utilizao de redes neurais para predio do comportamento em ... · o processamento do sinal em cada...
TRANSCRIPT

Anais do 13O Encontro de Iniciação Científica e Pós-Graduação do ITA – XIII ENCITA / 2007 Instituto Tecnológico de Aeronáutica, São José dos Campos, SP, Brasil, Outubro, 01 a 04, 2007.
Utilização de Redes Neurais para Predição do Comportamento em Cisalhamento de Compósitos Aeronáuticos
Marcela Sobrinho Pereira Instituto Tecnológico de Aeronáutica, Divisão de Ciência da Computação ,Praça Marechal Eduardo Gomes 50, Vila das Acácias, 12228-900 São José dos Campos, SP, Brasil Bolsista PIBIC-CNPq [email protected] Eduardo Marcelo Bezerra Instituto Tecnológico de Aeronáutica, Divisão de Ciência da Computação ,Praça Marechal Eduardo Gomes 50, Vila das Acácias, 12228-900 São José dos Campos, SP, Brasil Bolsista PIBIC-CNPq
[email protected] Resumo.Redes neurais têm sido usados como interpoladores universais de funções multivariáveis. Tendo em vista: a não-linearidade das curvasresultantes dos ensaios mecânicos de materiais compósitos, o grande número de fatores que definem estas curvas e a crescente aplicação desses materiais na industria aeronáutica, este artigo analisa a implementação de redes neurais tipo MLP(MultLayer Perceptron) que modelem curvas de cisalhamento e vibração de compósitos de matriz epóxi reforçadas por fibra de carbono e fibra de vidro. Considerou-se os seguintes fatores: tipo de fibra e orientação da fibra.Obteve-se, com uso de redes de médio porte (duas camadas intermediárias, com no máximo 100 neurônios), redes com grande capacidade preditiva. Palavras chave: Redes Neurais, MultLayer Perceptron, Backpropagation, Compósitos
1. Introdução
Baseada no sistema cognitivo humano, foi desenvolvida a teoria de redes neurais. Segundo a vertente conexionista da inteligência artificial, é possível simular computacionalmente o modelo de redes de neurônios e sinapses biológicas.( Braga, Ludermir, Carvalho, 2000).
Desta forma a rede neural artificial é composta por unidades de processamento denominadas neurônios, organizadas em camadas, conectadas por pesos, que retornam saídas para um conjunto de entradas assim como acontecem as sinapses nos neurônios biológicos. Estes neurônios são dispostos em camadas. Tipicamente, redes neurais que utilizam o paradigma de aprendizado supervisionado – o mais comum, efetivo e provavelmente mais bem estudado paradigma de aprendizado – geram, a partir de um algoritmo de adaptação paramétrica e de um conjunto de dados de treinamento – um modelo regressivo não-linear, cujas propriedades de aproximação universal são bem conhecidas (Rossi; Conan-Guez,2005). Entretanto, na prática a capacidade da rede adequar os parâmetros desta aproximação, de modo que o modelo analítico subjacente aproxime-se do que seria o processo “real” que gerou os dados, depende em grande parte dos dados efetivamente utilizados.
As redes artificiais podem atuar como mapeadores de funções multivariáveis, com baixo custo computacional (este cresce linearmente com o número de variáveis)(Ferneda E.,2006).Sua capacidade de aprendizado permite que a rede obtenha resultados a partir de uma base incompleta ou ruidosa(Bezerra, EM. 2007)
Desta forma, utiliza-se neste trabalho redes neurais multicamadas para o estudo de propriedades de materiais compósitos, mais especificamente para a análise de compósitos de matriz epóxi reforçados com fibras de carbono, e compósitos reforçados com fibras de vidro submetidos à ensaios de vibração e ensaio de cisalhamento Iosipescu.
Os materiais compósitos têm sido cada vez mais utilizados na indústria aeronáutica e gradativamente têm substituido os materiais metálicos, por terem alta rigidez, baixa massa específica e maior resistência à corrosão. Compósitos de matriz epóxi reforçados com fibras de carbono são usados em peças aeronáuticas que precisam suportar grandes cargas, por apresentarem alta resistência à tração ( = 1.5-2.5 GPa), rigidez elevada ( = 300-500 GPa) e baixa massa específica ( 1,8 g/cm3) (Brito Junior, 2007). Para peças com menor requisito estrutural, utilizam-se fibras de vidro as quais têm menor custo (carbono : U$ 17,25; vidro: 1,90)e propriedades inferiores( 2,5 g/cm3 e
= 70-85 GPa). Nos próximos anos, o uso de compósitos em aviões deve alcançar a marca dos 50% do peso total da aeronave É necessário, portanto, para maior viabilidade e confiabilidade de projetos de aeronaves conhecer bem o comportamento deste tipo de material, especialmente características como propriedades dinâmico-mecânicas e de cisalhamento.(Bezerra, 2005;Bezerra, 2007)Entretanto, há vários fatores que determinam estas características, como a porcentagem de reforço de fibra na matriz, o tipo de fibra (carbono, vidro, kevlar etc.) e a orientação das fibras no compósito.

Anais do XIII ENCITA 2007, ITA, Outubro, 01-04, 2007 Além disso, o perfil não-linear de curvas como a de tensão por deformação em cisalhamento dificultam
interpolações por regressão linear múltipla; tornando relevante utilizar redes neurais artificiais para aumentar a eficiência na predição deste comportamento.
Para deixar isto mais claro, provou-se que o erro em um modelamento de uma função não-linear decresce com , onde M é o número de unidades escondidas, enquanto em uma regressão polinomial de dimensão d o erro decai
com . (Barron,1993).
