abordagem bayesiana para identificaÇÃo de...
TRANSCRIPT

ABORDAGEM BAYESIANA PARA IDENTIFICAÇÃO DE FALHAS EM
COMPÓSITOS LAMINADOS ATRAVÉS DA TRANSFERÊNCIA DE CALOR
Luiz Alberto da Silva Abreu
Dissertação de Mestrado apresentada ao
Programa de Pós-graduação em Engenharia
Mecânica, COPPE, da Universidade Federal do
Rio de Janeiro, como parte dos requisitos
necessários à obtenção do título de Mestre em
Engenharia Mecânica.
Orientador: Hélcio Rangel Barreto Orlande
Rio de Janeiro
Março de 2011

ABORDAGEM BAYESIANA PARA IDENTIFICAÇÃO DE FALHAS EM
COMPÓSITOS LAMINADOS ATRAVÉS DA TRANSFERÊNCIA DE CALOR
Luiz Alberto da Silva Abreu
DISSERTAÇÃO SUBMETIDA AO CORPO DOCENTE DO INSTITUTO ALBERTO
LUIZ COIMBRA DE PÓS-GRADUAÇÃO E PESQUISA DE ENGENHARIA
(COPPE) DA UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COMO PARTE
DOS REQUISITOS NECESSÁRIOS PARA A OBTENÇÃO DO GRAU DE MESTRE
EM CIÊNCIAS EM ENGENHARIA MECÂNICA
Examinada por:
________________________________________________
Prof. Hélcio Rangel Barreto Orlande, Ph.D.
________________________________________________
Profª. Carolina Palma Naveira Cotta, D.Sc.
________________________________________________
Prof. Marcelo José Colaço, D.Sc.
________________________________________________
Prof. Rodrigo Otávio de Castro Guedes, Ph.D.
RIO DE JANEIRO, RJ - BRASIL
MARÇO DE 2011

iii
Abreu, Luiz Alberto da Silva
Abordagem Bayesiana para Identificação de Falhas
em Compósitos Laminados Através da Transferência de
Calor/ Luiz Alberto da Silva Abreu. – Rio de Janeiro:
UFRJ/COPPE, 2011.
XVIII, 138 p.: il.; 29,7 cm.
Orientador: Helcio Rangel Barreto Orlande
Dissertação (mestrado) – UFRJ/ COPPE/ Programa de
Engenharia Mecânica, 2011.
Referencias Bibliográficas: p. 116-118.
1. Problemas Inversos. 2. Detecção de falhas em
Compósitos Laminados. 3. Transformada Integral
Generalizada. 4. Metropolis-Hastings. I. Orlande, Helcio
Rangel Barreto. II. Universidade Federal do Rio de
Janeiro, COPPE, Programa de Engenharia Mecânica. III.
Titulo.

iv
“Amor com amor se paga...”
Sta. Teresinha do Menino Jesus
Dedico este trabalho à Deus,
à minha família e
aos meus amigos.

v
AGRADECIMENTOS
DEUS,
Autor da minha vida e de tudo o que foi criado, pela sua presença real e perceptível.
MINHA ESPOSA MILENA
Pelo carinho e paciência. Uma pessoa realmente especial. Pela disponibilidade de ajudar, Amor com Amor se paga...
MEUS PAIS E FAMILIARES:
que souberam dividir os momentos difíceis neste ano de chuvas incomuns,
AOS AMIGOS DA REPÚBLICA
Gustavo, Alisson, Vanessa e Joyce, pela ajuda e paciência logo no início de tudo, Quando ainda estava me adaptando ao Rio.
ALUNO DE MESTRADO DIEGO
Pelas incansáveis discussões teóricas, durante todo o curso foi um amigo com quem pude contar
MEU ORIENTADOR PROF. HELCIO
Pela sua constante participação no trabalho, incentivando e acompanhando de perto. Sua ajuda foi fundamental para que tudo fosse realizado.
DEMAIS AMIGOS
Agradeço ainda à todos os amigos que fiz neste período,entre eles: Prof. Renato Cotta, Prof. João Nazareno a Profª. Carolina Naveira Cotta
os alunos de mestrado: Karol, Milena, Guilherme, Marcelo.

vi
Resumo da Dissertação de Mestrado apresentada à COPPE/UFRJ como parte dos requisitos necessários para a obtenção do grau de Mestre em Ciências (M.Sc.)
ABORDAGEM BAYESIANA PARA IDENTIFICAÇÃO DE FALHAS EM
COMPÓSITOS LAMINADOS ATRAVÉS DA TRANSFERÊNCIA DE CALOR
Luiz Alberto da Silva Abreu
Março/2011
Orientador: Helcio Rangel Barreto Orlande
Programa: Engenharia Mecânica
Atualmente, materiais compósitos são comumente utilizados na engenharia, com
muitas aplicações práticas. Um típico exemplo envolvendo o uso de compósitos
formados por camadas de diferentes materiais é a indústria aeronáutica, devido à sua
grande força e rigidez, bem como sua densidade. Geralmente, tal tipo de compósito é
formado por camadas de diferentes materiais. A qualidade da adesão entre as camadas
tem um papel fundamental no desempenho e na vida útil da estrutura do compósito.
Desta forma, a detecção não destrutiva de falhas na ligação das camadas adjacentes é
extremamente importante para o monitoramento da saúde estrutural. Neste trabalho, foi
resolvido um problema inverso de condução de calor para a identificação do coeficiente
de troca térmica no contato, que pode ser diretamente associado à qualidade da adesão
entre as camadas. O problema físico envolve o aquecimento da superfície superior de
um compósito de duas camadas. A formulação do problema direto é solucionada com
um método hibrido que combina a Técnica da Transformada Integral Generalizada
(GITT) com diferenças-finitas. Medidas simuladas de temperatura na superfície
aquecida são usadas na análise do problema inverso para identificar a variação espacial
do coeficiente de troca térmica no contato na interface. O problema inverso é resolvido
através de Inferência Bayesiana, com o Método de Monte Carlo e Cadeia de Markov,
implementado através do Algoritmo Metropolis-Hastings. O resultado obtido revela que
a metodologia proposta é capaz de estimar quantitativamente e qualitativamente as
falhas de junções entre placas de diferentes tamanhos.

vii
Abstract of Dissertation presented to COPPE/UFRJ as a partial fulfillment of the requirements for the degree of Master of Science (M.Sc.)
BAYESIAN APPROACH FOR FAILURES IDENTIFICATION ON LAMINATED
COMPOSITES THROUGH HEAT TRANSFER
Luiz Alberto da Silva Abreu
March /2011
Advisors: Helcio Rangel Barreto Orlande
Department: Mechanical Engineering
Composite materials are commonly used in engineering nowadays, with many
practical applications. One typical example involves the use of composites formed by
layers of different materials in the airplane industry, because of its greater strength and
stiffness. Generally, such kind of laminated composites is formed by layers of different
materials. The quality of the adhesion between layers plays a fundamental role for the
performance and lifetime of the composite structure. As a result, the non-destructive
detection of failures in the bonding of adjacent layers is extremely important for
structural health monitoring. In this paper, we solve an inverse heat conduction problem
for the identification of the interface thermal contact conductance, which can be directly
associated to the quality of the adhesion between layers. The physical problem involves
the heating of the external surface of a composite with two layers. The direct problem
formulation is solved with a hybrid method that combines the Generalized Integral
Transform Technique (GITT) and finite-differences. Simulated temperature
measurements taken at this heated surface are used in the inverse analysis to identify the
spatially varying interface contact conductance. Such measurements are assumed to be
taken with an infrared camera, which allows for high spatial resolution and high data
acquisition frequency. The present inverse problem is solved within the Bayesian
statistical paradigm, with a Markov chain Monte Carlo method implemented through
Metropolis-Hastings’ algorithm. The results obtained reveal that the proposed
methodology is capable of estimating quite well bonding failures of different sizes.

viii
SUMÁRIO
CAPÍTULO 1 - INTRODUÇÃO .................................................................................. 1
CAPÍTULO 2 - REVISÃO BIBLIOGRÁFICA ............................................................ 3
2.1 Materiais Compósitos ............................................................................. 3
2.2 Solução de Problemas de Condução de Calor ........................................ 6
2.3 Problemas Inversos em Transferência de Calor...................................... 8
2.4 Problema Inverso via Inferência Bayesiana ............................................ 8
CAPÍTULO 3 - PROBLEMA FÍSICO ....................................................................... 10
3.1 Modelo Físico ....................................................................................... 10
3.2 Formulação Matemática Geral .............................................................. 11
3.3 Formulação Matemática Adimensional ................................................ 12
3.4 Formulação Matemática particular com duas camadas ........................ 14
CAPÍTULO 4 - SOLUÇÃO DO PROBLEMA DIRETO ........................................... 16
4.1 Aplicando GITT nas Direções Longitudinais da Placa ........................ 16
4.2 Aplicando Diferenças Finitas na Direção Transversal da Placa ........... 21
4.3 Implementação Numérica ..................................................................... 25
4.4 Reordenando os autovalores ................................................................. 26
CAPÍTULO 5 - PROBLEMA INVERSO ................................................................... 28
5.1 Formulação do problema inverso.......................................................... 28
5.2 Solução do Problema Inverso ............................................................... 29
5.3 O Algoritmo Metropolis-Hastings ........................................................ 31
CAPÍTULO 6 - RESULTADOS E DISCUSSÕES .................................................... 34
6.1 Verificação da Solução do Problema Direto ......................................... 35
6.2 Problema Direto com falha de contato entre as placas ......................... 67
6.3 Solução do Problema Inverso ............................................................... 77
CAPÍTULO 7 - CONCLUSÕES E SUGESTÕES ................................................... 114
CAPÍTULO 8 - REFERÊNCIAS BIBLIOGRÁFICAS ............................................ 116
APÊNDICE A - Teste I em regime permanente ........................................................ 119

ix
APÊNDICE B - Teste I em regime transiente ........................................................... 121
APÊNDICE C - Teste II em regime transiente .......................................................... 125
APÊNDICE D - Teste III em regime transiente ........................................................ 129
APÊNDICE E - Teste IV em regime transiente ........................................................ 133

x
LISTA DE FIGURAS
Figura 3.1 - Meio compósito laminado constituído por ‘ MaxI ’ camadas. ....................... 10
Figura 4.1 - Discretização por diferenças finitas ao longo do eixo Z. ............................ 22
Figura 5.1 - Representação esquemática da obtenção de medidas experimentais.......... 28
Figura 6.1 - Esquema do problema geral. ....................................................................... 34
Figura 6.2 - Representação esquemática do teste 1, em regime permanente. ................ 38
Figura 6.3 - Gráfico de temperatura versus posição para um valor dech alto, em regime
permanente...................................................................................................................... 39
Figura 6.4 - Distribuição de temperatura na superfície, no tempo final t = 100s. .......... 40
Figura 6.5 - Gráfico de temperatura versus posição para um ch muito baixo, em regime
permanente...................................................................................................................... 41
Figura 6.6 - Gráfico demonstrando a diminuição da descontinuidade do valor das
temperaturas na interface à medida que o ch →∞ . ......................................................... 42
Figura 6.7 - Representação esquemática do primeiro teste em regime transiente. ......... 44
Figura 6.8 - Gráfico de temperatura versos tempo para o teste 1, em regime transiente.
........................................................................................................................................ 46
Figura 6.9 - Posição z versus temperatura para o teste 1, em regime transiente. ........... 47
Figura 6.10 - Distribuição de temperatura na superfície, para o teste 1 em regime
transiente. ........................................................................................................................ 48
Figura 6.11 - Representação esquemática do segundo teste em regime transiente. ....... 50
Figura 6.12 - Gráfico de temperatura versos tempo para o teste 2, em regime transiente.
........................................................................................................................................ 52
Figura 6.13 - Posição z versus temperatura para o teste 2, em regime transiente. ......... 53
Figura 6.14 - Distribuição de temperatura na superfície, para o teste 2 em regime
transiente. ........................................................................................................................ 54
Figura 6.15 - Representação esquemática do terceiro teste em regime transiente ......... 54
Figura 6.16 - Temperatura versus tempo para o problema teste 3, em regime transiente.
........................................................................................................................................ 57
Figura 6.17 - Posição z versus temperatura para o teste 3, em regime transiente. ......... 58
Figura 6.18 - Distribuição de temperatura na superfície, para o teste 3 em regime
transiente. ........................................................................................................................ 59
Figura 6.19 - Representação esquemática do quarto teste em regime transiente. .......... 59

xi
Figura 6.20 - Temperatura versus tempo para o problema teste 4, em regime transiente.
........................................................................................................................................ 63
Figura 6.21 - Posição z versus temperatura para o teste 4, em regime transiente .......... 64
Figura 6.22 - Distribuição de temperatura na superfície para o teste 4 em regime
transiente. ........................................................................................................................ 64
Figura 6.23 - Analise da solução de T x x ...................................................................... 65
Figura 6.24 - Analise da solução de T x y ...................................................................... 65
Figura 6.25 - Variação espacial do Biot de contato,cBi , com Titânio exposto ao fluxo de
calor com malha em x e y, 11x11. .................................................................................. 68
Figura 6.26 - Variação espacial do Biot de contato,cBi , com Titânio exposto ao fluxo de
calor com malha em x e y, 11x11. .................................................................................. 68
Figura 6.27 - Gráfico de distribuição de temperatura no tempo com Titânio exposto ao
fluxo de calor com malha em x e y, 11x11. .................................................................... 70
Figura 6.28 - Distribuição de temperatura adimensional na superfície, na posição
adimensional Z=1, onde o fluxo de calor foi imposto, no tempo final 6. ...................... 70
Figura 6.29 - Distribuição de temperatura adimensional na superfície, na posição
adimensional Z=1, onde o fluxo de calor foi imposto, no tempo final 0.065 ................ 71
Figura 6.30 - Distribuição de temperatura adimensional na superfície, na posição
adimensional Z=1, onde o fluxo de calor foi imposto, no tempo final 0.13. ................. 72
Figura 6.31 - Distribuição de temperatura adimensional na superfície, na posição
adimensional Z=1, onde o fluxo de calor foi imposto, no tempo final 0.065. ............... 73
Figura 6.32 - Distribuição de temperatura adimensional na superfície, na posição
adimensional Z=1, onde o fluxo de calor foi imposto, no tempo final 0.13. ................. 74
Figura 6.33 - Gráfico de variação espacial do biot de contato, cBi , com Titânio exposto
ao fluxo de calor com malha em x e y, 21x21. ............................................................... 75
Figura 6.34 - Gráfico de variação espacial do Biot de contato, cBi , com malha em x e y,
21x21. ............................................................................................................................. 75
Figura 6.35 - Distribuição de temperatura adimensional na superfície, na posição
adimensional Z=1, para 441 sensores, no tempo 0.065. ................................................. 76
Figura 6.36 - Distribuição de temperatura adimensional na superfície, na posição
adimensional Z=1, para malha em x e y = 21 x 21, no tempo 0.13. ............................... 77
Figura 6.37 - Biot exato comparado com o Biot estimado. ............................................ 80
Figura 6.38 - Biot exato à esquerda comparado com o Biot estimado à direita. ............ 81

xii
Figura 6.39 - Desvio padrão dos resultados para a estimativa do Biot de contato ......... 81
Figura 6.40 - Estabilização da Cadeia de Markov para um ponto com falha e para um
ponto com contato. ......................................................................................................... 81
Figura 6.41 - Biot exato comparado com o Biot estimado. ............................................ 83
Figura 6.42 - Biot exato à esquerda comparado com o Biot estimado à direita. ............ 83
Figura 6.43 - Desvio padrão dos resultados para a estimativa do Biot de contato ......... 83
Figura 6.44 - Estabilização da Cadeia de Markov para um ponto com falha e para um
ponto com contato. ......................................................................................................... 84
Figura 6.45 - Biot exato comparado com o Biot estimado. ............................................ 85
Figura 6.46 - Biot exato à esquerda comparado com o Biot estimado à direita. ............ 86
Figura 6.47 - Desvio padrão dos resultados para a estimativa do Biot de contato ......... 86
Figura 6.48 - Estabilização da Cadeia de Markov para um ponto com falha e para um
ponto com contato. ......................................................................................................... 86
Figura 6.49 - Biot exato comparado com o Biot estimado. ............................................ 88
Figura 6.50 - Biot exato à esquerda comparado com o Biot estimado à direita. ............ 88
Figura 6.51 - Desvio padrão dos resultados para a estimativa do Biot de contato ......... 88
Figura 6.52 - Estabilização da Cadeia de Markov para um ponto com falha e para um
ponto com contato. ......................................................................................................... 89
Figura 6.53 - Biot exato comparado com o Biot estimado. ............................................ 90
Figura 6.54 - Biot exato à esquerda comparado com o Biot estimado à direita. ............ 91
Figura 6.55 - Desvio padrão dos resultados para a estimativa do Biot de contato ......... 91
Figura 6.56 - Estabilização da Cadeia de Markov para um ponto com falha e para um
ponto com contato. ......................................................................................................... 91
Figura 6.57 - Biot exato comparado com o Biot estimado. ............................................ 93
Figura 6.58 - Biot exato à esquerda comparado com o Biot estimado à direita. ............ 93
Figura 6.59 - Desvio padrão dos resultados para a estimativa do Biot de contato ......... 93
Figura 6.60 - Estabilização da Cadeia de Markov para um ponto com falha e para um
ponto com contato. ......................................................................................................... 94
Figura 6.61 - Biot exato comparado com o Biot estimado. ............................................ 96
Figura 6.62 - Biot exato à esquerda comparado com o Biot estimado à direita. ............ 96
Figura 6.63 - Desvio padrão dos resultados para a estimativa do Biot de contato ......... 96
Figura 6.64 - Estabilização da Cadeia de Markov para um ponto com falha e para um
ponto com contato. ......................................................................................................... 97
Figura 6.65 - Biot exato comparado com o Biot estimado. ............................................ 99
xiii
Figura 6.66 - Biot exato à esquerda comparado com o Biot estimado à direita. ............ 99
Figura 6.67 - Desvio padrão dos resultados para a estimativa do Biot de contato ......... 99
Figura 6.68 - Estabilização da Cadeia de Markov para um ponto com falha e para um
ponto com contato. ....................................................................................................... 100
Figura 6.69 - Biot exato comparado com o Biot estimado. .......................................... 101
Figura 6.70 - Biot exato à esquerda comparado com o Biot estimado à direita. .......... 102
Figura 6.71 - Desvio padrão dos resultados para a estimativa do Biot de contato ....... 102
Figura 6.72 - Estabilização da Cadeia de Markov para um ponto com falha e para um
ponto com contato. ....................................................................................................... 102
Figura 6.73 - Biot exato comparado com o Biot estimado. .......................................... 104
Figura 6.74 - Biot exato à esquerda comparado com o Biot estimado à direita. .......... 104
Figura 6.75 - Desvio padrão dos resultados para a estimativa do Biot de contato ....... 105
Figura 6.76 - Estabilização da Cadeia de Markov para um ponto com falha e para um
ponto com contato. ....................................................................................................... 105
Figura 6.77 - Biot exato comparado com o Biot estimado. .......................................... 107
Figura 6.78 - Biot exato à esquerda comparado com o Biot estimado à direita. .......... 107
Figura 6.79 - Desvio padrão dos resultados para a estimativa do Biot de contato ....... 108
Figura 6.80 - Estabilização da Cadeia de Markov para um ponto com falha e para um
ponto com contato. ....................................................................................................... 108
Figura 6.81 - Biot exato comparado com o Biot estimado. .......................................... 109
Figura 6.82 - Biot exato à esquerda comparado com o Biot estimado à direita. .......... 110
Figura 6.83 - Desvio padrão dos resultados para a estimativa do Biot de contato ....... 110
Figura 6.84 - Estabilização da Cadeia de Markov para um ponto com falha e para um
ponto com contato. ....................................................................................................... 110
Figura 6.85 – Biot exato comparado com o Biot estimado. ......................................... 112
Figura 6.86 - Biot exato à esquerda comparado com o Biot estimado à direita. .......... 113
Figura 6.87 - Desvio padrão dos resultados para a estimativa do Biot de contato ....... 113
Figura 6.88 - Estabilização da Cadeia de Markov para um ponto com falha e para um
ponto com contato térmico perfeito. ............................................................................. 113
Figura A.1 – Desenho esquemático do teste 1, em regime permanente ....................... 119
Figura B.1 – Desenho esquemático do teste 1, em regime transiente ........................... 121
Figura C.1 – Desenho esquemático do teste 1, em regime permanente ........................ 125
Figura D.1 – Desenho esquemático do teste 1, em regime permanente ........................ 129
Figura E.1 – Desenho esquemático do teste 1, em regime permanente ........................ 133

xiv
LISTA DE TABELAS
Tabela 6.1 - Dimensões do material compósito ............................................................. 34
Tabela 6.2 - Temperatura dos meios externos e temperatura inicial da placa ................ 35
Tabela 6.3 - Propriedades Termofísicas dos Materiais utilizados .................................. 35
Tabela 6.4 - Parâmetros de entrada do teste 1, em regime permanente. ........................ 38
Tabela 6.5 - Tabela de temperatura versus posição para um ch muito alto, em regime
permanente...................................................................................................................... 40
Tabela 6.6 - Tabela de temperatura versus posição para um ch muito baixo, em regime
permanente...................................................................................................................... 41
Tabela 6.7 - Análise de convergência da série em X e Y, para o teste 1 em regime
permanente...................................................................................................................... 43
Tabela 6.8 - Parâmetros de entrada do teste 1 em regime transiente ............................. 46
Tabela 6.9 - Tabela de valores de temperatura versos tempo para o teste 1, em regime
transiente. ........................................................................................................................ 47
Tabela 6.10 - Análise de convergência da série em X e Y, para o teste 1 em regime
permanente...................................................................................................................... 48
Tabela 6.11 - Parâmetros de entrada do teste 1 em regime transiente ........................... 52
Tabela 6.12 - Tabela de valores de temperatura versos tempo para o teste 2, em regime
transiente . ....................................................................................................................... 53
Tabela 6.13 - Parâmetros de entrada do teste 1 em regime transiente ........................... 57
Tabela 6.14 - Tabela de valores de temperatura versos tempo para o teste 3, em regime
transiente ......................................................................................................................... 57
Tabela 6.15 - Parâmetros de entrada do teste 1, em regime permanente. ...................... 62
Tabela 6.16 - Tabela de valores de temperatura versos tempo para o teste 4, em regime
transiente ......................................................................................................................... 63
Tabela 6.17 - Análise de convergência da série em X e Y, para o teste 1 em regime
permanente...................................................................................................................... 66
Tabela 6.18 - Parâmetros de entrada do teste 1, em regime permanente. ...................... 69
Tabela 6.19 - Análise de convergência da série em X e Y, para o teste 1 em regime
permanente...................................................................................................................... 72
Tabela 6.20 - Parâmetros de entrada para o problema inverso ....................................... 78
Tabela 6.21 - Resultados obtidos para titânio exposto ao fluxo de calor. ...................... 80
Tabela 6.22 - Resultados obtidos para epóxi exposto ao fluxo de calor. ....................... 82
xv
Tabela 6.23 - Resultados obtidos para titânio exposto ao fluxo de calor. ...................... 85
Tabela 6.24 - Resultados obtidos para epóxi exposto ao fluxo de calor. ....................... 87
Tabela 6.25 - Resultados obtidos para titânio exposto ao fluxo de calor. ...................... 90
Tabela 6.26 - Resultados obtidos para epóxi exposto ao fluxo de calor. ....................... 92
Tabela 6.27 - Resultados obtidos para titânio exposto ao fluxo de calor. ...................... 95
Tabela 6.28 - Resultados obtidos para titânio exposto ao fluxo de calor. ...................... 98
Tabela 6.29 - Resultados obtidos para epóxi exposto ao fluxo de calor. ..................... 101
Tabela 6.30 - Resultados obtidos para titânio exposto ao fluxo de calor ..................... 104
Tabela 6.31 - Resultados obtidos para titânio exposto ao fluxo de calor ..................... 107
Tabela 6.32 - Resultados obtidos para epóxi exposto ao fluxo de calor. ..................... 109
Tabela 6.33 - Resultados obtidos para titânio exposto ao fluxo de calor. .................... 112

xvi
LISTA DE SÍMBOLOS
SÍMBOLOS LATINOS
a - Comprimento dimensional do material compósito, em [ ]m .
A - Comprimento adimensional do material compósito.
b - Largura dimensional do material compósito, em [ ]m .
B - Largura adimensional do material compósito.
(...)Bi - Número de Biot, adimensional.
c - Espessura dimensional do material compósito, em [ ]m .
1matc - Espessura do material 1 que compõe o compósito laminado, em [ ]m .
2matc - Espessura do material 2 que compõe o compósito laminado, em [ ]m .
C - Espessura adimensional do material compósito.
gradx - Número de sensores na direção x, na superfície do compósito laminado.
grady - Número de sensores na direção y, na superfície do compósito laminado.
(...)h - Coeficiente de transferência de calor, em 2W m K .
(...)k - Condutividade térmica dos materiais que formam o compósito
laminado, em [ ]W mK .
IJF - Número máximo de autovalores reordenados.
n - Tempo discretizado, na malha de diferenças finitas.
tn - Posição discretizada referente ao tempo, no vetor de medidas
realizadas.
medN - Número máximo de medidas realizadas.
máxN - Número de nós na malha de diferenças finitas para o tempo
discretizado.
,(...)Nψ - Integral de normalização para a direção x.
,(...)Nϕ - Integral de normalização para a direção y.
,(...)ZN - Integral de normalização para a direção z.
P - Vetor de parâmetros, no problema inverso.
q - Fluxo de calor imposto à superfície superior do compósito laminado.

xvii
t - Tempo dimensional, em [ ]s
iT - Temperatura nas camadas do compósito laminado, em oC
T∞ - Temperatura do fluido em que a superfície inferior do compósito
laminado esta em contato, em oC .
*T∞ - Temperatura do fluido em que a superfície superior do compósito
laminado esta em contato, em oC .
v - Matriz de covariância dos parâmetros no problema inverso.
W - Inversa da matriz de covariância dos erros de medição.
x - Variável independente para a direção x, em [ ]m
X - Variável independente adimensional, para a direção x.
y - Variável independente para a direção y, em [ ]m .
Y - Variável independente adimensional, para a direção y.
Y - Vetor contendo as todas as temperaturas medidas na superfície do
compósito laminado em diferentes tempos.
z - Variável independente para a direção z, em [ ]m.
cz - Posição dimensional da interface entre as camadas do compósito
laminado particular com duas camadas, em [ ]m .
cZ - Posição adimensional da interface entre as camadas do compósito
laminado particular com duas camadas.
Z - Variável independente adimensional, para a direção z
SÍMBOLOS GREGOS
(...)α - Difusividade térmica dos materiais que formam o compósito laminado,
em 2m s .
(...)β - Autovalores para a direção x.
(...)γ - Autovalores para a direção y.
(...)η - Autovalores para a direção z.

xviii
iθ - Temperaturas adimensionais nas camadas do compósito laminado.
θɶ - Temperatura transformada
(...)λ - Autovalores reordenados.
µ - Média dos parâmetros, da informação a priori gaussiana, no problema
inverso.
σ - Desvio padrão das medidas.
Biσ - Desvio padrão da informação a priori gaussiana.
τ - Tempo adimensional.
ϕ - Autofunções para a direção x.
ψ - Autofunções para a direção y.

1
CAPÍTULO 1 - INTRODUÇÃO
A análise de falhas em compósitos laminados constitui uma importante área do
conhecimento em engenharia, devido à sua crescente aplicação em diversos campos da
indústria. Muitas razões contribuem para este crescimento, dentre os quais se destacam:
a necessidade de materiais mais leves, fáceis de instalar e transportar, mais resistentes e
com propriedades termofísicas, acústicas e mecânicas cada vez mais específicas para
uma determinada aplicação (AMITECH, 2010).
Atualmente existem diversas aplicações para os compósitos laminados, com
destaque para as indústrias de defesa, hidráulica, naval, aeronáutica e petrolífera. Nesta
última, tais materiais vêm sendo usados, por exemplo, em tubulações e tanques, por
serem leves e resistentes à corrosão. Assim, investimentos vêm sendo feitos para evitar
os inúmeros problemas que podem ser causados por falhas internas e externas nestes
materiais (AMITECH, 2010).
Desta forma, a caracterização e análise do comportamento destes novos
materiais vêm se tornando fundamental para sua correta aplicação. Destaca-se neste
trabalho a grande importância em avaliar e qualificar o surgimento de falhas internas
dos compósitos laminados, especialmente nas juntas entre as placas que formam estes
materiais.
Este trabalho tem como principal objetivo analisar, do ponto de vista térmico, a
existência de possíveis falhas entre as camadas de um material compósito laminado.
Esta análise será realizada em duas etapas, a saber: a solução do problema direto; e a
solução do problema inverso de transferência de calor de detecção de falhas na adesão
entre placas de materiais compósitos laminados. A solução do problema inverso será
obtida com o método de Monte Carlo com Cadeias de Markov (MCMC) (KAIPIO e
SOMERSALO, 2004). Devido à complexidade da solução do problema direto, que será
detalhado adiante, propõe-se aqui uma solução do mesmo através de uma técnica
híbrida que faz uso da Transformada Integral Generalizada (GITT) (COTTA, 1993) e de
diferenças finitas (PLETCHER e ANDERSON, 1997), considerando um coeficiente de
troca térmica no contato dependente da posição na superfície, ����, ��.
No capítulo 2 é apresentada uma revisão bibliográfica sobre os assuntos
referentes à elaboração deste trabalho. Buscou-se focar nesta revisão: os conhecimentos
básicos sobre compósitos laminados, bem como as técnicas existentes para a solução de
problemas diretos e inversos em condução de calor através de meios compostos por
2
mais de uma camada. Desta forma, pode-se situar o presente trabalho no atual contexto
dos estudos existentes na literatura.
No capítulo 3 propõe-se um modelo físico e matemático para o problema direto
de condução de calor tridimensional transiente através de um meio composto com
coeficiente de transferência de calor no contato, ����, ��, variando na seção transversal
do material. Inicialmente, propõe-se uma formulação geral dimensional e adimensional.
Em seguida, no capítulo 4, o problema direto é solucionado para um caso particular
(envolvendo duas camadas de um compósito laminado) através de um método híbrido
(analítico/numérico) utilizando para isto a técnica de transformada integral generalizada
e o método de diferenças finitas.
No capítulo 5 é apresentada a solução do problema inverso de transferência de
Calor, utilizando o método de Monte Carlo com Cadeia de Markov (MCMC). No
problema inverso utilizaram-se medidas de temperatura realizadas na superfície do
material, onde se aplicou um fluxo de calor conhecido. Com estas medidas e
conhecendo as propriedades de cada material que compõe o compósito laminado,
estimou-se o coeficiente de transferência de calor no contato. Desta forma, pode-se não
apenas quantificar locais onde existam falhas nas interfaces entre os compósitos, mas
também qualificar estas falhas.
No Capítulo 6 são apresentados e discutidos os resultados obtidos. Inicialmente
buscou-se verificar a solução do problema direto. Para isto, foram usados quatro testes
cujas soluções analíticas são apresentadas nos apêndices deste trabalho. Utilizando a
solução do problema direto, foram simuladas medidas de temperatura com erros
controlados para gerar resultados de alguns casos da solução do problema inverso,
envolvendo materiais utilizados na indústria aeronáutica. Considerou-se diferentes
informações a priori (informativa e não-informativa) e avaliou-se diferentes níveis de
erros das medidas, assim como a convergência das cadeias de Markov.
O capítulo 7 apresenta as conclusões do trabalho, contendo um balanço daquilo
que foi realizado aqui. Neste capítulo também são apresentadas sugestões para trabalhos
futuros.

3
CAPÍTULO 2 - REVISÃO BIBLIOGRÁFICA
2.1 Materiais Compósitos
Segundo a literatura, um material “composto”, ou “compósito” é definido como
o resultado da combinação de dois ou mais materiais distintos em suas propriedades
físicas. Trata-se de uma classe de um meio heterogêneo cujo objetivo é a obtenção de
um material que, combinando as características de seus componentes, apresente um
desempenho mecânico, acústico, térmico, etc, desejado (JONES, 1975).
Os materiais compósitos têm sido utilizados cada vez mais em substituição dos
materiais convencionais, devido à carência dos mesmos em atender às crescentes
exigências do mercado (FARO, 2008). De acordo com o tipo dos materiais constituintes
e dos processos de fabricação, há diferentes classificações de materiais compósitos, tais
como: Compósitos Fibrosos; Compósitos Particulados; Compósitos Laminados
(GIBSON, 1994).
Os Compósitos Laminados apresentam-se pela laminação de diferentes camadas,
de materiais distintos (como fibra de vidro, resinas, etc) a combinação destas diferentes
camadas resulta num material cujas características são melhoradas de acordo com a
expectativa de aplicação do mesmo (GIBSON, 1994). Nas indústrias aeronáutica, naval
ou petrolífera, algumas características são freqüentemente encontradas como: aumento
da resistência mecânica, durabilidade, resistência à corrosão, menor peso, maior
facilidade na instalação, etc (AMITECH, 2010).
Em geral muitos consideram que materiais compósitos são a última palavra em
tecnologia de materiais para uso aeronáutico (ZANATTA, 2010), por reunirem
especificamente duas propriedades de suma importância para este setor: baixo peso e
alta resistência. Existem vários métodos de fabricação de compósitos laminados, a
saber: (i) Laminação manual; (ii) Laminação a vácuo ; (iii) Métodos automatizados;
entre outros.
Na laminação manual, o método mais comum, consiste em banhar as fibras de
material escolhido com a matriz sobre um molde (esta matriz pode ser de alguma resina,
por exemplo epóxi) camada por camada, retirando o excesso de resina com uma
espátula e um rolo. Na laminação a vácuo o processo é semelhante, com a diferença que
o compósito é selado em uma bolsa plástica que por sua vez é conectada através de
tubos e válvulas, a uma bomba de vácuo. Neste processo existe uma maior compactação
da peça e assim, menos chances de formação de falhas internas. Nos processos

4
automáticos todo o processo automatizado tem temperatura e pressão controladas de
maneira a evitar que falhas internas ocorram. Este métodos de fato são os mais
utilizados pela indústria, embora não garantam que possam haver falhas nas junções
entre as resinas e as fibras. Um dos tipos de compósito mais comum é aquele formado
por estruturas em sanduíche. A idéia de sanduíche se deve ao fato de que um
componente apresenta duas camadas externas feitas, no caso, em laminados de
materiais compostos, e um núcleo, normalmente feito com alguma forma de espuma
expansível (poliestireno, poliuretano) ou o famoso “honeycomb”, ou “colméia”
(ZANATTA, 2010).
Algumas camadas constituintes de meios compósitos laminados são reforçadas
com fibras e outros materiais, que vistos microscopicamente são meios heterogêneos
(REDDY, 1997). Porém, espera-se tratar estas camadas neste trabalho como meios
homogêneos do ponto de vista macroscópico, ou seja, as propriedades em cada camada
do material não homogêneo serão analisadas através de seus valores efetivos. Ambos os
casos estão largamente analisados na literatura (ÖZIŞIK, 1993, MIKHAILOV e
ÖZIŞIK, 1984, COTTA, 1993), destaca-se que do ponto de vista macroscópico, o
tratamento dado para os compósitos laminados pode-se dar a qualquer material
composto, constituído por várias placas.
Conforme (DA SILVA, et al., 2008), através de um estudo comparativo das
propriedades mecânicas em flexão de um laminado hibrido e de dois outros laminados,
um apenas com fibras de vidro e um apenas com fibras de curauá, obteve-se um
resultado excelente para o novo laminado híbrido.
Segundo (CÂNDIDO, et al., 2000), a técnica de fabricação de laminados de
material pré-impregnado com bordas moldadas é uma opção interessante para a
industrialização da produção de compósitos poliméricos avançados por laminação a
vácuo e cura em autoclave, porque reduz custos de fabricação e não há perda de peças
por delaminação de borda devido ao corte. Entretanto, deve-se atentar para o fato de que
há uma predisposição para o surgimento de bolsas de resina no material. Portanto é
preciso que seja escolhida uma seqüência de empilhamento que não favoreça tal
desvantagem.
Existem inúmeras razões para o surgimento de falhas em compósitos laminados.
As mais comuns são: danos provenientes do processo de fabricação e presença de
tensões internas entre as camadas do compósito ou nas fibras que estas contêm em sua
construção (LIU, 1988). Desta forma, uma grande parte dos danos encontrados em

5
compósitos laminados estão presentes internamente no material e são observados
externamente apenas em situações extremas (MORAES, 1999).
Segundo a literatura (SCHÖNTAG, 2009), encontram-se diferentes
classificações para os tipos de danos em materiais compósitos laminados, de maneira
geral os principais termos são: “delaminations” ou “disbonds”, “ debonds” e “kissing
bonds”.
Delaminação (delamination) ou disbonds refere-sem ao descolamento de uma
lâmina ou uma parte de uma lâmina que compõe o material compósito laminado,
debonds é o termo utilizado quando esta falha ocorre numa região onde já havia sido
realizado um reparo, e finalmente kissing bonds é o termo utilizado para falhas
ocorridas por falta de material aderente entre as interfaces (SCHÖNTAG, 2009).
Entretanto existem inúmeras outras nomenclaturas utilizadas para diferentes casos de
falhas em compósitos laminados, cita-se aqui apenas os mais utilizados e comuns.
Neste contexto, conclui-se que é de grande importância conhecer, quantificar e
qualificar estas falhas internas na indústria como as delaminações internas, devido às
diversas aplicações envolvendo grandes custos, transporte de materiais com alto risco
para o meio ambiente (como na indústria petrolífera) e outros. Para detectar falhas em
compósitos laminados, existem diversos métodos dentre os quais destacam-se os
ensaios não-destrutivos (END), de grande interesse no mercado, entre eles: Exames
ultrasonografia do tipo “C-Scanning”, de radiografia, inspeção visual, exame por
transmissão de luz, microscopia, termografia de infravermelho, (MORAES, 1999).
De acordo com (FRANCO, et al., 2006), a caracterização de fraturas de
laminados de tecidos de fibras de vidro-epoxi , através de técnicas de investigação e
análise de falhas, permite estabelecer o início da falha e qual a seqüência de falhas no
laminado. Através do ensaio de cisalhamento interlaminar, observaram-se múltiplos
cisalhamentos, além de cisalhamento intralaminar nos compósitos analisados. A
microscopia eletrônica de varredura não pode determinar a direção ou modo da falha.
De acordo com (SCHÖNTAG, 2009), existem muitos métodos para adetecção
de falhas em compósitos laminados, através de diversos tipos de END’s, entretanto
poucos são eficientes aos detectar delaminações. Em seu trabalho (SCHÖNTAG, 2009)
propos um estudo para caracterizar a profundidade em que se localizam defeitos
internos em materiais compósitos, apresentando um estudo sobre shearografia associado
ao carregamento vibracional.

