alteraÇÃo da cobertura florestal e biomassa em Área … · 1. manejo florestal. 2. landsat. 3....
TRANSCRIPT

INSTITUTO NACIONAL DE PESQUISAS DA AMAZÔNIA – INPA
PROGRAMA DE PÓS-GRADUAÇÃO EM CIÊNCIAS DE FLORESTAS TROPICAIS
ALTERAÇÃO DA COBERTURA FLORESTAL E BIOMASSA EM
ÁREA DE MANEJO FLORESTAL NO ESTADO DO ACRE
INTEGRANDO DADOS DE CAMPO E SENSORES REMOTOS
NARA VIDAL PANTOJA
Manaus, Amazonas
Agosto, 2017

NARA VIDAL PANTOJA
ALTERAÇÃO DA COBERTURA FLORESTAL E BIOMASSA EM
ÁREA DE MANEJO FLORESTAL NO ESTADO DO ACRE
INTEGRANDO DADOS DE CAMPO E SENSORES REMOTOS
Orientador: DR. NIRO HIGUCHI
Coorientador: DR. MARCUS VINÍCIO NEVES D’OLIVEIRA
Tese apresentada ao Programa de Pós-
Graduação do Instituto Nacional de Pesquisas
da Amazônia como parte dos requisitos para
obtenção do título de Doutora em Ciências de
Florestas Tropicais.
Manaus, Amazonas
Agosto, 2017

ii
NARA VIDAL PANTOJA
ALTERAÇÃO DA COBERTURA FLORESTAL E BIOMASSA EM
ÁREA DE MANEJO FLORESTAL NO ESTADO DO ACRE
INTEGRANDO DADOS DE CAMPO E SENSORES REMOTOS
Aprovada em 31 de agosto de 2017.
BANCA EXAMINADORA:
Dr. Bruce Walker Nelson
Instituto Nacional de Pesquisas da Amazônia
Dr. Evandro José Linhares
Instituto Nacional de Pesquisas da Amazônia
Dr. Henrique dos Santos Pereira
Universidade Federal do Amazonas
Dr. Irving Foster Brown
Woods Hole Research Center
Dra. Thelma Krug
Instituto Nacional de Pesquisas Espaciais

iii
P198 Pantoja, Nara Vidal
Alteração da cobertura florestal e biomassa em área de manejo
florestal no Estado do Acre integrando dados de campo e sensores
remotos / Nara Vidal Pantoja. --- Manaus: [s.n.], 2017.
90 f. : il. color.
Tese (Doutorado) --- INPA, Manaus, 2017.
Orientador : Niro Higuchi.
Coorientador: Marcus Vinício Neves D'Oliveira.
Área de concentração: Ciências de Florestas Tropicais.
1. Manejo florestal. 2. Landsat. 3. LiDAR. 4. Sensoriamento
Remoto. 5. REDD+. I. Título.
CDD 634.928
Sinopse:
Estudou-se as alterações da cobertura florestal causadas pela exploração madeireira
em uma área de manejo florestal sob concessão na Floresta Estadual do Antimary
no Acre utilizando produtos de Sensoriamento Remoto (Landsat, RapidEye e
LiDAR) para detecção dos indícios da infraestrutura florestal. A alteração da
cobertura florestal e da biomassa estimada com dados LiDAR foi comparada com
levantamento em campo na área de exploração florestal.
Palavras-chave: Atividade madeireira, infraestrutura da exploração,
Sensoriamento Remoto.

iv
Com amor e gratidão,
Aos meus pais Braga e Nazaré.

v
AGRADECIMENTOS
Este trabalho não seria possível sem a participação de muitas pessoas e instituições que
de alguma forma contribuíram neste período.
Em primeiro lugar, eu agradeço ao meu orientador Dr. Niro Higuchi por ter apoiado a
construção dessa pesquisa, com discussões e ensinamentos no desenvolvimento do
projeto e ao meu coorientador Dr. Marcus D’Oliveira pelo incentivo e acompanhamento
nas diferentes fases do trabalho.
Ao Dr. Ary Vieira pelo apoio e coordenação do projeto de Doutorado Institucional
INPA/UFAC e ao Dr. José Francisco pelo auxílio em questões específicas do DINTER.
Ao Dr. Foster Brown pelos ensinamentos e inspiração que me acompanham desde a
graduação e sobretudo pelo estímulo à formação da comunidade científica do Acre.
Aos membros da banca examinadora pela excelente contribuição e comentários
construtivos para a tese.
Ao Dr. Paulo Graça pela disposição em ajudar e por contribuir com sua experiência com
comentários e conversas durante o doutorado.
À Dra. Liana Anderson pelo apoio e sugestões no projeto de tese.
Aos pesquisadores Dr. Yosio Shimabukuro, Dr. Luiz Aragão e Dr. Egídio Arai pelas
contribuições. Em especial ao Dr. Dalton Valeriano pelos ensinamentos sobre
monitoramento da Amazônia.
Ao Dr. Fernando Espírito pelos comentários no processo da pesquisa e disponibilidade
em colaborar.
Ao Igor Agapejev pela ajuda fundamental em compartilhar os dados do plano de manejo
e disponibilidade em esclarecer minhas dúvidas.
Ao Givanildo Ortega e Manoel Freire pela ajuda no trabalho de campo. Aos técnicos da
Embrapa Airton, Aldeci e Paulo pela companhia durante as campanhas de campo e aos
funcionários da base do Antimary pelo suporte e acomodações no acampamento.
Ao DINTER INPA/UFAC pela oportunidade de formação e ao INPA pelo programa de
Pós-Graduação em Ciências de Florestas Tropicais.
Ao Laboratório de Manejo Florestal por me nutrir com orgulho, agradecimento e vontade
de colaborar por fazer parte da equipe. Além de disponibilizar estrutura de trabalho e
pelas oportunidades de capacitação ao longo do doutorado. Agradeço também aos
funcionários da ZF-2 pela interação e convívio durante as disciplinas e cursos. Minha
sincera gratidão também aos pesquisadores Dr. Joaquim dos Santos, Dr. Adriano Lima e
Dr. Moacir Campos.

vi
À CAPES pelo financiamento do projeto de pesquisa Pró-Integração (Nº 3172/2013) que
financiou o sobrevoo do LiDAR e a pesquisa de campo e pelo financiamento do Programa
de Doutorado Institucional (Nº 459/2013).
Ao Ibama, instituição a qual pertenço, por permitir a realização deste doutorado
concedendo minha licença para capacitação.
À Embrapa/Acre pela parceria institucional, além de fornecer infraestrutura de trabalho e
apoio logístico.
À Agência de Cooperação Internacional do Japão pelos conhecimentos e vivências
durante o curso “Capacity Building for National Forest Monitoring System to Promote
REDD+ and Sustainable Forest Management”.
À FAPAC pelo apoio financeiro disponibilizado.
À SEDENS pela parceria para o desenvolvimento da pesquisa na Floresta Estadual do
Antimary.
Ao Carnegie Institution for Science pela licença do CLASLite.
Aos amigos da turma do DINTER, Anelena, Willian, Elsa, Gleisson, João Ricardo, Pedro
Ferraz e Sonaira pelo convívio, ajuda e amizade.
Aos amigos que conheci no INPA pelas conversas, troca de ideias e convívio. Minha
gratidão à Aurora, Aline, Flávia, Gel, Pedro, Ju, Leo e Nathan pela ajuda na reta final.
À Anne e à sua família pela amizade e pelas vezes me recebeu em sua casa oferecendo
acolhida e boas conversas durante as temporadas em Manaus.
Ao meu primo Júnior e sua família pelas visitas durante minhas idas à Manaus.
Aos amigos da Embrapa/Acre pelos felizes momentos de descontração.
Aos meus colegas do Ibama/Acre que me apoiaram durante o meu afastamento para o
doutorado.
Ao Anderson, que esteve ao meu lado durante esse percurso e à sua família pelo apoio.
Aos meus grandes amigos e amigas, sobretudo aqueles que me ouviram e motivaram no
momento que mais precisei durante essa trajetória.
Aos meus pais, Braga e Nazaré, por sempre me apoiarem e pelas orações que me
encorajaram sempre. À minha irmã Najara pelo apoio e torcida. Ao Bil, meu
companheirinho de estudos e escrita com seu chamego e ronronar.
Por fim, agradeço sempre a Deus pelas bênçãos recebidas e pela força constante.

vii
“O correr da vida embrulha tudo.
A vida é assim:
esquenta e esfria,
aperta e daí afrouxa,
sossega e depois desinquieta.
O que ela quer da gente é coragem”.
Guimarães Rosa
“Minhas raízes estão no ar
Minha casa é qualquer lugar
Se depender de mim
Eu vou até o fim
Voando sem instrumentos
Ao sabor do vento
Se depender de mim
Eu vou até o fim”.
Humberto Gessinger

viii
RESUMO
A exploração madeireira praticada a partir dos princípios do manejo florestal é uma
estratégia de gestão promissora para a conservação da biodiversidade e sequestro de
carbono na Amazônia. Entretanto, os métodos de controle atualmente utilizados são
insuficientes para monitorar com frequência e em grande escala a ocorrência de áreas de
exploração de madeira. Foi mapeada uma área de floresta tropical sob manejo florestal
na Floresta Estadual do Antimary no estado do Acre para avaliar o potencial de detecção
dos impactos produzidos por operações florestais (estradas e pátios) a partir de diferentes
níveis de aquisição de dados: campo, aéreo e orbital. As estradas e pátios foram mapeados
em campo com aparelhos de GPS. A imagem-fração Vegetação Não-Fotossintética
(NPV) obtida do modelo de mistura das imagens Landsat dos anos 2009 a 2015
processadas no programa CLASlite foram utilizadas para mapear as estradas florestais e
pátios instalados dentro da área explorada. Imagens RapidEye dos anos 2012 a 2015
também foram analisadas para identificar áreas alteradas por corte seletivo. Dados
LiDAR aerotransportado foram utilizados para obter o modelo de densidade relativa de
vegetação e identificar a área explorada. O mapeamento da exploração madeireira na área
usando classificação automática e interpretação visual, mostrou, respectivamente, áreas
com 398 ha e 1.428 ha. A exatidão global foi estimada em 0,50 ± 0,060 para a
classificação de imagens Landsat e 0,788 ± 0,149 para a classificação das imagens
RapidEye. A área de exploração madeireira subestimada de acordo com os dados de
referência foi de 4.537 ha (Landsat) e 705 ha (RapidEye). O tamanho dos pátios
influenciou a detecção pelo Landsat, pois foi possível detectar somente 40% dos pátios
mapeados em campo, enquanto 98% dos pátios foram detectados pelo LiDAR. A média
da área dos pátios detectados foi de 435 m2 enquanto que a dos pátios não detectados foi
de 302 m2, havendo diferença significativa na detecção em função do tamanho dos pátios
(t = -4,0076, df = 38, p≤0,01). O monitoramento das parcelas permanentes mostrou as
diferenças de estoque de cobertura florestal antes e após a exploração. Estes resultados
enfatizam a necessidade de pesquisas relacionadas ao manejo florestal para entender a
variabilidade espacial das estradas e pátios até então detectadas por sensoriamento
remoto. Enquanto o GPS é recomendado para mapear com maior confiabilidade a
infraestrutura florestal, dados LiDAR e Landsat também são eficazes para quantificar
remotamente a extensão dos impactos da exploração em florestas tropicais, subsidiando
a gestão e o monitoramento florestal.
Palavras-chave: Corte seletivo. Manejo florestal. Processamento de imagens.
Perfilamento a laser. REDD+.

ix
ALTERATION OF THE FOREST COVERAGE AND BIOMASS IN
SELECTIVELY LOGGED FOREST IN THE STATE OF ACRE
INTEGRATING FIELD DATA AND REMOTE SENSORS
ABSTRACT
Logging based on the principles of forest management in the Amazon region is a
promising management strategy for biodiversity conservation and carbon sequestration.
However, the control methods currently used are insufficient to monitor frequently and
on a large scale the occurrence of areas for logging. An area of tropical forest under forest
management was mapped in the Antimary State Forest in the state of Acre, Western
Brazilian Amazon, to assess the potential for the detection of impacts produced by forest
operations (roads and landings) using different levels of data acquisition: field, aerial and
orbital. Within the Antimary State Forest, roads and landings were mapped in the field
with GPS devices. The remote mapping of these structures was achieved using the non-
photosynthetic vegetation (NPV) fraction images obtained from the mixing model of the
Landsat images from years 2009 to 2015 processed in the CLASlite program. RapidEye
images from the years 2012 to 2015 were used to identify areas degraded by selective
logging. Airborne LiDAR data were used to create a high-resolution canopy relative
density model (RDM) and to identify the logged areas. The mapping of logging in the
study area showed 398 ha and 1,428 ha using automatic classification and visual
interpretation, respectively. The overall accuracy was estimated at 0.50 ± 0.060 for the
classification of Landsat images and 0.788 ± 0.149 for the classification of the RapidEye
images. The underestimated logged area according to the reference data was 4,537 ha
using Landsat and 705 ha using RapidEye. The size of the landings affected the Landsat
detection since it detected only 40% of the landings, while 98% of landing were detected
by LiDAR. The mean area of detected logging ladings was 435 m2 while the mean area
of those undetected was 302 m2, with a significant difference in detection being the
function of the size of the patios (t = -4.0076, df = 38, p≤0.01). Monitoring of permanent
plots showed differences in forest cover stocks before and after selective logging. These
results emphasize the need for research related to forest management in order to
understand the spatial variability of roads, landings and harvested tree gaps being detected
by remote sensing. While GPS is more reliable for the mapping of forest infrastructure,
LiDAR and Landsat data are effective in remotely quantifying the extent of exploitation
impacts in tropical forests by subsidizing forest management and monitoring.
Keywords: Selective logging. Forest management. Image processing. Laser. REDD+.

x
SUMÁRIO
Pág.
LISTA DE TABELAS ................................................................................................... xi
LISTA DE FIGURAS ................................................................................................... xii
LISTA DE ABREVIATURAS ..................................................................................... xv
1. INTRODUÇÃO ......................................................................................... 1
2. REFERENCIAL TEÓRICO .................................................................... 6 2.1. A Amazônia no contexto da mudança do clima .................................................. 6
2.2. Redução das emissões pelo desmatamento e degradação florestal ..................... 8 2.3. Exploração madeireira na Amazônia ................................................................ 10
2.4. Monitoramento por satélite da exploração madeireira ...................................... 13
2.5. O uso do LiDAR na área florestal ..................................................................... 18
3. OBJETIVOS ............................................................................................ 22 3.1. Geral .................................................................................................................. 22 3.2. Específicos......................................................................................................... 22
4. MATERIAL E MÉTODOS .................................................................... 23 4.1. Descrição da área de estudo .............................................................................. 23
4.1.1. Manejo florestal na Floresta Estadual do Antimary ................................... 24 4.2. Coleta de dados ................................................................................................. 27 4.2.1. Parcelas permanentes ................................................................................. 27
4.2.2. Infraestrutura da exploração florestal ......................................................... 29 4.3. Dados de Sensoriamento Remoto...................................................................... 32
4.3.1. Imagens Landsat e RapidEye ..................................................................... 32 4.3.2. Escaneamento a laser aerotransportado (ALS) .......................................... 33
4.4. Processamentos de dados e imagens ................................................................. 34 4.4.1. Detecção da extração seletiva com imagens Landsat e RapidEye ............. 34
4.4.2. Verificação da exatidão dos resultados da classificação ............................ 36 4.4.3. Identificação da infraestrutura florestal a partir de dados LiDAR ............. 39
4.5. Análise dos dados .............................................................................................. 43
5. RESULTADOS E DISCUSSÃO ............................................................ 44 5.1. Alteração da cobertura florestal em área de manejo florestal ........................... 44 5.2. Estimativa da área de exploração florestal ........................................................ 59 5.3. Uso de LiDAR para monitorar a alteração da cobertura florestal ..................... 67
5.4. Caracterização da infraestrutura da exploração ................................................. 72
5.5. Alteração da biomassa antes e após a exploração ............................................. 78
6. CONCLUSÃO ......................................................................................... 81
REFERÊNCIAS BIBLIOGRÁFICAS ....................................................................... 82

xi
LISTA DE TABELAS
Tabela 1. Detalhes das Unidades de Produção Anual (UPA) na Floresta Estadual do
Antimary, Estado do Acre. ..................................................................................... 27 Tabela 2. Detalhamento das parcelas permanentes cobertas com imageamento do
LiDAR no ano 2015 instaladas na Floresta Estadual do Antimary. ....................... 29
Tabela 3. Imagens utilizadas no estudo. ........................................................................ 33 Tabela 4. Parâmetros do sobrevoo do sistema LiDAR realizado nas UPAs. ................ 34 Tabela 5. Matriz de erros de contagem de amostras usada para avaliar a exatidão da
classificação de imagens Landsat na Floresta Estadual do Antimary. ................... 59 Tabela 6. Matriz de erro de contagem de amostras (nij) construída a partir da amostra de
avaliação de exatidão. As categorias da classificaçao são as linhas enquanto as
categorias de referência são as colunas. ................................................................. 60 Tabela 7. Matriz de erro das proporções de área estimada com base na Tabela 6. As
medidas de exatidão são apresentadas com um intervalo de confiança de 95%. As
categorias da classificaçao são as linhas enquanto as categorias de referência são as
colunas. ................................................................................................................... 61 Tabela 8. Matriz de erros usada para avaliar a exatidão da classificação automática da
exploração madeireira utilizando imagens RapidEye na UPA-3 da Floresta
Estadual do Antimary. ............................................................................................ 63
Tabela 9. Matriz de erro de contagem de amostras (nij) construída a partir da amostra de
avaliação de exatidão da classificação com RapidEye. As categorias da
classificaçao são as linhas enquanto as categorias de referência são as colunas. ... 64
Tabela 10. Matriz de erro estimada a partir da Tabela 9 com valores expressos como
proporção de área estimada. As medidas de exatidão são apresentadas com um
intervalo de confiança de 95%. As categorias da classificaçao são as linhas
enquanto as categorias de referência são as colunas. ............................................. 64
Tabela 11. Área dos pátios não detectados e detectados na imagem Landsat neste
estudo. ..................................................................................................................... 73 Tabela 12. Valores de biomassa medidos nas parcelas permanentes da UPA-3 e a taxa
de mudança para cada parcela. ............................................................................... 78 Tabela 13. Volume, número de árvores exploradas (totais e por hectare) e relação entre
volume selecionado e explorado na Floresta Estadual do Antimary. ..................... 79

xii
LISTA DE FIGURAS
Figura 1. Representação do funcionamento de um sistema de escaneamento a laser
aerotransportado, ilustrando um único feixe emitido do avião e o retorno originado
na copa da árvore. No detalhe da figura, ilustram-se vários feixes emitidos do
avião. Fonte: adaptado de Reutebuch; Andersen; Mcgaughey, 2005; Diaz, 2011.
Citado por Gorgens; Silva; Estraviz, 2014. ............................................................ 19 Figura 2. Aquisição de dados de LiDAR. (a) Impacto causado pelo aumento do ângulo
de varredura. (b) Geração de múltiplos retornos a partir de um único pulso de luz
laser. Fonte: adaptado de Jensen, 2009. ................................................................. 20 Figura 3. Localização da Floresta Estadual do Antimary, Estado do Acre, com
detalhamento da área de manejo florestal e Unidades de Produção Anual (UPA)
sobrepostas na imagem Landsat-8 de 23 de julho de 2016. ................................... 23 Figura 4. Localização das Unidades de Produção na Floresta Estadual do Antimary. As
UPAs em destaque (cor cinza) foram exploradas no período de 2007 a 2017. ...... 26 Figura 5. Parcelas permanentes instaladas na Floresta Estadual do Antimary, Acre. (a)
Área da cobertura LiDAR nas UPAs 2 e 3, (b) cobertura LiDAR na UPA-2 e (c)
cobertura LiDAR e 10 parcelas permanentes na UPA-3. ....................................... 28
Figura 6. Levantamento de campo na área explorada da UPA-3 na Floresta Estadual
Antimary, Acre. (a) Abrangência da área mapeada no trabalho de campo, (b)
Detalhamento das estradas, pátios, trilhas e árvores e (c) exemplo de um pátio de
estocagem com os vértices georreferenciados durante o trabalho de campo: A – B
= 24 m, B – C = 14 m, C – D = 22 m, D – A = 19 m. ............................................ 30
Figura 7. Procedimento para coleta de dados de GPS geodésico nos pátios de madeira
da UPA-3 da Floresta Estadual Antimary, Acre. (a) Deslocamento da base do
acampamento até o início da UPA-3, (b e c) Localização dos pátios e identificação
dos limites de floresta e pátio (vermelho), assim como restos de galhos secos nas
trilhas de acesso (d) Uso de dois aparelhos de GPS simultaneamente, (e) visão
geral de um pátio de madeira, (f e g) Coleta de coordenadas geográficas nos
vértices do pátio, (h) Caderneta de campo com anotações de data, horário de início
e término de cada coleta e número do pátio. .......................................................... 32 Figura 8. Representação gráfica do cálculo do Modelo de Densidade Relativa (RDM).
Valores altos de RDM indicam uma área com sub-bosque sem alteração enquanto
que valores próximos de zero indicam danos no sub-bosque. Fonte: Adaptado de
(D’OLIVEIRA et al., 2012). ................................................................................... 40
Figura 9. Imagem Landsat/TM de 09 de setembro de 2009 em composição R (S), G
(PV) e B (NPV) sobreposta com a delimitação da UPA-1 (em preto). (a)
Interpretação visual de estradas florestais e área afetada pela exploração sobreposta
na imagem-fração colorida, (b) detalhe do mapeamento da área afetada pela
exploração (em vermelho), (c) detalhe da infraestrutura de estradas e pátios
planejada para a exploração florestal...................................................................... 45 Figura 10. Imagem Landsat/TM de 09 de setembro de 2009 sobreposta com a
delimitação da UPA-1 utilizada para mapear a degradação florestal por extração
seletiva. (a) Imagem-fração NPV, (b) imagem-fração PV, (c) composição colorida
Solo, PV e NPV com delimitação da área de exploração identificada (em
vermelho) e (d) classificação CLASlite da floresta e área explorada. .................... 46

