análise da dinâmica de um rotor de jeffcott com selo...
TRANSCRIPT

ANÁLISE DA DINÂMICA DE UM ROTOR DE JEFFCOTT COM SELO
INTERNO
João Rego Monteiro Barreto
Projeto de Graduação apresentado ao Curso
de Engenharia Mecânica da Escola Politécnica,
Universidade Federal do Rio de Janeiro, como
parte dos requisitos necessários à obtenção do
título de Engenheiro.
Orientador: Thiago Ritto
Rio de Janeiro
Abril de 2016

UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
Departamento de Engenharia Mecânica
DEM/POLI/UFRJ
ANÁLISE DA DINÂMICA DE UM ROTOR DE JEFFCOTT COM SELO
INTERNO
João Rego Monteiro Barreto
PROJETO DE GRADUAÇÃO SUBMETIDO AO CORPO DOCENTE DO
CURSO DE ENGENHARIA MECÂNICA DA ESCOLA POLITÉCNICA
DA UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COMO PARTE
DOS REQUISITOS NECESSÁRIOS PARA A OBTENÇÃO DO GRAU DE
ENGENHEIRO MECÂNICO.
Aprovada por:
Prof. Thiago Ritto,
Prof. Marcelo Savi,
Prof. Gustavo Bodstein,
RIO DE JANEIRO, RJ BRASIL
ABRIL DE 2016

Rego Monteiro Barreto, João
Análise da Dinâmica de um Rotor de Jecott com Selo
Interno/ João Rego Monteiro Barreto. Rio de Janeiro:
UFRJ/Escola Politécnica, 2016.
XII, 63 p.: il.; 29, 7cm.
Orientador: Thiago Ritto
Projeto de Graduação UFRJ/ Escola Politécnica/
Curso de Engenharia Mecânica, 2016.
Referências Bibliográcas: p. 54 55.
1. Selos. 2. Jecott. 3. Análise Dinâmica. I. Ritto,
Thiago. II. Universidade Federal do Rio de Janeiro, UFRJ,
Curso de Engenharia Mecânica. III. Análise da Dinâmica
de um Rotor de Jecott com Selo Interno.
iii

A meus pais.
iv

Agradecimentos
Agradeço aos meus amigos que me ajudaram a cada passo nesse caminho educacio-
nal.
Ao professor Thiago Ritto pela orientação ao longo de todo o projeto.
v

Resumo da Projeto apresentada à COPPE/UFRJ como parte dos requisitos
necessários para a obtenção do grau de Engenheiro em Ciências (M.Sc.)
ANÁLISE DA DINÂMICA DE UM ROTOR DE JEFFCOTT COM SELO
INTERNO
João Rego Monteiro Barreto
Abril/2016
Orientador: Thiago Ritto
Programa: Engenharia Mecânica
Com o intuito de prever instabilidades no sistema ou encontrar falhas em sua
utilização, esse projeto tem como objetivo fazer essa análise da dinâmica do sistema
através de simulações numéricas. Conseguindo mapear o comportamento dinâmico
de uma máquina rotativa quando considerados os selos no conjunto em um modelo
global com variações de temperatura e pressão nos permite ter uma análise mais
completa do conjunto, podendo ser aplicado a condições diversas. Essa análise nos
mostrará a amplitude de vibração do sistema quando adicionados os selos, além da
variação das constantes dos selos com a alteração de diversos parâmetros. Veremos
como o sistema reage a mudanças de rotação, e veremos as diferentes frequências
naturais encontrados com diferentes comprimentos do eixo do sistema. Palavras-
chave: Máquinas rotativas, Selos, simulações numéricas, Vibração.
vi

Abstract of Project presented to COPPE/UFRJ as a partial fulllment of the
requirements for the degree of Engineer of Science (M.Sc.)
ANALYSIS OF THE DYNAMICS OF A JEFFCOTT ROTOR WITH AN
INTERNAL SEAL
João Rego Monteiro Barreto
April/2016
Advisor: Thiago Ritto
Department: Mechanical Engineering
In order to predict instabilities in the system or nd fault with their use, this
project aims to make this system dynamics analysis through numerical simulations.
Mapping the dynamic behavior of a rotating machine when considering the ow
seals as a whole on a global model with temperature and pressure variations allows
us to have a more complete analysis of the whole, which can be applied to various
conditions. This analysis will show the amplitude of the system's vibration with
the seals, and also how the constants of the seal vary with the variation of dier-
ent parameters. We will see how the system reacts to dierent rotational speeds,
and the dierent natural frequencies found with variating axial lengths. Keywords :
Rotordynamics, Seals, Numerical simulations, Vibration.
vii

Sumário
Lista de Figuras x
Lista de Tabelas xii
1 Introdução 1
1.1 Objetivo do Trabalho . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2 Revisão Bibliográca . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.3 Organização do Estudo . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2 Selos 6
2.1 Selos Labirinto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.1.1 Tipos de Selos Labirinto . . . . . . . . . . . . . . . . . . . . . 6
2.2 Selos Damper . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.2.1 Selo Colmeia . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.2.2 Pocket Damper Seal (PDS) . . . . . . . . . . . . . . . . . . . 9
2.3 Selo de Cerdas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.4 Freio de Turbulência . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
3 Modelo Matemático 13
3.1 Rotor de Jecott . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3.2 Hipóteses . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3.3 Cinemática e Equações de Movimento . . . . . . . . . . . . . . . . . . 15
3.4 Equações de Força Dinâmica do Selo . . . . . . . . . . . . . . . . . . 17
3.5 Estimativa dos Coecientes Dinâmicos dos Selos . . . . . . . . . . . . 17
3.6 Cálculo da Resposta do Sistema . . . . . . . . . . . . . . . . . . . . . 20
viii

4 Simulações e Análises Numéricas 22
4.1 Dados Iniciais do Rotor de Jecott . . . . . . . . . . . . . . . . . . . 23
4.2 Comportamento dos Coecientes do Selo . . . . . . . . . . . . . . . . 25
4.3 Análise do Rotor de Jecott . . . . . . . . . . . . . . . . . . . . . . . 43
5 Conclusões e Trabalhos Futuros 52
Referências Bibliográcas 54
ix

Lista de Figuras
1.1 Detalhamento de uma máquina rotativa, [18] . . . . . . . . . . . . . . 2
2.1 Exemplo de Selo Labirinto [16] . . . . . . . . . . . . . . . . . . . . . . 7
2.2 Exemplo de Selo de Intertravamento . . . . . . . . . . . . . . . . . . 8
2.3 Exemplo de selo colmeia [20] . . . . . . . . . . . . . . . . . . . . . . . 9
2.4 Exemplo de PDS Convencional [11] . . . . . . . . . . . . . . . . . . . 10
2.5 Exemplo de PDS Totalmente Dividido [11] . . . . . . . . . . . . . . . 11
2.6 Exemplo de Selo de Cerdas [19] . . . . . . . . . . . . . . . . . . . . . 11
3.1 Precessão Direta e Inversa [15] . . . . . . . . . . . . . . . . . . . . . . 13
3.2 Rotor de Jecott [15] . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3.3 (a) Precessão Síncrona e (b) Precessão Não-Síncrona [15] . . . . . . . 15
3.4 Movimento de Precessão realizada pelo Rotor de Jecott [15] . . . . . 16
3.5 Anel com uido entre parte rotativa e parte estática para a análise
da lubricação turbulenta [7] . . . . . . . . . . . . . . . . . . . . . . . 18
4.1 Variação da rigidez direta kd do selo com a rotação . . . . . . . . . . 25
4.2 Variação da rigidez direta kc do selo com a rotação . . . . . . . . . . 26
4.3 Variação da rigidez direta cd do selo com a rotação . . . . . . . . . . 27
4.4 Variação da rigidez direta cc do selo com a rotação . . . . . . . . . . 28
4.5 Variação da rigidez direta kd do selo com a variação do comprimento
do selo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
4.6 Variação da rigidez direta kc do selo com a variação do comprimento
do selo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
4.7 Variação da rigidez direta cd do selo com a variação do comprimento
do selo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
x

