agosto 2014 - tpn.usp.br · –trajetória pré-definida e pode não representar a real ação do...
TRANSCRIPT
Modelagem matemática de manobras e validação de simuladoresProf. Dr. Eduardo A. TannuriTPN-USP
Modelagem matemática de manobras e validação de simuladoresProf. Dr. Eduardo A. TannuriTPN-USP
Modelagem matemática de manobras e validação de simuladores
AGOSTO 2014
Prof. Dr. Eduardo A. Tannuri
Prof. Associado, Dept. Eng. Mecatrônica e Sistemas Mecânicos
Coordenador do Centro de Simulações do TPN-USP
ESCOLA POLITÉCNICA
DA USP
Modelagem matemática de manobras e validação de simuladoresProf. Dr. Eduardo A. TannuriTPN-USP
Objetivos
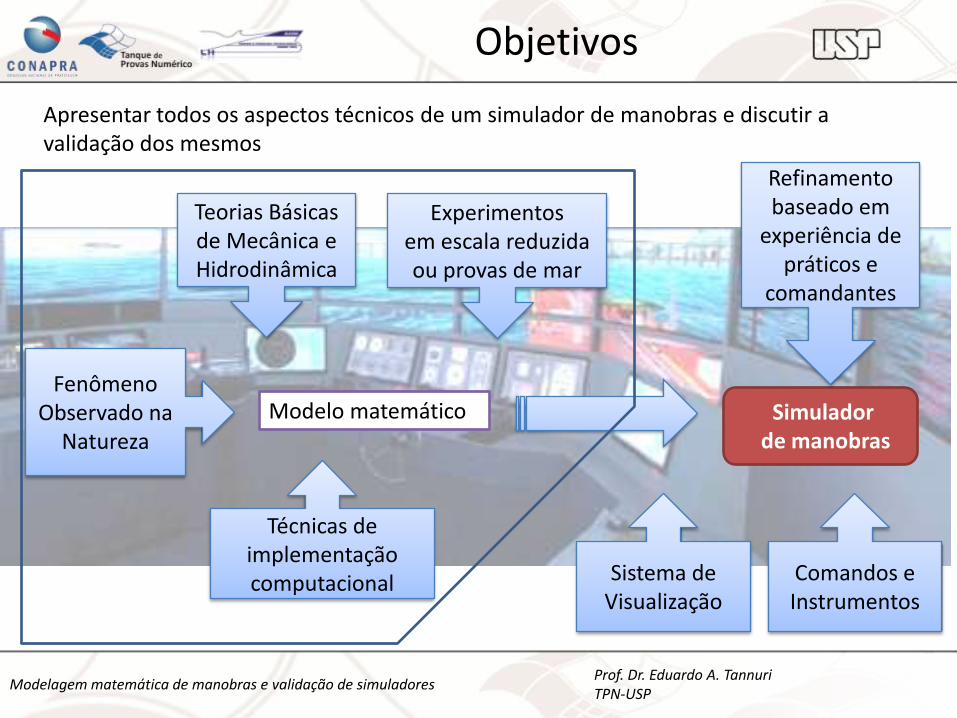
Apresentar todos os aspectos técnicos de um simulador de manobras e discutir a validação dos mesmos
Fenômeno Observado na
Natureza
Teorias Básicas de Mecânica e Hidrodinâmica
Experimentosem escala reduzida ou provas de mar
Modelo matemático
Técnicas de implementação computacional
Simulador de manobras
Refinamento baseado em
experiência de práticos e
comandantes
Comandos e Instrumentos
Sistema de Visualização
Modelagem matemática de manobras e validação de simuladoresProf. Dr. Eduardo A. TannuriTPN-USP
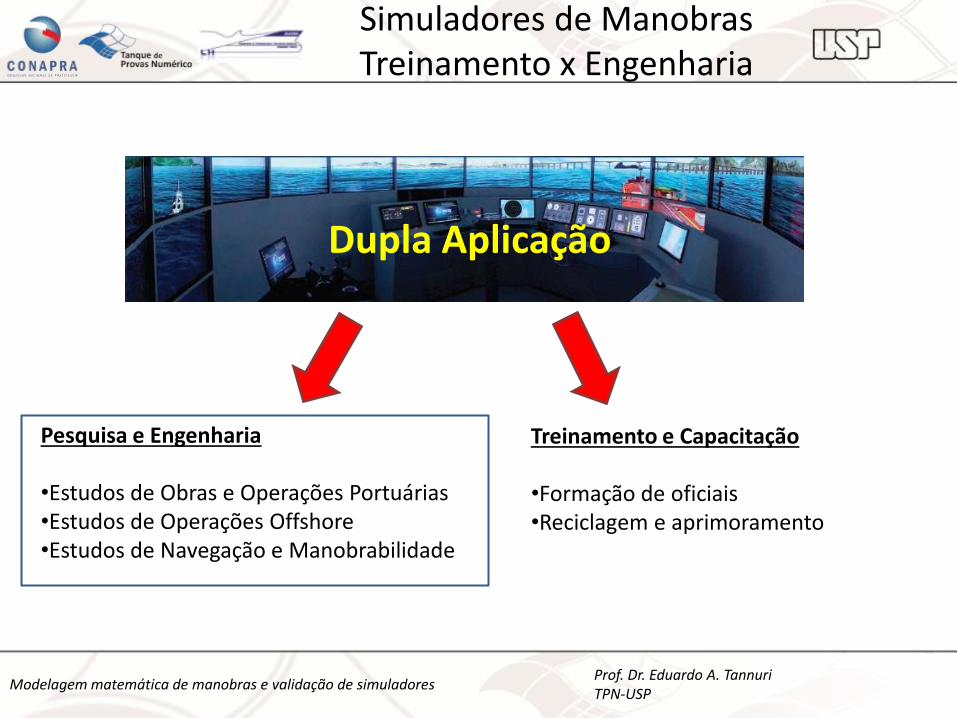
Simuladores de ManobrasTreinamento x Engenharia
Dupla Aplicação
Pesquisa e Engenharia
•Estudos de Obras e Operações Portuárias•Estudos de Operações Offshore•Estudos de Navegação e Manobrabilidade
Treinamento e Capacitação
•Formação de oficiais•Reciclagem e aprimoramento
Modelagem matemática de manobras e validação de simuladoresProf. Dr. Eduardo A. TannuriTPN-USP
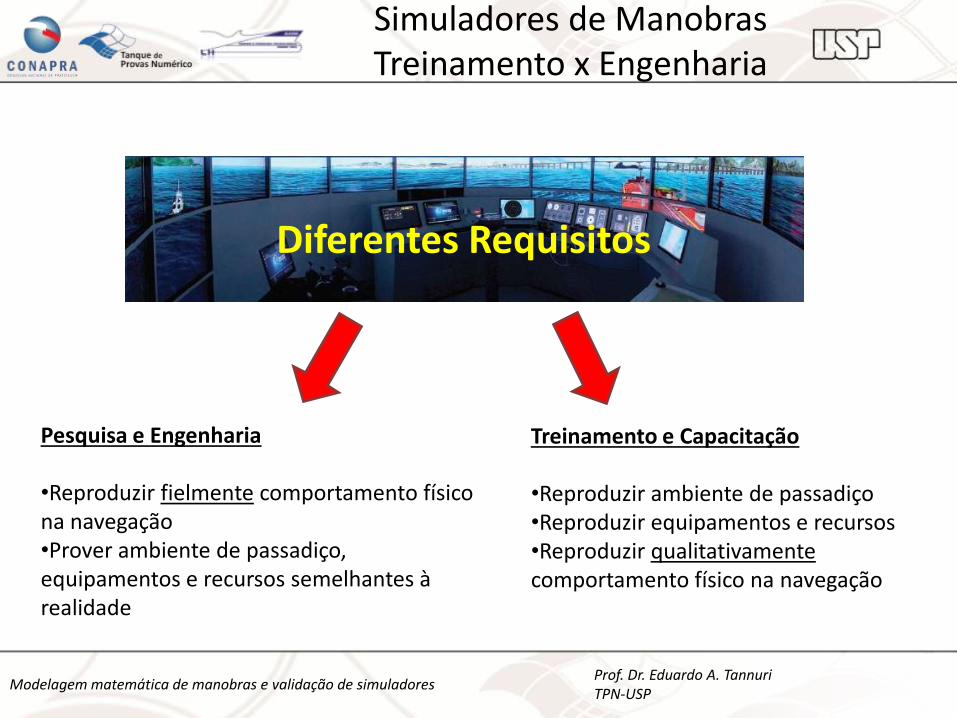
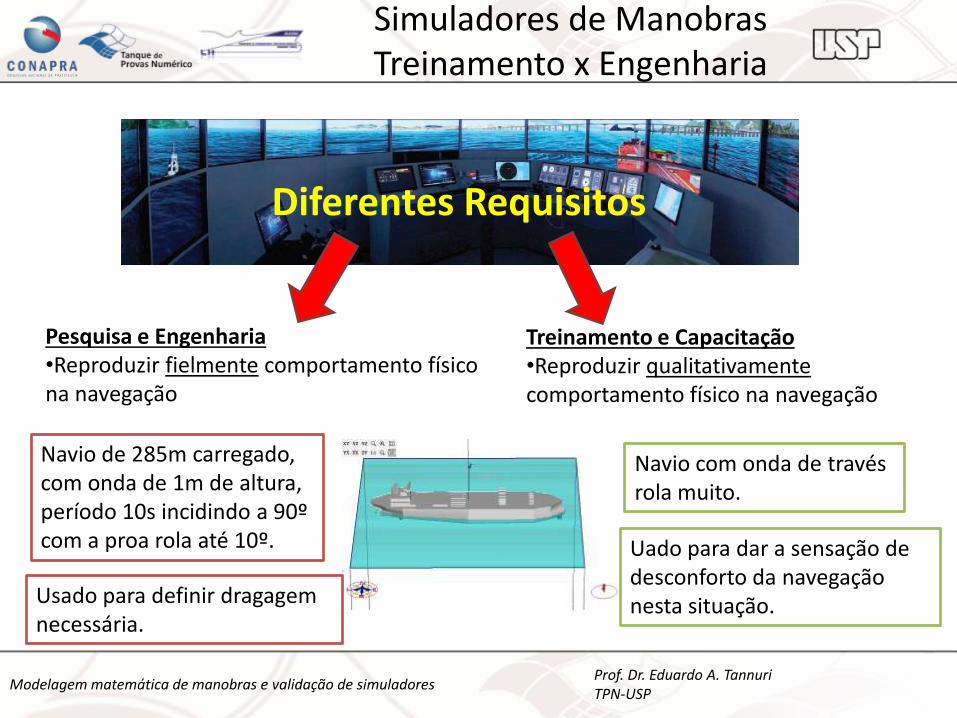
Diferentes Requisitos
Pesquisa e Engenharia
•Reproduzir fielmente comportamento físico na navegação•Prover ambiente de passadiço, equipamentos e recursos semelhantes à realidade
Treinamento e Capacitação
•Reproduzir ambiente de passadiço•Reproduzir equipamentos e recursos•Reproduzir qualitativamentecomportamento físico na navegação
Simuladores de ManobrasTreinamento x Engenharia
Modelagem matemática de manobras e validação de simuladoresProf. Dr. Eduardo A. TannuriTPN-USP
Diferentes Requisitos
Pesquisa e Engenharia•Reproduzir fielmente comportamento físico na navegação
Treinamento e Capacitação•Reproduzir qualitativamentecomportamento físico na navegação
Navio com onda de través rola muito.
Navio de 285m carregado, com onda de 1m de altura, período 10s incidindo a 90º com a proa rola até 10º.
Usado para definir dragagem necessária.
Uado para dar a sensação de desconforto da navegação nesta situação.