xiii
Figura 11. Imagem Landsat/TM sobreposta com a delimitação da UPA-1 utilizada para
identificar os indícios da infraestrutura da exploração florestal. (a) Imagem-fração
NPV de 24 de agosto de 2010, (b) imagem-fração PV de 24 de agosto de 2010, (c)
Imagem-fração NPV de 11 de agosto de 2011 e (d) Imagem-fração PV de 11 de
agosto de 2011. ....................................................................................................... 47 Figura 12. Imagem Landsat/TM sobreposta com a delimitação da UPA-2 (polígono
amarelo) utilizada para identificar a exploração florestal. (a) Imagem-fração NPV
de 06 de setembro de 2009, (b) imagem-fração NPV de 24 de agosto de 2010 e
sobreposição da área coberta pelo LiDAR (polígono branco) e detalhe de uma parte
da área com as frações NPV (c), PV (d) e composição RGB (e). .......................... 48 Figura 13. Imagem-fração NPV e sobreposição da área explorada na UPA-2 delimitada
a partir da interpretação visual (branco) no ano 2010 (a) e no ano 2013 (b). O ramal
de acesso construído foi perceptível na imagem de 2013. ..................................... 49 Figura 14. Área afetada pela exploração florestal na UPA-2. (a) Classificação CLASlite
de floresta (verde) e degradação (amarelo) na imagem Landsat do ano da
exploração e (b) dois anos após a exploração......................................................... 50
Figura 15. Imagem-fração NPV do Landsat sobreposta com a delimitação da UPA-3
(polígono branco) utilizada para identificar áreas alteradas pela exploração
florestal, antes (a e c) e após a exploração (b e d). A parte inferior da figura destaca
a região representada pelo polígono vermelho. ...................................................... 51
Figura 16. Imagem Landsat/OLI sobreposta com a delimitação da UPA-3 (polígono
branco) utilizada para identificar os indícios da infraestrutura da exploração
florestal. (a) Imagem-fração NPV e (b) Resultado da classificação CLASlite de
floresta (verde) e degradação florestal (amarelo). .................................................. 52 Figura 17. Imagem-fração solo derivada do MLME da imagem RapidEye com
sobreposição da UPA-3 (branco). (a) Imagem do primeiro ano após a exploração.
(b) Imagem de 2013 destacando as áreas exploradas. (c) Imagem do ano seguinte
da exploração. (d) Imagem de dois anos após a exploração. .................................. 53 Figura 18. Comparação do mapeamento da área afetada pela exploração usando
Landsat e RapidEye. (a) Imagem-fração NPV derivada do Claslite da imagem
Landsat com sobreposição da UPA-3 (branco) e delimitação da área explorada
(vermelho) e (b) Imagem-fração derivada do MLME da imagem RapidEye. ....... 54 Figura 19. Classificação automática em imagem RapidEye de 18 de outubro de 2013
com sobreposição área afetada pela exploração (em amarelo) e das estradas
florestais mapeadas em campo na UPA-3. ............................................................. 55 Figura 20. Comparação do mapeamento da área afetada pela exploração usando
Landsat e RapidEye. (a) Imagem-fração NPV derivada do Claslite da imagem
Landsat com sobreposição da UPA-3 (branco) e delimitação da área explorada
(vermelho) e (b) Imagem-fração derivada do MLME da imagem RapidEye. ....... 55 Figura 21. Comparação entre a área explorada medida a partir da interpretação visual
na imagem-fração NPV e a classificação automática para cada Unidade de
Produção Anual explorada na Floresta Estadual do Antimary entre os anos de 2009
e 2015. .................................................................................................................... 56 Figura 22. Área explorada identificada a partir da interpretação visual na imagem-
fração NPV nas UPAs da Floresta Estadual do Antimary, totalizando 1.428
hectares no período de 2009 a 2015. ...................................................................... 57

xiv
Figura 23. Área explorada identificada a partir da classificação automática nas UPAs
da Floresta Estadual do Antimary, totalizando 397 hectares no período de 2009 a
2015. ....................................................................................................................... 57
Figura 24. Proporção da área explorada estimada a partir da classificação automática de
imagens Landsat nas UPAs da Floresta Estadual do Antimary, considerando a
exatidão geral, do usuário e do produtor no intervalo de confiança de 95%. ......... 62 Figura 25. Proporção da área explorada estimada a partir da classificação automática de
imagens RapidEye na UPA-3 da Floresta Estadual do Antimary, considerando a
exatidão geral, do usuário e do produtor no intervalo de confiança de 95%. ......... 65 Figura 26. Modelo de Densidade Relativa de Vegetação (RDM) obtido do LiDAR na
UPA-2. (a) RDM do primeiro ano da exploração e (b) RDM do segundo ano da
exploração. O retângulo vermelho indica área explorada em 2010 e o azul área
explorada em 2011.................................................................................................. 67 Figura 27. Modelos obtidos a partir do LiDAR na UPA-3 da Floresta Estadual do
Antimary, Acre. (a) modelo de altura de dossel e (b) modelo de densidade relativa.
................................................................................................................................ 69
Figura 28. Modelos de densidade relativa de vegetação (RDM) para a área de estudo a
partir dos dados Lidar. (a) RDM de 1 m e 5 metros acima do solo conforme
proposto por D’Oliveira et al. (2012) e (b) RDM entre 8 m e 12 metros proposto
neste estudo. A escala de cinza representa a densidade de retorno do LiDAR com
as áreas exploradas em preto. ................................................................................. 70 Figura 29. (a) Detalhamento da visualização de pátios no RDM proposto por d’Oliveira
et al. (2012) e (b) RDM proposto neste estudo. A escala de cinza representa a
densidade de retorno do LiDAR com as áreas exploradas em preto e os pátios em
vermelho. ................................................................................................................ 71
Figura 30. Variância da elevação dos pontos LiDAR nas parcelas da UPA-3. ............. 72
Figura 31. Identificação de pátios a partir da interpretação visual nas imagens de
cobertura fracional NPV do Landsat dos anos 2011, 2013, 2014 e 2015............... 74 Figura 32. Detecção dos pátios na imagem NPV do ano de 2013 e relação com a área
medida em campo. Gráfico Boxplot apresenta o primeiro, segundo e terceiro
quartil, limites inferiores e superiores da distribuição dos dados referentes (a) área
dos pátios (m2) e (b) fração NPV (%) em relação a detecção na imagem Landsat-8.
................................................................................................................................ 75
Figura 33. Detecção dos pátios na imagem NPV do ano de 2013 e relação com a área
medida em campo. .................................................................................................. 75 Figura 34. Detecção dos pátios na imagem NPV do ano de 2013 e relação com a área
medida em campo. .................................................................................................. 76 Figura 35. Visualização da nuvem de pontos LiDAR dos pátios que não foram
detectados na imagem NPV. Dimensão dos pátios: 294 m2 (a), 298 m2 (b) e 299 m2
(c). ........................................................................................................................... 76
Figura 36. Estoques de biomassa e volume medidos nas parcelas permanentes........... 79

xv
LISTA DE ABREVIATURAS
ALS: Airborne Laser Scanning (escaneamento a laser aerotransportado)
AUTEX: Autorização de Exploração
CBD: Convenção sobre Diversidade Biológica
CLASlite: Carnegie Landsat Analysis System - Lite
CHP: Canopy Height Profile (perfil de altura de dossel)
COP: Conferência das Partes da Convenção-Quadro das Nações Unidas sobre Mudança do
Clima
DAP: Diâmetro à altura do peito
DEM: Digital Elevation Model (modelo digital de elevação)
DEGRAD: Sistema de Monitoramento de Degradação Florestal
DETER: Sistema de Detecção de Desmatamento em Tempo Real
DETEX: Detecção de Exploração Seletiva
DTM: Digital Terrain Model (modelo digital de terreno)
FEA: Floresta Estadual do Antimary
FREL: Forest Emission Level
GEE: Gases de Efeito Estufa
IBAMA: Instituto Brasileiro de Meio Ambiente e dos Recursos Naturais Renováveis
IMAZON: Instituto do Homem e do Meio Ambiente da Amazônia
INPE: Instituto Nacional de Pesquisas Espaciais
IPCC: Painel Intergovernamental sobre Mudanças Climáticas
ITTO: Organização Internacional de Madeira Tropical
LiDAR: Light Detection and Ranging (detecção e distanciamento da luz)
MFS: Manejo Florestal Sustentável
MLME: Modelo Linear de Mistura Espectral
MRV: Measurement, Report and Verification (Mensuração, Relato e Verificação)
PMFS: Plano de Manejo Florestal Sustentável
PPCDAm: Plano de Ação para Prevenção e Controle do Desmatamento na Amazônia Legal
PRODES: Projeto de Monitoramento da Floresta Amazônica Brasileira por Satélite
REDD+: Reducing Emissions from Deforestation and Forest Degradation, and the role of
Conservation of Forest Carbon Stocks, Sustainable Management of Forests and Enhancement
of Forest Carbon Stocks
SFB: Serviço Florestal Brasileiro
UNFCCC: Convenção-Quadro das Nações Unidas sobre Mudança do Clima

1
1. INTRODUÇÃO
O Brasil tem apresentado expressivos resultados de redução de emissões de CO2
provenientes do desmatamento no bioma Amazônia (INPE, 2017). Estes resultados foram
reportados no âmbito da Convenção-Quadro das Nações Unidas sobre Mudança do Clima
(UNFCCC) (MMA, 2016). Por outro lado, a degradação florestal é um processo de
alteração do estado da floresta madura e a extração seletiva de madeira também contribui
para o balanço do carbono na Amazônia brasileira, representando 33% das fontes de
carbono em anos sem secas extremas (ARAGÃO et al., 2014). A extração madeireira,
que consiste na remoção de árvores madeireiras com valor comercial, é um importante
uso da terra na Amazônia brasileira e pode causar mudanças de estrutura a longo prazo e
perda de biomassa florestal.
A floresta amazônica brasileira é a principal fonte de madeira tropical para o
mercado nacional e também uma fonte significativa para os mercados internacionais.
Contudo, a atividade madeireira afeta extensas áreas de florestas maduras na Amazônia
(ASNER et al., 2005) e nos trópicos em geral (HIRSCHMUGL et al., 2014). Mas quando
esta atividade é praticada a partir dos princípios e fundamentos do manejo florestal, ela
pode ser uma grande aliada no esforço para reduzir a perda de cobertura florestal da
Amazônia, evitando o corte seletivo desordenado.
Após a estabilização das taxas de desmatamento da Amazônia Legal na última
década (INPE, 2015) e a redução de 82% em 2012 em comparação a 2004, o governo
brasileiro enfrenta novos desafios para cumprir a legislação brasileira sobre mudança do
clima que determina que até 2020 a taxa anual de desmatamento alcance no máximo
3.915 km² e cause, por consequência, uma diminuição nas emissões de carbono. Porém,
as emissões de carbono devido à degradação florestal podem ser da mesma magnitude
que o desmatamento (ASNER et al., 2005; NEPSTAD et al., 1999) e tendem a aumentar
dada a rápida expansão da atividade madeireira nos trópicos e a diminuição da oferta de
madeira no mercado asiático (HIGUCHI et al., 2006). A degradação das florestas é uma
preocupação global e uma questão contemporânea importante para vários países devido

2
a Convenção sobre Diversidade Biológica (CBD) de 2010 ter estabelecido a meta de
restauração de pelo menos 15% dos ecossistemas degradados até a próxima década.
A comunidade científica internacional recomenda um sistema de monitoramento
de florestas que combine dados de inventários florestais e de sensoriamento remoto
(DEFRIES et al., 2007; GOETZ et al., 2009; IPCC, 2014) visto que os sistemas
atualmente existentes não são capazes de fornecer a exatidão necessária para avaliar as
mudanças nos estoques de carbono devido à degradação e recuperação florestal (ASNER
et al., 2005; UNFCCC et al., 2009). Durante o Acordo de Copenhagen (COP 15), surgiu
a demanda para o estabelecimento de um sistema de monitoramento florestal a nível
subnacional ou nacional que combine sensoriamento remoto com inventários de campo e
que considere as circunstâncias de cada país para estabelecer os níveis de referência a
serem adotados para avaliar as ações de REDD+1 (UNFCCC, 2009).
O papel do desmatamento nas mudanças dos ecossistemas é comprovado e
facilmente calculado, mas a degradação florestal por extração seletiva de madeira é mais
difícil de discernir e quantificar utilizando produtos de sensoriamento remoto, pois a
retirada de árvores apresenta respostas altamente variáveis nos danos da copa e podem
ser confundidas com o dossel intacto. Desta forma, monitorar a exploração madeireira em
escala regional é uma questão desafiadora porque requer dados de alta resolução espacial
para identificar a retirada de árvores e frequente revisita para acompanhar o surgimento
de feições relacionadas à infraestrutura da exploração florestal, como abertura de pátios,
estradas e trilhas de arraste.
Apesar da complexidade para mapear a exploração madeireira por sensoriamento
remoto, alguns estudos já foram realizados utilizando séries temporais de imagens de
satélite de média resolução espacial, a maioria deles apresentaram estudos de caso na
Amazônia Oriental (SOUZA; BARRETO, 2000; SOUZA et al., 2003; STONE;
1 Sigla em inglês para redução de emissões por desmatamento; redução de emissões por degradação
florestal; conservação do estoque de carbono florestal; manejo sustentável de florestas e aumento dos
estoques de carbono florestal. A definição de REDD+ de acordo com a terminologia da COP13 compreende
ações locais, subnacionais, nacionais e globais cujo principal objetivo é reduzir as emissões do
desmatamento e degradação florestal e melhorar os estoques de carbono nos países em desenvolvimento.

3
LEFEBVRE, 1998). A degradação florestal tem sido levada em consideração por alguns
investigadores, como ASNER et al. (2005), MATRICARDI et al. (2013) e SOUZA, JR
et al. (2013) com estudos mais abrangentes para a Amazônia Legal, porém envolvendo
séries históricas de no máximo uma década e com dados de campo relacionados apenas à
validação do mapeamento. Entretanto, esses estudos ainda não foram replicados para
incorporar um programa operacional de monitoramento da degradação florestal por corte
seletivo na Amazônia.
A Força Tarefa do IPCC reunida em Yokohama em 2010 observou que os
métodos existentes não forneciam detalhes suficientes para detectar a perda de biomassa
em florestas exploradas por corte seletivo e apontou a necessidade de fornecer orientações
adicionais sobre sistemas de monitoramento florestal, incluindo questões sobre avaliação
de exatidão e incertezas (IPCC, 2010). A necessidade de obter estimativas mais
consistentes da exploração madeireira mostra que o monitoramento desta atividade é um
campo da ciência que necessita avançar para contribuir com programas e políticas de
diminuição dos impactos da mudança do clima nos países tropicais.
Para possibilitar um entendimento do processo de degradação em longo prazo,
com dados de parcelas permanentes e análise temporal de dados de sensores remotos,
estudos são necessários para preencher lacunas importantes nessa questão científica.
Estudos recentes, incluindo dados de inventários florestais, foram realizados no sudoeste
da Amazônia com levantamento a laser aerotransportado (ANDERSEN et al., 2014;
D’OLIVEIRA et al., 2012). O cruzamento de imagens de satélite com informações de
campo é uma abordagem promissora para o monitoramento e controle da degradação
florestal, avaliando se um plano de manejo está sendo conduzido de forma a reduzir os
impactos da exploração. A estratégia de adotar o uso de sensores remotos combinados
com dados de inventários florestais que possam ser aplicados de maneira sistemática para
a detecção da exploração madeireira na Amazônia é uma alternativa para monitoramento
em grande escala, fornecendo dados frequentes para subsidiar a fiscalização ambiental.
No contexto das políticas de REDD+ o monitoramento da exploração madeireira
tem um papel importante uma vez que os dados de degradação ainda não foram utilizados

4
para reportar o nível de referência de emissões florestais (FREL) do país (MMA, 2014).
A quantificação da degradação e recuperação florestal é um dos principais impedimentos
para a implementação de mecanismos REDD+ (AGUIAR et al., 2012; MITCHARD et
al., 2014). O monitoramento contínuo da exploração madeireira é necessário para reportar
as estimativas relacionadas às emissões de carbono por degradação florestal. Embora
desde 2008 já exista um sistema de monitoramento da degradação na Amazônia, o
Programa DEGRAD, essa atividade não foi incluída no FREL do Brasil devido a curta
série temporal existente não gerar taxas de áreas exploradas periodicamente e para todos
os estados da Amazônia. Deste modo, até o momento o Brasil utiliza somente os dados
de desmatamento para reportar as emissões de carbono, apesar de assumir protagonismo
nas negociações sobre REDD+ no âmbito da UNFCCC. Contudo, a avaliação do FREL
do Brasil propôs, dentre outros aspectos, a inclusão do monitoramento da degradação
florestal da Amazônia.
De acordo com o Marco de Varsóvia de REDD+, para países em desenvolvimento
receberem pagamentos por resultados de redução de desmatamento e degradação devem
antes passar por um processo de Mensuração, Relato e Verificação (MRV). Assim, o
Brasil tornou-se o primeiro país a concluir a implementação do Marco de Varsóvia e a ter
resultados de REDD+ verificados, passando a receber recursos de pagamentos por seus
resultados de redução de emissões provenientes do desmatamento no bioma Amazônia
(MMA, 2016). Levando em consideração o local de destaque ocupado pela Amazônia
brasileira nas discussões relacionadas ao cenário de mudança climática, torna-se
necessário identificar áreas sob extração seletiva de madeira que possibilitem convergir
para sistemas de monitoramento florestal.
A adoção de métodos de mapeamento combinando informações de campo e
sensoriamento remoto é necessária para diminuir as incertezas das estimativas de carbono
florestal e no cumprimento dos requisitos existentes de inventário de Gases de Efeito
Estufa (GEE) e será especialmente importante em áreas com projetos de REDD+, como
no Acre, primeiro estado a implementar um Sistema de Incentivos por Serviços
Ambientais. O presente trabalho busca responder a seguinte pergunta: qual a capacidade
de monitorar a exploração madeireira utilizando dados de sensores remotos após a

5
ocorrência da exploração em florestas do sudoeste da Amazônia brasileira e como estes
dados se relacionam com parâmetros obtidos em parcelas de campo? Deste modo, a
exploração madeireira ocorrida em uma área de concessão florestal no Acre foi analisada
a partir da combinação de dados LANDSAT, RapidEye e LiDAR e parcelas de campo
para compreender o potencial destes sensores em fornecer estimativas de degradação
florestal e oferecer suporte à definição de políticas e estratégias de ação e controle ligadas
ao monitoramento da Amazônia.

6
2. REFERENCIAL TEÓRICO
No presente tópico é apresentada a fundamentação teórica mais diretamente
relacionada ao escopo da tese, incluindo os principais conceitos ligados ao tema e os
estudos mais relevantes publicados nas últimas décadas. Inicialmente é apresentada uma
breve síntese sobre a mudança climática global e as consequências para as florestas
tropicais. O conceito de degradação florestal é discutido, bem como a importância da
exploração madeireira na Amazônia. Em seguida é revisada a potencialidade do
monitoramento florestal com o uso de imagens de satélites, abordando as principais
técnicas adotadas para detectar e mapear a degradação florestal por corte seletivo na
Amazônia brasileira. Por último, é abordado o avanço da tecnologia de escaneamento a
laser aerotransportado na área florestal, bem como os componentes de um sistema
Airborne Laser Scanner (ALS), funcionamento e propriedades do escaneamento.
2.1. A Amazônia no contexto da mudança do clima
As questões relacionadas à mudança do clima fazem parte da discussão da
comunidade internacional desde a Conferência das Nações Unidas sobre o Meio
Ambiente e Desenvolvimento realizada em 1992 na cidade do Rio de Janeiro. No entanto,
iniciativas anteriores são reportadas desde eventos que aconteceram a partir de 1972,
como a Conferência de Estocolmo que criou o Programa das Nações Unidas para o Meio
Ambiente (PNUMA), influenciando os países a criarem estruturas executivas para tratar
de temas ambientais.
Em 1988 foi criado o Painel Intergovernamental sobre Mudança do Clima (IPCC),
com o propósito de fornecer uma visão científica do estado atual da mudança do clima,
bem como suas potenciais consequências ambientais e socioeconômicas. Em 1992 foi
criada a Convenção-Quadro das Nações Unidas sobre Mudança do Clima (UNFCCC) que
entrou em vigor em 1994 com o objetivo de estabilizar as concentrações de gases de efeito
estufa na atmosfera reduzindo a interferência antrópica (UNFCCC, 1992).

7
A partir do ano seguinte, a Conferência das Partes (COP), órgão supremo da
Convenção do Clima, passou a reunir-se anualmente e em 1997, durante a COP-6, foi
assinado o Protocolo de Quioto que adotou limites para emissão dos gases de efeito estufa
em países desenvolvidos e ao mesmo tempo criou significantes incentivos para os países
em desenvolvimento controlarem as suas emissões em consonância ao crescimento
econômico. O Protocolo de Quioto foi assinado por mais de 160 nações e previa a
estabilização das emissões, em 2000, aos níveis de 1990, porém isto não ocorreu e as
emissões continuaram a crescer tanto nos países desenvolvidos como nos países em
desenvolvimento (MCT, 2015).
A Convenção sobre Mudança do Clima explica as mudanças climáticas como uma
diferença entre a variação do clima com e sem a interferência humana, que contribua com
a variabilidade natural observada ao longo do tempo, alterando a composição da
atmosfera mundial (FCCC, 1992). Enquanto o IPCC define mudanças climáticas como
uma mudança no estado do clima que pode ser identificada por alterações na média e/ou
na variabilidade de suas propriedades e que persistem por um longo período de tempo,
normalmente décadas (IPCC, 2007).
Neste aspecto, a definição do IPCC se refere a qualquer mudança do clima ao
longo do tempo, seja devido às causas naturais ou antrópicas, enquanto que o conceito
das Nações Unidas atribui as mudanças climáticas direta ou indiretamente às atividades
humanas. A permanência do padrão atual de emissões de gases de GEE para a atmosfera
resultante de ações antrópicas representa alta probabilidade de que haverá mudanças
climáticas globais de grande magnitude ocorrendo nos próximos 100 anos no país,
destacando-se o aumento de temperatura, modificações nos padrões de chuvas e
alterações na distribuição de extremos climáticos tais como secas, inundações, penetração
de frentes frias, tempestades severas, vendavais, dentre outros (MARENGO; SOARES,
2003; NOBRE, 2001).

8
2.2.Redução das emissões pelo desmatamento e degradação florestal
O relatório do IPCC que trata sobre LULUCF2 introduziu o tema desmatamento
evitado em florestas tropicais ao Mecanismo de Desenvolvimento Limpo (MDL).
REDD+ é considerado um instrumento internacional para pagamento de resultados de
redução de emissões relacionadas ao setor florestal. Cinco mecanismos para gerar
créditos de REDD+ são atualmente considerados pela UNFCCC: i) redução de emissões
por desmatamento; ii) redução de emissões pela degradação florestal; iii) conservação de
florestas; iv) manejo florestal sustentável e v) aumento dos estoques de carbono. Cabe
destacar o histórico de criação do REDD+, introduzido no contexto das negociações
relacionadas às florestas tropicais durante a 11ª Conferência das Partes (COP-11)
realizada em Montreal em 2005, quando Costa Rica e Papua Nova Guiné apresentaram
conjuntamente uma proposta de redução de emissões por desmatamento em países em
desenvolvimento. Com isso, abordagens para estimular ações foi oficialmente
introduzido na agenda da UNFCCC.
A modalidade REDD+ foi baseada no fato que o desmatamento em países em
desenvolvimento contribui com uma quantidade significativa de emissões de GEEs
partindo das seguintes premissas: (i) a Convenção do Clima é omissa em relação à
redução de emissões por meio do desmatamento; (ii) não há como os países em
desenvolvimento se engajarem ao Protocolo de Quioto para as reduções de suas emissões;
(iii) na ausência de rendas para florestas em pé, as comunidades e os governos de países
em desenvolvimento têm poucos incentivos para impedir o desmatamento; (iv) as nações
em desenvolvimento estão preparadas para estimar as suas contribuições à estabilidade
do clima global baseado no “acesso justo e igual aos mercados de emissões de carbono”
e (v) a estabilidade climática dependerá da expansão igual dos sistemas de mercados
iniciados pelo Protocolo de Quioto devendo facilitar e integrar a participação dos países
em desenvolvimento. Os mecanismos de REDD foram aprovados durante a COP 11 e
ganhou destaque no Quarto Relatório de Avaliação do IPCC (HIGUCHI et al., 2009).
2 Do inglês, Land Use Change and Forestry.