2. Redes Neurais 2.1. Neurônio Artificial
A unidade fundamental da rede artificial é o neurônio artificial. Cada neurônio é estimulado por um conjunto de entradas . A cada conexão com a entrada é associado um peso. O sinal considerado pelo neurônio será a soma ponderada das entradas pelos pesos. Como os pesos podem ser negativos, o estimulo da entrada pode ser inibitório ou excitatório (Ferneda, 2006).
Portanto, a saída do neurônio é a função de ativação aplicada a esse sinal. A função de ativação, fazendo uma analogia com o neurônio biológico em que o sinal elétrico só é transmitido caso tenha um potencial suficientemente alto se atingir um limite, determina se a saída é ativada ou não.
No caso de aplicação de redes para interpolação de curvas, a função de ativação determina a suavidade da curva resultante. Podemos entender que a rede representa funções não-lineares a partir da superposição de funções não-lineares (Bishop,1995).
2.2.Arquitetura da rede
Os neurônios de uma rede são dispostos em camadas. O processamento do sinal em cada neurônio de uma camada é independente, ou seja, não há fluxo de informação entre neurônios de uma mesma camada.
Uma rede de única camada é aquela em que entre qualquer entrada e qualquer saída existe apenas um nó. Neste caso, todos os neurônios pertencem à camada de entrada. As outras redes são denominadas multicamadas. A camada de neurônios em que as entradas são as próprias entradas da rede é denominada camada de entrada. As camadas escondidas são aquelas em que seus neurônios recebem como entrada a saída de outros neurônios.Estas camadas, também denominadas intermediárias, permitem a implementação de funções com maior complexidade.
As entradas nos nós podem ser saídas de qualquer neurônio de outra camada. Assim, quanto às conexões, as redes podem ser divididas em acíclicas (feedfodward) e cíclicas (feedback). A primeira classe engloba as redes em que um neurônio recebe como entrada apenas a saída dos neurônios pertencentes às camadas anteriores, enquanto a segunda engloba redes em que a saída de um neurônio pode ser usada como entrada para um neurônio de camada anterior.
Os parâmetros que definem uma rede são, portanto: o número de camadas, o número de nós, o tipo de conexão, a topologia da rede, a taxa de momentum e de aprendizado que indica o grau de modificação dos pesos nas diferentes camadas. 2.2. Aprendizado da rede
Para que um valor de entrada, quando processado pela rede, forneça um determinado valor de saída, basta alterar os pesos. Portanto, fazer com que a rede aprenda uma função, consiste em determinar os valores para os pesos das conexões.
O conjunto de procedimentos para adaptar os parâmetros da rede é o algoritmo de aprendizado. A diferença entre eles é maneira como é feito o ajuste dos pesos (Braga, Ludermir, Carvalho,2000).
O aprendizado pode ser supervisionado ou não. No processo não supervisionado, são fornecidas apenas as entradas e a própria rede é responsável pela definição de seus parâmetros identificando regularidades no padrão fornecido de modo a codificar suas características e classificá-las.
No processo supervisionado, são fornecidas tanto as entradas quanto às saídas desejadas. O conjunto de valores fornecidos pela rede é comparado com os valores de saída desejados, e os pesos são reajustados de acordo com o erro entre esses valores, até que a saída da rede atinja parâmetros previamente estipulados. 2.3. Topologia
Nesta seção, abordaremos apenas algumas topologias que serão usadas no projeto ou servirão de base para o estudo
das outras topologias. 2.3.1.Perceptron

Anais do XIII ENCITA 2007, ITA, Outubro, 01-04, 2007 A topologia perceptron é composta por apenas uma camada entre entradas e saídas, esta camada é denominada
camada associativa. Apenas o nível de saída tem parâmetros ajustáveis, uma vez que os pesos na camada associativa são fixos e previamente determinados.
Se as entradas na rede são elas podem ser representadas pelo vetor de entrada , o mesmo para o vetor de pesos w = ,. O processo de aprendizado de uma rede perceptron consiste em atualizar os pesos de modo que o padrão da saída esteja o mais próximo do padrão desejado (ou experimental) que o original, assim:
(1) xwxw
wtwtw
i ii ..
)()1(
=
Δ+=+
∑ Em redes perceptron, são usadas portas limiares, ou seja, a saída só é ativada se a soma atingir um limiar. As portas
limiares podem ser lineares, quadráticas ou polinomiais. Usando uma única porta limiar é possível implementar-se qualquer das funções lógicas E, OU, NÃO-E, NÃO-OU, o que não é possível usando portas lógicas (Braga, Ludermir, Carvalho,2000). Se o limiar da rede for e os vetores entrada e peso, x’ e w’, respectivamente, a situação crítica será: x’.w’ = . Considerando como peso da entrada fixa 1, ou seja, os vetores e w = , quer-se, então: x.w = 0 (vetores perpendiculares), por isso a atualização é feita da seguinte forma:
)(.)()1( txtwtw η+=+ (2) 2.3.2. Multilayers perceptrons
As redes perceptron não são capazes de resolver problemas não linearmente separáveis(Minsky e Papert, 1969),
entretanto, redes multicamadas semelhantes as redes perceptron e treinadas utilizando o algoritmo de retropropagação (Backpropagation) podem implementar qualquer função.
As camadas intermediárias funcionam como detectores de características, ou seja, elas codificam os padrões da entrada, então com um número suficientemente grande de camadas internas, a rede é capaz de representar qualquer conjunto de entradas.
O problema em expandir o conceito de redes percetron para redes de várias camadas é definir como será calculado o erro para as camadas intermediárias. Funções de ativação sendo portas limiares dificultam o cálculo do erro, por isso, são usadas funções contínuas e diferenciáveis para as quais são definidas o gradiente em todos os pontos, que auxiliará na definição do erro. Estas redes são chamadas de Multilayer perceptrons (MLP).
