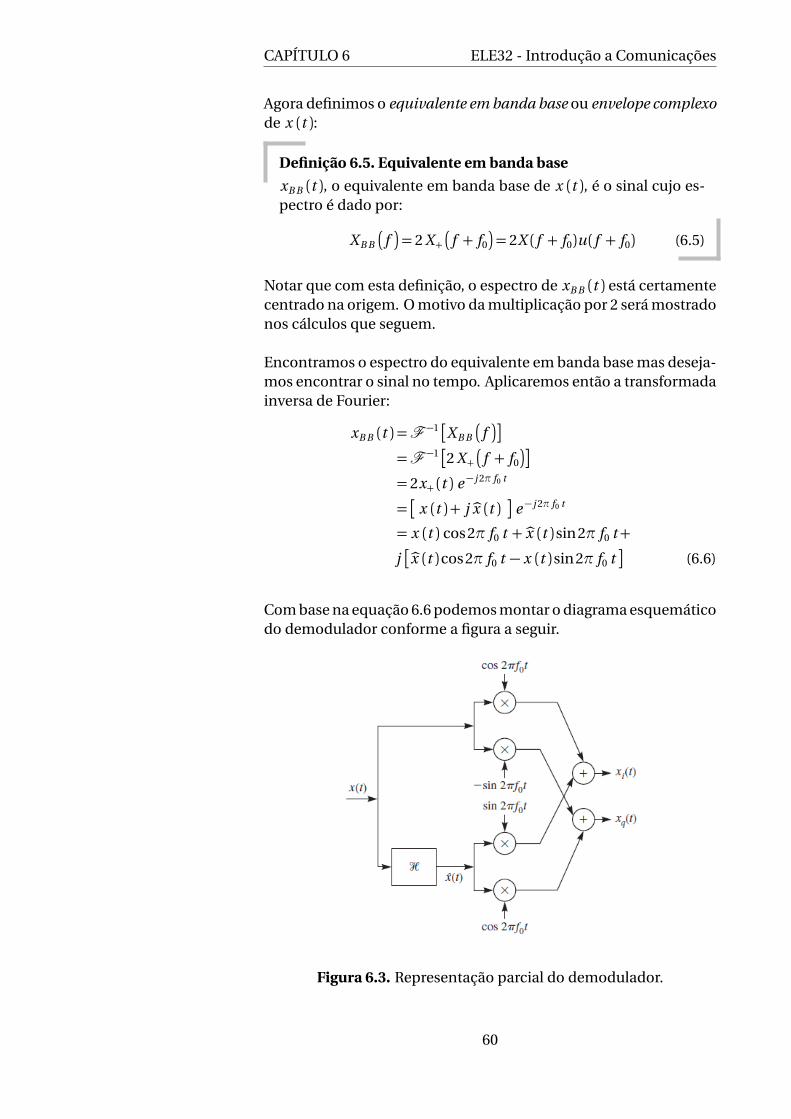
= x (t ) cos 2π f0 t + bx (t )sin 2π f0 t+
j
bx (t )cos 2π f0 t − x (t )sin 2π f0 t
(6.6)
Com base na equação 6.6 podemos montar o diagrama esquemáticodo demodulador conforme a figura a seguir.
Figura 6.3. Representação parcial do demodulador.
60
ELE32 - Introdução a Comunicações CAPÍTULO 6
Então, partindo dos cálculos acima, podemos destacar que para ob-ter o equivalente em banda base de um sinal x (t ), utiliza-se a ex-pressão deduzida acima:
xB B (t ) =
x (t )+ j bx (t )
e − j 2π f0 t (6.7)
A expressão acima também permite concluir como obter um sinalem banda passante com o conhecimento do sinal em banda base:
x (t ) =R e
xB B (t ) e j 2π f0 t
(6.8)
Por fim, se quisermos trabalhar no domínio da frequência, pode-seobter o espectro em banda passante de um sinal com o conheci-mento do espectro em banda base construindo a seguinte relaçãopor meio das equações 6.3 e 6.5:
X
f
=1
2
XB B
f − f0
+X ∗B B
− f − f0
(6.9)
Como xB B (t ) é um sinal imaginário, este possui uma parte real eimaginária. A componente real é chamada de componente em fasee a parte imaginária de componente em quadratura e são denotadasrespectivamente por xi (t ) e xq (t ); ambos são sinais reais em bandabase. De forma que temos:
xB B (t ) = xi (t )+ j xq (t ) (6.10)
Comparando isto com a equação 6.6 encontra-se que:
xi (t ) = x (t )cos 2π f0t + bx (t )sin 2π f0t
xq (t ) = bx (t )cos 2π f0t − x (t )sin 2π f0t (6.11)
Solucionando a equação acima pode-se obter:
x (t ) = xi (t )cos 2π f0t − xq (t )sin 2π f0t
bx (t ) = xq (t )cos 2π f0t + xi (t )sin 2π f0t (6.12)
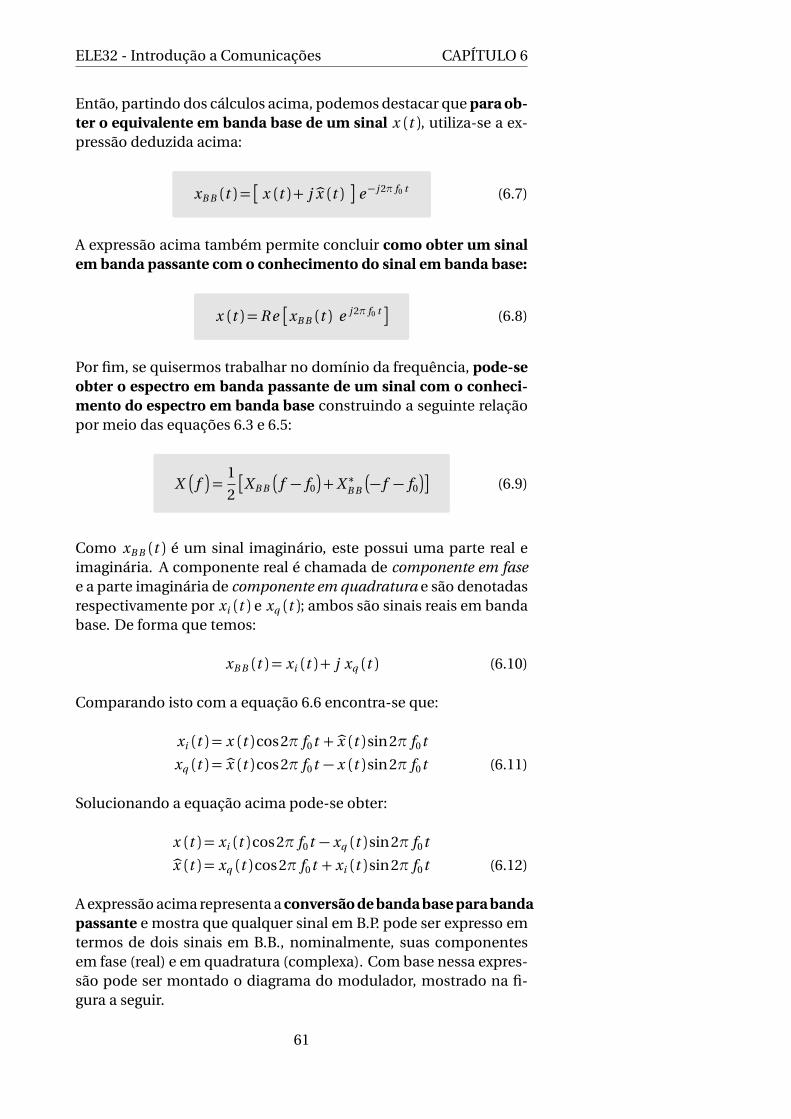
A expressão acima representa a conversão de banda base para bandapassante e mostra que qualquer sinal em B.P. pode ser expresso emtermos de dois sinais em B.B., nominalmente, suas componentesem fase (real) e em quadratura (complexa). Com base nessa expres-são pode ser montado o diagrama do modulador, mostrado na fi-gura a seguir.
61

CAPÍTULO 6 ELE32 - Introdução a Comunicações
Figura 6.4. Representação parcial do modulador.
6.3 Equivalente em Banda Base para Sistemaem Banda Passante
Um sistema em banda passante é um sistema cuja função de trans-ferência é localizada em torno de uma frequência f0 e sua imagemespelhada em − f0. Mais formalmente:
Definição 6.6. Sistema em Banda Passante
Um sistema em banda passante é um sistema cuja resposta aoimpulso h (t ) é um sinal em banda passante.
Para h (t ) são válidas as seguintes expressões. As duas expressõesseguintes são semelhantes as equações 6.5 e 6.8, mudando apenaso fator multiplicativo.
HB B ( f ) =HB P ( f + f0)u ( f + f0)
⇔ h (t ) =R e
hB B (t )e j 2π f0t
2
(6.13)
Se um sinal em banda passante x (t )passa por um sistema em bandapassante a saída será claramente um sinal em banda passante y (t ).A relação entre o espectro de entrada e saída é dada por:
Y
f
= X
f
H
f
(6.14)
Utilizando a equação 6.5 para o sinal de saída y :
YB B
f
= 2Y
f + f0
u
f + f0
= 2X
f + f0
H
f + f0
u
f + f0
(6.15)
62
ELE32 - Introdução a Comunicações CAPÍTULO 6
Note que para ∀ f 6= f0 podemos dizer que u
f − f0
= u 2
f − f0
.
Então podemos expandir o termo u
f + f0
na equação 6.15 paracontinuar o desenvolvimento:
YB B
f
=
2X
f + f0
u
f + f0
H
f + f0
u
f + f0
Aplicando então as equações 6.5 e 6.13 temos no domínio da frequên-cia:
YB B
f
= XB B
f
HB B
f
(6.16)
e no domínio do tempo:
yB B (t ) = xB B (t ) ∗hB B (t ) (6.17)
6.4 Representação vetorial de sinais
A representação vetorial de sinais é uma forma efetiva e útil de re-alizar a análise de sinais digitalmente modulados. O conceito é deque qualquer conjunto de sinais é equivalente a um conjunto de ve-tores e que estes possuem as mesmas propriedades básicas. Aquiserão abordados métodos para a determinação de um conjunto devetores equivalentes a partir de um dado conjunto de sinais e seráintroduzida a noção de representação em espaço de sinais, ou cons-telação de sinais, de um conjunto de formas de onda.
6.4.1 Conceitos de representação em espaço de sinais
Como dito, é possível fornecer um tratamento paralelo de vetores aum conjunto de sinais. Primeiramente, definimos o produto internoentre dois sinais:
Definição 6.7. Produto interno entre sinais
Dado dois sinais x1 (t ) e x2 (t ), o produto interno entre eles édado por:
⟨ x1 (t ) , x2 (t ) ⟩=∫ ∞
−∞x1 (t ) x
∗2 (t ) d t (6.18)
Para deixar claro definimos também o que são sinais ortogonais:
Definição 6.8. Sinais ortogonais entre si
Sinais cujos produtos internos entre si são nulos
63

CAPÍTULO 6 ELE32 - Introdução a Comunicações
O que é a norma de um sinal:
Definição 6.9. Norma de um sinal
A norma de um sinal é a raiz quadrada do produto interno destesinal com ele mesmo:
‖x (t )‖=∫ ∞
−∞|x (t )|2 d t
1/2
=p
εx (6.19)
em que εx é a energia contida em x (t ).
É possível destacar, também, duas propriedades da álgebra linearpara este contexto, a desigualdade triangular e a desigualdade deCauchy-Schwarz:Desigualdade triangular:
‖x1 (t )+ x2 (t )‖ ≤ ‖x1 (t )‖+ ‖x2 (t )‖ (6.20)
Desigualdade de Cauchy-Schwarz:
|⟨ x1 (t ) , x2 (t ) ⟩| ≤ ‖x1 (t )‖ · ‖x2 (t )‖ (6.21)
6.4.2 Expansão Ortogonal de Sinais
Nesta seção, será desenvolvida uma representação vetorial para si-nais em formas de onda, e assim demonstrar uma equivalência en-tre sua forma de onda e sua representação vetorial.Suponha que s (t ) seja um sinal determinístico com energia finita esuponha também que exista um conjunto de funções:
φn (t ) , n = 1, 2, . . . N (6.22)
que são ortonormais entre si:
⟨φn (t ) ,φm (t ) ⟩=∫ ∞
−∞φn (t )φ
∗m (t )d t =
¨
1 m = n
0 m 6= n(6.23)
Pode-se aproximar o sinal s (t ) por uma combinação linear ponde-rada destas funções:
es (t ) =N∑
k=1
skφk (t ) (6.24)
onde
sk , 1≤ k ≤N (6.25)
64
ELE32 - Introdução a Comunicações CAPÍTULO 6
são os coeficientes na aproximação de s (t ). O erro da aproximaçãoé dado por:
e (t ) = s (t )− es (t ) (6.26)
Pode-se demonstrar que o erro no valor da energia do sinal s (t ) émínimo quando os coeficientes são:
sn = ⟨ s (t ) ,φn (t ) ⟩ n = 1, 2, . . . , N (6.27)
Quando o erro é nulo, pode-se expressar s (t ) como:
s (t ) =N∑
k=1
skφk (t ) (6.28)
ou na forma vetorial:
s (t ) = [s1 s2 · · · sN ]Tφ (6.29)
Este vetor é chamado de símbolo equivalente a s (t ). Além disso, senós conceitualmente estendermos a convencional noção de 2 ou 3dimensões espaços Euclidianos para um N dimensional espaço Eu-clidiano, é possível visualisar s (t ) como um ponto neste espaço emque existem N mutualmente perpendiculares eixos nomeados por
φn (t ) , n = 1, 2, . . . N
este N dimensional espaço Euclidiano é chamado de espaço de si-nais e o diagrama geométrico deste espaço é chamado de constela-ção. Para destacar:
Definição 6.10. Espaço de Sinais
O espaço de sinais é o espaço Euclidiano de N dimensões cujoseixos perpendiculares representam a base ortonormalφ que ex-pande completamente todo um conjunto de sinais si (t )
Definição 6.11. Constelação
O diagrama, o desenho, do espaço Euclidiano com a presençados pontos correspondentes dos vetores si (t ). (Este desenho sóé possível para o caso em que o número de dimensões é menordo que 4)
A ideia de visualizar um conjunto de sinais de energia geometrica-mente, como descrito, é muito importante. Providenciando a basematemática para representação geométrica de sinais, este conceitopavimenta o caminho para análise de ruídos em comunicações di-gitais numa forma conceitualmente simples.
65

CAPÍTULO 6 ELE32 - Introdução a Comunicações
Exemplo 6.1.
Um conjunto ortogonal de sinais é caracterizado pela proprie-dade de que o produto interno entre qualquer par de sinais noconjunto é zero. A figura 6.5 mostra um par de sinais que satis-fazem esta condição. Construa a constelação para este par desinais.
T /2 T
−1
1
t
s1 (t )
(a)
T
1
t
s2 (t )
(b)
Figura 6.5
Solução: O sinais s1 (t ) e s2 (t ) são ortogonais entre si. A energia des1 (t ) é:
E1 =
∫ T /2
0
12d t +
∫ T
T /2
(−1)2 d t = T
A energia de s2 (t ) é:
E2 =
∫ T
0
12d t = T
Os sinais são ortogonais porém não são normais. Para representarestes dois sinais, é preciso utilizar duas funções base. A primeirafunção base é dada por:
φ1 (t ) =s1 (t )p
E1
=s1 (t )p
T
A segunda função base é dada por:
φ2 (t ) =s2 (t )p
E2
=s2 (t )p
T
A constelação então é desenhada da seguinte forma:
66

ELE32 - Introdução a Comunicações CAPÍTULO 6
pT
pT
φ2
φ1
Figura 6.6. Constelação dos sinais s1 (t ) e s2 (t ).
6.4.3 Processo de Gram-Schmidt
Suponha que exista um conjunto de sinais de energia finita
sm (t ) , m = 1, 2, ...M
e que se deseja obter uma base ortonormal a partir deste conjunto.Para tal propósito utiliza-se o processo de ortonormalização de Grand-Schmidt. Primeiramente, precisamos definir o conceito de proje-ção:
Definição 6.12.
A projeção de v na direção de u é dada por
proju (v) =⟨v, u⟩⟨u, u⟩
u (6.30)
Agora podemos descrever o algoritmo do processo de Gran-Schmidtcomo:
u1 = s1, φ1 =u1
‖u1‖
u2 = s2−proju1(s2), φ2 =
u2
‖u2‖
u3 = s3−proju1(s3)−proju2
(s3), φ3 =u3
‖u3‖
u4 = s4−proju1(s4)−proju2
(s4)−proju3(s4), φ4 =
u4
‖u4‖...
...
uM = sM −M−1∑
j=1
proju j(sM ), φk =
uM
‖uM ‖.
Onde o conjunto
φm (t ) , m = 1, 2, ...M
representa a base ortonormal obtida.
67

CAPÍTULO 6 ELE32 - Introdução a Comunicações
Exemplo 6.2.
(a) Usando o processo de Gram-Schmidt, encontre uma base or-tonormal para representar os 3 sinais s1 (t ), s2 (t ), s3 (t ) mostra-dos na figura 6.7(b) Expresse cada um desses sinais em termos da base encon-trada no item a.
1 2 3
−4−3−2−1
1234
t
s1 (t )
(a)
1 2 3
−4−3−2−1
1234
t
s1 (t )
(b)
1 2 3
−4−3−2−1
1234
t
s1 (t )
(c)
Figura 6.7
Solução. (a) Primeiro observamos que os sinais são linearmente in-dependentes. A primeira base é:
φ1 =s1 (t )‖s1 (t )‖
e pela definição de norma:
‖s1 (t )‖=
∫ 1
0
(2)2 d t
1/2
=p
4= 2
68

ELE32 - Introdução a Comunicações CAPÍTULO 6
portanto:
φ1 (t ) =s1 (t )
2
φ1 (t ) =
¨
1, 0≤ t ≤ 1
0, o u t r o l ug a r
Agora para obter a segunda base precisamos calcular primeiro a pro-jeção de s2 (t ) na direção de u1 (t ), lembrando que u1 (t ) = s1 (t ):
p r o ju1(s2) = ⟨ s2 (t ) , u1 (t ) ⟩φ1 (t )
p r o ju1(s2) =
∫ 1
0
(−4) (1)d t φ1 ()
p r o ju1(s2) =−4φ1 (t )
Então:
u2 (t ) = s2 (t )−p r o ju1(s2)
u2 (t ) = s2 (t ) +4φ1 (t )
u2 (t ) =
¨
−4, 1≤ t ≤ 2
0, o u t r o l ug a r
Portanto a segunda função base é:
φ2 (t ) =u2 (t )
r
∫ 2
1(−4)2 d t
φ2 (t ) =
¨
−1, 1≤ t ≤ 2
0, o u t r o l ug a r
Agora repetimos o processo para encontrar a terceira base, porémagora, como descrito no algoritmo, devemos encontrar duas proje-ções. Começando pela projeção de s3 na direção de u1:
p r o ju1(s3) = ⟨ s3 (t ) , u1 (t ) ⟩φ1 (t )
p r o ju1(s3) =
∫ 1
0
(3) (1)d t φ1 ()
p r o ju1(s3) = 3φ1 (t )
Agora a projeção de s3 na direção de u2:
p r o ju2(s3) = ⟨ s3 (t ) , u2 (t ) ⟩φ2 (t )
p r o ju2(s3) =
∫ 2
1
(3) (−1)d t φ2 ()
p r o ju2(s3) =−3φ2 (t )
69