9
Durante a COP 13 de Bali, em 2007, foi adotado o Plano de Ação de Bali que
estabeleceu as negociações pós-Kyoto, ou seja, sobre medidas de cooperação de longo
prazo, com início imediato até 2012. Então, naquele momento, a modalidade de
degradação florestal foi incorporada ao RED, passando a ser denominado REDD. Os
países com florestas tropicais foram encorajados a desenvolverem “atividades de
demonstração” subsidiando o desenvolvimento de uma linha de base3 para emissões
nacionais historicamente contabilizadas (UNFCCC, 2008).
O termo REDD+ foi formalmente adotado durante a COP 16 de Cancun, em 2010,
passando a ser formalmente incorporado à agenda climática da UNFCCC como um
elemento de um acordo pós-Kyoto. Assim, REDD+ assumiu sua conotação atual, ou seja,
de um mecanismo ou política que contempla formas de prover incentivos positivos aos
países em desenvolvimento para enfrentar as mudanças climáticas. No Brasil, o
Ministério do Meio Ambiente é o órgão que coordena o debate em torno das negociações
e elaborou uma estratégia nacional de REDD+, definindo orientações metodológicas em
alinhamento com as decisões internacionais no âmbito UNFCCC (MMA, 2016).
No contexto das discussões sobre mudanças climáticas, os conceitos relacionados
à floresta, degradação florestal e desmatamento têm relevância por estarem estritamente
relacionados às emissões de carbono, e por consequência possibilitam implicações para
projetos de REDD+. A degradação florestal e o desmatamento são processos distintos,
uma vez que o desmatamento representa a retirada da cobertura florestal por corte raso,
enquanto a degradação florestal pode levar vários anos (BARLOW; PERES, 2008). Desta
forma, o desmatamento envolve a conversão das florestas para outros tipos de cobertura
do solo e a degradação ocorre quando as florestas permanecem com cobertura florestal,
mas tem comprometido sua capacidade para fornecer serviços ecossistêmicos ou sofrem
grandes mudanças na composição de espécies devido à sobre-exploração, invasão de
espécies exóticas, poluição, incêndios ou outros fatores (SASAKI; PUTZ, 2009).
3 Linha de base é o cenário de referência contra o qual uma mudança na emissão ou remoção de GEE é
medida (IPCCC, 2000).

10
Diferentes conceitos são utilizados para definir a degradação florestal. Simula
(2009) a define como uma redução em longo prazo da oferta potencial total de benefícios
da floresta, que inclui carbono, madeira, biodiversidade e outros bens e serviços, enquanto
que a Organização Internacional de Madeiras Tropicais (ITTO, do inglês International
Tropical Timber Organization) define a degradação florestal como uma perda direta
provocada pelo homem de valores florestais (especialmente carbono), que provavelmente
será caracterizado por uma redução da cobertura arbórea. Este conceito não considera o
manejo florestal como degradação florestal ao assumir que a cobertura do dossel vai se
recuperar ao longo dos anos. Por outro lado, a degradação florestal é considerada como
uma redução dos estoques de biomassa em X% por um tempo Y (SCHOENE et al., 2007).
2.3.Exploração madeireira na Amazônia
A exploração de madeira é uma atividade econômica de grande expressão na
Amazônia brasileira, envolvendo o desdobramento de uma média anual de 25 milhões de
metros cúbicos de toras entre 1990 a 2015 (IBGE, 2015). A atividade madeireira na
Amazônia brasileira começou historicamente há cerca de 300 anos com a exploração de
poucas espécies nas regiões de várzea (BARROS; UHL, 1995). Por volta dos anos 50 do
século passado iniciou-se a produção de madeira a partir de serrarias industriais e pode-
se citar como os primeiros exemplos da extração seletiva a exploração de duas espécies
típicas de áreas alagáveis conhecidas como virola (Virola surinamensis) e andiroba
(Carapa guianensis) (BARROS; UHL, 1995; ZARIN et al., 2001). A partir da década de
1970 a atividade teve um impulso com a chegada de imigrantes para a região, vindos
principalmente das regiões sul e sudeste do país, e também em virtude da exaustão de
florestas tropicais na Mata Atlântica (LENTINI; VERÍSSIMO; SOBRAL, 2003).
Nas últimas décadas, o corte de espécies arbóreas de alto valor comercial tem se
tornado uma importante atividade na Amazônia (STONE; LEFEBVRE, 1998; NEPSTAD
et al., 1999). Este cenário tornou-se mais comum a partir da construção de estradas na
região durante as décadas de 60 e 70 que permitiram a expansão da extração seletiva de
madeira das florestas de terra firme (UHL; VIEIRA, 1989; UHL et al., 2010). A partir de

11
então, a exploração de madeira praticada na Amazônia pode ser caracterizada de duas
formas: i) exploração convencional ou exploração predatória, caracterizada pela
exploração sem planejamento em que as estradas e os pátios de estocagem seguem formas
desordenadas e mais longas, os cipós não são cortados antes da exploração e as árvores
são derrubadas sem um levantamento técnico para o corte, causando maior impacto na
floresta; e ii) exploração manejada, caracterizada pelo planejamento da construção de
estradas, pátios de estocagem e ramais de arraste, do corte de cipós antes da exploração e
da derrubada direcional das árvores (JOHNS; BARRETO; UHL, 1996; VIDAL et al.,
1997).
UHL et al. (1997) descrevem três formas de exploração madeireira em florestas de
terra firme na Amazônia: a primeira está relacionada à exploração de baixo impacto que,
mesmo requerendo a abertura de quilômetros de estradas no interior da floresta, causa
poucos danos ao ecossistema florestal em razão da distribuição espacial e baixa densidade
de indivíduos adultos por hectare das espécies exploradas; a segunda ocorre nas áreas
próximas às estradas construídas pelo governo, onde algumas árvores são removidas por
hectare; a terceira é de alto impacto, caracterizando-se pela extração de mais de 100
espécies de árvores, isto é, 5 a 10 indivíduos por hectare.
A exploração predatória de madeira extrai de 30 a 50 metros cúbicos de madeira
em tora por hectare e reduz a cobertura total do dossel original de 80% para 45% em
florestas ombrófilas densas (UHL; VIEIRA, 1989). A redução pode chegar a 39% quando
a floresta é submetida à exploração de madeira seguida de intensa queimada (GERWING,
2002). A extração seletiva remove tipicamente 3 a 9 árvores por hectare de
aproximadamente 100 espécies com valor comercial (VERISSIMO et al., 1992).
Nas áreas submetidas à exploração por mais tempo ocorre redução de matéria-
prima, ou a falta local de madeira, que juntamente com os altos custos de transporte de
toras de árvores provenientes de florestas distantes pode provocar uma continuação da
sequência da exploração descrita por Uhl et al. (1997). Deste modo, novas extrações
removem aproximadamente todos os indivíduos restantes de espécies comerciais,

12
incluindo aqueles considerados anteriormente muito pequenos, ou seja, de diâmetros
inferiores aos usualmente considerados de corte.
Laurance (1998) estimou que aproximadamente 80% das espécies exploradas são
ilegais e ocorrem sem qualquer tipo de manejo florestal, enquanto Lentini et al. (2005)
estimou que 50% provém de fonte ilegal. Estima-se que 66% do volume de madeira em
toras extraído na Amazônia são oriundas de áreas autorizadas (SFB; IMAZON, 2010).
A exploração de madeira na Amazônia é influenciada pela demanda por madeira
no mercado internacional, em razão do esgotamento desse recurso na Ásia (HIGUCHI,
1994) e também devido a limitação dos recursos florestais nas regiões Sudeste e Sul do
Brasil (VERÍSSIMO; LIMA; LENTINI, 2002). A indústria madeireira é um propulsor
econômico que gera lucros e tem o potencial de ser uma fonte renovável para a Amazônia,
porém este setor é afetado pelo baixo capital de investimento e dificuldades enfrentadas
pela fiscalização para coibir a ilegalidade na exploração madeireira (ASNER et al.,
2009a). Estes fatores impedem o fortalecimento de uma atividade madeireira sustentável
e que se estabeleça a longo prazo na região em razão da concorrência desleal para os
empresários que trabalham na legalidade, visto que o a extração de madeira sem
autorização é conduzida sob custos mais baixos (PEREIRA et al 2002; HOLMES et al,
2002,ASNER et al., 2009a).
Há dois procedimentos para obter a permissão legal para realizar exploração
madeireira na Amazônia: manejo florestal e desmatamento. O Manejo Florestal
Sustentável (MFS)4 é a atividade legalmente permitida para a produção florestal com
amparo na legislação por meio da Lei nº 12.651/2012, do Decreto 5.975/2006, das
Instruções Normativas MMA 04 e 05/2006 e da Resolução Conama 406/2009. O MFS
tem como requisito norteador o Plano de Manejo Florestal Sustentável (PMFS) que
orienta a atividade florestal a partir da caracterização do meio físico e biológico da Área
4 Definido pela Lei nº 12.651/2012 como a administração da vegetação natural para a obtenção de
benefícios econômicos, sociais e ambientais, respeitando-se os mecanismos de sustentação do ecossistema
objeto do manejo e considerando-se, cumulativa ou alternativamente, a utilização de múltiplas espécies
madeireiras ou não, de múltiplos produtos e subprodutos da flora, bem como a utilização de outros bens e
serviços.

13
de Manejo Florestal (AMF), das técnicas de produção, intensidade de corte e ciclo de
corte estabelecido no PMFS, que varia entre 25 e 35 anos na Amazônia (SFB, 2017).
Enquanto o desmatamento é permitido por meio da Autorização de Supressão da
Vegetação (ASV) de 20% da área total de propriedades rurais amazônicas.
2.4.Monitoramento por satélite da exploração madeireira
A extensão, intensidade da exploração madeireira e tempo após a exploração são
os fatores mais relevantes para se entender os efeitos diretos da retirada de madeira sobre
a floresta, bem como a resposta nas imagens de satélites. Stone e Lefebvre (1998)
mostraram que os dados causados pela atividade madeireira podem ser identificados em
três anos ou menos nas imagens de satélite. Nos primeiros anos após a exploração
florestal, a estrutura da vegetação nos sítios explorados é inversa à estrutura da floresta
original, ou seja, essas áreas apresentam um grande crescimento secundário nos estratos
mais baixos e um dossel aberto, por isso a detecção de florestas previamente cortadas (>1
ano) torna-se bastante complexa.
Estimativas de áreas de florestas afetadas pela exploração madeireira têm sido
realizadas através de técnicas de interpretação visual de imagens obtidas dos sensores TM
e ETM+ do satélite LANDSAT. A localização e extensão da extração seletiva em uma
região a oeste de Paragominas no Pará foram delimitadas a partir de imagens do sensor
TM/LANDSAT dos anos de 1986, 1991 e 1998 por Stone e Lefebvre (1998) com
emprego das técnicas de interpretação visual nas imagens e classificação supervisionada
(algoritmo de máxima verossimilhança). Os resultados mostraram que a área explorada
naquela região em 1991 (32%) foi mais que o dobro da área identificada cinco anos antes
(14%). A exploração seletiva observada em 1991 foi mais amplamente distribuída do que
em 1986, quando a maior concentração ocorreu longe do centro urbano de Paragominas.
Enquanto na região oeste do estado, indícios de exploração madeireira identificados nas
imagens de 1986 não estavam aparentes nas imagens de 1991 (STONE; LEFEBVRE,
1998).

14
Apesar da interpretação visual permitir a delimitação entre as áreas exploradas
pela atividade madeireira e áreas de florestas tropicais intactas, o delineamento das áreas
exploradas por este método está sujeito a erros subjetivos de interpretação. Áreas com
atividades de exploração sutis tais, como aquelas de baixa intensidade de exploração ou
em fase inicial podem ser desconsideradas pelo intérprete, aumentando a incerteza na
estimativa das áreas exploradas. Desta forma, técnicas de processamento de imagens
também são utilizadas na delimitação automática realizada por algoritmos de
classificação para mapeamento da exploração madeireira.
Graça (2006) encontrou resultados satisfatórios ao evidenciar áreas sob
exploração madeireira a partir de imagens fração. As imagens fração solo, vegetação e
sombra apresentam em tons de cinza mais claro a predominância dos componentes puros
de suas respectivas frações. O componente solo realça áreas de solo exposto, permitindo
identificar com facilidade as estradas de acesso e áreas de pátios de estocagem. Alvos
como estradas e pátios nas imagens TM/LANDSAT são indicadores importantes na
detecção de áreas de floresta exploradas (STONE; LEFEBVRE, 1998; WATRIN;
ROCHA, 1992).
As aberturas no dossel da floresta causadas pela exploração de madeira são
visíveis em imagens Landsat, contudo a vegetação se recupera dentro de 1 a 5 anos e
podem ser classificados erroneamente na ausência de dados de campo (NEPSTAD et al.,
1999). Muitas atividades podem causar degradação das reservas de carbono das florestas,
porém nem todas podem ser monitoradas usando dados de sensoriamento remoto. A
abertura no dossel causada pelo corte seletivo de árvores pode ser detectada em imagens
LANDSAT utilizando técnicas sofisticadas e esta tarefa torna-se mais fácil quando a
atividade de exploração madeireira é mais intensa, ou seja, maior número de árvores
explorado (GOFC-GOLD, 2015).
Áreas de florestas submetidas à extração seletiva também podem ser interpretadas
em imagens de sensoriamento remoto baseadas na observação das estradas e pátios que
muitas vezes são claramente reconhecíveis nas imagens, enquanto que a degradação do
estoque de carbono por incêndios florestais são mais difíceis de identificar a partir das

15
imagens de satélite (GOFC-GOLD, 2015). O impacto da exploração madeireira deixa
marcas características associadas a solo exposto, vegetação secundária, árvores mortas
caídas e em pé, árvores danificadas, cicatriz de fogo florestal, manchas florestais
inalteradas, pátios de estoque de madeira e trilhas de arraste (MATRICARDI et al., 2010)
Nos últimos anos, diferentes sistemas de monitoramento foram desenvolvidos com
o intuito de mapear a extensão de áreas com degradação florestal na Amazônia, como o
sistema de Detecção de Exploração Seletiva de Madeira (DETEX) com o objetivo de
produzir mapeamentos de ocorrência de exploração seletiva de madeira nos Distritos
Florestais Sustentáveis pertencentes ao Serviço Florestal Brasileiro (SFB) e o Programa
de Monitoramento da Degradação Florestal (DEGRAD) fornecendo estimativas anuais
de áreas degradadas na Amazônia, cujos programas foram desenvolvidos pelo Instituto
Nacional de Pesquisas Espaciais (INPE).
O projeto Detecção do Desmatamento em Tempo Real (DETER-B), também
executado pelo INPE para identificar e mapear, em tempo quase real, alterações na
cobertura florestal com área mínima próxima de 1ha com uso de imagens do Satélite Sino-
Brasileiro de Recursos Terrestres (CBERS-4) e do satélite Indian Remote Sensing
Satellite (IRS), com 64 e 56 metros de resolução espacial, respectivamente. No DETER-
B, a identificação da exploração madeireira é feita por interpretação visual com base em
cinco elementos principais (cor, tonalidade, textura, forma e contexto) e utiliza a técnica
de Modelo Linear de Mistura Espectral (MLME), conjuntamente com sua imagem
multiespectral em composição colorida para mapear corte seletivo. O DETER-B
diferencia duas classes de corte seletivo: desordenado e geométrico (DINIZ et al., 2015).
O Instituto do Homem e Meio Ambiente da Amazônia (Imazon) desenvolveu o
Sistema de Alerta de Desmatamento (SAD) utilizando técnicas para detectar, quantificar
e monitorar o desmatamento e a degradação florestal, gerando estimativas mensais para
a Amazônia (SOUZA, JR et al., 2013). Outro sistema bastante difundido para monitorar
a degradação florestal e aplicado também em outros países é o Sistema de Análise
Carnegie Landsat (CLASlite), adotado por Asner et al. (2009).

16
Shimabukuro e Smith (1991) utilizaram uma relação linear para representar a
mistura espectral dos componentes dentro do elemento de resolução do sensor. Assim, a
resposta de cada pixel, em qualquer banda espectral, pode ser definida como uma
combinação linear das respostas de cada componente, desde que esteja no alvo
sensoriado. Desse modo, cada pixel da imagem, que pode assumir qualquer valor dentro
da escala de cinza, contém informações sobre a proporção e a resposta espectral de cada
componente dentro de cada elemento de resolução. O Modelo Linear de Mistura Espectral
visa estimar a proporção dos componentes, tais como solo, sombra e vegetação, para cada
pixel, a partir da resposta espectral nas diversas bandas, gerando imagens fração
vegetação, solo e sombra (SHIMABUKURO; SMITH, 1991). O modelo de mistura
espectral pode ser escrito como:
iiiii esombracsolobvegar (Equação 1)
Onde ir é a resposta do pixel;
i representa a banda específica utilizada; cba ,, são as
proporções de vegetação, solo e sombra (ou água), respectivamente;
iii sombrasoloveg ,, são as respostas espectrais das frações vegetação, solo e sombra
(ou água), respectivamente; ie significa o erro na banda utilizada.
Na análise de mistura espectral são usados endmembers para estimar as
abundâncias de sombra, solo, vegetação e erro. A análise de mistura espectral assume que
a superfície da imagem é formada por um pequeno número de materiais distintos que têm
propriedades espectrais relativamente constantes, tal que:
bbiIb DNFDN , (Equação 2)
para:
1 IF (Equação 3)
Onde bDN = o número digital da banda b; IF = a fração do endmember; biDN ,
= o
número digital relativo do endmember; e b = é o erro na banda b.

17
O Modelo de Linear de Mistura Espectral tem a finalidade de identificar a
proporção do padrão de resposta espectral de diferentes alvos que compõem um elemento
de cena. Isto porque a irradiância medida pelo sensor em um ponto é dada pela integração
das respostas de cada um dos componentes de um elemento de cena (pixel), uma vez que,
em geral, a resolução espacial de um sensor permite a inclusão de mais de um tipo de
objeto dentro de um pixel (WU; MURRAY, 2003).
O Sistema de Análise Carnegie Landsat (CLASlite) é um sistema desenvolvido para
mapear as alterações na estrutura florestal a partir da extração por corte seletivo e está
disponível gratuitamente na internet (http://claslite.stanford.edu). Este sistema baseia-se
na conversão de imagens de satélite de seu formato original, através de calibração, pré-
processamento, correção atmosférica e as etapas de máscara de nuvens, análise Monte
Carlo e de Mistura Espectral para gerar uma imagem classificação do corte seletivo.
O CLASlite pode ser utilizado com uma variedade de imagens de satélite, como
LANDSAT, ASTER, MODIS e SPOT (ASNER et al., 2009b). O CLASlite utiliza uma
abordagem de mapeamento automatizado por satélite para determinar cada um dos
componentes da estrutura da floresta: a cobertura fracional do dossel, da vegetação morta
e das superfícies desprovidas de vegetação (solo exposto). A análise da cobertura
fracional é a essência do CLASlite, pois tais coberturas fracionais são determinantes
básicos da composição, fisiologia, estrutura, biomassa e processos biogeoquímicos do
ecossistema.
Diferentes estimativas de área afetada pela exploração madeireira foram reportadas
nos últimos anos, como 10.000-15000 Km2/ano no estudo conduzido por Nepstad et al.
(1999). Enquanto que Santos et al. (2001) estimaram 17.146 Km2 no período de 1988 a
1998. Estudo divulgado por Asner et al. (2005) mostrou que a exploração de madeira
entre 1999 e 2002 atingiu de 12 mil a 19,8 mil Km2 de cobertura florestal por ano nos
Estados do Acre, Mato Grosso, Pará, Rondônia e Roraima. Matricardi et al. (2013)
utilizaram dados de imagens de satélite e estimaram que mais de 17.000 km2 de florestas
foram degradadas na Amazônia em 1999. Souza et al. (2013) estimaram que no período
compreendido entre os anos de 2000 e 2010, uma área de aproximadamente 50.000 km2

18
de floresta amazônica brasileira sofreu algum tipo de degradação em razão da exploração
seletiva de madeira ou ocorrência de fogo.
2.5.O uso do LiDAR na área florestal
Ao longo das últimas décadas, as plataformas aéreas começaram a preencher uma
lacuna entre as medidas fornecidas em estudos de campo e aqueles por sensores baseados
em satélite. O sistema LiDAR5 apresenta sua própria fonte de energia, neste caso, uma
fonte de luz, o laser, a qual emite radiação eletromagnética em ondas curtas (1-10 m)
sendo sensíveis às perturbações atmosféricas.
O LiDAR é considerado um método direto na captura de dados e é classificado
como um sensor ativo. Os pulsos de laser do LiDAR podem penetrar por diferentes
aberturas no dossel da floresta e fornecer informações sobre a estrutura florestal e também
sobre o relevo destas áreas. A tecnologia LiDAR baseia-se nos mesmos princípios
utilizados no sistema de radar, com a diferença de que ao invés do uso de ondas de rádio
para localizar os objetos de interesse, o sistema LiDAR utiliza pulsos a laser (GIONGO
et al., 2010).
As métricas, estatísticas que resultam de processamento da nuvem de pontos
LiDAR, tem grande aplicação na área florestal por permitirem caracterizar a estrutura
vertical e horizontal da vegetação, parametrizar a forma de árvores individuais; qualificar
o modelo digital do terreno e modelar as variáveis florestais. As métricas podem ser
classificadas em grupos: i) métricas de contagem, ii) métricas de elevação ou altura, iii)
métricas de intensidade do retorno, iv) métricas topográficas (GORGENS; SILVA;
ESTRAVIZ, 2014). A Figura 1 demonstra o funcionamento desse sistema, ilustrando um
único feixe emitido do avião e o retorno originado na copa da árvore.
5Light Detection and Ranging

19
Figura 1. Representação do funcionamento de um sistema de escaneamento a laser
aerotransportado, ilustrando um único feixe emitido do avião e o retorno originado na
copa da árvore. No detalhe da figura, ilustram-se vários feixes emitidos do avião. Fonte:
adaptado de Reutebuch; Andersen; Mcgaughey, 2005; Diaz, 2011. Citado por Gorgens;
Silva; Estraviz, 2014.
O uso do sistema LiDAR aerotransportado é conhecido como ALS6 e normalmente
utiliza o seguinte processo: uma aeronave sobrevoa uma região e o equipamento laser
efetua uma varredura no chão perpendicular à direção do voo, determinando a distância
ao terreno. Assumindo que o dossel das árvores tem altura e densidade uniformes, então
quanto maior o ângulo de varredura a partir do nadir, maior será a quantidade de dossel
a ser penetrada para se atingir a superfície do solo e, portanto, adquirir a informação
necessária para produzir um modelo digital de terreno desprovido de vegetação. A Figura
2 ilustra a variação do ângulo de varredura em relação ao imageamento do terreno. Na
área de sensoriamento remoto para estudos de vegetação os tipos de laser utilizados são
aqueles com comprimento de onda próximo ao infravermelho (JENSEN, 2009).
6 Airbone Laser Scanning

20
Figura 2. Aquisição de dados de LiDAR. (a) Impacto causado pelo aumento do ângulo
de varredura. (b) Geração de múltiplos retornos a partir de um único pulso de luz laser.
Fonte: adaptado de Jensen, 2009.
O levantamento in situ utilizando métodos convencionais como instrumentos GPS
pode fornecer informações x, y, z precisas. Entretanto, os trabalhos de campo demandam
tempo e têm um alto custo por ponto adquirido. Mesmo com instrumentos GPS,
geralmente é difícil obter pontos em áreas com vegetação densa. Devido a esses
obstáculos, a densidade de observações x, y,z obtidas em uma área geralmente é baixa.
Isso torna necessário a interpolação entre pontos distantes para se produzir um modelo
digital do terreno (DTM) de uma área (JENSEN, 2009).
Nos últimos anos, a tecnologia LiDAR tem sido aplicada em florestas tropicais para
fins de estudos ecológicos e de avaliação de estoques de biomassa e carbono (SAATCHI
et al., 2011; ASNER et al., 2012; BACCINI et al., 2012; FELDPAUSCH et al., 2012;
ESPÍRITO-SANTO et al., 2014) e quantificar as mudanças estruturais na floresta
causadas pela exploração de madeira, mesmo em intensidades muito baixas de exploração
(D’OLIVEIRA et al., 2012).