4.8 Variação da rigidez direta cc do selo com a variação do comprimento
do selo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
4.9 Variação da rigidez direta kd do selo com a variação de pressão . . . . 37
4.10 Variação da rigidez direta kc do selo com a variação da pressão . . . . 38
4.11 Variação da rigidez direta cd do selo com a variação da pressão . . . . 38
4.12 Variação da rigidez direta cc do selo com a variação da pressão . . . . 39
4.13 Variação da rigidez direta kd do selo com a variação de folga . . . . . 41
4.14 Variação da rigidez direta kc do selo com a variação da Folga . . . . . 41
4.15 Variação da rigidez direta cd do selo com a variação da folga . . . . . 42
4.16 Variação da rigidez direta cc do selo com a variação da folga . . . . . 42
4.17 Deslocamento do eixo em função da rotação para 3 comprimentos de
eixo diferentes, sem o selo. . . . . . . . . . . . . . . . . . . . . . . . . 43
4.18 Valores experimentais das constantes do selo encontrados em [14] . . 45
4.19 Deslocamento do eixo em função da rotação para 3 comprimentos de
eixo diferentes, com o selo. . . . . . . . . . . . . . . . . . . . . . . . . 46
4.20 Deslocamento do eixo em função da rotação sem o selo, com o selo,
apenas com a constante "kc"e apenas com "kd". . . . . . . . . . . . . 48
4.21 Amplitude do movimento do eixo em função do tempo. . . . . . . . . 50
4.22 Deslocamento do centro geométrico do disco, sem a presença dos selos. 51
xi

Lista de Tabelas
4.1 Dados do Rotor de Jecott . . . . . . . . . . . . . . . . . . . . . . . . 23
xii

Capítulo 1
Introdução
Máquinas rotativas estão presentes em diversos aspectos de nossas vidas no
mundo moderno. Essas máquinas se encontram no sistema d'água do prédio para
bombear água aos apartamentos, no sistema de refrigeração do ar-condicionado ou
da geladeira. Por conta disso, existe um foco muito grande em aumentar a eciência
de máquinas rotativas, já que uma maior eciência implica um consumo menor de
energia para realizar o mesmo trabalho.
Os selos são essenciais no funcionamento de máquinas rotativas de grande
e médio porte, pois são utilizadas para controlar o vazamento do uido de traba-
lho e exercem uma inuência signicativa na dinâmica das máquinas rotativas de
uxo devido à queda de pressão entre a entrada e saída do selo. Essa inuência é
representada no modelo matemático do sistema através de coecientes dinâmicos de
rigidez, amortecimento e inércia. Nesse projeto, o selo estudado será o selo labirinto,
que possui espaçamentos que geram turbulências no uido, dicultando sua passa-
gem. O modelo desse selo especíco, porém, é a mesma para qualquer tipo de selo.
A Figura 1.1 mostra um exemplo de uma máquina rotativa com seus componentes
detalhados.
1

Figura 1.1: Detalhamento de uma máquina rotativa, [18]
1.1 Objetivo do Trabalho
O presente trabalho tem como objetivo principal a análise da resposta dinâmica
de uma máquina rotativa, quando adicionado um selo ao sistema global em condi-
ções pré-determinadas de temperatura e pressão. A máquina rotativa é analisada
considerando o modelo do rotor de Jecott.
Esse estudo irá analisar as constantes do selo e como elas são afetadas pela
variação de diversos parâmetros, incluindo a folga entre o selo e o eixo, pressão,
comprimento do selo. Veremos gracamente como essa variação se dá, seja ex-
ponencialmente, linearmente, ou inexistente. Faremos a comparação dos valores
encontrados em ordem de grandeza com os valores experimentais que temos em [14].
Veremos também como o sistema se porta sem a presença do selo, para
depois compará-lo ao sistema com o selo. Esse contraste facilitará a visualização
das diferenças geradas pela presença do selo no sistema.
Por m, veremos como se move o sistema em regime transiente, além da
movimentação do centro geométrico do disco apenas com a resposta particular da
equação.
1.2 Revisão Bibliográca
O primeiro estudo a respeito dos selos mecânicos foi feito por Lomakin (1958).
Através dele, foi descoberto a força centralizadora que é produzida quando há um
uxo radial de uido passando entre um componente rotativo e outro estacionário.
Como o eixo central não está preso, o uido passa livremente em sua volta. O eixo,
porém, tende a gerar uma excentricidade, ou seja, é gerado folgas diferentes em
cada lado da passagem de uxo. Com essa folga maior, há mais uido passando,
2

resultando em uma pressão menor. Já no outro lado, com uma menor folga e me-
nos uido passando, a pressão aumenta. Essa diferença de pressão cria uma força
direcionada ao centro geométrico inicial do eixo. Essa força gerada pela distribuição
de pressão ao longo do eixo é conhecida como rigidez radial, ou "Efeito Lomakin".
Esse efeito é descrito no livro de Maurice L. Adams, Jr. [1].
Black (1969) [4] supos que o deslocamento do eixo não ocorre ao redor do
ponto de equilíbrio incial do eixo. Sendo assim, as forças de restituição são criadas
por componentes de inércia e amortecimento, além da rigidez. Com essas hipóteses,
foi desenvolvido um modelo linear para a obtenção das forças em selos curtos.
Hirs (1973) [12] se aprofundou no assunto utilizando a pesquisa de Black
(1969), teorizando um modelo de cálculo da tensão cisalhante de um líquido em
relação à sua velocidade. Esse estudo pode ser utilizado no escoamento do líquido
entre o eixo de rotação e o selo mecânico para melhor compreender o comportamento
do mesmo.
Utilizando o estudo de Hirs (1973), Childs (1983) [7] constrói equações bá-
sicas para o cálculo dos coecientes do selo. Essas fórmulas serão a base para nosso
estudo.
Benckert e Wachter (1980) [3] se aprofundaram nos coecientes de rigidez
dos selos labirintos na dinâmica dos rotores.
Joseph K. Scharrer e Joseph M. Pelletti (1995) [16] estudaram as diferenças
entre os diferentes tipos de selos labirinto, "honeycomb", entre outros, analisando
a rigidez e o amortecimento em função da folga de cada selo, além da análise do
"whirl"apresentado por cada tipo de selo em função da pressão dada pela máquina
rotativa.
R. Nordmann (1987) [14] nos dá as fórmulas teóricas para o cálculo dos co-
ecientes dos selos mecânicos: inércia, rigidez e amortecimento. Para os uidos que
serão utilizados nesse experimento (ár ambiente, CO2 e NO2), podemos desprezar os
efeitos da inércia no sistema. Essas fórmulas serão utilizadas para o cálculos diretos
dos valores dos coecientes.
Para a caracterização dos diferentes tipos de selos, Childs [6] faz um es-
tudo importante a respeito de alterações que podem ser feitas para melhorarem o
desempenho dos selos.
3
Eldin (2007) [11] explica a diferença entre diversos tipos de selos labirinto
em seu artigo .
Childs e Vance [8] escreveram sobre os diferentes tipos de selos, e quais
são os efeitos de utilizar selos diferentes nas máquinas rotativas. Através desse
estudo, foi possível constatar que as forças desestabilizadoras desenvolvidas nos selos
labirinto são causadas pela rotação do uido dentro do selo. Essa rotação que surge
é proveniente ou da pré-rotação do mesmo ou pelas forças cisalhantes encontradas
nas paredes internas do selo.
Bruno Dutra (2015) [10] detalhou e equacionou o funcionamento do rotor de
Jecott, que será utilizado como base para o estudo dinâmico dos efeitos dos selos
em uma máquina rotativa.
Continuando o trabalho da Daniela Camara [13], o trabalho visa analisar
o sistema com os parâmetros do rotor de Jecott utilizado no laboratório. Além
disso, são utilizadas as equações de Nordmann [14], além dos dados experimentais
do mesmo. Por m, as últimas análises das resposta dinâmicas do sistema são
distintas das análises realizadas em [13].
1.3 Organização do Estudo
No primeiro capítulo, é feito uma abordagem geral do trabalho realizado e citado
publicações e estudos já publicados sobre os componentes e sistemas em questão ao
longo do tempo.
O segundo capítulo apresenta informações a respeito dos diferentes tipos
de selos, mais especicamente sobre os selos labirinto. Essa análise constituirá na
comparação dos diferentes tipos de selos labirinto, além das vantagens e desvanta-
gens de cada um. Será comentado algumas normas que são necessárias seguirem,
dependendo do ramo em que a máquina rotativa será utilizada.
O capítulo 3 descreve o funcionamento do rotor de Jecott, modelo que
será utilizado como base para o estudo da dinâmica das máquinas rotativas quando
adicionado o selo. Esse tipo de rotor é a representação mais simples de uma máquina
rotativa, utilizada com o intuito de facilitar as simulações feitas. Nesse capítulo, é
realizado também um detalhamento da estimativa dos coecientes dinâmicos de um
4

selo à partir das equações de Nordmann.
No capítulo 4, aplicamos os coecientes encontrados no capítulo anterior
no modelo de Jecott, gerando assim os resultados desejados para a análise. Além
disso, é aplicado os mesmos valores dos coecientes em um programa baseado em
elementos nitos para uma representação mais verídica da dinâmica das máquinas
rotativas quando acoplado um selo.
5