CAPÍTULO 6 ELE32 - Introdução a Comunicações
Então:
u3 (t ) = s3 (t )−p r o ju1(s3)−p r o ju2
(s3)u3 (t ) = s3 (t )−3φ1 (t )+3φ2 (t )
u3 (t ) =
¨
3, 2≤ t ≤ 3
0, o u t r o l ug a r
Enfim a terceira função base é:
φ3 (t ) =u3 (t )
r
∫ 3
2(3)2 d t
φ3 (t ) =
¨
1, 2≤ t ≤ 3
0, o u t r o l ug a r
(b)
s1 (t ) = 2φ1 (t )s2 (t ) =−4φ1 (t )+4φ2 (t )s3 (t ) = 3φ1 (t )−3φ2 (t )+3φ3 (t )
6.4.4 Bases Ortonormais em Banda Passante e em BandaBase
Vamos considerar o caso em que as formas de onda dos sinais sãosinais em banda passante e representadas por:
sm (t ) =R e
sm B B (t )ej 2π f0t
m = 1, 2, . . . M (6.31)
de forma que sm B B (t ) são os sinais em banda base equivalente. Seos sinais são ortogonais em banda base então eles também são or-togonais em banda passante. Portanto, se:
φn B B (t ) , n = 1, 2, . . . N
é uma base ortonormal para o conjunto de sinais em banda basesm B B (t ), então o conjunto
φn (t ) , n = 1, 2, . . . N
onde
φn (t ) =p
2R e
sm B B (t )ej 2π f0t
(6.32)
é um conjunto de sinais ortonormais, sendo op
2 um fator normali-zante para fazer com que cada φn (t ) possua energia unitária. Con-tudo, apesar de ser uma base ortonormal, não há nenhuma garantiaque 6.32 seja uma base completa para gerar o conjunto de sinais
sm (t ) , m = 1, 2, . . . M (6.33)
70

ELE32 - Introdução a Comunicações CAPÍTULO 6
O objetivo desta subseção é evidenciar como obter uma base orto-normal para representação de um sinal em banda passante por meiode uma base ortonormal que representa o sinal em banda base equi-valente.
Como já visto, podemos escrever:
sm B B (t ) =N∑
n=1
sm B B nφn B B (t ) , m = 1, . . . , M (6.34)
onde
sm B B n = ⟨ sm B B (t ) ,φn B B (t ) ⟩, m = 1, . . . , M n = 1, . . . , N (6.35)
Utilizando as equações 6.31 e 6.34 pode-se escrever:
sm (t ) =R e
N∑
n=1
sm B B nφn B B (t )
e j 2π f0t
m = 1, . . . , M (6.36)
e então:
sm (t ) =R e
N∑
n=1
sm B B nφn B B (t )
cos 2π f0t
−I m
N∑
n=1
sm B B nφn B B (t )
sin 2π f0t (6.37)
Quando um conjunto de sinais ortonormais
φn B B (t ) , n = 1, 2, . . . N
constitui uma base complexa de N dimensões para a representaçãodo sinal em banda base:
sm B B (t ) , m = 1, 2, . . . M
então o conjunto
φn (t ) , eφn (t ) n = 1, 2, . . . N
onde
φn (t ) =p
2R e
φm B B (t )ej 2π f0t
eφn (t ) =−p
2I m
φm B B (t )ej 2π f0t
(6.38)
constitui em uma base de 2N dimensões que é suficiente para a re-presentação dos M sinais em banda passante:
sm (t ) =p
2R e
sm B B (t )ej 2π f0t
m = 1, 2, . . . M (6.39)
71

CAPÍTULO 6 ELE32 - Introdução a Comunicações
Em alguns casos, nem todas bases no conjunto de bases dada por6.38 são necessárias, apenas um subconjunto destas é preciso paraexpandir os sinais em banda passante.
Da equação 6.36 temos:
sm (t ) =R e
N∑
n=1
sm B B nφn B B (t )
e j 2π f0t
=N∑
n=1
sm B B nφn B B (t )
e j 2π f0t
(6.40)
=N∑
n=1
(r )sm B B np
2φn (t )+
(i )sm B B np
2eφn (t )
onde se foi assumido que
sm B B n =(r )
sm B B n + j(i )
sm B B n
As equações 6.38 e 6.40 mostram como um sinal em banda pas-sante pode ser expandido em termos da base usada para a expan-são do equivalente em banda base. Em geral, sinais em banda basepodem ser representados por um vetor complexo de N dimensões,e o sinal em banda passante correspondente por um vetor real de2N dimensões.
Enfim, se o vetor complexo:
sm B B = [sm B B 1, sm B B 2, . . . sm B B N ]T (6.41)
for a representação vetorial de um sinal em banda base sm B B (t ) uti-lizando a base em banda base
φn B B (t ) , n = 1, 2, . . . N
então o vetor
sm B B =
(r )sm B B 1p
2,
(r )sm B B 2p
2, . . . ,
(r )sm B B Np
2,
(i )sm B B 1p
2,
(i )sm B B 2p
2, . . . ,
(i )im B B Np
2
T
(6.42)
será a representação vetorial do sinal em banda passante quando abase utilizada é correspondente à da equação 6.38:
φn (t ) , eφn (t ) n = 1, 2, . . . N
72
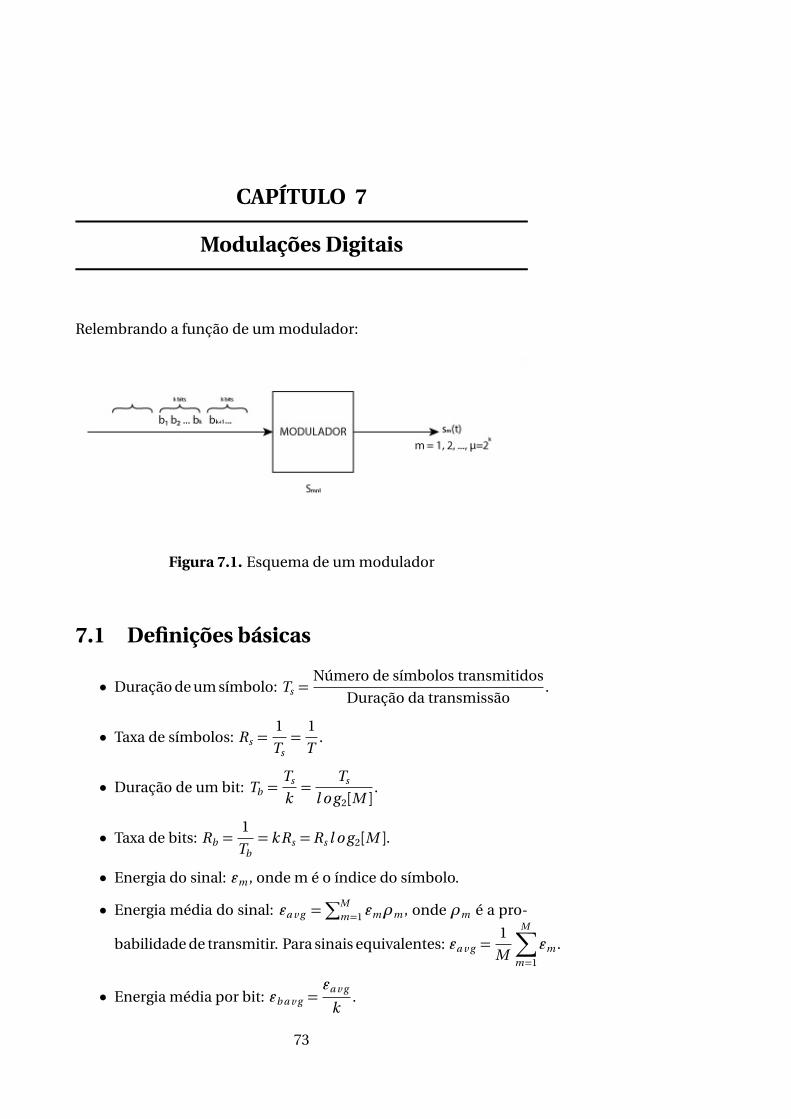
CAPÍTULO 7
Modulações Digitais
Relembrando a função de um modulador:
Figura 7.1. Esquema de um modulador
7.1 Definições básicas
• Duração de um símbolo: Ts =Número de símbolos transmitidos
Duração da transmissão.
• Taxa de símbolos: Rs =1
Ts=
1
T.
• Duração de um bit: Tb =Ts
k=
Ts
l o g2[M ].
• Taxa de bits: Rb =1
Tb= k Rs =Rs l o g2[M ].
• Energia do sinal: εm , onde m é o índice do símbolo.
• Energia média do sinal: εa v g =∑M
m=1 εmρm , onde ρm é a pro-
babilidade de transmitir. Para sinais equivalentes: εa v g =1
M
M∑
m=1
εm .
• Energia média por bit: εb a v g =εa v g
k.
73

CAPÍTULO 7 ELE32 - Introdução a Comunicações
• Potência média:Energia
Duração=εa v g
Ts=δb a v g
Tb=Rsεa v g =Rbεb a v g .
• A princípio, não há restrição na escolha de si n f ( f ) em BB.
• Na prática, os sinais sm (t ) diferem em uma ou uma combina-ção das três grandezas: amplitude, fase e frequência.
Am c o s (2π f t +φn ) (7.1)
7.2 1a Modulação: Modulação em amplitudede pulso - PAM
Sinais: sm (t ) = Am p (t ), onde p (t ) é o pulso de transmissão, com du-ração Ts = T e cujo formato define o espectro de sm (t )Escolha comum para Am :
Am = 2m −1−M , para m = 0, ..., M = 2k −1 (7.2)
Duração de um bit: Ts/kEnergia do sinal:
εm =
∫ ∞
−∞|sm (t )|2d t =
∫ ∞
−∞A2
m |p (t )|2d t = A2
mεp , (7.3)
onde εp é a energia de p (t ).Energia média para símbolos equiprováveis:
εa v g =1
M
M∑
m=1
A2mεp =
εp
M
M∑
m=1
(2m−1−M )2 =2εp (12+32+ ...+ (M −1)2)
M(7.4)
εa v g =2εp
M
M (M 2−1)6
=εp (M 2−1)
3(7.5)
Energia média por bit:
εa v g =εa v g
l o g2[M ]=εp (M 2−1)
3l o g2[M ](7.6)
Para sinais em banda passante:
sm (t ) =R e Am g (t )e x p ( j 2π f0t ), (7.7)
onde o termo Am g (t ) é o equivalente em banda base.Assim:
p (t ) = g (t )c o s (2π f0t ) e εp =εg
2(7.8)
Sinais PAM são unidimensionais. Base genérica:
φg (t ) =p (t )p
εp(7.9)
74

ELE32 - Introdução a Comunicações CAPÍTULO 7
Base em banda passante:
√
√
√
2
εgg (t )c o s (2π f0t ) =
φ(t )
φ(t )(7.10)
Resultando na descrição:
sml (t ) = Amp
εpφg (t ) em banda base (7.11)
sm (t ) = Am
√
√εg
2φ(t ) (7.12)
Os símbolos são:sml = [Am
p
εp ] (7.13)
sm = [Am
√
√εg
2] (7.14)
Representação gráfica:
Figura 7.2. Representação gráfica dos símbolos para M = 4
Relação de bits para símbolos:
• Natural: 000 - 001 - 010 - 011 - 100
• Grey: 000 - 001- 011 - 010 - 110 - 111 - 101 - 100
Figura 7.3. Relacionando bits para os símbolos das duas maneirasapresentadas
75

CAPÍTULO 7 ELE32 - Introdução a Comunicações
Parâmetro importante: Distância Euclidiana entre símbolos
dmn ®
||sm − sn ||2 (7.15)
No caso PAM, tem-se
dmn =
(
|Am −An |Æ
ξp , no caso de banda base
|Am −An |Ç
ξp
2 , no caso de banda passante
A distância euclidiana mínima no caso do PAM é
dmi n =minm ,n
dmn = 2Æ
ξp =
√
√12 log2 M ·ξb a r g
M 2−1, (7.16)
ξb a r g =(M 2−1) ·ξp
3 log2 M(7.17)
7.3 2o Caso - Modulação em Fase (PSK: PhaseShift Keying)
sm (t ) =Re
g (t )Am exp( j 2π f0t )
(7.18)
Para este caso, Am = exp(j 2π(m −1)
M)
Quando g (t ) é real,
sm (t ) = g (t ) · cos
2π f0t +2π(m −1)
M
, m = 1, · · · , M (7.19)
Para a fase,
φm =2π(m −1)
M(7.20)
Desenvolvendo o cosseno da soma na equação 7.19, encontra-se ostermos g (t )cos(2π f0t ) e −g (t )sin(2π f0t ), que são ortogonais. As-sim, a base ortonormal precisa de 2 elementos. Uma escolha útilpara a base é:
φ1(t ) =
√
√
√
2
ξgg (t )cos(2π f0t )
φ1(t ) =−
√
√
√
2
ξgg (t )sin(2π f0t )
O que resulta nos sinais
sm (t ) =
√
√ξg
2
φ1(t )cos(θm ) +φ2 sin(θm )
(7.21)
Que por sua vez resultam nos símbolos
sn =
√
√ξg
2cos(θm ),
√
√ξg
2sin(θm )
(7.22)
76
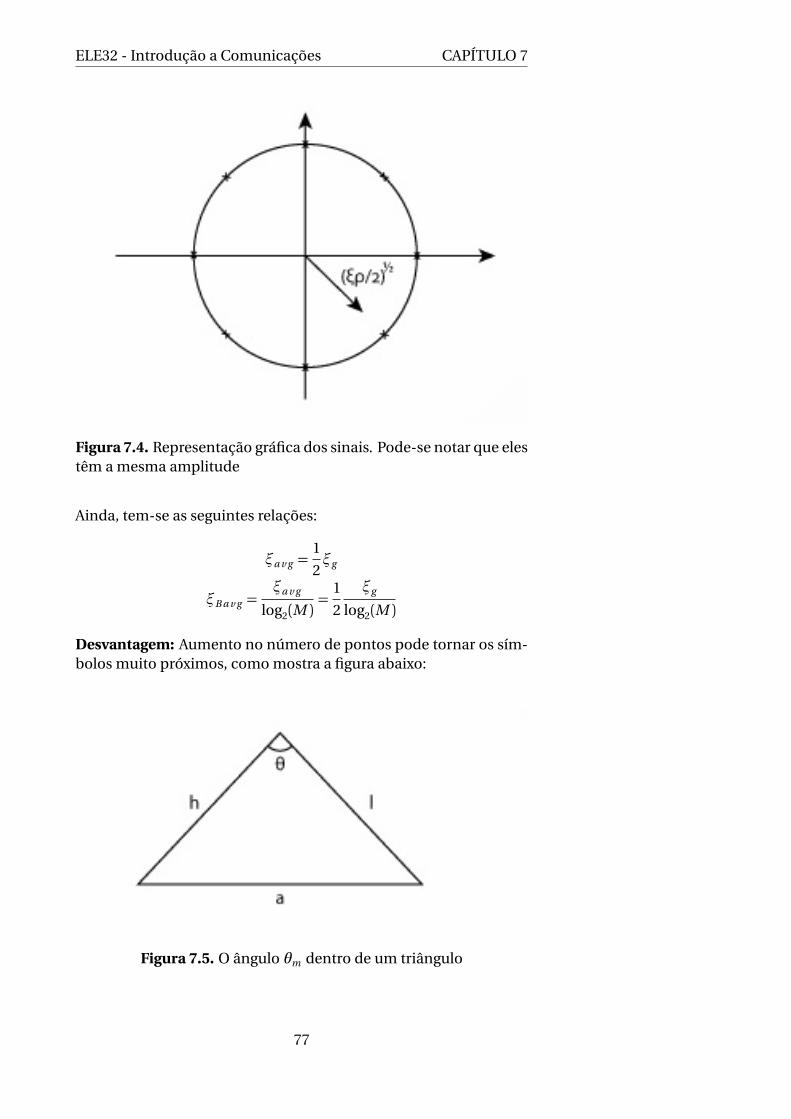
ELE32 - Introdução a Comunicações CAPÍTULO 7
Figura 7.4. Representação gráfica dos sinais. Pode-se notar que elestêm a mesma amplitude
Ainda, tem-se as seguintes relações:
ξa v g =1
2ξg
ξB a v g =ξa v g
log2(M )=
1
2
ξg
log2(M )
Desvantagem: Aumento no número de pontos pode tornar os sím-bolos muito próximos, como mostra a figura abaixo:
Figura 7.5. O ângulo θm dentro de um triângulo
77

CAPÍTULO 7 ELE32 - Introdução a Comunicações
O ângulo θm fica então assim limitado
a 2 = h 2+ l 2−2hl cos(θm )
θm =2π(m −1)
M
Dessa forma, no caso PSK, tem-se h = l , de modo que um M cadavez maior tornaria a muito pequeno
7.4 Combinação dos dois casos anteriores: QAM(Quadrature Amplitude Modulation)
Seja um sinal PSK
sm (t ) =
√
√ξg
2φ1(t )cos(θm ) +
√
√ξg
2φ2(t )sin(θm )
Ele pode ser escrito como
sm (t ) = A(i )m
√
√ξg
2φ1(t ) +A( j )m
√
√ξg
2φ2(t )
A modulação PSK exige que Am = exp
j 2π(m −1)M
= cos(θm )+ j sin(θm ).
Desse modo, poderíamos permitir que
q: quadrature⇒ A(i )mq =±1,±3, . . . ,±(Mi −1) (7.23)
i: in phase⇒ A(r )mi =±1,±3, . . . ,±(Mr −1) (7.24)
Número de pontos⇒M =Mi ·Mr (7.25)
Definindo Mq = 2n e Mi = 2l , tem-se M = 2n+l = 2k
• Sinal modulado: sm (t ) = Ami
√
√ξg
2φ1(t ) +Amq
√
√ξg
2φ2(t )
• Símbolos: sm =
Ami
√
√ξg
2, Amq
√
√ξg
2
• Energia do Símbolo: ξm = ||sm ||2 =ξg
2(A2
mi +A2mq )
Supondo sinais equiprováveis e Mi =Mr =p
M , conseguimos che-gar em
ξa v g =1
M
ξg
2
M∑
m=1
(A2mi +A2
mq ) =1
M
ξg
2
2M (M −1)3
=M −1
3ξg (7.26)
ξB a v g =(M −1)log2(M )
ξg
3(7.27)
Distância Euclidiana
dmn =Æ
||sm − sn ||2 =
√
√ξg
2
Ai m −Ai n )2+ (Ar m −Ar n )
2
(7.28)
78
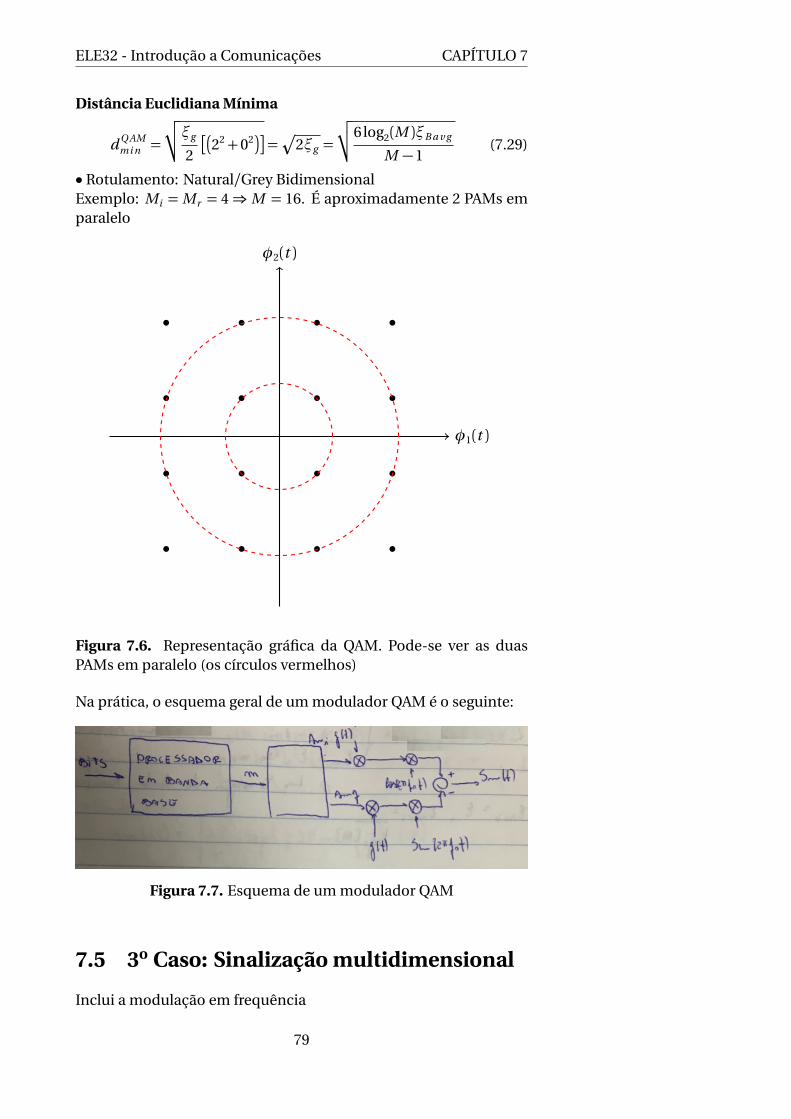
ELE32 - Introdução a Comunicações CAPÍTULO 7
Distância Euclidiana Mínima
d Q AMmi n =
√
√ξg
2
22+02
=Æ
2ξg =
√
√6 log2(M )ξB a v g
M −1(7.29)
• Rotulamento: Natural/Grey BidimensionalExemplo: Mi =Mr = 4⇒M = 16. É aproximadamente 2 PAMs emparalelo
φ1(t )
φ2(t )
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
Figura 7.6. Representação gráfica da QAM. Pode-se ver as duasPAMs em paralelo (os círculos vermelhos)
Na prática, o esquema geral de um modulador QAM é o seguinte:
Figura 7.7. Esquema de um modulador QAM
7.5 3o Caso: Sinalização multidimensional
Inclui a modulação em frequência
79