21
O Sistema GLAS7 a bordo do satélite ICESat forneceu imagens no período de 2003
a 2005 para o globo. Baccini et al. (2012) e Saatchi et al. (2011) utilizaram dados GLAS
e de campo para gerar mapas de estoque de carbono florestal para regiões tropicais. Asner
et al. (2010) e Asner et al. (2012) obtiveram mapas de carbono florestal de alta resolução
de parte da Amazônia colombiana e peruana e todo o ecossistema florestal da Costa Rica,
utilizando dados LiDAR aerotransportado, imagens de satélite e parcelas no campo.
Longo et al. (2016) quantificaram o estoque de carbono acima do solo em áreas de floresta
intacta e degradada usando dados LiDAR aerotransportado e banco de dados de parcelas
de inventário florestal da Amazônia brasileira.
D’Oliveira et al. (2012) também utilizaram dados LiDAR para estimar a biomassa
acima do solo e da floresta e identificar áreas perturbadas pela exploração seletiva de
madeira em uma floresta manejada no estado do Acre. Andersen et al. (2014) testaram
dados LiDAR para estimar as mudanças associadas ao impacto da extração seletiva de
madeira em florestas tropicais na Amazônia Ocidental brasileira e encontraram resultados
que mostram que é possível quantificar as mudanças estruturais tanto no nível de solo
quanto de copa causadas por extração seletiva de madeira, mesmo em intensidades muito
baixas de exploração. Dados LiDAR permitem também estimar o crescimento florestal e
monitorar a exploração a partir de algoritmos para detecção de árvores extraídas (YU et
al., 2004).
Desta forma, é possível quantificar as mudanças estruturais tanto no nível de solo
quanto de copa causadas pela exploração de madeira, porém esta tecnologia ainda possui
um custo alto de imageamento das áreas de interesse. Yu et al. (2004) demonstraram
aplicação do uso do sistema laser aerotransportado para o monitoramento da exploração
florestal com o desenvolvimento de algoritmos para a detecção de árvores cortadas, sendo
também avaliado o crescimento das florestas.
7 Geoscience Laser Altimeter System

22
3. OBJETIVOS
3.1. Geral
Avaliar áreas florestais alteradas por corte seletivo no sudoeste da Amazônia
brasileira a partir da combinação de dados de campo e sensoriamento remoto.
3.2. Específicos
Para contemplar o objetivo principal deste trabalho, os objetivos específicos
foram:
a) Mapear e estimar a área afetada pela exploração madeireira na Floresta
Estadual do Antimary usando imagens de satélite para os anos de estudo (2009 a 2015);
b) Avaliar a exatidão do mapeamento da exploração madeireira e apresentar
a confiabilidade das estimativas obtidas a partir de classificação de imagens de satélites;
c) Mensurar a área afetada pela exploração florestal utilizando modelos
obtidos a partir de dados LiDAR aerotransportados;
d) Caracterizar a infraestrutura da exploração até o terceiro ano após a
extração seletiva em áreas afetadas pela atividade madeireira utilizando imagens Landsat,
RapidEye e dados LiDAR;
e) Estimar os estoques (volume e biomassa) de cobertura florestal antes e
depois da exploração com a utilização de parcelas permanentes e dados LiDAR.

23
4. MATERIAL E MÉTODOS
Nesta seção consta o procedimento metodológico adotado no decorrer da
pesquisa. Primeiramente é feito um relato da área de estudo com o histórico da atividade
madeireira até o presente, descrevem-se os métodos de coleta dos dados de campo e a
aquisição dos dados de sensores remotos e os respectivos processamentos para identificar
a degradação florestal por corte seletivo, bem como a análise dos dados.
4.1.Descrição da área de estudo
A Floresta Estadual de Antimary (FEA) está localizada na região leste do Acre,
entre Rio Branco e Sena Madureira, na divisa com o estado do Amazonas, entre as
coordenadas 68º 01’ a 68º 23’ W e 9º13’ a 9º 31’ S (Figura 3). Possui área total de 45.687
ha e a área de manejo florestal corresponde a 37.688 ha (82,49% da área total da FEA).
Figura 3. Localização da Floresta Estadual do Antimary, Estado do Acre, com
detalhamento da área de manejo florestal e Unidades de Produção Anual (UPA)
sobrepostas na imagem Landsat-8 de 23 de julho de 2016.
24
O clima da FEA é classificado como Am (Köppen), com temperatura média anual
entre 24 °C e 26 °C, estações seca e úmida bem definidas com precipitação total anual
entre 2.000 mm e 2.200 mm (ALVARES et al., 2013). A predominância da vegetação é
do tipo Floresta Aberta com Bambu associada com Floresta Densa (38% da área total da
floresta) e do tipo Floresta Densa associada com Floresta Aberta com Palmeiras (32%).
Os outros tipos representam 29% e compreendem Floresta Densa (14%), Floresta Aberta
com Palmeiras associada com Floresta Aberta com Bambu (6%), Floresta Aberta com
Bambu Dominante (3%), Floresta Aluvial Aberta com Palmeiras (2%) e área antropizada
(4%) (SEDENS, 2012).
O principal solo encontrado na área, de acordo com o sistema brasileiro de
classificação de solos, é o Argissolo. Este tipo de solo apresenta drenagem moderada e
baixa ou média fertilidade natural em razão do predomínio de minerais de argila de baixa
atividade e por estarem muitas vezes associados a condições de relevo mais
movimentado, são também bastante suscetíveis à erosão (SEDENS, 2012).
4.1.1. Manejo florestal na Floresta Estadual do Antimary
A Floresta Estadual do Antimary é considerada, de acordo com o Sistema
Nacional de Unidades de Conservação da Natureza (SNUC), uma Unidade de
Conservação de Uso Sustentável, e por isso é possível que a população residente utilize
por meio de concessão os recursos naturais de acordo com as recomendações previstas
em Plano de Manejo.
A criação da floresta pública do Antimary teve início na década de 80 com o
desenvolvimento de um projeto conjunto do Governo do Estado do Acre e o ITTO. O
projeto, executado pela Fundação de Tecnologia do Estado do Acre (FUNTAC), tinha
como objetivo produzir informações básicas sobre a floresta em suas diversas dimensões
físicas, botânicas, faunísticas e humana.

25
A formalização da criação da Floresta Estadual do Antimary aconteceu em 07 de
fevereiro de 1997 por iniciativa do Governo do Estado do Acre (Decreto nº 46/1997). A
área da FEA era de 57.629 hectares no ano de sua criação, mas aumentou para 85.371 ha
a partir de 1998 com a incorporação de áreas dos Projetos de Assentamentos
Agroextrativistas (PAEs) Canary e Limoreiro por meio de um convênio do Instituto
Nacional de Colonização e Reforma Agrária e o Governo do Estado do Acre.
O Plano de Manejo Florestal da FEA foi elaborado pela FUNTAC e protocolado
junto ao IBAMA em 09 de novembro de 1995, estabelecendo o uso do Sistema Brasileiro
de Manejo Seletivo8 aplicado às condições de florestas de terra firme na Amazônia
brasileira. É um Sistema Silvicultural Policíclico onde a rotação é dividida em ciclos de
corte e tem como princípio a exploração de apenas uma parte das árvores comerciais que
atingiram o tamanho de corte, de modo que árvores de tamanho intermediário e parte das
árvores com diâmetro de corte constituem o estoque para o próximo ciclo. Técnicas
silviculturais são realizadas para reduzir os danos à floresta residual e os custos de
exploração. Elas também visam o aumento da produção via redução ou maximização do
potencial do próximo ciclo de corte, definido para um período de 30 anos.
Em 2002 foi lançada a licitação para a exploração florestal com fins madeireiros
na FEA e três empresas receberam a concessão de uso madeireiro empresarial na FEA.
No mesmo ano foi elaborado o Plano de Manejo Florestal Sustentável referente a área do
PAE Limoeiro, que resultou na liberação para o corte de madeira em regime sustentável9.
No ano seguinte aconteceu a primeira colheita, realizada por um consórcio
formado pelas empresas Ouro Verde, Acre Brasil Verde e Verne Lumber Brasil, em uma
área de 2,5 mil hectares do PAE Limoeiro. Em 2003, com a definição do novo traçado da
Linha Cunha Gomes e a exclusão do PAEs Canary e Limoeiro do escopo da FEA, a área
da FEA diminuiu para 65.966 ha. Porém, em virtude da constante pressão fundiária vivida
8 Denominação dada pela Embrapa. 9 Manejo florestal em regime sustentável é a aplicação de sistemas silviculturais em florestas destinadas à
produção madeireira e a condução da regeneração natural do povoamento remanescente, de modo a garantir
a contínua operação da capacidade instalada para o desdobro do produto da floresta (HIGUCHI, 1994).
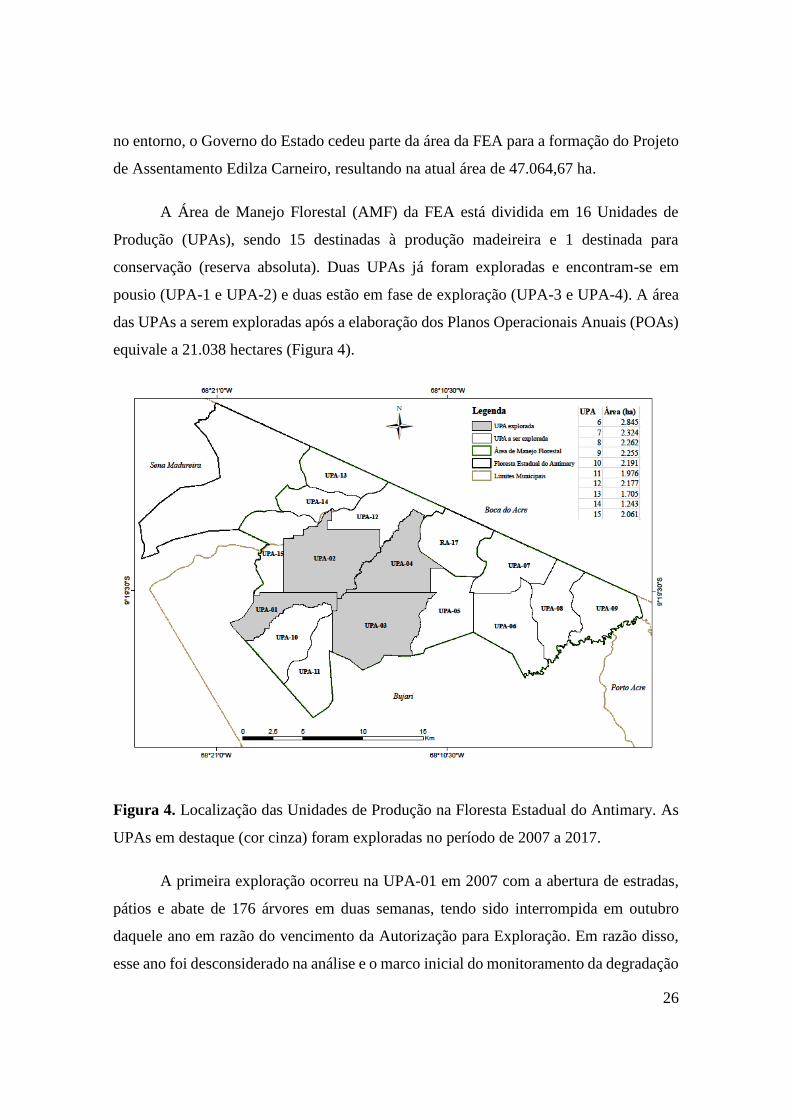
26
no entorno, o Governo do Estado cedeu parte da área da FEA para a formação do Projeto
de Assentamento Edilza Carneiro, resultando na atual área de 47.064,67 ha.
A Área de Manejo Florestal (AMF) da FEA está dividida em 16 Unidades de
Produção (UPAs), sendo 15 destinadas à produção madeireira e 1 destinada para
conservação (reserva absoluta). Duas UPAs já foram exploradas e encontram-se em
pousio (UPA-1 e UPA-2) e duas estão em fase de exploração (UPA-3 e UPA-4). A área
das UPAs a serem exploradas após a elaboração dos Planos Operacionais Anuais (POAs)
equivale a 21.038 hectares (Figura 4).
Figura 4. Localização das Unidades de Produção na Floresta Estadual do Antimary. As
UPAs em destaque (cor cinza) foram exploradas no período de 2007 a 2017.
A primeira exploração ocorreu na UPA-01 em 2007 com a abertura de estradas,
pátios e abate de 176 árvores em duas semanas, tendo sido interrompida em outubro
daquele ano em razão do vencimento da Autorização para Exploração. Em razão disso,
esse ano foi desconsiderado na análise e o marco inicial do monitoramento da degradação
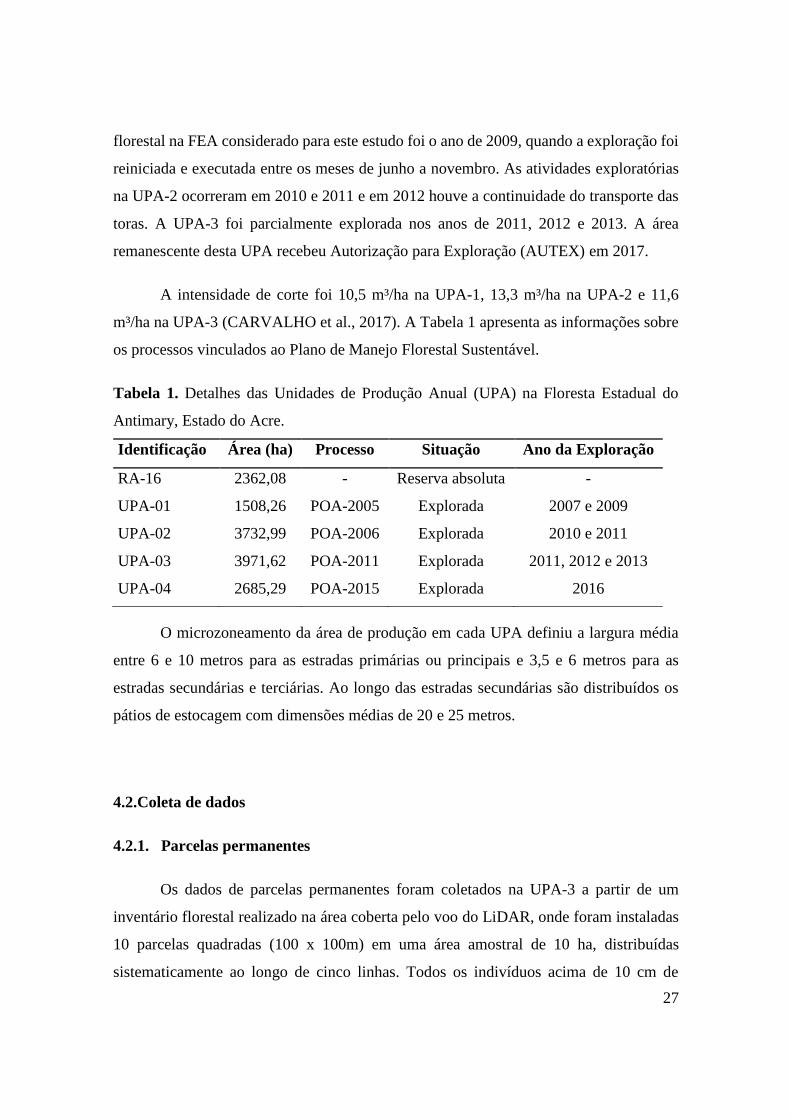
27
florestal na FEA considerado para este estudo foi o ano de 2009, quando a exploração foi
reiniciada e executada entre os meses de junho a novembro. As atividades exploratórias
na UPA-2 ocorreram em 2010 e 2011 e em 2012 houve a continuidade do transporte das
toras. A UPA-3 foi parcialmente explorada nos anos de 2011, 2012 e 2013. A área
remanescente desta UPA recebeu Autorização para Exploração (AUTEX) em 2017.
A intensidade de corte foi 10,5 m³/ha na UPA-1, 13,3 m³/ha na UPA-2 e 11,6
m³/ha na UPA-3 (CARVALHO et al., 2017). A Tabela 1 apresenta as informações sobre
os processos vinculados ao Plano de Manejo Florestal Sustentável.
Tabela 1. Detalhes das Unidades de Produção Anual (UPA) na Floresta Estadual do
Antimary, Estado do Acre.
Identificação Área (ha) Processo Situação Ano da Exploração
RA-16 2362,08 - Reserva absoluta -
UPA-01 1508,26 POA-2005 Explorada 2007 e 2009
UPA-02 3732,99 POA-2006 Explorada 2010 e 2011
UPA-03 3971,62 POA-2011 Explorada 2011, 2012 e 2013
UPA-04 2685,29 POA-2015 Explorada 2016
O microzoneamento da área de produção em cada UPA definiu a largura média
entre 6 e 10 metros para as estradas primárias ou principais e 3,5 e 6 metros para as
estradas secundárias e terciárias. Ao longo das estradas secundárias são distribuídos os
pátios de estocagem com dimensões médias de 20 e 25 metros.
4.2.Coleta de dados
4.2.1. Parcelas permanentes
Os dados de parcelas permanentes foram coletados na UPA-3 a partir de um
inventário florestal realizado na área coberta pelo voo do LiDAR, onde foram instaladas
10 parcelas quadradas (100 x 100m) em uma área amostral de 10 ha, distribuídas
sistematicamente ao longo de cinco linhas. Todos os indivíduos acima de 10 cm de

28
diâmetro à altura do peito (DAP) foram marcados, medidos e identificados. Todos os
indivíduos com DAP 10 cm foram identificados, plaqueteados e medidos de acordo
com o protocolo da Rede de Monitoramento da Dinâmicas de Florestas na Amazônia
(Redeflor) e a Metodologia de Inventário Florestal Contínuo (SILVA; LOPES, 1984). Os
limites das parcelas foram estabelecidos utilizando uma bússola de mão para azimutes e
uma fita de medição para comprimento e as espécies foram identificadas por técnicos da
Embrapa/Acre. Os vértices de todas as parcelas foram georreferenciados com aparelho
GPS geodésico (Figura 5).
Figura 5. Parcelas permanentes instaladas na Floresta Estadual do Antimary, Acre. (a)
Área da cobertura LiDAR nas UPAs 2 e 3, (b) cobertura LiDAR na UPA-2 e (c) cobertura
LiDAR e 10 parcelas permanentes na UPA-3.
A exploração ocorreu em 2013, logo após a instalação das parcelas em maio
daquele ano e o segundo levantamento foi realizado em julho de 2015. A exploração de
madeira ocorreu em apenas uma parte da UPA-3, abrangendo cinco parcelas denominadas
como “parcelas exploradas” e cinco parcelas que permaneceram sem intervenção foram

29
denominadas como “parcelas sem exploração”. O resumo dos dados das parcelas
permanentes está descrito na Tabela 2.
Tabela 2. Detalhamento das parcelas permanentes cobertas com imageamento do LiDAR
no ano 2015 instaladas na Floresta Estadual do Antimary.
Local da
parcela
Nº de
parcelas Medição Exploração Área total Dado LiDAR
UPA-3 10 2013, 2015 2013 10 ha 2015
A partir das medições de diâmetro do fuste a 1,3 m de cada indivíduo nas parcelas
permanentes foi possível estimar a biomassa acima do solo (AGB) utilizando a equação
de Melo (2017):
𝐴𝐺𝐵 = 0,064 𝑥 𝐷2,671 (Equação 4)
Onde:
AGB = biomassa seca acima do solo (kg);
D = diâmetro a altura do peito (cm).
Para este estudo, foi determinada a equação de volume para a Floresta Estadual
do Antimary considerando as amostras coletadas por Melo (2017):
𝑉𝑜𝑙𝑢𝑚𝑒 = −8,8428 + 2,4690 × ln 𝐷𝐴𝑃 (Equação 5)
4.2.2. Infraestrutura da exploração florestal
O trabalho de campo foi realizado na UPA-3 e envolveu a coleta de coordenadas
geográficas com equipamento DGPS modelo Zenith II em cada uma das extremidades de
40 (quarenta) pátios de estocagem de madeira com duração de trinta minutos para coleta
de cada ponto, utilizando dois aparelhos coletando simultaneamente. A área foi
parcialmente explorada em 2011, 2012 e 2013 e as campanhas de campo foram realizadas

30
nos meses de setembro e outubro de 2014 e agosto de 2015. A Figura 6 ilustra a área
mapeada na UPA-3.
Figura 6. Levantamento de campo na área explorada da UPA-3 na Floresta Estadual
Antimary, Acre. (a) Abrangência da área mapeada no trabalho de campo, (b)
Detalhamento das estradas, pátios, trilhas e árvores e (c) exemplo de um pátio de
estocagem com os vértices georreferenciados durante o trabalho de campo: A – B = 24
m, B – C = 14 m, C – D = 22 m, D – A = 19 m.
O levantamento dos limites dos pátios de estocagem de madeira e o procedimento
de campo adotado para georreferenciamento dos pátios de madeira é mostrado na Figura
7. As coordenadas coletadas foram processadas no programa GTR Processor e os dados
da Rede Brasileira de Monitoramento Contínuo do IBGE foram utilizados como base de
referência. As estradas e trilhas de arraste também foram mapeados com aparelhos de
GPS de navegação para auxiliar na identificação da área afetada pela exploração florestal.