O treinamento das redes MLP é feito, geralmente, usando o algoritmo BackPropagation. Este algoritmo pode ser divido em duas fases:
Forward: Os sinais de entrada entram na primeira camada.Os sinais de saída de cada camada são calculados e são passados como sinal de entrada para a próxima camada até que seja calculada a saída da rede. Esta é comparada com a desejada.
Backward: Da última até a primeira camada, em cada camada são atualizados de forma a reduzir o erro desta. Com os valores atualizados, o erro da camada anterior é recalculado.
A atualização é feita com base no gradiente descendente da função erro. O erro quadrático total é expresso por:
∑ ∑=
−=p
k
i
pi
pi ydE
1
2)(21
(3)
Em que p é o número de padrões, k é o tal de saídas, d i e y i são as saídas desejadas e produzidas pela rede, em cada unidade. A saída do nodo j é , onde )( j
pj
pj netfy = ∑= ji
pi
pj wx .net e f é a função de ativação do nodo.
Prova-se que os pesos devem ser reajustados da seguinte forma: )(')( jjjj netfyd −=δ
(4)
∑∂=l
ijljj wnetf )(δ (5)
)()()()1( txttwtw ijjiji ηδ+=+ (6) A Eq. 4 é usada para a camada de saída e a Eq.5 para as demais camadas. Então, a camada de saída é a única em que o valor do erro calculado coincide com o erro real, as outras
camadas têm apenas uma estimativa do erro. O treinamento pode ser encerrado depois de realizado um número máximo de iterações, uma parcela pré-
determinada da capacidade do processador for utilizada, o erro seja menor que uma constante, a variação relativa do
Anais do XIII ENCITA 2007, ITA, Outubro, 01-04, 2007 erro atinge um valor pré-determinado, o erro medido usando um grupo de validação diferente começa a crescer (Bishop, 1995).
De acordo com Braga, Ludermir, Carvalho et al.(2000), a convergência para um mínimo local é uma das principais dificuldades para este treinamento. Ela pode ser evitada utilizando uma taxa de aprendizado decrescente, adicionando nós intermediários, adição de momentum,adição de dados ruidosos.
A taxa de aprendizado decrescente faz com que, por ser inicialmente muito grande, o erro seja grande e mesmo para mínimos locais não haja convergência. Depois de algumas iterações, há uma maior probabilidade de se aproximar do mínimo global, neste momento a taxa de aprendizado já será menor.
O termo momentum é uma espécie de inércia a mudança de pesos, o termo é adicionado à equação do gradiente descendente, que fica:
)1()(()()1( −−++=+ twtwxtwtw ijijijijij αηδ (7)
Em geral, além de diminuir a incidência de convergência para mínimos locais, a adição de termo momentum
acelera o treinamento, especialmente em regiões planas na superfície do erro. Um termo momentum muito grande, entretanto aumenta a instabilidade do algoritmo, gerando oscilações ao redor do mínimo global. Portanto, a adição deste termo é a adição de mais um parâmetro a ser escolhido.
O aumento do número de nós intermediários, apesar de resolver o problema de mínimos locais, pode gerar o fenômeno conhecido por overfitting, isto é a rede aprende os padrões de treinamento gravando peculiaridades e ruídos.
Dessa maneira, o número de nós deve ser grande o suficiente para que a rede consiga aprender todos os padrões e pequeno o suficiente para que sua capacidade de generalização não seja comprometida.
Outro problema do treinamento por Backpropagation é sua velocidade para superfícies de erro complexas. Para melhorar este aspecto, são usados algoritmos de otimização que consideram as derivadas de segunda ordem da matriz de erros, como o método de Newton, e o método de Levenberg-Marquardt. 3.Resultados
Neste projeto, redes neurais artificiais foram usadas para a aproximação de curvas experimentais obtidas em testes mecânicos.
Para treinar a rede de maneira mais adequada, os dados devem ser apresentados aleatoriamente. Verificou-se, experimentalmente, a estrita necessidade de um processamento prévio dos dados, uma vez que a rede não convergia para os dados originais, mas convergia usando os dados normalizados. Note que a normalização não gera perda de informação, portanto, é perfeitamente aplicável ao treinamento. A normalização utilizada foi:
(9)
Os dados foram divididos, aleatoriamente, em dois grupos, um grupo para o treinamento da rede e um segundo para a validação. Para a normalização e separação dos dados, foi utilizada uma macro do software Excel.
Para avaliar os resultados obtidos, usou-se o coeficiente , expresso pela equação: , na
qual é a i-ésima saída da rede, é o i-ésimo resultado experimental, O é a média dos valores exeprimentais e M é total de valores.
3.1.Propriedades de cisalhamento de compósitos
Para a determinação das propriedades de cisalhamento, módulo de cisalhamento e levantamento da curva de tensão
por deformação, os compósitos foram submetidos ao ensaio de cisalhamento IOSIPESCU. Utilizou-se neste teste um pré-impregnado de fibras de carbono em resina epóxi com especificação F155. Os
compósitos foram preparados empilhando 10 camadas cuja fração volumétrica de fibras situava-se entre 55% e 58%. As camadas foram empilhadas e seladas, e foi então realizada a cura em autoclave, com taxa de aquecimento de 2.5°C, até atingir a temperatura de 120°C, permanecendo nesta temperatura por uma hora, a uma pressão de 0,69MPa. A Fig. 1 mostra a configuração do ensaio de cisalhamento Iosipescu em conformidade com a norma ASTM D 5379 .

Anais do XIII ENCITA 2007, ITA, Outubro, 01-04, 2007 Figura 1: Esquematização do Ensaio Iosipescu a) Dispositivo Iosipescu b) Geometria da amostra Foram usados entalhes , cuja ponta tem raio de 1.3mm, para fixar as amostras para provocar uma distribuição mais
uniforme das tensões. A linha de aplicaçãoda carga é a região entre os entalhes.