6
Segundo (HUNG, et al., 2007), existe a possibilidade de detectar profundidade
da falha de maneira inversa, quando é conhecida a temperatura do material e as
propriedades do mesmo (o que é proposto neste trabalho). Entretanto, encontrou-se
nesta pesquisa apenas a metodologia direta, onde aplica-se calor uniformemente sobre a
superfície do material a ser avaliado e monitora-se as alterações na distribuição de
temperaturas por um determinado período de tempo (SKF, 2011, JARRETA NETO,
2009, PREDMESKY e ZALUZEC, 2000).
Nestes métodos diretos, aplica-se uma fonte uniforme de calor numa superfície e
a utilizando uma câmera termográfica monitora-se a mesma, desta forma, quando uma
estrutura está livre de falhas, a distribuição de temperaturas não muda conforme a
superfície se aquece e se resfria, mas permanece uniforme. Entretanto, as áreas com
falha se aquecem mais em comparação com áreas bem coladas, devido à um baixo
coeficiente de troca térmica de contato entre estes materiais. Nestas abordagens, a
região superficial onde existe falha é determinada, mas a profundidade onde esta falha
ocorre não é mensurada, diferente do que ocorre na abordagem através do problema
inverso (SKF, 2011). Assim de maneira simplificada, conhecer a profundidade onde a
falha se encontra significa determinar a posição exata onde a mesma ocorre e assim
todas as suas dimensões.
2.2 Solução de Problemas de Condução de Calor
Soluções analíticas para problemas de difusão de calor, inclusive em meios
compostos, são encontradas na literatura (ÖZIŞIK, 1993) para diversos casos de
equações diferenciais parciais (homogêneas e não homogêneas) que regem estes
problemas, utilizando para isto as técnicas de separação de variáveis e a Técnica da
Transformada Integral Clássica (CITT).
Foram obtidas soluções para o caso composto por um único material para
diversas classes de problemas, com modelos transientes uni, bi e tridimensionais com
condições de contorno homogêneas e não-homogêneas (ÖZIŞIK, 1993), inclusive para
alguns casos onde o meio é considerado heterogêneo e suas propriedades termofísicas
variam em seu interior.
Foram obtidas ainda (ÖZIŞIK, 1993) soluções para meios compostos por várias
camadas, de materiais diferentes, cujas propriedades são constantes dentro de cada uma
destas (abordagem a ser utilizada aqui para o problema de difusão de calor em
compósitos laminados). Entretanto, para este caso, as soluções devido à complexidade

7
do mesmo são mais restritas, sendo encontradas soluções apenas unidimensionais, com
a existência de uma resistência de contato constante ou problemas tridimensionais onde
considerou-se a hipótese de contato térmico perfeito.
Em princípio, não foram encontrados na literatura soluções analíticas
envolvendo um problema tridimensional que se considerasse uma resistência térmica de
contato entre os meios, que pudesse variar espacialmente. Esta suposição é essencial
para a formulação do problema direto que se pretende resolver aqui, para a análise de
falhas em compósitos laminados.
Soluções analíticas para problemas de difusão de calor estão compiladas
considerando sete classes de formulações (MIKHAILOV e ÖZIŞIK, 1984). As soluções
obtidas para os materiais compostos são considerados como um caso especial do
problema de classe II, definido e solucionado por (MIKHAILOV e ÖZIŞIK, 1984).
Nestes casos existe a necessidade da solução de um problema de autovalor associado e
de uma busca por seus autovalores. Este trabalho é de grande complexidade, pois
envolve equações transcendentais que dificultam muito a busca por estes autovalores
(COTTA, 1993). Nestes casos precisa-se de uma técnica mais acurada para encontrar
estes autovalores, como a contagem de sinais ou a Transformada Integral Generalizada
(COTTA, 1993), que constitui um avanço na solução de problemas de Sturm-Liouville.
A técnica por trás da solução utilizando contagem de sinais para a determinação
destes autovalores foi expandida e encontram-se na literatura alguns tópicos sobre este
assunto (COTTA e NOGUEIRA, 1988, MULHOLLAND e COBBLE, 1972).
A técnica da Transformada Integral Clássica posteriormente foi acrescida de
uma abordagem híbrida dando origem à Técnica da Transformada Integral Generalizada
(GITT), oferecendo assim a possibilidade de resolver problemas antes tratados como
não transformáveis através de uma abordagem numérico-analítica (COTTA, 1993).
Problemas de autovalor envolvendo meios heterogêneos, com propriedades internas do
meio variáveis , foram resolvidos, (NAVEIRA COTTA, 2009), inclusive expandindo as
propriedades termofísicas do meio em autofunções, permitindo uma abordagem
totalmente analítica do sistema transformado.
Soluções puramente numéricas são encontradas na literatura para casos
envolvendo transferência de calor tridimensional ou em meios compostos. Observou-se
que o custo computacional destas técnicas é alto (WANG, et al., 2003), mesmo quando
são usadas técnicas relativamente modernas (Método ADI-3D). Tal custo
computacional torna difícil a solução do problema inverso através do método MCMC

8
(KAIPIO e SOMERSALO, 2004), o qual necessita da solução do problema direto
milhares de vezes durante sua execução.
2.3 Problemas Inversos em Transferência de Calor
Nos problemas diretos, tradicionalmente conhecidos, as causas são dadas e os
efeitos das mesmas são determinados. Por outro lado nos problemas inversos os efeitos
(como distribuição de temperaturas numa placa) são dados, e as causas são estimadas
(ÖZIŞIK e ORLANDE, 2000).
Problemas inversos são encontrados em diversas áreas da ciência e engenharia.
Cientistas e engenheiros de diversas áreas, assim como físicos matemáticos etc estão
interessados em solucionar problemas inversos por diferentes razões (ÖZIŞIK, 1993).
Este trabalho está focado na solução de um problema inverso em condução de
calor (Inverse heat Conduction Problems - IHCP) com o objetivo de utilizar os
resultados para determinar qualitativamente falhas em compósitos laminados. Como já
foi dito anteriormente, a solução particular deste problema inverso é de grande interesse
para as indústrias de materiais, petrolífera, aeroespacial, entre outras.
Existem diversas obras literárias sobre problemas inversos em transferência de
calor, destacam-se inicialmente alguns trabalhos pioneiros, os quais venceram as
primeiras grandes dificuldades impostas pela instabilidade e caráter mal posto típico
desta classe de problemas. Entre os cientistas pioneiros pode-se citar: A. N. Tikhonov,
O.M. Alifanov e J. V. Beck (ÖZIŞIK e ORLANDE, 2000).
Os conceitos fundamentais sobre IHCP podem ser encontrados em (ÖZIŞIK e
ORLANDE, 2000), juntamente com quatro técnicas de solução de problemas inversos
em transferência de Calor, tanto para estimativa de parâmetros como para estimativa de
funções. Além de soluções de interesse prático na engenharia envolvendo problemas de
condução, convecção e radiação.
2.4 Problema Inverso via Inferência Bayesiana
Na abordagem estatística Bayesiana tenta-se utilizar toda a informação
disponível a priori a fim reduzir a quantidade de incerteza em um problema. Ou seja,
enquanto a informação nova é obtida, nela está combinada toda a informação
precedente, dando a base para procedimentos estatísticos. O mecanismo formal usado
para combinar a informação nova com a informação previamente disponível é

9
conhecido como o teorema de Bayes (WINKLER, 2003, PLETCHER e ANDERSON,
1997).
O algoritmo de Metropolis-Hastings é um dos Métodos MCMC (KAIPIO e
SOMERSALO, 2004). A cadeia de Markov é um caso particular de um processo
estocástico com estados discretos e apresenta a propriedade Markoviana (uma
homenagem ao matemático Andrei A. Markov). Esta propriedade, também chamada de
memória Markoviana, define que os estados anteriores são irrelevantes para a predição
dos estados seguintes, desde que o estado atual seja conhecido. Desta forma o processo
Markoviano depende apenas do estado atual (ORLANDE, 2009).
Técnicas Bayesianas foram utilizadas para identificar simultaneamente a
condutividade térmica, a capacidade térmica e um fluxo de calor, num problema inverso
unidimensional não-linear de transferência de calor. Utilizou-se para isto o algoritmo
Metropolis-Hastings, citado anteriormente (MOTA, et al., 2008).
Dois filtros Bayesianos foram utilizados, um linear e outro não-linear, com
sucesso para estimar o perfil transiente de temperaturas num problema de transferência
de calor linear e em outro não-linear. Especificamente os filtros utilizados foram os
Filtro de Kalman e Filtro de Partículas (ORLANDE, et al., 2008).
Na identificação de propriedades e parâmetros termofísicos variáveis, utilizando
técnicas bayesianas de estimativa de parâmetros e funções, a utilização da técnica de
termografia por infravermelho é de grande interesse, fornecendo uma quantidade
representativa de medidas, tanto no espaço quanto no tempo, criando assim novos
horizontes na análise da condução de calor em meios heterogêneos (FUDYM, 2006 ,
FUDYM, et al., 2007].
A técnica da transformada integral generalizada (GITT) foi aplicada na análise dos
problemas direto e inverso de condução de calor em meios heterogêneos, incluindo uma
abordagem inovadora de análise inversa no campo transformado, realizando a
transformação integral dos dados experimentais (NAVEIRA COTTA, et al., 2009).
10
CAPÍTULO 3 - PROBLEMA FÍSICO
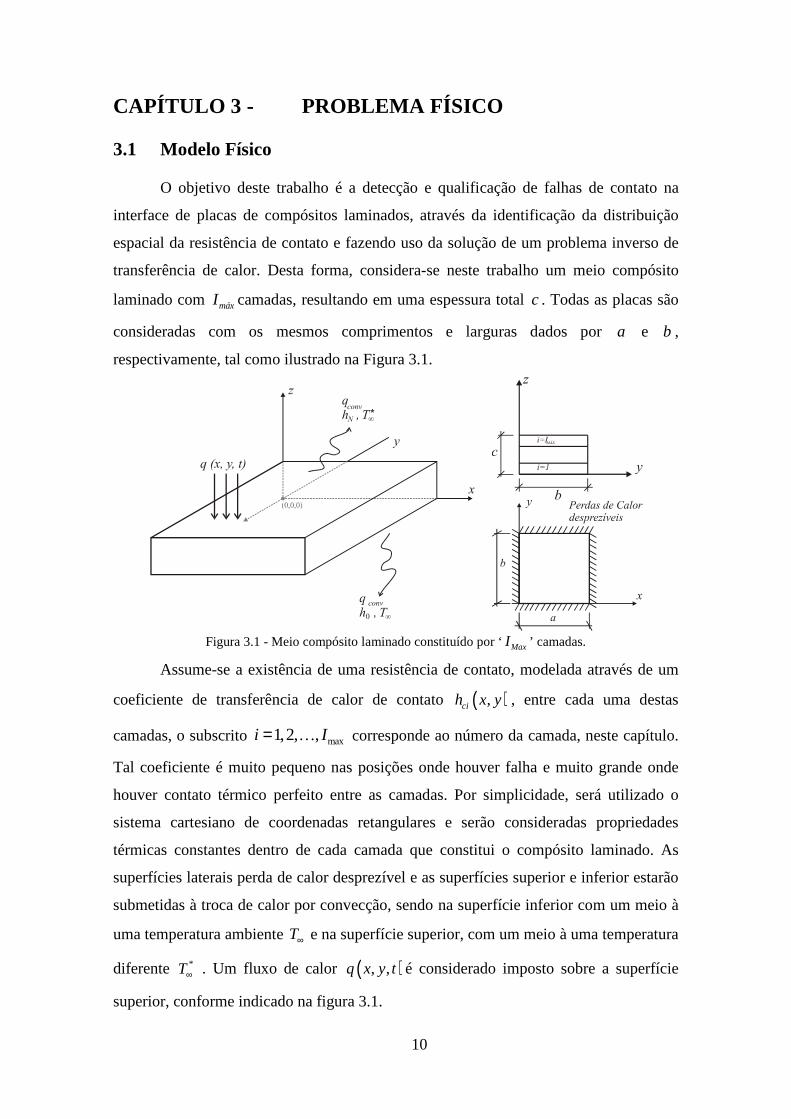
3.1 Modelo Físico
O objetivo deste trabalho é a detecção e qualificação de falhas de contato na
interface de placas de compósitos laminados, através da identificação da distribuição
espacial da resistência de contato e fazendo uso da solução de um problema inverso de
transferência de calor. Desta forma, considera-se neste trabalho um meio compósito
laminado com máxI camadas, resultando em uma espessura total c . Todas as placas são
consideradas com os mesmos comprimentos e larguras dados por a e b ,
respectivamente, tal como ilustrado na Figura 3.1.
Figura 3.1 - Meio compósito laminado constituído por ‘ MaxI ’ camadas.
Assume-se a existência de uma resistência de contato, modelada através de um
coeficiente de transferência de calor de contato ( ),cih x y , entre cada uma destas
camadas, o subscrito max1,2, ,i I= … corresponde ao número da camada, neste capítulo.
Tal coeficiente é muito pequeno nas posições onde houver falha e muito grande onde
houver contato térmico perfeito entre as camadas. Por simplicidade, será utilizado o
sistema cartesiano de coordenadas retangulares e serão consideradas propriedades
térmicas constantes dentro de cada camada que constitui o compósito laminado. As
superfícies laterais perda de calor desprezível e as superfícies superior e inferior estarão
submetidas à troca de calor por convecção, sendo na superfície inferior com um meio à
uma temperatura ambiente T∞ e na superfície superior, com um meio à uma temperatura
diferente *T∞ . Um fluxo de calor ( ), ,q x y t é considerado imposto sobre a superfície
superior, conforme indicado na figura 3.1.

11
3.2 Formulação Matemática Geral
A equação de condução de calor para o caso tridimensional transiente com
multicamadas pode ser escrita para as regiões 0 x a< < ,0 y b< < e 1i iz z z− < < , para
um tempo 0t > , da seguinte forma, (ÖZIŞIK, 1993).
( ) ( ) ( ) ( )2 2 2
2 2 2
, , , , , , , , , , ,1 ,i i i i
i
T T T T
t x y z
x y z t x y z t x y z t x y z t
α∂ ∂ ∂ ∂
= + +∂ ∂ ∂ ∂
(3.1)
onde neste capítulo o subscrito max1,2, ,i I= … corresponde ao número da camada e iα
corresponde a difusividade térmica do material ‘i ’.
A condição de contorno em 0 0z z= = para 0 x a< < ,0 y b< < e 0t > pode ser
escrita como:
( ) ( )1
0 11 0
, , ,, , ,
Th
x y z tk x y z t hT
zT∞− =
∂+
∂ (3.2)
onde ( )k corresponde a condutividade térmica nas diferentes camadas e ( )h é o
coeficiente de troca térmica, nos índices 0 e máxI entre os meios fluidos e as superfícies
inferior e superior do compósito, os demais índices referem-se ao coeficiente de troca
térmica entre as placas, cih .
Na interface entre as placas, para 0 x a< < ,0 y b< < , iz z= , para 0t > e
considerando ( )max1,2, , 1i I= −… escrevemos:
( ) ( )
( ) ( ) ( ) ( )
1
1
1
, , , , , ,
, , ,, , , , ,, ,
i i
ici i i
i i
i
T T
z zT
h x y T
x y z t x y z tk k
x y z tk x y z T
zt x y z t
++
+
=
−
∂ ∂∂ ∂
∂=
∂
(3.3)

12
No contorno em maxIz z c= = para0 x a< < , 0 y b< < e 0t > temos:
( ) ( ) ( )max
max max max max
*, , ,
, , , , ,II I I I
x y z tThk x y z t h T q
zy tT x∞
∂+ = +
∂ (3.4)
Nos contornos 0x = , x a= e 0 y b≤ ≤ para 0 z c< < e 0t > considerou-se a
hipótese de perda de calor desprezível, ou seja:
( ), , ,
0iT x y x t
x
∂=
∂ (3.5)
Da mesma maneira, nos contornos 0y = , y b= e0 x a≤ ≤ para 0 z c< < e 0t >
considerou-se a hipótese de perda de calor desprezível, ou seja:
( ), , ,
0iT x y x t
y
∂=
∂ (3.6)
Considerando a condição inicial para 0 x a< < ,0 y b< < ,0 z c< < , para 0t =
como temperatura uniforme, dada pela temperatura do meio em contato com a
superfície superior da placa, isto é,
( )
max
*,
1,
,
2, ,
,i x y z t T TT
i I∞
== =
… (3.7)
onde *T é a temperatura inicial do compósito laminado.
3.3 Formulação Matemática Adimensional
Utilizando os seguintes grupos adimensionais:
( )
( ) ( )
* *
* * *
* *
2
; ; ; ;
; ; ; ; ;
,; , ;
ref i iref i i
ref ref ref
ref cici
ref
k T T kT T qq q k
c q kT T
yx z a bX Y Z A B
c c c c ct h X Y c
Bi X Ykc
αθ α
α
ατ
∞∞
∞
−−= = = = =
−
= = = = =
= =
(3.8)

13
onde o subscrito ref indica que são parâmetros de referência, estes serão definidos
numericamente na apresentação dos resultados, os sobrescritos * indicam propriedades
ou parâmetros adimensionais.
Com estes grupos adimensionais pode-se reescrever as equações (3.1) até (3.7),
inicialmente em 0 X A< < ,0 Y B< < , 1i iZ Z Z− < < , para 0τ > e considerando
max1,2, ,i I= … :
( ) ( ) ( ) ( )2 2 2
* 2 2 2
, , , , , , , , , , , ,1 i i i i
i
X Y Z X Y Z X Y Z X Y
Z
Z
X Y
τ τ τθ τθ θ θα τ
∂ ∂ ∂ ∂= + +
∂ ∂ ∂ ∂ (3.9)
no contorno 0 0Z Z= = para 0 Z A< < ,0 Y B< < e 0τ > :
( ) ( )1*
1 0 1
, , ,, , , 0k Bi
Z
X Y ZX Y Z
θθ
ττ
∂− + =
∂ (3.10)
na interface entre as placas, para 0 X A< < ,0 Y B< < , iZ Z= , para 0τ > e
considerando ( )max1,2, , 1i I= −… :
( ) ( )
( ) ( ) ( ) ( )
1* *1
*1
, , , , , ,
, , ,, , , , ,, ,
i ii i
ii ci i i
X Y Z X Y Z
X Y Z
k kZ Z
k Bi X Y X Y Z X Y ZZ
τ τθ θ
θθ τθ
ττ
++
+
=
∂ ∂ ∂ ∂
∂ = − ∂
(3.11)
no contorno em max
1IZ Z= = para 0 X A< < , 0 Y B< < e 0τ > :
( )max
max max max max
* * *, ,II I I Ik Bi q X Y Bi
Z
θθ τ θ∞
∂+ = +
∂ (3.12)
onde ** * *
* *
1T T
T
T
T T T
Tθ ∞ ∞∞
∞ ∞
∞
∞
∞= =−− = −
−−

14
nos contornos 0X = , X A= e 0 Y B≤ ≤ :
( ), , ,
0i X Y Z
X
θ τ∂=
∂ (3.13)
nos contornos 0Y = , Y B= e 0 X A≤ ≤ :
( ), , ,
0i X Y Z
Y
θ τ∂=
∂ (3.14)
considerando a condição inicial para 0 X A< < ,0 Y B< < ,0 1Z< < , para 0τ = e
considerando max1,2, ,i I= …
*
**
* * *0i
TT T T
T T T Tθ θ ∞ ∞ ∞
∞ ∞
−− −
−= = = = (3.15)
3.4 Formulação Matemática particular com duas camadas
Nesta seção, particulariza-se a formulação geral dada pelas equações (3.9-3.15)
para o caso envolvendo apenas duas camadas, o qual será abordado neste estudo. O
subscrito i deixará de ser necessário para representar as diferentes camadas do material
compósito, desta maneira será reutilizado daqui para frente para representar os
autovalores na direçãoX . Para 0 X A< < ,0 Y B< < e 0τ > temos:
2 2 21 1 1 1
* 2 2 21
2 2 22 2 2 2
* 2 2 22
1
Para 0 11
X Y ZZ
X Y Z
θ θ θ θα τ
θ θ θ θα τ
∂ ∂ ∂ ∂= + + ∂ ∂ ∂ ∂ < <∂ ∂ ∂ ∂ = + +
∂ ∂ ∂ ∂
(3.16)
Lembrando que ( )* *, ,q X Y qτ = , ( )1 1, , ,X Y Z τθ θ= e ( )2 2, , ,X Y Z τθ θ= no
contorno 0 0Z Z= = para 0 Z A< < ,0 Y B< < e 0τ >
* 11 0 1 0k Bi
Z
θ θ+− ∂ =∂
(3.17)

15
na interface entre as placas, para 0 X A< < ,0 Y B< < , cZ Z= , para 0τ > :
( )[ ]
* *1 21 2
* 11 2 1,c
k kZ Z
k Bi X YZ
θ θ
θ θ θ
∂ ∂ ∂ ∂ ∂
=
= − ∂
(3.18)
no contorno em max
1IZ Z= = para 0 X A< < , 0 Y B< < e 0τ > :
* * *22 2 2 2k Bi q Bi
Z
θ θ θ∞∂ + = +∂
(3.19)
nos contornos 0,X X A= = e0 Y B≤ ≤ :
( ) ( )1 2, , , , , ,
0X
X Y Z X Y
X
Zθ θτ τ∂ ∂=
∂=
∂ (3.20)
nos contornos 0,Y Y B= = e0 X A≤ ≤ :
( ) ( )2 1, ,
0, , , ,
Y
X Y Z X Y
Y
Zθ θτ τ∂ ∂∂
= =∂
(3.21)
para a condição inicial:
* *1 2 * * * *
*
0T T T
T T
T
T Tθ θ ∞ ∞ ∞
∞ ∞
= = = −−
− =−
(3.22)

16
CAPÍTULO 4 - SOLUÇÃO DO PROBLEMA DIRETO
Neste capítulo apresenta-se a técnica de solução do problema direto, envolvendo
a formulação do problema físico dado pelas equações (3.16-3.22). A partir deste
capítulo o subscrito i será utilizado para representar o índice dos diferentes autovalores
na direção adimensional X.
Para o problema direto, são consideradas conhecidas a geometria das placas, as
propriedades termofísicas do meio, as condições de contorno e as condições iniciais. O
objetivo do problema direto é determinar o campo de temperaturas nas placas. A
solução do problema direto é obtida aqui utilizando-se um método híbrido, aplicando-se
a Transformada Integral Generalizada (GITT) (COTTA, 1993) nas direções
longitudinais da placa (direções X e Y) e diferenças finitas na direção transversal da
placa (direção z), conforme descrito a seguir.
4.1 Aplicando GITT nas Direções Longitudinais da Placa
Definindo um par, transformada-inversa, para X e Y (ÖZIŞIK, 1993, COTTA,
1993):
( ) ( )
( ) ( )0 0
0 0
, , , , , ,
, , , , , ,
A B
i j i j
X Y
i j i ji j
Z X Y Z dYdX
X Y Z Z
θ β γ τ ψ ϕ θ τ
θ τ ψ ϕ θ β γ τ
= =
∞ ∞
= =
=
=
∫ ∫
∑∑
ɶ
ɶ (4.1)
onde as autofunções normalizadas são definidas como:
, ,
jii j
i jN Nψ ϕ
ϕψψ ϕ= = (4.2)
e podem ser obtidas diretamente de (ÖZIŞIK, 1993), ou seja, solucionando os
problemas auxiliares:
( ) ( ) ( ) ( )2 2
2 22 2
0;0 0;0
0; 0 ; 0; 0
0; 0;
X YX X A Y Y B
X Y
X YX Y
X A Y BX Y
ψ ϕβ ψ γ ϕ
ψ ϕ
ψ ϕ
∂ ∂+ = < < + = < < ∂ ∂
∂ ∂ = = = = ∂ ∂ ∂ ∂ = = = = ∂ ∂
(4.3)

17
ou seja:
( )
( )
00 ,0 0
,0 ,0
,
, ,
1onde para 0
cosonde para 0
2ii
i i i
i i
N AN N
X AN
N N
ψψ ψ
ψψ ψ
ψψ β
βψψ β
= = = =
= = = ≠
(4.4)
e
( )
( )
00 ,0 0
,0 ,0
,
, ,
1onde = para 0
cosonde para 0
2jj
j j j
j j
N BN N
Y BN
N N
ϕϕ ϕ
ϕϕ ϕ
ϕϕ γ
γϕϕ γ
= = =
= = = ≠
(4.5)
onde ( ) ( ) 2
,
0
,A
i i iN X dXψ β ψ β= ∫ e ( ) ( ) 2
, ,
0
,B
j j j jN N Y dYϕ ϕγ γ = ∫ . Os autovalores iβ
e jγ são as raízes positivas das equações transcendentais
( )00 0
sin 0 0i iA
ββ β
= = ≠
(4.6)
( )00 0
sin 0 0j jB
γγ γ
= = ≠
(4.7)
operando com 0 0
_A B
i j
X Y
dYdXψ ϕ= =∫ ∫ as equações (3.16-3.22) que governam o problema
com duas camadas, podemos reescrevê-las da seguinte forma:
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
21 1 2 2
1* 21
22 2 2 2
2* 22
, , , , , ,1, , ,
, , , , , ,1, , ,
i j i j
i j i j
i j i j
i j i j
Z ZZ
Z
Z ZZ
Z
θ β γ τ θ β γ τβ γ θ β γ τ
α τ
θ β γ τ θ β γ τβ γ θ β γ τ
α τ
∂ ∂= − +
∂ ∂
∂ ∂= − +
∂ ∂
ɶ ɶɶ
ɶ ɶɶ
(4.8)
no contorno 0 0Z Z= = para 0 Z A< < ,0 Y B< < e 0τ > :
( ) ( )1*
1 0 1
, , ,, , , 0
i j
i j
Zk Bi Z
Z
θ β γ τθ β γ τ+
∂−
∂=
ɶɶ (4.9)
18
no contorno em 1NZ Z= = para 0 X A< < , 0 Y B< < e 0τ > :
( ) ( ) ( )2*
2 2 2
, , ,, , , ,
i j
i j
Zk Bi Z d i j
Z
θ β γ τθ β γ τ
∂+ =
∂
ɶɶɶ (4.10)
onde ( ) ( )* *2
0 0 0 0
, , ,A B A B
i j i j
X Y X Y
d i j q X Y dYdX Bi dYdXτ ψ ϕ θ ψ ϕ∞= = = =
= +∫ ∫ ∫ ∫ɶ e deve ser calculado
considerando que e i jψ ϕ são diferentes para ( )0 e 0i i= ≠ e ( )0 e 0j j= ≠ .
Serão considerados dois casos particulares para a função ( )* , ,q X Y τ , a primeira
delas considera que a função é constante igual a constq em todo o tempo e uniforme em
toda a superfície da placa. O segundo caso considera que esta função será constante no
tempo, dada por constq e uniforme somente nas posições entre 10 X A≤ ≤ e 10 Y B≤ ≤ ,
sendo nula fora desta região. As posições intermediárias 1A e 2B são definidas da
seguinte maneira: 10 A A< < e 10 B B< < .
Desta forma, no primeiro caso, as integrais existentes em ( ) ,d i jɶ que compõe o
sistema que soluciona ( )1 , , ,m u Zθ β γ τɶ e em ( )2 , , ,m u Zθ β γ τɶ podem ser calculadas
analiticamente para ( 0, 0)i j= = , ( 0, 0)i j= ≠ , ( 0, 0)i j≠ = e ( 0, 0)i j≠ ≠
respectivamente da seguinte forma:
( )
( )( )
( ) ( )( )
*0 0 2
0 0
*
0 0
*2
2
*
0
2
0
( , )
( , )
(
2 sin( )( )
2 sin
2sin si
,
,n
)
( )
i j const
consti j
const
i j
j
j
i
i
i j
i j
const
i j
A
d A B q B
B Bi
B
i
qd
qd
B A Bi
A
A B Bi
A
q
Bd
β γ θ
β γγ θ
γ
ββ
β
θβ γ
θβ γ
γβ γ
= = ∞
= ≠
∞≠ =
∞≠ ≠
∞ +
+
= +
=
=
=+
ɶ
ɶ
ɶ
ɶ
(4.11)
Similarmente, as integrais existentes em ( ) ,d i jɶ podem ser calculadas para o
segundo caso, onde as integrais podem ser calculadas analiticamente reescrevendo-as da
seguinte forma: ( ) ( )1 1
* *2
0 0 0 0
, , ,A B A B
i j i j
X Y X Y
d i j q X Y dYdX Bi dYdXτ ψ ϕ θ ψ ϕ∞= = = =
= +∫ ∫ ∫ ∫ɶ .

19
Como pode ser visto neste caso a integração é realizada apenas onde o fluxo de
calor é imposto. Assim o termo transformado ( ) ,d i jɶ para este caso é escrito como:
( ) ( )( )
( ) ( )( )
( ) ( ) ( ) ( )( )
2*
0 0
0 0
*
0 0
*
0 0
1 1
*2 1 1
2 1 1
2 1 1
( , )
( , )
( , )
2 sin sin
2 sin sin
2 sin sin sin si, )
n(
j j
consti j
const
i j
const
i j
co
j
i i
i
i j i j
i
st
i
j
n
j
Bi AB A B
A B
ABi B A B
A B
BBi A B A
A B
Bi A B A B
qd
qd
qd
q
Bd
A
θβ γ
β γ
θβ
θ γ γ
γ
β ββ
β γ β γ
γ
ββ γ
θγ
∞
∞= =
= ≠
∞≠ =
∞≠ ≠
= +
+
+
+
=
=
=
ɶ
ɶ
ɶ
ɶ
(4.12)
Para a condição inicial, onde a aplicação da transformada é zero:
* *1 2 0θ θ= =ɶ ɶ (4.13)
Finalmente na interface entre as placas, para 0 X A< < ,0 Y B< < , iZ Z= , para
0τ > serão consideradas as equações:
( ) ( )
( ) ( )[ ]
1 2* *1 2
1,( , )*1 2 1
0 0
, , , , , ,
, , ,,
i j i j
A Bi j i j
i j c
X Y
Z Zk k
Z Z
Zk Bi X Y dYdX
Z
θ β γ τ θ β γ τ
θ β γ τψ ϕ θ θ
= =
∂ ∂
∂ ∂
∂
∂
=
= −∫ ∫
ɶ ɶ
ɶ (4.14)
Para transformar o termo do lado direito da equação (4.14) deve-se lembrar que
1θ e 2θ podem ser escritas, usando as fórmulas da inversa (equações (4.1)) como:
( ) ( )
( ) ( )
1 10 0
2 20 0
, , , , , ,
, , , , , ,
m u m um u
m u m um u
X Y Z Z
X Y Z Z
θ τ ψ ϕ θ β γ τ
θ τ ψ ϕ θ β γ τ
∞ ∞
= =
∞ ∞
= =
=
=
∑∑
∑∑
ɶ
ɶ (4.15)

20
Substituindo as equações (4.15) na equação (4.14) obtêm-se a equação na
interface entre as placas como:
( )1,( , )*1 2,( , ) 1,( , )
0 0
, , ,i jm u m u
m u
k A i j m uZ
θθ θ
∞ ∞
= =
∂ = − ∂ ∑∑
ɶɶ ɶ (4.16)
Onde:
( ) ( )0 0
, , , ,A B
i m j u c
X Y
A i j m u Bi X Y dYdXψ ψ ϕ ϕ= =
= ∫ ∫ (4.17)
Assim como no cálculo de dɶ , serão consideradas duas possibilidades para a
função ( ),cBi X Y , na primeira ela será considerada constante na posição e no segundo
caso (de interesse para este trabalho) ela será considerada dependente da posição em X e
Y. Para os casos onde o ( ),cBi X Y const= pode-se utilizar a propriedade de
ortogonalidade, desta forma pode-se escrever:
( )
{ {0 0
0, 0,1, 1,
, , ,A B
c i m j u
X Y
i m j ui m j u
A i j m u Bi dX dYψ ψ ϕ ϕ= =
≠ ≠= =
= ∫ ∫����������
(4.18)
( ) 0 , para i m ou , , ,
, para ou c
j uA i j m u
Bi i m j u
≠ ≠= = =
(4.19)
Neste trabalho as integrais com Biot variando superficialmente, ( ),cBi X Y ,
serão obtidas realizando a integração da equação (4.17) através de métodos numéricos,
uma vez que a função ( ),cBi X Y será estimada através da solução do problema inverso
conforme descrito no capítulo 5.
Especificamente no problema direto, a integral poderia ser calculada inclusive
analiticamente, uma vez que a função ( ),cBi X Y seria conhecida. Porém optou-se por
métodos numéricos, devido ao fato de que no problema inverso esta função ( ),cBi X Y
será desconhecida e serão obtidas estimativas para a mesma em pontos discretos de uma
malha computacional em X e Y. Utilizou-se então aproximações por Cubic Splines
(CONTE e DE BOOR, 1980) para fazer o cálculo destas integrais.