CAPÍTULO 7 ELE32 - Introdução a Comunicações
• Modulações anteriores tem dimensão menor ou igual a 2
Porque não usar uma modulação com dimensão M?Implicações:
• Todos os símbolos são ortogonais entre si
• A base do espaço tem M elementos
Motivação:
Figura 7.8. Divisão simultânea de uma duração em frações de τ ede uma banda em frações de w
• Sinais duram um certo tempo e ocupam uma certa banda.
• Cada banda tem 2 sinais ortogonais
Logo, uma duraçãoτ1 pode ser dividida em N janelas de tempo comduração τ = τ1
N . Uma banda W1 pode ser dividida em L fatias comlargura W = W1
L .As divisões acima geram N L janelas tempo/frequência ⇒ haverá2N L sinais ortogonais (seno e cosseno).
7.6 Sinalização Ortogonal
Sinais sm (t ); m = 1, ..., M , tq.:
< sm (t ), sn (t )>= 0, m 6= n (7.30)
< sm (t ), sn (t )>↔ εm = ε, m = n (7.31)
80
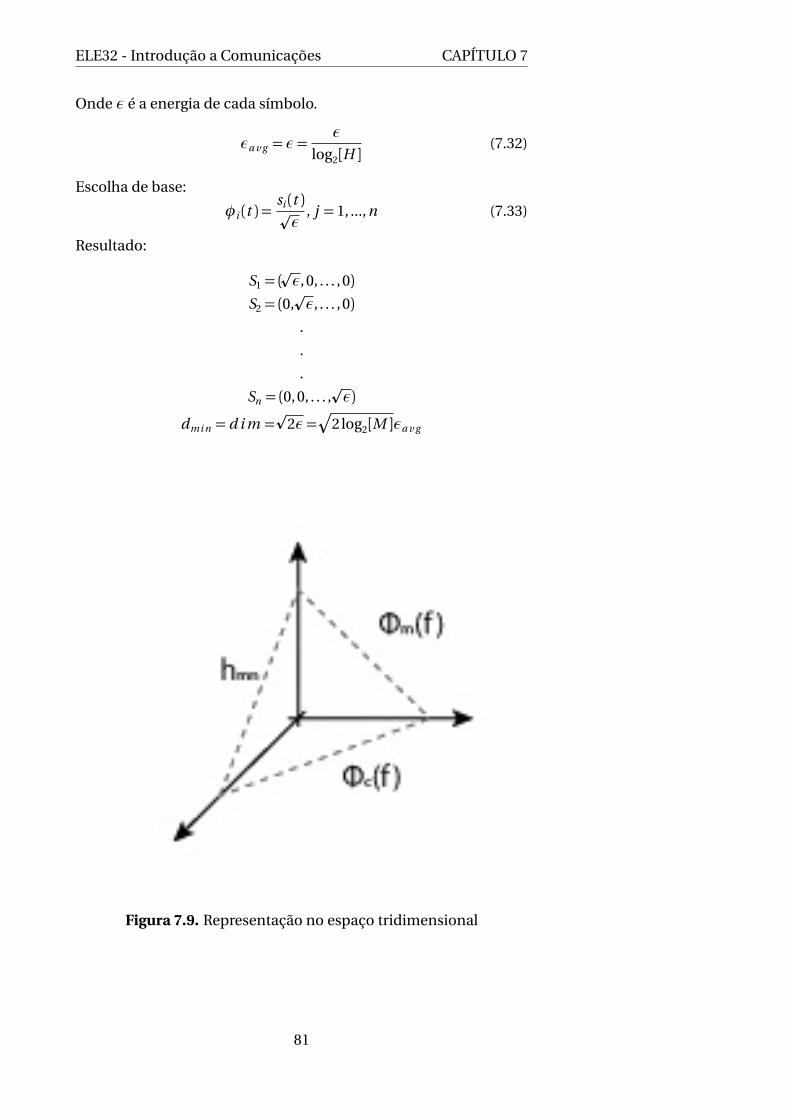
ELE32 - Introdução a Comunicações CAPÍTULO 7
Onde ε é a energia de cada símbolo.
εa v g = ε=ε
log2[H ](7.32)
Escolha de base:
φi (t ) =si (t )pε
, j = 1, ..., n (7.33)
Resultado:
S1 = (pε, 0, . . . , 0)
S2 = (0,pε, . . . , 0)
.
.
.
Sn = (0, 0, . . . ,pε)
dmi n = d i m =p
2ε=Æ
2 log2[M ]εa v g
Figura 7.9. Representação no espaço tridimensional
81

CAPÍTULO 7 ELE32 - Introdução a Comunicações
Figura 7.10. Esquema de modulador de sinalização multidimensi-onal
7.7 Caso Especial: FSK (Frequency Shift Keying)
Sinal em banda passante:
sm (t ) =R e sml (t )e x p ( j 2π f0t ), m = 1, ..., M (7.34)
onde:
sml (t ) =
√
√2ε
Te x p ( j 2πm∆ f t ) (7.35)
e∆ f será definido em breve. Substituindo, obtemos:
sm (t ) =
√
√2ε
Tcos(2π[ f0+m∆ f ]t ) (7.36)
Requisito para ortogonalidade:
< sm (t ), sn (t )>= 0, m 6= n (7.37)
< sm (t ), sn (t )>= ε, m = n (7.38)
Ou, equivalentemente:
R e [
∫ T
0
sml (t )snl (t )d t ] = 0, m 6= n (7.39)
Mostra-se:
R e [
∫ T
0
sml (t )snl (t )d t ] = 2εs i n c (2T (m −n )), m 6= n (7.40)
82

ELE32 - Introdução a Comunicações CAPÍTULO 7
Logo, 2T (m −n )∆ f = i n t e i r o 6= 0
∆ f =K
2T(7.41)
E a taxa? Dado T e W, qual é R?Banda total W
∆ f =W
M(7.42)
∆ f =K
2T=
1
2T(7.43)
T =1
2∆ f=
M
2W(7.44)
Rs =N umb i t s
duração=
2W log2[M ]M
(7.45)
7.8 Modulação Simples
Figura 7.11. Esquema da modulação simples
Modulação Simples usa translação dos símbolos para minimizar ener-gia, mantendo distâncias.
sm (t ) =N∑
j=1
sm jφ j (t ) (7.46)
εm (t ) =
∫ ∞
−∞|sm (t )|2d t =
N∑
j=1
s 2m j
∫ ∞
−∞|φ j (t )|2d t =
N∑
j=1
s 2m j (7.47)
Exemplo numérico:S1 = (1, 0, 0) (7.48)
S2 = (0, 1, 0) (7.49)
S3 = (0, 0, 1) (7.50)
εi = 1, i = 1, 2, 3 (7.51)
C e n t r o = (1
3,
1
3,
1
3) (7.52)
83

CAPÍTULO 7 ELE32 - Introdução a Comunicações
S ′1 = (2
3,−
1
3,−
1
3) (7.53)
S ′2 = (−1
3,
2
3,−
1
3) (7.54)
S ′3 = (−1
3,−
1
3,
2
3) (7.55)
εi =2
3
2
+1
3
2
+1
3
2
=6
9< 1 (7.56)
84

CAPÍTULO 8
Variáveis aleatórias e Processos Estocáticos
8.1 Revisão de variáveis aleatórias
1
2
3
ε
espaço amostral
possíveisrealizações
evento aleatório
EVENTO ALEATÓRIO
Figura 8.1. Esquema de eventos aleatórios
Definição 8.1. Evento aleatório e espaço amostral
Se um experimento não é deterministicamente determinável,há mais de uma forma de realizá-lo. Genericamente, esse eventoaleatório pode resultar em qualquer evento dentro de um con-junto. Esse conjunto é definido como Ω, o espaço amostral.
Definição 8.2. Espaço de eventos
Cada subconjunto do espaço amostral é denominado evento ε.Ao conjunto de todos os subconjuntos do espaço amostral Ω dáse o nome de espaço de eventos, denotado por F.
Exemplo 8.1. Lançamento de dado de 6 faces
O espaço amostral é W=1,2,3,4,5,6. Há 6 elementos. Há várioseventos. Por exemplo, temos que o Evento 1= 1 e o Evento par= 2,4,6.
85

CAPÍTULO 8 ELE32 - Introdução a Comunicações
Definição 8.3. Probabilidade
A probabilidade pode ser definida axiomaticamente por: P [ξ]com ξ ∈ F tal que:
• P [ξ]≥ 0
• P [ξ=Ω]≥ 0
• Se ξ, h ∈ F são disjuntos, P [ξ∪h ] = P [ξ] +P [h ]
Definição 8.4. Probabilidade condicional
A probabilidade condicional de dois eventos A e B com proba-bilidades P[A] e P[B] e probabilidade de ocorrerem simultanea-mente P [A ∩B ], é dada por:
P [B |A] =P [A ∩B ]
P [A](8.1)
lê-se a probabilidade de B dado A é a razão entre a probabilidadede B e A e a probabilidade de A.
Definição 8.5. Variável aleatória
Para facilitar o tratamento matemático dos eventos aleatórios,utiliza-se de funções que associam, para cada elemento do es-paço de eventos F, um número real X, denominadas VariáveisAleatórias (abreviação, v.a.). Se a imagem da variável aleatóriaX é contável, a v.a. é discreta. Caso contrário, é contínua.
8.1.1 Função distribuição de probabilidade
Tomemos o seguinte evento:
ξ : X (ξ)< x
onde x é um número real e X é uma variável aleatória.
Definição 8.6. Função distribuição de probabilidade
Tal evento possui uma probabilidade (número) associada, que é
P [X < x ] = FX (x )
, com FX (x ) chamada Função distribuição de probabilidade.
86
ELE32 - Introdução a Comunicações CAPÍTULO 8
Para satisfazer a definiição de probabilidade, temos os seguintes re-quisitos para uma PDF:
• FX (∞) = 1
• FX (−∞) = 0
• FX (x )≥ 0
• se x1 < x2, então FX (x1)< FX (x2)
É importante para o entendimento ressaltar a diferença entre X ex: X é uma variável aleatória, cujo valor não é sabido e pode assu-mir vários valores, dependendo da sua PDF; x é um número real. Avariável aleatória X pode assumir o valor de x, e isto acontece comprobabilidade P[X = x]. Quando temos uma v.a. continua, temosque:
P [x1 < X < x2] = FX (x2)− FX (x1)
P [X = x1] = 0⇒ limx2→x1
P [x1 < X < x2] = 0 pois FX é contínua
8.1.2 Função densidade de probabilidade
Definição 8.7. Função densidade de probabilidade – PDF
Se FX (x ) é contínua e diferenciável, definimos sua PDF (proba-bility density function) por
fX (x ) =d FX (x )
d x(8.2)
A funcão densidade de probabilidade tem as seguintes proprieda-des:
1. fX (x )≥ 0
2.∫∞−∞ fX (ε) d ε = 1
3. FX (x ) =∫ x
−∞ fX (ε) d ε = P [X ≤ x ]
4. FX (x2)− FX (x1) =∫ x2
x1fX (ε) d ε = P [x1 < X ≤ x2]
8.1.3 Principais variáveis aleatórias
• Uniforme: V.A contínua. Sejam a , b : a ≥ b . Então
fX (x ) =
1
b −a, se a ≤ x ≤ b ,
0
87
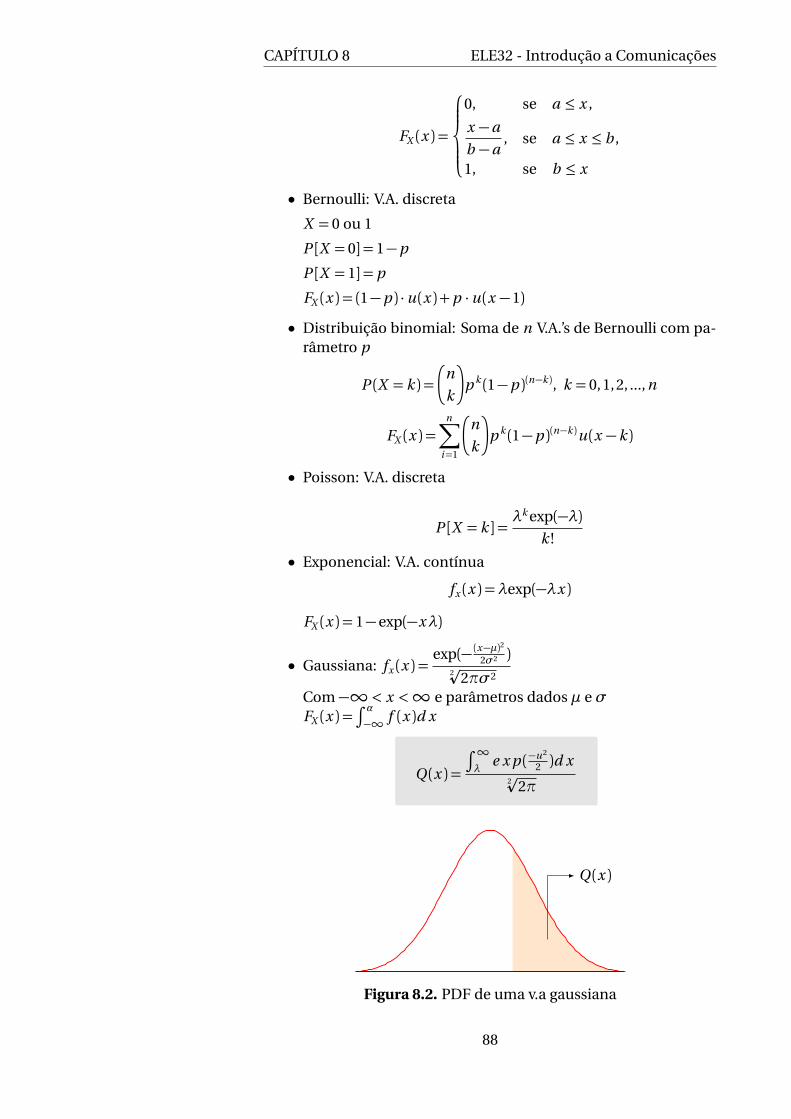
CAPÍTULO 8 ELE32 - Introdução a Comunicações
FX (x ) =
0, se a ≤ x ,
x −a
b −a, se a ≤ x ≤ b ,
1, se b ≤ x
• Bernoulli: V.A. discreta
X = 0 ou 1
P [X = 0] = 1−p
P [X = 1] = p
FX (x ) = (1−p ) ·u (x ) +p ·u (x −1)
• Distribuição binomial: Soma de n V.A.’s de Bernoulli com pa-râmetro p
P (X = k ) =
n
k
p k (1−p )(n−k ), k = 0, 1, 2, ..., n
FX (x ) =n∑
i=1
n
k
p k (1−p )(n−k )u (x −k )
• Poisson: V.A. discreta
P [X = k ] =λk exp(−λ)
k !
• Exponencial: V.A. contínua
fx (x ) =λexp(−λx )
FX (x ) = 1−exp(−xλ)
• Gaussiana: fx (x ) =exp(− (x−µ)
2
2σ2 )2p
2πσ2
Com −∞< x <∞ e parâmetros dados µ eσFX (x ) =
∫ α
−∞ f (x )d x
Q (x ) =
∫∞λ
e x p (−u 2
2 )d x2p
2π
Q (x )
Figura 8.2. PDF de uma v.a gaussiana
88
ELE32 - Introdução a Comunicações CAPÍTULO 8
8.1.4 Associação de variáveis aleatórias
Podemos ter pares de variáveis aleatórias com função distribuiçãode probabilidade dada por:
FX Y (x , y ) = P [X ≤ x ∩Y ≤ y ]
E, consequentemente, função densidade de probabilidade dada por:
fX Y (x , y ) =∂ 2FX Y (x , y )∂ x∂ y
São facilmente observáveis as seguintes propriedades:
1. FX Y (−∞,∞) = 0
2. FX Y (−∞, y ) =∞
3. FX Y (∞,∞) = 1
4. FX Y (x ,∞) = FX (x )
5. FX Y (∞, y ) = FY (y )
Ademais, podemos definir a distribuição condicional como
FX |Y (x |y ) = P [X ≤ x |Y ≤ y ]
E podemos escrever:
FX |Y (x , y ) = P [X = x , Y = y ] =
P [X = x ]P [Y = y |X = x ] = P [Y = y ]P [X = x |Y = y ]
Outra relação muito importante entre duas variáveis aleatórias podeser expressa pela Regra de Bayes, explicitada abaixo:
P [Y = y |X = x ] =P [X = x |Y = y ]P [Y = y ]
P [X = x ]
Caso tanto X quanto Y sejam continuas, temos ainda:
fX Y (x |y ) =fY X (y |x ) fX (x )
fY (y )
sendofX Y (x , y ) = fX (x )FY X (y |x ) = fY (y ) fX Y (x |y )
Exemplo 8.2.
Seja um teste médico cuja capacidade de acerto está definidapela figura abaixo
89

CAPÍTULO 8 ELE32 - Introdução a Comunicações
Figura 8.3. Probabilidades de acerto e erro do teste médico
Sendo assim,
P [Doente|Positivo] =P [Positivo|Doente] ·P [Doente]
P [Positivo]
P [Doente|Positivo] =0, 99 ·0, 01
0, 0198= 0, 5
8.1.5 Esperança ξ e momentos
Definição:
Definição 8.8.
A esperança ξ de uma variável aleatória é dada por
ξ
g (x )
=
∫ ∞
−∞g (x ) f (x )d x , V.A. contínua (8.3)
ξ
g (x )
=∑
x=1
g (x )P [X = x ], V.A. discreta (8.4)
Propriedades:
- ξX +Y = ξx +ξY - ξconstante= constante- ξa X = aξX
Para caracterizar uma v.a. é necessário saber:
ξX ,ξ
X 2
, ...⇒Mn = n-ésimo momento (8.5)
O valor de ξX também é chamado de média de X , ou µx . Substi-tuindo X por X −µx na equação 8.5, temos os chamados momentoscentrais.
Pares de v.a.’s podem ter momentos conjuntos:
µl n = ξX l Y n (8.6)
ml n = ξ(X −ux )l ((Y −u y )
∗)n (8.7)
90
ELE32 - Introdução a Comunicações CAPÍTULO 8
Momentos conjuntos importantes
Covariância:
Definição 8.9.
Covariância é uma medida de dependência estatística linear
m11 = ξ(X −ux )(Y −u y )∗= ξX Y ∗−µxµ
∗y = cov(X , Y )
• Correlação é covariância normalizada:
ρ(x , y )¬m11p
m02 ·m12
• Se duas V.A. são estaticamente independentes, ρ(X , Y ) = 0
• Se ρ(X , Y ) = 0, elas podem ou não ser E.I.
• Se ρ(X , Y ) 6= 0, elas são estaticamente dependentes
• V.A. Gaussianas com ρ(X , Y ) = 0, então elas são E.I.
8.2 Entropia
A conceito de entropia surge da necessidade de se medir a incertezasobre uma dada variável aleatória X, caracterizada pela distribuiçãoP(X). Podemos esperar da função H (X ) que realizará essa mediçãoas seguintes condições:
• Se X pode assumir os valores x1, x2, ..., xn com probabilida-des PX (x1), PX (x2), PX (x3), ..., PX (xn ), então H (X ) deve depen-der exclusivamente dos valores de PX (x1), PX (x2), PX (x3), ..., PX (xn ),e não dos valores que X pode assumir. Consequentemente,qualquer permutação de PX (x1), PX (x2), PX (x3), ..., PX (xn ) deveresultar no mesmo valor de H (X ).
• Uma pequena variação de PX (x1), PX (x2), PX (x3), ..., PX (xn ) devecausar uma pequena variação em H (X ), ou seja, H (X ) é con-tínua em função de PX (x1), PX (x2), PX (x3), ..., PX (xn ).
• Quanto mais incerto for a variável aleatória, maior deve ser ovalor de H (X ). Por exemplo, se X pode assumir com a mesmaprobabilidade PX (xi ) =
1N qualquer um dentre N valores possí-
veis, o aumento de N deve aumentar o valor de H(X).
• Valores impossíveis não devem afetar a incerteza. É irrelevantepara H (X ) se X = xi , com probabilidade PX (xi ) = 0.
91