Simuladores de ManobrasTreinamento x Engenharia
Modelagem matemática de manobras e validação de simuladoresProf. Dr. Eduardo A. TannuriTPN-USP
Principal Objetivo
Pesquisa e Engenharia
•O simulador deve ser um extrapoladorconfiável
Treinamento e Capacitação
•O simulador deve ter um ambiente operacional idêntico ao do navio real
Simuladores de ManobrasTreinamento x Engenharia
Modelagem matemática de manobras e validação de simuladoresProf. Dr. Eduardo A. TannuriTPN-USP
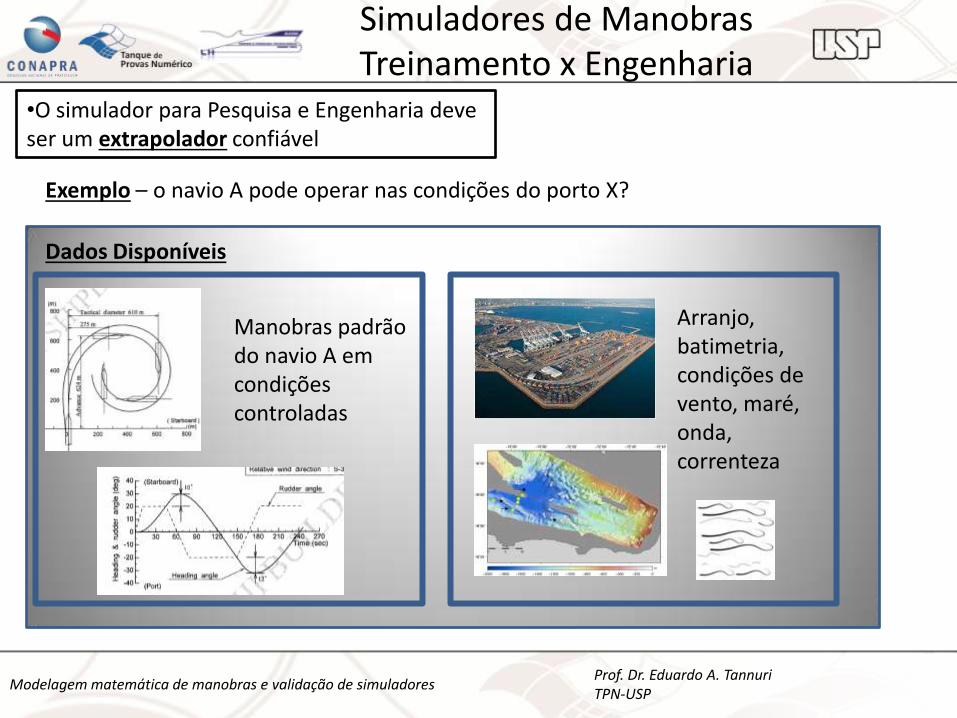
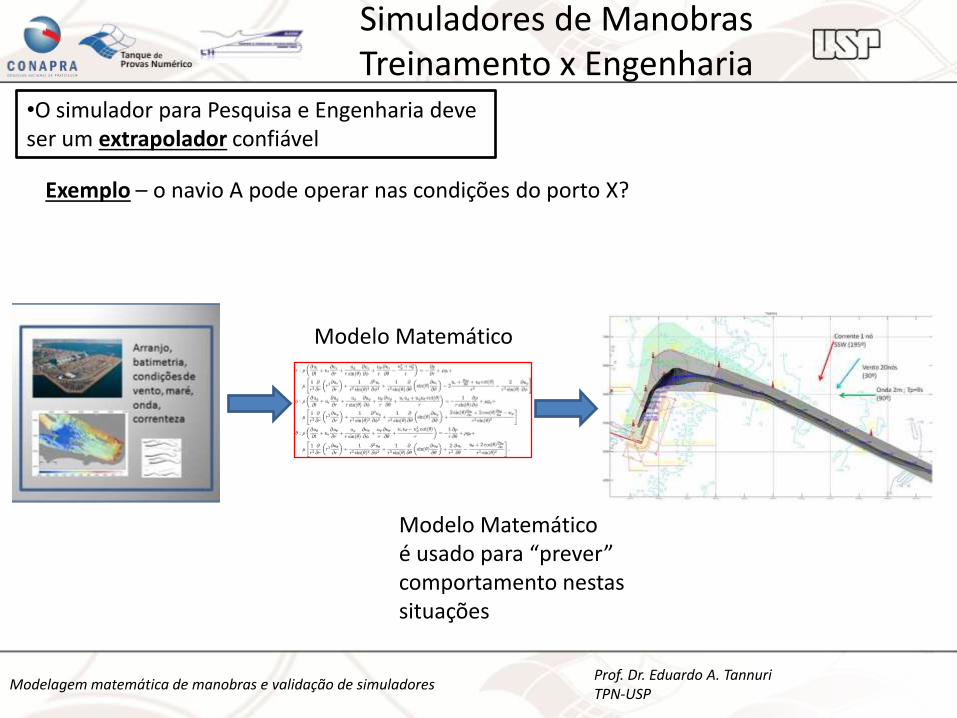
•O simulador para Pesquisa e Engenharia deve ser um extrapolador confiável
Exemplo – o navio A pode operar nas condições do porto X?
Dados Disponíveis
Manobras padrão do navio A em condições controladas
Arranjo, batimetria, condições de vento, maré, onda, correnteza
Simuladores de ManobrasTreinamento x Engenharia
Modelagem matemática de manobras e validação de simuladoresProf. Dr. Eduardo A. TannuriTPN-USP
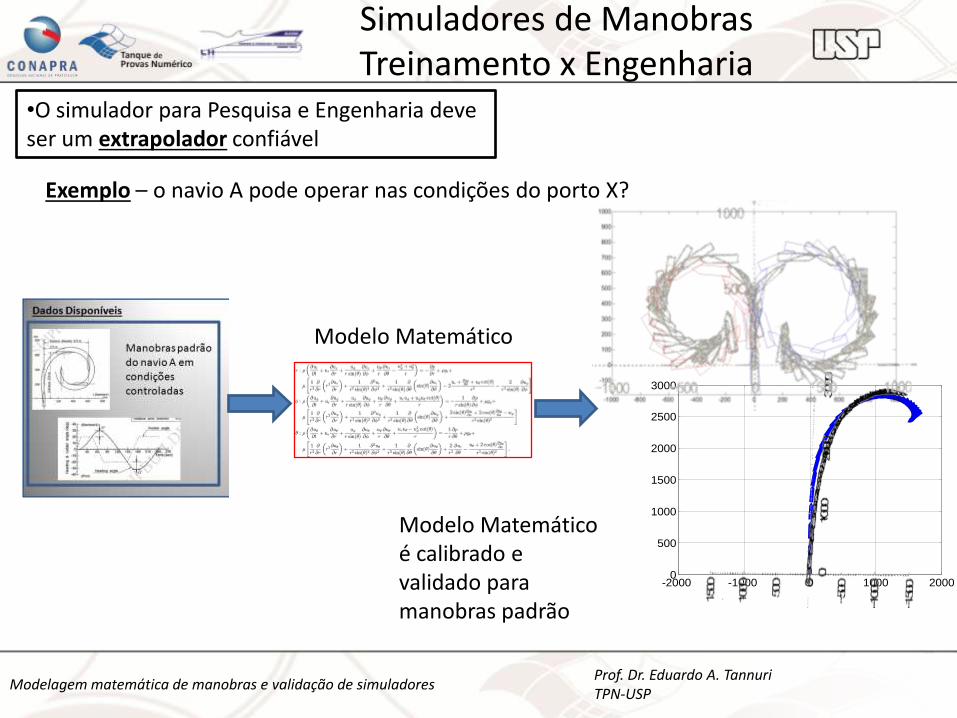
•O simulador para Pesquisa e Engenharia deve ser um extrapolador confiável
Exemplo – o navio A pode operar nas condições do porto X?
-2000 -1000 0 1000 20000
500
1000
1500
2000
2500
3000
Modelo Matemático
Modelo Matemáticoé calibrado e validado para manobras padrão
Simuladores de ManobrasTreinamento x Engenharia
Modelagem matemática de manobras e validação de simuladoresProf. Dr. Eduardo A. TannuriTPN-USP
•O simulador para Pesquisa e Engenharia deve ser um extrapolador confiável
Exemplo – o navio A pode operar nas condições do porto X?
Modelo Matemático
Modelo Matemáticoé usado para “prever” comportamento nestas situações
Simuladores de ManobrasTreinamento x Engenharia
Modelagem matemática de manobras e validação de simuladoresProf. Dr. Eduardo A. TannuriTPN-USP
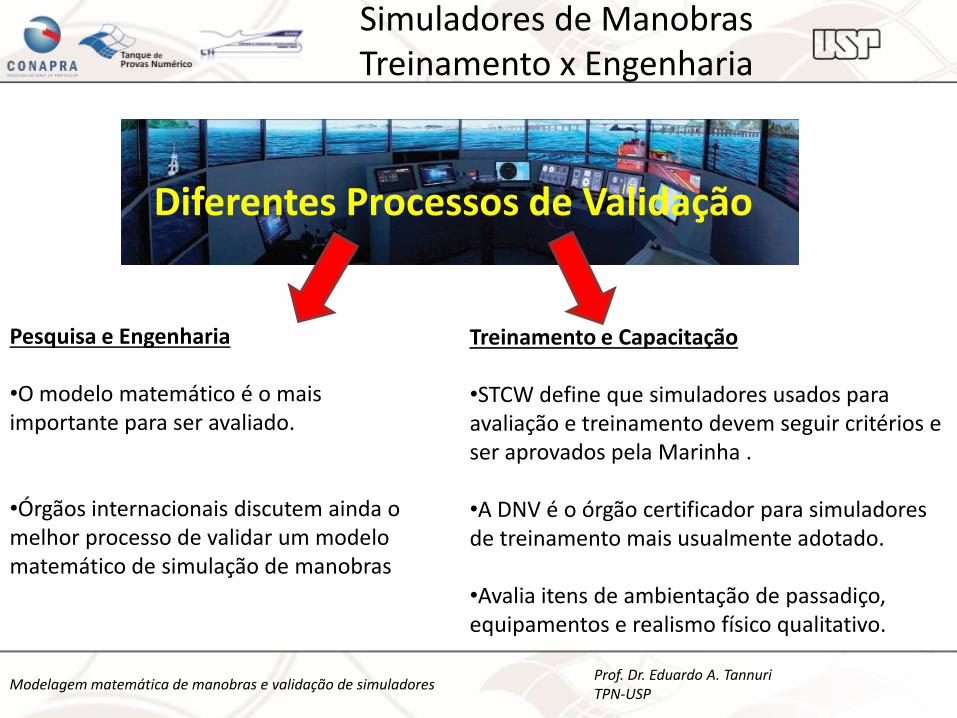
Diferentes Processos de Validação
Pesquisa e Engenharia
•O modelo matemático é o mais importante para ser avaliado.
•Órgãos internacionais discutem ainda o melhor processo de validar um modelo matemático de simulação de manobras
Treinamento e Capacitação
•STCW define que simuladores usados para avaliação e treinamento devem seguir critérios e ser aprovados pela Marinha .
•A DNV é o órgão certificador para simuladores de treinamento mais usualmente adotado.
•Avalia itens de ambientação de passadiço, equipamentos e realismo físico qualitativo.