21
Optou-se neste trabalho ainda por não utilizar a técnica da transformada integral
generalizada também na direção Z devido à grande dificuldade em encontrar os
autovalores associados às soluções obtidas com este método. Como existe uma variação
espacial do ( ),cBi X Y seria necessário que a técnica de contagem de sinais fosse
expandida para este caso.
Os autovalores necessitam de uma técnica específica (contagem de sinais) para
serem encontrados devido à grande complexidade das autofunções e com isto a
ocorrência de autovalores em freqüências e amplitudes com variações muito bruscas.
Exigindo que o método de detecção das raízes das autofunções seja muito refinado e
desta forma demore um tempo computacional excessivo.
Desta forma, o termo ( ), , ,i j Zθ β γ τɶ será resolvido numericamente utilizando o
método de diferenças finitas, conforme descrito a seguir.
4.2 Aplicando Diferenças Finitas na Direção Transversal da Placa
Considerando o método implícito de diferenças finitas as equações governantes
transformadas (equações 4.8) podem ser reescritas na forma para 0 X A< < ,0 Y B< < e
para a posição discretizada 0 fk K< < (ver figura 4.1) (PLETCHER e ANDERSON,
1997) para um tempo discretizado 0n> .
( ) ( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( ) ( )
1 1 1 11, , , 1, , , 1, , , 1 1, , , 1, , , 1 2 2 1
1, , ,* 21 1
1 1 1 12, , , 2, , , 2, , , 1 2, , , 2, , , 1 2 2 1
2, , ,* 22 2
21
21
n n n n ni j k i j k i j k i j k i j k n
i j i j k
n n n n ni j k i j k i j k i j k i j k n
i j i j k
Z
Z
θ θ θ θ θβ γ θ
α τ
θ θ θ θ θβ γ θ
α τ
+ + + +− + +
+ + + +− + +
− − += − +
∆ ∆
− − += − +
∆ ∆
ɶ ɶ ɶ ɶ ɶɶ
ɶ ɶ ɶ ɶ ɶɶ
(4.20)
Onde o subscrito 1,0,..., , ...c c fk K K K+= , sendo cK e 1cK + as posições de interface
(como mostra a figura 4.1), e max0,1,...n N= o tempo discretizado. Foram considerados
na discretização a existência de quatro nós fictícios demonstrados na figura pela linha
pontilhada e pelo ‘ * ’. Podendo por simplicidade desprezar então o subscrito referente
ao material 1 e 2, uma vez que o nó discretizado já carrega esta informação.

22
Figura 4.1 - Discretização por diferenças finitas ao longo do eixo Z.
Reescrevendo a equação (4.20) em 0 X A< < ,0 Y B< < :
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
1 1 11 1 1, , , , 1 , , , , 1
1 1 12 2 2, , , , 1 , , , , 1
para 0 1
n n n ni j k i j k i j k i j k
n n n ni j k i j k i j k i j k
R S RZ
R S R
θ θ θ θ
θ θ θ θ
+ + +− +
+ + +− +
= − + − < <= − + −
ɶ ɶ ɶ ɶ
ɶ ɶ ɶ ɶ (4.21)
onde *1 1 2
1
RZ
τα ∆=∆
, *2 2 2
2
RZ
τα ∆=∆
, ( )* 2 21 1 1( , ) 2 1i jS i j R α τ β γ = + ∆ + + ,
( )* 2 22 2 2( , ) 2 1i jS i j R α τ β γ = + ∆ + +
Escrevendo a equação (4.20) para o nó 0k = obtém-se:
( ) ( ) ( ) ( )1 1 1
1 1 1, ,0 , , 1 , ,0 , ,1( , )n n n ni j i j i j i jR S i j Rθ θ θ θ+ + +
−= − + −ɶ ɶ ɶ ɶ (4.22)
onde o termo ( ) ( )*0
1 1, , 1 , ,
n ni j i j K
θ θ+ +− =ɶ ɶ é a temperatura obtida no nó fictício *
0K (Figura 4.1) obtido
a partir da discretização da condição de contorno em 0Z = , ou seja:
( ) ( ) ( ) ( )*0
1 1 1 11 0, , 1 , ,0 , ,1*, ,
1
2n n n ni j i j i ji j K
Z Bi
kθ θ θ θ+ + + +
−
∆= = − +ɶ ɶ ɶ ɶ (4.23)

23
Assim reescrevendo a equação (4.21) utilizando (4.22), a equação para o nó
0k = pode ser escrita como:
( ) ( ) ( )1 11 0
1 1 1, ,0 , ,0 , ,1*1
( , ) 2 2n n ni j i j i j
Z BiS i j R R
kθ θ θ+ + ∆= + −
ɶ ɶ ɶ (4.24)
Escrevendo a equação (4.20) para o nó fk K= obtém-se:
( ) ( ) ( ) ( )1 1 1
2 2 2, , , , 1 , , , , 1( , )
f f f f
n n n n
i j K i j K i j K i j KR S i j Rθ θ θ θ+ + +
− += − + −ɶ ɶ ɶ ɶ (4.25)
O termo ( ) ( )*
1 1, , 1 , ,c f
n ni j K i j K
θ θ+ ++ =ɶ ɶ é a temperatura obtida no nó fictício em *
fK , obtida pela
equação de contorno discretizada em 1Z = :
( ) ( ) ( ) ( ) ( )*
1 1 1 12 22* *, , 1 , , , , 1, ,
2 2
2 2,
f f ff
n n n n
i j K i j K i j Ki j K
Z Zd i j Bi
k kθ θ θ θ+ + + +
+ −
∆ ∆= = − +ɶɶ ɶ ɶ ɶ (4.26)
Podendo ser reescrita como:
( ) ( ) ( ) ( )1 12 22 2 2 2 2* *, , , , 1 , ,
2 2
2 ( , ) 2 2 ,f f f
n n n
i j K i j K i j K
Z ZR S i j R Bi R d i j
k kθ θ θ+ +
−
∆ ∆= − + + −
ɶɶ ɶ ɶ (4.27)
Para o primeiro nó de interface, pode-se escrever:
( ) ( ) ( ) ( )*
1 1 11 1 1, , , , 1 , , , , 1
( , )c c c c
n n n ni j K i j K i j K i j K
R S i j Rθ θ θ θ+ + +− +
= − + −ɶ ɶ ɶ ɶ (4.28)
O termo ( )*
1
, , 1c
n
i j Kθ +
+ɶ é obtido de uma das duas equações de contorno discretizadas,
em cZ Z= , note a utilização do nó fictício de interface *1cK + , assim pode-se escrever:
( ) ( ) ( ) ( ) ( )*
1 1 1 11, , 1 , , , , 1*, , 1
0 01
2, , ,
c c cc
n n n nm u K m u K i j Ki j K
m u
ZA i j m u
kθ θ θ θ
∞ ∞+ + + +
+ −+= =
∆ = − + ∑∑ɶ ɶ ɶ ɶ (4.29)

24
( ) ( ) ( ) ( ) ( ) ( )1 1 1 11
1 1 1, , , , 1 , , , , 1 , ,*0 01
2 ( , ) 2 , , ,c c c c c
n n n n ni j K i j K i j K m u K m u K
m u
ZR S i j R A i j m u
kθ θ θ θ θ
∞ ∞+ + + +
− += =
∆ = − + − − ∑∑ɶ ɶ ɶ ɶ ɶ (4.30)
Para o segundo nó da interface pode-se escrever:
( ) ( ) ( ) ( )*
1 1 12 2 2, , 1 , , 1 , , 2, ,
( , )c c cc
n n n ni j K i j K i j Ki j K
R S i j Rθ θ θ θ+ + ++ + += − + −ɶ ɶ ɶ ɶ (4.31)
O termo ( )*
1
, , c
n
i j Kθ +ɶ sai da manipulação algébrica das duas equações discretizadas do
contorno na interface, utilizando os nós de interface * 1cK + e *cK :
( ) ( ) ( ) ( ) ( )*
1 1 1 12, , 1 , , , , 2*, ,
0 02
2, , ,
c c cc
n n n nm u K m u K i j Ki j K
m u
ZA i j m u
kθ θ θ θ
∞ ∞+ + + +
+ += =
∆ = − − + ∑∑ɶ ɶ ɶ ɶ (4.32)
Desta forma a segunda equação discretizada na interface pode ser escrita como:
( ) ( ) ( ) ( ) ( ) ( )1 1 1 12
2 2 2, , 1 , , 1 , , , , 1 , , 2*0 02
2 , , , ( , ) 2c c c c c
n n n n ni j K m u K m u K i j K i j K
m u
ZR A i j m u S i j R
kθ θ θ θ θ
∞ ∞+ + + +
+ + + += =
∆ = − + − ∑∑ɶ ɶ ɶ ɶ ɶ (4.33)
Em resumo pode-se reescrever o problema (4.20) a (4.33) discretizado pelo
método de diferenças finitas na direção Z, como sendo:
( ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( )
1 11 01 1 1, ,0 , ,0 , ,1*
1
1 1 11 1 1, , , , 1 , , , , 1
1 1 111 1 1, , , , 1 , , , , 1 , ,*
1
( , ) 2 2
( , )
2 ( , ) 2 , , ,c c c c
n n ni j i j i j
n n n ni j k i j k i j k i j k
n n n ni j K i j K i j K m u K m u
Z BiS i j R R
k
R S i j R
ZR S i j R A i j m u
k
θ θ θ
θ θ θ θ
θ θ θ θ θ
+ +
+ + +− +
+ + +− +
∆= + −
= − + −
∆= − + − −
ɶ ɶ ɶ
ɶ ɶ ɶ ɶ
ɶ ɶ ɶ ɶ ɶ( )
( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
1
0 0
1 1 1 122 2 2, , 1 , , 1 , , , , 1 , , 2*
0 02
1 12 2 2, , , , 1 , , , , 1
2 , , , ( , ) 2
( , )
c
c c c c c
nK
m u
n n n n ni j K m u K m u K i j K i j K
m u
n n n ni j k i j k i j k i j k
ZR A i j m u S i j R
k
R S i j R
θ θ θ θ θ
θ θ θ θ
∞ ∞+
= =
∞ ∞+ + + +
+ + + += =
+ + +− +
∆ = − + −
= − + −
∑∑
∑∑ɶ ɶ ɶ ɶ ɶ
ɶ ɶ ɶ ɶ
( ) ( ) ( ) ( )
1
1 12 22 2 2 2 2* *, , , , 1 , ,
2 2
2 ( , ) 2 2 ,f f f
n n n
i j K i j K i j K
Z ZR S i j R Bi R d i j
k kθ θ θ+ +
−
∆ ∆= − + + −
ɶɶ ɶ ɶ
(4.34)

25
O sistema dado pelas equações (4.34) é resolvido para cada um dos índices i,j
resultantes da transformação integral nas direções X e Y, conforme detalhado acima na
seção 4.1. Este sistema é acoplado nas condições de contorno na interface cZ Z= , que
resulta nas equações discretizadas (4.34). A solução numérica deste sistema acoplado é
discutida abaixo.
4.3 Implementação Numérica
O sistema (4.34) foi resolvido numericamente em ambiente de programação
FORTRAN. Para isto, foi utilizado o método de Gauss-Seidel com SOR (successive
over relaxation), que é uma técnica utilizada comumente para acelerar a convergênca de
métodos iterativos de ponto fixo como o Gauss Seidel.(CONTE e DE BOOR, 1980).
Uma vez que o sistema esta discretizado e os nós de interface são ck K= e 1ck K= + ,
pode-se reescrever o sistema de equações (4.35) da seguinte forma:
( ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( )
1 1 1 01 1 1, ,0 , ,0 , ,1 *
1
1 1 11 1 1, , , , , , 1 , , 1
1 1 111 1, , , , , , 1 , , 1 , ,*
1
2 ( , ) 2
( , )
2 2 , , ,c c c c
n n ni j i j i j
n n n ni j k i j k i j k i j k
n n n ni j K i j K i j K m u K m u K
Z BiR S i j R
k
R R S i j
ZR R A i j m u
k
θ θ θ
θ θ θ θ
θ θ θ θ θ
+ +
+ + +− +
+ + +− +
∆ = + +
= + +
∆= + + −
ɶ ɶ ɶ
ɶ ɶ ɶ ɶ
ɶ ɶ ɶ ɶ ɶ( )
( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( )
11
0 0
1 1 1 122 2 2, , 1 , , 1 , , 1 , , , , 2*
0 02
1 12 2, , , , , , 1 , ,
( , )
2 , , , 2 ( , )
c
c c c c c
n
m u
n n n n ni j K i j K m u K m u K i j K
m u
n n ni j k i j k i j k i j k
S i j
ZR A i j m u R S i j
k
R R
θ θ θ θ θ
θ θ θ θ
∞ ∞+
= =
∞ ∞+ + + +
+ + + += =
+ +− +
∆ = − − +
= + +
∑∑
∑∑ɶ ɶ ɶ ɶ ɶ
ɶ ɶ ɶ ɶ( )
( ) ( ) ( ) ( )
121
1 1 2 22 2 2 2 2* *, , , , , , 1
2 2
( , )
2 2 , ( , ) 2f f f
n
n n n
i j K i j K i j K
S i j
Z ZR R d i j S i j R Bi
k kθ θ θ
+
+ +−
∆ ∆ = + + +
ɶɶ ɶ ɶ
(4.35)
Existem, portanto, dois nós de interface referentes às duas temperaturas
existentes no mesmo ponto, na posição cZ Z= , um para o material 1 e outro para 2
respectivamente.
Como pode ser observado, para a solução do problema é necessário que se saiba
a priori os valores de ( ) ( )1 1, , 1 , , e
c c
n nm u K m u Kθ θ+ +
+ɶ ɶ . Então a forma definida neste trabalho para
conseguir calcular as temperaturas a cada tempo foi considerando um método iterativo.

26
Assim obtêm-se ( ) ( )1 1
, , 1 , , e c c
n ni j K i j Kθ θ+ +
+ɶ ɶ ao final do processo iterativo do método de Gauss-
Seidel com SOR (CONTE e DE BOOR, 1980).
A solução final do problema é encontrada ao substituir os resultados obtidos
pelo método de diferenças finitas na fórmula da inversa, obtendo desta forma:
( ) ( )0 0
, , , , , ,i j i ji j
X Y Z Zθ τ ψ ϕ θ β γ τ∞ ∞
= =
=∑∑ ɶ (4.36)
Estes somatórios serão truncados num valor onde os resultados obtidos já
tenham convergido para uma solução estável, conforme será discutido no capítulo de
resultados.
4.4 Reordenando os autovalores
Visando aumentar a velocidade de convergência das séries representadas, nas
equação(4.1), diminuindo o tempo de CPU, utilizou-se ainda a técnica de
reordenamento dos autovalores obtidos nas equações (4.6) e (4.7) (CORREA, et
al.,1997). Assim, cada somatório duplo pode ser reescrito como um somatório simples,
desta forma, aplicando o reordenamento no sistema de equações (4.35):
( ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( )
1 1 1 01 1 1,0 ,0 ,1 *
1
1 1 11 1 1, , , 1 , 1
1 1 1 111 1, , , 1 , 1 ,*
01
2 ( ) 2
( )
2 2 ,c c c c c
n n nij ij ij
n n n nij k ij k ij k ij k
n n n n nij K ij K ij K mu K mu K
mu
Z BiR S ij R
k
R R S ij
ZR R A ij mu
k
θ θ θ
θ θ θ θ
θ θ θ θ θ
+ +
+ + +− +
∞+ + + +
− +=
∆ = + +
= + +
∆ = + + −
∑
ɶ ɶ ɶ
ɶ ɶ ɶ ɶ
ɶ ɶ ɶ ɶ ɶ
( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( )
1
1 1 1 122 2 2, 1 , 1 , 1 , , 2*
02
1 1 12 2 2, , , 1 , 1
12, ,
( )
2 , 2 ( )
( )
2
c c c c c
f f
n n n n nij K ij K mu K mu K ij K
mu
n n n nij k ij k ij k ij k
n n
ij K ij K
S ij
ZR A ij mu R S ij
k
R R S ij
R
θ θ θ θ θ
θ θ θ θ
θ θ
∞+ + + +
+ + + +=
+ + +− +
+
∆ = − − +
= + +
= +
∑ɶ ɶ ɶ ɶ ɶ
ɶ ɶ ɶ ɶ
ɶ ɶ( ) ( )1 2 2
2 2 2 2* *, 12 2
2 ( ) 2f
n
ij K
Z ZR d ij S ij R Bi
k kθ +
−
∆ ∆ + +
ɶɶ
(4.37)

27
onde: ( )*1 1 1( ) 2 1iS ij R α τ λ = + ∆ + e ( )*
2 2 2( ) 2 1iS ij R α τ λ = + ∆ + , 2 2ij i jλ β γ= + , os
subscritos i e j que representavam os índices dos autovalores nas direções X e Y,
passaram a ser representados por um único subscrito ij que representa o índice dos
autovalores reordenados em ijλ .
Utilizando esta técnica são utilizados os autovalores mais relevantes na obtenção
do resultado final (CORREA, et al., 1997). O resultado final pode ser escrito na forma:
( ) ( )0
, , , ( ) , ,ijij
X Y Z ij Zθ τ ψϕ θ λ τ∞
=
=∑ ɶ (4.38)
onde ( ) i jijψϕ ψ ϕ= e são obtidos conforme explicado no item 4.1.
Este somatório será truncado quando os valores obtidos para 510ijte
λ− −< ,
considerando então o somatório reescrito da seguinte maneira:
( ) ( )0
, , , ( ) , ,IJF
ijij
X Y Z ij Zθ τ ψϕ θ λ τ=
=∑ ɶ (4.39)
Onde IJF será o número máximo de termos da série.

28
CAPÍTULO 5 - PROBLEMA INVERSO
5.1 Formulação do problema inverso
No problema inverso, devido à complexidade do problema direto e ao objetivo
principal deste trabalho de analisar e qualificar falhas em compósitos laminados, optou-
se inicialmente em estimar apenas o coeficiente de troca térmica no contato entre as
placas, ( ),ch x y .
Assumiu-se que as propriedades de cada material que compõe este compósito
são conhecidas deterministicamente, assim como o fluxo de calor imposto, as
temperaturas *T∞ e T∞ , os coeficientes de troca térmica 0h e Nh e as dimensões da placa
a , b , e c . A estimativa destes parâmetros também pode ser considerada na solução do
problema inverso em trabalhos futuros, (até mesmo levando-se em conta incertezas nos
valores julgados conhecidos a priori para os mesmos, através de uma abordagem que se
baseie em inferência Bayesiana). Considerou-se então que são tomadas medidas de
temperatura na superfície do compósito laminado, onde é imposto o fluxo de calor.
Considera-se que cada região reticulada, mostrada na figura 5.1, constituirá uma
região cuja temperatura pode ser obtida através de uma câmera de termografia por
infravermelho, onde estes reticulados constituirão os pixels da câmera. Desta forma
pode-se formar uma matriz de temperaturas experimentais ( ), ,meas X Y tT i j n , assumindo
que estas temperaturas serão tomadas a cada intervalo de tempo t∆ e que haverá um
número máximo de medidas medN com o tempo.
Figura 5.1 - Representação esquemática da obtenção de medidas experimentais.

29
Como pode ser observado na representação esquemática da figura 5.1, o número
de medidas na superfície dependerá da resolução da câmera termográfica, considera-se
que iX, jY, neste capítulo serão respectivamente as posições discretizadas dos sensores na
direção x e y e que o número máximo de sensores em cada direção serão gradxe
grady.
Os parâmetros adimensionais estimados neste problema serão ( ),c X YBi i j , nas
posições discretizadas iX, jY . Destaca-se aqui, uma grande dificuldade deste problema
que implica em que este termo não transformável deverá ser integrado na solução do
problema direto por GITT. Nas soluções utilizadas no problema inverso, estes valores
pontuais do ( ),c X YBi i j serão integrados numericamente utilizando cubic splines
(CONTE e DE BOOR, 1980) através das sub-rotinas IMSL (COMPAC, 1997).
5.2 Solução do Problema Inverso
O problema inverso em estudo foi resolvido utilizando-se inferência Bayesiana,
através do algoritmo de Metropolis-Hastings, que é uma implementação do Método de
Monte Carlo baseados em Cadeias de Markov (MCMC - Markov Chain Monte Carlo)
(KAIPIO e SOMERSALO, 2004)
Um estimador Bayesiano está basicamente preocupado em analisar a densidade
de probabilidade a posteriori. Esta consiste na probabilidade condicional dos
parâmetros, dadas as medidas realizadas, enquanto a verossimilhança é a probabilidade
condicional das medidas experimentais, dados os parâmetros (KAIPIO e
SOMERSALO, 2004, TAN, et al., 2006).
Nas técnicas estatísticas Bayesianas, tenta-se utilizar toda a informação
disponível a priori a fim reduzir a incerteza atual em um problema. Ou seja, quando a
informação nova é obtida, ela é combinada com toda a informação precedente, dando a
base para procedimentos estatísticos. O mecanismo formal usado para combinar a
informação nova com a informação previamente disponível é conhecido como o
teorema de Bayes (WINKLER, 2003, KAIPIO e SOMERSALO, 2004, TAN, et al.,
2006):
( ) ( )
( ) ( )( )
prioriposteriori
π ππ π
π= =
P Y PP P Y
Y (4.40)

30
onde:
( )posterioriπ P = densidade de probabilidade a posteriori;
( )prioriπ P = densidade de probabilidade a priori;
( )|π Y P = verossimilhança;
( )π Y = densidade de probabilidade das medidas;
Desta forma, considera-se que a matriz de parâmetros encontrada na formulação
matemática do problema inverso, seja escrita como:
( )1,1 1,2 1,
2,1 2,
,1 ,2 ,
,
J
JX Y
I I I J
Bi Bi Bi
Bi BiBi i j
Bi Bi Bi
≡ ≡
P
⋯
⋱
⋮ ⋮
⋯
(5.1)
e considera-se ainda que ( ), ,meas X Y tT i j n=Y , contendo as temperaturas medidas nos
pontos iX e jY da superfície até o tempo final do experimento.
Assumindo que o erro relacionado com as medidas é aditivo e com distribuição
gaussiana, com média e desvio padrão conhecidos e independentes dos parâmetros P, a
verossimilhança pode ser expressa como (KAIPIO e SOMERSALO, 2004):
1/2/2 1 1
( ) (2 ) exp ( ) ( )2
medN Tπ π−− − = −
Y P W Y - T W Y - T (5.2)
ondeW é a inversa da matriz de covariância dos erros de medição. Para medidas não
correlacionadas, esta matriz é dada por:
21
22
2
1/ 0
1/
0 1/medN
σσ
σ
=
W⋱
(5.3)
onde σ é o desvio padrão das medidas.
31
Considerou-se neste trabalho dois casos para a informação a priori, no primeiro a
informação a priori era informativa gaussiana, no segundo a informação a priori era
considerada com distribuição não-informativa uniforme. Em ambos os casos
considerou-se ainda que fisicamente ( ), 0cBi X Y > .
No primeiro caso tem-se:
1/2/2 11( ) (2 ) exp ( ) ( )
2medN Tπ π −− − = −
P V P -µ V P - µ (5.4)
onde µ e V são respectivamente a média e a matriz de covariância de Pcomposta pelo
desvio padrão ( ),Bi X Yi jσ , que também será considerado constante.
Utilizando a informação a priori Uniforme, no segundo caso, será considerado
um intervalo onde todos os valores de ( ),cBi X Y são equiprováveis. O limite inferior
deste intervalo é tomado como sendo zero, já que fisicamente tem-se ( ), 0cBi X Y > . O
limite superior deste intervalo (VC) é tomado como um valor suficientemente grande de
( ),cBi X Y que caracterize numericamente um contato perfeito. A probabilidade da
ocorrência de ( ),cBi X Y fora deste intervalo é nula.
5.3 O Algoritmo Metropolis-Hastings
Embora o uso de algumas distribuições a priori resultem em distribuições a
posteriori analíticas, permitindo assim que estimadores baseados em técnicas de
minimização possam ser usados, como no uso da função objetivo maximum a
posteriori, casos gerais requerem integrações de funções randômicas. Nestes casos, é
interessante gerar amostras da distribuição a posteriori de modo que inferência sobre a
distribuição seja obtida através de inferência sobre tais amostras.
O Método de Monte Carlo com Cadeias de Markov é então usado com o
objetivo de se gerar as amostras da distribuição (KAIPIO e SOMERSALO, 2004, TAN,
et al., 2006). Como foi dito anteriormente utilizou-se o algoritmo Metropolis-Hastings
para implementação do Método de Monte Carlo com Cadeia de Markov.

32
Tal algoritmo se baseia na escolha de uma função de distribuição ( )( )1* , tp −P P
que será utilizada para gerar um novo ponto candidato *P a partir do estado atual ( )1t−P
da cadeia de Markov.
O algoritmo de Metropolis-Hastings pode ser resumido nos seguintes passos
(TAN, et al., 2006, KAIPIO e SOMERSALO, 2004):
1. Gere um ponto candidato *P a partir da distribuição ( )( )1* , tp −P P ;
2. Calcule o fator de aceitação:
( ) ( )( )
( )( ) ( )( )1* *
1 1 *
| ,min 1,
| ,
t
t t
p
p
πα
π
−
− −
=
P Y P P
P Y P P (5.5)
3. Gere um valor ( )0,1U U∼ .
4. Se U α≤ , faça ( ) *t =P P , caso contrário faça ( ) ( )1t t−=P P .
5. Retorne ao passo 1 e gere a seqüência ( ) ( ) ( ){ }1 2, , , nP P P… .
Observa-se que para uma distribuição simétrica para ( )( )1* , tp −P P , como por
exemplo o modelo de random-walk cujos incrementos são obtidos de uma distribuição
normal, pode-se reduzir a equação (5.5) a:
( ) ( )( )1* *| ,
min 1,
tpπα
−
=P Y P P
( )( ) ( )( )1 1 *| ,t tpπ − −P Y P P
( )( )( )
*
1
|min 1,
|t
π
π −
=
P Y
P Y (5.6)
Assim, a razão de Hastings torna-se:
( )
( )( ) ( ) ( )
* * *
1 11
| ( ) ( )
( ) ( )|
priori
t ttpriori
π π π
π ππ − −−=
P Y P Y P
P Y PP Y (5.7)

33
Utilizando a informação a priori Gaussiana, pode-se escrever:
a verossimilhança como:
( ) ( ) 2
21 1 1
, , , ,1( ) exp
2
med
X Y t
Ngradx gradymeas t t
i j n
T i j n T i j nπ
σ= = =
= −
∑ ∑ ∑-
Y P (5.8)
e a informação a priori, Gaussiana como:
( ) ( ) 2
21 1
, ,1( ) exp
2X Y
gradx gradyX Y X Y
i j Bi
Bi i j i jµπ
σ= =
= −
∑ ∑-
P (5.9)

34
CAPÍTULO 6 - RESULTADOS E DISCUSSÕES
Neste trabalho são apresentados os resultados obtidos para o problema direto de
transferência de calor e para o problema inverso. Inicialmente foi feita a verificação da
solução do problema direto através de diversos testes, cujas soluções são encontradas
detalhadamente na literatura (ÖZIŞIK, 1993). Em seguida foram solucionados alguns
casos do problema inverso, utilizando-se medidas simuladas de temperatura, e
envolvendo diferentes formas funcionais da função ( ),cBi X Y .
Em todos os casos estudados abaixo, considerou-se as mesmas dimensões do
material compósito, onde os materiais 1 e 2 têm respectivamente espessuras 1matc e
2matc , onde o material 2 é aquele cuja superfície perpendicular ao eixo z está exposta ao
fluxo de calor ( ), ,q x y t na posição z = c (ver figura 6.1).
Figura 6.1 - Esquema do problema geral.
As dimensões do material compósito estão descritas na tabela 6.1, enquanto na
tabela 6.2 são apresentadas as temperaturas dos meios inferior e superior que trocam
calor por convecção com a placa, assim como a sua temperatura inicial.
Tabela 6.1 - Dimensões do material compósito
a [ ]m b [ ]m c [ ]m [ ]1matc m [ ]
2matc m [ ]cz m
0.10 0.10 0.010 0.005 0.005 10.005matc c− =

35
Tabela 6.2 - Temperatura dos meios externos e temperatura inicial da placa
*T oC T∞oC *T∞
oC
25.0 25.0 30.0
Nos diversos resultados obtidos nesta seção, foram utilizados combinações dos
seguintes materiais para formar o compósito laminado: nylon 6-6, titânio, latão, fibra de
grafite e poliestireno expandido (Isopor). As propriedades destes materiais estão
dispostas na tabela 6.3 (INCROPERA e DE WITT, 2003, CALLISTER e WILLIAM,
2002). Os valores de referência para os problemas adimensionais serão sempre as
propriedades do material constituinte do compósito laminado que for pior condutor
térmico.
Tabela 6.3 - Propriedades Termofísicas dos Materiais utilizados
Material Wk mK
2610 msα ⋅
poliestireno expandido (isopor) 0.027 0.40
nylon 6,6 0.240 1.26
Latão (70% Cu,45% Zn) 110.000 33.90
titânio 21.900 9.32
fibra de grafite (25% volume) em epóxi 0.870 0.66
6.1 Verificação da Solução do Problema Direto
Foram resolvidos casos particulares do problema geral onde a solução
puramente analítica pode ser obtida na literatura (ÖZIŞIK, 1993), para então comparar
com os resultados obtidos (resultados analíticos) com a solução geral proposta neste
trabalho (resultados numéricos). Por questão de simplicidade optou-se por comparar os
resultados obtidos na forma dimensional, evitando assim que a formulação de cada um
dos testes fosse adimensionalizada.
Os primeiros quatro testes (um em regime permanente e três em regime
transiente) foram realizados considerando que o fluxo de calor e o coeficiente de troca
térmica no contato fossem uniformes na superfície perpendicular ao eixo z. Em todos os
testes de verificação do problema direto, foram considerados uma malha com 20 nós em

36
Z e um número máximo de termos na série de 150IJF = . Entretanto, como neste
trabalho o tempo de CPU tem grande importância, para a solução do problema inverso
utilizou-se uma malha com apenas 6 nós, uma vez os resultados obtidos com 6 ou 20
nós na posição z c= , onde serão tomadas as medidas de temperatura, estão
suficientemente próximos dos resultados analíticos. Lembrando que existem dois nós na
região de interface. Os casos teste usados na verificação foram os seguintes:
1. O primeiro teste consistiu na solução de um problema de transferência de
calor unidimensional na direção z, em regime permanente, numa placa
composta por dois materiais iguais, considerando a existência de um
coeficiente de troca térmica de contato. Este teste permitiu primeiramente
avaliar as soluções obtidas quando o problema geral atinge o regime
permanente e avaliar a influência do coeficiente de troca térmica no contato
nas temperaturas medidas na posição z = zc.
2. O segundo teste, primeiro de uma série de 4 testes em regime transiente,
consistiu na solução de um problema unidimensional de transferência de
calor numa placa, cuja espessura representa a espessura de apenas uma das
placas no problema geral. Num dos contornos deste problema teste
considerou-se isolamento térmico perfeito, desta forma simulou-se o mesmo
efeito obtido numa região do problema geral onde o coeficiente de troca
térmica no contato fosse muito pequeno. Assim, comparou-se o resultado do
problema teste com o resultado obtido numa das placas do problema geral.
3. O segundo teste em regime transiente, consistiu na solução de um problema
unidimensional de transferência de calor numa placa, cuja espessura
representa a espessura de apenas uma das placas no problema geral. Neste
caso, no contorno z c= deste problema teste, considerou-se que a
temperatura nesta posição fosse conhecida e igual à temperatura T∞ . Desta
forma, simulou-se o mesmo efeito obtido numa região do problema geral
onde o coeficiente de troca térmica no contato fosse muito grande e que o
material 1, exposto a temperatura T∞ tivesse uma alta condutividade térmica.
Assim, comparou-se o resultado do problema teste com o resultado obtido
numa das placas do problema geral.

37
4. O terceiro teste em regime transiente, consistiu na solução de um problema
unidimensional de transferência de calor numa placa, cuja espessura
representa a soma das espessuras das duas placas que formam o material
compósito do problema geral. Neste caso, considerando que o compósito no
problema geral fosse composto por duas placas de um mesmo material,
pode-se comparar os resultados obtidos para um coeficiente de troca térmica
muito grande no problema geral, com os resultados obtidos quando o contato
térmico é perfeito.
5. O quarto teste em regime transiente consistiu num problema de transferência
de calor tridimensional exposto a um fluxo de calor dependente da posição
z c= , na superfície perpendicular ao eixo z. Considerou-se um problema
composto por apenas um material com espessura igual à soma da espessura
dos dois materiais no problema geral, onde considerou-se um coeficiente de
contato térmico muito alto com os dois materiais que formam o compósito
laminado iguais.
6.1.1 Problema teste em regime permanente – análise na direção z
Comparou-se primeiramente as temperaturas obtidas pelo programa geral
considerando no mesmo que o fluxo de calor imposto e que o coeficiente de troca
térmica no contato eram constantes em toda a superfície perpendicular ao eixo z do
compósito laminado. Desta forma, as temperaturas obtidas deverão ser as mesmas em
cada ponto x, y do problema geral e mudará apenas em cada nó da malha computacional
na direção z, caracterizando um problema que pode ser considerado unidimensional na
direção z.
Assim, o primeiro problema proposto consistirá num problema unidimensional
nesta direção, em regime permanente, num meio composto por duas camadas, com
propriedades térmicas constantes em cada material que compõe o compósito laminado
que será formado por duas placas de um mesmo material, o nylon 6-6, cujas
propriedades termofísicas estão na tabela 6.3. Os parâmetros de entrada utilizados na
solução deste problema estão na tabela 6.4.