31

32
Figura 7. Procedimento para coleta de dados de GPS geodésico nos pátios de madeira da
UPA-3 da Floresta Estadual Antimary, Acre. (a) Deslocamento da base do acampamento
até o início da UPA-3, (b e c) Localização dos pátios e identificação dos limites de floresta
e pátio (vermelho), assim como restos de galhos secos nas trilhas de acesso (d) Uso de
dois aparelhos de GPS simultaneamente, (e) visão geral de um pátio de madeira, (f e g)
Coleta de coordenadas geográficas nos vértices do pátio, (h) Caderneta de campo com
anotações de data, horário de início e término de cada coleta e número do pátio.
A abordagem usada neste estudo para mapear o pátio de madeira como indicativo
da exploração florestal a ser identificado via sensoriamento remoto leva em consideração
o contexto da vizinhança entre floresta e o pátio. Os pátios de estocagem de madeira são
construídos de acordo com a Norma de Execução do Ibama 01/2006 que recomenda o
tamanho de até 25 x 25 metros e devem ser locados ao longo das estradas secundárias e
obedecer critério de localização de maior incidência de árvores exploráveis.
4.3.Dados de Sensoriamento Remoto
4.3.1. Imagens Landsat e RapidEye
As imagens de satélite série Landsat (TM e OLI) foram adquiridas gratuitamente
pela internet, através da ferramenta Earth Explorer do Serviço Geológico dos Estados
Unidos (USGS) no sítio na internet <http://www.usgs.gov/>. Dados ópticos referentes à
cena 002-66 do satélite Landsat-5 dos anos 2009 a 2011, e do satélite Landsat-8 dos anos
2013 a 2015 foram utilizados para detectar a exploração madeireira.
Para a UPA-3 foram utilizadas também imagens do satélite RapidEye, que
compreende um sistema de constelação de cinco satélites em mesma órbita com
capacidade de coletar imagens sobre grandes áreas e com alta capacidade de revisita. As
imagens foram adquiridas através do banco de dados do catálogo de imagens do
Ministério do Meio Ambiente no sítio eletrônico <http://geocatalogo.ibama.gov.br/> para
os anos de 2012, 2014 e 2015.
A utilização das imagens RapidEye se deve a sua resolução espacial de 5 metros
e serviu como referência para o mapeamento da área afetada pela exploração madeireira

33
na UPA-3. A tabela 3 apresenta as informações sobre as imagens Landsat e RapidEye
utilizadas nesta fase do trabalho.
Tabela 3. Imagens utilizadas no estudo.
Satélite/Sensor Data de Aquisição Bandas Espectrais
Landsat/TM 13/08/2009
Azul, Verde, Vermelho,
NIR e SWIR
25/09/2010
11/08/2011
Landsat/OLI 01/09/2013
19/08/2014
10/09/2015
RapidEye 31/07/2012 Azul, Verde, Vermelho,
Red-Edge,
Infravermelho Próximo
18/10/2013
29/07/2014
09/08/2015
O período escolhido deve-se ao primeiro ser o ano anterior à exploração, que
ocorreu em 2010, 2011 e parte de 2013 e o último ano de 2015 ser utilizado para verificar
se ainda havia indícios da exploração 3 anos após a última parte explorada. O primeiro
ano, anterior à exploração, foi usado como uma referência para a área antes da
perturbação promovida pelo manejo florestal e o último ano foi utilizado para verificar a
existência de indícios da exploração após dois anos. Foram selecionadas
preferencialmente as cenas com menor cobertura de nuvens.
4.3.2. Escaneamento a laser aerotransportado (ALS)
O aerolevantamento com escaneamento a laser foi realizado em duas áreas
distintas: na UPA-2 e UPA-3. Os levantamentos ocorreram em dois voos repetidos na
UPA-2: o primeiro, durante a exploração florestal de 2010, e o segundo em 2011 após o
término da exploração. As características do levantamento a laser aerotransportado foram
descritas por Andersen et al. (2014). Os dados LiDAR da área da UPA-3 foram coletados

34
em setembro de 2015 quando a exploração já havia sido encerrada em aproximadamente
50% da área coberta pelo voo. A densidade média de retornos foi de 5,5 pontos por metro
quadrado (ppm2). A Tabela 4 apresenta as informações do sobrevoo do LiDAR na UPAs.
Tabela 4. Parâmetros do sobrevoo do sistema LiDAR realizado nas UPAs.
Parâmetro Especificações
UPA-2 – Voo 1 UPA-2 – Voo 2 UPA-3
Aeronave Embraer 810 Sêneca II Embraer 810 Sêneca II CESSNA
modelo 206
Sensor ALTM 3100EA/Optech ALTM3100EA/Optech Harrier 68i
Data de aquisição 29/05 a 03/06/2010 23/11/2011 25/09/2015
Distância entre linhas de voo (m) 40 65 65
Altitude de voo (m) 500 600 600
Divergência de feixe mrad (1/e) 0,25 0,25 0,25
Ângulo de varredura
(± graus off-nadir)
5,5 6 5,5
Largura da faixa no terreno (m) 95 125 494
Sobreposição de faixa (%) 60 50 50
Taxa de varredura (hz) 70 70 80
Taxa de pulso (Khz) 50 50 50
Densidade de Pulso (m2) 25 14 7
Densidade média de retornos
(ptos/m2)
40 14
4.4.Processamentos de dados e imagens
4.4.1. Detecção da extração seletiva com imagens Landsat e RapidEye
O processamento das imagens Landsat foi feito no programa computacional
CLASLite 3.2 (ASNER et al., 2009b). O CLASLite é um método automatizado para
discriminar mudanças na floresta. As imagens de reflectância foram utilizadas para obter
as imagens de cobertura fraccional por meio do método Automated Monte Carlo
Unmixing (AutoMCU) (ASNER, 1998; ASNER; HEIDEBRECHT, 2002). Neste estudo,
foi utilizada principalmente a fração Vegetação Não-Fotossintética (NPV) que
corresponde à vegetação morta para identificar a infraestrutura da exploração florestal.

35
O Modelo Linear de Mistura Espectral (MLME) foi utilizado para identificar as
áreas afetadas por exploração seletiva usando imagens RapidEye. As Regiões de Interesse
(RI’s) foram tomadas a partir da análise do diagrama de dispersão entre as bandas
vermelho (eixo X) e a banda infravermelho próximo (eixo Y). Para a coleta das amostras
para o classificador foi utilizada toda a cena em cada imagem. Das três imagens fração
(solo, sombra e vegetação) geradas pelo MLME, após uma análise visual, a fração solo
foi escolhida, pois melhor representou as áreas que sofreram alguma perturbação. Gerou-
se então, uma imagem binária da fração solo proveniente da técnica MLME, utilizando
um limiar ≥ 0,5 para o pixel ser considerado da classe degradada.
Para todas as imagens quantificaram-se as áreas classificadas na imagem gerada
a partir do MLME e esses valores foram comparados com a área explorada estimada com
dados dos demais sensores utilizados neste estudo. Os pátios mapeados em campo foram
identificados visualmente na imagem RapidEye e foi calculada a área dos polígonos de
área afetada pela explorada detectada na imagem.
O mapeamento da infraestrutura da exploração madeireira foi realizado a partir de
interpretação visual nas imagens Landsat com a digitalização dos polígonos
correspondentes à área impactada pela extração seletiva com base na imagem-fração solo
e composição colorida das frações R (Red - substrato exposto), G (Green – Vegetação) e
B (Blue – Vegetação Não-Fotossintética). A identificação de estradas em áreas
degradadas foi feita considerando-se as feições lineares das estradas em meio à uma área
de floresta e normalmente estão associadas a altos valores de abundância de solos (>20%).
Neste estudo o limiar definido para a geração das imagens-fração foi de 20% para
solo e 80% para vegetação. Para interpretação dos pátios foram usadas como referência
as informações coletadas em campo. A identificação dos ramais de arraste foi dificultada
em razão da largura reduzida, não sendo possível detectar em imagens de média resolução
espacial. Os dados vetoriais produzidos pela empresa responsável pelo plano de manejo
foram utilizados como base para facilitar a identificação das estradas principais e
secundárias, assim como os pátios de estocagem.

36
A avaliação das dimensões das infraestruturas construídas para a exploração
florestal considerou todas as estradas secundárias e pátios de estocagem. A largura média
das estradas secundárias foi registrada a cada 10 m de comprimento, sendo a área expressa
pelo produto da largura média e soma total do comprimento, enquanto a área dos pátios
de estocagem foi obtida pela média registrada para cada um de seus lados.
A identificação dos pátios foi feita no aplicativo computacional ArcGis 10 a partir
da interpretação visual na imagem NPV do ano 2011, quando ainda não havia exploração
na área e dos anos 2013, 2014 e 2015, após a exploração. A interpretação visual dos pátios
na imagem foi baseada no contraste deste alvo em relação à floresta e também a
proximidade de estradas florestais interligadas aos pátios.
Á área dos pátios coletada em campo foi calculada e em seguida relacionada com
os pátios detectados na imagem. A comparação entre os pátios detectados nas imagens e
não detectados foi realizada por meio de teste de Tukey (α=0,05) dos valores médios
obtidos utilizando o programa estatístico R para estabelecer a relação entre área dos pátios
e potencial de detecção pela imagem Landsat e os modelos obtidos a partir dos dados
LiDAR.
4.4.2. Verificação da exatidão dos resultados da classificação
Para avaliar a exatidão do mapeamento da exploração madeireira a partir da
classificação automática e estimar a área das categorias do mapa foram selecionadas
amostras de pontos de GPS de floresta e exploração madeireira coletados nas UPAS. Uma
matriz de erro foi construída onde as categorias do mapeamento (i) são representadas por
linhas e as categorias de referência (j) por colunas em termos de contagem de amostras e
em termos do estimador imparcial da proporção de área na célula i, j da matriz de erro
para se obter uma apresentação mais informativa da matriz de erro, contendo a exatidão
do usuário, do produtor e geral.

37
A exatidão é definida como o grau em que o mapa produzido concorda com a
classificação de referência (LIU; FRAZIER; KUMAR, 2007; OLOFSSON et al., 2013a).
As medidas de exatidão utilizadas neste estudo são:
a) exatidão geral: proporção da área mapeada corretamente, fornecendo a
probabilidade de um local selecionado aleatoriamente no mapa ser corretamente
classificado;
b) exatidão do usuário: proporção da área mapeada como uma categoria específica
corresponda a essa categoria "no chão", isto é, indica a probabilidade de que um pixel
seja da classe A dado que o mapa classificou o pixel na classe A. Assim, num mapa em
que o classificador mapeou 60 amostras de um total de 100, a exatidão do usuário é a
proporção de 60/100 ou 60%. A exatidão do usuário é o complemento da probabilidade
de erro de comissão;
c) exatidão do produtor: proporção da área que é uma categoria “no chão” também
é mapeada como essa categoria, isto é, indica a probabilidade de que o classificador tenha
rotulado um pixel na imagem na Classe A, dado que na verdade de campo é classe A.
Assim, num mapa a classe A tem um total de 100 amostras de verdade de campo, onde
60 pixels foram classificados corretamente, então a exatidão do produtor é a proporção
de 60/100 ou 60%. A exatidão do produtor é o complemento da probabilidade de erro de
omissão.
Os erros de omissão representam os pixels que pertencem à classe de verdade de
campo, mas a classificação não conseguiu classificá-los na classe apropriada, enquanto
que os erros de comissão representam os pixels que pertencem a outra classe que são
rotulados como pertencentes à classe de interesse.
A exatidão do usuário foi obtida a partir da contagem da amostra de cada classe
(floresta e área explorada), enquanto que a exatidão do produtor foi obtida de uma matriz
do valor obtido da proporção de área na célula i, j da matriz de erro, pois as unidades de
amostra de diferentes classes exigem pesos de estimativas diferentes. As equações

38
utilizadas para gerar a matriz de erro são derivadas de (CONGALTON; GREEN, 2008;
OLOFSSON et al., 2013b, 2014)
As proporções da área das classes do mapeamento para cada categoria foram
obtidos pela Equação:
𝑝𝑖,𝑗= 𝑊𝑖
𝑛𝑖𝑗
𝑛𝑖. (Equação 6)
Onde a proporção da área mapeada como categoria i obtida a partir de 𝑊𝑖 =
𝐴𝑚,𝑖 ÷ 𝐴𝑡.
A estimativa da área total com base na classificação de referência da categoria j é
então:
𝐴�̂� = 𝐴𝑡𝑜𝑡 × �̂�𝑗 (Equação 7)
A equação para a estimativa estratificada ajustada foi obtida por:
𝐴�̂� = 𝐴𝑡𝑜𝑡 ∑ 𝑊𝑖𝑖𝑛𝑖𝑗
𝑛𝑖.. (Equação 8)
O erro padrão estimado da proporção de área é:
𝑆(�̂�.𝑗) = √∑ 𝑊12
𝑛𝑖𝑗
𝑛𝑖.(1−
𝑛𝑖𝑗
𝑛𝑖.)
𝑛𝑖.−1
𝑞𝑖=1 (Equação 9)
O erro padrão da área estimada ajustada por erro é:
𝑆 (�̂�𝑗) = 𝐴𝑡𝑜𝑡 × 𝑆 (�̂�.𝑗) (Equação 10)
O intervalo de confiança aproximado de 95% para A j é:
�̂�𝑗 ± 2 × 𝑆 (�̂�𝐽) (Equação 11)
A margem de erro é definida como o escore z (z é um percentil da distribuição
normal padrão) multiplicado pelo erro padrão (ou seja, a ± parte do intervalo de
confiança) e o valor do escore z depende do nível de confiança (para 95% de confiança,
z = 1,96 que foi aproximado para 2). Uma vez que as proporções da área da matriz de

39
erro foram estimadas, a exatidão do usuário (Ui) e do produtor (Pj) para as categorias e a
exatidão geral do mapa (Ô) foram estimadas diretamente a partir da matriz de erro.
As estimativas foram obtidas por meio das Equações:
i) exatidão do usuário: �̂�𝑖 = 𝑝𝑖𝑖
𝑝𝑖. ; (Equação 12)
ii) exatidão do produtor: �̂�𝐽 = 𝑝𝑗𝑗
𝑝.𝑗 e (Equação 13)
iii) exatidão geral do mapa: �̂� = ∑ �̂�𝑗𝑗𝑞𝑗=1 (Equação 14)
4.4.3. Identificação da infraestrutura florestal a partir de dados LiDAR
Os dados de nuvens de pontos provenientes do LiDAR foram processados em
ambiente FUSION LTK (LiDAR Tool kit) gratuitamente disponibilizado pelo Serviço
Florestal Norte Americano e de acordo com os métodos propostos por Mcgaughey (2014)
e D’Oliveira; Figueiredo; Papa (2014). Os modelos gerados para cada conjunto de nuvem
de pontos LiDAR foram: i) Modelo Digital do Terreno; ii) Modelo Digital de Dossel; iii)
Modelo Digital de Altura; iv) Modelo de Densidade Relativa da Vegetação. Todas as
imagens de referência do terreno com resolução de 1 metro.
A identificação da área afetada por exploração madeireira foi feita a partir do
Modelo de Densidade Relativa da Vegetação (RDM). Este modelo corresponde a uma
camada raster da porcentagem relativa de retornos de LiDAR dentro de um estrato de
altura acima do solo especificado pelo usuário (D’OLIVEIRA et al., 2012), gerando a
densidade relativa da vegetação em uma camada do estrato florestal previamente
selecionada. A camada é definida por um limite inferior e superior de altura.
O cálculo da densidade de vegetação relativa é feito a partir da divisão do número
de pontos dentro da camada definida pelo número de pontos acima da superfície até a
altura superior da camada, como mostra a Figura 8. No modelo gerado os pixels em preto
representam densidade de vegetação relativa igual a zero na camada selecionada. Os

40
trechos contínuos ou agrupados de pixels em preto representam a infraestrutura
construída na floresta, como estradas, pátios, trilhas de arraste e clareiras resultantes da
queda das árvores e foram usadas como referência para a definição das áreas alteradas
pelas operações florestais.
Figura 8. Representação gráfica do cálculo do Modelo de Densidade Relativa (RDM).
Valores altos de RDM indicam uma área com sub-bosque sem alteração enquanto que
valores próximos de zero indicam danos no sub-bosque. Fonte: Adaptado de
(D’OLIVEIRA et al., 2012).
Os modelos gerados a partir dos dados LiDAR também foram associados com os
pátios de madeira com base nos pontos coletados e a imagem gerada foi normalizada para
obter a altura do terreno nesta imagem. A partir do modelo digital de terreno foram
extraídas as métricas de elevação dos retornos dos dados LiDAR dos pátios. O modelo de
densidade relativa de vegetação foi utilizado para identificar a infraestrutura construída
na floresta (estradas e pátios de estocagem) e comparar com as imagens Landsat para
indicar qual indício foi possível observar após a exploração, de acordo com método
proposto por D’OLIVEIRA et al. (2012).
Retorno mais alto
Valor RDM: 76,9 = 10/(10 + 3) * 100
14 retornos acima de 5m
(desconsiderados no cálculo)
Limite RDM superior (5m)
Limite RDM inferior (1m)
10 retornos abaixo 5m
3 retornos abaixo de 1m
Nível do terreno (MDT)
1 m
1 m

41
Além do RDM entre 1 m e 5 m, outros limites de altura de RDMs foram
examinados para determinar quais os limites de altura estrato seria mais adequado para
identificar áreas exploradas na UPA-3 para validar o método proposto por D’Oliveira et
al. (2012). Por inspeção visual, o RDM que incluiu os retornos LiDAR acima de 8 m e
abaixo de 12 m foi escolhido para identificar os indícios da exploração. Assim, para este
estudo também foi utilizada a camada do estrado florestal de 8 metros como limite inferior
e 12 metros como limite superior de altura devido o imageamento do LiDAR ter ocorrido
dois anos após a exploração, pois foi observado nos trabalhos de campo que nos pátios já
havia regeneração.
No RDM gerado os pixels escuros representam a densidade de vegetação relativa
igual a zero na camada selecionada, assim os trechos contínuos ou agrupados por esses
pixels representam a área afetada pela exploração florestal (estradas, pátios e clareiras).
No entanto, além das perturbações promovidas pela exploração florestal, ocorre também
clareiras naturais.
Para determinar a área afetada pela exploração foram realizadas diferentes
simulações utilizando intervalos de valores de pixels (0 a 100) que melhor se
relacionassem com a área explorada. Assim, foi utilizado o intervalo de valores de 0 a 40
na tabela de atributos do RDM. A escolha desse intervalo foi feita a partir da interpretação
visual da cobertura florestal afetada pela exploração. Então, foram determinados buffers
para representar os limites que correspondem às alterações causadas pelas operações
florestais.
A área de abrangência de cada infraestrutura da exploração foi definida de acordo
com método proposto por D’Oliveira; Figueiredo; Papa, (2014) em que para as trilhas de
arraste foi usado um buffer de 4 metros, produzindo uma zona tampão com 8 metros de
largura, para as estradas, pátios e clareiras de árvores, buffer de 6 m, 20 m e 25 m
respectivamente.
Foram geradas também imagens do Modelo Digital de Superfície (MDS) e o
Modelo Digital de Terreno (MDT). A subtração do MDS pelo MDT resultou no Modelo
de Altura de Dossel para os anos de 2010 e 2011. Foi realizada a comparação

42
multitemporal da área de cobertura vegetal de com a subtração destas imagens para
analisar as áreas que sofreram alteração. A imagem proveniente da subtração das imagens
do LiDAR foi utilizada como referência na comparação com os resultados obtidos dos
sensores Landsat e RapidEye.
A delimitação da área de dossel afetada pela exploração florestal foi realizada a
partir do Modelo Digital de Dossel (DCM) obtido a partir da subtração do modelo digital
de terreno (DTM) e do modelo digital de superfície (DSM). O DCM é composto por todos
os retornos úteis da amostra feita pelo LiDAR e é obtido por meio do comando
Canopymodel do Fusion. Em seguida, foi gerado o modelo de altura do dossel a partir do
comando Canopyheightmodel (CHM) para obter a normalização das elevações da
superfície tornando o terreno plano.
A partir do modelo de altura de dossel podem ser criados modelos de cobertura
vegetal a diferentes alturas acima da superfície. Esses modelos são usados para estimar
parâmetros estruturais da floresta e comparar áreas de cobertura vegetal antes e após a
exploração. Quando duas ou mais amostras de LiDAR são obtidas, cobrindo a mesma
área em tempos diferentes, é possível comparar a variação na cobertura de vegetação a
uma determinada altura dessa área.
A estimativa do estoque de biomassa foi estimada por meio de uma regressão entre
os dados LiDAR e os dados das parcelas permanentes da UPA-3. No preparo dos dados
do LiDAR para análise foram usados três comandos do Fusion: a) recorte dos dados do
LiDAR contidos nas parcelas amostradas em campo (Polyclipdata); b) normalização das
alturas das árvores nos arquivos recortados (Subtractground); e c) geração das estatísticas
com os dados métricos dos retornos do Lidar contidos nas amostras (Cloudmetrics). Em
seguida, com a extração da nuvem de pontos coincidente com cada parcela foi feita a
extrapolação dos modelos de regressão gerados com base na área das parcelas do
inventário florestal para toda a área amostrada pelo Lidar por meio do comando
Gridmetrics.
Esse processamento resultou nas métricas estruturais para cada parcela, incluindo
métricas baseadas em altura, intensidade e número de retornos. Os arquivos com

43
estatísticas para elevação e intensidade dos retornos são produzidos no formato CSV.
Enquanto que no Cloudmetrics cada linha do arquivo gerado representa as estatísticas de
uma parcela, no Gridmetrics as estatísticas serão geradas para células com tamanho
definido neste estudo de 50 m x 50 m e cada coluna corresponde a uma variável.
A partir da exportação dos arquivos gerados pelo comando Gridmetrics foi
possível calcular a biomassa de cada célula da imagem produzida por meio da aplicação
do modelo de regressão desenvolvido por D’Oliveira et al. (2012) para produzir a
estimativa de biomassa seca acima do solo na área da UPA-3 coberta pelo LiDAR. Foi
analisada a correlação de Pearson entre as métricas extraídas e a biomassa calculada em
campo e o modelo resultante foi utilizado para estimar a AGB em toda a área sobrevoada.
4.5.Análise dos dados
A análise de regressão para ajuste da equação de biomassa florestal a partir dos
dados LiDAR foi realizada com o método dos mínimos quadrados para ajustar as
equações, usando o pacote base stats (funções lm e nls) do aplicativo estatístico R. O teste
Kolmogorov-Smirnov também foi aplicado aos dados para testar a probabilidade de
distribuição normal e para comparar a distribuição dos dados observados com os preditos
nas equações de biomassa geradas. Para comparação de médias foram aplicados os testes
t, análise de variância (ANOVA) e coeficiente de correlação de Pearson. Para os dados
que não atenderam aos pressupostos de distribuição normal foram utilizados os testes de
Wilcoxon e coeficiente de correlação de Spearman. A comparação entre os pátios
detectados nas imagens e não detectados foi realizada por meio de teste de Tukey
(α=0,05) dos valores médios obtidos utilizando o programa estatístico R para estabelecer
a relação entre área dos pátios e potencial de detecção pela imagem Landsat.

44
5. RESULTADOS E DISCUSSÃO
As principais contribuições e resultados do presente trabalho estão apresentadas
nos tópicos seguintes. Inicialmente são abordados os mapas de degradação florestal por
corte seletivo utilizando sensores de diferentes resoluções espaciais e com a identificação
visual e automática. Em tal abordagem é apresentada a estimativa da área afetada pela
exploração madeireira, considerando as incertezas associadas ao uso de sensores remotos
para mapear a degradação florestal. Apresentam-se os resultados encontrados para a
análise a partir dos modelos obtidos a partir do LiDAR aerotransportado e a
caracterização da infraestrutura da exploração com abordagem multisensor. Por último,
são expostas as estimativas de estoques de cobertura florestal antes e após a exploração
considerando os dados de inventários obtidos das parcelas de campo. Neste tópico
também são discutidos os principais resultados encontrados na pesquisa.
5.1.Alteração da cobertura florestal em área de manejo florestal
A interpretação visual das imagens-fração derivadas da classificação CLASlite
permitiu identificar a área afetada pela exploração florestal nas Unidades de Produção da
Floresta Estadual do Antimary. A Figura 9 mostra a delimitação da área explorada na
UPA-1 a partir da interpretação visual na imagem Landsat/TM utilizando as frações
derivadas do CLASlite. As áreas em azul na imagem composição colorida RGB
correspondem a infraestrutura da exploração, como estradas e pátios e também a retirada
de árvores. O mapeamento da infraestrutura planejada apresentado pela empresa
responsável pela elaboração do POA auxiliou na identificação e mapeamento das
infraestruturas de exploração por meio das imagens ópticas. Verificou-se que a abertura
de estradas foi executada de acordo com o planejado (Figuras 9b e 9c).

45
Figura 9. Imagem Landsat/TM de 09 de setembro de 2009 em composição R (S), G (PV)
e B (NPV) sobreposta com a delimitação da UPA-1 (em preto). (a) Interpretação visual
de estradas florestais e área afetada pela exploração sobreposta na imagem-fração
colorida, (b) detalhe do mapeamento da área afetada pela exploração (em vermelho), (c)
detalhe da infraestrutura de estradas e pátios planejada para a exploração florestal.
A área alterada em decorrência das atividades da exploração florestal é mostrada
na Figura 10 para a primeira imagem Landsat/TM usada nesta análise. No ano de 2009
foram mapeados 268 hectares de área afetada pela exploração florestal utilizando a
interpretação visual na imagem-fração NPV (Figura 10c), enquanto que a classificação
automática a partir do CLASlite mapeou 101 hectares (Figura 10d). A área total da UPA
é 1.508 hectares, enquanto que a área efetiva de produção equivale a 1.092 hectares,
descontadas as Áreas de Preservação Permanente (APP) e áreas antropizadas.