Simuladores de ManobrasTreinamento x Engenharia
Modelagem matemática de manobras e validação de simuladoresProf. Dr. Eduardo A. TannuriTPN-USP
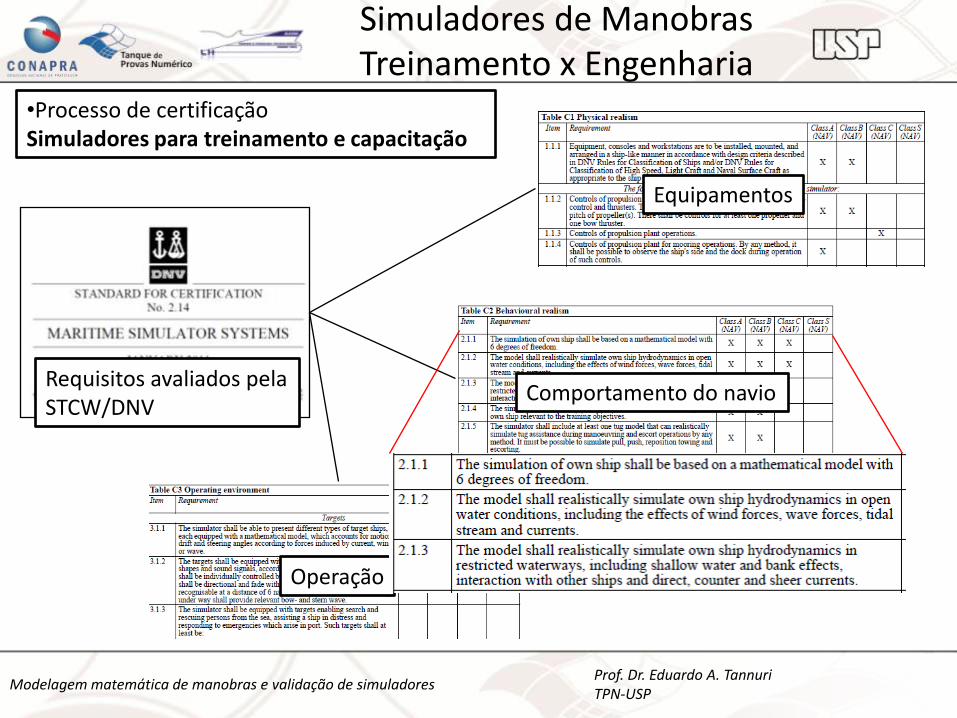
•Processo de certificação Simuladores para treinamento e capacitação
Equipamentos
Comportamento do navio
Operação
Requisitos avaliados pela STCW/DNV
Simuladores de ManobrasTreinamento x Engenharia
Modelagem matemática de manobras e validação de simuladoresProf. Dr. Eduardo A. TannuriTPN-USP
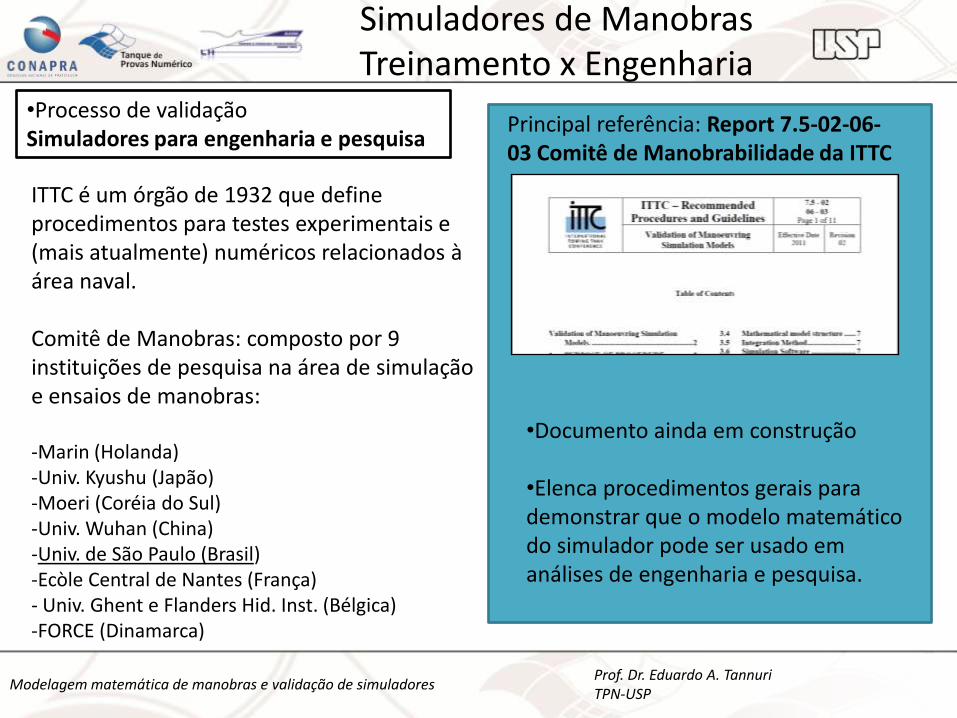
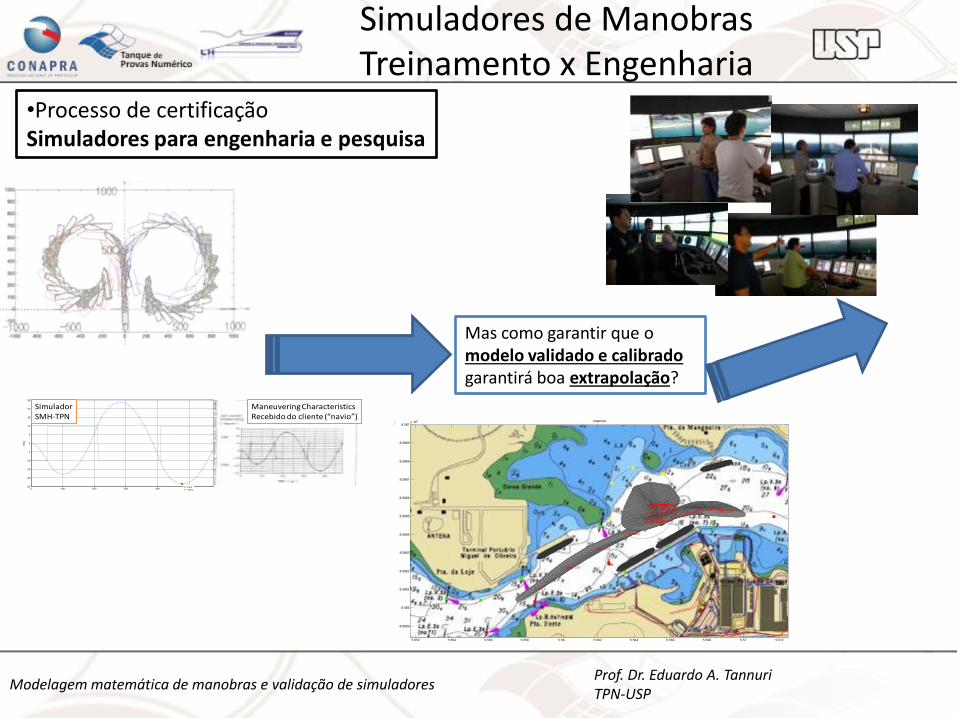
•Processo de validaçãoSimuladores para engenharia e pesquisa
Simuladores de ManobrasTreinamento x Engenharia
ITTC é um órgão de 1932 que define procedimentos para testes experimentais e (mais atualmente) numéricos relacionados à área naval.
Comitê de Manobras: composto por 9 instituições de pesquisa na área de simulação e ensaios de manobras:
-Marin (Holanda)-Univ. Kyushu (Japão)-Moeri (Coréia do Sul)-Univ. Wuhan (China)-Univ. de São Paulo (Brasil)-Ecòle Central de Nantes (França)- Univ. Ghent e Flanders Hid. Inst. (Bélgica)-FORCE (Dinamarca)
•Documento ainda em construção
•Elenca procedimentos gerais para demonstrar que o modelo matemático do simulador pode ser usado em análises de engenharia e pesquisa.
Principal referência: Report 7.5-02-06-03 Comitê de Manobrabilidade da ITTC
Modelagem matemática de manobras e validação de simuladoresProf. Dr. Eduardo A. TannuriTPN-USP
•Processo de validaçãoSimuladores para engenharia e pesquisa
Simuladores de ManobrasTreinamento x Engenharia
Report 7.5-02-06-03 Comitê de Manobrabilidade da ITTC
Generally, the method of prediction applied must be validated against benchmark data, and the
documentation of such validation should be available in the form of a report or published paper.
Modelagem matemática de manobras e validação de simuladoresProf. Dr. Eduardo A. TannuriTPN-USP
•Processo de validaçãoSimuladores para engenharia e pesquisa
Simuladores de ManobrasTreinamento x Engenharia
Premissa 1: Simulador deve ser totalmente DOCUMENTADO e PUBLICADO
Dados do navio
Modelo de cálculo das forças
hidrodinâmicas
Estrutura geral do modelo matemático (forças ambientais,
leme e propulsor, ...)
Método de Integração
Premissa: o modelo deve ser publicado para que seja submetido a um crivo da
comunidade internacional
Modelagem matemática de manobras e validação de simuladoresProf. Dr. Eduardo A. TannuriTPN-USP
•Processo de validaçãoSimuladores para engenharia e pesquisa
Simuladores de ManobrasTreinamento x Engenharia
Premissa 2: O modelo deve ser confrontado com dados de Benchmark
Exemplos:
-Cascos KVLCC
-Casco KCS
-Dados de provas de mar de navios semelhantes
Premissa: o modelo testado em casos em que os
resultados são conhecidos. Resultados devem ser
demonstrados.
Modelagem matemática de manobras e validação de simuladoresProf. Dr. Eduardo A. TannuriTPN-USP
•Processo de validaçãoSimuladores para engenharia e pesquisa
Simuladores de ManobrasTreinamento x Engenharia
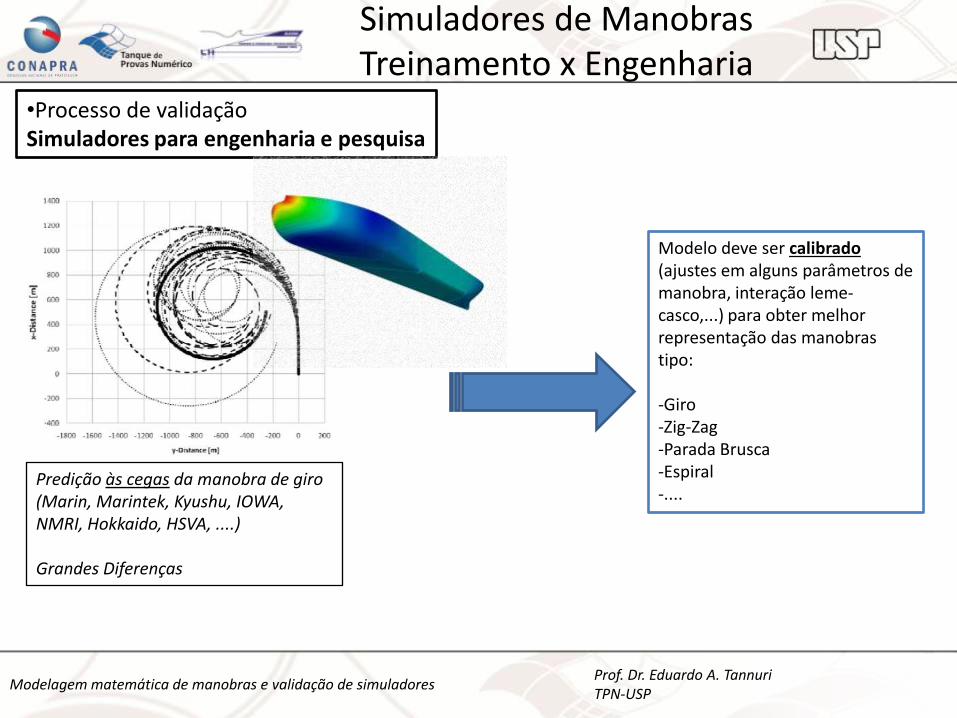
Predição às cegas da manobra de giro (Marin, Marintek, Kyushu, IOWA, NMRI, Hokkaido, HSVA, ....)
Grandes Diferenças
Modelo deve ser calibrado(ajustes em alguns parâmetros de manobra, interação leme-casco,...) para obter melhor representação das manobras tipo:
-Giro-Zig-Zag-Parada Brusca-Espiral-....
Modelagem matemática de manobras e validação de simuladoresProf. Dr. Eduardo A. TannuriTPN-USP
•Processo de certificação Simuladores para engenharia e pesquisa
Simuladores de ManobrasTreinamento x Engenharia
0 100 200 300 400 500-25
-20
-15
-10
-5
0
5
10
15
20
25
X: 478.3
Y: -23.54time(s)
Deg
First Overshoot = 7.7º (navio) ; 7.8º (TPN)
Second Overshot = 15.3º (navio) ; 13.7º
(TPN)
ManeuveringCharacteristicsRecebido do cliente (“navio”)
Simulador SMH-TPN
Time for 10º heading change
48.5s (Navio) ; 52.1s(TPN)
Period = 330s(navio) ; 363s(TPN)
Mas como garantir que o modelo validado e calibrado garantirá boa extrapolação?
4.4kn 0
3.9kn 100
3.6kn 200
3.4kn 300
2.2kn 400
0.72kn 500
0.21kn 6000.16kn 700-0.097kn 8000.058kn 9000.12kn 1000-0.058kn 1100
-0.27kn 1200
-0.078kn 1300
0.058kn 1400-0.7kn 1500-1.3kn 1600
-1.5kn 1700
-1.4kn 1800-1.3kn 1900-1.1kn 2000
-1.1kn 2100
Trajetória
5.552 5.554 5.556 5.558 5.56 5.562 5.564 5.566 5.568 5.57 5.572
x 105
8.5859
8.586
8.5861
8.5862
8.5863
8.5864
8.5865
8.5866
8.5867
8.5868
8.5869
8.587x 10
6
Modelagem matemática de manobras e validação de simuladoresProf. Dr. Eduardo A. TannuriTPN-USP
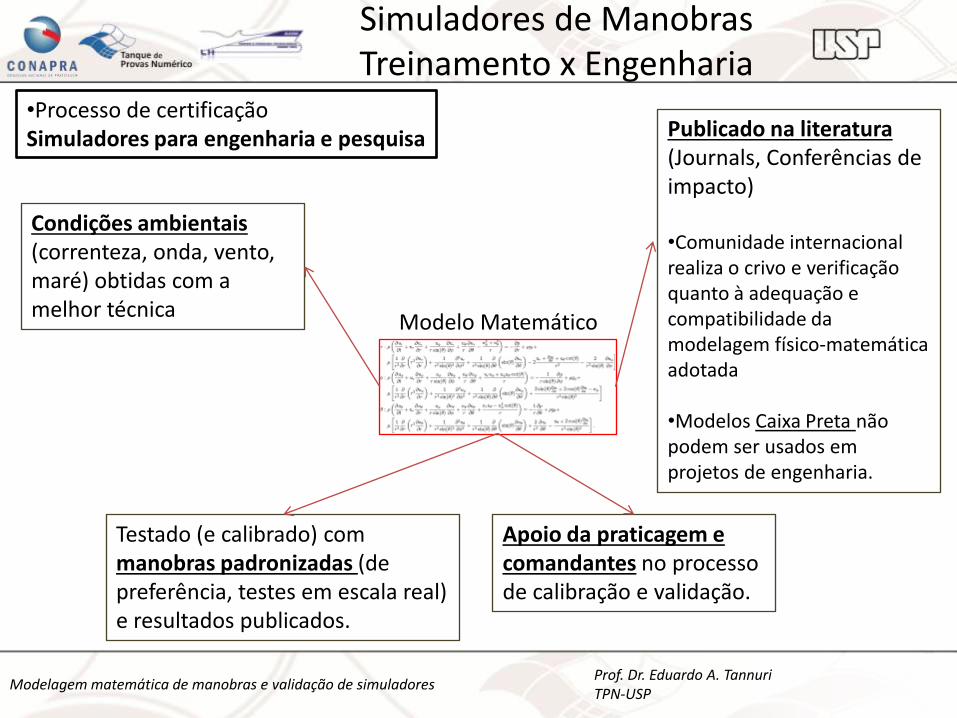
•Processo de certificação Simuladores para engenharia e pesquisa
Simuladores de ManobrasTreinamento x Engenharia
Modelo Matemático
Publicado na literatura (Journals, Conferências de impacto)
•Comunidade internacional realiza o crivo e verificação quanto à adequação e compatibilidade da modelagem físico-matemáticaadotada
•Modelos Caixa Preta não podem ser usados em projetos de engenharia.