CAPÍTULO 8 ELE32 - Introdução a Comunicações
• Se a realização de uma variável aleatória pode ser modeladacomo uma sequência de dois eventos aleatórios, a incertezatotal deve ser igual à soma das incertezas dos eventos indivi-duais, ponderadas pela probabilidade dos eventos ocorrerem.
Definição 8.10. Entropia
Dentre todas as funções possíveis, pode-se provar que a únicafunção que cumpre estes requisitos é a função H (X ) dada por8.8, denominada entropia.
H (X )¬−N∑
i=1
PX (xi ) · logb PX (xi ) (8.8)
onde X pode assumir os valores x1, x2, ..., xn . O valor de b definea unidade de H (X ). Quando b = 2, a unidade de H (X ) é bitse pode ser interprertado como a quantidade de bits necessáriospara representar a v.a X, se atribuíssemos um rótulo binário paracada valor possível de X. O valor de H (X ) é sempre positivo.
Definição 8.11. Entropia condicional
Já para medir a incerteza sobre a v.a. X quando sabemos o valorda v.a. Y, tem-se a entropia condicional:
H (X |Y ) =M∑
j=1
PY (x j ) ·H (X |Y = yj )
=M∑
j=1
PY (x j )N∑
i=1
PX |Y (xi |yi ) logb PX |Y (xi |yi )|Y |yi
(8.9)
Além disso, a incerteza conjunta sobre as v.a. X e Y pode ser medidapela função dada pela Equação 8.10:
H (X , Y ) =−M∑
j=1
N∑
i=1
PX Y (xi , yj ) · logb PX Y (xi , yj ) (8.10)
Utilizando que PX Y (xi , yj ) = PY (yj )PX |Y (xi |yj ) = PX (xi )PY |X (yj |xi ), con-cluímos que
H (X , Y ) =H (X ) +H (Y |X ) =H (Y ) +H (X |Y )
De onde percebe-se que H (X , Y )≤H (X )+H (Y ), dado que H (X |Y )≤H (X ). Conclui-se então que saber o valor de uma das variáveis ale-atórias reduz a incerteza sobre a outra.
92

ELE32 - Introdução a Comunicações CAPÍTULO 8
Definição 8.12. Informação mútua
Chama-se essa redução na incerteza de uma variável dado o co-nhecimento da outra de informação mútua, e ela pode ser ex-pressa pela expressão dada por
I (X , Y ) =H (X )−H (X |Y ) =H (Y )−H (Y |X )
Como consequência dessa definição, conclui-se que a quantidadede informação que X guarda sobre Y é a mesma que Y guarda sobreX, independentemente de relações de causalidade. Justamente porisso, tal informação pode é denominada mútua.
Figura 8.4. Diagrama de Venn das entropias
8.3 Sequências e processos aleatórios
Uma Variável Aleatória mapeia uma realização de um evento alea-tório em um número. Na equação 8.11, ζ é uma realização e x umnúmero.
X (ζ) = x (8.11)
Um processo aleatório mapeia uma realização em uma função notempo: X (t ;ζK ) = x (t ).
• Dado ζ, X (t ,ζ) = x (t ) é uma função no tempo.
• Dado t , mas não ζ, X (t ,ζ) = x (t ) é uma variável aleatória.
• Dados t e ζ, X (t ,ζ) é um número qualquer.
• Dados nem t , nem ζ, X (t ,ζ) é um processo aleatório.
Denotaremos X (t ) (caso contínuo) e X [n ] (caso discreto) um pro-cesso aleatório e x (t ) e x [n ] uma realização.Caracterização Estatística: é preciso definir fx (x1; x2; . . . ; xm ; t1; t2; . . . ; tm )para todo m e para todas as possibilidades de t1, t2, . . . , tm .
93

CAPÍTULO 8 ELE32 - Introdução a Comunicações
fx (x1; x2; . . . ; xm−1; t1; t2; . . . ; tm−1) =
∫ ∞
−∞Fx (x1; x2; . . . ; xm ; t1; t2; . . . ; tm )d xm
Momentos são funções do tempo.
• Média: µX (t ) = ξx (t )=∫∞−∞X (t ) fx (x ; t )d x
• (Auto)correlação: ξX (t1)−µX (t1)ξ[X (t2)−µX (t2)]∗= KX X (t1, t2)
• Potência instantânea: µ|X (t )|2=RX X (t , t ) = PX (t )
Estacionaridade no sentido restrito: um processo é estacionário nosentido restrito, se um deslocamento temporal não altera a sua ca-racterística, ou seja,
fx (x1; x2; . . . ; xm ; t1; t2; . . . ; tm ) = fx (x1; x2; . . . ; xm ; t1+τ; t2+τ; . . . ; tm+τ)
para todo valor de m de x1, x2, . . . , xm , de t1, t2, . . . , tm e de τ.Consequências da estacionaridade:
• Média: µX (t ) =µ
• Correlação:∫∞−∞
∫∞−∞X (t1)X ∗(t2) fx (x1, x2, t1, t2)d x1d x2 =RX X (t1+
δ, t2+δ) =RX X (t1− t2) =RX X (τ)
• Potência instantânea: µ|X (t )|2=RX X (t , t ) = PX (t )
Nem sempre estacionaridade é necessária para analisar um sistema.Em muitas situações é suficiente que o processo seja WSS: Wide SenseStationary (Estacionário em sentido amplo). As exigências de umprocesso WSS são:
1. µX (t ) é constante
2. RX X (t1, t2) =RX X (t2− t1) =RX X (τ)
Podemos definir a densidade espectral de potência de um processoaleatório como sendo:
SX X ( f ) =
∫ ∞
−∞RX X (τ)e x p (− j 2π f τ)dτ
Caminho contrário:
RX X ( f ) =
∫ ∞
−∞SX X (τ)e x p ( j 2π f τ)dτ
Assim como no caso determinístico, Sx x ( f ) é real, maior ou igual azero para todo f , e se X ( f ) for real, tem simetria par em torno def = 0.Temos então as sequintes relações:
94

ELE32 - Introdução a Comunicações CAPÍTULO 8
• y (t ) = h (t ) ∗ x (t ), x (t ) é WSS e h (t ) é LTI
• RX X (τ)←→ SX X ( f )
• RX Y (τ) = h ∗(−τ) ∗RX X (τ)←→ SX Y ( f ) =H ∗( f )SX X ( f )
• RY Y (τ) = h ∗(τ)∗RX Y (τ) = h (τ)∗h ∗(−τ)∗RX X (τ) = g (τ)∗RX X (τ)
• SY Y ( f ) =H ( f )SX Y ( f ) = |H ( f )|2SX X ( f ) =G ( f )SX X ( f )
A potência de um sinal aleatório WSS é:
PX =
∫ ∞
−∞SX X ( f )
Exemplo 8.3. Ruído AWGN: Additive White Gaussian Noise •s (t ) +n (t ) = r (t ), onde n (t ) é o ruído AWGN
• SX X ( f ) =N02
• RX X (τ) =Π−1SX X ( f )=N02 δ(τ)
Desse modo,
ξn (t1)n∗(t1+τ)=
¨
0, τ 6= 0,N02 δ(τ), n = 0.
fx (x1; x2; . . . ; xm ; t1; t2; . . . ; tm ) =m∏
l=1
fx (xl ; tl )
Para um sistema h (t ) LTI, y (t ) = s (t ) ∗ h (t ) + n (t ) ∗ h (t ). Cha-mando w (t ) = n (t ) ∗ h (t ), temos w (t ) =
∫∞−∞h (c )n (t − c )d c e
SW W ( f ) = |H ( f )|2N02 .
Vamos supor que:
H ( f ) =
¨
1, | f |<W ,
0, c .c .
Assim,
h (t ) = F T −1Π(f
2W)= 2W s i n c (2W t )
Como
|H ( f )|2 =
¨
1, | f |<W ,
0, c .c .
temos,
SW W ( f ) = |HW W ( f )|2¨
N 02 , | f |<W ,
0, c .c .
RW W (τ) = 2WN0
2s i n c (e W τ) =W N0s i n c (2wτ)
95

CAPÍTULO 8 ELE32 - Introdução a Comunicações
Definindo a frequência aleatória, w [n ] =w (∆t n ), teremos umasequência aleatória gaussiana com termos estatisticamente in-dependentes se∆t = 1
2W .
96
CAPÍTULO 9
Modelos de Canal
9.1 Ruído Gaussiano Branco
• Um processo é denominado White Process se a densidade es-pectral de potência for constante para todas as frequências.
Sx ( f ) =N0
2(9.1)
• Percebe-se que a potência desse tipo de processo é infinita:
Px ( f ) =
∫ ∞
∞Sx ( f ) d f =
∫ ∞
∞
N0
2d f =∞ (9.2)
• Dessa forma, esse tipo de processo não existe como processofísico. Contudo, esse conceito é útil para modelar certos fenô-menos físicos.
• Assim, o Ruído Gaussiano Branco apresenta a seguinte FunçãoDensidade de Probabilidade (pdf):
fN (n ) =1
Æ
2πσ2N
· e x p
−n 2
2σ2N
(9.3)
• Uma vez conhecida a densidade espectral de potência do RuídoGaussiano Branco, podemos calcular sua Autocorrelação:
SN ( f ) =N0
2
RN (τ) = T F −1SN ( f )= T F −1N0
2
RN (τ) =N0
2·δ(τ) (9.4)
97
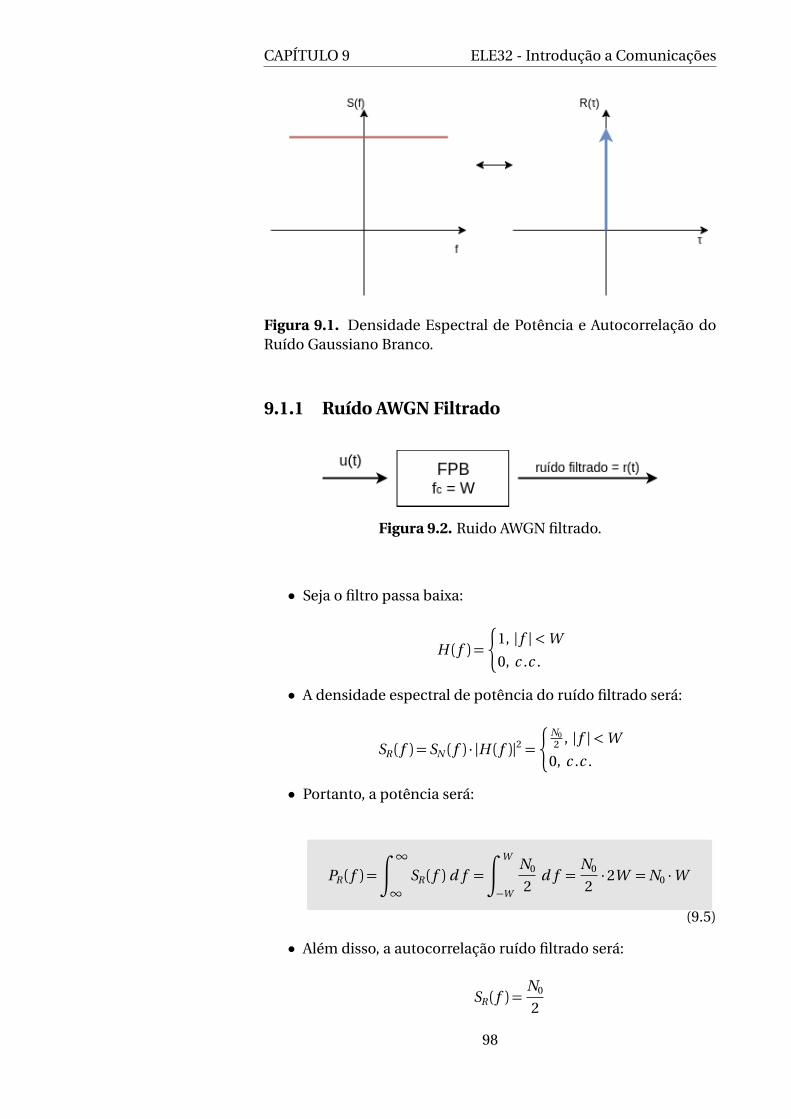
CAPÍTULO 9 ELE32 - Introdução a Comunicações
Figura 9.1. Densidade Espectral de Potência e Autocorrelação doRuído Gaussiano Branco.
9.1.1 Ruído AWGN Filtrado
Figura 9.2. Ruido AWGN filtrado.
• Seja o filtro passa baixa:
H ( f ) =
¨
1, | f |<W
0, c .c .
• A densidade espectral de potência do ruído filtrado será:
SR ( f ) = SN ( f ) · |H ( f )|2 =
¨
N02 , | f |<W
0, c .c .
• Portanto, a potência será:
PR ( f ) =
∫ ∞
∞SR ( f ) d f =
∫ W
−W
N0
2d f =
N0
2·2W =N0 ·W
(9.5)
• Além disso, a autocorrelação ruído filtrado será:
SR ( f ) =N0
2
98

ELE32 - Introdução a Comunicações CAPÍTULO 9
RR (τ) = T F −1SR ( f )
RR (τ) =W ·N0 · s i n c (2W τ)→∆t =1
2W, p a r a Ru (τ) = 0
(9.6)
9.2 Modelo de canal AWGN
Figura 9.3. Modelo de canal AWGN.
• O sinal recebido é diferente do sinal transmitido.
• Um modelo de canal muito simples é o canal AWGN - Addi-tive White Gaussian Noise. Neste modelo, o sinal recebido r (t )vale:
r (t ) = sm (t ) +n (t ) (9.7)
onde m= 1, 2, ... , M é o índice da informação e n(t) o ruído. Oruído n (t ) é um processo aleatório Gaussiano com densidadeespectral de potência constante valendo N0
2 . É suficiente parao entendimento do que segue saber a relação entre densidadeespectral de potência e a autocorrelação do processo aleató-rio.
9.2.1 Capacidade do Canal AWGN
Figura 9.4. Modelo de canal AWGN.
I r (t ∗), s (t ∗)=H r (t ∗)−H r (t ∗)s (t ∗) (9.8)
99

CAPÍTULO 9 ELE32 - Introdução a Comunicações
– A capacidade do canal em bits/símbolo será:
C =1
2· l o g2
1+Ps i na l
Pr ui d o
(9.9)
– A capacidade do canal em bits/segundo será:
C =W · l o g2
1+P
N0W
(9.10)
9.3 Representação vetorial de um canalGaussiano
• O objetivo do receptor é estimar da melhor forma possível ovalor de m ( e consequentemente dos bits associados) atravésda observação de r (t ).
• Uma forma de se realizar a estimativa é representar r no es-paço de sinais. O problema é que a base do espaço, emboraseja capaz de representar exatamente todos os sinais sm (t ), nãoé capaz de representar exatamente todas as possibilidades den (t ).
• O ruído poderia ser decomposto em n (t ) = n1(t )+n2(t ), onde:
n1(t ) =∑N
j=1 n jφ j (t )n j =< n (t ),φ j (t )>=
∫∞∞ n (t )φ∗j (t )d t
(9.11)
isto é, a parte do ruído que pode ser representada pela base. Oresto é n2(t ) = n (t )−n1(t ). Com esta representação, podemosescrever o sinal recebido como:
r (t ) =
N∑
j=1
(s j +n j )φ j (t )
+n2(t )
=
N∑
j=1
(r j )φ j (t )
+n2(t )
(9.12)
onde r j = s j +n j .
Por definição, n (t ) é um processo AWGN com média zero.
N ( f ) =N0
2←→Rn (τ) =
N0
2δ(τ)
100

ELE32 - Introdução a Comunicações CAPÍTULO 9
Como consequência, n j é uma variável aleatória Gaussianascom média zero e variância N0
2 . Isto é, a sua pdf é:
p (n j ) =1
p
πN0
· e x p
−n 2
j
N0
(9.13)
• Calculemos a covariância de ni e n j :
C o v [ni , n j ] = ξni n j −ξni ξn j
Como ξni = 0 e ξn j = 0, temos:
C o v [ni , n j ] = ξ
∫ ∞
−∞n (t )φi (t )d t
∫ ∞
−∞n (s )φ j (s )d s
C o v [ni , n j ] = ξ
∫ ∞
−∞
∫ ∞
−∞n (t )n (s )φi (t )φ j (s )d t d s
C o v [ni , n j ] =
∫ ∞
−∞
∫ ∞
−∞ξn (t )n (s )φi (t )φ j (s )d t d s
C o v [ni , n j ] =
∫ ∞
−∞
∫ ∞
−∞
N0
2φi (t )φ j (s )d t d s
C o v [ni , n j ] =N0
2
∫ ∞
−∞φi (s )φ j (s )d s
C o v [ni , n j ] =N0
2
∫ ∞
−∞φi (s )φ j (s )d s =
¨
N02 , sei = j ,
0, c.c.
• ni e n j são descorrelacionados se i 6= j . Como ambos são va-riáveis aleatórias gaussianas, então eles são estatisticamenteindependentes.
• Qual é a relação entre os ni s e n2(t )?
C o v [n j , n2(t )] = ξn j n2(t )= ξn j n (t )−ξn j n1(t )
C o v [n j , n2(t )] = ξ
n (t )
∫ ∞
−∞n (s )φ j (s )d s
−ξ
¨
n j
N∑
i=1
niφi (t )
«
101

CAPÍTULO 9 ELE32 - Introdução a Comunicações
C o v [n j , n2(t )] = ξ∫ ∞
−∞n (t )n (s )φ j (s )d s −ξ
N∑
i=1
n j niφi (t )
C o v [n j , n2(t )] =
∫ ∞
−∞ξn (t )n (s )φ j (s )d s −
N∑
i=1
ξ
n j ni
φi (t )
C o v [n j , n2(t )] =
∫ ∞
−∞
N0
2δ(t − s )φ j (s )d s −
N0
2φ j (t )
C o v [n j , n2(t )] =N0
2φ j (t )−
N0
2φ j (t ) = 0
Logo,∑N
i=1 r jφ j (t ) e n2(t ) são estatisticamente independentes.
• Só estamos interessados em Sm (vetor de símbolos).
• n2(t ) não interfere em r , ou seja, o resto n2(t ) não traz ne-nhuma informação sobre nenhum n j . Assim, podemos ignorá-lo.
• Logo, o canal r (t ) = sm (t ) +n (t ) contínuo no tempo equivaleao canal vetorial r = Sm + n , onde:
r = [r1 r2 · · · rN ]Sm = [sm1 sm2 · · · smN ]
n = [n1 n2 · · · nN ](9.14)
• Lembrar que n j é Gaussiano e apresenta média nula eσ2n j =
N02
9.4 Receptor ótimo para o canal Gaussiano
• O objetivo do receptor é estimar da melhor forma possível ovalor de m .
• A função de um receptor é g (r ) = m , sendo m a estimativa damensagem transmitida. É uma funçãoℜn →1, 2, ..., M
• Ocorre um erro de transmissão se Òm 6=m , o que acontece comprobabilidade Pe = P [Òm 6=m ]. Logo, o melhor receptor é aqueleque minimiza Pe , ou equivalentemente, que maximiza a pro-babilidade de acerto.
102
ELE32 - Introdução a Comunicações CAPÍTULO 9
• A decisão do receptor pode ser vista como a aplicação de umafunção sobre o vetor recebido, isto é, Òm = g (r ). Desta forma,podemos dividir o espaço em regiões de decisão definidos como:
DÒm = r ∈ℜN | g (r ) = Òm q ua nd o r ∈D
Òm (9.15)
ou, literalmente, a região de decisão pela estimativa Òm é o con-junto de valores de r tal que a decisão do receptor g (r ) é Òm .
• Dado que m é a mensagem transmitida, temos:
P [a c e r t o |m ] = P [g (r ) =m |m ] = P [r ∈D m |m ] (9.16)
• A decisão correta ocorre então se, dado m , o vetor r está den-tro da região Dm . Na média, a probabilidade de acerto podeser calculada como:
P [a c e r t o ] =M∑
m=1
P [a c e r t o |m ] ·P [m ]
=M∑
m=1
P [r ∈Dm |m ] ·P [m ]
=M∑
m=1
∫
Dm
p (r |m )d r
·P [m ]
=M∑
m=1
∫
Dm
p (r |m ) ·P [m ]d r
(9.17)
• Como um valor qualquer de r só pode estar dentro de umaregião de decisão, ele deve estar naquela que maximiza a ex-pressão acima. Isto é, r deve pertencer a D
Òm se:
p (r |Òm ) ·P [Òm ]> p (r |Óm ′) ·P [Óm ′], ∀Óm ′ = 1, 2, ..., M ; Óm ′ 6= Òm(9.18)
• Esta expressão permite definir as regiões de decisão ótimascomo:
DÒm = r ∈ℜN |p (r |Òm )·P [Òm ]> p (r |Óm ′)·P [Óm ′];∀Óm ′ 6= Òm (9.19)
• Esta expressão facilita a tarefa do receptor, pois ele pode subs-tituir a tarefa de encontrar em qual região de decisão o vetorr se encontra pela tarefa de encontrar o valor de m que maxi-miza p (r |Òm ) ·P [Òm ]. Usando o teorema de Bayes temos:
p (r |Òm ) ·P [Òm ]p (r )
= P [Òm |r ] (9.20)
• Como o valor de r é constante para todo Òm , o valor de Òm quemaximiza p (r |Òm ) ·P [Òm ] também maximizará P [Òm |r ]. Logo, aestimativa ótima é:
Òm = a r g maxm[P [m |r ]] (9.21)
103