Capítulo 2
Selos
Selos são elementos de máquina cuja principal função é reduzir ao máximo o
vazamento em equipamentos rotativos. O selo deve controlar esse uxo de vaza-
mento entre uma parte estacionária e outra rotativa do equipamento, com certa
conabilidade e vida útil. A criticidade desse elemento depende da importância do
equipamento rotativo na cadeia produtiva e qual produto está sendo transportado
pelo equipamento.
2.1 Selos Labirinto
Dentre os selos existentes, temos os selos labirinto. Os selos labirinto foram
uma das primeiras congurações de selos utilizadas em turbo-máquinas modernas.
São, também, os mais utilizados atualmente. Ele funciona através de depressões no
selo com obstáculos, gerando quedas de pressão que desaceleram o uido. A Fig.
2.1 mostra um exemplo clássico de selo labirinto. No caso abaixo, o selo se encontra
xado à parte estacionária do rotor.
2.1.1 Tipos de Selos Labirinto
Os selos labirinto possuem diversas variações em sua geometria, como uma an-
gulação mais acentuada, tamanho dos dentes do selo variável, selo de intertrava-
mento, ou até a xação na parte móvel ou estática do rotor. Cada alteração dessas
afeta a dinâmica do sistema em diferentes formas, modicando o amortecimento
e/ou a rigidez que o selo impõe sobre a máquina rotativa.
6

Figura 2.1: Exemplo de Selo Labirinto [16]
Selo Labirinto "Transparente"
O selo labirinto "transparente", ou See-Through Labyrinth Seal, é o tipo mais
básico dos selos labirinto. Ele é feito com apenas uma seção de "dentes"que pode
ser acoplada na parte estacionária ou rotativa do equipamento.
Se o selo é xado na parte estacionária, temos assim o Teeth-On-Stator
Seal (TOS), ou "dentes no estator". Caso o selo seja xado na parte rotativa do
equipamento, é denominado Teeth-On-Rotor Seal (TOR), ou "dentes no rotor".
Através do estudo de Child e Vance [8], temos que o selo labirinto transparente
desestabiliza mais o sistema quando acoplado ao rotor, ou seja, funciona melhor
quando preso na parte estática do sistema.
Selo de Intertravamento
O selo de intertravamento, ou Interlocking Seal, funciona com ambas as partes
do equipamento rotativo, estacionária e rotativa, com os "dentes"acoplados a elas.
Cada "dente"de uma entra na depressão da outra, com um leve espaçamento para
que não haja contato.
Esse tipo de selo possui o mesmo coeciente de rigidez de acoplamento Kc
quando comparado ao selo labirinto transparente, porém possui um coeciente
de amortecimento direto Cd menor. Podemos ver um exemplo de um selo de
intertravamento na Fig. 2.2 abaixo.
7

Figura 2.2: Exemplo de Selo de Intertravamento
2.2 Selos Damper
Além dos selos labirinto, existe também os Damper Seals, com diferenças mais
chamativas em seu desenho. Selos como o honeycomb, ou colmeia, e os Pocket
Damper Seals, ou PDS são alguns exemplos que veremos com mais detalhe.
A característica mais chamativa desse tipo de selo é a existência de inúmeras
entradas ao longo do selo, que geram quedas de pressão para dicultar a passagem
do uido em questão. São essas entradas que podem ser alteradas, gerando selos
distintos.
2.2.1 Selo Colmeia
Os selos colmeia, ou Honeycomb, são feitos de diversos orifícios com o formato
hexagonal, como uma colmeia de abelhas. Um dos benefícios de utilizar esse tipo de
selo é o fato do selo inibir a pré-rotação do uido, melhorando o amortecimento do
mesmo para o sistema. Esse tipo de selo é afetado diretamente pelas mudanças de
abertura e profundidade de cada entrada do selo. Uma das maiores vantagens desse
tipo de selo é o baixo vazamento apresentado.
Os selos colmeia, quando presos na parte estacionária do rotor, não dimi-
nuem os valores da rigidez, Kc e Kd, quando comparados aos selos labirinto
presos na parte móvel do rotor.
A utilização de selos colmeia está ligada diretamente ao comprimento L a
ser estudado. Childs e Vance [8] explicam que, para L < 25mm, o selo Honeycomb
não apresenta melhor desempenho do que um selo labirinto convencional. Para L >
50mm, porém, o vazamento apresentado por esse tipo de selo se mostra bem mais
vantajoso.
Podemos ver um exemplo do selo colmeia na Fig. 2.3 abaixo.
8

Figura 2.3: Exemplo de selo colmeia [20]
2.2.2 Pocket Damper Seal (PDS)
Existem 3 tipos diferentes de Pocket Damper Seals : O convencional, Furos-
Padrão e totalmente dividido.
PDS Convencional
O PDS original é feito à partir de uma série de lâminas que dividem o selo em
cavidades ativas e inativas. Além disso, existe também pequenas barreiras circunfe-
renciais que cortam as cavidades ativas, formando espaços menores. Essa montagem
é conhecida como PDS convencional, como vemos na Fig. 2.4 abaixo. Quando com-
parados a selos labirinto e colmeia, esses selos apresentam uma taxa de vazamento
parecido ou até menor, dependendo do comprimento do selo. As constantes de amor-
tecimento e estabilidade desses selos também são melhores do que os selos labirinto
e comparável aos outros tipos de PDS.
PDS Furos-Padrão
Os selos conhecidos como Hole-Pattern Damper Seals, ou Furos-Padrão, são
parecidos aos selos colmeia, com entradas radiais ao longo de toda a extensão do
selo. Segundo o fabricante "Dresser-Rand", esse tipo de selo proporciona um ganho
de 5% ou até mais na eciência, quando comparado ao selo colmeia.
9

Figura 2.4: Exemplo de PDS Convencional [11]
PDS Totalmente Dividido
Os Fully-Partitioned Damper Seals, ou Totalmente Dividido, é semelhante ao
PDS Convencional, porém as barreiras circunferenciais se encontram ao longo do
comprimento inteiro do selo. Isso gera "bolsos"circunferenciais chamados de primá-
rios e secundários, em vez de ativos e inativos. A Fig. 2.5 abaixo nos mostra em
detalhe um PDS Totalmente Dividido.
2.3 Selo de Cerdas
O Brush Seal, ou Selo de Cerdas, é um selo com inúmeras cerdas presas em
sua parte xadora, seja no rotor ou na parte estacionária. O outro lado das cerdas
encontra-se solta, evitando o travamento do eixo rotativo, ao mesmo tempo em que
as cerdas se mantem em contato com o lado oposto ao xado no selo. Geralmente
essas cerdas são xadas a um ângulo entre 35°e 60°. A angulação das cerdas deter-
mina quanto da carga das cerdas é carregada pelo dobramento das mesmas e quanto
é carregada pela compressão da coluna. Devido à fragilidade estrutural apresentada
pelas cerdas desse tipo de selo, o Selo de Cerdas é utilizado apenas para o bloqueio de
10