Testado (e calibrado) com manobras padronizadas (de preferência, testes em escala real) e resultados publicados.
Condições ambientais (correnteza, onda, vento, maré) obtidas com a melhor técnica
Apoio da praticagem e comandantes no processo de calibração e validação.
Modelagem matemática de manobras e validação de simuladoresProf. Dr. Eduardo A. TannuriTPN-USP
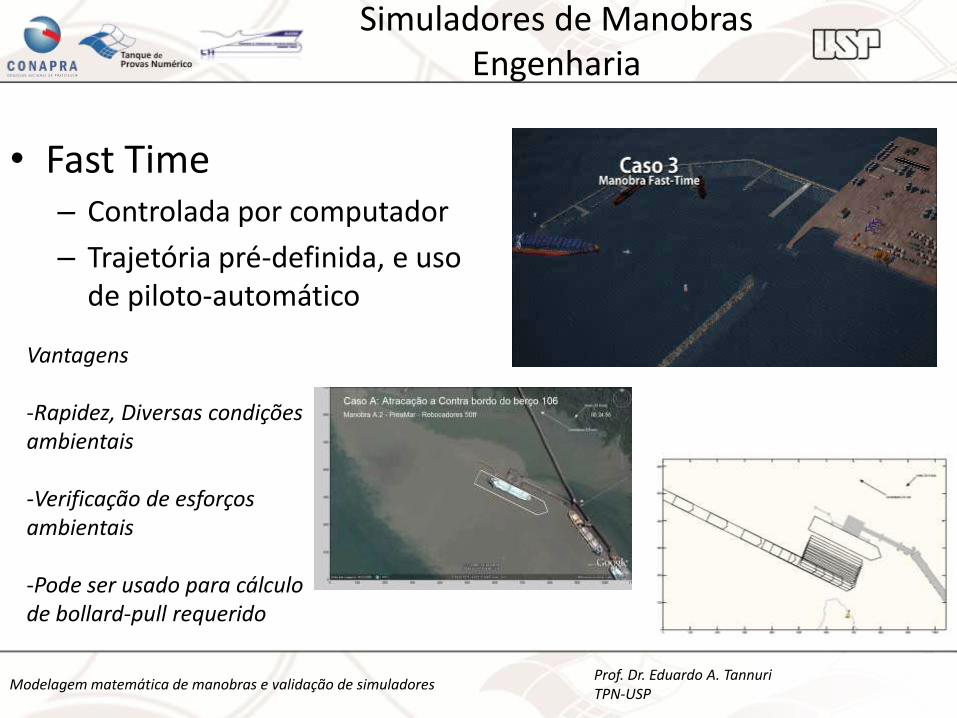
Simuladores de ManobrasEngenharia
• Fast Time– Controlada por computador
– Trajetória pré-definida, e uso de piloto-automático
Vantagens
-Rapidez, Diversas condições ambientais
-Verificação de esforços ambientais
-Pode ser usado para cálculo de bollard-pull requerido
Modelagem matemática de manobras e validação de simuladoresProf. Dr. Eduardo A. TannuriTPN-USP
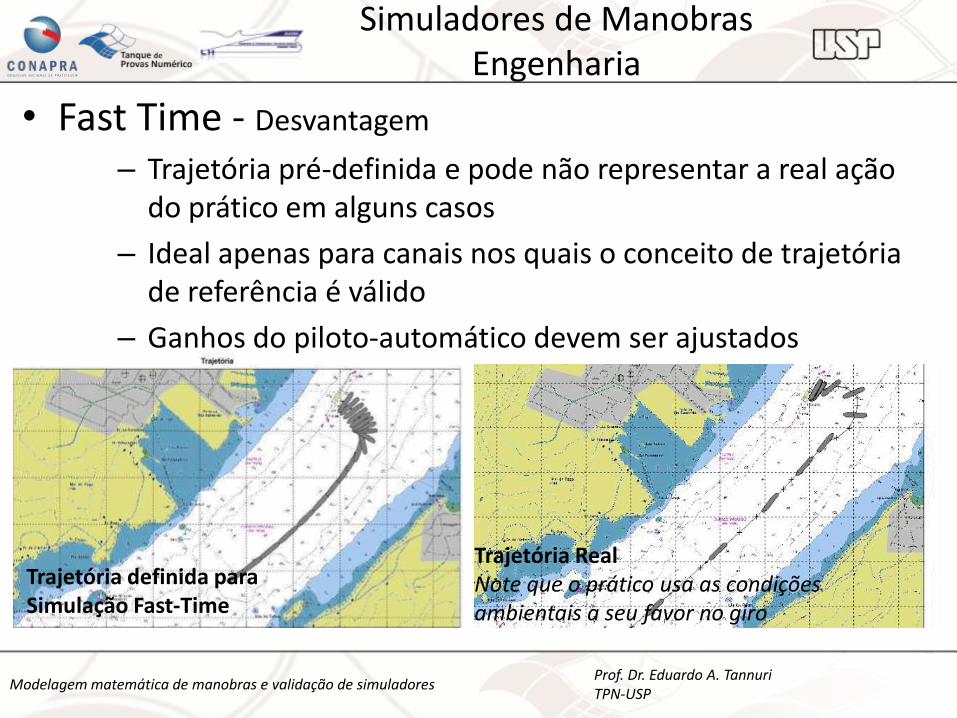
• Fast Time - Desvantagem
– Trajetória pré-definida e pode não representar a real ação do prático em alguns casos
– Ideal apenas para canais nos quais o conceito de trajetória de referência é válido
– Ganhos do piloto-automático devem ser ajustados
Simuladores de ManobrasEngenharia
Trajetória definida para Simulação Fast-Time
Trajetória RealNote que o prático usa as condições ambientais a seu favor no giro
Modelagem matemática de manobras e validação de simuladoresProf. Dr. Eduardo A. TannuriTPN-USP
Simuladores de ManobrasEngenharia
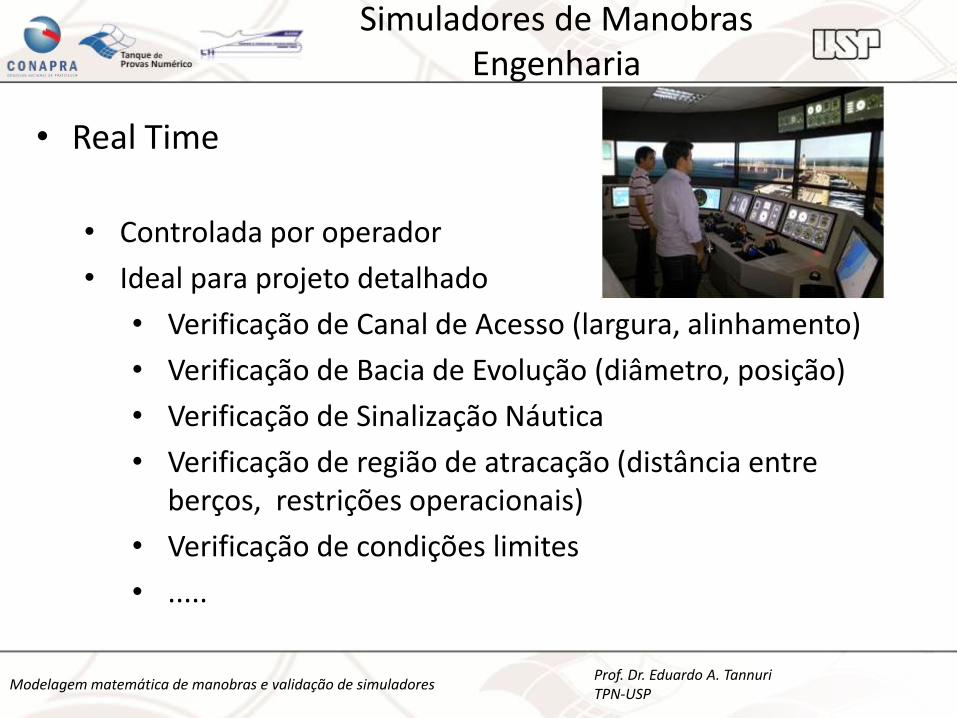
• Real Time
• Controlada por operador
• Ideal para projeto detalhado
• Verificação de Canal de Acesso (largura, alinhamento)
• Verificação de Bacia de Evolução (diâmetro, posição)
• Verificação de Sinalização Náutica
• Verificação de região de atracação (distância entre berços, restrições operacionais)
• Verificação de condições limites
• .....
Modelagem matemática de manobras e validação de simuladoresProf. Dr. Eduardo A. TannuriTPN-USP
Modelo matemático
Modelagem matemática de manobras e validação de simuladoresProf. Dr. Eduardo A. TannuriTPN-USP
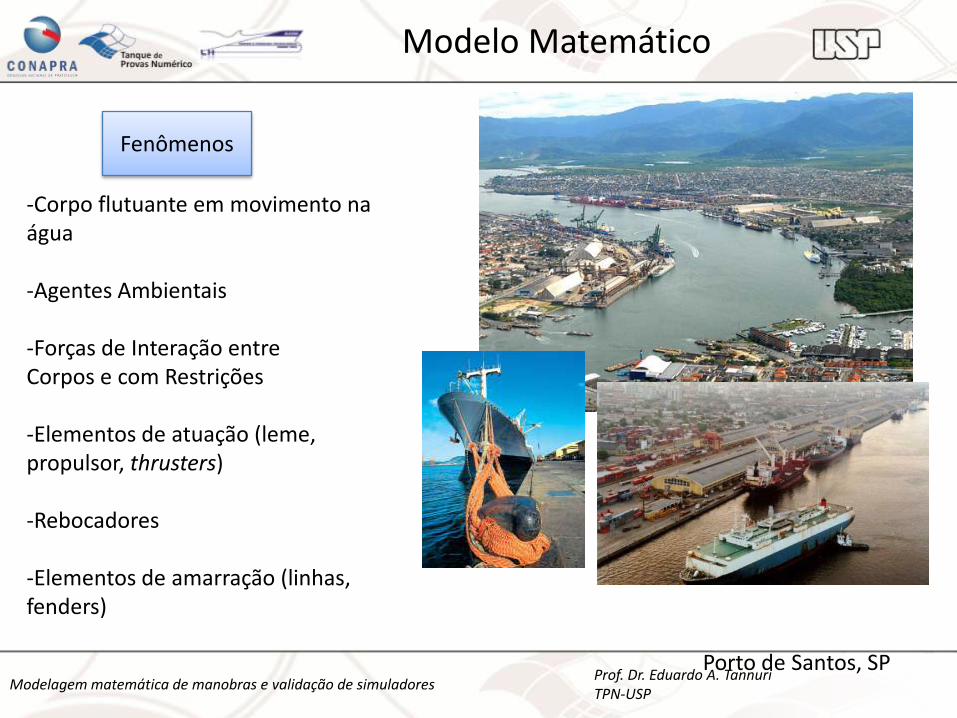
Porto de Santos, SP
Fenômenos
-Corpo flutuante em movimento na água
-Agentes Ambientais
-Forças de Interação entre Corpos e com Restrições