CAPÍTULO 9 ELE32 - Introdução a Comunicações
• Este critério é chamado de Máxima a Posteriori (MAP), poisa decisão é tomada a partir de um máximo após a observaçãodo sinal r e com o conhecimento das probabilidades a prioriPm .
• Quando todos os sinais são equiprováveis, Pm =1
M temos quea r g max
mP [m | r ]= a r g maxP [ r |m ]O critério de decisão
pode ser simplificado para:
Òm = a r g maxp (r |m ) (9.22)
• Este critério é chamado de Máxima Verossimilhança (ML -Maximum Likelihood) pois ele procura o valor de Sm mais pa-recido com r .
• O critério ML só é ótimo (e equivalente ao MAP) quando ossinais ão equiprováveis.
9.5 Evento de erro
• Um erro de transmissão ocorre se transmitirmos sm , mas re-cebemos r 6∈Dm
P [e r r o |m ] = P [r /∈Dm |m ] = P [r ∈D Cm |m ] (9.23)
• A probabilidade do erro será:
Pe =M∑
m=1
P [m ]P [r 6∈Dm |m ] =M∑
m=1
Pm P [e r r o |m ] =M∑
m=1
Pm
∫
Dm
p (r |m )d r ,
onde P [e r r o |m ] =∫
Dmc
p (r |m )d r
Esta é a probabilidade de erro do símbolo. A probabilidadede erro de bit depende dos rótulos dos símbolos (codificaçãonormal, Gray, etc.)
• Cada erro de símbolo causa :
– no máximo K = l o g2[M ] erro de bits
– no mínimo 1 erro de bit
⇒ Pb ≤ Pe ≤ K Pb
sendo Pb a probabilidade de erro de bit. Isolando a probabili-dade de erro de bit Pb :
Pe
K≤ Pb ≤ Pe
104

ELE32 - Introdução a Comunicações CAPÍTULO 9
No caso de sinal gaussiano:
m = a r g ma xmPm p (r |m )
Como r = sm + n , então n = r − sm ,
Pm p (r |sm ) = Pm p (n ) = Pm ·1
(p
πN0)N· e x p
−||r − sm ||2
N0
O valor de m que maximiza Pm p (r |m ) maximizará qualquerf
Pm p (r |m )
se f for monotonamente crescente, como o l o g (∗)
l o g (Pm p (r |sm )) = l o g (Pm )−N l o g (πN0)
2−||r − sm ||2
N0
Ignorando o termo constante N l o g (πN0)2 e multiplicando por
N02
,tem-se
N0l o g (Pm )2
+||sm ||2
2
−||r ||2
2− r sm
Como ||r ||22 − r sm não depende de m,
N0l o g (Pm )2
+||sm ||2
2=ηm + r sm
onde ηm =N0l o g (Pm )
2 + εm2
Logo, o critério equivalente ao MAP para o canal gaussiano é:
m = a r g ma x ηm + r sm
Para sinais equiprováveis:
m = a r g ma x −||r − sm ||2= a r g mi n||r − sm ||
Dois casos importantes
1. Sinais antipodais, canal Gaussiano
Figura 9.5. Representação de sinais antipodais
105

CAPÍTULO 9 ELE32 - Introdução a Comunicações
Tem-se s1(t ) =pεbφ(t ) = −s2(t ). As probabilidades são respectiva-
mente p e 1−p , e as energias são iguais e valem εb . Calculando osηi :
η1 =N0l n [p ]
2−εb
2
η2 =N0l n [1−p ]
2−εb
2
Regiões de decisão:
D1 =
r |η1+ rp
εb >η2− rp
εb
=§
r |N0l n (p )
2+ r
p
εb >N0l n (1−p )
2− r
p
εb
ª
isolando r :¨
r | r >N0l n ( 1−p
p )
4pεb
«
Defini-seN0l n ( 1−p
p )4pεb
como limiar de decisão (rt h ). De maneira similar,chegamos a D2 = r |r < rt h. Assim, a probabilidade de erro de sím-bolo vale:
Pe = p
∫ rt h
−∞p (r |s1)d r + (1−p )
∫ ∞
rt h
p (r |s2)d r
Para calcular as integrais, usaremos a funçãoQ da distribuição Gaus-siana, dada por:
P (x >α) =Qα−µσ
P (x <α) =Qµ−ασ
o que leva ao resultado
Pe = pQ
pεb − rt hq
N02
!
+ (1−p )Q
pεb + rt hq
N02
!
(9.24)
Quando p = (1−p ) = 0.5, rt h = 0. Logo,
Pe Q
√
√2εb
N0
(9.25)
2. Sinalização binária equiprovávelConsidere os símbolos S1 e S2 ∈ RN e o sinal recebido r = S1 + n .
Um evento de erro vai acontecer se a projeção de n no vetor S1−S2d12
for
maior que d122 , isto é,
106
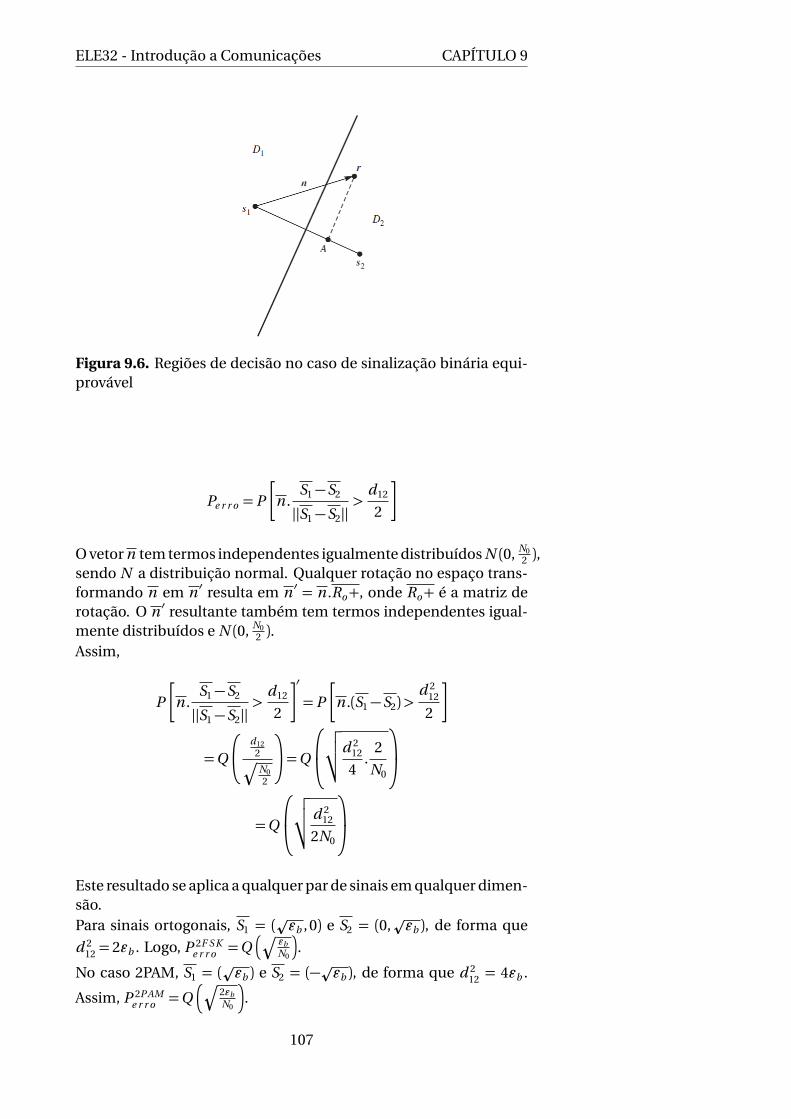
ELE32 - Introdução a Comunicações CAPÍTULO 9
Figura 9.6. Regiões de decisão no caso de sinalização binária equi-provável
Pe r r o = P
n .S1−S2
||S1−S2||>
d12
2
O vetor n tem termos independentes igualmente distribuídos N (0, N02 ),
sendo N a distribuição normal. Qualquer rotação no espaço trans-formando n em n ′ resulta em n ′ = n .Ro+, onde Ro+ é a matriz derotação. O n ′ resultante também tem termos independentes igual-mente distribuídos e N (0, N0
2 ).Assim,
P
n .S1−S2
||S1−S2||>
d12
2
′
= P
n .(S1−S2)>d 2
12
2
=Q
d122
q
N02
!
=Q
√
√
√d 212
4.
2
N0
=Q
√
√
√ d 212
2N0
Este resultado se aplica a qualquer par de sinais em qualquer dimen-são.Para sinais ortogonais, S1 = (
pεb , 0) e S2 = (0,
pεb ), de forma que
d 212 = 2εb . Logo, P 2F S K
e r r o =Qq
εbN0
.
No caso 2PAM, S1 = (pεb ) e S2 = (−
pεb ), de forma que d 2
12 = 4εb .
Assim, P 2PAMe r r o =Q
Ç
2εbN0
.
107

CAPÍTULO 9 ELE32 - Introdução a Comunicações
Limitante superior para Pe usando ML (Limitante de União)
Definição 9.1. Limitante de União
A probabilidade da união de eventos é menor que a soma dasprobabilidades de ocorrência de cada evento individualmenteconsiderado. A esse limite, é dado o nome de limitante de união.
Nem sempre é fácil calcular Pe . Sabemos que:
Pe =M∑
m=1
Pm ·Pe |m
quando sinais equiprováveis Pm =1
M , assim:
Pe =1
M
M∑
m=1
Pe |m
Figura 9.7. Regiões de decisão para uma constelação qualquer
No caso AWGN:
Pe |m =
∫
D cm
p (r |s m ) · r =M∑
m ′=1m ′ 6=m
∫
D ′m
p (r |s m ) · r
Pois
D cm =
M⋃
m ′=1m ′ 6=m
Dm ′
Dm ′
⋂
Dm ′′ =∅
Tal integral pode ser difícil de calcular.
108
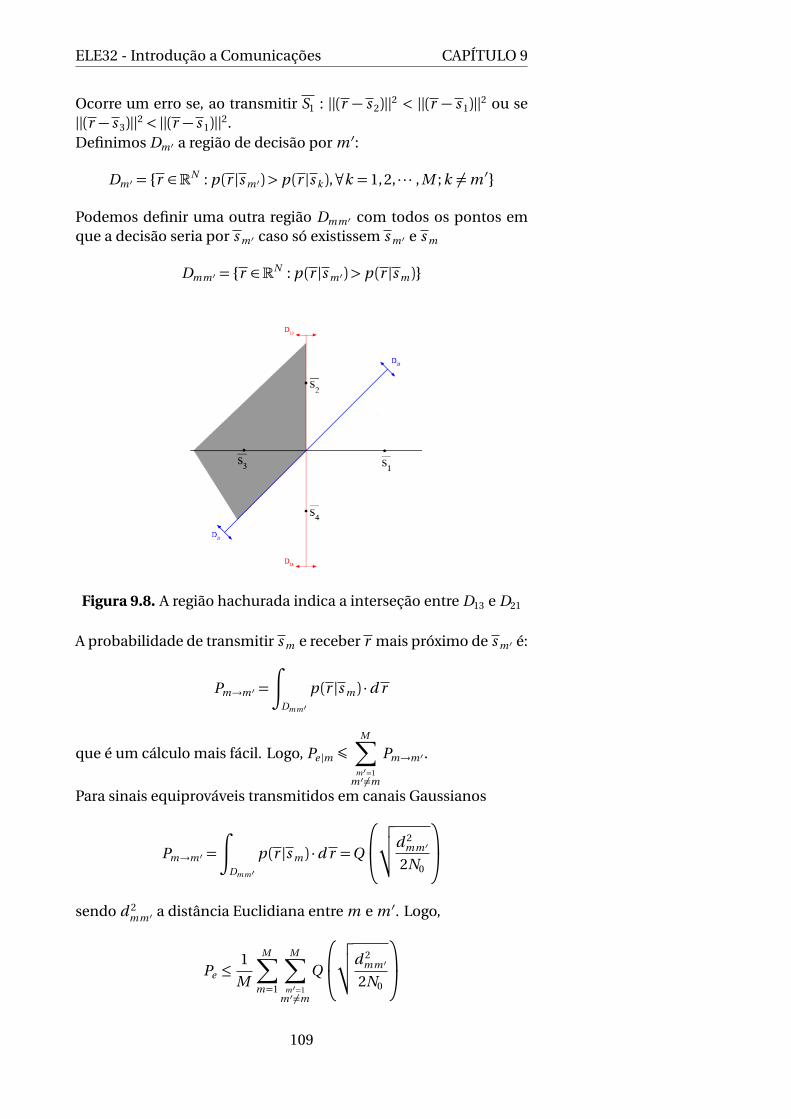
ELE32 - Introdução a Comunicações CAPÍTULO 9
Ocorre um erro se, ao transmitir S1 : ||(r − s 2)||2 < ||(r − s 1)||2 ou se||(r − s 3)||2 < ||(r − s 1)||2.Definimos Dm ′ a região de decisão por m ′:
Dm ′ = r ∈RN : p (r |s m ′)> p (r |s k ),∀k = 1, 2, · · · , M ; k 6=m ′
Podemos definir uma outra região Dmm ′ com todos os pontos emque a decisão seria por s m ′ caso só existissem s m ′ e s m
Dmm ′ = r ∈RN : p (r |s m ′)> p (r |s m )
Figura 9.8. A região hachurada indica a interseção entre D13 e D21
A probabilidade de transmitir s m e receber r mais próximo de s m ′ é:
Pm→m ′ =
∫
Dmm ′
p (r |s m ) ·d r
que é um cálculo mais fácil. Logo, Pe |m ¶M∑
m ′=1m ′ 6=m
Pm→m ′ .
Para sinais equiprováveis transmitidos em canais Gaussianos
Pm→m ′ =
∫
Dmm ′
p (r |s m ) ·d r =Q
√
√
√d 2mm ′
2N0
sendo d 2mm ′ a distância Euclidiana entre m e m ′. Logo,
Pe ≤1
M
M∑
m=1
M∑
m ′=1m ′ 6=m
Q
√
√
√d 2mm ′
2N0
109

CAPÍTULO 9 ELE32 - Introdução a Comunicações
Como Q (x )≤ 12 exp(−x 2
2 ), usando o limite superior:
Pe ≤1
2M
M∑
m=1
M∑
m ′=1m ′ 6=m
exp
d 2mm ′
4N0
É comum definir a função enumeradora de distâncias:
T (x ) =∑
d
ad x d 2
Sendo ad o número de pares ordenados (m , m ′) tal que ||s m − s m ′ ||=d e x uma variável dummy. Exemplo:
T (x ) = 8x d 2mi n +4x d 2
De posse da função enumeradora de distâncias, tem-se
Pe ≤1
2MT (x )|x=e x p ( −1
4N )
Seja
dmi n = min1≤m ′,m<M
m 6=m ′
||s m − s m ′ ||
Como Q (x ) é decrescente,
Q
√
√
√d 2mi n
2N0
≥Q
√
√
√d 2mm ′
2N0
(9.26)
Assim, um limitante ainda mais fácil é usar dmi n no lugar de tododmm ′
Pe ≤M (M −1)
MQ
√
√
√d 2mi n
2N0
≤(M −1)
2e x p
−d 2mi n
4N0
(9.27)
Limitante inferior para Pe
A relação entre Dm e Dmm ′ é Dmm ′ ⊆ D cm (basta r mais próximo de
qualquer m ′ para que r /∈Dm )Além disso:
Dm ⊆D cmm ′
Dm ′ ⊆Dmm ′
D cmm ′ ⊆D c
m ′
D cm ′m ⊆D c
m
110
ELE32 - Introdução a Comunicações CAPÍTULO 9
Utilizando a última afirmação:
Pe =1
M
M∑
m=1
Pe |m =M∑
m=1
∫
D cm
p (r |s m ) · r ≥
1
M
M∑
m=1
∫
D cm ′m
p (r |s m ) · r
Logo,
Pe =1
M
M∑
m=1
Q
√
√
√d 2mm ′
2N0
O melhor limitante inferior é o maior possível
Pe ≥1
M
M∑
m=1
maxm ′
Q
√
√
√d 2mm ′
2N0
Seja dmi n =min ||s m − s m ′ ≥ dmi n , então:
Pe ≥1
M
M∑
m=1
Q
√
√
√d 2m ′m
2N0
9.6 Desempenho de detector ótimo
r = Sm +n (9.28)
9.6.1 PAM
dmi n ==
√
√12l o g2M εb a v g
M 2−1
• Errar 1o símbolo se n > dmi n2 ⇒Q
dmi np2N0
• Errar 2o símbolo se n > dmi n2 ou n < −dmi n
2
• Errar 3o símbolo se |n |> dmi n2 ⇒ 2Q
dmi np2N0
• Errar 4o símbolo se n < −dmi n2 ⇒Q
dmi np2N0
Para M pontos:
111

CAPÍTULO 9 ELE32 - Introdução a Comunicações
Figura 9.9. Constelação PAM com M = 4
• 1 extremo à direita
• 1 extremo à esquerda
• M-2 intermediários
Pe =1
MQ
dmi np
2N0
+1
MQ
dmi np
2N0
+M −2
M2Q
dmi np
2N0
=
=2(M −1)
MQ
dmi np
2N0
=
=2(M −1)
MQ
√
√6l o g2M
(M 2−1)εb
N0
(9.29)
Para M muito grande, ou seja, M−1M ≈ 1
Pe ≈ 2Q
√
√6l o g2M
(M 2−1)εb
N0
(9.30)
112

ELE32 - Introdução a Comunicações CAPÍTULO 9
Figura 9.10. Gráfico de Pe pelo SNR. Pode-se ver a influência de Mno erro
9.6.2 QAM
Figura 9.11. Representação gráfica de um 16QAM, cujos pontos ca-racterísticos estão marcados
Pe 1 = p
n1 >dmi n
2
+p
n2 <−dmi n
2
−p
n1 >dmi n
2
p
n2 <−dmi n
2
Pe 2 = p
|n1|>dmi n
2
+p
n2 <−dmi n
2
−p
|n1|>dmi n
2
p
n2 <−dmi n
2
Pe 3 = p
|n1|>dmi n
2
+p
|n2|>dmi n
2
−p
|n1|>dmi n
2
p
|n2|>dmi n
2
113

CAPÍTULO 9 ELE32 - Introdução a Comunicações
A modulação QAM também pode ser vista como modulaçõesp
M -PAM em paralelo.
• Probabilidade de errar um símbolo: 1−Pp
M−PAMe
• Probabilidade de acertar um símbolo: 1−Pp
M−PAMe
• Probabilidade de acertar dois símbolosp
M -PAM= (1−Pp
M−PAMe )2
= probabilidade de acertar um símbolo M-QAM
• Probabilidade de errar um símbolo M-QAM:
[1− (1−Pp
M−PAMe )2] (9.31)
Além disso, tem-se que:
Pp
M−PAMe = 2
1−1p
M
Q
dmi np
2N0
= 2
1−1p
M
Q
√
√3l o g2M
M −1
εb a v g
N0
(9.32)Usando 9.32 em 9.31:
P M−Q AMe =
= 4
1−1p
M
Q
√
√3l o g2M
M −1
εb a v g
N0
1−
1−1p
M
Q
√
√3l o g2M
M −1
εb a v g
N0
(9.33)
P M−Q AMe ≤Q
√
√3l o g2M
M −1
εb a v g
N0
(9.34)
9.6.3 PSK
Figura 9.12. Constelação PSK com M = 8
114