38
Tabela 6.4 - Parâmetros de entrada do teste 1, em regime permanente.
20Wh
m K
22Wh
m K
2constWq
m
100 100 1000
Este problema teste pode ser representado conforme a na figura 6.2:
Figura 6.2 - Representação esquemática do teste 1, em regime permanente.
e pode ser formulado da seguinte maneira:
( )
( )
21
2
22
2
0; Para 0
0; Para
c
c
d T zz z
dz
d T zz z c
dz
= < <
= < < (6.1)
sujeito as condições de contorno e interface:
( ) ( ) 0
11 0 1 em 0dT z
h T zd
Tz
k h z∞+− = = (6.2)
( ) ( )
( ) ( ) ( )2
1 2
1
1 2
11
em
c
c
dT z dT z
dz dzdT z
h T z T z
kz
d
kz
kz
= =
− =
(6.3)
( ) ( )2
2 2 2 2* em constk h T
dT zh T z
dzq z c∞+ = + = (6.4)
Considerando as dimensões da placa (tabela 6.1), as temperaturas impostas
(tabela 6.2), as propriedades do nylon 6-6 e os parâmetros de entrada (tabela 6.4), a
solução desde problema, pode ser escrita como:
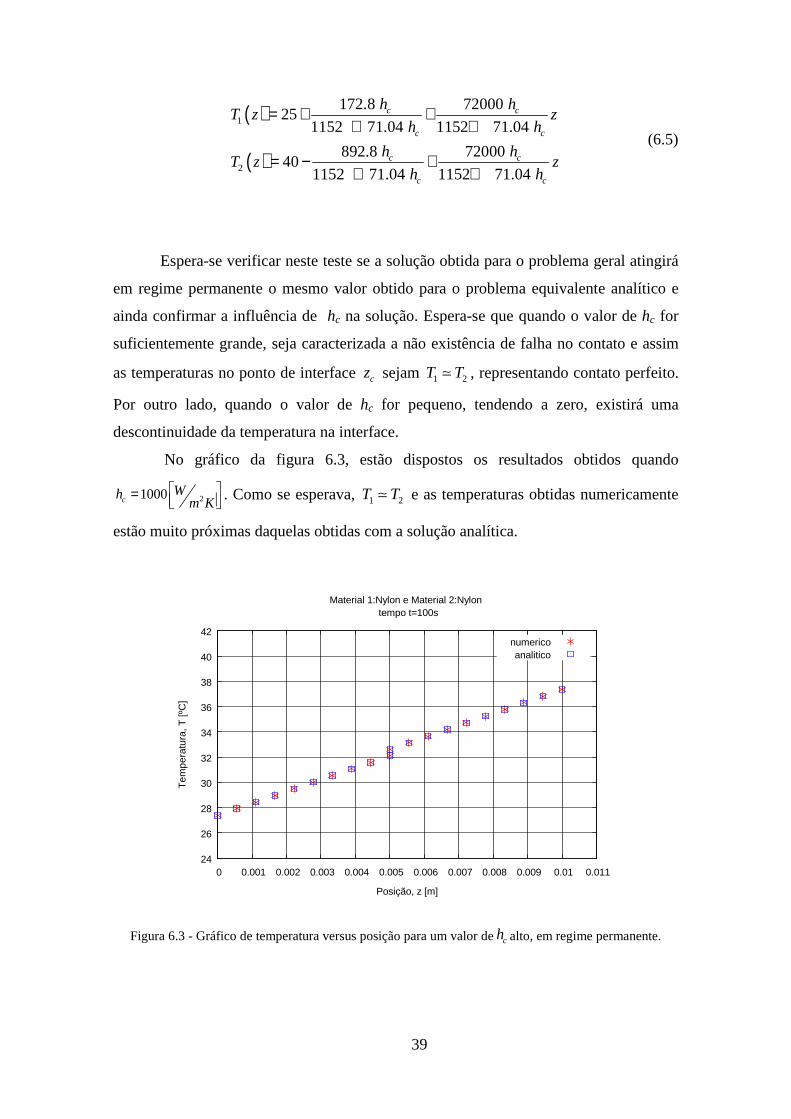
39
( )
( )
1
2
172.8 72000
1152 71.04 1152 71.04
892.8
25
72000
1152 71.04 1152 71.04 40
c c
c c
c c
c c
h hT z z
h h
h hT z
hz
h
= ++ +
+=
+
−+ +
(6.5)
Espera-se verificar neste teste se a solução obtida para o problema geral atingirá
em regime permanente o mesmo valor obtido para o problema equivalente analítico e
ainda confirmar a influência de hc na solução. Espera-se que quando o valor de hc for
suficientemente grande, seja caracterizada a não existência de falha no contato e assim
as temperaturas no ponto de interface cz sejam 1 2T T≃ , representando contato perfeito.
Por outro lado, quando o valor de hc for pequeno, tendendo a zero, existirá uma
descontinuidade da temperatura na interface.
No gráfico da figura 6.3, estão dispostos os resultados obtidos quando
21000cWh
m K =
. Como se esperava, 1 2T T≃ e as temperaturas obtidas numericamente
estão muito próximas daquelas obtidas com a solução analítica.
Figura 6.3 - Gráfico de temperatura versus posição para um valor dech alto, em regime permanente.
24
26
28
30
32
34
36
38
40
42
0 0.001 0.002 0.003 0.004 0.005 0.006 0.007 0.008 0.009 0.01 0.011
Tem
pera
tura
, T [º
C]
Posição, z [m]
Material 1:Nylon e Material 2:Nylon tempo t=100s
numericoanalitico
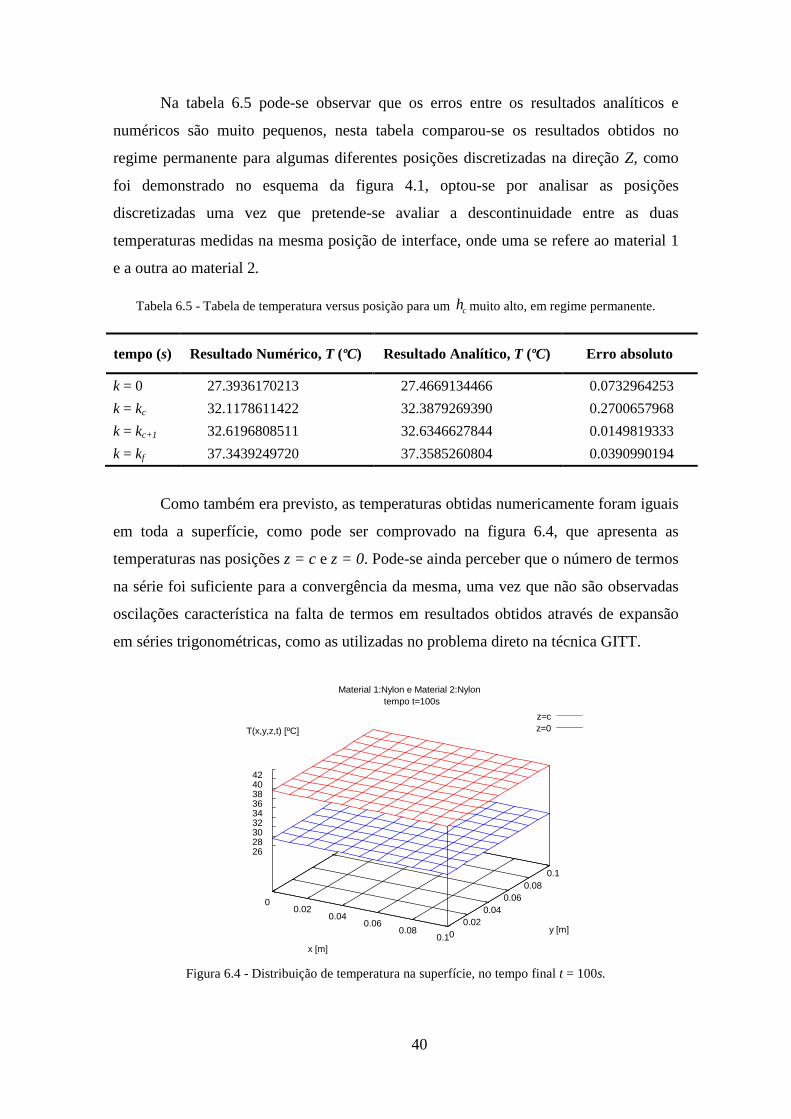
40
Na tabela 6.5 pode-se observar que os erros entre os resultados analíticos e
numéricos são muito pequenos, nesta tabela comparou-se os resultados obtidos no
regime permanente para algumas diferentes posições discretizadas na direção Z, como
foi demonstrado no esquema da figura 4.1, optou-se por analisar as posições
discretizadas uma vez que pretende-se avaliar a descontinuidade entre as duas
temperaturas medidas na mesma posição de interface, onde uma se refere ao material 1
e a outra ao material 2.
Tabela 6.5 - Tabela de temperatura versus posição para um ch muito alto, em regime permanente.
tempo (s) Resultado Numérico, T (ºC) Resultado Analítico, T (ºC) Erro absoluto
k = 0 27.3936170213 27.4669134466 0.0732964253
k = kc 32.1178611422 32.3879269390 0.2700657968
k = kc+1 32.6196808511 32.6346627844 0.0149819333
k = kf 37.3439249720 37.3585260804 0.0390990194
Como também era previsto, as temperaturas obtidas numericamente foram iguais
em toda a superfície, como pode ser comprovado na figura 6.4, que apresenta as
temperaturas nas posições z = c e z = 0. Pode-se ainda perceber que o número de termos
na série foi suficiente para a convergência da mesma, uma vez que não são observadas
oscilações característica na falta de termos em resultados obtidos através de expansão
em séries trigonométricas, como as utilizadas no problema direto na técnica GITT.
Figura 6.4 - Distribuição de temperatura na superfície, no tempo final t = 100s.
Material 1:Nylon e Material 2:Nylon tempo t=100s
z=cz=0
0 0.02
0.04 0.06
0.08 0.1
x [m]
0 0.02
0.04 0.06
0.08 0.1
y [m]
26 28 30 32 34 36 38 40 42
T(x,y,z,t) [ºC]

41
Assumindo agora que o 20.0001cWh
m K =
obteve-se os resultados
apresentados na Figura 6.5 e na tabela 6.6.
Tabela 6.6 - Tabela de temperatura versus posição para um ch muito baixo, em regime permanente.
tempo (s) Resultado Numérico, T (ºC) Resultado Analítico, T (ºC) Erro absoluto
k = 0 25.0000149999 25.0000144106 0.0000005893
k = kc 25.0000446050 25.0000432909 0.0000013141
k = kc+1 39.9999537503 39.9168935743 0.0830601760
k = kf 39.9999833554 39.9603782706 0.0396050848
Figura 6.5 - Gráfico de temperatura versus posição para um ch muito baixo, em regime permanente.
Neste caso os resultados obtidos numericamente também foram verificados com
êxito, através da comparação com os resultados analíticos. As temperaturas de interface
são descontínuas, significando que neste ponto existe uma falha no material, conforme
já era esperado.
O Gráfico da Figura 6.6, demonstra que à medida que o ch →∞ a distribuição de
temperaturas, de fato, tende àquela de contato térmico perfeito. Nota-se que os valores
obtidos para o modelo com duas camadas de mesmo material quando ch →∞ se
aproximam aos obtidos pelo modelo envolvendo um único material. Este fato confirma
o funcionamento do programa, no regime permanente.
24
26
28
30
32
34
36
38
40
42
44
0 0.001 0.002 0.003 0.004 0.005 0.006 0.007 0.008 0.009 0.01 0.011
Tem
pera
tura
, T [º
C]
Posição, z [m]
Material 1:Nylon e Material 2:Nylon tempo t=100s
numericoanalitico

42
Figura 6.6 - Gráfico demonstrando a diminuição da descontinuidade do valor das temperaturas na
interface à medida que o ch →∞ .
6.1.1.1 Análise de convergência do problema teste 1, em regime permanente
Utilizando a resposta analítica em regime estacionário pode-se realizar a análise
de convergência da série do problema geral. Observou-se que o número mínimo de
termos para a convergência da série aumenta na medida em que são utilizadas malhas
computacionais em z mais refinadas. Desta forma, fixou-se uma malha computacional
em z com 20 nós. Na tabela 6.7 é apresentada uma tabela de convergência para a série
que resolve o problema direto, da equação (4.41), para o tempo final onde o regime
transiente é atingido, 100t s= e para a posição onde o fluxo de calor é imposto.
Foram consideradas algumas diferentes posições em x e y para demonstrar que
os valores são iguais, como era previsto teoricamente (ÖZIŞIK, 1993) e diferentes
números máximos ná série, lembrando que existe um critério de convergência da série
quando 510ijte
λ− −< . Como pode ser visto na tabela 6.7 a convergência da série acontece
rapidamente, o que não ocorre nos casos com variação espacial do Biot de contato ou do
termo fonte.
24
26
28
30
32
34
36
38
40
42
0 0.001 0.002 0.003 0.004 0.005 0.006 0.007 0.008 0.009 0.01 0.011
Tem
pera
tura
, T
[ºC
]
Posição, z [m]
Material 1:Nylon e Material 2:Nylon tempo t=100s
hc = 0.0001 [w/m^2K]hc = 300 [w/m^2K]hc = 1000 [w/m^2K]
analitico com 1 material

43
Tabela 6.7 - Análise de convergência da série em X e Y, para o teste 1 em regime permanente.
Número máximo de termos
100 temperatura em regime permanenteft s= = x = 0.0 mm y = 0.0 mm
x = 50 mm y = 50 mm
x = 100 mm y = 100 mm
IJF = 1 37.358785923901 37.358785923901 37.358785923901
IJF = 50 37.358785917148 37.358785917148 37.358785917148
IJF = 100 37.358785917147 37.358785917147 37.358785917147
IJF = 150 37.358526080480 37.358526080480 37.358526080480
IJF = 200 37.358520488649 37.358520488649 37.358520488649
Solução analítica 37.343924972000 37.343924972000 37.343924972000
6.1.2 Problema teste 1 em regime transiente
No regime transiente foram realizados quatro testes visando validar a solução
numérica proposta, buscou-se diferentes casos onde pudessem ser testadas as diversas
possibilidades existentes de valores para as regiões de contorno e interface.
O primeiro desta série de testes em regime transiente teve por objetivo avaliar a
influência do coeficiente de troca térmica no contato entre as placas de material
compósito, quando este é muito baixo e reproduz um isolamento térmico entre as
placas.
Considerou-se neste caso que o coeficiente de troca térmica no contato entre as
placas fosse constante assim como o fluxo de calor, no tempo e em toda a superfície do
material perpendicular ao eixo z, tornando o problema unidimensional na direção z.
Considera-se que a posição 1matz c= no problema geral corresponde à posição 0z = no
problema teste. A espessura total no problema geral corresponde à 1 2mat matc c c= + . No
problema teste, como se considerou que existe um isolamento térmico e só existe
condução a partir do material 2, a espessura total considerada é de 2matc c= . O problema
teste pode ser entendido através da representação esquemática da figura 6.7. Do lado
esquerdo da figura pode ser visualizado o efeito de um coeficiente de troca térmica no
contato muito baixo, através das linhas pontilhadas representando um isolamento
fictício na interface entre as placas.

44
Figura 6.7 - Representação esquemática do primeiro teste em regime transiente.
Este problema teste pode ser formulado, utilizando a equação do calor, da
seguinte maneira (ÖZIŞIK, 1993):
( ) ( )
2
2
22
1, 0 e 0
, ,mat
T Tz c t
t
z t z t
zα∂ ∂
= < < >∂ ∂
(6.6)
sujeito as condições de contorno:
( )
0, ,
0 e 0T
zz
tt
z∂= = >
∂ (6.7)
( ) ( )( )
2
*2 2
,, , e 0const mat
Tk h T T q z c
z
zz t t
t∞
∂+ − = = >
∂ (6.8)
e sujeito a condição inicial:
2
, 0 e 0ini matT T z c t= ≤ ≤ = (6.9)
Para que este problema tenha suas condições de contorno homogeneizadas e
uma convergência mais rápida, é proposto um filtro que permita homogeneizar as
condições de contorno. Este filtro consiste na solução do problema em regime
permanente associado ao problema geral. Desta forma a solução final poderá ser escrita
como:

45
( ) ( ) ( ), ,fT z t T z t F z= + (6.10)
onde ( )F z corresponde a solução em regime estacionário do problema teste completo,
corresponde a um filtro e ( ),fT z t corresponde ao problema filtrado homogêneo que foi
solucionado através da técnica CITT (ÖZIŞIK, 1993).
A solução para o filtro, ( )F z , considerando as dimensões da placa (tabela 6.1),
as temperaturas impostas (tabela 6.2), as propriedades do nylon 6-6 e os parâmetros de
entrada (tabela 6.4), a solução desde problema, pode ser escrita como: vide Apêndice B,
( ) *F z T∞= (6.11)
A solução do problema homogêneo, resolvido através da técnica CITT e cuja
solução também esta detalhada no Apêndice B, é dado por:
( ) ( ) ( ) ( )( ) ( )2
2 222
'2'
,1 20
' ,, , '
m
m
ttm matt
f m f inim m
m
q t Z ceT z t Z z T e dt
N k
α βα β
α ββ
ββ
−∞
=
= +
∑ ∫ (6.12)
onde ( ) ( )( ) ( )2
,
0
,matc
f ini i im n mT T F z Z z dzββ = −∫ .
De (ÖZIŞIK, 1993) temos que:
( ) ( ), cosm mZ z zβ β= (6.13)
( ) ( )2
2 22 2
22 2 22 2
12 ,m
m mat m
H hH
N kc H H
ββ β
+ = =
+ +
(6.14)
Os autovalores mβ são as raízes positivas das equações transcendentais:
( )2 2tanm m matc Hβ β = (6.15)

46
Para que no problema geral fossem reproduzidos os mesmos efeitos do problema
teste considerou-se o nylon 6-6 como material 2 e poliestireno expandido (isopor) como
material 1, cujas propriedades encontram-se na tabela 6.3. Considerou-se ainda um
coeficiente de troca térmica no contato pequeno, ( ) 2, 0.0001cWh x y
m K =
a fim de
simular a condição de isolamento térmico do caso-teste. Os outros parâmetros de
entrada para o problema estão na tabela 6.8.
Tabela 6.8 - Parâmetros de entrada do teste 1 em regime transiente
20Wh
m K
22Wh
m K
2constWq
m
100 100 1000
No problema teste considerou-se os mesmos parâmetros de entrada do problema
geral, entretanto este problema teste reproduz os efeitos no problema geral entre
1 2mat matc z c≤ ≤ . Assim, terão como entrada espessura 2matc ,coeficiente de troca térmica
na posição 2matz c= igual a 2h e fluxo de calor exposto nesta posição igual aconstq .
Na figura 6.8 os resultados analíticos obtidos com a solução deste problema teste
são comparados com a solução do problema direto geral, para a posição z = c no
problema geral e para a posição 2matz c= no problema teste.
Figura 6.8 - Gráfico de temperatura versos tempo para o teste 1, em regime transiente.
24
26
28
30
32
34
36
38
40
42
44
0 10 20 30 40 50 60 70 80 90 100
Tem
pera
tura
, T [º
C]
tempo, t [s]
Material 1:Isopor e Material 2:Nylon na posição z=c, x=0 e y=0
numericoanalitico

47
Como pode ser visto no gráfico o resultado obtido permite a verificação da
solução do programa numérico para este caso teste, graficamente pode ser notado que o
erro existente é mínimo, entretanto, na tabela 6.9 pode ser visto o percentual de erros
relativos para a posição onde o fluxo de calor é imposto, � , para alguns diferentes
tempos. Os resultados analíticos foram obtidos através da plataforma Mathematica,
foram utilizados 300 termos na série, para a convergência do problema teste.
Tabela 6.9 - Tabela de valores de temperatura versos tempo para o teste 1, em regime transiente.
tempo (s) Resultado Numérico, T (ºC) Resultado Analítico, T (ºC) Erro Relativo (%)
0 25.0000000000000 25.0033801856525 0.0135207426
20 37.1263972908883 36.9446758856235 0.4894668444
40 39.0033921061276 38.8842608389344 0.3054382216
60 39.7417467789071 39.5898215462890 0.3822812154
80 39.9341629036358 39.8464864619481 0.2195524717
100 39.9832076681462 39.9370859779711 0.1153526514
Na figura 6.9 pode ser visto que, como previsto, um valor baixo no coeficiente
de troca térmica no contato pode ser modelado como um isolamento térmico neste
ponto. A figura 6.10 mostra que a temperatura em toda a superfície é uniforme.
Figura 6.9 - Posição z versus temperatura para o teste 1, em regime transiente.
24
26
28
30
32
34
36
38
40
42
44
0 0.001 0.002 0.003 0.004 0.005 0.006 0.007 0.008 0.009 0.01 0.011
Tem
pera
tura
, T [º
C]
Posição, z [m]
Material 1:Isopor e Material 2:Nylon tempo t=100s
numericoanalitico
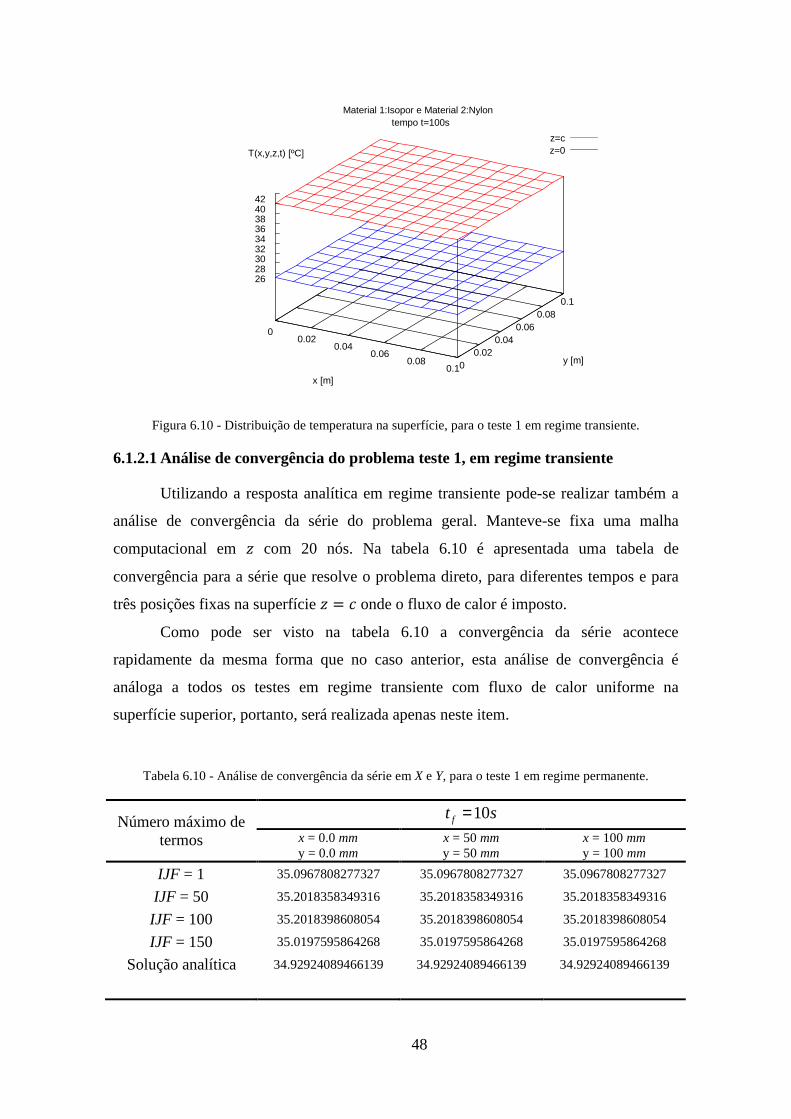
48
Figura 6.10 - Distribuição de temperatura na superfície, para o teste 1 em regime transiente.
6.1.2.1 Análise de convergência do problema teste 1, em regime transiente
Utilizando a resposta analítica em regime transiente pode-se realizar também a
análise de convergência da série do problema geral. Manteve-se fixa uma malha
computacional em � com 20 nós. Na tabela 6.10 é apresentada uma tabela de
convergência para a série que resolve o problema direto, para diferentes tempos e para
três posições fixas na superfície � onde o fluxo de calor é imposto.
Como pode ser visto na tabela 6.10 a convergência da série acontece
rapidamente da mesma forma que no caso anterior, esta análise de convergência é
análoga a todos os testes em regime transiente com fluxo de calor uniforme na
superfície superior, portanto, será realizada apenas neste item.
Tabela 6.10 - Análise de convergência da série em X e Y, para o teste 1 em regime permanente.
Número máximo de termos
10ft s= x = 0.0 mm y = 0.0 mm
x = 50 mm y = 50 mm
x = 100 mm y = 100 mm
IJF = 1 35.0967808277327 35.0967808277327 35.0967808277327
IJF = 50 35.2018358349316 35.2018358349316 35.2018358349316
IJF = 100 35.2018398608054 35.2018398608054 35.2018398608054
IJF = 150 35.0197595864268 35.0197595864268 35.0197595864268
Solução analítica 34.92924089466139 34.92924089466139 34.92924089466139
Material 1:Isopor e Material 2:Nylon tempo t=100s
z=cz=0
0 0.02
0.04 0.06
0.08 0.1
x [m]
0 0.02
0.04 0.06
0.08 0.1
y [m]
26 28 30 32 34 36 38 40 42
T(x,y,z,t) [ºC]

49
Número máximo de termos
20ft s= x = 0.0 mm y = 0.0 mm
x = 50 mm y = 50 mm
x = 100 mm y = 100 mm
IJF = 1 37.4534875108709 37.4534875108709 37.4534875108709
IJF = 50 37.0028340292732 37.0028340292732 37.0028340292732
IJF = 100 37.1520286084707 37.1520286084707 37.1520286084707
IJF = 150 37.1263972908883 37.1263972908883 37.1263972908883
Solução analítica 36.94467588562353 36.94467588562353 36.94467588562353
Número máximo de termos
50ft s= x = 0.0 mm y = 0.0 mm
x = 50 mm y = 50 mm
x = 100 mm y = 100 mm
IJF = 1 39.7096846467752 39.7096846467752 39.7096846467752
IJF = 50 39.6426060449239 39.6426060449239 39.6426060449239
IJF = 100 39.6426063411726 39.6426063411726 39.6426063411726
IJF = 150 39.4884841883616 39.4884841883616 39.4884841883616
Solução analítica 39.32437335156286 39.32437335156286 39.32437335156286
6.1.3 Problema teste 2 em regime transiente
O teste 2 em regime transiente teve por objetivo avaliar a influência do
coeficiente de troca térmica no contato entre as placas de material compósito, quando
este é muito alto e reproduz um contato térmico perfeito entre as placas. Entretanto
considerou-se ainda que o coeficiente de troca térmica 0h na posição z = 0 fosse muito
alto e que o material 1 fosse um bom condutor térmico. Com estas suposições espera-se
que a temperatura no material 1 seja sempre uniforme e igual a temperatura à que o
mesmo está exposto em z = 0, ou seja, ( )11 , , ,matT x y c t T∞= .
Considerou-se neste caso que o coeficiente de troca térmica no contato fosse
constante assim como o fluxo de calor, no tempo e em toda a superfície do material
perpendicular ao eixo z, tornando o problema unidimensional na direção z.
O problema teste pode ser entendido através da representação esquemática da
figura 6.11.

50
Figura 6.11 - Representação esquemática do segundo teste em regime transiente.
Este problema teste pode ser formulado, utilizando a equação do calor, da
seguinte maneira (ÖZIŞIK, 1993):
( ) ( )
2
2
22
1, 0 e 0
, ,mat
T Tz c t
t
z t z t
zα∂ ∂
= < < >∂ ∂
(6.16)
sujeito as condições de contorno:
( ) , , 0 e 0T T z tz t ∞= = > (6.17)
( ) ( )( )
2
*2 2
,, , e 0const mat
Tk h T T q z c
z
zz t t
t∞
∂+ − = = >
∂ (6.18)
e sujeito a condição inicial:
2
, 0 e 0ini matT T z c t= ≤ ≤ = (6.19)
Para que este problema tenha suas condições de contorno homogeneizadas e
uma convergência mais rápida, é proposto um filtro que permita homogeneizar as
condições de contorno. Este filtro consiste na solução do problema em regime

51
permanente associado ao problema geral. Desta forma a solução final poderá ser escrita
como:
( ) ( ) ( ), ,fT z t T z t F z= + (6.20)
onde ( )F z corresponde a solução em regime estacionário do problema teste completo,
corresponde a um filtro e foi aplicado para permitir que a solução do problema teste
fosse obtida mais facilmente utilizando o método CITT, (ÖZIŞIK, 1993).
A solução para o filtro, ( )F z , considerando as dimensões da placa (tabela 6.1),
as temperaturas impostas (tabela 6.2), as propriedades do nylon 6-6 e os parâmetros de
entrada (tabela 6.4), a solução desde problema, pode ser escrita como (vide Apêndice
C):
( ) 25 + 675.676 zF z = (6.21)
A solução do problema homogêneo resolvido através da técnica CITT, também
está detalhada no Apêndice C e tem a seguinte forma:
( ) ( ) ( ) ( )( ) ( )2
2 222
'2'
,1 20
' ,, , '
m
m
ttm matt
f m f inim m
m
q t Z ceT z t Z z T e dt
N k
α βα β
α ββ
ββ
−∞
=
= +
∑ ∫ (6.22)
onde ( ) ( )( ) ( )2
,
0
,matc
f ini i im n mT T F z Z z dzββ = −∫ .
De (ÖZIŞIK, 1993) temos que:
( ) ( ), sinm mZ z zβ β= (6.23)
( ) ( )2
2 22 2
22 2 22 2
12 ,m
m mat m
H hH
N kc H H
ββ β
+ = =
+ +
(6.24)

52
Os autovalores mβ são as raízes positivas das equações transcendentais:
( )2 2cotm m matc Hβ β = − (6.25)
Para que no problema geral fossem reproduzidos os mesmos efeitos do problema
teste considerou-se o nylon 6-6 como material 2 e latão como material 1, cujas
propriedades estão na tabela 6.3. Considerou-se ainda um coeficiente de troca térmica
alto, ( ) 2, 10000cWh x y
m K =
, os outros parâmetros de entrada estão na tabela 6.11.
Tabela 6.11 - Parâmetros de entrada do teste 1 em regime transiente
20Wh
m K
22Wh
m K
2constWq
m
10000 100 1000
No problema teste considerou-se os mesmos parâmetros de entrada do problema
geral. Entretanto este problema teste reproduz os efeitos no problema geral entre
1 2mat matc z c≤ ≤ . Assim, terão como espessura 2matc , coeficiente de troca térmica na
posição 2matz c= igual a 2h e fluxo de calor exposto nesta posição igual aconstq .
Na figura 6.12 os resultados analíticos obtidos com a solução deste problema
teste foram comparados com a solução do problema direto geral. Nesta figura são
comparados os resultados de temperatura versos tempo para a posição z = c no
problema geral e para a posição 2matz c= do problema teste.
Figura 6.12 - Gráfico de temperatura versos tempo para o teste 2, em regime transiente.
24
26
28
30
32
34
36
38
0 10 20 30 40 50
Tem
pera
tura
, T [º
C]
tempo, t [s]
Material 1:Latão e Material 2:Nylon na posição z=c, x=0 e y=0
numericoanalitico

53
Como pode ser visto na figura 6.12 e na tabela 6.12 de fato os resultados obtidos
para o problema teste 2 também confirmam a solução do problema geral proposta neste
trabalho. Assim como era esperado a temperatura no material 1 foi constante e igual a
temperatura T∞ , permitindo que as comparações pudessem ser feitas com o problema
unidimensional com temperatura prescrita no contorno da posição 0z = do problema
teste, que corresponde a posição 1matc c= no problema geral (ver figura 6.13).
Os resultados analíticos foram obtidos através da plataforma Mathematica,
foram utilizados 300 termos na série, para a convergência do problema teste.
Tabela 6.12 - Tabela de valores de temperatura versos tempo para o teste 2, em regime transiente .
tempo (s) Resultado Numérico, T (ºC) Resultado Analítico, T (ºC) Erro Relativo (%)
0 25.0000000000 25.0202633835 0.0810535342
10 34.4576229848 34.2761707656 0.5265952887
20 34.9628631498 34.8898888924 0.2087193405
30 35.0117937794 34.9523863284 0.1696783984
40 35.0148683107 34.9587514582 0.1602657818
50 35.0150086116 34.9593808584 0.1588683121
Figura 6.13 - Posição z versus temperatura para o teste 2, em regime transiente.
24
26
28
30
32
34
36
38
0 0.001 0.002 0.003 0.004 0.005 0.006 0.007 0.008 0.009 0.01 0.011
Tem
pera
tura
, T
[ºC
]
Posição, z [m]
Material 1:Latão e Material 2:Nylon tempo t=50s
numericoanalitico

54
A distribuição de temperaturas nas superfícies do material compósito são de fato
uniformes, como pode ser visto na figura 6.14. Desta forma também pode ser
confirmada a hipótese de regime unidimensional para o problema teste.
Figura 6.14 - Distribuição de temperatura na superfície, para o teste 2 em regime transiente.
6.1.4 Problema teste 3 em regime transiente
O teste 3 em regime transiente teve por objetivo avaliar a influência do
coeficiente de troca térmica no contato entre as placas de material compósito, quando
este é muito alto e reproduz um contato térmico perfeito entre as placas. Este teste em
regime transiente complementa o teste em regime permanente resolvido no item 6.1.1,
onde considerou-se que o material 1 fosse igual ao material 2 e a espessura foi
1 2mat matc c c= + ,conforme a representação esquemática da figura 6.15.
Figura 6.15 - Representação esquemática do terceiro teste em regime transiente
Material 1:Latão e Material 2:Nylon tempo t=50s
z=cz=0
0 0.02
0.04 0.06
0.08 0.1
x [m]
0 0.02
0.04 0.06
0.08 0.1
y [m]
24 26 28 30 32 34 36 38
T(x,y,z,t) [ºC]

55
Considerou-se neste caso que o coeficiente de troca térmica no contato fosse
constante assim como o fluxo de calor, no tempo e em toda a superfície do material
perpendicular ao eixo z, tornando o problema unidimensional na direção z.
Este problema teste pode ser formulado, utilizando a equação do calor, da
seguinte maneira (ÖZIŞIK, 1993):
( ) ( )2
2
1, 0 e 0
, ,T Tz c t
t z
z t z t
α∂ ∂
= < < >∂ ∂
(6.26)
sujeito as condições de contorno:
( ) ( )( )0 0, 0 e 0
,,
Tk h T T
z tz
zt z t∞
∂− + − = = >
∂ (6.27)
( ) ( )( )*
2 , 0, e ,
const
Tk h T T q z c tz t
z
z t∞
∂+ − = = >
∂ (6.28)
e sujeito a condição inicial:
, 0 e 0iniT T z c t= ≤ ≤ = (6.29)
Para que este problema tenha suas condições de contorno homogeneizadas e
uma convergência mais rápida, é proposto um filtro que permita homogeneizar as
condições de contorno. Este filtro consiste na solução do problema em regime
permanente associado ao problema geral. Desta forma a solução final poderá ser escrita
como:
( ) ( ) ( ), ,fT z t T z t F z= + (6.30)
onde ( )F z corresponde a solução em regime estacionário do problema teste completo,
corresponde a um filtro e foi aplicado para permitir que a solução do problema teste
fosse obtida mais facilmente utilizando o método CITT (ÖZIŞIK, 1993).
A solução para o filtro, ( )F z , considerando as dimensões da placa (tabela 6.1),
as temperaturas impostas (tabela 6.2), as propriedades do nylon 6-6 e os parâmetros de
entrada (tabela 6.4), pode ser escrita como (vide Apêndice D):

56
( ) 27.5 + 1000 zF z = (6.31)
O problema filtrado, resolvido através da técnica CITT e cuja solução também
esta detalhada no Apêndice D, tem a seguinte forma:
( ) ( ) ( ) ( )2
,1
, ,mt
f m f inim m
m
eT z t Z z T
N
αβ
ββ
β−∞
=
=∑ (6.32)
onde ( ) ( )( ) ( )2
,
0
,matc
f ini i im n mT T F z Z z dzββ = −∫ .
De (ÖZIŞIK, 1993) temos que:
( ) ( ) ( ) 00 0, cos sin ,m m m m
hZ z z H z H
kβ β β β= + = (6.33)
( ) ( ) ( )
1
2 2 02 20 0 0 22 2
2
12 , ,m
m m
hH hH c H H H
N k kHβ
β β
− = + + + = =
+
(6.34)
Os autovalores mβ são as raízes positivas das equações transcendentais:
( ) ( )0 22
0 2
tan mm
m
H Hc
H H
ββ
β+
=−
(6.35)
Para que no problema geral fossem reproduzidos os mesmos efeitos do problema
teste considerou-se o nylon 6-6 como material 1 e 2, e suas propriedades podem ser
encontradas na tabela 6.3.
Considerou-se ainda um coeficiente de troca térmica no contato alto,
( ) 2, 10000cWh x y
m K =
Os outros parâmetros de entrada para o problema são
apresentados na tabela 6.13. Os resultados analíticos foram obtidos através da
plataforma Mathematica, foram utilizados 300 termos na série da Eq. 6.32, para a
convergência do problema teste.