-Elementos de atuação (leme, propulsor, thrusters)
-Rebocadores
-Elementos de amarração (linhas, fenders)
Modelo Matemático
Modelagem matemática de manobras e validação de simuladoresProf. Dr. Eduardo A. TannuriTPN-USP
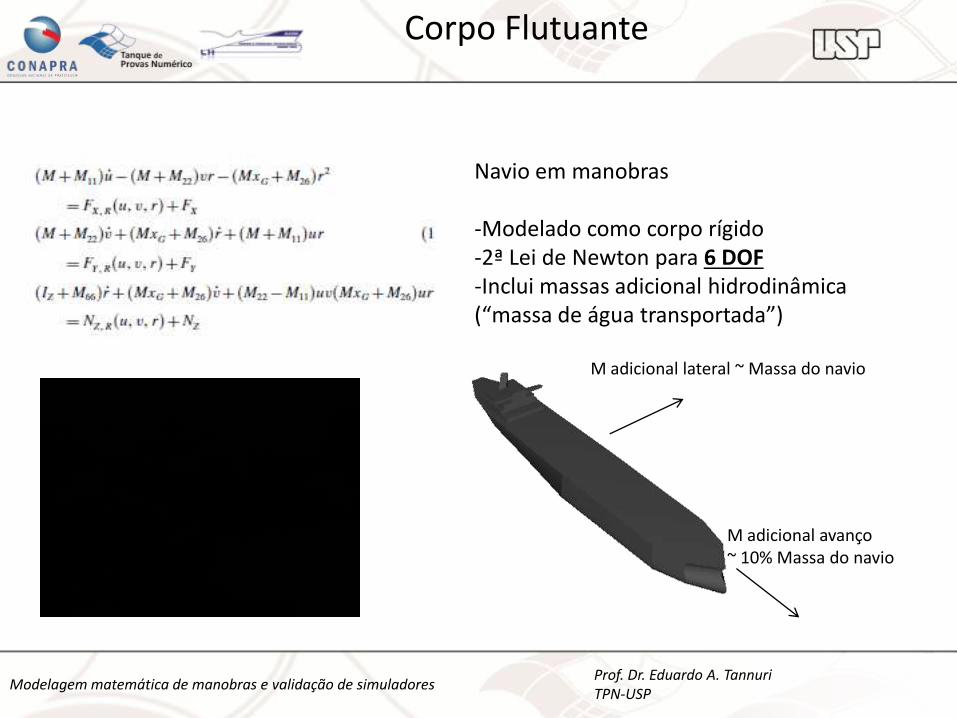
Corpo Flutuante
Navio em manobras
-Modelado como corpo rígido-2ª Lei de Newton para 6 DOF-Inclui massas adicional hidrodinâmica (“massa de água transportada”)
M adicional lateral ~ Massa do navio
M adicional avanço~ 10% Massa do navio
Modelagem matemática de manobras e validação de simuladoresProf. Dr. Eduardo A. TannuriTPN-USP
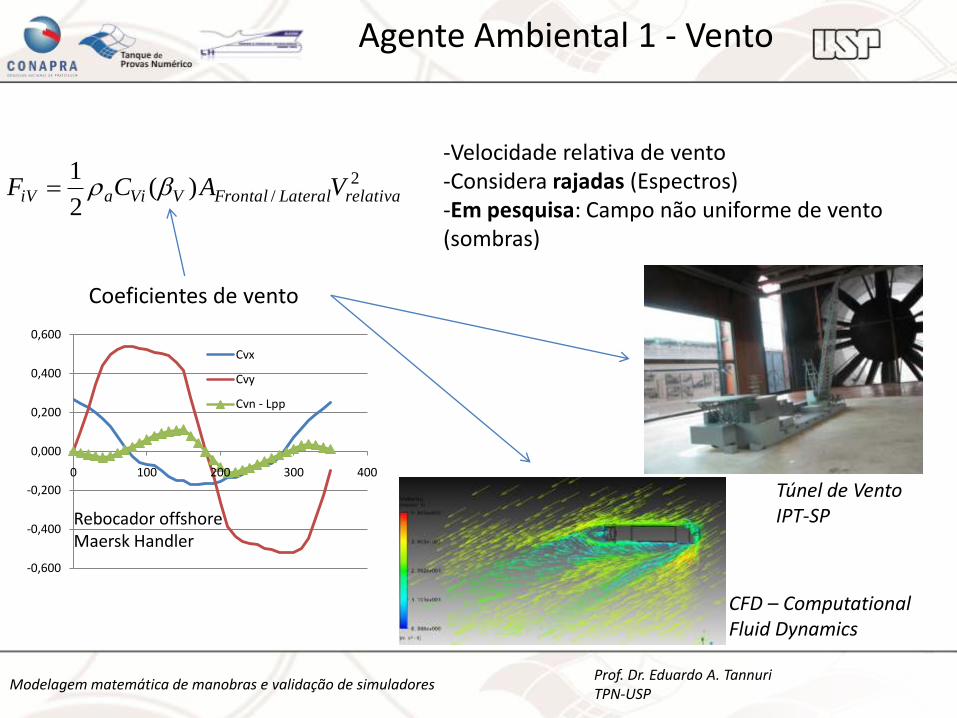
Agente Ambiental 1 - Vento
2/)(
2
1relativaLateralFrontalVViaiV VACF
-Velocidade relativa de vento-Considera rajadas (Espectros)-Em pesquisa: Campo não uniforme de vento (sombras)
Coeficientes de vento
-0,600
-0,400
-0,200
0,000
0,200
0,400
0,600
0 100 200 300 400
Cvx
Cvy
Cvn - Lpp
Rebocador offshoreMaersk Handler
Túnel de Vento IPT-SP
CFD – ComputationalFluid Dynamics
Modelagem matemática de manobras e validação de simuladoresProf. Dr. Eduardo A. TannuriTPN-USP
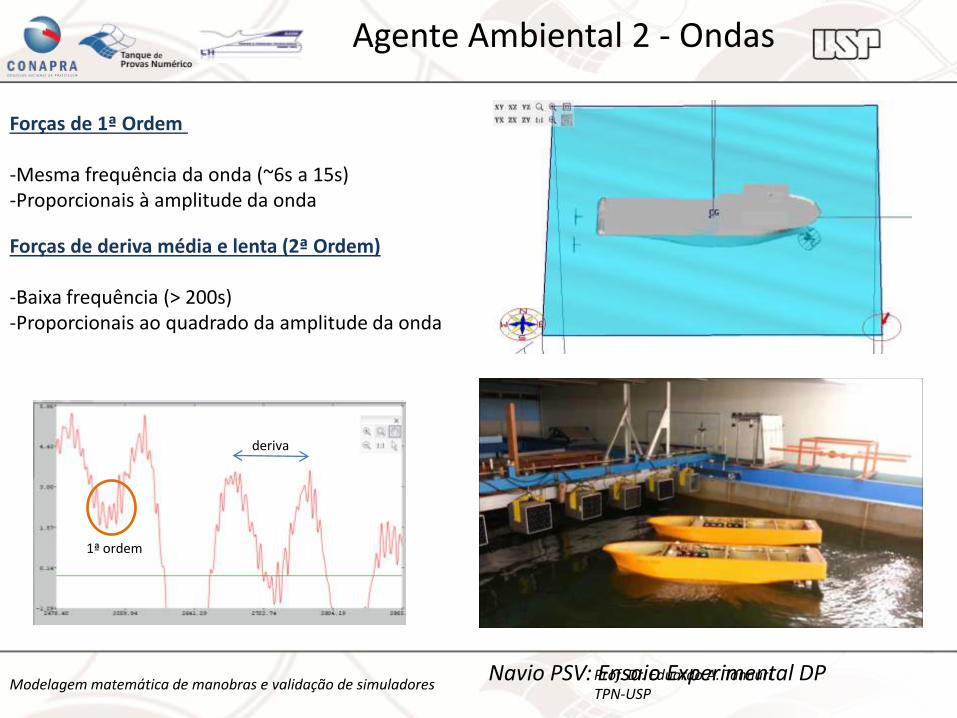
Agente Ambiental 2 - Ondas
Forças de 1ª Ordem
-Mesma frequência da onda (~6s a 15s)-Proporcionais à amplitude da onda
Forças de deriva média e lenta (2ª Ordem)
-Baixa frequência (> 200s)-Proporcionais ao quadrado da amplitude da onda
deriva
1ª ordem
Navio PSV: Ensaio Experimental DP
Modelagem matemática de manobras e validação de simuladoresProf. Dr. Eduardo A. TannuriTPN-USP
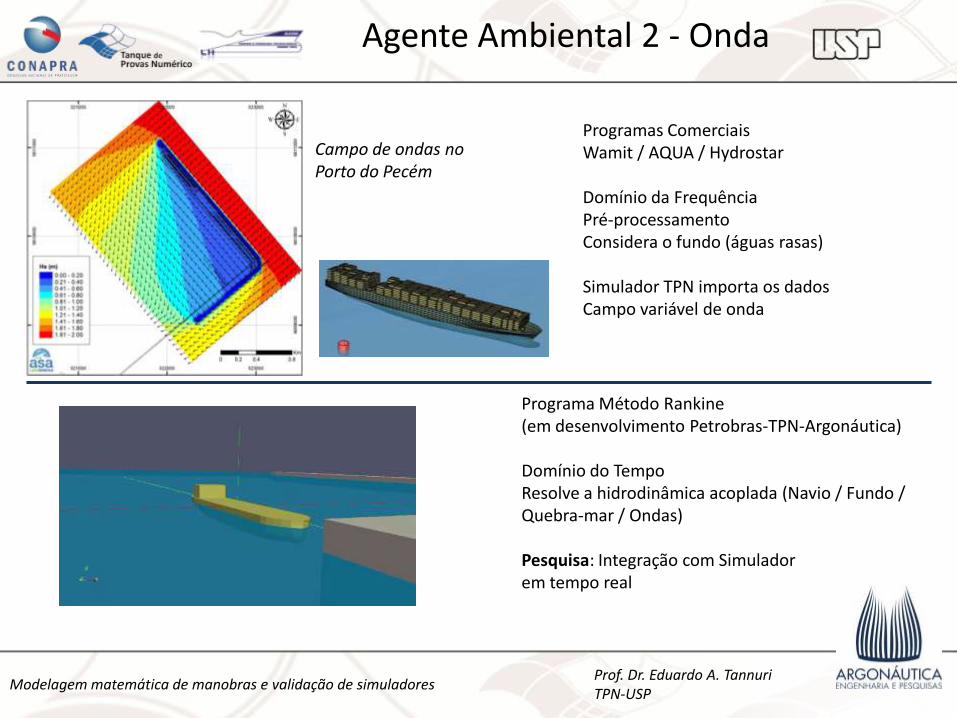
Agente Ambiental 2 - Onda
Programas Comerciais Wamit / AQUA / Hydrostar
Domínio da FrequênciaPré-processamentoConsidera o fundo (águas rasas)
Simulador TPN importa os dadosCampo variável de onda
Programa Método Rankine(em desenvolvimento Petrobras-TPN-Argonáutica)
Domínio do TempoResolve a hidrodinâmica acoplada (Navio / Fundo / Quebra-mar / Ondas)
Pesquisa: Integração com Simulador em tempo real
Campo de ondas no Porto do Pecém
Modelagem matemática de manobras e validação de simuladoresProf. Dr. Eduardo A. TannuriTPN-USP
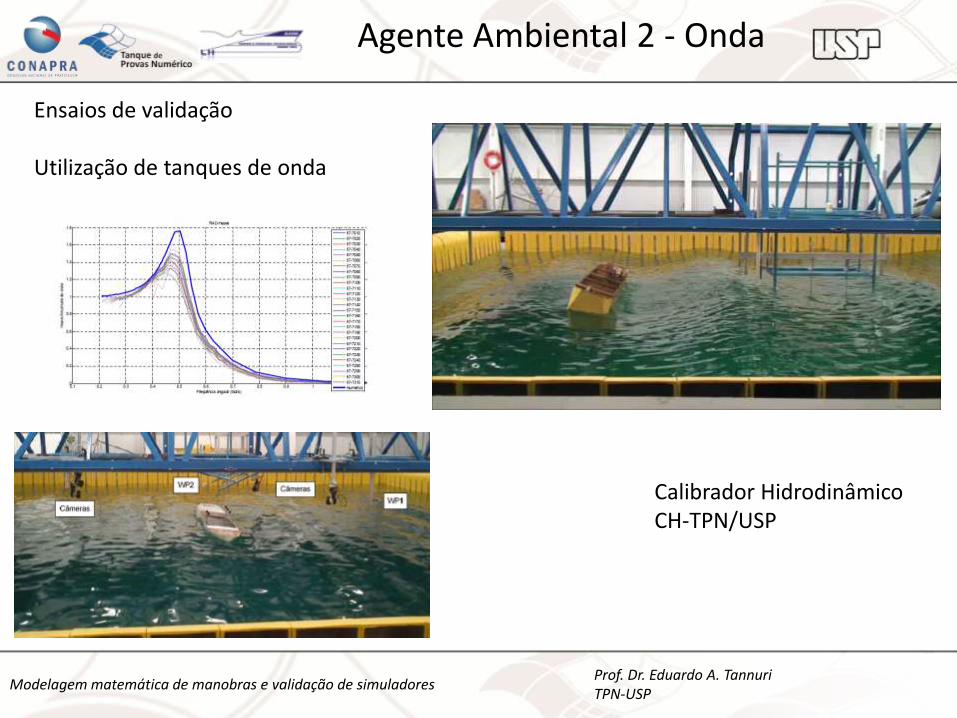
Agente Ambiental 2 - Onda