ELE32 - Introdução a Comunicações CAPÍTULO 9
Devido a simetria, P P S Ke = Pe |m∀m = 1, 2, · · · , M . Utilizando m = 1⇒
S 1 = (pεs , 0) e r = S 1+n , tal que n = (n1, n2) e r = (r1, r2).
Como n1 e n2 são i.i.d. com p.d.f. N (0, N02 ), conclui-se que:
p (r1, r2|m = 1) =1
N0πe x p
−[(r1−pεs )2+ r 2
2 ]N0
(9.35)
Pode-se transformar r em:
ν=q
r 21 + r 2
2 (9.36)
θ = t a n−1
r1
r2
(9.37)
Sendo ν e θ respectivamente a amplitude e a fase de r . Usando(9.35), (9.36) e (9.37), obtém-se a p.d.f. conjunta:
pν,θ (ν,θ ) =ν
N0πe x p (−
ν2+ εs −2pεs c o s (θ )
N0) (9.38)
A probabilidade marginal de θ é dada por:
pθ (θ ) =
∫ ∞
0
pν,θ (ν,θ )dν
pθ (θ ) =1
2πe x p
−εs
N0s e n 2(θ )
∫ ∞
∞ν · e x p
ν−Ç
2εsN0
2
dν (9.39)
Definindo γs =εsN0
, temos o seguinte gráfico relacionando γs à PDFde θ :
115
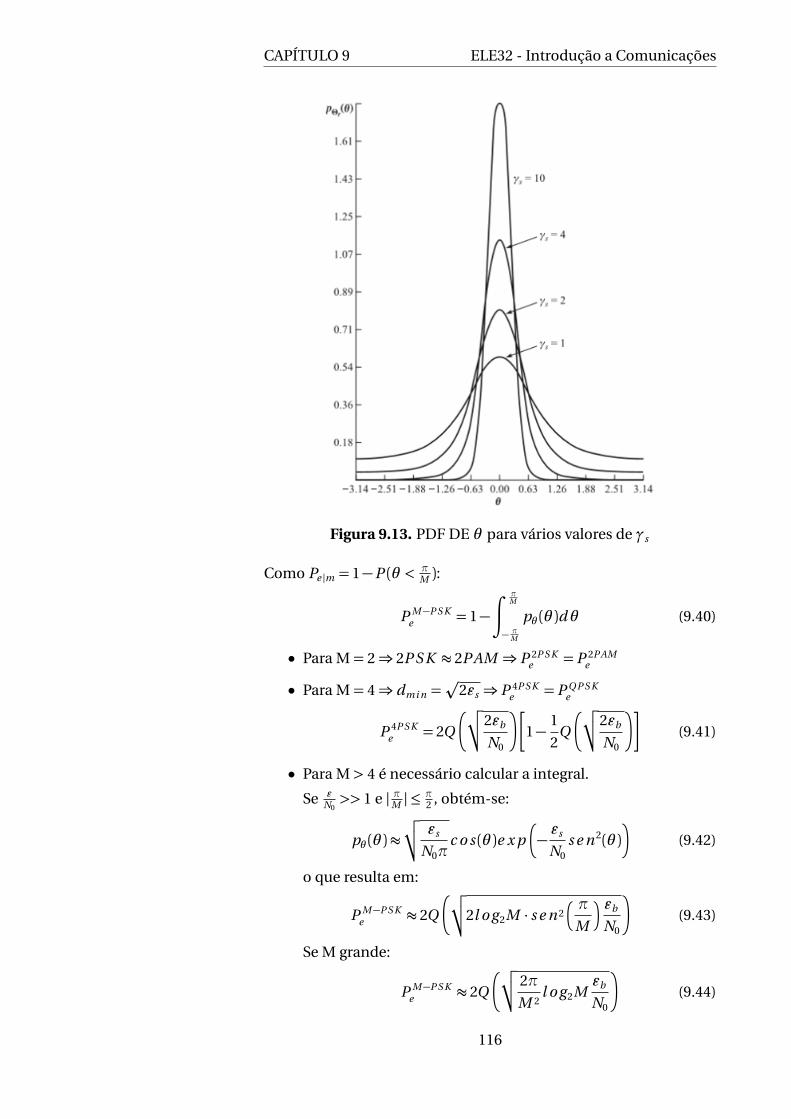
CAPÍTULO 9 ELE32 - Introdução a Comunicações
Figura 9.13. PDF DE θ para vários valores de γs
Como Pe |m = 1−P (θ < πM ):
P M−P S Ke = 1−
∫πM
− πM
pθ (θ )dθ (9.40)
• Para M = 2⇒ 2P S K ≈ 2PAM ⇒ P 2P S Ke = P 2PAM
e
• Para M = 4⇒ dmi n =p
2εs ⇒ P 4P S Ke = P Q P S K
e
P 4P S Ke = 2Q
√
√2εb
N0
1−1
2Q
√
√2εb
N0
(9.41)
• Para M > 4 é necessário calcular a integral.
Se εN0>> 1 e | πM | ≤
π2 , obtém-se:
pθ (θ )≈√
√ εs
N0πc o s (θ )e x p
−εs
N0s e n 2(θ )
(9.42)
o que resulta em:
P M−P S Ke ≈ 2Q
√
√
2l o g2M · s e n 2
π
M
εb
N0
(9.43)
Se M grande:
P M−P S Ke ≈ 2Q
√
√ 2π
M 2l o g2M
εb
N0
(9.44)
116

ELE32 - Introdução a Comunicações CAPÍTULO 9
Comparando PSK com PAM
Considerando P M−P S Ke ≈ 2Q
q
2πM 2 l o g2M εb
N0
e P M−PAMe ≈ 2Q
Ç
6l o g2M(M 2−1)
εbN0
,temos:
2πl o g2M
M 2≥
6l o g2M
M 2−1⇒ PSK é melhor que PAM para o mesmo valor de M
Comparando PSK com QAM
Considerando P M−P S Ke ≈ 2Q
q
2πM 2 l o g2M εb
N0
e P M−Q AMe ≤ 4Q
Ç
3l o g2M(M−1)
εbN0
.
Fazendo 2l o g2M · s e n 2
εbN0
P S K= 3l o g2M
M−1
εbN0
Q AM
RM =
εbN0
P S K
εbN0
Q AM
=3
M −1
1
2s e n 2
πM
Se RM > 1 é necessário que
εbN0
P S K>
εbN0
Q AM. Para M = 4⇒RM = 1.
Para M > 4⇒RM > 1⇒QAM é melhor que PSK.
9.6.4 Sinalização Ortogonal
Símbolos:S 1 = (
pε, 0, · · · , 0, 0)
S 2 = (0,pε, · · · , 0, 0)
...S m = (0, 0, · · · , 0,
pε)
No qual,pε = energia do símbolo.Para sinais equiprováveis e com a
mesma energia, o critério de decisão se torna:
m = a r g ma x [r · s m ], 1≤m ≤M (9.45)
Assumindo que m = 1. Nesse caso:
r = (pε+n1, n2, · · · , nm ) (9.46)
Definimos:
Rm ¬ r · s m =
¨
ε+n1pε, m = 1
nmpε, m 6= 1
Acontece o erro se qualquer Rm > R1,∀m = 2, 3, · · · , M . Acontece oacerto se Rm <R1,∀m = 2, 3, · · · , M
Pa c e r t o =
∫ ∞
−∞[n2 < n +
pε, · · · , nM < n +
pε|n1 = n ] ·p (n1 = 1)d n =
=
∫ ∞
−∞P [n2 < n +
pε|n1 = n ]M−1 ·p (n1 = n )d n =
=
∫ ∞
−∞[1−Q
n +pε
q
N02
!
]M−1 1p
πN0
e x p
−n 2
N0
d n
117

CAPÍTULO 9 ELE32 - Introdução a Comunicações
P M−o r t o g o na le = 1−Pa c e r t o (9.47)
Qualquer tipo de erro pode acontecer com a mesma probabilidade
P (m 6=m |m = 1) =Pe
2K −1(9.48)
De todos os 2K −1 eventos de erro, 2K −1 vão errar o primeiro bit (ouqualquer bit).
Logo, Pe b =Pe
2K −1 2K −1 ≈ 12 Pe para K grande.
Usando o limitante superior para Pe :
Pe ≤M −1
2e x p
−d 2mi n
4N0
(9.49)
Usando M = 2K e dmi n =p
2K εb , temos:
Pe ≤2K −1
2e x p
−K εb
2N0
< 2K e x p−K εb
2N0
= e x p−K εb
2N0+K l n2
= e x p−K
2
εb
N0−2l n2
Se εbN0− 2l n2 < 0⇒ εb
N0< 1.42d B , a exponencial terá argumento po-
sitivo.
• Limite teórico: -1.6 dB
FSK: tipo de sinalização ortogonal
Precisa que∆ f = 12T para garantir ortogonalidade.
Modulação biortogonal tem os seguintes símbolos:
S 1 =−SN+1 = (pε, 0, · · · , 0, 0)
S 2 =−SN+2 = (0,pε, · · · , 0, 0)
...S n =−SN+N = (0, 0, · · · , 0,
pε)
Considerando n = 1, r = S 1+n = (pε+n1, n2, · · · , nN ).
Novamente calculamos Rm = r · s m .
118
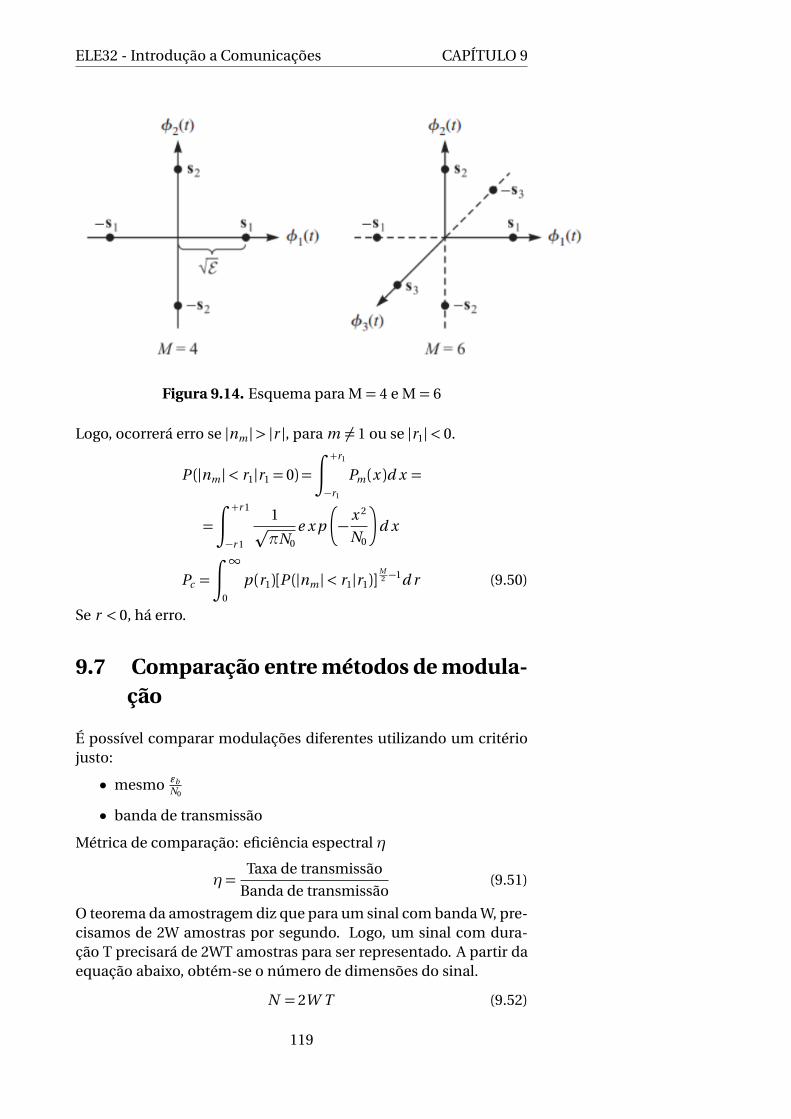
ELE32 - Introdução a Comunicações CAPÍTULO 9
Figura 9.14. Esquema para M = 4 e M = 6
Logo, ocorrerá erro se |nm |> |r |, para m 6= 1 ou se |r1|< 0.
P (|nm |< r1|r1 = 0) =
∫ +r1
−r1
Pm (x )d x =
=
∫ +r 1
−r 1
1p
πN0
e x p
−x 2
N0
d x
Pc =
∫ ∞
0
p (r1)[P (|nm |< r1|r1)]M2 −1d r (9.50)
Se r < 0, há erro.
9.7 Comparação entre métodos de modula-ção
É possível comparar modulações diferentes utilizando um critériojusto:
• mesmo εbN0
• banda de transmissão
Métrica de comparação: eficiência espectral η
η=Taxa de transmissão
Banda de transmissão(9.51)
O teorema da amostragem diz que para um sinal com banda W, pre-cisamos de 2W amostras por segundo. Logo, um sinal com dura-ção T precisará de 2WT amostras para ser representado. A partir daequação abaixo, obtém-se o número de dimensões do sinal.
N = 2W T (9.52)
119

CAPÍTULO 9 ELE32 - Introdução a Comunicações
Sabe-se que a taxa de símbolos é dada por Rs =1
Ts. Desse modo, a
partir da equação (9.52), temos:
W =N
2
Rb
l o g2M(9.53)
Como η = RbW =
2l o g2MN , para PAM (N = 1) e QAM, PSK (N = 2), η au-
menta com o aumento de M . Por outro lado, aumentar M piorao desempenho. Para qualquer sinalização (bi)-ortonormal, N =M(ortonormal) e N = M
2 (biortonormal).
120

CAPÍTULO 10
Transmissão em canais limitados em banda
10.1 Características do Canal
Figura 10.1. Representação de um sistema com canal limitado embanda.
• O canal é invariante no tempo.
• O canal pode distorcer o sinal transmitido.
• Não haveria distorção se C ( f ) = K e x p (− j 2π f td ) para todo fdentro da faixa de interesse, onde td é o atraso de propagaçãoe K é uma constante;
• |C ( f )| 6= K , haverá distorção de amplitude.
• Se a r g [C ( f )] =Θ( f ) 6= K1+K2 f , haverá distorção de fase.
Como distorções podem causar ISI (Intersymbol Interference), é ne-cessário estudar a transmissão de uma sequência de símbolos.
10.2 Projeto de sinais para canais limitadosem banda
A equação 10.1 equivale a um sinal transmitido em banda base paravárias modulações. In é a sequência de informação, por exemplo
121

CAPÍTULO 10 ELE32 - Introdução a Comunicações
uma sequência de símbolos, e g (t − nT ) é o pulso de transmissãocom Transformada de Fourier G ( f ). T é o período de amostragem.
v (t ) =∞∑
n=0
In g (t −nT ) (10.1)
Figura 10.2. Representação do modelo do sistema.
A figura 10.2 representa o modelo do sistema estudado. O sinal re-cebido é dado por 10.2, onde o pulso recebido é h (t ) = g (t )∗ c (t )↔H ( f ) =G ( f )C ( f ).
rl (t ) = v (t ) ∗ c (t ) + z (t ) =∞∑
n=0
In h (t −nT ) + z (t ) (10.2)
O melhor filtro de recepção (GR ( f )) é H ∗( f ) (filtro casado h ∗(−t )1).Sendo x (t ) = h (t ) ∗h ∗(−t )↔ X ( f ) = H ( f )H ∗( f ) = G ( f )C ( f )H ∗( f ),temos:
y (t ) = rl (t ) ∗h ∗(t ) =∞∑
n=0
In x (t −nT ) +ν(t )
yk = y (k T +T0) =∞∑
n=0
In x (k T −nT +T0)+ν(k T +T0) =∞∑
n=0
In xk−n+νk
Onde ν(t ) é a resposta do filtro ao ruído (z (t ) ∗h ∗(t )). Por simplici-dade pode-se adotar T0 = 0.
yk = Ik x0+∞∑
n=0,n 6=k
In xk−n +νk
Arbitrariamente, definindo x0 = 1, temos:
yk = Ik +∞∑
n=0,n 6=k
In xk−n +νk
O termo∞∑
n=0,n 6=k
In xk−n
é a Interferência Intersimbólica (ISI), que representa a interferênciade outros símbolos neste. Ik é o termo desejado.
1A prova está na próxima seção
122