57
Tabela 6.13 - Parâmetros de entrada do teste 1 em regime transiente
( )20Wh
m K ( )22
Whm K
( )2constWq
m
100 100 1000
No problema teste considerou-se os mesmos parâmetros de entrada do problema
geral entre 0 z c≤ ≤ . Na figura 6.16 e na tabela 6.14 os resultados analíticos obtidos
com a solução deste problema teste foram comparados com a presente solução do
problema direto geral. Nesta figura são comparados os resultados de temperatura versos
tempo para a posição z = c.
Figura 6.16 - Temperatura versus tempo para o problema teste 3, em regime transiente.
Os resultados obtidos de temperatura versus tempo para o teste 3, na posição
z c= foram muito satisfatórios, como pode ser visto na figura 6.16 e na tabela 6.14. Os
resultados numéricos estão em perfeita concordância, na escala gráfica, com os
resultados analíticos obtidos para o problema teste, porém existe um pequeno erro
percentual como pode ser observado na tabela 6.14.
Tabela 6.14 - Tabela de valores de temperatura versos tempo para o teste 3, em regime transiente
tempo (s) Resultado Numérico, T (ºC) Resultado Analítico, T (ºC) Erro Relativo (%)
0 25.0000000000 25.0884508657 0.3538034628
20 35.9892420837 35.8618643329 0.3539328515
40 36.9536570431 36.9163932882 0.1008391533
60 37.3079887447 37.2878263628 0.0540430684
80 37.4164283229 37.4228179875 0.0170771635
100 37.4431615983 37.4704670791 0.0729251474
24
26
28
30
32
34
36
38
40
42
0 10 20 30 40 50 60 70 80 90 100
Tem
pera
tura
, T [º
C]
tempo, t [s]
Material 1:Nylon e Material 2:Nylon na posição z=c, x=0 e y=0
numericoanalitico

58
Desta forma comprovou-se através destes 3 testes que a solução em regime
transiente proposta neste trabalho é valida quando o fluxo de calor imposto e o
coeficiente de troca térmica no contato forem constantes no tempo e através da
superfície perpendicular ao eixo z.
Na figura 6.17 apresenta-se o perfil de temperatura em relação à direção z.
Observa-se que os resultados numéricos e analíticos são muito próximos até a posição
de interface � �� �. A partir desta posição, entre a região
10 matz c≤ ≤ , os resultados
em escala gráfica são idênticos, entretanto numericamente eles diferem um pouco
devido ao fato de que o contato térmico não é perfeito e sim uma aproximação disto,
entretanto, pode ser visto que �� � �� na região de interface em � �� 0.0055�, o
valor do coeficiente de transferência de calor no contato térmico utilizado foi
2( , ) 1000cWh x y
m K =
.
Figura 6.17 - Posição z versus temperatura para o teste 3, em regime transiente.
Como era esperado, a distribuição de temperaturas nas superfícies do material
compósito foram uniformes, como mostra a figura 6.18.
24
26
28
30
32
34
36
38
40
42
0 0.001 0.002 0.003 0.004 0.005 0.006 0.007 0.008 0.009 0.01 0.011
Tem
pera
tura
, T [º
C]
Posição, z [m]
Material 1:Nylon e Material 2:Nylon tempo t=100s
numericoanalitico

59
Figura 6.18 - Distribuição de temperatura na superfície, para o teste 3 em regime transiente.
6.1.5 Problema teste 4, tridimensional e em regime transiente
No problema teste 4 é proposto um teste em regime transiente tridimensional,
resolvido analiticamente e comparado com uma configuração equivalente no problema
geral tratado neste trabalho. O objetivo deste teste consistiu em demonstrar que o
problema geral foi corretamente resolvido quando o fluxo de calor é dependente da
posição em x e y.
Considerou-se um problema tridimensional semelhante ao problema resolvido
neste trabalho. Entretanto, no problema teste existe apenas um material, como mostra o
esquema da figura 6.19. Neste caso o fluxo de calor dependerá da posição em xey .
Figura 6.19 - Representação esquemática do quarto teste em regime transiente.
Material 1:Nylon e Material 2:Nylon tempo t=100s
z=cz=0
0 0.02
0.04 0.06
0.08 0.1
x [m]
0 0.02
0.04 0.06
0.08 0.1
y [m]
24 26 28 30 32 34 36 38 40 42
T(x,y,z,t) [ºC]

60
Como pode ser observado no esquema considerou-se apenas um material neste
teste, ou seja, no problema tridimensional o material 1 é igual ao material 2, tal como no
terceiro teste em regime transiente examinado acima.
O fluxo de calor no problema geral terá a variação descrita no item 4.11. Esta
função é constante no tempo uniforme na região entre 0 � � � �� e 0 � � � �� e nulo
fora dela. Este problema teste pode ser formulado, utilizando a equação de condução de
calor da seguinte maneira (ÖZIŞIK, 1993) para 0 � � � ��, 0 � � � ��, 0 � � � e
� � 0:
( ) ( ) ( ) ( )2 2 2
2 2 2
, , , , , , , , , , , ,1 T T T T
t x y z
x y z t x y z t x y z t x y z t
α∂ ∂ ∂ ∂
= + +∂ ∂ ∂ ∂
(6.36)
sujeito as condições de contornoem 0, ,0 ,0 para 0x x a y b z c t= = ≤ ≤ ≤ ≤ > :
0T
x
∂ =∂
(6.37)
sujeito as condições de contornoem 0, ,0 ,0 para 0y y b x a z c t= = ≤ ≤ ≤ ≤ > :
0T
y
∂ =∂
(6.38)
em 0,0 ,0 e 0z x a y b t= ≤ ≤ ≤ ≤ > :
( ) ( )( )0
,0 , ,
Tk h T T
tz
z
zt ∞
∂− + − =
∂ (6.39)
em ,0 ,0 e 0z c x a y b t= ≤ ≤ ≤ ≤ > :
( ) ( )( ) ( )*
2
,, , ,
Tk
zh T T q y
tt
zz x t
∞
∂+ − =
∂ (6.40)
A condição inicial é de temperatura uniforme em todo o compósito:
iniT T T∞= = (6.41)

61
A solução analítica deste problema pode ser obtida dividindo-o em dois
problemas, o primeiro permanente e não-homogêneo, enquanto o segundo é transiente
homogêneo. Desta forma, considera-se que o problema pode ser reescrito da seguinte
maneira:
( ) ( ) ( ), , , , , ,fT x y z t T x y z t F z= + (6.42)
onde ( )F z corresponde a solução em regime estacionário do problema teste completo,
problema filtro, e foi aplicado para permitir que a solução do problema teste fosse
obtida mais facilmente utilizando o método CITT (ÖZIŞIK, 1993).
A solução para o filtro, ( )F z , considerando as dimensões da placa (tabela 6.1),
as temperaturas impostas (tabela 6.2), as propriedades do nylon 6-6 e os parâmetros de
entrada (tabela 6.4), a solução desde problema, pode ser escrita como (vide Apêndice
E):
( ) 25.83 + 333.33 zF z = (6.43)
O problema homogêneo é resolvido através da técnica CITT, e cuja solução,
também esta detalhada no Apêndice E, tem a seguinte forma:
( ) ( ) ( ) ( )( ) ( ) ( )
( )2 2 2
,0 0 1
, , ,, , , m n k tm n k
f f inim n k x m y n z k
X x Y y Z zT x y z t e T A
N N N
α β γ ηβ γ ηβ γ η
∞ ∞ ∞ − + +
= = =
= + ∑∑∑ (6.44)
onde
( )( ) ( ) ( ) ( ),
0 0 0
, , ,c b a
f ini ini m n kT T F z X x Y y Z z dxdydzβ γ η= −∫ ∫ ∫ (6.45)
e
( ) ( ) ( ) ( )1 12 2 2 '
0 0 0
,, , 'm n k
a btt k
const m n
z c
Z zA e q X x Y y dydx dt
k
α β γ η ηα β γ+ +
=
=
∫ ∫ ∫ (6.46)
De (ÖZIŞIK, 1993) temos que:

62
( ) ( )( ) ( )
0
21 para 0,
,cos para 0,
x mm
m m x m
NaX x
x N a
β ββ
β β β
= == ≠ =
(6.47)
e
( ) ( )
( ) ( )0
21 para 0,
,cos para 0,
y n
n
n n y n
NaY y
y N a
γ γγ
γ γ γ
= == ≠ =
(6.48)
( ) ( ) ( )1, cos sink k k kZ z z H zη η η η= + (6.49)
e
( ) ( ) ( )
1
2 2 20 02 2
2
12 k
z k k
HH c H
N Hη
η η
− = + + +
+
(6.50)
onde 0 20 2,
h hH H
k k= = , os autovalores ��, �� e ! são as raízes positivas das equações
transcendentais:
( )00 0
sin 0 0m mA
ββ β
= = ≠
(6.51)
( )00 0
sin 0 0n nB
γγ γ
= = ≠
(6.52)
e
( ) ( )0 22
0 2
tan kk
k
H Hc
H H
ηη
η+
=−
(6.53)
Para que no problema geral fossem reproduzidos os mesmos efeitos do problema
teste considerou-se o nylon 6-6 como material 1 e material 2,cujas propriedades estão na
tabela 6.3. Considerou-se ainda um coeficiente de troca térmica no contato alto,
( ) 2, 10000cWh x y
m K =
, e os outros parâmetros de entrada apresentados na tabela
6.15.
Tabela 6.15 - Parâmetros de entrada do teste 1, em regime permanente.
( )20Wh
m K ( )22
Whm K
( )2constWq
m
100 100 1000

63
Na figura 6.20 compara-se a evolução da temperatura com o tempo na posição
� � 0 " � . A concordância entre os resultados numéricos e os resultados
analíticos é perfeita, em escala gráfica. Na tabela 6.16 pode ser observado que existe um
pequeno erro percentual entre os resultados obtidos, nesta tabela os resultados foram
comparados para diversos tempos fixando as posições � 0, � 0 e � . Nesta
posição existe um fluxo de calor aplicado. Os resultados analíticos foram obtidos com
truncamento após 400 termos na convergência das séries em � , � e �.
Figura 6.20 - Temperatura versus tempo para o problema teste 4, em regime transiente.
Tabela 6.16 - Tabela de valores de temperatura versos tempo para o teste 4, em regime transiente
tempo (s) Resultado Numérico, T (ºC) Resultado Analítico, T (ºC) Erro Relativo (%)
0 25.0000000000 25.1328484723 0.5313938894
20 35.6699117139 35.5501292291 0.3358081897
40 36.6388381008 36.6022616492 0.0998297257
60 36.9858122119 36.9666430381 0.0518284517
80 37.0766735033 37.0947076926 0.0486402572
100 37.0973427965 37.1380961805 0.1098552643
Como aconteceu no teste anterior existe uma pequena diferença para posições z
menores do que a posição de interface, possivelmente por conta de se utilizar um valor
finito, embora grande, para o coeficiente de transferência de calor no contato entre os
24
26
28
30
32
34
36
38
40
42
0 10 20 30 40 50 60 70 80 90 100
Tem
pera
tura
, T [º
C]
tempo, t [s]
Material 1:Nylon e Material 2:Nylon na posição z=c, x=0 e y=0
numericoanalitico
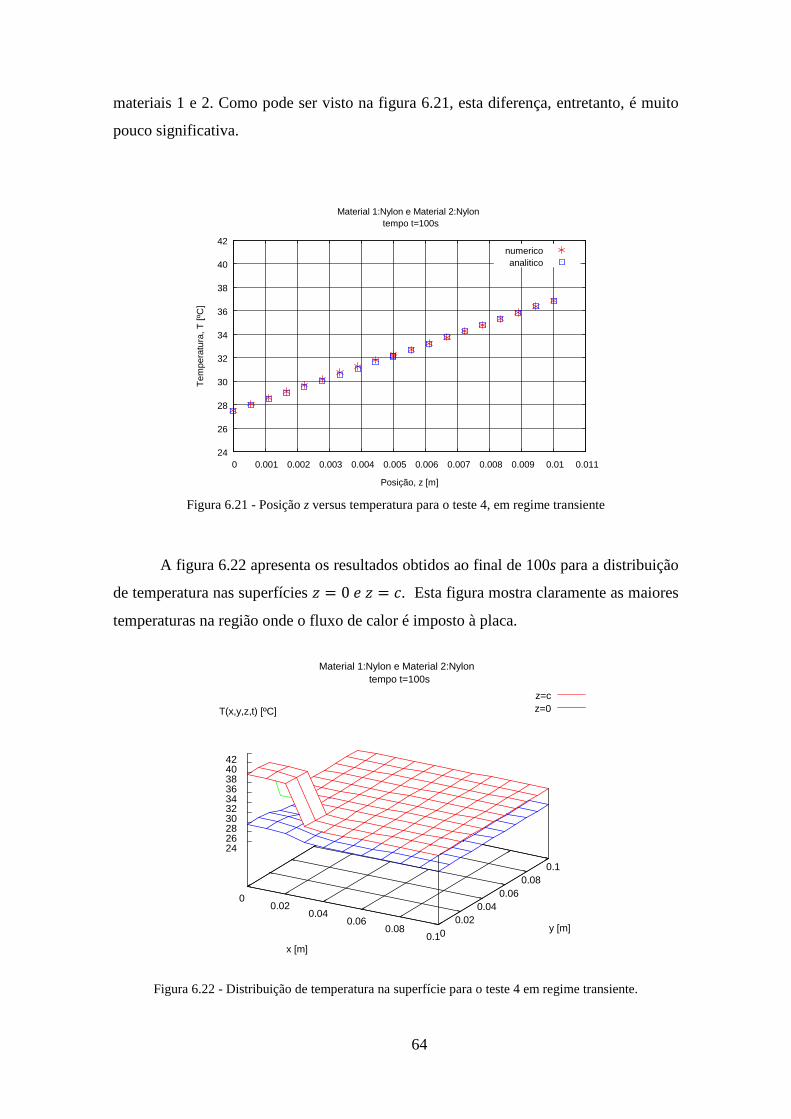
64
materiais 1 e 2. Como pode ser visto na figura 6.21, esta diferença, entretanto, é muito
pouco significativa.
Figura 6.21 - Posição z versus temperatura para o teste 4, em regime transiente
A figura 6.22 apresenta os resultados obtidos ao final de 100s para a distribuição
de temperatura nas superfícies � 0 " � . Esta figura mostra claramente as maiores
temperaturas na região onde o fluxo de calor é imposto à placa.
Figura 6.22 - Distribuição de temperatura na superfície para o teste 4 em regime transiente.
24
26
28
30
32
34
36
38
40
42
0 0.001 0.002 0.003 0.004 0.005 0.006 0.007 0.008 0.009 0.01 0.011
Tem
pera
tura
, T [º
C]
Posição, z [m]
Material 1:Nylon e Material 2:Nylon tempo t=100s
numericoanalitico
Material 1:Nylon e Material 2:Nylon tempo t=100s
z=cz=0
0 0.02
0.04 0.06
0.08 0.1
x [m]
0 0.02
0.04 0.06
0.08 0.1
y [m]
24 26 28 30 32 34 36 38 40 42
T(x,y,z,t) [ºC]
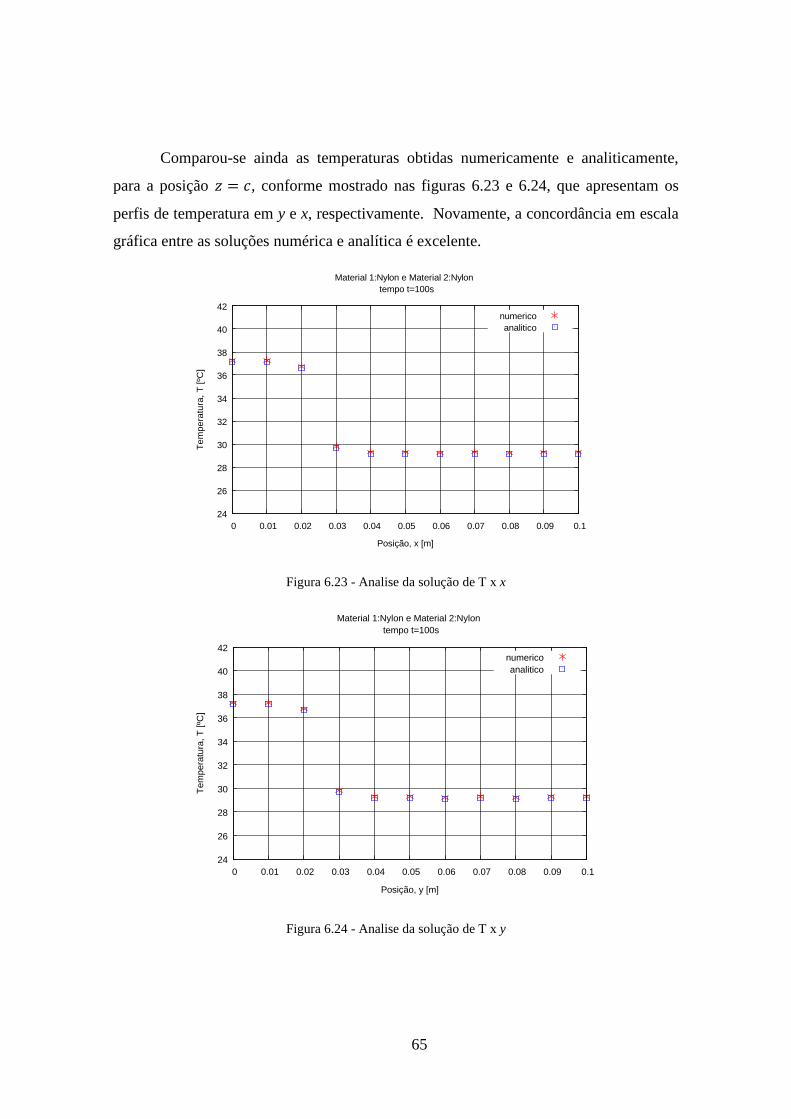
65
Comparou-se ainda as temperaturas obtidas numericamente e analiticamente,
para a posição � , conforme mostrado nas figuras 6.23 e 6.24, que apresentam os
perfis de temperatura em y e x, respectivamente. Novamente, a concordância em escala
gráfica entre as soluções numérica e analítica é excelente.
Figura 6.23 - Analise da solução de T x x
Figura 6.24 - Analise da solução de T x y
24
26
28
30
32
34
36
38
40
42
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1
Tem
pera
tura
, T [º
C]
Posição, x [m]
Material 1:Nylon e Material 2:Nylon tempo t=100s
numericoanalitico
24
26
28
30
32
34
36
38
40
42
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1
Tem
pera
tura
, T [º
C]
Posição, y [m]
Material 1:Nylon e Material 2:Nylon tempo t=100s
numericoanalitico

66
6.1.5.1 Análise de convergência do problema teste 4, em regime transiente
Utilizando a resposta analítica em regime transiente pode-se realizar também a
análise de convergência da série do problema geral neste caso. Manteve-se novamente
fixa uma malha computacional em � com 20 nós. Na tabela 6.10 é apresentada uma
tabela de convergência para a série que resolve o problema direto, para diferentes
tempos e para três posições fixas na superfície � onde o fluxo de calor é imposto.
Estas posições foram uma na posição x = 0.1m e y = 0.1m e duas outras posições
simétricas em x e y, desta forma devendo apresentar valores próximos quando
comparados.
Tabela 6.17 - Análise de convergência da série em X e Y, para o teste 1 em regime permanente.
Número máximo de termos
10ft s= x = 0.0 mm y = 10.0 mm
x = 10.0 mm y = 0.0 mm
x = 100.0 mm y = 100.0 mm
IJF = 5 31.8964 31.8964 29.1124
IJF = 50 35.0832 35.0832 28.2317
IJF = 100 34.6429 34.6429 28.2740
IJF = 150 34.6424 34.6424 28.3730
Solução analítica 33.9338 33.9338 28.2321
Número máximo de termos
20ft s= x = 0.0 mm y = 10.0 mm
x = 10.0 mm y = 0.0 mm
x = 100.0 mm y = 100.0 mm
IJF = 5 32.7759 32.7759 29.6371
IJF = 50 36.3726 36.3726 28.6537
IJF = 100 36.1032 36.1032 28.7009
IJF = 150 35.9227 35.9227 28.8018
Solução analítica 35.1822 35.1822 28.6494
Número máximo de termos
50ft s= x = 0.0 mm y = 10.0 mm
x = 10.0 mm y = 0.0 mm
x = 100.0 mm y = 100.0 mm
IJF = 5 33.4325 33.4325 30.0292
IJF = 50 37.3246 37.3246 28.9756
IJF = 100 37.0330 37.0330 29.0248
IJF = 150 36.8728 36.8728 29.1260
Solução analítica 36.3686 36.3686 29.0553

67
6.2 Problema Direto com falha de contato entre as placas
Faz-se agora uma avaliação qualitativa da solução, para um caso em que o
coeficiente de transferência de calor no contato não é uniforme, simulando assim uma
região com falha de contato. Neste caso, considera-se o fluxo de calor uniforme em toda
a superfície é ( ) 2, 1000 cWh x y
m K =
para a região de contato é
( ) 2, 0 cWh x y
m K =
para a região sem contato, este valor utilizado na região de
contato, como foi avaliado anteriormente, corresponde a uma boa aproximação do que
seria um contato térmico perfeito, e corresponde para os materiais tratados aqui a
( ), 12cBi X Y = .
Na solução deste caso com coeficiente de transferência de calor variável no
contato serão utilizadas interpolações por cubic splines para a solução das integrais de
hc (x,y), conforme foi explicado no capítulo 4. Os resultados abaixo são apresentados na
forma adimensional.
O Material utilizado a partir desde item será um material utilizado na indústria
aeronáutica, formado por fibra de grafite e titânio, cujas propriedades são apresentadas
na tabela 6.3.
6.2.1 Titânio exposto ao fluxo de calor
Neste primeiro teste será considerada uma malha de análise de medidas de
temperatura em x e y igual à 11x11, ou seja, será considerado que a temperatura será
medida em 121 pontos da superfície. Considerando que estas temperaturas serão
medidas com uma câmera termográfica, pode-se dizer que a resolução inicial da mesma
seria de 11x11. Define-se então um valor discreto para o Bic(X,Y) para ponto de
temperatura medida, baseado na seguinte função:
( )
( )
para 2 3 e 2 3, 0
para 7 8 e 5 6
, 12 nas outras regiões
c
c
X YBi X Y
X Y
Bi X Y
≤ ≤ ≤ ≤= ≤ ≤ ≤ ≤
=
(6.54)

68
Esta função do número de Biot de contato pode ser observada nas figuras 6.25 e 6.26.
Na figura 6.26, podem ser vistas mais claramente as regiões da superfície onde o
contato térmico é perfeito e onde existem falhas.
Figura 6.25 - Variação espacial do Biot de contato,cBi , com Titânio exposto ao fluxo de calor com
malha em x e y, 11x11.
Figura 6.26 - Variação espacial do Biot de contato,cBi , com Titânio exposto ao fluxo de calor com
malha em x e y, 11x11.
0 2
4 6
8 10 0
2 4
6 8
10
0
2
4
6
8
10
12
Biot
Variação do Biot em X e Y
X
Y
Biot
Variação do Biot em X e Y
0 2 4 6 8 10
X
0
2
4
6
8
10
Y
0
2
4
6
8
10
12

69
Considerando os valores de entrada da tabela 6.18 e considerando o material 1
como o epóxi com grafite e material 2 o titânio, foram realizados os primeiros testes do
problema direto.
Tabela 6.18 - Parâmetros de entrada do teste 1, em regime permanente.
( )20Wh
m K ( )22
Whm K
( )2constWq
m
10 100 1000
A variação da temperatura adimensional com o tempo, obtida com a função dada
pela equação 6.42, é apresentada na figura 6.27 para as posições 0x = , 0y = e z c= .
Observa-se que o problema atingiu o regime permanente aproximadamente após o
tempo adimensional 6, ou seja, aproximadamente 900 segundos. A temperatura
adimensional foi negativa devido à temperatura de referência utilizada na
adimensionalização, de acordo com a equação (3.8), sendo que a temperatura
dimensional para a qual o problema convergiu em regime permanente, nesta posição, foi
de 38.7 oC e aumentou com o tempo.
Na figura 6.28, é apresentada a distribuição de temperaturas na superfície em
� . Observa-se, entretanto, que a temperatura ‘dimensional’ aumenta com o tempo e
que as regiões de falha tiveram temperatura dimensional maior do que as regiões onde
não havia falha.
Isto pode ser confirmado pela equação (3.8) e é explicado devido a uma
temperatura adimensional definida como: * *
T T
T Tθ ∞
∞
−=−
, uma vez que *T T∞ = e que nos
testes realizados *T T∞ ∞> , então à medida que ( ), , ,T x y z t aumenta, o valor de
( ), , ,X Y Zθ τ diminui. Pela tabela 6.2 pode ser visto que ( )* 5T T∞− = − .

70
Figura 6.27 - Gráfico de distribuição de temperatura no tempo com Titânio exposto ao fluxo de calor com
malha em x e y, 11x11.
Figura 6.28 - Distribuição de temperatura adimensional na superfície, na posição adimensional Z=1, onde
o fluxo de calor foi imposto, no tempo final 6.
O tempo de CPU gasto na solução deste problema, até que o regime permanente
fosse atingido, foi de 40s. Tal tempo computacional é considerado alto, já que o foco
deste estudo é a solução problema inverso através do Método de Monte Carlo com
Cadeia de Markov, o que pode requerer milhares de avaliações da solução do problema
direto. Assim, utilizou-se um tempo final no experimento simulado menor do que
aquele necessário para o regime permanente, além disto, é sabido (ÖZIŞIK e
ORLANDE, 2000) que tipicamente as medidas realizadas no regime transiente possuem
maiores informações para a solução do problema inverso.
-3
-2.5
-2
-1.5
-1
-0.5
0
0 1 2 3 4 5 6 7
Tem
pera
tura
Adi
men
sion
al
tempo adimensional
Titânio exposto ao fluxo de calor na posição Z=1, X=0 e Y=0
0 2
4 6
8 10 0
2 4
6 8
10
-2.754-2.752-2.75
-2.748-2.746-2.744-2.742-2.74
-2.738
Theta(X,Y,Z,t)
Titanio exposto ao fluxo de Calor
X
Y
Theta(X,Y,Z,t)
-2.754-2.752-2.75-2.748-2.746-2.744-2.742-2.74-2.738

71
Por outro lado, é necessário que exista uma variação de temperatura significativa
na superfície onde são feitas as medições, para possibilitar uma estimativa adequada da
função desconhecida. Assim o fluxo de calor foi aumentado para 225000constq W m =
, ou seja, uma potência aplicada de aproximadamente [ ]250 W para a área tratada neste
trabalho. Na figura 6.29 pode ser vista a distribuição de temperatura na superfície
aquecida (posição adimensional Z = 1), considerando o tempo final 0.065τ = . Para este
caso, o tempo de CPU foi significativamente menor, sendo da ordem de 2.8s.
Figura 6.29 - Distribuição de temperatura adimensional na superfície, na posição adimensional Z=1, onde
o fluxo de calor foi imposto, no tempo final 0.065
Nos casos avaliados, esta variação de temperatura se mostrou adequada para a
solução do problema inverso quando o desvio padrão das medidas simuladas fosse de
0.001σ = . Porém, ao se aumentar o desvio padrão para 0.01σ = foi necessário utilizar
um tempo final maior, uma vez este desvio padrão produziu erros cuja ordem de
grandeza impossibilitava que a variação das temperaturas obtidas nas regiões de contato
e das regiões de falha fosse identificada. Utilizou-se então o tempo final de 0.13τ = . A
variação de temperatura para este caso pode ser vista na figura 6.30 e o tempo de CPU
foi 3.29 segundos.
0 2
4 6
8 10 0
2 4
6 8
10
-5-4.95-4.9
-4.85-4.8
-4.75-4.7
-4.65-4.6
-4.55
Theta(X,Y,Z,t)
Titanio exposto ao fluxo de Calor
X
Y
Theta(X,Y,Z,t)
-5-4.95-4.9-4.85-4.8-4.75-4.7-4.65-4.6-4.55

72
Figura 6.30 - Distribuição de temperatura adimensional na superfície, na posição adimensional Z=1, onde
o fluxo de calor foi imposto, no tempo final 0.13.
6.2.2 Análise de convergência do problema direto
Realizou-se a análise de convergência da série do problema geral apenas para o
caso com titânio exposto ao fluxo, uma vez que os resultados obtidos com a outra face
do compósito laminado exposta ao fluxo, a análise de convergência dos resultados é
análoga. Manteve-se uma malha computacional em z com 6 nós, a mesma que será
utilizada no problema direto, devido a necessidade de ser utilizado o menor tempo de
CPU possível. Na tabela 6.19 é apresentada uma tabela de convergência para a série que
resolve o problema direto, para diferentes tempos e para três posições fixas na superfície
z c= onde o fluxo de calor é imposto. Estas posições foram uma numa região com bom
contato térmico e duas outras posições com falha no contato térmico em x e y, desta
forma devendo apresentar valores próximos quando comparados. Como pode ser visto
os valores de temperatura.
Tabela 6.19 - Análise de convergência da série em X e Y, para o teste 1 em regime permanente.
Número máximo de termos
26 e 1000f consq W mτ = = X = 0.0 Y = 0.0
X = 2.0 Y = 2.0
X = 7.0 Y = 5.0
IJF = 10 -2.739951 -2.739876 -2.739893
IJF = 50 -2.740758 -2.744466 -2.743866
IJF = 100 -2.740678 -2.751876 -2.751689
IJF = 150 -2.740984 -2.753444 -2.752601
0 2
4 6
8 10 0
2 4
6 8
10
-8.7-8.6-8.5-8.4-8.3-8.2-8.1
-8-7.9-7.8
Theta(X,Y,Z,t)
Titanio exposto ao fluxo de Calor
X
Y
Theta(X,Y,Z,t)
-8.7-8.6-8.5-8.4-8.3-8.2-8.1-8-7.9-7.8

73
Número máximo de termos
20.065 e 25000f consq W mτ = = X = 0.0 Y = 0.0
X = 2.0 Y = 2.0
X = 7.0 Y = 5.0
IJF = 10 -7.987722 -7.971328 -7.976237
IJF = 50 -7.978068 -8.400835 -8.365097
IJF = 100 -7.957970 -8.695596 -8.671369
IJF = 150 -7.960531 -8.681492 -8.658416
Número máximo de termos
20.13 e 25000f consq W mτ = = X = 0.0 Y = 0.0
X = 2.0 Y = 2.0
X = 7.0 Y = 5.0
IJF = 10 -4.630266 -4.619972 -4.624899
IJF = 50 4.605672 -4.885096 -4.860527
IJF = 100 -4.580167 -4.983206 -4.983459
IJF = 150 -4.579754 -4.994525 -4.984449
6.2.3 Fibra de grafite em epóxi exposta ao fluxo de calor com malha em x e
y, 11x11
Neste caso, considerou-se a mesma função de Biot de contato do item anterior,
dada pela equação (6.54), assim como os mesmos parâmetros de entrada. Nas figuras
6.31 e 6.32 são apresentados, respectivamente, as distribuições de temperatura para os
tempos finais 0.065τ = e 0.13τ = :
Figura 6.31 - Distribuição de temperatura adimensional na superfície, na posição adimensional Z=1, onde
o fluxo de calor foi imposto, no tempo final 0.065.
0 2
4 6
8 10 0
2 4
6 8
10
-13.45-13.4
-13.35-13.3
-13.25-13.2
-13.15-13.1
-13.05-13
Theta(X,Y,Z,t)
Epóxi com fibra de grafite exposta ao fluxo de Calor
X
Y
Theta(X,Y,Z,t)
-13.45-13.4-13.35-13.3-13.25-13.2-13.15-13.1-13.05-13

74
Figura 6.32 - Distribuição de temperatura adimensional na superfície, na posição adimensional Z=1, onde
o fluxo de calor foi imposto, no tempo final 0.13.
Pode ser observado pelas figuras 6.31 e 6.32 que as temperaturas na região onde
existe falha no contato térmico têm um formato gráfico bem semelhante àquele
demonstrado na Figura 6.25 para a variação do Biot de contato. Isto não ocorreu nas
figuras 6.29 e 6.30 devido ao fluxo de calor ter sido imposto num material melhor
condutor térmico. Como era esperado, com a imposição do fluxo de calor no epóxi com
fibra de grafite a perda de calor para o meio foi menor e assim, o calor pode ser
transmitido de maneira mais homogênea. Pode ser observado nestas figuras 6.31.
Como esperado, as temperaturas obtidas foram adimensionalmente menores
(dimensionalmente maiores) do que àquelas obtidas nas figuras 6.29 e 6.30, devido às
características dos materiais (ÖZIŞIK, 1993). Deve-se ainda ressaltar que até este tempo
adimensional, as temperaturas do material tiveram uma variação que permite utilizar a
hipótese de propriedades térmicas constantes, dentro dos materiais.
6.2.4 Titânio exposto ao fluxo de calor com malha em x e y, 21x21
Este caso é análogo àquele apresentado no item 6.2.1 anteriormente, mas o
número de medidas de temperatura na superfície da placa de material compósito é
ampliado e por conseqüência a resolução espacial da função ( ),cBi X Y a ser estimada.
0 2
4 6
8 10 0
2 4
6 8
10
-19.5
-19
-18.5
-18
-17.5
-17
-16.5
Theta(X,Y,Z,t)
Epóxi com fibra de grafite exposta ao fluxo de Calor
X
Y
Theta(X,Y,Z,t)
-19.5
-19
-18.5
-18
-17.5
-17
-16.5

75
Desta forma, existe um maior número de regiões onde o ( ),cBi X Y será estimado,
permitindo que falhas menores do que no caso anterior sejam detectadas. Neste caso
será considerada uma malha computacional em x e y de 21x21, com a seguinte função
para o ( ),cBi X Y , que representam as regiões de falhas menores (ver figuras 6.32 e
6.33):
( )
( )
para 3.0 3.5 e 3.0 3.5, 0
para 7.5 8.0 e 7.5 8.0
, 12 nas outras regiões
c
c
X YBi X Y
X Y
Bi X Y
< < < <= < < < <
= (6.55)
Figura 6.33 - Gráfico de variação espacial do biot de contato, cBi , com Titânio exposto ao fluxo de calor
com malha em x e y, 21x21.
Figura 6.34 - Gráfico de variação espacial do Biot de contato, cBi , com malha em x e y, 21x21.
0 1 2 3 4 5 6 7 8 9 10 0 1
2 3
4 5
6 7
8 9
10
0 2 4 6 8
10 12 14
Biot
Variação do Biot em X e Y
Biot Exato
X
Y
Biot
Variação do Biot em X e Y
0 1 2 3 4 5 6 7 8 9 10
X
0
1
2
3
4
5
6
7
8
9
10
Y
0
2
4
6
8
10
12