Ensaios de validação
Utilização de tanques de onda
Calibrador HidrodinâmicoCH-TPN/USP
Modelagem matemática de manobras e validação de simuladoresProf. Dr. Eduardo A. TannuriTPN-USP
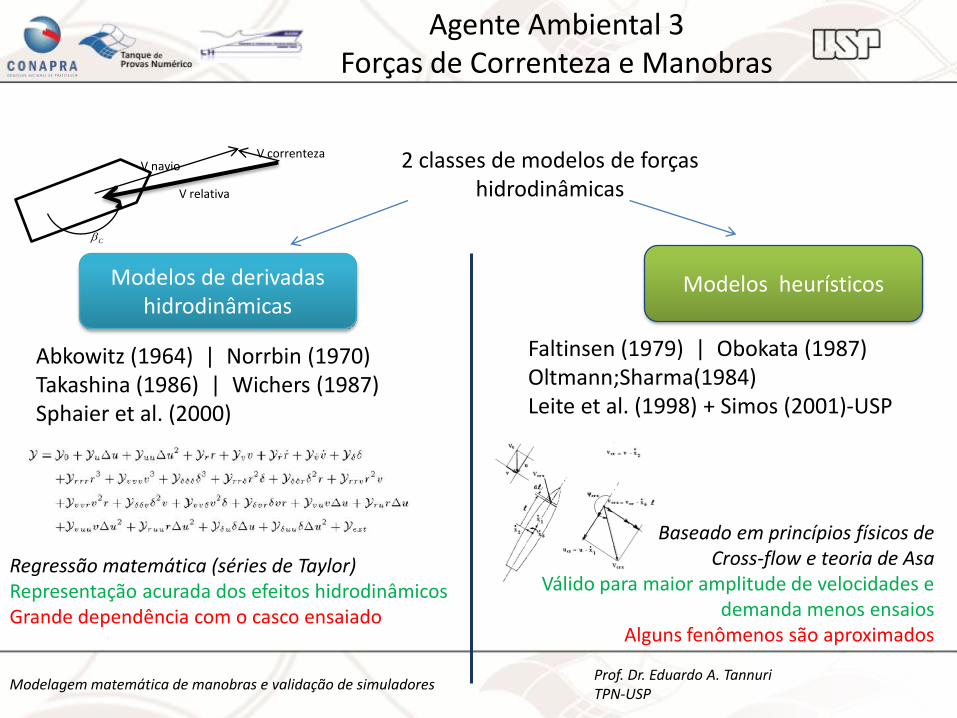
Agente Ambiental 3 Forças de Correnteza e Manobras
Modelos de derivadas hidrodinâmicas
Modelos heurísticos
2 classes de modelos de forças hidrodinâmicas
V navioV correnteza
V relativa
C
Abkowitz (1964) | Norrbin (1970)Takashina (1986) | Wichers (1987)Sphaier et al. (2000)
Regressão matemática (séries de Taylor)Representação acurada dos efeitos hidrodinâmicosGrande dependência com o casco ensaiado
Faltinsen (1979) | Obokata (1987) Oltmann;Sharma(1984)Leite et al. (1998) + Simos (2001)-USP
Baseado em princípios físicos de Cross-flow e teoria de Asa
Válido para maior amplitude de velocidades e demanda menos ensaios
Alguns fenômenos são aproximados
Modelagem matemática de manobras e validação de simuladoresProf. Dr. Eduardo A. TannuriTPN-USP
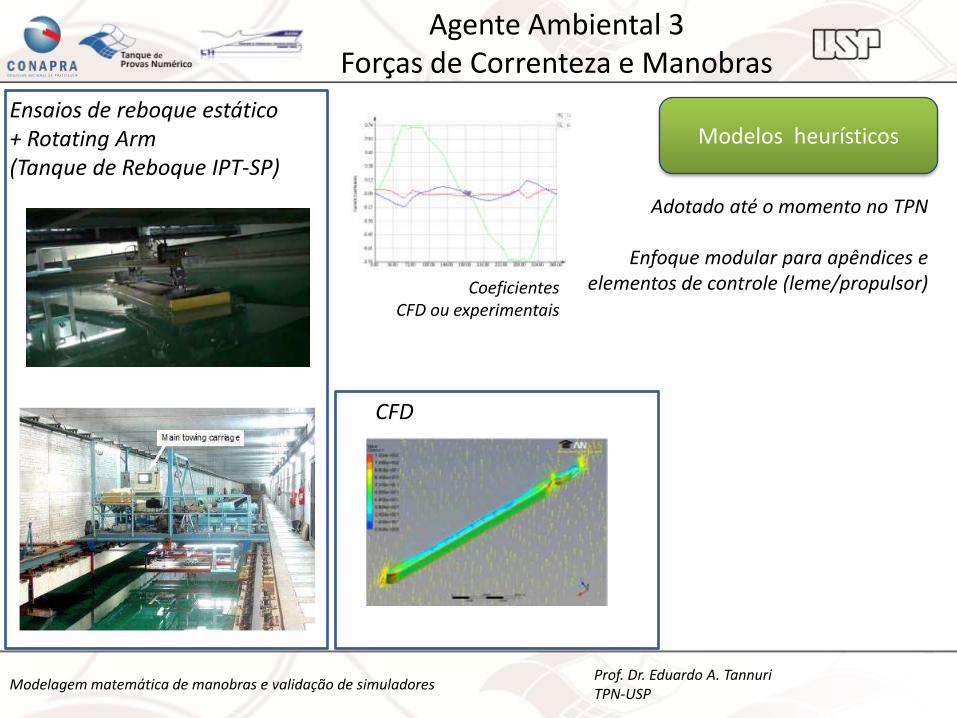
Adotado até o momento no TPN
Enfoque modular para apêndices e elementos de controle (leme/propulsor)
Ensaios de reboque estático+ Rotating Arm(Tanque de Reboque IPT-SP)
CoeficientesCFD ou experimentais
Modelos heurísticos
CFD
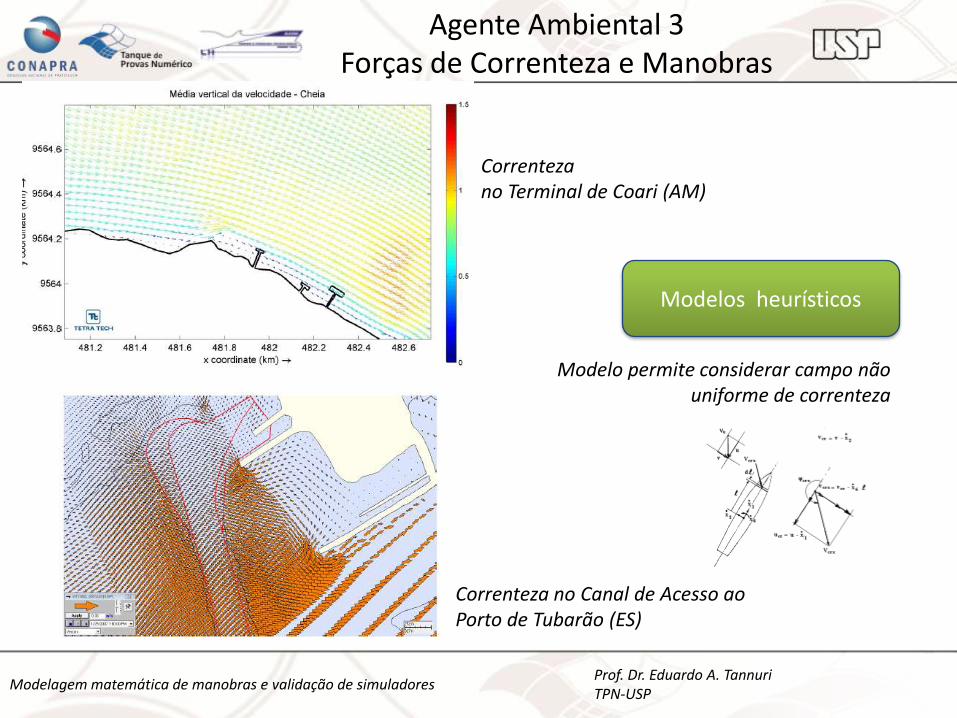
Agente Ambiental 3 Forças de Correnteza e Manobras
Modelagem matemática de manobras e validação de simuladoresProf. Dr. Eduardo A. TannuriTPN-USP
Modelo permite considerar campo não uniforme de correnteza
Modelos heurísticos
Correnteza no Terminal de Coari (AM)
Correnteza no Canal de Acesso ao Porto de Tubarão (ES)
Agente Ambiental 3 Forças de Correnteza e Manobras
Modelagem matemática de manobras e validação de simuladoresProf. Dr. Eduardo A. TannuriTPN-USP
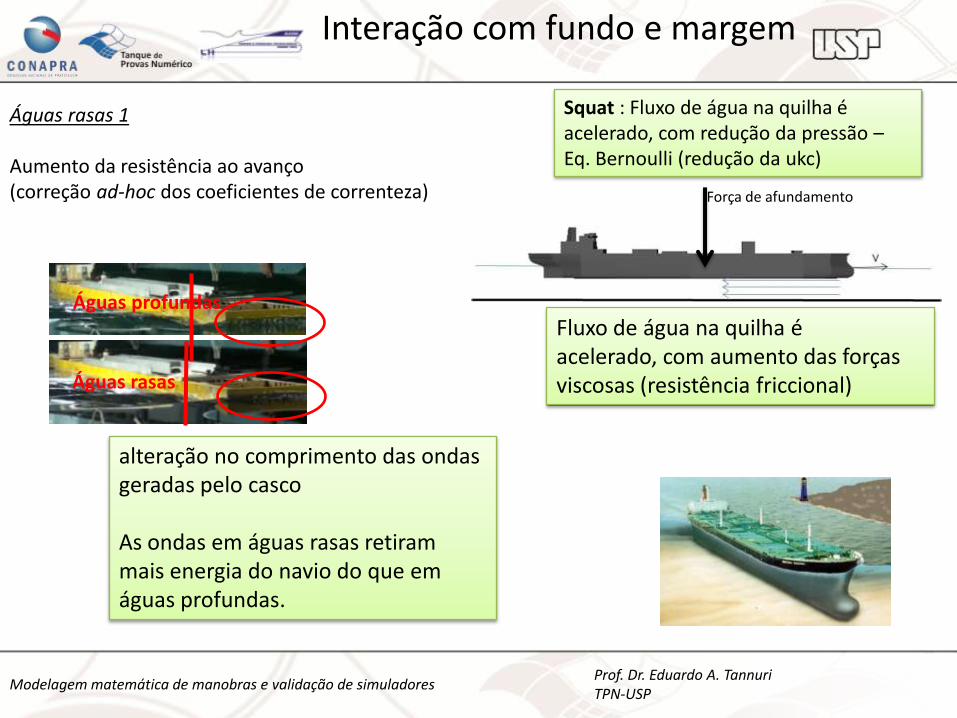
Interação com fundo e margem
Águas rasas 1
Aumento da resistência ao avanço(correção ad-hoc dos coeficientes de correnteza)
Fluxo de água na quilha é acelerado, com aumento das forças viscosas (resistência friccional)
alteração no comprimento das ondas geradas pelo casco
As ondas em águas rasas retiram mais energia do navio do que em águas profundas.