Figura 2.5: Exemplo de PDS Totalmente Dividido [11]
gases. Segundo o fabricante [19], é possível obter entre 20% e 40% menos vazamento
em condições ótimas, quando comparado a um selo labirinto.
O Selo de Cerdas foi testado e descoberto uma limitação de uso por estágio
de uma diferença de pressão de até 4,8 bar. Podemos ver um exemplo de Selo de
Cerdas na Fig. 2.6 abaixo.
Figura 2.6: Exemplo de Selo de Cerdas [19]
11

2.4 Freio de Turbulência
Além dos diferentes tipos de selos, existe a possibilidade de pôr um freio de
turbulência no selo labirinto, ou Swirl Brake. Os efeitos desse acoplamento foram
mais bem explicados no artigo de Childs [6].
12

Capítulo 3
Modelo Matemático
Para a simulação numérica dos efeitos dinâmicos de um selo no rotor, simpli-
quemos o sistema para que seja composto apenas por eixo, disco e mancais. Os
movimentos do sistema também são xados em duas rotações: a rotação propria-
mente dita do disco, ou spin, e a rotação do eixo deetido em torno da linha de
centro não-deetida, ou precessão ou whirl.
As rotações descritas acima podem ter o mesmo sentido de rotação ou sen-
tidos contrários de rotação. Se ambas tiverem o mesmo sentido de rotação, temos
o movimento caracterizado como precessão direta, ou forward whirl. Se os sentidos
forem opostos, temos a precessão inversa, ou backward whirl. Os maiores problemas
destrutivos em máquinas rotativas aparecem com a precessão inversa, já que esse
movimento alterna as tensões normais na seção transversal do eixo, podendo levá-lo
a falha por fadiga. A Fig. 3.1 detalha esses movimentos distintos.
Figura 3.1: Precessão Direta e Inversa [15]
13

3.1 Rotor de Jecott
O modelo que será utilizado é o Rotor de Jecott, idealizado por Henry Ho-
man Jecott (1919) [10]. O rotor de Jecott possui o esquema descrito abaixo na
Fig. 3.2. Os mancais rígidos impedem o deslocamento dos dois pontos no eixo, en-
quanto o eixo elástico proporciona uma deexão por conta da massa desbalanceadora
presente no disco rígido.
Figura 3.2: Rotor de Jecott [15]
Além de precessões direta ou inversa, o sistema pode ter seus movimentos
de precessão sincronizados com a rotação do rotor ou não. Sendo φ o ângulo de
precessão, β o ângulo entre os vetores de velocidade de precessão V e força de exci-
tação U e Ω a velocidade de rotação do eixo, temos a precessão não síncrona quando
há variação de β, ou seja, existe uma velocidade de rotação além da velocidade da
precessão. Dessa forma, temos:
Ω = β + φ (3.1)
Observamos com maior clareza essas precessões na Fig. 3.3 abaixo:
Para a precessão síncrona, temos β = 0, ou seja, o vetor U se mantém
sempre estático em relação à rotação da precessão.
14

Figura 3.3: (a) Precessão Síncrona e (b) Precessão Não-Síncrona [15]
3.2 Hipóteses
Para o cálculo da dinâmica do rotor de Jecott, utilizaremos o caso de precessão
síncrona, já que esse caso nos dá uma análise mais simplicada do sistema. Dessa
forma, temos a velocidade de rotação como:
Ω = φ (3.2)
Vamos considerar para o estudo o modelo com mancais rígidos, eixo exível
e rolamentos sem atrito com o eixo. O disco está sempre girando no mesmo plano,
só existindo o movimento de precessão. Na condição de regime estacionário, temos
Ω = constante e Ω = 0.
Além disso, temos o problema uido-dinâmico desacoplado, analisando ape-
nas a parte dinâmica do problema. Será considerado a variação da pressão sempre
a mesma, independente da rotação do eixo, e a velocidade do uido também se
mantendo constante.
3.3 Cinemática e Equações de Movimento
A Fig. 3.4 abaixo nos mostra a vista de frente do rotor de Jecott. Podemos
observar que o disco está desbalanceado a uma distância d do centro de massa e
a deexão do rotor devido ao movimento é de r. Desprezamos a gravidade nesse
15

sistema.
Figura 3.4: Movimento de Precessão realizada pelo Rotor de Jecott [15]
O eixo do rotor é considerado tendo rigidez k, o disco tem massa m, o
amortecimento viscoso do conjunto é c e a velocidade de rotação do rotor é Ω . As
equações abaixo fornecem o movimento do centro disco em X e Y são encontradas
abaixo:
mx+cx+ kx = mΩ2d sin Ωt (3.3)
m¸+cy + kx = mΩ2d cos Ωt (3.4)
Temos, também, que r é a deexão do rotor proveniente da oscilação gerada
pelo movimento rotativo. Assim, através da gura acima, temos a fórmula:
r =√x2 + y2 (3.5)
A Equação Resultante do Rotor de Jecott está representada no modelo
linear na equação abaixo:
k 0
0 k
xy
+
c 0
0 c
xy
+
m 0
0 m
xy
=
mω2d cos θ
mω2d sin θ
(3.6)
16

Para encontrarmos o valor k, utilizaremos [9]:
Ω = θ;
F = ky, sendo F a força resultante do peso do disco no centro da barra;
F = mdg;
y = PL3/48EIf ,
Onde L = Comprimento do eixo;
E = Módulo de Elasticidade do material do eixo e
If = Momento de Inércia da seção.
Para um eixo cilíndrico de diâmetro D, temos o momento de inércia sendo:
If =πD4
64(3.7)
Sabendo as informações acima, temos k como:
k =48EI
L3(3.8)
A seguir, introduziremos os efeitos do selo na dinâmica do rotor.
3.4 Equações de Força Dinâmica do Selo
Quando existe vibração do rotor, aparece uma força de reação do uido entre
o selo e o rotor que atua. Considerando que essa vibração gera deexões pequenas,
ou seja, ∆x e ∆y são desprezíveis, a força do uido pode ser linearizada. A equação
geral das forças do lme de uido no selo, considerando a suposição anterior, é dada
pelo modelo linear força-deslocamento representado na equação abaixo:
kd kc
−kc kd
xy
+
cd cc
−cc cd
xy
+
md 0
0 md
xy
= −
FxFy (3.9)
3.5 Estimativa dos Coecientes Dinâmicos dos Se-
los
Para encontrarmos estimativas compatíveis com as equações que temos, utili-
zaremos as equações de Childs ([7]) para o modelo de uxo de massa. Dessa forma,
17

consideremos a geometria de um anel de vedação cheio de uido, como mostra a Fig.
3.5 abaixo. Nas equações que utilizaremos, as coordenadas do meridiano da folga
entre a parte rotativa e a parte estática são dadas por z(s) e R(s), onde 0 < s < L.
Esse s é medido ao longo desse meridiano e temos t como o tempo. O selo, para
efeitos de simplicação, será o selo plano.
Figura 3.5: Anel com uido entre parte rotativa e parte estática para a análise da
lubricação turbulenta [7]
A folga entre as partes rotativa e estática é dada por h(s,θ,T), onde o valor
de h é ζ(s). As equações que governam o uxo de massa são todas em função da
folga, nos dando a equação abaixo:
δh
δt+
δ
δs(huθ) +
1
R
δ
δθuθ = 0 (3.10)
onde uθ e us são velocidades médias locais.
As equações dos momentos axial e circunferencial são, respectivamente:
−1
ρ
δP
δs=τssρh
+τsrρh
− uθ2
ρh
dR
ds+δusδt
+uθR
δusδθ
+ usδusδθ
(3.11)
e
− 1
ρR
δP
δθ=τθsρh
+τθrρh
+uθ
2
R
dR
ds− δuθ
δt+uθR
δuθδθ
+ usδuθδs
(3.12)
Resolvendo as equações acima, podemos obter as fórmulas das pressões. A
partir dessa resolução e utilizando as equações encontradas no [5], a seguir, podemos
18

obter os valores de rigidez e amortecimento do selo:
Kd =∫ L0
∫ 2π
0px cos θRBdθdz (3.13)
Kc =∫ L0
∫ 2π
0py cos θRBdθdz (3.14)
Cd =∫ L0
∫ 2π
0px cos θRBdθdz (3.15)
Cc =∫ L0
∫ 2π
0py cos θRBdθdz (3.16)
sendo:
RB o raio do selo;
L o comprimento do selo;
θ o ângulo de rotação do eixo e
z a direção axial.
Embora as equações acima possam nos dar valores mais precisos, a comple-
xidade da formulação nos impossibilita momentaneamente de fazer nossos cálculos
dessa forma. Por conta disso, será utilizado uma metodologia diferente dessa des-
crita acima para o cálculo das constantes do selo. Através de [14], [4], e [7],
temos as equações para o cálculo teórico das constantes kd, kc, cd e cc:
cd =πR∆Pµ1T
λ(3.17)
cc =πR∆Pµ2ωT
2
λ(3.18)
kd =πR∆P (µ0 − µ2ω
2T 2)
4λ(3.19)
kc =πR∆Pµ2T
2λ(3.20)
µ0 =9σ
1.5 + 2σ(3.21)
19