46
Figura 10. Imagem Landsat/TM de 09 de setembro de 2009 sobreposta com a delimitação
da UPA-1 utilizada para mapear a degradação florestal por extração seletiva. (a) Imagem-
fração NPV, (b) imagem-fração PV, (c) composição colorida Solo, PV e NPV com
delimitação da área de exploração identificada (em vermelho) e (d) classificação
CLASlite da floresta e área explorada.
Dessa forma, a imagem Landsat indicou a ocorrência da exploração na área da
UPA-1 no ano de 2009. As áreas afetadas pela exploração delimitadas dentro da floresta
estão relacionadas a um processo de degradação causado pela retirada de árvores durante
a exploração. Na imagem NPV essa área é representada em tons claros e a floresta na cor
preta. Enquanto que na fração PV a floresta é representada pela cor clara e as áreas sem
vegetação pela cor escura. Na composição colorida a área explorada é representada em
azul. A classificação automática mostrada na Figura 10d permitiu classificar os polígonos
de área afetada pela exploração.
A Figura 11 mostra as imagens-fração NPV e PV dos anos 2010 e 2011 com a
delimitação da UPA-1. Não foi possível identificar por interpretação visual as áreas
alteradas pela exploração como pátios e estradas como mostrou a imagem de 2009, ou

47
seja, dois anos após a exploração a área degradada não foi mais perceptível nas imagens
Landsat. A ausência de indícios da exploração nas imagens Landsat um ano após a
retirada de madeira demonstra que o uso de um conjunto de dados da série temporal é
essencial para diferenciar os processos de degradação utilizando imagens de satélite. No
contexto de monitoramento da cobertura florestal, as áreas desmatadas são identificadas
como áreas não florestais (terras agrícolas ou pastagens) nos meses ou anos sucessivos,
enquanto a floresta degradada se recupera rapidamente com a regeneração da floresta.
Figura 11. Imagem Landsat/TM sobreposta com a delimitação da UPA-1 utilizada para
identificar os indícios da infraestrutura da exploração florestal. (a) Imagem-fração NPV
de 24 de agosto de 2010, (b) imagem-fração PV de 24 de agosto de 2010, (c) Imagem-
fração NPV de 11 de agosto de 2011 e (d) Imagem-fração PV de 11 de agosto de 2011.
Ao contrário da primeira unidade de produção, a UPA-2 teve um período maior
de exploração da área, iniciada em 2010 e finalizada totalmente em 2012, em decorrência
de suas grandes dimensões. A Figura 12 mostra a área total da UPA-2 na imagem Landsat
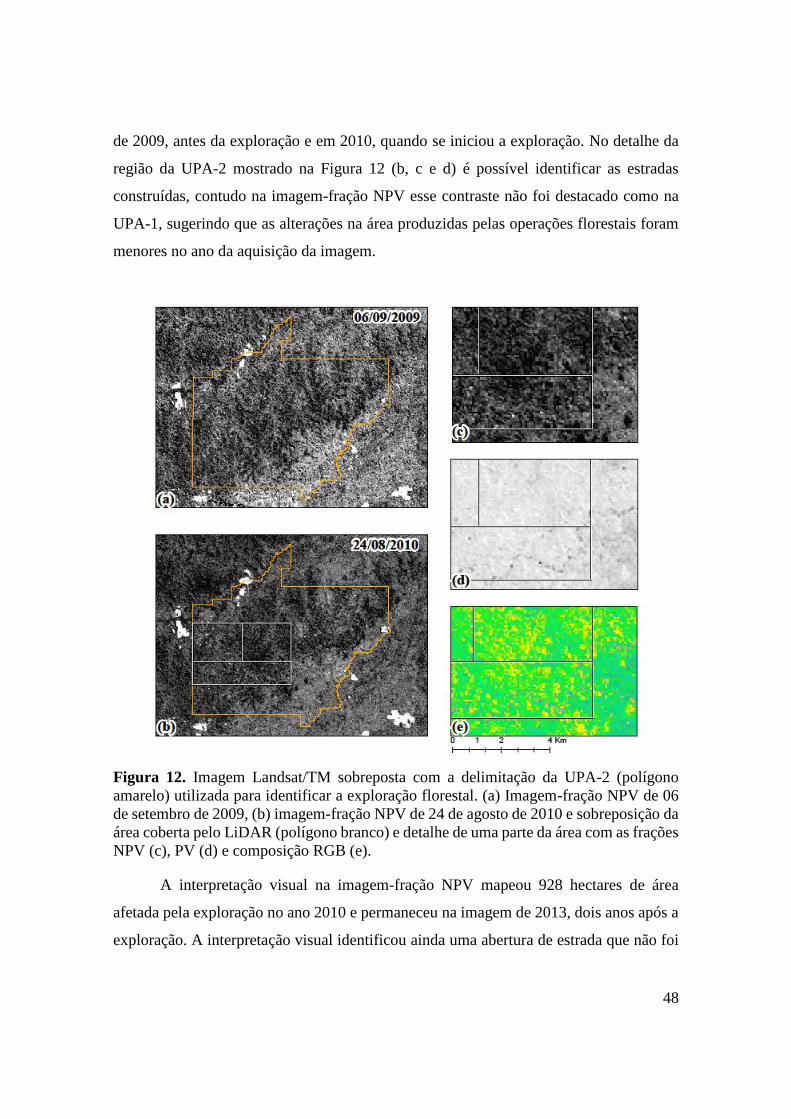
48
de 2009, antes da exploração e em 2010, quando se iniciou a exploração. No detalhe da
região da UPA-2 mostrado na Figura 12 (b, c e d) é possível identificar as estradas
construídas, contudo na imagem-fração NPV esse contraste não foi destacado como na
UPA-1, sugerindo que as alterações na área produzidas pelas operações florestais foram
menores no ano da aquisição da imagem.
Figura 12. Imagem Landsat/TM sobreposta com a delimitação da UPA-2 (polígono
amarelo) utilizada para identificar a exploração florestal. (a) Imagem-fração NPV de 06
de setembro de 2009, (b) imagem-fração NPV de 24 de agosto de 2010 e sobreposição da
área coberta pelo LiDAR (polígono branco) e detalhe de uma parte da área com as frações
NPV (c), PV (d) e composição RGB (e).
A interpretação visual na imagem-fração NPV mapeou 928 hectares de área
afetada pela exploração no ano 2010 e permaneceu na imagem de 2013, dois anos após a
exploração. A interpretação visual identificou ainda uma abertura de estrada que não foi

49
contabilizada na área de exploração por se tratar de um ramal de acesso dentro da Floresta
Estadual do Antimary (Figura 13).
Figura 13. Imagem-fração NPV e sobreposição da área explorada na UPA-2 delimitada
a partir da interpretação visual (branco) no ano 2010 (a) e no ano 2013 (b). O ramal de
acesso construído foi perceptível na imagem de 2013.
A área total explorada identificada na classificação automática usando o CLASlite
mapeou 139 hectares nos anos 2010 e 2011, anos em que houve exploração. A
classificação automática CLASlite mapeou 113 hectares de áreas alteradas (Figura 14a)
no ano de 2010 e no ano após a exploração somente 21 hectares foram mapeados na UPA
2 (Figura 14b). A área total da UPA equivale a 3.721 hectares, enquanto que a área efetiva
explorada de acordo o relatório pós-exploratório apresentado ao órgão licenciador foi
estimada em 3.257 hectares.

50
Figura 14. Área afetada pela exploração florestal na UPA-2. (a) Classificação CLASlite
de floresta (verde) e degradação (amarelo) na imagem Landsat do ano da exploração e (b)
dois anos após a exploração.
A exploração da UPA-3 foi executada no término do ano de 2011, parte de 2012,
2013 e início de 2014 e foi realizada em duas fases englobando um terço da área total
autorizada, ou seja, dos 3.971 ha licenciados para a UPA 03, foram explorados apenas
1.240 ha, onde 101 dos 306 pátios planejados foram explorados, de acordo com os dados
pós-exploratórios. A imagem-fração NPV de 2013 evidenciou a área afetada pela
exploração, conforme Figura 15. Em razão da exploração ter ocorrido no final do ano de
2011, a imagem Landsat de 11/08/2011 utilizada não apresenta nenhum indício de
exploração madeireira, indicando que a exploração ainda não havia ocorrido naquela
época. Em 2011 o sensor a bordo do satélite Landsat-5 era o Thematic Mapper (TM) e
houve a interrupção do imageamento pela plataforma Landsat em 2012, voltando a operar
em 2013 com o sensor OLI, quando a imagem de agosto de 2013 mostrou a ocorrência
de exploração na área da UPA 3 (Figura 15 b e d).

51
Figura 15. Imagem-fração NPV do Landsat sobreposta com a delimitação da UPA-3
(polígono branco) utilizada para identificar áreas alteradas pela exploração florestal, antes
(a e c) e após a exploração (b e d). A parte inferior da figura destaca a região representada
pelo polígono vermelho.
O mapeamento da área de extração seletiva detectou 230 hectares a partir da
interpretação visual (Figura 16a) e a classificação automática da degradação identificou
75,10 (Figura 16b). A área desmatada ao norte da UPA totalizou 117 hectares e estes
polígonos foram desconsiderados aplicando a máscara de desmatamento do PRODES. A
área total desta UPA-2 representa 3.972 ha e estima-se que a área de efetivo manejo
equivale a 1.981 ha ao se descontar a área de APP e área antropizada, além de uma área
de 1.000 ha considerada remanescente e que foi autorizada para exploração em 2017.

52
Figura 16. Imagem Landsat/OLI sobreposta com a delimitação da UPA-3 (polígono
branco) utilizada para identificar os indícios da infraestrutura da exploração florestal. (a)
Imagem-fração NPV e (b) Resultado da classificação CLASlite de floresta (verde) e
degradação florestal (amarelo).
A Figura 17 apresenta o monitoramento da degradação florestal por extração
seletiva no período de 2012 a 2015 na UPA 3 com a utilização de imagens RapidEye. As
áreas de exploração madeireira se destacam como manchas mais brilhantes na floresta,
sendo mais visíveis na imagem-fração solo. Na Figura 17 a imagem referente ao ano de
2012 não mostra indícios da infraestrutura aberta para exploração, apesar do relatório pós-
exploratório indicar que houve corte de árvores naquele ano, o que pode ser explicado
pela data de aquisição da imagem ser anterior ao início da exploração em 2012.

53
Figura 17. Imagem-fração solo derivada do MLME da imagem RapidEye com
sobreposição da UPA-3 (branco). (a) Imagem do primeiro ano após a exploração. (b)
Imagem de 2013 destacando as áreas exploradas. (c) Imagem do ano seguinte da
exploração. (d) Imagem de dois anos após a exploração.
Contudo, isto não pôde ser verificado devido a inconsistência de informações
sobre os meses em que houve a construção de estradas e retirada de árvores, pois de
acordo com o relatório pós-exploratório, a área foi explorada no final de 2011, mas não
foram identificadas nas imagens RapidEye e Landsat, conforme mostrado na Figura 15a.
O mapeamento da exploração madeireira utilizando interpretação visual na
imagem RapidEye identificou 646 hectares enquanto que na imagem Landsat a área foi
apenas 230 hectares, ou seja, quase três vezes menos do que foi observado na imagem
RapidEye (Figura 18).

54
Figura 18. Comparação do mapeamento da área afetada pela exploração usando Landsat
e RapidEye. (a) Imagem-fração NPV derivada do Claslite da imagem Landsat com
sobreposição da UPA-3 (branco) e delimitação da área explorada (vermelho) e (b)
Imagem-fração derivada do MLME da imagem RapidEye.
Essa subestimativa pode ter sido em razão da data da imagem Landsat utilizada
(agosto) ou pode ser explicada devido a resolução espacial de 30 metros não ter detectado
a baixa intensidade da exploração ocorrida na área. Na UPA-1 a intensidade de corte foi
10 m3.ha-1 e na UPA-3 foi em torno de 11 m3.ha-1, assim essa diferença não é suficiente
para afirmar que nela não houve uma intensidade de exploração que não foi capaz de se
ser detectada na imagem Landsat, como ocorreu na identificação da UPA-1, então não foi
possível identificar áreas afetadas menores que a resolução do sensor.
As estradas florestais mapeadas na UPA-3 foram detectadas na imagem RapidEye
do ano 2013, mostrando que a resolução espacial de 5 metros do sensor foi adequada para
identificar as estradas e trilhas abertas durante a exploração (Figuras 19 e 20).

55
Figura 19. Classificação automática em imagem RapidEye de 18 de outubro de 2013
com sobreposição área afetada pela exploração (em amarelo) e das estradas florestais
mapeadas em campo na UPA-3.
Figura 20. Comparação do mapeamento da área afetada pela exploração usando Landsat
e RapidEye. (a) Imagem-fração NPV derivada do Claslite da imagem Landsat com
sobreposição da UPA-3 (branco) e delimitação da área explorada (vermelho) e (b)
Imagem-fração derivada do MLME da imagem RapidEye.

56
A Figura 21 apresenta o total da área explorada mapeada em cada UPA em
comparação com a interpretação visual e a classificação CLASlite na imagem Landsat
para todas as UPAs analisadas e imagem RapidEye para a UPA-3.
Figura 21. Comparação entre a área explorada medida a partir da interpretação visual na
imagem-fração NPV e a classificação automática para cada Unidade de Produção Anual
explorada na Floresta Estadual do Antimary entre os anos de 2009 e 2015.
O total da área explorada mapeada pela classificação CLASlite foi 397 hectares,
enquanto que a interpretação visual identificou 1.428 hectares (Figura 22), ou seja, cerca
de quatro vezes superior à área mapeada pelo CLASlite (Figura 23).
269
929
230
101139 157
646
0
300
600
900
1200
UPA-1 UPA-2 UPA-3
Áre
a ex
plo
rad
a (h
a)
Interpretação Visual CLASlite Landsat MLME RapidEye

57
Figura 22. Área explorada identificada a partir da interpretação visual na imagem-fração
NPV nas UPAs da Floresta Estadual do Antimary, totalizando 1.428 hectares no período
de 2009 a 2015.
Figura 23. Área explorada identificada a partir da classificação automática nas UPAs da
Floresta Estadual do Antimary, totalizando 397 hectares no período de 2009 a 2015.

58
Os resultados revelam que, embora a área explorada seja passível de identificação
em imagens Landsat, essa alteração não é perceptível ao longo dos anos. Essas diferenças
são ainda mais significativas se considerarmos todas as áreas que mostraram algum nível
de perturbação pelo menos uma vez durante esse período, como o caso da UPA-2. Stone
e Lefebvre (1998) usando imagens adquiridas com 5 anos de diferença (1986 e 1991),
mostraram que 91% da floresta com exploração madeireira em 1986 foram classificados
como floresta novamente em 1991 e apenas 9% foi convertido para pastagens.
Isso pode estar relacionado aos resultados de Matricardi et al. (2007) que
mostraram que a cobertura florestal impactada pela extração seletiva leva cerca de três
anos para se regenerar. Por outro lado, Asner et al. (2006) relataram também a
probabilidade de desmatamento nas áreas exploradas, pois avaliaram que 16% da floresta
degradada por extração seletiva entre 1999 e 2004 foram desmatadas até 2005. Asner et
al. (2005) avaliaram a exploração seletiva no Mato Grosso para o período de 2000 a 2002.
O conjunto de dados consiste em informações binárias: floresta explorada e floresta não
explorada. Em contraste com o desmatamento, que normalmente consiste em uma
mudança permanente ou de longo prazo para outros tipos de cobertura terrestre, as áreas
de extração seletiva são frequentemente seguidas pela regeneração da floresta no curto
prazo.
Os resultados de mapeamento são condicionados pela resolução espacial do sensor
e enfrentam algumas limitações, como o mapeamento parcial das estradas e a exclusão
de muitas áreas exploradas. Outra limitação da classificação automática é que esta não
permite a delimitação precisa dos limites das áreas de extração seletiva, então para
diminuir esse efeito Souza et al. (2013) aplicaram buffers em torno de pixels.
O INPE mapeou a degradação florestal através do projeto DEGRAD (INPE,
2008). Apesar das diferenças em metodologias e definições, uma comparação dos
resultados deste estudo com o DEGRAD do ano de 2013 mostra que as áreas identificadas
pelo CLASlite não foram mapeadas por esse sistema. O INPE executa também projeto
DETEX, que se concentra no mapeamento de extração seletiva em áreas de concessão

59
florestal na Amazônia brasileira. No entanto, os resultados do DETEX não estão
disponíveis publicamente.
O produto Global Forest Change (GFC) não mapeia ou mede a degradação da
floresta, caracterizada por uma diminuição da cobertura da copa da árvore dentro de um
pixel Landsat (HANSEN, 2013). Isso permite avaliar as informações adicionais
fornecidas por esta abordagem de fração de solo (sub-pixel) em comparação com a
abordagem completa de remoção de cobertura de árvore do produto GFC. (TYUKAVINA
et al., 2017) usaram o conjunto de dados GFC como camada de estratificação para um
estudo sobre distúrbios florestais na Amazônia Legal brasileira. No entanto, a falta de
informações parciais de remoção da cobertura da coroa no conjunto de dados do GFC
leva provavelmente a uma subestimação significativa dos distúrbios relacionados à
exploração madeireira neste estudo.
5.2.Estimativa da área de exploração florestal
Os resultados apresentados na seção anterior mostraram que a área estimada de
exploração florestal identificada por classificação automática e interpretação visual foram
muito discrepantes, variando de 397 hectares a 1.428 hectares, respectivamente. Assim
são apresentados os resultados da avaliação da exatidão do mapa para estimar a área das
classes de floresta e área explorada com os intervalos de confiança apresentando a
incerteza das estimativas de área obtidas para a classificação das imagens Landsat
(Tabelas 5 a 7) e para as imagens RapidEye (Tabelas 8 a 10).
Tabela 5. Matriz de erros de contagem de amostras usada para avaliar a exatidão da
classificação de imagens Landsat na Floresta Estadual do Antimary.
Referência
Floresta Área Explorada Total Erros de
Comissão
Erros de
Omissão
Map
eam
ento
Floresta 116 127 243 52% 2%
Área Explorada 2 27 29 7% 18%
Total 118 154 272

60
Os erros de comissão de 52% da classe floresta representam a área de exploração
que foi mapeada como floresta. O mapeamento classificou 127 amostras como floresta
que pertenciam a classe área explorada, de acordo com os dados de referência coletados
na área de manejo florestal. Por outro lado, os erros de comissão da classe área explorada
foram baixos (7%), assim como os erros de omissão (18%), pois a técnica de classificação
conseguiu mapear a exploração na classe apropriada.
Contudo, a classe área explorada teve um total de 154 amostras de verdade de
campo, em que somente 27 destas amostras foram classificadas corretamente, mostrando
que a classificação automática com imagens Landsat identificou como floresta mais da
metade das amostras coletadas na classe área explorada.
Os erros de comissão e omissão tem diferentes implicações quando se trata de
gerar estimativas de área, assim os resultados de área mapeada para as classes floresta e
área explorada são apresentados na Tabela 6.
Tabela 6. Matriz de erro de contagem de amostras (nij) construída a partir da amostra de
avaliação de exatidão. As categorias da classificaçao são as linhas enquanto as categorias
de referência são as colunas.
Referência
Floresta Área Explorada Total Área mapeada (ha) W pij
Map
eam
ento
Floresta 116 127 243 8.733 0,96 0,46
Área Explorada 2 27 29 398 0,04 0,54
Total 118 154 272 9.131
W = proporção de área da classe obtida no mapeamento em relação a área total.
pij = somatório da área da classe obtida no mapeamento em relação a área total dividido pelo total
das classes, representando a estimativa ajustada por erro estratificado.
A partir dos valores obtidos para a área de cada classe mapeada em relação a área
total (W) e dos valores do somatório da área das classes mapeadas em relação a área total
dividido pelo total das classes (pij) foi possível obter a estimativa ajustada para cada
classe, como pode ser observado na Tabela 7.

61
Tabela 7. Matriz de erro das proporções de área estimada com base na Tabela 6. As
medidas de exatidão são apresentadas com um intervalo de confiança de 95%. As
categorias da classificaçao são as linhas enquanto as categorias de referência são as
colunas.
Floresta Área Explorada Total Área mapeada W pij
Floresta 0,46 0,50 0,96 8.733 0,96 0,46
Área Explorada 0,00 0,04 0,04 398 0,04 0,54
Total 0,46 0,54 9.131
Área (ha) 4.196 4.934
Erro padrão 0,03
Estimativa de área ajustada (ha) 277
95% IC (ha) 925 1.001
Margem de erro (%) 22 20
Acurácia total 0,50±0,06
Acurácia do usuário 0,48±0,06 0,93±0,09
Acurácia do produtor 0,99±0,00 0,08±0,11
A área de floresta mapeada foi 8.733 ha e a área estimada ajustada por erro
estratificado foi 4.196 ha (Atotal = 9.131x0,46). A área explorada mapeada foi 398 ha,
enquanto que a área estimada ajustada por erro estratificado é cerca de doze vezes maior
(Atotal x 0,54=4.934 ha). O motivo dessa grande discrepância pode ser deduzido a partir
da matriz de erro, em que quase metade da proporção da área de explorada é omitida no
mapa (proporção de área estimada omitida na classe de exploração foi 0,50), de modo
que a estimativa ajustada por erro desta classe adiciona a área de floresta omitida à área
de exploração mapeada.
Neste caso, o erro de omissão associado às unidades de amostra de área explorada
tem uma forte influência na área estimada dessa classe. Cada unidade de amostra de erro
de omissão da classe floresta contribui 36 ha (Atotal mapeada × W × P ÷ Afloresta mapeada = 9.131
× 0,96 × 1 ÷ 243) de área explorada para o total ajustado por erro. Com isso, a estimativa
da área à omissão das unidades de amostra de exploração é capturada pelo erro padrão
relativamente alto da área estimada.

62
Os valores de exatidão do usuário, produtor e total calculados a partir das
proporções estimadas da área, bem como as variações das medidas também são
apresentados na Tabela 7. Neste mapeamento, para a classe floresta a exatidão do usuário
é de 0,48±0,06, do produtor é 0,99±0,00 ao intervalo de confiança de 95%.
Para a área explorada, a estimativa de exatidão do usuário é 0,93±0,09 e a exatidão
do produtor é 0,08±0,11. A exatidão global estimada é de 0,50 ± 0,06 como mostra a
Figura 24.
Figura 24. Proporção da área explorada estimada a partir da classificação automática de
imagens Landsat nas UPAs da Floresta Estadual do Antimary, considerando a exatidão
geral, do usuário e do produtor no intervalo de confiança de 95%.
Considerando estas estimativas, a área de floresta mapeada deveria ser 4.196 ha ±
925 ha e área de exploração equivalente a 4.934 ha ± 1.001 ha, pois o intervalo de
confiança quantifica a incerteza associada à estimativa baseada em cada amostra das
classes. Assim, a partir do intervalo de confiança obtido, a estimativa de área explorada
poderia variar entre o limite inferior calculado de 3.933 ha ou superior de 5.936 ha no
nível de confiança de 95%.