Águas profundas
Águas rasas
Força de afundamento
Squat : Fluxo de água na quilha é acelerado, com redução da pressão –Eq. Bernoulli (redução da ukc)
Modelagem matemática de manobras e validação de simuladoresProf. Dr. Eduardo A. TannuriTPN-USP
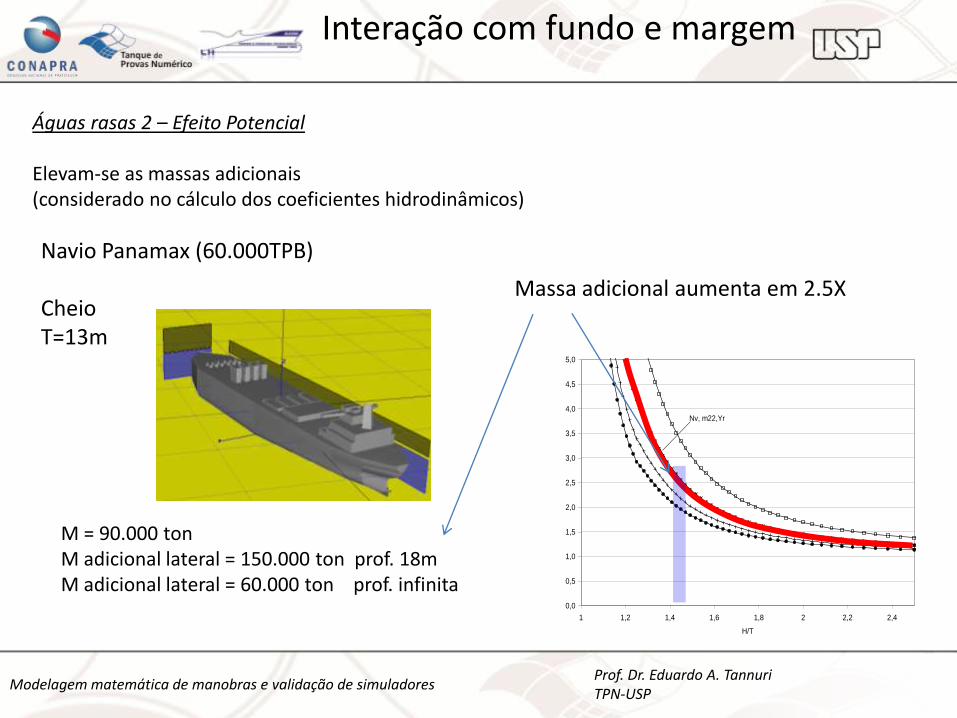
Águas rasas 2 – Efeito Potencial
Elevam-se as massas adicionais(considerado no cálculo dos coeficientes hidrodinâmicos)
0,0
0,5
1,0
1,5
2,0
2,5
3,0
3,5
4,0
4,5
5,0
1 1,2 1,4 1,6 1,8 2 2,2 2,4
H/T
m22
m66
Yv
Nv
Yr
Nr
Nv, m22,Yr
Massa adicional aumenta em 2.5X
Navio Panamax (60.000TPB)
CheioT=13m
M = 90.000 tonM adicional lateral = 150.000 ton prof. 18mM adicional lateral = 60.000 ton prof. infinita
Interação com fundo e margem
Modelagem matemática de manobras e validação de simuladoresProf. Dr. Eduardo A. TannuriTPN-USP
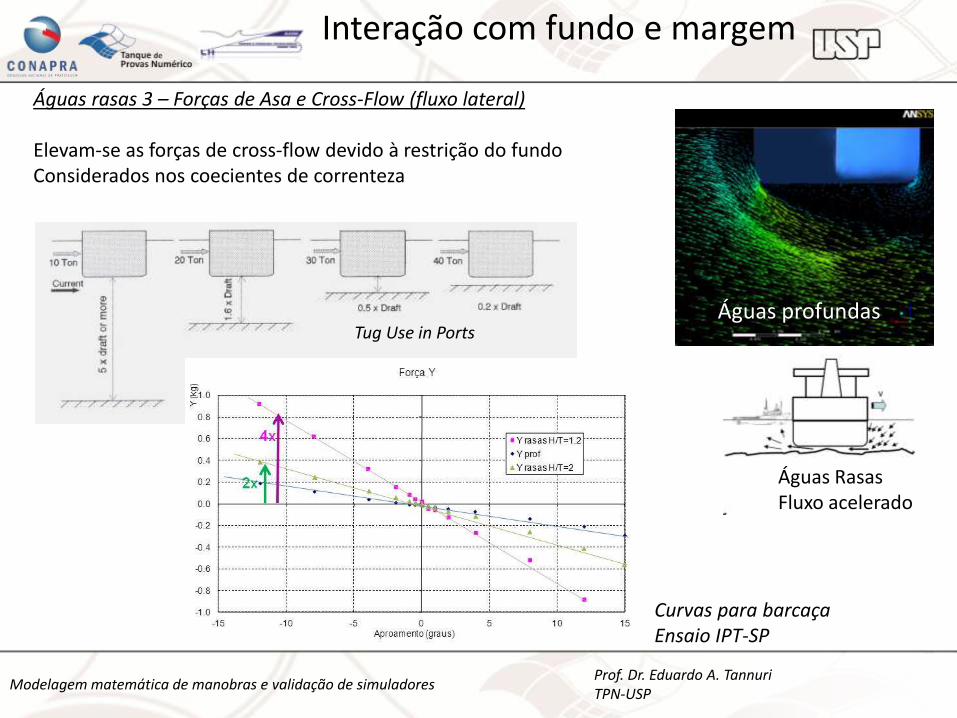
Águas rasas 3 – Forças de Asa e Cross-Flow (fluxo lateral)
Elevam-se as forças de cross-flow devido à restrição do fundoConsiderados nos coecientes de correnteza
Águas profundasTug Use in Ports
Águas RasasFluxo acelerado
Curvas para barcaçaEnsaio IPT-SP
Interação com fundo e margem
Modelagem matemática de manobras e validação de simuladoresProf. Dr. Eduardo A. TannuriTPN-USP
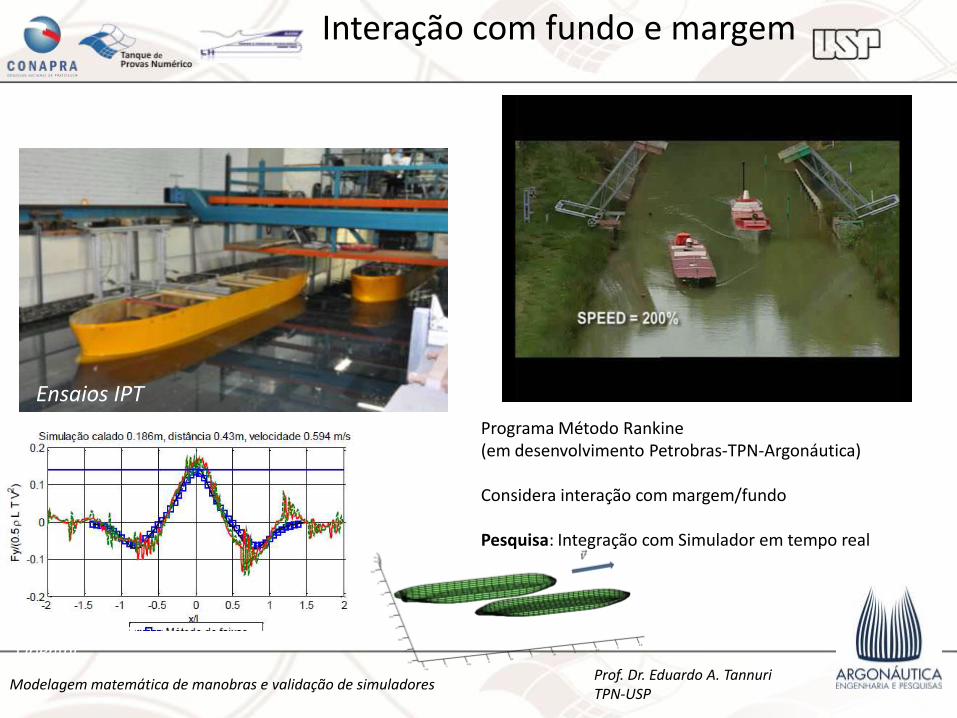
Ensaios IPT
Bacia AmazônicaOriental
Programa Método Rankine(em desenvolvimento Petrobras-TPN-Argonáutica)
Considera interação com margem/fundo
Pesquisa: Integração com Simulador em tempo real
Interação com fundo e margem
Modelagem matemática de manobras e validação de simuladoresProf. Dr. Eduardo A. TannuriTPN-USP
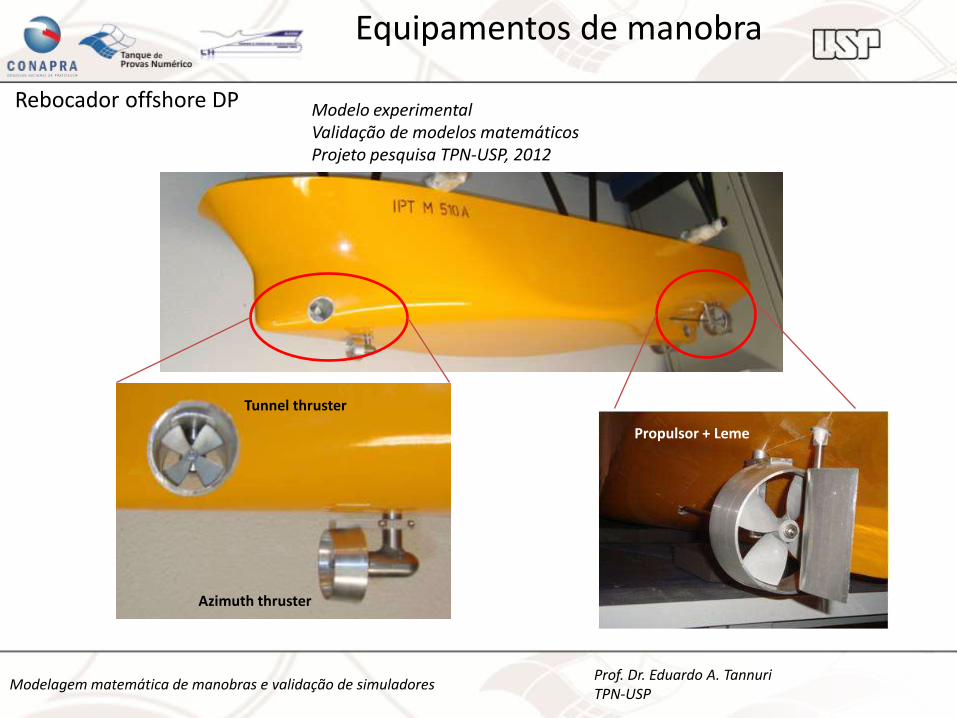
Rebocador offshore DP Modelo experimentalValidação de modelos matemáticosProjeto pesquisa TPN-USP, 2012
Tunnel thruster
Azimuth thruster
Propulsor + Leme
Equipamentos de manobra
Modelagem matemática de manobras e validação de simuladoresProf. Dr. Eduardo A. TannuriTPN-USP
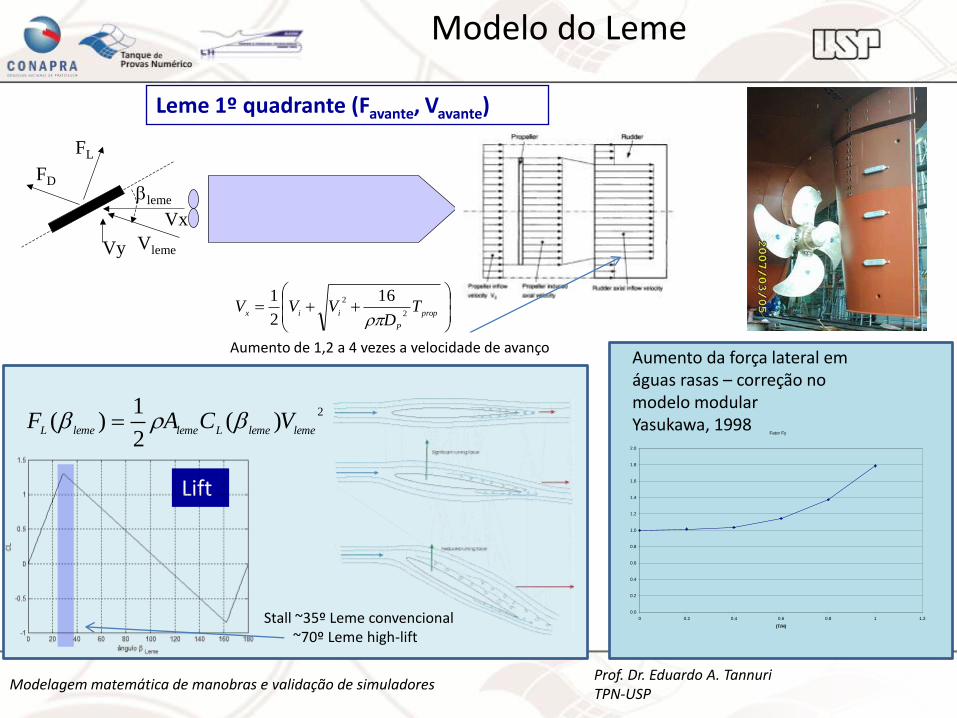
Leme 1º quadrante (Favante, Vavante)
Vleme
FD
FL
Vx
Vy
leme
prop
P
iixT
DVVV
2
2 16
2
1
2)(
2
1)(
lemelemeLlemelemeLVCAF
Lift
Fator Fy
0.0
0.2
0.4
0.6
0.8
1.0
1.2
1.4
1.6
1.8
2.0
0 0.2 0.4 0.6 0.8 1 1.2
(T/H)
Aumento da força lateral em águas rasas – correção no modelo modularYasukawa, 1998
Stall ~35º Leme convencional~70º Leme high-lift