Figura 2: Diagramas de Estado da amostra Neste ensaio, as tensões são acompanhadas por carregamento indireto, ou seja, a uma certa distância da região
de teste, cuja secção reduzida garante que esta estará submetida às maiores tensões. Nesta região é estabelecido um regime de tensão uniforme. Aplica-se um conjunto de forças que resultam em momentos de ação contrária.
A área é coberta por sensores de deslocamento(strain gages), assim garantindo a distribuição uniforme da tensão, pode-se calcular a tensão de cisalhamento e a deformação em cisalhamento.
Depois de várias tentativas obteve-se a arquitetura que otimizou o treinamento da rede com 2 camadas escondidas de 30 neurônios. As funções de transferência utilizadas foram tangente sigmoidal (entre a entrada e a primeira camada escondida) e linear pura (entre as demais camadas). O treinamento foi realizado usando uma taxa de aprendizado de 0,4 e momentum de 0,3.
Cerca de 70% dos dados foram utilizados na etapa de treinamento e o restante dos dados foi empregado nas etapas de validação (20%) e teste (10%). Os dados de treinamento foram normalizados com dois propósitos: (1) aumentar a velocidade de treinamento e (2) não saturar a função de ativação tangente sigmóide quando as entradas com valores numéricos altos são apresentadas e propagadas pela estrutura da rede neural. O erro quadrático estipulado na configuração de treinamentofoi de , e novamente treinando-se a rede com o algoritmo BackPropagation otimizado por Levenberg-Marquardt, devido a sua rápida convergênvcia para redes de médio porte. A fig.3 mostra o bom desempenho da rede para a curva do compósito de epoxi/vidro com orientação 0°/90°.Pode-se observar que a rede é de fato robusta pela gráfico da figura 4. Pelas Fig. 4-6, é observado um desempenho superior para a rede com 30 neurônios.
Figura 3: Curva de deformação - Vidro 0/90 °
Anais do XIII ENCITA 2007, ITA, Outubro, 01-04, 2007
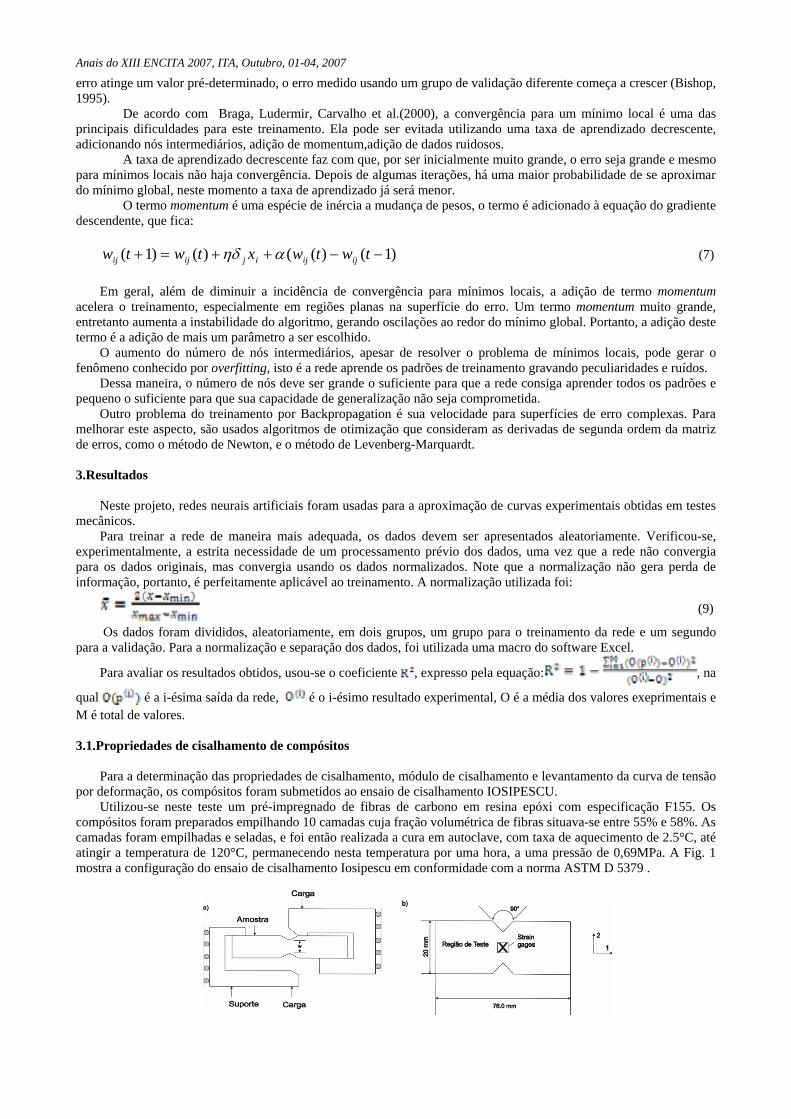
Figura 4: Distribuição do coeficiente em porcentagem de dados da rede em função da arquitetura da rede para o
ompósito epoxi/vidro 0°/90°
Figura 5: MSE em função do número de Iterações para a rede 3-[30-30]-1
Figura 6: MSE em função do número de Iterações para a rede 3-[3-3]-1 Note que a rede 3-[30-30]-1em 1000 iterações atingiu o erro quadrático médio desejado, enquanto a 3-[3-3]-1
em 221 iterações obteve convergência para MSE de 0,024. Para a orientação , a curva resultante é mostrada na Fig. 7. A maior característica linear, levou a uma
capacidade preditiva maior como pode ser visto na Fig. 8 e a uma convergência mais rápida( o erro desejável é atingido com apenas 450 iterações), como é ilustrado na Fig. 9.