ELE32 - Introdução a Comunicações CAPÍTULO 10
10.3 Filtro Casado (Opcional)
Esta seção tem como objetivo apenas mostrar que o melhor filtro derecepção é H ∗( f ), complementando a seção anterior.
Figura 10.3. Filtro
r (t ) = sm (t ) +n (t )↔R ( f ) = Sm (t ) +N (t ) (10.3)
h (t ) = x (T − t )↔H ( f ) = X ( f )e − j 2π f T → |H ( f )|2 = |X ( f )|2 (10.4)
Substituindo as equações acima em Y ( f ) =H ( f )R ( f ), temos:
Y ( f ) = Sm ( f )X ( f )e− j 2π f T +N ( f )X ( f )e − j 2π f T . (10.5)
Análise das potências:
Pruído =
∫
N0
2|H ( f )|2d f =
N0
2εh (10.6)
Psinal =
∫ +∞
−∞Ss s ( f )|H ( f )|2d f (10.7)
Pela desigualdade de Cauchy-Schwarz:
Psinal ≤∫
Ss s ( f )d f
∫
|H ( f )|2d f
(10.8)
O máximo ocorre quando Ss s ( f ) = K |H ( f )|2, isto é, h (t ) = s ∗(T − t ).Ou seja, h está casado ("matched") com s .Cálculo da relação sinal-ruído (SNR) com máxima potência do sinal:
Psinal, max = εsεh
SN R =Psinal, max
Pruído=
2εs
N0(10.9)
Só é possível atingir essa relação quando usamos o filtro casado.
123
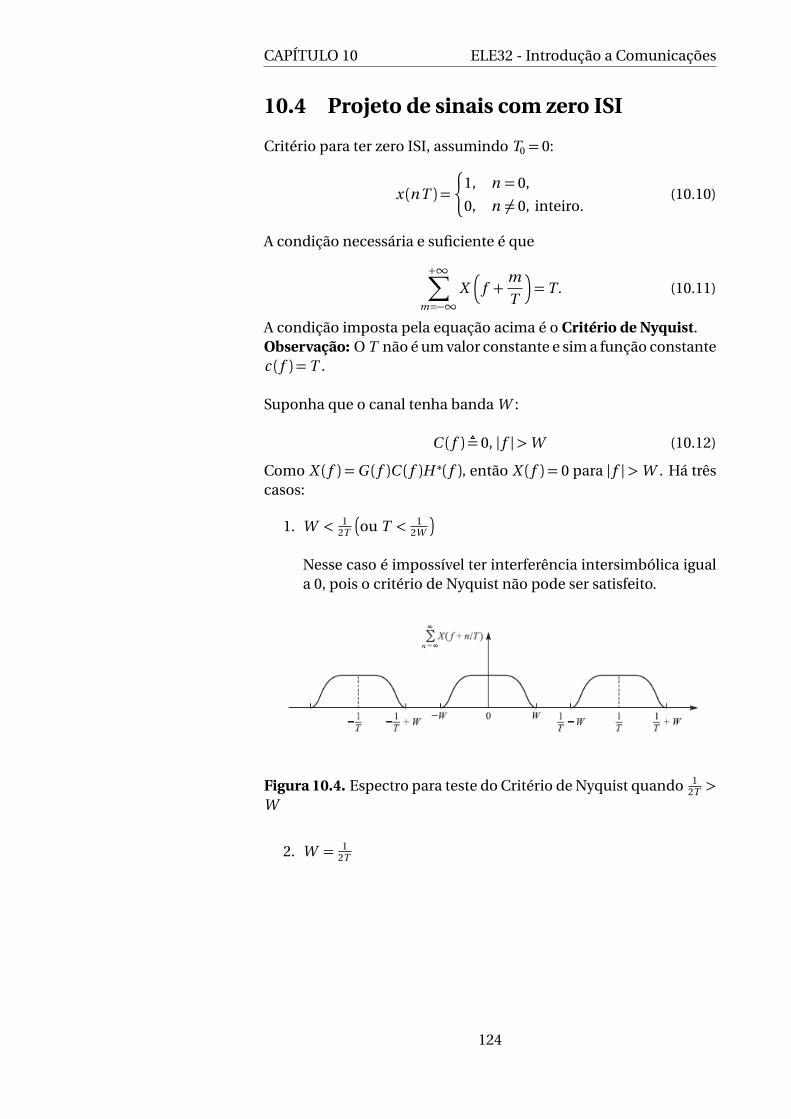
CAPÍTULO 10 ELE32 - Introdução a Comunicações
10.4 Projeto de sinais com zero ISI
Critério para ter zero ISI, assumindo T0 = 0:
x (nT ) =
¨
1, n = 0,
0, n 6= 0, inteiro.(10.10)
A condição necessária e suficiente é que
+∞∑
m=−∞X
f +m
T
= T . (10.11)
A condição imposta pela equação acima é o Critério de Nyquist.Observação: O T não é um valor constante e sim a função constantec ( f ) = T .
Suponha que o canal tenha banda W :
C ( f )¬ 0, | f |>W (10.12)
Como X ( f ) =G ( f )C ( f )H ∗( f ), então X ( f ) = 0 para | f | >W . Há trêscasos:
1. W < 12T
ou T < 12W
Nesse caso é impossível ter interferência intersimbólica iguala 0, pois o critério de Nyquist não pode ser satisfeito.
Figura 10.4. Espectro para teste do Critério de Nyquist quando 12T >
W
2. W = 12T
124
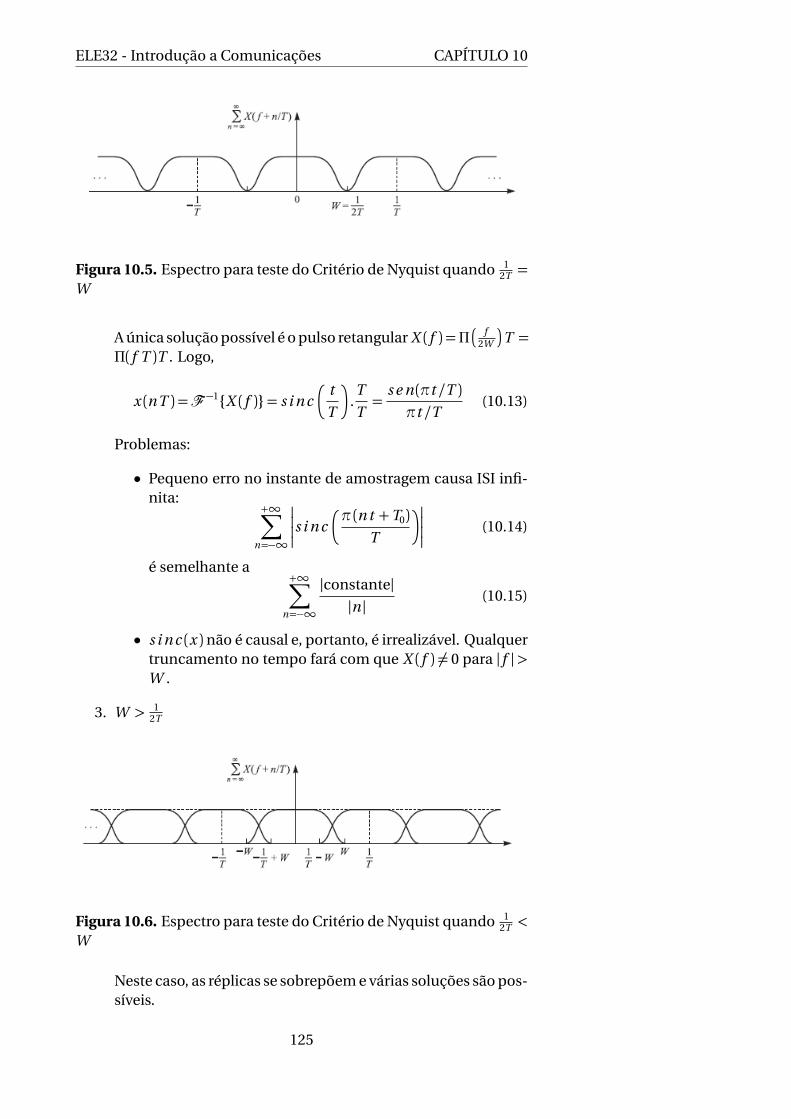
ELE32 - Introdução a Comunicações CAPÍTULO 10
Figura 10.5. Espectro para teste do Critério de Nyquist quando 12T =
W
A única solução possível é o pulso retangular X ( f ) =Π f
2W
T =Π( f T )T . Logo,
x (nT ) =F −1X ( f )= s i n c
t
T
.T
T=
s e n (πt /T )πt /T
(10.13)
Problemas:
• Pequeno erro no instante de amostragem causa ISI infi-nita:
+∞∑
n=−∞
s i n c
π (n t +T0)T
(10.14)
é semelhante a+∞∑
n=−∞
|constante||n |
(10.15)
• s i n c (x ) não é causal e, portanto, é irrealizável. Qualquertruncamento no tempo fará com que X ( f ) 6= 0 para | f |>W .
3. W > 12T
Figura 10.6. Espectro para teste do Critério de Nyquist quando 12T <
W
Neste caso, as réplicas se sobrepõem e várias soluções são pos-síveis.
125

CAPÍTULO 10 ELE32 - Introdução a Comunicações
Uma possível solução é o cosseno levantado (Raised Cosine).Essa solução é muito usada pois é suave e possui espectro compropriedades desejáveis. A equação a seguir mostra o espectrodeste pulso.
XR C ( f ) =
T , 0≤ | f | ≤ 1−β2T ,
T2
¦
1+ c o s
πTβ
| f | − 1−β2T
©
, 1−β2T ≤ | f | ≤
1+β2T ,
0, | f | ≥ 1+β2T .
(10.16)
Algumas propriedades importantes:
• A taxa de símbolos é 1T ;
• Banda ocupada = 12T ;
• Banda em excesso = β2T ;
• A banda disponível é a soma W = 1+β2T ;
• Segue que T = 1+β2W ;
• β é um número entre 0 e 1, inclusive, chamado fator de
roll-off e é igual a banda em excessobanda ocupada .
Figura 10.7. Diferentes valores de β
• No tempo (normalizado para que x (0) = 1):
xR C (t ) = s i n c
πt
T
.c o s
πβ t /T
1−4β 2t 2/T 2(10.17)
• Quando t =± T2β :
xR C (t ) = s i n c
π
2β
.π
4T(10.18)
• xR C (t ) decai com 1/t 3. Erro no instante de amostragemcausa ISI finita (tente demonstrar);
126

ELE32 - Introdução a Comunicações CAPÍTULO 10
• Causalidade: ainda é não causal e possui duração infi-nita.
Para canais planos em frequência:
C ( f ) =
¨
1, | f |<W ,
0, | f |>W .(10.19)
Neste caso, XR C ( f ) =GT ( f )C ( f )GR ( f ). Utilizando GR ( f ) casado comGT ( f ), tem-se que GR ( f ) =G ∗
T ( f ). Logo, XR C ( f ) = |Gt ( f )|2.Idealmente, teríamos metade do filtro no transmissor:
GT ( f ) =Æ
|XR C ( f )e x p (− j 2π f T0) (10.20)
O termo exponencial é um atraso para torná-lo causal. Esse sinal échamado de raiz de cosseno levantado XR R C ( f ) (Root Raised Cosine).Essa raiz é no domínio da frequência, não no tempo. XR R C (t ) 6= 0para t =mT , m 6= 0.Por outro lado, se o canal é conhecido e não é plano, há duas alter-nativas:
• GT ( f ) =p
XR C ( f )|C ( f )| e GR ( f ) =
p
XR C ( f ), para | f | ≤W : Toda a dis-torção é compensada no transmissor. Nesse caso, mostra-seque
d 2mi n
σ2=
2PAV G T
N0
∫ W
−W
XR C ( f )|C ( f )|2
d f
−1
.
• GT ( f ) =Ç
XR C ( f )|C ( f )| e GR ( f ) =
Ç
XR C ( f )|C ( f )| , para | f | ≤W : compensa-
ção é dividida entre transmissor e receptor. Nesse caso, tem-se
d 2mi n
σ2=
2PAV G T
N0
∫ W
−W
XR C ( f )|C ( f )|
d f
−2
.
O segundo é melhor, pois fornece um valor maior de d 2/σ2 (esse éo valor do SNR).
10.5 Equalização
O procedimento de eliminação ou minimização da ISI causada poruma canal não ideal é denominado equalização. Os equalizadoresde canal podem ser classificados em dois grupos:
• MLSE (Maximum-likelihood sequence estimation) - Estimaçãode sequência de máxima verossimilhança
• Equalização com filtros
127

CAPÍTULO 10 ELE32 - Introdução a Comunicações
10.5.1 Transformada Z
Transformada de Laplace no tempo discreto:
F (z ) =∞∑
n=−∞f [n ].z−n (10.21)
10.5.2 Projeto de equalizadores transversais
Figura 10.8. Modelo de transmissão
yn =∞∑
k=0
Ik xn−k +νn (10.22)
Nesta equação, é mais fácil desenvolver soluções se as amostras deruído forem estatisticamente independentes (isso exige que o ruídoseja branco, o que não acontece por causa de GR ( f )). Como xk = x ∗−k ,pois X ( f ) = H ( f )H ∗( f ), satisfazendo ou não Nyquist, a transfor-mada Z de xn será:
X (z ) = F (z )F ∗ 1
z ∗
(10.23)
Se tivermos x0 = 1, x1 = − j e x−1 = j , então a sua T.Z. será: X (z ) =1− j z−1+ j z .
Podemos dizer que seρ for raíz de F (z ), então1
ρ∗também será raíz.
Desta forma:
• F (z ) tem L raízes ρ1, ρ2, ..., ρL .
• F ∗
1
z ∗
tem L raízes1
ρ∗L.
1
ρ∗1,
1
ρ∗2, ...,
1
ρ∗L.
Se ρl está fora do círculo unitário,1
ρ∗lestá dentro do círculo unitá-
rio e vice-versa.
Há 2L formas de se fatorar X (z ) = F (z )F ∗ 1
z ∗
.
Uma delas faz com que F ∗ 1
z ∗
tenha todas as raízes (zeros) dentro
do círculo unitário.
128

ELE32 - Introdução a Comunicações CAPÍTULO 10
O filtro branqueador obtido usando1
F ∗ 1
z ∗
desta forma é estável,
anti-causal e de fase mínima. Ele faz com que o modelo no tempodiscreto seja:
Y (z ) = I (z )X (z ) +ν(z )⇒
Y (z ) ·1
F ∗ 1
z ∗
=
I (z ) · F (z ) · F ∗ 1
z ∗
+ν(z ) ·1
F ∗ 1
z ∗
=
I (z ) · F (z ) +η(z )
Onde temos que:
εη∗k ,ηi =
¨
2N0, s e j = k
0, c .c .
O Modelo resultante encontra-se na figura abaixo:
Figura 10.9. Máquina de estados com L memórias e M L estados,onde M é o número de valores que Ik pode assumir.
vk =L∑
j=0
Ik− j f j +ηk = Ik f0+L∑
j=1
Ik− j f j +ηk (10.24)
• Solução ótima: MLSE
– Complexidade depende de M e de M L .
• Solução subótima: utilizar equalizadores.
Modelo equivalente:
129
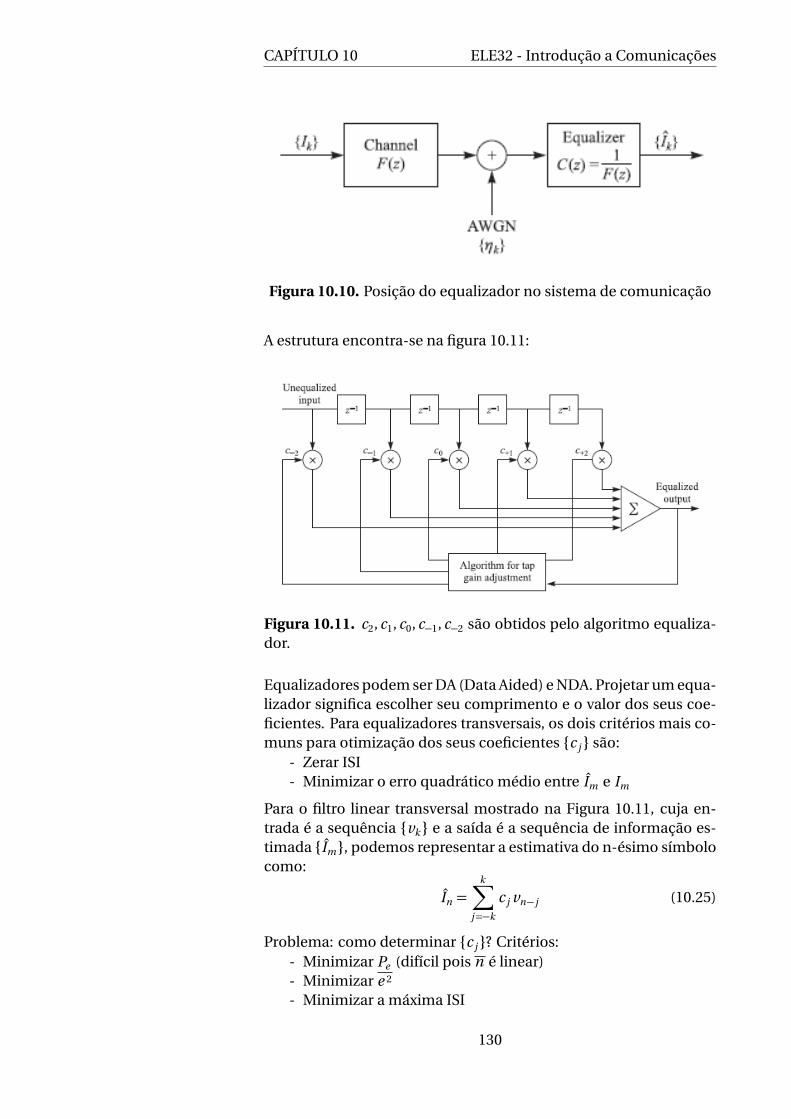
CAPÍTULO 10 ELE32 - Introdução a Comunicações
Figura 10.10. Posição do equalizador no sistema de comunicação
A estrutura encontra-se na figura 10.11:
Figura 10.11. c2, c1, c0, c−1, c−2 são obtidos pelo algoritmo equaliza-dor.
Equalizadores podem ser DA (Data Aided) e NDA. Projetar um equa-lizador significa escolher seu comprimento e o valor dos seus coe-ficientes. Para equalizadores transversais, os dois critérios mais co-muns para otimização dos seus coeficientes c j são:
- Zerar ISI- Minimizar o erro quadrático médio entre Im e Im
Para o filtro linear transversal mostrado na Figura 10.11, cuja en-trada é a sequência vk e a saída é a sequência de informação es-timada Im, podemos representar a estimativa do n-ésimo símbolocomo:
In =k∑
j=−k
c j vn− j (10.25)
Problema: como determinar c j ? Critérios:- Minimizar Pe (difícil pois n é linear)- Minimizar e 2
- Minimizar a máxima ISI
130

ELE32 - Introdução a Comunicações CAPÍTULO 10
Observa-se que o cascateamento de um filtro linear em tempo dis-creto e um equalizador, cujas respostas ao impulso são fn e cnrespectivamente, pode ser representado por um único filtro equiva-lente com resposta ao impulso dada pela convolução de F(z) comC(z):
qn =+∞∑
j=−∞
c j fn− j (10.26)
Ou seja, qn é a convolução de fn e cn. Assim, a saída do equa-lizador no n-ésimo instante de amostragem pode ser representadapor:
In = q0In +∑
j 6=k
I j qn− j ++∞∑
j=−∞
c jηn− j (10.27)
Convenção:ξI 2
n = 1 (10.28)
O primeiro termo da Equação 10.27 representa o símbolo desejado.Por conveniência, normaliza-se q0 como a unidade. O segundo termorepresenta a interefrência intersimbólica (ISI). Já o terceiro termo,representa o ruído AWGN que só passa pelo equalizador. O valor depico dessa interferência, chamada distorção de pico, é dado por:
D (C ) =∞∑
n=−∞
qn
=∞∑
n=−∞n 6=0
∞∑
j=−∞
c j fn− j
(10.29)
Assim D (C ) é uma função dos pesos dos taps do equalizador. Seo equalizador tiver comprimento infinito é possível determinar ospesos dos taps de forma que D (C ) = 0, e consequentemente qn = 0para todo n , exceto n = 0.Assim pode-se determinar os valores doscoeficientes do filtro a fim de se eliminar a interferência intersimbó-lica com base na seguinte condição:
qn =+∞∑
j=−∞
c j fn− j =
¨
1, n = 0,
0, n 6= 0.(10.30)
Tomando a transformada Z da Equação 10.30, obtém-se:
Q (z ) =C (z )F (z ) = 1 (10.31)
Ou, simplesmente, pelo equalizador Z.F.:
C (z ) =1
F (z )(10.32)
Tomando a transformada Z da Equação 10.27, obtém-se:
I (z ) =V (z )C (z )
I (z ) = [I (z )F (z ) + ”η(z )”]C (z )
131

CAPÍTULO 10 ELE32 - Introdução a Comunicações
I (z ) =Q (z )I (z ) + ”η(z )”C (z ) (10.33)
Onde C (z ) denota a transformada Z de cn. Assim, a eliminação daISI requer um equalizador com filtro cuja função transferência C (z )é dada pelo inverso do filtro linear F (z ). Esse filtro é denominadofiltro de forçagem zero.Incorporando o filtro branqueador com função transferência 1/F ∗(1/z ∗),temos um equalizador equivalente com função transferência:
C ′(z ) =1
F (z )F ∗(1/z ∗)=
1
X (z )(10.34)
O desempenho de um equalizador ideal de comprimento infinitopode ser mensurado pela SNR na sua saída. A densidade espectralde potência do ruído na saída do equalizador vale:
Sηη(w ) =N0
X (z = exp( j w T )), |w | ≤
π
T(10.35)
Consequentemente, a variância do ruído na saída do equalizadorvale:
σ2η =
T
2π
∫ π/T
−π/TSηη(w )d w =
T N0
2π
∫ π/T
−π/T
d w
X (exp( j w T ))(10.36)
Para simplificações matemáticas, a energia do sinal recebido foi nor-malizada para a unidade. Assim a relação sinal ruído para o equali-zador de forçagem zero é:
SN R =1
σ2η
= [T N0
2π
∫ π/T
−π/T
d w
X (exp( j w T ))]−1 (10.37)
No mundo real, o equalizador de forçagem zero não funciona namairoria das aplicações pelas seguintes razões:
- Mesmo que a resposta ao impulso do canal tenha comprimentofinito, a resposta ao impulso do equalizador precisa ser infini-tamente longa;
- Em algumas frequências o sinal recebido pode ser fraco (X ( f )muito pequeno). Para compensar, a magnitude do filtro deforçagem zero ("ganho") aumenta muito nesta faixa de frequên-cia. Como conseqüência, qualquer ruído adicionado após ocanal será amplificado por um fator muito grande, destruindoa relação sinal-ruído global (o filtro ZFE tenta planificar a res-posta do sistema);
- Se o canal apresentar zeros na sua resposta em frequência (X ( f ) =0 para alguma frequência) a integral da Equação 10.37 não con-verge e como consequência a relação sinal-ruído tende a 0.
A alternativa, então, é eliminar a ISI utilizando o método do erroquadrático médio mínimo: chamado de Mean-Square-Error (MSE)
132
ELE32 - Introdução a Comunicações CAPÍTULO 10
Criterion, esse método consiste em ajustar os valores dos pesos dostaps c j do equalizador para minimizar valor do erro quadráticomédio:
εk = Ik − Ik (10.38)
onde Ik é o símbolo de informação transmitido no k-ésimo intervalode sinalização e Ik é a estimativa desse símbolo na saída do equa-lizador, definido pela equação 10.25. Quando os símbolos Ik as-sumem valores complexos, o índice de performance para o critérioMSE, denotado por J , é definido como:
J = ξεk2 = ξIk − Ik2 (10.39)
Considerando o equalizador com um número infinito de taps, a es-timativa Ik é expressa como:
Ik =∞∑
j=−∞
c j vk− j (10.40)
Para encontrar o valor ótimo, utilizamos o princípio de ortogonali-dade do erro em estimação, ao selecionar os coeficientes c j quegeram erro εk ortogonal à sequência de sinal v ∗k−l , para −∞< l <∞. Com isso:
ξ
εk v ∗k−l
= 0, −∞< l <∞ (10.41)
Substituindo εk da equação 10.41 pelo da equação 10.39, temos:
ξ
(
Ik −∞∑
j=−∞
c j vk− j
!
v ∗k−l
)
= 0 (10.42)
ou seja:
∞∑
j=−∞
c jξ
vk− j v ∗k−l
= ξ
Ik v ∗k−l
(10.43)
Temos ξ
vk− j v ∗k−l
=
∑Ln=0
f ∗n fn+l− j
+N0δl j . Usando ξ
|Ik |2
= 1:
ξ
vk− j v ∗k−l
=
¨
xl− j +N0δl j , |l − j | ≤ L ,
0, caso contrário(10.44)
e também
ξ
Ik v ∗k−l
=
¨
f ∗−l , −L ≤ l ≤ 0,
0, caso contrário(10.45)
Substituindo as equações 10.44 e 10.45 em 10.43 e aplicando a trans-formada z nos dois lados da equação, obtém-se:
C (z ) [F (z )F ∗ (1/z ∗)+N0] = F ∗ (1/z ∗) (10.46)
133