Aumento de 1,2 a 4 vezes a velocidade de avanço
Modelo do Leme
Modelagem matemática de manobras e validação de simuladoresProf. Dr. Eduardo A. TannuriTPN-USP
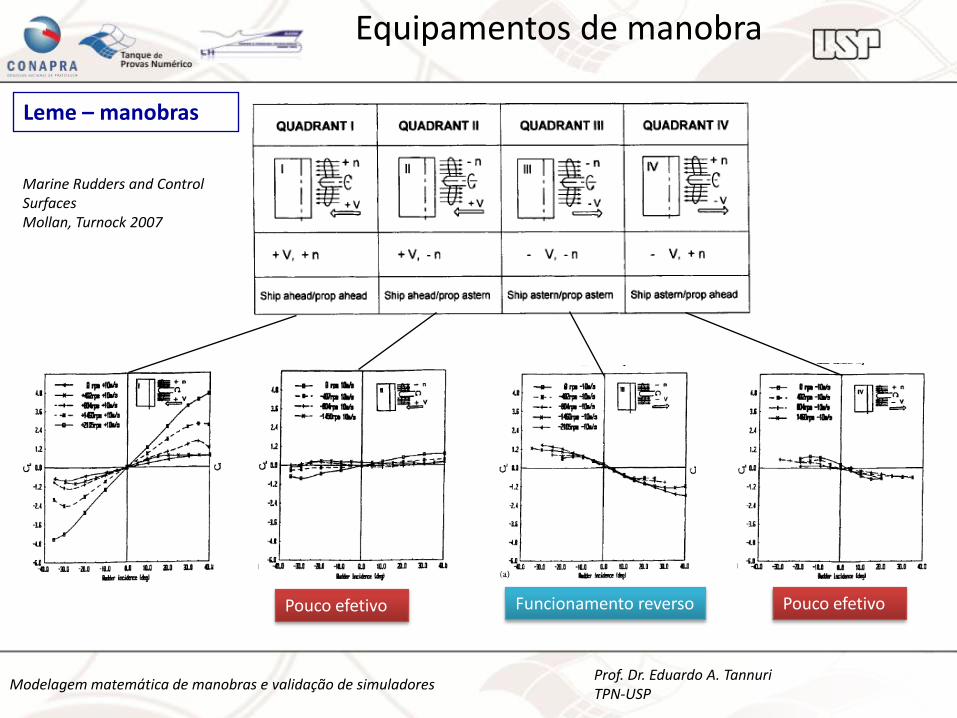
Leme – manobras
Pouco efetivo Pouco efetivoFuncionamento reverso
Marine Rudders and ControlSurfacesMollan, Turnock 2007
Equipamentos de manobra
Modelagem matemática de manobras e validação de simuladoresProf. Dr. Eduardo A. TannuriTPN-USP
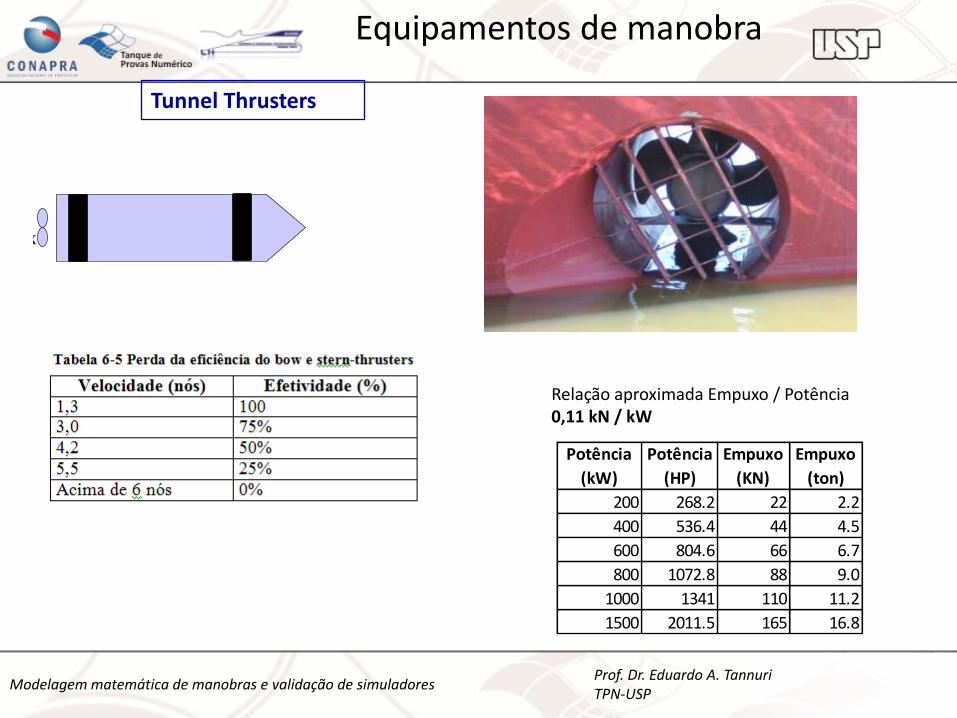
Tunnel Thrusters
Vleme
FD
FL
Vx
Vy
leme
Relação aproximada Empuxo / Potência0,11 kN / kW
Potência
(kW)
Potência
(HP)
Empuxo
(KN)
Empuxo
(ton)
200 268.2 22 2.2
400 536.4 44 4.5
600 804.6 66 6.7
800 1072.8 88 9.0
1000 1341 110 11.2
1500 2011.5 165 16.8
Equipamentos de manobra
Modelagem matemática de manobras e validação de simuladoresProf. Dr. Eduardo A. TannuriTPN-USP
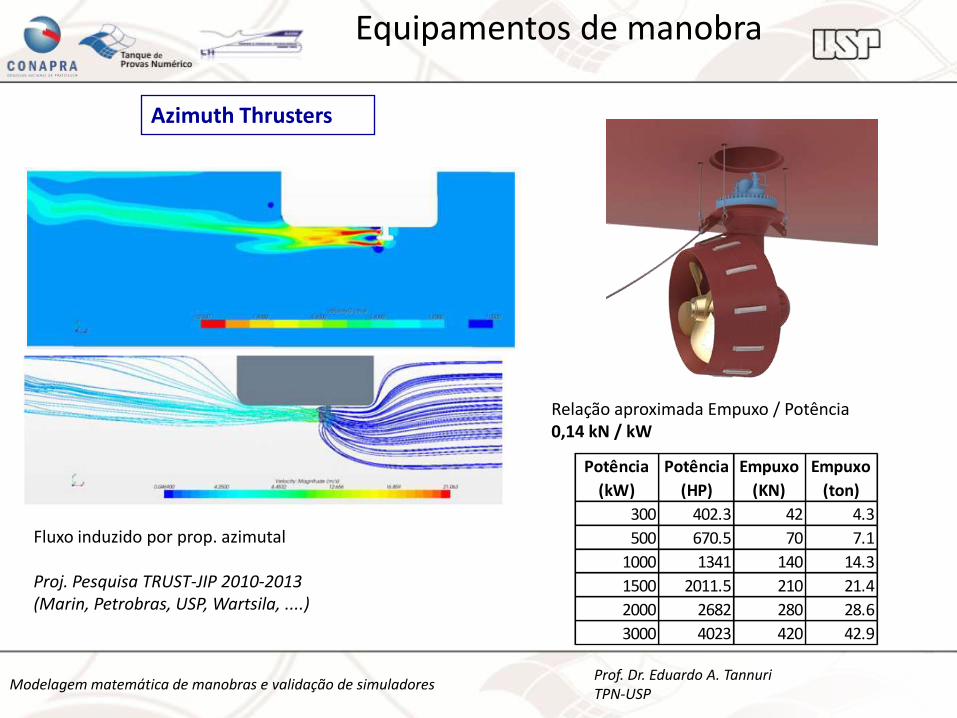
Azimuth Thrusters
Relação aproximada Empuxo / Potência0,14 kN / kW
Potência
(kW)
Potência
(HP)
Empuxo
(KN)
Empuxo
(ton)
300 402.3 42 4.3
500 670.5 70 7.1
1000 1341 140 14.3
1500 2011.5 210 21.4
2000 2682 280 28.6
3000 4023 420 42.9
Fluxo induzido por prop. azimutal
Proj. Pesquisa TRUST-JIP 2010-2013(Marin, Petrobras, USP, Wartsila, ....)
Equipamentos de manobra
Modelagem matemática de manobras e validação de simuladoresProf. Dr. Eduardo A. TannuriTPN-USP
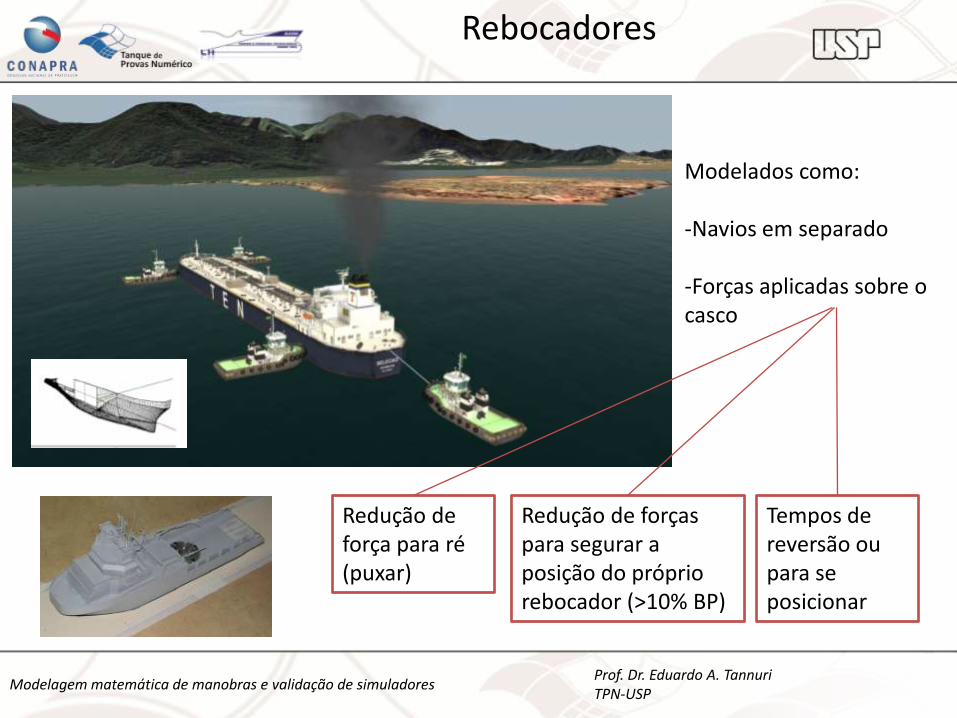
Modelados como:
-Navios em separado
-Forças aplicadas sobre o casco
Redução de força para ré (puxar)
Redução de forças para segurar a posição do próprio rebocador (>10% BP)
Tempos de reversão ou para se posicionar
Rebocadores
Modelagem matemática de manobras e validação de simuladoresProf. Dr. Eduardo A. TannuriTPN-USP
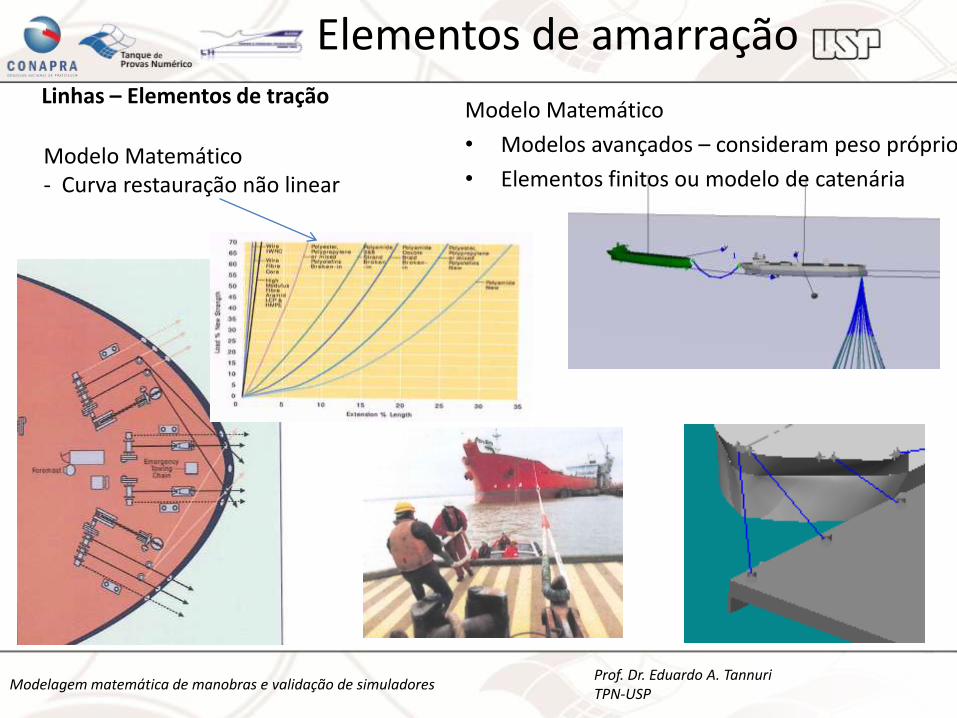
Elementos de amarraçãoLinhas – Elementos de tração
Modelo Matemático - Curva restauração não linear
Modelo Matemático
• Modelos avançados – consideram peso próprio
• Elementos finitos ou modelo de catenária
Modelagem matemática de manobras e validação de simuladoresProf. Dr. Eduardo A. TannuriTPN-USP
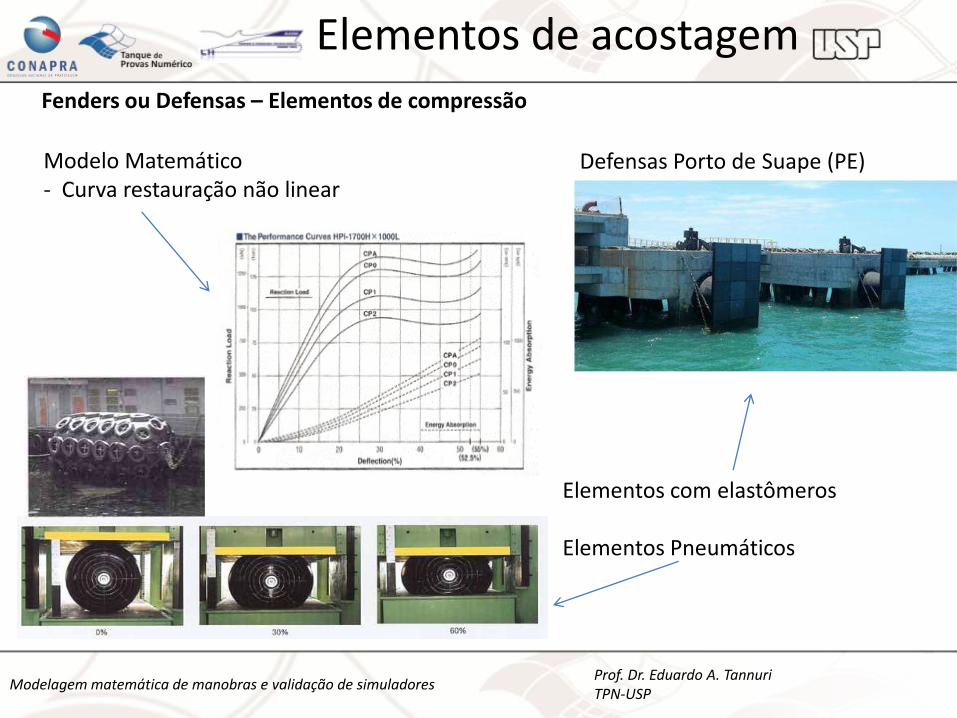
Elementos de acostagemFenders ou Defensas – Elementos de compressão
Elementos com elastômeros
Elementos Pneumáticos
Modelo Matemático - Curva restauração não linear
Defensas Porto de Suape (PE)