µ1 =(3 + 2σ)2(1.5 + 2σ) − 9σ
(1.5 + 2σ)2(3.22)
µ2 =19σ + 18σ2 + 8σ3
(1.5 + 2σ)3(3.23)
σ =λL
y0(3.24)
T =L
V(3.25)
V =
√2∆P
(ρ(1 + E + 2σ))(3.26)
Re =ρV y0µ
(3.27)
sendo:
λ = Coeciente de fricção entre o uido e o eixo;
y0 = Folga do selo;
E = Erro de Childs;
V = Velocidade do uido.
Sabendo como calcular esses valores, podemos fazer as análises propostas.
3.6 Cálculo da Resposta do Sistema
Tendo os valores calculados na seção anterior, podemos montar a função de
resposta do sistema com as equações abaixo:
H = (−ω2M + iωC +K)−1 (3.28)
F =
mω2µ
mω2µ
(3.29)
X = HF (3.30)
20

sendo:
X o deslocamento da vibração do eixo;
M, C e K as matrizes da massa, amortecimento e rigidez, respectivamente;
µ o desbalanceamento do sistema.
O código utilizado para a modelagem do sistema em Matlab se encontra no
Apêndice B.
21

Capítulo 4
Simulações e Análises Numéricas
Sabendo o funcionamento do sistema e das fórmulas por trás da teoria, podemos
começar a analisar a bancada que temos em nossa disposição. Temos como objetivo
estuda como diversos fatores inuenciam na rigidez e no amortecimento dos selos,
além das inuências na frequência natural do sistema e o deslocamento do eixo em
função da rotação imposta no mesmo. Para isso, é necessário realizar alguns cálculos
para encontrarmos os valores das constantes desejadas da bancada.
Após os cálculos desses valores, serão modicadas as constantes de folga,
rotação, comprimento do selo e variação da pressão para analisar o comportamento
da rigidez e amortecimento do selo.
22

4.1 Dados Iniciais do Rotor de Jecott
Tabela 4.1: Dados do Rotor de JecottDensidade do Material: Aço 1020 7,5 g
cm3
Comprimento do Eixo 0,8m
Módulo de Elasticidade 207 GPa
Raio do Disco 140 mm
rC/M (d) 30 mm
Raio do Eixo 40 mm
Rotação do Eixo 60 Hz
Massa do Eixo 6,15 kg
Rigidez do Eixo 1,7 × 106 N/m
Amortecimento do Eixo 323,3 Ns/m
Momento de Inercia 8,8 × 10−8 m4
É necessário calcularmos os valores da rigidez, amortecimento e momento de
inércia do eixo. Como podemos ver no Apêndice, temos 3 diâmetros diferentes ao
longo do eixo. Para calcular o momento de inércia, iremos utilizar a Eq. (3.7) e uma
média ponderada, como podemos ver abaixo. Utilizando fundamentos da mecânica
dos sólidos, é possível encontrar valores mais precisos para o momento de inércia e,
consquentemente, para a rigidez do eixo com diâmetro variável. Para o intúito desse
trabalho, porém, a forma utilizada será o suciente:
IEixo =LD1ID1 + LD2ID2 + LD3ID3
LTotal(4.1)
Tendo D1 como 0.032m, L1 como 376mm, D2 como 0.036m, L2 como 40mm,
D3 como 0.040m, L3 como 380mm e LTotal como 800mm, temos:
IEixo = 8,80 × 10−8m4
Tendo o valor acima para o momento de inércia total do eixo e tendo a Eq.
(3.8), podemos calcular a rigidez total da bancada. Sendo assim, temos que:
k = 1,7 × 106N/m
Para o cálculo da massa m, é necessário encontrarmos o volume do eixo.
Dessa forma, utilizando novamente o Apêndice, temos:
23

V = πR21L1+πR2
2L2+πR23L3
V = 820,6 cm3
Tendo o volume do eixo e a densidade do material, temos a massa como:
m = V ρ
m = 6,15 kg
Através de [2], temos as Eq. (4.2), (4.3) e (4.4) abaixo:
ζ =c
ccritico(4.2)
ccritico = 2mωn (4.3)
ωn =√k/m (4.4)
Tendo os valores já calculados, as equações acima, e sabendo que ζ = 0.05,
temos o valor do amortecimento do eixo "c"como:
ccritico = 6, 5x103 Ns/m
c = ζccritico
c = 323,3 Ns/m
Tendo os valores de c e k do eixo, adicionamos na equação do selo. Substi-
tuindo os dados gerais e sabendo que a massa do selo é desprezível, temos a equação
nal na forma:
kd + k kc
−kc kd + k
xy
+
cd + c cc
−cc cd + c
xy
+
md 0
0 md
xy
=
mdω2d cos θ
mdω2d sin θ
(4.5)
24

4.2 Comportamento dos Coecientes do Selo
Com as equações (3.17) a (3.27) e sabendo que o uido que passará pelo selo é
o ar, podemos vizualizar os grácos a seguir, considerando:
∆P = 80 bar;
Comprimento do selo L = 0.030 m;
Raio do eixo R = 0.032 m;
Folga y0 = 0.0003 m;
Densidade do ar ρ = 1.18 kg/m3;
Viscosidade dinâmica do ar µ = 18.27 x 10−6 kg/ms;
Coeciente de fricção λ = 0.01;
Erro de Childs "E"= 0.5.
Utilizando o código encontrado no Apêndice B, podemos ter a visualização
dos grácos abaixo. Os grácos foram montados a partir de um passo de 1 Hz:
Figura 4.1: Variação da rigidez direta kd do selo com a rotação
Observemos no gráco acima que, embora tenha uma queda exponencial
do valor de kd , o valor de fato não sofre grandes alterações, ou seja, se mantém
relativamente constante.
25

Figura 4.2: Variação da rigidez direta kc do selo com a rotação
Vemos no gráco de kc que temos uma variação linear crescente em relação
à rotação do eixo, coerente com a formulação utilizada.
26

Figura 4.3: Variação da rigidez direta cd do selo com a rotação
Vemos que o valor de cd se mantém constante, independente da rotação.
Novamente, esse resultado é condizente com a equação de Nordmann que utilizamos.
27

Figura 4.4: Variação da rigidez direta cc do selo com a rotação
Temos novamente um valor linearmente crescente, dessa vez com cc. Esse
gráco possui a forma coerente com a análise feita.
Podemos observar, também, como essas constantes variam com a mudança
do comprimento do selo, tendo ω = 60 Hz:
28

Figura 4.5: Variação da rigidez direta kd do selo com a variação do comprimento do
selo
Através da variação do comprimento do selo L, temos que o valor de kd tende
a se estabilizar depois de aproximadamente 100mm de comprimento.
29

Figura 4.6: Variação da rigidez direta kc do selo com a variação do comprimento do
selo
30

No gráco acima, kc cresce de forma exponencial em relação ao comprimento
do selo, ou seja, quanto maior for o selo, maior será a rigidez de acoplamento.
31

Figura 4.7: Variação da rigidez direta cd do selo com a variação do comprimento do
selo
32