CAPÍTULO 10 ELE32 - Introdução a Comunicações
Com isso, a função de transferência do equalizador baseado no cri-tério MSE fica:
C (z ) =F ∗ (1/z ∗)
F (z )F ∗ (1/z ∗)+N0(10.47)
Incorporando um filtro branqueador, obtém-se um equalizador equi-valente com função de trannferência:
C ′(z ) =1
F (z )F ∗ (1/z ∗)+N0=
1
X (z ) +N0(10.48)
134

CAPÍTULO 11
Sistemas com múltiplos usuários
Em um sistema de transmissão de informações qualquer, é inefici-ente reservar recursos (como Banda de Transmissão W, Tempo deTransmissão T e Potência de Transmissão P) para um único usuárioque não utiliza o sistema o tempo todo. A solução óbvia é compar-tilhar tais recursos entre os usuários.O objetivo desse capítulo é analisar os sistemas de comunicação paramúltiplos usuários e links, como alternativa para os sistemas de co-municação ponto a ponto de um usuário apenas. Além disso sãodescritos os métodos de acesso desses múltiplos usuários através deum canal comum para transmissão de informação.
Figura 11.1. Sistema de acesso múltiplo
11.1 Métodos de compartilhamento
Nesse curso, serão estudados
• FDMA (Frequency-Division Multiple Access)
• TDMA (Time-Division Multiple Access)
• CDMA (Code-Division Multiple Access)
• SIC (Sequential Interference Cancellation)
135

CAPÍTULO 11 ELE32 - Introdução a Comunicações
11.2 Tipos de sistema de comunicação múl-tipla
Existem diferentes topologias para sistemas com múltiplos usuários:broadcast, Figura 11.2, uma mensagem única transmitida para vá-rios receptores;
Figura 11.2. Topologia Broadcast
multicast, Figura 11.3, mensagens diferentes para cada receptor;
Figura 11.3. Topologia Multicast
multiple access channel, Figura 11.4, vários transmissores para umreceptor recebendo diferentes mensagens);
Figura 11.4. Topologia Multiple Access Channel
e interference channel, interferência de sinal entre transmissores ereceptores.
136

ELE32 - Introdução a Comunicações CAPÍTULO 11
Figura 11.5. Topologia Interference Channel
Dentro de um sistema de acesso múltiplo, o envio de informaçãopara o canal de comuniação com o receptor pode ser por mais deum método possível, destacando-se o FDMA, TDMA e o CDMA.
Figura 11.6. Subdivisão do canal em bandas de frequências que nãose intersectam - FDMA
O método mais simples, FDMA - frequency-division multiple access- é realizado a partir da divisão da largura de banda em um valorK, em subcanais de frequências diferentes, sem que haja sobreposi-ção. O TDMA - time-division multiple access - é utilizado a partir dasubdivisão do período Tf (frame duration) em K intervalos de tempo
de duraçãoTf
K para cada usuário que deseja transmitir informação.O FDMA e TDMA, portanto, são métodos de partição de canal emsubcanais independentes para cada usuário. Por último, o CDMA -code-division multiple access - os usuários tem acesso aleatório acanal, ocorrendo superposições de transmissão de sinais em tempoe frequência. Nesse método, cada usuário possui uma assinaturapara que o receptor possa identificar o transmissor da mensagem.
11.3 Capacidade em métodos de acesso múl-tiplo
A capacidade do canal ideal de banda limitada AWGN para um únicousuário corresponde a :
C =1
2l o g2
1+P
N
(11.1)
137

CAPÍTULO 11 ELE32 - Introdução a Comunicações
onde C é a capacidade em bits por segundo, W é a largura de banda,P, a potência do sinal. Sendo N0
2 a densidade espectral de potênciado ruído, define-se N tal que:
N = 2
∫
f0+W2
f0−W2
N0
2df=W N0 (11.2)
Como há 2W amostras/segundo, logo:
C = 2W1
2l o g2
1+P
N
=W l o g2
1+P
N
(11.3)
Na análise de capacidade de um sistema de acesso múltiplo, os usuá-rios podem ser encarados como dimensões em um "espaço de ta-xas", ou seja, para um sistema com ’U’ usuários, cada indivíduo i ,1 ≤ i ≤ U , possui uma taxa de transmissão Ri associada, dada embits por segundo.Além disso, para todos os agrupamentos de usuários possíveis, o Te-orema de Shannon-Hartley deve ser respeitado, ou seja, em geral,tem-se:
U∑
k=1
Rk <W log2
1+1
N
U∑
k=1
Pk
(11.4)
Tais restrições no "espaço de taxas"geram uma região S onde os pon-tos (R1, R2, ..., RU ) pertencentes à S são tais que é possível transmitira informação com uma probabilidade de erro arbitrariamente pe-quena na recepção.
Exemplo 11.1. Dois usuários
Para o caso com dois usuários, ocorrem os dois limites:
R1 ≤C1 =W l o g2
1+P1
N
R2 ≤C2 =W l o g2
1+P2
N
A soma das taxas então corresponde a:
R1+R2 ≤C =W l o g2
1+P1+P2
N
A região de capacidade, nesse exemplo, é dada pela Figura 11.7
138

ELE32 - Introdução a Comunicações CAPÍTULO 11
Figura 11.7. Região S em um espaço de taxas de 2 usuários"
Exemplo 11.2. Três usuários
Para o caso com três usuários, ocorrem os dois limites:
R1 ≤C1 =W l o g2
1+P1
N
R2 ≤C2 =W l o g2
1+P2
N
R3 ≤C3 =W l o g2
1+P3
N
A soma das taxas então corresponde a:
R1+R2 ≤C =W l o g2
1+P1+P2
N
R1+R3 ≤C =W l o g2
1+P1+P3
N
R2+R3 ≤C =W l o g2
1+P2+P3
N
A região de capacidade, nesse caso, é dada pela Figura 11.8
139
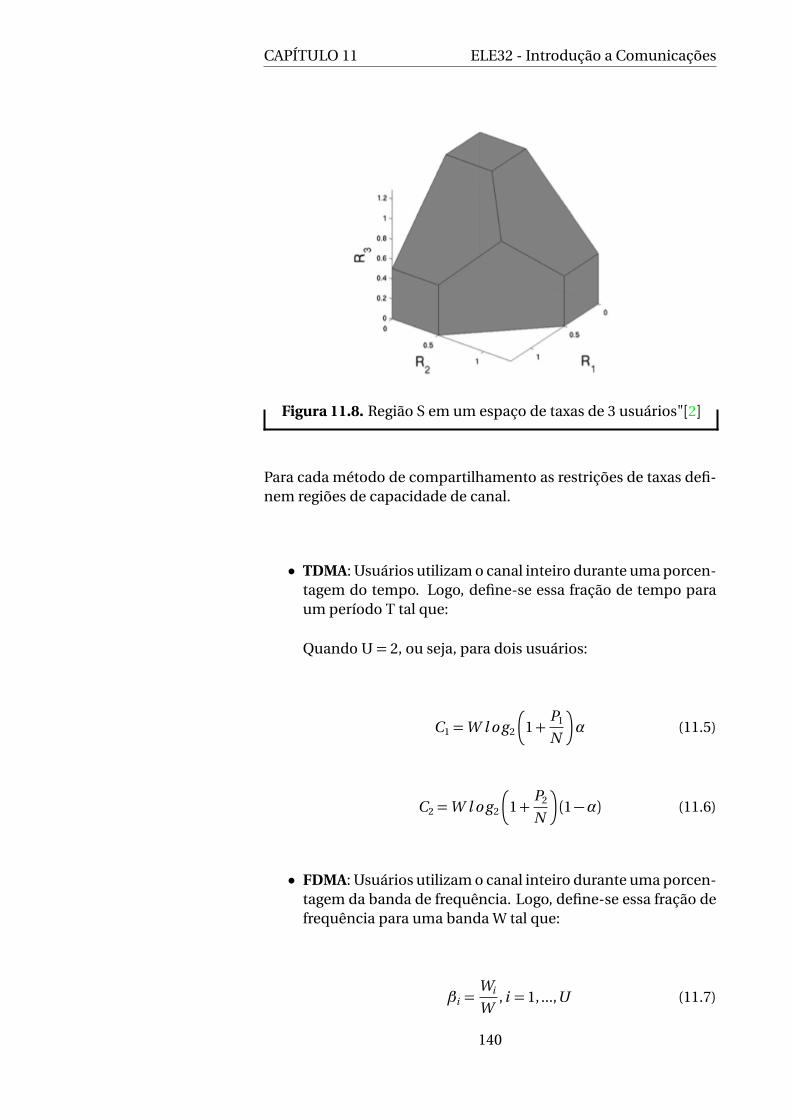
CAPÍTULO 11 ELE32 - Introdução a Comunicações
Figura 11.8. Região S em um espaço de taxas de 3 usuários"[2]
Para cada método de compartilhamento as restrições de taxas defi-nem regiões de capacidade de canal.
• TDMA: Usuários utilizam o canal inteiro durante uma porcen-tagem do tempo. Logo, define-se essa fração de tempo paraum período T tal que:
Quando U = 2, ou seja, para dois usuários:
C1 =W l o g2
1+P1
N
α (11.5)
C2 =W l o g2
1+P2
N
(1−α) (11.6)
• FDMA: Usuários utilizam o canal inteiro durante uma porcen-tagem da banda de frequência. Logo, define-se essa fração defrequência para uma banda W tal que:
βi =Wi
W, i = 1, ...,U (11.7)
140

ELE32 - Introdução a Comunicações CAPÍTULO 11
Figura 11.9. Esquema da divisão do canal FDMA
Nesse caso cada usuário irá ter uma percepção diferente doruído, tal que:
Ni = 2
∫ fi−1+Wi
fi−1
N0
2d f =Wi N0 =Nβi (11.8)
Onde fi−1 equivale à frequência inicial da banda do usuário i,tal que
fi =i∑
j=1
Wj + f0 (11.9)
Logo, a restrição sobre a taxa de cada usuário é:
Ri ≤βi W l o g2
1+P
N βi
(11.10)
E, portanto:
Cs o ma =u∑
i=1
βi W l o g2
1+P
Nβi
(11.11)
Supondo distribuição uniforme,
βi =1
U,∀i (11.12)
E neste caso,
Cs o ma =W l o g2
1+U P
N
(11.13)
Logo, o aumento de U implica o aumento da Capacidade dasoma.
141

CAPÍTULO 11 ELE32 - Introdução a Comunicações
Analisando-se a capacidade de canal para cada usuário:
Ci =W
Ul o g2
1+U P
N
(11.14)
observa-se que o aumento de U implica a diminuição da ca-pacidade individual
Figura 11.10. Capacidade total por Hz para acesso múltiplo FDMA
Para o aumento do número u de usuários, a capacidade Cs o ma
aumenta e Ci diminui.
Na situação em que u= 2, ou seja, há dois usuários, as capaci-dades de canal para cada usuário são definidas por:
C1 =βW l o g2
1+P
Nβ
(11.15)
C2 = (1−β )W l o g2
1+P
N (1−β )
(11.16)
Além disso, para o caso particular em que a banda é equiva-lente para os dois usuários, β é 1
2 , C1 e C2 são equivalentes a12 W l o g2
1+ 2uPN
.
Para o FDMA não é necessária a sincronização, os usuáriospodem transmitir ininterruptamente. Porém, quanto maior onúmero de usuários, menor a capacidade individual, tal qualo TDMA.
142

ELE32 - Introdução a Comunicações CAPÍTULO 11
Exemplo 11.3.
Dois usuários, com potências P1 e P2, respectivamente, di-videm uma banda de largura W. Qual a divisão deve serfeita, utilizando o modelo FDMA, de forma que a capaci-dade soma do canal atinja o maior valor possível?
Fazendo α1 =α e α2 = 1−α, temos:
C1 =αW l o g2
1+P1
N0W α
C2 = (1−α)W l o g2
1+P2
N0W (1−α)
Cs =C1+C2
Derivando Cs em relação à alpha:
d Cs
dα= 0
logo
W l o g2
1+P1
N0W α
−P1
N0W α ln(2)
1+P1
N0W α
−W l o g2
1+P2
N0W (1−α)
+P2
N0W (1−α) ln(2)
1+P2
N0W (1−α)
= 0
ln
1+P1
N0W α
−P1
N0W α
1+P1
N0W α
= ln
1+P2
N0W (1−α)
−P2
N0W (1−α)
1+P2
N0W (1−α)
Estudando a função f (x ) = ln(1+ kx )−
kx (1+
kx ), x > 0:
d f (x )d x
< 0,∀x > 0(é monotona e decrescente)
limx→0
f (x ) = +∞ e limx→+∞
f (x ) = 0(é sempre positiva)
Assim, para que f (x1) = f (x2) seja válida, devemos ter x1 =x2:
f
α
k1
= f
1−αk2
143

CAPÍTULO 11 ELE32 - Introdução a Comunicações
com k1 =P1
N0W e k2 =P2
N0W
α
k1=(1−α)
k2
α
1
k1+
1
k2
=1
k2
α=k1
k1+k2=
P1
P1+P2
Assim, a banda deve ser dividida de forma proporcional àspotências dos usuários.
Observação: Quando αi =Pi∑
Pi, temos:
Ci =αi W log2(1+Pi
NPi∑
Pi
)
Ci =αi W log2(1+∑
Pi
N )
logo a capacidade da soma será:
Cs =∑
Ci =W log2(1+∑
Pi
N
esse valor será um ponto da fronteira da região de capacidade.
• CDMA: Cada usuário possui um código diferente para trans-missão através de uma largura de banda comum de um canal.Existem o DS- CDMA (direct sequence) e o FH - CDMA (fre-quency hoping).
Figura 11.11. Esquema da divisão do canal CDMA
DS-CDMA: Nesse caso, não existe nenhum tipo de cooperaçãoentre os usuários que utilizam o canal. Dessa forma, o recep-tor de um transmissor ignora os outros transmissores no pro-cesso de demodulação. Assim, os sinais dos outros usuáriosaparecem como interferência no receptor de cada usuário.
144

ELE32 - Introdução a Comunicações CAPÍTULO 11
Portanto, o receptor multiusuário consiste em um banco deK filtros de mono-usuário combinados. Se assumirmos quea forma de onda do sinal de cada usuário é gaussiana, entãocada sinal de usuário é corrompido por interferência gaussi-ana de potência (K −1)P e por um ruído gaussiano de variân-cia N0
2 . Portanto, a capacidade por usuário para a detecção deum único usuário é
Ck =W l o g2
1+P
W No + (K −1)P
(11.17)
De forma equivalente, tem-se que
Ck
W≤
Ck
W
ξbN0
1+K
CkW
ξbN0
l o g2(e ) (11.18)
A capacidade total não aumenta com K como para o TDMA eFDMA.
Figura 11.12. Capacidade normalizada como ξbN0
para o DS-CDMA
Supondo, agora, que há cooperação total entre os usuários queutilizam o canal, a taxa para os K usuários, em um canal AWGN,assumindo igual potência para cada usuário, é dada pelas se-guintes equações:
Ri ≤W l o g2
1+P
W N0
, 1≤ i ≤ K (11.19)
Ri +R j ≤W l o g2
1+2P
W N0
, 1≤ i , j ≤ K (11.20)
145

CAPÍTULO 11 ELE32 - Introdução a Comunicações
K∑
i=1
Ri ≤W l o g2
1+K P
W N0
, i ≤ K (11.21)
(INSERIR UM EXEMPLO DE APLICAÇÃO)
• SIC:
O Cancelamento de Interferência - Sequential Interference Can-celation (SIC) é uma otimização do CDMA, na qual é possí-vel excluir, de forma gradual, a interferência que um usuáriocausa no outro.
Supondo r =m1+m2+η , onde:
m1=mensagem do usuário 1, cuja potência é P1 m2=mensa-gem do usuário 2, cuja potência é P2 η= AW G N , N0
2
É possível receber m1, tratando como interferência m2. Assim:
C1 =W l o g2
1+P1
P2+N
(11.22)
Se R1 <C1, podemos transmitir m1, com probabilidade de errotão baixa quanto desejado. Assim, saberíamos corretamentem1.
Dessa forma, teríamos que m2 : r ′ = r −m1 =m2+η
Logo:
C2 =W l o g2
1+P2
N
>W l o g2
1+P2
N +P1
(11.23)
O termo mais à direita representa a capacidade sem removera interferência.
Assim:
C1+C2 =W l o g2
P2+N +P1
P2+N)(
N +P2
N
=W l o g2
1+P1+P2
N
(11.24)Dessa forma, o par (C1,C2) está no vértice do pentágono da re-gião de capacidade, ilustrado na Figura ??.
- Invertendo a ordem de recepção, recebendo primeiro m2 ecancelando a sua interferência em m1, atingiria-se o outro vér-tice.
- Alternando a ordem de recepção, recebendo parte de um si-nal e cancelando essa interferência nos outros sinais, é possí-vel atingir qualquer ponto do segmento Cs =W l o g2
1+ P1+P2N
146
ELE32 - Introdução a Comunicações CAPÍTULO 11
- Para U usuários:
C S I CS =
U∑
i=1
W l o g2
1+Pi
∑Uj=i+1 Pj +N
= (11.25)
Dado um usuário i, i <U
Ci =W l o g2
1+Pi
∑i−1j=i Pj +N
!
(11.26)
Exemplo 11.4.
- Rate Spliting: 1 usuário real dividido em 2 usuários virtu-ais. Usuário 1: P1 Usuário 2: P2
No exemplo, o usuário 1 é dividido em dois usuários virtu-ais (usuário 1’ e usuário 1”): Usuário 1’: αP1 Usuário 2: P2
Usuário 1”: (1−α)P1
Objetivo: Ambos os usuários terem a mesma taxa total.Método: Potência do usuário 1 é dividida em 2 usuáriosvirtuais. Faz-se P1 = P2 = P
Taxa total do usuário 1:
C1 =W l o g2
1+Pα
N +P (1−α) +P
+W l o g2
1+P (1−α)
N
(11.27)Taxa total do usuário 2:
C2 =W l o g2
1+P
N +P (1−α)
(11.28)
Queremos que C1=C2 , isto é:
1+Pα
N +P (2−α)
1+P (1−α)
N
=
1+P
N +P (1−α)
(11.29)
temos que: 2Pα2− (4P +N )α+ (2P −N ) = 0
portanto:
α=(N +4P )±
p
(−N −4P )2−8P (2P −N )4P
paraP 6= 0
.
147
REFERÊNCIAS
[1] SHANNON, C. E., A Mathematical Theory of Communication. The Bell SystemTechnical Journal, Cambridge, v. 27, pp. 379–423, 623–656, jul/out, 1948
[2] CHAABAN, Anas. SEZGIN, Aydin. The Capacity Region of the 3-User Gaus-sian Interference Channel with Mixed Strong-Very Strong Interference. Cor-nell University. v1, 2010.
[3] PROAKIS, John G. Digital Communications. McGraw-Hill Higher Education.5ed, 2008.
148