63
Embora o intervalo de confiança para a área explorada seja amplo, não inclui o
valor da área classificada (398 hectares). Por esta razão é importante ajustar a área obtida
a partir da contagem de amostras, levando em consideração a informação contida na
matriz de erros.
A avaliação do mapeamento da UPA-3 utilizando imagens RapidEye (Figura 20b)
é apresentada nas Tabelas 9 a 11.
Tabela 8. Matriz de erros usada para avaliar a exatidão da classificação automática da
exploração madeireira utilizando imagens RapidEye na UPA-3 da Floresta Estadual do
Antimary.
Referência
Floresta Área Explorada Total Erros de
Comissão
Erros de
Omissão
Map
eam
ento
Floresta 21 6 27 22% 16%
Área Explorada 4 49 53 8% 89%
Total 25 55 80
Em relação ao mapeamento utilizando imagens RapidEye, os erros de comissão
de 22% da classe floresta compreendem as amostras de área explorada que foram
mapeadas como floresta e os baixos erros de 7,4% das amostras de área explorada
representam áreas que foram confirmadas como exploração de madeira no levantamento
de campo e a classificação usando imagens RapidEye detectou tais amostras como
floresta.
Os erros de omissão (16%) de floresta também foram baixos, enquanto que estes
erros da classe área explorada foram bastante elevados, pois a técnica de classificação
não permitiu detectar a exploração apropriadamente. Os erros de comissão e omissão tem
diferentes implicações quando se trata de gerar estimativas de área, assim os resultados
da estimativa de área mapeada para as classes floresta e área explorada são apresentados
na Tabela 9.

64
Tabela 9. Matriz de erro de contagem de amostras (nij) construída a partir da amostra de
avaliação de exatidão da classificação com RapidEye. As categorias da classificaçao são
as linhas enquanto as categorias de referência são as colunas.
Referência
Floresta Área Explorada Total Área mapeada (ha) W pij
Map
eam
ento
Floresta 21 6 27 3,257 0,93 0,73
Área Explorada 4 49 53 249 0,07 0,27
Total 25 55 80 3,506
O conjunto de dados amostrais investigados para verificar as incertezas do
mapeamento de cada classe mapeada em relação a área total (W) e dos valores do
somatório da área das classes mapeadas em relação a área total dividido pelo total das
classes (pij), incluindo-se os erros do produtor e usuário pode ser visualizado na Tabela
10.
Tabela 10. Matriz de erro estimada a partir da Tabela 9 com valores expressos como
proporção de área estimada. As medidas de exatidão são apresentadas com um intervalo
de confiança de 95%. As categorias da classificaçao são as linhas enquanto as categorias
de referência são as colunas.
Floresta Área Explorada Total Área mapeada W pij
Floresta 0,72 0,21 0,93 3.257 0,93 0,73
Área Explorada 0,01 0,07 0,07 249 0,07 0,27
Total 0,73 0,27 3.506
Área (ha) 2.552 954
Erro padrão 0,02
Estimativa de área ajustada (ha) 87
95% IC (ha) 1.472 659
Margem de erro (%) 58 69
Acurácia total 0,79 ±0,15
Acurácia do usuário 0,78±0,16 0,92±0,07
Acurácia do produtor 0,99±0,00 0,24±0,54
Neste mapeamento, a exatidão do usuário (95% de intervalo de confiança) é de
0,78±0,16 para a classe floresta e 0,92±0,07 para a classe área explorada. A exatidão do
produtor é 0,99±0,00 para floresta e 0,24±0,54 para área explorada. A exatidão total

65
estimada é de 0,79±0,15. A figura 25 demonstra o intervalo de confiança (95%) obtido
para a classe área explorada.
Figura 25. Proporção da área explorada estimada a partir da classificação automática de
imagens RapidEye na UPA-3 da Floresta Estadual do Antimary, considerando a exatidão
geral, do usuário e do produtor no intervalo de confiança de 95%.
Considerando estas estimativas, a área de floresta mapeada deveria ser 2.552
ha±1.472 ha e a área explorada equivalente a 954 ha±659 ha. Embora o intervalo de
confiança seja amplo, não inclui o valor de 249 ha obtido no mapeamento, pois o limite
inferior estimado compreende 296 hectares, enquanto que o limite superior equivale a
1.613 hectares. Desta forma, de acordo com os dados de referência a subestimativa
calculada para o mapeamento da exploração madeireira a partir do Landsat foi de 3.535
ha, enquanto para a classificação utilizando RapidEye foi de 47 hectares considerando
somente os limites inferiores do intervalo de confiança.

66
O raciocínio para apresentar esta estratégia é que, embora os métodos adotados
neste estudo para verificar as incertezas do mapeamento data de mais de 30 anos (Card,
1982), a comunidade de sensoriamento remoto ainda não adotou consistentemente essas
boas práticas.
A partir das equações e dados extraídos nas matrizes de erros foi possível obter a
estimativa ajustada por erro de área explorada. A área calculada com o estimador
estratificado confirma a necessidade de ajustar a área do mapa a partir da contagem de
amostras para explicar o elevado erro de omissão da degradação florestal por corte
seletivo usando imagens Landsat e o classificador do CLASlite.
Para as análises deste estudo a área de exploração foi severamente subestimada a
ponto de estar fora do intervalo de confiança de 95%, pois considerar a área mapeada de
398 hectares (Landsat) tem um efeito importante para aplicações que utilizam essa área
como fonte de informação, por exemplo, quantidade de emissão de carbono e projetos de
REDD+, em comparação com os resultados utilizando área ajustada estimada de 4.934
ha com margem de erro de 20% (Tabela 7).
Shimabukuro et al. (2014) desenvolveram um método para identificar e mapear
as áreas de degradação florestal no Mato Grosso, utilizando imagens Landsat de 2002. O
método proposto é baseado na segmentação e classificação de imagens multitemporais de
um conjunto de dados de imagens de frações de solo e sombra derivadas de imagens
Landsat ETM+. As áreas de extração seletiva foram identificadas e mapeadas a partir das
imagens da fração do solo.
Grecchi et al. (2017) analisaram o conjunto de dados de mapeamento de extração
seletiva de Asner et al. (2005) e encontraram que a partir da área total de exploração
identificada por Asner et al. para o ano 2000, apenas 64% são identificados como áreas
degradadas no produto gerado pelo método de Grecchi et al. (2017). Por outro lado, a área
total detectada no mesmo ano, apenas 44% foram identificados como áreas exploradas
em Asner et al. (2005), indicando discrepâncias espaciais entre os dois conjuntos de
dados.

67
A análise mostra que a floresta recém-perturbada pela extração seletiva é muito
maior do que a estimativa feita pela classificação de imagens. É importante destacar que
apenas uma parte dessas áreas permanece como perturbada por vários anos. Se os
distúrbios fossem mapeados a partir de imagens com um intervalo de tempo maior (com
mais de 3-4 anos de intervalo), seria muito menor o distúrbio identificado e
consequentemente as estimativas de área de degradação por extração seletiva apontadas.
5.3.Uso de LiDAR para monitorar a alteração da cobertura florestal
Os dados oriundos de aerolevantamento a laser fornecem diferentes modelos que
podem ser utilizados para monitorar a degradação florestal e gerar estimativas de área de
sub-bosque e de copa afetada pela exploração florestal. A Figura 26 mostra a extração
seletiva na área da UPA-2 nos anos 2010 e 2011, com estradas interligando os pátios de
estocagem e as trilhas usadas para arrastar as árvores até os pátios.
Figura 26. Modelo de Densidade Relativa de Vegetação (RDM) obtido do LiDAR na
UPA-2. (a) RDM do primeiro ano da exploração e (b) RDM do segundo ano da
exploração. O retângulo vermelho indica área explorada em 2010 e o azul área explorada
em 2011.

68
No Modelo de Densidade Relativa (RDM) as cores mais escuras representam os
valores baixos, indicando locais onde há ausência ou menor quantidade de alvos, uma vez
que estes não interagiram totalmente com os pulsos lasers para gerar muitos retornos. Os
tons mais escuros destacam áreas com sub-bosque mais aberto, indicando áreas afetadas
pela exploração florestal ou naturalmente abertas pela queda de árvores. Enquanto que as
áreas com cores mais claras representam maior densidade relativa e são os locais onde
houve maior interação entre os pulsos emitidos e a vegetação, por consequência gerando
maior quantidade de retornos, indicando áreas não degradadas.
Os modelos de densidade relativa do LiDAR mostram a localização de estradas,
trilhas, pátios e clareiras utilizando o estrato entre 1 m a 5 m acima do solo para os dois
anos de sobrevoo do LiDAR. As atividades exploratórias iniciaram no primeiro trimestre
de 2010, de acordo com as informações protocoladas no órgão licenciador, e o RDM
mostrou indícios de exploração na parte sul da área coberta pelo LiDAR, confirmando as
informações levantadas.
A parte norte da área coberta pelo LiDAR mostrou que houve exploração em 2010
e 2011, de modo que a exploração de 2011 é destacada no retângulo azul da Figura 26b,
enquanto que a área explorada no ano anterior já está sendo regenerada (retângulo
vermelho, Figura 26b). A escala de cinza no RDM representa a densidade de retorno do
LiDAR (preto = baixo, branco = alto), assim, estradas, trilhas, pátios e clareiras são pretos.

69
Figura 27. Modelos obtidos a partir do LiDAR na UPA-3 da Floresta Estadual do
Antimary, Acre. (a) modelo de altura de dossel e (b) modelo de densidade relativa.
Como mostrado na Figura 27a, áreas afetadas pela extração seletiva não foram
prontamente evidentes no modelo de altura de dossel com 1 metro de resolução do
LiDAR, enquanto que o modelo de densidade relativa de dossel com retornos acima de 1
metro e abaixo de 5 metros identificaram os locais com infraestrutura da exploração e
consequentemente permitiu quantificar a área afetada pela atividade madeireira nas áreas
manejadas. No RDM as áreas exploradas são visualmente distintas de áreas não
exploradas.
Para a UPA-3, os modelos de densidade relativa derivados dos dados LiDAR
também detectaram a infraestrutura da exploração mesmo após dois anos. Porém o
modelo de densidade relativa de vegetação (RDM) sugerido por D’Oliveira et al. (2012)

70
com altura mínima de 1 metro e altura máxima de 5 metros não mostrou claramente as
áreas dos pátios medidos em campo (Figura 28a).
Figura 28. Modelos de densidade relativa de vegetação (RDM) para a área de estudo a
partir dos dados Lidar. (a) RDM de 1 m e 5 metros acima do solo conforme proposto por
D’Oliveira et al. (2012) e (b) RDM entre 8 m e 12 metros proposto neste estudo. A escala
de cinza representa a densidade de retorno do LiDAR com as áreas exploradas em preto.
Considerando que neste estudo o sobrevoo LiDAR ocorreu dois anos após a
exploração, para evitar a interferência da vegetação secundária e projeção das copas das
árvores circundantes no modelo, a camada com altura mínima de 8 m e máxima de 12
metros apresentou melhor identificação da degradação florestal por corte seletivo (Figura
28b).
A definição dos novos limites da camada feita em função da análise das amostras
LiDAR dos pátios com elevação normalizada identificou a infraestrutura construída na
floresta (estradas e pátios de estocagem) e perturbações promovidas pelo corte das árvores
(clareiras), além da extração de toras (trilhas de arraste) mesmo dois anos após a
exploração, mostrando que o modelo de densidade relativa com altura mínima de 8 metros
e máxima de 12 metros foi mais adequado para detectar a infraestrutura da exploração em
um período mais longo, como mostrado na Figura 29b.

71
Figura 29. (a) Detalhamento da visualização de pátios no RDM proposto por d’Oliveira
et al. (2012) e (b) RDM proposto neste estudo. A escala de cinza representa a densidade
de retorno do LiDAR com as áreas exploradas em preto e os pátios em vermelho.
O fechamento do dossel é consideravelmente rápido (1-4 anos), como destacado
por Asner et al. (2009), já os estoques de carbono e os processos ecológicos são afetados
por um período muito mais longo nas áreas submetidas a manejo florestal na Amazônia.
As áreas de degradação por corte seletivo detectadas no Modelo de Densidade
Relativa para as UPAS 2 e 3 foram 78,30 ha e 143,41 hectares respectivamente.
Considerando o limite coberto pelo levantamento do LiDAR, a área imageada na UPA-2
apresentou 6,59% da área afetada pela exploração e a UPA-3 teve 12,75% da área
explorada.
A métrica de elevação dos pontos LiDAR está associada com as coordenadas de
posicionamento vertical dos pontos na nuvem, e mostram a amplitude vertical das árvores
dentro da UPA-3. A variância da altura permitiu caracterizar a estrutura de copa no dossel,
pois a área explorada tem menor variância de elevação devido a maior homogeneidade
do ambiente e, assim, a variabilidade é maior nas áreas exploradas, enquanto que há
menor variabilidade e por consequência, maior complexidade nas parceladas não
exploradas, como mostra a Figura 30.
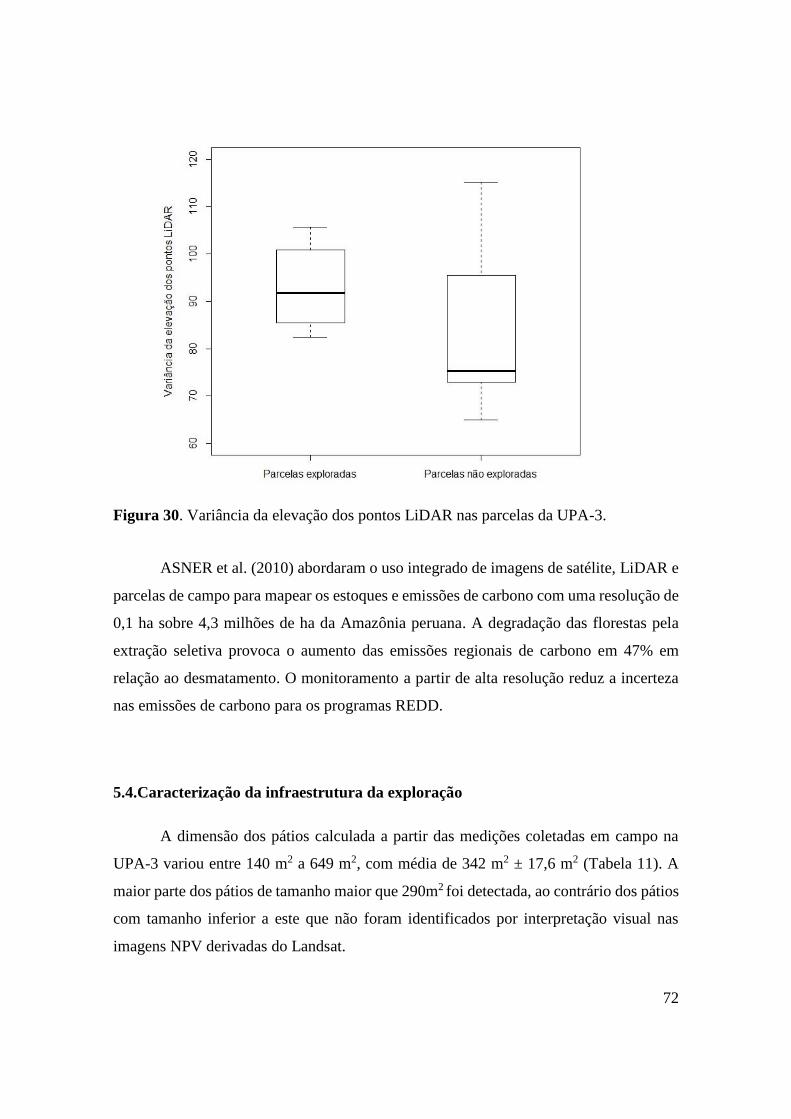
72
Figura 30. Variância da elevação dos pontos LiDAR nas parcelas da UPA-3.
ASNER et al. (2010) abordaram o uso integrado de imagens de satélite, LiDAR e
parcelas de campo para mapear os estoques e emissões de carbono com uma resolução de
0,1 ha sobre 4,3 milhões de ha da Amazônia peruana. A degradação das florestas pela
extração seletiva provoca o aumento das emissões regionais de carbono em 47% em
relação ao desmatamento. O monitoramento a partir de alta resolução reduz a incerteza
nas emissões de carbono para os programas REDD.
5.4.Caracterização da infraestrutura da exploração
A dimensão dos pátios calculada a partir das medições coletadas em campo na
UPA-3 variou entre 140 m2 a 649 m2, com média de 342 m2 ± 17,6 m2 (Tabela 11). A
maior parte dos pátios de tamanho maior que 290m2 foi detectada, ao contrário dos pátios
com tamanho inferior a este que não foram identificados por interpretação visual nas
imagens NPV derivadas do Landsat.

73
Tabela 11. Área dos pátios não detectados e detectados na imagem Landsat neste estudo.
Pátio não detectado Pátio detectado
N° Área (m2) N° Área (m2) N° Área (m2) N° Área (m2) N° Área (m2) N° Área (m2)
1 140 8 247 16 307 25 361 12 290 30 401
2 147 9 248 18 317 29 394 17 308 36 469
3 177 10 265 19 326 31 411 20 334 37 495
4 190 11 280 21 338 32 412 26 363 38 563
5 204 13 294 22 340 33 423 27 382 39 572
6 217 14 298 23 343 34 427 28 393 40 649
7 244 15 299 24 353 35 461
A partir do posicionamento dos pátios foi possível comparar dados Landsat e
LiDAR. A partir da interpretação visual da imagem Landsat do ano 2013 foi possível
identificar 30% de pátios na área de estudo no ano da exploração (Figura 31). A diferença
de contraste entre o alvo de interesse e o restante da imagem possibilitou a detecção dos
pátios na região onde as estradas estavam abertas recentemente. No ano seguinte após a
exploração não foi possível identificar indícios de pátios e estradas na imagem de satélite.
Isto pode ser explicado pela baixa intensidade de corte (11 m3. ha-1) ocorrida na área,
implicando na abertura de pátios menores e favorecendo o rápido fechamento do dossel,
diferente de áreas com maior impacto em que os indícios da exploração permanecem
visíveis por 2-3 anos em imagens Landsat. As estradas também ficaram visíveis apenas
no ano da exploração (Figura 31).

74
Figura 31. Identificação de pátios a partir da interpretação visual nas imagens de
cobertura fracional NPV do Landsat dos anos 2011, 2013, 2014 e 2015.
A média da área dos pátios detectados foi 435 m2 enquanto que dos pátios não
detectados foi 302 m2. O tamanho do pátio afetou significativamente (t = -4,0076, df =
38, p≤0,01) a identificação nas imagens de satélite (Figura 32).

75
Figura 32. Detecção dos pátios na imagem NPV do ano de 2013 e relação com a área
medida em campo. Gráfico Boxplot apresenta o primeiro, segundo e terceiro quartil,
limites inferiores e superiores da distribuição dos dados referentes (a) área dos pátios (m2)
e (b) fração NPV (%) em relação a detecção na imagem Landsat-8.
Figura 33. Detecção dos pátios na imagem NPV do ano de 2013 e relação com a área
medida em campo.
O teste Shapiro-Wilk (w = 0,89064, p-value = 0,001033) mostrou que não há
distribuição normal entre os dados e o teste não paramétrico Wilcoxon (w = 76,5, p-value
= 0,00000).

76
Figura 34. Detecção dos pátios na imagem NPV do ano de 2013 e relação com a área
medida em campo.
Os pátios de estocagem de madeira, estradas principais e secundárias e as trilhas
de arraste favoreceram a detecção de exploração seletiva de madeira, como mostrado em
estudos anteriores (GRAÇA et al., 2015; MONTEIRO et al., 2007; SOUZA et al., 2003).
A maior parte dos pátios de tamanho maior que 290 m2 foi detectada na imagem Landsat.
Os pátios com tamanho menor que este limite não foram identificados na imagem NPV
devido a presença de copas de árvores dentro dos pátios que dificulta a detecção, como
pode ser observado na nuvem de pontos LiDAR de pátios com área em torno de 290 m2
(Figura 35).
(a) (b) (c
Figura 35. Visualização da nuvem de pontos LiDAR dos pátios que não foram detectados
na imagem NPV. Dimensão dos pátios: 294 m2 (a), 298 m2 (b) e 299 m2 (c).
Como mostrado na Figura 35 havia pátios de estocagem de madeira com efeito da
cobertura de copas de árvores e também em regeneração, o que também foi observado
Área dos pátios m2
Fra
çã
o N
PV
(%
)
200 300 400 500 600
01
02
03
04
0
R2
= 0,20
Área dos pátios m2
Fra
çã
o N
PV
(%
)
200 300 400 500 600
10
20
30
R2
= 0,29

77
durante as campanhas de campo. A análise do modelo de densidade relativa de vegetação
confirmou esta influência da vegetação, pois o RDM considerando os estratos de 1 e 5
metros detectou apenas 35% dos pátios, enquanto que o RDM desenvolvido para este
trabalho detectou 98% dos pátios, pois adota os limites de 8 e 12 metros na análise.
Brandão, JR; Souza, JR, (2006) em estudo realizado no município de Paragominas
no Pará, região onde se observa exploração madeireira convencional e manejada,
conseguiram identificar estradas principais, de acesso e de exploração por meio de
imagens Landsat, mas as trilhas não foram identificadas. Monteiro (2007), utilizando as
imagens de média resolução Landsat e ASTER, e de alta resolução IKONOS, conseguiu
detectar pátios e estradas de exploração madeireira na região de Sinop, Mato Grosso, com
considerável ganho de informações das feições de exploração usando a imagem de alta
resolução espacial.
Em geral os pátios construídos em áreas de planos de manejo têm dimensões
aproximadas de 500 m2 (MMA, 2002). Neste estudo demostramos que pátios acima de
290 m2 podem ser identificados em imagens de média resolução espacial, quando imagens
do mesmo ano da exploração são usadas para a análise. O programa DEGRAD usa os
dados Landsat com resolução de 30 metros para mapear a floresta degradada por corte
seletivo e incêndios florestais.
Como estes dados ainda não foram adotados para estabelecer o nível de referência
de emissões, as estimativas a serem consideradas podem subestimar a área impactada pela
exploração, sobretudo no estado do Acre, onde a intensidade de exploração é geralmente
baixa quando comparada com outros locais da Amazônia.
A disponibilidade de dados de resolução temporal de 5 dias e resolução espacial
de 10 m como as imagens do sensor Sentinel-2 poderá melhorar a avaliação e o
acompanhamento dos processos de degradação florestal.

78
5.5.Alteração da biomassa antes e após a exploração
Para a área da UPA-3 com os dados LiDAR obtidos em 2015, a estimativa de
biomassa total foi 200,4 Mg.ha-1 e biomassa da área de floresta foi 207,50 Mg.ha-1. Da
área coberta pela nuvem de pontos, 74 ha (6,58%) são de áreas alteradas e 1050 ha
(93,42%) são áreas de floresta. A área de cobertura de dossel acima de 30 m foi de 221
ha. Nas áreas exploradas, observou-se a taxa de mudança negativa quando comparadas
com as parcelas não exploradas, permitindo caracterizar as diferenças entre as estruturas
das parcelas inventariadas.
Tabela 12. Valores de biomassa medidos nas parcelas permanentes da UPA-3 e a taxa de
mudança para cada parcela.
Parcela Biomassa (Mg.ha-1) Taxa de
mudança (%) 2013 2015
1 250,0 208,5 -16,6
2 144,1 143,9 -0,1
3 285,4 285,0 -0,1
4 181,0 185,0 2,2
5 275,7 283,24 2,7
6 309,8 269,3 -13,1
7 326,4 251,6 -22,9
8 239,5 253,9 6,0
9 176,3 150,6 -14,6
10 174,6 176,8 1,3
Total 2362,7 2207,7
A equação de biomassa seca ajustada para a área da Floresta Estadual do Antimary
produzida por Melo (2017) e a equação de volume ajustada a partir das amostras coletadas
no estudo citado permitiram inferir sobre a estimativa de estoques de cobertura florestal
para as parcelas medidas em campo e identificar as diferenças estruturais causadas pela
exploração madeireira (Figura 36).