Anais do XIII ENCITA 2007, ITA, Outubro, 01-04, 2007
Figura 7: Curva de deformação - Vidro 45 °
Figura 8: Distribuição do coeficiente em porcentagem de dados da rede em função da arquitetura da rede para o
ompósito epoxi/vidro
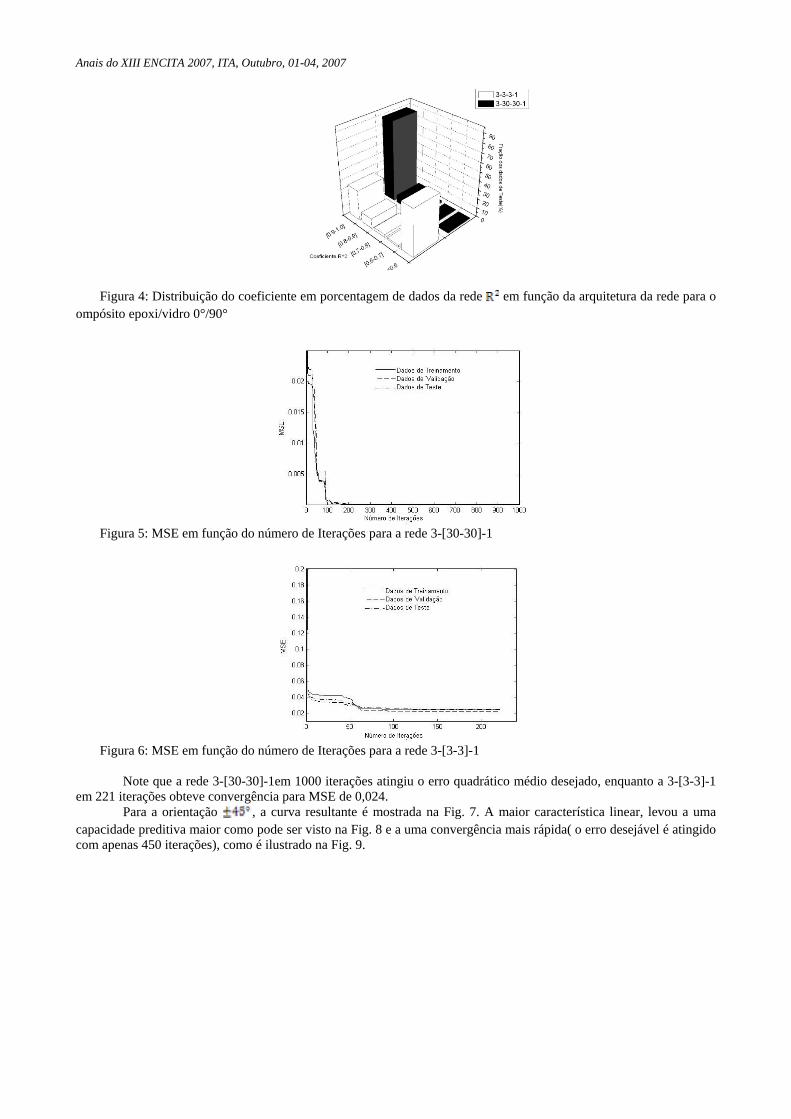
Figura 9: MSE em função do número de Iterações para a rede 3-[30-30]-1 A Fig.10 mostra a saída da rede para o reforço de carbono com orientação 0°/90°. Analisando a Fig.11, vê-se
que, mais uma vez, a rede se mostrou robusta. Em 21 iterações, o erro já era satisfatório, Fig. 12. Usando a mesma rede, para analisar a influência da orientação das fibras, usou os dados relativos à orientação . As Fig.13 e 14 mostram o excelente desempenho da rede.
Anais do XIII ENCITA 2007, ITA, Outubro, 01-04, 2007
Figura 10: Curva de deformação - Carbono 0/90 °
Figura 11: Distribuição do coeficiente em porcentagem de dados da rede em função da arquitetura da rede para
o ompósito epoxi/carbono 0°/90°
Figura 12: MSE em função do número de Iterações para a rede 3-[30-30]-1
Figura 13: Curva de deformação - Carbono 45 °
Anais do XIII ENCITA 2007, ITA, Outubro, 01-04, 2007
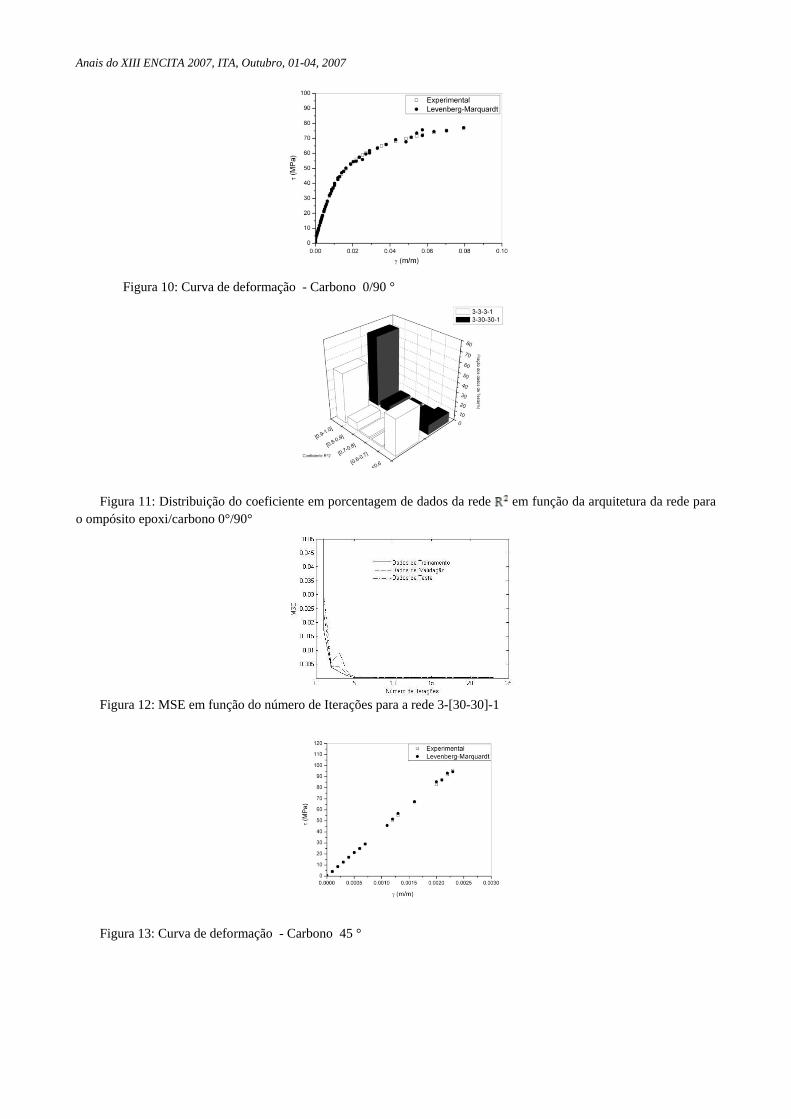
Figura 14: Distribuição do coeficiente em porcentagem de dados da rede em função da arquitetura da rede para