No gráco acima, cd cresce de forma exponencial em relação ao comprimento
do selo, ou seja, quanto maior for o selo, maior será o amortecimento direto do selo.
33

Figura 4.8: Variação da rigidez direta cc do selo com a variação do comprimento do
selo
34

No gráco acima, cc cresce de forma exponencial em relação ao comprimento
do selo, ou seja, quanto maior for o selo, maior será a rigidez de acoplamento.
35

Observemos, agora, como a variação da pressão ∆P afeta as constantes kc,
kd, cc e cd do selo:
36

Figura 4.9: Variação da rigidez direta kd do selo com a variação de pressão
37

Figura 4.10: Variação da rigidez direta kc do selo com a variação da pressão
Figura 4.11: Variação da rigidez direta cd do selo com a variação da pressão
38

Figura 4.12: Variação da rigidez direta cc do selo com a variação da pressão
39

Com exceção do amortecimento de acoplamento cruzado cc, podemos ob-
servar que a variação de pressão tem um grande impacto nas constantes do selo,
consequentemente, afeta fortemente o sistema.
Observemos, agora, como a variação da folga entre o eixo e o selo afeta os
valores das constantes:
40

Figura 4.13: Variação da rigidez direta kd do selo com a variação de folga
Figura 4.14: Variação da rigidez direta kc do selo com a variação da Folga
41

Figura 4.15: Variação da rigidez direta cd do selo com a variação da folga
Figura 4.16: Variação da rigidez direta cc do selo com a variação da folga
42
Podemos analisar que, com exceção da rigidez direta do selo kd, a folga
entre o eixo e o selo impacta fortemente as constantes caso ela seja muito pequena,
tendendo a zero. Após esse rápido início, as constantes tendem a se estabilizarem.
4.3 Análise do Rotor de Jecott
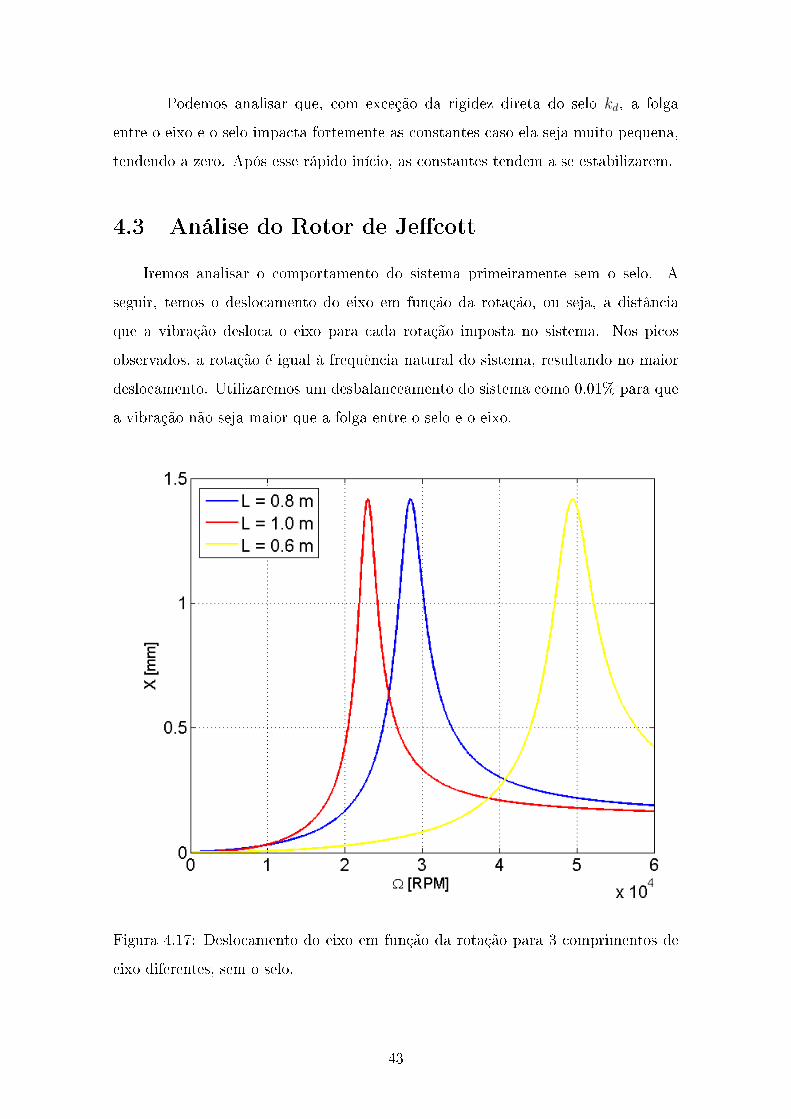
Iremos analisar o comportamento do sistema primeiramente sem o selo. A
seguir, temos o deslocamento do eixo em função da rotação, ou seja, a distância
que a vibração desloca o eixo para cada rotação imposta no sistema. Nos picos
observados, a rotação é igual à frequência natural do sistema, resultando no maior
deslocamento. Utilizaremos um desbalanceamento do sistema como 0.01% para que
a vibração não seja maior que a folga entre o selo e o eixo.
Figura 4.17: Deslocamento do eixo em função da rotação para 3 comprimentos de
eixo diferentes, sem o selo.
43

Como podemos observar nos grácos da seção anterior, os valores encon-
trados dos coecientes do selo para o método descrito não possuem uma ordem de
grndeza coerente com os valores medidos em [14]. Sendo assim, utilizaremos os
valores experimentais adquiridos em [14] para adicionar ao sistema. Dessa forma,
podemos analisar o rotor de Jecott, agora com os selos alocados nele. Os valores
experimentais estão na gura abaixo:
44

Figura 4.18: Valores experimentais das constantes do selo encontrados em [14]
45

Figura 4.19: Deslocamento do eixo em função da rotação para 3 comprimentos de
eixo diferentes, com o selo.
46

Podemos analisar separadamente cada constante de rigidez do selo e seus
efeitos no deslocamento do eixo do sistema:
47

Figura 4.20: Deslocamento do eixo em função da rotação sem o selo, com o selo,
apenas com a constante "kc"e apenas com "kd".
48
Caso seja de interesse observar o regime transiente da resposta, é necessário
integrar a resposta do sistema em função do tempo, utilizando o método de Runge-
Kutta de 4a ordem [17] com o Matlab.
Dessa forma, temos os grácos abaixo, sendo o gráco 4.21 da amplitude
do movimento no tempo e o 4.22 o gráco do movimento do centro geométrico do
disco. Esses grácos são calculados sem a presença dos selos, com rotação de 60
Hz. O movimento do centro geométrico do disco é calculado apenas através da
solução particular do sistema, não considerando o início do movimento proveniente
da solução homogênea.
49