79
Figura 36. Estoques de biomassa e volume medidos nas parcelas permanentes.
A relação entre o volume selecionado e explorado indica que a volumetria
calculada das árvores abatidas foi inferior à volumetria mensurada nas UPAs 2 e 3. De
acordo com as informações obtidas junto aos relatórios pós-exploratórios esta diferença
é devido ao volume constante na tabela de campo não coincidir com o que foi calculado
no processamento do inventário florestal.
Tabela 13. Volume, número de árvores exploradas (totais e por hectare) e relação entre
volume selecionado e explorado na Floresta Estadual do Antimary.
Volume
Selecionado - VS
Volume
Explorado - VE
Nº de árvores
exploradas
Volume
Romaneiado - VR
VE/
VS
VR/
VS
VR/
VE
(m3) (m3) (m3/ha) (NI) (NI/ha) (m3) (m3/ha) (%)
UPA-1 16.818,8 10.924,0 10,5 1.519 1,45 10.924.0 10,5 65 65 100
UPA-2 29.392,4 17.372,3 7,9 3.787 1,71 28.965,6 13,1 59 99 167
UPA-3 77.650,2 16.148,0 6,2 2.076 0,80 17.279,9 6,7 21 22 107
Total 123.861,4 44.444,3 24,5 7.382 3,97 57.169,4 30,2

80
No caso das UPAs monitoradas na Floresta Estadual do Antimary, o mapeamento
da área explorada e consequente estimativa das áreas resultou em grande subestimativa
da área de degradação florestal a partir na análise utilizando imagens de satélites.
Resultados semelhantes foram relatados em estudos anteriores, como em
(MATRICARDI et al., 2010). Estima-se que para cada árvore que é extraída, outras 20
árvores serão danificadas, mesmo em operações planejadas. No entanto, os danos na
floresta são de baixa intensidade (UHL et al., 1997), e podem ser observados em campo,
mas são pouco visíveis em imagens Landsat.
O uso integrado de imagens de satélite de alta resolução, LiDAR e dados obtidos
em campo reduziriam as incertezas na estimativa do estoque de biomassa e carbono da
floresta primária e manejada, fornecendo informações mais precisas para aplicação em
Programas de REDD+ (ASNER et al., 2012b).
Para analisar a degradação florestal por exploração madeireira é recomendado o
uso de um conjunto de dados para compreender esta dinâmica e consequentemente
facilitar a implementação de ações no âmbito de programas REDD+. É importante
ressaltar que a nova abordagem na produção dos cenários é um esforço em direção à
redução de tais incertezas e à maior e mais eficaz integração entre as pesquisas de
diferentes equipes junto ao IPCC.
As estimativas da extensão da degradação florestal são frequentemente derivadas
de dados de sensoriamento remoto e a estimativa da área desempenha um papel
importante nos esforços para estabelecer protocolos cientificamente válidos, seja no que
diz respeito ao monitoramento de mudanças florestais no contexto de REDD+ ou para
abordagem que possibilitem a formulação de políticas públicas para redução de emissões
de gases de efeito estufa.

81
6. CONCLUSÃO
Os sistemas de monitoramento florestal que utilizam sensoriamento remoto têm
sido tradicionalmente baseados em mapeamentos e são úteis para diversas aplicações,
como o gerenciamento florestal e aplicação das leis ambientais. Contudo, faz-se
necessário que dados de validação baseados em amostras de campo sejam adotados para
fornecer as informações necessárias para quantificar os erros de classificação presentes
nos mapas e com isso, produzir estimativas de área com as incertezas associadas
expressas como intervalo de confiança.
A verificação em campo dos resultados obtidos de técnicas de mapeamento em
sensoriamento remoto é fundamental para o conhecimento da qualidade e limitações de
diferentes usos. Neste estudo, o tamanho da área dos pátios interferiu na detecção a partir
de imagens Landsat derivadas da fração Vegetação Não-Fotossintética e somente pátios
com área superior a 290 m2 foram identificados neste estudo. Apesar disto, as imagens
Landsat podem ser utilizadas como indicativo de atividade madeireira recente, ou seja,
no mesmo ano da exploração. Enquanto que as imagens RapidEye forneceram estimativas
de alteração da cobertura florestal mais aproximadas com os dados obtidos em campo.
O modelo de vegetação relativa derivado de dados LiDAR desenvolvido para este
trabalho identificou as alterações produzidas na estrutura da floresta pelas operações
florestais até dois anos após a exploração, demonstrando o potencial desse levantamento
para produzir estimativas mais refinadas acerca das alterações na cobertura florestal. No
entanto, as estimativas dos estoques de biomassa e volume de cobertura florestal antes e
depois da exploração obtidas neste estudo não foram representativas para detectar a perda
de biomassa calculada a partir do Lidar em comparação com os dados obtidos nos
inventários de campo nas parcelas com ocorrência de extração seletiva.
Considerando a complexidade para detectar as alterações na cobertura florestal
por meio de Sensoriamento Remoto são recomendados trabalhos futuros em regiões com
diferentes dinâmicas de exploração madeireira para ampliar os estudos combinando dados
de campo e sensores remotos na Amazônia.

82
REFERÊNCIAS BIBLIOGRÁFICAS
AGUIAR, A. P. D. et al. Modeling the spatial and temporal heterogeneity of
deforestation-driven carbon emissions: The INPE-EM framework applied to the Brazilian
Amazon. Global Change Biology, v. 18, n. 11, p. 3346–3366, 2012.
ALVARES, C. A. et al. K??ppen’s climate classification map for Brazil.
Meteorologische Zeitschrift, v. 22, n. 6, p. 711–728, 2013.
ANDERSEN, H.-E. et al. Monitoring selective logging in western Amazonia with repeat
lidar flights. Remote Sensing of Environment, v. 151, p. 157–165, 2014.
ARAGÃO, L. E. O. C. et al. Environmental change and the carbon balance of Amazonian
forests. Biological Reviews, v. 89, n. 4, p. 913–931, 2014.
ASNER, G. P. Biophysical and biochemical sources of variability in canopy reflectance.
Remote Sensing of Environment, v. 64, n. 3, p. 234–253, 1998.
ASNER, G. P. et al. Selective Logging in the Brazilian Amazon. Science, v. 310, n. 5747,
p. 480–482, 21 out. 2005.
ASNER, G. P. et al. A universal airborne LiDAR approach for tropical forest carbon
mapping. n. February 2013, p. 37–41, 2006a.
ASNER, G. P. et al. Condition and fate of logged forests in the Brazilian Amazon.
Proceedings of the National Academy of Sciences of the United States of America, v.
103, n. 34, p. 12947–12950, 22 ago. 2006b.
ASNER, G. P. et al. Extração Seletiva de Madeira e Sua Relação com Desmatamento.
Amazonia and Global Change. Geophysical Monograph Series 186, p. 25–42, 2009a.
ASNER, G. P. et al. Automated mapping of tropical deforestation and forest degradation:
CLASlite. Journal of Applied Remote Sensing, v. 3, n. 1, p. 335–345, 2009b.
ASNER, G. P. et al. High-resolution forest carbon stocks and emissions in the Amazon.
Proceedings of the National Academy of Sciences, v. 107, n. 38, p. 16738–16742, 2010.
ASNER, G. P. et al. High-resolution mapping of forest carbon stocks in the Colombian
Amazon. Biogeosciences, v. 9, n. 7, p. 2683–2696, 2012a.

83
ASNER, G. P. et al. A universal airborne LiDAR approach for tropical forest carbon
mapping. p. 1147–1160, 2012b.
ASNER, G. P.; HEIDEBRECHT, K. B. Spectral unmixing of vegetation, soil and dry
carbon cover in arid regions: Comparing multispectral and hyperspectral observations.
International Journal of Remote Sensing, v. 23, n. 19, p. 3939–3958, 2002.
BACCINI, A. et al. Estimated carbon dioxide emissions from tropical deforestation
improved by carbon-density maps. Nature Climate Change, v. 2, n. 3, p. 182–185, 2012.
BARLOW, J.; PERES, C. A. Fire-mediated dieback and compositional cascade in an
Amazonian forest. Philosophical transactions of the Royal Society of London. Series
B, Biological sciences, v. 363, n. 1498, p. 1787–94, 27 maio 2008.
BARROS, A. C.; UHL, C. Logging along the Amazon River and estuary: Patterns,
problems and potential. Forest Ecology and Management, v. 77, n. 1–3, p. 87–105,
1995.
CARVALHO, A. L. et al. Natural regeneration of trees in selectively logged forest in
western Amazonia. Forest Ecology and Management, v. 392, p. 36–44, 2017.
CONGALTON, R. G. .; GREEN, K. Assessing the accuracy of remotely sensed data:
principles and practices. [s.l: s.n.].
D’OLIVEIRA, M. V. N. et al. Estimating forest biomass and identifying low-intensity
logging areas using airborne scanning lidar in Antimary State Forest, Acre State, Western
Brazilian Amazon. Remote Sensing of Environment, v. 124, p. 479–491, set. 2012.
D’OLIVEIRA, M. V. N.; FIGUEIREDO, E. O.; PAPA, D. D. A. Uso do Lidar como
Ferramenta para o Manejo de Precisão em Florestas Tropicais. [s.l: s.n.].
DEFRIES, R. et al. Earth observations for estimating greenhouse gas emissions from
deforestation in developing countries. Environmental Science & Policy, v. 10, n. 4, p.
385–394, jun. 2007.
DIAZ, J. C. F. Lifting the Canopy Veil, Airborne LiDAR for Archeology of Forested
Areas. Imaging Notes: [s.n.].
DINIZ, C. G. et al. DETER-B: The New Amazon Near Real-Time Deforestation

84
Detection System. IEEE Journal of Selected Topics in Applied Earth Observations
and Remote Sensing, v. 8, n. 7, p. 3619–3628, 2015.
ESPÍRITO-SANTO, F. D. B. et al. Size and frequency of natural forest disturbances and
the Amazon forest carbon balance. Nature Communications, p. 1–6, 2014.
FCCC. United Nations Framework Convention on Climate Change. Fccc/Informal/84,
v. 1, n. 3, p. 270–277, 1992.
FELDPAUSCH, T. R. et al. Tree height integrated into pantropical forest biomass
estimates. Biogeosciences, v. 9, n. 8, p. 3381–3403, 2012.
GERWING, J. J. Degradation of forests through logging and fire in the eastern Brazilian
Amazon. Forest Ecology and Management, v. 157, n. 1–3, p. 131–141, mar. 2002.
GIONGO, M. et al. LiDAR: princípios e aplicações florestais. Pesquisa Florestal
Brasileira, v. 30, n. 63, p. 231–244, 2010.
GOETZ, S. J. et al. Mapping and monitoring carbon stocks with satellite observations: a
comparison of methods. Carbon Balance and Management, v. 4, n. 1, p. 2, 2009.
GOFC-GOLD. Sourcebook. GOFC-GOLD Report version COP21, p. 1–266, 2015.
GORGENS, E. B.; SILVA, A. G. P. DA; ESTRAVIZ, L. C. LIDAR: aplicações
florestais. [s.l: s.n.].
GRAÇA, P. M. L. DE A. Monitoramento e Caracterização de Áreas Submetidas à
Exploração Florestal na Amazônia por Técnicas de Detecção de Mudanças. São José
dos Campos - SP: Instituto Nacional de Pesquisas Espaciais (INPE), 2006.
GRAÇA, P. M. L. DE A. et al. Multi-temporal analysis of radiometric changes in satellite
images of forest edges to infer selective- logging areas in the Amazon forest. Acta
Amazonica, v. 45, n. 1, p. 35–44, 2015.
GRECCHI, R. et al. Int J Appl Earth Obs Geoinformation An integrated remote sensing
and GIS approach for monitoring areas a ff ected by selective logging : A case study in
northern Mato Grosso , Brazilian Amazon. Int J Appl Earth Obs Geoinformation, v.
61, n. May, p. 70–80, 2017.
HANSEN, M. C. High-resolution global maps of 21st-century forest cover change.

85
Science, v. 342, n. 6160, p. 850-853, 2013.
HIGUCHI, N. Utilização e manejo dos recursos madeireiros das florestas tropicais
úmidas. Acta Amazonica, 1994.
HIGUCHI, N. et al. O mercado internacional de madeira tropical está à beira do
colapso. [s.l: s.n.].
HIGUCHI, N. Governos locais amazônicos e as questões climáticas globais. [s.l: s.n.].
HIRSCHMUGL, M. et al. Mapping Forest Degradation due to Selective Logging by
Means of Time Series Analysis: Case Studies in Central Africa. Remote Sensing, v. 6,
n. 1, p. 756–775, 2014.
HOLMES, T. P. et al. Custos e Benefícios Financeiros da Exploração Florestal de
Impacto Reduzido em Comparação à Exploração Florestal Convencional na Amazônia
Oriental. p. 68, 2004.
IBGE. Instituto Brasileiro De Geografia E Estatística - Ibge. Estatísticas do registro civil
2014, v. 41, p. 1–81, 2015.
INPE. Monitoramento da cobertura florestal da Amazônia por satélites: sistemas
PRODES, DETER, DEGRAD e Queimadas 2007-2008. Ministério da Ciência e
Tecnologia, p. 47, 2008.
INPE. Taxa de desmatamento consolidada do PRODES 2015. n. 65, p. 3, 2015.
INTERGOVERNMENTAL PANEL ON CHANGE CLIMATE (IPCC). Climate Change
2007 : An Assessment of the Intergovernmental Panel on Climate Change. Change, v.
446, p. 12–17, 2007.
IPCC. National Forest GHG Inventories – A Stock Taking Task Force on National
Greenhouse Gas Inventories National Forest GHG Inventories – A Stock Taking Task
Force on National Greenhouse Gas Inventories. Presentations, p. 1–25, 2010.
IPCC. Climate Change 2014: Synthesis Report. Contribution of Working Groups I,
II and III to the Fifth Assessment Report of the Intergovernmental Panel on Climate
Change. [s.l: s.n.].
JENSEN, J. R. JENSEN, J. R. Sensoriamento remoto do ambiente: uma perspectiva

86
em recursos terrestres. São José dos Campos: Parêntese, 598 p. 2009.
JOHNS, J. S.; BARRETO, P.; UHL, C. Logging damage during planned and unplanned
logging operations in the eastern Amazon. Forest Ecology and Management, v. 89, n.
1–3, p. 59–77, dez. 1996.
LAURANCE, W. F. A crisis in the making: Responses of Amazonian forests to land use
and climate change. Trends in Ecology and Evolution, v. 13, n. 10, p. 411–415, 1998.
LENTINI, M. et al. Fatos Florestais da Amazônia 2005 (Amazonian Forest Facts).
[s.l: s.n.].
LENTINI, M.; VERÍSSIMO, A.; SOBRAL, L. Fatos Florestais da Amazônia 2003. 1.
ed. Belém, PA, Brasil: IMAZON, 2003.
LIU, C.; FRAZIER, P.; KUMAR, L. Comparative assessment of the measures of thematic
classification accuracy. Remote Sensing of Environment, v. 107, n. 4, p. 606–616, 2007.
LONGO, M. et al. Aboveground biomass variability across intact and degraded forests in
the Brazilian Amazon. Global Biogeochemical Cycles, v. 30, n. 11, p. 1639–1660, 2016.
MARENGO, J. A.; SOARES, W. R. Impacto das Mudanças Climáticas no Brasil e
Possíveis Futuros Cenários Climáticos: Síntese do Terceiro Relatório do IPCC 2001.
Clima e Recursos Hídricos, p. 209–233, 2003.
MATRICARDI, E. et al. Assessment of tropical forest degradation by selective logging
and fire using Landsat imagery. Remote Sensing of Environment, v. 114, n. 5, p. 1117–
1129, maio 2010.
MATRICARDI, E. A. T. et al. Multi‐ temporal assessment of selective logging in the
Brazilian Amazon using Landsat data. International Journal of Remote Sensing, v. 28,
n. 1, p. 63–82, 10 jan. 2007.
MATRICARDI, E. A. T. et al. Assessment of forest disturbances by selective logging
and forest fires in the Brazilian Amazon using Landsat data. International journal of
remote sensing, v. 34, n. 4, p. 1057–1086, 2013.
MCGAUGHEY, R. J. FUSION/LDV: Software for LIDAR Data Analysis and
Visualization. n. March, p. 154, 2014.

87
MCT. Protocolo de Quioto. Protocolo de Quioto. O Brasil e a Conveção - Quadro das
Nações Unidas, v. I, p. 29, 2015.
MITCHARD, E. T. A. et al. Markedly divergent estimates of Amazon forest carbon
density from ground plots and satellites. Global Ecology and Biogeography, v. 23, n. 8,
p. 935–946, 2014.
MMA. Brazil’s submission of a forest reference emission level for deforestation in the
Amazonia biome for results-based payments for REDD+ under the UNFCCC. p. 1–58,
2014.
MMA. ENREDD+ Estratégia Nacional para REDD +. [s.l: s.n.].
MONTEIRO, A. L. S.; DE SOUZA, C. M.; LINGNAU, C. Avaliação de imagens
LANDSAT para o monitoramento do manejo florestal na Amazônia. Scientia
Forestalis/Forest Sciences, n. 75, p. 95–104, 2007.
NEPSTAD, D. C. et al. Large-scale impoverishment of Amazonian forests by logging
and fire. Nature, v. 398, n. 1997, p. 1997–2000, 1999.
NOBRE, C. A. Mudanças climáticas globais : possíveis impactos nos ecossistemas do
país. Parcerias Estratégicas, v. 12, p. 239–258, 2001.
OLOFSSON, P. et al. Making better use of accuracy data in land change studies:
Estimating accuracy and area and quantifying uncertainty using stratified estimation.
Remote Sensing of Environment, v. 129, p. 122–131, 2013a.
OLOFSSON, P. et al. Remote Sensing of Environment Making better use of accuracy
data in land change studies : Estimating accuracy and area and quantifying uncertainty
using strati fi ed estimation. Remote Sensing of Environment, v. 129, p. 122–131,
2013b.
OLOFSSON, P. et al. Remote Sensing of Environment Good practices for estimating area
and assessing accuracy of land change. Remote Sensing of Environment, v. 148, p. 42–
57, 2014.
REUTEBUCH, S. E.; ANDERSEN, H.; MCGAUGHEY, R. J. tec ti on and Ra ngin g (
LI DAR ) : An tmerg I ng Res lource Inve ntory. 2005.

88
SAATCHI, S. S. et al. Benchmark map of forest carbon stocks in tropical regions across
three continents. Proceedings of the National Academy of Sciences, v. 108, n. 8, p.
9899–9904, 2011.
SASAKI, N.; PUTZ, F. E. Critical need for new definitions of “forest” and “forest
degradation” in global climate change agreements. Conservation Letters, v. 2, n. 5, p.
226–232, out. 2009.
SCHOENE, D. et al. Definitional issues related to reducing emissions from deforestation
in developing countries. Fao, v. 5, p. 1–26, 2007.
SEDENS. Plano de Manejo da Floresta Estadual do Antimary. 2012.
SFB. Plano Nacional de Outorga Florestal. 2017.
SFB; IMAZON. A atividade madeireira na Amazônia brasileira: produção, receita e
mercados. Serviço Florestal Brasileiro (SFB), Instituto do Homem e Meio Ambiente
da Amazônia (Imazon), p. 32, 2010.
SHIMABUKURO, Y. E.; BEUCHLE, R.; CRISTINA, R. Assessment of forest
degradation in Brazilian Amazon due to selective logging and fires using time series of
fraction images derived from Landsat ETM + images. n. November, p. 37–41, 2014.
SHIMABUKURO, Y. E.; SMITH, J. A. The least-squares mixing models to generate
fraction images derived from remote sensing multispectral data. IEEE Transactions on
Geoscience and Remote Sensing, v. 31, n. 3, p. 16–20, 1991.
SOUZA, JR, C. et al. Ten-Year Landsat Classification of Deforestation and Forest
Degradation in the Brazilian Amazon. Remote Sensing, v. 5, n. 11, p. 5493–5513, 28
out. 2013.
SOUZA, C.; BARRETO, P. An alternative approach for detecting and monitoring
selectively logged forests in the Amazon. International Journal of Remote Sensing, v.
21, n. 1, p. 173–179, 2000.
SOUZA, C. M. et al. Mapping forest degradation in the Eastern Amazon from SPOT 4
through spectral mixture models. Remote Sensing of Environment, v. 87, n. 4, p. 494–
506, 15 nov. 2003.

89
STONE, T. A.; LEFEBVRE, P. Using multi-temporal satellite data to evaluate selective
logging in Para, Brazil. International Journal of Remote Sensing, v. 19, n. 13, p. 2517–
2526, jan. 1998.
TYUKAVINA, A. et al. Types and rates of forest disturbance in Brazilian Legal Amazon,
2000 – 2013. v. 2005, p. 1–16, 2017.
UHL, C. et al. Natural Resource Management in the Brazilian Amazon An integrated
research approach. American institute of biological sciences, v. 47, n. 3, p. 160–168,
1997.
UHL, C.; CELIA, I.; VIEIRA, G. Ecological Impacts of Selective Logging in the
Brazilian Amazon: A Case Study from the Paragominas Region of the State of Para.
Source: Biotropica, v. 21, n. 2, p. 98–106, 1989.
UNFCCC. Convenção sobre Mudança do Clima - Protocolo de Kyoto. p. 27, 1992.
UNFCCC. UNITED Report of the Conference of the Parties on its thirteenth session ,
held in Bali from 3 to 15 December 2007 Part Two : Action taken by the Conference of
the Parties at its thirteenth session Decisions adopted by the Conference of the Parties. p.
1–60, 2008.
UNFCCC. UNITED Report of the Conference of the Parties on its fifteenth session , held
in Copenhagen from 7 to 19 December 2009 Part Two : Action taken by the Conference
of the Parties at its fifteenth session Decisions adopted by the Conference of the Parties.
p. 1–43, 2009.
UNFCCC, T. et al. Gofc-Gold, 2008. [s.d.].
VERISSIMO, A. et al. Logging impacts and prospects for sustainable forest management
in an old Amazonian frontier: The case of Paragominas. Forest Ecology and
Management, v. 55, n. 1–4, p. 169–199, dez. 1992.
VERÍSSIMO, A.; LIMA, E.; LENTINI, M. Pólos Madeireiros do Estado do Pará.
Belém, PA, Brasil: [s.n.].
VIDAL, E. et al. Redução de desperdícios na produção de madeira na Amazônia. Série
Amazônia, v. 05, p. 20, 1997.

90
WATRIN, O. S.; ROCHA, A. M. A. Levantamento da Vegetação Natural e do Uso da
Terra no Município de Paragominas (PA) utilizando imagens TM/ Landsat. p. 42, 1992.
WILLIAN, A.; MELO, F. DE. Alometria de Árvores e Biomassa Florestal na Amazônia
Sul-Ocidental. 2017.
WU, C.; MURRAY, A. T. Estimating impervious surface distribution by spectral mixture
analysis. Remote Sensing of Environment, v. 84, n. 4, p. 493–505, 2003.
YU, X. et al. Automatic detection of harvested trees and determination of forest growth
using airborne laser scanning. Remote Sensing of Environment, v. 90, n. 4, p. 451–462,
2004.
ZARIN, D. J. et al. Landscape change in tidal floodplains near the mouth of the Amazon
River. Forest Ecology and Management, v. 154, n. 3, p. 383–393, 2001.