o ompósito epoxi/carbono A rede apresentou alta qualidade preditiva, tendo um >0.9 para 90% dos valores de compósitos reforçados com
fibras de vidro na orientação , o que justifica a aplicação de redes neurais, mesmo considerando-se um comportamento altamente linear. Para compósitos reforçados com fibras de vidro na orientação 0/90°, obteve-se superior a 0.9 para 75% dos dados testados, o que pode ser considerado um excelente resultado tendo em conta a característica não-linear desta curva. Para o mesmo reforço, com orientação , obteve-se se superior a 0.9 para 83% dos dados testados. Figs. 4,8,11,14.
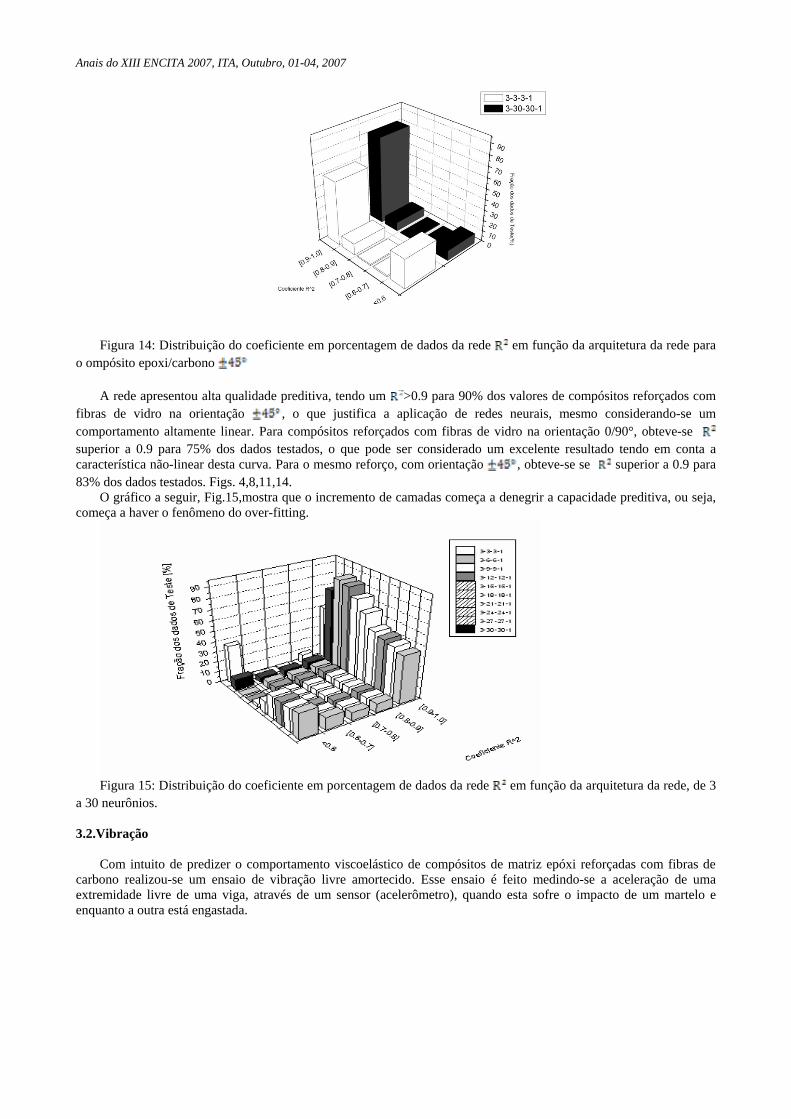
O gráfico a seguir, Fig.15,mostra que o incremento de camadas começa a denegrir a capacidade preditiva, ou seja, começa a haver o fenômeno do over-fitting.
Figura 15: Distribuição do coeficiente em porcentagem de dados da rede em função da arquitetura da rede, de 3
a 30 neurônios.
3.2.Vibração Com intuito de predizer o comportamento viscoelástico de compósitos de matriz epóxi reforçadas com fibras de
carbono realizou-se um ensaio de vibração livre amortecido. Esse ensaio é feito medindo-se a aceleração de uma extremidade livre de uma viga, através de um sensor (acelerômetro), quando esta sofre o impacto de um martelo e enquanto a outra está engastada.