76
A distribuição de temperatura na superfície aquecida (Z=1), para os tempos
adimensionais de 0.065 e 0.13 (em termos dimensionais 10s e 20s, respectivamente) são
apresentadas nas figuras 6.34 e 6.35, respectivamente. Observa-se que as temperaturas
entorno da região com falha no contato térmico obtidas neste caso foram semelhantes
àquelas obtidas nas figuras 6.29 e 6.30, onde a área com falha era maior.
Verifica-se que da mesma forma que ocorreu naqueles gráficos, figuras 6.29 e
6.30, o fato do titânio ser um bom condutor térmico fez com que entorno da região com
falha houvesse uma troca de calor, desta forma, observa-se nas figuras 6.35 e 6.36 uma
variação de temperaturas suave nas posições em torno da falha. Num caso com uma
malha mais refinada com o epóxi com fibra de grafite exposta ao fluxo de calor, a
região em torno da falha teria muito menos troca de calor, e se assemelharia ainda mais
a figura 6.33, para a variação do ( ),cBi X Y .
Figura 6.35 - Distribuição de temperatura adimensional na superfície, na posição adimensional Z=1, para
441 sensores, no tempo 0.065.
0 2
4 6
8 10 0
2 4
6 8
10
-4.92-4.9
-4.88-4.86-4.84-4.82-4.8
-4.78-4.76-4.74-4.72
Theta(X,Y,Z,t)
Titanio exposto ao fluxo de Calor
X
Y
Theta(X,Y,Z,t)
-4.92-4.9-4.88-4.86-4.84-4.82-4.8-4.78-4.76-4.74-4.72

77
Figura 6.36 - Distribuição de temperatura adimensional na superfície, na posição adimensional Z=1, para
malha em x e y = 21 x 21, no tempo 0.13.
6.3 Solução do Problema Inverso
Neste trabalho foram utilizadas medidas experimentais simuladas, obtidas a
partir da solução do problema direto, cujo desvio padrão do erro é controlado. Para isto,
a partir da solução do problema direto, juntamente com um número randômico
( )0,1Nω ∼ e um desvio padrão dos erros de medição igual a σ obtém-se:
( )( , , , ) , , ,meas X Y exato X Y exatoT i j n T i j n ωσ= = +Y P P (6.56)
onde exatoP é o vetor contendo o valor exato de #$��%, &� nos pontos discretos na
superfície $', () , onde a temperatura T é calculada, com intervalos t∆ no tempo até o
número máximo de medidas maxN no tempo final ft .
Utilizou-se um modelo Markoviano para gerar os pontos candidatos, onde
(1 2 )t t t tP P P ω+∆ = + ∆ − , sendo que ( )0,1t Uω ∼ (ORLANDE, 2009) e 25 10P −∆ = × .
Percentuais de aceitação muito altos ou muito baixos podem fazer com que a cadeia
demore muito tempo para estabilizar ou podendo até mesmo divergir. Com este valor de
DP a taxa de aceitação dos estados da cadeia de Markov foi de aproximadamente 25%.
0 2
4 6
8 10 0
2 4
6 8
10
-8.8-8.75-8.7
-8.65-8.6
-8.55-8.5
-8.45
Theta(X,Y,Z,t)
Titanio exposto ao fluxo de Calor
X
Y
Theta(X,Y,Z,t)
-8.8-8.75-8.7-8.65-8.6-8.55-8.5-8.45

78
Foram considerados abaixo, problemas inversos envolvendo um compósito
laminado utilizado na indústria aeronáutica, constituído de uma placa de Titânio e outra
de Epóxi com fibra de grafite, cujas propriedades estão na tabela 6.3. Testou-se
inicialmente a exposição do titânio ao fluxo de calor e posteriormente do epóxi com
fibra de grafite.
Em todos os casos apresentados para a solução do problema inverso considerou-
se como estado inicial da cadeia de Markov o valor uniforme de #$��%, &�= 0 6=P .
Este valor corresponde à metade do valor exato de #$��%, &� onde há contato entre as
placas, os demais parâmetros de entrada estão na tabela 6.18:
Tabela 6.20 - Parâmetros de entrada para o problema inverso
( )20Wh
m K ( )22
Whm K
IJF Numero Estados da cadeia de Markov
( )t s∆ ( )2constWq
m
10 100 100 15000 0.1 25000
Foram examinadas abaixo informações a priori Gaussianas e uniformes para os
parâmetros a serem estimados, que representam os valores da função #$��%, &� em cada
um dos elementos de área estipulados pela resolução considerada para a câmera. Foram
realizadas estimativas com desvio padrão da informação a priori Gaussiana, *+,, iguais
a 0.2µ e 0.6µ , onde µ é a média dos parâmetros, e µ é suposta conhecida, considerou-
se ainda como informação a priori, que ( ),cBi X Y nunca assumiria números negativos,
uma vez que ( ), 0cBi X Y = ou muito baixos, caracterizam que existe uma falha no
contato entre as placas, assim, este Biot então não pode ser negativo.
Para os casos utilizando informação a priori uniforme, não-informativa,
considerou-se que os valores obtidos para os pontos candidatos para a estimativa do
#$��%, &� estariam entre 0 e 50. Com relação às resoluções espaciais consideradas,
foram examinados dois casos, a saber: (i) resolução de 121 elementos (malha espacial
de 11 por 11) e (ii) resolução de 441 elementos (malha espacial de 21 por 21). Com
relação aos erros de medição, foram analisados casos com erros de medição iguais a
0.1% e 1% da maior temperatura medida
Os resultados obtidos foram quantitativamente avaliados através do cálculo do
erro RMS da função estimada, que é definido como:

79
( ) ( ) 2
, ,1 1
, ,X Y
gradx grady
c exato X Y c estimado X Yi j
RMS
Bi i j Bi i j
Egradx grady
= =
− =
⋅
∑ ∑ (6.57)
A seguir são apresentados e discutidos em detalhe os resultados obtidos para os
casos analisados.
6.3.1 Informação a priori informativa gaussiana, com - ./01234, desvio
padrão das medidas igual a 0.1% da maior temperatura medida e com
desvio padrão da informação a priori 5./ 6. 76-. Utilizando 121 sensores
na superfície
6.3.1.1 Com titânio exposto ao fluxo de calor.
São apresentados nesta seção os resultados para o titânio exposto ao fluxo de
calor com informação a priori informativa gaussiana, com média µ , constante e igual
ao número de Biot exato da região de contato térmico perfeito, cBi , e desvio padrão da
informação a priori Biσ igual a 20% da média µ . Desta forma, assumiu-se a priori que
a adesão entre as placas que compõe o compósito laminado era perfeita. Assim, nas
regiões onde o contato não fosse perfeito, a solução do problema inverso deveria
retornar números de Biot de contato nulos. Este caso em análise corresponde ao
problema direto analisado na seção 6.2.1, cujo gráfico de distribuição de temperaturas
no tempo final utilizado 8 0.065 está na figura 6.29.
Os resultados obtidos para este caso são apresentados na tabela 6.21 e nas
figuras 6.37 até 6.40. A figura 6.37 apresenta a comparação entre as funções exata e
estimada. Tal comparação também é feita na figura 6.38 através de um gráfico de
contorno. A figura 6.39 apresenta os valores estimados para os desvios-padrão dos
valores pontuais da função na malha espacial considerada. As cadeias de Markov para
dois pontos desta malha espacial são apresentadas na figura 6.40. O ponto considerado
para análise da cadeia de Markov em uma região correspondente a contato perfeito foi
aquele na posição � 0, � 0, enquanto o ponto na região correspondente à falha foi
aquele na posição � 2, � 3.

80
Tabela 6.21 - Resultados obtidos para titânio exposto ao fluxo de calor.
Erro RMS
Tempo de CPU ( s )
Taxa de Aceitação
0.1576 49314 23%
As figuras 6.37 e 6.38 mostram uma excelente concordância entre as funções
exata e estimada (valor médio da cadeia de Markov depois de desprezados o período de
aquecimento de 6000 amostras). De fato, o erro RMS correspondente a esta estimativa é
de 0.1576. Além disso, a dispersão dos valores estimados é pequena, como pode ser
observado na figura 6.39. De fato, os desvios-padrão das estimativas encontram-se em
torno de 0.2.
A figura 6.40 mostra uma excelente convergência das cadeias de Markov
analisadas. De fato, o método usado é capaz de rapidamente distinguir as regiões de
contato daquelas com falhas, isto é, a partir de 6000 estados. Portanto, somente os
estados seguintes forma usados para os cálculos dos valores médios e dos desvios-
padrão das estimativas.
Figura 6.37 - Biot exato comparado com o Biot estimado.
0 2
4 6
8 10 0
2 4
6 8
10
0 2 4 6 8
10 12 14
Biot
Material 1:Epóxi com Fibras de Grafite e Material 2:Titanio
Biot ExatoBiot Estimado
X
Y
Biot

81
Figura 6.38 - Biot exato à esquerda comparado com o Biot estimado à direita.
Figura 6.39 - Desvio padrão dos resultados para a estimativa do Biot de contato
Figura 6.40 - Estabilização da Cadeia de Markov para um ponto com falha e para um ponto com contato.
Material 1:Epóxi com Fibras de Grafite e Material 2:Titanio
Biot Exato
0 2 4 6 8 10
X
0
2
4
6
8
10
Y
0
4
8
12
16
20
Biot Estimado
0 2 4 6 8 10
X
0
2
4
6
8
10
Y
0
4
8
12
16
20
Material 1:Epóxi com Fibras de Grafite e Material 2:Titanio
0 2
4 6
8 10
X
0 2
4 6
8 10
Y
0
0.2
0.4
0.6
0.8
1
Desvio Padrao
0
2
4
6
8
10
12
14
16
0 2000 4000 6000 8000 10000 12000 14000 16000
Bio
t Est
imad
o
Estados da cadeia de Markov
Material 1:Epóxi com Fibras de Grafite e Material 2:Titanio
falhacontato térmico perfeito

82
6.3.1.2 Com epóxi exposto ao fluxo de calor.
Este caso é semelhante ao anterior, mas considera-se que a placa de epóxi
revestido com fibra de grafite é exposta ao fluxo de calor, ao invés da placa de titânio.
Os resultados foram igualmente bons aos obtidos no caso anterior, como pode ser
visualizado nas figuras 6.41 a 6.44 e os valores de Biot de contato estimados foram
muito próximos dos valores exatos, como mostram as figuras 6.41 e 6.42.
De fato, o erro RMS neste caso (tabela 6.22) foi menor do que no caso anterior
(tabela 6.21), comprovando a qualidade dos resultados obtidos. Isto pode ser explicado
devido à maior variação de temperatura entre as regiões com falha no contato térmico e
as regiões sem falha, isto pode ser comprovado no gráfico de distribuição de
temperaturas para este caso, na figura 6.31, para o tempo final de 8 0.065.
Na figura 6.43 podem ser vistos os valores estimados para os desvios-padrão dos
valores pontuais da função na malha espacial considerada. As cadeias de Markov para
dois pontos desta malha espacial são apresentadas na figura 6.44. O ponto considerado
para análise da cadeia de Markov em uma região correspondente a contato perfeito foi
aquele na posição � 0, � 0, enquanto o ponto na região correspondente à falha foi
aquele na posição � 2, � 3, os mesmos pontos analisados no caso anterior.
A figura 6.44 mostra uma excelente convergência das cadeias de Markov
analisadas, comprovando que o método usado é capaz de rapidamente definir as regiões
de contato daquelas com falhas, isto é, a partir de 6000 estados (após o período de
aquecimento). Portanto, somente os estados seguintes foram usados para os cálculos dos
valores médios e dos desvios-padrão das estimativas, como no caso anterior.
Tabela 6.22 - Resultados obtidos para epóxi exposto ao fluxo de calor.
Erro RMS
Tempo de CPU ( s )
Fator de Aceitação
0.1206 50128 20%

83
Figura 6.41 - Biot exato comparado com o Biot estimado.
Figura 6.42 - Biot exato à esquerda comparado com o Biot estimado à direita.
Figura 6.43 - Desvio padrão dos resultados para a estimativa do Biot de contato
0 2
4 6
8 10 0
2 4
6 8
10
0 2 4 6 8
10 12 14
Biot
Material 1:Titanio e Material 2:Epóxi com Fibras de Grafite
Biot ExatoBiot Estimado
X
Y
Biot
Material 1:Titanio e Material 2:Epóxi com Fibras de Grafite
Biot Exato
0 2 4 6 8 10
X
0
2
4
6
8
10
Y
0
4
8
12
16
20
Biot Estimado
0 2 4 6 8 10
X
0
2
4
6
8
10
Y
0
4
8
12
16
20
Material 1:Titanio e Material 2:Epóxi com Fibras de Grafite
0 2
4 6
8 10
X
0 2
4 6
8 10
Y
0
0.2
0.4
0.6
0.8
1
Desvio Padrao

84
Figura 6.44 - Estabilização da Cadeia de Markov para um ponto com falha e para um ponto com contato.
6.3.2 Informação a priori informativa gaussiana, com - ./01234, desvio
padrão das medidas igual a 0.1% da maior temperatura medida e com
desvio padrão da informação a priori 5./ 6. <6-. Utilizando 121 sensores
na superfície
6.3.2.1 Com titânio exposto ao fluxo de calor.
Neste teste aumentou-se o desvio padrão da informação a priori, isto é,
considera-se maior a incerteza na informação disponível sobre os parâmetros antes de
serem tomadas as medidas de temperatura no experimento idealizado. Considerou-se a
informação a priori na forma de uma distribuição gaussiana conforme nos casos
anteriores, com valor médio igual ao valor de cBi exato num ponto onde existe contato
térmico perfeito, mas com desvio-padrão de 60% deste valor exato. Como era esperado
os resultados obtidos foram um pouco piores daqueles obtidos com desvio padrão de
20%, como mostra a tabela 6.23.
Os resultados obtidos estão na tabela 6.23 e nas figuras 6.45 a 6.48 onde pode
ser visto que houve uma excelente concordância entre as funções exata e estimada para
o Biot no contato (valor médio da cadeia de Markov depois de desprezados o período de
aquecimento, de 8000 amostras). O erro RMS correspondente a esta estimativa é de 0.7
e a dispersão dos valores estimados (figura 6.47), os desvios-padrão das estimativas
encontram-se em torno de 0.6 conforme era previsto.
0
2
4
6
8
10
12
14
16
0 2000 4000 6000 8000 10000 12000 14000 16000
Bio
t Est
imad
o
Estados da cadeia de Markov
Material 1:Titanio e Material 2:Epóxi com Fibras de Grafite
falhacontato térmico perfeito

85
Tabela 6.23 - Resultados obtidos para titânio exposto ao fluxo de calor.
Erro RMS
Tempo de CPU ( s )
Fator de Aceitação
0.7 50420 21%
A comparação das figuras 6.45, 6.46 com as figuras 6.36, 6.37 mostra
claramente que a função não é tão bem estimada quando a informação a priori
disponível tem maior incerteza. De fato, o erro RMS é maior neste caso, quando
comparado com aquele do caso 6.3.1 (ver tabelas 6.21 e 6.22 e os gráficos das figuras
6.37 e 6.38), bem como o desvio-padrão das estimativas é maior (ver figuras 6.39 e
6.47).
O comportamento das cadeias de Markov para este caso é semelhante daquelas
dos casos anteriores. O ponto considerado para análise da cadeia de Markov em uma
região correspondente a contato perfeito foi aquele na posição � 0, � 0, enquanto o
ponto na região correspondente à falha foi aquele na posição � 2, � 3 .
Os resultados obtidos são excelentes, tendo em vista o caráter pouco informativo
da distribuição a priori usada.
Figura 6.45 - Biot exato comparado com o Biot estimado.
0 2
4 6
8 10 0
2 4
6 8
10
0 2 4 6 8
10 12 14
Biot
Material 1:Epóxi com Fibras de Grafite e Material 2:Titanio
Biot ExatoBiot Estimado
X
Y
Biot

86
Figura 6.46 - Biot exato à esquerda comparado com o Biot estimado à direita.
Figura 6.47 - Desvio padrão dos resultados para a estimativa do Biot de contato
Figura 6.48 - Estabilização da Cadeia de Markov para um ponto com falha e para um ponto com contato.
Material 1:Epóxi com Fibras de Grafite e Material 2:Titanio
Biot Exato
0 2 4 6 8 10
X
0
2
4
6
8
10
Y
0
4
8
12
16
20
Biot Estimado
0 2 4 6 8 10
X
0
2
4
6
8
10
Y
0
4
8
12
16
20
Material 1:Epóxi com Fibras de Grafite e Material 2:Titanio
0 2
4 6
8 10
X
0 2
4 6
8 10
Y
0
0.2
0.4
0.6
0.8
1
Desvio Padrao
0
2
4
6
8
10
12
14
16
0 2000 4000 6000 8000 10000 12000 14000 16000
Bio
t Est
imad
o
Estados da cadeia de Markov
Material 1:Epóxi com Fibras de Grafite e Material 2:Titanio
falhacontato térmico perfeito

87
6.3.2.2 Com epóxi exposto ao fluxo de calor.
Repete-se aqui o caso anterior, mas com o fluxo de calor imposto na outra face
do material, isto é, sobre a placa de epóxi com grafite. Os resultados foram igualmente
bons aos obtidos no caso anterior, os valores de Biot de contato estimados foram muito
próximos dos valores exatos como pode ser visualizado nas figuras 6.49 a 6.50.
De fato, o erro RMS neste caso (tabela 6.24) foi menor do que no caso anterior
(tabela 6.23), comprovando a qualidade dos resultados obtidos. Isto pode ser explicado
novamente, devido à maior variação de temperatura entre as regiões com falha no
contato térmico e as regiões sem falha, isto pode ser visualizado no gráfico de
distribuição de temperaturas para este caso (sem o erro simulando medidas), na figura
6.31, para o tempo final de 8 0.065.
Na figura 6.51 podem ser vistos os valores estimados para os desvios-padrão dos
valores pontuais da função na malha espacial considerada. As cadeias de Markov para
dois pontos desta malha espacial são apresentadas na figura 6.52. O ponto considerado
para análise da cadeia de Markov em uma região correspondente a contato perfeito foi
aquele na posição � 0, � 0, enquanto o ponto na região correspondente à falha foi
aquele na posição � 2, � 3, os mesmos pontos analisados no caso anterior.
A figura 6.52 mostra uma boa convergência das cadeias de Markov analisadas,
comprovando que o método usado é capaz de distinguir as regiões de contato daquelas
com falhas, a partir de 8000 estados (após o período de aquecimento).
A comparação das figuras 6.49, 6.50 com as figuras 6.45, 6.46 e ainda com as
figuras 6.37 e 6.38, mostra que a função não é tão bem estimada quando a informação a
priori disponível tem maior incerteza e ainda quando o material exposto ao fluxo de
calor tem maior condutividade térmica, devido aos fatores comentados anteriormente.
Os resultados obtidos para este caso (tabela 6.24 e figuras 6.49 a 6.52),
entretanto confirmam que neste caso é possível estimar com boa precisão o Biot de
contato, mesmo com priori pouco informativa e com sua maior incerteza.
Tabela 6.24 - Resultados obtidos para epóxi exposto ao fluxo de calor.
Erro RMS
Tempo de CPU ( s )
Fator de Aceitação
0.3100 50801 0.28%

88
Figura 6.49 - Biot exato comparado com o Biot estimado.
Figura 6.50 - Biot exato à esquerda comparado com o Biot estimado à direita.
Figura 6.51 - Desvio padrão dos resultados para a estimativa do Biot de contato
0 2
4 6
8 10 0
2 4
6 8
10
0 2 4 6 8
10 12 14
Biot
Material 1:Titanio e Material 2:Epóxi com Fibras de Grafite
Biot ExatoBiot Estimado
X
Y
Biot
Material 1:Titanio e Material 2:Epóxi com Fibras de Grafite
Biot Exato
0 2 4 6 8 10
X
0
2
4
6
8
10
Y
0
4
8
12
16
20
Biot Estimado
0 2 4 6 8 10
X
0
2
4
6
8
10
Y
0
4
8
12
16
20
Material 1:Titanio e Material 2:Epóxi com Fibras de Grafite
0 2
4 6
8 10
X
0 2
4 6
8 10
Y
0
0.2
0.4
0.6
0.8
1
Desvio Padrao

89
Figura 6.52 - Estabilização da Cadeia de Markov para um ponto com falha e para um ponto com contato.
6.3.3 Informação a priori não-informativa uniforme, com 6 � = � >6,
desvio padrão das medidas igual a 0.1% da maior temperatura medida.
Utilizando 121 sensores na superfície
Nesta seção aborda-se o caso em que considera-se uma distribuição a priori não
informativa, codificada na forma de uma distribuição uniforme, com valores
equiprováveis no intervalo 0 � #$��%, &� � 50, e probabilidade nula fora deste
intervalo.
6.3.3.1 Com titânio exposto ao fluxo de calor.
Inicialmente pode-se perceber que o erro RMS (vide tabela 6.25) obtido para
este caso foi maior do que o dos casos anteriores, onde havia uma informação a priori
informativa. Por outro lado tal erro é aceitável já que a função exata foi muito bem
recuperada, conforme ilustrado nas figuras 6.52 e 6.53, apesar da pouquíssima
informação a priori. Este caso em análise corresponde ao problema direto analisado na
seção 6.2.1, cujo gráfico de distribuição de temperaturas no tempo final utilizado
8 0.065 está na figura 6.29.
0
2
4
6
8
10
12
14
16
0 2000 4000 6000 8000 10000 12000 14000 16000
Bio
t Est
imad
o
Estados da cadeia de Markov
Material 1:Titanio e Material 2:Epóxi com Fibras de Grafite
falhacontato térmico perfeito

90
Observa-se nas figuras 6.52 e 6.53 que a função estimada foi bastante próxima
da função exata, destaca-se que nos pontos onde havia falha no contato térmico a
qualidade da estimativa foi muito alta.
Na figura 6.55 podem ser vistos os valores estimados para os desvios-padrão dos
valores pontuais da função na malha espacial considerada. As cadeias de Markov para
dois pontos desta malha espacial são apresentadas na figura 6.56. O ponto considerado
para análise da cadeia de Markov em uma região correspondente a contato perfeito foi
aquele na posição � 0, � 0, enquanto o ponto na região correspondente à falha foi
aquele na posição � 2, � 3, os mesmos pontos analisados no caso anterior.
A figura 6.56 mostra uma boa convergência das cadeias de Markov analisadas,
comprovando que o método usado é capaz de distinguir as regiões de contato daquelas
com falhas, a partir de 8000 estados (após o período de aquecimento) mesmo neste caso
onde existe muito pouca informação a priori, por ela ser uniforme e não-informativa.
Tabela 6.25 - Resultados obtidos para titânio exposto ao fluxo de calor.
Erro RMS
Tempo de CPU ( s )
Fator de Aceitação
1.35 25985 23%
Figura 6.53 - Biot exato comparado com o Biot estimado.
0 2
4 6
8 10 0
2 4
6 8
10
0 2 4 6 8
10 12 14 16 18
Biot
Material 1:Epóxi com Fibras de Grafite e Material 2:Titanio
Biot ExatoBiot Estimado
X
Y
Biot

91
Figura 6.54 - Biot exato à esquerda comparado com o Biot estimado à direita.
Figura 6.55 - Desvio padrão dos resultados para a estimativa do Biot de contato
Figura 6.56 - Estabilização da Cadeia de Markov para um ponto com falha e para um ponto com contato.
Material 1:Epóxi com Fibras de Grafite e Material 2:Titanio
Biot Exato
0 2 4 6 8 10
X
0
2
4
6
8
10
Y
0
4
8
12
16
20
Biot Estimado
0 2 4 6 8 10
X
0
2
4
6
8
10
Y
0
4
8
12
16
20
Material 1:Epóxi com Fibras de Grafite e Material 2:Titanio
0 2
4 6
8 10
X
0 2
4 6
8 10
Y
0
0.2
0.4
0.6
0.8
1
Desvio Padrao
0
2
4
6
8
10
12
14
16
0 2000 4000 6000 8000 10000 12000 14000
Bio
t Est
imad
o
Estados da cadeia de Markov
Material 1:Epóxi com Fibras de Grafite e Material 2:Titanio
falhacontato térmico perfeito

92
6.3.3.2 Com epóxi exposto ao fluxo de calor.
Este caso é semelhante ao anterior, entretanto, considera-se que a placa de epóxi
revestido com fibra de grafite está exposta ao fluxo de calor, ao invés da placa de
titânio. Os resultados foram igualmente bons aos obtidos no caso anterior, como pode
ser visualizado nas figuras 6.57 a 6.69 e a função de Biot de contato muito bem
recuperada como mostram as figuras 6.57 e 6.58. De fato, o erro RMS (tabela 6.26) foi
maior do que os casos onde a priori era informativa, entretanto considerando a pouca
informação a priori neste, assim como no caso anterior, o valor RMS é perfeitamente
aceitável. O gráfico de distribuição de temperaturas para este caso pode ser visualizado
na figura 6.31, sem a adição dos erros de medição simulados, para o tempo final de
8 0.065.
Na figura 6.59 podem ser vistos os valores estimados para os desvios-padrão dos
valores pontuais da função na malha espacial considerada. As cadeias de Markov para
dois pontos desta malha espacial são apresentadas na figura 6.60. O ponto considerado
para análise da cadeia de Markov em uma região correspondente a contato perfeito foi
aquele na posição � 0, � 0, enquanto o ponto na região correspondente à falha foi
aquele na posição � 2, � 3, os mesmos pontos analisados no caso anterior.
A figura 6.60 mostra que o valor do ponto de contato teve convergência para um
valor menor do que esperado, porém dentro da variação esperada para estes casos com
informação a priori não-informativa, mesmo assim, comprova que o método usado é
capaz de distinguir com boa precisão as regiões de contato daquelas com falhas. O
período de aquecimento utilizado neste caso foi de 6000 amostras. Portanto, somente os
estados seguintes ao período de aquecimento foram usados para os cálculos dos valores
médios e dos desvios-padrão das estimativas, como nos casos anteriores.
Tabela 6.26 - Resultados obtidos para epóxi exposto ao fluxo de calor.
Erro RMS
Tempo de CPU ( s )
Fator de Aceitação
1.7716 23137 0.22%

93
Figura 6.57 - Biot exato comparado com o Biot estimado.
Figura 6.58 - Biot exato à esquerda comparado com o Biot estimado à direita.
Figura 6.59 - Desvio padrão dos resultados para a estimativa do Biot de contato
0 2
4 6
8 10 0
2 4
6 8
10
0 2 4 6 8
10 12 14 16 18
Biot
Material 1:Epóxi com Fibras de Grafite e Material 2:Titanio
Biot ExatoBiot Estimado
X
Y
Biot
Material 1:Titanio e Material 2:Epóxi com Fibras de Grafite
Biot Exato
0 2 4 6 8 10
X
0
2
4
6
8
10
Y
0
4
8
12
16
20
Biot Estimado
0 2 4 6 8 10
X
0
2
4
6
8
10
Y
0
4
8
12
16
20
Material 1:Epóxi com Fibras de Grafite e Material 2:Titanio
0 2
4 6
8 10
X
0 2
4 6
8 10
Y
0
0.2
0.4
0.6
0.8
1
Desvio Padrao

94
Figura 6.60 - Estabilização da Cadeia de Markov para um ponto com falha e para um ponto com contato.
6.3.4 Informação a priori informativa gaussiana, com - ./01234, desvio
padrão das medidas igual a 0.1% da maior temperatura medida e com
desvio padrão da informação a priori 5./ 6. 76-. Utilizando 441 sensores
na superfície
6.3.4.1 Com titânio exposto ao fluxo de calor.
Este caso é correspondente ao primeiro caso estudado, item 6.3.1, mas
aumentou-se a resolução espacial das medidas de temperatura e, por conseqüência, da
função a ser estimada. Tal fato permite analisar a capacidade do presente método de
estimativa para identificar falhas de contato de menores dimensões. Consideraram-se
ainda outros casos com uma maior resolução espacial, mas o tempo computacional para
a solução do problema inverso seria extremamente alto.
De fato, com esta resolução espacial de 441 pontos na superfície foram
necessários 137197 segundos para obter 10000 estados da cadeia de Markov, ou seja,
aproximadamente 38 horas. Num caso 50 x 50 o tempo chegaria a 8 ou 9 dias para
alcançar o mesmo número de estados da cadeia. Por este motivo, nos casos
apresentados para uma resolução de uma malha com 21x21 pontos, foram utilizados
apenas 10000 estados e não 15000 estados como nos casos com 11x11 pontos na malha,
0
2
4
6
8
10
12
14
16
0 2000 4000 6000 8000 10000 12000 14000 16000
Bio
t Est
imad
o
Estados da cadeia de Markov
Material 1:Titanio e Material 2:Epóxi com Fibras de Grafite
falhacontato térmico perfeito

95
dos quais os primeiros 8000 estados foram desprezados por estarem no período de
aquecimento. Entretanto, como poderá ser visto, mesmo com menos estados é possível
verificar a eficácia do método.
Os resultados obtidos para este caso estão na tabela 6.27 e nas figuras 6.61 a
6.64. Na tabela 6.27 pode ser visto que o erro RMS para este caso foi muito baixo,
comprovando a qualidade da estimativa obtida.
A comparação das figuras 6.61, 6.62 com as figuras 6.36, 6.37 mostra
claramente que a função foi tão bem estimada quanto no caso com menor número de
pontos na malha em x e y, fica claro nestas figuras em escala gráfica as regiões de falha
e de contato, assim como a qualidade da recuperação dos valores do #$��%, &� em
ambos os casos. De fato, o erro RMS é semelhante quando comparado com o caso 6.3.1
(ver tabelas 6.21 e 6.22 e os gráficos das figuras 6.37 e 6.38), o mesmo não ocorre com
o desvio-padrão das estimativas, que neste caso (ver Figura 6.63) é maior do que o
apresentado no primeiro caso (ver figura 6.39), nota-se que devido à utilização de
poucos estados da cadeia de Markov (ver figura 6.64), utilizou-se os estados entre 8000
e 10000 onde o período de aquecimento havia terminado, o desvio padrão esteve acima
do esperado.
O comportamento das cadeias de Markov para este caso se mostrou semelhante
aquele apresentado nos casos anteriores, entretanto como dito anteriormente, o
problema foi interrompido após 10000 estados, devido ao alto tempo computacional. O
ponto considerado para análise da cadeia de Markov em uma região correspondente a
contato perfeito foi aquele na posição � 0, � 0, enquanto o ponto na região
correspondente à falha foi aquele na posição � 3, � 3.5.
Os resultados obtidos são excelentes, e mostram que com a otimização do tempo
de CPU na solução do problema direto, malhas muito mais refinadas podem ser
utilizadas para conseguir distinguir regiões com falhas bem pequenas.
Tabela 6.27 - Resultados obtidos para titânio exposto ao fluxo de calor.
Erro RMS
Tempo de CPU ( s )
Fator de Aceitação
0.24 137197 19%

96
Figura 6.61 - Biot exato comparado com o Biot estimado.
Figura 6.62 - Biot exato à esquerda comparado com o Biot estimado à direita.
Figura 6.63 - Desvio padrão dos resultados para a estimativa do Biot de contato
0 1 2 3 4 5 6 7 8 9 10 0 1
2 3
4 5
6 7
8 9
10
0 2 4 6 8
10 12 14
Biot
Material 1:Epóxi com Fibras de Grafite e Material 2:Titanio
Biot ExatoBiot Estimado
X
Y
Biot
Material 1:Epóxi com Fibras de Grafite e Material 2:Titanio
Biot Exato
0 2 4 6 8 10
X
0
2
4
6
8
10
Y
0
4
8
12
16
20
Biot Estimado
0 2 4 6 8 10
X
0
2
4
6
8
10
Y
0
4
8
12
16
20
Material 1:Epóxi com Fibras de Grafite e Material 2:Titanio
0 2
4 6
8 10
X
0 2
4 6
8 10
Y
0
0.2
0.4
0.6
0.8
1
Desvio Padrao
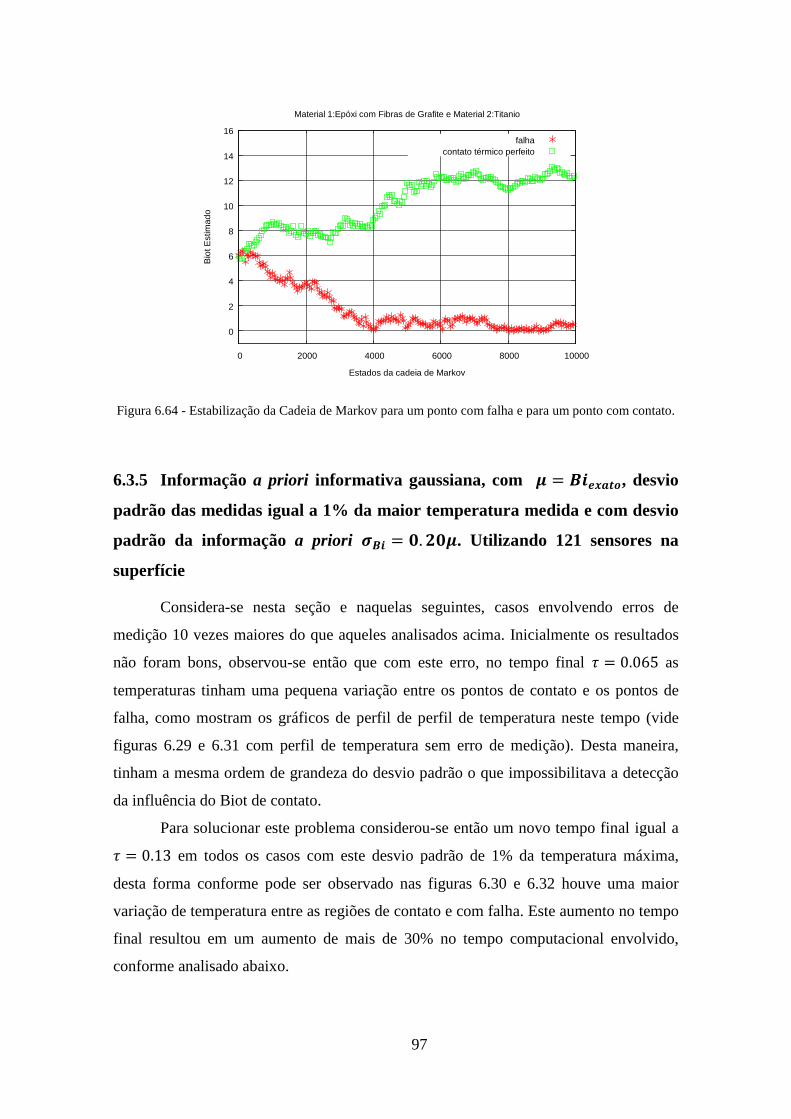
97
Figura 6.64 - Estabilização da Cadeia de Markov para um ponto com falha e para um ponto com contato.
6.3.5 Informação a priori informativa gaussiana, com - ./01234, desvio
padrão das medidas igual a 1% da maior temperatura medida e com desvio
padrão da informação a priori 5./ 6. 76-. Utilizando 121 sensores na
superfície
Considera-se nesta seção e naquelas seguintes, casos envolvendo erros de
medição 10 vezes maiores do que aqueles analisados acima. Inicialmente os resultados
não foram bons, observou-se então que com este erro, no tempo final 8 0.065 as
temperaturas tinham uma pequena variação entre os pontos de contato e os pontos de
falha, como mostram os gráficos de perfil de perfil de temperatura neste tempo (vide
figuras 6.29 e 6.31 com perfil de temperatura sem erro de medição). Desta maneira,
tinham a mesma ordem de grandeza do desvio padrão o que impossibilitava a detecção
da influência do Biot de contato.
Para solucionar este problema considerou-se então um novo tempo final igual a
8 0.13 em todos os casos com este desvio padrão de 1% da temperatura máxima,
desta forma conforme pode ser observado nas figuras 6.30 e 6.32 houve uma maior
variação de temperatura entre as regiões de contato e com falha. Este aumento no tempo
final resultou em um aumento de mais de 30% no tempo computacional envolvido,
conforme analisado abaixo.
0
2
4
6
8
10
12
14
16
0 2000 4000 6000 8000 10000
Bio
t Est
imad
o
Estados da cadeia de Markov
Material 1:Epóxi com Fibras de Grafite e Material 2:Titanio
falhacontato térmico perfeito