Figura 4.21: Amplitude do movimento do eixo em função do tempo.
50
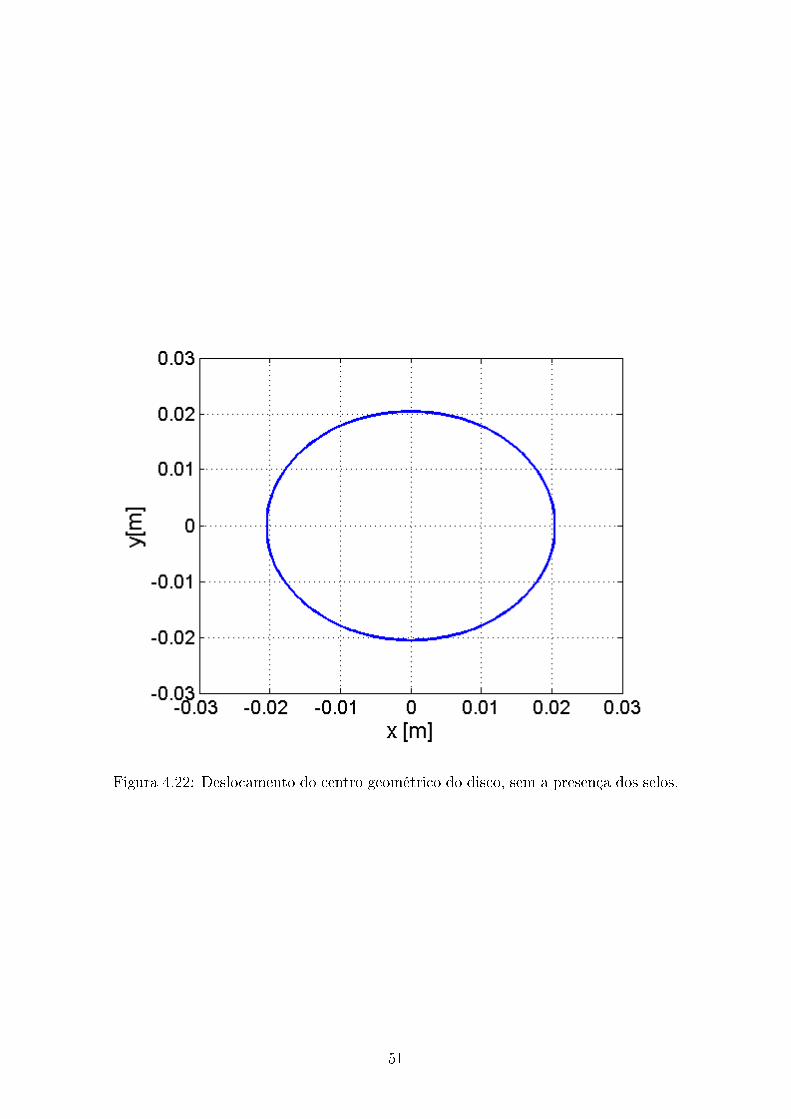
Figura 4.22: Deslocamento do centro geométrico do disco, sem a presença dos selos.
51

Capítulo 5
Conclusões e Trabalhos Futuros
Neste trabalho foram apresentados diversos tipos de selos, assim como um breve
comparativo entre eles. A partir dessa apresentação inicial, foi mostrado a base
teórica para o cálculo teórico dos coecientes dos selos, assim como a base teórica
do sistema que utilizamos, o Rotor de Jecott. Tendo as duas bases, juntamo-as
para obter uma estimativa teórica da movimentação do sistema completo, quando
adicionado selos.
A partir da simulação numérica, chegamos a valores teóricos para os co-
ecientes dinâmicos dos selos para diversas condições de trabalho. Os efeitos da
velocidade de rotação do rotor, das dimensões do selo e das condições de operação
nos coecientes dinâmicos de selos também foram analisados. Para comparação,
pudemos observar os valores teóricos encontrados por Nordmann [14], o que nos
mostrou uma diferença de grandeza de 102 para a rigidez direta e 103 para o amor-
tecimento de acoplamento cruzado.
Através da comparação dos dois grácos, observamos que, adicionando os
selos, a frequência natural do sistema diminui, porém a amplitude de vibração tam-
bém sofre uma grande queda. O comprimento do eixo também afeta diretamente a
amplitude da vibração. Com o desbalanceamento igual a 0.01%, conseguimos man-
ter a vibração menor do que a folga do selo, impedindo que haja impacto entre o
selo e o eixo.
Ao observar os efeitos separados das constantes do selo no sistema, vemos que
a rigidez de acoplamento cruzado mantém o deslocamento do eixo baixo, enquanto
a rigidez direta aumenta exponencialmente esse deslocamento.
52

Analisando o gráco em regime transiente, após o início proveniente da
solução homogênea do sistema, o rotor entra em regime permanente, mantendo o
deslocamento do eixo constante.
Por m, concluímos que, para a determinação do comportamento dinâmico
de uma máquina rotativa com a presença de selos, é necessário inclui-los no modelo
do sistema para torná-la mais completa possível. Com a inclusão dos selos, torna-se
mais viável a previsão de condições geradores de instabilidades no sistema, facili-
tando a prevenção de falhas inesperadas. Podemos observar também a complexidade
do comportamento de rotores e como cada elemento e condição de trabalho pode
ter um impacto signicativo no comportamento do sistema.
Recomenda-se a utilização de mais testes e ajustes nos modelos utilizados
para encontrar resultados mais alinhados, ressaltando que o uso de um modelo
experimental é essencial para a validação dos resultados teóricos.
53

Referências Bibliográcas
[1] ADAMS M.L., Rotating Machinery Vibration: From Analysis to Troubleshoo-
ting, 2nd edition, CRC Press, 2001.
[2] ALCIATORE D. G., Introduction to Mechatronics and Measurement Systems,
4th Edition, McGraw Hill, 2012.
[3] BENCKERT AND WACHTER, Flow Induced Spring Coecients of Labyrinth
Seals for Application in Rotor Dynamics, 1980.
[4] BLACK H.F., Eects of Hydraulic Forces in Annular Pressure Seals on the Vibra-
tions of Centrifugal Pumps, Journal of Mechanical Engineering Science,
Vol 11, no 2., 206213, 1969.
[5] BETTIG B., Rotordynamics - Unit 5: Modeling Journal Bearings.
[6] CHILDS D., Seal-Rotordynamic-Coecient Test Results for a Model SSME
ATD-HPFTP Turbine Interstage Seal With and Without a Swirl Brake,
179190, 1993.
[7] CHILDS D. W., Dynamic Analysis of Turbulent Annular Seals Based on Hirs'
Lubrication Equation. Journal of Tribology, v. 105, n. 3, p. 429436, 1983.
[8] CHILDS D. W. AND VANCE J. M., Annular Gas Seals and Rotordynamics of
Compressors and Turbines, 201220, 2007.
[9] CRANDALL, S. H.; LARDNER, T. J.; ARCHER, R. R.; COOK, N. H.; DAHL,
N. C. An Introduction to the Mechanics of Solids, McGraw-Hill, 1978.
[10] DUTRA B., Modelagem e Simulação de uma Turbina Geradora, 2015.
54

[11] ELDIN A., Leakage and Rotordynamic Eects of Pocket Damper Seals and
See-Through Labyrinth Seals, 2007.
[12] HIRS G. G., A Bulk-Flow Theory for Turbulence in Lubricant Films, 206213,
1973.
[13] GONÇALVES D. C., Análise da Dinâmica de Selos Mecânicos em Compresso-
res, 2015.
[14] NORDMANN R., Rotordynamics 2: Problems in Turbomachinery, CISM Cour-
ses and Lectures No. 297, Chapter 5, 153173, 1987.
[15] PEREIRA J. C., Introdução à Dinâmica de Rotores, 2005.
[16] SCHARRER J. K. AND PELLETTI J. M., Proceedings of the Twenty-Fourth
Turbomachinery Symposium, 175190, 1995.
[17] VULPIANI A., Numerical Recipes in C: The Art of Scientic Computing, Cam-
bridge University Press, Chapter 16, 710714, 1988.
[18] http://du-o-lap.com.br/noticias/?p=4, 2016.
[19] www.eaton.com, 2016.
[20] www.indyhoneycomb.com/products/engine-seal-honeycomb-2/, 2016.
[21] DRESSER-RAND, http://www.enginuityinc.com/upgrades/turbo/n-2034.pdf,
2016.
55

17
32
36
40
36
32
17
50 188
20 380 20
188 120
800
970
A B
2
2
45°
DETAIL ASCALE 1 : 2
2
2
45°
DETAIL BSCALE 1 : 2
O s mancais ficarão nas seções de 17mm. A parte de 800mm entre eles que provavelmente será de interesse para vocês.
SolidWorks Student Edition. For Academic Use Only.
Apêndice A
Desenho Detalhado do Eixo

Apêndice B
Códigos Matlab Utilizados
%Funcao baseada nas equacoes de Nordmann para o calculo dos coeficientes do
%selo
clear all;
deltaP = 8000000; %Queda de pressno selo [Pa ou kg/m^2*s]
L = 0.030; %Comprimento do selo [m]
R = 0.032; %Raio do eixo
omega = 0; %Velocidade de rota do eixo [Hz ou rad/s]
y0 = 0.0003; %Folga [m]
%Dados do fluido
rho = 1.18; %densidade do fluido [kg/m] Ar
xi=0.5; %coeficiente de perda de entrada Childs [Sem Unidade]
mu=18.27*10^-6; %viscosidade dinca do fluido [Kg/ms]
e = 1; %Erro
E = 0.5; %Erro de Childs (1983)
lambda = 0.01; %[Sem unidade] ou = 0.079/(Re^(1/4))
sigma = lambda*L/y0;
V = sqrt(2*deltaP/(rho*(1 + E + 2*sigma))); %Velocidade ma axial do fluido [m/s]
Re = rho*V*y0/mu; %Nmero de Reynolds
57