Anais do XIII ENCITA 2007, ITA, Outubro, 01-04, 2007
Figura 16: Representação esquemática do ensaio de vibração Os corpos de prova tinham dimensão 250x20x5 mm. As características geométricas, momento de inércia e massa
útil foram fixadas para que pudesse ser analisado apenas as diferenças devido às orientações dos reforços. Considerou-se os gráficos da amplitude de aceleração(m/ em função do tempo.
Esse ensaio é relevante para o cálculo das frequências naturais ( ) e do fator de amortecimento( , uma vez que da teoria têm-se que a equação da amplitude em função do tempo é dada por:
(10) Deste modo, para a predição deste comportamento, foi usada uma rede neural de duas entradas (tempo, orientação
da fibra) e uma saída (amplitude de aceleração da extremidade livre). Optou-se pelo uso de duas camadas escondidas, inicialmente com 30 neurônios cada. O número de neurônios foi gradativamente aumentado, até obter-se convergência com erro inferior a .
Assim, rede com 100 neurônios na camada escondida foi escolhida. Seu bom desempenho pode ser visto nas Fig. 17 e 18. Treinou-se a rede com 80% dos 8000 vetores, de tal forma que os outros 1600 vetores restantes foram utilizados nas etapas conseguintes, os resultados para este treinamento são mostrados a seguir.
Figura 17: Distribuição do coeficiente em porcentagem de dados da rede em função da arquitetura da rede
Figura 18: Logarítmo do erro quadrático em função do número de iterações
Anais do XIII ENCITA 2007, ITA, Outubro, 01-04, 2007
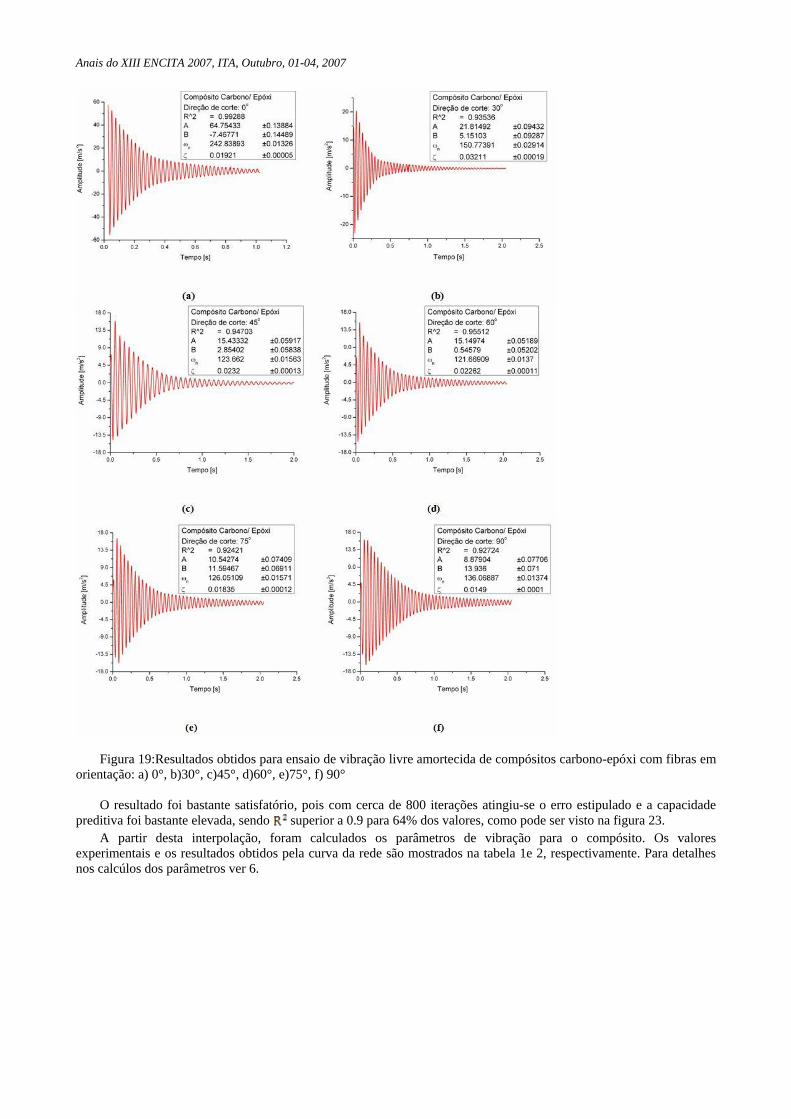
Figura 19:Resultados obtidos para ensaio de vibração livre amortecida de compósitos carbono-epóxi com fibras em
orientação: a) 0°, b)30°, c)45°, d)60°, e)75°, f) 90° O resultado foi bastante satisfatório, pois com cerca de 800 iterações atingiu-se o erro estipulado e a capacidade
preditiva foi bastante elevada, sendo superior a 0.9 para 64% dos valores, como pode ser visto na figura 23. A partir desta interpolação, foram calculados os parâmetros de vibração para o compósito. Os valores
experimentais e os resultados obtidos pela curva da rede são mostrados na tabela 1e 2, respectivamente. Para detalhes nos calcúlos dos parâmetros ver 6.