98
6.3.5.1 Com titânio exposto ao fluxo de calor.
Os resultados obtidos para este caso foram especialmente bons, como podem ser
visualizados na tabela 6.28 e nas figuras 6.65 a 6.68. As figuras 6.65 e 6.66, apresentam
a comparação entre as funções exata e estimada. A figura 6.67 apresenta os valores
estimados para os desvios-padrão dos valores pontuais da função na malha espacial
considerada.
As cadeias de Markov para dois pontos desta malha espacial são apresentadas na
figura 6.68. O ponto considerado para análise da cadeia de Markov em uma região
correspondente a contato perfeito foi aquele na posição � 0, � 0, enquanto o ponto
na região correspondente à falha foi aquele na posição � 2, � 3, conforme foi
realizado em todos os casos com malha em X, Y de 11x11.
Comparando os resultados obtidos para este caso com o primeiro caso, 6.3.1.1
(vide tabela 6.21 e figuras (6.37 a 6.40)), pode ser observado que mesmo o erro das
medições aumentando 10 vezes os resultados obtidos não apenas são excelentes como
também não melhores do que os obtidos no primeiro caso teste, cujo erro de medição
era menor. Este fato pode ser explicado, pela maior diferença de temperatura entre os
pontos com contato e com falha, entretanto como foi visto a utilização de um tempo
final menor naquele caso permitiu a estimativa de funções com excelente qualidade e
com um tempo computacional muito menor.
A pequena incerteza considerada na informação a priori permitiu que o erro
RMS estivesse em torno de 0.06, muito pequeno como mostra a tabela 6.28, entretanto
nesta mesma tabela pode ser visto o aumento no tempo de CPU gasto na execução deste
problema até 15000 estados da cadeia de Markov.
Nas figuras 6.65 e 6.66 se confirma graficamente a excelente estimativa obtida,
sendo em escala gráfica, obtida uma estimativa idêntica a função exata. De fato,
conforme era esperado, o desvio padrão obtido (figura 6.67) esteve em torno de 0.2.
A figura 6.67 mostra uma excelente convergência das cadeias de Markov
analisadas. De fato, o método usado foi capaz de rapidamente distinguir as regiões de
contato daquelas com falhas, isto é, a partir de 4000 estados.
Tabela 6.28 - Resultados obtidos para titânio exposto ao fluxo de calor.
Erro RMS
Tempo de CPU ( s )
Fator de Aceitação
6.4857 x 10-2 80911 23%
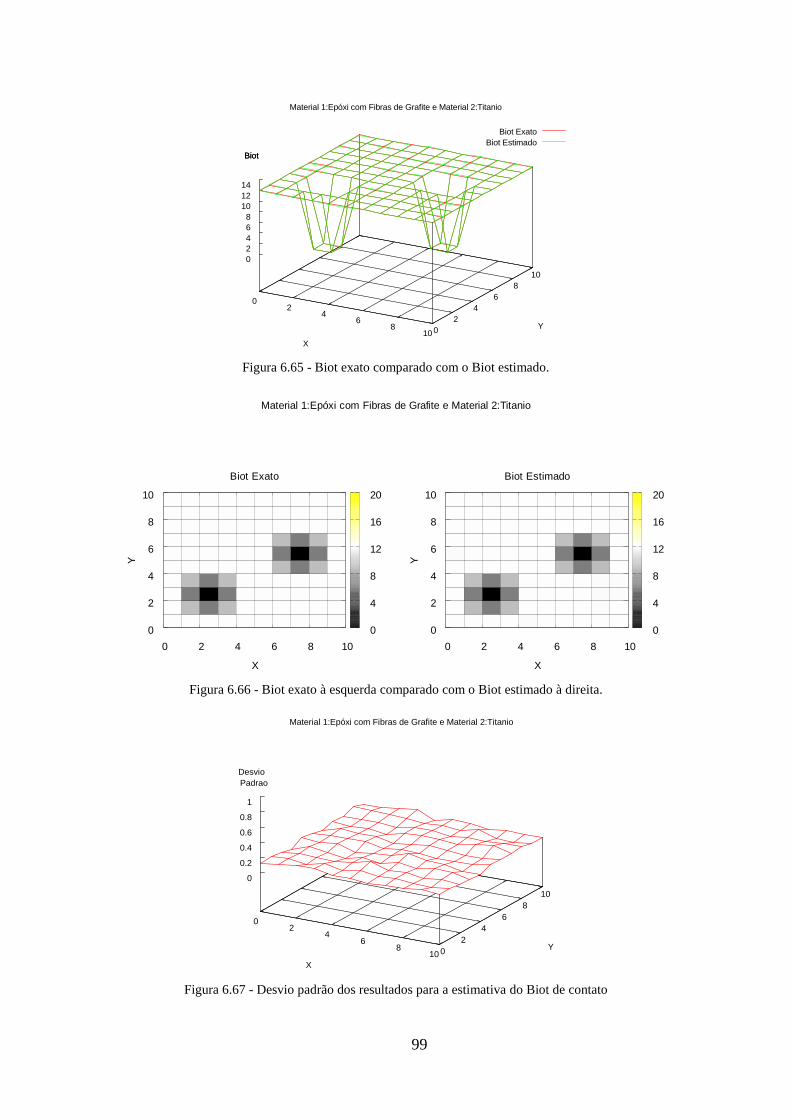
99
Figura 6.65 - Biot exato comparado com o Biot estimado.
Figura 6.66 - Biot exato à esquerda comparado com o Biot estimado à direita.
Figura 6.67 - Desvio padrão dos resultados para a estimativa do Biot de contato
0 2
4 6
8 10 0
2 4
6 8
10
0 2 4 6 8
10 12 14
Biot
Material 1:Epóxi com Fibras de Grafite e Material 2:Titanio
Biot ExatoBiot Estimado
X
Y
Biot
Material 1:Epóxi com Fibras de Grafite e Material 2:Titanio
Biot Exato
0 2 4 6 8 10
X
0
2
4
6
8
10
Y
0
4
8
12
16
20
Biot Estimado
0 2 4 6 8 10
X
0
2
4
6
8
10
Y
0
4
8
12
16
20
Material 1:Epóxi com Fibras de Grafite e Material 2:Titanio
0 2
4 6
8 10
X
0 2
4 6
8 10
Y
0
0.2
0.4
0.6
0.8
1
Desvio Padrao
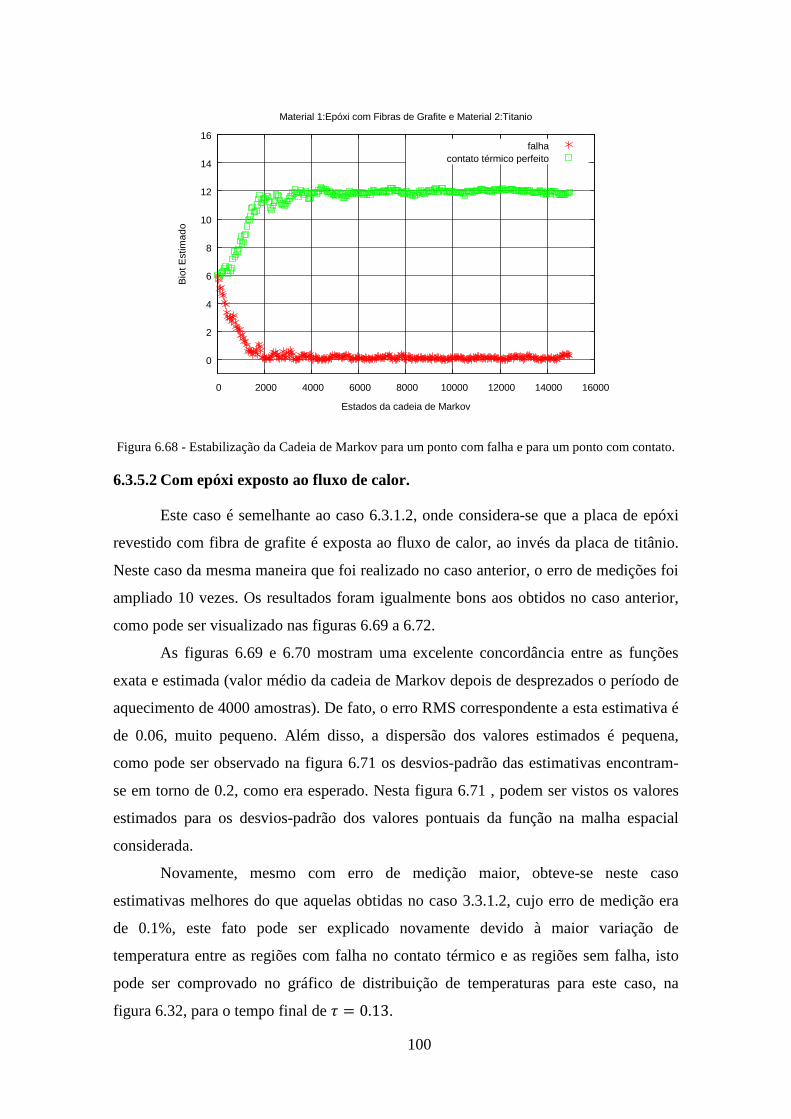
100
Figura 6.68 - Estabilização da Cadeia de Markov para um ponto com falha e para um ponto com contato.
6.3.5.2 Com epóxi exposto ao fluxo de calor.
Este caso é semelhante ao caso 6.3.1.2, onde considera-se que a placa de epóxi
revestido com fibra de grafite é exposta ao fluxo de calor, ao invés da placa de titânio.
Neste caso da mesma maneira que foi realizado no caso anterior, o erro de medições foi
ampliado 10 vezes. Os resultados foram igualmente bons aos obtidos no caso anterior,
como pode ser visualizado nas figuras 6.69 a 6.72.
As figuras 6.69 e 6.70 mostram uma excelente concordância entre as funções
exata e estimada (valor médio da cadeia de Markov depois de desprezados o período de
aquecimento de 4000 amostras). De fato, o erro RMS correspondente a esta estimativa é
de 0.06, muito pequeno. Além disso, a dispersão dos valores estimados é pequena,
como pode ser observado na figura 6.71 os desvios-padrão das estimativas encontram-
se em torno de 0.2, como era esperado. Nesta figura 6.71 , podem ser vistos os valores
estimados para os desvios-padrão dos valores pontuais da função na malha espacial
considerada.
Novamente, mesmo com erro de medição maior, obteve-se neste caso
estimativas melhores do que aquelas obtidas no caso 3.3.1.2, cujo erro de medição era
de 0.1%, este fato pode ser explicado novamente devido à maior variação de
temperatura entre as regiões com falha no contato térmico e as regiões sem falha, isto
pode ser comprovado no gráfico de distribuição de temperaturas para este caso, na
figura 6.32, para o tempo final de 8 0.13.
0
2
4
6
8
10
12
14
16
0 2000 4000 6000 8000 10000 12000 14000 16000
Bio
t Est
imad
o
Estados da cadeia de Markov
Material 1:Epóxi com Fibras de Grafite e Material 2:Titanio
falhacontato térmico perfeito

101
As cadeias de Markov para dois pontos desta malha espacial são apresentadas na
figura 6.72. O ponto considerado para análise da cadeia de Markov em uma região
correspondente a contato perfeito foi aquele na posição � 0, � 0, enquanto o ponto
na região correspondente à falha foi aquele na posição � 2, � 3, os mesmos pontos
analisados no caso anterior. A figura 6.44 mostra uma excelente convergência das
cadeias de Markov analisadas, comprovando que o método usado é capaz de
rapidamente distinguir as regiões de contato daquelas com falhas, isto é, a partir de 4000
estados (após o período de aquecimento). Portanto, somente os estados seguintes foram
usados para os cálculos dos valores médios e dos desvios-padrão das estimativas, como
nos casos anteriores, Pode ser observada ainda, uma pequena diminuição do erro RMS
obtido neste caso em relação ao caso anterior com titânio exposto ao fluxo de calor
(vide tabelas 6.29 e 6.28), isto ocorreu devido à melhor definição das regiões de contato
e de falha na distribuição espacial de temperaturas na superfície.
Tabela 6.29 - Resultados obtidos para epóxi exposto ao fluxo de calor.
Erro RMS
Tempo de CPU ( s )
Fator de Aceitação
6.2031 x 10-2 66208.88 17%
Figura 6.69 - Biot exato comparado com o Biot estimado.
0 2
4 6
8 10 0
2 4
6 8
10
0 2 4 6 8
10 12 14
Biot
Material 1:Titanio e Material 2:Epóxi com Fibras de Grafite
Biot ExatoBiot Estimado
X
Y
Biot

102
Figura 6.70 - Biot exato à esquerda comparado com o Biot estimado à direita.
Figura 6.71 - Desvio padrão dos resultados para a estimativa do Biot de contato
Figura 6.72 - Estabilização da Cadeia de Markov para um ponto com falha e para um ponto com contato.
Material 1:Titanio e Material 2:Epóxi com Fibras de Grafite
Biot Exato
0 2 4 6 8 10
X
0
2
4
6
8
10
Y
0
4
8
12
16
20
Biot Estimado
0 2 4 6 8 10
X
0
2
4
6
8
10
Y
0
4
8
12
16
20
Material 1:Titanio e Material 2:Epóxi com Fibras de Grafite
0 2
4 6
8 10
X
0 2
4 6
8 10
Y
0
0.2
0.4
0.6
0.8
1
Desvio Padrao
0
2
4
6
8
10
12
14
16
0 2000 4000 6000 8000 10000 12000 14000 16000
Bio
t Est
imad
o
Estados da cadeia de Markov
Material 1:Titanio e Material 2:Epóxi com Fibras de Grafite
falhacontato térmico perfeito

103
6.3.6 Informação a priori informativa gaussiana, com - ./01234, desvio
padrão das medidas igual a 1% da maior temperatura medida e com desvio
padrão da informação a priori 5./ 6. <6-. Utilizando 121 sensores na
superfície
Neste teste aumentou-se o desvio padrão da informação a priori, isto é,
considera-se maior a incerteza na informação disponível sobre os parâmetros antes de
serem tomadas as medidas de temperatura no experimento idealizado. Considerou-se a
informação a priori na forma de uma distribuição gaussiana conforme foi feito em
alguns casos anteriores, com valor médio igual ao valor de cBi exato num ponto onde
existe contato térmico perfeito, mas com desvio-padrão de 60% deste valor exato. Como
era esperado os resultados obtidos foram um pouco piores daqueles obtidos com desvio
padrão de 20%, apresentados no item 6.3.2.1.
6.3.6.1 Com titânio exposto ao fluxo de calor.
Os resultados obtidos estão na tabela 6.30 e nas figuras 6.73 a 6.76 onde pode
ser visto que houve uma excelente concordância entre as funções exata e estimada para
o Biot no contato. O erro RMS correspondente a esta estimativa é de 0.1948 e a
dispersão dos valores estimados (figura 6.75), os desvios-padrão das estimativas
encontram-se em torno de 0.6 conforme era previsto.
As cadeias de Markov para dois pontos desta malha espacial são apresentadas na
figura 6.76. O ponto considerado para análise da cadeia de Markov em uma região
correspondente a contato perfeito foi aquele na posição � 0, � 0, enquanto o ponto
na região correspondente à falha foi aquele na posição � 2, � 3, os mesmos pontos
analisados no caso anterior. A figura 6.76 mostra novamente uma excelente
convergência das cadeias de Markov analisadas, comprovando que o método usado é
capaz de rapidamente distinguir as regiões de contato daquelas com falhas, isto é, a
partir de 6000 estados (após o período de aquecimento).
Comparando os resultados obtidos neste caso (figuras 6.73 a 6.76) com os
resultados obtidos com a mesma informação a priori (6.3.2.1), porém com erro de
medição menor, observa-se novamente que o tempo final do experimento permitiu que
as estimativas fossem melhores do que naquele caso, mesmo que neste caso os erros de
medição fossem menores. Ao comparar este caso com o caso onde os erros de medição
são iguais porém a informação a priori possuía um desvio padrão da informação a

104
priori maior, isto é, uma maior a incerteza na informação disponível sobre os
parâmetros antes de serem tomadas as medidas de temperatura no experimento
idealizado, os resultados foram piores, como pode ser visto nas tabelas 6.29 e 6.28, onde
pode-se comparar a enorme diferença entre os erros RMS, embora mesmo assim as
estimativas obtidas neste caso são excelentes. Pode-se então concluir, que mesmo com
erros de medição altos com um ajuste adequado no tempo final do experimento pode-se
obter bons resultados.
Tabela 6.30 - Resultados obtidos para titânio exposto ao fluxo de calor
Erro RMS
Tempo de CPU ( s )
Fator de Aceitação
0.1948 44464 34%
Figura 6.73 - Biot exato comparado com o Biot estimado.
Figura 6.74 - Biot exato à esquerda comparado com o Biot estimado à direita.
0 2
4 6
8 10 0
2 4
6 8
10
0 2 4 6 8
10 12 14
Biot
Material 1:Epóxi com Fibras de Grafite e Material 2:Titanio
Biot ExatoBiot Estimado
X
Y
Biot
Material 1:Epóxi com Fibras de Grafite e Material 2:Titanio
Biot Exato
0 2 4 6 8 10
X
0
2
4
6
8
10
Y
0
4
8
12
16
20
Biot Estimado
0 2 4 6 8 10
X
0
2
4
6
8
10
Y
0
4
8
12
16
20

105
Figura 6.75 - Desvio padrão dos resultados para a estimativa do Biot de contato
Figura 6.76 - Estabilização da Cadeia de Markov para um ponto com falha e para um ponto com contato.
6.3.7 Informação a priori não-informativa uniforme, com 6 � = � >6,
desvio padrão das medidas igual a 1% da maior temperatura medida.
Utilizando 121 sensores na superfície
Nesta seção aborda-se novamente o caso em que considera-se uma distribuição a
priori não informativa, codificada na forma de uma distribuição uniforme, com valores
equiprováveis no intervalo 0 � #$��%, &� � 50, e probabilidade nula fora deste
intervalo. Porém neste caso, os erros de medição são 10 vezes maiores do que nos casos
anteriores onde esta abordagem foi realizada (vide item 6.3.3).
Material 1:Epóxi com Fibras de Grafite e Material 2:Titanio
0 2
4 6
8 10
X
0 2
4 6
8 10
Y
0
0.2
0.4
0.6
0.8
1
Desvio Padrao
0
2
4
6
8
10
12
14
16
0 2000 4000 6000 8000 10000 12000 14000 16000
Bio
t Est
imad
o
Estados da cadeia de Markov
Material 1:Epóxi com Fibras de Grafite e Material 2:Titanio
falhacontato térmico perfeito

106
6.3.7.1 Com titânio exposto ao fluxo de calor.
Este caso representa uma variação do caso estudado no item 6.3.3.1, porém
como foi dito anteriormente utilizou-se aqui um erro de medição 10 vezes maior e
conseqüentemente um tempo final igual aos casos com este erro, de 8 0.13. Os
resultados obtidos para este caso são apresentados na tabela 6.31 e nas figuras 6.77 a
6.80.
Inicialmente pode-se perceber que o erro RMS (vide tabela 6.31) obtido para
este caso foi muito maior do que todos os casos estudados anteriormente, devido a
necessidade de que para este caso fossem obtidos mais estados da cadeia de Markov
para que a mesma atingisse uma região de estabilidade. Por outro lado, tal erro é
aceitável já que a função exata foi bem recuperada, conforme ilustrado nas figuras 6.77
e 6.78, apesar da pouquíssima informação a priori e da pouca quantidade de estados na
cadeia de Markov. Este caso em análise corresponde ao problema direto analisado na
seção 6.2, cujo gráfico de distribuição de temperaturas no tempo final utilizado 8
0.13 está na figura 6.30.
Observa-se nas figuras 6.77 e 6.78 que a função estimada razoavelmente
próxima da função exata, destaca-se que nos pontos onde havia falha no contato térmico
a qualidade da estimativa foi muito alta.
Na figura 6.79 podem ser vistos os valores estimados para os desvios-padrão dos
valores pontuais da função na malha espacial considerada. As cadeias de Markov para
dois pontos desta malha espacial são apresentadas na figura 6.80. O ponto considerado
para análise da cadeia de Markov em uma região correspondente a contato perfeito foi
aquele na posição � 0, � 0, enquanto o ponto na região correspondente à falha foi
aquele na posição � 2, � 3, os mesmos pontos analisados no caso anterior.
A figura 6.80 mostra uma convergência mais lenta das cadeias de Markov
analisadas, comprovando que o método usado é capaz de distinguir as regiões de
contato daquelas com falhas, porém deve-se utilizar uma maior quantidade de estados
da cadeia de Markov após o período de aquecimento.
Entretanto, considerando a pouca informação a priori e o alto erro considerado
nas medições, pode-se dizer que estes resultados também estão excelentes e permitem
qualificar com razoável precisão as regiões onde existem falhas no contato térmico.

107
Tabela 6.31 - Resultados obtidos para titânio exposto ao fluxo de calor
Erro RMS
Tempo de CPU ( s )
Fator de Aceitação
2.47 16889 22%
Figura 6.77 - Biot exato comparado com o Biot estimado.
Figura 6.78 - Biot exato à esquerda comparado com o Biot estimado à direita.
0 2
4 6
8 10 0
2 4
6 8
10
0 2 4 6 8
10 12 14 16 18 20
Biot
Material 1:Epóxi com Fibras de Grafite e Material 2:Titanio
Biot ExatoBiot Estimado
X
Y
Biot
Material 1:Epóxi com Fibras de Grafite e Material 2:Titanio
Biot Exato
0 2 4 6 8 10
X
0
2
4
6
8
10
Y
0
4
8
12
16
20
Biot Estimado
0 2 4 6 8 10
X
0
2
4
6
8
10
Y
0
4
8
12
16
20

108
Figura 6.79 - Desvio padrão dos resultados para a estimativa do Biot de contato
Figura 6.80 - Estabilização da Cadeia de Markov para um ponto com falha e para um ponto com contato.
6.3.7.2 Com epóxi exposto ao fluxo de calor.
Este caso consiste num caso semelhante ao último caso estudado, porém a placa
teve a superfície oposta exposta ao fluxo de calor, ou seja, neste caso o epóxi foi
exposto ao fluxo de calor.
Assim, como comparações anteriores em relação a mudança de posição do
compósito, esta alteração provocou uma pequena diminuição do erro RMS devido às
características de distribuição de temperatura do epóxi. Os resultados obtidos para este
caso estão apresentados na tabela 6.32 e nas figuras 6.81 a 6.84. Na tabela 6.32 observa-
se que assim como no caso anterior houve um erro RMS maior do que todos os casos
Material 1:Epóxi com Fibras de Grafite e Material 2:Titanio
0 2
4 6
8 10
X
0 2
4 6
8 10
Y
0
0.5
1
1.5
2
Desvio Padrao
0
2
4
6
8
10
12
14
16
0 2000 4000 6000 8000 10000 12000 14000 16000
Bio
t Est
imad
o
Estados da cadeia de Markov
Material 1:Epóxi com Fibras de Grafite e Material 2:Titanio
falhacontato térmico perfeito

109
estudados, devido à pouca informação a priori disponível e ainda ao maior erro de
medição simulado. Entretanto, nas figuras 6.81 e 6.82 pode-se visualizar que a função
exata foi muito bem recuperada.
Na figura 6.83 podem ser vistos os valores estimados para os desvios-padrão dos
valores pontuais da função na malha espacial considerada. As cadeias de Markov para
dois pontos desta malha espacial são apresentadas na figura 6.84. O ponto considerado
para análise da cadeia de Markov em uma região correspondente a contato perfeito foi
aquele na posição � 0, � 0, enquanto o ponto na região correspondente à falha foi
aquele na posição � 2, � 3, os mesmos pontos analisados nos casos anteriores.
Entretanto, considerando a pouca informação a priori e o alto erro considerado
nas medições, pode-se dizer que estes resultados também estão excelentes e permitem
qualificar com razoável precisão as regiões onde existem falhas no contato térmico.
Tabela 6.32 - Resultados obtidos para epóxi exposto ao fluxo de calor.
Erro RMS
Tempo de CPU ( s )
Fator de Aceitação
2.15 17632 31%
Figura 6.81 - Biot exato comparado com o Biot estimado.
0 2
4 6
8 10 0
2 4
6 8
10
0 2 4 6 8
10 12 14 16 18
Biot
Material 1:Titanio e Material 2:Epóxi com Fibras de Grafite
Biot ExatoBiot Estimado
X
Y
Biot

110
Figura 6.82 - Biot exato à esquerda comparado com o Biot estimado à direita.
Figura 6.83 - Desvio padrão dos resultados para a estimativa do Biot de contato
Figura 6.84 - Estabilização da Cadeia de Markov para um ponto com falha e para um ponto com contato.
Material 1:Titanio e Material 2:Epóxi com Fibras de Grafite
Biot Exato
0 2 4 6 8 10
X
0
2
4
6
8
10
Y
0
4
8
12
16
20
Biot Estimado
0 2 4 6 8 10
X
0
2
4
6
8
10
Y
0
4
8
12
16
20
Material 1:Titanio e Material 2:Epóxi com Fibras de Grafite
0 2
4 6
8 10
X
0 2
4 6
8 10
Y
0
0.5
1
1.5
2
Desvio Padrao
0
2
4
6
8
10
12
14
16
0 2000 4000 6000 8000 10000 12000 14000 16000
Bio
t Est
imad
o
Estados da cadeia de Markov
Material 1:Titanio e Material 2:Epóxi com Fibras de Grafite
falhacontato térmico perfeito

111
6.3.8 Informação a priori informativa gaussiana, com - ./01234, desvio
padrão das medidas igual a 1% da maior temperatura medida e com desvio
padrão da informação a priori 5./ 6. 76-. Utilizando 441 sensores na
superfície
6.3.8.1 Com titânio exposto ao fluxo de calor.
Este caso correspondente ao primeiro caso estudado, item 6.3.1, mas com um
aumento na resolução espacial das medidas de temperatura e, por conseqüência, da
função a ser estimada. Corresponde também ao caso 6.3.4.1, porém aumentando o erro
de medição em 10 vezes.
De fato, com esta resolução espacial de 441 pontos na superfície foram
necessários 12850 segundos para obter 10000 estados da cadeia de Markov. Por este
motivo, nos casos apresentados para uma resolução de uma malha com 21x21 pontos,
foram utilizados apenas 10000 estados e não 15000 estados como nos casos com 11x11
pontos na malha, destes estados os primeiros 8000 estados foram desprezados por
estarem no período de aquecimento da cadeia.
Os resultados obtidos para este caso estão na tabela 6.33 e nas figuras 6.85 a
6.88. Na tabela 6.33 pode ser visto que o erro RMS para este caso foi muito baixo,
comprovando a qualidade da estimativa obtida.
A comparação das figuras 6.85, 6.86 com as figuras 6.36, 6.37 mostra
claramente que a função foi tão bem estimada quanto no caso com menor número de
pontos na malha em x e y. De fato, o erro RMS é semelhante quando comparado com o
caso 6.3.1 (ver tabela 6.21 e 6.22 e os gráficos das figuras 6.37 e 6.38) e foi maior do
que o erro obtido no caso 6.3.4.1, devido ao maior erro de medição simulado.
Da mesma forma que ocorre no caso 6.3.4.1 o desvio-padrão das estimativas
(figura 8.87) é maior do que o esperado em torno de 0.20, nota-se que isto ocorreu
devido à utilização de poucos estados da cadeia de Markov (ver figura 6.88) onde
utilizou-se os estados entre 8000 e 10000 (estados após o período de aquecimento).
O comportamento das cadeias de Markov para este caso se mostrou promissor,
entretanto como dito anteriormente, o problema foi interrompido após 10000 estados,
devido ao alto tempo computacional (ver figura 6.88). O ponto considerado para análise
da cadeia de Markov em uma região correspondente a contato perfeito foi aquele na
posição � 0, � 0, enquanto o ponto na região correspondente à falha foi aquele na
posição � 3, � 3.5. Pode-se observar na figura 6.88 que a cadeia convergiu

112
rapidamente e após 8000 estados mesmo com erros de medição altos a cadeia já começa
a estabilizar.
Os resultados obtidos são excelentes, e mostram novamente que com a
otimização do tempo de CPU na solução do problema direto, malhas muito mais
refinadas podem ser utilizadas para conseguir distinguir regiões com falhas bem
pequenas.
Tabela 6.33 - Resultados obtidos para titânio exposto ao fluxo de calor.
Erro RMS
Tempo de CPU ( s )
Fator de Aceitação
0.31 12850 26%
Figura 6.85 – Biot exato comparado com o Biot estimado.
0 2
4 6
8 10 0
2 4
6 8
10
0 2 4 6 8
10 12 14
Biot
Material 1:Epóxi com Fibras de Grafite e Material 2:Titanio
Biot ExatoBiot Estimado
X
Y
Biot
Material 1:Epóxi com Fibras de Grafite e Material 2:Titanio
Biot Exato
0 2 4 6 8 10
X
0
2
4
6
8
10
Y
0
4
8
12
16
20
Biot Estimado
0 2 4 6 8 10
X
0
2
4
6
8
10
Y
0
4
8
12
16
20

113
Figura 6.86 - Biot exato à esquerda comparado com o Biot estimado à direita.
Figura 6.87 - Desvio padrão dos resultados para a estimativa do Biot de contato
Figura 6.88 - Estabilização da Cadeia de Markov para um ponto com falha e para um ponto com contato
térmico perfeito.
Material 1:Epóxi com Fibras de Grafite e Material 2:Titanio
0 2
4 6
8 10
X
0 2
4 6
8 10
Y
0
0.2
0.4
0.6
0.8
1
Desvio Padrao
0
2
4
6
8
10
12
14
16
0 2000 4000 6000 8000 10000
Bio
t Est
imad
o
Estados da cadeia de Markov
Material 1:Epóxi com Fibras de Grafite e Material 2:Titanio
falhacontato térmico perfeito

114
CAPÍTULO 7 - CONCLUSÕES E SUGESTÕES
Este trabalho teve como objetivo detectar falhas de contato em compósitos
laminados, através da solução do problema inverso de transferência de calor. A análise
realizada toma como base medidas de temperatura em uma das superfícies da placa de
compósito através de uma câmera de termografia por infravermelho. As medições são
realizadas na mesma superfície que é aquecida através da imposição de um fluxo de
calor constante.
A solução do problema direto proposta aqui foi obtida através de uma técnica
híbrida, que faz uso da Transformada Integral Generalizada (GITT) e de diferenças
finitas, considerando um coeficiente de troca térmica no contato dependente da posição
na superfície, hc (x,y). A solução do problema direto foi verificada usando-se soluções
analíticas para diferentes casos.
A solução do problema inverso foi obtida com o método de Monte Carlo com
Cadeias de Markov (MCMC), tendo sido analisadas diversos tipos de distribuições a
priori para a função a ser estimada, incluindo distribuições Gaussianas e uniforme (não
informativa). Em todos os casos analisados foi possível determinar as regiões onde
existiam falhas além de conseguir, com boa precisão, identificar o valor do coeficiente
de troca térmica no contato.
Entre as maiores dificuldades encontradas, destaca-se a necessidade de muitos
termos na cadeia de Markov e com isto necessitar reduzir o tempo de CPU gasto na
solução do problema direto. Malhas computacionais com 11x11 pontos em x e y fazem
com que o problema direto leve cerca de 3 a 4 segundos o que faz com que o tempo
para a solução do problema inverso com 15000 estados da cadeia de Markov demore 10
a 15 horas.
Considera-se importante que em trabalhos futuros a solução do problema direto
seja otimizada, visando obter um menor tempo de CPU, possibilitando a solução de
problemas com um maior refinamento de malha na superfície a ser analisada.
Entretanto, é importante ressaltar que o tempo de CPU obtido neste trabalho já pode ser
considerado baixo considerando a complexidade do problema direto. Uma possibilidade
para aumentar a economia do tempo de CPU, consiste em usar as medidas
transformadas, reduzindo assim as medidas distribuídas espacialmente a alguns modos
transformados.
115
Sugere-se ainda que o coeficiente de troca térmica no contato seja expandido em
autofunções a fim de calcular analiticamente a integral que faz a transformação integral
em X e Y. Sugere-se ainda a realização de experimentos que validem a solução obtida
neste trabalho para os problemas direto e inverso.

116
CAPÍTULO 8 - REFERÊNCIAS BIBLIOGRÁFICAS
AMITECH, B. T. , 2010, Catálogo de Sistemas de Tubos de PRFV. Ipeúna, SP,
Brasil: Amitech Brazil Tubos Ltda.
CALLISTER, J., & WILLIAM, D. , 2002, Materials Science and Engineering,
An Introduction. New York: John Wiley & Sons.
CÂNDIDO, G. M., ALMEIDA, S. F., & REZENDE, M. C. , 2000,
“Processamento de Laminados de Compósitos”, Polímeros: Ciência e Tecnologia,v. 10,
n.1, pp. 31-41.
COMPAC. , 1997, Manual IMSL Computational Technology Toolkit. Texas.
CONTE, S. D., & De BOOR, C. , 1980, Elementary Numerical Analysis - An
Algorithmic Approach. New York: McGraw-Hill.
CORREA, E., COTTA, R., & ORLANDE, H. , 1997, “On the reduction of
computational costs in eigenfunction expansions of multidimensional diffusion
problems”, International Journal of Numerical Methods for Heat & Fluid Flow , v. 7,
n.7, pp. 675 - 695.
COTTA, R. M. , 1993, Integral Transforms in Computational Heat and Fluid
Flow. Florida: CRC Press.
COTTA, R. M., & NOGUEIRA, E. ,1988,“On the Eigenvalues basic to diffusion
through composite media”,Computational and Appl. Math. , v.7, n.3,pp. 201-213.
DA SILVA, R., AQUINO, E., RODRIGUES, L., & BARROS, A. , 2008,
“Desenvolvimento de um compósito laminado híbrido”,Revista Matéria , pp. 154-161.
FARO, A. A. , 2008, Desenvolvimento de Tubos Compósitos Produzidos por
Enrolamento Filamentar para Possíveis Aplicações como Risers Rígidos. Dissertação
de M.Sc.,COPPE/UFRJ, Rio de Janeiro, RJ, Brasil.
FRANCO, L. A., BOTELHO, E., CÂNDIDO, G., et al., 2006, “Avaliação
Fractográfica de Compósitos de Fibras de Vidro/Epóxi após Ensaios de Tração e
Cisalhamento Interlaminar”.In: 17º CBECIMat - Congresso Brasileiro de Engenharia e
Ciência dos Materiais, Foz do Iguaçu, PR, Brasil, Mar. 15-19.
FUDYM, O. , 2006, “Velocity and heat transfer parameters mapping: thermal
quadrupoles and infrared image processing”. In: 11th Brazilian Congress of Thermal
Sciences and Engineering - ENCIT. Curitiba,Brasil, Dec. 5-8.