T = L/V;
mi0 = 9*sigma/(1.5+2*sigma);
mi1 = ((3+2*sigma)^2*(1.5+2*sigma)-9*sigma)/(1.5+2*sigma)^2;
mi2 = (19*sigma+18*sigma^2+8*sigma^3)/(1.5+2*sigma)^3;
omegaMax = 60000; %Velocidade de rotacao maxima [RPM]
for i=1:omegaMax/60
cd1(i) = pi*R*deltaP*mi1*T/lambda;
cc1(i) = pi*R*deltaP*mi2*omega*T^2/lambda;
kd1(i) = pi*R*deltaP*(mi0-mi2*omega^2*T^2)/(4*lambda);
kc1(i) = pi*R*deltaP*mi2*omega*T/(2*lambda);
omega = omega+1;
w(i) = i;
end
figure('name','Constante Cd x ega')
axes('fontsize',16)
plot(w*60,cd1,'k','linewidth',2)
xlabel('\Omega [RPM]','fontsize',14)
ylabel('Cd [Ns/m]','fontsize',14)
grid on
figure('name','Constante Cc x ega')
plot(w*60,cc1,'k','linewidth',2)
xlabel('\Omega [RPM]','fontsize',14)
ylabel('Cc [Ns/m]','fontsize',14)
grid on
58

figure('name','Constante Kd x ega')
plot(w*60,kd1,'k','linewidth',2)
xlabel('\Omega [RPM]','fontsize',14)
ylabel('Kd [N/m]','fontsize',14)
grid on
figure('name','Constante Kc x ega')
axes('fontsize',16)
plot(w*60,kc1,'k','linewidth',2)
xlabel('\Omega [RPM]','fontsize',14)
ylabel('Kc [N/m]','fontsize',14)
grid on
59

%Codigo para obter a resposta do deslocamento do sistema
clear all;
%Dados da bancada
wmax = 1000; %Frequencia maxima [rad/s]
u = 0.0001; %Desbalanceamento do eixo
zeta = 0.05;
md = 6.15; %Massa do disco de Jeffcott [kg]
E = 207000000000; %Constante do Material: Aco Padrao 1020 [Pa]
L1 = 0.376; %Comprimento do eixo com D = 32mm [m]
L2 = 0.040; %Comprimento do eixo com D = 36mm [m]
L3 = 0.380; %Comprimento do eixo com D = 40mm [m]
LE = L1 + L2 + L3; %Comprimento do eixo [m]
I = (L1*(pi*(.032)^4/64) + L2*(pi*(.036)^4/64) + L3*(pi*(.040)^4/64))/LE ;%Momento de inercia [m^4]
k = 48*E*I/LE^3; %Rigidez do eixo [N/m]
c = zeta*2*sqrt(k*md); %Amortecimento do eixo [Ns/m]
deltaP = 8000000; %Queda de pressao no selo [Pa ou kg/m^2*s]
L = 0.030; %Comprimento do selo [m]
R = 0.032; %Raio do eixo
omega = 60; %Velocidade de rota do eixo [Hz ou rad/s]
y0 = 0.0003; %Folga [m]
%Dados do fluido
rho = 1.18; %densidade do fluido [kg/m] Ar
xi=0.5; %coeficiente de perda de entrada Childs [Sem Unidade]
mu=18.27*10^-6; %viscosidade dinamica do fluido [Kg/ms]
e = 1; %Erro
EC = 0.5; %Erro de Childs (1983)
lambda = 0.01; %[Sem unidade] ou 0.079/(Re^(1/4))
60

sigma = lambda*L/y0;
V = sqrt(2*deltaP/(rho*(1 + EC + 2*sigma))); %Velocidade ma axial do fluido [m/s]
Re = rho*V*y0/mu; %Numero de Reynolds
wn = sqrt(k/md);
T = L/V;
for j=1:wmax
cd(j) = 1350-(3/80)*omega*60;
cc(j) = 0.15*omega*60;
kd(j) = (1/600)*(omega*60)^2-25*(omega*60) + (730000/3);
kc(j) = 17.5*omega*60;
C = [c + cd(j) cc(j); -cc(j) c + cd(j)];
K = [k + kd(j) kc(j); -kc(j) k + kd(j)];
M = [md 0; 0 md];
H = inv((1i*omega)^2*M + 1i*omega*C + K);
F = [md*u*omega^2; md*u*omega^2];
X = H*F;
x(j) = sqrt((abs(X(1)))^2+abs(X(2))^2);
omega = omega+1;
w(j) = j;
end
L1 = 0.476; %Comprimento do eixo com D = 32mm [m]
L2 = 0.040; %Comprimento do eixo com D = 36mm [m]
L3 = 0.480; %Comprimento do eixo com D = 40mm [m]
LE = L1 + L2 + L3; %Comprimento do eixo [m]
61

I = (L1*(pi*(.032)^4/64) + L2*(pi*(.036)^4/64) + L3*(pi*(.040)^4/64))/LE ;%Momento de inia [m^4]
k = 48*E*I/LE^3; %Rigidez do eixo [N/m]
c = zeta*2*sqrt(k*md); %Amortecimento do eixo [Ns/m]
omega = 0;
for j=1:wmax
cd(j) = 1350-(3/80)*omega*60;
cc(j) = 0.15*omega*60;
kd(j) = (1/600)*(omega*60)^2-25*(omega*60) + (730000/3);
kc(j) = 17.5*omega*60;
C = [c + cd(j) cc(j); -cc(j) c + cd(j)];
K = [k + kd(j) kc(j); -kc(j) k + kd(j)];
M = [md 0; 0 md];
H = inv((1i*omega)^2*M + 1i*omega*C + K);
F = [md*u*omega^2; md*u*omega^2];
X = H*F;
x2(j) = sqrt((abs(X(1)))^2+abs(X(2))^2);
omega = omega+1;
w(j) = j;
end
L1 = 0.276; %Comprimento do eixo com D = 32mm [m]
L2 = 0.040; %Comprimento do eixo com D = 36mm [m]
L3 = 0.280; %Comprimento do eixo com D = 40mm [m]
LE = L1 + L2 + L3; %Comprimento do eixo [m]
I = (L1*(pi*(.032)^4/64) + L2*(pi*(.036)^4/64) + L3*(pi*(.040)^4/64))/LE ;%Momento de inercia [m^4]
k = 48*E*I/LE^3; %Rigidez do eixo [N/m]
c = zeta*2*sqrt(k*md); %Amortecimento do eixo [Ns/m]
omega = 0;
62

for j=1:wmax
cd(j) = 1350-(3/80)*omega*60;
cc(j) = 0.15*omega*60;
kd(j) = (1/600)*(omega*60)^2-25*(omega*60) + (730000/3);
kc(j) = 17.5*omega*60;
C = [c + cd(j) cc(j); -cc(j) c + cd(j)];
K = [k + kd(j) kc(j); -kc(j) k + kd(j)];
M = [md 0; 0 md];
H = inv((1i*omega)^2*M + 1i*omega*C + K);
F = [md*u*omega^2; md*u*omega^2];
X = H*F;
x3(j) = sqrt((abs(X(1)))^2+abs(X(2))^2);
omega = omega+1;
w(j) = j;
end
figure('name','Deslocamento do Eixo x ega')
axes('fontsize',16)
plot(w*60,x*1000,'b','linewidth',2)
xlabel('\Omega [RPM]','fontsize',14)
ylabel('X [mm]','fontsize',14)
grid on
hold on
plot(w*60,x2*1000,'r','linewidth',2)
hold on
plot(w*60,x3*1000,'y','linewidth',2)
63