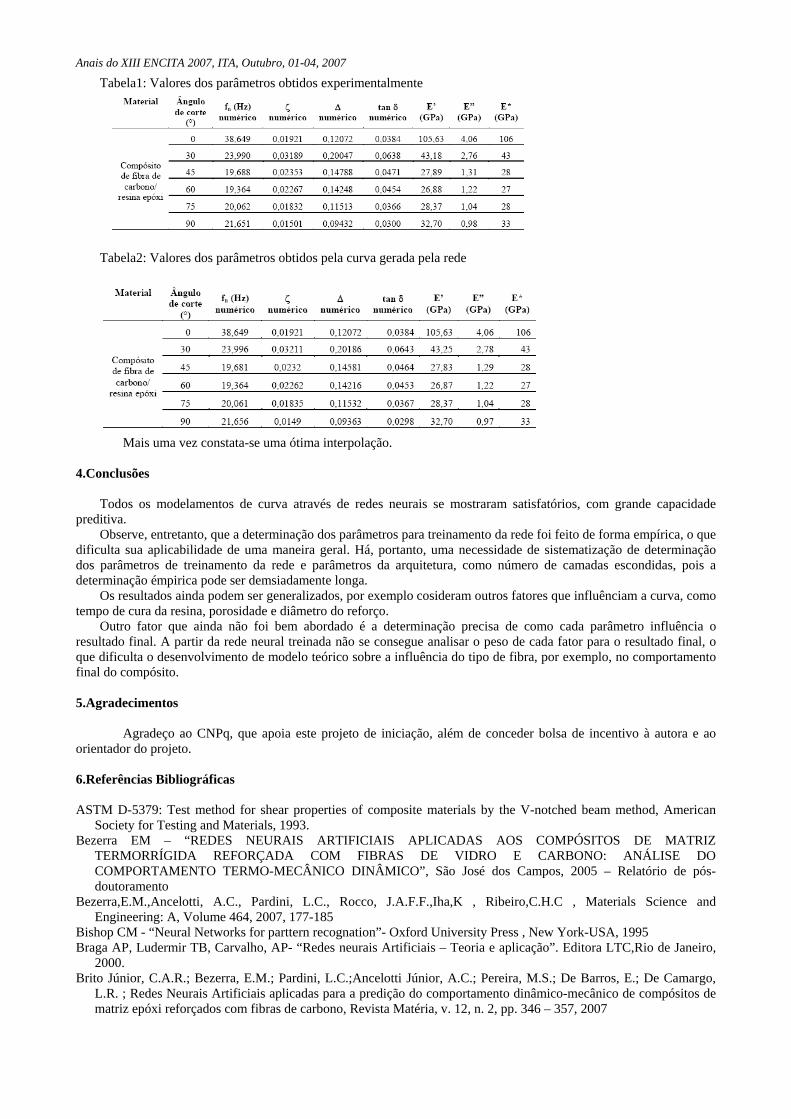
Anais do XIII ENCITA 2007, ITA, Outubro, 01-04, 2007 Tabela1: Valores dos parâmetros obtidos experimentalmente
Tabela2: Valores dos parâmetros obtidos pela curva gerada pela rede
Mais uma vez constata-se uma ótima interpolação.
4.Conclusões Todos os modelamentos de curva através de redes neurais se mostraram satisfatórios, com grande capacidade
preditiva. Observe, entretanto, que a determinação dos parâmetros para treinamento da rede foi feito de forma empírica, o que
dificulta sua aplicabilidade de uma maneira geral. Há, portanto, uma necessidade de sistematização de determinação dos parâmetros de treinamento da rede e parâmetros da arquitetura, como número de camadas escondidas, pois a determinação émpirica pode ser demsiadamente longa.
Os resultados ainda podem ser generalizados, por exemplo cosideram outros fatores que influênciam a curva, como tempo de cura da resina, porosidade e diâmetro do reforço.
Outro fator que ainda não foi bem abordado é a determinação precisa de como cada parâmetro influência o resultado final. A partir da rede neural treinada não se consegue analisar o peso de cada fator para o resultado final, o que dificulta o desenvolvimento de modelo teórico sobre a influência do tipo de fibra, por exemplo, no comportamento final do compósito.
5.Agradecimentos
Agradeço ao CNPq, que apoia este projeto de iniciação, além de conceder bolsa de incentivo à autora e ao
orientador do projeto. 6.Referências Bibliográficas
ASTM D-5379: Test method for shear properties of composite materials by the V-notched beam method, American
Society for Testing and Materials, 1993. Bezerra EM – “REDES NEURAIS ARTIFICIAIS APLICADAS AOS COMPÓSITOS DE MATRIZ
TERMORRÍGIDA REFORÇADA COM FIBRAS DE VIDRO E CARBONO: ANÁLISE DO COMPORTAMENTO TERMO-MECÂNICO DINÂMICO”, São José dos Campos, 2005 – Relatório de pós-doutoramento
Bezerra,E.M.,Ancelotti, A.C., Pardini, L.C., Rocco, J.A.F.F.,Iha,K , Ribeiro,C.H.C , Materials Science and Engineering: A, Volume 464, 2007, 177-185
Bishop CM - “Neural Networks for parttern recognation”- Oxford University Press , New York-USA, 1995 Braga AP, Ludermir TB, Carvalho, AP- “Redes neurais Artificiais – Teoria e aplicação”. Editora LTC,Rio de Janeiro,
2000. Brito Júnior, C.A.R.; Bezerra, E.M.; Pardini, L.C.;Ancelotti Júnior, A.C.; Pereira, M.S.; De Barros, E.; De Camargo,
L.R. ; Redes Neurais Artificiais aplicadas para a predição do comportamento dinâmico-mecânico de compósitos de matriz epóxi reforçados com fibras de carbono, Revista Matéria, v. 12, n. 2, pp. 346 – 357, 2007

Anais do XIII ENCITA 2007, ITA, Outubro, 01-04, 2007 Rossi, F.; Conan-Guez, B. Functional multi-layer perceptron: a non-linear tool for functional data analysis. Neural
Networks 2005;18:45-60 Ferneda E. – “Redes Neurais e sua aplicação em sistemas de recuperação de informação”- Ci. Inf., Brasília, v. 35, n. 1,
p. 25-30, jan./abr. 2006 Kalman, B. L.,Kwasny, S. C.“High performance training of feedforward and simple recurrent networks” –
Neurocomputing Journal,1997, volume 14, 63-81 Minsky,M., Papert, S. – “Perceptrons: na introduction to computacional geometry.”- Mit Press, Massachussets, 1969