117
FUDYM, O., BATSALE, J., & BATTAGLIA, J. , 2007, “Thermophysical
properties mapping in semi-infinite longitudinally cracked plates by temperature image
processing”, Inverse Problems in Science and Engineering , v. 15, n.2, pp.163-176.
GIBSON, R. F. ,1994, Principles of Composite materials Mechanics.
Washington: Mc-Graw-Hill Book.
Hung, M., Chen, Y., Ng, S., et al. , 2007, “Review and Comparation of
Shearography and pulse Thermography for adhesive band evaluation”. J. Optical
Engineering , v. 46 , n. 5.
INCROPERA, P. F., & DE WITT, D. P. , 2003, Fundamentos de transferência
da calor e massa. Rio de Janeiro: LTC.
JARRETA NETO, C. , 2009, Termografia aplicada a detecção e
dimensionamento de descontinuidades em tubulações de material compósito.
Dissertação de M.Sc.,UFRGS, Porto Alegre, RS, Brasil.
JONES, R. M. , 1975, Mechanics of Composite materials. Washington : Mc-
Graw-Hill Book.
KAIPIO, J. P., & SOMERSALO, E. , 2004, Computational and Statistical
Methods for Inverse Problems. Springer.
LIU, D. , 1988, “Impact-Induced delamination – a view of bending stiffness
mismatching”. Journal of Composite Materials , pp. 674-692.
MIKHAILOV, M. D., & ÖZI ŞIK, M. N. , 1984, Unified Analysis and Solutions
of Heat & Mass Diffusion. New York: John Wiley & Sons.
MORAES, W. A. , 1999, Estudo e Caracterização da Resistência a Impactos de
Baixas Energias de Materiais Compósitos. Dissertação de M.Sc., PUC-Rio, Rio de
Janeiro, RJ, Brasil.
MOTA, C. A., ORLANDE, H. R., DE CARVALHO, et al. , 2010, “Bayesian
Estimation of Temperature-Dependent Thermophysical Properties and Transient
Boundary Heat Flux”. Heat Transfer Engineering , v. 31 , n.7, pp. 570-580.
MULHOLLAND, G. P., & COBBLE, M. H. , 1972, “Diffusion Through
Composite Media”. International Journal of Heat and Mass Transfer , v.15 , n.1, pp.
147-160.
NAVEIRA COTTA, C. P. , 2009, Problemas Inversos De Condução De Calor
Em Meios Heterogêneos: Analise Teórico-Experimental Via Transformação Integral,
Inferência Bayesiana E Termografia Por Infravermelho. Tese de D.Sc.,COPPE/UFRJ,
Rio de janeiro,RJ,Brasil.

118
NAVEIRA COTTA, C. P., COTTA, R. M., ORLANDE, H. R., et al., 2009,
“Eigenfunction expansions for transient diffusion in heterogeneous media”.
International Journal of Heat and Mass Transfer , v.52, pp. 5029-5039.
ORLANDE, H. R. , 2009, Problemas Inversos, COPPE/UFRJ. Rio de
Janeiro,RJ,Brasil. Notas de Aula da disciplina Tópicos Especiais em Engenharia
Mecânica.
ORLANDE, H. R., COLAÇO, M. J., & DULIKRAVICH, G. S. , 2008,
“Application of Bayesian Filters to Heat Conduction Problems”. EngOpt 2008 -
International Conference on Engineering Optimization, Rio de Janeiro, Brazil, June 01-
05.
ÖZIŞIK, M. N. , 1993, Heat Conduction. New York: John Wiley & Sons.
ÖZIŞIK, M. N., & ORLANDE, H. R. , 2000, Inverse Heat Transfer:
Fundamentals and Applications. New York: Taylor & Francis.
PLETCHER, R. H., & ANDERSON, D. A. , 1997, Computational Fluid
Mechanics and Heat Transfer. Washington: Taylor & Francis.
PREDMESKY, R., & ZALUZEC, M. , 2000, Nondestructive Testing for
AmericaOne. Ford Motor Company, Dearborn, MI, Auckland,NZ.
REDDY, J. N. , 1997, Mechanics of Laminated Composite Plates - Theory and
analysis. CRC Press.
SCHÖNTAG, J. M. , 2009, Caracterização da Profundidade de Defeitos em
Materiais Compositos utilizando Shearografia com Carregamento Vibracional.
Dissertação de M.Sc., UFSC, Florianópolis, SC, Brasil.
SKF, G. , 2011, skf. Acesso em 10 de março de 2011, disponível em SFK:
http://www.skf.com/skf/content/printerfriendly.jsp?contentId=0.296683
TAN, S., FOX, C., & NICHOLLS, G. , 2006, Inverse Problems - Course Notes
for Physics 707. Auckland, University of Auckland.
WANG, T.-Y., LEE, Y.-M., & CHEN, C. C. , 2003, “3D Thermal-ADI: An
Efficient Chip-Level Transient Thermal Simulator”. International Symposium on
Physical Design (ISPD), Monterey, California, USA.
WINKLER, R. , 2003, An Introduction to Bayesian Interference and Decision.
Gainsville: Probabilistic Publishing.
ZANATTA, R. , 30 de 12 de 2010, Acesso em 15 de 08 de 2010, disponível em
Aviacao on line: http://aviacaoonline.wordpress.com/2010/12/30/materiais-compostos/

119
APÊNDICE A - Teste I em regime permanente
Considerando um problema de condução de calor estacionário unidimensional,
num material compósito laminado constituído por duas placas de espessura 1matc e
2matc ,
conforme o esquema descrito na figura A.1.
Figura A.1 – Desenho esquemático do teste 1, em regime permanente
Este problema de condução de calor tem a seguinte formulação matemática:
( )
( )1
1
21
2
22
2
0; Para 0
0; Para
mat
mat
d T zz c
dz
d T zc z c
dz
= < <
= < < (6.1)
sujeita às condições de contorno e interface:
( ) ( ) 0
11 0 1 em 0dT z
h T zd
Tz
k h z∞+− = = (6.2)
( ) ( )
( ) ( ) ( )1
1 21 2
121 1
em a
c
m t
dT z dT z
dz dzdT z
h T z T zd
k kc
kz
z
= =
= −
(6.3)
( ) ( )2
2 2 2 2* em constk h T
dT zh T z
dzq z c∞+ = + = (6.4)
A solução deste problema é obtida integrando duas vezes as equações (1):

120
( )( )
1 1 2
2 3 4
T z C zC
T z C zC
= +
= + (6.5)
e utilizando as equações de contorno e interface, pode-se formar o sistema de equações
para determinar os coeficientes constantes:
( )( )
1 1
1 2 1 0 0
1 2 2 4
1 2 1 2 3 4
*2 4 3 4 2 2
c mat mat
cons
k C C h T h
k C k C
k C h C c C C c C
k C C cC h q T h
∞
∞
− + − − + + + + +
=
=
=
=
(6.6)
desta forma considerando as dimensões da placa (tabela 6.1), as temperaturas impostas
(tabela 6.2), as propriedades do nylon 6-6 e os parâmetros de entrada (tabela 6.4),a
solução geral para o problema de transferência de calor pode ser escrito como:
( )
( )
1
2
172.8 72000
1152 71.04 1152 71.04
892.8
25
72000
1152 71.04 1152 71.04 40
c c
c c
c c
c c
h hT z z
h h
h hT z
hz
h
= ++ +
+=
+
−+ +
(6.7)

121
APÊNDICE B - Teste I em regime transiente
Considerando um problema de condução de calor transiente unidimensional,
numa placa com espessura 2matc , conforme o esquema descrito na figura B.1. Sujeito a
um isolamento térmico perfeito na posição z = 0 e a um fluxo de calor e troca de calor
por convecção em z = c.
Figura B.1 - Desenho esquemático do teste 1, em regime transiente
A formulação matemática deste problema é regida pela equação do calor
unidimensional transiente, como segue:
( ) ( )
2
2
22
1, 0 e 0
, ,mat
T Tz c t
t
z t z t
zα∂ ∂
= < < >∂ ∂
(6.1)
sujeita as condições de contorno:
( )
0, ,
0 e 0T
zz
tt
z∂= = >
∂ (6.2)
( ) ( )( )
2
*2 2
,, , e 0const mat
Tk h T T q z c
z
zz t t
t∞
∂+ − = = >
∂ (6.3)
e a condição inicial:
2
, 0 e 0ini matT T z c t= ≤ ≤ = (6.4)

122
A solução deste problema pode ser obtida inicialmente dividindo-o em dois
problemas, o primeiro contendo o problema permanente e o segundo contendo a parcela
transiente. Esta técnica é utilizada com a finalidade de homogeneizar as condições de
contorno do problema principal.
Desta forma, considera-se que o problema pode ser reescrito da seguinte
maneira:
( ) ( ) ( ), ,fT z t T z t F z= + (6.5)
onde ( )F z , como foi dito anteriormente, corresponde a um filtro obtido a partir da
solução do problema estacionário correspondente. Considera-se então ( ),fT z t o
problema filtrado relacionado, cujas condições de contorno foram homogeneizadas.
Assim, aplicando a equação (5) nas equações (1) a (4), pode-se separar o
problema original nestes dois sub-problemas, a seguir a formulação matemática do
problema filtro:
( )2
220; Para 0 mat
d F zz c
dz= < < (6.6)
( )
0,em 0dF
dz
zz= = (6.7)
( ) ( )
2
*2 22 em mat
zk h T z
dFh F z
dzc∞= =+ (6.8)
A solução deste problema é análoga a solução do problema teste 1 em regime
permanente, porém aqui trata-se de uma placa com apenas um material. Esta solução é
obtida integrando a equação (6) duas vezes e utilizando as condições de contorno para
determinar os coeficientes constantes.
( ) *F z T∞= (6.9)
O problema filtrado, ( ),fT z t , possui a seguinte formulação matemática:
( ) ( )2
222
, ,1, Para 0 e 0f f
mat
T z t T z tz c t
t zα∂ ∂
= < < >∂ ∂
(6.10)

123
com as seguintes condições de contorno:
( )
0, 0 e 0,fT
z tz
z t∂= = >
∂ (6.11)
( ) ( )
22 2
,, , e 0f
f const mat
Tk h T q z
z tz t c t
z
∂+ = = >
∂ (6.12)
Juntamente com a condição inicial:
( ) ( ) 2Para 0 e , 0,f mi i tn az t TT z c tF z ≤ ≤= =− (6.13)
Para a solução do problema filtrado, ( ),fT z t , será utilizada a técnica da
transformada integral clássica, CITT (ÖZIŞIK, 1993 ,COTTA, 1993). Primeiramente,
definiu-se um par transformada-inversa:
( ) ( ) ( )
( ) ( )( ) ( )
2
0
1
, , ' ', '
,, ,
matc
m m
z
mm
Z
f
fm
f
fm
T t Z z z t dz
Z zz
ransformada T T
Inversa tTN
T t
β β
ββ
β
=
∞
=
=
=
∫
∑ (6.14)
Aplicando a transformada integral no problema com relação a x obtém-se o
seguinte problema reduzido à um sistema de EDO’s:
( ) ( ) ( ) ( )22
2 22
,,, , para 0
m matf mm f m
Z cdT tT t q t t
dt k
ββα β β α+ = > (6.15)
( ) ( ),, para 0f f inim mt T tT β β= = (6.16)
Solucionando as equações (15) e (16) e utilizando a fórmula da inversa a solução
do problema filtrado pode ser escrita como:
( ) ( ) ( ) ( )( ) ( )2
2 222
'2'
,1 20
' ,, , '
m
m
ttm matt
f m f inim m
mZ
q t Z ceT z t Z z T e d
kNt
α βα β
α ββ
ββ
−∞
=
= +
∑ ∫ (6.17)

124
onde ( ) ( )( ) ( )2
,
0
,matc
f ini i im n mT T F z Z z dzββ = −∫ .
Pela literatura (ÖZIŞIK, 1993) pode-se obter diretamente as autofunções, que
são obtidas solucionando o problema auxiliar:
( ) ( )
( )
( ) ( )
22
2
2
0;0
0; 0
0;
Z zZ z z c
zZ z
zz
Z zH Z z z c
z
β∂
+ = < < ∂∂ = = ∂∂
+ = = ∂
(6.18)
cuja solução é
( ) ( ), cosm mZ z zβ β= (6.19)
onde
( ) ( )2
2 22 2
22 2 22 2
12 ,m
m matZ m
H hH
kc H HN
ββ β
+ = =
+ +
(6.20)
Lembrando que ( ) ( )2
2
0
,matc
mZ m Z z dN zβ β= ∫ . Os autovalores mβ são as raízes positivas
da equação transcedental:
( )2 2tanm m matc Hβ β = (6.21)
Desta forma, a solução do problema teste ( ),T z t é encontrada somando as
soluções do problema filtro ( )F z com o problema filtrado ( ),fT z t .

125
APÊNDICE C - Teste II em regime transiente
Considerando um problema de condução de calor transiente unidimensional,
numa placa com espessura 2matc , conforme o esquema descrito na figura C.1. Sujeito a
uma temperatura prescrita na posição z = 0 e a um fluxo de calor e troca de calor por
convecção em z = c.
Figura C.1 - Desenho esquemático do teste 2, em regime transiente
A formulação matemática deste problema é regida pela equação do calor
unidimensional transiente, como segue:
( ) ( )
2
2
22
1, 0 e 0
, ,mat
T Tz c t
t
z t z t
zα∂ ∂
= < < >∂ ∂
(6.1)
sujeita as condições de contorno:
( ) , , 0 e 0T T z tz t ∞= = > (6.2)
( ) ( )( )
2
*2 2
,, , e 0const mat
Tk h T T q z c
z
zz t t
t∞
∂+ − = = >
∂ (6.3)
e a condição inicial:
2
, 0 e 0ini matT T z c t= ≤ ≤ = (6.4)

126
A solução deste problema pode ser obtida inicialmente dividindo-o em dois
problemas, o primeiro contendo o problema permanente e o segundo contendo a parcela
transiente. Esta técnica é utilizada com a finalidade de homogeneizar as condições de
contorno do problema principal.
Desta forma, considera-se que o problema pode ser reescrito da seguinte
maneira:
( ) ( ) ( ), ,fT z t T z t F z= + (6.5)
onde ( )F z , como foi dito anteriormente, corresponde a um filtro obtido a partir da
solução do problema estacionário correspondente. Considera-se então ( ),fT z t o
problema filtrado relacionado, cujas condições de contorno foram homogeneizadas.
Assim, aplicando a equação (5) nas equações (1) a (4), pode-se separar o
problema original nestes dois sub-problemas, a seguir a formulação matemática do
problema filtro:
( )2
220, Para 0 mat
d F zz c
dz= < < (6.6)
( ) ,em 0z T zF ∞= = (6.7)
( ) ( )
2
*2 22 em mat
zk h T z
dFh F z
dzc∞= =+ (6.8)
A solução deste problema é análoga a solução do problema teste 1 em regime
permanente, porém aqui trata-se de uma placa com apenas um material. Esta solução é
obtida integrando a equação (6) duas vezes e utilizando as condições de contorno para
determinar os coeficientes constantes.
( ) 25 + 675.676 zF z = (6.9)
O problema filtrado, ( ),fT z t , possui a seguinte formulação matemática:
( ) ( )2
222
, ,1, Para 0 e 0f f
mat
T z t T z tz c t
t zα∂ ∂
= < < >∂ ∂
(6.10)

127
com as seguintes condições de contorno:
( ) 0, 0 , e 0fT z tz t = = > (6.11)
( ) ( )
22 2
,, , e 0f
f const mat
Tk h T q z
z tz t c t
z
∂+ = = >
∂ (6.12)
Juntamente com a condição inicial:
( ) ( ) 2Para 0 e , 0,f mi i tn az t TT z c tF z ≤ ≤= =− (6.13)
Para a solução do problema filtrado, ( ),fT z t , será utilizada a técnica da
transformada integral clássica, CITT (ÖZIŞIK, 1993, COTTA, 1993). Primeiramente,
definiu-se um par transformada-inversa:
( ) ( ) ( )
( ) ( )( ) ( )
2
0
1
, , ' ', '
,, ,
matc
m m
z
mm
Z
f
fm
f
fm
T t Z z z t dz
Z zz
ransformada T T
Inversa tTN
T t
β β
ββ
β
=
∞
=
=
=
∫
∑ (6.14)
Aplicando a transformada integral no problema com relação a x obtém-se o
seguinte problema reduzido à um sistema de EDO’s:
( ) ( ) ( ) ( )22
2 22
,,, , para 0
m matf mm f m
Z cdT tT t q t t
dt k
ββα β β α+ = > (6.15)
( ) ( ),, para 0f f inim mt T tT β β= = (6.16)
Solucionando as equações (15) e (16) e utilizando a fórmula da inversa a solução
do problema filtrado pode ser escrita como:
( ) ( ) ( ) ( )( ) ( )2
2 222
'2'
,1 20
' ,, , '
m
m
ttm matt
f m f inim Z m
m
q t Z ceT z t Z z T e dt
N k
α βα β
α ββ
ββ
−∞
=
= +
∑ ∫ (6.17)

128
onde ( ) ( )( ) ( )2
,
0
,matc
f ini i im n mT T F z Z z dzββ = −∫ .
Pela literatura (ÖZIŞIK, 1993) pode-se obter diretamente as autofunções, que
são obtidas solucionando o problema auxiliar:
( ) ( )
( )( ) ( )
22
2
2
0;0
0; 0
0;
Z zZ z z c
zZ z z
Z zH Z z z c
z
β∂
+ = < < ∂ = =∂ + = = ∂
(6.18)
cuja solução é:
( ) ( ), sinm mZ z zβ β= (6.19)
( ) ( )2
2 22 2
22 2 22 2
12 ,m
Z m mat m
H hH
N kc H H
ββ β
+ = =
+ +
(6.20)
Lembrando que ( ) ( )2
2
0
,matc
mZ m Z z dN zβ β= ∫ . Os autovalores mβ são as raízes positivas
da equação transcedental:
( )2 2cotm m matc Hβ β = − (6.21)
Desta forma, a solução do problema teste ( ),T z t é encontrada somando as
soluções do problema filtro ( )F z com o problema filtrado ( ),fT z t .

129
APÊNDICE D - Teste III em regime transiente
Considerando um problema de condução de calor transiente unidimensional,
numa placa com espessura c , conforme o esquema descrito na figura D.1. Sujeito a uma
troca de calor por convecção em z = 0 e a um fluxo de calor constante juntamente com
uma troca de calor por convecção em z = c.
Figura D.1 - Desenho esquemático do teste 3, em regime transiente
A formulação matemática deste problema é regida pela equação do calor
unidimensional transiente, como segue:
( ) ( )2
2
1, 0 e 0
, ,T Tz c t
t z
z t z t
α∂ ∂
= < < >∂ ∂
(6.1)
sujeito as condições de contorno:
( ) ( )( )0 0, 0 e 0
,,
Tk h T T
z tz
zt z t∞
∂− + − = = >
∂ (6.2)
( ) ( )( )*
2 , 0, e ,
const
Tk h T T q z c tz t
z
z t∞
∂+ − = = >
∂ (6.3)
e sujeito a condição inicial:
, 0 e 0iniT T z c t= ≤ ≤ = (6.4)

130
A solução deste problema pode ser obtida dividindo-o em dois problemas, o
primeiro contendo o problema permanente e o segundo contendo a parcela transiente.
Esta técnica é utilizada com a finalidade de homogeneizar as condições de contorno do
problema principal.
Desta forma, considera-se que o problema pode ser reescrito da seguinte
maneira:
( ) ( ) ( ), ,fT z t T z t F z= + (6.5)
onde ( )F z , como foi dito anteriormente, corresponde a um filtro obtido a partir da
solução do problema estacionário correspondente. Considera-se então ( ),fT z t o
problema filtrado relacionado, cujas condições de contorno foram homogeneizadas.
Assim, aplicando a equação (5) nas equações (1) a (4), pode-se separar o
problema original nestes dois sub-problemas, a seguir a formulação matemática do
problema filtro:
( )2
20, Para 0
d F zz c
dz= < < (6.6)
( ) ( ) 00 em 0
dFh F z
zk h T z
dz ∞− = =+ (6.7)
( ) ( )( )*
2 em const
zk T q z c
dFh F z
dz ∞ =− =+ (6.8)
A solução deste problema é análoga a solução do problema teste 1 em regime
permanente, porém aqui trata-se de uma placa com apenas um material. Esta solução é
obtida integrando a equação (6) duas vezes e utilizando as condições de contorno para
determinar os coeficientes constantes.
( ) 27.5 + 1000 zF z = (6.9)
O problema filtrado, ( ),fT z t , possui a seguinte formulação matemática:
( ) ( )2
2
, ,1, Para 0 e 0f fT z t T z t
z c tt zα
∂ ∂= < < >
∂ ∂ (6.10)
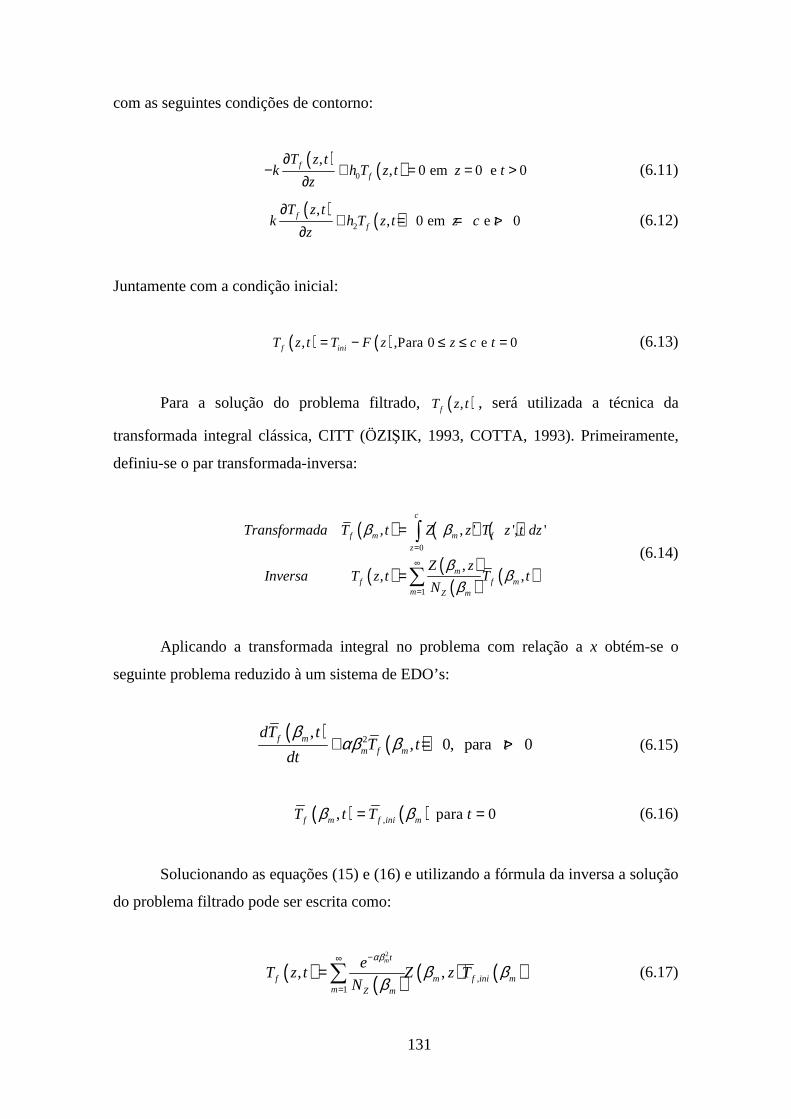
131
com as seguintes condições de contorno:
( ) ( )0
,, 0 em 0 e 0 f
f
z tk z t
TT
zzh t
∂+
∂= = >− (6.11)
( ) ( )2 0 em , 0
,e f
f
z tz t
Tk h T z c t
z
∂+ = = >
∂ (6.12)
Juntamente com a condição inicial:
( ) ( ) Para, , 0 e 0inif zT z ct T tF z ≤− ≤= = (6.13)
Para a solução do problema filtrado, ( ),fT z t , será utilizada a técnica da
transformada integral clássica, CITT (ÖZIŞIK, 1993, COTTA, 1993). Primeiramente,
definiu-se o par transformada-inversa:
( ) ( ) ( )
( ) ( )( ) ( )
0
1
, , ' ', '
,, ,
c
m m
z
f f
f fm
mm Z m
t Z z z t dTransformada T z
Z zz t t
N
T
Inversa T T
β β
ββ
β
=
∞
=
=
=
∫
∑ (6.14)
Aplicando a transformada integral no problema com relação a x obtém-se o
seguinte problema reduzido à um sistema de EDO’s:
( ) ( )2,
, 0, para 0f mm f m
dT tT t t
dt
βαβ β+ = > (6.15)
( ) ( ),, para 0f f inim mt T tT β β= = (6.16)
Solucionando as equações (15) e (16) e utilizando a fórmula da inversa a solução
do problema filtrado pode ser escrita como:
( ) ( ) ( ) ( )2
,1
, ,mt
f m f inim Z
mm
eT z t Z z T
N
αβ
β ββ
−∞
=
=∑ (6.17)

132
onde ( ) ( )( ) ( ),
0
,c
f ini ini mmT T F z Z z dzββ = −∫ .
Pela literatura (ÖZIŞIK, 1993) pode-se obter diretamente as autofunções, que
são obtidas solucionando o problema auxiliar:
( ) ( )
( ) ( )
( ) ( )
22
2
0
2
0;0
0; 0
0;
Z zZ z z c
zZ z
H Z z zz
Z zH Z z z c
z
β∂
+ = < < ∂ ∂− + = = ∂∂
+ = = ∂
(6.18)
cuja solução é:
( ) ( ) ( ) 00 0, cos sin ,m m m m
hZ z z H z H
kβ β β β= + = (6.19)
( ) ( ) ( )
1
2 2 02 20 0 0 22 2
2
12 , ,m
Z m m
hH hH c H H H
N k kHβ
β β
− = + + + = =
+
(6.20)
Lembrando que ( ) ( ) 2
0
,c
m mZN Z z dzβ β= ∫ . Os autovalores mβ são as raízes positivas
da equação transcedental:
( ) ( )0 22
0 2
tan mm
m
H Hc
H H
ββ
β+
=−
(6.21)
Desta forma, a solução do problema teste ( ),T z t é encontrada somando as
soluções do problema filtro ( )F z com o problema filtrado ( ),fT z t .

133
APÊNDICE E - Teste IV em regime transiente
Considerando um problema de condução de calor transiente tridimensional,
conforme o esquema descrito na figura E.1. Sujeito uma troca de calor por convecção
em z = 0 e a um fluxo de calor variando na superfície perpendicular ao eixo z,
juntamente com uma troca de calor por convecção em z = c.
Figura E.1 - Desenho esquemático do teste 4, em regime transiente
O Fluxo de calor no problema será constante no tempo e será constante igual a
constq somente nas posições entre 10 x a≤ ≤ e 10 y b≤ ≤ . Este problema teste pode ser
formulado, utilizando a equação tridimensional transiente do calor, da seguinte maneira:
Para 0 ,0 ,0 e 0x a y b z c t< < < < < < > :
( ) ( ) ( ) ( )2 2 2
2 2 2
, , , , , , , , , , , ,1 T T T T
t x y z
x y z t x y z t x y z t x y z t
α∂ ∂ ∂ ∂
= + +∂ ∂ ∂ ∂
(6.1)
sujeito as condições de contornoem 0, , ,0 para 0x y x a y b z c t= = = = < < > :
0T T
x y
∂ ∂= =∂ ∂
(6.2)
em 0,0 ,0 e 0z x a y b t= < < < < > :
( ) ( )( )0
,0 , ,
Tk h T T
tz
z
zt ∞
∂− + − =
∂ (6.3)

134
em ,0 ,0 e 0z c x a y b t= < < < < > :
( ) ( )( ) ( )*
2
,, , ,
Tk
zh T T q y
tt
zz x t
∞
∂+ − =
∂ (6.4)
Em todo o compósito sujeito a condição inicial:
iniT T T∞= = (6.5)
A solução deste problema pode ser obtida inicialmente dividindo-o em dois
problemas, o primeiro contendo o problema permanente e o segundo contendo a parcela
transiente. Esta técnica é utilizada com a finalidade de homogeneizar as condições de
contorno do problema principal.
Desta forma, considera-se que o problema pode ser reescrito da seguinte
maneira:
( ) ( ) ( ), , , , , ,fT x y z t T x y z t F z= + (6.6)
onde ( )F z , como foi dito anteriormente, corresponde a um filtro obtido a partir da
solução do problema estacionário correspondente. Considera-se então ( ),fT z t o
problema filtrado relacionado, cujas condições de contorno foram homogeneizadas.
Assim, aplicando a equação (5) nas equações (1) a (4), pode-se separar o
problema original nestes dois sub-problemas, a seguir a formulação matemática do
problema filtro:
( )2
20, Para 0
d F zz c
dz= < < (6.7)
( ) ( ) 00 em 0
dFh F z
zk h T z
dz ∞− = =+ (6.8)
( ) ( ) 2
*2 em
dFh F z h
dz
zk T z c∞+ = = (6.9)

135
A solução para o filtro, ( )F z , considerando as dimensões da placa (tabela 6.1),
as temperaturas impostas (tabela 6.2), as propriedades do nylon 6-6 e os parâmetros de
entrada (tabela 6.4), a solução desde problema, pode ser escrita como:
( ) 25.83 + 333.33 zF z = (6.10)
O problema filtrado, resolvido através da técnica CITT e cuja solução também
esta detalhada no Apêndice E, tem a seguinte forma:
Para 0 ,0 ,0 e 0x a y b z c t< < < < < < > :
( ) ( ) ( ) ( )2 2 2
2 2 2
1 , , , , , , , , , , , ,f f f fT T T T
t x y z
x y z t x y z t x y z t x y z t
α∂ ∂ ∂ ∂
= + +∂ ∂ ∂ ∂
(6.1)
sujeito as condições de contornoem 0, , ,0 para 0x y x a y b z c t= = = = < < > :
0f fT T
x y
∂ ∂= =
∂ ∂ (6.2)
em 0,0 ,0 e 0z x a y b t= < < < < > :
( ) ( )0 0
,,f
f
Tk h T
z
z tz t
∂− + =
∂ (6.3)
em ,0 ,0 e 0z c x a y b t= < < < < > :
( ) ( ) ( )2
,, , ,f
f
Tk h T
z tz t q x y t
z
∂+ =
∂ (6.4)
Em todo o compósito sujeito a condição inicial:
( ) ( )f iniT T F z T F z∞= − = − (6.5)

136
Este problema filtrado será resolvido utilizando CITT. Assim, definindo um par
transformada inversa:
( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( )( ) ( ) ( ) ( )
0 0 0
0 0 1
, ', ', ', ' ', , , ' , ' , '
, , ,, ,
'
, , , ,
f n k m n k f
m n
a b c
m
x y
kf f n k
z
mm n k x m y n z k
t x y z t dz dy dx
inve
transformada
T X x Y y Z z T
X x Y y Z zT T
N N N
rsa
x y z t t
γ η β γ η
β γ ηγ η
β γ η
β
β∞ ∞ ∞
= =
= = =
=
=
= ∑∑
∫ ∫ ∫
∑
(6.6)
Aplicando a técnica na equação governante do problema filtrado, obteve-se:
( ) ( ) ( )2 2 2 , , ,fm n k f k z c
dTT q x y t Z z
dt k
αα β γ η η=
+ + + = (6.7)
( ) ( ) ( ) ( ),
0 0 0
, , ,a b c
f ini ini m n kT T T X x Y y Z z dzdydxβ γ η∞= −∫ ∫ ∫ (6.8)
Este sistema de EDO’s foi solucionado e então aplicado na fórmula da inversa,
obtendo a solução do problema filtro:
( ) ( ) ( ) ( )( ) ( ) ( )
( )2 2 2
,0 0 1
, , ,, , , m n k tm n k
f f inim n k x m y n z k
X x Y y Z zT x y z t e T A
N N N
α β γ ηβ γ ηβ γ η
∞ ∞ ∞ − + +
= = =
= + ∑∑∑ (6.9)
onde
( ) ( ) ( ) ( ),
0 0 0
, , ,a b c
f ini ini m n kT T T X x Y y Z z dzdydxβ γ η∞= −∫ ∫ ∫ (6.10)
E
( ) ( ) ( ) ( )1 12 2 2 '
0 0 0
,, , 'm n k
a btt k
const m n
z c
Z zA e q X x Y y dydx dt
k
α β γ η ηα β γ+ +
=
=
∫ ∫ ∫ (6.11)
como a variação do fluxo no contorno acontece apenas entre 10 x a≤ ≤ e 10 y b≤ ≤ , a
transformação do termo ( ), ,q x y t foi realizada apenas no intervalo onde a mesma era
diferente de zero.

137
Pela literatura (ÖZIŞIK, 1993) pode-se obter diretamente as autofunções, que
são obtidas solucionando os problemas auxiliares:
( ) ( )
( )
( )
( ) ( )
( )
( )
( ) ( )
( ) ( )
( ) ( )
22 222 2
22 2
0
2
0;00;0 0;0
0; 0 0; 0 0; 0
0; 0;0;
Y yX x Z zY y y bX x x a Z z z cyx z
X x Y y Z zx y H Z z z
x y zX x Z zY yx a H Z z z cy b
x zy
γβ η∂ ∂ ∂+ = < <+ = < < + = < < ∂∂ ∂ ∂ ∂ ∂ = = = = − + = = ∂ ∂ ∂
∂ ∂∂= = + = = = =∂ ∂ ∂
(6.12)
cujas soluções são:
( ) ( )( ) ( )
0
21 para 0,
,cos para 0,
x mm
m m x m
NaX x
x N a
β ββ
β β β
= == ≠ =
(6.13)
( ) ( )
( ) ( )0
21 para 0,
,cos para 0,
y n
n
n n y n
NaY y
y N a
γ γγ
γ γ γ
= == ≠ =
(6.14)
( ) ( ) ( )1, cos sink k k kZ z z H zη η η η= + (6.15)
e
( ) ( ) ( )
1
2 2 20 02 2
2
12 k
z k k
HH c H
N Hη
η η
− = + + +
+
(6.16)
onde 00
hH
k= , 2
2
hH
k= , ( ) ( ) 2
0
,a
m mxN X x dxβ β= ∫ , ( ) ( ) 2
0
,b
n nyN Y y dyγ γ= ∫ ,
( ) ( ) 2
0
,c
k kzN Z z dzη η= ∫ e os autovalores ��, �� e ! são as raízes positivas das
equações transcedentais:
( )00 0
sin 0 0i ia
ββ β
= = ≠
(6.17)
( )00 0
sin 0 0j jb
γγ γ
= = ≠
(6.18)

138
e
( ) ( )0 22
0 2
tan kk
k
H Hc
H H
ηη
η+
=−
(6.19)
Desta forma, a solução do problema teste ( ),T z t é encontrada somando as
soluções do problema filtro ( )F z com o problema filtrado ( ),fT z t .